-
8/2/2019 PID control automtico (proporcional integral
derivativo)
1/28
INSTITUTO TECNOLGICO SUPERIOR DE
SAN MARTN TEXMELCANOrganismo Pblico Descentralizado del Gobierno
del Estado
PRESENTA:
AGUSTIN DELGADO MACIAS
TEMA
PID
8 SEMESTRE
GRUPO B TURNO VESPERTINO
San Martin Texmelucan Pu. Marzo de 201
NOMBRE DEL PROFESOR:
ING. ALFREDO FLORES CONDE
MATERIA
AUTOMATIZACION
INGENIERA ELECTROMECNICA
-
8/2/2019 PID control automtico (proporcional integral
derivativo)
2/28
INTRODUCCIN
Veremos la familia de controladores PID, que mostraron ser
robustos en muchasaplicaciones y son los que ms se utilizan en la
industria. La estructura de uncontrolador PID es simple, aunque su
simpleza es tambin su debilidad, dado que
limita el rango de plantas donde pueden controlar en forma
satisfactoria (existe ungrupo de plantas inestables que no pueden
estabilizadas con ningn miembro dela familia PID). Tambin
estudiaremos los enfoques tradicionales al diseo decontroladores
PID.
QUE ES EL PID?
Un PID (Proporcional Integral Derivativo) es un mecanismo de
controlpor realimentacin que calcula la desviacin o error entre un
valor medido y elvalor que se quiere obtener, para aplicar una
accin correctora que ajuste elproceso. El algoritmo de clculo del
control PID se da en tres parmetros distintos:
el proporcional, el integral, y el derivativo. El valor
Proporcional determina lareaccin del error actual. El Integral
genera una correccin proporcional a laintegral del error, esto nos
asegura que aplicando un esfuerzo de controlsuficiente, el error de
seguimiento se reduce a cero. El Derivativo determina lareaccin del
tiempo en el que el error se produce. La suma de estas tres
accioneses usada para ajustar al proceso va un elemento de control
como la posicin deuna vlvula de control o la energa suministrada a
un calentador, por ejemplo.Ajustando estas tres variables en el
algoritmo de control del PID, el controladorpuede proveer un
control diseado para lo que requiera el proceso a realizar.
Larespuesta del controlador puede ser descrita en trminos de
respuesta del controlante un error, el grado el cual el controlador
llega al "set point", y el grado
de oscilacin del sistema. Ntese que el uso del PID para control
no garantizacontrol ptimo del sistema o la estabilidad del mismo.
Algunas aplicacionespueden solo requerir de uno o dos modos de los
que provee este sistema decontrol. Un controlador PID puede ser
llamado tambin PI, PD, P o I en laausencia de las acciones de
control respectivas. Los controladores PI sonparticularmente
comunes, ya que la accin derivativa es muy sensible al ruido, y
laausencia del proceso integral puede evitar que se alcance al
valor deseado debidoa la accin de control.
http://es.wikipedia.org/wiki/Realimentaci%C3%B3nhttp://es.wikipedia.org/wiki/Algoritmohttp://es.wikipedia.org/wiki/Oscilaci%C3%B3nhttp://es.wikipedia.org/wiki/Estabilidadhttp://es.wikipedia.org/wiki/Estabilidadhttp://es.wikipedia.org/wiki/Oscilaci%C3%B3nhttp://es.wikipedia.org/wiki/Algoritmohttp://es.wikipedia.org/wiki/Realimentaci%C3%B3n
-
8/2/2019 PID control automtico (proporcional integral
derivativo)
3/28
Controlador PID en lazo cerrado.
Funcionamiento
Para el correcto funcionamiento de un controlador PID que regule
un proceso o
sistema se necesita, al menos:
1. Un sensor, que determine el estado del sistema (termmetro,
caudalmetro,
manmetro, etc.).
2. Un controlador, que genere la seal que gobierna al
actuador.
3. Un actuador, que modifique al sistema de manera controlada
(resistencia
elctrica, motor, vlvula, bomba, etc.).
El sensor proporciona una seal analgica o digital al
controlador, la cual
representa el punto actual en el que se encuentra el proceso o
sistema. La seal
puede representar ese valor en tensin elctrica, intensidad de
corriente
elctrica o frecuencia. En este ltimo caso la seal es de
corriente alterna, a
diferencia de los dos anteriores, que son con corriente
continua.
El controlador lee una seal externa que representa el valor que
se desea
alcanzar. Esta seal recibe el nombre de punto de consigna (o
punto de
referencia), la cual es de la misma naturaleza y tiene el mismo
rango de valores
que la seal que proporciona el sensor. Para hacer posible esta
compatibilidad y
que, a su vez, la seal pueda ser entendida por un humano, habr
que establecer
algn tipo de interfaz(HMI-Human Machine Interface), son
pantallas de gran valor
visual y fcil manejo que se usan para hacer ms intuitivo el
control de un proceso.
El controlador resta la seal de punto actual a la seal de punto
de consigna,
obteniendo as la seal de error, que determina en cada instante
la diferencia que
http://es.wikipedia.org/wiki/Term%C3%B3metrohttp://es.wikipedia.org/wiki/Caudal%C3%ADmetrohttp://es.wikipedia.org/wiki/Man%C3%B3metrohttp://es.wikipedia.org/wiki/Resistencia_el%C3%A9ctricahttp://es.wikipedia.org/wiki/Resistencia_el%C3%A9ctricahttp://es.wikipedia.org/wiki/Bomba_(m%C3%A1quina)http://es.wikipedia.org/wiki/Se%C3%B1al_anal%C3%B3gicahttp://es.wikipedia.org/wiki/Se%C3%B1al_digitalhttp://es.wikipedia.org/wiki/Tensi%C3%B3n_el%C3%A9ctricahttp://es.wikipedia.org/wiki/Intensidad_de_corriente_el%C3%A9ctricahttp://es.wikipedia.org/wiki/Intensidad_de_corriente_el%C3%A9ctricahttp://es.wikipedia.org/wiki/Frecuenciahttp://es.wikipedia.org/wiki/Corriente_alternahttp://es.wikipedia.org/wiki/Corriente_continuahttp://es.wikipedia.org/wiki/Interfazhttp://es.wikipedia.org/wiki/Interfazhttp://es.wikipedia.org/wiki/Corriente_continuahttp://es.wikipedia.org/wiki/Corriente_alternahttp://es.wikipedia.org/wiki/Frecuenciahttp://es.wikipedia.org/wiki/Intensidad_de_corriente_el%C3%A9ctricahttp://es.wikipedia.org/wiki/Intensidad_de_corriente_el%C3%A9ctricahttp://es.wikipedia.org/wiki/Tensi%C3%B3n_el%C3%A9ctricahttp://es.wikipedia.org/wiki/Se%C3%B1al_digitalhttp://es.wikipedia.org/wiki/Se%C3%B1al_anal%C3%B3gicahttp://es.wikipedia.org/wiki/Bomba_(m%C3%A1quina)http://es.wikipedia.org/wiki/Resistencia_el%C3%A9ctricahttp://es.wikipedia.org/wiki/Resistencia_el%C3%A9ctricahttp://es.wikipedia.org/wiki/Man%C3%B3metrohttp://es.wikipedia.org/wiki/Caudal%C3%ADmetrohttp://es.wikipedia.org/wiki/Term%C3%B3metro
-
8/2/2019 PID control automtico (proporcional integral
derivativo)
4/28
hay entre el valor deseado (consigna) y el valor medido. La seal
de error es
utilizada por cada uno de los 3 componentes del controlador PID.
Las 3 seales
sumadas, componen la seal de salida que el controlador va a
utilizar para
gobernar al actuador. La seal resultante de la suma de estas
tres se
llama variable manipulada y no se aplica directamente sobre el
actuador, sino quedebe ser transformada para ser compatible con el
actuador utilizado.
Las tres componentes de un controlador PID son: parte
Proporcional,
accin Integral y accin Derivativa. El peso de la influencia que
cada una de estas
partes tiene en la suma final, viene dado por la constante
proporcional, el tiempo
integral y el tiempo derivativo, respectivamente. Se pretender
lograr que el bucle
de control corrija eficazmente y en el mnimo tiempo posible los
efectos de las
perturbaciones.
ProporcionalArtculo principal: Control proporcional
Proporcional.
La parte proporcional consiste en el producto entre la seal de
error y la constante
proporcional como para que hagan que el error en estado
estacionario sea casi
nulo, pero en la mayora de los casos, estos valores solo sern
ptimos en una
determinada porcin del rango total de control, siendo distintos
los valores ptimos
para cada porcin del rango. Sin embargo, existe tambin un valor
lmite en la
constante proporcional a partir del cual, en algunos casos, el
sistema alcanza
valores superiores a los deseados. Este fenmeno se llama sobre
oscilacin y, por
razones de seguridad, no debe sobrepasar el 30%, aunque es
conveniente que la
parte proporcional ni siquiera produzca sobre oscilacin. Hay una
relacin lineal
http://es.wikipedia.org/w/index.php?title=Control_proporcional&action=edit&redlink=1http://es.wikipedia.org/wiki/Multiplicaci%C3%B3nhttp://es.wikipedia.org/w/index.php?title=Valor_l%C3%ADmite&action=edit&redlink=1http://es.wikipedia.org/w/index.php?title=Sobreoscilaci%C3%B3n&action=edit&redlink=1http://es.wikipedia.org/wiki/Archivo:Proporcional.PNGhttp://es.wikipedia.org/w/index.php?title=Sobreoscilaci%C3%B3n&action=edit&redlink=1http://es.wikipedia.org/w/index.php?title=Valor_l%C3%ADmite&action=edit&redlink=1http://es.wikipedia.org/wiki/Multiplicaci%C3%B3nhttp://es.wikipedia.org/w/index.php?title=Control_proporcional&action=edit&redlink=1
-
8/2/2019 PID control automtico (proporcional integral
derivativo)
5/28
continua entre el valor de la variable controlada y la posicin
del elemento final de
control (la vlvula se mueve al mismo valor por unidad de
desviacin). La parte
proporcional no considera el tiempo, por lo tanto, la mejor
manera de solucionar
el error permanente y hacer que el sistema contenga alguna
componente que
tenga en cuenta la variacin respecto al tiempo, es incluyendo y
configurando lasacciones integral y derivativa.
La frmula del proporcional est dada por:
El error, la banda proporcional y la posicin inicial del
elemento final de control se
expresan en tanto por uno. Nos indicar la posicin que pasar a
ocupar el
elemento final de control
Ejemplo: Cambiar la posicin de una vlvula (elemento final de
control)proporcionalmente a la desviacin de la temperatura
(variable) respecto al puntode consigna (valor deseado).
Integral
Artculo principal: Proporcional integral
Integral.
El modo de control Integral tiene como propsito disminuir y
eliminar el error en
estado estacionario, provocado por el modo proporcional. El
control integral acta
cuando hay una desviacin entre la variable y el punto de
consigna, integrando
esta desviacin en el tiempo y sumndola a la accin proporcional.
El
error es integrado, lo cual tiene la funcin de promediarlo o
sumarlo por un perodo
determinado; Luego es multiplicado por una constante I.
Posteriormente, la
http://es.wikipedia.org/w/index.php?title=Error_permanente&action=edit&redlink=1http://es.wikipedia.org/wiki/Proporcional_integralhttp://es.wikipedia.org/wiki/Integralhttp://es.wikipedia.org/wiki/Media_aritm%C3%A9ticahttp://es.wikipedia.org/wiki/Sumahttp://es.wikipedia.org/wiki/Archivo:Integral.PNGhttp://es.wikipedia.org/wiki/Archivo:Integral.PNGhttp://es.wikipedia.org/wiki/Sumahttp://es.wikipedia.org/wiki/Media_aritm%C3%A9ticahttp://es.wikipedia.org/wiki/Integralhttp://es.wikipedia.org/wiki/Proporcional_integralhttp://es.wikipedia.org/w/index.php?title=Error_permanente&action=edit&redlink=1
-
8/2/2019 PID control automtico (proporcional integral
derivativo)
6/28
respuesta integral es adicionada al modo Proporcional para
formar el control P + I
con el propsito de obtener una respuesta estable del sistema sin
error
estacionario.
El modo integral presenta un desfasamiento en la respuesta de 90
que sumados
a los 180 de la retroalimentacin ( negativa ) acercan al proceso
a tener un
retraso de 270, luego entonces solo ser necesario que el tiempo
muerto
contribuya con 90 de retardo para provocar la oscilacin del
proceso. >
Se caracteriza por el tiempo de accin integral en minutos por
repeticin. Es el
tiempo en que delante una seal en escaln, el elemento final de
control repite el
mismo movimiento correspondiente a la accin proporcional.
El control integral se utiliza para obviar el inconveniente del
offset (desviacinpermanente de la variable con respecto al punto de
consigna) de la banda
proporcional.
La frmula del integral est dada por:
Ejemplo: Mover la vlvula (elemento final de control) a una
velocidadproporcional a la desviacin respecto al punto de consigna
(variable deseada).
DerivativoArtculo principal: Proporcional derivativo
http://es.wikipedia.org/w/index.php?title=Proporcional_derivativo&action=edit&redlink=1http://es.wikipedia.org/wiki/Archivo:Derivativo.PNGhttp://es.wikipedia.org/wiki/Archivo:Derivativo.PNGhttp://es.wikipedia.org/w/index.php?title=Proporcional_derivativo&action=edit&redlink=1
-
8/2/2019 PID control automtico (proporcional integral
derivativo)
7/28
Derivativo.
La accin derivativa se manifiesta cuando hay un cambio en el
valor absoluto del
error; (si el error es constante, solamente actan los modos
proporcional e
integral).
El error es la desviacin existente entre el punto de medida y el
valor consigna, o
"Set Point".
La funcin de la accin derivativa es mantener el error al mnimo
corrigindolo
proporcionalmente con la misma velocidad que se produce; de esta
manera evita
que el error se incremente.
Se deriva con respecto al tiempo y se multiplica por una
constante D y luego se
suma a las seales anteriores (P+I). Es importante adaptar la
respuesta de control
a los cambios en el sistema ya que una mayor derivativa
corresponde a un cambioms rpido y el controlador puede responder
acordemente.
La frmula del derivativo est dada por:
El control derivativo se caracteriza por el tiempo de accin
derivada en minutos de
anticipo. La accin derivada es adecuada cuando hay retraso entre
el movimiento
de la vlvula de control y su repercusin a la variable
controlada.
Cuando el tiempo de accin derivada es grande, hay inestabilidad
en el proceso.
Cuando el tiempo de accin derivada es pequeo la variable oscila
demasiado conrelacin al punto de consigna. Suele ser poco utilizada
debido a la sensibilidad al
ruido que manifiesta y a las complicaciones que ello
conlleva.
El tiempo ptimo de accin derivativa es el que retorna la
variable al punto de
consigna con las mnimas oscilaciones
Ejemplo: Corrige la posicin de la vlvula (elemento final de
control)proporcionalmente a la velocidad de cambio de la variable
controlada.
La accin derivada puede ayudar a disminuir el rebasamiento de la
variable
durante el arranque del proceso. Puede emplearse en sistemas con
tiempo de
retardo considerables, porque permite una repercusin rpida de la
variable
despus de presentarse una perturbacin en el proceso.
http://es.wikipedia.org/wiki/Funci%C3%B3n_derivadahttp://es.wikipedia.org/wiki/Se%C3%B1alhttp://es.wikipedia.org/wiki/Se%C3%B1alhttp://es.wikipedia.org/wiki/Funci%C3%B3n_derivada
-
8/2/2019 PID control automtico (proporcional integral
derivativo)
8/28
Significado de las constantes
P constante de proporcionalidad: se puede ajustar como el valor
de la gananciadel controlador o el porcentaje de banda
proporcional. Ejemplo: Cambia laposicin de la vlvula
proporcionalmente a la desviacin de la variable respecto al
punto de consigna. La seal P mueve la vlvula siguiendo fielmente
los cambios
de temperatura multiplicados por la ganancia.
I constante de integracin: indica la velocidad con la que se
repite la accin
proporcional.
D constante de derivacin: hace presente la respuesta de la accin
proporcional
duplicndola, sin esperar a que el error se duplique. El valor
indicado por la
constante de derivacin es el lapso de tiempo durante el cual se
manifestar la
accin proporcional correspondiente a 2 veces el error y despus
desaparecer.Ejemplo:Mueve la vlvula a una velocidad proporcional a
la desviacin respetoal punto de consigna. La seal I va sumando las
reas diferentes entre la variable
y el punto de consigna repitiendo la seal proporcional segn el
tiempo de accin
derivada (minutos/repeticin).
Tanto la accin Integral como la accin Derivativa, afectan a la
ganancia dinmica
del proceso. La accin integral sirve para reducir el error
estacionario, que existira
siempre si la constante Ki fuera nula. Ejemplo:Corrige la
posicin de la vlvulaproporcionalmente a la velocidad de cambio de
la variable controlada. La seal d
es la pendiente (tangente) por la curva descrita por la
variable.
La salida de estos tres trminos, el proporcional, el integral, y
el derivativo son
sumados para calcular la salida del controlador PID. Definiendo
u (t) como la
salida del controlador, la forma final del algoritmo del PID
es:
La teora del regulador PIDEl esquema de control PID es el nombre
de sus tres trminos de correccin, cuya
suma constituye la variable manipulada (MV). Los trminos
proporcionales,
integrales, y derivado se suman para calcular la salida del
controlador
PID. Definiendo como la salida del controlador, la forma final
del algoritmo
PID es:
-
8/2/2019 PID control automtico (proporcional integral
derivativo)
9/28
Donde
: Ganancia proporcional, un parmetro de ajuste
: Ganancia integral, un parmetro de ajuste
: Ganancia derivada, un parmetro de ajuste
: Error
: Tiempo o tiempo instantneo (el presente)
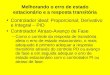
Trmino proporcional
Parcela de PV frente al tiempo, para tres valores de K p (K i y
K d se mantiene
constante)
El trmino proporcional realiza un cambio en la salida que es
proporcional al valor
de error de corriente. La respuesta proporcional puede ser
ajustado mediante la
multiplicacin del error por una constante K p, llamada la
ganancia proporcional.
El trmino proporcional est dada por:
Se produce una alta ganancia proporcional en un gran cambio en
la salida para un
cambio dado en el error. Si la ganancia proporcional es
demasiado alta, el sistema
puede volverse inestable (vase la seccin sobre optimizacin de
bucle). En
http://en.wikipedia.org/wiki/PID_controller#Loop_tuninghttp://en.wikipedia.org/wiki/File:Change_with_Kp.pnghttp://en.wikipedia.org/wiki/File:Change_with_Kp.pnghttp://en.wikipedia.org/wiki/File:Change_with_Kp.pnghttp://en.wikipedia.org/wiki/File:Change_with_Kp.pnghttp://en.wikipedia.org/wiki/File:Change_with_Kp.pnghttp://en.wikipedia.org/wiki/File:Change_with_Kp.pnghttp://en.wikipedia.org/wiki/File:Change_with_Kp.pnghttp://en.wikipedia.org/wiki/File:Change_with_Kp.pnghttp://en.wikipedia.org/wiki/File:Change_with_Kp.pnghttp://en.wikipedia.org/wiki/PID_controller#Loop_tuning
-
8/2/2019 PID control automtico (proporcional integral
derivativo)
10/28
contraste, se produce una pequea ganancia en una respuesta de
salida a un
pequeo error de entrada grande, y un controlador menos sensibles
o menos
sensibles. Si la ganancia proporcional es demasiado baja, la
accin de control
puede ser demasiado pequea al responder a las perturbaciones del
sistema.
Ajuste de la teora y la prctica industrial indica que el trmino
proporcional debecontribuir la mayor parte del cambio en la
salida.
Cada
Un controlador proporcional puro no siempre se asentar en su
valor objetivo, pero
puede retener un error de estado estacionario. Especficamente,
la deriva en la
ausencia de control, tales como el enfriamiento de un horno
hacia temperatura
ambiente, sesgos un controlador proporcional puro. Si la
tendencia es a la baja,
como en refrigeracin, entonces el sesgo ser por debajo del punto
de consigna,
de ah el trmino "cada".
Droop es proporcional a la ganancia del proceso e inversamente
proporcional a la
ganancia proporcional. En concreto, el error de estado
estacionario viene dada
por:
Cada es un vicio propio de control puramente proporcional. Cada
puede ser
mitigado mediante la adicin de una compensacin sesgo plazo
(ajuste de la
referencia por encima del verdadero valor deseado), o corregido
mediante laadicin de un trmino integral.
Trmino integral
http://en.wikipedia.org/wiki/File:Change_with_Ki.pnghttp://en.wikipedia.org/wiki/File:Change_with_Ki.png
-
8/2/2019 PID control automtico (proporcional integral
derivativo)
11/28
Parcela de PV frente al tiempo, para tres valores de K i (K p y
K d se mantiene
constante)
La contribucin del trmino integral es proporcional a la magnitud
del error y laduracin del error. El integrante de un controlador
PID es la suma del error
instantneo en el tiempo y ofrece la. Acumulado desplazamiento
que debera
haber sido corregido previamente El error acumulado se
multiplica por la ganancia
integral ( ) y se aadi a la salida del controlador.
El trmino integral est dada por:
El trmino integral acelera el movimiento del proceso hacia el
punto de ajuste y
elimina el residuo error de estado estacionario que se produce
con un controlador
proporcional puro. Sin embargo, dado que el trmino integral
responde a los
errores acumulados en el pasado, puede hacer que el valor actual
de exceso del
valor nominal (vase la seccin sobre optimizacin de bucle ).
Trmino derivativo
Parcela de PV frente al tiempo, para tres valores de K d (K p y
K i se mantiene
constante)
El derivado del error de proceso se calcula determinando la
pendiente del error en
el tiempo y multiplicando esta velocidad de cambio por la
ganancia derivada
http://en.wikipedia.org/wiki/Integralhttp://en.wikipedia.org/wiki/Overshoot_(signal)http://en.wikipedia.org/wiki/PID_controller#Loop_tuninghttp://en.wikipedia.org/wiki/Derivativehttp://en.wikipedia.org/wiki/File:Change_with_Kd.pnghttp://en.wikipedia.org/wiki/File:Change_with_Kd.pnghttp://en.wikipedia.org/wiki/File:Change_with_Kd.pnghttp://en.wikipedia.org/wiki/File:Change_with_Kd.pnghttp://en.wikipedia.org/wiki/Derivativehttp://en.wikipedia.org/wiki/PID_controller#Loop_tuninghttp://en.wikipedia.org/wiki/Overshoot_(signal)http://en.wikipedia.org/wiki/Integral
-
8/2/2019 PID control automtico (proporcional integral
derivativo)
12/28
. La magnitud de la contribucin del trmino derivado de la accin
de control global
que se denomina la ganancia derivado, .
El trmino derivado est dada por:
El trmino derivado ralentiza la velocidad de cambio de la salida
del controlador.
Derivado de control se utiliza para reducir la magnitud del
exceso producido por el
componente integral y mejorar el proceso combinado controlador
estabilidad. Sin
embargo, el trmino derivado retarda la respuesta transitoria del
controlador.
Adems, la diferenciacin de una seal amplifica el ruido y por lo
tanto este
trmino en el controlador es muy sensible al ruido en el trmino
de error, y puede
causar un proceso a ser inestable si el ruido y la ganancia
derivado son
suficientemente grandes. Por lo tanto una aproximacin a un
diferenciador con un
ancho de banda limitado es ms comnmente utilizada. Tal circuito
es conocido
como un compensador de adelanto de fase .
Usos
Por tener una exactitud mayor a los controladores proporcional,
proporcional
derivativo y proporcional integral se utiliza en aplicaciones ms
cruciales tales
como control de presin, flujo, fuerza, velocidad, en muchas
aplicaciones qumica,
y otras variables. Adems es utilizado en reguladores de
velocidad de automviles (control de crucero o cruise control),
control de ozono
residual en tanques de contacto.
Ajuste de parmetros del PID
El objetivo de los ajustes de los parmetros PID es lograr que el
bucle de control
corrija eficazmente y en el mnimo tiempo los efectos de las
perturbaciones; se
tiene que lograr la mnima integral de error. Si los parmetros
del controlador PID
(la ganancia del proporcional, integral y derivativo) se eligen
incorrectamente, el
proceso a controlar puede ser inestable, por ejemplo, que la
salida de este vare,
con o sin oscilacin, y est limitada solo por saturacin o rotura
mecnica. Ajustar
un lazo de control significa ajustar los parmetros del sistema
de control a los
valores ptimos para la respuesta del sistema de control deseada.
El
comportamiento ptimo ante un cambio del proceso o cambio del
"setpoint" vara
http://en.wikipedia.org/wiki/Transient_responsehttp://en.wikipedia.org/wiki/Lead%E2%80%93lag_compensatorhttp://es.wikipedia.org/w/index.php?title=Control_proporcional&action=edit&redlink=1http://es.wikipedia.org/w/index.php?title=Proporcional_derivativo&action=edit&redlink=1http://es.wikipedia.org/w/index.php?title=Proporcional_derivativo&action=edit&redlink=1http://es.wikipedia.org/wiki/Proporcional_integralhttp://es.wikipedia.org/wiki/Presi%C3%B3nhttp://es.wikipedia.org/wiki/Flujohttp://es.wikipedia.org/wiki/Fuerzahttp://es.wikipedia.org/wiki/Velocidadhttp://es.wikipedia.org/wiki/Qu%C3%ADmicahttp://es.wikipedia.org/wiki/Variablehttp://es.wikipedia.org/wiki/Regulador_de_velocidadhttp://es.wikipedia.org/wiki/Regulador_de_velocidadhttp://es.wikipedia.org/wiki/Autom%C3%B3vilhttp://es.wikipedia.org/wiki/Saturaci%C3%B3nhttp://es.wikipedia.org/w/index.php?title=Lazo_de_control&action=edit&redlink=1http://es.wikipedia.org/w/index.php?title=Lazo_de_control&action=edit&redlink=1http://es.wikipedia.org/wiki/Saturaci%C3%B3nhttp://es.wikipedia.org/wiki/Autom%C3%B3vilhttp://es.wikipedia.org/wiki/Regulador_de_velocidadhttp://es.wikipedia.org/wiki/Regulador_de_velocidadhttp://es.wikipedia.org/wiki/Variablehttp://es.wikipedia.org/wiki/Qu%C3%ADmicahttp://es.wikipedia.org/wiki/Velocidadhttp://es.wikipedia.org/wiki/Fuerzahttp://es.wikipedia.org/wiki/Flujohttp://es.wikipedia.org/wiki/Presi%C3%B3nhttp://es.wikipedia.org/wiki/Proporcional_integralhttp://es.wikipedia.org/w/index.php?title=Proporcional_derivativo&action=edit&redlink=1http://es.wikipedia.org/w/index.php?title=Proporcional_derivativo&action=edit&redlink=1http://es.wikipedia.org/w/index.php?title=Control_proporcional&action=edit&redlink=1http://en.wikipedia.org/wiki/Lead%E2%80%93lag_compensatorhttp://en.wikipedia.org/wiki/Transient_response
-
8/2/2019 PID control automtico (proporcional integral
derivativo)
13/28
dependiendo de la aplicacin. Generalmente, se requiere
estabilidad ante la
respuesta dada por el controlador, y este no debe oscilar ante
ninguna
combinacin de las condiciones del proceso y cambio de
"setpoints". Algunos
procesos tienen un grado de no-linealidad y algunos parmetros
que funcionan
bien en condiciones de carga mxima no funcionan cuando el
proceso est enestado de "sin carga". Hay varios mtodos para ajustar
un lazo de PID. El mtodo
ms efectivo generalmente requiere del desarrollo de alguna forma
del modelo del
proceso, luego elegir P, I y D basndose en los parmetros del
modelo dinmico.
Los mtodos de ajuste manual pueden ser muy ineficientes. La
eleccin de un
mtodo depender de si el lazo puede ser "desconectado" para
ajustarlo, y del
tiempo de respuesta del sistema. Si el sistema puede
desconectarse, el mejor
mtodo de ajuste a menudo es el de ajustar la entrada, midiendo
la salida en
funcin del tiempo, y usando esta respuesta para determinar los
parmetros de
control. Ahora describimos como realizar un ajuste manual.
Ajuste manualSi el sistema debe mantenerse online, un mtodo de
ajuste consiste en establecer
primero los valores de I y D a cero. A continuacin, incremente P
hasta que la
salida del lazo oscile. Luego establezca P a aproximadamente la
mitad del valor
configurado previamente. Despus incremente I hasta que el
proceso se ajuste en
el tiempo requerido (aunque subir mucho I puede causar
inestabilidad).
Finalmente, incremente D, si se necesita, hasta que el lazo sea
lo suficientemente
rpido para alcanzar su referencia tras una variacin brusca de la
carga.Un lazo de PID muy rpido alcanza su setpoint de manera veloz.
Algunos
sistemas no son capaces de aceptar este disparo brusco; en estos
casos se
requiere de otro lazo con un P menor a la mitad del P del
sistema de control
anterior.
Resumen de los mtodos
Hay varios mtodos para el ajuste de un lazo PID. Los mtodos ms
efectivos
generalmente involucran el desarrollo de algn tipo de modelo de
proceso, acontinuacin, elija P, I y D sobre la base de los
parmetros del modelo
dinmico. Los mtodos manuales de sintonizacin pueden ser
relativamente
ineficientes, particularmente si los bucles tienen tiempos de
respuesta del orden
de minutos o ms.
-
8/2/2019 PID control automtico (proporcional integral
derivativo)
14/28
La eleccin del mtodo depender en gran medida de s o no el bucle
se puede
tomar "en lnea" para el ajuste, y el tiempo de respuesta del
sistema. Si el sistema
puede ser puesto fuera de lnea, el mejor mtodo de sintonizacin a
menudo
consiste en someter el sistema a un cambio de paso en la
entrada, la medicin de
la salida como una funcin del tiempo, y utilizando esta
respuesta para determinarlos parmetros de control.
La eleccin de un mtodo de sintonizacin
Mtodo Ventajas Desventajas
Ajuste manual No requiere de matemticas. Mtodode lnea.
Requiere personal conexperiencia.
Ziegler-
Nichols
Mtodo Comprobado. Mtodo de
lnea.
Proceso de malestar, un
poco de ensayo y error,
puesta a punto muy
agresivo.
Herramientas
de Software
Ajuste consistente. Mtodo de lnea o
sin conexin. Puede incluir la vlvula
y el anlisis del sensor. Permitir la
simulacin antes de
descargar. Puede el apoyo del
Estado no estacionario (NSS)
Tuning.
Algn coste y la formacin
implicados.
Cohen-Coon Los buenos modelos de proceso.
Algunos de
matemticas. Mtodo de
conexin. Slo est bien
para procesos de primer
orden.
-
8/2/2019 PID control automtico (proporcional integral
derivativo)
15/28
Manual de ajuste
Si el sistema debe permanecer en lnea, un mtodo de sintonizacin
es de primer
conjunto y los valores a cero. Aumentar el hasta que la salida
de las
oscila bucle, entonces el debe establecerse en aproximadamente
la mitad de
ese valor para obtener una respuesta "cuarto de la decadencia de
amplitud" de
tipo. A continuacin, aumentar hasta cualquier desviacin se
corrige a tiempo
suficiente para el proceso. Sin embargo, demasiado causar
inestabilidad. Por
ltimo, aumentar , si es necesario, hasta que el bucle es
aceptablemente rpido
para alcanzar su referencia despus de una perturbacin de carga.
Sin embargo,
demasiado a provocar una respuesta excesiva y el sobrepaso. Un
ajuste PID
bucle rpido generalmente rebasa ligeramente para alcanzar el
punto de ajuste
ms rpidamente, sin embargo, algunos sistemas no puede aceptar
sobre
impulso, en cuyo caso una sobre-amortiguada sistema de circuito
cerrado serequiere, lo que requiere un ajuste significativamente
menor que la mitad de
la configuracin causando oscilacin.
Mtodo de Ziegler-NicholsPara ms detalles sobre este tema, vea el
mtodo de Ziegler-Nichols .
Otro mtodo de sintonizacin heurstica se conoce formalmente como
el mtodo
de Ziegler-Nichols , presentado por John G. Ziegler y Nathaniel
B. Nichols , en la
dcada de 1940. Como en el mtodo anterior, los y las ganancias
estn
primero pone a cero. El P ganancia se incrementa hasta que
alcanza la ganancia
final, en el cual la salida del bucle comienza a oscilar. y el
perodo de
oscilacin se utilizan para establecer las ganancias como se
muestra:
http://en.wikipedia.org/wiki/Overdampinghttp://en.wikipedia.org/wiki/Ziegler%E2%80%93Nichols_methodhttp://en.wikipedia.org/wiki/Ziegler%E2%80%93Nichols_methodhttp://en.wikipedia.org/wiki/Ziegler%E2%80%93Nichols_methodhttp://en.wikipedia.org/w/index.php?title=John_G._Ziegler&action=edit&redlink=1http://en.wikipedia.org/wiki/Nathaniel_B._Nicholshttp://en.wikipedia.org/wiki/Nathaniel_B._Nicholshttp://en.wikipedia.org/w/index.php?title=John_G._Ziegler&action=edit&redlink=1http://en.wikipedia.org/wiki/Ziegler%E2%80%93Nichols_methodhttp://en.wikipedia.org/wiki/Ziegler%E2%80%93Nichols_methodhttp://en.wikipedia.org/wiki/Ziegler%E2%80%93Nichols_methodhttp://en.wikipedia.org/wiki/Overdamping
-
8/2/2019 PID control automtico (proporcional integral
derivativo)
16/28
Ziegler-Nichols mtodo
Tipo de control
P - -
PI -
PID
Estos beneficios se aplican a la forma ideal, en paralelo del
regulador PID. Cuando
se aplica a la forma PID estndar, los parmetros de tiempo
integral y derivativa
, y son slo depende del perodo de oscilacin . Por favor,
consulte la
seccin " Alternativa de la nomenclatura y las formas PID ".
software de sintonizacin PID
Las instalaciones industriales ms modernas ya no ajustar los
circuitos que utilizan
los mtodos de clculo manuales que se muestran arriba. En cambio,
el ajuste
PID y el software de optimizacin de bucle se utiliza para
asegurar resultados
consistentes. Estos paquetes de software se reunirn los datos,
desarrollo de
modelos de procesos, y sugerir ajustes ptimos. Algunos paquetes
de software,
incluso se puede desarrollar de ajuste mediante la recopilacin
de datos de
cambios de referencia.
Ajuste matemtico lazo PID induce un impulso en el sistema, a
continuacin,
utiliza la respuesta del sistema de control de frecuencia para
disear los valores
del bucle PID. En los lazos con los tiempos de respuesta de
varios minutos, el
ajuste de bucle matemtica se recomienda, debido a ensayo y error
puede tomar
das para encontrar un conjunto estable de los valores de bucle.
Los valores
ptimos son ms difciles de encontrar. Algunos controladores de
bucle digital
ofrecen una caracterstica de auto-ajuste en el que los cambios
de punto de ajuste
muy pequeas se envan al proceso, permitiendo que el controlador
de s mismo
para calcular los valores ptimos de sintonizacin.
http://en.wikipedia.org/wiki/PID_controller#Alternative_nomenclature_and_PID_formshttp://en.wikipedia.org/wiki/PID_controller#Alternative_nomenclature_and_PID_forms
-
8/2/2019 PID control automtico (proporcional integral
derivativo)
17/28
Otras frmulas estn disponibles para sintonizar el circuito de
acuerdo con los
criterios de rendimiento diferentes. Muchas frmulas patentadas
estn ahora
incorporados en el software de sintonizacin PID y mdulos de
hardware.
Los avances en el software de ajuste automtico del Lazo PID
tambin ofrecen
algoritmos de lazos PID de ajuste en un Estado dinmico o no
estacionario (NSS)
escenario. El software modelar la dinmica de un proceso, a travs
de una
perturbacin, y calcular los parmetros de control PID en
respuesta.
Modificaciones del algoritmo PID
El algoritmo PID bsico presenta algunos desafos en aplicaciones
de control que
han sido tratados por pequeas modificaciones en la forma
PID.
Cuerda Integral
Para ms detalles sobre este tema, consulte cuerda Integral .
Un problema comn que resulta de las implementaciones de PID es
ideal cuerda
integral , donde un gran cambio en el punto de ajuste se produce
(por ejemplo un
cambio positivo) y el trmino integral acumula un error ms grande
que el valor
mximo para la variable de regulacin (cuerda), con lo que se
supera el sistema y
contina aumentando a medida que este error acumulado se
desenrolla. Este
problema se puede abordar a travs de:
Inicializacin del controlador integral a un valor deseado
Aumentar el valor de consigna en una rampa adecuada
Desactivacin de la funcin integral hasta que la energa
fotovoltaica ha
entrado en la regin controlables
Limitar el perodo de tiempo durante el cual se calcula el error
integral
La prevencin de la acumulacin de trmino integral por encima o
por
debajo de los lmites predeterminados
El rebasamiento de las perturbaciones conocidas
Por ejemplo, un bucle PID se utiliza para controlar la
temperatura de un horno de
resistencia elctrica, el sistema se estabiliz. Ahora se abre la
puerta y algo fro se
pone en el horno la temperatura desciende por debajo del punto
de ajuste. La
funcin integral del controlador tiende a compensar este error
mediante la
introduccin de otro error en la direccin positiva. Este exceso
puede ser evitado
http://en.wikipedia.org/wiki/Integral_winduphttp://en.wikipedia.org/wiki/Integral_winduphttp://en.wikipedia.org/wiki/Integral_winduphttp://en.wikipedia.org/wiki/Integral_winduphttp://en.wikipedia.org/wiki/Integral_winduphttp://en.wikipedia.org/wiki/Integral_windup
-
8/2/2019 PID control automtico (proporcional integral
derivativo)
18/28
por congelacin de la funcin integral despus de la apertura de la
puerta durante
el tiempo del bucle de control tpicamente necesita para
recalentar el horno.
Sustitucin de la funcin integral de una parte del modelo basado
en
A menudo, el tiempo de respuesta del sistema es
aproximadamenteconocido. Entonces es una ventaja para simular este
tiempo de respuesta con un
modelo y para calcular algn parmetro desconocido de la respuesta
real del
sistema. Si, por ejemplo el sistema es un horno elctrico de la
respuesta de la
diferencia entre la temperatura del horno y la temperatura
ambiente a los cambios
de la potencia elctrica ser similar a la de una simple RC filtro
de paso bajo,
multiplicado por un coeficiente proporcional desconocido. La
potencia real elctrica
suministrada a la caldera se retrasa por un filtro de paso bajo
para simular la
respuesta de la temperatura del horno y luego la temperatura
real menos la
temperatura ambiente se divide por este paso bajo poder filtr
elctrica. Acontinuacin, el resultado es estabilizado por otro
filtro de paso bajo que conducen
a una estimacin del coeficiente proporcional. Con esta
estimacin, es posible
calcular la potencia elctrica necesaria dividiendo el punto de
ajuste de la
temperatura de menos la temperatura ambiente por este
coeficiente. El resultado
puede ser utilizado en lugar de la funcin integral. Esto tambin
se logra un control
de errores de cero en el estado de equilibrio, pero evita cuerda
integral y puede
dar una accin de control mejorado significativamente en
comparacin con un
controlador PID optimizado. Este tipo de controlador no funciona
correctamente en
una situacin de bucle abierto que hace de bobinado integral con
una funcin
integral. Esto es una ventaja si, por ejemplo, el calentamiento
de un horno tiene
que ser reducida por algn tiempo debido a la falta de un
elemento de
calentamiento, o si el controlador se utiliza como un sistema de
asesoramiento a
un operador humano que no puede cambiar a en lazo cerrado.
Tambin puede ser
til si el controlador se encuentra dentro de una rama de un
complejo sistema de
control que puede estar temporalmente inactiva.
Muchos bucles de control PID un dispositivo mecnico (por
ejemplo, una
vlvula). Mantenimiento mecnico puede ser un mayor costo y el
desgaste
derivaciones para controlar la degradacin en la forma de friccin
esttica o
una banda muerta en la respuesta mecnica a una seal de entrada.
La tasa de
desgaste mecnico es principalmente una funcin de la frecuencia
se activa un
dispositivo para realizar un cambio. Cuando el desgaste es una
preocupacin
significativa, el lazo PID puede tener una salida de banda
muerta para reducir la
http://en.wikipedia.org/wiki/Stictionhttp://en.wikipedia.org/wiki/Deadbandhttp://en.wikipedia.org/wiki/Deadbandhttp://en.wikipedia.org/wiki/Deadbandhttp://en.wikipedia.org/wiki/Deadbandhttp://en.wikipedia.org/wiki/Stiction
-
8/2/2019 PID control automtico (proporcional integral
derivativo)
19/28
frecuencia de activacin de la salida (vlvula). Esto se logra
mediante la
modificacin del controlador para mantener su produccin estable
si el cambio
sera pequeo (dentro del rango definido banda muerta). El
resultado calculado
debe dejar la banda muerta antes de la salida real va a
cambiar.
El trmino proporcional y derivado puede producir un movimiento
excesivo en la
salida cuando un sistema est sometido a un aumento de paso
instantneo en el
error, tal como un cambio de consigna grande. En el caso del
trmino derivado,
esto es debido a la derivada del error, que es muy grande en el
caso de un cambio
de paso instantneo. Como resultado, algunos algoritmos PID
incorporar las
siguientes modificaciones:
Derivada de la variable de proceso
En este caso, el controlador PID mide la derivada de la medida
variable de
proceso (PV), en lugar de la derivada del error. Esta cantidad
es siempre
constante (es decir, nunca tiene un cambio de paso, como
resultado de consigna
cambiado). Para esta tcnica para ser eficaz, el derivado de la
PV debe tener el
signo opuesto de la derivada del error, en el caso de control de
realimentacin
negativa.
Punto de ajuste de rampa
En esta modificacin, el punto de ajuste es gradualmente movido
de su valor
anterior a un nuevo valor especificado utilizando un diferencial
lineal o de primer
orden funcin de rampa. Esto evita la discontinuidad presente en
un cambio
simple paso.
Punto de ajuste de ponderacin
Ponderacin de consigna utiliza diferentes multiplicadores para
el error en funcin
de qu elemento del controlador que se utiliza in El error en el
trmino integral
debe ser el error de un verdadero control para evitar errores de
estado
estacionario de control. Esto afecta a la respuesta del
controlador de punto de
referencia. Estos parmetros no afectan a la respuesta a cargar
las perturbaciones
y el ruido de medicin.
Limitaciones de un control PID
http://en.wikipedia.org/wiki/Process_variablehttp://en.wikipedia.org/wiki/Process_variablehttp://en.wikipedia.org/wiki/Discontinuity_(mathematics)http://en.wikipedia.org/wiki/Discontinuity_(mathematics)http://en.wikipedia.org/wiki/Process_variablehttp://en.wikipedia.org/wiki/Process_variable
-
8/2/2019 PID control automtico (proporcional integral
derivativo)
20/28
Mientras que los controladores PID son aplicables a la mayora de
los problemas
de control, puede ser pobres en otras aplicaciones. Los
controladores PID, cuando
se usan solos, pueden dar un desempeo pobre cuando la ganancia
del lazo del
PID debe ser reducida para que no se dispare u oscile sobre el
valor del "setpoint".
El desempeo del sistema de control puede ser mejorado combinando
el lazocerrado de un control PID con un lazo abierto. Conociendo el
sistema (como
la aceleracin necesaria o la inercia) puede ser avanaccionado y
combinado con
la salida del PID para aumentar el desempeo final del sistema.
Solamente el
valor de avanaccin (o Control pre alimentado) puede proveer la
mayor porcin de
la salida del controlador. El controlador PID puede ser usado
principalmente para
responder a cualquier diferencia o "error" que quede entre el
setpoint y el valor
actual del proceso. Como la salida del lazo de avanaccin no se
ve afectada a la
realimentacin del proceso, nunca puede causar que el sistema
oscile,
aumentando el desempeo del sistema, su respuesta y
estabilidad.
Por ejemplo, en la mayora de los sistemas de control con
movimiento, para
acelerar una carga mecnica, se necesita de ms fuerza (o torque)
para el motor.
Si se usa un lazo PID para controlar la velocidad de la carga y
manejar la fuerza o
torque necesaria para el motor, puede ser til tomar el valor de
aceleracin
instantnea deseada para la carga, y agregarla a la salida del
controlador PID.
Esto significa que sin importar si la carga est siendo acelerada
o desacelerada,
una cantidad proporcional de fuerza est siendo manejada por el
motor adems
del valor de realimentacin del PID. El lazo del PID en esta
situacin usa la
informacin de la realimentacin para incrementar o decrementar la
diferencia
entre el setpoint y el valor del primero. Trabajando juntos, la
combinacin
avanaccin-realimentacin provee un sistema ms confiable y
estable.
Otro problema que posee el PID es que es lineal. Principalmente
el desempeo de
los controladores PID en sistemas no lineales es variable.
Tambin otro problema
comn que posee el PID es, que en la parte derivativa, el ruido
puede afectar
al sistema, haciendo que esas pequeas variaciones, hagan que el
cambio a la
salida sea muy grande. Generalmente un Filtro pasa bajo ayuda,
ya que eliminalas componentes de alta frecuencia del ruido. Sin
embargo, un FPB y un control
derivativo pueden hacer que se anulen entre ellos.
Alternativamente, el control
derivativo puede ser sacado en algunos sistemas sin mucha prdida
de control.
Esto es equivalente a usar un controlador PID como PI
solamente.
http://es.wikipedia.org/w/index.php?title=Avanacci%C3%B3n&action=edit&redlink=1http://es.wikipedia.org/wiki/Aceleraci%C3%B3n_instant%C3%A1neahttp://es.wikipedia.org/wiki/Aceleraci%C3%B3n_instant%C3%A1neahttp://es.wikipedia.org/wiki/Linealhttp://es.wikipedia.org/wiki/Ruidohttp://es.wikipedia.org/wiki/Filtro_pasa_bajohttp://es.wikipedia.org/wiki/Filtro_pasa_bajohttp://es.wikipedia.org/wiki/Ruidohttp://es.wikipedia.org/wiki/Linealhttp://es.wikipedia.org/wiki/Aceleraci%C3%B3n_instant%C3%A1neahttp://es.wikipedia.org/wiki/Aceleraci%C3%B3n_instant%C3%A1neahttp://es.wikipedia.org/w/index.php?title=Avanacci%C3%B3n&action=edit&redlink=1
-
8/2/2019 PID control automtico (proporcional integral
derivativo)
21/28
La ejecucin material de control PID
En la historia temprana del proceso de control automtico, el
controlador PID se
implementa como un dispositivo mecnico. Estos controladores
mecnicos utilizan
una palanca , resorte y una masa y se energizaron a menudo por
aire
comprimido. Estos neumticos son los controladores una vez que el
estndar de la
industria.
Electrnicos analgicos controladores se pueden hacer de un
estado
slido o tubo amplificador , un condensador y una resistencia
.Electrnica loops
analgicos de control PID con frecuencia se encontraban dentro de
los sistemas
electrnicos ms complejos, por ejemplo, la colocacin de la cabeza
de
una unidad de disco , el condicionamiento de la energa de una
fuente de
alimentacin , o incluso el circuito de deteccin de movimiento de
un
moderno sismgrafo . Hoy en da, los controladores electrnicos han
sido
reemplazados por los controladores digitales implementados
con microcontroladores o FPGAs .
Controladores PID ms modernos de la industria se implementan en
controladores
lgicos programables (PLCs) o como un panel montado en un
dispositivo
digital. Implementaciones de software tienen la ventaja de que
son relativamente
baratos y son flexibles con respecto a la implementacin del
algoritmo PID.
Voltajes variables pueden ser aplicadas por el tiempo
proporcional forma de ancho
de pulso modulacin (PWM) - un tiempo de ciclo es fijo, y la
variacin se consigue
variando la proporcin del tiempo durante este ciclo que el
controlador emite una
(o -1) en lugar de 0. En un sistema digital de las proporciones
posibles son
discretos - por ejemplo, incrementos de 0,1 segundos dentro de
un tiempo de ciclo
de 2 segundos da 20 pasos posibles: incrementos porcentuales del
5% - lo que es
un error de discretizacin , pero para alta resolucin
satisfactoria suficiente tiempo
esto produce rendimiento.
Alternativa nomenclatura y formas PID
forma PID Ideal versus estndarLa forma del controlador PID con
mayor frecuencia en la industria, y el ms
relevante para afinar los algoritmos de uno es la forma estndar
.En esta forma
la ganancia se aplica a la , y trminos, obtenindose:
http://en.wikipedia.org/wiki/Leverhttp://en.wikipedia.org/wiki/Spring_(device)http://en.wikipedia.org/wiki/Masshttp://en.wikipedia.org/wiki/Pneumatichttp://en.wikipedia.org/wiki/Analog_circuithttp://en.wikipedia.org/wiki/Transistorhttp://en.wikipedia.org/wiki/Transistorhttp://en.wikipedia.org/wiki/Vacuum_tubehttp://en.wikipedia.org/wiki/Capacitorhttp://en.wikipedia.org/wiki/Electrical_resistancehttp://en.wikipedia.org/wiki/Disk_drivehttp://en.wikipedia.org/wiki/Power_supplyhttp://en.wikipedia.org/wiki/Power_supplyhttp://en.wikipedia.org/wiki/Seismometerhttp://en.wikipedia.org/wiki/Microcontrollershttp://en.wikipedia.org/wiki/FPGAhttp://en.wikipedia.org/wiki/Programmable_logic_controllerhttp://en.wikipedia.org/wiki/Programmable_logic_controllerhttp://en.wikipedia.org/wiki/Time_proportioninghttp://en.wikipedia.org/wiki/Pulse-width_modulationhttp://en.wikipedia.org/wiki/Pulse-width_modulationhttp://en.wikipedia.org/w/index.php?title=Cycle_time&action=edit&redlink=1http://en.wikipedia.org/wiki/Discretization_errorhttp://en.wikipedia.org/wiki/Discretization_errorhttp://en.wikipedia.org/w/index.php?title=Cycle_time&action=edit&redlink=1http://en.wikipedia.org/wiki/Pulse-width_modulationhttp://en.wikipedia.org/wiki/Pulse-width_modulationhttp://en.wikipedia.org/wiki/Time_proportioninghttp://en.wikipedia.org/wiki/Programmable_logic_controllerhttp://en.wikipedia.org/wiki/Programmable_logic_controllerhttp://en.wikipedia.org/wiki/FPGAhttp://en.wikipedia.org/wiki/Microcontrollershttp://en.wikipedia.org/wiki/Seismometerhttp://en.wikipedia.org/wiki/Power_supplyhttp://en.wikipedia.org/wiki/Power_supplyhttp://en.wikipedia.org/wiki/Disk_drivehttp://en.wikipedia.org/wiki/Electrical_resistancehttp://en.wikipedia.org/wiki/Capacitorhttp://en.wikipedia.org/wiki/Vacuum_tubehttp://en.wikipedia.org/wiki/Vacuum_tubehttp://en.wikipedia.org/wiki/Transistorhttp://en.wikipedia.org/wiki/Transistorhttp://en.wikipedia.org/wiki/Analog_circuithttp://en.wikipedia.org/wiki/Pneumatichttp://en.wikipedia.org/wiki/Masshttp://en.wikipedia.org/wiki/Spring_(device)http://en.wikipedia.org/wiki/Lever
-
8/2/2019 PID control automtico (proporcional integral
derivativo)
22/28
donde
es la integral en el tiempo
es el tiempo de derivada
En esta forma estndar, los parmetros tienen un significado fsico
claro. En
particular, la suma interna produce un nuevo valor nico error
que se compensa
por errores en el futuro y el pasado. La adicin de los
componentes proporcionales
y derivado eficazmente predice el valor de error en segundos (o
muestras) en
el futuro, suponiendo que el control de bucle se mantiene sin
cambios. El
componente integral ajusta el valor de error para compensar la
suma de todos los
errores del pasado, con la intencin de su eliminacin completa en
segundos (omuestras). El valor resultante compensado solo error es
escalado por la ganancia
individual .
En la forma paralela ideal, se muestra en la seccin teora
controlador
los parmetros de ganancia estn relacionados con los parmetros de
la forma
estndar a travs de y . Esta forma paralela, donde los
parmetros son tratados como ganancias simples, es la forma ms
general y
flexible. Sin embargo, es tambin la forma en que los parmetros
tienen la menor
interpretacin fsica y se reserva generalmente para el
tratamiento terico del
controlador PID.El impreso normalizado, a pesar de ser un poco
ms compleja
matemticamente, es ms comn en la industria.
Bases en la accin derivada de PV
En los sistemas de control ms comerciales, la accin derivado se
basa en el PV
en lugar del error. Esto es porque la versin digitalizada del
algoritmo produce un
pico no deseado grande cuando el SP es cambiado. Si el SP es
constante,
entonces los cambios en la PV ser el mismo que los cambios en el
error. Por lo
tanto esta modificacin no hace ninguna diferencia a la forma en
que el
controlador responde a procesar las perturbaciones.
-
8/2/2019 PID control automtico (proporcional integral
derivativo)
23/28
Bases en la accin proporcional sobre PV
La mayora de los sistemas de control comerciales ofrecen la
posibilidad de fundartambin la accin proporcional sobre PV. Esto
significa que slo la accin integral
responde a los cambios en el SP. Mientras que al principio esto
podra parecer a
afectar negativamente a la hora de que el proceso se llevar a
responder a los
cambios, el controlador puede ser reajustado para dar casi la
misma respuesta -
en gran parte por el aumento . La modificacin del algoritmo no
afecta a la
forma en que el controlador responde a procesar las
perturbaciones, pero el
cambio de sintonizacin tiene un efecto beneficioso. A menudo, la
magnitud y
duracin de la perturbacin ser ms de la mitad. Como la mayora de
los
controladores tienen que lidiar frecuentemente con los
trastornos del proceso y
con relativa poca frecuencia con los cambios de SP, bien puesto
a punto el
algoritmo modificado puede mejorar drsticamente el rendimiento
del proceso.
Mtodos de optimizacin, tales como Ziegler-Nichols y Cohen-Coon,
no sern
fiables cuando se utiliza con este algoritmo. El rey describe
una efectiva carta
basada en el mtodo.
Laplace forma del controlador PID
A veces es til para escribir el regulador PID en la transformada
de Laplace forma:
Habiendo el controlador PID escrito en forma de Laplace y que
tiene la funcin de
transferencia del sistema controlado hace que sea fcil
determinar la funcin de
transferencia de bucle cerrado del sistema.
PID polo cero de cancelacinLa ecuacin PID se puede escribir en
esta forma:
http://en.wikipedia.org/wiki/Laplace_transformhttp://en.wikipedia.org/wiki/Transfer_functionhttp://en.wikipedia.org/wiki/Transfer_functionhttp://en.wikipedia.org/wiki/Transfer_functionhttp://en.wikipedia.org/wiki/Transfer_functionhttp://en.wikipedia.org/wiki/Laplace_transform
-
8/2/2019 PID control automtico (proporcional integral
derivativo)
24/28
Cuando se utiliza esta forma es fcil determinar la funcin de
transferencia en lazo
cerrado.
Si
Entonces
Esto puede ser muy til para eliminar los polos inestables
Series / interactuar forma
Otra representacin del controlador PID es la serie, o que
interactan forma
donde los parmetros estn relacionados con los parmetros de la
forma estndar
a travs
, y
con
.
Esta forma consiste esencialmente de un controlador PD y PI en
serie, y se hizo
tempranos (analgico) controladores ms fcil de construir. Cuando
los
controladores ms tarde se convirti digital, muchas llevada por
medio de la forma
que interactan.
la aplicacin discreta
-
8/2/2019 PID control automtico (proporcional integral
derivativo)
25/28
El anlisis para el diseo de una aplicacin digital de un
controlador PID en
un microcontrolador (MCU) o FPGA dispositivo requiere la forma
estndar del
controlador PID que discretiza .[ 13 ]Aproximaciones de primer
orden derivados se
hacen hacia atrs las diferencias finitas . El trmino integral es
discretiza, con un
tiempo de muestreo , como sigue,
El trmino derivativo se aproxima como,
As, un algoritmo de velocidad para la aplicacin del controlador
PID discretiza en
un MCU se obtiene diferenciando , utilizando las definiciones
numricas de laderivada primera y segunda y resolviendo para obtener
y finalmente:
P seudocdigo
Aqu hay un bucle de software simple que implementa el algoritmo
de control PID
en forma de su "ideal de forma paralela,":
previous_error = punto de referencia - process_feedbackintegral
= 0
empezar:
esperar (dt)
error = punto de referencia - process_feedback
integral = integral + (* error dt)
derivada = (error - previous_error) / dt
salida = (Kp * Error) + (Ki * integrante) + (Kd * derivado)
previous_error = Error
goto inicio
regulador PI
http://en.wikipedia.org/wiki/Microcontrollerhttp://en.wikipedia.org/wiki/FPGAhttp://en.wikipedia.org/wiki/PID_controller#cite_note-12http://en.wikipedia.org/wiki/PID_controller#cite_note-12http://en.wikipedia.org/wiki/PID_controller#cite_note-12http://en.wikipedia.org/wiki/Finite_differencehttp://en.wikipedia.org/wiki/Finite_differencehttp://en.wikipedia.org/wiki/PID_controller#cite_note-12http://en.wikipedia.org/wiki/FPGAhttp://en.wikipedia.org/wiki/Microcontroller
-
8/2/2019 PID control automtico (proporcional integral
derivativo)
26/28
Bloque bsico de un controlador PI.
Un controlador PI (proporcional-integral controlador) es un caso
especial del
regulador PID en el que el derivado de (D) del error no se
utiliza.
La salida del controlador est dada por
donde es el error o desviacin del valor real medido ( PV ) a
partir de la puesta
a punto ( SP ).
.
Un controlador PI se puede modelar fcilmente en el software
como Simulink utilizando un "diagrama de flujo" cuadro de la
participacin de
Laplace operadores:
donde
= Ganancia proporcional
= Ganancia integral
Establecer un valor para es a menudo una disminucin de los
intercambios
comerciales entre exceso y aumentar el tiempo de
establecimiento.
La falta de accin derivado puede hacer el sistema ms estable en
el estado
estacionario en el caso de datos ruidosos. Esto es debido a la
accin derivada es
ms sensible a los trminos de mayor frecuencia en las
entradas.
Sin una accin derivado de un sistema de PI-controlada es menos
sensible a las
alteraciones reales (sin ruido) y relativamente rpido en el
estado y por lo tanto el
sistema ser ms lento para llegar a punto de ajuste y ms lento
para responder a
las perturbaciones que un sistema bien afinado PID puede
ser.
http://en.wikipedia.org/wiki/Simulinkhttp://en.wikipedia.org/wiki/Laplace_transformhttp://en.wikipedia.org/wiki/File:PI_controller.pnghttp://en.wikipedia.org/wiki/File:PI_controller.pnghttp://en.wikipedia.org/wiki/File:PI_controller.pnghttp://en.wikipedia.org/wiki/File:PI_controller.pnghttp://en.wikipedia.org/wiki/File:PI_controller.pnghttp://en.wikipedia.org/wiki/File:PI_controller.pnghttp://en.wikipedia.org/wiki/File:PI_controller.pnghttp://en.wikipedia.org/wiki/File:PI_controller.pnghttp://en.wikipedia.org/wiki/Laplace_transformhttp://en.wikipedia.org/wiki/Simulink
-
8/2/2019 PID control automtico (proporcional integral
derivativo)
27/28
Ejemplos prcticos
Se desea controlar el caudal de un flujo de entrada en un
reactor qumico. En
primer lugar se tiene que poner una vlvula de control del caudal
de dicho flujo, y
un caudalmetro, con la finalidad de tener una medicin constante
del valor del
caudal que circule. El controlador ir vigilando que el caudal
que circule sea el
establecido por nosotros; en el momento que detecte un error,
mandar una seal
a la vlvula de control de modo que esta se abrir o cerrar
corrigiendo el error
medido. Y tendremos de ese modo el flujo deseado y necesario. El
PID es un
clculo matemtico, lo que enva la informacin es el PLC.
Se desea mantener la temperatura interna de un reactor qumico en
su valor de
referencia. Se debe tener un dispositivo de control de la
temperatura (puede ser
un calentador, una resistencia elctrica,...), y un sensor
(termmetro). El P, PI o
PID ir controlando la variable (en este caso la temperatura). En
el instante que
esta no sea la correcta avisar al dispositivo de control de
manera que este acte,
corrigiendo el error. De todos modos, lo ms correcto es poner un
PID; si hay
mucho ruido, un PI, pero un P no nos sirve mucho puesto que no
llegara a
corregir hasta el valor exacto.
Aplicaciones / Ejemplo
Un ejemplo muy sencillo que ilustra la funcionalidad bsica de un
PID es cuando
una persona entra a una ducha. Inicialmente abre la llave de
agua caliente paraaumentar la temperatura hasta un valor aceptable
(tambin llamado "Setpoint"). El
problema es que puede llegar el momento en que la temperatura
del agua
sobrepase este valor as que la persona tiene que abrir un poco
la llave de agua
fra para contrarrestar el calor y mantener el balance. El agua
fra es ajustada
hasta llegar a la temperatura deseada. En este caso, el humano
es el que est
ejerciendo el control sobre el lazo de control, y es el que toma
las decisiones de
abrir o cerrar alguna de las llaves; pero no sera ideal si en
lugar de nosotros,
fuera una maquina la que tomara las decisiones y mantuviera la
temperatura que
deseamos?
Esta es la razn por la cual los lazos PID fueron inventados.
Para simplificar las
labores de los operadores y ejercer un mejor control sobre las
operaciones.
Algunas de las aplicaciones ms comunes son:
-
8/2/2019 PID control automtico (proporcional integral
derivativo)
28/28
Lazos de Temperatura (Aire acondicionado, Calentadores,
Refrigeradores,
etc.)
Lazos de Nivel (Nivel en tanques de lquidos como agua, lcteos,
mezclas,
crudo, etc.)
Lazos de Presin (para mantener una presin predeterminada en
tanques,
tubos, recipientes, etc.)
Lazos de Flujo (mantienen la cantidad de flujo dentro de una
lnea o tubo).
CONCLUSION.
Un controlador proporcional-integral-derivativo ( PID ) es un
genrico de control debucle mecanismo de retroalimentacin ( control
), ampliamente utilizado en
los sistemas de control industrial - un PID es el controlador de
retroalimentacinms comnmente utilizado. Un controlador PID calcula
un "error" valor como ladiferencia entre una medida variable de
proceso y un deseado punto de ajuste . Elcontrolador intenta
reducir al mnimo el error mediante el ajuste de las entradas
decontrol de proceso.
El clculo del controlador PID ( algoritmo ) consta de tres
parmetros constantespor separado, y, en consecuencia a veces se
llama de tres perodos de control :el proporcional , las integrales
y derivado de los valores, que se denota P, I, yde D.Heursticamente
, estos valores pueden ser interpretados en trminos detiempo: P
depende del presente error, que en la acumulacin de
pasadoserrores,
y D es una prediccin de futuros errores, basado en la tasa
actual de cambio. Lasuma ponderada de estas tres acciones se
utiliza para ajustar el proceso a travsun elemento de control tales
como la posicin de una vlvula de control , o lapotencia
suministrada a un elemento de calentamiento.
http://en.wikipedia.org/wiki/Control_loophttp://en.wikipedia.org/wiki/Control_loophttp://en.wikipedia.org/wiki/Feedback_mechanismhttp://en.wikipedia.org/wiki/Controller_(control_theory)http://en.wikipedia.org/wiki/Industrial_control_systemhttp://en.wikipedia.org/wiki/Process_variablehttp://en.wikipedia.org/wiki/Setpoint_(control_system)http://en.wikipedia.org/wiki/Algorithmhttp://en.wikipedia.org/wiki/Proportionality_(mathematics)http://en.wikipedia.org/wiki/Integralhttp://en.wikipedia.org/wiki/Derivativehttp://en.wikipedia.org/wiki/Heuristichttp://en.wikipedia.org/wiki/Control_valvehttp://en.wikipedia.org/wiki/Control_valvehttp://en.wikipedia.org/wiki/Heuristichttp://en.wikipedia.org/wiki/Derivativehttp://en.wikipedia.org/wiki/Integralhttp://en.wikipedia.org/wiki/Proportionality_(mathematics)http://en.wikipedia.org/wiki/Algorithmhttp://en.wikipedia.org/wiki/Setpoint_(control_system)http://en.wikipedia.org/wiki/Process_variablehttp://en.wikipedia.org/wiki/Industrial_control_systemhttp://en.wikipedia.org/wiki/Controller_(control_theory)http://en.wikipedia.org/wiki/Feedback_mechanismhttp://en.wikipedia.org/wiki/Control_loophttp://en.wikipedia.org/wiki/Control_loop