-
7/25/2019 Projeto de Uma Dobradeira de Tubos
1/4
XXVI CONGRESSO REGIONAL DE INICIAO CIENTFICA E TECNOLGICAEM
ENGENHARIACRICTE 2014
8 a 10 de outubro de 2014AlegreteRSBrasil
PROJETO DE UMA DOBRADEIRA DE TUBOS
Igor F. BassoAcadmico do curso de Engenharia Mecnica do curso de
Engenharia Mecnica Universidade
Federal do [email protected]
Tonilson S. RozendoProfessor do curso de Engenharia Mecnica
Universidade Federal do Pampa
[email protected]
Resumo. Este trabalho se propedesenvolver o projeto de uma
mquina de
acionamento automatizado, que seja capaz
de dobrar tubos cilndricos de diferentes
dimetros e com diferentes raios e ngulos.
A metodologia deste projeto se baseia nos
seguintes passos: reviso bibliogrfica,
consulta de mquinas existentes no
mercado, determinao dos parmetros,
concepo da mquina, dimensionamento
analtico, simulaes em elementos finitos,
seleo e especificao dos elementos de
mquinas, dimensionamento do sistema de
controle e a realizao do memorial do
projeto. O projeto realizado permite realizar
dobras em tubos de ao de at 1 (31,75
mm) de dimetro com no mximo 3,35 mm
(0,1318 in) de espessura de parede, com um
raio de dobramento de at 300 mm.
Palavras-chave: Dobramento de Tubo.
Projeto de Mquina. Mquina de DobrarTubo.
1. INTRODUO
A conformao mecnica um processoque permite moldar o metal
(pr-forma) demodo a se obter o formato desejado. Odobramento uma
operao de conformaomecnica que consiste em realizar dobras ecurvas
e chapas ou tubos metlicos, pelaaplicao de um momento fletor capaz
de
deformar plasticamente o material(GROOVER, 2007).O objetivo
geral deste trabalho
desenvolver o projeto de uma mquina comacionamento automatizado,
que seja capazde dobrar tubos de diferentes dimetros ecom
diferentes raios e ngulos dedobramento.
A motivao deste trabalho foi afrequente necessidade dos
acadmicos dauniversidade em realizar dobras em tubos,em virtudes de
alguns projetos como o BajaSAE, por exemplo.
2. METODOLOGIA
A metodologia deste trabalho seguiu asseguintes etapas:
Reviso Bibliogrfica: foi feito umareviso de projetos
edimensionamentos de elementos de
mquinas e uma reviso emfundamentos de dobramento taiscomo: tipos
de dobramento, esforonecessrio para realizar a dobra etipos de
mquinas.
Determinao dos Parmetros deProjeto e Concepo: foramdefinidos a
faixa de trabalho damquina, calculados os parmetrosiniciais para o
projeto da mquina eno final se gerou trs concepes
possveis para a mquina.
-
7/25/2019 Projeto de Uma Dobradeira de Tubos
2/4
-
7/25/2019 Projeto de Uma Dobradeira de Tubos
3/4
XXVI CONGRESSO REGIONAL DE INICIAO CIENTFICA E TECNOLGICAEM
ENGENHARIACRICTE 2014
8 a 10 de outubro de 2014AlegreteRSBrasil
Figura 3. Vista explodida da mquina.
Para que a mquina permita realizardobras em tubos de ao com 1
dedimetro e at 3,35 mm de espessura de
parede, o torque requerido na matriz mvel de Treq= 3000 Nm. Foi
selecionado o motoreltrico trifsico WEG W22 Plus, com
potncia de 2 HP e rotao de 1750 RPM. Areduo mecnica minima para
obter otorque desejado na sada de 357:1. Estareduo foi feita em trs
estgios, onde o
primeiro estgio um par de engrenagenshelicoidais com reduo 4:1,
no segundoestgio se selecionou uma reduo do tiposem-fim/coroa de
30:1 e o terceiro estgio
projetou-se um par de engrenagenshelicoidais com reduo de
3:1.
Na maior parte da estrutura utilizou-secantoneiras 2 x de ao
estrutural SAE
1020, regulamentado pela norma NBR 7007AR 350 (ou ASTM A 572
G50). Pelasanlises em elementos finitos, a menorfrequncia natural
da estrutura deaproximadamente 70,7 Hz (4242 rpm), omximo
deslocamento 0,24 mm e ocoeficiente de segurana quanto aoescoamento
3,5.
3.4 Sistema de Controle
O sistema eltrico da mquina utilizaum micro controlador Arduino
modelo UNOR3 para automatizar a mquina, onde o
operador insere apenas o ngulo dedobramento. A Fig. 4 apresenta
uma imagemdo modelo deste sistema.
Figura 4. Modelo do Sistema de Controle.
O operador utiliza o boto S2 para inserira centena do ngulo de
dobramento desejado(0 ou 1) e seleciona o boto S3 paraconfirmar,
repetindo essa operao para adezena e a unidade do ngulo. A
mquinaretornar o ngulo de dobramento e paraconfirmar o operador
deve pressionar o
boto S4, iniciando o dobramento. Nestemomento o rel K3 acionado
ligando omotor.
O sensor ptico alimentado pela fonte
de tenso de 12V, tal como o Arduino, e seusinal passa pelo
regulador de tenso 7805que rebaixa a tenso para 5V. Este
reguladorde tenso necessrio por que as portasdigitais do Arduino
suportam apenas 5V eno mximo 80mA. Quando a contagem desinais do
sensor for correspondente aongulo de dobramento, o rel K3
desativado.
MatrizMvel
Estrutura
Motor
Engrenagen
Redutor Sem-Fim/Coroa
MatrizFixa
Sensor tico
Arduino
Boto S2
Boto S3 Boto S4
Rel K3
-
7/25/2019 Projeto de Uma Dobradeira de Tubos
4/4
XXVI CONGRESSO REGIONAL DE INICIAO CIENTFICA E TECNOLGICAEM
ENGENHARIACRICTE 2014
8 a 10 de outubro de 2014AlegreteRSBrasil
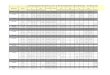
3.5 Dados Tcnicos
A Tabela 1 apresenta os dados tcnicosda mquina projetada.
Tabela 1. Dados Tcnicos da Mquina.Potncia (do Motor) 2 HP
Mximo Dimetro de TudoPermissvel
1 in
Mxima Parede de TuboPermissvel
3,35 mm
Raio de DobramentoMximo
300 mm (11,8 in)
ngulo de DobramentoMximo
180
Dimenses Mximas887,6 mm x 588,9 mm
x 615,9 mm
Peso Aproximado 140 kgPreciso Mxima 1
4. REFERNCIAS
GROOVER, M. P. Fundamentals of ModernManufacturing: Materials,
Processes, andSystems. 3 Ed. United States of America:Jonh Willey
& Sons, 2007.
INARMEG, Redutores e Motoredutores
(Catlogo), 2010. Disponvel em: . Acesso em: 03 de junhode
2014.
JUVINALL, R. C., MARSHEK, K. M.,Fundamentos do Projeto de
Componentesde Mquina, 4 Ed., Rio de Janeiro: LTC,2013.
NORTON, R. L. Projeto de Mquinas:uma abordagem integrada, 2 Ed.
PortoAlegre: Bookman, 2004.
SHIGLEY, J. E., MISCHKE, C. R.,BUDINAS, R. G. Projeto de
EngenhariaMecnica, 7 Ed., Porto Alegre: Bookman,2005.
TANG, N. C. Plastic-deformation Analysisin Tube Bending.
International Journal ofPressure Vessels and Piping, Toronto,
v.77,f.12, p. 751-759, Setembro 2000.
RESULTADOS OBTIDOS
Ao final deste trabalho pode-se fazeras seguintes concluses:
a) a mquina realiza dobras em
tubos de ao de at 1 dedimetro com mximo 3,35 mmde parede, com um
raio dedobramento de at 300 mm;
b) o projeto da mquina de dobrartubos realizado baseia-se no
princpio de dobramento portrao, onde o tubo fixado emuma matriz
circunferencial, e dobrado quando se gira estamatriz em torno de
seu eixo;
c)
o sistema de controle utiliza ummicro controlador Arduino,
queutiliza/recebe os dados de entradado operador e os sinais do
sensor(contador) para ligar e desligar omotor, porm necessita
sercalibrado na montagem final.