Embed Size (px)
DESCRIPTION
Sistema de controle
Citation preview

UNIVERSIDADE FEDERAL DE SANTA CATARINA
CENTRO TECNOLÓGICO
DEPARTAMENTO DE AUTOMAÇÃO E SISTEMAS
LABORATÓRIO DE SISTEMAS DE CONTROLE – DAS5317
RELATÓRIO 1: Conceitos Básicos
(Laboratórios 1, 2 e 3)
Equipe:
Alexandre Kobayashi – 10100844
Pathrycia Romero – 10100857
Florianópolis, 10 de outubro de 2012

SumárioINTRODUÇÃO.........................................................................................................................3
EXPERIÊNCIA 1: Simulação de Sistemas................................................................................4
Fundamentação teórica...........................................................................................................4
Definição do problema proposto............................................................................................5
Soluções e análise dos resultados...........................................................................................6
EXPERIÊNCIA 2: Efeitos de Pólos e Zeros na Dinâmica......................................................13
Fundamentação teórica.........................................................................................................13
Definição do problema proposto..........................................................................................14
Soluções e análises dos resultados.......................................................................................14
EXPERIÊNCIA 3: Identificação de Sistemas..........................................................................37
Fundamentação teórica.........................................................................................................37
Definição do problema proposto..........................................................................................38
Soluções e análises dos resultados.......................................................................................38
CONCLUSÃO.........................................................................................................................46
REFERÊNCIA BIBLIOGRÁFICA.........................................................................................48

INTRODUÇÃO
“Geralmente, sistemas são projetados para produzir uma saída y(t) desejada, dada uma
entrada x(t). Idealmente, sistemas em malha aberta deveriam resultar na saída desejada. Na
prática, entretanto, as características do sistema mudam com o tempo, o que causa variação
no sinal de saída para uma mesma entrada (LATHI, 2007).”
“Um sistema realimentado pode ser utilizado em problemas que aparecem em função
de distúrbios indesejados, bem como para reduzir não linearidades em um sistema ou para
controla o tempo de subida. Um sistema realimentado, portanto, possui a habilidade de
supervisão e autocorreção em função de alterações nos parâmetros do sistema e distúrbios
externos (LATHI, 2007).”
Neste relatório, são apresentados os resultados e conclusões relativos a três
experiências. A primeira delas é relacionada a simulações de sistemas lineares com
controlador proporcional e integral. A segunda consta na análise sobre os efeitos de polos e
zeros na dinâmica dos sistemas. Por fim, é realizada a identificação dos sistemas quanto sua
ordem.

EXPERIÊNCIA 1: Simulação de Sistemas
Fundamentação teórica
“Um sistema linear pode ser identificado por sua função de transferência H(s) e
grandes sistemas são representados em diagramas de blocos, nos quais cada subsistema,
caracterizado por sua entrada e saída, é interligado a outro (LATHI, 2007).”
Para facilitar a análise da dinâmica do sistema, sugere-se calcular a função de
transferência equivalente de todos os blocos da seguinte forma:
Por fim, é modelado o sistema de controle em malha fechada de acordo com a figura
abaixo:
,
no qual G(s) é a planta, r(t) a referência rastreada pela saída y(t), e(t) = r(t) – y(t) é o
erro de rastreamento, C(t) é o controlador e, por fim, u(t) é o sinal de controle gerado por
C(s).
Em alguns dos procedimentos realizados, é utilizado o Teorema do Valor Final para
analisar o erro em regime permanente.

Existem vários tipos de controladores, porém são aplicados neste experimento o
proporcional e o integral.
Um controlador proporcional, Cs = K, é aquele em que o sinal de controle u(t) é
proporcional ao erro de rastreamento e(t) e K é denominado ganho do controlador. Já no
controlador integral, C = K/s, o controle u(t) é proporcional à integral de e(t).
Definição do problema proposto
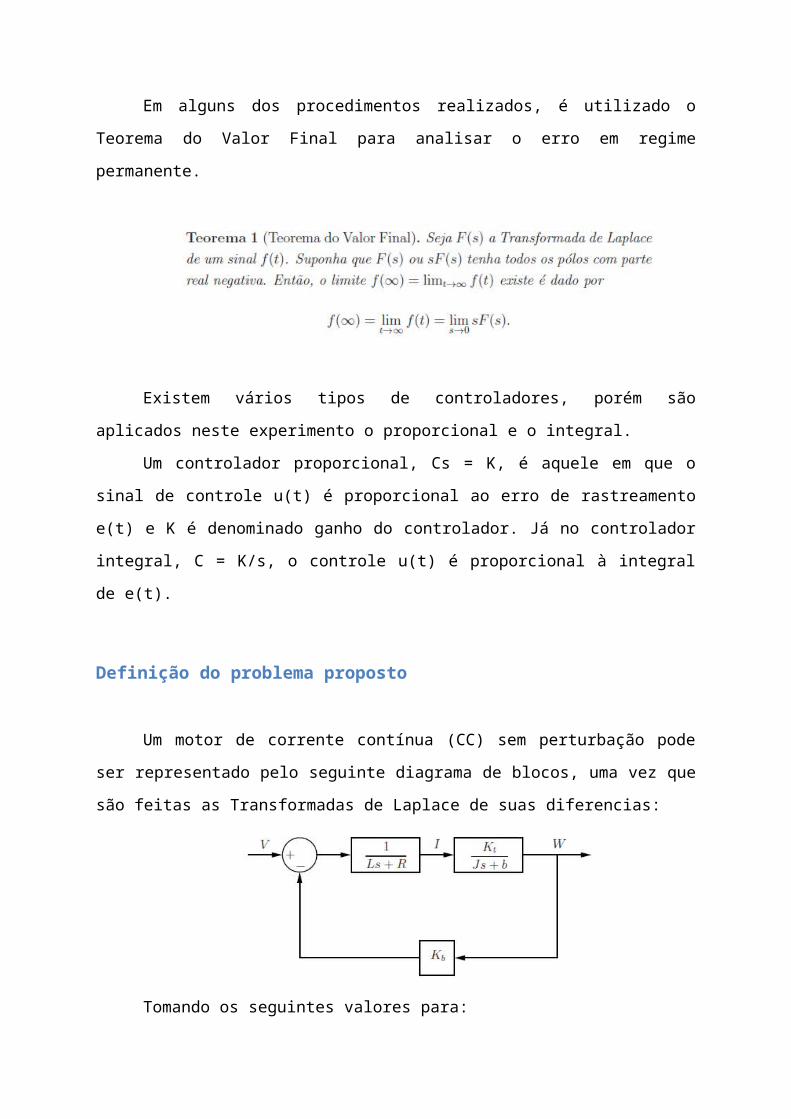
Um motor de corrente contínua (CC) sem perturbação pode ser representado pelo
seguinte diagrama de blocos, uma vez que são feitas as Transformadas de Laplace de suas
diferencias:
Tomando os seguintes valores para:
L = 0,01; R = 1,2; J = 0,2;
b = 0,1; Kb = Kt = 1
é encontrada a seguinte função de transferência:
G(s) =
G(s) é inserida no modelo de sistema de controle apresentado acima e são aplicados
para C(s) os controladores proporcional e integral.
Soluções e análise dos resultados
1. Implemente a Função de Transferência (3) no Simulink/Matlab com o objetivo de simular
a dinâmica da saída y(t) = w(t) (velocidade angular do eixo) do motor CC para uma entrada
U(s) = 1/s do tipo degrau unitário. Analise a dinâmica de y(t). Note que y(t) não apresenta
sobressinal. Isto era esperado? Justifique sua resposta. Observe também que y(∞) = G(0) =
1/(1, 12). Isto era esperado? Justifique sua resposta (dica: aplique o Teorema do Valor Final
em Y (s) = G(s)*U(s)).
Figura 1 - Sinal de saída y(t), para entrada degrau unitário
Como na entrada é aplicada uma tensão limitada e trata-se de um controlador
proporcional, o motor tende a girar até um limite, que é determinado pela entrada, ou seja, a
saída não apresentará sobressinal, já que não são adicionados zeros à equação do sistema. É
possível identificar também que a taxa de convergência do sinal é de aproximadamente 1,4s.
Ao aplicar o Teorema do Valor Final em Y (s) = G(s)*U(s), a divisão por s da entrada degrau com
a multiplicação do s do sistema causa cancelamento de ambos. Com isso, tendendo s → 0, tem-
se que y(infinito) = 1[1,12.
2. Implemente a diagrama de blocos da Figura 2 para simular o motor CC em malha-fechada
com um controlador proporcional C(s) = K e referência R(s) = 1/s do tipo degrau unitário.

Analise a dinâmica da saída y(t) para os valores de ganho K = 1, K = 2, K = 10, K = 100, K = 1000.
O que acontece com o erro em regime permanente e(∞) à medida que aumentamos o valor
do ganho K? Tal resultado era esperado? Justifique sua resposta (dica: veja (5)). Para o motor
CC, podemos então sempre escolher K = ∞ para que e(∞) = 0? Justifique sua resposta. Dica:
visualize y(t) e o sinal de controle u(t).
Figura 2 - Saída e erro para K=1
Figura 3 - Saída e erro para K=2
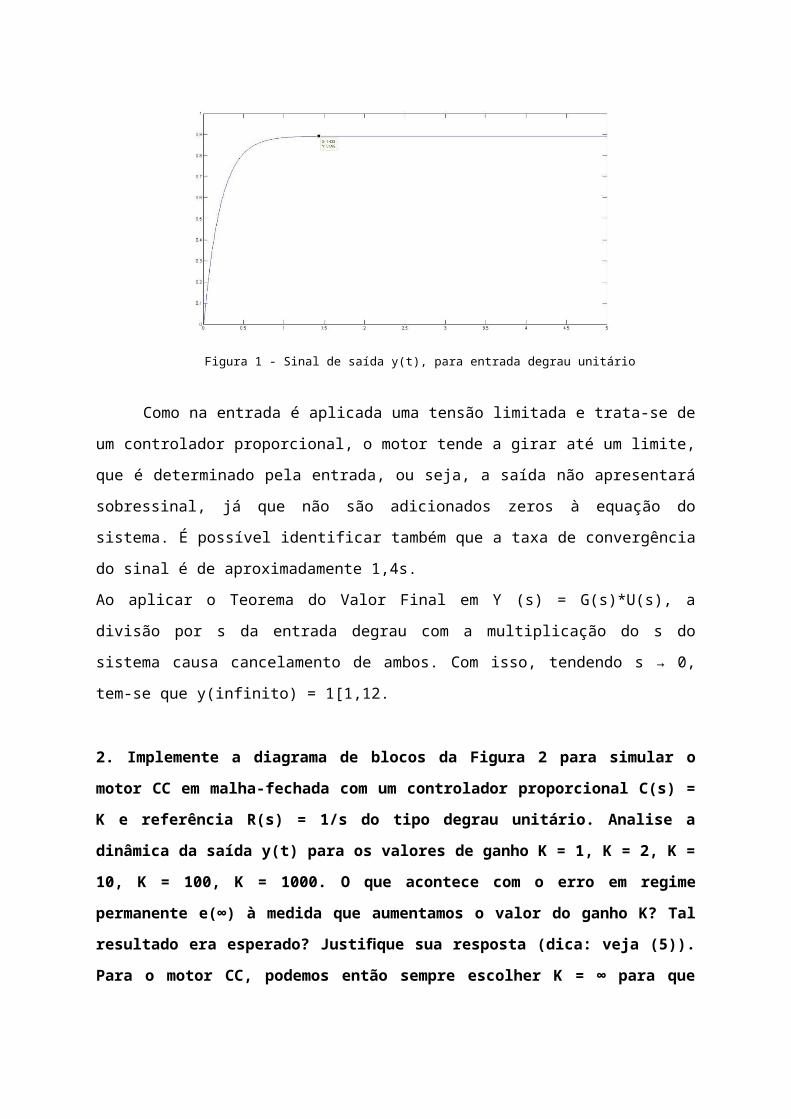
Figura 4 - Saída e erro para K=10
Figura 5 - Saída e erro para K=100

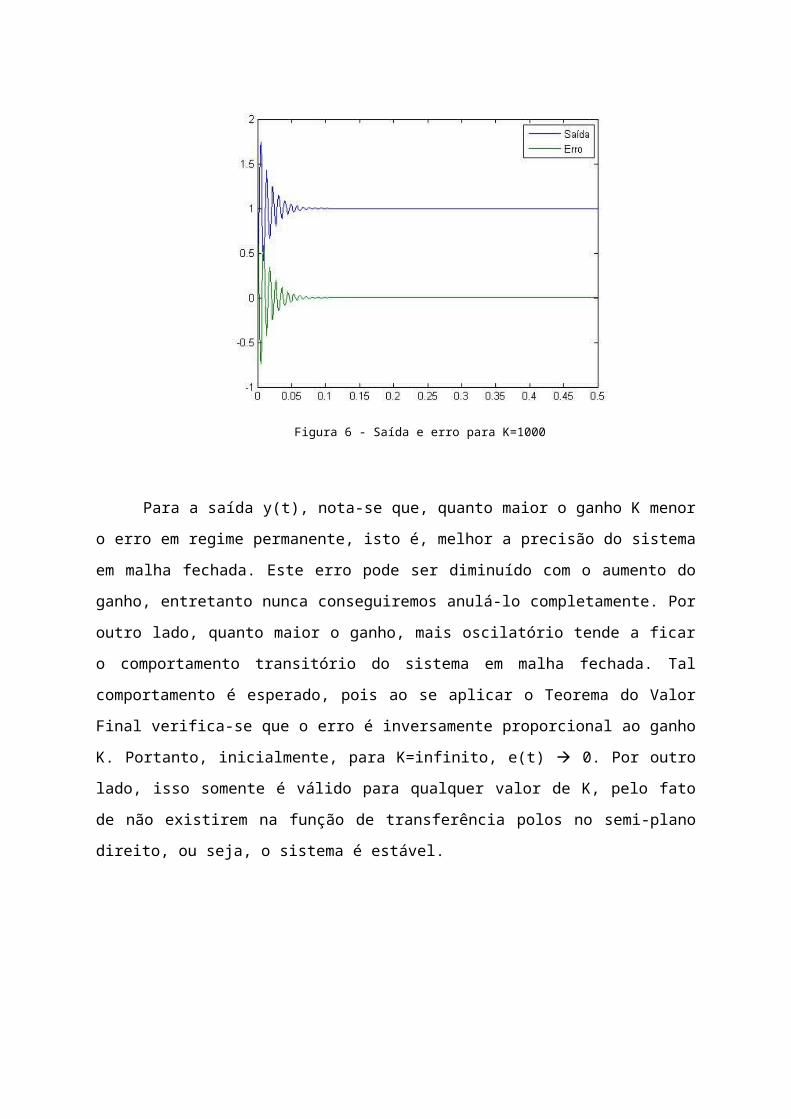
Figura 6 - Saída e erro para K=1000
Para a saída y(t), nota-se que, quanto maior o ganho K menor o erro em regime
permanente, isto é, melhor a precisão do sistema em malha fechada. Este erro pode ser
diminuído com o aumento do ganho, entretanto nunca conseguiremos anulá-lo completamente.
Por outro lado, quanto maior o ganho, mais oscilatório tende a ficar o comportamento
transitório do sistema em malha fechada. Tal comportamento é esperado, pois ao se aplicar o
Teorema do Valor Final verifica-se que o erro é inversamente proporcional ao ganho K.
Portanto, inicialmente, para K=infinito, e(t) 0. Por outro lado, isso somente é válido para
qualquer valor de K, pelo fato de não existirem na função de transferência polos no semi-plano
direito, ou seja, o sistema é estável.

Figura 7 - Gráfico do sinal de saída para controlador integrador e K muito grande
3. Implemente o diagrama de blocos da Figura 2 para simular o motor CC em malha-
fechada com um controlador integral C(s) = K/s e referência R(s) = 1/s do tipo degrau
unitário. Analise a dinâmica de y(t) para os valores de ganho K = 1, K = 2, K = 10, K =
100, K = 150. O que acontece com a saída y(t) à medida que aumentamos o valor do
ganho K (relembre (6))? Note que, quando e(∞) = 0, temos que u(∞) = 1/G(0). Isto era
esperado? Justifique. Explique o motivo pelo qual não temos e(∞) = 0 para K = 150
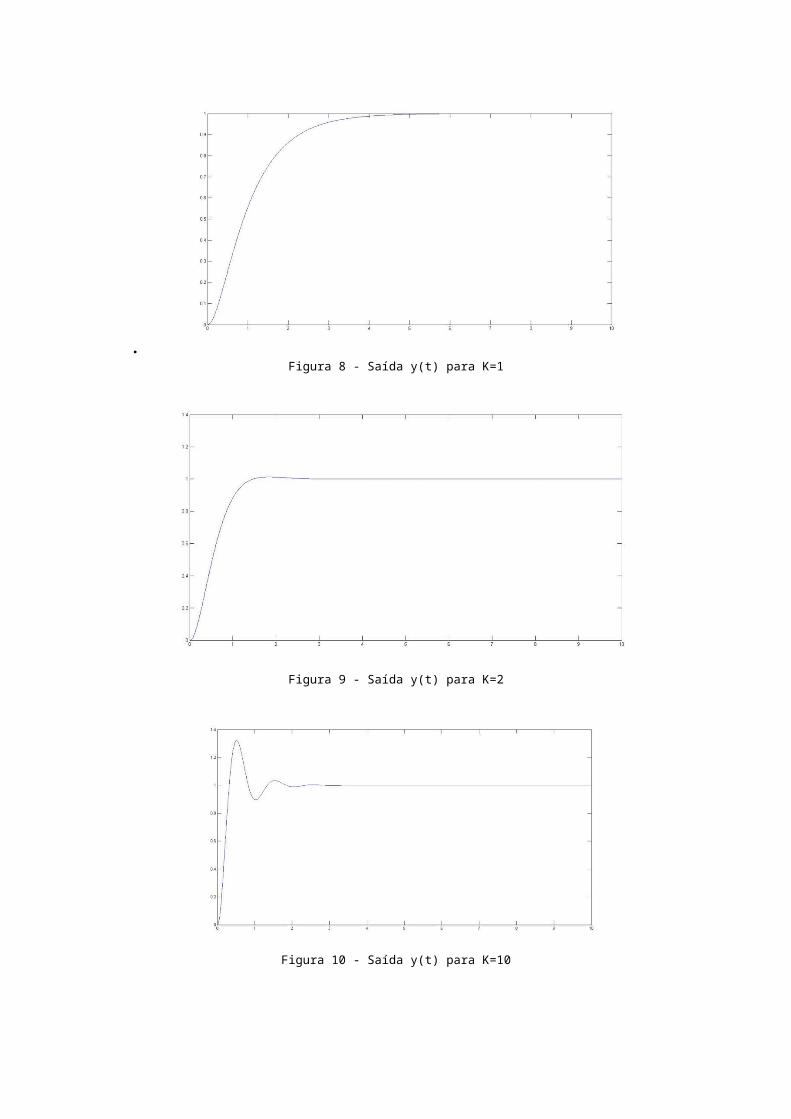
.Figura 8 - Saída y(t) para K=1
Figura 9 - Saída y(t) para K=2
Figura 10 - Saída y(t) para K=10

Figura 11 - Saída y(t) para K=100
Figura 12 - Saída y(t) para K=150
À medida em que aumentamos o ganho, o sinal y(t) passa a tomar forma oscilatória em
regime transitório e o sistema demora cada vez mais para estabilizar em regime permanente.
Tomando em conta que:
Quando K = 150 o sistema passa a ser instável e, por isso que o erro não tende mais a
zero.
EXPERIÊNCIA 2: Efeitos de Pólos e Zeros na Dinâmica
Fundamentação teórica
Considerando uma Função de Transferência
Onde Y(s) é a saída de ordem m e U(s) a entrada de ordem n, n >= m e ambas com
coeficientes reais, tem-se que os polos de G(s) são as raízes quando U(s) = 0 e os zeros de
G(s) são as raízes quando Y(s) = 0. A estabilidade de G(s) é garantida quando todos os polos
possuem parte real negativa, ou seja, todos os polos estão no semiplano esquerdo (SPE) do
plano s.
Para uma função de transferência estável, pode-se analisar que:

Definição do problema proposto
A partir do que foi apresentado na fundamentação teórica, é verificada a influência
destes polos e zeros na resposta dinâmica para entradas do tipo degrau e para senóides.
Soluções e análises dos resultados
Para G = 1/ (t.s + 1)
Para taul = 1
Polo = (-1,0)
Para resposta ao degrau: Sistema estável, com taxa de convergência em
aproximadamente 6,46s

Figura 13 - Localização do polo no plano s, taul = 1.
Figura 14 - Resposta ao degrau, taul = 1.
Para taul = 0,5
Polo = (-2,0)

Para resposta ao degrau: Sistema estável, com taxa de convergência em
aproximadamente 3,55s.
Figura 15 -Localização do polo no plano s, taul = 0,5.
Figura 16 - Resposta ao degrau, taul = 0,5.

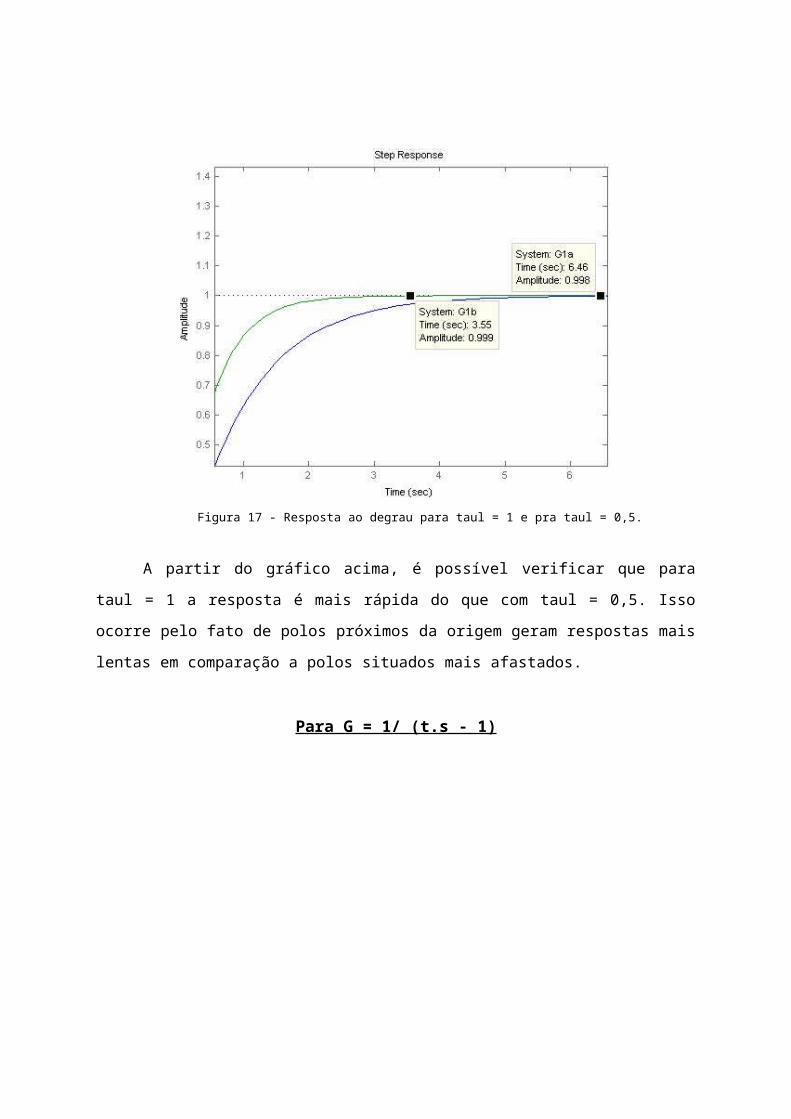
Figura 17 - Resposta ao degrau para taul = 1 e pra taul = 0,5.
A partir do gráfico acima, é possível verificar que para taul = 1 a resposta é mais rápida
do que com taul = 0,5. Isso ocorre pelo fato de polos próximos da origem geram respostas mais
lentas em comparação a polos situados mais afastados.
Para G = 1/ (t.s - 1)
Figura 18 - Localização do polo para t=1

Figura 19 - Resposta ao degrau para t=1
Como pode ser observado na figura 18, o polo do sistema encontra-se no semi-plano
direito que é característico de um sistema instável. Na figura 19, pode ser observada a
estabilidade do sistema, dado que a saída tende ao infinito. Para qualquer valor de taul, a
instabilidade do sistema continua sendo verificada, pois o polo continua no semi-plano direito
independente do valor de taul.

Para G2 = 1/s
Polo = (0,0)
Figura 20 - Localização do polo no plano s.
Para resposta ao degrau: a saída é uma rampa (integral do degrau).
Figura 21 - Resposta ao degrau unitário

Para a resposta à senoide: a saída é uma co-senoide (integral do seno).
.
Figura 22 - Resposta a senóide
Esses resultados eram esperados, visto que ao se isolar 1 = G(s)*s, é possível
identificar a propriedade da integração. Segundo a propriedade, quando uma função na
frequência é dividida por s, a operação equivalente no tempo é a sua integral.
G(s) = 1/(s² + w²)
Polos = (0,-5) e (0,5)
Figura 23 - Localização dos polos no plano s.
Figura 24 - Resposta ao degrau unitário

Figura 25 - Resposta a senóide: sen(4t)
Figura 26 - Resposta a senóide: sen(6t)
Figura 27 - Resposta a senóide: sen(5t)

Para (1):
Figura 28 - Localização dos polos

Figura 29 - Resposta ao degrau unitário
Polos em : (-2,0) e (-1, 0)
O sobressinal não é visto pelo fato de não existirem polos complexos e a função é
estável, pois todos os polos estão no SPE.
Para:
Figura 30 - Localização dos polos de G(s)

Figura 31 - Resposta ao degrau unitário do sistema G(s)
Polos em: (-10,0) e (0,0)
Como a função apresenta um polo em (0,0) ela passa a ser instável e tem como
resposta ao degrau uma saída ilimitada.
Para:
Localização dos polos para cada beta:
Figura 32 – Localização dos polos e zeros para beta = 0.1
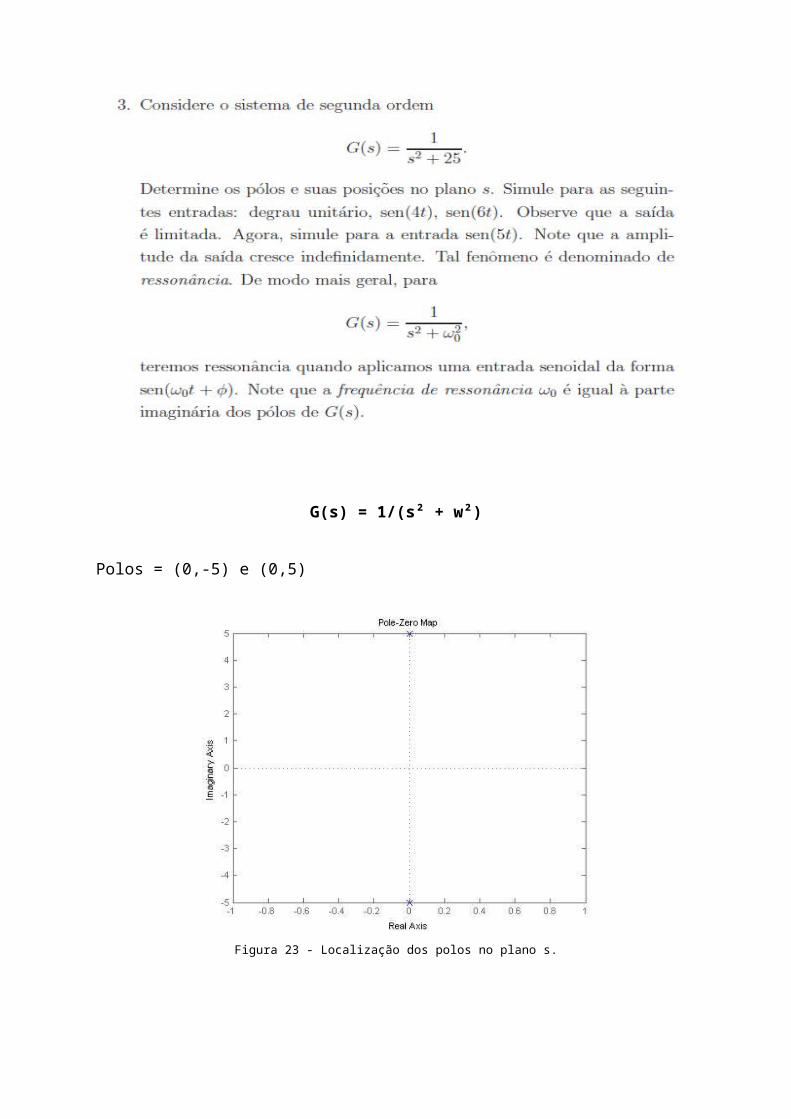
Figura 33 - Localização dos polos e zeros para beta = 0.6
Figura 34 - Localização dos polos e zeros para beta = 0.99

Figura 35 - Localização dos polos e zeros para beta = 1.2
Figura 36 - Localização dos polos e zeros para beta = 2

Figura 37 - Localização dos polos e zeros para beta = 10
Resposta ao degrau para cada beta:
Figura 38 - Resposta ao degrau para diferentes valores de beta de Gz(s)
O fato de acrescentar um zero a função, normalmente faz com que um sobressinal
apareça na saída. Verifica-se que variando beta somente o zero da função é alterado. Em cada
etapa ele caminha de um extremo do SPE para perto da origem. Essa transição faz com que
quando o zero está longe da origem o sobressinal praticamente some e quanto mais se
aproxima de zero mais evidente ele se torna.

Para:
Figura 39 - Localização dos polos no plano s.

Figura 40 - Resposta ao degrau
O sobressinal é justificado pelo fato dos polos serem complexos conjugados, situados
sobre o eixo imaginário.
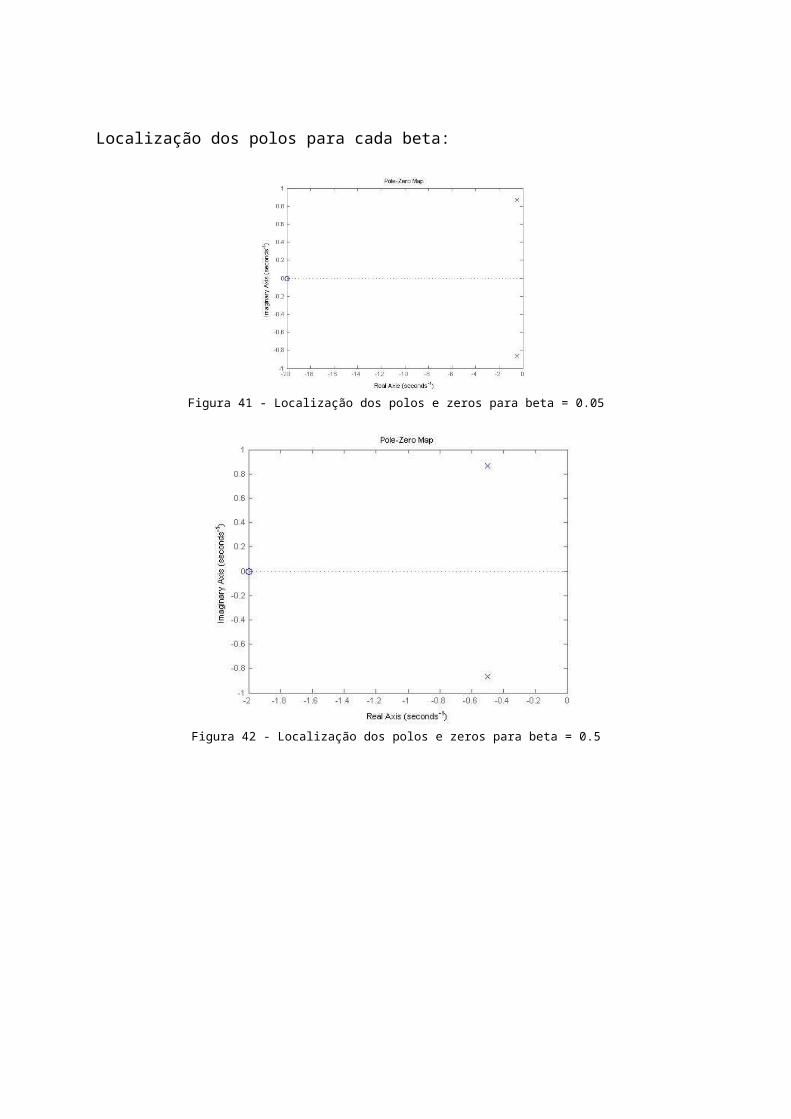
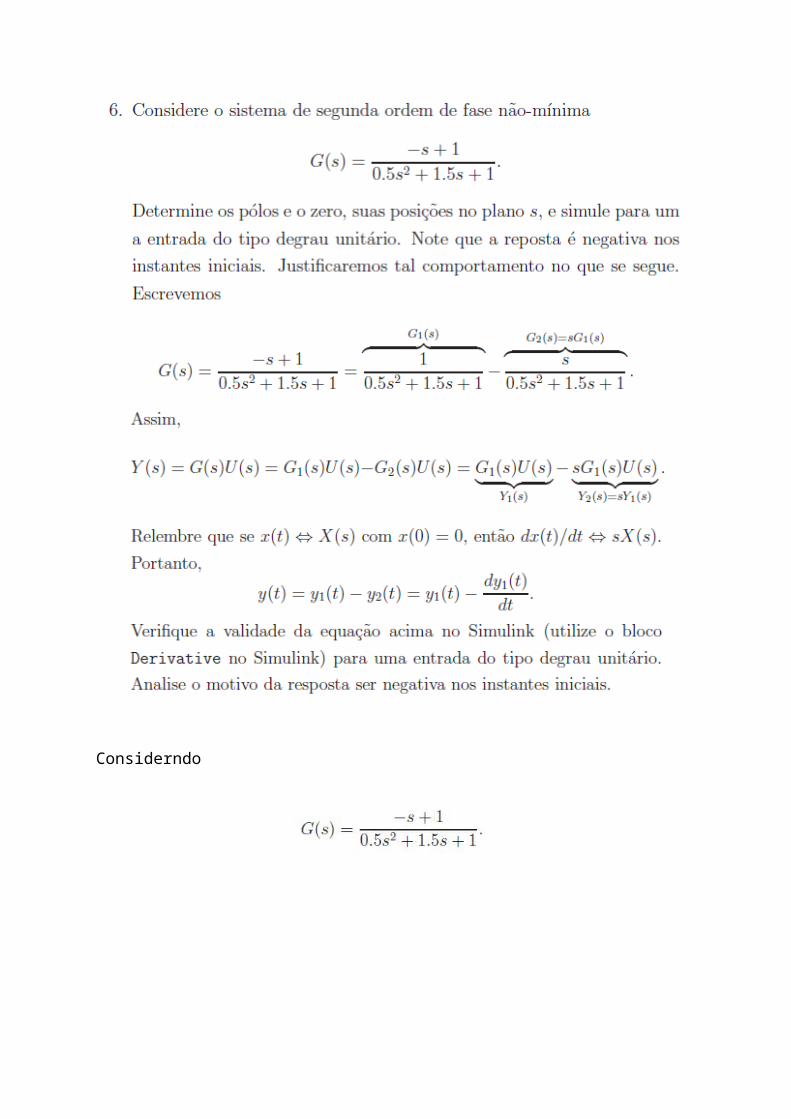
Para:
Localização dos polos para cada beta:
Figura 41 - Localização dos polos e zeros para beta = 0.05

Figura 42 - Localização dos polos e zeros para beta = 0.5
Figura 43 - Localização dos polos e zeros para beta = 1.0

Figura 44 - Localização dos polos e zeros para beta = 2.5
Resposta ao degrau:
Figura 45 – Resposta ao Degrau para diferentes valores de beta
Assim como antes, variar beta implica em na variação da posição do zero, que transita
de longe da origem no SPE em direção ao ponto zero. Como resultado, o sobressinal já
existente dos polos complexos é somado ao gerado pelo zero. A cada transição a amplitude
aumenta cada vez mais.

Considerndo

Figura 46 - Resposta ao degrau unitário do sistema G(s)
Figura 47 - Identificação dos polos para o sistema G(s)

Figura 48 - Saída y(t) para G(s) inicial e G(s) a partir da equação y(t) = y1(t) - y2(t)
Figura 49 - Saída y1(t) e y2(t)

Como pode ser observado na figura y, a subtração da saída y2(t) da saída y1(t)
resultará é uma resposta y(t) negativa nos instantes iniciais, pois neste momento os valores de
y2(t) é maior que os de y1(t).
EXPERIÊNCIA 3: Identificação de Sistemas
Fundamentação teórica
Um modelo é a descrição matemática das características dinâmicas de um sistema e é
a ferramenta essencial para a análise e controle do sistema. Na prática, saber quais são os
parâmetros do modelo é um obstáculo, visto as inúmeras variáveis de cada componente do
sistema. Por isso, antes de saber quais são os parâmetros, procura-se formular um modelo
mais simplificado, porém que contenha as características essenciais, ou seja, primeiro ocorre
a modelagem para em seguida ser feita a identificação dos parâmetros.
Os sistemas podem ser de ordem infinita, porém são aplicadas à experiência somente
sistemas de primeira e segunda ordem funções de primeira e segunda ordem, com polos não
nulos, possuem as seguintes formas características:
;
Onde na função de primeira ordem taul interfere na velocidade da resposta do sistema
e na de segunda, a depender dos polos, são possíveis as seguintes situações de resposta:

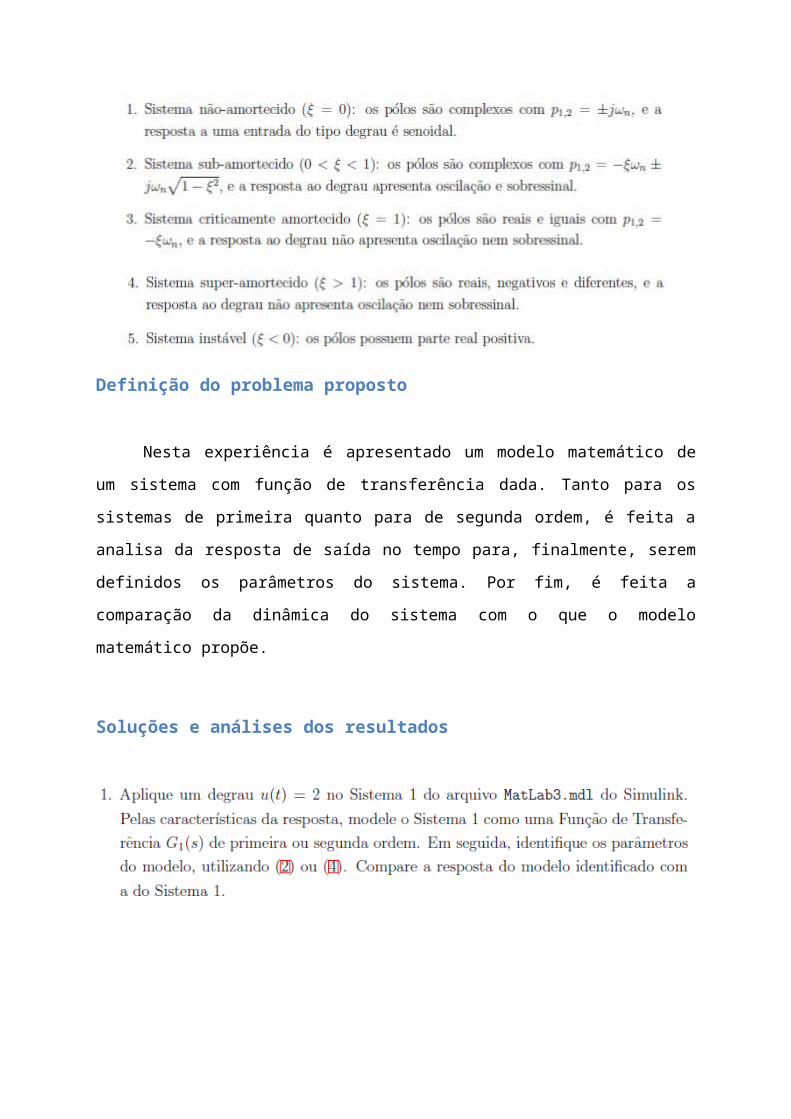
Definição do problema proposto
Nesta experiência é apresentado um modelo matemático de um sistema com função de
transferência dada. Tanto para os sistemas de primeira quanto para de segunda ordem, é feita
a analisa da resposta de saída no tempo para, finalmente, serem definidos os parâmetros do
sistema. Por fim, é feita a comparação da dinâmica do sistema com o que o modelo
matemático propõe.
Soluções e análises dos resultados
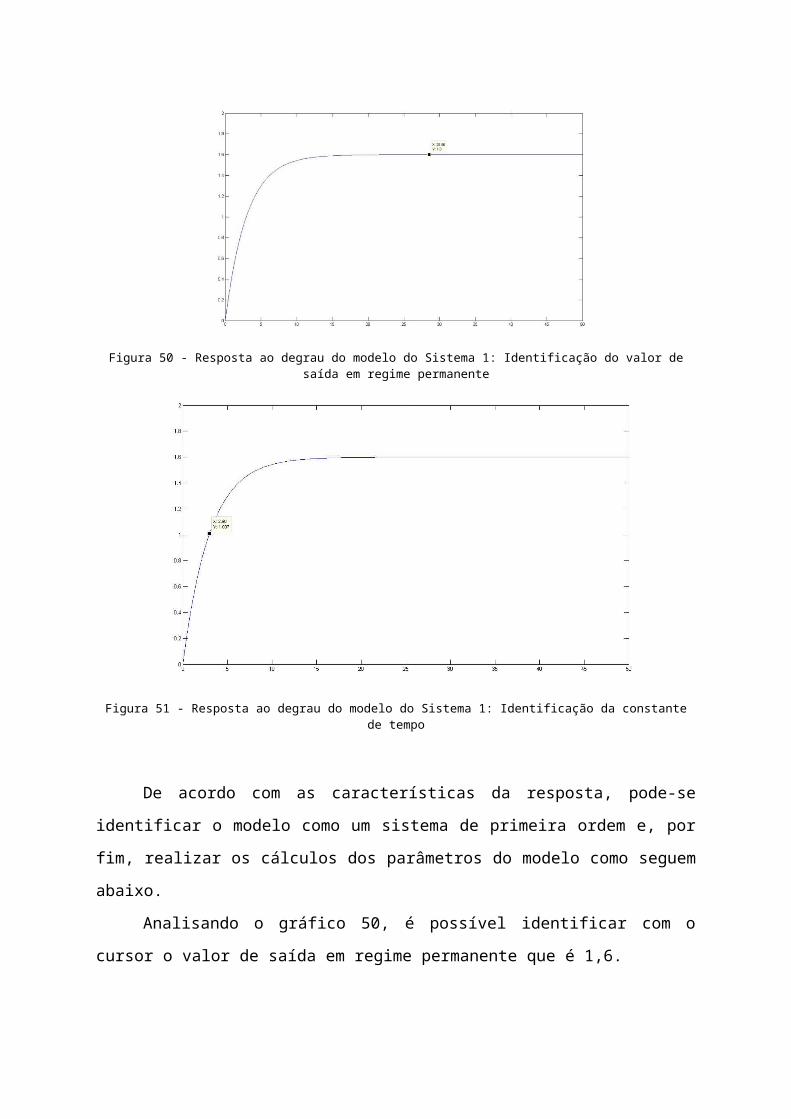
Figura 50 - Resposta ao degrau do modelo do Sistema 1: Identificação do valor de saída em regime permanente

Figura 51 - Resposta ao degrau do modelo do Sistema 1: Identificação da constante de tempo
De acordo com as características da resposta, pode-se identificar o modelo como um
sistema de primeira ordem e, por fim, realizar os cálculos dos parâmetros do modelo como
seguem abaixo.
Analisando o gráfico 50, é possível identificar com o cursor o valor de saída em
regime permanente que é 1,6.
A constante de tempo pode ser obtida no momento em que a saída é aproximadamente
63% do valor final ou valor de saída em regime permanente, como pode ser observado no
gráfico 51. A partir deste cálculo, obtêm-se o valor de saída em regime permanente
(y=1,007). Sendo assim, com auxílio do cursor é possível identificar y=1,007 e,
consequentemente, o valor da constante de tempo (Tal = 2,98s).
O valor de saída em regime permanente é dado por:
y(infinito) = AK , sendo A = 2.
Portanto:
K=1,6/2 = 0,8
Comparando o sistema 1 com o modelo identificado pode observa-se que são
semelhantes, dado que o sistema 1 é 0,8/(3s+1) e o modelo é 0,8/(2,98s+1).
Figura 52 - Resposta ao degrau do modelo do Sistema 2: Identificação do valor de saída em regime permanente
Figura 53 - Resposta ao degrau do modelo do Sistema 2: Identificação do valor de pico

De acordo com as características da resposta, pode-se identificar o modelo como um
sistema de segunda ordem, pois como pode ser observado na figura 52 ou 53 a saída
apresentar um sobressinal. A partir dos gráficos foi calculado os parâmetros do modelo como
seguem abaixo.
Analisando o gráfico 52, é possível identificar com o cursor o valor de saída em
regime permanente que é 4,8.
Dado que na entrada é aplicado um degrau u(t) = 2 no sistema 2, temos que:
A partir das fórmulas acima, foi calculado os parâmetros do modelo do sistema 2:
y(infinito) = 4,8, sendo A = 4
Portanto, K = 1,2.
Com o auxílio do MatLab, foi calculado os demais parâmetros do modelo do sistema
2 com base nas fórmulas acima e nos gráficos 52, que demonstra o valor de regime
permanente da saída, e 53, que demonstra o valor de yp, como pode ser observado abaixo:
yinf = 4.8
yp =5.5580
>> mp = (yp - yinf)/yinf
mp =0.1579
>> xi = sqrt ((log(mp)^2/(pi^2+log(mp)^2)))
xi =0.5065
>> wn = pi / (tp*sqrt(1-xi^2))
wn =0.9109
Comparando o sistema 2 com o modelo identificado, pode-se observar que o são
semelhantes dado que o sistema 2 é [1,2*0.9025^2/(s^2+0,9s+0,9025^2)] e o modelo é
[1,2*0,9109^2/(s^2+2*0,5065*9,9109s+0,9109^2)]

a)
Figura 54 - Resposta ao degrau unitário do sistema G(s)
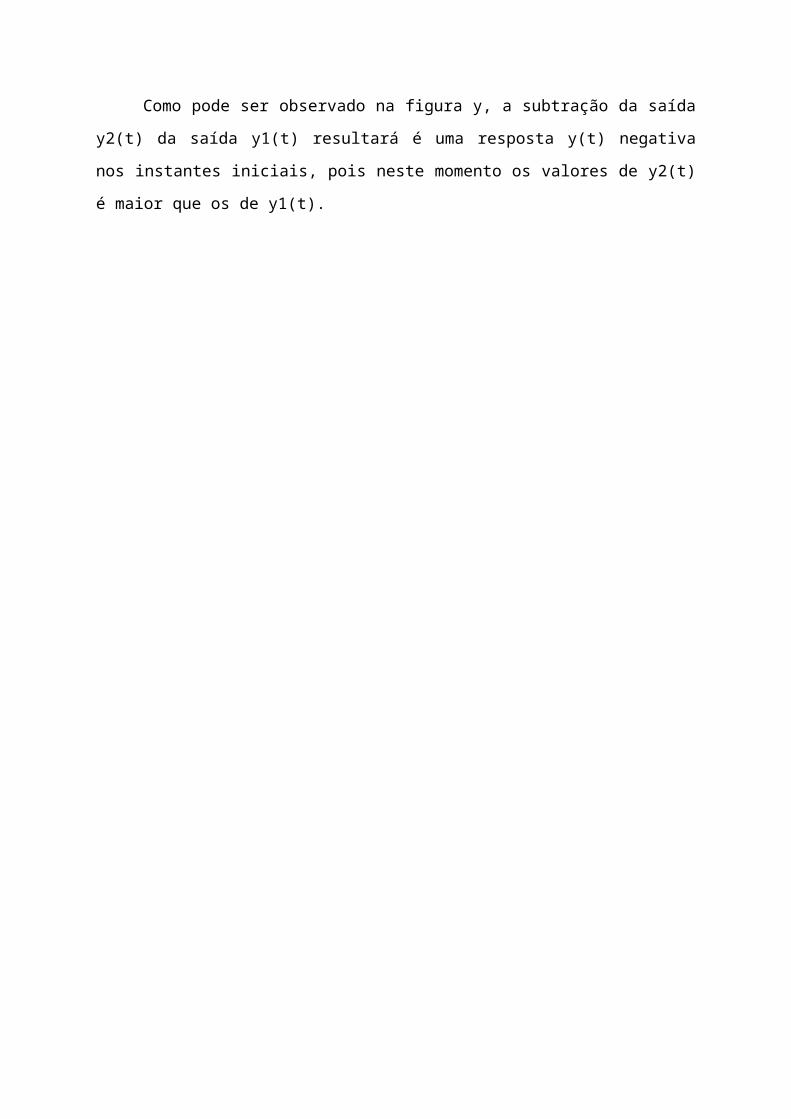
Figura 55 - Resposta ao degrau unitário do sistema F(s)
Se G(s) é de primeira ordem, então a Função o de Transferência em malha-fechada
F(s) nem sempre será de primeira ordem para qualquer valor de Kc > 0, pois como pode ser
observado no gráfico da resposta de F(s) é caracteristico de um sistema de segunda ordem,
pois apresenta um sobressinal. No entanto, a saída de G(s) é caracteristico de um sistema de
primeira ordem, o que demonstra a ocorrência de um erro, visto que para que F(s) seja de
segunda ordem, necessariamente G(s) deve ser de segunda ordem.
b)
Figura 56 - Resposta ao degrau do sistema 3

Para identificar F(s) a partir dos parâmetros do sistema calculados, utilizou-se do
MatLab como segue abaixo:
Valor de regime permanente:
yinf= 0.7959
Valor de pico
yp=0.8686
Cálculo do Mp
>>mp=(yp-yinf)/yinf
mp =0.0913
Cálculo do ksi:
>> xi = sqrt ((log(mp)^2/(pi^2+log(mp)^2)))
xi =0.6060
Cálculo do K:
>> k = yinf/3k = 0.2653
Tempo de subida
>> tp = 0.4
tp =0.4000
Frequência natural
>> wn = pi / (tp*sqrt(1-xi^2))
wn =9.8732
Cálculo da função de transferência:
>> F = tf([k*wn^2],[1 2*xi*wn wn^2])
F = 25.86
---------------------
s^2 + 11.97 s + 97.48
Valor de Kc:
>> kc = 3
kc =3
Cálculo de G(s):
>> G = F/(kc-kc*F)
G =25.86 s^2 + 309.4 s + 2521
-------------------------------------------------
3 s^4 + 71.79 s^3 + 936.8 s^2 + 6070 s + 2.094e04
Continuous-time transfer function.
>> G = zpk (minreal (G))
G = 8.6204
----------------------
(s^2 + 11.97s + 71.62)
Como pode ser observado após o cálculo de G(s), podemos afirmar que estava errado
na modelagem inicial do sistema 3 como sistema de primeira ordem, pois G(s) é um sistema
de segunda ordem.
CONCLUSÃO
Com a realização dos experimentos apresentados anteriormente, vários pontos
fundamentais relacionados a sistemas de controle puderam ser analisados. Primeiramente, foi
visto que um sistema de controle é uma interconexão de componentes formando uma
configuração que fornece um desempenho desejado. Um componente ou processo a ser
controlado pode ser representado como um diagrama de blocos e que um sistema de controle
em malha fechada usa uma medida da saída e uma realimentação deste sinal para uma
comparação com a saída (resposta) desejada (referência).
Em seguida, foram vistos conceitos de modelagem que nos levam a crer que a relação
entrada-saída representa a relação causa-efeito do processo e, em geral, é descrita
matematicamente por meio de equações diferenciais (tempo) ou funções de transferência (na
frequência).
Em última instância, a ideia fundamental do projeto de sistemas de controle é alterar
as características do sistema no domínio do tempo (e consequentemente no domínio da
frequência) com a introdução do controlador dado por H(s). A interação entre H(s) e G(s) em
malha fechada permite realocar os polos e zeros do sistema de tal forma a tentar satisfazer os
requisitos desejados.
O objetivo primordial de sistemas de controle é a imposição de determinados
objetivos de desempenho para a operação do sistema. Em última instância, os objetivos de
desempenho de um sistema podem ser traduzidos através da imposição dos seus polos e
zeros.
Usualmente, os objetivos de desempenho são representados através de suas
características no domínio do tempo:
Erro estático (ess): ess = lim t1 e(t) para uma entrada padronizada.
Tempo de subida (ts) : tempo que a saída do sistema y(t) demora entre 0 e 100% do
valor final y(infinito).
Tempo de assentamento (ta): O tempo de assentamento ta é definido como o instante
de tempo tal que o sinal de erro e(t) passa a ser menor que um determinado valor
percentual, em geral, definido como 2% ou 5%.

Máximo sobressinal (Mp): O máximo sobressinal é o maior erro percentual em
relação ao valor final y(1). O maior valor de y(t) é denominado y(tp) onde tp é o
instante de ocorrência do valor de pico.
Como já observado, o sistema de controle em malha fechada modifica os polos e zeros
que representam o sistema. Desta forma, a condição de estabilidade do sistema pode ser
modificada, tornando um sistema estável em instável e vice-versa. Através da análise de
G(s)H(s) é possível analisar a margem de estabilidade do sistema, ou seja, a distância que o
sistema se encontra do limiar da instabilidade.
Foi também observado que o ganho da malha direta G(s)H(s) é a principal grandeza a ser
analisada para a análise de desempenho do sistema em malha fechada.
Por fim, foi verificado como realizar a modelagem de sistemas de primeira ordem e de
segunda ordem que são desconhecidos. Pode ser atribuída a importância deste fato, dado que
em situações reais não se sabe exatamente os parâmetros do modelo, sendo assim, é
imprescindível uma estimativa destes parâmetros do modelo, de modo que, o mesmo seja o
mais semelhante possível da realidade.

REFERÊNCIA BIBLIOGRÁFICA
COUTINHO, D.;SILVEIRA, H.B. Roteiros de Aula – Universidade Federal de Santa
Catarina. Florianópolis, 2012.
LATHI, B. P. Sinais e Sistemas Lineares. 2.ed. Porto Alegre: Bookman, 2007.
MARUYAMA, Newton. Notas de Aula PMR2360 – Universidade de São Paulo, 2004.