Embed Size (px)
Citation preview

1. Soporta encoder incremental AB y efecto Sensor Hall.2. Bus de comunicación CAN o RS485 Modbus, avanzada
protección contra ruido.3. Doble interfaz de alimentación y comunicación
Plug & Play.4. Algoritmo eficiente para el control de velocidad.5. Programación y monitorización mediante panel display.6. Protección contra:
• Sobrecorriente• Sobretensión• Cortocircuitos• Sobretempetaruta• Sobrecarga
/!w!/¢9wN{¢L/!{
Corriente nominalCorriente máximaTensión de salida
Tensión nominalTensión servicio
ESPECIFICACIONES TÉCNICAS
Entrada
Salida
5ŜǎŎNJƛLJŎƛƽƴDC 48 V/24 VDC 18 ~ 60V
10 A30 A
0 ~ Tensión entrada
w#tL5h ¸ C[9·L.[9Σ {h[¦/Ljb 9{¢!.[9 ¸ 9CL/L9b¢9MOTORES BRUSHLESS
DRIVER PARA RODILLOS MOTORIZADOS

ESPECIFICACIONES TÉCNICAS
EC05Z000
Serie EC
Tensión de entrada
Potencia nominal
CAN
RS 485
Encoder inc.
Sensor Hall
ESPECIFICACIONES EC-05Z0005-*-*
Entrada
Salida
Tensión nominal
Rango tensión permitido
Corriente nominal
Corriente máxima
Modos decomunicación
DC 48 V / 24 V
Velocidad hasta 1M baudios. Protocolo CAN Open y protocolo libre.
Uso interior, evitar luz solar y zonas con: polvo, gases, aceites, vapor de agua y agua salada.
RS485
CAN BUS
DC 18 ~ 60 V
10 A
30 A
Encoder incremental AB / Sensor Hall
Velocidad hasta 115.2k baudios. Compatible con Modbus RTU y ASCII.
Funciones de protección Sobrecorriente, sobretensión, baja tensión, sobrecalentamiento, sobre carga.
DC 60V±2V
Fusible reemplazable incorporado
Motor brushless / Servomotor
Lugar de uso
Altitud
Temperatura de uso
Humedad
Temperatura de almacenamiento
Grado IP
RefrigeraciónCarcasa
Condicionesambientales
IP20
Reducción del 10% de potencia por cada 1000 metros de altura.
Parámetros configurables, posibilidad de operar y observar el accionamiento.
Desde -10ºC hasta +40ºC. 40~50 con derating.
Sin ventilador. Si el consumo de corriente es elevado, el equipo requiere refrigeración asistida.
Modo de instalación Instalación horizontal
-40ºC ~ 70ºC
5% ~ 95 % HR
Seguridad eléctrica
Tipo de motor
Señal de realimentación
Resistencia de frenado Opcional. Para cargas con cambios bruscos.
Tensión de frenado
Panel de operación
CLEH

RUIIPOWER
001
D
34
1 �
5
102
92
@
loc+I lHI I loc+I lHI 1
@
.,,__ '
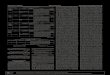
DIMENSIONES DEL EQUIPO

(X6)
(X7)
(X8)
TERMINALES
Interfaz Esquema Nombre Función / Pin Interfaz Esquema Nombre
Interfaz demotor
(X1)
Interfaz de resistencia
defrenado
(X2)
Interfaz delSensor Hall
(X3)
Interfaz decomunicación
(X4, X5)
CANH
CANL
CAN
Terminal tierra
485-
485+
Cableado delSensor Hall
Entrada resistencia de freno externo
InterruptorDIP
Interfaz delencoder
Interfaz de desarrollo de software
Interfaz de teclado de depuración
SW1 ON. Cortocircuita CAN_GND de driver y bus.
SW2 ON. Resistencia terminación 120 Ohm integ.
Int. Descarga
Int. Debug
Conexión doble de motor
Diagrama

![Minuta Edital da Prefeitura · ZZZ LGLE RUJ EU E1s > K Z'K Z KEd j K E Ñ /d E^ W ^K dKd > W Z&/> D1E/DK WZKs K Z d Z } v Z ] u v } _ ( ] } ] } o ] ( ] ] } _ ( ] }](https://img.document.onl/doc/110x75/6000076119be4f382d11dc25/minuta-edital-da-prefeitura-zzz-lgle-ruj-eu-e1s-k-zk-z-ked-j-k-e-d-e.jpg)


![Z 'h> D EdK K WZK'Z D Z > /KE D EdK K E K K Z ^/> ^ X X t ... · z 'h> d edk k wzk'z d z > /ke d edk k e k k z ^/> ^ x x t wkedk wz sk ^ µ u ] } / x /^wk^/ o ^ ' z /^ î // x w z](https://img.document.onl/doc/110x75/5e09d29899bc0f67a0138942/z-h-d-edk-k-wzkz-d-z-ke-d-edk-k-e-k-k-z-x-x-t-z-h.jpg)



![W>E K Z hW Z K:h / /> 'ZhWK hdhZ/t uZ µ }:µ ] ]o · wshuvGklGylj|wlyhÍÉvGq|kpjphsGkvGny|wvGi|{|ypUG W>E K Z hW Z K:h / /> 'ZhWK hdhZ/t uZ µ }:µ ] ]o WK Z:h / /Z /K K ^d K KW](https://img.document.onl/doc/110x75/5fd90017704090003509a720/we-k-z-hw-z-kh-zhwk-hdhzt-uz-o-wshuvgklgyljwlyhvgqkpjphsgkvgnywvgiypug.jpg)

![Ks ZEK K ^d K 'K/ ^ ^ Z d Z/ ^d K D/E/^dZ K ~^ /d > EKZD ...€¦ · 'Ks ZEK K ^d K 'K/ ^ ^ Z d Z/ ^d K D/E/^dZ K ~^ /d > EKZD d/sK E Ñ í l î ì í õ r ^W r ' W Z µ o } & ]](https://img.document.onl/doc/110x75/5f8565188bbaf2392900076a/ks-zek-k-d-k-k-z-d-z-d-k-dedz-k-d-ekzd-ks-zek-k-d-k.jpg)

















