Embed Size (px)
Citation preview

Page 1
Paulo Ferreira - INESC/IST 1
SistemasSistemasOperativosOperativos
IST - LEIC - 1ºIST - LEIC - 1º SemestreSemestre
Paulo Ferreira - INESC/IST 2
Autoriað estes transparentes:wsão baseados no livro “Fundamentos de Sistemas Operativos”, de José Alves
Marques e Paulo Guedes, Editorial Presença ;wabrodam apenas a primeira parte da matéria, i.e., introdução aos sistemas
operativos, noção de processo, gestão de processos e sincronização;wresultam do esforço de vários docentes do IST que, ao longo de vários anos, têm
leccionado a disciplina de Sistemas Operativos: Paulo Ferreira, André Zúquete,Luís Veiga;wsão disponibilizados livremente para fins didácticos em www.rnl.ist.utl.pt/~ic-so;wserão constantemente melhorados de modo a satisfazer as necessiadades de
aprendizagem dos alunos.

Page 2
Paulo Ferreira - INESC/IST 3
Introduçãoð o que é um sistema operativo?wconjunto de programas que servem para gerir e vigiar a execução dos programas de
diversos utilizadores e que promovem a gestão dos recursos de um computador
ð quais os objectivos?winterface com o utilizador simples e fácil de utilizar (máquina virtual)wexploração eficiente dos recursos hardware da máquina (tempo de processamento,
memória volátil e de massa, periféricos de comunicação)
Paulo Ferreira - INESC/IST 4
Funções Principais de um Sistema Operativoð gestão da concorrênciawcontrolar diversos fluxos de actividade independentes que se executam “em
paralelo” sem que os mesmos interfiram não intencionalmente
ð partilha de recursos com protecçãowfísicos: processador, memória, discos, periféricos diversoswlógicos: programas de uso geral (editores, compiladores) e bibliotecas partilhadas
por diversos programas
ð gestão de informação persistentewarmazenamento fiável e seguro da informação não volátil em suportes magnéticos,
ópticos, etc.
ð controlo dos gastoswcontabilização e limitação da utilização dos recursos físicos

Page 3
Paulo Ferreira - INESC/IST 5
Recursos Físicos (hardware)ð processador (CPU)ð memória volátil (RAM)ð periféricos:wterminaiswdiscoswoutros (diskettes, bandas, CDs, impressoras, scanners, etc.)
ð especiais:winterrupções do processadorwrelógio de tempo realwinstruções privilegiadaswsuporte para memória virtual e protecção de memória
Paulo Ferreira - INESC/IST 6
19501946 1960 1970 1980
Tempo Partilhado
Memória Virtual (UNIX)
Sistemas Distribuídos
Multiprogramação (Multics)
Tratamento por Lotes (IBM 7090)
Tratamento por Lotes Rudimentar
Sem Sistema Operativo (UNIVAC, IBM 701, IBM 650)
1ª Geração:Interruptores
e válvulas
2ª Geração:Transístores
3ª Geração:Circuitos integrados
4ª Geração:Computadores pessoais
Evolução histórica

Page 4
Paulo Ferreira - INESC/IST 7
Monitor de Controloð permite ao utilizador: carregar programas em memória, editá-los e
verificar a sua execuçãoð cada utilizador tem um determinado tempo atribuído durante o
qual tem o computador apenas para sið resultados dos programas: listagens, fitas perfuradasð monitor é formado por um conjunto de utilitários:winterpretador de linguagem de comandowcompiladorweditor de ligações (linker)wcarregador de programas em memória (loader)wutilitários para controlo de periféricos (consola, leitor de cartões, etc.)
ð desvantagem: computador está parado a maior parte do tempo
Paulo Ferreira - INESC/IST 8
Tratamento em Lotes (Batch)ð impessoras, leitores/perfuradores de fita são muito lentosð monitor de controlo: tempo de execução de um programa é
determinado pelas E/Sð solução:wrecolha de dados num computador auxiliar onde os dados são lidos para banda
magnéticawcomputador central lê a banda magnética e escreve resultados numa outra que é
lida pelo computador auxiliar produzindo listagens
ð evolução:wperiféricos executam tarefas autónomas e avisam o processador do fim da sua
execução através de interrupções (comunicação assíncrona)wexecução em paralelo dos programas e das E/S
Page 5
Paulo Ferreira - INESC/IST 9
Multiprogramaçãoð mecanismo de interrupções permite multiplexar o processador
entre várias actividades concorrentesð execução concorrente de vários programas:wpermite optimizar a utilização do processadorwex.: P1 acede ao disco e ica bloqueado enquanto o controlador de disco funciona;
durante esse tempo, P2 pode ser executado pelo processadorwimplica mudança de contexto rápida, logo os programas têm de estar em memória
ð memória é limitada:wswapping (guardar P1 em disco e carregar P2 em memória)wimplica código recolocável (numa outra posição de memória)
Paulo Ferreira - INESC/IST 10
Tempo Partilhado e Memória Virtualð tempo partilhado:wmultiplexagem entre vários utilizadoreswdivisão do tempo disponível do processadorwsensação de dispôr de um computador apenas para siwimplica considerar novos aspectos: sistemas de ficheiros, protecção dos dados
ð memória virtual:wgestão da memória muito complexa (programas/utilizadores distintos)wespaço de endereçamento virtual muito superior à memória física
Page 6
Paulo Ferreira - INESC/IST 11
Sistemas Operativos: tempo virtual e realð tempo virtual:wtempo de execução dos programas não tem relação com o tempo cronológico
exterior ao computador
ð tempo real:wnoção do tempo é relevantewtem como objectivo garantir que o computador pruduz uma resposta a um
acontecimento externo num intervalo de tempo limitado previamente especificado
ð várias gradações de tempo real:wcontrolo de processos industriaiswsistemas transaccionaiswetc.
Paulo Ferreira - INESC/IST 12
Critérios de Qualidadeð fiabilidade:wnão existência de erros intrínsecoswtolerância a faltas/falhas nos recursos físicos
ð eficiência:wtempo de resposta nos sistemas de tempo partilhadowtempo de processador aproveitado/desaproveitadowdesempenho - trabalhos/unidade de tempowpartilha dos recursoswdegradação do desempenho com o aumento da carga
ð capacidade/facilidade de manutenção:wconfiguraçãowcorrecção de erroswevolução

Page 7
Paulo Ferreira - INESC/IST 13
Gestão de Processos
Gestão de Memória
Comunicação e E/S
Sistema de Ficheiros
Interface do Sistema
Aplicações
Realização
Paulo Ferreira - INESC/IST 14
Modelo Computacional
Modelo Computacional
Gestão de Processos
Gestão de Memória
Comunicação e E/S
Sistema de Ficheiros
Gestão de Processose
Sincronização
Gestão de Memória
Comunicação e E/S
Sistema de Ficheiros
ð conjunto de objectos do sistema operativo e operações que ospermitem manipular

Page 8
Paulo Ferreira - INESC/IST 15
Gestão de Processos: conceitos de baseð processadorwelemento físico que executa uma acção definida numa instrução máquina
ð processowentidade “activa” no sistema operativo no âmbito da qual é executada uma
sequência de acções determinada por um programa
ð programawsequência de acções, descritas numa determinada linguagem, sem actividade
própria
ð aplicaçãowconjunto de actividades cooperantes a decorrer em um ou mais processos segundo
as directivas de um ou mais programas
ð executável (ficheiro)wbloco de instruções máquina e dados resultantes da tradução (compilação) de um
programa
Paulo Ferreira - INESC/IST 16
Processo: abstracção de máquina virtualð espaço de endereçamento:wconjunto de posições de memória a que um programa executado num processo pode
acederwregião de memória onde está o código, os dados e a pilha (stack) do processo
ð reportório de instruções:wcódigo (programa compilado)wtambém designado por imagem
ð contexto de execução:wvalor dos registos do processador e de outras unidades de controlo (memória, etc.)
em cada instante

Page 9
Paulo Ferreira - INESC/IST 17
Utilizador 1processo inicial
subprocesso 1
subprocesso 3subprocesso 2
Utilizador 2processo inicial
subprocesso 1
subprocesso 3
Gestor de Processos: objectivoð criação e eliminação de processosð suportar a co-existência de processos:watribuição do processador aos processoswtratamento das interrupções da actividade dos processoswfornecimento de mecanismos de sincronização entre processoswlimitação das interferências destrutivas entre processos
ð manutenção de uma hierarquia de processos em curso
Paulo Ferreira - INESC/IST 18
Utilizador 1processo inicial
subprocesso 1
subprocesso 3subprocesso 2
Utilizador 2processo inicial
subprocesso 1
subprocesso 3
Estrutura Hierárquica dos Processosð hierarquia traduz-se por informações que são mantidas no contexto
dos processosð tratamento da relação hierárquica depende dos sistemas:wfim de um processo elimina todos os processos filhoswfim de um processo não altera estado dos processos fihos
ð estrutura hierárquica facilita a criação de processos:wgrande parte do ambiente pode ser herdado
Page 10
Paulo Ferreira - INESC/IST 19
Gestor de Processos: modelo computacionalð criação de processoswIdProcesso = CriarProc ( Código, Prioridade, ... )
•IdProcesso - identificador do processo no sistema.•Código - ficheiro executável com o programa a executar pelo processo.•Prioridade - importância relativa do processo no sistema.
ð eliminação de processoswEliminarProc ( IdProcesso )
Paulo Ferreira - INESC/IST 20
Concorrênciað competição entre processos no acesso a um recursoð só um processador => pseudo-concorrênciawintercalação ou paralelismo lógico; ilusão de uma concorrência efectiva
ð comutação de processoswo processo a executar é sucessivamente retirado do processador para dar lugar a
outro
ð salvaguarda do contexto de execuçãowquando um processo perde o processador há que guardar um conjunto de
informações (contexto de execução) que possibilitem o seu retorno como se nadativesse acontecido
ð programação concorrentewdesenvolvimento de programas incluindo partes que podem ser executadas em
paralelo

Page 11
Paulo Ferreira - INESC/IST 21
t
P2
P1
P3
Tempo real de execução dos processos
t
P2
P1
P3
Utilização do processador
Pseudo-concorrência
Paulo Ferreira - INESC/IST 22
Representação de Processosð os programas do núcleo fazem a gestão do “ambiente” onde os
processos são executadosð estes programas manuseiam estruturas de dados que representam a
estrutura física dos processosð cada processo é representado por uma descrição que contém toda a
informação relevante:wcontexto de hardware
• registos do processador (acumulador, uso geral, contador de programa, stack pointer,estado do CPU) e da unidade de gestão de memória
wcontexto de software (permanente e volátil)•identificação•ficheiro executável•prioridade•estado do processo•outras informações (periféricos em uso, ficheiros abertos, directório por omissão,
programa em execução, etc.)

Page 12
Paulo Ferreira - INESC/IST 23
Gestão das Interrupções e Excepçõesð mecanismos de comunicação assíncrona entre o sistema e o
processador:winterrupções
•notificações de acontecimentos globais à máquina (não dirigidas a um determinadoprocesso)
•controladas e tratadas exclusivamente pelo núcleo do sistema operativo
wexcepções•notificações de acontecimentos relacionados com um processo e que devem ser
tratadas no seu contexto.•controladas e tratadas pelo sistema operativo e (opcionalmente) pelos processos.
ð processamento de interrupções:winterrupção gestor de interrupções rotina de tratamento/escalonamento
despacho
Paulo Ferreira - INESC/IST 24
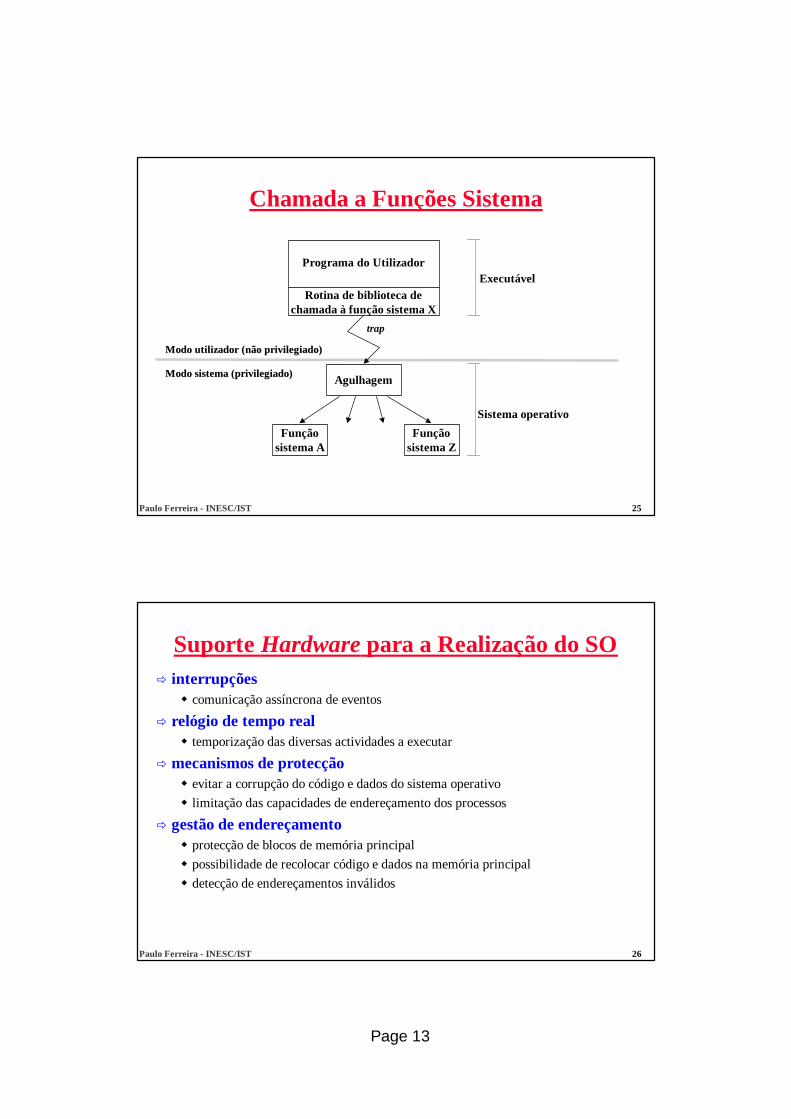
Funções Sistema (system calls)ð interface aos serviços do sistema operativoð protecção (duas entidades funcionais):wfunção propriamente dita, pertence ao programa do núcleo do sistema operativowrotina de interface que é ligada com o código do utilizador e que usa instruções
especiais (traps) para mudar de modo utilizador para modo sistema
ð vantagens:wpartilha das funções sistema por todos os processoswmodificação transparente do sistema operativo desde que não se altere a interface
ð protecção => não utilização de endereços de memória com dados dosistema operativo
Page 13
Paulo Ferreira - INESC/IST 25
Rotina de biblioteca dechamada à função sistema X
Programa do UtilizadorExecutável
Sistema operativo
Agulhagem
Funçãosistema A
Funçãosistema Z
trap
Modo utilizador (não privilegiado)Modo utilizador (não privilegiado)
Modo sistema (privilegiado)Modo sistema (privilegiado)
Chamada a Funções Sistema
Paulo Ferreira - INESC/IST 26
Suporte Hardware para a Realização do SOð interrupçõeswcomunicação assíncrona de eventos
ð relógio de tempo realwtemporização das diversas actividades a executar
ð mecanismos de protecçãowevitar a corrupção do código e dados do sistema operativowlimitação das capacidades de endereçamento dos processos
ð gestão de endereçamentowprotecção de blocos de memória principalwpossibilidade de recolocar código e dados na memória principalwdetecção de endereçamentos inválidos
Page 14
Paulo Ferreira - INESC/IST 27
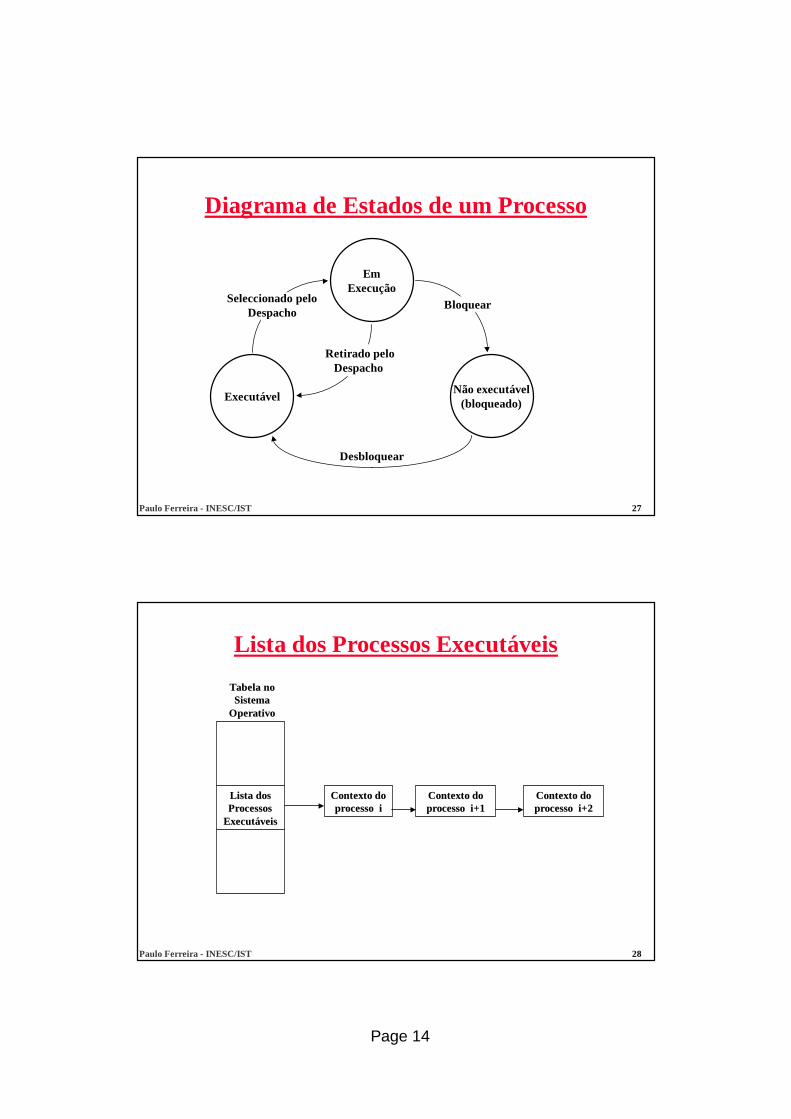
Diagrama de Estados de um Processo
EmExecução
Executável Não executável(bloqueado)
Seleccionado peloDespacho
Retirado peloDespacho
Bloquear
Desbloquear
Paulo Ferreira - INESC/IST 28
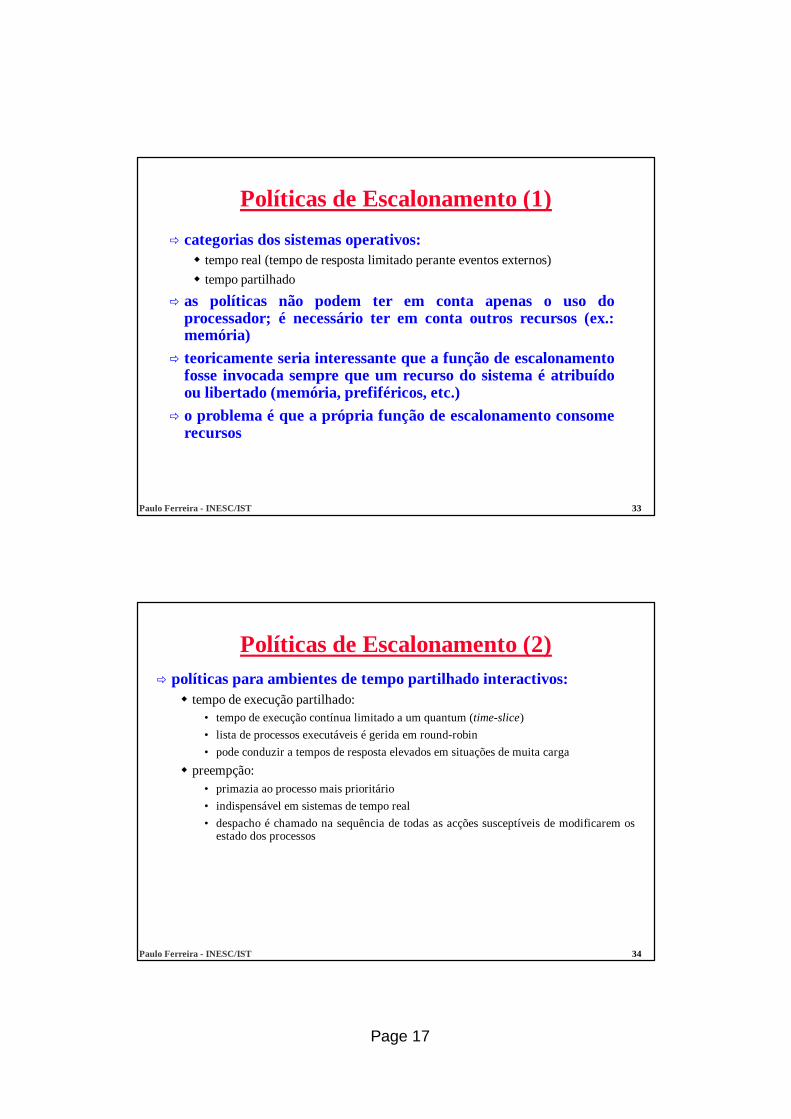
Lista dosLista dosProcessosProcessos
ExecutáveisExecutáveis
Contexto doContexto doprocesso iprocesso i
Contexto doContexto doprocesso i+1processo i+1
Contexto doContexto doprocesso i+2processo i+2
Tabela noTabela noSistemaSistema
OperativoOperativo
Lista dos Processos Executáveis

Page 15
Paulo Ferreira - INESC/IST 29
Núcleo do SO: gestão dos processos
Restantes Níveis
Aplicações
Gestão das
Interrupções
Multiplexagem(scheduling)
Sincronização
Paulo Ferreira - INESC/IST 30
Multiplexagem do Processadorð despacho:wverifica se o processo em execução é o mais prioritário; caso não seja (preempção):
•guarda o contexto hardware do processo em execução no respectivo descritor•escolhe o processo mais prioritário entre os executáveis•carrega o seu contexto hardware no processador•transfere o controlo para o novo processo (instrução a executar: program counter)
wexecuta o processo em execuçãowé activado sempre que existe a possibilidade de o processador ser comutado:
•quando o processo corrente termina ou fica bloqueado•após uma interrupção ou uma chamada ao núcleo
ð escalonamento (scheduling):wgestor do processadorwcontrola a prioridade dos processos de modo a optimizar a utilização de todos os
recursos do computador

Page 16
Paulo Ferreira - INESC/IST 31
Escalonamentoð objectivos:wmaximizar a utilização do processador sem descurar o estado dos restantes
componentes do sistema (memória, periféricos, etc.)wminimizar o custo computacional do algoritmo de escalonamento
ð time-slice:wintervalo de tempo máximo que é atribuído a um processo
ð prioridade:wrepresenta a importância do processo no algoritmo de atribuição do processador
ð preempção:wretira o processador ao processo em execução sempre que um processo mais
prioritário fica executávelwestado do núcleo do sistema operativo tem de estar consistente quando se dá a
preempção
Paulo Ferreira - INESC/IST 32
Preempçãoð o que é:wacção de retirar o processador a um processo em execução devido à existência de
outro mais prioritário
ð objectivo:wpermite que os processos mais prioritários reajam rapidamente a um dado
acontecimento (reactividade aos acontecimentos externos)
ð custo:wassociado à mudança de contexto (ex.: um processo só é retirado de execução
depois de ter usado processador durante um tempo mínimo)
ð quando ocore:wna sequência de todas as acções susceptíveis de modificarem o estado dos
processos
ð exemplo (Unix):wquando o processo em execução retorna a modo utilizador e existe um processo
mais prioritário executável
Page 17
Paulo Ferreira - INESC/IST 33
ð categorias dos sistemas operativos:wtempo real (tempo de resposta limitado perante eventos externos)wtempo partilhado
ð as políticas não podem ter em conta apenas o uso doprocessador; é necessário ter em conta outros recursos (ex.:memória)
ð teoricamente seria interessante que a função de escalonamentofosse invocada sempre que um recurso do sistema é atribuídoou libertado (memória, prefiféricos, etc.)
ð o problema é que a própria função de escalonamento consomerecursos
Políticas de Escalonamento (1)
Paulo Ferreira - INESC/IST 34
Políticas de Escalonamento (2)ð políticas para ambientes de tempo partilhado interactivos:wtempo de execução partilhado:
•tempo de execução contínua limitado a um quantum (time-slice)•lista de processos executáveis é gerida em round-robin•pode conduzir a tempos de resposta elevados em situações de muita carga
wpreempção:•primazia ao processo mais prioritário•indispensável em sistemas de tempo real•despacho é chamado na sequência de todas as acções susceptíveis de modificarem os
estado dos processos

Page 18
Paulo Ferreira - INESC/IST 35
Políticas de Escalonamento (3)wmultilista:
•usado em sistemas mistos de tempo partilhado (gestão circular) e tratamento por lotes(gestão baseada na menor duração do trabalho)
•utilização de várias listas consoante o tipo de processos em execução(fundamentalmente segundo o nível de interactividade)
•despacho escolhe sempre um processo da lista mais prioritária
wprioridades dinâmicas:•ajuste da prioridade de acordo com o consumo de recursos (fundamentalmente tempo
de CPU)•processos apenas numa lista que é ordenada em função das prioridades
wquantum variável:•adaptar o valor do quantum ao comportamento dos processos•aumentar o valor do quantum quando o sistema está muito carregado (limitar o custo
dos context-switch e aumentar a probabilidade do processo terminar)•complexidade acrescida no sistema operativo
Paulo Ferreira - INESC/IST 36
Gestão Multilista
utiliza o processador
utiliza o processador
utiliza o processador
lista de maiorprioridade (menosprocessador usado)
lista demenorprioridade

Page 19
Paulo Ferreira - INESC/IST 37
Gestão Multilista com Quantum Variável
Prioridade Máxima tcpu = 0,02 s
Prioridade Média tcpu = 0,25 s
Prioridade Mínima tcpu = 2 s
Despacho
Paulo Ferreira - INESC/IST 38
Função dos Mecanismos de Sincronizaçãoð aplicações eficientes implica decomposição em vários processosð potencialmente melhor desempenhoð cooperação:wpermitir a um processo assinalar a um outro o final de uma etapa, de forma a que o
segundo possa prosseguir na execução do algoritmo da aplicação (ex.: reserva debilhete de avião)
ð competição por/gestão de um recurso:wcompetição pela obtenção de um recurso único ou limitado no sistema (o recurso
pode ser um periférico, um ficheiro, zona de memória, etc.)wbloquear os processos consumidores quando não há recursoswassinalar a existência de recursos disponíveis quando há processos bloqueados
ð exclusão mútua:wgarantir a coerência na modificação de variáveis partilhadas (ex., teste e alteração
do valor de uma variável)

Page 20
Paulo Ferreira - INESC/IST 39
Exclusão Mútuað não-determinismo:wum processo pode ser interrompido em instantes impossíveis de prever
ð secções críticas:wconjuntos de instrucções que se devem executar de forma atómicawdados partilhados devem ser manipulados no interior de secções críticas que
garantam uma exclusão mútua no acesso aos mesmos
ð sincronização:wcontrolo do não-determinismo entre processos concorrentes
ð mecanismos:wdirectos: funções que actuam directamente sobre o estado dos processoswindirectos: trincos lógicos e semáforos
Paulo Ferreira - INESC/IST 40
Alocador de Memória
pilha com descritores dos blocos livres
livre
livre
livre
livre
mapa de memória
Page 21
Paulo Ferreira - INESC/IST 41
Alo
cado
r de
Mem
ória
(con
t.)
char
* pe
deM
em()
{ch
ar*
ptr
= 0;
if (t
opo
>= 0
) {pt
r =
pilh
a[to
po];
topo
--;
} retu
rn p
tr;
}
void
dev
olve
Mem
(cha
r* p
tr) {
if (t
opo
< M
AX
_PIL
HA
) {to
po++
;pi
lha[
topo
]= p
tr;
}}
#def
ine
MA
X_P
ILH
A 1
00ch
ar*
pilh
a[M
AX
_PIL
HA
];in
t top
o;
funç
ões/
dado
s par
tilha
dos p
or to
dos o
s pro
cess
os!
Paulo Ferreira - INESC/IST 42
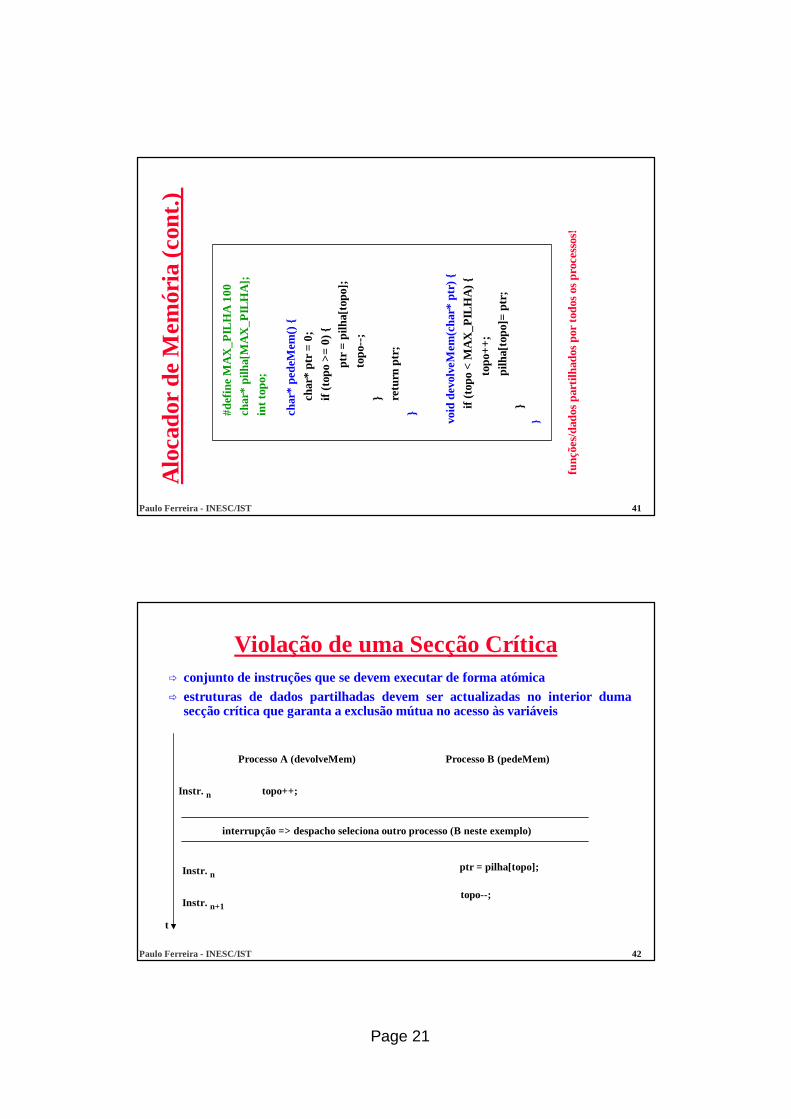
Violação de uma Secção Crítica
Processo A (devolveMem) Processo B (pedeMem)
Instr. n topo++;
interrupção => despacho seleciona outro processo (B neste exemplo)
Instr. n
Instr. n+1
ptr = pilha[topo];
topo--;
t
ð conjunto de instruções que se devem executar de forma atómicað estruturas de dados partilhadas devem ser actualizadas no interior duma
secção crítica que garanta a exclusão mútua no acesso às variáveis

Page 22
Paulo Ferreira - INESC/IST 43
Exclusão Mútua: solução alg. básica
void procUm() { while (TRUE) { /*testar possibilidade de acesso*/ while (nProc == SEGUNDO) ;
/* secção crítica */ nProc = SEGUNDO; /*permite acesso ao outro proc.*/
} }
void procDois() { while (TRUE) {
while (nProc == PRIMEIRO) ; /* secção crítica */ nProc = PRIMEIRO; /*
} }
enum {PRIMEIRO = 1, SEGUNDO}; enum {FALSE, TRUE}; int nProc = PRIMEIRO
ð processos comutam explicitamente o direito de acesso à secção críticað um processo pode atrasar indefinidamente a entrada do outro na secção críticað o algoritmo só se aplica a dois processosð o processo impedido de entrar fica em espera activað instruções não são indivisíveis
Paulo Ferreira - INESC/IST 44
Exclusão Mútua: algoritmo de Dekker
void procUm() {while (TRUE) { P1QuerEntrar = TRUE; /*assinalar tentativa de acesso*/ while (P2QuerEntrar) { /*verificar disponibilidade*/ if (procPrioritario == SEGUNDO) { /*proc. proritario*/ P1QuerEntrar = FALSE; /*desistir temporariamente*/ while (procPrioritario == SEGUNDO); P1QuerEntrar = TRUE;
} }
/* secção crítica */ procPrioritario = SEGUNDO; P1QuerEntrar = FALSE;
}}
void procDois() {while (TRUE) { P2QuerEntrar = TRUE; while (P1QuerEntrar) { if (procPrioritario == PRIMEIRO) { P2QuerEntrar = FALSE; while (procPrioritario == PRIMEIRO); P2QuerEntrar = TRUE;
} } /* secção crítica */
procPrioritario = PRIMEIRO; P2QuerEntrar = FALSE;
} }
enum {PRIMEIRO = 1, SEGUNDO}; enum {FALSE, TRUE}; int procPrioritario = PRIMEIRO, P1QuerEntrar = FALSE, P2QuerEntrar = FALSE;

Page 23
Paulo Ferreira - INESC/IST 45
ð vantagens:wnão impõe uma sequência de utilização alternada do recurso partilhado
ð desvantagens:wapenas se aplica a dois processoswo processo impedido de entrar fica em espera activawinstruções não são indivisíveis
Algoritmo de Dekker
Paulo Ferreira - INESC/IST 46
Exlusão Mútua: algoritmo de Lamport
int compara(int a, int b) { if (senha[a] < senha[b] || (senha[a] == senha[b] && a < b )) return TRUE; else return FALSE; }
int max() { int maximo=0, i; for (i=0; i < N; i++) if (senha[i] > maximo) maximo = senha[i]; return maximo; }
void proc (int i) {int j;while (TRUE) { /*atribuição da senha*/ escolha[i] = TRUE;
senha[i] = max() + 1; escolha[i] = FALSE;
/*espera até deter a senha de número menos elevado*/ for (j=0; j < N; j++ ) {
while (escolha[j]); while (senha[j] != 0 && compara(j, i));
} /* secção critica */ senha[i] = 0;}
}
#define N 10 enum {FALSE, TRUE}; int senha[ N ]; int escolha[ N ];

Page 24
Paulo Ferreira - INESC/IST 47
Soluções Algorítmicas vs.Modelo Computacional
ð são muito complexasð o programador tem uma carga adicional de trabalhoð instruções de linguagens de alto nível não são indivisíveisð o modelo computacional do sistema operativo deve incorporar os
mecanismos necessários à implementação da exclusão mútua:wé mais simples e mais eficaz
ð mecanismos indirectos:wtrincos lógicos: variável booleana partilhada por vários processos que indica se
algum deles está numa determinada secção críticawsemáforos: variável inteira e fila de espera
ð mecanismos directos:wfunções que actuam directamente sobre o estado dos processos
Paulo Ferreira - INESC/IST 48
Dis
trib
uido
r de
Mem
ória
com
Tri
nco
char
* pe
deM
em()
{fe
char
(tri
ncoM
em);
ch
ar*
ptr
= 0;
if (t
opo
>= 0
) {pt
r =
pilh
a[to
po];
topo
--;
} abri
r(tr
inco
Mem
);re
turn
ptr
;} vo
id d
evol
veM
em(c
har*
ptr
) {fe
char
(tri
ncoM
em);
if (t
opo
< M
AX
_PIL
HA
) {to
po++
;pi
lha[
topo
]= p
tr;
} abri
r(tr
inco
Mem
);}#d
efin
e M
AX
_PIL
HA
100
char
* pi
lha[
MA
X_P
ILH
A];
int t
opo;
void
fech
ar (i
nt tr
inco
) {
whi
le (t
rinc
o ==
TR
UE
);
tri
nco
= TR
UE
; } vo
id a
brir
(int
trin
co) {
trin
co =
FA
LSE
; }
Page 25
Paulo Ferreira - INESC/IST 49
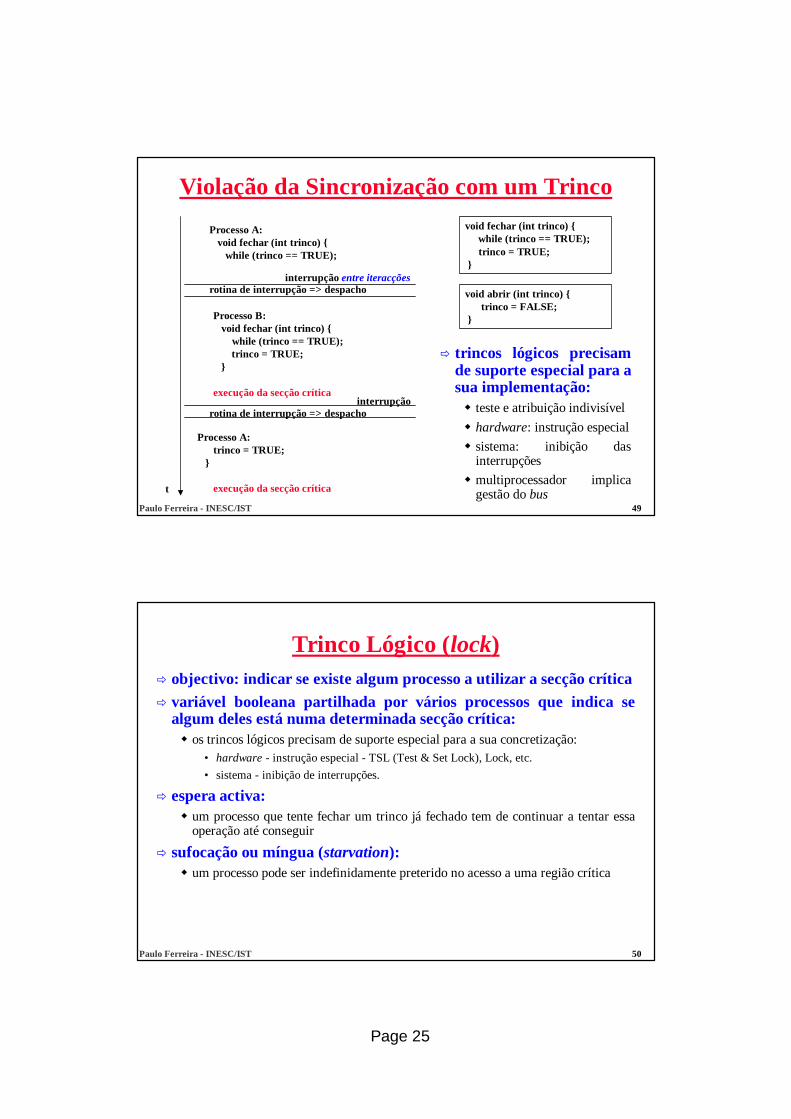
Violação da Sincronização com um Trinco
Processo A: void fechar (int trinco) { while (trinco == TRUE);
rotina de interrupção => despacho
Processo B: void fechar (int trinco) { while (trinco == TRUE); trinco = TRUE; }
execução da secção crítica
interrupção entre iteracções
rotina de interrupção => despacho
Processo A: trinco = TRUE; } execução da secção crítica
interrupção
t
ð trincos lógicos precisamde suporte especial para asua implementação:wteste e atribuição indivisívelwhardware: instrução especialwsistema: inibição das
interrupçõeswmultiprocessador implica
gestão do bus
void fechar (int trinco) { while (trinco == TRUE); trinco = TRUE; }
void abrir (int trinco) { trinco = FALSE; }
Paulo Ferreira - INESC/IST 50
Trinco Lógico (lock)ð objectivo: indicar se existe algum processo a utilizar a secção críticað variável booleana partilhada por vários processos que indica se
algum deles está numa determinada secção crítica:wos trincos lógicos precisam de suporte especial para a sua concretização:
•hardware - instrução especial - TSL (Test & Set Lock), Lock, etc.•sistema - inibição de interrupções.
ð espera activa:wum processo que tente fechar um trinco já fechado tem de continuar a tentar essa
operação até conseguir
ð sufocação ou míngua (starvation):wum processo pode ser indefinidamente preterido no acesso a uma região crítica

Page 26
Paulo Ferreira - INESC/IST 51
Diagrama de Estados de um Processo
EmExecução
Executável Não executável(bloqueado)
Bloquear
Desbloquear
Espera Activa/Starvation
Retirado pelo Despacho
Seleccionado pelo Despacho
Paulo Ferreira - INESC/IST 52
Semáforo (Dijkstra)ð um semáforo é constituído porwuma variável de controlo ss e por uma fila de espera (processos bloqueados)
ð que, para além da atribuição inicial, só pode ser modificada atravésdas primitivaswesperar(s) = wait(s) = p(s)wassinalar(s) = signal(s) = v(s)
ð semântica:wwss negativo ou nulo força o bloqueio do processowwss positivo indica possibilidade de continuar a execução

Page 27
Paulo Ferreira - INESC/IST 53
Operações Sobre os Semáforosvoid Esperar () { i = i -1; if (i < 0) { /* aceder ao descritor do processo em causa, retirar de execução e colocar na fila de espera do semáforo */ }}
void Assinalar () { i = i + 1; if (i <= 0) { /* aceder ao primeiro descritor na fila de espera do semáforo e transferir para fila de executáveis */ }}
ð os dados do semáforo são acedidos apenas por funções sistemað os dados do semáforo são acedidos em exclusão mútua
ss <= 0
ss > 0
=> bloqueia processo
=> processo continua
Paulo Ferreira - INESC/IST 54
Implementação de Semáforos
fechar(trinco)
i = i - 1;
i < 0 ?aceder ao descritordo processo em causa
retirar o processo de execução e colocar nafila de espera do semáforo
abir(trinco)
Esperar
fechar(trinco)
i = i + 1;
i <= 0 ?retirar o descritor dodo processo da fila deespera do semáforo
colocar o descritor do processo na fila dos executáveis
abir(trinco)
Assinalar
ss <= 0
SS
NN
ss > 0

Page 28
Paulo Ferreira - INESC/IST 55
Implementação de Semáforos (cont.)void Esperar () { fechar(trincoSem); i = i - 1; if (i < 0) { /* aceder ao descritor do processo em causa, retirar de execução e colocar na fila de espera do semáforo */ } abrir(trincoSem);}
void Assinalar () { fechar(trincoSem); i = i + 1; if (i <= 0) { /* aceder ao primeiro descritor na fila de espera do semáforo e transferir para fila de executáveis */ } abrir(trincoSem);}
Paulo Ferreira - INESC/IST 56
ð objectivo:wexclusão mútua de
processos nas primitivas desincronização
ð implementação:whardware
ð mecanismos de atraso:wespera activa
ð tempo de atraso típico:walguns microsegundos
semáforossemáforos trincostrincos
Comparação de Semáforos e Trincos
ð objectivo:wprimitivas gerais de sincronização
ð implementação:wsoftware
ð mecanismos de atraso:wfila de espera
ð tempo de atraso típico:walguns segundos
Page 29
Paulo Ferreira - INESC/IST 57
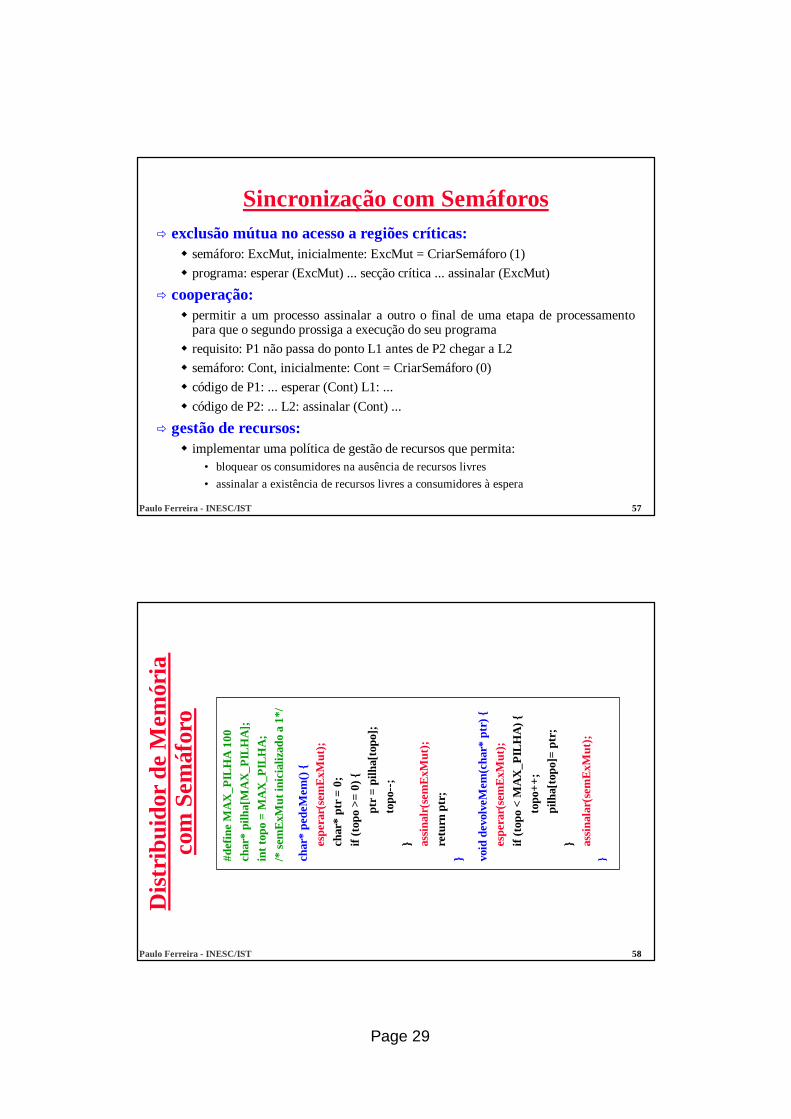
Sincronização com Semáforosð exclusão mútua no acesso a regiões críticas:wsemáforo: ExcMut, inicialmente: ExcMut = CriarSemáforo (1)wprograma: esperar (ExcMut) ... secção crítica ... assinalar (ExcMut)
ð cooperação:wpermitir a um processo assinalar a outro o final de uma etapa de processamento
para que o segundo prossiga a execução do seu programawrequisito: P1 não passa do ponto L1 antes de P2 chegar a L2wsemáforo: Cont, inicialmente: Cont = CriarSemáforo (0)wcódigo de P1: ... esperar (Cont) L1: ...wcódigo de P2: ... L2: assinalar (Cont) ...
ð gestão de recursos:wimplementar uma política de gestão de recursos que permita:
•bloquear os consumidores na ausência de recursos livres•assinalar a existência de recursos livres a consumidores à espera
Paulo Ferreira - INESC/IST 58
Dis
trib
uido
r de
Mem
ória
com
Sem
áfor
o
char
* pe
deM
em()
{es
pera
r(se
mE
xMut
);
char
* pt
r =
0;if
(top
o >=
0) {
ptr
= pi
lha[
topo
];to
po--
;} as
sina
lr(s
emE
xMut
);re
turn
ptr
;} vo
id d
evol
veM
em(c
har*
ptr
) {es
pera
r(se
mE
xMut
);if
(top
o <
MA
X_P
ILH
A) {
topo
++;
pilh
a[to
po]=
ptr
;} as
sina
lar(
sem
ExM
ut);
}#def
ine
MA
X_P
ILH
A 1
00ch
ar*
pilh
a[M
AX
_PIL
HA
];in
t top
o =
MA
X_P
ILH
A;
/* se
mE
xMut
inic
ializ
ado
a 1*
/

Page 30
Paulo Ferreira - INESC/IST 59
Dis
trib
uido
r de
Mem
ória
com
Sem
áfor
o (c
ont.)
char
* pe
deM
em()
{es
pera
r(se
mM
em);
e
sper
ar(s
emE
xMut
);
ptr
= pi
lha[
topo
];to
po--
;as
sina
lr(s
emE
xMut
);re
turn
ptr
;} vo
id d
evol
veM
em(c
har*
ptr
) {es
pera
r(se
mE
xMut
);to
po++
;
pilh
a[to
po]=
ptr
;
ass
inal
ar(s
emE
xMut
);
ass
inal
ar(s
emM
em);
}#def
ine
MA
X_P
ILH
A 1
00ch
ar*
pilh
a[M
AX
_PIL
HA
]; in
t top
o =
MA
X_P
ILH
A;
/* se
mE
xMut
inic
ializ
ado
a 1*
//*
sem
Mem
inic
ializ
ado
a M
AX
_PIL
HA
*/
Paulo Ferreira - INESC/IST 60
Jantar dos Filósofosð cinco filósofos jantam espargueteð cada filósofo precisa de dois
garfos para comerð existe apenas um garfo por
pessoa (i.e, cinco garfos)ð os filósofos têm lugar fixoð cada filósofo pode usar apenas os
garfos que se encontram à suaesquerda e à sua direita
ð os filósofos têm três estadospossíveis: pensar, pensar comer,comer
1
0
2
3
4

Page 31
Paulo Ferreira - INESC/IST 61
Jantar dos Filósofos - solução #define MAX 5 enum {Pensar, PensarComer, Comer}; int estado[MAX]; semaforo semPriv[MAX]; /* inicializado a 0 */ semaforo mutex; /* inicializado a 1 */
void testa (int k) { if ((estado[k] == pensarComer) && (estado[mod(k+1, MAX)] != Comer) && (estado[mod(k-1, MAX)] != Comer)) { estado[k] = Comer; assinalar (semPriv[k]); }}
void filosofo (int i) { for(;;) {
/* pensar */
esperar(mutex); estado[i] = PensarComer; testa(i); assinalar(mutex); esperar(semPriv[i]);
/* comer */
esperar(mutex); estado[i] = Pensar; testa(i+1); testa(i-1); assinalar(mutex); }
int mod (j, max) { if (j == MAX) return 0; if (j == -1) return (MAX-1); return j;}
Paulo Ferreira - INESC/IST 62
Lei
tore
s-E
scri
tore
s
voi
d in
icia
Leitu
ra()
{
Esp
erar
(Mut
ex);
if
(em
Escr
ita |
|
(esc
rito
resE
sper
a >
0)) {
leito
resE
sper
a ++
;
A
ssin
alar
(Mut
ex);
Esp
erar
(Lei
tore
s);
Esp
erar
(Mut
ex);
leito
resE
sper
a--;
if (l
eito
resE
sper
a >
0)
A
ssin
alar
(Lei
tore
s);
}
n
Leito
res
++;
A
ssin
alar
(Mut
ex);
}
void
aca
baLe
itura
() {
E
sper
ar(M
utex
);
nLe
itore
s --
;
if (
escr
itore
sEsp
era
> &
&
nLe
itore
s ==
0)
A
ssin
alar
(Esc
rito
res)
;
Ass
inal
ar(M
utex
);}en
um {
FALS
E, T
RU
E};
int n
Leito
res,
leito
resE
sper
a, e
scri
tore
sEsp
era;
int e
mEs
crita
;se
maf
oro
Mut
ex, L
eito
res,
Esc
rito
res;
/* in
icia
lizad
os a
1, 0
, 0 *
/
void
aca
baEs
crita
(){
E
sper
ar(M
utex
);
em
Escr
ita =
FA
LSE;
if
(lei
tore
sEsp
era
> 0)
A
ssin
alar
(Lei
tore
s);
el
se
if
(esc
rito
resE
sper
a >
0)
A
ssin
alar
(Esc
rito
res)
;
Ass
inal
ar(M
utex
);}vo
id in
icia
Escr
ita()
{
Espe
rar(
Mut
ex);
if
(nLe
itore
s >
0 |
|
(leito
resE
sper
a >
0) ||
em
Escr
ita) {
escr
itore
sEsp
era
++;
Ass
inal
ar(M
utex
);
Es
pera
r(Es
crito
res)
;
Es
pera
r(M
utex
);
es
crito
resE
sper
a --
;
}
em
Escr
ita =
TR
UE;
A
ssin
alar
(Mut
ex);
}

Page 32
Paulo Ferreira - INESC/IST 63
Impasse ou Interblocagem (deadlock)ð acontece quando as seguintes situações podem ocorrer:wvários processos tentam aceder em exclusivo a diversos recursoswos processos mantêm o acesso aos recursos já adquiridos enquanto esperam a
obtenção de acesso a outroswos recursos não podem ser retirados aos processos que os detêm até serem
completamente utilizadoswexiste uma cadeia circular de processos na qual cada processo possui um ou mais
recursos que são pretendidos pelo processo seguinte
ð soluções:wprevenção:
•aquisição de vários recursos sempre pela mesma ordem•caso falhe a aquisição de um recurso, libertar todos os recursos detidos e recomeçar
wdetecção e eliminação forçada de estados de interblocagem
Paulo Ferreira - INESC/IST 64
Interblocagem (deadlock)
t
Processo P1 Processo P2
Esperar(semA)
expira o quantum do processo P1
Esperar(semB)
Esperar(semA)P2 fica bloqueado
Esperar(semB)
P1 fica bloqueado

Page 33
Paulo Ferreira - INESC/IST 65
Mecanismos de Sincronização Directosð funções que actuam directamente sobre os estado dos processosð suspensão e reactivação de processos:wsuspender (IdProcesso)wacordar (IdProcesso)
ð a capacidade de suspensão é frequentemente utilizada para realizarmecanismos de atraso que funcionam como uma auto-suspensão:wadormecer (Período)
ð não é de uso geral:winterferência com outros utilizadoreswidentidade do processo só é conhecida em tempo de execução
Paulo Ferreira - INESC/IST 66
Mecanismos de Sincronização Directos
EmExecução
Executável Não executável(bloqueado)
Selecionadopelo
Despacho
Preempção
Bloquear
Desbloquear
Suspenso
Acordar
Acordar
Suspender
Suspender
Suspender

Page 34
Paulo Ferreira - INESC/IST 67
Controlador de Tarefasð processos:wum processo com funções de relógio - função relogiowum processo controlador - finção controladorwNTAR processos, cada um desempenhando uma determinada tarefa - função tarefa
tarefa 1 tarefa 2 tarefa i tarefa (i+1)
relogio
controlador
NTAR processos:
semPriv semPriv semPriv semPrivsemPriv
assinalar assinalar
adormecer
Paulo Ferreira - INESC/IST 68
Controlador de Tarefas (cont.)
void controlador() { for(;;) { esperar(impulso); for (int i = 0; i < NTAR; i++) { tempo[i]--; if (tempo[i] < 0) { tempo[i] = novoIntervalo(); assinalar(iniTarefa[i]); } } }}
define PERIODO 100int tempo[NTAR]; /* inicializado aleatoriamente *//* semaforo impulso inicializado a 0 *//* semaforos iniTarefa[NTAR] inicializados a 0 */
void tarefa (int i) { for (;;) { esperar (iniTarefa[i]); /* executa tarefa */ }}
void relogio () { for (;;) { assinalar(impulso); adormecer(PERIODO);}





