-
UNIVERSIDADE ESTADUAL DE MONTES CLAROS UNIMONTES CENTRO DE
CINCIAS EXATAS E TECNOLGICAS CCET
ESPECIALIZAO EM ENGENHARIA DE SISTEMAS
Samuel Cruz Guimares
PROPOSTA DE UM SISTEMA MULTIAGENTE EVOLUTIVO
BASEADO EM ALGORITMOS GENTICOS
E EVOLUO DIFERENCIAL
Montes Claros MG 2015
-
Samuel Cruz Guimares
PROPOSTA DE UM SISTEMA MULTIAGENTE EVOLUTIVO
BASEADO EM ALGORITMOS GENTICOS
E EVOLUO DIFERENCIAL
Monografia apresentada Universidade
Estadual de Montes Claros, como requisito
parcial para a concluso do curso de
Especializao em Engenharia de Sistemas.
Orientador: Me. Allysson Steve Mota Lacerda
Montes Claros MG 2015
-
RESUMO
Problemas de otimizao so facilmente encontrados nas mais
diversas reas do conhecimento,
com diferentes especificidades e nveis de complexidade. Devido a
isso, a definio do melhor
mtodo para resoluo de tais problemas pode ser bastante difcil,
pois o desempenho de cada
um ir depender, principalmente, da natureza do problema. Alm
disso, a popularizao de
computadores com mltiplos ncleos ou processadores tem
incentivado o desenvolvimento de
algoritmos paralelizveis, como os Sistemas Multiagente. Este
trabalho prope um Sistema
Multiagente Evolutivo baseado em ilhas, utilizando Algoritmos
Genticos e Evoluo
Diferencial, para a soluo de problemas no lineares. Experimentos
realizados mostraram que
o mtodo proposto apresentou bons resultados quando comparado a
outros algoritmos
disponveis na literatura, especialmente em problemas com maior
complexidade ou maior
dimenso.
Palavras-chave: Sistemas MultiAgente Evolutivos, Algoritmos
Genticos, Evoluo
Diferencial, Computao Natural, Otimizao.
-
ABSTRACT
Optimization problems can be easily found in several areas of
knowledge, with different levels
of complexity and specificities. For this reason, it can be
difficult to choose a resolution
methods to these problems, since its performance will depend
mainly on the nature of the
problem. Furthermore, the increasing use of multi-core computers
leads to the development of
new parallel algorithms, like multiagent systems. This paper
aims to develop an Evolutionary
MultiAgent System based on an island model, using Genetic
Algorithms and Differential
Evolution to solve nonlinear problems. Experiments showed that
the proposed method showed
good results when compared to other algorithms available in the
literature, especially in
problems with more complex or larger.
Keywords: MultiAgent Systems. Evolutionary MultiAgent Systems.
Differential Evolution
Genetic Algorithms. Evolutionary Computation. Natural Computing.
Optimization.
-
LISTA DE FIGURAS
Figura 1: Pseudocdigo de um AG.
.........................................................................................
12
Figura 2: Fluxograma que sintetiza um AG.
............................................................................
13
Figura 3: Fluxograma que sintetiza um ED.
.............................................................................
15
Figura 4: Pseudocdigo de um ED.
..........................................................................................
16
Figura 5: Representao grfica da mutao do algoritmo de ED.
.......................................... 17
Figura 6: Componentes de um Sistema de Agente.
..................................................................
21
Figura 7: Utilizao de AE pelos agentes individualmente e pela
populao de agentes. ....... 22
Figura 8: Representao grfica da funo de Rastrigin bidimensional.
................................. 32
Figura 9: Acompanhamento do progresso do AG.
...................................................................
33
Figura 10: Acompanhamento do progresso do ED.
.................................................................
33
-
SUMRIO
1 INTRODUO
..................................................................................................................
6
2 FUNDAMENTAO TERICA
.....................................................................................
9
2.1 ALGORITMOS GENTICOS
...................................................................................
9
2.1.1 ESTRUTURA DO ALGORITMO
.......................................................................
11
2.2 EVOLUO DIFERENCIAL
.................................................................................
13
2.2.1 IMPLEMENTAO PADRO DO ALGORITMO DE ED
.............................. 15
2.2.2 VARIANTES
.......................................................................................................
18
2.3 SISTEMA MULTIAGENTE EVOLUTIVO
........................................................... 19
2.3.1 MODELAGEM DOS PROCESSOS EVOLUTIVOS NOS SMAE
.................... 24
3 MODELAGEM E DESENVOLVIMENTO
....................................................................
26
3.1 ALGORITMO GENTICO
.....................................................................................
26
3.2 ALGORITMO DE EVOLUO DIFERENCIAL
.................................................. 28
3.3 SISTEMA MULTIAGENTE EVOLUTIVO
........................................................... 29
4 EXPERIMENTOS E RESULTADOS OBTIDOS
........................................................... 32
4.1 FUNO RASTRIGIN
...........................................................................................
32
4.2 EXPERIMENTOS REALIZADOS
..........................................................................
32
5 CONCLUSES
................................................................................................................
37
REFERNCIAS BIBLIOGRFICAS
.....................................................................................
39
-
6
1 INTRODUO
A otimizao pode ser definida como a tentativa de se produzir o
melhor resultado (resposta)
possvel para uma determinada situao, segundo um critrio de
avaliao previamente
definido. Geralmente definida como uma busca, e no importando a
rea de atuao, sempre
tem como objetivo encontrar a melhor soluo dentre todas as
solues possveis (espao de
solues), por intermdio da maximizao ou minimizao de uma funo
objetivo (LINDEN,
2006). A definio de melhor relativa ao problema proposto, s
tolerncias aceitas e aos
mtodos utilizados para resoluo e avaliao.
Problemas de otimizao so facilmente encontrados nas mais
diversas reas do conhecimento,
com diferentes especificidades e nveis de complexidade. Devido a
isso, a escolha do mtodo
pode ser de difcil determinao, pois o desempenho de cada um vai
depender, principalmente,
da natureza do problema. O teorema No Free Lunch para algoritmos
de otimizao nos
mostra o quo difcil e improvvel a criao de uma estratgia de
otimizao que seja
universalmente eficiente. (WOLPERT & MACREADY, 1997) (HO
& PEYNE, 2001)
Uma das abordagens mais estudadas na Otimizao so as
metaheursticas baseadas na
Computao Natural, das quais os Algoritmos Evolucionrios (ou
Evolutivos) (AE), fazem
parte. Os Algoritmos Evolutivos so tcnicas inspiradas no
princpio Darwiniano da evoluo
das espcies e na gentica (GOLDBERG, 1989). Metaheursticas so
procedimentos genricos
de alto nvel que fazem uso de aleatoriedade em diversas
estratgias heursticas visando
encontrar boas solues para o problema considerado (BLUM &
ROLI, 2003).
Destacam-se entre as diversas abordagens dos AE os Algoritmos
Genticos (AG) e a Evoluo
Diferencial (ED). Os AG foram propostos por HOLLAND (1975) e so
fortemente baseados
no processo de seleo natural e evoluo das espcies. Em suma,
prope que os indivduos
mais aptos e suas caractersticas tem maiores chances de
prevalecer pelas geraes
subsequentes, enquanto os mais fracos (menos aptos) tendem a
desaparecer. O mtodo da ED
criado por STORN & PRICE (1995) tem como ideia principal a
gerao de novos indivduos,
denominados vetores, por intermdio do procedimento de adicionar
um vetor diferena
ponderada entre outros dois vetores aleatrios.
-
7
Os mtodos citados at o momento nesse trabalho tm obtido bons
resultados na resoluo de
muitos problemas de otimizao global. Ainda assim, pode-se
deparar com inadequaes
devido crescente complexidade dos problemas e limitaes impostas
pelo poder de
processamento dos computadores atuais. Com o intuito de
contornar ou pelo menos amenizar
essas complexidades e limitaes, cada vez mais, vm sendo
explorados mtodos que se
adaptem bem paralelizao, podendo assim tirar proveito dos
processadores com mltiplos
ncleos e/ou do uso da computao distribuda. O processamento
paralelo tem o intuito de
dividir uma tarefa grande ou complexa em partes menores que
tenham menor custo
computacional. (ALMASI & GOTTLIEB, 1989)
Seguindo essa linha de pesquisa, podemos citar uma outra
abordagem muita explorada
atualmente, os Sistemas Multiagentes (SMA). Essa abordagem
viabiliza e adequa-se a
resoluo de problemas complexos e de natureza descentralizada. Os
SMA adotam o conceito
de agente como uma unidade autnoma de resoluo de problemas. O
agrupamento desses
agentes para trabalharem cooperativamente, cada um resolvendo
parte do problema e
interagindo com o ambiente onde esto inseridos, caracteriza os
SMA. (WOOLDRIDGE &
JENNINGS, 1995)
Inspirados nos Sistemas Multiagente, surgiram os Sistemas
Multiagente Evolutivos (SMAE),
que so um tipo de SMA que implementam sobre seus agentes os
operados presentes nas demais
abordagens evolutivas, como seleo, cruzamento e mutao.
Comumente os SMA e SMAE utilizam o modelo de ilhas, no qual os
agentes so distribudos
em subpopulaes que evoluem de forma independente na busca da
soluo do problema
proposto. A troca de informaes entre ilhas ocorre,
principalmente, por meio da migrao de
agentes entre elas.
O presente trabalho tem como objetivo principal desenvolver e
avaliar um Sistema Multiagente
Evolutivo em um modelo de ilhas, utilizando as metaheursticas de
Algoritmos Genticos e
Evoluo Diferencial, para resoluo de problemas de otimizao no
linear. Este trabalho
tambm objetiva comparar o desempenho do SMAE proposto, com os
algoritmos utilizados em
suas ilhas, AG e ED, isoladamente.
-
8
O restante desse trabalho est organizado da seguinte forma: o
segundo captulo apresenta a
fundamentao terica utilizada para o seu desenvolvimento,
abordando assuntos pertinentes
otimizao e heursticas utilizadas pelos algoritmos. No terceiro
captulo apresentada a
implementao do trabalho, descrevendo a metodologia utilizada nos
algoritmos. O quarto
captulo apresenta as implantaes, os testes, os resultados
obtidos e faz uma comparao entre
o SMAE e os algoritmos de AG e ED isoladamente. Por fim, o
quinto captulo traz as
concluses, dificuldades encontradas e os trabalhos futuros.
-
9
2 FUNDAMENTAO TERICA
2.1 ALGORITMOS GENTICOS
Os Algoritmos Genticos (AG) foram desenvolvidos por John Holland
e sua equipe, na
Universidade de Michigan, em 1975. Originalmente, os AG estavam
muito fortemente ligados
a modelos de aprendizado automtico, como demonstrada na nfase
dada por HOLLAND
(1975) aos chamados sistemas classificadores, que so um modelo
de mquina de aprendizado
usando AG. Posteriormente GOLDBERG (1989) passou a utilizar a
ideia de otimizao como
tema central na teoria dos AG. Por esses motivos que, ao
contrrio de outras abordagens
evolutivas, os AG conceitualmente apresentam um escopo mais
amplo do que a simples
otimizao, sendo apresentados como um modelo para a aprendizagem
de mquina por
HEITKOETTER & BEASLEY (1994).
Os AG so o ramo mais conhecido da Computao Evolutiva (CE), sendo
eles algoritmos de
otimizao global, baseados nos mecanismos de gentica e seleo
natural (GOLDBERG,
1989), (LINDEN, 2006). So um mecanismo de busca de solues que
utilizam combinaes
de melhores solues - melhores pais - de uma determinada gerao,
com o objetivo de obter
novas solues - filhos - para a gerao seguinte. Os filhos devem
apresentar resultados mais
eficientes para a funo de avaliao, funo essa que a responsvel
por manter a gerao
contnua de melhores solues para o problema.
A base de um algoritmo gentico pode ser definida por: um
procedimento de descoberta de
bons blocos, seleo desses blocos e construo de novos blocos a
partir desses, sendo que a
ideia principal que cada novo bloco gerado a partir de outros
bons blocos, ser melhor que os
blocos geradores. (HOLLAND, 1975)
Assim sendo, LINDEN (2006) conclui que os AG no constituem um
algoritmo de busca da
soluo tima de um problema, mas sim uma metaheurstica que
encontra, de forma
probabilstica, um conjunto de boas solues a cada execuo.
Os AG empregam uma estratgia de busca paralela e estruturada,
mas aleatria, que voltada
em direo ao reforo da busca de pontos de alta aptido, ou seja,
pontos nos quais a funo
-
10
a ser minimizada (ou maximizada) tm valores relativamente baixos
(ou altos) (BRAGA et al.,
2000). Portanto, apesar de aleatrios, eles no so caminhadas
aleatrias no direcionadas, pois
exploram informaes histricas para encontrar novos pontos de
busca onde so esperados
melhores desempenhos.
A vantagem principal dos AG ao trabalharem com o conceito de
populao, ao contrrio de
muitos outros mtodos que trabalham com um s ponto, que eles
encontram segurana na
quantidade. Tendo uma populao de pontos bem adaptados, a
possibilidade de alcanar um
falso timo torna-se menor.
O conceito de mnimo/mximo local (ou falso timo) acontece quando
o algoritmo converge
para uma regio que possui uma soluo local e a explora at que
encontre seu melhor valor,
ignorando, porm, o restante do espao de busca.
A seguir descrevemos os conceitos fundamentais da gentica que so
utilizados nos AG:
Cromossomo ou Indivduo: uma possvel soluo para o problema em
questo,
codificada, de acordo com um modelo selecionado, com informaes
do problema a
ser resolvido.
Gene: parte de uma soluo. Por exemplo, supondo um vetor [1, 3,
2] como uma
soluo proposta para o problema, pode-se dizer que o 3 um gene do
cromossomo.
Fitness: demonstra o quo adaptado um determinado individuo a
situao qual
ele est exposto. No caso dos AG representa o valor obtido pela
funo de avaliao
sobre aquele determinado indivduo (ou soluo).
Funo de Avaliao: a funo objetivo do problema em questo, que deve
avaliar
cada soluo proposta e determinar a probabilidade da sua
permanncia no grupo de
solues admissveis (timas) para o problema.
Populao: conjunto de solues propostas, presentes numa
determinada etapa da
execuo do AG.
Cruzamento: processo de reproduo de indivduos, no qual os
indivduos filhos
(solues propostas para a gerao seguinte) so construdos a partir
de genes obtidos
dos pais (solues propostas atuais).
-
11
Mutao: processo de modificao aleatria de um ou mais genes
contidos em uma
determinada soluo (cromossomo), que aplicada nos AG, visam
evitar os problemas
de mnimos locais e convergncia rpida, diversificando os
indivduos da populao
corrente.
Seleo: processo de separao dos indivduos que possuem uma melhor
resposta
funo de avaliao daqueles que no possuem boas avaliaes, para que
os melhores
originem os indivduos da gerao seguinte.
Populao Inicial: o conjunto inicial de solues para o problema, o
ponto de
partida da execuo do AG. A partir desses indivduos, aplicando os
operadores
genticos, so gerados os indivduos das geraes futuras. Geralmente
esses
indivduos recebem valores aleatrios.
Condio de Parada: condio que deve ser satisfeita para que o
algoritmo gentico
pare de executar, condio essa, que deve ser determinada de
acordo com o problema
a ser resolvido. Usualmente, essa condio um nmero que representa
a quantidade
mxima de iteraes sobre as quais o AG deve ser executado.
2.1.1 ESTRUTURA DO ALGORITMO
necessrio observar uma sequncia de passos para a utilizao de AG
em problemas de
otimizao e busca.
O primeiro passo deve ser a codificao ou representao, ou seja,
deve ser determinado como
os indivduos sero codificados. A codificao da informao em
cromossomos um ponto
crucial dentro do AG, e , junto com a funo de avaliao, o que
liga o AG ao problema a ser
resolvido.
O prximo passo a gerao da populao inicial. Durante o processo
evolutivo, a populao
avaliada, sendo que para cada indivduo dada uma nota, ou ndice,
refletindo sua habilidade
de adaptao a um determinado ambiente.
O processo de seleo determina quais indivduos da populao podem
participar da fase de
reproduo. Os indivduos so selecionados de acordo com uma
probabilidade dada pelos
ndices ou notas de aptido.
-
12
Os indivduos escolhidos na fase de seleo participam da fase de
reproduo, em que podem
ser combinados e modificados, produzindo os indivduos da prxima
gerao. Essas
combinaes e modificaes so realizadas pelo conjunto de operadores
genticos.
Depois de concludas essas etapas, a nova gerao formada novamente
submetida avaliao,
e assim ser feito at o ponto de parada do algoritmo.
De acordo com os passos vistos acima, o AG, em linhas gerais,
pode ser descrito pelo
pseudocdigo da Figura 1.
Figura 1: Pseudocdigo de um AG.
A Figura 2 modela exatamente a situao proposta no algoritmo.
Obviamente esta somente
uma viso de alto nvel do algoritmo. O que ela esconde a
complexidade do processo de
obteno de uma representao cromossomial que seja adequada ao
problema e de uma funo
de avaliao que penalize solues implausveis para nosso problema e
que avalie
satisfatoriamente o grau de adequabilidade de cada indivduo como
soluo do problema em
questo (LINDEN, 2006).
Define populao inicial P
ENQUANTO condio de parada = falso
Seleo(P)
Cruzamento(P)
Mutao(P)
FIM
-
13
Figura 2: Fluxograma que sintetiza um AG.
No sero citados, tampouco detalhados, os tipos de representao
cromossmica, operadores
genticos e demais mtodos possveis de utilizao nos AG, j que
estes no fazem parte do
espoco principal do trabalho. Apenas sero mencionados, no
captulo 3, os tipos utilizados na
implementao do algoritmo proposto e utilizado para os testes do
trabalho.
2.2 EVOLUO DIFERENCIAL
O algoritmo de Evoluo Diferencial foi desenvolvido por Storn e
Price, inicialmente em 1995
e surgiu a partir de tentativas para resolver o problema de
ajuste polinomial de Chebychev
(STORN & PRICE,1995). Esse algoritmo introduz uma abordagem
um pouco diferente dos
demais AE. Prope usar a diferena de vetores para perturbar a
populao de indivduos
(demais vetores) o que, segundo STORN & PRICE (2013),
resulta em um mtodo que requer
poucas variveis, de rpida convergncia, simples e robusto.
Sim
Incio
Inicializa Parmetros
Populao Inicial
Funo de Avaliao Mutao
Cruzamento
Seleo
Trmino Fim da Busca?
No
-
14
O mtodo consiste em gerar aleatoriamente uma populao de
indivduos, denominados de
vetores, onde cada um representa um ponto de busca no espao de
solues potenciais de um
dado problema. Em geral, esta populao inicial criada por meio de
uma distribuio de
probabilidade uniforme, quando no h nenhum conhecimento sobre o
problema.
A populao inicial sofre modificaes durante suas interaes dando
lugar a uma nova
populao de mesmo tamanho, e assim vrias interaes so realizadas
at que o processo de
otimizao seja encerrado. Segundo OLIVEIRA (2006), estas
modificaes ocorrem com uma
gerao de novos vetores modificados ou doadores, por intermdio da
adio da diferena
ponderada entre dois indivduos aleatrios da populao a um
terceiro indivduo tambm
escolhido aleatoriamente. Essa operao corresponde ao operador de
mutao.
Escolhe-se aleatoriamente outro vetor, denominado vetor alvo,
cujos componentes so
misturados com os componentes do vetor doador, resultando no
vetor chamado vetor tentativa,
vetor experimental ou vetor candidato. Este processo de misturar
os componentes
correspondente ao operador de cruzamento.
Se o valor da funo objetivo aplicada ao vetor candidato for
melhor do que o valor dela
aplicada ao vetor alvo, ento o vetor candidato substitui o vetor
alvo na gerao seguinte. Caso
contrrio, o vetor alvo mantido na prxima gerao. Esta ltima
operao corresponde ao
operador de seleo.
O procedimento de otimizao continua at que algum critrio de
parada seja satisfeito. Na
Figura 3, um fluxograma apresenta uma sntese dos procedimentos
citados anteriormente com
as principais etapas do algoritmo de ED.
-
15
Figura 3: Fluxograma que sintetiza um ED.
Abaixo, algumas caractersticas do algoritmo que o tornam
candidato otimizao de
problemas numricos. (OLIVEIRA, 2006)
Parmetros de entrada e sada so representados como nmeros reais,
evitando
overhead;
Tende a no se prender a timos locais;
Custo computacional potencialmente baixo, pois eficiente com
populaes
pequenas.
2.2.1 IMPLEMENTAO PADRO DO ALGORITMO DE ED
O algoritmo padro pode ser representado pelo pseudocdigo da
Figura 4.
Incio
Inicializa Parmetros
Populao Inicial (Vetores Alvos)
Funo de Avaliao Seleo
Cruzamento (Vetores Candidatos)
Mutao (Vetores Doadores)
Trmino Fim da Busca?
Sim
No
-
16
Figura 4: Pseudocdigo de um ED.
Um algoritmo de ED pode ser implementado inicializando-se um
conjunto de vetores de
nmeros reais que representam possveis solues para o problema.
Cada nmero real
representa um parmetro da funo a ser otimizada, cada uma
possuindo um limite mnimo e
mximo, para evitar solues fora do escopo de busca. Em seguida, o
conjunto iterado e cada
vetor sofre as operaes de mutao, cruzamento e seleo. O processo
se repete at que um
critrio de parada seja alcanado. Em cada iterao, o vetor
observado denominado vetor alvo
(Va).
Os operadores da evoluo diferencial se baseiam no princpio da
evoluo natural cujos
objetivos so manter a diversidade da populao, evitar
convergncias prematuras e obter a
melhor soluo. (OLIVEIRA, 2006). A seguir apresentaremos os
principais operadores
utilizados pelo algoritmo de ED.
2.2.1.1 MUTAO
Para a realizao da mutao, trs vetores distintos V1, V2 e V3
(diferentes tambm do vetor
alvo) so selecionados aleatoriamente na populao. Definimos um
valor arbitrrio, pertencente
ao intervalo [0, 2], para o fator de mutao (Fm), que controla a
amplitude do vetor diferena.
Obtemos o vetor doador (Vd) multiplicando Fm pela diferena entre
V2 e V3, e somando o
resultado a V1.
O clculo de Vd pode ser representado por:
= 1 + (2 3) (1)
Define populao inicial P
ENQUANTO condio de parada = falso
PARA cada indivduo Va de P
Define V1, V2 e V3
Vd = Mutao(V1,V2,V3)
Vc = Cruzamento(Va,Vd)
Seleo(Va,Vc)
FIM
FIM
-
17
Com base na descrio do operador pode-se concluir que o nmero de
vetores no conjunto
(tamanho da populao) deve ser maior ou igual a 4, para que a
mutao seja vivel. (STORN
& PRICE, 1995). A Figura 5 mostra uma representao do
operador de mutao do ED.
Figura 5: Representao grfica da mutao do algoritmo de ED.
2.2.1.2 CRUZAMENTO
No processo de cruzamento, um vetor candidato (Vc) criado
combinando elementos do vetor
doador (Vd) e do vetor alvo (Va). Cada elemento do vetor doador
tem uma chance de participar
do vetor candidato determinada pela probabilidade de cruzamento
(Pc). Se a posio observada
do vetor doador no participar do vetor candidato, um elemento do
vetor alvo ser utilizado no
lugar. Podemos representar esse processo de cruzamento por
intermdio da equao:
() = {(), (), >
= 1, , (2)
Este mtodo de cruzamento denominado binomial. Uma variao deste
mtodo que veio a
surgir depois, o cruzamento exponencial, dita que elementos do
vetor doador sejam utilizados
at que o primeiro nmero aleatrio seja maior que Pc, sendo que
todos os prximos sero do
vetor alvo. De acordo com STORN & PRICE (2013), o cruzamento
binomial nunca ser pior
que o cruzamento exponencial.
-
18
2.2.1.3 SELEO
Depois de construdo, o vetor candidato ento comparado ao vetor
alvo, por meio dos valores
da funo objetivo aplicado a cada um, e o substituir na prxima
gerao caso represente uma
melhor soluo para o problema.
() (()), (+1) =
() > (()), (+1) = () (3)
A seleo o processo de produzir filhos melhores. Diferentemente
de outros algoritmos
evolutivos, a evoluo diferencial no usa hierarquia (elitismo)
nem seleo proporcional.
(OLIVEIRA, 2006)
2.2.2 VARIANTES
Alm da estrutura bsica apresentada, variantes dos operadores
possibilitam diferentes
implementaes do algoritmo, podendo apresentar vantagens de
acordo com o problema
proposto. Algumas variaes possveis para os operadores so:
Mutao:
o Escolher V1 baseado em algum critrio especfico e no
aleatoriamente. Ex.:
melhor vetor do conjunto.
o Utilizar 2 (dois) vetores diferenciais (diferenas ponderadas),
para isso o mnimo
de indivduos da populao passa a ser 6 (seis).
Cruzamento:
o Binrio: para cada posio do vetor candidato, h uma chance de
ser usado um
elemento do vetor doador.
o Exponencial: o vetor candidato preenchido como no binrio, porm
ao
primeiro elemento do vetor alvo utilizado, todos os prximos
elementos tambm
derivam dele.
Com o intuito de classificar essas variantes STORN & PRICE
(1995) introduziram a seguinte
notao:
-
19
///
Onde:
a - especifica o critrio de escolha do vetor a ser mutado V1,
rand para escolha aleatria ou best
para escolha do vetor de menor custo.
b - especifica o nmero de vetores diferena (direes) utilizados
na etapa de mutao.
c - especifica o esquema de cruzamento adotado, bin para
cruzamento binomial ou exp para
cruzamento exponencial.
Utilizando dessa notao, podemos definir a implementao padro
proposta por Storn e Price,
e descrita acima, como: //1/.
A eficincia do algoritmo tambm pode ser otimizada ajustando-se
os parmetros principais:
tamanho da populao, fator de mutao e probabilidade de
cruzamento. Cada tipo de problema
melhor resolvido utilizando-se uma combinao especfica desses, a
ser descoberta com base
em testes e anlise dos resultados.
2.3 SISTEMA MULTIAGENTE EVOLUTIVO
No existe uma definio exclusiva para o termo agente, mas dentre
os principais autores da
rea de Inteligncia Artificial Distribuda (IAD) podemos extrair
de consenso a ideia central de
autonomia (WOOLDRIDGE, 1999). E autonomia pode ser visto como a
capacidade de realizar
aes sem (ou com o mnimo possvel) de intervenes de outros agentes
computacionais ou
humanos.
A existncia de vrios tipos de agentes para os vrios domnios de
aplicao possveis,
justificam a pluralidade encontrada nas definies.
Adotaremos como definio o seguinte: Um agente um sistema
computacional inserido em
algum ambiente, e que capaz de agir de forma autnoma nesse
ambiente, a fim de cumprir os
objetivos do projeto. (WOOLDRIDGE, 1999)
-
20
Para WOOLDRIDGE & JENNINGS (1995), um agente uma entidade
que encapsula
conhecimentos sobre algum domnio e os define como tendo as
seguintes propriedades:
Autonomia: os agentes operam sem a interveno direta de seres
humanos ou outros,
e tem controle sobre suas aes e estado interno;
Habilidade social: os agentes interagem com outros agentes
(computacionais e/ou
humanos) por meio de algum tipo de comunicao;
Capacidade de reao: os agentes percebem o ambiente que esto
inseridos e reagem
em tempo hbil s mudanas que nele ocorrem;
Capacidade pr-ativa: os agentes so capazes de apresentar um
comportamento
orientado a objetivos ao tomarem iniciativas.
Alm dessas propriedades, pode-se tambm destacar a temporalidade
(o agente decide se
permanece ou no em um ambiente), adaptabilidade (capacidade de
se adaptar s modificaes
do ambiente), mobilidade (capacidade de locomoo entre
ambientes), entre outras.
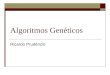
A Figura 6 apresenta a interao global entre uma agente e o
ambiente onde est inserido. Juntos
so conhecidos como Sistema de Agente.
O agente recebe estmulos do ambiente e reage a esses estmulos.
Um agente constitudo por
um corpo e um controlador. O controlador recebe percepes do
corpo e envia comandos para
o corpo. O corpo inclui sensores que convertem estmulos em
percepes e atuadores que
convertem comandos em aes. (POOLE & MACKWORTH, 2010)
-
21
Figura 6: Componentes de um Sistema de Agente.
Apesar de um agente encapsular informaes sobre algum domnio,
cada vez mais raro a
ocorrncia desse agente possuir todo o conhecimento necessrio
para resolver problemas sem
o auxlio de outrem. Isso em muito se deve ao crescimento da
complexidade dos problemas, a
necessidade de tratamento de grandes quantidades de dados e o
fato de alguns problemas terem
a sua prpria natureza distribuda.
Sendo assim, o agrupamento de agentes com capacidades especficas
pode ser usado, com o
intuito de complementarem suas capacidades, para resoluo de
problemas que um nico agente
seria insuficiente.
ZAMBONELLI et al. (2000) distingue duas classes principais de
sistemas com mltiplos
agentes: (i) Sistemas de Resoluo Distribuda de Problemas, nos
quais os agentes envolvidos
so explicitamente projetados para, de maneira cooperativa,
atingirem um dado objetivo,
considerando-se que todos eles so conhecidos a priori e supondo
que todos so benevolentes,
existindo desta forma confiana mtua em relao s suas interaes; e
(ii) Sistemas Abertos,
nos quais os agentes no so necessariamente projetados para
atingirem um objetivo comum,
podendo ingressar e sair do sistema de maneira dinmica. Neste
caso, a chegada dinmica de
agentes desconhecidos precisa ser levada em considerao, bem como
a possvel existncia de
comportamento no benevolente no curso das interaes.
-
22
Os Sistemas Multiagentes (SMA) se enquadram na classificao de
Sistemas Abertos, pois
caracterizam-se por possuir um conjunto de agentes autnomos que
interagem objetivando a
resoluo de um problema que est alm das capacidades de um nico
agente.
Segundo JENNINGS (1996), os SMA apresentam diversas vantagens se
comparados s
solues convencionais:
Maior rapidez na resoluo de problemas por intermdio da
possibilidade de
aproveitamento do paralelismo;
Diminuio da comunicao por transmitir somente solues parciais em
alto nvel
para outros agentes ao invs de dados brutos para um lugar
central;
Mais flexibilidade por ter agentes de diferentes habilidades que
so dinamicamente
agrupados para resolver problemas;
Aumento da segurana pela possibilidade de agentes assumirem
responsabilidades
de agentes que falham.
Entre os muitos assuntos relacionados com os SMA pode-se
encontrar tambm a computao
evolutiva. Em muitos dos casos um AE utilizado por um agente
para auxiliar na realizao de
alguma de suas funes, ou para apoiar alguma atividade em grupo
(Figura 7 (a)). No entanto,
resultados interessantes vm sendo encontrados ao aplicar modelos
evolutivos ao nvel da
populao, ou seja, entre os agentes (Figura 7 (b)). Essa nova
classe de SMA chamada de
Sistema Multiagente Evolutivo (SMAE). (BYRSKI et al., 2014)
Figura 7: Utilizao de AE pelos agentes individualmente e pela
populao de agentes.
A ideia fundamental do SMAE a incorporao de processos evolutivos
em um SMA ao nvel
da populao de agentes. Isto significa que alm de mecanismos de
interao tpicos de SMA
-
23
(tais como a comunicao), os agentes so capazes de se reproduzir
(gerar novos agentes) e
podem morrer (serem eliminados do sistema/ambiente). Um fator
decisivo da atividade de um
agente a sua aptido, expressa pela quantidade que possui de um
recurso no renovvel
chamado energia vital. A seleo realizada de tal forma que os
agentes com alta energia so
mais suscetveis de se reproduzir, enquanto aumenta a
possibilidade de morte para os agentes
com baixa energia.
A avaliao do comportamento dos agentes e mecanismos de seleo
levam ao surgimento de
uma populao mais ajustada com relao ao objetivo do sistema. O
resultado formado como
uma simples composio de resultados obtidos por agentes
particulares. A arquitetura do
SMAE homognea, o que significa que os agentes so idnticos, no
sentido de algoritmo e
aes internas. (KISIEL-DOROHINICKI et al., 2003)
A principal vantagem do SMAE, em relao a outros mtodos
evolutivos, que ele abrange
vrias tcnicas especializadas em um modelo coerente.
(KISIEL-DOROHINICKI, 2002)
De acordo com os paradigmas neodarwinistas, os dois principais
componentes do processo de
evoluo so herana (com mudanas aleatrias da informao gentica por
meio de mutao
e cruzamento) e seleo. Nos SMAE, eles so implementados pelos
fenmenos de morte e
reproduo, que podem ser modelados com as seguintes aes
executadas pelos agentes:
Ao de morte resulta na eliminao do agente do sistema;
Ao de reproduo simplesmente produo de um novo agente a partir do
seu(s)
pai(s).
A seleo o elemento mais importante e difcil do modelo de evoluo
empregado nos SMAE.
Os SMAE comumente utilizam de um recurso denominado energia
vital para seleo dos
agentes mais aptos ao ambiente. A energia adquirida e perdida
quando os agentes executam
aes no meio ambiente que esto inseridos. O aumento de energia
uma recompensa por um
"bom" comportamento de um agente, j a sua diminuio, uma
penalidade para um "mau"
comportamento (a definio do que pode ser considerado um "bom" ou
"mau" comportamento
depende do problema a ser resolvido). Ao mesmo tempo, o nvel de
energia determina as aes
que um agente capaz de executar. Em particular, baixo nvel de
energia deve aumentar a
-
24
possibilidade de morte e alto nvel de energia deve aumentar
possibilidade de reproduo.
(KISIEL-DOROHINICKI, 2002)
Os agentes devem mudar sua energia com base em algum tipo de
algoritmo local, que pode
consistir na avaliao da sua aptido e troca de certas pores da
sua energia durante os
encontros com seus vizinhos.
2.3.1 MODELAGEM DOS PROCESSOS EVOLUTIVOS NOS SMAE
A seleo em SMAE baseada em mecanismos especficos, que so na sua
maioria dirigidos
por um perfil energtico () que consiste em (KISIEL-DOROHINICKI,
2002):
Recurso eng a energia vital;
Objetivo de manter o nvel de energia acima do valor mnimo ;
Estratgias descrevendo as aes do agente em termos de ganho e
perda de energia.
Assumindo como um exemplo de estratgia (ao de morte), um perfil
energtico pode
ser descrito como:
= , = { , }, = { > } (4)
Sendo as estratgias e o o objetivo desse perfil energtico.
O esforo do agente para a reproduo modelado por um perfil
reprodutivo (), que
consiste em:
Recurso hr, que determina a capacidade do agente se
reproduzir;
Estratgias descrevendo as aes de reproduo, como, dentre outras
possveis, a
reduo do nvel de hr para o seu valor mnimo ():
(5)
Objetivo de manter o nvel de hr abaixo do valor mximo > .
Sendo assim, um perfil reprodutivo pode ser descrito por:
-
25
= , = { , }, = { < } (6)
Sendo as estratgias, o um exemplo dessas estratgias e o o
objetivo desse perfil
reprodutivo.
A quantidade de recurso hr pode aumentar (ou diminuir),
dependendo da situao do agente,
ou seja, a sua idade, as interaes com o meio ambiente e outros
agentes, etc. Quando se atinge
o nvel de o agente tenta se reproduzir, esperando que consiga
abaixar o nvel de hr. A
reproduo ser bem sucedida, se o estado do agente (por exemplo,
quantidade de energia vital)
e a sua vizinhana permitem a gerao de um novo agente.
(KISIEL-DOROHINICKI, 2002)
Com base nas informaes prestadas at aqui, podemos modelar a
evoluo de um agente por
intermdio da seguinte equao:
= = {, , }, = {, , } (7)
Sendo as aes dos agentes e os perfis para cada uma dessas
aes.
-
26
3 MODELAGEM E DESENVOLVIMENTO
Este captulo apresentar a modelagem e o desenvolvimento do
Sistema Multiagente Evolutivo
proposto, bem como dos algoritmos utilizados em suas ilhas,
Algoritmo Gentico e Evoluo
Diferencial.
A ferramenta utilizada na construo dos algoritmos foi o MATLAB
R2010b. Trata-se de um
ambiente de desenvolvimento que integra anlise numrica, clculo
com matrizes,
processamento de sinais e criao de grficos. Os comandos do
MATLAB so muito
semelhantes forma como se escrevem expresses algbricas, tornando
mais simples e direto
seu uso.
3.1 ALGORITMO GENTICO
Como visto anteriormente, os AG so algoritmos baseados na
gentica e na seleo natural, e
utilizam os princpios fundamentais destas duas reas para definir
seus parmetros e mtodos.
O cromossomo do AG implementado nesse trabalho a representao
real de uma soluo para
a funo de benchmark descrita pela Equao 11. Cada gene desse
cromossomo representa um
ponto no espao de solues da funo.
O fitness de cada cromossomo calculado por intermdio da funo de
avaliao representada
matematicamente pela Equao (11).
O algoritmo utiliza uma populao de n indivduos, ou seja, a cada
gerao so institudos n
novos cromossomos e estes so ento submetidos aos operadores
genticos. A populao
inicial definida de forma aleatria. O AG desenvolvido neste
trabalho utiliza o nmero de
geraes como critrio de parada, sendo a quantidade definida nos
testes que foram realizados
e esto descritos na prxima seo. Assim sendo ao final das iteraes
o algoritmo cessa sua
execuo e retorna a melhor soluo encontrada at o momento.
O algoritmo implementa o elitismo, que como descrito neste
trabalho, consiste em selecionar
uma quantidade de cromossomos com o menor custo e preserv-los
para a gerao seguinte.
Assim garante-se que, caso no seja criado um indivduo mais apto
na gerao seguinte, a
-
27
melhor soluo ser igual da gerao atual. Usando este mecanismo
estamos influenciando a
intensificao do algoritmo na zona do espao de busca prximo s
melhores solues de cada
gerao. Uma constante controla a quantidade de cromossomos que
sero mantidos pelo
elitismo, que neste trabalho foi fixado em 0,1 (10% da
quantidade total de cromossomos). Deve-
se atentar para o valor dessa constante, que deve possuir um
valor entre 0 e 1, pois um valor
muito alto pode levar o algoritmo para uma convergncia
prematura.
O operador de seleo utilizado o mtodo do torneio, onde pares de
indivduos so
selecionados, dentre os possveis, de forma aleatria e disputam
entre si levando-se em
considerao o custo de cada cromossomo. Esse operador seleciona
de forma probabilstica os
indivduos com maior aptido para participar dos demais
operadores.
No operador de cruzamento so escolhidos dois cromossomos que
sero chamados de
cromossomos pais, sendo o primeiro escolhido de forma
sequencial, garantindo que todos os
cromossomos participem da reproduo, e o segundo escolhido de
forma aleatria devendo ser
diferente do primeiro. O operador de cruzamento escolhido para o
desenvolvimento do AG
nesse trabalho baseado no crossover aritmtico descrito por
LINDEN (2006), onde define-se
aleatoriamente um parmetro (fator de cruzamento) [0,1], e a
posio do filho calculada
por intermdio da seguinte equao :
= 1 + (2 0.5) (2 1) (8)
Aps os cruzamentos, os cromossomos resultantes, denominados de
cromossomos filhos, so
encaminhados para a prxima etapa do AG.
Com o intuito de evitar a perda prematura da diversidade da
populao, foi incrementada uma
nova etapa que consiste na realizao de uma mutao controlada no
cromossomo resultante
do cruzamento. Essa mutao s ser realizada caso a distncia
euclidiana entre o par de
cromossomos pais seja inferior 10% do tamanho de uma das
dimenses do espao de busca.
Esse operador permite que o novo cromossomo mude sua posio numa
subrea dentro do
espao de busca. Essa subrea corresponde a 10% da rea total do
espao de busca e tem como
ponto central o cromossomo que sofrer a mutao. A Equao (9)
representa esse operador de
mutao.
-
28
= + ( 0.5) 0,1 ( ) (9)
A prxima etapa do algoritmo consiste em submeter os cromossomos
a outro operador de
mutao, esse controlado de forma probabilstica. No presente
trabalho a constante que controla
o ndice de mutao foi inicializada em 0,2. Assim sendo, gerado um
nmero aleatrio entre
0 e 1 para cada gene (bit a bit) de todos os cromossomos, caso
este nmero seja inferior
constante, o gene em questo alterado para outro valor de acordo
com a Equao (10),
permitindo que tal gene movimente-se em uma subrea corresponde a
20% da rea total do
espao de busca tendo como ponto central o cromossomo que est
sofrendo a mutao. O
operador de mutao contribui para a diversificao dos indivduos,
evitando assim uma
convergncia prematura e garantindo a possibilidade de grande
parte do espao de busca ser
representado.
= + ( 0.5) 0,2 ( ) (10)
Aps a operao de mutao, os cromossomos escolhidos no elitismo so
reinseridos na
populao e assim conclumos toda uma gerao do AG. Os cromossomos
resultantes
consistem numa nova gerao de indivduos. Estes mesmos
procedimentos se repetem at que
o critrio de parada seja satisfeito, e aps o trmino de todas as
geraes, a melhor soluo
encontrada tida como resultado do algoritmo.
3.2 ALGORITMO DE EVOLUO DIFERENCIAL
Este algoritmo tambm inspirado nos processos evolutivos, e assim
como os AG, implementa
os operadores genticos de seleo, cruzamento e mutao.
Os parmetros iniciais do ED sero os mais prximos possveis dos do
AG, para que o
desempenho dos dois possa ser comparado mais facilmente e com
maior propriedade. Assim
sendo a populao inicial (aqui chamados de vetores) e a
quantidade de geraes que ser
utilizada como critrio de parada sero os mesmos do AG.
A representao dos vetores no ED a mesma utilizada nos
cromossomos do AG: usa-se a
representao de nmeros reais, onde cada elemento do vetor
representa a posio em uma
dimenso de um ponto no espao de busca.
-
29
Semelhante ao que acontece nos AG a primeira ao do ED clculo do
custo dos vetores da
populao inicial, com base na Equao (11).
Como dito anteriormente, o primeiro operador utilizado no ED a
mutao, onde 3 vetores
distintos, escolhidos aleatoriamente, so usados para gerar o
vetor doador conforme Equao
(1), tendo sido o Fm inicializado em 0,1.
O cruzamento realizado entre vetor alvo e o vetor doador de
acordo com a Equao (2). A
constante Pc, que controla a probabilidade de cruzamento, foi
definido igual a 0,9. O vetor
gerado a partir do cruzamento o vetor candidato.
O prximo operador a seleo, onde o vetor alvo ser comparado com o
vetor candidato.
Aquele que apresentar menor custo, de acordo com a Equao (11),
ser mantido para a prxima
gerao.
Todo esse processo repetido at que o critrio de parada seja
satisfeito, e, nesse momento, o
vetor com o menor custo corresponde melhor soluo encontrada pelo
algoritmo.
3.3 SISTEMA MULTIAGENTE EVOLUTIVO
O SMAE proposto por este trabalho contar com subpopulaes dividas
em ilhas, e em cada
uma dessas ilhas ser realizado um processo de otimizao local com
base nos algoritmos AG
e ED descritos anteriormente.
O sistema dividido em pocas que sero executadas de maneira
subsequente, sendo que cada
uma delas corresponde uma gerao dos algoritmos de otimizao das
ilhas. Entre essas
pocas ocorrero as comunicaes entre as ilhas. Para realizao dos
testes desse trabalho
definimos o nmero de ilhas igual a 4. Portanto teremos 2 ilhas
executando o AG e outras duas
com o ED.
As descries dos algoritmos contidas nas sees anteriores so para
um processamento
isolado, sendo necessrios pequenos ajustes para inseri-los e
adapt-los ao SMAE.
-
30
A primeira adaptao diz respeito a quantidade de indivduos da
populao e a quantidade de
geraes usadas como critrio de parada dos algoritmos, com o
intuito de tentar aproximar as
condies do SMAE a dos algoritmos individuais, para posteriores
comparaes. Como
definiu-se que o SMAE contar com 4 ilhas, dividiu-se a populao e
a quantidade total de
geraes cada uma por 2 e assim tm-se todos os algoritmos
realizando, aproximadamente, a
mesma quantidade de clculos da funo objetivo.
A segunda e mais importante das adaptaes foi a criao de uma
estrutura para o controle da
energia vital de cada um dos agentes. Agora, alm da aptido
calculada pelo custo da funo de
benchmark, cada agente possui uma segunda medida de aptido, a
energia vital, que ser usada
tanto internamente nos algoritmos de otimizao locais, como tambm
para controle dos
processos evolutivos e de comunicao do SMAE.
Para utilizao dessa energia vital foram criadas algumas
constantes, a saber:
Energia inicial = 5, a quantidade de energia que cada um dos
agentes recebe quando
criado;
Energia de competio = 2, a quantidade de energia transferida do
perdedor para o
vencedor em cada competio;
Limiar de morte = 0, a quantidade mnima de energia que um agente
necessita para
no ser declarada a sua morte;
Limiar de reproduo = 7, a quantidade mnima de energia que um
agente necessita
para poder participar do(s) operador(es) de reproduo;
Limiar de migrao = 10, a quantidade mnima de energia que um
agente necessita
para poder migrar para outra ilha.
Em ambos os algoritmos de otimizao foram implementados
procedimentos para lidar com a
energia vital e suas constantes.
Foi adotado que a energia total do sistema deve se manter fixa
para facilitar o uso das
constantes. Como existem procedimentos que podem alterar o total
da energia do sistema, aps
a execuo desses feita uma normalizao das energias de cada um dos
agentes para que a
energia total retorne ao valor inicial.
-
31
Nos momentos de competio entre agentes ocorre apenas a
transferncia de energia do
perdedor para o ganhador. J nos momentos de reproduo, a energia
do agente filho que
gerado calculada com base nas energias dos agentes pais
submetidas mesma funo utilizada
no processo de cruzamento.
Aps a execuo de cada uma das pocas do SMAE so verificados quais
agentes podem migrar
para outra ilha por terem extrapolado o valor da constante que
controla esse limiar. A nova ilha
para cada um desses agentes escolhida de forma aleatria. A
poltica de migrao adotada
de sempre manter as subpopulaes em igual nmero, sendo que o
agente migrante substitui o
pior agente da ilha de destino, usando como critrio as suas
energias vitais. O agente migrante
tem sua energia reinicializada aps ser inserido na nova ilha, ou
seja, ele volta a possuir o valor
da energia inicial.
Ainda no intervalo entre pocas, e aps as possveis migraes,
verificado se existem agentes
com energia abaixo do limiar de morte. Em caso afirmativo, esses
agentes so descartados e
novos agentes, criados de forma aleatria, os substituem.
Ao final de todas as iteraes o melhor agente dentre os
resultados das ilhas tido como o
resultado do SMAE.
Apesar da possibilidade de aproveitamento do paralelismo ser
destacado como uma das
vantagens de um SMA, e consequentemente de um SMAE, a
implementao feita para esse
trabalho foi de forma sequencial por meio de iteraes sobre as
ilhas. O intuito dessa escolha
foi simplificar o desenvolvimento e os testes que foram
realizados, j que no interferiria no
principal indicador usado para avaliar e comparar os algoritmos
que o valor da funo objetivo
alcanado pelos mesmo.
-
32
4 EXPERIMENTOS E RESULTADOS OBTIDOS
Neste captulo sero descritos como os experimentos foram
realizados, a funo de benchmark
que foi utilizada, bem como sero apresentados os resultados
desses testes obtidos pelos 3
algoritmos implementados neste trabalho.
4.1 FUNO RASTRIGIN
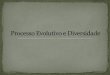
A funo Rastrigin proposta inicialmente por RASTRIGIN (1974),
trata-se de uma funo no-
linear multimodal. Possui 10n (sendo n o nmero de dimenses da
funo) mnimos locais, o
que aumenta a complexidade do processo de otimizao, distribudos
regularmente. A funo
de Rastrigin dada pela Equao 11 e tem seu mnimo global em = 0
onde () = 0.
(1, , ) = 10 + [2 10 cos(2)]
=1 , [5.12, 5.12] (11)
Essa funo amplamente estudada e comumente usada como problema
teste (funo de
benchmark) de otimizao no linear (MICHALEWICZ, 1996). A Figura 8
apresenta uma
representao grfica da funo de Rastrigin considerando n=2
(bidimensional).
Figura 8: Representao grfica da funo de Rastrigin
bidimensional.
4.2 EXPERIMENTOS REALIZADOS
Inicialmente foram realizados testes individuais nos algoritmos
AG e ED descritos neste
trabalho. Esses testes foram realizados utilizando a funo de
Rastrigin com 2 dimenses, j
que as principais finalidades eram: conseguir visualizar
graficamente, no espao de variveis,
-
33
a distribuio dos indivduos da populao no espao de busca para
verificar se, por exemplo,
estava ocorrendo perda da diversidade da populao; e visualizar a
convergncia dos algoritmos
ao longo das geraes.
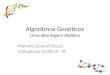
Pode-se observar os grficos de 2 desses testes realizados nas
figuras 9 e 10. A Figura 9 mostra
os resultados de um teste do AG enquanto a Figura 10 os
resultados de um teste do ED, isso ao
longo de 40 geraes e considerando uma populao de 200
indivduos.
Figura 9: Resultados de um teste do AG.
Figura 10: Resultados de um teste do ED.
-
34
De semelhana entre os dois algoritmos observa-se a convergncia
dos melhores fitness. No
entanto, h grandes diferenas entre a distribuio dos indivduos no
espao de solues e na
curva da mdia dos fitness encontrados. O AG apresenta os
indivduos mais uniformemente
distribudos nas regies prximas a soluo tima e a curva da mdia
dos fitness da populao
bastante irregular, apresentando um declnio acentuado nas
primeiras geraes e altos e baixos
ao longo das demais geraes. Isso porque o AG no impede que 2
pais deem origem a um filho
com custo maior para a gerao seguinte, j que a seleo (competio)
ocorre antes do
cruzamento e um mesmo indivduo pode ser selecionado mais de uma
vez. No caso da ED, ao
final da execuo, os indivduos ficam agrupados em vrias regies de
mnimos locais e na
regio do mnimo global, ocasionando uma perda maior da
diversidade dessa populao, e a
curva da mdia dos fitness apresenta um declnio contnuo.
Diferentemente do AG, no ED a
competio ocorre entre um indivduo da populao atual e um novo
indivduo gerado dos
operadores de mutao e cruzamento, garantindo assim que, no pior
dos casos, os fitness da
nova populao sejam iguais aos da gerao anterior.
Posteriormente, foram realizados testes semelhantes com o SMAE
utilizando parmetros
escolhidos de forma aleatria para observar o comportamento do
mesmo.
As observaes dos testes iniciais serviram para incentivar
mudanas que foram realizadas
nesses algoritmos com o intuito de melhorar seus desempenhos e
posteriormente para auxiliar
no dimensionamento das quantidades da populao e das geraes que
foram utilizadas no teste
subsequente.
Aps os testes iniciais, o prximo e principal experimento
constituiu na execuo de cada um
dos algoritmos para vrias dimenses da funo de Rastrigin e, em
cada uma delas, executado
vrias vezes consecutivas. Para conseguir uma quantidade razovel
de resultados, definiu-se
que cada um dos algoritmos deveria ser executado por 30 vezes
consecutivas e as dimenses
escolhidas para os testes foram: 2, 5, 10, 15 e 20.
O tamanho das populaes dos algoritmos mantiveram-se fixas ao
longo de todas as execues,
200 indivduos para os AG e ED, e de 100 indivduos para o SMAE j
que, como foi dito
anteriormente, a populao desse algoritmo deve ser a metade dos
demais para aproximar a
-
35
quantidade de clculos da funo objetivo e possibilitar uma justa
comparao entre todos os
algoritmos.
A quantidade de geraes que foram utilizadas nesse teste variava
de acordo com a dimenso
utilizada na funo objetivo. Considerando d como a dimenso
utilizada nessa funo, definiu-
se que a quantidade de geraes dos algoritmos seria dada por = 2
10. Lembrando que no
caso do SMAE a quantidade de geraes obtida pela equao anterior
ainda deveria ser dividida
pela metade, pelo mesmo motivo apresentado no pargrafo
antecedente, que trata do caso da
quantidade da populao. A Tabela 1 apresenta alguns dos
resultados obtidos com a realizao
desse experimento.
Tabela 1: Resultados do experimento principal.
Dimenses Resultados Algoritmo
AG ED SMAE
2
Mnimo 0,0001 0,0000 0,0000
Mdio 0,0112 0,0000 0,0000
Mximo 0,0510 0,0000 0,0005
Tempo Mdio (seg.) 0,17 0,19 0,39
5
Mnimo 0,0027 0,0000 0,0000
Mdio 0,0322 0,0332 0,0000
Mximo 0,0846 0,9950 0,0000
Tempo Mdio (seg.) 1,21 1,28 3,09
10
Mnimo 0,0336 0,0000 0,0000
Mdio 0,1482 0,4662 0,0000
Mximo 0,3627 3,9886 0,0000
Tempo Mdio (seg.) 4,48 5,08 11,39
15
Mnimo 0,2424 0,0000 0,0000
Mdio 0,6489 1,4320 0,0000
Mximo 1,1800 3,9862 0,0000
Tempo Mdio (seg.) 10,21 11,65 25,30
20
Mnimo 2,3310 1,9912 0,0000
Mdio 4,6039 4,4535 0,0000
Mximo 7,1397 8,0742 0,0000
Tempo Mdio (seg.) 19,62 22,07 50,89
Baseado nas informaes contidas na Tabela 1 percebe-se que o SMAE
alcanou bons
resultados em relao aos demais mtodos abordados, com resultados
prximos ao timo
global.
-
36
Uma possvel explicao para os resultados significativos alcanados
pelo SMAE a troca de
informaes relevantes que o ocorre no momento da migrao de
agentes entre as ilhas, j que
os indivduos aptos a realizarem migrao tendem a estar entre os
melhores indivduos at o
momento em suas ilhas.
Em muitos casos do experimento o AG e o ED alcanaram resultados
prximos aos do SMAE,
ainda assim ficando aqum desse ltimo. A vantagem desses mtodos
consiste em apresentar
bons resultados se considerarmos como parmetro o tempo mdio de
execuo dos algoritmos.
Tanto o AG como o ED apresentaram uma tendncia de piora com o
aumento da complexidade
do problema. Cabe avaliar a influncia dos parmetros utilizados
por esses mtodos na obteno
desses resultados.
J no SMAE praticamente no h alteraes nos resultados obtidos com
o aumento da
complexidade do problema. A mdia dos resultados do SMAE
mantem-se praticamente
inalterada independentemente da dimenso utilizada pela funo de
avaliao.
-
37
5 CONCLUSES
O presente trabalho props a implementao de um SMAE empregando o
modelo de ilhas, em
que cada uma dessas ilhas possui uma subpopulao submetida a um
algoritmo de otimizao
evolutivo. Os mtodos evolutivos utilizados nas ilhas foram o AG
e o ED.
O SMAE foi desenvolvido com o intuito de resolver um problema de
otimizao no linear.
Para avaliar o algoritmo proposto, o mesmo foi aplicado a uma
conhecida funo de benchmark
utilizada para esse tipo de problema, a funo de Rastrigin.
Por disponibilizar uma quantidade de resultados que possibilita
uma anlise estatstica, o
principal experimento utilizado para avaliao foi a execuo por
diversas vezes consecutivas,
tanto do SMAE como dos AG e ED individualmente, sobre a funo de
Rastrigin para vrias
dimenses. O indicador capital de desempenho dos algoritmos foi o
custo da soluo
encontrada.
Tomando como base os resultados experimentais dos 3 algoritmos
utilizados nos testes,
conclui-se que a abordagem proposta do SMAE mostrou-se a mais
eficaz j que apresentou
melhores resultados em relao aos demais mtodos avaliados. O SMAE
conseguiu melhorar
o desempenho dos mtodos convencionais de otimizao no linear
usados nesse trabalho,
utilizando o mesmo nmero de clculos da funo objetivo,
evidenciando assim o sucesso da
implementao do algoritmo proposto.
Apesar deste no ser o indicador de maior relevncia utilizado
nesse trabalho para as avaliaes
e comparaes feitas, o tempo de execuo dos algoritmos, presentes
na Tabela 1, pde ajudar
em algumas constataes.
O fato do SMAE possuir um tempo de execuo acima dos demais nos
permite fazer as
seguintes constataes: (i) a percepo do efeito causado pela
escolha de no aproveitar a
possibilidade de execuo em paralelo; e (ii) a concluso de que os
procedimentos adicionais
presentes no SMAE para controle dos agentes e das suas energias
vitais colaboraram para a
elevao do custo computacional desse algoritmo em relao aos
demais aqui apresentados.
-
38
Conclui-se tambm que o SMAE tende a se tornar mais benfico
medida que a complexidade
do problema aumenta pois a diferena de desempenho deste em relao
aos demais algoritmos
fica em evidncia com o aumento das dimenses do problema.
Esse trabalho apresentou resultados satisfatrios levando em
considerao o que foi proposto.
Ainda assim propostas de melhorias, novos experimentos e novos
critrios de avalio podem
ser pensados para futuras implementaes buscando melhorar o
desempenho dos algoritmos e
solidificar uma concluso a respeito dos mesmos. Pensando nisso
pode-se propor os seguintes
trabalhos futuros:
Alterao dos parmetros inicias dos algoritmos, buscando um
equilbrio entre a
convergncia e os resultados finais encontrados;
Implementao de outros mtodos de otimizao para serem utilizados
nas ilhas do
SMAE;
Adaptao do sistema proposto para utilizao do mesmo de forma
paralela;
Adaptao do sistema proposto para resoluo de problemas
discretos;
Analisar o comportamento dos sistemas propostos em outros
problemas (funes).
-
39
REFERNCIAS BIBLIOGRFICAS
ALMASI, G. S., GOTTLIEB, A. Highly Parallel Computing.
Benjamin-Cummings, Redwood
City, CA. 1989
VILA, S. L. et al. Otimizao Conceitos Bsicos, Ferramentas e
Aplicaes. Revista de
Automao e Tecnologia da Informao, Florianpolis, v.2, n.1,
2003.
BEZ, E. D. Procedimento de Representao de Solues em Otimizao
Global: Aplicao em
Modelos de Interao Espacial. Tese (Doutorado em Engenharia de
Produo), Universidade
Federal de Santa Catarina, Florianpolis, 2005.
BLUM, C., ROLI, A. Metaheuristics in combinatorial optimization:
Overview and conceptual
comparison. 35 (3). ACM Computing Surveys. pp. 268308. 2003.
BRAGA, A. P.; LUDENIR, T. B.; CARVALHO, A. C. P. L. F. Redes
Neurais Artificiais
Teoria e aplicaes. LTC, 2000.
BYRSKI, A., DREZEWSKI, R., KISIEL-DOROHINICKI, M., SIWIK, L.
Evolutionary multi-
agent systems. Disponvel em: . Acesso em:
Dezembro de 2014.
GOLDBERG, D. E. Genetic Algorithms in Search, Optimization and
Machine Learning.
Addison Wesley, 1989.
GOLDBERG, D. E.; HOLLAND, J. H. Genetic algorithms and machine
learning: Introduction
to the special issue on genetic algorithms. Machine Learning,
1988.
HEITKOETTER, J., BEASLEY, D. The hitch-hiker's guide to
evolutionary computation: a list
of frequently asked questions (FAQ). 1994. Disponvel em:
. Acesso em: Outubro de 2009.
HO, Y. C.; PEYNE, D. L. Simple Explanation of the No Free Lunch
Theorem of Optimization.
Proceedings of the 40th IEEE Conference on Decision and Control,
volume 5, 2001.
-
40
HOLLAND, J. H. Adaptation in Natural and Artificial Systems. The
University of Michigan
Press, 1975.
JENNINGS, N. R. Coordination techniques for distributed
artificial intelligence. In: OHARE,
G.M.P.; JENNINGS, N.R. (Eds.). Foundations of distributed
artificial intelligence. New York:
John Wiley & Sons. pp.187-210. 1996.
KISIEL-DOROHINICKI, M. Agent-Oriented Model of Simulated
Evolution. SOFSEM 2002:
Theory and Practice of Informatics. Springer-Verlag. pp.
253-261. 2002
KISIEL-DOROHINICKI, M., DOBROWOLSKI, G., NAWARECKI, E. Agent
Populations as
Computational Intelligence. Neural Networks and Soft Computing.
Springer-Verlag. pp 608-
613. 2003.
LINDEN, R. Algoritmos Genticos: Uma importante ferramenta da
Inteligncia
Computacional. Rio de Janeiro: Brassport, 2006.
MICHALEWICZ, Z. Genetic Algorithms + Data Structures = Evolution
Programs. 3rd revised
and extended. Berlim, Springer-Verlag, 1996.
MICHALEWICZ, Z., SCHOENAUER, M. Evolutionary Algorithms for
Constrained
Parameter Optimization Problems. Evolutionary Computation, vol.
4, no. 1, 1996.
OLIVEIRA, G. T. S. Estudo e aplicaes da Evoluo Diferencial.
Dissertao (Mestrado em
Engenharia Mecnica). Universidade Federal de Uberlndia.
Uberlndia, 2006.
POOLE, D., MACKWORTH, A. Artificial Intelligence: Foundations of
Computational Agents.
Cambridge University Press, 2010.
RASTRIGIN, L. A. Systems of Extremal Control, Nauka, Moscow,
1974.
STORN, R.; PRICE, K., Differential Evolution: a simple and
efficient adaptive scheme for
global optimization over continuous spaces, Technical Report
TR-95-012, International
Computer Science Institute, Berkeley, 1995.
-
41
STORN R.; PRICE K. Differential evolution - A Simple and
Efficient Heuristic for Global
Optimization Over Continuous Spaces. Journal of Global
Optimization, v. 11, p. 341-359, 1997.
STORN, R.; PRICE, K. Home Page of Differential Evolution (DE)
for Continuous Function
Optimization. Disponvel em: . Acesso em:
Setembro de 2013.
WOLPERT, D. H.; MACREADY, W. G. No Free Lunch Theorems for
Optimization. IEEE
Transactions on Evolutionary Computation, 1(1):67-82, 1997.
WOOLDRIDGE, M; JENNINGS, N. R. Intelligent Agents: Theory and
Practice. The
Knowledge Engineering Review. Cambridge University Press. Volume
10, p 115-152, nmero
2, 1995.
WOOLDRIDGE, M. Intelligent agents. In: WEISS, G. (Ed.)
Multiagent Systems - A Modern
Approach to Distributed Artificial Intelligence, MIT Press,
1999.
ZAMBONELLI, F., JENNINGS, N. R., WOOLDRIDGE, M. Organizational
abstractions for
the analysis and design of multi-agent systems. In: Proceedings
of the 1st International
Workshop on Agent-Oriented Software Engineering, 2000, Limerick,
Ireland, pp.127141,
2000.