Embed Size (px)
Citation preview

Sistema Neural para Reconhecimento de Padroes em SinaisEMGs para Controle de Braco Robotico
Evelyne L. Ferreira, Maury M. Gouvea Jr.
1Programa de Pos-Graduacao em Engenharia EletricaPontifıcia Universidade Catolica de Minas Gerais (PUCMINAS)Caixa Postal 1.686 – 30.535-901 – Belo Horizonte – MG – Brazil
[email protected],[email protected]
Abstract. Research studies on Artificial Intelligence applied to Biomedical En-gineering have sought to design devices which may improve the quality of life ofpeople with physical disabilities. The use of intelligent systems may allow thatpeople control electrical prostheses by signals of muscle tissue, namely elec-tromyography (EMG) signals. This paper presents an intelligent system able toprocess electromyography signals and to control basic movements of a roboticarm. The pattern recognitions of the movements were performed by a multilayerperceptron artificial neural network,from two different approaches. The resultsshowed that both approaches proposed for the RNA are able to classify the mo-vements of the robotic arm hit rates higher than 98%, and when implemented inthe robotic arm , can recognize the movement from the EMG signals in real timewith a hit rate of 80% to 100%.
Resumo. Pesquisas na area de Inteligencia Artificial aplicadas a EngenhariaBiomedica tem buscado dispositivos que possam melhorar a qualidade de vidade portadores de deficiencia fısica. O uso de sistemas inteligentes pode permi-tir que o usuario controle proteses eletricas por meio de sinais emanados dacontracao muscular, denominados eletromiograficos (EMGs). Este artigo apre-senta um sistema inteligente capaz de processar sinais EMGs e controlar movi-mentos basicos de um braco robotico. A classificacao dos padroes de movimen-tos foi feita por uma rede neural artificial (RNA) do tipo Multilayer Perceptron(MLP), a partir de duas abordagens distintas. Os resultados mostraram que am-bas abordagens propostas para a RNA sao capazes de classificar os movimentosdo braco robotico com taxas de acerto superiores 98% e, quando implementa-das no braco robotico, sao capazes de reconhecer os movimentos a partir dossinais EMGs, em tempo real, com uma taxa de acerto de 80% a 100%.
1. IntroducaoPesquisas cientıficas em Inteligencia Artificial aplicada a Engenharia Biomedica buscampor sistemas mais inteligentes, que proporcionem mais controle e adaptacao em disposi-tivos, como proteses, melhorando a qualidade de vida e inclusao social de pessoas comdeficiencia fısica [Chan et al. 2000], [de Carvalho 2004]. Um dos principais objetivosdessas pesquisas tem sido melhorar a integracao homem-maquina e tornar esses disposi-tivos mais viaveis economicamente [Ortolan 2002].
O uso de sistemas inteligentes aplicados ao controle de proteses eletricas de mem-bros superiores aumenta a mobilidade do portador de necessidades especiais, fazendo
XIII Encontro Nacional de Inteligencia Artificial e Computacional
SBC ENIAC-2016 Recife - PE 505

com que a tarefa desejada seja alcancada de maneira mais eficaz [Caldwell et al. 2012].Assim, o desenvolvimento desses sistemas, quando comandados por sinais eletricos pro-venientes dos musculos localizados acima da parte amputada e que ainda apresentam umaatividade controlavel, pode permitir a reproducao do movimento do antebraco e mao, demodo a seguir a intencao do usuario.
O sinal eletromiografico (EMG) e o sinal de controle muscular do corpo humano.Quando um portador de deficiencia fısica contrai um musculo, ao realizar um determinadomovimento, e possıvel captar sua intencao atraves da analise desse sinal. O processamentodo sinal EMG pode ser dividido em tres etapas: (i) pre-processamento com filtragem,retificacao e amplificacao do sinal; (ii) extracao das caracterısticas do sinal; e (iii) proces-samento do sinal EMG, por meio de um sistema de classificacao [Barros et al. 2005]. Naetapa de reconhecimento e classificacao dos padroes dos movimentos, o principal desafioe a estrategia utilizada para transmitir para a protese a intencao de movimento do usuario.Com o desenvolvimento dos sistemas baseados em Inteligencia Artificial, varias tecnicasvem sendo desenvolvidas e aperfeicoadas, como logica fuzzy e redes neurais artificiais[Favieiro 2012], [de Oliveira Andrade 2000].
Em especial, as redes neurais artificiais (RNAs) sao modelos computacionais, ins-pirados no neuronio biologico, capazes de reconhecer e classificar padroes a partir deexemplos por meio de aprendizagem [Meireles et al. 2003], [Haykin 2000]. O processode aprendizagem se da por meio de um algoritmo de treinamento que deve ser capaz deajustar iterativamente os pesos sinapticos da RNA. Uma RNA e uma boa alternativa parareconhecimento de padroes de movimentos via EMG, pois pode receber um sinal aindanao conhecido e generalizar a partir dos padroes treinados [Gouvea 2012].
O objetivo deste trabalho e desenvolver um sistema inteligente baseado em redesneurais artificiais para reconhecimento de padroes em sinais EMGs e controle de umbraco robotico. O sistema inteligente proposto e desenvolvido em tres fases: na primeirafase, sinais EMGs provenientes dos grupos musculares do bıceps e flexor ulnar do carposao coletados de voluntarios para criacao de uma base de dados de treinamento e teste darede neural artificial; na segunda fase, avalia-se o desempenho de dois tipos de padroes desinais, a saber, um padrao constituıdo pela amplitude da tensao do sinal e outro formadopor uma serie temporal do mesmo; na fase final, sao realizados experimentos para analisede cinco tipos de movimentos do braco robotico.
O restante deste artigo esta organizado como segue. A Secao 2 apresenta o desen-volvimento do sistema inteligente de reconhecimento de sinais EMGs com redes neuraisartificiais para controle do braco robotico. As secoes 3 e 4 apresentam os experimentoscom a rede neural artificial e os experimentos com o braco robotico, assim como a analisedos resultados. Por fim, a secao 5 apresenta as consideracoes finais.
2. Reconhecimento de padroes em sinais EMGs com redes neurais artificiaisA Figura 1 apresenta o diagrama de bloco simplificado do sistema proposto. Na etapa decaptacao do sinal, sao usados eletrodos de superfıcie e a placa MyoWare Muscle Sensor,da Advanced Technologies, para a deteccao, condicionamento e aquisicao do sinal EMG.Na segunda etapa, e utilizada uma RNA Multilayer Perceptron (MLP) para a classificacaodesses sinais em movimentos do braco robotico. E, por fim, o sistema inteligente dereconhecimento de padroes em sinais EMGs e implementado no braco robotico por meio
XIII Encontro Nacional de Inteligencia Artificial e Computacional
SBC ENIAC-2016 Recife - PE 506

de um microcontrolador.
Figura 1. Diagrama de bloco do sistema proposto
Nesta pesquisa, sao classificados cinco movimentos do braco: quatro movimentossimples (extensao e flexao do cotovelo, extensao e contracao da mao) e um movimentocomposto (extensao do cotovelo e contracao da mao).
2.1. Aquisicao de sinais EMGsPara avaliar o sistema proposto, decidiu-se trabalhar com um conjunto de sinais EMGscoletados de 04 voluntarios, idades 30 ± 4 anos, saudaveis, ativos, sem antecedentes delesao do aparelho locomotor, de ambos os sexos. Todos os voluntarios assinaram o Termode Consentimento Livre e Esclarecido, conforme Comite de Etica.
Para a captacao dos sinais eletromiograficos, utilizaram-se 2 canais de eletrodos,posicionados nos musculos do antebraco Bıceps (Canal 1) e Flexor Ulnar do Carpo (Ca-nal 2), a fim de reconhecer informacoes sobre a ativacao muscular [de Barros 2005],[Favieiro 2012]. Cada canal de eletrodo e composto por uma placa Myoware MuscleSensor e tres eletrodos de superfıcie. Sabendo-se que eletrodos conectados a placa devemser posicionados no musculo de estudo, numa direcao longitudinal em relacao as fibrasmusculares e o eletrodo de referencia posicionado em um grupo muscular distinto. Para aaquisicao de um sinal adequado, fez-se a limpeza com alcool da regiao onde foram posi-cionados os eletrodos. A Figura 2 mostra o posicionamento dos canais dos eletrodos nosgrupos musculares selecionados de um dos voluntarios.
Figura 2. Posicionamento dos dois canais de eletrodos nos grupos muscularesde estudo
A placa MyoWare Muscle Sensor e responsavel pelo condicionamento e aquisicaodo sinal EMG. O sinal EMG possui baixa amplitude (milivolts). Por esse motivo, e ne-cessario que seja realizado o condicionamento do mesmo. A placa possui um circuito
XIII Encontro Nacional de Inteligencia Artificial e Computacional
SBC ENIAC-2016 Recife - PE 507

condicionador composto de amplificadores e filtros responsaveis por eliminar os ruıdos eamplificar o sinal desejado. Na saıda da placa, o sinal ja esta retificado e integrado e edado em volts.
Para a aquisicao dos sinais, as placas foram conectadas ao microcontrolador Ar-duino e os dados enviados ao computador foram coletados atraves do software ArduinoIDE, versao 1.6.7. A partir de testes de captacao, foi adotado 50 ms para o tempo entremedicoes.
2.2. Extracao das caracterısticas do sinal EMG
A etapa de extracao das caracterısticas consiste na transformacao do sinal original,contınuo, em uma estrutura de informacao relevante. E extraıda a caracterıstica de ampli-tude de tensao do sinal EMG por canal. Nesta etapa, os dados coletados do Arduino IDEforam organizados em matrizes. A matriz caracterıstica dos sinais EMGs gera duas basesde dados com caracterısticas diferentes nos dados de entrada, sendo uma base de dadoscomposta por sinais de amplitude de tensao e outra composta por uma serie temporal com5 amostras consecutivas do sinal EMG. Essas caracterısticas geram as entradas da RNA.
2.3. Classificacao dos padroes
E nesta etapa que se faz a associacao das caracterısticas extraıdas do sinal EMG a um con-junto de classes previamente especificadas, onde cada classe representa um movimento.Adotou-se o metodo supervisionado e utilizou-se a RNA Multilayer Perceptron para atarefa de classificacao proposta.
Para tal, adotaram-se duas abordagens para o tratamento dos sinais EMGs, a saber,(i) para cada canal, considera-se como entrada da RNA a amplitude do sinal EMG geradopelo movimento do braco humano e (ii) para cada canal, considera-se como entrada daRNA uma serie temporal com 5 amostras consecutivas do sinal EMG.
Na primeira abordagem, a arquitetura da RNA contem 2 neuronios na camada deentrada e 4 neuronios na camada de saıda. O numero de neuronios na camada de entradae funcao do numero de canais de eletrodos. Ja na segunda abordagem, a arquitetura daRNA contem 10 neuronios na camada de entrada e 4 neuronios na camada de saıda. Onumero de neuronios na camada de entrada se refere as 5 componentes da serie temporalde cada canal. Quanto a camada de saıda, utilizaram-se saıdas binarias em que apenasum neuronio e ativado por vez. Os neuronios dessa camada representam as 4 classes demovimento, sendo elas: cotovelo e mao em repouso; cotovelo flexionado; mao contraıda;cotovelo flexionado e mao contraıda.
No treinamento da RNA, utilizou-se o algoritmo Backpropagation e definiram-secomo condicao de parada 1000 epocas de treinamento e erro medio quadratico (EQM)menor que 0.01. Os dados da matriz caracterıstica foram divididos em: 60% para trei-namento, 20% para validacao e 20% para teste da RNA. E, entao, os mesmos foramnormalizados e embaralhados para serem enviados a entrada da rede neural artificial.
Para determinar o numero ideal de neuronio da camada oculta, foram realizadosexperimentos com quatro diferentes topologias da RNA para cada abordagem, a saber,com 3, 5, 10 e 15 neuronios na camada oculta da MLP para a primeira abordagem ecom 15, 20, 25 e 30 neuronios na camada oculta da MLP para a segunda abordagem.
XIII Encontro Nacional de Inteligencia Artificial e Computacional
SBC ENIAC-2016 Recife - PE 508
Como saıda desse treinamento e gerado um vetor com os pesos ideais para a solucao doproblema, que e utilizado no sistema inteligente.
2.4. Sistema Inteligente
O sistema inteligente e implementado em um microcontrolador Arduino MEGA 2560 e ecomposto de um modulo neural de reconhecimento de sinais EMGs. O modulo neural eresponsavel por fazer, em modo de operacao, a conversao dos sinais EMGs no movimentocorrespondente, a partir da RNA. O sistema inteligente aciona o motor do braco roboticode acordo com o movimento realizado.
2.5. Braco Robotico
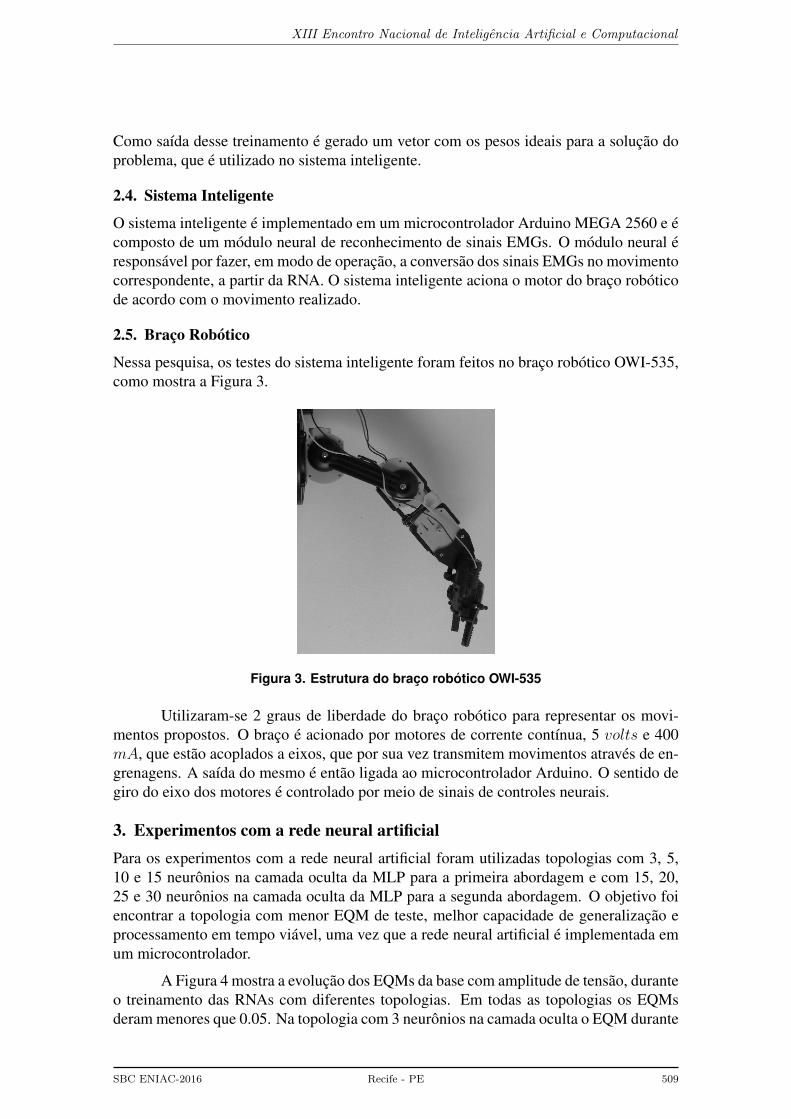
Nessa pesquisa, os testes do sistema inteligente foram feitos no braco robotico OWI-535,como mostra a Figura 3.
Figura 3. Estrutura do braco robotico OWI-535
Utilizaram-se 2 graus de liberdade do braco robotico para representar os movi-mentos propostos. O braco e acionado por motores de corrente contınua, 5 volts e 400mA, que estao acoplados a eixos, que por sua vez transmitem movimentos atraves de en-grenagens. A saıda do mesmo e entao ligada ao microcontrolador Arduino. O sentido degiro do eixo dos motores e controlado por meio de sinais de controles neurais.
3. Experimentos com a rede neural artificialPara os experimentos com a rede neural artificial foram utilizadas topologias com 3, 5,10 e 15 neuronios na camada oculta da MLP para a primeira abordagem e com 15, 20,25 e 30 neuronios na camada oculta da MLP para a segunda abordagem. O objetivo foiencontrar a topologia com menor EQM de teste, melhor capacidade de generalizacao eprocessamento em tempo viavel, uma vez que a rede neural artificial e implementada emum microcontrolador.
A Figura 4 mostra a evolucao dos EQMs da base com amplitude de tensao, duranteo treinamento das RNAs com diferentes topologias. Em todas as topologias os EQMsderam menores que 0.05. Na topologia com 3 neuronios na camada oculta o EQM durante
XIII Encontro Nacional de Inteligencia Artificial e Computacional
SBC ENIAC-2016 Recife - PE 509
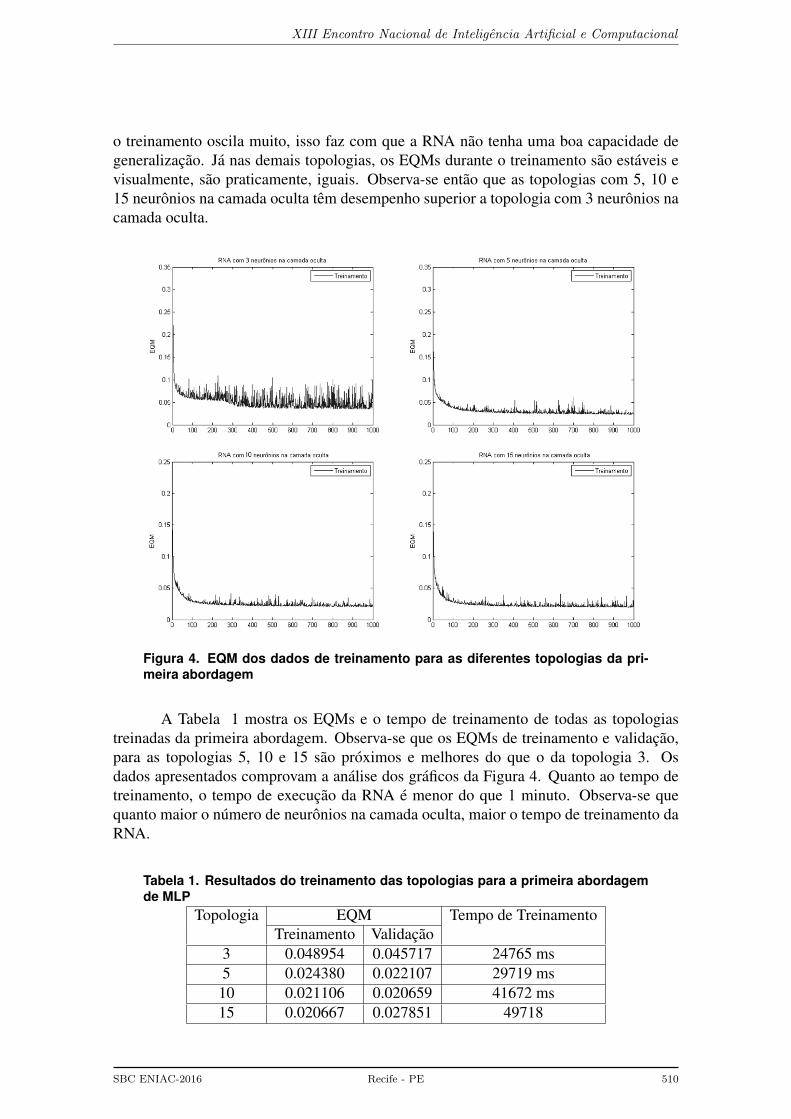
o treinamento oscila muito, isso faz com que a RNA nao tenha uma boa capacidade degeneralizacao. Ja nas demais topologias, os EQMs durante o treinamento sao estaveis evisualmente, sao praticamente, iguais. Observa-se entao que as topologias com 5, 10 e15 neuronios na camada oculta tem desempenho superior a topologia com 3 neuronios nacamada oculta.
Figura 4. EQM dos dados de treinamento para as diferentes topologias da pri-meira abordagem
A Tabela 1 mostra os EQMs e o tempo de treinamento de todas as topologiastreinadas da primeira abordagem. Observa-se que os EQMs de treinamento e validacao,para as topologias 5, 10 e 15 sao proximos e melhores do que o da topologia 3. Osdados apresentados comprovam a analise dos graficos da Figura 4. Quanto ao tempo detreinamento, o tempo de execucao da RNA e menor do que 1 minuto. Observa-se quequanto maior o numero de neuronios na camada oculta, maior o tempo de treinamento daRNA.
Tabela 1. Resultados do treinamento das topologias para a primeira abordagemde MLP
Topologia EQM Tempo de TreinamentoTreinamento Validacao
3 0.048954 0.045717 24765 ms5 0.024380 0.022107 29719 ms
10 0.021106 0.020659 41672 ms15 0.020667 0.027851 49718
XIII Encontro Nacional de Inteligencia Artificial e Computacional
SBC ENIAC-2016 Recife - PE 510

A Tabela 2 apresenta as taxas de acerto e os EQMs da fase de teste das diferentestopologias da RNA da primeira abordagem. Todas as topologias tiveram uma taxa deacerto superior a 95%, confirmando a capacidade de generalizacao da rede neural. ARNA com 15 neuronios na camada oculta teve menor EQM e maior taxa de acerto, sedestacando das demais topologias.
Tabela 2. Resultados do teste das topologias para a primeira abordagem de MLP
Topologia TesteTaxa de acerto EQM
3 97.62 % 0.04020355 96.14 % 0.0312474
10 98,95 % 0.028094815 99.26 % 0.0188695
As RNAs com 5,10 e 15 neuronios na camada oculta tiveram melhor desempenhono treinamento, como mostra a Tabela 1 e a Figura 4. Essas tres topologias tiveramseus resultados parecidos, porem as topologias com 10 e 15 neuronios na camada ocultaforam discretamente melhores que as demais topologias. Nos testes com a RNA, todas astopologias tiveram resultados proximos, como mostra a Tabela 2.
A Figura 5 mostra os EQMs da base com serie temporal, durante o treinamento daRNA com diferentes topologias. Em todas as topologias os EQMs durante o treinamentosao estaveis e praticamente iguais, com valores girando em torno de 0.02.
Figura 5. EQM dos dados de treinamento para as diferentes topologias da se-gunda abordagem
XIII Encontro Nacional de Inteligencia Artificial e Computacional
SBC ENIAC-2016 Recife - PE 511

A Tabela 3 mostra os EQMs e o tempo de treinamento de todas as topologiastreinadas. Observa-se que os EQMs de treinamento e validacao, para todas as topologiassao bem proximos. Os dados apresentados comprovam a analise dos graficos da Figura5. Quanto ao tempo de treinamento, o tempo de execucao da RNA varia de 1 minuto a 2minutos. Observa-se que quanto maior o numero de neuronios na camada oculta, maior otempo de treinamento da RNA.
Tabela 3. Resultados do treinamento das topologias para a segunda abordagemde MLP
Topologia EQM Tempo de TreinamentoTreinamento Validacao
15 0.018144 0.026547 75593 ms20 0.017029 0.024742 92406 ms25 0.018881 0.025536 101453 ms30 0.024860 0.032272 139875 ms
A Tabela 4 apresenta as taxas de acerto e os EQMs da fase de teste das diferentestopologias da RNA. Todas as topologias tiveram uma taxa de acerto em torno de 99%,confirmando a capacidade de generalizacao da rede neural artificial. A RNA com 25e 30 neuronios na camada oculta tiveram menores EQM e maiores taxa de acerto, sedestacando das demais topologias.
Tabela 4. Resultados do teste das topologias para a segunda abordagem de MLPTopologia Teste
Taxa de acerto EQM15 98.94 % 0.020456820 99.09 % 0.018707625 99.54 % 0.018630730 99.54 % 0.0180613
Todas as topologias tiveram desempenho semelhantes no treinamento, como mos-tra a Tabela 3 e a Figura 5 e nos testes, como mostra a Tabela 4. Para a base de serietemporal nao ha diferenca significativa nos resultados de todas as topologias. Portantopode-se escolher entre as RNAs com maior taxa de acerto e menor EQM.
4. Experimentos com o braco robotico
Optou-se por utilizar no sistema inteligente a topologia com 10 neuronios na camadaoculta para RNA Multilayer Perceptron da primeira abordagem e a topologia com 25neuronios na camada oculta para RNA Multilayer Perceptron da segunda abordagem.Ambas topologias conseguiram mapear melhor os dados, apresentando taxas de acertomelhores e EQMs menores do que as demais topologias.
Para a avaliacao do sistema inteligente, implementou-se a rede neural artificial nomicrocontrolador Arduino MEGA 2560, onde os pesos sinapticos adquiridos na etapa detreinamento foram passados como parametros para a RNA. Em modo de operacao, o sis-tema inteligente recebe em suas entradas os valores do sinal EMG captados das placas
XIII Encontro Nacional de Inteligencia Artificial e Computacional
SBC ENIAC-2016 Recife - PE 512

Myoware Muscle Sensor e processa a informacao atraves da RNA, acionando o servomo-tor correspondente ao movimento executado. E informado em tela, atraves do softwareArduino IDE, o resultado obtido pela RNA e o motor acionado. A Figura 6 mostra oresultado da RNA em modo de operacao para alguns padroes de sinais EMGs.
Figura 6. Saıda da RNA do sistema inteligente em modo de operacao
Para a realizacao do experimento, foi escolhido um indivıduo, idade de 30 anos,sem antecedentes de lesao do aparelho locomotor. Analisaram-se as cinco classes demovimentos do braco: extensao e flexao do cotovelo, extensao e contracao da mao eflexao do cotovelo e contracao da mao. Os movimentos foram realizados tendo em mentea naturalidade dos mesmos e de forma a evitar fadiga muscular.
A Tabela 5 mostra a taxa de acerto do sistema inteligente, com a rede neural MLPpara a primeira abordagem, para o reconhecimento do sinal EMG e execucao do movi-mento pelo braco robotico. Foram realizados 80 movimentos aleatorios no experimento.
Tabela 5. Taxa de acerto do sistema inteligente para a primeira abordagemMovimento Taxa de Acerto
Extensao do cotovelo 90,00 %Flexao do cotovelo 70,00 %Extensao da mao 90,00 %Contracao da mao 100,00 %Flexao do cotovelo e contracao da mao 85,00 %
A Tabela 6 mostra a taxa de acerto do sistema inteligente, com a rede neural MLPpara a segunda abordagem. Foram realizados os mesmos movimentos, na mesma ordem,do experimento da primeira abordagem.
XIII Encontro Nacional de Inteligencia Artificial e Computacional
SBC ENIAC-2016 Recife - PE 513
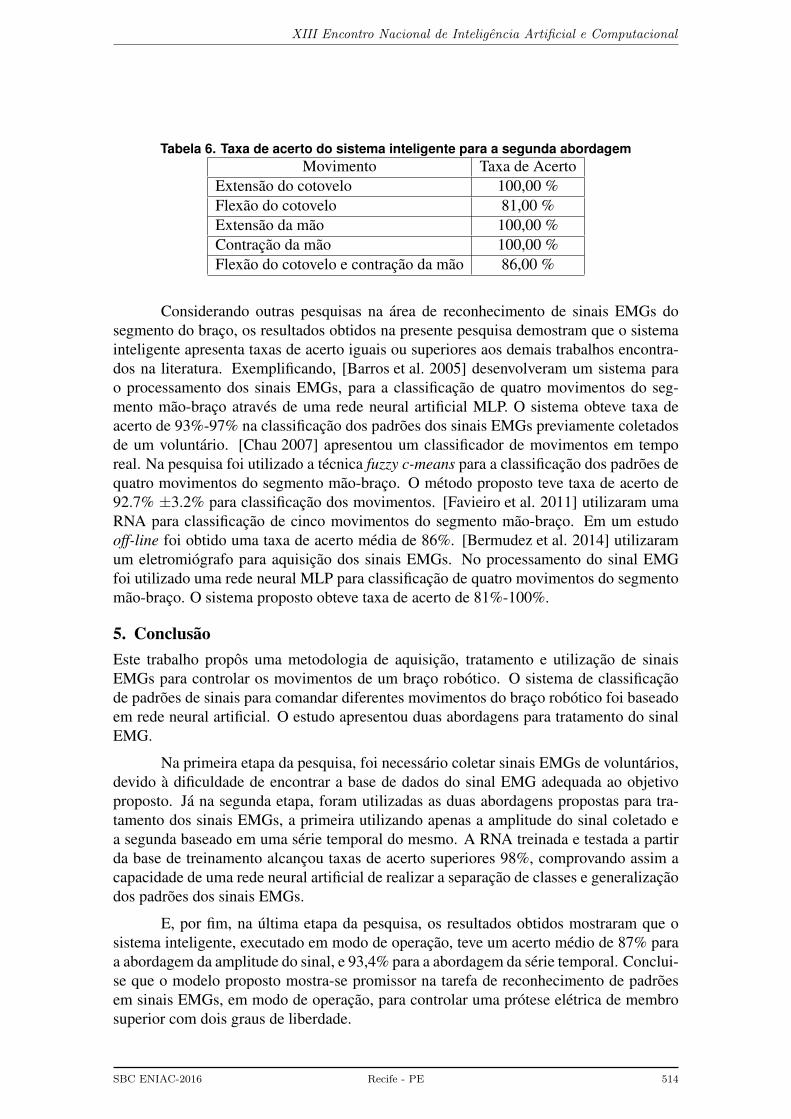
Tabela 6. Taxa de acerto do sistema inteligente para a segunda abordagemMovimento Taxa de Acerto
Extensao do cotovelo 100,00 %Flexao do cotovelo 81,00 %Extensao da mao 100,00 %Contracao da mao 100,00 %Flexao do cotovelo e contracao da mao 86,00 %
Considerando outras pesquisas na area de reconhecimento de sinais EMGs dosegmento do braco, os resultados obtidos na presente pesquisa demostram que o sistemainteligente apresenta taxas de acerto iguais ou superiores aos demais trabalhos encontra-dos na literatura. Exemplificando, [Barros et al. 2005] desenvolveram um sistema parao processamento dos sinais EMGs, para a classificacao de quatro movimentos do seg-mento mao-braco atraves de uma rede neural artificial MLP. O sistema obteve taxa deacerto de 93%-97% na classificacao dos padroes dos sinais EMGs previamente coletadosde um voluntario. [Chau 2007] apresentou um classificador de movimentos em temporeal. Na pesquisa foi utilizado a tecnica fuzzy c-means para a classificacao dos padroes dequatro movimentos do segmento mao-braco. O metodo proposto teve taxa de acerto de92.7% ±3.2% para classificacao dos movimentos. [Favieiro et al. 2011] utilizaram umaRNA para classificacao de cinco movimentos do segmento mao-braco. Em um estudooff-line foi obtido uma taxa de acerto media de 86%. [Bermudez et al. 2014] utilizaramum eletromiografo para aquisicao dos sinais EMGs. No processamento do sinal EMGfoi utilizado uma rede neural MLP para classificacao de quatro movimentos do segmentomao-braco. O sistema proposto obteve taxa de acerto de 81%-100%.
5. ConclusaoEste trabalho propos uma metodologia de aquisicao, tratamento e utilizacao de sinaisEMGs para controlar os movimentos de um braco robotico. O sistema de classificacaode padroes de sinais para comandar diferentes movimentos do braco robotico foi baseadoem rede neural artificial. O estudo apresentou duas abordagens para tratamento do sinalEMG.
Na primeira etapa da pesquisa, foi necessario coletar sinais EMGs de voluntarios,devido a dificuldade de encontrar a base de dados do sinal EMG adequada ao objetivoproposto. Ja na segunda etapa, foram utilizadas as duas abordagens propostas para tra-tamento dos sinais EMGs, a primeira utilizando apenas a amplitude do sinal coletado ea segunda baseado em uma serie temporal do mesmo. A RNA treinada e testada a partirda base de treinamento alcancou taxas de acerto superiores 98%, comprovando assim acapacidade de uma rede neural artificial de realizar a separacao de classes e generalizacaodos padroes dos sinais EMGs.
E, por fim, na ultima etapa da pesquisa, os resultados obtidos mostraram que osistema inteligente, executado em modo de operacao, teve um acerto medio de 87% paraa abordagem da amplitude do sinal, e 93,4% para a abordagem da serie temporal. Conclui-se que o modelo proposto mostra-se promissor na tarefa de reconhecimento de padroesem sinais EMGs, em modo de operacao, para controlar uma protese eletrica de membrosuperior com dois graus de liberdade.
XIII Encontro Nacional de Inteligencia Artificial e Computacional
SBC ENIAC-2016 Recife - PE 514

ReferenciasBarros, K. R., Caparelli, T. B., and Soares, A. B. (2005). Metodologia de baixo esforco
computacional para classificacao de sinais eeletromiografico para controle de proteses.pages 1 – 4, Uberlandia. IV Conferencia de Estudos em Engenharia Eletrica.
Bermudez, R., Balbinot, A., and Shuck, A. (2014). Caracterizacao de movimentos dosegmento mao-braco atraves de wavelets e redes neurais artificiais. pages 169–172,Uberlandia. 25th. Congresso Brasileiro de Engenharia Biomedica.
Caldwell, P., Al-Bayaty, R., Kellar, C., and Shin, I.-S. (2012). Biomechanics: Surfaceelectromyographic prothesis control. In BMEI, pages 786–789, Chongqing. 5th. Inter-national Conference on Biomedical Engineering and Informatics, IEEE.
Chan, F. H. Y., Yang, Y.-S., Lam, F. K., Zhang, Y.-T., and Parker, P. A. (2000). Fuzzy emgclassification for prosthesis control. IEEE Transactions on Rehabilitation Engineering,8(3):305–311.
Chau, K. M. S. K. T. (2007). Real-time classification of forearm electromyographic sig-nals corresponding to user-selected intentional movements for multifunction prothe-sis control. IEEE Transactions on Neural Systems and Rehabilitation Engineering,15:535–542.
de Barros, K. R. (2005). Metodologia para classificacao de sinais emg para controle deproteses com baixo esforco computacional. Master’s thesis, Universidade Federal deUberlandia, Uberlandia.
de Carvalho, G. L. (2004). Proposta de um metodo de projeto de proteses de membrossuperiores com a utilizacao da engenharia e analise do valor. Master’s thesis, Univer-sidade de Sao Paulo, Sao Paulo.
de Oliveira Andrade, A. (2000). Metodologia para classificacao de sinais emg no con-trole de membros artificiais. Master’s thesis, Universidade Federal de Uberlandia,Uberlandia.
Favieiro, G., Balbinot, A., and Barreto, M. M. (2011). Decoding arm movements bymyoeletric signal and artificial neural networks. pages 1–6, Vitoria. Conference of theIEEE Biosignals and Biorobotics, IEEE.
Favieiro, G. W. (2012). Desenvolvimento de um sistema neuro-fuzzy para analise desinais mioeletrico do segmento mao-braco. Master’s thesis, Universidade Federal doRio Grande do Sul, Porto Alegre.
Gouvea, M. M. (2012). A neural-based gradient optimization in large power systems.WSEAS Transaction on Systems, 11(8).
Haykin, S. (2000). Redes Neurais - Princıpios e Praticas. Bookman, Porto Alegre, 2edition.
Meireles, M. R. G., Almeida, P. E. M., Simoes, M. G., Simoes, M. G., and Simoes,M. G. (2003). A comprehensive review for industrial applicability of artificial neuralnetworks. IEEE Transaction on Industrial Electronics, 50(3):585–601.
Ortolan, R. L. (2002). Estudo e avaliacao de tecnicas de processamento do sinal mi-oeletrico para o controle de sistemas de reabilitacao. Master’s thesis, Universidade deSao Paulo, Sao Carlos.
XIII Encontro Nacional de Inteligencia Artificial e Computacional
SBC ENIAC-2016 Recife - PE 515





























