Embed Size (px)
Citation preview
Mariana Rita Ramos Seabra
Modelo Computacional para a Fractura baseado no conceito de Elementos Finitos Generalizados
Dissertação submetida à Faculdade de Engenharia da
Universidade do Porto para conclusão do Mestrado Integrado
em Engenharia Mecânica sob orientação do
Prof. Doutor José Manuel de Almeida César de Sá
Julho de 2008

i
“Jade que não é lapidada não
se torna gema.”
Provérbio Chinês
ii
Agradecimentos
Em primeiro lugar, gostaria de exprimir o meu profundo agradecimento ao Prof.
Doutor José de Almeida César de Sá, meu orientador científico, por todo o apoio e
dedicação que me dispensou, sem o qual este trabalho não teria sido possível.
Ao Filipe Xavier Costa Andrade agradeço a disponibilidade com que me
explicou o funcionamento de um programa computacional e a ajuda na realização de
algumas tarefas.
Ao Prof. Francisco Pires agradeço as sugestões e críticas construtivas ao longo
do trabalho.
Aos meus colegas do MIEM quero mostrar o meu apreço por todos os bons
momentos que passamos ao longo do curso e por todo o apoio que sempre me deram.
À Faculdade de Engenharia da Universidade do Porto, em especial ao DEMEGI
e ao IDMEC agradeço todos os meios que disponibilizaram para a realização do
trabalho.
Aos meus amigos Ana, Andreia, Ricardo e Vânia que nunca me deixam
desanimar quero também dizer obrigada.
Para minha família, em especial aos meus pais e irmão, vai um agradecimento
muito especial pela presença constante e apoio incondicional na realização deste
trabalho, e em todos os momentos da minha vida.
Finalmente, quero agradecer ao Lito, o meu companheiro, por ter deixado de
jogar Playstation para ler esta dissertação.

iii
Modelo Computacional para a Fractura baseado no conceito
de Elementos Finitos Generalizados
por
Mariana Rita Ramos Seabra
Dissertação submetida à Faculdade de Engenharia da Universidade do
Porto para conclusão do Mestrado Integrado em Engenharia Mecânica
sob orientação do
Prof. Doutor José Manuel de Almeida César de Sá
Resumo
O principal objectivo deste trabalho é o desenvolvimento de um modelo
computacional para a fractura baseado no conceito de Elementos Finitos Generalizados.
A Mecânica da Fractura estuda as consequências que os defeitos do material, como as
fendas, provocam no campo de tensões e de deformações, procurando estabelecer
critérios de dimensionamento baseados na propagação instável dessas fendas.
Em geral, pode dizer-se que uma fenda se propaga instavelmente se o factor de
concentração de tensões, FIT, for superior a um determinado valor crítico. Existem
várias formas de calcular os FITs, porém só estão disponíveis soluções analíticas para as
geometrias e carregamentos mais simples. Em casos mais complexos torna-se
necessário recorrer a métodos numéricos. O Método dos Elementos Finitos é o método
numérico mais utilizado em problemas de mecânica, mas requer algumas adaptações
para descrever a fractura, já que as funções polinomiais utilizadas nas aproximações não
descrevem descontinuidades.
Uma solução para aquele tipo de problemas é a utilização do conceito de Método
dos Elementos Finitos Generalizados. Dentro destes métodos destaca-se o Método dos
Elementos Finitos Estendidos, XFEM, que modeliza as fendas enriquecendo alguns nós
da malha de elementos finitos tradicionais com funções descontínuas. Possibilita, ainda,
a incorporação de funções associadas aos campos de deslocamentos assimptóticos em
torno da extremidade da fenda, permitindo o cálculo dos FITs de forma simples. É uma
ferramenta poderosa na descrição do fenómeno da fractura e permite poupar esforços

iv
computacionais, já que a simulação das fendas é independente da malha, evitando o
remalhamento.
Assim, construiram-se alguns modelos computacionais, baseados no XFEM, de
peças contendo fendas e calcularam-se os respectivos FITs. Os resultados obtidos foram
comparados com soluções analíticas e resultados numéricos obtidos por outros métodos.
No final do trabalho, procurou-se desenvolver um exemplo que estabelecesse a
ponte entre a mecânica do dano contínuo e a mecânica da fractura.

v
Computational Model of Fracture based on the concept of
Generalized Finite Elements
by
Mariana Rita Ramos Seabra
Thesis submitted in the fulfilment of the Degree of Master in Mechanical Engineering of
Faculdade de Engenharia da Universidade do Porto under the supervision of
Prof. Doutor José Manuel de Almeida César de Sá
Summary
The main objective of this thesis is the development of a computational model
for fracture based on the Generalized Finite Element Method. Fracture Mechanics
studies failure due to defects on the materials and establishes failure criteria based on
the instable propagation of cracks.
Usually, one may say that the instable propagation of a crack occurs when the
stress intensity factor, SIT, reaches a critical value. There are several ways of calculate
the SITs, however, there are only analytical solutions for simple geometry and simple
load cases. For complex situations it is necessary to use numerical methods. The Finite
Element Method is the most used numerical method in mechanical problems but it
requires some special features to describe fracture as the polynomial functions in which
is based cannot describe discontinuities.
A solution for that type if problems is to use the concept of Generalized Finite
Element Method. Among these methods, the Extended Finite Element Method, XFEM,
is the most popular, in which cracks are modelled by the local enrichment of standard
nodal functions with discontinuous functions. Asymptotic displacement fields
associated with the cracks may also be used on the crack tip to improve the solution and
to easily calculate the SIFs. XFEM does not require remeshing for fracture propagation
and therefore it is a powerful tool to address fracture phenomena with little
computational resources.

vi
Based on the XFEM some computational models containing cracks were built
and the SIFs were calculated. Results were compared with analytical solutions and other
results obtained with different numerical methods.
Finally, an attempt was made to build a model combining Damage Mechanics and
Fracture Mechanics.
vii
Índice geral 1.Introdução .................................................................................................................... 1
1.1.Considerações Gerais ............................................................................................. 1
1.2. Objecto e organização da presente dissertação...................................................... 3
1.3.Referências ............................................................................................................. 4
2.Mecânica da Fractura Linear Elástica...................................................................... 6
2.1.Introdução............................................................................................................... 6
2.2.Factor de Concentração de Tensões ....................................................................... 6
2.3.Critério de propagação instável de fendas.............................................................. 8
2.4.Caracterização do campo de tensões e do campo de deslocamentos na
extremidade de uma fenda............................................................................................ 8
2.4.Referências ........................................................................................................... 11
3.Método dos Elementos Finitos na Mecânica da Fractura ..................................... 12
3.1.Introdução............................................................................................................. 12
3.2.Modelar a singularidade na extremidade da fenda............................................... 12
3.2.1.Manipulação das Posições dos nós................................................................12
3.2.2.Formulações mistas ....................................................................................... 15
3.3.1.Extrapolação dos deslocamentos ................................................................... 18
3.3.2.Taxa de libertação de energia de deformação ............................................... 19
3.3.3.O Integral J ................................................................................................... 20
3.3.3.1.Integral de Interacção .......................................................................... 21
3.3.3.2.Formas de domínio do integral J ......................................................... 22
3.3.3.3.Considerações em casos 3D ................................................................ 23
3.4.Referências ........................................................................................................... 24
4.Método dos Elementos Finitos Estendidos.............................................................. 25
4.1.Introdução............................................................................................................. 25
4.2.Método dos Elementos Finitos Estendidos...........................................................26
4.3.Selecção dos nós a enriquecer - Level Sets .......................................................... 28
4.4.Implementação...................................................................................................... 30
4.5.Integração numérica ............................................................................................. 32
viii
4.6.Elementos de Ligação (Blending Elements) ........................................................ 33
4.7.Aplicação de XFEM à Mecânica da Fractura....................................................... 35
4.7.1.Equações........................................................................................................ 35
4.7.2.Aproximação XFEM para a mecânica da fractura ........................................ 36
4.7.3.Funções de Enriquecimento........................................................................... 36
4.7.4.Domínio a enriquecer .................................................................................... 37
4.7.5.Pós- processamento ....................................................................................... 38
4.7.6.Crescimento da fenda .................................................................................... 39
4.7.7.Fendas múltiplas............................................................................................ 41
4.7.8.Limitações do método ................................................................................... 41
4.8.Referências ........................................................................................................... 42
5.Do Dano à Fractura................................................................................................... 45
5.1.Introdução............................................................................................................. 45
5.2.O Dano.................................................................................................................. 45
5.3.Relação entre a mecânica da fractura e o dano.....................................................47
5.3.1.Base Termodinâmica ..................................................................................... 47
5.3.2. Equivalência Energética ............................................................................... 49
5.4.Referências ........................................................................................................... 50
6.Exemplos Numéricos................................................................................................. 51
6.1.Introdução............................................................................................................. 51
6.2. Placa com Fenda Central ..................................................................................... 51
6.2.1.Modelo recorrendo a elementos finitos colapsados....................................... 52
6.2.2.Modelo XFEM............................................................................................... 54
6.2.3. Comparação de resultados............................................................................ 56
6.2.4.Crescimento da fenda .................................................................................... 57
6.3.Placa com fenda lateral......................................................................................... 58
6.2.1.Modelo recorrendo a elementos finitos colapsados....................................... 59
6.3.2.Modelo XFEM............................................................................................... 60
6.3.3. Comparação de resultados............................................................................ 63
6.4.Provete Cilíndrico................................................................................................. 64
6.5.Referências ........................................................................................................... 70
ix
7.Conclusões e Perspectivas de Desenvolvimento Futuro......................................... 71
7.1.Conclusões............................................................................................................ 71
7.2.Perspectivas de Desenvolvimentos Futuros ......................................................... 72
x
Índice de Figuras
Capítulo 2
2.1.Placa infinita com furo elíptico .............................................................................. 7
2.2.Modos de fractura................................................................................................... 9
2.3.Coordenadas utilizadas na análise de tensões e deformações na extremidade de
uma fenda ................................................................................................................... 10
Capítulo 3
3.1.Elemento quadrangular com os nós dos lados trasladados................................... 13
3.2.Elemento quadrangular com os nós 1, 8 e 7 colapsados e os nós 2 e 6 trasladados
.................................................................................................................................... 14
3.3.Elemento de Tipo A.............................................................................................. 16
3.4.Divisão do elemento de 8 nós em triângulos........................................................17
3.5.Elemento do tipo B............................................................................................... 18
3.6.Factor de intensidade de tensão em função da distância à extremidade da fenda 19
3.7.Caminho fechado que contorna a extremidade da fenda...................................... 20
3.8.Contorno de integração que passa pelos pontos de Gauss.................................... 21
3.9.Possível contorno para o cálculo do integral de interacção.................................. 23
3.10.Sistema de eixos em coordenadas cilindricas..................................................... 23
Capítulo 4
4.1.Meio contínuo com banda de localização............................................................. 25
4.2.Diferentes formas de modelizar uma descontinuidade......................................... 27
4.3.Domínio dividido por uma descontinuidade ........................................................ 28
4.4.Domínios separados por uma descontinuidade .................................................... 29
4.5.Fenda muito próxima da fronteira de um elemento.............................................. 30
4.6.Divisão dos elementos que contêm a fenda em triângulos................................... 32
4.7.Domínio com uma fronteira interna ..................................................................... 33
4.8.Condições fronteira do problema ......................................................................... 35
4.9.Sistema de coordenadas na extremidade da fenda................................................ 37
xi
4.10.Fendas e respectivos nós a enriquecer................................................................ 38
4.11.Funções de distância com sinal para cada uma das situações de fendas múltiplas
.................................................................................................................................... 41
4.12.Situações em que a modelização por XFEM pode apresentar resultados pouco
fiáveis ......................................................................................................................... 42
Capítulo 5
5.1.Elemento danificado............................................................................................. 46
Capítulo 6
6.1.Placa com fenda central........................................................................................ 52
6.2.Malha utilizada no estudo de meia placa com fenda central ................................ 53
6.3.Modelo para a placa com fenda central ................................................................ 54
6.4.Pontos de Gauss na região da fenda ..................................................................... 55
6.5.Deformada de placa com fenda central ................................................................ 55
6.6.Tensões na placa com fenda central ..................................................................... 56
6.8.Crescimento de uma fenda ................................................................................... 57
6.8.Propagação de uma fenda..................................................................................... 58
6.9.Placa com fenda lateral traccionada ..................................................................... 59
6.10.Malha utilizada no estudo de meia placa com fenda lateral ............................... 60
6.11.Modelo para placa com fenda lateral.................................................................. 61
6.12.Pontos de Gauss na região da fenda ................................................................... 61
6.13.Deformada da placa com fenda lateral ............................................................... 62
6.14.Tensões na placa com fenda lateral .................................................................... 63
6.15.Provete cilindrico................................................................................................ 65
6.16.Dano local e dano não local em função do deslocamento.................................. 66
6.17.Trabalho total do dano em função do deslocamento .......................................... 66
6.18.Dano local........................................................................................................... 67
6.19.Trabalho total do dano........................................................................................ 67
6.20.Configuração do provete após formada a fenda ................................................. 68
6.21.Região do provete cilindrico que contém a fenda .............................................. 69
6.22.Abertura da fenda ............................................................................................... 69

xii
6.23.Tensão segundo y na vizinhança da fenda.......................................................... 70
xiii
Índice de Tabelas
Capítulo 4
4.1.Algumas combinações possíveis de funções de forma convencionais, funções de
partição da unidade e funções de enriquecimento ...................................................... 34
Capítulo 6
6.1.Propriedades da placa com fenda central ............................................................. 52
6.2.Valores obtidos para KI ........................................................................................ 57
6.3.Propriedades da placa com fenda lateral .............................................................. 59
6.4. Valores obtidos para KI ....................................................................................... 64
6.5.Propriedades do provete cilindrico ....................................................................... 65

Capítulo 1 Introdução
1
Capítulo 1
Introdução
1.1.Considerações Gerais
A contínua sofisticação dos projectos e crescente necessidade de economia de
material e energia resultaram numa importância cada vez maior da modelação numérica
na concepção e fabrico de peças mecânicas. Apesar do conhecimento teórico dos
fenómenos de falha, muitas vezes os critérios de dimensionamento só se aplicam
directamente a geometrias e carregamentos simples. É necessário, por isso, recorrer a
métodos numéricos para prever o comportamento futuro de estruturas mais complexas.
Tradicionalmente, o dimensionamento baseava-se em limitar a tensão máxima
na secção crítica ao valor da tensão de segurança que não é mais do que a tensão de
cedência dividida por um coeficiente de segurança. Esta metodologia conduzia, na
maior parte das vezes, a coeficientes de segurança muito elevados que cobrissem
qualquer factor que não estivesse a ser considerado no cálculo.
Porém, mesmo em estruturas dimensionadas muito abaixo da tensão de cedência
ocorriam falhas, por vezes catastróficas. Situações quase sempre associadas à presença
de defeitos no material, que não é necessariamente um meio contínuo mas que contém
fendas. Surgiu, então, a necessidade de se estudar atentamente o fenómeno da fractura.
O estudo da Mecânica da Fractura iniciou-se no início do século XX com os
trabalhos de Inglis [1] que introduziu o conceito de factor de concentração de tensões: a
presença de defeitos em materiais é responsável pelo aumento da tensão nominal em
algumas zonas.
Apesar de Inglis prever o aumento das tensões em determinadas zonas de uma
peça, não conseguiu explicar quais as condições necessárias à propagação instável de

Capítulo 1 Introdução
2
uma fenda. Estudos nesse sentido foram realizados por Griffith [2] que comparou o
valor teórico com o valor experimental da tensão de fractura de um sólido frágil.
Em 1948, Irwin [3] estuda o comportamento mecânico na extremidade de uma
fenda e em 1955, Orowan [4] define critérios e tipos de fractura e dá-se o nascimento de
conceitos como Factor de Intensidade de Tensões, tenacidade e fragilidade, entre outros.
Os Factores de Intensidade de Tensões, FITs, caracterizam a magnitude do
campo de tensões na vizinhança de uma fenda. A partir de um determinado valor crítico
as fendas propagam-se instavelmente conduzindo à rotura catastrófica.
Estão disponíveis algumas soluções analíticas para o cálculo dos FITs mas
apenas contemplam as geometrias e carregamentos mais simples; para todas as outras
situações é necessário recorrer a métodos numéricos.
Nas últimas décadas, o Método dos Elementos Finitos afirmou-se como o
método numérico mais poderoso para resolver problemas de mecânica.
No campo da Mecânica da Fractura foi necessário desenvolver algumas técnicas
específicas para modelizar as fendas presentes no material, pois as funções polinomiais
geralmente usadas não são capazes de descrever descontinuidades. Tradicionalmente,
posicionam-se as fendas entre elementos mas esta filosofia obriga a recursos
computacionais elevados, em especial em situações de desenvolvimento de fendas, o
que obriga a constantes regenerações da malha.
Mais recentemente, surgiu o Método dos Elementos Finitos Estendidos, XFEM,
em que se adicionam, localmente, funções descontínuas à aproximação por elementos
finitos convencionais para modelizar as descontinuidades. Pode considerar-se que o
XFEM pertence à classe do Método dos Elementos Finitos Generalizados. [5]
No caso da Mecânica da Fractura, pode-se, por exemplo, escolher a função de
Heaviside para descrever uma fenda. O XFEM permite ainda a incorporação da solução
analítica para obtenção da solução numérica. É pratica corrente utilizar os campos de
deslocamentos assimptóticos na extremidade da fenda para melhorar os resultados
numéricos. Com isto, as descontinuidades são modelizadas independentemente da
malha, evitando-se o remalhamento e os FITs podem ser calculados de forma simples.
Como o XFEM permite poupar esforços computacionais é interessante
incorporá-lo em programas mais abrangentes que incluam a evolução do dano do
Capítulo 1 Introdução
3
material até à fractura e a propagação de fendas, já que nos últimos anos se têm
desenvolvido muitas teorias para estabelecer a ponte entre a Mecânica da Fractura e a
Mecânica do Dano Contínuo.
1.2. Objecto e organização da presente dissertação
Este trabalho tem como principal objectivo o desenvolvimento de um modelo
computacional para a fractura, recorrendo ao Método dos Elementos Finitos Estendidos,
XFEM.
Assim, o trabalho decorreu de acordo com a realização de alguns objectivos
parcelares:
• Compreender a Mecânica da Fractura clássica e os respectivos critérios de
dimensionamento.
• Conhecer as principais abordagens do Método dos Elementos Finitos no âmbito
da Mecânica da Fractura.
• Caracterizar o XFEM como Método dos Elementos Finitos Generalizados.
• Aplicar o XFEM à mecânica da fractura.
• Desenvolver de um programa computacional para calcular FITs para diferentes
casos, recorrendo ao XFEM.
• Relacionar o dano com a Mecânica da Fractura e aplicar as vantagens do XFEM
neste contexto.
Com efeito, após a presente introdução, segue-se no Capítulo 2 a apresentação
dos conceitos fundamentais da Mecânica da Fractura clássica. Descrevem-se os
campos de tensões e de deslocamentos na extremidade de uma fenda e introduz-se o
conceito de Factor de Intensidade de Tensão.
No Capítulo 3 descrevem-se as técnicas tradicionais de aplicação do Método dos
Elementos Finitos à Mecânica da Fractura. Apresentam-se formas de simular as
fendas e calcular os Factores de Intensidade de Tensão.

Capítulo 1 Introdução
4
No capítulo 4, o XFEM é caracterizado em termos de modelo matemático e
implementação. Descrevem-se algumas funções adicionais utilizadas no método
assim como o conceito de conjunto de nível. Mostra-se ainda como o método pode
ser aplicado no contexto da Mecânica da Fractura.
No capítulo 5 faz-se uma pequena abordagem ao dano. Define-se a variável de
dano e discute-se a aplicabilidade das teorias que utilizam o modelo de dano
contínuo no âmbito da Mecânica da Fractura.
No capítulo 6 apresentam-se alguns modelos computacionais desenvolvidos.
Procurou-se calcular os FITs para diferentes peças contendo fendas, recorrendo ao
XFEM e comparando os resultados com soluções analíticas e ainda outros
resultados numéricos obtidos por diferentes técnicas no ambito dos Elementos
Finitos.
Finalmente, no capítulo 7, sumariam-se as conclusões mais importantes e
apresentam-se algumas sugestões para trabalhos futuros.
1.3.Referências
[1] Inglis, C.E., Stresses in a plate due to the presence of cracks and sharp corners, Trans. Inst.
Naval Architects, London, 1913.
[2] Griffith, A. A., Proceedings of the 1st International Congress for Applied Mechanics, Delft,
1924.
[3] Irwin, G. R., Analysis of stresses and strains near the end of a crack traversing a plate,
Trans A.S.M.E., 1957
[4] Orowan, E., Energy criteria of fracture, Weld J. Res. Suppl., 20, 1955.

Capítulo 1 Introdução
5
[5] Strouboulis T, Copps K, Babuska I, The design and analysis of the Generalized Finite
Element Method, Computer Methods in Applied Mechanics and Engineering, 2000,181:43-
69.
Capítulo 2 Mecânica da Fractura Linear Elástica
6
Capítulo 2
Mecânica da Fractura Linear Elástica
2.1.Introdução
Com a crescente sofisticação dos projectos é importante compreender o
comportamento dos materiais nas condições de serviço e em particular em situações de
fractura.
A fractura pode ocorrer em estruturas sujeitas a tensões de trabalho nominais
que estão abaixo da tensão de cedência do material, o que está associado à existência de
defeitos na estrutura. [1]
2.2.Factor de Concentração de Tensões
A primeira abordagem matemática da mecânica da fractura surgiu em 1913.
Inglis [2] mostrou que a tensão máxima numa placa infinita com um furo elíptico
(figura 2.1) ocorre nas extremidades do furo e é dada por:
+=b
ay
21max σσ (2.1)
em que a e b são os comprimentos dos semi-eixos da elipse como representado na
figura 2.1.
Capítulo 2 Mecânica da Fractura Linear Elástica
7
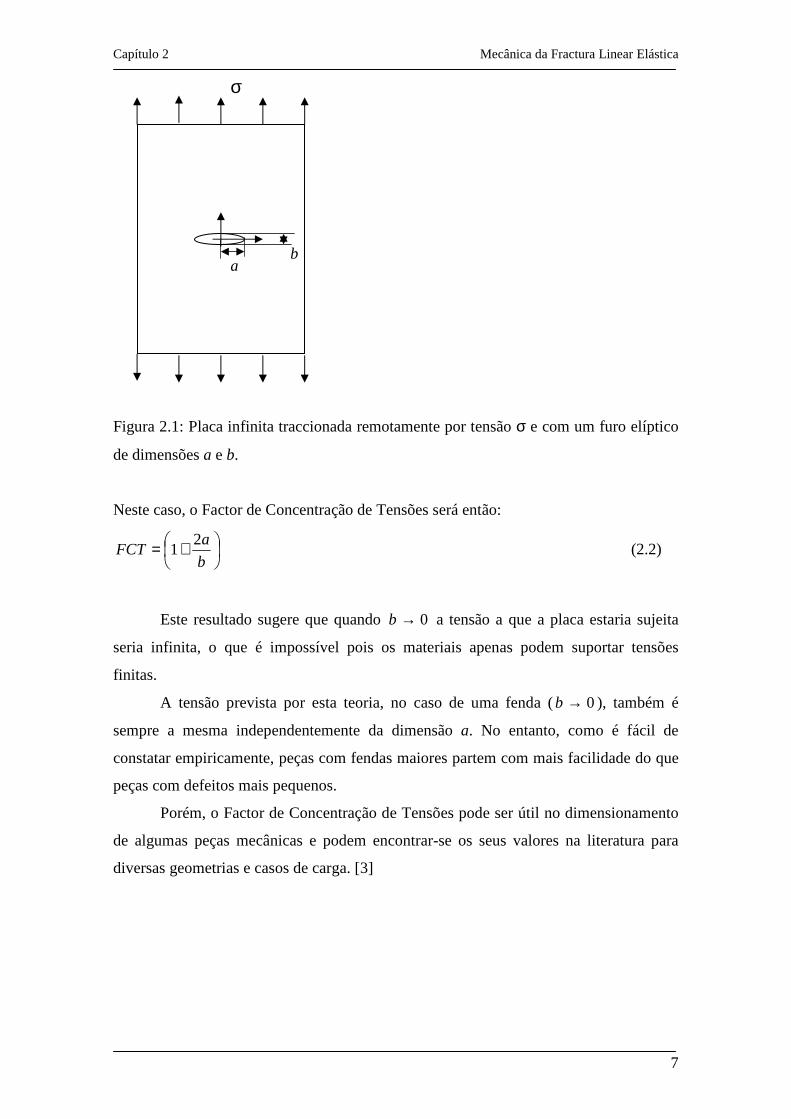
Figura 2.1: Placa infinita traccionada remotamente por tensão σ e com um furo elíptico
de dimensões a e b.
Neste caso, o Factor de Concentração de Tensões será então:
+=b
aFCT
21 (2.2)
Este resultado sugere que quando 0→b a tensão a que a placa estaria sujeita
seria infinita, o que é impossível pois os materiais apenas podem suportar tensões
finitas.
A tensão prevista por esta teoria, no caso de uma fenda ( 0→b ), também é
sempre a mesma independentemente da dimensão a. No entanto, como é fácil de
constatar empiricamente, peças com fendas maiores partem com mais facilidade do que
peças com defeitos mais pequenos.
Porém, o Factor de Concentração de Tensões pode ser útil no dimensionamento
de algumas peças mecânicas e podem encontrar-se os seus valores na literatura para
diversas geometrias e casos de carga. [3]
a b
σ

Capítulo 2 Mecânica da Fractura Linear Elástica
8
2.3.Critério de propagação Instável de Fendas
Griffith [4] estudou pela primeira vez a propagação instável de fendas em
materiais frágeis e explicou a diferença entre os valores teórico e experimental da tensão
de fractura de um sólido frágil.
Teoricamente, é necessário fornecer uma determinada quantidade de energia, a
um determinado material, para separar completamente os seus átomos. Essa quantidade
de energia é função das forças a nível atómico. Na prática verifica-se que a quantidade
de energia necessária para que ocorra a fractura é aproximadamente duas ordens de
grandeza inferior, pois os sólidos possuem defeitos como as fendas.
Assim, ocorrerá propagação instável de uma fenda, se a taxa de energia libertada
devido à presença de uma fenda, G, for superior à taxa de energia superficial, ou seja,
para uma fenda sofrer um incremento δa no seu comprimento, a energia de deformação,
U, tem de ser superior à energia superficial, W:
a
W
a
UG
∂∂>
∂∂= (2.3)
Daqui resulta que a propagação de uma fenda é dada pelo valor crítico de G, Gc:
a
EGcc π
σ = (2.4)
em que E é o módulo de Young do material e a o comprimento da fenda.
Apesar de o estudo de Griffith ser direccionado para materiais frágeis, Irwin e
Orowan [5] mostraram que a equação (2.4) pode ser aplicada a materiais dúcteis no
domínio linear elástico.
Note-se que a análise de Griffith não contempla a distribuição de tensões na
vizinhança da extremidade da fenda. [3, 6]
2.4.Caracterização do campo de tensões e do campo de deslocamentos
na extremidade de uma fenda
Para caracterizar o campo de tensões e o campo de deslocamentos na
extremidade de uma fenda é necessário conhecer os modos básicos de fractura. Estes
modos descrevem três movimentos cinemáticamente independentes e podem definir-se:
Capítulo 2 Mecânica da Fractura Linear Elástica
9
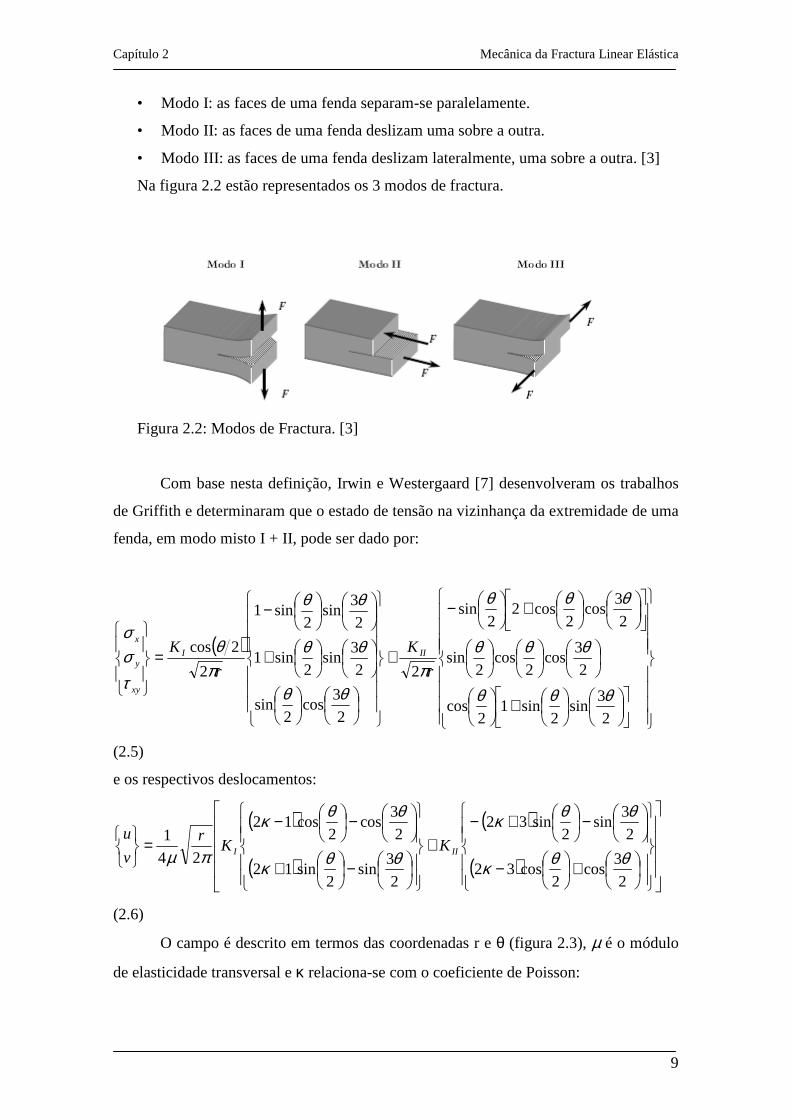
• Modo I: as faces de uma fenda separam-se paralelamente.
• Modo II: as faces de uma fenda deslizam uma sobre a outra.
• Modo III: as faces de uma fenda deslizam lateralmente, uma sobre a outra. [3]
Na figura 2.2 estão representados os 3 modos de fractura.
Figura 2.2: Modos de Fractura. [3]
Com base nesta definição, Irwin e Westergaard [7] desenvolveram os trabalhos
de Griffith e determinaram que o estado de tensão na vizinhança da extremidade de uma
fenda, em modo misto I + II, pode ser dado por:
( )
+
+
−
+
+
−
=
2
3sin
2sin1
2cos
2
3cos
2cos
2sin
2
3cos
2cos2
2sin
2
2
3cos
2sin
2
3sin
2sin1
2
3sin
2sin1
2
2cos
θθθ
θθθ
θθθ
πθθ
θθ
θθ
πθ
τσσ
r
K
r
K III
xy
y
x
(2.5)
e os respectivos deslocamentos:
( )
( )
( )
( )
+
−
−
+−+
−
+
−
−=
2
3cos
2cos32
2
3sin
2sin32
2
3sin
2sin12
2
3cos
2cos12
24
1
θθκ
θθκ
θθκ
θθκ
πµ III KKr
v
u
(2.6)
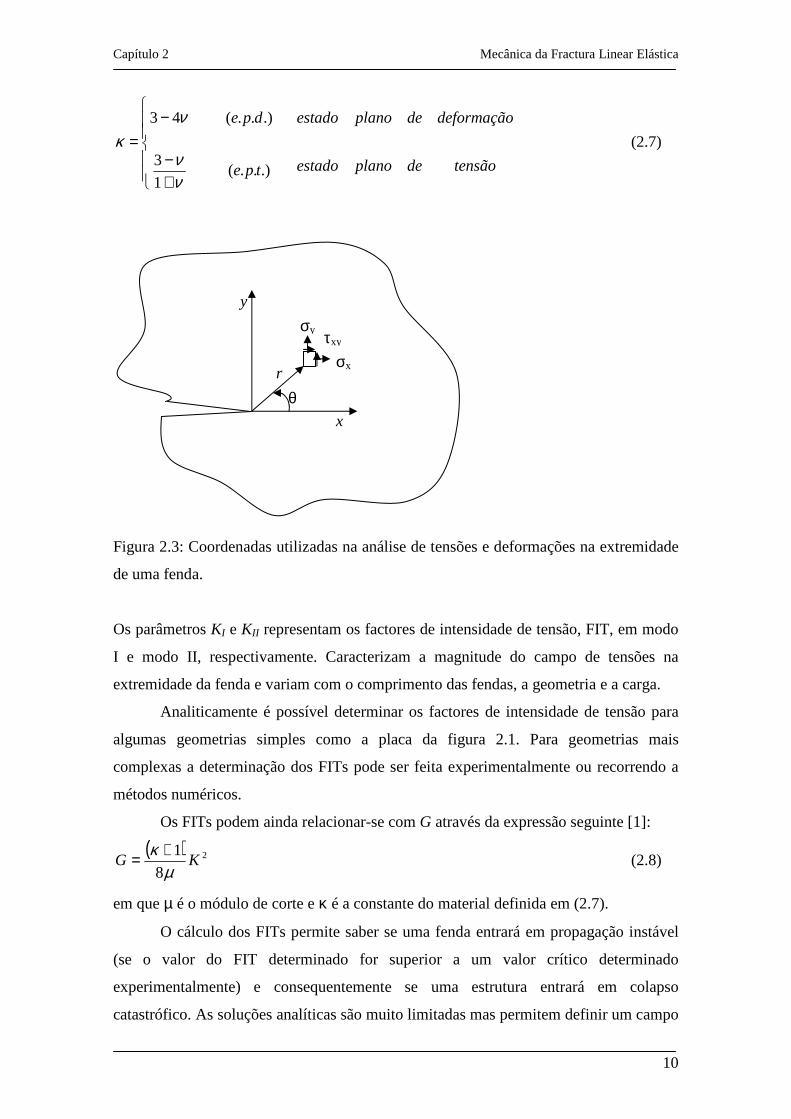
O campo é descrito em termos das coordenadas r e θ (figura 2.3), µ é o módulo
de elasticidade transversal e κ relaciona-se com o coeficiente de Poisson:
Capítulo 2 Mecânica da Fractura Linear Elástica
10
tensãodeplanoestado
deformaçãodeplanoestado
tpe
dpe
+−
−=
.)..(1
3
.)..(43
νν
νκ (2.7)
Figura 2.3: Coordenadas utilizadas na análise de tensões e deformações na extremidade
de uma fenda.
Os parâmetros KI e KII representam os factores de intensidade de tensão, FIT, em modo
I e modo II, respectivamente. Caracterizam a magnitude do campo de tensões na
extremidade da fenda e variam com o comprimento das fendas, a geometria e a carga.
Analiticamente é possível determinar os factores de intensidade de tensão para
algumas geometrias simples como a placa da figura 2.1. Para geometrias mais
complexas a determinação dos FITs pode ser feita experimentalmente ou recorrendo a
métodos numéricos.
Os FITs podem ainda relacionar-se com G através da expressão seguinte [1]:
( ) 2
8
1KG
µκ += (2.8)
em que µ é o módulo de corte e κ é a constante do material definida em (2.7).
O cálculo dos FITs permite saber se uma fenda entrará em propagação instável
(se o valor do FIT determinado for superior a um valor crítico determinado
experimentalmente) e consequentemente se uma estrutura entrará em colapso
catastrófico. As soluções analíticas são muito limitadas mas permitem definir um campo
θ r
x
y
σx
σy τxy

Capítulo 2 Mecânica da Fractura Linear Elástica
11
de funções, a partir das equações (2.5) e (2.6) que poderá ser utilizado em conjunto com
métodos numéricos para caracterizar os deslocamentos na extremidade da fenda.
[ ]
== θθθθθθψψψψψ sin2
cos,sin2
sin,2
cos,2
sin4321 rrrr (2.9)
[3, 6]
2.5.Referências
[1] Branco C., Fernandes A., Tavares de Castro P., Fadiga de Estruturas Soldadas, Fundação
Calouste Gulbenkian, Lisboa, 1986.
[2] Inglis, C.E., Stresses in a plate due to the presence of cracks and sharp corners, Trans. Inst.
Naval Architects, London, 1913.
[3] Owen D., Fawkes A., Engineering Fracture Mechanics: Numerical Methods and
Applications, Pineridge Press Ltd., Swansea, 1983.
[4] Griffith, A. A., Proceedings of the 1st International Congress for Applied Mechanics, Delft,
1924.
[5] Orowan, E., Fracture Strength of Solids, Report on Progress in Physics, 12, Physical Society
of London, 1949.
[6] Oller S., Fractura Mecánica Un enfoque global, CIMNE, Barcelona, 2001.
[7] Irwin, G. R., Analysis of stresses and strains near the end of a crack traversing a plate,
Trans A.S.M.E., 1957

Capítulo 3 Método dos Elementos Finitos na Mecânica da Fractura
12
Capítulo 3
Método dos Elementos Finitos na Mecânica da
Fractura
3.1.Introdução
Só é possível determinar analiticamente os Factores de Intensidade de Tensão,
FITs, para geometrias muito simples. Para casos mais complexos é necessário recorrer a
métodos numéricos como o Método dos Elementos Finitos.
O Método dos Elementos Finitos é utilizado há várias décadas no estudo da
Mecânica da Fractura, contudo foi necessário desenvolver um conjunto de técnicas
especiais tanto para modelizar a singularidade no campo de deslocamentos e no campo
de tensões, como para calcular os FITs. [1]
3.2.Modelar a singularidade na extremidade da fenda
3.2.1.Manipulação das Posições dos nós
Uma das formas mais fáceis de introduzir a singularidade r1 , que resulta das
equações (2.5), num elemento quadrático isoparamétrico é manipulando as posições dos
nós no meio dos lados como no caso representado na figura 3.1.

Capítulo 3 Método dos Elementos Finitos na Mecânica da Fractura
13
Figura 3.1: Elemento quadrangular com os nós dos lados trasladados. [2]
Considerando a aresta 1-3 desta figura, de comprimento l, definida por η = -1,
em coordenadas locais, temos que as funções de forma N1, N2 e N3 são dadas por:
( )
( )ξξ
ξ
ξξ
+=
−=
−−=
12
1
1
12
1
3
22
1
N
N
N
(3.1)
Logo, a coordenada x é aproximada por:
( ) ( ) ( ) 322
1
3
1
12
111
2
1xxxxNx
iii ξξξξξ ++−+−−==∑
=
(3.2)
Tendo em conta que x1 = 0, x2 = l/4 e x3 = l, se considerarmos que a origem do sistema
de eixos está localizada no nó 1, vem
( ) ( )4
112
1 2 llx ξξξ −++= (3.3)
e portanto
l
x21+−=ξ (3.4)
Com isto pode-se determinar o termo da matriz Jacobiana:
( ) lxlx =+=
∂∂ ξξ
12
(3.5)
o que implica que a matriz é singular no ponto 1, para x = 0.
No lado 1-3 resultam os deslocamentos:
( ) ( ) ( ) ( ) 322
1
3
1
14
111
2
1UUUUNu
iii ξξξξξξ ++−+−−==∑
=
(3.6)

Capítulo 3 Método dos Elementos Finitos na Mecânica da Fractura
14
em que Ni são as funções já definidas. Substituindo em função de x:
( ) ( ) ( )
−++
−−+=
l
xUUU
l
xUUUUxu 2131321 42234 (3.7)
e derivando, obtém-se o campo de deformações ou longo da direcção x:
321
41
2
14243
2
1u
lxlu
lxlu
lxlx
+−+
−+
−−=ε (3.8)
Assim obtém-se uma descontinuidade no campo de deformações da ordem r1
no lado 1-3. No lado 1-7 ocorre o mesmo tipo de deformação, logo teremos o mesmo
tipo de descontinuidade. Porém, dentro do elemento não se verifica esta
descontinuidade. [1, 2]
Para que a singularidade r1 esteja presente em qualquer raio a partir do ponto
1, podem gerar-se Elementos Colapsados. [2]
O colapso de nós consiste em fazer coincidir os nós 1, 7 e 8 e transladar os nós 6
e 2 para a extremidade da fenda, como se pode observar na figura 3.2.
Figura 3.2: Elemento quadrangular com os nós 1, 8 e 7 colapsados e os nós 2 e 6
trasladados. [1]
Como funções de forma ao longo da linha η = 0 temos, neste caso:
( )
( )
( )
( )
−=
+=
−==
−−====
ξ
ξ
ξ
ξ
12
1
12
1
12
1
14
1
8
4
262
27531
N
N
NN
NNNN
(3.9)
Capítulo 3 Método dos Elementos Finitos na Mecânica da Fractura
15
Substituindo pelo valor das coordenadas, como anteriormente, resulta que:
( ) ( )4
112
1 2 llx ξξξ −++= ou
l
x21+−=ξ (3.10)
Esta resultado é formalmente idêntico ao resultado encontrado na equação (3.4), logo o
Jacobiano também será.
Os deslocamentos obtêm-se substituindo as funções de forma:
( ) ( )
( ) ( )8462531
624531
222
223
UUl
xUUUUU
l
xUUUUUUxu
++
−−+++
+
++−−−−=
(3.11)
Derivando, obtém-se o campo de deformações ao longo da direcção x:
( ) ( )62543162531 2232
1222
1UUUUUU
lxUUUUU
lx −−+++−−−++=ε (3.12)
Este campo de deslocamentos conduzirá igualmente a um campo de tensões com
a descontinuidade de ordem r1 , mas diferencia-se do campo anterior pois a
descontinuidade também está presente para qualquer raio no interior do elemento,
medido a partir da extremidade da fenda. [1, 2]
3.2.2.Formulações Mistas
Para além dos elementos descritos também se podem criar elementos mistos
introduzindo soluções analíticas na sua formulação.
Se o campo de tensões e o campo de deslocamentos forem aproximados por
campos independentes, então a rigidez pode ser obtida a partir de um dos campos ou
dos dois.
Se apenas se utilizar o campo de deslocamentos, a formulação obtém-se a partir
da energia potencial mínima, resultando uma solução abaixo do valor real. Ao utilizar-
se o campo de tensões, a formulação obtém-se a partir da energia complementar
mínima, resultando uma solução acima do valor real. Com os dois campos, será então
de esperar uma solução entre estes dois limites.
Os campos de tensão, σσσσ, e de deslocamentos, u, dados pelas equações (2.5) a
(2.7), solução do problema de uma fenda lateral numa placa infinita, podem ser escritos
na forma matricial:
aPσ = (3.13)
Capítulo 3 Método dos Elementos Finitos na Mecânica da Fractura
16
aAu = (3.14)
em que os componentes de a se relacionam com os FITs KI e KII
π21
IKa = (3.15)
π21
IIn
Ka =+ (3.16)
Os coeficientes desconhecidos podem também relacionar-se com os
deslocamentos nodais, δδδδ, em cada posição nodal:
aAδ = (3.17)
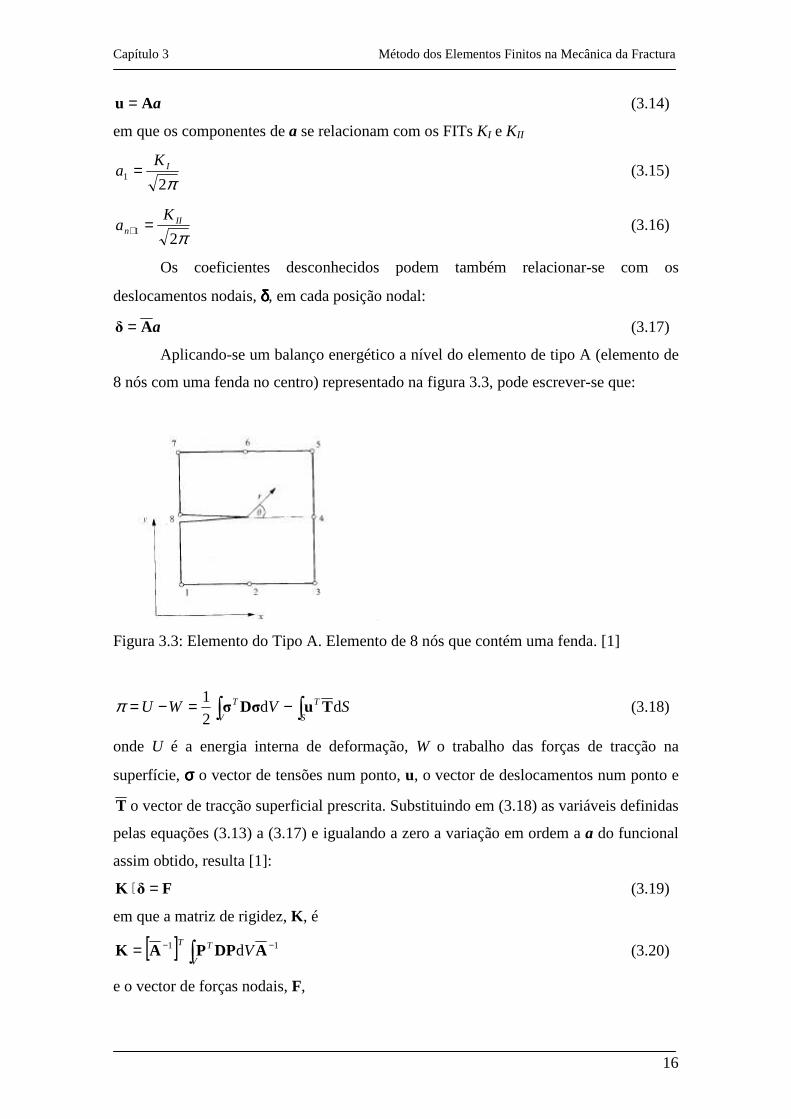
Aplicando-se um balanço energético a nível do elemento de tipo A (elemento de
8 nós com uma fenda no centro) representado na figura 3.3, pode escrever-se que:
Figura 3.3: Elemento do Tipo A. Elemento de 8 nós que contém uma fenda. [1]
∫∫ −=−=S
T
V
T SVWU dd2
1TuDσσπ (3.18)
onde U é a energia interna de deformação, W o trabalho das forças de tracção na
superfície, σσσσ o vector de tensões num ponto, u, o vector de deslocamentos num ponto e
T o vector de tracção superficial prescrita. Substituindo em (3.18) as variáveis definidas
pelas equações (3.13) a (3.17) e igualando a zero a variação em ordem a a do funcional
assim obtido, resulta [1]:
FδK =⋅ (3.19)
em que a matriz de rigidez, K , é
[ ] 11 d −−∫= ADPPAKV
TTV (3.20)
e o vector de forças nodais, F,

Capítulo 3 Método dos Elementos Finitos na Mecânica da Fractura
17
[ ] ∫−=S
TTdSTAAF 1 (3.21)
Como o elemento é de 8 nós, os deslocamentos nodais e as incógnitas a estão
restringidas a 16. Também é preciso incluir os termos de deslocamento de corpo rígido
pois não foram considerados na construção da matriz A :
=
y
x
a
a
x
y
θ13
1
100
01
M
Au (3.22 a)
Em termos de tensões, apenas se acrescentam zeros na matriz P pois os movimentos de
corpo rígido não provocam tensões no corpo:
=
y
x
a
a
θ13
1
0000
0000
000M
P
σ (3.22 b)
Os FITs podem, então, calcular-se directamente a partir da solução do sistema
(3.19). Contudo, para proceder à integração é necessário dividir o elemento da figura
3.3 em triângulos (figura 3.4) pois os termos da matriz P estão expressos em
coordenadas polares.
Figura 3.4: Divisão do elemento de 8 nós em triângulos para a integração numérica. [1]
Capítulo 3 Método dos Elementos Finitos na Mecânica da Fractura
18
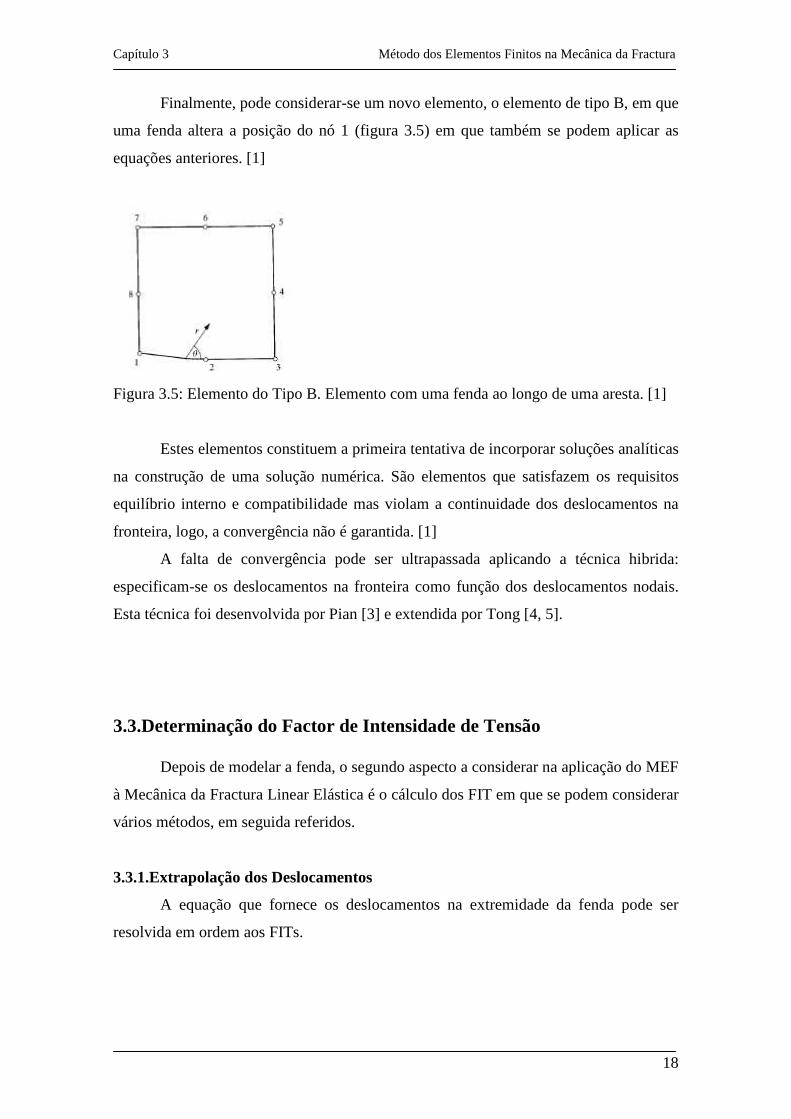
Finalmente, pode considerar-se um novo elemento, o elemento de tipo B, em que
uma fenda altera a posição do nó 1 (figura 3.5) em que também se podem aplicar as
equações anteriores. [1]
Figura 3.5: Elemento do Tipo B. Elemento com uma fenda ao longo de uma aresta. [1]
Estes elementos constituem a primeira tentativa de incorporar soluções analíticas
na construção de uma solução numérica. São elementos que satisfazem os requisitos
equilíbrio interno e compatibilidade mas violam a continuidade dos deslocamentos na
fronteira, logo, a convergência não é garantida. [1]
A falta de convergência pode ser ultrapassada aplicando a técnica hibrida:
especificam-se os deslocamentos na fronteira como função dos deslocamentos nodais.
Esta técnica foi desenvolvida por Pian [3] e extendida por Tong [4, 5].
3.3.Determinação do Factor de Intensidade de Tensão
Depois de modelar a fenda, o segundo aspecto a considerar na aplicação do MEF
à Mecânica da Fractura Linear Elástica é o cálculo dos FIT em que se podem considerar
vários métodos, em seguida referidos.
3.3.1.Extrapolação dos Deslocamentos
A equação que fornece os deslocamentos na extremidade da fenda pode ser
resolvida em ordem aos FITs.
Capítulo 3 Método dos Elementos Finitos na Mecânica da Fractura
19
( )
( )
−−−−
=
−+
−−
132
132
34
3424
2
3sin
2sin12
2
3cos
2cos12
VVV
UUU
LK I
πµθθκ
θθκ (3.23)
( )
( )
−−−−
=
+−
−+−
132
132
34
3424
2
3cos
2cos32
2
3sin
2sin32
VVV
UUU
LK II
πµθθκ
θθκ (3.24)
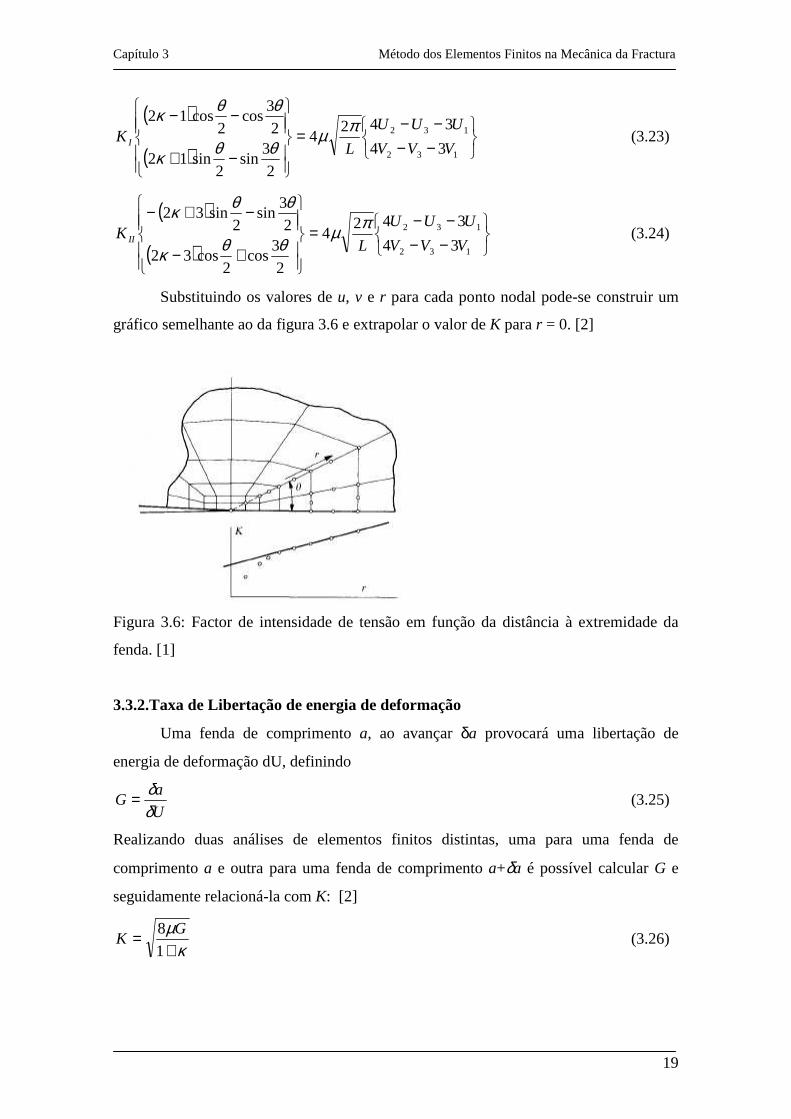
Substituindo os valores de u, v e r para cada ponto nodal pode-se construir um
gráfico semelhante ao da figura 3.6 e extrapolar o valor de K para r = 0. [2]
Figura 3.6: Factor de intensidade de tensão em função da distância à extremidade da
fenda. [1]
3.3.2.Taxa de Libertação de energia de deformação
Uma fenda de comprimento a, ao avançar δa provocará uma libertação de
energia de deformação dU, definindo
U
aG
δδ= (3.25)
Realizando duas análises de elementos finitos distintas, uma para uma fenda de
comprimento a e outra para uma fenda de comprimento a+δa é possível calcular G e
seguidamente relacioná-la com K: [2]
κµ+
=1
8 GK (3.26)

Capítulo 3 Método dos Elementos Finitos na Mecânica da Fractura
20
3.3.3.O Integral J
Hoje em dia, o integral J e as suas variantes são a forma mais utilizada para o
cálculo numérico de FITs.
O integral J representa a energia acumulada ao longo de um caminho fechado Γ
que contorna a extremidade da fenda (figura 3.7). Estabelecendo-se balanço energético
resulta:
∫Γ
∂∂
−= dsx
utdyUJ iiI σ (3.27)
Figura 3.7: Caminho fechado que contorna a extremidade da fenda. [6]
Na equação anterior, Uσ representa a densidade de energia de deformação por
unidade de volume, ui o campo contínuo de deslocamentos e ti o vector tracção normal à
superfície. Quando não existe nenhuma fenda o integral vale zero.
Demonstra-se que o integral J é independente do caminho escolhido e que
GJ = (3.28)
podendo, por isso, utilizar-se a relação (3.26) para calcular K.
O integral J é um integral de linha. Uma das formas de o calcular, utilizando
MEF, é definindo o seu caminho ao longo dos pontos de Gauss de um conjunto
determinado de elementos conforme está representado na figura 3.8. [1, 2]

Capítulo 3 Método dos Elementos Finitos na Mecânica da Fractura
21
Figura 3.8: Contorno de integração que passa pelos pontos de Gauss. [2]
3.3.3.1.Integral de Interacção
Uma forma muito utilizada do integral J no MEF é o Integral de Interacção, que
pode ser deduzido directamente a partir da expressão geral (3.27).
Para problemas gerais de modo misto I e II, o integral J relaciona-se com os
FITs da seguinte forma:
**
22
E
K
E
KJ III += (3.29)
em que E* é definido a partir das características do material modulo de Young, E, e
coeficiente de Poisson,ν:
−=
planadeformaçãoE
planatensãoEE
21
*
ν (3.30)
Escolhendo 2 estados num corpo fracturado, o estado 1 correspondente ao estado
real ( ( )1ijσ , ( )1
ijε , ( )1iu ) e um estado 2 auxiliar (( )2
ijσ , ( )2ijε , ( )2
iu ), o valor de J(1+2) calcula-se
substituindo na equação 3.27:
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( )
∫Γ+ Γ
∂+∂
+−++= d2
1
1
2121212121
jii
ijijijijijijij nx
uuJ σσδεεσσ (3.31)
Expandido e rearranjando os termos em (3.31), tem-se:
( ) ( ) ( ) ( )212121 ++ ++= IJJJ (3.32)
Na equação anterior, I(1+2) é o Integral de Interacção entre os estados 1 e 2:
( ) ( ) ( ) ( ) ( ) ( )Γ
∂∂
−∂
∂−= ∫Γ
++ d1
11
1
21
12121
ji
iji
ijj nx
u
x
uWI σσδ (3.33)

Capítulo 3 Método dos Elementos Finitos na Mecânica da Fractura
22
W(1+2) representa a energia de deformação de interacção
( ) ( ) ( ) ( ) ( )122121ijijijijW εσεσ ==+ (3.34)
Escrevendo a equação (3.32) para o estado (1+2) e rearranjando os termos obtém-se
( ) ( ) ( ) ( ) ( ) ( ) ( )( )21212121
*
2IIIIII KKKK
EJJJ +++=+ (3.35)
Combinando esta última equação com a equação (3.29), conclui-se que
( ) ( ) ( ) ( ) ( )( )212121
*
2IIIIII KKKK
EI +=+ (3.36)
Se para estado 2 for escolhido o modo I puro com KI(2) = 1 com os
deslocamentos e tensões calculados a partir dos campos assimptóticos como descrito no
capítulo 2, a equação (3.36) devolve o valor de KI(1):
( ) ( )ModoII I
EK ,11
*
2= (3.37)
De forma idêntica pode ser determinado o valor de KII(1). [7]
3.3.3.2.Formas de domínio do integral J
Os integrais de linha apresentados atrás não são a melhor opção para o cálculo
com elementos finitos pois obrigam à definição de um caminho que só passa por alguns
pontos de Gauss dentro de cada elemento. Para contornar esta dificuldade, o integral em
linha pode ser transformado num integral de área.
Assim, inicialmente multiplica-se o Integral de Interacção por uma função peso
q(x) contínua, que toma o valor 1 nos nós que se encontram completamente dentro do
contorno e zero nos que se encontram totalmente fora, obtendo-se:
( ) ( ) ( ) ( ) Γ
∂∂
−∂∂
−= ∫+ d
1
12
1
21
12,121
C ji
iji
ijj qmx
u
x
uWI σσδ (3.38)
Aplicando o teorema da divergência obtém-se:
( ) ( ) ( ) ( ) Adx
qW
x
u
x
uI
Cj
ji
iji
ij d12,1
1
12
1
2121
∫∂
−
∂∂
+∂∂
=+ δσσ (3.39)
onde m é o vector normal ao contorno C. Na figura 3.9 está representado um contorno C
possível associado à fenda representada. A integração é agora efectuada nos elementos a
vermelho da figura. Por sua vez, nos pontos de Gauss de cada elemento a considerar,
q(x) é aproximada com as funções de forma, tomando valores entre zero e um. [7]
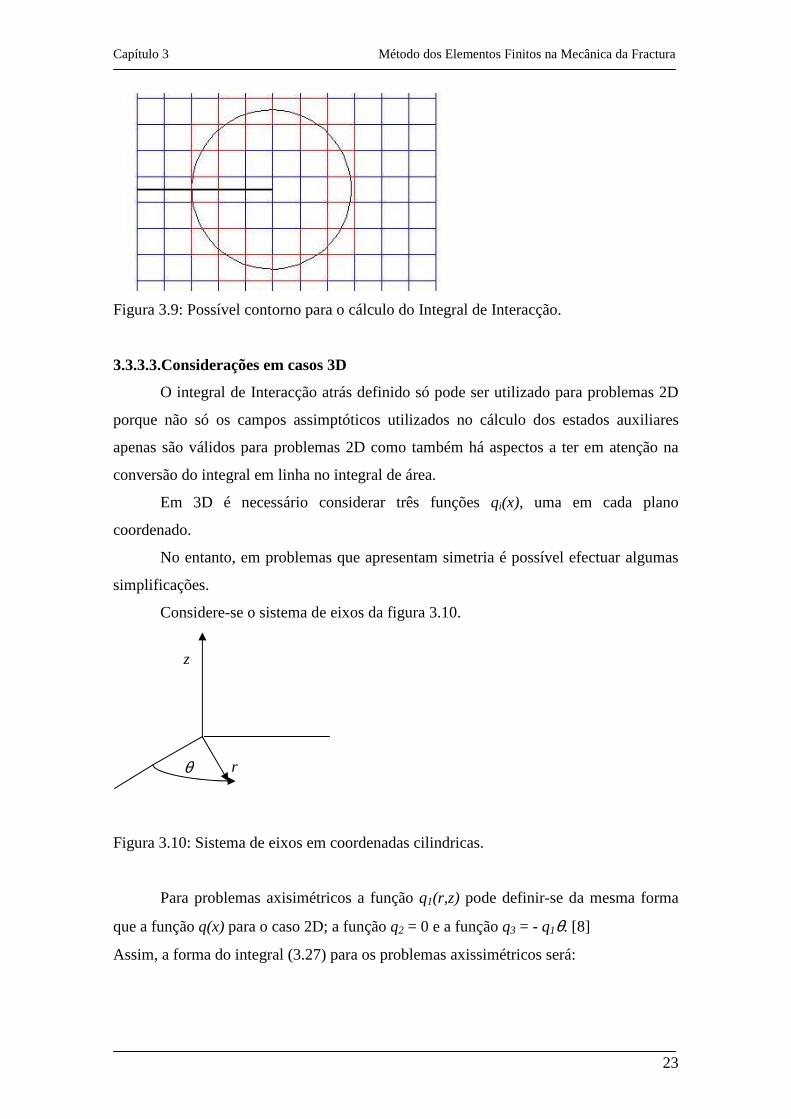
Capítulo 3 Método dos Elementos Finitos na Mecânica da Fractura
23
Figura 3.9: Possível contorno para o cálculo do Integral de Interacção.
3.3.3.3.Considerações em casos 3D
O integral de Interacção atrás definido só pode ser utilizado para problemas 2D
porque não só os campos assimptóticos utilizados no cálculo dos estados auxiliares
apenas são válidos para problemas 2D como também há aspectos a ter em atenção na
conversão do integral em linha no integral de área.
Em 3D é necessário considerar três funções qi(x), uma em cada plano
coordenado.
No entanto, em problemas que apresentam simetria é possível efectuar algumas
simplificações.
Considere-se o sistema de eixos da figura 3.10.
Figura 3.10: Sistema de eixos em coordenadas cilindricas.
Para problemas axisimétricos a função q1(r,z) pode definir-se da mesma forma
que a função q(x) para o caso 2D; a função q2 = 0 e a função q3 = - q1θ. [8]
Assim, a forma do integral (3.27) para os problemas axissimétricos será:
z
r θ
Capítulo 3 Método dos Elementos Finitos na Mecânica da Fractura
24
∫
−+
∂∂−
∂∂
+∂∂
−
∂∂
=A
ijij
ij
jij AqW
x
uxq
x
W
xx
qW
x
u
RJ d
1
1
1331
111
1
σε
σδσ (3.40)
em que R é distância da extremidade da fenda ao eixo dos zz e dA = drdz, considerando
um sistema de coordenadas cilindricas (r, θ, z). [8, 9]
3.4.Referências
[1] Owen D., Fawkes A., Engineering Fracture Mechanics: Numerical Methods and
Applications, Pineridge Press Ltd., Swansea, 1983.
[2] Oller S., Fractura Mecánica Un enfoque global, CIMNE, Barcelona, 2001.
[3]Pian, T., Tong, P., Basis of finite element method for solid continua, Int. J. Numer. Meth.
Engng. 1:3-28, 1969.
[4] Tong, P., New displacement hybrid finite element models for solid continua, Int. J. Numer.
Meth. Engng. 2:73-83, 1970.
[5] Tong, P., A new finite element model for solid continua, Aeroelastic and Structures Research
Laboratory, MIT, Massachusetts, 1968.
[6]http://www.efunda.com/formulae/solid_mechanics/fracture_mechanics/fm_epfm_J_det.cfm
[7] Moes, N., Dolbow, J., Belytschko, T., A finite element method for crack growth without
remeshing, Int. J. Numer. Meth. Engng. 46: 131-150, 1999.
[8] Shih, C., Moran, B., Nakamura, T., Energy release rate along a three-dimensional crack
front in a thermally stressed body, International Journal of Fracture, 30:79-102, 1986.
[9] Lei, Y., J-integral evaluation for cases involving non-proportional stressing, Engineering
Fracture Mechanics, 72:577-596, 2005.
Capítulo 4 XFEM
25
Capítulo 4
Método dos Elementos Finitos Estendidos
4.1.Introdução
Do ponto de vista da Mecânica dos Meios Contínuos, a fractura está
intimamente relacionada com a deformação localizada.A presença de modos de intensa
deformação, restringidos a regiões estreitas no interior de um sólido, caracterizam a
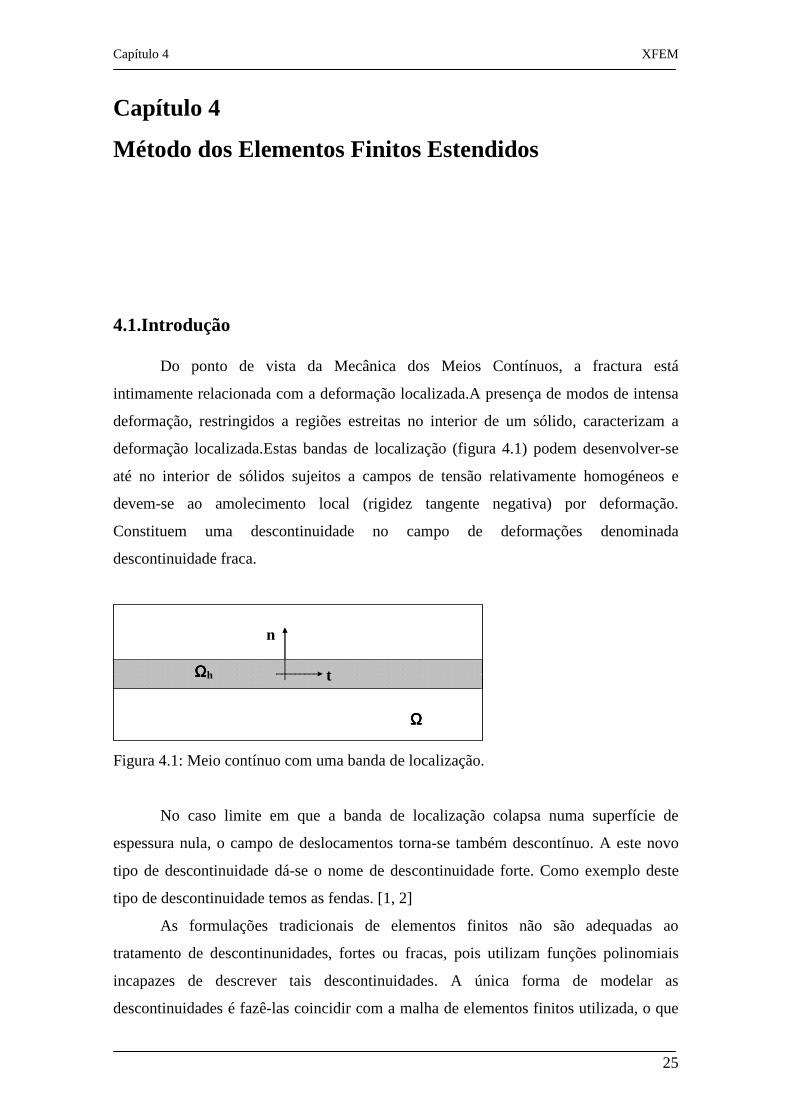
deformação localizada.Estas bandas de localização (figura 4.1) podem desenvolver-se
até no interior de sólidos sujeitos a campos de tensão relativamente homogéneos e
devem-se ao amolecimento local (rigidez tangente negativa) por deformação.
Constituem uma descontinuidade no campo de deformações denominada
descontinuidade fraca.
Figura 4.1: Meio contínuo com uma banda de localização.
No caso limite em que a banda de localização colapsa numa superfície de
espessura nula, o campo de deslocamentos torna-se também descontínuo. A este novo
tipo de descontinuidade dá-se o nome de descontinuidade forte. Como exemplo deste
tipo de descontinuidade temos as fendas. [1, 2]
As formulações tradicionais de elementos finitos não são adequadas ao
tratamento de descontinunidades, fortes ou fracas, pois utilizam funções polinomiais
incapazes de descrever tais descontinuidades. A única forma de modelar as
descontinuidades é fazê-las coincidir com a malha de elementos finitos utilizada, o que
ΩΩΩΩh
ΩΩΩΩ
n
t
Capítulo 4 XFEM
26
requer constantes regenerações das malhas de elementos finitos, computacionalmente
dispendiosas, no caso de descontinuidades que se alteram com a deformação. Os
resultados também apresentam alguma dependência na malha utilizada. [3, 4]
Um dos métodos para evitar o remalhamento é o designado XFEM, Extended
Finite Element Method.
O XFEM é um método numérico para modelar descontinuidades fortes e
descontinuidades fracas dentro de uma malha de elementos finitos comuns. Baseia-se
no principio da partição da unidade e consiste, essencialmente, no enriquecimento das
funções de forma tradicionais com outras funções. [3]
No caso da mecânica da fractura recorre-se a funções descontínuas, como a
função de Heaviside, e ao campo de deslocamentos assimptóticos na extremidade da
fenda para descrever a descontinuidade. Logo não é necessário construir uma malha
específica para modelar a fenda e também é possivel obter os factores de intensidade de
tensão, tudo com recursos computacionais reduzidos. [5]
4.2.Método dos Elementos Finitos Estendidos
O Método dos Elementos Finitos Estendidos, XFEM, pertence a uma classe de
métodos denominada Método dos Elementos Finitos Generalizado (GFEM), baseado
numa partição local da unidade. O domínio é dividido em subdomínios ΩI e cada um
deles apresenta uma função φI associada que só é diferente de zero em ΩI com a
propriedade:
( ) 11
=∑=
N
I
xφ (4.1)
[6]
Esta partição da unidade força automaticamente a continuidade e permite incluir
funções de base específicas para melhor aproximar a solução. Qualquer singularidade
pontual, linear ou superficial pode ser tratada sem estar alinhada com a malha de
elementos finitos como se pode observar na figura 4.2 em que estão representadas várias
formas de discretizar um domínio contendo uma descontinuidade. [3, 7]
Capítulo 4 XFEM
27
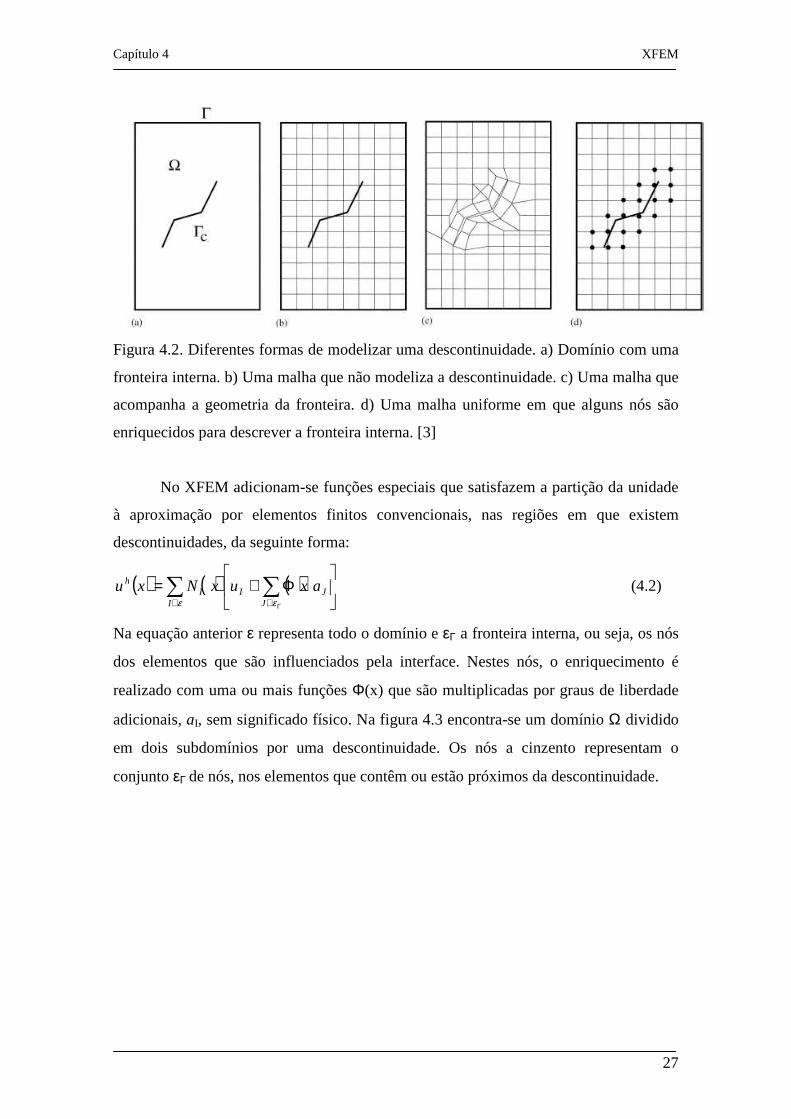
Figura 4.2. Diferentes formas de modelizar uma descontinuidade. a) Domínio com uma
fronteira interna. b) Uma malha que não modeliza a descontinuidade. c) Uma malha que
acompanha a geometria da fronteira. d) Uma malha uniforme em que alguns nós são
enriquecidos para descrever a fronteira interna. [3]
No XFEM adicionam-se funções especiais que satisfazem a partição da unidade
à aproximação por elementos finitos convencionais, nas regiões em que existem
descontinuidades, da seguinte forma:
( ) ( ) ( )
Φ+= ∑∑
Γ∈∈ εε JJI
II
h axuxNxu (4.2)
Na equação anterior ε representa todo o domínio e εΓ a fronteira interna, ou seja, os nós
dos elementos que são influenciados pela interface. Nestes nós, o enriquecimento é
realizado com uma ou mais funções Φ(x) que são multiplicadas por graus de liberdade
adicionais, aI, sem significado físico. Na figura 4.3 encontra-se um domínio Ω dividido
em dois subdomínios por uma descontinuidade. Os nós a cinzento representam o
conjunto εΓ de nós, nos elementos que contêm ou estão próximos da descontinuidade.

Capítulo 4 XFEM
28
Figura 4.3: Domínio dividido por uma descontinuidade. Os nós a cinzento serão os nós
enriquecidos. [7]
A continuidade da função Φ(x) que descreve a fenda é dependente das funções
de forma utilizadas no método dos elementos finitos. Se as funções de forma são C0,
então a função Φ(x) também é C0.
A escolha das funções Φ(x) está dependente do problema particular e pode
obrigar a algum conhecimento sobre o tipo de solução do problema. [8]
4.3.Selecção dos nós a enriquecer - Level Sets
Um aspecto importante dos problemas com interfaces é a detecção dessas
interfaces. Como enriquecimento geral de uma função vectorial com uma partição da
unidade é dado por:
( ) ( ) ( )
Φ+= ∑∑
Γ∈∈ εε JJI
II
h N axuxxu (4.3)
é necessário identificar o conjunto de nós pertencentes a εΓ, isto é, os nós a enriquecer.
Os métodos de detecção podem ser divididos em três grupos: métodos globais, métodos
locais e Level Sets (Conjuntos de Nível).
Os métodos globais consistem na resolução de um problema térmico linear em
cada passo do problema mecânico original. É um procedimento computacionalmente
dispendioso.

Capítulo 4 XFEM
29
Nos métodos locais as superfícies de rotura são posicionadas relativamente à sua
vizinhança e os elementos divididos recursivamente. São métodos especialmente
eficazes em 3D.
Os conjuntos de nível (level sets) são das ferramentas mais poderosas na
detecção de interfaces e são o método escolhido para este trabalho, pelo que se segue a
sua definição detalhada. [7]
Considerando dois domínios ΩA e ΩB com fronteira Γ (figura 4.4), um conjunto
de nível é definido a partir de uma função tal que:
( )( )( ) Γ∈∀=
Ω∈∀<Ω∈∀>
xx
xx
xx
B
A
0
0
0
φφφ
(4.4)
[7]
Figura 4.4: Domínios separados por uma descontinuidade. [7]
Uma função φ habitual é a distância à fenda com sinal associado. Sendo d a
distância entre um ponto de teste x e o ponto mais próximo x* pertencente à interface,
vem:
( )( )( )
*
0
xx −=Ω=
Ω−=Ω=
Γ
dcom
emx
emdx
emdx
B
A
φφφ
(4.5)
Em termos de implementação, para além do level set deve-se aplicar um critério de área
para tratar correctamente os casos como o representado na figura 4.5, em que a fenda
está muito próxima de um dos lados do elemento.

Capítulo 4 XFEM
30
Figura 4.5: Fenda muito próxima da fronteira de um elemento. [7]
Como se pode observar na figura 4.5, a fenda está muito próxima da aresta ab,
do elemento abc. Considerando os elementos adjacentes ao nó a, define-se a área abaixo
e a área acima da fenda. Quando a razão entre a área acima da fenda e a área total ou a
razão entre a área abaixo da fenda e a área total é inferior a um determinado valor de
tolerância pré-definido, o nó em questão não é enriquecido. Um valor corrente para esta
tolerância é 10-4. Neste caso apenas os nós a e b serão enriquecidos. [5, 7]
4.4.Implementação
Em termos de implementação é necessário considerar novos graus de liberdade
aI associados a cada nó enriquecido por funções Φ(x). Visto que a aproximação de
elementos finitos é dada por:
( ) ( ) ( )
Φ+= ∑∑
Γ∈∈ εε JJI
II
h N axuxxu (4.6)
assim, para um nó enriquecido:
( ) ( ) JKK axuxu Φ+= (4.7)
ou seja, o parâmetro nodal uK não corresponde ao valor real do deslocamento no nó. É
necessário avaliar a equação anterior para determinar o deslocamento no ponto xK. [6,
7]
Para evitar avaliar a equação (4.7) e obter directamente o deslocamento no ponto
xK atarvés da solução do sitema de equações, as funções de forma enriquecidas são
calculadas em torno do nó em questão:

Capítulo 4 XFEM
31
( ) ( ) ( ) ( ) ( )( ) IIIII
Ih NN axxxuxxu ∑∑ Φ−Φ+=
∈ε (4.8)
Na forma matricial, pode escrever-se:
( )
ΦΦΦΦ
=
yn
y
xn
x
yn
y
xn
x
nnn
nnne
a
a
a
a
u
u
u
u
NNNN
NNNN
M
M
M
M
LL
LL
1
1
1
1
111
111
000000
000000xu
(4.9)
em que ( ) ( )KK xx Φ−Φ=Φ
De uma forma mais compacta e separando a matriz das funções de forma entre
uma parte normal e uma parte enriquecida, pode então escrever-se:
( ) ( ) ( )[ ] eeenr
estd
e NN qxxxu = (4.10)
Tal como no Método dos Elementos Finitos clássico, as deformações são obtidas
a partir das derivadas dos deslocamentos:
eDuε = (4.11)
em que
∂∂
∂∂
∂∂
∂∂
=
xy
y
x
0
0
D (4.12)
Substituindo u pela respectiva aproximação vem que:
eeee qBqDNε == (4.13)
e consequentemente a matriz B, matriz com as derivadas das funções de forma, tem a
seguinte expressão:
[ ]eenr
estd
ee BBDNB == (4.14)
Capítulo 4 XFEM
32
Finalmente, a matriz de rigidez é dada, na sua forma tradicional, por:
∫Ω
=e
T eeee BCBK (4.15)
em que C representa a matriz das constantes elásticas.
A matriz de rigidez pode ser separada em quatro partes:
=∫∫
∫∫
ΩΩ
ΩΩ
e
T
e
T
e
T
e
T
eenr
eeenr
estd
eeenr
eenr
eestd
estd
eestd
el
BCBBCB
BCBBCB
K (4.16)
tendo em conta a divisão anterior da matriz B, referida na equação (4.14). [7]
4.5.Integração numérica
A quadratura Gaussiana não pode ser utilizada em elementos atravessados por
descontinuidades, pois estes elementos envolvem a integração de uma função
descontínua, o que conduziria a resultados pouco fiáveis e perder-se-ia a equivalência
entre a forma forte e a forma fraca da equação da elástica. [5]
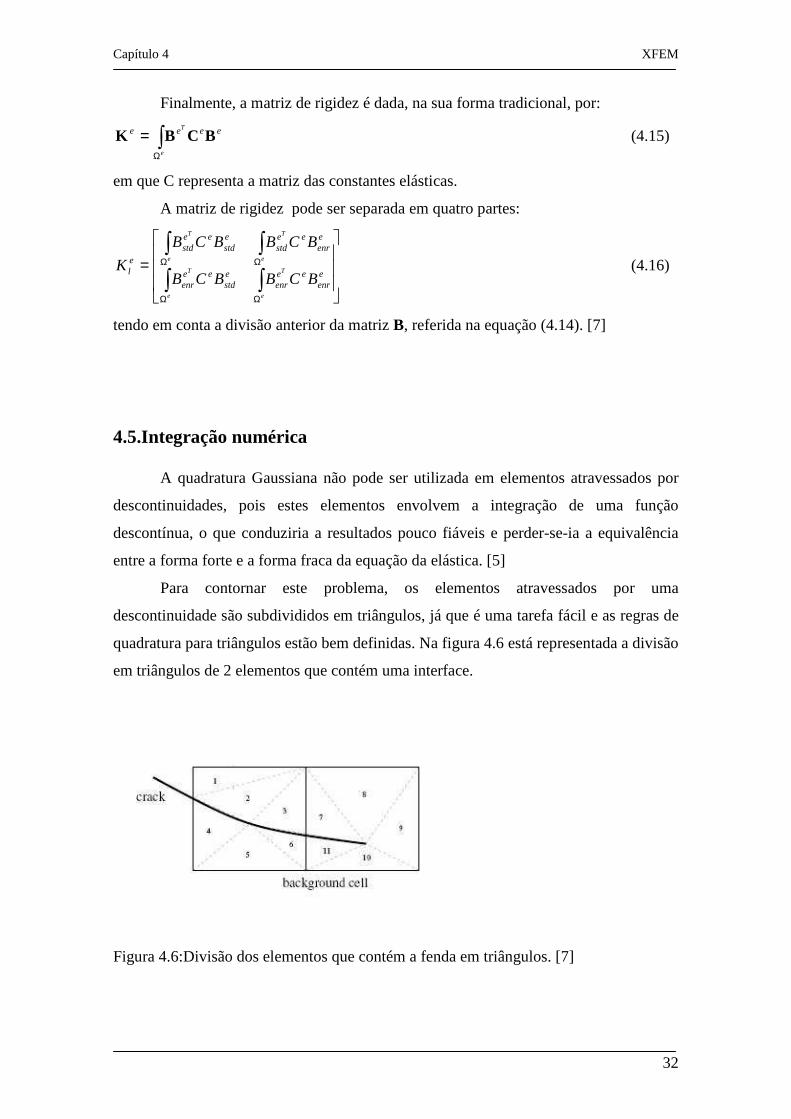
Para contornar este problema, os elementos atravessados por uma
descontinuidade são subdivididos em triângulos, já que é uma tarefa fácil e as regras de
quadratura para triângulos estão bem definidas. Na figura 4.6 está representada a divisão
em triângulos de 2 elementos que contém uma interface.
Figura 4.6:Divisão dos elementos que contém a fenda em triângulos. [7]

Capítulo 4 XFEM
33
Apesar de realizar esta divisão dos elementos atravessados pela descontinuidade em
triângulos, o esforço computacional é muito inferior ao requerido pela regeneração da
malha pois:
• A divisão dos elementos apenas se faz para a integração numérica, logo não são
introduzidos novos graus de liberdade do espaço discreto;
• As funções de base estão associadas ao elemento de base e não ao triângulo;
• Dividir um elemento em triângulos, no caso 2D ou em tetraedros, no caso 3D, é
um exercício fácil de geometria computacional. [5]
4.6.Elementos de Transição (Blending Elements)
Observando a figura 4.7, verifica-se que existem elementos em que todos os seus
nós encontram enriquecidos, elementos em que nenhum nó está enriquecido e elementos
que contém nós enriquecidos e não enriquecidos. A este último tipo de elementos dá-se
o nome de blending elements (elementos de transição). [7]
Figura 4.7. Domínio com uma fronteira interna. Os elementos mais escuros são aqueles
em que todos os nós se encontram enriquecidos de modo a recriar a descontinuidade. A
tracejado estão representados os blending elements, ou seja, aqueles que contém tanto
nós enriquecidos como nós não enriquecidos. [7]
Escolhendo, por exemplo, um elemento de 4 nós em que 3 estão enriquecidos
vem:
( ) ( ) ( ) ( )∑∑==
Φ+=3
1
4
1 JJJ
III
h NN axxuxxu (4.17)
Capítulo 4 XFEM
34
Dentro deste elemento não é possível obter a função Φ(x) fazendo uI = 0 pois
(N1, N2, N3) não constitui uma partição da unidade:
∑=
≠3
1
1J
JN (4.18)
Estes elementos não contém a interface, logo não recuperar a função Φ(x) não é
relevante. Porém, a presença destes elementos conduz a taxas de convergência mais
baixas do que em standard MEF. Também podem surgir termos espúrios que levam a
erros na solução.
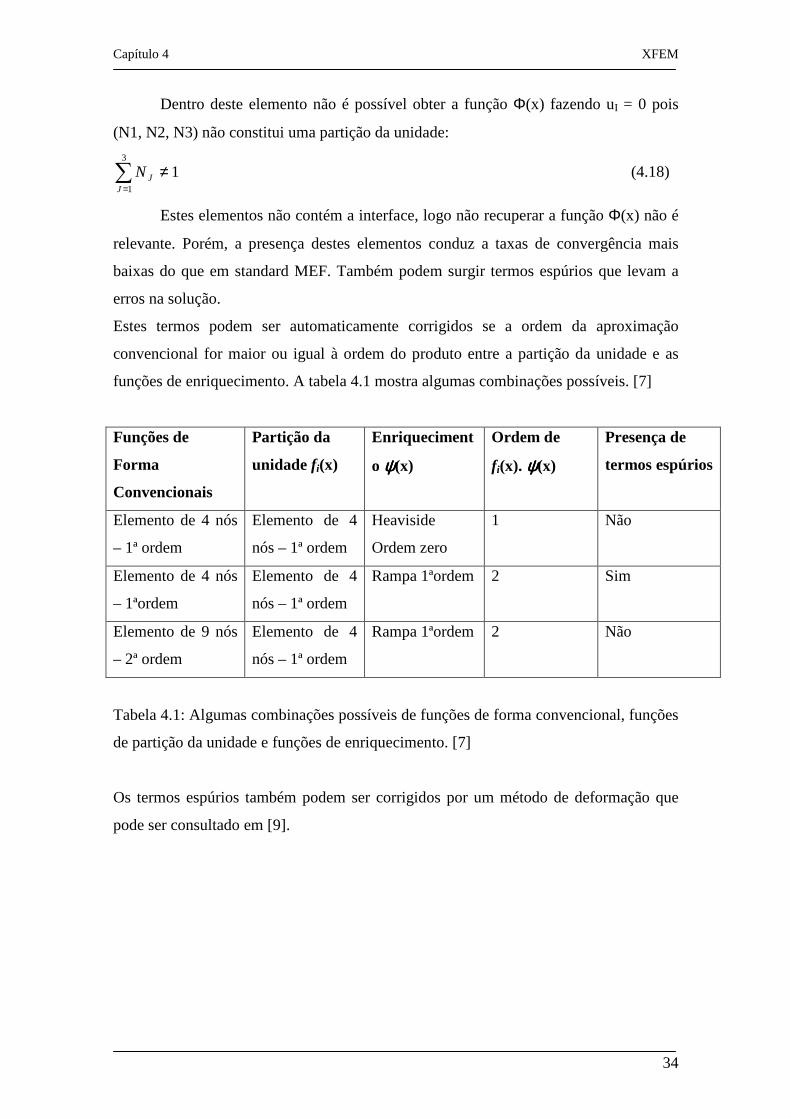
Estes termos podem ser automaticamente corrigidos se a ordem da aproximação
convencional for maior ou igual à ordem do produto entre a partição da unidade e as
funções de enriquecimento. A tabela 4.1 mostra algumas combinações possíveis. [7]
Funções de
Forma
Convencionais
Partição da
unidade fi(x)
Enriqueciment
o ψψψψ(x)
Ordem de
fi(x). ψ ψ ψ ψ(x)
Presença de
termos espúrios
Elemento de 4 nós
– 1ª ordem
Elemento de 4
nós – 1ª ordem
Heaviside
Ordem zero
1 Não
Elemento de 4 nós
– 1ªordem
Elemento de 4
nós – 1ª ordem
Rampa 1ªordem 2 Sim
Elemento de 9 nós
– 2ª ordem
Elemento de 4
nós – 1ª ordem
Rampa 1ªordem 2 Não
Tabela 4.1: Algumas combinações possíveis de funções de forma convencional, funções
de partição da unidade e funções de enriquecimento. [7]
Os termos espúrios também podem ser corrigidos por um método de deformação que
pode ser consultado em [9].
Capítulo 4 XFEM
35
4.7.Aplicação de XFEM à Mecânica da Fractura
4.7.1.Equações
Para pequenas deformações, a equação de equilíbrio e as condições fronteira
para um sólido homogéneo, isotrópico e linear elástico são, respectivamente:
0=+∇ bσ (4.19)
tnσ =⋅ em tΓ (4.20)
0=⋅nσ em Tc+ (4.21)
0=⋅nσ em Tc- (4.22)
uu = em uΤ (4.23)
onde σ é o tensor das tensões, u o vector de deslocamentos, b o vector de forças de
volume e t e u respresentam os vectores da tensão superficial prescrita e dos
deslocamentos prescritos, respectivamente, num domínio Ω com um versor normal n e
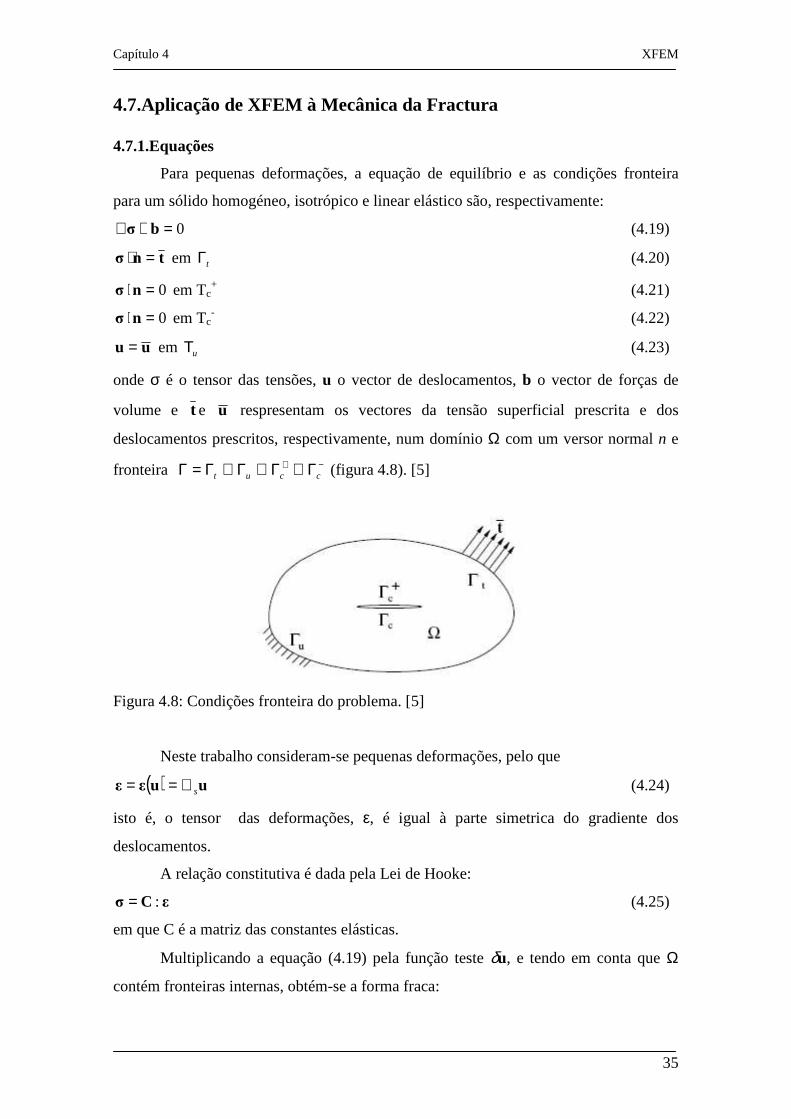
fronteira −+ Γ∪Γ∪Γ∪Γ=Γ ccut (figura 4.8). [5]
Figura 4.8: Condições fronteira do problema. [5]
Neste trabalho consideram-se pequenas deformações, pelo que
( ) uuεε s∇== (4.24)
isto é, o tensor das deformações, ε, é igual à parte simetrica do gradiente dos
deslocamentos.
A relação constitutiva é dada pela Lei de Hooke:
εCσ := (4.25)
em que C é a matriz das constantes elásticas.
Multiplicando a equação (4.19) pela função teste δu, e tendo em conta que Ω
contém fronteiras internas, obtém-se a forma fraca:

Capítulo 4 XFEM
36
( ) ( ) 0: =Ω∂⋅+Ω∂∇−Ω∂⋅⋅∇ ∫∫∫ΩΩΩ
ddd ubuσuσ (4.26)
Aplicando o teorema da divergência:
∫∫∫ΩΓΩ
Ω∂⋅+Γ∂⋅=Ω∂ dddt
ubutεσ : (4.27)
e finalmente, usando a lei constitutiva, o problema consiste em encontrar V∈u tal que:
∫∫∫ΓΩΩ
Γ∂⋅+Ω∂⋅=Ω∂ ddd utubε:C:ε
(4.28)
em que
( ) ( ) ( ) ( ) cu emodescontínuemttHttV ΓΓ=⋅∈⋅⋅= uuuuu ,,,,, 1 . [5, 7]
4.7.2.Aproximação XFEM para a mecânica da fractura
No estudo da mecânica da fractura podem modelizar-se as fendas recorrendo ao
XFEM mas tendo em atenção alguns aspectos. É necessário assegurar que a fenda fecha
na sua extremidade, ter em atenção que num ciclo de carga a fenda pode abrir ou fechar
e que a fenda se pode propagar. [7]
4.7.3.Funções de Enriquecimento
Em primeiro lugar é necessário escolher as funções de enriquecimento. No caso
da mecânica da fractura, utilizam-se as seguintes funções para descrever a fenda:
Função Heaviside Generalizada
O interior de uma fenda é modelado com a função de Heaviside generalizada H,
em que H toma o valor +1 acima da fenda e -1 abaixo da fenda:
( ) ( )
−≥−
=restantes1
0.se1 nxH
*xx (4.29)
onde x representa o ponto de teste, x* é o ponto da fenda mais próximo de x e n é o
versor normal à fenda em x*. [5, 6]
Funções da extremidade da fenda
As funções que enriquecem os nós do elemento que contém a extremidade da
fenda incorporam o comportamento radial e angular do campo de deslocamentos
assimptóticos da extremidade da fenda, ou seja, utilizam a solução analítica

Capítulo 4 XFEM
37
apresentados no capítulo 3 na construção da solução numérica. A função de Heaviside
não é adequada para a extremidade da fenda pois significaria que a fenda intersecta a
aresta do elemento, o que na maioria dos casos não corresponde à realidade.
No caso de elasticidade isotrópica as funções podem utilizar-se as funções
seguintes:
( )[ ]
=−=2
cossin,2
sinsin,2
cos,2
sin41,θθθθθθψ rrrrKK x (4.30)
Note-se que a primeira função é descontínua ao longo da fenda.
[5, 7]
Existem situações em que a primeira função, ψ1, pode ser susbtituida. Considere-
se a função R descrita em termos do sistema de eixos situado na extremidade da fenda
(figura 4.9).
( )
=
≤
+
=
0ˆ0
0ˆˆ
2ˆ
3ˆ,ˆ
32
xpara
xparal
x
l
xyxR
cc (4.31)
Figura 4.9: Sistema de coordenadas na extremidade da fenda. [3]
Multiplicando esta função pela função H(x),
( ) ( ) ( )xx HyxRR ⋅= ˆ,ˆ~
(4.32)
obtém-se uma função que é descontínua ao longo da fenda mas que desaparece na frente
da fenda e que também é extensível a três dimensões. Esta função é muito útil quando
não se conhecem os campos assimptóticos do problema, como em casos de não
linearidade. [3]
4.7.4.Domínio a enriquecer
O domínio a enriquecer pode ser determinado recorrendo ao Level Set, método
descrito na secção 4.3.

Capítulo 4 XFEM
38
Assim, pode definir-se o conjunto de nós atravessado pelas fenda, εC,
enriquecidos pela função de Heaviside e o conjunto de nós εΓ os nós enriquecidos pelas
quatro funções ψK, definindo a aproximação:
( ) ( ) ( ) ( ) ( ) ( ) KLK
KL
LJJ
JII
Ih bNHNN
C
∑∑∑∑Γ∈∈∈
++= xxaxxuxxu ψεεε
(4.33)
Na figura 4.10 podem distinguir-se os diferentes conjuntos de nós a enriquecer.
As funções ψK são geralmente aplicadas apenas ao elemento onde se encontra a
extremidade da fenda, mas não é obrigatório que assim seja. [7]
Figura 4.10: Fendas e respectivos nós a enriquecer. Os nós representados a preto serão
enriquecidos com a função Heaviside. Os nós representados a branco serão enriquecidos
com o campo de deslocamentos assimptótico da extremidade da fenda. [7]
Para cada nó enriquecido estão associados novos graus de liberdade. Em cada nó
enriquecido por uma função de Heaviside existe um novo grau de liberdade e por cada
nó enriquecido pelo campo de funções ψK existem 4 novos graus de liberdade. Em
termos de implementação isto obriga à adição de nós fictícios na matriz de rigidez para
facilitar a assemblagem. [7]
4.7.5.Pós- processamento
No XFEM, a solução encontrada para o valor dos graus de liberdade dos
elementos não enriquecidos corresponde ao valor dos deslocamentos nodais, mas nos
Capítulo 4 XFEM
39
elementos enriquecidos tal já não acontece. É necessário avaliar a equação (4.33) para
determinar os deslocamentos nodais de cada nó. [5]
Determinados os deslocamentos, as deformações e tensões, podem calcular-se os
parâmetros de fractura, nomeadamente os FITs em modo I e modo II. O método mais
usual para calcular os FITs em problemas 2D é o integral de interacção que se deduz a
partir do integral J, como foi visto no capítulo 3.
Tanto o integral de interacção como o integral J nas suas diversas formas não
carecem de adapação especial para serem aplicados no contexto do XFEM. [3, 5]
4.7.6.Crescimento da fenda
Depois de aplicada uma tensão a um corpo com uma fenda é importante saber se
a fenda irá crescer e de que forma.
Existem vários critérios para determinar a direcção de propagação das fendas, dos quais
se podem citar:
• o critério da tensão máxima principal;
• o critério da densidade de energia de deformação mínima [10]
• o critério da taxa de libertação de energia máxima [11]
• o critério de KII = 0 [12]
Os primeiros dois critérios preveem a direcção de propagação a partir da extensão
real da fenda. Os dois ultimos requerem a análise da tensão para a fenda virtualmente
extendida. Qualquer um dos critérios permite apenas calcular a direcção de propagação
da fenda, o aumento de comprimento só pode ser calculado experimentando vários
comprimentos em cada direcção, sendo prática corrente definir-se um incremento
constante.
Adoptando o primeiro critério, pode definir-se a tensão máxima principal em função
das coordenadas polares em torno da extremidade da fenda e da velocidade de
propagação vc:
( ) ( )cII
hII
cI
hI vf
r
Kvf
r
K,
2,
2θ
πθ
πσ θθ += (4.34)
as funções fhI e fh
II representam a variação angular da tensão para diferentes valores da
velocidade de propagação.

Capítulo 4 XFEM
40
Quando a tensão σθθ atinge um valor crítico, σθθc, a fenda propaga-se na
direcção perpendicular de σθθ.
O valor de σθθc em modo I é dado por:
r
K cIc
πσ θθ
2= (4.35)
K Ic é a tenacidade do material e é obtida experimentalmente. A direcção de propagação
é então determinada, tendo em conta que a tensão de corte local é nula, conduzindo a:
( ) 01cos3sin =−+ cIIcI KK θθ (4.36)
e portanto:
+−=
II
IIIIc K
KKK
4
8arctan2
22
θ (4.37)
De cada vez que a fenda aumenta é necessário actualizar o level set. Existem
várias técnicas para o fazer que dependem da ordem das funções de forma utilizadas,
como se pode consultar em [13].
No caso de fendas definidas por segmentos de recta basta guardar os nós que já
eram atravessados pelos segmentos anteriores e acrescentar os nós dos elementos
divididos pelo novo segmento. [7]
Numa primeira análise, tendo em conta apenas o regime linear elástico, pode fazer-
se uma análise do crescimento de uma fenda:
1. Para uma determinada solicitação determina-se o valor dos FITs.
2. Se o valor calculado for inferior ao valor critico (obtido experimentalmente),
aumenta-se o carregamento. Caso contrário a fenda propaga-se e passa-se às
etapas seguintes.
3. A fenda propaga-se na direcção calculada através de (4.37) e sofre um
incremento de comprimento.
4. Actualiza-se o Level Set.
5. Calculam-se os novos valores dos FITs e retoma-se a etapa 2. [7, 14]
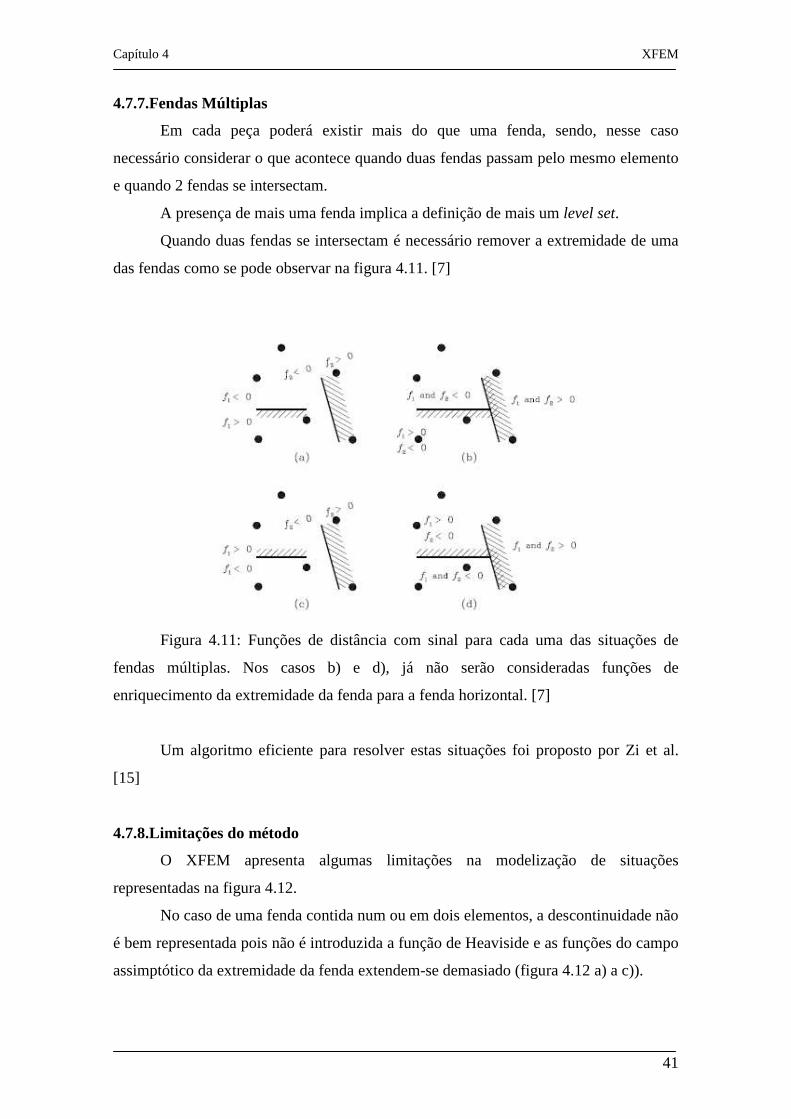
Capítulo 4 XFEM
41
4.7.7.Fendas Múltiplas
Em cada peça poderá existir mais do que uma fenda, sendo, nesse caso
necessário considerar o que acontece quando duas fendas passam pelo mesmo elemento
e quando 2 fendas se intersectam.
A presença de mais uma fenda implica a definição de mais um level set.
Quando duas fendas se intersectam é necessário remover a extremidade de uma
das fendas como se pode observar na figura 4.11. [7]
Figura 4.11: Funções de distância com sinal para cada uma das situações de
fendas múltiplas. Nos casos b) e d), já não serão consideradas funções de
enriquecimento da extremidade da fenda para a fenda horizontal. [7]
Um algoritmo eficiente para resolver estas situações foi proposto por Zi et al.
[15]
4.7.8.Limitações do método
O XFEM apresenta algumas limitações na modelização de situações
representadas na figura 4.12.
No caso de uma fenda contida num ou em dois elementos, a descontinuidade não
é bem representada pois não é introduzida a função de Heaviside e as funções do campo
assimptótico da extremidade da fenda extendem-se demasiado (figura 4.12 a) a c)).
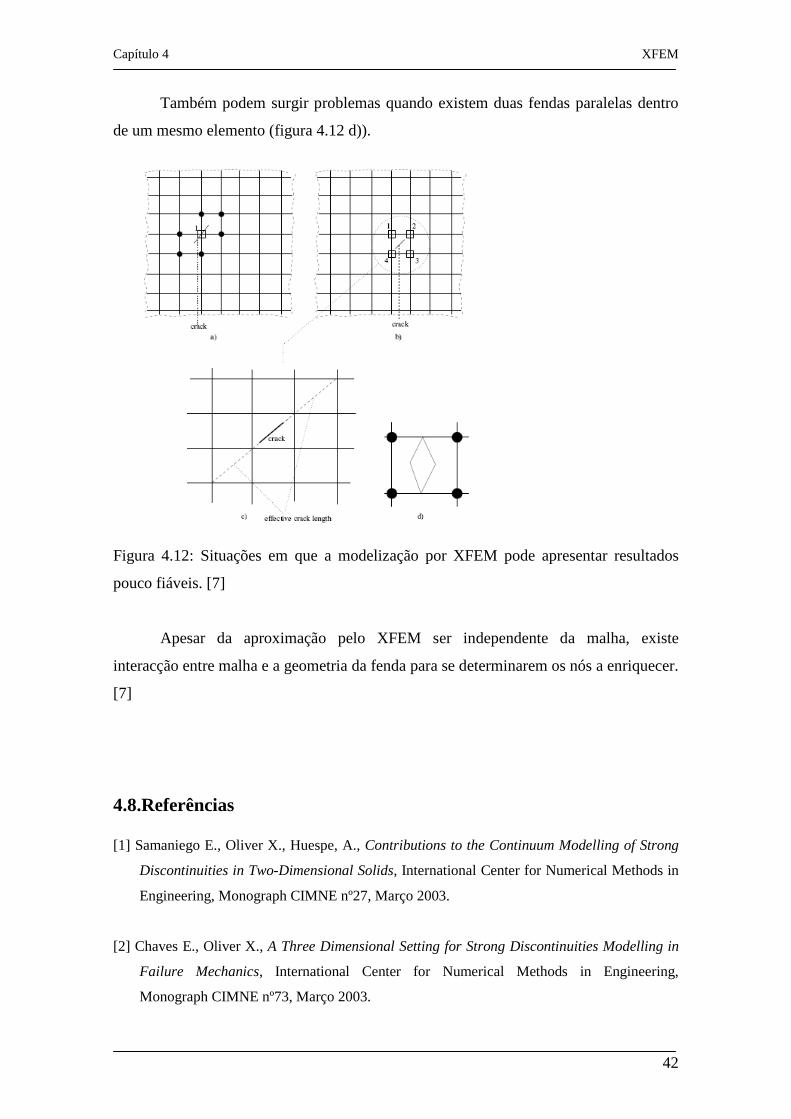
Capítulo 4 XFEM
42
Também podem surgir problemas quando existem duas fendas paralelas dentro
de um mesmo elemento (figura 4.12 d)).
Figura 4.12: Situações em que a modelização por XFEM pode apresentar resultados
pouco fiáveis. [7]
Apesar da aproximação pelo XFEM ser independente da malha, existe
interacção entre malha e a geometria da fenda para se determinarem os nós a enriquecer.
[7]
4.8.Referências
[1] Samaniego E., Oliver X., Huespe, A., Contributions to the Continuum Modelling of Strong
Discontinuities in Two-Dimensional Solids, International Center for Numerical Methods in
Engineering, Monograph CIMNE nº27, Março 2003.
[2] Chaves E., Oliver X., A Three Dimensional Setting for Strong Discontinuities Modelling in
Failure Mechanics, International Center for Numerical Methods in Engineering,
Monograph CIMNE nº73, Março 2003.
Capítulo 4 XFEM
43
[3] Dolbow J., Moes N., Belytschko, Discontinuous Enrichment in Finite Elements with a
Partition of Unity Method, Finite Elements in Analysis and Design, 2000, 36(3-4):235-60.
[4] Abdelaziz Yazid, Hamouine Abdelmadjid, A survey of the Extended Finite Element,
Computes & Structures, 2007.
[5] Sukumar N., Prévost J., Modeling Quasi-Static Crack Growth with the Extended Finite
Element Method. Part I: Computer Implementetion, International Journal of Solids and
Structures, 2003.
[6] Strouboulis T, Copps K, Babuska I, The design and analysis of the Generalized Finite
Element Method, Computer Methods in Applied Mechanics and Engineering, 2000,181:43-
69.
[7] Rabczuk T.,Wall W., Extended Finite Element and Meshfree Methods, Technical University
of Munich, 2006.
[8] Stazi F., Finite Element Methods for Cracked and Microcracked Bodies, PhD Thesis,
Università di Roma “La Sapienza”, 2003.
[9] Chessa J, Wang H., Belytschko T., On the construction of blending elements for local
partition of unity enriched finite elements. International Journal for Numerical Methods in
Engineering, 2004, 193(33-35):3523-3540.
[10] Shih G., Strain Energy Density Factor applied to mixed-mode crack problems,
International Journal of Fracture, 1974, 10:305-321.
[11] Wu C., Fracture under combined loads by maximum energy release rate criterion, Journal
of Applied Mechanics, 1978, 45:553-558.
[12] Goldstein R., Salganik R., Brittle fracture of solids with arbitrary cracks, International
Journal of Fracture, 1974, 10:507-527.
[13] Ventura G., Xu J., Belytschko, A vector level set method and new discontinuity
approximations for crack growth by EFG, International Journal for Numerical Methods in
Engineering, 2002, 54:923-944.

Capítulo 4 XFEM
44
[14] Oller S., Fractura Mecánica Un enfoque global, CIMNE, Barcelona, 2001.
[15] Zi G., Song J., Budyn E., Lee S., Belytschko, A method for grawing multiple cracks
without remeshing and its application to fatigue crack growth, Modelling and Simulation in
Material Science and Engineering, 2004, 12:901-915.
Capítulo 5 Do Dano à Fractura
45
Capítulo 5
Do Dano à Fractura
5.1.Introdução
No capítulo 2 foi apresentada a forma clássica de tratar e representar o
comportamento à fractura de um sólido. Em alternativa à mecânica da fractura clássica,
o comportamento das descontinuidades num sólido pode ser estudado através da
Mecânica do Dano Contínuo.
À primeira vista, parece contraditório tratar uma descontinuídade, como é a
fractura, com uma teoria contínua. Porém, pode ser mais importante conhecer as
consequências tenso-deformacionais que a fractura provoca num sólido do que o
fenómeno em si mesmo.
Tendo como hipótese de partida que a fractura é o resultado de comportamentos
complexos que originam a perda de resistência mecânica, rigidez, etc, do material em
determinados pontos de uma estrutura, pode estabelecer-se uma relação entre o dano e a
fractura. [1]
A equivalência entre as duas teorias é importante de forma a escolher a mais
simples e eficiente, consoante as situações. Em termos de modelização também se pode
alternar em casos em que uma das teorias é computacionalmente mais eficiente do que a
outra. [2]
5.2.O Dano
O dano pode definir-se como a presença, desenvolvimento e coalescência de
fendas e cavidades ao nível microscópico que podem, eventualmente, levar à perda
completa de capacidade de carga do material. Manifesta-se sob a forma de rotura
irreversível de ligações atómicas. Logo, para descrever a degradação interna do sólido

Capítulo 5 Do Dano à Fractura
46
no contexto da Mecânica dos Meios Contínuos têm de ser introduzida uma nova
variável para além das variáveis comuns como o tensor das deformações e o tensor das
tensões, normalmente utilizadas na descrição da deformação. [3, 4]
Existem vários modelos constitutivos para definir a variável do dano. Segue-se,
como exemplo, o modelo dano isotrópico de Lemaître [5] pois a anisotropia não é
relevante para este trabalho.
Considere-se um sólido sujeito ao dano do qual é isolado um elemento de
volume suficientemente grande em relação às heterogenidades do meio (figura 5.1):
Figura 5.1: Elemento danificado. [3]
Seja S a área de uma secção do elemento de volume, com fendas e cavidades que
constituem o dano, identificada pela sua normal n, S~
a área resistente efectiva e SD a
diferença
SSSD
~−= (5.1)
temos que a medida local do dano, Dn, em relação à normal n é
S
SD D
n = (5.2)
[4]
Assim,
<<==
dano de nível o acaracteriz 10
a normal plano um de longo ao partes 2 em elemento do rotura à ecorrespond 1
ou virgem dano ao sujeito não estado ao ecorrespond 0
n
n
n
D
nD
D
No caso do dano anisotrópico as micro-fendas e cavidades possuem orientações
preferenciais e o valor de Dn depende da orientação da normal n. No caso anisotrópico,
a variável dano pode ser representada por um tensor de segunda ou quarta ordem. [6]
n
n
Capítulo 5 Do Dano à Fractura
47
Quanto à evolução do dano pode ser activada por mecanismos físicos muito
diferentes que dependem do tipo e taxa de carga, da temperatura ou até da exposição a
susbstâncias corrosivas ou radiação. [4]
Existem vantagens em considerar uma teoria não local de crescimento do dano
pois é um modelo que consegue capturar micro-fendas difusas e localizadas sem
assumir falhas iniciais e pode constituir a ponte entre o dano e a fractura. Assume-se
que, em cada ponto, o aumento do dano é função de uma média pesada das deformações
na vizinhança cujo comprimento característico está relacionado com a dimensão das
heterogenidades. [2]
5.3.Relação entre a Mecânica da Fractura e a Mecânica do Dano
Contínuo
A Mecânica da Fractura é adequada uma vez que se iniciou uma fenda num
sólido, ou assumindo que existem fendas de localização e comprimento conhecidos;
descreve a separação do meio contínuo em partes devido à descoesão.
Por sua vez, a Mecânica do Dano Contínuo descreve os efeitos locais de
microfendas e cavidades que conduzem à degradação da rigidez, anisotropia induzida,
etc.
Existem critérios para a Mecânica da Fractura mas a relação entre eles e a
evolução do dano é difícil de definir e para além disso a Mecânica da Fractura é incapaz
de prever onde surgirão novas fendas. Por outro lado, a Mecânica do Dano Contínuo
prevê as zonas de iniciação das fendas mas é incapaz de definir a sua orientação e
tamanho.
No entanto, pode considerar-se que a ponte entre a Mecânica da Fractura e a
Mecânica do Dano Contínuo acontece quando a variável do dano toma um valor crítico,
num ponto material ou numa pequena região. [2]
5.3.1.Base Termodinâmica
Uma forma unificada de apresentar a fractura e o dano é a Termodinâmica dos
Processos Irreversíveis, já que lida com considerações energéticas a partir das quais é
fácil relacionar variáveis locais do dano com variáveis globais da fractura.

Capítulo 5 Do Dano à Fractura
48
Seguidamente consideraremos a energia específica armazenada no material
durante a deformação e por uma questão de simplicidade consideraremos que o regime
linear elástico a temperatura constante.
As equações de estado são deduzidas a partir da energia livre definida como:
TSU −=Ψ (5.3)
em que U representa a energia interna, T a temperatura e S a entropia.
Para um volume elementar, num determinado estado de dano, temos que a energia u é:
klijDijkl εεΛu
2
1= (5.4)
e para todo o corpo danificado ou parcialmente fracturado:
2
2
1Kq=U (5.5)
em que DijklΛ é a matriz de rigidez local para um determinado estado de dano; εij é a
componente de deformação local; q representa o deslocamento provocado por uma
carga Q aplicada à estrutura e K é a matriz de rigidez local. A relação entre DijklΛ e a
rigidez inicial é
( )DijklDijkl −= 1ΛΛ (5.6)
em que ijklΛ é a matriz de rigidez para o material virgem e D a variável de dano
definida na secção 5.2.
Assim, as equações de estado são:
• dano:
( ) klijklij
ij D εε
σ −=∂
Ψ∂= 1Λ (5.7)
klijijklDY εεΛ
2
1−=∂Ψ∂= (5.8)
onde Y corresponde à taxa de energia libertada devido ao dano.
• fractura:
KqQ =∂Ψ∂=q
(5.9)
AAG
∂∂=
∂Ψ∂= K
q2
2
1 (5.10)
em que G é a taxa de energia libertada devido à presença de fendas, definida no capítulo
2 e A é a área da fenda.

Capítulo 5 Do Dano à Fractura
49
Para satisfazer a primeira e a segunda lei da termodinâmica é necessário
verificar a desigualdade de Clausius-Duhem [7]:
02
10 ≥Λ→≥− DDY klijijkl εε& (5.11)
02
10 2 ≥
∂∂−→≥− A
A
KqAG && (5.12)
Como Y é uma função quadrática e K diminui quando A aumenta, estas
inequações implicam que 0≥D& e que 0≥A& , mostrando a irreversibilidade da
propagação de micro e macro fendas, respectivamente.
Finalmente, as equações de evolução para o modelo de dano são:
cg εε −= ~ (5.13)
00 =⇒< Dg & (5.14)
00 >⇒= Dg & (5.15)
em que g é uma função de carga, g = 0 representa o limite elástico e εc é o valor actual
da deformação.
Para a fractura vem:
CGGF −= (5.16)
00 =⇒< AF & (5.17)
00 >⇒= AF & (5.18)
em que F = 0 define o domínio reversível e GC representa o valor crítico de G. [2]
5.3.2. Equivalência Energética
Para passar do modelo de dano para o modelo de fractura, a equivalência tem de
ser termodinamicamente aceitável, o que significa que durante a evolução, o trabalho de
dano total tem de ser igual à energia necessária para criação de uma fenda:
AGdVDYV
&& −=−∫ (5.19)
em que V é o volume da estrutura.
No caso da mecânica da fractura linear elástica, a propagação que resulta de
(5.16) a (5.18) é –G = GC, portanto, a equação (5.19) dá a progressão equivalente de
uma fenda, dAe, para uma dada evolução dD(x) do dano:
C
Ve G
YdDdVdA
∫−= (5.20)
Capítulo 5 Do Dano à Fractura
50
Considerando a evolução total resulta:
C
V
D
e G
YdDdVA
c
∫ ∫ −= 0 (5.21)
Daqui conclui-se que quando a variável de dano atinge o valor crítico D(x)
forma-se uma fenda cuja progressão consome a mesma energia que a do processo de
dano e cuja área é dada pela equação (5.21). [2]
5.4.Referências
[1] Oller S., Fractura Mecánica Un enfoque global, CIMNE, Barcelona, 2001.
[2] Mazars J., Cabot G., From Damage to fracture mechanics and conversely: a combined
approach, International Journal Solid Structures, 33:20-22, 1996.
[3] Pires F., Modelação por Elementos Finitos da Iniciação da Fractura Dúctil nos Processos
de Enformação Plástica em Massa, tese se Mestrado, Faculdade de Engenharia da
Universidade do Porto, 2001.
[4] Souza Neto, Pric D., Owen D., Continuum modelling and numerical simulation of material
damage at finite strains, Arch. Comput. Meth. Engng, 5:311-384, 1998.
[5] Lemaître J., A continuous damage mechanics model for ductile fracture, J. Engng. Mat.
Tech., Trans. ASME, 107:83-89, 1985.
[6] Chaboche, J., Continuous Damage Mechanics – a tool to describe phenomena before crack
initiation, Nuclear Engineering Design, 64:233-247, 1981.
[7] Lemaître, J., Chaboche, J., Mechanics of Solid Materials, Cambridge University Press,
Cambridge, 1990.
Capítulo 6 Exemplos Numéricos
51
Capítulo 6
Exemplos Numéricos
6.1.Introdução
Este capítulo contém essencialmente os resultados obtidos no cálculo de factores
de intensidade de tensão de alguns modelos desenvolvidos, no regime linear elástico.
Todos os corpos de prova contêm uma fenda modelizada com o XFEM.
Os resultados numéricos são comparados com soluções analíticas e nalguns
casos também se comparam o resultados com outras simulações numéricas de outros
métodos de elementos finitos.
No final, apresenta-se ainda um exemplo que pretende estabelecer a ponte entre
a mecânica do dano e a fractura.
6.2. Placa com Fenda Central
Na figura 6.1 está representada uma placa com uma fenda central, submetida a
uma tensão constante σ, perpendicular à direcção da fenda, tratando-se, portanto, de um
carregamento em modo I.

Capítulo 6 Exemplos Numéricos
52
Figura 6.1: Placa com fenda central traccionada por uma tensão constante.
Na tabela 6.1 encontram-se as propriedades da placa.
Propriedades
Comprimento da fenda, a 4
Largura, L 20
Altura, D 50
Tensão Remota, s 100
Módulo de Young, E 104
Coeficiente de Poisson, v 0,3
Estado Deformação Plana
Tabela 6.1: Propriedades da placa com fenda central.
6.2.1.Modelo recorrendo a elementos finitos colapsados
Numa primeira abordagem, utilizou-se uma aproximação por elementos finitos
tradicionais, recorrendo a um programa já existente, o LINKPAK / Masterelast [1], para
2a
D
σσσσ
L
x
y
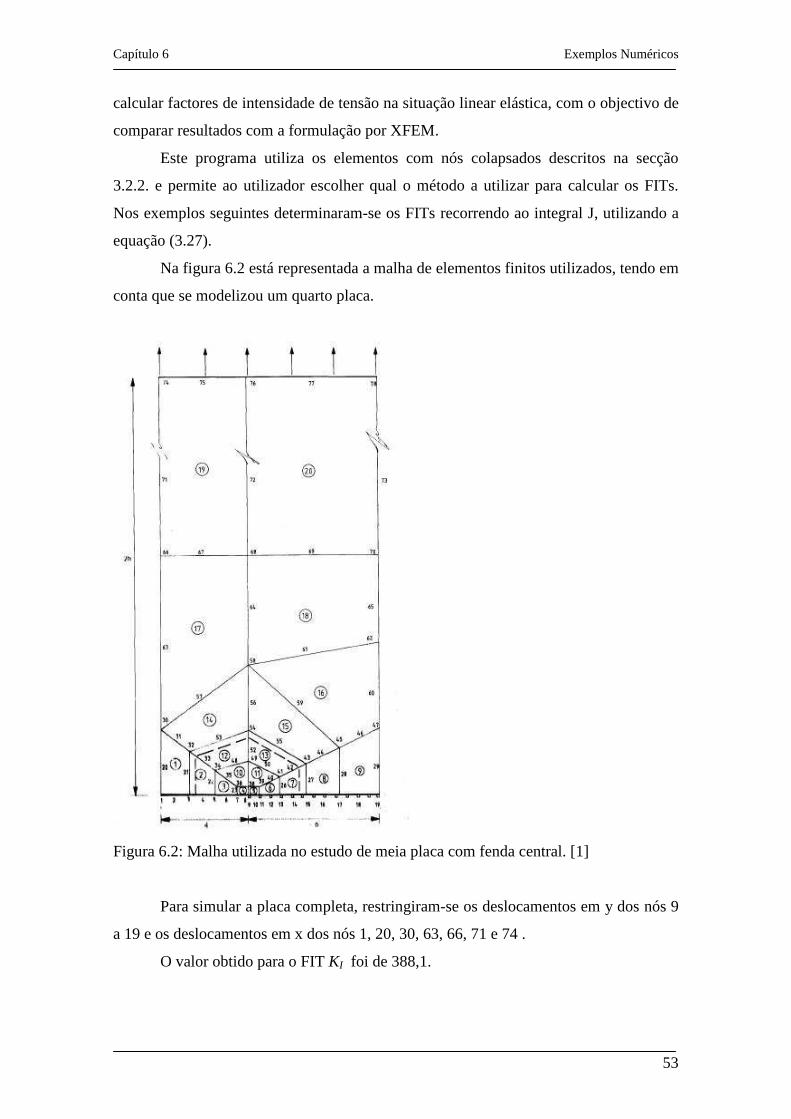
Capítulo 6 Exemplos Numéricos
53
calcular factores de intensidade de tensão na situação linear elástica, com o objectivo de
comparar resultados com a formulação por XFEM.
Este programa utiliza os elementos com nós colapsados descritos na secção
3.2.2. e permite ao utilizador escolher qual o método a utilizar para calcular os FITs.
Nos exemplos seguintes determinaram-se os FITs recorrendo ao integral J, utilizando a
equação (3.27).
Na figura 6.2 está representada a malha de elementos finitos utilizados, tendo em
conta que se modelizou um quarto placa.
Figura 6.2: Malha utilizada no estudo de meia placa com fenda central. [1]
Para simular a placa completa, restringiram-se os deslocamentos em y dos nós 9
a 19 e os deslocamentos em x dos nós 1, 20, 30, 63, 66, 71 e 74 .
O valor obtido para o FIT KI foi de 388,1.

Capítulo 6 Exemplos Numéricos
54
6.2.2.Modelo XFEM
Ao longo deste trabalho desenvolveu-se um programa que modeliza as fendas
segundo o XFEM, em ambiente MATLAB.
Na figura 6.3. está representado o modelo para a placa com fenda central.
Observa-se que a fenda está no interior dos elementos. A selecção dos elementos que
são atravessados pela fenda realizou-se através do level set.
Figura 6.3: Modelo para a placa com fenda central com XFEM (à direita encontra-se um
pormenor). Todos os nós enriquecidos com a função Heaviside encontram-se marcados
com um x e todos os nós enriquecidos com o campo asimptótico de deslocamentos da
extremidade da fenda encontram-se marcados com um quadrado vermelho. Os
quadrados pretos indicam os nós com graus de liberdade restringidos.
Recorrendo ao XFEM é necessário utilizar mais pontos de Gauss na região da
fenda (figura 6.4).
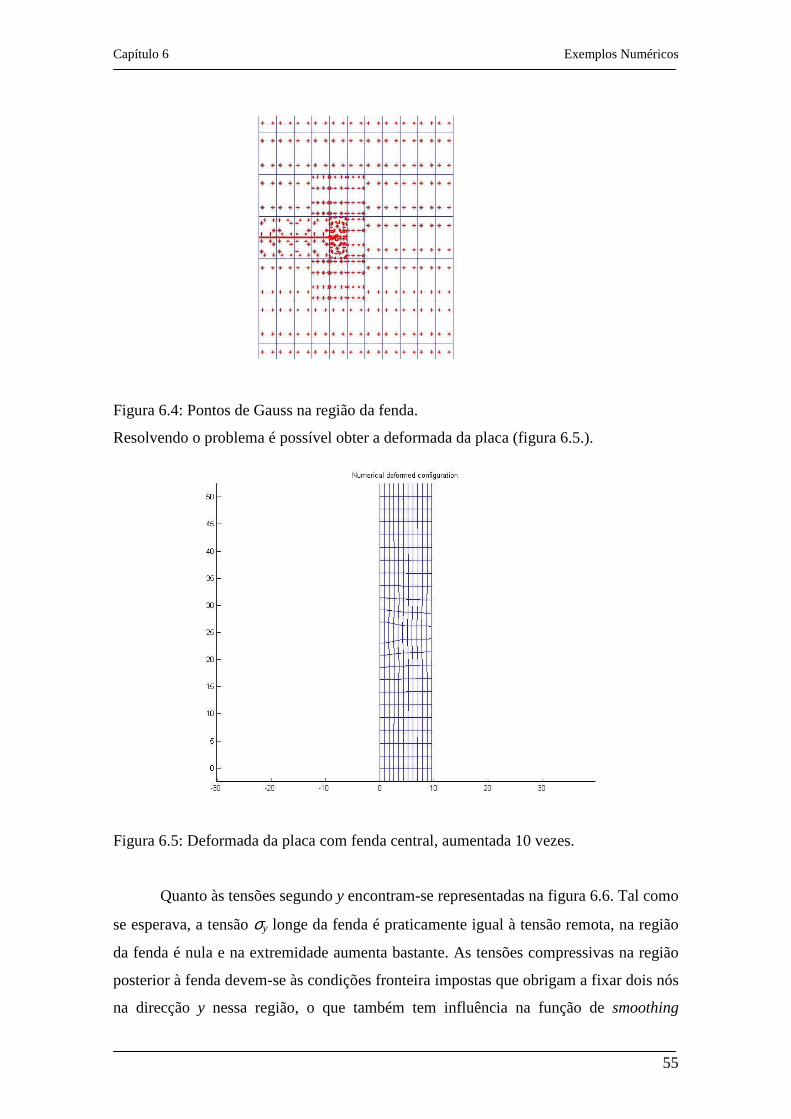
Capítulo 6 Exemplos Numéricos
55
Figura 6.4: Pontos de Gauss na região da fenda.
Resolvendo o problema é possível obter a deformada da placa (figura 6.5.).
Figura 6.5: Deformada da placa com fenda central, aumentada 10 vezes.
Quanto às tensões segundo y encontram-se representadas na figura 6.6. Tal como
se esperava, a tensão σy longe da fenda é praticamente igual à tensão remota, na região
da fenda é nula e na extremidade aumenta bastante. As tensões compressivas na região
posterior à fenda devem-se às condições fronteira impostas que obrigam a fixar dois nós
na direcção y nessa região, o que também tem influência na função de smoothing

Capítulo 6 Exemplos Numéricos
56
utilizada na representação das tensões. Esta função de smothing escolhe os pontos de
gauss mais próximos de um determinado nó e calcula o valor da tensão no nó através do
método dos mínimos quadrados. No caso dos nós dos elementos atravessados pela
fenda, só se utilizam os pontos de gauss que estão do mesmo lado da fenda.
Figura 6.6: Tensões na placa com fenda central.
Finalmente, recorrendo-se ao Integral de Interacção obteve-se para KI o valor de
394,5.
6.2.3. Comparação de resultados
Uma solução analítica para o FIT KI para uma placa de largura 2L com uma
fenda central de comprimento 2a e carregada remotamente por uma tensão σ é dada pela
seguinte expressão:
( )LaFaK I πσ= (6.1)
[2]
O valor de F(a/L) pode ser consultado numa tabela presente na mesma
referência. Para este caso, como a = 0,4, F(a/L) é 1,1094.
Na tabela 6.2 encontram-se os diversos valores obtidos para KI
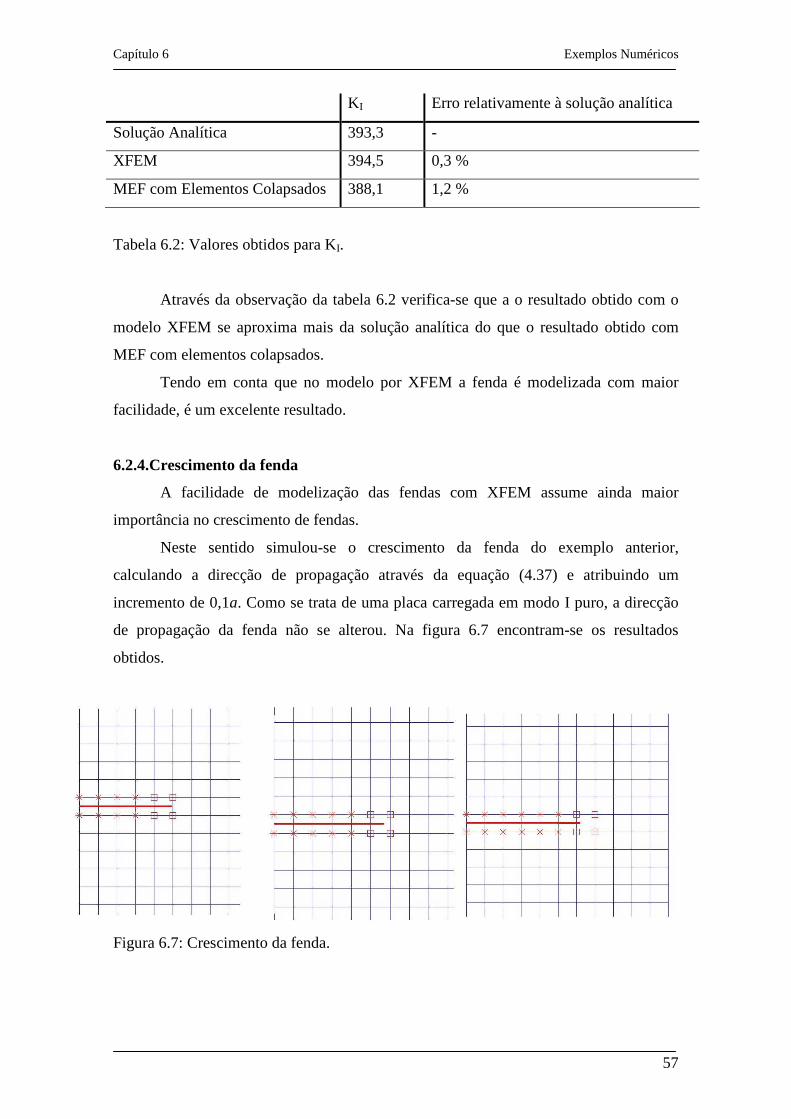
Capítulo 6 Exemplos Numéricos
57
KI Erro relativamente à solução analítica
Solução Analítica 393,3 -
XFEM 394,5 0,3 %
MEF com Elementos Colapsados 388,1 1,2 %
Tabela 6.2: Valores obtidos para KI.
Através da observação da tabela 6.2 verifica-se que a o resultado obtido com o
modelo XFEM se aproxima mais da solução analítica do que o resultado obtido com
MEF com elementos colapsados.
Tendo em conta que no modelo por XFEM a fenda é modelizada com maior
facilidade, é um excelente resultado.
6.2.4.Crescimento da fenda
A facilidade de modelização das fendas com XFEM assume ainda maior
importância no crescimento de fendas.
Neste sentido simulou-se o crescimento da fenda do exemplo anterior,
calculando a direcção de propagação através da equação (4.37) e atribuindo um
incremento de 0,1a. Como se trata de uma placa carregada em modo I puro, a direcção
de propagação da fenda não se alterou. Na figura 6.7 encontram-se os resultados
obtidos.
Figura 6.7: Crescimento da fenda.
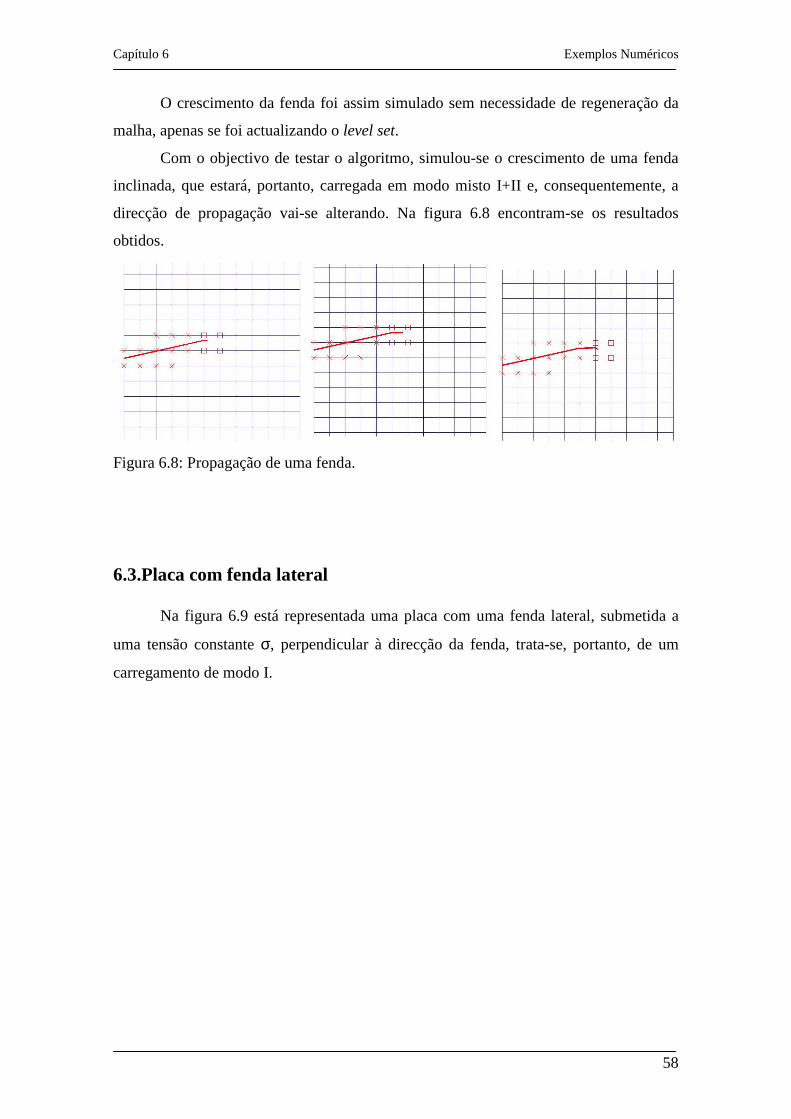
Capítulo 6 Exemplos Numéricos
58
O crescimento da fenda foi assim simulado sem necessidade de regeneração da
malha, apenas se foi actualizando o level set.
Com o objectivo de testar o algoritmo, simulou-se o crescimento de uma fenda
inclinada, que estará, portanto, carregada em modo misto I+II e, consequentemente, a
direcção de propagação vai-se alterando. Na figura 6.8 encontram-se os resultados
obtidos.
Figura 6.8: Propagação de uma fenda.
6.3.Placa com fenda lateral
Na figura 6.9 está representada uma placa com uma fenda lateral, submetida a
uma tensão constante σ, perpendicular à direcção da fenda, trata-se, portanto, de um
carregamento de modo I.
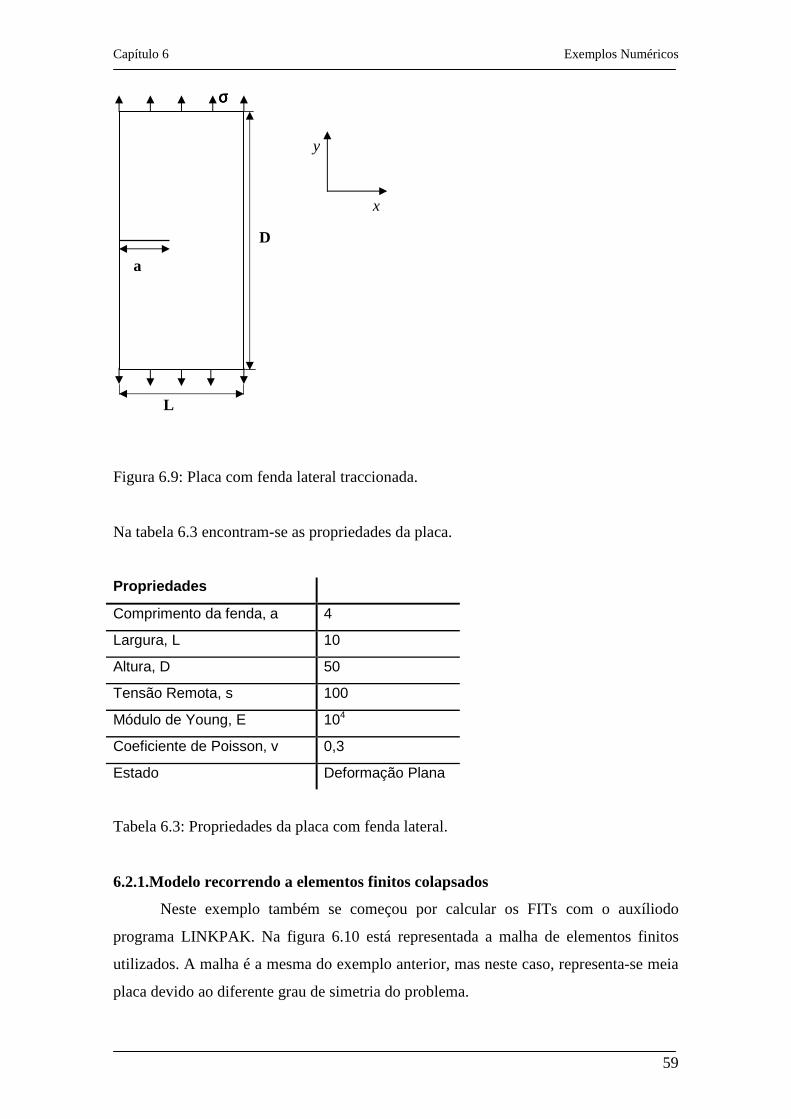
Capítulo 6 Exemplos Numéricos
59
Figura 6.9: Placa com fenda lateral traccionada.
Na tabela 6.3 encontram-se as propriedades da placa.
Propriedades
Comprimento da fenda, a 4
Largura, L 10
Altura, D 50
Tensão Remota, s 100
Módulo de Young, E 104
Coeficiente de Poisson, v 0,3
Estado Deformação Plana
Tabela 6.3: Propriedades da placa com fenda lateral.
6.2.1.Modelo recorrendo a elementos finitos colapsados
Neste exemplo também se começou por calcular os FITs com o auxíliodo
programa LINKPAK. Na figura 6.10 está representada a malha de elementos finitos
utilizados. A malha é a mesma do exemplo anterior, mas neste caso, representa-se meia
placa devido ao diferente grau de simetria do problema.
a
x
y
σσσσ
L
D
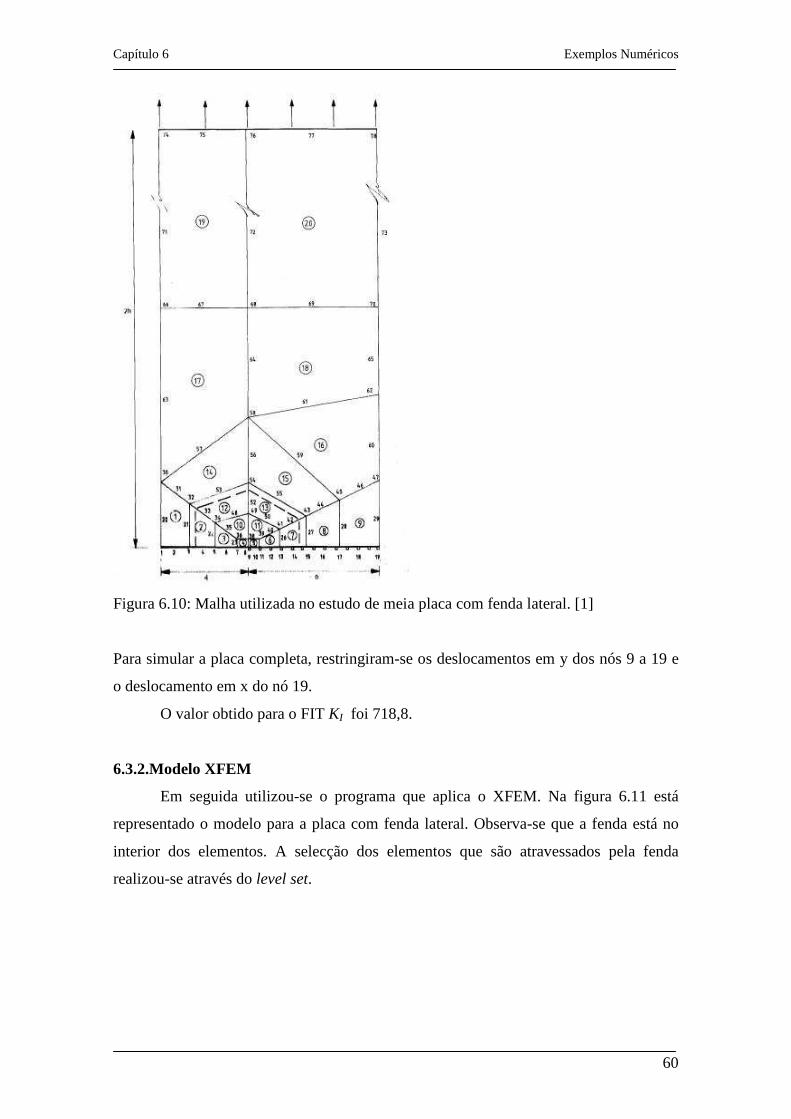
Capítulo 6 Exemplos Numéricos
60
Figura 6.10: Malha utilizada no estudo de meia placa com fenda lateral. [1]
Para simular a placa completa, restringiram-se os deslocamentos em y dos nós 9 a 19 e
o deslocamento em x do nó 19.
O valor obtido para o FIT KI foi 718,8.
6.3.2.Modelo XFEM
Em seguida utilizou-se o programa que aplica o XFEM. Na figura 6.11 está
representado o modelo para a placa com fenda lateral. Observa-se que a fenda está no
interior dos elementos. A selecção dos elementos que são atravessados pela fenda
realizou-se através do level set.
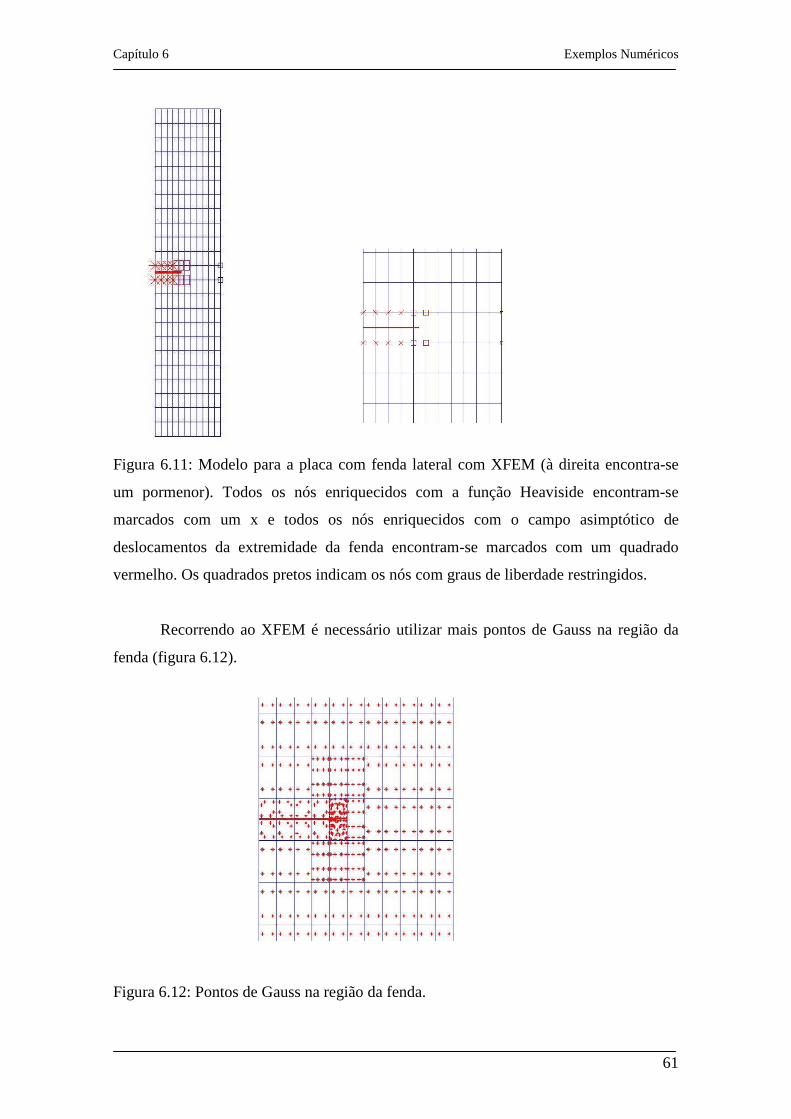
Capítulo 6 Exemplos Numéricos
61
Figura 6.11: Modelo para a placa com fenda lateral com XFEM (à direita encontra-se
um pormenor). Todos os nós enriquecidos com a função Heaviside encontram-se
marcados com um x e todos os nós enriquecidos com o campo asimptótico de
deslocamentos da extremidade da fenda encontram-se marcados com um quadrado
vermelho. Os quadrados pretos indicam os nós com graus de liberdade restringidos.
Recorrendo ao XFEM é necessário utilizar mais pontos de Gauss na região da
fenda (figura 6.12).
Figura 6.12: Pontos de Gauss na região da fenda.
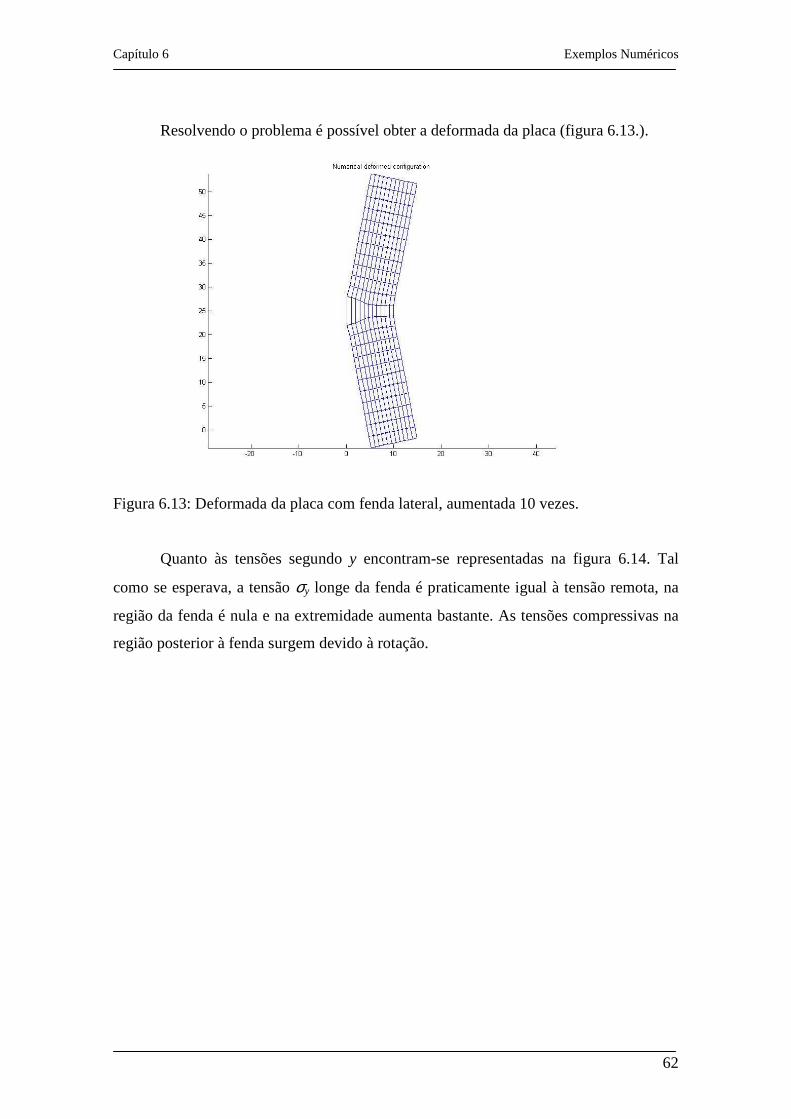
Capítulo 6 Exemplos Numéricos
62
Resolvendo o problema é possível obter a deformada da placa (figura 6.13.).
Figura 6.13: Deformada da placa com fenda lateral, aumentada 10 vezes.
Quanto às tensões segundo y encontram-se representadas na figura 6.14. Tal
como se esperava, a tensão σy longe da fenda é praticamente igual à tensão remota, na
região da fenda é nula e na extremidade aumenta bastante. As tensões compressivas na
região posterior à fenda surgem devido à rotação.

Capítulo 6 Exemplos Numéricos
63
Figura 6.14: Tensões na placa com fenda lateral.
Finalmente, recorrendo ao Integral de Interacção para calcular o valor de KI
obteve-se o valor de 667,3.
6.3.3. Comparação de resultados
Uma solução analítica para o FIT KI para uma placa de largura L com uma fenda
lateral de comprimento a e carregada remotamente por uma tensão σ é dada pela
seguinte expressão:
( )LaFaK I πσ= (6.2)
com
( ) ( ) ( ) ( ) ( )432 38,3071,2155,10231,012,1 LaLaLaLaLaF +−+−= (6.3)
[2]
Na tabela 6.4 encontram-se os diversos valores obtidos para KI
Capítulo 6 Exemplos Numéricos
64
KI Erro relativamente à solução analítica
Solução Analítica 745,8 -
XFEM 667,3 10,5 %
MEF com Elementos Colapsados 717,9 3,7 %
Tabela 6.4: Valores obtidos para KI.
Neste exemplo a modelização por XFEM não apresenta tão bons resultados
como a modelização por MEF com elementos colapsados.
O XFEM apresenta alguns parâmetros variáveis como a quantidade de nós
enriquecidos como o campo assimptótico de deslocamentos da extremidade da fenda, ao
acrescentar a zona de influência deste campo talvez se obtenha um resultado melhor.
O campo assimptótico de deslocamentos na extremidade da fenda utilizado foi
deduzido para a vizinhança de uma fenda dentro de placa infinita, portanto, alterando
ligeiramente as funções de enriquecimento, talvez se consiga uma melhor aproximação
para uma placa com uma fenda lateral.
6.4.Provete Cilíndrico
Como último exemplo, criou-se um modelo de um provete cilíndrico (figura 6.15) com
as propriedades descritas na tabela 6.5.
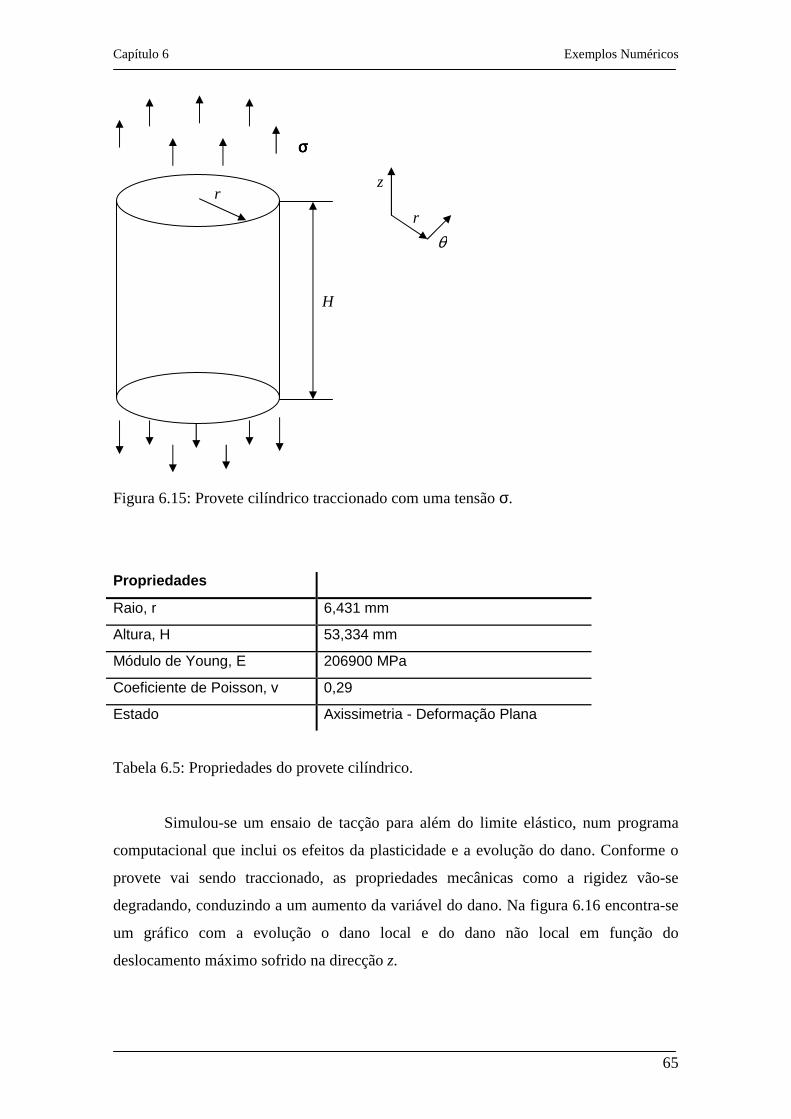
Capítulo 6 Exemplos Numéricos
65
Figura 6.15: Provete cilíndrico traccionado com uma tensão σ.
Propriedades
Raio, r 6,431 mm
Altura, H 53,334 mm
Módulo de Young, E 206900 MPa
Coeficiente de Poisson, v 0,29
Estado Axissimetria - Deformação Plana
Tabela 6.5: Propriedades do provete cilíndrico.
Simulou-se um ensaio de tacção para além do limite elástico, num programa
computacional que inclui os efeitos da plasticidade e a evolução do dano. Conforme o
provete vai sendo traccionado, as propriedades mecânicas como a rigidez vão-se
degradando, conduzindo a um aumento da variável do dano. Na figura 6.16 encontra-se
um gráfico com a evolução o dano local e do dano não local em função do
deslocamento máximo sofrido na direcção z.
H
σσσσ
r z
r
θ
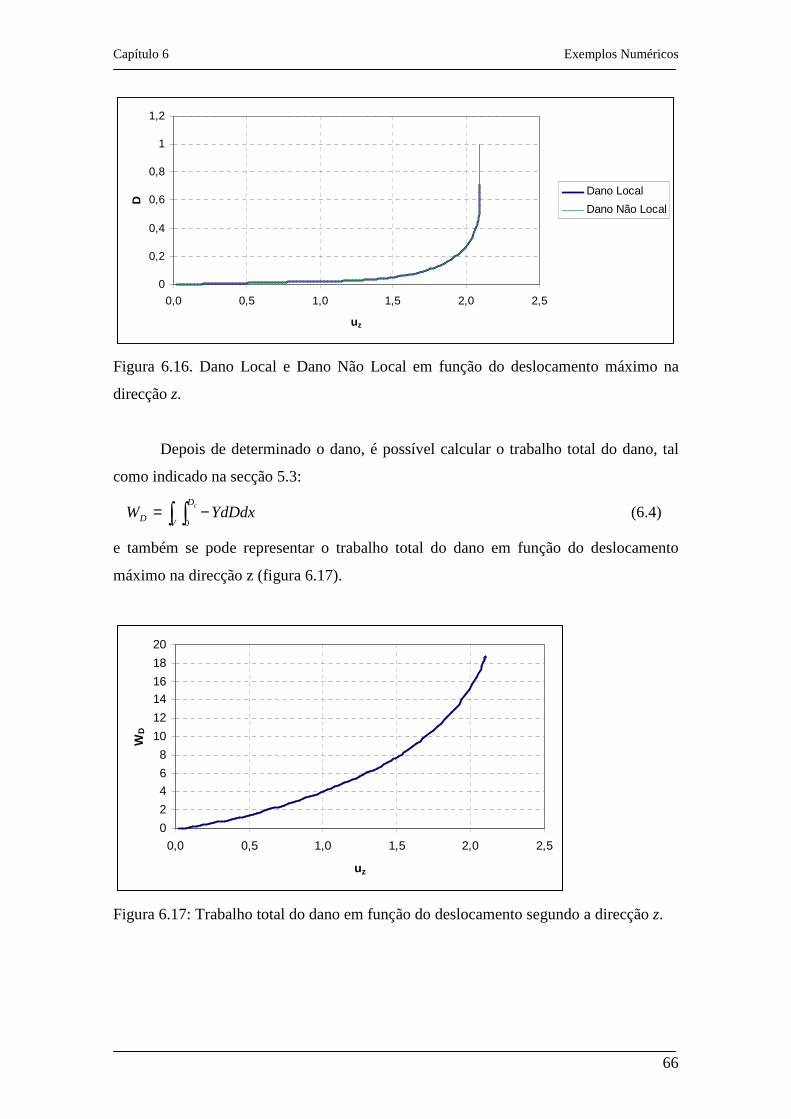
Capítulo 6 Exemplos Numéricos
66
0
0,2
0,4
0,6
0,8
1
1,2
0,0 0,5 1,0 1,5 2,0 2,5
uz
D
Dano Local
Dano Não Local
Figura 6.16. Dano Local e Dano Não Local em função do deslocamento máximo na
direcção z.
Depois de determinado o dano, é possível calcular o trabalho total do dano, tal
como indicado na secção 5.3:
∫ ∫ −=V
D
D
c
YdDdxW0
(6.4)
e também se pode representar o trabalho total do dano em função do deslocamento
máximo na direcção z (figura 6.17).
0
2
4
6
8
10
12
14
16
18
20
0,0 0,5 1,0 1,5 2,0 2,5
uz
WD
Figura 6.17: Trabalho total do dano em função do deslocamento segundo a direcção z.
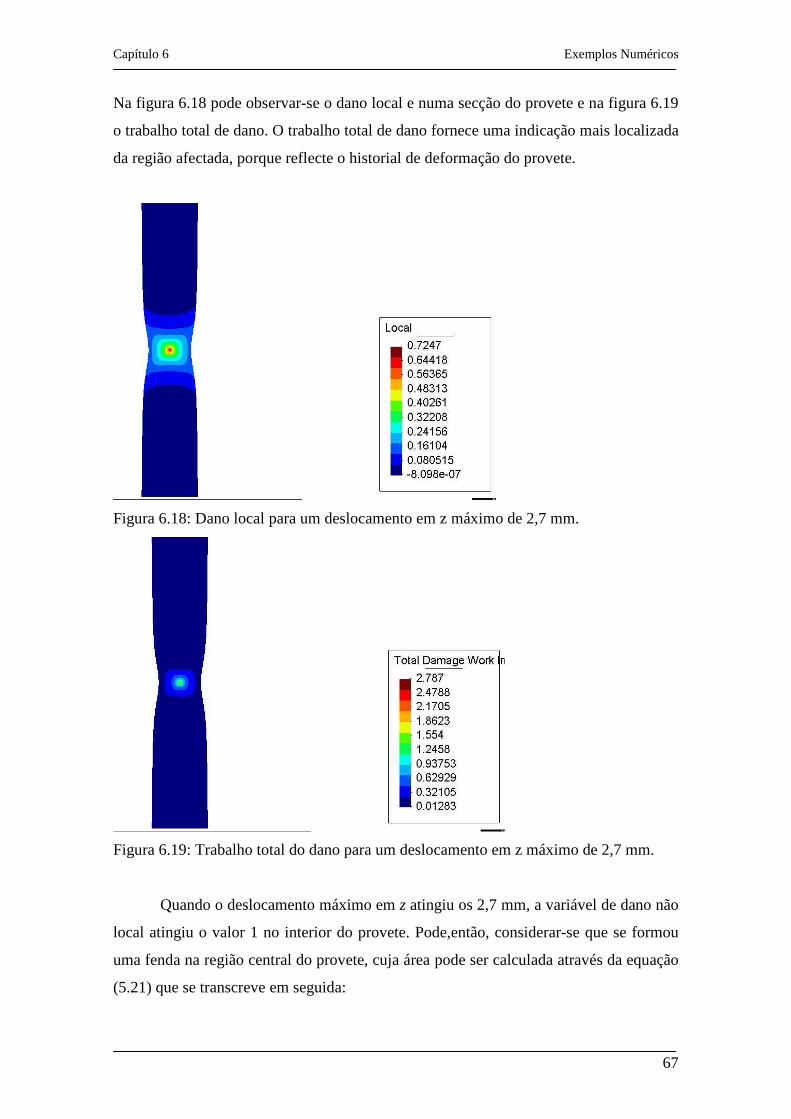
Capítulo 6 Exemplos Numéricos
67
Na figura 6.18 pode observar-se o dano local e numa secção do provete e na figura 6.19
o trabalho total de dano. O trabalho total de dano fornece uma indicação mais localizada
da região afectada, porque reflecte o historial de deformação do provete.
Figura 6.18: Dano local para um deslocamento em z máximo de 2,7 mm.
Figura 6.19: Trabalho total do dano para um deslocamento em z máximo de 2,7 mm.
Quando o deslocamento máximo em z atingiu os 2,7 mm, a variável de dano não
local atingiu o valor 1 no interior do provete. Pode,então, considerar-se que se formou
uma fenda na região central do provete, cuja área pode ser calculada através da equação
(5.21) que se transcreve em seguida:

Capítulo 6 Exemplos Numéricos
68
C
V
D
e G
YdDdVA
c
∫ ∫ −= 0 (6.5)
Tendo em conta que o numerador da equação (6.5) é o trabalho total do dano e que a
taxa de libertação de energia de deformação crítica, GC, é 50.10-3 MPa.m, a área da
fenda é 2
50
18mmAe = , o que corresponde a um raio de fenda de 0,34 mm ( πeAr = ).
Depois de descarregar o provete, já com a fenda formada, simulou-se um novo
carregamento, elástico, de tensão σ = 1000 MPa para avaliar o comportamento da fenda
no programa de XFEM. A tensão um pouco elevada para o regime elástico, mas o
principal objectivo é testar o algoritmo, que numa primeira fase apenas considera este
regime. Futuramente, pretende-se integrar os efeitos da plasticidade.
Assim, na figura 6.20 está representado o modelo de uma secção do provete
utilizado no programa de XFEM. Na figura 6.21 pode observar-se a região onde se
formou a fenda e os nós a enriquecer determinados pelo level set.
Figura 6.20: Configuração do provete após formada a fenda.
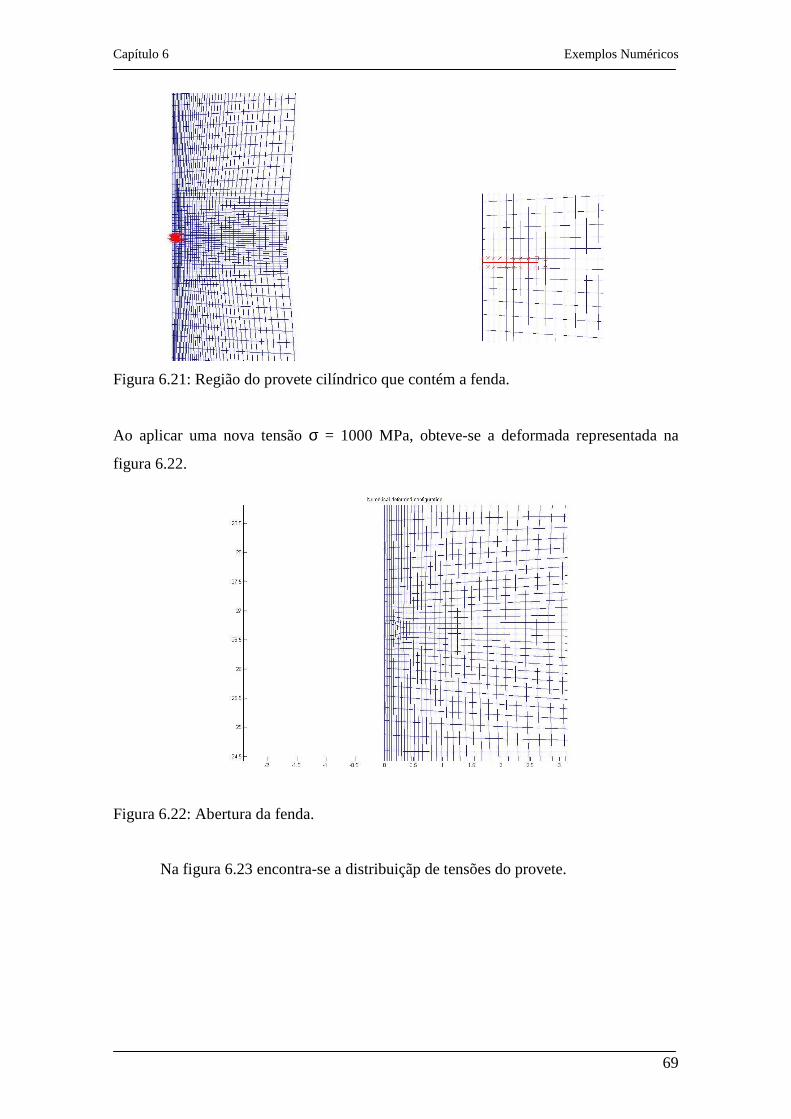
Capítulo 6 Exemplos Numéricos
69
Figura 6.21: Região do provete cilíndrico que contém a fenda.
Ao aplicar uma nova tensão σ = 1000 MPa, obteve-se a deformada representada na
figura 6.22.
Figura 6.22: Abertura da fenda.
Na figura 6.23 encontra-se a distribuiçãp de tensões do provete.
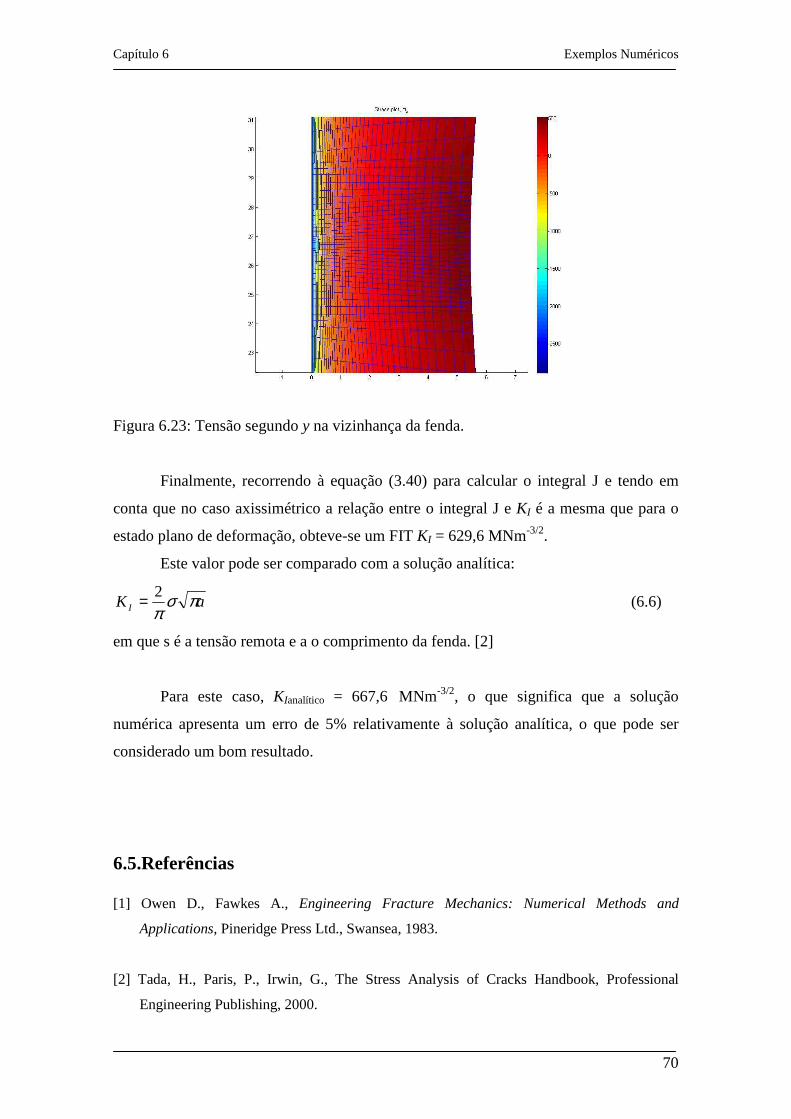
Capítulo 6 Exemplos Numéricos
70
Figura 6.23: Tensão segundo y na vizinhança da fenda.
Finalmente, recorrendo à equação (3.40) para calcular o integral J e tendo em
conta que no caso axissimétrico a relação entre o integral J e KI é a mesma que para o
estado plano de deformação, obteve-se um FIT KI = 629,6 MNm-3/2.
Este valor pode ser comparado com a solução analítica:
aK I πσπ2= (6.6)
em que s é a tensão remota e a o comprimento da fenda. [2]
Para este caso, KIanalítico = 667,6 MNm-3/2, o que significa que a solução
numérica apresenta um erro de 5% relativamente à solução analítica, o que pode ser
considerado um bom resultado.
6.5.Referências
[1] Owen D., Fawkes A., Engineering Fracture Mechanics: Numerical Methods and
Applications, Pineridge Press Ltd., Swansea, 1983.
[2] Tada, H., Paris, P., Irwin, G., The Stress Analysis of Cracks Handbook, Professional
Engineering Publishing, 2000.

Capítulo 7 Conclusões e Perspectivas de Trabalhos Futuros
71
Capítulo 7
Conclusões e Perspectivas
de Desenvolvimento Futuro
7.1.Conclusões
O XFEM é um método numérico poderoso na modelização de descontinuidades
de um sólido. Permite a modelização de fendas independentemente da malha através do
enriquecimento de alguns nós com funções descontínuas, que satisfazem a partição da
unidade. É talvez o método mais utilizado dentro da classe dos Elementos Finitos
Generalizados.
As simulações realizadas ao longo deste trabalho permitiram mostrar a
simplicidade com que o método trabalha as descontinuidades. Os exemplos realizados
apresentaram bons resultados no cálculo dos FITs, um importante critério de fractura,
comparados com soluções analíticas e outras soluções numéricas.
Contudo existem alguns parâmetros que podem ser alterados para melhorar os
resultados em situações particulares, como a placa com fenda lateral, em que se poderia
experimentar aumentar a zona de influência do campo assimptótico da extremidade da
fenda e também experimentar funções de enriquecimento ligeiramente diferentes.
Também se verificou que para simular o crescimento de fendas não são necessários
grandes recursos computacionais, não ocorrendo regeneração da malha; basta aplicar
um critério de fractura e actualizar o level set em cada iteração.
Neste trabalho efectuou-se, ainda, uma primeira abordagem ao dano em que se
pode concluir que o XFEM pode ser facilmente incorporado em diferentes programas.
Depois de se avaliar a variável de dano é possível calcular as dimensões das fendas que
se formam nas regiões em que esta variável atinge um valor crítico e, seguidamente,
localizar as fendas através do level set e avaliar o seu comportanto com o XFEM:
Capítulo 7 Conclusões e Perspectivas de Trabalhos Futuros
72
calcular campos de deslocamentos, deformação e tensão; determinar os FTIs
correspondentes; aplicar um critério de fractura e verificar se as fendas se propagarão ou
não e se impedirão ou não o normal funcionamento do componente em questão.
Assim, conclui-se que o XFEM dá um importante contributo na simulação de
situações de fractura cada vez mais complexas.
7.2.Perspectivas de Desenvolvimentos Futuros
Este trabalho constitui o primeiro passo na aplicação de Elementos Finitos
Generalizados à Mecânica da Fractura. Centrou-se na Mecânica da Fractura Linear
Elástica e na simulação de exemplos com apenas uma fenda.
Assim, sugere-se a simulação de exemplos com múltiplas fendas e a criação de
modelos que considerassem a deformação plástica que ocorre na extremidade de uma
fenda antes da sua propagação.
Na parte final do trabalho, aplicou-se o XFEM a um provete, que em
consequência do dano, apresentou uma fenda no seu interior. Partindo deste exemplo,
seria interessante incorporar o XFEM num modelo computacional que fosse para além
do regime linear elástico, entrando no domínio da plasticidade e considerando os efeitos
do dano. Também seria interessante o estudo do comportamento do método em grandes
deformações, estabelecendo, também neste caso, a ponte entre a Mecânica da Fractura e
a Mecânica do Dano Contínuo.


























![[Apostila] Elementos Finitos 3](https://img.document.onl/doc/110x75/577d26c61a28ab4e1ea22508/apostila-elementos-finitos-3.jpg)


