Embed Size (px)
Citation preview
UNIVERSIDADE FEDERAL DO CEARÁDEPARTAMENTO DE ENGENHARIA DE TRANSPORTESUNIDADE CURRICULAR DE TOPOGRAFIA
TRABALHO DE TOPOGRAFIA
LEVANTAMENTO TAQUEOMÉTRICO
1. Poligonal Fechada:
A poligonal fechada é caracterizada por ter o último vértice coincidindo com o vértice inicial, formando, desta forma, um POLÍGONO.
2. Cálculo da Poligonal:
O cálculo da poligonal fechada é idêntico ao cálculo de uma poligonal aberta.
Na poligonal fechada há controle de fechamento angular e linear a partir de uma precisão pré estabelecidas pelas “Normas Técnicas para Levantamentos Topográficos” – NBR 13.133 da Associação Brasileira de Normas Técnicas.
Normalmente para precisão linear, são aceitos os valores:
1:1.000______para Poligonais Taqueométricas.
1:2.000______para Poligonais medidas com Trigonometria.
1:5.000______para Poligonais medidas com Trena.
1:10.000_____para Poligonais Eletrônicas.
Dependendo da precisão da Estação Total pode-se chegar a precisões, no fechamento da poligonal, da ordem de 1:30.000 ou melhor.
A precisão angular depende, fundamentalmente, do Teodolito ou Estação Total utilizada no levantamento topográfico.
A NBR 13.133 fornece as precisões para os diversos tipos de poligonais.
3. Roteiro para o cálculo de uma poligonal fechada:
Vamos a seguir mostrar os procedimentos feitos passo à passo para o cálculo de uma poligonal fechada, tomando um exemplo qualquer para maior clareza do processo.
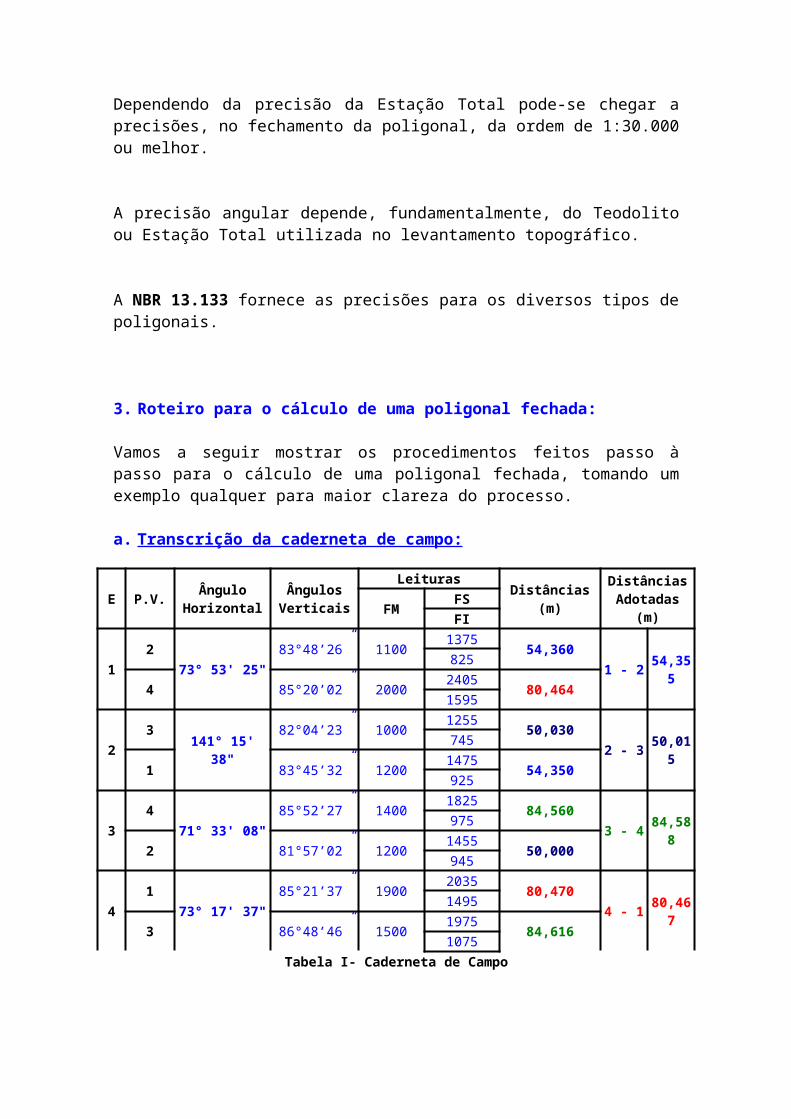
a. Transcrição da caderneta de campo:
E P.V.Ângulo
HorizontalÂngulosVerticais
LeiturasDistâncias
(m)
Distâncias Adotadas
(m)FMFSFI
12
73° 53' 25"83°48’26” 1100
137554,360
1 - 2 54,355825
4 85°20’02” 20002405
80,4641595
23
141° 15' 38"82°04’23” 1000
125550,030
2 - 3 50,015745
1 83°45’32” 12001475
54,350925
34
71° 33' 08"85°52’27” 1400
182584,560
3 - 4 84,588975
2 81°57’02” 12001455
50,000945
41
73° 17' 37"85°21’37” 1900
203580,470
4 - 1 80,4671495
3 86°48’46” 15001975
84,6161075
Tabela I- Caderneta de Campo
Azimute Inicial Az4-1 = 38° 15’ 02”
Obtido em campo com o auxílio da Bússola.
Coordenadas Iniciais:
X1 = 108,310Y1 = 106,215
Caso não sejam fornecidas as coordenadas iniciais, determina-se “O ponto Mais a Oeste” e para este ponto atribuem-se as coodenadas:
X1 = 0,000Y1 = 0,000
O ponto de saída deverá ser sempre o de coordenadas conhecidas.
O azimute de saída deverá ser sempre da linha de ré do primeiro ponto ou
seja, o azimute deverá ser do último ponto para o primeiro ponto. (?)

Tabela II- Transcrição da caderneta de campo para planilha
E PVÂngulos
Azimute Distância (m)
Lido Erro Compensado° ‘ “ “ ° ‘ “ ° ‘ “
1 2 73 53 25 54,3552 3 141 15 38 50,0153 4 71 33 08 84,5884 1 73 17 37 80,467
b. Cálculo das distâncias:
D = ( k . L . sen2z )
Onde: K Constante do aparelho. L Leitura FS – Leitura FI. z Ângulo zenital.
Observações:
Calculamos sempre duas distâncias para o mesmo alinhamento, resultantes da visadas de vante e ré. (ver Tabela I)
A distância adotada será a média aritmética destas. (ver Tabela I)
c. Soma dos ângulos internos ou externos:
A poligonal está geometricamente fechada angularmente se :
Ai = (n-2).180° ou Ae = (n+2).180°
Onde:
Ai Soma dos ângulos internos.Ae Soma dos ângulos externos.n Número de Vértices.
No nosso Exemplo,n = 4;Então,Ai = 360°
d. Cálculo do erro angular cometido:
É dado pela diferença entre as somas dos ângulos lidos em campo e a soma calculada pela fórmula.
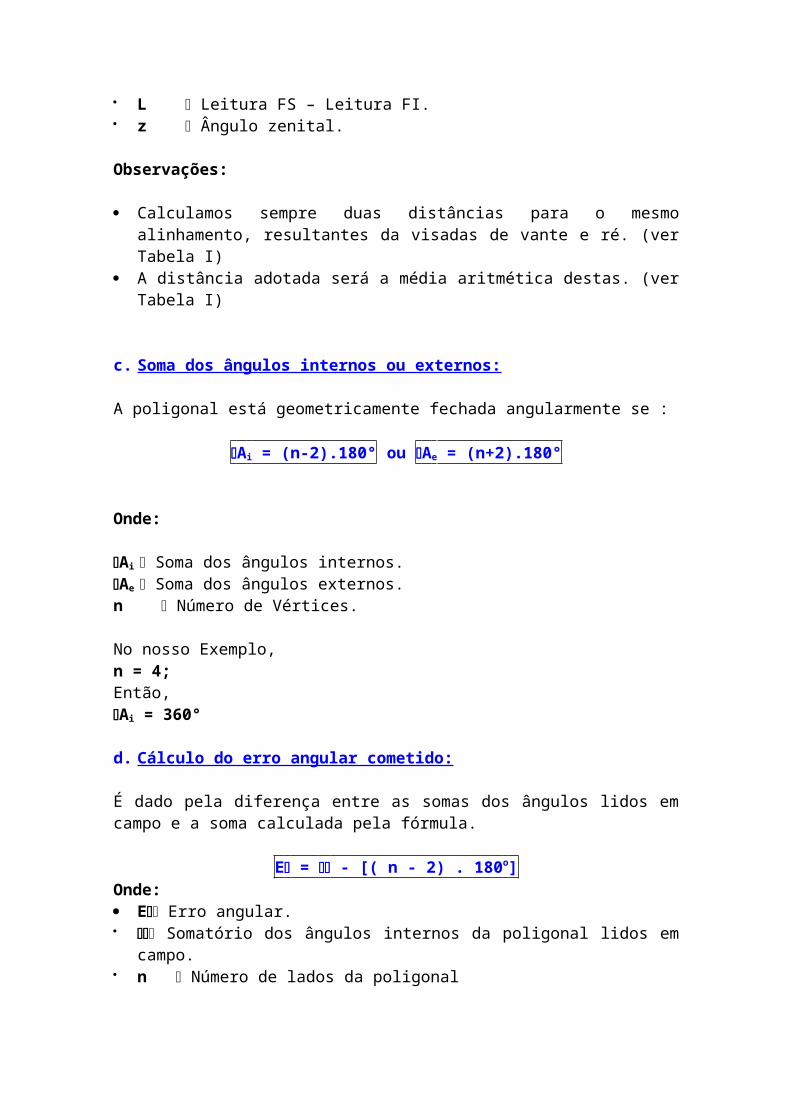
E = - [( n - 2) . 180o]Onde: E Erro angular. Somatório dos ângulos internos da poligonal lidos em campo. n Número de lados da poligonal
e. Tolerância para o erro angular:
T = 1,5’. n
Observação:
Caso o erro cometido seja menor que a tolerância, a poligonal é válida, caso contrário os ângulos em campo deverão ser novamente medidos com mais atenção e cuidado com a operação do aparelho e com os procedimentos.
f. Correção dos ângulos:
C = - E / n
Onde: C Correção angular. E Erro angular. n Número de vértices da poligonal.
Observações:
O sinal negativo indicará se deveremos somar ou subtrair o erro angular.
A distribuição do erro pode ser feita em quantidades iguais por vértice,no entanto, caso haja frações de segundo para distribuir entre os ângulos, podemos adotar uma maneira de distribuir apenas valores inteiros de minutos e segundos entre os ângulos para facilitar os cálculos.
g. Cálculo do ângulo compensado:
O ângulo compensado é obtido adicionando ou subtraindo a correção ao ângulo lido.
Ângulo compensado = Ângulo lido C
Ao final destes procedimentos deveremos ter completa esta tabela.

Tabela III- Soma dos ângulos
E PVÂngulos Internos
Azimute Distância (m)
Lido Erro Compensado° ‘ “ “ ° ‘ “ ° ‘ “
1 2 73 53 25 3 73 53 28 54,3552 3 141 15 38 3 141 15 41 50,0153 4 71 33 08 3 71 33 11 84,5884 1 73 17 37 3 73 17 40 80,467Soma 359 59 48 12 360 00 00 269,425
180°.(n-2) 360 00 00 Distribuição do erro angular 3” por Vértice
Erro = 12”
h. Cálculos dos Azimutes de Vante e Ré:
O Azimute de uma linha é dado por:
Azn = Azn-1 an 180o
Onde: Azn Azimute da linha. Azn-1 Azimute da linha anterior. + an Ângulo horizontal Interno (ângulo no sentido anti-horário a partir da
linha de ré ). - an Ângulo horizontal Externo (ângulo no sentido horário a partir da linha
de ré ).
Tabela IV- Ângulos compensados e azimutes
E PVÂngulos
Azimute Distância (m)
Lido Erro Compensado° ‘ “ “ ° ‘ “ ° ‘ “
1 2 73 53 25 +3 73 53 28 292 08 30 54,3552 3 141 15 38 +3 141 15 41 253 24 11 50,0153 4 71 33 08 +3 71 33 11 144 57 22 84,5884 1 73 17 37 +3 73 17 40 38 15 02 80,467
Observações:
Se Azn-1 an > 180o devemos subtrair 180o Se Azn-1 an < 180o devemos somar 180o
A diferença entre os Azimutes de vante e de ré de um mesmo alinhamento é sempre de 180o.
Temos então,
Az1-2 = 38° 15’ 02” + 73° 53’ 28” + 180°Az1-2 = 292° 08’ 30”

Az2-3 = 292° 08’ 30” + 141° 15’ 41” - 180°Az2-3 = 253°24’ 11”
Az3-4 = 253° 24’ 11” + 71° 33’ 11” - 180°Az3-4 = 144°57’ 22”
Az4-1 = 144° 57’ 22” + 73° 17’ 40” - 180°Az4-1 = 38°15’ 02”
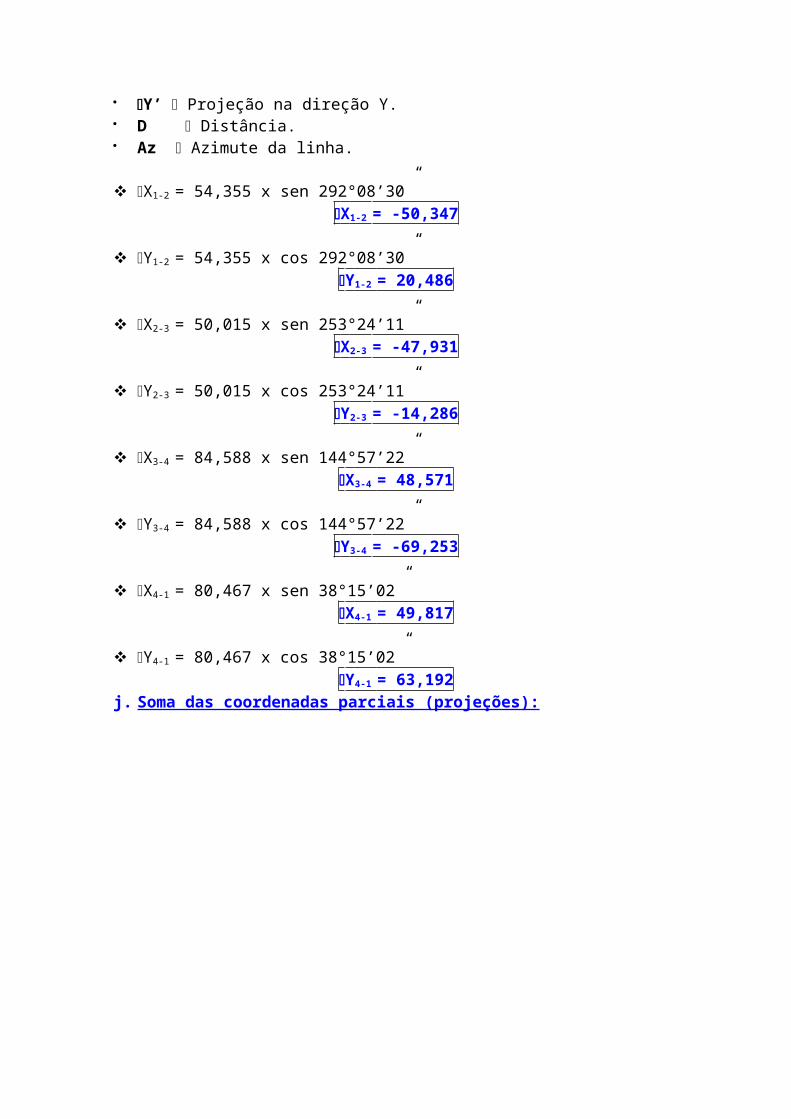
i. Cálculo das coordenadas parciais (projeções):
As projeções são calculadas pela fórmula:
X’ = D . sen Az
Y’ = D . cos Az
Onde: X’ Projeção na direção X. Y’ Projeção na direção Y. D Distância. Az Azimute da linha.
X1-2 = 54,355 x sen 292°08’30”X1-2 = -50,347
Y1-2 = 54,355 x cos 292°08’30”Y1-2 = 20,486
X2-3 = 50,015 x sen 253°24’11”X2-3 = -47,931
Y2-3 = 50,015 x cos 253°24’11”Y2-3 = -14,286
X3-4 = 84,588 x sen 144°57’22”X3-4 = 48,571
Y3-4 = 84,588 x cos 144°57’22”Y3-4 = -69,253
X4-1 = 80,467 x sen 38°15’02”X4-1 = 49,817
Y4-1 = 80,467 x cos 38°15’02”

Y4-1 = 63,192j. Soma das coordenadas parciais (projeções):
- Coordenadas no eixo X
Com sinal = X’
X1-2 = -50,347X2-3 = -47,931X3-4 = +48,571 X 4-1 = +49,817 X’ = + 0,110
Sem sinal = |X’|
X1-2 = 50,347X2-3 = 47,931X3-4 = 48,571 X 4-1 = 49,817 |X’| = 196,666
- Coordenadas no eixo Y
Com sinal = Y’
Y1-2 = +20,486Y2-3 = -14,286Y3-4 = -69,253 Y 4-1 = +63,192 Y’ = 0,139
Sem sinal = |Y’|
Y1-2 = 20,486Y2-3 = 14,286Y3-4 = 69,253 Y 4-1 = 63,192 |Y’| = 167,217
k. Erro linear:
Ef = [( X’)2 + (Y’)2]
Onde: Ef Erro linear absoluto. X’ Somatório das coordenadas na direção X, com o sinal. Y’ Somatório das coordenadas na direção Y, com o sinal. |X’| Somatório das coordenadas na direção X, sem o sinal. |Y’| Somatório das coordenadas na direção Y, sem o sinal.
Logo:
Ef = [( 0,110)2 + (0,139)2]Ef = 0,177
l. Tolerância do Erro Linear Absoluto:
M = P / Ef
Onde: Ef Erro linear absoluto. P Perímetro da Poligonal. M Módulo da Escala.Observação: A precisão indica o perímetro de levantamento para se obter o erro de
1 metro. A precisão é anotada na forma de escala.

1: M Temos, então:
M= 269,425/0,177M= 1.522
Ou seja,
Precisão = 1: 1.522
Observação: De acordo com a NBR 13.133, para poligonais taqueométricas que é o nosso caso, a precisão de 1:1000 é aceita, ou seja, podemos errar 1cm em cada 1000cm de perímetro levantado, no exemplo erramos 1cm em 1522cm de perímetro levantado, portanto estamos dentro do tolerável por Norma.
Erro Linear Precisão0,177 1: 1.522
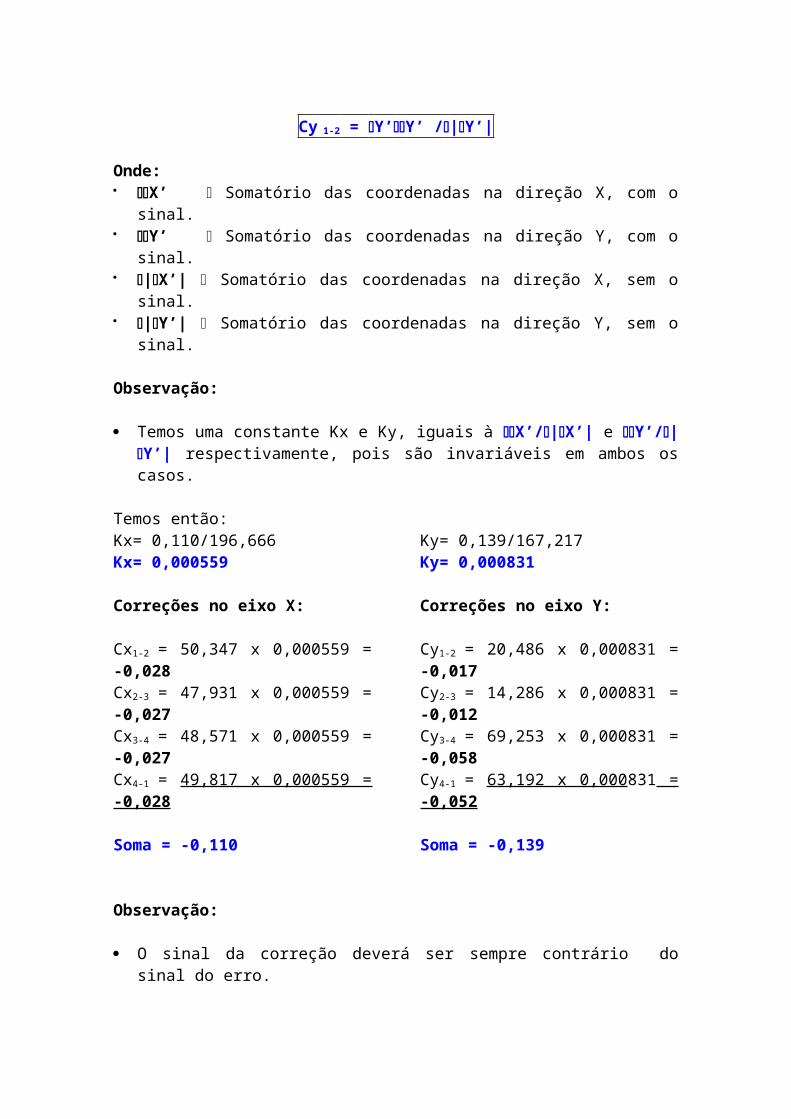
m. Cálculo da correções (erro linear).
A correção no eixo X:
Cx 1-2 = X’X’ /|X’|
A correção no eixo Y:
Cy 1-2 = Y’Y’ /|Y’|
Onde: X’ Somatório das coordenadas na direção X, com o sinal. Y’ Somatório das coordenadas na direção Y, com o sinal. |X’| Somatório das coordenadas na direção X, sem o sinal. |Y’| Somatório das coordenadas na direção Y, sem o sinal.
Observação:
Temos uma constante Kx e Ky, iguais à X’/|X’| e Y’/|Y’| respectivamente, pois são invariáveis em ambos os casos.
Temos então:Kx= 0,110/196,666Kx= 0,000559
Ky= 0,139/167,217Ky= 0,000831
Correções no eixo X:
Cx1-2 = 50,347 x 0,000559 = -0,028Cx2-3 = 47,931 x 0,000559 = -0,027
Cx3-4 = 48,571 x 0,000559 = -0,027Cx4-1 = 49,817 x 0,000559 = -0,028 Soma = -0,110

Correções no eixo Y:
Cy1-2 = 20,486 x 0,000831 = -0,017Cy2-3 = 14,286 x 0,000831 = -0,012
Cy3-4 = 69,253 x 0,000831 = -0,058Cy4-1 = 63,192 x 0,000831 = -0,052 Soma = -0,139
Observação:
O sinal da correção deverá ser sempre contrário do sinal do erro.
n. Compensação das coordenadas parciais:
São dadas pelas fórmulas:X = X’ + Cx
Y = Y’ + Cx
Tabela V- Coordenadas e correçõesCoordenadas no eixo X Coordenadas no eixo Y
Calculada Correção Compensada Calculada Correção CompensadaX’ Cx X Y’ Cy Y
-50,347 -0,028 -50,375 +20,486 -0,017 +20,469-47,931 -0,027 -47,958 -14,286 -0,012 -14,298+48,571 -0,027 +48,544 -69,253 -0,058 -69,311-49,817 -0,028 -49,789 +63,192 -0,052 +63,140
Observação:
O somatório das coordenadas compensadas deverá ser obrigatoriamente igual a ZERO.
Coord. compensadas no eixo X:
x1-2 = -50,347 – 0,028 = -50,375x2-3 = -47,931 – 0,027 = -47,958x3-4 = 48,571 – 0,027 = 48,544x4-1 = 49,817 – 0,028 = 49,789 Soma = 0,000
Coord. compensadas no eixo Y:
y1-2 = 20,486 – 0,017 = 20,469y2-3 = 14,286 – 0,012 = -14,298y3-4 = 69,253 – 0,058 = -69,311y4-1 = 63,192 – 0,052 = 63,140 Soma = 0,000
o. Cálculo das coordenadas totais:
As coordenadas (abscissas e ordenadas) são calculadas pelas fórmulas:
Xn = Xn-1 + X
Yn = Yn-1 + YOnde: Xn Abscissa do ponto Yn Ordenada do ponto Xn-1 Abscissa do ponto anterior Yn-1 Ordenada do ponto anterior X Projeção Compensada no eixo X Y Projeção Compensada no eixo Y
X1 = 108,310 (Abcissa Inicial)
X2 = X1 + X1-2
X2 =108,310 + (-50,375)X2 = 57,935
X3 =57,935 + (-47,958)X3 = 9,977
X4 =9,977+ (+48,544)X4 = 58,521
X1 =58,521+ (+48,789)X1 = 108,310
Y1 = 106,215 (Ordenada Inicial)
Y2 = Y1 + Y1-2
Y2 =106,215 + (20,469)Y2 = 126,684
Y3 =126,684 + (-14,298)Y3 = 112,386
Y4 =112,386+ (-69,311)Y4 = 43,075
Y1 =43,075+ (-63,140)Y1 = 106,215

Observação:
As coordenadas do ponto de chegada deverão ser iguais as coordenadas do ponto de saída.
Tabela IV- Coordenadas totais
VérticesCoordenadas
X Y1 108,310 106,2152 57,935 126,6843 9,977 112,3864 58,521 43,075
p. Correção das distâncias:
É dada pela fórmula:
D’ = X2 + Y2
Onde: D’ Distância corrigida X Projeção no eixo X compensada Y Projeção no eixo X compensada
temos então,
D1-2 = (-50,375)2 + ( 20,469)2
D1-2 = 54,375m
D2-3 = (-47,958)2 + (-14,298)2
D2-3 = 50,044m
D3-4 = (48,544)2 + (-69,311)2
D3-4 = 84,620m
D4-1 = (49,789)2 + (-63,140)2
D4-1 = 80,409m
q. Correção dos Azimutes:
É dada pela Fórmula:

Az’ = arccos (Y / D’)
Caso X, seja negativo, deveremos subtrair o resultado de 360o,ou seja;
Az’ = 360o - arccos (Y / D’)Temos então,
Az’1-2 = 360° - arccos (20,469/ 54,375)
Az’1-2 = 292°06’ 48”
Az’2-3 = 360° - arccos (14,298/ 50,044)
Az’2-3 = 253°23’ 56”
Az’3-4 = arccos (-69,311/ 84,620)
Az’3-4 = 144°59’ 36”
Az’4-1 = arccos (63,140/ 80,409)
Az’4-1 = 38°15’ 27”
r. Correção dos ângulos internos:
É dada pela mesma fórmula com que se calcularam os Azimutes, apenas substituindo-se os azimutes corrigidos.
an = Az’n – Az’n-1 180o
a1= 292° 06’ 48” - 38° 15’ 27” –180°a1 =73° 51’ 21”
a2= 253° 51’ 21” - 292° 06’ 48” + 180°a2 =141° 17’ 7”
a3= 144° 59’ 36” - 253° 23’ 56” + 180° a3 =71° 35’ 40”
a4= 38° 15’ 27” - 144° 59’ 36” a4 =73° 15’ 51”
Observação:

Considerando-se todas as casas decimais dos segundos, temos que o somatório dos ângulos internos devem satisfazer a fórmula:
Ai = 180°.(n-2)
Logo:
a1 + a2 + a3 + a4 =360°
73° 51’ 21” + 141° 17’ 7” + 71° 35’ 40” + 73° 15’ 51”
360° 00’ 00”
s. Desenho da Planta:
Os vértices da poligonal e os pontos de referência mais importantes devem ser plotados segundo suas coordenadas (eixos X e Y), enquanto os pontos de detalhes comuns (feições) devem ser plotados com o auxílio de um software topográfico, ou ainda, plotados manualmente, com escalímetro, compasso e transferidor. No desenho devem constar:
As feições naturais e/ou artificiais; A orientação verdadeira ou magnética; A data do levantamento; A escala gráfica e numérica; A legenda e convenções utilizadas; O título (do trabalho); O número dos vértices, distâncias e azimutes dos alinhamentos; Os eixos de coordenadas; Área e perímetro; e Os responsáveis pela execução.
t. Memorial Descritivo:
Documento indispensável para o registro em cartório da superfície levantada. Deve conter a descrição pormenorizada desta superfície no que diz respeito à sua localização, confrontação, área, perímetro, nome do proprietário, etc. ___________________________________________________________________
Finalmente, os pontos são:
B2 = ( 547005,9586108 )
C3 = ( 547042.569,9586109.430 )
B1 = ( 547097.264,9586112.713 )
E2 = ( 547076.936,9586058.057 )
E1 = ( 547009.847,9586052.637 )
UNIVERSIDADE FEDERAL DO CEARÁ

DEPARTAMENTO DE ENGENHARIA DE TRANSPORTESUNIDADE CURRICULAR DE TOPOGRAFIA
TRABALHO DE TOPOGRAFIA / PRÁTICA
LEVANTAMENTO TAQUEOMÉTRICO
Aluno: Gelly Whesley Silva NevesMatrícula 320653 Turma E Semestre 2011.1Professora: Dra. Maria Elisabeth Pinheiro Moreira
Fortaleza, 28 de março de 2011

O levantamento taqueométrico é usado principalmente para definição
planialtimétrica de parcelas do terreno, realizado através de poligonais. A poligonal,
desenvolvida é o que serve de base para um levantamento.
Para encontrar os pontos da poligonal, faz-se observações em campo, com a
utilização de teodolito e trena, para obter os azimutes e distâncias entre os vértices
demarcados.
Em seguida, trabalha-se com esses dados para diminuir os erros e obter as
coordenadas com maior precisão.
As observações em campo foram feitas nas manhãs de 21 e 24 de março,
num terreno do Centro de Tecnologia da UFC.

O azimute inicial, visto que foram dadas as coordenadas dos pontos C3 e B2
é dado pela fórmula:
90° – arctg[(yC3 – yB2)/(xC3 – xB2)]
Deste modo:
AzB2-C3 = 90° – arctg[(yC3 – yB2)/(xC3 – xB2)]
AzB2-C3 = 90° – arctg[(9586116 – 9586108)/(947043 – 547005)]
AzB2-C3 = 90° – arctg[8/38] = 90° – 2°10’51” = 87°49’7”
Com os dados obtidos em campo, formou-se a seguinte tabela:
Estação P V Ângulo Externo Ângulo(Média
)
Distância(m)
B2
E1
C3
272°50’25”
27°50’35”37,600
272°50’30”
272°50’50”
C3
B2
B1
178°44’35”
178°44’42”54,800
178°44’40”
178°44’50”
B1
C3
E2
293°51’10”
293°50’53”58,280
293°50’35”
293°50’10”
E2
B1
E1
244°58’15”
24458’17”67,300
244°58’25”
244°58’10”
E1
E2
B2
269°37’15”
269°37’05”55,610
269°37’05”
269°36’55”

Como já foi obtido as medidas de todos os ângulos externos, pode-se calcular
todos os azimutes da seguinte forma:
Azn = Ae + Azn-1 – 180°
AzC3-B1 = AC3 + AzB2-C3 – 180° = 178°44’42” + 87°49’7” – 180° = 86°33’49”
AzB1-E2 = AB1 + AzC3-B1 – 180° = 293°50’53” + 86°33’49” – 180° = 200°24’42”
AzE2-E1 = AE2 + AzB1-E1 – 180° = 244°58’17” + 200°24’42” – 180° = 265°22’59”
AzE1-B2 = AE1 + AzE2-E1 – 180° = 269°37’05” + 265°22’59” – 180° = 355°00’04”
Agora, pode-se calcular o Erro Angular das medidas:
O erro foi calculado por E = ΣAe – (n+2)180°.
Onde n é o número de pontos medidos e ΣAe é o somatório dos ângulos
externos.
E = ΣAe – (n+2)180° =1260°1’32” – 1260° = 1’32”
O erro obtido está dentro da tolerância admitida pelas normas, que é de 1,5√n
= 1,5’√5 = 3’32”.
Então, distribuiu-se esse erro pra compensar o erro distribuindo-o. Optou-se
por distribuir de forma ponderada de acordo com o ângulo medido. Utilizou-se a
fórmula:
Cx = –E.(Ae/Se),
Onde C é a compensação no ângulo externo Ax do ponto X, E é o erro angular
obtido e Se é o somatório ΣAe dos ângulos externos.
CB2 = –1’32”.(272°50’35”/1260°1’32”) = –20”
CC3 = –1’32”.(178°44’42”/1260°1’32”) = –13”
CB1 = –1’32”.(293°50’53”/1260°1’32”) = –21”
CE2 = –1’32”.(244°58’17”/1260°1’32”) = –18”
CE1 = –1’32”.(269°37’5”/1260°1’32”) = –20”
De posse disto, foram obtidos os ângulos compensados através da seguinte
fórmula:
ACx = Ae – Cx
Os ângulos calculados foram:
ACB2 = 272°50’35” – 20” = 272°50’15”
ACC3 = 178°44’42” – 13” = 178°44’29”
ACB1 = 293°50’53” – 21” = 293°50’32”
ACE2 = 244°58’17” – 18” = 244°57’59”
ACE1 = 269°37’05” – 20” = 269°36’45”
Agora, calculou-se as projeções ∆x’ e ∆y’ de cada um dos comprimentos
medidos através das fórmulas ∆x’ = d.senAz e ∆y’ = d.cosAz.
∆x’(B2-C3) = 37,600.sen87°49’07” = 37,573m
∆x’(C3-B1) = 54,800.sen86°33’49” = 54,701m
∆x’(B1-E2) = 58,280.sen200°24’42” = –20,326m
∆x’(E2-E1) = 67,300.sen265°22’59” = –67,082m
∆x’(E1-B2) = 55,610.sen355°00’04” = –4,846m
Σ|∆x’| = 184,528m
∆y’(B2-C3) = 37,600.cos87°49’07” = 1,431m
∆y’(C3-B1) = 54,800.cos86°33’49” = 3,285m
∆y’(B1-E2) = 58,280.cos200°24’42” = –54,621m
∆y’(E2-E1) = 67,300.cos265°22’59” = –5,417m
∆y’(E1-B2) = 55,610.cos355°00’04” = 55,399m
Σ|∆y’| = 120,153m
Somando todas as projeções no eixo x obtemos 0,020m, que é o erro no eixo
x. Analogamente, no eixo y, foi obtido 0,077m. O Erro de fechamento é obtido pela
fórmula [(Σ∆x’)2 +(Σ∆y’)2]1/2 = 0,080m.

Foi constatado um erro de 1:9259 no eixo x e 1:1560 no eixo y e 1:3436 no
fechamento, que está dentro da tolerância que é de 1mm de erro para cada 1000mm
medidos.
Visto que o erro é tolerável, Foi feita a distribuição do erro linear de forma
ponderada, de acordo com a seguinte fórmula:
C(A-B) = EL [(|∆c’|)/(Σ|∆c´|)]
Onde EL é o Erro Linear no dado eixo, ∆c’ é a projeção medida neste e Σ|∆c´|
é o somatório dos módulos das projeções no eixo tratado.
No eixo x, obtive:
∆x’(B2-C3) = 0,02.( 37,573 / 184,528 ) = 0,004m
∆x’(C3-B1) = 0,02.( 54,701 / 184,528 ) = 0,006m
∆x’(B1-E2) = 0,02.( 20,326 / 184,528 ) = 0,002m
∆x’(E2-E1) = 0,02.( 67,082 / 184,528 ) = 0,007m
∆x’(E1-B2) = 0,02.( 4,846 / 184,528 ) = 0,001m
No eixo y, foi obtido:
∆x’(B2-C3) = 0,077.( 1,431 / 120,153 ) = 0,001m
∆x’(C3-B1) = 0,077.( 3,285 / 120,153 ) = 0,002m
∆x’(B1-E2) = 0,077.( 54,621 / 120,153 ) = 0,035m
∆x’(E2-E1) = 0,077.( 5,417 / 120,153 ) = 0,003m
∆x’(E1-B2) = 0,077.( 55,399 / 120,153 ) = 0,036m
Com estes dados, foram calculadas as projeções compensadas em ambos os
eixos, utilizando a seguinte fórmula:
∆c = ∆c’ – C(A-B), num dado eixo.

No eixo x:
∆x(B2-C3) = 37,573 – 0,004 = 37,569m
∆x(C3-B1) = 54,701 – 0,006 = 54,695m
∆x(B1-E2) = –20,326 – 0,002 = –20,328m
∆x(E2-E1) = –67,082 – 0,007 = –67,089m
∆x(E1-B2) = –4,846 – 0,001 = –4,847m
No eixo y:
∆x(B2-C3) = 1,431 – 0,001 = 1,430m
∆x(C3-B1) = 3,285 – 0,002 = 3,283m
∆x(B1-E2) = –54,621 – 0,035 = –54,656m
∆x(E2-E1) = –5,417 – 0,003 = –5,420
∆x(E1-B2) = 55,399 – 0,036 = 55,363m
Com estes dados das projeções e com base no ponto B2 de coordenadas
conhecidas, foram calculadas as coordenadas dos outros pontos.
( ∆XB2-C3 ; ∆YB2-C3 ) = C3 – B2
( 37,569 ; 1,430 ) = C3 – ( 547005 ; 9586108 )
C3 = ( 37,569 ; 1,430 ) + ( 547005 ; 9586108 )
C3 = ( 547042,569 ; 9586109,430 )
( ∆XC3-B1 ; ∆YC3-B1 ) = B1 – C3
( 54,695 ; 3,283 ) = B1 – ( 547042,569 ; 9586109,430 )
B1 = ( 54,695 ; 3,283 ) + ( 547042,569 ; 9586109,430 )
B1 = ( 547097,264 ; 9586112,713 )
( ∆XB1-E2 ; ∆YB1-E2 ) = E2 – B1
(–20,328 ; –54,656 ) = E2 – ( 547097,264 ; 9586112,713 )
E2 = (–20,328 ; –54,656 ) + ( 547097,264 ; 9586112,713 )
E2 = ( 547076,936 ; 9586058,057 )

( ∆XE2-E1 ; ∆YE2-E1 ) = E1 – E2
( –67,089 ; –5,420 ) = E1 – ( 547076,936 ; 9586058,057 )
E1 = ( –67,089 ; –5,420 ) + ( 547076,936 ; 9586058,057 )
E1 = ( 547009,847 ; 9586052,637 )
Basta conferir o último ponto:
(∆XE1-B2,∆YE1-B2) = B2 – E1
(–4,847 ; 55,363 ) = ( 547005 ; 9586108 ) – ( 547009,847 ; 9586052,637 )
(–4,847 ; 55,363 ) = (-4,847 ; 55,363 )
Isso significa que a poligonal fechou.

O levantamento foi concluído com sucesso, os erros obtidos estavam dentro
da tolerância exigida e puderam ser minimizados com artifícios matemáticos,
finalmente os pontos observados têm as seguintes coordenadas, o ponto B2 já era
conhecido.
B2 = ( 547005 ; 9586108 )
C3 = ( 547042,569 ; 9586109,430 )
B1 = ( 547097,264 ; 9586112,713 )
E2 = ( 547076,936 ; 9586058,057 )
E1 = ( 547009,847 ; 9586052,637 )
Em anexo, segue o desenho da poligonal.



























![PDF Apostila de Trico[1]](https://img.document.onl/doc/110x75/55cf9c59550346d033a98a8c/pdf-apostila-de-trico1.jpg)

