Embed Size (px)
Citation preview

27/06/2017
1
REGRESSÃO NÃO LINEAR
CUIABÁ, MT
2017/1
Os modelos de regressão não linear
diferenciam-se dos modelos lineares,
tanto simples como múltiplos, pelo fato
de suas variáveis independentes não
estarem separados por adição ou
subtração e os coeficientes não estarem
elevados a 1.
𝑌𝑖 = 𝛽0𝑋1𝑖𝛽1𝑋2𝑖
𝛽2 + 𝜀 𝑖
𝑌𝑖 = 𝛽0(𝑋1𝑖𝛽1+𝑋2𝑖
𝛽2) + 𝜀 𝑖
MÉTODOS ITERATIVOS
✓ Os coeficientes dos modelos de Regressão não
lineares não são estimados por MMQO e sim
por métodos iterativos através de processo
de otimização.
✓ Esses métodos utilizam um algoritmo
para resolver o problema dos mínimos
quadrados não lineares;
✓ Dentre os vários tipos de algoritmos
podemos citar: Gauss-Newton, quasi
Newton, Marquardt.
ALGORITMO DE GAUSS-NEWTON
✓ Ele usa um processo de otimização não linear
como a maioria dos algoritmos;
✓ Um problema não-linear de mínimos quadrados
é um problema de otimização sem restrições
da forma
em que m é o número de variáveis
✓ A função objetivo f(x) é definida por m
funções residuais auxiliares {ri(x)}. Vamos
supor que m ≥ n.
✓ Esse problema é chamado de mínimos
quadrados, porque há soma dos quadrados das
funções residuais.
✓ Um dos maiores problemas das técnicas de
otimização é a estimação dos problemas não
lineares.
✓ A função ri(x) representa a diferença
residual entre o valor predito e o valor
real.
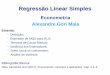
Escrevendo o problema de otimização:
E o cálculo do resíduo:
E r é a função real do valor:
A função residual descreve uma superfície
(geralmente n-dimensional) em ℜm.
27/06/2017
2
Como:
Pode ser interpretado como:
Dessa forma, a técnica busca encontrar os
coeficiente x no espaço de parâmetros ℜm.
R(x) = [r1(x) r2(x) r3(x)]T superfície em ℜm
como uma função de
Como:
Pode ser interpretado como:
Dessa forma, a técnica busca encontrar os
coeficiente x no espaço de parâmetros ℜm.
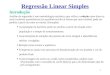
Aplicado regra da cadeia na f(x):
J(x) corresponde a matriz Jacobiana de r(x).
Usando a regra da cadeia novamente, têm-se a
matriz Hessiana
A matriz Hessiana é composta de dois
componentes:
O método que usa a aproximação Q (x) = 0 é
chamado o método de Gauss-Newton e determina a
direção de busca como a solução da equação de
Newton
Com uma matriz Hessiana aproximada
Se J(x) assumir o posto completo, a
aproximação de Hessiana
É uma matriz definida positiva e a direção de
busca de Gauss-Newton pGN é uma direção de
descida.
Caso contrário, torna-se sem inversão.
Essa operação não oferece solução única,
denominando-se problema sub determinado ou
sobre parametrizado.
27/06/2017
3
Se J(x) assumir o posto completo, a
aproximação de Hessiana
É uma matriz definida positiva e a direção de
busca de Gauss-Newton pGN é uma direção de
descida.
Caso contrário, torna-se sem inversão.
Essa operação não oferece solução única,
denominando-se problema sub determinado ou
sobre parametrizado.
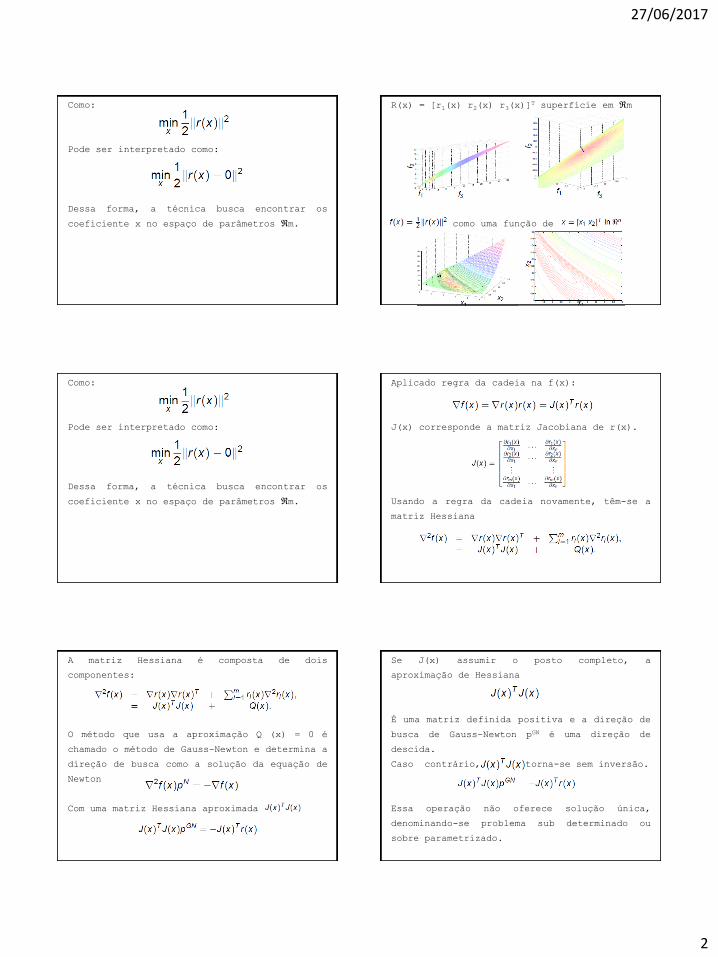
Suponha que nós aproximamos a função residual
r(x) com uma função linear de Taylor
Resolvendo o problema dos mínimos quadrados
lineares
Usando sistema de equações normais
ou
Esse procedimento corresponde a direção de
busca de Gauss-Newton
✓ A aproximação linear
corresponde a um
plano tangente à
superfície r(x) em
✓ Rk = r(xk)
✓ Plano mais próximo da
origem é dado pela
projeção de -rk no
espaço de alcance de
Jk, uma vez que
Como ocorre a convergência?
Se r(x*) = 0, então a aproximação Q(x)≈0 é boa
e o método de Gauss-Newton se comportará como
o método de Newton próximo da solução, isto é,
converge quadraticamente se J(x*) tiver o
posto completo.
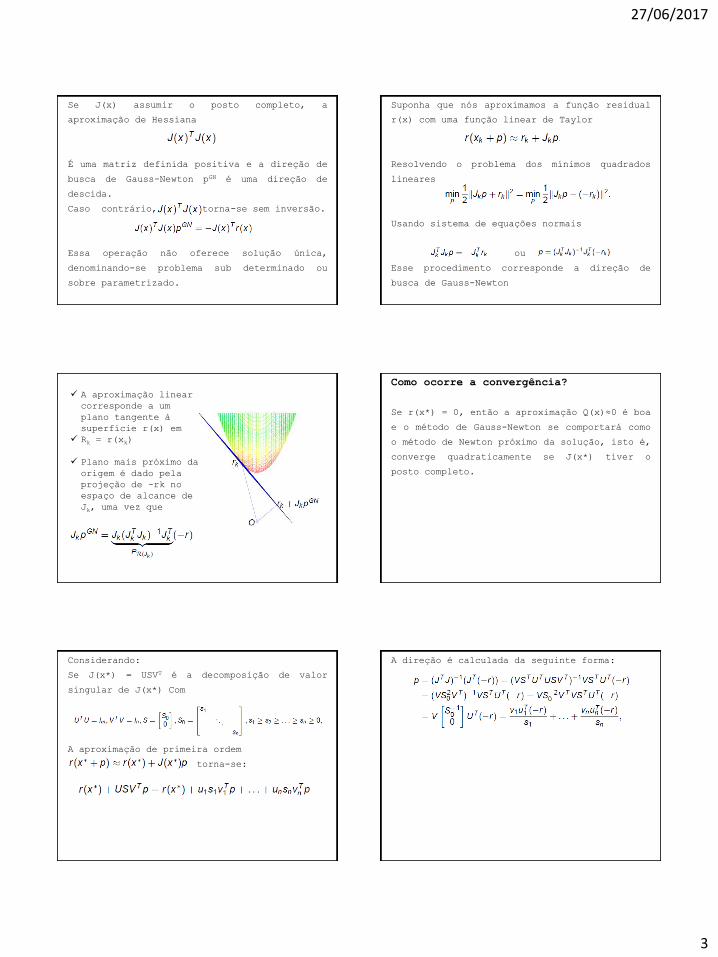
Considerando:
Se J(x*) = USVT é a decomposição de valor
singular de J(x*) Com
A aproximação de primeira ordem
torna-se:
A direção é calculada da seguinte forma:
27/06/2017
4
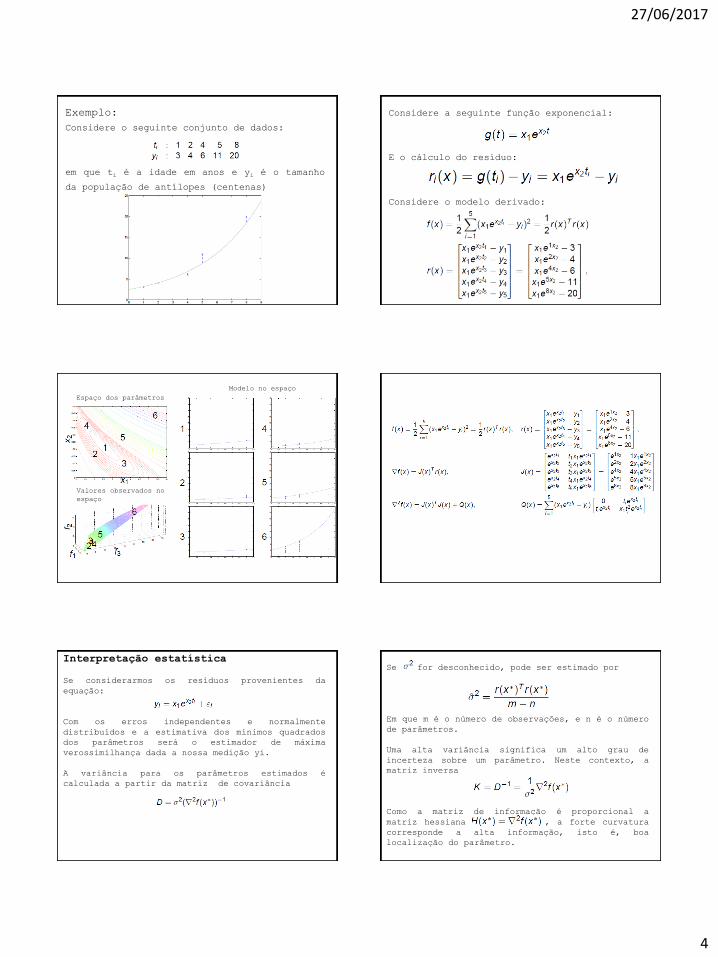
Exemplo:
Considere o seguinte conjunto de dados:
em que ti é a idade em anos e yi é o tamanho
da população de antílopes (centenas)
Considere a seguinte função exponencial:
E o cálculo do resíduo:
Considere o modelo derivado:
Espaço dos parâmetros
Modelo no espaço
Valores observados no
espaço
Interpretação estatística
Se considerarmos os resíduos provenientes da
equação:
Com os erros independentes e normalmente
distribuídos e a estimativa dos mínimos quadrados
dos parâmetros será o estimador de máxima
verossimilhança dada a nossa medição yi.
A variância para os parâmetros estimados é
calculada a partir da matriz de covariância
Se for desconhecido, pode ser estimado por
Em que m é o número de observações, e n é o número
de parâmetros.
Uma alta variância significa um alto grau de
incerteza sobre um parâmetro. Neste contexto, a
matriz inversa
Como a matriz de informação é proporcional a
matriz hessiana , a forte curvatura
corresponde a alta informação, isto é, boa
localização do parâmetro.

27/06/2017
5
Assim, (hecto-antílopes) e o desvio padrão
de x1 é (hecto-antilopes) e de x2 é
(Hecto-antílopes / ano). Com estas unidades, a incerteza
máxima é na direção de 0,99x1 - 0,11x2.
TESTE DE SIGNIFICÂNCIA DOS COEFICIENTES
em que: é o valor estimado do parâmetro
(coeficiente); parâmetro – obtido a partir
da hipótese (geralmente utilizamos zero);
variância da estimativa do parâmetro
ˆ
ˆ
2St
Teste utilizado para verificar a
significância das estimativas dos parâmetros.
2S
0:
0:0
ia
i
H
H
Hipótese
Como obter as estimativas das
variâncias dos coeficientes?
✓ Considerando um modelo linear
simples têm-se:
Matriz de Variâncias e Covariâncias
𝐶𝑂𝑉 መ𝛽 = (𝑋′𝑋)−1𝑠2 = (𝑋′𝑋)−1𝑄𝑀𝑅𝑒𝑠
𝐶𝑂𝑉 መ𝛽 =
1
𝑛+
ത𝑋2
σ𝑖=1𝑛 (𝑋𝑖− ത𝑋)2
−ത𝑋
𝑛σ𝑖=1𝑛 (𝑋𝑖−ത𝑋)2
−ത𝑋
𝑛σ𝑖=1𝑛 (𝑋𝑖−ത𝑋)2
1
σ𝑖=1𝑛 (𝑋𝑖−ത𝑋)2
𝑠2
𝐶𝑂𝑉 መ𝛽 =𝑉( መ𝛽0) 𝐶𝑂𝑉( መ𝛽0 መ𝛽1)
𝐶𝑂𝑉( መ𝛽0 መ𝛽1) 𝑉( መ𝛽1)
✓ Intervalo de confiança para
os coeficientes
ˆ)( 2StIC jj
em que: t é o valor da distribuição t de
student a um nível de probabilidade
fixado, com n-p-1 graus de liberdade do
resíduo.
- Coeficiente de correlação linear ao
quadrado (rxy)2:
100)((%) 22
xyrR
CRITÉRIOS DE SELEÇÃO DOS MODELOS Comparando modelos com número de
coeficientes diferentes
Para comparar modelos com número de
coeficientes diferentes pode-se fazer o cálculo
do Coeficientes de Determinado Ajustado(R2adj)
ou Corrigido (R2corrig)
𝑅𝑎𝑑𝑗2 = 1 −
𝑛 − 1
𝑛 − 𝑝 + 1(1 − 𝑅2)
em que: R2 pode ser o próprio R2, IA ou
(rxy)2.

27/06/2017
6
Erro padrão da estimativa (Syx)
Lembre-se que no caso da variável
dependente estar na forma
logarítmica o deve ser
corrigido pelo Fator de Meyer
QMResíduo SY.X
pn
YY
Syx
n
i
1
)ˆ(
1
2
E se o modelo tiver a variável
dependente na forma logarítmica?
)*(5,0 2SyxeFM
em que: Syx2 = QMRes obtido no ajuste da variável dependente
na forma logarítmica.
✓ Erro padrão da média (Syx(%)):
100Y
SyxSyx(%)
ANÁLISE GRÁFICA DE RESÍDUOS
Consiste na análise dos resíduos da variável
resposta analisada em função de uma variável,
que pode ser a resposta (variável resposta) ou
uma variável independente.
Erros ou Resíduos?iY
iii YYE
i
ii
Y
YYsíduo
Re
Os resíduos podem ser plotados em função de
qualquer variável em estudo, geralmente os
resíduos são plotados contra o valor de dap ou
contra os valores de iY
Os erros Ei são definidos como as “n”
diferenças de sendo i = 1, 2, 3, ....,
n. Dessa forma, o erro indica o quanto a
equação de regressão não é capaz de explicar
os valores da variável dependente.
ii YY
Outliers
Um outiler corresponde a um ou mais ponto(s)
(resíduo(s)) muito discrepante em relação a
curva do modelo.
Nem sempre um ponto é um outlier, pode ter
acontecido do modelo não ter ajustado aos
dados. Por isso utilizamos vários modelos.
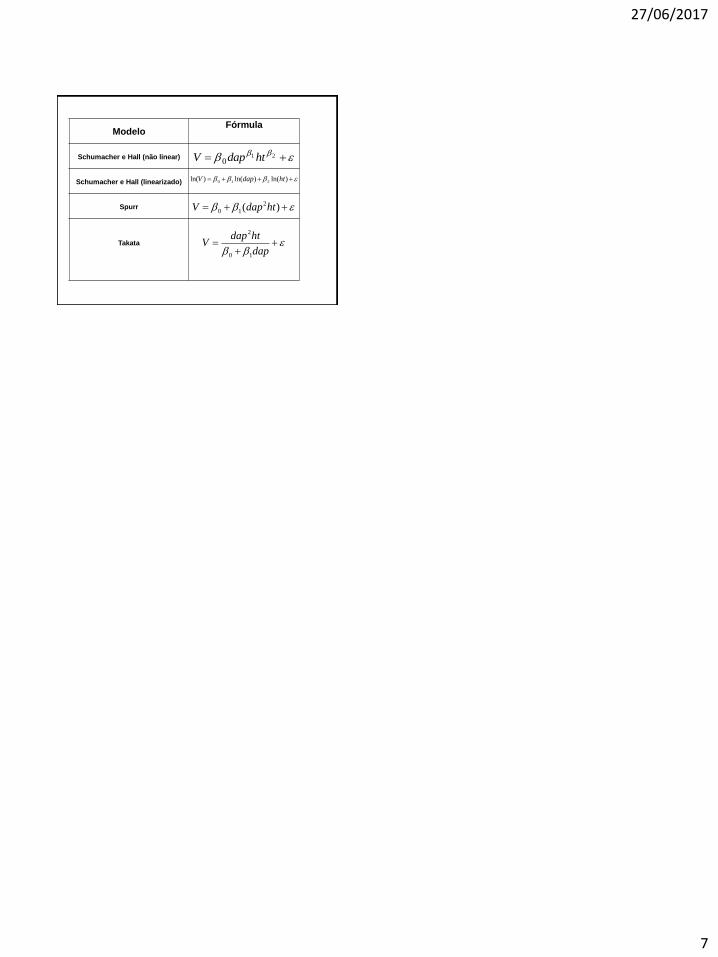
Exercício de Fixação
Ajustar os seguintes modelos volumétricos e
selecionar o(s) mais acurado(s) através da
análise gráfica de resíduos, Syx(%) e R2
ajustado*.
*Lembre-se que o R2 deve ser o que melhor se
adequa a maioria dos modelos.
27/06/2017
7
ModeloFórmula
Schumacher e Hall (não linear)
Schumacher e Hall (linearizado)
Spurr
Takata
21
0 htdapV
)( 2
10 htdapV
)ln()ln()ln( 210 htdapV
dap
htdapV
10
2