Embed Size (px)
Citation preview

SIMULADOR DE TOMÓGRAFO
IMAGENS MÉDICASPROF. DARIO F. G. de AZEVEDO, Ph.D.
IUBERI C. ZWETSCH, LEANDRO LEÃO, MURILO F. da ROCHA
- Resumo:
Este trabalho tem por objetivo apresentar a evolução
dos equipamentos de tomografia computadorizada (CT), seu
princípio de funcionamento, aplicações médicas e a
construção de um simulador tomográfico num sistema
computacional com a utilização de um phantom de elementos
geométricos, gerando um senograma das projeções paralelas
desse phantom. A metodologia aplicada na construção do
simulador foi baseada nos tomógrafos de terceira geração e as
conclusões serão apresentadas ao final.
Palavras-chave: Simulador Tomográfico -Tomografia
Computadorizada – Senograma - Phantom
I. INTRODUÇÃO
A tomografia computadorizada(TC) é considerada a
maior invenção da radiologia depois da descoberta do raio-X.
A tomografia computadorizada foi inventada pelo engenheiro
eletrônico Godfrey N. Hounsfield (1919-), pela qual recebeu o
prêmio Nobel em fisiologia e medicina em 1979, juntamente
com o sul-africano naturalizado americano, físico Allan
McLeod Cormack (1924-). Cormack desenvolveu em 1956 a
teoria e a matemática de como múltiplos raios projetados
sobre o corpo, em ângulos diferentes, mas em um único plano,
forneceriam uma imagem melhor do que o raio único, usado
na radiografia. Seus trabalhos foram publicados no Journal of
Applied Physics, em 1963 e 1964.
Hoje é um dos mais importantes métodos de
diagnóstico, sendo fundamental para a atividade médica, pois
se trata de um método não invasivo que fornece imagem
definida das estruturas e patologias dos órgãos analisados.
A TC utiliza um aparelho de raios X que gira a sua
volta, fazendo radiografias transversais de seu corpo. Estas
radiografias são então convertidas por um computador nos
chamados cortes tomográficos. Isto quer dizer que a TC
constrói imagens internas das estruturas do corpo e dos órgãos
através de cortes transversais, de uma série de seções fatiadas
que são posteriormente montadas pelo computador para
formar um quadro completo.
Através de processamento matemático, ainda é possível
reconstruir os orgãos estudados tridimensionalmente.
Visando entender melhor esses processamenos
matemáticos, é importante a implementação de um simulador
tomográfico de terceira geração para phantoms compostos de
elementos geométricos. A literatura emprega como phantom
padrão, o modelo Shepp-Logan, composto basicamente por
elipses transladadas e/ou rotacionadas no espaço.
O estudo consiste em projetar os raios do tubo de raio
X em direção aos detetores e ler, nestes detetores, o somatório
de atenuações nos diferentes ângulos projetados. Para
construir o senograma, é necessário converter a projeção
equiangular para uma projeção paralela. Após isso, tem-se o
senograma pronto para a reconstrução.
II. METODOLOGIA
Os tomógrafos de terceira geração possuem um leque
de detectores situados à frente do tubo do outro lado do gantry
e igualmente espaçados. À medida que o tubo se movimenta,
estes detectores se movimentam na mesma velocidade e no
mesmo sentido rotacional, garantindo a leitura dos raios X
1

oriundos do tubo. Os tomógrafos de quarta geração possuem
um tubo girante e uma coroa de detectores num raio maior.
Estes detectores não se movimentam, pois toda a
circunferência do gantry está provida de detectores.
O funcionamento do tomógrafo de terceira geração e,
consequentemente do simulador, consiste em gerar um feixe
de raios X e conseqüente detecção destes raios atenuados pelo
corpo em estudo (no caso do simulador um phantom
geométrico). Seguindo a equação da absorção:
I = Ioe
Para chegar a este resultado calcula-se os pontos de
intersecção entre o raio e cada uma das elipses. De posse
destes dois pontos, é possível determinar a distância entre eles.
Multiplicando-se essa distância pela atenuação da elipse em
questão, tem-se a atenuação gerada por aquela elipse. O
processo é então repetido para todas as outras elipses que são
interceptadas pelos raios X do tubo do tomógrafo e ao fim de
todas as projeções e´ feito o somatório das atenuações de todas
as elipses, para cada angulo de projeção.
Estes raios são projetados numa geometria equiangular e
devem ser adequados a um senograma de geometria paralela
para cada ângulo de incidência. Para que isto ocorra, é
necessário utilizar a técnica de rebbininng, transladando os
dados para agrupar cada uma das projeções no seu ângulo
correto. Após isto, tem-se o senograma pronto para a
reconstrução da imagem tomográfica.
FIGURA-1 – geometria equiangular dos raios
FIGURA 2 - geometria paralela dos raios
II. I SENOGRAMA
É a apresentação gráfica dos somatórios das atenuações
do phantom para cada angulo. Embora o gráfico pareça
contínuo, a movimentação do sistema é discreto e,
consequentemente existe uma lacuna entre cada um dos
ângulos apresentados. Estes dados ficam disponíveis para a
reconstrução futura e conseqüente processamento da imagem.
Uma possibilidade cada vez mais comum é a reconstrução do
elemento em estudo em 3D, a partir de interpolações entre as
várias aquisições (ou cortes) realizadas no mesmo exame.
Outra possibilidade é por exemplo, trabalhar com os dados
originais em comparação com imagens novas ou com as
antigas; estudo de uma mesma região porém obtidos com
equipamentos diferentes e o resultado de diferentes algorítmos
na reconstrução da imagem a partir destes dados.
São vários algoritmos existentes para a reconstrução
da imagem a partir das projeções , porém , embora já bem
desenvolvidas, continuam como assunto para aperfeiçoamento
em pesquisas.
2

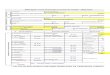
FIGURA 3 - exemplo de senograma (de
uma tomografia , com 768 colunas e 90 linhas - cada linha é
obtida após uma rotação de 2 graus da amostra, perfazendo
180 ˚ - projeções obtidas utilizando um phantom de teste
(objeto cilíndrico com furos)
II. II PHANTOM
São objetos geométricos usados para descrever o objeto
a ser escaneado pelo tomógrafo. É composto por um ou mais
elementos. Estes elementos são formas geométricas simples
especificamente retângulos, triângulos, elipses, setores e
segmentos. Com estes elementos, um phantom padrão pode
ser construído.
Um phantom pode ser classificado como eletrônico.
Este trata-se de uma combinação espacial de voxels que
devem representar um objeto com uma dimensão, localização,
orientação, e composição pré-definido, para que possam
serem descritos pela média dos coeficientes de atenuação que
corresponde cada região.
As coordenadas cartesianas determinam a localização
de um ponto do objeto sendo uma referência em geral do
centro de simetria. Já a orientação do objeto é especificado
perto três coordenadas angulares. A composição é selecionada
de uma biblioteca contendo tipos de tecido ( osso, músculo,
gordura ) , metais ( chumbo, cobre, passa a ferro, alumínio), e
outros materiais também importantes em radiologia como
água, por exemplo. Nos objetos de formas irregulares os seus
contornos são reconstruídos, através de pontos que
determinarão os contornos de suas seções sucessivas e então
traçados os seus lados .
O volume de interesse é dividido em voxels
representados por uma matriz dimensional que determinará a
informaçãodo conteúdo de cada voxel. O phantom também
pode ser criado compilando uma série de fatias da tomografia,
resultando em uma seção anatômica virtual do corpo Humano,
neste caso, a todo voxel será atribuído um valor da atenuação
linear ( coeficiente ) correspondendo a um número que será a
base para a reconstrução tomográfica .
FIGURA 4 - exemplo de phantom e a representação
em elipses e suas coordenadas .
II.III SIMULAÇÃO
A simulação consiste em:
Inicializar variáveis:
1- Quantidade de detectores, posição inicial do tubo,
curso do tubo e outras variáveis.
2 - Movimento do tubo
Através do passo do tubo gerar a nova posição do tubo
e conseqüentemente a posição do detector central. A partir do
passo dos detectores, é possível posiciona-los ao longo do
gantry.
3- Gerar o leque de raios :
3

Calcular geometricamente o trajeto do raio entre o tubo
e cada um dos detectores.
4- Calcular as atenuações :
Calcular os pontos de interseções de cada raio com
cada elemento geométrico, gerando o somatório das
atenuações.
5 - Fazer o rebinning do resultado para que cada coluna
do senograma corresponda a um ângulo do tubo.
III. CONCLUSÕES
Nesta simulação utilizamos o cálculo das interseções
das retas com as elipse por estarmos tratando com o modelo de
phantom Shepp Logan, dado como phantom padrão na
totalidade das publicações. Qualquer outro elemento
geométrico básico, possui uma equação mais simples que a
elipse, o que nos leva a crer que a implementação de outros
elementos que não a elipse será facilmente implementável.
Neste primeiro momento trabalhamos com um
protótipo sem interação com o usuário, sem entradas pelo
teclado e com interface do MatiLab(sem arquivo executável)
dado o tempo exíguo, porém, será interessante dar
continuidade ao projeto para que possamos implementar uma
interface gráfica bem elaborada de entrada e saída de dados
com interação do usuário.
Além disso, embora orientados a não utilizar o
phantom de matriz de atenuações(devido a grande distorção da
imagem reconstruída usando dados simulados com esse
método), entendemos que resultados interessantes podem ser
gerados a partir desta técnica e comparados com o modo
habitual de gerar senogramas (por elementos geométricos).
Numa próxima versão, também queremos implementar
esses algoritmos desenvolvidos em MatLab, em linguagem C,
visando a melhora de performance do sistema e a
implementação de uma interface gráfica de fácil
interatividade.
Outra possibilidade de implantação é integralizar o raio
que passa pelas elipses obtendo um senograma com os valores
de atenuação mais próximos ainda dos valores reais.
IV. RESULTADO
Como resultado prático temos o desenvolvimento e
implementação de um simulador TC, todo o algorítmo foi
programado em MatLab (segue em anexo o código fonte),
como variáveis de entrada no simulador temos o passo do
tubo, o raio do gantry, o número de detectores
(obrigatoriamente ímpar) e o espaço entre detectores. Como
saída temos uma matriz de atenuações ( O senograma ).
V. REFERÊNCIAS
[1] Macovski, Albert . Medical Imaging Systems-Information
and Systems Science Series .Prentice-Hall
[2] Martins, V ; Ribeiro, E. P..Compressão de Projeções de
Tomografia Computadorizada: Um Estudo de Caso
II Workshop de Informática aplicada à Saúde – 2002 Teses e
Dissertações ,Centro Politécnico, Curitiba, PR, Brasil
[3] Collins,D.L ; Zijdenbos, A. P.; Kollokian,V.; Sled, J.G.;
Kabani,N.J.; Holmes C.J.; and Evans, A.C..Design and
Construction of a Realistic Digital Brain Phantom IEEE
TRANSACTIONS ON MEDICAL IMAGING, VOL. 17, NO.
3, JUNE 1998, p463-468.
[4] Maureemootoo, K.; Webb,S.; Leach, M. O. and Bentley,
R. E.. The Performance Characteristics of a Simulator-Based
CT Scanner, IEEE TRANSACTIONS ON MEDICAL
IMAGING, VOL. 7, NO. 2. JUNE 1988, p 91-98.
[5] Lazos, D.; Kolitsi, Z. and Pallikarakis, N. A Software
Data Generator for Radiographic Imaging Investigation.IEEE
TRANSACTIONS ON INFORMATION TECHNOLOGY IN
BIOMEDICINE, VOL. 4, NO. 1, MARCH 2000, p74-79.
4