Embed Size (px)
Citation preview

Optimização multidisciplinar aplicada à concepção d e veículos de transporte espacial
Tiago Miguel Esteves Cardim dos Santos Soares
Dissertação para obtenção do grau de mestre em
Engenharia Aeroespacial
Juri
Presidente : Prof. Paulo Gil dos Santos Silva
Orientador : Profª Maria Alexandra dos Santos Aguiar Gomes
Vogais : Prof. Hélder Carriço Rodrigues
Outubro 2007

1
Índice
I – INTRODUÇÃO .................................................................................................................................................... 6
1.1 –APRESENTAÇÃO DA EMPRESA ................................................................................................................................... 7
1.1.1 – História ..................................................................................................................................................... 7
1.1.2 – Organização interna da empresa ............................................................................................................. 8
1.1.3 - O Departamento de Perspectiva e Síntese (DPRS) .................................................................................... 8
1.2 – O PROGRAMA MODEFRONTIER ............................................................................................................................ 9
1.2.1 - Work Flow ................................................................................................................................................. 9
1.2.2 - Run Logs .................................................................................................................................................. 11
1.2.3 - Designs Space .......................................................................................................................................... 11
1.3 – OS PROJECTOS HADES E CENTOR ........................................................................................................................ 12
1.3.1 - Projecto HADES ....................................................................................................................................... 12
1.3.2 - PRF CENTOR ............................................................................................................................................ 13
II – OPTIMIZAÇÃO MULTIDISCIPLINAR ................................................................................................................. 14
2.1 – AS DIFICULDADES DA SUA APLICAÇÃO ...................................................................................................................... 14
2.2 - UM DOMÍNIO EM EXPANSÃO .................................................................................................................................. 14
III – APLICAÇÃO DA OMD À CONCEPÇÃO DE VEÍCULOS ESPACIAIS....................................................................... 16
3.1 – PLURIDISCIPLINARIDADE ....................................................................................................................................... 17
3.1.1 – Propulsão ............................................................................................................................................... 17
3.1.2 – Massa e dimensões ................................................................................................................................ 18
3.1.3 – Aerodinâmica ......................................................................................................................................... 18
3.1.4 – Trajectória .............................................................................................................................................. 18
3.1.5 – Analise de custos .................................................................................................................................... 19
3.1.6 – Acoplagem interdisciplinar ..................................................................................................................... 19
3.2 - MÉTODOS DE OPTIMIZAÇÃO .................................................................................................................................. 21
3.2.1 - Métodos paramétricos ............................................................................................................................ 21
3.2.2 - Métodos gradientes ................................................................................................................................ 22
3.2.3 – Métodos estocásticos ............................................................................................................................. 22
3.2.4 – Quadro de síntese .................................................................................................................................. 23
3.3 – ARQUITECTURAS DE OPTIMIZAÇÃO ......................................................................................................................... 23
3.3.1 – Estratégias «one variable at the time» .................................................................................................. 24
3.3.2 - Ciclos de convergência (Loop Convergence Criterium) ........................................................................... 24
3.3.3 – Estratégias «all at once» ........................................................................................................................ 24
3.3.4 – Optimização colaborativa (Collaborative Optimisation, C.O.) ............................................................... 24
3.3.5 – Comparação entre os métodos .............................................................................................................. 25
IV – FUNCIONALIDADES DA PLATAFORMA DE OMD PARA A APLICAÇÃO A UM LANÇADOR ................................ 29
4.1 – DADOS EM ENTRADA ........................................................................................................................................... 31
4.2 – OS CICLOS DE OPTIMIZAÇÃO .................................................................................................................................. 32
4.2.1 – Ciclo staging – propulsão sólida ............................................................................................................. 32
4.2.2 – ciclo staging – propulsão sólida – trajectória ......................................................................................... 34
4.2.3 – Ciclo staging – propulsão – trajectória ................................................................................................... 35
4.3 - OS MÓDULOS DE OPTIMIZAÇÃO .............................................................................................................................. 36
4.3.1 - Módulo de dimensionamento da ogiva .................................................................................................. 36
4.3.2 - Módulo de optimização da divisão do lançador em andares ................................................................. 36
4.3.3 - Módulo de propulsão .............................................................................................................................. 37

2
4.3.4 – Módulo de optimização da propulsão solida ......................................................................................... 37
4.3.5 – Módulo de optimização da propulsão liquida ........................................................................................ 37
4.3.6 – Módulo de optimização da trajectória ................................................................................................... 38
4.4 – ALGORITMO DE CONVERGÊNCIA RÁPIDA .................................................................................................................. 39
4.5 - OS OBJECTIVOS E LIMITES DA OPTIMIZAÇÃO .............................................................................................................. 40
4.6 – DADOS EM SAÍDA ................................................................................................................................................ 40
V – MÓDULOS DE OPTIMIZAÇÃO E CALCULO DESENVOLVIDOS ........................................................................... 42
5.1 - MÓDULO DE DIMENSIONAMENTO DA OGIVA E DO ADAPTADOR DA CARGA ÚTIL ................................................................ 42
5.1.1 – Os dados em entrada ............................................................................................................................. 42
5.1.2 – Dimensionamento da ogiva ................................................................................................................... 43
5.1.3 – Dimensionamento do adaptador ........................................................................................................... 44
5.1.4 – Validação dos resultados ....................................................................................................................... 47
5.2 - MÓDULO DE PROPULSÃO SÓLIDA ............................................................................................................................ 48
5.2.1 – Os objectivos, parâmetros e limites da optimização .............................................................................. 48
5.2.2 – Es entradas ............................................................................................................................................. 50
5.2.3 – A inicialização dos parâmetros de optimização ..................................................................................... 51
5.2.4 – Organização do cálculo .......................................................................................................................... 52
5.2.5 – As saídas ................................................................................................................................................. 52
5.3 – MÓDULO DE PROPULSÃO LÍQUIDA .......................................................................................................................... 53
5.3.1 - Adaptação do código a um problema de optimização ........................................................................... 53
5.3.2 – As entradas ............................................................................................................................................ 55
5.3.3 – Os objectivos, parâmetros e limites da optimização .............................................................................. 55
5.3.4 – As saídas ................................................................................................................................................. 56
5.4 - MÓDULO DE AERODINÂMICA ................................................................................................................................. 56
5.4.1 – Estudo da influência dos parâmetros ..................................................................................................... 57
5.4.2 – Integração do módulo de optimização da trajectória ............................................................................ 58
5.5 – MÓDULO DE DINÂMICA ESTRUTURAL ...................................................................................................................... 58
5.5.1 – A modelação em elementos finitos ........................................................................................................ 59
5.5.2 - Cálculo das frequências de ressonância do lançador .............................................................................. 66
VI - ANÁLISE DOS RESULTADOS ........................................................................................................................... 67
6.1 - EFICÁCIA E ROBUSTEZ ........................................................................................................................................... 67
6.2 - TEMPO DE COMPUTAÇÃO ...................................................................................................................................... 68
6.3 – INTERPRETAÇÃO DOS RESULTADOS ......................................................................................................................... 70
6.3.1 – Perfis óptimos ......................................................................................................................................... 70
6.3.2 – Análise da convergência ......................................................................................................................... 74
6.4 – COMPARAÇÃO COM LANÇADORES EXISTENTES .......................................................................................................... 77
6.4.1 – Caso de lançador a propulsão sólida – Lançador TAURUS ..................................................................... 77
VII – APLICAÇÃO DA OMD À CONCEPÇÃO DE VEÍCULOS DE TRANSFERÊNCIA ORBITAL ........................................ 79
7.1 – AS FASES DO PROJECTO E CORRESPONDENTES CICLOS DE OPTIMIZAÇÃO .......................................................................... 79
VIII – PERSPECTIVAS PARA A CONTINUAÇÃO DOS TRABALHOS ........................................................................... 81
8.1 - PROJECTO HADES............................................................................................................................................... 81
8.2 - PFR CENTOR .................................................................................................................................................... 81
IX - CONCLUSÃO .................................................................................................................................................. 82
BIBLIOGRAFIA ...................................................................................................................................................... 84
ANEXOS .............................................................................................................................................................. 85

3
Índice de ilustrações
Figura 1 Organização do departamento DPRS ...................................................................................................... 8
Figura 2 Janela Work Flow com os diferentes nós ............................................................................................. 10
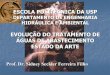
Figura 3 Veículo de transferência orbital na sua concepção com aero-assistência e interramente propulsiva 13
Figura 4 disciplinas intervenientes no processo ................................................................................................. 16
Figura 5 modelo representativo das interacções entre as disciplinas ................................................................ 20
Figura 6 bases para a escolha do método mais adequado para a análise .......................................................... 23
Figura 7 esquema representativo de um processo de optimização colaborativa .............................................. 25
Figura 8 esquema do processo de optimização da plataforma HADES .............................................................. 29
Figura 9 Plataforma de optimização HADES V0 .................................................................................................. 30
Figura 10 Ciclo staging – propulsão sólida .......................................................................................................... 33
Figura 11 Ciclo staging-propulsão sólida com dimensionamento da ogiva ........................................................ 33
Figura 12 Ciclo staging-propulsão sólida-trajectória .......................................................................................... 34
Figura 13 Ciclo Final staging-propulsão-trajectoria ............................................................................................ 35
Figura 14 Modelo de calculo simplificado da trajectória ................................................................................... 38
Figura 15 - esquema do dimensionamento da ogiva.......................................................................................... 44
Figura 16 - adaptador para a carga útil, modelo do projecto CENTOR .............................................................. 45
Figura 17 gráfico representativo da inequação em função do diâmetro da garganta da tubeira ..................... 51
Figura 18 Organização do cálculo do programa MoDiSP para o ciclo motor a combustíveis pressurizados ..... 54
Figura 19 Evolução de dT_rr com os parâmetros de optimização ..................................................................... 55
Figura 20 Variação do Ca com o Mach para diferentes diâmetros da secção de referência ............................ 57
Figura 21 Variação de Ca com o Mach para diferentes altitudes ....................................................................... 57
Figura 22 Variação de Ca com o Mach para diferentes comprimentos do lançador ......................................... 58
Figura 23 Modelação em elementos finitos de um lançador a propulsão sólida e de um lançador a propulsão
líquida ................................................................................................................................................................. 59
Figura 24 Modelação em elementos finitos de um andar a propulsão sólida ................................................... 59
Figura 25 Modelação em elementos finitos de um andar a propulsão líquide .................................................. 62
Figura 26 Esquema do modelo massa-pêndulo equivalente .............................................................................. 64
Figura 27 Modelação em elementos finitos de uma ogiva e carga útil .............................................................. 65
Figura 28 Parallel Chart Mu-diam1 ..................................................................................................................... 67
Figura 29 Representação dos perfis estudados num gráfico Mu vs. Mt ............................................................ 70
Figura 30 Representação dos perfis estudados em graphiques Me1 vs. Mu, Me2 vs. Mu et Me3 vs. Mu ........ 71
Figura 31 Representação dos perfis estudados em gráficos Isp1 vs. Mu et Isp2 vs. Mu .................................... 72
Figura 32 Correlação entre as variável de entrada ............................................................................................. 73
Figura 33 Representação os perfis estudados pelos processos em gráficos Isp2 vs. Isp1.................................. 75
Figura 34 Evolução da massa total para o processo a massa útil fixa e tipo de combustivel fixo ...................... 75
Figura 35 Representação dos perfis estudados pelos processos a 2% e 10% de probabilidade de mutação .... 76
Figura 36 Evolução da massa total nos processos a 2% e 10% de probabilidade de mutação .......................... 76
Figura 37 Ciclo 1 PFR CENTOR ............................................................................................................................ 79
Figura 38 Ciclo 2 PFR CENTOR ............................................................................................................................ 80
Figura 39 Ciclo 3 PRF CENTOR ............................................................................................................................ 80

4
Agradecimentos
Queria agradecer a todos aqueles que tornaram a minha estadia na empresa ONERA a mais proveitosa
possível, tanto ao nível pessoal como ao nível profissional, e que possibilitaram que me aplicasse
plenamente em todos os projectos em que participei e de contactar com o domínio espacial, uma paixão
de infância.
Queria agradecer particularmente ao Sr. Nicolas BEREND, meu tutor de estágio na ONERA e
coordenador do PRF CENTOR, por me guiar ao longo deste trabalho, pelos seus conselhos e paciência
face a todas as minhas questões.
Queria também agradecer imenso a todos os membros do departamento DPRS pelo acolhimento que
tive nesta equipa e pela simpatia demonstrada desde o primeiro dia.
Finalmente agradeço a toda a equipa do PRF CENTOR por me ter acolhido no projecto e por toda a sua
disponibilidade.

5
Resumo e abstract A tese aqui apresentada foi realizada ao longo de um estágio de 5 meses no departamento perspectiva e
síntese (DPRS) da ONERA, (Office National d’Etudes et Recherches Aérospatiales) no seu centro de
investigação em Châtillon. Esta organização desenvolve, desde 1946, actividades de pesquisa no
domínio aeroespacial.
O tema deste projecto é o estudo e aplicação de processos de optimização multidisciplinar (OMD) à
concepção de veículos de transporte espacial, nomeadamente lançadores (projecto HADES) e veículos
de transferência orbital (PRF CENTOR), explorando as potencialidades do software modeFRONTIER. O
trabalho focalizou-se no desenvolvimento e adaptação de códigos de optimização disciplinar e na sua
interacção assim como na análise dos processos globais de optimização multidisciplinar.
Este estudo será posteriormente aplicado na continuação dos trabalhos sobre veículos de transferência
orbital feitos pela ONERA e na escolha de uma plataforma de concepção para os futuros projectos de
lançadores, a ser utilizada nomeadamente pelo CNES (Centre Nationale d’Etudes Spatiales).
The present project was realized during a 5 month internship in ONERA’s prospective and synthesis
department, based in Châtillon. This society develops research activities in the aerospatial domain after
1946.
The subject of this project is the study and application of multidisciplinary optimization processes to
launch systems design (HADES project) ant orbital transfer vehicles (PFR CENTOR) exploiting the
possibilities of the optimization software modeFRONTIER. The work was focalized in the development
and adaptation of disciplinary optimization tools and in their interaction and organization in a process of
multidisciplinary optimization.
This study will be used in the following works of orbital transfer vehicles to be realized by ONERA and in
the choice of an optimization platform for the design of future launch systems, to be used notably by
CNES.
Palavras-chave: optimização multidisciplinar (MDO), lançador, veículo de transferência orbital (OTV),
modeFRONTIER, propulsão, aerodinâmica, estruturas, trajectória, staging.

6
Nota : Embora esta tese tenha tido por fim a validação do diploma de mestrado em engenharia aeroespacial no Instituto Superior Técnico, Profª Maria Alexandra dos Santos Aguiar Gomes desempenhou unicamente o papel de orientadora a nível administrativo.

7
I – Introdução
1.1 –Apresentação da empresa
A ONERA (Office National d’Etudes et Recherches Aérospatiales) é um estabelecimento público, sob a
tutela do Ministério da Defesa francês, criado em 1946 com a missão de desenvolver e orientar as
pesquisas no domínio aeroespacial.
A ONERA é uma organização de investigação de carácter industrial e comercial, dotada de uma grande
riqueza pluridisciplinar, cujo espectro de actividades se estende do domínio fundamental ao mais
aplicado. A ONERA conta hoje com cerca de 2000 assalariados, dos quais 1500 são investigadores,
engenheiros ou técnicos, distribuídos por oito pólos em França.
Aquando da sua criação a ONERA assumiu como missões chave:
• Orientar e conduzir as pesquisas no domínio aeroespacial;
• Valorizar estas pesquisas para a indústria nacional e europeia;
• Desenvolver e utilizar os meios de experimentação associados;
• Fornecer à indústria prestações e competências de alto nível;
• Conduzir pesquisas em benefício do estado;
• Formar cientistas, engenheiros e técnicos.
1.1.1 – História
Criada no período do pós-guerra, A ONERA torna-se no primeiro actor francês da investigação e da
tecnologia aeronáutica, campo que de demonstrava cada vez mais essencial tanto para a defesa como
para o desenvolvimento de actividades económicas e industriais.
Com o nome original de Office National d’Etudes et Recherches Aéronautiques, a ONERA adquire nos
seus primeiros anos de existência uma competência indiscutível e traz uma contribuição inestimável aos
construtores aeronáuticos franceses. Em particular, ela desenvolve técnicas novas para a propulsão em
regime supersónico e hipersónico, o que será uma contribuição determinante para os primeiros
lançadores de satélites e para os programas de concepção de mísseis estratégicos e tácticos.
É em 1963 que a missão espacial da ONERA é confirmada, através da mudança do seu nome para
Office National d’Etudes et Recherches Aérospatiales e entrada num período de grande expansão até
1983, com um aumento dos meios e um alargamento das áreas de competência. Neste período a
empresa terá uma influência determinante em vários programas militares e civis como é o caso do
Concorde, das Mirages, dos Airbus e dos lançadores Ariane.

8
Actualmente a ONERA depara-se com um triplo desafio: a diversificação das fontes de financiamento, a
europeização e o aumento da concorrência. Para fazer face a estas questões a empresa prepara-se
para se tornar numa peça chave graças a sua rede única de competências de alto nível.
1.1.2 – Organização interna da empresa
A empresa, devido ao seu carácter pluridisciplinar, está organizada em departamentos de pesquisa por
disciplina de estudo. Estes departamentos, um total de 17, são agrupados em quatro ramos científicos.
• Mecânica dos fluidos e energética (5 departamentos);
• Física (4 departamentos);
• Materiais e estruturas (5 departamentos);
• Tratamento de informação e sistemas (3 departamentos);
A capacidade de realizar projectos pluridisciplinares, aparentemente contraditória com a organização em
departamentos disciplinares, exprime-se através dos PRF (Projets de Recherche Fédérateurs),
institucionalizados em 1997, e que constituem o protótipo dos projectos de investigação cientifica. O seu
lado federativo resulta precisamente da exigência de participação de vários departamentos da empresa.
1.1.3 - O Departamento de Perspectiva e Síntese (DPRS)
O departamento de prospectiva e síntese faz parte do ramo de tratamento de informação e sistemas da
direcção científica e técnica da ONERA.
O departamento é dirigido pelo Sr. Thierry MICHAL e é organizado como é apresentado de seguida:
Figura 1 Organização do departamento DPRS

9
1.1.3.1 – Missão do departamento
A missão do departamento é a de realizar, em colaboração com outros departamentos, trabalhos de
perspectiva para ajudar à definição e à avaliação de veículos ou de sistemas espaciais futuros.
Para projectos de veículos espaciais modernos, é de facto fundamental definir os conceitos cujas
performances permitem satisfazer as necessidades operacionais e que sejam ao mesmo tempo
tecnicamente realizáveis e compatíveis com o financiamento disponível.
Este é portanto um departamento transversal no seio da ONERA que assegura a coordenação de
projectos pluridisciplinares e que assume um papel fundamental nos programas e projectos futuros no
domínio aeroespacial.
1.2 – O programa ModeFRONTIER
ModeFRONTIER é uma plataforma de optimização multi-objectivo, desenvolvida pela ESTECO (Itália), e
distribuída em França pela SIREHNA (baseada em Nantes), que foi desenvolvida de forma a permitir a
interacção com varias ferramentas informáticas de engenharia. Ela disponibiliza uma grande variedade
de métodos de optimização, o que permite adaptar o método às variáveis de entrada ou à análise
pretendida.
O espaço de trabalho de modeFRONTIER é composto por 3 unidades: Work Flow, Run Logs e Design
Space.
• Work Flow – espaço onde o utilizador define o problema e o plano de execução. Esta unidade é
dotada de uma interface gráfica simples e de uma janela de erro que permitem uma
implementação correcta e facilitam a compreensão do problema;
• Run Logs – espaço onde o utilizador segue o progresso do cálculo para os vários designs;
• Design Space – espaço onde o utilizador analisa os resultados com uma série de ferramentas
gráficas e funções de ajuda á interpretação dos dados;
Uma análise mais detalhada de cada uma destas unidades é feita nos capítulos que se seguem.
1.2.1 - Work Flow
O trabalho desenvolvido na unidade Work Flow constitui a primeira etapa para a resolução de um
problema de optimização através do programa modeFRONTIER, o seu aspecto gráfico é o apresentado
na Figura 2.

10
Figura 2 Janela Work Flow com os diferentes nós
1.2.1.1 - As entradas
As entradas podem ser definidas como constantes, variáveis ou como função das restantes entradas.
Naturalmente só as entradas definidas como variáveis são parte activa no problema de optimização. Os
diferentes configurações dos dados serão obtidos fazendo variar as entradas, permitindo a escolha da
configuração dos dados de entrada que melhor responde ao problema.
Cabe ao utilizador definir os limites e intervalo de valores admissíveis a cada entrada, que devem ser
adaptados ao problema em questão. As entradas podem também ser importadas a partir de ficheiros,
utilizando a funcionalidade “input file”
1.2.1.2 – Os executáveis
A plataforma modeFRONTIER permite recorrer a aplicações externas. Isso permite a execução de
scripts e mesmo de outros programas, que comunicam com a plataforma de optimização directamente
ou através de ficheiros.
A realização de scripts é simples e pode ser feita utilizando as seguintes linguagens compiláveis: Visual
Basic, Java, Jyton, Bean Shell, DOS batch.
Outros tipos de executáveis estão também disponíveis. Na versão modeFRONTIER 3.1.3, utilizada no
presente projecto é possível utilizar outros scripts: Matlab, Excel, Catia, ANSYS, OpenOffice e AMESim.
Esta lista foi alargada na versão 4, por exemplo com Scilab. Para trabalhar com estes programas basta
importar um script já feito ou de o programar directamente, sabendo que os nomes dos parâmetros no
plano de execução e no script devem ser os mesmos.
O modeFRONTIER permite também recorrer a vários executáveis no mesmo plano de execução, o que
é muito interessante no quadro da optimização multidisciplinar. A sua utilização pode ser organizada de
várias formas de acordo com os objectivos da optimização.

11
1.2.1.3 - objectivos e limites
Os critérios de optimização podem ser definidos pelo utilizador através dos nós objectivo e dos nós
limite. Os nós objectivo definem-se através de uma janela onde o utilizador escolhe a variável ou a
combinação de variáveis que ele quer maximizar ou minimizar. Os nós limite definem-se através de uma
janela onde o utilizador pode limitar os dados de saída ou as relações entre variáveis, impondo um valor
máximo ou mínimo.
1.2.1.4 – A cadeia de solução
Cama-se cadeia de solução à cadeia (indissociável) formada pelo DOE (Design of Experiment) e pelo
Optimiser.
O DOE é um elemento obrigatório. Neste nó são criados os conjuntos de parâmetros iniciais (população
inicial) a partir dos intervalos de valores admissíveis para as variáveis de entrada. O utilizador pode
escolher entre vários tipos de sequências de dados, que podem ser aleatórias, repartidas
proporcionalmente nos intervalos definidos para as variáveis de entrada, ou em função de uma lei de
probabilidade.
No Optimiser, o utilizador vai definir o algoritmo que vai regular a evolução da população inicial para uma
melhor optimização. A robustez, o tempo de cálculo e o tipo de solução desejado (intervalo de solução,
solução local,...) são pontos muito influentes na escolha do algoritmo.
1.2.1.5 – As saídas
As saídas podem corresponder aos resultados do programa ou a combinações de variáveis. O seu
formato pode ser escolhido pelo utilizador.
1.2.2 - Run Logs
Nesta unidade o utilizador pode seguir a execução dos cálculos tendo acesso ao tempo de cálculo de
cada perfil, tal como a todos os dados de entrada que o compõem, resultados e informações sobre o
processo.
1.2.3 - Designs Space
Este espaço de trabalho permite a análise dos resultados obtidos, para tal disponibiliza varias
ferramentas que são postas à disposição do utilizador.
1.2.3.1 - Multi Criteria Decision Making (MCDM)
O programa modeFRONTIER propõe-se a ajudar o utilizador a escolher o perfil mais apto entre as
soluções encontradas. De facto a ferramenta MCDM permite definir o melhor perfil, entre o conjunto de
resultados encontrados, em função dos objectivos formulados. Cabe ao utilizador definir os atributos que
vão influenciar a sua escolha e atribuir- lhes um peso relativo.

12
1.2.3.2 - Responce Surfaces Methodology (RSM)
O RSM é um conjunto de ferramentas matemáticas e estatísticas que constroem uma aproximação do
modelo de resposta do sistema às entradas. Quando a aproximação é satisfatória, ela substitui
eficazmente a simulação no processo de optimização e análise dos resultados
A vantagem desta abordagem é que ela permite, graças a modelos de aproximação, o cálculo de uma
resposta com um tempo de computação quase instantâneo. Ela torna-se então mais interessante para os
cálculos complexos com elevados tempos de computação.
1.2.3.3 – Métodos gráficos
Estas ferramentas permitem uma análise simples e interactiva dos resultados. Elas permitem
nomeadamente:
• Percorrer parametricamente os dados e analisar os casos de estudo desejados (“Parallel Chart”);
• Estudar a evolução dos parâmetros ao longo das iterações (“History Chart”);
• Confrontar os parâmetros (“Scatter Chart”)
• Estudar a influência de certos parâmetros sobre os restantes (“Student Chart”)
1.3 – Os projectos HADES e CENTOR
1.3.1 - Projecto HADES
O HADES é um projecto desenvolvido pelo CNES com a colaboração de várias empresas (como é o
caso da ONERA, da Bertin Technologies, ou do IRRCyN) e universidades. O objectivo é o de criar uma
plataforma de concepção preliminar de sistemas de transporte espacial, através de um processo de
optimização multidisciplinar baseado sobre o programa modeFRONTIER.
Esta plataforma deverá ser capaz de definir e avaliar as características de um lançador, andar ou
subsistema, de comparar as suas performances e de integrar tecnologias inovantes.
O CNES procura através deste projecto desenvolver uma base de trabalho centralizando as informações
de proveniência variada e onde diferentes competência trabalham em conjunto, nos processos de
criação, simulação, optimização e comparação dos diferentes conceitos de sistema de transporte
espacial. A plataforma HADES deve ser facilmente utilizável (user friendly) e bem documentada, de
forma a tornar-se numa ferramenta eficaz e que facilite a concepção de lançadores.

13
1.3.2 - PRF CENTOR
Este projecto federativo da ONERA tem como objectivo estudar o interesse e as performances de
veículos de transferência orbital, capazes de efectuar uma ou mais missões com trajectos de ida e volta
entre uma órbita baixa e as outras órbitas.
Um dos objectivos é a experimentação de técnicas de concepção pluridisciplinares, sabendo que a
concepção destes veículos faz intervir varias disciplinas (analise de missão, sistema propulsivo, controlo
térmico pilotagem, aerotermodinâmica, etc.). Estes estudos devem ser aplicados na comparação entre
os diferentes conceitos existentes para estes veículos.
Este tipo de veículo apresenta um interesse no quadro de um sistema de lançamento pois ele permitiria:
• Introduzir um nível de reutilização suplementar no sistema, em relação aos lançadores
“consumíveis”;
• Completar as capacidades de manobra possíveis com os sistemas existentes;
• Fazer regressar o satélite de uma órbita elevada para uma órbita baixa afim de ser reparado, ou
de o tirar de órbita (problema do lixo espacial)
Este tipo de veículo vem abrir também caminho a todas as aplicações civis ou militares de intervenção
no local: reparação, aprovisionamento em órbita (on-orbit servicing), inspecção entre muitas outras.
Figura 3 Veículo de transferência orbital na sua concepção com aero-assistência e interramente propulsiva

14
II – Optimização Multidisciplinar
A optimização multidisciplinar (OMD) é um conjunto de técnicas matemáticas, informáticas e
organizacionais, que permite encontrar a configuração óptima de sistemas complexos. Ela consiste em
fazer interagir modelos representativos de cada aspecto dos subsistemas, de complexidade e custos
variados, num processo de optimização a vários níveis onde as sinergias e acoplagens entre estes
subsistemas são exploradas de forma a encontrar a configuração óptima.
2.1 – As dificuldades da sua aplicação
Esta abordagem inovante na concepção de sistemas tem ainda um longo caminho a percorrer e vários
obstáculos a ultrapassar, estes problemas podem ser divididos em dois grupos principais:
Custos computacionais: O volume acumulado de cálculos dos modelos disciplinares e a necessidade
de análises iterativas dos sistemas acoplados capitalizam-se em tempos de computação muito elevados.
Uma abordagem interessante consiste em criar modelos de complexidade crescente à medida que o
processo de concepção progride.
Organizacional: é uma abordagem que vem mudar a organização tradicional do trabalho em equipa. A
organização e coordenação dos recursos humanos, da informação e dos trabalhos é um ponto muito
sensível e que deve ser sujeito de muita atenção. A reutilização de análises previamente desenvolvidas
numa outra lógica de trabalho é sempre problemática, e os riscos de incompatibilidades entre os códigos
das análises disciplinares são sempre elevados.
É então necessária uma clara definição dos papéis das equipas que trabalham num processo OMD,
assim como uma constante e importante comunicação entre os membros do projecto. As redes
informáticas, se tiverem em conta a organização humana, podem fornecer um elemento de resposta
muito interessante a estas dificuldades.
2.2 - Um domínio em expansão
A OMD é um domínio em grande expansão, e muitos são os trabalhos científicos feitos que têm como
tema esta metodologia. A recente criação em França de um pólo de competitividade neste domínio por
um grupo de empresas e laboratórios públicos, como a Renault, Dassault, ONERA, Astrium e Escola
Central de Paris entre muitos outros nomes, atesta isso mesmo.

15
O objectivo de muitos dos trabalhos mais recentes é o de resolver os problemas já enunciados, podemos
classificar os desenvolvimentos recentes nos seguintes grupos:
Conceitos de aproximação: Criação de algoritmos de aproximação de modelos por funções
construídas tendo por base as respostas do modelo original. Ex.: Método das Superfícies de Resposta.
Arquitectura OMD: Estudos sobre as diferentes organizações do processo de optimização
multidisciplinar, com comparação das diferentes formulações em vários casos. Ex.: melhoramento dos
processos heurísticos para a decomposição do problema de OMD.
Analise de sensibilidade : Focalização crescente no desenvolvimento das ferramentas e analise da
sensibilidade e robustez na analise disciplinar. Ex.: Ferramentas de diferenciação automática.
Teoria e algoritmos de optimização : Desenvolvimento de teorias de convergência, de estratégias de
optimização multi-objectivo e de definição e inicialização de parâmetros.
Infraestruturas software : Experimentação da computação paralela e heterogénea, desenvolvimento de
software comercial de OMD e de ferramentas de visualização e manipulação de resultados. Ex.:
modeFRONTIER.
O futuro da optimização multidisciplinar deve passar por progressos ao nível dos métodos de
aproximação, como o método das superfícies de resposta, mas também pelos trabalhos teóricos sobre a
convergência da optimização com múltiplos níveis. A robustez das concepções e a análise de incerteza,
com toda a sua importância para a aplicação industrial destes processos, será certamente outro domínio
em grande evolução.

16
III – Aplicação da OMD à concepção de veículos espaciais Para a concepção de um sistema complexo como um veículo espacial é necessário fazer compromissos
para chegar ao equilíbrio entre diferentes objectivos acoplados entre si, como por exemplo o
desempenho, a segurança, a complexidade dos cálculos e os custos.
O estudo de concepção tem por objectivo de encontrar e propor várias alternativas para o veículo, o mais
depressa possível na fase do projecto, quando se tem mais flexibilidade às variações. Este estudo
oferece em geral a possibilidade de atingir um nível superior de desempenhos, frequentemente ligados à
uma redução dos pesos.
Na análise conceptual é necessário considerar as complexas interdependências entre as exigências
ligadas à missão e os constrangimentos relacionados com as tecnologias disponíveis e o ambiente. É
por isso que, para resolver este problema, é necessário utilizar uma optimização conceptual
pluridisciplinar (Multidisciplinary Design Optimisation, MDO). Este método fornece várias opções que
permitem convergir para a configuração final.
O esquema da Figura 4 permite visualizar o processo seguido para chegar à concepção final, de maneira
muito simplificada, dado que não se destaca o acoplamento que há entre todos os domínios.
Figura 4 disciplinas intervenientes no processo
Os primeiros estudos de concepção eram orientados para melhorias dos veículos já existentes; isso
significa que havia constrangimentos estritos, impostos para a solução com MDO.
A perda trágica da Lançadeira a Colúmbia, o 1 de Fevereiro de 2003, levou os peritos a procurar novas
concepções, o que implica aplicar-se muito menos constrangimentos ao sistema, que por conseguinte
tem mais liberdade na sua investigação da solução óptima. Esta acção conduziu a concepções menos
intuitivas, mas mais interessantes a estudar, às quais nunca se teria chegado seguindo o método
tradicional.

17
3.1 – Pluridisciplinaridade
O projecto de um novo lançador espacial implica a qualquer nível (do início da análise conceptual à
determinação detalhada dos parâmetros do veículo) diversas disciplinas diferentes: propulsão,
dimensionamento estrutural e mássico, aerodinâmica, análise de missão, pilotagem, arquitectura do
veículo e avaliação dos custos.
Todos estas disciplinas têm interacções mais ou menos fortes entre si, em função dos constrangimentos
que põem em jogo, que podem ser de tipo local (não interdependência) ou tipo "compartilhado" (a sua
determinação influencia também os outros domínios). Vai-se agora ver resumidamente as características
principais das diferentes disciplinas.
3.1.1 – Propulsão
Um dos mais importantes parâmetros do projecto de um lançador é a força propulsiva, porque esta
grandeza determina a aceleração do veículo, mais explicitamente através da relação entre a força
propulsiva e o peso total.
Em função das características da missão é obrigatório ter-se em conta soluções que se adaptem às
exigências, podendo isto aumentar a complexidade do estudo.
Por exemplo pode considerar-se a possibilidade de controlar o nível de força propulsiva a uma
percentagem do valor nominal. Se por um lado representa uma vantagem para a optimização da
trajectória e para a redução das acelerações durante a fase final da utilização de um motor, onde os
reservatórios estão quase vazios e, por conseguinte, a massa do conjunto é mais baixa; por outro lado é
uma verdadeira necessidade, se for considerada uma missão habitada, para a qual o intervalo de
acelerações admissíveis está fortemente ligado aos limites humanos e portanto é provavelmente
reduzido.
Outros parâmetros devem ser tidos em conta no estudo do sistema propulsivo, como a sua geometria e
as características energéticas ligadas à combustão. É portanto importante atentar-se à relação entre as
secções da tubeira, da qual depende a relação entre as pressões. No que se refere ao aspecto
energético, o parâmetro mais importante é a impulsão específica, que é representativa da eficácia do
motor. Esta grandeza depende primeiramente da escolha entre motores a combustíveis sólidos ou
líquidos e em seguida da escolha específica dos combustíveis, mais concretamente da razão de mistura
dos combustíveis no caso líquido.

18
3.1.2 – Massa e dimensões
A massa total de um lançador é constituída pelas massas dos combustíveis e respectivos reservatórios,
dos motores, do sistema de alimentação e da carga útil. No caso de um lançador com vários andares,
para cada um deles será necessário adicionar a massa dos andares superiores na carga útil desse andar
propulsivo.
A massa do motor é certamente a mais dificilmente determinável, dado que depende dos desempenhos
de uma maneira menos directa que os combustíveis. Ou seja, os desempenhos determinam uma
pressão na câmara de combustão da qual vão depender as suas dimensões e a sua espessura, por
conseguinte a sua massa.
No caso dos combustíveis, as necessidades da missão permitem determinar a quantidade de
combustíveis e as suas massas, graças às quais se podem determinar dimensões, espessuras e por
conseguinte massas dos reservatórios.
3.1.3 – Aerodinâmica
Uma análise completa da fase de descolagem necessita dos valores dos coeficientes aerodinâmicos de
esteira e sustentação, em função do ângulo de incidência e do número de Mach.
Numa primeira fase de estudo do veículo não se tem a possibilidade de determinar de maneira definitiva
estes valores, porque não se tem ainda a configuração definitiva do lançador. Geralmente decompõe-se
o veículo em vários elementos de geometria simples, para os combinar de maneiras diferentes a medida
que se avança na concepção do lançador.
É evidente que esta análise conduziria à resultados muito diferentes o caso de um veículo reutilizável,
para o qual são impostas outras exigências sobre os coeficientes aerodinâmicos.
3.1.4 – Trajectória
Em geral, no cálculo da trajectória de descolagem, assume-se um modelo à três graus de liberdade,
considerando-se o lançador como um corpo pontual, colocado no seu centro da gravidade.
O veículo é modelado como uma sequência de andares, cada um com as suas próprias características
aerodinâmicas e propulsivas. Acrescentando estas às outras características fundamentais para a
resolução das equações dinâmicas (peso total à descolagem, relação entre forças propulsivas e pesos,
débito do propulsor, superfícies de referência...), podendo então integrar-se a trajectória, impondo as
condições limites ligadas à órbita visada (altitude, velocidade, ângulo de inclinação...).
Este processo permite obter uma aproximação da trajectória a seguir, porque não tem em conta todas as
perturbações. É no entanto muito vantajoso graças à sua eficiência e à rapidez de cálculo.

19
3.1.5 – Analise de custos
A análise dos custos de desenvolvimento de lançador é geralmente constituída de duas etapas
principais.
Uma primeira onde se consideram separadamente os nove domínios tecnológico seguintes: aviónica,
estruturas, actuadores electromecânicos, conversão e distribuição eléctrica, propulsão auxiliar, potência
principal, reservatórios de combustível e protecção térmica. Para cada um destes domínios faz-se uma
estimativa dos investimentos necessários para a melhoria do nível tecnológico actual nos cinco anos que
seguem (período de espera habitual antes que do inicio do ciclo de desenvolvimento). O custo total deste
processo de progresso tecnológico é dado simplesmente pela soma dos nove valores obtidos.
A segunda etapa consiste a considerar os custos do verdadeiro desenvolvimento do veículo, o que
implica a consideração da estimativa de vários factores: os pesos e as dimensões das diferentes partes,
a complexidade da sua realização e o nível tecnológico que se terá atingido aquando do início do
desenvolvimento.
3.1.6 – Acoplagem interdisciplinar
É claro que a solução destes problemas necessita uma abordagem iterativa, dado que as diferentes
disciplinas apresentadas são fortemente correlacionadas entre elas: os dados de entrada de uma são os
resultados das outras e vice-versa. Por exemplo, é necessário que a superfície de referência obtida pelo
cálculo do dimensionamento estrutural e mássico seja a mesma utilizada para os cálculos das forças
aerodinâmicas.
Esta compatibilidade interdisciplinar deve ser verificada igualmente no que se refere ao peso total na
descolagem (e na aterragem, se se tratar de um veículo de reentrada), ao diâmetro de referência, à
razão de mistura, à razão de massas e a cada grandeza ligada à propulsão.
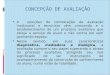
O esquema da Figura 5 mostra, de forma mais precisa, a interdependência das diferentes disciplinas e o
processo de determinação das mudanças a fazer para melhorar a concepção do veículo.

20
optções deconcepção
missão
opções depropulsão
opçõestecnológicas
opçõesopérationais
geometria
analiseaerodinâmica
análisetrajectória
configuraçãopeso - dimensões
software – hardwareanálise de segurança
análise de custosCritério
de avaliação
análises estructuras,contrôlo, térmico,
propulsão, radiações
Concepção
análise
Figura 5 modelo representativo das interacções entre as disciplinas
Nesta figura, a oval estão representadas as decisões tomadas sobre a concepção, i.e. o vector dos
parâmetros de concepção que devem ser avaliados, enquanto que os rectângulos representam as
análises que devem ser feitas para determinar as necessidades de cada domínio.
Este esquema mostra efectivamente os aspectos que constituem a totalidade do problema da concepção
de um veículo espacial:
• as necessidades específicas da missão (carga útil, massa, destino, constrangimentos
ambientais, manobras órbitais...);
• abordagem de selecção do veículo (foguete ou reactor, com ou sem asas, com ou sem piloto,
mono ou de vários andares, descartável ou reutilizável...);
• tecnologias disponíveis (materiais estruturais, sistema de protecção térmico, aviónica,
propulsão...);
• disposição e geometria das superfícies que vão conter a carga útil, os subsistemas e os
equipamentos de apoio;
• estimativa da aerodinâmica em fase de descolagem e de reentrada atmosférica (subsónico,
transsónico, supersónico e hipersónico);
• cálculo da trajectória e consequentes ambientes de voo;
• análises de estruturas, controlo, fluxos de calor, radiações e propulsão;
• estimativa de pesos, de dimensões e posição do centro de gravidade, com base na geometria e
escolhas tecnológicas;
• estimativa dos custos de desenvolvimento;
• estimativa do desempenho dos métodos utilizados para comparar as diferentes alternativas;
• utilização de todos os resultados para alterar e optimizar o sistema global, aproximando-se dos
objectivos da missão;
• iteração de todos estes processos até a convergência para a melhor concepção final.

21
3.2 - Métodos de optimização
As características da concepção de lançadores obrigam à aplicação de um grupo de métodos de
optimização para responder à necessidades específicas de cada disciplina.
Os métodos de optimização podem ser classificados em três grandes grupos: métodos paramétricos
baseados na concepção de técnicas experimentais; métodos gradientes que utilizam o cálculo derivativo;
métodos estocásticos como os algoritmos genéticos.
3.2.1 - Métodos paramétricos
Uma abordagem interessante para a optimização de um sistema que combine várias disciplinas será à
que não tem necessidade que os códigos sejam integrados. Esta consideração e a necessidade de
receber variáveis discretas e contínuas sugerem a aplicação dos métodos paramétricos, como Responce
Surface Methods (RSM), para construir modelos polinomiais aproximativos que representam a interacção
entre os parâmetros do processo de concepção. Estes modelos podem ser utilizados para a optimização
pluridisciplinar e a análise da sensibilidade.
Dados gerados por diferentes códigos são agrupados e utilizados por um programa que determina a
equação da superfície de aproximação. A determinação numérica é então feita de acordo com métodos
gradiente sobre estas superfícies de aproximação.
Quando o número de variáveis é pequeno o número requerido de concepções globais será também
pequeno e por conseguinte pode gerar-se tradicionalmente a superfície de resposta ao nível do veículo.
Uma outra abordagem possível é gerar uma superfície de resposta para cada disciplina.
As vantagens dos métodos paramétricos são:
• A integração interdisciplinar não é necessária e por conseguinte os códigos interactivos e
comerciais não representam um problema;
• Acomodação das variáveis discretas e contínuas;
• A sensibilidade em todo o domínio pode ser analisada a partir da superfície de aproximação;
• A alteração dos constrangimentos não implica recomeçar o processo;
• A superfície pode fornecer um modelo para o acoplamento com outras aplicações;
As desvantagens destes métodos são:
• A aproximação pode ser má;
• Apenas uma solução próxima da óptima pode ser encontrada;
• Com um número crescente de variáveis esta abordagem torna-se impossível;
• A acção humana é necessária.

22
3.2.2 - Métodos gradientes
Estes métodos são utilizados frequentemente nas análises disciplinares individuais e multidisciplinares
no caso de uma estrutura monolítica, onde várias disciplinas são representadas num só código. Este
método calcula as derivadas da função objectivo de forma a fazer a aproximação ao ponto óptimo.
As vantagens de este método são:
• Uma solução rigorosa pode ser encontrada;
• Pode manipular um grande número de variáveis e constrangimentos;
• Uma vez desenvolvidos, estes códigos não têm necessidade de intervenção humana;
As desvantagens são:
• Estes métodos não suportam variáveis ou domínios discretos ou não-lisos ou cujas derivadas
sejam descontínuas;
• A sensibilidade da função apenas é conhecida no caminho percorrido pelo método até a solução;
• Um importante esforço é requerido para agrupar as disciplinas num só código;
• Muitas disciplinas devido à sua complexidade e interactividade são impossíveis integrar;
A concepção monolítica é responsável pelas duas últimas desvantagens, estes podem ser evitados
recorrendo a uma subclasse dos métodos gradientes, a análise da sensibilidade do sistema. Este
método utiliza o teorema da função implícita para decompor o problema global em vários problemas
paralelos calculando os seus próprios gradientes. As derivadas locais de todas as disciplinas são
calculadas e combinadas numa equação matricial linear que pode ser resolvida para gerar todas as
derivadas totais para o optimizador.
3.2.3 – Métodos estocásticos
Um dos métodos estocásticos mais conhecida é o algoritmo genético, que é concebida a fim de simular a
selecção natural. Este método é explicado no apêndice B.
As vantagens dos algoritmos genéticos são:
• Problemas descontínuos, múltiplos mínimos locais e variáveis discretas não representam um
problema;
• Execução fácil;
• Apenas a função objectivo é avaliada e não os seus gradientes;
As desvantagens são:
• É um necessário grande número de avaliações da função objectivo;
• Apenas resultados próximos da situação óptima podem ser acessíveis;
• Não fornece nenhuma informação sobre a sensibilidade da função;

23
3.2.4 – Quadro de síntese
O esquema da Figura 6 resume as bases para a selecção do método mais adequado para a análise.
inicio
Tem de ser insensivel ao ruido
Design robusto(Tagushi)
Sim
Esperam-se muitosMinimos locais?
Não
Algoritmosgenéticos
Variáveis de design discretas?
Não
Sim
Avaliação de funções rápida/fácil?
Algoritmos genéticos
Sim
Sim
Métodos de Tagushi
Não
Função objectivo suave?
Não
Grelha de procura Procura aleatórea
Não
Avaliação de funções rápida/fácil?
Sim
Condições fronteira?
Algoritmo de opt.sem constrangimentos
Sim
Não
Algoritmo de opt. com constrangimentos
Sim
Modelo linear OK?
Modelo quadratico OK?Cáculo de gradientes?
RSMMétodo gradiente com análise de sensibilidade
Optimização claborativa
Não
Não
Não
Não
RSM
Sim
Sim
Sim
Métodos paramétricos
Métodos estocásticos
Métodos baseados em calculos
Figura 6 bases para a escolha do método mais adequado para a análise
3.3 – Arquitecturas de optimização
Várias arquitecturas diferentes foram propostas para a concepção de veículos espaciais. Neste capítulo
vão apresentar-se algumas das principais estratégias utilizadas.
Em primeiro lugar é necessário introduzir a divisão do domínio nas diferentes disciplinas que participam
na totalidade dos aspectos a considerar na fase de concepção de um veículo espacial. Tratam-se das
disciplinas apresentadas no capítulo 3.1. As diferentes arquitecturas distinguem-se entre elas pela forma
como acoplam os estudos cada uma das disciplinas.

24
3.3.1 – Estratégias «one variable at the time»
Nos primeiros estudos de concepção de veículos espaciais, cada aspecto a considerar (propulsão,
aerodinâmica, trajectórias...) era estudado separadamente; desta maneira havia um perito em cada
domínio que se ocupava exactamente de um aspecto. De modo a poder construir um veículo real, que
tenha em conta todos os aspectos ao mesmo tempo, era necessário uma equipa de pessoas que se
ocupava de iterar manualmente as diferentes disciplinas. Para cada um destas iterações fazia-se variar
apenas um dos parâmetros (daí o nome destas abordagens), o que permitia iterar manualmente, mas
tornava ao mesmo tempo processo muito mais longo.
3.3.2 - Ciclos de convergência (Loop Convergence Criterium)
Neste tipo de abordagem, a compatibilidade interdisciplinar é garantida por uma espécie de critério de
convergência em anel. Várias estratégias, baseadas nos métodos gradientes, fazem parte deste grupo.
Resolvem os problemas de optimização de cada disciplina através de um anel que as toma em conta, de
acordo com um princípio não hierárquico. No âmbito destes de métodos, várias avaliações são
necessárias para chegar a uma concepção realizável.
3.3.3 – Estratégias «all at once»
Nos estudos de concepção de veículos espaciais, várias estratégias que consideram todas as variáveis
na mesma função a optimizar foram propostas. Trata-se de métodos que eliminam o anel de que se falou
anteriormente, substituindo-o pela adição de variáveis auxiliares e constrangimentos de compatibilidade.
Foi mostrado que este tipo de método pode reduzir significativamente o número de avaliações da função
a optimizar.
3.3.4 – Optimização colaborativa (Collaborative Optimisation, C.O.)
Trata-se de uma nova arquitectura cujas características se revelaram muito adaptadas aos casos de
concepção de veículos espaciais mais complicados, em termos de números variáveis utilizadas. Como
outros métodos já analisados, apoia-se na ideia da descentralização do estudo, dividindo o problema
principal em sub-problemas, em função dos diferentes domínios a tratarem. Neste caso cada subsistema
é encarregado de optimizar a sua função através das suas variáveis locais, respeitando ao mesmo
tempo os constrangimentos do seu domínio.
A intercomunicação entre os diferentes subsistemas não é necessária, porque nenhum entre eles é
influenciado pelos constrangimentos dos outro, graças ao facto de a coerência entre as diferentes
disciplinas ser garantida pela avaliação das variáveis interdisciplinares. Ao nível do sistema principal, um
optimizador encarrega-se de avaliar estas variáveis interdisciplinares e de gerir o processo de
compatibilidade global, optimizando ao mesmo tempo o objectivo final.

25
Várias vantagens derivam das características deste método. Outros sub-problemas podem ser
acrescentado ou alterados sem grande dificuldade. Além disso, como se disse ao início, tem-se a
possibilidade de resolver sistemas complexos, com um número de variáveis muito elevado, guardando
ao mesmo tempo um bom desempenho.
No diagrama da Figura 7 apresenta-se o esquema de uma possível aplicação de este método.
Figura 7 esquema representativo de um processo de optimização colaborativa
Neste caso o sistema principal é dividido em três subsistemas, um dos quais que tem em conta as
massas, o dimensionamento e os custos. Esta estratégia de decomposição vem da consideração que a
optimização das massas e a dos custos são acopladas fortemente.
3.3.5 – Comparação entre os métodos
Apresentam-se agora os resultados (em termos de desempenho) obtidos no mesmo caso de estudo,
utilizando três métodos diferentes: um de tipo "one variable at the time" dita standard, uma CO e uma de
tipo "all at once". Com a ajuda do quadro abaixo, pode comparar-se o número de vezes que a função foi
calculada e o número de comunicações interdisciplinares requeridas em cada caso.
Arquitecturas de
optimização
Nº de avaliações da
função
Comunicações
necessárias
Standard 10482 66
CO 3125 – 24840 23
All at once 3182 65
O intervalo de valores para o número de avaliações da função no caso da arquitectura colaborativa deve-
se ao diferente número de variáveis internas nos subsistemas, o que faz com que haja mais ou menos
necessidade de calcular a função. Permanecendo na coluna de esquerda, vê-se que a optimização
colaborativa não supera o método "all at once", mas pode ser melhor que o método standard.

26
No entanto o CO pode ser considerado melhor que os outros porque oferece outras vantagens. Uma
primeira vantagem aparece directamente na coluna da direita do quadro, onde se vê que o número de
comunicações interdisciplinares requeridas é muito menor. dado que cada um destas trocas entre os
domínios diferentes implica uma re-avaliação das funções dos subsistemas compreende-se rapidamente
em que consiste esta vantagem.
Este número baixo de comunicações necessárias é o resultado directo do aumento da autonomia de
cada subsistema e por conseguinte do seu nível de responsabilidade. Além disso, como já foi visto, ele
tem uma muito grande flexibilidade, o que significa maior facilidade em ser alterado rapidamente,
enquanto que os outros são muito mais dificilmente adaptáveis a uma situação diferente.
Na referência [ 4 ] é apresentada a resolução de 8 problemas de concepção pluridisciplinar feita pela
NASA. Estas resoluções são conduzidas de forma a promover uma comparação dos métodos.
Os métodos aqui comparados são:
• O Método Multidisciplinar Fazível (MDF) , onde um vector de variáveis XD é dado ao conjunto
do sistema das análises disciplinares e uma análise multidisciplinar é fornecida via um cálculo
iterativo a partir do ponto fixo XD para obter o vector de saída U(XD). Este é utilizada para avaliar
a função objectivo f(XD,U(XD)) e os constrangimentos g (XD,U(XD)). A análise pode ser efectuada
por um método gradiente.
• O Método uni Disciplinar Fazível (IDF) , onde as variáveis que representam a interacção entre
as disciplinas são tratadas como variáveis de optimização, o vector de variáveis é dividido em
variáveis de concepção XD e variáveis de interacção Xµ.
• A Optimização Colaborativa.
Nem todos os problemas podem ser resolvidos através de todos os métodos. Na presença de um
problema não-linear que não pode ser decomposto os métodos baseados na decomposição do problema
(IDF, CO) não poderão ser utilizados, como é o caso do problema 8 (isomerização), além disso se a
decomposição do problema for feita apenas nas variáveis de entrada a solução o método IDF não tem
interesse.
As dimensões do problema em cada formulação são apresentadas na Tabela 1, a convergência para a
solução óptima partindo de diferentes pontos é destacada na Tabela 2 e o trabalho de computação é
avaliado na Tabela 3.

27
Problema # 1 2 3 4 5 6 7 8
MDF
# de Variáveis 6 8 6 7 4 4 120 80
# de Cond. Limite 7 3 4 11 4 4 764 115
IDF
# de Variáveis 14 12 12 - 6 8 - -
# de Cond. Limite 11 5 6 - 6 6 - -
CO
Système
# de Variáveis 11 5 6 2 4 8 40 -
# de Cond. Limite 5 2 6 3 2 6 6 -
# de sub-sistemas 5 2 2 3 2 2 2 -
# total de variáveis dos sub-sistemas
18 12 12 11 7 12 120 -
Tabela 1 dimensões do problema
Problema # 1 2 3 4 5 6 7 8
MDF
(#convergiram / #ensaiados)
IDF 4/4 4/4 4/5 - 4/5 3/5 - -
CO 4/4 2/4 3/4 4/5 5/5 4/5 0/5 -
3/3 5/12 10/10 1/612/12 12/12 12/12 12/12
Tabela 2 resultados convergentes
Problema # 1 2 3 4 5 6 7 8
MDF 667 275 1025 77 10626 3035 6887 245
IDF 9640 6019 406 - 694 1071 - -
CO
Sistema:152 113 54 5 52 96 92 -
Sub-sistema:13065 18005 2983 2102 837 40125 691058 -
Tabela 3 Número de análises até à convergência

28
Para esta última tabela é necessário ter em conta que uma análise num subsistema não corresponde ao
mesmo tempo de computação que uma chamada do sistema completo como é o caso das análises pelo
método MDF.
É então demonstrado nestas tabelas que a formulação e a aplicação têm uma influência directa sobre o
desempenho da análise. Sendo possível discernir a influência das limitações dos problemas e
tendências específicas, no desempenho de cada método. Por exemplo o problema 5 (combustão de
propano) tem subsistemas bem separados e como se pode ver o método da optimização colaborativa é
muito mais eficaz. O problema 7 (hub frame), em contrapartida, mostra um muito mau desempenho do
método CO devido a um problema de desacoplagem difícil.

29
IV – Funcionalidades da plataforma de OMD para a aplicação a um lançador Numa primeira fase, os trabalhos da tese aqui apresentada centraram-se no desenvolvimento de uma
plataforma de optimização multidisciplinar para a aplicação a um lançador. Estes trabalhos foram
enquadrados no projecto HADES no qual a ONERA colabora com o CNES.
O objectivo desta plataforma é de ser uma ferramenta simplificada permitindo ao utilizador obter uma
configuração óptima dos dados característicos da concepção de um lançador tomando em conta as
diversas disciplinas intervenientes.
Esta plataforma deve também permitir ao utilizador a definição de vários parâmetros da missão e da
própria configuração do lançador, de forma a ser o mais flexível possível. Ela devera também ser a mais
robusta possível, para funcionar correctamente nas diferentes configurações de dados possíveis.
O processo de optimização é lançado em série pelo modeFRONTIER e portanto a velocidade de
execução é também um critério importante a ter em conta
A Figura 8 apresenta um organograma das disciplinas e das suas posições dentro do ciclo de
optimização na primeira versão do programa HADES.
Figura 8 esquema do processo de optimização da plataforma HADES

30
Esta tese, no quadro do projecto HADES, centrou-se no desenvolvimento da parte identificada como V0
na Figura 8, e na preparação dos trabalhos correspondentes à versão V1, nomeadamente com o
desenvolvimento e modelação dos cálculos simplificados de estruturas.
O objectivo dos trabalhos é a criação de um processo de optimização, de utilização simples, que calcula
os dados ligados às disciplinas intervenientes (staging, propulsão, trajectória e aerodinâmica). Estes
dados determinam a configuração óptima do lançador para uma missão dada, a partir de um ou vários
critérios escolhidos pelo utilizador (massa total, razão entre a massa útil e a massa total, etc.).
Conhecendo todas estas exigências, a plataforma foi desenvolvida ao longo deste estágio sendo o seu
aspecto final na janela de Work Flow do programa modeFRONTIER o apresentado na Figura 9 e
explicado ao longo deste capítulo.
Figura 9 Plataforma de optimização HADES V0
Neste nível superior de optimização foi escolhido como algoritmo de optimização um algoritmo genético
que lança em série um processo de optimização interno à caixa de cálculo (executável Matlab). Este
processo é lançado com diferentes perfis de dados de entrada determinados aleatoriamente para o
domínio de valores admissível para cada variável de entrada.
A escolha deste algoritmo deve-se a dois factores : a este nível são feitas as escolhas tecnológicas a
utilizar no processo interno de optimização mas também se definem a geometria exterior do lançador, a
órbita visada e a massa da carga util, coabitando assim variáveis discretas e variáveis contínuas ; dada a
complexidade do sistema e o número de disciplinas a serem tomadas em conta são de esperar vários
mínimos e máximos locais.
Nestas condições e analisando o esquema da Figura 6, o algoritmo genético apresenta-se como o mais
interessante para a optimização a este nível.

31
4.1 – Dados em entrada
As variáveis de entrada foram escolhidas de forma a flexibilizar ao máximo o processo, permitindo ao
utilizador uma manipulação rápida e intuitiva dos dados. Assim sendo as entradas podem ser divididas
segundo as disciplinas em que intervêm
Para permitir a definição da missão o utilizador pode manipular as variáveis seguintes:
• Mutile: Massa da carga útil a ser injectada em órbita pelo lançador;
• h: altitude da órbita circular pretendida para a missão;
A distribuição da massa pelos diferentes andares do lançador (staging) pode ser manipulada alterando a
variável:
• n_etages: número de andares propulsivos do lançador (previsto para 3 ou 4)
A aerodinâmica do lançador depende muito da forma da ogiva, definida neste programa como
parabólica. Como dados de entrada influentes na aerodinâmica temos então:
• along_c: alongamento da ogiva (em calibres);
• diam1, diam2, diam3, diam4: diâmetros exteriores dos andares propulsivos;
Para o estudo da propulsão, as variáveis de entrada são:
• typ_prop1, typ_prop2, typ_prop3, typ_prop4: tipo de propulsão utilizado em cada andar
propulsivo
o = 1: propulsão sólida;
o = 2: propulsão liquida;
• tprop1, tprop2, tprop3, tprop4: combustível utilizado em cada andar propulsivo
o Propulsão sólida
� = 1: TP-H-1202, 21% al, 57% AP, 12% HMX, 10% HTPB;
� = 2: TP-H-3340, 18% Al, 71% AP, 11% HTPB;
� = 3: TP-H-1148, 16% Al, 70% AP, 14% PBAN;
o Propulsão liquida
� = 1: motor a hidrazina (N2O2 / MMH);
� = 2: motor criogénico (H2 / O2);
� = 3: motor a metano (CH4 / O2);
• cycle1, cycle2, cycle3, cycle4: ciclo termodinâmico do sistema de propulsão a combustíveis
líquidos
o = 1: combustíveis pressurizados;
o = 2: gerador de gás em ciclo aberto;
o = 3: expander;

32
O diâmetro exterior dos andares é também um parâmetro dimensionante para a propulsão, sendo assim
representativo da pluridisciplinaridade do processo de optimização.
4.2 – Os ciclos de optimização
Durante a realização deste projecto foram desenvolvidos vários ciclos de optimização global, incluindo
módulos internos de optimização local. Estes ciclos apresentam um grau crescente de complexidade e
de número de disciplinas intervenientes. É através destes ciclos de convergência que é garantida a
compatibilidade entre os vários módulos de optimização.
Esta abordagem modular, escolhida para os processos de optimização internos, onde cada disciplina é
introduzida e estudada num nó de optimização próprio, corresponde à escolha de uma arquitectura de
optimização colaborativa.
Esta organização permite uma introdução facilitada de novas disciplinas assim como uma maior
flexibilidade dos processos, permitindo manipula-los mais intuitivamente e uma localização mais precisa
as fontes de erro. Esta característica é tanto mais importante uma vez que este é um processo em
evolução ao qual serão adicionadas várias novas disciplinas. Para além deste aspecto esta arquitectura
permite uma mais fácil reutilização ou adaptação futura dos códigos disciplinares.
Esta abordagem modular é feita ao nível do script Matlab, sendo as optimizações internas a cada módulo
feitas utilizando a função fmincon . Esta função utiliza o método sequencial quadrático (método gradiente
com análise de sensibilidade, que constrói uma função quadrática de aproximação a cada passo da
iteração de procura do óptimo) para determinar, dentro dos limites impostos, o valor óptimo dos critérios
definidos para cada disciplina.
Esta formulação, interna ao Matlab, foi escolhida porque a versão 3.1.3 do programa modeFRONTIER
não permite a optimização local imbricada (já presente na versão 4) e também porque possibilita uma
gestão mais simples da comunicação de dados entre os módulos.
4.2.1 – Ciclo staging – propulsão sólida
O primeiro ciclo programado faz interagir dois módulos. O modulo de optimização da divisão em andares
que determina a distribuição da massa pelos andares. Este módulo parte dos valores de impulsão
específica no vazio dada para cada andar, para garantir o ∆V propulsivo necessário para a realização da
missão, minimizando a massa total do lançador.
O segundo modulo procura optimizar a propulsão sólida, ele maximiza a impulsão específica à pressão
atmosférica média de funcionamento de cada andar para os dados de staging calculados pelo o primeiro
modulo e dados propulsivos definidos no nível exterior ao ciclo (seja pelo utilizador ou pelos algoritmos
de optimização de modeFRONTIER). A impulsão específica no vazio correspondente a esta

33
maximização será então utilizada pelo módulo de staging aquando da determinação da nova divisão em
andares.
A convergência do ciclo é avaliada através da convergência da impulsão específica de cada andar. O
ciclo pára assim que o modulo do vector das impulsões especificas no vazio de cada andar varia menos
de 1 (s) entre cada iteração. Este ciclo é representado na Figura 10.
Figura 10 Ciclo staging – propulsão sólida
Uma segunda versão deste ciclo de optimização permitiu a introdução de um módulo de
dimensionamento da ogiva e do adaptador da carga útil. Este módulo determina as massas destes dois
elementos estruturais. Estas são adicionadas à massa da carga útil de forma a completar a massa do
andar não propulsivo a transportar até à órbita pretendida.
Os casos infazíveis encontrados são de dois tipos: impossibilidade efectiva de respeitar os limites a partir
dos dados de entrada; problemas de robustez do código. Para diminuir o prejuízo causado pelos casos
do primeiro tipo foi incluído um filtro que detecta certos perfis dos dados de entrada que tornam o caso
infazível antes que estes entrem no ciclo de convergência. Tal procedimento permite economizar tempo
de computação inútil dado que estes casos passaram a ser detectados em cerca de 0,5 segundos em
vez dos cerca de 30 segundos perdidos pelo ciclo à procura de uma solução. A Figura 11 mostra um
esquema representativo deste ciclo.
Figura 11 Ciclo staging-propulsão sólida com dimensionamento da ogiva

34
4.2.2 – ciclo staging – propulsão sólida – trajectória
O segundo ciclo desenvolvido é baseado num modelo do tipo boneca russa, tendo um ciclo interno de
optimização da divisão em andares e da propulsão sólida e um ciclo externo de convergência entre os
dados do ciclo interno e do modulo de optimização da trajectória. Esta convergência é feita utilizando o
parâmetro de perdas, que é um dado de entrada do modulo de staging e é determinado pelo modulo de
trajectória a partir dos dados propulsivos e da divisão em andares do lançador.
A organização tipo boneca russa é característica dos casos em que o tempo de computação de um dos
módulos é significativamente superior que o dos restantes. De facto o tempo gasto pelo modulo de
optimização de trajectória é bastante mais significativo que o tempo consumido pelos módulos de
propulsão sólida e staging, o que justifica esta organização do ciclo.
O objectivo do módulo de trajectória, neste ciclo, é a determinação da trajectória que maximiza o ∆V final
da missão, injectando a carga útil à altitude da órbita pretendida com declive nulo. Este valor de ∆V é de
seguida confrontado com o ∆V propulsivo disponível para calcular as perdas da missão. O cálculo das
perdas permite determinar o novo ∆V propulsivo a ser fornecido pelo ciclo de staging – propulsão sólida.
O ciclo é interrompido quando o valor das perdas varia menos de 0,5% entre cada iteração. Este ciclo é
representado na Figura 12.
Figura 12 Ciclo staging-propulsão sólida-trajectória
Como representado, o módulo de trajectória calcula também, recorrendo a um cálculo integrativo, a
pressão atmosférica média de funcionamento de cada andar, utilizada no módulo de optimização da
propulsão sólida.

35
Este ciclo foi posteriormente dotado de um cálculo dinâmico das perdas aerodinâmicas, integrado no
módulo de optimização da trajectória. Este cálculo é feito determinando o valor do coeficiente
aerodinâmico em cada ponto do cálculo da trajectória do lançador a partir da interpolação de uma tabela
com três dimensões (alongamento da ogiva, número de Mach e altitude de voo).
4.2.3 – Ciclo staging – propulsão – trajectória
Neste ciclo a propulsão deixa de estar limitada ao caso de combustível sólido, permitindo ao utilizador
escolher entre propulsão sólida ou liquida em cada andar. O módulo de propulsão líquida é em tudo
similar ao módulo de propulsão sólida, optimizando a impulsão específica à pressão atmosférica média
de funcionamento do andar e determinando a impulsão específica no vazio correspondente. Esta ultima
vai realimentar o módulo de staging até à convergência do ciclo interno, mantendo a impulsão especifica
no vazio como critério de convergência.
A inclusão do módulo de propulsão, que faz a gestão dos dados de entrada e saída dos módulos de
propulsão sólida e líquida, foi feita em duas fases. Uma primeira onde a robustez e a eficácia do ciclo
interno (staging – propulsão) foi testada sozinha e uma segunda onde foi integrado o módulo de
optimização da trajectória, assumindo o aspecto representado na Figura 13.
Figura 13 Ciclo Final staging-propulsão-trajectória

36
4.3 - Os módulos de optimização
Segue-se uma apresentação simplificada das funcionalidades de cada um dos módulos que fazem parte
do ciclo final apresentado no capítulo anterior.
4.3.1 - Módulo de dimensionamento da ogiva
Este módulo foi desenvolvido no quadro do projecto aqui apresentado e é explicado mais
pormenorizadamente no capítulo 5.1. O seu objectivo é o cálculo das massas associadas à ogiva e ao
adaptador da carga útil. Estas massas são adicionadas à massa da carga útil para obter a massa total a
ser injectada em órbita.
O tamanho e a massa da ogiva são determinados em função da carga útil utilizando relações empíricas
feitas a partir das ogivas dos lançadores actuais.
O dimensionamento do adaptador da carga útil é feito seguindo o modelo de adaptador definido na
referência bibliográfica [13]. Este é desenhado de forma a suportar os factores de carga limites impostos
ao lançador.
4.3.2 - Módulo de optimização da divisão do lançador em andares
Este módulo foi desenvolvido pelo engenheiro Nicolas BEREND da ONERA. Ele faz uma optimização da
repartição de massa dos andares. Esta optimização pode ser feita tendo como objectivo da optimização:
a maximização da massa da carga útil, a maximização do quociente entre a massa da carga útil e a
massa total inicial do lançador, a minimização da massa total inicial do lançador ou a minimização da
massa seca total. Como limites, o utilizador pode fixar o ∆V propulsivo e/ou a massa total inicial do
lançador. Finalmente o utilizador pode escolher quais são os andares cujas massas serão parâmetros de
optimização, podendo escolher a massa útil como parâmetro.
Nos trabalhos realizados o objectivo da optimização foi a minimização da massa total inicial, produzindo
um ∆V propulsivo fixo, tendo como parâmetros de optimização as massas dos andares propulsivos.
Para o cálculo dos índices construtivos de cada andar este módulo utiliza uma ferramenta que calcula os
seus valores a partir do tipo de andar (andar superior ou primeiro andar, propulsão sólida/liquida, tipo de
ciclo termodinâmico) e da massa de combustível embarcada. Esta ferramenta resulta do meu trabalho
com o Sr. BEREND e utiliza uma modelação computacional das curvas empíricas de aproximação
apresentadas na referência bibliográficas [9].

37
4.3.3 - Módulo de propulsão
Este módulo foi desenvolvido para o projecto aqui apresentado. O seu propósito é o de fazer o
tratamento e uniformização dos dados de entrada e saídas dos módulos de optimização da propulsão
líquida e sólida. É este módulo que junta os resultados de cada um destes módulos e que gere a sua
interacção com os restantes módulos de optimização.
Os módulos de optimização da propulsão trabalham segundo uma lógica de optimização de um andar de
cada vez, o que permite ao utilizador ter a flexibilidade de escolher quais os andares que têm um sistema
propulsivo a combustível sólido e quais têm um sistema propulsivo a combustível líquido.
4.3.4 – Módulo de optimização da propulsão solida
Este módulo foi desenvolvido no enquadramento do projecto aqui apresentado e é explicado mais
pormenorizadamente no capítulo 5.2. Ele faz uma optimização do sistema propulsivo dos andares a
propulsão sólida, que tem como objectivo a maximização da Isp à pressão atmosférica média de
funcionamento do andar.
Este módulo faz então um cálculo da configuração óptima do motor tendo como parâmetros de
optimização a pressão na câmara de combustão (Pc), quociente de expansão da tubeira (ε) e o diâmetro
da garganta da tubeira (Dc). Esta configuração é determinada a partir dos dados de staging (massas de
combustível e índices construtivos de todos os andares, tal como a massa do andar não propulsivo),
dados da propulsão (tipo de combustível, diâmetro exterior de cada andar) e dados relativos à trajectória
(pressão atmosférica média de funcionamento de cada andar).
Este módulo é também responsável pelo dimensionamento dos andares propulsivos a combustível
sólido, e dos elementos do próprio sistema propulsivo (reservatórios, tubeira). Os dados em saída deste
módulo são assim: as dimensões dos andares a propulsão sólida e dos seus sistemas propulsivos, os
valores finais dos parâmetros de optimização do sistema propulsivo, as impulsões especificas e força
propulsiva ao nível do solo e no vazio.
4.3.5 – Módulo de optimização da propulsão liquida
Este módulo tem por base uma ferramenta de dimensionamento de sistemas propulsivos a combustíveis
líquidos, desenvolvido pelo estagiário da ONERA Adrien GRYNAGIER. O seu código foi adaptado a uma
função de optimização para responder aos requisitos do trabalho de optimização multidisciplinar aqui
apresentado. Os trabalhos de adaptação são explicados com mais pormenor no capítulo 5.3.
À imagem do que se passa no módulo de optimização da propulsão sólida, este módulo faz uma
optimização do sistema propulsivo dos andares a propulsão liquida, tendo por objectivo a maximização
do Isp à pressão atmosférica média de funcionamento do andar.

38
Este módulo determina a configuração óptima do motor tendo como parâmetros de optimização a
pressão de câmara (Pc), o quociente de expansão (ε) e o quociente de mistura entre os combustíveis
(Rm). Esta configuração é determinada a partir dos dados de staging (massa de combustível e índices
construtivos de todos os andares, assim como a massa do andar não propulsivo), dos dados relativos à
propulsão (tipo de combustível, ciclo termodinâmico, diâmetro exterior e força propulsiva no vazio
pretendida para cada andar) e dos dados relativos à trajectória (pressão atmosférica média de
funcionamento de cada andar).
Tal como o módulo de optimização da propulsão sólida, este módulo faz o dimensionamento dos
andares propulsivos a combustíveis líquidos e dos elementos do sistema propulsivo (tubeira,
reservatórios, motor). Também os dados de saída foram sujeitos a uma uniformização em relação aos
dos andares a propulsão sólida. As saídas deste módulo são então: as dimensões dos andares a
propulsão liquida e dos seus sistemas propulsivos, os valores finais dos parâmetros de optimização, a
impulsão especifica e força propulsiva no vazio e ao nível do solo.
4.3.6 – Módulo de optimização da trajectória
Este módulo foi desenvolvido pelo engenheiro Nicolas BEREND da ONERA. O objectivo é o de
encontrar a configuração dos parâmetros que optimiza a trajectória, seguindo os critérios definidos pelo
utilizador.
Neste módulo a trajectória será modelada de uma forma simplificada como mostrado no esquema da
Figura 14. É considerado que todo o voo é feito a incidência nula. O voo do primeiro andar pode ser
dividido em duas fases, uma fase inicial de voo vertical e uma segunda fase onde o voo é feito em
«gravity turn» após uma variação instantânea do declive da trajectória. Segue-se o voo do andar
propulsivo seguinte (e do terceiro andar no caso de um lançador a 4 andares) feito sempre em «gravity
turn». Uma fase de trajectória balística segue-se a esta fase propulsiva e antecede a fase propulsiva do
último andar, também ela feita em «gravity turn». O voo deste último andar deve transportar a carga útil
até à altitude da órbita pretendida, injectando-a com declive nulo.
Figura 14 Modelo de calculo simplificado da trajectória

39
A optimização da trajectória pode fazer-se tendo por objectivo: maximizar a massa da carga útil posta em
órbita, maximizar a velocidade final da trajectória do lançador, maximizar a altitude de apogeu da órbita
na qual o satélite é injectado, ou o momento cinético. Para esta optimização o lançador pode definir
como parâmetros o tempo de voo vertical do primeiro andar antes da oscilação instantânea. Os limites
que podem ser impostos à trajectória são: a imposição de uma altitude final, uma velocidade de injecção
do satélite na órbita, o ângulo final da trajectória e a altitude do perigeu da órbita de injecção do satélite.
Nos trabalhos desenvolvidos para o projecto HADES, o módulo foi utilizado para encontrar a trajectória
que maximiza a velocidade final, e portanto aquela que minimiza as perdas. Como constrangimentos
foram fixados o declive da trajectória e a altitude final, a primeira fixada a 0º e a segunda a ser definida
pelo utilizador. Os parâmetros escolhidos para a optimização foram: o tempo antes da variação brusca
de declive da trajectória, o ângulo dessa variação e a duração da fase balística.
A função de optimização da trajectória revelou-se muito sensível à inicialização dos parâmetros de
optimização, nomeadamente pelo tempo de voo antes da variação instantânea do declive e respectivo
ângulo. Para compensar este facto foi introduzido um algoritmo de inicialização destas variáveis de
forma a aumentar a robustez do módulo. Este algoritmo faz uma procura de valores iniciais para estes
dois parâmetros que resultem num ângulo final da trajectória nulo, o que constitui um bom indicador de
que o caso é resolúvel.
4.4 – Algoritmo de convergência rápida
Como dito anteriormente, a velocidade de execução do processo de optimização é muito importante,
pois ele será executado em série pelo programa modeFRONTIER. Procurando responder a esta
exigência, os ciclos de convergência foram dotados de um algoritmo com o fim de acelerar a sua
convergência e minimizar o número de casos onde os ciclos atingem o número limite de iterações sem
convergir. Estes casos resultam em tempos de computação significativos (3 a 5 minutos).
Este algoritmo é baseado no estudo da evolução dos parâmetros através dos quais é analisada a
convergência. O algoritmo está previsto para evitar as progressões em zig-zag divergentes ou de
convergência lenta. Estes tipos de progressão foram encontrados frequentemente aquando do estudo
dos ciclos de convergência.
A ideia base é de introduzir um filtro que detecta se a progressão do critério de convergência se faz em
zig-zag, ou seja, se as duas ultimas evoluções do parâmetro têm sentidos opostos. Quando uma
evolução deste género é detectada, o valor do parâmetro é substituído pela média dos seus últimos dois
valores.

40
Cada vez que o valor do parâmetro é substituído, ele é gravado num vector de memória. Este valor
servirá a verificar que os valores médios calculados não se repetem, o que indicaria que o processo tinha
entrado num ciclo infinito. Quando uma repetição é detectada o algoritmo altera esse valor por um outro
próximo da média entre os dois últimos valores do parâmetro, mas calculado utilizando um factor
aleatório que impede a progressão de entrar num ciclo infinito.
Este algoritmo permitiu diminuir enormemente, de cerca de 10% a 0,5%, o número de casos em que os
ciclos de convergência atingem o número máximo de iterações previsto, e acelerar de forma importante
a convergência. Ele também permite fazer convergir certos casos de progressão normalmente
divergente, aumentando a robustez do ciclo.
Nos casos em que a convergência é analisada através de um vector e não de um escalar, como é o caso
do ciclo interno onde o critério de convergência são as impulsões especificas dos andares propulsivos, o
algoritmo de convergência rápida é aplicado a cada um dos elementos do vector individualmente.
4.5 - Os objectivos e limites da optimização
Nos ciclos realizados, os objectivos de optimização ao nível do ciclo global foram a minimização da
massa total do lançador para uma missão dada e a maximização do quociente entre a massa da carga
útil e a massa total do lançador. A escolha destes critérios deve-se à forte ligação que existe entre a
massa de um lançador e o seu custo de produção.
Na perspectiva industrial, o verdadeiro critério para a concepção de lançadores é o custo de produção.
No entanto a avaliação do custo ao longo de trabalhos teóricos como o aqui apresentado é difícil e assim
sendo tenta-se substituir este critério por outros mais acessíveis.
Como limite ao processo de optimização global foi definido que o alongamento do lançador não deveria
ser inferior a 7 (um valor comum para o alongamento de um lançador é de 10).
4.6 – Dados em saída
Dimenções :
• L1, L2, L3, L4, L5 – altura de cada andar ;
o Caso de lançador com 3 andares :
� L4 –altura da ogiva ;
� L5 – nulo ;
o Caso de lançador com 4 andares :
� L4 – altura do quarto andar ;
� L5 – altura da ogiva ;
• Diam – diâmetro máximo dos andares do lançador ;

41
Massa :
• Me1, Me2, Me3, Me4, Me5 – Massa de cada andar
o Caso de lançador com 3 andares :
� Me4 – Massa do adaptador e da ogiva ;
� Me5 – nulo ;
o Caso do lançador com 4 andares :
� Me4 – Massa do quarto andar ;
� Me5 – Massa do adaptador e da ogiva ;
• Mu – Massa da carga útil ;
• Mtot – Massa total do lançador na descolagem ;
Dados propulsivos :
• Fvide1, Fvide2, Fvide3, Fvide4 – Força propulsiva no vazio de cada um dos andares
propulsivos ;
• F1, F2, F3, F4 – Força propulsiva de cada um dos andares propulsivos à pressão atmosférica
média de funcionamento ;
• Ispvide1, Ispvide2, Ispvide3, Ispvide4 – Impulsão especifica no vazio de cada um dos andares
propulsivos ;
• Ispsol1, Ispsol2, Ispsol3, Ispsol4 – Impulsão especifica ao nível do solo de cada um dos andares
propulsivos ;
• Isp1, Isp2, Isp3, Isp4 – Impulsão especifica de cada um dos andares propulsivos à pressão
atmosférica média de funcionamento ;
Caracteristicas dos motores :
• Epsilon1, Epsilon2, Epsilon3, Epsilon4 – Quocientes de expansão das tubeiras;
• diamcol1, diamcol2, diamcol3, diamcol4 – Diâmetros das gargantas das tubeiras;
• Pch1, Pch2, Pch3, Pch4 – Pressão da câmara dos motores;
• tempscomb1, tempscomb2, tempscomb3, tempscomb4 – Tempo de combustão de cada um dos
andares propulsivos;
Dados da trajectória :
• tempsavb – Tempo de voo antes da oscilação ;
• tempsbal – Duração da fase balística ;
• angbasc – Ângulo da trajectória logo após a oscilação (antes ele é de 90º) ;
• coefpertes – Coeficiente de perdas totais ao longo da trajectória ;

42
V – Módulos de optimização e calculo desenvolvidos
5.1 - Módulo de dimensionamento da ogiva e do adaptador da carga útil
Para um dimensionamento mais realista do lançador é essencial ter em conta as massas associadas à
ogiva e ao adaptador da carga útil, que representam um aumento não negligenciável da massa a
transportar até à órbita pretendida. Este aumento é mais importante para as cargas úteis com uma
massa mais pequena, onde a percentagem da massa da ogiva e do adaptador na massa total se torna
maior.
5.1.1 – Os dados em entrada
O módulo de dimensionamento da ogiva e do adaptador é executado através da função Matlab
dim_coiffe e tem como entradas as estruturas de dados datapropul e dadalanceur. Nestas estruturas
devem estar presentes os dados seguintes:
• datapropul
datapropul.D0 – diâmetro exterior de cada andar;
datapropul.along_coiff – alongamento da ogiva;
• datalanceur
datalanceur.netages – número de andares do lançador;
datalanceur.Mutile – massa da carga útil;

43
5.1.2 – Dimensionamento da ogiva
Considerou-se como hipótese que a ogiva teria uma forma parabólica, de alongamento fixo dado em
entrada. Considerou-se também que o volume da ogiva deve ser suficiente para comportar, com uma
margem de segurança, um volume cúbico de carga útil, calculado a partir das relações empíricas entre a
massa e o volume dos pequenos satélites (estudado na referência bibliográfica [6]). É também assumido
que a altura do adaptador é de .
Partindo destas hipóteses a superfície da ogiva será modelada pela equação de uma parábola a três
dimensões.
( )
+−
Φ⋅= 22
2
2YXZ coiffeα
Onde α é um coeficiente que é função do alongamento da ogiva e do diâmetro da base da ogiva.
A partir das relações empíricas para a relação entre a massa e o volume dos pequenos satélites chega-
se à relação seguinte para a determinação do volume da carga útil.
E assim, se considerarmos um volume cúbico, a dimensão do cubo será:
.
De forma a permitir a acomodação do volume da carga útil e do adaptador, como representado na Figura
15, sendo o alongamento fixo, o diâmetro da base da ogiva será determinado através do cálculo iterativo
seguinte. Este cálculo parte da condição de que o diâmetro da ogiva ao nível do alto da carga útil deve
ser de:
( -facteur de sécurité).

44
Figura 15 - esquema do dimensionamento da ogiva
A condição enunciada pode ser traduzida na relação seguinte:
−
Φ⋅=+
22
2
**2
2
fsllh coiffeα
Sabendo que o alongamento é fixo e que α e h são função do diâmetro, a determinação deste será feita
através de um calculo iterativo onde α é dado a partir do diâmetro inicial da ogiva. O novo valor do
diâmetro, que será depois utilizado para calcular α, é calculado a partir da relação dada acima. O
processo pára quando os valores do diâmetro convergem.
A superfície total da ogiva é determinada através da integração da equação da parábola, sendo dada
por:
Finalmente, a massa da ogiva resulta do produto desta superfície, da espessura e da massa volúmica do
material da ogiva:
5.1.3 – Dimensionamento do adaptador
O dimensionamento do adaptador da carga útil foi feito utilizando a modelação apresentada na
referência [13], para os adaptadores de carga útil dos veículos de transferência orbital. Esta modelação
foi escolhida pela sua simplicidade e também pela possibilidade de ser reutilizada posteriormente na
aplicação da optimização multidisciplinar ao projecto CENTOR.

45
O dimensionamento é feito em função dos factores de carga transversal e axial que são definidos pelo
utilizador. Na aplicação lançador os factores de carga utilizados são apresentados na Tabela 4. O factor
de segurança utilizado foi de 1,3.
valor utilizado valor TAURUS Factor de carga longitudinal ± 6 -6 / + 1 Factor de carga lateral ± 2 ± 2.5
Tabela 4 Valores de factores de carga estáticos utilizados no dimensionamento
O modelo é apresentado esquematicamente na Figura 16.
Figura 16 - adaptador para a carga útil, modelo do projecto CENTOR
5.1.3.1 – Anel superior
O anel superior do adaptador é dimensionado a partir do momento-flector. O momento-flector exercido
sobre o anel é de:
, com
A tensão máxima à qual uma secção do anel é sujeita é dada por:
, com
Fixando os valores do raio exterior, como sendo tangente às faces laterais da carga útil, e a espessura
do anel como uma função do raio, a altura do anel é calculada a partir da relação seguinte:
massa do anel superior é então dada por:

46
5.1.3.2 – Barras do sistema de treliças
Supôs-se que 80% da altura do adaptador esta ocupada por um sistema de treliças. As barras treliças
serão submetidas a esforços induzidos pelos anéis. O sistema de treliças é unicamente solicitado à
compressão/tracção, e portanto o seu dimensionamento será feito de forma a impedir a sua
instabilidade.
A partir das hipóteses já enunciadas sobre a estrutura do adaptador, pode definir-se a altura do sistema
de treliças e os raios de ligação aos anéis superior e inferior. O comprimento das barras será assim dado
por:
O número de ligações é definido pelo utilizador, para a aplicação lançador ela será assumida
.
A força equivalente que é aplicada ao anel superior é assumida vertical e majorada por:
A força axial que actua sobre cada barra pode então ser determinada através da relação::
Finalmente, é possível dimensionar as barras a partir da carga limite ligada à instabilidade Euleriana:
Onde, sabendo que as barras são consideradas ocas,
A partir da regra empírica, da referencia [13], de estabilidade das barras o raio interior da barra é de
sendo o raio exterior dado por :
A massa do sistema de treliças é obtida através da equação:

47
5.1.3.3 - Anel inferior
O dimensionamento do anel inferior é feito a partir da condição de tenção superficial induzida nas
fixações das barras, que solicitam localmente o anel. O elemento solicitado é aproximado por um painel
de pequena espessura e1 e comprimento l = 2Dbarre . Esta pressão superficial pode ser determinada pela
a equação:
A condição de resistência do painel à instabilidade é a seguinte (Km é um coeficiente determinado pelos
ábacos dados no Anexo A):
Sabendo que a força na ligação será igual à soma das forças exercidas nas duas barras
correspondentes, pode calcular-se a espessura do painel através da relação:
E finalmente a massa do anel é calculada por:
5.1.4 – Validação dos resultados A validação dos resultados faz-se comparando as massas de ogiva mais adaptador de certos lançadores
actuais com as massas de ogiva mais adaptador calculadas pelo programa, para comportar uma mesma
massa de carga útil. Nestes testes o material escolhido para a ogiva foi o ninho de abelha de alumínio
(material utilizado nas ogivas dos lançadores TITAN, ARIANE 4, TAURUS, etc.) e a espessura foi
assumida como sendo de 2,5 cm (espessura da ogiva do ARIANE 4).
Os resultados obtidos são apresentados na Tabela 5.
Massa da carga útil LEO (kg)
Massa real da ogiva (kg)
Massa calculada da ogiva (kg)
Ariane 5 6900 2900 2977
Ariane 4 3700 1130 1160 Taurus 1259 400 416
H-Vehicule 1300 600 451
Tabela 5 Comparação dos valores obtidos com o código de dimensionamento da ogiva e os valores reais

48
Como se pode ver o código tem resultados muito próximos dos que temos nos casos reais. A diferença
observada no caso do lançador Japonês H-Vehicule deve-se ao material da ogiva ser em alumínio
massiço e não em estrutura de ninho de abelha.
5.2 - Módulo de propulsão sólida
O módulo de propulsão sólida é uma ferramenta de cálculo simplificado que tem por fim determinar a
configuração óptima dos motores a combustível sólido, respeitando os limites e condições de
funcionamento específicas à missão e à propulsão de cada andar do lançador.
O cálculo baseia-se na hipótese de que o motor debita uma quantidade constante de gás, o que
corresponde a considerar que a forma da perfuração do bloco de combustível do motor permite ter uma
área de superfície em combustão aproximadamente constante, durante o tempo de vida do sistema
propulsivo. Para tal a forma da perfuração foi assumida como sendo uma estrela de seis braços (uma
das formas que permite este tipo de débito).
Uma outra simplificação consiste em não considerar a fracção dos combustíveis residuais que não
contribuem para a propulsão.
5.2.1 – Os objectivos, parâmetros e limites da optimização
5.2.1.1 - Objectivos
O objectivo da optimização efectuada no módulo de propulsão sólida foi escolhido após uma reflexão
sobre o parâmetro mais adaptado, procurando ser coerente com os objectivos globais e utilizar um
parâmetro que correspondesse a uma verdadeira optimização do sistema propulsivo. Visto que os
parâmetros da optimização global são, neste projecto, ligados à eficácia em termos de massa (massa
total mínima para colocar uma determinada massa de carga útil em órbita e maximização da razão entre
a massa útil e a massa total do lançador), o parâmetro que aparece como mais lógico é então a impulsão
específica média de funcionamento do sistema propulsivo. Este parâmetro está directamente ligado à
variação da velocidade que a massa de combustível embarcada em cada andar consegue induzir a um
lançador.
5.2.1.2 - Parâmetros
A optimização é obtida fazendo variar três parâmetros:
• Quociente de expansão, ε, que corresponde à razão entre a área de saída e a área da garganta
da tubeira;
• Diâmetro da garganta da tubeira, Dc;
• Pressão da câmara de combustão, Pc;

49
5.2.1.3 - Limites
A optimização é limitada através da imposição de varias condições que permitem ter um resultado
realista e extrapolável para os outros módulos. Estas condições são:
• Limitação do diâmetro de saída da tubeira ao diâmetro exterior do andar: esta condição permite
manter a geometria do lançador determinada para o lançador ao nível global pelo programa
modeFRONTIER;
• Imposição de uma pressão de saída inferior à pressão da câmara: esta condição assegura que
existe uma expansão ao nível da tubeira, ou seja um quociente de expansão superior a 1;
• Imposição de uma pressão de câmara superior à pressão atmosférica: esta condição assegura
que existirá uma pressão na câmara superior à pressão atmosférica máxima à qual sistema
propulsivo vai funcionar.
• Factor de carga máximo de 6 em fim de vida: Esta condição limita a força propulsiva de modo a
que a aceleração do lançador no fim de vida do andar (quando a massa é mínima) não passe os
6 g.
• Limitação da espessura das paredes da câmara de combustão: limitação da pressão de câmara
de modo a que o seu valor não implique uma espessura irrealista das paredes da câmara, este
limite é função do diâmetro exterior do andar.
• Limitação da espessura equivalente do bloco combustível: esta condição impede que a taxa de
ocupação do motor com o bloco de combustível seja demasiado grande em relação aos casos
dos motores conhecidos.
• Força propulsiva superior ao peso em inicio de vida: esta condição garante a descolagem do
lançador e é imposta unicamente ao primeiro andar, para os restantes ela impõe uma força
propulsiva superior a 80% do peso por razões de robustez do módulo de optimização da
trajectória.
• Imposição de uma pressão mínima fazível: Garante que a pressão de câmara seja superior à
pressão correspondente à forma da perfuração do bloco de combustível que minimiza a área da
superfície em combustão.
• Imposição de uma pressão máxima fazível: Garante que a pressão de câmara seja inferior à
pressão correspondente à forma da perfuração do bloco de combustível que maximiza a área da
superfície em combustão.
Estas duas últimas condições resultam do facto de se ter assumido a perfuração do bloco de
combustível como tendo a forma de uma estrela de 6 braços, forma para a qual existem relações
empíricas (referência bibliográfica [5]) para as dimensões máxima e mínima dos braços da estrela.

50
5.2.2 – Es entradas
O módulo de propulsão sólida é executado através da função Matlab main_propul_solide que tem por
entradas duas estruturas de dados datapropul e datalanceur que contêm os dados de entrada
necessários à optimização realizada neste módulo.
Todos os dados em entrada são organizados em vectores onde cada coluna corresponde a um andar do
lançador. O módulo identifica e trata os andares a propulsão sólida individualmente.
Os dados relativos à propulsão e geometria do lançador encontram-se na estrutura datapropul, enquanto
que os dados relativos à divisão em andares se encontram na estrutura datalanceur. A descrição destas
estruturas é feita de seguida.
• datapropul
datapropul.netage_sol – número de andares a propulsão sólida ;
datapropul.ietage_sol – identificação dos andares a propulsão sólida ;
datapropul.D0 – diâmetro exterior de cada andar ;
datapropul.tprop.id – identificação do combustível utilizado em ceda andar ;
datapropul.Pa – pressão atmosférica média de funcionamento de cada andar ;
• datalanceur
datalanceur.netages – número de andares do lançador ;
datalanceur.Mutile – massa da carga útil ;
datalanceur.tab_Metage – vector de massas de cada andar ;
datalanceur.tab_k – vector de índices construtivos de cada andar ;
datalanceur.tab_Isp – vector das impulsões específicas iniciais de cada andar ;

51
5.2.3 – A inicialização dos parâmetros de optimização
Uma grande parte do trabalho realizado em cada um dos módulos é dedicada ao aumento da sua
robustez. No caso da utilização de um método gradiente com limites, como a função Matlab de
optimização fmincon , a boa inicialização dos parâmetros de optimização assume um papel fundamental.
Esta função utiliza a resolução das equações de Kuhn-Tucher no processo de optimização, utilizando um
código de programação sequencial quadrático que faz uma aproximação do tipo quasi-Newton da matriz
Hessiana da função.
No caso do módulo de propulsão sólida onde o número de condições limite é grande este trabalho torna-
se mais complexo. Um modo de aumentar a eficácia do código é de inicializar o ciclo de optimização
com um caso fazível, ou seja que as condições iniciais respeitem todas as condições limite.
As condições mais problemáticas são a de limitação da espessura equivalente do bloco de combustível e
a de imposição de um factor de carga em fim de vida de cada andar superior a 6 g. Estas duas
condições são por vezes contraditórias uma vez que estão ambas ligadas ao diâmetro na garganta da
tubeira, uma por impor que o diâmetro da perfuração do bloco de combustível seja maior que o diâmetro
na garganta da tubeira e outra por regular a força propulsiva e portanto o débito do motor.
A relação entre estas duas condições pode ser traduzida pela relação seguinte:
Esta inequação pode ser representada pela região a cinzento do gráfico qualitativo da Figura 17.
Figura 17 gráfico representativo da inequação em função do diâmetro da garganta da tubeira
O diâmetro da garganta será então inicializado para todos os andares como o mínimo da equação do
lado esquerdo da inequação, de forma a ter um valor que respeite estas duas condições. A partir deste
valor de Dc, a inicialização quociente de expansão, outro dos parâmetros de optimização, será feita de

52
forma a que o diâmetro de saída da tubeira não seja superior ao diâmetro exterior do andar, obrigando
assim as condições iniciais a respeitar também esta condição.
Finalmente, sabendo os valores de ε e Dc, a pressão da câmara de combustão é definida de forma a
respeitar também ela duas condições. Ela é inicializada como sendo o valor mínimo que respeita as
condições de factor de carga máximo em fim de vida de cada andar e de área máxima da superfície em
combustão com uma perfuração em forma de estrela de seis braços.
Os casos onde não é encontrada uma configuração inicial que respeite as condições limite são
automaticamente eliminados antes de entrar no ciclo de optimização.
5.2.4 – Organização do cálculo
O processo de cálculo das variáveis de dimensionamento e das características do sistema propulsivo é
organizado segundo a ordem apresentada no esquema seguinte:
A optimização é feita utilizando unicamente as funções onde os parâmetros intervêm (com entradas a
verde) e da função de cálculo da Isp média, o que permite acelerar o processo.
5.2.5 – As saídas
As saídas deste módulo são adicionadas ou actualizadas na estrutura de dados da propulsão, a
estrutura datapropul. A organização desta estrutura é explicada nos tópicos e orgaoigrama seguintes.

53
• datapropul
datapropul.dim.Dc – diâmetro da garganta da tubeira de cada andar ;
datapropul.Pc – pressão na câmara de combustão do motor de cada andar ;
datapropul.epsi – quociente de expansão de cada andar ;
datapropul.mi – massa total do lançador aquando da ignição do sistema propulsivo de cada andar ;
datapropul.poussee.F_vid – força propulsiva no vazio do motor de cada andar ;
datapropul.poussee.F – força propulsiva média do motor à pressão média de funcionamento do andar
respectivo ;
datapropul.poussee.isp_vid – impulsão especifica no vazio do motor de cada andar ;
datapropul.poussee.isp_sol – impulsão especifica ao nível do solo do motor de cada andar ;
datapropul.poussee.Isp – impulsão especifica do motor á pressão atmosférica média de
funcionamento do andar respectivo ;
datapropul.Lm – comprimento de cada andar (reservatório + estrutura entre andares) ;
5.3 – Módulo de propulsão líquida
O módulo de optimização da propulsão a combustíveis líquidos recorre ao programa de cálculo MoDiSP,
desenvolvido na ONERA pelo estagiário Adrien GRYNAGIER, no quadro do projecto CENTOR. O
trabalho realizado para este módulo foi então o de adaptar esta função a um problema de optimização
multidisciplinar, como o do projecto HADES ou do PRF CENTOR.
5.3.1 - Adaptação do código a um problema de optimização
A primeira fase desta adaptação consistiu em criar uma plataforma de optimização, como a da propulsão
sólida, que funciona em torno do programa MoDiSP. As entradas e saídas do programa foram adaptadas
de forma a serem uniformes com as que utiliza o módulo de propulsão sólida. Nesta fase o programa foi
utilizado como uma «caixa negra» onde era calculada a impulsão específica à pressão média de
funcionamento do andar a partir dos dados de entrada e parâmetros de optimização, sendo utilizada pela
função de optimização fmincon .
Depois deste trabalho de integração do MoDiSP no módulo de optimização da propulsão líquida,
concluiu-se que este módulo era demasiado lento. A duração do processo de optimização, onde cada
andar é sujeito a uma optimização da propulsão, passara de cerca de 1 minuto a mais de uma hora.

54
Para tentar resolver este problema foi necessário compreender toda a estrutura do algoritmo do MoDiSP
e tentar simplificá-la, de modo a acelerar o cálculo. Depois da análise da organização do cálculo, a
estrutura do programa pode ser representada (para o ciclo termodinâmico a combustíveis pressurizados,
o mais simples) como é apresentado na Figura 18.
Figura 18 Organização do cálculo do programa MoDiSP para o ciclo motor a combustíveis pressurizados
Olhando cada uma das funções pode constatar-se também que a função de varr_rr , que faz o
dimensionamento do sistema de refrigeração, é aquela que consome mais tempo de calculo. Ela faz um
cálculo integrativo do calor transferido entre a câmara de combustão e o combustível (liquido de
refrigeração) que é executada iterativamente.
Sabendo que a contribuição do sistema de refrigeração para o balanço de massa (objecto de
optimização global) é pequena, tentou eliminar-se esta função sem perder, no entanto a sua importante
contribuição para a eficácia do motor. As saídas desta função são dP_rr e dT_rr, variação da pressão e
da temperatura do combustível ao longo do circuito de refrigeração.
A referência bibliográfica [6] fornece a seguinte relação empírica entre a variação de pressão no sistema
de refrigeração e a pressão de câmara do motor.

55
No entanto, para a variação da temperatura não foi possível encontrar relações empíricas dado que ela
depende enormemente de factores como a forma da câmara, os materiais que a compõem, etc. Para
encontrar uma aproximação da modelação utilizada no programa MoDiSP, a variação de dT_rr com os
parâmetros de entrada foi estudada utilizando este software. Os resultados usando como combustíveis o
par CH4/O2 são apresentados na Figura 19.
Figura 19 Evolução de dT_rr com os parâmetros de optimização
Como se pode constatar, as variações mais significativas são aquelas obtidas com a variação da
pressão na câmara de combustão (P_ch) e o quociente de mistura dos combustíveis (Rm). A opção mais
interessante para aproximar a variação da temperatura do combustível no circuito de refrigeração é
então a de criar uma matriz, com os valores de dT_rr para os diferentes valores de P_ch e Rm, para
cada par redutor/oxidante. Estas tabelas foram feitas com ajuda do modeFRONTIER utilizado da forma
explicada para o módulo de aerodinâmica (ver capítulo 5.4).
A utilização de tabelas reduziu o tempo de cálculo a um terço e dá resultados concordantes com aqueles
do programa original.
5.3.2 – As entradas
O módulo de propulsão líquida é executado através da função Matlab main_propul_liquide . Estas
entradas foram, na medida do possível, uniformizadas com as do módulo de propulsão sólida. A
diferença é que a estrutura datapropul deve definir também o ciclo termodinâmico e a força propulsiva no
vazio a ser produzida pelo sistema propulsivo. Esta definição é feita através da variável datapropul.cycle
cujos valores correspondem aos diferentes ciclos de motor (1 : combustíveis pressurizados ; 2 : gerador
de gás ; 3 : expander) e datapropul.poussee.F_vid, calculado de forma a respeitar as condições limite
impostas ao módulo (factor de carga máximo).
5.3.3 – Os objectivos, parâmetros e limites da optimização
5.3.3.1 – Os objectivos
O objectivo da optimização, seguindo a lógica já descrita para a propulsão sólida, será também a
impulsão específica média de funcionamento de cada andar.

56
5.3.3.2 – Os parâmetros
A optimização é obtida fazendo variar três parâmetros de optimização :
• quociente de expansão, ε ;
• quociente de mistura dos combustíveis, Rm ;
• Pressão na câmara de combustão, Pc ;
O diâmetro da garganta da tubeira (Dc) não é um parâmetro da optimização porque a força propulsiva no
vazio é fixada e portanto Dc será fixado directamente em função do Isp no vazio e do valor da pressão
na câmara.
5.3.3.3 – Os limites
A fixação da força propulsiva no vazio e a aplicação do processo de optimização num nível superior,
englobando todas as funções de dimensionamento permitem diminuir o número de condições impostas.
No caso da propulsão líquida as condições limite são :
• Limitação do diâmetro de saída da tubeira ao diâmetro exterior do andar ;
• Imposição de uma pressão de saída inferior à pressão da câmara ;
• Imposição de uma pressão da câmara superior à pressão atmosférica ;
• Força propulsiva superior ao peso em início de vida ;
Estas condições limite são similares às descritas no capítulo 5.2.1.3.
5.3.4 – As saídas
As saídas foram também elas uniformizadas com as saídas do módulo de propulsão sólida, a única
diferença reside na introdução da variável datapropul.Rm que determina o quociente de mistura entre o
oxidante e o redutor.
5.4 - Módulo de aerodinâmica
A aerodinâmica é um elemento importante no calculo das perdas por fricção aerodinâmica e portanto
para o dimensionamento da divisão em andares do lançador, porque o incremento de velocidade (∆V)
necessário para efectuar a missão é directamente dependente das perdas. Este será assim um módulo
de cálculo que será incluído no módulo de optimização da trajectória para um cálculo mais preciso das
perdas induzidas pela atmosfera, calculadas a partir dos coeficientes aerodinâmicos (Ca) ao longo da
trajectória do lançador.

57
5.4.1 – Estudo da influência dos parâmetros
Para determinar a melhor integração para o módulo de forma a minimizar os tempos de computação do
processo, foram realizados estudos de influência dos diferentes parâmetros de dimensionamento e
trajectória do lançador.
Os gráficos abaixo apresentam a evolução dos valores de Ca com o número de Mach para diferentes
valores dos parâmetros em estudo. Estas evoluções foram obtidas utilizando o programa Code Missile,
desenvolvido pelo departamento DPRS no quadro do projecto DOOM.
Figura 20 Variação do Ca com o Mach para diferentes diâmetros da secção de referência
Como se pode observar no gráfico da Figura 20, a evolução do coeficiente aerodinâmico com o número
de Mach não muda significativamente com a variação do diâmetro da secção de referência, pois a sua
contribuição para a força de resistência é capitalizada no cálculo desta força a partir do coeficiente
aerodinâmico.
Figura 21 Variação de Ca com o Mach para diferentes altitudes
A altitude tem uma influência importante nos valores de Ca, principalmente para as grandes altitudes e
números de Mach entre 1 e 11. Este parâmetro pode assim influenciar a escolha da trajectória óptima
que minimiza as perdas.

58
Figura 22 Variação de Ca com o Mach para diferentes comprimentos do lançador
A variação dos valores de coeficiente aerodinâmico com o comprimento do lançador é devida ao
desenvolvimento da camada limite ao longo do corpo do foguetão. Como se pode ver na Figura 22, esta
variação não é muito significativa e observa-se sobretudo para baixos números de Mach. A introdução
de uma nova dimensão na matriz de valores de Ca não foi assim considerada essencial.
5.4.2 – Integração do módulo de optimização da trajectória
A matriz de valores de Ca foi então construída com três dimensões, o alongamento da ogiva parabólica,
o número de Mach e a altitude. Ela foi construída utilizando o software modeFRONTIER que lançou o
programa Code Missile em série calculando e arquivando os valores de Ca para os diferentes valores
dos três parâmetros, através da manipulação dos ficheiros de entrada e saída do programa.
O valor de Ca é então calculado, a partir da interpolação dos valores da matriz, para cada ponto da
trajectória a partir dos valores de vector de estado (velocidade, altitude). Este valor é utilizado para
determinar as forças aplicadas ao lançador em cada instante, e portanto para calcular a sua trajectória.
5.5 – Módulo de dinâmica estrutural
O módulo de dinâmica estrutural é um módulo que faz parte da modelação mais complexa que foi
apresentada na Figura 8 como versão V1 da plataforma HADES. Ele deve ser utilizado numa abordagem
em que, em vez de índices construtivos aproximados (como na versão V0) se realiza um verdadeiro
dimensionamento dos reservatórios, motores, tubeiras e inter-andares.
A finalidade deste módulo é o dimensionamento das estruturas entre os andares do lançador de forma a
limitar a compressão ou a flecha estática da estrutura e as frequências de ressonância da estrutura. Este
módulo deve ser capaz de funcionar enquanto como módulo de cálculo e como módulo de optimização.
Neste projecto o módulo não foi programado, mas foi realizado todo o trabalho teórico que será
explicado ao longo deste capítulo.

59
Este módulo utiliza uma modelação simplificada do lançador em elementos finitos, definida a partir da
referência bibliográfica [5] e do trabalho desenvolvido com o departamento DDSS (Departamento de
dinâmica de estruturas e sistemas acoplados).
5.5.1 – A modelação em elementos finitos
A modelação efectuada faz uma análise desacoplada dos modos de vibração longitudinais e laterais.
Como mostra a Figura 23, foram construídos dois modelos diferentes, um para cada tipo de propulsão.
Figura 23 Modelação em elementos finitos de um lançador a propulsão sólida e de um lançador a propulsão líquida
Sabendo que é o utilizador ou o algoritmo de optimização que deve escolher o tipo de propulsão de cada
andar, o programa deve ser concebido para trabalhar de forma modular. Assim as matrizes de rigidez de
cada andar são calculadas individualmente, para o tipo de propulsão correspondente, e juntas aquando
da construção da matriz de rigidez global do lançador.
5.5.1.1 – Módulo do andar a propulsão sólido
Os andares a propulsão sólida foram modelados de forma simplificada em elementos finitos, do modo
apresentado na Figura 24.
Figura 24 Modelação em elementos finitos de um andar a propulsão sólida

60
Nesta modelação em elementos finitos, a massa do lançador concentra-se nas massas pontuais que se
encontram nas extremidades de cada elemento. A massa dos componentes do lançador que
correspondem a cada elemento finito é dividida pelas duas extremidades do elemento finito respectivo.
Para a construção das matrizes de rigidez a massa dos modos longitudinais, a cada massa é associado
um grau de liberdade de translação vertical.
A matriz de rigidez longitudinal de um andar a propulsão sólida correspondendo ao modelo da Figura 24
é apresentada de abaixo.
A primeira coluna corresponde ao grau de liberdade da massa 1 do esquema e a ultima ao da massa
5.Os valores de rigidez Kres e Kitet são calculados a partir do módulo de Young do material do
componente respectivo (E) e a sua secção recta (Φ * π * e) e do seu comprimento (L), utilizando a
seguinte equação.
A matriz de massa é diagonal e cada elemento tem o valor da massa ligada ao grau de liberdade
correspondente. Com a mesma distribuição dos graus de liberdade que é utilizada na matriz de rigidez, a
matriz será a seguinte (os índices correspondem aos da legenda da Figura 24):
Para a determinação dos modos de vibração laterais a cada massa corresponderão dois graus de
liberdade, um de rotação e outro de translação lateral.
A matriz de rigidez lateral do andar a propulsão sólida será a seguinte.

61
A grandeza γ representa o produto entre o momento de inércia de flexão î e o módulo de Young E do
material utilizado, para cada componente do lançador e L representa o seu comprimento.
O momento de inércia de flexão de um tubo cilíndrico é dado pela expressão seguinte, onde ri é o raio
interior do tubo e e a espessura.
Como simplificação a tubeira pode ser modelada como um tubo cilíndrico tendo como raio o seu raio
médio.
A matriz de massa correspondente, com os índices das massas indicadas na Figura 24, é a matriz
diagonal seguinte :
Nesta matriz de massa I corresponde ao momento de inércia dos diferentes elementos. Estes elementos
podem ser modelados sem grande erro como tubos cilíndricos. Para este cálculo é necessário tomar em
conta a massa dos combustíveis, sabendo que no caso de propulsão sólida também eles podem ser
assumidos como tubos cilíndricos. O momento de inércia de um tubo cilíndrico é dado pela equação
seguinte.

62
Esta organização de graus de liberdade foi escolhida de forma a facilitar a junção das matrizes dos
diferentes andares. Esta é feita adicionando aos elementos da matriz relativos aos graus de liberdade do
nó da base do andar superior (marcados a vermelho) os elementos relativos aos graus de liberdade do
nó do topo do andar seguinte (marcados a azul).
5.5.1.2 – Modelo de andar a propulsão sólida
Os andares a propulsão líquida foram modelados de forma simplificada como representado na Figura 25.
Figura 25 Modelação em elementos finitos de um andar a propulsão líquida
A introdução do grau de liberdade longitudinal para o motor, inexistente na modelação dos andares a
propulsão sólida, deve-se ao facto da existência de uma concentração de massa superior neste ponto,
que é o ponto de aplicação da força de propulsão. Numa modelação que pretendesse estudar a resposta
a oscilação forçada, devida à vibração do motor, este seria o ponto de aplicação das excitações.
As massas 7 e 8 correspondem à massa de cada um dos combustíveis, localizadas longitudinalmente à
altura de centragem da massa estática descrita no capítulo 5.5.1.3.
Neste caso a matriz de rigidez para os modos longitudinais apresenta a forma seguinte.
Onde Kres e Kit devem ser modelados como descrito para a propulsão sólida e Kmot deve ser ou dada ou
calculada a partir de uma modelação do suporte do motor.
A matriz de massas, fazendo referência às legendas da Figura 25, será então :

63
A matriz de rigidez para o cálculo dos modos laterais será neste caso uma matriz quadrada 14x14. A
matriz seguinte refere-se à parte que muda em relação ao caso da propulsão sólida, os reservatórios,
que têm 10 graus de liberdade em vez dos 4 do caso sólido.
Os valores Lres1 correspondem à distância entre o topo dos reservatórios e o ponto de concentração da
massa do combustível no reservatório superior. Lres2 corresponde à distância entre os dois pontos de
concentração das massas dos combustíveis dos dois reservatórios e Lres3 à distância entre o ponto de
concentração da massa de combustível no reservatório inferior e a base dos reservatórios. O cálculo das
constantes de rigidez Kbal1 e Kbal2 é explicado no capítulo 5.5.1.3.
A matriz de massas para o andar a propulsão sólida será então:

64
5.5.1.3 - Modelação da oscilação dos combustíveis líquidos
O balanço dos líquidos nos reservatórios foi modelado através de um sistema massa-pêndulo, como é
apresentado na referência [12]. Esta modelação é apresentada na Figura 26.
Figura 26 Esquema do modelo massa-pêndulo equivalente
Os valores das grandezas presentes na Figura 26 podem ser calculados a partir das relações seguintes:
Finalmente o sistema massa-pêndulo pode ser traduzido num sistema massa-mola equivalente, sabendo
que a frequência de ressonância da oscilação do combustível é dada por:
E que a mesma grandeza num sistema de massa mola é dada por :
Onde M será a massa m1, do sistema massa-pêndulo, calculada anteriormente.

65
5.5.1.4 - Modelo de ogiva
A ogiva foi modelada em elementos finitos de forma simplificada, como é representado na Figura 27.
Figura 27 Modelação em elementos finitos de uma ogiva e carga útil
A rigidez longitudinal e lateral do satélite deve ser dada, ou estimada a partir de casos conhecidos. A
ogiva pode, como no caso da tubeira, ser aproximada por um cilindro com o diâmetro médio desta
estrutura parabólica.
A matriz de rigidez longitudinal deste modelo com 3 graus de liberdade tem a seguinte forma:
A matriz de massa correspondente é :
A matriz de rigidez lateral terá o dobro dos graus de liberdade, sendo:
A matriz de massas correspondente é :

66
5.5.2 - Cálculo das frequências de ressonância do lançador
O cálculo das frequências de ressonância é baseado na relação
O que é equivalente a dizer-se que se pode calcular as frequências naturais do sistema através da
determinação dos valores próprios da matriz [K][M]-1, que correspondem ao inverso dos quadrados das
frequências de ressonância.
Um processo de optimização, utilizando como parâmetros a espessura e/ou o comprimento de cada
inter-andar, pode ser aplicada em torno do calculo das frequências naturais já exposto. Este processo
deve ser limitado por condições limite ligadas ao facto de a estrutura dever suportar as cargas estáticas
às quais o inter-andar é sujeito.
É fácil estudar a dinâmica de um andar isolado, bastando para tal anular as partes das matrizes de
massa e rigidez correspondentes aos outros andares. É também possível fazer uma análise da evolução
das frequências naturais com a alteração das massas e momentos de inércia devida ao consumo dos
combustíveis.

67
VI - Análise dos resultados
6.1 - Eficácia e Robustez
A robustez dos ciclos de optimização foi testada utilizando modeFRONTIER para lançar perfis diferentes
de dados e determinar a percentagem de sucesso. Estes perfis devem representar, o melhor possível, o
espaço de entrada. Para tal os perfis utilizados para estes testes foram determinados aleatoriamente
pelo programa modeFRONTIER. Foram lançados 200 casos teste para cada configuração diferente do
ciclo.
O ciclo staging-propulsão sólida apresentado na Figura 11 respondeu positivamente em 99,50% dos
casos com a massa da carga útil fixa, e em 85,505 dos casos com massa útil variável. Nos casos com
massa útil variável existem também 0,50% de casos fazíveis mas que não respeitam as condições limite
impostas ao nível de modeFRONTIER. Esta diferença explica-se pelo facto de que para os casos a
massa útil fixa é possível encontrar os intervalos de valores mais adaptados ás entradas. Estes
resultados foram obtidos deixando o tipo de combustível variável para cada andar.
Fazendo a mesma análise, fixando agora o tipo de combustível utilizado, obtém-se uma eficácia de
100% para os casos em que a massa útil é fixa e de 78,50% nos casos em que a massa da carga útil é
utilizada como variável. Esta diferença é justificada pela mesma razão anteriormente explicada, de facto,
observando o gráfico da Figura 28 é visível que os casos infazíveis (em vermelho) se encontram todos
nas massas úteis mais elevadas. A partir desta análise podemos afirmar que esta configuração, dos
tipos de combustível utilizados, não está adaptada a massas úteis mais elevadas.
Figura 28 Parallel Chart Mu-diam1
Com a adição do módulo de optimização da trajectória, como é apresentado na Figura 12, a
percentagem de casos fazíveis cai para cerca de 50%. A robustez foi testada para várias configurações
de dados (massa de carga útil constante ou variável; tipos de combustível fixo ou variável) com
resultados similares.

68
Os casos com massa de carga útil variável apresentam 55,00% de casos fazíveis, e 1,00% de casos
fazíveis mas que não respeitam as condições limite. Nos casos com massa da carga útil fixa e tipos de
combustível variáveis a percentagem desce para os 46,50% de casos fazíveis e 3,00% de casos fazíveis
que não respeitam as condições limite. Finalmente o ciclo staging-propulsão-trajectória é eficaz em 56,5
% dos casos com massa de carga útil variável e tipos de combustível variáveis.
Esta diminuição da robustez do processo advém das condições limite de igualdade impostas ao
processo de optimização ao nível do módulo de trajectória. Contrariamente aos módulos de staging e de
propulsão onde todas as condições limites são inequações, o módulo de trajectória é obrigado a impor
condições de igualdade, nomeadamente para o declive e altitude de injecção da carga útil em órbita.
A imposição de condições limite de igualdade representa sempre um problema para a convergência da
função de optimização fmincon . É precisamente por isso que a velocidade de injecção não é fixa, e é
assumida como critério de optimização.
6.2 - Tempo de computação
A optimização do tempo de convergência dos ciclos é um dos pontos mais sensíveis destes trabalhos.
De facto é um parâmetro muito importante em processos de optimização multidisciplinares, pois eles são
normalmente lançados em série.
Os tempos de cálculo observados durante os ensaios do primeiro ciclo são apresentados na Tabela 6.
Casos fazíveis Casos infazíveis Tempo min. Tempo max Tempo min Tempo max Mutile variável tipo prop variável 5,062 s 23.046 s 3,719 s 56,297 s Mutile fixa tipo prop variável 5,078 s 13,365 s 8,515 s 8,515 s Mutile variável tipo prop fixo 5,031 s 38,734 s 3,703 s 62,187 s Mutile fixa tipo prop fixo 5,500 s 24,625 s - -
Tabela 6 Tempos de convergência do ciclo staging-propulsão
este ciclo está bastante bem adaptado a ser lançado em série. Para os casos fazíveis, os tempos
máximos correspondem a casos onde o ciclo é normalmente divergente, mas que converge graças ao
código a apresentado no capítulo 4.4. Os casos infazíveis mais longos correspondem aos casos onde o
ciclo atinge o numero máximo de iteração sem convergir, enquanto os tempos mínimos correspondem
aos casos para os quais a função fmincon não encontra solução durante a primeira iteração do ciclo.
Os tempos de cálculo verificados durante os ensaios realizados para o ciclo 2 são apresentados na
Tabela 7.

69
Casos fazíveis Casos infazíveis Tempo min. Tempo max Tempo min Tempo max Mutile variável tipo prop variável 37,531s 202,984 s 0,578 s 279,359 s Mutile fixa tipo prop variável 52,000 s 212,719 s 9,703 s 276,625 s Mutile fixa tprop fixo 44,875 s 121,203 s 6,407 s 189,484 s
Tabela 7 Tempos de convergência do ciclo staging-propulsão-trajectória
O tempo médio de convergência deste ciclo é de cerca de 70 segundos, continuando assim a estar
adaptado a ser utilizado em série. O tempo mínimo para o caso a massa útil e tipo de combustível
variáveis, corresponde a um caso onde o cálculo é interrompido pelo filtro antes mesmo de entrar no
ciclo de convergência.
Para a aplicação do algoritmo genético em torno deste ciclo, é necessário executá-lo várias vezes de
modo a encontrar o melhor perfil de dados de entrada. O número de indivíduos deve ser escolhido em
função do número de variáveis e respectivo intervalo de valores possíveis.
O algoritmo genético será mais eficaz com um número de indivíduos limitado. Por outro lado, se esse
número for demasiado pequeno não cobrirá todo o espaço de entrada e necessitará assim de mais
gerações para que o efeito da mutação seja efectivo e o algoritmo encontre o melhor perfil. O
funcionamento dos algoritmos genéticos é explicado no Anexo B.
Os números de indivíduos e de gerações escolhidos, para cada processo de optimização analisado, é
apresentado na Tabela 8.
Individus générations Mutile variável tipo prop variável 140 30 Mutile fixa tipo prop variável 100 20 Mutile fixa tipo prop fixo 70 20
Tabela 8 Números de indivíduos e de gerações utilizados nos ensaios
Estes números revelam, numa rápida análise, que o tempo de cálculo necessário para o primeiro destes
três casos será de cerca de 81,2 horas, ou seja 3,38 dias. Mesmo o terceiro caso, o mais rápido dos três,
levará 27,1 horas a convergir, correspondendo a 1,13 dias. Estes são assim processos de cálculo muito
longos.
A propulsão líquida não foi estudada porque necessita ainda de ser mais simplificada para poder ser
utilizada no ciclo final. A convergência do ciclo interno (staging-propulsão) com propulsão líquida
continua a exigir mais de 2 minutos de tempo de computação. Este tempo é muito penalizante para o
ciclo com o módulo de trajectória e portanto este ciclo não está ainda adaptado a ser lançado em série.

70
6.3 – Interpretação dos resultados
Os casos enunciados na Tabela 8 convergem para resultados muito satisfatórios, sendo os perfis
óptimos encontrados sujeitos agora a uma análise mais profunda.
6.3.1 – Perfis óptimos
6.3.1.1- Massa útil e tipo de combustível variáveis
Neste processo de optimização o objectivo era de encontrar o perfil de dados que maximizasse a razão
entre a massa da carga útil (Mu) injectável numa órbita circular à altitude de 400 km, e a massa total do
lançador (Mt).
Os perfis estudados são apresentados no gráfico de Mu em função de Mt presente na Figura 29. Neste
gráfico o código de cores representa a razão entre as massas em estudo sendo os valores
correspondentes dados na legenda.
Figura 29 Representação dos perfis estudados num gráfico Mu vs. Mt
O quociente de massas do melhor perfil encontrado é muito interessante, dado que se aproxima muito
das razões de massa encontradas nos lançadores existentes. É também interessante constatar que este
caso se encontra nos valores centrais do intervalo de valores definido para os valores de massa útil
(entre 600 e 3000kg) e não sobre os valores limite. Os dados de entrada deste perfil são apresentados
na Tabela 9 e os dados de dimensionamento em saída na Tabela 10.

71
Mutile(Kg) n_etages diam1(m) diam2(m) diam3(m) tprop1 tprop2 tprop3 along_c 2640 3 2.3 2,826 2,85 3 1 2 2,16
Tabela 9 Dados de entrada do perfil óptimo do processo a massa útil variável e tipo combustível variável
Mtot(Kg) Me1(kg) Me2(kg) Me3(Kg) M_c(Kg) L1(m) L2(m) L3(m) Mu_Mt allong 152801,4 72261,1 64379,4 12852,0 668,85 14,0 10,0 3,1 0,017277 7.949
Tabela 10 Dados de dimensionamento do perfil óptimo do processo a massa útil variável e tipo de combustível variável
O primeiro andar utiliza o tipo de combustível, de combustão mais rápida e o seu diâmetro é reduzido ao
mínimo definido para esta variável. Esta configuração, com um diâmetro mais pequeno no primeiro andar
que no segundo, não é corrente nos lançadores reais. Estes dois dados indicam que o optimizador tenta
fazer um primeiro andar de consumo rápido para a fase de descolagem. Para o terceiro andar no entanto
é escolhido o combustível 2 de consumo mais lento.
Um outro valor interessante é o alongamento da ogiva. Quanto maior for o alongamento maior será a
massa da ogiva mas mais favorável ela será do ponto de vista da aerodinâmica. O alongamento da ogiva
representa assim um balanço entre o aumento directo de massa e o aumento do coeficiente de perdas
que aumentará o ∆V propulsivo necessário à realização da missão. O intervalo de valores admissíveis
definido foi entre os 1,4 e os 3,3 calibres, sendo que o valor mais favorável é de 2,16, não se
encontrando portanto nos limites deste intervalo.
A massa de cada andar é estudada a partir dos gráficos da Figura 30.
Figura 30 Representação dos perfis estudados em gráficos Me1 vs. Mu, Me2 vs. Mu et Me3 vs. Mu

72
Estes gráficos são dotados de uma escala de transparência. Os perfis mais transparentes correspondem
às primeiras gerações enquanto que os mais opacos correspondem aos últimos casos calculados. Como
se pode ver, os melhores perfis (a vermelho e cor de laranja) são os mais opacos. Isto vem confirmar a
boa convergência do algoritmo genético para as soluções mais adaptadas.
Os perfis que maximizam o quociente entre a massa útil e a massa total do lançador são aqueles que
minimizam a massa do primeiro andar para as diferentes massas úteis. No entanto, as massas do
segundo e terceiro andar dos perfis globalmente mais favoráveis não são as massas mínimas
encontradas para cada massa útil. A partir desta análise podemos concluir que o optimizador tenta
diminuir a massa do andar que apresenta mais perdas e uma impulsão específica mais baixa.
É preciso compreender que, nesta fase dos trabalhos, o optimizador não faz qualquer análise da
centragem da massa ou de estabilidade do lançador, nem de estruturas. Um diâmetro pequeno do
primeiro andar é desfavorável em termos de estabilidade do lançador e ter andares longos e finos é
penalizante estruturalmente. Nenhum destes efeitos é tomado em conta nos cálculos apresentados.
Se fizermos o mesmo estudo para as impulsões específicas do primeiro e do segundo andar, obtemos
os gráficos apresentados na Figura 31.
Figura 31 Representação dos perfis estudados em gráficos Isp1 vs. Mu et Isp2 vs. Mu
Atentando a estes gráficos constata-se que os perfis que maximizam a razão de massas não são
aqueles que maximizam as impulsões específicas, critério de optimização no módulo de propulsão. Este
fenómeno vem demonstrar a pluridisciplinaridade do processo de optimização.
Outro gráfico interessante de observar representa as correlações entre as variáveis. Este gráfico pode
ser visto na Figura 32.

73
Figura 32 Correlação entre as variável de entrada
Estes coeficientes correspondem à evolução de cada variável durante o processo de optimização
confrontada com a evolução das restantes.
Observando a variável diam3 (diâmetro do terceiro andar) é visível que a sua variação não tem muita
influencia sobre os outros parâmetros. Tal deve-se a ter sido definido neste processo que este parâmetro
pode ser alterado ao nível do ciclo de optimização a partir do valor de diâmetro da ogiva.
Da mesma forma, é visível que a massa da carga útil não influencia significativamente a progressão dos
outros parâmetros. É então provável que a configuração óptima obtida para outra massa de carga útil
seja muito próxima da apresentada nas Tabelas 9 e 10.
6.3.1.2 Massa útil fixa e tipos de combustíveis variáveis
O mesmo processo foi aplicado com a massa de carga útil fixa previamente. O valor escolhido foi de
1259Kg, massa de carga útil máxima que o lançador TAURUS pode injectar na órbita LEO a 400 km de
altitude. Com a massa útil fixa, a maximização da razão de massas é equivalente à minimização do
denominador, ou seja da massa total do lançador.
O perfil óptimo encontrado é apresentado de seguida nas Tabelas 11 e 12.
Mutile(Kg) n_etages diam1(m) diam2(m) diam3(m) tprop1 tprop2 tprop3 along_c 1259 3 2.2 2,652 2,05 3 1 2 2,05
Tabela 11 Dados de entrada do perfil óptimo do processo a massa útil fixa e tipo de combustível variável
Mtot(Kg) Me1(kg) Me2(kg) Me3(Kg) M_c(Kg) L1(m) L2(m) L3(m) Mu_Mt allong 75650.1 42137,2 26844,3 5092,2 344.53 10,3 7,1 5,6 0.01664 9.02
Tabela 12 Dados de dimensionamento do perfil óptimo do processo a massa útil fixa e tipo de combustivel variável
Como podemos ver, a configuração óptima com carga útil fixa, corresponde a dados de entrada muito
próximos dos da configuração óptima com massa útil variável. Esta proximidade era esperada, dadas as
conclusões retiradas da Figura 32.

74
Estes estudos com massa útil fixa foram efectuados duas vezes, alterando os parâmetros do algoritmo
genético utilizado no processo de optimização. Os resultados do estudo destes dois casos são
analisados no capítulo 6.3.2.
6.3.1.3 Massa útil fixa e tipos de combustíveis fixos
Finalmente, para estudar a influência da escolha prévia dos combustíveis, escolheu-se fazer uma análise
com tipos de combustíveis fixos. Os combustíveis utilizados em cada andar foram escolhidos de forma a
serem os mesmos para todo o lançador. O combustível escolhido foi o do tipo 1 (ver capítulo 6.1) pois é
o que oferece mais robustez ao processo. A massa de carga útil foi fixada novamente a 1259 kg. O caso
óptimo é apresentado nas Tabelas 13 e 14.
Mutile(Kg) n_etages diam1(m) diam2(m) diam3(m) tprop1 tprop2 tprop3 along_c 1259 3 2.588 2.3 3.25 1 1 1 2,16
Tabela 13 Dados de entrada do perfil óptimo do processo a massa útil fixa e tipo de combustível fixo
Mtot(Kg) Me1(kg) Me2(kg) Me3(Kg) M_c(Kg) L1(m) L2(m) L3(m) Mu_Mt allong 85940.53 48598.53 29425.27 6292.98 364.75 11.5 7.5 3.3 0.01465 8.53
Tabela 14 Dados de dimensionamento do perfil óptimo do processo a massa útil fixa e tipo de combustível fixo
Pode constatar-se que o resultado obtido para o quociente entre a massa útil e a massa total do lançador
é mais baixo. No entanto o diâmetro do primeiro andar (diam1) já não converge para o mínimo possível a
esta variável. Esta configuração é mais próxima daquela que se observa nos lançadores existentes.
Os lançadores a combustíveis sólidos utilizam normalmente o mesmo tipo de combustível para os três
andares. É assim normal que o perfil encontrado se aproxime mais do dos lançadores conhecidos.
6.3.2 – Análise da convergência
Este capítulo vai permitir fazer uma análise da convergência do algoritmo genético ao longo dos
processos descritos anteriormente. As variáveis utilizadas para analisar a boa convergência dos
processos foram as impulsões específicas do primeiro e do segundo andar. Estes valores resultam de
uma optimização por um método gradiente, ao nível do módulo de optimização da propulsão, que
depende dos parâmetros definidos no nível global (modeFRONTIER). Estas variáveis são então um bom
testemunho da convergência e apresentam uma distribuição mais continua que os dados de entrada,
que assumem valores predefinidos.
Os casos estudados são apresentados graficamente na Figura 33.

75
Figura 33 Representação os perfis estudados pelos processos em gráficos Isp2 vs. Isp1
Como se pode ver os perfis menos transparentes correspondem aos mais adaptados, o que demonstra a
boa convergência do algoritmo.
Uma outra análise interessante pode ser feita a partir do gráfico da evolução da massa útil e tipo de
combustível fixados, é apresentado na Figura 34.
Figura 34 Evolução da massa total para o processo a massa útil fixa e tipo de combustivel fixo
Este gráfico mostra uma primeira convergência para um valor que não é o valor óptimo. A configuração
óptima é encontrada posteriormente e a convergência para esse valor aparece nas últimas gerações.
Esta evolução põe em evidência a importância da mutação para o processo, evitando que este se
bloqueie num óptimo local.
Esta influência foi alvo de um estudo mais profundo através do caso a massa útil fixa e tipo de
combustível variável, para o qual se analisaram diferentes valores da probabilidade de mutação do
algoritmo genético. A Figura 35 apresenta a distribuição desses perfis obtidos, para o mesmo problema,
com uma probabilidades de mutação de 2% e de 10% respectivamente.

76
Figura 35 Representação dos perfis estudados pelos processos a 2% e 10% de probabilidade de mutação
No primeiro caso é visível que os perfis estão muito mais concentrados e o espaço de solução apresenta
regiões cujos resultados não foram estudados, sendo exactamente nessas regiões que é encontrado o
perfil óptimo no segundo caso. O máximo encontrado para a razão de massas, utilizando a mesma
população inicial, foi de 0,015501 para o caso a 2% de probabilidade de mutação e de 0,016745 para o
caso a 10%.
No entanto, observando as evoluções da massa total para os dois casos, apresentados na Figura 36,
constata-se que a convergência para o valor óptimo é muito mais acentuada que no caso com mais
probabilidade de mutação.
Figura 36 Evolução da massa total nos processos a 2% e 10% de probabilidade de mutação
Esta análise conduz a duas conclusões : uma maior probabilidade de mutação pode conduzir ao
resultado óptimo mesmo com um uma população inicial insuficiente para cobrir à partida todo o espaço
de solução; a diminuição da probabilidade de mutação permite uma convergência mais rápida, o que
permite diminuir o número de gerações necessárias para a convergência. É assim essencial escolher
bem a probabilidade de mutação que minimiza o número de casos a ser calculado, tomando em conta
estes dois factores contraditórios.

77
6.4 – Comparação com lançadores existentes
Para atestar a validade dos modelos utilizados e do processo de optimização desenvolvido, os
resultados foram comparados com as características de lançadores existentes. Para esta comparação
recorreu-se aos dados de um lançador no qual todos os andares propulsivos utilizem motores a
combustível sólido, o lançador TAURUS.
A comparação com lançadores a propulsão líquida não foi testada, já que a maioria destes lançadores
utilizam motores a gerador de gás. Este ciclo de motor, devido à sua complexidade e falta de interesse
para o projecto CENTOR, não foi simplificado até ao final do presente projecto. A aplicação de um
processo de OMD a um lançador a propulsão liquida não foi efectuada devido também ao tempo que
seria necessário e de limitações ao nível dos recursos computacionais.
6.4.1 – Caso de lançador a propulsão sólida – Lançador TAURUS
A simulação do lançador equivalente ao TAURUS foi feita deixando a plataforma HADES encontrar a
configuração do lançador óptimo para a colocação em órbita da carga útil máxima que este lançador
transporta.
As características da combustão do combustível utilizado no TAURUS não são conhecidas e como tal
não foi possível uma simulação mais precisa. Os resultados obtidos para as configurações, a tipo de
combustível fixo e variável, são confrontados com os dados do TAURUS na Tabela 15
.
Config. optima combustivel variavel
Config. optima combustivel fixo
TAURUS
Massa total 75650,1 85940,5 78000 Massa andar 1 42137,2 48598,5 53020 Massa andar 2 26844,3 29425,3 17930 Massa andar 3 5092,2 6293 4330 Massa ogiva 344,5 364,8 360/400 Diâmetro andar 1 2,2 2,59 2,38 Diâmetro andar 2 2,65 2,3 1,28
Tabela 15 Comparação entre os perfis óptimos encontrados e o lançador TAURUS
Os valores encontrados têm a mesma ordem de grandeza que os do caso real TAURUS, o que é muito
encorajador.
Como se pode ver, a massa total do TAURUS esta compreendida entre os valores de massa total
obtidos nas simulações com o mesmo tipo de combustível para os três andares e com o tipo de
combustível variável.

78
A geometria do TAURUS é mais próxima daquela obtida para o caso em que o tipo de combustível é o
mesmo em todos os andares. A massa mais elevada encontrada neste caso deve-se à eficácia mais
baixa do tipo de combustível imposto em relação à utilizada pelo TAURUS. Existem também outros
factores que vão influenciar este valor : como a utilização de índices construtivos aproximados em vez de
um verdadeiro dimensionamento; ou a ogiva não ser largada antes do fim da fase de voo do lançador,
como acontece normalmente.
Sabendo que o estudo não tomou em conta certas disciplinas fundamentais da concepção do lançador, e
que é baseado em modelos simplificados, os resultados obtidos e aqui apresentados foram considerados
bastante satisfatórios.

79
VII – Aplicação da OMD à concepção de veículos de transferência orbital No quadro do projecto HADES, os trabalhos desenvolvidos ao longo desta tese centraram-se na
aplicação de um processo de optimização multidisciplinar, utilizando ferramentas de cálculo e
optimização já programadas e desenvolvendo novas ferramentas, no que se caracteriza por ser um
trabalho mais individual. Pelo contrário, no projecto CENTOR o trabalho centrou-se em prestar
assistência a uma equipa no trabalho de organização e de definição de um novo processo de OMD,
passando pela definição das fases do projecto, do papel de cada de cada elemento da equipa e dos
objectivos do projecto a curto e longo prazo.
Tendo como fim o de contribuir com a experiência ganha nesta matéria através da sua aplicação ao caso
do lançador, fez parte do trabalho desenvolvido a participação activa nas reuniões do grupo de trabalho
do PRF CENTOR. Estas reuniões têm como objectivo a coordenação dos trabalhos dos vários
investigadores que fazem parte desta equipa e a definição precisa dos ciclos e módulos de optimização
a ser realizados, assim como a sua ligação.
Uma grande parte dos trabalhos realizados até ao momento foi dedicada ao desenvolvimento de
modelos disciplinares. Devido ao facto que a aplicação da OMD à concepção de veículos de transporte
espacial é um conceito novo e assim não existiam ainda ferramentas feitas. Neste campo os trabalhos
desta tese contribuíram para a realização do módulo de propulsão líquida, modulo que é comum à
concepção do lançador e ao PRF CENTOR, sendo descrito no capítulo 6.3.
7.1 – As fases do projecto e correspondentes ciclos de optimização
O PRF CENTOR foi dividido em três fases correspondentes a três ciclos de optimização do processo a
módulos de complexidade crescente. Estes processos caracterizam-se pela preocupação constante em
comparar diferentes configurações possíveis para o veículo, nomeadamente a comparação entre os
veículos completamente propulsivo e os veículos com aero-assistência.
O primeiro ciclo corresponde a uma abordagem «all at once» onde só existe um módulo de cálculo. Um
esquema representativo deste ciclo é dado na Figura 37.
Figura 37 Ciclo 1 PFR CENTOR

80
Neste ciclo o estudo centra-se na análise de missão, ela permitirá comparar as diferentes trajectórias de
transferência de órbita com e sem aero-assistência e compreender melhor as vantagens de cada
conceito.
Nos segundos ciclo serão já incluídos todos os módulos disciplinares de cálculo que farão parte do ciclo
final, mas as grandezas são calculadas fazendo recurso a relações empíricas e a cálculos simples.
Neste ciclo não existem optimizações locais, assim sendo os módulos correspondem unicamente a
«caixas» de cálculo. A Figura 38 apresenta um esquema deste ciclo.
Figura 38 Ciclo 2 PFR CENTOR
Este ciclo permite fazer um cálculo paramétrico mais complexo, o dimensionamento e o estudo,
recorrendo a várias disciplinas, assim como de analisar a interacção entre os módulos. Finalmente o
último ciclo é baseado em módulos de optimização local e na interacção entre eles. A sua organização é
apresentada na Figura 39.
Figura 39 Ciclo 3 PRF CENTOR
Esta será o ciclo final de optimização, onde serão realizados os processos para encontrar a configuração
óptima dos parâmetros relativos a cada disciplina, resultando numa aplicação de optimização do sistema
global. Este ciclo permitirá encontrar a configuração óptima a ser escolhida para o veículo.

81
VIII – Perspectivas para a continuação dos trabalhos
8.1 - Projecto HADES
A continuação dos trabalhos desenvolvidos durante esta tese devem passar inicialmente pela
simplificação e adaptação dos restantes ciclos termodinâmicos do módulo de optimização da propulsão
líquida.
Será também necessário adaptar as funções existentes a um dimensionamento mais completo da massa
seca, onde esta não seja determinada a partir dos índices construtivos aproximados. Esta adaptação
permitirá o início dos trabalhos para a versão V1, onde novas disciplinas possam ser estudadas, como
por exemplo a estrutura.
Uma possibilidades interessante seria o estudo da aplicação do método das superfícies de resposta a
este ciclo já que se trata de um problema com vários parâmetros, tendo assim necessidade de muitas
gerações para a convergência do algoritmo genético. Uma outra mudança interessante seria a tradução
das funções em linguagens compiláveis, o que permitiria acelerar significativamente o processo.
Alternativamente, podem utilizar-se técnicas de «caching», que permitem evitar a reinterpretação do
código a cada instrução para as instruções frequentemente utilizadas (nos ciclos por exemplo), evitando
o trabalho de tradução do código.
A programação de novos módulos de optimização constituirá então o próximo passo.
8.2 - PFR CENTOR
A continuação dos trabalhos de passar pelo desenvolvimento do primeiro ciclo, a partir do programa de
analise de missão realizado pela investigadora da ONERA Catherine JOLLY, já em fase final de
desenvolvimento.
Enquanto os módulos de calculo do segundo ciclo são programados, é também necessário preparar a
sua integração e as interacções entre os diferentes módulos, assim como de adaptar programas já
desenvolvidos, como foi feito no caso do software de dimensionamento da propulsão liquida apresentado
no capítulo 6.3.

82
IX - Conclusão
A optimização é uma fase muito importante do projecto de veículos de transporte espacial, pois são-lhes
exigidas cada vez melhores performances. Estes são sistemas complexos que fazem interagir muitas
disciplinas diferentes e assim sendo a aplicação de processos de optimização multidisciplinar a estes
problemas apresenta-se como muito prometedora.
Os trabalhos efectuados ao longo deste estágio permitiram a melhor compreensão dos diferentes
processos e métodos de optimização multidisciplinar, o que se capitalizou no desenvolvimento e
adaptação de ferramentas disciplinares tal como na sua implementação e respectiva interacção.
No quadro da aplicação da OMD à concepção de lançadores, projecto HADES, foi desenvolvida uma
ferramenta simplificada, que permite determinar os parâmetros de uma configuração óptima, a partir da
manipulação de um número limitado de parâmetros de entrada.
Esta ferramenta está baseada num algoritmo genético ao nível modeFRONTIER (onde é seleccionado o
melhor perfil de dados de entrada possível), que lança em série um processo de optimização
multidisciplinar organizado segundo uma arquitectura de optimização colaborativa, onde em cada
modulo se executa uma optimização disciplinar individual que determina as características do lançador.
A compatibilidade dos dados em saída de cada módulo é assegurada através da sua implementação em
ciclos de convergência. Esta organização torna-se especialmente interessante dado este trabalho fazer
parte de uma fase inicial do projecto HADES, ao qual vão ser adicionados mais módulos disciplinares,
para além disso esta abordagem modular permite que os códigos disciplinares sejam extrapoláveis para
outros processos OMD como é o caso do PRF CENTOR.
O software produzido junta módulos de optimização disciplinares, desenvolvidos no decorrer deste
estágio, ou adaptados a partir de ferramentas já existentes, num processo de optimização global. Este
toma em consideração as contribuições disciplinares do staging, propulsão, trajectória e aerodinâmica,
para encontrar o lançador óptimo para a injecção de da carga útil definida na órbita pretendida. Foram
também realizados os trabalhos teóricos para o desenvolvimento dos futuros módulos a juntar ao
processo, nomeadamente o módulo de estruturas.
Os ensaios realizados para os diferentes ciclos de convergência produzidos mostraram uma robustez
bastante satisfatória dos mesmos. Para o ciclo de convergência entre o staging e a propulsão sólida
obtive-se uma percentagem de casos fazíveis entre os 78,50% e os 100,00% dependendo dos
parâmetros variáveis em cada ensaio. No ciclo onde foi incluído o módulo de trajectória/aerodinâmica
esta percentagem caiu para valores entre os 46,50% e os 56,50%. Este decréscimo da percentagem de
casos resolúveis deve-se à imposição de condições limite de igualdade neste módulo de optimização,
mais dificilmente respeitáveis pelo método gradiente (método sequencial quadrático) utilizado nas
optimizações internas a cada módulo. Estes valores de robustez do processo foram considerados
bastante satisfatórios.

83
Os tempos de convergência destes ciclos é de cerca de 7 segundos para o ciclo staging – propulsão
sólida e 70 segundos no caso do ciclo staging – propulsão sólida – trajectória. Estes tempos são
adequados a uma execução em série destes ciclos, guiada por um algoritmo estocástico aplicado pela
plataforma de optimização modeFRONTIER.
A obtenção destes tempos de convergência e valores de robustez foi possível através de trabalhos de
aperfeiçoamento dos ciclos de convergência, nomeadamente com a programação de um filtro de perfis
de dados de casos à partida infazíveis e de um algoritmo de alisamento da progressão dos critérios de
convergência, que também impossibilita esta progressão de entrar em ciclos infinitos.
Foi também feita uma análise dos parâmetros de configuração do algoritmo genético, como o estudo da
influência da probabilidade de mutação na convergência, de modo a poder escolher os melhores
parâmetros de inicialização do processo.
Este processo de optimização multidisciplinar permitiu determinar configurações de lançador com
relações entre massa útil e massa total à descolagem muito interessantes, ligeiramente superiores às
encontradas nos lançadores reais de configuração comparável. No ensaio onde foram assumidos como
variáveis a massa útil e o combustível utilizado em cada andar este valo ascende a 17,28%.
A validação do código global foi feita através da sua comparação com o lançador TAURUS. Desta
comparação pode concluir-se que as ordens de grandeza das características obtidas pelo algoritmo são
próximas das do lançador real. A massa total do lançador obtido consegue ser inferior à do lançador
TAURUS para o caso onde o combustível utilizado é uma das variáveis do processo.
Existem ainda algumas deficiências ao nível da geometria determinada pelo processo de optimização,
estas prendem-se com o facto de ainda não serem contabilizadas as contribuições de algumas
disciplinas fundamentais como a de estruturas ou a de centragem da massa, intimamente ligada à
manobrabilidade do veículo.
A contribuição para o PRF CENTOR consistiu em prestar assistência a uma equipa no processo de
organização do processo de optimização multidisciplinar. Esta contribuição teve por fim contribuir com a
experiência adquirida no projecto HADES, para a melhor organização dos ciclos e módulos de
optimização. No quadro deste projecto foram ainda desenvolvidos trabalhos para o módulo de
optimização da propulsão líquida.

84
Bibliografia
[1] Geethaikrishnan , Multi-Disciplinary design optimization strategy in multi-stage launch vehicle conceptual design, Department of Aerospace Engineering Indian Institut e of Technology , Bombay 2003
[2] Akhtar, Saqlain ; Linshu, He, Support Vector Regression-driven Multidisciplinary design optimisation for multi-stage space launch vehicle considering throttling effect, School of aeronautics, Beihang University , Beijing 2006
[3] Rowell, Lawrence F. ; Korte, John J., Lauch vehicle design and optimisation methods and priority for the advanced engineering environment, Swales aerospace , Hampton, Virginia 2003
[4] Kodiyalam, Srinivas, Evaluation methods for multi disciplinary design optimisation (MDO), phase 1, Morrisville, North Carolina 1998
[5] MARTY Daniel , Conception des Véhicules Spatiaux, Manson , Paris 1986.
[6] HUMBLE Ronald W.; HENRY Gary N.; LARSON Wiley J. , Space Propulsion Analysis and Design, McGraw-Hill Companies , New York 1995.
[7] SUTTON George P.; BIBLARZ Oscar , Rocket Propulsion Elements, John Wiley & Sons , New York 2001.
[8] BROWN Charles D. , Spacecraft Propulsion, American Institute of Aeronautics and Astronautics , Washington 1996.
[9] DUFOUR A. ; CALABRO M. , Technologies et Architectures des Etages Propulsifs, Ecole Centrale de Paris , Paris 2001.
[10] GOURINAT Y. , Dynamique Linéaire des Structures Minces, Ecole Nationale Supérieure de l’Aéronautique et de l’Espace , Toulouse 2003.
[11] FELIPPA Carlos A. , Introduction to Finite Element Methods, University of Colorado , 2006
[12] ROYON-LEBEAUD Aude , Ballotement des liquides dans les réservoirs cylindriques soumis à une oscillation harmonique, Université Joseph Fourier , 2005
[13] ADNET Nicolas , PRF CENTOR Elaboration d’un modèle de masses, ONERA, Paris 2006
[14] BON Mathieu , Etude d’optimisation pluridisciplinaire sur un lanceur avec le logiciel ModeFRONTIER, ONERA, Paris 2006
[15] GODON Jean-Claude ; LE QUELLEC , Code P.E.R.S.E., ONERA, Paris 2006
[16] DOREAU Fabien , Elaboration d’un calcul de vérification de données balistiques et application au fonctionnement des propulseurs à propergol solide, ONERA, Paris 2006
[17] Launch Vehicle Catalogue, ESA, 2004

85
Anexo A
A expressão do coeficiente km é:
2
+=
lm
h
h
lmKm
O índice m é uma função descontínua de h/l que muda para km = km + 1, seja
( )1+= mml
h Para uma placa de dimensões (h, l), o valor de km é obtido a partir dos seguintes
ábacos
Extremidades Bordos
Cas 1 Apoiadas Apoiados
Cas 2 Apoiados Encastrados
Cas 3 Articulados Livres
F
F
h
l
Panneau
Bords
Extrémités

86
Anexo B Algoritmos genéticos
É um dos métodos estocásticos mais conhecidos e foi desenhado para simular a ideia de Darwin de
selecção natural. Cada solução é vista como um indivíduo e o problema consiste em maximizar ou
minimizar a performance dos indivíduos. O algoritmo funciona fazendo com que os melhores indivíduos
propaguem o seu material genético à geração seguinte. Enquanto os indivíduos menos adaptados não
sobrevivem.
Nos algoritmos genéticos o domínio é representado como uma conjunto de indivíduos. Estes indivíduos
são representados por uma cadeia de caracteres ou matrizes e são geralmente designados de
cromossomas. O objectivo é de encontrar o indivíduo do domínio com o melhor material genético. A
parte do domínio que é examinada é chamada de população.
As operações genéticas que definem o nascimento de novos indivíduos são designadas operação de
crossover e de mutação. Estas duas operações têm papéis diferentes no algoritmo genético. A mutação
aleatória produzindo variações dos códigos genéticos que podem ser benéficas, é também necessária
para explorar novas soluções e evitar soluções locais. O Crossover é a base do algoritmo, ele processa
a troca de material genético entre dois cromossomas pais, dando a possibilidade de uma recombinação
benéfica dos genes de cada um dos progenitores. O critério para parar o algoritmo deve ter em conta a
uniformidade da populações e a relação entre a média e o valor do melhor individuo.
As cinco etapas básicas de um algoritmo genético são:
1. Começar com uma população aleatória de n cromossomas (perfis candidatos à solução do problema);
2. Calcular a performance f(x) de cada cromossoma x da população ;
3. Repetir as etapas seguintes até produzir n crias :
a. Escolher aleatoriamente um par de progenitores na população;
b. Proceder ao crossover do par num ponto escolhido aleatoriamente para produzir dois novos indivíduos;
c. Mutar aleatoriamente os dois indivíduos criados e juntar os cromossomas resultantes à população;
d. Calcular a performance dos cromossomas criados ;
4. Deixar os n cromossomas com melhores performances sobreviver e para a geração seguinte;
5. Voltar à etapa 3 (até à convergência).~
Depois de um certo número de gerações a população evolui para uma solução quasi-optima.

87
Anexo C Método das superfícies de resposta
Os métodos de concepção robusta são uma abordagem eficaz para alcançar uma solução quasi-óptima.
Eles utilizam os códigos de análise já existentes para construir a função de concepção, sendo capazes
de manipular variáveis discretas e contínuas, mesmo as não lineares. Estes métodos podem ainda
quantificar o ruído e as variações e, utilizando os vectores ortogonais para a concepção das
experiências, permitem estudar um grande número de parâmetros com um número pequeno de
experiências.
A eficácia da utilização de vectores ortogonais pode ser ilustrada pelos exemplos seguintes:
• Com 4 parâmetros com 3 níveis, pelo método dos vectores ortogonais são necessárias apenas 15 experiências em vez das 81 combinações possíveis.
• Para 13 parâmetros com 3 níveis são necessárias 105 experimentações em vez dos 1,6 milhões de casos possíveis.
O óptimo não é em geral um desses casos calculados, mas pode ser eficazmente previsto através de
modelos matemáticos.
O método das superfícies de resposta é então utilizado para:
• Obter aproximações polinomiais das relações entre os objectos e os parâmetros da concepção, na forma;
• Determinação dos efeitos de cada parâmetro, das interacções entre eles e entre as disciplinas;
• Determinação dos valores óptimos e estudo da sensibilidade;
As etapas do processo de estudo são :
1. Conduzir um estudo para uma escolha eficaz dos parâmetros importantes para o sistema e das características a optimizar;
2. Determinar o intervalo de valores possível para cada parâmetro;
3. Escolher a combinações de experiências que irá cobrir o domínio de concepção (método dos vectores ortogonais);
4. Definir o processo e conduzir a análises nos pontos determinados;
5. Construir os modelos matemáticos (segunda ordem para captar a não-linearidade) ;
6. Analise dos dados e modelos para obter as sensibilidades ;
7. Determinar os níveis de optimização dos parâmetros;
8. Se o óptimo não for um dos casos experimentados, deve fazer-se a experiência nesse ponto para confirmar a validade dos valores encontrados para os parâmetros.


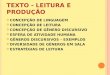











![МУПВ ВПЭС - Главная · 2020. 2. 12. · onErA ROU]EBOrO OflErA KOUJEBOro 011ErA KOWEBOFO 011ErA KOLUEBOro OflE-rA KOWE80rO OllErA HOWE-BCTO OJIE-rA ROWEBOrO MATPOCOBA](https://img.document.onl/doc/110x75/60aee6473037f61237103632/oe-2020-2-12-onera-roueboro-oflera-koujeboro.jpg)