Embed Size (px)
Citation preview
SISTEMA DE MODELAGEM 3D DE COLUNA VERTEBRAL BASEADO EM IMAGENS DE RAIOS-X
Pedro Sampaio VieiraOrientador: Marcelo Gattass

SUMÁRIO
Introdução
Sistema de modelagem 3D
Experimentos computacionais
Conclusão
Trabalhos futuros

INTRODUÇÃOSISTEMAS DE AVALIAÇÃO POSTURAL
Software para Avaliação Postural - SAPO

INTRODUÇÃOSISTEMAS DE AVALIAÇÃO POSTURAL
Software para Avaliação Postural - SAPO

INTRODUÇÃOSISTEMAS DE AVALIAÇÃO POSTURAL
Reconstrução através de Tomografia Computadorizada (TC) e Ressonância Magnética (RM)
INTRODUÇÃO
Motivação Contruir um sistema baseado em imagens de raios-x
Baixo custo em relação a TC e RM Exposição a radiação Dificuldade psicológico ou técnica
Problema Modelar em 3D a coluna vertebral do paciente
Objetivo Tornar a avaliação postural mais precisa Permitir uma tomada de decisão mais qualificada Monitoramento do tratamento
SISTEMA DE MODELAGEM 3D
Aquisição das radiografias
Pré-processamento das imagens de raios-x
Marcação dos pontos chaves de cada vértebra
Cálculo da coordenada 3D dos pontos chaves (estereoradiografia)
Recuperação da posição e rotação de cada vértebra
AQUISIÇÃO DAS RADIOGRAFIAS
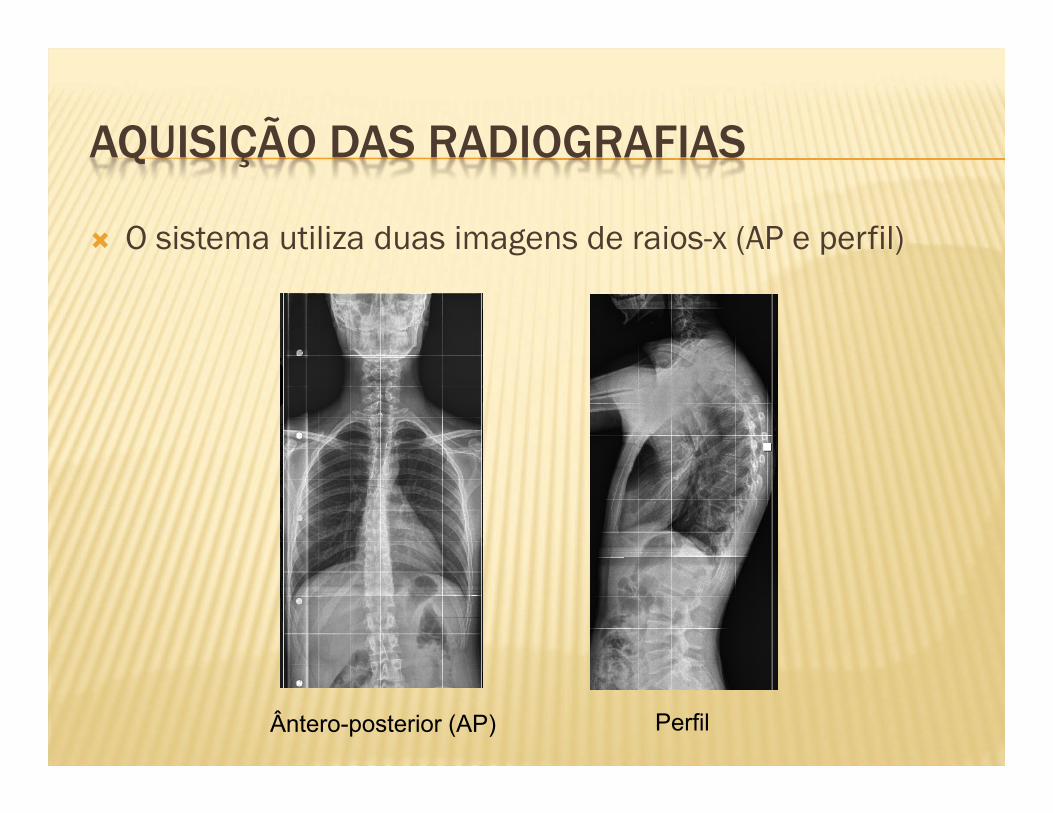
O sistema utiliza duas imagens de raios-x (AP e perfil)
Ântero-posterior (AP) Perfil

AQUISIÇÃO DAS RADIOGRAFIAS
Local
AQUISIÇÃO DAS RADIOGRAFIASCONSTRUÇÃO DA BASE
Suporte que armazena o filme é fixo
Movimentação do paciente entre as imagens em AP e perfil
Construção da base para atenuar o problema da transição entre a captura das radiografias

AQUISIÇÃO DAS RADIOGRAFIASCONSTRUÇÃO DA BASE
Base

AQUISIÇÃO DAS RADIOGRAFIAS
Configuração da estrutura Marcador de escala

AQUISIÇÃO DAS RADIOGRAFIAS
Medidas referentes aos objetos em cena
Base
Emissor de raios-x

AQUISIÇÃO DAS RADIOGRAFIASPROTOCOLO
Protocolo para retirada das radiografias
alinhar, pelo centro, emissor, suporte e base;
fixar no suporte os marcadores que definem o enquadramento da coluna vertebral do paciente;
fixar no suporte o marcador de escala;
posicionar o paciente em cima da base e retirar a radiografia em AP. Depois, rotacionar a base em 90º no sentido horário e retirar a radiografia em perfil;
realizar as medidas referentes aos objetos em cena.

RECUPERAÇÃO DOS PONTOS 3DFATOR DE ESCALA
Relação entre as medidas na imagem e no mundo (cena real)
Medidas na horizontal e vertical
hori wmundowimagem
vert hmundohimagem
RECUPERAÇÃO DOS PONTOS 3DMÉTODO 1
X
Y
Z
uAP
vAP
uperfil
vperfil
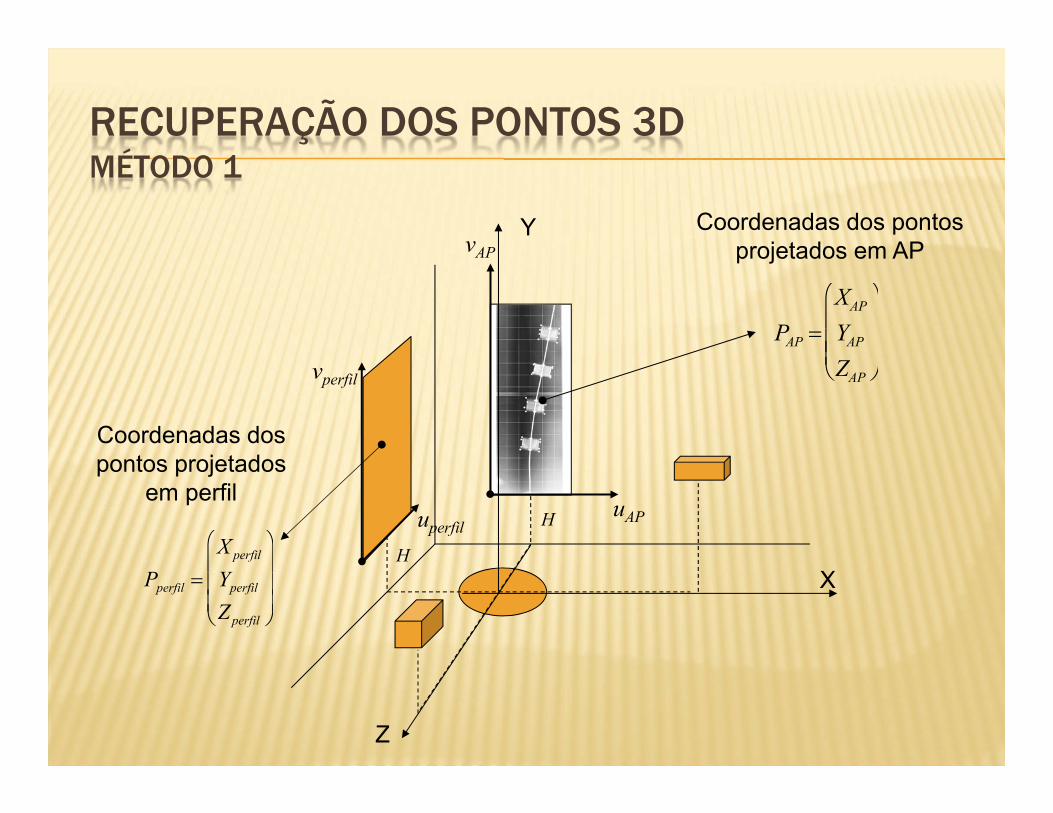
PAP XAPYAPZAP
Coordenadas dos pontos projetados em AP
Pperfil XperfilYperfilZperfil
Coordenadas dos pontos projetados
em perfilH
H
RECUPERAÇÃO DOS PONTOS 3DMÉTODO 1
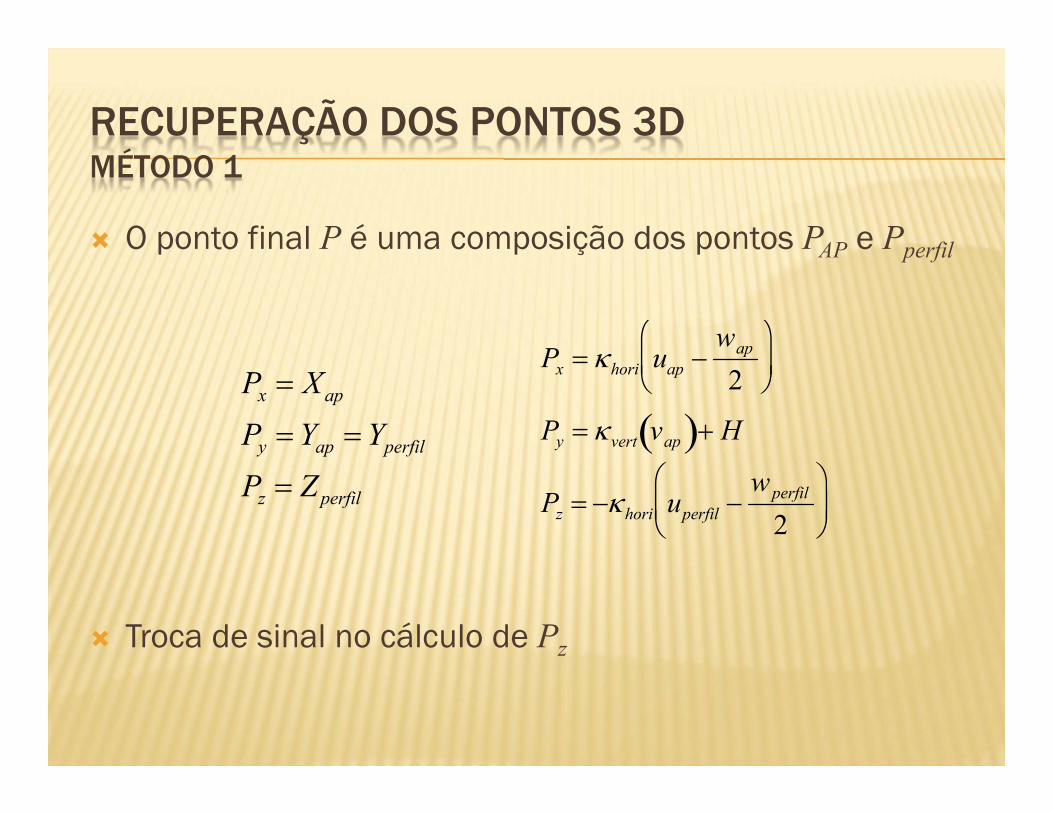
O ponto final P é uma composição dos pontos PAP e Pperfil
Troca de sinal no cálculo de Pz
Px XapPy Yap YperfilPz Zperfil
Px hori uap wap2
Py vert vap H
Pz hori uperfil wperfil
2
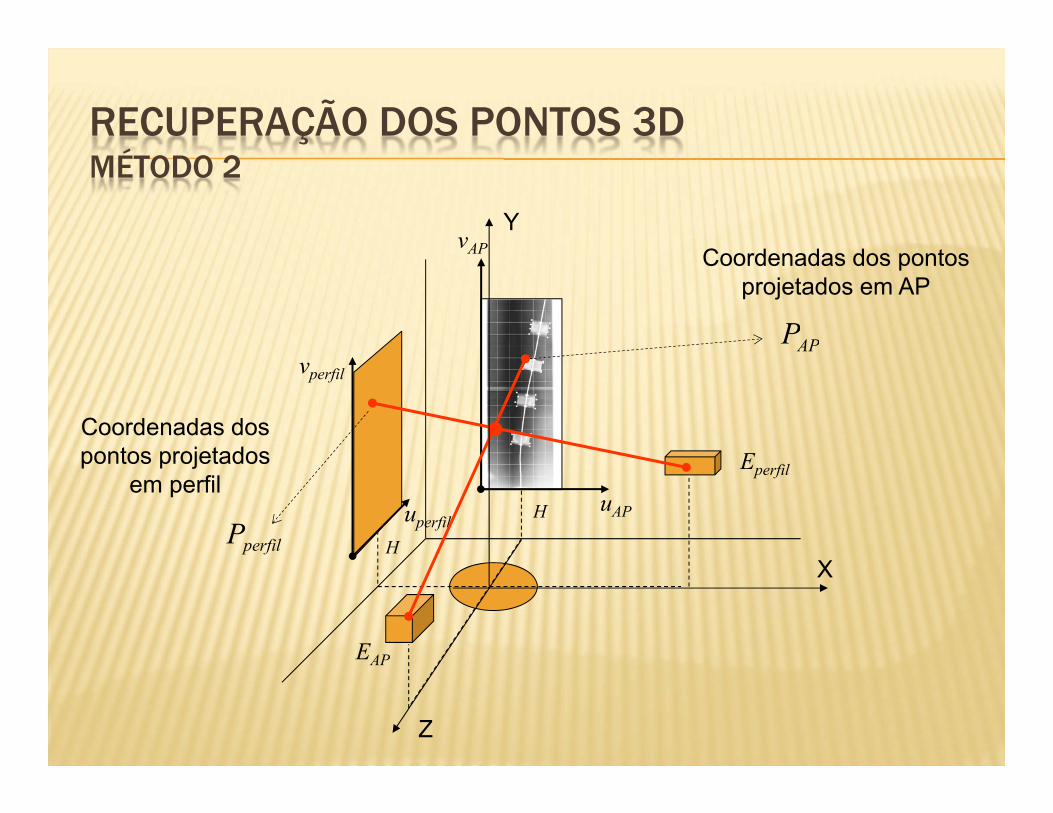
RECUPERAÇÃO DOS PONTOS 3DMÉTODO 2
X
Y
Z
uAP
vAP
uperfil
vperfilPAP
Coordenadas dos pontos projetados em AP
Pperfil
Coordenadas dos pontos projetados
em perfilH
H
Eperfil
EAP
RECUPERAÇÃO DOS PONTOS 3DMÉTODO 2
Encontrar a interseção das projeções dos pontos nas duas radiografias
Os pontos em cada imagem usam o mesmo fator de escala usado no método 1
Baixa probabilidade das retas coincidirem
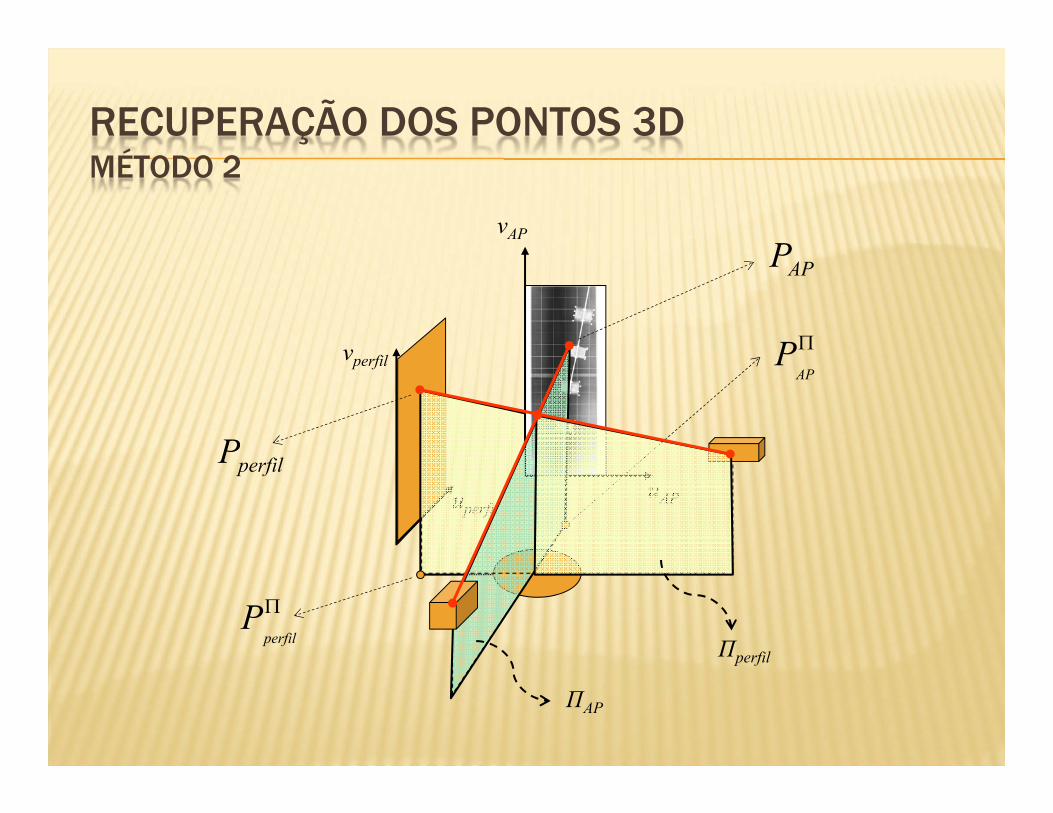
RECUPERAÇÃO DOS PONTOS 3DMÉTODO 2
uperfil
vperfil
uAP
vAPPAP
Pperfil
Pperfil
PAP
ΠAP
Πperfil

RECUPERAÇÃO DOS PONTOS 3DMÉTODO 2
Reta de interseção entre os dois planos
Ponto de interseção entre a linha Eperfil
com ΠAP
Ponto de interseção entre a linha EAP
com Πperfil
y final
uperfil
vperfil
uAP
vAP
Eperfil
EAP
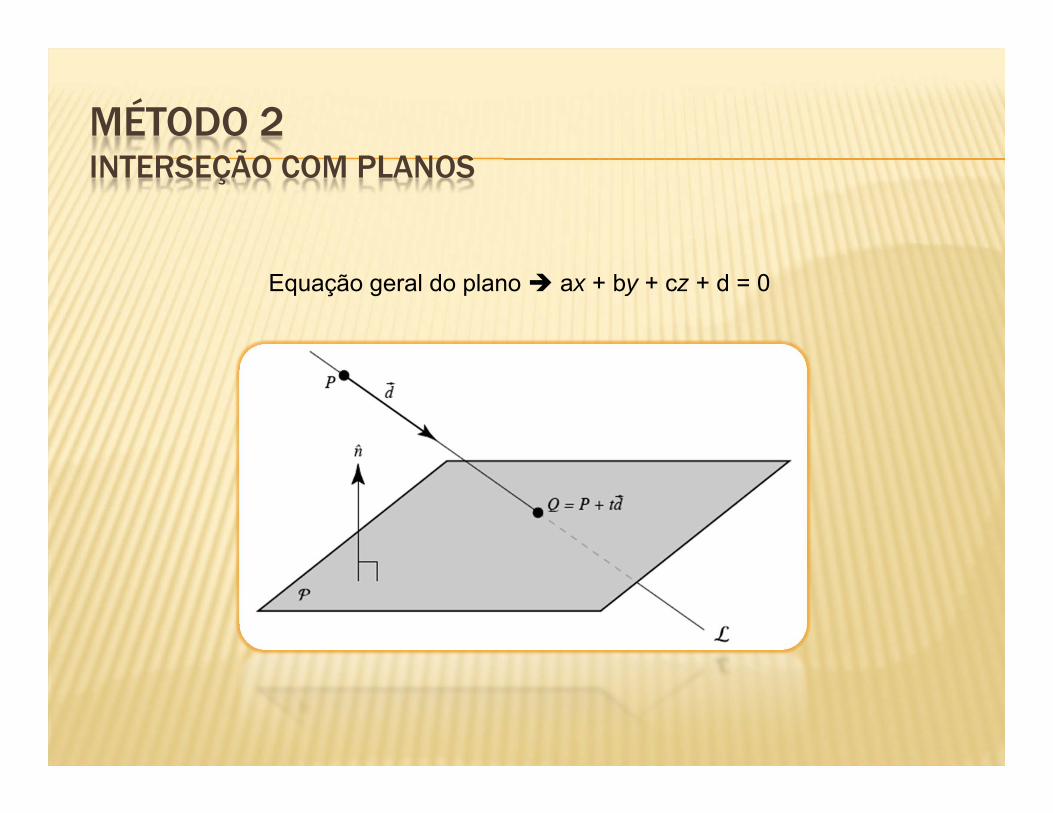
MÉTODO 2INTERSEÇÃO COM PLANOS
Equação geral do plano ax + by + cz + d = 0
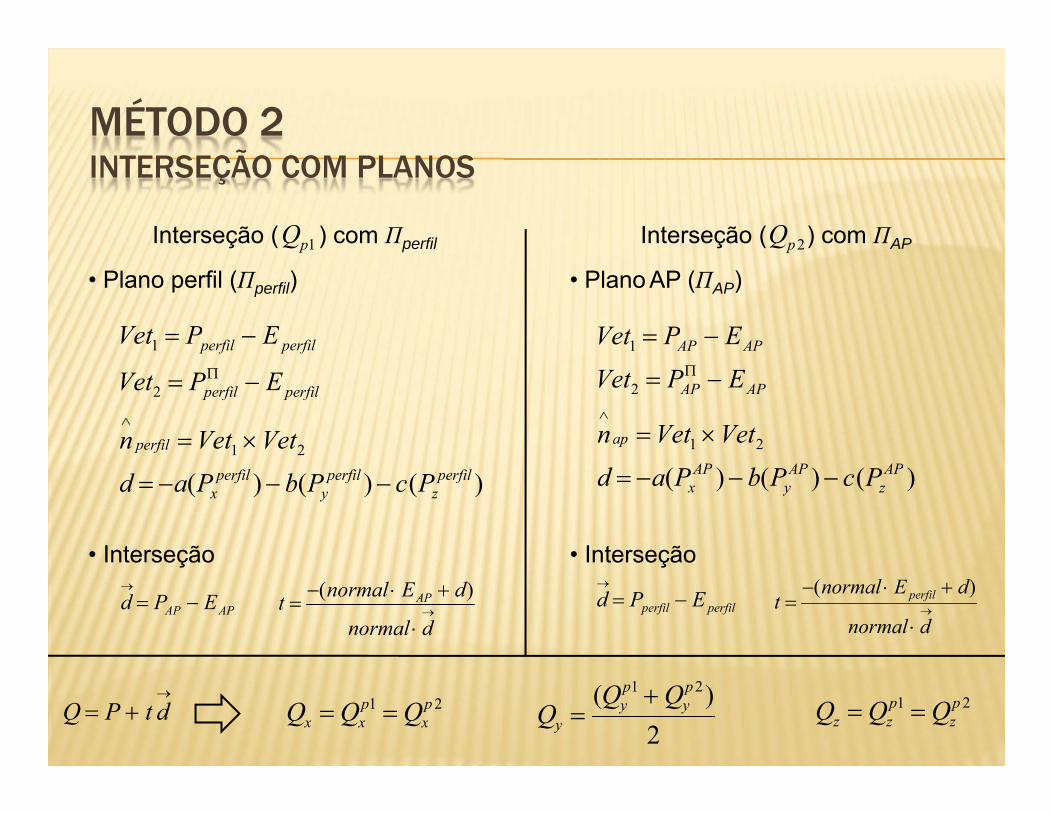
MÉTODO 2INTERSEÇÃO COM PLANOS
Interseção ( ) com Πperfil
• Plano perfil (Πperfil)
• Interseção
t (normal EAP d)
normal dd
PAP EAP
Interseção ( ) com ΠAP
• Plano AP (ΠAP)
• Interseção
t (normal Eperfil d)
normal d
d
Pperfil Eperfil
Q P t d
Qx Qxp1 Qx
p2 Qz Qzp1 Qz
p2Qy (Qy
p1 Qyp2)
2
Qp1 Qp2
Vet1 Pperfil EperfilVet2 Pperfil
Eperfil
n
perfil Vet1 Vet2d a(Px
perfil ) b(Pyperfil ) c(Pz
perfil )
Vet1 PAP EAPVet2 PAP
EAP
n
ap Vet1 Vet2d a(Px
AP ) b(PyAP ) c(Pz
AP )
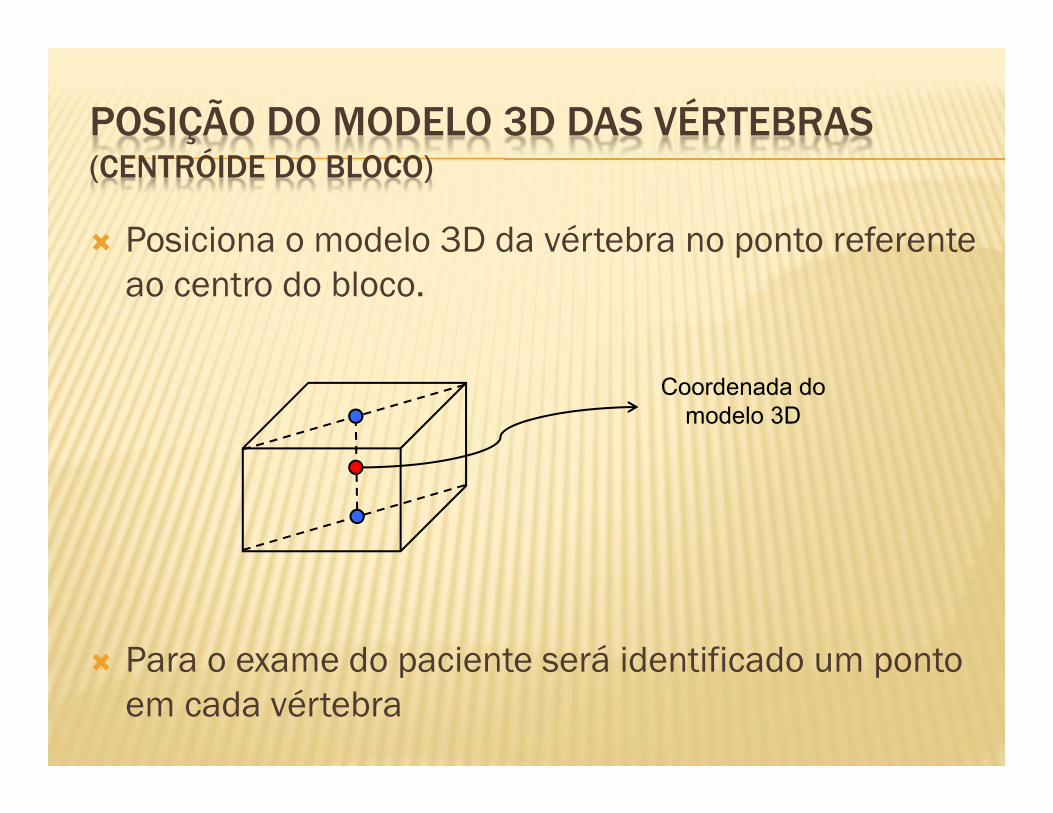
POSIÇÃO DO MODELO 3D DAS VÉRTEBRAS(CENTRÓIDE DO BLOCO)
Posiciona o modelo 3D da vértebra no ponto referente ao centro do bloco.
Para o exame do paciente será identificado um ponto em cada vértebra
Coordenada do modelo 3D
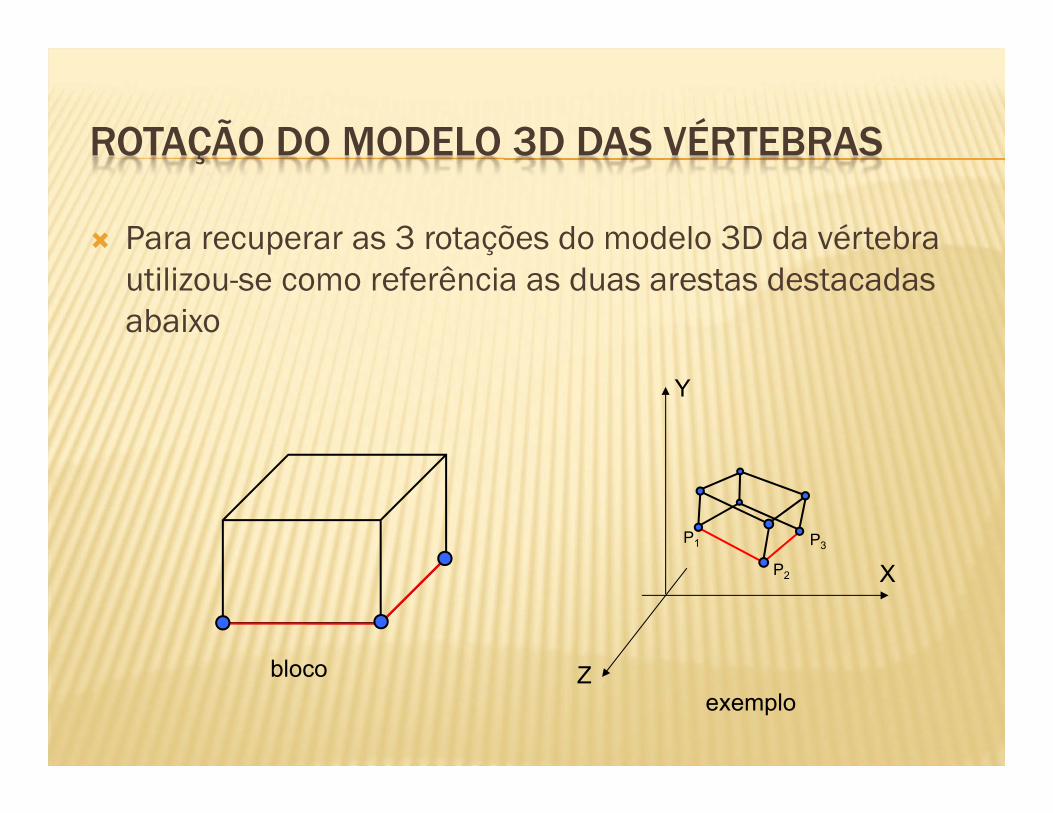
ROTAÇÃO DO MODELO 3D DAS VÉRTEBRAS
Para recuperar as 3 rotações do modelo 3D da vértebra utilizou-se como referência as duas arestas destacadas abaixo
blocoexemplo
X
Y
Z
P1
P2
P3

ROTAÇÃO DO MODELO 3D DAS VÉRTEBRAS(EIXO X)
V1 Px3,Py
3,Pz2 P3
V2 Px3,Py
2,Pz2 P3
α = ângulo entre V1 e V2
Se (Py3 – Py
2 < 0) então:
α é negativo
Senão:
α é positivo
X
Y
Z
P2
P3
V1
V2α
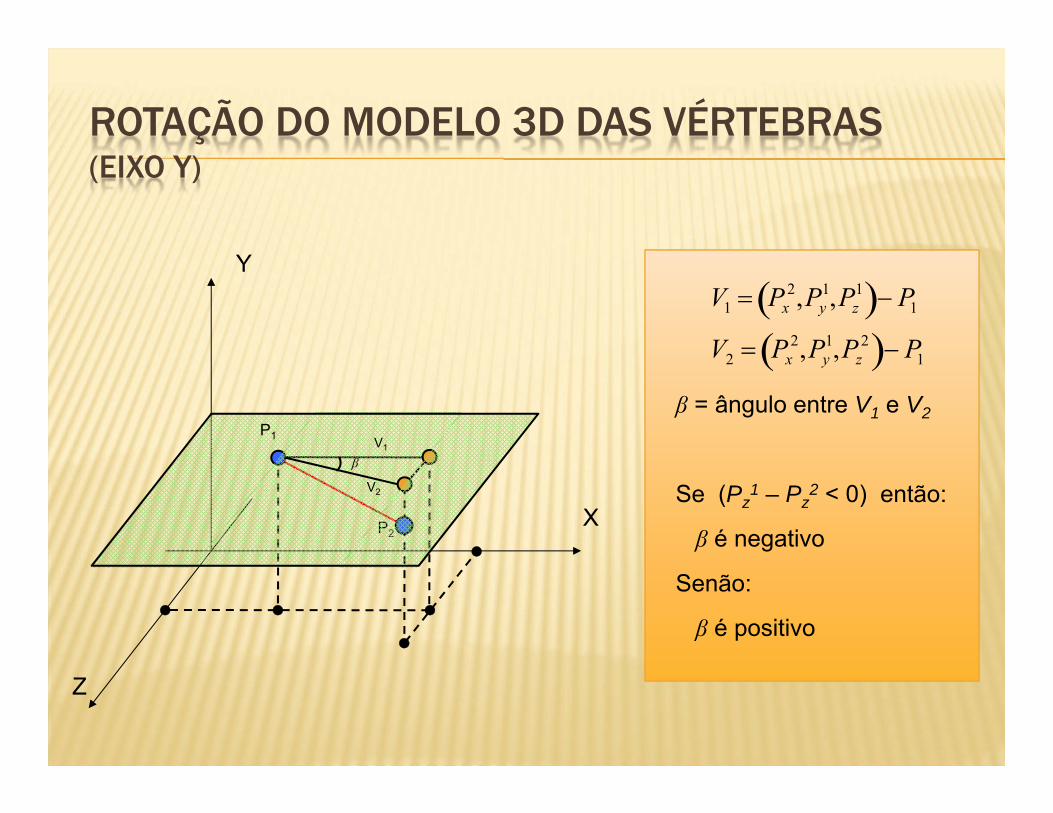
ROTAÇÃO DO MODELO 3D DAS VÉRTEBRAS(EIXO Y)
V1 Px2,Py
1,Pz1 P1
V2 Px2,Py
1,Pz2 P1
β = ângulo entre V1 e V2
Se (Pz1 – Pz
2 < 0) então:
β é negativo
Senão:
β é positivo
X
Y
Z
P2
P1
βV1
V2
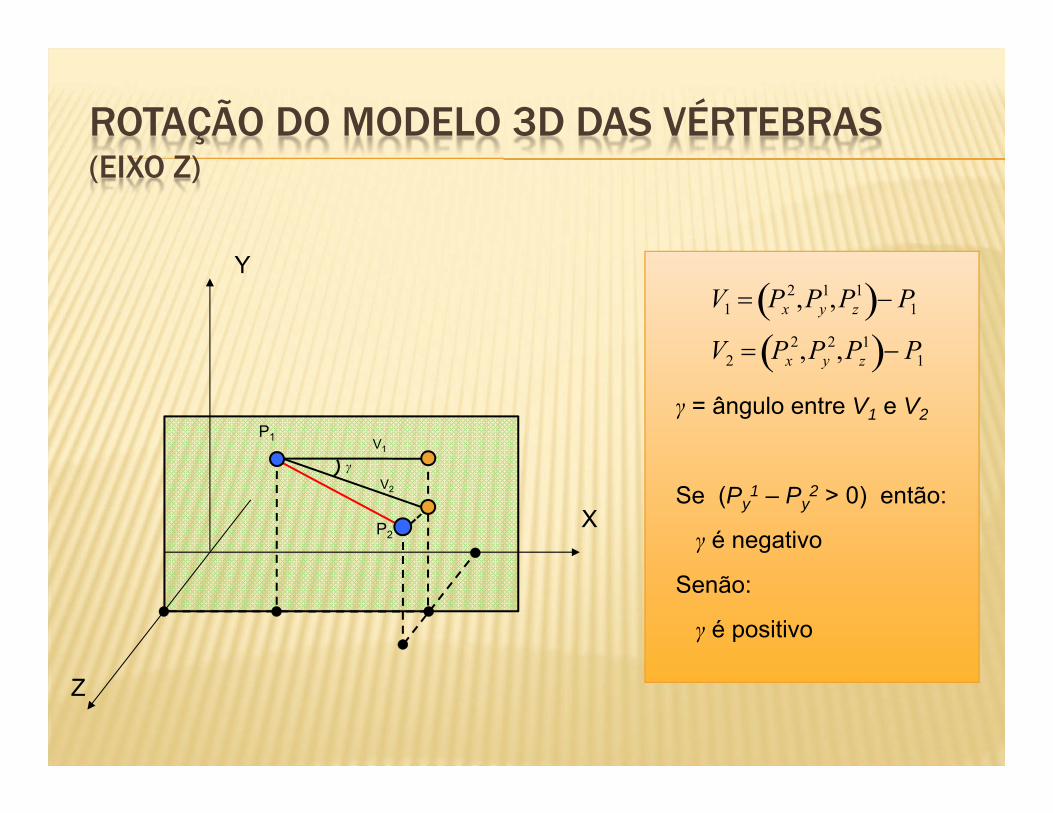
ROTAÇÃO DO MODELO 3D DAS VÉRTEBRAS(EIXO Z)
X
Y
Z
P2
γ
P1 V1
V2
V1 Px2,Py
1,Pz1 P1
V2 Px2,Py
2,Pz1 P1
γ = ângulo entre V1 e V2
Se (Py1 – Py
2 > 0) então:
γ é negativo
Senão:
γ é positivo

MARCAÇÃO DOS PONTOS CHAVES
Características da vértebra identificadas nas radiografias
Pontos que fornecem informações de posicionamento e rotação
Semelhança com o bloco

MARCAÇÃO DOS PONTOS CHAVES
Função de cada ponto: Posiciona o modelo 3D no ponto 4 Rotação em x, pontos 4 e 5 Rotação em y, pontos 3 e 4 Rotação em z, pontos 1 e 2
EXPERIMENTOS COMPUTACIONAIS
Linguagem de programação C/C++
Bibliotecas utilizadas Ogre3D – representação do ambiente 3D OpenCV – processamento de imagens e estrutura de dados GTK+ – interface gráfica
Radiografias adquiridas com colaboração da clínica RAD MED, especializada em diagnóstico por imagem

EXPERIMENTOS COMPUTACIONAIS
Tipos de radiografias
Convencional Computadorizado Digital Direta
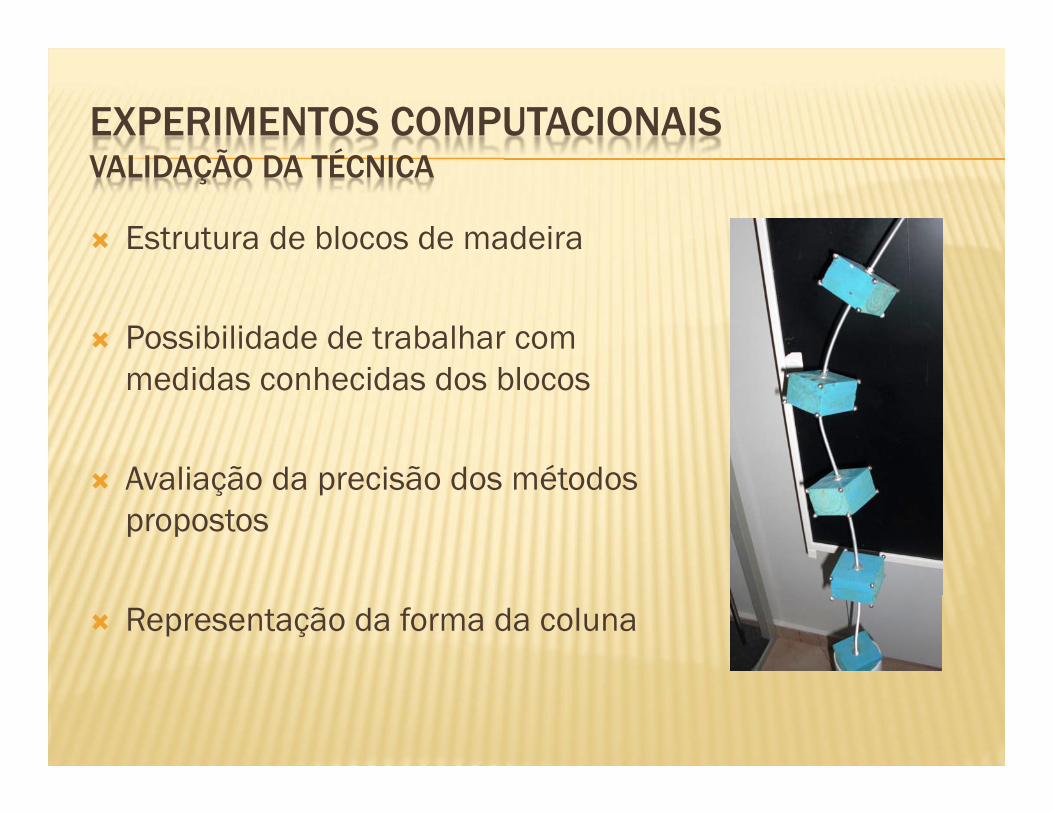
EXPERIMENTOS COMPUTACIONAISVALIDAÇÃO DA TÉCNICA
Estrutura de blocos de madeira
Possibilidade de trabalhar com medidas conhecidas dos blocos
Avaliação da precisão dos métodos propostos
Representação da forma da coluna

EXPERIMENTOS COMPUTACIONAISVALIDAÇÃO DA TÉCNICA
Estrutura construída para o experimento

EXPERIMENTOS COMPUTACIONAISVALIDAÇÃO DA TÉCNICA
Configuração do ambiente
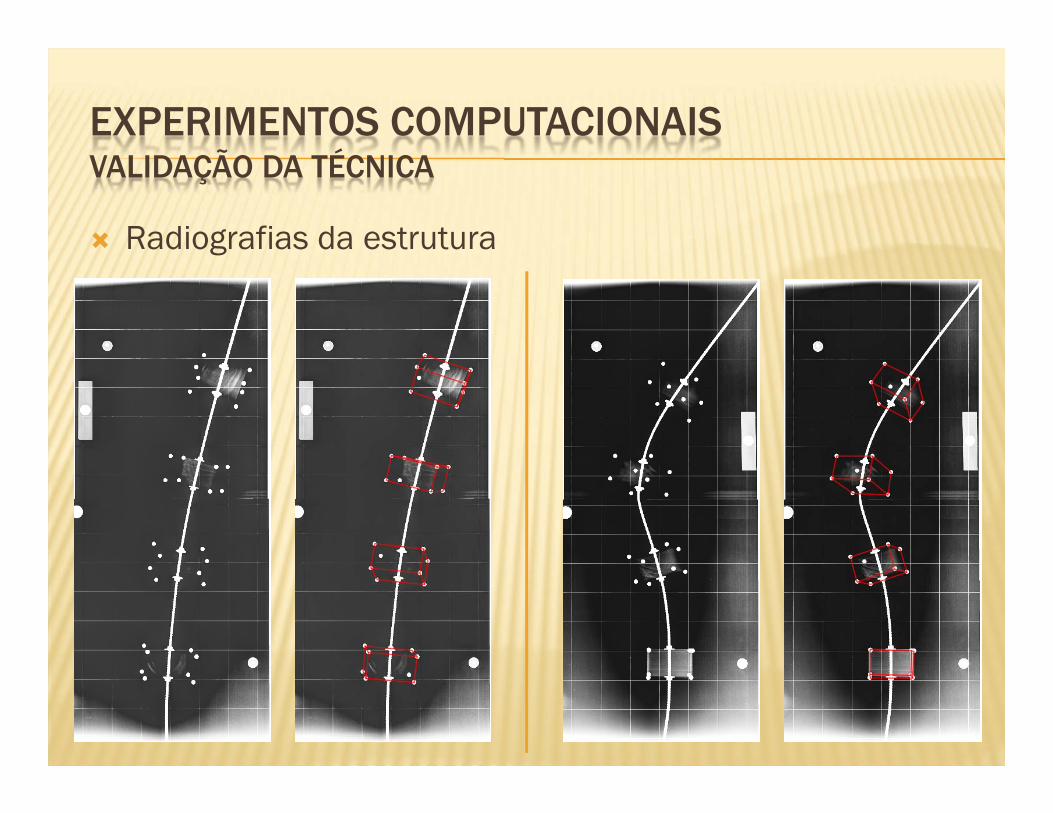
EXPERIMENTOS COMPUTACIONAISVALIDAÇÃO DA TÉCNICA
Radiografias da estrutura
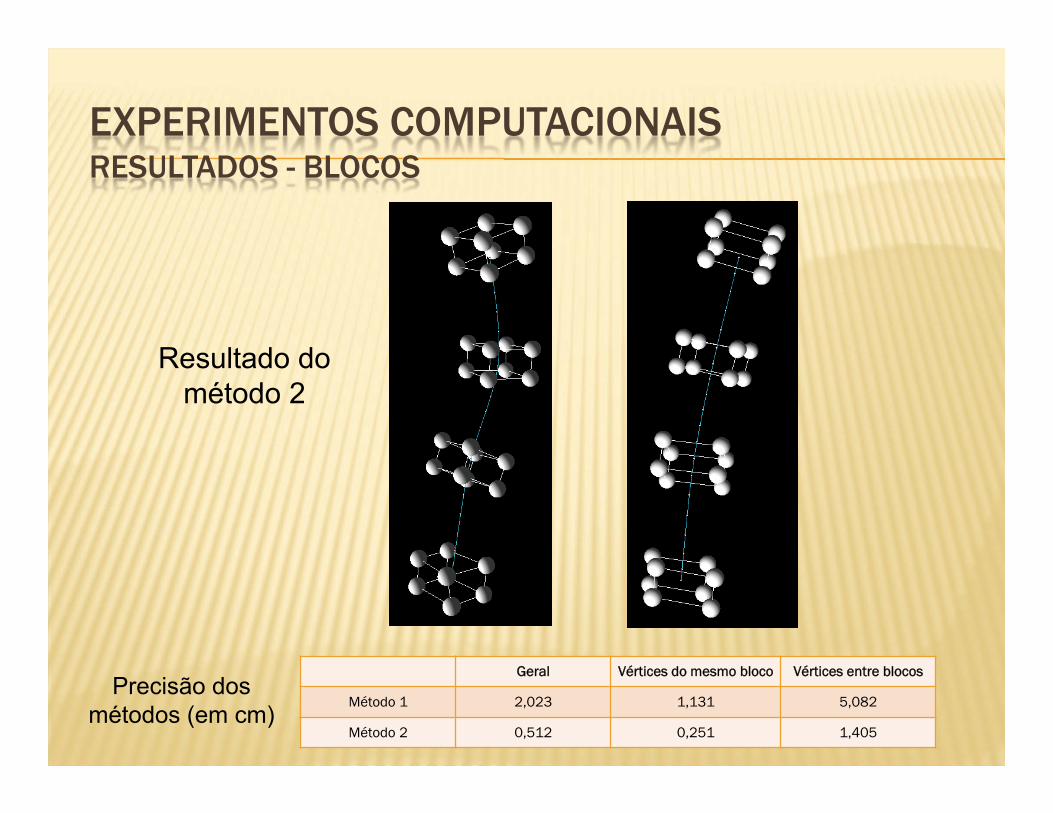
EXPERIMENTOS COMPUTACIONAISRESULTADOS - BLOCOS
Geral Vértices do mesmo bloco Vértices entre blocos
Método 1 2,023 1,131 5,082
Método 2 0,512 0,251 1,405
Resultado do método 2
Precisão dos métodos (em cm)
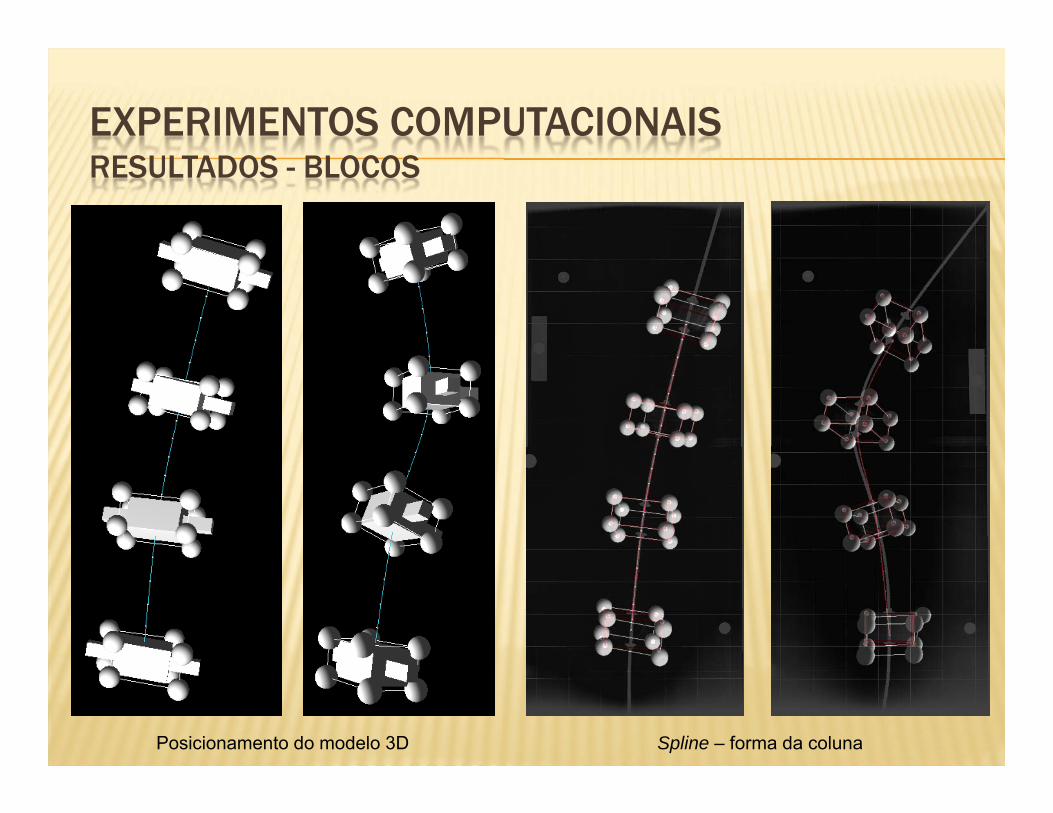
EXPERIMENTOS COMPUTACIONAISRESULTADOS - BLOCOS
Posicionamento do modelo 3D Spline – forma da coluna
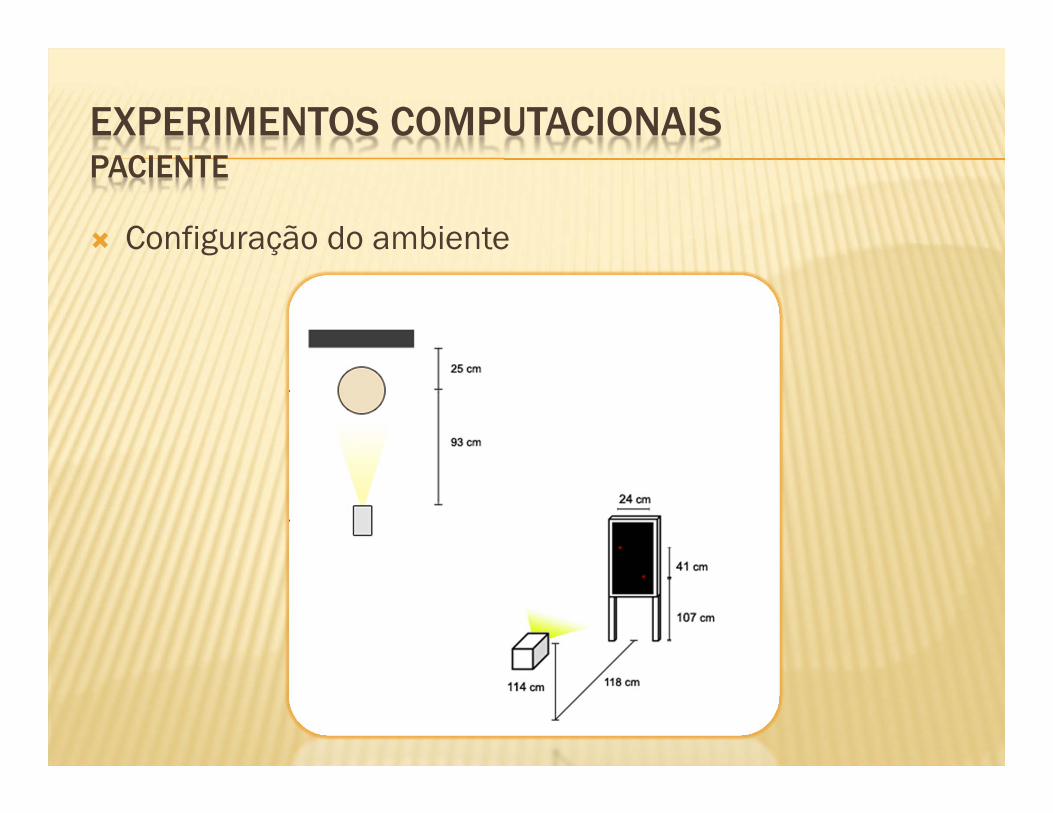
EXPERIMENTOS COMPUTACIONAISPACIENTE
Configuração do ambiente

EXPERIMENTOS COMPUTACIONAISPACIENTE
Radiografias do paciente

EXPERIMENTOS COMPUTACIONAISRESULTADOS - PACIENTE
Coluna vertebral 3D

EXPERIMENTOS COMPUTACIONAISRESULTADOS - PACIENTE
Avaliação qualitativa
RESULTADOSAVALIAÇÃO CLÍNICA
Informações do paciente: Dores de cabeça Incômodo nos olhos Dores na coluna, em específico na região lombar
Análise feita pelos profissionais da área médica
Detalhes e clareza na leitura do exame
Desenho do quadro clínico e elaboração do tratamento

EXPERIMENTOS COMPUTACIONAISAVALIAÇÃO CLÍNICA
Fator causador das dores lombares:
Compressão do lado esquerdo - pontada
Tração do lado direito -queimação
EXPERIMENTOS COMPUTACIONAISAVALIAÇÃO CLÍNICA
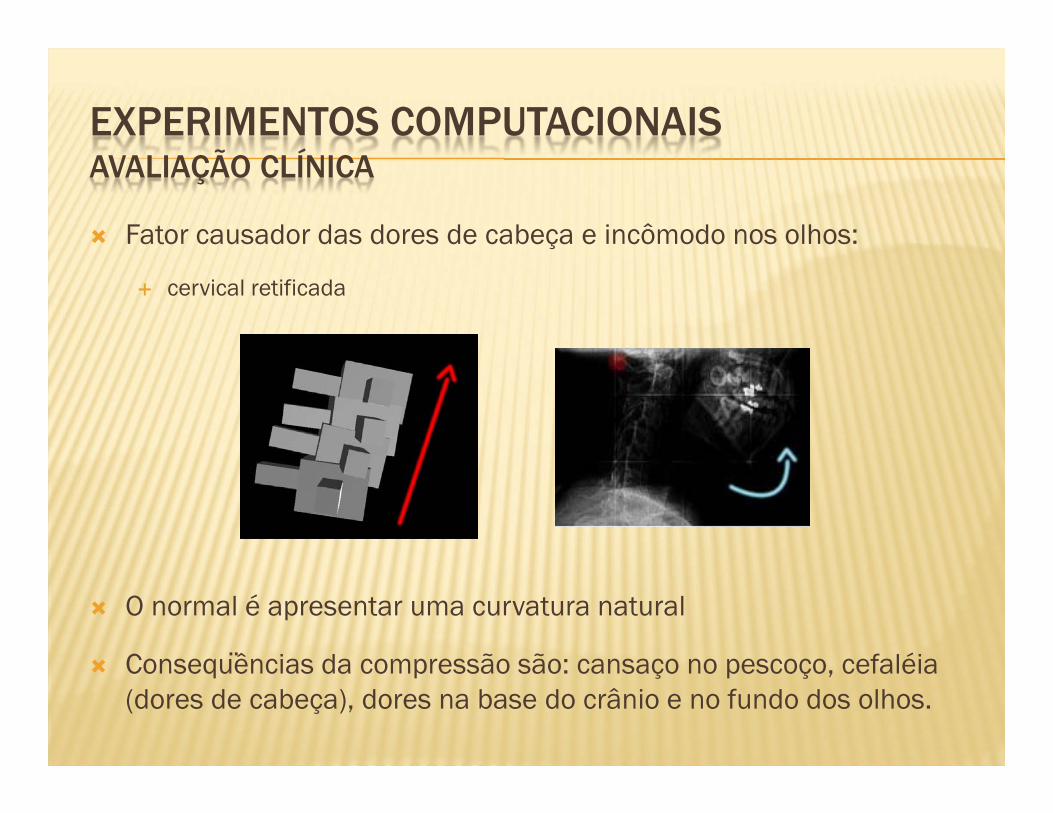
Fator causador das dores de cabeça e incômodo nos olhos:
cervical retificada
O normal é apresentar uma curvatura natural
Consequências da compressão são: cansaço no pescoço, cefaléia (dores de cabeça), dores na base do crânio e no fundo dos olhos.

EXPERIMENTOS COMPUTACIONAISAVALIAÇÃO CLÍNICA
Ângulo de Cobb na região torácica (2D)
Tratamento:
Uso de colete ortopédico no início
Reeducação postural (como RPG, por exemplo) direcionada às regiões críticas
EXPERIMENTOS COMPUTACIONAISDISCUSSÃO DOS RESULTADOS
O método 2 obteve os melhores resultados
Diferença de precisão quando comparado à distâncias maiores
No geral, o método apresentou boa precisão, ficando numa faixa aproximada de 4 mm da TC
Resultado próximo de trabalhos que utilizam imagens de raios-x com modelos estatísticos
CONCLUSÃOVANTAGENS DO SISTEMA 3D
Identificação mais clara e detalhada da estrutura da coluna vertebral
Identificação da trajetória articular de pequenos movimemtos que não são fornecidos por exame de raios-x
Identificação de pontos de maior compressão e tensão dos discos intervertebrais, possibilitando realizar intervenções preventivas.
Acompanhamento do tratamento Verificação dos seguimentos vertebrais ao longo do tempo Comparação das splines
TRABALHOS FUTUROS
Investigar a perda de precisão em distâncias maiores
Adição de outro equipamento de raios-x no processo de captura da imagens
Utilização da tecnologia de Radiografia Digital Direta
Tentativa de obter o modelo 3D de cada vértebra, mantendo sua forma geométrica
Adaptação do sistema para exames de outras partes do corpo humano
REFERÊNCIAS
POMERO V., MITTON D., LAPORTE S., GUISE J. A., SKALLI W. Fast accuratestereoradiographic 3d-reconstruction of the spine using a combinedgeometric and statistic model. Clinical Biomechanics, 19(3):240–247,Março 2004.
NOVOSAD J., CHERIET F., PETIT Y., LABELLE H. Three-Dimensional (3D)Reconstruction of the Spine From a Single X-Ray Image and Prior VertebraModels. IEEE Transactions on Biomedical Engineering, 51(9):1628-1639,Setembro 2004.
AGRADECIMENTOS
Aos pesquisadores do Instituto Superior de Ensino do CENSA, Felipe Sampaio Jorge e Jefferson da Silva
À clínica RAD MED, que nos forneceu o espaço e acesso ao equipamento de raios-x