Embed Size (px)
Citation preview
O M f T O D O D O S · · E L E M E N T O S FrNITOS A-
P L I C A D O .. 11. · · A N Ã L I S. E . D E · · V T G A S E · · P L A-
C AS APOIADAS EM METO ELÃSTICO
Tânia Glacy do Brasil DeFigueiredo
TESE SUBMETIDA AO CORPO DOCENTE DA COORDENAÇÃO DOS PROGRAMAS DE
PÕS-GRADUAÇÃO DE ENGENHARIA DA UNIVERSIDADE FEDERAL. DO RIO DE JA
NEIRO COMO PARTE DOS REQUISITOS NECESSÃRIOS PARA A OBTENÇÃO DO
GRAU DE MESTRE EM CitNCIA (M.Sc.)
Aprovada por:
RIO DE JANEIRO
ESTADO DA GUANABARA - BRASIL
FEVEREIRO DE 1974
Presidente
VEVICATÚRIA
A minha mae.
A meu marido.
AGRAVE CIMENTOS
Ao prof. Pedro Ivan Rogedo, da Universida
de de Brasília, nosso orientador durante o período em que esteve
na COPPE como professor visitante, pela escolha do tema deste
trabalho e pela atenção que nos dispensou.
Ao prof. Fernando Luiz L.B. Carneiro, nosso
segundo orientador, por sua solicitude e por tudo aquilo que tem
feito em prol da Pós-Graduação em Engenharia Civil.
Ao ex-diretor da COPPE, prof. Alberto Luiz
Coimbra e ao atual diretor, prof. Sydney M.G. dos Santos, pela
contribuição e incentivo aos estudos pós-graduados no Brasil.
Aos demais professores e funcionários da
COPPE.
Aos funcionários do Núcleo de Computação E-
letrônica da UFRJ.
Aos colegas da COPPE.
Ao Conselho Nacional de Pesquisas e a COPPE
pela bolsa de estudos concedida
A todos aqueles que direta ou indiretamente
contribuíram para a realização deste trabalho.

RESUMO
Aplicou-se o Método dos Elementos Finitos
à análise de vigas e placas assentes sobre o solo. Este é cons!
derado como um meio elástico linear, homogêneo e isotrópico.
são feitas algumas considerações sobre o
real comportamento do solo,bem como sobre as maneiras usuais de
se caracterizar esse comportamento no caso particular do probl~
ma em questão.
Os efeitos devido. a separaçoes que po~_
ventura ocorram entre assuperfícies de contato foram considera
dos.
E apresentado um programa automático para
o cálculo de placas retangulares (ou placas que possam ser dis
cretizadas por meio de retângulos) e vigas sobre um meio elásti-
co.
ABSTRACT
The Finite Element Method was applied to
analyse beams and plates resting on soil considered as an
isotropic, homogeneous and linear elastic medium.
Some considerations about the actual
behavior of the soil and about the usual assumptions used to
solve this and similar problems are discussed.
The effects of eventual separation of
contact surfaces are taken intó account.
A complete computer program for the
calculation of rectangular plates and beams is presented.
This program can also handle plates wich can be decomposed
into rectangles.
1NDICE
CAPITULO I - INTRODUÇÃO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . CAPITULO II - COMENT.ll.RIOS SOBRE O COMPORTAMENTO DO SOLO
2.1 - O solo como um material de engenharia
2.2 - Hipóteses clássicas referentes ao comporta -
mente do solo utilizadas no cálculo de vigas
e placas sobre o solo . . . . . . . . . . . . . . . . . . . . . .
CAPITULO III - O MÍ:TOOO DE c.ll.LCULO
3.1 - Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2 - Idealização estrutural
CAPITULO IV - A ESTRUTURA
. . . . . . . . . . . . . . . . . . . . .
4.1 - O elemento de viga . . . . . . . . . . . . . . . . . . . . . . . . . 4.1.1 - Matriz de rigidez do elemento de viga
4.1.2 - Matriz das forças nodais equivalentes
para o elemento de viga . . . . . . . . . . . . 4.2 - O elemento de placa . . . . . . . . . . . . . . . . . . . . . . . .
CAPITULO V - A FUNDAÇÃO EL.ll.STICA
5.1 - Deslocamentos verticais na fronteira de um
semi-espaço infinito devido a uma carga pun-
tual vertical . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
3
4
9
9
11
12
13
15
17
5.2 - Deslocamentos verticais na fronteira de um
semi-espaço infinito devido a uma carga uni
formemente distribu{da .............•....... 18
5.3 - Matriz de flexibilidade da fundação
5.3.l - Coeficientes de flexibilidade
. . . . . . . . 24
26

vi
5.4 - Matriz de rigidez da fundação
CAPÍTULO VI - FORMULAÇÃO GERAL PARA O CONJUNTO ESTRUTURA
SOLO
26
6.1 - Comportamento elástico linear............. 28
6.2 - Comportamento não-linear
CAPÍTULO VII - EXEMPLOS - ANÃLISE E CO~ÇÃO DOS Rli;:SULT~
DOS
Exemplos
Conclusões
.......................................
BIBLIOGRAFIA ............................................
AP~NDICE
33
36
40
41
1. Explicações sobre o programa ... ,f-............ 44
2. Programa principal - diagrama de blocos simpl!
ficado
3. Entrada de dados
4. Notações
5. Listagem do programa e subrotinas
45
47 ~
48
51

1
CAPfTULO 1
INTROVUÇÃO
Existem numerosos estudos a respeito de vi
gas e placas apoiadas sobre o solo. Principalmente em se tratan
do de vigas, o assunto já foi extensamente pesquisado. A maioria
dos autores, entretanto, ao idealizar.· um modelo matemático pa
ra o comportamento do solo, adota a tradicional hipÓtese do coe
ficiente de recalque ou hipÓtese de Winkler. Inclusive os auto -
res mais modernos, utilizando técnicas avançadas no campo do: cá!
culo estrutural, tais como o Método dos Elementos Finitos, nao
se preocupam numa melhor caracterização do comportamento do solo
(3), (•), (5), (6) •
Embora a aplicação de diferentes métodos à
solução do problema nos forneçam resultados, muitas vezes, tota!
mente diversos, a parte experimental deixa muito a desejar. No
caso de placas, então, são rarissimos os casos de ensaios já rea
lizados que constam da literatura.
Com o aparecimento dos computadores digi -
tais e a consequente facilidade de aplicação de métodos numéri -
cos, tais como o Método dos Elementos Finitos, vários trabalhos'
surgiram, principalmente no caso de placas sobre fundação elás
tica ( 1 l , ( 2 l , ( 3 l , (" l , ( 5 l , ( 6 l . Apesar de ainda predominar a ado
ção da hipÓtese do coeficiente de recalque, esperamos que essa

2
tendência vá gradativamente cedendo lugar a outra, onde o solo'
seja melhor representado. Contudo, a real caracterização so so
lo é praticamente impossível. No capitulo 2 fazemos um breve co
mentário sobre o assunto.
Neste trabalho, considerando o solo como'
um continuo elástico, pretendemos ser um pouco mais rigorosos,
apesar dessa forma ainda não ser a ideal.
Apresentamos nos capítulos seguintes todo
o desenvolvimento teórico necessário à confecção do programa au
tomatice, o qual é apresentado no apêndice.
3
CAPÍTULO II
COMENTÁRIOS SOBRE O COMPORTAMENTO VO SOLO
2.1 - () SOLO COMO UM MATERIAL DE ENGENHARIA
Ao pretendermos caracterizar o solo co
mo um material de engenharia enfrentamos um grande número de di
ficuldades. A principal delas deve-se ao fato do solo nao ser'
contínuo, nem mesmo no sentido em que se admite que o sejam, o~
tros materiais convencionais tais como o aço, a madeira, etc. ,
pois o solo é·. constituído por partículas sólidas desagregadas
Assim, o seu comportamento macroscópico depende tanto da nature
za dos contatos entre essas partículas como dos movimentos e de
formações dos grãos nesses contatos. Outras advem da forma como
usualmente encontramos o solo na natureza: heterogêneo e aniso
trópico, com suas propriedades características variando consid~
ravelmente de ponto a ponto. Devemos acrescentar, ainda, a dif!
culdade que temos em obter amostras com as mesmas propriedades
do solo original. Geralmente o solo possui propriedades que de
pendem da história de seu estado tensão-deformação e de sua
temperatura. Além disso as amostras são quase sempre amolgadas
devido à grande deformabilidade.do solo. Daí vemos porque ao
ensaiarmos o solo em laboratórios é comum termos as proprieda
des a serem determinadas alteradas ou, até mesmo, destruídas.
Na Mecânica dos Solos costuma-seca-

4
racterizar o solo de acordo com o problema a ser resolvido. De2
ta forma, no estudo de deslocamentos e recalques, usam-se solu-
çoes obtidas a partir da teoria da elasticidade linear. Neste
caso o solo é considerado, de início, como um ~~io homogêneo,!
sotrópico e semi-infinito e, depois, como um m~io anisotrópico,
formado por diferentes camadas. Já em questões de rutura ou es
tabilidade, o solo é caracterizado como um material rígido-plás
tice. Soluções da teoria da plasticidade são aí utilizadas.
Na verdade o comportamento real doso
lo nao é nem perfeitamente elástico e nem perfeitamente plásti
co.Considerando-se, contudo, a complexidade dos cálculos no es
tudo de um,sólido elástico linear, vemos que soluções conside
rando o comportamento verdadeiro do solo, ou seja, não linear e
histerético, são impossíveis de se obter analiticamente.
2.2 - HIPÕTESES CLÃSSICAS REFERENTES AO COMPORTAMENTO DO SOLO Q
TILIZADAS NO CÃLCULO DE VIGAS E PLACAS SOBRE O SOLO.
Neste caso há três maneiras tradicio
nais de se encarar o comportamento do solo:
a -1.) Considerando-se uma distribuiçao linear das pres-
sões de contato.
ªi· ~ 2. j Adotando-se a hipotese do coeficiente de recalque
(de Winkler) .

5
Acredita-se que essa hipótese tenha si
do proposta inicialmente por Winkler, em 1867.
O modelo matemático do comportamento ' /
mecânico do solo correspondente a esta hipótese e um sistema de
molas isoladas e independentes entre si (fig. 2.1)
fig. 2.1
Deste modo, para cada ponto, temos:
p = k. w
onde,
p = reaçao do solo,
k = coeficiente de recalque
w = recalque
Esta hipótese, bastante difundida e <i!!1
plamente utilizada é, obviamente, falha. Não se considera a in
teração entre pontos adjacentes do solo.
Há casos, entretanto, em que o uso de2
ta hipótese nos leva a bons resultados. Vesi6 {fr! 8), em estudos

6
sobre vigas em fundação. elás:tica, faz uma análise muito intere2
sante sobre o assunto. Ele mostra que esta hipótese é pratica
mente satisfatória para vigas de comprimento infinito desde que
adotemos um valor adequado para o coeficiente de recalque. Tra
tando-se de vigas de comprimento finito o método pode fornecer
resultados razoavelmente exatos desde que a viga seja suficien
temente longa. Também em vigas sobre dormente (trilhos de fer
rovias) os resultados obtidos adotando-se a hipótese de Winkler
são satisfatórios.
Como foi dito no capítulo I, é muito
escassa a bibliografia a respeito de.ensaios realizados em pla
cas com a finalidade de se comprovar a validade da hipótese de
Winkler ou de qualquer outro método.
Recentemente, na COPPE, Berberian (9),
ensaiou uma placa circular assente sobre areia média uniforme.
Para este caso a hipótese de Winkler não conduziu a resultados
satisfatórios.
3~) Considerando-se o solo como um meio linearmente
deformável.
Considera-se o solo como um meio elás
tico linear, homogêneo, isotrópico, semi-infinito, com um módu-
lo de elasticidade, E , o e um coeficiente de Poisson,
Dentre as acima citadas, esta é a for
ma mais rigorosa de se representar o solo.
7
Vesié .< B) , em ensaios com vigas de aço
sobre silte micáceo compactado concluiu que, pelo menos no que
concerne a distribuição de pressões, o solo possui um comporta
mento similar ao de um sólido elástico.
Berberian (9) obteve resultados satis
fatórios considerando o solo como um meio elástico linear.
Para que esta hipótese seja aplicável
nao é indispensável que o material seja perfeitamente elástico,
mas sim, que exista uma relação aproximadamente linear entre
tensões e deformações. Então, mesmo em massas de solo não-elás
ticas, esta hipótese pode ser aplicada quando pudermos admitir
proporcionalidade entre as tensões e deformações.
Certos tipos de carregamento do solo
produzem deformações aproximadamente proporcionais às tensões
aplicadas. Contudo em casos de carregamento onde a rutura por'
cisalhamento é iminente, não se tem, de forma alguma,
cionalidade entre tensões e deformações.
propor-
Souto Silveira ( 1 º> procurou verificar
a linearidade entre tensões e deformações (lei de Hooke) para
uma determinada areia argilosa (arenito decomposto) compactada
sob diferentes condições de umidade e peso específico aparente
seco. Para o solo considerado, compactado com graus de compac-
tação superiores a 84% e com umidades entre h0
t ± 4% (h = u ot -
midade ótima) , ela obteve um trecho inic;·a1 reto para a curva
tensão-deformação que compreende 67 a 74% do intervalo deva-

8
riação das tensões, isto é, da tensão. inicial zero até a
tensão de rutura.
9
CAPfTULO 111
O MÉTOVO VE CÁLCULO
3.1 - INTRODUÇÃO
Utilizamos o Método dos Elementos Fini
tos,adaptando-o ao problema da base elástica. ,J
Achamos desnecessário apresentarç aqui
um resumo do Método dos Elementos Finitos já que o mesmo está
perfeitamente explicado na bibliografia sobre o assunto (li) ,, P 2) e, apesar de recente, é bastante conhecido e utilizado.
Seguimos o livro "The Finite Element
Method in Structural and Continuum Mechanics" de O.C.~iewicz
e Y.K.Ch~ng) no que se refere a conceitos, nomenclatura, etc. ·-~~
3.2 - IDEALIZAÇÃO ESTRUTURAL
A estrutura (placa ou viga) é subdivi-
dida em um número finito de elementos, interligados por um --- " nu:-.,.,.,.
mero discreto de pontos nodais, exatamente como se procede no'
Método dos Elementos Finitos.
A cada no da estrutura corresponde um
nó da superfície do solo e,ocontato da estrutura com o solo se
10
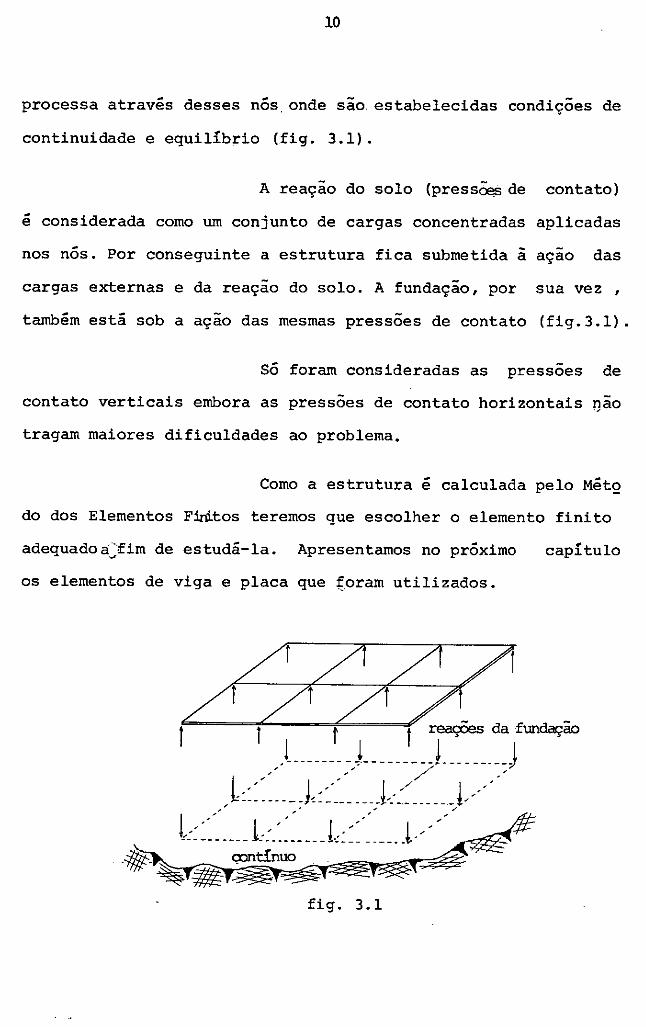
processa através desses nós.onde sao. estabelecidas condições de
continuidade e equilíbrio (fig. 3.1).
A reaçao do solo (pressÕ?_sde contato)
é considerada como um conjunto de cargas concentradas aplicadas
nos nós. Por conseguinte a estrutura fica submetida à açao das
cargas externas e da reação do solo. A fundação, por sua vez,
também está sob a açao das mesmas pressões de contato (fig.3.1).
SÓ foram consideradas as pressoes de
contato verticais embora as pressões de contato horizontais nao
tragam maiores dificuldades ao problema.
Como a estrutura é calculada pelo MétQ
do dos Elementos F:initos teremos que escolher o elemento finito
adequadoa·fim de estudá-la. Apresentamos no próximo ~
capítulo
os elementos de viga e placa que .foram utilizados.
fig. 3.1

11
CAPÍTULO IV
A ESTRUTURA
Considere-se aqui como estrutura a ple
ca ou viga sem o solo.
4.1 - O ELEMENTO DE VIGA
Adotamos o elemento prismático retilí
neo com dois nós e dois graus de liberdade por nó: uma transle
çao na direção z e uma rotação segundo o eixo dos y
4 .1) •
(fig.
Partimos da solução exata já conheci
da para a viga bi-engastada e, não, admitindo-se uma função
deslocamento para o elemento, como se procede normalmente no '
Método dos Elementos Finitos.
2 4
~·
y 1 X
z
fig. 4.1
~embramos que essa solução
quando a viga satisfizer às seguintes condições:
-so vale
a) O material da viga é linearmente elástico, isto é,

12
segue a lei de Hooke.
b) As deformações sao mui.'to pequenas.
c) Não se considera a interação entre esforço
e momento fletor no elemento.
axial
Assim, facilmente montamos as matrizes
do elemento necessárias ao cálculo da viga.
4.1.1 - MATRIZ DE RIGIDEZ DO ELEMENTO DE VIGA.
Seja um elemento com um módulo de ela2
ticidade, E, momento de inércia em relação ao eixo y, IY e
comprimento, L (fig.4.1). Sua matriz de rigidez referida aos
eixos e numeração mostrados na fig. 4.1(. será:
12 EI y L3
SIMtTRICA
6 EI 4 EI y y L2 L
[K]e =
12 EI 6 EI 12 EIY y y L3 L2 L3
13
O coeficiente de rigidez kij repre-
senta o esforço na direção i por unidade de deslocamento na
direção j, mantendo-se deslocamentos nulos em todas as outras
direções segundo o conceito de coeficientes de rigidez (1 3). No
caso em questão, é o esforço de engastamento na direção i por
unidade de deslocamento na direção j quando todos os outros '
deslocamentos são nulos. Esses esforços podem ser obtidos utili
zando-se qualquer método de cálculo.
Na obtenção dos coeficientes aqui apr~
sentados foram desprezadas as deformações causadas pelo esforço
cortante.
4.1.2 - MATRIZ DAS FORÇAS NODAIS EQUIVALENTES PARA O ELEMENTO
DE VIGA,
Também se refere aos eixos e numera-
çao da Jig. 4.1~.
As cargas nodais equivalente sao as a
çoes de engastamento perfeito para a viga bi-engastada, com os
sinais trocados.
Para uma carga concentrada, P, a uma
distância, a, do nó esquerdo e, b, do nó direito,
os seguintes esforços:
temos
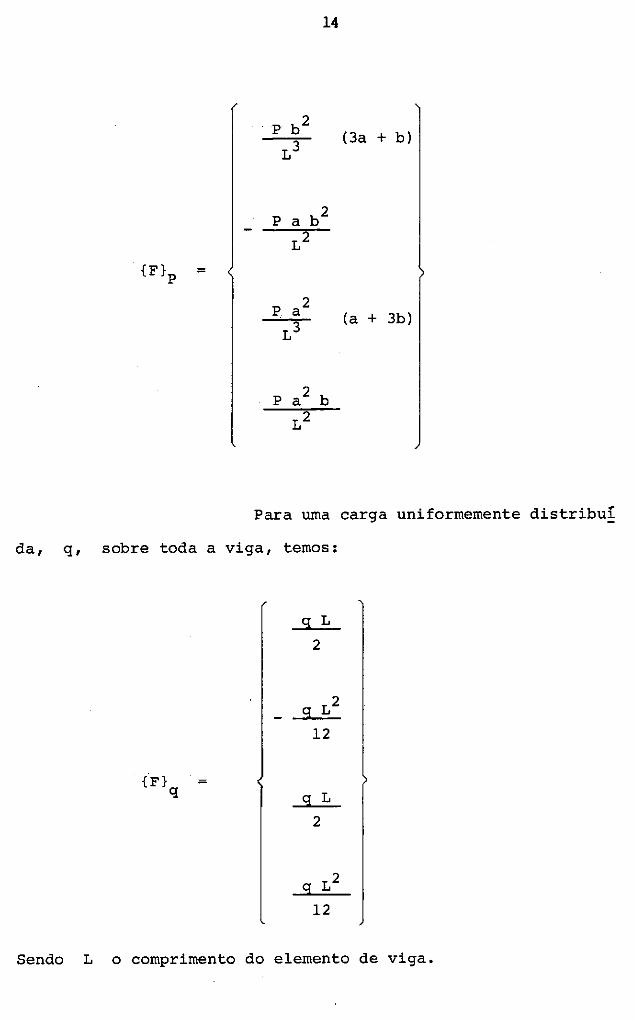
14
(3a + b)
=
(a + 3b)
Para uma carga uniformemente distribuí
da, q, sobre toda a viga, temos:
{F} = q
q L
2
q L
2
Sendo L o comprimento do elemento de viga.
15
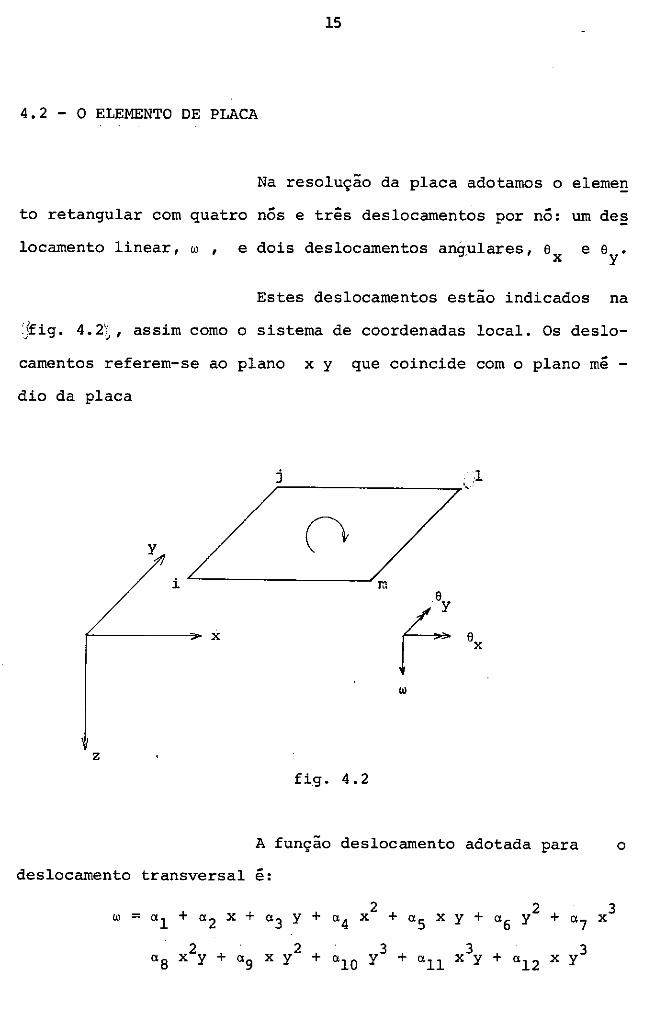
4.2 - O ELEMENTO DE PLACA
Na resolução da placa adotamos o elemen
to retangular com quatro nós e três deslocamentos por nó: um des
locamento linear, w , e dois deslocamentos ang,ulares, ex e ey.
''f. J ig.
Estes deslocamentos estão indicados na
4. 2'; , assim como o sistema de coordenadas local. Os deslo-
camentos referem-se ao plano x y que coincide com o plano mé -
dio da placa
j ',
.1
y 0 i m
e
X f ªx
w
fig. 4. 2
A função deslocamento adotada para o
deslocamento transversal é:
w = 2 y2 x3 ªl + ª2 X+ ª3 y + ª4 X + ª5 X y + ª6 + ª7
2 2 3 3 3 ª8 X y + ª9 X y + ª10 y + ª11 X y + ª12 X y

16
Este elemento, desenvolvido por Zien -
kiewicz(II), foi utilizado na COPPE pelo Prof. Vasconcellos Fi
lho ( l ") •
Em nosso trabalho partimos dos resulta
dos obtidos pelo Professor acima citado. As matrizes de rigi
dez, 4:as cargas nodais equivalentes, de elasticidade, etc. fo
ram tiradas de seu trabalho.
Consideramos uma placa ortõtropa.
Constatou o Prof. Vasconcellos Filho
que uma malha de retângulos iguais seguramente converge para a
solução exata. Por isso, e tendo em vista a simplificação dos
cálculos relativos à fundação, no nosso trabàlho só calculamos
malhas de retângulos iguais.
Observamos que a formulação obtida pa
ra esse elemento baseia-se na teoria das placas clássicas (si~
plificada). Portanto, os nossos resultados serão aplicáveis a
problemas onde o for a teoria clássica simplificada de placas.
17
CA_PfTULO V
A FUNVAÇÃO ~LÃSTICA
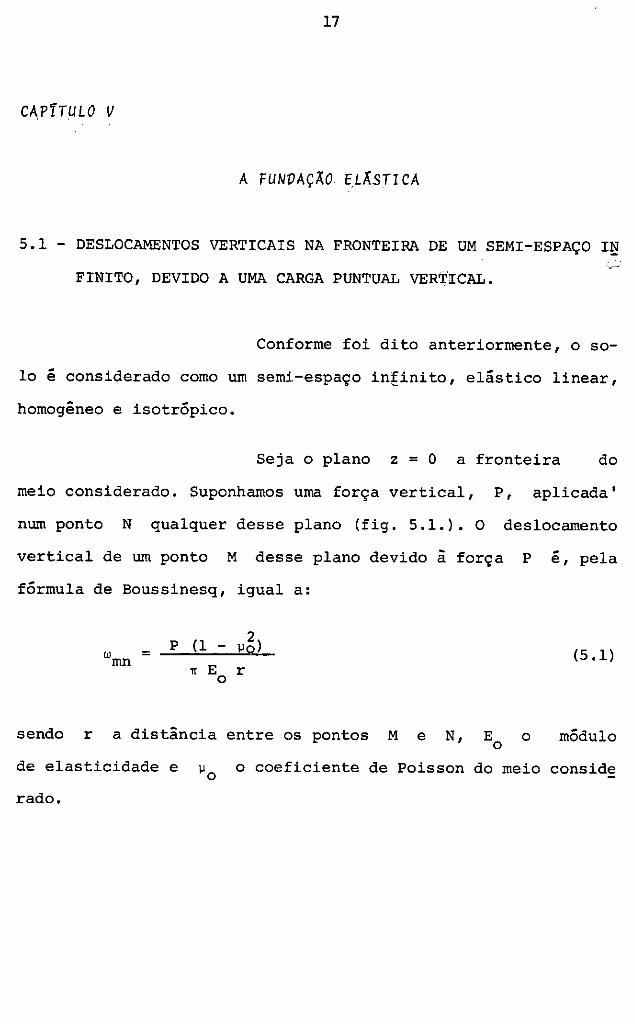
5.1 - DESLOCAMENTOS VERTICAIS NA FRONTEIRA DE UM SEMI-ESPAÇO I~
FINITO, DEVIDO A UMA CARGA PONTUAL VERTICAL.
Conforme foi dito anteriormente, o so
lo é considerado como um semi-espaço in~inito, elástico linear,
homogêneo e isotrópico.
Seja o plano z = O a fronteira do
meio considerado. Suponhamos uma força vertical, P, aplicada'
num ponto N qualquer desse plano (fig. 5.1.). O deslocamento
vertical de um ponto M desse plano devido à força P é, pela
fórmula de Boussinesq, igual a:
wmn = 2
p (1 - µq)
,r E r o
sendo r a distância entre os pontos M e N, E0
o
(5 .1)
módulo
de elasticidade e µ0
o coeficiente de Poisson do meio consid~
rado.

18
y
M ---'J,X
z
fig. 5.1
5.2 - DESLOCAMENTOS VERTICAIS NA FRONTEIRA DE UM SEMI-ESPAÇO IN
FINITO DEVIDO A UMA CARGA UNIFORMEMENTE DISTRIBU!DA.
Suponhamos uma carga uniformemente dis .. ·,
tribuída, q, num retângulo de lados a e b no plano z = O
(fig. 5.1). Calculemos o deslocamento vertical do ponto M, pe!:
tencente ao plano z = O (fig. 5.2)
a ,., I ' y ,,
N ef' A' ..Q
·y N (~,yN)
r
a/2
X
M(O,O)
fig. 5.2
19
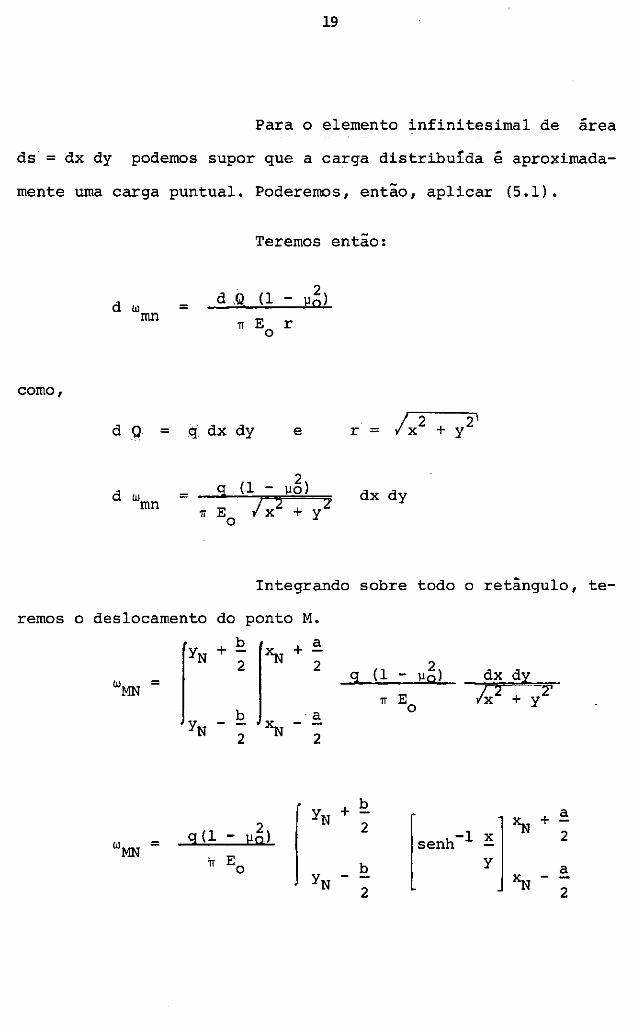
Para o elemento infinitesimal de area
ds = dx dy podemos supor que a carga distribuída é aproximada
mente uma carga puntual. Poderemos, então, aplicar (5.1).
como,
d ,o =
Teremos então:
= 2 d .Q (1 - µ 0 )
TI E0
r
q dx dy e
2 = q (1 - µo)
'1T E j xz + Yz o
r =
dx dy
Integrando sobre todo o retângulo, te-
remos o deslocamento do ponto M.
WMN =
+ b + a YN ~ -
2 2
b y -N 2
~-
2 q(l - µol
11 E0
a
2
y -N
b
2
dx dy
[ l + ~
senh-1; : _: 2
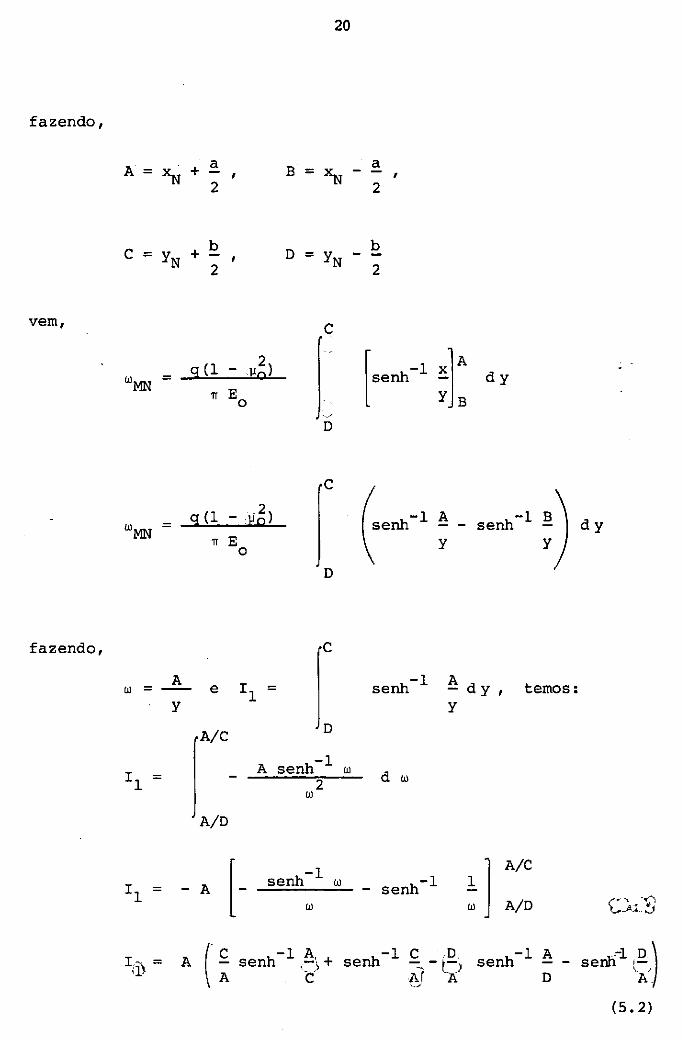
fazendo,
vem,
fazendo,
b e = Y + -N 2
= q (1
,
2 - µal "'MN
11 Eo
20
B = ~-2
a
b D = y - -
N 2
e
,
-1 X [ ]A senh ; B
.J
D
e
dy
"'MN = q(l - µ~) 11 E
o ( -1 A -1 B) senh ; - senh ; d y
D
e
A Il
-1 A ternos: (JJ = e = senh - dy y y
rc-D
A -1 Il
senh (JJ d (JJ = 2 (JJ
A/D
[- -1 :] A/C
Il - A senh (JJ -1 = - senh (JJ A/D c..::.l3
(~ -1 A -1 e .. D -1 A -1 D) I- = A senh -·. + senh - -r-) senh senh ,-,1) '- ) \. , e Al -À D A. ,.,
( 5. 2)

21
analogamente, se·:
I2 i: -1 B dy, = senh vem, y
logo,
WMN =
e -1 B e senh - + senh
B C B
2 q(l - µq)
TT Eº
com r 1 e r 2 dados por (5.2) e (5.3)
D senh-l B - senh-l D.
B D Ei
(5'.:'.l3)
(5.4)
Para os pontos M e N coincidentes,
ternos: y
a/2 a/2 1
-~
<\ N ef'~ :-a-
- X
N M :-a-
- '-
fig. 5.3
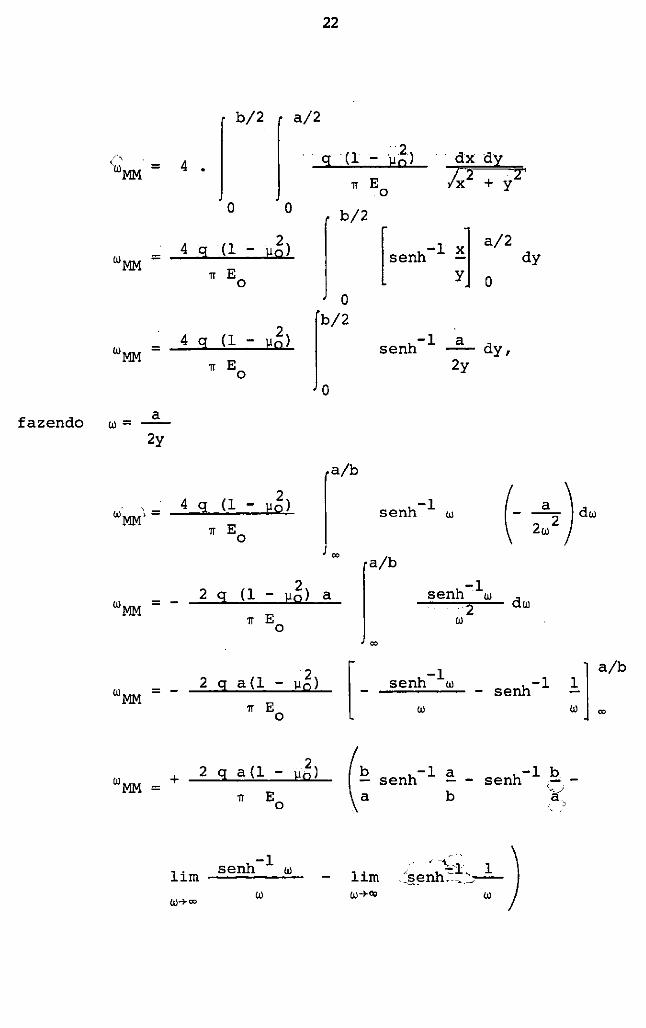
<~ . = MM
WMM =
WMM =
fazendo a w=
2y
w· .\ = MM
WMM =
22
b/2 a/2
q (1 2) dx ª:i:: 4 - l:!c . /x2 2'
,r Eo + y
o o b/2
4 (1 - 2 [ -1 x] a/2 q µq) senh ; dy
,r Eo o o
4 q (1 - 2
C' -1 µq) a senh -- dy, ,r Eo 2y
2 4 q (1 - µq)
lim
,r Eo
2 2 q (1 - µ0 ) a
,r Eo
2 2 q a(l - µ 0 )
,r Eo
2 2 q a(l - Uol
,r Eo
-1 senh w
w
a/b
-1 senh w (-,:,)a-.,
a/b
.,
[ -
lim w+o,
-1 senh · w dw
-1 senh w
w
2 w
.!. l a/b
- senh-l w .,
-1 b senh - -
( .... _)
a,

23
Cálculo dos limites:
-1 log (1 ~ Ll lim
s·enh · w lim + = =
w·*<>> w w+"' w
Aplicando a regra de L' HÔpi tal, vem:
L1 = lim (- --2-=w=_
w+"' 2 /1+w2 _l_+_~-=l=+w=2,.....) "
portanto,
= - lim w+"'
L1 = - lim w+"'
lim w+oo
-1 senh
w
/1+w20
(1 + /1+w~0)
1
/1;w 2' + Í (1 + /1+üÍ 2i
1 = senh-l O = o w
WMM = 2 g a (1 - µ~)
ir Eo (-:- -1 senh a
b
= o
- senh
=
-1
(5. 5)

24
5.3 - MATRIZ DE FLEXIBILIDADE DA FUNDAÇÃO
O solo nao é discretizado como no caso
da estrutura. A matriz de flexibilidade da fundação é deduzida'
para tod~ a fundação, considerada como uma estrutura cujos nós
são os pontos da., superfície de contato corresponclentes aos nos
da estrutura. Ou seja, não montamos a matriz de flexibilidade'
da estrutura a partir das matrizes de flexibilidade dos elemen
tos. No caso, nem temos uma porçao do solo que possa ser consi
derada como um elemento.
Como só consideramos deslocamentos ver
ticais para o solo, aquela matriz é obtida simplesmente aplican
do-se uma carga vertical unitária em cada nó e calculando-se os
deslocamentos verticª:i.s respectivos conforme o conceito clássi
co de coeficientes de flexibilidade (13 ). No cálculo dos deslo~
camentos verticais empregamos a fórmula de Boussinesq, (5.1).
Tendo em vista uma melhor simulação do
problema real e ainda levantar a indeterminação que surge ao
calcularmos o deslocamento no ponto de aplicação da carga, con
sideraremos, ao invés de uma carga unitária concentrada nos nós,
uma carga uniformemente distribuída num retângulo de lados a e
b em torno de cada nó.
A resultante dessa carga é suposta i-
gual a unidade.

25
As dimensões desse retângulo de carga
variam conforme tenhamos viga ou placa.
Para as placas, a e b serao iguais
as dimensões dos elementos (todos iguais). (fig. 5.4.a).
Para as vigas, temos dois casos a con-
siderar (fig. 5.4.b):
a
.Q
.Q
a) Nós extremos:
a= comprimento do elemento adjacente
b = base da viga do elemento adjacente
b) Nós internos:
a= média aritmética do comprimento dos elementos
adjacentes.
b = média aritmética das bases dos elementos adj~
centes.
1
a a a 1 CD ~'ªi-i+ai) tn 1 l t I ~ 1111
1 1
~ IJI 1 ~ ~/ ri-1
1 ªi ~
/ ,~ ~ 5.4.b
~ retângulo de atuação da
carga distribuída 5.4.a
fig. 5.4
26
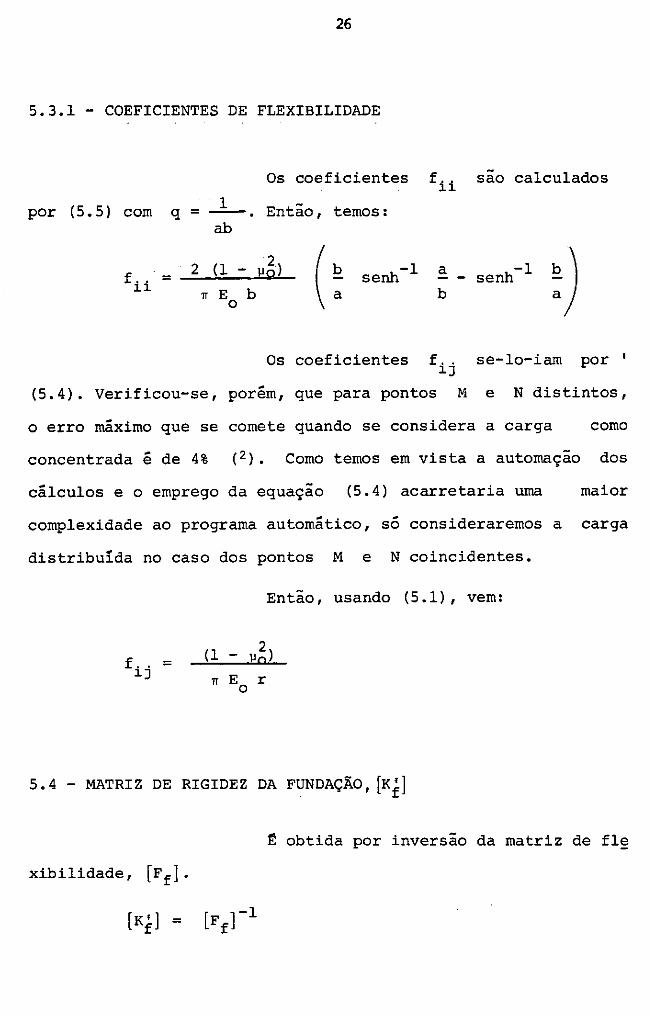
5.3.1 - COEFICIENTES DE FLEXIBILIDADE
Os coeficientes f .. sao calculados ]. ].
por (5. 5) com q 1 Então, temos: = ab
2 (1 - 2 (: -1 -1 :) fii µg) a = senh - senh
11 E b b o
Os coeficientes f .. se-lo-iam por ' l.J
(5.4). Verificou-se, porém, que para pontos M e N distintos,
o erro máximo que se comete quando se considera a carga como
concentrada é de 4% (2 ). Como temos em vista a automação dos
cálculos e o emprego da equação (5.4) acarretaria uma maior
complexidade ao programa automático, so consideraremos a carga
distribuída no caso dos pontos M e N coincidentes.
Então, usando (5.1), vem:
2 (1 - JJal
11 E0
r
5.4 - MATRIZ DE RIGIDEZ DA FUNDAÇÃO, [Kf]
~ obtida por inversão da matriz de fle
xibilidade, [Ff].
[ l [Ff]-1
Kf =

OBS.:
27
Devido à maneira como montamos a matriz, de rigidez da
fundação ela é uma matriz cujos termos sao todos dife -
rentes de zero. E, ainda mais, cada nó tem influência'
sobre todos os outros, razão pela qual nao podemos re -
solver problemas de estruturas simétricas utilizando es ,~,
sa_; simetria.
28
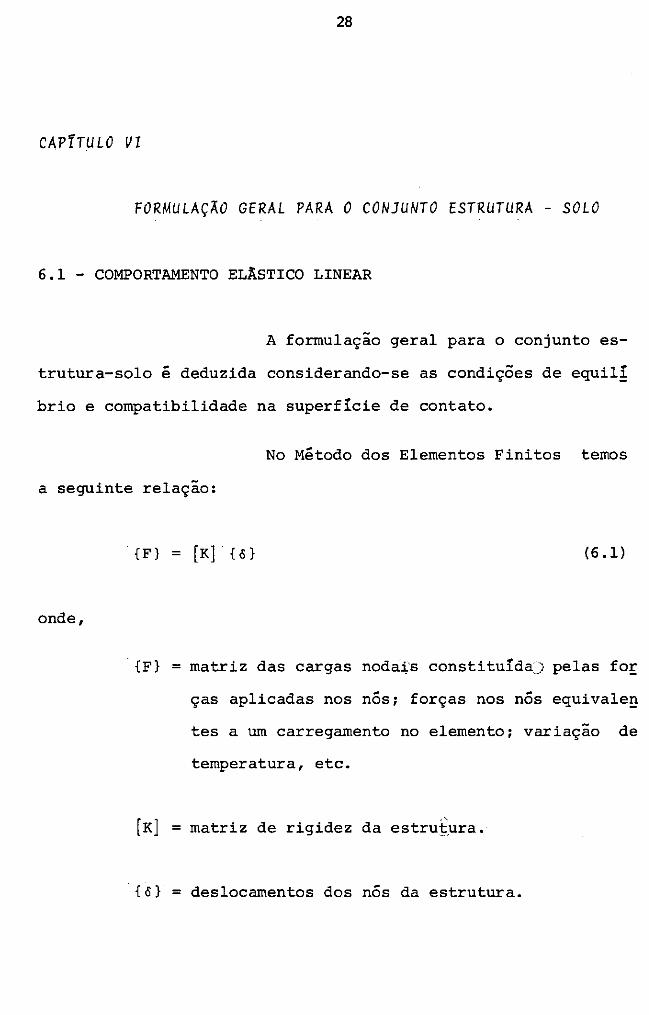
CAP1TULO VI
FORMULAÇÃO GERAL PARA O CONJUNTO ESTRUTURA - SOLO
6.1 - COMPORTAMENTO ELÃSTICO LINEAR
A formulação geral para o conjunto es
trutura-solo é deduzida considerando-se as condições de equilí
brio e compatibilidade na superfície de contato.
No Método dos Elementos Finitos temos
a seguinte relação:
onde,
.{F} = [K].{ó} (6 .1)
· {F} = matriz das cargas noda.i,s constituída) pelas fof
ças aplicadas nos nós; forças nos nós equivale~
tesa um carregamento no elemento; variação de
temperatura, etc.
[K] ,,
= matriz de rigidez da estrutura.
{ó}= deslocamentos dos nós da estrutura.

29
Consideremos apenas a placa ou a viga.
Seja Qi a força externa que atua no
no i. A carga que efetivamente atua nesse .nó será Ni = Qi-Pi
onde Pi é a reação do solo nesse ponto, (fig. 6.1). Então, pa
ra a viga ou placa, temos:
. {N} = {Q} - {P}
fig. 6.1
A equaçao (6.1), para a estrutura, to-
ma o seguinte aspecto:
onde,
ou
[K] = matriz de rigidez da estrutura, e
{ôe} = deslocamentos nodais da estrutura.
Para a fundação, (6.1) fica:
( 6. 2)
30
{P'} = [Kf] { .s;J ( 6. 3)
onde,
{P'} = matriz das reaçoes verticais do solo,
[Kf] = matriz de rigidez da fundação,
{ ,s 1 } = deslocamentos da fundação. f
Na equaçao (6.2) estão presentes ter -
mos relativos a momento-rotação, além de forças e deslocamentos
verticais. Na equação (6.3) apenas aparecem termos referentes a
forças e deslocamentos verticais.
Para que haja compatibilidade entre
(6.2) e (6.3) acrescentaremos em (6.3) linhas e colunas de ze
rosnas linhas e colunas relativas a momento-rotação.
Assim procedendo, a matriz de rigidez'
do solo [Kf] passará a [Kf], {P'} passará a· {P} e · {õf} a
• {_óf}.
Então,
( 6. 4)
Para que os deslocamentos sejam compa
tíveis os deslocamentos da estrutura devem ser iguais aos deslo
camentos da fundação na superfície de contato.
31
Logo,
{ôe} = {<Sf}
e
{P} = [Kf] {ôe} (6. 5)
Levando (6.5) em (6.2), temos:
{Q} = [Kf]. {<Se} + [Ke]. {ôe}
ou
{Q} = [Kf + Ke] {ôe}
e
-1 {ôe} = [Kf + Ke] {Q} ( 6. 6)
Assim ficam determinados os deslocamen
tos, tanto da estrutura quanto do solo.
Obtidos os deslocamentos, calculamos '
as reaçoes do solo concentradas nos nós por (6.4) e através des
sas calculamos as pressões de contato para um nó genérico, i,
da seguinte maneira:
" ab
sendo pi= pressao de contato em torno do no i e a um coe-

32
ficiente cujo valor depende da posição. do .nó na estrutura.
Para a placa, terrios os seguintes valo-
res de a
1, - internos (ponto A) a = para nos
a = 1 4' para nós de cantos salientes (ponto D)
a = 3 para cantos reentrantes (ponto B) _, 4
a 1 nós das bordas (ponto C) = 2' para os
Para a viga, temos:
a = 1, para nós internos (ponto F')
1 - extremos (ponto E) a = 2' para nos
Os pontos A a F estão indicados na fig. 6.2.
C D
A B
X E E
fig. 6.2

33
6.2 - COMPORTAMENTO NÃO. LINEAR
Observa-se que a análise de placas e
vigas flexlveis sobre uma fundação elástica nos conduz, não só
a tensões de compressão na superfície de contato, como também,
a tensões de tração. Evidentemente o aparecimento dessas ten
soes depende da rigidez da estrutura, da fundação e, ainda, do
tipo de carregamento.
Normalmente o solo nao resiste a ten
soes de tração. Isso provoca a separação entre a estrutura e o
solo, ou seja, há um levantamento da estrutura. Nesse caso o
comportamento é não-linear.
Para resolver o problema da não-linea
ridade provocada pelo descolamento entre a estrutura e o solo
lançamos mão de um processo iterativo que passaremos a descre
ver:
a) Procede-se à análise normal, obtendo-se uma solu
ção elástica linear.
b) Verifica-se a existência de pressoes de contato '
de tração. Em caso negativo o problema está term!
nado. Em caso afirmativo passa-se ao item seguin
te.
c) Suprimem-se as linhas e colunas da matriz de fle
xibilidade correspondentes aos nós com pressões '
de contato de tração.

34
d) Inverte-se essa matriz e acrescentam-se linhas e
colunas de zeros nos ·locais referentes aos nós .
com pressoes de contato de tração. A matriz resu_!
tante será a nova matriz de rigidez do solo. Vol-
ta-se ao item a.
A convergência é usualmente obtida a
pós dois, três ou quatro ciclos dependendo da rigidez relativa
da fundação.
Após cada iteração, nos nós inicial
mente com pressoes de contato de tração, temos pressões de con
tato nulas. Isto é Óbvio, pois já não há contato entre estrutu
ra e solo.
Observação:
Devido à separaçao entre o solo e a
estrutura os deslocamentos da estrutura não são iguais aos des
locamentos do solo. Assim, os deslocamentos calculados por
(6.6) são os deslocamentos da estrutura. Calculamos os desloca
mentas do solo da seguinte maneira:
De (6.4), vem:
~1 { 8f) = [Kf] {P}
como
[Ff] é a matriz de flexibilidade da
fundação.
35
então.,
logo,
{ôf} e a matriz dos deslocamentos do solo.

36
CAPfTULO VII
EXEMPLOS - ANÁLISE E COMPARAÇÃO VOS RESULTAVOS
EXEMPLO 1 - Placa quadrada com carga concentrada P=l000 no centro
(nó 6) .
11,5 1,5 1,511,5 1 1 1
Dados:
Lfl • ,...;
Lfl . 1 2 3
4 5
E = 40 p (da placa) µ = 0,15
,...; t = 0,8 (espessura)
Lfl • 6
,...;
Lfl •
- ,...;
E = 1 o (do solo) µo = 0,15
Obs.: Deixamos de colocar as unidades porque o exemplo original
(~) não as menciona.
Resultados
NÓ desloc. da placa desloc. do solo pressoes de contato
1 2 1 2 1 2
1 60,5 62,4 78,1 78,0 o o
2 105,1 105,1 10,5
3 122,2 125,4 122,2 125,4 23,8 28,0
4 166,8 16.6, 8 2.8.,2
5 199, 9 .19.9.,.9. .40 ,5
6 .264 ,.1 . . 2.6.6 ,o .. .264,1 . . 266, O .79 ,8 84 ,9 .
1 - Resultados obtidos
2 - Resultados obtidos por Cheung e Nag ( 1) utilizando o mesmo me
todo de cálculo e uma malha com 49 nós.
37
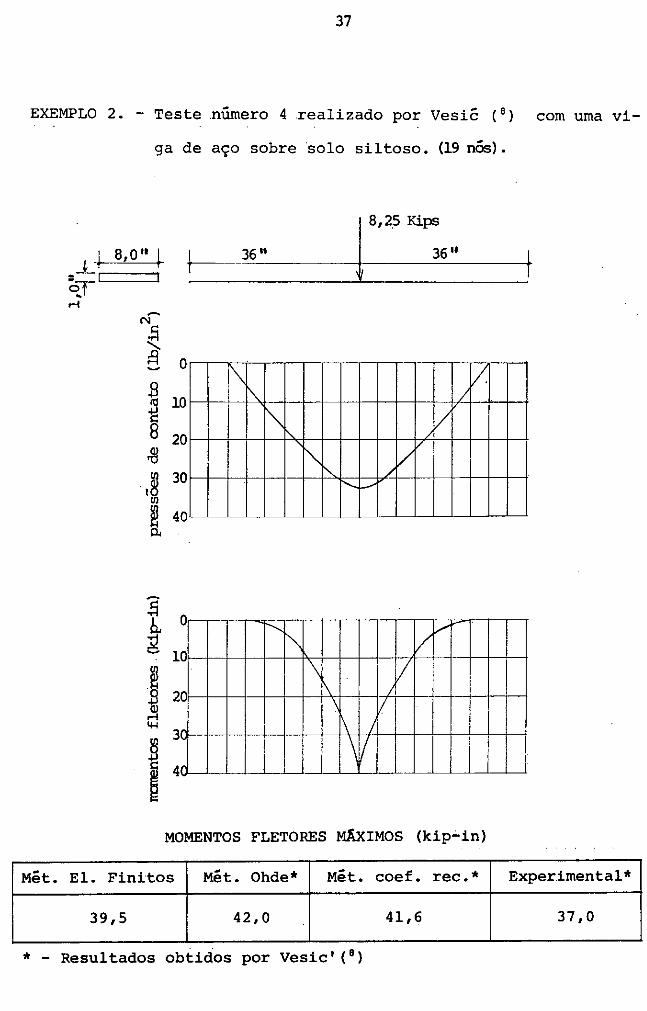
EXEMPLO 2. - Teste .numero 4 realizado por Vesié ( 8 ) com uma vi
ga de aço sobre solo siltoso. (19 nós).
_i l 8,0" 1 36"
~T ' M
~
N
i o ~
.s 10 ~
8 20
'\
" 1\
~ 1\
'~ 30
Ul
[ 40
---...._
r 1\ \
o
1
'-
\
'
j 8,25 Kips
36 11
V /
/ /
....... v
V /
/ 1,
/
\ I
\ I
v. /
1
MOMENTOS FLETORES MÃXIMOS (kip-in)
Mét. El. Finitos Mét. Ohde* Mét. coef. rec. *
39,5 42,0 41,6
* - Resultados obtidos por Vesic' ( 8 )
Experimental*
37,0

38
EXEMPLO 3. - Teste .número 2 realizado por Vesié ( 8 ), com uma vi
ga de aço sobre solo siltoso. (19 nós)
Mét. El.
8,25 kips 8,25 kips
2,q• 34 ,O" 1 34,0" ,O" t-11-------+l--------t-,-
l 8.0" 1 r<-=---t·
o .s
-- <1l !l o·
20
-o ~ 40 N
~ -~ 00 ~ 60 Q)
' g 00
[ 80
!Í -100 b..
·.-1 ~ -80 00
j -60 Q) ..... -40 4-l
00
~ -20
! o
' :
IV
/ r---.
/ " / " / \
/ \
/ \
/ 1 ~
MOMENTOS FLETORES MÃXIMOS (kip-in)
Finitos Mét. Ohde* Mét. coef. rec.*
-\
\ 1
1\ T
Experimental*
108,8 117,9 109,6 113,2
* - Resultados dados por Vesic' ( 8)
39
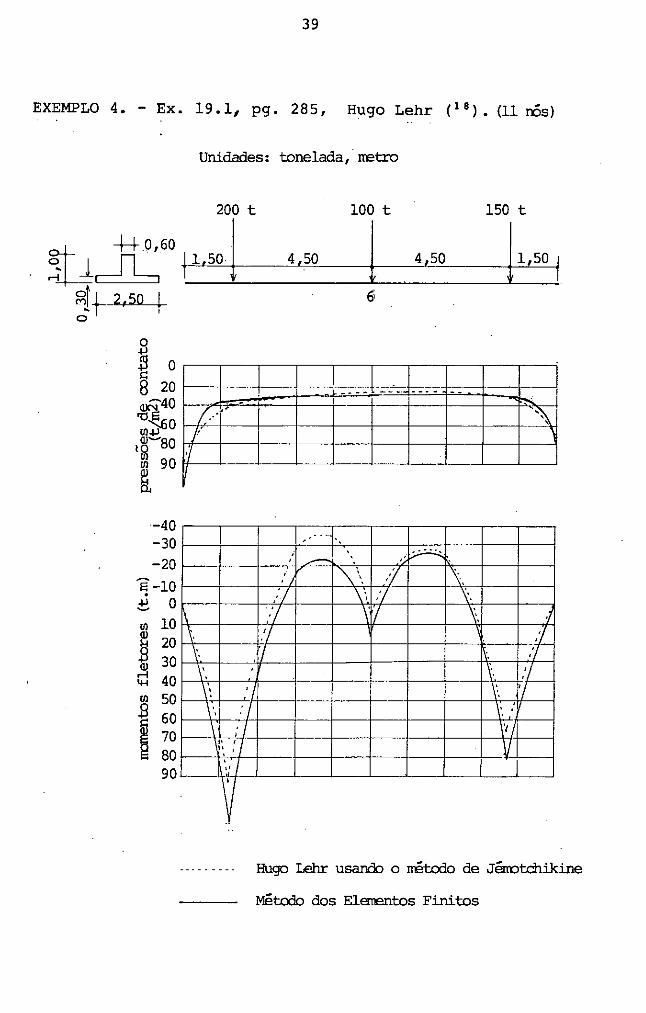
EXEMPLO 4. - Ex. 19.11 pg. 285, Hugo Lehr ( 18 ). (11 oos)
Unidades: tonelada,· rretro
200 t 100 t 150 t
~ 1 1Jt 60
~j 1= __ ·=5_º'::l~-=..-=._-=.__.._.4_,':__50==_-=._-=._-=._+-l~--=--=-~4~,5~0-=._-=._-=._-=._-::_J-=1_,~5-'---<o-'j
gl+- 2.50 ! - ' o
o
~ .: o
8 20 ~40 'O~º tll-1-l w~80
1
fil 90 [
>- , -/.·· r
,/
-40 -30 -20
~ -10 .±! o ti] 10 QJ
20 ~ 30 QJ ...... 40 .... ti] 50
1 60 70 80 90
\ \. \' \\ : / \·, : I \ ; I ,,
: I ,, ~. I
'
1
! i - - - - -- -·· - - - ~ - -~~
... . i --~--, -,' V '\ \ :/ \.
,:; \; :; \-. :'! \'.j \ ,j
.'/ :! '/ ·. :/
\'. ,/ \, '/ , \- ' '.
'/
\/
Hugo Lehr usancb o rrétodo de Jérrotdlikine
Método dos Elementos Finitos
40
CONCLUS11ES
Procurou-se, sempre que possivel, com
parar os resultados obtidos com resultados de ensaios já realizê
dos na prática. Isto porque ainda não se sabe ao certo qual o
método de cálculo que mais se aproxima da realidade, principal -
mente quando se trata de placas. Infelizmente, justamente nesse
caso, com a bibliografia de que dispunhamos, não pudemos· fazer
nenhum teste com placas retangulares. Alguns ensaios são cita
dos em ( 1 ) e ( 6 ), porém os dados citados são insuficientes. Des
sa forma, para placas retangulares, o programa foi testado mas
não o método de cálculo.
O problema da separaçao das superficies
de contato aparece nos exemplos 1 e 2. o método iterativo adotê
do funcionou satisfatoriamente. De um modo geral, os resultados
aproximam-se dos valores experimentais (caso de vigas).
Os exemplos 2, 3 e 4 foram calculados
no computador IBM 1130, utilizando precisão expandida para os nú
meros reais.
Tendo em vista as comparaçoes feitas ,
consideramos que o método satisfaz plenamente no caso de vigas e
esperamos que mais ensaios com placas retangulares sejam feitos
e publicados a fim de podermos testá-lo também para placas.
41
BIBLIOGRAFIA
1. - CHEUNG, Y.K. - NAG, D.K.
"Plates and beams on elastic foundations - Linear and non
linear behavior".
Géotechnique. June 1968.
2. - CHEUNG, Y.K. - ZIENKIEWICZ, o.e.
"Plates and tanks on elastic foundation - An application of
the Finite Element Method"
Int. J. Solids and Structures - Vol.l, pp.451-461, 1965
3. - BOLTON, RICHARD
"Stresses in circular plates on elastic foundations".
J. Eng. Mechanics Div. - ASCE - June 1972
4. - HADDADIN, MUNTHER J.
"Mats and combined footings - Analysis by the Finite Element
Method"
ACI/Journal - December 1971
5. - YANG, HENRY, T.Y.
"Flexible plate finite element on elastic foundation"
J. Structural Div. - ASCE - October 1970
6. - SEVERN, R.T.
"The solution of foundation mat pro}?lems by Finite Element
Methods"
The Structural Engineer - June 1966
42
7. - VESIC, ALEKSANDAR
"Bending of bearns resting on isotrcipic elastic solid"
J. Eng. Mechanics Div. - ASCE - April 1961
8. - VESIC, A.B. - WESLEY, JOHNSON H.
"Model studies of bearns resting on a silt subgrade"
J. Soil Mechanis and Foundation Div. - ASCE - February 1963
9. - BERBERIAN, D.
"Análise de placas circulares sobre base elástica"
Tese de Mestrado -·COPPE - UFRJ - 1972
10, - SOUTO SILVEIRA, E.B.
"Pesquisa sobre a variação de algumas características do
comportamento tensão-deformação de um solo arenoso em fun
ção dos parâmetros de compactação".
Publicação n9 104 - E.E. de são Carlos - USP - 1964
11. - ZIENKIEWICZ, o.e.
"The Finite Element Method in Structural and Continuum
Mechanics".
McGraw-Hill Publishing Conpany Limited,
12. - DESAI, CHANDRAKAT S. - ABEL, JOHN F,
11 Introduction to the Fini te Elemente ·Method 11
Van Nostrand Reinhold Company
-13. ;.. GERE, JAMES M.-,:- WEAVER Jr,, WILLIAM
"Análisis de Estructuras Reticulares"
Compania Editorial Continental S.A.
43
14. - VASCONCELLOS FILHO, A.
"O Método dos Elementos Finitos: fundamentos teóricos -
automatização - aplicações a problemas de placas e de
elasticidade plana"
Publ. n9 11.70 - COPPE - UFRJ, 1970
15. - SCOTT, RONALD - KO, HON-YIM
"Stress - deformation and strength caracteristics"
State of~the-Art Vol. ~ 7th Int. Conf. on Soil Mechanics
ânciFoundation Engineering - México, 1969
16. - BOWLES, JOSEPH E.
"Foundation Analysis and Design"
McGraw-Hill Book Company
17. - TAYLOR, DONALD W.
"F\1ndamentals of Soil Mechanics"
John Wiley & Sons, Inc. - London
18. - LEHR, HUGO
"Exemples de Calculs pour les Projets de Fondations"
Editions Eyrolles - Paris
19. - HARR, M.E.
"Foundations of Thoretical Soil Mechanics"
Kogakusha Company, Ltd.
20. - HETf:NYI, M.
Beams on Elastic Foundation"
University of Michigan Press

44
APtNVICE
PROGRAMA AUTOMÃTICO
1. EXPLICAÇÕES SOBRE O PROGRAMA
O programa automático apresentado a se
guir foi elaborado com base na teoria exposta nos capftulos III
a VI. Utilizou-se a linguagem FORTRAN. O programa foi desenvol
vido num computador IBM/1130 com 32k de memória e posteriormen
te adaptado ao sistema IBM/360.
O programa perriÚ,j:e a análise de vigas e
placas com até 40 nós, 40 elementos e 4 casos de carregamento.
Não há limite para o número de estruturas a serem analisadas.
Mais uma vez lembramos que nao se pode
tirar vantagem da simetria em estruturas simétricas, como se
faz comumente na análise de placas e vigas. (ver pág.27).
Como o elemento de placa é retangular,as
placas a serem analisadas deverão prestar-se à discretização:D '
por meio de retângulos (todos iguais). A análise de placas com
buracos e cantos reentrantes nao apresenta problemas, desde que
possam ser discretizadas por uma malha de retângulos iguais.
O programa permite a introdução de deslQ
camentos prescritos dos nós.

45
2 - PROGRAMA PRINCIPAL - DIAGRAMA DE BLOCOS SIMPLIFICADO
18 l
LEITURA DE DADOS SOBRE A
ESTRUTURA E O SOLO
LEITURA DE DADOS SOBRE
OS CARREGAMENTOS
FORMAÇÃO DA MATRIZ DE
RIGIDEZ DO SOLO
MONTAGEM DA MATRIZ DE RI-GIDEZ DA ESTRUTURA ATRA-VÉS DA MATRIZ DE RIGIDEZ DOS ELEMENTOS
FORMAÇÃO DA MATRIZ DE RI-
GIDEZ DO CONJUNTO
ESTRUTURA + SOLO
INTRODUÇÃO DOS DESLOCAMEN-
TOS PRESCRITOS
46
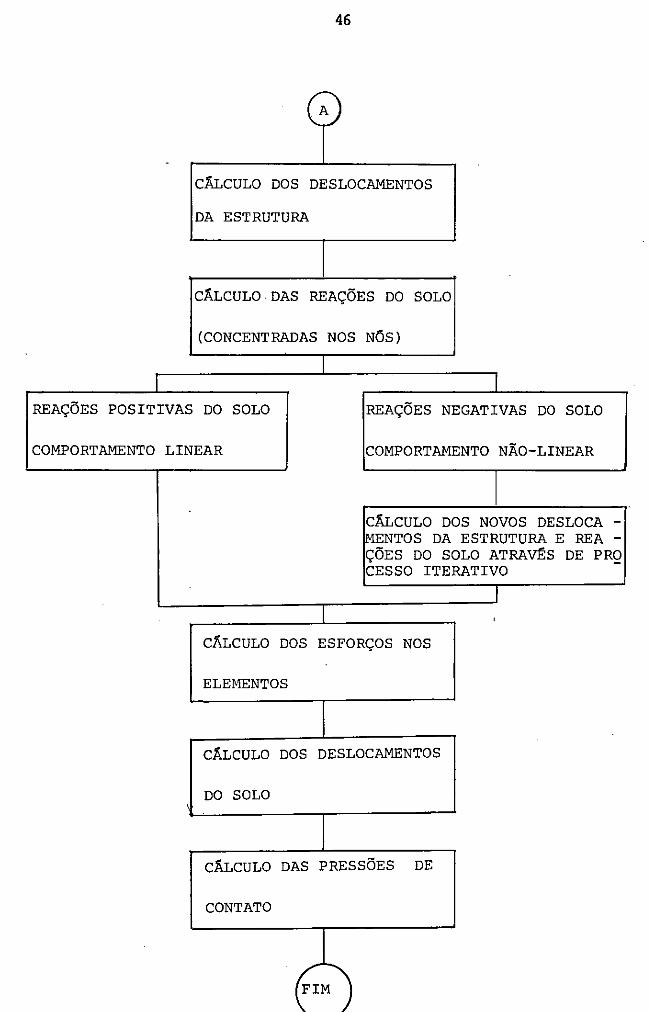
A
.
CÁLCULO DOS DESLOCAMENTOS
DA ESTRUTURA
CÁLCULO.DAS REAÇÕES DO SOLO
(CONCENTRADAS NOS NÕS)
REAÇÕES POSITIVAS DO SOLO REAÇÕES NEGATIVAS DO SOLO
COMPORTAMENTO LINEAR COMPORTAMENTO NÃO-LINEAR
CÁLCULO DOS NOVOS DESLOCA -MENTOS DA ESTRUTURA E REA -ÇÕES DO SOLO ATRAVt:S DE PRQ CESSO ITERATIVO
' CÁLCULO DOS ESFORÇOS NOS
ELEMENTOS
CÁLCULO DOS DESLOCAMENTOS
DO SOLO \
CÁLCULO DAS PRESSÕES DE
CONTATO
jFIM '\.
47
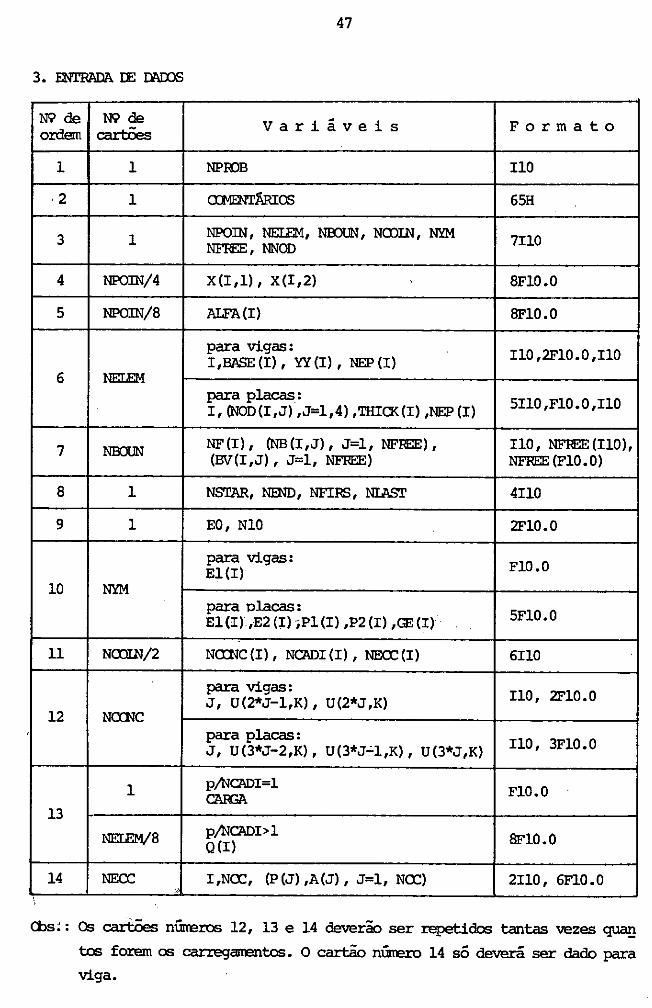
3. ENTRADA IE Dl\JX)8
N9 de N9 de Variáveis Formato oroem cartões
1 1 NPOOB 110
·2 1 CXMENTÁRIOO 65H
3 1 NPOIN, NELEM, NEOUN, NO)IN, NYM 7110 NFREE, NNOD
4 NPOIN/4 X(l,l), X(l,2) ' 8Fl0.0
5 NPOIN/8 ALFA(l) 8Fl0.0
para vigas: ll0,2Fl0.0,ll0 l,Bl\SE(l), YY(l), NEP(l)
6 NELEM para placas:
5110,Fl0.0,ll0 l, (NOD(l,J) ,J=l,4) ,THIO<(l) ,NEP (l)
7 NBOUN NF (l), (NB(l,J), J=l, NFREE), 110, NFREE(ll0), (BV(l,J), J=l, NFREE) NFREE(Fl0.0)
8 1 NSTAR, NEND, NFIRS, NU\ST 4110
9 1 E0, Nl0 2Fl0.0
para vigas: Fl0.0 El(l)
10 NYM para placas:
5Fl0.0 El(l).,E2 (l) ·;Pl (l) ,P2 (l) ,GE (I) .
11 NCOIN/2 NCXNC (I), NCADl (l) , NEXX: (l) 6110
para vigas: Il0, 2Fl0.0 J, U(2*J-l,K), U(2*J,K)
12 NCXNC para placas:
110, 3Fl0.0 J, U(3*J-2,K), U(3*J~l,K), U(3*J,K)
1 p;NCJ\DI=l Fl0.0 CAR:;A
13
NEIBM/8 p/NCADl>l
8Fl0.0 Q(l)
14 NECC l,NO:, (P (J) ,A(J) , J=l, NO:) 2110, 6Fl0.0 "
Cbs;: Os cartões núrreros 12, 13 e 14 deverão ser :repetidos tantas vezes <IU.3!!
tos forem os carregarrentos. o cartão núrrero 14 só deverá ser dado para
viga.
48 •
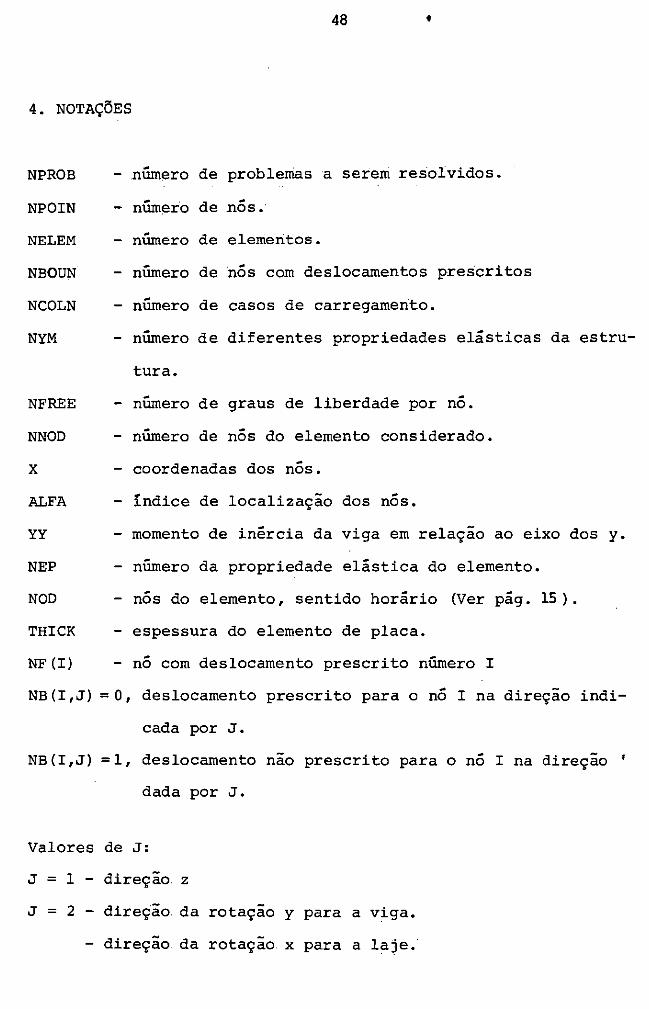
4. NOTAÇÕES
NPROB
NPOIN
NELEM
NBOUN
NCOLN
NYM
NFREE
NNOD
X
ALFA
YY
NEP
NOD
THICK
NF (I)
. de problemas serem resolvidos. - numero a
- número de .nós. . de elementos. - numero
- numero de .nós com deslocamentos prescritos
. de de carregamento. - numero casos
. de diferentes propriedades elásticas da estru-- numero
tura.
- número de graus de liberdade por .
no.
- numero de nós do elemento considerado.
- coordenadas dos nós.
- índice de localização dos nós.
momento de inércia da viga em relação ao eixo dos y.
- numero da propriedade elástica do elemento.
- nós do elemento, sentido horário (Ver pág. 15).
- espessura do elemento de placa.
- nó com deslocamento prescrito número I
NB(I,J) = O, deslocamento prescrito para o nó I na direção indi
cada por J.
NB(I,J) =l, deslocamento nao prescrito para o no I na direção '
dada por J.
Valores de J:
J = 1 - direção. z
J = 2 direção da rotação y para a viga.
direção da rotação X para a laje.
49
J = 3 - direção da rotação y para a laje.
BV
NSTAR
NEND
NFIRS
NLAST
EO
NIO
El
E2
Pl
P2
- valor do deslocamento prescrito
- primeiro elemento.
- Último elemento.
- primeiro nó.
- Último nó.
- módulo de elasticidade da fundação.
- coeficiente de Poisson da fundação.
- módulos de elasticidade longitudinal da estrutura.
- coeficientes de Poisson da estrutura.
GE - módulo de elasticidade transversal da placa.
NCONC - número de nós com carga concentrada.
NCADI - número de grupos de elementos com cargas distribuídas
iguais.
NECC - número de elementos com cargas concentradas (só para
vigas).
U - cargas nodais.
CARGA - carga distribuída igual para todos os elementos.
Q - carga distribuída no elemento.
NCC - número de cargas concentradas no elemento (caso de vigas).
P - carga concentrada no elemento. (para vigas).
A - distância da carga ao primeiro nó do elemento. (para vigas),
50
Pode-se ter os seguintes tipos de carre-
. gamerito:
a) para as placas: cargas concentradas nos nós nas direçoes
dos deslocamentos considerados e cargas unifor~emente '
distribuidas (verticais) nos elementos.
b) para as vigas: cargas concentradas nos nós nas direções
dos deslocamentos considerados, cargas concentradas ou
uniformemente distribuidas nos elementos (ambas verti -
cais) •
Obs.: O eixo dos x deverá ter a direção do eixo da viga. A nu
rneração dos nos da placa deverá obedecer à seguinte or
dem: nós i, j. 1, rn (Ver pág. 15 ) .
51
5 - LISTJG!M IX) PRXAAMA E SUBrol'INA5
//TANIA JOB 12026,2558l,MSGLEVEL=ll,ll,CLASS=G,TIME=30 //TANIA EXEC FORTNCEl //FORT.SYSIN 00 *
OIMENSION NEPl40l,THICK(40l,Ell3l,E213l,Pl(3l,P213l,GE(31, *NCONCl4l,NCAOl(4l,NF(201,NB(20,31,BV(20,31,Pl40,4J,H(40), *BASE(40l,NECCl41,ALFAl40l,YY(401
COMMON C(12,121,XE14,21,N00(40,4l,STl120,120l,Ull2C,4l, *X(40,2l,Q(40l,08Al12,121,Kl,K2,K3,0(l20,4l,F(4C,40l, *AEl240,41
DEFINE FILE 10(40,144,U,Kll,11140,360,U,K21,12(4,4CO,U,K3l e C PROGRAMA PARA ANALISE OE VIGAS E PLACAS SOBRE MEIO ELASTICO e
WRITEl~,20001 2000 FORMATl'l',5X,541'-'l,//,6X,'COPPE/UFRJ',161 1 - 1 l, 1 PROGRAM',
*'A DE ENGENHARIA CIVIL',//,6X,101 1-'l,'TANIA GLACY 00 BRA', *'SIL OEFIGUEIRE00',10('-'l,//,6X,'ANALISE OE VIGAS E PLAC•, *'AS APOIADAS SOBRE MEIO ELASTIC0 1 ,//,6X,54('-'ll
READ(B,101 NPROB 10 FORMAT(l101
00 20 LA=l,NPROB WRITE(5,1000l LA
1000 FORMAT(////,19X,181'-'l,/,19X,'PROBLEMA NUMER0 1 ,12,/,19X, *18( ·-· 1,///)
REAOl.8, 10011 1001 FORMATl65H
* WRITE15,1GOll REAOIS,1G02l NPOIN,NELEM,NBOUN,NCOLN,NYM,NFREE,NNOD
1002 FORMATl7110l WRITE(S,10031
1003 FORMAT(///,24X,'DADOS DA ESTRUTURA',/,24X,181'-'l,/, *8X, 1 NPOIN NELEM NBOUN NCOLN NYM NFREE NNOO'l
WRITE(S,1004) NPOIN,NELEM,NBOUN,NCOLN,NYM,NFREE,NNOD 1004 FORMATl10X,13,215X,131,414X,l3ll
REAOIS,35) IXII,ll,X(l,2l,1=1,NPOINl

52
35 FORMAT(8Fl0.0I READ18,40COI (ALFA(II ,l=l,NPOINI
4000 FORMAT(8Fl0.0I WRITE15,10071
1007 FORMAT(///,15X,'COORDENAOAS DOS NOS E VALOR OE ALFA',/,15X, *351 1 - 1 11
WR 1T E ( 5, 100 8 J 1008 FORMAT(l7X,'N0',9X,'X',9X,'Y',4X,'ALFA'I
00 111 1=1,NPOIN WRITEIS,10091 I,XII,11,XII,21,ALFAIII
1009 FORMAT(l6X,l3~2Fl0.2,3X,F5.21 111 CONTINUE
IF(NN00-2120,341,342 341 CONTINUE
DO 555 I=l,NELEM NODII,11=1 NOO(l,21=1+1
555 CONTINUE DO 43 11=1,NELEM READ18,91011,BASEIIl,YYIIl,NEP(II
910 FORMATl110,2FlC.O,IlOI 43 CONTINUE
WRITE15,1151 115 FORMAT{///,l3X,'PROPRIEDADES E INCIDENCIAS 00S ELEMENTOS",/
*,13X,401'-'1,/,8X,'ELEMENTO BASE INERCIA NEP 'i *' INCIDENCIAS'I WRITE15,ll6111,BASE(ll,YYIIl,NEPIIl,INODII,Jl,J=l,21,
*I=l,NELEMI 116 FORMAT(l3X,13,2Fl3,4~15,2X,2151
GOTO 44 342 CONTINUE
DO 40 l=l,NELEM READ18,4511,JNODII,Jl,J=l,41,THICK(ll,NEPIII
45 FORMAT(5110,Fl0.0,l10l 40 CONTINUE
WRITE15,10101
\

53
1010 FORMATli//,13X,'PROPRIEOAOES E INCIOENCIAS OOS ELEMENTOS',/ *,13X 1 40{ 1 - 1 l,/,11X,'ELEMENTO ESPESSURA NEP INCIOEN', *'CIAS'l
00 120 l=l,NELEM WRITE15,l0lll I,THICKCil,NEP(Il,tNOOII,Jl,J=l,NNODI
1011 FORMAT(l3X,13,2X,Fl0.4,2X,14,2X,4151 120 CONTINUE 44 IFINBOUNl20,502,501
501 WRITE15,1013l 1013 FORMATl///,17X,'RESTRICGES E DESLOCAMENTOS NOOAIS 1 ,/,17X,
*33('-'ll IF(NN00-2120,6000,6100
6000 REAO(B,6010llNFIIl,NBll,ll,NB(l,2l,BVII,11,BVII,2),I=l,NBOU *Nl
6010 FORMATl3l10,2Fl0.0I WRITEl5,6020lll,NF(ll,NBII,ll,NB11,2l,BVII,ll,BVll,2l,I=l,N
*BOUNl 6020 FORMATllOX,'1 NFIIl fi/Btl,ll NBII,21 BV(I,ll BVII,21',
*/,IBX.I3,319,2Fl2.4ll GOTO 502
6100 REA018,1012llNFIIl,NBCI,ll,NBII,2l,NBII,3l,BVll,11,BVII,2l, *BVII,31,I=l,NBOUN)
1012 FORMATl4Il0,3FlO.Ol WRITE15,1014l1I,NF(ll,NBll,ll,Nátl,2l,NBII,3l,BVll,ll,BVII,
* 2 1 , B V I I , 3 l , I = 1. N B OU N l 1014 FORMATI' l NF(ll NBII,ll NBII,11 NBII,31 BVII,ll',
*' BVCI,21 BVll,3l',/,ll3,4l9,3Fl2.4ll 502 REA018,1015JNSTAR,NENO,NFIRS,NLAST
1015 FORMATl4Il0l WRITE15,1016l
lOlt FORMAll///,21X,'DELIMITACAO DA ESTRUTURA',/,21X,24("-'l,/, *lOX,'EL. INICIAL EL. FINAL NO.INICIAL NO FINAL')
WRITE15,10171 NSTAR,NENO,NFIRS,NLAST 1017 FORMATl13X,I4,10X,I3,8X,I4,8X,l4l
REAOl8 1 6200IEO,XNIO 6200 FORMATl2Fl0.0l

54
00 64 l=l,NYM READCS,1018) Eltll,E2tll,Pl(ll,P2(11,GECIJ
1018 FORMATC5Fl0.0I 64 CONTINUE
IFCNND0-2120,97G,971 970 WRJTE15,'H5 I 975 FOR~AT(///,lBX,'PROPRJEOAOES ELASTICAS DA VIGA',/,18X,
*30(•-•J,/,23X,'NEP•,11x,•e1•1 WRITEl5,9761(1,Eltll,l=l,NYMI
976 FORMAT(23X,12,El4.41 GOTO 977
971 WRITEt5,1019l 1019 FORMATl///,18X,'PROPRIEOADES ELASTICAS DA PLACA',/,18X,
*311 1 -•1,1,• NEP•,1ox,•e1•,11x,•e2•,12x,•G•,0x,•N11•,0x, *'Nl2'1
DO 123 1=1,NYM WRITE15,1020lI,ElCil,E2(11,GElll,PlCil,P2(1l
1020 FORMAT(l3,3El3.4,2Ell.4l 123 CONTINUE 977 WRITEC5,205llEO,XNIO
2051 FORMATC///,18X,'PROPRJEDAOES. ELASTICAS DO SOL0',/,18X, *·301 •-• l ,/,25X, 'EO' ,llX, 'NIO' ,/,13X,2El4.4l
READIB,200l(NCONC(ll,NCAOIIIl,NECClll,I=l,NCOLNJ 200 FORMAT(tllO)
NLIB=NPOIN*NFREE Nl0=2*NELEM*NFREE DO 68 J=l,NCOLN 00 68 I=l,NLIB
68 UII,Jl=O, DO 668 J=l,NCOLN DO 668 K=l,NLD
668 AE(K,Jl=O, 00 155 K=l,NCOLN WRITEl5 ,20llK
201 FORMAT(///,22X,'CARREGAMENTO NUMER0',I2,/,22X,211'-'ll WRITEC5,202lNCONC(Kl,NCAOI(Kl,NECCCKl
55
202 FORMAT(/,' NUMERO DE NOS COM CARGAS CONCENTRADAS",13,/, *' NUMERO CE GRUPOS OE ELEMENTOS COM CARGAS OISTRIBUIOAS 1 1 ,
*'GUAIS',13,/, 1 NUMERO OE ELEMENTOS COM CARGAS CONCENTRADAS' *, I 31
IF(NCONC(Kll20,l58,b 6 NC=NCONC(Kl
WRITE15,102ll 1021 FORMATl///,21X,'CARGAS APLICADAS NOS NOS',/,21X,24l'-'ll
IFINNOD-2120,9eC,981 980 WRITE15,985l 985 FORMAT(l7X, 1 N0 1 ,ax, 1 FORCA Z1 ,6X, 1 MOMENTO Y1 )
00 962 1=1,NC REAOIS,9901J,Ul2*J-1,Kl,U(2*J,Kl
990 FORMAT(I10,2Fl0.0I WRITE15,20201J,Ul2*J-l,Kl,Ul2*J,Kl
2020 FORMAT(l6X,I3,2Fl5.4) 982 CONTINUE
GOTO 69 981 WRITEl5,986) 986 FORMAT(9X,'N0 1 ,eX,'FORCA Z',6X 1
1 MOMENTO X11 6X 1
1 MOMENTO Y'l DO 69 I=l,NC READ(8,1022)J 1 U(3*J-2,KJ,Ul3*J-1,Kl,U(3*J,K)
1022 FORMAT(Il0,3FlC.Cl WRITE15,1023lJ,Ul3*J-2,Kl,Ul3*J-1,Kl,U(3*J,Kl
1023 FORMATl8X,I3,3Fl5.4l 69 CONTINUE
158 IFINCADI(Klll51,222,151 151 IFlNCAOIIKl-1120, 154,153 154 READl8,203lCARGA 203 FORMATlflO.Ol
DO 156 I=l,NELEM 156 Q(Il=CARGA
GOTO 157 153 REAOIS,2041 IQII l ,I=l,NELEMI 204 FORMAT(SFI0.01 157 CALL CANOEIK,NPOIN 1 NELEM,NNOO)

56
WRITE15,205lll,Q(ll,1=1,NELEM) 205 FORMATl///,17X,'CARGA UNIFORMEMENTE OISTRIBUIDA',/,17X,
*31('-'l,/,24X,'ELEMENTO CARGA',/,l24X,15,F13.2)l 222 IF(NECCIK)l20,155,3C03
3003 NE=NECCIKJ CALL CCELEIK,NEl
155 CONTINUE e C FORMACAC DAS MATRIZES DE RIGIDEZ e
CALL MARillNELEM,NPOIN,EO,XNIO,NNOD,BASEl N3=NFREE*NPOIN DO 99 I=l,NPOIN DO 99 K=l,NPOIN
99 FII,Kl=STll,K) DO 47 I=l,N3 DO 47 J=l,N3
47 ST<I,Jl=O. NST=NSTAR NEN=NEND K=NFIRS L=NLAST Kl=l DO 80 LK=NST,NEN DO 85 I=l,NNOD JJ=NDD(LK,ll XEt I, ll=X(JJ, li
85 XEII,21=XIJJ,21 TH=THICKILKI J=NEPILK) YMl=EllJI IFINNGD-2120,140,141
140 XIY=YYILKI CALL MAREV(XIY,YMll GOTO 736
141 YM2=E2(JI

PRl=Pl(Jl PR2=P21Jl G=GE(Jl
57
CALL MARER(YM1,YM2,PR1,PR2,G,TH,LK) 736 00 80 LL=l,NNOO
00 80 KK=l,NNOO IFINOO(LK,KKl-KlB0,131,131
131 lf(NOO(LK,KKI-Lll32,132,80 132 M=NFREE*INOOILK,KKI-Kl
N=NFREE*INOOILK,LLI-Kl l=NFREE*IKK-ll J=NFREE* ( LL-11 IF(Nl!:0,900,900
900 00 5 NJ=l,NFREE 00 5 Ml=l,NFREE M.M l=M+M I NNJ=N+NJ IMI=I+MI JNJ=J+NJ
5 ST(MMI,NNJl=ST(MMI,NNJl+CIIMl,JNJl 80 CONTINUE
NM=NPOIN K 2= l WRITE(ll'K2l({STCI,Jl,I=l,N3l,J=l,N3l K=l WRITE15,93ll
931 FORMAT(///,23X, 1 0ESLOCAMENTOS NOOAIS',/,23X,201'-'ll 795 IFINN00-2)20,4050,4200
4050 00 4100 1=1,NPOIN 00 4100 J=l,NPOIN
4100 STl2*1-1,2*J-ll=ST(2*I-1,2*J-ll+F{I,Jl GOTO 4060
4200 00 505 1=1,NPOIN 00 5C5 J=l,NPOIN
505 STl3*1-2,3*J-2l=STl3*I-2,3*J-2l+F(I,Jl 4060 CONTINUE
58
c C INTRODUCAO DOS DESLOCAMENTOS PRESCRITOS c
IF(N8GUNl413,413,313 313 00 230 1=1,N80UN
M=N F II 1-1 00 230 J=l,NFREE IFINBII,Jll230,345,230
345 NMl=NFREE*M+J 00 71 JX=l,N3
71 STINMI,JXl=O. DO 72 JX=l,N3
72 STIJX,NMll=O. STINMI,N~Il=l. 00 233 JJ=l,NCOLN
233 U(NMI,JJl=BVlI,Jl 230 CONTINUE 413 CONTINUE
CALL INMATIN31 c C CALCULO ods DESLOCAMENTOS c
00 305 .l=l,N3 011,Kl=O. 00 305 J=l,N3
305 011,Kl=Oll,Kl+STII,Jl*UIJ,Kl WRITEl5,404)K
404 FORMATl/,22X,°CARREGAMENTO NUMERO•,I2,/,22X,2ll'- 1 ll IFINN00-2120,948,959.
948 WRITE15,t311(1,Dl2*1~1,Kl,0(2*1,Kl,I=l,NPOIN) 631 FORMAT(l6X,'N0',10X,'DESL. z•,ax,•ROTACAO Y',l,113X,15,
*2El7.61l GOTO 947
959 WRITE15,405l(I,013*1-2,Kl,D(3*1-l,Kl,Dl3*1,Kl,I=l,NPOINJ 405 FORMAT(7X,'N0',10X, 1 DESL. z•,1x,•ROTACAO X',7X,'ROTACAO y,,
*/,14X,15,3El7,6ll
59
c C CALCULO DAS REACOES DO SOLO c
c
941 oo· 30t I=l,NPOIN 00 306 J=l,NPOIN
306 Ptl,Kl=O. lf(NN00-2120,4300,4350
4300 00 4310 I=l,NPOIN 00 4310 J=l,NPOIN
4310 P(I,Kl=Fll,Kl+FII,Jl*Ol2*J-1,KJ GOTO 4400
4350 00 4500 I=l,NPOIN 00 4500 J=l,NPGIN
4500 PII,Kl=Pll,Kl+FII,Jl*Ol3*J-2,Kl 4400 WRITE15,3309)(1,PII,Kl,I=l,NPOINI 3309 FORMATl///,25X,'REACOES 00 SOL0',/,25X,151'-'1,/,23X,'N0',
*8X,'D1RECAO Z',/,t20X,15,El7.6ll Ll=O Ml=C 00 711 l=l,NPOIN IF(Pll,Kll710,711,711.
C COMPORTAMENTO NAO LINEAR - ITERACOES c
710 ll=l I=NPGIN
711 CONTINUE 1Fllll20,719,712
712 K3=1 READ(l2'K3)((Fll,Jl,I=l,NPOINl,J=l,NPOINI DO 717 I=l,NPOIN lf(P(l,Kll718~718,717
llE IFII-NPOINl120,722,20 722 NM=Nr,i-1
GG TG 717 720 KK=l-Ml

NI=NM-KK DO 240 J=l,NI Il=KK+J-1 DO 240 JJ=l,NM H C JJl=F C I I+l,JJ)
240 f(11,JJl=H(JJI NM=II NI=NM-KK+l DO 25() J•l,NI Il=KK+J-1 DO 250 JJ=l,NM H(JJ)=F(JJ,II+ll
250 F(JJ,IIl=HIJJI Ml=Ml+l
717 CONTINUE DO 242 I=l,NM 00 242 J=l,NM
242 ST(I,Jl=F(I,Jl CALL INM/lJ(NM) DO 243 I=l,NM DO 243 J=l,NM
243 FII,Jl=STII,Jl DO 245 I=l,NPOIN IFIP 11,KJ 1246,246,245
246 NN=NJ,1.-I + l J=O IF(NN)20,248,249
248 J= l · GO TO 2'17
249 J=J+l 247 IK=Nf'I.-J+2
DO 252 JJ=l,NM 252 FIIK,JJl=FIIK-1,JJl
IFlJ-NNl249,249,929 929 CONTINUE
NM=Nf'l+l
60

c
NN=NM-I IF(NNl20,258,25<;
258 J= l GOTO 257
25<; DO 253 J=l,NN 257 IK=NM-J+l
DO 253 JJ=l,NM 253 F(JJ,IKl=F(JJ,IK-ll
DO 251 J=l,NM FII,Jl=O.
251 flJ,Il=O. 245 CONTINUE
K2= l
61
REAO(ll'K2l(IST(I,Jl,I=l,N3l,J=l,N3l GOTO 795
71<; IFIK-NCCLN)333,444,20 333 K=K+l
K3=1 REAO(l2 1 K3)(1ST(I,Jl,I=l,NPDINl,J=l,NPOINl CALL INMATINPOINI 00 7001 I=l,NPOIN DO 7001 J=l,NPOIN
7001 FII,Jl=STII,Jl K2=1 REAG(ll'K2111ST(I,Jl,I=l,N3l,J=l,N3l GG TO 7<;5
444 CONTINUE
C CALCULO GCS ESFORCOS NOS ELEMENTOS e
IF(NN00-2120,515,525 515 CA~L ESEXINELEM,NCOLNI
GG TO 21 525 CALL MOFLEINPOIN,NELEM,NCOLNl
c C CALCULO DOS DESLOCAMENTOS DO SOLO·

e
c
62
27 K3=1 READll2'K3.I I (Fll,Jl ,I=l,NPOINI ,J=l,NPOINl DO 260 J=l,NCOLN DO 260 l=l,NPOIN O{l,Jl=O. DO 260 K=l,NPOIN
260 011,J)=DII,Jl+F(I,Kl*PIK,Jl WRITE15,632l
632 FORMATl///,22X,'DESLOCAMENTOS DO SOL0',/,22X,211'-'ll DO 703 J=l,NCOLN WRITE15,704lJ
104 FORMATl./,22X,'CARREGAMENTO NUMER0' 1 12,/,22X,21(•-•J) WRITEIS,705)(1,D{I,Jl,I=l,NPOINI
705 FORMAT{23X,'N0',8X, 1-0IRECAO z•,/,120X,15,El7.6ll 703 CONTINUE
C CALCULO DAS PRESSOES DE CONTATO c
WRITEl5,308l 308 FORMAT{///,23X, 1 PRESSOES DE CONTAT0 1 ,/,23X,lg{•-•))
DO 307 J=l,NCOLN DO 4010 I=l,NPOIN IF(NNOD-2l20,40C4,4C05
4004 IFII-1120,4040,5050 4040 A=X12,1}-X{l,ll
B=BASE(ll GOTO 4002
5050 IFII-NPOINl4045,4055,20 4045 A=0.5*(X(l+l,ll-X(I-l,11)
B=0.5*1BASE{Il+BASECI-lll GOTO 4002
4055 A=XII,11-X(I-1,11 B=BllSEI 1-ll GOTO 4002
4005 ll=SQRT((Xl3,ll-Xl2,lll**2+(X13,21-X12,211**21

c
63
B = S Q R T ( ( X( 1, ll - X 1 2 , li l * * 2 + 1 X ( 1 , 2 l -X 1 2 , 2 l l * * 2 l 4002 PII,Jl=Pll,Jl/lA*B*ALFA(lll 4010 CONTINUE
WRITE15,3091J,11,P11,Jl,I=l,NPOINl 309 FORMATl/,22X,'CARREGAMENTO NUMER0',12,/,22X,211 1 - 1 l,/,23X,
*'N0 1 ,8X,'DIRECAD Z1 ,/,120X,15,El7.6ll . 307 CONTINUE
20 CONTINUE CALL EXIT END SUBROUTINE MAREVIXIY,YMll COMMON Cll2,12l,XEl4,2l,NODl40,4l,STl120,l20l,Ull20,4l,
*Xl40,2l,Q(40l,DBAl12,12l,Kl,K2,K3,Dll20,4J,F(40,40), *AEl24C,4l
C ESTA SUBROTINA CALCULA A MATRIZ DE RIGIDEZ DO ELEMENTO C DE VIGA COM DOIS GRAUS DE LIBERDADE POR NO c
XL•XE(.2,1)-XEll,ll DO 10 1=1,4 DO 10 J=l,4
10 CI 1,Jl=O. C12,41=2.*YMl*XIY/XL C12,21=4.*YMl*XIY/XL Cll,2l=-C12,4l*3./Xl Cll,ll=-2.*Cll,21/XL C 11,3l=-C11, l l C 1 1 , 4 1 =C 1 1, 2 l C12,3l=-Cll,2l C13,31=Cll,ll C 13 , 41 =-C 11 , 21 Cl4,4l=C12,2l DO 20J=l,4 DO 20 1=1,4
20 CII,Jl=CIJ,11 WR lT E 1 1 O 1 K 11 1 1 C 1 1 , J l , I = 1, 4 l , J = 1, 4 l
e
RETURN ENO SUBROUTINE INMAT{NI OIMENSION G{l201,H{l201
64
COMMON Cl12,121,XEl4,21,NOOl40,41,All20,1201,Ull20,41, *Xl40,21,Q(401,DBA(12,121,Kl,K2,K3,01120,41,F{40,40l, *.tlEI 240,41
C ESTA SUBROTINA INVERTE MATRIZES UTILIZANOO O METOOG OA C . PART ICAO. e
NN=N-c l A{ 1, ll=l.0/AI 1, l 1 00 110 M=l,NN K=M+l 00 6C 1=1,M G('I l=O.O 00 60 J=l,M
60 G{ll=G{IJ+AII,Jl*AIJ,KI Dl=O.C DO 70 1=1,M
70 01=01+.tllK,ll*GIII E=AIK,Kl-01 AIK,Kl=l.0/E 00 60 1=1,M
BO All,Kl=-GIIl*AIK,KJ oo se J=l,1". H(Jl=O.O DO 90 1=1,M
90 H(Jl=H(Jl+AIK,ll*All,JI 00 100 J=l,M
100 AIK,Jl=-HIJl*AIK,KI DO 110 . l=l,M DO 110 J=l,M
110 All,Jl=AII,JI-GIIl*AIK,Jl RETURN

c
65
END SUBROUTINE MARER(YMl,YM2,PR1,PR2,G,TH,MMl DIMENSION AT(l2l COMMON C(12,12l,XE14,21,NOD(40,4l,ST(l20,120l,U(l20,4l,
*X(40,2l,Q140l,DBA(l2,121,Kl,K2,K3,D(l20,4l,F(40,40l, •AE.( 240,4)
C ESTA SUBTOTINA CALCULA A MATRIZ DE RIGIDEZ DO ELEMENTO C RETANGULAR ORlCTROPO. OS PLANOS COORDENADOS GLOBAIS SAO C CONSIDERADOS PLANOS DE SIMETRIA EM RELACAC AS PROPRIEDADES C ELASTICAS. c
OIA=SQRT( (XE13,ll-XE12, ll l**2+{XEl3,2l-XE(2,2l l**2l OIB=SQRTllXECl,ll-XEl2,ll l**2+(XE( 1,2l-XE(2,2l l**2l P2=DIA**2/0IB**2 COl=0.06666666/0IA/DIB C02=TH**3/12. YNl=YMl/(l.-PRl*PR2l YN2=YM2/(l.-PRl*PR2l YN3=YMl*PRl/(1.-PRl*PR2) OX=YNl*C02 OY=YN2*C02 D l=YN 3*CD2 ' OXY=G*.C02 DO .l I=l,12 co l J=l,12
l CII,Jl=O. C( 1,ll=t0./P2*0X+60.*P2*DY+3C,,01+84.*DXY C12,ll=-30,*P2*0Y-15.*Dl-6.*DXY C(3,ll=30./P2*DX+l5.*01+6.*0XY C(4 1 1)=30,/P2*0X-60.*P2*DY-30.*0l-84.*DXY C(5,ll=-30.*P2*DY-6.*DXY Ct6,ll=l5./P2*0X-15.*0l-6,*DXY C17,ll=-30./P2*0X-3C.*P2*DY+30.*01+84.*DXY Ct8,ll=-15,*P2*DY+6.*0XY C(9 1 ll=l5,/P2*DX-6,*DXY
66
Cl10,11=-60./P2*DX+30.*P2*DY-30.*0l-84.*DXY Clll,11=-15.*P2*DY+l5.*Dl+6.*DXY C(12,ll=30./P2*DX+6.*DXY C(Z,21=20.*PZ*DY+B.•DXY e 1 3, 2 1 =-1 s. •o 1 Ct4,21=-C15,ll C{5,2)=10.*P2*DY-2.*DXY C11,21=-C1€,ll C18,21=5.*P2*DY+2.*DXY CI 10,Zl=Clll,l l C(ll,21=10.•P2*DY-8.*DXY Cl3,31=20./P2*DX+B.*DXY Cl4,3l=Cl6,ll Cl6,31=10./P2*DX-B.*DXY Cl7,31=-C19,ll C(q,3J=5./P2*DX+2.•DXY Cll0,31=-C(12,ll C(l2,3)=10./P2*DX-Z.•DXY Cl4,4l=Cll,11 Ct5,41=-C12,ll Cl6,4l=C13,ll. Cl7,4l=Cl10,ll CIS,41=-Ctll,ll Ct9,4l=Cll2,11 Cll0,41=C17, li C(ll,41=-CtB,ll C t l «, 'i 1 =C I e;, 11 C15,5l=Cl2,21 C16,51=-C13,2J C 1 7 , 5 1 =-C 1 11, li C18,5l=Clll,21 Ct1G,51=C18,ll Clll,5l=Ct8,21 Ct6,6l=C13,31 CI 7,6 J=-C 112,11 Cl9,6l=C112,31
C ( 1 G, O =-C ( e;, 1 1 Cll2,61=C19,31 C(7,71=Cll,ll CIS,71=-C12,ll C(9,71=-C13,ll CI 10,7l=C14,ll C ( 11, 71 =-C 1 5, l l Cl12,71=-C16,ll C(8,81=C(2,2l Cl9,8l=Cl3,2l Cl1G,Bl=C15,ll C 1 11, 8 l =C ( 5, 2 l C19,9l=C13,31 C(10,9l=-C16,11 Cl12,91=Cl6,31 CllO,lOl=Cll,ll Clll,lOl=CIZ,11 Cll2,101=-C13,ll Clll,lll=CIZ,21 C(l2,lll=-C13,21 Cl12,12l=Cl3,3l DO 10 JT=l,4 AT 13*JT-2l=l. ATl3*JT-ll=DIB
10 ATl3*JTl=DIA DO 20 JD=l,12
67
DO 20 LD=l,JD CIJD,LDl=ATIJDl*CIJD,LDl*ATILOl*COl
20 CILD,JOl=CIJO,LDI IF (f'.IY.) 15, 15,25
25 P=OIA/DIB PX=DI.A*DIB DO 30 I=l,12 DO 30 J=l,6
30 DBAll,Jl=O. DBA(l,11=6.*IDX/P+Dl*Pl/PX

68
OBA12,ll=6.*IDY*P+Ol/Pl/PX OBAt3,ll=-2.*DXY/PX OBAt4,ll=-6.*P*Dl/PX OBA(5,ll=-6;*P*OY/PX OBAl6,ll=OBAl3,ll DBAt9,ll=DBAt3,ll OBAllO,ll=-6.*0X/P/PX OBA(ll,ll=-é.*01/P/PX DBAl12,ll=DBA13,ll DBAtl,21=-4.*0l/DIB D8At2,2l=-4.*DY/DIB OBA13,2l=2.*DXY/OIA OBA14,21=2.•Dl/OIB DBA15,2l=2.*DY/DIB OBA(12,2l=OBAl3,2l OBA(l,31=4.*0X/DIA OBA12,3l=4.*Dl/DIA 08A(3,3l=-2.*0XY/OIB OBAlé,3l=OBAt3,3J DBAll0,31=-2.*DX/OIA DBAtll,31=-2.*Dl/DIA OBA11,4l=DBAl4,ll DBA12,4l=OBAl5,ll OBA(3,4l=-OBAl6,l) DBA14,4l=DBAl1,ll OBA15,4l=OBAt2,ll OBAl6,4)=-0BAl3,ll DBA17,4l=OBAl10,ll OBA(8,4)=0BA(ll,ll OBA(q,4)=-DBAl12,ll OBAl12,4l=-OBA(9,ll OBA11,51=-0BA14,21 PBA12,5l=-OBA15,2l DBA14,5l=-OBA11,2) OBA15,5l=-DBA12,2l OBA1é,5l=DBA13,21

e
OBAl9,5l=OBA(12,2l OBAl3,6l=-OBA{6,31 OBA(4,6l=OBA!l,3l OBA15,6l=OBA!2,3l OBA(6,6l=-OBA(3,3l OBA17,6l=OBA(10,3l OBA18,6l=OBAl11,3l 00 40 J=l,6 J6=J+6 OBAIJ,7l=OBAIJ6,ll OBA(J6,7l=OBAIJ,ll OBAIJ,8l=-DBAIJ6,2l OBA(J6,8l=-OBA(J,2l OBAIJ,9l=-OBAIJ6,3l OBAIJ6,9l=-OBAIJ,3l OBAlJ,10l=OBA(J6,4l OBAIJ6,10l=DBA(J,4l OBA{J,lll=-OBAlJ6,5l OBA(J6,lll=-OBA(J,5l OBA(J,12l=-OBA(J6,6l
69
40 OBA(J6,12l=-OBAIJ,6l WRITE{lO'Kl)((OBAll,Jl,I•l,121,J•l,121
15 RETURN ENO SUBROUTINE ESEXINELEM,NCOLNl OIMENSION S14,4l COMMON Ct12,12l,XE14,2l,N00(40,4l,STl120,120l,Ull20,4l,
*Xl40,2) 1 Q(40l,OBA(12,12l,Kl,K2,K3,0(l20,4l,F(40,40l, *AEl240,4l
C ESTA SUBROTINA CALCULA OS ESFORCOS NAS EXTREMIDADES OE UM C ELE~ENTO OE VIGA. e
Kl=l 00 20 LL=l,NELEM REAOl10'Kll(IC11,Jl,l=l,4l,J=l,4l
e
DO 20 J,;,l,NCCLN DO 3C 1=1,2 JJ=NCDILL,ll S12*1-l,Jl=Ol2*JJ-l,Jl
30 S(2*1,Jl=Dl2*JJ,JI DO 2C K=l,4 I=4*LL+K-4 DO 20 N=l,4
70
20 AEII,Jl=AEII,Jl+CIK,Nl*SIN,JI WRITE15,1001
100 FORMAT(///,13X,'ESFORCOS NAS EXTREMIDADES DOS ELEMENTOS',/, *13X,39{'-'II
DO 60 J=l,NCOLN WRITE15,llOIJ
110 FORMATl/,22X,'CARREGAMENTO NUMER0',12,/~22X,211'-'l} WRITE15,2201
220 FORMAT(2X,'EL.',11X,'AE1',12X,'AE2',12X,'AE3',12X,'AE4') DO 60 LL=l,NELEM
60 WRIJEl5,1201LL,AE(4*LL-3,Jl,AEl4*LL-2,Jl,AEl4*LL-1,Jl,AEl4*LL,Jl 120 FORMATl1X,I3,4El5.61
RETURN END SUBROUTINE MOFLEINPOIN,NELEM,NCOLNl OIMENSION 8(12l,R{l20l,MEDl40l COMMON Cl12,12l,XE14,2l,NOD(40,41,STl120,1201,Ull20,4l,
*Xl4-0,2l,Ql40l,OBAl12,121,Kl,K2 1 K3 1 01120 1 4l~F(40 1 40l, *AE{240,4l
C ESTA SUBROTINA CALCULA CS MOMENTOS FLETORES NOS NOS 00 C ELEMENTO OE PLACA. e
00 lC 1=1,NPOIN 10 MEO<ll=O
DO 20 LL=l,NELEM DO 20 1=1,4 JJ=NOO(LL,Il

20 MEOIJJ)=MEOIJJ)+l 00 30 J= 1, NCOLN NLIB=3*NPGIN 00 40 I=l,NLIB
40 R(Il=O. Kl=l
71
00 50 LL=l,NELEM REAOllO'KllllOBAll,Kl,1=1,121,K=l,12) 00 .60 I=l,4 JJ=NOOILL,II Cl3*1-2,Jl=Dl3*JJ-2,J) Cl3*I-1,Jl=Ol3*JJ-1,JI
60 Cl3*I,Jl=Ol3*JJ,JI 00 70 1=1,12 B( 1 l=O,· 00 70 K=l,12
70 Blll=BIIl+OBAll,K)*CIK,J) 00 50 I=l,4 JJ=NOO(LL,I) Rl3*JJ-2)=R(3*JJ-2)+8(3*1-2) · R(3*JJ-ll=Rl3*JJ-1)+813*1-ll
50 R(3*JJl=Rl3*JJl+Bl3*II DO 30 1=1,NPOIN Dl3•I-2,Jl=Rl3*1-21/MEDIII Ol3*1-1,Jl=Rl3*1-ll/MEOIII
30 Dl3*I,Jl=R(3*ll/MEDIII WRITEIS,1001
100 FORMAT(///,24X,'MOMENTOS FLETORES',/,24X,17('-'ll DO 90 J=l,NCOLN WRITEIS,llOIJ
110 FORMAT(/ 1 22X,'CARREGAMENTO NUMER0',12,/,22X,211'-'1,/,6X, *'N0',8X,'f'.OMENTO x•,ax,•MO".ENTO Y',7X,'M0"ENTG XY'l
90 WRITEl5,1201(1,013*1-2,Jl,013*1-1,Jl,0(3*1,Jl,1=1,NPOINI 120 FORMAT(5X,I3,3El7,6)
RETURN ENO
e
72
SUBROUTINE MARllfNELEM,NPOIN,EO,XNIO,NNOD,BASEI OIMENSIGN BASEl40I COMMGN C(12,121,XE(4,21,NOOl40,41,STl120,1201,U{l20,4l,
*Xl40,21,Ql401,DBA(l2,12l,Kl,K2,K3,Dll20,41,Fl40,40), *AEl240,4I
C ESTA SUBROTINA CALCULA A MATRIZ DE RIGIDEZ DO SOLO c
SHIIXJ•ALOG(l.+SQRTIX*X+l.ll DO 20 1=1,NPOIN IFINNGD-2)15,100,110
100 IFII-1115,85,80 85 OlA=X(l+l,ll-XII,11
OIB=BASEIIJ GOTO 130
80 IFII-NPGINJ90,95,l5 90 OIA=C.5*1X( I+l, ll-X(I-1,111
DIB=0.5*1BASEIIl+BASE(I-lll GO 10· 130
95 DIA•X(lill-X(l-1,ll DIB=BASE ( 1-11 GOTO 130
110 DO 10 K•l,3 J=NOO(l,Kl XE(K,1l=X(J, li
10 XEIK,21=XIJ,2I OIA=SQRTIIXEl3•ll-XE(2,lll**2+1XEl3,2l-XEl2,211**21 DIB=SQRTl{XEl1,11-XEl2,lll**2+(XEl1,21-XEl2,211**21
130 XB=Dl.6/01B. XC=DIB/DIA ll=l-1 lflllll5,20,25
25 DO 30 J=l,11 R=SQRTI IXll,ll-XIJ,ll l**2+1XII,21-XIJ,211**21
30 Fll,Jl=ll.-XNIO*XNIOl/13.l416*EO*RI 20 FII,Il=2*11.-XNIO*XNIOl/(DIA*3.1416*EOl*IXB*SHIIXCl+SHIIXBI

c
*l 00 4C I=l,NPOIN DO 40 J=l,1
40 FIJ,ll=Fll,Jl DO 45 1=1,NPOIN 00 45 J=l,NPOIN
45 STll,Jl=F(I,Jl
73
K3=1 WRITEl12 1 K3l11STII,Jl,I=l,NPOIN),J=l,NPOINI CALL INMATINPOIN)
15 RETIJRN END SUBROUTINE CANOEIK,NPOIN,NELE~,NNDDI COMMON Cl12,12l,XE(4,21,NODl40,41,STl120,120l,Ull20,41,
*Xl40,21 1 Ql40l,DBA(l2 1 121,Kl,K2,K3,D(l20,41,F(40,40l, *AE{240,41 1
C ESTA SUBROTINA CALCULA AS CARGÀS NODAIS EQUIVALENTES A UM C CARREGA~ENTO UNIFORMEMENTE OISTRIBUIOO SOBRE O ELEMENTO. e
IF ( NNGD-2 13, 2, 3 2 DO 4 I= 1, NEL EM
NOl=NOD 11,11 N02=NOD(I,21 DO 5 J=l,2 JJ=NODtl ,Jl
5 XEIJ,ll=X(JJ,11 XL=XE(2,ll-XE!l,ll AEl4*I-3,Kl=-Q{ll*Xl/2. AEl4*1-2,Kl=QIIl*XL*XL/12. AE(4*1-2,Kl=AE(4*1-3iKI AEl4*I,Kl=-AEl4*1-2,KI Ul2*N01,Kl=Ul2*N01,KI-AE14*1-2,KI Ul2*NG2-1,Kl=Ul2*N02-l,KI-AE(4*l-1,Kl
4 U(2~N02,Kl=U(2*ND2,KI-AE(4*I,KI GO TO 10
c
3 00 lG l=l,NELE~ NOl=NOOII,11 N02=NOOII,2l N03=NOOII,3l N04=NOOII,4l 00 15 J=l,4 J J=NOO II, J 1 . XE(J,ll=XIJJ,11
15 XE(J,2l=XIJJ,2l
74
OIA=SQRTI IXEl3,ll-XE12, li l**Z+IXE13,21-XE12,211**·21 ·OIB=SQRTIIXE!l,11-XEIZ,111**2+(XE11,21-XEl2,211**21 CON=Q( I l*OIA*OIB U(3*N01-2~Kl~U(3*N01-2,Kl+CON/4. U l 3*N01-l ,K l=U 13*N01-l, K 1-CON*O I B/ 24. Ul3*N01,Kl=Ul3*N01,Kl+CON*OIA/24. Ul3*N02-2,Kl=U(3*N02-2,Kl+CON/4. Ul3*N02-l,Kl=U(3*N02-l,Kl+CON*OIB/24. Ul3*N02,Kl=Ul3*N02,Kl+CON*OIA/24. Ul3*N03-2,Kl=U(3*N03-2,Kl+CON/4. Ul3*N03-1,Kl=U(3*N03-l,Kl+CON*OIB/24. U(3*N03,Kl=Ul3*N03,KI-CON*OIA/24. Ul3*N04-2,Kl=U(3*N04-2,Kl+CON/4. Ul3*N04-l,Kl=Ul3*N04-1,KI-CON*DIB/24 •. Ul3*N04,Kl=Ul3*N04,Kl-CON*OIA/24.
10 CONTINUE RETURN ENO SUBROUTINE CCELE(K,NEJ OIMENSION P(3l,Al31 COM~ON C(l2,121,XE14,21,NOOt40,41,ST(l20,1201,Ull20,41,
*X(40,21,Q(401,0BAl12,121,Kl,K2,K3,0(l20,41,F(40,40l, *AEl240,41
C ESTA SUBROTINA CALCULA AS CARGAS NODAIS EQUIVALENTES PARA C UMA CARGA CONCENTRADA NO ELEMENTO OE VIGA. c

75
WRITE15,901 90 FORMAT(///,16X, 1 CARGAS CONCENTRADAS NOS ELEMENTOS',/,lfX,
*33t•-•J,/,16X,'ELEMENTO FORCA 2 DISTANCIA A'I DO 10 11=1,NE READt8,lOOII,NCC,tP{Jl,AtJJ,J=l,NCCI
100 FORMATl2I10,6Fl0.0I DO 30 J=l,NCC
30 WRITEt5,11011,PtJl,AIJI 110 FOR~ATl16X,I5,2El4.4l
NOl=NODll,11 NOZ=NODll,21 DO s·J=l,2 JJ=NODII,JI
5 XEIJ,ll=X(JJ,11 XL=XE12,ll-XE(l,11 DO 2C J=l,NCC B=XL-AIJI AEl4*I-3,Kl=AEl4*I-3,KI-IPIJl*B*B/Xl**3)*13*AIJl+BI AEl4*1-2,Kl=AE(4*I-2,Kl+P(Jl*A{Jl*B*B/XL**2 AEl4*1-l,Kl=AEl4*I-1,KI-P(Jl*AtJl*AIJl/XL**3*(AIJl+3.*BI AE(4*1,KJ=AEl4*I,KI-PtJl*AlJl*AIJl*B/Xl**2 NOl=NODtl,11 N02=NOOll,2J Ul2*N01-l,Kl=Ul2*N01-l,KI-AE(4*I-3,Kl U(2*NOl,Kl=Ul2*N01,KI-AEt4*I-2,KI U(2*N02-1,Kl=U(2*N02-1,KI-AEt4*1-l,KI Ul2*N02,Kl=Ul2*N02,KI-AE(4*1,KI
20 CONTINUE 10 CONTINUE
RETURN ENO











![ctc17 cap5.2 IntroMDP.ppt [Modo de Compatibilidade]pauloac/ctc17/ctc17_cap4.3.pdfO horizonte pode ser finito ou infinito. MDP de Horizonte Finito e Políticas Estacionárias Inteligência](https://img.document.onl/doc/110x75/614076d01664f1518558c599/ctc17-cap52-modo-de-compatibilidade-pauloacctc17ctc17cap43pdf-o-horizonte.jpg)