Embed Size (px)
Citation preview

MS211 - Cálculo NuméricoAula 6 – Variações do Método da Eliminação de Gauss e da
Fatoração LU.
Marcos Eduardo Valle

O método da eliminação de Gauss e a Fatoração LU podem seradaptados para certos tipos de matrizes que surgem em muitassituações práticas.
Nesse casos, informações adicionais sobre a estrutura da matrizsão consideradas de forma a reduzir o esforço computacional dométodo numérico.
Na aula de hoje, veremos variações do método da eliminação deGauss e da fatoração LU.
Matriz Diagonalmente Estritamente Dominante
Para algumas matrizes, o método da eliminação de Gauss podeser aplicado sem a estratégia de pivoteamento parcial.
Definição 1
Dizemos que A ∈ Rn×n é uma matriz diagonalmenteestritamente dominante se
|aii | >∑j 6=i
|aij |, ∀i = 1, . . . ,n.

Exemplo 2
Determine quais matrizes são diagonalmente estritamentedominante:
A =
[2 −1 0−1 2 −10 −1 2
], B =
[7 2 03 5 −10 5 −6
]e C =
[6 4 −34 −2 0−3 0 1
].

Exemplo 2
Determine quais matrizes são diagonalmente estritamentedominante:
A =
[2 −1 0−1 2 −10 −1 2
], B =
[7 2 03 5 −10 5 −6
]e C =
[6 4 −34 −2 0−3 0 1
].
Resposta: A única matriz diagonalmente estritamentedominante é a matriz B.

Teorema 3Se A ∈ Rn×n é uma matriz diagonalmente estritamentedominante, então A é não-singular. Sobretudo, o sistema linearAx = b pode ser resolvido usando o método da eliminação deGauss sem pivoteamento.
A demonstração desse teorema pode ser encontrada em:“Análise Numérica, R. L. Burden e J. D. Faires. Editora Pioneira,2003”.
Matriz Simétrica
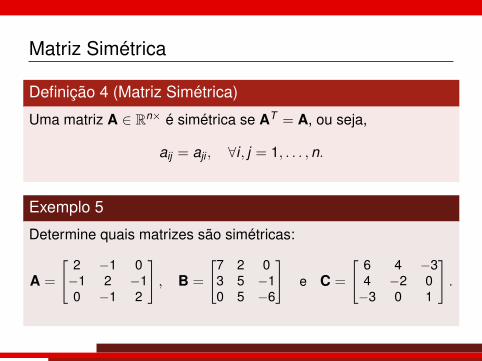
Definição 4 (Matriz Simétrica)
Uma matriz A ∈ Rn× é simétrica se AT = A, ou seja,
aij = aji , ∀i , j = 1, . . . ,n.
Exemplo 5
Determine quais matrizes são simétricas:
A =
[2 −1 0−1 2 −10 −1 2
], B =
[7 2 03 5 −10 5 −6
]e C =
[6 4 −34 −2 0−3 0 1
].

Matriz Simétrica
Definição 4 (Matriz Simétrica)
Uma matriz A ∈ Rn× é simétrica se AT = A, ou seja,
aij = aji , ∀i , j = 1, . . . ,n.
Exemplo 5
Determine quais matrizes são simétricas:
A =
[2 −1 0−1 2 −10 −1 2
], B =
[7 2 03 5 −10 5 −6
]e C =
[6 4 −34 −2 0−3 0 1
].
Resposta: As matrizes A e C são simétricas.

Matriz Definida Positiva
Definição 6 (Matriz Definida Positiva)
Uma matriz A ∈ Rn×n é definida positiva se xT Ax > 0 para todox ∈ Rn, x 6= 0.
Teorema 7 (Decomposição de Cholesky)
Se A ∈ Rn×n é uma matriz simétrica e definida positiva, então Apode ser decomposta de forma única no produto GT G, em que Gé uma matriz triangular superior com diagonal positiva.
Pode-se demonstrar o teorema acima usando a fatoração LU.
A demonstração pode ser encontrada em: “Cálculo Numérico –Aspectos Teóricos e Computacionais, M. Ruggiero e V. Lopes, 2aedição, Editora Pearson, 1997.”

Cálculo do Fator de Cholesky
Seja A ∈ Rn×n uma matriz simétrica e definida positiva.
Vamos admitir que podemos escrever A = GT G, ou seja,a11 a21 . . . an1a21 a22 . . . an2
......
. . ....
an1 an2 . . . ann
=
g11g12 g22
......
. . .g1n g2n . . . gnn
g11 g12 . . . g1ng22 . . . g2n
. . ....
gnn
Efetuando o produto por colunas, encontramos:

• Primeira coluna:a11a21
...an1
=
g11g12 g22
......
. . .g1n g2n . . . gnn
g110...0
=
g2
11g12g11
...g1ng11
Logo,
g11 =√
a11 e g1j =a1j
g11, j = 2, . . . ,n.

• Segunda coluna:a12a22a32
...an2
=
g11g12 g22g13 g23 g33
......
. . .g1n g2n g3n . . . gnn
g12g220...0
=
g11g12
g212 + g2
22g13g12 + g23g22
...g1ng12 + g2ng22
Logo,
g22 =√
a22 − g212 e g2j =
a2j − g1jg12
g22, j = 3, . . . ,n.
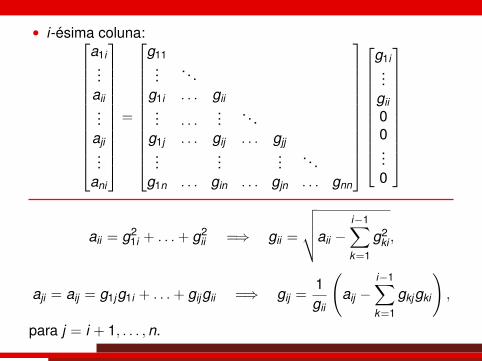
• i-ésima coluna:
a1i...
aii...
aji...
ani
=
g11...
. . .g1i . . . gii... . . .
.... . .
g1j . . . gij . . . gjj...
......
. . .g1n . . . gin . . . gjn . . . gnn
g1i...
gii00...0
aii = g21i + . . .+ g2
ii =⇒ gii =
√√√√aii −i−1∑k=1
g2ki ,
aji = aij = g1jg1i + . . .+ gijgii =⇒ gij =1gii
(aij −
i−1∑k=1
gkjgki
),
para j = i + 1, . . . ,n.

Fatoração de Cholesky
Entrada: Matriz A ∈ Rn×n simétrica e definida positiva.para i = 1 : n faça
• gii =
√√√√aii −i−1∑k=1
g2ki .
para j = i + 1 : n faça
• gij =1gii
(aij −
i−1∑k=1
gkjgki
).
fimfimSaída: Matriz G triangular superior com diagonal positiva.

Exemplo 8
Determine, se possível, a fatoração de Cholesky das matrizes
A =
2 −1 0−1 2 −10 −1 2
e C =
6 4 −34 −2 0−3 0 1
.

Exemplo 8
Determine, se possível, a fatoração de Cholesky das matrizes
A =
2 −1 0−1 2 −10 −1 2
e C =
6 4 −34 −2 0−3 0 1
.Resposta: Temos que A = GT G em que
G =
√
2 −1√2
0√32 −
√23
2√3
.Ao tentar fatorar a matriz C, encontra-se a raiz quadrada de umnúmero negativo. Logo, embora simétrica, C não é definidapositiva.

A fatoração de Cholesky pode ser usada para verificar se umamatriz é simétrica e definida positiva; se o método falhar, ahipótese é falsa!
A fatoração de Cholesky requer a metade do número deoperações efetuadas na fatoração LU!
Conhecendo a fatoração de Cholesky, o sistema Ax = b éresolvido em dois estágios:1. GT y = b.2. Gx = y.
No GNU Octave, a fatoração de Cholesky de uma matriz Asimétrica e definida positiva é obtida através do comando:» G = chol(A)

Matriz Banda
Definição 9 (Matriz Banda)
Dizemos que A ∈ Rn×n é uma matriz banda se existem inteiros pe q, com 1 < p,q < n, tais que
aij = 0, se i > j + p ou j > i + q.
O valor p + q + 1 é chamado tamanho da banda. Além disso, p échamado tamanho da banda inferior e q é o tamanho da bandasuperior.
Em muitas situações, encontramos matrizes banda que sãotambém diagonalmente dominante ou simétrica e definidapositiva.

Exemplo 10
Determine quais matrizes são banda e, no caso afirmativo, otamanho da banda:
A =
[2 −1 0−1 2 −10 −1 2
], B =
[7 2 03 5 −10 5 −6
]e C =
[6 4 −34 −2 0−3 0 1
].

Exemplo 10
Determine quais matrizes são banda e, no caso afirmativo, otamanho da banda:
A =
[2 −1 0−1 2 −10 −1 2
], B =
[7 2 03 5 −10 5 −6
]e C =
[6 4 −34 −2 0−3 0 1
].
Resposta: As matrizes A e B são matrizes banda comp = q = 1, ou seja, o tamanho da banda é p + q + 1 = 3.

Definição 11 (Matriz Tridiagonal)
Uma matriz banda A ∈ Rn×n com p = q = 1 é chamada matriztridiagonal.
De um modo geral, uma matriz A ∈ Rn×n tridiagonal é da forma:
A =
a1 c1b2 a2 c2
b3 a3 c3. . . . . . . . .
bn−1 an−1 cn−1bn an
O método da eliminação de Gauss e a fatoração LU sãodeterminados de modo a introduzir zeros apenas no lugar doselementos b2,b3, . . . ,bn.

Fatoração LU
A fatoração LU de uma matriz tridiagonal é da forma:
A =
1β2 1
β3 1. . . . . .
βn−1 1βn 1
︸ ︷︷ ︸
L
α1 c1α2 c2
α3 c3. . . . . . . . .
αn−1 cn−1αn
︸ ︷︷ ︸
U
.
Identificando A = LU, concluímos que
α1 = a1, βi =bi
αi−1e αi = ai − βici−1, ∀i = 2, . . . ,n.
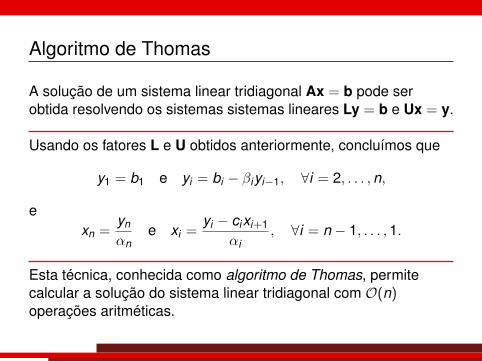
Algoritmo de Thomas
A solução de um sistema linear tridiagonal Ax = b pode serobtida resolvendo os sistemas sistemas lineares Ly = b e Ux = y.
Usando os fatores L e U obtidos anteriormente, concluímos que
y1 = b1 e yi = bi − βiyi−1, ∀i = 2, . . . ,n,
exn =
yn
αne xi =
yi − cixi+1
αi, ∀i = n − 1, . . . ,1.
Esta técnica, conhecida como algoritmo de Thomas, permitecalcular a solução do sistema linear tridiagonal com O(n)operações aritméticas.

Considerações Finais
Na aula de hoje apresentamos duas variações do método daeliminação de Gauss e da fatoração LU:• Fatoração de Cholesky:
Uma matriz simétrica (A = AT ) e definida positiva (xT Ax > 0)é escrita como A = GT G, em que G é triangular superior.
• Algoritmo de Thomas:Modificação do método da eliminação de Gauss/fatoração LUpara um sistema linear tridiagonal.
Esses dois tipos de matrizes aparecem em diversas aplicações!
Muito grato pela atenção!





![Convergência dos métodos iterativos para a procura dos ...roman/courses/MS211/2s2020/...Problema do ponto xo Exemplo Procurar o zero de f (x) = x log x 1 em [2;3]. Sabemos j a que](https://img.document.onl/doc/110x75/6092fe79382df971ad1b4937/convergncia-dos-mtodos-iterativos-para-a-procura-dos-romancoursesms2112s2020.jpg)