Embed Size (px)
DESCRIPTION
Resumo calculo 3 unicamp
Citation preview

Equações Diferenciais Ordinárias
(Última atualização: 21/04/2014)
Resumo dos conceitos vistos em MA311. O documento deve ser utilizado apenas como apoioao estudo e não tem caráter de referência.
OBS: a tabela ao final “Derivadas, Integrais e Identidades Trigonométricas” foi retirada dehttp://www.if.ufrgs.br/tex/fisica-4/tab-integrais.pdf
1. 1ª ordem1.1. Caso linear: (𝑦′ + 𝑝(𝑥)𝑦 = 𝑞(𝑥))
1) Calcule o fator integrante𝜇(𝑥) = exp(
∫𝑝(𝑥)𝑑𝑥)
2) Multiplique a edo por 𝜇(𝑥) para obter(𝜇(𝑥)𝑦(𝑥))′ = 𝜇(𝑥)𝑞(𝑥)
3) Integre esta nova equação com relação à 𝑥:
𝜇(𝑥)𝑦(𝑥) =∫
𝜇(𝑥)𝑞(𝑥)𝑑𝑥
4) A solução será:
𝑦(𝑥) =∫
𝜇(𝑥)𝑞(𝑥)𝑑𝑥
𝜇(𝑥)
1.2. Caso geral: (𝑦′ = 𝑓(𝑥, 𝑦) ≡ 𝑀(𝑥, 𝑦) + 𝑁(𝑥, 𝑦)𝑦′ = 0)∙ Equações Separáveis: (𝑀(𝑥, 𝑦) = 𝑀(𝑥), 𝑁(𝑥, 𝑦) = 𝑁(𝑦))
Neste caso, temos:𝑀(𝑥) = −𝑁(𝑦)𝑦′
→ Basta integrar esta equação com relação à x.∫𝑀(𝑥)𝑑𝑥 = −
∫𝑁(𝑦)𝑑𝑦
1

2
∙ Métodos de Substituição (𝑦(𝑥) 99K v(𝑥) 99K 𝑦(𝑥))
1) Realize uma substituição 𝑣(𝑥). Deseja-se passar a edo em 𝑦 para uma mais simples em 𝑣.
2) Resolva a edo em 𝑣.
3) Retorne a substituição de 𝑣 para encontrar uma solução em 𝑦 da edo original.
B Equações homogêneas:(𝑦′ = 𝑓( 𝑦
𝑥))
• Tome 𝑣(𝑥) = 𝑦𝑥
(truque: derive 𝑥𝑣(𝑥) = 𝑦 para encontrar 𝑦′ = 𝑣 + 𝑥𝑣′ e substituir na edo).
B Equação de Bernoulli: (𝑦′ + 𝑝(𝑥)𝑦 = 𝑞(𝑥)𝑦𝑛)
1) Divida a equação por 𝑦𝑛 para obter:
𝑦−𝑛𝑦′ + 𝑝(𝑥)𝑦1−𝑛 = 𝑞(𝑥)
2) Tome 𝑣(𝑥) = 𝑦1−𝑛. (Logo, 𝑣′ = (1 − 𝑛)𝑦−𝑛𝑦′)
3) Substituindo, temos a seguinte edo de 1ª ordem linear em 𝑣 (veja a seção 1.1.1):( 11 − 𝑛
)𝑣′ + 𝑝(𝑥)𝑣 = 𝑞(𝑥)
∙ Equações Exatas: (𝑀𝑦(𝑥, 𝑦) = 𝑁𝑥(𝑥, 𝑦))
Se a edo é exata, então ∃ 𝜑(𝑥, 𝑦) tal que⎧⎨⎩𝜑𝑥(𝑥, 𝑦) = 𝑀(𝑥, 𝑦) (𝑖)
𝜑𝑦(𝑥, 𝑦) = 𝑁(𝑥, 𝑦) (𝑖𝑖)
1) Integre (𝑖) (ou (𝑖𝑖)) com relação à 𝑥 (ou à 𝑦). Temos:
𝜑(𝑥, 𝑦) =∫
𝑀(𝑥, 𝑦)𝑑𝑥 + 𝑔(𝑦) (𝑜𝑢 𝜑(𝑥, 𝑦) =∫
𝑁(𝑥, 𝑦)𝑑𝑦 + 𝑔(𝑥))
2) Derive esta 𝜑(𝑥, 𝑦) com respeito a 𝑦 (ou a 𝑥) e compare 𝜑𝑦(𝑥, 𝑦) com (𝑖𝑖) (ou 𝜑𝑥(𝑥, 𝑦) com(𝑖)) para obter 𝑔′(𝑦) (ou 𝑔′(𝑥)).
3) Integre 𝑔′(𝑦) (ou 𝑔′(𝑥)) para obter 𝑔(𝑦) (ou 𝑔(𝑥)).
4) A solução geral será dada implicitamente por 𝜑(𝑥, 𝑦) = 𝐶.

3
B Edo’s não exatas
Podemos tentar obter uma edo exata, multiplicando a equação por um fator integrante 𝜇(𝑥, 𝑦).Podemos verificar se existe 𝜇(𝑥, 𝑦) dependente apenas de 𝑥 ou de 𝑦:
0) Teste de exatidão para um 𝜇(𝑥, 𝑦) = 𝜇(𝑥): Δ𝑥 = 𝑀𝑦−𝑁𝑥𝑁
depende apenas de 𝑥.
0’) Teste de exatidão para um 𝜇(𝑥, 𝑦) = 𝜇(𝑦): Δ𝑦 = 𝑁𝑥−𝑀𝑦𝑀
depende apenas de 𝑦.
1) Se 1) (ou 1′)) for satisfeita, tome o fator integrante:
𝜇(𝑥) = 𝑒𝑥𝑝(∫
Δ𝑥𝑑𝑥)
(𝑜𝑢 𝜇(𝑦) = 𝑒𝑥𝑝(∫
Δ𝑦𝑑𝑦)
)
2) Multiplique a edo por 𝜇(𝑥) (ou 𝜇(𝑦)) para obter uma edo exata.
3) A solução desta nova edo será a solução da edo original.
1.3. Teorema de Existência e Unicidade de EDO’sConsidere o p.v.i.: ⎧⎨⎩𝑦′ = 𝑓(𝑥, 𝑦)
𝑦(𝑥0) = 𝑦0
Se 𝑓 e 𝑓𝑦 forem contínuas em um aberto Ω = (𝑎, 𝑏)× (𝑐, 𝑑) ⊂ R2 com 𝑥0 ∈ (𝑎, 𝑏) e 𝑦0 ∈ (𝑐, 𝑑), entãoexiste um intervalo (𝑎0, 𝑏0) ⊆ (𝑎, 𝑏) com 𝑥0 ∈ (𝑎0, 𝑏0) onde existe uma única solução do p.v.i.
2. 2ª ordem2.1. Redução à 1ª ordem
Aplicável quando não aparecem as variáveis 𝑥 ou 𝑦 explicitamente na edo.
1) Realize uma substituição 𝑣 que reduza a edo à uma de 1ª ordem.
2) Resolva esta nova edo de 1ª ordem em 𝑣.
3) Retorne a substituição de 𝑣 em 𝑦′.
4) Resolva esta edo de 1ª ordem em 𝑦.
• Caso 1: 𝑥 não explícita. Substituição⎧⎨⎩v(y(x)) = y’(x)
𝑣′𝑦′ = 𝑦′′, 𝑖𝑒, 𝑣′𝑣 = 𝑦′′
• Caso 2: 𝑦 não explícita. Substituição⎧⎨⎩v(x) = y’(x)
𝑣′(𝑥) = 𝑦′′(𝑥)

4
3. n-ésima ordem lineares(𝑦(𝑛)(𝑥) + 𝑝𝑛−1(𝑥)𝑦(𝑛−1)(𝑥) + · · · + 𝑝1(𝑥)𝑦′(𝑥) + 𝑝0(𝑥)𝑦(𝑥) = 𝑞(𝑥))
3.0. Existência e Unicidade; Independência Linear e WronskianoTeorema (Existência e Unicidade). Considere o pvi.:⎧⎪⎪⎨⎪⎪⎩
𝑦(𝑛)(𝑥) + 𝑝𝑛−1(𝑥)𝑦(𝑛−1)(𝑥) + · · · + 𝑝1(𝑥)𝑦′(𝑥) + 𝑝0(𝑥)𝑦(𝑥) = 𝑞(𝑥)𝑦(𝑡0) = 𝑦0
𝑦(𝑖)(𝑡0) = 𝑦𝑖0 ∀1 ≤ 𝑖 ≤ (𝑛 − 1)
Se 𝑝𝑖 ∀0 ≤ 𝑖 ≤ (𝑛 − 1) e 𝑞 forem contínuas em um aberto 𝐼 ∈ R, então existe uma única soluçãodo pvi em 𝐼.
Teorema (Wronskiano de Soluções). Sejam 𝑦1, · · · , 𝑦𝑛 são 𝑛 soluções da equação homogênea,𝐿[𝑦](𝑥) = 0, onde
𝐿[𝑦](𝑥) = 𝑦(𝑛)(𝑥) + 𝑝𝑛−1(𝑥)𝑦(𝑛−1)(𝑥) + · · · + 𝑝1(𝑥)𝑦′(𝑥) + 𝑝0(𝑥)𝑦(𝑥)
então 𝑦1, · · · , 𝑦𝑛 são:⎧⎨⎩𝑙𝑖𝑛𝑒𝑎𝑟𝑚𝑒𝑛𝑡𝑒 𝑑𝑒𝑝𝑒𝑛𝑑𝑒𝑛𝑡𝑒𝑠 ⇔ 𝑊 (𝑦1, · · · , 𝑦𝑛)(𝑥) = 0 ∀𝑥 ∈ 𝐼
𝑙𝑖𝑛𝑒𝑎𝑟𝑚𝑒𝑛𝑡𝑒 𝑖𝑛𝑑𝑒𝑝𝑒𝑛𝑑𝑒𝑛𝑡𝑒𝑠 ⇔ 𝑊 (𝑦1, · · · , 𝑦𝑛)(𝑥) = 0 ∀𝑥 ∈ 𝐼
Teorema (Fórmula de Abel (geral)). Sejam 𝑦1, · · · , 𝑦𝑛 são 𝑛 soluções da equação homogênea,𝐿[𝑦](𝑥) = 0, onde
𝐿[𝑦](𝑥) = 𝑦(𝑛)(𝑥) + 𝑝𝑛−1(𝑥)𝑦(𝑛−1)(𝑥) + · · · + 𝑝1(𝑥)𝑦′(𝑥) + 𝑝0(𝑥)𝑦(𝑥)
então:𝑊 (𝑦1, 𝑦2, · · · , 𝑦𝑛)(𝑥) = exp(−
∫𝑝𝑛−1(𝑥)𝑑𝑥)
3.1. Homogêneas(𝑦(𝑛)(𝑥) + 𝑝𝑛−1(𝑥)𝑦(𝑛−1)(𝑥) + · · · + 𝑝1(𝑥)𝑦′(𝑥) + 𝑝0(𝑥)𝑦(𝑥) = 0)3.1.1 Com coeficientes constantes(𝑦(𝑛)(𝑥) + 𝑐𝑛−1𝑦
(𝑛−1)(𝑥) + · · · + 𝑐1𝑦′(𝑥) + 𝑐0𝑦(𝑥) = 0, 𝑐0, · · · , 𝑐𝑛−1 ∈ R)
1) Resolva a equação característica associada à edo.
2) Verifique separadamente cada raiz 𝑟:
i) Real não repetida: é solução fundamental: 𝑦𝑟(𝑥) = 𝑒𝑟𝑥

5
ii) Complexa: as raízes aparecem aos pares conjulgados:⎧⎨⎩𝑟 = 𝜆 + 𝑖𝜇
𝑟 = 𝜆 − 𝑖𝜇.
São soluções fundamentais:⎧⎨⎩𝑦𝑟(𝑥) = 𝑒𝜆𝑥 cos(𝜇𝑥)
𝑦𝑟(𝑥) = 𝑒𝜆𝑥 sin(𝜇𝑥)
iii) Real repetida 𝑘 vezes (𝑘 ≥ 1), ie, de multiplicidade 𝑘 + 1.
São soluções fundamentais:
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
𝑦𝑟0(𝑥) = 𝑒𝑟𝑥
𝑦𝑟1(𝑥) = 𝑥𝑒𝑟𝑥
𝑦𝑟2(𝑥) = 𝑥2𝑒𝑟𝑥
...𝑦𝑟𝑘
(𝑥) = 𝑥𝑘𝑒𝑟𝑥
iv) Complexa repetida 𝑘 vezes (𝑘 ≥ 1), ie, de multiplicidade 𝑘 + 1 da forma⎧⎨⎩𝑟 = 𝜆 + 𝑖𝜇
𝑟 = 𝜆 − 𝑖𝜇.
São soluções fundamentais:
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
𝑦𝑟0(𝑥) = 𝑒𝜆𝑥 cos(𝜇𝑥)𝑦𝑟0(𝑥) = 𝑒𝜆𝑥 sin(𝜇𝑥)𝑦𝑟1(𝑥) = 𝑥𝑒𝜆𝑥 cos(𝜇𝑥)𝑦𝑟1(𝑥) = 𝑥𝑒𝜆𝑥 sin(𝜇𝑥)...𝑦𝑟𝑘
(𝑥) = 𝑥𝑘𝑒𝜆𝑥 cos(𝜇𝑥)𝑦𝑟𝑘
(𝑥) = 𝑥𝑘𝑒𝜆𝑥 sin(𝜇𝑥)
3) Pelo Princípio da Superposição, a solução geral será da forma:
𝑦(𝑥) = 𝑐1𝑦𝑟1(𝑥) + · · · + 𝑐𝑛𝑦𝑟𝑛(𝑥)
onde os 𝑐′𝑖𝑠 são constantes arbitrárias reais e 𝑦′
𝑖𝑠 são soluções fundamentais ∀1 ≤ 𝑖 ≤ 𝑛.
3.1.2 Redução de ordem dada uma solução 𝑦2(𝑥) = 𝑣(𝑥)𝑦1(𝑥)
Para edo’s de 2ª ordem lineares homogêneas: 𝑦′′ + 𝑝(𝑥)𝑦′ + 𝑞(𝑥)𝑦 = 0, dada uma solução 𝑦1(𝑥).Objetivo: encontrar uma solução 𝑦2(𝑥) l.i. à 𝑦1(𝑥).
1) Suponha 𝑦2(𝑥) = 𝑣(𝑥)𝑦1(𝑥) solução. Queremos descobrir 𝑣(𝑥).
2) Derive 𝑦2(𝑥) = 𝑣(𝑥)𝑦1(𝑥), ie,⎧⎨⎩𝑦′
2(𝑥) = 𝑣′(𝑥)𝑦1(𝑥) + 𝑣(𝑥)𝑦′1(𝑥)
𝑦′′2(𝑥) = 𝑣′′(𝑥)𝑦1(𝑥) + 2𝑣′(𝑥)𝑦′
1(𝑥) + 𝑣(𝑥)𝑦′′1(𝑥)
.
e substitua na edo.

6
3) Obteremos uma edo em 𝑣, com 𝑣′ e 𝑣′′ explícitas e não aparecendo 𝑣. Logo podemos usar a
redução de (2.1) com 𝑣 não explícito, ie, tome⎧⎨⎩𝑧(𝑥) = 𝑣′(𝑥)
𝑧′(𝑥) = 𝑣′′(𝑥)para obter uma edo em 𝑧
de 1ª ordem.
4) Resolva esta edo em 𝑧, e retorne à 𝑣 (𝑧(𝑥) = 𝑣′(𝑥)). Temos uma edo em 𝑣 de 1ª ordem.
5) Resolva esta edo em 𝑣. (Pronto! Achamos 𝑣!)
6) Substitua em 𝑣 em 𝑦2(𝑥) = 𝑣(𝑥)𝑦1(𝑥) para encontrar 𝑦2(𝑥).
3.1.3 Equações de Euler-Cauchy (𝑥𝑛𝑦(𝑛) + 𝑎𝑛−1𝑥𝑛−1𝑦(𝑛−1) + · · · + 𝑎1𝑥𝑦′ + 𝑎0𝑦 = 0)
1) Suponha 𝑦(𝑥) = 𝑥𝑟 solução. Queremos determinar 𝑟.
2) Derive 𝑦 n vezes e substitua na equação. Teremos: 𝑥𝑟(𝑟(𝑟 − 1) · · · (𝑟 − 𝑛 + 1) + 𝑎𝑛−1𝑟(𝑟 −1) · · · (𝑟 − 𝑛 + 2) + · · · + 𝑎1𝑟 + 𝑎0) = 0. Logo (𝑟(𝑟 − 1) · · · (𝑟 − 𝑛 + 1) + · · · + 𝑎1𝑟 + 𝑎0) = 0.
3) Ache as raízes 𝑟1, · · · , 𝑟𝑛 desta equação e analise separadamente:
i) Real não repetida: é solução 𝑦𝑟(𝑥) = |𝑥|𝑟.
ii) Complexa: as raízes aparecem aos pares conjulgados:⎧⎨⎩𝑟 = 𝜆 + 𝑖𝜇
𝑟 = 𝜆 − 𝑖𝜇.
São soluções:⎧⎨⎩𝑦𝑟(𝑥) = |𝑥|𝜆 cos(𝜇 ln |𝑥|)
𝑦𝑟(𝑥) = |𝑥|𝜆 sin(𝜇 ln |𝑥|).
iii) Real repetida 𝑘 vezes (𝑘 ≥ 1), ie, de multiplicidade 𝑘 + 1.
São soluções:
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
𝑦𝑟0(𝑥) = |𝑥|𝑟
𝑦𝑟1(𝑥) = |𝑥|𝑟 ln |𝑥|𝑦𝑟2(𝑥) = |𝑥|𝑟(ln |𝑥|)2
...𝑦𝑟𝑘
(𝑥) = |𝑥|𝑟(ln |𝑥|)𝑘
.
iv) Complexa repetida 𝑘 vezes (𝑘 ≥ 1), ie, de multiplicidade 𝑘 + 1 da forma⎧⎨⎩𝑟 = 𝜆 + 𝑖𝜇
𝑟 = 𝜆 − 𝑖𝜇.

7
São soluções:
⎧⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎩
𝑦𝑟0(𝑥) = |𝑥|𝜆 cos(𝜇 ln |𝑥|)𝑦𝑟0(𝑥) = |𝑥|𝜆 sin(𝜇 ln |𝑥|)𝑦𝑟1(𝑥) = |𝑥|𝜆 cos(𝜇 ln |𝑥|)(ln |𝑥|)𝑦𝑟1(𝑥) = |𝑥|𝜆 sin(𝜇 ln |𝑥|)(ln |𝑥|)...𝑦𝑟𝑘
(𝑥) = |𝑥|𝜆 cos(𝜇 ln |𝑥|)(ln |𝑥|)𝑘
𝑦𝑟𝑘(𝑥) = |𝑥|𝜆 sin(𝜇 ln |𝑥|)(ln |𝑥|)𝑘
.
3) Pelo Princípio da Superposição, a solução geral será da forma:
𝑦(𝑥) = 𝑐1𝑦𝑟1(𝑥) + · · · + 𝑐𝑛𝑦𝑟𝑛(𝑥)
onde os 𝑐′𝑖𝑠 são constantes arbitrárias reais e 𝑦′
𝑖𝑠 são soluções relativas às raizes ∀1 ≤ 𝑖 ≤ 𝑛.
Obs: Note a semelhança com as soluções fundamentais de uma equação homogênea com coeficientesconstantes (3.1.1), trocando 𝑥 por ln |𝑥|.
3.2. Não-homogêneas(𝑦(𝑛)(𝑥) + 𝑝𝑛−1(𝑥)𝑦(𝑛−1)(𝑥) + · · · + 𝑝1(𝑥)𝑦′(𝑥) + 𝑝0(𝑥)𝑦(𝑥) = 𝑞(𝑥) � 0)
A solução geral será da forma: 𝑦(𝑥) = 𝑦ℎ(𝑥) + 𝑦𝑝, onde 𝑦ℎ é solução geral da homogêneaassociada (𝑦(𝑛)(𝑥) + 𝑝𝑛−1(𝑥)𝑦(𝑛−1)(𝑥) + · · · + 𝑝1(𝑥)𝑦′(𝑥) + 𝑝0(𝑥)𝑦(𝑥) = 0) e 𝑦𝑝 é solução particulardependendo do termo não homogêneo 𝑞(𝑥).
∙ Método dos Coeficientes Indeterminados
F Restrições:
• A edo tem que ter coeficientes constantes, ie, 𝑦(𝑛)(𝑥)+𝑐𝑛−1𝑦(𝑛−1)(𝑥)+ · · ·+𝑐1𝑦
′(𝑥)+𝑐0𝑦(𝑥) =𝑞(𝑥), com 𝑐𝑖 ∈ R, ∀0 ≤ 𝑖 ≤ 𝑛 − 1.
• 𝑞(𝑥) tem que ser ESPECIFICAMENTE produtos e/ou somas de: polinômios (𝑎𝑛𝑥𝑛 + · · · +𝑎1𝑥 + 𝑎0), exponenciais (𝑒𝑎𝑥), senos (sin(𝑎𝑥)) ou cossenos (cos(𝑎𝑥)).
Método:
1) Calcule a solução geral da homogênea associada 𝑦ℎ(𝑥). (Ver (3.1.1))
2) Caso o termo não homogêneo seja uma soma de 𝑘 funções, ie, 𝑞(𝑥) = 𝑞1(𝑥) + · · · + 𝑞𝑘(𝑥),estime uma solução separadamente para cada parcela 𝑞𝑖:
(i) Tentativa inicial:
• Se 𝑞𝑖(𝑥) = (𝑎𝑛𝑥𝑛 + · · · + 𝑎1𝑥 + 𝑎0), assuma 𝑦𝑝𝑖= (𝑐𝑛𝑥𝑛 + · · · + 𝑐1𝑥 + 𝑐0)

8
• Se 𝑞𝑖(𝑥) = (𝑎𝑛𝑥𝑛 + · · · + 𝑎1𝑥 + 𝑎0)𝑒𝑎𝑥, assuma 𝑦𝑝𝑖= (𝑐𝑛𝑥𝑛 + · · · + 𝑐1𝑥 + 𝑐0)𝑒𝑎𝑥
• Se 𝑞𝑖(𝑥) = (𝑎𝑛𝑥𝑛 + · · · + 𝑎1𝑥 + 𝑎0)𝑒𝑎𝑥 sin(𝑏𝑥) (ou cos(𝑏𝑥)), assuma 𝑦𝑝𝑖= (𝑐𝑛𝑥𝑛 + · · · + 𝑐1𝑥 +
𝑐0)𝑒𝑎𝑥 sin(𝑏𝑥) + (𝑑𝑛𝑥𝑛 + · · · + 𝑑1𝑥 + 𝑑0)𝑒𝑎𝑥 cos(𝑏𝑥)
(ii) Compare a estimativa 𝑦𝑝𝑖com a solução da homogênea 𝑦ℎ:
(*) (Iterativo) Caso não haja termos iguais de 𝑦𝑝𝑖e 𝑦ℎ(𝑥), temos que 𝑦𝑝𝑖
é solução particularrelativa à 𝑞𝑖. Porém, se algum termo de 𝑦𝑝𝑖
é igual à algum termo de 𝑦ℎ(𝑥), desconsiderandoconstantes, multiplique 𝑦𝑝𝑖
por 𝑥 e escreva agora 𝑦𝑝𝑖= 𝑥𝑦𝑝𝑖
. Vá para (*).
3) Temos que a solução particular é da forma 𝑦𝑝 = 𝑦𝑝1 + · · · + 𝑦𝑝𝑘.
4) Para encontrar os coeficientes de 𝑦𝑝, substitua na equação juntamente com suas derivadasem 𝑦(𝑛)(𝑥) + 𝑐𝑛−1𝑦
(𝑛−1)(𝑥) + · · · + 𝑐1𝑦′(𝑥) + 𝑐0𝑦(𝑥) e compare os coeficientes com os de 𝑞(𝑥).
∙ Método da Variação de Parâmetros
É um método geral, para: 𝑦(𝑛)(𝑥) + 𝑝𝑛−1(𝑥)𝑦(𝑛−1)(𝑥) + · · · + 𝑝1(𝑥)𝑦′(𝑥) + 𝑝0(𝑥)𝑦(𝑥) = 𝑞(𝑥) � 0
Notação:
• 𝑊 (𝑦1, · · · , 𝑦𝑛)(𝑥) é o Wronskiano de 𝑦1, · · · , 𝑦𝑛, ie:
𝑊 (𝑦1, · · · , 𝑦𝑛)(𝑥) = 𝑑𝑒𝑡
⎡⎢⎢⎢⎢⎣𝑦1(𝑥) · · · 𝑦𝑛(𝑥)𝑦′
1(𝑥) · · · 𝑦′𝑛(𝑥)
... ...𝑦
(𝑛−1)1 (𝑥) · · · 𝑦(𝑛−1)
𝑛 (𝑥)
⎤⎥⎥⎥⎥⎦ .
• 𝑊𝑖(𝑦1, · · · , 𝑦𝑛)(𝑥) é o determinante da matriz associada à 𝑊 (𝑦1, · · · , 𝑦𝑛)(𝑥) com a i-ésimacoluna substituída por (0, · · · , 0, 1), ie:
𝑊 (𝑦1, · · · , 𝑦𝑛)(𝑥) = 𝑑𝑒𝑡
⎡⎢⎢⎢⎢⎣𝑦1(𝑥) · · · 𝑦𝑖−1(𝑥) 0 𝑦𝑖+1(𝑥) · · · 𝑦𝑛(𝑥)𝑦′
1(𝑥) · · · 𝑦′𝑖−1(𝑥) 0 𝑦′
𝑖+1(𝑥) · · · 𝑦′𝑛(𝑥)
... ... ... ... ...𝑦
(𝑛−1)1 (𝑥) · · · 𝑦
(𝑛−1)𝑖−1 (𝑥) 1 𝑦
(𝑛−1)𝑖+1 (𝑥) · · · 𝑦(𝑛−1)
𝑛 (𝑥)
⎤⎥⎥⎥⎥⎦ .
Método:
1) Encontre a solução geral da homogênea associada, digamos 𝑦ℎ(𝑥) = 𝑐1𝑦1 + · · · + 𝑐𝑛𝑦𝑛. (Ver(3.1.1))
2) Suponha uma solução particular da forma 𝑦𝑝(𝑥) = 𝑢1(𝑥)𝑦1 + · · · + 𝑢𝑛(𝑥)𝑦𝑛. Queremosdeterminar os 𝑢𝑖’s.
3) Calcule 𝑊 (𝑦1, · · · , 𝑦𝑛)(𝑥) e 𝑊𝑖(𝑦1, · · · , 𝑦𝑛)(𝑥), ∀1 ≤ 𝑖 ≤ 𝑛.

9
4) Calcule ∀1 ≤ 𝑖 ≤ 𝑛,
𝑢𝑖 =∫ 𝑞(𝑥)𝑊𝑖(𝑦1, · · · , 𝑦𝑛)(𝑥)
𝑊 (𝑦1, · · · , 𝑦𝑛)(𝑥)Obs: Importante! Lembre que esta fórmula é válida para 𝑞(𝑥) na edo com a forma 𝑦(𝑛)(𝑥) +𝑝𝑛−1(𝑥)𝑦(𝑛−1)(𝑥) + · · · + 𝑝1(𝑥)𝑦′(𝑥) + 𝑝0(𝑥)𝑦(𝑥) = 𝑞(𝑥).
5) Substitua os 𝑢𝑖’s para obter assim, a solução particular 𝑦𝑝(𝑥) = 𝑢1(𝑥)𝑦1 + · · · + 𝑢𝑛(𝑥)𝑦𝑛.
3.3. Transformada de Laplace (ℒ{𝑓(𝑡)} =∫ ∞
0𝑒−𝑠𝑡𝑓(𝑡)𝑑𝑡 = 𝐹 (𝑠))
OBS: a tabela “Transformada de Laplace” (tabela referência) foi retirada dehttp://www.ime.unicamp.br/∼msantos/tab-laplace.pdf
Considere uma função 𝑓(𝑡) contínua por partes em [0, 𝐴] para algum 𝐴 > 0, tal que |𝑓(𝑡)| ≤𝐾𝑒𝑎𝑡, para 𝑡 ≥ 𝑀 , 𝑎, 𝑀, 𝐾 ∈ R constantes e 𝐾, 𝑀 > 0. Então para 𝑠 > 𝑎, existe ℒ{𝑓(𝑡)} =∫ ∞
0𝑒−𝑠𝑡𝑓(𝑡)𝑑𝑡 = 𝐹 (𝑠).
Seguem algumas propriedades e ferramentas envolvendo a transformada de Laplace e complementaa tabela de referência ao final.
∙ Propriedades
Suponha que todas as funções consideradas abaixo, satisfazem as hipóteses necessárias.
• Linearidade:ℒ{𝑐1𝑓1(𝑡) + · · · + 𝑐𝑛𝑓𝑛(𝑡)} = 𝑐1ℒ{𝑓1(𝑡)} + · · · + 𝑐𝑛ℒ{𝑓𝑛(𝑡)}}, ∀𝑐1, · · · , 𝑐𝑛 ∈ R
• Transformada da derivada de uma função:ℒ{𝑓 (𝑛)(𝑡)} = 𝑠𝑛ℒ{𝑓(𝑡)} − 𝑠𝑛−1𝑓(0) − · · · − 𝑠𝑓 (𝑛−2)(0) − 𝑓 (𝑛−1)(0)
• Transformada da integral de uma função:ℒ{
∫ 𝑡
0𝑓(𝜏)𝑑𝜏} = 𝐹 (𝑠)
𝑠
• Translação em 𝑠:ℒ{𝑒𝑐𝑡𝑓(𝑡)} = 𝐹 (𝑠 − 𝑐) ∼ ℒ−1{𝐹 (𝑠 − 𝑐)} = 𝑒𝑐𝑡𝑓(𝑡)
• Translação em 𝑡:𝑢𝑐(𝑡)𝑓(𝑡 − 𝑐) = ℒ−1{𝑒−𝑐𝑠𝐹 (𝑠)} ∼ ℒ{𝑢𝑐(𝑡)𝑓(𝑡 − 𝑐)} = 𝑒−𝑐𝑠𝐹 (𝑠)
• Transformada inversa de derivadas de uma 𝐹 (𝑠):ℒ−1{𝐹 (𝑛)(𝑠)} = (−𝑡)𝑛𝑓(𝑡)
• Transformada de uma função periódica:(𝑓(𝑡) é periódica com período 𝑇 > 0 se 𝑓(𝑡 + 𝑇 ) = 𝑓(𝑡), ∀𝑡)ℒ{𝑓(𝑡)} = 1
1 − 𝑒−𝑇 𝑠
∫ 𝑇
0𝑒−𝑠𝑡𝑓(𝑡)𝑑𝑡

10
∙ Ferramentas
• Função Gama: (Γ(𝑝 + 1) =∫ ∞
0𝑒−𝑥𝑥𝑝𝑑𝑥)
– para 𝑝 > 0, Γ(𝑝 + 1) = 𝑝Γ(𝑝)– Γ(1) = 1, Γ(1
2) =√
𝜋
– Se 𝑝 > −1, ℒ{𝑡𝑝} = Γ(𝑝 + 1)𝑠𝑝+1
• Função Degrau unitário: 𝑢𝑐(𝑡) =⎧⎨⎩0 𝑡 < 𝑐
1 𝑡 ≥ 𝑐
• Função Impulso unitário (𝛿 de Dirac): se 𝑡 = 0, 𝛿(𝑡) = 0;∫ +∞
−∞𝛿(𝑡)𝑑𝑡 = 1
ℒ{𝛿(𝑡 − 𝑡0)𝑓(𝑡)} = 𝑒−𝑠𝑡0𝑓(𝑡0)
• Convolução ((𝑓 * 𝑔)(𝑡) =∫ 𝑡
0𝑓(𝜏)𝑔(𝑡 − 𝜏)𝑑𝜏)
– 𝑓 * 𝑔 = 𝑔 * 𝑓
– 𝑓 * (𝑔1 + 𝑔2) = 𝑓 * 𝑔1 + 𝑓 * 𝑔2
– (𝑓 * 𝑔) * ℎ = 𝑓 * (𝑔 * ℎ)– ℒ{𝑓 * 𝑔} = ℒ{𝑓}ℒ{𝑔}
∙ Encontrando a solução de um pvi
Considere o pvi⎧⎨⎩𝑎𝑛𝑦(𝑛)(𝑡) + · · · + 𝑎1𝑦
′(𝑡) + 𝑎0𝑦(𝑡) = ℎ(𝑡)𝑦(𝑖)(0) = 𝑦𝑖 ∀0 ≤ 𝑖 ≤ 𝑛 − 1
1) Aplique a transformada de Laplace ℒ à edo.
2) Isole ℒ{𝑦(𝑡)} = 𝐹 (𝑠)
3) Aplique a transformada inversa ℒ−1 à 𝐹 (𝑠) para obter a solução 𝑦(𝑡).
∙ Observações para encontrar a transformada inversa ℒ−1{𝐹 (𝑠)} = 𝑓(𝑡)
• Verifique se 𝐹 (𝑠) não é resultado de translações, por exemplo, caso 𝐹 (𝑠) = 𝑒−𝑐𝑠𝐺(𝑠), paraalgum 𝐺(𝑠) = ℒ{𝑔(𝑡)}, sabemos que ℒ−1{𝐹 (𝑠)} = 𝑢𝑐(𝑡)𝑔(𝑡 − 𝑐); ou caso 𝐹 (𝑠) = 𝐺(𝑠 − 𝑐),temos ℒ−1{𝐹 (𝑠)} = 𝑒𝑐𝑡𝑔(𝑡).
• No caso 𝐹 (𝑠) = 𝐺(𝑠)𝐻(𝑠) , para algum 𝐺(𝑠) polinômio ou produto de exponencial com polinômio
e 𝐻(𝑠) polinômio. Tente fatorar 𝐻(𝑠) em fatores lineares, potências de fatores lineares oufatores do tipo (𝑠2 + 𝑎2) e use frações parciais para simplificar 𝐹 (𝑠).

11
• Sempre simplifique o seu problema para utilizar a tabela de referência, que contém transfor-madas elementares, a menos de translações. Caso 𝐹 (𝑠) não tenha uma cara suficientementesimples (como no item acima), pode-se tentar derivar 𝐹 𝑛 vezes com relação à 𝑠 e utilizarque a transformada inversa de derivada é ℒ−1{𝐹 (𝑛)(𝑠)} = (−𝑡)𝑛ℒ−1{𝐹 (𝑠)}.Por exemplo, 𝐹 (𝑠) = 𝑙𝑛(𝑠) ⇒ 𝐹 ′(𝑠) = 1
𝑠⇒ Como ℒ−1{𝐹 ′(𝑠)} = (−𝑡)ℒ−1{𝐹 (𝑠)}, então
ℒ−1{𝐹 (𝑠)} = −ℒ−1{𝐹 ′(𝑠)}𝑡
=−ℒ−1{1
𝑠}
𝑡= −1
𝑡.
• Dependendo do caso, ao invés de usar frações parciais, lembre que podemos usar convoluçãoou a propriedade da transformada da integral.
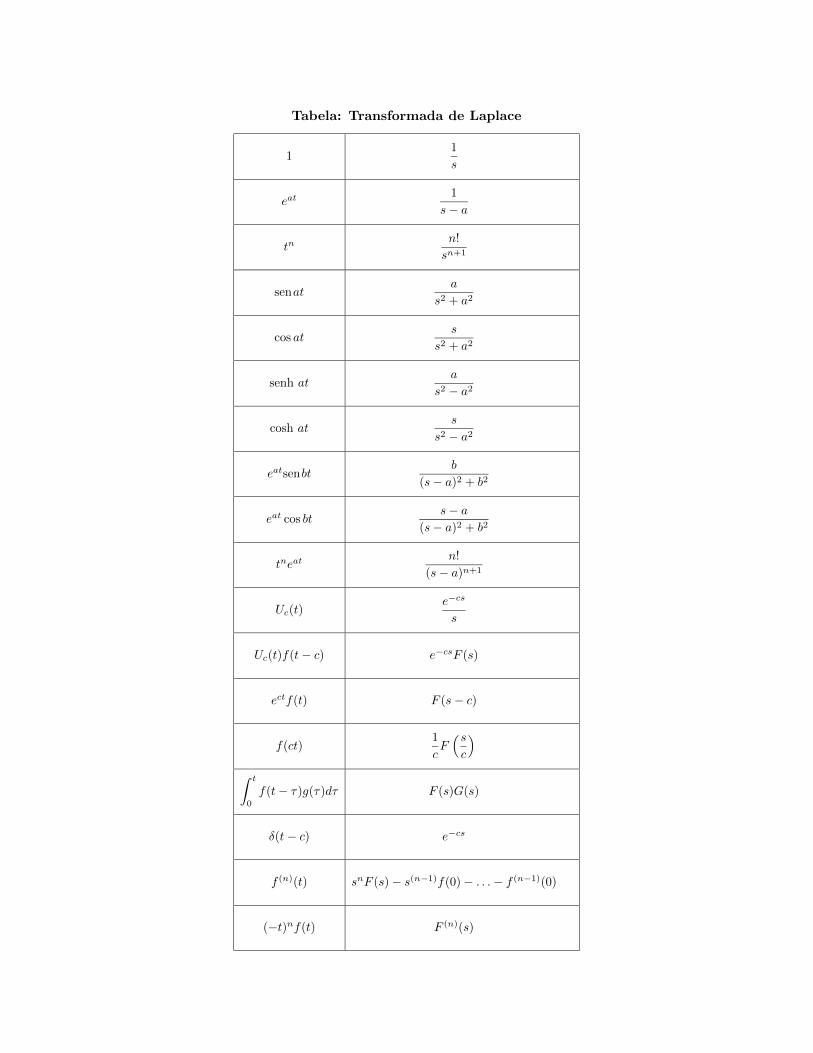
Tabela: Transformada de Laplace
11
s
eat1
s − a
tnn!
sn+1
senata
s2 + a2
cos ats
s2 + a2
senh ata
s2 − a2
cosh ats
s2 − a2
eatsenbtb
(s − a)2 + b2
eat cos bts − a
(s − a)2 + b2
tneatn!
(s − a)n+1
Uc(t)e−cs
s
Uc(t)f(t − c) e−csF (s)
ectf(t) F (s − c)
f(ct)1
cF
(s
c
)
∫ t
0
f(t − τ)g(τ)dτ F (s)G(s)
δ(t − c) e−cs
f (n)(t) snF (s) − s(n−1)f(0) − . . . − f (n−1)(0)
(−t)nf(t) F (n)(s)

TABELA: Derivadas, Integrais
e Identidades Trigonometricas
• Derivadas
Sejam u e v funcoes derivaveis de x e n con-stante.1. y = un ⇒ y′ = nun−1u′.2. y = uv ⇒ y′ = u′v + v′u.3. y = u
v ⇒ y′ = u′v−v′uv2
.4. y = au ⇒ y′ = au(ln a) u′, (a > 0, a 6= 1).5. y = eu ⇒ y′ = euu′.6. y = loga u ⇒ y′ = u′
u loga e.7. y = lnu ⇒ y′ = 1
uu′.
8. y = uv ⇒ y′ = v uv−1 u′ + uv(lnu) v′.9. y = sen u ⇒ y′ = u′ cos u.10. y = cos u ⇒ y′ = −u′sen u.11. y = tg u ⇒ y′ = u′ sec2 u.12. y = cotg u ⇒ y′ = −u′cosec2u.13. y = sec u ⇒ y′ = u′ sec u tg u.14. y = cosec u ⇒ y′ = −u′cosec u cotg u.15. y = arc sen u ⇒ y′ = u′√
1−u2.
16. y = arc cos u ⇒ y′ = −u′√1−u2
.
17. y = arc tg u ⇒ y′ = u′1+u2 .
18. y = arc cot g u ⇒ −u′1+u2 .
19. y = arc sec u, |u| > 1⇒ y′ = u′
|u|√u2−1
, |u| > 1.
20. y = arc cosec u, |u| > 1⇒ y′ = −u′
|u|√u2−1
, |u| > 1.
• Identidades Trigonometricas
1. sen2x+ cos2 x = 1.2. 1 + tg2x = sec2 x.3. 1 + cotg2x = cosec2x.4. sen2x = 1−cos 2x
2 .5. cos2 x = 1+cos 2x
2 .6. sen 2x = 2 sen x cos x.7. 2 sen x cos y = sen (x− y) + sen (x+ y).8. 2 sen x sen y = cos (x− y)− cos (x+ y).9. 2 cos x cos y = cos (x− y) + cos (x+ y).10. 1± sen x = 1± cos
(π2 − x
).
• Integrais
1.∫du = u+ c.
2.∫undu = un+1
n+1 + c, n 6= −1.
3.∫
duu = ln |u|+ c.
4.∫audu = au
ln a + c, a > 0, a 6= 1.5.
∫eudu = eu + c.
6.∫sen u du = − cos u+ c.
7.∫cos u du = sen u+ c.
8.∫tg u du = ln |sec u|+ c.
9.∫cotg u du = ln |sen u|+ c.
10.∫sec u du = ln |sec u+ tg u|+ c.
11.∫cosec u du = ln |cosec u− cotg u|+ c.
12.∫sec u tg u du = sec u+ c.
13.∫cosec u cotg u du = −cosec u+ c.
14.∫sec2 u du = tg u+ c.
15.∫cosec2u du = −cotg u+ c.
16.∫
duu2+a2
= 1aarc tg
ua + c.
17.∫
duu2−a2
= 12a ln
∣∣∣u−au+a
∣∣∣+ c, u2 > a2.
18.∫
du√u2+a2
= ln∣∣∣u+
√u2 + a2
∣∣∣+ c.
19.∫
du√u2−a2
= ln∣∣∣u+
√u2 − a2
∣∣∣+ c.
20.∫
du√a2−u2
= arc senua + c, u2 < a2.
21.∫
duu√u2−a2
= 1aarc sec
∣∣ua
∣∣+ c.
• Formulas de Recorrencia
1.∫sennau du = − senn−1au cos au
an+(n−1n
) ∫senn−2au du.
2.∫cosn au du = sen au cosn−1 au
an+(n−1n
) ∫cosn−2 au du.
3.∫tgnau du = tgn−1au
a(n−1) −∫tgn−2au du.
4.∫cotgnau du = − cotgn−1au
a(n−1) −∫cotgn−2au du.
5.∫secn au du = secn−2 au tg au
a(n−1)
+(n−2n−1
) ∫secn−2 au du.
6.∫cosecnau du = − cosecn−2au cotg au
a(n−1)
+(n−2n−1
) ∫cosecn−2au du.