Embed Size (px)
Citation preview

2
Noções de Sistemas
de Informação
Geográfica
Iana Alexandra Alves Rufino
Iana Daya Cavalcante Facundo
2.1 Cartografia Digital
2.1.1Cartografia
Ciência de organização de cartas terrestres, marítimas e aéreas de qualquer espécie, abrangendo todas
as operações, desde os levantamentos iniciais do terreno até a impressão definitiva das mesmas. Pode ser
considerada uma metodologia científica que se destina a expressar fatos e fenômenos observados na superfície
da terra através de simbologia própria.
A razão principal da relação interdisciplinar forte entre Cartografia e Geoprocessamento é o espaço
geográfico. Cartografia preocupa-se em apresentar um modelo de representação de dados para os processos
que ocorrem no espaço geográfico.
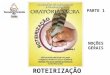
Geoprocessamento representa a área do conhecimento que utiliza técnicas matemáticas e
computacionais, fornecidas pelos Sistemas de Informação Geográfica (SIG), para tratar os processos que
ocorrem no espaço geográfico, ou seja, a informação geográfica. Isto estabelece de forma clara a relação
interdisciplinar entre Cartografia e Geoprocessamento (Figura 2.1).
2.1.2Mapa
Representação gráfica da Terra nos seus aspectos naturais ou artificiais. Os fenômenos do mundo real
podem ser representados por diversos tipos de dados, que são: dados temáticos (por ex: tipos de solo), dados
49

cadastrais (por ex: cadastro urbano e rural), dados de redes (por ex: rede de esgoto e logradouros), dados de
modelos numéricos (por ex: dados geofísicos e topográficos) e dados do tipo imagens (por ex: foto aérea e
Figura 2.1. Relações interdisciplinares entre SIG e outras áreas (Maguire et al., 1991)
de satélite). Estes dados estão cartografados nos respectivos tipos de mapas, portanto cabem algumas
definições do que são mapas. Um Mapa utiliza os dados do mundo real, sendo que:
são modelos simplificados da realidade;
utilizam uma representação, normalmente em escala, de uma seleção de entidades abstratas
relacionadas com a superfície da Terra;
são modelos de dados que se interpõe entre a realidade e a base de dados de um SIG.
2.1.3Sistemas de Coordenadas
A representação da superfície da Terra que é curva para uma superfície plana (folhas de papel ou monitor
de vídeo) apresenta várias dificuldades. Uma delas é a definição exata da forma e das dimensões da terra que é
o objetivo da geodésia. Para representar a superfície da Terra é necessário estabelecer um sistema tal que, um
ponto representado no mapa corresponda a um homólogo na superfície terrestre. Isto se faz através de um
sistema de coordenadas.
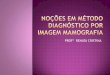
Sistema de coordenadas geográficas
É o sistema de coordenadas mais antigo. Nele, cada ponto da superfície terrestre é localizado na
interseção de um meridiano com um paralelo.Num modelo esférico os meridianos são círculos máximos cujos
planos contêm o eixo de rotação ou eixo dos pólos. Já num modelo elipsoidal os meridianos são elipses
definidas pelas interseções, com o elipsóide, dos planos que contêm o eixo de rotação. Meridiano de origem
(também conhecido como inicial ou fundamental) é aquele que passa pelo antigo observatório britânico de
Greenwich, escolhido convencionalmente como a origem (0°) das longitudes sobre a superfície terrestre e como
50

base para a contagem dos fusos horários. A leste de Greenwich os meridianos são medidos por valores
crescentes até + 180°. A oeste, suas medidas decrescem até o limite de -180° (Figura 2.2).
Figura 2.2. Paralelos. Figura 2.3. Meridianos.
Tanto no modelo esférico como no modelo elipsoidal os paralelos são círculos cujo plano é
perpendicular ao eixo dos pólos (Figura 2.3). O Equador é o paralelo que divide a Terra em dois hemisférios
(Norte e Sul) e é considerado como o pararelo de origem (0°). Partindo do equador em direção aos pólos tem-se
vários planos paralelos ao equador, cujos tamanhos vão diminuindo até que se reduzam a pontos nos pólos
Norte (+90°) e Sul (-90°).
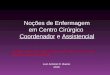
Longitude de um lugar qualquer da superfície terrestre é a distância angular entre o lugar e o meridiano
inicial ou de origem, contada sobre um plano paralelo ao equador. Latitude é a distância angular entre o lugar e
o plano do Equador, contada sobre o plano do meridiano que passa no lugar (Figura 2.4).
Figura 2.4. Latitude e longitude.
Sistema de coordenadas planas ou cartesianas
O sistema de coordenadas planas, também conhecido por sistema de coordenadas cartesianas, baseia-
se na escolha de dois eixos perpendiculares, cuja interseção é denominada origem, que é estabelecida como
base para a localização de qualquer ponto do plano.
Nesse sistema de coordenadas um ponto é representado por dois números reais: um correspondente à
projeção sobre o eixo x (horizontal) e outro correspondente à projeção sobre o eixo y (vertical). Os valores de x e
y são referenciados conforme a figura mostrada a seguir, que representa, como exemplo, as coordenadas de um
ponto na projeção UTM.
51

Figura 2.5. Coordenadas planas.
2.1.4Projeções Cartográficas
Todos os mapas são representações aproximadas da superfície terrestre. Isto ocorre porque não se pode
passar de uma superfície curva para uma superfície plana sem que haja deformações. Por isso os mapas
preservam certas características ao mesmo tempo em que alteram outras. A elaboração de um mapa requer um
método que estabeleça uma relação entre os pontos da superfície da Terra e seus correspondentes no plano de
projeção do mapa. Para se obter essa correspondência, utilizam-se os sistemas de projeções cartográficas.
Classificação das projeções
Analisam-se os sistemas de projeções cartográficas pelo tipo de superfície de
projeção adotada e grau de deformação.Quanto ao tipo de superfície de projeção
adotada, classificam-se as projeções em: planas ou azimutais, cilíndricas, cônicas e
poliédricas, segundo se represente a superfície curva da Terra sobre um plano, um
cilindro, um cone ou um poliedro tangente ou secante à Terra.
Projeção UTM - "Universal Transverse Mercator"
O mapeamento sistemático do Brasil, que compreende a elaboração de cartas topográficas, é feito na
projeção UTM (1:250.000, 1:100.000, 1:50.000). Relacionam-se, a seguir, suas principais características:
a superfície de projeção é um cilindro transverso e a projeção é conforme;
o meridiano central da região de interesse, o equador e os meridianos situados a 90 o do meridiano
central são representados por retas;
os outros meridianos e os paralelos são curvas complexas;
a escala aumenta com a distância em relação ao meridiano central. A 90o deste, a escala torna-se
infinita;
a Terra é dividida em 60 fusos de 6° de longitude. O cilindro transverso adotado como superfície de
projeção assume 60 posições diferentes, já que seu eixo mantém-se sempre perpendicular ao
meridiano central de cada fuso;
52

aplica-se ao meridiano central de cada fuso um fator de redução de escala igual a 0,9996, para
minimizar as variações de escala dentro do fuso. Como conseqüência, existem duas linhas
aproximadamente retas, uma a leste e outra a oeste, distantes cerca de 1o37' do meridiano central,
representadas em verdadeira grandeza.
Neste tipo de projeção usa-se um cilindro tangente ou secante à superfície da Terra como superfície de
projeção (Figura 2.6). Em seguida, desenvolve-se o cilindro num plano. Em todas as projeções cilíndricas
normais (eixo do cilindro coincidente com o eixo de rotação da Terra), os meridianos e os paralelos são
representados por retas perpendiculares. A projeção é conforme ou isogonal quando mantêm os ângulos ou as
formas de pequenas feições. Convém lembrar que a manutenção dos ângulos acarreta uma distorção no
tamanho dos objetos no mapa.
.
Figura 2.6. Projeção UTM
A definição de longitude de origem depende da projeção utilizada pelo usuário. A longitude de origem
(meridiano de referência para posicionar o eixo y do sistema de coordenadas) para a projeção UTM corresponde
ao meridiano central de um fuso (a cada 6° define-se um fuso), ou seja, o meridiano central de uma carta ao
milionésimo. A Figura 2.7 apresenta a distribuição das cartas 1: 1.000.000 para o Brasil.
Figura 2.7 Distribuição das cartas 1: 1.000.000 para o Brasil.
53

A latitude de origem corresponde a um paralelo de referência escolhido para posicionar o eixo x do
sistema de coordenadas planas ou de projeção. A latitude de origem costuma ser o equador para a maior parte
das projeções.
A Tabela 2.1 mostra algumas das projeções cartográficas mais importantes e suas características
principais.
Tabela 2.1 – Projeções cartográficas.
2.1.5Computação Gráfica na Cartografia
O uso da computação gráfica na cartografia, na década de 70 era limitado pelos altos custos dos
equipamentos, à falta de profissionais com conhecimento em cartografia e computação aos altos preços dos
mapeamentos digitais devido ao custo do equipamento, software e mão de obra.
Nos anos 80, a computação gráfica fez que surgissem softwares que permitiam a transcrição de mapas
para o meio digital. Esta transcrição era executada com auxílio de mesas digitalizadoras. O processo consiste
54

em uma mesa que possui uma malha magnética, um cursor e um computador com um software que interpreta o
sinal emitido pelo cursor sobre a mesa. Este processo ainda é muito utilizado quando se faz uso de mapas
existentes, porém, apresenta vários inconvenientes em geral como a má qualidade das cartas e mapas
existentes, descontinuidade entre as cartas, grande número de informações que requerem uma análise maior
nas interpretações dos elementos a serem transferidos, tornando assim um trabalho minucioso, demorado e o
material obtido é freqüentemente desatualizado.
No final dos anos 80 surgiu o scanner e a vetorização. O scanner consiste em um aparelho que copia a
carta na íntegra, tornando-a uma imagem, porém apresenta todas as imperfeições da carta. A vetorização que
não é uma operação simples e não totalmente automática veio permitir que esta imagem fosse transformada em
um arquivo vetorial somente com as informações necessárias ao usuário. Novamente esbarramos na qualidade
das cartas existentes e seu estado de apresentação muitas vezes degenerado fazendo com que as imperfeições
apresentadas atrapalhem a manipulação do produto.
Hoje com o scanner de alta precisão já podemos trabalhar com sistemas computacionais que permitem
o uso das imagens das aerofotos com maior eficácia e precisão dando assim uma melhor performance no
desenvolvimento dos trabalhos cartográficos associando as ortofotos digitais e os arquivos vetores o que permite
uma dinâmica maior na análise das informações de um mapa.
Com o desenvolvimento da computação gráfica foi possível a adaptação dos restituidores analógicos
para produção de cartas de forma on-line evitando-se a passagem pela mesa digitalizadora. A restituição on line
é realizada em estereorestituidores e devem ser representados todos os elementos naturais e artificiais, visíveis
e identificáveis nas fotografias e compatíveis com a escala da planta, em níveis de informações.
As funções de entrada de dados continuam a demandar uma fração desproporcionada dos recursos
para a implantação de um SIG. Seu custo é às vezes um impedimento para a adoção de SIG em organizações.
O que distingue os vários enfoques com relação à entrada de dados é o grau de automatização alcançado.
Processos manuais são bastante propensos a erros, apesar da sofisticação dos dispositivos e software
disponíveis, e a solução destes erros por procedimentos automáticos é lenta e custosa. A digitalização por
processos mais automatizados (digitalização semi-automática e automática) é economicamente interessante e
vai se tornar cada vez mais viável, à medida em que cresce o custo de mão-de-obra e decresce o custo de
equipamentos e software.
2.1.6Padrão Usual dos Mapeamentos
Geralmente para uma boa organização do mapa são estabelecidos os níveis de informação (ou
camadas) de acordo com as seguintes categorias usuais:
Sistema Viário – transportes
Sistema hidrográfico
Hipsografia
Vegetação
Detalhes planimétricos-antrópicos (surgiram pela mão do homem)
o Urbanos ou rurais
55

o Energia, telecomunicações
o Saneamento
Altimetria/hipsometria
Toponímia
Limites
Informações auxiliares (legendas, convenções, dados cartográficos, etc.)
Cadastro
Apoio básico e suplementar – pontos de controle
Referências cartográficas e gerais
2.2 Geoprocessamento
2.2.1 O que é Geoprocessamento?
A coleta de informações sobre a distribuição geográfica de recursos minerais, propriedades, animais e
plantas sempre foi uma parte importante das atividades das sociedades organizadas. Até recentemente, no
entanto, isto era feito apenas em documentos e mapas em papel; isto impedia uma análise que combinasse
diversos mapas e dados. Com o desenvolvimento simultâneo, na segunda metade deste século, da tecnologia
de Informática, tornou-se possível armazenar e representar tais informações em ambiente computacional,
abrindo espaço para o aparecimento do Geoprocessamento.
Nesse contexto, o termo Geoprocessamento denota a disciplina do conhecimento que utiliza
técnicas matemáticas e computacionais para o tratamento da informação geográfica e que vem
influenciando de maneira crescente as áreas de Cartografia, Análise de Recursos Naturais, Transportes,
Comunicações, Energia e Planejamento Urbano e Regional. As ferramentas computacionais para
Geoprocessamento, chamadas de Sistemas de Informação Geográfica (SIG), permitem realizar análises
complexas, ao integrar dados de diversas fontes e ao criar bancos de dados geo-referenciados.
Tornam ainda possível automatizar a produção de documentos cartográficos. Pode-se dizer, de forma
genérica, “Se onde é importante para seu negócio, então Geoprocessamento é sua ferramenta de trabalho”.
Sempre que o onde aparece, dentre as questões e problemas que precisam ser resolvidos por um sistema
informatizado, haverá uma oportunidade para considerar a adoção de um SIG.
Devido a sua ampla gama de aplicações, que inclui temas como agricultura, floresta, cartografia,
cadastro urbano e redes de concessionárias (água, energia e telefonia), há pelo menos três grandes maneiras de
utilizar um SIG:
Como ferramenta para produção de mapas - geração e visualização de dados espaciais;
Como suporte para análise espacial de fenômenos - Combinação de informações espaciais;
Como um banco de dados geográficos - com funções de armazenamento e recuperação de
informação espacial.
56

Estas três visões do SIG são antes convergentes que conflitantes e refletem a importância relativa do
tratamento da informação geográfica dentro de uma instituição. Para esclarecer ainda mais o assunto,
apresentamos mais a frente algumas definições de SIG.
Num país de dimensão continental como o Brasil, com uma grande carência de informações adequadas
para a tomada de decisões sobre os problemas urbanos, rurais e ambientais, o Geoprocessamento apresenta
um enorme potencial, principalmente se baseado em tecnologias de custo relativamente baixo, em que o
conhecimento seja adquirido localmente.
2.2.2 O que são dados espaciais?
Sem dúvida a utilização de dados espaciais em um SIG está na capacidade destes sistemas em realizar
análises. Alguns exemplos dos processos de análise espacial, típicos de um SIG, estão apresentados na Tabela
2.2 (adaptada de Maguire et al., 1991).
Tabela 2.2. Dados espaciais.
A informação geográfica apresenta uma natureza dual: um dado geográfico possui uma localização
geográfica (expressa como coordenadas em um espaço geográfico) e atributos descritivos (que podem ser
representados num banco de dados convencional).
De forma intuitiva, pode-se definir o termo “espaço geográfico” como uma coleção de localizações na
superfície da Terra, sobre a qual ocorrem os fenômenos geográficos. O espaço geográfico define-se, portanto,
em função de suas coordenadas, sua altitude e sua posição relativa. Sendo um espaço localizável, o espaço
geográfico é possível de ser cartografado. A noção de informação espacial está relacionada à existência de
objetos com propriedades, que incluem sua localização no espaço e sua relação com outros objetos. Estas
relações incluem conceitos topológicos (vizinhança, pertinência), métricos (distância) e direcionais (“ao norte
de”, “acima de”). Deste modo, os conceitos de espaço geográfico (um locus absoluto, existente em si mesmo) e
informação espacial (um locus relativo, dependente das relações entre objetos) são duas formas
complementares de conceituar o objeto de estudo do Geoprocessamento.
2.3 Estrutura de um SIG
57

O termo Sistemas de Informação Geográfica é aplicado para sistemas que realizam o tratamento
computacional de dados geográficos e recuperam informações não apenas com base em suas características
alfanuméricas, mas também através de sua localização espacial; oferecem ao administrador (urbanista,
planejador, engenheiro) uma visão inédita de seu ambiente de trabalho, em que todas as informações
disponíveis sobre um determinado assunto estão ao seu alcance, interrelacionadas com base no que lhes é
fundamentalmente comum – a localização geográfica. Para que isto seja possível, a geometria e os atributos dos
dados num SIG devem estar georreferenciados, isto é, localizados na superfície terrestre e representados numa
projeção cartográfica. Numa visão abrangente, pode-se indicar que um SIG tem os seguintes componentes
(Figura 2.8):
Interface com usuário;
Entrada e integração de dados;
Funções de consulta e análise espacial;
Visualização e plotagem;
Armazenamento e recuperação de dados (organizados sob a forma de um banco de dados
geográficos).
Figura 2.8. Estrutura geral de Sistemas de Informação Geográfica
Muitas pessoas quando falam em SIG referem-se, especificamente, ao software e não à tecnologia.
Percebe-se freqüentemente dificuldades de comunicação entre profissionais que se utilizam da mesma
nomenclatura para se referir a conceitos diferentes. Assim, para um entendimento mais completo, é necessário
explicar os principais componentes de um SIG, no qual o software é apenas um desses componentes. Os outros
elementos a serem definidos são: hardware, dados, usuários e as metodologias de análise. A Figura 2.9 ilustra
estes componentes.
58

Figura 2.9. Componentes do SIG
Recursos Humanos: Ë o componente mais importante de um SIG. É constituído de técnicos que usam a
tecnologia do Geoprocessamento para dar suporte à tomada de decisão nas atividades do dia-a-dia e nos
projetos de desenvolvimento. O técnico/usuário deverá usar as informações, buscar soluções, simular
problemas, criar protótipos de projetos, gerar informações, conhecer o mundo real no ambiente de sua atuação.
Metodologias: Consistem do conjunto de procedimentos que devem ser estabelecidos e executados durante o
desenvolvimento do projeto.
Hardware: São os equipamentos que constituem a plataforma computacional (computadores e periféricos de
entrada e de saída) definida para o projeto, além de câmeras digitais, restituidores aerofotogramétricos,
instrumentos topográficos eletrônicos e GPS, dentre outros. A Figura 2.10 ilustra alguns desses
equipamentos/instrumentos.
Software: Os Softwares de SIG são softwares específicos para o tratamento e manipulação dos dados
espaciais. É desenvolvido em níveis sofisticados, constituído de módulos e executa as mais diversas funções.
São exemplos deste tipo de software o Mapinfo Professional, o ArcGIS, o IDRISI, o SPRING e o MGE, dentre
outros. Assim como os SIG, os Softwares de SIG possuem várias definições. Tomemos as principais como
exemplo:
Softwares destinados ao processamento de dados referenciados espacialmente e empregados na
manipulação de dados de diversas fontes, possibilitando a recuperação e o cruzamento de informações
bem como a realização dos mais diversos tipos de análise espacial;
59

Figura 2.10. Exemplos do hardware de SIG
Softwares que permitem a integração entre bancos de dados alfanuméricos (tabelas) e gráficos (mapas)
para o processamento, análise e saída de dados georreferenciados;
Conjunto de overlays de uma determinada região geográfica, representando constelações de dados
brutos ou de informações temáticas que compartilham atributos geográficos comuns.
A Figura 2.11 ilustra o principal conceito do software de SIG, a sobreposição de camadas ou cruzamento de
informações.
Figura 2.11. Representação esquemática de um software de SIG
60

Muitos problemas no uso de ferramentas de geoprocessamento decorrem do fato de que, por
inexperiência, muitos técnicos utilizam sistemas CAD (Compute Aided Design) como SIG. Assim consideramos
relevante estabelecer a diferença entre as duas tecnologias.
Um sistema CAD é uma ferramenta para capturar desenhos em algum formato legível por uma
máquina. Os modelos CAD tratam os dados como desenhos eletrônicos em coordenadas do papel. Nas
aplicações CAD, existem muitas vezes regularidades nos objetos (como sólidos de revolução), que podem se
modeladas, com o uso de técnicas como a da geometria construtiva dos sólidos.
Em contraste, num sistema de Geoprocessamento, os dados têm poucas simetrias e regularidades que
possam ser reproduzidas. Mais ainda, os dados estão sempre georreferenciados, isto é, localizados na superfície
terrestre. Na grande maioria dos casos, os dados estão numa projeção cartográfica, o que impõe uma distorção
relativa às coordenadas geográficas.
Diferente dos sistemas CAD, uma das características básicas e gerais de um SIG é a sua capacidade
de tratar as relações espaciais entre objetos geográficos (topologia). Armazenara a topologia (vizinhança,
proximidade, pertinência) de um mapa é uma das características básicas que fazem distinguir um SIG de um
CAD.
Dados: São elementos fundamentais para o SIG. Os dados geográficos, espaciais ou georreferenciados se
diferenciam dos demais tipos de dados por possuírem além do tributo alfanumérico (descrição do fenômeno) a
sua localização sobre a superfície terrestre.
2.4. Mapas em SIG
2.4.1. Mapas Temáticos
Dados temáticos descrevem a distribuição espacial de uma grandeza geográfica, expressa de forma
qualitativa, como os mapas de pedologia e a aptidão agrícola de uma região. Estes dados, obtidos a partir de
levantamento de campo, são inseridos no sistema por digitalização ou, de forma mais automatizada, a partir de
classificação de imagens. Os dados apresentados na Figura 2.12 (mapa de vegetação e mapa de declividade)
são exemplos de dados temáticos.
Mapas temáticos medem, no espaço de atributos, valores nominais e ordinais. Os valores nominais
(lista de valores) representam classes de um mapa temático, como por exemplo, um mapa de vegetação (ver
Figura). No caso de valores ordinais, as classes do mapa representam intervalos (escala) de valores, como por
exemplo, as classes de um mapa de declividade (0 a 5% - 5 a 10%, etc).
61

Figura 2.12. Exemplos de medida nominal (mapa de vegetação) e medida ordinal (mapa de classes de
declividade).
Para permitir uma representação e análise mais acurada do espaço geográfico, a maior parte dos
sistemas armazenam estes tipos de mapas na forma vetorial (pontos, linhas ou polígonos). A topologia
construída é do tipo arco-nó-região: arcos se conectam entre si através de nós (pontos inicial e final) e arcos que
circundam uma área definem um polígono (região).
Um mapa temático pode também ser armazenado no formato matricial ("raster"). Neste caso, a área
correspondente ao mapa é dividida em células de tamanho fixo. Cada célula terá um valor qualitativo
correspondente ao tema naquela localização espacial. A escolha entre a representação matricial e a vetorial para
um mapa temático depende do objetivo em vista. Para a produção de cartas e em operações onde se requer
maior exatidão, a representação vetorial é mais adequada. As operações de álgebra de mapas são mais
facilmente realizadas no formato matricial. No entanto, para um mesmo grau de exatidão, o espaço de
armazenamento requerido por uma representação matricial é substancialmente maior.
2.4.2. Mapas Cadastrais (mapas de objetos)
Um mapa cadastral permite a representação de elementos gráficos (objetos geográficos) por pontos,
linhas ou polígonos, sendo que estes possuem atributos descritivos e podem estar associados a várias
representações gráficas. Por exemplo, os países da América do Sul são elementos do espaço geográfico que
possuem atributos (nome do país, valor do PIB, população etc.) e que podem ter representações gráficas
diferentes em mapas de escalas distintas (Figura 2.13). A parte gráfica dos mapas cadastrais é armazenada em
forma de coordenadas vetoriais, com a topologia associada. Não é usual representar estes dados na forma
matricial. Já os atributos estão armazenados normalmente num sistema gerenciador de banco de dados.
62

Figura 2.13. Exemplo de mapa cadastral (países da América do Sul).
2.4.3. Mapas de Redes
Em Geoprocessamento, o conceito de "rede" denota as informações associadas aos seguintes tipos de
dados:
- Serviços de utilidade pública, como água, luz e telefone;
- Redes de drenagem (bacias hidrográficas);
- Rodovias.
Mapas de redes também tratam de objetos, porém as informações gráficas são armazenadas em
coordenadas vetoriais, com topologia arco-nó: os atributos de arcos incluem o sentido de fluxo e os atributos
dos nós sua impedância (custo de percorrimento). A topologia de redes constitui um grafo, que armazena
informações sobre recursos que fluem entre localizações geográficas distintas, como ilustra a Figura 2.14.
Figura 2.14. Elementos de uma Rede.
Este tipo de dado é muito utilizado em serviços de utilidade pública, como água, luz, telefone, redes de
drenagem (bacias hidrográficas) e rodovias, que possuem uma localização geográfica bem definida e atributos
descritivos, presentes no banco de dados. Além disso, outros fatores como integração de dados, segmentação
dinâmica, linguagem de visualização e capacidade de adaptação, merecem destaques.
A integração de dados é necessária para aplicações como redes, onde se deseja gerar uma base
cartográfica contínua a partir de informações dispersas em vários mapas. Usualmente, as redes (elétrica, de
63

telefonia e de água e esgoto) estão interligadas em toda a malha urbana. Poucos sistemas conseguem
armazená-las de forma contínua, dando origem a particionamentos que não refletem a realidade e que dificultam
a realização de análises e simulações. Outro aspecto necessário para aplicações de redes é a capacidade de
definir diferentes cortes lógicos de uma rede sem ter de duplicar (ou repetir) a estrutura topológica da rede. Por
exemplo, ao se asfaltar parte de uma estrada de terra, será preciso atualizar esta informação, sem ter que
redigitalizar todas as coordenadas de localização da estrada. Esta capacidade, usualmente denotada por
segmentação dinâmica, permite separar os diferentes níveis de informação relativos a uma mesma rede.
O pacote mínimo disponível nos sistemas comerciais consiste tipicamente de cálculo de caminho ótimo e
alocação de recursos. Este pacote básico é insuficiente para a realização da maioria das aplicações, pois cada
usuário tem necessidades distintas. No caso de um sistema telefônico, por exemplo, uma questão pode ser:
"quais são todos os telefones servidos por uma dada caixa terminal?". Já para uma rede de água, pode-se
perguntar: "Se injetarmos uma dada percentagem de cloro na caixa d'água de um bairro, qual a
concentração final nas casas?"
Deste modo, um sistema de modelagem de redes só terá utilidade para o cliente depois de devidamente
adaptado para as suas necessidades, o que pode levar vários anos. Isto impõe uma característica básica para
esta aplicação: os sistemas devem ser versáteis e maleáveis.
2.4.4. Mapas numéricos
O termo modelo numérico de terreno (ou MNT) é utilizado para denotar a representação quantitativa de
uma grandeza que varia continuamente no espaço. Comumente associados à altimetria, também podem ser
utilizados para modelar unidades geológicas, como teor de minerais, ou propriedades do solo ou subsolo, como
aeromagnetismo. Entre os usos de modelos numéricos de terreno, podem-se citar (Burrough,1986):
Armazenamento de dados de altimetria para gerar mapas topográficos;
Análises de corte-aterro para projeto de estradas e barragens;
Cômputo de mapas de declividade e exposição para apoio a análises de geomorfologia e
erodibilidade;
Análise de variáveis geofísicas e geoquímicas;
Apresentação tridimensional (em combinação com outras variáveis).
Um MNT pode ser definido como um modelo matemático que reproduz uma superfície real a partir de
algoritmos e de um conjunto de pontos (x, y), em um referencial qualquer, com atributos denotados por z, que
descrevem a variação contínua da superfície. Um exemplo de MNT é apresentado na Figura 2.15. O processo
de aquisição de uma grandeza com variação espacial produz, usualmente, um conjunto de amostras pontuais.
A partir destas amostras, pode-se construir dois tipos de representação (veja a Figura 2.16):
64

grades regulares: matriz de elementos com espaçamento fixo, onde é associado o valor estimado
da grandeza na posição geográfica de cada ponto da grade. As grades regulares são obtidas por interpolação
das amostras ou, alternativamente, geradas por restituidores com saída digital.
grades triangulares: a grade é formada por conexão entre amostras, utilizando a triangulação de
Delaunay (sujeita à restrições). A grade triangular é uma estrutura topológica vetorial do tipo arco-nó, que forma
um conjunto de recortes irregulares no espaço.
2.4.5. Imagens
Obtidas por satélites, fotografias aéreas ou "scanners" aerotransportados, as imagens representam
formas de captura indireta de informação espacial. Armazenadas como matrizes, cada elemento de imagem
(denominado "pixel") tem um valor proporcional à energia eletromagnética refletida ou emitida pela área da
superfície terrestre correspondente. A Figura 2.17 mostra uma composição colorida falsa cor das bandas 3
(associada a cor Azul), 4 (Verde) e 5 (Vermelha) do satélite TM-Landsat, para a região de Manaus (AM). Pela
natureza do processo de aquisição de imagens, os objetos geográficos estão representados em cada elemento
da imagem, sendo necessário recorrer a técnicas de realce, fotointerpretação e de classificação para
individualizá-los.
Características importantes de imagens de satélite são: o número de bandas imageadas no espectro
eletromagnético (resolução espectral), a área da superfície terrestre observada instantaneamente por cada
sensor (resolução espacial) e o intervalo entre duas passagens do satélite pelo mesmo ponto (resolução
temporal). A Figura 2.18 apresenta as imagens de três sensores diferentes, com resoluções diferentes.
65
Figura 2.15. Isolinhas de um MNT Figura 2.16. Grades regulares e triangulares.

Figura 2.17. Exemplo de Imagem(Composição colorida TM Landsat)
Figura 2.18. Imagens, da esquerda p/ direita, com 5(foto aérea), 20 (Spot) e 30 (Landsat) metros de resolução.
2.5 Análise Espacial e Suas Aplicações
O objetivo geral do Geoprocessamento é fornecer ferramentas para que os diferentes usuários
determinem a evolução espacial e temporal de um fenômeno geográfico e as interrelações entre diferentes
fenômenos, ou seja a análise espacial. Alguns exemplos típicos de análise espacial de um SIG são:
Localização: Onde está...? o (objeto, fenômeno,evento,etc)
Em que área está acontecendo a queimada?
Condição: O que está...? em (estudo, jogo, análise,etc)
Qual a população atingida pela enchente?
Tendência: O que mudou...? desde (1990,o último evento)
Estas terras eram produtivas há cinco anos?
Roteamento: Qual o melhor caminho...? para (a universidade, o hospital, o hotel, etc)
Qual o melhor caminho para chegar até o local do acidente?
Padrões: Qual o padrão...? em (estudo, jogo, análise,etc)
Qual a distribuição das zonas de baixa precipitação na Paraíba?
Modelos: O que acontece se...?
O que acontecerá se não chover nos próximos dias?
66

“A eficiência do sistema depende do conhecimento que o usuário tem do problema implementado. É
perigosa e enganosa a implementação de um sistema sem a explícita definição da aplicação, dos dados e dos
tipos de análise a serem desenvolvidos.” (Burrough, 1986).
A aplicação é o componente mais importante dos SIGs. É através do conhecimento do problema a ser
resolvido que todo o sistema é desenvolvido. Quanto melhor se conhecer o problema, mais chance de sucesso
na implementação do sistema. Isso não significa, obviamente, que apenas o domínio da área de conhecimento
da aplicação seja suficiente para a implementação, já que visões de disciplinas diferentes terão que se juntar na
equipe técnica para garantir, além da implementação, a manutenção do sistema.
2.6 Referências Bibliográficas
BURROUGH, P. A. 1986. Principles of Geographical Information System for Land Resources Assesment.
Claredon Press, Oxford.
ESRI – Environmental Systems Research Institute. 1996. Introdução ao ArcView GIS. Apostila de Curso. São
Paulo.
GÓES, K. 2000. Autocad Map – Explorando as ferramentas de mapeamento. Rio de Janeiro: Editora Ciência
Moderna Ltda.
IDOETA I.; TOSTES, F. 1999. Cartografia Digital. Apostila de curso – GIS BRASIL 99 – V Congresso e Feira
para Usuários de Geoprocessamento da América Latina. Salvador.
INPE – Instituto de Pesquisas Espaciais. 2000. Fundamentos de Geoprocessamento. Apostila de Curso.
Disponível em: www.dpi.inpe.br (Junho, 2000).
MAGUIRE, D. 1991. An Overview and Definition of GIS. In: Maguire,D.; Goodchild, M.; Rhind, D. (eds)
Geographical Information Systems: Principles and Applications. New York: John Wiley and Sons, pp. 9-20.
67

68