Embed Size (px)
Citation preview
__________________________________________________________________________________
Faculdade de Tecnologia de Garça “Deputado Júlio Julinho Marcondes de Moura”
CURSO DE TECNOLOGIA EM MECATRÔNICA INDUSTRIAL
ANDERSON MICHAEL DA CRUZ GUIMARÃES
MASSAYOSHI FUONKE
OTIMIZADOR DE PARAFUSAMENTOS PNEUMÁTICO
Garça
2015
__________________________________________________________________________________
Faculdade de Tecnologia de Garça “Deputado Júlio Julinho Marcondes de Moura”
1
CURSO DE TECNOLOGIA EM MECATRÔNICA INDUSTRIAL
ANDERSON MICHAEL DA CRUZ GUIMARÃES
MASSAYOSHI FUONKE
OTIMIZADOR DE PARAFUSAMENTOS PNEUMÁTICO
Artigo Cientifico apresentado à Faculdade de Tecnologia de Garça – FATEC, como requisito para conclusão do curso de Tecnologia em Mecatrônica Industrial, examinado pela seguinte comissão de professores:
Data de Aprovação: ___/___/___
Prof. Dr. Ulysses de Barros Fernandes
FATEC Garça
Prof.(a) (membro da banca)
FATEC Garça
Prof.(a) (membro da banca)
FATEC Garça
Garça
2015
__________________________________________________________________________________
Faculdade de Tecnologia de Garça “Deputado Júlio Julinho Marcondes de Moura”
2
OTIMIZADOR DE PARAFUSAMENTOS PNEUMÁTICO
Anderson Michael da Cruz Guimarães1
Massayoshi Fuonke [email protected]
Prof. Dr. Ulysses de Barros Fernandes2 [email protected]
Resumo – O objetivo do projeto consiste em desenvolver uma unidade controladora de ar que visa melhorar o processo de parafusamento com ferramentas pneumáticas. Baseando-se em princípios de pneumática e eletrônica o equipamento será alocado entre a linha de ar e a ferramenta com a finalidade de eliminar o desconforto existente na contagem imaginária do tempo de torqueamento realizado pelo operador, o que causa inconformidades entre parafusamentos. O protótipo dará qualidade superior ao processo com a instalação de filtro eliminador de sujidades, regulador de pressão para ajuste de torque e lubrificador para proteção de rotor, engrenagens e rolamentos, propiciando maior durabilidade e funcionamento adequado à ferramenta. Para controle do tempo de torqueamento e demais variáveis será utilizado um microcontrolador, e com auxílio de uma interface homem-máquina (IHM) serão configurados dados de tempo, tipos de parafusos, quantidade entre outros, automatizando o sistema. A economia de energia elétrica e melhora da qualidade, produtividade e segurança são itens de relevância para o melhoramento do bem-estar do operador assim como a padronização do processo. Palavras-chave: Parafusamento pneumático. Torqueamento. Sistema microcontrolado.
Abstract – The project goal is to develop a controlling air unit aimed at improving the process of screwing with pneumatic tools. Based on principles of pneumatic and electronic equipment will be located between the air line and the tool in order to eliminate discomfort in the existing imaginary torquing time count performed by the operator, causing nonconformity of tightenings. The prototype will assign superior to the process with the eliminator filter installation of dirt, throttle for torque adjustment and lubricator for rotor protection, gears and bearings, providing greater durability and proper functioning of the tool. To control the torquing of time and other variables a microcontroller is used, and with the aid of a human-machine interface (HMI) will be set time data, types of screws, quantity etc. by automating the system. The savings in electricity and improved quality, productivity and security are important items to improve worker well-being as well as the standardization of the process. Keyword: Pneumatic screwing. Torquing. Microcontrolled system.
1 Alunos do curso de Tecnologia em Mecatrônica Industrial – FATEC Garça 2 Docente da FATEC - Garça
3
1 INTRODUÇÃO
As inovações tecnológicas são cada vez mais enfatizadas nas grandes
empresas de manufatura e com isso as melhorias na produtividade, qualidade e
segurança se fazem necessárias. No processo de montagem de máquinas e
equipamentos são utilizadas parafusadeiras pneumáticas manuais cuja operação
apresenta total dependência do operador no controle do tempo de torqueamento,
que é feito intuitivamente, ocasionando grande variação entre um parafusamento e
outro. Além disso, nem sempre o ar comprimido que chega às ferramentas é
regulado na pressão correta, filtrado ou lubrificado, ocasionando funcionamento
inadequado e desperdício de ar. A produtividade também fica comprometida por
parte do operador que disponibilizará muito tempo para conseguir uma padronização
aceitável.
Analisando os fatores deficitários do parafusamento pneumático manual, foi
elaborado um protótipo que consiste na leitura do fluxo de ar comprimido fornecido à
ferramenta e por meio de informações inseridas numa interface homem-máquina
(IHM) foi pré-estabelecido um tempo de parafusamento correto e seguro para cada
tipo e comprimento de parafuso.
Em uma indústria com variedades de produtos que utilizam parafusos de
diversas especificações, pré-definir eletronicamente o tempo de torqueamento
melhora a postura ergonômica do operador permitindo maior rendimento e
diminuindo o desgaste físico e mental eliminando o esforço, imperceptível, de
contagem do tempo de torqueamento. E pelo aspecto da qualidade, o sistema
permitirá a padronização de torque, o que implica num aumento na produtividade.
1.1 JUSTIFICATIVA
O trabalho de pesquisa é relevante porque contribuirá para o melhoramento
na qualidade do produto, na produtividade e na segurança dos operadores,
atenuando fatores que oneram o custo de produção das empresas, como por
exemplo, o uso excessivo e desnecessário de energia elétrica, que nesse caso é
utilizada por compressores para gerar ar comprimido.
4
1.2 OBJETIVO GERAL
Minimizar dificuldades no parafusamento pneumático referente ao tempo de
torqueamento e auxiliar o operador a alcançar uma padronização ideal nos
parafusamentos, além de desenvolver um equipamento capaz de solucionar os
problemas ergonômicos.
1.3 OBJETIVOS ESPECIFICOS
Criar uma unidade intermediária entre a linha de ar de uma empresa e a
ferramenta pneumática composta por filtro de ar, regulador de ar, lubrificador,
manômetro, temporizador, medidor de vazão, microcontrolador, painel com IHM,
válvula solenoide, alarme sonoro, luzes de aviso que juntos farão o controle de
pressão, vazão, tempo de aperto pré-determinado para que todos os parafusos
daquele conjunto tenham o mesmo torque, resolvendo os seguintes problemas:
- A dificuldade do operador em padronizar a qualidade do parafusamento durante
sua jornada diária de trabalho.
- O uso desnecessário de ar comprimido.
- Padronizar mecanicamente a qualidade do trabalho.
- Desgaste desnecessário do operador em calcular mentalmente o tempo do
processo.
- Tempo de preparação entre um parafusamento ao outro com a despreocupação do
operador na finalização do processo anterior, liberando-o para prever o próximo
passo.
- Falta de filtragem, regulagem de pressão e lubrificação do ar que proporcionaria
um funcionamento inadequado e pouca durabilidade das ferramentas pneumáticas.
1.4 OBSTÁCULOS A SEREM RESOLVIDOS
Os principais são:
- Após o tempo de parafusamento uma luz verde sinalizará a finalização da
tarefa e o fluxo de ar será interrompido para que não haja tempo de aperto
desnecessário e desperdício de ar;
5
- Se o operador interromper o processo durante o tempo pré-determinado, um
alarme deverá soar indicando que a tarefa está incompleta;
- O tempo de parafusamento só deverá ser contabilizado após o corpo do
parafuso for percorrido pela porca e esta entrar em contato com a peça a ser
apertada;
- Após a tarefa ser concluída deverá conter um tempo hábil pré-definido para
que o fluxo de ar seja reestabelecido para o parafusamento seguinte.
1.5 HIPÓTISE
A ferramenta pneumática poderia ser usada em outras tarefas e nesse caso
seria necessário um novo set-up.
1.6 METODOLOGIA
Desenvolvimento de um protótipo experimental para verificar a viabilidade do
dispositivo proposto para a solução do problema de pesquisa apresentado.
2 DESENVOLVIMENTO
Para o desenvolvimento do protótipo, foi necessário um aprofundamento
teórico sobre o tema sistemas de controle com IHM, confrontando a utilização do
CLP com o microcontrolador.
2.1 REFERENCIAIS TEÓRICOS
2.1.1 Microcontroladores
Os Microcontroladores são dispositivos computacionais inseridos em um
único encapsulamento.
Como afirma Junior (2013,p.12), a principal característica que faz do
microcontrolador um importante componente em projetos e fabricação de
dispositivos eletrônicos dos mais diversos tipo, está em reunir em um só
capsulamento (chip), todos os periféricos necessários para o controle do sistema
logico do projeto.
Embora o funcionamento do microcontrolador gire em torno de uma
frequência de clock de alguns MHz, o que é baixo comparado aos
6
microprocessadores atuais, sua utilização é apropriado para situações típicas, pois
possui um baixo consumo de energia, algo em torno de miliwats, que pode ser
reduzido ainda mais com a capacidade de hibernar (Sleep), enquanto aguarda o
acontecimento de algum evento que o colocará em funcionamento novamente. De
acordo com Ordonez (2005,p.29), modo sleep é uma particularidade que o
microcontrolador possui, que oferece uma maneira de operar diminuindo o consumo
de energia do chip. Atuando neste modo, o consumo típico do microcontrolador é
menor que 1µA (microampère, unidade de fluxo elétrico). Mesmo nesse consumo
mínimo, o microcontrolador é capaz de monitorar eventos em determinadas portas
de E/S (entrada ou saída), além de receber e tratar interrupções.
Com a capacidade que o microcontrolador tem de facilitar o controle dos
processos ainda é necessário desenvolver além do programa que irá conter as
instruções para controlar determinados processos do protótipo, uma função que será
responsável por gerar uma interrupção interna para a contagem do tempo de
torqueamento da parafusadeira.
De acordo com Borges (2008,p.17), as interrupções são desvios condicionais
efetuados pelo programa em função da ocorrência de um fenômeno prioritário
ocorrido em um determinado instante, o qual poderá ser executado rapidamente
fazendo parecer que o programa principal não tenha sido parado para sua
execução.
Existe uma ampla gama de modelos de microcontroladores e vários
fabricantes, em que se destacam a Microchip e a Atmel, ambas possuem modelos
de microcontroladores que se encaixam adequadamente as necessidades do
sistema de controle do protótipo. Dentre tantos foi escolhido o microcontrolador AVR
da serie Atmega328P da Atmel para comparar com os CLPs.
2.1.2 Controlador Lógico Programável (CLP)
O CLP é um componente imprescindível em indústrias com máquinas e
dispositivos automatizados. Na década de 1970, com a introdução dos
microprocessadores, sua capacidade de controle aumentou ainda mais fazendo de
sua utilização um item de extrema praticidade, diminuindo o espaço físico utilizado
na caixa de comando. Outro ponto favorável é a facilidade de comunicação com as
portas de saída que geralmente são feitas diretamente em tensão de 24 VDC com
7
corrente suficiente para alimentar válvulas solenoides e até motores sem o uso de
relés e contactoras. A construção robusta e resistente faz com que a durabilidade do
CLP seja grande a ponto de não ser considerado um equipamento descartável,
sendo item de estoque para possíveis trocas em manutenções e reutilização para
instalações futuras.
Apesar dos pontos favoráveis, pesam contra, itens como o custo e o espaço
que ocupam, ainda que devido a fatores tecnológicos, cada vez mais miniaturizados.
2.1.3 Estudos Comparativos
Analisando ambas as tecnologias, chegou-se à conclusão de que a melhor
opção é o microcontrolador por seu baixo custo perante o CLP e por possuir uma
grande quantidade de modelos com várias portas de entradas e saídas
possibilitando reduzir o custo do protótipo, o que não se consegue com CLP, por ser
caro e possuir alguns modelos complexos em sua configuração além de ser pouco
portátil e prático devido ao tamanho.
2.2 METODOLOGIA DO PROTÓTIPO
2.2.1 Principio de funcionamento
Cada parafusadeira pneumática tem uma vazão de ar característica com e
sem carga, quer dizer, o consumo de ar no momento em que a ferramenta está
transportando a porca pelo corpo do parafuso de encontro às peças a serem
apertadas tem um valor 1 e o consumo após o encontro das porcas com as peças é
1-x. Através de um sensor medidor de vazão, o fluxo é mapeado e a partir dessa
mudança é contado um tempo pré-determinado de parafusamento suficiente para a
conclusão da tarefa quando o fluxo de ar é interrompido através de uma válvula
solenoide. Para isso foi montado um circuito que terá como componente principal um
microcontrolador interligado a um IHM para que as condições possam ser
configuradas pelo responsável do aparelho. Após um determinado tempo, que
também será definido previamente, o fluxo de ar deverá ser reestabelecido para que
se possa dar continuidade ao trabalho.
8
2.2.2 Montagem do sistema pneumático
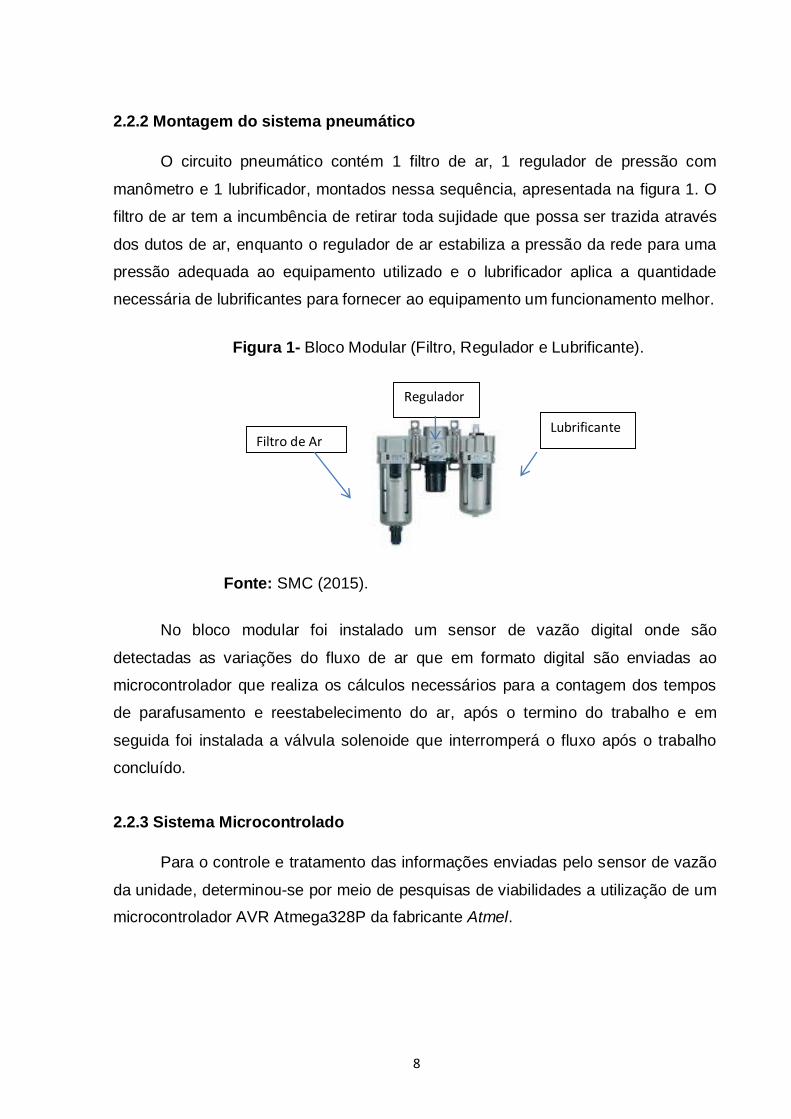
O circuito pneumático contém 1 filtro de ar, 1 regulador de pressão com
manômetro e 1 lubrificador, montados nessa sequência, apresentada na figura 1. O
filtro de ar tem a incumbência de retirar toda sujidade que possa ser trazida através
dos dutos de ar, enquanto o regulador de ar estabiliza a pressão da rede para uma
pressão adequada ao equipamento utilizado e o lubrificador aplica a quantidade
necessária de lubrificantes para fornecer ao equipamento um funcionamento melhor.
Figura 1- Bloco Modular (Filtro, Regulador e Lubrificante).
Fonte: SMC (2015).
No bloco modular foi instalado um sensor de vazão digital onde são
detectadas as variações do fluxo de ar que em formato digital são enviadas ao
microcontrolador que realiza os cálculos necessários para a contagem dos tempos
de parafusamento e reestabelecimento do ar, após o termino do trabalho e em
seguida foi instalada a válvula solenoide que interromperá o fluxo após o trabalho
concluído.
2.2.3 Sistema Microcontrolado
Para o controle e tratamento das informações enviadas pelo sensor de vazão
da unidade, determinou-se por meio de pesquisas de viabilidades a utilização de um
microcontrolador AVR Atmega328P da fabricante Atmel.
Filtro de Ar Lubrificante
Regulador
9
O microcontrolador Atmega328P se caracteriza por ter 28 pinos e fornecer 20
terminais de entrada ou saída (I/O), que possuem vários tipos de funções, tais como,
conversor analógico para digital (A/D), modulação por largura de pulso (PWM) entre
outras.
Com os componentes necessários para a montagem do sistema de controle,
iniciou-se a construção do circuito eletrônico do protótipo.
Foi desenvolvido primeiramente um esquema elétrico no software Proteus 7
Isis dos circuitos de controle e acionamento de potência.
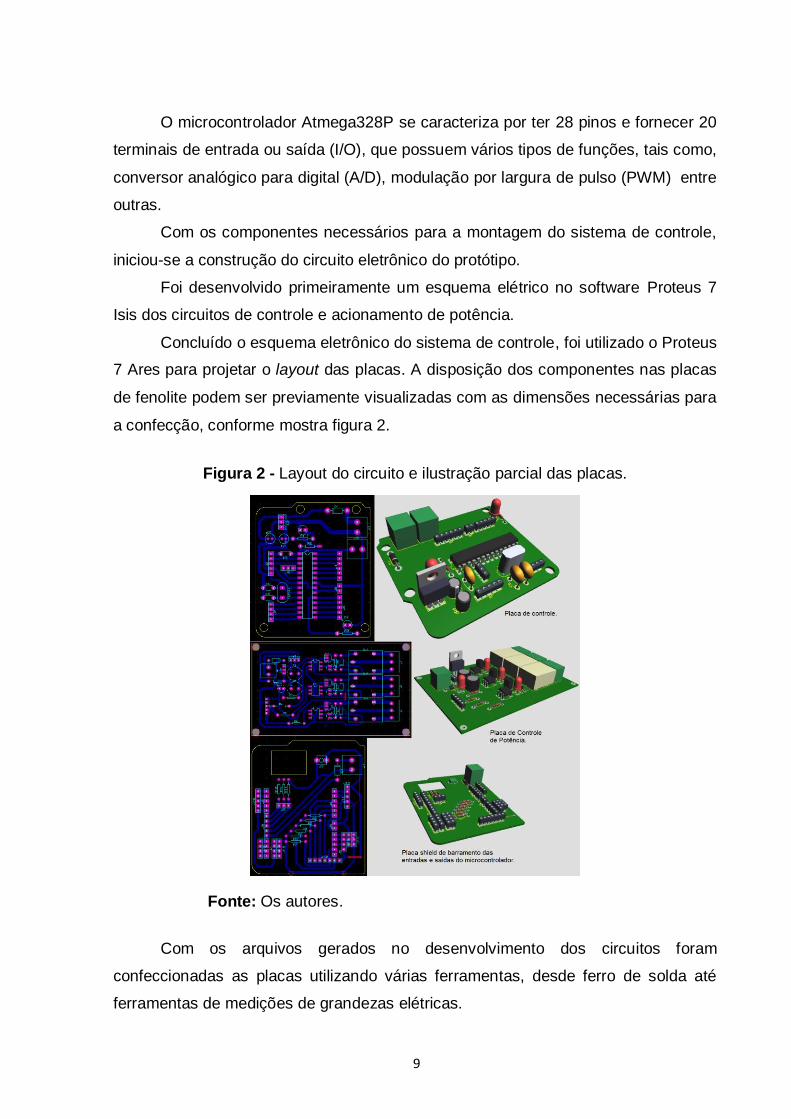
Concluído o esquema eletrônico do sistema de controle, foi utilizado o Proteus
7 Ares para projetar o layout das placas. A disposição dos componentes nas placas
de fenolite podem ser previamente visualizadas com as dimensões necessárias para
a confecção, conforme mostra figura 2.
Figura 2 - Layout do circuito e ilustração parcial das placas.
Fonte: Os autores.
Com os arquivos gerados no desenvolvimento dos circuitos foram
confeccionadas as placas utilizando várias ferramentas, desde ferro de solda até
ferramentas de medições de grandezas elétricas.
10
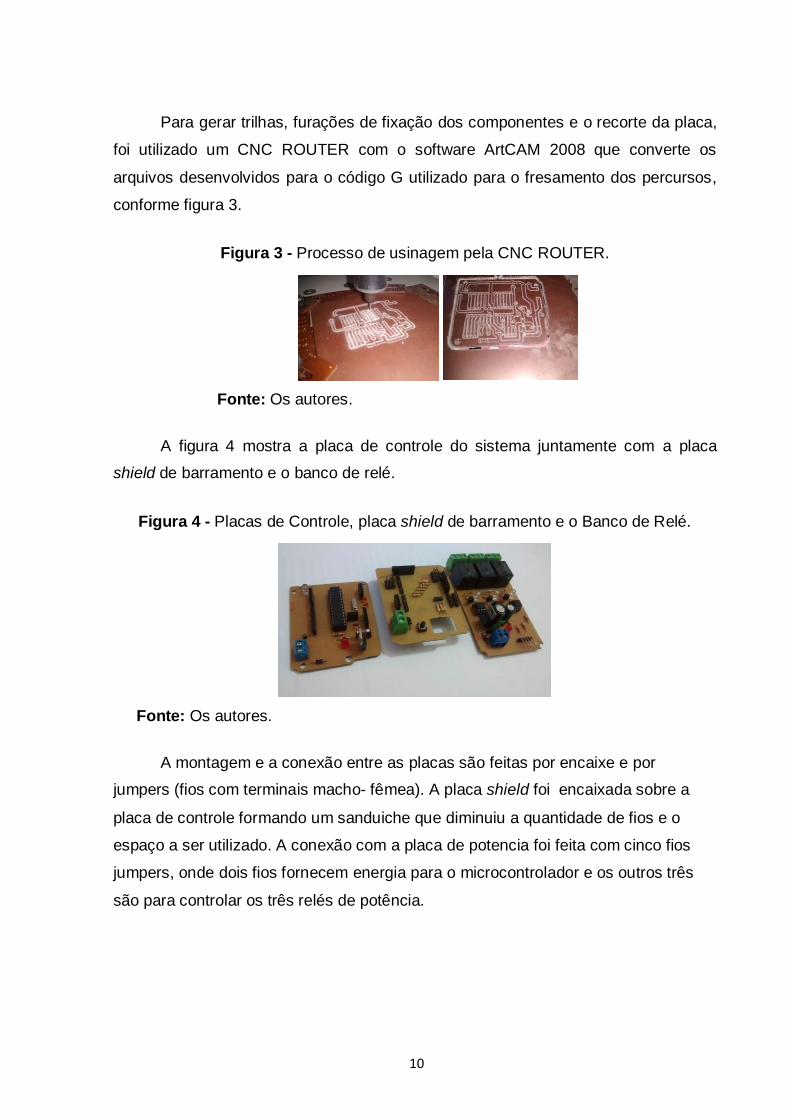
Para gerar trilhas, furações de fixação dos componentes e o recorte da placa,
foi utilizado um CNC ROUTER com o software ArtCAM 2008 que converte os
arquivos desenvolvidos para o código G utilizado para o fresamento dos percursos,
conforme figura 3.
Figura 3 - Processo de usinagem pela CNC ROUTER.
Fonte: Os autores.
A figura 4 mostra a placa de controle do sistema juntamente com a placa
shield de barramento e o banco de relé.
Figura 4 - Placas de Controle, placa shield de barramento e o Banco de Relé.
Fonte: Os autores.
A montagem e a conexão entre as placas são feitas por encaixe e por
jumpers (fios com terminais macho- fêmea). A placa shield foi encaixada sobre a
placa de controle formando um sanduiche que diminuiu a quantidade de fios e o
espaço a ser utilizado. A conexão com a placa de potencia foi feita com cinco fios
jumpers, onde dois fios fornecem energia para o microcontrolador e os outros três
são para controlar os três relés de potência.
11
2.2.4 Sistema de Display 20x4 com o Circuito Integrado PCF8574
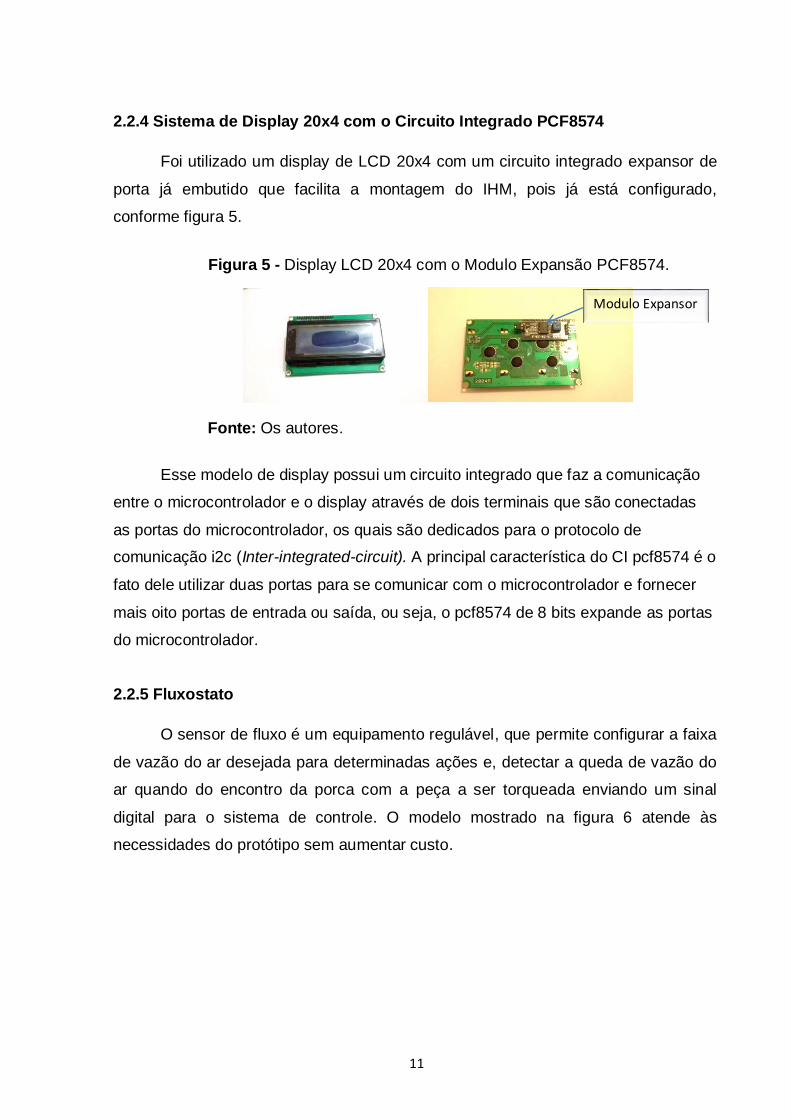
Foi utilizado um display de LCD 20x4 com um circuito integrado expansor de
porta já embutido que facilita a montagem do IHM, pois já está configurado,
conforme figura 5.
Figura 5 - Display LCD 20x4 com o Modulo Expansão PCF8574.
Fonte: Os autores.
Esse modelo de display possui um circuito integrado que faz a comunicação
entre o microcontrolador e o display através de dois terminais que são conectadas
as portas do microcontrolador, os quais são dedicados para o protocolo de
comunicação i2c (Inter-integrated-circuit). A principal característica do CI pcf8574 é o
fato dele utilizar duas portas para se comunicar com o microcontrolador e fornecer
mais oito portas de entrada ou saída, ou seja, o pcf8574 de 8 bits expande as portas
do microcontrolador.
2.2.5 Fluxostato
O sensor de fluxo é um equipamento regulável, que permite configurar a faixa
de vazão do ar desejada para determinadas ações e, detectar a queda de vazão do
ar quando do encontro da porca com a peça a ser torqueada enviando um sinal
digital para o sistema de controle. O modelo mostrado na figura 6 atende às
necessidades do protótipo sem aumentar custo.
Modulo Expansor

12
Figura 6 - Fluxostato de embolo.
Fonte: ICOS (2015).
O elemento sensorial que detecta o avanço do embolo é um reed switch
(chave magnética). O embolo é constituído de uma parte de metal e outra de imã,
que será detectado pelo sensor.
2.2.6 Parafusadeira Pneumática
São ferramentas anatômicas com designes modernos, com vantagens em
relação às elétricas, tais como, não causar choques elétricos e vibrações,
possibilitando maior rendimento no torqueamento manual de parafusos. Na figura 7,
são mostrados 2 exemplos de parafusadeira.
Figura 7- Modelos de parafusadeiras.
Fonte: Casa da Ferramenta (2015).
As parafusadeiras podem ser em L ou retas dependendo da utilização ou
tamanhos diferentes para faixas de torques necessárias.
13
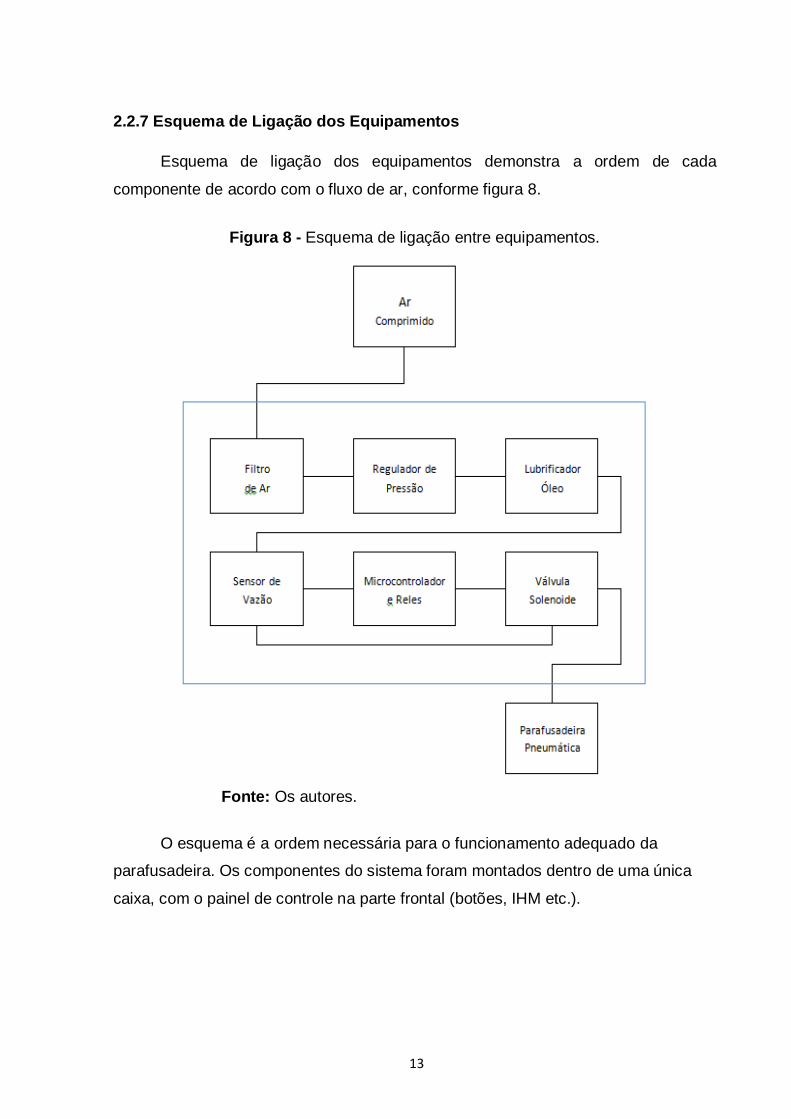
2.2.7 Esquema de Ligação dos Equipamentos
Esquema de ligação dos equipamentos demonstra a ordem de cada
componente de acordo com o fluxo de ar, conforme figura 8.
Figura 8 - Esquema de ligação entre equipamentos.
Fonte: Os autores.
O esquema é a ordem necessária para o funcionamento adequado da
parafusadeira. Os componentes do sistema foram montados dentro de uma única
caixa, com o painel de controle na parte frontal (botões, IHM etc.).
14
2.3 CONSIDERAÇÕES FINAIS
Os objetivos propostos foram alcançados e os resultados obtidos nos testes
mecânico e de programação o protótipo correspondeu às expectativas.
Melhorou as condições de uso (ergonomia), otimizou suas funções,
economizando energia e consequentemente a qualidade dos produtos.
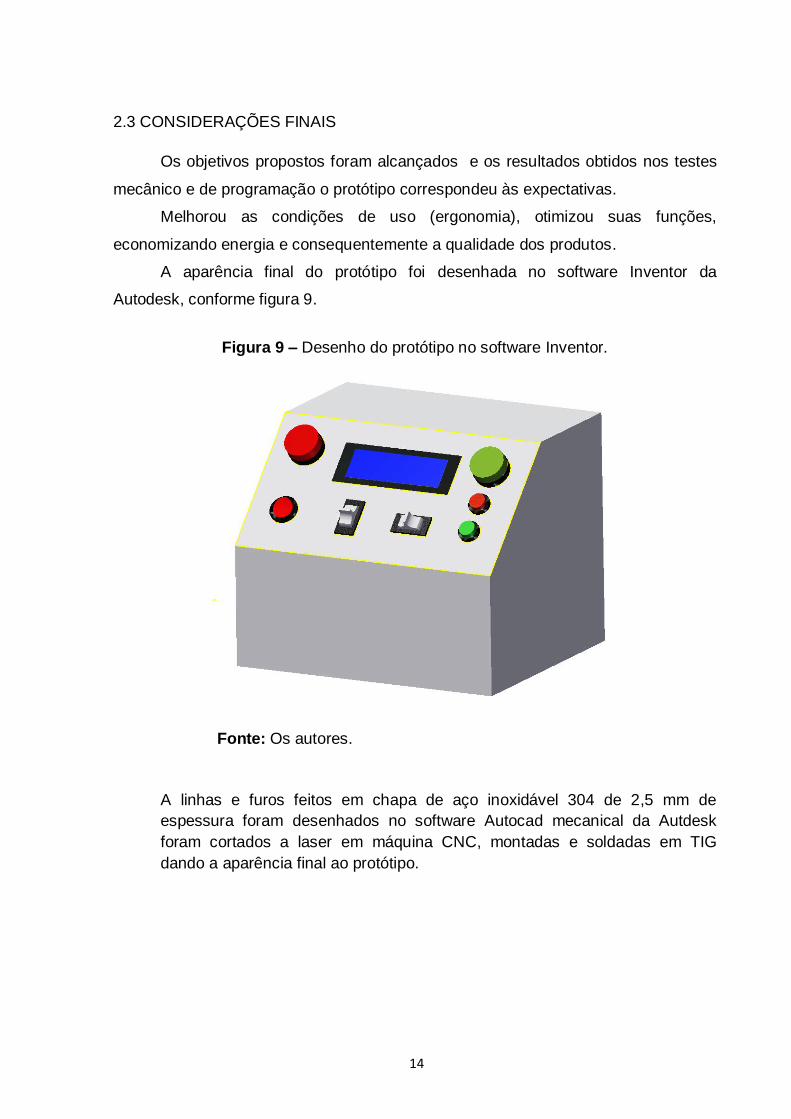
A aparência final do protótipo foi desenhada no software Inventor da
Autodesk, conforme figura 9.
Figura 9 – Desenho do protótipo no software Inventor.
Fonte: Os autores.
A linhas e furos feitos em chapa de aço inoxidável 304 de 2,5 mm de
espessura foram desenhados no software Autocad mecanical da Autdesk
foram cortados a laser em máquina CNC, montadas e soldadas em TIG
dando a aparência final ao protótipo.
15
REFERÊNCIAS
BORGES, Geovany A.. et al. Desenvolvimento com microcontrolador Atmel
AVR. 2008. 38 f. Trabalho técnico para auxiliar iniciantes em desenvolvimento de
projetos com microcontroladores (Engenharia Elétrica) - Universidade de Brasília,
UnB, 2010. Disponível em: <http://lara.unb.br/~gaborges/recursos/notas/nt.avr.pdf>.
Acesso em: 21 outubro 2015.
JUNIOR, Vidal Pereira da Silva. Microcontroladores pic 16F E 18F – teoria e
pratica. 1. ed. São Paulo: Editora Newton C. Braga, 2013.
ORDONEZ, Edward David Moreno. et al. Microcontroladores e fpgas aplicações
em automação. São Paulo: Novatec Editora LTDA, 2005.

















![Otimizador de Rotas - PythonBrasil[6]](https://img.document.onl/doc/110x75/5599b1a51a28ab64018b4570/otimizador-de-rotas-pythonbrasil6.jpg)











