Embed Size (px)
Citation preview

Irineu da Silva
Escola de Engenharia de São Carlos - USP
Potencialidades da Geomática no desenvolvimento
da Engenharia de Transportes.
Geomática
Termo utilizado para definir a área do conhecimento científico que
engloba as ciências, as técnicas e os métodos que tratam da medição,
da modelagem matemática, da definição dos sistemas de referência
terrestre, da representação espacial e do posicionamento de objetos na
superfície terrestre ou próximos a ela, de forma a agrupá-las em uma
matéria de estudo coerente com as novas tecnologias e necessidades
da engenharia.
Resumidamente, pode-se entender a Geomática como o agrupamento
dos conhecimentos científicos relacionados a determinação geométrica,
físico-espacial e temporal de objetos da superfície terrestre ou próximos
a ela.
Por Irineu da Silva – Maio/2017

Áreas de Aplicações da Geomática na Engenharia
de Transportes
As áreas de aplicações da Geomática na Engenharia de Transportes
são diversas. Resumidamente se destacam:
Por Irineu da Silva – Maio/2017
• Coleta de dados de campo – Informações topográficas e cadastrais
para suporte aos projetos de transportes;
• Modelagem dos dados – Estabelecimento da base de dados
geográficos (georreferenciados) sobre a qual se baseiam os projetos
de transporte;
• Desenvolvimento de aplicativos específicos;
• Representação gráfica e disponibilização de dados digitais.

Meu objetivo aqui hoje!
Por Irineu da Silva – Maio/2017
• Estimular a sua imaginação;
• Apresentar o estado da arte das principais áreas
de pesquisa relacionadas ao uso da Geomática
na Engenharia de Transportes;
• Incentivar a inovação e mostrar diretrizes para
novas pesquisas e desenvolvimentos científicos.
Áreas de destaque das aplicações da Geomática
na Engenharia de Transportes
Por Irineu da Silva – Maio/2017
• Navegação por satélites - Mobilidade controlada;
• Tecnologia UAV;
• Sistemas de controle de máquinas para
construção da infraestrutura rodoviária.

Navegação por satélitesPor Irineu da Silva – Maio/2017
Navegação por satélites
Por Irineu da Silva – Maio/2017
Na área de navegação por satélites os avanços
mais significativos têm ocorrido nos seguintes
aspectos:
• Lançamento de novas constelações de satélites e
soluções WAAS (Wide Area Augmentation
System);
• Posicionamento automotivo;
• Navegação indoor e urbana.

Por Irineu da Silva – Maio/2017

Uso do UAV para a
Engenharia de Transportes

Na área de transportes a tecnologia UAV está presente:
Projeto Geométrico da Via
Construção da Via
Operação da Via
A Tecnologia UAV na Engenharia de Transportes
Por Irineu da Silva – Maio/2017

A Tecnologia UAV na Engenharia de Transportes
As aplicações na engenharia de transportes,
entretanto, ainda podem ser consideradas restritas
devido, principalmente, aos poucos estudos que
estão sendo desenvolvidos nessa área. Mesmo
assim, encontram-se estudos relacionados tanto ao
uso das imagens qualitativas como quantitativas.
Qualitativas – Uso das imagens sem preocupação
com a orientação fotogramétrica.
Quantitativas – Uso de imagens orientadas
fotogrametricamente.
Por Irineu da Silva – Maio/2017

A Tecnologia UAV na Engenharia de Transportes
Estudos realizados com o uso de imagens
qualitativas na engenharia de transportes:
1.Monitoramento de incidentes;
2.Monitoramento da infraestrutura;
3.Análises das condições de pavimentos;
4.Monitoramento de tráfego;
5.Vigilância e reconhecimentos por câmeras aéreas;
6.Gestão de áreas em construção;
7.Outros.
Por Irineu da Silva – Maio/2017

A Tecnologia UAV na Engenharia de Transportes
Estudos realizados com o uso de imagens
quantitativas na engenharia de transportes:
1.Mapeamento de pequenas áreas;
2.Reconstrução de superfícies 2D e 3D;
3.Outros.
Por Irineu da Silva – Maio/2017

O voo fotogramétrico convencional
Por Irineu da Silva – Maio/2017
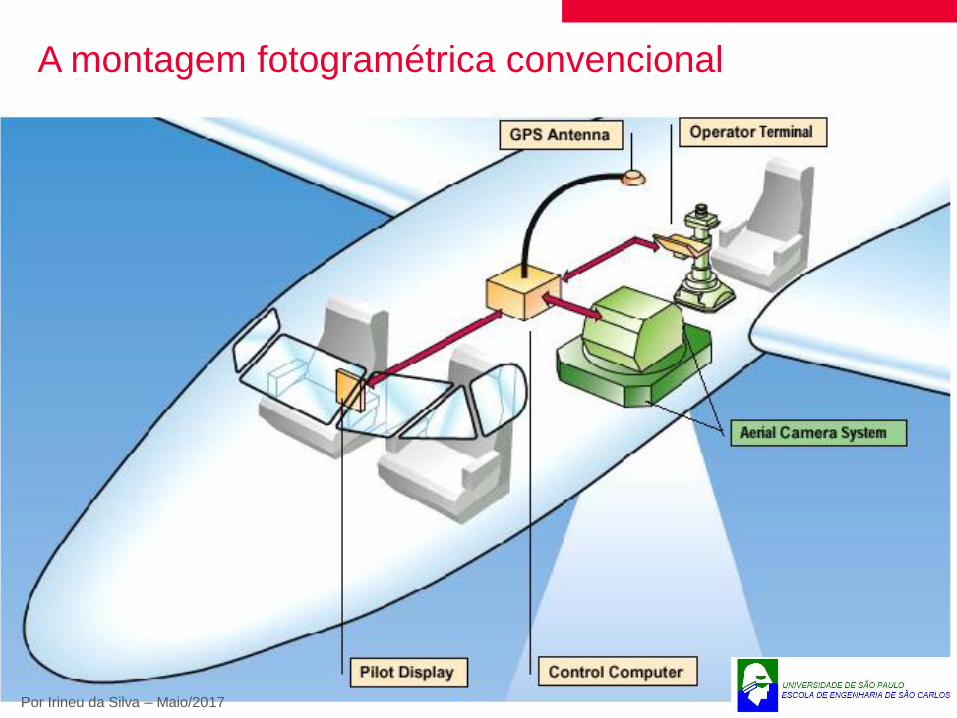
A montagem fotogramétrica convencional
Por Irineu da Silva – Maio/2017

Sensor Digital Aéreo
Terminal
Operador
Sensor
Digital
Aéreo
Unidade de Controle
e Armazenamento
Por Irineu da Silva – Maio/2017

Sensor Laser Aéreo: Componentes
Por Irineu da Silva – Maio/2017

Sensor Laser Aéreo: Componentes
Superfície
Unidade de
Controle e
Armazenamento
Antena
GNSS
Sistema
IMU
Detector
Receptor
Transmissor
Laser
Unidade
Defletora
Por Irineu da Silva – Maio/2017

Exemplos Aplicativos
Section of City of Pavia, Italy
3D city models, ALS depending on point density has poor
quality at building edges
© CGR,Parma
Por Irineu da Silva – Maio/2017
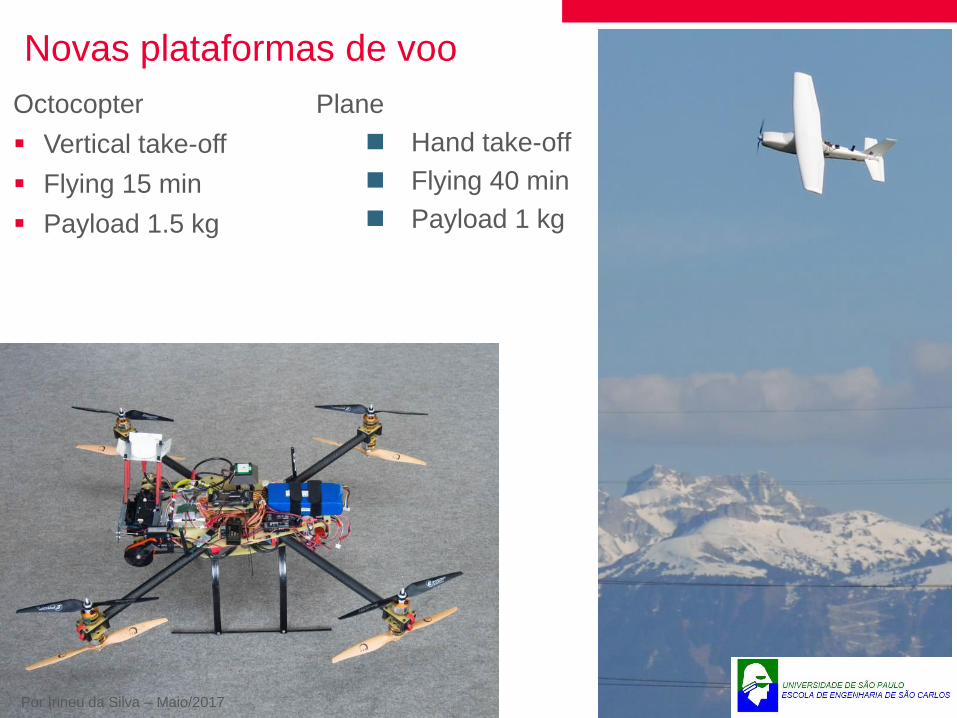
Novas plataformas de voo
Octocopter
Vertical take-off
Flying 15 min
Payload 1.5 kg
Plane
Hand take-off
Flying 40 min
Payload 1 kg
Por Irineu da Silva – Maio/2017

30 minutos de voo com payload de 5 kg
O Drone montado na UNESP de Presidente
Prudente
Por Irineu da Silva – Maio/2017

Câmeras aéreas - Cameras mono, RGB, NIR
Avanços importantes na capacidade de resolução e formatos.
track 4’400 pix
CamLight 20Mpix
track 8’000 pix
PhaseOne 80Mpix
*0.10 *0.10
track 14’800 pix
ULTRACAM
Por Irineu da Silva – Maio/2017

• Abertura: 85º;
• Alcance: 0.3 m a 200 m
• Resolução no solo: 4 cm;
• Precisão vertical: 10 cm.
IBEOLUX LASER SCANNER
Por Irineu da Silva – Maio/2017

INS – Novatel Span-IGM-S1
Sensonor's STIM300 MEMS IMU
NovAtel's OEM615 receiver
Time stamps for scanner
synchronization - PPS and NMEA
Raw GNSS and IMU data
Rasbery PI – is used to record:
• INS raw data
• Laser data packages
Outros sensores utilizados
Por Irineu da Silva – Maio/2017

Digital Surface Model
Perfil de um faixa
Experimento: 100 m altura, 6 faixas

Monitoramento de incidentes com a tecnologia UAV
Os estudos nesta área têm-se concentrado na coleta de informações
sobre o incidente, com o intuito de minimizar o tempo de
congestionamento do tráfego.
Método tradicional:
Método proposto:
Por Irineu da Silva – Maio/2017

Monitoramento de infraestrutura com a tecnologia UAV
Os estudos nessa área têm-se concentrado na coleta de informações
sobre a condição de elementos da infraestrutura rodoviária e
ferroviária.
Caso 1: Inspeção de pontes e viadutos:
Método tradicional:
Método proposto:
Por Irineu da Silva – Maio/2017

Monitoramento de infraestrutura com a tecnologia UAV
Caso 2: Manutenção rodoviária por intermédio de SIG.
Estudos com tentativas de detecção e mapeamento automático
de incidentes.
Por Irineu da Silva – Maio/2017

Análise das condições de pavimentos com a tecnologia UAV
Caso 1: Inspeção com detecção automática de defeitos no pavimento.
Tratamento de imagens.
Por Irineu da Silva – Maio/2017

Condições de pavimentos com a tecnologia UAV
Caso 2: Inspeção de superfícies não pavimentadas.
Visualização e mapeamento.
Agregados soltos Irregularidades da superfície
Buracos na via Sulcos e erosãoPor Irineu da Silva – Maio/2017

Monitoramento de tráfego com a tecnologia UAV
Caso 1: Elaboração de modelos de análise de filas e
congestionamentos rodoviários. (Área com projetos e estudos
científicos de destaque).
Por Irineu da Silva – Maio/2017

Vigilância e reconhecimentos com a tecnologia UAV
Caso 1: Vigilância aérea – substituição de câmeras em casos
específicos. Visitas a trechos específicos.
Central de vigilância Vigilância local
ResultadoPor Irineu da Silva – Maio/2017

Mapeamentos rodoviários com a tecnologia UAV
Por Irineu da Silva – Maio/2017

Mapeamentos rodoviários com a tecnologia UAV
Reconstrução 3D
Por Irineu da Silva – Maio/2017
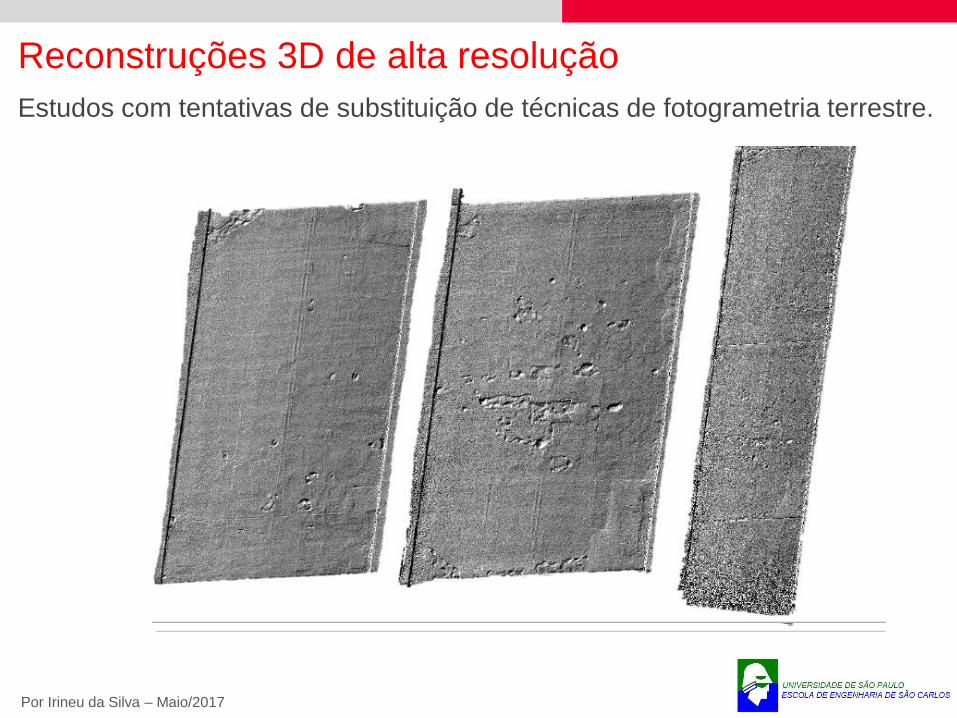
Reconstruções 3D de alta resolução
Estudos com tentativas de substituição de técnicas de fotogrametria terrestre.
Por Irineu da Silva – Maio/2017

E o Futuro?
1. As possibilidades são ilimitadas.
2. Novos sensores serão acoplados.
3. Automatização cada vez maior.
4. Qualidade e confiabilidade em constante melhora.
5. Novos usuários – novas ideias.
Por Irineu da Silva – Maio/2017

Sistemas de Controle de Máquinas
Por Irineu da Silva – Maio/2017

Sistemas de Controle de Máquinas
Implantação da obra sem a necessidade de
estaqueamentos.
O operador da máquina pode trabalhar em
diferentes áreas do projeto, sem que seja
necessário esperar pela implantação das estacas ou
pela verificação da progressão do trabalho.
Aumento de produtividade variando de 30% a 100%,
dependendo do tipo de obra, da máquina e do
sistema de automatização utilizado.
Por Irineu da Silva – Maio/2017

Tipos de Máquinas Automatizadas
Escavadeira Trator de EsteiraMoto-niveladora
Vibro-acabadora
PerfiladeirasFresadoras
Por Irineu da Silva – Maio/2017
Equipamentos usados para o Controle de Máquinas
Sensores de atitude: para a determinação dos movimentos
relativos dos implementos da máquina – orientação interna.
Instrumentos de localização topográfica: para a determinação
dos movimentos absolutos da máquina – orientação externa.
Válvulas hidráulicas: para comandar os movimentos dos
implementos.
Computador de bordo: para controlar o processo de
automatização.
Por Irineu da Silva – Maio/2017
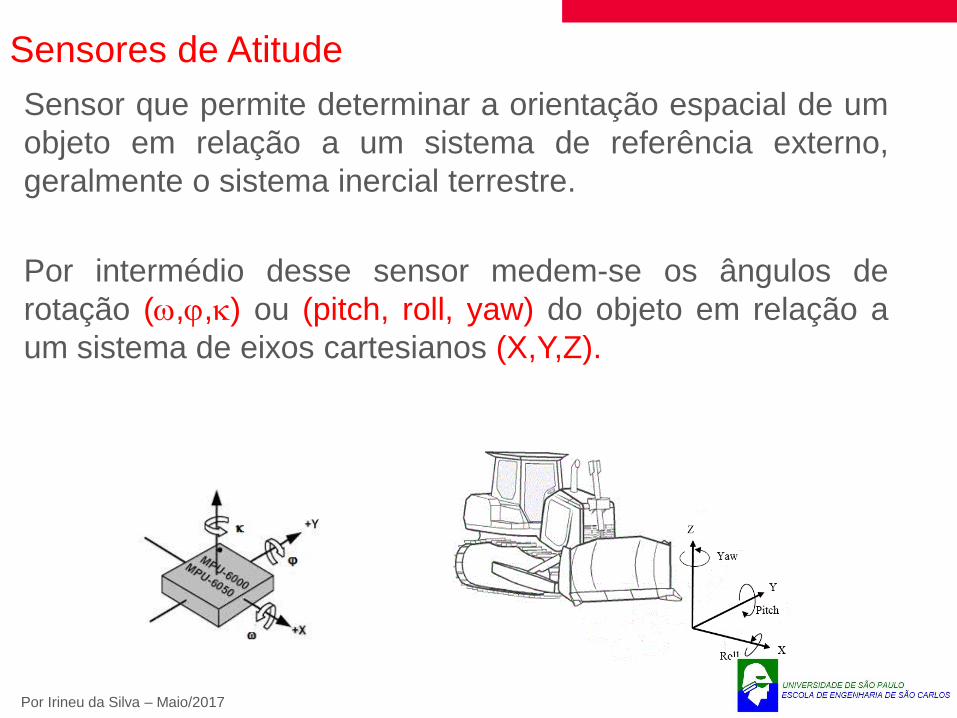
Sensores de Atitude
Sensor que permite determinar a orientação espacial de um
objeto em relação a um sistema de referência externo,
geralmente o sistema inercial terrestre.
Por intermédio desse sensor medem-se os ângulos de
rotação (,,) ou (pitch, roll, yaw) do objeto em relação a
um sistema de eixos cartesianos (X,Y,Z).
Por Irineu da Silva – Maio/2017

Sensor de Inclinação
Projetados para medir a inclinação
de uma linha de referência, em
relação a vertical do lugar.
Sensor de
inclinação
longitudinalSensor de
inclinação
transversal
Por Irineu da Silva – Maio/2017

Pag. 43
Sensor de Rotação
Instrumentos eletromecânicos projetados
para medir a rotação de um alinhamento,
em relação a um index fixo interno ao
sensor ou em relação a um referencial
externo.
Por Irineu da Silva – Maio/2017
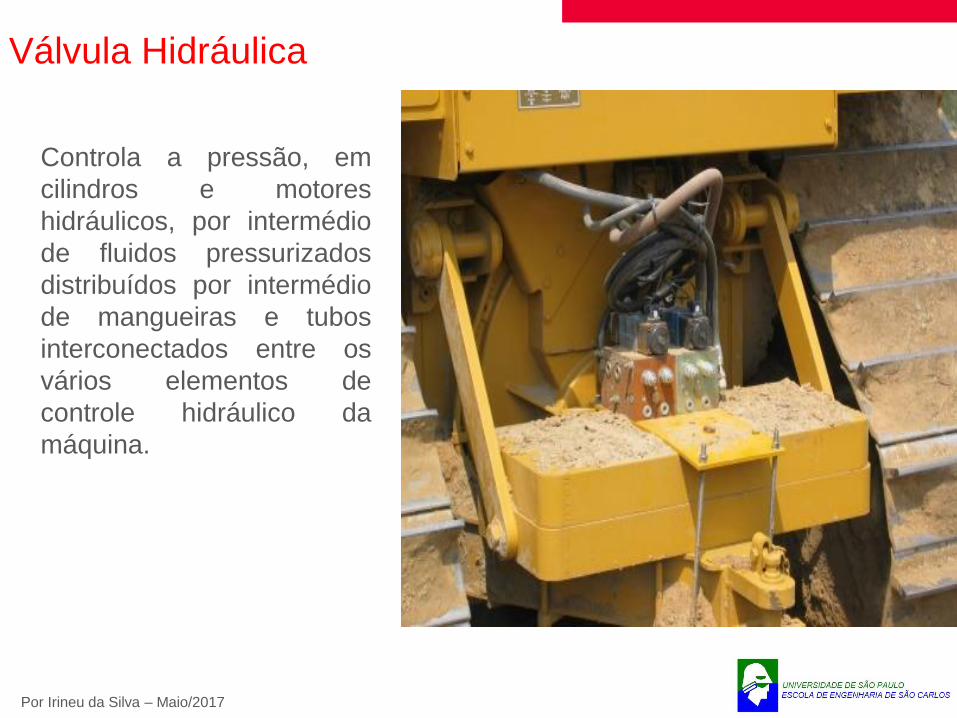
Válvula Hidráulica
Controla a pressão, em
cilindros e motores
hidráulicos, por intermédio
de fluidos pressurizados
distribuídos por intermédio
de mangueiras e tubos
interconectados entre os
vários elementos de
controle hidráulico da
máquina.
Por Irineu da Silva – Maio/2017
Modelos de Produção
Dá-se o nome de modelo de produção ao conjunto de
operações, que descrevem o trabalho a ser realizado em uma
obra, por meio de modelos matemáticos, que controlam a
reconstrução, sobre o terreno, de alinhamentos e superfícies
determinadas pelo projetista.
Em geral, ele é desenvolvido no escritório por um programa
de computador específico, baseado em plataforma CAD, e
inserido no computador de bordo da máquina para o controle
das operações de campo.
Por Irineu da Silva – Maio/2017

Pag. 46
Tipos de Modelos de Produção
• Descrição em texto .
• Representação gráfica 2D .
• Modelagem Numérica de Terreno.
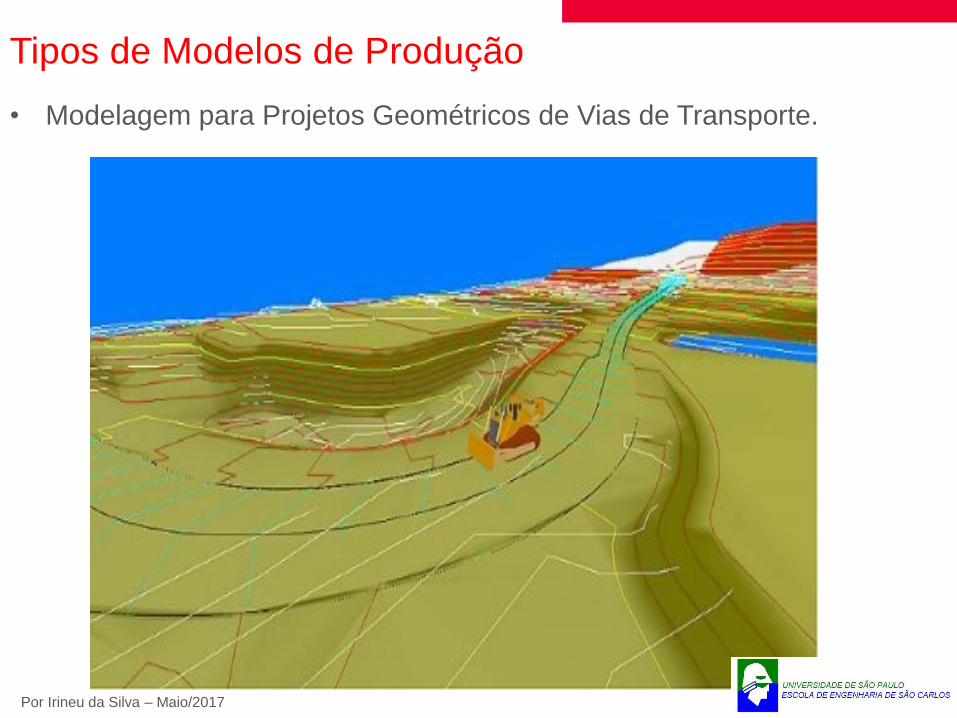
Tipos de Modelos de Produção
• Modelagem para Projetos Geométricos de Vias de Transporte.
Por Irineu da Silva – Maio/2017

Pag. 48
Computador de bordo e Interface gráfica
A comunicação entre o operador da máquina e o computador
de bordo se faz por intermédio de um painel de controle
munido de uma tela LCD sensível ao toque, instalado na
cabine da máquina.
Por Irineu da Silva – Maio/2017

Instrumentos de Posicionamento Topográfico
Nível a laser
Por Irineu da Silva – Maio/2017

Pag. 50
Estações Totais Robóticas para o Controle de Máquinas
Por Irineu da Silva – Maio/2017

Pag. 51
Sistema GNSS para o Controle de Máquinas
Por Irineu da Silva – Maio/2017
Categorias de Sistemas de Controle de Máquinas
Os sistemas de controle de máquinas estão
classificados, segundo o referencial de
posicionamento que controlam, em três categorias:
Sistema 1D;
Sistema 2D;
Sistema 3D.
Por Irineu da Silva – Maio/2017
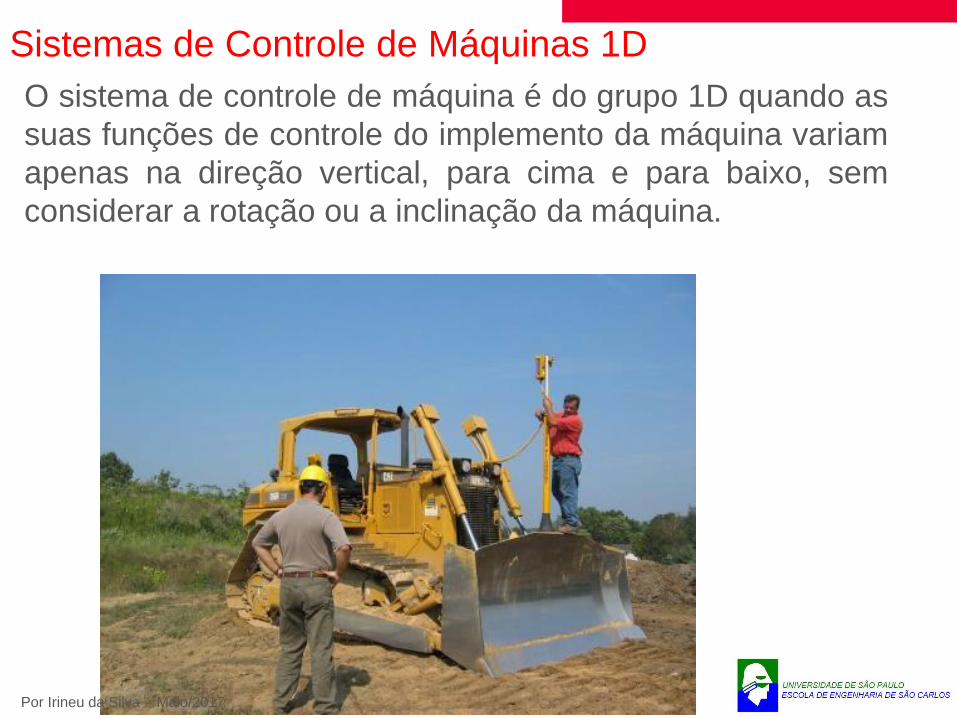
Sistemas de Controle de Máquinas 1D
O sistema de controle de máquina é do grupo 1D quando as
suas funções de controle do implemento da máquina variam
apenas na direção vertical, para cima e para baixo, sem
considerar a rotação ou a inclinação da máquina.
Por Irineu da Silva – Maio/2017

Sistemas de Controle de Máquinas 1D
Por Irineu da Silva – Maio/2017

Sistemas de Controle de Máquinas 2D
O sistema de controle de máquina é do grupo 2D quando as
suas funções de controle do implemento da máquina variam na
direção vertical, para cima e para baixo, em conjunto com
medições da inclinação e da rotação do implemento ou da
própria máquina
Por Irineu da Silva – Maio/2017

Sistemas de Controle de Máquinas 3D
O sistema de controle de máquina é do grupo 3D quando o
posicionamento da máquina e se dá nos seus três eixos de movimento.
A automatização, neste caso, se dá pela instalação de todos os
sensores nos implementos e no corpo da máquina e pelo
posicionamento da máquina por intermédio de instrumentos
topográficos.
Por Irineu da Silva – Maio/2017

57
Obrigado!!