Upload
others
View
17
Download
0
Embed Size (px)
Citation preview
UNIVERSIDADE DE LISBOA
FACULDADE DE CIÊNCIAS
DEPARTAMENTO DE FÍSICA
Models of Disformally Coupled Dark Energy
Elsa Maria Campos Teixeira
Mestrado em Fı́sica
Especialização em Astrofı́sica e Cosmologia
Dissertação orientada por:
Doutor Nelson Nunes
e Prof. Doutora Ana Nunes
2018
ii
Acknowledgments
I would like to take advantage of this opportunity and express my gratitude to everyone who, directly
or indirectly, had a significant contribution to the conclusion of this dissertation. First, I would like to
thank my supervisors, Doutor Nelson Nunes and Prof. Doutora Ana Nunes, for introducing me to the
world of research, for the unending discussions and mostly, for their enthusiasm and dedication to this
project. I have learned plenty throughout this process and I am very grateful.
I thank everyone in the Cosmology group, for always making me feel welcome and always being
kind. In particular, I thank José Pedro Mimoso and Francisco Lobo for the guidance, the encouragement
and insightful comments. Also, to Inês, Rita and Isma for always being around, for the fruitful discus-
sions and above all, their friendship. To Bruno, for all the unyielding care and for everything he has
taught me.
To my closest friends, for always cheering me on and for all the support over the years. And finally, a
heartfelt thanks to my family, in particular my parents, for their endless support and for always reminding
me of what’s right, and to my cousin, for always inciting my interest in science. I dedicate this work to
my sister, whose patience, optimism and advice were more valuable than she could ever imagine.
i
ii
Resumo
A Cosmologia é o estudo do Universo, ou cosmos, como um todo. A Cosmologia padrão surgiu
com a formulação da teoria da Relatividade Geral, em 1915, por Albert Einstein que, desde então, se
tem mostrado bem sucedida ao descrever a natureza do nosso Universo, tanto a pequenas como a largas
escalas. Mostrou-se também capaz de fazer previsões rigorosas que, só mais tarde, com o avanço da
tecnologia, puderam ser confirmadas, como é o caso das recém-detectadas ondas gravitacionais. Por
isso, o modelo padrão da Cosmologia baseia-se essencialmente na teoria da gravitação de Einstein e nas
suas implicações cosmológicas. No entanto, quando em 1998 se descobriu que o nosso Universo está
a experienciar uma fase de expansão acelerada, não parecia haver explicação para este fenómeno. Esta
adição ao nosso conhecimento acerca do Universo levou à necessidade de considerar extensões à teoria
da Gravitação em vigor.
Sabe-se que, todo o tipo de matéria conhecida e detectada até à data, incluı́da no Modelo Padrão da
Fı́sica de Partı́culas, interage gravitacionalmente de forma atractiva (e nunca repulsiva), o que significa
que, tendo apenas isso em conta, o Universo não se deveria estar a expandir. Neste sentido, um dos
maiores desafios da Cosmologia diz respeito à determinação da composição do Universo. Presentemente,
uma das generalizações mais bem aceites consiste em assumir que a expansão acelerada do Universo é
provocada pela presença de uma componente de matéria/energia, desconhecida até à data, caracterizada
por uma pressão eficaz negativa. Na realidade, através do ajuste dos dados observacionais, é possı́vel
inferir que esta fonte desconhecida teria de ser a mais abundante entre todos os constituintes do Universo.
A esta componente dá-se o nome de Energia Escura. Postula-se ainda a existência de um tipo de matéria,
denominada Matéria Escura, necessária para ajustar correctamente os dados observacionais, que sugerem
que deveria existir muito mais matéria do que aquela que se observa na realidade. Esta matéria não parece
emitir nem absorver radiação, pelo que não pode ser detectada por interacção electromagnética.
O próprio Einstein, enquanto procurava uma solução para a sua teoria que permitisse descrever um
Universo estático, verificou que seria necessário incluir uma contribuição proveniente de uma compo-
nente de matéria com pressão negativa. Tratando-se de algo pouco usual, Einstein optou antes por adi-
cionar à sua teoria a famosa constante cosmológica Λ. Mais tarde mostrou-se que esta solução apresenta
instabilidades mas serviu de inspiração às tentativas futuras de explicar a expansão acelerada do Uni-
verso. Assim, o modelo mais simples de energia escura é o da constante cosmológica Λ, que representa
uma fonte cosmológica com pressão pΛ = −ρΛ (onde p representa a pressão e ρ a densidade de energia
que, por questões de consistência, se assume sempre positiva). Com a adição de uma componente de
matéria escura obtém-se o modelo padrão da cosmologia actual: o modelo ΛCDM. Ainda assim, este
modelo enfrenta alguns obstáculos conceptuais e, por isso, considera-se extensões em que a energia es-
cura é descrita através de um campo escalar, cuja equação de estado, p = wρ, varia dinamicamente,
iii
sendo possı́vel reproduzir, com maior liberdade, a história da composição do Universo. Existe uma
grande variedade de modelos de energia escura, sendo que a maioria difere na escolha do Lagrangiano
para o campo escalar e na respectiva interpretação fı́sica.
Rapidamente se tornou natural considerar que a componente de energia escura possa interagir com
a matéria convencional e com a matéria escura, dando origem a padrões observacionais. Usualmente, é
imposta uma função de acoplamento ao nı́vel das equações do movimento. No entanto, esta interacção
pode emergir naturalmente através do próprio campo escalar presente na teoria, que representa o papel
de energia escura. Isto é possı́vel através de uma transformação conforme/disforme do tensor da métrica,
levando a uma interacção descrita ao nı́vel do Lagrangiano.
As técnicas desenvolvidas no contexto da teoria de Sistemas Dinâmicos têm sido fulcrais para o de-
senvolvimento e interpretação de modelos cosmológicos. O seu uso permite não só descrever o nosso
Universo no passado e no presente (onde os resultados podem ser comparados com os dados observa-
cionais), mas também fazer previsões (ou especulações) acerca da sua evolução futura. Esta dissertação
baseia-se nessas mesmas técnicas para desenvolver modelos cosmológicos capazes de explicar a fase
de expansão acelerada do Universo que vivemos no presente, permitindo interacções entre a energia
escura e as restantes componentes de matéria/energia naturalmente presentes na teoria. Neste sentido,
na exploração dos modelos cosmológicos propostos, conjugam-se dois pontos de vista complementares:
faz-se uma análise dinâmica baseada em princı́pios matemáticos bem estabelecidos e uma análise das
consequências cosmológicas, baseadas em hipóteses motivadas e relevantes.
No Capı́tulo 1 começamos por fazer uma breve apresentação dos conceitos utilizados nos Capı́tulos
que se seguem. Primeiramente, é feita uma breve introdução à teoria matemática de Sistemas Dinâmicos
e às principais técnicas utilizadas ao longo deste trabalho. De seguida, apresenta-se uma pequena
introdução à teoria de Relatividade Geral e ao modelo padrão da Cosmologia. Finalmente, discute-se
o conceito de energia escura e as suas principais caracterı́sticas. É também feita a distinção entre o
campo escalar canónico, ou quintessência, e o campo escalar relativista, denominado taquião, no con-
texto de Teoria Quântica de Campo, com um paralelismo à teoria clássica. Terminamos com uma breve
revisão das diferentes aplicações cosmológicas destes dois campos, presentes na literatura.
No Capı́tulo 2 apresentamos o conceito de transformações conformes/disformes e é feita uma análise
do seu significado do ponto de vista matemático e fı́sico. De seguida mostramos como este tipo de
transformações pode ser usado para descrever modelos cosmológicos em diferentes referenciais com
interpretações fı́sicas especı́ficas. Neste sentido, somos naturalmente levados para a descrição onde
se permite interacções entre energia escura e as outras formas de matéria/energia presentes na teo-
ria. Discute-se as principais consequências cosmológicas dessa mesma interacção e apresenta-se uma
breve revisão dos diferentes tipos de acoplamentos considerados na literatura. Os acoplamentos prove-
iv
nientes de transformações conformes/disformes destacam-se por surgirem naturalmente numa teoria que
já contém um campo escalar, permitindo estudar um determinado modelo cosmológico num referencial
onde a interpretação fı́sica é mais evidente e/ou conveniente. A principal novidade associada aos mod-
elos acoplados é o aparecimento de pontos fixos, denominados scaling, que descrevem um Universo a
evoluir para um estado onde as densidades de energia escura e matéria escalam uma com a outra. Assim,
a existência de acoplamentos pode ter um papel benéfico, na medida em que estas soluções podem ser
usadas como forma de aliviar o problema da coincidência cosmológica, relacionado com a necessidade
de escolher condições iniciais especı́ficas para o nosso Universo de forma a obter a configuração que se
observa hoje.
No Capı́tulo 3 aplicamos as ideias descritas nos Capı́tulos anteriores a um modelo com um acopla-
mento conforme, onde o papel de energia escura é representado por um campo escalar taquiónico e se
admite um potencial quadrático inverso. Faz-se uma análise detalhada do ponto de vista dinâmico e
extraem-se as principais consequências cosmológicas. O estudo é feito em comparação com o modelo
desacoplado estudado anteriormente onde existe apenas um ponto fixo estável e capaz de descrever um
Universo em expansão acelerada, correspondente a um Universo a evoluir para um estado totalmente
dominado por energia escura. Por outro lado, o modelo acoplado, admite soluções de scaling, abrindo
portas para novas configurações. Com base na análise dinâmica e no estudo de estabilidade dos pontos
fixos encontrados, conclui-se que este modelo só é capaz de reproduzir a história da constituição do
Universo para condições iniciais muito particulares.
No Capı́tulo 4 implementamos um modelo com um acoplamento disforme, onde se toma um campo
escalar canónico para descrever a energia escura. Modelos de quintessência com um acoplamento
disforme já foram previamente considerados mas a análise existente na literatura é estendida, já que
se considera que a função disforme pode depender, não só do campo escalar, mas também das suas
derivadas temporais e/ou espaciais. Ainda que o sistema seja complexo e extensivo do ponto de vista
matemático, extraem-se as principais conclusões cosmológicas e, em particular, estuda-se em que medida
a dependência da função disforme no termo cinético do campo escalar afecta a dinâmica do sistema.
Terminamos com o Capı́tulo 5, onde referimos as principais conclusões do estudo realizado nesta
dissertação. Nomeadamente, discutimos as vantagens e desvantagens de considerar acoplamentos entre
energia escura e as outras formas de matéria. No futuro seria importante constranger os dois modelos
através dos dados observacionais disponı́veis. A análise detalhada da dinâmica de cada sistema permite
uma discussão das consequências cosmológica mais consistente, num tema tão pertinente e instigante
como a história da composição do Universo e a sua presente expansão acelerada.
Palavras-chave: Energia Escura, Sistemas Dinâmicos em Cosmologia, Transformações Con-formes/Disformes, Quintessência Acoplada, Taquião
v
vi
Abstract
Cosmology is the study of the universe, or cosmos, regarded as a whole. Standard cosmology began
with the formulation of the theory of General Relativity (GR) in 1915, by Albert Einstein. GR has
showed successful at describing the nature of our Universe, at both small and large scales. It has also
been capable of making rigorous predictions, which could only be confirmed later with the advent of
technology, as was the case with the recently-detected gravitational waves. For this reason, the standard
model of Cosmology is based on Einstein’s theory of gravitation and its cosmological implications.
However, in 1998, it was discovered that the Universe seems to be experiencing a period of accelerated
expansion, which can not be explained by any macroscopic type of matter, detected so far, included in
the Standard Model of Particle Physics. This breakthrough lead to the need of extending the present
theory of Gravitation.
Therefore, one of the main challenges in Cosmology concerns the determination of the composition
of the Universe. Taking only into account ordinary matter, such as radiation or non-relativistic matter,
which is gravitationally attractive (and never repulsive), there seems to be no reason to consider an
accelerated expanding scenario. Currently, one of the most accepted generalisations consists on assuming
that the acceleration is powered by an unknown source of energy/matter component, characterised by an
effective negative pressure. In reality, to fit the observational data, this source would have to be the
most abundant among the known constituents of the Universe. Such an unknown component is usually
classified under the broad heading of Dark Energy (DE). Additionally, the measurements of the rotation
curves of galaxies are not in agreement with the theoretical predictions based on Newtonian mechanics.
These observations suggest the presence of an undetected type of non-relativistic matter which seems to
neither emit nor absorb radiation and therefore can not be detected through electromagnetic interaction.
For this reason it is usually referred to as Cold Dark Matter (CDM).
Einstein himself, unknowingly, attempted to solve this problem, while aiming for a static cosmo-
logical solution, which called for a component with negative pressure. He chose to rule this rather odd
paradigm as non-physical and instead introduced his famous cosmological constant Λ to the gravitational
action. Even though this static solution was found to be unstable, we can rely upon Einstein’s thinking to
try to explain the accelerated expanding Universe. Thus, the simplest dark energy model is represented
by the cosmological constant Λ, which is now taken to be a cosmological source with pΛ = −ρΛ (where
p stands for the pressure and ρ for the energy density, which, for consistency reasons, is always assumed
to be positive). By adding a dark matter component we arrive at the current standard model of Cosmol-
ogy: the ΛCDM model. However, the ΛCDM model is known to present some conceptual issues. As an
attempt to avoid these problems, the cosmological constant is often generalised to a scalar field, whose
dynamical equation of state, p = wρ, could more naturally reproduce the evolution of the Universe.
vii
There is a wide variety of dark energy models which differ on the choice of the Lagrangian for the
scalar field and its corresponding physical interpretation. The interest in the possibility of having dark
energy interacting with the other matter/energy fluids present in the theory arose naturally. Customarily,
a coupling function is imposed at the level of the field equations. However, it could be more naturally
generated by means of the scalar field already present in the theory, through a conformal/disformal
transformation of the metric tensor, casting the interaction into a Lagrangian description.
The tools of Dynamical Systems have proved ideal for the development of a theoretical understanding
of the evolution of our Universe. Their use also allows for future predictions/speculations. In this thesis,
we focus on these tools in order to build viable cosmological models, while trying to explain the late-time
acceleration of the Universe through a coupled dark energy component. Hence, the work developed in
the context of this dissertation relies on two complementary approaches: a complete dynamical study
based on well-established mathematical principles and an analysis of the cosmological consequences
based on well-motivated and relevant physical hypotheses.
In Chapter 1 we begin with a brief overview of the main concepts included in the following Chapters.
We start with a succinct introduction to the theory of Dynamical Systems and the main techniques used
throughout this work. We follow to present some of the main aspects concerning the theory of General
Relativity and Cosmology. Finally, we introduce the concept of Dark Energy and discuss the conven-
tional scalar field descriptions in the context of Quantum Field Theory (while making a comparison with
the classical approach): the canonical scalar field, the so-called quintessence, and the relativistic scalar
field, the tachyon field. We also perform a brief review of the main applications of these scalar fields in
cosmology present in the literature.
In Chapter 2 we introduce the mathematical and physical formalisms regarding the concept of confor-
mal/disformal transformations. Next, we show how these ideas can be implemented in order to describe
cosmological models in different frames with distinct physical interpretations. This naturally leads to
the cosmological approach where dark energy is allowed to interact with other matter/energy sources
present in the theory. We discuss the most important cosmological consequences of such an interaction
and perform a brief review on the different couplings considered in the literature. Couplings emerging
from conformal/disformal transformations can be accomplished through a fundamental scalar field al-
ready present in theory. They are of paramount importance for cosmological models by allowing for
the study to be made in a specific frame where the physical interpretation is more evident/convenient.
The main novelty associated with these models lies in the emergence of new fixed points, referred to
as scaling fixed points. These solutions describe a Universe evolving towards a state where the energy
densities of dark energy and coupled matter scale with each other. Hence, the presence of the coupling
could yield favourable results, for instance it could alleviate the cosmic coincidence problem, related to
viii
the need of postulating specific initial conditions for the Universe in order to reproduce the configuration
which we observe today.
In Chapter 3 we discuss the application of the ideas presented in the previous Chapters to a con-
formally coupled model where the role of dark energy is played by a tachyon field, characterised by
an inverse square potential, which is allowed to interact with the matter sector. A detailed dynamical
analysis of the cosmological outcome is performed in comparison with the previously studied uncoupled
tachyonic dark energy model. In the latter, there exists only one stable critical point capable of describ-
ing the late time acceleration of the Universe, corresponding to a totally dark energy dominated future
configuration. The conformally coupled model, on the other hand, provides scaling solutions, allowing
for different frameworks. Based on the dynamical analysis, we conclude that this model is only capable
of reproducing the history of the Universe for a specific set of initial conditions.
In Chapter 4 we implement a disformally coupled model where dark energy is represented by a
canonical scalar field with an exponential potential. The analysis in the existing literature is extended by
assuming that the disformal coefficient depends both on the scalar field and its kinetic term (related to
time and/or spatial derivatives of the field). Even though this is a complicated and mathematically exten-
sive model, we extract its main cosmological features and, in particular, we study how the dependence
of the transformation on the kinetic term affects the dynamics of the system.
We conclude in Chapter 5 with some final remarks regarding the work presented in this thesis.
Namely, we discuss the advantages/disadvantages of considering couplings between dark energy and
the matter sector. In the future it would be important to use observational data to constrain the models,
at the level of the background and by means of perturbation theory. The detailed dynamical analysis
performed for each system provides a better understanding of the cosmological consequences and the
physically allowed configurations, improving the consistency level of the study.
Keywords: Dark Energy, Dynamical Systems in Cosmology, Conformal/Disformal Transforma-tions, Coupled Quintessence, Tachyon
ix
x
Contents
Acknowledgments . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . i
Resumo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . iii
Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . vii
List of Tables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xiii
List of Figures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xv
1 Introduction 1
1.1 Dynamical Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.1 Linear Stability Theory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.1.2 Bifurcations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2 Basics of General Relativity . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.3 Standard Model of Cosmology - The FLRW model . . . . . . . . . . . . . . . . . . . . 12
1.4 Dark Energy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.4.1 Quintessence Field and Tachyon Field . . . . . . . . . . . . . . . . . . . . . . . 18
2 Conformal and Disformal Transformations 21
2.1 Lagrangian Formalism of GR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.2 Conformal Transformations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.3 Disformal Transformations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.4 Einstein Frame and Jordan Frame . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.5 Interacting Dark Energy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3 Conformally Coupled Tachyonic Dark Energy 35
3.1 The Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
3.2 Background Cosmology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.3 Dynamical Equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
3.4 Phase Space and Invariant Sets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3.5 Dynamical System Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
xi
3.5.1 Fixed Points, Stability and Phenomenology . . . . . . . . . . . . . . . . . . . . 44
3.5.2 Bifurcation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.5.3 Physical Phase Diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.6 Viable Cosmologies . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.7 Effective Potential . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
3.8 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
4 Disformally Coupled Quintessence 59
4.1 The Model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
4.2 Background Cosmology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
4.3 Dynamical Equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
4.4 Phase Space and Invariant Sets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
4.5 Dynamical System Analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
4.5.1 Fixed points, Stability and Phenomenology for a pressureless fluid . . . . . . . . 68
4.5.2 Fixed points, Stability and Phenomenology for a relativistic fluid . . . . . . . . . 73
4.6 Conclusions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
5 Final Remarks 79
Bibliography 81
A Natural Units 97
B Conformally Coupled Tachyonic Dark Energy - Linear Stability Matrix 100
C Conformally Coupled Tachyonic Dark Energy - Eigenvalues of the Stability Matrix 101
D Disformally Coupled Quintessence - Equation of Motion 103
E Disformally Coupled Quintessence - Interaction term 105
F Fixed Points for the Disformally Coupled System with no Kinetic Dependence 107
G Disformally Coupled Quintessence - Eigenvalues of the Stability Matrix 109
xii
List of Tables
3.1 Couplings of a barotropic perfect fluid to a tachyonic field studied in the literature . . . . 42
3.2 Fixed points and corresponding existence conditions and cosmological parameters for
the conformally coupled tachyonic model . . . . . . . . . . . . . . . . . . . . . . . . . 45
3.3 Effective equation of state parameter for the conformally coupled tachyonic model . . . 46
3.4 Dynamical stability for the fixed points of the conformally coupled tachyonic model . . . 48
4.1 Fixed points and corresponding cosmological parameters for disformal quintessence cou-
pled to a non-relativistic fluid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
4.2 Effective equation of state parameter for disformal quintessence coupled to a non-relativistic
fluid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
4.3 Fixed points for disformal quintessence coupled to a relativistic fluid with a linear de-
pendence of the disformal function on the kinetic term . . . . . . . . . . . . . . . . . . 74
4.4 Effective equation of state parameter for disformal quintessence coupled to a relativistic
fluid with a linear dependence of the disformal function on the kinetic term . . . . . . . 74
F.1 Fixed points for disformal quintessence coupled to a fluid with an arbitrary constant
equation of state for the case where the disformal function does not depend on the kinetic
term . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
G.1 Eingenvalues of the fixed points for disformal quintessence coupled to a non-relativistic
fluid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
G.2 Eingenvalues of the fixed points for disformal quintessence coupled to a relativistic fluid 110
xiii
xiv
List of Figures
1.1 Saddle node and transcritical bifurcation diagrams . . . . . . . . . . . . . . . . . . . . . 8
3.1 Bifurcation diagram and attractor of the coupled tachyonic system according to the pa-
rameter region . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
3.2 Phase portrait projections for the uncoupled and coupled tachyonic models . . . . . . . . 52
3.3 Viable cosmologies with fine tuning for the conformally coupled tachyonic model . . . . 53
3.4 Example of the evolution of the relative energy densities and the EoS parameters accord-
ing to the conformally coupled tachyonic model . . . . . . . . . . . . . . . . . . . . . . 54
3.5 Effective potential for the conformally coupled tachyonic model . . . . . . . . . . . . . 56
4.1 Parameter region for a stable fixed point for the case of quintessence disformally coupled
to a non-relativistic fluid . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
4.2 Attractor of the disformally coupled system according to the parameter region . . . . . . 73
xv
xvi
Chapter 1
Introduction
In this Chapter we give a brief introduction to some important topics and mathematical techniques
which will be relevant throughout this work. We start with a succinct introduction to the mathematical
theory of Dynamical Systems, then we discuss some important concepts regarding the theory of General
Relativity and its implications to Cosmology and finally, introduce the concept of Dark Energy and how
one implements this ideas in order to construct a cosmological model.
1.1 Dynamical Systems
This section is mainly based on references [1–5].
A dynamical system is one whose state varies with time, t. Whenever t is taken to be continuous the
dynamics is customarily described by a set of differential equations,
dx1dt
= ẋ1 = f1(t, x1, ..., xn),
... (1.1)
dxndt
= ẋn = fn(t, x1, ..., xn),
where t ∈ R, n is the dimension of the state space X ⊆ Rn and x = (x1, ..., xn) ∈ X is an element of
the state space which represents the state of the system. The function F = (f1(x), ..., fn(x)) is a vector
field that characterises the specific system which is being studied, with F : X → Rn.
Ordinary differential equations of the form ẋ = F(x), which do not depend explicitly on time,
are called autonomous or time independent as opposed to ordinary differential equations which depend
explicitly on time, ẋ = F(x, t), and are referred to as non-autonomous or time dependent.
The state space can be defined as the set of all possible values of the quantities that must be used
to fully describe the state of the system through time. One can think of ecological models, e.g. Lotka-
Volterra models, where the state space corresponds to the possible number of elements in each pop-
1
ulation. When working with cosmological models suitable normalised quantities are often chosen to
describe the state of the Universe and this will be studied in greater detail further on.
We will then have a set of n first order, ordinary differential equations describing how the system
evolves in time. A solution (also referred to as trajectory or phase curve) of the dynamical system (1.1)
on Rn is any function ψ : I ⊆ R → Rn which satisfies ψ̇(t) = F(ψ(t)) for a certain time interval
I . The image of a solution ψ(t) in Rn is often called an orbit or a trajectory in the phase space. The
corresponding physical system will evolve in time according to the motion of x ∈ Rn along that orbit of
the dynamical system.
Also, a dynamical system of the form (1.1) is said to be linear if all the x1, ..., xn appear linearly, i.e.,
to the first power only, on the RHS of the system of equations.
Theorem 1.1.1 (Existence and Uniqueness). Consider a general autonomous equation ẋ = F(x), x ∈
Rn, with initial value x0 ∈ Rn. If F : Rn → Rn is continuously differentiable, then for every x0 ∈ Rn,
there exists a maximal time interval I and a unique function ψ, defined on I , such that
ψ̇(t) = F(ψ(t)), ψ(0) = x0.
(Proof in [3], pages 161-167).
It can be shown that, in some specific cases, the maximal interval I for which the Existence and
Uniqueness Theorem is valid, can be extend for all t ∈ R. (For proof see [3], pages 171-173).
Theorem 1.1.1 tells us that, given two solutions of the dynamical system ψ(t) and ϕ(t) with ψ(0) =
ϕ(t0), then, by uniqueness of the solutions, ψ(t) = ϕ(t + t0). This means that we can distinguish a
solution by a particular point in the state space that it passes through at a specific time. Without loss
of generality, taking t0 = 0 and x0, we denote by x(t; x0), the solution for which ψ(0) = x0. This is
referred to as giving an initial condition or initial value and so, in fact, Theorem 1.1.1 states that solutions
can be labelled by their initial conditions.
Definition 1.1.1 (Orbit). Consider a general autonomous equation ẋ = F(x), x ∈ Rn. Let x0 ∈ Rn be a
point in the phase space. The orbit through x0,O(x0), is defined as the set of points in the state space that
lie on the trajectory which passes through x0. More precisely: O(x0) = {x ∈ Rn : x = x(t; x0), t ∈ I},
where I ⊆ R is the maximal time interval.
This means that an orbit O(x0) is the graph of a solution of the differential equation starting from the
initial condition x0. The collection of all the qualitatively different trajectories of the system represents
the phase portrait.
Definition 1.1.2 (Fixed point). Consider a general autonomous equation ẋ = F(x), x ∈ Rn. This
equation is said to have a fixed point at x = x∗ if and only if F(x∗) = 0.
Fixed points are also referred to as equilibrium points, stationary points or critical points.
2
Definition 1.1.2 implies that x∗ corresponds to a solution that does not change in time, which is to
say that the velocity on the phase space is zero, F(x∗) = 0. The question of whether the system, when
perturbed, will remain close to this state leads to the definition of stability, i.e., of the local properties of
the orbits in the neighbourhood of the fixed point.
Definition 1.1.3 (Lyapunov stability of a fixed point). Let x∗ be a fixed point of the system ẋ = F(x),
x ∈ Rn. x∗ is said to be stable (or Lyapunov stable) if, given some � > 0, there exists a δ > 0 such that,
for any other solution of the system ψ(t), satisfying | x∗ − ψ(t0) |< δ, then | x∗ − ψ(t) |< � for t > t0.
A solution which is not stable will, of course, be unstable and at least some solutions starting nearby
will move away from it. Whenever the fixed point is found to be stable and every solution approaches
the fixed point for any nearby initial conditions then it is called asymptotically stable.
Definition 1.1.4 (Asymptotic stability of a fixed point). Let x∗ be a fixed point of the system ẋ = F(x),
x ∈ Rn. x∗ is said to be asymptotically stable if it is Lyapunov stable and, for any other solution of the
system ψ(t), there exists a constant δ such that, if | x∗ − ψ(t0) |< δ, then limt→∞ | x∗ − ψ(t) |= 0.
The main difference between Definition 1.1.3 and Definition 1.1.4 is that, near an asymptotically
stable fixed point, as t → ∞, all trajectories will eventually approach it. On the other hand, for a
Lyapunov stable fixed point, we only know that solutions starting sufficiently close to the fixed point will
remain close for all time but there is no guarantee that they will approach the fixed point as they could,
for instance, simply orbit around the fixed point.
Both these definitions apply only to autonomous systems since in non-autonomous systems δ and �
could, and in principle would, have explicit dependence on time and more care should be taken. However
throughout this work we will only focus on autonomous dynamical systems. Also, since most fixed points
in cosmological models are asymptotically stable, we will make no distinction between Lyapunov stable
and asymptotically stable, unless it is specifically needed.
Definition 1.1.5 (Heteroclinic orbits). Let x∗ be a fixed point of the system ẋ = F(x), x ∈ Rn.
A heteroclinic orbit is an solution ψ(t) for which there exist two fixed points x− and x+ such that
limt→−∞ ψ(t) = x− and limt→+∞ ψ(t) = x+. This simply means that an heteroclinic orbit is an orbit
connecting distinct fixed points. If the orbit connects one fixed point to itself it is called a homoclinic
orbit.
The concept of an invariant set plays a crucial role in the theory of dynamical systems.
Definition 1.1.6 (Invariant set). Consider a general autonomous equation ẋ = F(x), x ∈ Rn and let
S ⊂ Rn be a set. In this context, S is said to be invariant if for all x0 ∈ S we have x(t; x0) ∈ S for all
t ∈ R. If t ≥ 0 (t ≤ 0) then S is said to be a positively (negatively) invariant set. In other words, all
trajectories starting in the invariant set, will never leave the invariant set.
3
Definition 1.1.6 also asserts that an invariant set is some part of the state space which is not connected
to the rest of the state space by any orbit. Also, we can assert that if S is an invariant set and x0 ∈ S then
the orbit O(x0) belongs to S. This means that an invariant set can also be defined as a union of orbits.
Until now we have defined the mathematical concept of different types of stability but to study the
stability properties of a specific fixed point we need a methodology. For this purpose we introduce the
so-called linear stability theory which allows for a good physical interpretation of most cosmological
models.
1.1.1 Linear Stability Theory
We consider a general autonomous equation ẋ = F(x), x ∈ Rn. In order to determine the stability
of a given fixed point x∗(t) we need to understand the nature of trajectories close to the fixed point.
For this purpose, we linearise the system around the fixed point, which is to say that, assuming F(x) =
f1(x), ..., fn(x) to be continuously differentiable, we Taylor expand each fi(x) around the fixed point:
fi(x) = fi(x∗) +n∑j=1
∂fi∂xj
(x∗)uj +1
2!
n∑j,k=1
∂2fi∂xj∂xk
(x∗)ujuk + ..., (1.2)
where u = u1, ..., un is defined as u = x − x∗ and, of course, fi(x∗) = 0. The first order truncation of
equation (1.2) is called the linearisation of the differential equation at the fixed point x∗ and is a good
first approximation to the full system near x = x∗:
fi(x) ≈n∑j=1
∂fi∂xj
(x∗)uj . (1.3)
So, it is reasonable to expect that the behaviour of the linearisation at x = x∗ is a good approximation
of the behaviour of the non-linear system near x = x∗.
Therefore, an important object for linear stability theory is the stability matrix,M:
M =[∂fi∂xj
]=
∂f1∂x1
· · · ∂f1∂xn...
. . ....
∂fn∂x1
· · · ∂fn∂xn
. (1.4)
The stability matrix is an n × n matrix (where n is the dimension of the phase space) containing
information about each first order derivative of each function fi:Mij = ∂fi∂xj1. Accordingly, there are n
eigenvalues of this matrix which, when evaluated at the fixed point, will provide the information about
the stability of the system.
1The stability matrix is the Jacobian matrix of traditional vector calculus.
4
Theorem 1.1.2. Let x∗ be a fixed point of the system ẋ = F(x), x ∈ Rn and suppose that all of the
eigenvalues of the stability matrix evaluated at the fixed point,M(x∗), have negative real parts. Then,
the fixed point x∗ is asymptotically stable.
The proof for Theorem 1.1.2 can be found in [2] (pages 24, 25).
This gives us a tool to determine the stability of a specific fixed point. As a consequence we have
three distinct cases:
• If all of the eigenvalues ofM(x∗) have negative real parts then the fixed point is asymptotically
stable and is said to be an attractor.
• If all of the eigenvalues ofM(x∗) have positive (non-zero) real parts then the fixed point is said to
be a repeller.
• Finally, if at least two of the eigenvalues ofM(x∗) have non-zero real parts with opposite sign then
the fixed point is said to be a saddle point, meaning that it attracts trajectories in some directions
but repels them along others.
The previous characterisation only gives information about the stability of a fixed point given that
none of the eigenvalues ofM(x∗) have real part equal to zero. This leads us to the definition of hyper-
bolic fixed point:
Definition 1.1.7 (Hyperbolic fixed point). Let x∗ be a fixed point of the system ẋ = F(x), x ∈ Rn and
consider the stability matrix evaluated at the fixed point, M(x∗). Then x∗ is called a hyperbolic fixed
point if none of the eigenvalues ofM(x∗) have zero real part 2.
Stability properties can only be derived from linear stability theory whenever the fixed points in
study are hyperbolic, meaning that it fails for non-hyperbolic points and their stability properties should
be studied with alternative methods [2].
1.1.2 Bifurcations
Until now, we have only considered dynamical equations of the form (1.1) depending on a set of
dynamical variables x = x1, ..., xn. But besides dynamical variables, the dynamical equations of a
model can contain time-independent quantities. The value of these parameters is fixed for a specific
application of the model. For example, for an ecological model, one useful parameter would be the
growth rate of a specific population. When we wish to leave the parameter free, it is advantageous to
think of it as a continuous variable which is time-independent. The result is a set of dynamical equations
indexed by that parameter.2Note that this definition is made according to the linearised system, as hyperbolicity is a much broader concept [3].
5
Following this, consider the parametrised vector field:
ẋ = F(x;λ), x ∈ Rn, λ ∈ Rp, (1.5)
where F : Rn → Rn is a continuous differentiable function and again, n is the dimension of the system,
and p is the number of parameters: λ = λ1, ..., λp. Now suppose that the family (1.5) has a fixed point at
(x;λ) = (x∗;λ∗), i.e., F(x∗;λ∗) = 0. We wish not only to ask if this fixed point is stable or not but we
also want to know how its stability (or instability) will be affected as λ is varied.
If the fixed point is hyperbolic, according to Definition 1.1.7, we know that its stability can be deter-
mined by the sign of the eigenvalues of the stability matrix in the linear approximation. Indeed, when
F(x∗;λ∗) = 0 andM(x∗;λ∗) has no eigenvalues with zero real-part,M(x∗;λ∗) is an invertible matrix
and, by the Implicit Function Theorem, for λ sufficiently close to λ∗, there exists a unique function,
x(λ), such that F(x(λ);λ) = 0. By continuity of the eigenvalues with respect to the parameters, for λ
sufficiently close to λ∗,M(x(λ);λ) has no eigenvalues with zero real-part. Therefore, for λ sufficiently
close to λ∗, the hyperbolic fixed point (x∗;λ∗) of (1.5) persists and its stability type remains unchanged.
To summarise, in a neighbourhood of λ∗, an isolated fixed point of (1.5) persists and always has the same
stability type.
Therefore, the question of whether the stability and number of fixed points is changed when λ varies
is only relevant for non-hyperbolic fixed points. In this case, for λ near λ∗ (and for x close to x∗), the
dynamical behaviour could be completely altered.
Definition 1.1.8 (Bifurcation of a Fixed Point). A fixed point (x;λ) = (x∗;λ∗) of a parameter family of
n-dimensional vector fields is said to undergo a bifurcation at λ = λ∗ if the flow for λ near λ∗ and x near
x∗ is not qualitatively the same as the flow near x = x∗ at λ = λ∗. In this case, x∗ is called a bifurcation
point and the parameter value λ = λ∗ a bifurcation value.
Note that the condition that a fixed point is non-hyperbolic is a necessary but not sufficient condi-
tion for bifurcation to occur in parameter families of vector fields. Bifurcations are usually classified
according to how the stability and number of fixed points are changed.
As an example, in the simplest case, the one dimensional system,
dx
dt= f(x;λ), t > 0 (1.6)
where λ is a real parameter and f is some continuously differentiable function of x and λ. The fixed
points x∗ of equation (1.6) are found by setting f(x;λ) = 0. If fx ≡ ∂f∂x = 0 at λ = λ∗, then several
fixed points may exist corresponding to one single value of λ, in a neighbourhood of λ∗. This happens
because the Implicit Function Theorem does not apply when ∂f∂x (x∗;λ∗) = 0.
6
The representation of f(x;λ) = 0 is called the branching diagram. The intersecting branches are
named bifurcating solutions and the points of intersection (in which stability changes), are called bifur-
cation points.
In our definition, the bifurcation value λ∗ is defined according to,
fx(x∗;λ∗) = 0, f(x∗;λ∗) = 0.
But, by the Implicit Function Theorem, f(x∗;λ) = 0 implies λ = λ(x∗) whenever fx(x∗;λ) 6= 0, This
can be expressed by differentiating f according to x∗,
fx∗ + fλdλ
dx∗= 0. (1.7)
Equation (1.7) shows that, if fλ 6= 0, then at a bifurcation point where fx∗ = 0, dλdx∗ = 0.
Example 1.1.1 (Saddle-node bifurcation). Consider the one-dimensional quadratic equation,
dy
dt= f(y;λ) = λ− y2, (1.8)
for λ ≥ 0. Solving equation (1.8) equal to zero translates into f(y;λ) = 0, which renders the fixed
points,
y∗1 =√λ, y∗2 = −
√λ (1.9)
The bifurcation point λ = 0 gives the intersection of the two branches of fixed points whose existence
is allowed near λ = 0 and y = 0 by the Implicit Function Theorem as dfdy = −2y vanishes at y = 0,
where the fixed points collide giving rise to a single non-hyperbolic fixed point. Besides, dfdy (y∗1 ;λ) =
−2y∗1 = −2√λ and dfdy (y∗2 ;λ) = −2y∗2 = 2
√λ.
This defines the stability of each fixed point. For λ > 0, y∗1 (represented by the solid branch of the
parabola in Figure 1.1 (a)) is stable and y∗2 (represented by the dashed branch of the parabola in Figure
1.1 (a)) is unstable. As y∗1 and y∗2 always have opposite signs they will also have opposite stability
characters. Hence, one single branch of fixed points experiences a transition from stable to unstable and,
in particular, there is an exchange of stability at the bifurcation point y∗ = 0. Note that, at the bifurcation
point, dfdλ = 1 6= 0 and equation (1.7) impliesdλdy∗
= 0 there. As λ is varied, the two critical points y∗1
and y∗2 get closer together, collide and are mutually destroyed.
This is a standard example of a saddle-node bifurcation which represents the procedure by which
fixed points are “created” or “destroyed”.
Example 1.1.2 (Transcritical bifurcation). Consider the one-dimensional logistic equation,
7
λ
y*
(a) Saddle node bifurcation
λ
n*
(b) Transcritical bifurcation
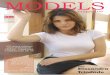
Figure 1.1: Bifurcation diagrams for the saddle node bifurcation described in Example 1.1.1 (left) andthe transcritical bifurcation described in Example 1.1.2 (right). A solid curve is used to represent a familyof stable fixed points whereas a dashed curve is used to highlight a family of unstable fixed points. Thevertical lines represent the flow generated by each system along the vertical direction.
dn
dt= f(n;λ) = λn− n2, (1.10)
where n represents the number of individuals in a given population. The parameter λ describes the
evolution of the population. If λ is relatively small then the population grows (dies) exponentially if
λ > 0 (λ < 0). If λ is big, the population grows too fast and eventually, it will become so large that
the growth rate drops due to lack of food income. The second term in (1.10), being non-linear, gives a
natural saturation of the exponential population growth.
The fixed points on equation (1.10) are found through f(n;λ) = 0:
n∗1 = 0, n∗2 = λ. (1.11)
These two fixed points coincide at λ = 0. This means that these two branches of fixed points
intersect at the bifurcation point λ = 0. Near λ = 0 and n = 0 the existence of these two branches is
allowed by the Implicit Function Theorem, because dfdn = 0 is when n = 0 and λ = 0, highlighting the
non-hyperbolic character of this fixed point.
Actually, we have,
df
dn(n∗1 , λ) = λ,
df
dn(n∗2 , λ) = −λ. (1.12)
By linear stability theory, the fixed point n∗1 is stable ifdfdn(n∗1 , λ) < 0 and the fixed point n∗2 is
stable if dfdn(n∗2 , λ) < 0. This translates into n∗1 being stable for λ < 0 and unstable for λ > 0 and
8
n∗2 being stable for λ > 0 and unstable for λ < 0. Hence, whenever n∗1 is stable n∗2 is unstable and
vice-versa. The two branches have exact opposite stabilities and exchange stability at the bifurcation
point λ = 0. A depiction of this behaviour can be found in Figure 1.1 (b).
Also, here, fλ = n = 0 at the bifurcation point, suggesting that, by equation (1.7), dλdn∗ could be
different from zero at this point. This is a typical example of a transcritical bifurcation and the logistic
equation is the canonical form of transcritical bifurcation.
1.2 Basics of General Relativity
General Relativity (GR), formulated in 1915 [6], is Albert Einstein’s theory of space, time and grav-
itation. It stands for a mathematical description of the three spatial dimensions plus one time dimension,
through four dimensional manifolds. This means that the three spatial dimensions and time are features
of a fundamental four-dimensional spacetime. This was soon considered to be a powerfully predictive
theory when it passed rigorous observational tests [7], namely, the recently detected gravitational waves
[8]. In GR, gravity is a manifestation of the curvature of spacetime itself, making it a purely geometrical
theory: locally, mass distorts spacetime, giving rise to a gravitational field, and on cosmological scales,
spacetime itself can be curved.
General Relativity rises as a generalisation of Einstein’s Special Relativity (SR) [9] in order to obtain
a coherent theory of gravitation. In GR the notions of distance and time between two spacetime points
in the manifold are encoded in the metric tensor, gµν , which is a function of the spacetime coordinates
xµ. In other words, the metric fixes the causal structure of spacetime (the light cones). For the four
dimensional manifold we take µ = 0, 1, 2, 3 and latin indices, i = 1, 2, 3, are used to denote spatial
coordinates.
We can define the determinant of the metric, g ≡ det(gµν) and the inverse of the metric, gµν , which,
given g 6= 0 (i.e., gµν invertible), is fully determined by the condition: gµαgαν = δνµ, where the symmetry
of gµν implies symmetry on the inverse, gµν . This means that the metric tensor and its inverse can be
used as a tool to raise or lower indices of a tensor, for example:
Xµ = gµνXν . (1.13)
Throughout this work we will rely on the Einstein notation, which states that when some index
appears twice in a single term, a summation of that term over all the values of the index is implied. For
example, for the case of the term in (1.13):
Xµ = gµνXν =3∑
ν=0
gµνXν . (1.14)
9
The separation between two points is defined according to the line element, ds,
ds2 = gµνdxµdxν , (1.15)
and is given by
`AB =
∫ BAds, (1.16)
where dxµ is an infinitesimal displacement vector in the direction of xµ.
In a curved spacetime, the generalisation of the partial derivative is the covariant derivative:
∇µXα = ∂µXα − ΓβµαXβ, ∇µXα = ∂µXα + ΓαµβXβ, (1.17)
respectively for covariant and contravariant tensors. In the previous expressions, Γλµν are the connection
coefficients, related to the parallel transport (transporting a given vector along a curve γ without any
change to its length or direction so as to obtain a parallel vector at each point of γ).
In order for the scalar product to stay invariant through parallel transport along any curve (which is to
say that its covariant derivative must vanish), we ask for compatibility between the covariant derivative
and the metric,
∇αgµν = 0. (1.18)
Assuming that the spacetime connection lower indices are symmetric and, according to the definition
of covariant derivative given in equation (1.17), this implies
Γλµν =1
2gλδ(∂νgδµ + ∂µgδν − ∂δgµν), (1.19)
which is the Levi-Civita connection, also referred to as Christoffel symbols of the second kind.
In the theory of General Relativity there is a very clear connection between the geometry of the
manifold, encoded in the metric tensor gµν , and the entire matter content of the Universe, expressed
by the so-called energy-momentum tensor, Tµν (EM). This relation is described by the Einstein field
equations (without a cosmological constant):
Gµν = Rµν −1
2gµνR =
8πG
c4Tµν , (1.20)
where G is the classical Newton’s gravitational constant, c is the speed of light in vacuum, Gµν is the
Einstein tensor, which encapsulates all curvature information, R and Rµν are the Ricci scalar and Ricci
tensor, defined in terms of the Riemann tensor Rρµσν , as follows:
Rρµσν = ∂σΓρνµ − ∂νΓρσµ + Γ
ρσλΓ
λνµ − Γ
ρνλΓ
λσµ, (1.21)
10
Rµν = Rλµλν , (1.22)
R = gµνRµν . (1.23)
Given this, expression (1.20) corresponds to a set of 16 equations. Actually, by assuming that the
Einstein tensor and the energy momentum tensor are symmetric we are left with a set of 10 equations.
Additionally, it can be shown that the Riemann curvature tensor also satisfies a set of differential identities
called the Bianchi identities,
∇λRρµσν +∇νRρµλσ +∇σR
ρµνλ = 0, (1.24)
which reduces the Einstein equations to a set of 6 independent non-linear differential equations. From
(1.24) it is possible to extract four conservation laws, commonly termed the contracted Bianchi identities:
∇µGµν = 0 =⇒ ∇µTµν = 0 , (1.25)
which can be interpreted as generalisations of the classical energy and momentum conservation laws.
The Riemann tensor describes the spacetime curvature and is given in terms of the connections,
which define the spacetime geodesics (trajectories of free particles). In GR, a free particle’s trajectory is
the generalisation of a straight line in a curved spacetime and is given by the geodesic equation
d2xα
ds2+ Γαµν
dxµ
ds
dxν
ds= 0, (1.26)
where ds is defined in equation (1.15). Equation (1.26) with Γαµν given by (1.19) is the geodesic equation
for Euclidean space. There are some privileged parameters u for which the geodesic equation has the
form d2xα
du2+ Γαµν
dxµ
dudxν
du = 0. These are known as affine parameters. For an affine parameter, ds/du is
constant, so one is taken along the geodesic at a constant sort of rate. ds2 contains information about the
causal structure of the spacetime, in the sense that any non-zero vector V µ is described as:timelike
null
spacelike
if gµνV µV ν
< 0
= 0
> 0.
(1.27)
For timelike structure, the length is called proper time whereas for spacelike structure it is termed proper
distance. It can be shown that a massive particle follows a timelike path through spacetime (and in
particular a free particle follows a timelike geodesic) whereas massless particles, such as photons, follow
a null geodesic (the tangent vectors to its path are null). We can not construct spacelike paths between
11
two events since, as they are spatially separated, the proper time is not defined (there is no worldline
connecting the events).
Note that the proper time for an observer is given by dτ2 = ds2/c2, implying that, sometimes, this
is a useful affine parameter to parametrise the geodesics. In General Relativity, Newton’s first law of
motion can be translated as “free particles follows geodesics in spacetime”. In fact, if we think of a local
inertial coordinate system, where we may neglect the terms proportional to Γαµν , the geodesic equation
(1.26) for the affine parameter τ reduces to d2xα/dτ2 = 0. For non-relativistic speeds dτ/dt ' 1 and
the geodesic equation yields d2xi/dt2 = 0 (i = 1, 2, 3), which is identified as the Newtonian equation
of motion of a free particle.
Given a specific metric, both the structure of spacetime and the motion of particles within it can be
deduced.
For more details regarding the formal geometrical details of General Relativity we refer the reader
to, for example, [9–14].
1.3 Standard Model of Cosmology - The FLRW model
This section is mainly based on [15–19].
Cosmology is the study of the universe, or cosmos, regarded as a whole. Modern theoretical cosmol-
ogy relies mainly on Einstein’s theory of gravitation and its cosmological implications [20].
There are no general solutions to the Einstein field equations, (1.20), but, among others, Einstein
realised that, in order for the field equations to give a coherent description of the Universe, some as-
sumptions were needed. The first simplification is that the Universe should look the same at each point
and in all directions. This is the Copernican Principle, commonly generalised to the Cosmological Prin-
ciple, which states that space can be assumed to be spatially homogeneous and isotropic on sufficiently
large scales. That is to say that there are no special positions in the Universe and, so, the cosmological
metric, needs to be one which describes a time varying universe and also one that is, at each time, spa-
tially homogeneous and isotropic. Taking only geometrical arguments, the most generic spacetime for a
homogeneous and isotropic Universe with matter uniformly distributed, as a perfect fluid is given by the
Friedmann-Lemaı̂tre-Robertson-Walker metric [21–23] and has the following form:
ds2 = −dt2 + a2(t)(
dr2
1− kr2+ r2dθ2 + r2sin2θ , dϕ2
), (1.28)
where t is the cosmic time, k ∈ {−1, 0,+1} is the spatial curvature and a(t) > 0 is the scale factor
which describes the expansion or contraction of the universe (defined in a way such that a(ttoday) = 1).
Hereafter we will choose units such that c = 1 (see Appendix A for more details regarding the system of
units). For k = 1 the universe is said to be spatially closed, spatially open for k = −1 and, if k = 0, it
12
is spatially flat. The set of coordinates (r, θ, ϕ) are called the comoving coordinates, i.e., the coordinates
for which r, θ, ϕ are constant throughout time evolution. For cosmological applications it will be useful
to consider the homogeneous, isotropic, spatially flat3 (k = 0) FLRW metric (1.28), which in Cartesian
coordinates reads
ds2 = −dt2 + a2(t)δijdxidxj , (1.29)
Secondly, as a consequence of the cosmological principle, the various matter-energy components of
the Universe are assumed to be well described, at large scales and with high precision, by a continuous
perfect fluid, to which spacial comoving coordinates are assigned. In particular, the corresponding EM
tensor is fully described by its energy density ρ(t) and isotropic (no shear nor viscosity) pressure p(t).
By assuming a perfect fluid, the energy-momentum tensor can be written as:
Tµν = (p+ ρ)uµuν − pgµν , (1.30)
where uµ is the fluid’s four-velocity defined as
uµ =dxµ√−ds2
, (1.31)
which satisfies uµuµ = −1 and, for a comoving observer, is given by uµ = (−1, 0, 0, 0). Given this, and
taking the metric in (1.29), Tµν is a purely diagonal tensor:
Tµν =
−ρ 0 0 00 p 0 0
0 0 p 0
0 0 0 p
(1.32)
When p and ρ can be related through an equation of state (EoS), p ≡ p(ρ), we speak of barotropic
fluids. This is usually considered to be a linear relation: p = wρ, where w is termed the equation of
state parameter. It is well-known that for a non-relativistic (dust-like) perfect fluid w = 0, while for a
relativistic (radiation-like) fluid w = 1/3. The Standard Model of Particle Physics excludes fluids with
w /∈ [0, 1] though some phenomenological models need to rely on non-physical values of w in order to
explain the astronomical observations.
The dynamical equations arising from the Einstein field equations (1.20) assuming a FLRW metric
(1.29) and possible spatial curvature k, consist of two coupled differential equations for the scale factor
a(t) and the functions ρ(t) and p(t). The Friedmann constraint follows from the time-time component
of the Einstein field equations and can be written as:3The hypothesis that the Universe is flat has been argued in the context, for instance, of CMB results, presenting a sharp
feature in the temperature anisotropy spectrum on the very angular scale predicted for a spatially flat Universe [24].
13
H2 =
(ȧ
a
)2=
8πG
3ρ− k
a2, (1.33)
where H ≡ ȧa is the Hubble parameter (with the convention that an over-dot denotes differentiation with
respect to t).
On the other hand, from the spatial (diagonal) components of the Einstein field equations we can
derive:
ä
a= −4πG
3(ρ+ 3p), (1.34)
which is known as the Raychaudhuri equation. This last equation is of great value as it gives a straight-
forward condition on the parameters in order to draw a distinction between a universe with an increasing
expansion rate, if ä > 0, or decreasing, if ä < 0. These two cases usually correspond to a Universe
undergoing accelerated or decelerated expansion respectively. According to equation (1.34), it is clear
that if ρ+ 3p > 0 the Universe must be decelerating whereas if ρ+ 3p < 0 the Universe is accelerating.
The positive inequality is shown to correspond to the strong energy condition [13]. By assuming a linear
equation of state all of this information can be translated as conditions imposed on the EoS parameter:
w > −1/3 for deceleration and w < −1/3 for acceleration. This gives constraints regarding the phys-
ically relevant solutions and one can note that ordinary matter (the one we are used to experience as
baryons and radiation), which presents 0 ≤ w ≤ 1/3 cannot be used to power an accelerating Universe.
From the conservation of the EM tensor, (1.25), and from equations (1.30), (1.33) and (1.34), we can
derive the continuity equation:
ρ̇+ 3H(ρ+ p) = 0, (1.35)
which expresses energy conservation throughout the evolution of the Universe. Taking into account the
EoS parameter and solving for ρ:
ρ ∝ a−3(w+1). (1.36)
Considering that for matter, i.e., a dust-like fluid (baryonic matter and dark matter4), pm = 0⇒ wm = 0,
and for a radiation-like or ultrarelativistic fluid (photons and neutrinos), pr = ρr/3 ⇒ wr = 1/3, we
have ρm ∝ a−3, for matter,
ρr ∝ a−4, for radiation.(1.37)
4This concept will be introduced in the next section.
14
This is an easy way of concluding that, for this scenario, in a sufficiently distant past, the ultrarelativistic
species were dominant over the matter species and, when the scale factor became sufficiently large, the
matter fluids became the dominant contribution to the content of the Universe.
An evolution equation for the scale factor can be derived for a flat Universe introducing (1.36) into
(1.33) and solving for a(t):
a(t) ∝ t2
3(w+1) , (1.38)
which is valid whenever w 6= −1. Hence, the scale factor depends on time through a power-law solution
and, in particular, a(t) ∝ t2/3, for matter,
a(t) ∝ t1/2, for radiation.(1.39)
Equation (1.36) is only valid for the case where there is only one perfect fluid characterised by an
EoS parameter w, appearing in the Einstein equations (1.20). In principle, there will be multiple fluids
sourcing the cosmological equations. In that case, the total energy momentum tensor present in the
Einstein equations, has to account for an individual energy momentum tensor for each fluid:
Tµν = T(1)µν + T
(2)µν + ...+ T
(n)µν , (1.40)
where n is the number of species in the theory. In this case, the conservation equation (1.25) implies the
conservation of the total energy momentum tensor, i.e., of the sum of the energy momentum tensors for
each fluid:
∇µTµν = 0 =⇒ ∇µ(T (1)µν + T
(2)µν + ...+ T
(n)µν
)= 0. (1.41)
This means that we have no information on whether the energy momentum tensor for a single fluid
is individually conserved. For example, considering a theory with only two fluids, T (1)µν and T(2)µν :
∇µTµν = ∇µ(T (1)µν + T
(2)µν
)= 0 =⇒ ∇µT (1)µν = Qν and ∇µT (2)µν = −Qν , (1.42)
where Qν stands for the exchange of energy-momentum between both fluids. Indeed, whenever there
is an interaction present, the form of Qν should not be arbitrary, but should account for the physical
properties of each fluid and how that could lead to an interaction.
Taking into account the different fluids present in the Universe, equation (1.33) can be rewritten as
1 = Ωm(a) + Ωr(a) + Ωk(a), (1.43)
15
where
Ωk ≡ −k
H2a2(1.44)
and
Ωm,r ≡8πG
3H2ρm,r (1.45)
are the density parameters for curvature, matter fluids and ultrarelativistic fluids. This definitions, to-
gether with the previous analysis, suggests that we can rewrite (1.33) as
H2 = H20(Ωk0a
−2 + Ωm0a−3 + Ωr0a
−4) , (1.46)where Ωk0 , Ωm0 and Ωr0 correspond to the value of the parameters defined in (1.44) and (1.45) today,
and H0 also represents the value of the Hubble rate at present times.
1.4 Dark Energy
The discovery of the accelerated expansion of the Universe by the Supernova Cosmology Project [25]
and by the High-z Supernova Search Team [26] in 1998 made drastic changes regarding our knowledge
of the Universe. Currently, our best guide comes from the latest release of parameter estimates coming
from the Planck satellite observations [27, 28] of the cosmic microwave background (CMB). Based on
these, and other cosmological observations, it is very well established that the Universe is currently
undergoing a period of accelerated expansion.
One of the main challenges in cosmology concernes the determination of the composition of the
Universe. As shown above, ordinary matter such as dust or radiation cannot be the power source for ac-
celerating our Universe. Consequently, these results indicate that there seems to exist an unknown source
of energy/matter component, which happens to be the most abundant among the known constituents of
the Universe. Such an energy source would need to have an EoS characterised by an effective negative
pressure in order to explain the observations. It is impossible to build a macroscopic type of matter which
behaves in this manner considering only particles of the Standard Model, i.e., all types of matter we have
detected so far. Such an unknown component is generally classified under the broad heading of Dark
Energy (DE) [29]. These results could also be explained by a more general gravitational theory, studied
in the formalism of Modified Theories of Gravity [30]. DE attempts to explain the late-time acceleration
as a mass-energy component on the right side of the Einstein field equations.
Einstein himself attempted to solve this problem (1917, although it was not a problem at the time
[20]) while aiming for a static cosmological solution. Such a static situation still requires a component
16
with negative pressure, more precisely a combination with w = −1. Einstein chose to rule this rather
odd equation of state as non-physical and instead introduced his famous cosmological constant Λ to the
gravitational action. By doing so we get a set of modified Einstein field equations (1.20),
Rµν −1
2Rgµν + Λgµν = 8πGTµν . (1.47)
This static solution was found to be unstable. However, as was later discovered [31, 32], the Universe
is not static, but we can rely upon Einstein’s thinking to try to explain the accelerated expansion.
One of the main problems revolves around quantum field theory arguments, predicting the existence
of a vacuum energy density associated with quantum fields, which should make a contribution to the
effective EM tensor. A problem was found when such a vacuum contribution was theoretically estimated,
leading to a discrepency of about 120 orders of magnitude, when compared to the experimental value
of the cosmological constant [33]. This is the famous fine tuning problem of the cosmological constant
[34–38].
Inspired by Einstein’s formulation, the simplest model of dark energy is represented by the cosmo-
logical constant Λ, which is now related to a cosmological source with pΛ = −ρΛ, or wΛ = −1, and is
called ΛCDM model, where CDM stands for cold dark matter (and cold stands for non-relativistic).
Dark matter is an undetected entity which is needed at galactic and cosmological scales in order to
correctly fit the astronomical data [27, 28, 39, 40]. The measurements of the rotation curves of galaxies
are not in agreement with the theoretical predictions based on Newtonian mechanics. The observed
behaviour can only be explained if more mass is present. But this type of mass seems to neither emit nor
absorb radiation and therefore cannot be detected through electromagnetic interaction.
Assuming a ΛCDM model, the most recent astronomical observations seem to point for a cosmo-
logical constant model with ΩΛ0 = 0.6847 ± 0.0073, for its present density parameter [28]. In fact, by
combining the Planck data [28] with other observational data such as Type-Ia supernovae, it is found
w = −1.03 ± 0.03 for the EoS of dark energy, which is in agreement with the results for a cosmo-
logical constant. For the remainder content of the Universe it is found, Ωb0h2 = 0.02237 ± 0.00015
for baryonic content and ΩDM0h2 = 0.1200 ± 0.0012 for cold dark matter, where h = H0/(100 km
s−1 Mpc−1) is the usual way of introducing the observational uncertainty related to the Hubble param-
eter, which is constrained as H0 = 67.36 ± 0.54 km s−1 Mpc−1. The neutrino mass is also tightly
constrained as mν < 0.12 eV. These observations also suggest that the Universe is spatially flat, with
Ωk0 = 0.001± 0.002, which is a good argument to take k = 0 in the metric (1.28) and, consequently, in
(1.33).
In this scenario, at early times, the ultrarelativistic species prevailed over all the others and, when
the scale factor became sufficiently large, the matter fluids became the dominant contribution to the
17
content of the Universe, until very recently, when the dark energy component started to dominate. But,
as mentioned, in the standard ΛCDM model of cosmology, the Universe at the present day appears to
be extremely fine tuned, as this cosmological constant appears to have begun dominating the universal
energy at a very specific moment. The ΛCDM model is also known to present some conceptual problems,
such as the cosmic coincidence problem [41, 42]. In attempts to avoid these problems, the cosmological
constant is often generalised to a dynamical scalar field, whose time evolution could more naturally result
in the observed energy density today. The dynamics of the evolution of the Universe under the ΛCDM
model can be found, for example, in [43].
1.4.1 Quintessence Field and Tachyon Field
Scalar fields, describing scalar (spin 0) particles, are extremely important entities in modern physics.
Relevant examples of scalar fields are the recently detected Higgs field [44], responsible for the mech-
anism of providing mass to the particles of the Standard Model of Particle Physics, or the inflaton,
considered to be the scalar field that drives inflation [45]. Both these scalar fields play a critical role in
models of fundamental physics. The inflaton, in particular, gives rise to dynamics similar to dark energy,
since both have to be responsible for a period of accelerated expansion. Additionally, there is a precedent
of solving problems related to missing energy by hypothesising a new particle or field, as was the case
with the neutrino and dark matter (which still awaits proper detection). Scalar fields were first considered
in cosmology mainly in the context of a time varying cosmological constant [46–48]. For this reason, it
seems reasonable to assume that dark energy could also be described by a dynamical scalar field, varying
slowly along some potential V (φ), instead of the cosmological constant. This dynamical scalar field
should account for the missing energy contribution needed to preserve flatness in the Universe. This
mechanism is similar to slow-roll inflation in the early Universe [49], but the difference is that non-
relativistic matter (dark matter and baryons) cannot be ignored in order to properly discuss the dynamics
of dark energy. The DE equation of state varies dynamically, making these models distinguishable from
the standard ΛCDM model.
Another important motivation to consider a dynamical scalar field is the so-called “coincidence prob-
lem”, which concerns the initial conditions required to explain the value of the energy densities of matter
and dark energy today. In other words, it seems to be an incredible coincidence that currently the energy
densities of dark energy and dark matter are comparable in magnitude. For the case of the cosmological
constant, the only possible option is to extremely fine tune the ratio of energy densities at the end of
inflation. On the other hand, a dynamical scalar field could, in principle, couple to other forms of energy
(directly or simply through gravitational interaction), granting the possibility of a DE component which
naturally adjusts itself to reproduce the inferred energy density today. This can be achieved, for instance,
18
with a DE model with attractor-like solutions which reproduce the energy densities for a very wide range
of initial conditions.
Regarding this, scalar field based theories of dark energy are most commonly described by a canoni-
cal scalar field φ, the quintessence field [50], which is the simplest scalar field scenario, and is described
by a Lagrangian of the form:
Lquin = −1
2∂µφ∂
µφ− V (φ). (1.48)
Through a simple analogy with special relativity, it is immediately clear that this represents a consis-
tent generalisation of the classical Lagrangian of a non-relativistic particle,
L =1
2q̇2 − V (q), (1.49)
where q stands for generalised coordinates in the Hamiltonian formulation.
It goes without saying, that cosmological models which rely on a canonical scalar field in order to
account for the late time acceleration, fall under the cathegory of the so-called quintessence models.
These type of models were first introduced in [46, 51]. Some sample models with quintessence applica-
tions, such as quintessence driven inflation or dynamical quintessence models with different potentials
can be found in [52–58]. Throughout this work we will make use of some dynamical variables to de-
scribe quintessence models, which were first introduced in [59–63]. Different models can differ from
each other on the choice of the potential V (φ) in the Lagrangian (1.48). The simplest case is the one for
an exponential potential and was studied, for example, in [59, 64, 65] and for a power law potential in
[56, 60, 66, 67]. For other potentials see, for example [55, 62, 64, 68–78].
Analogously, one could look for a natural generalisation of the Lagrangian for a relativistic particle:
L = −m√
1− q̇2, (1.50)
with energy E = m/√
1− q̇2 and momentum p = mq̇/√
1− q̇2, related by E2 = p2 +m2.
This can be generalised for a scalar field and written as
Ltach = −V (φ)√
1 + ∂µφ∂µφ, (1.51)
where the field φ is termed the tachyon field.
This relativistic description allows for massless particles with a finite well-defined energy given by
the particles momentum: E2 = p2. This can be transposed to field theory by taking the equivalence
q(t) −→ φ and q̇2 −→ −gµν∂µφ∂νφ where φ is a scalar field which, by means of relativistic invariance,
could depend on both space and time. This also means that it is possible to treat the mass as a function
of the scalar field [79], through V (φ).
19
This approach takes us to the so called tachyon scalar field which is widely studied in the context
of string theory, due to its crucial role in the Dirac-Born-Infeld (DBI) action, used to describe the D-
brane action [80–90]. Tachyons were originally proposed as hypothetical particles which could travel
faster than light. This has turned them into a theoretical illness for a long time. As explained above,
in the context of Field Theory, this has acquired new meaning and tachyons are associated with the
description of quantum states with negative mass squared. This translates into a vacuum instability
which is represented by the negative sign in (1.51). The potential is initially at a local maximum, i.e., the
field is very carefully balanced at the top of the potential and any small perturbation will destabilise the
system and make the field roll towards the local minimum (e.g. the mexican hat potential). Through this
process the quanta become well-defined particles with a positive, real-valued mass.
It has already been showed that tachyons could play a useful role in cosmology [79, 91–110].
Tachyons as the source of dark energy have also been the focus of many studies [110–114]. In [115]
a complete dynamical study of a dark energy scenario in the presence of a tachyon field and a barotropic
perfect fluid for specific forms of the potential was performed. This was also done in [116] for a general
form of the potential. For the tachyon field, the simplest case corresponds to the inverse square potential,
which was studied with dynamical system techiques, for example, in [114, 115]. Other forms for the
potential were considered in [117, 118].
There has been great activity in this area, motivated by explaining the accelerated expansion of the
Universe without the problems of the cosmological constant. That is exactly what we aim for in this
work, by considering dark energy models described by the quintessence field and the tachyon field, with
the addition of allowing matter to naturally interact with dark energy through a conformal or disformal
transformation of the metric.
20
Chapter 2
Conformal and Disformal
Transformations
In this Chapter we will focus on the topic of transformations of the metric tensor. We start by giving
an introduction to the Lagrangian formalism of GR, based on the Einstein-Hilbert action, from where
we extract the previously introduced Einstein field equations. In the early Chapters we have argued the
possibility of having scalar fields present in our Universe. This will change the Lagrangian formalism of
the theory, which departs from standard GR and, as we will see in further detail, leads to the concept of
frames, i.e., theories which can be related by a metric transformation. In particular, when the action can
be cast into the usual Einstein-Hilbert action plus the terms related to the scalar field, the scalar field is
said to be minimally coupled to gravity and we speak of the Einstein frame. On the other hand, if it is the
matter sector which we write separately, shifting the effect of the scalar field into the gravitational sector,
then the field is said to couple minimally to matter and, in that case, we speak of the Jordan frame. In
this work, we discuss the so-called conformal transformations of the metric and its generalisation, the
disformal transformations. The use of conformal/disformal transformations has become conventional in
the literature regarding alternate theories of gravity based on GR. Typically, the transformation can be
accomplished through a function(s) of the fundamental scalar field, already present in the theory. We
will see that metric transformations are of paramount importance since they can be used to simplify the
form of the action and relate apparently different theories.
In the end of this Chapter we discuss the concept of interacting dark energy (IDE) theories and how
they can arise naturally from metric transformations. We also present a succinct review on the models of
IDE present in the literature.
21
2.1 Lagrangian Formalism of GR
In Classical Field Theory [119], the information regarding the dynamics of a given system can be
encapsulated in a mathematical function called the Lagrangian, L, which is a function of the generalised
coordinates, their time derivatives and time. In this formalism we can turn to Hamilton’s Principle, which
is formulated in terms of an action integral,
S =
∫ t2t1
L(qi(t), q̇i(t))dt, (2.1)
where qi represents the generalised coordinates. This principle states that the evolution of a system
described by N generalised coordinates, q1, ..., qN , between two specific states qi(t1) and qi(t2), at two
specified times t1 and t2, is characterised by the action being stationary under small variations in the
path: qi(t) 7−→ qi(t) + δqi(t), with δqi(t1) = δqi(t2) = 0. This condition can be written as
δS =
∫ t2t1
δLdt = 0. (2.2)
For this reason, this is also referred to as the “Principle of least action”. The variation of the action
leads to
δS =
∫ t2t1
[∂L
∂qiδqi +
∂L
∂q̇iδq̇i
]dt. (2.3)
It is possible to rewrite the second term in (2.3) as∫ t2t1
∂L
∂q̇iδq̇idt =
∫ t2t1
∂L
∂q̇iδ
(dqidt
)dt =
[∂L
∂q̇iδqi
]t2t1
−∫ t2t1
d
dt
∂L
∂q̇iδqidt. (2.4)
We find that the term[∂L∂q̇iδqi
]t2t1
vanishes, since we are considering δqi(t1) = δqi(t2) = 0 and so we
get
δS =
∫ t2t1
[∂L
∂qi− ddt
∂L
∂q̇i
]δqidt = 0. (2.5)
In order for δS = 0 to hold for any arbitrary variation δqi, the term inside the curved brackets in
(2.5) has to vanish. This yields the Euler-Lagrange equations:
∂L
∂qi− ddt
∂L
∂q̇i= 0 (2.6)
In field theory, the generalised coordinates qi(t) are replaced by a set of spacetime dependent fields
Φi(xµ), and S becomes a functional of these fields. The Lagrangian is now expressed as an integral
over space of a Lagrangian density L, which is a function of the fields Φi and their spacetime derivatives
∂µΦi,
22
L =
∫d3xL(Φi, ∂µΦi) =⇒ S =
∫d4xL(Φi, ∂µΦi). (2.7)
Analogously, it is possible to derive the Euler-Lagrange equations,
∂L∂Φi− ∂µ
(∂L
∂(∂µΦi)
)= 0. (2.8)
For a more detailed description see, for example, [10].
Variational principles are used to derive the equations describing the motion of particles and fields in
theoretical physics, and GR is not an exception. We need to define the Lagrangian density from which we
derive the Einstein field equations. Let us consider a four-dimensional spacetime manifoldM endowed
with a metric gµν , accommodating the Levi-Civita connection, i.e, ∇λgµν = 0. The Lagrangian density
is assumed to be a function of the metric and of its derivatives up to second order.
The relevant action should be a scalar. The simplest choice, from both the mathematical and physical
points of view, is the Ricci scalar curvature R, defined in (1.23), which includes only first and second
order derivatives of the metric tensor. Thus, we introduce the Einstein-Hilbert action plus a matter-energy
source, defined as
S = SEH + SM =
∫Ud4x√−g
M2p2R+
∫Ud4x√−gLM, (2.9)
where U is a compact region of the manifold, Mp ≡ 1/√
8πG,√−g is the invariant volume element
defined in terms of the determinant of the metric g, R is the Ricci scalar and LM is the Lagrangian density
for matter and energy.
The field equations are obtained from the variation of the action (2.9) through the principle of least
action, by imposing that the metric and its first derivatives are held fixed on the boundary ∂U ,
δS = δSEH + δSM = 0. (2.10)
We will focus first on the Einstein-Hilbert action:
δSEH =M2p2
∫Ud4x
[√−gδR+Rδ
√−g]. (2.11)
The term pro