Embed Size (px)
Citation preview

Centro Universitário Positivo - UnicenP
Núcleo de Ciências Exatas e Tecnológicas NCET Engenharia da Computação
Luiz Francisco Carvalho Júnior
Sistema de aquisição e gerenciamento de dados sobre acidentes de trânsito através do uso da
tecnologia de geoprocessamento
Curitiba 2004

ii
Centro Universitário Positivo - UnicenP Núcleo de Ciências Exatas e Tecnológicas NCET
Engenharia da Computação Luiz Francisco Carvalho Júnior
Sistema de aquisição e gerenciamento de dados sobre acidentes de trânsito através do uso da
tecnologia de geoprocessamento Monografia apresentada à disciplina de Projeto Final, como requisito parcial à conclusão do Curso de Engenharia da Computação. Orientador: Professora Adriana Thomé
Curitiba 2004

iii
TERMO DE APROVAÇÃO
Luiz Francisco Carvalho Júnior
Sistema de aquisição e gerenciamento de dados sobre acidentes de trânsito através do uso
da tecnologia de geoprocessamento
Monografia aprovada como requisito parcial à conclusão do curso de
Engenharia da Computação do Centro Universitário Positivo, pela seguinte banca
examinadora:
Profa. Adriana Thomé
Prof. Luiz Carlos Albini
Prof. Marcelo Mikosz Gonçalves
Curitiba, 13 de Dezembro de 2004

iv
SUMÁRIO
1 Introdução ...............................................................................................................1
2 Especificação..........................................................................................................2
2.1 Descrição................................................................................................................................... 2
2.2 Motivação.................................................................................................................................. 2
2.3 Objetivos ................................................................................................................................... 3
2.4 Descrição................................................................................................................................... 3 2.4.1 Descrição geral do sistema ................................................................................................................. 3 2.4.2 Módulo Adicional............................................................................................................................... 4 2.4.3 Módulos do sistema............................................................................................................................ 4
2.5 Sistemas de informação geográfica (SIG)................................................................................. 5 2.5.1 Geoprocessamento.............................................................................................................................. 5
2.5.1.1 Características funcionais dos SIG S............................................................................. 6 2.5.1.2 Dados geográficos ................................................................................................................ 7
2.5.1.2.1 Natureza dos dados geográficos.............................................................................................. 8 2.5.1.2.2 Propriedades dos dados geográficos ....................................................................................... 9 2.5.1.2.3 Tipos de dados geográficos ................................................................................................... 11 2.5.1.2.4 Características dos dados espaciais ....................................................................................... 12
2.5.2 Sistema de informação geográfica-urbano....................................................................................... 15 2.5.3 ArcView GIS ..................................................................................................................................... 16
2.5.3.1 Estrutura de dados .............................................................................................................. 17 2.5.3.1.1 Topologia ............................................................................................................................... 17 2.5.3.1.2 Camadas................................................................................................................................. 17
2.6 NAVSTAR GPS................................................................................................................... 18 2.6.1.1 Características dos sinais GPS ....................................................................................... 19 2.6.1.2 Descrição dos receptores GPS........................................................................................ 20
2.6.2 Modelo utilizado............................................................................................................................... 22
2.7 Microcontroladores ................................................................................................................. 24 2.7.1 Microcontrolador 8051..................................................................................................................... 24
2.8 Porta serial............................................................................................................................... 26 2.8.1 Modo Síncrono de Comunicação ..................................................................................................... 26 2.8.2 Modo Assíncrono de Comunicação ................................................................................................. 27 2.8.3 Canais Simplex, Half-Duplex e Full-Duplex ................................................................................... 27 2.8.4 Interface serial no 8051 .................................................................................................................... 28 2.8.5 Comunicação RS-232 para o 8051................................................................................................... 28 2.8.6 Comunicação serial entre os módulos.............................................................................................. 29
2.9 Transmissão............................................................................................................................. 29 2.9.1 Rádio freqüência............................................................................................................................... 30 2.9.2 Transmissão via satélite.................................................................................................................... 30
2.9.2.1 Finalidade .............................................................................................................................. 31 2.9.2.2 Órbita ...................................................................................................................................... 32
2.9.3 Transmissão via telefonia celular..................................................................................................... 32
2.10 Especificação do Hardware .................................................................................................... 33 2.10.1 Análise dos meios de transmissão.................................................................................................... 33 2.10.2 Lista de componentes ....................................................................................................................... 36 2.10.3 Diagrama do hardware..................................................................................................................... 37 2.10.4 Esquemático do circuito ................................................................................................................... 40
2.11 Especificação do software ....................................................................................................... 40 2.11.1 Software de recepção e conversão dos dados .................................................................................. 41 2.11.2 SGBD (sistema gerenciador de banco de dados)............................................................................. 42
2.12 Especificação da validação do projeto .................................................................................... 43

v
2.13 Custos...................................................................................................................................... 43
2.14 Cronograma............................................................................................................................. 44
2.15 Descrição do software ............................................................................................................. 46 2.15.1 Casos de uso ..................................................................................................................................... 46 2.15.2 Diagrama de caso de uso .................................................................................................................. 48 2.15.3 Diagrama de classes (do software de aquisição) ............................................................................. 49 2.15.4 Diagrama de seqüência..................................................................................................................... 49
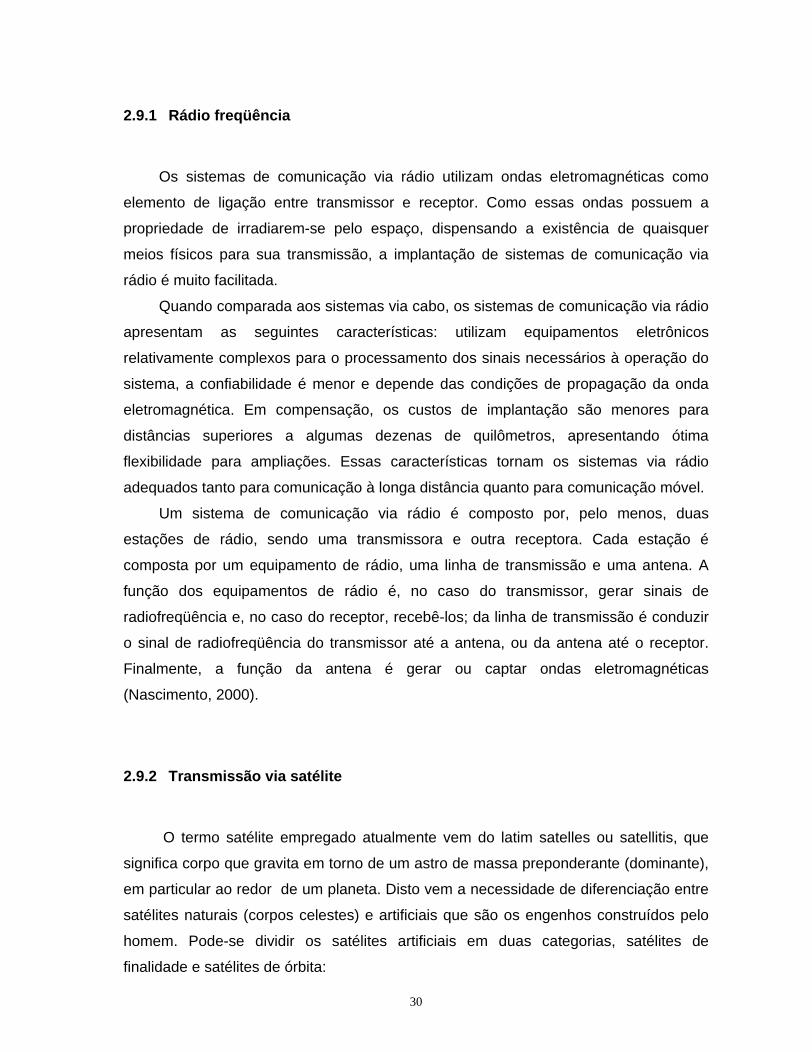
2.15.4.1 Inserir dados sobre acidentes de trânsito .................................................................... 49 2.15.4.2 Consultar o sistema............................................................................................................ 50 2.15.4.3 Inserir base-geográfica ..................................................................................................... 50 2.15.4.4 Alterar Base-geográfica ................................................................................................... 51
3 Resultados ............................................................................................................52
4 Conclusão .............................................................................................................56
5 Referencias bibliográficas.....................................................................................57

vi
LISTA DE FIGURAS
Figura 1 - Diagrama em blocos do projeto................................................................................................................. 4 Figura 2 Conceitos gráficos de localização, relação e descrição.......................................................................... 13 Figura 3 Conjunto de definições dos objetos espaciais......................................................................................... 14 Figura 4 - Exemplo de camadas ............................................................................................................................... 18 Figura 5 Diagrama em blocos do GPS .................................................................................................................. 21 Figura 6 - Comutação entre dispositivos.................................................................................................................29 Figura 7 Diagrama em blocos................................................................................................................................ 34 Figura 8 - Diagrama do hardware coletor de dados................................................................................................37 Figura 9 Diagrama do módulo transmissor ........................................................................................................... 37 Figura 10 Fluxograma do programa do microcontrolador.................................................................................... 39 Figura 11 - Esquemático do circuito utilizado no hardware .................................................................................... 40 Figura 12 Diagrama de contexto do software ....................................................................................................... 41 Figura 13 - Tela principal do sistema ....................................................................................................................... 52 Figura 14 - Tela principal com aproximação sobre os pontos ................................................................................. 53 Figura 15 - Caixa de pesquisa................................................................................................................................... 53 Figura 16 - Pesquisa realizada .................................................................................................................................. 54 Figura 17 - Informações sobre um ponto ................................................................................................................. 55 Figura 18 - Diferença entre dois pontos com mesma localização ........................................................................... 55

vii
LISTA DE SIGLAS
A/D
Analógico/Digital
ESRI - Environmental Systems Research Institute
Freq. Freqüência
GPS Global Positioning System
NAVSTAR - NAVigation Satellite with Time And Ranging
NCET - Núcleo de Ciências Exatas e Tecnológicas
Rf Radio freqüência
Rx Módulo de recepção
SIG Sistema de informações geográficas
TTL Transistor Transistor Logic, Lógica transistor-transistor
Tx Módulo de transmissão
UNICENP
Centro Universitário Positivo

viii
LISTA DE SÍMBOLOS
Kbps Kilo bits por segundo
KHz Kilo Hertz
MHz
Mega Hertz
- ohm
V - Volts

ix
RESUMO
Neste trabalho é apresentado um sistema que possibilita a aquisição e
gerenciamento de dados sobre acidentes de trânsito através do uso da tecnologia de
geoprocessamento. Neste projeto os dados sobre os acidentes de trânsito são
coletados em campo por meio de um equipamento portátil e transmitidos para uma
base, chamada de central de geoprocessamento, via telefonia celular.
Desta forma é possível observar os locais onde ocorrem o maior número de
acidentes e extrair informações sobre eles, permitindo que seja possível agir
corretiva e preventivamente.
Palavras-chave: Bancos de dados geográficos, Sistemas de informações
geográficas.

x
ABSTRACT
In this project is presented a system that makes data acquisition and
management on traffic accidents through using geographic information system
technology. The traffic accidents data are collected in field by means of a portable
equipment and transmitted to a base, called geographic information system central
office, by telephony cellular. Doing that is possible to observe the places where occur
the largest number of accidents and generate statisticians about them, allowing the
possibility to act corrective and preventively.
Key-words: Geographic Data bases, Systems of geographic information.

1
1 INTRODUÇÃO
No Brasil, o número de acidentes vem sofrendo um aumento gradual a cada ano,
sendo que a grande maioria deles acontece no perímetro urbano. Isto é uma
conseqüência da rápida urbanização, que satura a capacidade do uso das vias,
causando um elevado número de acidentes.
Para corrigir esta crescente desorganização nas vias, os órgãos gestores de
trânsito necessitam de informações confiáveis, com grande velocidade, para que
possam tomar decisões corretas diante das mais diversas situações.
Neste projeto é apresentado um sistema de aquisição e gerenciamento de dados
sobre acidentes de trânsito, que se utiliza da tecnologia de geoprocessamento. O
projeto utiliza ferramentas da engenharia para solucionar um problema de contexto
global. Assim sendo, este trabalho é uma ferramenta para ajudar no controle e
monitoração de acidentes de trânsito.
Uma aplicação bastante clara do projeto é no auxílio para a tomada de uma ação
preventiva. Uma região onde ocorre um grande número de acidentes pode ter um fluxo
excessivo de veículos podendo, por exemplo, através de um diagnóstico do sistema,
mudar-se a malha de ruas desta região. Um cruzamento com grande número de
colisões entre veículos pode ter seu sentido alterado, uma avenida onde existe muitos
atropelamentos pode ter seu limite de velocidade reduzido.
Desta maneira este projeto faz-se muito útil para o departamento de trânsito de
uma cidade ou de uma malha rodoviária, bastando somente a adaptação do projeto
para cada caso.
2
2 ESPECIFICAÇÃO
2.1 Descrição
Este projeto faz uso da axiomática da localização e do processamento de dados
geográficos, para ajudar na análise e prevenção de acidentes de trânsito, bem como
levantar dados estatísticos sobre eles. Isso é possível pois, com a coleta, tratamento,
análise e apresentação das informações quase que instantaneamente em mapas
digitais geo-referenciados; podem ser pesquisados locais, número de vítimas e épocas
do ano em que mais ocorrem acidentes.
Com uma base de dados consistente é possível gerar informações para a tomada
de decisões para a prevenção de acidentes. Isto pode ser feito através de uma melhora
na sinalização, da implantação de um semáforo, da limitação de velocidade (com
lombada ou radar eletrônico), da implantação de faixas de pedestre, ou até mesmo
uma mudança das vias de trânsito locais. Sendo estas decisões totalmente
fundamentadas em dados concretos, o que é possível através do uso da tecnologia de
geoprocessamento, a possibilidade de um erro é minimizada.
2.2 Motivação
A população mundial vem aumentando significativamente nos últimos 30 anos, e
com isso acarreta-se uma necessidade também crescente de melhoria nos meios de
transporte. É preciso garantir que um volume cada vez maior de pessoas faça valer o
seu direito de ir e vir, e um número também maior de cargas e informações precisa
trafegar de canto à canto do globo, seja por estradas de rodagens, vias públicas,
transporte aéreo ou marítimo.
Para este volume intenso de tráfego é preciso constantemente estabelecer e
aprimorar regras para se obter ordem neste meio comum. Por exemplo, em uma via
pública é necessário periodicamente se fazer uma avaliação de fluxo dos veículos que
ali transitam diariamente, do número de acidentes ocorridos etc.

3
Neste contexto o projeto está inserido, um sistema de informação para auxilio a
tomada de decisões, sendo útil para o departamento de trânsito de uma cidade.
2.3 Objetivos
O objetivo deste projeto é criar um sistema de aquisição e gerenciamento dos
dados sobre acidentes de trânsito de forma que, ao acontecer um acidente, um agente
possa obter in loco as coordenadas GPS (Global Positioning System), os dados do
número de feridos, e o número de vítimas fatais do acidente; e os forneça ao módulo
transmissor. Estas informações são transmitidas para uma central de
geoprocessamento onde é feita a análise dos dados e onde pode-se visualizar o local
onde ocorreu o acidente, bem como seus dados.
2.4 Descrição
2.4.1 Descrição geral do sistema
O sistema faz a aquisição dos dados em campo a partir de um hardware coletor,
onde são digitados os dados referentes aos acidentes. Os dados são:
1. as coordenadas GPS, que são obtidas automaticamente pelo módulo
coletor de dados;
2. as informações do número de feridos e
3. o número de vítimas fatais.
Após a etapa de entrada dos dados é feita a transmissão para uma central
chamada de central de geoprocessamento , onde os dados são primeiramente
recebidos. Em seguida, é realizado um tratamento e análise desses dados para gerar a
visualização das informações sobre os acidentes em um software de
geoprocessamento.
Ao término de todo o tratamento dos dados é possível extrair informações como:
em que local ocorre o maior número de acidentes,
onde ocorre o maior número de acidentes com vítimas fatais e

4
onde ocorre o maior número de acidentes sem vítimas.
Na figura 1 pode-se observar o diagrama em blocos do projeto, onde cada caixa indica um módulo importante da implementação.
Figura 1 - Diagrama em blocos do projeto
2.4.2 Módulo Adicional
Como módulo adicional foi proposto o acoplamento de uma câmera fotográfica
(uma web-cam por exemplo) ao hardware de coleta e transmissão. Desta forma, além
dos dados de localização e informação sobre o acidente, poderão ser enviadas
fotografias das placas dos automóveis envolvidos no mesmo.
2.4.3 Módulos do sistema
O sistema em questão pode ser dividido em 5 partes funcionais, são elas: módulo
coletor de dados, módulo transmissor e receptor, módulo de conversão do formato de
dados, módulo de geoprocessamento e o módulo de extração de informações do
sistema:
Entrada dos dados
Módulo GPS
Formatação dos dados para envio
Transmissão via telefonia celular
Recepção dos dados

5
O módulo coletor de dados tem uma interface onde é feita a entrada dos dados.
Este módulo faz também a coleta automática das coordenadas GPS.
O módulo transmissor e receptor faz a comunicação entre o módulo coletor e a
central de geoprocessamento.
O módulo de conversão do formato de dados faz a comunicação entre dois
sistemas diferentes de dados, colocando os dados no formato exigido pelo
software de geoprocessamento.
O módulo de geoprocessamento tem uma interface com usuário que mostra as
saídas do sistema, pontos em que ocorreram acidentes e informações sobre
eles.
O módulo de extração de informações do sistema, faz uma pesquisa em todos
os pontos e mostra ao usuário os resultados.
2.5 Sistemas de informação geográfica (SIG)
2.5.1 Geoprocessamento
A geografia é uma ciência antiga. O corpo de conceitos por ela desenvolvida é
amplo e complexo. São exemplos os conceitos de região, paisagem e ambiente, de uso
corrente na literatura geográfica há muitas décadas. O geoprocessamento, ao
contrário, é um campo de conhecimento (e de atividade) recente.
Os sistemas de informação geográfica (SIG), utilizando o Geoprocessamento,
constituem uma estrutura de interface entre a Geografia, o Processamento de Dados e
a Comunicação (ou Teoria da informação). Esta estrutura é merecedora da atenção
crescente que tem recebido por parte de geógrafos e especialistas em computação,
tendo despertado vigoroso interesse não apenas destes profissionais, mas de toda a
comunidade ambientalista e, em boa medida, de administradores responsáveis por
problemas que tenham expressão territorial. Administrar com eficiência recursos
ambientais disponíveis em um vasto território é um desafio. Enfrentar este desafio,
respeitando e promovendo a qualidade de vida dos habitantes, é tarefa de mérito
comparável à sua envergadura (Xavier da Silva, 1997).

6
O conceito SIG (Sistema de Informação Geográfica) foi desenvolvido
originalmente nos anos 60, como um meio de sobrepor e combinar diversos tipos de
dados em um mesmo mapa. O SIG associa atributos gráficos e não-gráficos de
recursos cartográficos. Os mapas resultantes mostram dados geográficos, ambientais
ou demográficos, separadamente ou em combinação.
O SIG possui uma estrutura flexível de dados baseada em relações topológicas.
Os sistemas típicos apresentam recursos de ponto, linha e área, cada linha tendo
dados com ligação e configuração espacial. Esta informação coordenada tem, então,
remissão recíproca com arquivos de atributos(Xavier da Silva, 1997)..
Pode-se dizer que sistemas de informação geográfica são sistemas destinados ao
tratamento de dados referenciados espacialmente. Estes sistemas manipulam dados
de diversas fontes como mapas, imagens de satélites, cadastros e outras, permitindo
recuperar e combinar informações e efetuar os mais diversos tipos de análise sobre os
dados (Paredes,1994).
A utilização em larga escala de tais sistemas tornou-se possível a partir da
disponibilidade, a custos aceitáveis, de diversas tecnologias como a cartografia digital,
os banco de dados e o processamento digital de imagens. Tipicamente, um SIG
combina essas tecnologias com técnicas de análise e manipulação da informação
espacial (Xavier da Silva, 1997).
2.5.1.1 Características funcionais dos SIG S
O SIG é um sistema que subsidia o processo de observação do mundo real em
atividades de definição, mensuração, classificação, enumeração. Faz a atuação sobre
o mundo real em atividades de operação, manutenção, gerenciamento, construção, etc.
Normalmente, o SIG realiza as seguintes funções básicas:
aquisição;
gerenciamento;
análise e
exibição de resultados.
A função de aquisição está relacionada com a conversão de informações
analógicas em digitais. A coleta de dados é proveniente de diversas fontes como

7
fotografias aéreas, ortofotos1, levantamentos topográficos e aerofotogramétricos,
imagens de satélites, mapas bi e tridimensionais, cartas, relatórios estatísticos,
levantamentos de população e outras fontes de informações, obtidas por intermédio de
restituidores, ortoprojetores, fitas magnéticas, digitalizadores e entrada de dados via
teclado (Paredes, 1994).
A função de gerenciamento consiste na inserção, remoção ou modificação dos
dados, sendo normalmente realizada através de um sistema de gerenciamento de
banco de dados ( SGBD ), normalmente comportando as seguintes tarefas:
armazenamento em banco de dados;
manutenção e recuperação de dados;
preservação da integridade dos dados;
controle de processo e
manipulação de arquivos (criar, inserir, modificar).
A função de análise efetua o exame dos dados que contenham informações
relacionadas, a fim de gerar novas informações que atendam às diversas visões
externas permitidas pelo sistema. Nesta etapa, poder-se-ão realizar as seguintes
tarefas:
seleção e agregação de informações;
controle da geometria e topologia;
conjugação de informações temáticas e
extração de informações estatísticas.
A função de exibição de resultados refere-se principalmente à representação dos
resultados dos dados manipulados e poderá ser exclusivamente constituída por dados
não-gráficos (Xavier da Silva, 1997).
2.5.1.2 Dados geográficos
1 Ortofotos Imagem fotográfica onde as feições nela contidas são apresentadas em suas verdadeiras posições, sendo desta forma, geometricamente equivalente a um mapa de linhas e símbolos, onde podem ser feitas medidas diretas de posição, distâncias, ângulos horizontais e áreas.

8
A Geografia assim como os dados que a descrevem fazem parte do mundo o
nosso dia-a-dia. Normalmente, cada decisão que tomamos é obrigada, influenciada ou
ditada pelos fatores da geografia. Estudos indicam que aproximadamente 90% das
decisões feitas pelas prefeituras e órgãos estaduais ou federais, estão relacionadas
com a geografia.
Desta forma, informação geográfica é o conjunto de dados (físicos, sociais,
econômicos, etc), cujo significado contém uma associação ou relação com uma
localidade específica (Xavier da Silva, 1997).
O mundo real consiste de muitas características geográficas. Elas permitem
efetivar diversas tarefas temáticas e ajudam responder perguntas como: onde está?
Quais são suas características? Como se relacionam entre eles e entre suas
características?, etc.
2.5.1.2.1 Natureza dos dados geográficos
Um SIG é muito mais do que um software de tecnologia avançada para efetivar
estudos de diferentes temas. Na verdade, o SIG nos leva ao entendimento da própria
natureza dos dados espaciais, das formas ou dos caminhos que as razões humanas
nos levam a apreender sobre eles e dos processos de decisões baseados nesses
dados. Dessa forma, é importante conhecer a natureza dos dados espaciais,
especialmente saber como as variações geográficas podem ser descritas e medidas,
ou como pode sua incerteza e o erro serem conhecidos.
A geografia é vista na Base de Dados (BD) do SIG como um depósito ocupado
por objetos, cujo espaço é definido através de relações entre locais. Vários espaços
podem ser visualizados dependendo da natureza desses relacionamentos.
O verdadeiro valor do SIG está na habilidade de analisar os dados espaciais
(Goodchield,1988). Por exemplo, tarefas descritivas, como localize e mostre todos os
grupos populacionais acima de 5000 , engloba questões do tipo que ou onde (bom
para planejamentos) e respostas de questões analíticas do tipo: por que , que se (
talvez para construir modelos ou simular predições) se requer o acesso a dados
descritivos e a informações localizacionais. Esses exemplos mostram a necessidade de
pesquisar amplamente os conceitos sobre os tipos de espaços apropriados e sua forma

9
de estruturar e manipular. Assim, é fundamental definir o espaço e a construção da
tipologia de espaços ( Paredes, 1994).
2.5.1.2.2 Propriedades dos dados geográficos
Todos os dados gráficos ou fenômenos geográficos possuem propriedades
intrínsecas que precisam ser conhecidas, sobretudo para os propósitos de
geocodificação. Normalmente, são as seguintes:
Localização - Assim como se usa a terceira dimensão ( Z ) para descrever a
elevação da superfície terrestre, as duas dimensões ( X,Y) de localização sobre o
plano ou a esfera são propriedades geográficas básicas para determinar a posição
dos dados geográficos. A grande maioria dos sistemas de coordenadas são
cartesianos. Dessa forma a localização é uma característica fundamental dos
dados geográficos e cartográficos.
Volumetria
Bases de dados geográficos e cartográficos contém milhares ou
milhões de elementos de dados. Muitos problemas de processamento de dados
cartográficos estão relacionados aos problemas geométricos de grande conjunto de
dados. Como resultado, em cartografia computadorizada, há problemas de
memória e eficiência na estrutura de dados. Por isso, o custo de armazenamento
de dados é alto. Mesmo porque o volume de armazenamento, o tempo de acesso a
esse volume, são considerações importantes que devem ser superadas.
Dimensionamento
Normalmente, a cartografia tem dividido as entidades em
pontos, linhas e áreas. Deve-se conhecer que o mensuramento varia desde
nominal, ordinal, intervalo até razão.
Continuidade
Alguns tipos de mapas como os altimétricos assumem uma
distribuição contínua, enquanto outros, como mapeamentos cloropléticos (mapas
onde é possível explorar visualmente o dado objeto de análise) assumem
distribuição descontínua. A continuidade é uma propriedade geográfica importante,
mas que nem sempre obedece à distribuição estatística. Entretanto, a classificação
do espaço por áreas ou regiões é possível graças à continuidade.

10
Tamanho
Muitos fenômenos geográficos podem ser medidos diretamente, por
exemplo, por levantamentos topográficos ou fotografias aéreas. Um ponto é
medido a nível de localização (X,Y), adjacência e elevação. Uma linha possui
comprimento, direção, conectividade e movimentação. Um polígono possui
topologia, área, limites, perímetro, localização e orientação. O volume tem
topologia, continuidade, declividade, vertente, superfície, localização e elevação.
Muitas dessas propriedades são relativamente fáceis de medir se a base de dados
cartográfica estiver codificada. Outros são extremamente difíceis e como tal, são
usados para analisar após serem abstraídos dos mapas. As medições são
implementadas usando-se certos algoritmos.
Distribuição
A densidade é uma medida de distribuição dos fenômenos que se
distribuem no espaço. A densidade pode ser calculada pela contagem dos objetos
cartográficos e pelos atributos de um conjunto de unidades geográficas. A
densidade de um fenômeno geográfico possui grande aplicação não apenas na
medida e geocodificação, mas também na generalização, tematização e
simbolização do mapa.
Padrão
Os padrões descrevem a estrutura da distribuição dos fenômenos
geográficos. Essa descrição envolve proximidade e cruzamento entre objetos. Esse
relacionamento envolve distância e tamanho dos padrões bem como evidencia sua
repetitividade.
Vizinhança
Se o padrão é a repetição de um atributo sobre o espaço, a
vizinhança define a variação do dado geográfico no espaço. Cada variação
depende da distância, indicando que distâncias de separação pequenas significam
similaridade e grandes distâncias indicam desuniformidade. Dentro da geografia, a
função distância tem sido caracterizada e medida usando-se ferramentas como
funções de correlação, modelos de interação espacial, modelos de destruição de
distâncias, etc..
Contigüidade
Normalmente, a contigüidade está relacionada à justaposição
(situação de contigüidade) dos dados, por isso, é uma expressão geográfica do
campo topológico. No partilhamento de limites comuns em mapas políticos,

11
interessa o comprimento desse limite, medido geometricamente, assim como em
coberturas de solos, uso do solo, etc. A contigüidade é expressa de diversas
maneiras e definida em termos de limite partilhado, como redes, indicando
conectividade e na forma de pixeis na estrutura de grid.
Forma
A medição direta da forma é bastante difícil e complexa. A forma
representa a composição de gráficos de pequenas dimensões.
Escala
É uma propriedade quantitativa dos dados cuja representação varia e
sua faixa é limitada pela finalidade cartográfica dos fenômenos. Sua particularidade
é prover precisão topográfica e característica métrica aos dados ou fenômenos
geográficos (Xavier da Silva, 1997).
2.5.1.2.3 Tipos de dados geográficos
Normalmente, os dados geográficos compreendem três tipos:
O dado espacial, que se refere à localização, à forma e às relações entre as
entidades espaciais. Um dado espacial é um elemento localizado no espaço
mediante um sistema predefinido de coordenadas que podem ser descritas por
meio de atributos e sua relação com outros elementos pode ser perfeitamente
estabelecida.
O dado descritivo, que se refere às características da entidade espacial (
também denominado atributo ).
O dado temporal, que se refere ao período ou época da ocorrência do
fenômeno ou fato geográfico.
Em abordagem simplificada, o SIG manipula dois tipos de dados principais:
geométricos, que descrevem características do próprio espaço ou características
geométricas de objetos; e não geométricos, que descrevem outros tipos de
características ( Paredes, 1994).
Os dados geométricos se caracterizam, marcadamente, por serem:
Posicionais
caracterizam a posição de um objeto. Atributos de posição são
necessários para caracterizar diferentes objetos ou diversos fatos geográficos

12
como uma cidade, a fronteira entre dois municípios, e um ponto de coleta de
lixo, áreas inundadas, precipitação pluviométrica, etc..
Topológicas
caracterizam relacionamentos de vizinhança ou de conexão
entre objetos. Dois municípios divididos por um rio ou duas cidades conectadas
através de uma malha viária são exemplos de objetos entre os quais podem
existir relacionamentos de natureza topológica.
Amostrais
caracterizam valores de grandezas físicas ou de outras
propriedades de um ponto ou de uma região. Dados amostrais podem ser, por
exemplo, o valor da altura de um ponto num MDT ( Modelo Digital do Terreno ),
ou o nível de refletância de um pixel numa imagem de satélite, etc.
2.5.1.2.4 Características dos dados espaciais
Os dados espaciais são aqueles que se referenciam no espaço terrestre por meio
de coordenadas x,y ( que descrevem a localização ) e uma variável z, que representa o
atributo.
Os dados espaciais descrevem objetos do mundo real em termos de posição com
relação a um sistema de coordenadas, de atributos (cor, custo, etc) e parâmetros
espaciais pelas relações topológicas, e descrevem a união desses dados entre si.
Desta forma a:
localização: define a condição geométrica das entidades; normalmente
identificado por coordenadas;
relação: define a topologia das entidades, sempre identificadas por apontadores
e
descrição: define os atributos das entidades, geralmente identificados por
códigos.
As figuras seguintes ilustram, graficamente, os conceitos de localização, relação e
descrição. Na figura de localização observa-se as coordenadas que compõem cada
segmento de reta (Xn, Yn), na figura de descrição a legenda mostra qual o tipo de
solo em cada área do gráfico; e na figura de relação está sendo mostrado a relação
entre as duas outras figuras.

13
Figura 2 Conceitos gráficos de localização, relação e descrição
FONTE: adaptada de paredes (1994), pág. 120
A padronização dos dados espaciais está baseada em entidades do mundo real e
o mecanismo para representá-las é feito sob objetos numa base de dados cartográfica.
Dentro dessa proposta existem conjuntos de definições dos objetos espaciais, que
estão divididos em classes baseadas na dimensão espacial dos mesmos.
Um objeto 0 dimensional é um ponto que especifica uma localização geométrica.
Pelo enfoque matemático o ponto é uma localização primitiva que não possui área.
Esses pontos são usados também para posicionar textos, símbolos, etc.
Um objeto 1-dimensional é uma linha entre dois pontos. Possuem muitas formas
complexas: retas e curvas resultantes de funções matemáticas. Nessa linha,
diferenciam-se perfeitamente o ponto final como início da linha e ponto final como fim
da linha, que são aspectos importantes numa análise de redes.
Um objeto 2-dimensional é uma área que também apresenta diversas formas.
Os exemplos seguintes ilustram, globalmente, as variações e as condições deste
tipo de dados:
0.0 X
Y
LOCALIZAÇÃO
1
2
3
4
5
DESCRIÇÃO
X
Y1
2
3
4
5
RELAÇÃO
X
Y
5
1
2
3
4
6
7
8
9
1= Solo arenoso, área urbana, população,etc... O sentido da direção é: desde...>até 2=Solo argiloso,área rural,despovoado,etc... A localização é: à direita de, abaixo de,etc.. 3= Exploração mineira, vias em construção, etc... 4= Área desértica, vegetação,etc... <atributo,atributo,...,atributo>
X1 Y1
X3 Y3
X2 Y2
X4 Y4
X5 Y5 X6 Y6
X7 Y7
X8 Y8
X9 Y9

14
Figura 3 Conjunto de definições dos objetos espaciais
FONTE: adaptado de Paredes (1994), pág. 121
Pontos
Formato
- Única Coordenada X, Y; - Sem comprimento; - Sem área
Exemplos
- Acidente de trânsito; - Árvore de rua; -Altitude; -Título de áreas; - Início e final de linhas
Linhas
- Cadeia de coordenadas x, y com ponto inicial e final; - Tem comprimento mas não área.
Formato
- Estradas; - Redes de drenagem; - Lihas de rotas; - Linhas de falhas; - Limites de áreas.
Exemplos
Polígonos
- Cadeia de coordenadas com mesmo ponto inicial; - Possui comprimento, e área.
Formato
- Parcelas; - Rodovias; - Construções; - Solos; - Distritos;
Exemplos
Superfícies
- Área com coordenada vertical; - Tem área, comprimento e elevação
Formato
- Mapa de declividade; - Plano de vertentes.
Exemplos

15
2.5.2 Sistema de informação geográfica-urbano
É tarefa fundamental da administração municipal receber e administrar a
população urbana, isto é, prever e direcionar o crescimento físico e sócio-econômico da
cidade e dos bairros, ordenar a expansão da malha urbana, e assegurar, ao mesmo
tempo, o acesso de todos à educação, saúde, alimentação, habitação, ao emprego, ao
transporte, à cultura, recreação, segurança e infra-estrutura urbana, e ordenar o pleno
desenvolvimento das funções sociais da cidade e garantir o bem-estar de seus
habitantes (Xavier da Silva, 1997).
Entretanto, esses serviços estão aquém das reais necessidades dos municípios e
tende isso a se agravar durante as próximas décadas, uma vez que o processo de
urbanização marcha a um ritmo muito mais acelerado do que as possibilidades de
planejar e controlar esse crescimento. Tal condição, propicia uma ocupação irracional
do espaço e, conseqüentemente, gera a anarquia na localização das atividades
urbanas que altera e afasta cada dia mais o desenvolvimento dessas possibilidades.
É fácil notar que as características do processo urbano de muitas cidades,
apresentam os seguintes aspectos:
imprecisão geral nos limites das áreas urbanas, suburbanas e rurais;
serviços públicos funcionais totalmente ultrapassados e sobrecarregados na sua
capacidade;
as redes de infra-estrutura, deficientes e insuficientes, não acompanham o ritmo
de expansão da malha urbana;
os componentes básicos do ambiente natural, alguns de difícil restauração,
configuram imagens deterioradas à paisagem urbana;
insegurança permanente na tomada de decisão sobre o desenvolvimento da
cidade, fazendo da vida urbana uma sucessão de fatos aleatórios e atentatórios
contra o conforto e segurança das pessoas.
Pode-se perceber que a maior parte desses problemas deve-se ao processo
arcaico de organizar, armazenar e manipular informações, ao uso de métodos
ultrapassados e aos técnicos sem alternativas de modernização. Agrava-se ainda o
problema, quando os dados existentes em diversos setores e entidades municipais não
se referenciam numa base comum, e os registros não podem ser atualizados com igual
grau de automatização. Assim, os sistemas tradicionais de armazenamento das

16
informações tornam-se rapidamente obsoletos. Logo, as condições existentes
dificultam o fluxo e o cruzamento das informações entre os diversos setores e
entidades municipais.
Para enfrentar e responder a esses problemas, o planejador urbano e o
administrador necessitam, não apenas inovar os meios que lhe permitam uma melhor
atuação em relação ao passado , contando com uma ferramenta rápida, possível de
implementar, econômica e simples, mas também incrementar procedimentos capazes
de registrar, medir e contabilizar a informação, bem como de tratar grande volume de
informações que reflitam a atual realidade urbana, de interpretar essa realidade, de
propor alternativas e de auxiliar na tomada de decisões de uma forma rápida, precisa,
eficiente e contínua (Paredes, 1994).
2.5.3 ArcView GIS
O ArcView GIS é um SIG desktop com interface gráfica que permite carregar
dados espaciais e descritivos para que se possa visualizá-los em mapas, tabelas e
gráficos. Inclui ainda ferramentas necessárias para inquirir e analisar os dados, bem
como apresentá-los em mapas de elevada qualidade.
O software ArcView foi desenvolvido pela empresa Environmental Systems
Research Institute (ESRI), para efetuar análises em ambiente de SIG.
Todas as atividades no âmbito do Arcview estão organizadas sob um Project, o
que pode estar constituído por uma série de Views, Tables, Charts(gráficos sobre
dados), Layouts, e Scripts. Scripts são programas na linguagem Avenue (linguagem de
programação do ArcView). As funções do Arcview incluem a apresentação de planos
de informação numa View, tabelas de atributos relacionados a essa View, tabelas de
atributos relacionados em função de campos chave, criação de gráficos para a
visualização de informações espaciais, e a criação de layout s para a apresentação de
informações supridas pelas Views, Charts, eTables (Ormsby,1999).

17
2.5.3.1 Estrutura de dados
Existem dois tipos de estruturas de dados no arcview: topologia e camadas.
2.5.3.1.1 Topologia
A informação topológica descreve a relação espacial entre as características e
geralmente não é mudada pelo operador SIG.
Ao descrever a posição de alguma coisa, geralmente diz-se que está à esquerda,
ao lado de, ou a determinada distância de qualquer outra coisa. Esta definição não é
precisa o suficiente para um SIG. Um SIG requer as definições precisas que a
topologia fornece para realizar numa análise espacial.
A topologia define a relação posicional de características ao definir suas
propriedades. Inclui informações sobre que rótulos estão ligados a cada característica,
como os pontos estão ligados uns aos outros e que pontos e linhas formam um
polígono em particular. Esta informação está armazenada no SIG. A informação
topológica permite que o SIG efetue funções de relação espacial como a sobreposição
de polígonos, que possa isolar polígonos e determinar se uma linha está dentro de um
polígono e determinar a proximidade entre características.
2.5.3.1.2 Camadas
A maioria dos SIG permite a separação de informações de um mapa em
categorias lógicas chamadas de camadas de mapa (layers). Estas também são
conhecidas como temas de mapa, níveis ou coberturas. As camadas geralmente
contém informações sobre um só tipo de característica, como áreas de tipo de solo ou
sobre um pequeno grupo de características relacionadas, tais como utilidades públicas
(por exemplo, telefone, gás e linhas elétricas).
Os dados separam-se de maneira lógica em camadas de mapa para que assim
possam ser manipulados e analisados espacialmente, sejam sozinhos ou em
combinação com outras camadas. Para obter-se resultados analíticos significativos, as

18
camadas no SIG devem registrar-se uma com respeito à outra pelo sistema de
coordenadas comum da base de dados.
As camadas podem ser usadas para criar mapas compostos com a sobreposição
delas numa tela de computador da mesma maneira que se sobrepões transparências
de acetato num projetor. Durante a análise criam-se novas sobreposições com a
combinação matemática de sobreposições já existentes. Pode-se usar compostos
novos para criar cenários alternativos. Logicamente ao separar os dados em camadas
facilita o manejo e uso da base de dados e seus produtos. Na figura 4 observa-se um
exemplo de uso de camadas.
Figura 4 - Exemplo de camadas
2.6 NAVSTAR GPS
O GPS, ou NAVSTAR-GPS, é um dispositivo de radionavegação desenvolvido
pelo Departamento de Defesa dos Estados Unidos da América
DoD (Department of
Defense), com o intuito de ser o principal sistema de navegação das forças armadas

19
americanas. Ele resultou da fusão de dois programas financiados pelo governo norte-
americano para desenvolver um sistema de navegação de abrangência global:
Timation e System621B, sob responsabilidade da Marinha e da força Aérea.
Em razão da alta acurácia proporcionada pelo sistema e do grande desenvolvimento da
tecnologia envolvida nos receptores GPS, uma grande comunidade usuária emergiu
dos mais variados segmentos da comunidade civil (navegação, posicionamento
geodésico, agricultura, controle de frotas etc.).
O GPS é um sistema de abrangência global. Esse sistema tem facilitado todas as
atividades que necessitam de posicionamento, fazendo que algumas concepções
antigas pudessem ser postas em prática. Um exemplo é o desenvolvimento da
agricultura.
O GPS permite que um usuário, em qualquer local da superfície terrestre, ou
próximo a ela, tenha à sua disposição, no mínimo, quatro satélites para serem
rastreados, esse número permite a realização de um posicionamento em tempo real.
O conceito básico do GPS consiste na medida da distância entre o usuário e
quatro satélites. Conhecendo as coordenadas dos satélites num sistema de referência
apropriado, é possível calcular as coordenadas da antena do usuário no mesmo
sistema de referência dos satélites (Galera, 2000).
2.6.1.1 Características dos sinais GPS
Cada satélite GPS transmite duas ondas portadoras: L1 e L2. Elas são geradas a
partir da freqüência fundamental de 10,23 MHz, que é multiplicada por 154 e 120,
respectivamente. Dessa forma, as freqüências (L) e os comprimentos de onda ( de
L1 e L2 são:
L1 = 1575,42 MHz e cm
L2 = 1227,60 Mhz e cm.
Essas duas freqüências são geradas simultaneamente, permitindo aos usuários,
corrigir grande parte dos efeitos em razão da refração ionosférica.
Os códigos que formam o PRN são modulados, em fase, sobre essas duas
portadoras. Essa técnica permite realizar medidas de distâncias a partir da medida do
tempo de propagação da modulação (Leick, 1995).

20
Um PRN é uma seqüência binária de +1 e -1, ou 1 e 0, que parece ter
característica aleatória. Como é gerado por um algoritmo, pode ser univocamente
identificado. Trata-se basicamente dos códigos C/A e P.
O código C/A ( Coarse Acquisition
fácil aquisição), com comprimento de onda
por volta de 300m, é transmitido a uma razão de 1,023 MHz. Ele é gerado a partir do
produto de duas seqüências PN ( Pseudorandom pseudo-aleatória), denominadas G1
e G2, cada uma com período de 1.023 bits. O código C/A resultante também consistirá
de 1.023 bits, com período de 1ms. Cada satélite transmite um código C/A diferente,
dentre os 37 definidos no ICD GPS-200C (Spilker, 1996).
Isso poderia causar dificuldades para um receptor GPS distinguir entre todos os
códigos possíveis. No entanto, o código C/A faz parte de uma família de códigos (gold
codes), que tem como característica básica a baixa correlação entre seus membros.
Isso possibilita a rápida distinção dos sinais recebidos, simultaneamente, de vários
satélites (Leick,1995).
O sinal é modulado somente sobre a portadora L1. Esse é o código a partir do
qual os usuários civis obtêm as medidas de distâncias que permitem atingir a
acuracidade estipulada no GPS (Galera,2000).
2.6.1.2 Descrição dos receptores GPS
Os principais componentes de um receptor GPS, tal como mostrado na figura 5,
são( Seeber,1993):
antena com pré-amplificador;
seção de RF ( radiofreqüência ) para identificação e processamento do
sinal;
microprocessador para controle do receptor, amostragem e processamento
dos dados;
oscilador;
interface para o usuário, painel de exibição e comandos;
provisão de energia e
memória para armazenar os dados.

21
Figura 5 Diagrama em blocos do GPS
Fonte: adaptada de GALERA (2000)
A seguir são detalhados os principais componentes do receptor GPS:
antena
a antena detecta as ondas eletromagnéticas emitidas pelos satélites,
converte a energia da onda em corrente elétrica, amplifica o sinal e o envia para a
parte eletrônica do receptor. Em razão da estrutura dos sinais GPS, todas as
antenas devem ser polarizadas circularmente à direita.
Seção de Rf
os sinais que entram no receptor são convertidos na divisão de RF
para uma freqüência mais baixa, denominada freqüência intermediária (fI), que é
mais fácil de ser tratada nas demais partes do receptor. Isso é realizado pela
combinação do sinal recebido pelo receptor com um sinal senoidal gerado pelo
oscilador do receptor. Normalmente, os osciladores dos receptores GPS são de
quartzo.
Canais
o canal de um receptor é considerado a sua unidade eletrônica primordial,
podendo o receptor possuir um ou mais canais. Os tipos de canais podem ser
Antena e pré-amplificador
Rastreador do código
Processador de sinal
Rastreador da fase
oscilador
Micropro-cessador
memória
Suprimento de energia
Unidade de comandos e
display
Descarre-gador
externo de dados

22
divididos em multicanais (canais dedicados), seqüenciais e multiplexados.Nos
receptores multicanais, também denominados canais paralelos, cada canal rastreia
continuamente um dos satélites visíveis. No mínimo quatro canais são necessários
para obter posição e correção do relógio em tempo real. Nos receptores
seqüenciais, o canal alterna entre satélites dentro de intervalos regulares,
normalmente não coincidentes com a transmissão dos dados, fazendo com que a
mensagem do satélite só seja recebida completamente depois de várias seqüências.
Microprocessador
o microprocessador é necessário no controle das operações
do receptor (obter e processar o sinal, decodificar a mensagem de navegação), bem
como para calcular posições e velocidades, além de outras funções (por exemplo,
controle dos dados de entrada e saída e mostrar informações). Ele utiliza dados
digitais para efetuar suas funções(Galera ,2000).
2.6.2 Modelo utilizado
Para a implementação do projeto foi utilizado o GPS da GARMIN modelo eTrex
Camo. Foi escolhido este modelo de GPS devido a sua forma de transmissão serial e o
baixo custo perante outros modelos e marcas existentes no mercado. Na tabela 1
observa-se o formato de envio dos dados pelo GPS utilizado.
Descrição do campo Tamanho Formato

23
Inicio do quadro 1 Sempre @
Ano 2 2 últimos dias do UTC ano
Mês 2 UTC mês, 01 .. 12
Dia 2 UTC dia do mês, 01 ... 31
Hora 2 UTC hora, 00 ... 23
Minuto 2 UTC minuto, 00 ... 59
D
ata
e H
ora
Segundo 2 UTC seundo, 00 ... 59
Hemisfério da latitude 1 N ou S
latitude 7 WGS84 ddmmmmm
Hemisfério da longitude 1 E ou W
longitude 8 WGS84 dddmmmmm
Status da posição 1 'd' se posição 2D diferencial
'D' se posição 3D diferencial
'g' se posição 2D atual
'G' se posição 3D atual
'S' se posição simulada
'_' se posição inválida
Erro horizontal 3 Em metros
Sinal da altitude 1 + ou -
p
osi
ção
altitude 5 Abaixo ou acima do nível do mar em
metros
leste/oeste velocidade
direção
1 'E' ou 'W'
leste/oeste
Velocidade magnitude
4 Metros por segundo
("1234" = 123.4 m/s)
norte/sul
velocidade direção
1 'N' or 'S'
norte/sul
velocidade magnitude
4 Metros por segundo
("1234" = 123.4 m/s)
Velocidade vertical
direção
1 'U' (para cima) or 'D' (para baixo)
Vel
oci
dad
e
Velocidade vertical
magnitude
4 Metros por segundo
("1234" = 123.4 m/s)
Fim de quadro 2 Retorno de carro, '0x0D', e nova
linha, '0x0A'
Tabela 1 Formato do quadro de dados enviado serialmente peloGPS

24
2.7 Microcontroladores
Um microcontrolador é um dispositivo utilizado para controlar e monitorar funções
durante um processo.
A partir do advento dos circuitos integrados TTL (Transistor Transistor Logic, Lógica
transistor-transistor), pode-se delinear três gerações no que diz respeito à
implementação de controladores.
Na primeira geração estão os projetos envolvendo circuitos integrados TTL, na
sua maioria. O alto consumo de energia, a grande quantidade de chips envolvidos e a
dificuldade em se realizar reengenharia nos microcontroladores de primeira geração
tornou a segunda geração atraente aos projetistas.
Então, o advento dos microprocessadores possibilitou projetos de circuitos
destinados ao controle, obtendo-se a segunda geração dos controladores. Boa parte
das funções antes implementadas por hardware passaram a ser implementadas por
software.
A terceira geração veio para integrar em um único chip boa parte dessa estrutura.
Microcontroladores da terceira geração integram as funções de um microprocessador,
memória de dados e de instruções, e ainda, dependendo da complexidade, portas
seriais e paralelas bidirecionais, conversores A/D, timers, watchdog e outros(Pereira da
Silva,2000).
2.7.1 Microcontrolador 8051
A partir da década de 80, a família MCS-51 da Intel obteve grande sucesso com
microcontroladores de uso geral com capacidades de memória e I/Os(input/output,
entrada/saída) diferenciados. A família MCS-51 pode incorporar memória de programa
e dados internamente com a possibilidade de expansão de até 64 Kbytes de programa
e mais 64 Kbytes de dados. Permite o acesso a portas internas de I/O, canal de
comunicação serial UART full duplex, interrupções com estrutura nesting com 5 fontes
mascaráveis e dois níveis de prioridade, timers/counters de 16 bits, oscilador interno e
freqüência de clock típica de 12 MHz.

25
A família MCS -51 torna fácil a execução de complexas operações aritméticas e
lógicas (multiplicação, divisão, permuta e deslocamento de bits, etc). Esta família
trabalha com bancos de registradores nominais e também com bits endereçáveis na
RAM (Pereira da Silva,2000).
Outras vantagens do 8051:
Popular: prontamente disponível e amplo suporte. Gama completa de produtos
de suporte estão disponíveis comercialmente.
Rápido e eficaz: a arquitetura se correlaciona de perto com o problema sendo
solucionado (sistemas de controle). Instruções especializadas significam que
menos bytes precisam ser buscados e menos jumps condicionais são
processados.
Baixo custo: alto nível de integração do sistema em um único componente.
Poucos componentes são necessários para se criar um sistema que funcione.
Ampla gama de produtos: uma única família de microcontroladores cobre as
opções que outros fornecedores só conseguem cobrir com um número razoável
de diferentes e incompatíveis famílias. Desse modo, o 8051 proporciona
economia real em termos de custo de ferramentas, treinamento e suporte para
software.
Compatibilidade: opcodes e código binário são os mesmos para todas as
variações do 8051, diferentemente de outras famílias de microcontroladores.
Multi-Sourced: mais de 12 fabricantes e centenas de variedades.
Aperfeiçoamentos constantes: melhorias na manufatura aumentam a
velocidade e potência anualmente. Há ainda versões de 16 bits vindo de
diversos fabricantes.

26
2.8 Porta serial
Diante da necessidade de se comunicar equipamentos à grande distância, foi
criada a transmissão serial. Atualmente, o meio mais utilizado para o transporte serial
de informação é a linha telefônica, privada ou pública, que com a ajuda de aparelhos
dedicados permite a ligação de dois ou mais computadores, por exemplo, em países
diferentes, bastando para tal a disponibilidade da linha telefônica e seus sistemas
próprios (centrais, antenas e até mesmo satélites).
Na transmissão serial, o envio de um certo caractere (vários bits) é feito de tal
forma que cada bit de cada caractere é transmitido de forma seqüencial, um após o
outro.
Para que vários sistemas troquem informações, foi criado um código binário para
cada caractere, de tal forma que exista compatibilidade. Atualmente usa-se o código
ASCII (American Standart Code for Interchange of Information). Neste código, cada
caractere possui seu correspondente em binário, incluindo-se também vários
caracteres de controle e sinais especiais(Pereira da Silva,2000).
A seguir são apresentadas as formas de comunicação serial.
2.8.1 Modo Síncrono de Comunicação
Este modo de comunicação necessita de um sincronismo entre dois sistemas em
comunicação. Este sincronismo é gerado por um conjunto de bits, denominado bits de
sincronismo, que ao serem recebidos pelo elemento receptor, ajustam seu relógio
interno para receberem um conjunto de bits referentes aos dados. Logo após o último
bit de dado, o transmissor envia um conjunto de bits chamado bits de parada, que ao
serem detectados pelo receptor informam que acabaram os bits de dados. Estes bits
de parada podem conter ou não informações a respeito dos bits transmitidos, para
permitirem ao receptor confirmar se recebeu os bits corretamente(Axelson,1998).

27
2.8.2 Modo Assíncrono de Comunicação
Neste modo não existe a necessidade de gerar sincronismo, cada caractere é
transmitido individualmente, e para cada caractere (transmitido bit a bit) existem bits de
início de transmissão (Start bit) e bits de fim de transmissão (Stop bit).
O Start bit é reconhecido pela transição do nível presente na linha de 1 para 0. A
partir desse instante, o clock interno do sistema efetua uma varredura da linha de
tempos em tempos para detectar o nível na mesma, nível este que será associado a
cada bit de forma conveniente. Ao reconhecer o sétimo bit, o sistema fica esperando o
Stop bit, que é a transição de 0 para 1, ou a permanência em nível 1. Neste ponto, o
sistema entra em repouso e fica na espera de um novo Start bit, para iniciar a recepção
de um novo caractere.
Neste modo de transmissão, deve-se garantir que o transmissor e o receptor
operem com a mesma taxa de transmissão e recepção(Axelson,1998).
2.8.3 Canais Simplex, Half-Duplex e Full-Duplex
Existem três maneiras de interligar dispositivos digitais:
1. o modo Simplex de interligação de dispositivos possui um elemento que
apenas transmite e outro que apenas recebe. Exemplo: terminais de dados
e impressoras;
2. outro modo é o Half-Duplex, ou Semiduplex, que permite elementos que
recebem e transmitem dados, embora as duas operações não possam
ocorrer simultaneamente;
3. e o último modo é o Full-Duplex, onde os sistemas podem transmitir e
receber dados simultaneamente(Axelson,1998).

28
2.8.4 Interface serial no 8051
No 8051, a interface serial é do tipo Full-Duplex, isto significa que o
microcontrolador pode receber e transmitir dados simultaneamente, sendo que existem
registros especiais para este fim. O registro para a serial chama-se SBUF (Serial
Buffer) e uma escrita no mesmo implica em automática transmissão do dado escrito,
assim como um dado que chegue no pino de recepção, implicará na automática
operação de recepção por parte do sistema, independentemente do controle do usuário
(desde que o canal serial esteja habilitado e corretamente ajustado)(Pereira da
Silva,2000).
Existem na realidade, dois registros com o mesmo nome SBUF, sendo um para
recepção e outro para transmissão. O reconhecimento é feito pelo sistema através das
instruções que acessarão o mesmo.
2.8.5 Comunicação RS-232 para o 8051
A comunicação RS-232 nasceu da necessidade de se criar um padrão para a
comunicação serial, através da definição de níveis de tensão e de impedância para a
transmissão de dados, permitindo que equipamentos incompatíveis entre si possam ser
interligados(Pereira da Silva,1998).
Os níveis de tensão o padrão RS-232C (o mais difundido atualmente) vão de -15
até + 15 Volts, divididos da seguinte forma:
Nível lógico 0 +5 a + 15 Volts Nível lógico 1 -5 a -15 Volts
Tabela 2 Níveis de tensão para o padrão RS-232C
Fonte: Adaptada de (Axelson, 1998), pág 55
A região entre -5 e + 5 Volts é conhecida como região de transição, e não é
reconhecida pelo sistema.

29
Para que a comunicação possa ser efetuada entre os módulos e o
microcontrolador é necessário à transformação do padrão TTL (natural ao
microcontrolador) para o padrão RS-232 (padrão dos módulos).
2.8.6 Comunicação serial entre os módulos
A comunicação entre o módulo coletor de dados e o GPS é feita serialmente em
modo Simplex (somente o GPS envia dados q são recebidos pelo microcontrolador), 8
bits de dados, sem paridade, com 1 bit de parada e com velocidade de transmissão de
9.600 bps. A transmissão entre o módulo coletor e o módulo de transmissão é efetuada
a 19.200 bps, com 8 bits de dados, sem paridade, com 1 bit de parada e com controle
de fluxo por hardware.
O microcontrolador usado no projeto possui apenas uma porta serial, desta forma
é necessária a comutação entre os dois dispositivos (GPS e celular) conectados na
porta serial, para isso foi utilizado um multiplexador (CD4051BE). Na figura 6 observa-
se o esquema de comutação entre os dispositivos.
2.9 Transmissão
A seguir serão apresentadas as várias formas de transmissão avaliadas para a
implantação no sistema.
microcontrolador TX
RX
GND
Celular
GPS
MUX
RX
TX
GND
GND
TX
P3.2
Figura 6 - Comutação entre dispositivos
30
2.9.1 Rádio freqüência
Os sistemas de comunicação via rádio utilizam ondas eletromagnéticas como
elemento de ligação entre transmissor e receptor. Como essas ondas possuem a
propriedade de irradiarem-se pelo espaço, dispensando a existência de quaisquer
meios físicos para sua transmissão, a implantação de sistemas de comunicação via
rádio é muito facilitada.
Quando comparada aos sistemas via cabo, os sistemas de comunicação via rádio
apresentam as seguintes características: utilizam equipamentos eletrônicos
relativamente complexos para o processamento dos sinais necessários à operação do
sistema, a confiabilidade é menor e depende das condições de propagação da onda
eletromagnética. Em compensação, os custos de implantação são menores para
distâncias superiores a algumas dezenas de quilômetros, apresentando ótima
flexibilidade para ampliações. Essas características tornam os sistemas via rádio
adequados tanto para comunicação à longa distância quanto para comunicação móvel.
Um sistema de comunicação via rádio é composto por, pelo menos, duas
estações de rádio, sendo uma transmissora e outra receptora. Cada estação é
composta por um equipamento de rádio, uma linha de transmissão e uma antena. A
função dos equipamentos de rádio é, no caso do transmissor, gerar sinais de
radiofreqüência e, no caso do receptor, recebê-los; da linha de transmissão é conduzir
o sinal de radiofreqüência do transmissor até a antena, ou da antena até o receptor.
Finalmente, a função da antena é gerar ou captar ondas eletromagnéticas
(Nascimento, 2000).
2.9.2 Transmissão via satélite
O termo satélite empregado atualmente vem do latim satelles ou satellitis, que
significa corpo que gravita em torno de um astro de massa preponderante (dominante),
em particular ao redor de um planeta. Disto vem a necessidade de diferenciação entre
satélites naturais (corpos celestes) e artificiais que são os engenhos construídos pelo
homem. Pode-se dividir os satélites artificiais em duas categorias, satélites de
finalidade e satélites de órbita:

31
2.9.2.1 Finalidade
Dentro dessa categoria, existem os satélites militares, os científicos, navegação e
os de comunicações:
Militares - Segundo consta, cerca de 75% dos satélites lançados a partir de
1957, tem finalidades militares. Desenvolvidos com os objetivos de
telecomunicação, observação, alerta avançado, ajuda à navegação e
reconhecimento, os satélites militares, em função do objetivo a que foram
concebidos, giram em diferentes altitudes e, por conseqüência órbita.
Científicos - Os satélites científicos englobam os meteorológicos, os de
exploração do universo e os de coletas de dados da Terra. Os meteorológicos
visam a óbvia tarefa de identificação do clima, possibilitando a prevenção de
mortes por desastres naturais como furacões ou chuvas de granizo. Já os de
exploração do universo, tem seu alvo voltado justamente para a exploração do
espaço a fim de obter mais conhecimento da Terra, do sistema solar e do
universo como um todo. E, o último dos satélites científicos, o de coleta de
dados, que visa elaboração de informações sobre fenômenos físicos, químicos,
biológicos da superfície da Terra e da atmosfera, através de uma gama infinita
de sensores existentes
Comunicação - Por fim, os satélites de comunicação que são utilizados na
transmissão mundial de informações digitais, especificamente para o mundo
civil. Os satélites de comunicação podem ter acessos múltiplos, isto é, servir
simultaneamente a diversas estações terrestres de localidades ou mesmo de
países diferentes. Um satélite de comunicações atua como uma estação
repetidora da órbita da Terra. Devido à sua enorme altitude, o satélite de
comunicações consegue estabelecer contato entre pontos localizados a milhares
de quilômetros de distância sobre a superfície terrestre. Para se comunicar com
o satélite são necessárias pelo menos duas estações terrenas, que atuam como
estações terminais de rádio (Nascimento, 2000).

32
2.9.2.2 Órbita
Existem três tipos de órbitas que um satélite pode cursar. A primeira e mais
comum delas é a geoestacionária, que é utilizada para fins de comunicação.
Posicionados a uma altitude entre 35800 km e 36000 km, os satélites gastam 23h e 56
min para dar uma vota em torno da Terra que, é o mesmo período de rotação de nosso
planeta. Neste caso a órbita é denominada geo-síncrona apenas. Se o plano da órbita
se confundir com o equador, o satélite parecerá estático a um observador terrestre,
devido ao fato dos dois terem a mesma velocidade angular e eixo de rotação. Para este
caso é atribuído um nome especial, órbita geoestacionária.
Devido a este fato, é disputada a altitude referida sob a linha do equador, já que a fim
de não haver interferência entre satélites os mesmos devem estar afastados de 2 graus
no mínimo. Assim, limita-se em 180 o número de satélites nesta órbita que já possui
satélites de várias finalidades como transmissão de televisão, governamental e militar.
2.9.3 Transmissão via telefonia celular
No Brasil, a telefonia celular tornou-se popular a partir dos anos 90, (com o
aparecimento do AMPS) seguido pelos sistemas celulares digitais TDMA, CDMA e a
poucos anos a tecnologia GSM.
A finalidade de um sistema de telefonia celular é permitir a comunicação entre dois
telefones móveis ou entre telefones móveis e fixos. Para isso, é utilizado um sistema
composto pela rede de telefonia pública comutada (RTPC), que atende os telefones
fixos, e por uma rede de telefonia móvel, composta pela CCC (Central de Controle
Celular) e algumas ERBs (Estações Radiobase), além dos TCs (telefones Celulares). A
CCC comunica-se com ERBs por meio de circuitos de voz e dados.
A comunicação de telefone celular para telefone celular, desde que na mesma
localidade, não passa pela rede telefônica pública comutada. O percurso será via rádio
entre o TC1 e a ERB1, via tronco entre a ERB1 e a CCC e entre a CCC e a ERB2. A
ERB2 comunica-se via rádio com TC2.
A estrutura do sistema celular oferece várias vantagens. A presença de uma
rede de ERBs espalhadas pela cidade proporciona uma menor distância média entre

33
elas e os telefones celulares. Por esse motivo, a potência necessária para a
transmissão é menor, permitindo que as freqüências empregadas na transmissão
possam ser reutilizadas por ERBs afastadas, aumentado o número de usuários
atendidos pelo sistema. A baixa potência de transmissão permite o emprego de
telefones celulares de peso e tamanho reduzidos, além de aumentar a duração da
carga da bateria (Nascimento, 2000).
2.10 Especificação do Hardware
Neste projeto a função do hardware do sistema é coletar os dados das amostras
com uma interface amigável e transmiti-las para a central de geoprocessamento; onde
o hardware deverá fazer a recepção e o tratamento desses dados para que eles
possam ser acessados pelo microcomputador.
O microcontrolador 8051 é o componente principal do hardware por ser de fácil
utilização, reprogramação e por ter disponível portas de entrada e saída para a
comunicação com o módulo de transmissão. Um teclado numérico e um display LCD
também serão acoplados ao microcontrolador.
A figura 7 ilustra o diagrama em blocos do hardware. Pode-se observar o
microcontrolador 8051 gerenciando os dados providos do GPS e do teclado numérico,
mostrando os dados no display LCD e fazendo a comunicação com o módulo
transmissor.
2.10.1 Análise dos meios de transmissão
Foram analisadas três alternativas diferentes para a comunicação de dados, são
elas:
transmissão por rádio freqüência,
transmissão via satélite e
transmissão via celular.

34
Foi feita uma análise a respeito de cada uma das tecnologias, avaliando-se
questões como distância de alcance, capacidade de transmissão, viabilidade
econômica etc.
A transmissão dos dados por rádio freqüência foi descartada devido ao seu
alcance, (máximo 500m para circuitos de baixa potência). Este alcance máximo
limitaria o projeto, pois a transmissão precisa cobrir toda uma área urbana. Foi
levantada a hipótese de se criar repetidoras em vários pontos, mas isso elevaria o
custo e a complexidade do projeto. Poderia-se também usar um módulo de rádio
Figura 8 Diagrama em blocos
freqüência com alta potência, mas desta forma o sistema coletor perderia a função
proposital inicial do projeto, que é a de ser um sistema leve e portátil.
Display LCD Microcontrolador
8051
Teclado numérico
Módulo transmissor
Módulo receptor
PC
Meio de transmissão
celular
GPS
Coordenadas
Dados sobre acidentes
Dados Para visualização

35
Para a transmissão via satélite foi analisado o serviço de rede de satélites de
baixa órbita Orbcomm, que é formado por uma constelação de 42 satélites que estão a
cerca de 830Km de altitude, por isso é denominado de baixa órbita. O custo do serviço
Orbcomm inclui uma mensalidade mínima de R$ 65,00 (sessenta e cinco reais), valor
este dependente do volume de dados transmitido. A utilização deste serviço ainda
implica na aquisição dos módulos receptor e transmissor com custo de R$
750,00(setecentos e cinqüenta reais) para o conjunto. A este valor pode ser acrescido
o preço de uma antena que pode vir a ser necessária.
A transmissão por satélite de baixa órbita é o meio de transmissão que mais
atendeu aos requisitos do sistema, funcional em toda área (no caso em uma cidade
inteira) e acoplamento ao módulo coletor e ao módulo de conversão do formato de
dados extremamente simples. Porém, devido ao seu alto custo operacional esta
abordagem foi inviabilizada.
De forma a utilizar uma rede de comunicação de dados já inteiramente pronta, e a
sua confiabilidade perante o sistema de rádio transmissão e ao seu custo médio total, a
tecnologia adotada para o projeto é a de telefonia celular. Utilizando a telefonia celular
foram avaliadas duas formas diferentes de transmissão, são elas:
Mensagens custas de texto (SMS) e
Transmissão celular utilizando modem.
A transmissão por mensagens de texto foi descartada devido a alguns fatores
como:
não garantia do recebimento da mensagem;
não há confirmação do recebimento da mensagem;
e o tempo indeterminado para chegar ao destino, podendo chegar
instantâneamente ou demorar algumas horas.
A transmissão por SMS também necessita de dois telefones celulares (um para o
módulo coletor e outro para a central de geoprocessamento) acarretando desta forma
um custo maior ao projeto.
O meio escolhido foi a transmissão por modem celular, desta forma a recepção é
feita por um computador conectado a uma linha telefônica comum. Com esta forma de
transmissão existe a garantia de que os dados são recebidos em tempo real, caso haja
um erro na transmissão o operador imediatamente fica ciente e deve tentar novamente
o envio dos dados.

36
Esta forma de comunicação foi o meio mais econômico encontrado, já que é
necessário apenas um telefone celular, e um modem conectado a uma linha telefônica.
O custo da transmissão é de uma ligação celular-telefone fixo com tempo de 30s,
variando entre R$ 0,25 e R$ 0,60, conforme o horário da comunicação. Este valor
viabiliza o pequeno volume de dados que será transmitido. Para um sistema comercial
de grande escala e grande volume de dados transmitido este valor se tornaria inviável.
2.10.2 Lista de componentes
A seguir é apresentada a lista de componentes utilizados:
baterias de 9V;
cabos;
capacitores;
circuito integrado CD4051, 74373;
conectores DB -9 macho e fêmea;
display LCD;
fonte de alimentação;
microcontrolador 8031;
EPROM
GPS;
celular;
diodos;
cristal;
resistores e
regulador de tensão.

37
2.10.3 Diagrama do hardware
O hardware pode ser dividido em duas partes: coleta dos dados e transmissão
dos dados.
Na coleta dos dados está a parte de interface com o usuário e comunicação com
o módulo de GPS. A comunicação entre o microcontrolador e o módulo GPS é feita
pela porta serial. A figura 8 ilustra esse módulo:
No módulo de transmissão dos dados, estão presentes os módulos de
transmissão celular para envio e recepção e a conexão com o computador. A
comunicação entre o microprocessador e o módulo de transmissão também é feita
serialmente, como pode-se observar na figura 9:
Figura 9 Diagrama do módulo transmissor
Módulo de transmissão
celular
Módulo de recepção
celular
microcontrolador
Teclado numérico dos
dados
GPS
Microcontrolador 8051
display
Figura 8 Diagrama do hardware coletor de dados
usuário

38
O microcontrolador faz o controle e sincronização dos dados, na verdade ele é
responsável por receber os dados digitados no teclado, mostrar a atual situação no
display, receber as coordenadas do módulo GPS e enviar todos estes dados
formatados para o módulo de transmissão celular. Na figura 10 observa-se o
fluxograma do programa do microcontrolador:

39
Figura 10 Fluxograma do programa do microcontrolador
Ler do teclado
Verificar o dado
N
Ler do teclado
S
Verificar o dado
N
Comunicação com módulo
GPS
S
Mostrar no display
Mostrar no display
Comunicação com módulo de
transmissão celular
FIM
início

40
2.10.4 Esquemático do circuito
Na figura 11 apresenta-se o esquemático do circuito baseado no microcontrolador
80C31 utilizado no hardware:
Figura 11 - Esquemático do circuito utilizado no hardware
2.11 Especificação do software
O ambiente de desenvolvimento do software para recepção e conversão dos
dados para a estação de geoprocessamento é utilizado o compilador Borland Builder
C++ 5.0, e a linguagem de programação é o C++.
Para o geoprocessamento foi adquirida ou uma base geográfica compatível com o
formato do software ARCVIEW 8.1, utilizando as suas facilidades nativas de banco de
dados e de interface com o usuário.

41
A função do software de geoprocessamento é a de mostrar ao usuário todos os
pontos do mapa onde ocorreram acidentes de trânsito, com informações do número de
vítimas e feridos, bem como analisar onde ocorrem o maior número de acidentes com
vítimas fatais, feridos e etc.
Na figura 12 é apresentado o diagrama de contexto do sistema. Este diagrama
mostra o relacionamento entre as entidades externas e o sistema de software.
Figura 12 Diagrama de contexto do software
2.11.1 Software de recepção e conversão dos dados
Este software foi desenvolvido em C++, possui a função de controlar o modem,
receber os dados e inseri-los no banco de dados. Este software deve estar sempre em
execução para que os dados possam ser recepcionados. Esta parte do projeto é
responsável por alterar os dados para o formato do sistema suportado pelo ARCVIEW
8.1 e também transformar as coordenadas para o sistema métrico.

42
2.11.2 SGBD (sistema gerenciador de banco de dados)
A tecnologia aplicada aos métodos de armazenamento de informações vem
crescendo e gerando um impacto cada vez maior no uso de computadores, em
qualquer área em que os mesmos podem ser aplicados.
Um banco de dados pode ser definido como um conjunto de dados
devidamente relacionados. Por dados pode-se compreender como fatos conhecidos
que podem ser armazenados e que possuem um significado implícito. Um banco de
dados possui as seguintes propriedades:
um banco de dados é uma coleção lógica coerente de dados com um
significado inerente;
uma disposição desordenada dos dados não pode ser referenciada como um
banco de dados;
um banco de dados é projetado, construído e populado com dados para um
propósito específico;
um banco de dados possui um conjunto pré definido de usuários e aplicações.
Um banco de dados pode ser criado e mantido por um conjunto de aplicações
desenvolvidas especialmente para esta tarefa ou por um Sistema Gerenciador de
Banco de Dados (SGBD). Um SGBD permite aos usuários criarem e manipularem
bancos de dados de propósito geral. O conjunto formado por um banco de dados mais
as aplicações que manipulam o mesmo é chamado de Sistema de Banco de Dados .
Neste projeto foi utilizado o PARADOX como SGBD. O banco de dados têm a
função de interligar o software de aquisição dos dados e o aplicativo de
geoprocessamento.
Os dados são inseridos no banco de dados pelo software de aquisição e lidos
pelo ARCVIEW. Todas as alterações no banco efetuada pelo software de aquisição são
refletidas na visualização do usuário no aplicativo de geoprocessamento. Abaixo está
a tabela usada no projeto, X e Y representam as coordenadas do acidente (latitude
e longitude), fatais o número de vítimas fatais e feridos o número de feridos no
acidente e os dois últimos campos são data e hora do acidente.

43
X Y feridos fatais data hora
-25.0283890
-47.1703583
0 0 13/02/2004 17:04:00
-25.0659251
-47.2000114
1 3 14/02/2004 12:56:45
-25.6789124
-47.4560235
5 0 17/10/2004 14:34:08
Tabela 3 -Exemplo da tabela utilizada no banco de dados
2.12 Especificação da validação do projeto
Os módulos de Hardware, por ter seu processamento controlado pelo
microcontrolador 8051, envolvem conceitos de microprocessadores, sistemas digitais e
instrumentação eletrônica no módulo controlador e no módulo de transmissão.
Os módulos de software envolvem conceitos de programação em linguagem C++,
e a utilização do ARCVIEW envolve conceitos de geoprocessamento e conhecimentos
em banco de dados.
Os testes e simulações serão feitos separadamente para cada módulo do projeto,
para, finalmente, haver um acoplamento entre todos os módulos. Uma atenção
especial será dada ao módulo de transmissão, por ser um módulo crítico do projeto.
2.13 Custos
A seguir é apresentado a tabela de estimativa de custos do projeto, estão
relatados os recursos necessários para o desenvolvimento do projeto e os seus
respectivos preços em reais.

44
Descrição Custo em reais (R$) Microsoft Windows XP profesional 1.247,00 Microsoft Office 2003 acadêmico 539,00 Borland C++ Builder 6 profesional 2.490,00 ESRI Arcview gis 8.3 4.500,00 Telefone celular 120,00 GPS 400,00 Componentes 200,00 Cabos e conectores 20,00 Gastos com transmissões 150,00 Gravador de memória 400,00 Horas despendidas (1000h) 4.000,00 Total 14.066,00
Tabela 4 Custos
2.14 Cronograma
A seguir é apresentado o cronograma do projeto com inicio no mês de março e
término no mês de dezembro.

45

46
2.15 Descrição do software
O software do sistema é dividido em dois módulos: módulo de aquisição dos
dados pela porta serial e o módulo de tratamento dos dados ( módulo para gerar
informações).
O módulo de aquisição dos dados pela porta serial foi desenvolvido em linguagem
C++ com o compilador Borland C++ Builder. Este módulo faz a comunicação com o
modem, recebe os dados e os formata no padrão de dados do software ArcView.
No módulo de tratamento dos dados está a visualização gráfica e os cálculos
estatísticos. Neste módulo será utilizado o software ArcView. Este software utiliza uma
linguagem de programação nativa (interna) que será utilizada para o desenvolvimento
de mapas, cálculos estatísticos e gerenciamento dos dados.
2.15.1 Casos de uso
Coletor de dados
Inserir dados sobre acidentes de
trânsito
Consultar o sistema
Usuário

47
Roteiro dos casos de uso:
-Nome: Inserir dados sobre acidentes de trânsitos;
-Caminho básico: O coletor de dados fornece ao sistema os dados sobre acidentes de
trânsito e estes são enviados para a central de geoprocessamento;
-Caminho de exceção: Os dados são fornecidos ao sistema incorretamente ou ocorreu
erro na transmissão.
-Nome: Consultar o sistema;
-Caminho básico: O usuário consulta as informações geradas e visualiza graficamente
as informações;
-Caminho de exceção: O sistema não possui os dados para gerar as informações;
-Nome: Alterar base-geográfica;
-Caminho básico: O administrador altera a base-geográfica do sistema;
-Nome: Inserir base-geográfica;
-Caminho básico: O administrador insere uma nova base-geográfica no sistema;
Administrador
Alterar base-geográfica
Inserir base-geográfica

48
2.15.2 Diagrama de caso de uso
Insere base-geográfica
Altera base-geográfica
Consulta o sistema
Insere novos dados
administrador
usuário
Coletor de dados

49
2.15.3 Diagrama de classes (do software de aquisição)
2.15.4 Diagrama de seqüência
Nos próximos itens são mostrados os diagramas de seqüência do software do
projeto.
2.15.4.1 Inserir dados sobre acidentes de trânsito
O diagrama mostra as etapas da entrada de um novo dado no sistema até a sua
inserção no banco de dados.
Cserial Ccontrole Cmodem
+ void outport (dado); + int inport();
Ccontrole(); ~Ccontrole(); +Void ativa(int porta); +Void transforma();
Cmodem(); ~Cmodem(); +void recepciona();
1...*
1 0..*
1
CBroker
Cbroker() ~Cbroker(); void dematerialize(x,y,fat,ferid);
- int porta; - float x; - float y; - int fatais; - int feridos;
-Char leitura;
- char buffer;
-Tquery *query
1
0..*
50
2.15.4.2 Consultar o sistema
O diagrama mostra a consulta do usuário ao sistema.
2.15.4.3 Inserir base-geográfica
O diagrama mostra o administrador do sistema inserindo uma nova base-
geográfica no sistema.
Usuário Sistem Geo
1. Consultar ()
Administrador Sistem Geo
1. Inserir ()
Cserial Ccontrole
Cmodem
1. int inport();
2. recepciona();
3.void recepciona();
Novo dado
CBroker
4.void desmaterialize (x,y,fat,ferid);

51
2.15.4.4 Alterar Base-geográfica
O diagrama mostra o administrador do sistema alterando a base-geográfica do
sistema.
Administrador Sistem geo
1. Alterar ()

52
3 RESULTADOS
Para a validação do projeto foram realizados vários testes, procurando-se coletar
o maior número de pontos possíveis. A localização de pontos coletados no mesmo
local varia um pouco devido a precisão do GPS utilizado, o GPS possui precisão de 10
metros.
Na figura 13 observa-se a tela principal do sistema de geoprocessamento,
mostrando a saída do sistema, onde pode-se observar o mapa da cidade de Curitiba,
com as linhas verdes representando as ruas e avenidas e os pontos registram cada
acidente de trânsito individualmente.
Figura 13 - Tela principal do sistema
Na figura 14 observa-se a mesma tela de saída, mas com um zoom aplicado na
área central da cidade de Curitiba.

53
Figura 14 - Tela principal com aproximação sobre os pontos
Na figura 15 é mostrada a caixa pesquisar , esta caixa permite ao usuário efetuar
pesquisa sobre os pontos.
Figura 15- Caixa de pesquisa
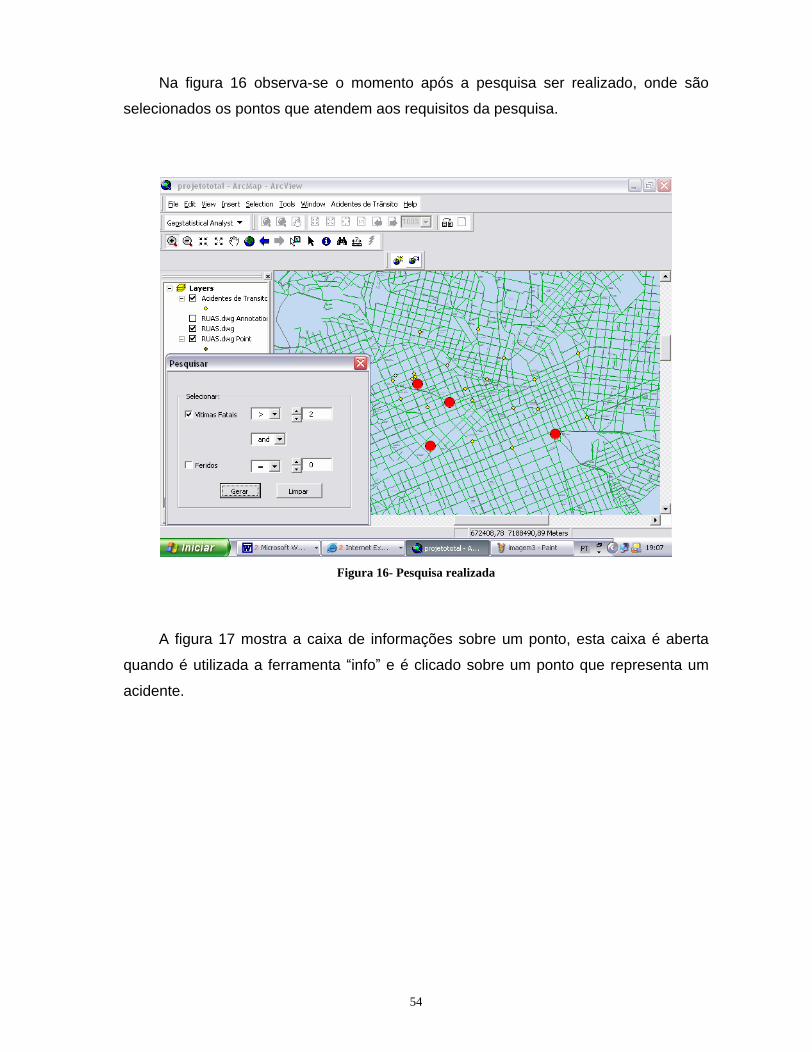
54
Na figura 16 observa-se o momento após a pesquisa ser realizado, onde são
selecionados os pontos que atendem aos requisitos da pesquisa.
Figura 16- Pesquisa realizada
A figura 17 mostra a caixa de informações sobre um ponto, esta caixa é aberta
quando é utilizada a ferramenta info e é clicado sobre um ponto que representa um
acidente.

55
Figura 17- Informações sobre um ponto
A figura 18 mostra a diferença de localização entre dois pontos coletados no
mesmo local, está diferença é devido a imprecisão do GPS utilizado no projeto.
Figura 18- Diferença entre dois pontos com mesma localização

56
4 CONCLUSÃO
O projeto implementado proporcionou estudos sobre assuntos e detalhes não
vistos anteriormente, como transmissão por telefonia celular, GPS e conceitos
geográficos. Os resultados obtidos foram os esperados, conseguindo cumprir as
funcionalidades propostas, além disso sua implementação mostrou-se viável.
Entretanto para que o projeto torne-se comercialmente viável há vários aspectos
que devem ser alterados, pode-se citar:
Alteração do meio de transmissão, pelo estudo realizado a melhor forma
mostrou ser a transmissão por satélite e baixa órbita e
Substituir o GPS por um módulo GPS que possa ser acoplado diretamente ao
microcontrolador, eximindo o usuário de seu funcionamento e configurações.

57
5 REFERENCIAS BIBLIOGRÁFICAS
AXELSON, J. Serial Port Complete, Programming and circuits for RS-232 and
Rs-485 links and Networks. Madison, WI ,USA, Lakeview Research, 1998.
ENVIRONMENTAL SYSTEMS RESEARCH INSTITUTE, INC. Getting to Know
ArcView GIS. The geographic information system (GIS) for everyone.
Redlands, CA,USA, 1999.
GALERA MONICO, J.F. Posicionamento pelo NAVSTAR-GPS. Descrição,
fundamentos e aplicações. São Paulo, Unesp, 2000.
NASCIMENTO, J. Telecomunicações. São Paulo, Makron Books, 2000.
PAREDES, E.A Sistema de informação geográfica, princípios e aplicações
(geoprocessamento). São Paulo, Érica, 1994.
PEREIRA DA SILVA, V, Aplicações práticas do microcontrolador 8051. São
Paulo, Erica,2000.
ORMSBY, T. Extending ArcView GIS. Teach yourself to use ArcView GIS
extensions. Redlands, CA, USA, Environmental Systems Research Institute,
Inc. (ESRI), 1999.
XAVIER DA SILVA, J. Geoprocessamento para análise ambiental. São Paulo,
Sermograf, 1997.

This document was created with Win2PDF available at http://www.daneprairie.com.The unregistered version of Win2PDF is for evaluation or non-commercial use only.