Embed Size (px)
Citation preview

ANALISE DA VIBRAÇÃO DE NAVIOS APLICANDO MODELAÇÃO
POR ELEMENTOS FINITOS EM DUAS DIMENSÕES
LUIZ OCTÁVIO PALETTA PICORELLI
TESE SUBMETIDA AO CORPO DOCENTE DA COORDENAÇÃO DOS
PROGRAMAS DE P& - GRADUAÇÃO EM ENGENHARIA DA
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO COMO PARTE DOS
REQUISITOS NECESSARIOS PARA OBTENÇAO DO GRAU DE
MESTRE EM CIENCIAS (M.Sc.) EM ENGENHARIA OCEÂNICA.
Aprovada por :
Piof. Tiago Alberto Piedras Lopes, M. Sc.
( Presidente )
/ ' p r a 5 ~ c & ~ d o Ornar Tyoco Miano,#
RIO DE JANEIRO, RJ - BRASIL
ABRIL DE 1991

Análise da vibração de navios aplicando modelação por elementos
finitos em duas dimensões [ Rio de Janeiro ] 1991
vii, 94 p. 29.7 cm ( COPPE / UFRJ, M.Sc. , Engenharia
Oceânica, 1991 )
Tese - Universidade Federal do Rio de Janeiro, COPPE.
1. Análise Estrutural I. COPPE / UFRJ 11. Título ( Série ).

iii
AGRADECIMENTOS
Ao meu orientador, Prof. Tiago, por sua orientação e exemplo de
trabalho e dedicação.
Ao Prof. Severino, pela co-orientação, amizade e pelas horas cle
apoio e companhia no laboratório.
Aos meus pais, Eli e Veia Líicia, pelo carinho e incentivo com os
quais sempre pude contar.
A Veroline Estaleiros Reunidos do Brasil S.A., pela liberação para
assistir hs aulas c10 curso cle mestraclo e pelo incentivo para perseguir sempre o
aprimoramento profissional.
A Coordenadoria para Projetos Especiais, Ministério da Marinha,
pela liberação para desenvolver o trabalho inicial desta Tese.
Ao Instituto cle Pesquisas da Marinha, pela colaboração para a
elaboração da parte final deste trabalho de mestrado.
Aos meus amigos e coinpanheiros de trabalho, pelo incentivo e
apoio para desenvolver esta Tese.
Aos Funcionários do Laboratório de Estruturas Navais da UFRJ,
pelo apoio no desenvolvimento deste trabalho.
Resumo da Tese apresentada à COPPE / UFRJ corno parte dos requisitos
necessários para obtenção do grau de Mestre em Ciências (M.Sc.)
ANALISE DA VIBRAÇÃO DE NAVIOS APL1CANI)O MODELAÇÁO
POR ELEMENTOS FINITOS EM DUAS DIMENSÕES
LUIZ OCTAVIO PALETTA PICORELLI
Abril, 1991
Orientador : Prof. Tiago Alberto Piedras Lopes (M.Sc.)
Programa : Engenharia Oceânica
Neste trabalho é apresent ado um procedimento para modelar
navios por elementos finitos em duas dimensões, a ser aplicado nas primeiras
fases do projeto e que, representando adequadamente a vibração do navio nas
frequências de interesse, possibilita o cálculo das frequências naturais, dos
modos de vibração e da resposta às excitações com um grau razoável de
precisão e com o mínimo esforço coinputacional e de modelação possíveis. O
modelo obtido permite verificar se o nível de vibrações é excessivo e, servinclo
para simulação a baixo custo, torna viável o estudo de soluções e de
alternativas para o projeto proposto.
Um navio transportador de produtos claros foi utilizado para
testar o procedimento de moclelação. Será apresentada uma comparação entre
os resultados obtidos c0111 o modelo e os obtidos com um modelo do mesmo
navio em três dimensões.

Abstract of Thesis presented to COPPE / UFRJ as partia1 fulfillrnent of the
requirements for the degree of Master of Science (M.Sc.)
SHIP'S VIBRATION ANALYSIS BY APPLICATION OF TWO
DIMENSIONAL FINITE ELEMENT MODELLING
LUIZ OCTAVIO PALETTA PICORELLI
April, 1991
Thesis Supeivisor : Piof. Tiago Alberto Piedias Lopes (M.Sc.)
Departinent : Ocean Engineeiing
Tliis Thesis desciibes a procedui-e to inodel ships in two
dimensions, using the Finite Element Method, to be applied at the initial
stage of design piocess. Repiesenting the ship's vibratioa oa the significaiit
fiequency range, it maltes possible the calculation of natural fiequencies,
modes of vibration and structuie response with minimum modelization effoit
and computei time. The obtained model permits to veiify if the vibration
leve1 is excessive and, applied to peifoiin low cost simulations, maltes possible
the study of solutions and alternatives to ship design.
A product cairier ship was used to test the procedure. A
comparison between the results obtained with the two-diinensional model aacl
the results obtained with a thiee-dimensional model of tlie same ship is
presented.

CAPÍTULO I : REVISÃO DA LITERATURA
CAPÍTULO I1 : ANALISE DE SISTEMAS EM VIBRAÇÃO
11.1 - ANÁLISE DINÂMICA DE ESTRUTURAS
11.2 - ANALISE DA VIBRAÇÃO LIVRE
11.3 - ANALISE DA VIBRAÇÃO FORÇADA
CAP~TULO 111: PROCEDIMENTO DE MODELAÇAO
111.1 - CONSIDERAÇ~ES GERAIS
111.2 - IDEALIZAÇÃO E DIVISÃO DA ESTRUTURA
111.3 - ESCOLHA DOS ELEMENTOS FINITOS
111.4 - MODELAÇÃO DA ESTRUTURA
111.5 - RIGIDEZ DO MODELO
CAPÍTULO IV : DETERMINAÇAO DA MASSA
IV.1- MASSA DO NAVIO
IV.2 - MASSA ADICIONAL
rV.3 - PROGRAMAS DE COMPUTADOR
IV.3.1 - Introdução
IV.3.2 - Programa PPlMASSA
IV.3.3 - Programa PP2ELEMA

vii
V.1- CONSIDERAÇÕES GERAIS
V.2 - MODELO EM 2D
V.2.1 - Estrutura
V.2.2 - Massa
V.3 - TESTES
CAP~TULO VI : RESULTADOS
V1.1- COMPARAÇÁO ENTRE MODELAÇÁO 2D E 3D
VI. 1.1 - Frequências Naturais
VI.1.2 - Frequência Natural da Superestrutura
VI.1.3 - Resposta da Estrutura
VI.2 - COMPARAÇÃO CONSIDERANDO MASSAS
ADICIONAIS DIFERENTES
V1.3 - AvALIAÇÃO DOS TEMPOS POR ATIVIDADE
VI.3.1 - Tempos Gastos na Modelação e Análise
VI.3.2 - Tempo de Processamento
v11.1- CONCLUS~ES
VlI.2 - CONSIDERAÇÕES FINAIS

A vibração é um fenômeno que está presente em todos os navios,
ocorrendo em diferentes modos e afetando diversas regiões da sua estrutura.
Forças de excitação de vários tipos estão atuando continuamente e o navio,
sendo um corpo elástico, responde a elas vibrando com intensidades de maior
ou menor grau de severidade.
As principais fontes de vibração a bordo são as forças e momentos
de desbalanceamento e de combustão provocados pelo motor principal e as
pressões induzidas pelo propulsor no casco.
Níveis altos de vibração a bordo de navios podem causar ruídos,
afetar a durabilidade e a integridade das várias estruturas de aço do casco e
causar desgaste excessivo e problemas mecânicos, estruturais ou de
funcionamento em máquinas e equipamentos essenciais. Além disto, tainbéin
trazem incômoclos à tripulação devido à redução do conforto, influindo no seu
desempenho e provocando perda de concentração e fadiga.
Por estas razões, o controle de vibrações está atraindo atualmente
uma atenção crescente, sendo uma consideração importante no projeto do
navio. Um grande níiinero de requisitos e recomendações relativas a vibrações
está sendo publicado por organismos e autoridades marítimas nacionais e
internacionais e é usual que os armadores estipulem, como objetivos de projeto
nas especificações de construção, os níveis ináximos de vibração que seus
navios devem atender.
A vibração em navios pode ser classificada em dois tipos. O
primeiro é a vibração local em estruturas como conveses e anteparas, que pode

ser reduzida a níveis aceitáveis através de simples modificações na rigidez do
painel, evitando ressonância. O segundo tipo, e mais importante, é a vibração
global do casco, que atinge o navio como um todo, fazendo com que o casco se
comporte dinarnicament e como sub-estruturas acopladas. Suas características
influenciam também os comportamentos dinâmicos de estruturas maiores
como, por exemplo, a superestrutura e o fundo duplo. Geralmente é difícil e
caro diminuir o nível de vibração global do casco depois de iniciada a
construção do navio.
As formas da vibração global do casco podem ser:
- vibração nos planos vertical ou horizontal;
- vibração torcional;
- vibração longitudinal;
- uma combinação das anteriores.
Problemas de vibração em navios convencionais, como petroleiros
e graneleiros, movidos a motores de combustão interna de baixa rotação,
estão, geralmente, associados à vibração vertical. Este é o tipo mais
importante e, portanto, deve ser o problema a ser atacado.
O comportamento dinâmico do navio depende do valor e da
distribuição da rigidez da estrutura, do valor e da distribuição da massa
(própria, carregamento e adicionada) a bordo, da quantidade de
amorteciinento na estrutura e da intensidade e frequência das forças de
excitação.
O combate a vibrações consiste em criar uma situação de baixa
excitação e evit ar condições de vibração em ressonância. Baixa excitação

pode ser conseguida de diversas formas como, por exemplo, escolher
adequadadamente motores com baixas forças e momentos de
desbalanceamento, aplicar compensadores e balanceadores e usar tipos
otimizados de propulsor. Para evitar condições de vibração em ressonância é
necessário controlar as frequências naturais do casco. Para este fim, os íinicos
parâmetros que podem ser alterados são:
- a distribuição da rigidez da estrutura do casco;
- a condição de carregamento, o que quase sempre não se
enquaclra nos objetivos do armador para o navio em
questão.
A aplicação destes conceitos em problemas de vibração em navios
construídos resultam, frequentemente, em soluções de compromisso que
tomam muito tempo e são extremamente caras.
Por todos os fatos apresentados é muito importaiite que o
comportamento dinâmico da estrutura do navio seja determinado na fase de
projeto, quando ainda existe flexibilidade nas outras restrições de projeto e até
mesmo grandes modificações poclem ser realizadas sem provocar grandes
alterações nos custos envolvidos.
Existem diversos métodos e ferramentas disponíveis para analisar
vibrações na fase de projeto. Um aspecto importante é o tempo limitado que
está disponível para se tomar decisões que afetem o projeto. O custo cla
análise também deve ficar sob controle, embora o custo de medidas de
correção após a construção do navio justifique urna soma siibstancial de
recursos a ser aplicada ao trabalho de rninimizar vibrações ainda nesta fase.
Atualmente, a análise de vibrações nesta fase é realizada utilizando-se

métodos semí+mpíricos desenvolvidos a partir de medições. Eles só podem
ser aplicados a um número pequeno de problemas de vibração e tipos de navio.
Seus resultados limitam-se aos três primeiros modos e sua precisão possibilita
apenas a indicação da necessidade ou não de estudos mais detalhados,
utilizando-se outros métodos.
Entre as ferramentas disponíveis, uma das mais potentes é o
Método dos Elementos Finitos. Nele, toda a estrutura do navio é subdividida
e representada por uma malha de pequenos elementos. Cada um desses
elementos é definido com massa e rigidez equivalentes às da região do navio
que esteja sendo representado. São também levadas em consideração a massa
dos equipamentos, da carga e dos cons~imíveis, e a massa adicional devida ao
fato de o navio estar vibrando iinerso em água.
O navio pode ser modelado por elementos finitos em uma
dimensão (lD), em duas diinensões (2D) ou em três diineiisões (3D). A
modelação em 3D é a única que pode representar completamente o
comportamento dinâmico do navio e de todas as suas sub-estruturas, mas a
modelação 2D, ou até mesmo a lD, pode levar em consideração a influência de
sub-sistemas como o fuildo d~iplo.
Quanto mais refinada a mallia, mais próximo do real fica o
modelo, mas maiores são também os custos da análise. Geralmente, o custo
da análise de vibração atinge valores altos. Embora o ciisto do tempo de
coinput ador seja usualmente muito importante, os homens-hor as gastos
durante a modelação, correção de erros e interpretação dos resultados podem
ter uma alta participação no ciisto final.
A vibração vertical do casco em navios convencionais está restrita

a um único plano devido à simetria do arranjo estrutural e à simetria das
forças de excitação que agem sobre ele. Neste caso existe a possibilidade de
diminuir o custo da análise modelando-se o navio em 2D. Outra vantagem
deste tipo de modelação é poder efetuar a análise numa fase mais inicial do
projeto, devido ao fato de que ela necessita um número menor de informações
se comparada com modelações mais detalhadas.
O objetivo deste trabalho é apresentar um procedimento para
modelar navios em duas dimensões (2D), a ser aplicado nas primeiras fases do
projeto e que, representando adequadamente a vibração do navio nas
frequências de interesse, possibilita o cálculo das frequências naturais, dos
modos de vibração e da resposta às excitações com um grau razoável de
precisão e com o mínimo esforço computacional e de modelação possíveis. O
modelo obtido permite verificar se o nível de vibrações é excessivo e, servindo
para simulação a baixo custo, torna viável o estudo de soluções e de
alternativas para o projeto proposto.
Um navio transportador de produtos claros foi utilizado para
testar o procedimento de modelação. Será apresentada uma comparação entre
os resultados obtidos com o modelo e os obtidos com um modelo do mesmo
navio em 3D.
O capítulo I apresenta urna revisão da literatura disponível,
consistindo dos principais estudos feitos até este momento a respeito de
modelação de navios por elementos finitos para cálculo de vibrações.
No capítulo I1 são apresentados os tipos de análises efetuaclas, as
equações e os métodos utilizados para solução.

No capítulo I11 é descrito o procedimento de modelação,
apresentando detalhadamente todos os passos para se obter um modelo, a
geometria, os critérios e aproximações utilizadas e as características e
propriedades dos elementos.
O capítulo IV apresenta o procedimento para modelação da massa
do navio, o método de cálculo da massa hidrodinâmica adicional e o seu
cálculo para cada um dos diferentes modos de vibração. São apresentados
também o programa de computador elaborado para calcular a massa adicional
tridimensional e para determinar a massa em cada nó e o pré-processador
elaborado para gerar os códigos cle entrada dos elementos de massa do modelo.
O capítulo V apresenta o navio escolhido pasa testas a modelação,
as características das condições de carregamento e dos modelos, o cálculo da
massa adicional e uma explicação sobre os testes que foram realizados.
No capítulo VI são apresentados os res~iltados obtidos com as
modelações em 2D e em 3D, a comparação entre eles, a comparação entre os
tempos de modelação através do tamanho dos arquivos de entrada e a
comparação entre os tempos de processamento. Os resultados obtidos com o
modelo 2D mantendo a massa adicional constante são comparados com os
resultados variando a massa adicional para cada modo de vibração.
No capítulo VI1 são apresentadas as conclusões e as considerações
finais do trabalho.
O programa de análise estrutural COSMOS/M, versão 1.52 A,
instalado em rnicro-computadores do tipo A T 286 e 386120 MHz foi utilizado
pasa efetuai- os cálculos.

REVISÃO DA LITERATURA
Atualmente existe uma vasta bibliografia englobando todos os
aspectos da vibração a bordo de navios. Sob o ponto de vista da previsão de
vibrações utilizando o Método dos Elementos Finitos na fase inicial do projeto
do navio, sempre haverá pressões no sentido de se restringir a análise a um
mínimo com respeito ao tempo e ao custo. Por esta razão, grande parte do
trabalho atualmente desenvolvido nesta área está voltado para a simplificação
dos métodos de modelação e dos procedimentos de análise.
HANSEN e SKAAR [ 1 1, apresentam um método cle análise para
previsão da resposta do casco e da superestrutura baseado no Método dos
Elementos Finitos. São feitos cálculos de frequência natural, modos de
vibração e resposta da estrutura à excitação forçada. Os resultados são
comparados com medições, indicando a aplicabilidade do método.
São apresentados diversos exemplos de modelação incluindo
modelos em lD, 2D, 3D e híbridos. O programa SESAM-69, desenvolvido
especialmente para aplicação em engenharia naval, foi utilizado para os
cálculos. Nele a vibração livre é calculada pelo método de Householder e a
vibração forçada pelo método da superposição modal. A técnica de
superelementos e a redução de graus de liberdade pelo inétodo de Guyan são
utilizados para modelos 3D grandes e complexos.
O amortecimento da estriitura é estimado como uma fração do
amortecimento crítico e a massa adicional é calculada por métodos baseados
na teoria de faixas.

Os resultados indicam a importância do amortecimento no cálculo
da resposta. Os autores recomendam um modelo híbrido para o cálculo, mas é
ressaltado que o modelo 2D pode ser utilizado quando o navio tiver
superestrutura bem apoiada na estrutura do casco.
CARLSEN [ 2 1, realizou um estudo paramétrico sobre o cálculo
de vibrações utilizando o Método dos Elementos Finitos com o objetivo de
indentificar a influência das diversas variáveis envolvidas. Foram estudados
os efeitos, no cálculo da vibração forçada, da vibração do fundo duplo e as
influências do cisalhamento, da extensão do modelo, da condição de
carregamento e da distribuição do campo de pressões iiiduzidas.
As frequências naturais dos modos mais baixos são comparadas
com os resultados obtidos utilizando como modelo a viga de Timoshenko, e
com meclições. São apresentados dois exeinplos de modelação, uin navio
graneleiro em 2D e um navio multipurpose em 3D. O programa SESAM-69
foi utilizado para os cálculos.
Quanto ao aspecto da modelação, as conclusões indicam que o
modelo 2D pode ser utilizado para determinar as frequências naturais e modos
de vibração c10 casco e da superestrutura com grau de precisão suficiente para
determinação do níimero de pás do hélice e que, para cálculo apenas do
comportamento da superestrutura, não é necessário representar totalmente a
região de carga do navio.
NORRIS e CATLEY [ 3 ] apresentam a aplicação do Método dos
Elementos Finitos no cálculo da resposta do navio em vibração vertical
utilizando diversos modelos 2D. O objetivo do trabalho foi estabelecer um
procedimento para criar modelos simples para serem utilizados nas fases

iniciais do projeto.
São apresentados os passos da modelação, exemplos da aplicação e
a comparação dos resultados do cálculo dos movimentos da estrutura com os
movimentos medidos durante testes utilizando um excitador mecânico. São
mostrados também comparações entre um modelo membrana-barra e os
modelos de viga e llíbrido correspondentes. E utilizado um modelo de
amortecimento modal, a massa adicional é calculada por um método baseado
na teoria de faixas e a redução da rigidez ao cortante é obtida através de
coeficientes desenvolvidos pelos autores a partir de medições.
O modelo membrana-barra é indicado como o que melhor se
encaixa no objetivo do trabalho e os resultados mostram que ele não só é
capaz de prever o comportamento dinâmico de navios em vibração vertical,
como também é capaz de demonstrar o efeito de modificações no projeto.
SKAAR e CARLSEN [ 4 1, descrevem o estado da arte da análise
de vibrações em navios e apresentam as dificuldades relativas à modelação por
elementos finitos. Eles fornecem sugestões no sentido de orientar a modelação
levando em consideração os objetivos da análise, a confiabilidade cios dados, o
tempo disponível e o custo final.
E feita uma comparação entre a aplicação de modelos 2D e 3D e
são fornecidas explicações detalhadas sobre os tipos disponíveis de estimativa
de massa adicional, sobre a conveniência de reduzir graus de liberdade em
modelos grandes e complexos, sobre amortecimento e sobre as forças de
excitação originadas pelo propulsor.
Como exemplo é apresentado um estudo comparativo entre os

resultados obtidos com a modelação de um navio em 3D e medições. O
programa SESAM-69 foi utilizado para os cálculos.
JOHANNESSEN e SKAAR [ 5 1, apresentam um manual com um
procedimento para fazer a checagem da vibração em navios durante a fase de
projeto com o objetivo de evitar que vibrações severas apareçam depois que o
navio entrar em operação. Esse manual traz explicações sobre as fontes de
excitação, sobre a vibração do eixo propulsor, da viga navio, da superestrutura
e sobre vibrações locais. Ele traz também critérios para avaliação com
respeito à habitabilidade, fadiga da estrutura e vibração de máquinas e
equipainent os.
A análise é dividida em três estágios que devem ser aplicados
desde o início do projeto. Para cada estágio são apresentados um pequeno
resumo dos problemas a serem enfrentados, os métodos de cálculo disponíveis
e os critérios de avaliação dos resultados. Somente devem ser efetuadas um
número mínimo de investigações e o estágio seguinte só deve ser realizado se o
anterior indicar a possibilidade de que algum problema sério pode ocorrer.
O manual é muito bem explicado, mostrando como e quando fazer
cada tipo de análise. São apresentados exemplos da sua aplicação através de
estudos efetuados em alguns navios, incluindo modelação por elementos
finitos.
PICORELLI e SILVA NETO [ 6 1, realizaram um estudo com o
objetivo de verificar as condições para o desenvolvimento de um procedimento
para modelação de navios por elementos finitos em duas dimensões, para
aplicação no cálculo de vibração vertical na fase inicial do projeto.

Um procedimento foi idealizado e o estudo mostra cada fase da
modelação, todos os parâmetros e métodos utilizados e as aproximações
assumidas. Foram feitos os cálculos das frequências naturais e dos modos de
vibração de um navio graneleiro. São apresentadas a comparação entre os
resultados obtidos com modelações com grau de refinamento diferentes e a
comparação destes com resultados de medições realizadas em prova de inar.
Este estudo foi o primeiro passo para esta tese. Os resultados
foram satisfatórios e as conclusões indicam alguns dos caminhos que foram
seguidos durante sua e1a;boração.

CAPITULO 11
ANALISE DE SISTEMAS EM VIBRAÇÃO
11.1 - ANALISE DINÂMICA DE ESTRUTURAS
A análise dinâmica de sistemas de engenharia, por exemplo uma
estrutura, pode ser dividida em quatro etapas. O primeiro passo consiste em
desenvolver um modelo analítico, no qual são utilizadas hipóteses
simplificadoras para transformar a estrutura real em uma forma na qual suas
propriedades físicas estejam representadas. O segundo passo é criar um
modelo matemático, aplicando as leis físicas para obter equações que
descrevam o modelo analítico em linguagem matemática. O terceiro passo é
resolver as equações obtendo o comportamento ou resposta do modelo. A
etapa final é a interpretação dos resultados.
Os modelos analíticos podem ser discretos ou contínuos. No
modelo discreto, a resposta é determinada diretamente pela solução de
sistemas de equações algébricas, com um número finito de variáveis. No
modelo contínuo, a resposta é determinada através da solução de sistemas de
equações diferenciais. A solução exata dessas equações, satisfazendo todas as
condições de contorno, só é possível em casos relativamente simples e métodos
numéricos são geralmente empregados para encontrar a resposta. Este
procedimento reduz o modelo contínuo de sistemas complexos a m a
modelação discreta que pode ser analisada.
Existem diversas maneiras de discretizar o modelo. As técnicas
utilizadas no Método dos Elementos Finitos e sua aplicação em computadores
possibilitaram a sistematização da modelação matemática e da solução de

modelos analíticos contínuos. Explicações detalhadas sobres métodos de
solução empregados pelo programa COSMOS - 1.52A podem ser encontradas
em BATHE [ 7 1.
Um evento dinâmico é um fenômeno que envolve parâmetros
variando no tempo. Desta forma, força dinâmica é aquela em que seu valor,
posição ou direção varia com o tempo e o comportamento dinâmico de
estruturas sob sua influência é caracterizado por tensões e deslocamentos que
também variam com o tempo.
A vibração é um evento dinâmico. Quando o Método dos
Elementos Finitos é usado para analisar a vibração do casco de navios, a
equação diferencial de equilíbrio dinâmico pode ser escrita da seguinte forma :
onde M - matriz de massa da estrutura -
C - matriz de amortecimento da estrutura -
K - matriz de rigidez da estrutura
u, u e u - vetores aceleração, velocidade e deslocamento, - - -
respectivamente
F(t) - vetos de forças externas
t - tempo
Na modelação de estruturas complexas, a equação (1)
transforma-se em um sistema de n equações com n incógnitas, onde n é o
número de graus de liberdade.

11.2 - ANALISE DA VIBRAÇAO LIVRE
Um sistema está oscilando em vibração livre quando não há forças
externas de excitação agiiido sobre ele. Neste caso, a influência do
aiiiortecimento é muito pequena e normalmente omitida e o vetor
deslocamentos pode ser representado por uma função correspondente a
movimentos harmônicos. Desta maneira temos :
F(t) = O - -
C = o - -
11 = Asen ( w . t ) -
Aplicando estas condições, a equação ( 1 ) é reduzida ao seguinte
problema de autovalor :
onde w - frequência natural
A - vetor amplitude de vibração
Para se resolver esta equação foi utilizado o Método de Iteração
por Subespaço. Os autovalores encontrados são as frequências naturais da
estrutura e os autovetores são os seus respectivos modos de vibração.
11.3 - ANALISE DA VIBRAÇAO FORÇADA
A excitação da vibração em navios provocada por motores e

apuo
: ouro:, sppgap xas apod 'sopuu~saqap s?:,o~ ma sps:,gds 'o.e5r!q9xa ap v5soj
v .ss.rIausm svs,raq ap opvurgsa Jas apod anb 'oquamy:,aq;roms o og5r!sapysuo:,
ura ssnaT o~qssa3au 9 sqsodsas ap sapnqgdurs ssp opl.3 ON
.sopsqdr! sas mapod sr!3~u~m.~sq sagkrqy~ ap
o p q y sswl so31s?runa sopoq?m a scq?!sad spssap~sao:, Ias apod salospdo~d

CAP~TULO 111
PROCEDIMENTO DE MODELAÇÃO
111.1 - CONSIDERAÇÕES GERAIS
A modelação por elementos finitos é aplicável a qualquer tipo de
estrutura. Ela consiste no processo de geração da malha com suas
coordenadas, nós, incidências e propriedades dos elementos, carregamentos e
condições de contorno. Na análise dinâmica, o modelo deve ser capaz de
representar a vibração da estrutura na faixa de frequência das forças de
excitação. O tipo de modelo (1D, 2D ou 3D) e o grau de refinamento da
malha devem ser escolhidos levando em consideração diversos fatores como o
tipo do problema, dados disponíveis, precisão requerida nos resultados e o
tempo e orçamento disponíveis.
Após a escolha do tipo de modelo que melhor se aplica a um
determinado tipo de problema, o primeiro passo na modelação é dividir a
estrutura em um número apropriado de elementos com propriedades físicas
conhecidas. Estes elementos são unidos pelos vértices, que são chamados
pontos nodais ou nós. Os deslocamentos dos nós, incógnitas do problema, são
as coordenadas generalizadas da estrutura e o seu número é chamado de graus
de liberdade do modelo idealizado.
Desta maneira, a deflexão de toda a estrutura pode ser expressa
em termos destas coordenadas generalizadas através de um conjunto de
funções assumidas, usadas para representar o comportamento aproximado das
incógnitas em cada elemento.

De uma maneira geral, a modelação por elementos finitos é a
maneira mais eficiente de expressar, através de um iiúmero limitado de
coordenadas, os deslocamentos de configurações estruturais arbitrárias e o seu
objetivo é descrever o comportamento da estrutura da maneira mais precisa
possível.
A figiira 3.1 é um fluxograma do processo de modelação adaptado
de NORRIS e CATLEY [ 3 1.
111.2 - IDEALIZAÇÃO E DIVISAO DA ESTRUTURA
O nhnero de dados e de detalhes estruturais do navio dispoiiíveis
na fase inicial do projeto não é milito grande, consistindo basicamente c10
arranjo geral, condições de carregamento e escantilhões da seção mestra, mas é
siificiente para a determinação das propriedades dos elementos para a geração
de um modelo em 2D.
A modelação de um navio em 2D consiste em projetar a sua
estrutura em um plano ao longo do seu eixo longitudiiial, transformando
adequadamente suas propriedades físicas. A malha deve ser idealizada de
maneira que os nós, e consequentemente as fronteiras dos elementos,
coincidam o máximo possível com aspectos importaiites da estrutura, como
anteparas, conveses, cavernas, pisos, et c.
As principais propriedacles físicas do modelo, como a área
seccional, a posição do eixo neutro e a clistiibuição de massa, devem ser
similares às da estriitura real. Simplificações podem ser assuniclas desde que
se esteja atento à elas e que se tenha alguma maneira de levar em

I ESTUDO PRELIMINAR D O S DESENHOS DO NAVIO I
I A P L I C A R R E D U Ç A O DO CO RT ANT E I
I DISTRIBUIR PELOS NÓS A MASSA NÁO ESTRUTURAL
DENSIDADE DOS MODELO = ELEMENTOS PESO-LEVE
SIM 4
I D IS T R IB U I R PELOS N ~ S A MASS A D A C O N D I F R O ~ D E C A R RE G A M E N T O E CALCULAR E DISTRIBUIR A MASSA HIDRODINAMICA ADICIONAL I
D E T E R M I N A R F O R C A S DE E X C I T A ~ Ã O , ES COLHE R MO DOS A SEREM U TILIZADOS E DETERMINAR O AMORTECIMENTO PARA O CALCULO
DA RESPOSTA DA ESTRUTURA
] T I R A R LISTAGENS E PLOTAR G R ~ I C O S COM A RESPOSTA DA ESTRUTURA
PLOTAR MODOS
V I B R A ~ ~ ~ O L
FIGURA 3.1 - FLUXOGRAMA DO PROCESSO DE MODELACÃO

consideração as suas influências. É importante ressaltar as hipóteses
utilizadas para simplificar e viabilizar os cálculos:
- o coinportamento do sistema discreto (modelo) é similar ao do
sistema real (navio) ;
- o comportamento do sistema real é definido como linear;
- os materiais utilizadas são considerados isotrópicos e lloinogêneos
e, portanto, certas deformações e suas correspondentes tensões são
desprezadas.
111.3 - ESCOLHA DOS ELEMENTOS FINITOS
Os elementos de membrana e de barra são utilizados para a
modelação de navios em 2D para cálculo da vibração vertical. A seguir são
descritas as caracteiísticas e propriedades dos elementos de membrana
(PLANE2D) e de barra (TRUSS2D) conforme indicadas no manual de
utilização do programa COSMOS/M [ 8 1.
O elemento PLANE2D, estado plano de tensões e deformações,
possui 3 ou 4 nós no plano XY e 2 graus de liberdade por nó. O outro grau de
liberdade de translação e os três de rotação devem ser restringidos.
O parâinetro geométrico necessário para a sua definição é a
espessura da membrana e as propriedades do material a serem aplicadas são o
módiilo de elasticidade na direção X, o coeficiente de Poisson e a densidade.
O elemento TRUSS2D, treliça, possui 2 nós no plano XY e 2 graus
de liberdade por nó, trabalhando apenas com tração e compressão.

O parâmetro geométrico necessário para a sua definição é a área
da seção e as propriedades do material a serem aplicadas são também o
módulo de elasticidade na direção X, o coeficiente de Poisson e a densidade.
111.4 - MODELAÇAO DA ESTRUTURA
Na modelação de navios, é necessário que cada aspecto da
estrutura real seja representado por elementos finitos de tipo adequado.
O elemento de membrana é utilizado para representar todas as
estruturas longitudinais, continuas, carregadas por esforços cortantes no plano
da linha de centro do navio. Nesta definiçlio podem ser classificados :
- o chapeamento do costado e do bojo;
- o chapeamento das anteparas longitudinais;
- os membros longitudinais;
- parte do chapearnento de estrutur- inclinadas.
FIGURA 3.2

A espessura de cada elemento de membrana do modelo é a soma
das espessuras das chapas, através da seção do navio, na região do casco onde
ele esta localizado. Por exemplo, a espessura de um elemento representando
uma parte do tanque central de um navio petroleiro é determinada através da
seguinte equação (ver figura 3.2) :
onde tel - espessura do elemento
c - espessura do costado
L t l - espessura da antepara longitudinal
O elemento de barra é utilizado para representar todas as
estruturas longitudiiiais, contínuas, carregadas por esforços axiais no plano
perpendicular ao plano da linha de centro do navio. Ele também é utilizado
para representar toda a estrutura transversal do navio. Nestas definições
podem ser classificados :
- o chapeamento dos conveses, pisos e cobertas;
- o chapeainento do fundo e do teto do fundo duplo;
- o chapeamento das anteparas traiisversais;
- os membros transversais;
- parte do chapeamento de estruturas inclinadas;
- reforços em geral.
A área seccional de cada elemento de barra do modelo é a soma
das áreas seccionais da região do casco que ele está representando. Por
exemplo, a área seccional de um elemento de barra que representa o piso de
um convés da superestrutura é igual a espessura do chapeameiito do piso

multiplicada pela largura da superestrutura e a área seccional de um elemento
de barra que representa uma antepara transversal na região de carga do navio
é igual a espessura média do chapeamento da antepara multiplicada pela boca
do navio.
111.5 - RIGIDEZ DO MODELO
A rigidez ao cortante é um parâmetro importante no cálculo da
vibração vertical em navios, principalmente para seus modos mais elevados.
Pode-se assumir que a força cortante é exercida sobre o chapeaineiito vertical
do costado e das anteparas longitudinais do casco. Ao transformar a estrutura
triclimensional do navio em um modelo bidimensional, através da soma das
espessuras das chapas verticais, provoca-se um aumento na rigidez devido ao
fato de que as distorções transversais do navio não são levadas em
consicleração. Um método de correção deve ser utilizado para reduzir a rigiclez
ao cortante do modelo.
Um método de cálculo da rigidez ao cortante nas direções vertical
e horizontal é apresentado por VAN HORSSEN [ 9 1. Nele, o valor da rigidez
é expresso através da área da seção e de um coeficiente I.( que depende cla
geometria da seção. O trabalho fornece uma série de valores para os
coeficientes K a serem aplicados em seções típicas do navio, tais como proa,
tanques centrais, praça de máquinas e superestrutura, e popa. As figuras 3.3 à
3.10 mostram estas seções e os respectivos coeficientes Kv para a direção
vertical.
A espessura dos elementos de membrana em cada seção do modelo
deve ser multiplicada por coeficientes Kv adequados, reduzindo a rigidez.

K = 0.82 v FIGURA 3.3
K = 0.83 sem supersestrutura v Kv = 0.84 com supèrestrutura
FIGURA 3.5
K = 0.86 v FIGURA 3.4
I Kv = 0.75
FIGURA 3.6


onde
Desta maneira a espessura final de cada elemento é :
- telf - tel Kv
e ~ f - espessura final do elemento
e1 - espessura do elemento calculada como em 111.4
I< - coeficiente na direção vertical para a seção do v
navio.

CAPITULO IV
DETERMINAÇÃO DA MASSA
A massa do modelo deve ser a mais próxima possível da massa
real do navio. Ela é a soma do Peso Leve ao Lastro ou Carga, conforme a
condição de carregamento. A massa hidrodinâmica adicional devida ao fato
do navio estar vibrando imerso em água também deve ser considerada.
IV. 1 - MASSA DO NAVIO
O peso leve ( PL ) é constituído de toda a massa do aço,
tubulações, equipamentos permanentes e acabamento do navio. Para efeito da
sua introdução no modelo ele é dividido em :
- massa não estrutural localizada ( MNEL )
. devem ser considerados neste ítem o motor principal, os motores
auxiliares, o hélice, o leme, a chaminé, as ancoras e amarras, o
acabamento da superestrutura e outros equipamentos similares;
. massas equivalentes devem ser concentradas nos nós do modelo
que estão mais próximos da localização real do equipamento.
- massa estrutural de aço ( MEA )
. seu valor é fornecido através da densidade dos elementos do
modelo que deve ser ajustada para levar em consideração que
existem a bordo tubulações, acabamentos e iníimeros
equipamentos com massa pequena, que não foram incluídos no
ítem anterior, e que diversos elementos estruturais do navio são
desprezados durante a modelação;

. a densidade é calculada pela seguinte fórmula :
( PL - MNEL ) P =
VOLM
onde VOLM - volume do modelo.
A massa da carga do navio ( MC ), consistindo dos consumíveis e
de lastro ou carga, conforme o caso considerado, deve ser dividida e
distribuída nos nós do modelo que formam os tanques e porões.
IV.2 - MASSA ADICIONAL
Devido ao fato do navio estar imerso em água, a sua vibração
provoca movimentos na água ao seu redor. A análise do feiiômeno indica que
flutuações de pressão aparecem na superfície submersa do casco. Sua
influência pode ser separada em componentes de velocidade e de aceleração. A
primeira representa dissipação de energia e deve ser incluída no
amortecimento. A segunda pode ser considerada como uma força de inércia
aplicada sobre a seção do navio e seu efeito pode ser siimlado adicionado-se
uma massa de água vibrando junto com o navio. Essa massa recebe a
denominação de massa virtual ou massa hidrodinâinica adicional (MAD).
A massa adicional representa uma grande parcela da massa tot a1
vibrando, sendo em alguns casos maior do que a massa do navio incluindo o
carregamento. Ela pode ser estimada por diversos métodos tais como a teoria
de faixas, incluindo transformação conforme ou técnicas de fonte-sumidouro,
elementos finitos fluídos ou elementos de contorno.

Apesar de serem mais precisos, elementos finitos ou de contorno
não devem ser utilizados nas fases iniciais do projeto porque uma
representação completa da água em volta do navio é muito complexa, levando
a custos altos devidos aos grandes tempos de modelação e coinputacional
iiecessários.
O método mais utilizado atualmente para a sua estimativa é o
método de LEWIS [ 10 1, baseado na teoria de faixas com transformação
conforme. Sua grande vantagem é a facilidade da iinplementação em
computadores e o baixo ciisto para a obtenção dos resultados. A massa
adicional para escoamentos bidimensionais, em uma determinada seção do
navio é calculada pela fórmula :
onde Mtv - massa adicional por unidade de compriniento
Pa - inassa específica da água
b - meia boca da seção
C - coeficiente para massa adicional vertical v
Os coeficientes Cv, para cada tipo de seção do navio, representam
a razão entre a massa adicional de um corpo cilíncliico com seção igual à do
navio e a inassa adicional de um cilindro de revolução com diâmetro igual à
boca da seção em consideração, por unidade de coinprimento.
Estes coeficientes foram plotados, figura 4.1 , por
LANDWEBER [ 11 ] em função do coeficiente da área da seção ( a ) e da
razão entre a meia boca e o calado da seção ( X ), na linha d'água.

FIGURA 4.1
Os valores de a e X são calculados por :
onde S - área da seção
b - meia boca na linha d'água
d - calado da seção na linha d'água
Este método tem precisão aceitável para escoamentos
bidimensionais e multiplicando-se o resultado obtido de ( 4 ) por fatores de
correção para escoamentos tridimensionais, obtem-se bons resultados no caso
da vibração vertical do casco. Estes fatores de correção, Jn, são funçgo do
modo de vibração e da razão entre a boca e o comprimento entre
perpendiculares do navio. O coeficiente Jn s6 deve ser aplicado até o sexto

modo (J7) porque não há diferenças significativas no valor da inassa adicional
acima deste modo.
O Jn pode ser calculado [ 12 ] pela fórmula :
onde n - número de nós do modo de vibração
B - boca do navio na seção mestra
L - comprimento entre perpendiculares
A massa adicional tridimensional por unidade de comprimento
(MADT), em cada seção, e para cada modo é calculada pela fórmula :
MADT = J, x Mly
IV.3 - PROGRAMAS DE COMPUTADOR
IV.3.l - Introdução
O eleineiito de inassa ( MASS ) disponível no programa
COSMOS/M age concentrando a massa especificada no nó foriiecido na sua
definição. Por exemplo, a massa concentrada em um nó correspondente a
praça de máquinas do navio pode ser :
Mlló = MC i- MNEL + MADT
onde MC - massa de óleo combustível ( carga )
MNEL - massa do motor principal
MADT - massa adicional desta seção do navio
Desta maneira, para especificar corretamente a massa de uin nó é
necessário criar até 3 elementos de massa diferentes. Este fato ocorre
praticamente em todos os nós do modelo e especialmente nos nós localizados
abaixo da linha d'água do carregamento.
Além disto, conforme citado no ítem IV.2, a massa adicional
varia de acordo com o modo de vibração, multiplicando-se o iiúineio de
elementos de massa a serem gerados pelo número de modos desejados. Tudo
isto faz com que o níiinero de elementos com massas diferentes seja muito
grande.
O programa C 0 SMO S/M possui lirnit ações na maneira de definir
as propriedades dos elementos, sendo a principal o fato de que só é possivel
especificar um número máximo de 100 grupos de elementos, incluindo todos os
tipos utilizados em uin modelo (membranas, barras, massas, etc.). Isto obriga
que seja definido o maior número possível de elementos dentro de um mesmo
grupo, isto é, com a mesina espessura, área ou massa.
Para auxiliar na limitação do número de grupos necessários para a
definição dos elementos cle massa de modelos foram desenvolviclos os
progranias PPlMASSA e PP2ELEMA , em linguagem BASIC, cuja operação
é feita através de telas interativas. Eles estão instalados e disponíveis para
utilização nos micro-computadores do tipo IBM - PC compatível, no
LABORATÓRIO DE ESTRUTURAS NAVAIS da COPPE - UFRJ.

IV.3.2 - Programa PPlMASSA
O Programa PPIMASSA é um pré-processador para o programa
COSMOS/M que realiza as seguintes funções :
- calcula o valor do fator de correção Jn para todos os modos
desejados ( é possivel também fornecer o valor diretamente);
- calcula a massa adicional tridimensioual ( MADT) em cada nó,
para cada J, ;
- soma as massas ( MNEL, MC e MADT ) que estão agindo sobre
um mesmo nó;
Os dados necessários para a sua utilização são :
- númei-o de nós com massa ;
- número de modos para cálculo do Jn ou valor do Jn ;
- número do nó, MNEL, MC e MAD para cada nó com massa.
O programa imprime uma listagem com todos os nós ordenados
por ordem crescente de massa para facilitar a divisão por grupos e gera iun
arqiiivo com os nós para servir como entrada de dados para o programa
PP2ELEMA. A figura 4.2 é o fluxograma do progiama.
IV.3.3 - Programa PPZELEMA
O Programa PP2ELEMA é um pré-processador para o progiama
COSMOS/M e seu objetivo é distribuir os elementos/nós pelos grupos
pré-escolhidos. Sua vantagem é simplificar e deixar mais clara a entrada cle

M h D T z M h D # J N
MNO= M N E L t MC t
'-r
N O i M N E L l M C l M A D r M A D T i MNO
N O i M N O ( O R D E M C R E S . )
PPIELEHEI O FIGURA 4.2 - FLUXOGRAMA DO PROGRAMA PPlMASSA

dados de elementos de massa, evitando a utilização de mais de um elemento
por nó.
Os dados necessários para a sua utilização são :
- arquivo de nós/massas gerado pelo programa PPIMASSA ;
- número de grupos ;
- número do grupo, limite superior da massa e valor médio da
massa para este grupo ;
- número do primeiro elemento de massa a ser gerado.
O programa gera um arquivo com os códigos dos elementos de
massa para leitura direta pelo programa COSMOS/M, eliminando os
trabalhos de digitação destes elementos e de verificação de erros. A figura 4.3
é o fluxograma do programa.
NGRUPOS NGRUPOiLIMINFr LIMSUPiMED NOiMNO NIELEM h DISTRIBUIGO
GRUPOS
ELEMENTOS PARA O
PROGRAMA
FIGURA 4.3 - FLUXOGRAMA DO PROGRAMA PP2ELEMA

V.1- CONSIDERAÇÕES GERAIS
Para testar o procedimento de modelação em 2D e verificar suas
vantagens em comparação a modelação mais detalhada, foi escolhido um navio
transportador de produtos claros, cujas características principais se encontram
na tabela ( V. 1 ).
Características Principais
Comprimento Total (m)
Comp. entre Perpendiculares (m)
Boca Moldada (m)
Ponta1 Moldado (m)
Calado Moldado à Vante (m)
Calado Moldado à Re (m)
Deslocamento (t)
Coeficiente de Bloco
Motor : M.A.N. - B & W
Potência Maxima
Potência de Serviço
Propulsor : Diâmetro (m)
Número de Pás
Carregado Lastro
5 L 50 MC
7430 BHP x 127 rpm
6685 BHP x 123 rpm
5.4
4
TABELA V. 1 - CARACTER~ STICAS PRINCIPAIS DO NAVIO


FIGURA 5.1

FIGURA 5.2

MODELO 2 D
FIGURA 5.3

V.2.1 - Estrutura
A posição dos nós no modelo 2D foi escolhida de maneira que eles
coincidissem com a posição dos nós no modelo 3D. A partir dos planos
estruturais e demais dados fornecidos pelo estaleiro, foram determinadas as
propriedades de cada um dos elementos de membrana e de barra, conforme o
procedimento indicado no ítem 111.4. Após a determinação de todos os
elementos de membrana, suas espessuras foram multiplicadas pelos
coeficientes de VAN HORSSEN (ver ítem 111.5).
V.2.2 - Massa
Foram efetuados cálculos para duas condições de carregamento,
isto é, para o navio carregado e para o navio em lastro. A tabela ( V.3 )
mostra as características destas condições e a comparação com os valores
obtidos com o modelo. Para ajustar o valor do peso leve do modelo, foi
considerada uma densidade de 16.92 t/m3 .
Características
Deslocamento
LCG (O = Espelho de Popa)
KG (O = Linha de Base
Lastro
Navio Modelo
Carregado
Navio Modelo
TABELA V.3 - CONDIÇÕES DE CARREGAMENTO

Como é possível observar, a massa calculada pelo programa é
idêntica à massa do navio e as posições horizontal e vertical do centro de
gravidade estão bastante próximas das suas posições reais no navio.
As tabelas ( V.4 ) e ( V.5 ) mostram o cálculo da massa adicional
bidimensional, em toneladas, para as condições em lastro e carregado,
respectivamente. O programa PPlMASSA foi utilizado para calcular a massa
adicional tridimensional dos 6 primeiros modos de vibração.
Seção s/2 b x o cv MI \7/l 1 M ' ~
Tot a1 10646.06 179.67 51567.42
Seção d
TABELA V.4 - CALCULO DA MASSA ADICIONAL - LASTRO

Tot a1 12136.73 179.67 58089.28
Seção d
TABELA V.5 - CÁLCULO DA MASSA ADICIONAL - CARREGADO

V.3 - TESTES
O programa COSMOS/M, versão 1.52, foi utilizado para realizar
os cálculos dos dois modelos, nas duas condições de caregamento.
Como os modelos não possuem pontos de apoio, foi dado um
SHIFT na frequência [ 7 ] com os objetivos de garantir que os modos de
movimento de corpo rígido fossem calculados e de que o programa não fosse
interrompido ao calcular aiitovalores próximos a zero. O valor do SHIFT foi
calculado aut omaticainente pelo programa.
Para cada condição de carregamento foram calculados os modos
de vibração e suas respectivas frequêiicias naturais, com a massa adicional
eq~~ivalente à do modelo 3D, utilizando o mesmo valor para o fator de
correção para escoameiito tridimeiisional ein todos os modos (J = 0.67). 2
A técnica da superposição inodal foi usada para calcular a resposta
à excitação provocada pelo momento de desbalanceainento de segunda ordem
do motor principal.
As comparações coin o modelo 3 0 e os resultados estão
apresentados i10 capítulo VI.
Finalmente, foram calciiíadas também as 6 primeiras frequências
naturais do modelo 2D, variando o valor da massa adicional para cada modo,
utilizando o coeficiente J, apropriado. As frequências foram comparadas com
as obtidas coin a massa adicional referente ao segundo modo ( J ) e os 2
resultados estão apresentados i10 capítulo VI.

RESULTADOS
VI.1- COMPARAÇÃO ENTRE MODELAÇÁO 2D E 3D
VI. 1.1 - Frequência Natural
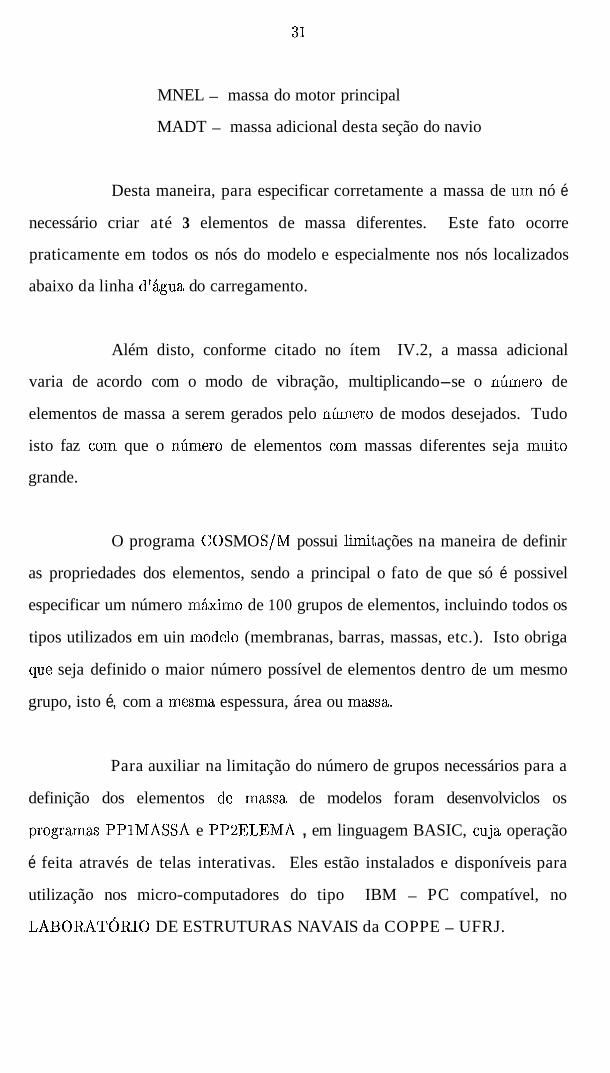
A tabela ( VI.1 ) mostra as frequências natmais e as figuras 6.1 à
6.24 mostram os modos de vibração obtidos com os modelos 2D e 3D.
Lastro Carregado
4.628 4.836 4.072 4.251 5.808 5.958 5.202 5.274 7.014 6.854 6.298 6.078
TABELA VI.1- FREQUÊNCIAS NATURAIS - MODELOS 2D E 3D
A partir da comparação entre os valores das frequências naturais
verificamos que o modelo 2D mostra precisão aceitável na faixa de frequência
correspondente à excitação provocada por motores diesel de baixa rotação
(terceiro ao sexto modos) e, portanto, o procedimento é bastante útil para
analisar este tipo de vibração. Os resultados podem ser melhorados através de
ajustes no modelo, como os que estão propostos no ítem VII.2.
Nas figuras, é possível observar que os modos estão conforine o

2 D - COND. LASTRO
FIGURA 6.1

2 D - COND. LASTRO
FIGURA 6.2

2 D - COND. LASTRO

2 D - COND. LASTRO
FIGURA 6.4

49
2 D - COND. LASTRO
FIGURA 6.5

50
2 D - COND. LASTRO
FIGURA 6.6

51
3 D - COND. LASTRO
FIGURA 6.7

52
3 D - COND. LASTRO
FIGURA 6.8
3 D - COND. LASTRO
FIGURA 6.9

3 D - COND. LASTRO
FIGURA 6.10

55
3 D - COND, LASTRO
FIGURA 6.11

56
3 D - COND. LASTRO
FIGURA 6.12

2 D - COND. CARREGADO
FIGURA 6.13

58
2 D - COND. CARREGADO
FIGURA 6.14

59
2 D - COND. CARREGADO
FIGURA 6.15

2 D - COND. CARREGADO
FIGURA 6.16

2 D - COND. CARREGADO
FIGURA 6.17

62
2 D - COND. CARREGADO
FIGURA 6.18

3 D - COND. CARREGADO
FIGURA 6.19

64
3 D - COND. CARREGADO
FIGURA 6.20

3 D - COND. CARREGADO
FIGURA 6.21

66
3 D - COND. CARREGADO
FIGURA 6.22

3 D - COND. CARREGADO
FIGURA 6.23

68
3 D - COND. CARREGADO
FIGURA 6.24

esperado, representando de maneira correta o fenômeno da vibração vertical
de navios, qualquer que seja o modelo.
VI. 1.2 - Frequência ~ a t u r a l da Superestrutura
As figuras 6.25 e 6.26, modelo 2D e as figuras 6.27 e 6.28, modelo
3D, mostram a superestrutura se movimentando de forma independente da
popa do navio. Isto caracteriza o seu primeiro modo de vibração. As
frequências calculadas são aproximadamente 8.3 Hz para o modelo 2D e
8.6 Hz para o modelo 3D, com diferença de apenas 3.6 %.
É possível utilizar qualquer um dos procedimentos de modelação
para identificar o primeiro modo da superestrutura e sua correspondente
frequência natural.
VI.1.3 -Resposta da Estrutura
O cálculo da resposta da estrutura à uma excitação forçada foi
realizado com o objetivo de avaliar as diferenças entre os modelos 2D e 3D,
com relação a este aspecto.
O problema idealizado consistiu em aplicar a um dos nós dos
modelos, correspondente ao manca1 de escora, o momento de
desbalanceamento de segunda ordem gerado pelo motor principal. Foi
utilizado um momento de 910 kN.m, conforme o valor fornecido pela
referência [ 14 1, referente ao motor B & W 5L50 MC sem compensador de
momento. O cálculo foi realizado para o navio na condição carregado.
O amortecimento é sempre um aspecto crítico no cálculo da

2 D - COND. LASTRO
FIGURA 6.25

71
2 D - COND. CARREGADO
FIGURA 6.26

3 D - COND. LASTRO
FIGURA 6.27

73
3 D - COND. CARREGADO
r;" /.--. J.1 .""."- ---- ---
FIGURA 6.28

resposta da estrutura. Apesar do grande progresso no sentido de compreender
o fenômeno, não existem métodos para o seu cálculo com precisão. Diversos
autores e estudos recomendam a utilização de um fator de amortecimento
igual a 2 % do amortecimento crítico. Este valor, que é baseado em medições
e largamente empregado, foi utilizado para os cálculos.
Foram escolhidos 4 pontos para a avaliação e a tabela ( VI.2 )
mostra para cada um deles, a direção analisada, o nó que representa o ponto, o
número da figura do gráfico frequência x velocidade correspondente, a maior
velocidade calculada e o valor da máxima velocidade permitida de acordo com
a norma ISO/DIS 6954 [ 15 1, que corresponde ao limite superior da faixa
"ADVERSE COMMENTS NOT PROBABLE".
Dir .
Vert.
Long.
Vert.
Vert.
Fig.
6.29
6.31
6.33
6.35
Vel. Fig.
Velocidades em (rnrn/s)
TABELA VI.2 - RESPOSTA DA ESTRUTURA
Vel.
Vel. Lim. 1s O
A análise dos gráficos mostra que, embora exista uma pequena
diferença entre as frequências relativas ao maior valor de velocidade, os
resultados do modelo 2D podem ser usados para estimar qualitativamente a

RESPOSTA DA ESTRUTURA
FIGURA 6.29

RESPOSTA DA ESTRUTURA
FIGURA 6.30

RESPOSTA DA ESTRUTURA
FIGURA 6.31

RESPOSTA DA ESTRUTURA
FIGURA 6.32

79
RESPOSTA DA ESTRUTURA
FIGURA 6.33

RESPOSTA DA ESTRUTURA
FIGURA 6.34

RESPOSTA DA ESTRUTURA
FIGURA 6.35

RESPOSTA DA ESTRUTURA
FIGURA 6.36

vibração vertical de navios, excitada pelo motor principal, com precisão
equivalente à do modelo 3D. O grau de incerteza aceito internacionalmente
para este tipo de cálculo ( 50 % ) permite que os resultados sejam comparados
quantitativamente com os limites estabelecidos para vibrações de navios.
Uma análise similar à realizada na referência [ 13 ] mas utilizando
um modelo 2D levaria à conclusões semelhantes às citadas no referido
relatório.
VI.2 - COMPARAÇAO CONSIDERANDO MASSAS ADICIONAIS
DIFERENTES
As tabelas ( VI.3 ) e ( VI.4 ) mostram os resultados obtidos
variando a massa adicional para os seis primeiros modos, para as condições em
lastro e carregado, respectivainent e. São apresentadas as frequências naturais
calculadas para cada modo e a diferença percentual entre as calculadas
utilizando o Jn apropriado e a calculada utilizando J . 2
Como podemos observar, as diferenças ficaram abaixo de 9%, o
que, em princípio, nos leva a acreditar que para estes modos não é necessário
utilizar Jn diferentes, pois as diferenças estão dentro da precisão esperada do
método, não compensando o esforço computacional empregado.
Uma melhor verificação da necessidade ou não da utilização de
massas adicionais diferentes para cada modo só poderá ser realizada após a
comparação dos resultados obtidos com os valores das frequências naturais
reais do navio, que serão medidas após a sua construção.

Frequência (Hz)
Modo J z . 6 7 4 J 2 . 5 9 2 A% J k . 5 5 0 A % J k . 5 2 6 A % Jfk.509 A % J7=.497 A%
TABELA VI.3 - FREQUÊNCIAS NATURAIS - LASTRO
Frequência (Hz)
Modo J E . 6 7 4 5 2 . 5 9 2 A % J4=.550 A % J k . 5 2 6 A % Jik.509 A% J7=.497 A%
TABELA VI.4 - FREQUÊNCIAS NATURAIS - CARREGADO
VI.3 - AVALIAÇÃO DOS TEMPOS POR ATIVIDADE
VI.3.1 - Tempos Gastos na Modelação e Análise
A comparação direta entre os tempos gastos na modelação e na
digitação não pode ser realizada porque as modelações em 3D e 2D foram


problema consiste no cálculo de 20 frequências naturais e modos de vibração e
também no cálculo da resposta da estrutura em 4 pontos, para uma condição
de carregamento e um valor de massa adicional. O programa usado para esta
comparação foi executado em um computador COMPAQ DESKPRO-386120,
com co-processador aritimético e 6144 kBytes de disco virtual.
Tempo de Computador Operação
Input
Observações
Leitura direta de ~rquivos digitados
Processamento :
Vúm. Equações
V. Elem. da Matriz
Vúm. Iterações
VIont. M. Rigidez
VIont. Matriz Massa
>ecomposição da VIatriz Rigidez
Jálc. Autovalores
Método da iteração lor subespaço com ,olerância para :onvergência de ).O0001
Output Jravação do irquivo de saída
Xlc. da Resposta hperposição moda1 120 frequências)
Tempo Total
TABELA VI.6 - TEMPOS DE PROCESSAMENTO

Como podemos verificar, o gasto computacional para resolver o
problema modelado em 2D é menor do que 15% do valor do gasto se for
utilizado um modelo 3D.
A tabela ( VI.7 ) mostra a comparação entre o tempo real, em
minutos, para executar o programa utilizando cada um dos modelos para o
mesmo problema acima.
Operação
Input
Solução
Output
Cálculo da Resposta
Tempo Total
Tempo Real (minutos)
TABELA VI.7 - TEMPO REAL D E EXECUÇÃO

CAPITULO VII
CONCLUSÕES E CONSIDERAÇÕES FINAIS
A escolha do navio transportador de produtos claros do estaleiro
Caneco para testar o procedimento foi devida ao fato de que a estrutura deste
navio é uma nova concepção para navios tanques, com uma nova topologia de
seção mestra que atende aos últimos regulamentos internacionais exigidos pela
International Maritime Organization, orgão da ONU, referentes à proteção
contra derramamento de óleo devido a acidentes.
Esta nova topologia faz com que o seu comportamento estrutural
seja diferente do comportamento estrutural dos navios tanques até agora
construídos.
Os resultados alcançados permitem afirmar que o procedimento
para modelar navios em duas dimensões e o Método dos Elementos Finitos
podem ser utilizados na fase inicial do projeto de navios para efetuar a
estimativa da vibração vertical. As frequências naturais, os modos de
vibração e a resposta da estrutura são calculadas com razoável precisão e
também é possível identificar a frequência natural correspondente ao primeiro
modo de vibração da superestrutura.
É bastante significativa a economia em tempo e custo da análise e
o procedimento permite que ela seja efetuada utilizando as poucas informações
disponíveis nesta fase do projeto. Ele é uma ferramenta barata e acessível, ,
que deve ser amplamente utilizada.

O advento de microcomputadores, com capacidade cada vez
maior, faz com que a economia no tempo de processamento não seja tão
siginificativa, mas a modelação em 2D viabiliza a simulação de soluções e
alternativas para o projeto, permitindo que um mesmo problema seja rodado,
analisado e modificado diversas vezes em um curto espaço de tempo, a custo
muito baixo.
VII. 2 - CONSIDERAÇÕES FINAIS
1 - A tabela VI.l mostra que , no modelo 2D, as frequências mais
baixas estão menores e as mais altas estão maiores do que as correspondentes
aos mesmos modos no modelo 3D. Este resultado pode ser melhorado através
de ajustes no modelo. Uma maneira de efetuar este ajuste é aumentar,
através de um coeficiente, a área da seção dos elementos de barra e diminuir,
na mesma proporção, a espessura dos elementos de membrana, modificando a
rigidez do modelo e fazendo com que as frequências se aproximem.
O valor do coeficiente deve ser determinado para um navio cujos
valores das frequências naturais sejam conhecidos (medidos). Este coeficiente
pode ser usado para outros navios do mesmo tipo e o seu valor deve ser
sempre ajustado cada vez que resultados de medições de vibração nestes
navios estejam disponíveis.
2 - Conforme explicado no ítem 111.5, a rigidez do modelo em 2D é
maior do que a do modelo em 3D. Este fato faz com que as velocidades do
movimento de vibração, determinadas na fase de cálculo da resposta da
estrutura, sejam menores para este modelo (tabela VI.2)) mas é importante
ressaltar que elas são da mesma ordem de grandeza.

Para o ajuste da resposta nos resultados do modelo 2D é possível
utilizar um fator de amortecimento menor que os 2 % usados neste trabalho.
3.- Os coeficientes Kv (item 111.5) foram utilizados nos cálculos para
redução da rigidez do modelo por sua simplicidade de aplicação, dentro do
objetivo de manter o procedimento de modelação simples, barato e
necessitando de poucas informações.
Existem outros métodos para se atacar este problema, que podem
levar a melhores resultados. Uma maneira é calcular a rigidez em cada seção
levando em consideração a efetiva largura colaborante do convés principal.
4 - Existem métodos simples e totalmente confiáveis para a
estimativa da frequência natural da superestrutura. O procedimento não deve
ser utilizado para calcular apenas este valor, que deve ser considerado um
resultado adicional aos cálculos para obter o comportameilto dinâmico do
casco.
5 - Os resultados apresentados podem ser reavaliados quando
estiverem disponíveis os resultados das medições de vibração, que serão
realizadas no navio utilizado para os testes.
6 - Este trabalho pode ser ampliado, estudando-se alternativas para
aplicação do procedimento para a modelação de outros tipos de navio.

[ 1 ] HANSEN, H. R. e SKAAR,K. T., Hdl and Superstructure
Vibrations Design Calculations by Finite Elements, Sym~osium
on High - Powered Pro~ulsion of Large Ships, Wagenigen, 1974.
[ 2 ] CARLSEN, C. A., A Parametric Study on Global Hull and
Superstructure Vibration Analysis by Means of the Finite
Element Method, Transactions of RINA, vol. 120, pp. 161-178,
1978.
[ 3 ] NORRIS, C. e CATLEY, D., Application of TwwDimensiond
Finite Element Model to Ship Vertical Vibration and Comparison
with Ship Mobility Measurements, RINA Svmposium on
Pro~eller Induced Ship Vibrations, London, 1979.
[ 4 ] SKAAR, K. T. e CARLSEN, C. A., Modelling Aspectsfor
Finite Element Analysis of Ship Vibrations, Computer &
Structures, vol. 12, pp. 409419, 1980.
[ 51 JOHANNESSEN, H. e SKAAR, K. T., Guidelines for
Prevention of Excessive Ship Vibration, Transactions of
SNAME, vol. 88, pp. 319-356,1980.
[ 6 ] PICORELLI, L. O. P. e SILVA NETO, S. F., Previsão de
Vibrações em Navios - Aplicação de Modelação por Elementos
Finitos em Duas Dimensões, 120 Congresso Nacional de
Trans~ortes Marítimos e Construcão Naval, S OBENA, 1988.

[ 7 ] B ATHE, K-J, Finite Element Procedures in Engineering
Analysis, Prentice-Hall Inc. , 1982.
[ 8 1 COSMOS/M USER GUIDE, Release Version 1.52, Structural
Research and Analysis Corporation, 1989.
[ 9 ] VAN HORSSEN, W., A Reduced Method for the Calculation of
the Shear Sti&ess of a Ship Hull, R e ~ o r t No. 148 S,
Netherlands S h i ~ Research Centre TNO, 1971.
[ 10 ] LEWIS, F. E., The Inertia of the Water Surrounding a vibrating
Ship, Transactions of SNAME, vol. 37, 1929.
[ 11 ] LANDWEBER, L. e DE MACAGNO, M. C., Added Mass of
Two-Dimensional Forms Oscillating in a Free Surface, Journal
of S h i ~ Research, No. 3, 1957. -
[ 1 2 ] TOWNSIN, R. L., VirtualMass ReductionFactors J' Values for
Ship Vibration Calculation Derived £com Tests with Bems,
Including Ellipsoids and Ship Models, Transactions' of RINA,
vol. 111, 1969.
[ 13 ] Relatório da Análise da Vibração Global do Casco 316, 018-89,
LEN / COPPE / UFRJ, 28/06/89.
[ 14 ] Project Guide - MC Program ( 5L50 MC ) - Instalation Manual,
M.A.N. - B & W Diesel, Edition 2, 1986.

[ 15 ] ISO/DIS 6954 , Mechanical Vibration and Shock - Guidelines
for the Overall Evaluation of Vibration in Merchant Ships,
International Organization for Standardization, 1983.
[ 16 ] BRYNDUM, L. e JAKOBSEN, S. B., Vibration Characteristcs
of Two-Stroke Low Speed Diesel Engines ,M.A.N. - B & W Diesel,
1986.
[ 17 ] WARD, G., The Application of Current Vibration Technology
to Routine Ship Design Work, Transactions of RINA, vol. 125,
1983.
[ 18 ] Recommendations Designed to Limit the Effects of Vibrations
on Board Ships, Guidance Note NI 138 A - RD3 - Bureau
Veritas, 1979.
[ 19 ] SKAAR, I<. T. Vibrations Parameters, Det Norske Veiitas
Seminar on Ship Vibrations, 1977.
[ 20 ] Handbook on Ship Vibration, Preliminarv, Report
No. 79 - 1003, Det Norske Veritas, 1979.
[ 2 1 ] LEENARS,C.E. J. e FORBESP.E.,AnApproachtoVibration
Problems at the Design Stage, RINA Symposium on Propellei
Induced Ship Vibrations, London, 1979.
[ 22 ] SKAAR, K. T., Finite Element Analysis to Investigate Resonant
Vibration and Forced Response, Det Norske Veritas Noise and
Vibration Seminar, Rio de Janeiro, 1981.

[ 23 ] HYLARIDES, I. S., Critical Consideration of Present Hull
Vibration Analysis, Report No. 144 S. Netherlands Ship Research
Centre TNO, 1971.
[ 241 TIMOSHENKO, S., YOUNG, D. H. e WEAVER JR., W.,
Vibration Problems in Engineering, Fourth Edition, John Wiley
& Sons, 1979.
[ 25 ] LOPES, T. A. P. e TROYMAN, A. C. R., Apostila de Vibrações
do Navio, Escola de Engenharia NFRJ, 1980.

Confidencial