Embed Size (px)
Citation preview

Projeções Cartográficas
Os sistemas de projeções cartográficas foram desenvolvidos para dar uma solução ao problema da transferência de uma imagem da superfície curva da esfera terrestre para um plano da carta, o que sempre vai acarretar deformações.Os sistemas de projeções constituem-se de uma fórmula matemática que transforma as coordenadas geográficas, a partir de uma superfície esférica (elipsoidal), em coordenadas planas, mantendo correspondência entre elas. O uso deste artifício geométrico das projeções consegue reduzir as deformações, mas nunca eliminá-las.
Os tipos de propriedades geométricas que caracterizam as projeções cartográficas, em suas relações entre a esfera (Terra) e um plano, que é o mapa, são:
a) Conformes – os ângulos são mantidos idênticos (na esfera e no plano) e as áreas são deformadas.
b) Equivalentes – quando as áreas apresentam-se idênticas e os ângulos deformados.
c) Afiláticas – quando as áreas e os ângulos apresentam-se deformados.
Projeção de Mercator
Nesta projeção os meridianos e os paralelos são linhas retas que se cortam em ângulos retos. Corresponde a um tipo cilíndrico pouco modificado. Nela as regiões polares aparecem muito exageradas.
Projeções de Mercator ou Cilíndrica Equatorial.
Projeção de Peters
Outra projeção muito utilizada para planisférios é a de Arno Peters, que data de 1973. Sua base também é cilíndrica equivalente, e determina uma distribuição dos paralelos

com intervalos decrescentes desde o Equador até os pólos, como podemos observar no mapa a seguir.
Projeção Cilíndrica Equivalente de Peters
As retas perpendiculares aos paralelos e as linhas meridianas têm intervalos menores, resultando na representação das massas continentais, um significativo achatamento no sentido Leste-Oeste e a deformação no sentido Norte-Sul, na faixa compreendida entre os paralelos 60o Norte e Sul, e acima destes até os pólos, a impressão de alongamento da Terra
Projeção ortográfica
Ela nos apresenta um hemisfério como se o víssemos a grande distância. Os paralelos mantêm seu paralelismo e os meridianos passam pelos pólos, como ocorre na esfera. As terras próximas ao Equador aparecem com forma e áreas corretas, mas os pólos apresentam maior deformação.
Projeção cônica
Nesta projeção os meridianos convergem para os pólos e os paralelos são arcos concêntricos situados a igual distância uns dos outros. São utilizados para mapas de países de latitudes médias.

Projeção de Mollweide
Nesta projeção os paralelos são linhas retas e os meridianos, linhas curvas. Sua área é proporcional à da esfera terrestre, tendo a forma elíptica. As zonas centrais apresentam grande exatidão, tanto em área como em configuração, mas as extremidades apresentam grandes distorções.
Projeção de Goode, que modifica a de Moolweide
É uma projeção descontínua, pois tenta eliminar várias áreas oceânicas. Goode coloca os meridianos centrais da projeção correspondendo aos meridianos quase centrais dos continentes para lograr maior exatidão.
Projeção de Holzel

Projeção equivalente, seu contorno elipsoidal faz referência à forma aproximada da Terra que tem um ligeiro achatamento nos pólos.
Projeção Azimutal Equidistante Oblíqua Centrada na Cidade de São Paulo
Nesta projeção, centrada em São Paulo, os ângulos azimutais são mantidos a partir da parte central da projeção.
Projeção Azimutal Equidistante Polar

Projeção equidistante que tem os pólos em sua porção central. As maiores deformações estão em suas áreas periféricas.
Projeções Cartográficas
Projeção cartográfica é a representação de uma superfície esférica (a Terra) num plano (o mapa), ou seja, trata-se de um "sistema plano de meridianos e paralelos sobre os quais pode ser desenhado um mapa" (Erwin Raisz. Cartografia geral. P. 58).
O grande problema da cartografia consiste em ter de representar uma superfície esférica num plano, pois, como é sabido, a esfera é um sólido não- desenvolvível, isto é, não-achatável ou não planificável. Assim, sempre que achatarmos uma esfera, necessariamente ela sofrerá alterações ou deformações.
Experimente, por exemplo, cortar uma laranja ao meio e depois pressionar (achatar) uma dessas partes sobre uma superfície plana.
Isso quer dizer que todas as projeções apresentam deformações, que podem ser em relação às distâncias, às áreas ou aos ângulos. Assim, cabe ao cartógrafo escolher o tipo de projeção que melhor atenda aos objetivos do mapa.
A maior parte das projeções hoje existentes deriva dos três tipos ou métodos originais, a saber: cilíndricas, cônicas e planas ou azimutais.

A projeção cilíndrica resulta da projeção dos paralelos e meridianos sobre um cilindro envolvente, que é posteriormente desenvolvido (planificado). Esse tipo de projeção:
apresenta os paralelos retos e horizontais e os meridianos retos e verticais; acarreta um crescimento (deformação) exagerado das regiões de elevadas
latitudes; é o mais utilizado para a representação total da Terra (mapas-múndi).
A projeção cônica resulta da projeção do globo terrestre sobre um cone, que posteriormente é planificado. Esse tipo de projeção:
apresenta paralelos circulares e meridianos radiais, isto é, retas que se originam de um único ponto;
é usado principalmente para a representação de países ou regiões de latitudes intermediárias, embora possa ser utilizado para outras latitudes.
A projeção azimutal resulta da projeção da superfície terrestre sobre um plano a partir de um determinado ponto (ponto de vista). De acordo com Erwin Raisz (famoso cartógrafo americano), as projeções azimutais são de três tipos: polar, equatorial e oblíqua. Elas são utilizadas para confeccionar mapas especiais, principalmente os náuticos e aeronáuticos.

Vejamos, a seguir, alguns dos mais conhecidos tipos de projeção cartográfica.
Projeção de Mercátor
Idealizada no século XVI, a projeção cilíndrica de Mercátor tornou-se a preferida dos navegantes por ser a única em que as direções podiam ser traçadas em linha reta sobre o mapa.
Nessa projeção, os paralelos e os meridianos são linhas retas que se cruzam formando ângulos retos. Pertence ao tipo chamado conforme, porque não deforma os ângulos. Em compensação, as áreas extensas ou situadas em latitudes elevadas aparecem nos mapas com dimensões exageradamente ampliadas.
Projeções de Mollweide e Aitoff
Essas projeções são do tipo equivalente, isto é, conservam a proporção ou equivalência das áreas representadas em detrimento da forma. Nelas, os paralelos são horizontais e estão de tal modo espaçados que cada área limitadas por dois deles conserva a mesma proporção da área real, embora possa variar muito no tocante à forma. Elas têm formato elíptico e são muito utilizadas para a confecção de mapas-múndi.
Projeção interrompida de Goode
A projeção interrompida ou descontínua do professor norte-americano Paul Goode é um tipo diferenciado de projeção idealizado pelo autor com a finalidade principal de mostrar a equivalência das massas continentais e oceânicas. Para tanto, os

1. INTRODUÇÃOA construção de uma carta exige, antes de tudo, o estabelecimento de ummétodo, segundo o qual, a cada ponto da superfície da Terra corresponda um ponto dacarta e vice-versa.Diversos métodos podem ser empregados para se obter essa correspondência depontos, constituindo os chamados "sistemas de projeções".A teoria das projeções compreende o estudo dos diferentes sistemas em uso,incluindo a exposição das leis segundo as quais se obtêm as interligações dos pontosde uma superfície (Terra) com os da outra (mapa).A correspondência entre a superfície e o mapa não pode ser exata por doismotivos básicos:- Alguma transformação de escala deve ocorrer porque a correspondência 1/1 éfisicamente impossível.- A superfície curva da Terra não pode ajustar-se a um plano sem a introduçãode alguma espécie de deformação ou distorção, equivalente a esticar ou rasgara superfície curva.O problema básico das projeções cartográficas é a representação de umasuperfície curva em um plano. Em termos práticos, o problema consiste em serepresentar a Terra em um plano. Como visto, a forma de nosso planeta é representada,para fins de mapeamento, por um elipsóide (ou por uma esfera, conforme seja aaplicação desejada) que é considerada a superfície de referência a qual estãorelacionados todos os elementos que desejamos representar (elementos obtidos atravésde determinadas tipos de levantamentos).Podemos ainda dizer que não existe nenhuma solução perfeita para o problema,e isto pode ser rapidamente compreendido se tentarmos fazer coincidir a casca de umalaranja com a superfície plana de uma mesa. Para alcançar um contato total entre asduas superfícies, a casca de laranja teria que ser distorcida. Embora esta seja umasimplificação grosseira do problema das projeções cartográficas, ela expressaclaramente a impossibilidade de uma solução perfeita (projeção livre de deformações).

Poderíamos então, questionar a validade deste modelo de representação já que seriapossível construir representações tridimensionais do elipsóide ou da esfera, como é ocaso do globo escolar, ou ainda expressá-lo matematicamente, como fazem osgeodesistas. Em termos teóricos esta argumentação é perfeitamente válida e o desejode se obter uma representação sobre uma superfície plana é de mera conveniência.Existem algumas razões que justificam esta postura, e as mais diretas são: o mapaplano é mais fácil de ser produzido e manuseado.Podemos dizer que todas as representações de superfícies curvas em um planoenvolvem: "extensões" ou "contrações" que resultam em distorções ou "rasgos".Diferentes técnicas de representação são aplicadas no sentido de se alcançar resultadosque possuam certas propriedades favoráveis para um propósito específico.A construção de um sistema de projeção é escolhida de maneira que a cartavenha a possuir propriedades que satisfaçam as finalidades impostas pela suautilização.O ideal seria construir uma carta que reunisse todas as propriedades,representando uma superfície rigorosamente semelhante à superfície da Terra. Estacarta deveria possuir as seguintes propriedades:1- Manutenção da verdadeira forma das áreas a serem representadas(conformidade).2- Inalterabilidade das áreas (equivalência).3- Constância das relações entre as distâncias dos pontos representados e asdistâncias dos seus correspondentes (eqüidistância).Essas propriedades seriam facilmente conseguidas se a superfície da Terra fosseplana ou uma superfície desenvolvível. Como tal não ocorre, torna-se impossível aconstrução da carta ideal, isto é, da carta que reunisse todas as condições desejadas.A solução será, portanto, construir uma carta que, sem possuir todas ascondições ideais, possua aquelas que satisfaçam a determinado objetivo. Assim, énecessário ao se fixar o sistema de projeção escolhido considerar a finalidade da cartaque se quer construir.Em Resumo:

As representações cartográficas são efetuadas, na sua maioria, sobre umasuperfície plana (Plano de Representação onde se desenha o mapa). O problema básicoconsiste em relacionar pontos da superfície terrestres ao plano de representação. Istocompreende as seguintes etapas:1º) Adoção de um modelo matemático da terra (Geóide) simplificado. Emgeral, esfera ou elipsóide de revolução;2º) Projetar todos os elementos da superfície terrestre sobre o modeloescolhido. (Atenção: tudo o que se vê num mapa corresponde à superfície terrestreprojetada sobre o nível do mar aproximadamente);3º) Relacionar por processo projetivo ou analítico pontos do modelomatemático com o plano de representação escolhendo-se uma escala e sistema decoordenadas.Os sistemas de coordenadas são necessários para expressar a posição de pontossobre uma superfície, seja ela, um elipsóide, esfera ou um plano. É com base emdeterminados sistemas de coordenadas que descrevemos geometricamente a superfícieterrestre nos levantamentos (destinados à execução de medições para a determinaçãoda forma e dimensões da Terra). Para o elipsóide, ou esfera, usualmente empregamosum sistema de coordenadas cartesiano e curvilíneo (PARALELOS e MERIDIANOS).Para o plano, um sistema de coordenadas cartesianas X e Y é usualmente aplicável.Para materializar a posição de um ponto no espaço necessitamos aindacomplementar as coordenadas bidimensionais, com uma terceira coordenada que édenominada ALTITUDE. A altitude de um ponto qualquer pode ser de dois tipos: oprimeiro tipo (h) é a distância contada a partir do geóide (que é a superfície dereferência para contagem das altitudes) e o segundo tipo (H), denominado ALTITUDEGEOMÉTRICA é contada a partir da superfície do elipsóide.2. CLASSIFICAÇÃO DAS PROJEÇÕES CARTOGRÁFICASAs projeções cartográficas podem ser classificadas segundo diversos tipos decaracterísticas:_ Quanto ao método:- Geométricas;- Analíticas;

_ Quanto à superfície de projeção:- Planas (Azimutais);- Cônicas;- Cilíndricas;_ Quanto às propriedades:- Eqüidistantes;- Conformes;- Equivalentes;_ Quanto ao tipo de contato entre as superfícies de projeção e referência:- Tangentes;- Secantes;2.1. QUANTO AO MÉTODOSegundo a forma de traçar (desenhar ou criar as projeções) podem ser classificadasem:_ Geométricas: baseiam-se em princípios geométricos projetivos. Podem serobtidos pela interseção, sobre a superfície de projeção, do feixe de retas quepassa por pontos da superfície de referência partindo de um centro perspectivo(ponto de vista)._ Analíticas: baseiam-se em formulação matemática obtidas com o objetivo dese atender condições (características) previamente estabelecidas (é o caso damaior parte das projeções existentes).2.2. QUANTO À SUPERFÍCIE DE PROJEÇÃOA superfície de projeção é a figura geométrica que estabelecerá a projeção planado mapa.Podem ser:- Planas ou Azimutais: quando a superfície for um plano.- Cônicas: quando a superfície for um cone.- Cilíndricas: quando a superfície for um cilindro.a) Planas ou Azimutais: este tipo de superfície pode assumir três posiçõesbásicas em relação a superfície de referência: polar, equatorial (ou meridiana)e oblíqua.Figura 1 – Superfícies de projeção azimutal.b) Cônicas: embora esta não seja uma superfície plana, já que a superfície deprojeção é o cone, ela pode ser desenvolvida em um plano sem que hajadistorções (figura 4), e funciona como superfície auxiliar na obtenção de umarepresentação. A sua posição em relação à superfície de referência pode ser:

normal (ou polar), transversal e oblíqua.Figura 2 – Superfícies de projeção cônica.c) Cilíndricas: tal qual a superfície cônica, a superfície de projeção que utiliza ocilindro pode ser desenvolvida em um plano (figura 4) e suas possíveisposições em relação a superfície de referência podem ser: equatorial,transversal e oblíqua.Figura 3 – Superfícies de projeção cilíndrica.Figura 4 - Superfícies de Projeção desenvolvidas em um plano.2.3. QUANTO ÀS PROPRIEDADESNa impossibilidade de se desenvolver uma superfície esférica ou elipsóidicasobre um plano sem deformações, na prática, buscam-se projeções tais que permitamdiminuir ou eliminar parte das deformações conforme a aplicação desejada. Assim,destacam-se:a. Eqüidistantes - As que não apresentam deformações lineares para algumaslinhas em especial, isto é, os comprimentos são representados em escalauniforme.b. Conformes - Representam sem deformação, todos os ângulos em torno dequaisquer pontos, e decorrentes dessa propriedade, não deformam pequenasregiões.ÂNGULOS E PEQUENAS FORMAS PRESERVADOSc. Equivalentes - Têm a propriedade de não alterarem as áreas, conservandoassim, uma relação constante com as suas correspondentes na superfície daTerra. Seja qual for a porção representada num mapa, ela conserva a mesmarelação com a área de todo o mapa.As propriedades acima descritas são básicas e mutuamente exclusivas. Elasressaltam mais uma vez que não existe uma representação ideal, mas apenas a melhorrepresentação para um determinado propósito.2.4. QUANTO AO TIPO DE CONTATO ENTRE AS SUPERFÍCIES DEPROJEÇÃO E REFERÊNCIAa. Tangentes: a superfície de projeção é tangente à de referência: no plano - umponto; no cone e no cilindro - uma linha.Figura 5 - Superfícies de projeção – tangentes.b. Secantes: a superfície de projeção secciona a superfície de referência: no

plano - uma linha; no cone - duas linhas desiguais; no cilindro - duas linhasiguais.Figura 6 - Superfícies de projeção – secante.Através da composição das diferentes características apresentadas nestaclassificação das projeções cartográficas, podemos especificar representaçõescartográficas cujas propriedades atendam as nossas necessidades em cada casoespecífico
. AULA 12: PROJEÇÕES CARTOGRÁFICAS
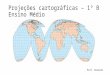
Para representarmos um objeto esférico (tridimensional) em uma superfície plana (bidimensional) temos de fazer algumas adaptações. Estas adaptações necessárias para representar o planeta Terra são chamadas de Projeções Cartográficas, e elas podem ser classificadas de acordo com seu FORMATO e TIPO.
Formatos Plano Cilíndrico Cônico
Cada formato de projeção pode representar sem distorção apenas os pontos da superfície da Terra que são tocados pelo plano no qual representamos o mapa. Sendo assim, podemos concluir que o formato Plano (ou Azimutal) pode representar apenas um ponto da superfície sem distorção, e quanto maior a distância pra este ponto, maior será a distorção. É, por tanto, recomendado para representar apenas porções relativamente pequenas do planeta.

Por outro lado, o formato cilíndrico é o único que consegue representar todo o planeta em um único plano (folha), sendo, portanto recomendado para representação de grandes áreas e construção de mapas-múndi. Na imagem, a região equatorial está representada sem distorção, enquanto os Polos são representados com maior distorção.
Por fim, o formato cônico pode ser utilizado para representar apenas um dos hemisférios do planeta, como mostra a imagem. As latitudes intermediárias são representadas de maneira precisa, enquanto as latitudes extremas (Polos e Equador) são distorcidas.
Há algumas variações da posição na qual projetamos o planeta no plano, como mostra a imagem ao lado.
Cada tipo de projeção nos permite tentar corrigir as distorções criadas pela adaptação de um objeto 3D em um plano.
O primeiro tipo de projeção é o equidistante, que mantém as distâncias lineares entre dois pontos, mas distorce as áreas e as formas dos países e continentes.
O segundo tipo é o conforme, que mantém os ângulos entre os paralelos e meridianos e conserva as formas dos continentes, mas distorce as áreas representadas.
O terceiro tipo de projeção é o equivalente, que mantém as áreas dos continentes e países, mas distorce suas formas e os ângulos entre os paralelos e meridianos.
Ao longo da história, alguns cartógrafos famosos utilizaram estes formatos e tipos de projeções cartográficas para elaborar alguns dos mapas que passaram a ser amplamente utilizados no mundo todo. Algumas das projeções clássicas mais famosas são as de Mercator e de Peters, como podemos observar na página 22 de nosso Livro de Geografia. Mais recentemente, alguns cartógrafos passaram a combinar
mais de um formato ou tipo de projeção, criando mapas mais complexos e mais precisos, como podemos observar na página 23 de nosso Livro de Geografia. Além destas páginas, devemos também ler as páginas 19 a 21.
Relembrando Coordenadas Geográficas!
AULA 13: FUSOS HORÁRIOS

Nosso planeta pode ser dividido como uma laranja: em gomos de 15º cada, totalizando os 360º que formam toda a circunferência do planeta. Então, em quanto tempo o mundo completa uma volta inteira? Isto significa o mesmo que dar uma volta completa em torno do seu eixo, logo, são necessárias aproximadamente 24h. Se o planeta tem 360º e demora 24 horas para dar essa volta
de 360 graus, então quantos graus ele anda em 1 hora?
360° = 24 h x = 360/24
x ° = 1 h x = 15°
A terra gira, portanto, 15º ao longo de uma hora. Diante desta constatação, foi criado um sistema de divisão do planeta em fatias de 15º no sentido das longitudes, determinando para cada fatia um horário diferente. Este sistema de divisões e seus respectivos horários compõem o sistema de Fusos Horários.
Para criar um fuso horário, determinou-se que o Meridiano de Greenwich, que passa em Londres e corta o mundo de Norte a Sul, seria referência. Então foi determinado que para cada 15º de afastamento do meridiano de Greenwich (GMT = hora de Greenwich), haveria uma variação de uma hora em relação ao horário de Greenwich. Mas como podemos nos afastar tanto para a esquerda quanto para a direita, determinou-se, por fim, que quando nos afastamos para leste do meridiano de Greenwich, a cada 15º acrescentamos 1 hora, e quando nos afastamos para oeste, diminuímos a cada 15º uma hora. Essa determinação deve-se ao fato de que a Terra gira de Oeste para Leste, logo, os países a Leste recebem o sol primeiro, ou seja, tem o horário adiantado.

Antes da divisão da Terra em fusos, a Europa possuía 27 horas diferentes (hoje são três) e a América, 74 (hoje, cinco). Isso acontecia porque, como o principal referencial para a contagem do tempo é a posição do Sol, qualquer ponto do planeta poderia considerar como meio-dia o instante em que o sol
está a pino. Muitas regiões próximas tinham horas diferentes, o que dificultava as comunicações entre os países. Para resolver o problema, na Conferência de Roma (Itália), em 1883, optou-se por dividir a circunferência da Terra (de 360º) em 24 fusos horários de 15º. Toda a região situada dentro de um fuso passou a ter uma única hora. No ano seguinte, na Conferência de Washington (EUA), 27 nações adotaram o meridiano de Greenwich como ponto zero, já que a maior parte das cartas geográficas da época, que eram inglesas, usava esse meridiano. No decorrer do tempo, outros países começaram a seguir essa divisão. Atualmente, em todo o mundo, é a partir dele que as horas são contadas.
Considerando que São Paulo (longitude 46º 38’ 10’’ oeste) está dentro do fuso 45º oeste, a diferença de três fusos (45º / 15º) indica que a cidade tem três horas de diferença em relação a Greenwich. Por estar a oeste, concluiu-se que a cidade está 3 horas atrasada em relação ao horário GMT, ou seja, quando forem 15 horas em Londres, será meio-dia em São Paulo. Durante o horário de verão, no entanto, cerca de metade dos estados brasileiros acrescenta uma hora ao seu horário oficial, portanto, a diferença entre São Paulo e Greenwich é reduzida para duas horas. Durante o verão do hemisfério Norte, caso os ingleses adotem o horário diferenciado, a diferença passará a ser de 4 horas.
A linha Internacional da Data, que acompanha o antimeridiano de Greenwich (180º), atravessando o oceano Pacífico, por convenção internacional, determina a mudança de data civil em todo o planeta. Ao ultrapassar essa linha, exatamente no ponto em que ela se localiza, é preciso alterar a data para o dia anterior (a leste da linha) ou seguinte (a oeste da linha) à

partida. A hora, no entanto, é a mesma nas duas zonas. É o que acontece no Kiribati, uma pequena nação formada por diversas ilhas no oceano Pacífico, cujo território é dividido pela Linha Internacional da Data. Enquanto no leste do país seus habitantes aproveitam o domingo, na capital, Bairiki, já é segunda-feira.

2.5 PLANO TOPOGRÁFICO LOCAL (PTL)O Plano Topográfico Local é um Plano topográfico elevado ao nível médiodo terreno da área de abrangência do Sistema Topográfico Local, segundo a normalà superfície de referência no ponto de origem do sistema (ponto de tangência doplano topográfico de projeção no elipsóide de referência) (NBR14166/1998).
Figura 13:
: Plano topográfico local

Figura 14: Plano meridianoFonte:Blitzkow et al (2004, p.16/34)
A figura 4 ilustra a relação existente entre a superfície topográfica, o elipsóide eo geóide para uma mesma porção da superfície terrestre.
Figura Para converter a altitude elipsoidal (h), obtida através de GPS, em altitudeortométrica (H), utiliza-se a equação: H = h – N, onde N é a altura (ou ondulação)geoidal.

Ondulação geoidal
O IBGE, através do Projeto Mudança do Referencial Geodésico (PMRG), estápromovendo a adoção no país de um novo sistema de referência, mais moderno, deconcepção geocêntrica e compatível com as mais modernas tecnologias deposicionamento.O novo sistema que atualmente esta sendo usado no Brasil é o SIRGAS (Sistemade Referência Geocêntrico para as Américas), e da mesma forma que o WGS-84(Elipsóide de Referência do GPS) é geocêntrico, e são compatíveis na ordem docentímetro.A importância de ser ter conhecimento sobre as diferenças entre um sistemageocêntrico e um regional (Figura 6), podem ser vistas na figura 7.
LEVANTAMENTOSCompreende-se por levantamento o conjunto de operações destinado àexecução de medições para a determinação da forma e dimensões da Terra.Dentre os diversos levantamentos necessários à descrição da superfície terrestreem suas múltiplas características, podemos destacar:- Levantamentos Geodésicos;- Levantamentos Topográficos;- Levantamentos por GPS;- Levantamentos por sistemas sensores: fotogramétricos e sistemasde varredura eletrônica;1.3.1 Levantamentos GeodésicosGeodésia: disciplina dedicada a medir a forma da terra e seu campo de

gravidade no espaço tridimensional e no tempo.Os levantamentos geodésicos compreendem o conjunto de atividades dirigidaspara as medições e observações que se destinam à determinação da forma e dimensõesdo nosso planeta (geóide e elipsóide). É a base para o estabelecimento do referencialfísico e geométrico necessário ao posicionamento dos elementos que compõem apaisagem territorial.- Obtenção de coordenadas tridimensionais na superfície terrestre ou próxima a ela(GPS), as quais podem ser traçadas a partir de um sistema CAD definindo as feições dasuperfície terrestre.- Levantamento PlanimétricoDentre os levantamentos planimétricos clássicos, merecem destaque:- Triangulação: é o procedimento em que se obtém figuras geométricas a partir detriângulos, justapostos, formados através da medição dos ângulos subtendidos por cadavértice.A triangulação geodésica consiste numa rede de triângulos construídos sobreuma superficie física, e a sua utilização permite a obtenção das coordenadas dos pontosque formam os vértices dos triângulos com elevada precisão. Esses marcos sãoutilizados para os mais variados trabalhos, como levantamentos topográficos, através dotransporte de coordenadas a partir desses pontos conhecidos.A triangulação é o mais antigo processo de levantamento planimétrico, sendo,ainda hoje, o mais recomendado diante do baixo investimento em instrumental eequipamentos auxiliares.- Trilateração: é um processo de levantamento semelhante à triangulação, sendo queem lugar da formação dos triângulos a partir da medição dos ângulos, o levantamentoserá efetuado através da medição dos lados.- Poligonação: É um encadeamento de distâncias e ângulos medidos entre pontosadjacentes formando linhas poligonais ou polígonos. Partindo de uma linha formadapor dois pontos conhecidos, determinam-se novos pontos, até chegar a uma linha depontos conhecidos.De um modo geral a poligonal parte de um ponto conhecido A, e chega mediantea medição de distâncias e ângulos a outro ponto conhecido B.

As poligonais levantadas em campo poderão ser fechadas, enquadradas ouabertas.- Levantamento Altimétrico- Nivelamento Geométrico: Processo de determinação de altitudes de pontos, que utilizaníveis e miras graduadas. Método usado nos levantamentos altimétricos de alta precisãoque se desenvolvem ao longo de rodovias e ferrovias.- Nivelamento Trigonométrico: Baseia-se em relações trigonométricas. É menospreciso que o geométrico, fornece apoio altimétrico para os trabalhos topográficos.1.3.2 Levantamentos TopográficosSão operações através das quais se realizam medições, com a finalidade dese determinar a posição relativa de pontos da superfície da Terra no horizontetopográfico.- Os métodos clássicos da Topografia, baseiam fundamentalmente na medição deângulos e distâncias recorrendo a instrumentos tais como estações totais, teodolitos eníveis;1.3.3 Posicionamento por GPSO Sistema de Posicionamento Global, conhecido por GPS (Global PositioningSystem), é um sistema de radionavegação desenvolvido pelo Departamento de Defesados Estados Unidos da América (DoD – Department of Defense), visando ser oprincipal sistema de navegação das forças armadas americana. Devido à alta acuráciaproporcionada pelo sistema e do grande desenvolvimento da tecnologia envolvida nosreceptores GPS, uma grande comunidade usuária emergiu dos mais variadossegmentos da comunidade civil (navegação, posicionamento geodésico, agricultura,controle de frotas, etc.).O GPS permite ao usuário, por meio do recebimento de sinais de satélitesartificiais, definir a localização de um ponto qualquer sobre a superfície terrestre oupróxima a ela.

Exemplos de receptores GPS.Este sistema apresenta vantagens sobre os métodos de posicionamento
convencionais, tais como rapidez na obtenção de coordenadas, disponibilidade emquaisquer condições climáticas e a não necessidade de visibilidade entre as estações.- Métodos de Posicionamento- Absoluto (Ponto isolado): Este método fornece uma precisão na ordem de 10 metros.- Diferencial: As posições absolutas, obtidas com um receptor móvel, são corrigidaspor um outro receptor fixo, estacionado num ponto de coordenadas conhecidas. Essesreceptores comunicam-se através de link de rádio. Precisão abaixo do metro.- Relativo: É o mais preciso. Utilizado para aplicações geodésicas de precisão.Dependendo da técnica utilizada (estático, cinemático ou dinâmico), é possível obterseuma precisão de até 1 ppm. Para aplicações científicas, por exemplo, oestabelecimento da Rede Brasileira de Monitoramento Contínuo - RBMC, essaprecisão é na ordem do cm.1.3.4 Levantamentos por Sistemas SensoresOs sensores remotos são equipamentos que captam e registram a energia

refletida ou emitida pelos elementos da superfície terrestre. Dependendo de suascaracterísticas, eles podem ser instalados em plataformas terrestres, áreas e orbitais.São exemplos de sensores as câmaras fotogramétricas e sistemas de varredura linear.- Quanto aos modelos operantes:Ativos: Possuem sua própria fonte de radiação, a qual incide em um alvo, captando emseguida o seu reflexo. Ex.: RadarPassivos: Registra irradiações diretas ou refletidas de fontes naturais. Dependem deuma fonte de radiação externa para que possam operar. Ex.: Câmara fotográfica- Quanto ao tipo de transformação sofrida pela radiação detectada:Não imageador: Não fornecem uma imagem da superfície sensoriada e sim registros naforma de dígitos ou gráficos.Imageador: Fornecem, mesmo por via indireta, uma imagem da superfície observadaatravés do Sistema de quadros ou Sistema de Varredura.– Câmaras fotogramétricasOs Métodos de levantamentos fotogramétricos utilizam como sensor umacâmera fotogramétrica instalada em aeronaves, para fotografar a área de interesse, deforma sistemática, compondo faixas de fotos aéreas com especificações que permitam aconstrução de modelos estereoscópicos (modelo tridimensional).Devido a distorções originadas do processo de formação da foto, como ainclinação da fotografia, imperfeições das lentes, deslocamento devido ao relevo,correções devem ser realizadas a fim de considerar a fotografia confiável para oprocesso de medição.A partir das fotografias devidamente corrigidas é que serão determinadas ascoordenadas da superfície terrestre, através de processo fotogramétricos;Produtos gerados: mapa gerado pela restituição da cena, ortofoto, mosaico, etc.Figura 9 – Exemplo de ortofoto convencional e ortofoto verdadeira.- Sistema de varredura eletrônicaOs sistemas de varredura eletrônica geram as imagens formadas pelomovimento de varredura, à medida que a plataforma se desloca ao longo de suatrajetória.

igura 10 – Geometria de varredura eletrônica linear.Sabe-se que tais imagens possuem distorções oriundas de diferentes fontes:Na correção radiométrica as técnicas utilizadas modificam os números digitais(ND) originais, para torná-los mais próximos dos valores que deveriam estar presentesna imagem. Esta correção engloba as distorções provocadas pela atmosfera e osproblemas derivados do mal funcionamento dos sensores.A correção geométrica deve modelar os erros inerentes ao processo deaquisição das imagens.A correção geométrica altera a geometria da imagem com a finalidade decorrigir distorções produzidas pelo movimento de rotação da Terra ou por pequenasvariações na altitude, atitude ou na velocidade da plataforma.Produtos gerados: imagens temáticas, ortoimagens;Figura 11 – Imagens Landsat ilustrando região d edesmatamento.Com a evolução dos sistemas orbitais, essa imagens passaram a ser fonte deinformação em diversas aplicações.- Sistemas de MicroondasO sistema de imageamento mais comum é o dos Radares de Visada Lateral, que

por ser um sistema ativo não é afetado pelas variações diurnas na radiação refletida pelasuperfície do terreno, podendo ser usado inclusive à noite. Pode operar em condições denebulosidade, uma vez que as nuvens são transparentes à radiação da faixa demicroondas.- Imagens radarmétricasO termo "Radar" é derivado da expressão Inglesa "Radio Detecting andRanging", que significa: detectar e medir distâncias através de ondas de rádio.Inicialmente os radares destinavam-se a fins militares. No decorrer da SegundaGuerra Mundial a Inglaterra foi equipada com eficiente rede de Radar, mas só apartir da década de 60 os geocientistas procuraram aplicar os princípios de Radarpara fins de levantamento de recursos naturais.A grande vantagem do sensor Radar é que o mesmo atravessa a cobertura denuvens.Pelo fato de ser um sensor ativo, não depende da luz solar e consequentementepode ser usado à noite, o que diminui sobremaneira o período de tempo doaerolevantamento.Um trabalho de relevância foi realizado na América do Sul, em especial naRegião Amazônica pela Grumman Ecosystens. Esta realizou o levantamento de todoo território brasileiro, com a primeira fase em 1972 (Projeto RADAM) eposteriormente em 1976, na complementação do restante do Brasil (ProjetoRADAM BRASIL).
1.0 PRODUTO - SUPERJETeO SUPERJETe é uma mistura que já vem pronta, composta porgesso, cal, calcário moído e aditivos, que são dosados e misturadosautomaticamente, o que garante a homogeneidade e a repetitividadedos traços, de forma a garantir um desempenho uniforme do produto.O SUPERJETe conta na sua composição com aditivos paraaumentar a sua trabalhabilidade e o seu desempenho, como umproduto para revestimento, influenciando principalmente no tempo depega, na retenção de água, no teor de ar incorporado e na consistênciada pasta, garantindo a manutenção das suas resistências.2.0 ESPECIFÍCAÇÕES TÉCNICAS DO SUPERJETeA argamassa SUPERJETe atende a NB 7200Características Técnicas do SUPERJETe estão apresentadas noquadro abaixo:

CARACTERÍSTICAS UNIDADE VALORESRelação água/gesso* - 0,65*Densidade após secagem Kg/m³ 1.050 à 1.100Densidade do Pó Kg/m³ 700 à 800Resistência a Compressão Mpa 2,5Resistência ao Arrancamento** Mpa 0,38**Trabalhabilidade Min. 60 à 90* Uma melhor relação água/ argamassa pode ser definida no localde aplicação pelas condições da base a ser revestida.** Aplicado sobre Bloco Cerâmico.Ana Carolina Numes Inojosa de OliveiraAna Maria Gomes da CostaLuciano Peres5
3.0 VANTAGENS NA APLICAÇÃO DO SUPERJETeAs paredes revestidas com SUPERJETe apresentamcomportamento diferente das paredes de argamassas convencionais decimento, cal e areia.O SUPERJETe após ser projetado reage e alcançarapidamente, níveis de resistências mecânicas e de dureza, muito acimadas conseguidas pelas argamassas convencionais, e com a característicade não se desagregar pela ação da água.O SUPERJETe permite diversos tipos de acabamentossuperficiais, e deixa a superfície pronta para ser pintada.Alem disso, o SUPERJETe ainda apresenta as seguintesvantagens:ISOLAMENTO ACÚSTICO - Apresenta uma maior capacidadede isolamento acústico. Reduz a passagem do barulho, de um lado daparede para outro.ISOLAMENTO TÉRMICO - O revestimento com SUPERJETetambém melhora a capacidade de isolamento térmico das paredes,diminuindo a passagem do calor, ou do frio, de um lado para o outroda parede. Assim, se mantém com mais facilidade a temperatura deambientes como: salas, escritórios, quartos, salas de aulas, cinemas,etc.RESISTENTE - As paredes revestidas com SUPERJETesuportam a fixação de buchas e parafusos para colocação deprateleiras, armários, pias, lavatórios, etc.CORTAFOGO - Em caso de incêndio, o revestimento de gessoretarda o aumento de temperatura das paredes, protegendo por maistempo as lajes e vigas.PROJETADO MECANICAMENTE - O que facilita o trabalhodo operário, diminuí a fadiga, aumenta a produtividade e dá um maiorretorno financeiro. A projeção, o sarrafeamento e o acabamento são

todas etapas muito fáceis de serem executadas, por profissionais daconstrução civil.Ana Carolina Numes Inojosa de OliveiraAna Maria Gomes da CostaLuciano Peres6
4.0 A MÁQUINA DE PROJETARAs máquinas de projetar gesso existentes no mercado são muitoparecidas entre si, e apresentam geralmente os mesmos equipamentose controle. São semelhantes a mostrada na figura.