Upload
mikhayl-morais
View
486
Download
12
Embed Size (px)
Citation preview
ndiceEditora Saber Ltda. Diretores Hlio Fittipaldi Thereza M. Ciampi Fittipaldi
i
12
MECATRNICA FCIL
www.mecatronicafacil.com.brEditor e Diretor Responsvel Hlio Fittipaldi Conselho Editorial Luiz Henrique C. Bernardes, Newton C. Braga Auxiliar de Redao Erika M. Yamashita Produo Diego M. Gomes Design Grfico Carlos C. Tartaglioni Edimldia Ferreira Publicidade Carla de Castro Assis, Ricardo Nunes Souza
30
PARA ANUNCIAR: (11)2095-5339 [email protected]
NotciasColaboradoresJeff Eckert, Newton C. Braga
2 7
Robonews
Capa Arquivo Editora Saber
ASSINATURAS www.mecatronicafacil.com.br Fone: (11) 2095-5335/Fax: (11) 2098-3366 Atendimento das 8:30 s 17:30 h
Circuito para controlar motoresConfira os circuitos de Controle linear, Corrente constante, PWM Integrado etc
9
Rob LuzoctaAssociado da:
Veja a montagem de um rob capaz de seguir a luz emitida pela lanterna
12
Futebol de RobsProposta de um circuito eletrnico para transmisso e recepo de dados e controle de um robAssociao Nacional dos Editores de Revistas
15
O que voc precisa saber sobre motores eltricosVeja as vantagens e desvantagens dos diversos tipos de motores e suas funcionalidades
21
Associao Nacional das Editoras de Publicaes Tcnicas, Dirigidas e Especializadas.
Por dentro do HDConhea algumas funes e curiosidades sobre esse importante perifrico
30
Efeito de Som de motorDescrevemos neste artigo um efeito sonoro para automatismos
36
n
notcias
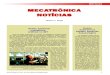
RoboFEI X-20 caracterizado pela grande entrada de ar frontal que contrasta com os faris em LED
Salo do Automvel traz
destaques para as tecnologias genuinamente brasileirasUniversidade FEI traz para o evento o primeiro roadster do pas capaz de guiar-se sozinhoO FEI X-20 une beleza s mais novas ferramentas de engenharia. O carro equipado com sistema autnomo de direo e estar exposto no 25 Salo do Automvel, palco das grandes mquinas automobilsticas da Amrica Latina, entre os dias 30 de outubro e 9 de novembro deste ano. O roadster fruto da dedicao de um grupo de alunos, professores e pesquisadores dos cursos de Engenharia Mecnica Automobilstica, Engenharia Eltrica e Cincia da Computao da FEi (Fundao Educacional Inaciana), alm do IPEI (Instituto de Pesquisas e Estudos Industriais). A carroceria foi gerada via computador, eliminando a modelagem de2
prottipos e possui chassi totalmente feito em alumnio. nosso primeiro passo em um estudo para a construo de veculos com alto grau de autonomia, utilizando, entre diversas ferramentas, a Inteligncia Artificial, afirma o reitor do Centro Universitrio da FEI, Marcio Rillo. Concebido pelo professor de Engenharia Mecnica Automobilistica da FEI, Ricardo Bock, o design traz as caractersticas de um moderno roadster. O professor explica que os faris traduzem a identidade de um carro, assim como o olhar de uma pessoa. Seu funcionamento basicamente simples, equipado com uma cmera de vdeo, localizada entre os dois
pra-brisas e interligada ao software instalado no laptop, o carro identifica a imagem das duas linhas brancas paralelas que envolvem a pista e, a partir de ento, o software traa uma linha imaginria central do trecho. Ao receber a orientao, uma placa eletrnica, interligada ao motor eltrico que controla o sistema de direo, orienta o veculo a seguir a linha central para que, assim, no saia da pista. Em caso de pane do sistema, o condutor conta com trs mecanismos de segurana que, quando acionados, so capazes de desligar automaticamente o sistema autnomo e lhe passar o controle de direo. O primeiro deles um boto de emerMecatrnica Fcil n41 - Novembro 2008
notciasgncia no painel, o segundo ativado quando o motorista exerce presso elevada sobre o pedal do freio, j o terceiro mecanismo passa a funcionar quando o volante movimentado para um dos lados. E, falando em mquinas nacionais, o Salo do Automvel tambm tambm contou com outras atraes de prottipos 100% brasileiros. A FIAT divulgou o FCC II, tambm chamado de Bugster, que une solues ecologimente corretas. Para a construo de sua carroceria o FCC II utiliza fibras naturais de fontes renovveis para ter menor impacto ao meio ambiente e da nanotecnologia para fazer peas mais leves e resistentes. Os painis de carroceria, como o cap, por exemplo, foram injetados em compsito com nanoargila, a chave de fenda que acompanha o kit de ferramentas foi injetada em plstico reciclado com fibras de curau e sisal. Outro exemplo a espuma que reveste os bancos que foi feita com 30% de poliol de leo de soja reciclado. Seu nome remete a buggy e roadster e seu conceito foi totalmente desenvolvido pela engenharia da Fiat no Brasil. O principio bsico do modelo a utilizao de um sistema de propulso com nenhum nvel de emisses. O FCC II utiliza motor eltrico feito sob medida para ele, conciliando desempenho e, ao mesmo tempo, respeitando o meio ambiente. J a linha Chevrolet ter como destaque no Salo do Automvel o GPiX, um crossover cup. De fato, o GPiX um conceito que poder resultar, no futuro, no desenvolvimento de vrios modelos a partir de uma mesma arquitetura, afirma o presidente da General Motors do Brasil e Mercosul, Jaime Ardila. O GPiX tambm outra tecnologia genuinamente brasileira, totalmente desenvolvido pelo Centro de Design da General Motors da Diviso LAAM (que engloba as regies da Amrica Latina, frica e Oriente Mdio), localizado em So Caetano do Sul, So Paulo. Seu nome est associado a uma combinao de letras: G de global, e Pix, a abreviatura de Picture, que em ingls significa imagem. Esta juno d ao veculo o significado de imagem global. Neste carro-conceito o que mais chama a ateno seu teto panormico de vidro, que abrange toda a superfcie superior, favorecendo a entrada de luminosidade e aumentando ainda a mais a sensao de espao e bem-estar. O 25 Salo do Automvel acontece no Pavilho de Exposies do Anhembi, So Paulo- SP. Para quem deseja visitar a exposio a organizao disponibilizar transportes gratuitos da Estao Metr Tiet at o Anhembi. Com o tema Carro para quem quer, o objetivo da campanha deste ano vai alm da divulgao do evento. Ela pretende atingir no s o pblico tradicional, mas agregar um pblico novo, passando o conceito de que a edio deste ano ir apresentar carros para todos os gostos e estilos. Os ingressos custam R$ 30 para adultos e R$ 20 para crianas entre 5 e 12 anos, sendo encontrados venda pelo site do evento (www.salaodoautomovel.com.br). Para este ano a expectativa que 600 mil pessoas passem para prestigiar as atraes dos mais de 150 expositores.
n
FEI X-20 possui motor entre eixos traseiros o mesmo V8 7.01, de 32 vlvulas.
Mecatrnica Fcil n41 - Novembro 2008
n
notciasQuadrimotor desenvolvido por alunos da UnB
Alunos da UnB constremProjeto de graduao inova sistema de controle de quadrirrotorOs alunos Pedro Henrique e Marcelo Braga do curso Engenharia Mecatrnica da Universidade de Braslia - UnB- desenvolvem prottipo de quadrirrotor. O projeto foi trabalhado no Laboratrio de Robtica e Automao (LARA/ENE) sob a orientao do professor Geovany Borges ao longo de 2008.O helicptero possui quatro hlices, maior estabilidade, mecnica simplificada e boa manobrabilidade. Inclumos o LARA como grupo de pesquisa na rea de robtica area com quadrirrotores. O conceito de quadrir4
helicptero de quatro hlicesrotor j existia. O que criamos foi um sistema de controle inovador, conta o estudante Pedro Henrique Santana. Durante o trabalho Concepo de um veculo areo no tripulado do tipo quadrirrotor eles desenvolveram o modelo matemtico do veculo e um software de simulao de vo para indicar a viabilidade do projeto. A aeronave possui sistema de controle tecnicamente simples se comparado aos existentes. Pedro Henrique conclui que o projeto desenvolvido em apenas um ano custou menos de R$ 2 mil. Este projeto chegou a receber a terceira colocao no Prmio Jovem Inventor na Fundao de Apoio Pesquisa, Distrito Federal, na categoria Graduado. Com a finalizao do projeto o estudante Pedro Henrique continua o trabalho com o mestrado em Sistemas de Controle Hbridos, no Departamento de Engenharia Eltrica da Universidade de Braslia, onde o quadrirrotor est sendo aperfeioado a ponto de ter estabilidade durante seu vo como um piloto automtico. Mecatrnica Fcil n41 - Novembro 2008
notcias
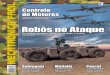
Robs saem da fico e atacam a vida modernaFederao Internacional de Robtica afirma que a populao humanide deve atingir meta de 55 milhes em 2010No de hoje que os robs tem tomado conta dos livros e das telas do cinema. Sempre em busca de uma qualidade de vida maior e sobrevivncia no mercado mundial os robs tem crescido substancialmente no mercado mundial. De acordo com a documentao anual da Federao Internacional de Robtica - IFR - os humanides tem dominado as reas domstica e industrial. Estima-se que em 2010 a populao mundial de robs deve atingir a meta de 55 milhes de unidades, na grande maioria domsticos. Os robs industriais ainda so minoria, embora tenham crescido 3% em relao ao ano passado. Segundo a IFR, em 2007 existiam em mdia 1 milho de mquinas industriais no mundo. Outras 5,5 milhes faziam servios em mares, campos, hospitais, residncias e at mesmo no espao, superando os limites humanos. Neste segmento a Argentina e o Brasil tem crescido de modo notvel, onde a demanda nos dois pases quase duplicou na rea industrial. J na parte de entretenimento, os robs incluem-se no quadro de brinquedos e sistemas educacionais. Com a recreao e lazer estima-se que at o final do ano passado tenham sido vendidos cerca de dois milhes de unidades. Mas para os prximos anos a pea-chave para o desenvolvimento tecnlogico tem sido os avanos destinados aos portadores de deficincia e sade. A robtica a fronteira mais avanada da tecnologia em cirurgia em procedimentos mais complexos, destaca o diretor clnico do Hospital Srio-Libans, Riad Younes. Grandes instituies de desenvolvimento j esto se preparando em Mecatrnica Fcil n41 - Novembro 2008
n
Federao Internacional de Robtica relata crescimento de humanides
pesquisas de prottipos e dispositivos juntamente com a robtica. Para mostrar a superao dos humanides na medicina, no dia 28 de outubro deste ano, uma equipe de cirurgies do Hospital Srio-Libans - HSL- realizou a primeira cirurgia de cabea e pescoo da Amrica Latina utilizando o rob Da Vinci S. O grupo de mdicos removeu um cncer de faringe de um homem de 63 anos, durante duas horas de cirurgia. Este mesmo rob j fez cerca de 57 operaes diferenciadas, como prostatectomia, histerectomia e pancreatectomia desde maro, quando realizou sua primeira operao. As vantagens de uma da aquisio do
rob, segundo o Hospital Sirio-Libans so o tamanho do corte e a preciso. Com isso reduz-se o sangramento e dores na hora da recuperao. Outra rea em potncial so os fornecedores que esto adaptando a necessidade de seus clientes para expandir a indstria metlica, farmacutica e automobilstica. A procura por Lowcost em mercados maduros na Europa Ocidental, Amrica do Norte e Japo s possvel dado o crescimento tecnolgico. Alm disso, o custo-benefcio com a operao das mquinas via automao industrial bem maior e substituvel por trabalhadores.
n
notcias
Salo do Inventor BrasileiroVisitantes podero conferir o Prmio MCT Talento Brasileiro Online e melhor Participante do eventoInovao a caracterstica fundamental para os desenvolvedores de projetos. com esse distintivo que o 12 Salo do Inventor Brasileiro traz as exposies de projetos feitos por pesquisadores e inventores de diversas reas do pas. O evento, organizado pela Associao Brasileira de Inventores e Propriedade Industrial do Esprito Santo (ABRIPI_ES), acontece entre os dias 11 e 14 de novembro, em Vitria- ES. O salo conta ainda com o prmio MCT Talento Brasileiro Online e a premiao destinada ao melhor participante do evento. Na disputa pelo MCT Talento Brasileiro Online, inventores de todo o Brasil tiveram a oportunidade de participar atravs da internet, provando que para ser inovador basta ter uma boa idia e ser persistente. Dentre os finalistas para a competio esto a Mquina para lavar ps, Biga - Triciclo Projetado para Cadeirantes e o Sinalizador Automotivo Multi-sinal. Vale ressaltar que os participantes precisam possuir em mos o pedido de registro de patente no INPI ou a carta patente. Durante o Salo, realizado no Ginsio da Escola de Medicina da Santa Casa de Misericrdia-EMESCAM, ainda sero apresentadas palestras sobre tecnologia, produtos
estaro a mostra no
orgnicos e trabalhos sobre experincias cientficas desenvolvidas com alunos do 1 e 2 grau, afim de despertar o interesse dos alunos. Na programao esto previstas as palestras: Transferncia de tecnologia, Gesto da Inovao, Registro de Patentes e Registro de Marcas. Paralelamente ao evento os visitante tero a oportunidade de conferir o Frum Nacional de Tecnologia Assistiva e Mercado de Trabalho. O Frum ter as palastras: Projeto Catavento, Projeto Somar em busca da incluso de pessoas com deficincia e PMUI (Universalizao dos Servios de Telecomunicaes).
Alunos do CEFET fazem competio do Veculo MecatrnicoNova verso do VM-2
Baseados na montagem do VM- 2, os professores incentivam os alunos a criarem uma nova verso do carrinhoNo dia 14 de outubro aconteceu no Centro Federal de Educao Tecnolgica - CEFET/GRU - a corrida de carrinhos baseados na montagem do Veculo Mecatrnico II. Os alunos do curso tcnico competiram sob comando dos professores Ricardo Formenton e Newton C. Braga, no ptio do colgio. Os participantes do desafio modificaram o carrinho original para serem acionados distncia por um Laser Pointer, com disparo e manuteno atravs de SCR. O VM-2 foi publicado
na revista Mecatrnica Fcil, edio n 35, e sua montagem foi baseada em componentes do Modelix.(*) Monte voc tambm uma nova verso do Veculo Mecatrnico e mande para a redao da revista Mecatrnica Fcil atravs do e-mail:
[email protected] Fcil n41 - Novembro 2008
notcias
Robo
n
Jeef Eckert
Hovers AUV SubmarinosPesquisadores do Massachusetts Institute of Technology - MIT - apresentam o novo Odyssey IV. O projeto um pequeno rob submarino que pode pairar como um helicptero, sendo interessante para exploradores de petrleo, arqueologistas marinhos, oceangrafos e outros que precisem analisar o fundo do oceano por longos intervalos de tempo. Enquanto os modelos anteriores s podiam movimentar-se para frente e para trs, o Odyssey IV pode parar em qualquer lugar, corrigindo sua posio de acordo com as correntes de gua e obstculos. Isso o torna til para trabalhos como realizar inspees detalhadas de uma plataforma ou da fauna e flora marinha. Num teste completado em Woods Hole, MA, ele atingiu profundidades de 6.000 metros. Ele tambm pode ter uma brao mecnico, possibilitando o recolhimento de amostras e realizando manipulaes como girar uma vlvula. O Odyssey IV tambm rpido, alcanando uma velocidade de 2 m/s. A meta criar uma verso que possa ficar sob a gua por at 1 ano, coletando e transmitindo dados, voltando base sem precisar vir a superfcie.
O esquema mostra o Odyssey IV, um rob submarino pequeno e barato. Cortesia do MIT Sea Grant AUV Lab
Fique Seguro na EstradaNo CEATEC Japan Show, a Nissan mostrou o seu conceito para segurana automotiva na forma do Bioimimetic Car Robot Drive, tambm conhecido como BR23C. De acordo com a empresa, ele baseado no sistema de viso das abelhas. Seus olhos compostos podem ver obstculos num ngulo de 300, permitindo um vo seguro dentro de um espao. Na verso automotiva, o sistema Laser Ranger Finder cobre 180 e tem um alcance de dois metros. O LRF calcula a distncia at outro objeto e envia os dados para um microprocessador on-board, que a transforma numa estratgia anticoliso. Uma abelha entretanto, pode subir, descer ou desviar para os lados de modo a evitar outras abelhas enquanto que o BR23C s pode mover-se em duas dimenses e dentro das limitaes das rodas. Mecatrnica Fcil n42 Presumivelmente, a faixa de operao de dois metros uma limitao do prottipo, sendo talvez necessrio ampliar isso para se obter mais tempo de reao. Supondo que voc esteja dirigindo em direo a um poste a 90 km/h (25 m/s) e detecta um obstculo a trs metros de distncia, isso lhe d apenas 1/8 de segundo de tempo de reao, suficiente para acionar o airbag mas no para tentar brecar ou desviar. Mas a Nissan diz que o dispositivo somente precisa de entradas a cada poucos segundos e agir. A empresa espera aperfeioar o sistema para reduzir o nmero de acidentes.
O Nissan BR23C utiliza olhos compostos para evitar coliso Cortesia da Nissan Motor Co. Advanced Technology Center
n
Novo Sistema de Viso Estreo
notcias
Sistema visual estreo Surveyor SVT com dois processadores e duas cmeras. Cortesia da Surveyor Corp
O Surveyor STV um processador duplo com duas cmeras e sistema WiFi, indicado para robtica, processamento de imagem embutido e monitoramento remoto baseado em Web. O projeto possui diversos destaques, incluindo programabilidade onboard, conectividade WiFi, interface simples de atuador e sensor, arquitetura de fonte aberta e um custo de lista de US$ 550. Observe pela foto que o
STV emprega processadores Blackfin da Analog Devices, que so projetados para este tipo de coisa como udio multiformato, processamento de vdeo e imagens etc. De acordo com a literatura da Surveyor, o sistema tira vantagens completas da potncia do processador, otimizado pelas instrues de vdeo, interface de vdeo de alta velocidade, e interfaceamento fcil com dispositivos perifricos.
Este projeto possui dois Blackfins de 32 bits BF537, duas cmeras OV9655 da Omnivision com 1,3 megapixel, controle de motor PWM, vrias interfaces e uma regulagem de 3,3 V e 5 V para operao com bateria. Podese ainda obter um rdio Matchport 802 802.11bg. Tudo isso mede apenas 2,5 x 6 x 2 polegadas, e consome menos de 2 W. A programao pode ser feita via Windows, Mac OS X ou Linux.
Cuidado com Objetos VoadoresO KillerBee UAS, um UAS inteiramente autnomo, que dever ser usado pela Marinha Americana. O sistema de aeronave no tripulada est sendo criado pela US Navy e Marine Corps por um time formado por Swift Engineering e Raytheon. Esta arma mortal tem capacidade de inserir inteligncia persistente, segurana e reconhecimento (ISR) no espao de batalha e rapidamente fornecer inteligncia acionvel aos comandos combatentes. Em setembro uma equipe de vo da Raytheon simulou um ambiente de combate enviando o KillerBee a uma localizao remota. No evento, em menos de 45 minutos a equipe ajustou o sistema e lanou o UAS. A nave propulsionada por um motor de 8 HP, pesa aproximadamente 80 kg e sua autonomia de 15 horas com um alcance de 972 milhas nuticas.
Aeronave desenvolvida pela US Navy e Marine Cortesia da Raytheon Corporation
Mecatrnica Fcil n42
eletrnica
e
Circuitos para controlar motoresNewton C. Braga
Nos projetos mecatrnicos mais avanados no basta simplesmente ligar e desligar um motor de corrente contnua. Mais do que isso, voc pode obter recursos para alterar o sentido de rotao, velocidade e at mesmo o torque sem modificar a velocidade, alm de outras caractersticas. Nesse artigo, focalizamos alguns circuitos simples que podem ser teis para o controle de motores DC.
Um dos problemas dos pequenos motores de corrente contnua (CC ou DC) usados em muitos projetos mecatrnicos que eles so dispositivos de alta velocidade e pequeno torque. Alm disso, o controle de sua velocidade no simples, pois depende da carga e da tenso aplicada. Assim, no basta variar a tenso nesses motores para se obter o efeito desejado, principalmente se a carga (fora que ele deve fazer) tambm muda. Isso se torna evidente principalmente quando movimentos rpidos so necessrios e caixas de reduo no so utilizadas, caso em que o controle do motor se torna difcil ou errtico. Usando componentes comuns, como transistores e circuitos integrados de baixo custo, daremos a seguir uma srie de circuitos que podem ajudar o projetista de dispositivos mecatrnicos obter mais de seus motores de corrente contnua. Mecatrnica Fcil n16 - Maio 2004 42
Controle Linear O controle linear funciona como um reostato eletrnico, dosando a corrente no motor conforme a velocidade desejada. No se trata de uma soluo ideal para o controle preciso, pois nas baixas velocidades, o circuito no linear, mas funciona muito bem nas aplicaes menos crticas. O circuito mostrado na figura 1 pode controlar motores at 500 mA para o caso do transistor BD135 e at 2 A para o caso do TIP31. Em ambos os casos, o transistor deve ser dotado de um bom radiador de calor e a alimentao pode ficar entre 3 e 15 V. Veja que nesse circuito, nas posies intermedirias de velocidade, o transistor dissipa parte da energia aplicada na forma de calor. O potencimetro de controle, entretanto, dissipa pouca potncia e pode ficar longe do motor. Essa a principal vantagem desse circuito.
1
Controle analgico para motor de 3 a 15 V. Transistores equivalentes ou de maior corrente podem ser utilizados
Para o caso de correntes maiores, o potencimetro utilizado deve ser de fio e reduzido. Por exemplo, com um 2N3055 podemos controlar at 4 A, mas o potencimetro deve ser de 220 ohms de fio e o resistor de 100 ohms com 2 W de dissipao.
e2
eletrnicaNum circuito de corrente constante, a corrente no motor independe da carga e da tenso aplicada, conforme mostra o grfico
3
Controle de corrente constante utilizando um regulador integrado de tenso do tipo LM350 que pode conduzir at 3 A de corrente
4
A potncia mdia pode ser controlada pela largura dos pulsos aplicados ao motor
Circuito de Corrente Constante Um motor de corrente contnua tpico tem consumo de corrente que depende tanto da carga como da tenso aplicada, conforme mostra a figura 2. Isso significa que, se um motor for submetido a um esforo maior na aplicao, automaticamente compensa-se a reduo da velocidade e aumento da carga com um aumento da corrente. Se o motor travar pode ser um perigo, pois a corrente pode aumentar a ponto de causar sua queima. Uma forma de se limitar a corrente no motor e ao mesmo tempo mant-la sempre na mesma intensidade, consiste em empregar como controle uma fonte de corrente constante. O circuito mostrado na figura 3 tem justamente essa finalidade. O potencimetro ajusta a intensidade da corrente no motor segundo a seguinte frmula: l = 1,25/P Onde: I a corrente no motor P a resistncia do potencimetro mais a resistncia R. R determina a corrente mxima no motor, valendo ento para quando a resistncia ajustada no potencimetro for nula. O circuito integrado LM350 pode operar com motores at 3 A e tenses de alimentaes at mais de 20 V. Esse componente deve ser montado em um bom radiador de calor.10
Controle PWM Simples Uma forma eficiente de controlar velocidade e torque de um motor de corrente contnua a que faz uso da modulao da largura de pulsos ou Pulse Width Modulation, abreviada por PWM. A idia alterar a largura dos pulsos de modo a modificar a tenso mdia que eles representam, conforme mostra a figura 4. Maior largura de pulso significa mais potncia aplicada. Veja que, nessa modalidade de controle a amplitude dos pulsos se mantm, o que significa, de certo modo, a manuteno do torque. O controle PWM mantm o torque mesmo em baixas velocidades, o que no ocorre com os controles lineares. Temos ento na figura 5, um circuito prtico que o leitor pode utilizar com motores at 500 mA (BD136) ou 2 a (TIP32), com excelente desempenho nas aplicaes em que o controle nas baixas velocidades crtico, principalmente com caixas de reduo. O transistor deve ser dotado de radiador de calor, assim o circuito funciona bem com tenses e motores de 5 V a 15 V sem problemas. O capacitor C1 eventualmente deve ser alterado para casos de ocorrncia de vibraes nos motores. Escolha o valor que d o desempenho mais suave em toda a faixa de velocidades. PWM e Ponte H O circuito anterior pode ser associado a uma ponte H para que, alm do controle de velocidade seja possvel obter tambm a inverso do sentido de rotao a partir de um sinal
5
Controle quase-PWM utilizando um oscilador com o circuito integrado 555. A freqncia, neste circuito tambm se altera com a largura do pulso
6
Ponte H que permite inverter a rotao de um motor de corrente contnua
lgico. Obtemos ento o circuito mostrado na figura 6. Os transistores da ponte H devem ser dotados de radiadores de calor e podem ser BD135/136 para motores at 500 mA ou TIP31/32 para motores Mecatrnica Fcil n16 - Maio 2004 Mecatrnica Fcil n42
eletrnica7Controle PWM para correntes at 3 A utilizando dois circuitos integrados
e
em um radiador de calor compatvel com a potncia do motor. Nesse caso tambm conveniente selecionar o capacitor do astvel (C1) para que o motor opere em toda a faixa de velocidades sem oscilaes. Concluso O que vimos nesse artigo apenas uma pequena amostra do que pode ser feito em termos de controles simples de motor DC, ponto fundamental de todo projeto mecatrnico. Solues com diversas tecnologias, incluindo circuitos integrados dedicados podem ser usadas nas aplicaes mais sofisticadas, mas nos projetos simples so justamente as solues baratas (e que usam componentes comuns) que mais atraem a ateno dos leitores. Caso desejar maiores sugestes de circuito, ou se especializar sobre o assunto, sugerimos o livro Eletrnica Para Mecatrnica do mesmo autor desse artigo. Esta publicao pode ser encontrada na loja Nova Saber (www.novasaber.com.br).
at 2 A. A alimentao tambm pode ser feita com tenses de 5 a 15 V. PWM Integrado Um circuito interessante para controle PWM o mostrado na figura 7, que faz uso de dois circuitos integrados. Nesse circuito, os pulsos de controle obtidos a partir de um astvel 555 so aplicados ao terminal de ajuste de um regulador de tenso do tipo
LM350T capaz de controlar cargas at 3 A. Quando o pulso est no nvel baixo temos a intensidade mnima do pulso aplicado, que de 1,25 V (insuficiente para o acionamento). J no nvel alto temos a aplicao da tenso ajustada no trimpot P1, a qual depende do motor utilizado. O circuito funciona bem com motores at 3 A e tenses na faixa de 6 V a 15 V ou mesmo mais. O circuito integrado LM350T deve ser montado
f
Mecatrnica Fcil n16 - Maio 2004 42
11
r
robtica
Rob LuzoctaNeste artigo atendemos aos leitores que no possuem experincia com microcontroladores e circuitos lgicos. O rob apresentado simples, sendo constitudo apenas de transistores.
Wellington Rocha Domingos
O Luzocta um rob capaz de seguir a luz emitida por uma lanterna, possibilitando curvas para esquerda e para direita, veja a figura 1. Para estudantes de eletrnica bsica uma tima opo, pois demonstraremos o funcionamento de uma meia ponte (H) para cada motor.
ligamos o circuito imediatamente a base de Q1 esta em nvel alto e Q2 em baixo. Para que Q1 sature necessrio ligar sua base no nvel lgico (0). J para Q2 preciso lig-lo em um nvel1Movimentos do rob
lgico (1), ou seja positivo da bateria se a base de Q1 est em nvel auto e a base de Q2 est baixo. Isso causaria um curto circuito se encostarmos as duas bases. Para evitar esse curto ligamos dois resis-
O circuitoO circuito eltrico do Luzocta mostrado na figura 2. R1 e R2 servem de proteo para os LEDs, o capacitor C1 auxilia como filtro. Os transistores Q1, Q2, Q3 e Q4 formam as chaves que ativam os motores, observe que Q1 e Q2 esto com seus coletores ligados nos plos de contatos dos motores. O que acontece bem compreensivo, o transistor PNP conduz do emissor para o coletor e o transistor NPN procede inversamente. Quando12
Mecatrnica Fcil n42
robticatores em suas bases, deste modo a tenso positiva de Q1 faz saturar Q2 e a tenso negativa de Q2 satura Q1, evitando que o circuito trave. Esse mesmo processo usufrudo por Q3 e Q4 para ativar o motor 2.2Circuito eltrico do Luzocta
r
Montagem em PCIA montagem em PCI (Placa de circuito impresso) mostrada na figura 3. Indicamos uma placa de 6 cm de largura e 7,5 cm de comprimento. S alertamos para que no inverta as posies dos transistores NPN com PNP, pois isso os faz aquecerem e at mesmo queimarem. Na hora da confeco tenha cuidado ao soldar os seguintes componentes: LED1, LED2 e C1, pois so polarizados e sua inverso pode parar todo o circuito.
3
Desenho da Placa
Montagem mecnicaA montagem mecnica ou estrutura fsica do Luzocta, foi construda a partir de caixas plsticas comerciais, fabricadas pela Patola, mas se preferir adote outra estrutura. Deixamos essa parte para que o leitor coloque sua criatividade tona! Se preferir montar o rob com a estrutura padro siga a figuras 4 a 8.
Teste e usoSe tudo estiver correto com a montagem, introduza as pilhas no suporte e ligue S1. O rob deve ser posicionado em um ambiente fora de luz solar, pois esta claridade ativa o funcionamento do rob fazendo-o andar para frente. J a luz ambiente no ativa o rob. Aps ligar S1 os dois LEDs devero acender e o Luzocta deve permanecer parado. Com uma lanterna aponte seu foco luminoso para o cho e aproxime, assim ele ir movimentar-se de acordo com a posio da lanterna. Aponte a luz para cada LDR de maneira independente para ter a certeza de ele obedece os comandos corretamente, se isso no acontecer verifique novamente a montagem.
Problemas comunsO Luzocta anda em crculos quando aproxima-se o foco luminoso da lanterna: Analise se os motores esto ligados de maneira correta ou se esto invertidos. Esta mesma observao serve quando ele andar para traz. Mecatrnica Fcil n4213
r
robticaMeu rob no obedece aos comandos de curvas: Isso acontece quando os comandos esto trocados de posio, basta apenas troca-los ou simplesmente trocar os LDRs.4Lateral do LuzOcta
Dicas e usosPromova uma competio entre amigos ou mesmo em feiras de cincias. Voc pode tambm aumentar a velocidade do rob com motores mais potentes e rpidos.
ConclusoEste artigo foi destinado aos iniciantes em eletrnica. Esperamos que a partir deste rob o leitor possa vir, em um futuro prximo, desenvolver seus prprios projetos com eletrnica bsica ou digital, at a prxima! f
Lista de materiais:Semicondutores Q1 e Q3 - TIP125 - Transistor PNP de potncia Q2 e Q4 - TIP120 - Transistor NPN de potncia LED1 e LED2 - LEDs de 5mm comuns cor vermelho Resistores R1 e R2 -1K - Resistores (Marrom, preto, vermelho) R3, R4, R6 e R7 - 560R - Resistores (Verde, azul e marrom) R5 e R8 - LDR - Resistor dependente de luz de tamanho 5mm Capacitores C1 - 470 F x 16 V - Capacitor eletroltico Diversos B1 - 6 V - Quatro pilhas AA ou equivalente bateria de 6V M1 e M2 - 6 V - Motores de corrente continua de 5V a 6V com caixa de reduo S1 - On / Off - Chave tipo Liga / Desliga Fios, placa para montagem, solda, caixas plsticas para montagem mecnica e etc.
5
Vista frontal do rob
6
Posio do suporte de pilhas
7
Posio da chave S1, dos LDRs, dos motores e da roda boba
8
Placa do rob
www.mecatronicafacil.com.brAcesse o site da revista e confira o vdeo do rob Luzocta
14
Mecatrnica Fcil n42
robtica
r
Futebol de Robs Proposta Eletrnica para Small Sized League
Este artigo descreve a proposta de um circuito eletrnico para transmisso e recepo de dados e controle dos robs desenvolvidos pelo Grupo de Robtica Aplicada da Bahia em parceria com a equipe Pounce Engenharia.
A irton Miranda Alexandre Costa Felipe Catalupo Murilo Plinio Victory Fernandes
O Futebol de Robs Small Sized League foi concebido como intuito de apresentar e solucionar problemas relacionados robtica mundial. A proposta do futebol de robs apresentada em trs categorias: Robs Simulados, Robs de Pequeno e Mdio Porte. Os robs da categoria de Mdio Porte e Simulao so completamente autnomos. J na competio de Pequeno Porte permitida a utilizao de um sistema de viso global, onde a imagem da cmera processada e enviada para os robs. Os jogos na modalidade Small Sized League, tema deste artigo, acontecem com dois times de cinco robs em um campo com dimenses determinadas pela Robocup. Veja figura 1. As imagens capturadas pelas cmeras so transmitidas para computadores e processadas de forma
1Estrutura da competio conforme apndice 2 da regra
a definir as estratgias de movimentao de cada rob. Esta estratgia enviada, via transmissores/receptores RF aos robs afim de executarem as tarefas determinadas, se deslocando no campo.
Ter um bom processamento indispensvel, j que um grande nmero de informaes so tratadas nos dois tempos de 15 minutos da partida. Nenhum dos robs, a no ser o goleiro, ter permisso de prender ou
Mecatrnica Fcil n42 - Novembro/Dezembro 2008
15
r
robtica2Contato permitido do rob e bola conforme apndice 3 da regra
deslocar a bola encobrindo mais de 30% de sua vista superior ou lateral. Como demonstra a figura 2, 70% da bola ter que estar livre. Para que seja possvel a compreenso do futebol de robs, necessrio antes de tudo entender como suas partes separadas correlacionam-se. Conforme o diagrama da figura 3, as imagens so captadas atravs de uma cmera, e processadas por um computador que interpreta qual a melhor jogada que os robs devem executar. Em seguida envia esta jogada destinada ao rob que est melhor posicionado. Contudo, para as instrues de jogada chegarem aos robs, ela passada para um circuito de comunicao sem fio. Este circuito de comunicao sem fio recebe as instrues das jogadas passadas pelo computador atravs da porta serial RS232 e por um dispositivo transmissor de rdio freqncia, passa as informaes que so captadas pelos receptores de rdio freqncia instalados nos robs. O rob recebe as instrues, processa e em seguida envia os dados para a ponte H que responsvel3Diagrama do conjunto
pela inverso da polaridade do motor, executando assim um movimento referente s instrues, que pode ser: andar para frente, para trs, girar por um determinado perodo e com uma determinada intensidade. Logo aps a tomada de deciso do computador quanto ao movimento a ser realizado, a transmisso, e, finalmente, a execuo do movimento, a cmera novamente capta novas imagens, que geram novas informaes a serem processadas pelo computador e transmite aos robs, fechando o ciclo de operaes demonstrado no diagrama.
os componentes do circuito necessitam ser alimentados com esta mesma tenso, evitando assim a necessidade de um regulador de tenso ou fonte de tenso auxiliar. Desta maneira utilizamos a porta USB apenas para fornecer tenso de 5 V ao circuito. O resultado final da montagem pode ser visto na figura 6.
Circuito do Rob Recepo, Processamento e ControleO circuito do rob possui um dispositivo RF receptor para receber as intrues a serem executadas. Cabe ao microcontrolador PIC modelo 16F628A instalado no rob processar estas informaes e executar os comandos. Assim como no circuito transmissor, muitos elementos do circuito devem estar alimentados com uma tenso de 5 volts. Como os robs no podem estar ligados a nenhum outro dispositivo por umbilical, foi escolhido para a alimentao uma bateria de 9 volts comum. A este circuito foi adaptado um regulador de tenso LM7805, responsvel por fixar a tenso de sada em 5 V para grande parte dos componentes do rob, com exceo dos motores que utilizam a tenso de 9 V diretamente. O microcontrolador, devido a sua grande versatilidade, o componente chave do circuito, pois pode-se obter uma vasta possibilidade de operaes. J o microcontrolador PIC 16F628A foi escolhido devido ao seu tamanho reduzido e suporte a comunicao serial, alm de ser facilmente encontrado no mercado. Para controlar os dois motores CC utilizados no projeto, o PIC envia 4 bits que indica se os motores esto ligados e o sentido de rotao. Um circuito integrado de ponte H, L293d, foi escolhido para executar a inverso de polaridade nos terminais4Diagrama de Comunicao Serial RS232 PC - PIC
Circuito TransmissorO circuito est implementado conforme o diagrama ilustrado na figura 4. Ele faz uso de um circuito integrado MAX232 passando estas informaes para a antena RF de 433MHz da empresa TATO. Veja a figura 5. Apesar do PIC 16F628A possuir o mdulo USART, tambm conhecido como Interface de comunicao serial, ele no completamente compatvel com o RS232, sendo necessrio o uso do MAX232 responsvel por transformar os sinais RS232 para o padro TTL lido e emitido pelo microcontrolador. Uma vez com as informaes convertidas, estes dados so encaminhados ao dispositivo RF transmissor. O circuito transmissor implementado est conectado porta serial RS232 e porta USB do computador. Esta idia surgiu para simplificar o circuito de uma maneira geral, pois, a USB fornece 5 volts de potencial nos pino 1 (VCC) e na carcaa ou no pino 2 corresponde ao GND, e todos
16
Mecatrnica Fcil n42 - Novembro/Dezembro 2008
robtica5Conversor RS232-TTL (fonte: www.rogercom.com)
6Foto do mdulo de comunicao implementado no projeto
r
dos motores e conseqentemente a inverso no sentido do giro de seus eixos, resultando na possibilidade de executar movimentaes para frente, para trs, esquerda e direita. Os pinos 7 e 15 acionam o funcionamento da ponte H, como mostra o diagrama. O outro bit enviado para7Diagrama de inverso de motores
um CI de porta lgica NOT, 74LS04, que nega o bit recebido e o envia para a ponte H. A ponte H recebe o bit original e o bit negado (oriundo do 74LS04) nos pinos 1 e 2 para motor da esquerda e 9 e 10 para motor direito. Estes bits indicam o sentido de rotao dos motores, como exibe o
diagrama da figura 7 que implementa a simulao eletrnica do processo no software LabCenter Proteus. Alm disso, para proteger o CI de ponte H de cargas indutivas contidas nas bobinas dos motores, que quando invertida a polaridade, geram tenses mais elevadas que as normalmente cedidas, foram adicionados diodos de proteo conforme sugesto de uso contida no datasheet do LM293d.
Mecatrnica Fcil n42 - Novembro/Dezembro 2008
17
r
robticaEstrutura Computacional e de SoftwareUma vez abordados os aspectos eletrnicos do projeto, preciso implementar os softwares que sero executados no computador. Para o desenvolvimento do software de comunicao com o rob foi utilizado o ambiente de programao orientado a objeto Borland Delphi 6, acrescido do componente freeware opensource TCommPortDriver para suporte a comunicao serial no Delphi. O software desenvolvido composto de duas telas, uma para configurar a conexo serial e outra para o controle do usurio, na qual os dados so enviados. A proposta deste artigo apresentar um software simples, capaz de controlar o rob atravs do pressionamento do teclado, abstraindo aspectos avanados da programao de tratamento digital das imagens recebidas das cmeras e definies de tticas. Com base nos conceitos apresentados possvel construir seu prprio projeto e progredir no sentido da implementao dos recursos avanados. A tela de configuraes, conforme apresentado na figura 8, modifica os parmetros de configurao da porta serial, tais como: qual porta ser usada na comunicao, velocidade em8Software de comunicao (Tela de configurao)
baud rate, bits de dados, paridade, bits de parada e controle de fluxo. A tela de controle, ilustrada na figura 9, composta de um boto conectar/desconectar que ativa a conexo previamente configurada e cinco botes de controle que so responsveis pelos movimentos do rob, conforme as teclas do teclado: w, s, a, d, q (frente, trs, esquerda, direita, desliga, respectivamente). Exceto pelo cdigo responsvel pela configurao e demais parametrizaes do sistema e seus componentes, o sistema de envio de dados para porta serial a uma nica funo. No evento OnClick de cada boto implementa-se a chamada a funo genrica de envio de Strings do componente da Classe TCommPortDriver, passando como parmetro o contedo do boto respectivo que executou o procedimento, conforme apresentado a seguir. Uma vez corretamente configurado e conectado porta, o acionamento do boto w por exemplo, envia o caractere w para a porta serial RS232, que por sua vez chega ao circuito transmissor de RF e reCdigo-fonteprocedure TFutebolFrm.SpeedButton4 Click(Sender: TObject); begin CommPortDriver1.SendString(TButton (Sender).Caption); end;
interrupes. O software embarcado que opera no rob foi implementado em 3 etapas: Teste ECHO: Primeiramente foi desenvolvido um aplicativo de testes onde foram aplicados todos os conceitos de configurao de porta serial USART e tratamento de interrupes para um sistema que recebesse bytes via porta serial, detectasse a chegada destas informaes e enviasse de volta as informaes recebidas numa aplicao clssica de programa ECHO. Desta maneira foi possvel garantir o funcionamento de toda a programao que seria base para o aplicativo final do rob. Teste Movimentao: Uma vez garantido que toda a programao base operava de forma devida, foi implementado aplicativo que tratava o recebimento dos caracteres w, s, a, d, q (frente, trs, esquerda, direita, desliga, respectivamente) realizando movimentao do rob, de forma que fosse possvel comand-los de forma simples atravs do teclado do computador. Aplicativo Final: O aplicativo final do rob inclui alteraes apenas no protocolo de comando e controle do rob que um pouco mais elaborado que a implementao da verso Teste de Movimento, uma vez que inclui tratamentos de PWM para regulao da potncia usada no movimento a depender da situao desejada e controle de mltiplos robs individualmente.
cebido no circuito receptor instalado no rob. O mesmo ocorre para os outros botes. Para Parar (ou Desligar o sistema), use a tecla q. Para ter acesso ao cdigo completo acesse o site da GRA-Ba9Software de comunicao (Tela de controle)
Teste MovimentaoConforme enunciado o aplicativo Teste de Movimentao utiliza como base toda a implementao do aplicativo Teste ECHO adicionando funcionalidade de identificao dos caracteres w, s, a, d, q (frente, trs, esquerda, direita, desliga, respectivamente) de forma a realizar a movimentao do rob como mostrado no diagrama geral de comunicao da figura 10. A correta interpretao e entendimento por parte do desenvolvedor dos dados recebidos pelo PIC dependem do conhecimento de bases numricas e da tabela ASCII uma vez que as informaes enviadas pelo computador
*
Software Embarcado no Rob
Para o desenvolvimento do software embarcado no rob foi utilizada a linguagem de programao Assembler para o PIC16F628A. Para tanto foi necessrio dominar todos os conceitos gerais da linguagem bem como dominar os conceitos especficos relacionados configurao e uso de porta serial USART e tratamento de18
Mecatrnica Fcil n42 - Novembro/Dezembro 2008
robticasob a forma de caracteres representam na verdade um byte que trafega sob a forma de bits e tem seu valor especificado conforme a tabela ASCII. A implementao do aplicativo Teste Movimentao foi feita conforme o seguinte algoritmo descritivo sob a forma de diagrama de blocos na figura 11. Para melhor compreender a proposta aconselhvel que o leitor tenha conhecimentos acerca de programao Assembler para microncontroladores PIC para recursos como tratamentos de interrupes seriais. De forma identificar qual caractere foi recebido via porta serial USART, mova o caractere para o registrador W e faa uma subtrao com o dado recebido (previamente armazenado na varivel DADO_RX). Para uma subtrao com resultado igual a zero, o flag Z do registrador STATUS setado, indicando que o caracter recebido igual ao caracter esperado, caso contrrio aplicasse o mesmo teste para cada caracter individualmente. Ento, para comparar se o dado recebido igual a um caractere especfico basta seguir o seguinte raciocnio: A seguir apresentamos partes relevantes do tratamento abordado. Para acesso ao cdigo completo acesse o site do Grupo de Robtica Aplicada da Bahia - GRA-Ba . O projeto completo da eletrnica foi ento acrescido a uma proposta mecnica de chassi implementado em acrlico conforme especificaes contidas no relatrio completo do projeto. As peas devem ser montadas conforme mostrado na simulao 3D em Google SkecthUp da figura 12, podendo ser utilizada cola (SuperBonder por exemplo) ou parafuso para unir as partes da estrutura entre si. Optamos por trabalhar com parafusos, pois os mesmos permitiam RaciocnioCHAMA_FUNCAO movlw X subwf DADO_RX,W Btfsc STATUS,Z call MINHA_FUNCAO
r
desmontar completamente o rob, caso necessrio, enquanto o uso de cola dificulta este tipo de operao no futuro. Mecatrnica Fcil n42 - Novembro/Dezembro 2008
19
r
robtica10Diagrama de Comunicao PC-PIC do Aplicativo TesteEcho
Cdigo-fonte(...) ;****************************************** * ROTINA IDENTIFICA FUNCAO * ******************************************* CHAMA_FUNCAO movlw a subwf DADO_RX,W Btfsc STATUS,Z call Go_ESQ
11Simulao 3D da montagem final em acrlico
movlw d subwf DADO_RX,W Btfsc STATUS,Z call Go_DIR movlw w subwf DADO_RX,W Btfsc STATUS,Z call Go_FRENTE movlw s subwf DADO_RX,W Btfsc STATUS,Z call Go_TRAS movlw q subwf DADO_RX,W Btfsc STATUS,Z call Go_STOP RETURN ()
Aps concluda a montagem final da estrutura mecnica, adicionamos ao conjunto a placa de circuito contendo toda a eletrnica de controle do rob proposta, bem como a bateria de 9V que fonte de alimentao, conforme a figura 13. Neste ponto as dimenses do rob so de exatamente 7 cm cbicos, e o rob j est pronto para ser testado. No entanto, para a competio nos campeonatos oficiais preciso ainda construir mais uma etapa mecnica, a carenagem.
Concluso12Simulao 3D da montagem final em acrlico
13
Montagem final do rob
A dificuldade das equipes em evoluir para modalidades mais complexas, dado o pouco amadurecimento da robtica na regio norte-nordeste e a dificuldade ao acesso de informaes, fez as equipes GRA-Ba (www. roboticaaplicada.com.br) e Pounce Engenharia (www.pounce.eng.br) trabalharem juntas no desenvolvimento de um projeto de Futebol de Robs Small Sized League, com toda sua documentao disponvel gratuitamente no site da GRA-Ba. Mecatrnica Fcil n42 - Novembro/Dezembro 2008
20
dispositivos
d
O que voc precisa saber sobre motores eltricosOs motores eltricos so parte integrante de uma infinidade de equipamentos. Mquinas industriais, automatismos domsticos e automotivos, portes eltricos, dispositivos mecatrnicos e robs so alguns exemplos de lugares onde podemos encontr-los. Os motores podem ser dos mais diversos tipos, formas e tamanhos, o que leva a necessidade de todo profissional de Eletrnica ter um conhecimento mais profundo desses dispositivos. Neste artigo analisaremos os diversos tipos de motores, suas vantagens e desvantagens e a tecnologia que cada um emprega.Newton Braga
Os motores so transdutores que convertem energia eltrica em energia mecnica. Nesta funo, eles fazem parte de uma grande quantidade de equipamentos que encontramos no dia-a-dia. Nos ltimos tempos, com a unio crescente da eletrnica mecnica na criao de dispositivos mecatrnicos, os motores aparecem cada vez mais em maior quantidade e numa variedade de tipos at ento nunca vista. Como funcionam os diversos motores que encontramos nos equipamentos de uso cotidiano e como trabalhar com eles, so conhecimentos que todo profissional deveria ter, e isso que vamos levar neste artigo.
FundamentosA idia de se obter energia mecnica a partir de energia eltrica criando-se, assim, o primeiro motor de corrente contnua, vem de 1830 quando Michael Faraday desenvolveu o primeiro motor de disco. Na figura 1 podemos ter uma idia de como ele funcionava. No entanto, naquela poca as prprias fontes de energia eltrica Mecatrnica Fcil n 42
eram limitadas, o que fez com que esse motor apenas se tornasse uma curiosidade de laboratrio sem aplicao prtica. Os motores modernos se baseiam num princpio muito conhecido de todos os estudantes de Fsica e Eletrnica , que ilustrado na figura 2. Quando uma corrente eltrica percorre um fio imerso em um campo magntico surge uma fora perpendicular ao fio, que tende a mov-lo. Se em lugar de um simples condutor usarmos uma bobina com muitas espiras de fio, mesmo uma corrente relativamente fraca poder gerar foras bastante intensas quando a mesma configurao for montada. Uma bobina com o formato mostrado na figura 3, quando percorrida por uma corrente e imersa num campo uniforme, ficar sujeita a um binrio que tender a gir-la. Evidentemente, nessas condies, se a bobina puder girar livremente, ela s ir faz-lo por um certo percurso, at que as foras no mais atuem no sentido de produzir esse movimento, conforme exibe a figura 4. A configurao interessante, pois pode produzir fora mecnica em
1Motor elementar de disco
2
Fora num condutor imerso num campo magntico
21
d
dispositivos3Princpio de funcionamento de um motor DC
4Movimento da armadura at a estabilidade
5O sistema de escova
6Rotao constante
boa quantidade, mas persiste o problema de como obter um movimento contnuo da bobina, ou seja, de fazla girar sem parar. Isso pode ser conseguido por um processo denominado comutao, mostrado na figura 5, e que j nos leva a um motor com possibilidade de apresentar aplicaes prticas. A bobina enrolada num cilindro que montado num eixo capaz de girar sobre mancais. Nesse eixo deixamos duas regies isolantes onde colocamos meia calhas de contatos comutadores, que so ligados aos fios da prpria bobina. Dois contatos fixos ou escovas fazem contato eltrico com essas meia calhas de modo a transferir energia para as bobinas. A ligao desses comutadores tal que, em meia volta do percurso, os comutadores A e B so ligados bobina e com isso a corrente circula num sentido. Na outra meia volta, os comutadores C e D que so ligados na bobina e a corrente circula no sentido oposto. Tudo isso nos leva ao seguinte comportamento mecnico do dispositivo assim formado: a) Quando aplicamos corrente nos contatos que alimentam a bobina, circula uma corrente em um sentido tal que tende a moviment-la de meia volta , dependendo o sentido de giro justamente do sentido de circulao da corrente. b) Quando a bobina alcana a posio que seria de repouso, meia volta depois, as escovas comutadoras mudam os contatos e, com isso, a corrente inverte seu sentido de circulao. c) O resultado disso que a posio que a bobina alcanou no mais a posio de repouso, uma vez que surge uma nova fora que tende a faz-la continuar girando. A nova posio de repouso estar, agora, meia volta adiante. d) A bobina gira mais meia volta para alcanar a nova posio de repouso, mas ao chegar prximo dela, novamente entram em ao os comutadores e a corrente novamente invertida. Uma nova posio de repouso aparece. e) A nova posio de repouso estar outra vez meia volta frente e a bobina continua girando.
fcil perceber que a bobina nunca ir parar enquanto houver disponibilidade de corrente para alimentar o circuito e obteremos, com isso, um movimento giratrio da bobina e de seu eixo constante. A figura 6 ilustra o que sucede. A fora que aparece no eixo desse tipo de motor vai depender de diversos fatores, tais como o nmero de espiras da bobina, a intensidade do campo magntico e tambm a intensidade da corrente.
Motor DC com escovasEste tipo de motor o mais tradicional, conhecido por brush DC motor, onde brush significa escova para designar a operao com o sistema comutador. Na figura 7 temos um motor desses, (visto em corte), como os muito encontrados em aplicaes vide como brinquedos, ventiladores de carro etc. Observe que so usados ms permanentes no estator, e que o rotor onde enrolada a bobina feito de metal ferroso para concentrar as linhas de fora do campo magntico criado pela mesma tornando-o mais intenso, e que as escovas so confeccionadas com pedaos de grafite ou ainda com lminas de cobre, dependendo do tipo. Esses motores podem ser encontrados em verses de todos os tamanhos e tipos, sendo as mais comuns as alimentadas por pilhas na faixa de 1,5 a 12 V, conforme ilustra a figura 8. Esses pequenos motores podem operar com potncias de poucos watts, uma vez que as correntes drenadas variam entre 50 mA e 2 A, tipicamente.7Motor DC com escovas (em corte)
22
Mecatrnica Fcil n42
dispositivos8Pequenos motores de corrente contnua
9Curvas tpicas de motores
d
CaractersticasEsses motores, na verdade, so especificados para operar dentro de uma faixa de tenses. Assim, um motor de 3 V realmente funcionar quando alimentado com tenses na faixa de 1,5 a 4,5 V, sem problemas. Acima dessa tenso o problema maior a dissipao de calor pelo enrolamento. Aquecendo demais, os fios podem ter sua isolao queimada, j que so do tipo esmaltado. A velocidade de rotao do motor depende da tenso aplicada e tambm da carga, ou seja, da fora que deve fazer. Desse modo, comum termos um grfico para especificar a relao tenso x velocidade conforme apresenta a figura 9. Pequenos motores para a faixa de 1,5 a 12 V podem ter rotaes sem carga na faixa de 1000 a 10 000 rpm. Quando carregados, a corrente aumenta e a rotao cai, levando- nos a um grfico de acordo com a figura 10. Por esse motivo, numa aplicao prtica preciso especificar tanto a tenso aplicada quanto a carga para que se possa ter uma idia exata da rotao em que ele vai trabalhar. Nas aplicaes mais crticas onde o motor necessita manter uma10Curva tpica rotao x corrente de um motor DC
rotao constante, existem diversas tcnicas que podem ser empregadas para essa finalidade. - Uma delas a regulagem mecnica da velocidade que pode ser conseguida com contrapesos conforme mostra a figura 11. Essa regulagem opera fazendo com que, ao aumentar a velocidade, os pesos se afastem do eixo de rotao e, com isso, seja requerida uma fora maior para mant-los em rotao compensando o ganho de velocidade. Outra possibilidade a regulagem eletrnica que pode empregar diversas configuraes prticas. Uma delas consiste no uso de algum tipo de circuito regulador de corrente ou fonte de corrente constante, veja exemplo na figura 12. Esse circuito utilizado quando o motor deve acionar uma carga com uma fora constante e manter a velocidade dentro de certos limites. Parte-se da idia de que a corrente depende da carga e da rotao e, uma vez ajustada, uma alterao na velocidade tende a modificar a corrente, que compensada pelo circuito. Outra opo consiste no uso de algum tipo de sensor acoplado ao eixo do motor que faa a leitura de sua rotao, conforme mostra a figura 13.11Regulando a velocidade com contrapesos
Um sensor magntico (ou ainda ptico) informa ao circuito qual a rotao e a compara com o valor ajustado, gerando um sinal de erro. Esse sinal usado para aumentar ou diminuir a tenso no motor, corrigindo-se assim a velocidade at que ela chegue ao valor desejado. Esse tipo de motor tem vrias limitaes como: a) A velocidade mxima est limitada no apenas pelas caractersticas mecnicas das escovas, mas tambm pelo ncleo. Em altas rotaes, a corrente inverte e desinverte milhares de vezes por segundo, gerando assim correntes de Foucault no ncleo ferroso do motor. Estas correntes fazem com que o ncleo se aquea, provocando a queda no rendimento do motor. b) Nas comutaes gerado rudo eltrico, que pode interferir nos circuitos mais sensveis do aparelho em que o motor funciona. No obstante possam ser usados filtros para eliminar esses rudos como, por exemplo, capacitores em paralelo, existe um limite para sua ao. c) As escovas ou contatos se desgastam com o tempo, reduzindo a vida til do motor.12Usando uma fonte de corrente constante
Mecatrnica Fcil n 42
23
d
dispositivos13Regulagem da velocidade com sensor ptico
14Motor com armadura impressa
15Motor com armadura em concha
Diversas tecnologias possibilitam a construo de motores DC com escovas com rendimento mais elevado, uma das quais a que possui a armadura em forma de disco gravado e que pode ser vista na figura 14. Esse motor no possui partes de ferro mvel, o que elimina os problemas do aquecimento do ncleo nas altas rotaes pelas correntes de turbulncia ou Foucault geradas pelas altas freqncias. Na figura 15 temos um outro tipo de motor DC que possui uma armadura em forma de concha, sendo chamado tambm de shell armature, em ingls. Sua grande vantagem em relao aos tradicionais que eles podem alcanar rotaes muito mais altas.
16Perdas nos motores com escovas
Perdas nos motores DCA finalidade bsica de um motor converter energia eltrica em energia mecnica. Evidentemente, o melhor motor aquele que consegue converter a maior parte da energia eltrica em energia mecnica, ou seja, tem o maior rendimento ou menores perdas. As perdas nos motores de corrente contnua, alm das que j comentamos no item anterior, podem ter diversas outras origens. Na figura 16 mostramos um diagrama com diversos tipos de perdas que podem afetar o rendimento desse motor. a) Perdas nos enrolamentos Tais perdas ocorrem porque os fios usados nos enrolamentos dos motores apresentam certa resistncia eltrica. Para venc-la, energia eltrica convertida em calor e no em fora mecnica. As perdas pela resistncia24
do enrolamento podem ser calculadas pela expresso: P = R x I2 Onde: P a potncia eltrica perdida - transformada em calor (W) R a resistncia do enrolamento (ohms) I a intensidade da corrente no motor (em ampres). Um fator importante que deve ser levado em conta nessas perdas que a resistncia do enrolamento aumenta quando ele se aquece, ou seja, quan-
do o motor passa a rodar em regime de maior potncia. b) Perdas pelos contatos As escovas no possibilitam a realizao de um contato eltrico perfeito quando o motor gira. Na verdade, a eficincia desse tipo de contato diminui bastante medida em que a velocidade do motor aumenta. Com a reduo da eficincia do contato, a resistncia aumenta e com isso a quantidade de calor que gerado nesse ponto do motor. A anlise da forma como os contatos atuam bastante complexa, uma vez que existe o problema do repique Mecatrnica Fcil n42
dispositivos17As perdas por curto-circuito
18Ondulao (ripple) no torque do motor
d
que gera pulsos de transientes quando comutam uma carga altamente indutiva, como o caso do enrolamento do motor. Em lugar do simples estabelecimento da corrente temos a produo de uma seqncia de pulsos muito rpidos que, atuando sobre a indutncia do motor, fazem com que a corrente estabelecida no alcance imediatamente o valor esperado e, alm disso, seja gerada uma tenso de retorno mais alta. c) Perdas no Ferro As caractersticas de magnetizao do ferro empregado como ncleo nos motores devem ser consideradas ao analisarmos o funcionamento de um motor de corrente contnua com escovas. A principal se deve s correntes de turbulncia ou Foucalt, que so geradas devido histerese do material usado no ncleo. Como esse material no consegue acompanhar as inverses muito rpidas de polaridade do campo magntico quando o motor gira em alta velocidade, so induzidas correntes no ncleo que causam seu aquecimento. Tal aquecimento pode influir no aumento da resistncia do enrolamento (como j vimos) e tambm nas prprias caractersticas magnticas do material utilizado no ncleo do motor. Em suma, maior velocidade para esse tipo de motor pode significar perdas considerveis pelas correntes induzidas dessa forma. O uso de Mecatrnica Fcil n 42
chapas de metal em lugar de ncleos slidos reduz o problema, mas no o elimina completamente. d) Perdas por Frico Estas perdas se devem s caractersticas mecnicas do motor que deve rodar sobre mancais com o mnimo de atrito possvel. Evidentemente, na prtica no podemos reduzir este atrito a zero e, assim, as perdas ocorrem. A prpria presso mecnica das escovas sobre os contatos no rotor do motor tambm induz perdas por atrito que, alm do inconveniente de atuarem como um freio, tambm geram calor que, conforme vimos, um dos fatores que causa uma perda de rendimento para esse motor. Materiais como a grafite que, alm de serem bons condutores eltricos, tm um coeficiente de atrito muito baixo, ajudam bastante a se obter motores com baixas perdas por atrito dos contatos, mas elas no so totalmente eliminadas e devem ser consideradas em certas aplicaes mais crticas. e) Perdas por curto-circuito Quando as escovas mudam de contato passando de um enrolamento para outro no giro de um motor, por uma frao de segundo o contato ocorre em dois enrolamentos ao mesmo tempo, conforme ilustra a figura 17. Neste instante, temos um curtocircuito de curta durao que absorve energia convertendo-a em calor. Outro problema que esse curto causa atuar como um freio eletrodi-
nmico, uma vez que as espiras so momentaneamente colocadas em curto gerando, assim, uma carga para o motor.
Outras PerdasAlm das causas analisadas, existem outras que afetam o desempenho de motores de corrente contnua que utilizam escovas. Analisemos algumas delas: A) Ripple de Torque Devido s caractersticas indutivas do enrolamento do motor e tambm inverso incessante da corrente pela ao nas escovas dos motores de corrente contnua, no possvel manter constante a corrente e com isso o torque. Na prtica, o torque varia conforme uma curva com ondulao (ripple) que mostrada na figura 18. Essa caracterstica costuma trazer problemas de funcionamento, principalmente em altas velocidades, e pode ser minimizada com a utilizao de enrolamentos mltiplos no motor ou ainda aumentando-se o nmero de plos de comutao, mas isso, sem dvida, encarece o dispositivo. Outras tcnicas podem ser empregadas para se minimizar tal tipo de problema. B) Desmagnetizao Os ms permanentes usados nos motores de corrente contnua para criar o campo sobre o qual se baseia seu funcionamento, no so to permanentes assim, perdendo seu magnetismo com o tempo.25
d
dispositivos19Caracterstica de c.f.e.m.
20Motor convencional com escovas
21Usando uma chave inversora mecnica
Outro fator que tem influncia na desmagnetizao do m permanente a prpria corrente que circula pelos enrolamentos. O campo magntico criado pelos enrolamentos atua sobre o m permanente e, com o tempo, faz com que seu magnetismo se reduza at o ponto em que ele comea a afetar de modo sensvel o rendimento do motor. importante observar que uma intensidade de corrente acima de certo valor nos enrolamentos do motor, poder criar um campo suficientemente intenso para desmagnetizar de modo completo os ms permanentes. Assim, pulsos de correntes intensas devem ser evitados de qualquer forma, pois podem causar esse tipo de problema. C) Ressonncia Mecnica Todos os corpos tendem a vibrar com maior intensidade em certas freqncias e isso vlido para as partes mecnicas de um motor. Desse modo, se deixarmos um motor de corrente contnua girar livremente sem carga, ele tender a se acomodar numa rotao em que suas partes mecnicas oscilem na sua freqncia de ressonncia. Nessa freqncia podem surgir esforos mecnicos que, tanto podem afetar a integridade do motor quanto o seu rendimento. Na prtica, o que se faz utilizar partes que tenham freqncias bem diferentes de ressonncia e at girem em sentidos contrrios para que este efeito seja anulado.
D) Contra - FEM Induzida A comutao rpida das escovas de uma carga indutiva faz com que surja uma tenso induzida, que conhecida como fora contra-eletromotriz. Na figura 19 temos a caracterstica dessa fora com a velocidade de rotao de um motor comum. Observe que essa fora contraeletromotriz aumenta com a velocidade de rotao. Normalmente, para os motores comuns, ela expressa para uma rotao de 1000 rpm. Ela faz com que o motor funcione como um gerador que devolve parte da energia para o circuito que o alimenta, atuando assim como uma espcie de freio.
Motores sem escovasConforme vimos, a maior limitao para a operao dos motores de corrente contnua est na necessidade de se adotar um sistema comutador mecnico que inverta e desinverta a corrente durante o movimento de modo a manter as foras atuando sempre no mesmo sentido, e assim ser obtida uma rotao contnua. Essas escovas se desgastam, geram rudos e alm disso esto sujeitas a problemas de contatos que se agravam medida que as rotaes aumentam. A terminologia usada especifica os motores sem escovas como um tipo especial de servomotor. Essa observao deve ser feita, pois os motores de passo tambm so motores sem escovas do mesmo modo que um motor de induo de corrente alternada.
Na categoria dos motores sem escovas temos dois tipos bsicos: o trapezoidal e os motores para ondas senoidais. O motor trapezoidal, na verdade, um servo DC enquanto que o senoidal se assemelha a um motor AC sncrono. Para entender melhor como eles funcionam, vamos partir da evoluo dos motores sem escovas. Um motor convencional com escovas, conforme ilustra a figura 20, consiste num rotor com uma bobina que gira num campo magntico produzido pelo estator. Se as conexes da bobina so feitas atravs de anis deslizantes, ele se comporta como um motor de passo (invertendo a corrente, o rotor gira de 180 graus). Incluindo o comutador e escovas, a reverso da corrente ser feita automaticamente e o rotor continuar girando na mesma direo. Para transform-lo em um motor sem escovas, devemos partir da eliminao dos enrolamentos do rotor. Isso pode ser conseguido virando ao avesso o motor. Em outras palavras, colocamos o m permanente como parte rotativa do motor e as bobinas nos plos do estator. claro que precisamos ainda pensar em algum meio de inverter a corrente automaticamente - uma chave acionada por um ressalto poderia ser usada para esta finalidade, conforme mostra a figura 21. Note que um arranjo que ainda inclua um dispositivo mecnico de comutao no a melhor soluo para o problema. Mecatrnica Fcil n42
26
dispositivos22Usando um enconder
d
23Caracterstica de torque
24Construo de um motor sem escovas
25Caracterstica senoidal de torque
Podemos, em lugar da chave mecnica, colocar um amplificador para excitar as bobinas, que seja acionado por algum dispositivo que possa verificar a posio do rotor em cada instante, por exemplo, um sensor ptico ou um sensor de efeito Hall; veja a figura 22. Esse circuito de leitura da posio e acionamento das bobinas denominado encoder de comutao na linguagem tcnica. Fica claro que um motor desse tipo no pode ser conectado diretamente a uma fonte de corrente contnua para funcionar. O motor deve ser ligado a um circuito que inverta constantemente a corrente, o que, em ltima anlise, significa que ele acionado por uma corrente alternada. Voltando aos motores comuns com escovas, vemos que um rotor que tenha apenas uma bobina, apresenta uma caracterstica de grande variao de torque com a rotao. De fato, a caracterstica ser senoidal com o mximo torque, uma vez que o rotor corta o campo magntico de uma forma que resulta nesse comportamento; observe a figura 23. Um motor DC, na prtica, possui diversas bobinas no rotor e cada uma ligada no somente ao seu prprio par de comutadores, mas tambm a outras bobinas. Dessa forma, temos um torque mais constante pelo efeito da mdia da corrente circulando atravs delas. Como obter o mesmo comportamento para um motor sem escovas? Isso exigir um grande nmero de bobinas no estator, o que em princpio no difcil de conseguir, mas tem o agravante de que precisaremos de um circuito excitador para cada uma delas. Na realidade, um motor sem escovas possui dois ou trs conjuntos de bobinas ou fases de acordo com a figura 24. O motor mostrado na figura do tipo de dois plos e trs fases. O rotor possui normalmente quatro ou seis plos no rotor com um aumento correspondente no nmero de plos do estator. Note que isso no aumenta o nmero de fases, pois elas podem
ser distribudas entre diversos estatores. A caracterstica de torque deste tipo de motor vista na figura 25. Atravs dessa figura podemos ver que o torque mximo conseguido quando os campos do estator e do rotor esto com uma defasagem de 90 graus. Limitando o nmero de fases a trs, isso significa que se pode avanar o campo do estator apenas em incrementos de 60 graus da rotao do eixo, o que quer dizer que no d para manter essa diferena de fase de 90 graus. Na verdade, o que se faz manter essa diferena oscilando entre 60 e 120 graus de modo que, na mdia, teremos 90 graus com o que se consegue uma boa aproximao da condio de maior torque.
O Motor TrapezoidalCom uma intensidade de corrente fixa nos enrolamentos, pode-se conseguir um bom aumento do torque. Logra-se com isso um achatamento de sua caracterstica de torque mostrada na figura 26 que, pela sua forma, d nome a esse tipo de motor. Na realidade, isso no muito simples, j que um certo grau de no linearidade sempre permanece. O efeito principal um pequeno soquinho no ponto de comutao do circuito, o que pode ser importante nas aplicaes de baixssima rotao. O ripple ou ondulao de torque resultante dessa caracterstica tende a produzir uma espcie de modulao de velocidade na carga. No entanto, em um sistema que use um feedback de velocidade de grande ganho o problema eliminado. Isso quer dizer que um pequeno aumento da velocidade gera num grande sinal de erro, reduzindo a demanda de torque para corrigir a velocidade. Na prtica, a corrente do amplificador tende a ser um espelho da caracterstica de torque, resultando numa modulao de velocidade muito pequena, observe a figura 27.
O motor senoidalNo motor senoidal, que tambm chamado de servo AC sem escovas, nenhum cuidado tomado para se27
Mecatrnica Fcil n 42
d
dispositivoscorrigir as caractersticas senoidais bsicas de torque. Ele pode ser alimentado como um motor AC sincronizado, simplesmente aplicando-se aos enrolamentos tenses senoidais com o deslocamento de fase apropriado, 120 graus no caso de motores de trs fases. Se for necessria uma preciso em baixas velocidades, uma preciso maior nas tenses deve ser conseguida. Isso significa que o drive deve gerar trs correntes que estejam em fase de acordo com a posio do eixo. Para obter a necessria preciso nessa codificao, normalmente so utilizados codificadores pticos. T1 + T2 = Io K (sen2 x + cos2 x) Mas, como: sen2 x + cos2 x = 1 conclumos que: T1 + T2 = Io x K Assim, para correntes senoidais aplicadas ao motor, o torque resultante ser independente da posio do eixo. Veja, entretanto, que, para que isso ocorra, deve haver preciso na aplicao dessas correntes no mo26Achatamento da caracterstica de torque
tor, o que exige o emprego de um encoder apropriado para enviar a informao necessria ao circuito de processamento que a gera.
Servos hbridosCom relao ao princpio de funcionamento, o motor de passo e o servomotor sem escovas so semelhantes. Cada um possui um sistemas de ms rotativos e um estator com bobinas enroladas. A nica diferena consiste no fato de que eles possuem nmeros de plos diferentes. So apenas 3 pares no servo hbrido e at 50 no motor de passo.27Mantendo o torque constante
Torque ConstantePara entender melhor como obter torque constante deste tipo de motor, conveniente analisar um caso em que tenhamos apenas duas fases. Este motor tem dois conjuntos de bobinas que so alimentadas com um sinal trapezoidal, defasadas de 90 graus, uma em relao outra. Se representarmos a posio do eixo por um ngulo x, as correntes nos enrolamentos estaro na forma: I = Io sen x I = Io cos x Voltando ao modelo bsico de motor, podemos observar que a caracterstica de torque fundamental tambm senoidal, o que quer dizer que o torque instantneo ser dado por: T1 = Io K sen x Onde K a constante de torque do motor. Tornando a corrente no motor senoidal e em fase com as caractersticas de torque do motor, o torque conseguido de uma das fases ser:T1 = (Io sen x) K sen x = Io K sen2 x
28Um servo hbrido
E, da mesma forma, o torque obtido ser dado por: T 2 = Io K cos2 x O torque total alcanado (nas duas fases) ser, ento:
28
Mecatrnica Fcil n42
dispositivosAssim, para efeito de anlise, podemos considerar um servo hbrido como um motor de passo simplificado. Baseados nos mesmos princpios, podemos utilizar um motor de passo como servo simplesmente agregando algum recurso de feedback como, por exemplo, um encoder ptico. O nome hbrido vem justamente do fato de que sua construo se baseia nos princpios de funcionamento dos servos comuns e nos dos motores de passo. Eles at so chamados, em alguns casos, de servos de passo. Na figura 28 temos uma vista em corte de um motor desse tipo. Nesse motor, um drive de 2 fases fornece as correntes defasadas (seno e cosseno) que os enrolamentos necessitam para a excitao, sempre comandados pelo dispositivo de realimentao. Esse dispositivo tanto pode ser um encoder ptico quanto um sensor de contatos. Como o motor tem 50 pares de plos, devem ser gerados 50 ciclos de sinal para cada volta do eixo. Um servo hbrido tem aproximadamente o mesmo torque do motor equivalente de passo quando alimentado pela mesma tenso e corrente, mas deve-se considerar que a operao tem que ser sempre em lao fechado. Um servo hbrido mais caro que um motor de passo em um determi29Motor de acoplamento direto
d
nado sistema, porm mais barato do que um servo sem escovas. Da mesma forma que nos motores de passo, a operao contnua em altas velocidades no recomendada para esse motor, pois podem ocorrer muitas perdas no ncleo. Outra de suas vantagens que ele costuma operar de modo mais silencioso e aquecer menos do que os motores de passo comuns.
Motores de acionamento diretoEsse tipo de motor acoplado diretamente nas cargas que deve movimentar sem o uso de caixas de reduo, engrenagens ou correias. Em algumas aplicaes, motores sem escovas e mesmo motores de passo podem apresentar torque e resoluo adequadas para essa aplicao especfica. Em outros, entretanto, as caixas de reduo e correias so utilizadas para se modificar o torque e a velocidade de acordo com as especificaes exigidas pelo projeto. Na figura 29 mostrado um tipo de motor de acionamento direto, em corte. Um motor como esse no possui escovas e nem engrenagens de modo a se obter maior torque e maior resoluo sacrificando, entretanto, a velocidade e a preciso.
Uma vantagem fundamental do acionamento direto a eliminao do atrito e frico das engrenagens, que so responsveis por perdas importantes de potncia. Esse motor contm componentes de preciso e um sistema de feedback em um invlucro muito compacto. Seu torque depende primeiramente do dimetro e, em segundo lugar, do nmero de dentes que criam o campo magntico de modo a se obter o maior nmero de passos de acionamento. Esses motores tm como principais vantagens a alta preciso, maior velocidade de reposta, maior torque em altas velocidades e rotao suave.
ConclusoMotores de todos os tipos so encontrados numa variedade enorme de aplicaes na indstria, na eletrnica de consumo e embarcada. O profissional desse setor deve conhecer cada tipo e, se for um projetista, deve saber que tipo empregar em uma aplicao especfica. O que vimos neste artigo foi apenas uma breve introduo ao princpio de funcionamento dos principais tipos de motores encontrados nos diversos equipamentos modernos. O leitor interessado pode ir alm, aprofundando-se em cada tipo de modo a saber como realizar projetos especficos e tirar o mximo proveito das vantagens que cada um oferece. f
Mecatrnica Fcil n 42
29
d
dispositivos
Por dentro do HDConhea mais sobre a tecnologia desse importante perifrico e os avanos que lhe proporcionam melhor performance.Da Redao
O HD um sistema de armazenamento de massa, isto , guarda grande volume de dados. Ele um conjunto de discos transparentes, sendo que cada um possui duas cabeas de leitura e gravao (uma por face). O motor gira em uma velocidade de 3600 rpm a 15.000 rpm (no caso dos SCSI) . lacrado para evitar a entrada de partculas, o que seria um desastre nessa velocidade. Nessa rotao cria-se uma camada de ar de aproximadamente 0,000056 mm que evita que as cabeas entrem em contato com a superfcie de gravao. Por esse motivo logo que seja detectada alimentao eltrica, o disco entra em funcionamento e assim permanece. Caso ele pare e funcione apenas quando ocorrer acesso, a inrcia far com que esse processo seja lento. Os primeiros HDs tinham motores que possuam filtros mecnicos para tirar os discos da inrcia. O pionei-
ro foi o RAMAC (Random Access Method of Accounting and Control) construdo pela IBM em 1957, era formado por cerca de 50 discos de 24 polegadas de dimetro, com uma capacidade total de 5 megabytes. Esses discos eram to pesados que o motor girava em falso at conseguir energia potencial suficiente para mov-los. Nem necessrio comentar que um aparelho desses custava uma fortuna. Nos anos 80 um HD de 10 megabytes custava cerca de US$ 2000! Por ser um equipamento que possui grande dose de elementos de alta tecnologia, resolvemos abordlo e desmistificar sua composio e funcionamento. Outro motivo foi seu destaque pelo seu desenvolvimento nos ultimos anos. Para este artigo escolhemos um modelo da NEC DSE2100A com 2.1 GB. Primeiramente daremos uma boa observada em sua parte interior! Mecatrnica Fcil n42
30
dispositivosAtuadorArmao de metal conhecida como brao, posicionada entre um conjunto parecido com um sanduche feito de ferrite de brio (BaFe), que tem uma ao eletromagntica forte. Serve para posicionar o brao de metal, no qual esto fixadas as cabeas, atravs da superfcie do disco. Para fazer isso, utiliza-se os ms do atuador que respondem s variaes de tenso enviadas pela placa lgica. Esse sistema mais preciso que os anteriores, que eram acionados por motores de passo e engrenagens. Esses sistemas antigos j foram descartados visto que as respostas dos ms so incomparavelmente mais rpidas.
d
Cabeas de Leitura/Gravao um eletrom composto por uma bobina de fios enrolada em um ncleo de ferro. Este eletrom pequeno e capaz de gravar trilhas de um centsimo de milmetro. Como serve para ler e gravar informaes opera de duas maneiras: durante a gravao, onde o campo magntico da cabea organiza as molculas de xido de ferro da superfcie do disco que ir ser gravada de modo que os plos positivos fiquem alinhados com o plo negativo da cabea e vice-versa. Para gravar as seqncias de bits, a polaridade da cabea mudada milhes de vezes por segundo, sempre em ciclos pr-determinados. E tambm durante a leitura, de modo que cada bit formado por vrias molculas. Para que seja lido, seu campo magntico captado pela cabea de leitura e a variao entre os sinais obtidos gera uma corrente eltrica que interpretada pela placa lgica como uma seqncia de bits 0 e 1.
DiscosMdia onde as informaes sero lidas e gravadas, a qual composta de duas camadas: a primeira o substrato e tratase de um disco metlico geralmente feito de ligas de alumnio. Para armazenar os dados, estes discos so recobertos pela a segunda camada, desta vez de material magntico, como o xido de ferro. Como os materiais magnticos moles (como o Silicato de Ferro ou Granada -Yttrium-iron-garnet), possuem uma alta permeabilidade e so facilmente magnetizados, eles figuram como sendo a primeira escolha para aplicaes de mdia. Visto que as informaes precisam ser permanentemente armazenadas e no momento em que a mdia move-se entre as cabeas os documentos podem ser apagados, no lugar destes materiais preferiu-se o uso do xido de ferro por possuir alta permeabilidade e coercibilidade. Ou seja, o xido de ferro evita que a magnetizao seja apagada ou alterada, quando exposta a campos magnticos externos. A densidade da rea de um disco rgido aumentou de uma taxa de 60 % para a incrvel taxa de 100% ao ano, recentemente. Se esta tendncia continuar, alcanaremos uma densidade prxima a 100 Gb/in2 em pouco tempo.
Eixo e MotorOs discos so montados no eixo de um motor que, por sua vez, acionado magneticamente por um conjunto de bobinas e controlado por um sistema especial chamado voice coil. Como no vivemos em um mundo fsico ideal, onde fios no tm peso e perdas eltricas no so levadas em conta, o grande inimigo dessa equao o atrito. O HD em que estou salvando este texto provavelmente possui um motor com rolamento de esferas, o Ball Bearing Spindle Motor, onde est montado todo o conjunto dos discos. Ele bem eficiente, mas com os HDs sendo cada vez mais usados medida que cresce a demanda por computadores, o mercado criou expectativas onde espera-se maior capacidade e diminuio na gerao de rudo. Neste sentido, criou-se um motor com rolamento fludo, o Fluid Dynamic Bearing Spindle Motor. O motor minimizou o NRRO (Non Repeatable Runout), fazendo com que houvesse uma diminuio na gerao de rudos e um aumento no rendimento. Se o Runout for excessivo os discos podem trepidar.
Placa LgicaCentro nervoso do HD que comanda todos os outros dispositivos. A placa recebe as informaes da controladora IDE ou SCSI, presente na placa-me, e interpreta para a tomada de deciso. Os elementos mais comuns que esto sob sua superviso so: rotao do motor, deslocamento do atuador e cabeas de leitura/gravao e uso do cache de memria do HD.
Mecatrnica Fcil n42
31
d
dispositivosT1
Comparativo entre dois HDs distanciados tecnologicamente em 5 anos Caracterstica NEC DSE 2100A 1.997 2,1 GB 4.092 3 3,5 5 5200 RPM 5 5045 5.350 trilhas por polegada 111.000 bits por polegada 1 por 1010 bits lidos Choque Mecnico em Operao Choque Mecnico fora de Operao 5 Gs, 11ms, sem erros 75 Gs sem danos 0,6 kg 25,4 mm 101,6 mm 146 mm Em Operao Fora de Operao 5 C a 55 C -40 C a 60 C PIO modo 4/DMA modo2 16,6 MB/s 12,6 MB/s 3 ms 8,5 ms 22 ms 5,7 ms 128 KB 2.001 40 GB 16.383 1 3,5 2 7.200 RPM 2 58.980 60.000 trilhas por polegada 568.425 bits por polegada 1 por 1014 bits lidos 30 Gs, 2ms, sem erros 300 Gs sem danos 0,58 kg 26,1 mm 102,1 mm 147 mm 5 C a 55 C -40 C a 65 C Ultra ATA/133 133 MB/s 54 MB/s 0,8 ms 11 ms 17,8 ms 4,2 ms 2 MB Obs.: Gs (Mxima acelerao) E10 = 1 x 1011 Full Stroke (tempo que a cabea leva para ir da trilha mais externa mais interna) Maxtor D740X
Ano de Fabricao Capacidade Cilindros Discos Tamanho dos Discos Cabeas Rotao Superficie de dados Trilhas por Superfcie Densidade de Trilhas Densidade de Bits Taxa de Erro Choque Peso Altura Largura Comprimento Temperatura
Controladora Integrada Taxa Mxima de Externa(interface) Transferncia Interna(mdia) Trilha por Trilha Tempos de Busca Mdio Mximo (Full Stroke) Mdio de Latncia Cache de Memria
Comparativo entre HDsO HD da NEC de 1997 e estava em funcionamento at poucos dias antes da realizao deste artigo, quando deu seu ltimo suspiro e doou seu corpo para a cincia. Por tratar-se de um modelo defasado, resolveu-se fazer um comparativo com um outro HD de fabricao recente: um Maxtor Diamond Plus D740X com 40 GB, um modelo topo de linha da Maxtor. Vamos compar-los na tabela 1 e ver a evoluo que houve em cinco anos de pesquisas e inovaes dedicadas a este perifrico.32
Geometria do HDA geometria de um HD (figura 1) basicamente composta de trs elementos: trilhas, cilindros e setores. Quando nos referimos a trilha, estamos falando da trilha de um determinado disco isoladamente. J o cilindro refere-se ao conjunto de trilhas que ocupam a mesma posio espacial no total de discos presentes no HD. Enquanto isso, os setores so clulas que compem tanto a trilha quanto o cilindro, e esto distribudos pelas faces do disco. Para um melhor desempenho de busca,
os setores ocupados pela gravao de um arquivo, devero estar distribudos de forma seqencial. A capacidade de um HD calculada levando-se em conta esses componentes, sendo expressa atravs da frmula:Capacidade = cilindros x nmero de setores por trilha x nmero de cabeas
Para termos o valor expresso em bytes, multiplicamos o valor por 512, visto que cada setor comporta 512 bytes de informao. Mecatrnica Fcil n42
dispositivosO formato fsico de um setor segue o seguinte padro: GAP: espao vazio entre os setores Header: Cabealho que contm informaes sobre a localizao fsica do setor CRC - Cyclical Redundance Check: valor de verificao para o cabealho do setor Dados: Campo de armazenamento de dados ECC - Error Correction Code: informaes referentes ao mtodo de correo de erros1Organizao lgica de um HD em trilhas, cilindros e setores
d
As interfaces de comunicaoOs HDs podem ser encontrados sob duas interfaces de comunicao: IDE e SCSI. Veja a figura 2. IDE, acrnimo para Integrated Drive Electronics, recebeu esse nome por sua controladora estar integrada ao prprio disco rgido. Esta controladora faz a comunicao do HD com a interface IDE integrada nas placasme. A conexo do HD IDE ao micro segue o padro ATA (AT Attachement) e tem como ponte de ligao um flat cable (cabo de dados) de 40 vias. A partir do padro ATA 66 (66 MB/s), o flat cable passou a ter 80 vias, j que sob tal velocidade, faz-se necessrio prover o cabo de vias de aterramento eltrico para evitar que rudos venham a corromper a informao. Para se comunicarem com o computador, os HDs IDE faziam uso de um circuito chamado PIO (Programmed I/O), que exigia a superviso do processador para transferir dados do HD para a memria RAM do PC. Com a advento do sistema DMA, (Acesso Direto Memria), os dados so movidos diretamente do disco para a memria RAM, liberando o processador para a execuo de outras atividades. Na tabela 2 vemos a evoluo das taxas de transferncia entre HD e placa-me, atravs da interface IDE. SCSI, acrnimo para Small Computer System Interface, uma interface mais difundida em servidores do que em computadores padro desktop (PC). Ela mais rpida, confivel e cara que a IDE. Mecatrnica Fcil n42
2
HD IDE ( esquerda) e SCSI ( direita)
T2
Modos de operao e taxas de transferncia para a interface IDE Modo de Operao Taxa Mxima de Transferncia (MB/s) 16,6 20,0 11,1 16,6 13,3 16,6 33,3 33,3 66,6 100 133
PIO modo 4 PIO modo 5 Fast ATA Fast ATA2 DMA Mode 1 DMA Mode 2 Ultra - ATA Ultra DMA 33 (ATA - 33) Ultra DMA 66 (ATA - 66) Ultra DMA 100 (ATA - 100) Ultra DMA 133 (ATA - 133)
33
d
dispositivos
3
Cabea de leitura do sinal de servo
Esta interface no segue o padro de configurao master-slave da interface anterior, mas sim um sistema de identificador (ID), onde cada perifrico SCSI tem seu nmero de controle (target ou ID). A conexo entre eles feita atravs de um cabo, conectado a uma controladora SCSI, resultando em um barramento no qual no pode haver dois perifricos com o mesmo ID. Um canal SCSI suporta at 15 perifricos e o flat cable utilizado normalmente possui 68 vias. Todavia, assim como para a IDE, a interface SCSI j teve vrias revises, cujos padres esto demonstrados na tabela 3.34
T3
Especificao aos vrios padres SCSI j definidos. Padro Taxa de Transferncia 2-4 MB/s 5 MB/s 10 MB/s 10 MB/s 20 MB/s 20 MB/s 40 MB/s 40 MB/s 80 MB/s 160 MB/s 320 MB/s 8 8 16 8 16 8 16 8 16 16 16 Largura de Barramento Conector 25 pinos pinos pinos pinos pinos pinos pinos pinos pinos pinos pinos Mecatrnica Fcil n42
SCSI-1 SCSI-2 Wide SCSI-2 Fast SCSI-2 Fast Wide SCSI-2 Ultra SCSI-3 Wide Ultra SCSI-3 Ultra2 SCSI-3 Wide Ultra2 SCSI-3 Ultra 160 Ultra 320
dispositivosA FormataoPara tornar-se funcional, o HD precisa ser formatado no sistema operacional escolhido para que as informaes possam ser gravadas e lidas de modo organizado. O processo de formatao tem trs etapas distintas: formatao fsica, particionamento e lgica. A formatao fsica a diviso da superfcie magntica dos discos em trilhas e setores, a qual j realizada na fbrica. Alm disso, no deve-se reformat-los fisicamente, pois causaria sua destruio. Atualmente, a formatao fsica, concernente ao usurio, consiste em procurar setores com defeito, atualizar o mapa de tais setores e substitu-los por setores reservas, os sectors sparings. Os prprios fabricantes de HDs fornecem programas de formatao de baixo nvel (fsica) para impedir que os setores defeituosos sejam mapeados pela FAT (tabela de alocao de arquivos), que utilizada pelo sistema operacional para localizar arquivos no HD. O desuso da formatao fsica deu-se pela substituio dos motores de passo pelos motores voice coil. No motor de passo, cada passo distanciava uma trilha da outra. No voice coil, foi introduzido um sinal chamado de servo que tem a mesma funo, e tambm uma cabea especial para a sua leitura. Se formatarmos o HD fisicamente, este sinal apagado, acarretando na inutilizao do HD. No HD NEC DSE2100A existem 3 discos, sendo que 5 faces so utilizadas para o armazenamento de dados e 1 para o sinal de servo, de acordo com a figura. A partilha do disco, como o prprio nome sugere, implica em sua segmentao. Podemos segmentlo em uma ou mais vezes, as quais sero utilizadas para conter diferentes sistemas operacionais. Cada partio ter o seu sistema de arquivos (file system), que corresponde a estrutura lgica mediante a qual os arquivos so organizados na superfcie dos discos do HD. Pode-se utilizar o Fdisk no WINDOWS, o Disk Druid no LINUX ou programas como o Partition Magic da PowerQuest. Mecatrnica Fcil n42 Os sistemas de arquivo mais comuns so: FAT16, FAT32, NTFS, EXT2 e EXT3 (LINUX), UFS (Unix File System). A formatao lgica feita pelo sistema operacional e consiste na preparao do HD para o seu uso, a qual criar o MBR (Master Boot Record) e o diretrio raiz.
d
ConclusoA finalidade deste artigo foi trazer algumas curiosidades e um pouco da teoria relacionada ao funcionamento deste perifrico, bem como auxili-lo em uma aquisio futura. Procure considerar trs parmetros essenciais para a boa performance de um HD. O primeiro a