Embed Size (px)
Citation preview
Método dos Deslocamentos 1
ENGENHARIA CIVIL TEORIA DE ESTRUTURAS II
3º Ano / 2º Semestre – 2001/2002
Prof. João Miranda Guedes (DEC)
MÉTODO DOS DESLOCAMENTOS
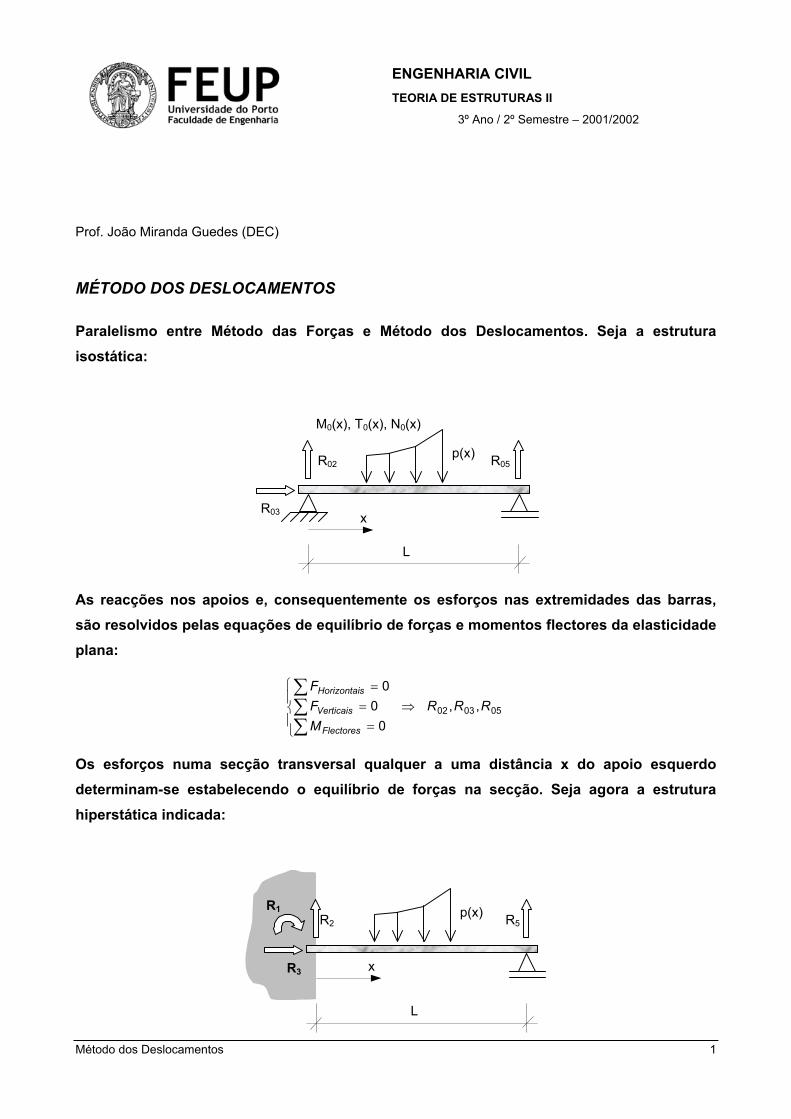
Paralelismo entre Método das Forças e Método dos Deslocamentos. Seja a estrutura isostática:
L
R03
R02 R05 p(x)
x
M0(x), T0(x), N0(x)
As reacções nos apoios e, consequentemente os esforços nas extremidades das barras, são resolvidos pelas equações de equilíbrio de forças e momentos flectores da elasticidade plana:
050302 ,,0
00
RRRMFF
Flectores
Verticais
sHorizontai
⇒
===
∑∑∑
Os esforços numa secção transversal qualquer a uma distância x do apoio esquerdo determinam-se estabelecendo o equilíbrio de forças na secção. Seja agora a estrutura hiperstática indicada:
L
R3
R2 R5p(x)R1
x

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 2
Método das Forças
1º)
R5
M(x), T(x), N(x)
R1
R2
p δ1=0
2º)
R10
R20 δ50
M0(x), T0(x), N0(x) p
Determinação do deslocamento δ10; aplicação do
P.T.V.
R15
R25
F =1
M5(x), T5(x), N5(x)
Método dos Deslocamentos
1º)
R5
M(x), T(x), N(x)
R1
R2
p
R4=0
δ4 = 0
2º)
R50
R10
R20
R40
M0(x), T0(x), N0(x) p
PARALELISMO ENTRE MÉTODO DAS FORÇAS E MÉTODO DOS
DESLOCAMENTOS
L
R3 = 0 R2
R5
R1
x
M(x), T(x), N(x) p(x) = p
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 3
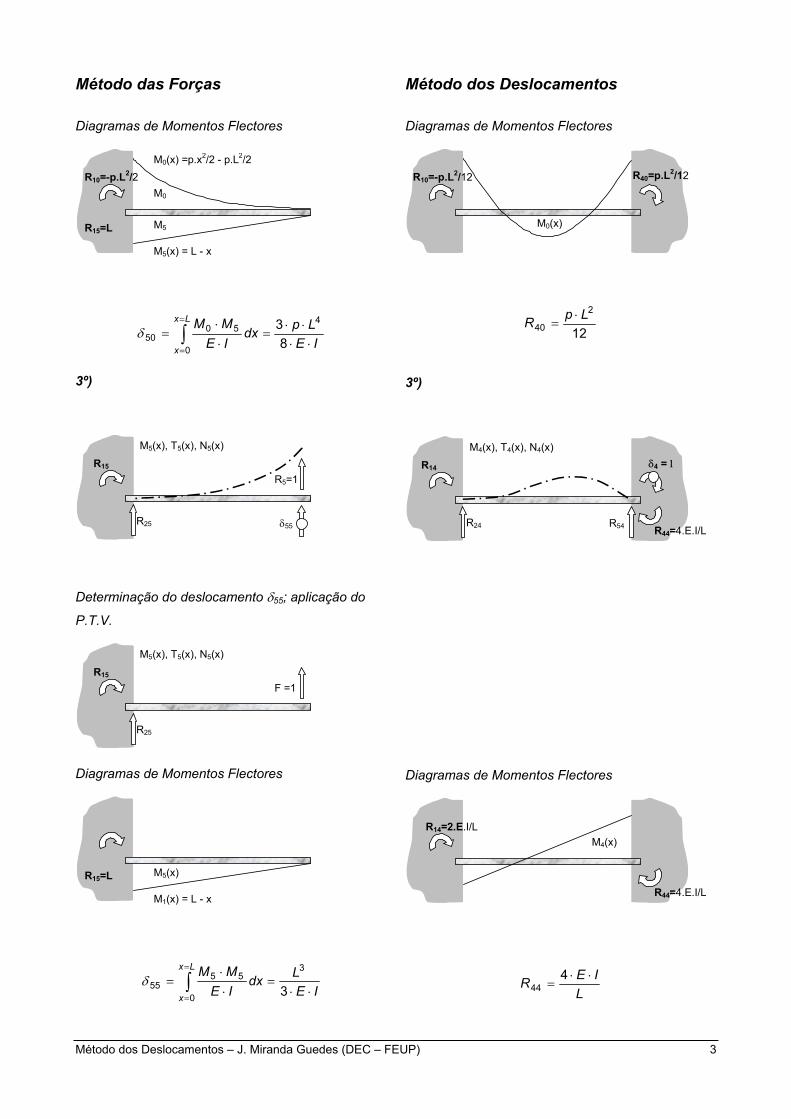
Método das Forças
Diagramas de Momentos Flectores
R10=-p.L2/2 M0(x) =p.x2/2 - p.L2/2
R15=L
M0
M5
M5(x) = L - x
IELpdx
IEMMLx
x ⋅⋅⋅⋅
=⋅⋅
= ∫=
= 83 4
0
5050δ
3º)
R15
R25 δ55
R5=1
M5(x), T5(x), N5(x)
Determinação do deslocamento δ55; aplicação do
P.T.V.
R15
R25
F =1
M5(x), T5(x), N5(x)
Diagramas de Momentos Flectores
R15=L M5(x)
M1(x) = L - x
IELdx
IEMMLx
x ⋅⋅=
⋅⋅
= ∫=
= 3
3
0
5555δ
Método dos Deslocamentos
Diagramas de Momentos Flectores
R10=-p.L2/12
M0(x)
R40=p.L2/12
12
2
40LpR ⋅
=
3º)
R54
M4(x), T4(x), N4(x)
R14
R24
δ4 = 1
R44=4.E.I/L
Diagramas de Momentos Flectores
M4(x) R14=2.E.I/L
R44=4.E.I/L
LIER ⋅⋅
=4
44

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 4
4º)
Sobrepondo os efeitos:
L
R2
R5
R1
x
M(x), T(x), N(x) p(x) = p δ4
=
R10
R20 δ50
M0(x), T0(x), N0(x) p
+
R15
R25 δ55
R5=1
M5(x), T5(x), N5(x)
* R5
que resulta na equação de compatibilidade de
deslocamentos no ponto de apoio:
83
5555505LpRR ⋅⋅
=⇒⋅+= δδδ
Estabelecem-se equações de compatibilidade de
deslocamentos em pontos de deslocamento
condicionado da estrutura.
Por aplicação do Princípio da Sobreposição dos
Efeitos determinam-se as reacções R e os esforços
finais E nas diversas secções da estrutura:
550
550
REEERRRR
iii
iii
⋅+=⋅+=
4º)
Sobrepondo os efeitos:
L
R2
R5
R1
x
M(x), T(x), N(x) p(x) = p δ4
=
R50
R10
R20
M0(x), T0(x), N0(x) p δ4 = 0
R40
+
R54
M4(x), T4(x), N4(x)
R14
R24
δ4 = 1
R44=4.E.I/L
* δ4
que resulta na equação de equilíbrio de forças no
ponto de deslocamento livre:
IELpRRR⋅⋅
⋅=⇒⋅+=
48
3
4444404 δδ
Estabelecem-se equações de equilíbrio de forças
nos nós livres da estrutura.
Por aplicação do Princípio da Sobreposição dos
Efeitos determinam-se as reacções R e os esforços
finais E nas diversas secções da estrutura:
440
440
δδ⋅+=⋅+=
iii
iii
EEERRR
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 5
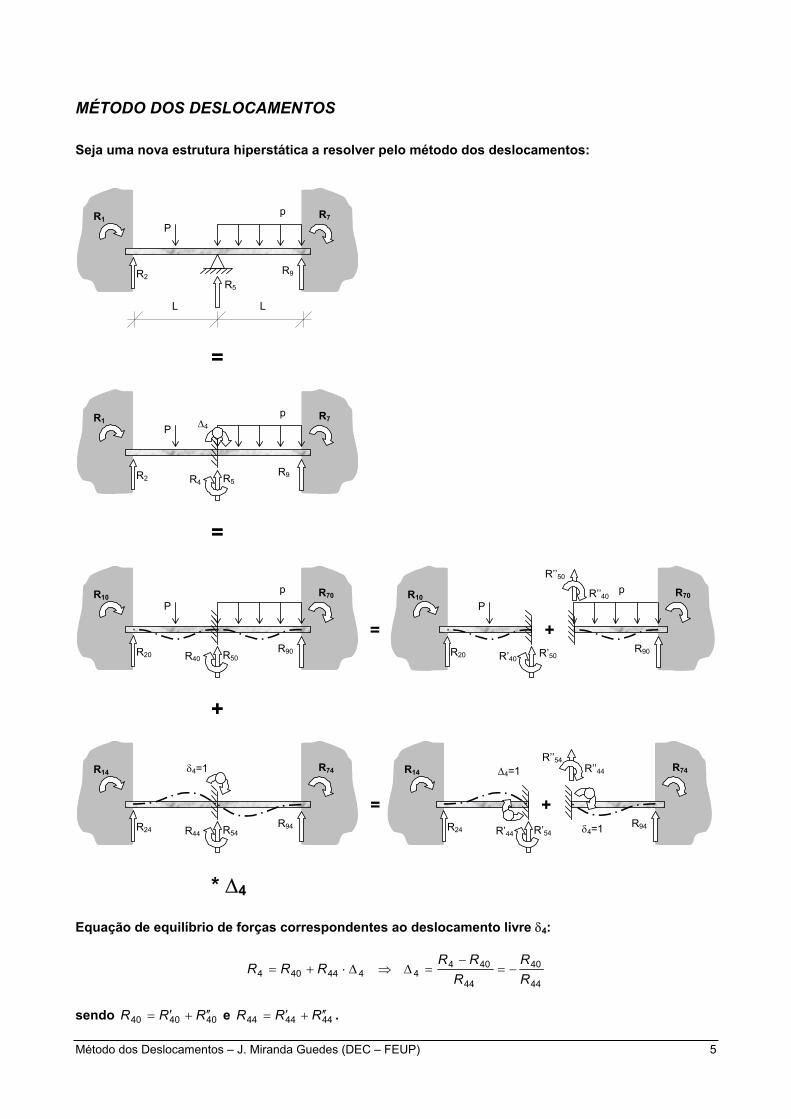
MÉTODO DOS DESLOCAMENTOS
Seja uma nova estrutura hiperstática a resolver pelo método dos deslocamentos:
R9
R1
R2
R7
R5
P
p
L L
=
R9
R1
R2
R7
R5
P ∆4
R4
p
=
R90
R10
R20
R70 P
R50R40
p
R10
R20
P
R’50R’40
R’’50
R90
R70 p R’’40
= +
+
R94
R14
R24
R74
R54R44
δ4=1
R14
R24 R’54R’44
=
∆4=1 R’’54
R94
R74 R’’44
δ4=1
+
* ∆4
Equação de equilíbrio de forças correspondentes ao deslocamento livre δ4:
44
40
44
4044444404 R
RRRR
RRR −=−
=∆⇒∆⋅+=
sendo 404040 RRR ′′+′= e 444444 RRR ′′+′= .

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 6
MÉTODO DOS DESLOCAMENTOS
Determinação de reacções resultantes de assentamentos de apoio em barras bi-encastradas por aplicação do P.T.V.:
1) Assentamento unitário na direcção 1, i.e. ∆1 = 1:
E, I, A
L
∆1=1 R2
R1
R5
R4
R3 R6
= Diagramas de momentos flectores
E, I, A
L
R2 R1 R5 R4
∆1=1
M(x)=R1-(R1+R4).x / L
R1
-R4
x
Estruturas auxiliares
Estrutura 1:
E, I, A
L
R21=-1/L R11=1 R51=1/L
M1(x)=1-x / L
1 x
Estrutura 2:
E, I, A
L
R24=-1/L R54=1/L R44=1
M4(x)=-x / L -1
x
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 7
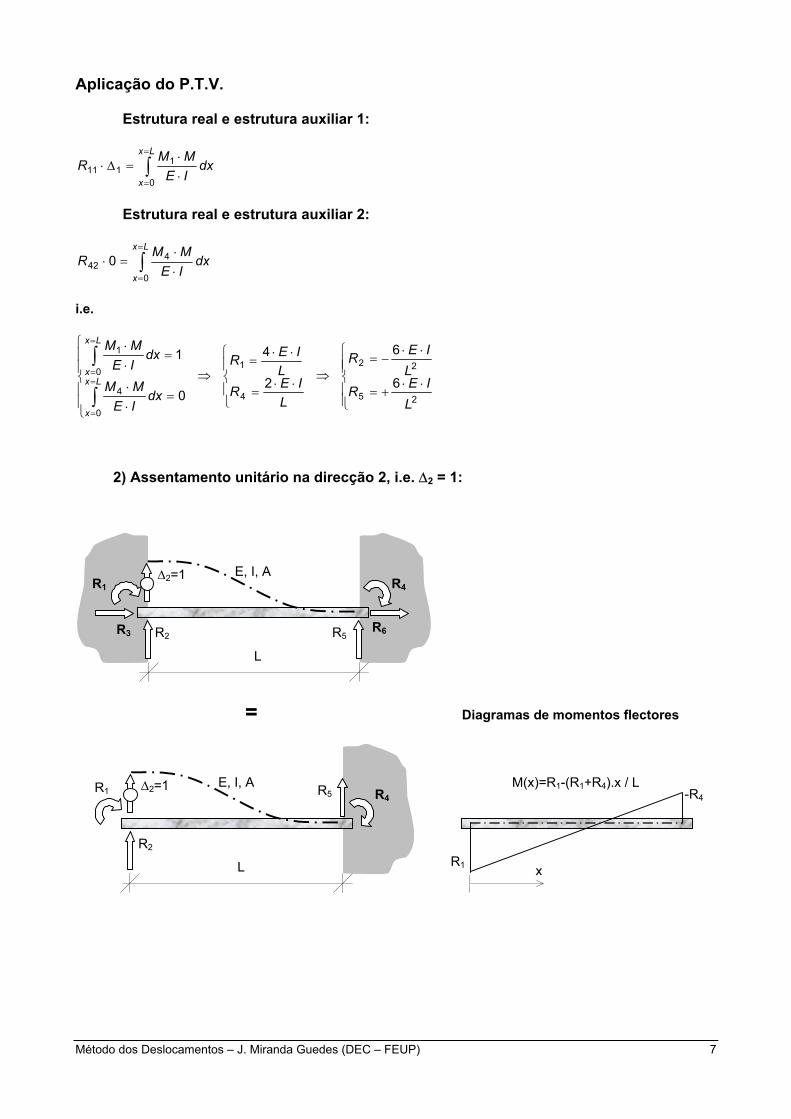
Aplicação do P.T.V.
Estrutura real e estrutura auxiliar 1:
∫=
= ⋅⋅
=∆⋅Lx
x
dxIEMM
R0
1111
Estrutura real e estrutura auxiliar 2:
∫=
= ⋅⋅
=⋅Lx
x
dxIEMM
R0
442 0
i.e.
⋅⋅+=
⋅⋅−=
⇒
⋅⋅=
⋅⋅=
⇒
=⋅⋅
=⋅⋅
∫
∫=
=
=
=
25
22
4
1
0
4
0
1
6
6
2
4
0
1
LIER
LIER
LIER
LIER
dxIEMM
dxIEMM
Lx
x
Lx
x
2) Assentamento unitário na direcção 2, i.e. ∆2 = 1:
E, I, A
L
∆2=1
R2
R1
R5
R4
R3 R6
= Diagramas de momentos flectores
E, I, A
L
R2
R1 R5 R4∆2=1
M(x)=R1-(R1+R4).x / L
R1
-R4
x

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 8
Estruturas auxiliares
Estrutura 1:
E, I, A
L
R41=-1R11=1
M1(x)=1
1
x
Estrutura 2:
E, I, A
L
R22=1
R52=-1 R42=-L
M2(x)= x / L
1x
Aplicação do P.T.V.
Estrutura real e estrutura auxiliar 1:
∫=
= ⋅⋅
=⋅Lx
x
dxIEMM
R0
111 0
Estrutura real e estrutura auxiliar 2:
∫=
= ⋅⋅
=∆⋅Lx
x
dxIEMM
R0
2222
i.e.
⋅⋅−=
⋅⋅+=
⇒
⋅⋅−=
⋅⋅−=
⇒
=⋅⋅
=⋅⋅
∫
∫=
=
=
=
35
32
24
21
0
2
0
1
12
12
6
6
1
0
LIER
LIER
LIER
LIER
dxIEMM
dxIEMM
Lx
x
Lx
x

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 9
2) Assentamento unitário na direcção 3, i.e. ∆3 = 1:
E, I, A
L
∆3=1
R2
R1
R5
R4
R3 R6
= Diagramas de esforços axiais
E, I, A
L
R3 R6
∆3=1
N(x)=-R3
x -R3
Estrutura auxiliar
E, I, A
L
R31=1 R61=-1
N3(x)=-1
x -1
Aplicação do P.T.V.
Estrutura real e estrutura auxiliar:
AELRdx
AENN
RLx
x ⋅⋅=⇔
⋅⋅
=∆⋅ ∫=
=3
0
3331 1
i.e.
⋅−=
⋅+=
LAERLAER
6
3
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 10
MÉTODO DOS DESLOCAMENTOS
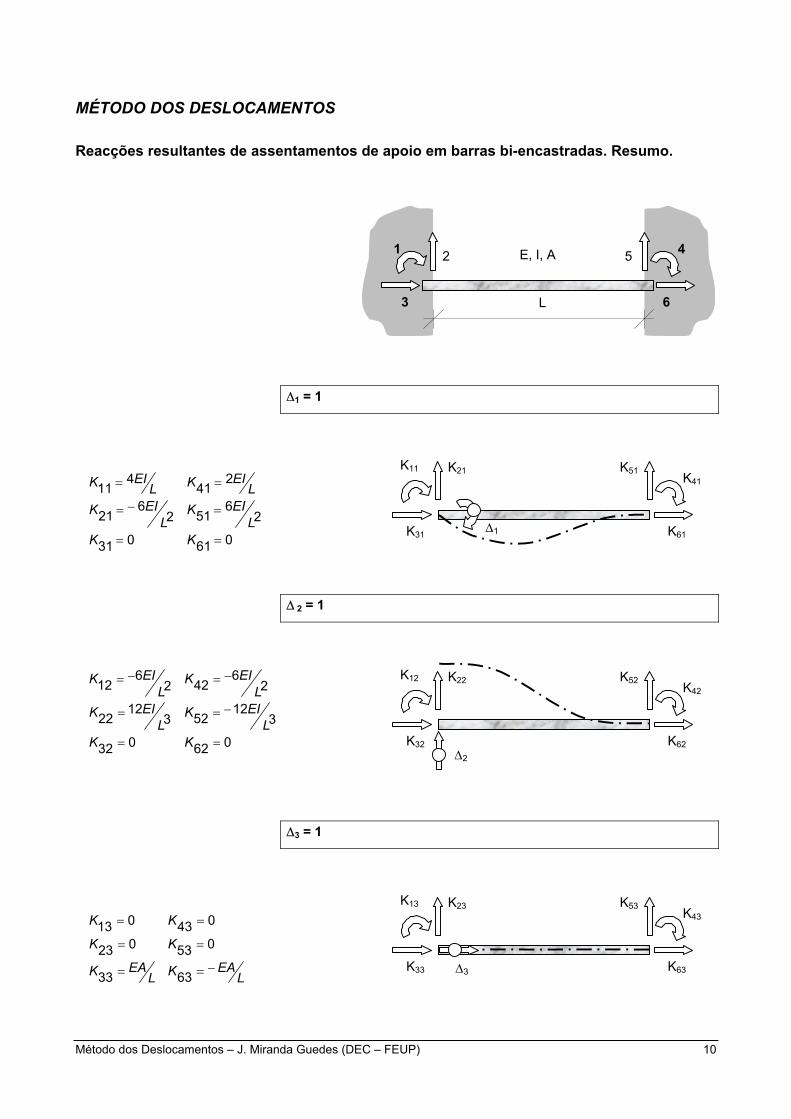
Reacções resultantes de assentamentos de apoio em barras bi-encastradas. Resumo.
3
1 2
6
5 4 E, I, A
L
∆1 = 1
K31
K11 K21
K61
K51 K41
∆1
∆ 2 = 1
K32
K12
K62
K42
∆2
K22 K52
∆3 = 1
K33
K13
K63
K43
∆3
K23 K53
061
26
51
241
031
26
21
411
=
=
=
=
−=
=
KL
EIKL
EIK
KL
EIKL
EIK
062
312
52
26
42
032
312
22
26
12
=
−=
−=
=
=
−=
KL
EIKL
EIK
KL
EIKL
EIK
LEAK
K
K
LEAK
K
K
−=
=
=
=
=
=
63
053
043
33
023
013
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 11
MÉTODO DOS DESLOCAMENTOS
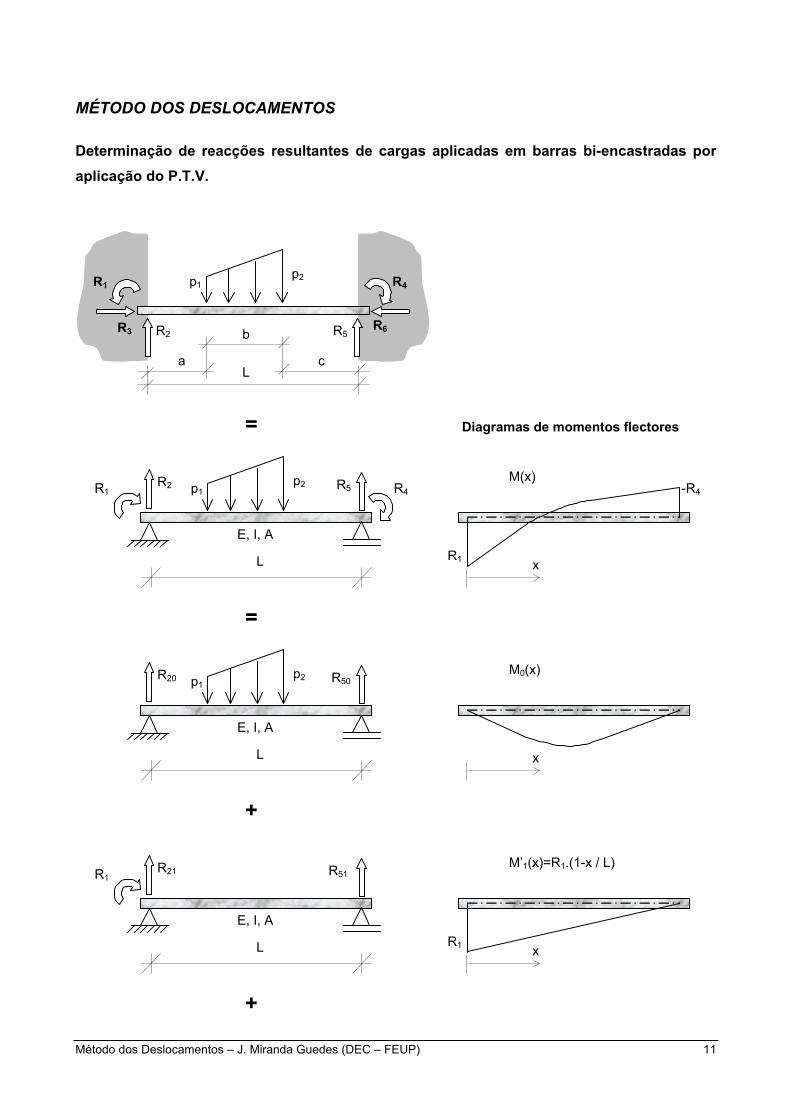
Determinação de reacções resultantes de cargas aplicadas em barras bi-encastradas por aplicação do P.T.V.
L
b
c a
p1 p2
R2
R1
R5
R4
R3 R6
= Diagramas de momentos flectores
E, I, A
L
R2 R1 R5 R4p1 p2
M(x)
R1
-R4
x
=
E, I, A
L
R20 R50 p1 p2
M0(x)
x
+
E, I, A
L
R21 R1 R51
M’1(x)=R1.(1-x / L)
R1
x
+
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 12
E, I, A
L
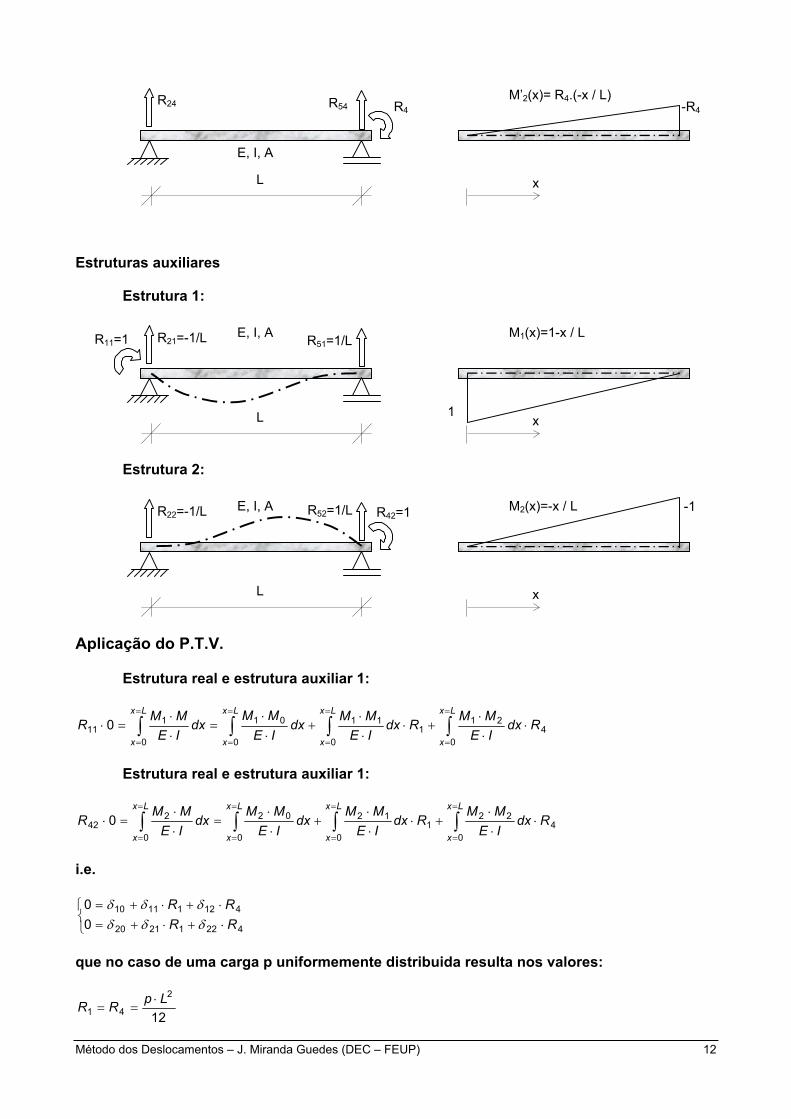
R24 R54 R4
M’2(x)= R4.(-x / L) -R4
x
Estruturas auxiliares
Estrutura 1:
E, I, A
L
R21=-1/L R11=1 R51=1/L
M1(x)=1-x / L
1 x
Estrutura 2:
E, I, A
L
R22=-1/L R52=1/L R42=1
M2(x)=-x / L -1
x
Aplicação do P.T.V.
Estrutura real e estrutura auxiliar 1:
40
211
0
11
0
01
0
111 0 Rdx
IEMM
RdxIEMM
dxIEMM
dxIEMM
RLx
x
Lx
x
Lx
x
Lx
x
⋅⋅⋅
+⋅⋅⋅
+⋅⋅
=⋅⋅
=⋅ ∫∫∫∫=
=
=
=
=
=
=
=
Estrutura real e estrutura auxiliar 1:
40
221
0
12
0
02
0
242 0 Rdx
IEMM
RdxIEMM
dxIEMM
dxIEMM
RLx
x
Lx
x
Lx
x
Lx
x
⋅⋅⋅
+⋅⋅⋅
+⋅⋅
=⋅⋅
=⋅ ∫∫∫∫=
=
=
=
=
=
=
=
i.e.
⋅+⋅+=⋅+⋅+=
42212120
41211110
00
RRRR
δδδδδδ
que no caso de uma carga p uniformemente distribuida resulta nos valores:
12
2
41LpRR ⋅
==
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 13
MÉTODO DOS DESLOCAMENTOS
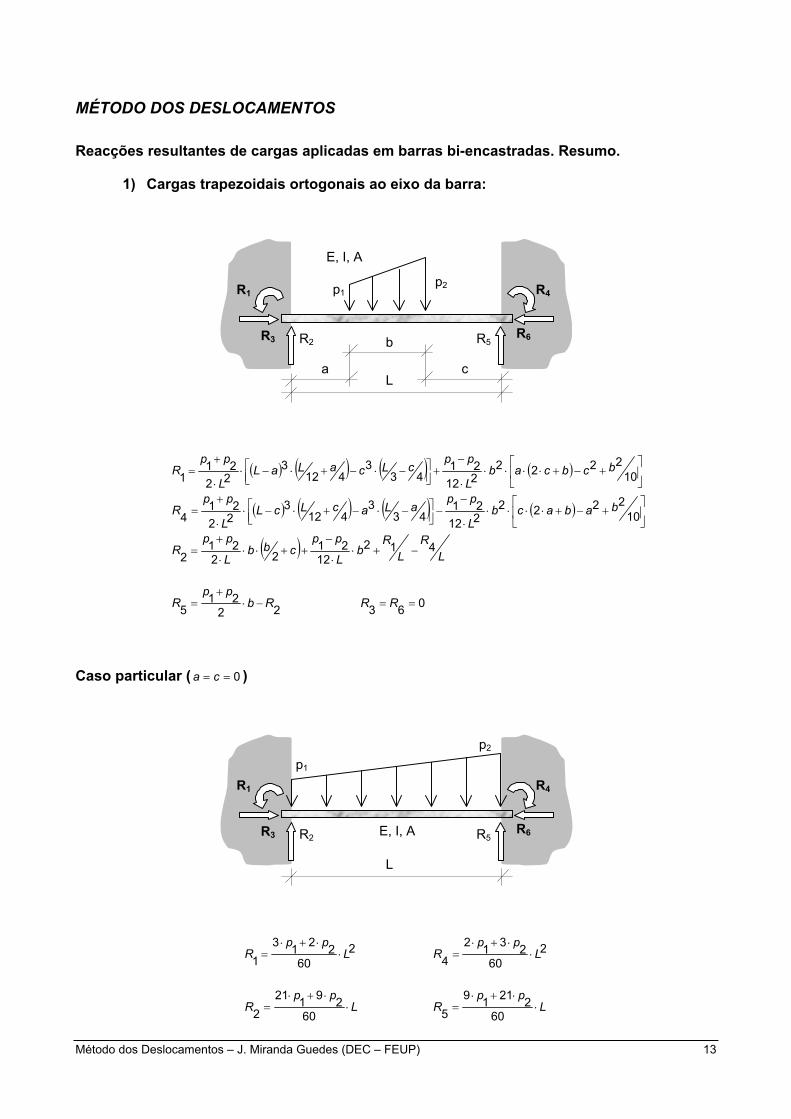
Reacções resultantes de cargas aplicadas em barras bi-encastradas. Resumo.
1) Cargas trapezoidais ortogonais ao eixo da barra:
L
b
c a
p1 p2
R2
R1
R5
R4
R3 R6
E, I, A
( ) ( ) ( ) ( )
+−+⋅⋅⋅⋅
⋅
−+
−⋅−+⋅−⋅
⋅
+= 10
222221221
433
4123
2221
1bcbcab
L
ppcLcaLaL
L
ppR
( ) ( ) ( ) ( )
+−+⋅⋅⋅⋅
⋅
−−
−⋅−+⋅−⋅
⋅
+= 10
222221221
433
4123
2221
4babacb
L
ppaLacLcL
L
ppR
( ) LR
LR
bL
ppcbb
L
ppR 412
1221
2221
2 −+⋅⋅
−++⋅⋅
⋅
+=
2221
5 Rbpp
R −⋅+
= 063 == RR
Caso particular ( 0== ca )
L
R2
R1
R5
R4
p1
p2
R3 R6E, I, A
260
22131 L
ppR ⋅
⋅+⋅= 2
602312
4 Lpp
R ⋅⋅+⋅
=
Lpp
R ⋅⋅+⋅
=60
291212 L
ppR ⋅
⋅+⋅=
6022119
5
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 14
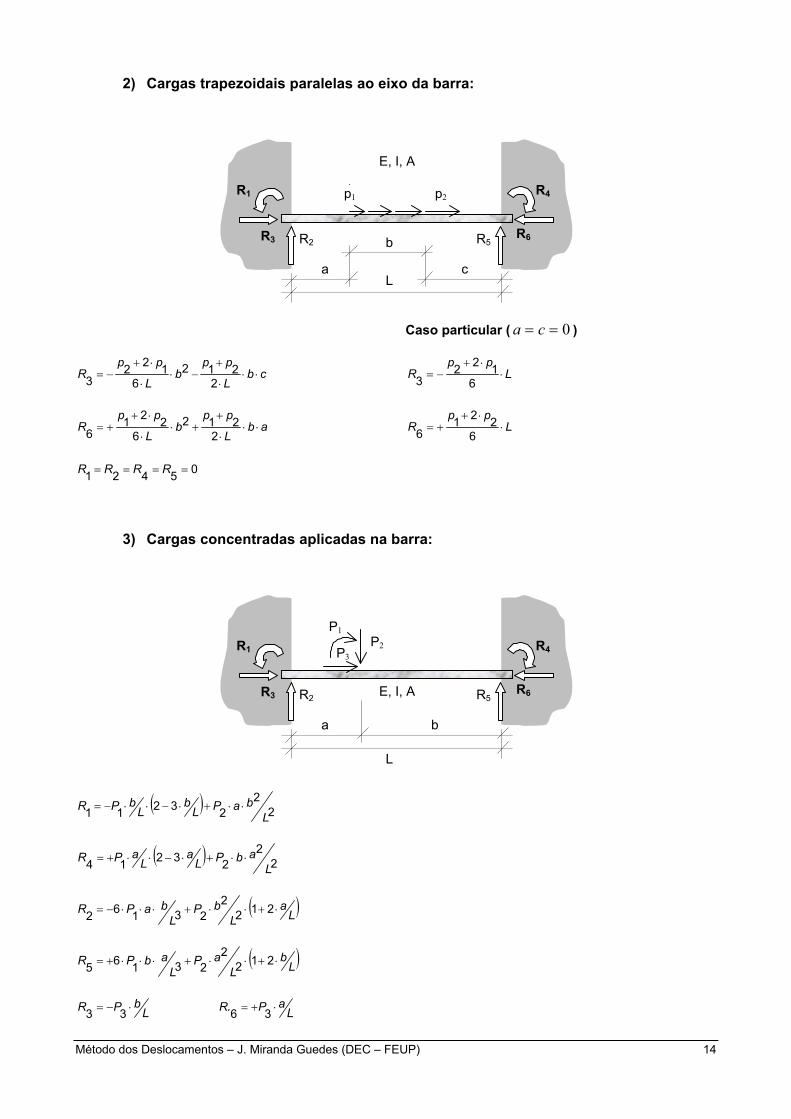
2) Cargas trapezoidais paralelas ao eixo da barra:
L
b
c a
p1 p2
R2
R1
R5
R4
R3 R6
E, I, A
Caso particular ( 0== ca )
cbL
ppb
L
ppR ⋅⋅
⋅
+−⋅
⋅
⋅+−=
2212
6122
3 Lpp
R ⋅⋅+
−=6
1223
abL
ppb
L
ppR ⋅⋅
⋅
++⋅
⋅
⋅++=
2212
6221
6 Lpp
R ⋅⋅+
+=6
2216
05421 ==== RRRR
3) Cargas concentradas aplicadas na barra:
L
a
P1 P2
P3
b
R2
R1
R5
R4
R3 R6E, I, A
( ) 22
23211 LbaPL
bLbPR ⋅⋅+⋅−⋅⋅−=
( ) 22
23214 LabPL
aLaPR ⋅⋅+⋅−⋅⋅+=
( )LaLbP
LbaPR ⋅+⋅⋅+⋅⋅⋅−= 212
223162
( )LbLaP
LabPR ⋅+⋅⋅+⋅⋅⋅+= 212
223165
LbPR ⋅−= 33 L
aPR ⋅+= 36´

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 15
4) Variação de temperatura ∆t nas faces superior e inferior da barra:
∆ts
∆ti R2
R1
R5
R4
R3 R6
E, I, A
hstitIERR
∆−∆⋅⋅⋅== α41
052 == RR
263stitAERR
∆+∆⋅⋅⋅== α
Sendo:
I, A, h – inércia, área e altura da secção transversal da barra, respectivamente;
E – módulo de elasticidade longitudinal e transversal do material da barra;
α – coeficiente de dilatação térmica do material da barra.
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 16
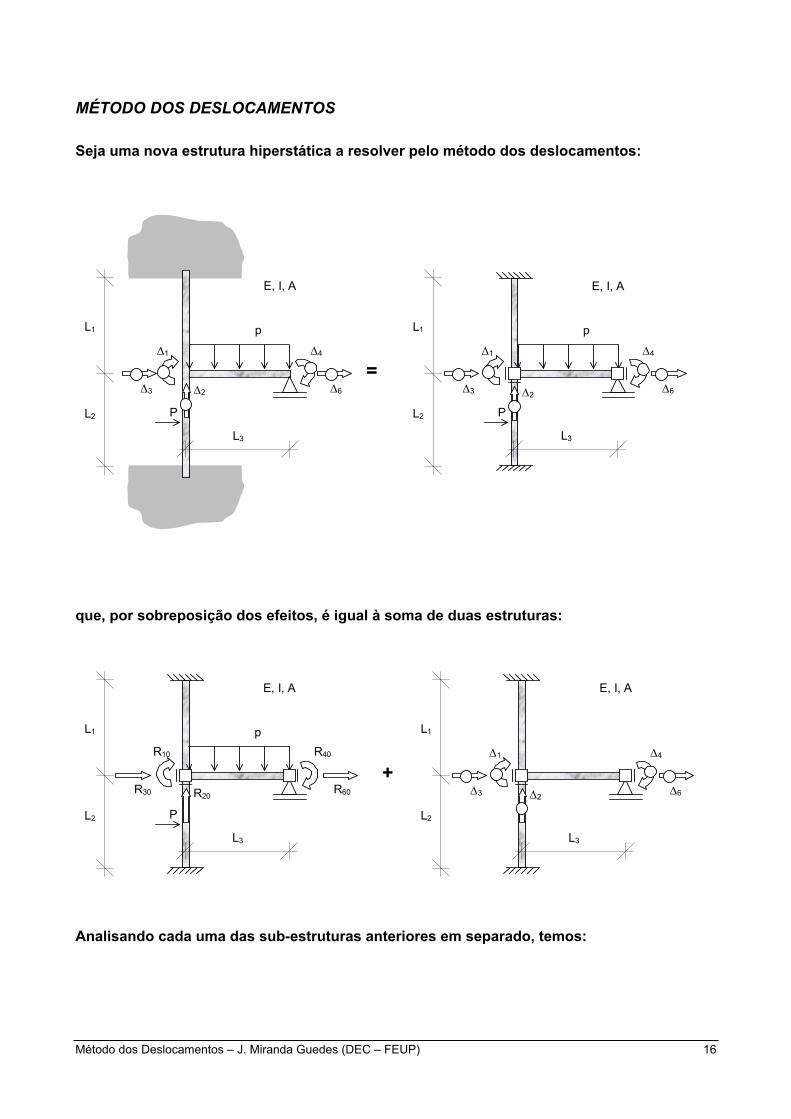
MÉTODO DOS DESLOCAMENTOS
Seja uma nova estrutura hiperstática a resolver pelo método dos deslocamentos:
∆1
P
pL1
L2
∆2∆3 ∆6
∆4
E, I, A
L3
∆1
P
pL1
L2
∆2∆3 ∆6
∆4
=
E, I, A
L3
que, por sobreposição dos efeitos, é igual à soma de duas estruturas:
R10
P
pL1
L2
R20R30 R60
R40
+
E, I, A
L3
∆1
L1
L2
∆2∆3 ∆6
∆4
E, I, A
L3
Analisando cada uma das sub-estruturas anteriores em separado, temos:

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 17
0) Cargas aplicadas:
R10
P
p L1
L2
R20 R30 R60
R40
=
E, I, A
L3
R’’’10
p
R’’’20 R’’’30 R60
R40 R’10
P
R’20
R’30
R’’10
R’’20 R’’30
1) Assentamento ∆1:
L1
L2
E, I, A
L3
K11
K21 K61
K41
K31
∆1 =
K’’’11
K’’’21K’’’31
K41 K’11 K’21
K’31
K’’11
K’’21 K’’31
∆1=1
K61

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 18
2) Assentamento ∆2:
L1
L2
E, I, A
L3
K12
K22 K62
K42
K32 =
∆2
K’’’12
K’’’22K’’’32
K42 K’12
K’22
K’32
K’’12
K’’22 K’’32
∆2=1
K62
3) Assentamento ∆3:
L1
L2
E, I, A
L3
K13
K23 K63
K43
K33 =
∆3
K63
K’’’13
K’’’23
K’’’33 K43 K’13 K’23
K’33
K’’13
K’’23
K’’33
∆3=1

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 19
4) Assentamento ∆4:
L1
L2
E, I, A
L3
K14
K24 K64
K44
K34 =
∆4
K’’’14
K’’’24K’’’34
K44K’14 K’24
K’34
K’’14
K’’24 K’’34
∆4=1
K64
5) Assentamento ∆6:
L1
L2
E, I, A
L3
K16
K26 K66
K46
K36 =
∆6
K’’’16
K’’’26K’’’36
K’16
K’26
K’36
K’’14
K’’26 K’’36
∆6=1
K66
K46
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 20
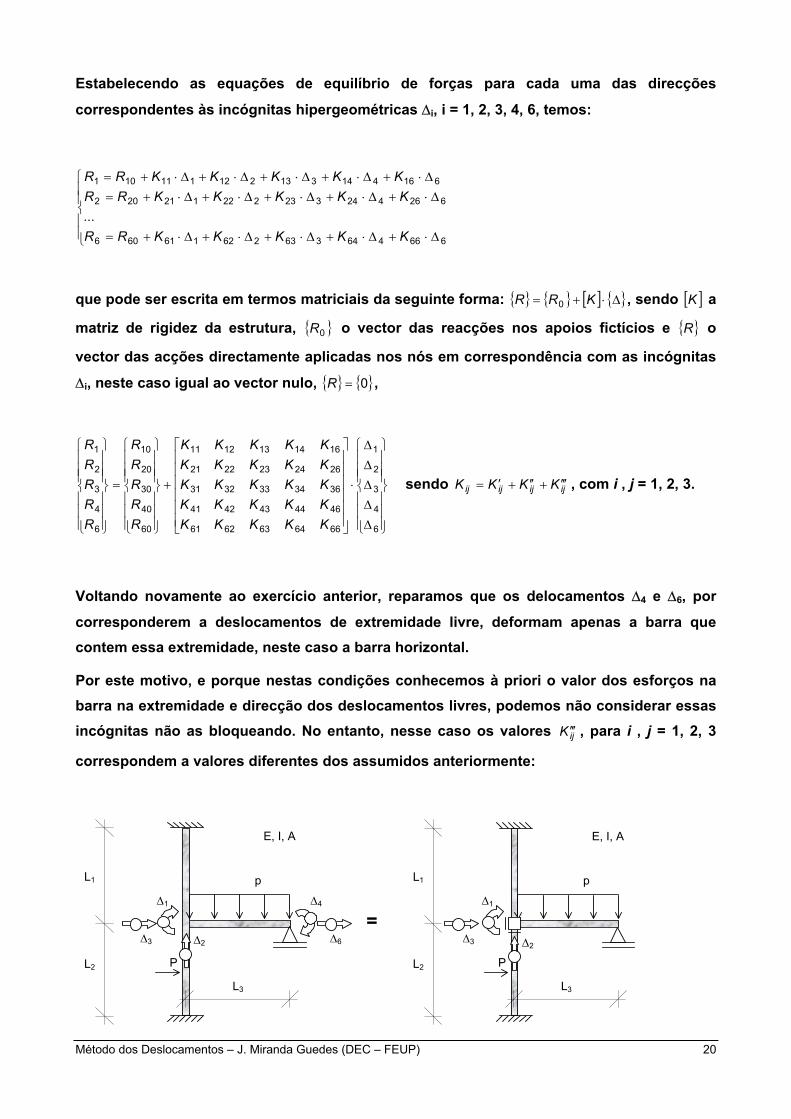
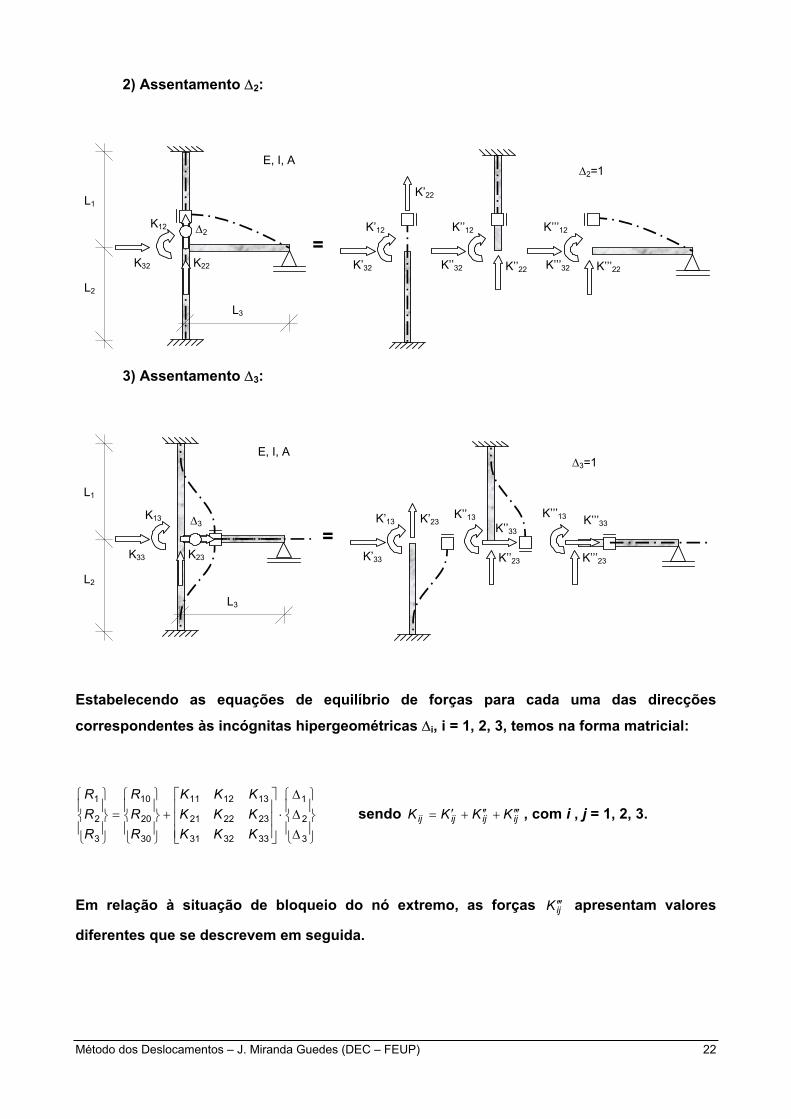
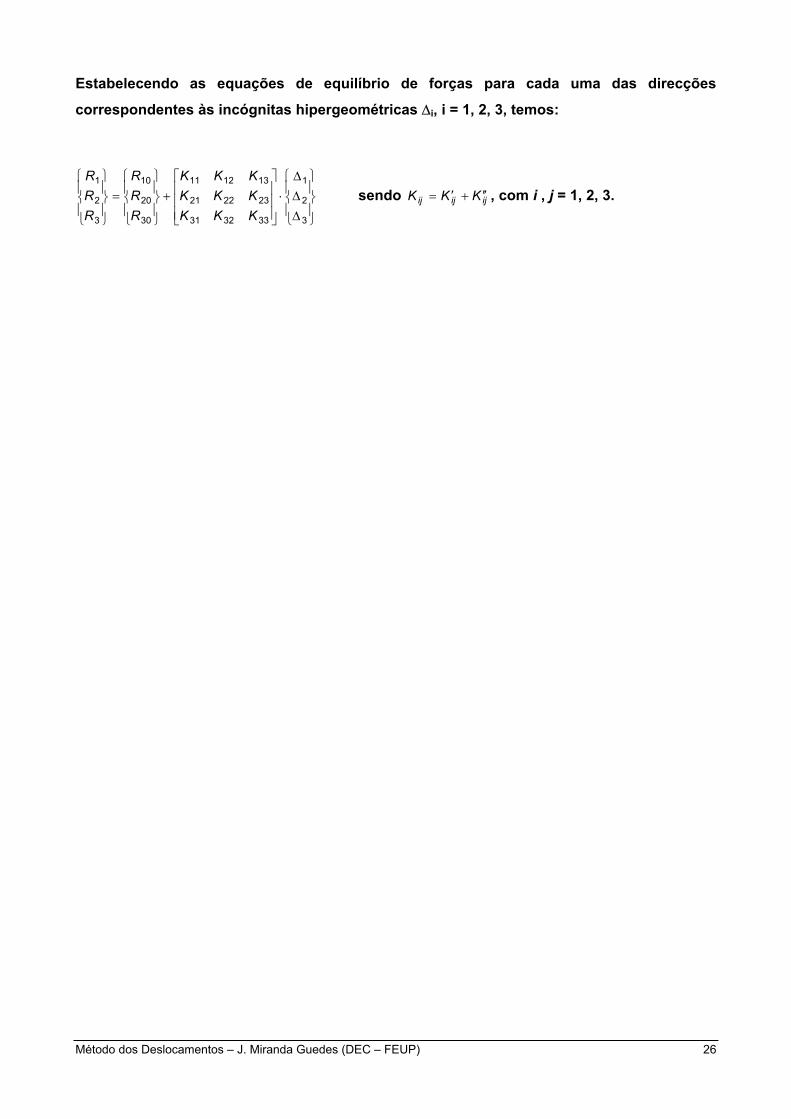
Estabelecendo as equações de equilíbrio de forças para cada uma das direcções
correspondentes às incógnitas hipergeométricas ∆i, i = 1, 2, 3, 4, 6, temos:
∆⋅+∆⋅+∆⋅+∆⋅+∆⋅+=
∆⋅+∆⋅+∆⋅+∆⋅+∆⋅+=∆⋅+∆⋅+∆⋅+∆⋅+∆⋅+=
666464363262161606
626424323222121202
616414313212111101
...KKKKKRR
KKKKKRRKKKKKRR
que pode ser escrita em termos matriciais da seguinte forma: { } { } [ ] { }∆⋅+= KRR 0 , sendo [ ]K a
matriz de rigidez da estrutura, { }0R o vector das reacções nos apoios fictícios e { }R o
vector das acções directamente aplicadas nos nós em correspondência com as incógnitas
∆i, neste caso igual ao vector nulo, { } { }0=R ,
∆∆∆∆∆
⋅
+
=
6
4
3
2
1
6664636261
4644434241
3634333231
2624232221
1614131211
60
40
30
20
10
6
4
3
2
1
KKKKKKKKKKKKKKKKKKKKKKKKK
RRRRR
RRRRR
sendo ijijijij KKKK ′′′+′′+′= , com i , j = 1, 2, 3.
Voltando novamente ao exercício anterior, reparamos que os delocamentos ∆4 e ∆6, por
corresponderem a deslocamentos de extremidade livre, deformam apenas a barra que contem essa extremidade, neste caso a barra horizontal.
Por este motivo, e porque nestas condições conhecemos à priori o valor dos esforços na barra na extremidade e direcção dos deslocamentos livres, podemos não considerar essas incógnitas não as bloqueando. No entanto, nesse caso os valores ijK ′′′ , para i , j = 1, 2, 3
correspondem a valores diferentes dos assumidos anteriormente:
∆1
P
p L1
L2
∆2 ∆3 ∆6
∆4
E, I, A
L3
∆1
P
p L1
L2
∆2 ∆3 =
E, I, A
L3
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 21
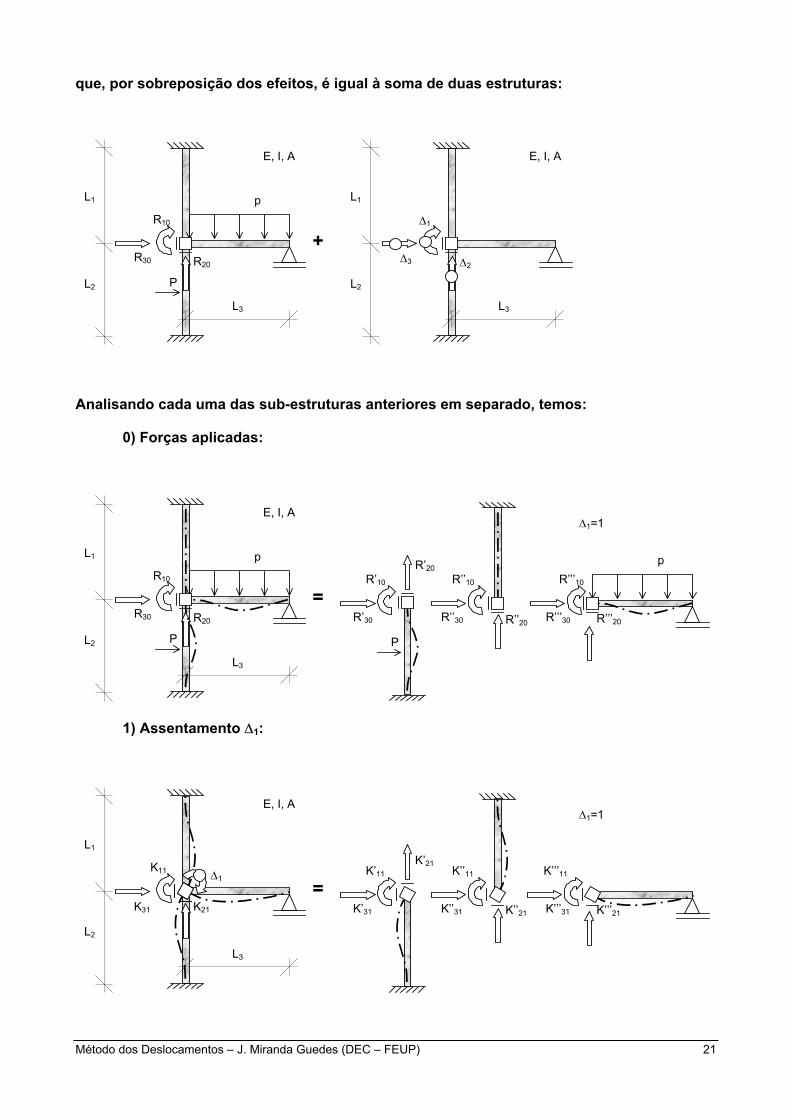
que, por sobreposição dos efeitos, é igual à soma de duas estruturas:
R10
P
p L1
L2
R20 R30
E, I, A
L3
+
∆1
L1
L2
∆2 ∆3
E, I, A
L3
Analisando cada uma das sub-estruturas anteriores em separado, temos:
0) Forças aplicadas:
R10
P
p L1
L2
R20 R30
E, I, A
L3
= R’’’10
p
R’’’20 R’’’30
R’10
P
R’20
R’30
R’’10
R’’20 R’’30
∆1=1
1) Assentamento ∆1:
L1
L2
E, I, A
L3
K11
K21 K31
∆1 =
K’’’11
K’’’21 K’’’31
K’11 K’21
K’31
K’’11
K’’21 K’’31
∆1=1
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 22
2) Assentamento ∆2:
L1
L2
E, I, A
L3
K12
K22 K32
∆2 =
K’’’12
K’’’22 K’’’32
K’12
K’22
K’32
K’’12
K’’22 K’’32
∆2=1
3) Assentamento ∆3:
L1
L2
E, I, A
L3
K13
K23 K33
∆3 =
K’’’13
K’’’23
K’’’33 K’13 K’23
K’33
K’’13
K’’23
K’’33
∆3=1
Estabelecendo as equações de equilíbrio de forças para cada uma das direcções
correspondentes às incógnitas hipergeométricas ∆i, i = 1, 2, 3, temos na forma matricial:
∆∆∆
⋅
+
=
3
2
1
333231
232221
131211
30
20
10
3
2
1
KKKKKKKKK
RRR
RRR
sendo ijijijij KKKK ′′′+′′+′= , com i , j = 1, 2, 3.
Em relação à situação de bloqueio do nó extremo, as forças ijK ′′′ apresentam valores
diferentes que se descrevem em seguida.
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 23
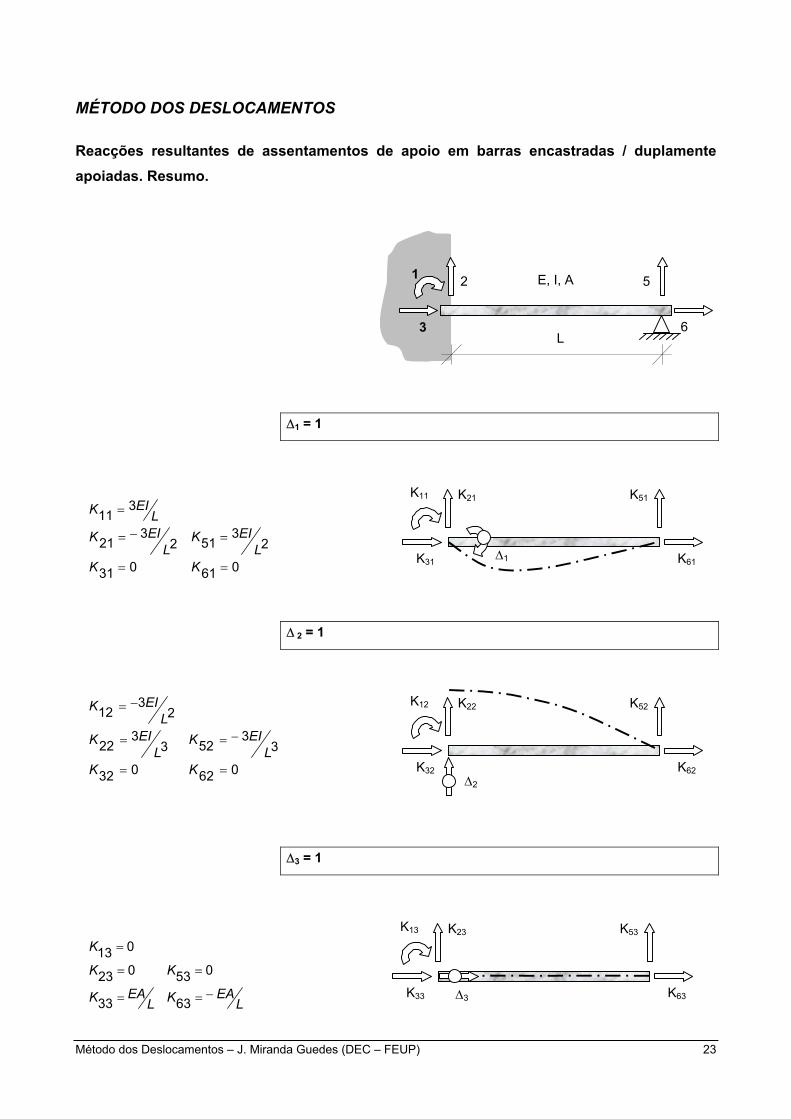
MÉTODO DOS DESLOCAMENTOS
Reacções resultantes de assentamentos de apoio em barras encastradas / duplamente apoiadas. Resumo.
3
1 2
6
5 E, I, A
L
∆1 = 1
K31
K11
K61 ∆1
K21 K51
∆ 2 = 1
K32
K12
K62 ∆2
K22 K52
∆3 = 1
K33
K13
K63 ∆3
K23 K53
061
23
51
031
23
21
311
=
=
=
−=
=
KL
EIK
KL
EIKL
EIK
062
33
52
032
33
22
23
12
=
−=
=
=
−=
KL
EIK
KL
EIKL
EIK
LEAK
K
LEAK
K
K
−=
=
=
=
=
63
053
33
023
013
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 24
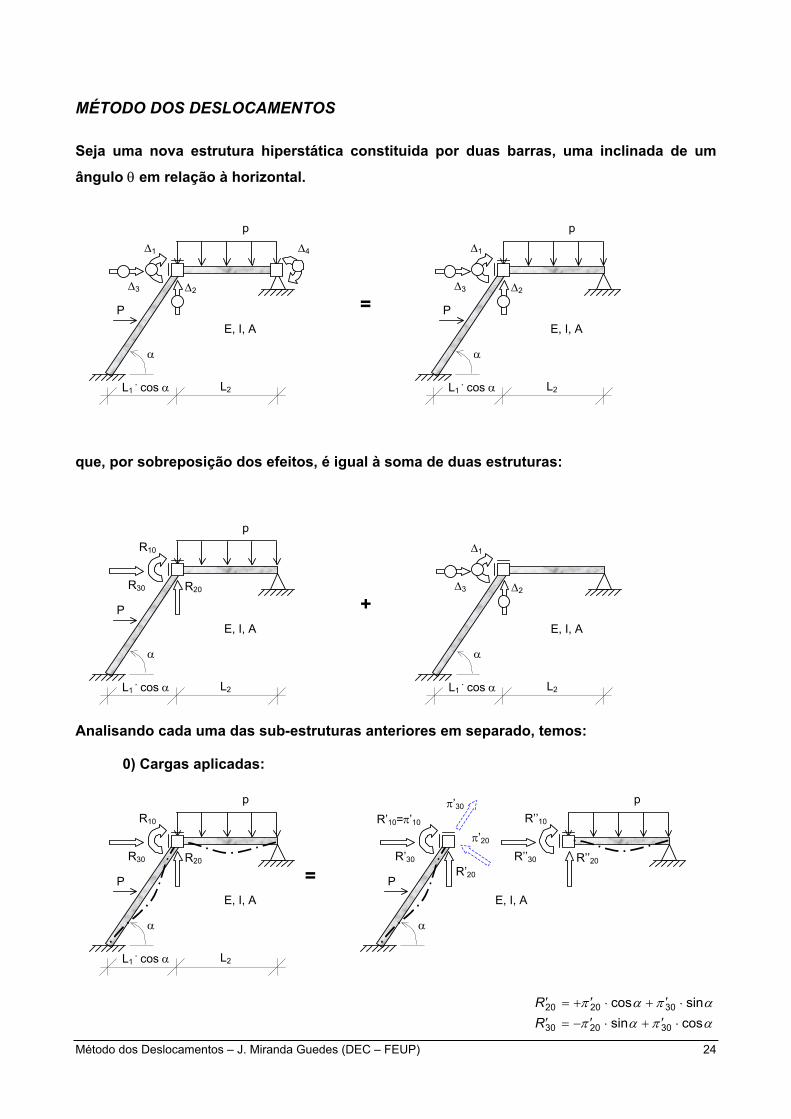
MÉTODO DOS DESLOCAMENTOS
Seja uma nova estrutura hiperstática constituida por duas barras, uma inclinada de um
ângulo θ em relação à horizontal.
∆1
P
p
∆2 ∆3
∆4
E, I, A
L2 L1 . cos α
α
p
E, I, A
=
∆1
P
∆2 ∆3
α
L2L1 . cos α
que, por sobreposição dos efeitos, é igual à soma de duas estruturas:
p
E, I, A
R10
P
R20 R30
α
L2 L1 . cos α
E, I, A
+
∆1
∆2 ∆3
α
L2L1 . cos α
Analisando cada uma das sub-estruturas anteriores em separado, temos:
0) Cargas aplicadas:
p
E, I, A
R10
P
R20 R30
α
L2 L1 . cos α
E, I, A
R’10=π’10
PR’20
R’30
α
=
p
R’’10
R’’20 R’’30
π’30
π’20
απαπαπαπ
cossinsincos
302030
302020
⋅′+⋅′−=′⋅′+⋅′+=′
RR
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 25
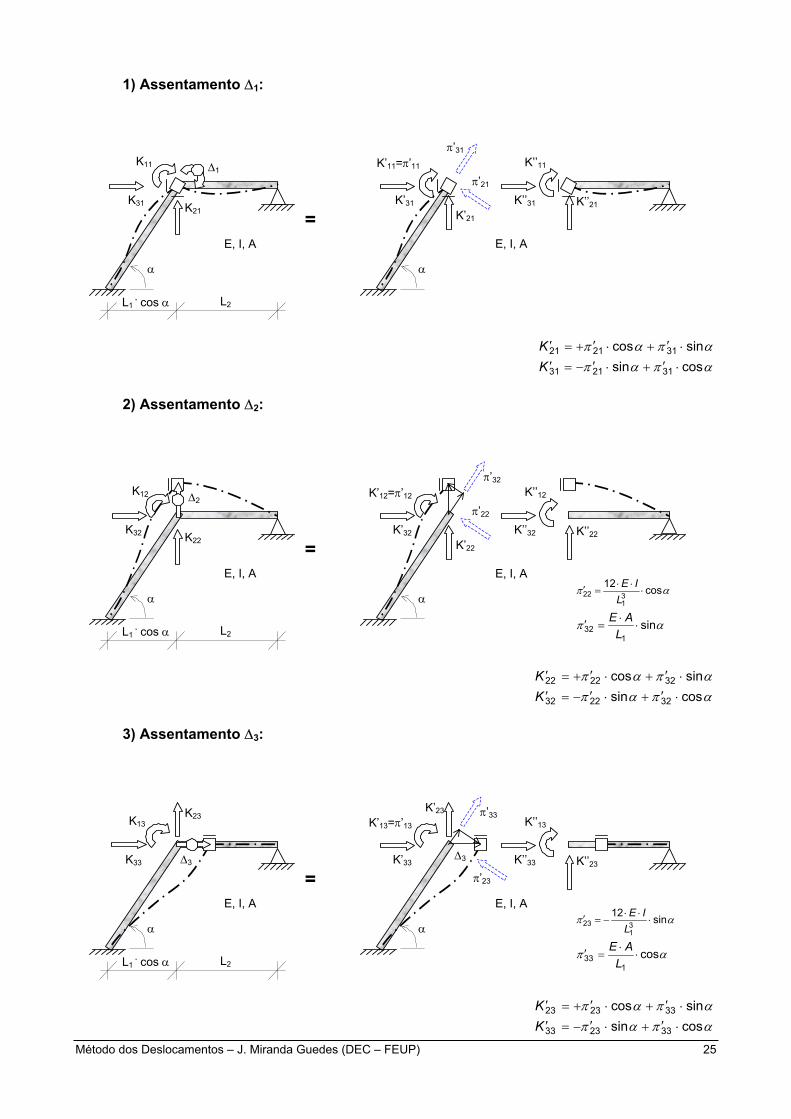
1) Assentamento ∆1:
E, I, A
K11
K21 K31
α
∆1
L2 L1 . cos α
E, I, A
K’11=π’11
K’21
K’31
α
=
K’’11
K’’21 K’’31
π’31
π’21
απαπαπαπ
cossinsincos
312131
312121
⋅′+⋅′−=′⋅′+⋅′+=′
KK
2) Assentamento ∆2:
E, I, A
K12
K22 K32
α
∆2
L2 L1 . cos α
E, I, A
K’12=π’12
K’22
K’32
α
=
K’’12
K’’22 K’’32
π’32
π’22
απ cos1231
22 ⋅⋅⋅
=′L
IE
απ sin1
32 ⋅⋅
=′LAE
απαπαπαπ
cossinsincos
322232
322222
⋅′+⋅′−=′⋅′+⋅′+=′
KK
3) Assentamento ∆3:
E, I, A
K13 K23
K33
α
∆3
L2 L1 . cos α
E, I, A
K’13=π’13
K’33
α
=
K’’13
K’’23 K’’33
π’33
π’23
K’23
∆3
απ sin1231
23 ⋅⋅⋅
−=′L
IE
απ cos1
33 ⋅⋅
=′LAE
απαπαπαπ
cossinsincos
332333
332323
⋅′+⋅′−=′⋅′+⋅′+=′
KK
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 26
Estabelecendo as equações de equilíbrio de forças para cada uma das direcções
correspondentes às incógnitas hipergeométricas ∆i, i = 1, 2, 3, temos:
∆∆∆
⋅
+
=
3
2
1
333231
232221
131211
30
20
10
3
2
1
KKKKKKKKK
RRR
RRR
sendo ijijij KKK ′′+′= , com i , j = 1, 2, 3.
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 27
MÉTODO DOS DESLOCAMENTOS: MATRIZ DE RIGIDEZ / ESFORÇOS NOS NÓS
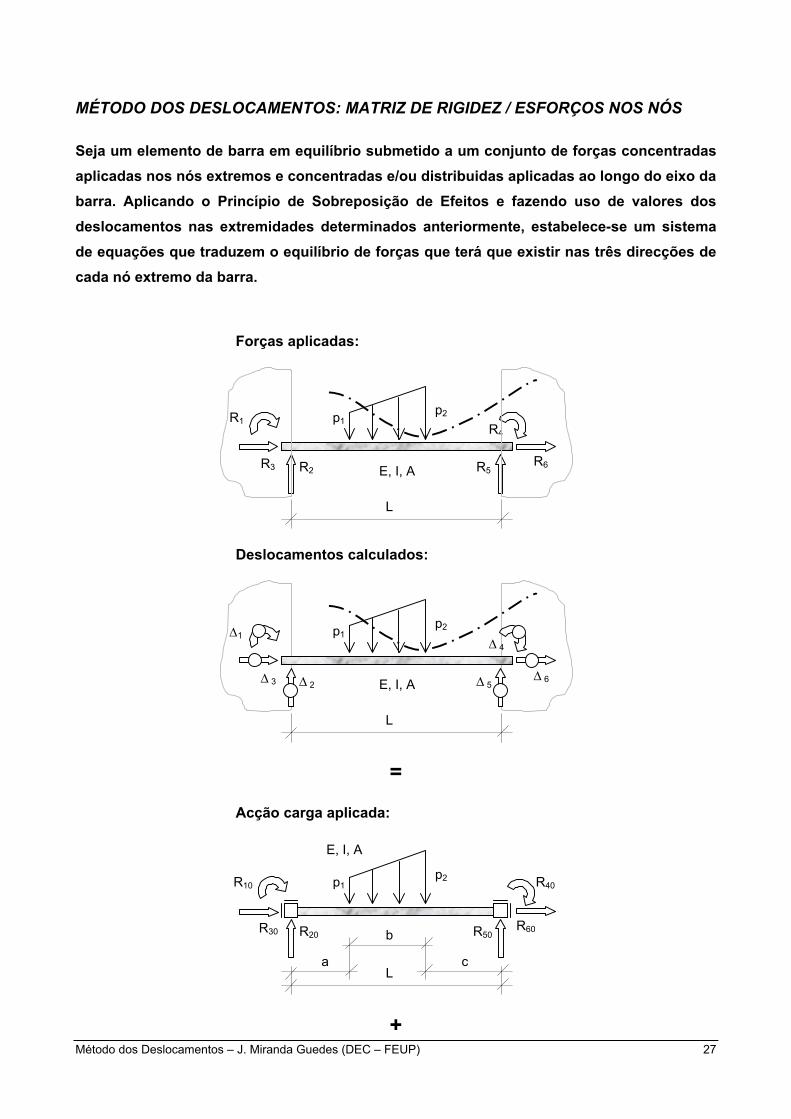
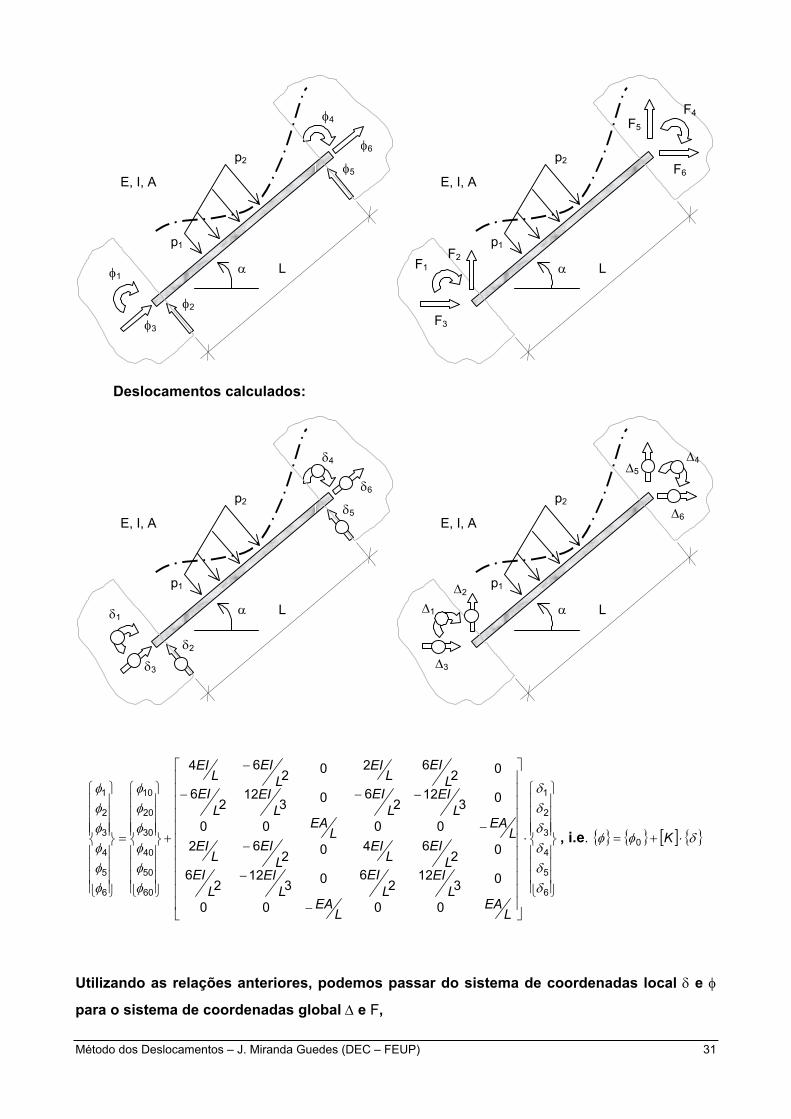
Seja um elemento de barra em equilíbrio submetido a um conjunto de forças concentradas aplicadas nos nós extremos e concentradas e/ou distribuidas aplicadas ao longo do eixo da barra. Aplicando o Princípio de Sobreposição de Efeitos e fazendo uso de valores dos deslocamentos nas extremidades determinados anteriormente, estabelece-se um sistema de equações que traduzem o equilíbrio de forças que terá que existir nas três direcções de cada nó extremo da barra.
Forças aplicadas:
L
R2
R1
R5
R4
R3 R6E, I, A
p1 p2
Deslocamentos calculados:
L
E, I, A ∆ 2
∆1
∆ 5
∆ 4
∆ 3 ∆ 6
p1 p2
=
Acção carga aplicada:
L
b
c a
p1 p2
R20
R10
R50
R40
R30 R60
E, I, A
+

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 28
Acção deslocamentos dos nós:
K31
K11 K21
K61
K51 K41
∆1
K34
K14 K24
K64
K54 K44
∆4
+
K32
K12 K22
K62
K52 K42
∆2
K35
K15 K25
K65
K55 K45
∆5
+
K33
K13 K23
K63
K53 K43
∆3
K36
K16 K26
K66
K56 K46
∆6 Estabelecendo a equação de equilíbrio de forças nos nós, temos:
∆∆∆∆∆∆
⋅
+
=
6
5
4
3
2
1
666564636261
565554535251
464544434241
363534333231
262524232221
161514131211
60
50
40
30
20
10
6
5
4
3
2
1
KKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKKK
RRRRRR
RRRRRR
i.e. { } { } [ ] { }∆⋅+= KRR 0 , designado-se a matriz [ ]K por matriz de rigidez. Por outro lado, o
vector { }R não representa mais do que os esforços nas extremidades da barra segundo as
direcções e os sentidos indicados na figura.
Substituindo as forças Kij pelos valores determinados anteriormente e as forças Ri pelos esforços correspondentes, temos:
∆∆∆∆∆∆
⋅
−
−
−−
−−−
−
+
=
−−−
6
5
4
3
2
1
60
50
40
30
20
10
0000
0312
2603
122
6
026402
620000
0312
2603
122
6
026202
64
LEA
LEA
LEI
LEI
LEI
LEI
LEI
LEI
LEI
LEI
LEA
LEA
LEI
LEI
LEI
LEI
LEI
LEI
LEI
LEI
RRRRRR
NTMNTM
d
d
d
e
e
e
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 29
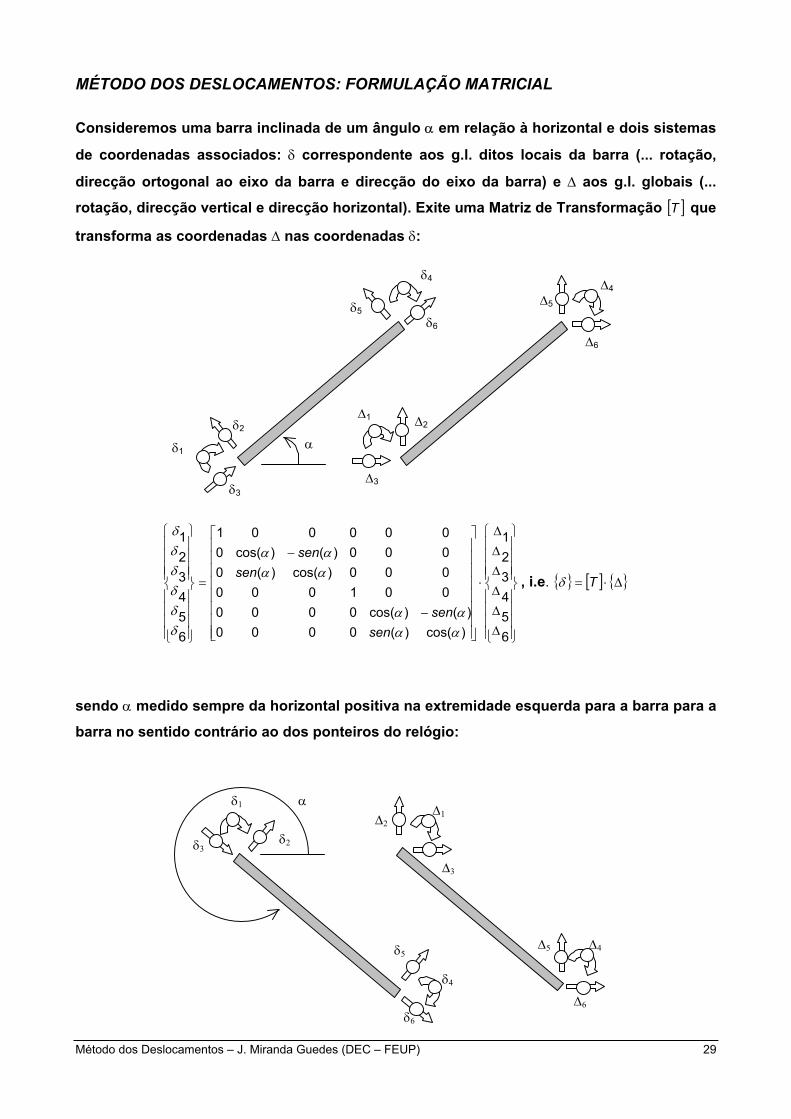
MÉTODO DOS DESLOCAMENTOS: FORMULAÇÃO MATRICIAL
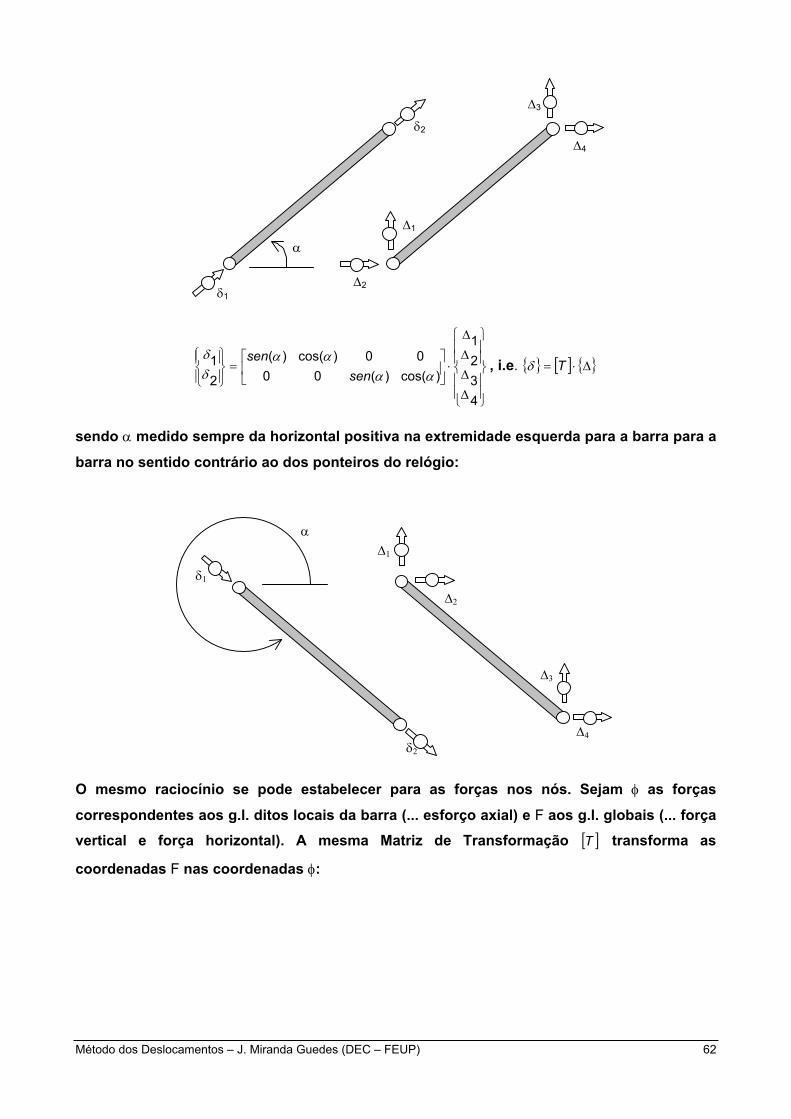
Consideremos uma barra inclinada de um ângulo α em relação à horizontal e dois sistemas
de coordenadas associados: δ correspondente aos g.l. ditos locais da barra (... rotação,
direcção ortogonal ao eixo da barra e direcção do eixo da barra) e ∆ aos g.l. globais (...
rotação, direcção vertical e direcção horizontal). Exite uma Matriz de Transformação [ ]T que
transforma as coordenadas ∆ nas coordenadas δ:
δ3
δ1
δ2
∆3
∆1 ∆2
∆6
∆5
∆4
δ6 δ5
δ4
α
∆∆∆∆∆∆
⋅
−
−
=
654321
)cos()(0000)()cos(0000
001000000)cos()(0000)()cos(0000001
654321
αααα
αααα
δδδδδδ
sensen
sensen
, i.e. { } [ ] { }∆⋅= Tδ
sendo α medido sempre da horizontal positiva na extremidade esquerda para a barra para a
barra no sentido contrário ao dos ponteiros do relógio:
α
δ2 δ3
δ1
δ6
δ5
δ4
∆3
∆1 ∆2
∆6
∆5 ∆4
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 30
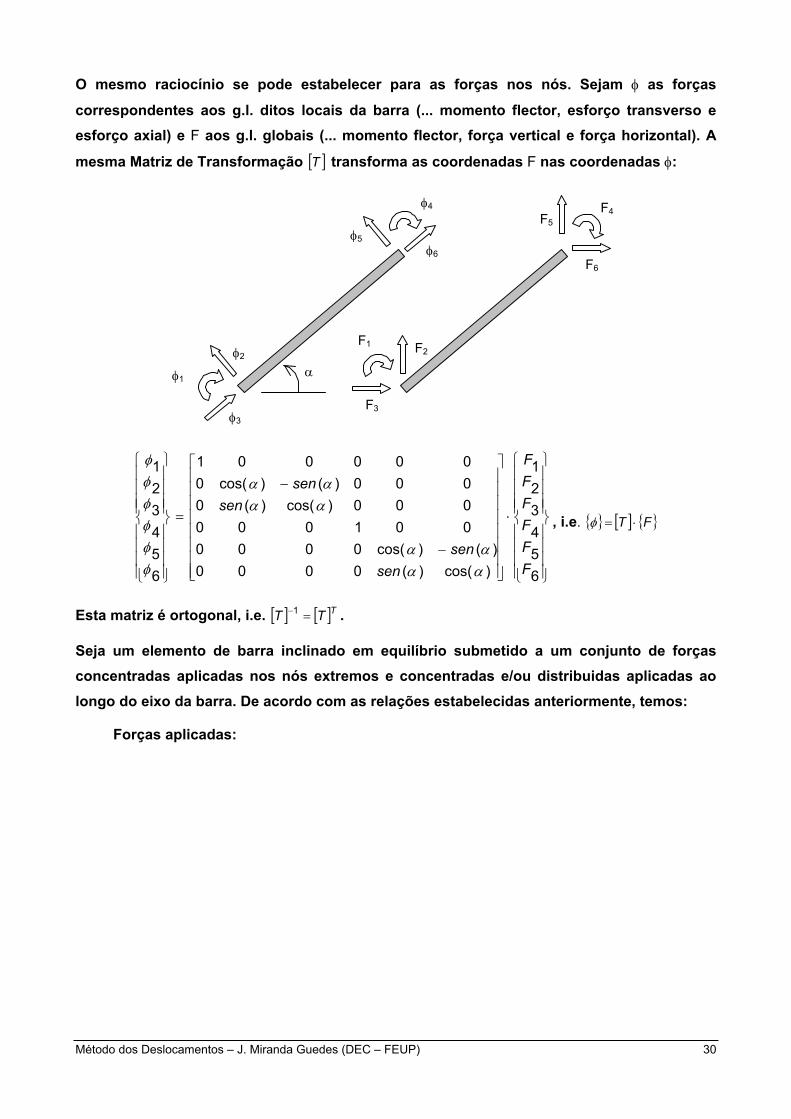
O mesmo raciocínio se pode estabelecer para as forças nos nós. Sejam φ as forças
correspondentes aos g.l. ditos locais da barra (... momento flector, esforço transverso e esforço axial) e F aos g.l. globais (... momento flector, força vertical e força horizontal). A
mesma Matriz de Transformação [ ]T transforma as coordenadas F nas coordenadas φ:
φ3
φ1
φ2
F3
F1 F2
F6
F5F4
φ6 φ5
φ4
α
⋅
−
−
=
654321
)cos()(0000)()cos(0000
001000000)cos()(0000)()cos(0000001
654321
FFFFFF
sensen
sensen
αααα
αααα
φφφφφφ
, i.e. { } [ ] { }FT ⋅=φ
Esta matriz é ortogonal, i.e. [ ] [ ]TTT =−1 .
Seja um elemento de barra inclinado em equilíbrio submetido a um conjunto de forças concentradas aplicadas nos nós extremos e concentradas e/ou distribuidas aplicadas ao longo do eixo da barra. De acordo com as relações estabelecidas anteriormente, temos:
Forças aplicadas:
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 31
L
φ2
φ1
φ5
φ4
φ3
φ6
E, I, A
p1
p2
α
L
E, I, A
p1
p2
α
F3
F1F2
F6
F5 F4
Deslocamentos calculados:
L
δ2
δ1
δ5
δ4
δ3
δ6
E, I, A
p1
p2
α
L
E, I, A
p1
p2
α
∆3
∆1
∆2
∆6
∆5 ∆4
⋅
−
−
−−
−−−
−
+
=
6
5
4
3
2
1
60
50
40
30
20
10
6
5
4
3
2
1
0000
0312
2603
122
6
026402
620000
0312
2603
122
6
026202
64
δδδδδδ
φφφφφφ
φφφφφφ
LEA
LEA
LEI
LEI
LEI
LEI
LEI
LEI
LEI
LEI
LEA
LEA
LEI
LEI
LEI
LEI
LEI
LEI
LEI
LEI
, i.e. { } { } [ ] { }δφφ ⋅+= K0
Utilizando as relações anteriores, podemos passar do sistema de coordenadas local δ e φ
para o sistema de coordenadas global ∆ e F,
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 32
{ } [ ] { }
{ } { } [ ] { }{ } { } [ ] [ ] { }
{ } [ ] { } { } [ ] { }{ } [ ] { } [ ] [ ] { }( )∆⋅⋅+⋅=⇒
⋅=⇒⋅=∧
∆⋅⋅+=⇒
⋅+=∧
∆⋅=
TKTFTFFT
TKK
T
T
T0
0
0φ
φφ
φφδφφ
δ
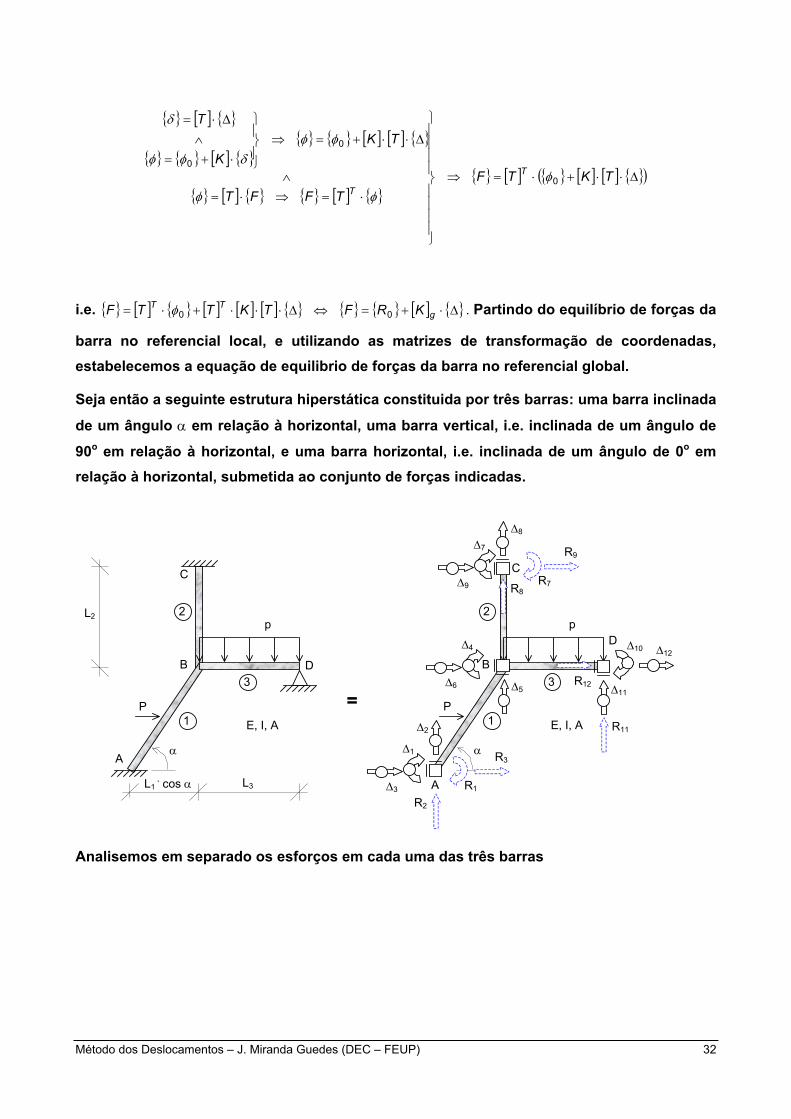
i.e. { } [ ] { } [ ] [ ] [ ] { } { } { } [ ] { }∆⋅+=⇔∆⋅⋅⋅+⋅= gTT KRFTKTTF 00φ . Partindo do equilíbrio de forças da
barra no referencial local, e utilizando as matrizes de transformação de coordenadas, estabelecemos a equação de equilibrio de forças da barra no referencial global.
Seja então a seguinte estrutura hiperstática constituida por três barras: uma barra inclinada
de um ângulo α em relação à horizontal, uma barra vertical, i.e. inclinada de um ângulo de
90o em relação à horizontal, e uma barra horizontal, i.e. inclinada de um ângulo de 0o em relação à horizontal, submetida ao conjunto de forças indicadas.
P
p
E, I, A
α
L2
A
B
C
D
1
2
3
L3 L1 . cos α
A
B
D
1
2
3
p
E, I, A
∆4
P
∆5 ∆6
α∆1
∆2
∆3
∆11
∆12∆10
∆7 ∆8
∆9 C
=
R1 R2
R3
R7 R8
R9
R11
R12
Analisemos em separado os esforços em cada uma das três barras

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 33
1) Barra 1:
A
B
1
E, I, A
∆4
P
∆5 ∆6
α ∆1
∆2
∆3
{ } { }{ }
{ } { }{ }
[ ] [ ] [ ][ ] [ ] 1
1666564
565554
464544
636261
535251
434241
363534
262524
161514
333231
232221
131211
1
16
5
4
3
2
1
1
1
16
5
4
3
2
1
1
gBBBA
ABAA
g
g
B
A
B
A
KKKK
KKKKKKKKK
KKKKKKKKK
KKKKKKKKK
KKKKKKKKK
K
FF
FFFFFF
F
=
=∧
∆
∆=
∆∆∆
∆∆∆
=∆
=
=
Logo,
{ }{ }
{ }{ }
[ ] [ ][ ] [ ]
{ }{ }
∆∆
⋅
+
=
B
A
gBBBA
ABAA
B
A
B
A
KKKK
RR
FF
110
0
1
ou ainda,
{ }{ }{ }{ }
{ }{ }
{ }{ }
[ ] [ ] [ ] [ ][ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ][ ] [ ] [ ] [ ]
{ }{ }{ }{ }
∆
∆
∆∆
⋅
+
=
D
C
B
A
g
BBBA
ABAA
B
A
D
C
B
A
KKKK
RR
FFFF
11
0
0
1 000000000000
00
{ } [ ] { } [ ] [ ] [ ] { } { } { } [ ] { }1110111111011 ∆⋅+=⇔∆⋅⋅⋅+⋅= gTT KRFTKTTF φ
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 34
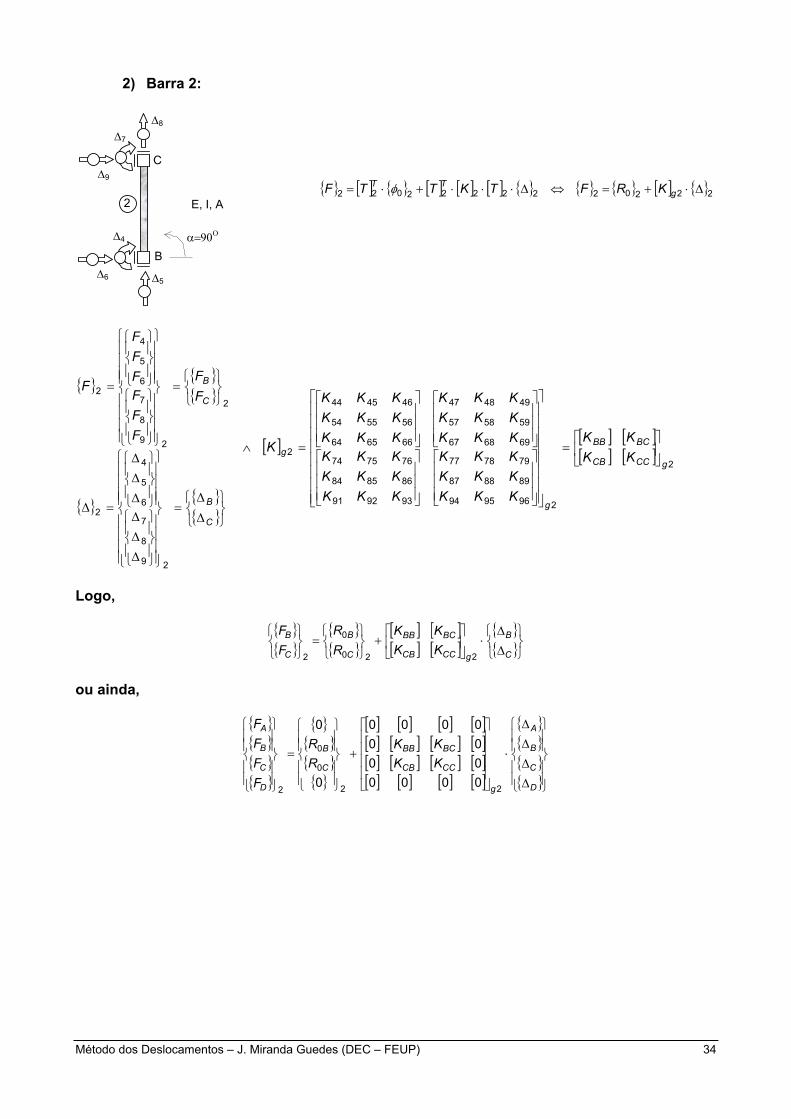
2) Barra 2:
B
2 E, I, A
∆4
∆5 ∆6
∆7 ∆8
∆9 C
α=90Ο
{ } { }{ }
{ } { }{ }
[ ] [ ] [ ][ ] [ ] 2
2969594
898887
797877
939291
868584
767574
696867
595857
494847
666564
565554
464544
2
29
8
7
6
5
4
2
2
29
8
7
6
5
4
2
gCCCB
BCBB
g
g
C
B
C
B
KKKK
KKKKKKKKK
KKKKKKKKK
KKKKKKKKK
KKKKKKKKK
K
FF
FFFFFF
F
=
=∧
∆∆
=
∆∆∆
∆∆∆
=∆
=
=
Logo,
{ }{ }
{ }{ }
[ ] [ ][ ] [ ]
{ }{ }
∆
∆⋅
+
=
C
B
gCCCB
BCBB
C
B
C
B
KKKK
RR
FF
220
0
2
ou ainda,
{ }{ }{ }{ }
{ }{ }{ }
{ }
[ ] [ ] [ ] [ ][ ] [ ] [ ] [ ][ ] [ ] [ ] [ ][ ] [ ] [ ] [ ]
{ }{ }{ }{ }
∆
∆
∆∆
⋅
+
=
D
C
B
A
g
CCCB
BCBB
C
B
D
C
B
A
KKKK
RR
FFFF
22
0
0
2 000000000000
0
0
{ } [ ] { } [ ] [ ] [ ] { } { } { } [ ] { }2220222222022 ∆⋅+=⇔∆⋅⋅⋅+⋅= gTT KRFTKTTF φ
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 35
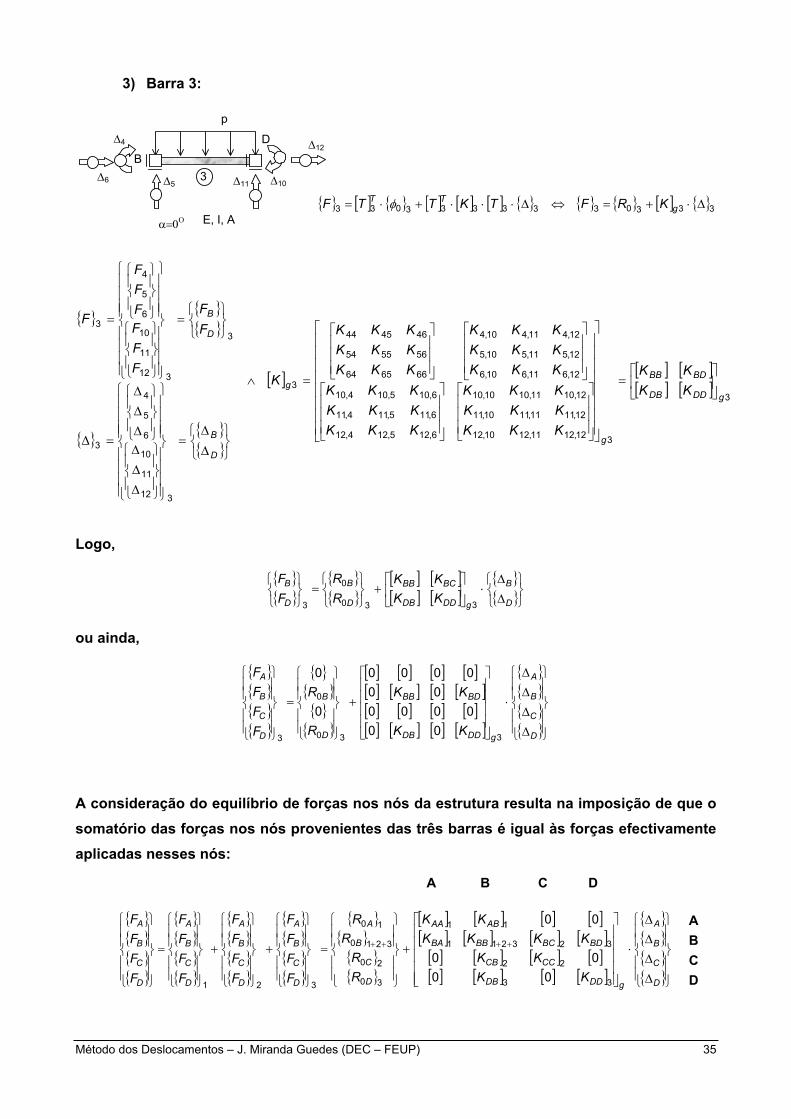
3) Barra 3:
α=0Ο
B D
3
p
E, I, A
∆4
∆5 ∆6 ∆11
∆12
∆10
{ } { }{ }
{ } { }{ }
[ ] [ ] [ ][ ] [ ] 3
312,1211,1210,12
12,1111,1110,11
12,1011,1010,10
6,125,124,12
6,115,114,11
6,105,104,10
12,611,610,6
12,511,510,5
12,411,410,4
666564
565554
464544
3
312
11
10
6
5
4
3
3
312
11
10
6
5
4
3
gDDDB
BDBB
g
g
D
B
D
B
KKKK
KKKKKKKKK
KKKKKKKKK
KKKKKKKKK
KKKKKKKKK
K
FF
FFFFFF
F
=
=∧
∆∆
=
∆∆∆
∆∆∆
=∆
=
=
Logo,
{ }{ }
{ }{ }
[ ] [ ][ ] [ ]
{ }{ }
∆
∆⋅
+
=
D
B
gDDDB
BCBB
D
B
D
B
KKKK
RR
FF
330
0
3
ou ainda,
{ }{ }{ }{ }
{ }{ }
{ }{ }
[ ] [ ] [ ] [ ][ ] [ ] [ ] [ ][ ] [ ] [ ] [ ][ ] [ ] [ ] [ ]
{ }{ }{ }{ }
∆
∆
∆∆
⋅
+
=
D
C
B
A
gDDDB
BDBB
D
B
D
C
B
A
KK
KK
R
R
FFFF
330
0
300
000000
0000
0
0
A consideração do equilíbrio de forças nos nós da estrutura resulta na imposição de que o somatório das forças nos nós provenientes das três barras é igual às forças efectivamente aplicadas nesses nós:
{ }{ }{ }{ }
{ }{ }{ }{ }
{ }{ }{ }{ }
{ }{ }{ }{ }
{ }{ }
{ }{ }
[ ] [ ] [ ] [ ][ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ][ ] [ ] [ ] [ ]
{ }{ }{ }{ }
∆
∆
∆∆
⋅
+
=
+
+
=
++++
D
C
B
A
gDDDB
CCCB
BDBCBBBA
ABAA
D
C
B
A
D
C
B
A
D
C
B
A
D
C
B
A
D
C
B
A
KKKK
KKKKKK
RR
RR
FFFF
FFFF
FFFF
FFFF
33
22
323211
11
30
20
3210
10
32100
00
00
{ } [ ] { } [ ] [ ] [ ] { } { } { } [ ] { }3330333333033 ∆⋅+=⇔∆⋅⋅⋅+⋅= gTT KRFTKTTF φ
A B C D
A B C D

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 36
Pela análise da equação, que se pode escrever na forma { } { } [ ] { }∆⋅+= gKRF 0 , verificamos que:
1) Existem deslocamentos de valor conhecido; os deslocamentos dos nós A, { }A∆ ,
e C, { }C∆ , e os deslocamentos vertical e horizontal do nó D, ∆11 e ∆12, são nulos;
2) Em correspondência com os deslocamentos anteriores, existem forças reactivas aplicadas nos nós de valor desconhecido, R1, R2, R3, R7, R8, R9, R11 e R12;
3) As matrizes de rigidez das barras consideradas isoladas, [ ]giK , ocupam posições
na matriz de rigidez global da estrutura, [ ]gK , correspondentes à ordem dos seus
nós extremos;
4) De igual modo, o vector das forças de reacção das barras consideradas isoladas,
{ }iR0 , ocupam posições no vector das forças de reacção global da estrutura, { }0R ,
correspondentes à ordem dos seus nós extremos;
Analisando mais em pormenor a equação, temos:
[ ]
=∆=∆
∆
=∆=∆=∆
∆∆∆
=∆=∆=∆
⋅+
=
===
===
===
===
++
00
000
000
0
000
12
11
10
9
8
7
6
5
4
3
2
1
30,12
0,11
0,10
290
80
70
32160
50
40
130
20
10
1212
1111
10
99
88
77
6
5
4
33
22
11
gK
RRRRRRRRRRRR
RFRF
FRFRFRF
FFF
RFRFRF
, e
[ ]
g
g
KKKKKKKKK
KKKKKKKKK
KKKKKKKKK
KKKKKKKKK
KKKKKKKKK
KKKKKKKKK
KKKKKKKKK
KKKKKKKKK
KKKKKKKKK
KKKKKKKKK
K
= ++
312,1211,1210,12
12,1111,1110,11
12,1011,1010,10
36,125,124,12
6,115,114,11
6,105,104,10
2999897
898887
797877
2969594
868584
767574
312,611,610,6
12,511,510,5
12,411,410,4
2696867
595857
494847
321666564
565554
464544
1636261
535251
434241
1363534
262524
161514
1333231
232221
131211
000000000
000000000
000000000
000000000
000000000
000000000
1 2 3 4 5 6 7 8 9 10 11 12
A B C D
1 2 3 4 5 6 7 8 9 101112
A B C D
1 2 3 4 5 6 7 8 9 10 11 12
A B C D

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 37
que, caso não se pretenda determinar as reacções nos apoios, pode ser simplificada através da eliminação das linhas e colunas correspondentes aos g.l. restringidos através de apoios:
[ ]
∆
∆∆∆
⋅+
=
++
00
000
000
0
000
10
6
5
4
30,12
0,11
0,10
290
80
70
32160
50
40
130
20
10
12
11
9
8
7
3
2
1
gK
RRRRRRRRRRRR
RR
RRR
RRR
, e
[ ]
g
g
KKKKKKKKK
KKKKKKKKK
KKKKKKKKK
KKKKKKKKK
KKKKKKKKK
KKKKKKKKK
KKKKKKKKK
KKKKKKKKK
KKKKKKKKK
KKKKKKKKK
K
= ++
312,1211,1210,12
12,1111,1110,11
12,1011,1010,10
36,125,124,12
6,115,114,11
6,105,104,10
2999897
898887
797877
2969594
868584
767574
312,611,610,6
12,511,510,5
12,411,410,4
2696867
595857
494847
321666564
565554
464544
1636261
535251
434241
1363534
262524
161514
1333231
232221
131211
000000000
000000000
000000000
000000000
000000000
000000000
resultando em:
{ } { } [ ] [ ] { }
∆
∆∆∆
⋅
+
=
++++
10
6
5
4
310,1036,105,104,10
310,6
10,5
10,4
321666564
565554
464544
30,10
32160
50
40
10
6
5
4
gKKKKKKK
KKKKKKKKK
RRRR
FFFF
4 5 6 10
4 5 6 10
B D
1 2 3 4 5 6 7 8 9 10 11 12
A B C D
1 2 3 4 5 6 7 8 9 10 11 12
A B C D
1 2 3 4 5 6 7 8 9 10 11 12
A B C D
B D
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 38
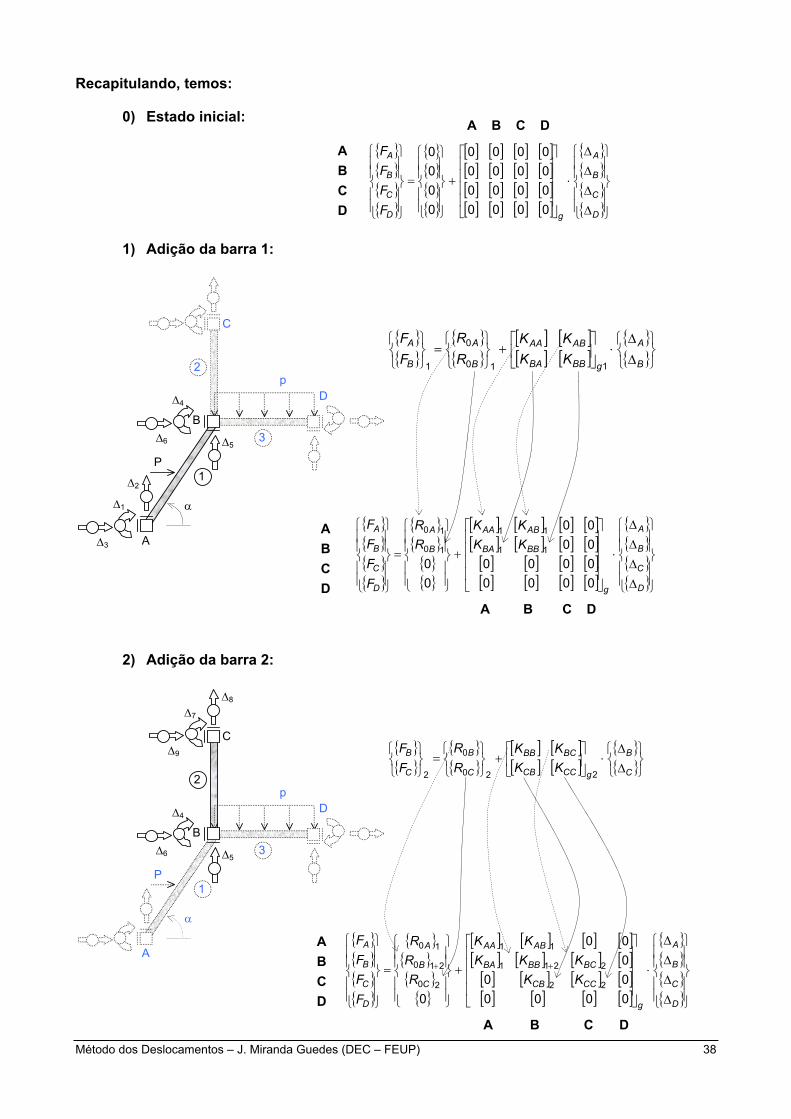
Recapitulando, temos:
0) Estado inicial:
{ }{ }{ }{ }
{ }{ }{ }{ }
[ ] [ ] [ ] [ ][ ] [ ] [ ] [ ][ ] [ ] [ ] [ ][ ] [ ] [ ] [ ]
{ }{ }{ }{ }
∆
∆
∆
∆
⋅
+
=
D
C
B
A
gD
C
B
A
FFFF
0000000000000000
0000
1) Adição da barra 1:
A
B
D
1
p
∆4
P
∆5 ∆6
α ∆1
∆2
∆3
C
2
3
2) Adição da barra 2:
A
B
D
1
2
3
p
∆4
P
∆5 ∆6
α
∆7 ∆8
∆9 C
{ }{ }
{ }{ }
[ ] [ ][ ] [ ]
{ }{ }
∆∆
⋅
+
=
B
A
gBBBA
ABAA
B
A
B
A
KKKK
RR
FF
110
0
1
{ }{ }{ }{ }
{ }{ }
{ }{ }
[ ] [ ] [ ] [ ][ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ][ ] [ ] [ ] [ ]
{ }{ }{ }{ }
∆
∆
∆
∆
⋅
+
=
D
C
B
A
g
BBBA
ABAA
B
A
D
C
B
A
KKKK
RR
FFFF
000000000000
00
11
11
10
10
A B C D
A B C D
A B C D
A B C D
{ }{ }
{ }{ }
[ ] [ ][ ] [ ]
{ }{ }
∆
∆⋅
+
=
C
B
gCCCB
BCBB
C
B
C
B
KKKK
RR
FF
220
0
2
{ }{ }{ }{ }
{ }{ }{ }
{ }
[ ] [ ] [ ] [ ][ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ][ ] [ ] [ ] [ ]
{ }{ }{ }{ }
∆
∆
∆
∆
⋅
+
=
++
D
C
B
A
g
CCCB
BCBBBA
ABAA
C
B
A
D
C
B
A
KKKKK
KK
RRR
FFFF
000000000
022
2211
11
20
210
10
A B C D
A B C D
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 39
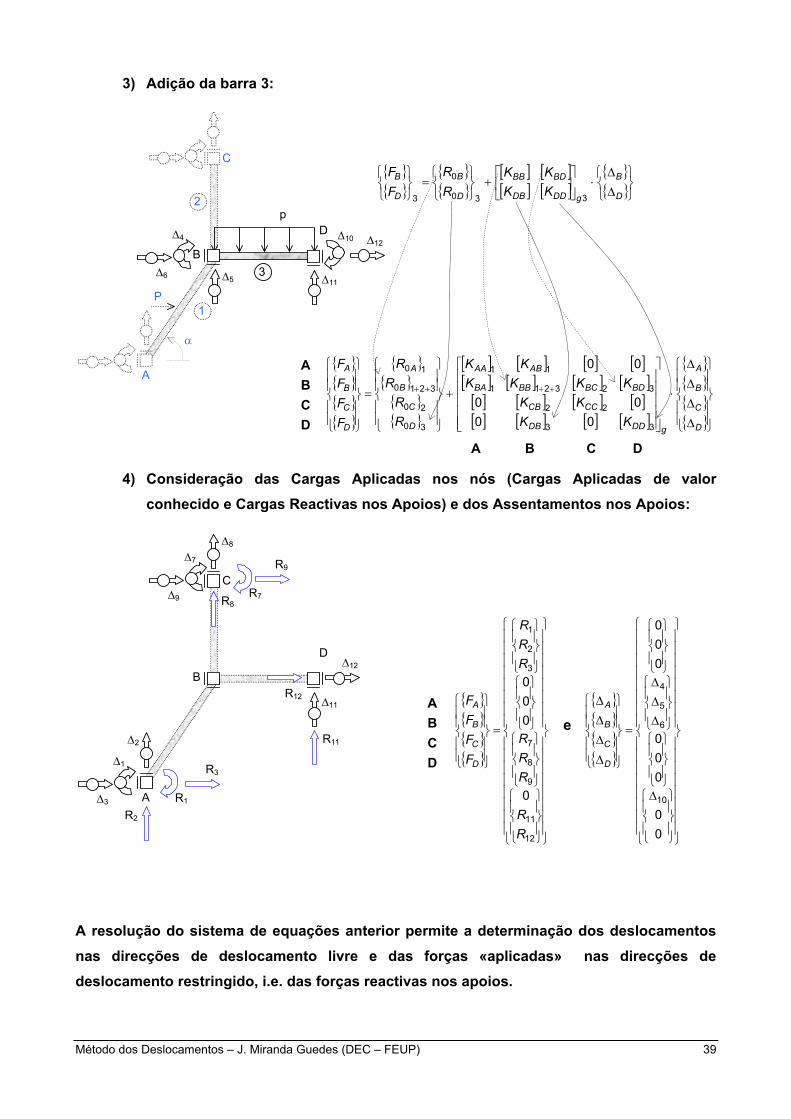
3) Adição da barra 3:
A
B
D
1
2
3
p
∆4
P
∆5 ∆6
α
∆11
∆12∆10
C
4) Consideração das Cargas Aplicadas nos nós (Cargas Aplicadas de valor conhecido e Cargas Reactivas nos Apoios) e dos Assentamentos nos Apoios:
A
B
D
∆1
∆2
∆3
∆11
∆12
∆7 ∆8
∆9 C
R1 R2
R3
R7 R8
R9
R11
R12
A resolução do sistema de equações anterior permite a determinação dos deslocamentos nas direcções de deslocamento livre e das forças «aplicadas» nas direcções de deslocamento restringido, i.e. das forças reactivas nos apoios.
{ }{ }
{ }{ }
[ ] [ ][ ] [ ]
{ }{ }
∆
∆⋅
+
=
D
B
gDDDB
BDBB
D
B
D
B
KKKK
RR
FF
330
0
3
{ }{ }{ }{ }
{ }{ }
{ }{ }
[ ] [ ] [ ] [ ][ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ][ ] [ ] [ ] [ ]
{ }{ }{ }{ }
∆
∆
∆∆
⋅
+
=
++++
D
C
B
A
gDDDB
CCCB
BDBCBBBA
ABAA
D
C
B
A
D
C
B
A
KKKK
KKKKKK
RR
RR
FFFF
33
22
323211
11
30
20
3210
10
0000
00
A B C D
A B C D
{ }{ }{ }{ }
=
12
11
9
8
7
3
2
1
0
000
RR
RRR
RRR
FFFF
D
C
B
A
e
{ }{ }{ }{ }
∆
∆∆∆
=
∆
∆
∆∆
00
000
000
10
6
5
4
D
C
B
A
A B C D

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 40
FORMULAÇÃO MATRICIAL: EXERCÍCIO
Consideremos uma estrutura constituida por uma barra inclinada de um ângulo α = 45o em
relação à horizontal e uma barra horizontal.
P
p
E, I, A
α A
B C
1
2
L2 L1 . cos α
A
B
C
1
2
p
E, I, A
∆4
P
∆5 ∆6
α∆1
∆2
∆3
∆8
∆9 ∆7
=
R1 R2
R3
R8
R9
Determinemos a matriz de rigidez e das acções em cada uma das duas barras.
1) Barra 1:
A
B
1
E, I, A
∆4
P
∆5 ∆6
α ∆1
∆2
∆3
[ ] { } [ ] { }{ } 10
0
11
110
1 210
1622
10
162
212
18
212
18
22
22
220000
22
220000
0010000002
22
20
00022
220
000001
=
−
+
−
−
⋅=
−
+
−
−
⋅
⋅=∧
−
−
=B
AT
RR
L
L
PL
L
PTRT
[ ] [ ] [ ]1
1
11
0000
0312
2603
122
6
026402
620000
0312
2603
122
6
026202
64
T
LEA
LEA
LEI
LEI
LEI
LEI
LEI
LEI
LEI
LEI
LEA
LEA
LEI
LEI
LEI
LEI
LEI
LEI
LEI
LEI
TK Tg ⋅
−
−
−−
−−−
−
⋅=
{ } [ ] { } [ ] [ ] [ ] { } { } { } [ ] { }1110111111011 ∆⋅+=⇔∆⋅⋅⋅+⋅= gTT KRFTKTTF φ
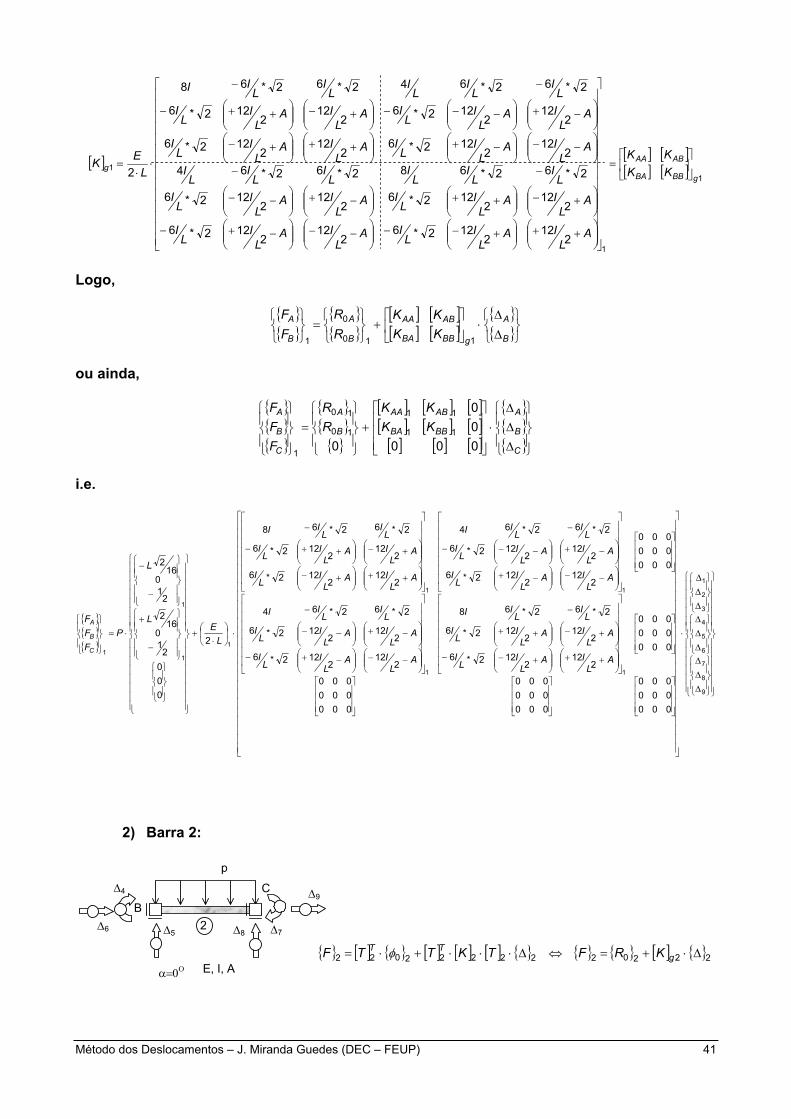
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 41
[ ] [ ] [ ][ ] [ ] 1
1
1
212
2122*6
212
2122*6
212
2122*6
212
2122*6
2*62*682*62*642
122
122*62
122
122*6
212
2122*6
212
2122*6
2*62*642*62*68
2 gBBBA
ABAAg KK
KK
ALIA
LI
LIA
LIA
LI
LI
ALIA
LI
LIA
LIA
LI
LI
LI
LI
LI
LI
LI
LI
ALIA
LI
LIA
LIA
LI
LI
ALIA
LI
LIA
LIA
LI
LI
LI
LI
LI
LI
LII
LEK
=
++
+−−
−−
−+−
+−
++
−+
−−
−−
−−
−+
++
+−
−+
−−−
+−
++−
−−
⋅⋅
=
Logo,
{ }{ }
{ }{ }
[ ] [ ][ ] [ ]
{ }{ }
∆
∆⋅
+
=
B
A
gBBBA
ABAA
B
A
B
A
KKKK
RR
FF
110
0
1
ou ainda,
{ }{ }{ }
{ }{ }
{ }
[ ] [ ] [ ][ ] [ ] [ ]
[ ] [ ] [ ]
{ }{ }{ }
∆∆∆
⋅
+
=
C
B
A
BBBA
ABAA
B
A
C
B
A
KKKK
RR
FFF
00000
011
11
10
10
1
i.e.
{ }{ }{ }
∆∆∆
∆∆∆
∆∆∆
⋅
++
+−−
+−
++
−
−−
−+−
−+
−−
−
−−
−+
−+
−−−
−
++
+−
+−
++−
−
⋅
⋅
+
−
+
−
−
⋅=
9
8
7
6
5
4
3
2
1
11
11
1
1
1
1
000000000
000000000
000000000
000000000
212
2122*6
212
2122*6
2*62*68
212
2122*6
212
2122*6
2*62*64
000000000
212
2122*6
212
2122*6
2*62*64
212
2122*6
212
2122*6
2*62*68
2
000
210
162
210
162
ALIA
LI
LI
ALIA
LI
LI
LI
LII
ALIA
LI
LI
ALIA
LI
LI
LI
LII
ALIA
LI
LI
ALIA
LI
LI
LI
LII
ALIA
LI
LI
ALIA
LI
LI
LI
LII
LE
L
L
PFFF
C
B
A
2) Barra 2:
α=0Ο
B C
2
p
E, I, A
∆4
∆5 ∆6 ∆8
∆9
∆7
{ } [ ] { } [ ] [ ] [ ] { } { } { } [ ] { }2220222222022 ∆⋅+=⇔∆⋅⋅⋅+⋅= gTT KRFTKTTF φ
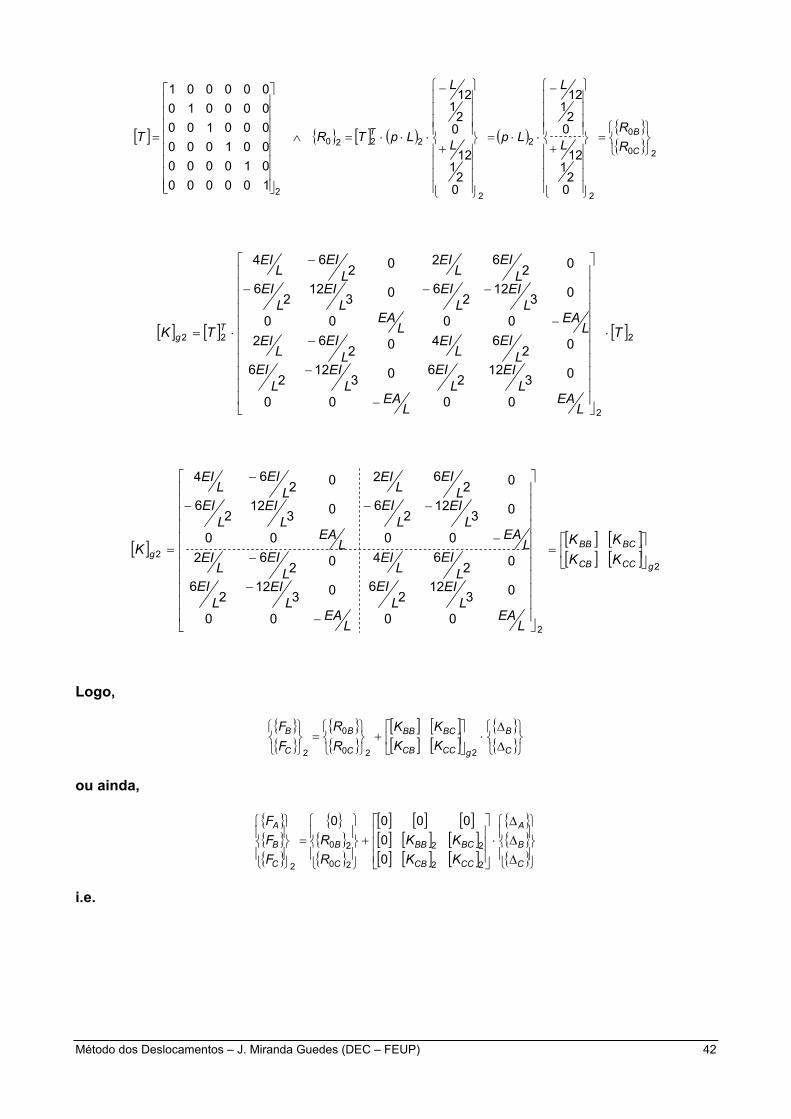
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 42
[ ] { } [ ] ( ) ( ) { }{ } 20
0
2
2
2
2220
2 02
112
02
112
02
112
02
112
100000010000001000000100000010000001
=
+
−
⋅⋅=
+
−
⋅⋅⋅=∧
=C
BT
RR
L
L
LpL
L
LpTRT
[ ] [ ] [ ]2
2
22
0000
0312
2603
122
6
026402
620000
0312
2603
122
6
026202
64
T
LEA
LEA
LEI
LEI
LEI
LEI
LEI
LEI
LEI
LEI
LEA
LEA
LEI
LEI
LEI
LEI
LEI
LEI
LEI
LEI
TK Tg ⋅
−
−
−−
−−−
−
⋅=
[ ] [ ] [ ][ ] [ ] 2
2
2
0000
0312
2603
122
6
026402
620000
0312
2603
122
6
026202
64
gCCCB
BCBBg KK
KK
LEA
LEA
LEI
LEI
LEI
LEI
LEI
LEI
LEI
LEI
LEA
LEA
LEI
LEI
LEI
LEI
LEI
LEI
LEI
LEI
K
=
−
−
−−
−−−
−
=
Logo,
{ }{ }
{ }{ }
[ ] [ ][ ] [ ]
{ }{ }
∆
∆⋅
+
=
C
B
gCCCB
BCBB
C
B
C
B
KKKK
RR
FF
220
0
2
ou ainda,
{ }{ }{ }
{ }{ }{ }
[ ] [ ] [ ][ ] [ ] [ ][ ] [ ] [ ]
{ }{ }{ }
∆∆∆
⋅
+
=
C
B
A
CCCB
BCBB
C
B
C
B
A
KKKK
RR
FFF
22
22
20
20
2 00
0000
i.e.
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 43
{ }{ }{ }
∆∆∆
∆∆∆
∆∆∆
⋅
−
−
−
−
−−
−
−
+
−
=
9
8
7
6
5
4
3
2
1
22
22
2
22
2
2
00
0312
26
0264
00
0312
26
0262
000000000
00
0312
26
0262
00
0312
26
0264
000000000
000000000
000000000
000000000
02
12
02
12
000
LEA
LEI
LEI
LEI
LEI
LEA
LEI
LEI
LEI
LEI
LEA
LEI
LEI
LEI
LEI
LEA
LEI
LEI
LEI
LEI
Lp
Lp
Lp
Lp
FFF
C
B
A
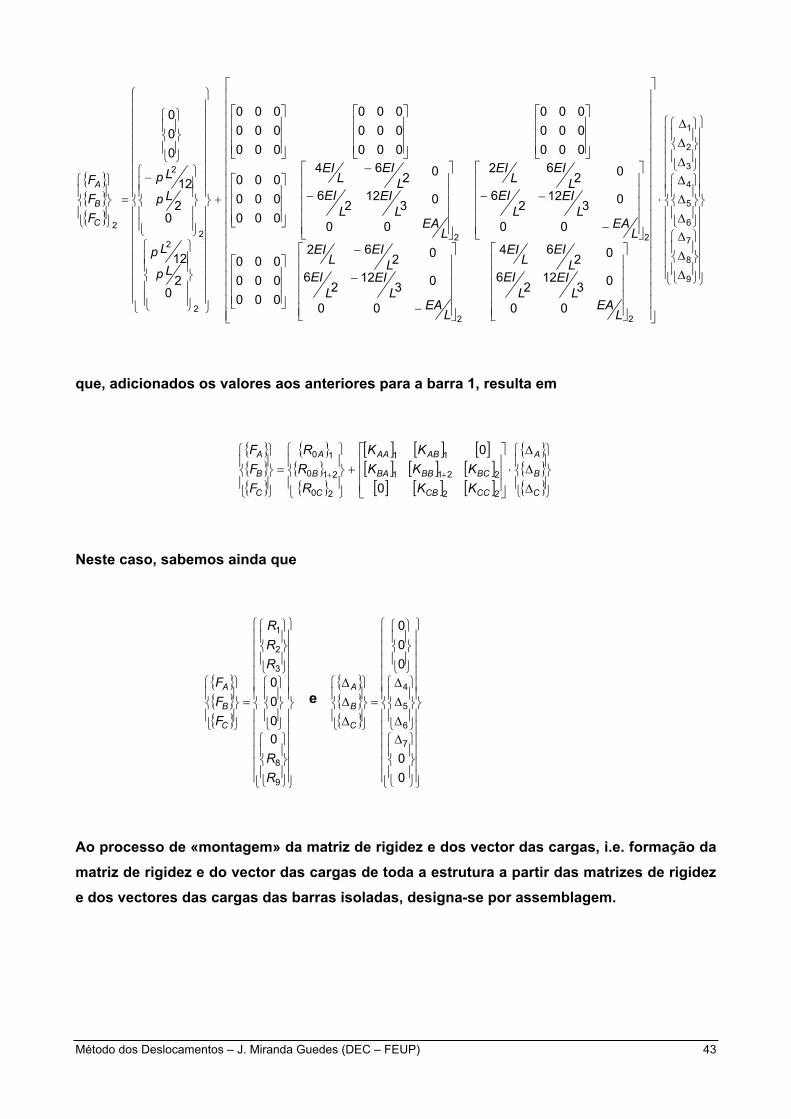
que, adicionados os valores aos anteriores para a barra 1, resulta em
{ }{ }{ }
{ }{ }{ }
[ ] [ ] [ ][ ] [ ] [ ]
[ ] [ ] [ ]
{ }{ }{ }
∆∆∆
⋅
+
=
++
C
B
A
CCCB
BCBBBA
ABAA
C
B
A
C
B
A
KKKKK
KK
RRR
FFF
22
2211
11
20
210
10
0
0
Neste caso, sabemos ainda que
{ }{ }{ }
=
9
8
3
2
1
0000
RR
RRR
FFF
C
B
A e
{ }{ }{ }
∆
∆∆∆
=
∆∆∆
00
000
7
6
5
4
C
B
A
Ao processo de «montagem» da matriz de rigidez e dos vector das cargas, i.e. formação da matriz de rigidez e do vector das cargas de toda a estrutura a partir das matrizes de rigidez e dos vectores das cargas das barras isoladas, designa-se por assemblagem.

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 44
ACÇÕES ASSENTAMENTOS DOS APOIOS
Consideremos a estrutura anterior submetida tambem a uma acção assentamento de um apoio. O resultado dessa acção irá adicionar-se ao das acções anteriores no vector { }0R .
Seja, por exemplo, a acção assentamento vertical δV no apoio duplo.
P
p
E, I, A
α
δV
L2 L1 . cos α
p
∆1
P
∆2 ∆3
α
δV
E, I, A
L2L1 . cos α
=
que, por sobreposição dos efeitos, é igual à soma de duas estruturas:
p
R10
P
R20 R30
α
δV
E, I, A
L2 L1 . cos α
+
∆1
∆2 ∆3
α
E, I, A
L2L1 . cos α
Analisando apenas a sub-estrutura relativa às acções, temos:
0) Cargas aplicadas + Assentamento de apoio:
R10
R20 R30
α
δV
p
E, I, A
L2 L1 . cos α
P
E, I, A
R’10=π’10
R’20 R’30
α
=
R’’10
R’’20 R’’30
π’30
π’20
p
P
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 45
E, I, A
R’10=π’10
R’20 R’30
α
R’’10
R’’20 R’’30
π’30
π’20
δV
+
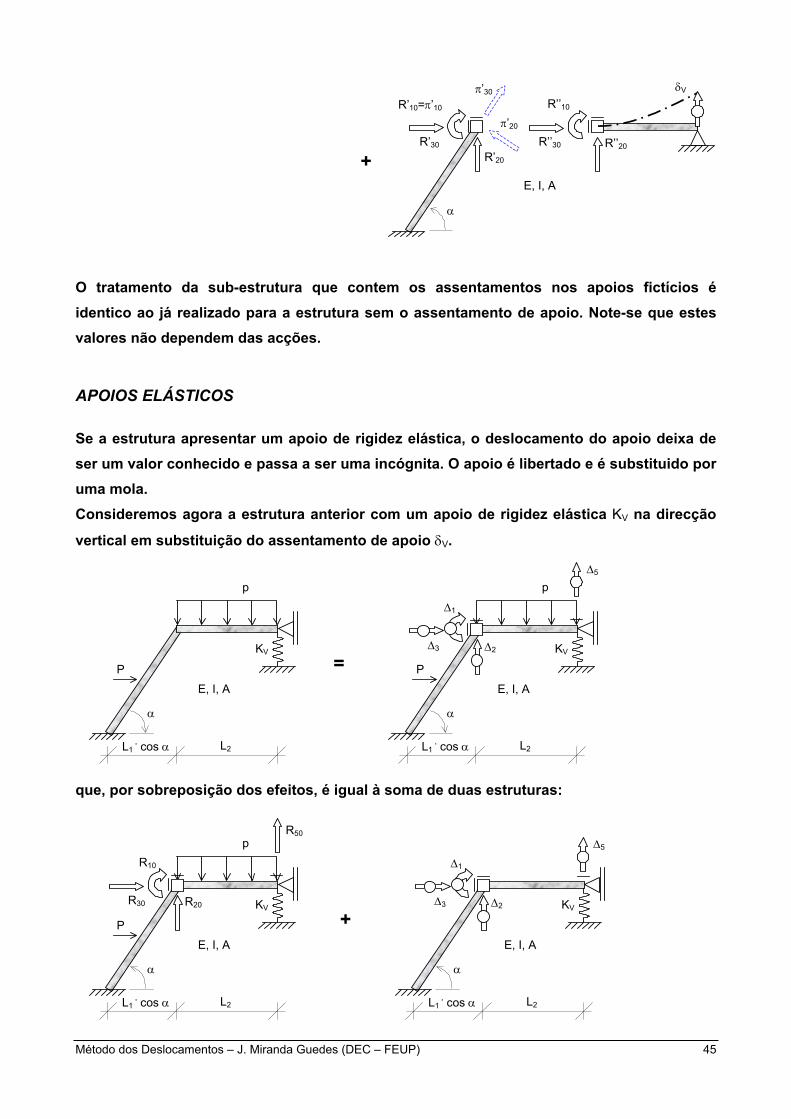
O tratamento da sub-estrutura que contem os assentamentos nos apoios fictícios é identico ao já realizado para a estrutura sem o assentamento de apoio. Note-se que estes valores não dependem das acções.
APOIOS ELÁSTICOS
Se a estrutura apresentar um apoio de rigidez elástica, o deslocamento do apoio deixa de ser um valor conhecido e passa a ser uma incógnita. O apoio é libertado e é substituido por uma mola. Consideremos agora a estrutura anterior com um apoio de rigidez elástica KV na direcção
vertical em substituição do assentamento de apoio δV.
P
p
α
KV
E, I, A
L2 L1 . cos α
p
=
∆1
P
∆2 ∆3
α
∆5
KV
E, I, A
L2L1 . cos α
que, por sobreposição dos efeitos, é igual à soma de duas estruturas:
p
R10
P
R20 R30
α
KV
E, I, A
R50
L2 L1 . cos α
∆1
∆2 ∆3
α
∆5
KV
E, I, A
L2L1 . cos α
+
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 46
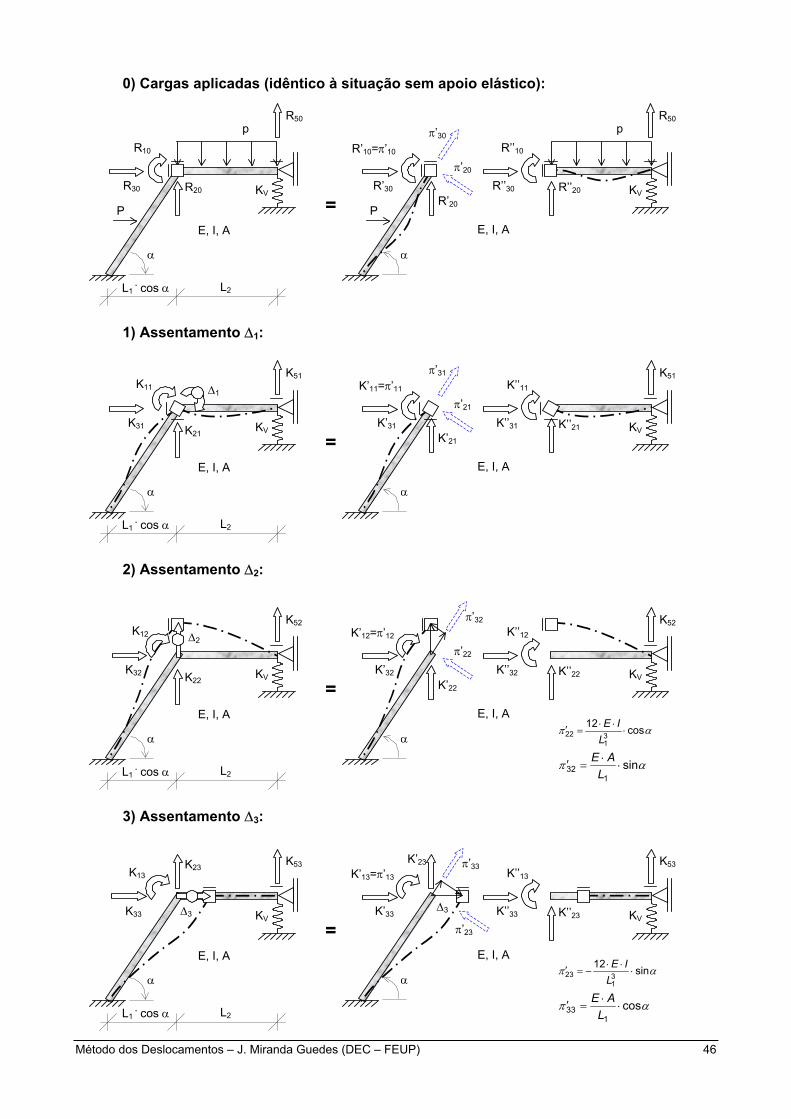
0) Cargas aplicadas (idêntico à situação sem apoio elástico):
R10
R20 R30
α
p
KV
E, I, A
R50
L2 L1 . cos α
P
E, I, A
R’10=π’10
R’20 R’30
α
=
R’’10
R’’20 R’’30
π’30
π’20
p
KV
R50
P
1) Assentamento ∆1:
K11
K21 K31
α
∆1
KV
K51
E, I, A
L2 L1 . cos α
E, I, A
K’11=π’11
K’21
K’31
α
K’’11
K’’21 K’’31
π’31
π’21
KV
K51
=
2) Assentamento ∆2:
K12
K22 K32
α
∆2
KV
K52
L2 L1 . cos α
E, I, A
E, I, A
K’12=π’12
K’22
K’32
α
K’’12
K’’22 K’’32
π’32
π’22
απ cos1231
22 ⋅⋅⋅
=′L
IE
απ sin1
32 ⋅⋅
=′LAE
KV
K52
=
3) Assentamento ∆3:
K13 K23
K33
α
∆3 KV
K53
E, I, A
L2 L1 . cos α
E, I, A
K’13=π’13
K’33
α
K’’13
K’’23 K’’33
π’33
π’23
απ sin1231
23 ⋅⋅⋅
−=′L
IE
απ cos1
33 ⋅⋅
=′LAE
K’23
∆3 KV
K53
=
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 47
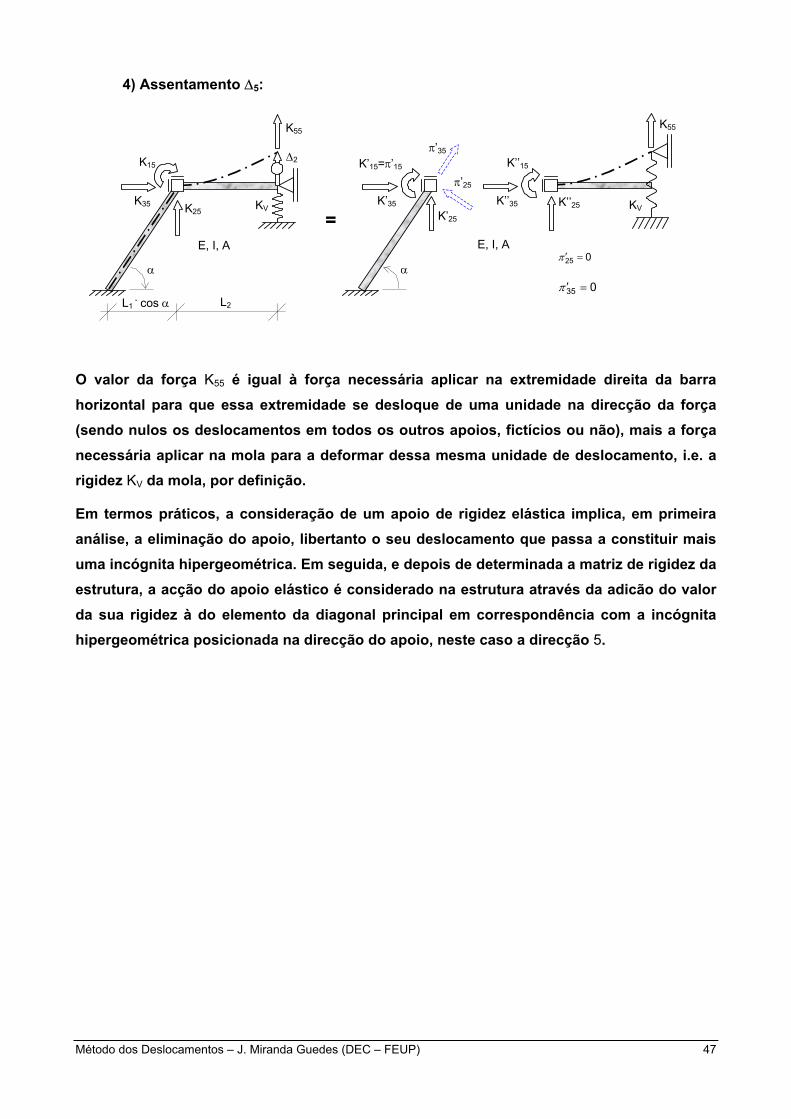
4) Assentamento ∆5:
K15
K25 K35
α
∆2
KV
K55
L2 L1 . cos α
E, I, A
E, I, A
K’15=π’15
K’25
K’35
α
K’’15
K’’25 K’’35
π’35
π’25
KV
K55
=
025 =′π
035 =′π
O valor da força K55 é igual à força necessária aplicar na extremidade direita da barra horizontal para que essa extremidade se desloque de uma unidade na direcção da força (sendo nulos os deslocamentos em todos os outros apoios, fictícios ou não), mais a força necessária aplicar na mola para a deformar dessa mesma unidade de deslocamento, i.e. a rigidez KV da mola, por definição.
Em termos práticos, a consideração de um apoio de rigidez elástica implica, em primeira análise, a eliminação do apoio, libertanto o seu deslocamento que passa a constituir mais uma incógnita hipergeométrica. Em seguida, e depois de determinada a matriz de rigidez da estrutura, a acção do apoio elástico é considerado na estrutura através da adicão do valor da sua rigidez à do elemento da diagonal principal em correspondência com a incógnita hipergeométrica posicionada na direcção do apoio, neste caso a direcção 5.

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 48
BARRAS «ESPESSAS»
Todos os valores descritos até ao momento, elementos Kij da matriz de rigidez e Ri0 do vector das acções, foram determinados no pressuposto de que os elementos de barra apresentam secção transversal homogénea de caracteristicas materiais e geométricas constantes ao longo do seu eixo rectílíneo, e que, apresentanto um valor suficientemente pequeno para o cociente entre a altura da secção transversal e comprimento do eixo do elemento, se pode desprezar a sua deformabilidade por acção do esforço transverso.
No entanto, caso se pretenda analisar peças espessas, a deformabilidade por esforço transverso terá que ser incluida na análise, i.e. teremos que determinar novos valores para os elementos Kij da matriz de rigidez e Ri0 do vector das acções que tenham esse efeito em consideração.
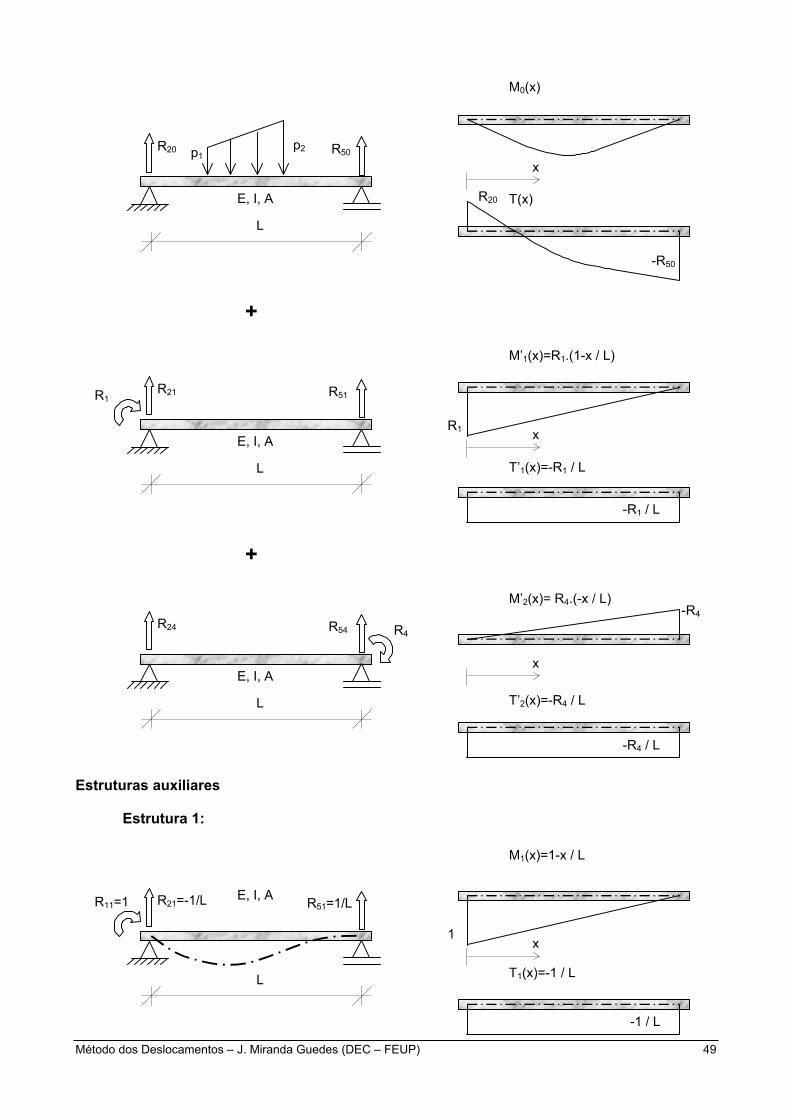
0) Reacções resultantes de cargas aplicadas em barras bi-encastradas espessas.
L
b
c a
p1 p2
R2
R1
R5
R4
R3 R6
= Diagramas de esforços
E, I, A
L
R2 R1 R5 R4p1 p2
M(x)
R1
-R4
x
T(x) R2
-R5
=
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 49
E, I, A
L
R20 R50 p1 p2
M0(x)
x
T(x) R20
-R50
+
E, I, A
L
R21 R1 R51
M’1(x)=R1.(1-x / L)
R1
x
-R1 / L
T’1(x)=-R1 / L
+
E, I, A
L
R24 R54 R4
M’2(x)= R4.(-x / L) -R4
x
T’2(x)=-R4 / L
-R4 / L
Estruturas auxiliares
Estrutura 1:
E, I, A
L
R21=-1/L R11=1 R51=1/L
M1(x)=1-x / L
1 x
T1(x)=-1 / L
-1 / L

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 50
Estrutura 2:
E, I, A
L
R22=-1/L R52=1/L R42=1
M2(x)=-x / L -1
x
T2(x)=-1 / L
-1 / L
Aplicação do P.T.V.
Estrutura real e estrutura auxiliar 1:
40 0
21211
0 0
1111
0
01
0
01
0
1
0
111 0
RdxAGTT
dxIEMM
RdxAGTT
dxIEMM
dxAGTT
dxIEMM
dxAGTT
dxIEMM
R
Lx
x
Lx
x
Lx
x
Lx
x
Lx
x
Lx
x
Lx
x
Lx
x
⋅
′⋅⋅
+⋅⋅
+⋅
′⋅⋅
+⋅⋅
+′⋅
⋅+
⋅⋅
=′⋅
⋅+
⋅⋅
=⋅
∫ ∫∫ ∫
∫∫∫∫=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
Estrutura real e estrutura auxiliar 2:
40 0
22221
0 0
1212
0
02
0
02
0
2
0
242 0
RdxAGTT
dxIEMM
RdxAGTT
dxIEMM
dxAGTT
dxIEMM
dxAGTT
dxIEMM
R
Lx
x
Lx
x
Lx
x
Lx
x
Lx
x
Lx
x
Lx
x
Lx
x
⋅
′⋅⋅
+⋅⋅
+⋅
′⋅⋅
+⋅⋅
+′⋅
⋅+
⋅⋅
=′⋅
⋅+
⋅⋅
=⋅
∫ ∫∫ ∫
∫∫∫∫=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
=
i.e.
⋅+⋅+=⋅+⋅+=
42212120
41211110
00
RRRR
δδδδδδ
que permite determinar o valor das incógnitas hiperstáticas R1 e R4 e, consequentemente, as restantes reacções nos apoios da barra bi-encastrada.
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 51
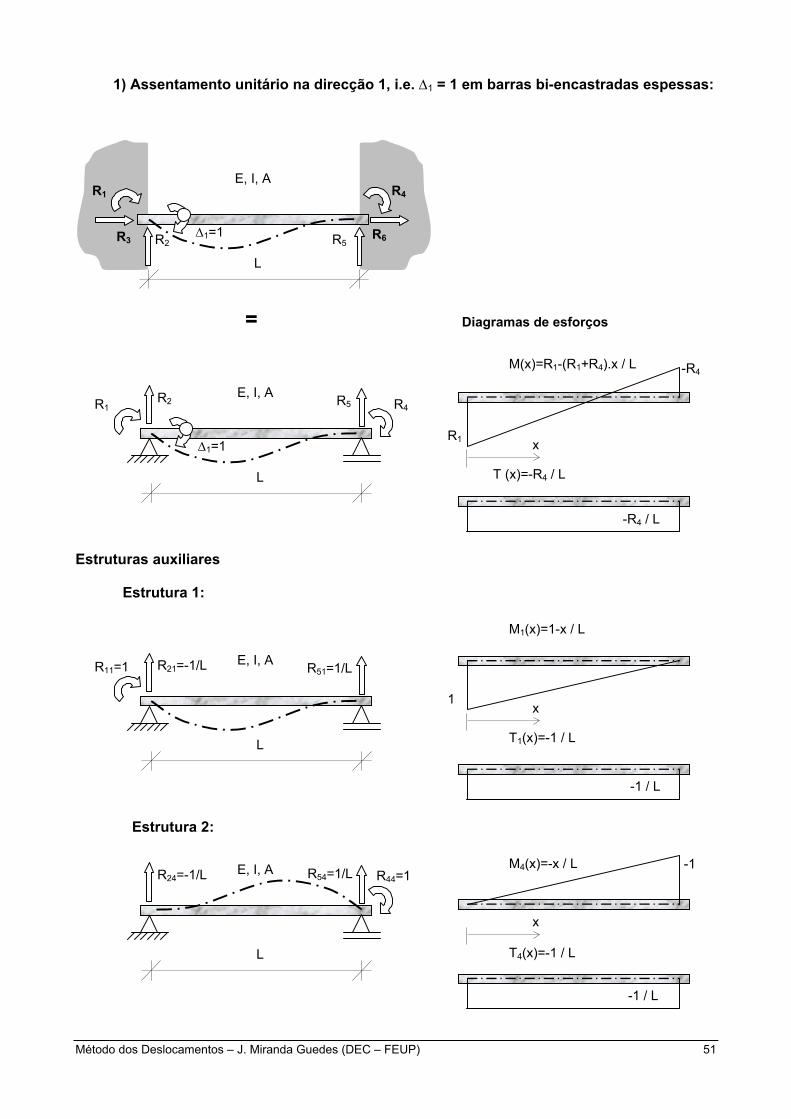
1) Assentamento unitário na direcção 1, i.e. ∆1 = 1 em barras bi-encastradas espessas:
E, I, A
L
∆1=1 R2
R1
R5
R4
R3 R6
= Diagramas de esforços
E, I, A
L
R2 R1 R5 R4
∆1=1
M(x)=R1-(R1+R4).x / L
R1
-R4
x
T (x)=-R4 / L
-R4 / L
Estruturas auxiliares
Estrutura 1:
E, I, A
L
R21=-1/L R11=1 R51=1/L
M1(x)=1-x / L
1 x
T1(x)=-1 / L
-1 / L
Estrutura 2:
E, I, A
L
R24=-1/L R54=1/L R44=1
M4(x)=-x / L -1
x
T4(x)=-1 / L
-1 / L

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 52
Aplicação do P.T.V.
Estrutura real e estrutura auxiliar 1:
∫∫=
=
=
=′⋅
⋅+
⋅⋅
=∆⋅Lx
x
Lx
x
dxAGTT
dxIEMM
R0
1
0
1111
Estrutura real e estrutura auxiliar 2:
∫∫=
=
=
=′⋅
⋅+
⋅⋅
=⋅Lx
x
Lx
x
dxAGTT
dxIEMM
R0
4
0
442 0
i.e.
⋅⋅⋅
+=
⋅⋅⋅
−=⇒
⋅⋅⋅
=
⋅⋅⋅
=⇒
=′⋅
⋅+
⋅⋅
=′⋅
⋅+
⋅⋅
∫∫
∫∫=
=
=
=
=
=
=
=
ϕ
ϕ
ζ
ψ
25
22
4
1
0
4
0
4
0
1
0
1
6
6
2
4
0
1
LIER
LIER
LIER
LIER
dxAGTT
dxIEMM
dxAGTT
dxIEMM
Lx
x
Lx
x
Lx
x
Lx
x
sendo, α
ϕ⋅+
=211 ,
α
αψ
⋅+
+=
2121
, α
αζ⋅+
−=
211 e
AGLIE
′⋅⋅
⋅⋅=
162
α .
2) Assentamento unitário na direcção 2, i.e. ∆2 = 1 em barras bi-encastradas espessas:
E, I, A
L
∆2=1
R2
R1
R5
R4
R3 R6
= Diagramas de esforços
E, I, A
L
R2
R1 R5 R4∆2=1
M(x)=R1-(R1+R4).x / L
R1
-R4
x
T (x)=-R4 / L
-R4 / L

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 53
Estruturas auxiliares
Estrutura 1: Diagramas de esforços
E, I, A
L
R41=-1R11=1
M1(x)=1
1
xT1(x)=0
Estrutura 2:
E, I, A
L
R22=1
R52=-1 R42=-L
M2(x)= x / L
1x
T2(x)= 1 / L
1 / L
Aplicação do P.T.V.
Estrutura real e estrutura auxiliar 1:
∫∫=
=
=
=′⋅
⋅+
⋅⋅
=⋅Lx
x
Lx
x
dxAGTT
dxIEMM
R0
1
0
111 0
Estrutura real e estrutura auxiliar 2:
∫∫=
=
=
=′⋅
⋅+
⋅⋅
=∆⋅Lx
x
Lx
x
dxAGTT
dxIEMM
R0
2
0
2222
i.e.
⋅⋅⋅
−=
⋅⋅⋅
+=⇒
⋅⋅⋅
−=
⋅⋅⋅
−=⇒
=′⋅
⋅+
⋅⋅
=′⋅
⋅+
⋅⋅
∫∫
∫∫=
=
=
=
=
=
=
=
ϕ
ϕ
ϕ
ϕ
35
32
24
21
0
2
0
2
0
1
0
1
12
12
6
6
1
0
LIER
LIER
LIER
LIER
dxAGTT
dxIEMM
dxAGTT
dxIEMM
Lx
x
Lx
x
Lx
x
Lx
x
sendo, α
ϕ⋅+
=211 e
AGLIE
′⋅⋅
⋅⋅=
162
α .
As operações indicadas permitem determinar os elementos da matriz de rigidez e do vector das cargas no referencial local da barra. A transformação e assemblagem das matrizes de rigidez e dos vectores das cargas, segue as operações indicadas anteriormente.
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 54
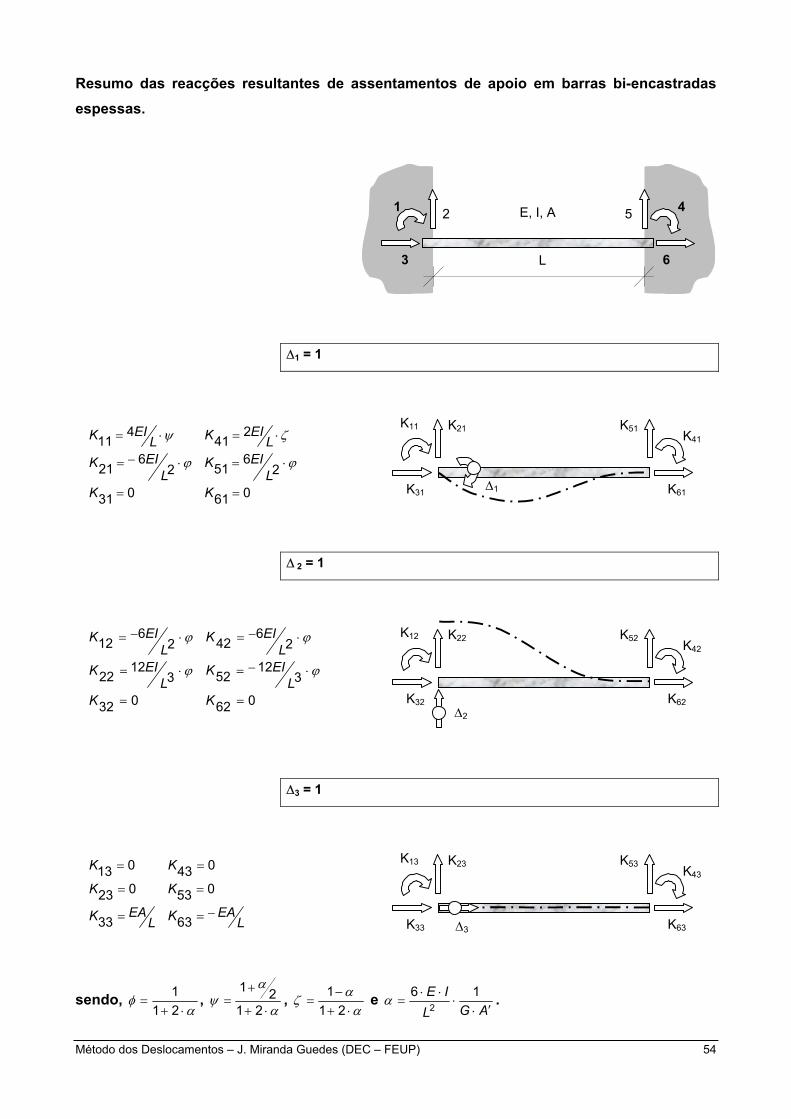
Resumo das reacções resultantes de assentamentos de apoio em barras bi-encastradas espessas.
3
1 2
6
5 4 E, I, A
L
∆1 = 1
K31
K11 K21
K61
K51 K41
∆1
∆ 2 = 1
K32
K12
K62
K42
∆2
K22 K52
∆3 = 1
K33
K13
K63
K43
∆3
K23 K53
sendo, α
φ⋅+
=211 ,
α
αψ
⋅+
+=
2121
, α
αζ⋅+
−=
211 e
AGLIE
′⋅⋅
⋅⋅=
162
α .
061
26
51
241
031
26
21
411
=
⋅=
⋅=
=
⋅−=
⋅=
KL
EIKL
EIK
KL
EIKL
EIK
ϕ
ζ
ϕ
ψ
062
312
52
26
42
032
312
22
26
12
=
⋅−=
⋅−=
=
⋅=
⋅−=
KL
EIKL
EIK
KL
EIKL
EIK
ϕ
ϕ
ϕ
ϕ
LEAK
K
K
LEAK
K
K
−=
=
=
=
=
=
63
053
043
33
023
013
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 55
BARRAS DE SECÇÃO VARIÁVEL
Todos os valores descritos até ao momento, elementos Kij da matriz de rigidez e Ri0 do vector das acções, foram determinados no pressuposto de que os elementos de barra apresentam secção transversal homogénea de caracteristicas materiais e geométricas constantes ao longo do seu eixo rectílíneo. Caso se pretenda analisar elementos de barra de secção transversal variável, teremos que repetir as operações anteriores e resolver os integrais considerando a variação da inércia, da área e do módulo de elasticidade ao longo do eixo ox do elemento, i.e. considerar I(x), A(x), E(x), respectivamente.
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 56
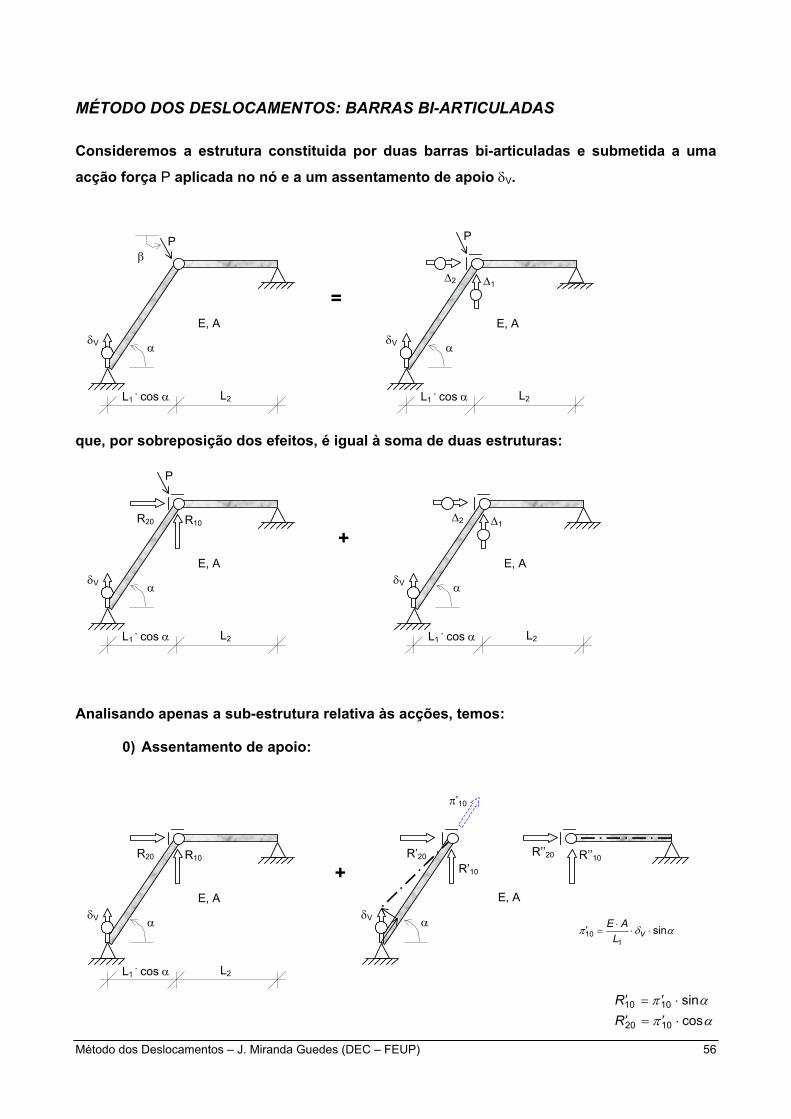
MÉTODO DOS DESLOCAMENTOS: BARRAS BI-ARTICULADAS
Consideremos a estrutura constituida por duas barras bi-articuladas e submetida a uma
acção força P aplicada no nó e a um assentamento de apoio δV.
P
E, A
α δV
L2 L1 . cos α
β
∆1 ∆2
α
E, A
=
P
δV
L2L1 . cos α
que, por sobreposição dos efeitos, é igual à soma de duas estruturas:
R10 R20
α
E, A
P
δV
L2 L1 . cos α
+∆1
α
E, A
∆2
δV
L2L1 . cos α
Analisando apenas a sub-estrutura relativa às acções, temos:
0) Assentamento de apoio:
R10 R20
α
E, A δV
L2 L1 . cos α
E, A
R’10 R’20
α
R’’10 R’’20
π’10
+
δV αδπ sin
110 ⋅⋅
⋅=′ VL
AE
απαπ
cossin
1020
1010
⋅′=′⋅′=′
RR
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 57
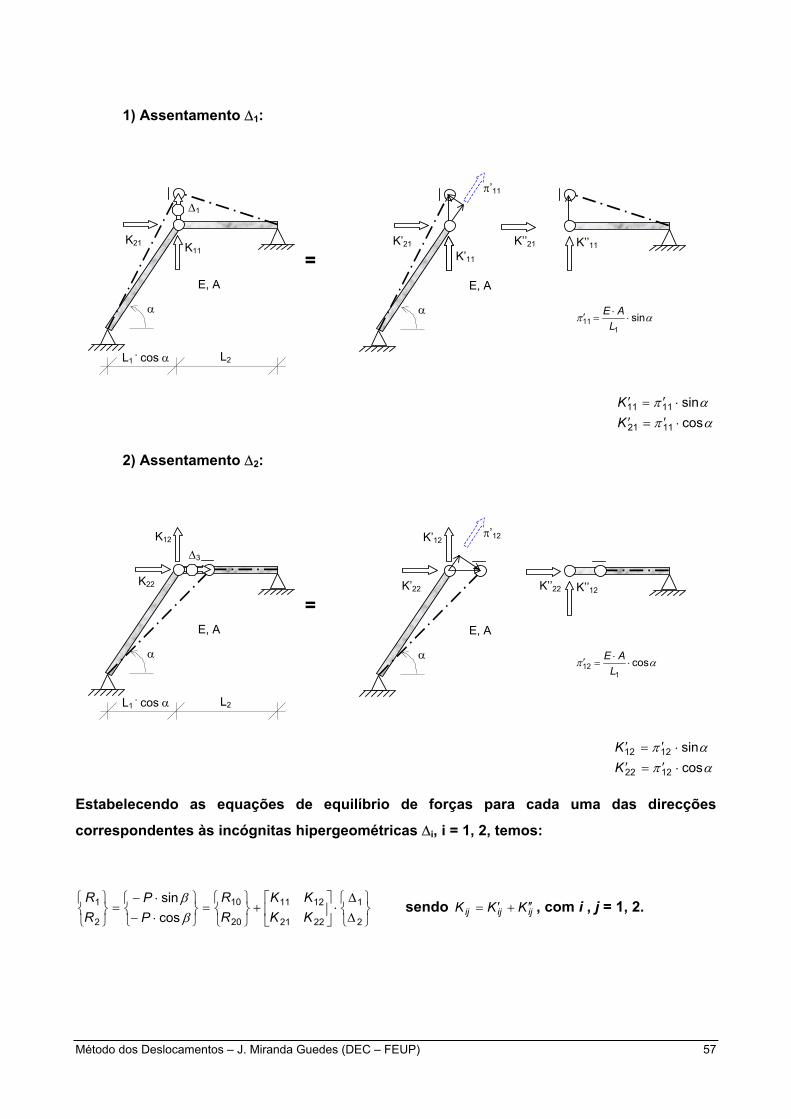
1) Assentamento ∆1:
K11 K21
α
∆1
E, A
L2 L1 . cos α
K’11
K’21
α
= K’’11 K’’21
π’11
απ sin1
11 ⋅⋅
=′LAE
E, A
απαπ
cossin
1121
1111
⋅′=′⋅′=′
KK
2) Assentamento ∆2:
K12
K22
α
E, A
L2 L1 . cos α
∆3
K’12
K’22
α
= K’’12 K’’22
π’12
απ cos1
12 ⋅⋅
=′LAE
E, A
απαπ
cossin
1222
1212
⋅′=′⋅′=′
KK
Estabelecendo as equações de equilíbrio de forças para cada uma das direcções
correspondentes às incógnitas hipergeométricas ∆i, i = 1, 2, temos:
∆∆
⋅
+
=
⋅−⋅−
=
2
1
2221
1211
20
10
2
1
cossin
KKKK
RR
PP
RR
ββ sendo ijijij KKK ′′+′= , com i , j = 1, 2.

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 58
∆1 ∆2
α
E, A
P
δV
L2 L1 . cos α
∆to
0) Cargas aplicadas:
R10 R20
α
E, A δV
L2 L1 . cos α
∆to
1) Assentamento ∆1:
K11 K21
α
∆1
E, A
L2 L1 . cos α
∆1
∆2 ∆3
E, I, A
α
P
δV
∆to
L2 L1 . cos α
0) Cargas aplicadas:
E, I, A
R10
R20R30
αδV
L2 L1 . cos α
1) Assentamento ∆1:
E, I, A
K11
K21K31
α
∆1
L2 L1 . cos α
2) Assentamento ∆2:
E, I, A
K12
K22K32
α
∆2
L2 L1 . cos α
PARALELISMO ENTRE BARRAS CONTÍNUAS E BARRAS BI-ARTICULADAS NO MÉTODO DOS DESLOCAMENTOS
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 59
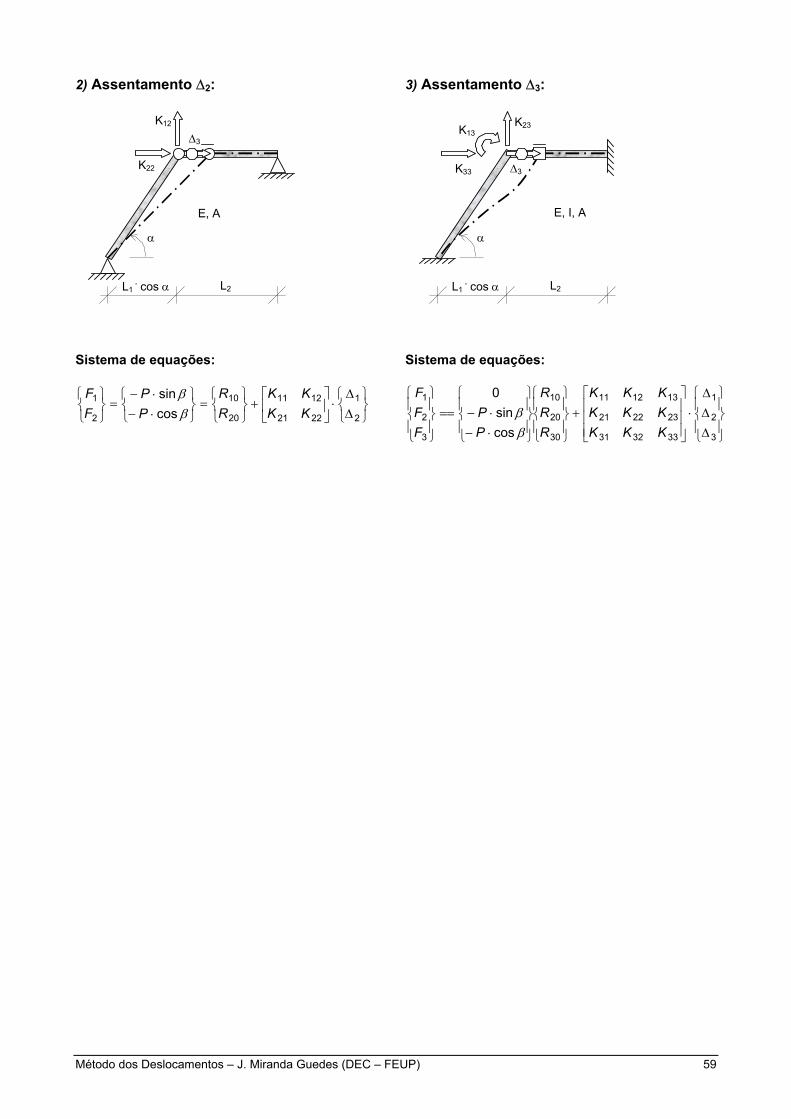
2) Assentamento ∆2: K12
K22
α
E, A
L2 L1 . cos α
∆3
Sistema de equações:
∆∆
⋅
+
=
⋅−⋅−
=
2
1
2221
1211
20
10
2
1
cossin
KKKK
RR
PP
FF
ββ
3) Assentamento ∆3:
E, I, A
K13 K23
K33
α
∆3
L2 L1 . cos α
Sistema de equações:
∆∆∆
⋅
+
⋅−⋅−==
3
2
1
333231
232221
131211
30
20
10
3
2
1
cossin
0
KKKKKKKKK
RRR
PP
FFF
ββ
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 60
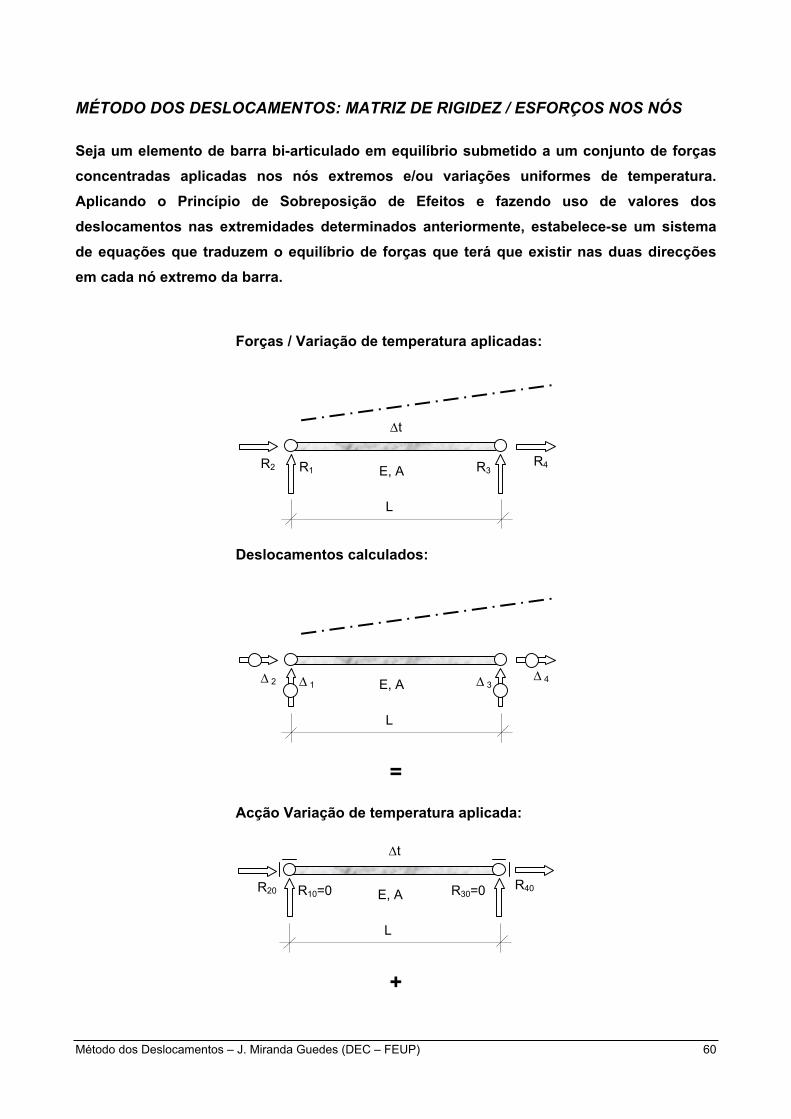
MÉTODO DOS DESLOCAMENTOS: MATRIZ DE RIGIDEZ / ESFORÇOS NOS NÓS
Seja um elemento de barra bi-articulado em equilíbrio submetido a um conjunto de forças concentradas aplicadas nos nós extremos e/ou variações uniformes de temperatura. Aplicando o Princípio de Sobreposição de Efeitos e fazendo uso de valores dos deslocamentos nas extremidades determinados anteriormente, estabelece-se um sistema de equações que traduzem o equilíbrio de forças que terá que existir nas duas direcções em cada nó extremo da barra.
Forças / Variação de temperatura aplicadas:
L
R1 R3R2 R4E, A
∆t
Deslocamentos calculados:
L
E, A ∆ 1 ∆ 3∆ 2 ∆ 4
=
Acção Variação de temperatura aplicada:
R10=0 R30=0 R20 R40
∆t
L
E, A
+

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 61
Acção deslocamentos dos nós:
+
K21 K41
K31=0
∆1
K11=0
K23 K43 ∆3
K33=0 K13=0
+
K22 K42 ∆2
K32=0 K12=0
K24 K44∆4
K34=0 K14=0
Estabelecendo a equação de equilíbrio de forças nos nós apenas nas direcções 2 e 4 do
eixo da barra, as únicas que introduzem esforços na barra, temos:
∆∆
⋅
+
=
4
2
4442
2422
40
20
4
2
KKKK
RR
RR
i.e. { } { } [ ] { }∆⋅+= KRR 0 , designado-se a matriz [ ]K por matriz de rigidez, agora relativa ao
elemento de barra bi-articulado. Por outro lado, o vector { }R não representa mais do que os
esforços nas extremidades da barra segundo as direcções e os sentidos indicados na figura.
Substituindo as forças Kij pelos valores determinados anteriormente e as forças Ri pelos esforços correspondentes, neste caso apenas os esforços axiais, temos:
∆∆
⋅
+−−+
⋅+
=
−
4
2
40
20
1111
LEA
RR
NN
d
e
MÉTODO DOS DESLOCAMENTOS: FORMULAÇÃO MATRICIAL
Consideremos uma barra inclinada de um ângulo α em relação à horizontal e dois sistemas
de coordenadas associados: δ correspondente aos g.l. ditos locais da barra (... direcção do
eixo da barra) e ∆ aos g.l. globais (... direcção vertical e direcção horizontal). Exite uma
Matriz de Transformação [ ]T que transforma as coordenadas ∆ nas coordenadas δ:
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 62
δ1 ∆2
∆1
∆4
∆3
δ2
α
∆∆∆∆
⋅
=
4321
)cos()(0000)cos()(
21
αααα
δδ
sensen , i.e. { } [ ] { }∆⋅= Tδ
sendo α medido sempre da horizontal positiva na extremidade esquerda para a barra para a
barra no sentido contrário ao dos ponteiros do relógio:
α
δ1
δ2
∆2
∆1
∆4
∆3
O mesmo raciocínio se pode estabelecer para as forças nos nós. Sejam φ as forças
correspondentes aos g.l. ditos locais da barra (... esforço axial) e F aos g.l. globais (... força
vertical e força horizontal). A mesma Matriz de Transformação [ ]T transforma as
coordenadas F nas coordenadas φ:

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 63
φ1 F2
F1
F4
F3
φ2
α
⋅
=
4321
)cos()(0000)cos()(
21
FFFF
sensen
αααα
φφ
, i.e. { } [ ] { }FT ⋅=φ
Esta matriz é ortogonal, i.e. { } [ ] { }φ⋅= TTF .
Seja um elemento de barra inclinado em equilíbrio submetido a um conjunto de forças concentradas aplicadas nos nós extremos e concentradas e/ou distribuidas aplicadas ao longo do eixo da barra. De acordo com as relações estabelecidas anteriormente, temos:
Forças aplicadas:
L
φ1
φ2
E, A
α
F2
F1
F4
F3
L
E, A
α

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 64
Deslocamentos calculados:
L
δ1
δ2
E, A
α
∆2
∆1
∆4
∆3
L
E, A
α
⋅
+−−+
⋅+
=
2
1
20
10
2
1
1111
δδ
φφ
φφ
LEA , i.e. { } { } [ ] { }δφφ ⋅+= K0
Utilizando as relações anteriores, podemos passar do sistema de coordenadas local δ e φ
para o sistema de coordenadas global ∆ e F,
{ } [ ] { }
{ } { } [ ] { }{ } { } [ ] [ ] { }
{ } [ ] { } { } [ ] { }{ } [ ] { } [ ] [ ] { }( )∆⋅⋅+⋅=⇒
⋅=⇒⋅=∧
∆⋅⋅+=⇒
⋅+=∧
∆⋅=
TKTFTFFT
TKK
T
T
T0
0
0φ
φφ
φφδφφ
δ
i.e. { } [ ] { } [ ] [ ] [ ] { } { } { } [ ] { }∆⋅+=⇔∆⋅⋅⋅+⋅= gTT KRFTKTTF 00φ . Partindo do equilíbrio de forças da
barra no referencial local, e utilizando as matrizes de transformação de coordenadas, estabelecemos a equação de equilibrio de forças da barra no referencial global.
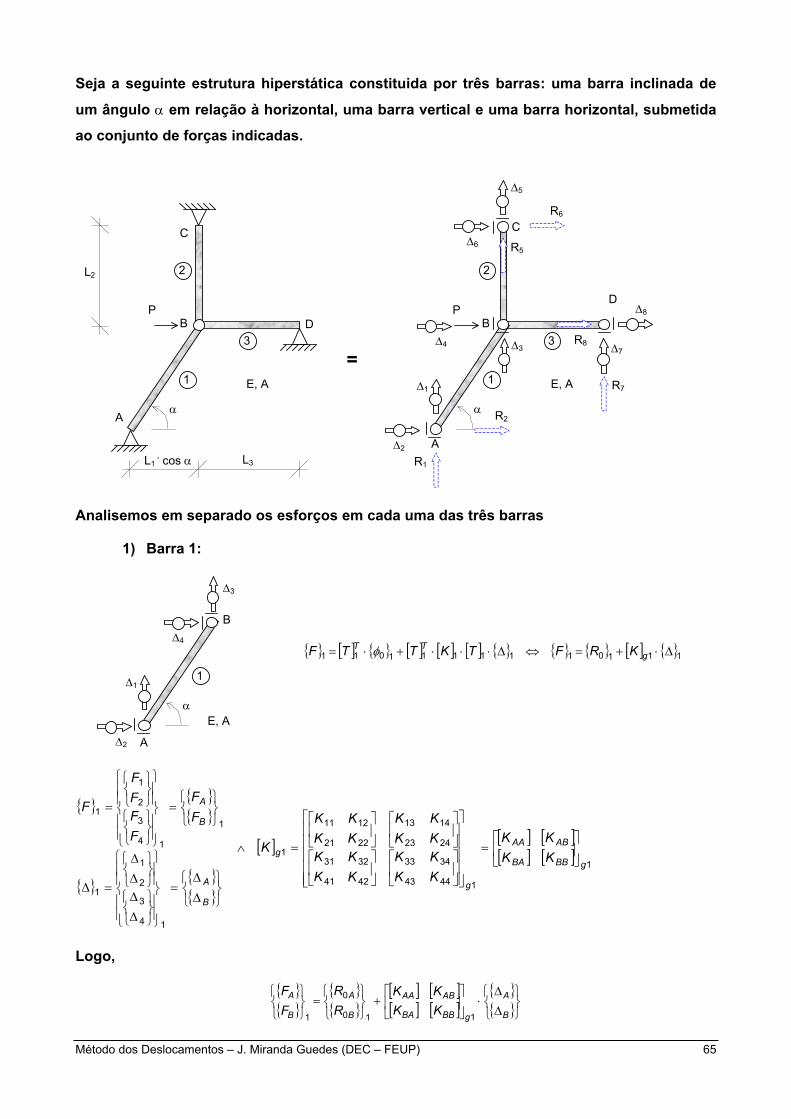
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 65
Seja a seguinte estrutura hiperstática constituida por três barras: uma barra inclinada de
um ângulo α em relação à horizontal, uma barra vertical e uma barra horizontal, submetida
ao conjunto de forças indicadas.
P
E, A
α
L2
A
B
C
D
1
2
3
L3 L1 . cos α
A
B
D
1
2
3
E, A
∆3 ∆4
α
∆1
∆2
∆7
∆8
∆5
∆6 C
=
R1
R2
R5
R6
R7
R8
P
Analisemos em separado os esforços em cada uma das três barras
1) Barra 1:
A
B
1
E, A
∆3
∆4
α
∆1
∆2
{ } { }{ }
{ } { }{ }
[ ] [ ] [ ][ ] [ ] 1
14443
3433
4241
3231
2423
1413
2221
1211
1
14
3
2
1
1
1
14
3
2
1
1
gBBBA
ABAA
g
g
B
A
B
A
KKKK
KKKK
KKKK
KKKK
KKKK
K
FF
FFFF
F
=
=∧
∆∆
=
∆∆
∆∆
=∆
=
=
Logo,
{ }{ }
{ }{ }
[ ] [ ][ ] [ ]
{ }{ }
∆
∆⋅
+
=
B
A
gBBBA
ABAA
B
A
B
A
KKKK
RR
FF
110
0
1
{ } [ ] { } [ ] [ ] [ ] { } { } { } [ ] { }1110111111011 ∆⋅+=⇔∆⋅⋅⋅+⋅= gTT KRFTKTTF φ
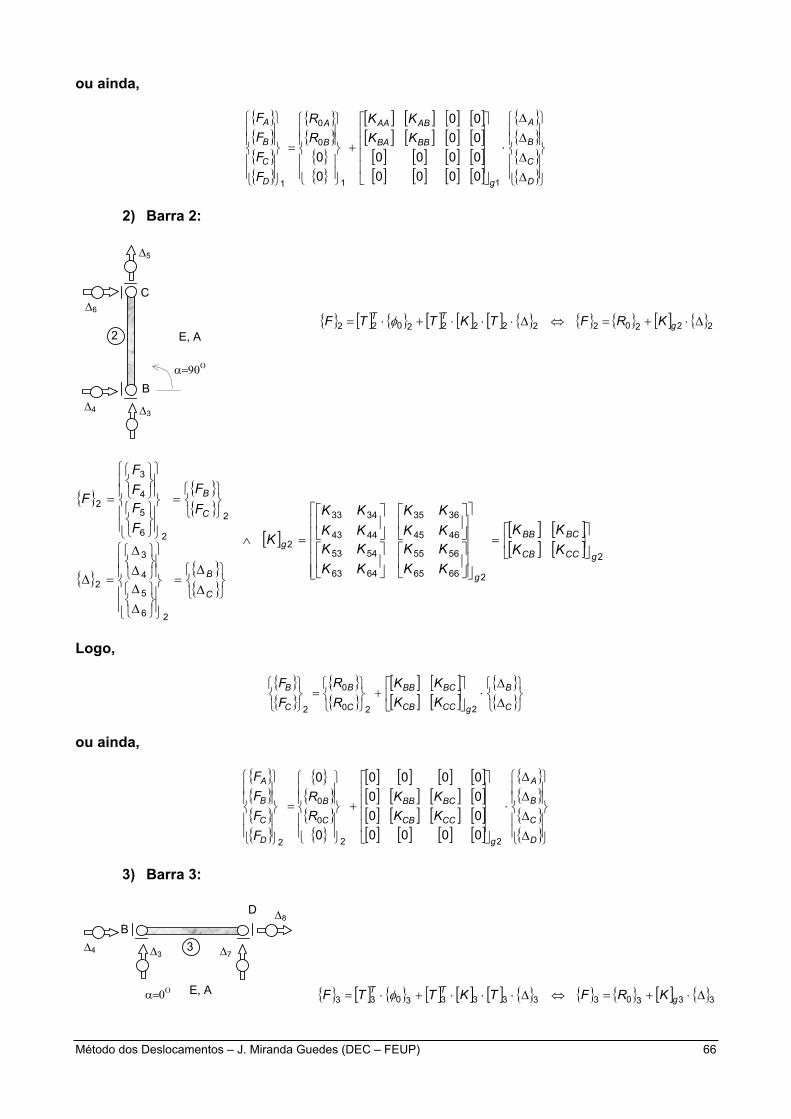
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 66
ou ainda,
{ }{ }{ }{ }
{ }{ }
{ }{ }
[ ] [ ] [ ] [ ][ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ][ ] [ ] [ ] [ ]
{ }{ }{ }{ }
∆
∆
∆∆
⋅
+
=
D
C
B
A
g
BBBA
ABAA
B
A
D
C
B
A
KKKK
RR
FFFF
11
0
0
1 000000000000
00
2) Barra 2:
B
2 E, A
∆3 ∆4
∆5
∆6 C
α=90Ο
{ } { }{ }
{ } { }{ }
[ ] [ ] [ ][ ] [ ] 2
26665
5655
6463
5453
4645
3635
4443
3433
2
26
5
4
3
2
2
26
5
4
3
2
gCCCB
BCBB
g
g
C
B
C
B
KKKK
KKKK
KKKK
KKKK
KKKK
K
FF
FFFF
F
=
=∧
∆∆
=
∆∆
∆∆
=∆
=
=
Logo,
{ }{ }
{ }{ }
[ ] [ ][ ] [ ]
{ }{ }
∆∆
⋅
+
=
C
B
gCCCB
BCBB
C
B
C
B
KKKK
RR
FF
220
0
2
ou ainda,
{ }{ }{ }{ }
{ }{ }{ }
{ }
[ ] [ ] [ ] [ ][ ] [ ] [ ] [ ][ ] [ ] [ ] [ ][ ] [ ] [ ] [ ]
{ }{ }{ }{ }
∆
∆
∆∆
⋅
+
=
D
C
B
A
g
CCCB
BCBB
C
B
D
C
B
A
KKKK
RR
FFFF
22
0
0
2000000000000
0
0
3) Barra 3:
α=0Ο
B D
3
E, A
∆3 ∆4 ∆7
∆8
{ } [ ] { } [ ] [ ] [ ] { } { } { } [ ] { }3330333333033 ∆⋅+=⇔∆⋅⋅⋅+⋅= g
TT KRFTKTTF φ
{ } [ ] { } [ ] [ ] [ ] { } { } { } [ ] { }2220222222022 ∆⋅+=⇔∆⋅⋅⋅+⋅= gTT KRFTKTTF φ
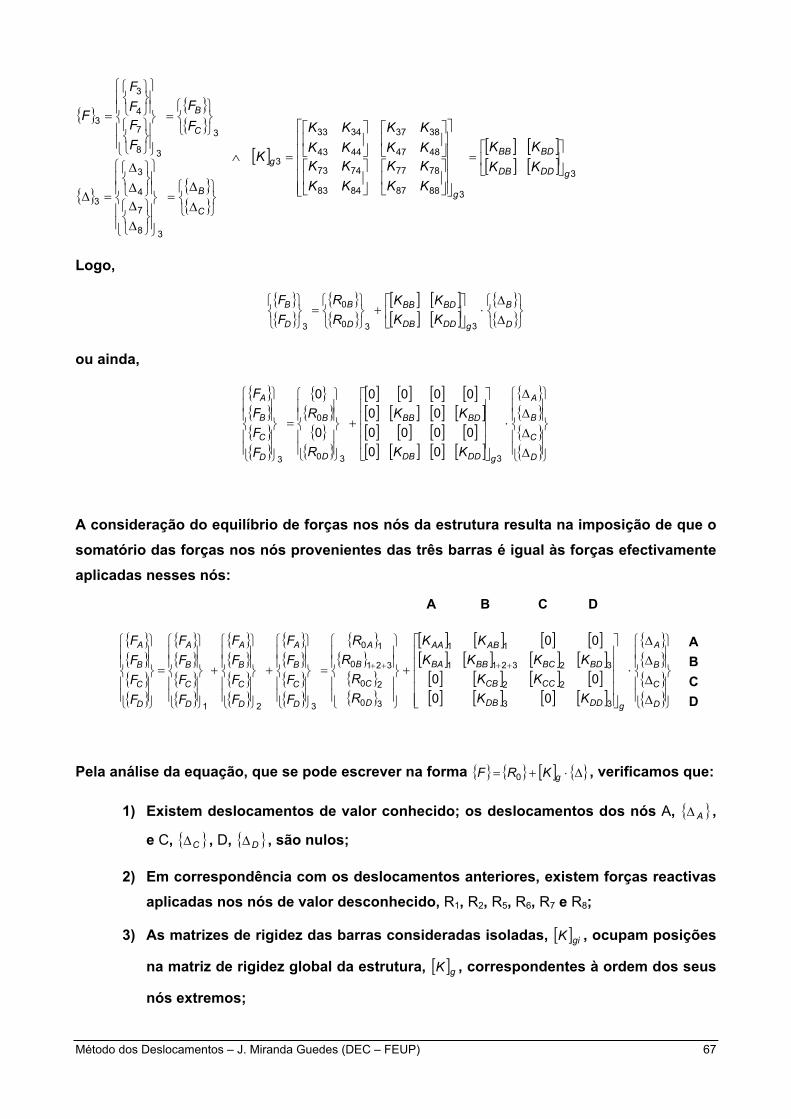
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 67
{ } { }{ }
{ } { }{ }
[ ] [ ] [ ][ ] [ ] 3
38887
7877
8483
7473
4847
3837
4443
3433
3
38
7
4
3
3
3
38
7
4
3
3
gDDDB
BDBB
g
g
C
B
C
B
KKKK
KKKK
KKKK
KKKK
KKKK
K
FF
FFFF
F
=
=∧
∆∆
=
∆∆
∆∆
=∆
=
=
Logo,
{ }{ }
{ }{ }
[ ] [ ][ ] [ ]
{ }{ }
∆
∆⋅
+
=
D
B
gDDDB
BDBB
D
B
D
B
KKKK
RR
FF
330
0
3
ou ainda,
{ }{ }{ }{ }
{ }{ }
{ }{ }
[ ] [ ] [ ] [ ][ ] [ ] [ ] [ ][ ] [ ] [ ] [ ][ ] [ ] [ ] [ ]
{ }{ }{ }{ }
∆
∆
∆∆
⋅
+
=
D
C
B
A
gDDDB
BDBB
D
B
D
C
B
A
KK
KK
R
R
FFFF
330
0
300
000000
0000
0
0
A consideração do equilíbrio de forças nos nós da estrutura resulta na imposição de que o somatório das forças nos nós provenientes das três barras é igual às forças efectivamente aplicadas nesses nós:
{ }{ }{ }{ }
{ }{ }{ }{ }
{ }{ }{ }{ }
{ }{ }{ }{ }
{ }{ }
{ }{ }
[ ] [ ] [ ] [ ][ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ][ ] [ ] [ ] [ ]
{ }{ }{ }{ }
∆
∆
∆∆
⋅
+
=
+
+
=
++++
D
C
B
A
gDDDB
CCCB
BDBCBBBA
ABAA
D
C
B
A
D
C
B
A
D
C
B
A
D
C
B
A
D
C
B
A
KKKK
KKKKKK
RR
RR
FFFF
FFFF
FFFF
FFFF
33
22
323211
11
30
20
3210
10
32100
00
00
Pela análise da equação, que se pode escrever na forma { } { } [ ] { }∆⋅+= gKRF 0 , verificamos que:
1) Existem deslocamentos de valor conhecido; os deslocamentos dos nós A, { }A∆ ,
e C, { }C∆ , D, { }D∆ , são nulos;
2) Em correspondência com os deslocamentos anteriores, existem forças reactivas aplicadas nos nós de valor desconhecido, R1, R2, R5, R6, R7 e R8;
3) As matrizes de rigidez das barras consideradas isoladas, [ ]giK , ocupam posições
na matriz de rigidez global da estrutura, [ ]gK , correspondentes à ordem dos seus
nós extremos;
A B C D
A B C D
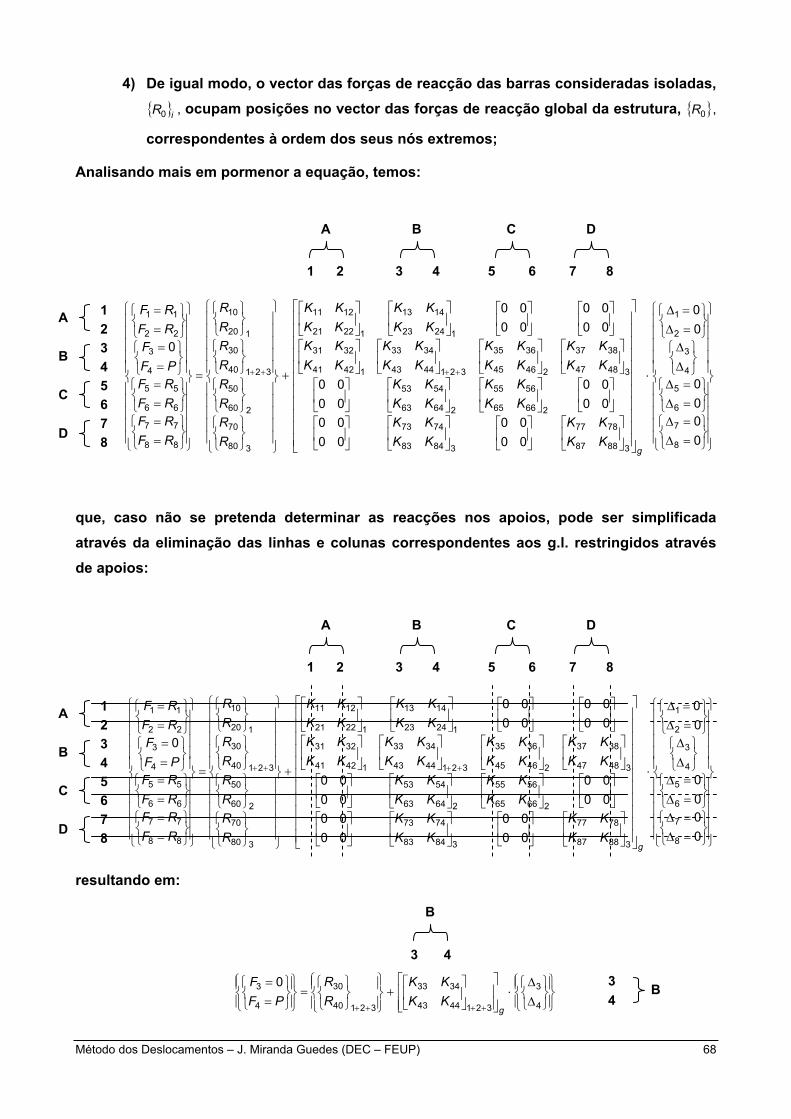
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 68
4) De igual modo, o vector das forças de reacção das barras consideradas isoladas,
{ }iR0 , ocupam posições no vector das forças de reacção global da estrutura, { }0R ,
correspondentes à ordem dos seus nós extremos;
Analisando mais em pormenor a equação, temos:
=∆=∆
=∆=∆
∆∆
=∆=∆
⋅
+
=
==
==
==
==
++++
0000
00
0000
0000
0000
0000
0000
0000
0
8
7
6
5
4
3
2
1
38887
7877
38483
7473
26665
5655
26463
5453
34847
3837
24645
3635
3214443
3433
14241
3231
12423
1413
12221
1211
380
70
260
50
32140
30
120
10
88
77
66
55
4
3
22
11
gKKKK
KKKK
KKKK
KKKK
KKKK
KKKK
KKKK
KKKK
KKKK
KKKK
RRRRRRRR
RFRFRFRFPF
FRFRF
que, caso não se pretenda determinar as reacções nos apoios, pode ser simplificada através da eliminação das linhas e colunas correspondentes aos g.l. restringidos através de apoios:
=∆=∆
=∆=∆
∆∆
=∆=∆
⋅
+
=
==
==
==
==
++++
0000
00
0000
0000
0000
0000
0000
0000
0
8
7
6
5
4
3
2
1
38887
7877
38483
7473
26665
5655
26463
5453
34847
3837
24645
3635
3214443
3433
14241
3231
12423
1413
12221
1211
380
70
260
50
32140
30
120
10
88
77
66
55
4
3
22
11
gKKKK
KKKK
KKKK
KKKK
KKKK
KKKK
KKKK
KKKK
KKKK
KKKK
RRRRRRRR
RFRFRFRFPF
FRFRF
resultando em:
∆∆
⋅
+
=
==
++++ 4
3
3214443
3433
32140
30
4
3 0
gKKKK
RR
PFF
3 4
3 4
B
B
1 2 3 4 5 6 7 8
A B C D
1 2 3 4 5 6 7 8
A B C D
1 2 3 4 5 6 7 8
A B C D
1 2 3 4 5 6 7 8
A B C D
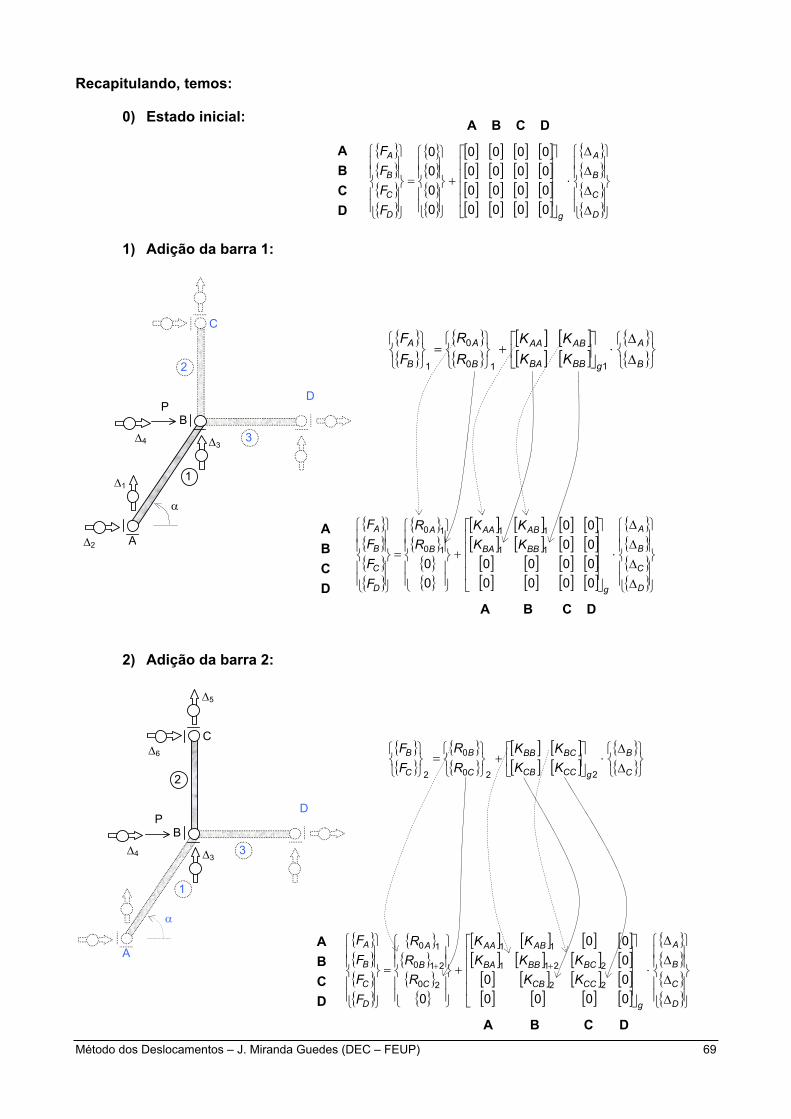
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 69
Recapitulando, temos:
0) Estado inicial:
{ }{ }{ }{ }
{ }{ }{ }{ }
[ ] [ ] [ ] [ ][ ] [ ] [ ] [ ][ ] [ ] [ ] [ ][ ] [ ] [ ] [ ]
{ }{ }{ }{ }
∆
∆
∆
∆
⋅
+
=
D
C
B
A
gD
C
B
A
FFFF
0000000000000000
0000
1) Adição da barra 1:
A
B
D
1
∆3 ∆4
α
∆1
∆2
C
2
3
P
2) Adição da barra 2:
A
B
D
1
2
3 ∆3 ∆4
α
∆5
∆6 C
P
{ }{ }
{ }{ }
[ ] [ ][ ] [ ]
{ }{ }
∆∆
⋅
+
=
B
A
gBBBA
ABAA
B
A
B
A
KKKK
RR
FF
110
0
1
{ }{ }{ }{ }
{ }{ }
{ }{ }
[ ] [ ] [ ] [ ][ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ][ ] [ ] [ ] [ ]
{ }{ }{ }{ }
∆
∆
∆
∆
⋅
+
=
D
C
B
A
g
BBBA
ABAA
B
A
D
C
B
A
KKKK
RR
FFFF
000000000000
00
11
11
10
10
A B C D
A B C D
A B C D
A B C D
{ }{ }
{ }{ }
[ ] [ ][ ] [ ]
{ }{ }
∆
∆⋅
+
=
C
B
gCCCB
BCBB
C
B
C
B
KKKK
RR
FF
220
0
2
{ }{ }{ }{ }
{ }{ }{ }
{ }
[ ] [ ] [ ] [ ][ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ][ ] [ ] [ ] [ ]
{ }{ }{ }{ }
∆
∆
∆
∆
⋅
+
=
++
D
C
B
A
g
CCCB
BCBBBA
ABAA
C
B
A
D
C
B
A
KKKKK
KK
RRR
FFFF
000000000
022
2211
11
20
210
10
A B C D
A B C D

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 70
3) Adição da barra 3:
A
B
D
1
2
3 ∆3 ∆4
α
∆7
∆8
C
P
4) Consideração das Cargas Aplicadas nos nós (Cargas Aplicadas de valor conhecido e Cargas Reactivas nos Apoios) e dos Assentamentos nos Apoios:
A
B
D
∆1
∆2
∆7
∆8
∆5
∆6 C
R1
R2
R5
R6
R7
R8
P
A resolução do sistema de equações anterior permite a determinação dos deslocamentos nas direcções de deslocamento livre e das forças «aplicadas» nas direcções de deslocamento restringido, i.e. das forças reactivas nos apoios.
{ }{ }
{ }{ }
[ ] [ ][ ] [ ]
{ }{ }
∆
∆⋅
+
=
D
B
gDDDB
BDBB
D
B
D
B
KKKK
RR
FF
330
0
3
{ }{ }{ }{ }
{ }{ }
{ }{ }
[ ] [ ] [ ] [ ][ ] [ ] [ ] [ ]
[ ] [ ] [ ] [ ][ ] [ ] [ ] [ ]
{ }{ }{ }{ }
∆
∆
∆∆
⋅
+
=
++++
D
C
B
A
gDDDB
CCCB
BDBCBBBA
ABAA
D
C
B
A
D
C
B
A
KKKK
KKKKKK
RR
RR
FFFF
33
22
323211
11
30
20
3210
10
0000
00
A B C D
A B C D
{ }{ }{ }{ }
=
8
7
6
5
2
1
0
RRRRP
RR
FFFF
D
C
B
A
e
{ }{ }{ }{ }
∆∆
=
∆
∆
∆
∆
0000
00
4
3
D
C
B
A
A B C D
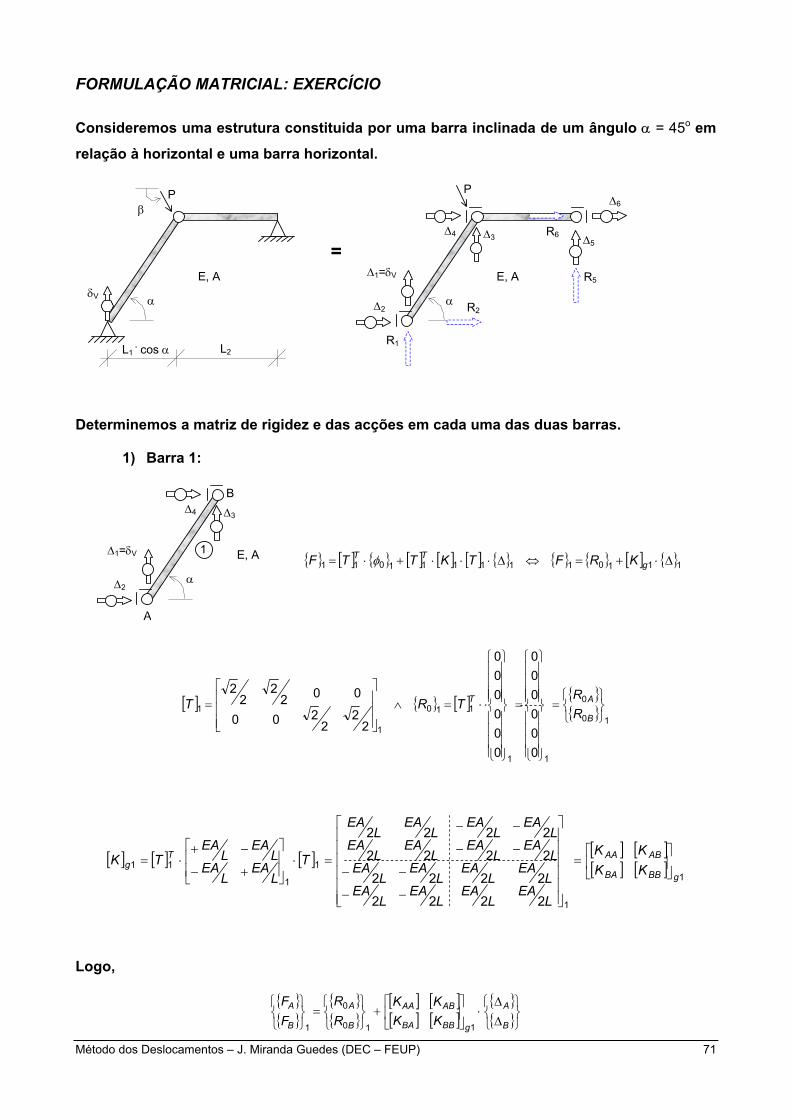
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 71
FORMULAÇÃO MATRICIAL: EXERCÍCIO
Consideremos uma estrutura constituida por uma barra inclinada de um ângulo α = 45o em
relação à horizontal e uma barra horizontal.
P
E, A
α δV
L2 L1 . cos α
β
∆3 ∆4
α
E, A
=
P
R1
R2
R5
R6
∆1=δV
∆2
∆5
∆6
Determinemos a matriz de rigidez e das acções em cada uma das duas barras.
1) Barra 1:
A
B
1
α
∆3 ∆4
E, A ∆1=δV
∆2
[ ] { } [ ] { }{ } 10
0
11
110
1
1
000000
000000
22
2200
0022
22
=
=
⋅⋅=∧
=
B
AT
RR
TRT
[ ] [ ] [ ] [ ] [ ][ ] [ ] 1
1
1
1
11
2222
2222
2222
2222
gBBBA
ABAATg KK
KK
LEA
LEA
LEA
LEA
LEA
LEA
LEA
LEA
LEA
LEA
LEA
LEA
LEA
LEA
LEA
LEA
TL
EAL
EAL
EAL
EATK
=
−−
−−
−−
−−
=⋅
+−
−+⋅=
Logo,
{ }{ }
{ }{ }
[ ] [ ][ ] [ ]
{ }{ }
∆
∆⋅
+
=
B
A
gBBBA
ABAA
B
A
B
A
KKKK
RR
FF
110
0
1
{ } [ ] { } [ ] [ ] [ ] { } { } { } [ ] { }1110111111011 ∆⋅+=⇔∆⋅⋅⋅+⋅= gTT KRFTKTTF φ

Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 72
ou ainda,
{ }{ }{ }
{ }{ }
{ }
[ ] [ ] [ ][ ] [ ] [ ]
[ ] [ ] [ ]
{ }{ }{ }
∆∆∆
⋅
+
=
C
B
A
BBBA
ABAA
B
A
C
B
A
KKKK
RR
FFF
00000
011
11
10
10
1
i.e.
{ }{ }{ }
∆∆
∆∆
∆∆
⋅
−−
−−
−−
−−
+
=
6
5
4
3
2
1
11
11
1
1
1
0000
0000
0000
0000
22
22
22
22
0000
22
22
22
22
000000
LEA
LEA
LEA
LEA
LEA
LEA
LEA
LEA
LEA
LEA
LEA
LEA
LEA
LEA
LEA
LEA
FFF
C
B
A
2) Barra 2:
α=0Ο
B C
2 ∆3 ∆4
E, A
∆5
∆6
[ ] { } [ ] { }{ } 20
0
22
2202
2
000000
000000
10000010
=
=
⋅=∧
=
C
BT
RR
TRT
[ ] [ ] [ ] [ ] [ ][ ] [ ] 2
2
2
2
22
2000000
000000
gCCCB
BCBBTg KK
KK
LEA
LEA
LEA
LEA
TL
EAL
EAL
EAL
EATK
=
−
−=⋅
+−
−+⋅=
Logo,
{ }{ }
{ }{ }
[ ] [ ][ ] [ ]
{ }{ }
∆
∆⋅
+
=
C
B
gCCCB
BCBB
C
B
C
B
KKKK
RR
FF
220
0
2
ou ainda,
{ } [ ] { } [ ] [ ] [ ] { } { } { } [ ] { }2220222222022 ∆⋅+=⇔∆⋅⋅⋅+⋅= gTT KRFTKTTF φ
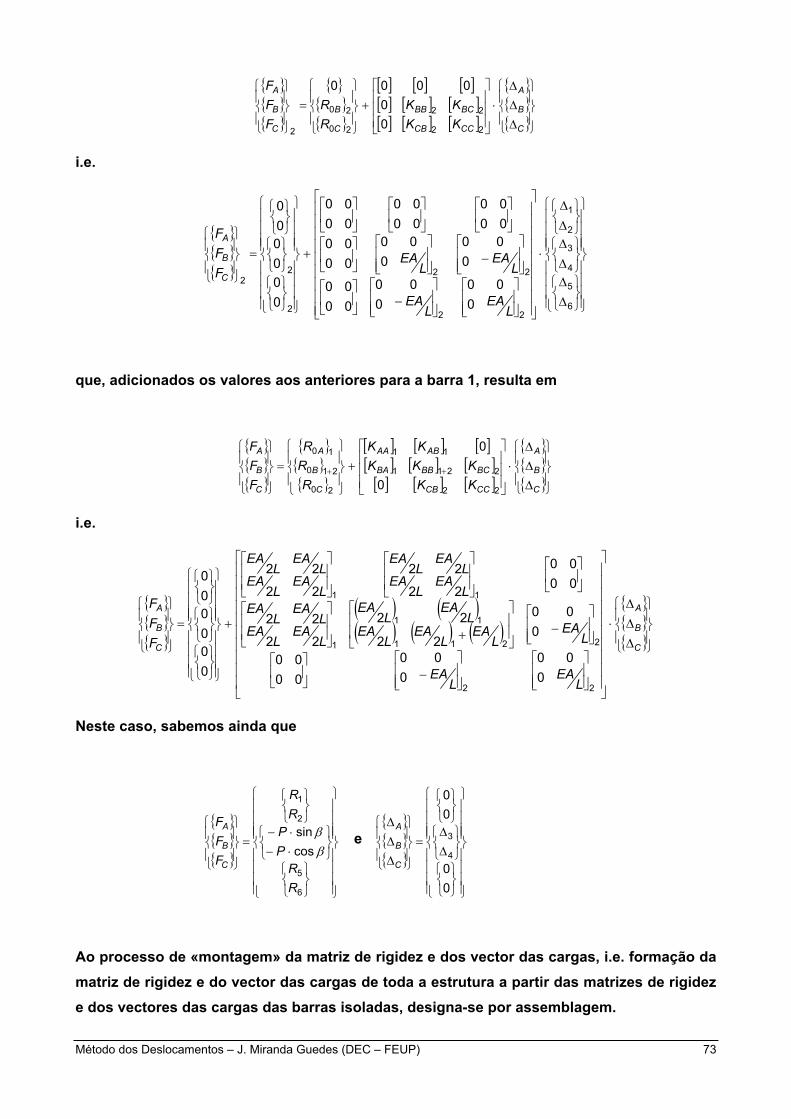
Método dos Deslocamentos – J. Miranda Guedes (DEC – FEUP) 73
{ }{ }{ }
{ }{ }{ }
[ ] [ ] [ ][ ] [ ] [ ][ ] [ ] [ ]
{ }{ }{ }
∆∆∆
⋅
+
=
C
B
A
CCCB
BCBB
C
B
C
B
A
KKKK
RR
FFF
22
22
20
20
2 00
0000
i.e.
{ }{ }{ }
∆∆
∆∆
∆∆
⋅
−
−
+
=
6
5
4
3
2
1
22
22
2
22
000
000
0000
000
000
0000
0000
0000
0000
000000
LEA
LEA
LEA
LEA
FFF
C
B
A
que, adicionados os valores aos anteriores para a barra 1, resulta em
{ }{ }{ }
{ }{ }{ }
[ ] [ ] [ ][ ] [ ] [ ]
[ ] [ ] [ ]
{ }{ }{ }
∆∆∆
⋅
+
=
++
C
B
A
CCCB
BCBBBA
ABAA
C
B
A
C
B
A
KKKKK
KK
RRR
FFF
22
2211
11
20
210
10
0
0
i.e.
{ }{ }{ }
( ) ( )( ) ( ) ( )
{ }{ }{ }
∆∆∆
⋅
−
−
+
+
=
C
B
A
C
B
A
LEA
LEA
LEA
LEA
LEA
LEA
LEA
LEA
LEA
LEA
LEA
LEA
LEA
LEA
LEA
LEA
LEA
LEA
LEA
LEA
FFF
22
2211
11
1
11
000
000
0000
000
22
22
22
22
0000
22
22
22
22
000000
Neste caso, sabemos ainda que
{ }{ }{ }
⋅−⋅−
=
6
5
2
1
cossin
RR
PPRR
FFF
C
B
A
ββ e
{ }{ }{ }
∆∆
=
∆∆∆
00
00
4
3
C
B
A
Ao processo de «montagem» da matriz de rigidez e dos vector das cargas, i.e. formação da matriz de rigidez e do vector das cargas de toda a estrutura a partir das matrizes de rigidez e dos vectores das cargas das barras isoladas, designa-se por assemblagem.




















![Método dos Deslocamentos [Modo de Compatibilidade]](https://img.document.onl/doc/110x75/5571fda549795991699995eb/metodo-dos-deslocamentos-modo-de-compatibilidade.jpg)








