Embed Size (px)
DESCRIPTION
Este artigo faz uso de tecnologias no sentido de incorporar o reconhecimento de gestos como ferramenta de manipulação na interação homem-máquina. O objetivo é desenvolver uma interface de comunicação entre uma pessoa e um computador, utilizando como dispositivo de entrada o Kinect.
Citation preview

Reconhecimento de Gestos em Imagens de Profundidade com
Utilização do Sensor Kinect
Rafael Miranda Guimarães*, João Victor Boechat Gomide
╘
*Universidade FUMEC
Belo Horizonte - MG – Brazil
E-mail: [email protected] ╘Universidade FUMEC
Belo Horizonte - MG – Brazil
E-mail: [email protected]
Resumo - Desenvolvido pela Microsoft, o sensor
Kinect (inicialmente chamado de “Projeto Natal”)
é um dispositivo de reconhecimento de gestos e
captura de movimentos que permite o uso de
interações gestuais livres como forma de
comunicação e entretenimento. Interações
gestuais livres auxiliam no desenvolvimento de
interfaces cada vez mais imersivas e intuitivas,
proporcionando uma nova experiência ao
usuário.
Palavras-chave – reconhecimento de Gestos,
interface, kinect.
I. Introdução
Interatividade tem sido a palavra chave na
história de toda a evolução tecnológica. A cada
dia surgem no mercado novos modelos de
interação baseados no conceito de interface
natural. A interface natural de usuário ou natural
user interface (NUI) como é conhecida, trabalha
o uso da linguagem natural como ferramenta de
interação homem-máquina (IHM) [1]. Sua
aplicação consiste na utilização de um novo
modelo de interação entre o homem e o
computador com base na utilização de gestos,
posições e comandos de voz.
É válido destacarmos a importância deste
conceito hoje para o mercado, pois, muito se
ouviu dizer a respeito da necessidade de
desenvolvimento de novas tecnologias de
comunicação homem-máquina na qual, fosse
possível estabelecer um canal de comunicação
estável entre o usuário e a aplicação viabilizando
um novo modelo de interação.
Diante deste cenário, temos uma nova área
de pesquisa intitulada de Interação Homem-
Máquina (IHM) na qual, faz parte o estudo do
planejamento, avaliação e implementação de
sistemas computacionais interativos para uso
humano compreendendo todos os fenômenos a
ele relacionados [2], [3].
A alta demanda por tecnologia e a rápida
necessidade de absorção do mercado consumidor,
proporcionaram estímulos para o
desenvolvimento de novas tecnologias. Tais
estímulos são responsáveis pelo elevado número
de aparatos tecnológicos disponíveis hoje para
consumo.
a. Descrição:
O Kinect é dotado de uma câmera RGB, um
sensor de profundidade composto por um
projetor e uma câmera que usa infravermelho
capaz de mapear o ambiente em 3 dimensões,
microfones, um motor para alterar seu ângulo de
visão, e uma interface USB 2.0 para conexão
com o videogame (Xbox) ou mesmo com um PC
comum (Windows ou Linux) [6].
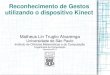
A figura abaixo demonstra as principais
componentes do dispositivo Kinect (figura 1):

Figure 1: O Microsoft Kinect.
Fonte: <http://goo.gl/J4XSxm>
Câmera RGB: obtém imagens coloridas numa
resolução de 640 por 480, com uma taxa de
atualização de 30 quadros por segundo. Cada
pixel é representado por 32 bits, sendo que
apenas 24 deles são usados, com cada 8
determinando o valor de uma componente [24].
Sensor de Profundidade: um emissor de luz
infravermelho espalha um padrão pseudo-
aleatório sobre o ambiente juntamente de um
sensor CMOS monocromático que compara a
luz refletida com um padrão gravado no
firmware. Dessa maneira, é calculado um mapa
de profundidade com resolução de 640 por 480,
a uma velocidade de 30 quadros por segundo
[24].
Microfones multi-vetorial: são quatro
microfones autodirecionáveis para o usuário,
capazes de isolar o som ambiente da fala do
jogador. Também captam comandos por voz [24].
A figura abaixo ilustra o hardware do
dispositivo Kinect (figura 2).
Figure 2: Imagem do hardware do Kinect.
Fonte: <http://goo.gl/wjpqux>
Sua arquitetura é composta de um
acelerômetro com 3 eixos, configurado para uma
variação 2G, em que G representa a aceleração
devido à gravidade, possibilitando assim
determinar a cada instante a orientação do sensor
[25].
Seu campo de visão consiste da forma de
uma pirâmide o que incorpora algumas
limitações. Possibilita o reconhecimento de
objetos ou utilizadores de forma mais precisa
entre os 40cm e os 4m, como pode ser observado
nas figuras 3 e 4, tendo um ângulo de visão de
57º graus na horizontal e 43º graus na vertical
[25].
Figura 3 – Padrão do campo de visão vertical do Kinect.
Fonte: MICROSOFT, 2011 [35]
Figure 4: Campo de Visão do Kinect
Fonte: < http://goo.gl/NFcTY>
b. Funcionamento:
O Kinect é um dispositivo RGB-D, na qual,
permite a captura de imagens representando as
cores (RGB) e a profundidade de uma cena (D –
Depth). Portanto, uma cena capturada pelo
Kinect é usualmente representada por um par de
imagens de resolução 640x480, com uma
imagem em formato colorido RGB (24
bits/pixel) e a outra imagem representando a
profundidade de cada pixel (Depth). A
profundidade representa a distância dos pixels
em relação ao sensor, formando uma mapa
LxCxP (Linha x Coluna x Profundidade).

Figure 5: Imagem da câmera RGB do Kinect.
Fonte: autor do trabalho (2013)
Figure 6: Imagem da câmera de Profundidade do Kinect.
Fonte: autor do trabalho (2013)
c. Reconhecimento de gestos e captura de
movimentos
Seria conveniente que computadores
pudessem compreender instruções de comando
fornecido pelos usuários de forma simples ao
invés de procedimentos manuais de comando
baseados em digitação ou sucessivos cliques do
mouse para acesso as opções de menus [26].
O reconhecimento de gestos tem assumido
um papel cada vez mais importante na área de
pesquisa ativa (Liang e Ouhyoung, 1998; D.
Gehrig e Schultz, 2009; Reyes et al, 2011;.
Wilson e Bobick, 1999) [46], [47], [48], [49], na
qual, envolve o uso de técnicas de aprendizagem
de máquina e capacidade de atuação de forma
confiável em diferentes ambientes.
Existem no mercado diversos métodos para
o reconhecimento de gestos, que vão desde a
utilização de algoritmos de sequencia de tempo
como o Dynamic Time Warping - DTW (Reyes
et ai., 2011) [27] até os chamados modelos
ocultos de Markov ou modelos Markovianos
(Hidden Markov Models - HMM) (Oliveira e
Morita, 2008) [28] na qual, trata-se de um
modelo estatístico com parâmetros
desconhecidos (D. Gehrig e Schultz, 2009) [29].
Em 1999 Segen e Kumar [30] utilizaram
uma câmera e uma fonte de luz calibrada para
calcular a profundidade. Em 2004 Ferris et al.
[32] utilizaram, uma série de fontes de luz
externas para iluminar o cenário aplicando
geometria de vários ângulos de visão para
construir uma imagem de profundidade. Em uma
Referências
[1] OLIVEIRA, I. Interface de Usuário: a Interação
Homem-Computador Através dos Tempos. Disponível em:
<
https://www.google.com.br/url?sa=t&rct=j&q=&esrc=s&s
ource=web&cd=1&cad=rja&ved=0CC4QFjAA&url=http
%3A%2F%2Fwww.olharcientifico.kinghost.net%2Findex.
php%2Folhar%2Farticle%2Fview%2F28%2F29&ei=Y1B
MUplnjPDwBIGOgYAC&usg=AFQjCNG4B2GrSLr5FQ
w3XKXEsGHNz-BQHA&bvm=bv.53371865,d.eWU >
Acesso em Set. 2013
[2] Hewett. Curricula for Human-Computer Interaction.
The Association for Computing Machinery, Special
Interest Group on Computer Human Interaction. [Online]
2009. Disponível em: <
http://old.sigchi.org/cdg/cdg2.html#2_1 > Acesso em Set.
2013.
[3] PRATES, R.; BARBOSA, S. Capítulo 6. Avaliação de
Interfaces de Usuário – Conceitos e Métodos.
Disponível em: <
http://homepages.dcc.ufmg.br/~rprates/ge_vis/cap6_vfinal.
pdf> Acesso em Set. 2013.
[4] TALARICO, S. Reconhecimento de gestos: tecnologia
em evolução. Business Review Brasil. 15 de Abril de
2013. Disponível em: < http://goo.gl/K3pOBU> Acesso
em: 12 set. 2013. [Portal de notícias]
[5] Biblioteca de Funções para Utilização do Kinect em
Jogos Eletrônicos e Aplicações NUI



![GESTOS GESTOS ARTÍSTICOS ARTÍSTICOS EM TEMPOS ...GESTOS ARTÍSTICOS EM TEMPOS DE CRISE Urbanidades Gestos artísticos em tempos de crise [livro eletrônico] / organização Urbanidades](https://img.document.onl/doc/110x75/60c5fe9cd15f5a472f7edc2b/gestos-gestos-artsticos-artsticos-em-tempos-gestos-artsticos-em-tempos.jpg)























