Embed Size (px)
Citation preview
Introdução ao Controle Automático deAeronaves
Sistemas de Coordenadas e Equaçõesde Movimento
Leonardo Torres
Escola de Engenharia – Universidade Federal de Minas Gerais/EEUFMG
Dep. Eng. Eletronica – EEUFMG – p. 1
Sistemas de Coordenadas
As velocidades e acelerações de um veículo sãocomumente descritas em diferentes referenciais.
Para o caso de veículos cujos movimentos deinteresse são aqueles em relação ao planeta Terra,podemos categorizar os sistemas de coordenadas em2 tipos:
1. Referenciais vinculados à Terra;
2. Referenciais vinculados ao corpo do veículo.
Dep. Eng. Eletronica – EEUFMG – p. 2
Referenciais vinculados à Terra
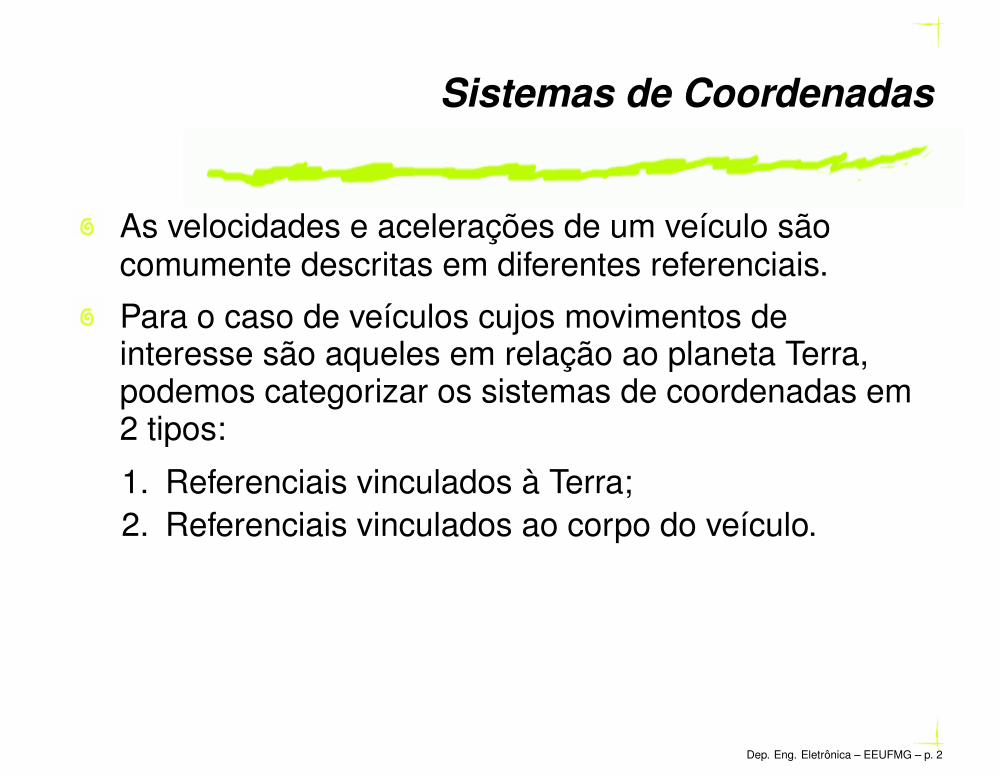
ECI – (Earth Centered Inertial frame)
x
y
zωE
Origem no centro doplaneta.
Eixo x coincide com oeixo de rotação daterra.
Move-se com a terraem seu movimento detranslação, mas man-tém sua orientaçãofixa em relação àsestrelas.
Dep. Eng. Eletronica – EEUFMG – p. 3
Referenciais vinculados à Terra
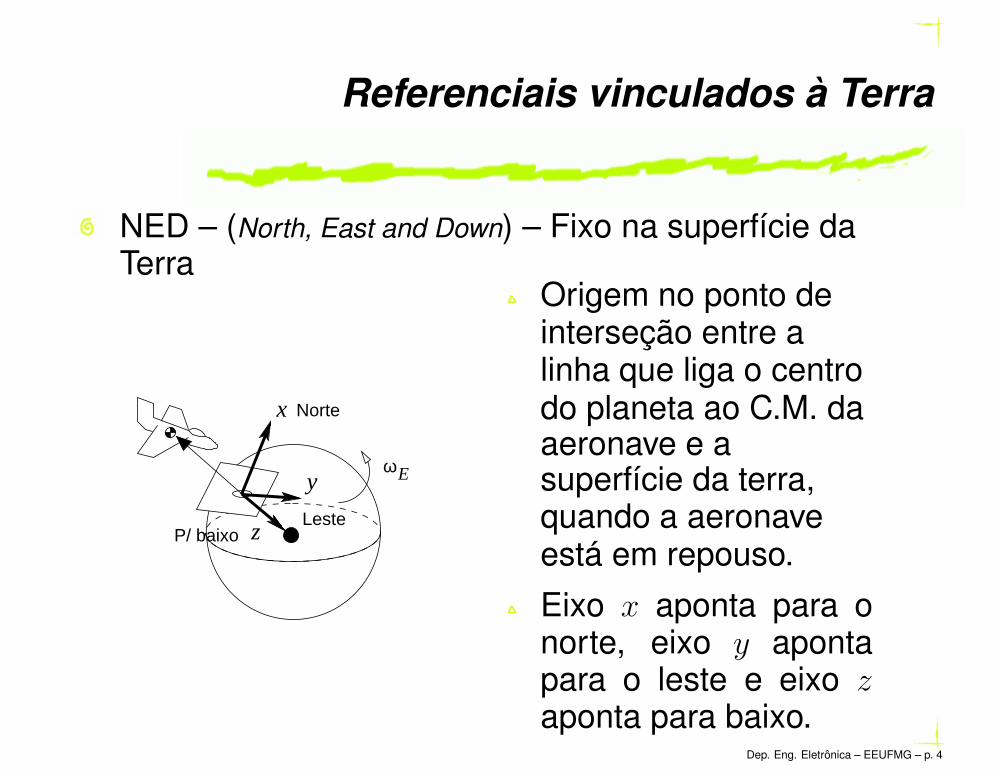
NED – (North, East and Down) – Fixo na superfície daTerra
ωE
P/ baixo z
x Norte
y
Leste
Origem no ponto deinterseção entre alinha que liga o centrodo planeta ao C.M. daaeronave e asuperfície da terra,quando a aeronaveestá em repouso.
Eixo x aponta para onorte, eixo y apontapara o leste e eixo zaponta para baixo.
Dep. Eng. Eletronica – EEUFMG – p. 4
Referenciais vinculados à Aeronave
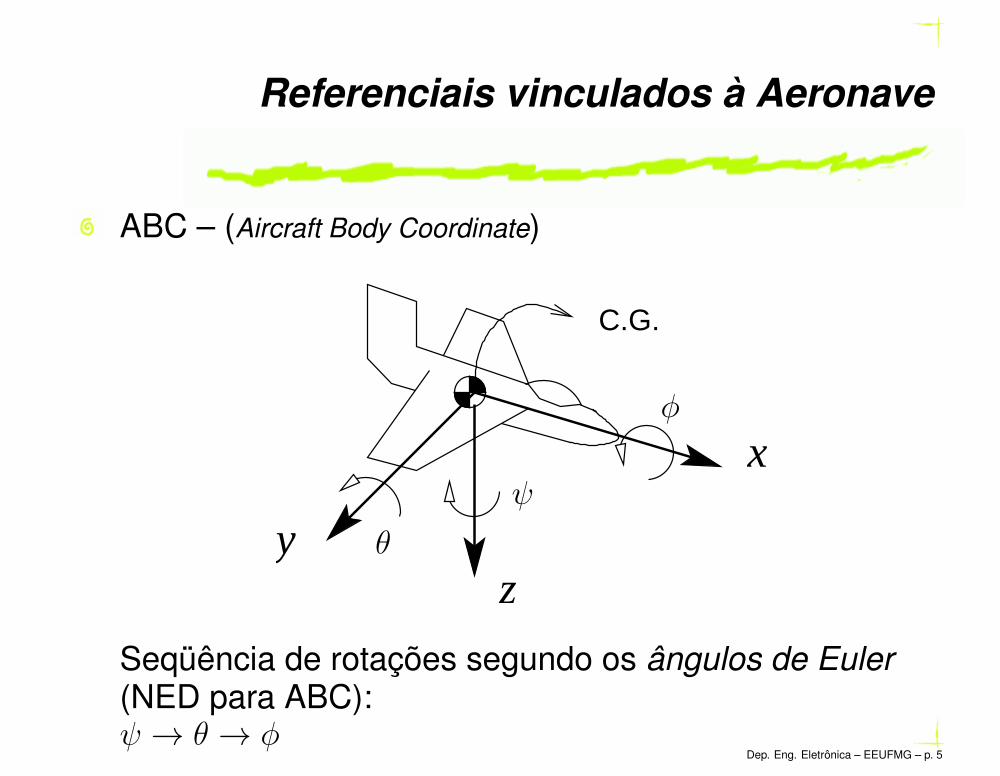
ABC – (Aircraft Body Coordinate)
C.G.
y
x
zθ
ψ
φ
Seqüência de rotações segundo os ângulos de Euler(NED para ABC):ψ → θ → φ
Dep. Eng. Eletronica – EEUFMG – p. 5
Referenciais vinculados à Aeronave
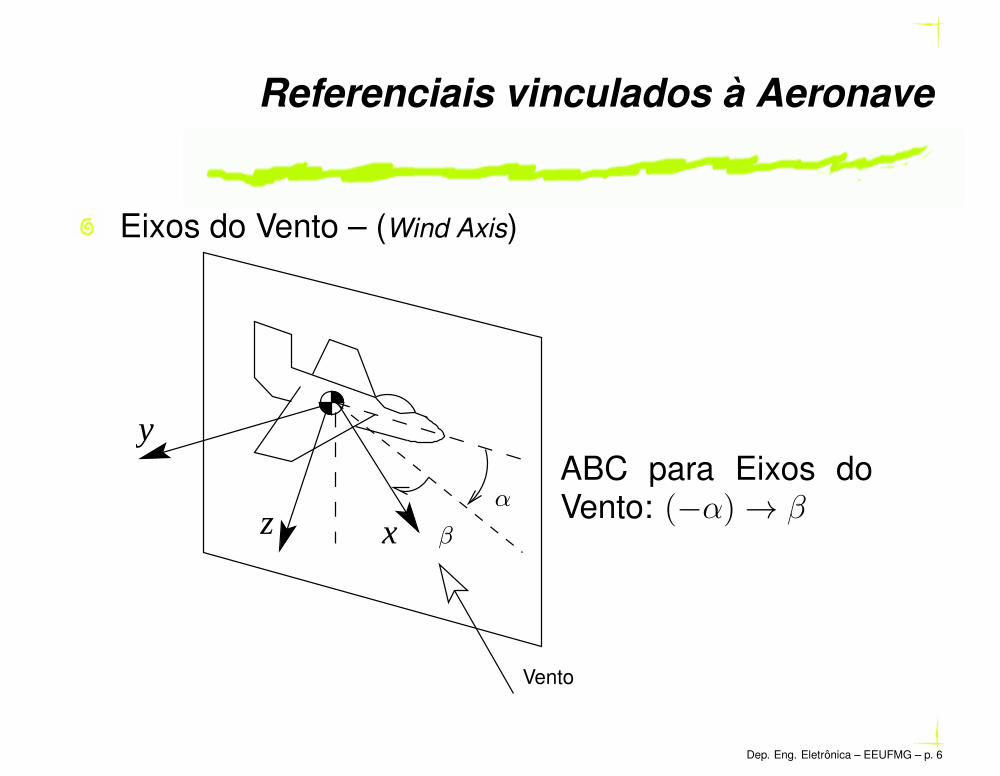
Eixos do Vento – (Wind Axis)
z
y
x
Vento
α
β
ABC para Eixos doVento: (−α) → β
Dep. Eng. Eletronica – EEUFMG – p. 6
Referenciais vinculados à Aeronave
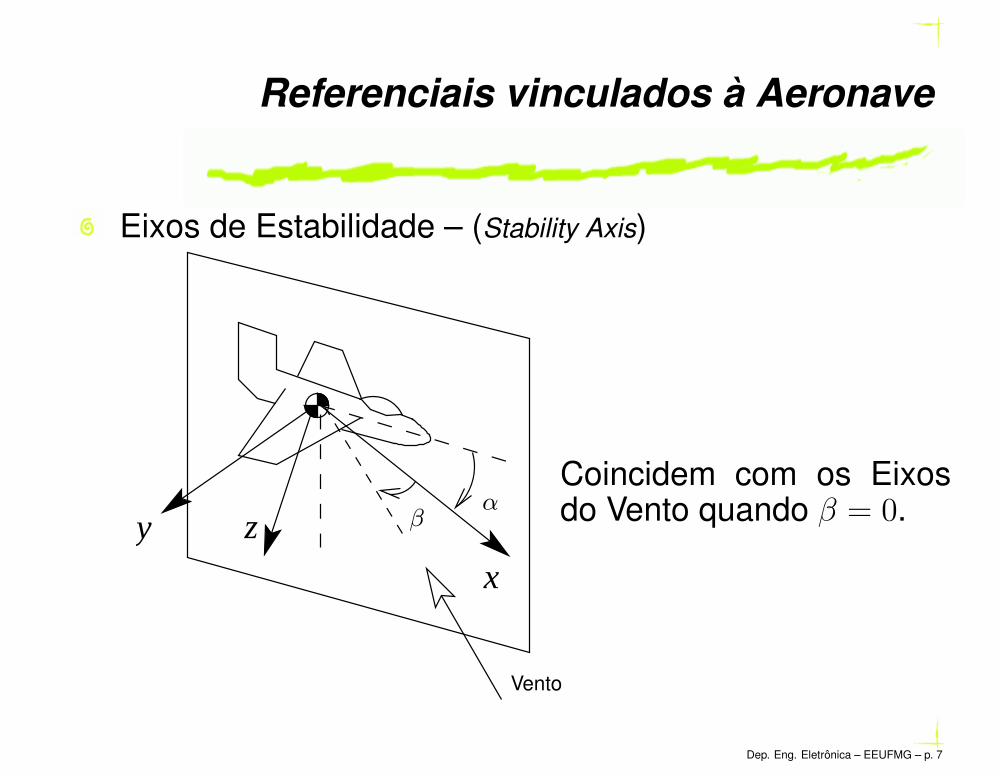
Eixos de Estabilidade – (Stability Axis)
zy
x
Vento
αβ
Coincidem com os Eixosdo Vento quando β = 0.
Dep. Eng. Eletronica – EEUFMG – p. 7
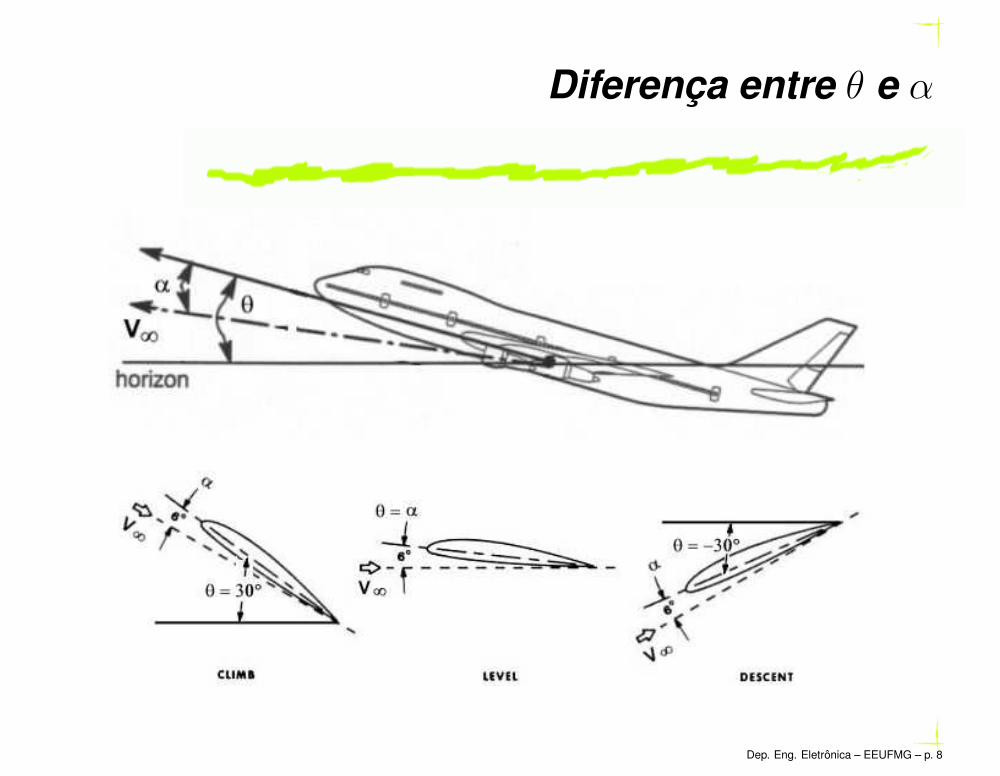
Diferença entre θ e α
Dep. Eng. Eletronica – EEUFMG – p. 8
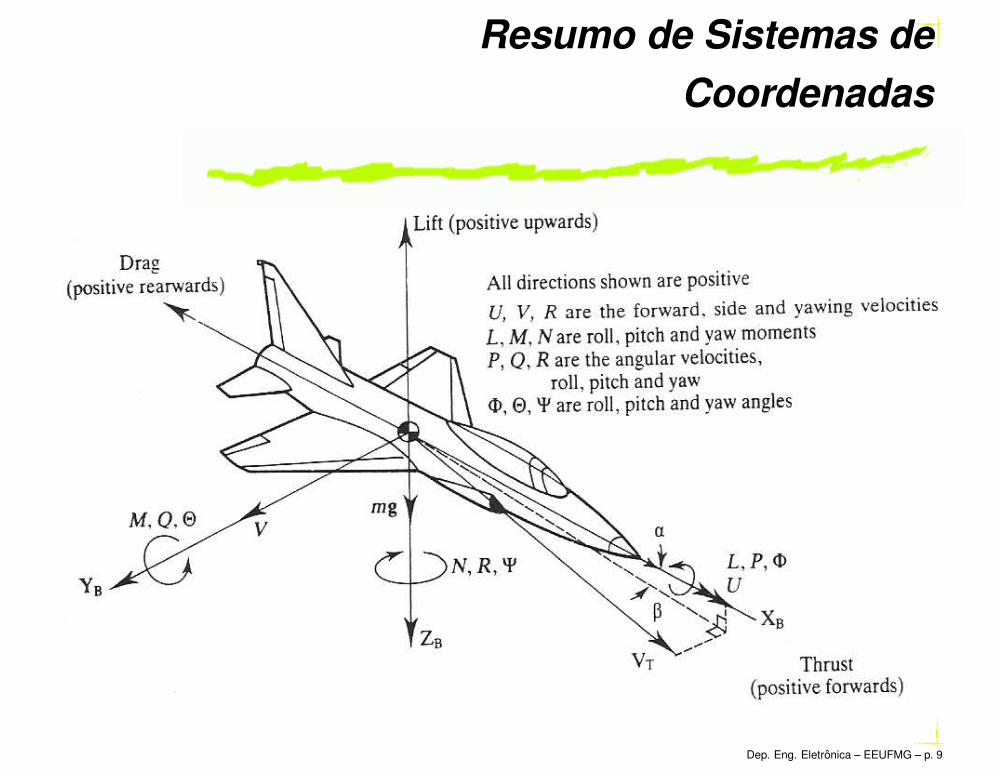
Resumo de Sistemas de
Coordenadas
Dep. Eng. Eletronica – EEUFMG – p. 9
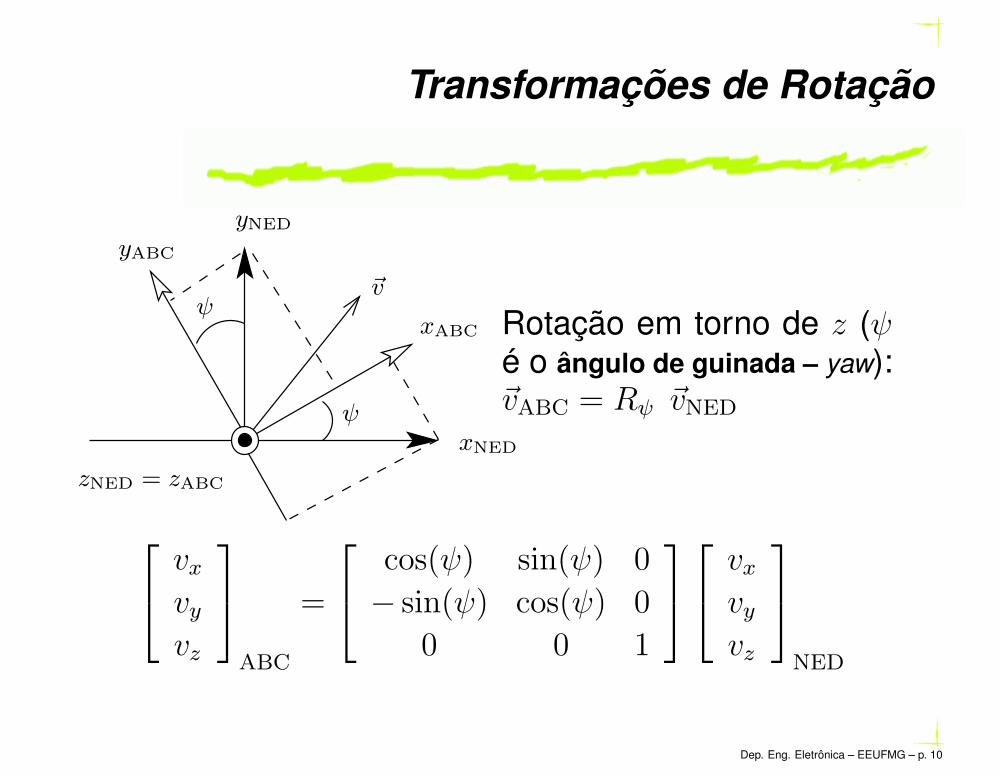
Transformações de Rotação
~v
ψ
ψ
xNED
xABC
yNED
yABC
zNED = zABC
Rotação em torno de z (ψé o angulo de guinada – yaw):~vABC = Rψ ~vNED
vx
vy
vz
ABC
=
cos(ψ) sin(ψ) 0
− sin(ψ) cos(ψ) 0
0 0 1
vx
vy
vz
NED
Dep. Eng. Eletronica – EEUFMG – p. 10
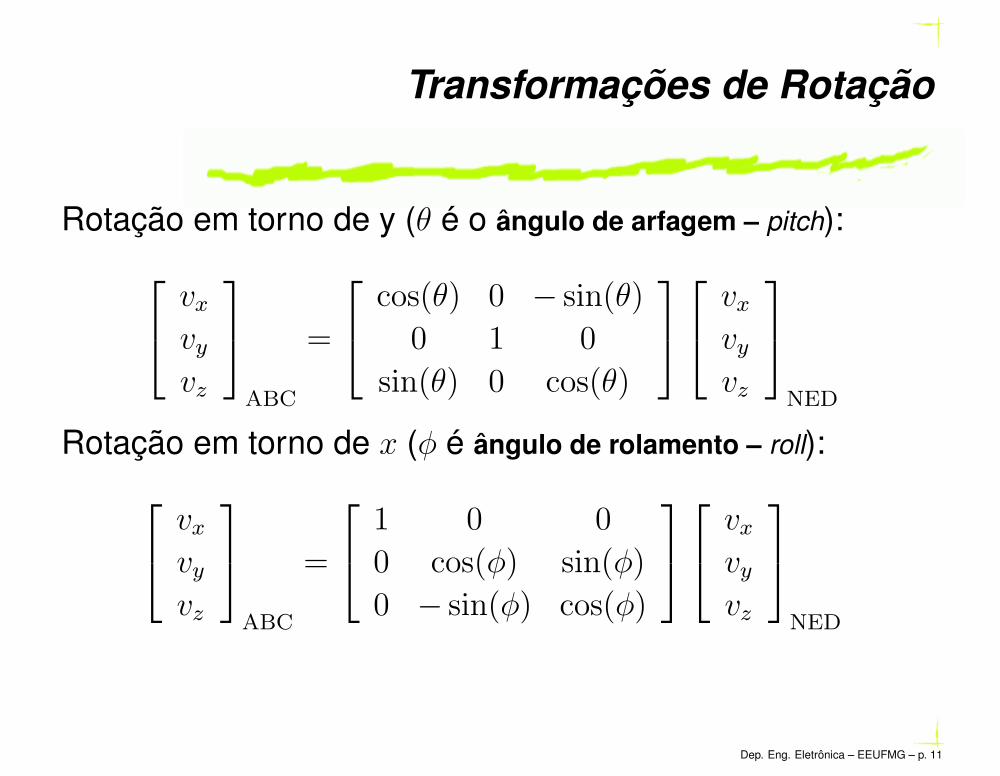
Transformações de Rotação
Rotação em torno de y (θ é o angulo de arfagem – pitch):
vx
vy
vz
ABC
=
cos(θ) 0 − sin(θ)
0 1 0
sin(θ) 0 cos(θ)
vx
vy
vz
NED
Rotação em torno de x (φ é angulo de rolamento – roll):
vx
vy
vz
ABC
=
1 0 0
0 cos(φ) sin(φ)
0 − sin(φ) cos(φ)
vx
vy
vz
NED
Dep. Eng. Eletronica – EEUFMG – p. 11
Transformações de Rotação
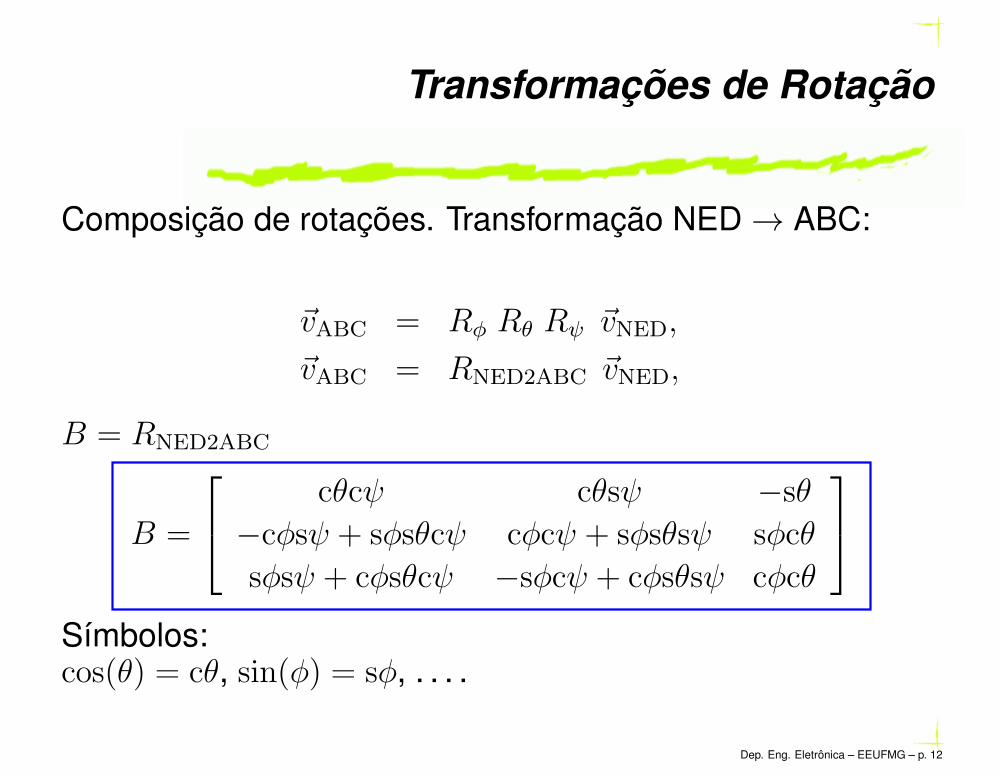
Composição de rotações. Transformação NED → ABC:
~vABC = Rφ Rθ Rψ ~vNED,
~vABC = RNED2ABC ~vNED,
B = RNED2ABC
B =
cθcψ cθsψ −sθ
−cφsψ + sφsθcψ cφcψ + sφsθsψ sφcθ
sφsψ + cφsθcψ −sφcψ + cφsθsψ cφcθ
Símbolos:cos(θ) = cθ, sin(φ) = sφ, . . . .
Dep. Eng. Eletronica – EEUFMG – p. 12
Transformações de Rotação
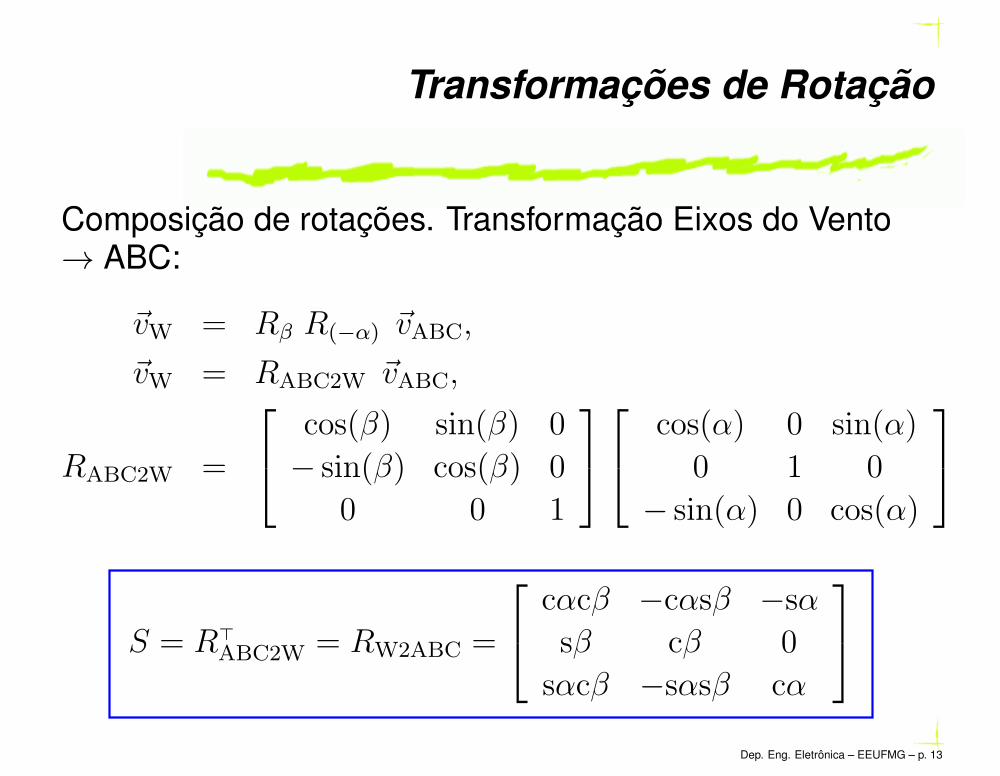
Composição de rotações. Transformação Eixos do Vento→ ABC:
~vW = Rβ R(−α) ~vABC,
~vW = RABC2W ~vABC,
RABC2W =
cos(β) sin(β) 0
− sin(β) cos(β) 0
0 0 1
cos(α) 0 sin(α)
0 1 0
− sin(α) 0 cos(α)
S = R⊤
ABC2W = RW2ABC =
cαcβ −cαsβ −sα
sβ cβ 0
sαcβ −sαsβ cα
Dep. Eng. Eletronica – EEUFMG – p. 13
Transformações de Rotação
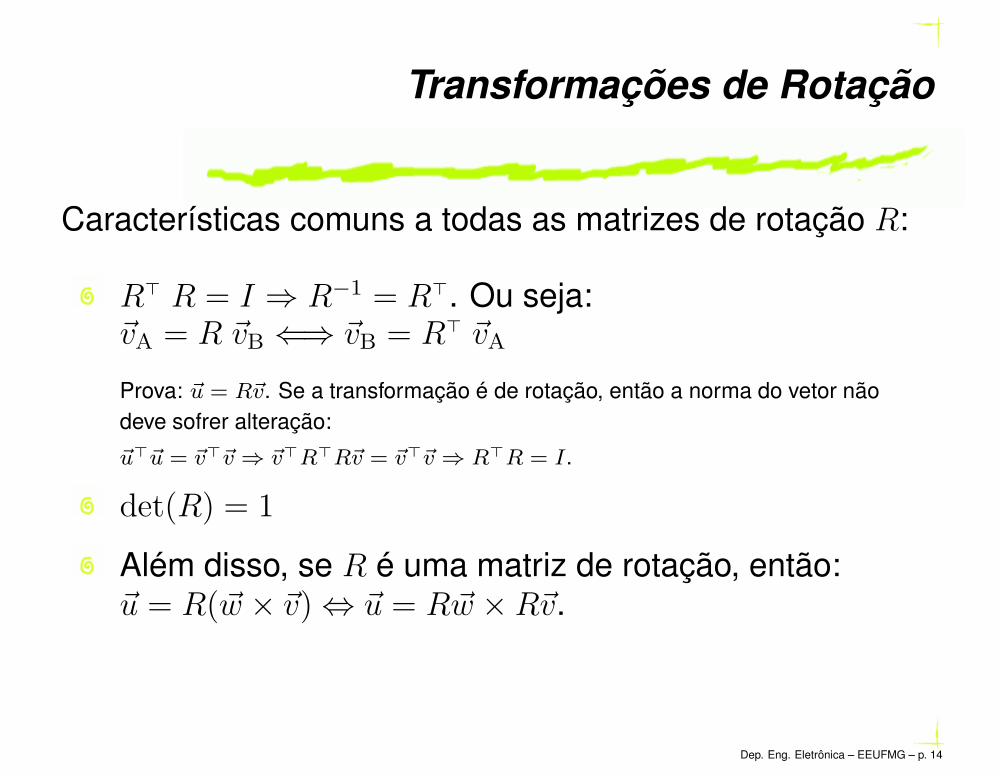
Características comuns a todas as matrizes de rotação R:
R⊤ R = I ⇒ R−1 = R⊤. Ou seja:~vA = R ~vB ⇐⇒ ~vB = R⊤ ~vA
Prova: ~u = R~v. Se a transformação é de rotação, então a norma do vetor não
deve sofrer alteração:
~u⊤~u = ~v⊤~v ⇒ ~v⊤R⊤R~v = ~v⊤~v ⇒ R⊤R = I.
det(R) = 1
Além disso, se R é uma matriz de rotação, então:~u = R(~w × ~v) ⇔ ~u = R~w ×R~v.
Dep. Eng. Eletronica – EEUFMG – p. 14
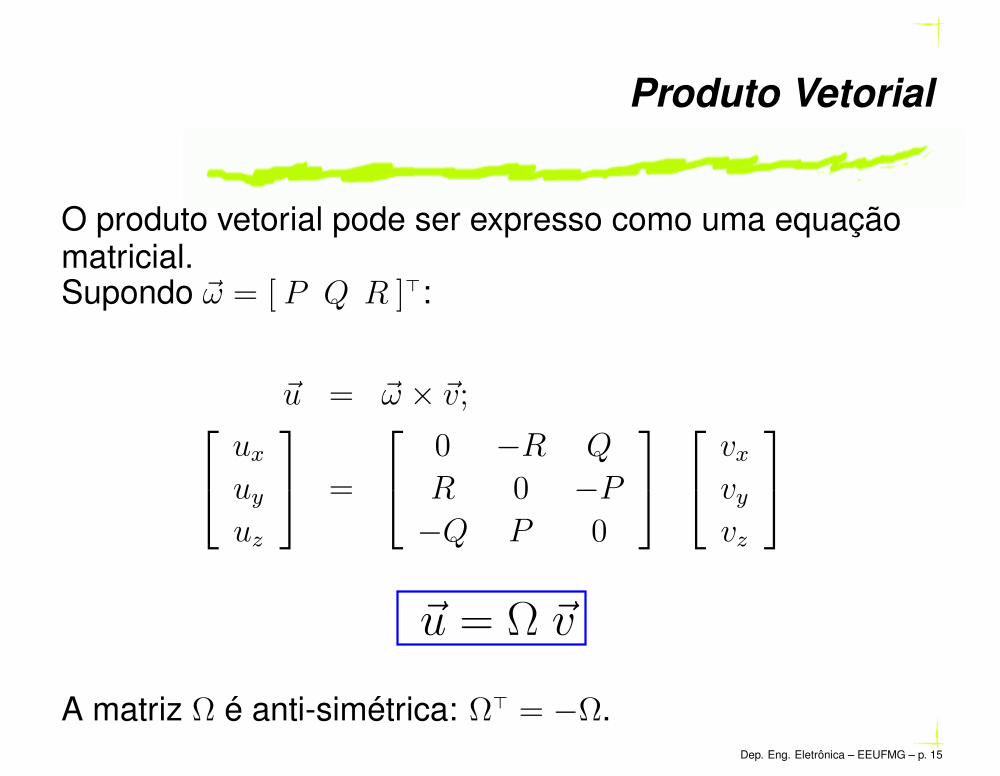
Produto Vetorial
O produto vetorial pode ser expresso como uma equaçãomatricial.Supondo ~ω = [ P Q R ]⊤:
~u = ~ω × ~v;
ux
uy
uz
=
0 −R Q
R 0 −P
−Q P 0
vx
vy
vz
~u = Ω ~v
A matriz Ω é anti-simétrica: Ω⊤ = −Ω.Dep. Eng. Eletronica – EEUFMG – p. 15
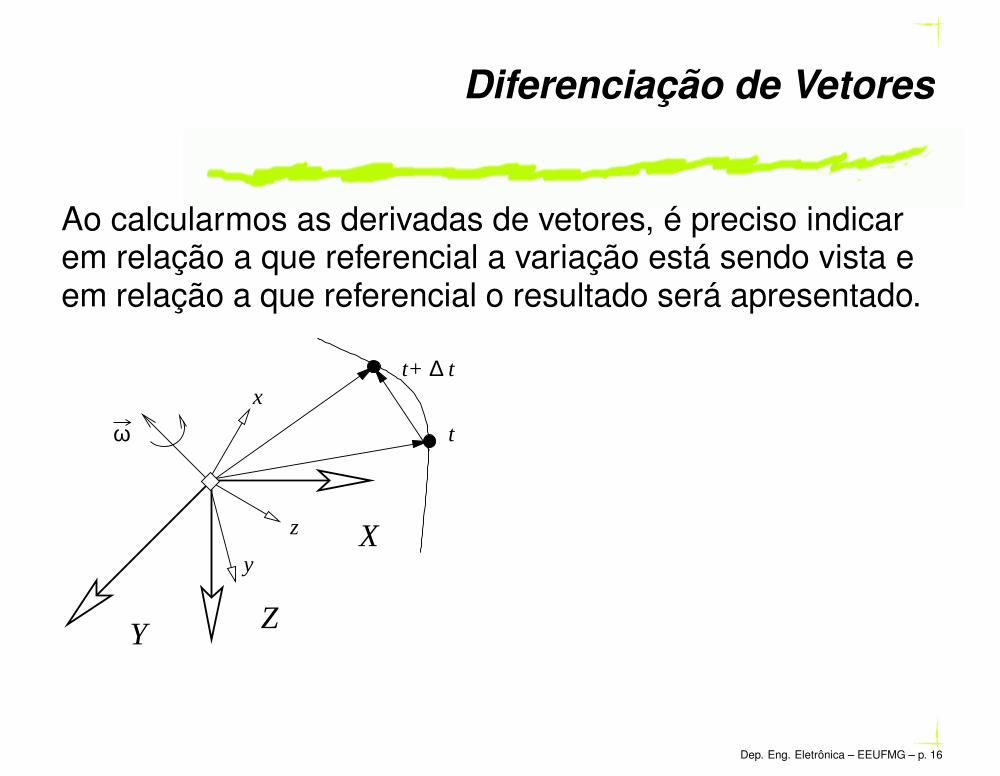
Diferenciação de Vetores
Ao calcularmos as derivadas de vetores, é preciso indicarem relação a que referencial a variação está sendo vista eem relação a que referencial o resultado será apresentado.
Z
X
Y
ω
t+ ∆ t
t
x
y
z
Dep. Eng. Eletronica – EEUFMG – p. 16
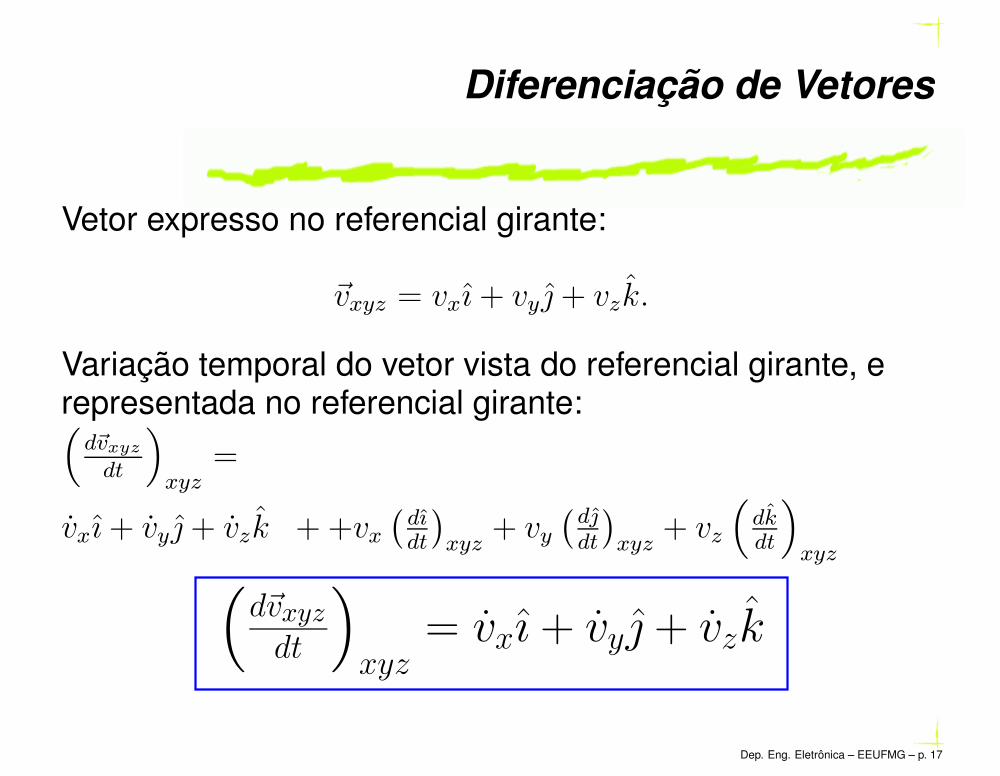
Diferenciação de Vetores
Vetor expresso no referencial girante:
~vxyz = vxı+ vy + vzk.
Variação temporal do vetor vista do referencial girante, erepresentada no referencial girante:(
d~vxyzdt
)
xyz=
vxı+ vy + vzk ++vx(
dıdt
)
xyz+ vy
(
d
dt
)
xyz+ vz
(
dkdt
)
xyz
(
d~vxyzdt
)
xyz= vxı + vy + vzk
Dep. Eng. Eletronica – EEUFMG – p. 17
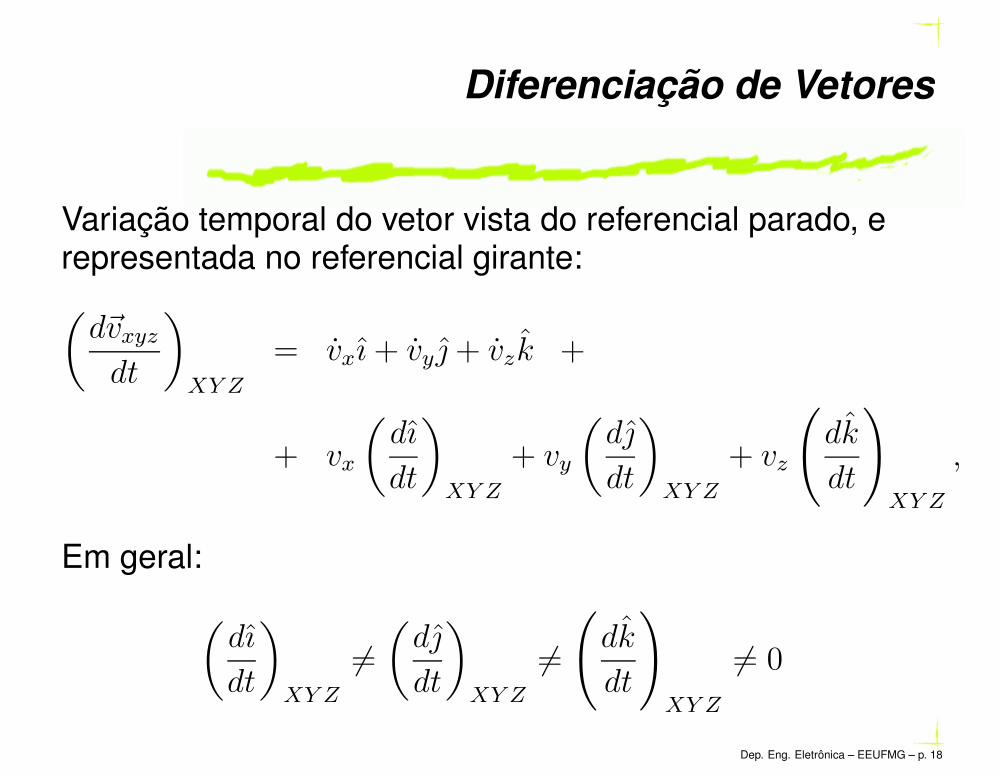
Diferenciação de Vetores
Variação temporal do vetor vista do referencial parado, erepresentada no referencial girante:
(
d~vxyz
dt
)
XY Z
= vxı+ vy + vzk +
+ vx
(
dı
dt
)
XY Z
+ vy
(
d
dt
)
XY Z
+ vz
(
dk
dt
)
XY Z
,
Em geral:
(
dı
dt
)
XY Z
6=
(
d
dt
)
XY Z
6=
(
dk
dt
)
XY Z
6= 0
Dep. Eng. Eletronica – EEUFMG – p. 18
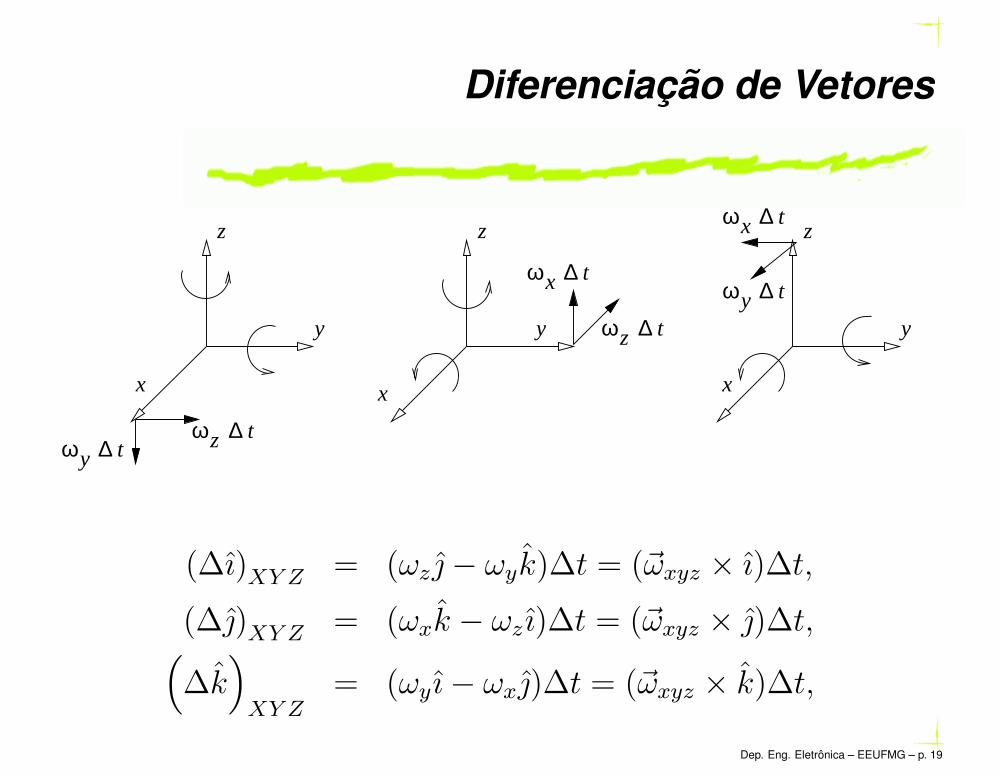
Diferenciação de Vetores
y
z
x
ωy ∆ tωz ∆ t
z
y
x
ωx ∆ t
ωz ∆ t y
z
x
ωx ∆ t
ωy ∆ t
(∆ı)XY Z = (ωz − ωyk)∆t = (~ωxyz × ı)∆t,
(∆)XY Z = (ωxk − ωz ı)∆t = (~ωxyz × )∆t,(
∆k)
XY Z= (ωy ı− ωx)∆t = (~ωxyz × k)∆t,
Dep. Eng. Eletronica – EEUFMG – p. 19
Diferenciação de Vetores
Variação temporal do vetor vista do referencial parado, erepresentada no referencial girante:
(
d~vxyz
dt
)
XY Z
= vxı+ vy + vzk +
+ vx
(
dı
dt
)
XY Z
+ vy
(
d
dt
)
XY Z
+ vz
(
dk
dt
)
XY Z
,
(
d~vxyzdt
)
XY Z=
(
d~vxyzdt
)
xyz+ ~ωxyz × ~vxyz
Dep. Eng. Eletronica – EEUFMG – p. 20
Equação de Desamarramento –
Bootstrap equation
Qual a relação entre a variação da posição espacialdescrita pelos ângulos de Euler
~Φ = [ φ θ ψ ]⊤
e a velocidade angular da aeronave?
~ω = [ P Q R ]⊤
Dep. Eng. Eletronica – EEUFMG – p. 21
Equação de Desamarramento –
Bootstrap equation
Suponha uma relação de transformação de rotaçãoqualquer, que transforma a representação de um vetorconstante em um referencial inercial em suarepresentação no referencial girante. Por exemplo:
~uABC = B ~uNED = B
1
0
0
NED
Por definição(
d~uABC
dt
)
NED
= 0
.
Dep. Eng. Eletronica – EEUFMG – p. 22
Equação de Desamarramento –
Bootstrap equation
Logo:
0 = ~uABC + ~ωABC × ~uABC;
0 = B
1
0
0
+B
0
0
0
+ ΩABC B
1
0
0
.
0 = ~b1 + ΩABC~b1,
sendo ~b1 a primeira coluna de B. Logo:
~b1 = −ΩABC~b1 = ~ωABC ×~b1 =
0 −R Q
R 0 −P
−Q P 0
~b1.
Dep. Eng. Eletronica – EEUFMG – p. 23
Equação de Desamarramento –
Bootstrap equation
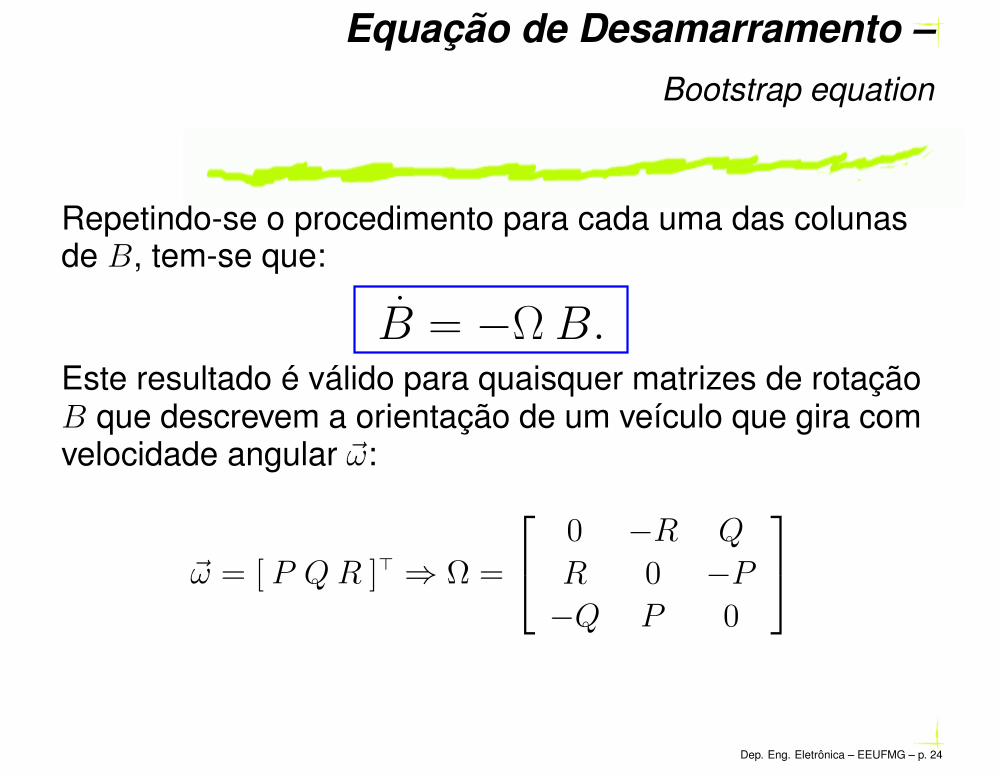
Repetindo-se o procedimento para cada uma das colunasde B, tem-se que:
B = −Ω B.Este resultado é válido para quaisquer matrizes de rotaçãoB que descrevem a orientação de um veículo que gira comvelocidade angular ~ω:
~ω = [ P Q R ]⊤ ⇒ Ω =
0 −R Q
R 0 −P
−Q P 0
Dep. Eng. Eletronica – EEUFMG – p. 24
Equação de Desamarramento –
Bootstrap equation
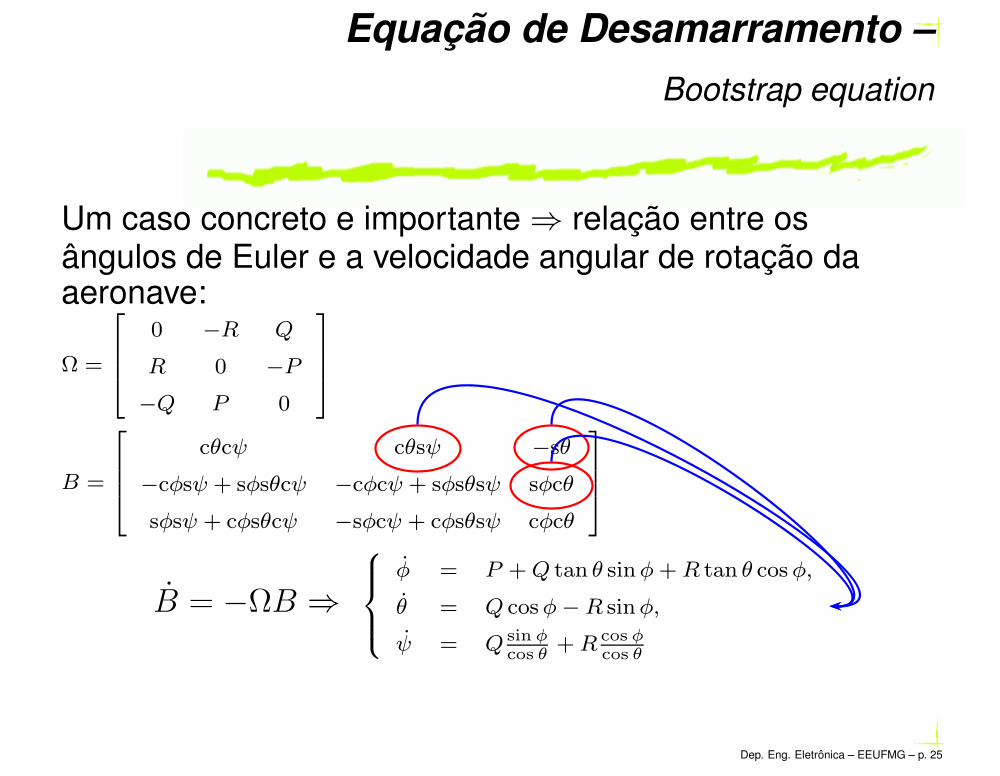
Um caso concreto e importante ⇒ relação entre osângulos de Euler e a velocidade angular de rotação daaeronave:
Ω =
0 −R Q
R 0 −P
−Q P 0
B =
cθcψ cθsψ −sθ
−cφsψ + sφsθcψ −cφcψ + sφsθsψ sφcθ
sφsψ + cφsθcψ −sφcψ + cφsθsψ cφcθ
B = −ΩB ⇒
φ = P +Q tan θ sinφ+R tan θ cosφ,
θ = Q cosφ−R sinφ,
ψ = Q sin φcos θ
+R cosφcos θ
Dep. Eng. Eletronica – EEUFMG – p. 25
Equação de Desamarramento –
Bootstrap equation
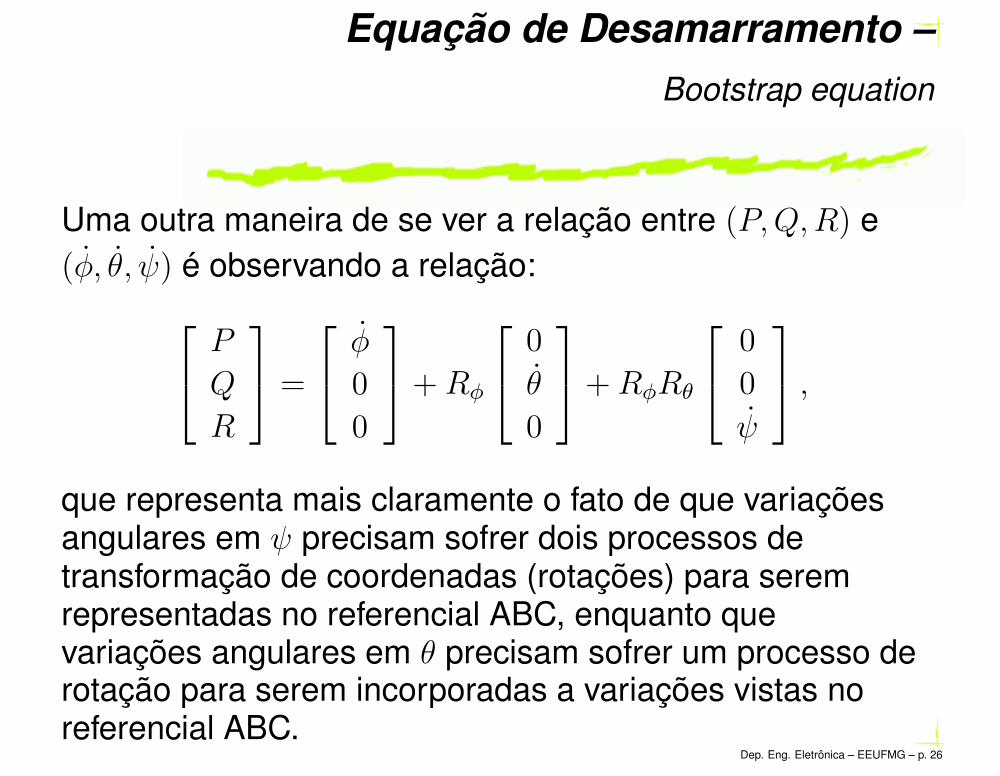
Uma outra maneira de se ver a relação entre (P,Q,R) e
(φ, θ, ψ) é observando a relação:
P
Q
R
=
φ
0
0
+ Rφ
0
θ
0
+RφRθ
0
0
ψ
,
que representa mais claramente o fato de que variaçõesangulares em ψ precisam sofrer dois processos detransformação de coordenadas (rotações) para seremrepresentadas no referencial ABC, enquanto quevariações angulares em θ precisam sofrer um processo derotação para serem incorporadas a variações vistas noreferencial ABC.
Dep. Eng. Eletronica – EEUFMG – p. 26