Embed Size (px)
DESCRIPTION
solucoes dos exercicios do manual de gd 11
Citation preview
1
SOLUÇÕES
SOLUÇÕES DOS EXERCÍCIOS PROPOSTOS
PARALELISMO
13
NOTA: Se bem que os dados métricos dos enunciados estejam em centímetros, as soluções apresentadas a partir da página seguinte nãoconsideraram o centímetro como unidade. De facto, entende-se que o objectivo da consulta das soluções dos exercícios, na perspectivado estudante, deve ser a verificação da correcção dos raciocínios e dos traçados e não a comparação métrica dos mesmos. Dessa for-ma, considerou-se de maior utilidade o desenvolvimento dos relatórios e a resolução gráfica dos problemas a uma escala que evite qual-quer tentativa de comparação métrica. De qualquer forma, considera-se relevante informar que a escala utilizada nas resoluçõesapresentadas foi de 1/2, o que significa que a cada centímetro da resolução do aluno corresponderá 0,5 cm nestas soluções.
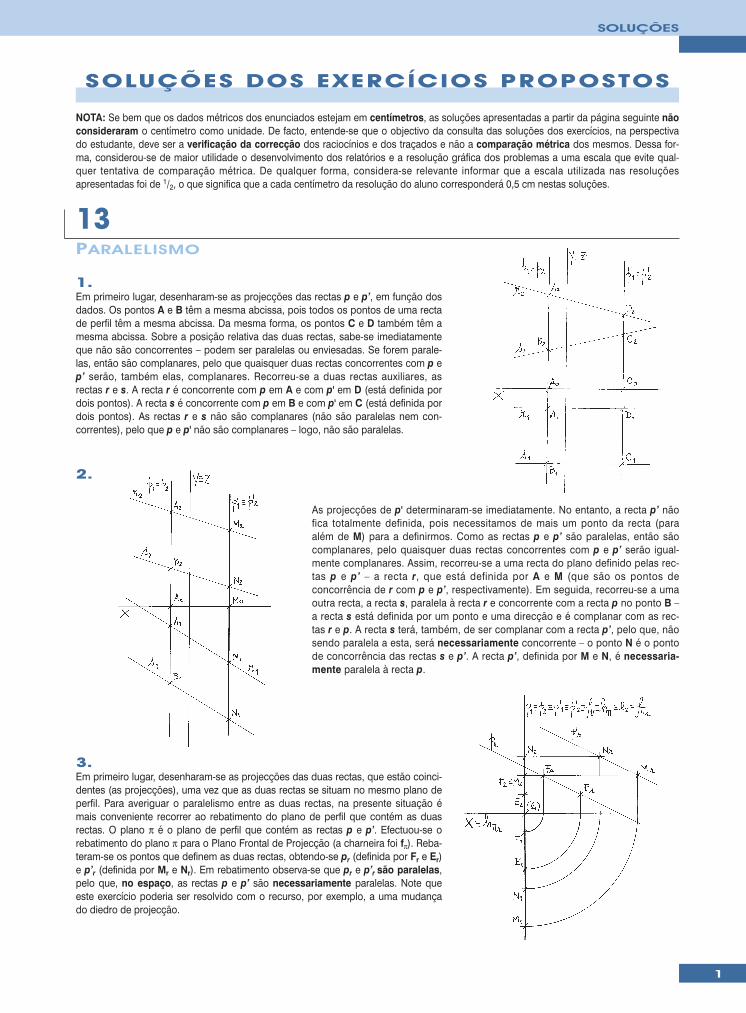
1.Em primeiro lugar, desenharam-se as projecções das rectas p e p’, em função dosdados. Os pontos A e B têm a mesma abcissa, pois todos os pontos de uma rectade perfil têm a mesma abcissa. Da mesma forma, os pontos C e D também têm amesma abcissa. Sobre a posição relativa das duas rectas, sabe-se imediatamenteque não são concorrentes – podem ser paralelas ou enviesadas. Se forem parale-las, então são complanares, pelo que quaisquer duas rectas concorrentes com p ep’ serão, também elas, complanares. Recorreu-se a duas rectas auxiliares, asrectas r e s. A recta r é concorrente com p em A e com p' em D (está definida pordois pontos). A recta s é concorrente com p em B e com p' em C (está definida pordois pontos). As rectas r e s não são complanares (não são paralelas nem con-correntes), pelo que p e p' não são complanares – logo, não são paralelas.
2.
As projecções de p' determinaram-se imediatamente. No entanto, a recta p’ nãofica totalmente definida, pois necessitamos de mais um ponto da recta (paraalém de M) para a definirmos. Como as rectas p e p’ são paralelas, então sãocomplanares, pelo quaisquer duas rectas concorrentes com p e p’ serão igual-mente complanares. Assim, recorreu-se a uma recta do plano definido pelas rec-tas p e p’ – a recta r, que está definida por A e M (que são os pontos deconcorrência de r com p e p’, respectivamente). Em seguida, recorreu-se a umaoutra recta, a recta s, paralela à recta r e concorrente com a recta p no ponto B –a recta s está definida por um ponto e uma direcção e é complanar com as rec-tas r e p. A recta s terá, também, de ser complanar com a recta p’, pelo que, nãosendo paralela a esta, será necessariamente concorrente – o ponto N é o pontode concorrência das rectas s e p’. A recta p’, definida por M e N, é necessaria-mente paralela à recta p.
3.Em primeiro lugar, desenharam-se as projecções das duas rectas, que estão coinci-dentes (as projecções), uma vez que as duas rectas se situam no mesmo plano deperfil. Para averiguar o paralelismo entre as duas rectas, na presente situação émais conveniente recorrer ao rebatimento do plano de perfil que contém as duasrectas. O plano π é o plano de perfil que contém as rectas p e p’. Efectuou-se orebatimento do plano π para o Plano Frontal de Projecção (a charneira foi fπ). Reba-teram-se os pontos que definem as duas rectas, obtendo-se pr (definida por Fr e Er)e p’r (definida por Mr e Nr). Em rebatimento observa-se que pr e p’r são paralelas,pelo que, no espaço, as rectas p e p’ são necessariamente paralelas. Note queeste exercício poderia ser resolvido com o recurso, por exemplo, a uma mudançado diedro de projecção.
2
SOLUÇÕES
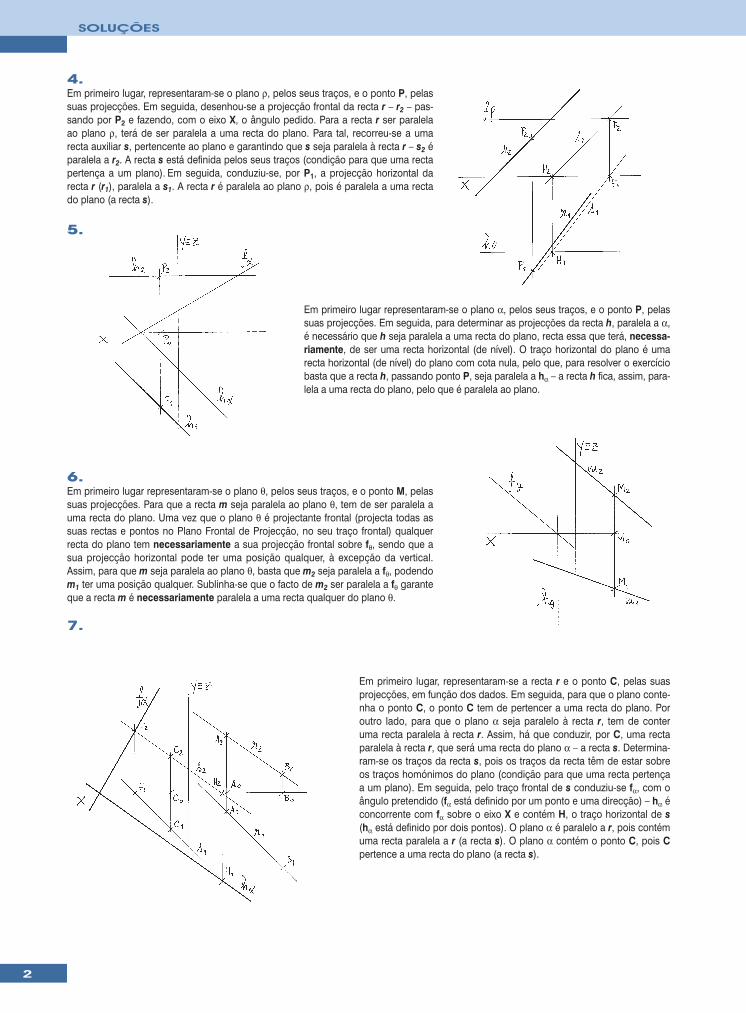
4.Em primeiro lugar, representaram-se o plano ρ, pelos seus traços, e o ponto P, pelassuas projecções. Em seguida, desenhou-se a projecção frontal da recta r – r2 – pas-sando por P2 e fazendo, com o eixo X, o ângulo pedido. Para a recta r ser paralelaao plano ρ, terá de ser paralela a uma recta do plano. Para tal, recorreu-se a umarecta auxiliar s, pertencente ao plano e garantindo que s seja paralela à recta r – s2 éparalela a r2. A recta s está definida pelos seus traços (condição para que uma rectapertença a um plano). Em seguida, conduziu-se, por P1, a projecção horizontal darecta r (r1), paralela a s1. A recta r é paralela ao plano ρ, pois é paralela a uma rectado plano (a recta s).
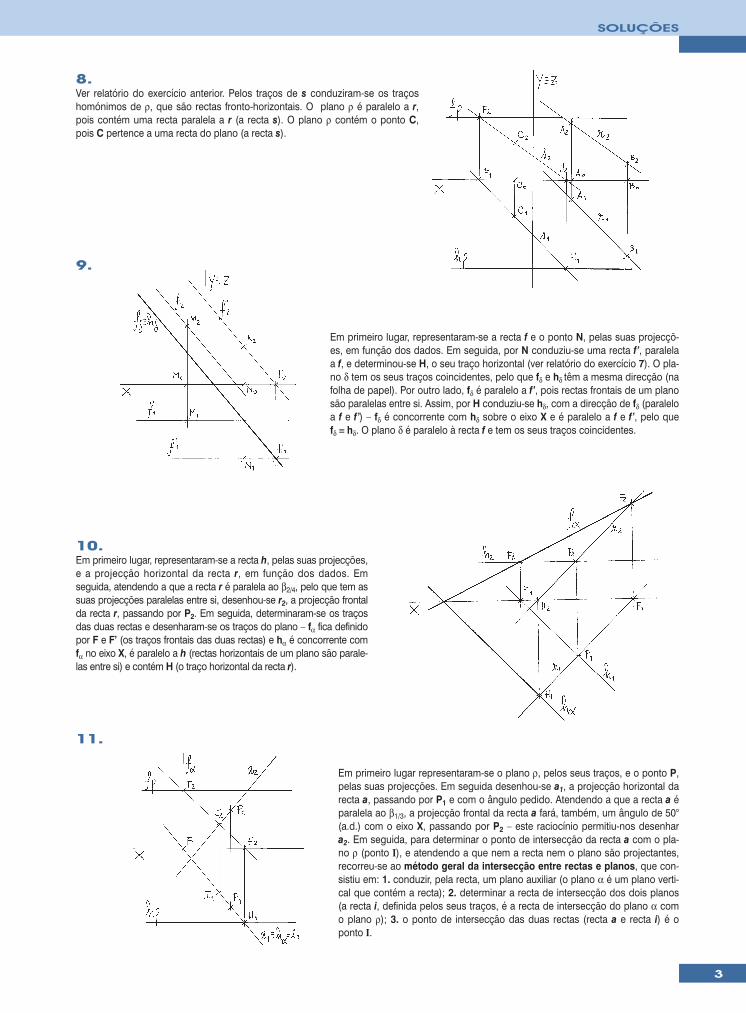
6.Em primeiro lugar representaram-se o plano θ, pelos seus traços, e o ponto M, pelassuas projecções. Para que a recta m seja paralela ao plano θ, tem de ser paralela auma recta do plano. Uma vez que o plano θ é projectante frontal (projecta todas assuas rectas e pontos no Plano Frontal de Projecção, no seu traço frontal) qualquerrecta do plano tem necessariamente a sua projecção frontal sobre fθ, sendo que asua projecção horizontal pode ter uma posição qualquer, à excepção da vertical.Assim, para que m seja paralela ao plano θ, basta que m2 seja paralela a fθ, podendom1 ter uma posição qualquer. Sublinha-se que o facto de m2 ser paralela a fθ garanteque a recta m é necessariamente paralela a uma recta qualquer do plano θ.
Em primeiro lugar representaram-se o plano α, pelos seus traços, e o ponto P, pelassuas projecções. Em seguida, para determinar as projecções da recta h, paralela a α,é necessário que h seja paralela a uma recta do plano, recta essa que terá, necessa-riamente, de ser uma recta horizontal (de nível). O traço horizontal do plano é umarecta horizontal (de nível) do plano com cota nula, pelo que, para resolver o exercíciobasta que a recta h, passando ponto P, seja paralela a hα – a recta h fica, assim, para-lela a uma recta do plano, pelo que é paralela ao plano.
5.
Em primeiro lugar, representaram-se a recta r e o ponto C, pelas suasprojecções, em função dos dados. Em seguida, para que o plano conte-nha o ponto C, o ponto C tem de pertencer a uma recta do plano. Poroutro lado, para que o plano α seja paralelo à recta r, tem de conteruma recta paralela à recta r. Assim, há que conduzir, por C, uma rectaparalela à recta r, que será uma recta do plano α – a recta s. Determina-ram-se os traços da recta s, pois os traços da recta têm de estar sobreos traços homónimos do plano (condição para que uma recta pertençaa um plano). Em seguida, pelo traço frontal de s conduziu-se fα, com oângulo pretendido (fα está definido por um ponto e uma direcção) – hα éconcorrente com fα sobre o eixo X e contém H, o traço horizontal de s(hα está definido por dois pontos). O plano α é paralelo a r, pois contémuma recta paralela a r (a recta s). O plano α contém o ponto C, pois Cpertence a uma recta do plano (a recta s).
7.
3
SOLUÇÕES
Em primeiro lugar, representaram-se a recta f e o ponto N, pelas suas projecçõ-es, em função dos dados. Em seguida, por N conduziu-se uma recta f’, paralelaa f, e determinou-se H, o seu traço horizontal (ver relatório do exercício 7). O pla-no δ tem os seus traços coincidentes, pelo que fδ e hδ têm a mesma direcção (nafolha de papel). Por outro lado, fδ é paralelo a f’, pois rectas frontais de um planosão paralelas entre si. Assim, por H conduziu-se hδ, com a direcção de fδ (paraleloa f e f’) – fδ é concorrente com hδ sobre o eixo X e é paralelo a f e f’, pelo quefδ ≡ hδ. O plano δ é paralelo à recta f e tem os seus traços coincidentes.
Em primeiro lugar representaram-se o plano ρ, pelos seus traços, e o ponto P,pelas suas projecções. Em seguida desenhou-se a1, a projecção horizontal darecta a, passando por P1 e com o ângulo pedido. Atendendo a que a recta a éparalela ao β1/3, a projecção frontal da recta a fará, também, um ângulo de 50°(a.d.) com o eixo X, passando por P2 – este raciocínio permitiu-nos desenhara2. Em seguida, para determinar o ponto de intersecção da recta a com o pla-no ρ (ponto I), e atendendo a que nem a recta nem o plano são projectantes,recorreu-se ao método geral da intersecção entre rectas e planos, que con-sistiu em: 1. conduzir, pela recta, um plano auxiliar (o plano α é um plano verti-cal que contém a recta); 2. determinar a recta de intersecção dos dois planos(a recta i, definida pelos seus traços, é a recta de intersecção do plano α como plano ρ); 3. o ponto de intersecção das duas rectas (recta a e recta i) é oponto I.
9.
11.
8.Ver relatório do exercício anterior. Pelos traços de s conduziram-se os traçoshomónimos de ρ, que são rectas fronto-horizontais. O plano ρ é paralelo a r,pois contém uma recta paralela a r (a recta s). O plano ρ contém o ponto C,pois C pertence a uma recta do plano (a recta s).
10.Em primeiro lugar, representaram-se a recta h, pelas suas projecções,e a projecção horizontal da recta r, em função dos dados. Emseguida, atendendo a que a recta r é paralela ao β2/4, pelo que tem assuas projecções paralelas entre si, desenhou-se r2, a projecção frontalda recta r, passando por P2. Em seguida, determinaram-se os traçosdas duas rectas e desenharam-se os traços do plano – fα fica definidopor F e F’ (os traços frontais das duas rectas) e hα é concorrente comfα no eixo X, é paralelo a h (rectas horizontais de um plano são parale-las entre si) e contém H (o traço horizontal da recta r).
4
SOLUÇÕES
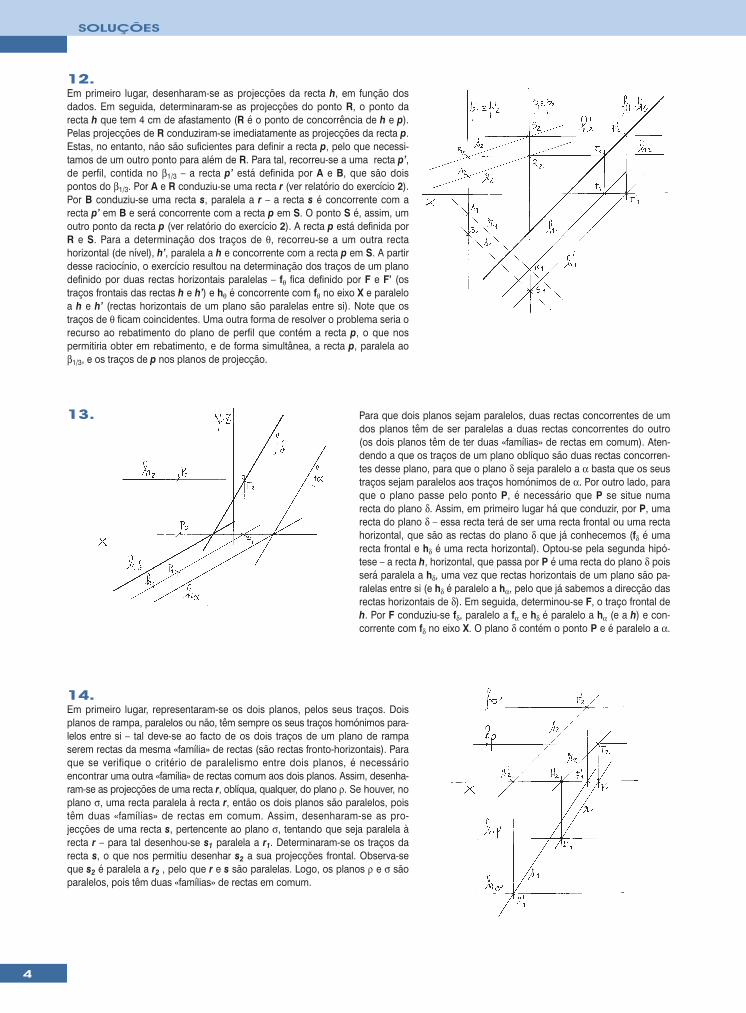
12.Em primeiro lugar, desenharam-se as projecções da recta h, em função dosdados. Em seguida, determinaram-se as projecções do ponto R, o ponto darecta h que tem 4 cm de afastamento (R é o ponto de concorrência de h e p).Pelas projecções de R conduziram-se imediatamente as projecções da recta p.Estas, no entanto, não são suficientes para definir a recta p, pelo que necessi-tamos de um outro ponto para além de R. Para tal, recorreu-se a uma recta p’,de perfil, contida no β1/3 – a recta p’ está definida por A e B, que são doispontos do β1/3. Por A e R conduziu-se uma recta r (ver relatório do exercício 2).Por B conduziu-se uma recta s, paralela a r – a recta s é concorrente com arecta p’ em B e será concorrente com a recta p em S. O ponto S é, assim, umoutro ponto da recta p (ver relatório do exercício 2). A recta p está definida porR e S. Para a determinação dos traços de θ, recorreu-se a um outra rectahorizontal (de nível), h’, paralela a h e concorrente com a recta p em S. A partirdesse raciocínio, o exercício resultou na determinação dos traços de um planodefinido por duas rectas horizontais paralelas – fθ fica definido por F e F’ (ostraços frontais das rectas h e h’) e hθ é concorrente com fθ no eixo X e paraleloa h e h’ (rectas horizontais de um plano são paralelas entre si). Note que ostraços de θ ficam coincidentes. Uma outra forma de resolver o problema seria orecurso ao rebatimento do plano de perfil que contém a recta p, o que nospermitiria obter em rebatimento, e de forma simultânea, a recta p, paralela aoβ1/3, e os traços de p nos planos de projecção.
14.Em primeiro lugar, representaram-se os dois planos, pelos seus traços. Doisplanos de rampa, paralelos ou não, têm sempre os seus traços homónimos para-lelos entre si – tal deve-se ao facto de os dois traços de um plano de rampaserem rectas da mesma «família» de rectas (são rectas fronto-horizontais). Paraque se verifique o critério de paralelismo entre dois planos, é necessárioencontrar uma outra «família» de rectas comum aos dois planos. Assim, desenha-ram-se as projecções de uma recta r, oblíqua, qualquer, do plano ρ. Se houver, noplano σ, uma recta paralela à recta r, então os dois planos são paralelos, poistêm duas «famílias» de rectas em comum. Assim, desenharam-se as pro-jecções de uma recta s, pertencente ao plano σ, tentando que seja paralela àrecta r – para tal desenhou-se s1 paralela a r1. Determinaram-se os traços darecta s, o que nos permitiu desenhar s2 a sua projecções frontal. Observa-seque s2 é paralela a r2 , pelo que r e s são paralelas. Logo, os planos ρ e σ sãoparalelos, pois têm duas «famílias» de rectas em comum.
Para que dois planos sejam paralelos, duas rectas concorrentes de umdos planos têm de ser paralelas a duas rectas concorrentes do outro(os dois planos têm de ter duas «famílias» de rectas em comum). Aten-dendo a que os traços de um plano oblíquo são duas rectas concorren-tes desse plano, para que o plano δ seja paralelo a α basta que os seustraços sejam paralelos aos traços homónimos de α. Por outro lado, paraque o plano passe pelo ponto P, é necessário que P se situe numarecta do plano δ. Assim, em primeiro lugar há que conduzir, por P, umarecta do plano δ – essa recta terá de ser uma recta frontal ou uma rectahorizontal, que são as rectas do plano δ que já conhecemos (fδ é umarecta frontal e hδ é uma recta horizontal). Optou-se pela segunda hipó-tese – a recta h, horizontal, que passa por P é uma recta do plano δ poisserá paralela a hδ, uma vez que rectas horizontais de um plano são pa-ralelas entre si (e hδ é paralelo a hα, pelo que já sabemos a direcção dasrectas horizontais de δ). Em seguida, determinou-se F, o traço frontal deh. Por F conduziu-se fδ, paralelo a fα e hδ é paralelo a hα (e a h) e con-corrente com fδ no eixo X. O plano δ contém o ponto P e é paralelo a α.
13.
5
SOLUÇÕES
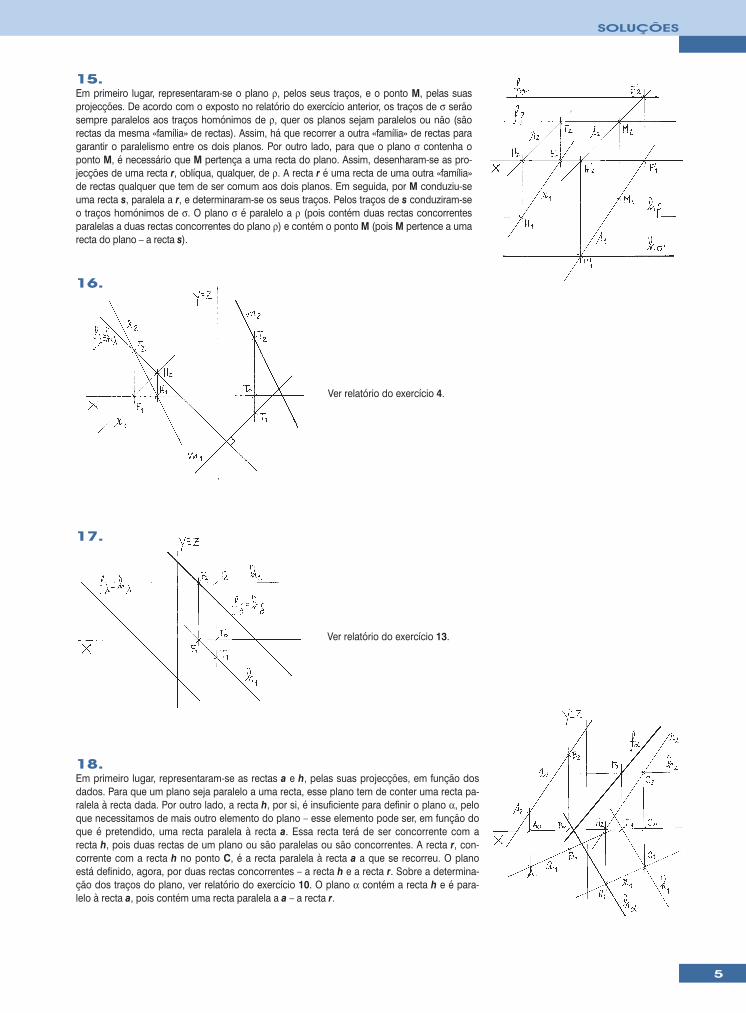
15.Em primeiro lugar, representaram-se o plano ρ, pelos seus traços, e o ponto M, pelas suasprojecções. De acordo com o exposto no relatório do exercício anterior, os traços de σ serãosempre paralelos aos traços homónimos de ρ, quer os planos sejam paralelos ou não (sãorectas da mesma «família» de rectas). Assim, há que recorrer a outra «família» de rectas paragarantir o paralelismo entre os dois planos. Por outro lado, para que o plano σ contenha oponto M, é necessário que M pertença a uma recta do plano. Assim, desenharam-se as pro-jecções de uma recta r, oblíqua, qualquer, de ρ. A recta r é uma recta de uma outra «família»de rectas qualquer que tem de ser comum aos dois planos. Em seguida, por M conduziu-seuma recta s, paralela a r, e determinaram-se os seus traços. Pelos traços de s conduziram-seo traços homónimos de σ. O plano σ é paralelo a ρ (pois contém duas rectas concorrentesparalelas a duas rectas concorrentes do plano ρ) e contém o ponto M (pois M pertence a umarecta do plano – a recta s).
18.Em primeiro lugar, representaram-se as rectas a e h, pelas suas projecções, em função dosdados. Para que um plano seja paralelo a uma recta, esse plano tem de conter uma recta pa-ralela à recta dada. Por outro lado, a recta h, por si, é insuficiente para definir o plano α, peloque necessitamos de mais outro elemento do plano – esse elemento pode ser, em função doque é pretendido, uma recta paralela à recta a. Essa recta terá de ser concorrente com arecta h, pois duas rectas de um plano ou são paralelas ou são concorrentes. A recta r, con-corrente com a recta h no ponto C, é a recta paralela à recta a a que se recorreu. O planoestá definido, agora, por duas rectas concorrentes – a recta h e a recta r. Sobre a determina-ção dos traços do plano, ver relatório do exercício 10. O plano α contém a recta h e é para-lelo à recta a, pois contém uma recta paralela a a – a recta r.
16.
17.
Ver relatório do exercício 4.
Ver relatório do exercício 13.
6
SOLUÇÕES
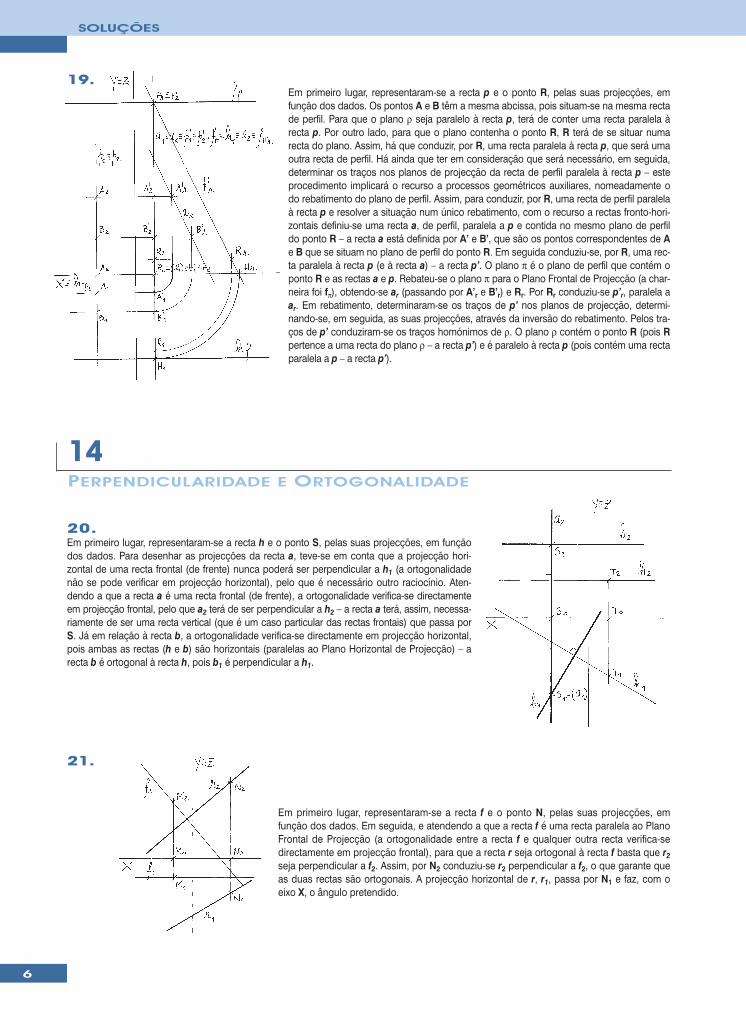
19.Em primeiro lugar, representaram-se a recta p e o ponto R, pelas suas projecções, emfunção dos dados. Os pontos A e B têm a mesma abcissa, pois situam-se na mesma rectade perfil. Para que o plano ρ seja paralelo à recta p, terá de conter uma recta paralela àrecta p. Por outro lado, para que o plano contenha o ponto R, R terá de se situar numarecta do plano. Assim, há que conduzir, por R, uma recta paralela à recta p, que será umaoutra recta de perfil. Há ainda que ter em consideração que será necessário, em seguida,determinar os traços nos planos de projecção da recta de perfil paralela à recta p – esteprocedimento implicará o recurso a processos geométricos auxiliares, nomeadamente odo rebatimento do plano de perfil. Assim, para conduzir, por R, uma recta de perfil paralelaà recta p e resolver a situação num único rebatimento, com o recurso a rectas fronto-hori-zontais definiu-se uma recta a, de perfil, paralela a p e contida no mesmo plano de perfildo ponto R – a recta a está definida por A’ e B’, que são os pontos correspondentes de Ae B que se situam no plano de perfil do ponto R. Em seguida conduziu-se, por R, uma rec-ta paralela à recta p (e à recta a) – a recta p’. O plano π é o plano de perfil que contém oponto R e as rectas a e p. Rebateu-se o plano π para o Plano Frontal de Projecção (a char-neira foi fπ), obtendo-se ar (passando por A’r e B’r) e Rr. Por Rr conduziu-se p’r, paralela aar. Em rebatimento, determinaram-se os traços de p’ nos planos de projecção, determi-nando-se, em seguida, as suas projecções, através da inversão do rebatimento. Pelos tra-ços de p’ conduziram-se os traços homónimos de ρ. O plano ρ contém o ponto R (pois Rpertence a uma recta do plano ρ – a recta p’) e é paralelo à recta p (pois contém uma rectaparalela a p – a recta p’).
PERPENDICULARIDADE E ORTOGONALIDADE
14
20.Em primeiro lugar, representaram-se a recta h e o ponto S, pelas suas projecções, em funçãodos dados. Para desenhar as projecções da recta a, teve-se em conta que a projecção hori-zontal de uma recta frontal (de frente) nunca poderá ser perpendicular a h1 (a ortogonalidadenão se pode verificar em projecção horizontal), pelo que é necessário outro raciocínio. Aten-dendo a que a recta a é uma recta frontal (de frente), a ortogonalidade verifica-se directamenteem projecção frontal, pelo que a2 terá de ser perpendicular a h2 – a recta a terá, assim, necessa-riamente de ser uma recta vertical (que é um caso particular das rectas frontais) que passa porS. Já em relação à recta b, a ortogonalidade verifica-se directamente em projecção horizontal,pois ambas as rectas (h e b) são horizontais (paralelas ao Plano Horizontal de Projecção) – arecta b é ortogonal à recta h, pois b1 é perpendicular a h1.
Em primeiro lugar, representaram-se a recta f e o ponto N, pelas suas projecções, emfunção dos dados. Em seguida, e atendendo a que a recta f é uma recta paralela ao PlanoFrontal de Projecção (a ortogonalidade entre a recta f e qualquer outra recta verifica-sedirectamente em projecção frontal), para que a recta r seja ortogonal à recta f basta que r2seja perpendicular a f2. Assim, por N2 conduziu-se r2 perpendicular a f2, o que garante queas duas rectas são ortogonais. A projecção horizontal de r, r1, passa por N1 e faz, com oeixo X, o ângulo pretendido.
21.
7
SOLUÇÕES
22.a) Em primeiro lugar, representaram-se os pontos A e B pelas suas projecções e desenha-
ram-se as projecções das rectas t e v, em função dos dados.b) As duas rectas são enviesadas e são ortogonais (não são perpendiculares, pois não
são complanares).c) Duas rectas perpendiculares são, antes de mais, ortogonais. Uma recta ortogonal a
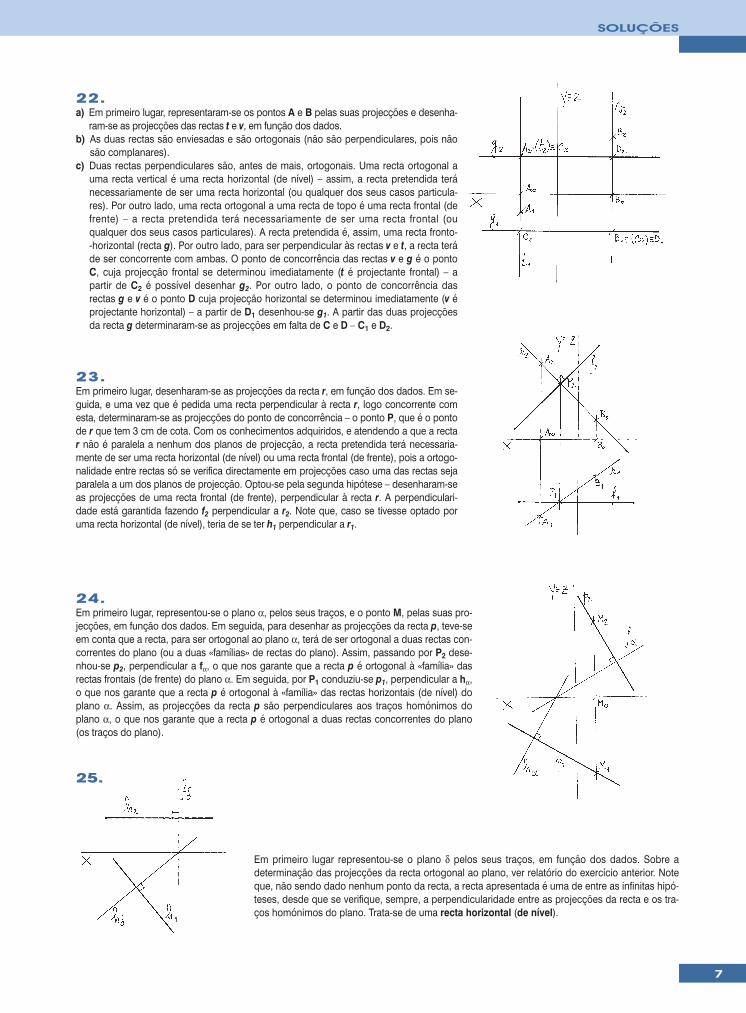
uma recta vertical é uma recta horizontal (de nível) – assim, a recta pretendida teránecessariamente de ser uma recta horizontal (ou qualquer dos seus casos particula-res). Por outro lado, uma recta ortogonal a uma recta de topo é uma recta frontal (defrente) – a recta pretendida terá necessariamente de ser uma recta frontal (ouqualquer dos seus casos particulares). A recta pretendida é, assim, uma recta fronto--horizontal (recta g). Por outro lado, para ser perpendicular às rectas v e t, a recta teráde ser concorrente com ambas. O ponto de concorrência das rectas v e g é o pontoC, cuja projecção frontal se determinou imediatamente (t é projectante frontal) – apartir de C2 é possível desenhar g2. Por outro lado, o ponto de concorrência dasrectas g e v é o ponto D cuja projecção horizontal se determinou imediatamente (v éprojectante horizontal) – a partir de D1 desenhou-se g1. A partir das duas projecçõesda recta g determinaram-se as projecções em falta de C e D – C1 e D2.
23.Em primeiro lugar, desenharam-se as projecções da recta r, em função dos dados. Em se-guida, e uma vez que é pedida uma recta perpendicular à recta r, logo concorrente comesta, determinaram-se as projecções do ponto de concorrência – o ponto P, que é o pontode r que tem 3 cm de cota. Com os conhecimentos adquiridos, e atendendo a que a rectar não é paralela a nenhum dos planos de projecção, a recta pretendida terá necessaria-mente de ser uma recta horizontal (de nível) ou uma recta frontal (de frente), pois a ortogo-nalidade entre rectas só se verifica directamente em projecções caso uma das rectas sejaparalela a um dos planos de projecção. Optou-se pela segunda hipótese – desenharam-seas projecções de uma recta frontal (de frente), perpendicular à recta r. A perpendiculari-dade está garantida fazendo f2 perpendicular a r2. Note que, caso se tivesse optado poruma recta horizontal (de nível), teria de se ter h1 perpendicular a r1.
24.Em primeiro lugar, representou-se o plano α, pelos seus traços, e o ponto M, pelas suas pro-jecções, em função dos dados. Em seguida, para desenhar as projecções da recta p, teve-seem conta que a recta, para ser ortogonal ao plano α, terá de ser ortogonal a duas rectas con-correntes do plano (ou a duas «famílias» de rectas do plano). Assim, passando por P2 dese-nhou-se p2, perpendicular a fα, o que nos garante que a recta p é ortogonal à «família» dasrectas frontais (de frente) do plano α. Em seguida, por P1 conduziu-se p1, perpendicular a hα,o que nos garante que a recta p é ortogonal à «família» das rectas horizontais (de nível) doplano α. Assim, as projecções da recta p são perpendiculares aos traços homónimos doplano α, o que nos garante que a recta p é ortogonal a duas rectas concorrentes do plano(os traços do plano).
25.
Em primeiro lugar representou-se o plano δ pelos seus traços, em função dos dados. Sobre adeterminação das projecções da recta ortogonal ao plano, ver relatório do exercício anterior. Noteque, não sendo dado nenhum ponto da recta, a recta apresentada é uma de entre as infinitas hipó-teses, desde que se verifique, sempre, a perpendicularidade entre as projecções da recta e os tra-ços homónimos do plano. Trata-se de uma recta horizontal (de nível).
8
SOLUÇÕES
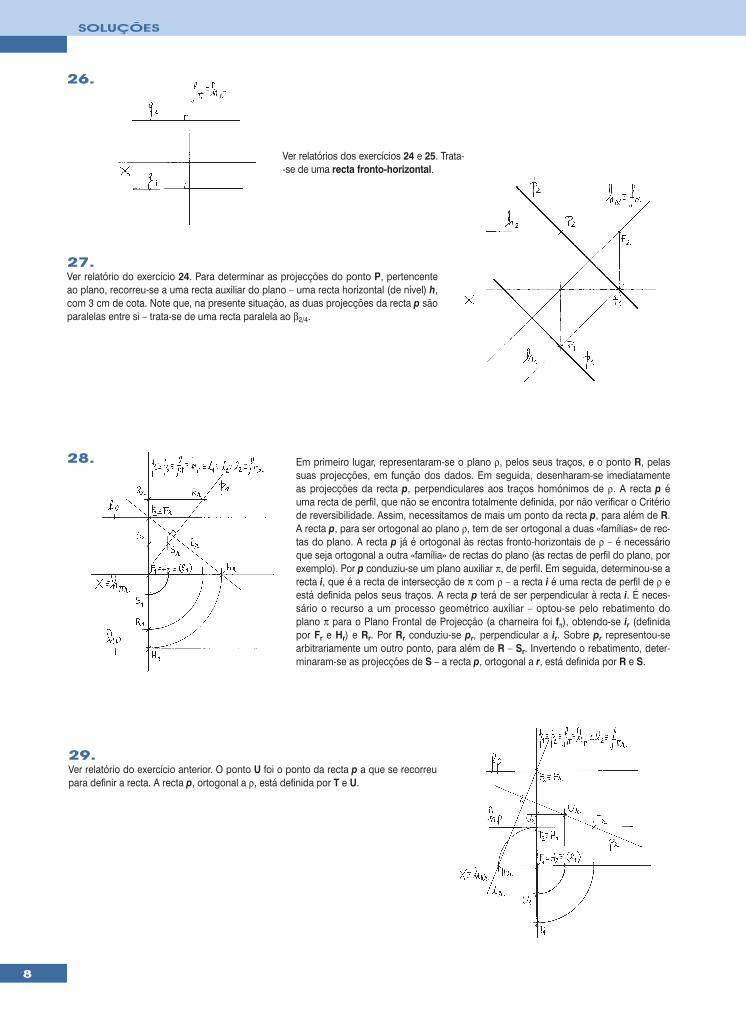
27.Ver relatório do exercício 24. Para determinar as projecções do ponto P, pertencenteao plano, recorreu-se a uma recta auxiliar do plano – uma recta horizontal (de nível) h,com 3 cm de cota. Note que, na presente situação, as duas projecções da recta p sãoparalelas entre si – trata-se de uma recta paralela ao β2/4.
28. Em primeiro lugar, representaram-se o plano ρ, pelos seus traços, e o ponto R, pelassuas projecções, em função dos dados. Em seguida, desenharam-se imediatamenteas projecções da recta p, perpendiculares aos traços homónimos de ρ. A recta p éuma recta de perfil, que não se encontra totalmente definida, por não verificar o Critériode reversibilidade. Assim, necessitamos de mais um ponto da recta p, para além de R.A recta p, para ser ortogonal ao plano ρ, tem de ser ortogonal a duas «famílias» de rec-tas do plano. A recta p já é ortogonal às rectas fronto-horizontais de ρ – é necessárioque seja ortogonal a outra «família» de rectas do plano (às rectas de perfil do plano, porexemplo). Por p conduziu-se um plano auxiliar π, de perfil. Em seguida, determinou-se arecta i, que é a recta de intersecção de π com ρ – a recta i é uma recta de perfil de ρ eestá definida pelos seus traços. A recta p terá de ser perpendicular à recta i. É neces-sário o recurso a um processo geométrico auxiliar – optou-se pelo rebatimento doplano π para o Plano Frontal de Projecção (a charneira foi fπ), obtendo-se ir (definidapor Fr e Hr) e Rr. Por Rr conduziu-se pr, perpendicular a ir. Sobre pr representou-searbitrariamente um outro ponto, para além de R – Sr. Invertendo o rebatimento, deter-minaram-se as projecções de S – a recta p, ortogonal a r, está definida por R e S.
26.
Ver relatórios dos exercícios 24 e 25. Trata--se de uma recta fronto-horizontal.
29.Ver relatório do exercício anterior. O ponto U foi o ponto da recta p a que se recorreupara definir a recta. A recta p, ortogonal a ρ, está definida por T e U.
9
SOLUÇÕES
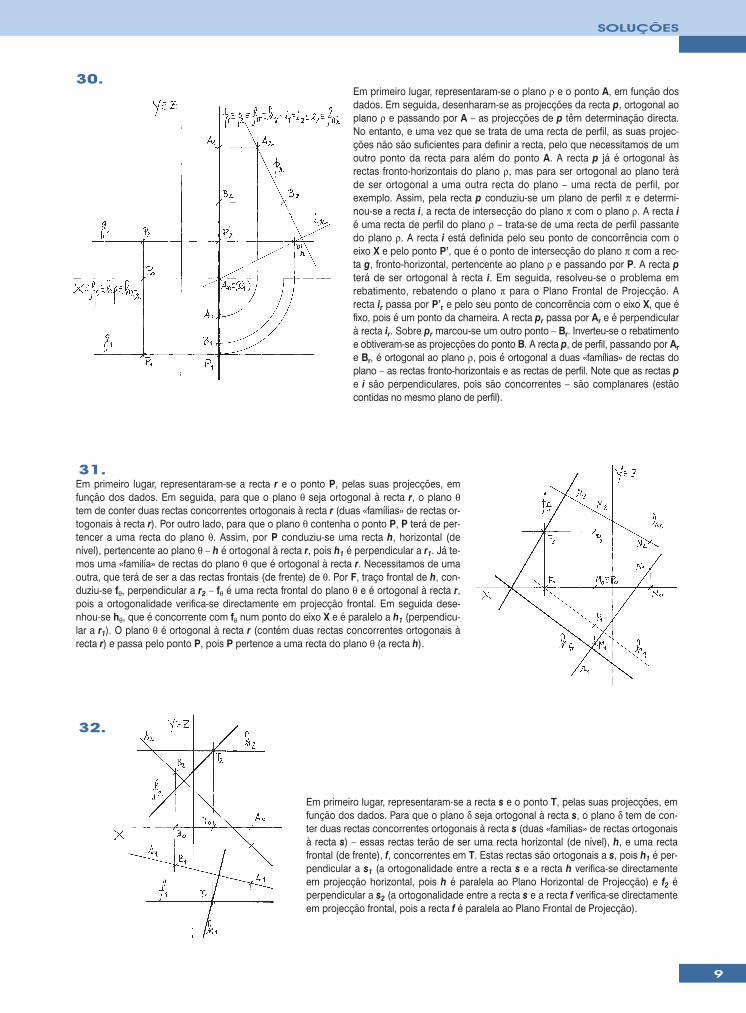
Em primeiro lugar, representaram-se o plano ρ e o ponto A, em função dosdados. Em seguida, desenharam-se as projecções da recta p, ortogonal aoplano ρ e passando por A – as projecções de p têm determinação directa.No entanto, e uma vez que se trata de uma recta de perfil, as suas projec-ções não são suficientes para definir a recta, pelo que necessitamos de umoutro ponto da recta para além do ponto A. A recta p já é ortogonal àsrectas fronto-horizontais do plano ρ, mas para ser ortogonal ao plano teráde ser ortogonal a uma outra recta do plano – uma recta de perfil, porexemplo. Assim, pela recta p conduziu-se um plano de perfil π e determi-nou-se a recta i, a recta de intersecção do plano π com o plano ρ. A recta ié uma recta de perfil do plano ρ – trata-se de uma recta de perfil passantedo plano ρ. A recta i está definida pelo seu ponto de concorrência com oeixo X e pelo ponto P’, que é o ponto de intersecção do plano π com a rec-ta g, fronto-horizontal, pertencente ao plano ρ e passando por P. A recta pterá de ser ortogonal à recta i. Em seguida, resolveu-se o problema emrebatimento, rebatendo o plano π para o Plano Frontal de Projecção. Arecta ir passa por P’r e pelo seu ponto de concorrência com o eixo X, que éfixo, pois é um ponto da charneira. A recta pr passa por Ar e é perpendicularà recta ir. Sobre pr marcou-se um outro ponto – Br. Inverteu-se o rebatimentoe obtiveram-se as projecções do ponto B. A recta p, de perfil, passando por Ar
e Br, é ortogonal ao plano ρ, pois é ortogonal a duas «famílias» de rectas doplano – as rectas fronto-horizontais e as rectas de perfil. Note que as rectas pe i são perpendiculares, pois são concorrentes – são complanares (estãocontidas no mesmo plano de perfil).
30.
31.Em primeiro lugar, representaram-se a recta r e o ponto P, pelas suas projecções, emfunção dos dados. Em seguida, para que o plano θ seja ortogonal à recta r, o plano θtem de conter duas rectas concorrentes ortogonais à recta r (duas «famílias» de rectas or-togonais à recta r). Por outro lado, para que o plano θ contenha o ponto P, P terá de per-tencer a uma recta do plano θ. Assim, por P conduziu-se uma recta h, horizontal (denível), pertencente ao plano θ – h é ortogonal à recta r, pois h1 é perpendicular a r1. Já te-mos uma «familía» de rectas do plano θ que é ortogonal à recta r. Necessitamos de umaoutra, que terá de ser a das rectas frontais (de frente) de θ. Por F, traço frontal de h, con-duziu-se fθ, perpendicular a r2 – fθ é uma recta frontal do plano θ e é ortogonal à recta r,pois a ortogonalidade verifica-se directamente em projecção frontal. Em seguida dese-nhou-se hθ, que é concorrente com fθ num ponto do eixo X e é paralelo a h1 (perpendicu-lar a r1). O plano θ é ortogonal à recta r (contém duas rectas concorrentes ortogonais àrecta r) e passa pelo ponto P, pois P pertence a uma recta do plano θ (a recta h).
Em primeiro lugar, representaram-se a recta s e o ponto T, pelas suas projecções, emfunção dos dados. Para que o plano δ seja ortogonal à recta s, o plano δ tem de con-ter duas rectas concorrentes ortogonais à recta s (duas «famílias» de rectas ortogonaisà recta s) – essas rectas terão de ser uma recta horizontal (de nível), h, e uma rectafrontal (de frente), f, concorrentes em T. Estas rectas são ortogonais a s, pois h1 é per-pendicular a s1 (a ortogonalidade entre a recta s e a recta h verifica-se directamenteem projecção horizontal, pois h é paralela ao Plano Horizontal de Projecção) e f2 éperpendicular a s2 (a ortogonalidade entre a recta s e a recta f verifica-se directamenteem projecção frontal, pois a recta f é paralela ao Plano Frontal de Projecção).
32.
10
SOLUÇÕES
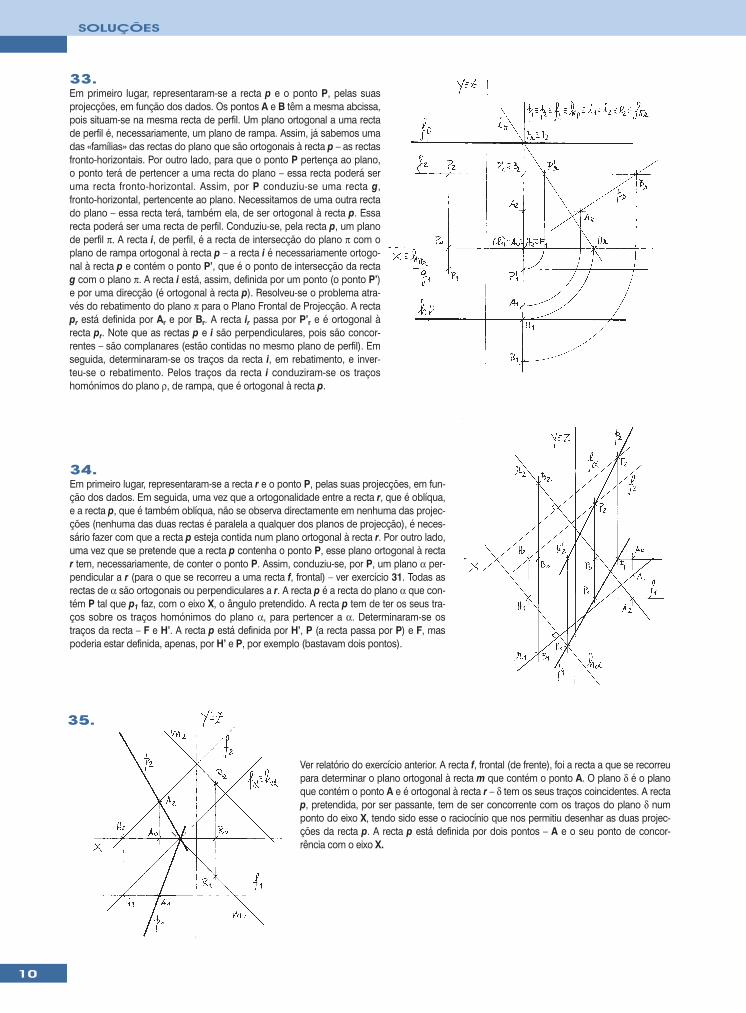
34.Em primeiro lugar, representaram-se a recta r e o ponto P, pelas suas projecções, em fun-ção dos dados. Em seguida, uma vez que a ortogonalidade entre a recta r, que é oblíqua,e a recta p, que é também oblíqua, não se observa directamente em nenhuma das projec-ções (nenhuma das duas rectas é paralela a qualquer dos planos de projecção), é neces-sário fazer com que a recta p esteja contida num plano ortogonal à recta r. Por outro lado,uma vez que se pretende que a recta p contenha o ponto P, esse plano ortogonal à rectar tem, necessariamente, de conter o ponto P. Assim, conduziu-se, por P, um plano α per-pendicular a r (para o que se recorreu a uma recta f, frontal) – ver exercício 31. Todas asrectas de α são ortogonais ou perpendiculares a r. A recta p é a recta do plano α que con-tém P tal que p1 faz, com o eixo X, o ângulo pretendido. A recta p tem de ter os seus tra-ços sobre os traços homónimos do plano α, para pertencer a α. Determinaram-se ostraços da recta – F e H’. A recta p está definida por H’, P (a recta passa por P) e F, maspoderia estar definida, apenas, por H’ e P, por exemplo (bastavam dois pontos).
33.Em primeiro lugar, representaram-se a recta p e o ponto P, pelas suasprojecções, em função dos dados. Os pontos A e B têm a mesma abcissa,pois situam-se na mesma recta de perfil. Um plano ortogonal a uma rectade perfil é, necessariamente, um plano de rampa. Assim, já sabemos umadas «famílias» das rectas do plano que são ortogonais à recta p – as rectasfronto-horizontais. Por outro lado, para que o ponto P pertença ao plano,o ponto terá de pertencer a uma recta do plano – essa recta poderá seruma recta fronto-horizontal. Assim, por P conduziu-se uma recta g,fronto-horizontal, pertencente ao plano. Necessitamos de uma outra rectado plano – essa recta terá, também ela, de ser ortogonal à recta p. Essarecta poderá ser uma recta de perfil. Conduziu-se, pela recta p, um planode perfil π. A recta i, de perfil, é a recta de intersecção do plano π com oplano de rampa ortogonal à recta p – a recta i é necessariamente ortogo-nal à recta p e contém o ponto P’, que é o ponto de intersecção da rectag com o plano π. A recta i está, assim, definida por um ponto (o ponto P’)e por uma direcção (é ortogonal à recta p). Resolveu-se o problema atra-vés do rebatimento do plano π para o Plano Frontal de Projecção. A rectapr está definida por Ar e por Br. A recta ir passa por P’r e é ortogonal àrecta pr. Note que as rectas p e i são perpendiculares, pois são concor-rentes – são complanares (estão contidas no mesmo plano de perfil). Emseguida, determinaram-se os traços da recta i, em rebatimento, e inver-teu-se o rebatimento. Pelos traços da recta i conduziram-se os traçoshomónimos do plano ρ, de rampa, que é ortogonal à recta p.
35.
Ver relatório do exercício anterior. A recta f, frontal (de frente), foi a recta a que se recorreupara determinar o plano ortogonal à recta m que contém o ponto A. O plano δ é o planoque contém o ponto A e é ortogonal à recta r – δ tem os seus traços coincidentes. A rectap, pretendida, por ser passante, tem de ser concorrente com os traços do plano δ numponto do eixo X, tendo sido esse o raciocínio que nos permitiu desenhar as duas projec-ções da recta p. A recta p está definida por dois pontos – A e o seu ponto de concor-rência com o eixo X.
11
SOLUÇÕES
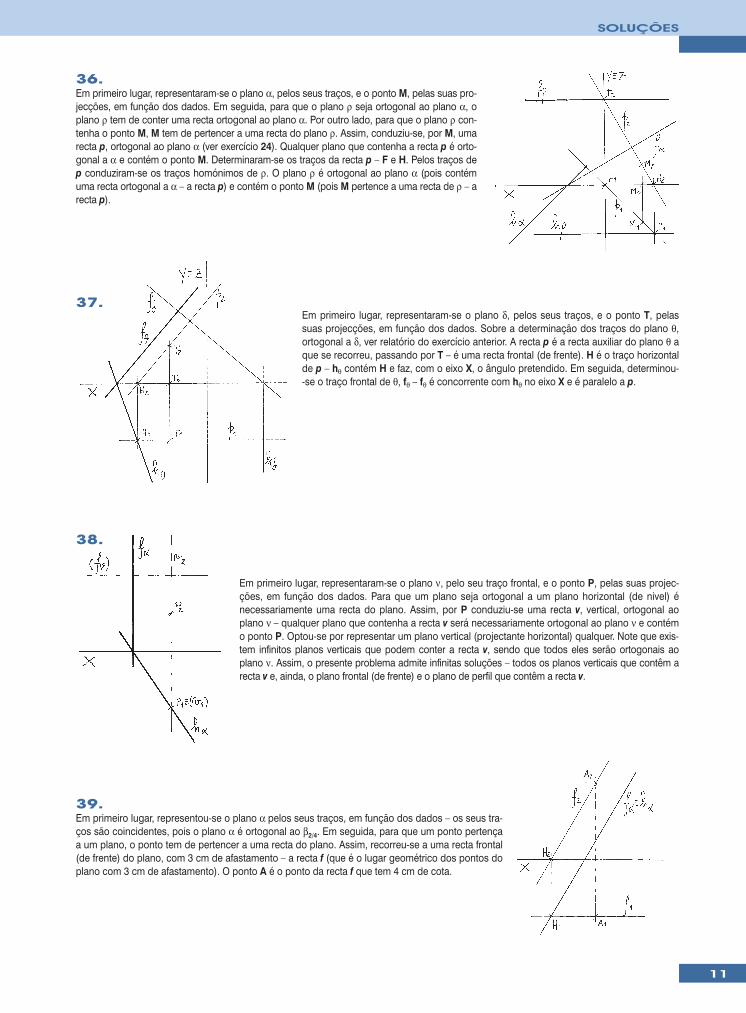
36.Em primeiro lugar, representaram-se o plano α, pelos seus traços, e o ponto M, pelas suas pro-jecções, em função dos dados. Em seguida, para que o plano ρ seja ortogonal ao plano α, oplano ρ tem de conter uma recta ortogonal ao plano α. Por outro lado, para que o plano ρ con-tenha o ponto M, M tem de pertencer a uma recta do plano ρ. Assim, conduziu-se, por M, umarecta p, ortogonal ao plano α (ver exercício 24). Qualquer plano que contenha a recta p é orto-gonal a α e contém o ponto M. Determinaram-se os traços da recta p – F e H. Pelos traços dep conduziram-se os traços homónimos de ρ. O plano ρ é ortogonal ao plano α (pois contémuma recta ortogonal a α – a recta p) e contém o ponto M (pois M pertence a uma recta de ρ – arecta p).
38.
Em primeiro lugar, representaram-se o plano ν, pelo seu traço frontal, e o ponto P, pelas suas projec-ções, em função dos dados. Para que um plano seja ortogonal a um plano horizontal (de nivel) énecessariamente uma recta do plano. Assim, por P conduziu-se uma recta v, vertical, ortogonal aoplano ν – qualquer plano que contenha a recta v será necessariamente ortogonal ao plano ν e contémo ponto P. Optou-se por representar um plano vertical (projectante horizontal) qualquer. Note que exis-tem infinitos planos verticais que podem conter a recta v, sendo que todos eles serão ortogonais aoplano ν. Assim, o presente problema admite infinitas soluções – todos os planos verticais que contêm arecta v e, ainda, o plano frontal (de frente) e o plano de perfil que contêm a recta v.
Em primeiro lugar, representaram-se o plano δ, pelos seus traços, e o ponto T, pelassuas projecções, em função dos dados. Sobre a determinação dos traços do plano θ,ortogonal a δ, ver relatório do exercício anterior. A recta p é a recta auxiliar do plano θ aque se recorreu, passando por T – é uma recta frontal (de frente). H é o traço horizontalde p – hθ contém H e faz, com o eixo X, o ângulo pretendido. Em seguida, determinou--se o traço frontal de θ, fθ – fθ é concorrente com hθ no eixo X e é paralelo a p.
39.Em primeiro lugar, representou-se o plano α pelos seus traços, em função dos dados – os seus tra-ços são coincidentes, pois o plano α é ortogonal ao β2/4. Em seguida, para que um ponto pertençaa um plano, o ponto tem de pertencer a uma recta do plano. Assim, recorreu-se a uma recta frontal(de frente) do plano, com 3 cm de afastamento – a recta f (que é o lugar geométrico dos pontos doplano com 3 cm de afastamento). O ponto A é o ponto da recta f que tem 4 cm de cota.
37.
12
SOLUÇÕES
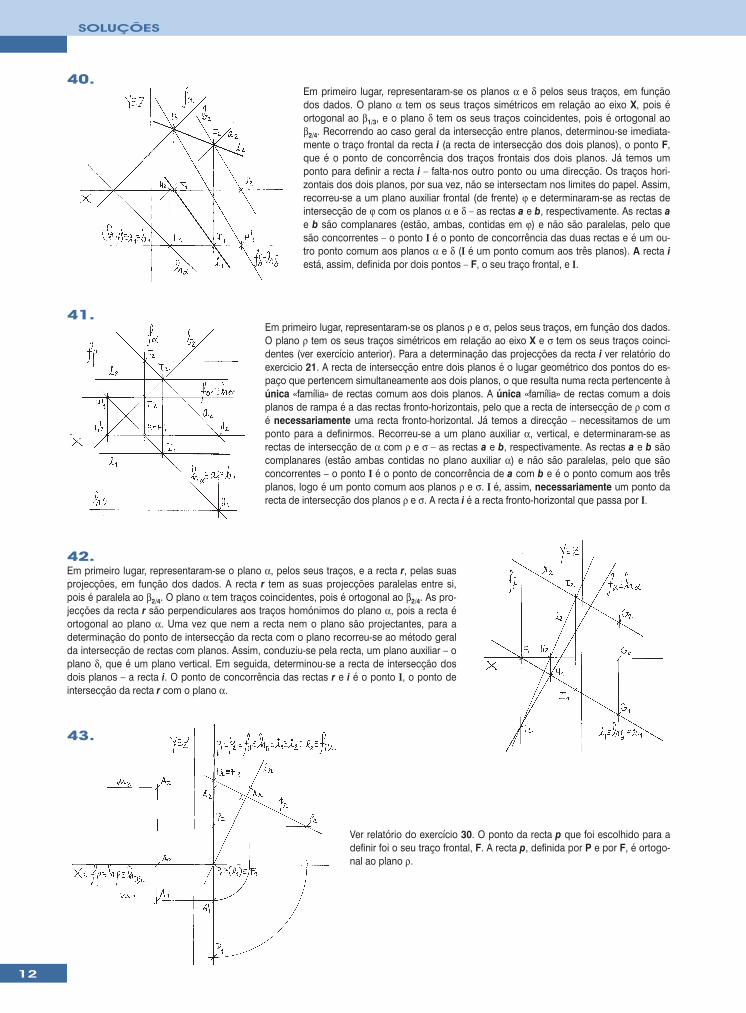
Em primeiro lugar, representaram-se os planos ρ e σ, pelos seus traços, em função dos dados.O plano ρ tem os seus traços simétricos em relação ao eixo X e σ tem os seus traços coinci-dentes (ver exercício anterior). Para a determinação das projecções da recta i ver relatório doexercicio 21. A recta de intersecção entre dois planos é o lugar geométrico dos pontos do es-paço que pertencem simultaneamente aos dois planos, o que resulta numa recta pertencente àúnica «família» de rectas comum aos dois planos. A única «família» de rectas comum a doisplanos de rampa é a das rectas fronto-horizontais, pelo que a recta de intersecção de ρ com σé necessariamente uma recta fronto-horizontal. Já temos a direcção – necessitamos de umponto para a definirmos. Recorreu-se a um plano auxiliar α, vertical, e determinaram-se asrectas de intersecção de α com ρ e σ – as rectas a e b, respectivamente. As rectas a e b sãocomplanares (estão ambas contidas no plano auxiliar α) e não são paralelas, pelo que sãoconcorrentes – o ponto I é o ponto de concorrência de a com b e é o ponto comum aos trêsplanos, logo é um ponto comum aos planos ρ e σ. I é, assim, necessariamente um ponto darecta de intersecção dos planos ρ e σ. A recta i é a recta fronto-horizontal que passa por I.
42.Em primeiro lugar, representaram-se o plano α, pelos seus traços, e a recta r, pelas suasprojecções, em função dos dados. A recta r tem as suas projecções paralelas entre si,pois é paralela ao β2/4. O plano α tem traços coincidentes, pois é ortogonal ao β2/4. As pro-jecções da recta r são perpendiculares aos traços homónimos do plano α, pois a recta éortogonal ao plano α. Uma vez que nem a recta nem o plano são projectantes, para adeterminação do ponto de intersecção da recta com o plano recorreu-se ao método geralda intersecção de rectas com planos. Assim, conduziu-se pela recta, um plano auxiliar – oplano δ, que é um plano vertical. Em seguida, determinou-se a recta de intersecção dosdois planos – a recta i. O ponto de concorrência das rectas r e i é o ponto I, o ponto deintersecção da recta r com o plano α.
Ver relatório do exercício 30. O ponto da recta p que foi escolhido para adefinir foi o seu traço frontal, F. A recta p, definida por P e por F, é ortogo-nal ao plano ρ.
43.
40.Em primeiro lugar, representaram-se os planos α e δ pelos seus traços, em funçãodos dados. O plano α tem os seus traços simétricos em relação ao eixo X, pois éortogonal ao β1/3, e o plano δ tem os seus traços coincidentes, pois é ortogonal aoβ2/4. Recorrendo ao caso geral da intersecção entre planos, determinou-se imediata-mente o traço frontal da recta i (a recta de intersecção dos dois planos), o ponto F,que é o ponto de concorrência dos traços frontais dos dois planos. Já temos umponto para definir a recta i – falta-nos outro ponto ou uma direcção. Os traços hori-zontais dos dois planos, por sua vez, não se intersectam nos limites do papel. Assim,recorreu-se a um plano auxiliar frontal (de frente) ϕ e determinaram-se as rectas deintersecção de ϕ com os planos α e δ – as rectas a e b, respectivamente. As rectas ae b são complanares (estão, ambas, contidas em ϕ) e não são paralelas, pelo quesão concorrentes – o ponto I é o ponto de concorrência das duas rectas e é um ou-tro ponto comum aos planos α e δ (I é um ponto comum aos três planos). A recta iestá, assim, definida por dois pontos – F, o seu traço frontal, e I.
41.
13
SOLUÇÕES
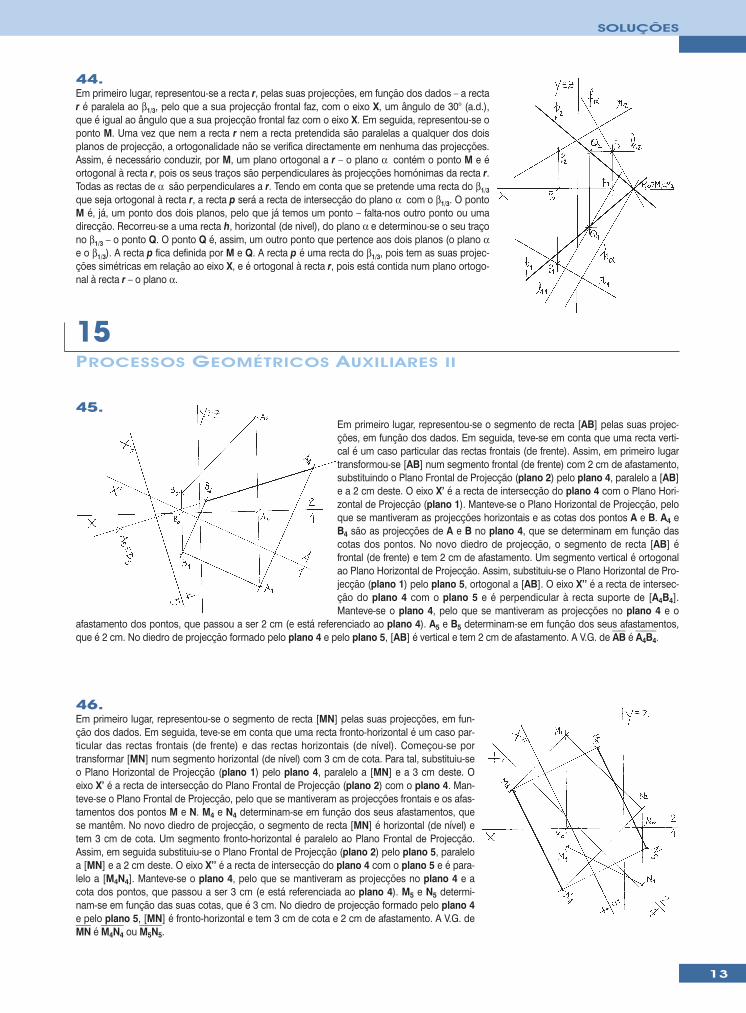
Em primeiro lugar, representou-se o segmento de recta [AB] pelas suas projec-ções, em função dos dados. Em seguida, teve-se em conta que uma recta verti-cal é um caso particular das rectas frontais (de frente). Assim, em primeiro lugartransformou-se [AB] num segmento frontal (de frente) com 2 cm de afastamento,substituindo o Plano Frontal de Projecção (plano 2) pelo plano 4, paralelo a [AB]e a 2 cm deste. O eixo X’ é a recta de intersecção do plano 4 com o Plano Hori-zontal de Projecção (plano 1). Manteve-se o Plano Horizontal de Projecção, peloque se mantiveram as projecções horizontais e as cotas dos pontos A e B. A4 eB4 são as projecções de A e B no plano 4, que se determinam em função dascotas dos pontos. No novo diedro de projecção, o segmento de recta [AB] éfrontal (de frente) e tem 2 cm de afastamento. Um segmento vertical é ortogonalao Plano Horizontal de Projecção. Assim, substituiu-se o Plano Horizontal de Pro-jecção (plano 1) pelo plano 5, ortogonal a [AB]. O eixo X’’ é a recta de intersec-ção do plano 4 com o plano 5 e é perpendicular à recta suporte de [A4B4].Manteve-se o plano 4, pelo que se mantiveram as projecções no plano 4 e o
afastamento dos pontos, que passou a ser 2 cm (e está referenciado ao plano 4). A5 e B5 determinam-se em função dos seus afastamentos,que é 2 cm. No diedro de projecção formado pelo plano 4 e pelo plano 5, [AB] é vertical e tem 2 cm de afastamento. A V.G. de A�B� é A�4�B�4�.
44.Em primeiro lugar, representou-se a recta r, pelas suas projecções, em função dos dados – a rectar é paralela ao β1/3, pelo que a sua projecção frontal faz, com o eixo X, um ângulo de 30° (a.d.),que é igual ao ângulo que a sua projecção frontal faz com o eixo X. Em seguida, representou-se oponto M. Uma vez que nem a recta r nem a recta pretendida são paralelas a qualquer dos doisplanos de projecção, a ortogonalidade não se verifica directamente em nenhuma das projecções.Assim, é necessário conduzir, por M, um plano ortogonal a r – o plano α contém o ponto M e éortogonal à recta r, pois os seus traços são perpendiculares às projecções homónimas da recta r.Todas as rectas de α são perpendiculares a r. Tendo em conta que se pretende uma recta do β1/3
que seja ortogonal à recta r, a recta p será a recta de intersecção do plano α com o β1/3. O pontoM é, já, um ponto dos dois planos, pelo que já temos um ponto – falta-nos outro ponto ou umadirecção. Recorreu-se a uma recta h, horizontal (de nivel), do plano α e determinou-se o seu traçono β1/3 – o ponto Q. O ponto Q é, assim, um outro ponto que pertence aos dois planos (o plano αe o β1/3). A recta p fica definida por M e Q. A recta p é uma recta do β1/3, pois tem as suas projec-ções simétricas em relação ao eixo X, e é ortogonal à recta r, pois está contida num plano ortogo-nal à recta r – o plano α.
46.Em primeiro lugar, representou-se o segmento de recta [MN] pelas suas projecções, em fun-ção dos dados. Em seguida, teve-se em conta que uma recta fronto-horizontal é um caso par-ticular das rectas frontais (de frente) e das rectas horizontais (de nível). Começou-se portransformar [MN] num segmento horizontal (de nível) com 3 cm de cota. Para tal, substituiu-seo Plano Horizontal de Projecção (plano 1) pelo plano 4, paralelo a [MN] e a 3 cm deste. Oeixo X’ é a recta de intersecção do Plano Frontal de Projecção (plano 2) com o plano 4. Man-teve-se o Plano Frontal de Projecção, pelo que se mantiveram as projecções frontais e os afas-tamentos dos pontos M e N. M4 e N4 determinam-se em função dos seus afastamentos, quese mantêm. No novo diedro de projecção, o segmento de recta [MN] é horizontal (de nível) etem 3 cm de cota. Um segmento fronto-horizontal é paralelo ao Plano Frontal de Projecção.Assim, em seguida substituiu-se o Plano Frontal de Projecção (plano 2) pelo plano 5, paraleloa [MN] e a 2 cm deste. O eixo X’’ é a recta de intersecção do plano 4 com o plano 5 e é para-lelo a [M4N4]. Manteve-se o plano 4, pelo que se mantiveram as projecções no plano 4 e acota dos pontos, que passou a ser 3 cm (e está referenciada ao plano 4). M5 e N5 determi-nam-se em função das suas cotas, que é 3 cm. No diedro de projecção formado pelo plano 4e pelo plano 5, [MN] é fronto-horizontal e tem 3 cm de cota e 2 cm de afastamento. A V.G. deM�N� é M�4�N�4� ou M�5�N�5�.
PROCESSOS GEOMÉTRICOS AUXILIARES II
15
45.
14
SOLUÇÕES
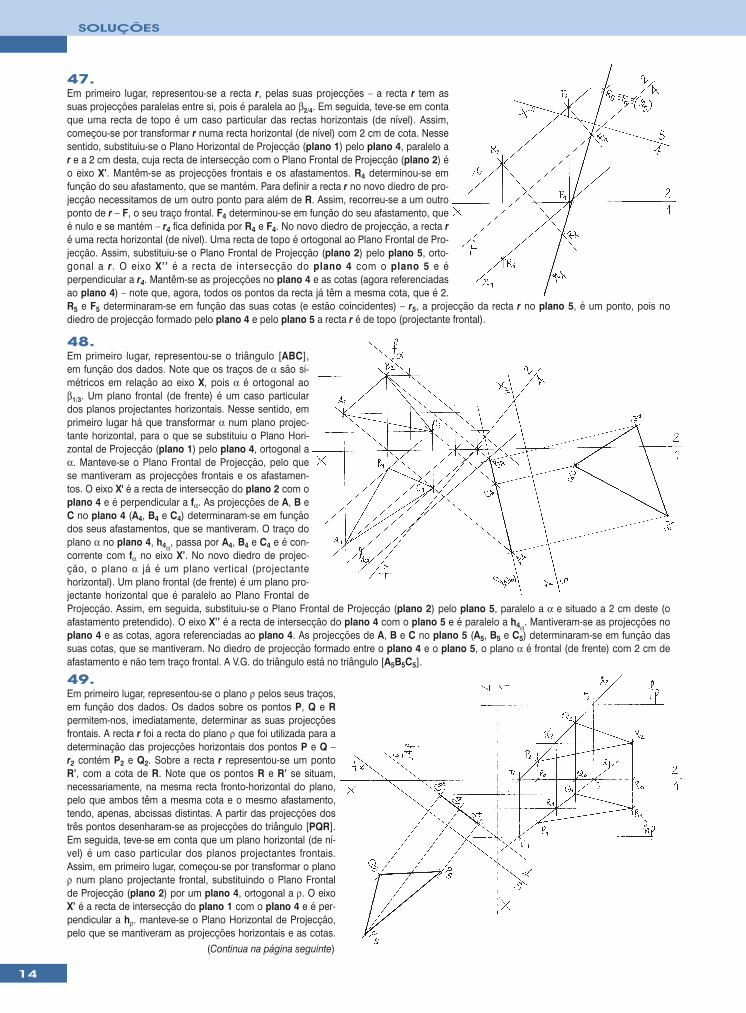
47.Em primeiro lugar, representou-se a recta r, pelas suas projecções – a recta r tem assuas projecções paralelas entre si, pois é paralela ao β2/4. Em seguida, teve-se em contaque uma recta de topo é um caso particular das rectas horizontais (de nível). Assim,começou-se por transformar r numa recta horizontal (de nível) com 2 cm de cota. Nessesentido, substituiu-se o Plano Horizontal de Projecção (plano 1) pelo plano 4, paralelo ar e a 2 cm desta, cuja recta de intersecção com o Plano Frontal de Projecção (plano 2) éo eixo X’. Mantêm-se as projecções frontais e os afastamentos. R4 determinou-se emfunção do seu afastamento, que se mantém. Para definir a recta r no novo diedro de pro-jecção necessitamos de um outro ponto para além de R. Assim, recorreu-se a um outroponto de r – F, o seu traço frontal. F4 determinou-se em função do seu afastamento, queé nulo e se mantém – r4 fica definida por R4 e F4. No novo diedro de projecção, a recta ré uma recta horizontal (de nível). Uma recta de topo é ortogonal ao Plano Frontal de Pro-jecção. Assim, substituiu-se o Plano Frontal de Projecção (plano 2) pelo plano 5, orto-gonal a r. O eixo X’’ é a recta de intersecção do plano 4 com o plano 5 e éperpendicular a r4. Mantêm-se as projecções no plano 4 e as cotas (agora referenciadasao plano 4) – note que, agora, todos os pontos da recta já têm a mesma cota, que é 2.R5 e F5 determinaram-se em função das suas cotas (e estão coincidentes) – r5, a projecção da recta r no plano 5, é um ponto, pois nodiedro de projecção formado pelo plano 4 e pelo plano 5 a recta r é de topo (projectante frontal).
48.Em primeiro lugar, representou-se o triângulo [ABC],em função dos dados. Note que os traços de α são si-métricos em relação ao eixo X, pois α é ortogonal aoβ1/3. Um plano frontal (de frente) é um caso particulardos planos projectantes horizontais. Nesse sentido, emprimeiro lugar há que transformar α num plano projec-tante horizontal, para o que se substituiu o Plano Hori-zontal de Projecção (plano 1) pelo plano 4, ortogonal aα. Manteve-se o Plano Frontal de Projecção, pelo quese mantiveram as projecções frontais e os afastamen-tos. O eixo X' é a recta de intersecção do plano 2 com oplano 4 e é perpendicular a fα. As projecções de A, B eC no plano 4 (A4, B4 e C4) determinaram-se em funçãodos seus afastamentos, que se mantiveram. O traço doplano α no plano 4, h4α, passa por A4, B4 e C4 e é con-corrente com fα no eixo X’. No novo diedro de projec-ção, o plano α já é um plano vertical (projectantehorizontal). Um plano frontal (de frente) é um plano pro-jectante horizontal que é paralelo ao Plano Frontal deProjecção. Assim, em seguida, substituiu-se o Plano Frontal de Projecção (plano 2) pelo plano 5, paralelo a α e situado a 2 cm deste (oafastamento pretendido). O eixo X’’ é a recta de intersecção do plano 4 com o plano 5 e é paralelo a h4α. Mantiveram-se as projecções noplano 4 e as cotas, agora referenciadas ao plano 4. As projecções de A, B e C no plano 5 (A5, B5 e C5) determinaram-se em função dassuas cotas, que se mantiveram. No diedro de projecção formado entre o plano 4 e o plano 5, o plano α é frontal (de frente) com 2 cm deafastamento e não tem traço frontal. A V.G. do triângulo está no triângulo [A5B5C5].
49.Em primeiro lugar, representou-se o plano ρ pelos seus traços,em função dos dados. Os dados sobre os pontos P, Q e Rpermitem-nos, imediatamente, determinar as suas projecçõesfrontais. A recta r foi a recta do plano ρ que foi utilizada para adeterminação das projecções horizontais dos pontos P e Q –r2 contém P2 e Q2. Sobre a recta r representou-se um pontoR’, com a cota de R. Note que os pontos R e R’ se situam,necessariamente, na mesma recta fronto-horizontal do plano,pelo que ambos têm a mesma cota e o mesmo afastamento,tendo, apenas, abcissas distintas. A partir das projecções dostrês pontos desenharam-se as projecções do triângulo [PQR].Em seguida, teve-se em conta que um plano horizontal (de ní-vel) é um caso particular dos planos projectantes frontais.Assim, em primeiro lugar, começou-se por transformar o planoρ num plano projectante frontal, substituindo o Plano Frontalde Projecção (plano 2) por um plano 4, ortogonal a ρ. O eixoX’ é a recta de intersecção do plano 1 com o plano 4 e é per-pendicular a hρ. manteve-se o Plano Horizontal de Projecção,pelo que se mantiveram as projecções horizontais e as cotas.
(Continua na página seguinte)
15
SOLUÇÕES
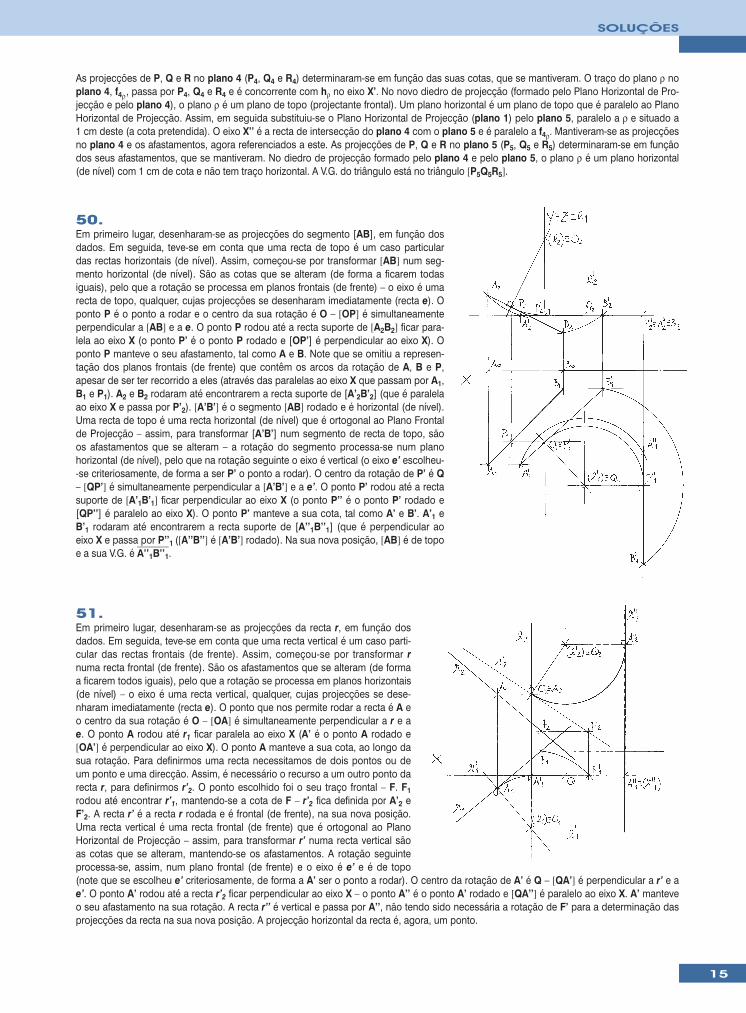
50.Em primeiro lugar, desenharam-se as projecções do segmento [AB], em função dosdados. Em seguida, teve-se em conta que uma recta de topo é um caso particulardas rectas horizontais (de nível). Assim, começou-se por transformar [AB] num seg-mento horizontal (de nível). São as cotas que se alteram (de forma a ficarem todasiguais), pelo que a rotação se processa em planos frontais (de frente) – o eixo é umarecta de topo, qualquer, cujas projecções se desenharam imediatamente (recta e). Oponto P é o ponto a rodar e o centro da sua rotação é O – [OP] é simultaneamenteperpendicular a [AB] e a e. O ponto P rodou até a recta suporte de [A2B2] ficar para-lela ao eixo X (o ponto P’ é o ponto P rodado e [OP’] é perpendicular ao eixo X). Oponto P manteve o seu afastamento, tal como A e B. Note que se omitiu a represen-tação dos planos frontais (de frente) que contêm os arcos da rotação de A, B e P,apesar de ser ter recorrido a eles (através das paralelas ao eixo X que passam por A1,B1 e P1). A2 e B2 rodaram até encontrarem a recta suporte de [A’2B’2] (que é paralelaao eixo X e passa por P’2). [A’B’] é o segmento [AB] rodado e é horizontal (de nível).Uma recta de topo é uma recta horizontal (de nível) que é ortogonal ao Plano Frontalde Projecção – assim, para transformar [A’B’] num segmento de recta de topo, sãoos afastamentos que se alteram – a rotação do segmento processa-se num planohorizontal (de nível), pelo que na rotação seguinte o eixo é vertical (o eixo e’ escolheu--se criteriosamente, de forma a ser P’ o ponto a rodar). O centro da rotação de P’ é Q– [QP’] é simultaneamente perpendicular a [A’B’] e a e’. O ponto P’ rodou até a rectasuporte de [A’1B’1] ficar perpendicular ao eixo X (o ponto P’’ é o ponto P’ rodado e[QP’’] é paralelo ao eixo X). O ponto P’ manteve a sua cota, tal como A’ e B’. A’1 eB’1 rodaram até encontrarem a recta suporte de [A’’1B’’1] (que é perpendicular aoeixo X e passa por P’’1 ([A’’B’’] é [A’B’] rodado). Na sua nova posição, [AB] é de topoe a sua V.G. é A�’�’�1�B�’�’�1�.
51.Em primeiro lugar, desenharam-se as projecções da recta r, em função dosdados. Em seguida, teve-se em conta que uma recta vertical é um caso parti-cular das rectas frontais (de frente). Assim, começou-se por transformar rnuma recta frontal (de frente). São os afastamentos que se alteram (de formaa ficarem todos iguais), pelo que a rotação se processa em planos horizontais(de nível) – o eixo é uma recta vertical, qualquer, cujas projecções se dese-nharam imediatamente (recta e). O ponto que nos permite rodar a recta é A eo centro da sua rotação é O – [OA] é simultaneamente perpendicular a r e ae. O ponto A rodou até r1 ficar paralela ao eixo X (A’ é o ponto A rodado e[OA’] é perpendicular ao eixo X). O ponto A manteve a sua cota, ao longo dasua rotação. Para definirmos uma recta necessitamos de dois pontos ou deum ponto e uma direcção. Assim, é necessário o recurso a um outro ponto darecta r, para definirmos r’2. O ponto escolhido foi o seu traço frontal – F. F1rodou até encontrar r’1, mantendo-se a cota de F – r’2 fica definida por A’2 eF’2. A recta r’ é a recta r rodada e é frontal (de frente), na sua nova posição.Uma recta vertical é uma recta frontal (de frente) que é ortogonal ao PlanoHorizontal de Projecção – assim, para transformar r’ numa recta vertical sãoas cotas que se alteram, mantendo-se os afastamentos. A rotação seguinteprocessa-se, assim, num plano frontal (de frente) e o eixo é e’ e é de topo(note que se escolheu e’ criteriosamente, de forma a A’ ser o ponto a rodar). O centro da rotação de A’ é Q – [QA’] é perpendicular a r’ e ae’. O ponto A’ rodou até a recta r’2 ficar perpendicular ao eixo X – o ponto A’’ é o ponto A’ rodado e [QA’’] é paralelo ao eixo X. A’ manteveo seu afastamento na sua rotação. A recta r’’ é vertical e passa por A’’, não tendo sido necessária a rotação de F’ para a determinação dasprojecções da recta na sua nova posição. A projecção horizontal da recta é, agora, um ponto.
As projecções de P, Q e R no plano 4 (P4, Q4 e R4) determinaram-se em função das suas cotas, que se mantiveram. O traço do plano ρ noplano 4, f4ρ, passa por P4, Q4 e R4 e é concorrente com hρ no eixo X’. No novo diedro de projecção (formado pelo Plano Horizontal de Pro-jecção e pelo plano 4), o plano ρ é um plano de topo (projectante frontal). Um plano horizontal é um plano de topo que é paralelo ao PlanoHorizontal de Projecção. Assim, em seguida substituiu-se o Plano Horizontal de Projecção (plano 1) pelo plano 5, paralelo a ρ e situado a1 cm deste (a cota pretendida). O eixo X’’ é a recta de intersecção do plano 4 com o plano 5 e é paralelo a f4ρ. Mantiveram-se as projecçõesno plano 4 e os afastamentos, agora referenciados a este. As projecções de P, Q e R no plano 5 (P5, Q5 e R5) determinaram-se em funçãodos seus afastamentos, que se mantiveram. No diedro de projecção formado pelo plano 4 e pelo plano 5, o plano ρ é um plano horizontal(de nível) com 1 cm de cota e não tem traço horizontal. A V.G. do triângulo está no triângulo [P5Q5R5].
16
SOLUÇÕES
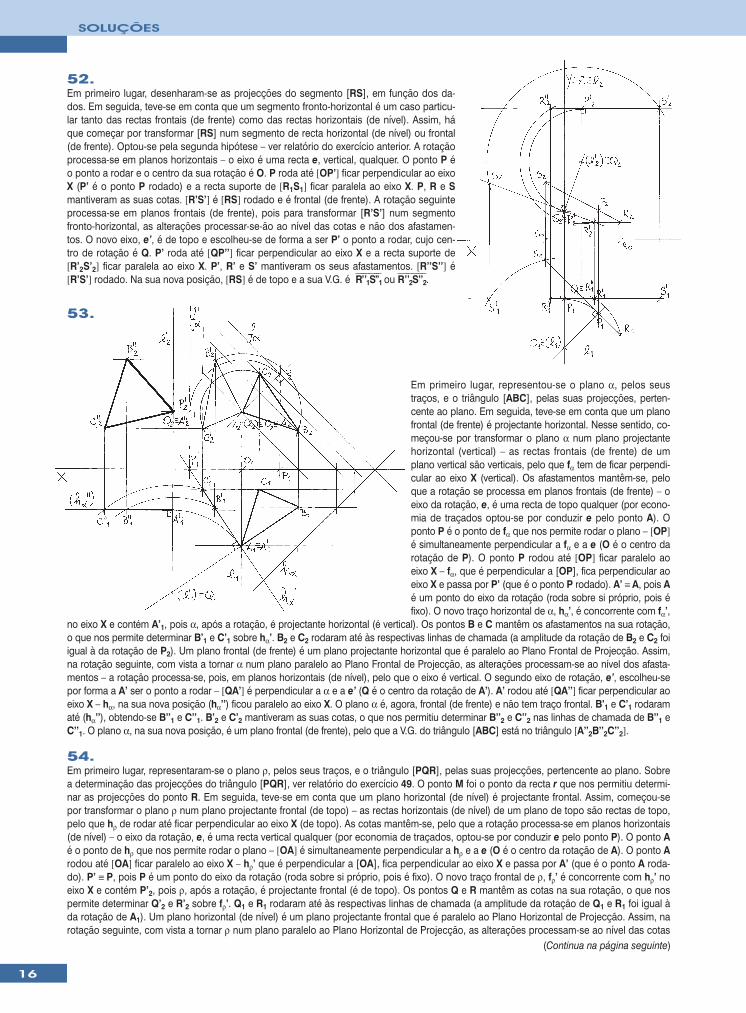
52.Em primeiro lugar, desenharam-se as projecções do segmento [RS], em função dos da-dos. Em seguida, teve-se em conta que um segmento fronto-horizontal é um caso particu-lar tanto das rectas frontais (de frente) como das rectas horizontais (de nível). Assim, háque começar por transformar [RS] num segmento de recta horizontal (de nível) ou frontal(de frente). Optou-se pela segunda hipótese – ver relatório do exercício anterior. A rotaçãoprocessa-se em planos horizontais – o eixo é uma recta e, vertical, qualquer. O ponto P éo ponto a rodar e o centro da sua rotação é O. P roda até [OP’] ficar perpendicular ao eixoX (P’ é o ponto P rodado) e a recta suporte de [R1S1] ficar paralela ao eixo X. P, R e Smantiveram as suas cotas. [R’S’] é [RS] rodado e é frontal (de frente). A rotação seguinteprocessa-se em planos frontais (de frente), pois para transformar [R’S’] num segmentofronto-horizontal, as alterações processar-se-ão ao nível das cotas e não dos afastamen-tos. O novo eixo, e’, é de topo e escolheu-se de forma a ser P’ o ponto a rodar, cujo cen-tro de rotação é Q. P’ roda até [QP’’] ficar perpendicular ao eixo X e a recta suporte de[R’2S’2] ficar paralela ao eixo X. P’, R’ e S’ mantiveram os seus afastamentos. [R’’S’’] é[R’S’] rodado. Na sua nova posição, [RS] é de topo e a sua V.G. é R�’�’�1�S�’�’�1� ou R�’�’�2�S�’�’�2�.
Em primeiro lugar, representou-se o plano α, pelos seustraços, e o triângulo [ABC], pelas suas projecções, perten-cente ao plano. Em seguida, teve-se em conta que um planofrontal (de frente) é projectante horizontal. Nesse sentido, co-meçou-se por transformar o plano α num plano projectantehorizontal (vertical) – as rectas frontais (de frente) de umplano vertical são verticais, pelo que fα tem de ficar perpendi-cular ao eixo X (vertical). Os afastamentos mantêm-se, peloque a rotação se processa em planos frontais (de frente) – oeixo da rotação, e, é uma recta de topo qualquer (por econo-mia de traçados optou-se por conduzir e pelo ponto A). Oponto P é o ponto de fα que nos permite rodar o plano – [OP]é simultaneamente perpendicular a fα e a e (O é o centro darotação de P). O ponto P rodou até [OP] ficar paralelo aoeixo X – fα, que é perpendicular a [OP], fica perpendicular aoeixo X e passa por P’ (que é o ponto P rodado). A’ ≡ A, pois Aé um ponto do eixo da rotação (roda sobre si próprio, pois éfixo). O novo traço horizontal de α, hα’, é concorrente com fα’,
no eixo X e contém A’1, pois α, após a rotação, é projectante horizontal (é vertical). Os pontos B e C mantêm os afastamentos na sua rotação,o que nos permite determinar B’1 e C’1 sobre hα’. B2 e C2 rodaram até às respectivas linhas de chamada (a amplitude da rotação de B2 e C2 foiigual à da rotação de P2). Um plano frontal (de frente) é um plano projectante horizontal que é paralelo ao Plano Frontal de Projecção. Assim,na rotação seguinte, com vista a tornar α num plano paralelo ao Plano Frontal de Projecção, as alterações processam-se ao nível dos afasta-mentos – a rotação processa-se, pois, em planos horizontais (de nível), pelo que o eixo é vertical. O segundo eixo de rotação, e’, escolheu-sepor forma a A’ ser o ponto a rodar – [QA’] é perpendicular a α e a e’ (Q é o centro da rotação de A’). A’ rodou até [QA’’] ficar perpendicular aoeixo X – hα, na sua nova posição (hα’’) ficou paralelo ao eixo X. O plano α é, agora, frontal (de frente) e não tem traço frontal. B’1 e C’1 rodaramaté (hα’’), obtendo-se B’’1 e C’’1. B’2 e C’2 mantiveram as suas cotas, o que nos permitiu determinar B’’2 e C’’2 nas linhas de chamada de B’’1 eC’’1. O plano α, na sua nova posição, é um plano frontal (de frente), pelo que a V.G. do triângulo [ABC] está no triângulo [A’’2B’’2C’’2].
54.Em primeiro lugar, representaram-se o plano ρ, pelos seus traços, e o triângulo [PQR], pelas suas projecções, pertencente ao plano. Sobrea determinação das projecções do triângulo [PQR], ver relatório do exercício 49. O ponto M foi o ponto da recta r que nos permitiu determi-nar as projecções do ponto R. Em seguida, teve-se em conta que um plano horizontal (de nível) é projectante frontal. Assim, começou-sepor transformar o plano ρ num plano projectante frontal (de topo) – as rectas horizontais (de nível) de um plano de topo são rectas de topo,pelo que hρ de rodar até ficar perpendicular ao eixo X (de topo). As cotas mantêm-se, pelo que a rotação processa-se em planos horizontais(de nível) – o eixo da rotação, e, é uma recta vertical qualquer (por economia de traçados, optou-se por conduzir e pelo ponto P). O ponto Aé o ponto de hρ que nos permite rodar o plano – [OA] é simultaneamente perpendicular a hρ e a e (O é o centro da rotação de A). O ponto Arodou até [OA] ficar paralelo ao eixo X – hρ’ que é perpendicular a [OA], fica perpendicular ao eixo X e passa por A’ (que é o ponto A roda-do). P’ ≡ P, pois P é um ponto do eixo da rotação (roda sobre si próprio, pois é fixo). O novo traço frontal de ρ, fρ’ é concorrente com hρ’ noeixo X e contém P’2, pois ρ, após a rotação, é projectante frontal (é de topo). Os pontos Q e R mantêm as cotas na sua rotação, o que nospermite determinar Q’2 e R’2 sobre fρ’. Q1 e R1 rodaram até às respectivas linhas de chamada (a amplitude da rotação de Q1 e R1 foi igual àda rotação de A1). Um plano horizontal (de nível) é um plano projectante frontal que é paralelo ao Plano Horizontal de Projecção. Assim, narotação seguinte, com vista a tornar ρ num plano paralelo ao Plano Horizontal de Projecção, as alterações processam-se ao nível das cotas
53.
(Continua na página seguinte)
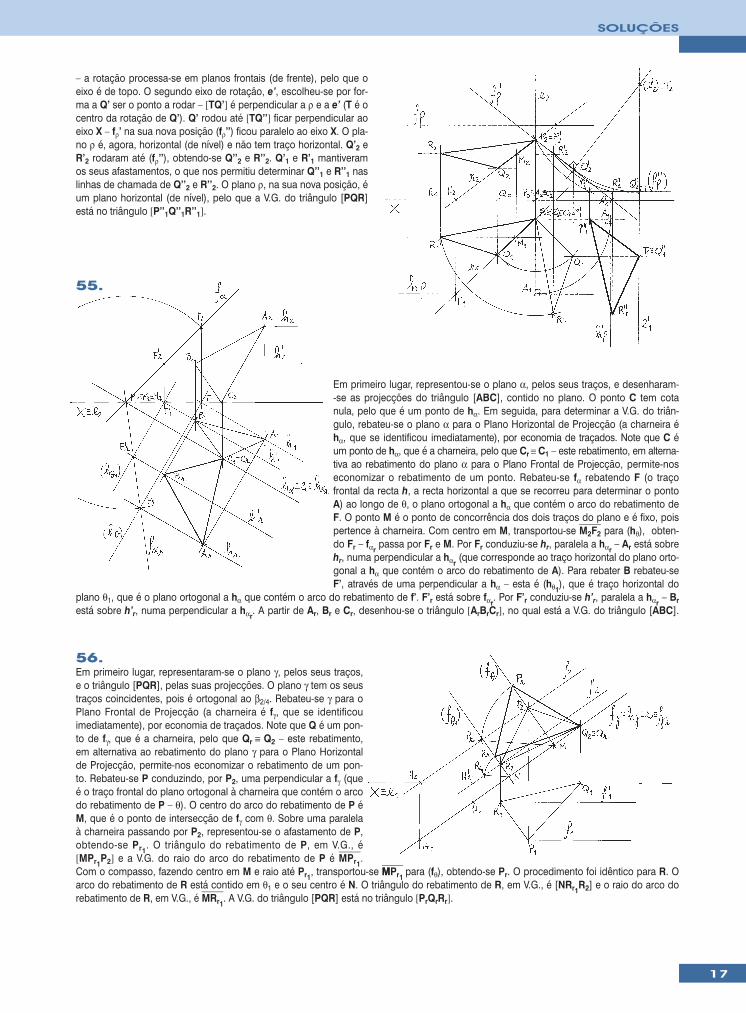
Em primeiro lugar, representou-se o plano α, pelos seus traços, e desenharam--se as projecções do triângulo [ABC], contido no plano. O ponto C tem cotanula, pelo que é um ponto de hα. Em seguida, para determinar a V.G. do triân-gulo, rebateu-se o plano α para o Plano Horizontal de Projecção (a charneira éhα, que se identificou imediatamente), por economia de traçados. Note que C éum ponto de hα, que é a charneira, pelo que Cr ≡ C1 – este rebatimento, em alterna-tiva ao rebatimento do plano α para o Plano Frontal de Projecção, permite-noseconomizar o rebatimento de um ponto. Rebateu-se fα rebatendo F (o traçofrontal da recta h, a recta horizontal a que se recorreu para determinar o pontoA) ao longo de θ, o plano ortogonal a hα que contém o arco do rebatimento deF. O ponto M é o ponto de concorrência dos dois traços do plano e é fixo, poispertence à charneira. Com centro em M, transportou-se M�2�F�2� para (hθ), obten-do Fr – fαr
passa por Fr e M. Por Fr conduziu-se hr, paralela a hαr– Ar está sobre
hr, numa perpendicular a hαr(que corresponde ao traço horizontal do plano orto-
gonal a hα que contém o arco do rebatimento de A). Para rebater B rebateu-seF’, através de uma perpendicular a hα – esta é (hθ1
), que é traço horizontal doplano θ1, que é o plano ortogonal a hα que contém o arco do rebatimento de f’. F’r está sobre fαr
. Por F’r conduziu-se h’r, paralela a hαr– Br
está sobre h’r, numa perpendicular a hαr. A partir de Ar, Br e Cr, desenhou-se o triângulo [ArBrCr], no qual está a V.G. do triângulo [ABC].
17
SOLUÇÕES
55.
– a rotação processa-se em planos frontais (de frente), pelo que oeixo é de topo. O segundo eixo de rotação, e’, escolheu-se por for-ma a Q’ ser o ponto a rodar – [TQ’] é perpendicular a ρ e a e’ (T é ocentro da rotação de Q’). Q’ rodou até [TQ’’] ficar perpendicular aoeixo X – fρ’ na sua nova posição (fρ’’) ficou paralelo ao eixo X. O pla-no ρ é, agora, horizontal (de nível) e não tem traço horizontal. Q’2 eR’2 rodaram até (fρ’’), obtendo-se Q’’2 e R’’2. Q’1 e R’1 mantiveramos seus afastamentos, o que nos permitiu determinar Q’’1 e R’’1 naslinhas de chamada de Q’’2 e R’’2. O plano ρ, na sua nova posição, éum plano horizontal (de nível), pelo que a V.G. do triângulo [PQR]está no triângulo [P’’1Q’’1R’’1].
56.Em primeiro lugar, representaram-se o plano γ, pelos seus traços,e o triângulo [PQR], pelas suas projecções. O plano γ tem os seustraços coincidentes, pois é ortogonal ao β2/4. Rebateu-se γ para oPlano Frontal de Projecção (a charneira é fγ, que se identificouimediatamente), por economia de traçados. Note que Q é um pon-to de fγ, que é a charneira, pelo que Qr ≡ Q2 – este rebatimento,em alternativa ao rebatimento do plano γ para o Plano Horizontalde Projecção, permite-nos economizar o rebatimento de um pon-to. Rebateu-se P conduzindo, por P2, uma perpendicular a fγ (queé o traço frontal do plano ortogonal à charneira que contém o arcodo rebatimento de P – θ). O centro do arco do rebatimento de P éM, que é o ponto de intersecção de fγ com θ. Sobre uma paralelaà charneira passando por P2, representou-se o afastamento de P,obtendo-se Pr1
. O triângulo do rebatimento de P, em V.G., é[MPr1
P2] e a V.G. do raio do arco do rebatimento de P é M�P�r�1�.
Com o compasso, fazendo centro em M e raio até Pr1, transportou-se MM�P�r�1
� para (fθ), obtendo-se Pr. O procedimento foi idêntico para R. Oarco do rebatimento de R está contido em θ1 e o seu centro é N. O triângulo do rebatimento de R, em V.G., é [NRr1
R2] e o raio do arco dorebatimento de R, em V.G., é M�R�r�1
�. A V.G. do triângulo [PQR] está no triângulo [PrQrRr].
18
SOLUÇÕES
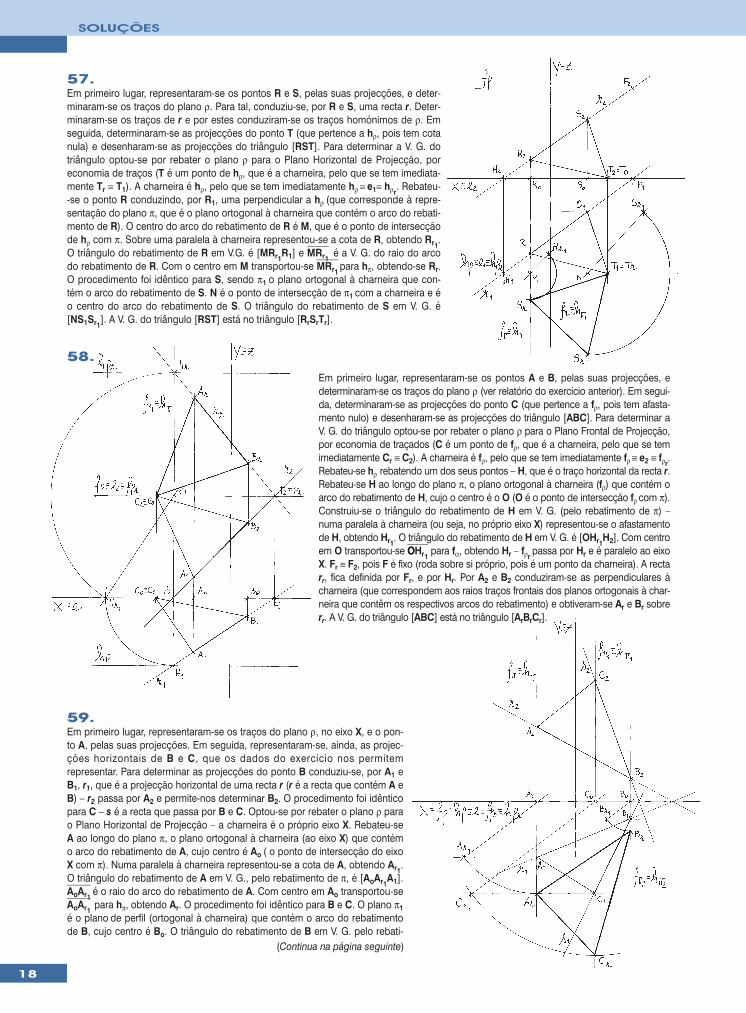
57.Em primeiro lugar, representaram-se os pontos R e S, pelas suas projecções, e deter-minaram-se os traços do plano ρ. Para tal, conduziu-se, por R e S, uma recta r. Deter-minaram-se os traços de r e por estes conduziram-se os traços homónimos de ρ. Emseguida, determinaram-se as projecções do ponto T (que pertence a hρ, pois tem cotanula) e desenharam-se as projecções do triângulo [RST]. Para determinar a V. G. dotriângulo optou-se por rebater o plano ρ para o Plano Horizontal de Projecção, poreconomia de traços (T é um ponto de hρ, que é a charneira, pelo que se tem imediata-mente Tr ≡ T1). A charneira é hρ, pelo que se tem imediatamente hρ ≡ e1≡ hρr
. Rebateu--se o ponto R conduzindo, por R1, uma perpendicular a hρ (que corresponde à repre-sentação do plano π, que é o plano ortogonal à charneira que contém o arco do rebati-mento de R). O centro do arco do rebatimento de R é M, que é o ponto de intersecçãode hρ com π. Sobre uma paralela à charneira representou-se a cota de R, obtendo Rr1
.O triângulo do rebatimento de R em V.G. é [MRr1
R1] e M�R�r�1� é a V. G. do raio do arco
do rebatimento de R. Com o centro em M transportou-se M�R�r�1� para hπ, obtendo-se Rr.
O procedimento foi idêntico para S, sendo π1 o plano ortogonal à charneira que con-tém o arco do rebatimento de S. N é o ponto de intersecção de π1 com a charneira e éo centro do arco do rebatimento de S. O triângulo do rebatimento de S em V. G. é[NS1Sr1
]. A V. G. do triângulo [RST] está no triângulo [RrSrTr].
58.
Em primeiro lugar, representaram-se os pontos A e B, pelas suas projecções, edeterminaram-se os traços do plano ρ (ver relatório do exercício anterior). Em segui-da, determinaram-se as projecções do ponto C (que pertence a fρ, pois tem afasta-mento nulo) e desenharam-se as projecções do triângulo [ABC]. Para determinar aV. G. do triângulo optou-se por rebater o plano ρ para o Plano Frontal de Projecção,por economia de traçados (C é um ponto de fρ, que é a charneira, pelo que se temimediatamente Cr ≡ C2). A charneira é fρ, pelo que se tem imediatamente fρ ≡ e2 ≡ fρr
.Rebateu-se hρ rebatendo um dos seus pontos – H, que é o traço horizontal da recta r.Rebateu-se H ao longo do plano π, o plano ortogonal à charneira (fρ) que contém oarco do rebatimento de H, cujo o centro é o O (O é o ponto de intersecção fρ com π).Construiu-se o triângulo do rebatimento de H em V. G. (pelo rebatimento de π) –numa paralela à charneira (ou seja, no próprio eixo X) representou-se o afastamentode H, obtendo Hr1
. O triângulo do rebatimento de H em V. G. é [OHr1H2]. Com centro
em O transportou-se OO�H�r�1� para fα, obtendo Hr – fρr
passa por Hr e é paralelo ao eixoX. Fr ≡ F2, pois F é fixo (roda sobre si próprio, pois é um ponto da charneira). A rectarr, fica definida por Fr, e por Hr. Por A2 e B2 conduziram-se as perpendiculares àcharneira (que correspondem aos raios traços frontais dos planos ortogonais à char-neira que contêm os respectivos arcos do rebatimento) e obtiveram-se Ar e Br sobrerr. A V. G. do triângulo [ABC] está no triângulo [ArBrCr].
59.Em primeiro lugar, representaram-se os traços do plano ρ, no eixo X, e o pon-to A, pelas suas projecções. Em seguida, representaram-se, ainda, as projec-ções horizontais de B e C, que os dados do exercício nos permitemrepresentar. Para determinar as projecções do ponto B conduziu-se, por A1 eB1, r1, que é a projecção horizontal de uma recta r (r é a recta que contém A eB) – r2 passa por A2 e permite-nos determinar B2. O procedimento foi idênticopara C – s é a recta que passa por B e C. Optou-se por rebater o plano ρ parao Plano Horizontal de Projecção – a charneira é o próprio eixo X. Rebateu-seA ao longo do plano π, o plano ortogonal à charneira (ao eixo X) que contémo arco do rebatimento de A, cujo centro é Ao ( o ponto de intersecção do eixoX com π). Numa paralela à charneira representou-se a cota de A, obtendo Ar1
.O triângulo do rebatimento de A em V. G., pelo rebatimento de π, é [AoAr1
A1].A�o�A�r�1
� é o raio do arco do rebatimento de A. Com centro em Ao transportou-seA�o�A�r�1
� para hπ, obtendo Ar. O procedimento foi idêntico para B e C. O plano π1é o plano de perfil (ortogonal à charneira) que contém o arco do rebatimentode B, cujo centro é Bo. O triângulo do rebatimento de B em V. G. pelo rebati-
(Continua na página seguinte)
19
SOLUÇÕES
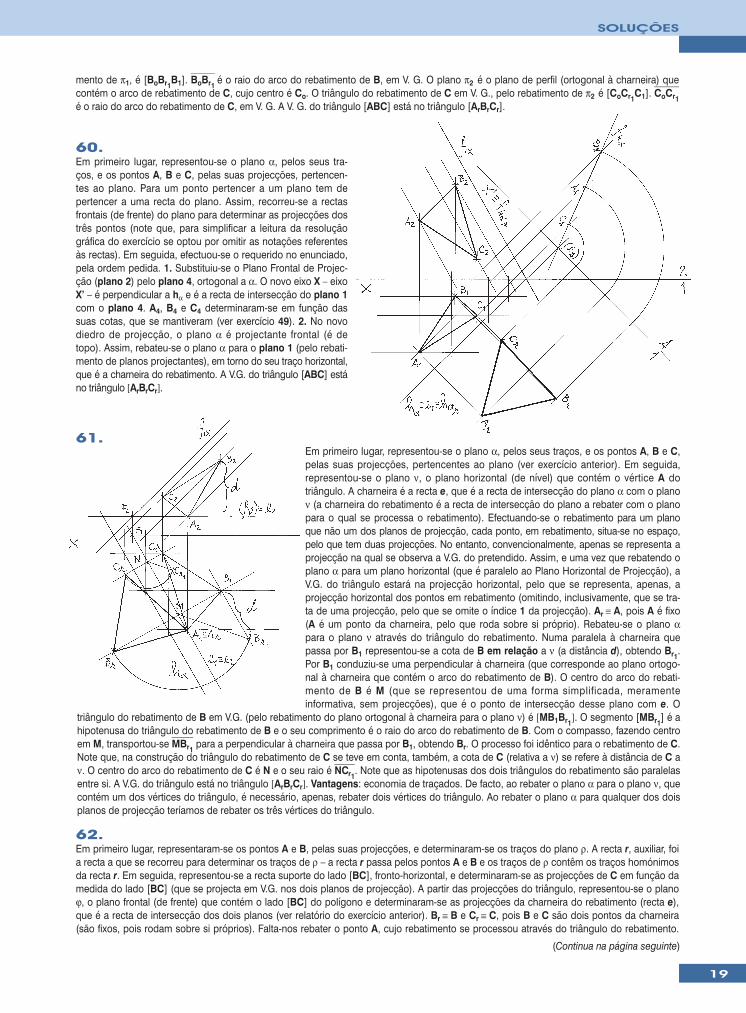
60.Em primeiro lugar, representou-se o plano α, pelos seus tra-ços, e os pontos A, B e C, pelas suas projecções, pertencen-tes ao plano. Para um ponto pertencer a um plano tem depertencer a uma recta do plano. Assim, recorreu-se a rectasfrontais (de frente) do plano para determinar as projecções dostrês pontos (note que, para simplificar a leitura da resoluçãográfica do exercício se optou por omitir as notações referentesàs rectas). Em seguida, efectuou-se o requerido no enunciado,pela ordem pedida. 1. Substituiu-se o Plano Frontal de Projec-ção (plano 2) pelo plano 4, ortogonal a α. O novo eixo X – eixoX’ – é perpendicular a hα e é a recta de intersecção do plano 1com o plano 4. A4, B4 e C4 determinaram-se em função dassuas cotas, que se mantiveram (ver exercício 49). 2. No novodiedro de projecção, o plano α é projectante frontal (é detopo). Assim, rebateu-se o plano α para o plano 1 (pelo rebati-mento de planos projectantes), em torno do seu traço horizontal,que é a charneira do rebatimento. A V.G. do triângulo [ABC] estáno triângulo [ArBrCr].
Em primeiro lugar, representou-se o plano α, pelos seus traços, e os pontos A, B e C,pelas suas projecções, pertencentes ao plano (ver exercício anterior). Em seguida,representou-se o plano ν, o plano horizontal (de nível) que contém o vértice A dotriângulo. A charneira é a recta e, que é a recta de intersecção do plano α com o planoν (a charneira do rebatimento é a recta de intersecção do plano a rebater com o planopara o qual se processa o rebatimento). Efectuando-se o rebatimento para um planoque não um dos planos de projecção, cada ponto, em rebatimento, situa-se no espaço,pelo que tem duas projecções. No entanto, convencionalmente, apenas se representa aprojecção na qual se observa a V.G. do pretendido. Assim, e uma vez que rebatendo oplano α para um plano horizontal (que é paralelo ao Plano Horizontal de Projecção), aV.G. do triângulo estará na projecção horizontal, pelo que se representa, apenas, aprojecção horizontal dos pontos em rebatimento (omitindo, inclusivamente, que se tra-ta de uma projecção, pelo que se omite o índice 1 da projecção). Ar ≡ A, pois A é fixo(A é um ponto da charneira, pelo que roda sobre si próprio). Rebateu-se o plano αpara o plano ν através do triângulo do rebatimento. Numa paralela à charneira quepassa por B1 representou-se a cota de B em relação a ν (a distância d), obtendo Br1
.Por B1 conduziu-se uma perpendicular à charneira (que corresponde ao plano ortogo-nal à charneira que contém o arco do rebatimento de B). O centro do arco do rebati-mento de B é M (que se representou de uma forma simplificada, meramenteinformativa, sem projecções), que é o ponto de intersecção desse plano com e. O
triângulo do rebatimento de B em V.G. (pelo rebatimento do plano ortogonal à charneira para o plano ν) é [MB1Br1]. O segmento [MBr1
] é ahipotenusa do triângulo do rebatimento de B e o seu comprimento é o raio do arco do rebatimento de B. Com o compasso, fazendo centroem M, transportou-se M�B�r�1
� para a perpendicular à charneira que passa por B1, obtendo Br. O processo foi idêntico para o rebatimento de C.Note que, na construção do triângulo do rebatimento de C se teve em conta, também, a cota de C (relativa a ν) se refere à distância de C aν. O centro do arco do rebatimento de C é N e o seu raio é N�C�r�1
�. Note que as hipotenusas dos dois triângulos do rebatimento são paralelasentre si. A V.G. do triângulo está no triângulo [ArBrCr]. Vantagens: economia de traçados. De facto, ao rebater o plano α para o plano ν, quecontém um dos vértices do triângulo, é necessário, apenas, rebater dois vértices do triângulo. Ao rebater o plano α para qualquer dos doisplanos de projecção teríamos de rebater os três vértices do triângulo.
62.Em primeiro lugar, representaram-se os pontos A e B, pelas suas projecções, e determinaram-se os traços do plano ρ. A recta r, auxiliar, foia recta a que se recorreu para determinar os traços de ρ – a recta r passa pelos pontos A e B e os traços de ρ contêm os traços homónimosda recta r. Em seguida, representou-se a recta suporte do lado [BC], fronto-horizontal, e determinaram-se as projecções de C em função damedida do lado [BC] (que se projecta em V.G. nos dois planos de projecção). A partir das projecções do triângulo, representou-se o planoϕ, o plano frontal (de frente) que contém o lado [BC] do polígono e determinaram-se as projecções da charneira do rebatimento (recta e),que é a recta de intersecção dos dois planos (ver relatório do exercício anterior). Br ≡ B e Cr ≡ C, pois B e C são dois pontos da charneira(são fixos, pois rodam sobre si próprios). Falta-nos rebater o ponto A, cujo rebatimento se processou através do triângulo do rebatimento.
mento de π1, é [BoBr1B1]. B�o�B�r�1
� é o raio do arco do rebatimento de B, em V. G. O plano π2 é o plano de perfil (ortogonal à charneira) quecontém o arco de rebatimento de C, cujo centro é Co. O triângulo do rebatimento de C em V. G., pelo rebatimento de π2 é [CoCr1
C1]. C�o�C�r�1�
é o raio do arco do rebatimento de C, em V. G. A V. G. do triângulo [ABC] está no triângulo [ArBrCr].
(Continua na página seguinte)
61.
20
SOLUÇÕES
Numa paralela à charneira que passa por A2 representou-se o afastamento de Aem relação a ϕ (a distância d), obtendo Ar1
. Por A2 conduziu-se uma perpendicu-lar à charneira, que corresponde ao plano ortogonal à charneira que contém oarco do rebatimento de A. O centro do arco do rebatimento de A é O (que se re-presentou de uma forma simplificada, meramente informativa, sem projecções),que é o ponto de intersecção desse plano com e. O triângulo do rebatimento deA em V.G. (pelo rebatimento do plano ortogonal à charneira para o plano ϕ) é[OA2Ar1
]. O segmento [OAr1] é a hipotenusa do triângulo do rebatimento de A e o
seu comprimento é o raio do arco do rebatimento de A. Com o compasso, fazendocentro em O, transportou-se O�A�r�1
� para a perpendicular à charneira que passa porA2, obtendo Ar. A V.G. do triângulo está no triângulo [ArBrCr]. Vantagens:economia de traçados. De facto, ao rebater o plano ρ para o plano ϕ é necessá-rio, apenas, rebater um vértice do triângulo, uma vez que dois dos seus vértices(os que estão contidos na charneira) estão automaticamente rebatidos. Ao rebatero plano ρ para qualquer dos dois planos de projecção, seria necessário efectuar orebatimento dos três vértices do triângulo. Note que, para a resolução do exercí-cio, não foi fundamental a determinação dos traços do plano ρ – o exercício teriaa mesma resolução, caso os traços do plano não tivessem sido determinados.
REPRESENTAÇÃO DE FIGURAS PLANAS III
16
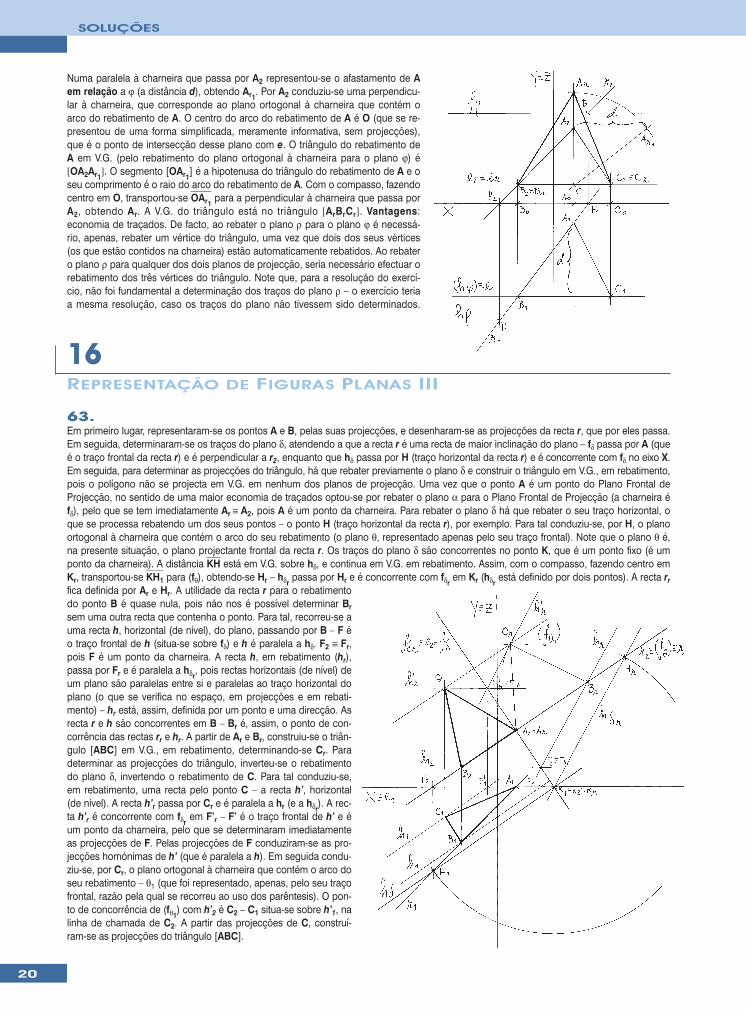
63.Em primeiro lugar, representaram-se os pontos A e B, pelas suas projecções, e desenharam-se as projecções da recta r, que por eles passa.Em seguida, determinaram-se os traços do plano δ, atendendo a que a recta r é uma recta de maior inclinação do plano – fδ passa por A (queé o traço frontal da recta r) e é perpendicular a r2, enquanto que hδ passa por H (traço horizontal da recta r) e é concorrente com fδ no eixo X.Em seguida, para determinar as projecções do triângulo, há que rebater previamente o plano δ e construir o triângulo em V.G., em rebatimento,pois o polígono não se projecta em V.G. em nenhum dos planos de projecção. Uma vez que o ponto A é um ponto do Plano Frontal deProjecção, no sentido de uma maior economia de traçados optou-se por rebater o plano α para o Plano Frontal de Projecção (a charneira éfδ), pelo que se tem imediatamente Ar ≡ A2, pois A é um ponto da charneira. Para rebater o plano δ há que rebater o seu traço horizontal, oque se processa rebatendo um dos seus pontos – o ponto H (traço horizontal da recta r), por exemplo. Para tal conduziu-se, por H, o planoortogonal à charneira que contém o arco do seu rebatimento (o plano θ, representado apenas pelo seu traço frontal). Note que o plano θ é,na presente situação, o plano projectante frontal da recta r. Os traços do plano δ são concorrentes no ponto K, que é um ponto fixo (é umponto da charneira). A distância K�H� está em V.G. sobre hδ, e continua em V.G. em rebatimento. Assim, com o compasso, fazendo centro emKr, transportou-se K�H�1� para (fθ), obtendo-se Hr – hδr
passa por Hr e é concorrente com fδrem Kr (hδr
está definido por dois pontos). A recta rrfica definida por Ar e Hr. A utilidade da recta r para o rebatimentodo ponto B é quase nula, pois não nos é possível determinar Br
sem uma outra recta que contenha o ponto. Para tal, recorreu-se auma recta h, horizontal (de nível), do plano, passando por B – F éo traço frontal de h (situa-se sobre fδ) e h é paralela a hδ. F2 ≡ Fr,pois F é um ponto da charneira. A recta h, em rebatimento (hr),passa por Fr e é paralela a hδr
, pois rectas horizontais (de nível) deum plano são paralelas entre si e paralelas ao traço horizontal doplano (o que se verifica no espaço, em projecções e em rebati-mento) – hr está, assim, definida por um ponto e uma direcção. Asrecta r e h são concorrentes em B – Br é, assim, o ponto de con-corrência das rectas rr e hr. A partir de Ar e Br, construiu-se o triân-gulo [ABC] em V.G., em rebatimento, determinando-se Cr. Paradeterminar as projecções do triângulo, inverteu-se o rebatimentodo plano δ, invertendo o rebatimento de C. Para tal conduziu-se,em rebatimento, uma recta pelo ponto C – a recta h’, horizontal(de nível). A recta h’r passa por Cr e é paralela a hr (e a hδr
). A rec-ta h’r é concorrente com fδr
em F’r – F’ é o traço frontal de h’ e éum ponto da charneira, pelo que se determinaram imediatamenteas projecções de F. Pelas projecções de F conduziram-se as pro-jecções homónimas de h’ (que é paralela a h). Em seguida condu-ziu-se, por Cr, o plano ortogonal à charneira que contém o arco doseu rebatimento – θ1 (que foi representado, apenas, pelo seu traçofrontal, razão pela qual se recorreu ao uso dos parêntesis). O pon-to de concorrência de (fθ1
) com h’2 é C2 – C1 situa-se sobre h’1, nalinha de chamada de C2. A partir das projecções de C, construí-ram-se as projecções do triângulo [ABC].
21
SOLUÇÕES
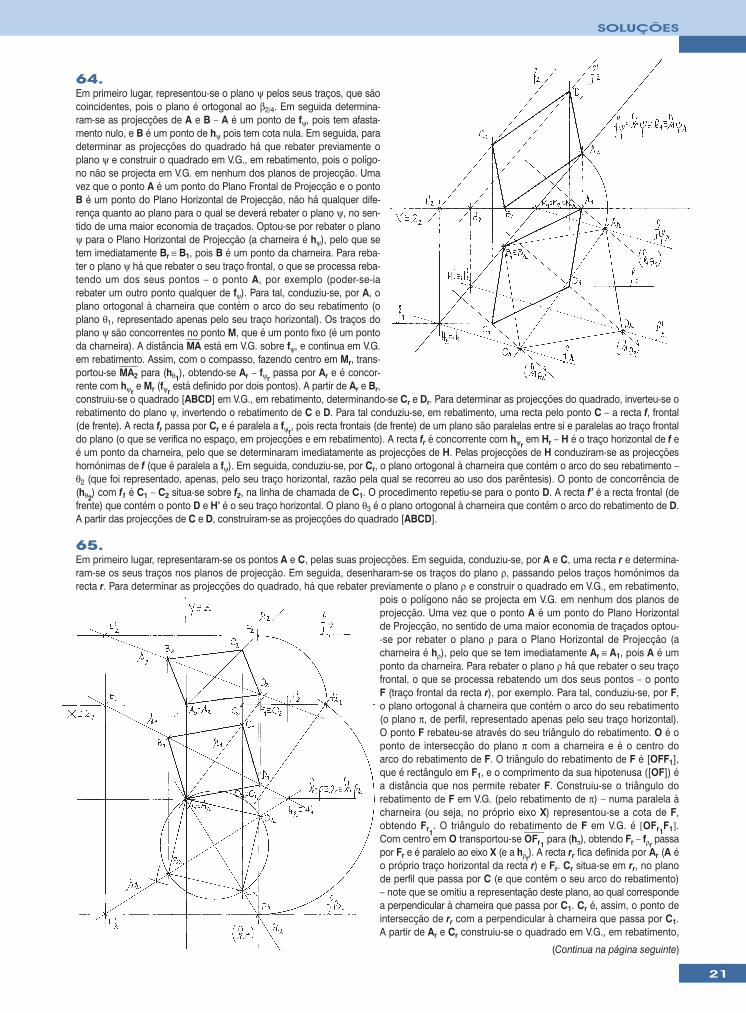
64.Em primeiro lugar, representou-se o plano ψ pelos seus traços, que sãocoincidentes, pois o plano é ortogonal ao β2/4. Em seguida determina-ram-se as projecções de A e B – A é um ponto de fψ, pois tem afasta-mento nulo, e B é um ponto de hψ pois tem cota nula. Em seguida, paradeterminar as projecções do quadrado há que rebater previamente oplano ψ e construir o quadrado em V.G., em rebatimento, pois o polígo-no não se projecta em V.G. em nenhum dos planos de projecção. Umavez que o ponto A é um ponto do Plano Frontal de Projecção e o pontoB é um ponto do Plano Horizontal de Projecção, não há qualquer dife-rença quanto ao plano para o qual se deverá rebater o plano ψ, no sen-tido de uma maior economia de traçados. Optou-se por rebater o planoψ para o Plano Horizontal de Projecção (a charneira é hψ), pelo que setem imediatamente Br ≡ B1, pois B é um ponto da charneira. Para reba-ter o plano ψ há que rebater o seu traço frontal, o que se processa reba-tendo um dos seus pontos – o ponto A, por exemplo (poder-se-iarebater um outro ponto qualquer de fψ). Para tal, conduziu-se, por A, oplano ortogonal à charneira que contém o arco do seu rebatimento (oplano θ1, representado apenas pelo seu traço horizontal). Os traços doplano ψ são concorrentes no ponto M, que é um ponto fixo (é um pontoda charneira). A distância M�A� está em V.G. sobre fψ, e continua em V.G.em rebatimento. Assim, com o compasso, fazendo centro em Mr, trans-portou-se M�A�2� para (hθ1
), obtendo-se Ar – fψrpassa por Ar e é concor-
rente com hψre Mr (fψr
está definido por dois pontos). A partir de Ar e Br,construiu-se o quadrado [ABCD] em V.G., em rebatimento, determinando-se Cr e Dr. Para determinar as projecções do quadrado, inverteu-se orebatimento do plano ψ, invertendo o rebatimento de C e D. Para tal conduziu-se, em rebatimento, uma recta pelo ponto C – a recta f, frontal(de frente). A recta fr passa por Cr e é paralela a fψr
, pois recta frontais (de frente) de um plano são paralelas entre si e paralelas ao traço frontaldo plano (o que se verifica no espaço, em projecções e em rebatimento). A recta fr é concorrente com hψr
em Hr – H é o traço horizontal de f eé um ponto da charneira, pelo que se determinaram imediatamente as projecções de H. Pelas projecções de H conduziram-se as projecçõeshomónimas de f (que é paralela a fψ). Em seguida, conduziu-se, por Cr, o plano ortogonal à charneira que contém o arco do seu rebatimento –θ2 (que foi representado, apenas, pelo seu traço horizontal, razão pela qual se recorreu ao uso dos parêntesis). O ponto de concorrência de(hθ2
) com f1 é C1 – C2 situa-se sobre f2, na linha de chamada de C1. O procedimento repetiu-se para o ponto D. A recta f’ é a recta frontal (defrente) que contém o ponto D e H’ é o seu traço horizontal. O plano θ3 é o plano ortogonal à charneira que contém o arco do rebatimento de D.A partir das projecções de C e D, construíram-se as projecções do quadrado [ABCD].
65.Em primeiro lugar, representaram-se os pontos A e C, pelas suas projecções. Em seguida, conduziu-se, por A e C, uma recta r e determina-ram-se os seus traços nos planos de projecção. Em seguida, desenharam-se os traços do plano ρ, passando pelos traços homónimos darecta r. Para determinar as projecções do quadrado, há que rebater previamente o plano ρ e construir o quadrado em V.G., em rebatimento,
pois o polígono não se projecta em V.G. em nenhum dos planos deprojecção. Uma vez que o ponto A é um ponto do Plano Horizontalde Projecção, no sentido de uma maior economia de traçados optou--se por rebater o plano ρ para o Plano Horizontal de Projecção (acharneira é hρ), pelo que se tem imediatamente Ar ≡ A1, pois A é umponto da charneira. Para rebater o plano ρ há que rebater o seu traçofrontal, o que se processa rebatendo um dos seus pontos – o pontoF (traço frontal da recta r), por exemplo. Para tal, conduziu-se, por F,o plano ortogonal à charneira que contém o arco do seu rebatimento(o plano π, de perfil, representado apenas pelo seu traço horizontal).O ponto F rebateu-se através do seu triângulo do rebatimento. O é oponto de intersecção do plano π com a charneira e é o centro doarco do rebatimento de F. O triângulo do rebatimento de F é [OFF1],que é rectângulo em F1, e o comprimento da sua hipotenusa ([OF]) éa distância que nos permite rebater F. Construiu-se o triângulo dorebatimento de F em V.G. (pelo rebatimento de π) – numa paralela àcharneira (ou seja, no próprio eixo X) representou-se a cota de F,obtendo Fr1
. O triângulo do rebatimento de F em V.G. é [OFr1F1].
Com centro em O transportou-se O�F�r�1� para (hπ), obtendo Fr – fρr
passapor Fr e é paralelo ao eixo X (e a hρr
). A recta rr fica definida por Ar (A éo próprio traço horizontal da recta r) e Fr. Cr situa-se em rr, no planode perfil que passa por C (e que contém o seu arco do rebatimento)– note que se omitiu a representação deste plano, ao qual correspondea perpendicular à charneira que passa por C1. Cr é, assim, o ponto deintersecção de rr com a perpendicular à charneira que passa por C1.A partir de Ar e Cr construiu-se o quadrado em V.G., em rebatimento,
(Continua na página seguinte)
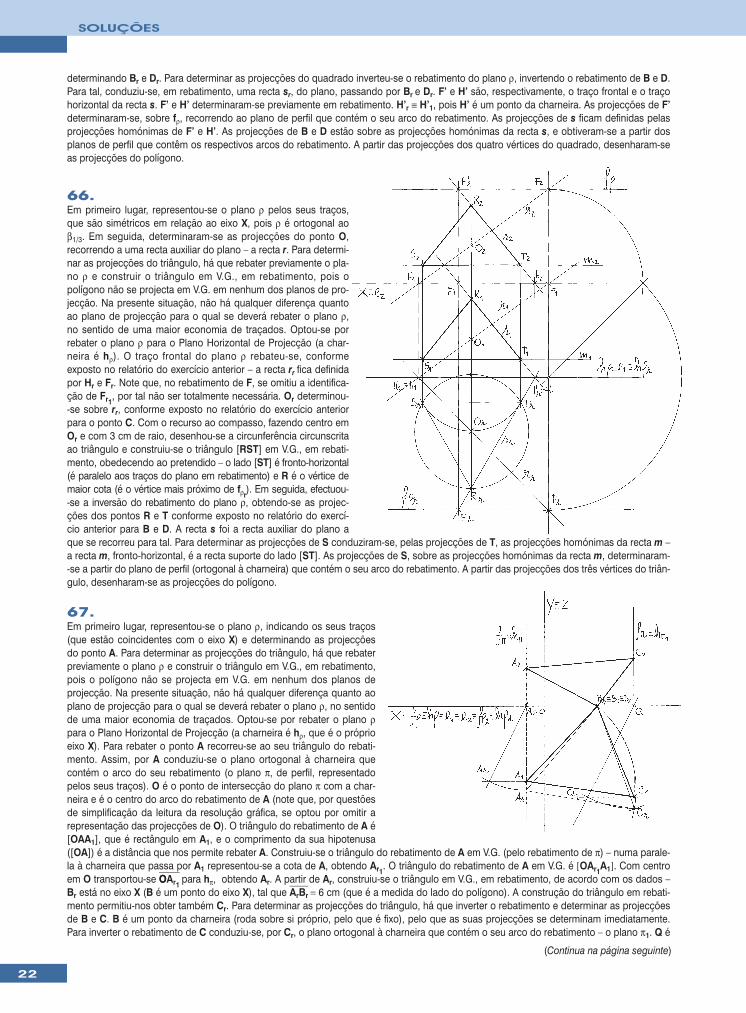
22
SOLUÇÕES
determinando Br e Dr. Para determinar as projecções do quadrado inverteu-se o rebatimento do plano ρ, invertendo o rebatimento de B e D.Para tal, conduziu-se, em rebatimento, uma recta sr, do plano, passando por Br e Dr. F’ e H’ são, respectivamente, o traço frontal e o traçohorizontal da recta s. F’ e H’ determinaram-se previamente em rebatimento. H’r ≡ H’1, pois H’ é um ponto da charneira. As projecções de F’determinaram-se, sobre fρ, recorrendo ao plano de perfil que contém o seu arco do rebatimento. As projecções de s ficam definidas pelasprojecções homónimas de F’ e H’. As projecções de B e D estão sobre as projecções homónimas da recta s, e obtiveram-se a partir dosplanos de perfil que contêm os respectivos arcos do rebatimento. A partir das projecções dos quatro vértices do quadrado, desenharam-seas projecções do polígono.
66.Em primeiro lugar, representou-se o plano ρ pelos seus traços,que são simétricos em relação ao eixo X, pois ρ é ortogonal aoβ1/3. Em seguida, determinaram-se as projecções do ponto O,recorrendo a uma recta auxiliar do plano – a recta r. Para determi-nar as projecções do triângulo, há que rebater previamente o pla-no ρ e construir o triângulo em V.G., em rebatimento, pois opolígono não se projecta em V.G. em nenhum dos planos de pro-jecção. Na presente situação, não há qualquer diferença quantoao plano de projecção para o qual se deverá rebater o plano ρ,no sentido de uma maior economia de traçados. Optou-se porrebater o plano ρ para o Plano Horizontal de Projecção (a char-neira é hρ). O traço frontal do plano ρ rebateu-se, conformeexposto no relatório do exercício anterior – a recta rr fica definidapor Hr e Fr. Note que, no rebatimento de F, se omitiu a identifica-ção de Fr1
, por tal não ser totalmente necessária. Or determinou--se sobre rr, conforme exposto no relatório do exercício anteriorpara o ponto C. Com o recurso ao compasso, fazendo centro emOr e com 3 cm de raio, desenhou-se a circunferência circunscritaao triângulo e construiu-se o triângulo [RST] em V.G., em rebati-mento, obedecendo ao pretendido – o lado [ST] é fronto-horizontal(é paralelo aos traços do plano em rebatimento) e R é o vértice demaior cota (é o vértice mais próximo de fρr
). Em seguida, efectuou--se a inversão do rebatimento do plano ρ, obtendo-se as projec-ções dos pontos R e T conforme exposto no relatório do exercí-cio anterior para B e D. A recta s foi a recta auxiliar do plano aque se recorreu para tal. Para determinar as projecções de S conduziram-se, pelas projecções de T, as projecções homónimas da recta m –a recta m, fronto-horizontal, é a recta suporte do lado [ST]. As projecções de S, sobre as projecções homónimas da recta m, determinaram--se a partir do plano de perfil (ortogonal à charneira) que contém o seu arco do rebatimento. A partir das projecções dos três vértices do triân-gulo, desenharam-se as projecções do polígono.
67.Em primeiro lugar, representou-se o plano ρ, indicando os seus traços(que estão coincidentes com o eixo X) e determinando as projecçõesdo ponto A. Para determinar as projecções do triângulo, há que rebaterpreviamente o plano ρ e construir o triângulo em V.G., em rebatimento,pois o polígono não se projecta em V.G. em nenhum dos planos deprojecção. Na presente situação, não há qualquer diferença quanto aoplano de projecção para o qual se deverá rebater o plano ρ, no sentidode uma maior economia de traçados. Optou-se por rebater o plano ρpara o Plano Horizontal de Projecção (a charneira é hρ, que é o próprioeixo X). Para rebater o ponto A recorreu-se ao seu triângulo do rebati-mento. Assim, por A conduziu-se o plano ortogonal à charneira quecontém o arco do seu rebatimento (o plano π, de perfil, representadopelos seus traços). O é o ponto de intersecção do plano π com a char-neira e é o centro do arco do rebatimento de A (note que, por questõesde simplificação da leitura da resolução gráfica, se optou por omitir arepresentação das projecções de O). O triângulo do rebatimento de A é[OAA1], que é rectângulo em A1, e o comprimento da sua hipotenusa([OA]) é a distância que nos permite rebater A. Construiu-se o triângulo do rebatimento de A em V.G. (pelo rebatimento de π) – numa parale-la à charneira que passa por A1 representou-se a cota de A, obtendo Ar1
. O triângulo do rebatimento de A em V.G. é [OAr1A1]. Com centro
em O transportou-se OO�A�r�1� para hπ, obtendo Ar. A partir de Ar, construiu-se o triângulo em V.G., em rebatimento, de acordo com os dados –
Br está no eixo X (B é um ponto do eixo X), tal que A�r�B�r� = 6 cm (que é a medida do lado do polígono). A construção do triângulo em rebati-mento permitiu-nos obter também Cr. Para determinar as projecções do triângulo, há que inverter o rebatimento e determinar as projecçõesde B e C. B é um ponto da charneira (roda sobre si próprio, pelo que é fixo), pelo que as suas projecções se determinam imediatamente.Para inverter o rebatimento de C conduziu-se, por Cr, o plano ortogonal à charneira que contém o seu arco do rebatimento – o plano π1. Q é
(Continua na página seguinte)
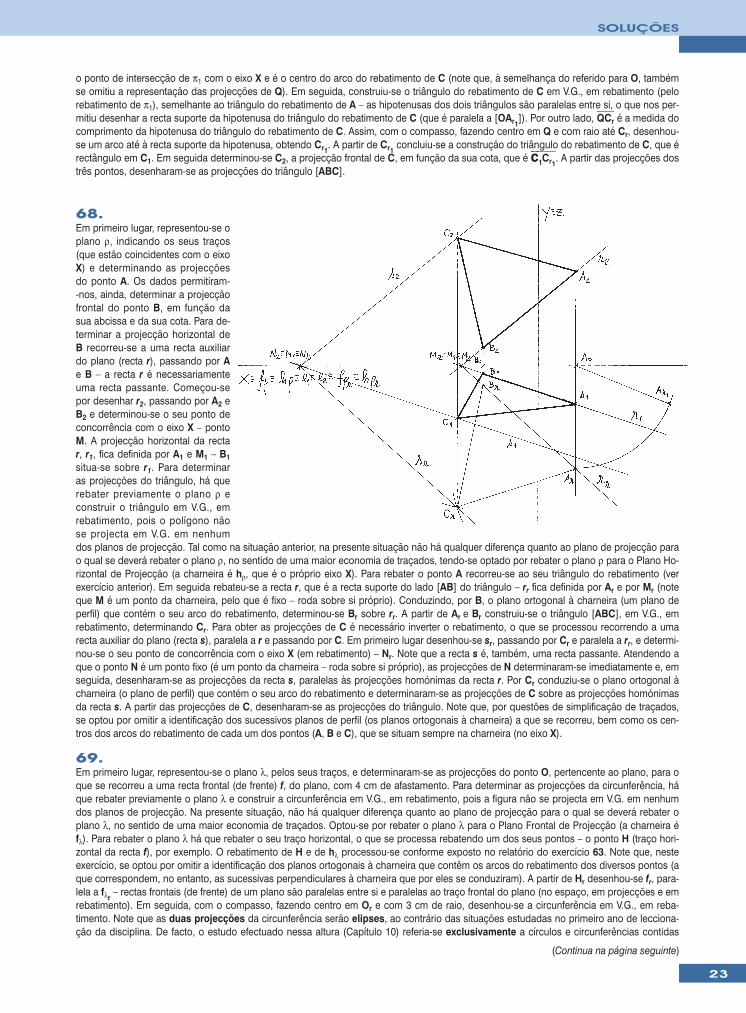
23
SOLUÇÕES
68.Em primeiro lugar, representou-se oplano ρ, indicando os seus traços(que estão coincidentes com o eixoX) e determinando as projecçõesdo ponto A. Os dados permitiram--nos, ainda, determinar a projecçãofrontal do ponto B, em função dasua abcissa e da sua cota. Para de-terminar a projecção horizontal deB recorreu-se a uma recta auxiliardo plano (recta r), passando por Ae B – a recta r é necessariamenteuma recta passante. Começou-sepor desenhar r2, passando por A2 eB2 e determinou-se o seu ponto deconcorrência com o eixo X – pontoM. A projecção horizontal da rectar, r1, fica definida por A1 e M1 – B1
situa-se sobre r1. Para determinaras projecções do triângulo, há querebater previamente o plano ρ econstruir o triângulo em V.G., emrebatimento, pois o polígono nãose projecta em V.G. em nenhumdos planos de projecção. Tal como na situação anterior, na presente situação não há qualquer diferença quanto ao plano de projecção parao qual se deverá rebater o plano ρ, no sentido de uma maior economia de traçados, tendo-se optado por rebater o plano ρ para o Plano Ho-rizontal de Projecção (a charneira é hρ, que é o próprio eixo X). Para rebater o ponto A recorreu-se ao seu triângulo do rebatimento (verexercício anterior). Em seguida rebateu-se a recta r, que é a recta suporte do lado [AB] do triângulo – rr fica definida por Ar e por Mr (noteque M é um ponto da charneira, pelo que é fixo – roda sobre si próprio). Conduzindo, por B, o plano ortogonal à charneira (um plano deperfil) que contém o seu arco do rebatimento, determinou-se Br sobre rr. A partir de Ar e Br construiu-se o triângulo [ABC], em V.G., emrebatimento, determinando Cr. Para obter as projecções de C é necessário inverter o rebatimento, o que se processou recorrendo a umarecta auxiliar do plano (recta s), paralela a r e passando por C. Em primeiro lugar desenhou-se sr, passando por Cr e paralela a rr, e determi-nou-se o seu ponto de concorrência com o eixo X (em rebatimento) – Nr. Note que a recta s é, também, uma recta passante. Atendendo aque o ponto N é um ponto fixo (é um ponto da charneira – roda sobre si próprio), as projecções de N determinaram-se imediatamente e, emseguida, desenharam-se as projecções da recta s, paralelas às projecções homónimas da recta r. Por Cr conduziu-se o plano ortogonal àcharneira (o plano de perfil) que contém o seu arco do rebatimento e determinaram-se as projecções de C sobre as projecções homónimasda recta s. A partir das projecções de C, desenharam-se as projecções do triângulo. Note que, por questões de simplificação de traçados,se optou por omitir a identificação dos sucessivos planos de perfil (os planos ortogonais à charneira) a que se recorreu, bem como os cen-tros dos arcos do rebatimento de cada um dos pontos (A, B e C), que se situam sempre na charneira (no eixo X).
69.Em primeiro lugar, representou-se o plano λ, pelos seus traços, e determinaram-se as projecções do ponto O, pertencente ao plano, para oque se recorreu a uma recta frontal (de frente) f, do plano, com 4 cm de afastamento. Para determinar as projecções da circunferência, háque rebater previamente o plano λ e construir a circunferência em V.G., em rebatimento, pois a figura não se projecta em V.G. em nenhumdos planos de projecção. Na presente situação, não há qualquer diferença quanto ao plano de projecção para o qual se deverá rebater oplano λ, no sentido de uma maior economia de traçados. Optou-se por rebater o plano λ para o Plano Frontal de Projecção (a charneira éfλ). Para rebater o plano λ há que rebater o seu traço horizontal, o que se processa rebatendo um dos seus pontos – o ponto H (traço hori-zontal da recta f), por exemplo. O rebatimento de H e de hλ processou-se conforme exposto no relatório do exercício 63. Note que, nesteexercício, se optou por omitir a identificação dos planos ortogonais à charneira que contêm os arcos do rebatimento dos diversos pontos (aque correspondem, no entanto, as sucessivas perpendiculares à charneira que por eles se conduziram). A partir de Hr desenhou-se fr, para-lela a fλr
– rectas frontais (de frente) de um plano são paralelas entre si e paralelas ao traço frontal do plano (no espaço, em projecções e emrebatimento). Em seguida, com o compasso, fazendo centro em Or e com 3 cm de raio, desenhou-se a circunferência em V.G., em reba-timento. Note que as duas projecções da circunferência serão elipses, ao contrário das situações estudadas no primeiro ano de lecciona-ção da disciplina. De facto, o estudo efectuado nessa altura (Capítulo 10) referia-se exclusivamente a círculos e circunferências contidas
o ponto de intersecção de π1 com o eixo X e é o centro do arco do rebatimento de C (note que, à semelhança do referido para O, tambémse omitiu a representação das projecções de Q). Em seguida, construiu-se o triângulo do rebatimento de C em V.G., em rebatimento (pelorebatimento de π1), semelhante ao triângulo do rebatimento de A – as hipotenusas dos dois triângulos são paralelas entre si, o que nos per-mitiu desenhar a recta suporte da hipotenusa do triângulo do rebatimento de C (que é paralela a [OAr1
]). Por outro lado, Q�C�r� é a medida docomprimento da hipotenusa do triângulo do rebatimento de C. Assim, com o compasso, fazendo centro em Q e com raio até Cr, desenhou-se um arco até à recta suporte da hipotenusa, obtendo Cr1
. A partir de Cr1concluiu-se a construção do triângulo do rebatimento de C, que é
rectângulo em C1. Em seguida determinou-se C2, a projecção frontal de C, em função da sua cota, que é C�C�1�C�r�1�. A partir das projecções dos
três pontos, desenharam-se as projecções do triângulo [ABC].
(Continua na página seguinte)
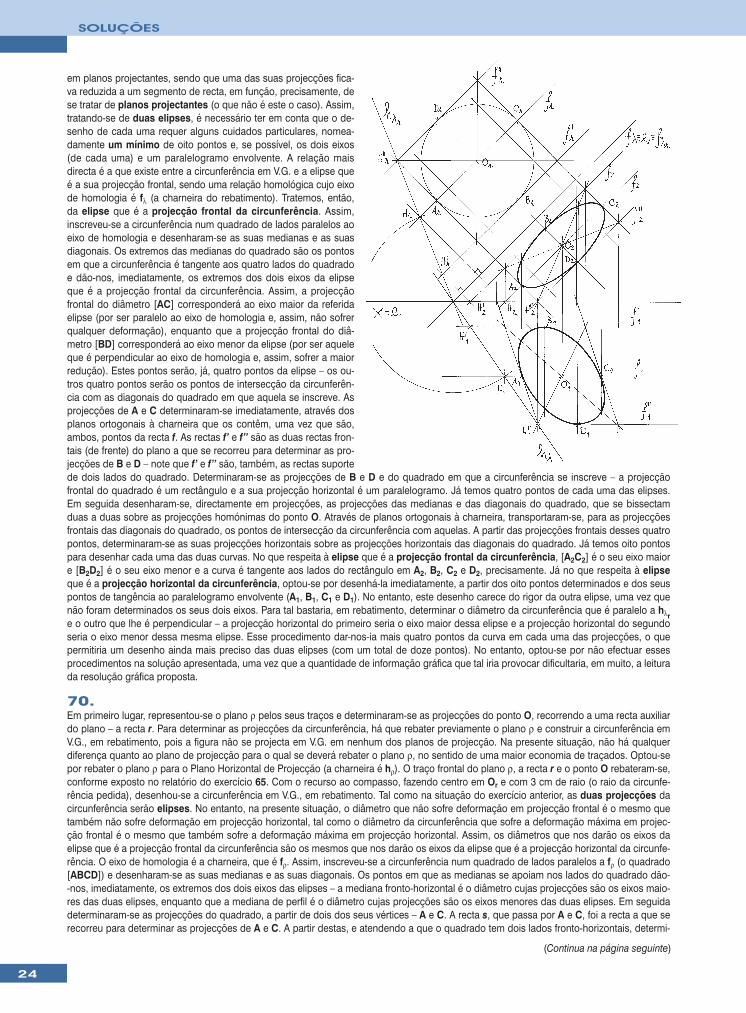
24
SOLUÇÕES
em planos projectantes, sendo que uma das suas projecções fica-va reduzida a um segmento de recta, em função, precisamente, dese tratar de planos projectantes (o que não é este o caso). Assim,tratando-se de duas elipses, é necessário ter em conta que o de-senho de cada uma requer alguns cuidados particulares, nomea-damente um mínimo de oito pontos e, se possível, os dois eixos(de cada uma) e um paralelogramo envolvente. A relação maisdirecta é a que existe entre a circunferência em V.G. e a elipse queé a sua projecção frontal, sendo uma relação homológica cujo eixode homologia é fλ (a charneira do rebatimento). Tratemos, então,da elipse que é a projecção frontal da circunferência. Assim,inscreveu-se a circunferência num quadrado de lados paralelos aoeixo de homologia e desenharam-se as suas medianas e as suasdiagonais. Os extremos das medianas do quadrado são os pontosem que a circunferência é tangente aos quatro lados do quadradoe dão-nos, imediatamente, os extremos dos dois eixos da elipseque é a projecção frontal da circunferência. Assim, a projecçãofrontal do diâmetro [AC] corresponderá ao eixo maior da referidaelipse (por ser paralelo ao eixo de homologia e, assim, não sofrerqualquer deformação), enquanto que a projecção frontal do diâ-metro [BD] corresponderá ao eixo menor da elipse (por ser aqueleque é perpendicular ao eixo de homologia e, assim, sofrer a maiorredução). Estes pontos serão, já, quatro pontos da elipse – os ou-tros quatro pontos serão os pontos de intersecção da circunferên-cia com as diagonais do quadrado em que aquela se inscreve. Asprojecções de A e C determinaram-se imediatamente, através dosplanos ortogonais à charneira que os contêm, uma vez que são,ambos, pontos da recta f. As rectas f’ e f’’ são as duas rectas fron-tais (de frente) do plano a que se recorreu para determinar as pro-jecções de B e D – note que f’ e f’’ são, também, as rectas suportede dois lados do quadrado. Determinaram-se as projecções de B e D e do quadrado em que a circunferência se inscreve – a projecçãofrontal do quadrado é um rectângulo e a sua projecção horizontal é um paralelogramo. Já temos quatro pontos de cada uma das elipses.Em seguida desenharam-se, directamente em projecções, as projecções das medianas e das diagonais do quadrado, que se bissectamduas a duas sobre as projecções homónimas do ponto O. Através de planos ortogonais à charneira, transportaram-se, para as projecçõesfrontais das diagonais do quadrado, os pontos de intersecção da circunferência com aquelas. A partir das projecções frontais desses quatropontos, determinaram-se as suas projecções horizontais sobre as projecções horizontais das diagonais do quadrado. Já temos oito pontospara desenhar cada uma das duas curvas. No que respeita à elipse que é a projecção frontal da circunferência, [A2C2] é o seu eixo maiore [B2D2] é o seu eixo menor e a curva é tangente aos lados do rectângulo em A2, B2, C2 e D2, precisamente. Já no que respeita à elipseque é a projecção horizontal da circunferência, optou-se por desenhá-la imediatamente, a partir dos oito pontos determinados e dos seuspontos de tangência ao paralelogramo envolvente (A1, B1, C1 e D1). No entanto, este desenho carece do rigor da outra elipse, uma vez quenão foram determinados os seus dois eixos. Para tal bastaria, em rebatimento, determinar o diâmetro da circunferência que é paralelo a hλre o outro que lhe é perpendicular – a projecção horizontal do primeiro seria o eixo maior dessa elipse e a projecção horizontal do segundoseria o eixo menor dessa mesma elipse. Esse procedimento dar-nos-ia mais quatro pontos da curva em cada uma das projecções, o quepermitiria um desenho ainda mais preciso das duas elipses (com um total de doze pontos). No entanto, optou-se por não efectuar essesprocedimentos na solução apresentada, uma vez que a quantidade de informação gráfica que tal iria provocar dificultaria, em muito, a leiturada resolução gráfica proposta.
70.Em primeiro lugar, representou-se o plano ρ pelos seus traços e determinaram-se as projecções do ponto O, recorrendo a uma recta auxiliardo plano – a recta r. Para determinar as projecções da circunferência, há que rebater previamente o plano ρ e construir a circunferência emV.G., em rebatimento, pois a figura não se projecta em V.G. em nenhum dos planos de projecção. Na presente situação, não há qualquerdiferença quanto ao plano de projecção para o qual se deverá rebater o plano ρ, no sentido de uma maior economia de traçados. Optou-sepor rebater o plano ρ para o Plano Horizontal de Projecção (a charneira é hρ). O traço frontal do plano ρ, a recta r e o ponto O rebateram-se,conforme exposto no relatório do exercício 65. Com o recurso ao compasso, fazendo centro em Or e com 3 cm de raio (o raio da circunfe-rência pedida), desenhou-se a circunferência em V.G., em rebatimento. Tal como na situação do exercício anterior, as duas projecções dacircunferência serão elipses. No entanto, na presente situação, o diâmetro que não sofre deformação em projecção frontal é o mesmo quetambém não sofre deformação em projecção horizontal, tal como o diâmetro da circunferência que sofre a deformação máxima em projec-ção frontal é o mesmo que também sofre a deformação máxima em projecção horizontal. Assim, os diâmetros que nos darão os eixos daelipse que é a projecção frontal da circunferência são os mesmos que nos darão os eixos da elipse que é a projecção horizontal da circunfe-rência. O eixo de homologia é a charneira, que é fρ. Assim, inscreveu-se a circunferência num quadrado de lados paralelos a fρ (o quadrado[ABCD]) e desenharam-se as suas medianas e as suas diagonais. Os pontos em que as medianas se apoiam nos lados do quadrado dão--nos, imediatamente, os extremos dos dois eixos das elipses – a mediana fronto-horizontal é o diâmetro cujas projecções são os eixos maio-res das duas elipses, enquanto que a mediana de perfil é o diâmetro cujas projecções são os eixos menores das duas elipses. Em seguidadeterminaram-se as projecções do quadrado, a partir de dois dos seus vértices – A e C. A recta s, que passa por A e C, foi a recta a que serecorreu para determinar as projecções de A e C. A partir destas, e atendendo a que o quadrado tem dois lados fronto-horizontais, determi-
(Continua na página seguinte)
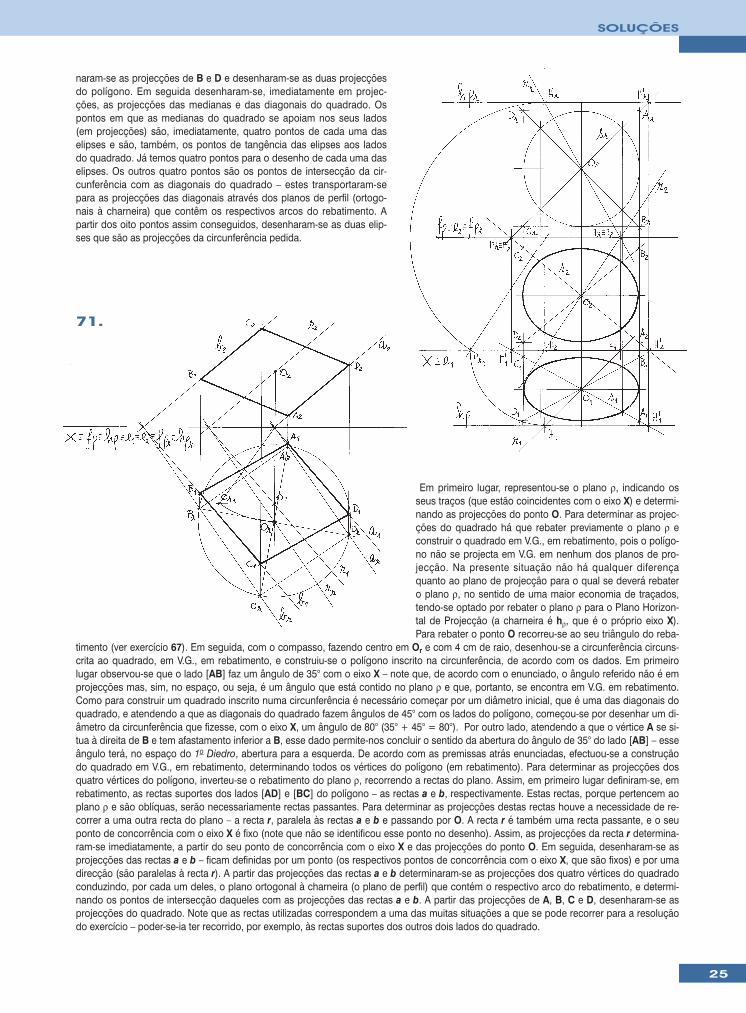
25
SOLUÇÕES
naram-se as projecções de B e D e desenharam-se as duas projecçõesdo polígono. Em seguida desenharam-se, imediatamente em projec-ções, as projecções das medianas e das diagonais do quadrado. Ospontos em que as medianas do quadrado se apoiam nos seus lados(em projecções) são, imediatamente, quatro pontos de cada uma daselipses e são, também, os pontos de tangência das elipses aos ladosdo quadrado. Já temos quatro pontos para o desenho de cada uma daselipses. Os outros quatro pontos são os pontos de intersecção da cir-cunferência com as diagonais do quadrado – estes transportaram-separa as projecções das diagonais através dos planos de perfil (ortogo-nais à charneira) que contêm os respectivos arcos do rebatimento. Apartir dos oito pontos assim conseguidos, desenharam-se as duas elip-ses que são as projecções da circunferência pedida.
Em primeiro lugar, representou-se o plano ρ, indicando osseus traços (que estão coincidentes com o eixo X) e determi-nando as projecções do ponto O. Para determinar as projec-ções do quadrado há que rebater previamente o plano ρ econstruir o quadrado em V.G., em rebatimento, pois o polígo-no não se projecta em V.G. em nenhum dos planos de pro-jecção. Na presente situação não há qualquer diferençaquanto ao plano de projecção para o qual se deverá rebatero plano ρ, no sentido de uma maior economia de traçados,tendo-se optado por rebater o plano ρ para o Plano Horizon-tal de Projecção (a charneira é hρ, que é o próprio eixo X).Para rebater o ponto O recorreu-se ao seu triângulo do reba-
timento (ver exercício 67). Em seguida, com o compasso, fazendo centro em Or e com 4 cm de raio, desenhou-se a circunferência circuns-crita ao quadrado, em V.G., em rebatimento, e construiu-se o polígono inscrito na circunferência, de acordo com os dados. Em primeirolugar observou-se que o lado [AB] faz um ângulo de 35° com o eixo X – note que, de acordo com o enunciado, o ângulo referido não é emprojecções mas, sim, no espaço, ou seja, é um ângulo que está contido no plano ρ e que, portanto, se encontra em V.G. em rebatimento.Como para construir um quadrado inscrito numa circunferência é necessário começar por um diâmetro inicial, que é uma das diagonais doquadrado, e atendendo a que as diagonais do quadrado fazem ângulos de 45° com os lados do polígono, começou-se por desenhar um di-âmetro da circunferência que fizesse, com o eixo X, um ângulo de 80° (35° + 45° = 80°). Por outro lado, atendendo a que o vértice A se si-tua à direita de B e tem afastamento inferior a B, esse dado permite-nos concluir o sentido da abertura do ângulo de 35° do lado [AB] – esseângulo terá, no espaço do 1o Diedro, abertura para a esquerda. De acordo com as premissas atrás enunciadas, efectuou-se a construçãodo quadrado em V.G., em rebatimento, determinando todos os vértices do polígono (em rebatimento). Para determinar as projecções dosquatro vértices do polígono, inverteu-se o rebatimento do plano ρ, recorrendo a rectas do plano. Assim, em primeiro lugar definiram-se, emrebatimento, as rectas suportes dos lados [AD] e [BC] do polígono – as rectas a e b, respectivamente. Estas rectas, porque pertencem aoplano ρ e são oblíquas, serão necessariamente rectas passantes. Para determinar as projecções destas rectas houve a necessidade de re-correr a uma outra recta do plano – a recta r, paralela às rectas a e b e passando por O. A recta r é também uma recta passante, e o seuponto de concorrência com o eixo X é fixo (note que não se identificou esse ponto no desenho). Assim, as projecções da recta r determina-ram-se imediatamente, a partir do seu ponto de concorrência com o eixo X e das projecções do ponto O. Em seguida, desenharam-se asprojecções das rectas a e b – ficam definidas por um ponto (os respectivos pontos de concorrência com o eixo X, que são fixos) e por umadirecção (são paralelas à recta r). A partir das projecções das rectas a e b determinaram-se as projecções dos quatro vértices do quadradoconduzindo, por cada um deles, o plano ortogonal à charneira (o plano de perfil) que contém o respectivo arco do rebatimento, e determi-nando os pontos de intersecção daqueles com as projecções das rectas a e b. A partir das projecções de A, B, C e D, desenharam-se asprojecções do quadrado. Note que as rectas utilizadas correspondem a uma das muitas situações a que se pode recorrer para a resoluçãodo exercício – poder-se-ia ter recorrido, por exemplo, às rectas suportes dos outros dois lados do quadrado.
71.
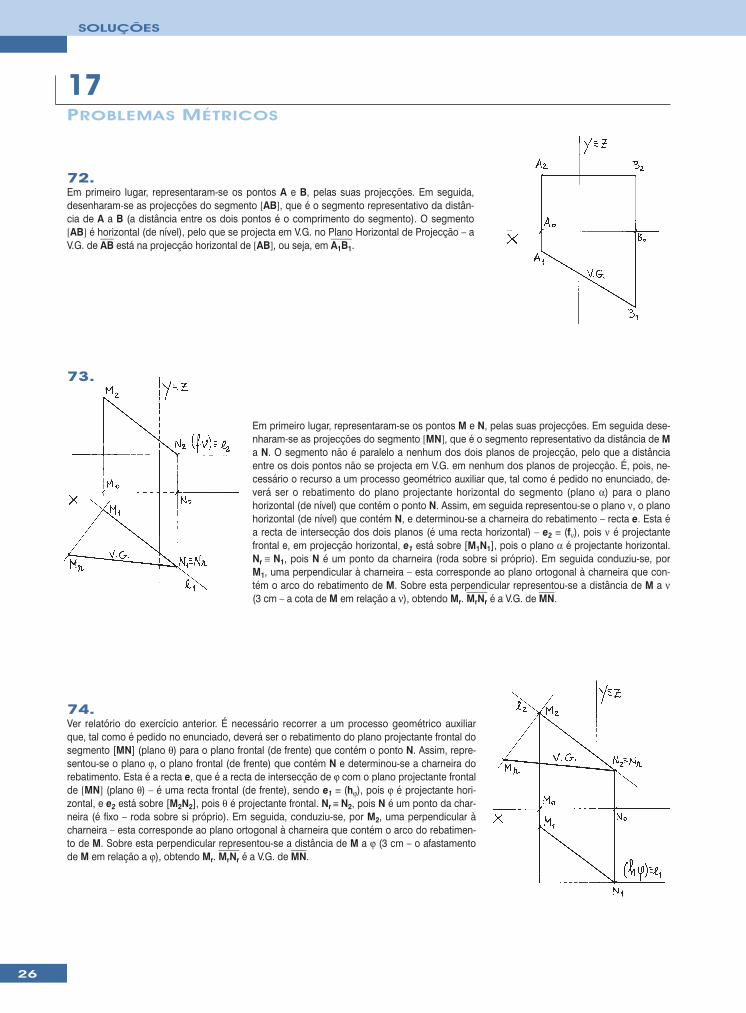
26
SOLUÇÕES
PROBLEMAS MÉTRICOS
17
72.Em primeiro lugar, representaram-se os pontos A e B, pelas suas projecções. Em seguida,desenharam-se as projecções do segmento [AB], que é o segmento representativo da distân-cia de A a B (a distância entre os dois pontos é o comprimento do segmento). O segmento[AB] é horizontal (de nível), pelo que se projecta em V.G. no Plano Horizontal de Projecção – aV.G. de A�B� está na projecção horizontal de [AB], ou seja, em A�1�B�1�.
74.Ver relatório do exercício anterior. É necessário recorrer a um processo geométrico auxiliarque, tal como é pedido no enunciado, deverá ser o rebatimento do plano projectante frontal dosegmento [MN] (plano θ) para o plano frontal (de frente) que contém o ponto N. Assim, repre-sentou-se o plano ϕ, o plano frontal (de frente) que contém N e determinou-se a charneira dorebatimento. Esta é a recta e, que é a recta de intersecção de ϕ com o plano projectante frontalde [MN] (plano θ) – é uma recta frontal (de frente), sendo e1 ≡ (hϕ), pois ϕ é projectante hori-zontal, e e2 está sobre [M2N2], pois θ é projectante frontal. Nr ≡ N2, pois N é um ponto da char-neira (é fixo – roda sobre si próprio). Em seguida, conduziu-se, por M2, uma perpendicular àcharneira – esta corresponde ao plano ortogonal à charneira que contém o arco do rebatimen-to de M. Sobre esta perpendicular representou-se a distância de M a ϕ (3 cm – o afastamentode M em relação a ϕ), obtendo Mr. M�r�N�r� é a V.G. de M�N�.
73.
Em primeiro lugar, representaram-se os pontos M e N, pelas suas projecções. Em seguida dese-nharam-se as projecções do segmento [MN], que é o segmento representativo da distância de Ma N. O segmento não é paralelo a nenhum dos dois planos de projecção, pelo que a distânciaentre os dois pontos não se projecta em V.G. em nenhum dos planos de projecção. É, pois, ne-cessário o recurso a um processo geométrico auxiliar que, tal como é pedido no enunciado, de-verá ser o rebatimento do plano projectante horizontal do segmento (plano α) para o planohorizontal (de nível) que contém o ponto N. Assim, em seguida representou-se o plano ν, o planohorizontal (de nível) que contém N, e determinou-se a charneira do rebatimento – recta e. Esta éa recta de intersecção dos dois planos (é uma recta horizontal) – e2 ≡ (fν), pois ν é projectantefrontal e, em projecção horizontal, e1 está sobre [M1N1], pois o plano α é projectante horizontal.Nr ≡ N1, pois N é um ponto da charneira (roda sobre si próprio). Em seguida conduziu-se, porM1, uma perpendicular à charneira – esta corresponde ao plano ortogonal à charneira que con-tém o arco do rebatimento de M. Sobre esta perpendicular representou-se a distância de M a ν(3 cm – a cota de M em relação a ν), obtendo Mr. M�r�N�r� é a V.G. de M�N�.
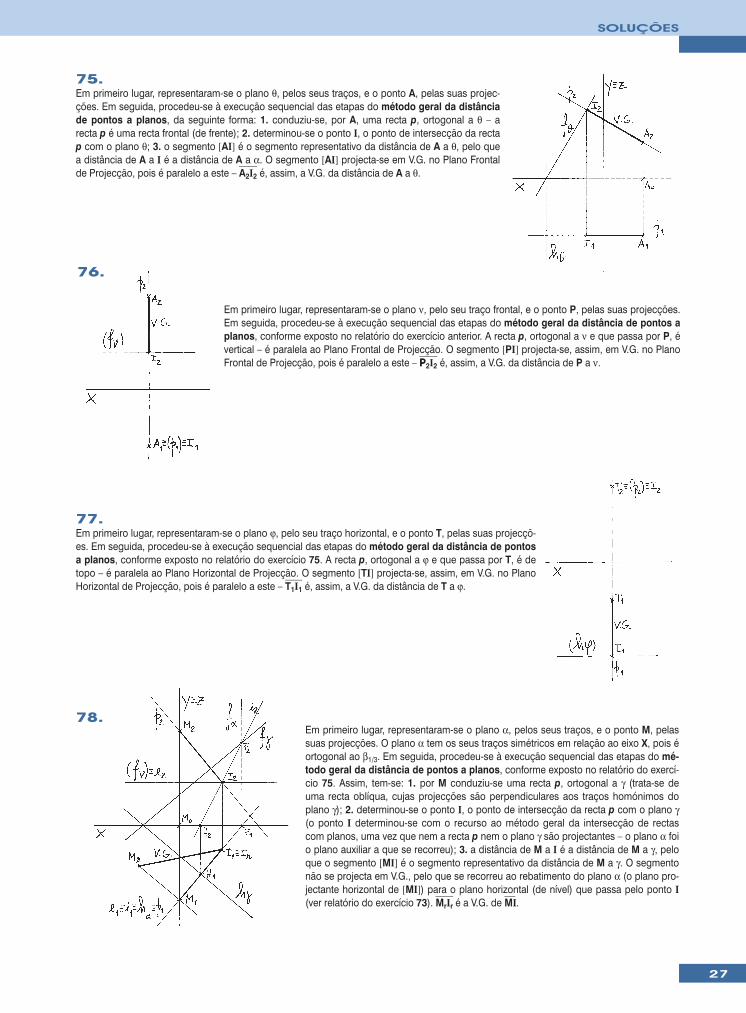
27
SOLUÇÕES
75.Em primeiro lugar, representaram-se o plano θ, pelos seus traços, e o ponto A, pelas suas projec-ções. Em seguida, procedeu-se à execução sequencial das etapas do método geral da distânciade pontos a planos, da seguinte forma: 1. conduziu-se, por A, uma recta p, ortogonal a θ – arecta p é uma recta frontal (de frente); 2. determinou-se o ponto I, o ponto de intersecção da rectap com o plano θ; 3. o segmento [AI] é o segmento representativo da distância de A a θ, pelo quea distância de A a I é a distância de A a α. O segmento [AI] projecta-se em V.G. no Plano Frontalde Projecção, pois é paralelo a este – A�2�I�2� é, assim, a V.G. da distância de A a θ.
76.
Em primeiro lugar, representaram-se o plano ν, pelo seu traço frontal, e o ponto P, pelas suas projecções.Em seguida, procedeu-se à execução sequencial das etapas do método geral da distância de pontos aplanos, conforme exposto no relatório do exercício anterior. A recta p, ortogonal a ν e que passa por P, évertical – é paralela ao Plano Frontal de Projecção. O segmento [PI] projecta-se, assim, em V.G. no PlanoFrontal de Projecção, pois é paralelo a este – PP�2�I�2� é, assim, a V.G. da distância de P a ν.
77.Em primeiro lugar, representaram-se o plano ϕ, pelo seu traço horizontal, e o ponto T, pelas suas projecçõ-es. Em seguida, procedeu-se à execução sequencial das etapas do método geral da distância de pontosa planos, conforme exposto no relatório do exercício 75. A recta p, ortogonal a ϕ e que passa por T, é detopo – é paralela ao Plano Horizontal de Projecção. O segmento [TI] projecta-se, assim, em V.G. no PlanoHorizontal de Projecção, pois é paralelo a este – T�1�I�1� é, assim, a V.G. da distância de T a ϕ.
Em primeiro lugar, representaram-se o plano α, pelos seus traços, e o ponto M, pelassuas projecções. O plano α tem os seus traços simétricos em relação ao eixo X, pois éortogonal ao β1/3. Em seguida, procedeu-se à execução sequencial das etapas do mé-todo geral da distância de pontos a planos, conforme exposto no relatório do exercí-cio 75. Assim, tem-se: 1. por M conduziu-se uma recta p, ortogonal a γ (trata-se deuma recta oblíqua, cujas projecções são perpendiculares aos traços homónimos doplano γ); 2. determinou-se o ponto I, o ponto de intersecção da recta p com o plano γ(o ponto I determinou-se com o recurso ao método geral da intersecção de rectascom planos, uma vez que nem a recta p nem o plano γ são projectantes – o plano α foio plano auxiliar a que se recorreu); 3. a distância de M a I é a distância de M a γ, peloque o segmento [MI] é o segmento representativo da distância de M a γ. O segmentonão se projecta em V.G., pelo que se recorreu ao rebatimento do plano α (o plano pro-jectante horizontal de [MI]) para o plano horizontal (de nível) que passa pelo ponto I(ver relatório do exercício 73). M�r�I�r� é a V.G. de M�I� .
78.
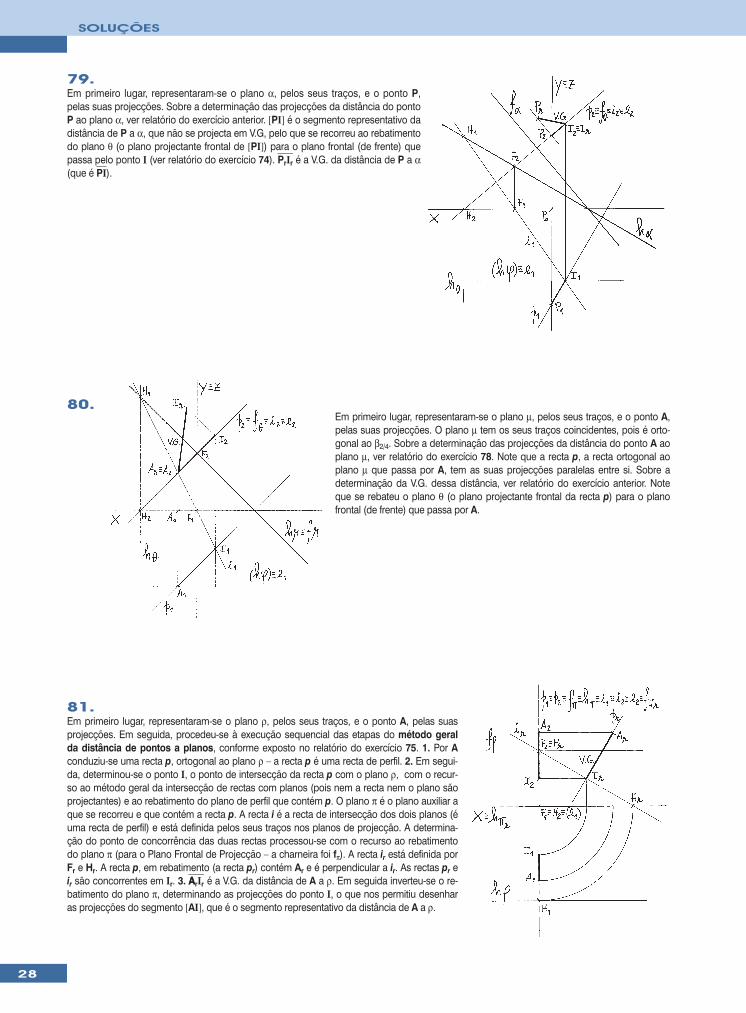
28
SOLUÇÕES
79.Em primeiro lugar, representaram-se o plano α, pelos seus traços, e o ponto P,pelas suas projecções. Sobre a determinação das projecções da distância do pontoP ao plano α, ver relatório do exercício anterior. [PI] é o segmento representativo dadistância de P a α, que não se projecta em V.G, pelo que se recorreu ao rebatimentodo plano θ (o plano projectante frontal de [PI]) para o plano frontal (de frente) quepassa pelo ponto I (ver relatório do exercício 74). P�r�I�r� é a V.G. da distância de P a α(que é P�I�).
Em primeiro lugar, representaram-se o plano µ, pelos seus traços, e o ponto A,pelas suas projecções. O plano µ tem os seus traços coincidentes, pois é orto-gonal ao β2/4. Sobre a determinação das projecções da distância do ponto A aoplano µ, ver relatório do exercício 78. Note que a recta p, a recta ortogonal aoplano µ que passa por A, tem as suas projecções paralelas entre si. Sobre adeterminação da V.G. dessa distância, ver relatório do exercício anterior. Noteque se rebateu o plano θ (o plano projectante frontal da recta p) para o planofrontal (de frente) que passa por A.
81.Em primeiro lugar, representaram-se o plano ρ, pelos seus traços, e o ponto A, pelas suasprojecções. Em seguida, procedeu-se à execução sequencial das etapas do método geralda distância de pontos a planos, conforme exposto no relatório do exercício 75. 1. Por Aconduziu-se uma recta p, ortogonal ao plano ρ – a recta p é uma recta de perfil. 2. Em segui-da, determinou-se o ponto I, o ponto de intersecção da recta p com o plano ρ, com o recur-so ao método geral da intersecção de rectas com planos (pois nem a recta nem o plano sãoprojectantes) e ao rebatimento do plano de perfil que contém p. O plano π é o plano auxiliar aque se recorreu e que contém a recta p. A recta i é a recta de intersecção dos dois planos (éuma recta de perfil) e está definida pelos seus traços nos planos de projecção. A determina-ção do ponto de concorrência das duas rectas processou-se com o recurso ao rebatimentodo plano π (para o Plano Frontal de Projecção – a charneira foi fπ). A recta ir está definida porFr e Hr. A recta p, em rebatimento (a recta pr) contém Ar e é perpendicular a ir. As rectas pr eir são concorrentes em Ir. 3. AA�r�I�r� é a V.G. da distância de A a ρ. Em seguida inverteu-se o re-batimento do plano π, determinando as projecções do ponto I, o que nos permitiu desenharas projecções do segmento [AI], que é o segmento representativo da distância de A a ρ.
80.
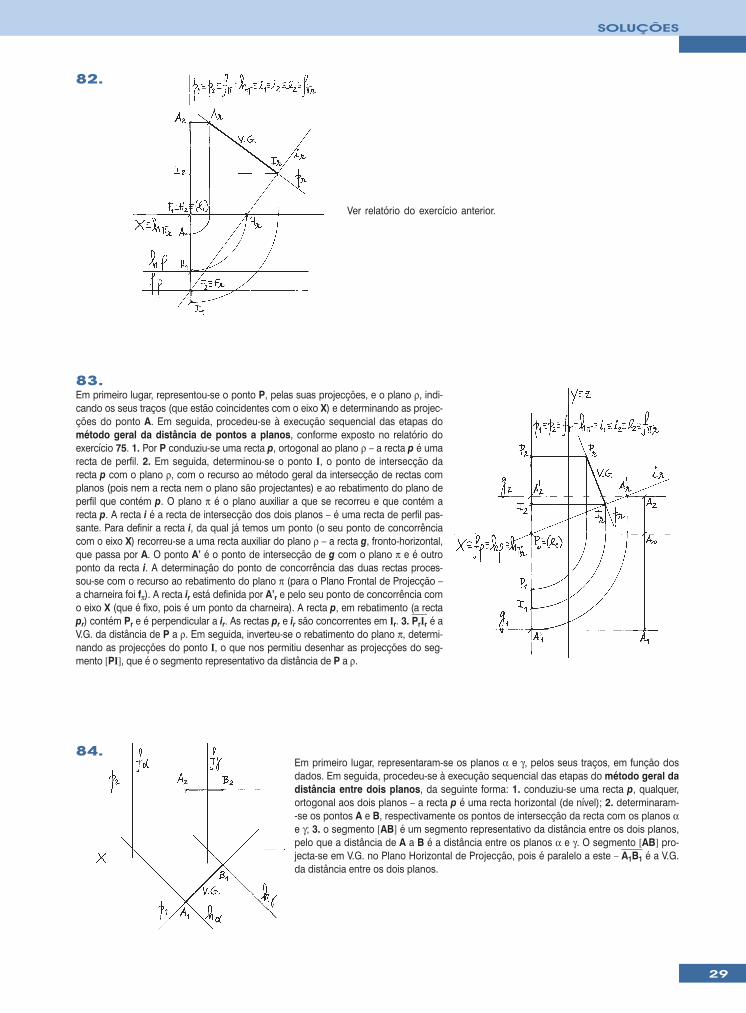
29
SOLUÇÕES
82.
Ver relatório do exercício anterior.
83.Em primeiro lugar, representou-se o ponto P, pelas suas projecções, e o plano ρ, indi-cando os seus traços (que estão coincidentes com o eixo X) e determinando as projec-ções do ponto A. Em seguida, procedeu-se à execução sequencial das etapas dométodo geral da distância de pontos a planos, conforme exposto no relatório doexercício 75. 1. Por P conduziu-se uma recta p, ortogonal ao plano ρ – a recta p é umarecta de perfil. 2. Em seguida, determinou-se o ponto I, o ponto de intersecção darecta p com o plano ρ, com o recurso ao método geral da intersecção de rectas complanos (pois nem a recta nem o plano são projectantes) e ao rebatimento do plano deperfil que contém p. O plano π é o plano auxiliar a que se recorreu e que contém arecta p. A recta i é a recta de intersecção dos dois planos – é uma recta de perfil pas-sante. Para definir a recta i, da qual já temos um ponto (o seu ponto de concorrênciacom o eixo X) recorreu-se a uma recta auxiliar do plano ρ – a recta g, fronto-horizontal,que passa por A. O ponto A’ é o ponto de intersecção de g com o plano π e é outroponto da recta i. A determinação do ponto de concorrência das duas rectas proces-sou-se com o recurso ao rebatimento do plano π (para o Plano Frontal de Projecção –a charneira foi fπ). A recta ir está definida por A’r e pelo seu ponto de concorrência como eixo X (que é fixo, pois é um ponto da charneira). A recta p, em rebatimento (a rectapr) contém Pr e é perpendicular a ir. As rectas pr e ir são concorrentes em Ir. 3. P�r�I�r� é aV.G. da distância de P a ρ. Em seguida, inverteu-se o rebatimento do plano π, determi-nando as projecções do ponto I, o que nos permitiu desenhar as projecções do seg-mento [PI], que é o segmento representativo da distância de P a ρ.
84.Em primeiro lugar, representaram-se os planos α e γ, pelos seus traços, em função dosdados. Em seguida, procedeu-se à execução sequencial das etapas do método geral dadistância entre dois planos, da seguinte forma: 1. conduziu-se uma recta p, qualquer,ortogonal aos dois planos – a recta p é uma recta horizontal (de nível); 2. determinaram--se os pontos A e B, respectivamente os pontos de intersecção da recta com os planos αe γ; 3. o segmento [AB] é um segmento representativo da distância entre os dois planos,pelo que a distância de A a B é a distância entre os planos α e γ. O segmento [AB] pro-jecta-se em V.G. no Plano Horizontal de Projecção, pois é paralelo a este – A�1�B�1� é a V.G.da distância entre os dois planos.
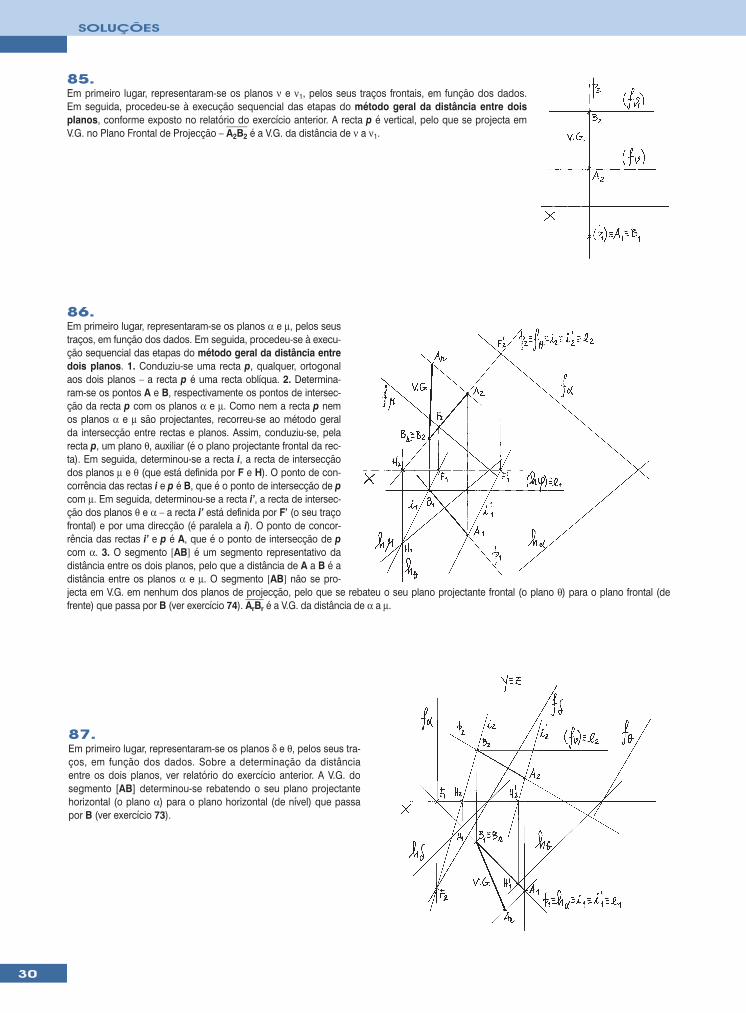
30
SOLUÇÕES
86.Em primeiro lugar, representaram-se os planos α e µ, pelos seustraços, em função dos dados. Em seguida, procedeu-se à execu-ção sequencial das etapas do método geral da distância entredois planos. 1. Conduziu-se uma recta p, qualquer, ortogonalaos dois planos – a recta p é uma recta oblíqua. 2. Determina-ram-se os pontos A e B, respectivamente os pontos de intersec-ção da recta p com os planos α e µ. Como nem a recta p nemos planos α e µ são projectantes, recorreu-se ao método geralda intersecção entre rectas e planos. Assim, conduziu-se, pelarecta p, um plano θ, auxiliar (é o plano projectante frontal da rec-ta). Em seguida, determinou-se a recta i, a recta de intersecçãodos planos µ e θ (que está definida por F e H). O ponto de con-corrência das rectas i e p é B, que é o ponto de intersecção de pcom µ. Em seguida, determinou-se a recta i’, a recta de intersec-ção dos planos θ e α – a recta i’ está definida por F’ (o seu traçofrontal) e por uma direcção (é paralela a i). O ponto de concor-rência das rectas i’ e p é A, que é o ponto de intersecção de pcom α. 3. O segmento [AB] é um segmento representativo dadistância entre os dois planos, pelo que a distância de A a B é adistância entre os planos α e µ. O segmento [AB] não se pro-jecta em V.G. em nenhum dos planos de projecção, pelo que se rebateu o seu plano projectante frontal (o plano θ) para o plano frontal (defrente) que passa por B (ver exercício 74). A�r�B�r� é a V.G. da distância de α a µ.
87.Em primeiro lugar, representaram-se os planos δ e θ, pelos seus tra-ços, em função dos dados. Sobre a determinação da distânciaentre os dois planos, ver relatório do exercício anterior. A V.G. dosegmento [AB] determinou-se rebatendo o seu plano projectantehorizontal (o plano α) para o plano horizontal (de nível) que passapor B (ver exercício 73).
85.Em primeiro lugar, representaram-se os planos ν e ν1, pelos seus traços frontais, em função dos dados.Em seguida, procedeu-se à execução sequencial das etapas do método geral da distância entre doisplanos, conforme exposto no relatório do exercício anterior. A recta p é vertical, pelo que se projecta emV.G. no Plano Frontal de Projecção – A�2�B�2� é a V.G. da distância de ν a ν1.
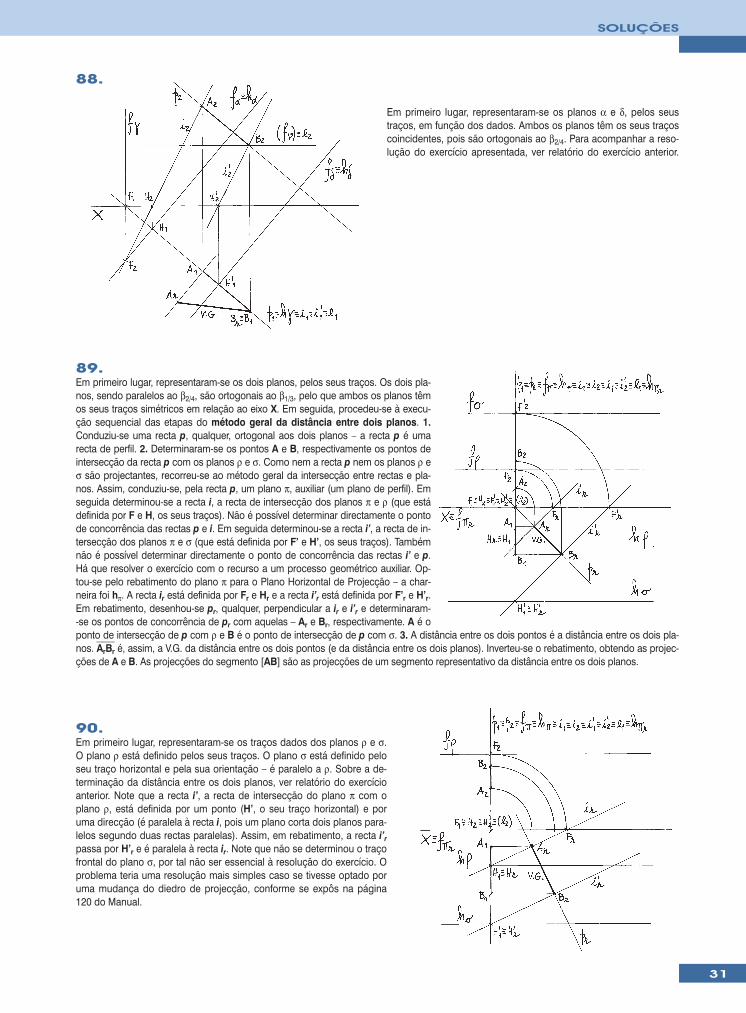
31
SOLUÇÕES
89.Em primeiro lugar, representaram-se os dois planos, pelos seus traços. Os dois pla-nos, sendo paralelos ao β2/4, são ortogonais ao β1/3, pelo que ambos os planos têmos seus traços simétricos em relação ao eixo X. Em seguida, procedeu-se à execu-ção sequencial das etapas do método geral da distância entre dois planos. 1.Conduziu-se uma recta p, qualquer, ortogonal aos dois planos – a recta p é umarecta de perfil. 2. Determinaram-se os pontos A e B, respectivamente os pontos deintersecção da recta p com os planos ρ e σ. Como nem a recta p nem os planos ρ eσ são projectantes, recorreu-se ao método geral da intersecção entre rectas e pla-nos. Assim, conduziu-se, pela recta p, um plano π, auxiliar (um plano de perfil). Emseguida determinou-se a recta i, a recta de intersecção dos planos π e ρ (que estádefinida por F e H, os seus traços). Não é possível determinar directamente o pontode concorrência das rectas p e i. Em seguida determinou-se a recta i’, a recta de in-tersecção dos planos π e σ (que está definida por F’ e H’, os seus traços). Tambémnão é possível determinar directamente o ponto de concorrência das rectas i’ e p.Há que resolver o exercício com o recurso a um processo geométrico auxiliar. Op-tou-se pelo rebatimento do plano π para o Plano Horizontal de Projecção – a char-neira foi hπ. A recta ir está definida por Fr e Hr e a recta i’r está definida por F’r e H’r.Em rebatimento, desenhou-se pr, qualquer, perpendicular a ir e i’r e determinaram--se os pontos de concorrência de pr com aquelas – Ar e Br, respectivamente. A é oponto de intersecção de p com ρ e B é o ponto de intersecção de p com σ. 3. A distância entre os dois pontos é a distância entre os dois pla-nos. A�r�B�r� é, assim, a V.G. da distância entre os dois pontos (e da distância entre os dois planos). Inverteu-se o rebatimento, obtendo as projec-ções de A e B. As projecções do segmento [AB] são as projecções de um segmento representativo da distância entre os dois planos.
90.Em primeiro lugar, representaram-se os traços dados dos planos ρ e σ.O plano ρ está definido pelos seus traços. O plano σ está definido peloseu traço horizontal e pela sua orientação – é paralelo a ρ. Sobre a de-terminação da distância entre os dois planos, ver relatório do exercícioanterior. Note que a recta i’, a recta de intersecção do plano π com oplano ρ, está definida por um ponto (H’, o seu traço horizontal) e poruma direcção (é paralela à recta i, pois um plano corta dois planos para-lelos segundo duas rectas paralelas). Assim, em rebatimento, a recta i’rpassa por H’r e é paralela à recta ir. Note que não se determinou o traçofrontal do plano σ, por tal não ser essencial à resolução do exercício. Oproblema teria uma resolução mais simples caso se tivesse optado poruma mudança do diedro de projecção, conforme se expôs na página120 do Manual.
Em primeiro lugar, representaram-se os planos α e δ, pelos seustraços, em função dos dados. Ambos os planos têm os seus traçoscoincidentes, pois são ortogonais ao β2/4. Para acompanhar a reso-lução do exercício apresentada, ver relatório do exercício anterior.
88.
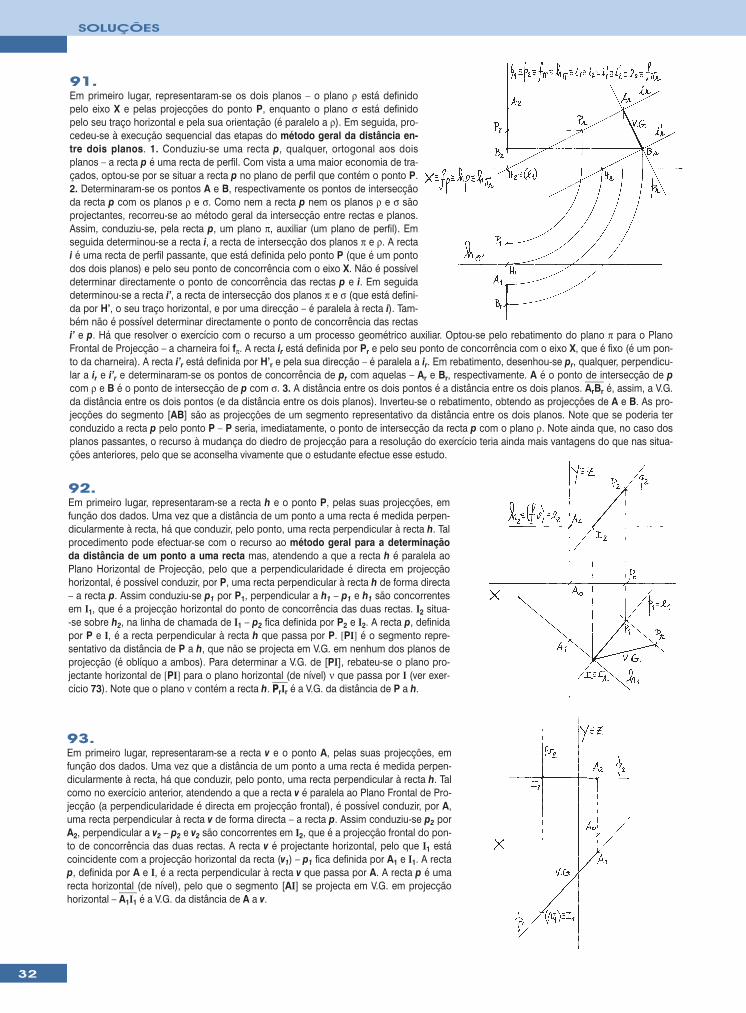
32
SOLUÇÕES
92.Em primeiro lugar, representaram-se a recta h e o ponto P, pelas suas projecções, emfunção dos dados. Uma vez que a distância de um ponto a uma recta é medida perpen-dicularmente à recta, há que conduzir, pelo ponto, uma recta perpendicular à recta h. Talprocedimento pode efectuar-se com o recurso ao método geral para a determinaçãoda distância de um ponto a uma recta mas, atendendo a que a recta h é paralela aoPlano Horizontal de Projecção, pelo que a perpendicularidade é directa em projecçãohorizontal, é possível conduzir, por P, uma recta perpendicular à recta h de forma directa– a recta p. Assim conduziu-se p1 por P1, perpendicular a h1 – p1 e h1 são concorrentesem I1, que é a projecção horizontal do ponto de concorrência das duas rectas. I2 situa--se sobre h2, na linha de chamada de I1 – p2 fica definida por P2 e I2. A recta p, definidapor P e I, é a recta perpendicular à recta h que passa por P. [PI] é o segmento repre-sentativo da distância de P a h, que não se projecta em V.G. em nenhum dos planos deprojecção (é oblíquo a ambos). Para determinar a V.G. de [PI], rebateu-se o plano pro-jectante horizontal de [PI] para o plano horizontal (de nível) ν que passa por I (ver exer-cício 73). Note que o plano ν contém a recta h. PP�r�I�r� é a V.G. da distância de P a h.
93.Em primeiro lugar, representaram-se a recta v e o ponto A, pelas suas projecções, emfunção dos dados. Uma vez que a distância de um ponto a uma recta é medida perpen-dicularmente à recta, há que conduzir, pelo ponto, uma recta perpendicular à recta h. Talcomo no exercício anterior, atendendo a que a recta v é paralela ao Plano Frontal de Pro-jecção (a perpendicularidade é directa em projecção frontal), é possível conduzir, por A,uma recta perpendicular à recta v de forma directa – a recta p. Assim conduziu-se p2 porA2, perpendicular a v2 – p2 e v2 são concorrentes em I2, que é a projecção frontal do pon-to de concorrência das duas rectas. A recta v é projectante horizontal, pelo que I1 estácoincidente com a projecção horizontal da recta (v1) – p1 fica definida por A1 e I1. A rectap, definida por A e I, é a recta perpendicular à recta v que passa por A. A recta p é umarecta horizontal (de nível), pelo que o segmento [AI] se projecta em V.G. em projecçãohorizontal – A�1�I�1� é a V.G. da distância de A a v.
91.Em primeiro lugar, representaram-se os dois planos – o plano ρ está definidopelo eixo X e pelas projecções do ponto P, enquanto o plano σ está definidopelo seu traço horizontal e pela sua orientação (é paralelo a ρ). Em seguida, pro-cedeu-se à execução sequencial das etapas do método geral da distância en-tre dois planos. 1. Conduziu-se uma recta p, qualquer, ortogonal aos doisplanos – a recta p é uma recta de perfil. Com vista a uma maior economia de tra-çados, optou-se por se situar a recta p no plano de perfil que contém o ponto P.2. Determinaram-se os pontos A e B, respectivamente os pontos de intersecçãoda recta p com os planos ρ e σ. Como nem a recta p nem os planos ρ e σ sãoprojectantes, recorreu-se ao método geral da intersecção entre rectas e planos.Assim, conduziu-se, pela recta p, um plano π, auxiliar (um plano de perfil). Emseguida determinou-se a recta i, a recta de intersecção dos planos π e ρ. A rectai é uma recta de perfil passante, que está definida pelo ponto P (que é um pontodos dois planos) e pelo seu ponto de concorrência com o eixo X. Não é possíveldeterminar directamente o ponto de concorrência das rectas p e i. Em seguidadeterminou-se a recta i’, a recta de intersecção dos planos π e σ (que está defini-da por H’, o seu traço horizontal, e por uma direcção – é paralela à recta i). Tam-bém não é possível determinar directamente o ponto de concorrência das rectasi’ e p. Há que resolver o exercício com o recurso a um processo geométrico auxiliar. Optou-se pelo rebatimento do plano π para o PlanoFrontal de Projecção – a charneira foi fπ. A recta ir está definida por Pr e pelo seu ponto de concorrência com o eixo X, que é fixo (é um pon-to da charneira). A recta i’r está definida por H’r e pela sua direcção – é paralela a ir. Em rebatimento, desenhou-se pr, qualquer, perpendicu-lar a ir e i’r e determinaram-se os pontos de concorrência de pr com aquelas – Ar e Br, respectivamente. A é o ponto de intersecção de pcom ρ e B é o ponto de intersecção de p com σ. 3. A distância entre os dois pontos é a distância entre os dois planos. A�r�B�r� é, assim, a V.G.da distância entre os dois pontos (e da distância entre os dois planos). Inverteu-se o rebatimento, obtendo as projecções de A e B. As pro-jecções do segmento [AB] são as projecções de um segmento representativo da distância entre os dois planos. Note que se poderia terconduzido a recta p pelo ponto P – P seria, imediatamente, o ponto de intersecção da recta p com o plano ρ. Note ainda que, no caso dosplanos passantes, o recurso à mudança do diedro de projecção para a resolução do exercício teria ainda mais vantagens do que nas situa-ções anteriores, pelo que se aconselha vivamente que o estudante efectue esse estudo.
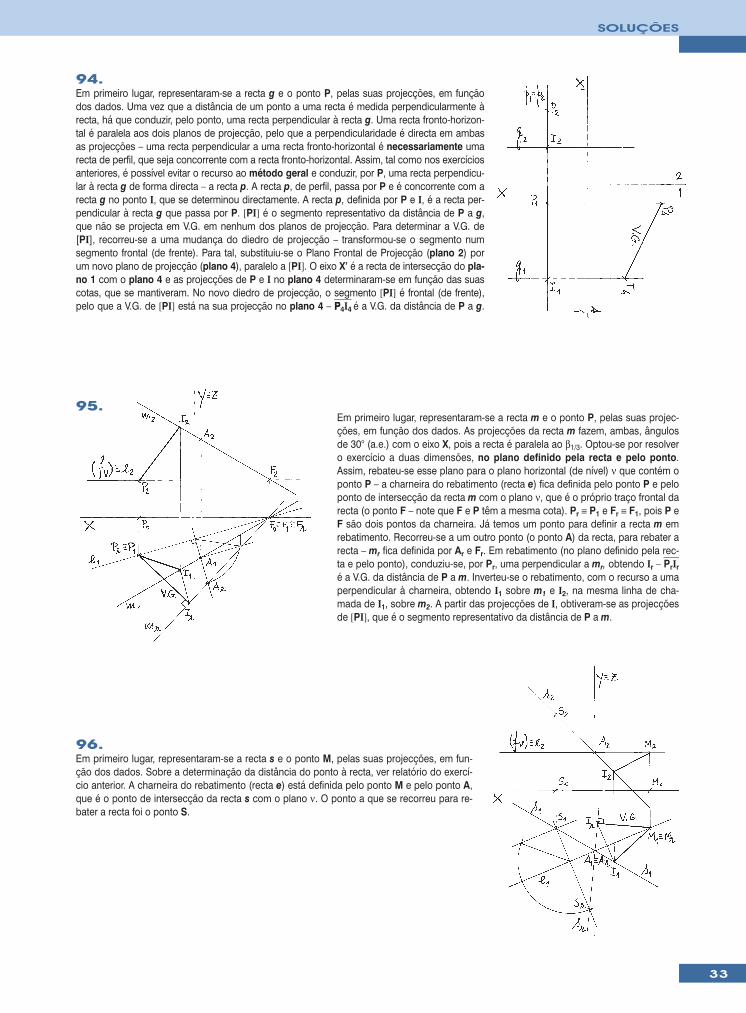
33
SOLUÇÕES
94.Em primeiro lugar, representaram-se a recta g e o ponto P, pelas suas projecções, em funçãodos dados. Uma vez que a distância de um ponto a uma recta é medida perpendicularmente àrecta, há que conduzir, pelo ponto, uma recta perpendicular à recta g. Uma recta fronto-horizon-tal é paralela aos dois planos de projecção, pelo que a perpendicularidade é directa em ambasas projecções – uma recta perpendicular a uma recta fronto-horizontal é necessariamente umarecta de perfil, que seja concorrente com a recta fronto-horizontal. Assim, tal como nos exercíciosanteriores, é possível evitar o recurso ao método geral e conduzir, por P, uma recta perpendicu-lar à recta g de forma directa – a recta p. A recta p, de perfil, passa por P e é concorrente com arecta g no ponto I, que se determinou directamente. A recta p, definida por P e I, é a recta per-pendicular à recta g que passa por P. [PI] é o segmento representativo da distância de P a g,que não se projecta em V.G. em nenhum dos planos de projecção. Para determinar a V.G. de[PI], recorreu-se a uma mudança do diedro de projecção – transformou-se o segmento numsegmento frontal (de frente). Para tal, substituiu-se o Plano Frontal de Projecção (plano 2) porum novo plano de projecção (plano 4), paralelo a [PI]. O eixo X’ é a recta de intersecção do pla-no 1 com o plano 4 e as projecções de P e I no plano 4 determinaram-se em função das suascotas, que se mantiveram. No novo diedro de projecção, o segmento [PI] é frontal (de frente),pelo que a V.G. de [PI] está na sua projecção no plano 4 – PP�4�I�4� é a V.G. da distância de P a g.
95.Em primeiro lugar, representaram-se a recta m e o ponto P, pelas suas projec-ções, em função dos dados. As projecções da recta m fazem, ambas, ângulosde 30° (a.e.) com o eixo X, pois a recta é paralela ao β1/3. Optou-se por resolvero exercício a duas dimensões, no plano definido pela recta e pelo ponto.Assim, rebateu-se esse plano para o plano horizontal (de nível) ν que contém oponto P – a charneira do rebatimento (recta e) fica definida pelo ponto P e peloponto de intersecção da recta m com o plano ν, que é o próprio traço frontal darecta (o ponto F – note que F e P têm a mesma cota). Pr ≡ P1 e Fr ≡ F1, pois P eF são dois pontos da charneira. Já temos um ponto para definir a recta m emrebatimento. Recorreu-se a um outro ponto (o ponto A) da recta, para rebater arecta – mr fica definida por Ar e Fr. Em rebatimento (no plano definido pela rec-ta e pelo ponto), conduziu-se, por Pr, uma perpendicular a mr, obtendo Ir – P�r�I�r�é a V.G. da distância de P a m. Inverteu-se o rebatimento, com o recurso a umaperpendicular à charneira, obtendo I1 sobre m1 e I2, na mesma linha de cha-mada de I1, sobre m2. A partir das projecções de I, obtiveram-se as projecçõesde [PI], que é o segmento representativo da distância de P a m.
96.Em primeiro lugar, representaram-se a recta s e o ponto M, pelas suas projecções, em fun-ção dos dados. Sobre a determinação da distância do ponto à recta, ver relatório do exercí-cio anterior. A charneira do rebatimento (recta e) está definida pelo ponto M e pelo ponto A,que é o ponto de intersecção da recta s com o plano ν. O ponto a que se recorreu para re-bater a recta foi o ponto S.
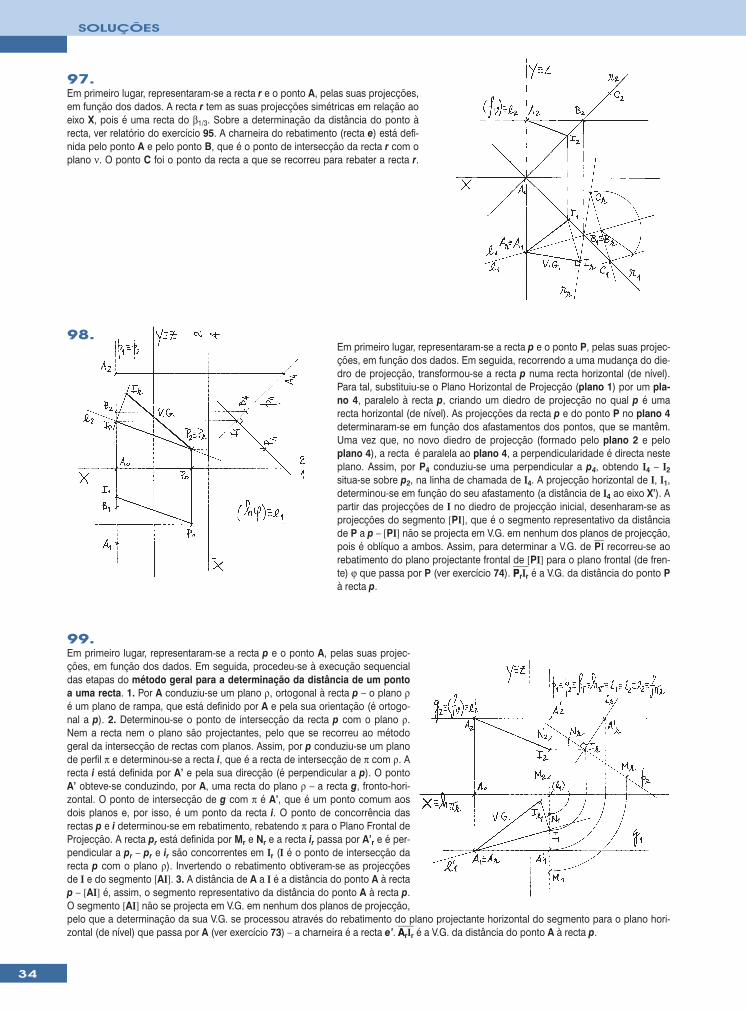
34
SOLUÇÕES
97.Em primeiro lugar, representaram-se a recta r e o ponto A, pelas suas projecções,em função dos dados. A recta r tem as suas projecções simétricas em relação aoeixo X, pois é uma recta do β1/3. Sobre a determinação da distância do ponto àrecta, ver relatório do exercício 95. A charneira do rebatimento (recta e) está defi-nida pelo ponto A e pelo ponto B, que é o ponto de intersecção da recta r com oplano ν. O ponto C foi o ponto da recta a que se recorreu para rebater a recta r.
98.Em primeiro lugar, representaram-se a recta p e o ponto P, pelas suas projec-ções, em função dos dados. Em seguida, recorrendo a uma mudança do die-dro de projecção, transformou-se a recta p numa recta horizontal (de nível).Para tal, substituiu-se o Plano Horizontal de Projecção (plano 1) por um pla-no 4, paralelo à recta p, criando um diedro de projecção no qual p é umarecta horizontal (de nível). As projecções da recta p e do ponto P no plano 4determinaram-se em função dos afastamentos dos pontos, que se mantêm.Uma vez que, no novo diedro de projecção (formado pelo plano 2 e peloplano 4), a recta é paralela ao plano 4, a perpendicularidade é directa nesteplano. Assim, por P4 conduziu-se uma perpendicular a p4, obtendo I4 – I2situa-se sobre p2, na linha de chamada de I4. A projecção horizontal de I, I1,determinou-se em função do seu afastamento (a distância de I4 ao eixo X’). Apartir das projecções de I no diedro de projecção inicial, desenharam-se asprojecções do segmento [PI], que é o segmento representativo da distânciade P a p – [PI] não se projecta em V.G. em nenhum dos planos de projecção,pois é oblíquo a ambos. Assim, para determinar a V.G. de P�Ι� recorreu-se aorebatimento do plano projectante frontal de [PI] para o plano frontal (de fren-te) ϕ que passa por P (ver exercício 74). PP�r�I�r� é a V.G. da distância do ponto Pà recta p.
99.Em primeiro lugar, representaram-se a recta p e o ponto A, pelas suas projec-ções, em função dos dados. Em seguida, procedeu-se à execução sequencialdas etapas do método geral para a determinação da distância de um pontoa uma recta. 1. Por A conduziu-se um plano ρ, ortogonal à recta p – o plano ρé um plano de rampa, que está definido por A e pela sua orientação (é ortogo-nal a p). 2. Determinou-se o ponto de intersecção da recta p com o plano ρ.Nem a recta nem o plano são projectantes, pelo que se recorreu ao métodogeral da intersecção de rectas com planos. Assim, por p conduziu-se um planode perfil π e determinou-se a recta i, que é a recta de intersecção de π com ρ. Arecta i está definida por A’ e pela sua direcção (é perpendicular a p). O pontoA’ obteve-se conduzindo, por A, uma recta do plano ρ – a recta g, fronto-hori-zontal. O ponto de intersecção de g com π é A’, que é um ponto comum aosdois planos e, por isso, é um ponto da recta i. O ponto de concorrência dasrectas p e i determinou-se em rebatimento, rebatendo π para o Plano Frontal deProjecção. A recta pr está definida por Mr e Nr e a recta ir passa por A’r e é per-pendicular a pr – pr e ir são concorrentes em Ir (I é o ponto de intersecção darecta p com o plano ρ). Invertendo o rebatimento obtiveram-se as projecçõesde I e do segmento [AI]. 3. A distância de A a I é a distância do ponto A à rectap – [AI] é, assim, o segmento representativo da distância do ponto A à recta p.O segmento [AI] não se projecta em V.G. em nenhum dos planos de projecção,pelo que a determinação da sua V.G. se processou através do rebatimento do plano projectante horizontal do segmento para o plano hori-zontal (de nível) que passa por A (ver exercício 73) – a charneira é a recta e’. AA�r�I�r� é a V.G. da distância do ponto A à recta p.
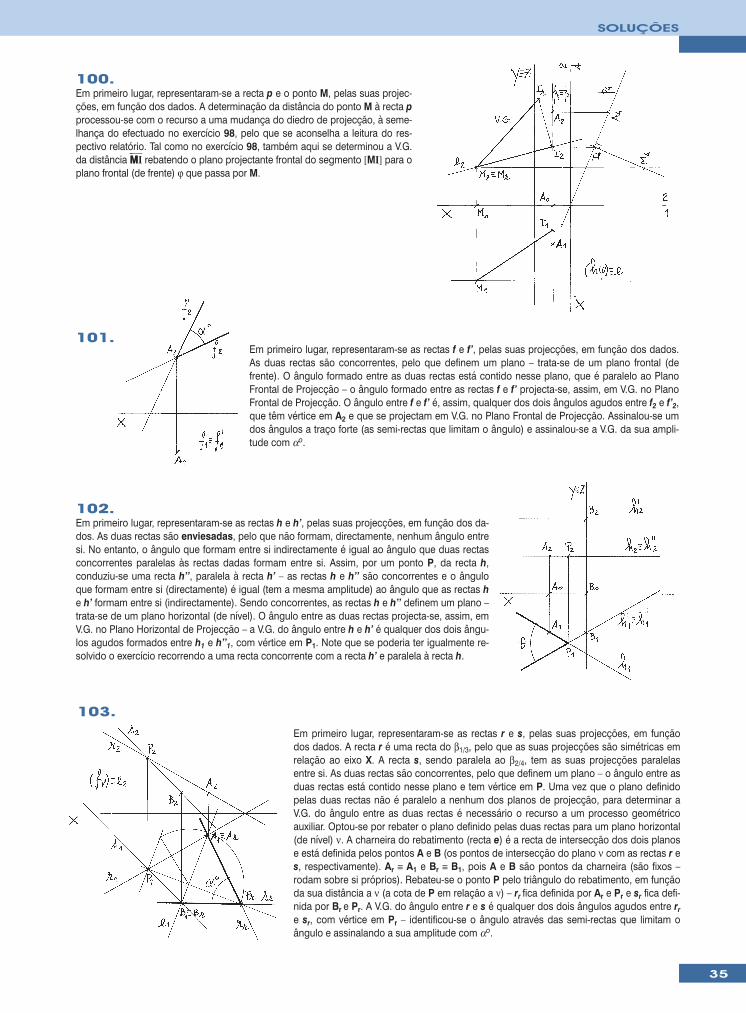
35
SOLUÇÕES
100.Em primeiro lugar, representaram-se a recta p e o ponto M, pelas suas projec-ções, em função dos dados. A determinação da distância do ponto M à recta pprocessou-se com o recurso a uma mudança do diedro de projecção, à seme-lhança do efectuado no exercício 98, pelo que se aconselha a leitura do res-pectivo relatório. Tal como no exercício 98, também aqui se determinou a V.G.da distância M�M�I� rebatendo o plano projectante frontal do segmento [MI] para oplano frontal (de frente) ϕ que passa por M.
Em primeiro lugar, representaram-se as rectas f e f’, pelas suas projecções, em função dos dados.As duas rectas são concorrentes, pelo que definem um plano – trata-se de um plano frontal (defrente). O ângulo formado entre as duas rectas está contido nesse plano, que é paralelo ao PlanoFrontal de Projecção – o ângulo formado entre as rectas f e f’ projecta-se, assim, em V.G. no PlanoFrontal de Projecção. O ângulo entre f e f’ é, assim, qualquer dos dois ângulos agudos entre f2 e f’2,que têm vértice em A2 e que se projectam em V.G. no Plano Frontal de Projecção. Assinalou-se umdos ângulos a traço forte (as semi-rectas que limitam o ângulo) e assinalou-se a V.G. da sua ampli-tude com αº.
101.
102.Em primeiro lugar, representaram-se as rectas h e h’, pelas suas projecções, em função dos da-dos. As duas rectas são enviesadas, pelo que não formam, directamente, nenhum ângulo entresi. No entanto, o ângulo que formam entre si indirectamente é igual ao ângulo que duas rectasconcorrentes paralelas às rectas dadas formam entre si. Assim, por um ponto P, da recta h,conduziu-se uma recta h’’, paralela à recta h’ – as rectas h e h’’ são concorrentes e o ânguloque formam entre si (directamente) é igual (tem a mesma amplitude) ao ângulo que as rectas he h’ formam entre si (indirectamente). Sendo concorrentes, as rectas h e h’’ definem um plano –trata-se de um plano horizontal (de nível). O ângulo entre as duas rectas projecta-se, assim, emV.G. no Plano Horizontal de Projecção – a V.G. do ângulo entre h e h’ é qualquer dos dois ângu-los agudos formados entre h1 e h’’1, com vértice em P1. Note que se poderia ter igualmente re-solvido o exercício recorrendo a uma recta concorrente com a recta h’ e paralela à recta h.
Em primeiro lugar, representaram-se as rectas r e s, pelas suas projecções, em funçãodos dados. A recta r é uma recta do β1/3, pelo que as suas projecções são simétricas emrelação ao eixo X. A recta s, sendo paralela ao β2/4, tem as suas projecções paralelasentre si. As duas rectas são concorrentes, pelo que definem um plano – o ângulo entre asduas rectas está contido nesse plano e tem vértice em P. Uma vez que o plano definidopelas duas rectas não é paralelo a nenhum dos planos de projecção, para determinar aV.G. do ângulo entre as duas rectas é necessário o recurso a um processo geométricoauxiliar. Optou-se por rebater o plano definido pelas duas rectas para um plano horizontal(de nível) ν. A charneira do rebatimento (recta e) é a recta de intersecção dos dois planose está definida pelos pontos A e B (os pontos de intersecção do plano ν com as rectas r es, respectivamente). Ar ≡ A1 e Br ≡ B1, pois A e B são pontos da charneira (são fixos –rodam sobre si próprios). Rebateu-se o ponto P pelo triângulo do rebatimento, em funçãoda sua distância a ν (a cota de P em relação a ν) – rr fica definida por Ar e Pr e sr fica defi-nida por Br e Pr. A V.G. do ângulo entre r e s é qualquer dos dois ângulos agudos entre rre sr, com vértice em Pr – identificou-se o ângulo através das semi-rectas que limitam oângulo e assinalando a sua amplitude com αº.
103.
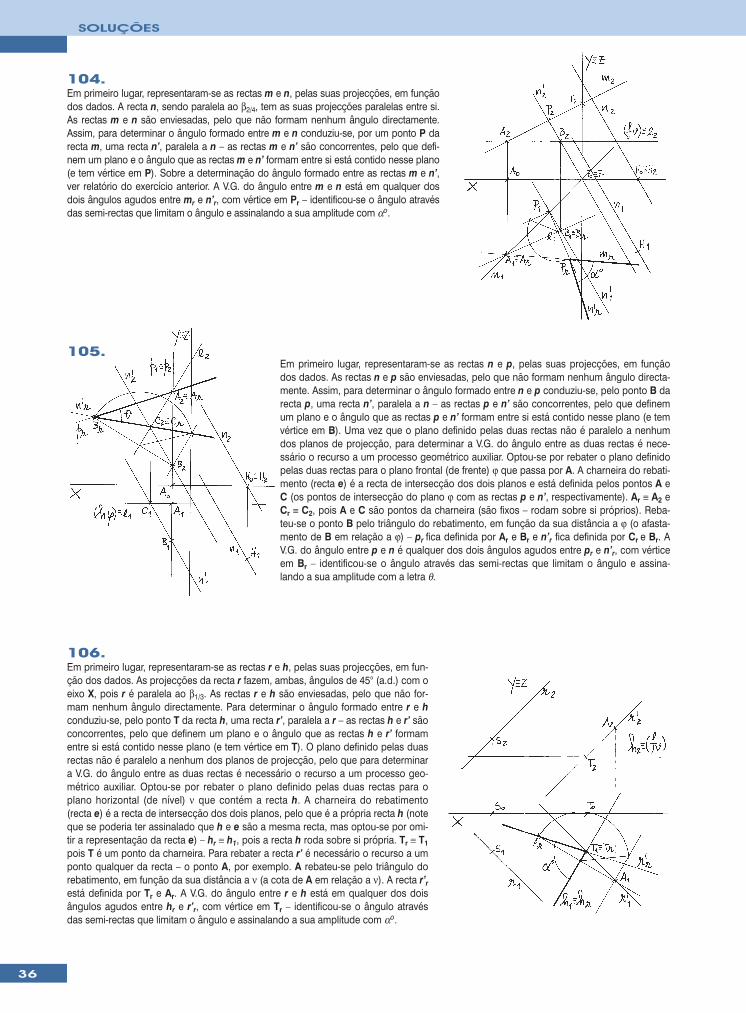
36
SOLUÇÕES
104.Em primeiro lugar, representaram-se as rectas m e n, pelas suas projecções, em funçãodos dados. A recta n, sendo paralela ao β2/4, tem as suas projecções paralelas entre si.As rectas m e n são enviesadas, pelo que não formam nenhum ângulo directamente.Assim, para determinar o ângulo formado entre m e n conduziu-se, por um ponto P darecta m, uma recta n’, paralela a n – as rectas m e n’ são concorrentes, pelo que defi-nem um plano e o ângulo que as rectas m e n’ formam entre si está contido nesse plano(e tem vértice em P). Sobre a determinação do ângulo formado entre as rectas m e n’,ver relatório do exercício anterior. A V.G. do ângulo entre m e n está em qualquer dosdois ângulos agudos entre mr e n’r, com vértice em Pr – identificou-se o ângulo atravésdas semi-rectas que limitam o ângulo e assinalando a sua amplitude com αº.
Em primeiro lugar, representaram-se as rectas n e p, pelas suas projecções, em funçãodos dados. As rectas n e p são enviesadas, pelo que não formam nenhum ângulo directa-mente. Assim, para determinar o ângulo formado entre n e p conduziu-se, pelo ponto B darecta p, uma recta n’, paralela a n – as rectas p e n’ são concorrentes, pelo que definemum plano e o ângulo que as rectas p e n’ formam entre si está contido nesse plano (e temvértice em B). Uma vez que o plano definido pelas duas rectas não é paralelo a nenhumdos planos de projecção, para determinar a V.G. do ângulo entre as duas rectas é nece-ssário o recurso a um processo geométrico auxiliar. Optou-se por rebater o plano definidopelas duas rectas para o plano frontal (de frente) ϕ que passa por A. A charneira do rebati-mento (recta e) é a recta de intersecção dos dois planos e está definida pelos pontos A eC (os pontos de intersecção do plano ϕ com as rectas p e n’, respectivamente). Ar ≡ A2 eCr ≡ C2, pois A e C são pontos da charneira (são fixos – rodam sobre si próprios). Reba-teu-se o ponto B pelo triângulo do rebatimento, em função da sua distância a ϕ (o afasta-mento de B em relação a ϕ) – pr fica definida por Ar e Br e n’r fica definida por Cr e Br. AV.G. do ângulo entre p e n é qualquer dos dois ângulos agudos entre pr e n’r, com vérticeem Br – identificou-se o ângulo através das semi-rectas que limitam o ângulo e assina-lando a sua amplitude com a letra θ.
105.
106.Em primeiro lugar, representaram-se as rectas r e h, pelas suas projecções, em fun-ção dos dados. As projecções da recta r fazem, ambas, ângulos de 45° (a.d.) com oeixo X, pois r é paralela ao β1/3. As rectas r e h são enviesadas, pelo que não for-mam nenhum ângulo directamente. Para determinar o ângulo formado entre r e hconduziu-se, pelo ponto T da recta h, uma recta r’, paralela a r – as rectas h e r’ sãoconcorrentes, pelo que definem um plano e o ângulo que as rectas h e r’ formamentre si está contido nesse plano (e tem vértice em T). O plano definido pelas duasrectas não é paralelo a nenhum dos planos de projecção, pelo que para determinara V.G. do ângulo entre as duas rectas é necessário o recurso a um processo geo-métrico auxiliar. Optou-se por rebater o plano definido pelas duas rectas para oplano horizontal (de nível) ν que contém a recta h. A charneira do rebatimento(recta e) é a recta de intersecção dos dois planos, pelo que é a própria recta h (noteque se poderia ter assinalado que h e e são a mesma recta, mas optou-se por omi-tir a representação da recta e) – hr ≡ h1, pois a recta h roda sobre si própria. Tr ≡ T1
pois T é um ponto da charneira. Para rebater a recta r’ é necessário o recurso a umponto qualquer da recta – o ponto A, por exemplo. A rebateu-se pelo triângulo dorebatimento, em função da sua distância a ν (a cota de A em relação a ν). A recta r’restá definida por Tr e Ar. A V.G. do ângulo entre r e h está em qualquer dos doisângulos agudos entre hr e r’r, com vértice em Tr – identificou-se o ângulo atravésdas semi-rectas que limitam o ângulo e assinalando a sua amplitude com αº.
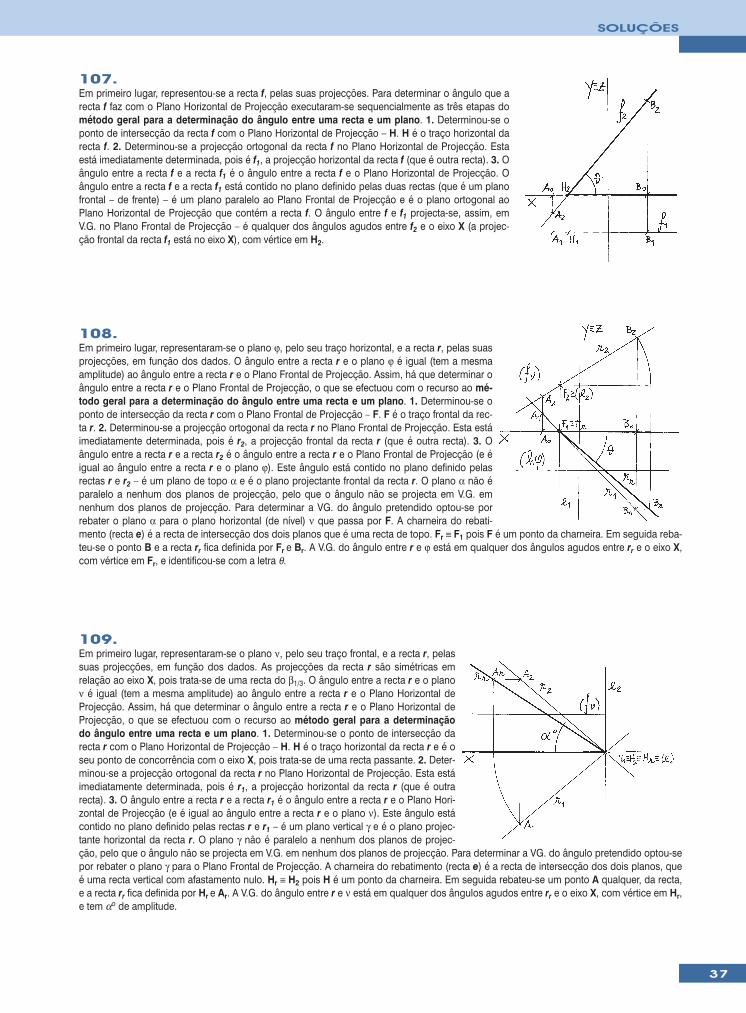
37
SOLUÇÕES
107.Em primeiro lugar, representou-se a recta f, pelas suas projecções. Para determinar o ângulo que arecta f faz com o Plano Horizontal de Projecção executaram-se sequencialmente as três etapas dométodo geral para a determinação do ângulo entre uma recta e um plano. 1. Determinou-se oponto de intersecção da recta f com o Plano Horizontal de Projecção – H. H é o traço horizontal darecta f. 2. Determinou-se a projecção ortogonal da recta f no Plano Horizontal de Projecção. Estaestá imediatamente determinada, pois é f1, a projecção horizontal da recta f (que é outra recta). 3. Oângulo entre a recta f e a recta f1 é o ângulo entre a recta f e o Plano Horizontal de Projecção. Oângulo entre a recta f e a recta f1 está contido no plano definido pelas duas rectas (que é um planofrontal – de frente) – é um plano paralelo ao Plano Frontal de Projecção e é o plano ortogonal aoPlano Horizontal de Projecção que contém a recta f. O ângulo entre f e f1 projecta-se, assim, emV.G. no Plano Frontal de Projecção – é qualquer dos ângulos agudos entre f2 e o eixo X (a projec-ção frontal da recta f1 está no eixo X), com vértice em H2.
108.Em primeiro lugar, representaram-se o plano ϕ, pelo seu traço horizontal, e a recta r, pelas suasprojecções, em função dos dados. O ângulo entre a recta r e o plano ϕ é igual (tem a mesmaamplitude) ao ângulo entre a recta r e o Plano Frontal de Projecção. Assim, há que determinar oângulo entre a recta r e o Plano Frontal de Projecção, o que se efectuou com o recurso ao mé-todo geral para a determinação do ângulo entre uma recta e um plano. 1. Determinou-se oponto de intersecção da recta r com o Plano Frontal de Projecção – F. F é o traço frontal da rec-ta r. 2. Determinou-se a projecção ortogonal da recta r no Plano Frontal de Projecção. Esta estáimediatamente determinada, pois é r2, a projecção frontal da recta r (que é outra recta). 3. Oângulo entre a recta r e a recta r2 é o ângulo entre a recta r e o Plano Frontal de Projecção (e éigual ao ângulo entre a recta r e o plano ϕ). Este ângulo está contido no plano definido pelasrectas r e r2 – é um plano de topo α e é o plano projectante frontal da recta r. O plano α não éparalelo a nenhum dos planos de projecção, pelo que o ângulo não se projecta em V.G. emnenhum dos planos de projecção. Para determinar a VG. do ângulo pretendido optou-se porrebater o plano α para o plano horizontal (de nível) ν que passa por F. A charneira do rebati-mento (recta e) é a recta de intersecção dos dois planos que é uma recta de topo. Fr ≡ F1 pois F é um ponto da charneira. Em seguida reba-teu-se o ponto B e a recta rr fica definida por Fr e Br. A V.G. do ângulo entre r e ϕ está em qualquer dos ângulos agudos entre rr e o eixo X,com vértice em Fr, e identificou-se com a letra θ.
109.Em primeiro lugar, representaram-se o plano ν, pelo seu traço frontal, e a recta r, pelassuas projecções, em função dos dados. As projecções da recta r são simétricas emrelação ao eixo X, pois trata-se de uma recta do β1/3. O ângulo entre a recta r e o planoν é igual (tem a mesma amplitude) ao ângulo entre a recta r e o Plano Horizontal deProjecção. Assim, há que determinar o ângulo entre a recta r e o Plano Horizontal deProjecção, o que se efectuou com o recurso ao método geral para a determinaçãodo ângulo entre uma recta e um plano. 1. Determinou-se o ponto de intersecção darecta r com o Plano Horizontal de Projecção – H. H é o traço horizontal da recta r e é oseu ponto de concorrência com o eixo X, pois trata-se de uma recta passante. 2. Deter-minou-se a projecção ortogonal da recta r no Plano Horizontal de Projecção. Esta estáimediatamente determinada, pois é r1, a projecção horizontal da recta r (que é outrarecta). 3. O ângulo entre a recta r e a recta r1 é o ângulo entre a recta r e o Plano Hori-zontal de Projecção (e é igual ao ângulo entre a recta r e o plano ν). Este ângulo estácontido no plano definido pelas rectas r e r1 – é um plano vertical γ e é o plano projec-tante horizontal da recta r. O plano γ não é paralelo a nenhum dos planos de projec-ção, pelo que o ângulo não se projecta em V.G. em nenhum dos planos de projecção. Para determinar a VG. do ângulo pretendido optou-sepor rebater o plano γ para o Plano Frontal de Projecção. A charneira do rebatimento (recta e) é a recta de intersecção dos dois planos, queé uma recta vertical com afastamento nulo. Hr ≡ H2 pois H é um ponto da charneira. Em seguida rebateu-se um ponto A qualquer, da recta,e a recta rr fica definida por Hr e Ar. A V.G. do ângulo entre r e ν está em qualquer dos ângulos agudos entre rr e o eixo X, com vértice em Hr,e tem αº de amplitude.
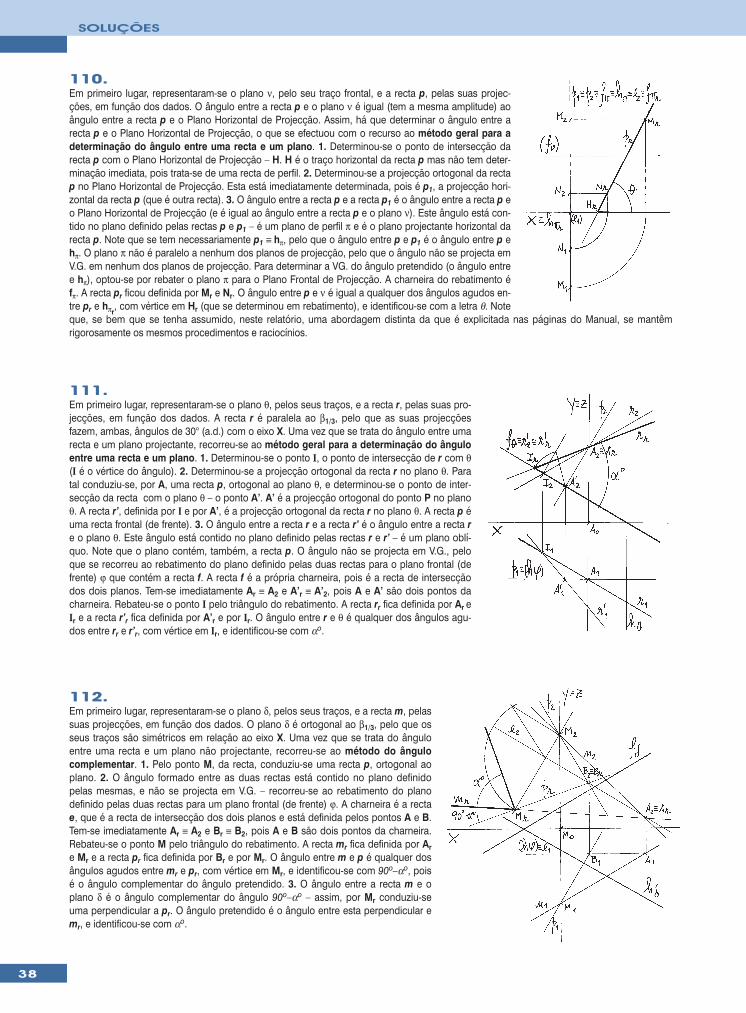
38
SOLUÇÕES
110.Em primeiro lugar, representaram-se o plano ν, pelo seu traço frontal, e a recta p, pelas suas projec-ções, em função dos dados. O ângulo entre a recta p e o plano ν é igual (tem a mesma amplitude) aoângulo entre a recta p e o Plano Horizontal de Projecção. Assim, há que determinar o ângulo entre arecta p e o Plano Horizontal de Projecção, o que se efectuou com o recurso ao método geral para adeterminação do ângulo entre uma recta e um plano. 1. Determinou-se o ponto de intersecção darecta p com o Plano Horizontal de Projecção – H. H é o traço horizontal da recta p mas não tem deter-minação imediata, pois trata-se de uma recta de perfil. 2. Determinou-se a projecção ortogonal da rectap no Plano Horizontal de Projecção. Esta está imediatamente determinada, pois é p1, a projecção hori-zontal da recta p (que é outra recta). 3. O ângulo entre a recta p e a recta p1 é o ângulo entre a recta p eo Plano Horizontal de Projecção (e é igual ao ângulo entre a recta p e o plano ν). Este ângulo está con-tido no plano definido pelas rectas p e p1 – é um plano de perfil π e é o plano projectante horizontal darecta p. Note que se tem necessariamente p1 ≡ hπ, pelo que o ângulo entre p e p1 é o ângulo entre p ehπ. O plano π não é paralelo a nenhum dos planos de projecção, pelo que o ângulo não se projecta emV.G. em nenhum dos planos de projecção. Para determinar a VG. do ângulo pretendido (o ângulo entree hπ), optou-se por rebater o plano π para o Plano Frontal de Projecção. A charneira do rebatimento éfπ. A recta pr ficou definida por Mr e Nr. O ângulo entre p e ν é igual a qualquer dos ângulos agudos en-tre pr e hπr
, com vértice em Hr (que se determinou em rebatimento), e identificou-se com a letra θ. Noteque, se bem que se tenha assumido, neste relatório, uma abordagem distinta da que é explicitada nas páginas do Manual, se mantêmrigorosamente os mesmos procedimentos e raciocínios.
111.Em primeiro lugar, representaram-se o plano θ, pelos seus traços, e a recta r, pelas suas pro-jecções, em função dos dados. A recta r é paralela ao β1/3, pelo que as suas projecçõesfazem, ambas, ângulos de 30° (a.d.) com o eixo X. Uma vez que se trata do ângulo entre umarecta e um plano projectante, recorreu-se ao método geral para a determinação do ânguloentre uma recta e um plano. 1. Determinou-se o ponto I, o ponto de intersecção de r com θ(I é o vértice do ângulo). 2. Determinou-se a projecção ortogonal da recta r no plano θ. Paratal conduziu-se, por A, uma recta p, ortogonal ao plano θ, e determinou-se o ponto de inter-secção da recta com o plano θ – o ponto A’. A’ é a projecção ortogonal do ponto P no planoθ. A recta r’, definida por I e por A’, é a projecção ortogonal da recta r no plano θ. A recta p éuma recta frontal (de frente). 3. O ângulo entre a recta r e a recta r’ é o ângulo entre a recta re o plano θ. Este ângulo está contido no plano definido pelas rectas r e r’ – é um plano oblí-quo. Note que o plano contém, também, a recta p. O ângulo não se projecta em V.G., peloque se recorreu ao rebatimento do plano definido pelas duas rectas para o plano frontal (defrente) ϕ que contém a recta f. A recta f é a própria charneira, pois é a recta de intersecçãodos dois planos. Tem-se imediatamente Ar ≡ A2 e A’r ≡ A’2, pois A e A’ são dois pontos dacharneira. Rebateu-se o ponto I pelo triângulo do rebatimento. A recta rr fica definida por Ar eIr e a recta r’r fica definida por A’r e por Ir. O ângulo entre r e θ é qualquer dos ângulos agu-dos entre rr e r’r, com vértice em Ir, e identificou-se com αº.
112.Em primeiro lugar, representaram-se o plano δ, pelos seus traços, e a recta m, pelassuas projecções, em função dos dados. O plano δ é ortogonal ao β1/3, pelo que osseus traços são simétricos em relação ao eixo X. Uma vez que se trata do ânguloentre uma recta e um plano não projectante, recorreu-se ao método do ângulocomplementar. 1. Pelo ponto M, da recta, conduziu-se uma recta p, ortogonal aoplano. 2. O ângulo formado entre as duas rectas está contido no plano definidopelas mesmas, e não se projecta em V.G. – recorreu-se ao rebatimento do planodefinido pelas duas rectas para um plano frontal (de frente) ϕ. A charneira é a rectae, que é a recta de intersecção dos dois planos e está definida pelos pontos A e B.Tem-se imediatamente Ar ≡ A2 e Br ≡ B2, pois A e B são dois pontos da charneira.Rebateu-se o ponto M pelo triângulo do rebatimento. A recta mr fica definida por Are Mr e a recta pr fica definida por Br e por Mr. O ângulo entre m e p é qualquer dosângulos agudos entre mr e pr, com vértice em Mr, e identificou-se com 90º–αº, poisé o ângulo complementar do ângulo pretendido. 3. O ângulo entre a recta m e oplano δ é o ângulo complementar do ângulo 90º–αº – assim, por Mr conduziu-seuma perpendicular a pr. O ângulo pretendido é o ângulo entre esta perpendicular emr, e identificou-se com αº.
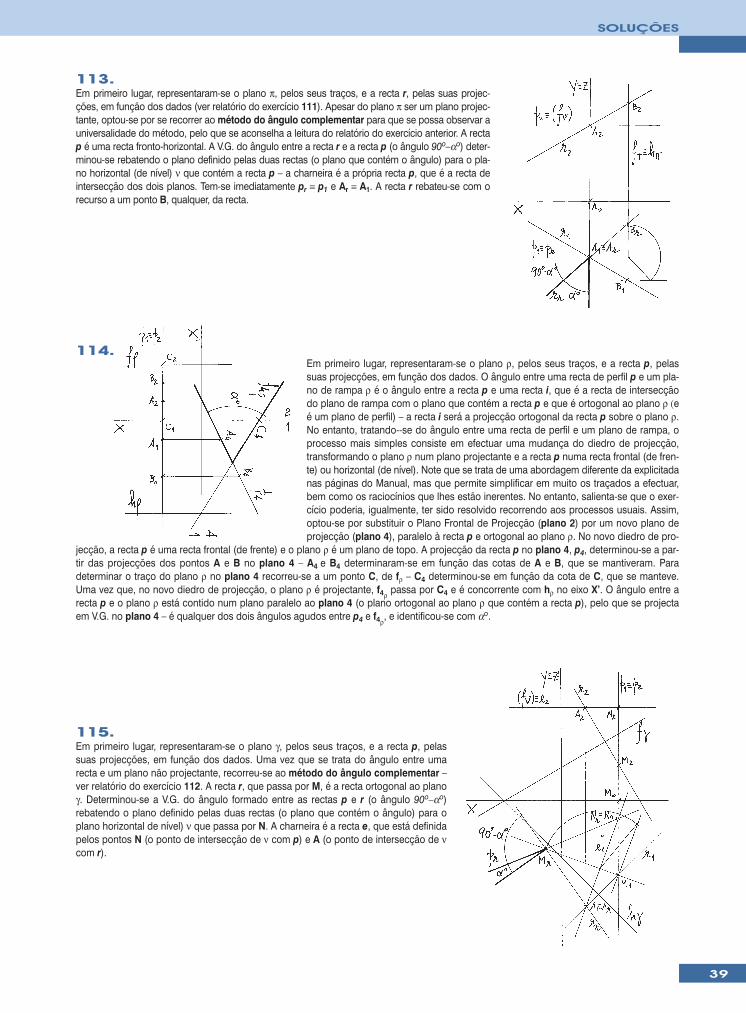
39
SOLUÇÕES
113.Em primeiro lugar, representaram-se o plano π, pelos seus traços, e a recta r, pelas suas projec-ções, em função dos dados (ver relatório do exercício 111). Apesar do plano π ser um plano projec-tante, optou-se por se recorrer ao método do ângulo complementar para que se possa observar auniversalidade do método, pelo que se aconselha a leitura do relatório do exercício anterior. A rectap é uma recta fronto-horizontal. A V.G. do ângulo entre a recta r e a recta p (o ângulo 90º–αº) deter-minou-se rebatendo o plano definido pelas duas rectas (o plano que contém o ângulo) para o pla-no horizontal (de nível) ν que contém a recta p – a charneira é a própria recta p, que é a recta deintersecção dos dois planos. Tem-se imediatamente pr ≡ p1 e Ar ≡ A1. A recta r rebateu-se com orecurso a um ponto B, qualquer, da recta.
Em primeiro lugar, representaram-se o plano ρ, pelos seus traços, e a recta p, pelassuas projecções, em função dos dados. O ângulo entre uma recta de perfil p e um pla-no de rampa ρ é o ângulo entre a recta p e uma recta i, que é a recta de intersecçãodo plano de rampa com o plano que contém a recta p e que é ortogonal ao plano ρ (eé um plano de perfil) – a recta i será a projecção ortogonal da recta p sobre o plano ρ.No entanto, tratando--se do ângulo entre uma recta de perfil e um plano de rampa, oprocesso mais simples consiste em efectuar uma mudança do diedro de projecção,transformando o plano ρ num plano projectante e a recta p numa recta frontal (de fren-te) ou horizontal (de nível). Note que se trata de uma abordagem diferente da explicitadanas páginas do Manual, mas que permite simplificar em muito os traçados a efectuar,bem como os raciocínios que lhes estão inerentes. No entanto, salienta-se que o exer-cício poderia, igualmente, ter sido resolvido recorrendo aos processos usuais. Assim,optou-se por substituir o Plano Frontal de Projecção (plano 2) por um novo plano deprojecção (plano 4), paralelo à recta p e ortogonal ao plano ρ. No novo diedro de pro-
jecção, a recta p é uma recta frontal (de frente) e o plano ρ é um plano de topo. A projecção da recta p no plano 4, p4, determinou-se a par-tir das projecções dos pontos A e B no plano 4 – A4 e B4 determinaram-se em função das cotas de A e B, que se mantiveram. Paradeterminar o traço do plano ρ no plano 4 recorreu-se a um ponto C, de fρ – C4 determinou-se em função da cota de C, que se manteve.Uma vez que, no novo diedro de projecção, o plano ρ é projectante, f4ρ passa por C4 e é concorrente com hρ no eixo X’. O ângulo entre arecta p e o plano ρ está contido num plano paralelo ao plano 4 (o plano ortogonal ao plano ρ que contém a recta p), pelo que se projectaem V.G. no plano 4 – é qualquer dos dois ângulos agudos entre p4 e f4ρ, e identificou-se com αº.
114.
115.Em primeiro lugar, representaram-se o plano γ, pelos seus traços, e a recta p, pelassuas projecções, em função dos dados. Uma vez que se trata do ângulo entre umarecta e um plano não projectante, recorreu-se ao método do ângulo complementar –ver relatório do exercício 112. A recta r, que passa por M, é a recta ortogonal ao planoγ. Determinou-se a V.G. do ângulo formado entre as rectas p e r (o ângulo 90º–αº)rebatendo o plano definido pelas duas rectas (o plano que contém o ângulo) para oplano horizontal de nível) ν que passa por N. A charneira é a recta e, que está definidapelos pontos N (o ponto de intersecção de ν com p) e A (o ponto de intersecção de νcom r).
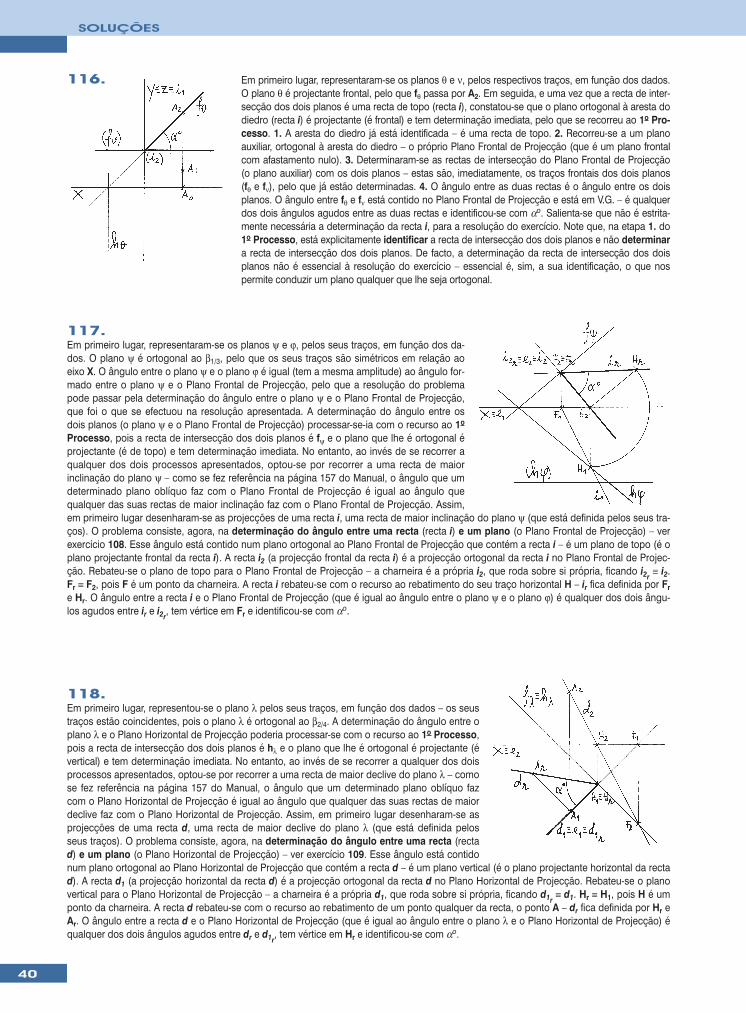
40
SOLUÇÕES
116. Em primeiro lugar, representaram-se os planos θ e ν, pelos respectivos traços, em função dos dados.O plano θ é projectante frontal, pelo que fθ passa por A2. Em seguida, e uma vez que a recta de inter-secção dos dois planos é uma recta de topo (recta i), constatou-se que o plano ortogonal à aresta dodiedro (recta i) é projectante (é frontal) e tem determinação imediata, pelo que se recorreu ao 1o Pro-cesso. 1. A aresta do diedro já está identificada – é uma recta de topo. 2. Recorreu-se a um planoauxiliar, ortogonal à aresta do diedro – o próprio Plano Frontal de Projecção (que é um plano frontalcom afastamento nulo). 3. Determinaram-se as rectas de intersecção do Plano Frontal de Projecção(o plano auxiliar) com os dois planos – estas são, imediatamente, os traços frontais dos dois planos(fθ e fν), pelo que já estão determinadas. 4. O ângulo entre as duas rectas é o ângulo entre os doisplanos. O ângulo entre fθ e fν está contido no Plano Frontal de Projecção e está em V.G. – é qualquerdos dois ângulos agudos entre as duas rectas e identificou-se com αº. Salienta-se que não é estrita-mente necessária a determinação da recta i, para a resolução do exercício. Note que, na etapa 1. do1o Processo, está explicitamente identificar a recta de intersecção dos dois planos e não determinara recta de intersecção dos dois planos. De facto, a determinação da recta de intersecção dos doisplanos não é essencial à resolução do exercício – essencial é, sim, a sua identificação, o que nospermite conduzir um plano qualquer que lhe seja ortogonal.
117.Em primeiro lugar, representaram-se os planos ψ e ϕ, pelos seus traços, em função dos da-dos. O plano ψ é ortogonal ao β1/3, pelo que os seus traços são simétricos em relação aoeixo X. O ângulo entre o plano ψ e o plano ϕ é igual (tem a mesma amplitude) ao ângulo for-mado entre o plano ψ e o Plano Frontal de Projecção, pelo que a resolução do problemapode passar pela determinação do ângulo entre o plano ψ e o Plano Frontal de Projecção,que foi o que se efectuou na resolução apresentada. A determinação do ângulo entre osdois planos (o plano ψ e o Plano Frontal de Projecção) processar-se-ia com o recurso ao 1o
Processo, pois a recta de intersecção dos dois planos é fψ e o plano que lhe é ortogonal éprojectante (é de topo) e tem determinação imediata. No entanto, ao invés de se recorrer aqualquer dos dois processos apresentados, optou-se por recorrer a uma recta de maiorinclinação do plano ψ – como se fez referência na página 157 do Manual, o ângulo que umdeterminado plano oblíquo faz com o Plano Frontal de Projecção é igual ao ângulo quequalquer das suas rectas de maior inclinação faz com o Plano Frontal de Projecção. Assim,em primeiro lugar desenharam-se as projecções de uma recta i, uma recta de maior inclinação do plano ψ (que está definida pelos seus tra-ços). O problema consiste, agora, na determinação do ângulo entre uma recta (recta i) e um plano (o Plano Frontal de Projecção) – verexercício 108. Esse ângulo está contido num plano ortogonal ao Plano Frontal de Projecção que contém a recta i – é um plano de topo (é oplano projectante frontal da recta i). A recta i2 (a projecção frontal da recta i) é a projecção ortogonal da recta i no Plano Frontal de Projec-ção. Rebateu-se o plano de topo para o Plano Frontal de Projecção – a charneira é a própria i2, que roda sobre si própria, ficando i2r
≡ i2.Fr ≡ F2, pois F é um ponto da charneira. A recta i rebateu-se com o recurso ao rebatimento do seu traço horizontal H – ir fica definida por Fr
e Hr. O ângulo entre a recta i e o Plano Frontal de Projecção (que é igual ao ângulo entre o plano ψ e o plano ϕ) é qualquer dos dois ângu-los agudos entre ir e i2r
, tem vértice em Fr e identificou-se com αº.
118.Em primeiro lugar, representou-se o plano λ pelos seus traços, em função dos dados – os seustraços estão coincidentes, pois o plano λ é ortogonal ao β2/4. A determinação do ângulo entre oplano λ e o Plano Horizontal de Projecção poderia processar-se com o recurso ao 1o Processo,pois a recta de intersecção dos dois planos é hλ e o plano que lhe é ortogonal é projectante (évertical) e tem determinação imediata. No entanto, ao invés de se recorrer a qualquer dos doisprocessos apresentados, optou-se por recorrer a uma recta de maior declive do plano λ – comose fez referência na página 157 do Manual, o ângulo que um determinado plano oblíquo fazcom o Plano Horizontal de Projecção é igual ao ângulo que qualquer das suas rectas de maiordeclive faz com o Plano Horizontal de Projecção. Assim, em primeiro lugar desenharam-se asprojecções de uma recta d, uma recta de maior declive do plano λ (que está definida pelosseus traços). O problema consiste, agora, na determinação do ângulo entre uma recta (rectad) e um plano (o Plano Horizontal de Projecção) – ver exercício 109. Esse ângulo está contidonum plano ortogonal ao Plano Horizontal de Projecção que contém a recta d – é um plano vertical (é o plano projectante horizontal da rectad). A recta d1 (a projecção horizontal da recta d) é a projecção ortogonal da recta d no Plano Horizontal de Projecção. Rebateu-se o planovertical para o Plano Horizontal de Projecção – a charneira é a própria d1, que roda sobre si própria, ficando d1r
≡ d1. Hr ≡ H1, pois H é umponto da charneira. A recta d rebateu-se com o recurso ao rebatimento de um ponto qualquer da recta, o ponto A – dr fica definida por Hr eAr. O ângulo entre a recta d e o Plano Horizontal de Projecção (que é igual ao ângulo entre o plano λ e o Plano Horizontal de Projecção) équalquer dos dois ângulos agudos entre dr e d1r
, tem vértice em Hr e identificou-se com αº.
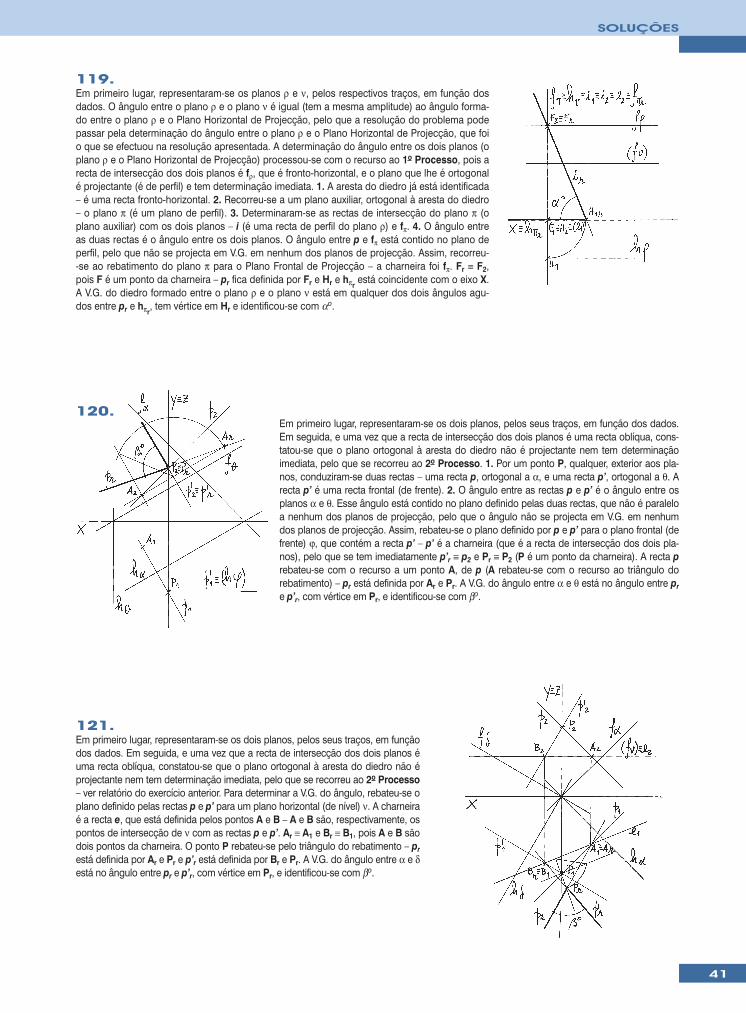
41
SOLUÇÕES
119.Em primeiro lugar, representaram-se os planos ρ e ν, pelos respectivos traços, em função dosdados. O ângulo entre o plano ρ e o plano ν é igual (tem a mesma amplitude) ao ângulo forma-do entre o plano ρ e o Plano Horizontal de Projecção, pelo que a resolução do problema podepassar pela determinação do ângulo entre o plano ρ e o Plano Horizontal de Projecção, que foio que se efectuou na resolução apresentada. A determinação do ângulo entre os dois planos (oplano ρ e o Plano Horizontal de Projecção) processou-se com o recurso ao 1o Processo, pois arecta de intersecção dos dois planos é fρ, que é fronto-horizontal, e o plano que lhe é ortogonalé projectante (é de perfil) e tem determinação imediata. 1. A aresta do diedro já está identificada– é uma recta fronto-horizontal. 2. Recorreu-se a um plano auxiliar, ortogonal à aresta do diedro– o plano π (é um plano de perfil). 3. Determinaram-se as rectas de intersecção do plano π (oplano auxiliar) com os dois planos – i (é uma recta de perfil do plano ρ) e fπ. 4. O ângulo entreas duas rectas é o ângulo entre os dois planos. O ângulo entre p e fπ está contido no plano deperfil, pelo que não se projecta em V.G. em nenhum dos planos de projecção. Assim, recorreu--se ao rebatimento do plano π para o Plano Frontal de Projecção – a charneira foi fπ. Fr ≡ F2,pois F é um ponto da charneira – pr fica definida por Fr e Hr e hπr
está coincidente com o eixo X.A V.G. do diedro formado entre o plano ρ e o plano ν está em qualquer dos dois ângulos agu-dos entre pr e hπr
, tem vértice em Hr e identificou-se com αº.
120.Em primeiro lugar, representaram-se os dois planos, pelos seus traços, em função dos dados.Em seguida, e uma vez que a recta de intersecção dos dois planos é uma recta oblíqua, cons-tatou-se que o plano ortogonal à aresta do diedro não é projectante nem tem determinaçãoimediata, pelo que se recorreu ao 2o Processo. 1. Por um ponto P, qualquer, exterior aos pla-nos, conduziram-se duas rectas – uma recta p, ortogonal a α, e uma recta p’, ortogonal a θ. Arecta p’ é uma recta frontal (de frente). 2. O ângulo entre as rectas p e p’ é o ângulo entre osplanos α e θ. Esse ângulo está contido no plano definido pelas duas rectas, que não é paraleloa nenhum dos planos de projecção, pelo que o ângulo não se projecta em V.G. em nenhumdos planos de projecção. Assim, rebateu-se o plano definido por p e p’ para o plano frontal (defrente) ϕ, que contém a recta p’ – p’ é a charneira (que é a recta de intersecção dos dois pla-nos), pelo que se tem imediatamente p’r ≡ p2 e Pr ≡ P2 (P é um ponto da charneira). A recta prebateu-se com o recurso a um ponto A, de p (A rebateu-se com o recurso ao triângulo dorebatimento) – pr está definida por Ar e Pr. A V.G. do ângulo entre α e θ está no ângulo entre pre p’r, com vértice em Pr, e identificou-se com βº.
121.Em primeiro lugar, representaram-se os dois planos, pelos seus traços, em funçãodos dados. Em seguida, e uma vez que a recta de intersecção dos dois planos éuma recta oblíqua, constatou-se que o plano ortogonal à aresta do diedro não éprojectante nem tem determinação imediata, pelo que se recorreu ao 2o Processo– ver relatório do exercício anterior. Para determinar a V.G. do ângulo, rebateu-se oplano definido pelas rectas p e p’ para um plano horizontal (de nível) ν. A charneiraé a recta e, que está definida pelos pontos A e B – A e B são, respectivamente, ospontos de intersecção de ν com as rectas p e p’. Ar ≡ A1 e Br ≡ B1, pois A e B sãodois pontos da charneira. O ponto P rebateu-se pelo triângulo do rebatimento – prestá definida por Ar e Pr e p’r está definida por Br e Pr. A V.G. do ângulo entre α e δestá no ângulo entre pr e p’r, com vértice em Pr, e identificou-se com βº.
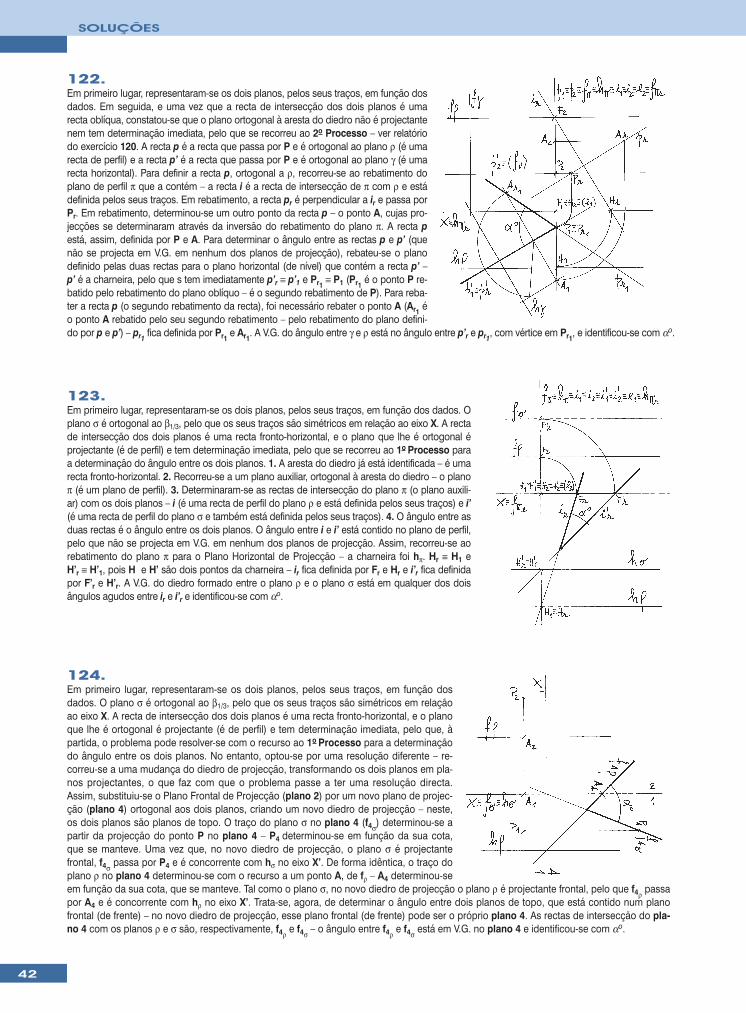
42
SOLUÇÕES
122.Em primeiro lugar, representaram-se os dois planos, pelos seus traços, em função dosdados. Em seguida, e uma vez que a recta de intersecção dos dois planos é umarecta oblíqua, constatou-se que o plano ortogonal à aresta do diedro não é projectantenem tem determinação imediata, pelo que se recorreu ao 2o Processo – ver relatóriodo exercício 120. A recta p é a recta que passa por P e é ortogonal ao plano ρ (é umarecta de perfil) e a recta p’ é a recta que passa por P e é ortogonal ao plano γ (é umarecta horizontal). Para definir a recta p, ortogonal a ρ, recorreu-se ao rebatimento doplano de perfil π que a contém – a recta i é a recta de intersecção de π com ρ e estádefinida pelos seus traços. Em rebatimento, a recta pr é perpendicular a ir e passa porPr. Em rebatimento, determinou-se um outro ponto da recta p – o ponto A, cujas pro-jecções se determinaram através da inversão do rebatimento do plano π. A recta pestá, assim, definida por P e A. Para determinar o ângulo entre as rectas p e p’ (quenão se projecta em V.G. em nenhum dos planos de projecção), rebateu-se o planodefinido pelas duas rectas para o plano horizontal (de nível) que contém a recta p’ –p’ é a charneira, pelo que s tem imediatamente p’r ≡ p’1 e Pr1
≡ P1 (Pr1é o ponto P re-
batido pelo rebatimento do plano oblíquo – é o segundo rebatimento de P). Para reba-ter a recta p (o segundo rebatimento da recta), foi necessário rebater o ponto A (Ar1
éo ponto A rebatido pelo seu segundo rebatimento – pelo rebatimento do plano defini-do por p e p’) – pr1
fica definida por Pr1e Ar1
. A V.G. do ângulo entre γ e ρ está no ângulo entre p’r e pr1, com vértice em Pr1
, e identificou-se com αº.
123.Em primeiro lugar, representaram-se os dois planos, pelos seus traços, em função dos dados. Oplano σ é ortogonal ao β1/3, pelo que os seus traços são simétricos em relação ao eixo X. A rectade intersecção dos dois planos é uma recta fronto-horizontal, e o plano que lhe é ortogonal éprojectante (é de perfil) e tem determinação imediata, pelo que se recorreu ao 1o Processo paraa determinação do ângulo entre os dois planos. 1. A aresta do diedro já está identificada – é umarecta fronto-horizontal. 2. Recorreu-se a um plano auxiliar, ortogonal à aresta do diedro – o planoπ (é um plano de perfil). 3. Determinaram-se as rectas de intersecção do plano π (o plano auxili-ar) com os dois planos – i (é uma recta de perfil do plano ρ e está definida pelos seus traços) e i’(é uma recta de perfil do plano σ e também está definida pelos seus traços). 4. O ângulo entre asduas rectas é o ângulo entre os dois planos. O ângulo entre i e i’ está contido no plano de perfil,pelo que não se projecta em V.G. em nenhum dos planos de projecção. Assim, recorreu-se aorebatimento do plano π para o Plano Horizontal de Projecção – a charneira foi hπ. Hr ≡ H1 eH’r ≡ H’1, pois H e H’ são dois pontos da charneira – ir fica definida por Fr e Hr e i’r fica definidapor F’r e H’r. A V.G. do diedro formado entre o plano ρ e o plano σ está em qualquer dos doisângulos agudos entre ir e i’r e identificou-se com αº.
124.Em primeiro lugar, representaram-se os dois planos, pelos seus traços, em função dosdados. O plano σ é ortogonal ao β1/3, pelo que os seus traços são simétricos em relaçãoao eixo X. A recta de intersecção dos dois planos é uma recta fronto-horizontal, e o planoque lhe é ortogonal é projectante (é de perfil) e tem determinação imediata, pelo que, àpartida, o problema pode resolver-se com o recurso ao 1o Processo para a determinaçãodo ângulo entre os dois planos. No entanto, optou-se por uma resolução diferente – re-correu-se a uma mudança do diedro de projecção, transformando os dois planos em pla-nos projectantes, o que faz com que o problema passe a ter uma resolução directa.Assim, substituiu-se o Plano Frontal de Projecção (plano 2) por um novo plano de projec-ção (plano 4) ortogonal aos dois planos, criando um novo diedro de projecção – neste,os dois planos são planos de topo. O traço do plano σ no plano 4 (f4σ) determinou-se apartir da projecção do ponto P no plano 4 – P4 determinou-se em função da sua cota,que se manteve. Uma vez que, no novo diedro de projecção, o plano σ é projectantefrontal, f4σ passa por P4 e é concorrente com hσ no eixo X’. De forma idêntica, o traço doplano ρ no plano 4 determinou-se com o recurso a um ponto A, de fρ – A4 determinou-seem função da sua cota, que se manteve. Tal como o plano σ, no novo diedro de projecção o plano ρ é projectante frontal, pelo que f4ρ passapor A4 e é concorrente com hρ no eixo X’. Trata-se, agora, de determinar o ângulo entre dois planos de topo, que está contido num planofrontal (de frente) – no novo diedro de projecção, esse plano frontal (de frente) pode ser o próprio plano 4. As rectas de intersecção do pla-no 4 com os planos ρ e σ são, respectivamente, f4ρ e f4σ – o ângulo entre f4ρ e f4σ está em V.G. no plano 4 e identificou-se com αº.
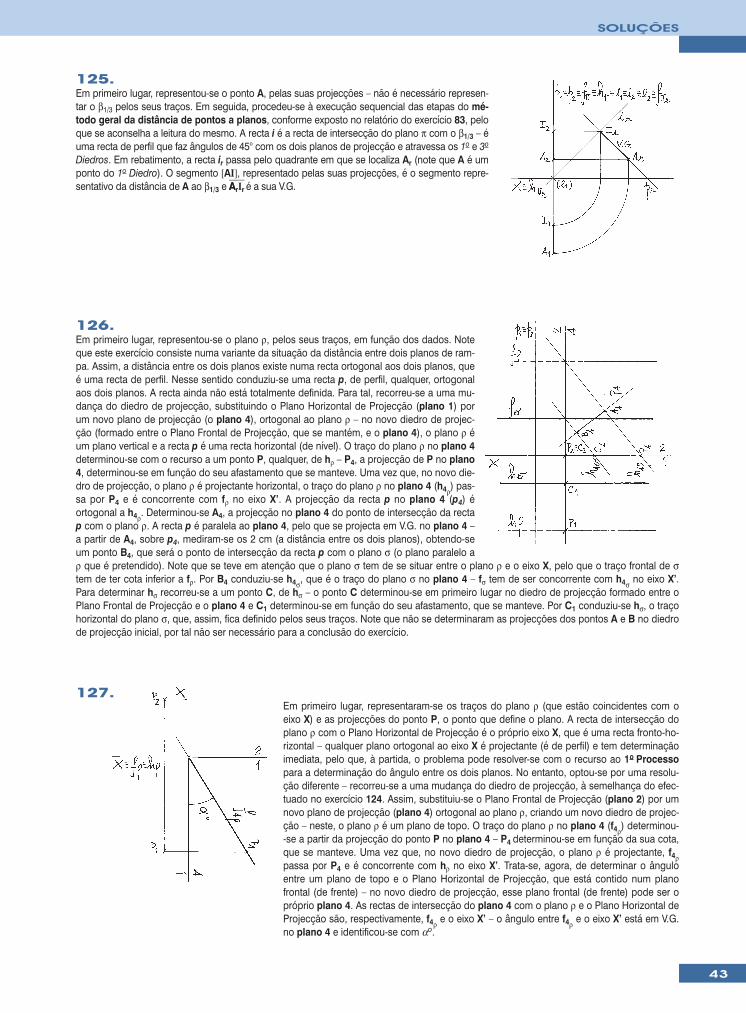
43
SOLUÇÕES
125.Em primeiro lugar, representou-se o ponto A, pelas suas projecções – não é necessário represen-tar o β1/3 pelos seus traços. Em seguida, procedeu-se à execução sequencial das etapas do mé-todo geral da distância de pontos a planos, conforme exposto no relatório do exercício 83, peloque se aconselha a leitura do mesmo. A recta i é a recta de intersecção do plano π com o β1/3 – éuma recta de perfil que faz ângulos de 45° com os dois planos de projecção e atravessa os 1o e 3o
Diedros. Em rebatimento, a recta ir passa pelo quadrante em que se localiza Ar (note que A é umponto do 1o Diedro). O segmento [AI], representado pelas suas projecções, é o segmento repre-sentativo da distância de A ao β1/3 e AA�r�I�r� é a sua V.G.
126.Em primeiro lugar, representou-se o plano ρ, pelos seus traços, em função dos dados. Noteque este exercício consiste numa variante da situação da distância entre dois planos de ram-pa. Assim, a distância entre os dois planos existe numa recta ortogonal aos dois planos, queé uma recta de perfil. Nesse sentido conduziu-se uma recta p, de perfil, qualquer, ortogonalaos dois planos. A recta ainda não está totalmente definida. Para tal, recorreu-se a uma mu-dança do diedro de projecção, substituindo o Plano Horizontal de Projecção (plano 1) porum novo plano de projecção (o plano 4), ortogonal ao plano ρ – no novo diedro de projec-ção (formado entre o Plano Frontal de Projecção, que se mantém, e o plano 4), o plano ρ éum plano vertical e a recta p é uma recta horizontal (de nível). O traço do plano ρ no plano 4determinou-se com o recurso a um ponto P, qualquer, de hρ – P4, a projecção de P no plano4, determinou-se em função do seu afastamento que se manteve. Uma vez que, no novo die-dro de projecção, o plano ρ é projectante horizontal, o traço do plano ρ no plano 4 (h4ρ) pas-sa por P4 e é concorrente com fρ no eixo X’. A projecção da recta p no plano 4 (p4) éortogonal a h4ρ. Determinou-se A4, a projecção no plano 4 do ponto de intersecção da rectap com o plano ρ. A recta p é paralela ao plano 4, pelo que se projecta em V.G. no plano 4 –a partir de A4, sobre p4, mediram-se os 2 cm (a distância entre os dois planos), obtendo-seum ponto B4, que será o ponto de intersecção da recta p com o plano σ (o plano paralelo aρ que é pretendido). Note que se teve em atenção que o plano σ tem de se situar entre o plano ρ e o eixo X, pelo que o traço frontal de σtem de ter cota inferior a fρ. Por B4 conduziu-se h4σ, que é o traço do plano σ no plano 4 – fσ tem de ser concorrente com h4σ no eixo X’.Para determinar hσ recorreu-se a um ponto C, de hσ – o ponto C determinou-se em primeiro lugar no diedro de projecção formado entre oPlano Frontal de Projecção e o plano 4 e C1 determinou-se em função do seu afastamento, que se manteve. Por C1 conduziu-se hσ, o traçohorizontal do plano σ, que, assim, fica definido pelos seus traços. Note que não se determinaram as projecções dos pontos A e B no diedrode projecção inicial, por tal não ser necessário para a conclusão do exercício.
Em primeiro lugar, representaram-se os traços do plano ρ (que estão coincidentes com oeixo X) e as projecções do ponto P, o ponto que define o plano. A recta de intersecção doplano ρ com o Plano Horizontal de Projecção é o próprio eixo X, que é uma recta fronto-ho-rizontal – qualquer plano ortogonal ao eixo X é projectante (é de perfil) e tem determinaçãoimediata, pelo que, à partida, o problema pode resolver-se com o recurso ao 1o Processopara a determinação do ângulo entre os dois planos. No entanto, optou-se por uma resolu-ção diferente – recorreu-se a uma mudança do diedro de projecção, à semelhança do efec-tuado no exercício 124. Assim, substituiu-se o Plano Frontal de Projecção (plano 2) por umnovo plano de projecção (plano 4) ortogonal ao plano ρ, criando um novo diedro de projec-ção – neste, o plano ρ é um plano de topo. O traço do plano ρ no plano 4 (f4ρ) determinou--se a partir da projecção do ponto P no plano 4 – P4 determinou-se em função da sua cota,que se manteve. Uma vez que, no novo diedro de projecção, o plano ρ é projectante, f4ρpassa por P4 e é concorrente com hρ no eixo X’. Trata-se, agora, de determinar o ânguloentre um plano de topo e o Plano Horizontal de Projecção, que está contido num planofrontal (de frente) – no novo diedro de projecção, esse plano frontal (de frente) pode ser opróprio plano 4. As rectas de intersecção do plano 4 com o plano ρ e o Plano Horizontal deProjecção são, respectivamente, f4ρ e o eixo X’ – o ângulo entre f4ρ e o eixo X’ está em V.G.no plano 4 e identificou-se com αº.
127.
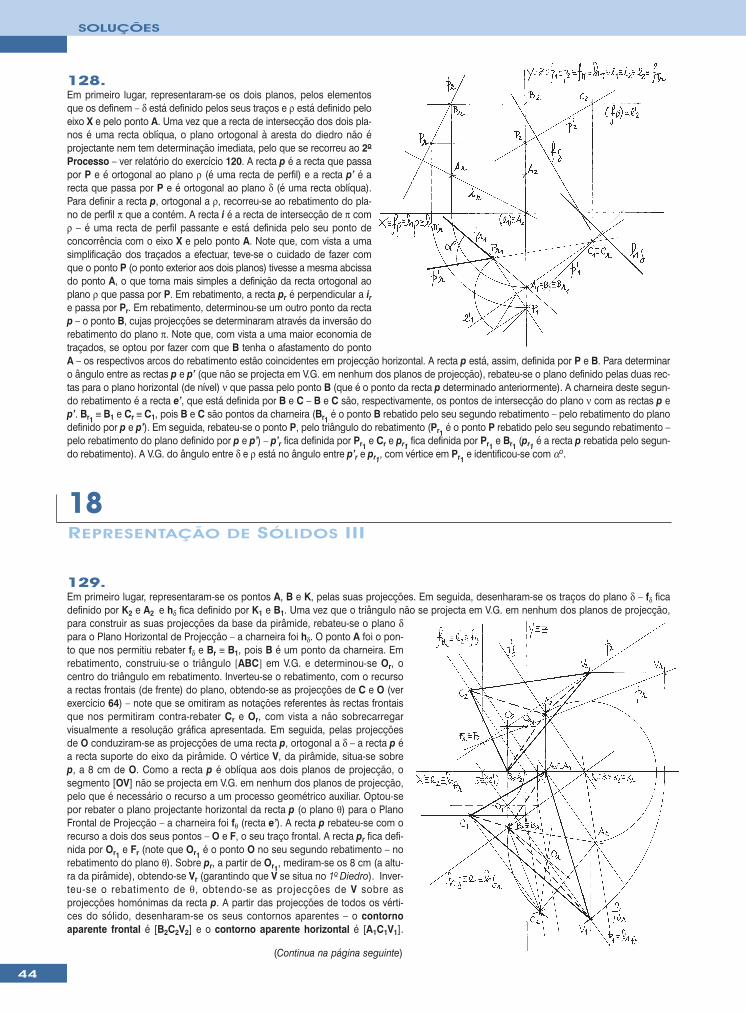
44
SOLUÇÕES
(Continua na página seguinte)
128.Em primeiro lugar, representaram-se os dois planos, pelos elementosque os definem – δ está definido pelos seus traços e ρ está definido peloeixo X e pelo ponto A. Uma vez que a recta de intersecção dos dois pla-nos é uma recta oblíqua, o plano ortogonal à aresta do diedro não éprojectante nem tem determinação imediata, pelo que se recorreu ao 2o
Processo – ver relatório do exercício 120. A recta p é a recta que passapor P e é ortogonal ao plano ρ (é uma recta de perfil) e a recta p’ é arecta que passa por P e é ortogonal ao plano δ (é uma recta oblíqua).Para definir a recta p, ortogonal a ρ, recorreu-se ao rebatimento do pla-no de perfil π que a contém. A recta i é a recta de intersecção de π comρ – é uma recta de perfil passante e está definida pelo seu ponto deconcorrência com o eixo X e pelo ponto A. Note que, com vista a umasimplificação dos traçados a efectuar, teve-se o cuidado de fazer comque o ponto P (o ponto exterior aos dois planos) tivesse a mesma abcissado ponto A, o que torna mais simples a definição da recta ortogonal aoplano ρ que passa por P. Em rebatimento, a recta pr é perpendicular a ire passa por Pr. Em rebatimento, determinou-se um outro ponto da rectap – o ponto B, cujas projecções se determinaram através da inversão dorebatimento do plano π. Note que, com vista a uma maior economia detraçados, se optou por fazer com que B tenha o afastamento do pontoA – os respectivos arcos do rebatimento estão coincidentes em projecção horizontal. A recta p está, assim, definida por P e B. Para determinaro ângulo entre as rectas p e p’ (que não se projecta em V.G. em nenhum dos planos de projecção), rebateu-se o plano definido pelas duas rec-tas para o plano horizontal (de nível) ν que passa pelo ponto B (que é o ponto da recta p determinado anteriormente). A charneira deste segun-do rebatimento é a recta e’, que está definida por B e C – B e C são, respectivamente, os pontos de intersecção do plano ν com as rectas p ep’. Br1
≡ B1 e Cr ≡ C1, pois B e C são pontos da charneira (Br1é o ponto B rebatido pelo seu segundo rebatimento – pelo rebatimento do plano
definido por p e p’). Em seguida, rebateu-se o ponto P, pelo triângulo do rebatimento (Pr1é o ponto P rebatido pelo seu segundo rebatimento –
pelo rebatimento do plano definido por p e p’) – p’r fica definida por Pr1e Cr e pr1
fica definida por Pr1e Br1
(pr1é a recta p rebatida pelo segun-
do rebatimento). A V.G. do ângulo entre δ e ρ está no ângulo entre p’r e pr1, com vértice em Pr1
e identificou-se com αº.
129.Em primeiro lugar, representaram-se os pontos A, B e K, pelas suas projecções. Em seguida, desenharam-se os traços do plano δ – fδ ficadefinido por K2 e A2 e hδ fica definido por K1 e B1. Uma vez que o triângulo não se projecta em V.G. em nenhum dos planos de projecção,para construir as suas projecções da base da pirâmide, rebateu-se o plano δpara o Plano Horizontal de Projecção – a charneira foi hδ. O ponto A foi o pon-to que nos permitiu rebater fδ e Br ≡ B1, pois B é um ponto da charneira. Emrebatimento, construiu-se o triângulo [ABC] em V.G. e determinou-se Or, ocentro do triângulo em rebatimento. Inverteu-se o rebatimento, com o recursoa rectas frontais (de frente) do plano, obtendo-se as projecções de C e O (verexercício 64) – note que se omitiram as notações referentes às rectas frontaisque nos permitiram contra-rebater Cr e Or, com vista a não sobrecarregarvisualmente a resolução gráfica apresentada. Em seguida, pelas projecçõesde O conduziram-se as projecções de uma recta p, ortogonal a δ – a recta p éa recta suporte do eixo da pirâmide. O vértice V, da pirâmide, situa-se sobrep, a 8 cm de O. Como a recta p é oblíqua aos dois planos de projecção, osegmento [OV] não se projecta em V.G. em nenhum dos planos de projecção,pelo que é necessário o recurso a um processo geométrico auxiliar. Optou-sepor rebater o plano projectante horizontal da recta p (o plano θ) para o PlanoFrontal de Projecção – a charneira foi fθ (recta e’). A recta p rebateu-se com orecurso a dois dos seus pontos – O e F, o seu traço frontal. A recta pr fica defi-nida por Or1
e Fr (note que Or1é o ponto O no seu segundo rebatimento – no
rebatimento do plano θ). Sobre pr, a partir de Or1, mediram-se os 8 cm (a altu-
ra da pirâmide), obtendo-se Vr (garantindo que V se situa no 1o Diedro). Inver-teu-se o rebatimento de θ, obtendo-se as projecções de V sobre asprojecções homónimas da recta p. A partir das projecções de todos os vérti-ces do sólido, desenharam-se os seus contornos aparentes – o contornoaparente frontal é [B2C2V2] e o contorno aparente horizontal é [A1C1V1].
REPRESENTAÇÃO DE SÓLIDOS III
18
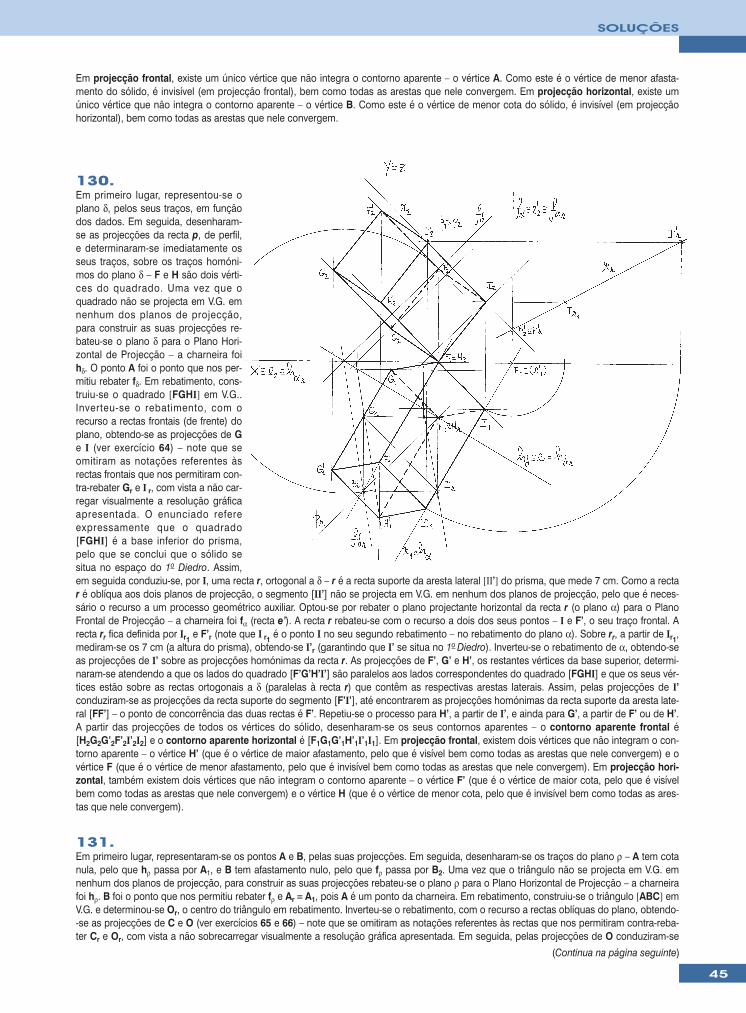
45
SOLUÇÕES
130.Em primeiro lugar, representou-se oplano δ, pelos seus traços, em funçãodos dados. Em seguida, desenharam-se as projecções da recta p, de perfil,e determinaram-se imediatamente osseus traços, sobre os traços homóni-mos do plano δ – F e H são dois vérti-ces do quadrado. Uma vez que oquadrado não se projecta em V.G. emnenhum dos planos de projecção,para construir as suas projecções re-bateu-se o plano δ para o Plano Hori-zontal de Projecção – a charneira foihδ. O ponto A foi o ponto que nos per-mitiu rebater fδ. Em rebatimento, cons-truiu-se o quadrado [FGHI] em V.G..Inverteu-se o rebatimento, com orecurso a rectas frontais (de frente) doplano, obtendo-se as projecções de Ge I (ver exercício 64) – note que seomitiram as notações referentes àsrectas frontais que nos permitiram con-tra-rebater Gr e I r, com vista a não car-regar visualmente a resolução gráficaapresentada. O enunciado refereexpressamente que o quadrado[FGHI] é a base inferior do prisma,pelo que se conclui que o sólido sesitua no espaço do 1o Diedro. Assim,em seguida conduziu-se, por I, uma recta r, ortogonal a δ – r é a recta suporte da aresta lateral [ΙΙ’] do prisma, que mede 7 cm. Como a rectar é oblíqua aos dois planos de projecção, o segmento [II’] não se projecta em V.G. em nenhum dos planos de projecção, pelo que é neces-sário o recurso a um processo geométrico auxiliar. Optou-se por rebater o plano projectante horizontal da recta r (o plano α) para o PlanoFrontal de Projecção – a charneira foi fα (recta e’). A recta r rebateu-se com o recurso a dois dos seus pontos – I e F’, o seu traço frontal. Arecta rr fica definida por Ir1
e F’r (note que I r1é o ponto I no seu segundo rebatimento – no rebatimento do plano α). Sobre rr, a partir de Ir1
,mediram-se os 7 cm (a altura do prisma), obtendo-se I’r (garantindo que I’ se situa no 1o Diedro). Inverteu-se o rebatimento de α, obtendo-seas projecções de I’ sobre as projecções homónimas da recta r. As projecções de F’, G’ e H’, os restantes vértices da base superior, determi-naram-se atendendo a que os lados do quadrado [F’G’H’I’] são paralelos aos lados correspondentes do quadrado [FGHI] e que os seus vér-tices estão sobre as rectas ortogonais a δ (paralelas à recta r) que contêm as respectivas arestas laterais. Assim, pelas projecções de I’conduziram-se as projecções da recta suporte do segmento [F’I’], até encontrarem as projecções homónimas da recta suporte da aresta late-ral [FF’] – o ponto de concorrência das duas rectas é F’. Repetiu-se o processo para H’, a partir de I’, e ainda para G’, a partir de F’ ou de H’.A partir das projecções de todos os vértices do sólido, desenharam-se os seus contornos aparentes – o contorno aparente frontal é[H2G2G’2F’2I’2I2] e o contorno aparente horizontal é [F1G1G’1H’1I’1I1]. Em projecção frontal, existem dois vértices que não integram o con-torno aparente – o vértice H’ (que é o vértice de maior afastamento, pelo que é visível bem como todas as arestas que nele convergem) e ovértice F (que é o vértice de menor afastamento, pelo que é invisível bem como todas as arestas que nele convergem). Em projecção hori-zontal, também existem dois vértices que não integram o contorno aparente – o vértice F’ (que é o vértice de maior cota, pelo que é visívelbem como todas as arestas que nele convergem) e o vértice H (que é o vértice de menor cota, pelo que é invisível bem como todas as ares-tas que nele convergem).
131.Em primeiro lugar, representaram-se os pontos A e B, pelas suas projecções. Em seguida, desenharam-se os traços do plano ρ – A tem cotanula, pelo que hρ passa por A1, e B tem afastamento nulo, pelo que fρ passa por B2. Uma vez que o triângulo não se projecta em V.G. emnenhum dos planos de projecção, para construir as suas projecções rebateu-se o plano ρ para o Plano Horizontal de Projecção – a charneirafoi hρ. B foi o ponto que nos permitiu rebater fρ e Ar ≡ A1, pois A é um ponto da charneira. Em rebatimento, construiu-se o triângulo [ABC] emV.G. e determinou-se Or, o centro do triângulo em rebatimento. Inverteu-se o rebatimento, com o recurso a rectas oblíquas do plano, obtendo--se as projecções de C e O (ver exercícios 65 e 66) – note que se omitiram as notações referentes às rectas que nos permitiram contra-reba-ter Cr e Or, com vista a não sobrecarregar visualmente a resolução gráfica apresentada. Em seguida, pelas projecções de O conduziram-se
Em projecção frontal, existe um único vértice que não integra o contorno aparente – o vértice A. Como este é o vértice de menor afasta-mento do sólido, é invisível (em projecção frontal), bem como todas as arestas que nele convergem. Em projecção horizontal, existe umúnico vértice que não integra o contorno aparente – o vértice B. Como este é o vértice de menor cota do sólido, é invisível (em projecçãohorizontal), bem como todas as arestas que nele convergem.
(Continua na página seguinte)

46
SOLUÇÕES
as projecções de uma recta p, ortogonal a ρ – a recta p é arecta suporte do eixo da pirâmide e é uma recta de perfil(que está definida por um ponto – O – e pela sua direcção –é ortogonal a ρ). A recta p é ortogonal às rectas de perfil doplano ρ. Para definir a recta p conduziu-se, pela recta, umplano de perfil π e determinou-se a recta de intersecção deπ com ρ – recta i (que está definida pelos seus traços, F eH). A recta i contém o ponto O (que é um ponto dos doisplanos) e a recta p também – as duas rectas são perpendi-culares no ponto O. Por outro lado, ο vértice V, da pirâmide,situa-se sobre p, a 8 cm de O (a altura da pirâmide). Aten-dendo a que o segmento [OV] não se projecta em V.G. emnenhum dos planos de projecção e que a recta p não estátotalmente definida, recorreu-se ao rebatimento do plano πpara o Plano Frontal de Projecção – a charneira foi fπ (rectae’). A recta ir fica definida por Fr e Hr. Note que o ponto Or1tem também de se situar sobre ir, pois O é um ponto da rec-ta i (Or1
é o ponto O no seu segundo rebatimento – no reba-timento do plano π). A recta pr passa por Or1
e éperpendicular a ir em Or1
. Sobre pr, a partir de Or1, medi-
ram-se os 8 cm, obtendo-se Vr (garantindo que V se situano 1o Diedro). Inverteu-se o rebatimento de π, obtendo-se asprojecções de V. A partir das projecções de todos os vérti-ces do sólido, desenharam-se os seus contornos aparentes– o contorno aparente frontal é [A2B2V2C2] e o contornoaparente horizontal é [A1B1C1V1]. Em projecção frontal,todos os vértices integram o contorno aparente. No entanto,a base do sólido é invisível, bem como a face lateral [BCV],pelo que a aresta [BC] é a única aresta invisível. Tambémem projecção horizontal, todos os vértices integram o con-torno aparente. No entanto, a base do sólido também é invi-sível em projecção horizontal, bem como a face lateral[ACV], pelo que a aresta [AC] é a única aresta invisível.
132.Em primeiro lugar, representaram-se os pontos A e C,pelas suas projecções. Em seguida, desenhou-se otraço frontal do plano – C tem afastamento nulo, peloque fρ passa por C2. Para determinar o traço horizontaldo plano, recorreu-se a uma recta r do plano (definidapor A e C) e determinou-se o seu traço horizontal, H –hρ passa por H1. Uma vez que o quadrado não se pro-jecta em V.G. em nenhum dos planos de projecção,para construir as suas projecções rebateu-se o plano ρpara o Plano Horizontal de Projecção – a charneira foihρ. C foi o ponto que nos permitiu rebater fρ. A recta rrfica definida por Cr e por Hr (Hr ≡ H1, pois H é um pontoda charneira). Ar situa-se sobre rr. Em rebatimento,construiu-se o quadrado [ABCD] em V.G.. Em seguidainverteu-se o rebatimento, com o recurso a rectas oblí-quas do plano (paralelas à recta r), obtendo-se as pro-jecções de B e D (ver exercícios 65 e 66) – note que seomitiram as notações referentes às rectas que nos per-mitiram contra-rebater Br e Cr, com vista a não sobre-carregar visualmente a resolução gráfica apresentada.Em seguida, pelas projecções de B conduziram-se asprojecções de uma recta p, ortogonal a ρ – a recta p éa recta suporte da aresta lateral [BB’] e é uma recta deperfil (que está definida por um ponto – B – e pela suadirecção – é ortogonal a ρ). A recta p é ortogonal àsrectas de perfil do plano ρ. Para definir a recta p condu-ziu-se, pela recta, um plano de perfil π e determinou-sea recta de intersecção de π com ρ – recta i (que estádefinida pelos seus traços, F e H’). A recta i contém oponto B (que é um ponto dos dois planos) e a recta p
(Continua na página seguinte)
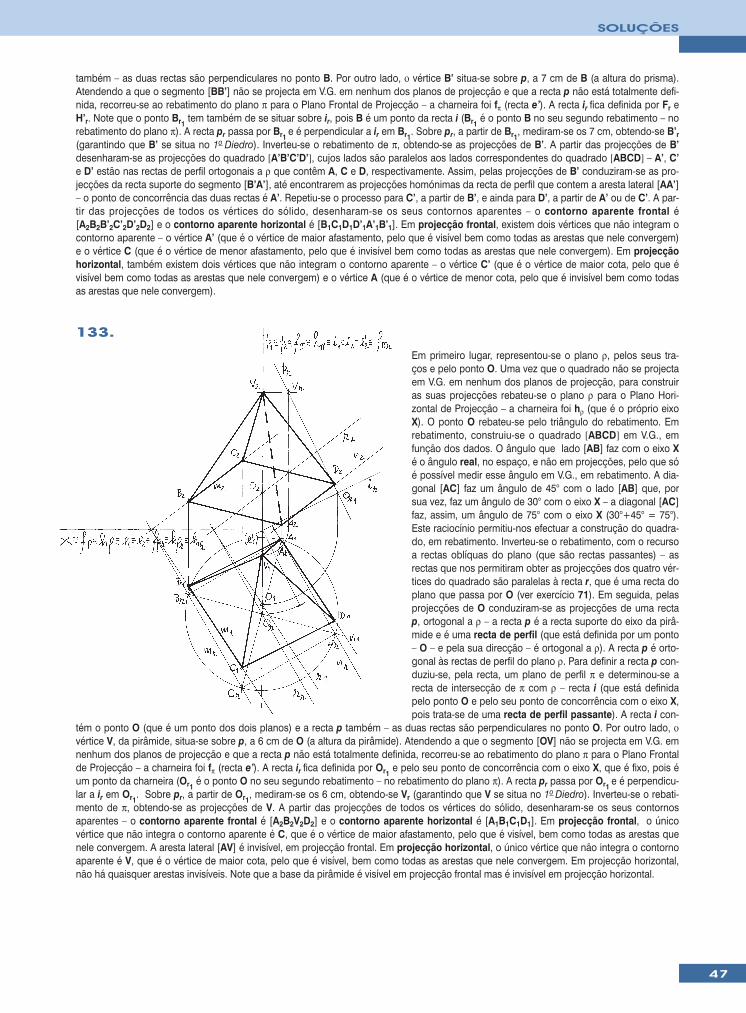
47
SOLUÇÕES
também – as duas rectas são perpendiculares no ponto B. Por outro lado, ο vértice B’ situa-se sobre p, a 7 cm de B (a altura do prisma).Atendendo a que o segmento [BB’] não se projecta em V.G. em nenhum dos planos de projecção e que a recta p não está totalmente defi-nida, recorreu-se ao rebatimento do plano π para o Plano Frontal de Projecção – a charneira foi fπ (recta e’). A recta ir fica definida por Fr eH’r. Note que o ponto Br1
tem também de se situar sobre ir, pois B é um ponto da recta i (Br1é o ponto B no seu segundo rebatimento – no
rebatimento do plano π). A recta pr passa por Br1e é perpendicular a ir em Br1
. Sobre pr, a partir de Br1, mediram-se os 7 cm, obtendo-se B’r
(garantindo que B’ se situa no 1o Diedro). Inverteu-se o rebatimento de π, obtendo-se as projecções de B’. A partir das projecções de B’desenharam-se as projecções do quadrado [A’B’C’D’], cujos lados são paralelos aos lados correspondentes do quadrado [ABCD] – A’, C’e D’ estão nas rectas de perfil ortogonais a ρ que contêm A, C e D, respectivamente. Assim, pelas projecções de B’ conduziram-se as pro-jecções da recta suporte do segmento [B’A’], até encontrarem as projecções homónimas da recta de perfil que contem a aresta lateral [AA’]– o ponto de concorrência das duas rectas é A’. Repetiu-se o processo para C’, a partir de B’, e ainda para D’, a partir de A’ ou de C’. A par-tir das projecções de todos os vértices do sólido, desenharam-se os seus contornos aparentes – o contorno aparente frontal é[A2B2B’2C’2D’2D2] e o contorno aparente horizontal é [B1C1D1D’1A’1B’1]. Em projecção frontal, existem dois vértices que não integram ocontorno aparente – o vértice A’ (que é o vértice de maior afastamento, pelo que é visível bem como todas as arestas que nele convergem)e o vértice C (que é o vértice de menor afastamento, pelo que é invisível bem como todas as arestas que nele convergem). Em projecçãohorizontal, também existem dois vértices que não integram o contorno aparente – o vértice C’ (que é o vértice de maior cota, pelo que évisível bem como todas as arestas que nele convergem) e o vértice A (que é o vértice de menor cota, pelo que é invisível bem como todasas arestas que nele convergem).
Em primeiro lugar, representou-se o plano ρ, pelos seus tra-ços e pelo ponto O. Uma vez que o quadrado não se projectaem V.G. em nenhum dos planos de projecção, para construiras suas projecções rebateu-se o plano ρ para o Plano Hori-zontal de Projecção – a charneira foi hρ (que é o próprio eixoX). O ponto O rebateu-se pelo triângulo do rebatimento. Emrebatimento, construiu-se o quadrado [ABCD] em V.G., emfunção dos dados. O ângulo que lado [AB] faz com o eixo Xé o ângulo real, no espaço, e não em projecções, pelo que sóé possível medir esse ângulo em V.G., em rebatimento. A dia-gonal [AC] faz um ângulo de 45° com o lado [AB] que, porsua vez, faz um ângulo de 30° com o eixo X – a diagonal [AC]faz, assim, um ângulo de 75° com o eixo X (30°+45° = 75°).Este raciocínio permitiu-nos efectuar a construção do quadra-do, em rebatimento. Inverteu-se o rebatimento, com o recursoa rectas oblíquas do plano (que são rectas passantes) – asrectas que nos permitiram obter as projecções dos quatro vér-tices do quadrado são paralelas à recta r, que é uma recta doplano que passa por O (ver exercício 71). Em seguida, pelasprojecções de O conduziram-se as projecções de uma rectap, ortogonal a ρ – a recta p é a recta suporte do eixo da pirâ-mide e é uma recta de perfil (que está definida por um ponto– O – e pela sua direcção – é ortogonal a ρ). A recta p é orto-gonal às rectas de perfil do plano ρ. Para definir a recta p con-duziu-se, pela recta, um plano de perfil π e determinou-se arecta de intersecção de π com ρ – recta i (que está definidapelo ponto O e pelo seu ponto de concorrência com o eixo X,pois trata-se de uma recta de perfil passante). A recta i con-
tém o ponto O (que é um ponto dos dois planos) e a recta p também – as duas rectas são perpendiculares no ponto O. Por outro lado, οvértice V, da pirâmide, situa-se sobre p, a 6 cm de O (a altura da pirâmide). Atendendo a que o segmento [OV] não se projecta em V.G. emnenhum dos planos de projecção e que a recta p não está totalmente definida, recorreu-se ao rebatimento do plano π para o Plano Frontalde Projecção – a charneira foi fπ (recta e’). A recta ir fica definida por Or1
e pelo seu ponto de concorrência com o eixo X, que é fixo, pois éum ponto da charneira (Or1
é o ponto O no seu segundo rebatimento – no rebatimento do plano π). A recta pr passa por Or1e é perpendicu-
lar a ir em Or1. Sobre pr, a partir de Or1
, mediram-se os 6 cm, obtendo-se Vr (garantindo que V se situa no 1o Diedro). Inverteu-se o rebati-mento de π, obtendo-se as projecções de V. A partir das projecções de todos os vértices do sólido, desenharam-se os seus contornosaparentes – o contorno aparente frontal é [A2B2V2D2] e o contorno aparente horizontal é [A1B1C1D1]. Em projecção frontal, o únicovértice que não integra o contorno aparente é C, que é o vértice de maior afastamento, pelo que é visível, bem como todas as arestas quenele convergem. A aresta lateral [AV] é invisível, em projecção frontal. Em projecção horizontal, o único vértice que não integra o contornoaparente é V, que é o vértice de maior cota, pelo que é visível, bem como todas as arestas que nele convergem. Em projecção horizontal,não há quaisquer arestas invisíveis. Note que a base da pirâmide é visível em projecção frontal mas é invisível em projecção horizontal.
133.
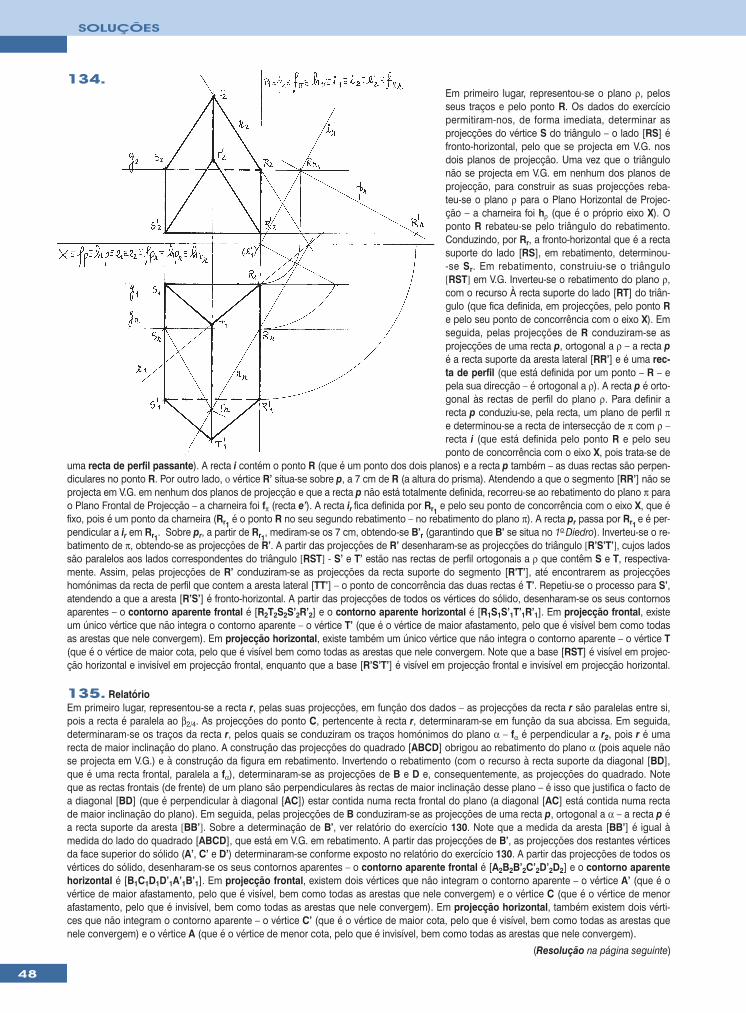
48
SOLUÇÕES
Em primeiro lugar, representou-se o plano ρ, pelosseus traços e pelo ponto R. Os dados do exercíciopermitiram-nos, de forma imediata, determinar asprojecções do vértice S do triângulo – o lado [RS] éfronto-horizontal, pelo que se projecta em V.G. nosdois planos de projecção. Uma vez que o triângulonão se projecta em V.G. em nenhum dos planos deprojecção, para construir as suas projecções reba-teu-se o plano ρ para o Plano Horizontal de Projec-ção – a charneira foi hρ (que é o próprio eixo X). Oponto R rebateu-se pelo triângulo do rebatimento.Conduzindo, por Rr, a fronto-horizontal que é a rectasuporte do lado [RS], em rebatimento, determinou--se Sr. Em rebatimento, construiu-se o triângulo[RST] em V.G. Inverteu-se o rebatimento do plano ρ,com o recurso À recta suporte do lado [RT] do triân-gulo (que fica definida, em projecções, pelo ponto Re pelo seu ponto de concorrência com o eixo X). Emseguida, pelas projecções de R conduziram-se asprojecções de uma recta p, ortogonal a ρ – a recta pé a recta suporte da aresta lateral [RR’] e é uma rec-ta de perfil (que está definida por um ponto – R – epela sua direcção – é ortogonal a ρ). A recta p é orto-gonal às rectas de perfil do plano ρ. Para definir arecta p conduziu-se, pela recta, um plano de perfil πe determinou-se a recta de intersecção de π com ρ –recta i (que está definida pelo ponto R e pelo seuponto de concorrência com o eixo X, pois trata-se de
uma recta de perfil passante). A recta i contém o ponto R (que é um ponto dos dois planos) e a recta p também – as duas rectas são perpen-diculares no ponto R. Por outro lado, ο vértice R’ situa-se sobre p, a 7 cm de R (a altura do prisma). Atendendo a que o segmento [RR’] não seprojecta em V.G. em nenhum dos planos de projecção e que a recta p não está totalmente definida, recorreu-se ao rebatimento do plano π parao Plano Frontal de Projecção – a charneira foi fπ (recta e’). A recta ir fica definida por Rr1
e pelo seu ponto de concorrência com o eixo X, que éfixo, pois é um ponto da charneira (Rr1
é o ponto R no seu segundo rebatimento – no rebatimento do plano π). A recta pr passa por Rr1e é per-
pendicular a ir em Rr1. Sobre pr, a partir de Rr1
, mediram-se os 7 cm, obtendo-se B’r (garantindo que B’ se situa no 1o Diedro). Inverteu-se o re-batimento de π, obtendo-se as projecções de R’. A partir das projecções de R’ desenharam-se as projecções do triângulo [R’S’T’], cujos ladossão paralelos aos lados correspondentes do triângulo [RST] - S’ e T’ estão nas rectas de perfil ortogonais a ρ que contêm S e T, respectiva-mente. Assim, pelas projecções de R’ conduziram-se as projecções da recta suporte do segmento [R’T’], até encontrarem as projecçõeshomónimas da recta de perfil que contem a aresta lateral [TT’] – o ponto de concorrência das duas rectas é T’. Repetiu-se o processo para S’,atendendo a que a aresta [R’S’] é fronto-horizontal. A partir das projecções de todos os vértices do sólido, desenharam-se os seus contornosaparentes – o contorno aparente frontal é [R2T2S2S’2R’2] e o contorno aparente horizontal é [R1S1S’1T’1R’1]. Em projecção frontal, existeum único vértice que não integra o contorno aparente – o vértice T’ (que é o vértice de maior afastamento, pelo que é visível bem como todasas arestas que nele convergem). Em projecção horizontal, existe também um único vértice que não integra o contorno aparente – o vértice T(que é o vértice de maior cota, pelo que é visível bem como todas as arestas que nele convergem. Note que a base [RST] é visível em projec-ção horizontal e invisível em projecção frontal, enquanto que a base [R’S’T’] é visível em projecção frontal e invisível em projecção horizontal.
134.
135. RelatórioEm primeiro lugar, representou-se a recta r, pelas suas projecções, em função dos dados – as projecções da recta r são paralelas entre si,pois a recta é paralela ao β2/4. As projecções do ponto C, pertencente à recta r, determinaram-se em função da sua abcissa. Em seguida,determinaram-se os traços da recta r, pelos quais se conduziram os traços homónimos do plano α – fα é perpendicular a r2, pois r é umarecta de maior inclinação do plano. A construção das projecções do quadrado [ABCD] obrigou ao rebatimento do plano α (pois aquele nãose projecta em V.G.) e à construção da figura em rebatimento. Invertendo o rebatimento (com o recurso à recta suporte da diagonal [BD],que é uma recta frontal, paralela a fα), determinaram-se as projecções de B e D e, consequentemente, as projecções do quadrado. Noteque as rectas frontais (de frente) de um plano são perpendiculares às rectas de maior inclinação desse plano – é isso que justifica o facto dea diagonal [BD] (que é perpendicular à diagonal [AC]) estar contida numa recta frontal do plano (a diagonal [AC] está contida numa rectade maior inclinação do plano). Em seguida, pelas projecções de B conduziram-se as projecções de uma recta p, ortogonal a α – a recta p éa recta suporte da aresta [BB’]. Sobre a determinação de B’, ver relatório do exercício 130. Note que a medida da aresta [BB’] é igual àmedida do lado do quadrado [ABCD], que está em V.G. em rebatimento. A partir das projecções de B’, as projecções dos restantes vérticesda face superior do sólido (A’, C’ e D’) determinaram-se conforme exposto no relatório do exercício 130. A partir das projecções de todos osvértices do sólido, desenharam-se os seus contornos aparentes – o contorno aparente frontal é [A2B2B’2C’2D’2D2] e o contorno aparentehorizontal é [B1C1D1D’1A’1B’1]. Em projecção frontal, existem dois vértices que não integram o contorno aparente – o vértice A’ (que é ovértice de maior afastamento, pelo que é visível, bem como todas as arestas que nele convergem) e o vértice C (que é o vértice de menorafastamento, pelo que é invisível, bem como todas as arestas que nele convergem). Em projecção horizontal, também existem dois vérti-ces que não integram o contorno aparente – o vértice C’ (que é o vértice de maior cota, pelo que é visível, bem como todas as arestas quenele convergem) e o vértice A (que é o vértice de menor cota, pelo que é invisível, bem como todas as arestas que nele convergem).
(Resolução na página seguinte)
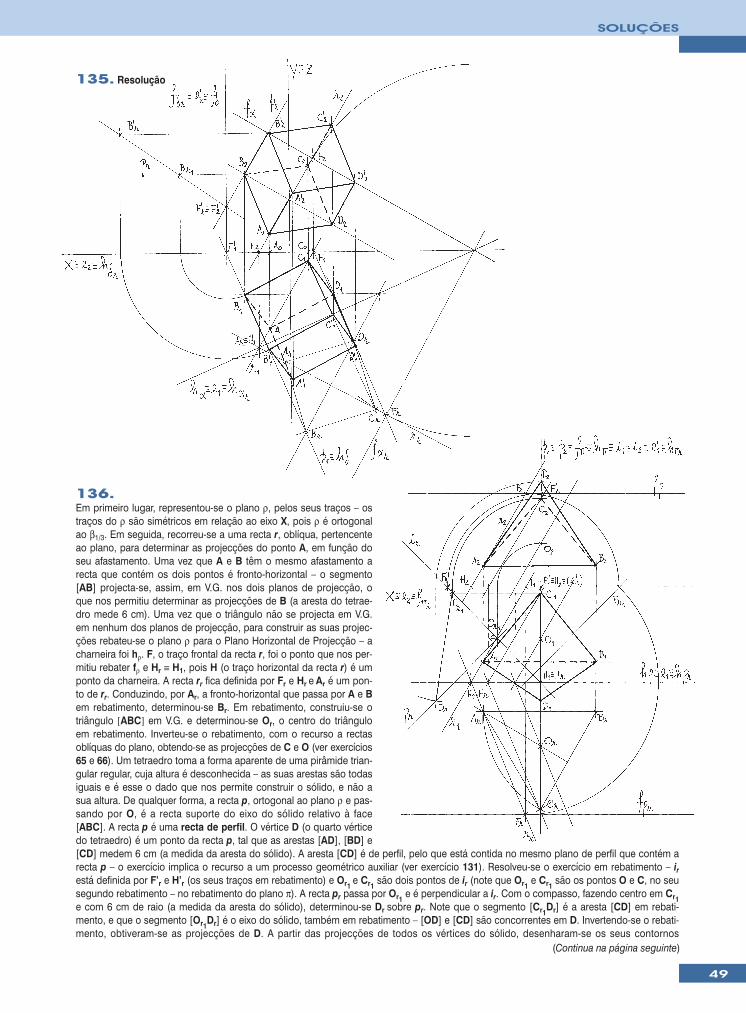
49
SOLUÇÕES
135. Resolução
136.Em primeiro lugar, representou-se o plano ρ, pelos seus traços – ostraços do ρ são simétricos em relação ao eixo X, pois ρ é ortogonalao β1/3. Em seguida, recorreu-se a uma recta r, oblíqua, pertencenteao plano, para determinar as projecções do ponto A, em função doseu afastamento. Uma vez que A e B têm o mesmo afastamento arecta que contém os dois pontos é fronto-horizontal – o segmento[AB] projecta-se, assim, em V.G. nos dois planos de projecção, oque nos permitiu determinar as projecções de B (a aresta do tetrae-dro mede 6 cm). Uma vez que o triângulo não se projecta em V.G.em nenhum dos planos de projecção, para construir as suas projec-ções rebateu-se o plano ρ para o Plano Horizontal de Projecção – acharneira foi hρ. F, o traço frontal da recta r, foi o ponto que nos per-mitiu rebater fρ e Hr ≡ H1, pois H (o traço horizontal da recta r) é umponto da charneira. A recta rr fica definida por Fr e Hr e Ar é um pon-to de rr. Conduzindo, por Ar, a fronto-horizontal que passa por A e Bem rebatimento, determinou-se Br. Em rebatimento, construiu-se otriângulo [ABC] em V.G. e determinou-se Or, o centro do triânguloem rebatimento. Inverteu-se o rebatimento, com o recurso a rectasoblíquas do plano, obtendo-se as projecções de C e O (ver exercícios65 e 66). Um tetraedro toma a forma aparente de uma pirâmide trian-gular regular, cuja altura é desconhecida – as suas arestas são todasiguais e é esse o dado que nos permite construir o sólido, e não asua altura. De qualquer forma, a recta p, ortogonal ao plano ρ e pas-sando por O, é a recta suporte do eixo do sólido relativo à face[ABC]. A recta p é uma recta de perfil. O vértice D (o quarto vérticedo tetraedro) é um ponto da recta p, tal que as arestas [AD], [BD] e[CD] medem 6 cm (a medida da aresta do sólido). A aresta [CD] é de perfil, pelo que está contida no mesmo plano de perfil que contém arecta p – o exercício implica o recurso a um processo geométrico auxiliar (ver exercício 131). Resolveu-se o exercício em rebatimento – irestá definida por F’r e H’r (os seus traços em rebatimento) e Or1
e Cr1são dois pontos de ir (note que Or1
e Cr1são os pontos O e C, no seu
segundo rebatimento – no rebatimento do plano π). A recta pr passa por Or1e é perpendicular a ir. Com o compasso, fazendo centro em Cr1
e com 6 cm de raio (a medida da aresta do sólido), determinou-se Dr sobre pr. Note que o segmento [Cr1Dr] é a aresta [CD] em rebati-
mento, e que o segmento [Or1Dr] é o eixo do sólido, também em rebatimento – [OD] e [CD] são concorrentes em D. Invertendo-se o rebati-
mento, obtiveram-se as projecções de D. A partir das projecções de todos os vértices do sólido, desenharam-se os seus contornos(Continua na página seguinte)
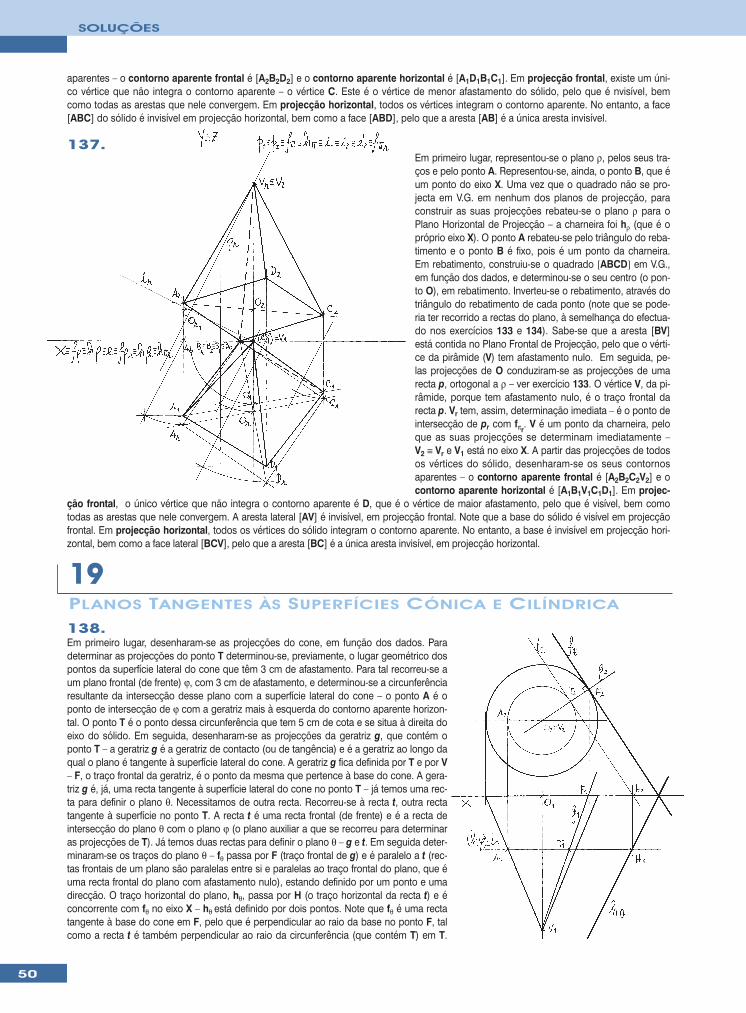
50
SOLUÇÕES
aparentes – o contorno aparente frontal é [A2B2D2] e o contorno aparente horizontal é [A1D1B1C1]. Em projecção frontal, existe um úni-co vértice que não integra o contorno aparente – o vértice C. Este é o vértice de menor afastamento do sólido, pelo que é nvisível, bemcomo todas as arestas que nele convergem. Em projecção horizontal, todos os vértices integram o contorno aparente. No entanto, a face[ABC] do sólido é invisível em projecção horizontal, bem como a face [ABD], pelo que a aresta [AB] é a única aresta invisível.
Em primeiro lugar, representou-se o plano ρ, pelos seus tra-ços e pelo ponto A. Representou-se, ainda, o ponto B, que éum ponto do eixo X. Uma vez que o quadrado não se pro-jecta em V.G. em nenhum dos planos de projecção, paraconstruir as suas projecções rebateu-se o plano ρ para oPlano Horizontal de Projecção – a charneira foi hρ (que é opróprio eixo X). O ponto A rebateu-se pelo triângulo do reba-timento e o ponto B é fixo, pois é um ponto da charneira.Em rebatimento, construiu-se o quadrado [ABCD] em V.G.,em função dos dados, e determinou-se o seu centro (o pon-to O), em rebatimento. Inverteu-se o rebatimento, através dotriângulo do rebatimento de cada ponto (note que se pode-ria ter recorrido a rectas do plano, à semelhança do efectua-do nos exercícios 133 e 134). Sabe-se que a aresta [BV]está contida no Plano Frontal de Projecção, pelo que o vérti-ce da pirâmide (V) tem afastamento nulo. Em seguida, pe-las projecções de O conduziram-se as projecções de umarecta p, ortogonal a ρ – ver exercício 133. O vértice V, da pi-râmide, porque tem afastamento nulo, é o traço frontal darecta p. Vr tem, assim, determinação imediata – é o ponto deintersecção de pr com fπr
. V é um ponto da charneira, peloque as suas projecções se determinam imediatamente –V2 ≡ Vr e V1 está no eixo X. A partir das projecções de todosos vértices do sólido, desenharam-se os seus contornosaparentes – o contorno aparente frontal é [A2B2C2V2] e ocontorno aparente horizontal é [A1B1V1C1D1]. Em projec-
ção frontal, o único vértice que não integra o contorno aparente é D, que é o vértice de maior afastamento, pelo que é visível, bem comotodas as arestas que nele convergem. A aresta lateral [AV] é invisível, em projecção frontal. Note que a base do sólido é visível em projecçãofrontal. Em projecção horizontal, todos os vértices do sólido integram o contorno aparente. No entanto, a base é invisível em projecção hori-zontal, bem como a face lateral [BCV], pelo que a aresta [BC] é a única aresta invisível, em projecção horizontal.
137.
138.Em primeiro lugar, desenharam-se as projecções do cone, em função dos dados. Paradeterminar as projecções do ponto T determinou-se, previamente, o lugar geométrico dospontos da superfície lateral do cone que têm 3 cm de afastamento. Para tal recorreu-se aum plano frontal (de frente) ϕ, com 3 cm de afastamento, e determinou-se a circunferênciaresultante da intersecção desse plano com a superfície lateral do cone – o ponto A é oponto de intersecção de ϕ com a geratriz mais à esquerda do contorno aparente horizon-tal. O ponto T é o ponto dessa circunferência que tem 5 cm de cota e se situa à direita doeixo do sólido. Em seguida, desenharam-se as projecções da geratriz g, que contém oponto T – a geratriz g é a geratriz de contacto (ou de tangência) e é a geratriz ao longo daqual o plano é tangente à superfície lateral do cone. A geratriz g fica definida por T e por V– F, o traço frontal da geratriz, é o ponto da mesma que pertence à base do cone. A gera-triz g é, já, uma recta tangente à superfície lateral do cone no ponto T – já temos uma rec-ta para definir o plano θ. Necessitamos de outra recta. Recorreu-se à recta t, outra rectatangente à superfície no ponto T. A recta t é uma recta frontal (de frente) e é a recta deintersecção do plano θ com o plano ϕ (o plano auxiliar a que se recorreu para determinaras projecções de T). Já temos duas rectas para definir o plano θ – g e t. Em seguida deter-minaram-se os traços do plano θ – fθ passa por F (traço frontal de g) e é paralelo a t (rec-tas frontais de um plano são paralelas entre si e paralelas ao traço frontal do plano, que éuma recta frontal do plano com afastamento nulo), estando definido por um ponto e umadirecção. O traço horizontal do plano, hθ, passa por H (o traço horizontal da recta t) e éconcorrente com fθ no eixo X – hθ está definido por dois pontos. Note que fθ é uma rectatangente à base do cone em F, pelo que é perpendicular ao raio da base no ponto F, talcomo a recta t é também perpendicular ao raio da circunferência (que contém T) em T.
PLANOS TANGENTES ÀS SUPERFÍCIES CÓNICA E CILÍNDRICA
19
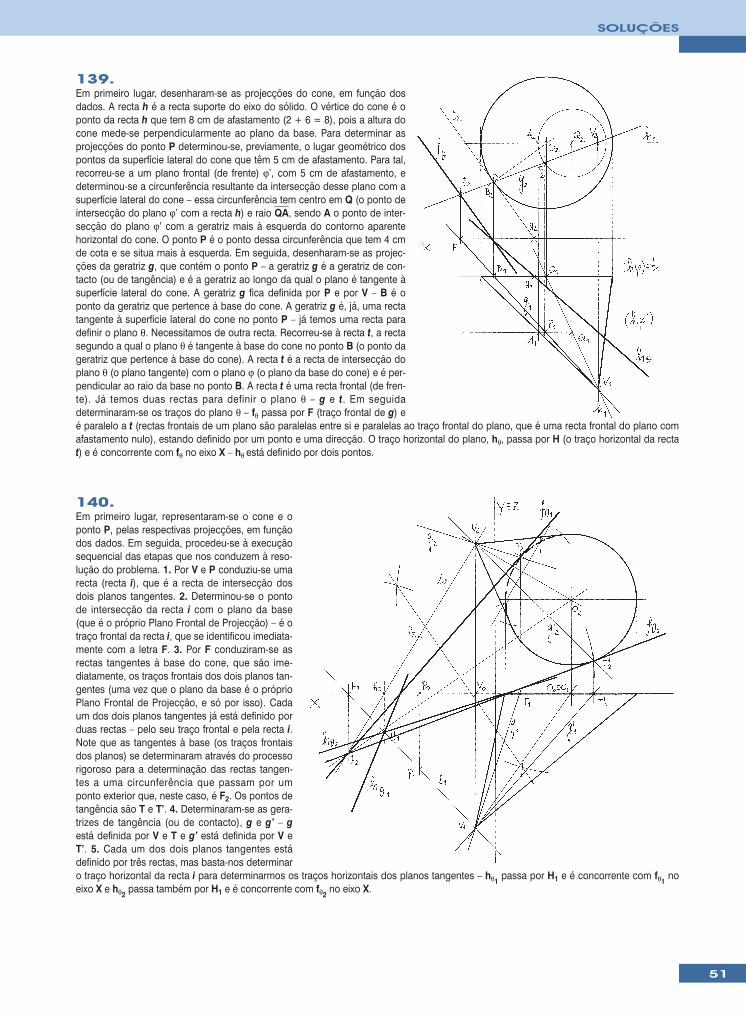
51
SOLUÇÕES
139.Em primeiro lugar, desenharam-se as projecções do cone, em função dosdados. A recta h é a recta suporte do eixo do sólido. O vértice do cone é oponto da recta h que tem 8 cm de afastamento (2 + 6 = 8), pois a altura docone mede-se perpendicularmente ao plano da base. Para determinar asprojecções do ponto P determinou-se, previamente, o lugar geométrico dospontos da superfície lateral do cone que têm 5 cm de afastamento. Para tal,recorreu-se a um plano frontal (de frente) ϕ’, com 5 cm de afastamento, edeterminou-se a circunferência resultante da intersecção desse plano com asuperfície lateral do cone – essa circunferência tem centro em Q (o ponto deintersecção do plano ϕ’ com a recta h) e raio Q�A�, sendo A o ponto de inter-secção do plano ϕ’ com a geratriz mais à esquerda do contorno aparentehorizontal do cone. O ponto P é o ponto dessa circunferência que tem 4 cmde cota e se situa mais à esquerda. Em seguida, desenharam-se as projec-ções da geratriz g, que contém o ponto P – a geratriz g é a geratriz de con-tacto (ou de tangência) e é a geratriz ao longo da qual o plano é tangente àsuperfície lateral do cone. A geratriz g fica definida por P e por V – B é oponto da geratriz que pertence à base do cone. A geratriz g é, já, uma rectatangente à superfície lateral do cone no ponto P – já temos uma recta paradefinir o plano θ. Necessitamos de outra recta. Recorreu-se à recta t, a rectasegundo a qual o plano θ é tangente à base do cone no ponto B (o ponto dageratriz que pertence à base do cone). A recta t é a recta de intersecção doplano θ (o plano tangente) com o plano ϕ (o plano da base do cone) e é per-pendicular ao raio da base no ponto B. A recta t é uma recta frontal (de fren-te). Já temos duas rectas para definir o plano θ – g e t. Em seguidadeterminaram-se os traços do plano θ – fθ passa por F (traço frontal de g) eé paralelo a t (rectas frontais de um plano são paralelas entre si e paralelas ao traço frontal do plano, que é uma recta frontal do plano comafastamento nulo), estando definido por um ponto e uma direcção. O traço horizontal do plano, hθ, passa por H (o traço horizontal da rectat) e é concorrente com fθ no eixo X – hθ está definido por dois pontos.
140.Em primeiro lugar, representaram-se o cone e oponto P, pelas respectivas projecções, em funçãodos dados. Em seguida, procedeu-se à execuçãosequencial das etapas que nos conduzem à reso-lução do problema. 1. Por V e P conduziu-se umarecta (recta i), que é a recta de intersecção dosdois planos tangentes. 2. Determinou-se o pontode intersecção da recta i com o plano da base(que é o próprio Plano Frontal de Projecção) – é otraço frontal da recta i, que se identificou imediata-mente com a letra F. 3. Por F conduziram-se asrectas tangentes à base do cone, que são ime-diatamente, os traços frontais dos dois planos tan-gentes (uma vez que o plano da base é o próprioPlano Frontal de Projecção, e só por isso). Cadaum dos dois planos tangentes já está definido porduas rectas – pelo seu traço frontal e pela recta i.Note que as tangentes à base (os traços frontaisdos planos) se determinaram através do processorigoroso para a determinação das rectas tangen-tes a uma circunferência que passam por umponto exterior que, neste caso, é F2. Os pontos detangência são T e T’. 4. Determinaram-se as gera-trizes de tangência (ou de contacto), g e g’ – gestá definida por V e T e g’ está definida por V eT’. 5. Cada um dos dois planos tangentes estádefinido por três rectas, mas basta-nos determinaro traço horizontal da recta i para determinarmos os traços horizontais dos planos tangentes – hθ1
passa por H1 e é concorrente com fθ1no
eixo X e hθ2passa também por H1 e é concorrente com fθ2
no eixo X.
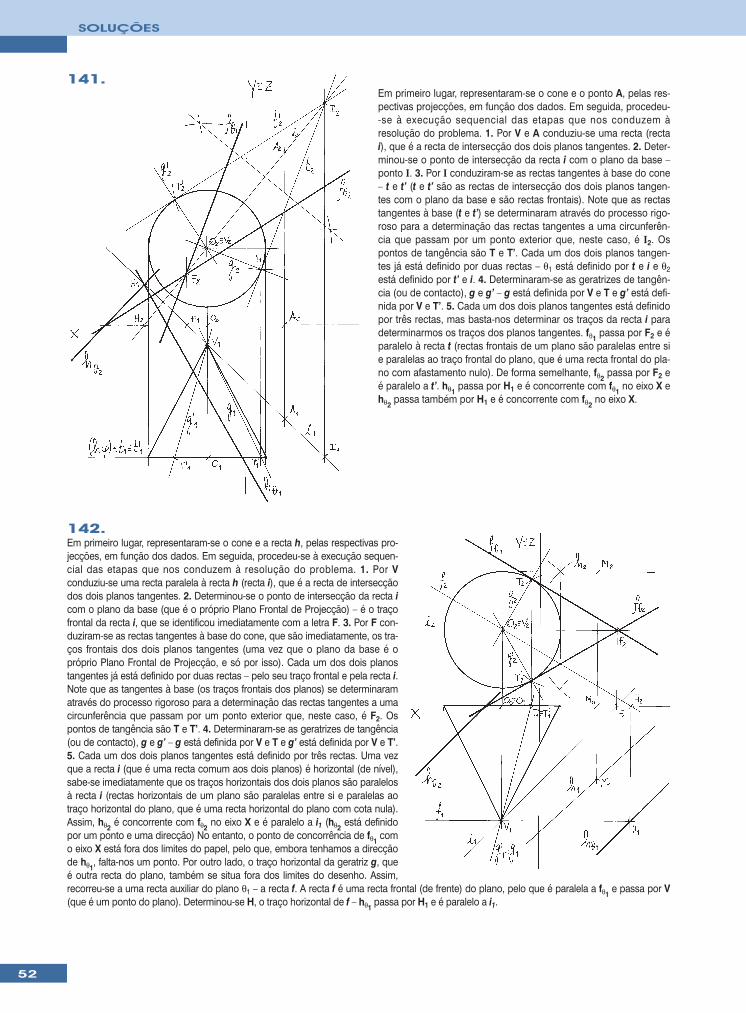
52
SOLUÇÕES
142.Em primeiro lugar, representaram-se o cone e a recta h, pelas respectivas pro-jecções, em função dos dados. Em seguida, procedeu-se à execução sequen-cial das etapas que nos conduzem à resolução do problema. 1. Por Vconduziu-se uma recta paralela à recta h (recta i), que é a recta de intersecçãodos dois planos tangentes. 2. Determinou-se o ponto de intersecção da recta icom o plano da base (que é o próprio Plano Frontal de Projecção) – é o traçofrontal da recta i, que se identificou imediatamente com a letra F. 3. Por F con-duziram-se as rectas tangentes à base do cone, que são imediatamente, os tra-ços frontais dos dois planos tangentes (uma vez que o plano da base é opróprio Plano Frontal de Projecção, e só por isso). Cada um dos dois planostangentes já está definido por duas rectas – pelo seu traço frontal e pela recta i.Note que as tangentes à base (os traços frontais dos planos) se determinaramatravés do processo rigoroso para a determinação das rectas tangentes a umacircunferência que passam por um ponto exterior que, neste caso, é F2. Ospontos de tangência são T e T’. 4. Determinaram-se as geratrizes de tangência(ou de contacto), g e g’ – g está definida por V e T e g’ está definida por V e T’.5. Cada um dos dois planos tangentes está definido por três rectas. Uma vezque a recta i (que é uma recta comum aos dois planos) é horizontal (de nível),sabe-se imediatamente que os traços horizontais dos dois planos são paralelosà recta i (rectas horizontais de um plano são paralelas entre si e paralelas aotraço horizontal do plano, que é uma recta horizontal do plano com cota nula).Assim, hθ2
é concorrente com fθ2no eixo X e é paralelo a i1 (hθ2
está definidopor um ponto e uma direcção) No entanto, o ponto de concorrência de fθ1
como eixo X está fora dos limites do papel, pelo que, embora tenhamos a direcçãode hθ1
, falta-nos um ponto. Por outro lado, o traço horizontal da geratriz g, queé outra recta do plano, também se situa fora dos limites do desenho. Assim,recorreu-se a uma recta auxiliar do plano θ1 – a recta f. A recta f é uma recta frontal (de frente) do plano, pelo que é paralela a fθ1
e passa por V(que é um ponto do plano). Determinou-se H, o traço horizontal de f – hθ1
passa por H1 e é paralelo a i1.
141.Em primeiro lugar, representaram-se o cone e o ponto A, pelas res-pectivas projecções, em função dos dados. Em seguida, procedeu--se à execução sequencial das etapas que nos conduzem àresolução do problema. 1. Por V e A conduziu-se uma recta (rectai), que é a recta de intersecção dos dois planos tangentes. 2. Deter-minou-se o ponto de intersecção da recta i com o plano da base –ponto I. 3. Por I conduziram-se as rectas tangentes à base do cone– t e t’ (t e t’ são as rectas de intersecção dos dois planos tangen-tes com o plano da base e são rectas frontais). Note que as rectastangentes à base (t e t’) se determinaram através do processo rigo-roso para a determinação das rectas tangentes a uma circunferên-cia que passam por um ponto exterior que, neste caso, é I2. Ospontos de tangência são T e T’. Cada um dos dois planos tangen-tes já está definido por duas rectas – θ1 está definido por t e i e θ2está definido por t’ e i. 4. Determinaram-se as geratrizes de tangên-cia (ou de contacto), g e g’ – g está definida por V e T e g’ está defi-nida por V e T’. 5. Cada um dos dois planos tangentes está definidopor três rectas, mas basta-nos determinar os traços da recta i paradeterminarmos os traços dos planos tangentes. fθ1
passa por F2 e éparalelo à recta t (rectas frontais de um plano são paralelas entre sie paralelas ao traço frontal do plano, que é uma recta frontal do pla-no com afastamento nulo). De forma semelhante, fθ2
passa por F2 eé paralelo a t’. hθ1
passa por H1 e é concorrente com fθ1no eixo X e
hθ2passa também por H1 e é concorrente com fθ2
no eixo X.
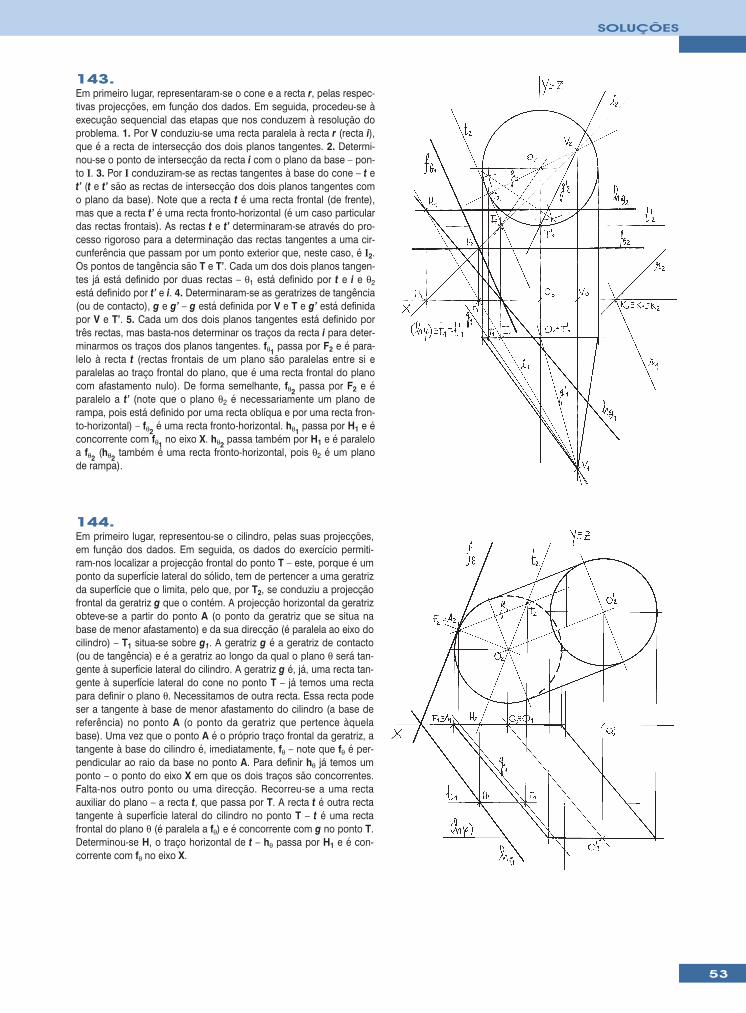
53
SOLUÇÕES
143.Em primeiro lugar, representaram-se o cone e a recta r, pelas respec-tivas projecções, em função dos dados. Em seguida, procedeu-se àexecução sequencial das etapas que nos conduzem à resolução doproblema. 1. Por V conduziu-se uma recta paralela à recta r (recta i),que é a recta de intersecção dos dois planos tangentes. 2. Determi-nou-se o ponto de intersecção da recta i com o plano da base – pon-to I. 3. Por I conduziram-se as rectas tangentes à base do cone – t et’ (t e t’ são as rectas de intersecção dos dois planos tangentes como plano da base). Note que a recta t é uma recta frontal (de frente),mas que a recta t’ é uma recta fronto-horizontal (é um caso particulardas rectas frontais). As rectas t e t’ determinaram-se através do pro-cesso rigoroso para a determinação das rectas tangentes a uma cir-cunferência que passam por um ponto exterior que, neste caso, é I2.Os pontos de tangência são T e T’. Cada um dos dois planos tangen-tes já está definido por duas rectas – θ1 está definido por t e i e θ2está definido por t’ e i. 4. Determinaram-se as geratrizes de tangência(ou de contacto), g e g’ – g está definida por V e T e g’ está definidapor V e T’. 5. Cada um dos dois planos tangentes está definido portrês rectas, mas basta-nos determinar os traços da recta i para deter-minarmos os traços dos planos tangentes. fθ1
passa por F2 e é para-lelo à recta t (rectas frontais de um plano são paralelas entre si eparalelas ao traço frontal do plano, que é uma recta frontal do planocom afastamento nulo). De forma semelhante, fθ2
passa por F2 e éparalelo a t’ (note que o plano θ2 é necessariamente um plano derampa, pois está definido por uma recta oblíqua e por uma recta fron-to-horizontal) – fθ2
é uma recta fronto-horizontal. hθ1passa por H1 e é
concorrente com fθ1no eixo X. hθ2
passa também por H1 e é paraleloa fθ2
(hθ2também é uma recta fronto-horizontal, pois θ2 é um plano
de rampa).
144.Em primeiro lugar, representou-se o cilindro, pelas suas projecções,em função dos dados. Em seguida, os dados do exercício permiti-ram-nos localizar a projecção frontal do ponto T – este, porque é umponto da superfície lateral do sólido, tem de pertencer a uma geratrizda superfície que o limita, pelo que, por T2, se conduziu a projecçãofrontal da geratriz g que o contém. A projecção horizontal da geratrizobteve-se a partir do ponto A (o ponto da geratriz que se situa nabase de menor afastamento) e da sua direcção (é paralela ao eixo docilindro) – T1 situa-se sobre g1. A geratriz g é a geratriz de contacto(ou de tangência) e é a geratriz ao longo da qual o plano θ será tan-gente à superfície lateral do cilindro. A geratriz g é, já, uma recta tan-gente à superfície lateral do cone no ponto T – já temos uma rectapara definir o plano θ. Necessitamos de outra recta. Essa recta podeser a tangente à base de menor afastamento do cilindro (a base dereferência) no ponto A (o ponto da geratriz que pertence àquelabase). Uma vez que o ponto A é o próprio traço frontal da geratriz, atangente à base do cilindro é, imediatamente, fθ – note que fθ é per-pendicular ao raio da base no ponto A. Para definir hθ já temos umponto – o ponto do eixo X em que os dois traços são concorrentes.Falta-nos outro ponto ou uma direcção. Recorreu-se a uma rectaauxiliar do plano – a recta t, que passa por T. A recta t é outra rectatangente à superfície lateral do cilindro no ponto T – t é uma rectafrontal do plano θ (é paralela a fθ) e é concorrente com g no ponto T.Determinou-se H, o traço horizontal de t – hθ passa por H1 e é con-corrente com fθ no eixo X.
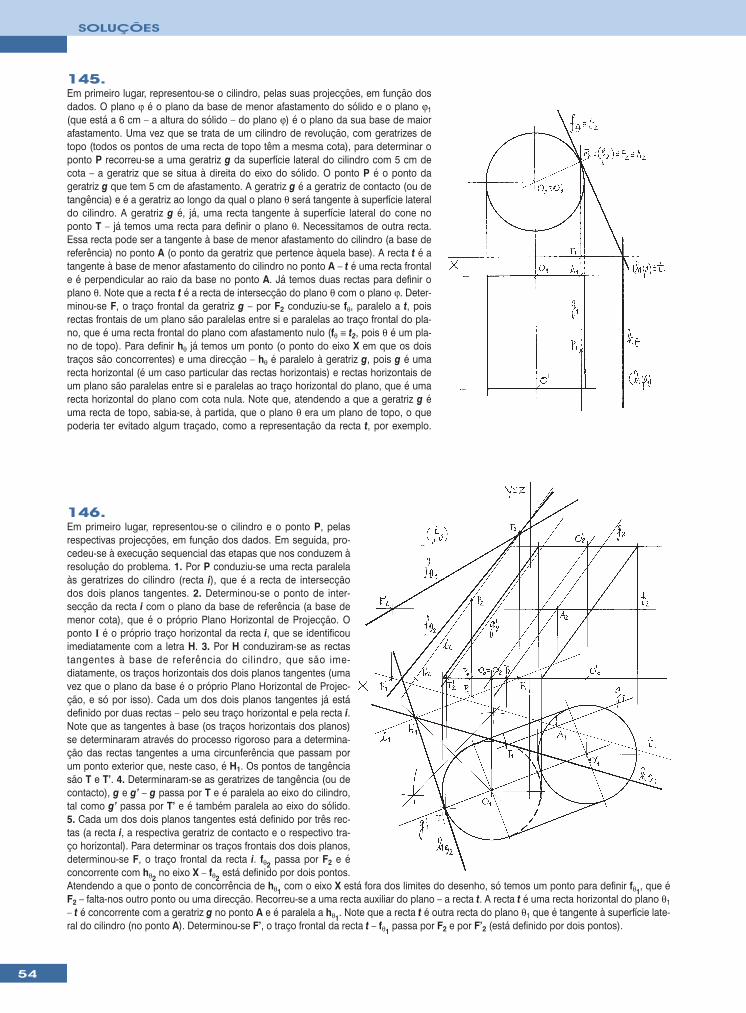
54
SOLUÇÕES
145.Em primeiro lugar, representou-se o cilindro, pelas suas projecções, em função dosdados. O plano ϕ é o plano da base de menor afastamento do sólido e o plano ϕ1(que está a 6 cm – a altura do sólido – do plano ϕ) é o plano da sua base de maiorafastamento. Uma vez que se trata de um cilindro de revolução, com geratrizes detopo (todos os pontos de uma recta de topo têm a mesma cota), para determinar oponto P recorreu-se a uma geratriz g da superfície lateral do cilindro com 5 cm decota – a geratriz que se situa à direita do eixo do sólido. O ponto P é o ponto dageratriz g que tem 5 cm de afastamento. A geratriz g é a geratriz de contacto (ou detangência) e é a geratriz ao longo da qual o plano θ será tangente à superfície lateraldo cilindro. A geratriz g é, já, uma recta tangente à superfície lateral do cone noponto T – já temos uma recta para definir o plano θ. Necessitamos de outra recta.Essa recta pode ser a tangente à base de menor afastamento do cilindro (a base dereferência) no ponto A (o ponto da geratriz que pertence àquela base). A recta t é atangente à base de menor afastamento do cilindro no ponto A – t é uma recta frontale é perpendicular ao raio da base no ponto A. Já temos duas rectas para definir oplano θ. Note que a recta t é a recta de intersecção do plano θ com o plano ϕ. Deter-minou-se F, o traço frontal da geratriz g – por F2 conduziu-se fθ, paralelo a t, poisrectas frontais de um plano são paralelas entre si e paralelas ao traço frontal do pla-no, que é uma recta frontal do plano com afastamento nulo (fθ ≡ t2, pois θ é um pla-no de topo). Para definir hθ já temos um ponto (o ponto do eixo X em que os doistraços são concorrentes) e uma direcção – hθ é paralelo à geratriz g, pois g é umarecta horizontal (é um caso particular das rectas horizontais) e rectas horizontais deum plano são paralelas entre si e paralelas ao traço horizontal do plano, que é umarecta horizontal do plano com cota nula. Note que, atendendo a que a geratriz g éuma recta de topo, sabia-se, à partida, que o plano θ era um plano de topo, o quepoderia ter evitado algum traçado, como a representação da recta t, por exemplo.
146.Em primeiro lugar, representou-se o cilindro e o ponto P, pelasrespectivas projecções, em função dos dados. Em seguida, pro-cedeu-se à execução sequencial das etapas que nos conduzem àresolução do problema. 1. Por P conduziu-se uma recta paralelaàs geratrizes do cilindro (recta i), que é a recta de intersecçãodos dois planos tangentes. 2. Determinou-se o ponto de inter-secção da recta i com o plano da base de referência (a base demenor cota), que é o próprio Plano Horizontal de Projecção. Oponto I é o próprio traço horizontal da recta i, que se identificouimediatamente com a letra H. 3. Por H conduziram-se as rectastangentes à base de referência do cilindro, que são ime-diatamente, os traços horizontais dos dois planos tangentes (umavez que o plano da base é o próprio Plano Horizontal de Projec-ção, e só por isso). Cada um dos dois planos tangentes já estádefinido por duas rectas – pelo seu traço horizontal e pela recta i.Note que as tangentes à base (os traços horizontais dos planos)se determinaram através do processo rigoroso para a determina-ção das rectas tangentes a uma circunferência que passam porum ponto exterior que, neste caso, é H1. Os pontos de tangênciasão T e T’. 4. Determinaram-se as geratrizes de tangência (ou decontacto), g e g’ – g passa por T e é paralela ao eixo do cilindro,tal como g’ passa por T’ e é também paralela ao eixo do sólido.5. Cada um dos dois planos tangentes está definido por três rec-tas (a recta i, a respectiva geratriz de contacto e o respectivo tra-ço horizontal). Para determinar os traços frontais dos dois planos,determinou-se F, o traço frontal da recta i. fθ2
passa por F2 e éconcorrente com hθ2
no eixo X – fθ2está definido por dois pontos.
Atendendo a que o ponto de concorrência de hθ1com o eixo X está fora dos limites do desenho, só temos um ponto para definir fθ1
, que éF2 – falta-nos outro ponto ou uma direcção. Recorreu-se a uma recta auxiliar do plano – a recta t. A recta t é uma recta horizontal do plano θ1– t é concorrente com a geratriz g no ponto A e é paralela a hθ1
. Note que a recta t é outra recta do plano θ1 que é tangente à superfície late-ral do cilindro (no ponto A). Determinou-se F’, o traço frontal da recta t – fθ1
passa por F2 e por F’2 (está definido por dois pontos).
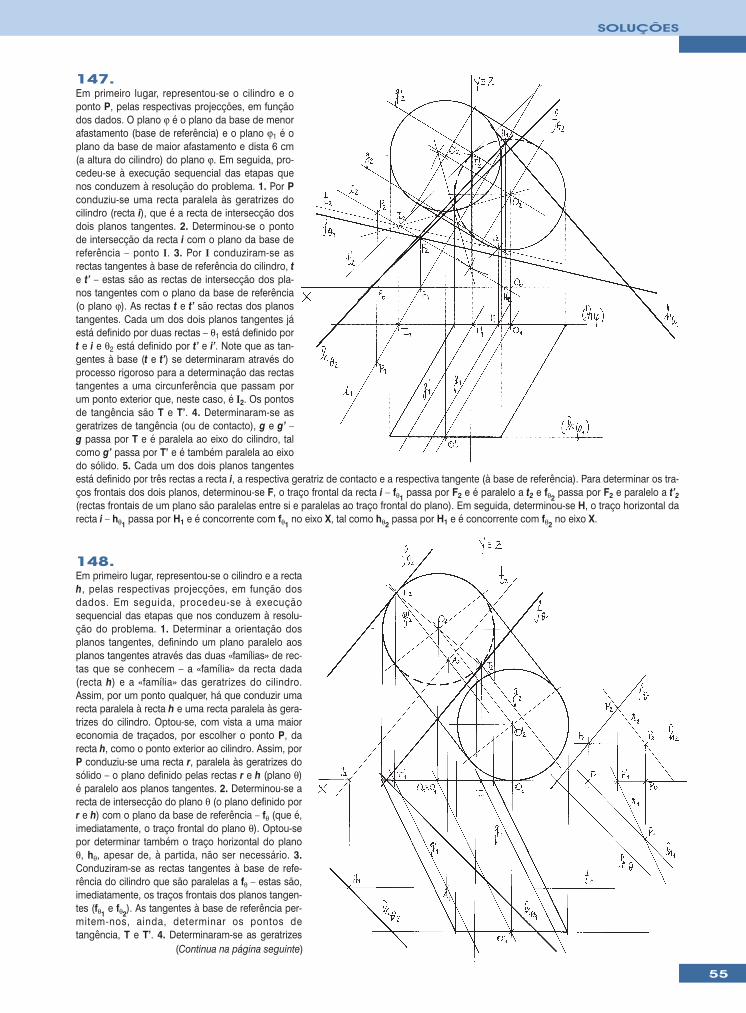
55
SOLUÇÕES
147.Em primeiro lugar, representou-se o cilindro e oponto P, pelas respectivas projecções, em funçãodos dados. O plano ϕ é o plano da base de menorafastamento (base de referência) e o plano ϕ1 é oplano da base de maior afastamento e dista 6 cm(a altura do cilindro) do plano ϕ. Em seguida, pro-cedeu-se à execução sequencial das etapas quenos conduzem à resolução do problema. 1. Por Pconduziu-se uma recta paralela às geratrizes docilindro (recta i), que é a recta de intersecção dosdois planos tangentes. 2. Determinou-se o pontode intersecção da recta i com o plano da base dereferência – ponto I. 3. Por I conduziram-se asrectas tangentes à base de referência do cilindro, te t’ – estas são as rectas de intersecção dos pla-nos tangentes com o plano da base de referência(o plano ϕ). As rectas t e t’ são rectas dos planostangentes. Cada um dos dois planos tangentes jáestá definido por duas rectas – θ1 está definido port e i e θ2 está definido por t’ e i’. Note que as tan-gentes à base (t e t’) se determinaram através doprocesso rigoroso para a determinação das rectastangentes a uma circunferência que passam porum ponto exterior que, neste caso, é I2. Os pontosde tangência são T e T’. 4. Determinaram-se asgeratrizes de tangência (ou de contacto), g e g’ –g passa por T e é paralela ao eixo do cilindro, talcomo g’ passa por T’ e é também paralela ao eixodo sólido. 5. Cada um dos dois planos tangentesestá definido por três rectas a recta i, a respectiva geratriz de contacto e a respectiva tangente (à base de referência). Para determinar os tra-ços frontais dos dois planos, determinou-se F, o traço frontal da recta i – fθ1
passa por F2 e é paralelo a t2 e fθ2passa por F2 e paralelo a t’2
(rectas frontais de um plano são paralelas entre si e paralelas ao traço frontal do plano). Em seguida, determinou-se H, o traço horizontal darecta i – hθ1
passa por H1 e é concorrente com fθ1no eixo X, tal como hθ2
passa por H1 e é concorrente com fθ2no eixo X.
148.Em primeiro lugar, representou-se o cilindro e a rectah, pelas respectivas projecções, em função dosdados. Em seguida, procedeu-se à execuçãosequencial das etapas que nos conduzem à resolu-ção do problema. 1. Determinar a orientação dosplanos tangentes, definindo um plano paralelo aosplanos tangentes através das duas «famílias» de rec-tas que se conhecem – a «família» da recta dada(recta h) e a «família» das geratrizes do cilindro.Assim, por um ponto qualquer, há que conduzir umarecta paralela à recta h e uma recta paralela às gera-trizes do cilindro. Optou-se, com vista a uma maioreconomia de traçados, por escolher o ponto P, darecta h, como o ponto exterior ao cilindro. Assim, porP conduziu-se uma recta r, paralela às geratrizes dosólido – o plano definido pelas rectas r e h (plano θ)é paralelo aos planos tangentes. 2. Determinou-se arecta de intersecção do plano θ (o plano definido porr e h) com o plano da base de referência – fθ (que é,imediatamente, o traço frontal do plano θ). Optou-sepor determinar também o traço horizontal do planoθ, hθ, apesar de, à partida, não ser necessário. 3.Conduziram-se as rectas tangentes à base de refe-rência do cilindro que são paralelas a fθ – estas são,imediatamente, os traços frontais dos planos tangen-tes (fθ1
e fθ2). As tangentes à base de referência per-
mitem-nos, ainda, determinar os pontos detangência, T e T’. 4. Determinaram-se as geratrizes
(Continua na página seguinte)
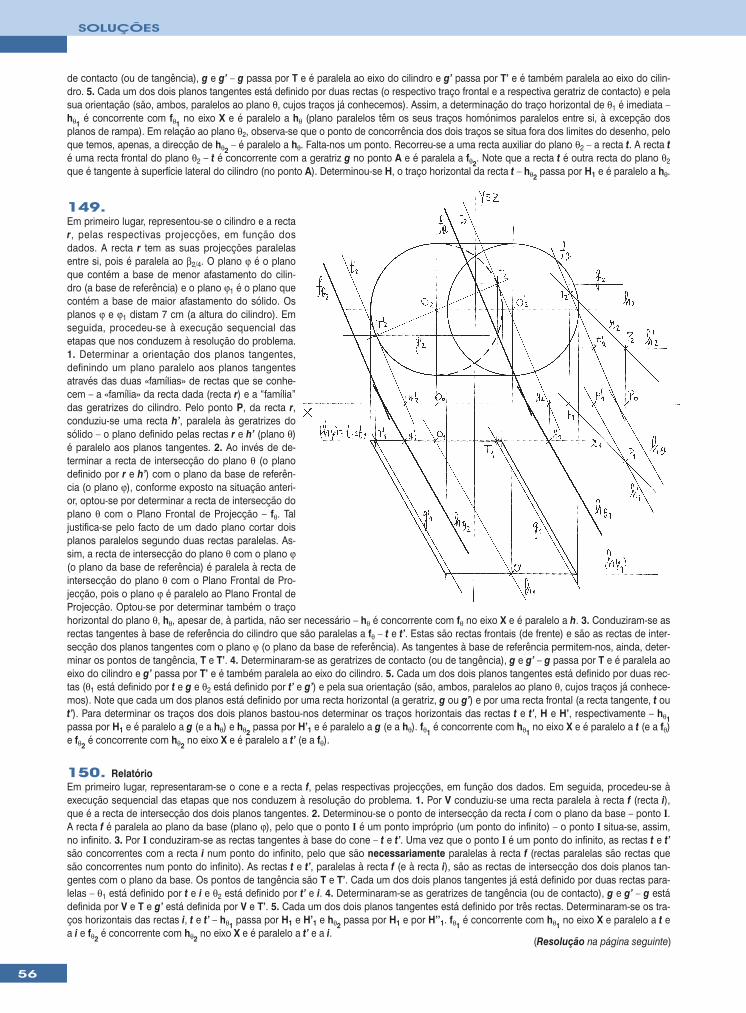
56
SOLUÇÕES
de contacto (ou de tangência), g e g’ – g passa por T e é paralela ao eixo do cilindro e g’ passa por T’ e é também paralela ao eixo do cilin-dro. 5. Cada um dos dois planos tangentes está definido por duas rectas (o respectivo traço frontal e a respectiva geratriz de contacto) e pelasua orientação (são, ambos, paralelos ao plano θ, cujos traços já conhecemos). Assim, a determinação do traço horizontal de θ1 é imediata –hθ1
é concorrente com fθ1no eixo X e é paralelo a hθ (plano paralelos têm os seus traços homónimos paralelos entre si, à excepção dos
planos de rampa). Em relação ao plano θ2, observa-se que o ponto de concorrência dos dois traços se situa fora dos limites do desenho, peloque temos, apenas, a direcção de hθ2
– é paralelo a hθ. Falta-nos um ponto. Recorreu-se a uma recta auxiliar do plano θ2 – a recta t. A recta té uma recta frontal do plano θ2 – t é concorrente com a geratriz g no ponto A e é paralela a fθ2
. Note que a recta t é outra recta do plano θ2
que é tangente à superfície lateral do cilindro (no ponto A). Determinou-se H, o traço horizontal da recta t – hθ2passa por H1 e é paralelo a hθ.
149.Em primeiro lugar, representou-se o cilindro e a rectar, pelas respectivas projecções, em função dosdados. A recta r tem as suas projecções paralelasentre si, pois é paralela ao β2/4. O plano ϕ é o planoque contém a base de menor afastamento do cilin-dro (a base de referência) e o plano ϕ1 é o plano quecontém a base de maior afastamento do sólido. Osplanos ϕ e ϕ1 distam 7 cm (a altura do cilindro). Emseguida, procedeu-se à execução sequencial dasetapas que nos conduzem à resolução do problema.1. Determinar a orientação dos planos tangentes,definindo um plano paralelo aos planos tangentesatravés das duas «famílias» de rectas que se conhe-cem – a «família» da recta dada (recta r) e a “família”das geratrizes do cilindro. Pelo ponto P, da recta r,conduziu-se uma recta h’, paralela às geratrizes dosólido – o plano definido pelas rectas r e h’ (plano θ)é paralelo aos planos tangentes. 2. Ao invés de de-terminar a recta de intersecção do plano θ (o planodefinido por r e h’) com o plano da base de referên-cia (o plano ϕ), conforme exposto na situação anteri-or, optou-se por determinar a recta de intersecção doplano θ com o Plano Frontal de Projecção – fθ. Taljustifica-se pelo facto de um dado plano cortar doisplanos paralelos segundo duas rectas paralelas. As-sim, a recta de intersecção do plano θ com o plano ϕ(o plano da base de referência) é paralela à recta deintersecção do plano θ com o Plano Frontal de Pro-jecção, pois o plano ϕ é paralelo ao Plano Frontal deProjecção. Optou-se por determinar também o traçohorizontal do plano θ, hθ, apesar de, à partida, não ser necessário – hθ é concorrente com fθ no eixo X e é paralelo a h. 3. Conduziram-se asrectas tangentes à base de referência do cilindro que são paralelas a fθ – t e t’. Estas são rectas frontais (de frente) e são as rectas de inter-secção dos planos tangentes com o plano ϕ (o plano da base de referência). As tangentes à base de referência permitem-nos, ainda, deter-minar os pontos de tangência, T e T’. 4. Determinaram-se as geratrizes de contacto (ou de tangência), g e g’ – g passa por T e é paralela aoeixo do cilindro e g’ passa por T’ e é também paralela ao eixo do cilindro. 5. Cada um dos dois planos tangentes está definido por duas rec-tas (θ1 está definido por t e g e θ2 está definido por t’ e g’) e pela sua orientação (são, ambos, paralelos ao plano θ, cujos traços já conhece-mos). Note que cada um dos planos está definido por uma recta horizontal (a geratriz, g ou g’) e por uma recta frontal (a recta tangente, t out’). Para determinar os traços dos dois planos bastou-nos determinar os traços horizontais das rectas t e t’, H e H’, respectivamente – hθ1passa por H1 e é paralelo a g (e a hθ) e hθ2
passa por H’1 e é paralelo a g (e a hθ). fθ1é concorrente com hθ1
no eixo X e é paralelo a t (e a fθ)e fθ2
é concorrente com hθ2no eixo X e é paralelo a t’ (e a fθ).
150. RelatórioEm primeiro lugar, representaram-se o cone e a recta f, pelas respectivas projecções, em função dos dados. Em seguida, procedeu-se àexecução sequencial das etapas que nos conduzem à resolução do problema. 1. Por V conduziu-se uma recta paralela à recta f (recta i),que é a recta de intersecção dos dois planos tangentes. 2. Determinou-se o ponto de intersecção da recta i com o plano da base – ponto I.A recta f é paralela ao plano da base (plano ϕ), pelo que o ponto I é um ponto impróprio (um ponto do infinito) – o ponto I situa-se, assim,no infinito. 3. Por I conduziram-se as rectas tangentes à base do cone – t e t’. Uma vez que o ponto I é um ponto do infinito, as rectas t e t’são concorrentes com a recta i num ponto do infinito, pelo que são necessariamente paralelas à recta f (rectas paralelas são rectas quesão concorrentes num ponto do infinito). As rectas t e t’, paralelas à recta f (e à recta i), são as rectas de intersecção dos dois planos tan-gentes com o plano da base. Os pontos de tangência são T e T’. Cada um dos dois planos tangentes já está definido por duas rectas para-lelas – θ1 está definido por t e i e θ2 está definido por t’ e i. 4. Determinaram-se as geratrizes de tangência (ou de contacto), g e g’ – g estádefinida por V e T e g’ está definida por V e T’. 5. Cada um dos dois planos tangentes está definido por três rectas. Determinaram-se os tra-ços horizontais das rectas i, t e t’ – hθ1
passa por H1 e H’1 e hθ2passa por H1 e por H’’1. fθ1
é concorrente com hθ1no eixo X e paralelo a t e
a i e fθ2é concorrente com hθ2
no eixo X e é paralelo a t’ e a i.(Resolução na página seguinte)
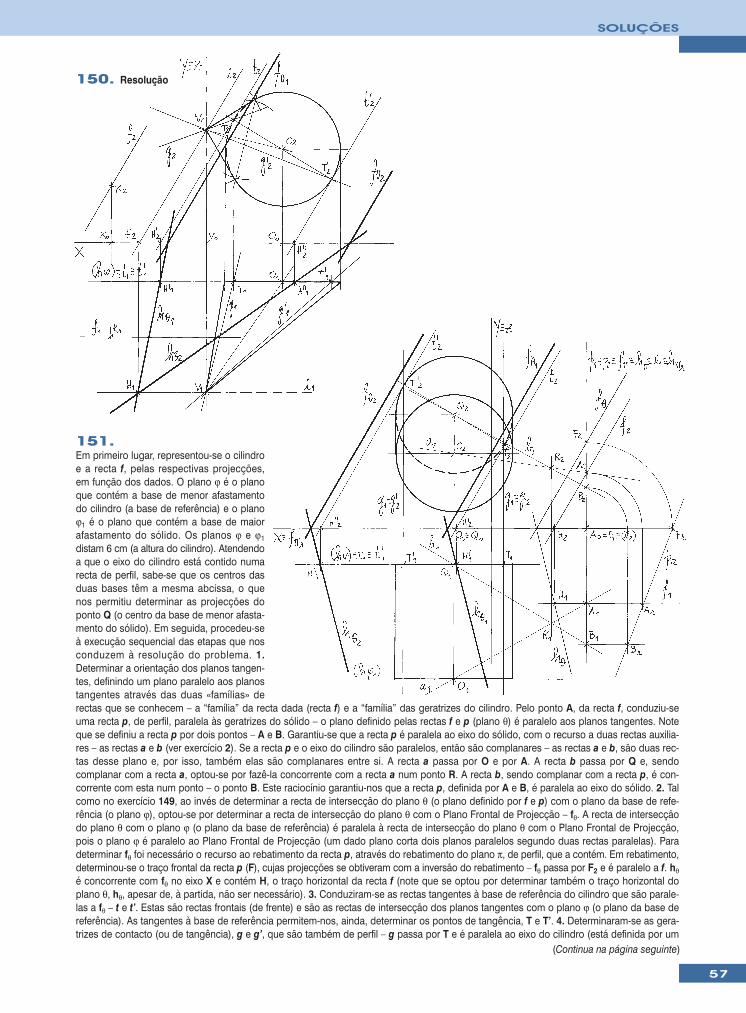
57
SOLUÇÕES
151.Em primeiro lugar, representou-se o cilindroe a recta f, pelas respectivas projecções,em função dos dados. O plano ϕ é o planoque contém a base de menor afastamentodo cilindro (a base de referência) e o planoϕ1 é o plano que contém a base de maiorafastamento do sólido. Os planos ϕ e ϕ1
distam 6 cm (a altura do cilindro). Atendendoa que o eixo do cilindro está contido numarecta de perfil, sabe-se que os centros dasduas bases têm a mesma abcissa, o quenos permitiu determinar as projecções doponto Q (o centro da base de menor afasta-mento do sólido). Em seguida, procedeu-seà execução sequencial das etapas que nosconduzem à resolução do problema. 1.Determinar a orientação dos planos tangen-tes, definindo um plano paralelo aos planostangentes através das duas «famílias» derectas que se conhecem – a “família” da recta dada (recta f) e a “família” das geratrizes do cilindro. Pelo ponto A, da recta f, conduziu-seuma recta p, de perfil, paralela às geratrizes do sólido – o plano definido pelas rectas f e p (plano θ) é paralelo aos planos tangentes. Noteque se definiu a recta p por dois pontos – A e B. Garantiu-se que a recta p é paralela ao eixo do sólido, com o recurso a duas rectas auxilia-res – as rectas a e b (ver exercício 2). Se a recta p e o eixo do cilindro são paralelos, então são complanares – as rectas a e b, são duas rec-tas desse plano e, por isso, também elas são complanares entre si. A recta a passa por O e por A. A recta b passa por Q e, sendocomplanar com a recta a, optou-se por fazê-la concorrente com a recta a num ponto R. A recta b, sendo complanar com a recta p, é con-corrente com esta num ponto – o ponto B. Este raciocínio garantiu-nos que a recta p, definida por A e B, é paralela ao eixo do sólido. 2. Talcomo no exercício 149, ao invés de determinar a recta de intersecção do plano θ (o plano definido por f e p) com o plano da base de refe-rência (o plano ϕ), optou-se por determinar a recta de intersecção do plano θ com o Plano Frontal de Projecção – fθ. A recta de intersecçãodo plano θ com o plano ϕ (o plano da base de referência) é paralela à recta de intersecção do plano θ com o Plano Frontal de Projecção,pois o plano ϕ é paralelo ao Plano Frontal de Projecção (um dado plano corta dois planos paralelos segundo duas rectas paralelas). Paradeterminar fθ foi necessário o recurso ao rebatimento da recta p, através do rebatimento do plano π, de perfil, que a contém. Em rebatimento,determinou-se o traço frontal da recta p (F), cujas projecções se obtiveram com a inversão do rebatimento – fθ passa por F2 e é paralelo a f. hθé concorrente com fθ no eixo X e contém H, o traço horizontal da recta f (note que se optou por determinar também o traço horizontal doplano θ, hθ, apesar de, à partida, não ser necessário). 3. Conduziram-se as rectas tangentes à base de referência do cilindro que são parale-las a fθ – t e t’. Estas são rectas frontais (de frente) e são as rectas de intersecção dos planos tangentes com o plano ϕ (o plano da base dereferência). As tangentes à base de referência permitem-nos, ainda, determinar os pontos de tangência, T e T’. 4. Determinaram-se as gera-trizes de contacto (ou de tangência), g e g’, que são também de perfil – g passa por T e é paralela ao eixo do cilindro (está definida por um
150. Resolução
(Continua na página seguinte)
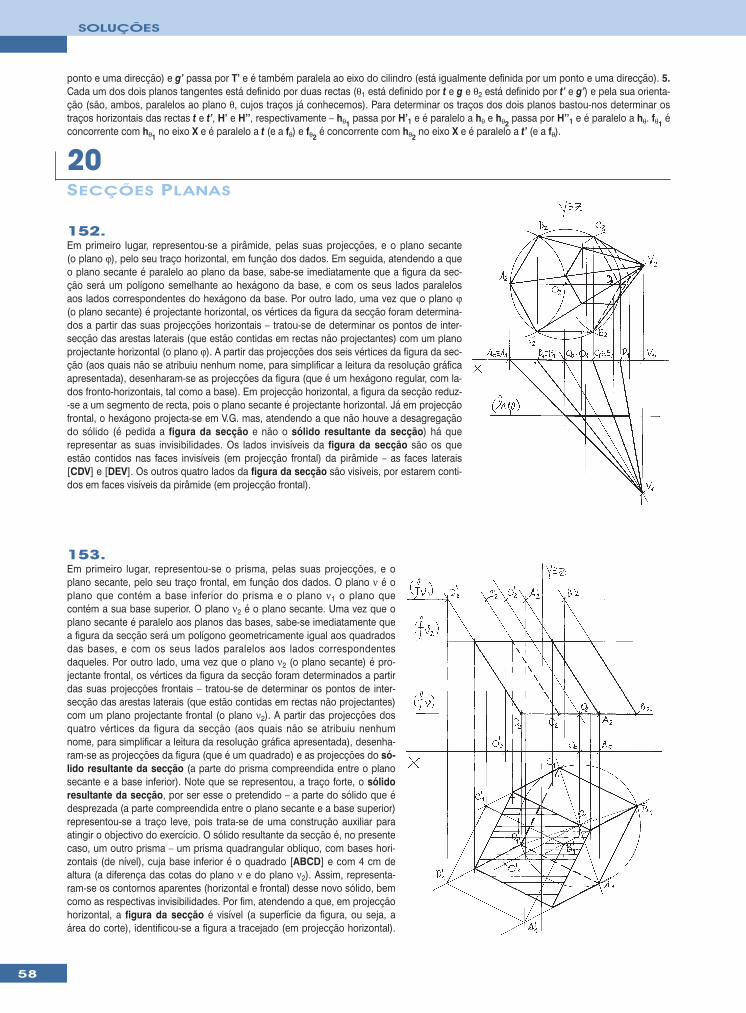
58
SOLUÇÕES
ponto e uma direcção) e g’ passa por T’ e é também paralela ao eixo do cilindro (está igualmente definida por um ponto e uma direcção). 5.Cada um dos dois planos tangentes está definido por duas rectas (θ1 está definido por t e g e θ2 está definido por t’ e g’) e pela sua orienta-ção (são, ambos, paralelos ao plano θ, cujos traços já conhecemos). Para determinar os traços dos dois planos bastou-nos determinar ostraços horizontais das rectas t e t’, H’ e H’’, respectivamente – hθ1
passa por H’1 e é paralelo a hθ e hθ2passa por H’’1 e é paralelo a hθ. fθ1
éconcorrente com hθ1
no eixo X e é paralelo a t (e a fθ) e fθ2é concorrente com hθ2
no eixo X e é paralelo a t’ (e a fθ).
SECÇÕES PLANAS
20
152.Em primeiro lugar, representou-se a pirâmide, pelas suas projecções, e o plano secante(o plano ϕ), pelo seu traço horizontal, em função dos dados. Em seguida, atendendo a queo plano secante é paralelo ao plano da base, sabe-se imediatamente que a figura da sec-ção será um polígono semelhante ao hexágono da base, e com os seus lados paralelosaos lados correspondentes do hexágono da base. Por outro lado, uma vez que o plano ϕ(o plano secante) é projectante horizontal, os vértices da figura da secção foram determina-dos a partir das suas projecções horizontais – tratou-se de determinar os pontos de inter-secção das arestas laterais (que estão contidas em rectas não projectantes) com um planoprojectante horizontal (o plano ϕ). A partir das projecções dos seis vértices da figura da sec-ção (aos quais não se atribuiu nenhum nome, para simplificar a leitura da resolução gráficaapresentada), desenharam-se as projecções da figura (que é um hexágono regular, com la-dos fronto-horizontais, tal como a base). Em projecção horizontal, a figura da secção reduz--se a um segmento de recta, pois o plano secante é projectante horizontal. Já em projecçãofrontal, o hexágono projecta-se em V.G. mas, atendendo a que não houve a desagregaçãodo sólido (é pedida a figura da secção e não o sólido resultante da secção) há querepresentar as suas invisibilidades. Os lados invisíveis da figura da secção são os queestão contidos nas faces invisíveis (em projecção frontal) da pirâmide – as faces laterais[CDV] e [DEV]. Os outros quatro lados da figura da secção são visíveis, por estarem conti-dos em faces visíveis da pirâmide (em projecção frontal).
153.Em primeiro lugar, representou-se o prisma, pelas suas projecções, e oplano secante, pelo seu traço frontal, em função dos dados. O plano ν é oplano que contém a base inferior do prisma e o plano ν1 o plano quecontém a sua base superior. O plano ν2 é o plano secante. Uma vez que oplano secante é paralelo aos planos das bases, sabe-se imediatamente quea figura da secção será um polígono geometricamente igual aos quadradosdas bases, e com os seus lados paralelos aos lados correspondentesdaqueles. Por outro lado, uma vez que o plano ν2 (o plano secante) é pro-jectante frontal, os vértices da figura da secção foram determinados a partirdas suas projecções frontais – tratou-se de determinar os pontos de inter-secção das arestas laterais (que estão contidas em rectas não projectantes)com um plano projectante frontal (o plano ν2). A partir das projecções dosquatro vértices da figura da secção (aos quais não se atribuiu nenhumnome, para simplificar a leitura da resolução gráfica apresentada), desenha-ram-se as projecções da figura (que é um quadrado) e as projecções do só-lido resultante da secção (a parte do prisma compreendida entre o planosecante e a base inferior). Note que se representou, a traço forte, o sólidoresultante da secção, por ser esse o pretendido – a parte do sólido que édesprezada (a parte compreendida entre o plano secante e a base superior)representou-se a traço leve, pois trata-se de uma construção auxiliar paraatingir o objectivo do exercício. O sólido resultante da secção é, no presentecaso, um outro prisma – um prisma quadrangular oblíquo, com bases hori-zontais (de nível), cuja base inferior é o quadrado [ABCD] e com 4 cm dealtura (a diferença das cotas do plano ν e do plano ν2). Assim, representa-ram-se os contornos aparentes (horizontal e frontal) desse novo sólido, bemcomo as respectivas invisibilidades. Por fim, atendendo a que, em projecçãohorizontal, a figura da secção é visível (a superfície da figura, ou seja, aárea do corte), identificou-se a figura a tracejado (em projecção horizontal).
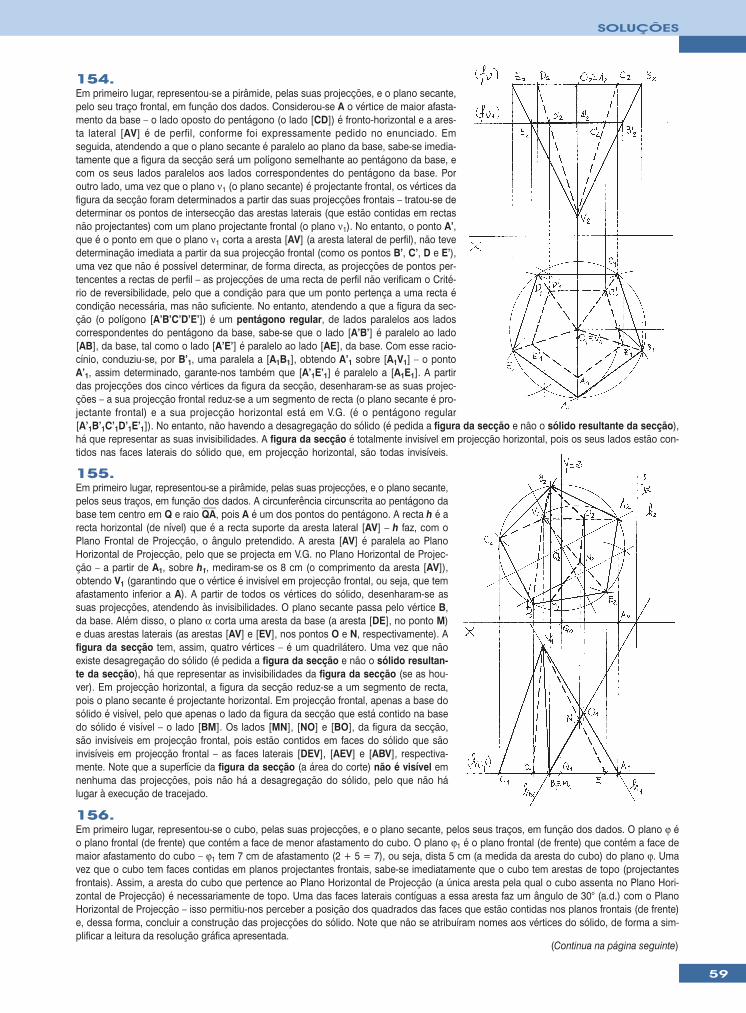
59
SOLUÇÕES
154.Em primeiro lugar, representou-se a pirâmide, pelas suas projecções, e o plano secante,pelo seu traço frontal, em função dos dados. Considerou-se A o vértice de maior afasta-mento da base – o lado oposto do pentágono (o lado [CD]) é fronto-horizontal e a ares-ta lateral [AV] é de perfil, conforme foi expressamente pedido no enunciado. Emseguida, atendendo a que o plano secante é paralelo ao plano da base, sabe-se imedia-tamente que a figura da secção será um polígono semelhante ao pentágono da base, ecom os seus lados paralelos aos lados correspondentes do pentágono da base. Poroutro lado, uma vez que o plano ν1 (o plano secante) é projectante frontal, os vértices dafigura da secção foram determinados a partir das suas projecções frontais – tratou-se dedeterminar os pontos de intersecção das arestas laterais (que estão contidas em rectasnão projectantes) com um plano projectante frontal (o plano ν1). No entanto, o ponto A’,que é o ponto em que o plano ν1 corta a aresta [AV] (a aresta lateral de perfil), não tevedeterminação imediata a partir da sua projecção frontal (como os pontos B’, C’, D e E’),uma vez que não é possível determinar, de forma directa, as projecções de pontos per-tencentes a rectas de perfil – as projecções de uma recta de perfil não verificam o Crité-rio de reversibilidade, pelo que a condição para que um ponto pertença a uma recta écondição necessária, mas não suficiente. No entanto, atendendo a que a figura da sec-ção (o polígono [A’B’C’D’E’]) é um pentágono regular, de lados paralelos aos ladoscorrespondentes do pentágono da base, sabe-se que o lado [A’B’] é paralelo ao lado[AB], da base, tal como o lado [A’E’] é paralelo ao lado [AE], da base. Com esse racio-cínio, conduziu-se, por B’1, uma paralela a [A1B1], obtendo A’1 sobre [A1V1] – o pontoA’1, assim determinado, garante-nos também que [A’1E’1] é paralelo a [A1E1]. A partirdas projecções dos cinco vértices da figura da secção, desenharam-se as suas projec-ções – a sua projecção frontal reduz-se a um segmento de recta (o plano secante é pro-jectante frontal) e a sua projecção horizontal está em V.G. (é o pentágono regular[A’1B’1C’1D’1E’1]). No entanto, não havendo a desagregação do sólido (é pedida a figura da secção e não o sólido resultante da secção),há que representar as suas invisibilidades. A figura da secção é totalmente invisível em projecção horizontal, pois os seus lados estão con-tidos nas faces laterais do sólido que, em projecção horizontal, são todas invisíveis.
155.Em primeiro lugar, representou-se a pirâmide, pelas suas projecções, e o plano secante,pelos seus traços, em função dos dados. A circunferência circunscrita ao pentágono dabase tem centro em Q e raio Q�A�, pois A é um dos pontos do pentágono. A recta h é arecta horizontal (de nível) que é a recta suporte da aresta lateral [AV] – h faz, com oPlano Frontal de Projecção, o ângulo pretendido. A aresta [AV] é paralela ao PlanoHorizontal de Projecção, pelo que se projecta em V.G. no Plano Horizontal de Projec-ção – a partir de A1, sobre h1, mediram-se os 8 cm (o comprimento da aresta [AV]),obtendo V1 (garantindo que o vértice é invisível em projecção frontal, ou seja, que temafastamento inferior a A). A partir de todos os vértices do sólido, desenharam-se assuas projecções, atendendo às invisibilidades. O plano secante passa pelo vértice B,da base. Além disso, o plano α corta uma aresta da base (a aresta [DE], no ponto M)e duas arestas laterais (as arestas [AV] e [EV], nos pontos O e N, respectivamente). Afigura da secção tem, assim, quatro vértices – é um quadrilátero. Uma vez que nãoexiste desagregação do sólido (é pedida a figura da secção e não o sólido resultan-te da secção), há que representar as invisibilidades da figura da secção (se as hou-ver). Em projecção horizontal, a figura da secção reduz-se a um segmento de recta,pois o plano secante é projectante horizontal. Em projecção frontal, apenas a base dosólido é visível, pelo que apenas o lado da figura da secção que está contido na basedo sólido é visível – o lado [BM]. Os lados [MN], [NO] e [BO], da figura da secção,são invisíveis em projecção frontal, pois estão contidos em faces do sólido que sãoinvisíveis em projecção frontal – as faces laterais [DEV], [AEV] e [ABV], respectiva-mente. Note que a superfície da figura da secção (a área do corte) não é visível emnenhuma das projecções, pois não há a desagregação do sólido, pelo que não hálugar à execução de tracejado.
156.Em primeiro lugar, representou-se o cubo, pelas suas projecções, e o plano secante, pelos seus traços, em função dos dados. O plano ϕ éo plano frontal (de frente) que contém a face de menor afastamento do cubo. O plano ϕ1 é o plano frontal (de frente) que contém a face demaior afastamento do cubo – ϕ1 tem 7 cm de afastamento (2 + 5 = 7), ou seja, dista 5 cm (a medida da aresta do cubo) do plano ϕ. Umavez que o cubo tem faces contidas em planos projectantes frontais, sabe-se imediatamente que o cubo tem arestas de topo (projectantesfrontais). Assim, a aresta do cubo que pertence ao Plano Horizontal de Projecção (a única aresta pela qual o cubo assenta no Plano Hori-zontal de Projecção) é necessariamente de topo. Uma das faces laterais contíguas a essa aresta faz um ângulo de 30° (a.d.) com o PlanoHorizontal de Projecção – isso permitiu-nos perceber a posição dos quadrados das faces que estão contidas nos planos frontais (de frente)e, dessa forma, concluir a construção das projecções do sólido. Note que não se atribuíram nomes aos vértices do sólido, de forma a sim-plificar a leitura da resolução gráfica apresentada.
(Continua na página seguinte)
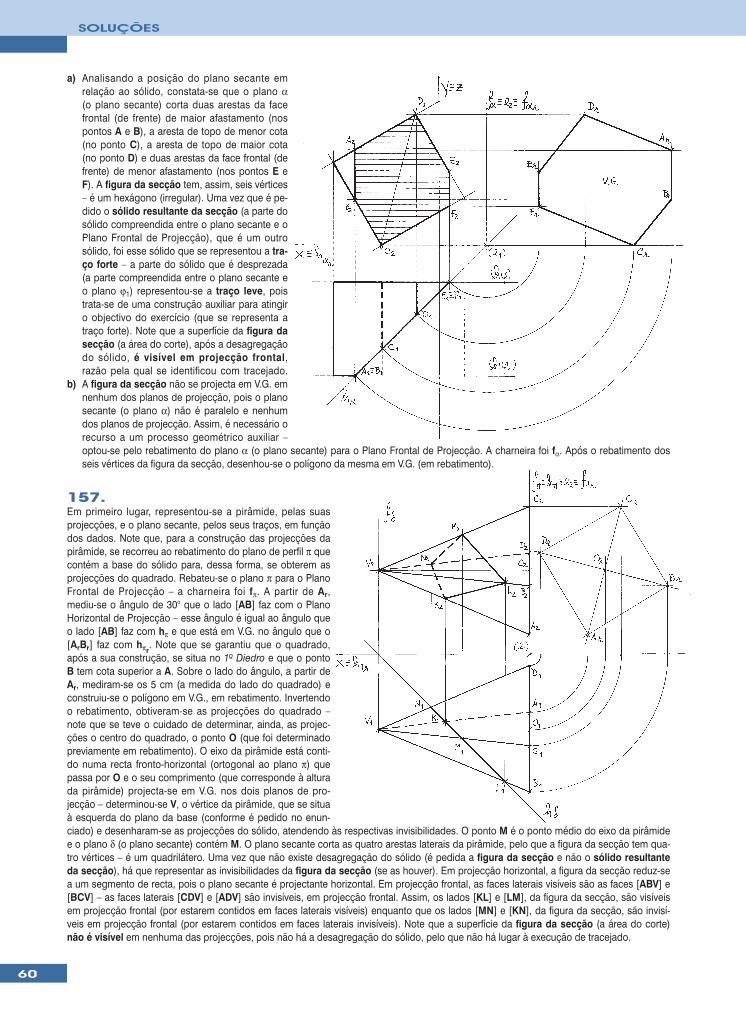
60
SOLUÇÕES
157.Em primeiro lugar, representou-se a pirâmide, pelas suasprojecções, e o plano secante, pelos seus traços, em funçãodos dados. Note que, para a construção das projecções dapirâmide, se recorreu ao rebatimento do plano de perfil π quecontém a base do sólido para, dessa forma, se obterem asprojecções do quadrado. Rebateu-se o plano π para o PlanoFrontal de Projecção – a charneira foi fπ. A partir de Ar,mediu-se o ângulo de 30° que o lado [AB] faz com o PlanoHorizontal de Projecção – esse ângulo é igual ao ângulo queo lado [AB] faz com hπ e que está em V.G. no ângulo que o[ArBr] faz com hπr
. Note que se garantiu que o quadrado,após a sua construção, se situa no 1o Diedro e que o pontoB tem cota superior a A. Sobre o lado do ângulo, a partir deAr, mediram-se os 5 cm (a medida do lado do quadrado) econstruiu-se o polígono em V.G., em rebatimento. Invertendoo rebatimento, obtiveram-se as projecções do quadrado –note que se teve o cuidado de determinar, ainda, as projec-ções o centro do quadrado, o ponto O (que foi determinadopreviamente em rebatimento). O eixo da pirâmide está conti-do numa recta fronto-horizontal (ortogonal ao plano π) quepassa por O e o seu comprimento (que corresponde à alturada pirâmide) projecta-se em V.G. nos dois planos de pro-jecção – determinou-se V, o vértice da pirâmide, que se situaà esquerda do plano da base (conforme é pedido no enun-ciado) e desenharam-se as projecções do sólido, atendendo às respectivas invisibilidades. O ponto M é o ponto médio do eixo da pirâmidee o plano δ (o plano secante) contém M. O plano secante corta as quatro arestas laterais da pirâmide, pelo que a figura da secção tem qua-tro vértices – é um quadrilátero. Uma vez que não existe desagregação do sólido (é pedida a figura da secção e não o sólido resultanteda secção), há que representar as invisibilidades da figura da secção (se as houver). Em projecção horizontal, a figura da secção reduz-sea um segmento de recta, pois o plano secante é projectante horizontal. Em projecção frontal, as faces laterais visíveis são as faces [ABV] e[BCV] – as faces laterais [CDV] e [ADV] são invisíveis, em projecção frontal. Assim, os lados [KL] e [LM], da figura da secção, são visíveisem projecção frontal (por estarem contidos em faces laterais visíveis) enquanto que os lados [MN] e [KN], da figura da secção, são invisí-veis em projecção frontal (por estarem contidos em faces laterais invisíveis). Note que a superfície da figura da secção (a área do corte)não é visível em nenhuma das projecções, pois não há a desagregação do sólido, pelo que não há lugar à execução de tracejado.
a) Analisando a posição do plano secante emrelação ao sólido, constata-se que o plano α(o plano secante) corta duas arestas da facefrontal (de frente) de maior afastamento (nospontos A e B), a aresta de topo de menor cota(no ponto C), a aresta de topo de maior cota(no ponto D) e duas arestas da face frontal (defrente) de menor afastamento (nos pontos E eF). A figura da secção tem, assim, seis vértices– é um hexágono (irregular). Uma vez que é pe-dido o sólido resultante da secção (a parte dosólido compreendida entre o plano secante e oPlano Frontal de Projecção), que é um outrosólido, foi esse sólido que se representou a tra-ço forte – a parte do sólido que é desprezada(a parte compreendida entre o plano secante eo plano ϕ1) representou-se a traço leve, poistrata-se de uma construção auxiliar para atingiro objectivo do exercício (que se representa atraço forte). Note que a superfície da figura dasecção (a área do corte), após a desagregaçãodo sólido, é visível em projecção frontal,razão pela qual se identificou com tracejado.
b) A figura da secção não se projecta em V.G. emnenhum dos planos de projecção, pois o planosecante (o plano α) não é paralelo e nenhumdos planos de projecção. Assim, é necessário orecurso a um processo geométrico auxiliar –optou-se pelo rebatimento do plano α (o plano secante) para o Plano Frontal de Projecção. A charneira foi fα. Após o rebatimento dosseis vértices da figura da secção, desenhou-se o polígono da mesma em V.G. (em rebatimento).
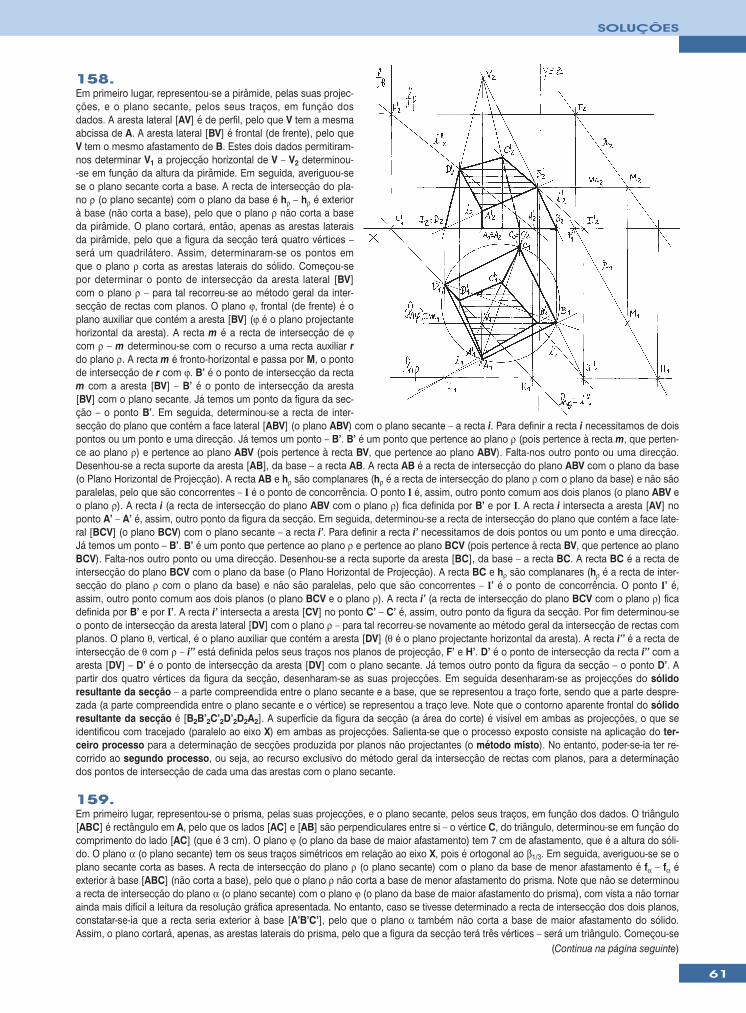
61
SOLUÇÕES
158.Em primeiro lugar, representou-se a pirâmide, pelas suas projec-ções, e o plano secante, pelos seus traços, em função dosdados. A aresta lateral [AV] é de perfil, pelo que V tem a mesmaabcissa de A. A aresta lateral [BV] é frontal (de frente), pelo queV tem o mesmo afastamento de B. Estes dois dados permitiram-nos determinar V1 a projecção horizontal de V – V2 determinou--se em função da altura da pirâmide. Em seguida, averiguou-sese o plano secante corta a base. A recta de intersecção do pla-no ρ (o plano secante) com o plano da base é hρ – hρ é exteriorà base (não corta a base), pelo que o plano ρ não corta a baseda pirâmide. O plano cortará, então, apenas as arestas lateraisda pirâmide, pelo que a figura da secção terá quatro vértices –será um quadrilátero. Assim, determinaram-se os pontos emque o plano ρ corta as arestas laterais do sólido. Começou-sepor determinar o ponto de intersecção da aresta lateral [BV]com o plano ρ – para tal recorreu-se ao método geral da inter-secção de rectas com planos. O plano ϕ, frontal (de frente) é oplano auxiliar que contém a aresta [BV] (ϕ é o plano projectantehorizontal da aresta). A recta m é a recta de intersecção de ϕcom ρ – m determinou-se com o recurso a uma recta auxiliar rdo plano ρ. A recta m é fronto-horizontal e passa por M, o pontode intersecção de r com ϕ. B’ é o ponto de intersecção da rectam com a aresta [BV] – B’ é o ponto de intersecção da aresta[BV] com o plano secante. Já temos um ponto da figura da sec-ção – o ponto B’. Em seguida, determinou-se a recta de inter-secção do plano que contém a face lateral [ABV] (o plano ABV) com o plano secante – a recta i. Para definir a recta i necessitamos de doispontos ou um ponto e uma direcção. Já temos um ponto – B’. B’ é um ponto que pertence ao plano ρ (pois pertence à recta m, que perten-ce ao plano ρ) e pertence ao plano ABV (pois pertence à recta BV, que pertence ao plano ABV). Falta-nos outro ponto ou uma direcção.Desenhou-se a recta suporte da aresta [AB], da base – a recta AB. A recta AB é a recta de intersecção do plano ABV com o plano da base(o Plano Horizontal de Projecção). A recta AB e hρ são complanares (hρ é a recta de intersecção do plano ρ com o plano da base) e não sãoparalelas, pelo que são concorrentes – I é o ponto de concorrência. O ponto I é, assim, outro ponto comum aos dois planos (o plano ABV eo plano ρ). A recta i (a recta de intersecção do plano ABV com o plano ρ) fica definida por B’ e por I. A recta i intersecta a aresta [AV] noponto A’ – A’ é, assim, outro ponto da figura da secção. Em seguida, determinou-se a recta de intersecção do plano que contém a face late-ral [BCV] (o plano BCV) com o plano secante – a recta i’. Para definir a recta i’ necessitamos de dois pontos ou um ponto e uma direcção.Já temos um ponto – B’. B’ é um ponto que pertence ao plano ρ e pertence ao plano BCV (pois pertence à recta BV, que pertence ao planoBCV). Falta-nos outro ponto ou uma direcção. Desenhou-se a recta suporte da aresta [BC], da base – a recta BC. A recta BC é a recta deintersecção do plano BCV com o plano da base (o Plano Horizontal de Projecção). A recta BC e hρ são complanares (hρ é a recta de inter-secção do plano ρ com o plano da base) e não são paralelas, pelo que são concorrentes – I’ é o ponto de concorrência. O ponto I’ é,assim, outro ponto comum aos dois planos (o plano BCV e o plano ρ). A recta i’ (a recta de intersecção do plano BCV com o plano ρ) ficadefinida por B’ e por I’. A recta i’ intersecta a aresta [CV] no ponto C’ – C’ é, assim, outro ponto da figura da secção. Por fim determinou-seo ponto de intersecção da aresta lateral [DV] com o plano ρ – para tal recorreu-se novamente ao método geral da intersecção de rectas complanos. O plano θ, vertical, é o plano auxiliar que contém a aresta [DV] (θ é o plano projectante horizontal da aresta). A recta i’’ é a recta deintersecção de θ com ρ – i’’ está definida pelos seus traços nos planos de projecção, F’ e H’. D’ é o ponto de intersecção da recta i’’ com aaresta [DV] – D’ é o ponto de intersecção da aresta [DV] com o plano secante. Já temos outro ponto da figura da secção – o ponto D’. Apartir dos quatro vértices da figura da secção, desenharam-se as suas projecções. Em seguida desenharam-se as projecções do sólidoresultante da secção – a parte compreendida entre o plano secante e a base, que se representou a traço forte, sendo que a parte despre-zada (a parte compreendida entre o plano secante e o vértice) se representou a traço leve. Note que o contorno aparente frontal do sólidoresultante da secção é [B2B’2C’2D’2D2A2]. A superfície da figura da secção (a área do corte) é visível em ambas as projecções, o que seidentificou com tracejado (paralelo ao eixo X) em ambas as projecções. Salienta-se que o processo exposto consiste na aplicação do ter-ceiro processo para a determinação de secções produzida por planos não projectantes (o método misto). No entanto, poder-se-ia ter re-corrido ao segundo processo, ou seja, ao recurso exclusivo do método geral da intersecção de rectas com planos, para a determinaçãodos pontos de intersecção de cada uma das arestas com o plano secante.
159.Em primeiro lugar, representou-se o prisma, pelas suas projecções, e o plano secante, pelos seus traços, em função dos dados. O triângulo[ABC] é rectângulo em A, pelo que os lados [AC] e [AB] são perpendiculares entre si – o vértice C, do triângulo, determinou-se em função docomprimento do lado [AC] (que é 3 cm). O plano ϕ (o plano da base de maior afastamento) tem 7 cm de afastamento, que é a altura do sóli-do. O plano α (o plano secante) tem os seus traços simétricos em relação ao eixo X, pois é ortogonal ao β1/3. Em seguida, averiguou-se se oplano secante corta as bases. A recta de intersecção do plano ρ (o plano secante) com o plano da base de menor afastamento é fα – fα éexterior à base [ABC] (não corta a base), pelo que o plano ρ não corta a base de menor afastamento do prisma. Note que não se determinoua recta de intersecção do plano α (o plano secante) com o plano ϕ (o plano da base de maior afastamento do prisma), com vista a não tornarainda mais difícil a leitura da resolução gráfica apresentada. No entanto, caso se tivesse determinado a recta de intersecção dos dois planos,constatar-se-ia que a recta seria exterior à base [A’B’C’], pelo que o plano α também não corta a base de maior afastamento do sólido.Assim, o plano cortará, apenas, as arestas laterais do prisma, pelo que a figura da secção terá três vértices – será um triângulo. Começou-se
(Continua na página seguinte)
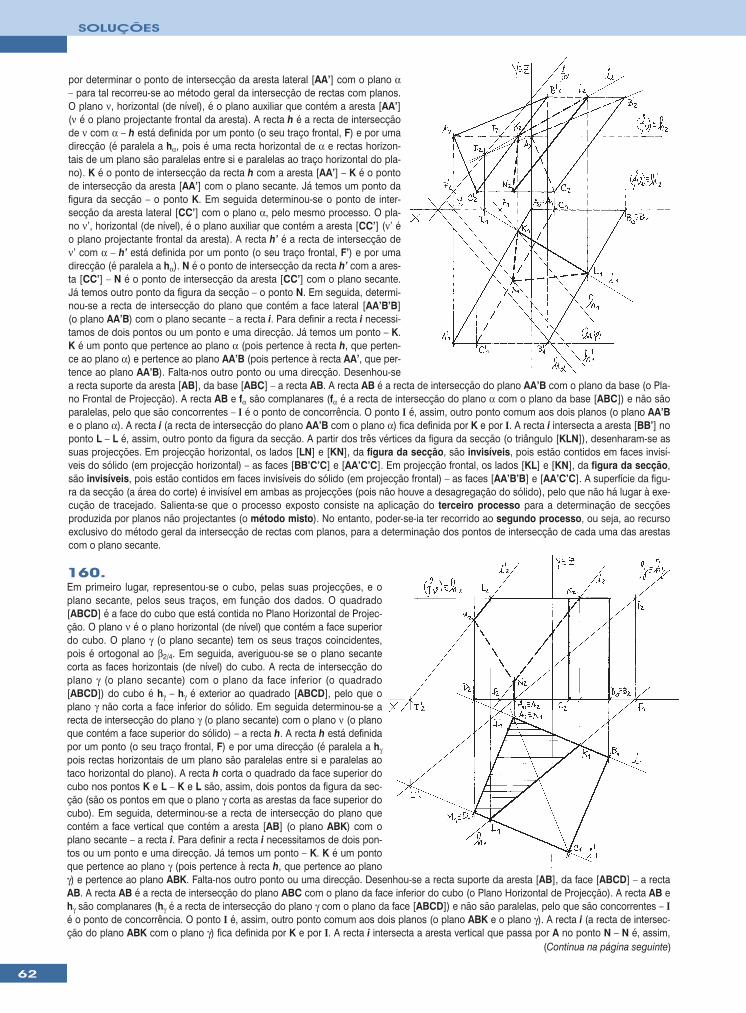
62
SOLUÇÕES
por determinar o ponto de intersecção da aresta lateral [AA’] com o plano α– para tal recorreu-se ao método geral da intersecção de rectas com planos.O plano ν, horizontal (de nível), é o plano auxiliar que contém a aresta [AA’](ν é o plano projectante frontal da aresta). A recta h é a recta de intersecçãode ν com α – h está definida por um ponto (o seu traço frontal, F) e por umadirecção (é paralela a hα, pois é uma recta horizontal de α e rectas horizon-tais de um plano são paralelas entre si e paralelas ao traço horizontal do pla-no). K é o ponto de intersecção da recta h com a aresta [AA’] – K é o pontode intersecção da aresta [AA’] com o plano secante. Já temos um ponto dafigura da secção – o ponto K. Em seguida determinou-se o ponto de inter-secção da aresta lateral [CC’] com o plano α, pelo mesmo processo. O pla-no ν’, horizontal (de nível), é o plano auxiliar que contém a aresta [CC’] (ν’ éo plano projectante frontal da aresta). A recta h’ é a recta de intersecção deν’ com α – h’ está definida por um ponto (o seu traço frontal, F’) e por umadirecção (é paralela a hα). N é o ponto de intersecção da recta h’ com a ares-ta [CC’] – N é o ponto de intersecção da aresta [CC’] com o plano secante.Já temos outro ponto da figura da secção – o ponto N. Em seguida, determi-nou-se a recta de intersecção do plano que contém a face lateral [AA’B’B](o plano AA’B) com o plano secante – a recta i. Para definir a recta i necessi-tamos de dois pontos ou um ponto e uma direcção. Já temos um ponto – K.K é um ponto que pertence ao plano α (pois pertence à recta h, que perten-ce ao plano α) e pertence ao plano AA’B (pois pertence à recta AA’, que per-tence ao plano AA’B). Falta-nos outro ponto ou uma direcção. Desenhou-sea recta suporte da aresta [AB], da base [ABC] – a recta AB. A recta AB é a recta de intersecção do plano AA’B com o plano da base (o Pla-no Frontal de Projecção). A recta AB e fα são complanares (fα é a recta de intersecção do plano α com o plano da base [ABC]) e não sãoparalelas, pelo que são concorrentes – I é o ponto de concorrência. O ponto I é, assim, outro ponto comum aos dois planos (o plano AA’Be o plano α). A recta i (a recta de intersecção do plano AA’B com o plano α) fica definida por K e por I. A recta i intersecta a aresta [BB’] noponto L – L é, assim, outro ponto da figura da secção. A partir dos três vértices da figura da secção (o triângulo [KLN]), desenharam-se assuas projecções. Em projecção horizontal, os lados [LN] e [KN], da figura da secção, são invisíveis, pois estão contidos em faces invisí-veis do sólido (em projecção horizontal) – as faces [BB’C’C] e [AA’C’C]. Em projecção frontal, os lados [KL] e [KN], da figura da secção,são invisíveis, pois estão contidos em faces invisíveis do sólido (em projecção frontal) – as faces [AA’B’B] e [AA’C’C]. A superfície da figu-ra da secção (a área do corte) é invisível em ambas as projecções (pois não houve a desagregação do sólido), pelo que não há lugar à exe-cução de tracejado. Salienta-se que o processo exposto consiste na aplicação do terceiro processo para a determinação de secçõesproduzida por planos não projectantes (o método misto). No entanto, poder-se-ia ter recorrido ao segundo processo, ou seja, ao recursoexclusivo do método geral da intersecção de rectas com planos, para a determinação dos pontos de intersecção de cada uma das arestascom o plano secante.
160.Em primeiro lugar, representou-se o cubo, pelas suas projecções, e oplano secante, pelos seus traços, em função dos dados. O quadrado[ABCD] é a face do cubo que está contida no Plano Horizontal de Projec-ção. O plano ν é o plano horizontal (de nível) que contém a face superiordo cubo. O plano γ (o plano secante) tem os seus traços coincidentes,pois é ortogonal ao β2/4. Em seguida, averiguou-se se o plano secantecorta as faces horizontais (de nível) do cubo. A recta de intersecção doplano γ (o plano secante) com o plano da face inferior (o quadrado[ABCD]) do cubo é hγ – hγ é exterior ao quadrado [ABCD], pelo que oplano γ não corta a face inferior do sólido. Em seguida determinou-se arecta de intersecção do plano γ (o plano secante) com o plano ν (o planoque contém a face superior do sólido) – a recta h. A recta h está definidapor um ponto (o seu traço frontal, F) e por uma direcção (é paralela a hγpois rectas horizontais de um plano são paralelas entre si e paralelas aotaco horizontal do plano). A recta h corta o quadrado da face superior docubo nos pontos K e L – K e L são, assim, dois pontos da figura da sec-ção (são os pontos em que o plano γ corta as arestas da face superior docubo). Em seguida, determinou-se a recta de intersecção do plano quecontém a face vertical que contém a aresta [AB] (o plano ABK) com oplano secante – a recta i. Para definir a recta i necessitamos de dois pon-tos ou um ponto e uma direcção. Já temos um ponto – K. K é um pontoque pertence ao plano γ (pois pertence à recta h, que pertence ao planoγ) e pertence ao plano ABK. Falta-nos outro ponto ou uma direcção. Desenhou-se a recta suporte da aresta [AB], da face [ABCD] – a rectaAB. A recta AB é a recta de intersecção do plano ABC com o plano da face inferior do cubo (o Plano Horizontal de Projecção). A recta AB ehγ são complanares (hγ é a recta de intersecção do plano γ com o plano da face [ABCD]) e não são paralelas, pelo que são concorrentes – Ié o ponto de concorrência. O ponto I é, assim, outro ponto comum aos dois planos (o plano ABK e o plano γ). A recta i (a recta de intersec-ção do plano ABK com o plano γ) fica definida por K e por I. A recta i intersecta a aresta vertical que passa por A no ponto N – N é, assim,
(Continua na página seguinte)
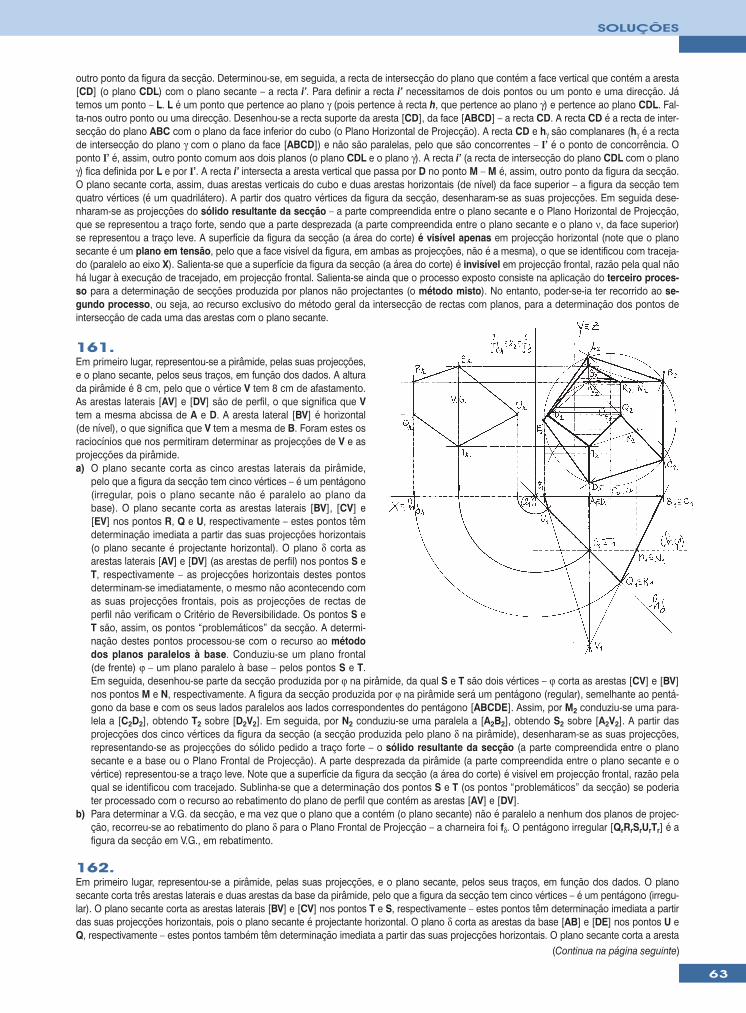
63
SOLUÇÕES
outro ponto da figura da secção. Determinou-se, em seguida, a recta de intersecção do plano que contém a face vertical que contém a aresta[CD] (o plano CDL) com o plano secante – a recta i’. Para definir a recta i’ necessitamos de dois pontos ou um ponto e uma direcção. Játemos um ponto – L. L é um ponto que pertence ao plano γ (pois pertence à recta h, que pertence ao plano γ) e pertence ao plano CDL. Fal-ta-nos outro ponto ou uma direcção. Desenhou-se a recta suporte da aresta [CD], da face [ABCD] – a recta CD. A recta CD é a recta de inter-secção do plano ABC com o plano da face inferior do cubo (o Plano Horizontal de Projecção). A recta CD e hγ são complanares (hγ é a rectade intersecção do plano γ com o plano da face [ABCD]) e não são paralelas, pelo que são concorrentes – I’ é o ponto de concorrência. Oponto I’ é, assim, outro ponto comum aos dois planos (o plano CDL e o plano γ). A recta i’ (a recta de intersecção do plano CDL com o planoγ) fica definida por L e por I’. A recta i’ intersecta a aresta vertical que passa por D no ponto M – M é, assim, outro ponto da figura da secção.O plano secante corta, assim, duas arestas verticais do cubo e duas arestas horizontais (de nível) da face superior – a figura da secção temquatro vértices (é um quadrilátero). A partir dos quatro vértices da figura da secção, desenharam-se as suas projecções. Em seguida dese-nharam-se as projecções do sólido resultante da secção – a parte compreendida entre o plano secante e o Plano Horizontal de Projecção,que se representou a traço forte, sendo que a parte desprezada (a parte compreendida entre o plano secante e o plano ν, da face superior)se representou a traço leve. A superfície da figura da secção (a área do corte) é visível apenas em projecção horizontal (note que o planosecante é um plano em tensão, pelo que a face visível da figura, em ambas as projecções, não é a mesma), o que se identificou com traceja-do (paralelo ao eixo X). Salienta-se que a superfície da figura da secção (a área do corte) é invisível em projecção frontal, razão pela qual nãohá lugar à execução de tracejado, em projecção frontal. Salienta-se ainda que o processo exposto consiste na aplicação do terceiro proces-so para a determinação de secções produzida por planos não projectantes (o método misto). No entanto, poder-se-ia ter recorrido ao se-gundo processo, ou seja, ao recurso exclusivo do método geral da intersecção de rectas com planos, para a determinação dos pontos deintersecção de cada uma das arestas com o plano secante.
(Continua na página seguinte)
161.Em primeiro lugar, representou-se a pirâmide, pelas suas projecções,e o plano secante, pelos seus traços, em função dos dados. A alturada pirâmide é 8 cm, pelo que o vértice V tem 8 cm de afastamento.As arestas laterais [AV] e [DV] são de perfil, o que significa que Vtem a mesma abcissa de A e D. A aresta lateral [BV] é horizontal(de nível), o que significa que V tem a mesma de B. Foram estes osraciocínios que nos permitiram determinar as projecções de V e asprojecções da pirâmide. a) O plano secante corta as cinco arestas laterais da pirâmide,
pelo que a figura da secção tem cinco vértices – é um pentágono(irregular, pois o plano secante não é paralelo ao plano dabase). O plano secante corta as arestas laterais [BV], [CV] e[EV] nos pontos R, Q e U, respectivamente – estes pontos têmdeterminação imediata a partir das suas projecções horizontais(o plano secante é projectante horizontal). O plano δ corta asarestas laterais [AV] e [DV] (as arestas de perfil) nos pontos S eT, respectivamente – as projecções horizontais destes pontosdeterminam-se imediatamente, o mesmo não acontecendo comas suas projecções frontais, pois as projecções de rectas deperfil não verificam o Critério de Reversibilidade. Os pontos S eT são, assim, os pontos “problemáticos” da secção. A determi-nação destes pontos processou-se com o recurso ao métododos planos paralelos à base. Conduziu-se um plano frontal(de frente) ϕ – um plano paralelo à base – pelos pontos S e T.Em seguida, desenhou-se parte da secção produzida por ϕ na pirâmide, da qual S e T são dois vértices – ϕ corta as arestas [CV] e [BV]nos pontos M e N, respectivamente. A figura da secção produzida por ϕ na pirâmide será um pentágono (regular), semelhante ao pentá-gono da base e com os seus lados paralelos aos lados correspondentes do pentágono [ABCDE]. Assim, por M2 conduziu-se uma para-lela a [C2D2], obtendo T2 sobre [D2V2]. Em seguida, por N2 conduziu-se uma paralela a [A2B2], obtendo S2 sobre [A2V2]. A partir dasprojecções dos cinco vértices da figura da secção (a secção produzida pelo plano δ na pirâmide), desenharam-se as suas projecções,representando-se as projecções do sólido pedido a traço forte – o sólido resultante da secção (a parte compreendida entre o planosecante e a base ou o Plano Frontal de Projecção). A parte desprezada da pirâmide (a parte compreendida entre o plano secante e ovértice) representou-se a traço leve. Note que a superfície da figura da secção (a área do corte) é visível em projecção frontal, razão pelaqual se identificou com tracejado. Sublinha-se que a determinação dos pontos S e T (os pontos “problemáticos” da secção) se poderiater processado com o recurso ao rebatimento do plano de perfil que contém as arestas [AV] e [DV].
b) Para determinar a V.G. da secção, e ma vez que o plano que a contém (o plano secante) não é paralelo a nenhum dos planos de projec-ção, recorreu-se ao rebatimento do plano δ para o Plano Frontal de Projecção – a charneira foi fδ. O pentágono irregular [QrRrSrUrTr] é afigura da secção em V.G., em rebatimento.
162.Em primeiro lugar, representou-se a pirâmide, pelas suas projecções, e o plano secante, pelos seus traços, em função dos dados. O planosecante corta três arestas laterais e duas arestas da base da pirâmide, pelo que a figura da secção tem cinco vértices – é um pentágono (irregu-lar). O plano secante corta as arestas laterais [BV] e [CV] nos pontos T e S, respectivamente – estes pontos têm determinação imediata a partirdas suas projecções horizontais, pois o plano secante é projectante horizontal. O plano δ corta as arestas da base [AB] e [DE] nos pontos U eQ, respectivamente – estes pontos também têm determinação imediata a partir das suas projecções horizontais. O plano secante corta a aresta
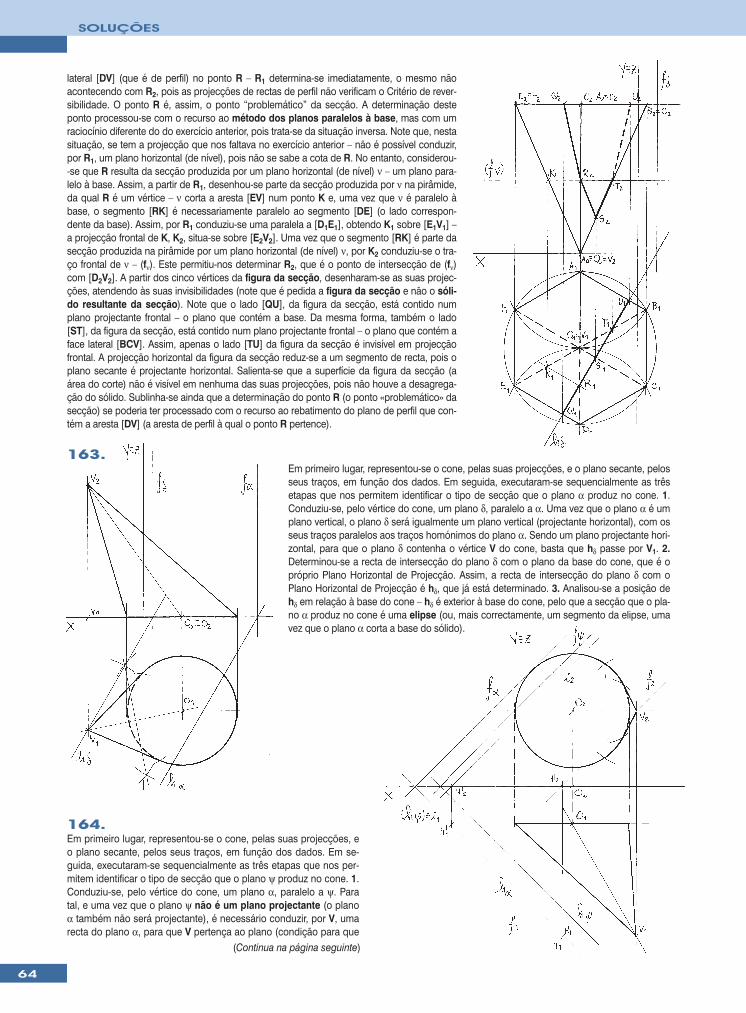
64
SOLUÇÕES
lateral [DV] (que é de perfil) no ponto R – R1 determina-se imediatamente, o mesmo nãoacontecendo com R2, pois as projecções de rectas de perfil não verificam o Critério de rever-sibilidade. O ponto R é, assim, o ponto “problemático” da secção. A determinação desteponto processou-se com o recurso ao método dos planos paralelos à base, mas com umraciocínio diferente do do exercício anterior, pois trata-se da situação inversa. Note que, nestasituação, se tem a projecção que nos faltava no exercício anterior – não é possível conduzir,por R1, um plano horizontal (de nível), pois não se sabe a cota de R. No entanto, considerou--se que R resulta da secção produzida por um plano horizontal (de nível) ν – um plano para-lelo à base. Assim, a partir de R1, desenhou-se parte da secção produzida por ν na pirâmide,da qual R é um vértice – ν corta a aresta [EV] num ponto K e, uma vez que ν é paralelo àbase, o segmento [RK] é necessariamente paralelo ao segmento [DE] (o lado correspon-dente da base). Assim, por R1 conduziu-se uma paralela a [D1E1], obtendo K1 sobre [E1V1] –a projecção frontal de K, K2, situa-se sobre [E2V2]. Uma vez que o segmento [RK] é parte dasecção produzida na pirâmide por um plano horizontal (de nível) ν, por K2 conduziu-se o tra-ço frontal de ν – (fν). Este permitiu-nos determinar R2, que é o ponto de intersecção de (fν)com [D2V2]. A partir dos cinco vértices da figura da secção, desenharam-se as suas projec-ções, atendendo às suas invisibilidades (note que é pedida a figura da secção e não o sóli-do resultante da secção). Note que o lado [QU], da figura da secção, está contido numplano projectante frontal – o plano que contém a base. Da mesma forma, também o lado[ST], da figura da secção, está contido num plano projectante frontal – o plano que contém aface lateral [BCV]. Assim, apenas o lado [TU] da figura da secção é invisível em projecçãofrontal. A projecção horizontal da figura da secção reduz-se a um segmento de recta, pois oplano secante é projectante horizontal. Salienta-se que a superfície da figura da secção (aárea do corte) não é visível em nenhuma das suas projecções, pois não houve a desagrega-ção do sólido. Sublinha-se ainda que a determinação do ponto R (o ponto «problemático» dasecção) se poderia ter processado com o recurso ao rebatimento do plano de perfil que con-tém a aresta [DV] (a aresta de perfil à qual o ponto R pertence).
163.Em primeiro lugar, representou-se o cone, pelas suas projecções, e o plano secante, pelosseus traços, em função dos dados. Em seguida, executaram-se sequencialmente as trêsetapas que nos permitem identificar o tipo de secção que o plano α produz no cone. 1.Conduziu-se, pelo vértice do cone, um plano δ, paralelo a α. Uma vez que o plano α é umplano vertical, o plano δ será igualmente um plano vertical (projectante horizontal), com osseus traços paralelos aos traços homónimos do plano α. Sendo um plano projectante hori-zontal, para que o plano δ contenha o vértice V do cone, basta que hδ passe por V1. 2.Determinou-se a recta de intersecção do plano δ com o plano da base do cone, que é opróprio Plano Horizontal de Projecção. Assim, a recta de intersecção do plano δ com oPlano Horizontal de Projecção é hδ, que já está determinado. 3. Analisou-se a posição dehδ em relação à base do cone – hδ é exterior à base do cone, pelo que a secção que o pla-no α produz no cone é uma elipse (ou, mais correctamente, um segmento da elipse, umavez que o plano α corta a base do sólido).
164.Em primeiro lugar, representou-se o cone, pelas suas projecções, eo plano secante, pelos seus traços, em função dos dados. Em se-guida, executaram-se sequencialmente as três etapas que nos per-mitem identificar o tipo de secção que o plano ψ produz no cone. 1.Conduziu-se, pelo vértice do cone, um plano α, paralelo a ψ. Paratal, e uma vez que o plano ψ não é um plano projectante (o planoα também não será projectante), é necessário conduzir, por V, umarecta do plano α, para que V pertença ao plano (condição para que
(Continua na página seguinte)

65
SOLUÇÕES
um ponto pertença a um plano). Recorreu-se a uma recta f, frontal (de frente), paralela às rectas frontais do plano ψ (a rectas frontais de αsão necessariamente paralelas às rectas de ψ). Determinou-se H, o traço horizontal da recta f, pelo qual se conduziu hα – fα é paralelo a f (ea fψ) e é concorrente com hα no eixo X. O plano α, definido pelos seus traços, é paralelo a ψ e contém V. 2. Determinou-se a recta de inter-secção do plano α com o plano da base do cone (o plano frontal ϕ) – recta i. A recta i é uma recta frontal (de frente) do plano α e está defi-nida por um ponto (o seu traço horizontal, H’) e por uma direcção (a direcção das rectas frontais de α). 3. Analisou-se a posição da recta iem relação à base do cone – i é secante à base do cone, pelo que a secção que o plano ψ produz no cone é uma hipérbole (ou, mais cor-rectamente, um ramo da hipérbole, uma vez se trata de um cone e não se uma superfície cónica).
(Continua na página seguinte)
Em primeiro lugar, representaram-se o cone, pelas suasprojecções, e o plano secante, pelos seus traços, em fun-ção dos dados. Em seguida, efectuaram-se os traçadosnecessários à identificação do tipo de cónica que é a sec-ção produzida pelo plano θ no sólido. 1. Conduziu-se, porV, um plano paralelo a θ – o plano θ1 (o que se processoude forma directa, pois θ é projectante frontal pelo que,para que θ1 contenha V, basta que fθ1
passe por V2). 2.Determinou-se a recta de intersecção do plano θ1 com oplano da base (o plano ν) – a recta i (a recta i é uma rectade topo, pois trata-se da recta de intersecção entre doisplanos projectantes frontais). 3. Averiguou-se a posiçãorelativa da recta i e da base do cone – a recta i é exterior àbase do cone, pelo que a secção que o plano θ produz nocone é uma elipse. Já sabendo que tipo de curva a sec-ção vai gerar, procedeu-se à sua determinação. Assim,determinaram-se, antes de mais, os pontos em que o pla-no θ (o plano secante) corta os contornos aparentes. Oplano θ corta o contorno aparente frontal em dois pontos –A e B (os pontos em que o plano θ corta as geratrizesmais à esquerda e mais à direita do contorno aparentefrontal, respectivamente). A é o ponto de menor cota dasecção e B o seu ponto de maior cota. O plano θ nãocorta o contorno aparente horizontal. Já temos doispontos da curva da secção, que são os dois extremos doeixo maior da elipse (e que definem o espaço útil para os
planos auxiliares). Para determinar o eixo menor recorreu-se ao ponto médio de [AB] (o ponto M, que se determinou com o recurso à medi-atriz de [AB]), pelo qual se conduziu o primeiro plano auxiliar paralelo à base – o plano horizontal (de nível) ν1. O plano ν1 corta o conesegundo uma circunferência – esta tem centro em Q (o ponto em que ν1 corta o eixo do sólido) e raio Q�P� (P é o ponto em que ν1 corta ageratriz mais à esquerda do contorno aparente frontal). A recta de intersecção do plano ν1 com o plano θ (o plano secante) é também umarecta de topo, que corta a circunferência nos pontos C e D – C e D são mais dois pontos da secção e são os extremos do eixo menor daelipse. Já temos quatro pontos da curva da secção. Repetiu-se o processo com mais dois planos auxiliares paralelos à base (os planos hori-zontais ν2 e ν3), distribuídos uniformemente entre os pontos já determinados – cada um destes planos permitiu-nos determinar mais doispontos da elipse. Com um total de oito pontos, desenharam-se as projecções da figura da secção (que não apresenta quaisquer invisibili-dades) – a projecção frontal é um segmento de recta (o plano é projectante frontal) e a projecção horizontal é outra elipse, cujo desenho, apartir dos dois pontos determinados, foi relativamente preciso.
166.Em primeiro lugar, representaram-se o cone, pelas suas projecções, e o plano secante, pelos seus traços, em função dos dados. Para aconstrução do cone, e uma vez que não é dada a sua altura mas, sim, o comprimento das geratrizes, teve-se em conta que as geratrizes docontorno aparente horizontal são horizontais (de nível), pelo que se projectam em V.G. em projecção horizontal, o que nos permitiu determi-nar V1. Em seguida, efectuaram-se os traçados necessários à identificação do tipo de cónica que é a secção produzida pelo plano α no sóli-do. 1. Conduziu-se, por V, um plano paralelo a α – o plano α1 (o que se processou de forma directa, pois α é projectante horizontal peloque, para que α1 contenha V, basta que hα1
passe por V1). 2. Determinou-se a recta de intersecção do plano α1 com o plano da base (o Pla-no Horizontal de Projecção), que é fα1
. 3. Averiguou-se a posição relativa de fα1com a base do cone – fα1
é tangente à base do cone, peloque a secção que o plano α produz no cone é uma parábola (note que o plano α é paralelo à geratriz mais à esquerda do contorno aparentehorizontal). Já sabendo a cónica que a secção vai gerar, procedeu-se à sua determinação. Assim, determinaram-se, antes de mais, os pon-tos em que o plano α (o plano secante) corta os contornos aparentes. O plano α corta o contorno aparente horizontal em três pontos – ospontos A e B (os pontos em que o plano α corta a base) e o ponto C (o ponto em que o plano α corta a geratriz mais à direita do contornoaparente horizontal). O plano não corta a geratriz mais à esquerda do contorno aparente horizontal (é paralelo a esta). O plano α corta ocontorno aparente frontal em dois pontos – os pontos A e B (já determinados). Já temos três pontos da curva da secção, que definem oespaço útil para os planos auxiliares – é o espaço compreendido entre o ponto C e a base do cone (C é o ponto de maior afastamento dasecção e A e B os seus pontos de menor afastamento). Recorreu-se a três planos auxiliares paralelos à base – planos frontais (de frente).Estes foram distribuídos uniformemente pelo espaço útil – note que se omitiu a identificação dos planos (as notações referentes aos seus
165.
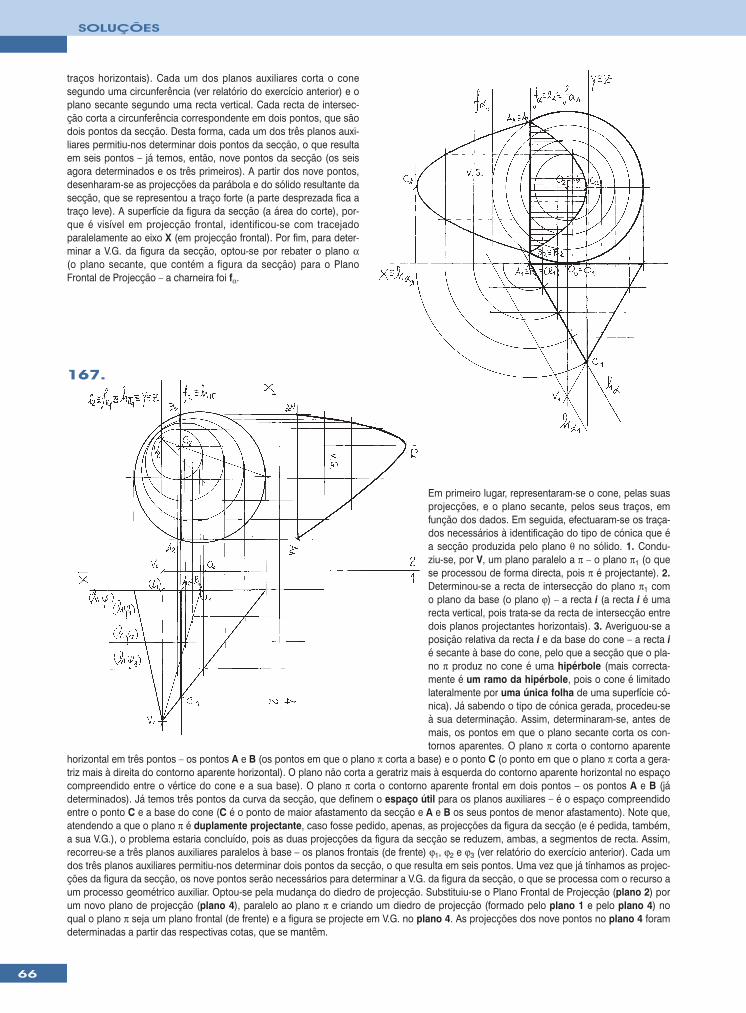
66
SOLUÇÕES
traços horizontais). Cada um dos planos auxiliares corta o conesegundo uma circunferência (ver relatório do exercício anterior) e oplano secante segundo uma recta vertical. Cada recta de intersec-ção corta a circunferência correspondente em dois pontos, que sãodois pontos da secção. Desta forma, cada um dos três planos auxi-liares permitiu-nos determinar dois pontos da secção, o que resultaem seis pontos – já temos, então, nove pontos da secção (os seisagora determinados e os três primeiros). A partir dos nove pontos,desenharam-se as projecções da parábola e do sólido resultante dasecção, que se representou a traço forte (a parte desprezada fica atraço leve). A superfície da figura da secção (a área do corte), por-que é visível em projecção frontal, identificou-se com tracejadoparalelamente ao eixo X (em projecção frontal). Por fim, para deter-minar a V.G. da figura da secção, optou-se por rebater o plano α(o plano secante, que contém a figura da secção) para o PlanoFrontal de Projecção – a charneira foi fα.
Em primeiro lugar, representaram-se o cone, pelas suasprojecções, e o plano secante, pelos seus traços, emfunção dos dados. Em seguida, efectuaram-se os traça-dos necessários à identificação do tipo de cónica que éa secção produzida pelo plano θ no sólido. 1. Condu-ziu-se, por V, um plano paralelo a π – o plano π1 (o quese processou de forma directa, pois π é projectante). 2.Determinou-se a recta de intersecção do plano π1 como plano da base (o plano ϕ) – a recta i (a recta i é umarecta vertical, pois trata-se da recta de intersecção entredois planos projectantes horizontais). 3. Averiguou-se aposição relativa da recta i e da base do cone – a recta ié secante à base do cone, pelo que a secção que o pla-no π produz no cone é uma hipérbole (mais correcta-mente é um ramo da hipérbole, pois o cone é limitadolateralmente por uma única folha de uma superfície có-nica). Já sabendo o tipo de cónica gerada, procedeu-seà sua determinação. Assim, determinaram-se, antes demais, os pontos em que o plano secante corta os con-tornos aparentes. O plano π corta o contorno aparente
horizontal em três pontos – os pontos A e B (os pontos em que o plano π corta a base) e o ponto C (o ponto em que o plano π corta a gera-triz mais à direita do contorno aparente horizontal). O plano não corta a geratriz mais à esquerda do contorno aparente horizontal no espaçocompreendido entre o vértice do cone e a sua base). O plano π corta o contorno aparente frontal em dois pontos – os pontos A e B (jádeterminados). Já temos três pontos da curva da secção, que definem o espaço útil para os planos auxiliares – é o espaço compreendidoentre o ponto C e a base do cone (C é o ponto de maior afastamento da secção e A e B os seus pontos de menor afastamento). Note que,atendendo a que o plano π é duplamente projectante, caso fosse pedido, apenas, as projecções da figura da secção (e é pedida, também,a sua V.G.), o problema estaria concluído, pois as duas projecções da figura da secção se reduzem, ambas, a segmentos de recta. Assim,recorreu-se a três planos auxiliares paralelos à base – os planos frontais (de frente) ϕ1, ϕ2 e ϕ3 (ver relatório do exercício anterior). Cada umdos três planos auxiliares permitiu-nos determinar dois pontos da secção, o que resulta em seis pontos. Uma vez que já tínhamos as projec-ções da figura da secção, os nove pontos serão necessários para determinar a V.G. da figura da secção, o que se processa com o recurso aum processo geométrico auxiliar. Optou-se pela mudança do diedro de projecção. Substituiu-se o Plano Frontal de Projecção (plano 2) porum novo plano de projecção (plano 4), paralelo ao plano π e criando um diedro de projecção (formado pelo plano 1 e pelo plano 4) noqual o plano π seja um plano frontal (de frente) e a figura se projecte em V.G. no plano 4. As projecções dos nove pontos no plano 4 foramdeterminadas a partir das respectivas cotas, que se mantêm.
167.
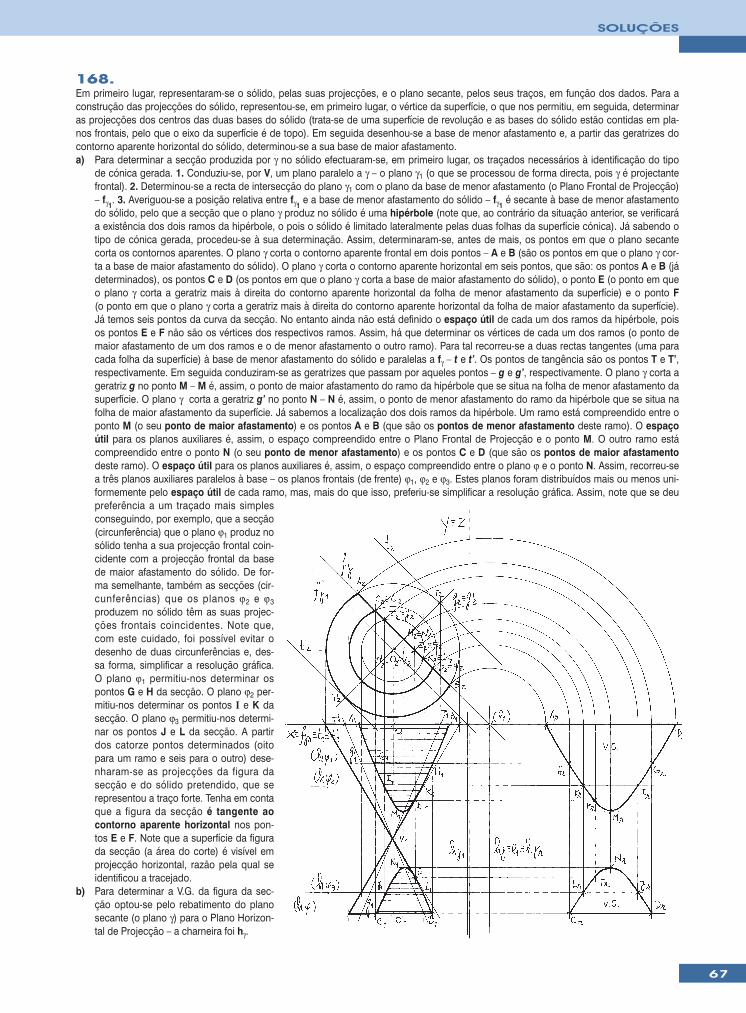
67
SOLUÇÕES
168.Em primeiro lugar, representaram-se o sólido, pelas suas projecções, e o plano secante, pelos seus traços, em função dos dados. Para aconstrução das projecções do sólido, representou-se, em primeiro lugar, o vértice da superfície, o que nos permitiu, em seguida, determinaras projecções dos centros das duas bases do sólido (trata-se de uma superfície de revolução e as bases do sólido estão contidas em pla-nos frontais, pelo que o eixo da superfície é de topo). Em seguida desenhou-se a base de menor afastamento e, a partir das geratrizes docontorno aparente horizontal do sólido, determinou-se a sua base de maior afastamento.a) Para determinar a secção produzida por γ no sólido efectuaram-se, em primeiro lugar, os traçados necessários à identificação do tipo
de cónica gerada. 1. Conduziu-se, por V, um plano paralelo a γ – o plano γ1 (o que se processou de forma directa, pois γ é projectantefrontal). 2. Determinou-se a recta de intersecção do plano γ1 com o plano da base de menor afastamento (o Plano Frontal de Projecção)– fγ1. 3. Averiguou-se a posição relativa entre fγ1 e a base de menor afastamento do sólido – fγ1 é secante à base de menor afastamentodo sólido, pelo que a secção que o plano γ produz no sólido é uma hipérbole (note que, ao contrário da situação anterior, se verificaráa existência dos dois ramos da hipérbole, o pois o sólido é limitado lateralmente pelas duas folhas da superfície cónica). Já sabendo otipo de cónica gerada, procedeu-se à sua determinação. Assim, determinaram-se, antes de mais, os pontos em que o plano secantecorta os contornos aparentes. O plano γ corta o contorno aparente frontal em dois pontos – A e B (são os pontos em que o plano γ cor-ta a base de maior afastamento do sólido). O plano γ corta o contorno aparente horizontal em seis pontos, que são: os pontos A e B (jádeterminados), os pontos C e D (os pontos em que o plano γ corta a base de maior afastamento do sólido), o ponto E (o ponto em queo plano γ corta a geratriz mais à direita do contorno aparente horizontal da folha de menor afastamento da superfície) e o ponto F(o ponto em que o plano γ corta a geratriz mais à direita do contorno aparente horizontal da folha de maior afastamento da superfície).Já temos seis pontos da curva da secção. No entanto ainda não está definido o espaço útil de cada um dos ramos da hipérbole, poisos pontos E e F não são os vértices dos respectivos ramos. Assim, há que determinar os vértices de cada um dos ramos (o ponto demaior afastamento de um dos ramos e o de menor afastamento o outro ramo). Para tal recorreu-se a duas rectas tangentes (uma paracada folha da superfície) à base de menor afastamento do sólido e paralelas a fγ – t e t’. Os pontos de tangência são os pontos T e T’,respectivamente. Em seguida conduziram-se as geratrizes que passam por aqueles pontos – g e g’, respectivamente. O plano γ corta ageratriz g no ponto M – M é, assim, o ponto de maior afastamento do ramo da hipérbole que se situa na folha de menor afastamento dasuperfície. O plano γ corta a geratriz g’ no ponto N – N é, assim, o ponto de menor afastamento do ramo da hipérbole que se situa nafolha de maior afastamento da superfície. Já sabemos a localização dos dois ramos da hipérbole. Um ramo está compreendido entre oponto M (o seu ponto de maior afastamento) e os pontos A e B (que são os pontos de menor afastamento deste ramo). O espaçoútil para os planos auxiliares é, assim, o espaço compreendido entre o Plano Frontal de Projecção e o ponto M. O outro ramo estácompreendido entre o ponto N (o seu ponto de menor afastamento) e os pontos C e D (que são os pontos de maior afastamentodeste ramo). O espaço útil para os planos auxiliares é, assim, o espaço compreendido entre o plano ϕ e o ponto N. Assim, recorreu-sea três planos auxiliares paralelos à base – os planos frontais (de frente) ϕ1, ϕ2 e ϕ3. Estes planos foram distribuídos mais ou menos uni-formemente pelo espaço útil de cada ramo, mas, mais do que isso, preferiu-se simplificar a resolução gráfica. Assim, note que se deupreferência a um traçado mais simplesconseguindo, por exemplo, que a secção(circunferência) que o plano ϕ1 produz nosólido tenha a sua projecção frontal coin-cidente com a projecção frontal da basede maior afastamento do sólido. De for-ma semelhante, também as secções (cir-cunferências) que os planos ϕ2 e ϕ3produzem no sólido têm as suas projec-ções frontais coincidentes. Note que,com este cuidado, foi possível evitar odesenho de duas circunferências e, des-sa forma, simplificar a resolução gráfica.O plano ϕ1 permitiu-nos determinar ospontos G e H da secção. O plano ϕ2 per-mitiu-nos determinar os pontos I e K dasecção. O plano ϕ3 permitiu-nos determi-nar os pontos J e L da secção. A partirdos catorze pontos determinados (oitopara um ramo e seis para o outro) dese-nharam-se as projecções da figura dasecção e do sólido pretendido, que serepresentou a traço forte. Tenha em contaque a figura da secção é tangente aocontorno aparente horizontal nos pon-tos E e F. Note que a superfície da figurada secção (a área do corte) é visível emprojecção horizontal, razão pela qual seidentificou a tracejado.
b) Para determinar a V.G. da figura da sec-ção optou-se pelo rebatimento do planosecante (o plano γ) para o Plano Horizon-tal de Projecção – a charneira foi hγ.
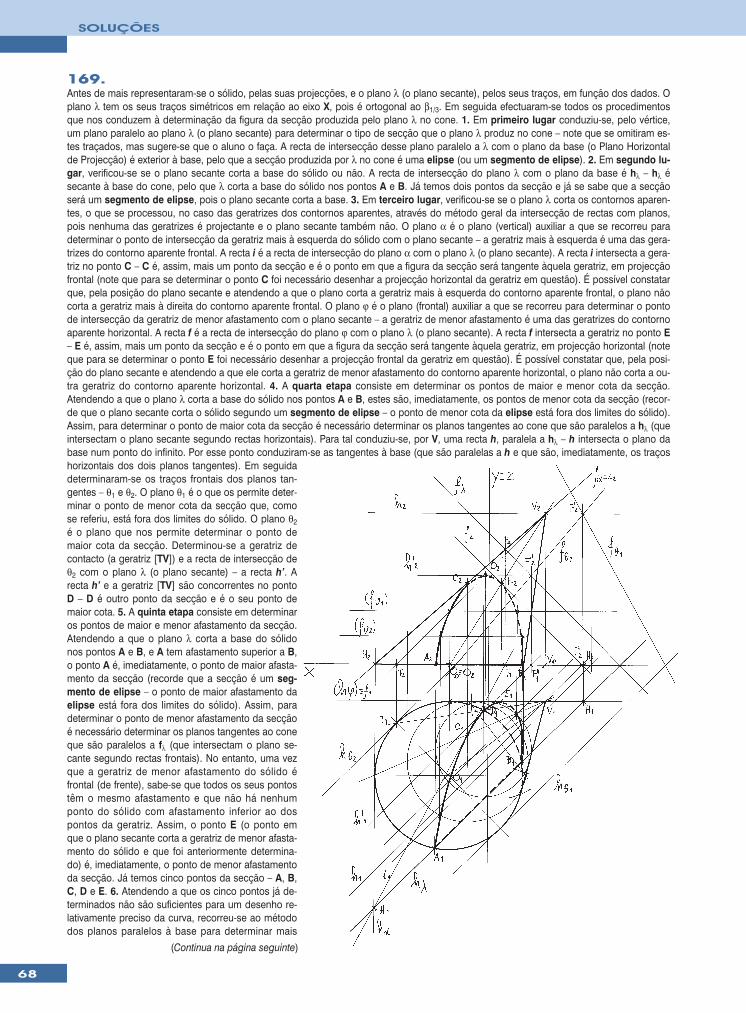
68
SOLUÇÕES
169.Antes de mais representaram-se o sólido, pelas suas projecções, e o plano λ (o plano secante), pelos seus traços, em função dos dados. Oplano λ tem os seus traços simétricos em relação ao eixo X, pois é ortogonal ao β1/3. Em seguida efectuaram-se todos os procedimentosque nos conduzem à determinação da figura da secção produzida pelo plano λ no cone. 1. Em primeiro lugar conduziu-se, pelo vértice,um plano paralelo ao plano λ (o plano secante) para determinar o tipo de secção que o plano λ produz no cone – note que se omitiram es-tes traçados, mas sugere-se que o aluno o faça. A recta de intersecção desse plano paralelo a λ com o plano da base (o Plano Horizontalde Projecção) é exterior à base, pelo que a secção produzida por λ no cone é uma elipse (ou um segmento de elipse). 2. Em segundo lu-gar, verificou-se se o plano secante corta a base do sólido ou não. A recta de intersecção do plano λ com o plano da base é hλ – hλ ésecante à base do cone, pelo que λ corta a base do sólido nos pontos A e B. Já temos dois pontos da secção e já se sabe que a secçãoserá um segmento de elipse, pois o plano secante corta a base. 3. Em terceiro lugar, verificou-se se o plano λ corta os contornos aparen-tes, o que se processou, no caso das geratrizes dos contornos aparentes, através do método geral da intersecção de rectas com planos,pois nenhuma das geratrizes é projectante e o plano secante também não. O plano α é o plano (vertical) auxiliar a que se recorreu paradeterminar o ponto de intersecção da geratriz mais à esquerda do sólido com o plano secante – a geratriz mais à esquerda é uma das gera-trizes do contorno aparente frontal. A recta i é a recta de intersecção do plano α com o plano λ (o plano secante). A recta i intersecta a gera-triz no ponto C – C é, assim, mais um ponto da secção e é o ponto em que a figura da secção será tangente àquela geratriz, em projecçãofrontal (note que para se determinar o ponto C foi necessário desenhar a projecção horizontal da geratriz em questão). É possível constatarque, pela posição do plano secante e atendendo a que o plano corta a geratriz mais à esquerda do contorno aparente frontal, o plano nãocorta a geratriz mais à direita do contorno aparente frontal. O plano ϕ é o plano (frontal) auxiliar a que se recorreu para determinar o pontode intersecção da geratriz de menor afastamento com o plano secante – a geratriz de menor afastamento é uma das geratrizes do contornoaparente horizontal. A recta f é a recta de intersecção do plano ϕ com o plano λ (o plano secante). A recta f intersecta a geratriz no ponto E– E é, assim, mais um ponto da secção e é o ponto em que a figura da secção será tangente àquela geratriz, em projecção horizontal (noteque para se determinar o ponto E foi necessário desenhar a projecção frontal da geratriz em questão). É possível constatar que, pela posi-ção do plano secante e atendendo a que ele corta a geratriz de menor afastamento do contorno aparente horizontal, o plano não corta a ou-tra geratriz do contorno aparente horizontal. 4. A quarta etapa consiste em determinar os pontos de maior e menor cota da secção.Atendendo a que o plano λ corta a base do sólido nos pontos A e B, estes são, imediatamente, os pontos de menor cota da secção (recor-de que o plano secante corta o sólido segundo um segmento de elipse – o ponto de menor cota da elipse está fora dos limites do sólido).Assim, para determinar o ponto de maior cota da secção é necessário determinar os planos tangentes ao cone que são paralelos a hλ (queintersectam o plano secante segundo rectas horizontais). Para tal conduziu-se, por V, uma recta h, paralela a hλ – h intersecta o plano dabase num ponto do infinito. Por esse ponto conduziram-se as tangentes à base (que são paralelas a h e que são, imediatamente, os traçoshorizontais dos dois planos tangentes). Em seguidadeterminaram-se os traços frontais dos planos tan-gentes – θ1 e θ2. O plano θ1 é o que os permite deter-minar o ponto de menor cota da secção que, comose referiu, está fora dos limites do sólido. O plano θ2é o plano que nos permite determinar o ponto demaior cota da secção. Determinou-se a geratriz decontacto (a geratriz [TV]) e a recta de intersecção deθ2 com o plano λ (o plano secante) – a recta h’. Arecta h’ e a geratriz [TV] são concorrentes no pontoD – D é outro ponto da secção e é o seu ponto demaior cota. 5. A quinta etapa consiste em determinaros pontos de maior e menor afastamento da secção.Atendendo a que o plano λ corta a base do sólidonos pontos A e B, e A tem afastamento superior a B,o ponto A é, imediatamente, o ponto de maior afasta-mento da secção (recorde que a secção é um seg-mento de elipse – o ponto de maior afastamento daelipse está fora dos limites do sólido). Assim, paradeterminar o ponto de menor afastamento da secçãoé necessário determinar os planos tangentes ao coneque são paralelos a fλ (que intersectam o plano se-cante segundo rectas frontais). No entanto, uma vezque a geratriz de menor afastamento do sólido éfrontal (de frente), sabe-se que todos os seus pontostêm o mesmo afastamento e que não há nenhumponto do sólido com afastamento inferior ao dospontos da geratriz. Assim, o ponto E (o ponto emque o plano secante corta a geratriz de menor afasta-mento do sólido e que foi anteriormente determina-do) é, imediatamente, o ponto de menor afastamentoda secção. Já temos cinco pontos da secção – A, B,C, D e E. 6. Atendendo a que os cinco pontos já de-terminados não são suficientes para um desenho re-lativamente preciso da curva, recorreu-se ao métododos planos paralelos à base para determinar mais
(Continua na página seguinte)
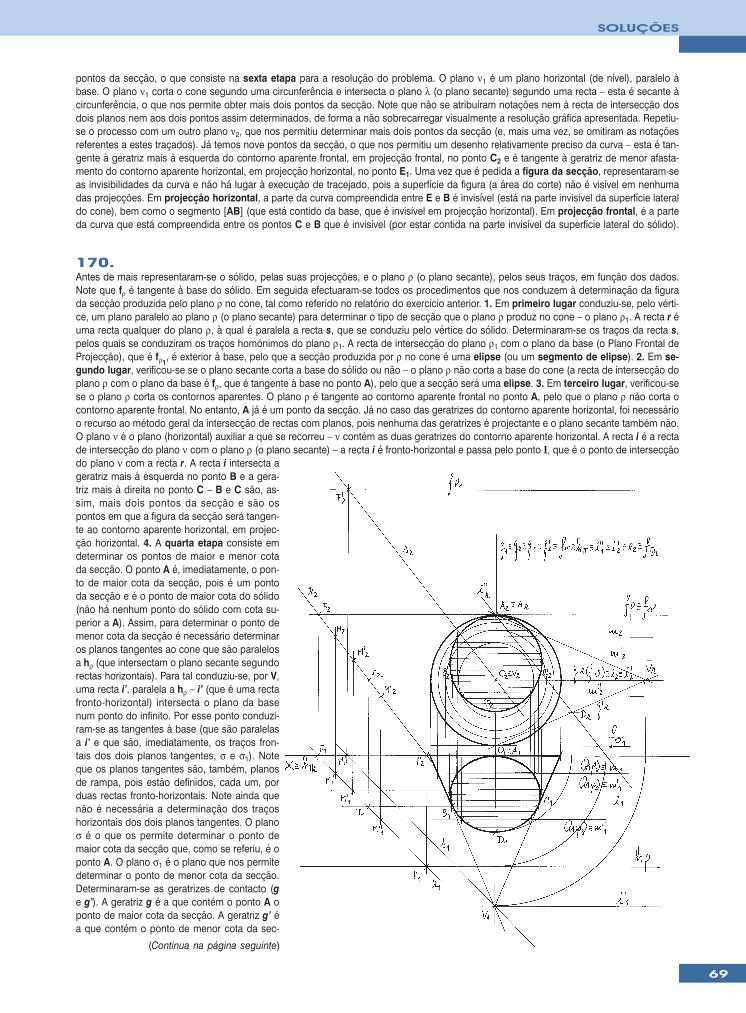
69
SOLUÇÕES
pontos da secção, o que consiste na sexta etapa para a resolução do problema. O plano ν1 é um plano horizontal (de nível), paralelo àbase. O plano ν1 corta o cone segundo uma circunferência e intersecta o plano λ (o plano secante) segundo uma recta – esta é secante àcircunferência, o que nos permite obter mais dois pontos da secção. Note que não se atribuíram notações nem à recta de intersecção dosdois planos nem aos dois pontos assim determinados, de forma a não sobrecarregar visualmente a resolução gráfica apresentada. Repetiu-se o processo com um outro plano ν2, que nos permitiu determinar mais dois pontos da secção (e, mais uma vez, se omitiram as notaçõesreferentes a estes traçados). Já temos nove pontos da secção, o que nos permitiu um desenho relativamente preciso da curva – esta é tan-gente à geratriz mais à esquerda do contorno aparente frontal, em projecção frontal, no ponto C2 e é tangente à geratriz de menor afasta-mento do contorno aparente horizontal, em projecção horizontal, no ponto E1. Uma vez que é pedida a figura da secção, representaram-seas invisibilidades da curva e não há lugar à execução de tracejado, pois a superfície da figura (a área do corte) não é visível em nenhumadas projecções. Em projecção horizontal, a parte da curva compreendida entre E e B é invisível (está na parte invisível da superfície lateraldo cone), bem como o segmento [AB] (que está contido da base, que é invisível em projecção horizontal). Em projecção frontal, é a parteda curva que está compreendida entre os pontos C e B que é invisível (por estar contida na parte invisível da superfície lateral do sólido).
(Continua na página seguinte)
170.Antes de mais representaram-se o sólido, pelas suas projecções, e o plano ρ (o plano secante), pelos seus traços, em função dos dados.Note que fρ é tangente à base do sólido. Em seguida efectuaram-se todos os procedimentos que nos conduzem à determinação da figurada secção produzida pelo plano ρ no cone, tal como referido no relatório do exercício anterior. 1. Em primeiro lugar conduziu-se, pelo vérti-ce, um plano paralelo ao plano ρ (o plano secante) para determinar o tipo de secção que o plano ρ produz no cone – o plano ρ1. A recta r éuma recta qualquer do plano ρ, à qual é paralela a recta s, que se conduziu pelo vértice do sólido. Determinaram-se os traços da recta s,pelos quais se conduziram os traços homónimos do plano ρ1. A recta de intersecção do plano ρ1 com o plano da base (o Plano Frontal deProjecção), que é fρ1
, é exterior à base, pelo que a secção produzida por ρ no cone é uma elipse (ou um segmento de elipse). 2. Em se-gundo lugar, verificou-se se o plano secante corta a base do sólido ou não – o plano ρ não corta a base do cone (a recta de intersecção doplano ρ com o plano da base é fρ, que é tangente à base no ponto A), pelo que a secção será uma elipse. 3. Em terceiro lugar, verificou-sese o plano ρ corta os contornos aparentes. O plano ρ é tangente ao contorno aparente frontal no ponto A, pelo que o plano ρ não corta ocontorno aparente frontal. No entanto, A já é um ponto da secção. Já no caso das geratrizes do contorno aparente horizontal, foi necessárioo recurso ao método geral da intersecção de rectas com planos, pois nenhuma das geratrizes é projectante e o plano secante também não.O plano ν é o plano (horizontal) auxiliar a que se recorreu – ν contém as duas geratrizes do contorno aparente horizontal. A recta i é a rectade intersecção do plano ν com o plano ρ (o plano secante) – a recta i é fronto-horizontal e passa pelo ponto I, que é o ponto de intersecçãodo plano ν com a recta r. A recta i intersecta ageratriz mais à esquerda no ponto B e a gera-triz mais à direita no ponto C – B e C são, as-sim, mais dois pontos da secção e são ospontos em que a figura da secção será tangen-te ao contorno aparente horizontal, em projec-ção horizontal. 4. A quarta etapa consiste emdeterminar os pontos de maior e menor cotada secção. O ponto A é, imediatamente, o pon-to de maior cota da secção, pois é um pontoda secção e é o ponto de maior cota do sólido(não há nenhum ponto do sólido com cota su-perior a A). Assim, para determinar o ponto demenor cota da secção é necessário determinaros planos tangentes ao cone que são paralelosa hρ (que intersectam o plano secante segundorectas horizontais). Para tal conduziu-se, por V,uma recta i’, paralela a hρ – i’ (que é uma rectafronto-horizontal) intersecta o plano da basenum ponto do infinito. Por esse ponto conduzi-ram-se as tangentes à base (que são paralelasa i’ e que são, imediatamente, os traços fron-tais dos dois planos tangentes, σ e σ1). Noteque os planos tangentes são, também, planosde rampa, pois estão definidos, cada um, porduas rectas fronto-horizontais. Note ainda quenão é necessária a determinação dos traçoshorizontais dos dois planos tangentes. O planoσ é o que os permite determinar o ponto demaior cota da secção que, como se referiu, é oponto A. O plano σ1 é o plano que nos permitedeterminar o ponto de menor cota da secção.Determinaram-se as geratrizes de contacto (ge g’). A geratriz g é a que contém o ponto A oponto de maior cota da secção. A geratriz g’ éa que contém o ponto de menor cota da sec-
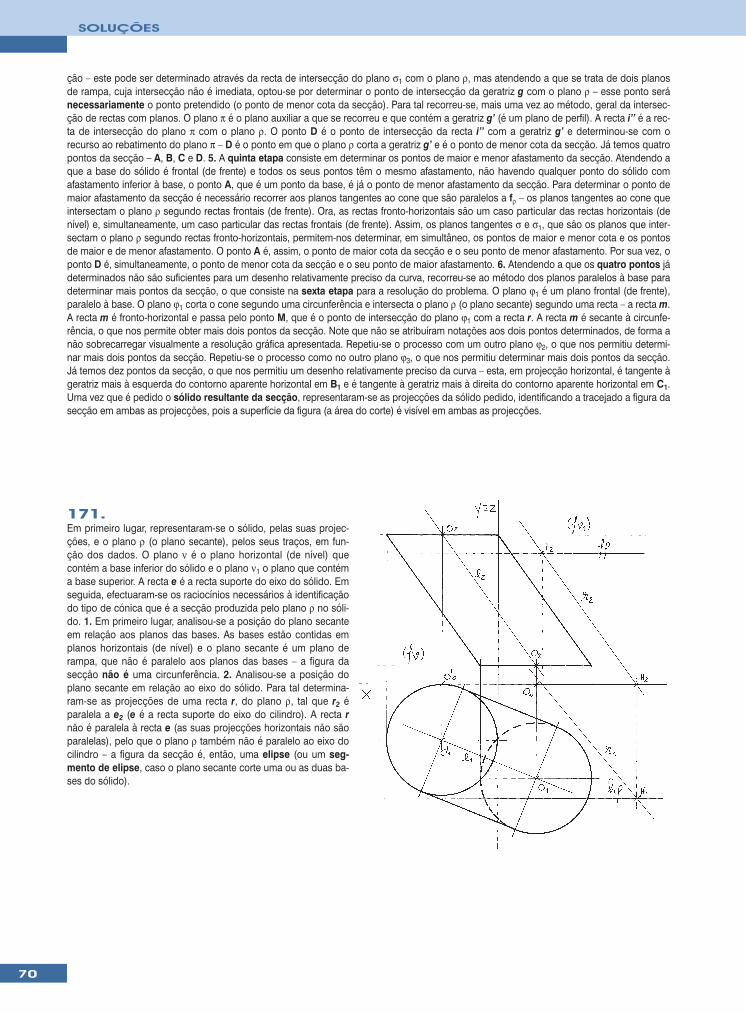
70
SOLUÇÕES
ção – este pode ser determinado através da recta de intersecção do plano σ1 com o plano ρ, mas atendendo a que se trata de dois planosde rampa, cuja intersecção não é imediata, optou-se por determinar o ponto de intersecção da geratriz g com o plano ρ – esse ponto seránecessariamente o ponto pretendido (o ponto de menor cota da secção). Para tal recorreu-se, mais uma vez ao método, geral da intersec-ção de rectas com planos. O plano π é o plano auxiliar a que se recorreu e que contém a geratriz g’ (é um plano de perfil). A recta i’’ é a rec-ta de intersecção do plano π com o plano ρ. O ponto D é o ponto de intersecção da recta i’’ com a geratriz g’ e determinou-se com orecurso ao rebatimento do plano π – D é o ponto em que o plano ρ corta a geratriz g’ e é o ponto de menor cota da secção. Já temos quatropontos da secção – A, B, C e D. 5. A quinta etapa consiste em determinar os pontos de maior e menor afastamento da secção. Atendendo aque a base do sólido é frontal (de frente) e todos os seus pontos têm o mesmo afastamento, não havendo qualquer ponto do sólido comafastamento inferior à base, o ponto A, que é um ponto da base, é já o ponto de menor afastamento da secção. Para determinar o ponto demaior afastamento da secção é necessário recorrer aos planos tangentes ao cone que são paralelos a fρ – os planos tangentes ao cone queintersectam o plano ρ segundo rectas frontais (de frente). Ora, as rectas fronto-horizontais são um caso particular das rectas horizontais (denível) e, simultaneamente, um caso particular das rectas frontais (de frente). Assim, os planos tangentes σ e σ1, que são os planos que inter-sectam o plano ρ segundo rectas fronto-horizontais, permitem-nos determinar, em simultâneo, os pontos de maior e menor cota e os pontosde maior e de menor afastamento. O ponto A é, assim, o ponto de maior cota da secção e o seu ponto de menor afastamento. Por sua vez, oponto D é, simultaneamente, o ponto de menor cota da secção e o seu ponto de maior afastamento. 6. Atendendo a que os quatro pontos jádeterminados não são suficientes para um desenho relativamente preciso da curva, recorreu-se ao método dos planos paralelos à base paradeterminar mais pontos da secção, o que consiste na sexta etapa para a resolução do problema. O plano ϕ1 é um plano frontal (de frente),paralelo à base. O plano ϕ1 corta o cone segundo uma circunferência e intersecta o plano ρ (o plano secante) segundo uma recta – a recta m.A recta m é fronto-horizontal e passa pelo ponto M, que é o ponto de intersecção do plano ϕ1 com a recta r. A recta m é secante à circunfe-rência, o que nos permite obter mais dois pontos da secção. Note que não se atribuíram notações aos dois pontos determinados, de forma anão sobrecarregar visualmente a resolução gráfica apresentada. Repetiu-se o processo com um outro plano ϕ2, o que nos permitiu determi-nar mais dois pontos da secção. Repetiu-se o processo como no outro plano ϕ3, o que nos permitiu determinar mais dois pontos da secção.Já temos dez pontos da secção, o que nos permitiu um desenho relativamente preciso da curva – esta, em projecção horizontal, é tangente àgeratriz mais à esquerda do contorno aparente horizontal em B1 e é tangente à geratriz mais à direita do contorno aparente horizontal em C1.Uma vez que é pedido o sólido resultante da secção, representaram-se as projecções da sólido pedido, identificando a tracejado a figura dasecção em ambas as projecções, pois a superfície da figura (a área do corte) é visível em ambas as projecções.
171.Em primeiro lugar, representaram-se o sólido, pelas suas projec-ções, e o plano ρ (o plano secante), pelos seus traços, em fun-ção dos dados. O plano ν é o plano horizontal (de nível) quecontém a base inferior do sólido e o plano ν1 o plano que contéma base superior. A recta e é a recta suporte do eixo do sólido. Emseguida, efectuaram-se os raciocínios necessários à identificaçãodo tipo de cónica que é a secção produzida pelo plano ρ no sóli-do. 1. Em primeiro lugar, analisou-se a posição do plano secanteem relação aos planos das bases. As bases estão contidas emplanos horizontais (de nível) e o plano secante é um plano derampa, que não é paralelo aos planos das bases – a figura dasecção não é uma circunferência. 2. Analisou-se a posição doplano secante em relação ao eixo do sólido. Para tal determina-ram-se as projecções de uma recta r, do plano ρ, tal que r2 éparalela a e2 (e é a recta suporte do eixo do cilindro). A recta rnão é paralela à recta e (as suas projecções horizontais não sãoparalelas), pelo que o plano ρ também não é paralelo ao eixo docilindro – a figura da secção é, então, uma elipse (ou um seg-mento de elipse, caso o plano secante corte uma ou as duas ba-ses do sólido).
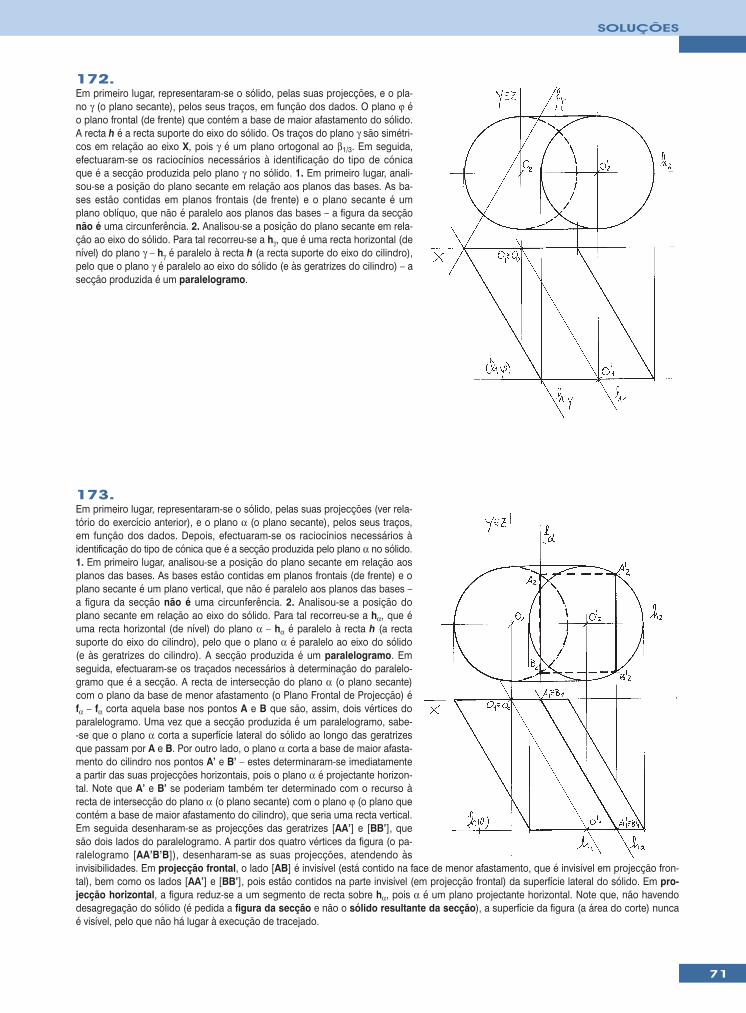
71
SOLUÇÕES
172.Em primeiro lugar, representaram-se o sólido, pelas suas projecções, e o pla-no γ (o plano secante), pelos seus traços, em função dos dados. O plano ϕ éo plano frontal (de frente) que contém a base de maior afastamento do sólido.A recta h é a recta suporte do eixo do sólido. Os traços do plano γ são simétri-cos em relação ao eixo X, pois γ é um plano ortogonal ao β1/3. Em seguida,efectuaram-se os raciocínios necessários à identificação do tipo de cónicaque é a secção produzida pelo plano γ no sólido. 1. Em primeiro lugar, anali-sou-se a posição do plano secante em relação aos planos das bases. As ba-ses estão contidas em planos frontais (de frente) e o plano secante é umplano oblíquo, que não é paralelo aos planos das bases – a figura da secçãonão é uma circunferência. 2. Analisou-se a posição do plano secante em rela-ção ao eixo do sólido. Para tal recorreu-se a hγ, que é uma recta horizontal (denível) do plano γ – hγ é paralelo à recta h (a recta suporte do eixo do cilindro),pelo que o plano γ é paralelo ao eixo do sólido (e às geratrizes do cilindro) – asecção produzida é um paralelogramo.
173.Em primeiro lugar, representaram-se o sólido, pelas suas projecções (ver rela-tório do exercício anterior), e o plano α (o plano secante), pelos seus traços,em função dos dados. Depois, efectuaram-se os raciocínios necessários àidentificação do tipo de cónica que é a secção produzida pelo plano α no sólido.1. Em primeiro lugar, analisou-se a posição do plano secante em relação aosplanos das bases. As bases estão contidas em planos frontais (de frente) e oplano secante é um plano vertical, que não é paralelo aos planos das bases –a figura da secção não é uma circunferência. 2. Analisou-se a posição doplano secante em relação ao eixo do sólido. Para tal recorreu-se a hα, que éuma recta horizontal (de nível) do plano α – hα é paralelo à recta h (a rectasuporte do eixo do cilindro), pelo que o plano α é paralelo ao eixo do sólido(e às geratrizes do cilindro). A secção produzida é um paralelogramo. Emseguida, efectuaram-se os traçados necessários à determinação do paralelo-gramo que é a secção. A recta de intersecção do plano α (o plano secante)com o plano da base de menor afastamento (o Plano Frontal de Projecção) éfα – fα corta aquela base nos pontos A e B que são, assim, dois vértices doparalelogramo. Uma vez que a secção produzida é um paralelogramo, sabe--se que o plano α corta a superfície lateral do sólido ao longo das geratrizesque passam por A e B. Por outro lado, o plano α corta a base de maior afasta-mento do cilindro nos pontos A’ e B’ – estes determinaram-se imediatamentea partir das suas projecções horizontais, pois o plano α é projectante horizon-tal. Note que A’ e B’ se poderiam também ter determinado com o recurso àrecta de intersecção do plano α (o plano secante) com o plano ϕ (o plano quecontém a base de maior afastamento do cilindro), que seria uma recta vertical.Em seguida desenharam-se as projecções das geratrizes [AA’] e [BB’], quesão dois lados do paralelogramo. A partir dos quatro vértices da figura (o pa-ralelogramo [AA’B’B]), desenharam-se as suas projecções, atendendo àsinvisibilidades. Em projecção frontal, o lado [AB] é invisível (está contido na face de menor afastamento, que é invisível em projecção fron-tal), bem como os lados [AA’] e [BB’], pois estão contidos na parte invisível (em projecção frontal) da superfície lateral do sólido. Em pro-jecção horizontal, a figura reduz-se a um segmento de recta sobre hα, pois α é um plano projectante horizontal. Note que, não havendodesagregação do sólido (é pedida a figura da secção e não o sólido resultante da secção), a superfície da figura (a área do corte) nuncaé visível, pelo que não há lugar à execução de tracejado.
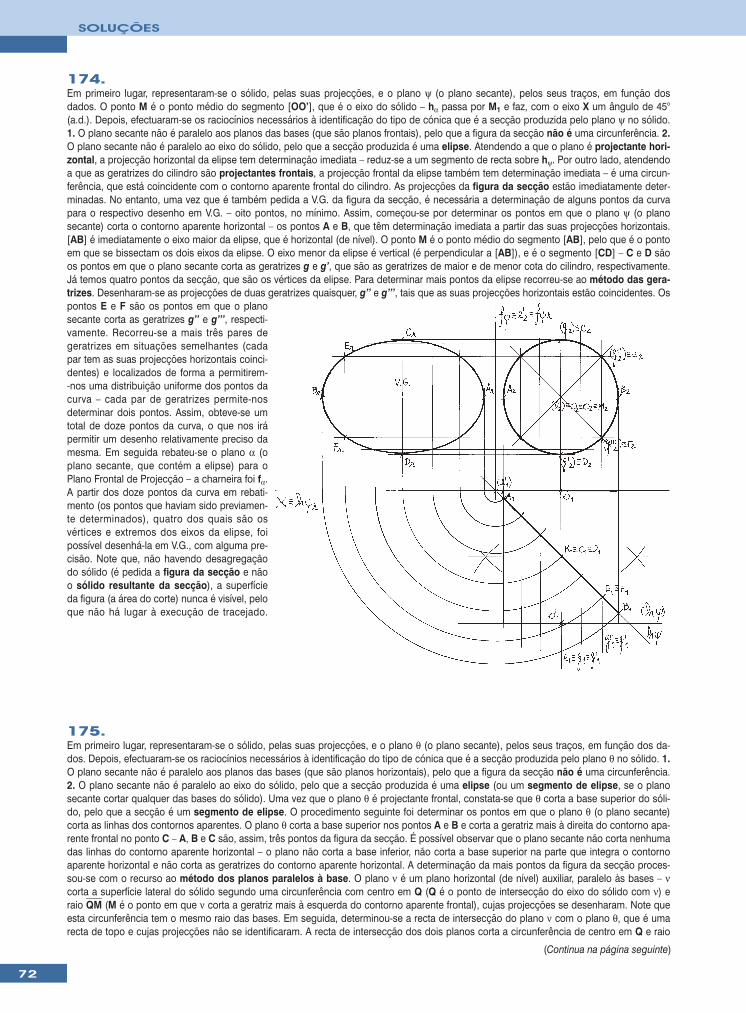
72
SOLUÇÕES
174.Em primeiro lugar, representaram-se o sólido, pelas suas projecções, e o plano ψ (o plano secante), pelos seus traços, em função dosdados. O ponto M é o ponto médio do segmento [OO’], que é o eixo do sólido – hα passa por M1 e faz, com o eixo X um ângulo de 45°(a.d.). Depois, efectuaram-se os raciocínios necessários à identificação do tipo de cónica que é a secção produzida pelo plano ψ no sólido.1. O plano secante não é paralelo aos planos das bases (que são planos frontais), pelo que a figura da secção não é uma circunferência. 2.O plano secante não é paralelo ao eixo do sólido, pelo que a secção produzida é uma elipse. Atendendo a que o plano é projectante hori-zontal, a projecção horizontal da elipse tem determinação imediata – reduz-se a um segmento de recta sobre hψ. Por outro lado, atendendoa que as geratrizes do cilindro são projectantes frontais, a projecção frontal da elipse também tem determinação imediata – é uma circun-ferência, que está coincidente com o contorno aparente frontal do cilindro. As projecções da figura da secção estão imediatamente deter-minadas. No entanto, uma vez que é também pedida a V.G. da figura da secção, é necessária a determinação de alguns pontos da curvapara o respectivo desenho em V.G. – oito pontos, no mínimo. Assim, começou-se por determinar os pontos em que o plano ψ (o planosecante) corta o contorno aparente horizontal – os pontos A e B, que têm determinação imediata a partir das suas projecções horizontais.[AB] é imediatamente o eixo maior da elipse, que é horizontal (de nível). O ponto M é o ponto médio do segmento [AB], pelo que é o pontoem que se bissectam os dois eixos da elipse. O eixo menor da elipse é vertical (é perpendicular a [AB]), e é o segmento [CD] – C e D sãoos pontos em que o plano secante corta as geratrizes g e g’, que são as geratrizes de maior e de menor cota do cilindro, respectivamente.Já temos quatro pontos da secção, que são os vértices da elipse. Para determinar mais pontos da elipse recorreu-se ao método das gera-trizes. Desenharam-se as projecções de duas geratrizes quaisquer, g’’ e g’’’, tais que as suas projecções horizontais estão coincidentes. Ospontos E e F são os pontos em que o planosecante corta as geratrizes g’’ e g’’’, respecti-vamente. Recorreu-se a mais três pares degeratrizes em situações semelhantes (cadapar tem as suas projecções horizontais coinci-dentes) e localizados de forma a permitirem--nos uma distribuição uniforme dos pontos dacurva – cada par de geratrizes permite-nosdeterminar dois pontos. Assim, obteve-se umtotal de doze pontos da curva, o que nos irápermitir um desenho relativamente preciso damesma. Em seguida rebateu-se o plano α (oplano secante, que contém a elipse) para oPlano Frontal de Projecção – a charneira foi fα.A partir dos doze pontos da curva em rebati-mento (os pontos que haviam sido previamen-te determinados), quatro dos quais são osvértices e extremos dos eixos da elipse, foipossível desenhá-la em V.G., com alguma pre-cisão. Note que, não havendo desagregaçãodo sólido (é pedida a figura da secção e nãoo sólido resultante da secção), a superfícieda figura (a área do corte) nunca é visível, peloque não há lugar à execução de tracejado.
175.Em primeiro lugar, representaram-se o sólido, pelas suas projecções, e o plano θ (o plano secante), pelos seus traços, em função dos da-dos. Depois, efectuaram-se os raciocínios necessários à identificação do tipo de cónica que é a secção produzida pelo plano θ no sólido. 1.O plano secante não é paralelo aos planos das bases (que são planos horizontais), pelo que a figura da secção não é uma circunferência.2. O plano secante não é paralelo ao eixo do sólido, pelo que a secção produzida é uma elipse (ou um segmento de elipse, se o planosecante cortar qualquer das bases do sólido). Uma vez que o plano θ é projectante frontal, constata-se que θ corta a base superior do sóli-do, pelo que a secção é um segmento de elipse. O procedimento seguinte foi determinar os pontos em que o plano θ (o plano secante)corta as linhas dos contornos aparentes. O plano θ corta a base superior nos pontos A e B e corta a geratriz mais à direita do contorno apa-rente frontal no ponto C – A, B e C são, assim, três pontos da figura da secção. É possível observar que o plano secante não corta nenhumadas linhas do contorno aparente horizontal – o plano não corta a base inferior, não corta a base superior na parte que integra o contornoaparente horizontal e não corta as geratrizes do contorno aparente horizontal. A determinação da mais pontos da figura da secção proces-sou-se com o recurso ao método dos planos paralelos à base. O plano ν é um plano horizontal (de nível) auxiliar, paralelo às bases – νcorta a superfície lateral do sólido segundo uma circunferência com centro em Q (Q é o ponto de intersecção do eixo do sólido com ν) eraio Q�M� (M é o ponto em que ν corta a geratriz mais à esquerda do contorno aparente frontal), cujas projecções se desenharam. Note queesta circunferência tem o mesmo raio das bases. Em seguida, determinou-se a recta de intersecção do plano ν com o plano θ, que é umarecta de topo e cujas projecções não se identificaram. A recta de intersecção dos dois planos corta a circunferência de centro em Q e raio
(Continua na página seguinte)
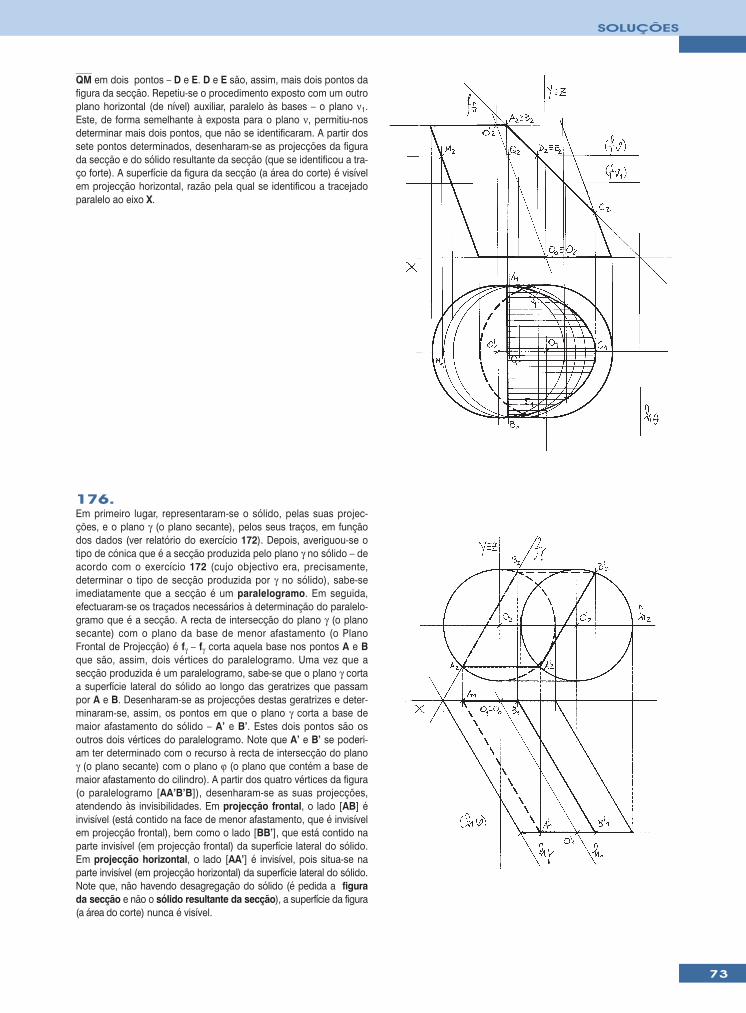
73
SOLUÇÕES
176.Em primeiro lugar, representaram-se o sólido, pelas suas projec-ções, e o plano γ (o plano secante), pelos seus traços, em funçãodos dados (ver relatório do exercício 172). Depois, averiguou-se otipo de cónica que é a secção produzida pelo plano γ no sólido – deacordo com o exercício 172 (cujo objectivo era, precisamente,determinar o tipo de secção produzida por γ no sólido), sabe-seimediatamente que a secção é um paralelogramo. Em seguida,efectuaram-se os traçados necessários à determinação do paralelo-gramo que é a secção. A recta de intersecção do plano γ (o planosecante) com o plano da base de menor afastamento (o PlanoFrontal de Projecção) é fγ – fγ corta aquela base nos pontos A e Bque são, assim, dois vértices do paralelogramo. Uma vez que asecção produzida é um paralelogramo, sabe-se que o plano γ cortaa superfície lateral do sólido ao longo das geratrizes que passampor A e B. Desenharam-se as projecções destas geratrizes e deter-minaram-se, assim, os pontos em que o plano γ corta a base demaior afastamento do sólido – A’ e B’. Estes dois pontos são osoutros dois vértices do paralelogramo. Note que A’ e B’ se poderi-am ter determinado com o recurso à recta de intersecção do planoγ (o plano secante) com o plano ϕ (o plano que contém a base demaior afastamento do cilindro). A partir dos quatro vértices da figura(o paralelogramo [AA’B’B]), desenharam-se as suas projecções,atendendo às invisibilidades. Em projecção frontal, o lado [AB] éinvisível (está contido na face de menor afastamento, que é invisívelem projecção frontal), bem como o lado [BB’], que está contido naparte invisível (em projecção frontal) da superfície lateral do sólido.Em projecção horizontal, o lado [AA’] é invisível, pois situa-se naparte invisível (em projecção horizontal) da superfície lateral do sólido.Note que, não havendo desagregação do sólido (é pedida a figurada secção e não o sólido resultante da secção), a superfície da figura(a área do corte) nunca é visível.
Q�M� em dois pontos – D e E. D e E são, assim, mais dois pontos dafigura da secção. Repetiu-se o procedimento exposto com um outroplano horizontal (de nível) auxiliar, paralelo às bases – o plano ν1.Este, de forma semelhante à exposta para o plano ν, permitiu-nosdeterminar mais dois pontos, que não se identificaram. A partir dossete pontos determinados, desenharam-se as projecções da figurada secção e do sólido resultante da secção (que se identificou a tra-ço forte). A superfície da figura da secção (a área do corte) é visívelem projecção horizontal, razão pela qual se identificou a tracejadoparalelo ao eixo X.

74
SOLUÇÕES
177.Em primeiro lugar, representaram-se o sólido, pelas suas projecções, e o plano ρ (o plano secante), pelos seus traços, em função dosdados. Em seguida efectuaram-se todos os procedimentos que nos conduzem à determinação da figura da secção produzida pelo plano ρno cilindro. 1. Em primeiro lugar identificou-se o tipo de cónica que é a secção produzida pelo plano ρ no sólido – o plano secante não éparalelo aos planos das bases nem é paralelo ao eixo do sólido, pelo que a secção produzida é uma elipse (ou um segmento de elipse, seo plano secante cortar qualquer das bases do sólido). 2. Em segundo lugar, verificou-se se o plano secante corta as bases do sólido ounão. A recta de intersecção do plano ρ com o plano da base inferior é hρ – hρ é secante à base inferior do cilindro, pelo que ρ corta a baseinferior do sólido nos pontos A e B. Já temos dois pontos da secção e já se sabe que a secção será um segmento de elipse, pois o planosecante corta uma base. Apesar de não se ter determinado, a recta de intersecção do plano ρ com o plano da base superior é uma rectafronto-horizontal que se situa no 2o Diedro, pelo que se conclui que o plano ρ não corta a base superior do sólido. 3. Em terceiro lugar,verificou-se se o plano ρ corta os contornos aparentes. Em função da etapa anterior, já se sabe que o plano ρ corta o contorno aparentehorizontal nos pontos A e B. Falta averiguar se o plano ρ corta as geratrizes do contorno aparente frontal, o que se processou com o recur-so ao método geral da intersecção de rectas com planos. O plano ϕ é o plano (frontal) auxiliar a que se recorreu – o plano ϕ contém as duasgeratrizes do contorno aparente frontal. A recta i, fronto-horizontal, é a recta de intersecção do plano ϕ com o plano ρ – i passa por I, que éo ponto de intersecção do plano ϕ com uma recta r, auxiliar, do plano ρ. A recta i é concorrente com a geratriz mais à esquerda do contornoaparente frontal no ponto C e é concorrente com a geratriz mais à direita do contorno aparente frontal no ponto D – C e D são, assim, ospontos em que o plano ρ corta aquelas geratrizes e são os pontos nos quais a projecção frontal da curva da secção será tangente às gera-trizes do contorno aparente frontal. 4. A quarta etapa consiste em determinar os pontos de maior e menor cota da secção. Atendendo aque o plano ρ corta a base do sólido nos pontos A e B, estes são, imediatamente, os pontos de menor cota da secção (recorde que o planosecante corta o sólido segundo um segmento de elipse – o ponto de menor cota da elipse está fora dos limites do sólido). Assim, paradeterminar o ponto de maior cota da secção é necessário determinar os planos tangentes ao cilindro que são paralelos a hρ (que intersec-tam o plano secante segundo rectas horizontais). Os planos tangentes são necessariamente projectantes horizontais, pois têm de conteruma geratriz do cilindro e as geratrizes do cilindro são projectantes horizontais – os planos tangentes são, assim, planos frontais (de frente),pelo que está determinada a orientação dos planos tangentes. O plano ϕ1 é o plano tangente à superfície do cilindro ao longo da sua gera-triz de menor afastamento, na qual se situará o ponto de maior cota da secção – note que o outro plano tangente (que não se representou)seria tangente ao cilindro ao longo da sua geratriz de maior afastamento e o plano secante não corta essa geratriz (o ponto de menor cotada elipse está fora dos limites do sólido). A recta i’ é a recta de intersecção de ϕ1 com ρ – i’ é fronto-horizontal e passa pelo ponto I’, que é oponto de intersecção de ϕ1 com a recta r (a recta auxiliar do plano ρ). A recta i’ é concorrente com a geratriz de menor afastamento do cilin-dro no ponto E – E é o ponto em que a tangente é horizontal e é o ponto em que o plano ρ corta aquela geratriz. E é o ponto de maior cotada secção. 5. A quinta etapa consiste em determinar os pontos de maior e menor afastamento da secção. Para tal, é necessário recorreraos planos tangentes ao cilindro que são paralelos a fρ (que intersectam o plano secante segundo rectas frontais) – são os planos tangentesque intersectam o plano ρ segundo rectas fronto-horizontais (as rectas fronto-horizontais são simultaneamente casos particulares das rectashorizontais e das rectas frontais). Trata-se, portanto, de planos frontais (de frente), o que redunda na etapa anterior. De facto, uma vez que oplano secante é um plano de rampa (cujas rectas horizontais são também frontais e vice-versa), os planos tangentes que nos permitemdeterminar os pontos de maior e de menor cota da secção são os mesmos que nos permitem determinar os pontos de maior e de menorafastamento, pois as tangentes horizontais são também as tangentes frontais (são fronto-horizontais). Face ao exposto, conclui-se que oponto de maior afastamento da elipse (que é o ponto de menor cota) está fora dos limites da secção (que é um segmento de elipse) e queE é o ponto de menor afastamento da secção. Já temos cinco pontos da secção – A, B, C, D e E. 6. Atendendo a que os cinco pontos jádeterminados não são suficientes para um desenho relativamente preciso da curva, recorreu-se ao método das geratrizes, determinar maispontos da secção, o que consiste na sexta etapa para a resolução do problema. O plano ϕ2 é um plano auxiliar (frontal) que contém duasgeratrizes da superfície lateral do sólido, localizadas de forma a colmatar a lacuna que existe, ao nível dos pontos da secção, entre os pon-tos C e E e os pontos D e E. A recta i’’ é a recta de intersecção de ϕ2 com ρ – i’’ é fronto-horizontal e passa pelo ponto I’’, que é o ponto deintersecção de ϕ2 com a recta r (a recta auxiliar doplano ρ). A recta i’’ permite-nos determinar os pontosM e N, que são os seus pontos de concorrência comas geratrizes que o plano ϕ2 contém. Os sete pontosda secção já determinados permitem-nos um dese-nho relativamente preciso da curva – esta, em projec-ção frontal, é tangente à geratriz mais à esquerda docontorno aparente frontal no ponto C2 e é tangente àgeratriz mais à direita do contorno aparente frontal noponto D2. Uma vez que é pedida a figura da secção,representaram-se as invisibilidades da curva e não hálugar à execução de tracejado, pois a superfície da fi-gura (a área do corte) não é visível em nenhuma dasprojecções. Em projecção horizontal, o segmentode recta [AB] é invisível, pois situa-se na base inferiordo sólido, que é invisível em projecção horizontal. Emprojecção frontal, é a parte da curva que está com-preendida entre os pontos C e D e que contém oponto E que é invisível (por estar contida na parteinvisível da superfície lateral do sólido).

75
SOLUÇÕES
178.Em primeiro lugar, representaram-se o sólido, pelas suas projecções, e o plano α (o plano secante), pelos seus traços, em função dos dados.O plano da base superior (o plano ν) tem 6 cm de cota, pois a base inferior tem cota nula e o sólido tem 6 cm de altura). Em seguida efectua-ram-se todos os procedimentos que nos conduzem à determinação da figura da secção produzida pelo plano α no cilindro, conforme expos-to no relatório do exercício anterior. 1. Em primeiro lugar identificou-se o tipo de cónica que é a secção produzida pelo plano α no sólido – oplano secante não é paralelo aos planos das bases nem é paralelo ao eixo do sólido, pelo que a secção produzida é uma elipse (ou um seg-mento de elipse, se o plano secante cortar qualquer das bases do sólido). 2. Em segundo lugar, verificou-se se o plano secante corta as ba-ses do sólido ou não. A recta de intersecção de α com o plano da base inferior é hα – hα é exterior à base inferior do cilindro, pelo que α nãocorta a base inferior do sólido. Em seguida determinou-se a recta de intersecção de α com ν (o plano da base superior) – a recta h. A recta hé exterior à base superior do sólido, pelo que α também não corta a base superior – a secção é uma elipse completa. 3. Em terceiro lugar,verificou-se se o plano α corta os contornos aparentes, o que se processou com o recurso ao método geral da intersecção de rectas com pla-nos. O plano γ é o plano (de topo) auxiliar que contém as duas geratrizes do contorno aparente horizontal. A recta i é a recta de intersecçãodo plano γ com o plano α. A recta i é concorrente com a geratriz de menor afastamento do contorno aparente horizontal no ponto A e é con-corrente com a geratriz de maior afastamento do contorno aparente horizontal no ponto B – A e B são, assim, os pontos em que o plano αcorta aquelas geratrizes e são os pontos nos quais a projecção horizontal da curva da secção será tangente às geratrizes do contorno apa-rente horizontal. O plano ϕ é o plano (frontal) auxiliar que contém as duas geratrizes do contorno aparente frontal. A recta f, frontal (de frente),é a recta de intersecção do plano ϕ com o plano α. A recta f é concorrente com a geratriz mais à esquerda do contorno aparente frontal noponto C e é concorrente com a geratriz mais à direita do contorno aparente frontal no ponto D – C e D são, assim, os pontos em que o planoα corta aquelas geratrizes e são os pontos nos quais a projecção frontal da curva da secção será tangente às geratrizes do contorno aparentefrontal. 4. A quarta etapa consiste em determinar os pontos de maior e menor cota da secção, para o que é necessário determinar os planostangentes ao cilindro que intersectam o plano α segundo rectas horizontais (os planos tangentes ao cilindro que são paralelos a hα). Omiti-ram-se os traçados referentes à determinação da orientação desses planos, uma vez que se sabe que os seus traços horizontais são parale-los a hα e que os seus traços frontais são paralelos às geratrizes do cilindro (que são rectas frontais). Assim, conduziram-se, imediatamente,as tangentes à base inferior do sólido (a base de referência) que são paralelas a hα – estas são, imediatamente, hθ1
e hθ2, os traços horizon-
tais dos dois planos tangentes. Os respectivos traços frontais determinaram-se em seguida, paralelos às geratrizes do cilindro. Determinaram-se as geratrizes de contacto, g e g’, e as rectas de intersecção dos planos tangentes com o plano α, t e t’ (que são as tangentes horizontaisnos pontos de maior e de menor cota da secção). O ponto M é o ponto de concorrência de t e g e é o ponto de maior cota da secção. O pon-to N é o ponto de concorrência de t’ e g’ e é o ponto de menor cota da secção. 5. A quinta etapa consiste em determinar os pontos de maiore menor afastamento da secção, para o que é necessário determinar os planos tangentes ao cilindro que intersectam o plano α segundo rec-tas frontais (os planos tangentes ao cilindro que são paralelos a fα). Uma vez que as geratrizes do cilindro são rectas frontais (de frente), estesplanos estão definidos por duas rectas frontais (de frente), pelo que são planos frontais (de frente). As geratrizes de contacto são, imediata-mente, as duas geratrizes do contorno aparente horizontal, peloque os pontos de maior e de menor afastamento da secção já estãodeterminados – são B e A, respectivamente. Já temos seis pontosda secção – A, B, C, D, M e N. 6. Atendendo a que os seis pontosjá determinados não são suficientes para um desenho relativamentepreciso da curva, recorreu-se ao método dos planos paralelos àsbases, determinar mais pontos da secção, o que consiste na sextaetapa para a resolução do problema. O plano ν1 é um plano auxiliar(horizontal) – ν1 corta a superfície do sólido segundo uma circunfe-rência e corta o plano α segundo uma recta horizontal (paralela ahα). A recta de intersecção dos dois planos corta a circunferênciaem dois pontos, que são mais dois pontos da secção. O plano ν2 éoutro plano auxiliar (horizontal) – ν2 corta a superfície do sólidosegundo uma circunferência e corta o plano α segundo outra rectahorizontal (paralela a hα). A recta de intersecção dos dois planoscorta a circunferência em outros dois pontos, que são mais doispontos da secção. Note que se omitiram as notações das rectas deintersecção dos planos auxiliares com o plano α, bem como asnotações dos quatro pontos assim determinados, de forma a nãosobrecarregar em demasia a resolução gráfica apresentada. Tenhaem conta que os dois planos auxiliares se localizaram de forma acolmatar as lacunas existentes, ao nível dos pontos da secção,entre os pontos A e C e os pontos B e D. Os dez pontos da secçãojá determinados permitem-nos um desenho relativamente precisoda curva. A secção, em projecção frontal, é tangente à geratriz maisà esquerda do contorno aparente frontal no ponto C2 e é tangente àgeratriz mais à direita do contorno aparente frontal no ponto D2. Jáem projecção horizontal, a secção é tangente à geratriz de menorafastamento do contorno aparente horizontal no ponto A1 e é tan-gente à geratriz de maior afastamento do contorno aparente hori-zontal no ponto B1. Em seguida desenharam-se as projecções dosólido resultante da secção e tracejaram-se paralelamente ao eixo Xas duas projecções da figura da secção, pois a superfície da figura(a área do corte) é visível em ambas as projecções.
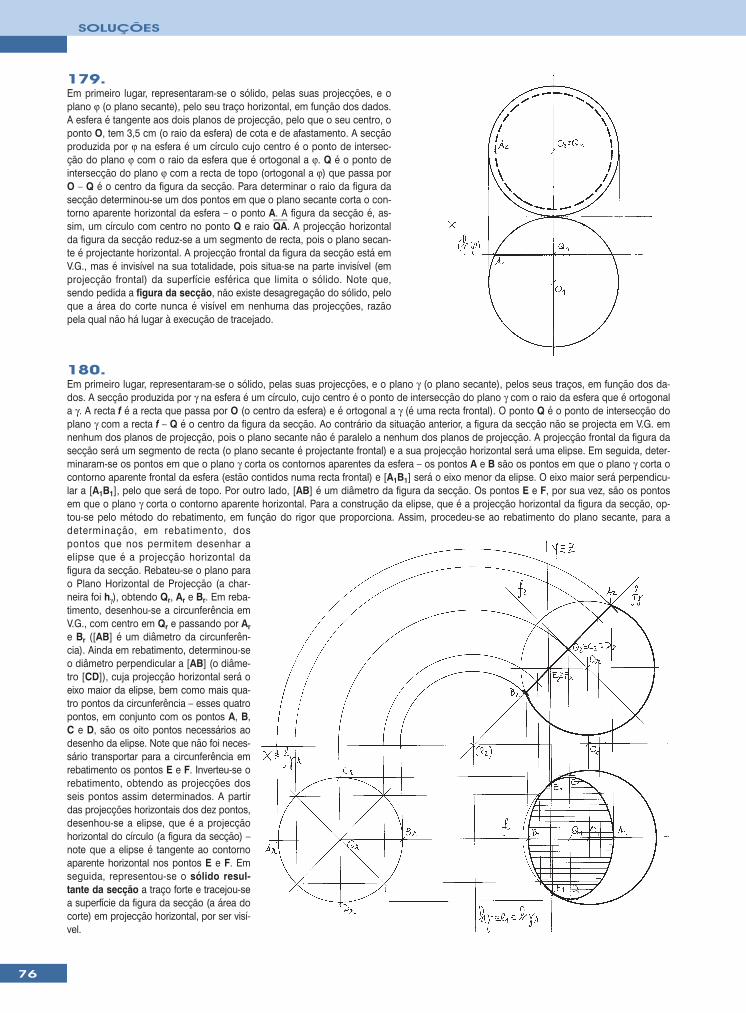
76
SOLUÇÕES
179.Em primeiro lugar, representaram-se o sólido, pelas suas projecções, e oplano ϕ (o plano secante), pelo seu traço horizontal, em função dos dados.A esfera é tangente aos dois planos de projecção, pelo que o seu centro, oponto O, tem 3,5 cm (o raio da esfera) de cota e de afastamento. A secçãoproduzida por ϕ na esfera é um círculo cujo centro é o ponto de intersec-ção do plano ϕ com o raio da esfera que é ortogonal a ϕ. Q é o ponto deintersecção do plano ϕ com a recta de topo (ortogonal a ϕ) que passa porO – Q é o centro da figura da secção. Para determinar o raio da figura dasecção determinou-se um dos pontos em que o plano secante corta o con-torno aparente horizontal da esfera – o ponto A. A figura da secção é, as-sim, um círculo com centro no ponto Q e raio Q�A�. A projecção horizontalda figura da secção reduz-se a um segmento de recta, pois o plano secan-te é projectante horizontal. A projecção frontal da figura da secção está emV.G., mas é invisível na sua totalidade, pois situa-se na parte invisível (emprojecção frontal) da superfície esférica que limita o sólido. Note que,sendo pedida a figura da secção, não existe desagregação do sólido, peloque a área do corte nunca é visível em nenhuma das projecções, razãopela qual não há lugar à execução de tracejado.
180.Em primeiro lugar, representaram-se o sólido, pelas suas projecções, e o plano γ (o plano secante), pelos seus traços, em função dos da-dos. A secção produzida por γ na esfera é um círculo, cujo centro é o ponto de intersecção do plano γ com o raio da esfera que é ortogonala γ. A recta f é a recta que passa por O (o centro da esfera) e é ortogonal a γ (é uma recta frontal). O ponto Q é o ponto de intersecção doplano γ com a recta f – Q é o centro da figura da secção. Ao contrário da situação anterior, a figura da secção não se projecta em V.G. emnenhum dos planos de projecção, pois o plano secante não é paralelo a nenhum dos planos de projecção. A projecção frontal da figura dasecção será um segmento de recta (o plano secante é projectante frontal) e a sua projecção horizontal será uma elipse. Em seguida, deter-minaram-se os pontos em que o plano γ corta os contornos aparentes da esfera – os pontos A e B são os pontos em que o plano γ corta ocontorno aparente frontal da esfera (estão contidos numa recta frontal) e [A1B1] será o eixo menor da elipse. O eixo maior será perpendicu-lar a [A1B1], pelo que será de topo. Por outro lado, [AB] é um diâmetro da figura da secção. Os pontos E e F, por sua vez, são os pontosem que o plano γ corta o contorno aparente horizontal. Para a construção da elipse, que é a projecção horizontal da figura da secção, op-tou-se pelo método do rebatimento, em função do rigor que proporciona. Assim, procedeu-se ao rebatimento do plano secante, para adeterminação, em rebatimento, dospontos que nos permitem desenhar aelipse que é a projecção horizontal dafigura da secção. Rebateu-se o plano parao Plano Horizontal de Projecção (a char-neira foi hγ), obtendo Qr, Ar e Br. Em reba-timento, desenhou-se a circunferência emV.G., com centro em Qr e passando por Ar
e Br ([AB] é um diâmetro da circunferên-cia). Ainda em rebatimento, determinou-seo diâmetro perpendicular a [AB] (o diâme-tro [CD]), cuja projecção horizontal será oeixo maior da elipse, bem como mais qua-tro pontos da circunferência – esses quatropontos, em conjunto com os pontos A, B,C e D, são os oito pontos necessários aodesenho da elipse. Note que não foi neces-sário transportar para a circunferência emrebatimento os pontos E e F. Inverteu-se orebatimento, obtendo as projecções dosseis pontos assim determinados. A partirdas projecções horizontais dos dez pontos,desenhou-se a elipse, que é a projecçãohorizontal do círculo (a figura da secção) –note que a elipse é tangente ao contornoaparente horizontal nos pontos E e F. Emseguida, representou-se o sólido resul-tante da secção a traço forte e tracejou-sea superfície da figura da secção (a área docorte) em projecção horizontal, por ser visí-vel.

77
SOLUÇÕES
181.Em primeiro lugar, representaram-se o sólido, pelassuas projecções, e o plano δ (o plano secante), pelosseus traços, em função dos dados. O plano δ tem osseus traços simétricos em relação ao eixo X, pois éortogonal ao β1/3. Para a construção das projecçõesdo tetraedro, foi necessário o recurso a um processogeométrico auxiliar, pois as arestas que não estãocontidas no Plano Horizontal de Projecção não seprojectam em V.G. em nenhum dos planos de projec-ção. Assim, os dados do exercício permitiram-nosconstruir, imediatamente, a projecção horizontal dosólido. Em seguida, conduziu-se, pela aresta [AD],um plano auxiliar α, e rebateu-se o plano para o Pla-no Frontal de Projecção (a charneira foi fα), obtendoAr e a referência de Dr – com o compasso, fazendocentro em Ar e com raio igual à medida do lado dotriângulo [ABC], determinou-se Dr sobre a perpendi-cular ao eixo X que passa pela sua referência emrebatimento. Invertendo o rebatimento, determinou-seD2 e construiu-se a projecção frontal do sólido. a) Para determinar a secção produzida pelo plano δ
no sólido verificou-se, em primeiro lugar, que oplano δ corta a face horizontal do tetraedro, poishδ é secante ao triângulo [ABC] nos pontos M eN – estes são, imediatamente, dois pontos dasecção. Em seguida determinou-se o ponto emque o plano δ corta a aresta [AD], com o recursoao método geral da intersecção de rectas complanos. O plano α é o plano que contém a aresta[AD] e a recta i é a recta de intersecção do plano α com o plano δ. A recta i é concorrente com a aresta [AD] no ponto L – L é o pontoem que o plano δ corta a aresta [AD] e é outro ponto da secção. Por fim determinou-se o ponto em que o plano δ corta a aresta [BD],de novo com o recurso ao método geral da intersecção de rectas com planos. O plano γ é o plano (de topo) que contém a aresta [BD]e a recta i’ é a recta de intersecção do plano γ com o plano δ. A recta i’ é concorrente com a aresta [BD] no ponto K – K é o ponto emque o plano δ corta a aresta [BD] e é outro ponto da secção. O plano δ não corta a aresta [CD], pelo que a figura da secção é um qua-drilátero – o quadrilátero [KLMN]. Desenharam-se as projecções do sólido resultante da secção e identificou-se a área do corte em am-bas as projecções, com tracejado, pois é visível em ambas as projecções.
b) Para determinar a V.G. da figura da secção, que está contida no plano δ, recorreu-se ao rebatimento do plano δ para o Plano Horizontalde Projecção – a charneira foi hδ. Rebateu-se o plano δ através dos seus traços. Mr ≡ M1 e Nr ≡ N1, pois M e N são dois pontos da char-neira. Rebateu-se a recta i através dos seus traços e determinou-se Lr sobre ir, no plano ortogonal à charneira que contém o arco do re-batimento de L. Rebateu-se a recta i’ igualmente através dos seus traços e determinou-se Kr sobre i’r, no plano ortogonal à charneiraque contém o arco do rebatimento de K. A V.G. da figura da secção está no quadrilátero [KrLrMrNr].
182.Antes de mais representaram-se o sólido, pelas suas projecções, e o plano α (o plano secante), pelos seus traços, em função dos dados. Oplano α tem os seus traços coincidentes, pois é ortogonal ao β2/4. Em seguida efectuaram-se todos os procedimentos que nos conduzem àdeterminação da figura da secção produzida pelo plano α no cone. 1. Em primeiro lugar conduziu-se, pelo vértice, um plano paralelo aoplano α (o plano secante) para determinar o tipo de secção que o plano α produz no cone. A recta h é a recta paralela a hα que passa pelovértice. Por F, traço frontal de h, conduziu-se fα1
, paralelo a fα e hα1, que está coincidente com fα1
. A recta h’ é a recta de intersecção do pla-no α1 com o plano ν (o plano da base do cone) – h’ é exterior à base, pelo que a secção que o plano α produz no cone é uma elipse (ouum segmento de elipse). 2. Em segundo lugar, verificou-se se o plano secante corta a base do sólido. A recta de intersecção do plano αcom o plano da base é h’’ – h’’ é secante à base do cone, pelo que α corta a base do sólido nos pontos A e B. Já temos dois pontos dasecção, e já se sabe que a secção será um segmento de elipse. 3. Em terceiro lugar, verificou-se se o plano α corta os contornos aparen-tes, o que se processou, no caso das geratrizes do contorno aparente frontal, com o recurso ao método geral da intersecção de rectas complanos. O plano ϕ é o plano (frontal) auxiliar a que se recorreu – ϕ contém as duas geratrizes do contorno aparente frontal. A recta f é a rectade intersecção do plano ϕ com o plano α (o plano secante) – a recta f intersecta a geratriz mais à esquerda do contorno aparente frontal noponto A e intersecta a geratriz mais à direita do contorno aparente frontal no ponto C – A e C são, assim, mais dois pontos da secção e sãoos pontos em que a figura da secção será tangente ao contorno aparente frontal. Note que o plano α corta o contorno aparente horizontalnos pontos A e B já determinados. 4. A quarta etapa consiste em determinar os pontos de maior e menor cota da secção. Atendendo a queo plano α corta a base do sólido nos pontos A e B, estes são, imediatamente, os pontos de maior cota da secção (recorde que o planosecante corta o sólido segundo um segmento de elipse – o ponto de maior cota da elipse está fora dos limites do sólido). Assim, paradeterminar o ponto de menor cota da secção é necessário determinar os planos tangentes ao cone que são paralelos a hα (que intersectamo plano secante segundo rectas horizontais). Para tal, recorreu-se à recta h que passa por V e é paralela a hα – h intersecta o plano da basenum ponto do infinito. Por esse ponto conduziu-se uma tangente à base (que é paralela a h) – a recta t (note que basta a tangente que nos
(Continua na página seguinte)
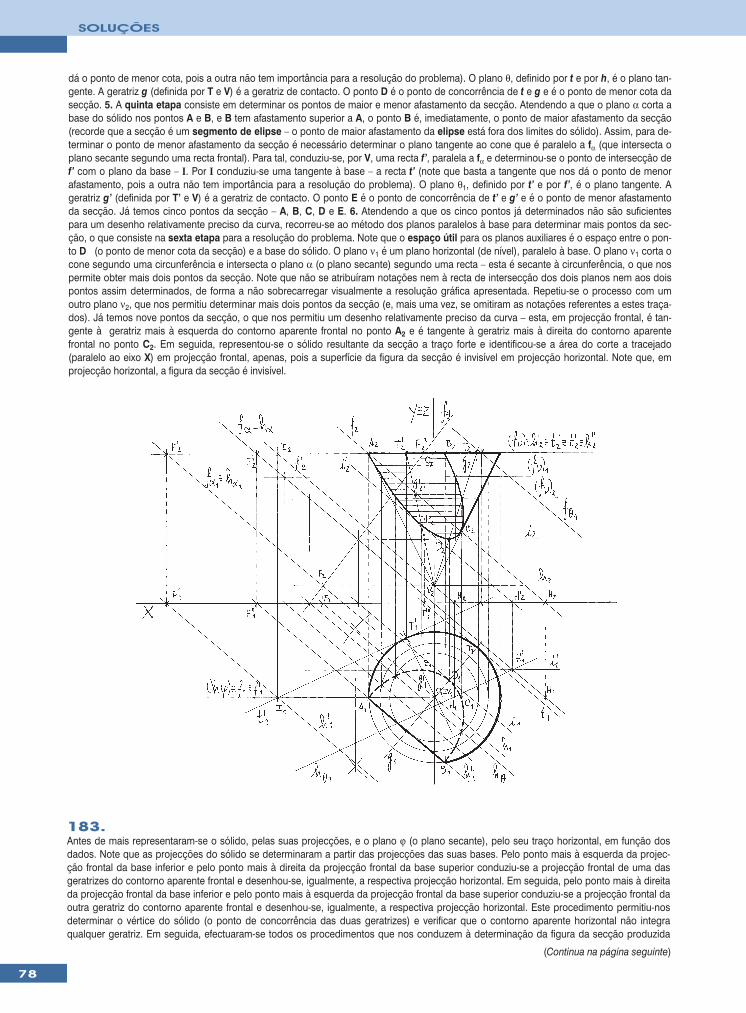
78
SOLUÇÕES
dá o ponto de menor cota, pois a outra não tem importância para a resolução do problema). O plano θ, definido por t e por h, é o plano tan-gente. A geratriz g (definida por T e V) é a geratriz de contacto. O ponto D é o ponto de concorrência de t e g e é o ponto de menor cota dasecção. 5. A quinta etapa consiste em determinar os pontos de maior e menor afastamento da secção. Atendendo a que o plano α corta abase do sólido nos pontos A e B, e B tem afastamento superior a A, o ponto B é, imediatamente, o ponto de maior afastamento da secção(recorde que a secção é um segmento de elipse – o ponto de maior afastamento da elipse está fora dos limites do sólido). Assim, para de-terminar o ponto de menor afastamento da secção é necessário determinar o plano tangente ao cone que é paralelo a fα (que intersecta oplano secante segundo uma recta frontal). Para tal, conduziu-se, por V, uma recta f’, paralela a fα e determinou-se o ponto de intersecção def’ com o plano da base – I. Por I conduziu-se uma tangente à base – a recta t’ (note que basta a tangente que nos dá o ponto de menorafastamento, pois a outra não tem importância para a resolução do problema). O plano θ1, definido por t’ e por f’, é o plano tangente. Ageratriz g’ (definida por T’ e V) é a geratriz de contacto. O ponto E é o ponto de concorrência de t’ e g’ e é o ponto de menor afastamentoda secção. Já temos cinco pontos da secção – A, B, C, D e E. 6. Atendendo a que os cinco pontos já determinados não são suficientespara um desenho relativamente preciso da curva, recorreu-se ao método dos planos paralelos à base para determinar mais pontos da sec-ção, o que consiste na sexta etapa para a resolução do problema. Note que o espaço útil para os planos auxiliares é o espaço entre o pon-to D (o ponto de menor cota da secção) e a base do sólido. O plano ν1 é um plano horizontal (de nível), paralelo à base. O plano ν1 corta ocone segundo uma circunferência e intersecta o plano α (o plano secante) segundo uma recta – esta é secante à circunferência, o que nospermite obter mais dois pontos da secção. Note que não se atribuíram notações nem à recta de intersecção dos dois planos nem aos doispontos assim determinados, de forma a não sobrecarregar visualmente a resolução gráfica apresentada. Repetiu-se o processo com umoutro plano ν2, que nos permitiu determinar mais dois pontos da secção (e, mais uma vez, se omitiram as notações referentes a estes traça-dos). Já temos nove pontos da secção, o que nos permitiu um desenho relativamente preciso da curva – esta, em projecção frontal, é tan-gente à geratriz mais à esquerda do contorno aparente frontal no ponto A2 e é tangente à geratriz mais à direita do contorno aparentefrontal no ponto C2. Em seguida, representou-se o sólido resultante da secção a traço forte e identificou-se a área do corte a tracejado(paralelo ao eixo X) em projecção frontal, apenas, pois a superfície da figura da secção é invisível em projecção horizontal. Note que, emprojecção horizontal, a figura da secção é invisível.
183.Antes de mais representaram-se o sólido, pelas suas projecções, e o plano ϕ (o plano secante), pelo seu traço horizontal, em função dosdados. Note que as projecções do sólido se determinaram a partir das projecções das suas bases. Pelo ponto mais à esquerda da projec-ção frontal da base inferior e pelo ponto mais à direita da projecção frontal da base superior conduziu-se a projecção frontal de uma dasgeratrizes do contorno aparente frontal e desenhou-se, igualmente, a respectiva projecção horizontal. Em seguida, pelo ponto mais à direitada projecção frontal da base inferior e pelo ponto mais à esquerda da projecção frontal da base superior conduziu-se a projecção frontal daoutra geratriz do contorno aparente frontal e desenhou-se, igualmente, a respectiva projecção horizontal. Este procedimento permitiu-nosdeterminar o vértice do sólido (o ponto de concorrência das duas geratrizes) e verificar que o contorno aparente horizontal não integraqualquer geratriz. Em seguida, efectuaram-se todos os procedimentos que nos conduzem à determinação da figura da secção produzida
(Continua na página seguinte)
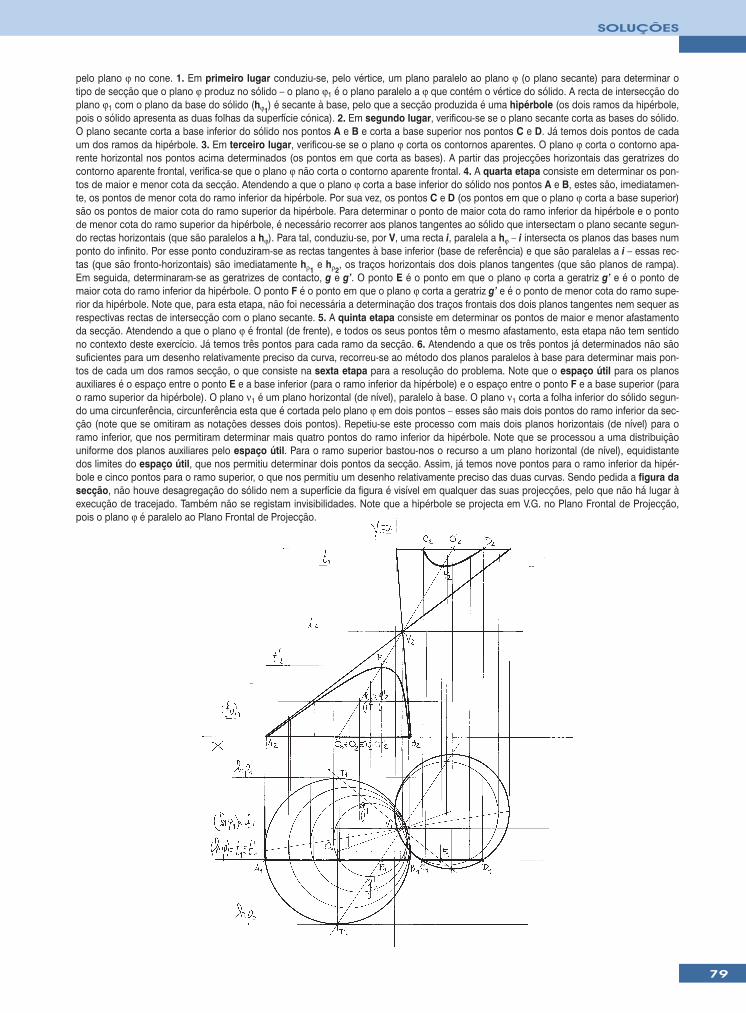
79
SOLUÇÕES
pelo plano ϕ no cone. 1. Em primeiro lugar conduziu-se, pelo vértice, um plano paralelo ao plano ϕ (o plano secante) para determinar otipo de secção que o plano ϕ produz no sólido – o plano ϕ1 é o plano paralelo a ϕ que contém o vértice do sólido. A recta de intersecção doplano ϕ1 com o plano da base do sólido (hϕ1
) é secante à base, pelo que a secção produzida é uma hipérbole (os dois ramos da hipérbole,pois o sólido apresenta as duas folhas da superfície cónica). 2. Em segundo lugar, verificou-se se o plano secante corta as bases do sólido.O plano secante corta a base inferior do sólido nos pontos A e B e corta a base superior nos pontos C e D. Já temos dois pontos de cadaum dos ramos da hipérbole. 3. Em terceiro lugar, verificou-se se o plano ϕ corta os contornos aparentes. O plano ϕ corta o contorno apa-rente horizontal nos pontos acima determinados (os pontos em que corta as bases). A partir das projecções horizontais das geratrizes docontorno aparente frontal, verifica-se que o plano ϕ não corta o contorno aparente frontal. 4. A quarta etapa consiste em determinar os pon-tos de maior e menor cota da secção. Atendendo a que o plano ϕ corta a base inferior do sólido nos pontos A e B, estes são, imediatamen-te, os pontos de menor cota do ramo inferior da hipérbole. Por sua vez, os pontos C e D (os pontos em que o plano ϕ corta a base superior)são os pontos de maior cota do ramo superior da hipérbole. Para determinar o ponto de maior cota do ramo inferior da hipérbole e o pontode menor cota do ramo superior da hipérbole, é necessário recorrer aos planos tangentes ao sólido que intersectam o plano secante segun-do rectas horizontais (que são paralelos a hϕ). Para tal, conduziu-se, por V, uma recta i, paralela a hϕ – i intersecta os planos das bases numponto do infinito. Por esse ponto conduziram-se as rectas tangentes à base inferior (base de referência) e que são paralelas a i – essas rec-tas (que são fronto-horizontais) são imediatamente hρ1
e hρ2, os traços horizontais dos dois planos tangentes (que são planos de rampa).
Em seguida, determinaram-se as geratrizes de contacto, g e g’. O ponto E é o ponto em que o plano ϕ corta a geratriz g’ e é o ponto demaior cota do ramo inferior da hipérbole. O ponto F é o ponto em que o plano ϕ corta a geratriz g’ e é o ponto de menor cota do ramo supe-rior da hipérbole. Note que, para esta etapa, não foi necessária a determinação dos traços frontais dos dois planos tangentes nem sequer asrespectivas rectas de intersecção com o plano secante. 5. A quinta etapa consiste em determinar os pontos de maior e menor afastamentoda secção. Atendendo a que o plano ϕ é frontal (de frente), e todos os seus pontos têm o mesmo afastamento, esta etapa não tem sentidono contexto deste exercício. Já temos três pontos para cada ramo da secção. 6. Atendendo a que os três pontos já determinados não sãosuficientes para um desenho relativamente preciso da curva, recorreu-se ao método dos planos paralelos à base para determinar mais pon-tos de cada um dos ramos secção, o que consiste na sexta etapa para a resolução do problema. Note que o espaço útil para os planosauxiliares é o espaço entre o ponto E e a base inferior (para o ramo inferior da hipérbole) e o espaço entre o ponto F e a base superior (parao ramo superior da hipérbole). O plano ν1 é um plano horizontal (de nível), paralelo à base. O plano ν1 corta a folha inferior do sólido segun-do uma circunferência, circunferência esta que é cortada pelo plano ϕ em dois pontos – esses são mais dois pontos do ramo inferior da sec-ção (note que se omitiram as notações desses dois pontos). Repetiu-se este processo com mais dois planos horizontais (de nível) para oramo inferior, que nos permitiram determinar mais quatro pontos do ramo inferior da hipérbole. Note que se processou a uma distribuiçãouniforme dos planos auxiliares pelo espaço útil. Para o ramo superior bastou-nos o recurso a um plano horizontal (de nível), equidistantedos limites do espaço útil, que nos permitiu determinar dois pontos da secção. Assim, já temos nove pontos para o ramo inferior da hipér-bole e cinco pontos para o ramo superior, o que nos permitiu um desenho relativamente preciso das duas curvas. Sendo pedida a figura dasecção, não houve desagregação do sólido nem a superfície da figura é visível em qualquer das suas projecções, pelo que não há lugar àexecução de tracejado. Também não se registam invisibilidades. Note que a hipérbole se projecta em V.G. no Plano Frontal de Projecção,pois o plano ϕ é paralelo ao Plano Frontal de Projecção.
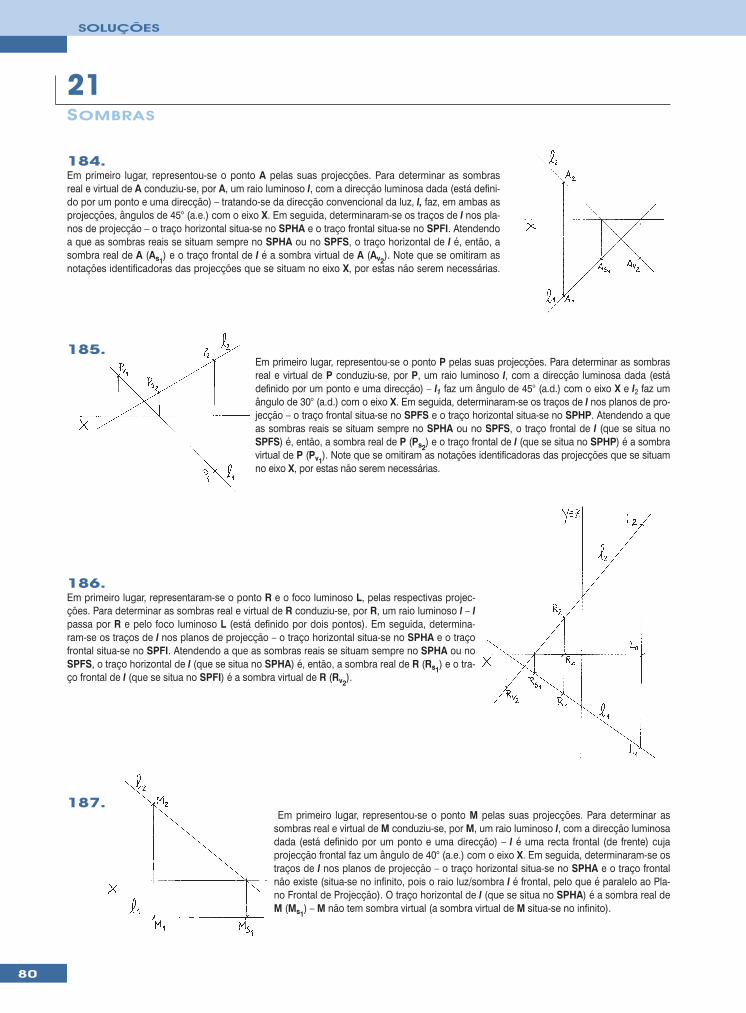
80
SOLUÇÕES
SOMBRAS
21
184.Em primeiro lugar, representou-se o ponto A pelas suas projecções. Para determinar as sombrasreal e virtual de A conduziu-se, por A, um raio luminoso l, com a direcção luminosa dada (está defini-do por um ponto e uma direcção) – tratando-se da direcção convencional da luz, l, faz, em ambas asprojecções, ângulos de 45° (a.e.) com o eixo X. Em seguida, determinaram-se os traços de l nos pla-nos de projecção – o traço horizontal situa-se no SPHA e o traço frontal situa-se no SPFI. Atendendoa que as sombras reais se situam sempre no SPHA ou no SPFS, o traço horizontal de l é, então, asombra real de A (As1
) e o traço frontal de l é a sombra virtual de A (Av2). Note que se omitiram as
notações identificadoras das projecções que se situam no eixo X, por estas não serem necessárias.
Em primeiro lugar, representou-se o ponto P pelas suas projecções. Para determinar as sombrasreal e virtual de P conduziu-se, por P, um raio luminoso l, com a direcção luminosa dada (estádefinido por um ponto e uma direcção) – l1 faz um ângulo de 45° (a.d.) com o eixo X e l2 faz umângulo de 30° (a.d.) com o eixo X. Em seguida, determinaram-se os traços de l nos planos de pro-jecção – o traço frontal situa-se no SPFS e o traço horizontal situa-se no SPHP. Atendendo a queas sombras reais se situam sempre no SPHA ou no SPFS, o traço frontal de l (que se situa noSPFS) é, então, a sombra real de P (Ps2
) e o traço frontal de l (que se situa no SPHP) é a sombravirtual de P (Pv1
). Note que se omitiram as notações identificadoras das projecções que se situamno eixo X, por estas não serem necessárias.
186.Em primeiro lugar, representaram-se o ponto R e o foco luminoso L, pelas respectivas projec-ções. Para determinar as sombras real e virtual de R conduziu-se, por R, um raio luminoso l – lpassa por R e pelo foco luminoso L (está definido por dois pontos). Em seguida, determina-ram-se os traços de l nos planos de projecção – o traço horizontal situa-se no SPHA e o traçofrontal situa-se no SPFI. Atendendo a que as sombras reais se situam sempre no SPHA ou noSPFS, o traço horizontal de l (que se situa no SPHA) é, então, a sombra real de R (Rs1
) e o tra-ço frontal de l (que se situa no SPFI) é a sombra virtual de R (Rv2
).
Em primeiro lugar, representou-se o ponto M pelas suas projecções. Para determinar assombras real e virtual de M conduziu-se, por M, um raio luminoso l, com a direcção luminosadada (está definido por um ponto e uma direcção) – l é uma recta frontal (de frente) cujaprojecção frontal faz um ângulo de 40° (a.e.) com o eixo X. Em seguida, determinaram-se ostraços de l nos planos de projecção – o traço horizontal situa-se no SPHA e o traço frontalnão existe (situa-se no infinito, pois o raio luz/sombra l é frontal, pelo que é paralelo ao Pla-no Frontal de Projecção). O traço horizontal de l (que se situa no SPHA) é a sombra real deM (Ms1
) – M não tem sombra virtual (a sombra virtual de M situa-se no infinito).
185.
187.
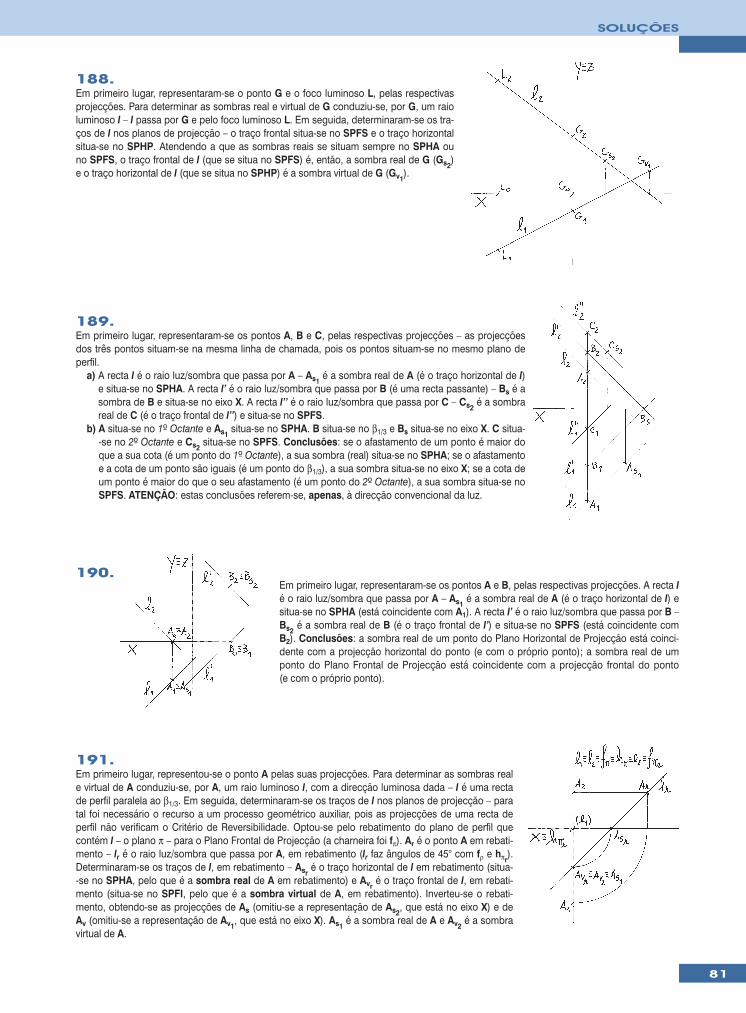
81
SOLUÇÕES
188.Em primeiro lugar, representaram-se o ponto G e o foco luminoso L, pelas respectivasprojecções. Para determinar as sombras real e virtual de G conduziu-se, por G, um raioluminoso l – l passa por G e pelo foco luminoso L. Em seguida, determinaram-se os tra-ços de l nos planos de projecção – o traço frontal situa-se no SPFS e o traço horizontalsitua-se no SPHP. Atendendo a que as sombras reais se situam sempre no SPHA ouno SPFS, o traço frontal de l (que se situa no SPFS) é, então, a sombra real de G (Gs2
)e o traço horizontal de l (que se situa no SPHP) é a sombra virtual de G (Gv1
).
189.Em primeiro lugar, representaram-se os pontos A, B e C, pelas respectivas projecções – as projecçõesdos três pontos situam-se na mesma linha de chamada, pois os pontos situam-se no mesmo plano deperfil.
a) A recta l é o raio luz/sombra que passa por A – As1é a sombra real de A (é o traço horizontal de l)
e situa-se no SPHA. A recta l’ é o raio luz/sombra que passa por B (é uma recta passante) – Bs é asombra de B e situa-se no eixo X. A recta l’’ é o raio luz/sombra que passa por C – Cs2
é a sombrareal de C (é o traço frontal de l’’) e situa-se no SPFS.
b) A situa-se no 1º Octante e As1situa-se no SPHA. B situa-se no β1/3 e Bs situa-se no eixo X. C situa-
-se no 2º Octante e Cs2situa-se no SPFS. Conclusões: se o afastamento de um ponto é maior do
que a sua cota (é um ponto do 1º Octante), a sua sombra (real) situa-se no SPHA; se o afastamentoe a cota de um ponto são iguais (é um ponto do β1/3), a sua sombra situa-se no eixo X; se a cota deum ponto é maior do que o seu afastamento (é um ponto do 2º Octante), a sua sombra situa-se noSPFS. ATENÇÃO: estas conclusões referem-se, apenas, à direcção convencional da luz.
Em primeiro lugar, representaram-se os pontos A e B, pelas respectivas projecções. A recta lé o raio luz/sombra que passa por A – As1
é a sombra real de A (é o traço horizontal de l) esitua-se no SPHA (está coincidente com A1). A recta l’ é o raio luz/sombra que passa por B –Bs2
é a sombra real de B (é o traço frontal de l’) e situa-se no SPFS (está coincidente comB2). Conclusões: a sombra real de um ponto do Plano Horizontal de Projecção está coinci-dente com a projecção horizontal do ponto (e com o próprio ponto); a sombra real de umponto do Plano Frontal de Projecção está coincidente com a projecção frontal do ponto(e com o próprio ponto).
190.
191.Em primeiro lugar, representou-se o ponto A pelas suas projecções. Para determinar as sombras reale virtual de A conduziu-se, por A, um raio luminoso l, com a direcção luminosa dada – l é uma rectade perfil paralela ao β1/3. Em seguida, determinaram-se os traços de l nos planos de projecção – paratal foi necessário o recurso a um processo geométrico auxiliar, pois as projecções de uma recta deperfil não verificam o Critério de Reversibilidade. Optou-se pelo rebatimento do plano de perfil quecontém l – o plano π – para o Plano Frontal de Projecção (a charneira foi fπ). Ar é o ponto A em rebati-mento – lr é o raio luz/sombra que passa por A, em rebatimento (lr faz ângulos de 45° com fρ e hπr
).Determinaram-se os traços de l, em rebatimento – Asr
é o traço horizontal de l em rebatimento (situa--se no SPHA, pelo que é a sombra real de A em rebatimento) e Avr
é o traço frontal de l, em rebati-mento (situa-se no SPFI, pelo que é a sombra virtual de A, em rebatimento). Inverteu-se o rebati-mento, obtendo-se as projecções de As (omitiu-se a representação de As2
, que está no eixo X) e deAv (omitiu-se a representação de Av1
, que está no eixo X). As1é a sombra real de A e Av2
é a sombravirtual de A.
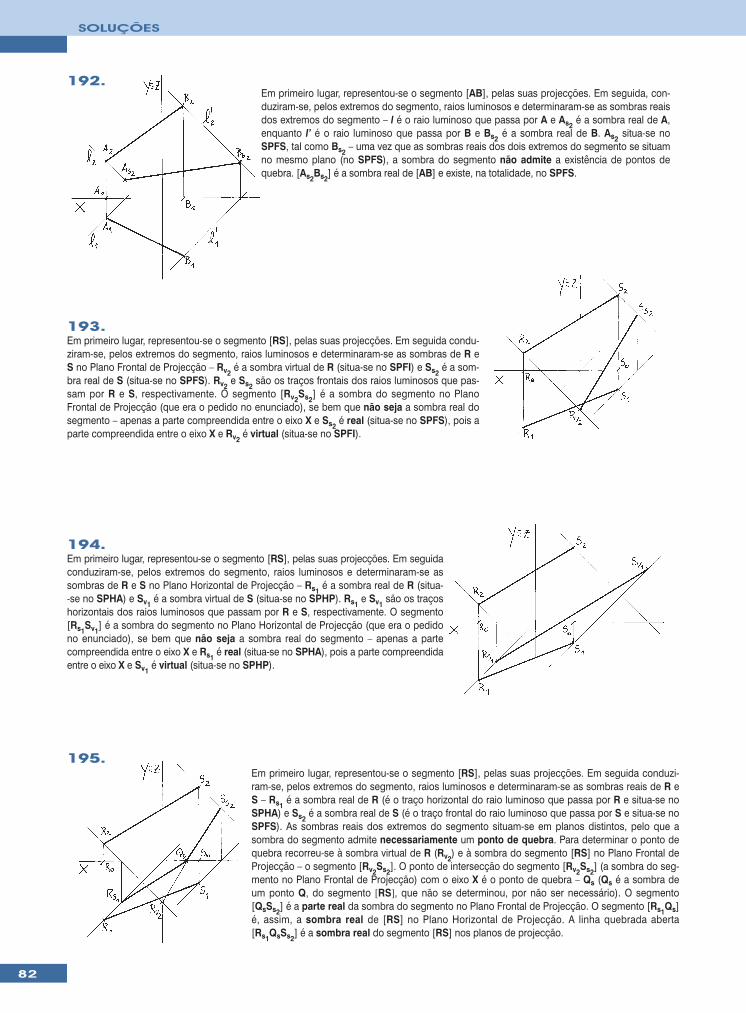
82
SOLUÇÕES
193.Em primeiro lugar, representou-se o segmento [RS], pelas suas projecções. Em seguida condu-ziram-se, pelos extremos do segmento, raios luminosos e determinaram-se as sombras de R eS no Plano Frontal de Projecção – Rv2
é a sombra virtual de R (situa-se no SPFI) e Ss2é a som-
bra real de S (situa-se no SPFS). Rv2e Ss2
são os traços frontais dos raios luminosos que pas-sam por R e S, respectivamente. O segmento [Rv2
Ss2] é a sombra do segmento no Plano
Frontal de Projecção (que era o pedido no enunciado), se bem que não seja a sombra real dosegmento – apenas a parte compreendida entre o eixo X e Ss2
é real (situa-se no SPFS), pois aparte compreendida entre o eixo X e Rv2
é virtual (situa-se no SPFI).
Em primeiro lugar, representou-se o segmento [AB], pelas suas projecções. Em seguida, con-duziram-se, pelos extremos do segmento, raios luminosos e determinaram-se as sombras reaisdos extremos do segmento – l é o raio luminoso que passa por A e As2
é a sombra real de A,enquanto l’ é o raio luminoso que passa por B e Bs2
é a sombra real de B. As2situa-se no
SPFS, tal como Bs2– uma vez que as sombras reais dos dois extremos do segmento se situam
no mesmo plano (no SPFS), a sombra do segmento não admite a existência de pontos dequebra. [As2
Bs2] é a sombra real de [AB] e existe, na totalidade, no SPFS.
192.
194.Em primeiro lugar, representou-se o segmento [RS], pelas suas projecções. Em seguidaconduziram-se, pelos extremos do segmento, raios luminosos e determinaram-se assombras de R e S no Plano Horizontal de Projecção – Rs1
é a sombra real de R (situa--se no SPHA) e Sv1
é a sombra virtual de S (situa-se no SPHP). Rs1e Sv1
são os traçoshorizontais dos raios luminosos que passam por R e S, respectivamente. O segmento[Rs1
Sv1] é a sombra do segmento no Plano Horizontal de Projecção (que era o pedido
no enunciado), se bem que não seja a sombra real do segmento – apenas a partecompreendida entre o eixo X e Rs1
é real (situa-se no SPHA), pois a parte compreendidaentre o eixo X e Sv1
é virtual (situa-se no SPHP).
Em primeiro lugar, representou-se o segmento [RS], pelas suas projecções. Em seguida conduzi-ram-se, pelos extremos do segmento, raios luminosos e determinaram-se as sombras reais de R eS – Rs1
é a sombra real de R (é o traço horizontal do raio luminoso que passa por R e situa-se noSPHA) e Ss2
é a sombra real de S (é o traço frontal do raio luminoso que passa por S e situa-se noSPFS). As sombras reais dos extremos do segmento situam-se em planos distintos, pelo que asombra do segmento admite necessariamente um ponto de quebra. Para determinar o ponto dequebra recorreu-se à sombra virtual de R (Rv2
) e à sombra do segmento [RS] no Plano Frontal deProjecção – o segmento [Rv2
Ss2]. O ponto de intersecção do segmento [Rv2
Ss2] (a sombra do seg-
mento no Plano Frontal de Projecção) com o eixo X é o ponto de quebra – Qs (Qs é a sombra deum ponto Q, do segmento [RS], que não se determinou, por não ser necessário). O segmento[QsSs2
] é a parte real da sombra do segmento no Plano Frontal de Projecção. O segmento [Rs1Qs]
é, assim, a sombra real de [RS] no Plano Horizontal de Projecção. A linha quebrada aberta[Rs1
QsSs2] é a sombra real do segmento [RS] nos planos de projecção.
195.
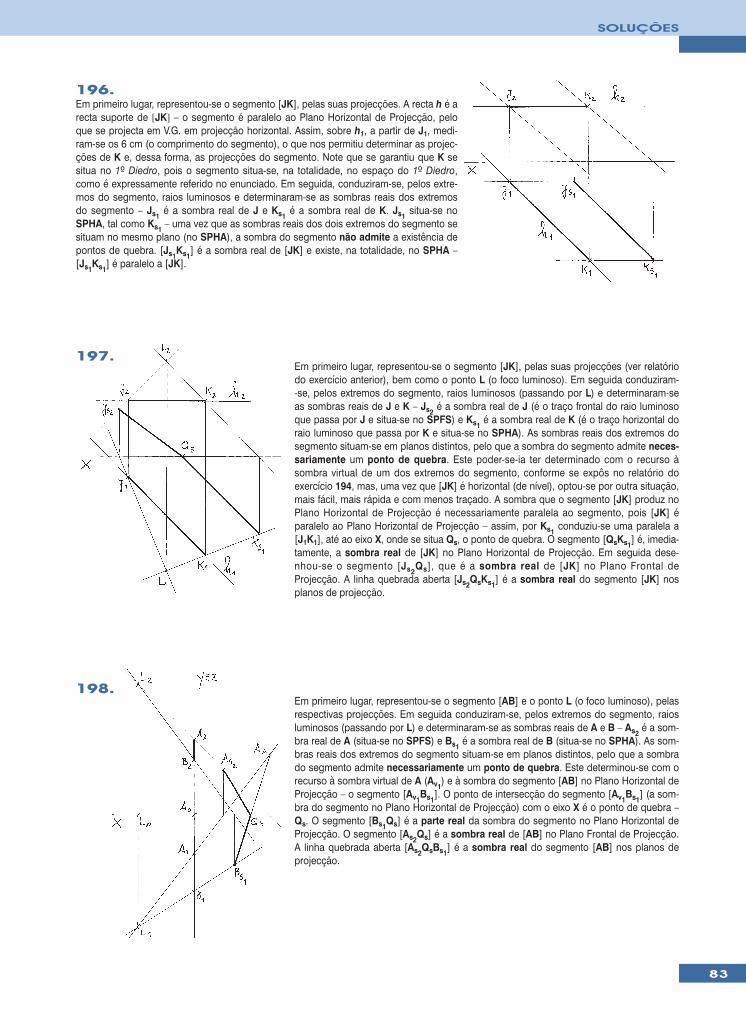
83
SOLUÇÕES
196.Em primeiro lugar, representou-se o segmento [JK], pelas suas projecções. A recta h é arecta suporte de [JK] – o segmento é paralelo ao Plano Horizontal de Projecção, peloque se projecta em V.G. em projecção horizontal. Assim, sobre h1, a partir de J1, medi-ram-se os 6 cm (o comprimento do segmento), o que nos permitiu determinar as projec-ções de K e, dessa forma, as projecções do segmento. Note que se garantiu que K sesitua no 1º Diedro, pois o segmento situa-se, na totalidade, no espaço do 1º Diedro,como é expressamente referido no enunciado. Em seguida, conduziram-se, pelos extre-mos do segmento, raios luminosos e determinaram-se as sombras reais dos extremosdo segmento – Js1
é a sombra real de J e Ks1é a sombra real de K. Js1
situa-se noSPHA, tal como Ks1
– uma vez que as sombras reais dos dois extremos do segmento sesituam no mesmo plano (no SPHA), a sombra do segmento não admite a existência depontos de quebra. [Js1
Ks1] é a sombra real de [JK] e existe, na totalidade, no SPHA –
[Js1Ks1
] é paralelo a [JK].
197.Em primeiro lugar, representou-se o segmento [JK], pelas suas projecções (ver relatóriodo exercício anterior), bem como o ponto L (o foco luminoso). Em seguida conduziram--se, pelos extremos do segmento, raios luminosos (passando por L) e determinaram-seas sombras reais de J e K – Js2
é a sombra real de J (é o traço frontal do raio luminosoque passa por J e situa-se no SPFS) e Ks1
é a sombra real de K (é o traço horizontal doraio luminoso que passa por K e situa-se no SPHA). As sombras reais dos extremos dosegmento situam-se em planos distintos, pelo que a sombra do segmento admite neces-sariamente um ponto de quebra. Este poder-se-ia ter determinado com o recurso àsombra virtual de um dos extremos do segmento, conforme se expôs no relatório doexercício 194, mas, uma vez que [JK] é horizontal (de nível), optou-se por outra situação,mais fácil, mais rápida e com menos traçado. A sombra que o segmento [JK] produz noPlano Horizontal de Projecção é necessariamente paralela ao segmento, pois [JK] éparalelo ao Plano Horizontal de Projecção – assim, por Ks1
conduziu-se uma paralela a[J1K1], até ao eixo X, onde se situa Qs, o ponto de quebra. O segmento [QsKs1
] é, imedia-tamente, a sombra real de [JK] no Plano Horizontal de Projecção. Em seguida dese-nhou-se o segmento [Js2
Qs], que é a sombra real de [JK] no Plano Frontal deProjecção. A linha quebrada aberta [Js2
QsKs1] é a sombra real do segmento [JK] nos
planos de projecção.
Em primeiro lugar, representou-se o segmento [AB] e o ponto L (o foco luminoso), pelasrespectivas projecções. Em seguida conduziram-se, pelos extremos do segmento, raiosluminosos (passando por L) e determinaram-se as sombras reais de A e B – As2
é a som-bra real de A (situa-se no SPFS) e Bs1
é a sombra real de B (situa-se no SPHA). As som-bras reais dos extremos do segmento situam-se em planos distintos, pelo que a sombrado segmento admite necessariamente um ponto de quebra. Este determinou-se com orecurso à sombra virtual de A (Av1
) e à sombra do segmento [AB] no Plano Horizontal deProjecção – o segmento [Av1
Bs1]. O ponto de intersecção do segmento [Av1
Bs1] (a som-
bra do segmento no Plano Horizontal de Projecção) com o eixo X é o ponto de quebra –Qs. O segmento [Bs1
Qs] é a parte real da sombra do segmento no Plano Horizontal deProjecção. O segmento [As2
Qs] é a sombra real de [AB] no Plano Frontal de Projecção.A linha quebrada aberta [As2
QsBs1] é a sombra real do segmento [AB] nos planos de
projecção.
198.
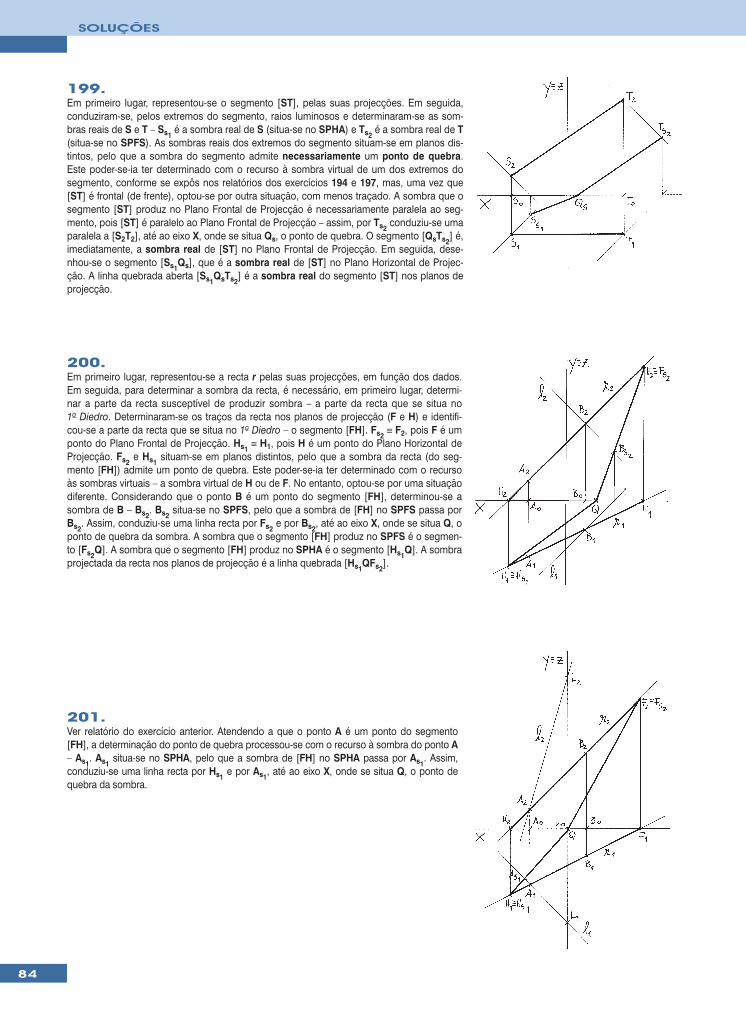
84
SOLUÇÕES
201.Ver relatório do exercício anterior. Atendendo a que o ponto A é um ponto do segmento[FH], a determinação do ponto de quebra processou-se com o recurso à sombra do ponto A– As1
. As1situa-se no SPHA, pelo que a sombra de [FH] no SPHA passa por As1
. Assim,conduziu-se uma linha recta por Hs1
e por As1, até ao eixo X, onde se situa Q, o ponto de
quebra da sombra.
200.Em primeiro lugar, representou-se a recta r pelas suas projecções, em função dos dados.Em seguida, para determinar a sombra da recta, é necessário, em primeiro lugar, determi-nar a parte da recta susceptível de produzir sombra – a parte da recta que se situa no1o Diedro. Determinaram-se os traços da recta nos planos de projecção (F e H) e identifi-cou-se a parte da recta que se situa no 1o Diedro – o segmento [FH]. Fs2
≡ F2, pois F é umponto do Plano Frontal de Projecção. Hs1
≡ H1, pois H é um ponto do Plano Horizontal deProjecção. Fs2
e Hs1situam-se em planos distintos, pelo que a sombra da recta (do seg-
mento [FH]) admite um ponto de quebra. Este poder-se-ia ter determinado com o recursoàs sombras virtuais – a sombra virtual de H ou de F. No entanto, optou-se por uma situaçãodiferente. Considerando que o ponto B é um ponto do segmento [FH], determinou-se asombra de B – Bs2
. Bs2situa-se no SPFS, pelo que a sombra de [FH] no SPFS passa por
Bs2. Assim, conduziu-se uma linha recta por Fs2
e por Bs2, até ao eixo X, onde se situa Q, o
ponto de quebra da sombra. A sombra que o segmento [FH] produz no SPFS é o segmen-to [Fs2
Q]. A sombra que o segmento [FH] produz no SPHA é o segmento [Hs1Q]. A sombra
projectada da recta nos planos de projecção é a linha quebrada [Hs1QFs2
].
199.Em primeiro lugar, representou-se o segmento [ST], pelas suas projecções. Em seguida,conduziram-se, pelos extremos do segmento, raios luminosos e determinaram-se as som-bras reais de S e T – Ss1
é a sombra real de S (situa-se no SPHA) e Ts2é a sombra real de T
(situa-se no SPFS). As sombras reais dos extremos do segmento situam-se em planos dis-tintos, pelo que a sombra do segmento admite necessariamente um ponto de quebra.Este poder-se-ia ter determinado com o recurso à sombra virtual de um dos extremos dosegmento, conforme se expôs nos relatórios dos exercícios 194 e 197, mas, uma vez que[ST] é frontal (de frente), optou-se por outra situação, com menos traçado. A sombra que osegmento [ST] produz no Plano Frontal de Projecção é necessariamente paralela ao seg-mento, pois [ST] é paralelo ao Plano Frontal de Projecção – assim, por Ts2
conduziu-se umaparalela a [S2T2], até ao eixo X, onde se situa Qs, o ponto de quebra. O segmento [QsTs2
] é,imediatamente, a sombra real de [ST] no Plano Frontal de Projecção. Em seguida, dese-nhou-se o segmento [Ss1
Qs], que é a sombra real de [ST] no Plano Horizontal de Projec-ção. A linha quebrada aberta [Ss1
QsTs2] é a sombra real do segmento [ST] nos planos de
projecção.
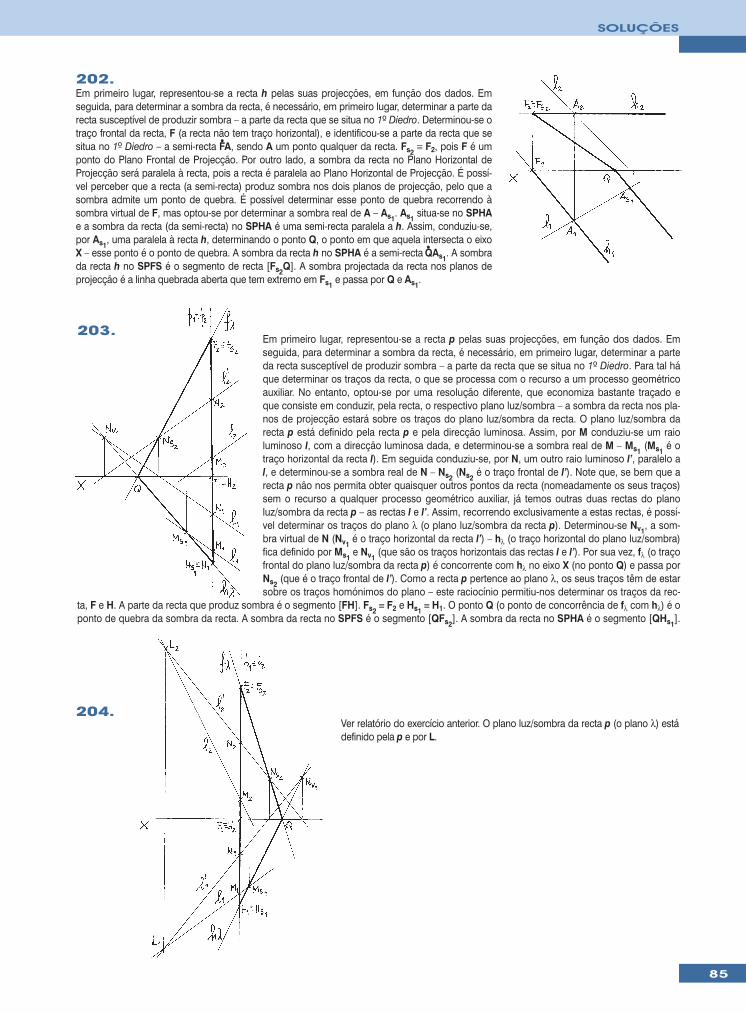
85
SOLUÇÕES
202.Em primeiro lugar, representou-se a recta h pelas suas projecções, em função dos dados. Emseguida, para determinar a sombra da recta, é necessário, em primeiro lugar, determinar a parte darecta susceptível de produzir sombra – a parte da recta que se situa no 1º Diedro. Determinou-se otraço frontal da recta, F (a recta não tem traço horizontal), e identificou-se a parte da recta que sesitua no 1º Diedro – a semi-recta •FA, sendo A um ponto qualquer da recta. Fs2
≡ F2, pois F é umponto do Plano Frontal de Projecção. Por outro lado, a sombra da recta no Plano Horizontal deProjecção será paralela à recta, pois a recta é paralela ao Plano Horizontal de Projecção. É possí-vel perceber que a recta (a semi-recta) produz sombra nos dois planos de projecção, pelo que asombra admite um ponto de quebra. É possível determinar esse ponto de quebra recorrendo àsombra virtual de F, mas optou-se por determinar a sombra real de A – As1
. As1situa-se no SPHA
e a sombra da recta (da semi-recta) no SPHA é uma semi-recta paralela a h. Assim, conduziu-se,por As1
, uma paralela à recta h, determinando o ponto Q, o ponto em que aquela intersecta o eixoX – esse ponto é o ponto de quebra. A sombra da recta h no SPHA é a semi-recta •QAs1
. A sombrada recta h no SPFS é o segmento de recta [Fs2
Q]. A sombra projectada da recta nos planos deprojecção é a linha quebrada aberta que tem extremo em Fs1
e passa por Q e As1.
Em primeiro lugar, representou-se a recta p pelas suas projecções, em função dos dados. Emseguida, para determinar a sombra da recta, é necessário, em primeiro lugar, determinar a parteda recta susceptível de produzir sombra – a parte da recta que se situa no 1º Diedro. Para tal háque determinar os traços da recta, o que se processa com o recurso a um processo geométricoauxiliar. No entanto, optou-se por uma resolução diferente, que economiza bastante traçado eque consiste em conduzir, pela recta, o respectivo plano luz/sombra – a sombra da recta nos pla-nos de projecção estará sobre os traços do plano luz/sombra da recta. O plano luz/sombra darecta p está definido pela recta p e pela direcção luminosa. Assim, por M conduziu-se um raioluminoso l, com a direcção luminosa dada, e determinou-se a sombra real de M – Ms1
(Ms1é o
traço horizontal da recta l). Em seguida conduziu-se, por N, um outro raio luminoso l’, paralelo al, e determinou-se a sombra real de N – Ns2
(Ns2é o traço frontal de l’). Note que, se bem que a
recta p não nos permita obter quaisquer outros pontos da recta (nomeadamente os seus traços)sem o recurso a qualquer processo geométrico auxiliar, já temos outras duas rectas do planoluz/sombra da recta p – as rectas l e l’. Assim, recorrendo exclusivamente a estas rectas, é possí-vel determinar os traços do plano λ (o plano luz/sombra da recta p). Determinou-se Nv1
, a som-bra virtual de N (Nv1
é o traço horizontal da recta l’) – hλ (o traço horizontal do plano luz/sombra)fica definido por Ms1
e Nv1(que são os traços horizontais das rectas l e l’). Por sua vez, fλ (o traço
frontal do plano luz/sombra da recta p) é concorrente com hλ no eixo X (no ponto Q) e passa porNs2
(que é o traço frontal de l’). Como a recta p pertence ao plano λ, os seus traços têm de estarsobre os traços homónimos do plano – este raciocínio permitiu-nos determinar os traços da rec-
ta, F e H. A parte da recta que produz sombra é o segmento [FH]. Fs2≡ F2 e Hs1
≡ H1. O ponto Q (o ponto de concorrência de fλ com hλ) é oponto de quebra da sombra da recta. A sombra da recta no SPFS é o segmento [QFs2
]. A sombra da recta no SPHA é o segmento [QHs1].
203.
204.Ver relatório do exercício anterior. O plano luz/sombra da recta p (o plano λ) estádefinido pela p e por L.
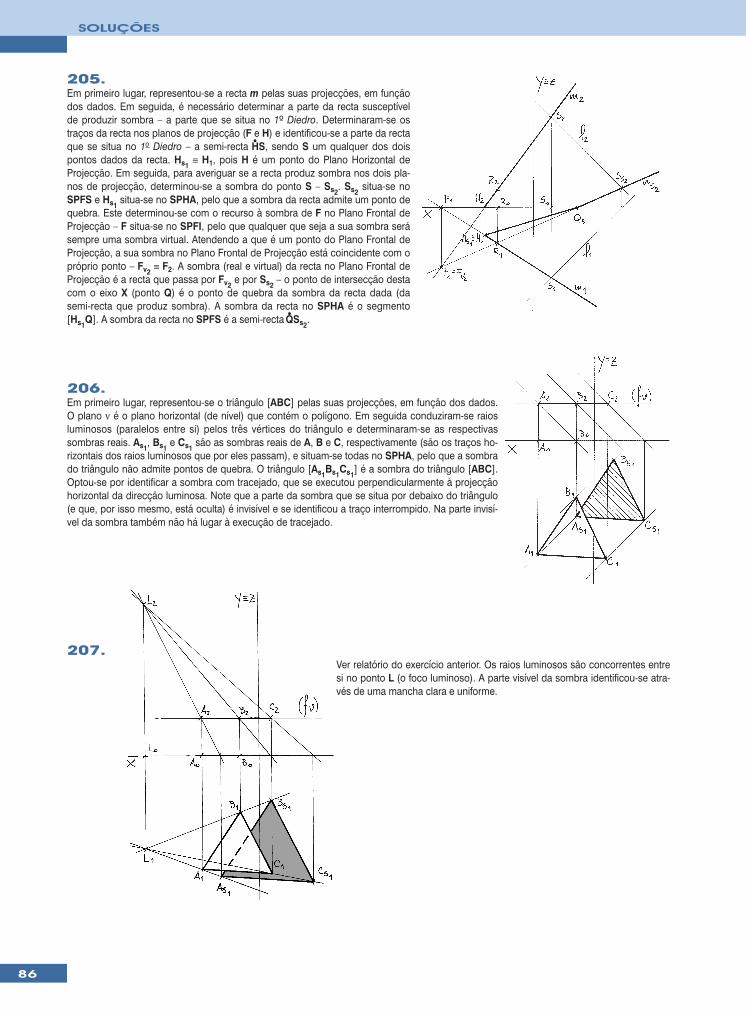
86
SOLUÇÕES
206.Em primeiro lugar, representou-se o triângulo [ABC] pelas suas projecções, em função dos dados.O plano ν é o plano horizontal (de nível) que contém o polígono. Em seguida conduziram-se raiosluminosos (paralelos entre si) pelos três vértices do triângulo e determinaram-se as respectivassombras reais. As1
, Bs1e Cs1
são as sombras reais de A, B e C, respectivamente (são os traços ho-rizontais dos raios luminosos que por eles passam), e situam-se todas no SPHA, pelo que a sombrado triângulo não admite pontos de quebra. O triângulo [As1
Bs1Cs1
] é a sombra do triângulo [ABC].Optou-se por identificar a sombra com tracejado, que se executou perpendicularmente à projecçãohorizontal da direcção luminosa. Note que a parte da sombra que se situa por debaixo do triângulo(e que, por isso mesmo, está oculta) é invisível e se identificou a traço interrompido. Na parte invisí-vel da sombra também não há lugar à execução de tracejado.
Ver relatório do exercício anterior. Os raios luminosos são concorrentes entresi no ponto L (o foco luminoso). A parte visível da sombra identificou-se atra-vés de uma mancha clara e uniforme.
207.
205.Em primeiro lugar, representou-se a recta m pelas suas projecções, em funçãodos dados. Em seguida, é necessário determinar a parte da recta susceptívelde produzir sombra – a parte que se situa no 1º Diedro. Determinaram-se ostraços da recta nos planos de projecção (F e H) e identificou-se a parte da rectaque se situa no 1o Diedro – a semi-recta •HS, sendo S um qualquer dos doispontos dados da recta. Hs1
≡ H1, pois H é um ponto do Plano Horizontal deProjecção. Em seguida, para averiguar se a recta produz sombra nos dois pla-nos de projecção, determinou-se a sombra do ponto S – Ss2
. Ss2situa-se no
SPFS e Hs1situa-se no SPHA, pelo que a sombra da recta admite um ponto de
quebra. Este determinou-se com o recurso à sombra de F no Plano Frontal deProjecção – F situa-se no SPFI, pelo que qualquer que seja a sua sombra serásempre uma sombra virtual. Atendendo a que é um ponto do Plano Frontal deProjecção, a sua sombra no Plano Frontal de Projecção está coincidente com opróprio ponto – Fv2
≡ F2. A sombra (real e virtual) da recta no Plano Frontal deProjecção é a recta que passa por Fv2
e por Ss2– o ponto de intersecção desta
com o eixo X (ponto Q) é o ponto de quebra da sombra da recta dada (dasemi-recta que produz sombra). A sombra da recta no SPHA é o segmento[Hs1
Q]. A sombra da recta no SPFS é a semi-recta •QSs2.
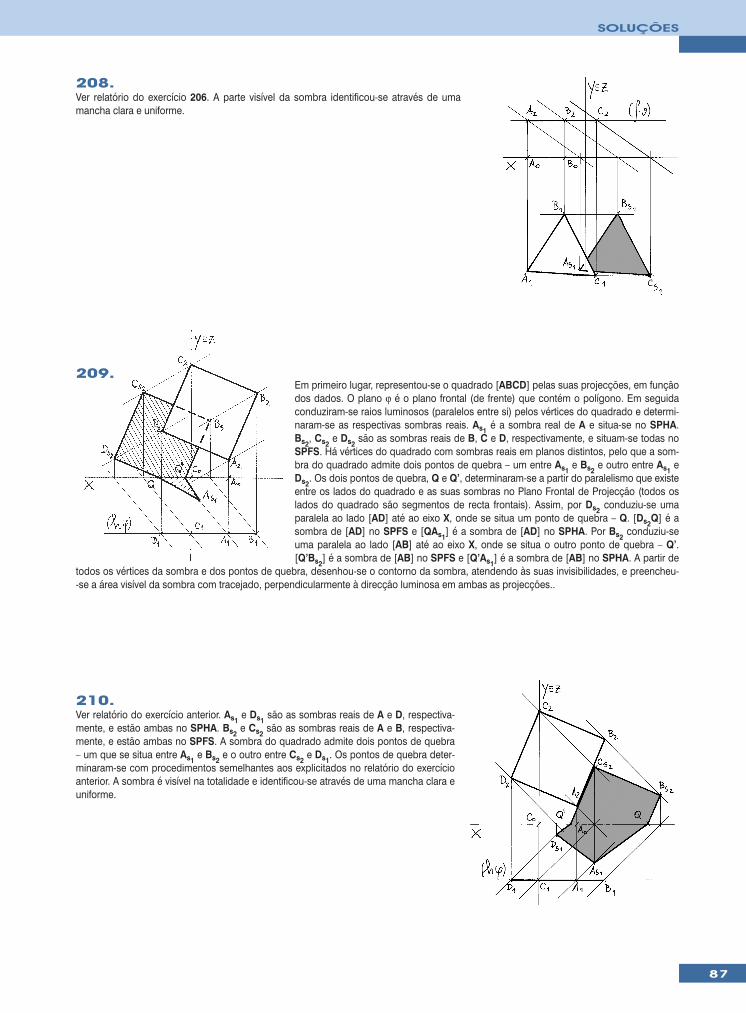
87
SOLUÇÕES
208.Ver relatório do exercício 206. A parte visível da sombra identificou-se através de umamancha clara e uniforme.
Em primeiro lugar, representou-se o quadrado [ABCD] pelas suas projecções, em funçãodos dados. O plano ϕ é o plano frontal (de frente) que contém o polígono. Em seguidaconduziram-se raios luminosos (paralelos entre si) pelos vértices do quadrado e determi-naram-se as respectivas sombras reais. As1
é a sombra real de A e situa-se no SPHA.Bs2
, Cs2e Ds2
são as sombras reais de B, C e D, respectivamente, e situam-se todas noSPFS. Há vértices do quadrado com sombras reais em planos distintos, pelo que a som-bra do quadrado admite dois pontos de quebra – um entre As1
e Bs2e outro entre As1
eDs2
. Os dois pontos de quebra, Q e Q’, determinaram-se a partir do paralelismo que existeentre os lados do quadrado e as suas sombras no Plano Frontal de Projecção (todos oslados do quadrado são segmentos de recta frontais). Assim, por Ds2
conduziu-se umaparalela ao lado [AD] até ao eixo X, onde se situa um ponto de quebra – Q. [Ds2
Q] é asombra de [AD] no SPFS e [QAs1
] é a sombra de [AD] no SPHA. Por Bs2conduziu-se
uma paralela ao lado [AB] até ao eixo X, onde se situa o outro ponto de quebra – Q’.[Q’Bs2
] é a sombra de [AB] no SPFS e [Q’As1] é a sombra de [AB] no SPHA. A partir de
todos os vértices da sombra e dos pontos de quebra, desenhou-se o contorno da sombra, atendendo às suas invisibilidades, e preencheu--se a área visível da sombra com tracejado, perpendicularmente à direcção luminosa em ambas as projecções..
209.
210.Ver relatório do exercício anterior. As1
e Ds1são as sombras reais de A e D, respectiva-
mente, e estão ambas no SPHA. Bs2e Cs2
são as sombras reais de A e B, respectiva-mente, e estão ambas no SPFS. A sombra do quadrado admite dois pontos de quebra– um que se situa entre As1
e Bs2e o outro entre Cs2
e Ds1. Os pontos de quebra deter-
minaram-se com procedimentos semelhantes aos explicitados no relatório do exercícioanterior. A sombra é visível na totalidade e identificou-se através de uma mancha clara euniforme.
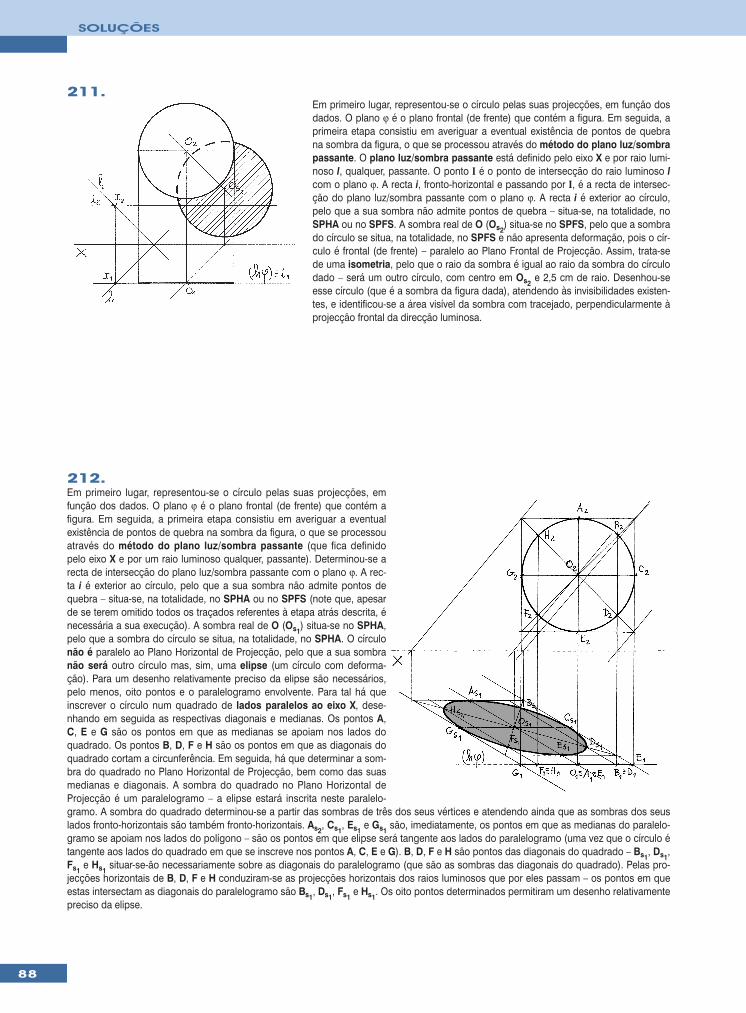
88
SOLUÇÕES
Em primeiro lugar, representou-se o círculo pelas suas projecções, em função dosdados. O plano ϕ é o plano frontal (de frente) que contém a figura. Em seguida, aprimeira etapa consistiu em averiguar a eventual existência de pontos de quebrana sombra da figura, o que se processou através do método do plano luz/sombrapassante. O plano luz/sombra passante está definido pelo eixo X e por raio lumi-noso l, qualquer, passante. O ponto I é o ponto de intersecção do raio luminoso lcom o plano ϕ. A recta i, fronto-horizontal e passando por I, é a recta de intersec-ção do plano luz/sombra passante com o plano ϕ. A recta i é exterior ao círculo,pelo que a sua sombra não admite pontos de quebra – situa-se, na totalidade, noSPHA ou no SPFS. A sombra real de O (Os2
) situa-se no SPFS, pelo que a sombrado círculo se situa, na totalidade, no SPFS e não apresenta deformação, pois o cír-culo é frontal (de frente) – paralelo ao Plano Frontal de Projecção. Assim, trata-sede uma isometria, pelo que o raio da sombra é igual ao raio da sombra do círculodado – será um outro círculo, com centro em Os2
e 2,5 cm de raio. Desenhou-seesse círculo (que é a sombra da figura dada), atendendo às invisibilidades existen-tes, e identificou-se a área visível da sombra com tracejado, perpendicularmente àprojecção frontal da direcção luminosa.
212.Em primeiro lugar, representou-se o círculo pelas suas projecções, emfunção dos dados. O plano ϕ é o plano frontal (de frente) que contém afigura. Em seguida, a primeira etapa consistiu em averiguar a eventualexistência de pontos de quebra na sombra da figura, o que se processouatravés do método do plano luz/sombra passante (que fica definidopelo eixo X e por um raio luminoso qualquer, passante). Determinou-se arecta de intersecção do plano luz/sombra passante com o plano ϕ. A rec-ta i é exterior ao círculo, pelo que a sua sombra não admite pontos dequebra – situa-se, na totalidade, no SPHA ou no SPFS (note que, apesarde se terem omitido todos os traçados referentes à etapa atrás descrita, énecessária a sua execução). A sombra real de O (Os1
) situa-se no SPHA,pelo que a sombra do círculo se situa, na totalidade, no SPHA. O círculonão é paralelo ao Plano Horizontal de Projecção, pelo que a sua sombranão será outro círculo mas, sim, uma elipse (um círculo com deforma-ção). Para um desenho relativamente preciso da elipse são necessários,pelo menos, oito pontos e o paralelogramo envolvente. Para tal há queinscrever o círculo num quadrado de lados paralelos ao eixo X, dese-nhando em seguida as respectivas diagonais e medianas. Os pontos A,C, E e G são os pontos em que as medianas se apoiam nos lados doquadrado. Os pontos B, D, F e H são os pontos em que as diagonais doquadrado cortam a circunferência. Em seguida, há que determinar a som-bra do quadrado no Plano Horizontal de Projecção, bem como das suasmedianas e diagonais. A sombra do quadrado no Plano Horizontal deProjecção é um paralelogramo – a elipse estará inscrita neste paralelo-gramo. A sombra do quadrado determinou-se a partir das sombras de três dos seus vértices e atendendo ainda que as sombras dos seuslados fronto-horizontais são também fronto-horizontais. As2
, Cs1, Es1
e Gs1são, imediatamente, os pontos em que as medianas do paralelo-
gramo se apoiam nos lados do polígono – são os pontos em que elipse será tangente aos lados do paralelogramo (uma vez que o círculo étangente aos lados do quadrado em que se inscreve nos pontos A, C, E e G). B, D, F e H são pontos das diagonais do quadrado – Bs1
, Ds1,
Fs1e Hs1
situar-se-ão necessariamente sobre as diagonais do paralelogramo (que são as sombras das diagonais do quadrado). Pelas pro-jecções horizontais de B, D, F e H conduziram-se as projecções horizontais dos raios luminosos que por eles passam – os pontos em queestas intersectam as diagonais do paralelogramo são Bs1
, Ds1, Fs1
e Hs1. Os oito pontos determinados permitiram um desenho relativamente
preciso da elipse.
211.
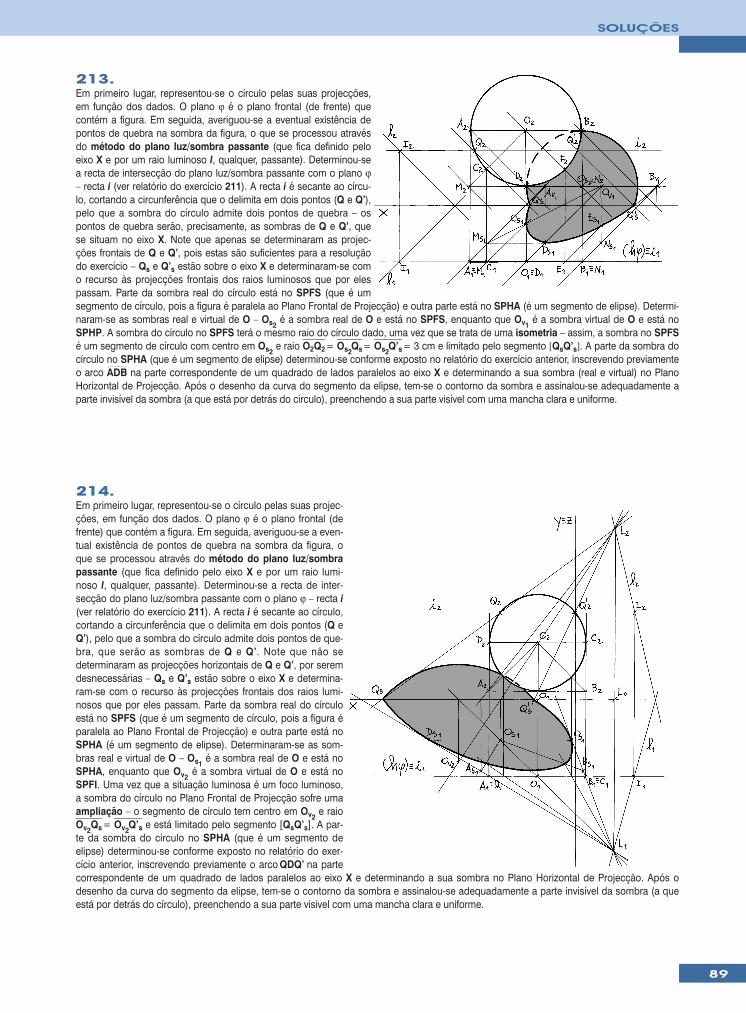
89
SOLUÇÕES
214.Em primeiro lugar, representou-se o círculo pelas suas projec-ções, em função dos dados. O plano ϕ é o plano frontal (defrente) que contém a figura. Em seguida, averiguou-se a even-tual existência de pontos de quebra na sombra da figura, oque se processou através do método do plano luz/sombrapassante (que fica definido pelo eixo X e por um raio lumi-noso l, qualquer, passante). Determinou-se a recta de inter-secção do plano luz/sombra passante com o plano ϕ – recta i(ver relatório do exercício 211). A recta i é secante ao círculo,cortando a circunferência que o delimita em dois pontos (Q eQ’), pelo que a sombra do círculo admite dois pontos de que-bra, que serão as sombras de Q e Q’. Note que não sedeterminaram as projecções horizontais de Q e Q’, por seremdesnecessárias – Qs e Q’s estão sobre o eixo X e determina-ram-se com o recurso às projecções frontais dos raios lumi-nosos que por eles passam. Parte da sombra real do círculoestá no SPFS (que é um segmento de círculo, pois a figura éparalela ao Plano Frontal de Projecção) e outra parte está noSPHA (é um segmento de elipse). Determinaram-se as som-bras real e virtual de O – Os1
é a sombra real de O e está noSPHA, enquanto que Ov2
é a sombra virtual de O e está noSPFI. Uma vez que a situação luminosa é um foco luminoso,a sombra do círculo no Plano Frontal de Projecção sofre umaampliação – o segmento de círculo tem centro em Ov2
e raioO�v�2
�Q�s� = O�v�2�Q�’�s� e está limitado pelo segmento [QsQ’s]. A par-
te da sombra do círculo no SPHA (que é um segmento deelipse) determinou-se conforme exposto no relatório do exer-cício anterior, inscrevendo previamente o arco
�QDQ’ na parte
correspondente de um quadrado de lados paralelos ao eixo X e determinando a sua sombra no Plano Horizontal de Projecção. Após odesenho da curva do segmento da elipse, tem-se o contorno da sombra e assinalou-se adequadamente a parte invisível da sombra (a queestá por detrás do círculo), preenchendo a sua parte visível com uma mancha clara e uniforme.
213.Em primeiro lugar, representou-se o círculo pelas suas projecções,em função dos dados. O plano ϕ é o plano frontal (de frente) quecontém a figura. Em seguida, averiguou-se a eventual existência depontos de quebra na sombra da figura, o que se processou atravésdo método do plano luz/sombra passante (que fica definido peloeixo X e por um raio luminoso l, qualquer, passante). Determinou-sea recta de intersecção do plano luz/sombra passante com o plano ϕ– recta i (ver relatório do exercício 211). A recta i é secante ao círcu-lo, cortando a circunferência que o delimita em dois pontos (Q e Q’),pelo que a sombra do círculo admite dois pontos de quebra – ospontos de quebra serão, precisamente, as sombras de Q e Q’, quese situam no eixo X. Note que apenas se determinaram as projec-ções frontais de Q e Q’, pois estas são suficientes para a resoluçãodo exercício – Qs e Q’s estão sobre o eixo X e determinaram-se como recurso às projecções frontais dos raios luminosos que por elespassam. Parte da sombra real do círculo está no SPFS (que é umsegmento de círculo, pois a figura é paralela ao Plano Frontal de Projecção) e outra parte está no SPHA (é um segmento de elipse). Determi-naram-se as sombras real e virtual de O – Os2
é a sombra real de O e está no SPFS, enquanto que Ov1é a sombra virtual de O e está no
SPHP. A sombra do círculo no SPFS terá o mesmo raio do círculo dado, uma vez que se trata de uma isometria – assim, a sombra no SPFSé um segmento de círculo com centro em Os2
e raio O�2�Q�2� = O�s�2�Q�s� = O�s�2
�Q�’�s� = 3 cm e limitado pelo segmento [QsQ’s]. A parte da sombra docírculo no SPHA (que é um segmento de elipse) determinou-se conforme exposto no relatório do exercício anterior, inscrevendo previamenteo arco �ADB na parte correspondente de um quadrado de lados paralelos ao eixo X e determinando a sua sombra (real e virtual) no PlanoHorizontal de Projecção. Após o desenho da curva do segmento da elipse, tem-se o contorno da sombra e assinalou-se adequadamente aparte invisível da sombra (a que está por detrás do círculo), preenchendo a sua parte visível com uma mancha clara e uniforme.
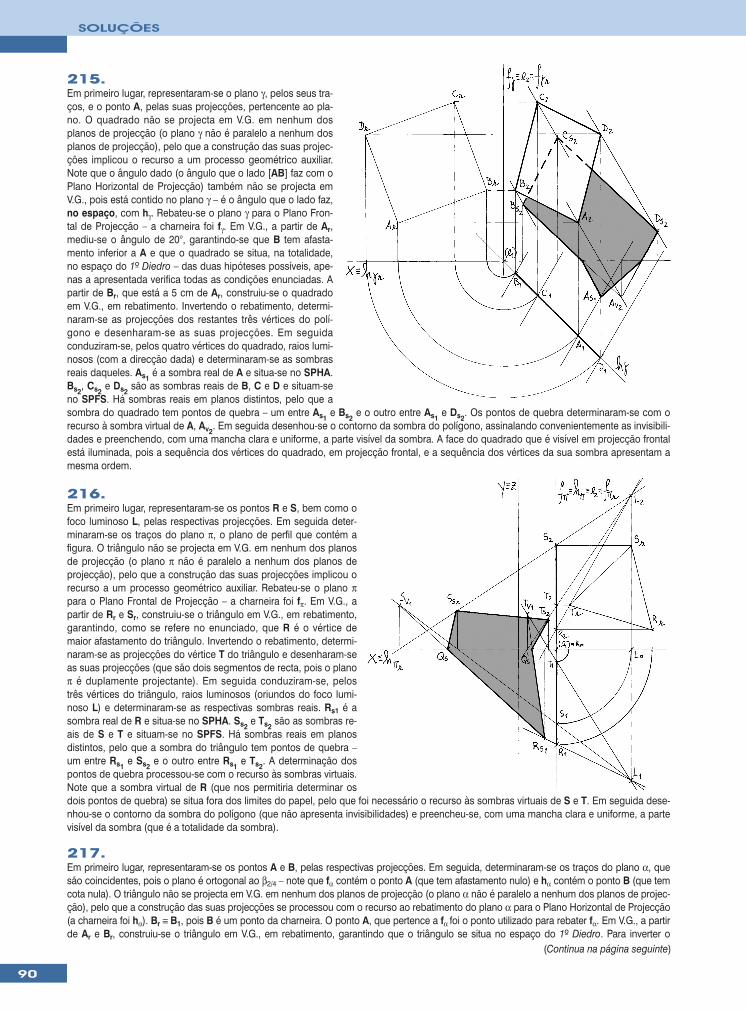
90
SOLUÇÕES
215.Em primeiro lugar, representaram-se o plano γ, pelos seus tra-ços, e o ponto A, pelas suas projecções, pertencente ao pla-no. O quadrado não se projecta em V.G. em nenhum dosplanos de projecção (o plano γ não é paralelo a nenhum dosplanos de projecção), pelo que a construção das suas projec-ções implicou o recurso a um processo geométrico auxiliar.Note que o ângulo dado (o ângulo que o lado [AB] faz com oPlano Horizontal de Projecção) também não se projecta emV.G., pois está contido no plano γ – é o ângulo que o lado faz,no espaço, com hγ. Rebateu-se o plano γ para o Plano Fron-tal de Projecção – a charneira foi fγ. Em V.G., a partir de Ar,mediu-se o ângulo de 20°, garantindo-se que B tem afasta-mento inferior a A e que o quadrado se situa, na totalidade,no espaço do 1º Diedro – das duas hipóteses possíveis, ape-nas a apresentada verifica todas as condições enunciadas. Apartir de Br, que está a 5 cm de Ar, construiu-se o quadradoem V.G., em rebatimento. Invertendo o rebatimento, determi-naram-se as projecções dos restantes três vértices do polí-gono e desenharam-se as suas projecções. Em seguidaconduziram-se, pelos quatro vértices do quadrado, raios lumi-nosos (com a direcção dada) e determinaram-se as sombrasreais daqueles. As1
é a sombra real de A e situa-se no SPHA.Bs2
, Cs2e Ds2
são as sombras reais de B, C e D e situam-seno SPFS. Há sombras reais em planos distintos, pelo que asombra do quadrado tem pontos de quebra – um entre As1
e Bs2e o outro entre As1
e Ds2. Os pontos de quebra determinaram-se com o
recurso à sombra virtual de A, Av2. Em seguida desenhou-se o contorno da sombra do polígono, assinalando convenientemente as invisibili-
dades e preenchendo, com uma mancha clara e uniforme, a parte visível da sombra. A face do quadrado que é visível em projecção frontalestá iluminada, pois a sequência dos vértices do quadrado, em projecção frontal, e a sequência dos vértices da sua sombra apresentam amesma ordem.
216.Em primeiro lugar, representaram-se os pontos R e S, bem como ofoco luminoso L, pelas respectivas projecções. Em seguida deter-minaram-se os traços do plano π, o plano de perfil que contém afigura. O triângulo não se projecta em V.G. em nenhum dos planosde projecção (o plano π não é paralelo a nenhum dos planos deprojecção), pelo que a construção das suas projecções implicou orecurso a um processo geométrico auxiliar. Rebateu-se o plano πpara o Plano Frontal de Projecção – a charneira foi fπ. Em V.G., apartir de Rr e Sr, construiu-se o triângulo em V.G., em rebatimento,garantindo, como se refere no enunciado, que R é o vértice demaior afastamento do triângulo. Invertendo o rebatimento, determi-naram-se as projecções do vértice T do triângulo e desenharam-seas suas projecções (que são dois segmentos de recta, pois o planoπ é duplamente projectante). Em seguida conduziram-se, pelostrês vértices do triângulo, raios luminosos (oriundos do foco lumi-noso L) e determinaram-se as respectivas sombras reais. Rs1 é asombra real de R e situa-se no SPHA. Ss2
e Ts2são as sombras re-
ais de S e T e situam-se no SPFS. Há sombras reais em planosdistintos, pelo que a sombra do triângulo tem pontos de quebra –um entre Rs1
e Ss2e o outro entre Rs1
e Ts2. A determinação dos
pontos de quebra processou-se com o recurso às sombras virtuais.Note que a sombra virtual de R (que nos permitiria determinar osdois pontos de quebra) se situa fora dos limites do papel, pelo que foi necessário o recurso às sombras virtuais de S e T. Em seguida dese-nhou-se o contorno da sombra do polígono (que não apresenta invisibilidades) e preencheu-se, com uma mancha clara e uniforme, a partevisível da sombra (que é a totalidade da sombra).
217.Em primeiro lugar, representaram-se os pontos A e B, pelas respectivas projecções. Em seguida, determinaram-se os traços do plano α, quesão coincidentes, pois o plano é ortogonal ao β2/4 – note que fα contém o ponto A (que tem afastamento nulo) e hα contém o ponto B (que temcota nula). O triângulo não se projecta em V.G. em nenhum dos planos de projecção (o plano α não é paralelo a nenhum dos planos de projec-ção), pelo que a construção das suas projecções se processou com o recurso ao rebatimento do plano α para o Plano Horizontal de Projecção(a charneira foi hα). Br ≡ B1, pois B é um ponto da charneira. O ponto A, que pertence a fα foi o ponto utilizado para rebater fα. Em V.G., a partirde Ar e Br, construiu-se o triângulo em V.G., em rebatimento, garantindo que o triângulo se situa no espaço do 1º Diedro. Para inverter o
(Continua na página seguinte)
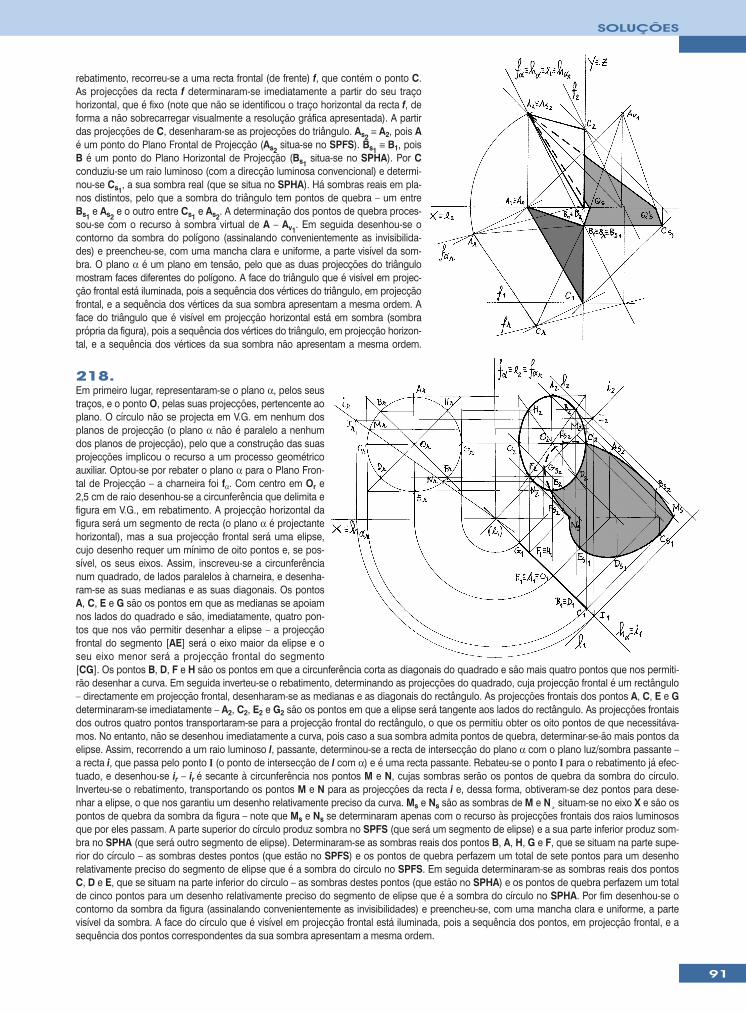
91
SOLUÇÕES
218.Em primeiro lugar, representaram-se o plano α, pelos seustraços, e o ponto O, pelas suas projecções, pertencente aoplano. O círculo não se projecta em V.G. em nenhum dosplanos de projecção (o plano α não é paralelo a nenhumdos planos de projecção), pelo que a construção das suasprojecções implicou o recurso a um processo geométricoauxiliar. Optou-se por rebater o plano α para o Plano Fron-tal de Projecção – a charneira foi fα. Com centro em Or e2,5 cm de raio desenhou-se a circunferência que delimita efigura em V.G., em rebatimento. A projecção horizontal dafigura será um segmento de recta (o plano α é projectantehorizontal), mas a sua projecção frontal será uma elipse,cujo desenho requer um mínimo de oito pontos e, se pos-sível, os seus eixos. Assim, inscreveu-se a circunferêncianum quadrado, de lados paralelos à charneira, e desenha-ram-se as suas medianas e as suas diagonais. Os pontosA, C, E e G são os pontos em que as medianas se apoiamnos lados do quadrado e são, imediatamente, quatro pon-tos que nos vão permitir desenhar a elipse – a projecçãofrontal do segmento [AE] será o eixo maior da elipse e oseu eixo menor será a projecção frontal do segmento[CG]. Os pontos B, D, F e H são os pontos em que a circunferência corta as diagonais do quadrado e são mais quatro pontos que nos permiti-rão desenhar a curva. Em seguida inverteu-se o rebatimento, determinando as projecções do quadrado, cuja projecção frontal é um rectângulo– directamente em projecção frontal, desenharam-se as medianas e as diagonais do rectângulo. As projecções frontais dos pontos A, C, E e Gdeterminaram-se imediatamente – A2, C2, E2 e G2 são os pontos em que a elipse será tangente aos lados do rectângulo. As projecções frontaisdos outros quatro pontos transportaram-se para a projecção frontal do rectângulo, o que os permitiu obter os oito pontos de que necessitáva-mos. No entanto, não se desenhou imediatamente a curva, pois caso a sua sombra admita pontos de quebra, determinar-se-ão mais pontos daelipse. Assim, recorrendo a um raio luminoso l, passante, determinou-se a recta de intersecção do plano α com o plano luz/sombra passante –a recta i, que passa pelo ponto I (o ponto de intersecção de l com α) e é uma recta passante. Rebateu-se o ponto I para o rebatimento já efec-tuado, e desenhou-se ir – ir é secante à circunferência nos pontos M e N, cujas sombras serão os pontos de quebra da sombra do círculo.Inverteu-se o rebatimento, transportando os pontos M e N para as projecções da recta i e, dessa forma, obtiveram-se dez pontos para dese-nhar a elipse, o que nos garantiu um desenho relativamente preciso da curva. Ms e Ns são as sombras de M e N¸ situam-se no eixo X e são ospontos de quebra da sombra da figura – note que Ms e Ns se determinaram apenas com o recurso às projecções frontais dos raios luminososque por eles passam. A parte superior do círculo produz sombra no SPFS (que será um segmento de elipse) e a sua parte inferior produz som-bra no SPHA (que será outro segmento de elipse). Determinaram-se as sombras reais dos pontos B, A, H, G e F, que se situam na parte supe-rior do círculo – as sombras destes pontos (que estão no SPFS) e os pontos de quebra perfazem um total de sete pontos para um desenhorelativamente preciso do segmento de elipse que é a sombra do círculo no SPFS. Em seguida determinaram-se as sombras reais dos pontosC, D e E, que se situam na parte inferior do círculo – as sombras destes pontos (que estão no SPHA) e os pontos de quebra perfazem um totalde cinco pontos para um desenho relativamente preciso do segmento de elipse que é a sombra do círculo no SPHA. Por fim desenhou-se ocontorno da sombra da figura (assinalando convenientemente as invisibilidades) e preencheu-se, com uma mancha clara e uniforme, a partevisível da sombra. A face do círculo que é visível em projecção frontal está iluminada, pois a sequência dos pontos, em projecção frontal, e asequência dos pontos correspondentes da sua sombra apresentam a mesma ordem.
rebatimento, recorreu-se a uma recta frontal (de frente) f, que contém o ponto C.As projecções da recta f determinaram-se imediatamente a partir do seu traçohorizontal, que é fixo (note que não se identificou o traço horizontal da recta f, deforma a não sobrecarregar visualmente a resolução gráfica apresentada). A partirdas projecções de C, desenharam-se as projecções do triângulo. As2
≡ A2, pois Aé um ponto do Plano Frontal de Projecção (As2
situa-se no SPFS). Bs1≡ B1, pois
B é um ponto do Plano Horizontal de Projecção (Bs1situa-se no SPHA). Por C
conduziu-se um raio luminoso (com a direcção luminosa convencional) e determi-nou-se Cs1
, a sua sombra real (que se situa no SPHA). Há sombras reais em pla-nos distintos, pelo que a sombra do triângulo tem pontos de quebra – um entreBs1
e As2e o outro entre Cs1
e As2. A determinação dos pontos de quebra proces-
sou-se com o recurso à sombra virtual de A – Av1. Em seguida desenhou-se o
contorno da sombra do polígono (assinalando convenientemente as invisibilida-des) e preencheu-se, com uma mancha clara e uniforme, a parte visível da som-bra. O plano α é um plano em tensão, pelo que as duas projecções do triângulomostram faces diferentes do polígono. A face do triângulo que é visível em projec-ção frontal está iluminada, pois a sequência dos vértices do triângulo, em projecçãofrontal, e a sequência dos vértices da sua sombra apresentam a mesma ordem. Aface do triângulo que é visível em projecção horizontal está em sombra (sombraprópria da figura), pois a sequência dos vértices do triângulo, em projecção horizon-tal, e a sequência dos vértices da sua sombra não apresentam a mesma ordem.
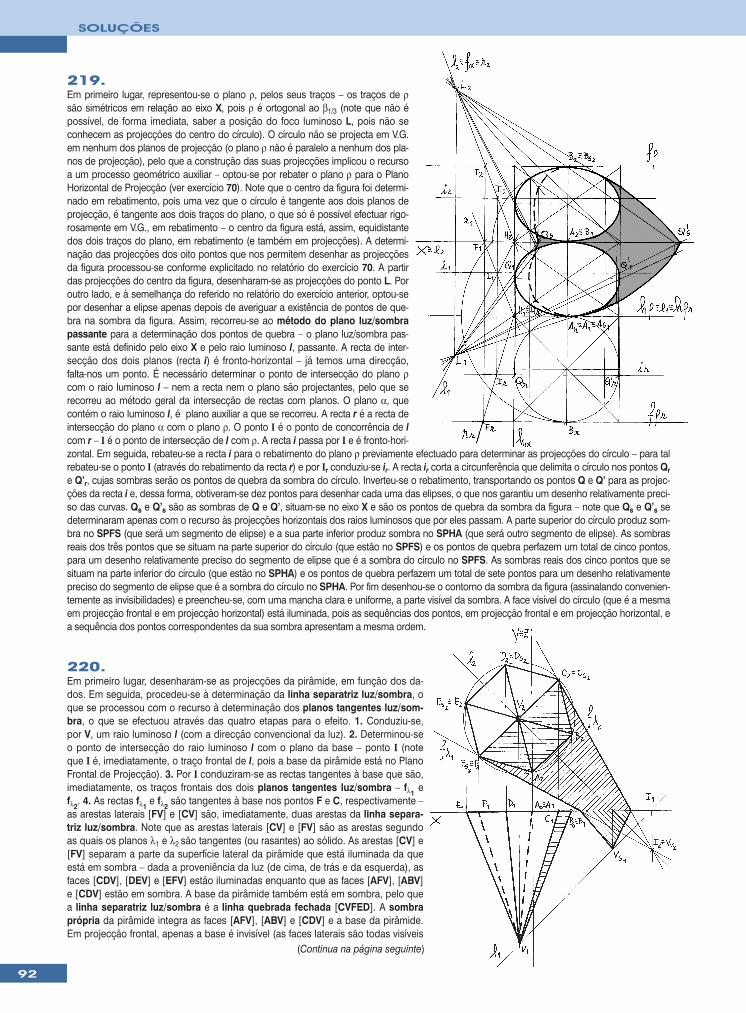
92
SOLUÇÕES
220.Em primeiro lugar, desenharam-se as projecções da pirâmide, em função dos da-dos. Em seguida, procedeu-se à determinação da linha separatriz luz/sombra, oque se processou com o recurso à determinação dos planos tangentes luz/som-bra, o que se efectuou através das quatro etapas para o efeito. 1. Conduziu-se,por V, um raio luminoso l (com a direcção convencional da luz). 2. Determinou-seo ponto de intersecção do raio luminoso l com o plano da base – ponto I (noteque I é, imediatamente, o traço frontal de l, pois a base da pirâmide está no PlanoFrontal de Projecção). 3. Por I conduziram-se as rectas tangentes à base que são,imediatamente, os traços frontais dos dois planos tangentes luz/sombra – fλ1
efλ2
. 4. As rectas fλ1e fλ2
são tangentes à base nos pontos F e C, respectivamente –as arestas laterais [FV] e [CV] são, imediatamente, duas arestas da linha separa-triz luz/sombra. Note que as arestas laterais [CV] e [FV] são as arestas segundoas quais os planos λ1 e λ2 são tangentes (ou rasantes) ao sólido. As arestas [CV] e[FV] separam a parte da superfície lateral da pirâmide que está iluminada da queestá em sombra – dada a proveniência da luz (de cima, de trás e da esquerda), asfaces [CDV], [DEV] e [EFV] estão iluminadas enquanto que as faces [AFV], [ABV]e [CDV] estão em sombra. A base da pirâmide também está em sombra, pelo quea linha separatriz luz/sombra é a linha quebrada fechada [CVFED]. A sombraprópria da pirâmide integra as faces [AFV], [ABV] e [CDV] e a base da pirâmide.Em projecção frontal, apenas a base é invisível (as faces laterais são todas visíveis
219.Em primeiro lugar, representou-se o plano ρ, pelos seus traços – os traços de ρsão simétricos em relação ao eixo X, pois ρ é ortogonal ao β1/3 (note que não épossível, de forma imediata, saber a posição do foco luminoso L, pois não seconhecem as projecções do centro do círculo). O círculo não se projecta em V.G.em nenhum dos planos de projecção (o plano ρ não é paralelo a nenhum dos pla-nos de projecção), pelo que a construção das suas projecções implicou o recursoa um processo geométrico auxiliar – optou-se por rebater o plano ρ para o PlanoHorizontal de Projecção (ver exercício 70). Note que o centro da figura foi determi-nado em rebatimento, pois uma vez que o círculo é tangente aos dois planos deprojecção, é tangente aos dois traços do plano, o que só é possível efectuar rigo-rosamente em V.G., em rebatimento – o centro da figura está, assim, equidistantedos dois traços do plano, em rebatimento (e também em projecções). A determi-nação das projecções dos oito pontos que nos permitem desenhar as projecçõesda figura processou-se conforme explicitado no relatório do exercício 70. A partirdas projecções do centro da figura, desenharam-se as projecções do ponto L. Poroutro lado, e à semelhança do referido no relatório do exercício anterior, optou-sepor desenhar a elipse apenas depois de averiguar a existência de pontos de que-bra na sombra da figura. Assim, recorreu-se ao método do plano luz/sombrapassante para a determinação dos pontos de quebra – o plano luz/sombra pas-sante está definido pelo eixo X e pelo raio luminoso l, passante. A recta de inter-secção dos dois planos (recta i) é fronto-horizontal – já temos uma direcção,falta-nos um ponto. É necessário determinar o ponto de intersecção do plano ρcom o raio luminoso l – nem a recta nem o plano são projectantes, pelo que serecorreu ao método geral da intersecção de rectas com planos. O plano α, quecontém o raio luminoso l, é plano auxiliar a que se recorreu. A recta r é a recta deintersecção do plano α com o plano ρ. O ponto I é o ponto de concorrência de lcom r – I é o ponto de intersecção de l com ρ. A recta i passa por I e é fronto-hori-zontal. Em seguida, rebateu-se a recta i para o rebatimento do plano ρ previamente efectuado para determinar as projecções do círculo – para talrebateu-se o ponto I (através do rebatimento da recta r) e por Ir conduziu-se ir. A recta ir corta a circunferência que delimita o círculo nos pontos Qre Q’r, cujas sombras serão os pontos de quebra da sombra do círculo. Inverteu-se o rebatimento, transportando os pontos Q e Q’ para as projec-ções da recta i e, dessa forma, obtiveram-se dez pontos para desenhar cada uma das elipses, o que nos garantiu um desenho relativamente preci-so das curvas. Qs e Q’s são as sombras de Q e Q’, situam-se no eixo X e são os pontos de quebra da sombra da figura – note que Qs e Q’s sedeterminaram apenas com o recurso às projecções horizontais dos raios luminosos que por eles passam. A parte superior do círculo produz som-bra no SPFS (que será um segmento de elipse) e a sua parte inferior produz sombra no SPHA (que será outro segmento de elipse). As sombrasreais dos três pontos que se situam na parte superior do círculo (que estão no SPFS) e os pontos de quebra perfazem um total de cinco pontos,para um desenho relativamente preciso do segmento de elipse que é a sombra do círculo no SPFS. As sombras reais dos cinco pontos que sesituam na parte inferior do círculo (que estão no SPHA) e os pontos de quebra perfazem um total de sete pontos para um desenho relativamentepreciso do segmento de elipse que é a sombra do círculo no SPHA. Por fim desenhou-se o contorno da sombra da figura (assinalando convenien-temente as invisibilidades) e preencheu-se, com uma mancha clara e uniforme, a parte visível da sombra. A face visível do círculo (que é a mesmaem projecção frontal e em projecção horizontal) está iluminada, pois as sequências dos pontos, em projecção frontal e em projecção horizontal, ea sequência dos pontos correspondentes da sua sombra apresentam a mesma ordem.
(Continua na página seguinte)
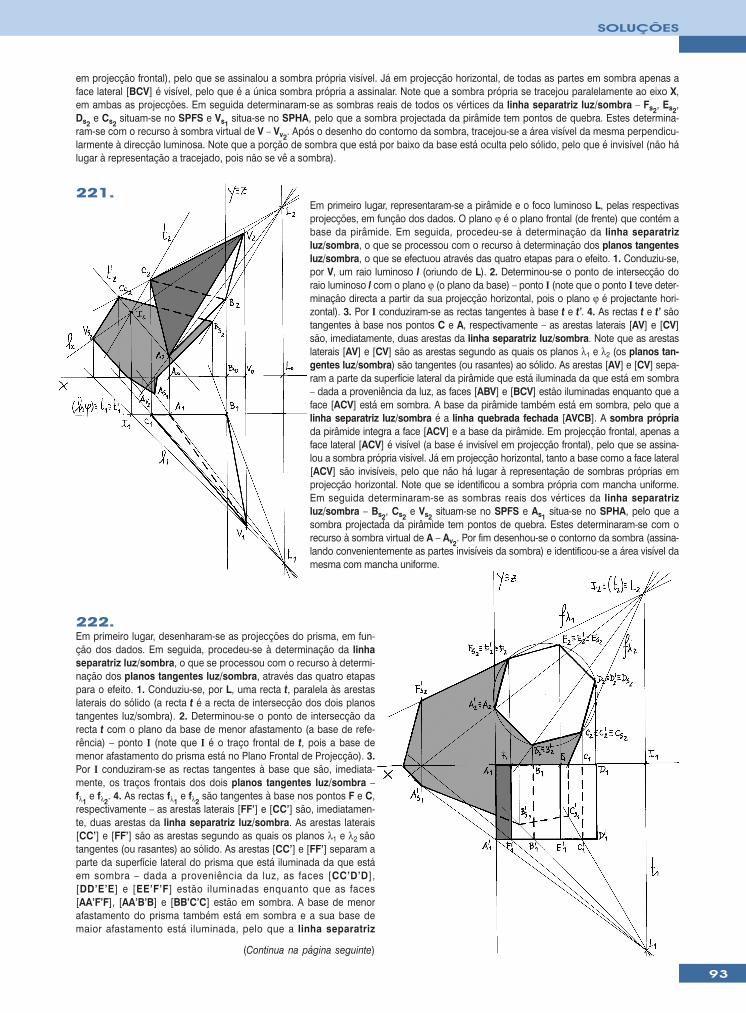
93
SOLUÇÕES
222.Em primeiro lugar, desenharam-se as projecções do prisma, em fun-ção dos dados. Em seguida, procedeu-se à determinação da linhaseparatriz luz/sombra, o que se processou com o recurso à determi-nação dos planos tangentes luz/sombra, através das quatro etapaspara o efeito. 1. Conduziu-se, por L, uma recta t, paralela às arestaslaterais do sólido (a recta t é a recta de intersecção dos dois planostangentes luz/sombra). 2. Determinou-se o ponto de intersecção darecta t com o plano da base de menor afastamento (a base de refe-rência) – ponto I (note que I é o traço frontal de t, pois a base demenor afastamento do prisma está no Plano Frontal de Projecção). 3.Por I conduziram-se as rectas tangentes à base que são, imediata-mente, os traços frontais dos dois planos tangentes luz/sombra –fλ1
e fλ2. 4. As rectas fλ1
e fλ2são tangentes à base nos pontos F e C,
respectivamente – as arestas laterais [FF’] e [CC’] são, imediatamen-te, duas arestas da linha separatriz luz/sombra. As arestas laterais[CC’] e [FF’] são as arestas segundo as quais os planos λ1 e λ2 sãotangentes (ou rasantes) ao sólido. As arestas [CC’] e [FF’] separam aparte da superfície lateral do prisma que está iluminada da que estáem sombra – dada a proveniência da luz, as faces [CC’D’D],[DD’E’E] e [EE’F’F] estão iluminadas enquanto que as faces[AA’F’F], [AA’B’B] e [BB’C’C] estão em sombra. A base de menorafastamento do prisma também está em sombra e a sua base demaior afastamento está iluminada, pelo que a linha separatriz
em projecção frontal), pelo que se assinalou a sombra própria visível. Já em projecção horizontal, de todas as partes em sombra apenas aface lateral [BCV] é visível, pelo que é a única sombra própria a assinalar. Note que a sombra própria se tracejou paralelamente ao eixo X,em ambas as projecções. Em seguida determinaram-se as sombras reais de todos os vértices da linha separatriz luz/sombra – Fs2
, Es2,
Ds2e Cs2
situam-se no SPFS e Vs1situa-se no SPHA, pelo que a sombra projectada da pirâmide tem pontos de quebra. Estes determina-
ram-se com o recurso à sombra virtual de V – Vv2. Após o desenho do contorno da sombra, tracejou-se a área visível da mesma perpendicu-
larmente à direcção luminosa. Note que a porção de sombra que está por baixo da base está oculta pelo sólido, pelo que é invisível (não hálugar à representação a tracejado, pois não se vê a sombra).
(Continua na página seguinte)
Em primeiro lugar, representaram-se a pirâmide e o foco luminoso L, pelas respectivasprojecções, em função dos dados. O plano ϕ é o plano frontal (de frente) que contém abase da pirâmide. Em seguida, procedeu-se à determinação da linha separatrizluz/sombra, o que se processou com o recurso à determinação dos planos tangentesluz/sombra, o que se efectuou através das quatro etapas para o efeito. 1. Conduziu-se,por V, um raio luminoso l (oriundo de L). 2. Determinou-se o ponto de intersecção doraio luminoso l com o plano ϕ (o plano da base) – ponto I (note que o ponto I teve deter-minação directa a partir da sua projecção horizontal, pois o plano ϕ é projectante hori-zontal). 3. Por I conduziram-se as rectas tangentes à base t e t’. 4. As rectas t e t’ sãotangentes à base nos pontos C e A, respectivamente – as arestas laterais [AV] e [CV]são, imediatamente, duas arestas da linha separatriz luz/sombra. Note que as arestaslaterais [AV] e [CV] são as arestas segundo as quais os planos λ1 e λ2 (os planos tan-gentes luz/sombra) são tangentes (ou rasantes) ao sólido. As arestas [AV] e [CV] sepa-ram a parte da superfície lateral da pirâmide que está iluminada da que está em sombra– dada a proveniência da luz, as faces [ABV] e [BCV] estão iluminadas enquanto que aface [ACV] está em sombra. A base da pirâmide também está em sombra, pelo que alinha separatriz luz/sombra é a linha quebrada fechada [AVCB]. A sombra própriada pirâmide integra a face [ACV] e a base da pirâmide. Em projecção frontal, apenas aface lateral [ACV] é visível (a base é invisível em projecção frontal), pelo que se assina-lou a sombra própria visível. Já em projecção horizontal, tanto a base como a face lateral[ACV] são invisíveis, pelo que não há lugar à representação de sombras próprias emprojecção horizontal. Note que se identificou a sombra própria com mancha uniforme.Em seguida determinaram-se as sombras reais dos vértices da linha separatrizluz/sombra – Bs2
, Cs2e Vs2
situam-se no SPFS e As1situa-se no SPHA, pelo que a
sombra projectada da pirâmide tem pontos de quebra. Estes determinaram-se com orecurso à sombra virtual de A – Av2
. Por fim desenhou-se o contorno da sombra (assina-lando convenientemente as partes invisíveis da sombra) e identificou-se a área visível damesma com mancha uniforme.
221.

94
SOLUÇÕES
luz/sombra é a linha quebrada fechada [CC’B’A’F’FED]. A sombra própria do prisma integra as faces [AA’F’F], [AA’B’B] e [BB’C’C] e abase de menor afastamento do prisma. Em projecção frontal, as faces laterais são todas invisíveis (são projectantes frontais), bem como abase de menor afastamento, pelo que não há lugar à representação de sombra própria em projecção frontal. Já em projecção horizontal, detodas as partes em sombra apenas a face lateral [AA’F’F] é visível, pelo que é a única sombra própria a assinalar. Identificou-se a sombraprópria com uma mancha uniforme. Em seguida, determinaram-se as sombras reais de todos os vértices da linha separatriz luz/sombra –Fs2
, Es2, Ds2
, Cs2e F’s2
situam-se no SPFS e C’s1, B’s1
e A’s1situam-se no SPHA, pelo que a sombra projectada do prisma tem pontos de
quebra. Estes determinaram-se atendendo às situações de paralelismo entre as arestas e os planos nos quais produzem sombra. A arestalateral [CC’] é de topo, pelo que a sombra que [CC’] produz no Plano Horizontal de Projecção é paralela a [CC’] – este raciocínio permitiu--nos determinar o ponto de quebra que se situa entre C’s1
e Cs2. A aresta [A’F’], da base, é frontal (de frente), pelo que a sombra que [A’F’]
produz no Plano Frontal de Projecção é paralela a [A’F’] – este raciocínio permitiu-nos determinar o ponto de quebra que se situa entre A’s1e F’s2
. Após o desenho do contorno da sombra, identificou-se a área visível da mesma com uma mancha uniforme. Note que a porção desombra que está por baixo da base de menor afastamento do sólido está oculta pelo sólido, pelo que é invisível (não há lugar à execuçãode mancha, pois não se vê a sombra).
223.Em primeiro lugar, desenharam-se as projecções do pris-ma, em função dos dados. O plano ϕ é o plano da basede referência do sólido (a base de menor afastamento). Adistância entre os planos das duas bases é 5 cm, que é aaltura do prisma. Em seguida, procedeu-se à determina-ção da linha separatriz luz/sombra, o que se processoucom o recurso à determinação dos planos tangentesluz/sombra, através das quatro etapas para o efeito. 1.Por um ponto P, exterior ao sólido, conduziram-se duasrectas – uma recta h, paralela às arestas laterais do sólido,e um raio luminoso l. Estas duas rectas definem um plano(o plano λ) que é paralelo aos planos tangentes luz/som-bra (têm a mesma orientação). 2. Determinou-se a rectade intersecção do plano λ (o plano definido pelas rectas he l) com o plano da base de referência (a base de menorafastamento) – recta t. 3. Conduziram-se as rectas tangen-tes à base que são paralelas à recta t – t’ e t’’. Estas sãoas rectas de intersecção dos planos tangentes luz/som-bra (os planos λ1 e λ2) com o plano ϕ (o plano da base dereferência). 4. As rectas t’ e t’’ são tangentes à base (dereferência) nos pontos A e C, respectivamente – as ares-tas laterais [AA’] e [CC’] são, imediatamente, duas ares-tas da linha separatriz luz/sombra. As arestas laterais [AA’] e [CC’] são as arestas segundo as quais os planos λ1 e λ2 são tangentes (ourasantes) ao sólido. As arestas [AA’] e [CC’] separam a parte da superfície lateral do prisma que está iluminada da que está em sombra –dada a proveniência da luz, a face lateral [AA’C’C] é a única face iluminada, enquanto que as faces [AA’B’B] e [BB’C’C] estão em sombra.A base de menor afastamento do prisma também está em sombra e a sua base de maior afastamento está iluminada, pelo que a linhaseparatriz luz/sombra é a linha quebrada fechada [AA’B’C’C]. A sombra própria da pirâmide integra as faces [AA’B’B] e [BB’C’C] e abase de menor afastamento do prisma. Em projecção frontal, a face lateral [BB’C’C] é invisível, bem como a base de menor afastamento,pelo que a face [AA’B’B] é a única sombra própria a assinalar em projecção frontal. Já em projecção horizontal, de todas as partes em som-bra apenas a face lateral [BB’C’C] é visível, pelo que é a única sombra própria a assinalar. Identificou-se a sombra própria com uma manchauniforme. Em seguida determinaram-se as sombras reais de todos os vértices da linha separatriz luz/sombra – As2
e Cs2situam-se no
SPFS e A’s1, B’s1
e C’s1situam-se no SPHA, pelo que a sombra projectada do prisma tem pontos de quebra. Estes determinaram-se aten-
dendo às situações de paralelismo entre as arestas e os planos nos quais produzem sombra. A aresta lateral [AA’] é horizontal, pelo que asombra que [AA’] produz no Plano Horizontal de Projecção é paralela a [AA’] – este raciocínio permitiu-nos determinar o ponto de quebraque se situa entre A’s1
e As2. Raciocínio idêntico se teve para a aresta [CC’], que nos permitiu determinar o ponto de quebra que se situa
entre Cs2e C’s1
. Após o desenho do contorno da sombra (no qual se assinalaram convenientemente as invisibilidades), identificou-se a áreavisível da mesma com uma mancha uniforme. Note que na porção de sombra que oculta pelo sólido não há lugar à execução de mancha,pois não se vê a sombra.
224.Em primeiro lugar, representaram-se o cone e o foco luminoso L, pelas respectivas projecções, em função dos dados. Em seguida, proce-deu-se à determinação da linha separatriz luz/sombra, o que se processou com o recurso à determinação dos planos tangentesluz/sombra, através das quatro etapas para o efeito. 1. Conduziu-se, por V, um raio luminoso l (oriundo de L). 2. Determinou-se o ponto deintersecção do raio luminoso l com o plano da base – ponto I (note que I é, imediatamente, o traço horizontal de l, pois a base da pirâmideestá no Plano Horizontal de Projecção). 3. Por I conduziram-se as rectas tangentes à base que são, imediatamente, os traços horizontaisdos dois planos tangentes luz/sombra – hλ1
e hλ2. 4. As rectas hλ1
e hλ2são tangentes à base nos pontos T e T’, respectivamente – as
geratrizes [TV] e [T’V] são, imediatamente, duas linhas da linha separatriz luz/sombra (são as geratrizes ao longo das quais os planos λ1 eλ2 são tangentes ao cone). As geratrizes [TV] e [T’V] separam a parte da superfície lateral do cone que está iluminada da que está em som-
(Continua na página seguinte)
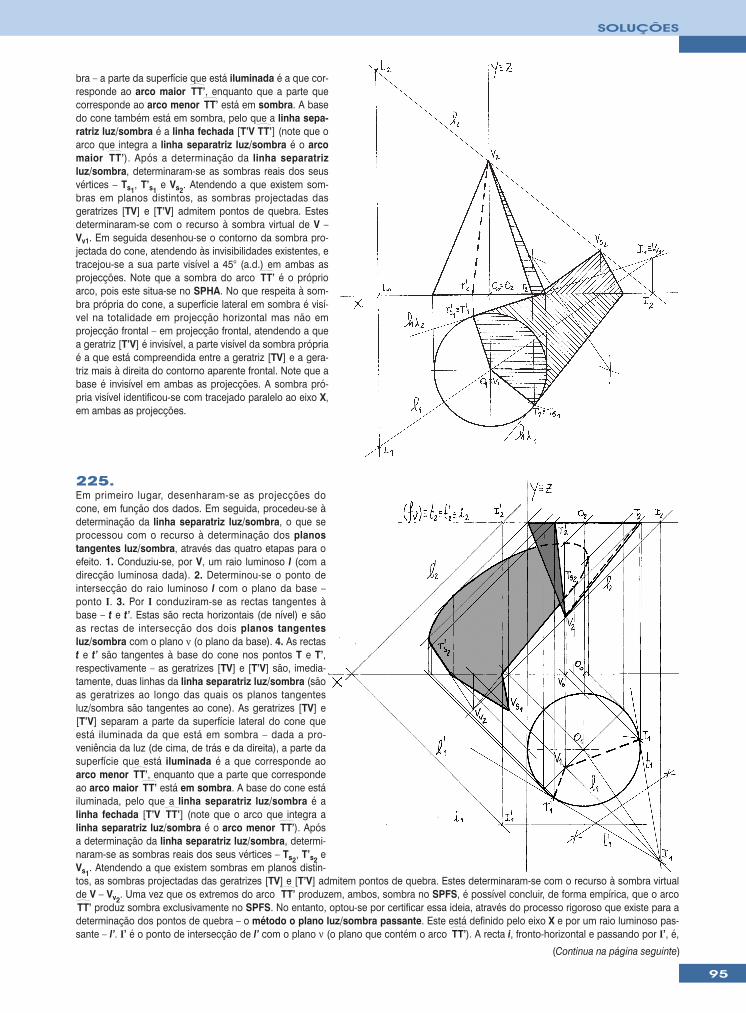
95
SOLUÇÕES
225.Em primeiro lugar, desenharam-se as projecções docone, em função dos dados. Em seguida, procedeu-se àdeterminação da linha separatriz luz/sombra, o que seprocessou com o recurso à determinação dos planostangentes luz/sombra, através das quatro etapas para oefeito. 1. Conduziu-se, por V, um raio luminoso l (com adirecção luminosa dada). 2. Determinou-se o ponto deintersecção do raio luminoso l com o plano da base –ponto I. 3. Por I conduziram-se as rectas tangentes àbase – t e t’. Estas são recta horizontais (de nível) e sãoas rectas de intersecção dos dois planos tangentesluz/sombra com o plano ν (o plano da base). 4. As rectast e t’ são tangentes à base do cone nos pontos T e T’,respectivamente – as geratrizes [TV] e [T’V] são, imedia-tamente, duas linhas da linha separatriz luz/sombra (sãoas geratrizes ao longo das quais os planos tangentesluz/sombra são tangentes ao cone). As geratrizes [TV] e[T’V] separam a parte da superfície lateral do cone queestá iluminada da que está em sombra – dada a pro-veniência da luz (de cima, de trás e da direita), a parte dasuperfície que está iluminada é a que corresponde aoarco menor
�TT’, enquanto que a parte que corresponde
ao arco maior �TT’ está em sombra. A base do cone está
iluminada, pelo que a linha separatriz luz/sombra é alinha fechada [T’V
�TT’] (note que o arco que integra a
linha separatriz luz/sombra é o arco menor �TT’). Após
a determinação da linha separatriz luz/sombra, determi-naram-se as sombras reais dos seus vértices – Ts2
, T’s2e
Vs1. Atendendo a que existem sombras em planos distin-
tos, as sombras projectadas das geratrizes [TV] e [T’V] admitem pontos de quebra. Estes determinaram-se com o recurso à sombra virtualde V – Vv2
. Uma vez que os extremos do arco�TT’ produzem, ambos, sombra no SPFS, é possível concluir, de forma empírica, que o arco
�TT’ produz sombra exclusivamente no SPFS. No entanto, optou-se por certificar essa ideia, através do processo rigoroso que existe para adeterminação dos pontos de quebra – o método o plano luz/sombra passante. Este está definido pelo eixo X e por um raio luminoso pas-sante – l’. I’ é o ponto de intersecção de l’ com o plano ν (o plano que contém o arco
�TT’). A recta i, fronto-horizontal e passando por I’, é,
bra – a parte da superfície que está iluminada é a que cor-responde ao arco maior
�TT’, enquanto que a parte que
corresponde ao arco menor �TT’ está em sombra. A base
do cone também está em sombra, pelo que a linha sepa-ratriz luz/sombra é a linha fechada [T’V
�TT’] (note que o
arco que integra a linha separatriz luz/sombra é o arcomaior
�TT’). Após a determinação da linha separatriz
luz/sombra, determinaram-se as sombras reais dos seusvértices – Ts1
, T’s1e Vs2
. Atendendo a que existem som-bras em planos distintos, as sombras projectadas dasgeratrizes [TV] e [T’V] admitem pontos de quebra. Estesdeterminaram-se com o recurso à sombra virtual de V –Vv1. Em seguida desenhou-se o contorno da sombra pro-jectada do cone, atendendo às invisibilidades existentes, etracejou-se a sua parte visível a 45° (a.d.) em ambas asprojecções. Note que a sombra do arco
�TT’ é o próprio
arco, pois este situa-se no SPHA. No que respeita à som-bra própria do cone, a superfície lateral em sombra é visí-vel na totalidade em projecção horizontal mas não emprojecção frontal – em projecção frontal, atendendo a quea geratriz [T’V] é invisível, a parte visível da sombra própriaé a que está compreendida entre a geratriz [TV] e a gera-triz mais à direita do contorno aparente frontal. Note que abase é invisível em ambas as projecções. A sombra pró-pria visível identificou-se com tracejado paralelo ao eixo X,em ambas as projecções.
(Continua na página seguinte)
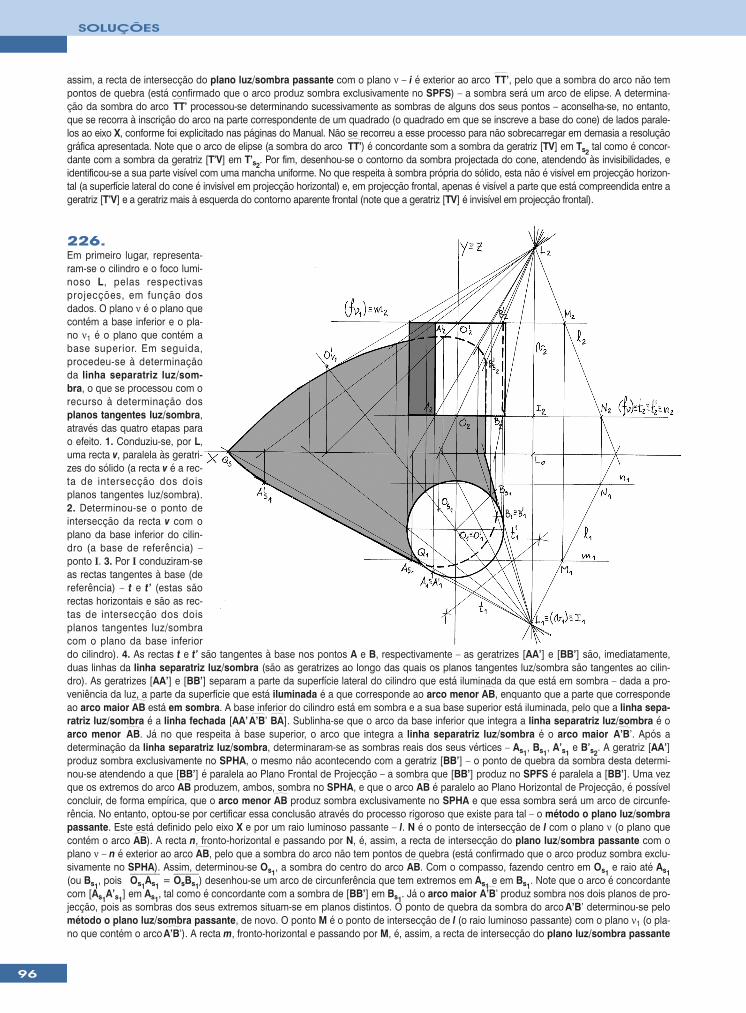
96
SOLUÇÕES
assim, a recta de intersecção do plano luz/sombra passante com o plano ν – i é exterior ao arco�TT’, pelo que a sombra do arco não tem
pontos de quebra (está confirmado que o arco produz sombra exclusivamente no SPFS) – a sombra será um arco de elipse. A determina-ção da sombra do arco
�TT’ processou-se determinando sucessivamente as sombras de alguns dos seus pontos – aconselha-se, no entanto,
que se recorra à inscrição do arco na parte correspondente de um quadrado (o quadrado em que se inscreve a base do cone) de lados parale-los ao eixo X, conforme foi explicitado nas páginas do Manual. Não se recorreu a esse processo para não sobrecarregar em demasia a resoluçãográfica apresentada. Note que o arco de elipse (a sombra do arco
�TT’) é concordante som a sombra da geratriz [TV] em Ts2
tal como é concor-dante com a sombra da geratriz [T’V] em T’s2
. Por fim, desenhou-se o contorno da sombra projectada do cone, atendendo às invisibilidades, eidentificou-se a sua parte visível com uma mancha uniforme. No que respeita à sombra própria do sólido, esta não é visível em projecção horizon-tal (a superfície lateral do cone é invisível em projecção horizontal) e, em projecção frontal, apenas é visível a parte que está compreendida entre ageratriz [T’V] e a geratriz mais à esquerda do contorno aparente frontal (note que a geratriz [TV] é invisível em projecção frontal).
226.Em primeiro lugar, representa-ram-se o cilindro e o foco lumi-noso L, pelas respectivasprojecções, em função dosdados. O plano ν é o plano quecontém a base inferior e o pla-no ν1 é o plano que contém abase superior. Em seguida,procedeu-se à determinaçãoda linha separatriz luz/som-bra, o que se processou com orecurso à determinação dosplanos tangentes luz/sombra,através das quatro etapas parao efeito. 1. Conduziu-se, por L,uma recta v, paralela às geratri-zes do sólido (a recta v é a rec-ta de intersecção dos doisplanos tangentes luz/sombra).2. Determinou-se o ponto deintersecção da recta v com oplano da base inferior do cilin-dro (a base de referência) –ponto I. 3. Por I conduziram-seas rectas tangentes à base (dereferência) – t e t’ (estas sãorectas horizontais e são as rec-tas de intersecção dos doisplanos tangentes luz/sombracom o plano da base inferiordo cilindro). 4. As rectas t e t’ são tangentes à base nos pontos A e B, respectivamente – as geratrizes [AA’] e [BB’] são, imediatamente,duas linhas da linha separatriz luz/sombra (são as geratrizes ao longo das quais os planos tangentes luz/sombra são tangentes ao cilin-dro). As geratrizes [AA’] e [BB’] separam a parte da superfície lateral do cilindro que está iluminada da que está em sombra – dada a pro-veniência da luz, a parte da superfície que está iluminada é a que corresponde ao arco menor
�AB, enquanto que a parte que corresponde
ao arco maior �AB está em sombra. A base inferior do cilindro está em sombra e a sua base superior está iluminada, pelo que a linha sepa-
ratriz luz/sombra é a linha fechada [AA’ �A’B’
�BA]. Sublinha-se que o arco da base inferior que integra a linha separatriz luz/sombra é o
arco menor�AB. Já no que respeita à base superior, o arco que integra a linha separatriz luz/sombra é o arco maior
�A’B’. Após a
determinação da linha separatriz luz/sombra, determinaram-se as sombras reais dos seus vértices – As1, Bs1
, A’s1e B’s2
. A geratriz [AA’]produz sombra exclusivamente no SPHA, o mesmo não acontecendo com a geratriz [BB’] – o ponto de quebra da sombra desta determi-nou-se atendendo a que [BB’] é paralela ao Plano Frontal de Projecção – a sombra que [BB’] produz no SPFS é paralela a [BB’]. Uma vezque os extremos do arco
�AB produzem, ambos, sombra no SPHA, e que o arco
�AB é paralelo ao Plano Horizontal de Projecção, é possível
concluir, de forma empírica, que o arco menor �AB produz sombra exclusivamente no SPHA e que essa sombra será um arco de circunfe-
rência. No entanto, optou-se por certificar essa conclusão através do processo rigoroso que existe para tal – o método o plano luz/sombrapassante. Este está definido pelo eixo X e por um raio luminoso passante – l. N é o ponto de intersecção de l com o plano ν (o plano quecontém o arco
�AB). A recta n, fronto-horizontal e passando por N, é, assim, a recta de intersecção do plano luz/sombra passante com o
plano ν – n é exterior ao arco�AB, pelo que a sombra do arco não tem pontos de quebra (está confirmado que o arco produz sombra exclu-
sivamente no SPHA). Assim, determinou-se Os1, a sombra do centro do arco
�AB. Com o compasso, fazendo centro em Os1
e raio até As1(ou Bs1
, pois O�s�1�A�s�1
� = O�s�B�s�1�) desenhou-se um arco de circunferência que tem extremos em As1
e em Bs1. Note que o arco é concordante
com [As1A’s1
] em As1, tal como é concordante com a sombra de [BB’] em Bs1
. Já o arco maior�A’B’ produz sombra nos dois planos de pro-
jecção, pois as sombras dos seus extremos situam-se em planos distintos. O ponto de quebra da sombra do arco�
A’B’ determinou-se pelométodo o plano luz/sombra passante, de novo. O ponto M é o ponto de intersecção de l (o raio luminoso passante) com o plano ν1 (o pla-no que contém o arco
�A’B’). A recta m, fronto-horizontal e passando por M, é, assim, a recta de intersecção do plano luz/sombra passante
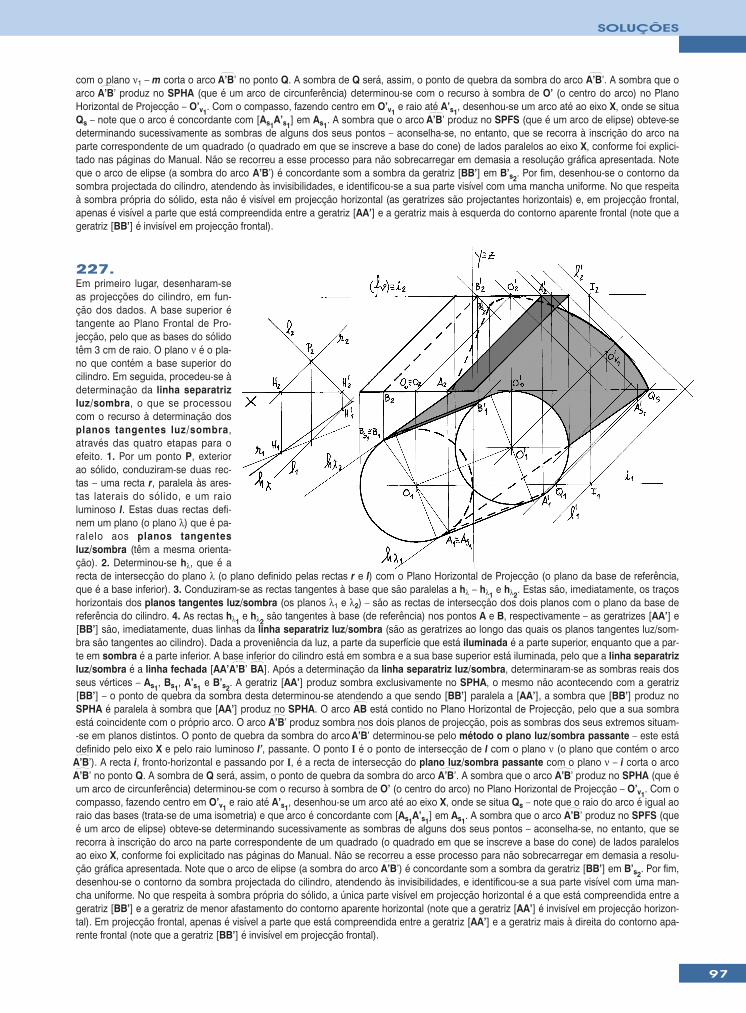
97
SOLUÇÕES
com o plano ν1 – m corta o arco�
A’B’ no ponto Q. A sombra de Q será, assim, o ponto de quebra da sombra do arco �
A’B’. A sombra que oarco
�A’B’ produz no SPHA (que é um arco de circunferência) determinou-se com o recurso à sombra de O’ (o centro do arco) no Plano
Horizontal de Projecção – O’v1. Com o compasso, fazendo centro em O’v1
e raio até A’s1, desenhou-se um arco até ao eixo X, onde se situa
Qs – note que o arco é concordante com [As1A’s1
] em As1. A sombra que o arco
�A’B’ produz no SPFS (que é um arco de elipse) obteve-se
determinando sucessivamente as sombras de alguns dos seus pontos – aconselha-se, no entanto, que se recorra à inscrição do arco naparte correspondente de um quadrado (o quadrado em que se inscreve a base do cone) de lados paralelos ao eixo X, conforme foi explici-tado nas páginas do Manual. Não se recorreu a esse processo para não sobrecarregar em demasia a resolução gráfica apresentada. Noteque o arco de elipse (a sombra do arco
�A’B’) é concordante som a sombra da geratriz [BB’] em B’s2
. Por fim, desenhou-se o contorno dasombra projectada do cilindro, atendendo às invisibilidades, e identificou-se a sua parte visível com uma mancha uniforme. No que respeitaà sombra própria do sólido, esta não é visível em projecção horizontal (as geratrizes são projectantes horizontais) e, em projecção frontal,apenas é visível a parte que está compreendida entre a geratriz [AA’] e a geratriz mais à esquerda do contorno aparente frontal (note que ageratriz [BB’] é invisível em projecção frontal).
227.Em primeiro lugar, desenharam-seas projecções do cilindro, em fun-ção dos dados. A base superior étangente ao Plano Frontal de Pro-jecção, pelo que as bases do sólidotêm 3 cm de raio. O plano ν é o pla-no que contém a base superior docilindro. Em seguida, procedeu-se àdeterminação da linha separatrizluz/sombra, o que se processoucom o recurso à determinação dosplanos tangentes luz/sombra,através das quatro etapas para oefeito. 1. Por um ponto P, exteriorao sólido, conduziram-se duas rec-tas – uma recta r, paralela às ares-tas laterais do sólido, e um raioluminoso l. Estas duas rectas defi-nem um plano (o plano λ) que é pa-ralelo aos planos tangentesluz/sombra (têm a mesma orienta-ção). 2. Determinou-se hλ, que é arecta de intersecção do plano λ (o plano definido pelas rectas r e l) com o Plano Horizontal de Projecção (o plano da base de referência,que é a base inferior). 3. Conduziram-se as rectas tangentes à base que são paralelas a hλ – hλ1
e hλ2. Estas são, imediatamente, os traços
horizontais dos planos tangentes luz/sombra (os planos λ1 e λ2) – são as rectas de intersecção dos dois planos com o plano da base dereferência do cilindro. 4. As rectas hλ1
e hλ2são tangentes à base (de referência) nos pontos A e B, respectivamente – as geratrizes [AA’] e
[BB’] são, imediatamente, duas linhas da linha separatriz luz/sombra (são as geratrizes ao longo das quais os planos tangentes luz/som-bra são tangentes ao cilindro). Dada a proveniência da luz, a parte da superfície que está iluminada é a parte superior, enquanto que a par-te em sombra é a parte inferior. A base inferior do cilindro está em sombra e a sua base superior está iluminada, pelo que a linha separatrizluz/sombra é a linha fechada [AA’
�A’B’
�BA]. Após a determinação da linha separatriz luz/sombra, determinaram-se as sombras reais dos
seus vértices – As1, Bs1
, A’s1e B’s2
. A geratriz [AA’] produz sombra exclusivamente no SPHA, o mesmo não acontecendo com a geratriz[BB’] – o ponto de quebra da sombra desta determinou-se atendendo a que sendo [BB’] paralela a [AA’], a sombra que [BB’] produz noSPHA é paralela à sombra que [AA’] produz no SPHA. O arco
�AB está contido no Plano Horizontal de Projecção, pelo que a sua sombra
está coincidente com o próprio arco. O arco �
A’B’ produz sombra nos dois planos de projecção, pois as sombras dos seus extremos situam--se em planos distintos. O ponto de quebra da sombra do arco
�A’B’ determinou-se pelo método o plano luz/sombra passante – este está
definido pelo eixo X e pelo raio luminoso l’, passante. O ponto I é o ponto de intersecção de l com o plano ν (o plano que contém o arco�
A’B’). A recta i, fronto-horizontal e passando por I, é a recta de intersecção do plano luz/sombra passante com o plano ν – i corta o arco�
A’B’ no ponto Q. A sombra de Q será, assim, o ponto de quebra da sombra do arco �
A’B’. A sombra que o arco �
A’B’ produz no SPHA (que éum arco de circunferência) determinou-se com o recurso à sombra de O’ (o centro do arco) no Plano Horizontal de Projecção – O’v1
. Com ocompasso, fazendo centro em O’v1
e raio até A’s1, desenhou-se um arco até ao eixo X, onde se situa Qs – note que o raio do arco é igual ao
raio das bases (trata-se de uma isometria) e que arco é concordante com [As1A’s1
] em As1. A sombra que o arco
�A’B’ produz no SPFS (que
é um arco de elipse) obteve-se determinando sucessivamente as sombras de alguns dos seus pontos – aconselha-se, no entanto, que serecorra à inscrição do arco na parte correspondente de um quadrado (o quadrado em que se inscreve a base do cone) de lados paralelosao eixo X, conforme foi explicitado nas páginas do Manual. Não se recorreu a esse processo para não sobrecarregar em demasia a resolu-ção gráfica apresentada. Note que o arco de elipse (a sombra do arco
�A’B’) é concordante som a sombra da geratriz [BB’] em B’s2
. Por fim,desenhou-se o contorno da sombra projectada do cilindro, atendendo às invisibilidades, e identificou-se a sua parte visível com uma man-cha uniforme. No que respeita à sombra própria do sólido, a única parte visível em projecção horizontal é a que está compreendida entre ageratriz [BB’] e a geratriz de menor afastamento do contorno aparente horizontal (note que a geratriz [AA’] é invisível em projecção horizon-tal). Em projecção frontal, apenas é visível a parte que está compreendida entre a geratriz [AA’] e a geratriz mais à direita do contorno apa-rente frontal (note que a geratriz [BB’] é invisível em projecção frontal).
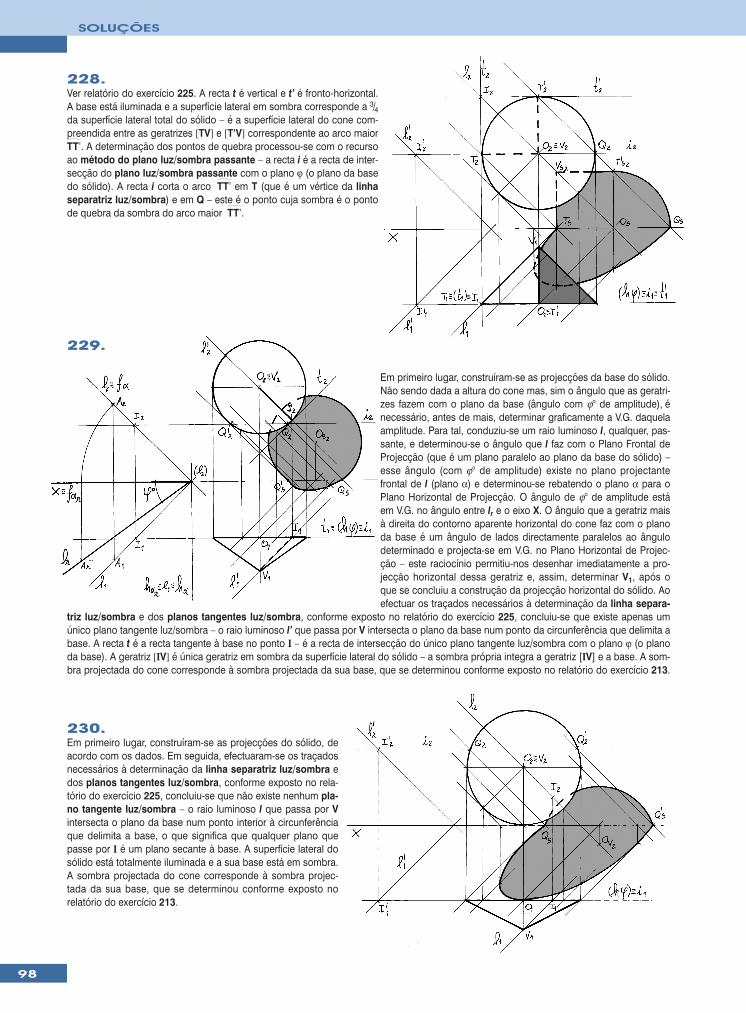
98
SOLUÇÕES
228.Ver relatório do exercício 225. A recta t é vertical e t’ é fronto-horizontal.A base está iluminada e a superfície lateral em sombra corresponde a 3/4da superfície lateral total do sólido – é a superfície lateral do cone com-preendida entre as geratrizes [TV] e [T’V] correspondente ao arco maior�TT’. A determinação dos pontos de quebra processou-se com o recursoao método do plano luz/sombra passante – a recta i é a recta de inter-secção do plano luz/sombra passante com o plano ϕ (o plano da basedo sólido). A recta i corta o arco
�TT’ em T (que é um vértice da linha
separatriz luz/sombra) e em Q – este é o ponto cuja sombra é o pontode quebra da sombra do arco maior
�TT’.
230.Em primeiro lugar, construíram-se as projecções do sólido, deacordo com os dados. Em seguida, efectuaram-se os traçadosnecessários à determinação da linha separatriz luz/sombra edos planos tangentes luz/sombra, conforme exposto no rela-tório do exercício 225, concluiu-se que não existe nenhum pla-no tangente luz/sombra – o raio luminoso l que passa por Vintersecta o plano da base num ponto interior à circunferênciaque delimita a base, o que significa que qualquer plano quepasse por I é um plano secante à base. A superfície lateral dosólido está totalmente iluminada e a sua base está em sombra.A sombra projectada do cone corresponde à sombra projec-tada da sua base, que se determinou conforme exposto norelatório do exercício 213.
Em primeiro lugar, construíram-se as projecções da base do sólido.Não sendo dada a altura do cone mas, sim o ângulo que as geratri-zes fazem com o plano da base (ângulo com ϕ° de amplitude), énecessário, antes de mais, determinar graficamente a V.G. daquelaamplitude. Para tal, conduziu-se um raio luminoso l, qualquer, pas-sante, e determinou-se o ângulo que l faz com o Plano Frontal deProjecção (que é um plano paralelo ao plano da base do sólido) –esse ângulo (com ϕ° de amplitude) existe no plano projectantefrontal de l (plano α) e determinou-se rebatendo o plano α para oPlano Horizontal de Projecção. O ângulo de ϕ° de amplitude estáem V.G. no ângulo entre lr e o eixo X. O ângulo que a geratriz maisà direita do contorno aparente horizontal do cone faz com o planoda base é um ângulo de lados directamente paralelos ao ângulodeterminado e projecta-se em V.G. no Plano Horizontal de Projec-ção – este raciocínio permitiu-nos desenhar imediatamente a pro-jecção horizontal dessa geratriz e, assim, determinar V1, após oque se concluiu a construção da projecção horizontal do sólido. Aoefectuar os traçados necessários à determinação da linha separa-
triz luz/sombra e dos planos tangentes luz/sombra, conforme exposto no relatório do exercício 225, concluiu-se que existe apenas umúnico plano tangente luz/sombra – o raio luminoso l’ que passa por V intersecta o plano da base num ponto da circunferência que delimita abase. A recta t é a recta tangente à base no ponto I – é a recta de intersecção do único plano tangente luz/sombra com o plano ϕ (o planoda base). A geratriz [IV] é única geratriz em sombra da superfície lateral do sólido – a sombra própria integra a geratriz [IV] e a base. A som-bra projectada do cone corresponde à sombra projectada da sua base, que se determinou conforme exposto no relatório do exercício 213.
229.
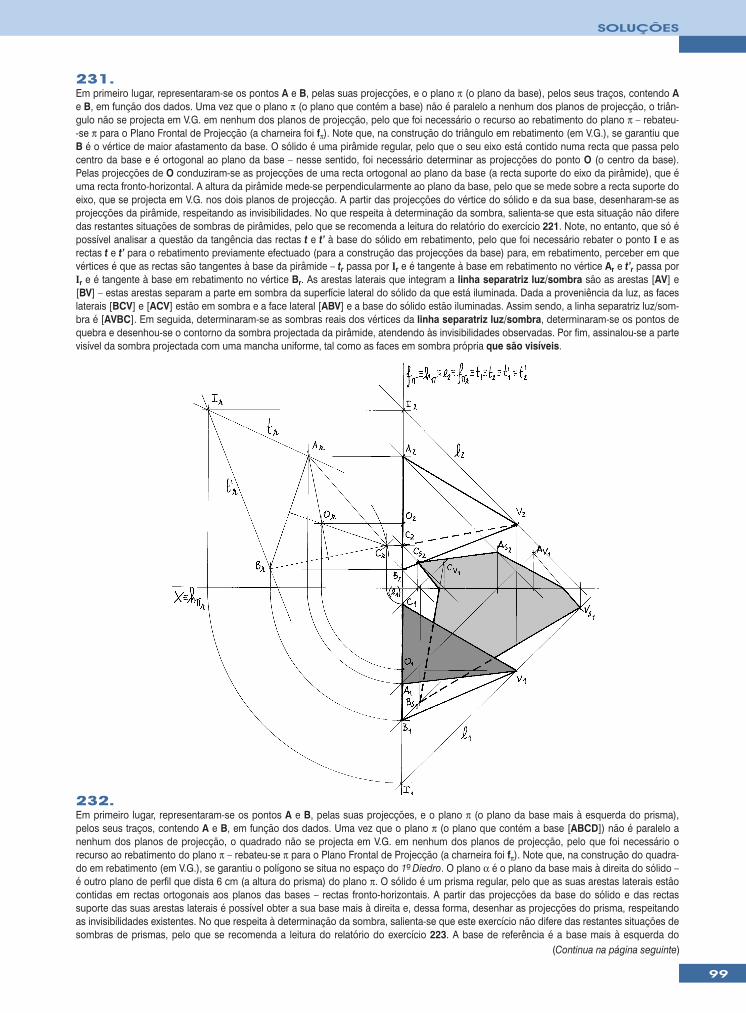
99
SOLUÇÕES
231.Em primeiro lugar, representaram-se os pontos A e B, pelas suas projecções, e o plano π (o plano da base), pelos seus traços, contendo Ae B, em função dos dados. Uma vez que o plano π (o plano que contém a base) não é paralelo a nenhum dos planos de projecção, o triân-gulo não se projecta em V.G. em nenhum dos planos de projecção, pelo que foi necessário o recurso ao rebatimento do plano π – rebateu--se π para o Plano Frontal de Projecção (a charneira foi fπ). Note que, na construção do triângulo em rebatimento (em V.G.), se garantiu queB é o vértice de maior afastamento da base. O sólido é uma pirâmide regular, pelo que o seu eixo está contido numa recta que passa pelocentro da base e é ortogonal ao plano da base – nesse sentido, foi necessário determinar as projecções do ponto O (o centro da base).Pelas projecções de O conduziram-se as projecções de uma recta ortogonal ao plano da base (a recta suporte do eixo da pirâmide), que éuma recta fronto-horizontal. A altura da pirâmide mede-se perpendicularmente ao plano da base, pelo que se mede sobre a recta suporte doeixo, que se projecta em V.G. nos dois planos de projecção. A partir das projecções do vértice do sólido e da sua base, desenharam-se asprojecções da pirâmide, respeitando as invisibilidades. No que respeita à determinação da sombra, salienta-se que esta situação não diferedas restantes situações de sombras de pirâmides, pelo que se recomenda a leitura do relatório do exercício 221. Note, no entanto, que só épossível analisar a questão da tangência das rectas t e t’ à base do sólido em rebatimento, pelo que foi necessário rebater o ponto I e asrectas t e t’ para o rebatimento previamente efectuado (para a construção das projecções da base) para, em rebatimento, perceber em quevértices é que as rectas são tangentes à base da pirâmide – tr passa por Ir e é tangente à base em rebatimento no vértice Ar e t’r passa porIr e é tangente à base em rebatimento no vértice Br. As arestas laterais que integram a linha separatriz luz/sombra são as arestas [AV] e[BV] – estas arestas separam a parte em sombra da superfície lateral do sólido da que está iluminada. Dada a proveniência da luz, as faceslaterais [BCV] e [ACV] estão em sombra e a face lateral [ABV] e a base do sólido estão iluminadas. Assim sendo, a linha separatriz luz/som-bra é [AVBC]. Em seguida, determinaram-se as sombras reais dos vértices da linha separatriz luz/sombra, determinaram-se os pontos dequebra e desenhou-se o contorno da sombra projectada da pirâmide, atendendo às invisibilidades observadas. Por fim, assinalou-se a partevisível da sombra projectada com uma mancha uniforme, tal como as faces em sombra própria que são visíveis.
232.Em primeiro lugar, representaram-se os pontos A e B, pelas suas projecções, e o plano π (o plano da base mais à esquerda do prisma),pelos seus traços, contendo A e B, em função dos dados. Uma vez que o plano π (o plano que contém a base [ABCD]) não é paralelo anenhum dos planos de projecção, o quadrado não se projecta em V.G. em nenhum dos planos de projecção, pelo que foi necessário orecurso ao rebatimento do plano π – rebateu-se π para o Plano Frontal de Projecção (a charneira foi fπ). Note que, na construção do quadra-do em rebatimento (em V.G.), se garantiu o polígono se situa no espaço do 1º Diedro. O plano α é o plano da base mais à direita do sólido –é outro plano de perfil que dista 6 cm (a altura do prisma) do plano π. O sólido é um prisma regular, pelo que as suas arestas laterais estãocontidas em rectas ortogonais aos planos das bases – rectas fronto-horizontais. A partir das projecções da base do sólido e das rectassuporte das suas arestas laterais é possível obter a sua base mais à direita e, dessa forma, desenhar as projecções do prisma, respeitandoas invisibilidades existentes. No que respeita à determinação da sombra, salienta-se que este exercício não difere das restantes situações desombras de prismas, pelo que se recomenda a leitura do relatório do exercício 223. A base de referência é a base mais à esquerda do
(Continua na página seguinte)
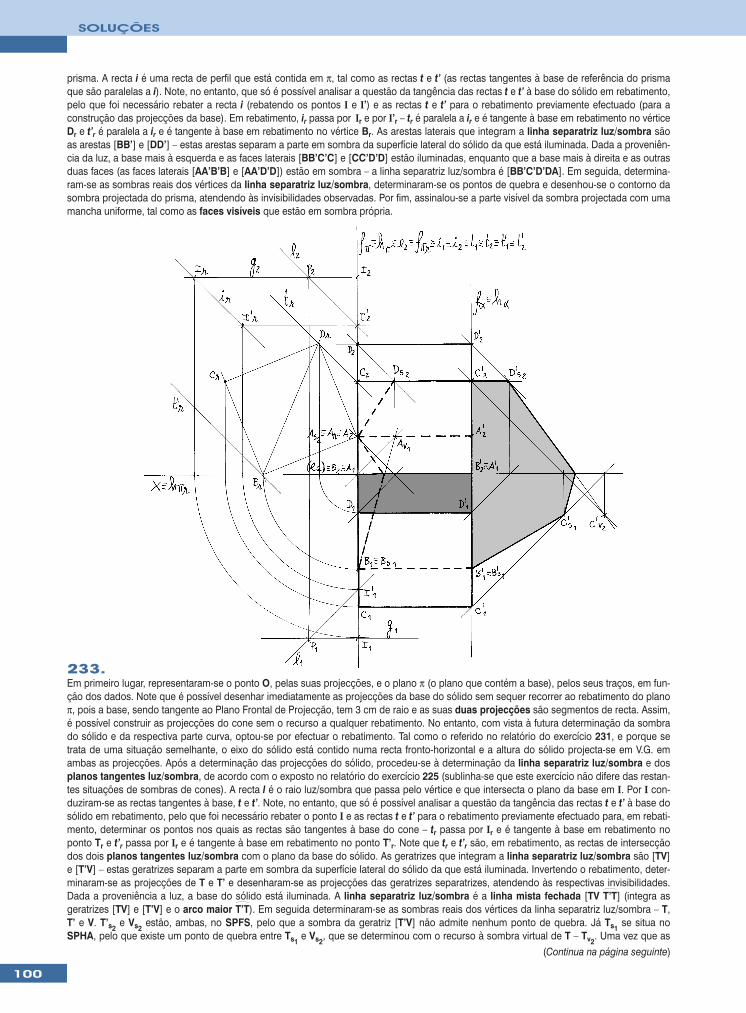
100
SOLUÇÕES
prisma. A recta i é uma recta de perfil que está contida em π, tal como as rectas t e t’ (as rectas tangentes à base de referência do prismaque são paralelas a i). Note, no entanto, que só é possível analisar a questão da tangência das rectas t e t’ à base do sólido em rebatimento,pelo que foi necessário rebater a recta i (rebatendo os pontos I e I’) e as rectas t e t’ para o rebatimento previamente efectuado (para aconstrução das projecções da base). Em rebatimento, ir passa por Ir e por I’r – tr é paralela a ir e é tangente à base em rebatimento no vérticeDr e t’r é paralela a ir e é tangente à base em rebatimento no vértice Br. As arestas laterais que integram a linha separatriz luz/sombra sãoas arestas [BB’] e [DD’] – estas arestas separam a parte em sombra da superfície lateral do sólido da que está iluminada. Dada a proveniên-cia da luz, a base mais à esquerda e as faces laterais [BB’C’C] e [CC’D’D] estão iluminadas, enquanto que a base mais à direita e as outrasduas faces (as faces laterais [AA’B’B] e [AA’D’D]) estão em sombra – a linha separatriz luz/sombra é [BB’C’D’DA]. Em seguida, determina-ram-se as sombras reais dos vértices da linha separatriz luz/sombra, determinaram-se os pontos de quebra e desenhou-se o contorno dasombra projectada do prisma, atendendo às invisibilidades observadas. Por fim, assinalou-se a parte visível da sombra projectada com umamancha uniforme, tal como as faces visíveis que estão em sombra própria.
233.Em primeiro lugar, representaram-se o ponto O, pelas suas projecções, e o plano π (o plano que contém a base), pelos seus traços, em fun-ção dos dados. Note que é possível desenhar imediatamente as projecções da base do sólido sem sequer recorrer ao rebatimento do planoπ, pois a base, sendo tangente ao Plano Frontal de Projecção, tem 3 cm de raio e as suas duas projecções são segmentos de recta. Assim,é possível construir as projecções do cone sem o recurso a qualquer rebatimento. No entanto, com vista à futura determinação da sombrado sólido e da respectiva parte curva, optou-se por efectuar o rebatimento. Tal como o referido no relatório do exercício 231, e porque setrata de uma situação semelhante, o eixo do sólido está contido numa recta fronto-horizontal e a altura do sólido projecta-se em V.G. emambas as projecções. Após a determinação das projecções do sólido, procedeu-se à determinação da linha separatriz luz/sombra e dosplanos tangentes luz/sombra, de acordo com o exposto no relatório do exercício 225 (sublinha-se que este exercício não difere das restan-tes situações de sombras de cones). A recta l é o raio luz/sombra que passa pelo vértice e que intersecta o plano da base em I. Por I con-duziram-se as rectas tangentes à base, t e t’. Note, no entanto, que só é possível analisar a questão da tangência das rectas t e t’ à base dosólido em rebatimento, pelo que foi necessário rebater o ponto I e as rectas t e t’ para o rebatimento previamente efectuado para, em rebati-mento, determinar os pontos nos quais as rectas são tangentes à base do cone – tr passa por Ir e é tangente à base em rebatimento noponto Tr e t’r passa por Ir e é tangente à base em rebatimento no ponto T’r. Note que tr e t’r são, em rebatimento, as rectas de intersecçãodos dois planos tangentes luz/sombra com o plano da base do sólido. As geratrizes que integram a linha separatriz luz/sombra são [TV]e [T’V] – estas geratrizes separam a parte em sombra da superfície lateral do sólido da que está iluminada. Invertendo o rebatimento, deter-minaram-se as projecções de T e T’ e desenharam-se as projecções das geratrizes separatrizes, atendendo às respectivas invisibilidades.Dada a proveniência a luz, a base do sólido está iluminada. A linha separatriz luz/sombra é a linha mista fechada [TV
�T’T] (integra as
geratrizes [TV] e [T’V] e o arco maior �T’T). Em seguida determinaram-se as sombras reais dos vértices da linha separatriz luz/sombra – T,
T’ e V. T’s2e Vs2
estão, ambas, no SPFS, pelo que a sombra da geratriz [T’V] não admite nenhum ponto de quebra. Já Ts1se situa no
SPHA, pelo que existe um ponto de quebra entre Ts1e Vs2
, que se determinou com o recurso à sombra virtual de T – Tv2. Uma vez que as
(Continua na página seguinte)
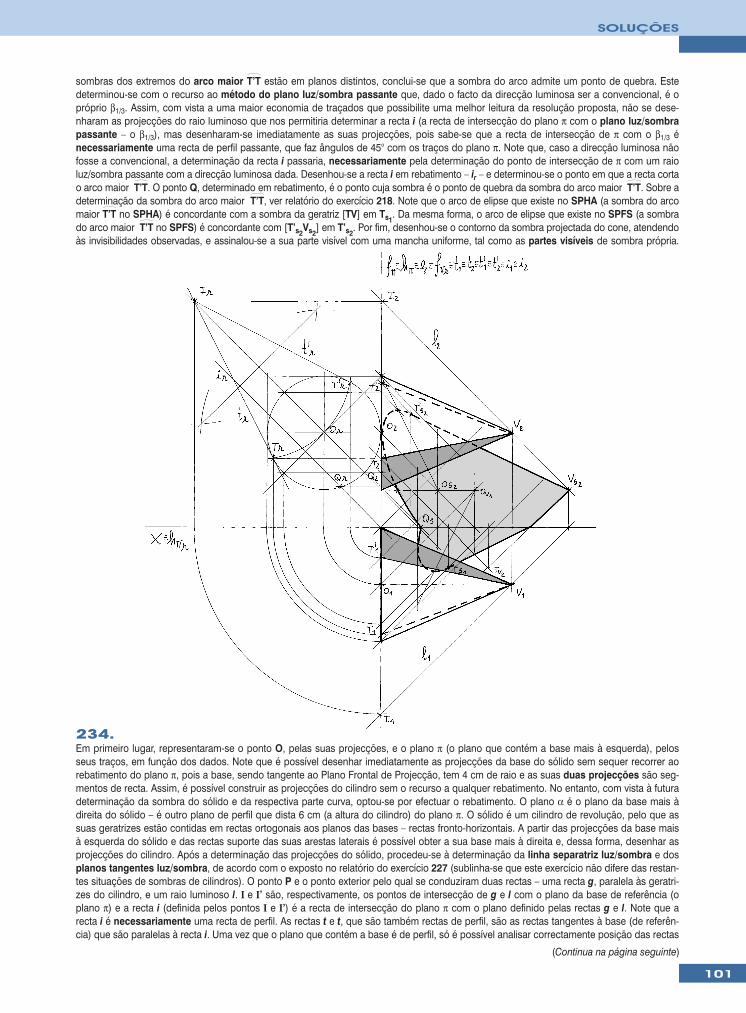
101
SOLUÇÕES
sombras dos extremos do arco maior �T’T estão em planos distintos, conclui-se que a sombra do arco admite um ponto de quebra. Este
determinou-se com o recurso ao método do plano luz/sombra passante que, dado o facto da direcção luminosa ser a convencional, é opróprio β1/3. Assim, com vista a uma maior economia de traçados que possibilite uma melhor leitura da resolução proposta, não se dese-nharam as projecções do raio luminoso que nos permitiria determinar a recta i (a recta de intersecção do plano π com o plano luz/sombrapassante – o β1/3), mas desenharam-se imediatamente as suas projecções, pois sabe-se que a recta de intersecção de π com o β1/3 énecessariamente uma recta de perfil passante, que faz ângulos de 45° com os traços do plano π. Note que, caso a direcção luminosa nãofosse a convencional, a determinação da recta i passaria, necessariamente pela determinação do ponto de intersecção de π com um raioluz/sombra passante com a direcção luminosa dada. Desenhou-se a recta i em rebatimento – ir – e determinou-se o ponto em que a recta cortao arco maior
�T’T. O ponto Q, determinado em rebatimento, é o ponto cuja sombra é o ponto de quebra da sombra do arco maior
�T’T. Sobre a
determinação da sombra do arco maior �T’T, ver relatório do exercício 218. Note que o arco de elipse que existe no SPHA (a sombra do arco
maior �T’T no SPHA) é concordante com a sombra da geratriz [TV] em Ts1
. Da mesma forma, o arco de elipse que existe no SPFS (a sombrado arco maior
�T’T no SPFS) é concordante com [T’s2
Vs2] em T’s2
. Por fim, desenhou-se o contorno da sombra projectada do cone, atendendoàs invisibilidades observadas, e assinalou-se a sua parte visível com uma mancha uniforme, tal como as partes visíveis de sombra própria.
234.Em primeiro lugar, representaram-se o ponto O, pelas suas projecções, e o plano π (o plano que contém a base mais à esquerda), pelosseus traços, em função dos dados. Note que é possível desenhar imediatamente as projecções da base do sólido sem sequer recorrer aorebatimento do plano π, pois a base, sendo tangente ao Plano Frontal de Projecção, tem 4 cm de raio e as suas duas projecções são seg-mentos de recta. Assim, é possível construir as projecções do cilindro sem o recurso a qualquer rebatimento. No entanto, com vista à futuradeterminação da sombra do sólido e da respectiva parte curva, optou-se por efectuar o rebatimento. O plano α é o plano da base mais àdireita do sólido – é outro plano de perfil que dista 6 cm (a altura do cilindro) do plano π. O sólido é um cilindro de revolução, pelo que assuas geratrizes estão contidas em rectas ortogonais aos planos das bases – rectas fronto-horizontais. A partir das projecções da base maisà esquerda do sólido e das rectas suporte das suas arestas laterais é possível obter a sua base mais à direita e, dessa forma, desenhar asprojecções do cilindro. Após a determinação das projecções do sólido, procedeu-se à determinação da linha separatriz luz/sombra e dosplanos tangentes luz/sombra, de acordo com o exposto no relatório do exercício 227 (sublinha-se que este exercício não difere das restan-tes situações de sombras de cilindros). O ponto P e o ponto exterior pelo qual se conduziram duas rectas – uma recta g, paralela às geratri-zes do cilindro, e um raio luminoso l. I e I’ são, respectivamente, os pontos de intersecção de g e l com o plano da base de referência (oplano π) e a recta i (definida pelos pontos I e I’) é a recta de intersecção do plano π com o plano definido pelas rectas g e l. Note que arecta i é necessariamente uma recta de perfil. As rectas t e t, que são também rectas de perfil, são as rectas tangentes à base (de referên-cia) que são paralelas à recta i. Uma vez que o plano que contém a base é de perfil, só é possível analisar correctamente posição das rectas
(Continua na página seguinte)
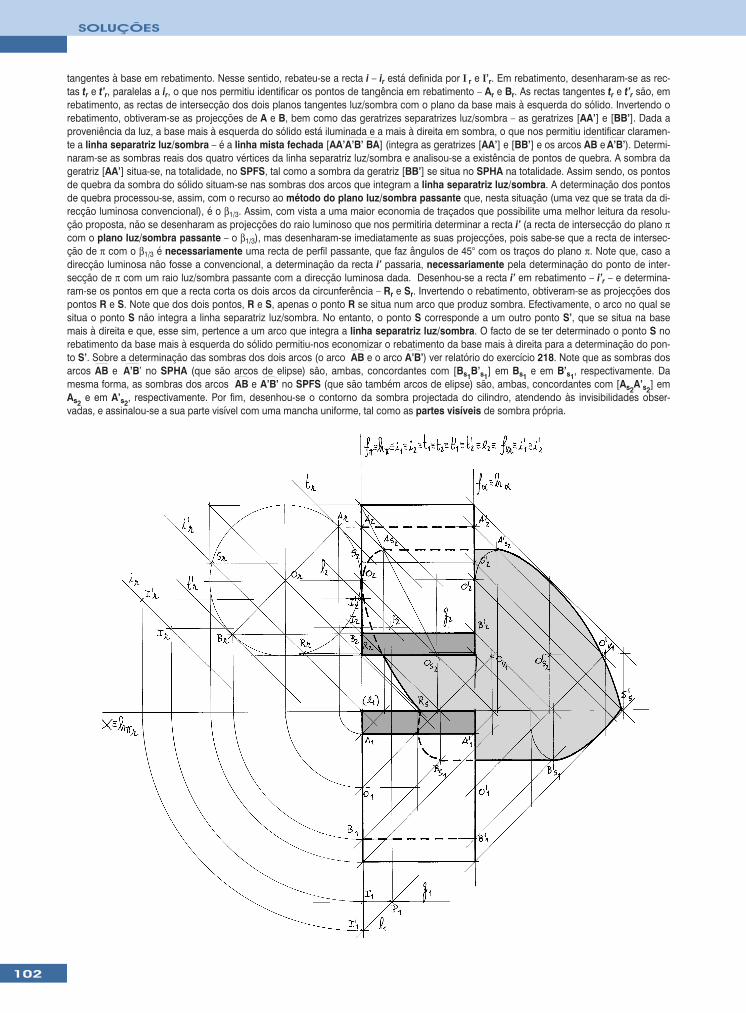
102
SOLUÇÕES
tangentes à base em rebatimento. Nesse sentido, rebateu-se a recta i – ir está definida por I r e I’r. Em rebatimento, desenharam-se as rec-tas tr e t’r, paralelas a ir, o que nos permitiu identificar os pontos de tangência em rebatimento – Ar e Br. As rectas tangentes tr e t’r são, emrebatimento, as rectas de intersecção dos dois planos tangentes luz/sombra com o plano da base mais à esquerda do sólido. Invertendo orebatimento, obtiveram-se as projecções de A e B, bem como das geratrizes separatrizes luz/sombra – as geratrizes [AA’] e [BB’]. Dada aproveniência da luz, a base mais à esquerda do sólido está iluminada e a mais à direita em sombra, o que nos permitiu identificar claramen-te a linha separatriz luz/sombra – é a linha mista fechada [AA’
�A’B’
�BA] (integra as geratrizes [AA’] e [BB’] e os arcos
�AB e
�A’B’). Determi-
naram-se as sombras reais dos quatro vértices da linha separatriz luz/sombra e analisou-se a existência de pontos de quebra. A sombra dageratriz [AA’] situa-se, na totalidade, no SPFS, tal como a sombra da geratriz [BB’] se situa no SPHA na totalidade. Assim sendo, os pontosde quebra da sombra do sólido situam-se nas sombras dos arcos que integram a linha separatriz luz/sombra. A determinação dos pontosde quebra processou-se, assim, com o recurso ao método do plano luz/sombra passante que, nesta situação (uma vez que se trata da di-recção luminosa convencional), é o β1/3. Assim, com vista a uma maior economia de traçados que possibilite uma melhor leitura da resolu-ção proposta, não se desenharam as projecções do raio luminoso que nos permitiria determinar a recta i’ (a recta de intersecção do plano πcom o plano luz/sombra passante – o β1/3), mas desenharam-se imediatamente as suas projecções, pois sabe-se que a recta de intersec-ção de π com o β1/3 é necessariamente uma recta de perfil passante, que faz ângulos de 45° com os traços do plano π. Note que, caso adirecção luminosa não fosse a convencional, a determinação da recta i’ passaria, necessariamente pela determinação do ponto de inter-secção de π com um raio luz/sombra passante com a direcção luminosa dada. Desenhou-se a recta i’ em rebatimento – i’r – e determina-ram-se os pontos em que a recta corta os dois arcos da circunferência – Rr e Sr. Invertendo o rebatimento, obtiveram-se as projecções dospontos R e S. Note que dos dois pontos, R e S, apenas o ponto R se situa num arco que produz sombra. Efectivamente, o arco no qual sesitua o ponto S não integra a linha separatriz luz/sombra. No entanto, o ponto S corresponde a um outro ponto S’, que se situa na basemais à direita e que, esse sim, pertence a um arco que integra a linha separatriz luz/sombra. O facto de se ter determinado o ponto S norebatimento da base mais à esquerda do sólido permitiu-nos economizar o rebatimento da base mais à direita para a determinação do pon-to S’. Sobre a determinação das sombras dos dois arcos (o arco
�AB e o arco
�A’B’) ver relatório do exercício 218. Note que as sombras dos
arcos�AB e
�A’B’ no SPHA (que são arcos de elipse) são, ambas, concordantes com [Bs1
B’s1] em Bs1
e em B’s1, respectivamente. Da
mesma forma, as sombras dos arcos �AB e
�A’B’ no SPFS (que são também arcos de elipse) são, ambas, concordantes com [As2
A’s2] em
As2e em A’s2
, respectivamente. Por fim, desenhou-se o contorno da sombra projectada do cilindro, atendendo às invisibilidades obser-vadas, e assinalou-se a sua parte visível com uma mancha uniforme, tal como as partes visíveis de sombra própria.
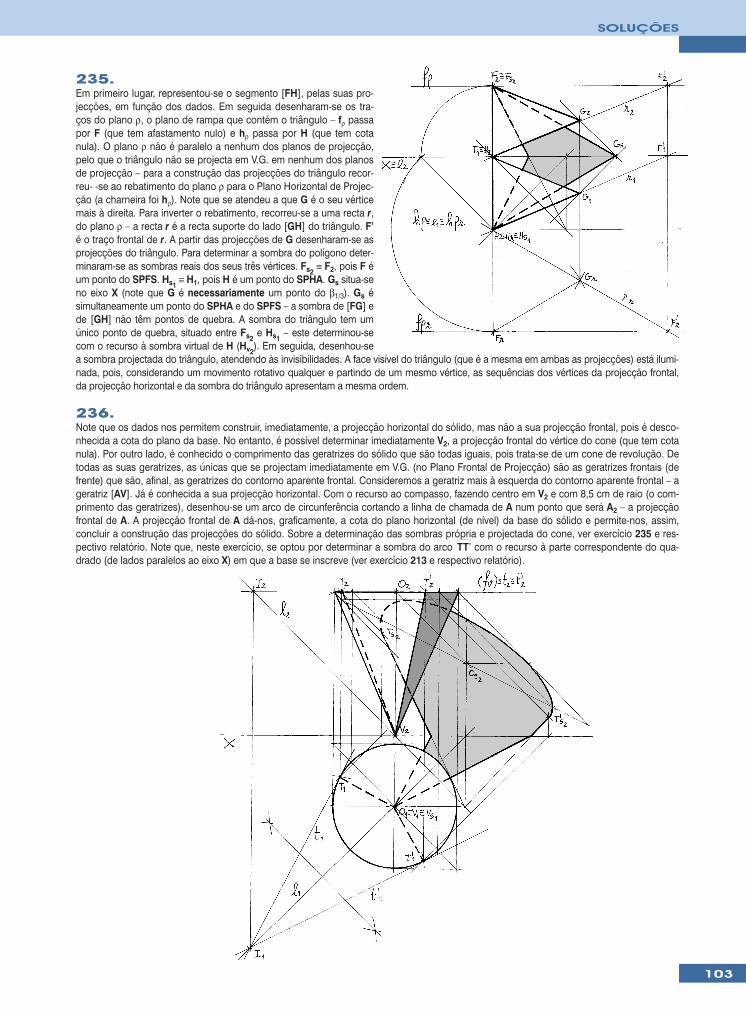
103
SOLUÇÕES
235.Em primeiro lugar, representou-se o segmento [FH], pelas suas pro-jecções, em função dos dados. Em seguida desenharam-se os tra-ços do plano ρ, o plano de rampa que contém o triângulo – fρ passapor F (que tem afastamento nulo) e hρ passa por H (que tem cotanula). O plano ρ não é paralelo a nenhum dos planos de projecção,pelo que o triângulo não se projecta em V.G. em nenhum dos planosde projecção – para a construção das projecções do triângulo recor-reu- -se ao rebatimento do plano ρ para o Plano Horizontal de Projec-ção (a charneira foi hρ). Note que se atendeu a que G é o seu vérticemais à direita. Para inverter o rebatimento, recorreu-se a uma recta r,do plano ρ – a recta r é a recta suporte do lado [GH] do triângulo. F’é o traço frontal de r. A partir das projecções de G desenharam-se asprojecções do triângulo. Para determinar a sombra do polígono deter-minaram-se as sombras reais dos seus três vértices. Fs2
≡ F2, pois F éum ponto do SPFS. Hs1
≡ H1, pois H é um ponto do SPHA. Gs situa-seno eixo X (note que G é necessariamente um ponto do β1/3). Gs ésimultaneamente um ponto do SPHA e do SPFS – a sombra de [FG] ede [GH] não têm pontos de quebra. A sombra do triângulo tem umúnico ponto de quebra, situado entre Fs2
e Hs1– este determinou-se
com o recurso à sombra virtual de H (Hv2). Em seguida, desenhou-se
a sombra projectada do triângulo, atendendo às invisibilidades. A face visível do triângulo (que é a mesma em ambas as projecções) está ilumi-nada, pois, considerando um movimento rotativo qualquer e partindo de um mesmo vértice, as sequências dos vértices da projecção frontal,da projecção horizontal e da sombra do triângulo apresentam a mesma ordem.
236.Note que os dados nos permitem construir, imediatamente, a projecção horizontal do sólido, mas não a sua projecção frontal, pois é desco-nhecida a cota do plano da base. No entanto, é possível determinar imediatamente V2, a projecção frontal do vértice do cone (que tem cotanula). Por outro lado, é conhecido o comprimento das geratrizes do sólido que são todas iguais, pois trata-se de um cone de revolução. Detodas as suas geratrizes, as únicas que se projectam imediatamente em V.G. (no Plano Frontal de Projecção) são as geratrizes frontais (defrente) que são, afinal, as geratrizes do contorno aparente frontal. Consideremos a geratriz mais à esquerda do contorno aparente frontal – ageratriz [AV]. Já é conhecida a sua projecção horizontal. Com o recurso ao compasso, fazendo centro em V2 e com 8,5 cm de raio (o com-primento das geratrizes), desenhou-se um arco de circunferência cortando a linha de chamada de A num ponto que será A2 – a projecçãofrontal de A. A projecção frontal de A dá-nos, graficamente, a cota do plano horizontal (de nível) da base do sólido e permite-nos, assim,concluir a construção das projecções do sólido. Sobre a determinação das sombras própria e projectada do cone, ver exercício 235 e res-pectivo relatório. Note que, neste exercício, se optou por determinar a sombra do arco
�TT’ com o recurso à parte correspondente do qua-
drado (de lados paralelos ao eixo X) em que a base se inscreve (ver exercício 213 e respectivo relatório).
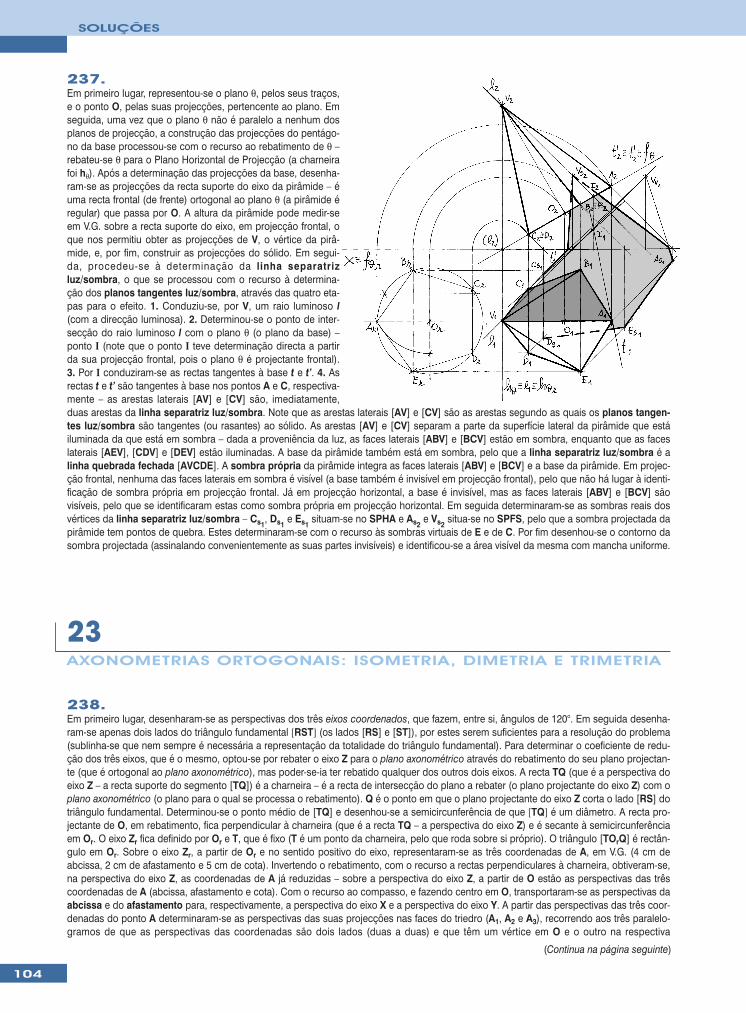
104
SOLUÇÕES
237.Em primeiro lugar, representou-se o plano θ, pelos seus traços,e o ponto O, pelas suas projecções, pertencente ao plano. Emseguida, uma vez que o plano θ não é paralelo a nenhum dosplanos de projecção, a construção das projecções do pentágo-no da base processou-se com o recurso ao rebatimento de θ –rebateu-se θ para o Plano Horizontal de Projecção (a charneirafoi hθ). Após a determinação das projecções da base, desenha-ram-se as projecções da recta suporte do eixo da pirâmide – éuma recta frontal (de frente) ortogonal ao plano θ (a pirâmide éregular) que passa por O. A altura da pirâmide pode medir-seem V.G. sobre a recta suporte do eixo, em projecção frontal, oque nos permitiu obter as projecções de V, o vértice da pirâ-mide, e, por fim, construir as projecções do sólido. Em segui-da, procedeu-se à determinação da linha separatrizluz/sombra, o que se processou com o recurso à determina-ção dos planos tangentes luz/sombra, através das quatro eta-pas para o efeito. 1. Conduziu-se, por V, um raio luminoso l(com a direcção luminosa). 2. Determinou-se o ponto de inter-secção do raio luminoso l com o plano θ (o plano da base) –ponto I (note que o ponto I teve determinação directa a partirda sua projecção frontal, pois o plano θ é projectante frontal).3. Por I conduziram-se as rectas tangentes à base t e t’. 4. Asrectas t e t’ são tangentes à base nos pontos A e C, respectiva-mente – as arestas laterais [AV] e [CV] são, imediatamente,duas arestas da linha separatriz luz/sombra. Note que as arestas laterais [AV] e [CV] são as arestas segundo as quais os planos tangen-tes luz/sombra são tangentes (ou rasantes) ao sólido. As arestas [AV] e [CV] separam a parte da superfície lateral da pirâmide que estáiluminada da que está em sombra – dada a proveniência da luz, as faces laterais [ABV] e [BCV] estão em sombra, enquanto que as faceslaterais [AEV], [CDV] e [DEV] estão iluminadas. A base da pirâmide também está em sombra, pelo que a linha separatriz luz/sombra é alinha quebrada fechada [AVCDE]. A sombra própria da pirâmide integra as faces laterais [ABV] e [BCV] e a base da pirâmide. Em projec-ção frontal, nenhuma das faces laterais em sombra é visível (a base também é invisível em projecção frontal), pelo que não há lugar à identi-ficação de sombra própria em projecção frontal. Já em projecção horizontal, a base é invisível, mas as faces laterais [ABV] e [BCV] sãovisíveis, pelo que se identificaram estas como sombra própria em projecção horizontal. Em seguida determinaram-se as sombras reais dosvértices da linha separatriz luz/sombra – Cs1
, Ds1e Es1
situam-se no SPHA e As2e Vs2
situa-se no SPFS, pelo que a sombra projectada dapirâmide tem pontos de quebra. Estes determinaram-se com o recurso às sombras virtuais de E e de C. Por fim desenhou-se o contorno dasombra projectada (assinalando convenientemente as suas partes invisíveis) e identificou-se a área visível da mesma com mancha uniforme.
238.Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados, que fazem, entre si, ângulos de 120°. Em seguida desenha-ram-se apenas dois lados do triângulo fundamental [RST] (os lados [RS] e [ST]), por estes serem suficientes para a resolução do problema(sublinha-se que nem sempre é necessária a representação da totalidade do triângulo fundamental). Para determinar o coeficiente de redu-ção dos três eixos, que é o mesmo, optou-se por rebater o eixo Z para o plano axonométrico através do rebatimento do seu plano projectan-te (que é ortogonal ao plano axonométrico), mas poder-se-ia ter rebatido qualquer dos outros dois eixos. A recta TQ (que é a perspectiva doeixo Z – a recta suporte do segmento [TQ]) é a charneira – é a recta de intersecção do plano a rebater (o plano projectante do eixo Z) com oplano axonométrico (o plano para o qual se processa o rebatimento). Q é o ponto em que o plano projectante do eixo Z corta o lado [RS] dotriângulo fundamental. Determinou-se o ponto médio de [TQ] e desenhou-se a semicircunferência de que [TQ] é um diâmetro. A recta pro-jectante de O, em rebatimento, fica perpendicular à charneira (que é a recta TQ – a perspectiva do eixo Z) e é secante à semicircunferênciaem Or. O eixo Zr fica definido por Or e T, que é fixo (T é um ponto da charneira, pelo que roda sobre si próprio). O triângulo [TOrQ] é rectân-gulo em Or. Sobre o eixo Zr, a partir de Or e no sentido positivo do eixo, representaram-se as três coordenadas de A, em V.G. (4 cm deabcissa, 2 cm de afastamento e 5 cm de cota). Invertendo o rebatimento, com o recurso a rectas perpendiculares à charneira, obtiveram-se,na perspectiva do eixo Z, as coordenadas de A já reduzidas – sobre a perspectiva do eixo Z, a partir de O estão as perspectivas das trêscoordenadas de A (abcissa, afastamento e cota). Com o recurso ao compasso, e fazendo centro em O, transportaram-se as perspectivas daabcissa e do afastamento para, respectivamente, a perspectiva do eixo X e a perspectiva do eixo Y. A partir das perspectivas das três coor-denadas do ponto A determinaram-se as perspectivas das suas projecções nas faces do triedro (A1, A2 e A3), recorrendo aos três paralelo-gramos de que as perspectivas das coordenadas são dois lados (duas a duas) e que têm um vértice em O e o outro na respectiva
AXONOMETRIAS ORTOGONAIS: ISOMETRIA, DIMETRIA E TRIMETRIA
23
(Continua na página seguinte)
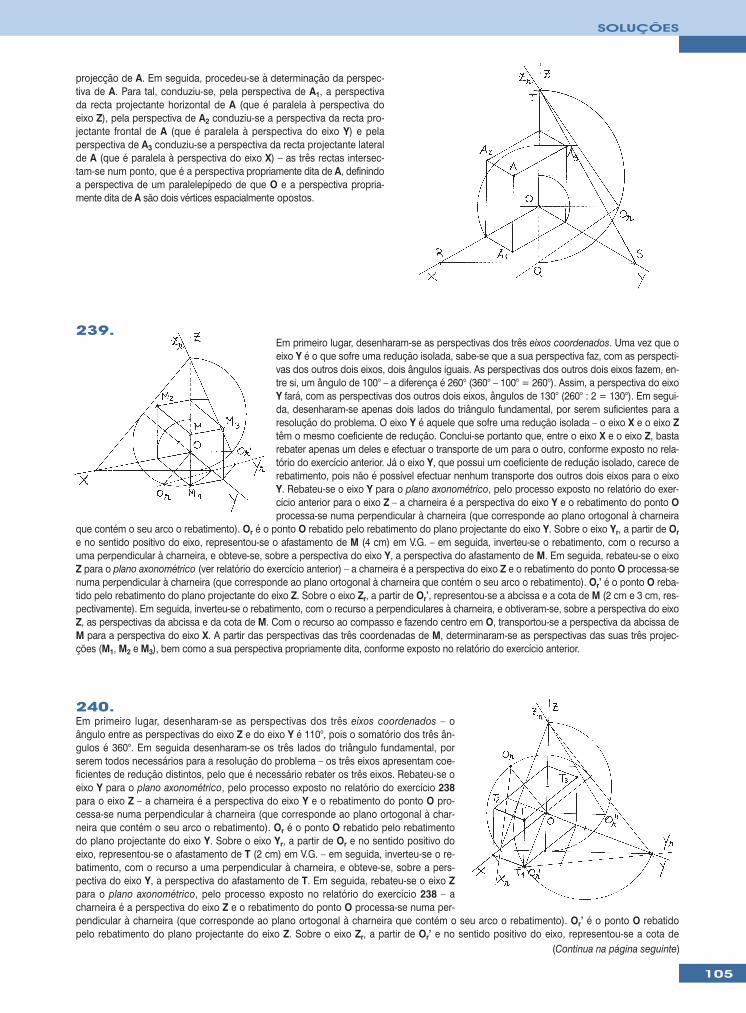
105
SOLUÇÕES
Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados. Uma vez que oeixo Y é o que sofre uma redução isolada, sabe-se que a sua perspectiva faz, com as perspecti-vas dos outros dois eixos, dois ângulos iguais. As perspectivas dos outros dois eixos fazem, en-tre si, um ângulo de 100° – a diferença é 260° (360° – 100° = 260°). Assim, a perspectiva do eixoY fará, com as perspectivas dos outros dois eixos, ângulos de 130° (260° : 2 = 130°). Em segui-da, desenharam-se apenas dois lados do triângulo fundamental, por serem suficientes para aresolução do problema. O eixo Y é aquele que sofre uma redução isolada – o eixo X e o eixo Ztêm o mesmo coeficiente de redução. Conclui-se portanto que, entre o eixo X e o eixo Z, bastarebater apenas um deles e efectuar o transporte de um para o outro, conforme exposto no rela-tório do exercício anterior. Já o eixo Y, que possui um coeficiente de redução isolado, carece derebatimento, pois não é possível efectuar nenhum transporte dos outros dois eixos para o eixoY. Rebateu-se o eixo Y para o plano axonométrico, pelo processo exposto no relatório do exer-cício anterior para o eixo Z – a charneira é a perspectiva do eixo Y e o rebatimento do ponto Oprocessa-se numa perpendicular à charneira (que corresponde ao plano ortogonal à charneira
que contém o seu arco o rebatimento). Or é o ponto O rebatido pelo rebatimento do plano projectante do eixo Y. Sobre o eixo Yr, a partir de Or
e no sentido positivo do eixo, representou-se o afastamento de M (4 cm) em V.G. – em seguida, inverteu-se o rebatimento, com o recurso auma perpendicular à charneira, e obteve-se, sobre a perspectiva do eixo Y, a perspectiva do afastamento de M. Em seguida, rebateu-se o eixoZ para o plano axonométrico (ver relatório do exercício anterior) – a charneira é a perspectiva do eixo Z e o rebatimento do ponto O processa-senuma perpendicular à charneira (que corresponde ao plano ortogonal à charneira que contém o seu arco o rebatimento). Or’ é o ponto O reba-tido pelo rebatimento do plano projectante do eixo Z. Sobre o eixo Zr, a partir de Or’, representou-se a abcissa e a cota de M (2 cm e 3 cm, res-pectivamente). Em seguida, inverteu-se o rebatimento, com o recurso a perpendiculares à charneira, e obtiveram-se, sobre a perspectiva do eixoZ, as perspectivas da abcissa e da cota de M. Com o recurso ao compasso e fazendo centro em O, transportou-se a perspectiva da abcissa deM para a perspectiva do eixo X. A partir das perspectivas das três coordenadas de M, determinaram-se as perspectivas das suas três projec-ções (M1, M2 e M3), bem como a sua perspectiva propriamente dita, conforme exposto no relatório do exercício anterior.
240.Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados – oângulo entre as perspectivas do eixo Z e do eixo Y é 110°, pois o somatório dos três ân-gulos é 360°. Em seguida desenharam-se os três lados do triângulo fundamental, porserem todos necessários para a resolução do problema – os três eixos apresentam coe-ficientes de redução distintos, pelo que é necessário rebater os três eixos. Rebateu-se oeixo Y para o plano axonométrico, pelo processo exposto no relatório do exercício 238para o eixo Z – a charneira é a perspectiva do eixo Y e o rebatimento do ponto O pro-cessa-se numa perpendicular à charneira (que corresponde ao plano ortogonal à char-neira que contém o seu arco o rebatimento). Or é o ponto O rebatido pelo rebatimentodo plano projectante do eixo Y. Sobre o eixo Yr, a partir de Or e no sentido positivo doeixo, representou-se o afastamento de T (2 cm) em V.G. – em seguida, inverteu-se o re-batimento, com o recurso a uma perpendicular à charneira, e obteve-se, sobre a pers-pectiva do eixo Y, a perspectiva do afastamento de T. Em seguida, rebateu-se o eixo Zpara o plano axonométrico, pelo processo exposto no relatório do exercício 238 – acharneira é a perspectiva do eixo Z e o rebatimento do ponto O processa-se numa per-pendicular à charneira (que corresponde ao plano ortogonal à charneira que contém o seu arco o rebatimento). Or’ é o ponto O rebatidopelo rebatimento do plano projectante do eixo Z. Sobre o eixo Zr, a partir de Or’ e no sentido positivo do eixo, representou-se a cota de
projecção de A. Em seguida, procedeu-se à determinação da perspec-tiva de A. Para tal, conduziu-se, pela perspectiva de A1, a perspectivada recta projectante horizontal de A (que é paralela à perspectiva doeixo Z), pela perspectiva de A2 conduziu-se a perspectiva da recta pro-jectante frontal de A (que é paralela à perspectiva do eixo Y) e pelaperspectiva de A3 conduziu-se a perspectiva da recta projectante lateralde A (que é paralela à perspectiva do eixo X) – as três rectas intersec-tam-se num ponto, que é a perspectiva propriamente dita de A, definindoa perspectiva de um paralelepípedo de que O e a perspectiva propria-mente dita de A são dois vértices espacialmente opostos.
(Continua na página seguinte)
239.
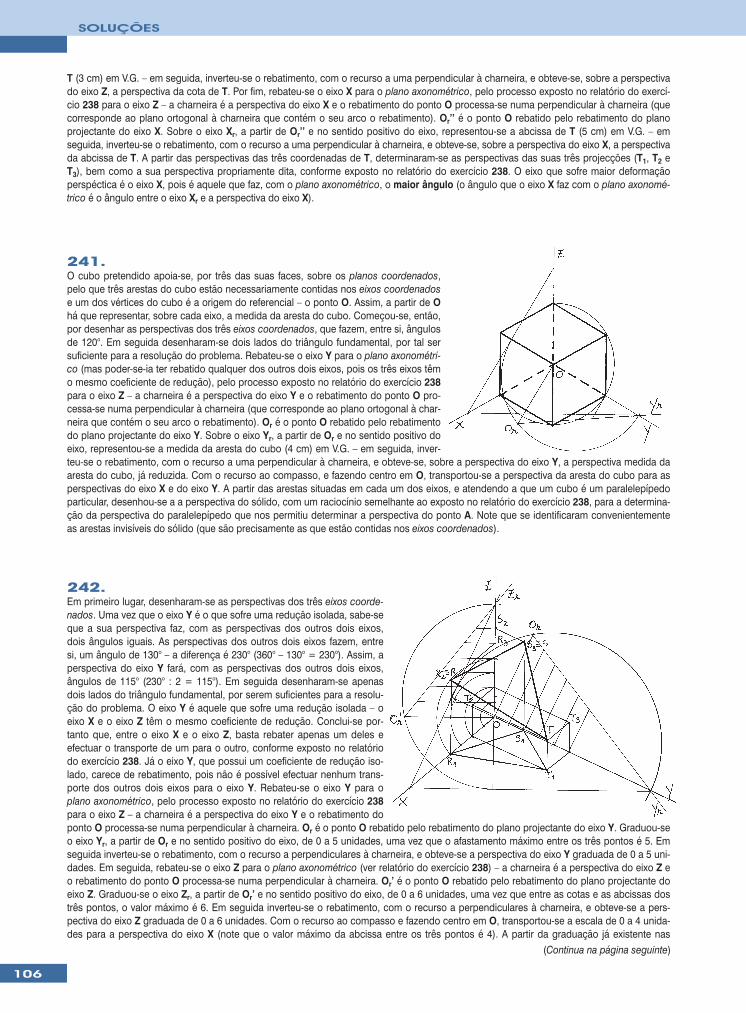
106
SOLUÇÕES
T (3 cm) em V.G. – em seguida, inverteu-se o rebatimento, com o recurso a uma perpendicular à charneira, e obteve-se, sobre a perspectivado eixo Z, a perspectiva da cota de T. Por fim, rebateu-se o eixo X para o plano axonométrico, pelo processo exposto no relatório do exercí-cio 238 para o eixo Z – a charneira é a perspectiva do eixo X e o rebatimento do ponto O processa-se numa perpendicular à charneira (quecorresponde ao plano ortogonal à charneira que contém o seu arco o rebatimento). Or’’ é o ponto O rebatido pelo rebatimento do planoprojectante do eixo X. Sobre o eixo Xr, a partir de Or’’ e no sentido positivo do eixo, representou-se a abcissa de T (5 cm) em V.G. – emseguida, inverteu-se o rebatimento, com o recurso a uma perpendicular à charneira, e obteve-se, sobre a perspectiva do eixo X, a perspectivada abcissa de T. A partir das perspectivas das três coordenadas de T, determinaram-se as perspectivas das suas três projecções (T1, T2 eT3), bem como a sua perspectiva propriamente dita, conforme exposto no relatório do exercício 238. O eixo que sofre maior deformaçãoperspéctica é o eixo X, pois é aquele que faz, com o plano axonométrico, o maior ângulo (o ângulo que o eixo X faz com o plano axonomé-trico é o ângulo entre o eixo Xr e a perspectiva do eixo X).
241.O cubo pretendido apoia-se, por três das suas faces, sobre os planos coordenados,pelo que três arestas do cubo estão necessariamente contidas nos eixos coordenadose um dos vértices do cubo é a origem do referencial – o ponto O. Assim, a partir de Ohá que representar, sobre cada eixo, a medida da aresta do cubo. Começou-se, então,por desenhar as perspectivas dos três eixos coordenados, que fazem, entre si, ângulosde 120°. Em seguida desenharam-se dois lados do triângulo fundamental, por tal sersuficiente para a resolução do problema. Rebateu-se o eixo Y para o plano axonométri-co (mas poder-se-ia ter rebatido qualquer dos outros dois eixos, pois os três eixos têmo mesmo coeficiente de redução), pelo processo exposto no relatório do exercício 238para o eixo Z – a charneira é a perspectiva do eixo Y e o rebatimento do ponto O pro-cessa-se numa perpendicular à charneira (que corresponde ao plano ortogonal à char-neira que contém o seu arco o rebatimento). Or é o ponto O rebatido pelo rebatimentodo plano projectante do eixo Y. Sobre o eixo Yr, a partir de Or e no sentido positivo doeixo, representou-se a medida da aresta do cubo (4 cm) em V.G. – em seguida, inver-teu-se o rebatimento, com o recurso a uma perpendicular à charneira, e obteve-se, sobre a perspectiva do eixo Y, a perspectiva medida daaresta do cubo, já reduzida. Com o recurso ao compasso, e fazendo centro em O, transportou-se a perspectiva da aresta do cubo para asperspectivas do eixo X e do eixo Y. A partir das arestas situadas em cada um dos eixos, e atendendo a que um cubo é um paralelepípedoparticular, desenhou-se a a perspectiva do sólido, com um raciocínio semelhante ao exposto no relatório do exercício 238, para a determina-ção da perspectiva do paralelepípedo que nos permitiu determinar a perspectiva do ponto A. Note que se identificaram convenientementeas arestas invisíveis do sólido (que são precisamente as que estão contidas nos eixos coordenados).
242.Em primeiro lugar, desenharam-se as perspectivas dos três eixos coorde-nados. Uma vez que o eixo Y é o que sofre uma redução isolada, sabe-seque a sua perspectiva faz, com as perspectivas dos outros dois eixos,dois ângulos iguais. As perspectivas dos outros dois eixos fazem, entresi, um ângulo de 130° – a diferença é 230° (360° – 130° = 230°). Assim, aperspectiva do eixo Y fará, com as perspectivas dos outros dois eixos,ângulos de 115° (230° : 2 = 115°). Em seguida desenharam-se apenasdois lados do triângulo fundamental, por serem suficientes para a resolu-ção do problema. O eixo Y é aquele que sofre uma redução isolada – oeixo X e o eixo Z têm o mesmo coeficiente de redução. Conclui-se por-tanto que, entre o eixo X e o eixo Z, basta rebater apenas um deles eefectuar o transporte de um para o outro, conforme exposto no relatóriodo exercício 238. Já o eixo Y, que possui um coeficiente de redução iso-lado, carece de rebatimento, pois não é possível efectuar nenhum trans-porte dos outros dois eixos para o eixo Y. Rebateu-se o eixo Y para oplano axonométrico, pelo processo exposto no relatório do exercício 238para o eixo Z – a charneira é a perspectiva do eixo Y e o rebatimento doponto O processa-se numa perpendicular à charneira. Or é o ponto O rebatido pelo rebatimento do plano projectante do eixo Y. Graduou-seo eixo Yr, a partir de Or e no sentido positivo do eixo, de 0 a 5 unidades, uma vez que o afastamento máximo entre os três pontos é 5. Emseguida inverteu-se o rebatimento, com o recurso a perpendiculares à charneira, e obteve-se a perspectiva do eixo Y graduada de 0 a 5 uni-dades. Em seguida, rebateu-se o eixo Z para o plano axonométrico (ver relatório do exercício 238) – a charneira é a perspectiva do eixo Z eo rebatimento do ponto O processa-se numa perpendicular à charneira. Or’ é o ponto O rebatido pelo rebatimento do plano projectante doeixo Z. Graduou-se o eixo Zr, a partir de Or’ e no sentido positivo do eixo, de 0 a 6 unidades, uma vez que entre as cotas e as abcissas dostrês pontos, o valor máximo é 6. Em seguida inverteu-se o rebatimento, com o recurso a perpendiculares à charneira, e obteve-se a pers-pectiva do eixo Z graduada de 0 a 6 unidades. Com o recurso ao compasso e fazendo centro em O, transportou-se a escala de 0 a 4 unida-des para a perspectiva do eixo X (note que o valor máximo da abcissa entre os três pontos é 4). A partir da graduação já existente nas
(Continua na página seguinte)
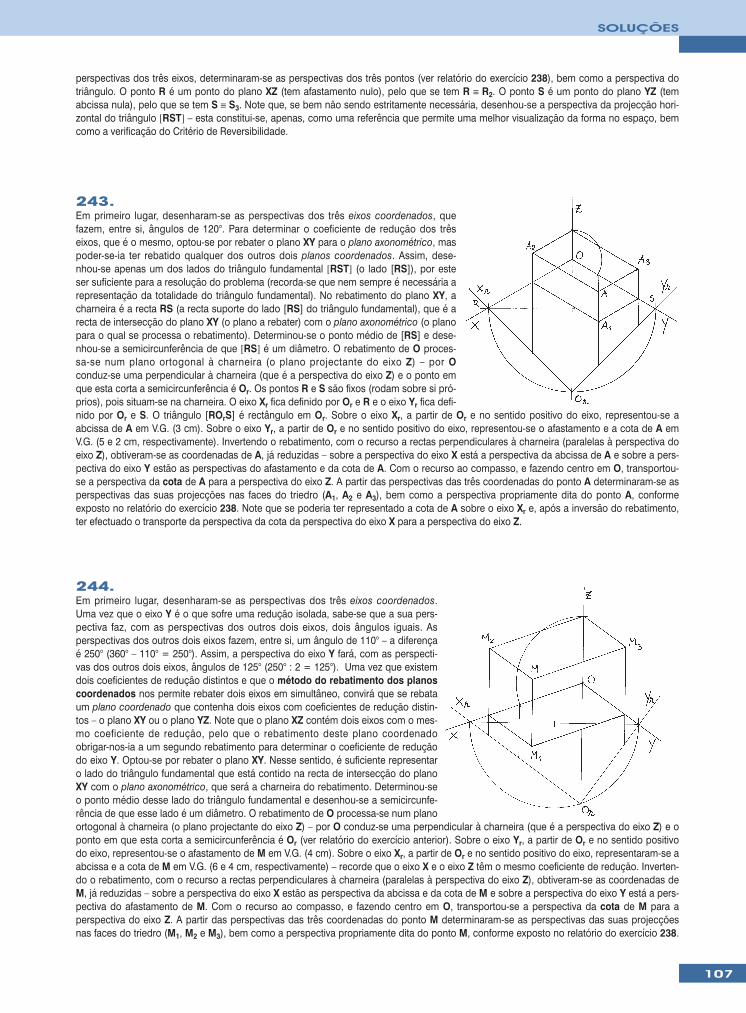
107
SOLUÇÕES
243.Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados, quefazem, entre si, ângulos de 120°. Para determinar o coeficiente de redução dos trêseixos, que é o mesmo, optou-se por rebater o plano XY para o plano axonométrico, maspoder-se-ia ter rebatido qualquer dos outros dois planos coordenados. Assim, dese-nhou-se apenas um dos lados do triângulo fundamental [RST] (o lado [RS]), por esteser suficiente para a resolução do problema (recorda-se que nem sempre é necessária arepresentação da totalidade do triângulo fundamental). No rebatimento do plano XY, acharneira é a recta RS (a recta suporte do lado [RS] do triângulo fundamental), que é arecta de intersecção do plano XY (o plano a rebater) com o plano axonométrico (o planopara o qual se processa o rebatimento). Determinou-se o ponto médio de [RS] e dese-nhou-se a semicircunferência de que [RS] é um diâmetro. O rebatimento de O proces-sa-se num plano ortogonal à charneira (o plano projectante do eixo Z) – por Oconduz-se uma perpendicular à charneira (que é a perspectiva do eixo Z) e o ponto emque esta corta a semicircunferência é Or. Os pontos R e S são fixos (rodam sobre si pró-prios), pois situam-se na charneira. O eixo Xr fica definido por Or e R e o eixo Yr fica defi-nido por Or e S. O triângulo [ROrS] é rectângulo em Or. Sobre o eixo Xr, a partir de Or e no sentido positivo do eixo, representou-se aabcissa de A em V.G. (3 cm). Sobre o eixo Yr, a partir de Or e no sentido positivo do eixo, representou-se o afastamento e a cota de A emV.G. (5 e 2 cm, respectivamente). Invertendo o rebatimento, com o recurso a rectas perpendiculares à charneira (paralelas à perspectiva doeixo Z), obtiveram-se as coordenadas de A, já reduzidas – sobre a perspectiva do eixo X está a perspectiva da abcissa de A e sobre a pers-pectiva do eixo Y estão as perspectivas do afastamento e da cota de A. Com o recurso ao compasso, e fazendo centro em O, transportou-se a perspectiva da cota de A para a perspectiva do eixo Z. A partir das perspectivas das três coordenadas do ponto A determinaram-se asperspectivas das suas projecções nas faces do triedro (A1, A2 e A3), bem como a perspectiva propriamente dita do ponto A, conformeexposto no relatório do exercício 238. Note que se poderia ter representado a cota de A sobre o eixo Xr e, após a inversão do rebatimento,ter efectuado o transporte da perspectiva da cota da perspectiva do eixo X para a perspectiva do eixo Z.
244.Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados.Uma vez que o eixo Y é o que sofre uma redução isolada, sabe-se que a sua pers-pectiva faz, com as perspectivas dos outros dois eixos, dois ângulos iguais. Asperspectivas dos outros dois eixos fazem, entre si, um ângulo de 110° – a diferençaé 250° (360° – 110° = 250°). Assim, a perspectiva do eixo Y fará, com as perspecti-vas dos outros dois eixos, ângulos de 125° (250° : 2 = 125°). Uma vez que existemdois coeficientes de redução distintos e que o método do rebatimento dos planoscoordenados nos permite rebater dois eixos em simultâneo, convirá que se rebataum plano coordenado que contenha dois eixos com coeficientes de redução distin-tos – o plano XY ou o plano YZ. Note que o plano XZ contém dois eixos com o mes-mo coeficiente de redução, pelo que o rebatimento deste plano coordenadoobrigar-nos-ia a um segundo rebatimento para determinar o coeficiente de reduçãodo eixo Y. Optou-se por rebater o plano XY. Nesse sentido, é suficiente representaro lado do triângulo fundamental que está contido na recta de intersecção do planoXY com o plano axonométrico, que será a charneira do rebatimento. Determinou-seo ponto médio desse lado do triângulo fundamental e desenhou-se a semicircunfe-rência de que esse lado é um diâmetro. O rebatimento de O processa-se num planoortogonal à charneira (o plano projectante do eixo Z) – por O conduz-se uma perpendicular à charneira (que é a perspectiva do eixo Z) e oponto em que esta corta a semicircunferência é Or (ver relatório do exercício anterior). Sobre o eixo Yr, a partir de Or e no sentido positivodo eixo, representou-se o afastamento de M em V.G. (4 cm). Sobre o eixo Xr, a partir de Or e no sentido positivo do eixo, representaram-se aabcissa e a cota de M em V.G. (6 e 4 cm, respectivamente) – recorde que o eixo X e o eixo Z têm o mesmo coeficiente de redução. Inverten-do o rebatimento, com o recurso a rectas perpendiculares à charneira (paralelas à perspectiva do eixo Z), obtiveram-se as coordenadas deM, já reduzidas – sobre a perspectiva do eixo X estão as perspectiva da abcissa e da cota de M e sobre a perspectiva do eixo Y está a pers-pectiva do afastamento de M. Com o recurso ao compasso, e fazendo centro em O, transportou-se a perspectiva da cota de M para aperspectiva do eixo Z. A partir das perspectivas das três coordenadas do ponto M determinaram-se as perspectivas das suas projecçõesnas faces do triedro (M1, M2 e M3), bem como a perspectiva propriamente dita do ponto M, conforme exposto no relatório do exercício 238.
perspectivas dos três eixos, determinaram-se as perspectivas dos três pontos (ver relatório do exercício 238), bem como a perspectiva dotriângulo. O ponto R é um ponto do plano XZ (tem afastamento nulo), pelo que se tem R ≡ R2. O ponto S é um ponto do plano YZ (temabcissa nula), pelo que se tem S ≡ S3. Note que, se bem não sendo estritamente necessária, desenhou-se a perspectiva da projecção hori-zontal do triângulo [RST] – esta constitui-se, apenas, como uma referência que permite uma melhor visualização da forma no espaço, bemcomo a verificação do Critério de Reversibilidade.
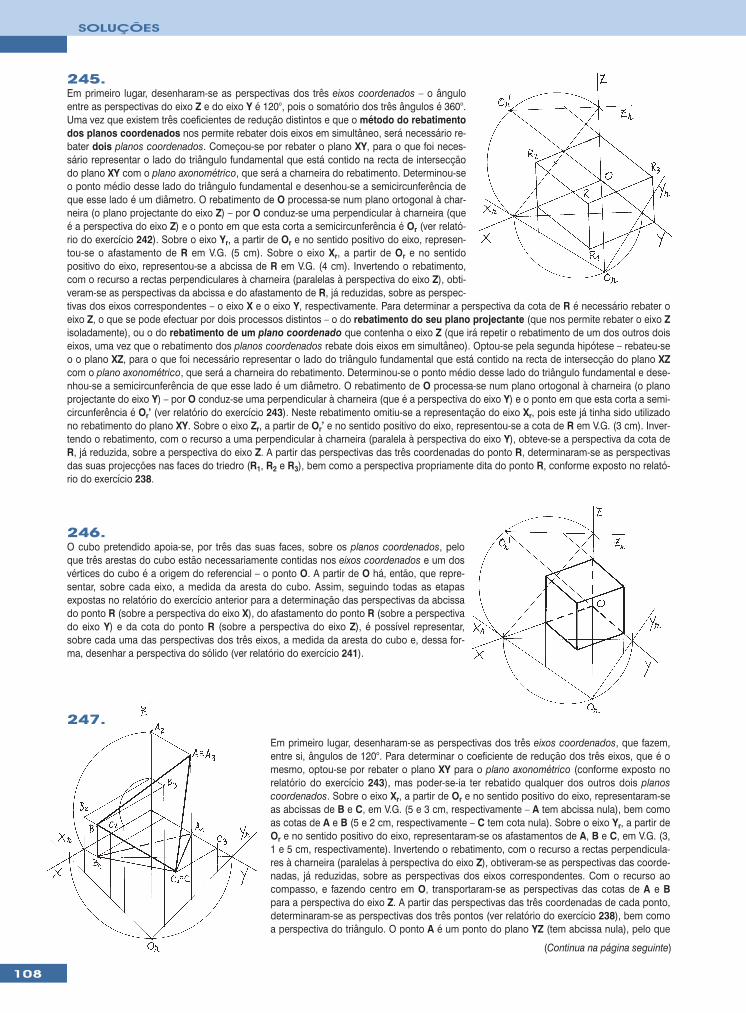
108
SOLUÇÕES
246.O cubo pretendido apoia-se, por três das suas faces, sobre os planos coordenados, peloque três arestas do cubo estão necessariamente contidas nos eixos coordenados e um dosvértices do cubo é a origem do referencial – o ponto O. A partir de O há, então, que repre-sentar, sobre cada eixo, a medida da aresta do cubo. Assim, seguindo todas as etapasexpostas no relatório do exercício anterior para a determinação das perspectivas da abcissado ponto R (sobre a perspectiva do eixo X), do afastamento do ponto R (sobre a perspectivado eixo Y) e da cota do ponto R (sobre a perspectiva do eixo Z), é possível representar,sobre cada uma das perspectivas dos três eixos, a medida da aresta do cubo e, dessa for-ma, desenhar a perspectiva do sólido (ver relatório do exercício 241).
Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados, que fazem,entre si, ângulos de 120°. Para determinar o coeficiente de redução dos três eixos, que é omesmo, optou-se por rebater o plano XY para o plano axonométrico (conforme exposto norelatório do exercício 243), mas poder-se-ia ter rebatido qualquer dos outros dois planoscoordenados. Sobre o eixo Xr, a partir de Or e no sentido positivo do eixo, representaram-seas abcissas de B e C, em V.G. (5 e 3 cm, respectivamente – A tem abcissa nula), bem comoas cotas de A e B (5 e 2 cm, respectivamente – C tem cota nula). Sobre o eixo Yr, a partir deOr e no sentido positivo do eixo, representaram-se os afastamentos de A, B e C, em V.G. (3,1 e 5 cm, respectivamente). Invertendo o rebatimento, com o recurso a rectas perpendicula-res à charneira (paralelas à perspectiva do eixo Z), obtiveram-se as perspectivas das coorde-nadas, já reduzidas, sobre as perspectivas dos eixos correspondentes. Com o recurso aocompasso, e fazendo centro em O, transportaram-se as perspectivas das cotas de A e Bpara a perspectiva do eixo Z. A partir das perspectivas das três coordenadas de cada ponto,determinaram-se as perspectivas dos três pontos (ver relatório do exercício 238), bem comoa perspectiva do triângulo. O ponto A é um ponto do plano YZ (tem abcissa nula), pelo que
247.
245.Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados – o ânguloentre as perspectivas do eixo Z e do eixo Y é 120°, pois o somatório dos três ângulos é 360°.Uma vez que existem três coeficientes de redução distintos e que o método do rebatimentodos planos coordenados nos permite rebater dois eixos em simultâneo, será necessário re-bater dois planos coordenados. Começou-se por rebater o plano XY, para o que foi neces-sário representar o lado do triângulo fundamental que está contido na recta de intersecçãodo plano XY com o plano axonométrico, que será a charneira do rebatimento. Determinou-seo ponto médio desse lado do triângulo fundamental e desenhou-se a semicircunferência deque esse lado é um diâmetro. O rebatimento de O processa-se num plano ortogonal à char-neira (o plano projectante do eixo Z) – por O conduz-se uma perpendicular à charneira (queé a perspectiva do eixo Z) e o ponto em que esta corta a semicircunferência é Or (ver relató-rio do exercício 242). Sobre o eixo Yr, a partir de Or e no sentido positivo do eixo, represen-tou-se o afastamento de R em V.G. (5 cm). Sobre o eixo Xr, a partir de Or e no sentidopositivo do eixo, representou-se a abcissa de R em V.G. (4 cm). Invertendo o rebatimento,com o recurso a rectas perpendiculares à charneira (paralelas à perspectiva do eixo Z), obti-veram-se as perspectivas da abcissa e do afastamento de R, já reduzidas, sobre as perspec-tivas dos eixos correspondentes – o eixo X e o eixo Y, respectivamente. Para determinar a perspectiva da cota de R é necessário rebater oeixo Z, o que se pode efectuar por dois processos distintos – o do rebatimento do seu plano projectante (que nos permite rebater o eixo Zisoladamente), ou o do rebatimento de um plano coordenado que contenha o eixo Z (que irá repetir o rebatimento de um dos outros doiseixos, uma vez que o rebatimento dos planos coordenados rebate dois eixos em simultâneo). Optou-se pela segunda hipótese – rebateu-seo o plano XZ, para o que foi necessário representar o lado do triângulo fundamental que está contido na recta de intersecção do plano XZcom o plano axonométrico, que será a charneira do rebatimento. Determinou-se o ponto médio desse lado do triângulo fundamental e dese-nhou-se a semicircunferência de que esse lado é um diâmetro. O rebatimento de O processa-se num plano ortogonal à charneira (o planoprojectante do eixo Y) – por O conduz-se uma perpendicular à charneira (que é a perspectiva do eixo Y) e o ponto em que esta corta a semi-circunferência é Or’ (ver relatório do exercício 243). Neste rebatimento omitiu-se a representação do eixo Xr, pois este já tinha sido utilizadono rebatimento do plano XY. Sobre o eixo Zr, a partir de Or’ e no sentido positivo do eixo, representou-se a cota de R em V.G. (3 cm). Inver-tendo o rebatimento, com o recurso a uma perpendicular à charneira (paralela à perspectiva do eixo Y), obteve-se a perspectiva da cota deR, já reduzida, sobre a perspectiva do eixo Z. A partir das perspectivas das três coordenadas do ponto R, determinaram-se as perspectivasdas suas projecções nas faces do triedro (R1, R2 e R3), bem como a perspectiva propriamente dita do ponto R, conforme exposto no relató-rio do exercício 238.
(Continua na página seguinte)
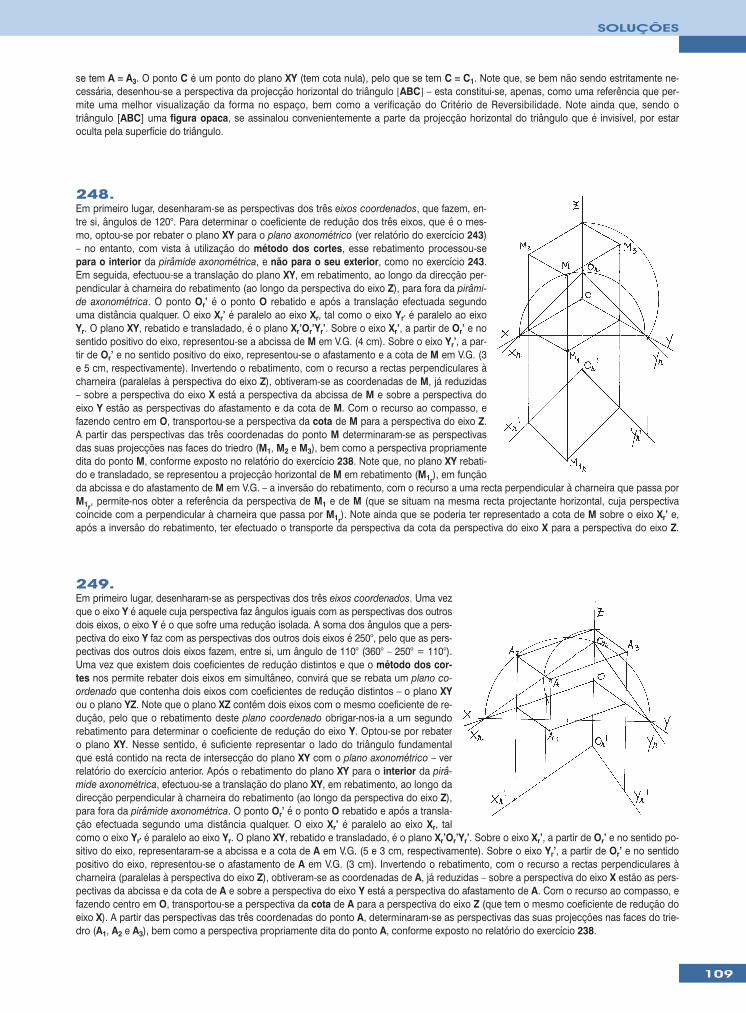
109
SOLUÇÕES
248.Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados, que fazem, en-tre si, ângulos de 120°. Para determinar o coeficiente de redução dos três eixos, que é o mes-mo, optou-se por rebater o plano XY para o plano axonométrico (ver relatório do exercício 243)– no entanto, com vista à utilização do método dos cortes, esse rebatimento processou-separa o interior da pirâmide axonométrica, e não para o seu exterior, como no exercício 243.Em seguida, efectuou-se a translação do plano XY, em rebatimento, ao longo da direcção per-pendicular à charneira do rebatimento (ao longo da perspectiva do eixo Z), para fora da pirâmi-de axonométrica. O ponto Or’ é o ponto O rebatido e após a translação efectuada segundouma distância qualquer. O eixo Xr’ é paralelo ao eixo Xr, tal como o eixo Yr’ é paralelo ao eixoYr. O plano XY, rebatido e transladado, é o plano Xr’Or’Yr’. Sobre o eixo Xr’, a partir de Or’ e nosentido positivo do eixo, representou-se a abcissa de M em V.G. (4 cm). Sobre o eixo Yr’, a par-tir de Or’ e no sentido positivo do eixo, representou-se o afastamento e a cota de M em V.G. (3e 5 cm, respectivamente). Invertendo o rebatimento, com o recurso a rectas perpendiculares àcharneira (paralelas à perspectiva do eixo Z), obtiveram-se as coordenadas de M, já reduzidas– sobre a perspectiva do eixo X está a perspectiva da abcissa de M e sobre a perspectiva doeixo Y estão as perspectivas do afastamento e da cota de M. Com o recurso ao compasso, efazendo centro em O, transportou-se a perspectiva da cota de M para a perspectiva do eixo Z.A partir das perspectivas das três coordenadas do ponto M determinaram-se as perspectivasdas suas projecções nas faces do triedro (M1, M2 e M3), bem como a perspectiva propriamentedita do ponto M, conforme exposto no relatório do exercício 238. Note que, no plano XY rebati-do e transladado, se representou a projecção horizontal de M em rebatimento (M1r
), em funçãoda abcissa e do afastamento de M em V.G. – a inversão do rebatimento, com o recurso a uma recta perpendicular à charneira que passa porM1r
, permite-nos obter a referência da perspectiva de M1 e de M (que se situam na mesma recta projectante horizontal, cuja perspectivacoincide com a perpendicular à charneira que passa por M1r
). Note ainda que se poderia ter representado a cota de M sobre o eixo Xr’ e,após a inversão do rebatimento, ter efectuado o transporte da perspectiva da cota da perspectiva do eixo X para a perspectiva do eixo Z.
249.Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados. Uma vezque o eixo Y é aquele cuja perspectiva faz ângulos iguais com as perspectivas dos outrosdois eixos, o eixo Y é o que sofre uma redução isolada. A soma dos ângulos que a pers-pectiva do eixo Y faz com as perspectivas dos outros dois eixos é 250°, pelo que as pers-pectivas dos outros dois eixos fazem, entre si, um ângulo de 110° (360° – 250° = 110°).Uma vez que existem dois coeficientes de redução distintos e que o método dos cor-tes nos permite rebater dois eixos em simultâneo, convirá que se rebata um plano co-ordenado que contenha dois eixos com coeficientes de redução distintos – o plano XYou o plano YZ. Note que o plano XZ contém dois eixos com o mesmo coeficiente de re-dução, pelo que o rebatimento deste plano coordenado obrigar-nos-ia a um segundorebatimento para determinar o coeficiente de redução do eixo Y. Optou-se por rebatero plano XY. Nesse sentido, é suficiente representar o lado do triângulo fundamentalque está contido na recta de intersecção do plano XY com o plano axonométrico – verrelatório do exercício anterior. Após o rebatimento do plano XY para o interior da pirâ-mide axonométrica, efectuou-se a translação do plano XY, em rebatimento, ao longo dadirecção perpendicular à charneira do rebatimento (ao longo da perspectiva do eixo Z),para fora da pirâmide axonométrica. O ponto Or’ é o ponto O rebatido e após a transla-ção efectuada segundo uma distância qualquer. O eixo Xr’ é paralelo ao eixo Xr, talcomo o eixo Yr’ é paralelo ao eixo Yr. O plano XY, rebatido e transladado, é o plano Xr’Or’Yr’. Sobre o eixo Xr’, a partir de Or’ e no sentido po-sitivo do eixo, representaram-se a abcissa e a cota de A em V.G. (5 e 3 cm, respectivamente). Sobre o eixo Yr’, a partir de Or’ e no sentidopositivo do eixo, representou-se o afastamento de A em V.G. (3 cm). Invertendo o rebatimento, com o recurso a rectas perpendiculares àcharneira (paralelas à perspectiva do eixo Z), obtiveram-se as coordenadas de A, já reduzidas – sobre a perspectiva do eixo X estão as pers-pectivas da abcissa e da cota de A e sobre a perspectiva do eixo Y está a perspectiva do afastamento de A. Com o recurso ao compasso, efazendo centro em O, transportou-se a perspectiva da cota de A para a perspectiva do eixo Z (que tem o mesmo coeficiente de redução doeixo X). A partir das perspectivas das três coordenadas do ponto A, determinaram-se as perspectivas das suas projecções nas faces do trie-dro (A1, A2 e A3), bem como a perspectiva propriamente dita do ponto A, conforme exposto no relatório do exercício 238.
se tem A ≡ A3. O ponto C é um ponto do plano XY (tem cota nula), pelo que se tem C ≡ C1. Note que, se bem não sendo estritamente ne-cessária, desenhou-se a perspectiva da projecção horizontal do triângulo [ABC] – esta constitui-se, apenas, como uma referência que per-mite uma melhor visualização da forma no espaço, bem como a verificação do Critério de Reversibilidade. Note ainda que, sendo otriângulo [ABC] uma figura opaca, se assinalou convenientemente a parte da projecção horizontal do triângulo que é invisível, por estaroculta pela superfície do triângulo.
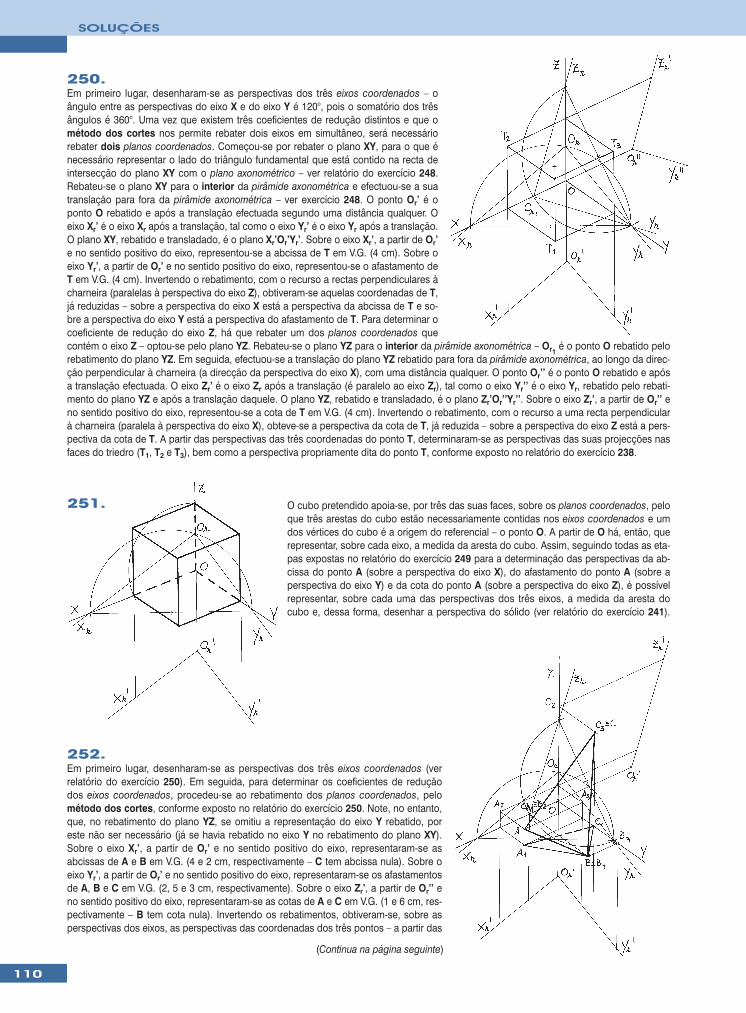
110
SOLUÇÕES
250.Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados – oângulo entre as perspectivas do eixo X e do eixo Y é 120°, pois o somatório dos trêsângulos é 360°. Uma vez que existem três coeficientes de redução distintos e que ométodo dos cortes nos permite rebater dois eixos em simultâneo, será necessáriorebater dois planos coordenados. Começou-se por rebater o plano XY, para o que énecessário representar o lado do triângulo fundamental que está contido na recta deintersecção do plano XY com o plano axonométrico – ver relatório do exercício 248.Rebateu-se o plano XY para o interior da pirâmide axonométrica e efectuou-se a suatranslação para fora da pirâmide axonométrica – ver exercício 248. O ponto Or’ é oponto O rebatido e após a translação efectuada segundo uma distância qualquer. Oeixo Xr’ é o eixo Xr após a translação, tal como o eixo Yr’ é o eixo Yr após a translação.O plano XY, rebatido e transladado, é o plano Xr’Or’Yr’. Sobre o eixo Xr’, a partir de Or’e no sentido positivo do eixo, representou-se a abcissa de T em V.G. (4 cm). Sobre oeixo Yr’, a partir de Or’ e no sentido positivo do eixo, representou-se o afastamento deT em V.G. (4 cm). Invertendo o rebatimento, com o recurso a rectas perpendiculares àcharneira (paralelas à perspectiva do eixo Z), obtiveram-se aquelas coordenadas de T,já reduzidas – sobre a perspectiva do eixo X está a perspectiva da abcissa de T e so-bre a perspectiva do eixo Y está a perspectiva do afastamento de T. Para determinar ocoeficiente de redução do eixo Z, há que rebater um dos planos coordenados quecontém o eixo Z – optou-se pelo plano YZ. Rebateu-se o plano YZ para o interior da pirâmide axonométrica – Or1
é o ponto O rebatido pelorebatimento do plano YZ. Em seguida, efectuou-se a translação do plano YZ rebatido para fora da pirâmide axonométrica, ao longo da direc-ção perpendicular à charneira (a direcção da perspectiva do eixo X), com uma distância qualquer. O ponto Or’’ é o ponto O rebatido e apósa translação efectuada. O eixo Zr’ é o eixo Zr após a translação (é paralelo ao eixo Zr), tal como o eixo Yr’’ é o eixo Yr, rebatido pelo rebati-mento do plano YZ e após a translação daquele. O plano YZ, rebatido e transladado, é o plano Zr’Or’’Yr’’. Sobre o eixo Zr’, a partir de Or’’ eno sentido positivo do eixo, representou-se a cota de T em V.G. (4 cm). Invertendo o rebatimento, com o recurso a uma recta perpendicularà charneira (paralela à perspectiva do eixo X), obteve-se a perspectiva da cota de T, já reduzida – sobre a perspectiva do eixo Z está a pers-pectiva da cota de T. A partir das perspectivas das três coordenadas do ponto T, determinaram-se as perspectivas das suas projecções nasfaces do triedro (T1, T2 e T3), bem como a perspectiva propriamente dita do ponto T, conforme exposto no relatório do exercício 238.
O cubo pretendido apoia-se, por três das suas faces, sobre os planos coordenados, peloque três arestas do cubo estão necessariamente contidas nos eixos coordenados e umdos vértices do cubo é a origem do referencial – o ponto O. A partir de O há, então, querepresentar, sobre cada eixo, a medida da aresta do cubo. Assim, seguindo todas as eta-pas expostas no relatório do exercício 249 para a determinação das perspectivas da ab-cissa do ponto A (sobre a perspectiva do eixo X), do afastamento do ponto A (sobre aperspectiva do eixo Y) e da cota do ponto A (sobre a perspectiva do eixo Z), é possívelrepresentar, sobre cada uma das perspectivas dos três eixos, a medida da aresta docubo e, dessa forma, desenhar a perspectiva do sólido (ver relatório do exercício 241).
252.Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados (verrelatório do exercício 250). Em seguida, para determinar os coeficientes de reduçãodos eixos coordenados, procedeu-se ao rebatimento dos planos coordenados, pelométodo dos cortes, conforme exposto no relatório do exercício 250. Note, no entanto,que, no rebatimento do plano YZ, se omitiu a representação do eixo Y rebatido, poreste não ser necessário (já se havia rebatido no eixo Y no rebatimento do plano XY).Sobre o eixo Xr’, a partir de Or’ e no sentido positivo do eixo, representaram-se asabcissas de A e B em V.G. (4 e 2 cm, respectivamente – C tem abcissa nula). Sobre oeixo Yr’, a partir de Or’ e no sentido positivo do eixo, representaram-se os afastamentosde A, B e C em V.G. (2, 5 e 3 cm, respectivamente). Sobre o eixo Zr’, a partir de Or’’ eno sentido positivo do eixo, representaram-se as cotas de A e C em V.G. (1 e 6 cm, res-pectivamente – B tem cota nula). Invertendo os rebatimentos, obtiveram-se, sobre asperspectivas dos eixos, as perspectivas das coordenadas dos três pontos – a partir das
251.
(Continua na página seguinte)
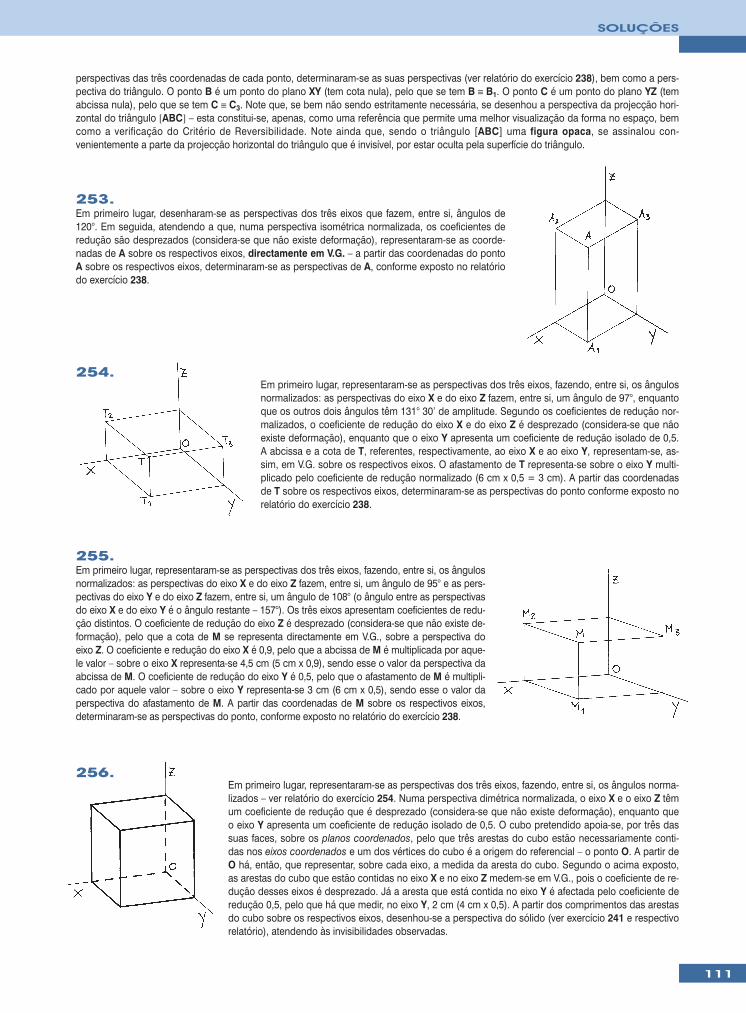
111
SOLUÇÕES
253.Em primeiro lugar, desenharam-se as perspectivas dos três eixos que fazem, entre si, ângulos de120°. Em seguida, atendendo a que, numa perspectiva isométrica normalizada, os coeficientes deredução são desprezados (considera-se que não existe deformação), representaram-se as coorde-nadas de A sobre os respectivos eixos, directamente em V.G. – a partir das coordenadas do pontoA sobre os respectivos eixos, determinaram-se as perspectivas de A, conforme exposto no relatóriodo exercício 238.
255.Em primeiro lugar, representaram-se as perspectivas dos três eixos, fazendo, entre si, os ângulosnormalizados: as perspectivas do eixo X e do eixo Z fazem, entre si, um ângulo de 95° e as pers-pectivas do eixo Y e do eixo Z fazem, entre si, um ângulo de 108° (o ângulo entre as perspectivasdo eixo X e do eixo Y é o ângulo restante – 157°). Os três eixos apresentam coeficientes de redu-ção distintos. O coeficiente de redução do eixo Z é desprezado (considera-se que não existe de-formação), pelo que a cota de M se representa directamente em V.G., sobre a perspectiva doeixo Z. O coeficiente e redução do eixo X é 0,9, pelo que a abcissa de M é multiplicada por aque-le valor – sobre o eixo X representa-se 4,5 cm (5 cm x 0,9), sendo esse o valor da perspectiva daabcissa de M. O coeficiente de redução do eixo Y é 0,5, pelo que o afastamento de M é multipli-cado por aquele valor – sobre o eixo Y representa-se 3 cm (6 cm x 0,5), sendo esse o valor daperspectiva do afastamento de M. A partir das coordenadas de M sobre os respectivos eixos,determinaram-se as perspectivas do ponto, conforme exposto no relatório do exercício 238.
Em primeiro lugar, representaram-se as perspectivas dos três eixos, fazendo, entre si, os ângulosnormalizados: as perspectivas do eixo X e do eixo Z fazem, entre si, um ângulo de 97°, enquantoque os outros dois ângulos têm 131° 30’ de amplitude. Segundo os coeficientes de redução nor-malizados, o coeficiente de redução do eixo X e do eixo Z é desprezado (considera-se que nãoexiste deformação), enquanto que o eixo Y apresenta um coeficiente de redução isolado de 0,5.A abcissa e a cota de T, referentes, respectivamente, ao eixo X e ao eixo Y, representam-se, as-sim, em V.G. sobre os respectivos eixos. O afastamento de T representa-se sobre o eixo Y multi-plicado pelo coeficiente de redução normalizado (6 cm x 0,5 = 3 cm). A partir das coordenadasde T sobre os respectivos eixos, determinaram-se as perspectivas do ponto conforme exposto norelatório do exercício 238.
Em primeiro lugar, representaram-se as perspectivas dos três eixos, fazendo, entre si, os ângulos norma-lizados – ver relatório do exercício 254. Numa perspectiva dimétrica normalizada, o eixo X e o eixo Z têmum coeficiente de redução que é desprezado (considera-se que não existe deformação), enquanto queo eixo Y apresenta um coeficiente de redução isolado de 0,5. O cubo pretendido apoia-se, por três dassuas faces, sobre os planos coordenados, pelo que três arestas do cubo estão necessariamente conti-das nos eixos coordenados e um dos vértices do cubo é a origem do referencial – o ponto O. A partir deO há, então, que representar, sobre cada eixo, a medida da aresta do cubo. Segundo o acima exposto,as arestas do cubo que estão contidas no eixo X e no eixo Z medem-se em V.G., pois o coeficiente de re-dução desses eixos é desprezado. Já a aresta que está contida no eixo Y é afectada pelo coeficiente deredução 0,5, pelo que há que medir, no eixo Y, 2 cm (4 cm x 0,5). A partir dos comprimentos das arestasdo cubo sobre os respectivos eixos, desenhou-se a perspectiva do sólido (ver exercício 241 e respectivorelatório), atendendo às invisibilidades observadas.
perspectivas das três coordenadas de cada ponto, determinaram-se as suas perspectivas (ver relatório do exercício 238), bem como a pers-pectiva do triângulo. O ponto B é um ponto do plano XY (tem cota nula), pelo que se tem B ≡ B1. O ponto C é um ponto do plano YZ (temabcissa nula), pelo que se tem C ≡ C3. Note que, se bem não sendo estritamente necessária, se desenhou a perspectiva da projecção hori-zontal do triângulo [ABC] – esta constitui-se, apenas, como uma referência que permite uma melhor visualização da forma no espaço, bemcomo a verificação do Critério de Reversibilidade. Note ainda que, sendo o triângulo [ABC] uma figura opaca, se assinalou con-venientemente a parte da projecção horizontal do triângulo que é invisível, por estar oculta pela superfície do triângulo.
254.
256.
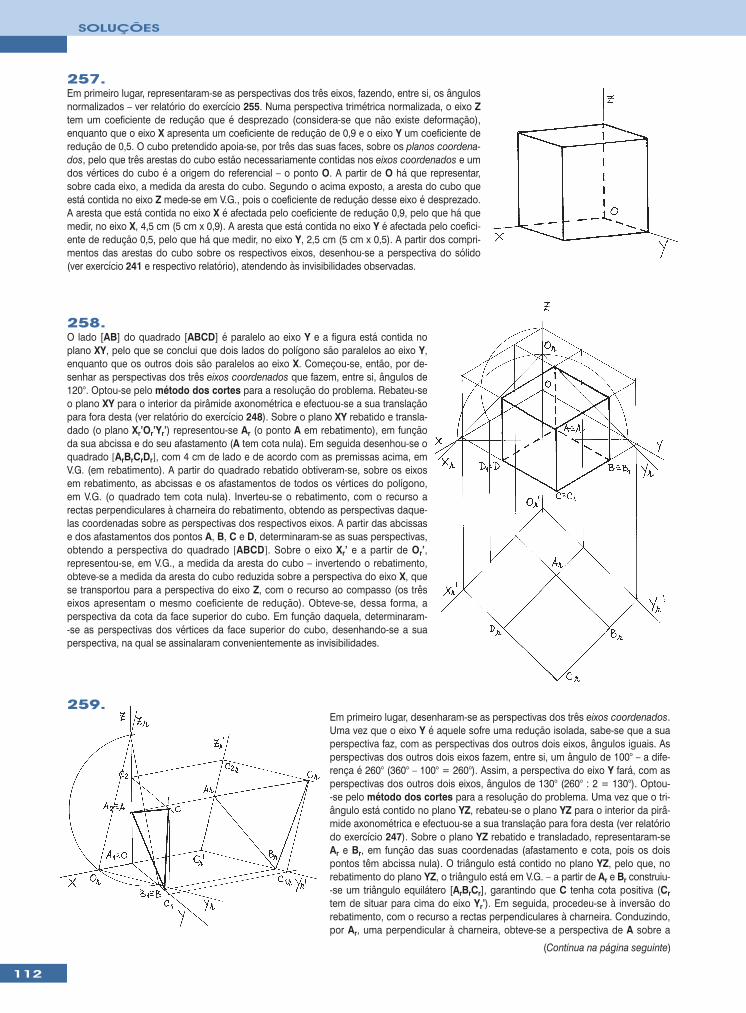
112
SOLUÇÕES
257.Em primeiro lugar, representaram-se as perspectivas dos três eixos, fazendo, entre si, os ângulosnormalizados – ver relatório do exercício 255. Numa perspectiva trimétrica normalizada, o eixo Ztem um coeficiente de redução que é desprezado (considera-se que não existe deformação),enquanto que o eixo X apresenta um coeficiente de redução de 0,9 e o eixo Y um coeficiente deredução de 0,5. O cubo pretendido apoia-se, por três das suas faces, sobre os planos coordena-dos, pelo que três arestas do cubo estão necessariamente contidas nos eixos coordenados e umdos vértices do cubo é a origem do referencial – o ponto O. A partir de O há que representar,sobre cada eixo, a medida da aresta do cubo. Segundo o acima exposto, a aresta do cubo queestá contida no eixo Z mede-se em V.G., pois o coeficiente de redução desse eixo é desprezado.A aresta que está contida no eixo X é afectada pelo coeficiente de redução 0,9, pelo que há quemedir, no eixo X, 4,5 cm (5 cm x 0,9). A aresta que está contida no eixo Y é afectada pelo coefici-ente de redução 0,5, pelo que há que medir, no eixo Y, 2,5 cm (5 cm x 0,5). A partir dos compri-mentos das arestas do cubo sobre os respectivos eixos, desenhou-se a perspectiva do sólido(ver exercício 241 e respectivo relatório), atendendo às invisibilidades observadas.
258.O lado [AB] do quadrado [ABCD] é paralelo ao eixo Y e a figura está contida noplano XY, pelo que se conclui que dois lados do polígono são paralelos ao eixo Y,enquanto que os outros dois são paralelos ao eixo X. Começou-se, então, por de-senhar as perspectivas dos três eixos coordenados que fazem, entre si, ângulos de120°. Optou-se pelo método dos cortes para a resolução do problema. Rebateu-seo plano XY para o interior da pirâmide axonométrica e efectuou-se a sua translaçãopara fora desta (ver relatório do exercício 248). Sobre o plano XY rebatido e transla-dado (o plano Xr’Or’Yr’) representou-se Ar (o ponto A em rebatimento), em funçãoda sua abcissa e do seu afastamento (A tem cota nula). Em seguida desenhou-se oquadrado [ArBrCrDr], com 4 cm de lado e de acordo com as premissas acima, emV.G. (em rebatimento). A partir do quadrado rebatido obtiveram-se, sobre os eixosem rebatimento, as abcissas e os afastamentos de todos os vértices do polígono,em V.G. (o quadrado tem cota nula). Inverteu-se o rebatimento, com o recurso arectas perpendiculares à charneira do rebatimento, obtendo as perspectivas daque-las coordenadas sobre as perspectivas dos respectivos eixos. A partir das abcissase dos afastamentos dos pontos A, B, C e D, determinaram-se as suas perspectivas,obtendo a perspectiva do quadrado [ABCD]. Sobre o eixo Xr’ e a partir de Or’,representou-se, em V.G., a medida da aresta do cubo – invertendo o rebatimento,obteve-se a medida da aresta do cubo reduzida sobre a perspectiva do eixo X, quese transportou para a perspectiva do eixo Z, com o recurso ao compasso (os trêseixos apresentam o mesmo coeficiente de redução). Obteve-se, dessa forma, aperspectiva da cota da face superior do cubo. Em função daquela, determinaram--se as perspectivas dos vértices da face superior do cubo, desenhando-se a suaperspectiva, na qual se assinalaram convenientemente as invisibilidades.
Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados.Uma vez que o eixo Y é aquele sofre uma redução isolada, sabe-se que a suaperspectiva faz, com as perspectivas dos outros dois eixos, ângulos iguais. Asperspectivas dos outros dois eixos fazem, entre si, um ângulo de 100° – a dife-rença é 260° (360° – 100° = 260°). Assim, a perspectiva do eixo Y fará, com asperspectivas dos outros dois eixos, ângulos de 130° (260° : 2 = 130°). Optou--se pelo método dos cortes para a resolução do problema. Uma vez que o tri-ângulo está contido no plano YZ, rebateu-se o plano YZ para o interior da pirâ-mide axonométrica e efectuou-se a sua translação para fora desta (ver relatóriodo exercício 247). Sobre o plano YZ rebatido e transladado, representaram-seAr e Br, em função das suas coordenadas (afastamento e cota, pois os doispontos têm abcissa nula). O triângulo está contido no plano YZ, pelo que, norebatimento do plano YZ, o triângulo está em V.G. – a partir de Ar e Br construiu--se um triângulo equilátero [ArBrCr], garantindo que C tenha cota positiva (Crtem de situar para cima do eixo Yr’). Em seguida, procedeu-se à inversão dorebatimento, com o recurso a rectas perpendiculares à charneira. Conduzindo,por Ar, uma perpendicular à charneira, obteve-se a perspectiva de A sobre a
259.
(Continua na página seguinte)
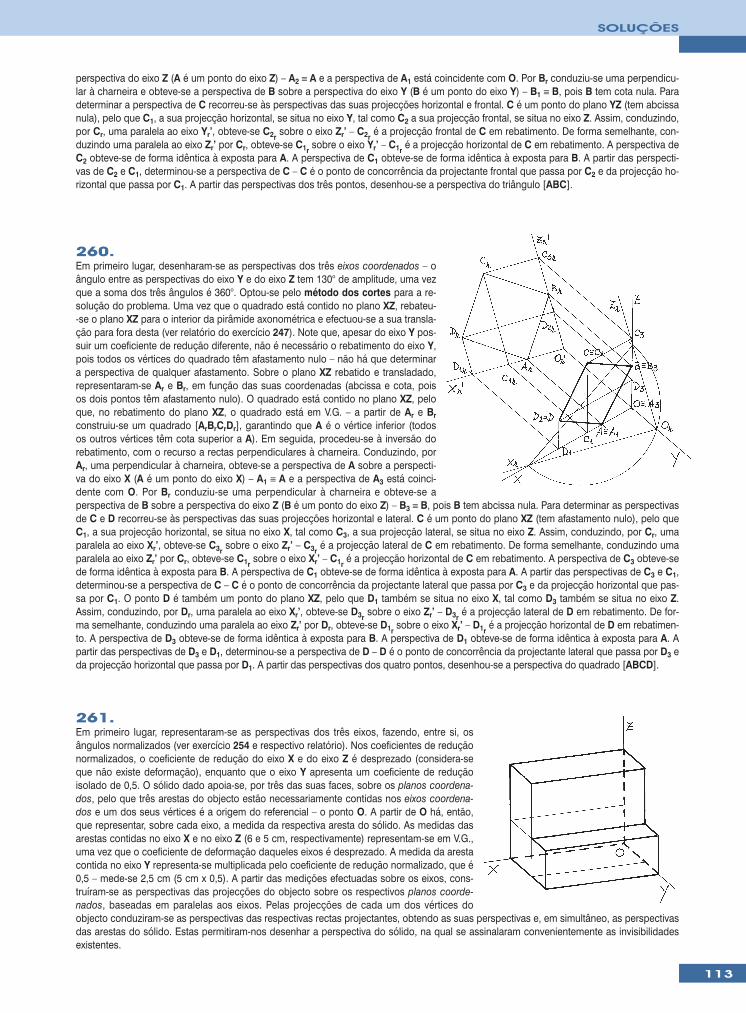
113
SOLUÇÕES
260.Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados – oângulo entre as perspectivas do eixo Y e do eixo Z tem 130° de amplitude, uma vezque a soma dos três ângulos é 360°. Optou-se pelo método dos cortes para a re-solução do problema. Uma vez que o quadrado está contido no plano XZ, rebateu--se o plano XZ para o interior da pirâmide axonométrica e efectuou-se a sua transla-ção para fora desta (ver relatório do exercício 247). Note que, apesar do eixo Y pos-suir um coeficiente de redução diferente, não é necessário o rebatimento do eixo Y,pois todos os vértices do quadrado têm afastamento nulo – não há que determinara perspectiva de qualquer afastamento. Sobre o plano XZ rebatido e transladado,representaram-se Ar e Br, em função das suas coordenadas (abcissa e cota, poisos dois pontos têm afastamento nulo). O quadrado está contido no plano XZ, peloque, no rebatimento do plano XZ, o quadrado está em V.G. – a partir de Ar e Br
construiu-se um quadrado [ArBrCrDr], garantindo que A é o vértice inferior (todosos outros vértices têm cota superior a A). Em seguida, procedeu-se à inversão dorebatimento, com o recurso a rectas perpendiculares à charneira. Conduzindo, porAr, uma perpendicular à charneira, obteve-se a perspectiva de A sobre a perspecti-va do eixo X (A é um ponto do eixo X) – A1 ≡ A e a perspectiva de A3 está coinci-dente com O. Por Br conduziu-se uma perpendicular à charneira e obteve-se aperspectiva de B sobre a perspectiva do eixo Z (B é um ponto do eixo Z) – B3 ≡ B, pois B tem abcissa nula. Para determinar as perspectivasde C e D recorreu-se às perspectivas das suas projecções horizontal e lateral. C é um ponto do plano XZ (tem afastamento nulo), pelo queC1, a sua projecção horizontal, se situa no eixo X, tal como C3, a sua projecção lateral, se situa no eixo Z. Assim, conduzindo, por Cr, umaparalela ao eixo Xr’, obteve-se C3r
sobre o eixo Zr’ – C3ré a projecção lateral de C em rebatimento. De forma semelhante, conduzindo uma
paralela ao eixo Zr’ por Cr, obteve-se C1rsobre o eixo Xr’ – C1r
é a projecção horizontal de C em rebatimento. A perspectiva de C3 obteve-sede forma idêntica à exposta para B. A perspectiva de C1 obteve-se de forma idêntica à exposta para A. A partir das perspectivas de C3 e C1,determinou-se a perspectiva de C – C é o ponto de concorrência da projectante lateral que passa por C3 e da projecção horizontal que pas-sa por C1. O ponto D é também um ponto do plano XZ, pelo que D1 também se situa no eixo X, tal como D3 também se situa no eixo Z.Assim, conduzindo, por Dr, uma paralela ao eixo Xr’, obteve-se D3r
sobre o eixo Zr’ – D3ré a projecção lateral de D em rebatimento. De for-
ma semelhante, conduzindo uma paralela ao eixo Zr’ por Dr, obteve-se D1rsobre o eixo Xr’ – D1r
é a projecção horizontal de D em rebatimen-to. A perspectiva de D3 obteve-se de forma idêntica à exposta para B. A perspectiva de D1 obteve-se de forma idêntica à exposta para A. Apartir das perspectivas de D3 e D1, determinou-se a perspectiva de D – D é o ponto de concorrência da projectante lateral que passa por D3 eda projecção horizontal que passa por D1. A partir das perspectivas dos quatro pontos, desenhou-se a perspectiva do quadrado [ABCD].
261.Em primeiro lugar, representaram-se as perspectivas dos três eixos, fazendo, entre si, osângulos normalizados (ver exercício 254 e respectivo relatório). Nos coeficientes de reduçãonormalizados, o coeficiente de redução do eixo X e do eixo Z é desprezado (considera-seque não existe deformação), enquanto que o eixo Y apresenta um coeficiente de reduçãoisolado de 0,5. O sólido dado apoia-se, por três das suas faces, sobre os planos coordena-dos, pelo que três arestas do objecto estão necessariamente contidas nos eixos coordena-dos e um dos seus vértices é a origem do referencial – o ponto O. A partir de O há, então,que representar, sobre cada eixo, a medida da respectiva aresta do sólido. As medidas dasarestas contidas no eixo X e no eixo Z (6 e 5 cm, respectivamente) representam-se em V.G.,uma vez que o coeficiente de deformação daqueles eixos é desprezado. A medida da arestacontida no eixo Y representa-se multiplicada pelo coeficiente de redução normalizado, que é0,5 – mede-se 2,5 cm (5 cm x 0,5). A partir das medições efectuadas sobre os eixos, cons-truíram-se as perspectivas das projecções do objecto sobre os respectivos planos coorde-nados, baseadas em paralelas aos eixos. Pelas projecções de cada um dos vértices doobjecto conduziram-se as perspectivas das respectivas rectas projectantes, obtendo as suas perspectivas e, em simultâneo, as perspectivasdas arestas do sólido. Estas permitiram-nos desenhar a perspectiva do sólido, na qual se assinalaram convenientemente as invisibilidadesexistentes.
perspectiva do eixo Z (A é um ponto do eixo Z) – A2 ≡ A e a perspectiva de A1 está coincidente com O. Por Br conduziu-se uma perpendicu-lar à charneira e obteve-se a perspectiva de B sobre a perspectiva do eixo Y (B é um ponto do eixo Y) – B1 ≡ B, pois B tem cota nula. Paradeterminar a perspectiva de C recorreu-se às perspectivas das suas projecções horizontal e frontal. C é um ponto do plano YZ (tem abcissanula), pelo que C1, a sua projecção horizontal, se situa no eixo Y, tal como C2 a sua projecção frontal, se situa no eixo Z. Assim, conduzindo,por Cr, uma paralela ao eixo Yr’, obteve-se C2r
sobre o eixo Zr’ – C2ré a projecção frontal de C em rebatimento. De forma semelhante, con-
duzindo uma paralela ao eixo Zr’ por Cr, obteve-se C1rsobre o eixo Yr’ – C1r
é a projecção horizontal de C em rebatimento. A perspectiva deC2 obteve-se de forma idêntica à exposta para A. A perspectiva de C1 obteve-se de forma idêntica à exposta para B. A partir das perspecti-vas de C2 e C1, determinou-se a perspectiva de C – C é o ponto de concorrência da projectante frontal que passa por C2 e da projecção ho-rizontal que passa por C1. A partir das perspectivas dos três pontos, desenhou-se a perspectiva do triângulo [ABC].
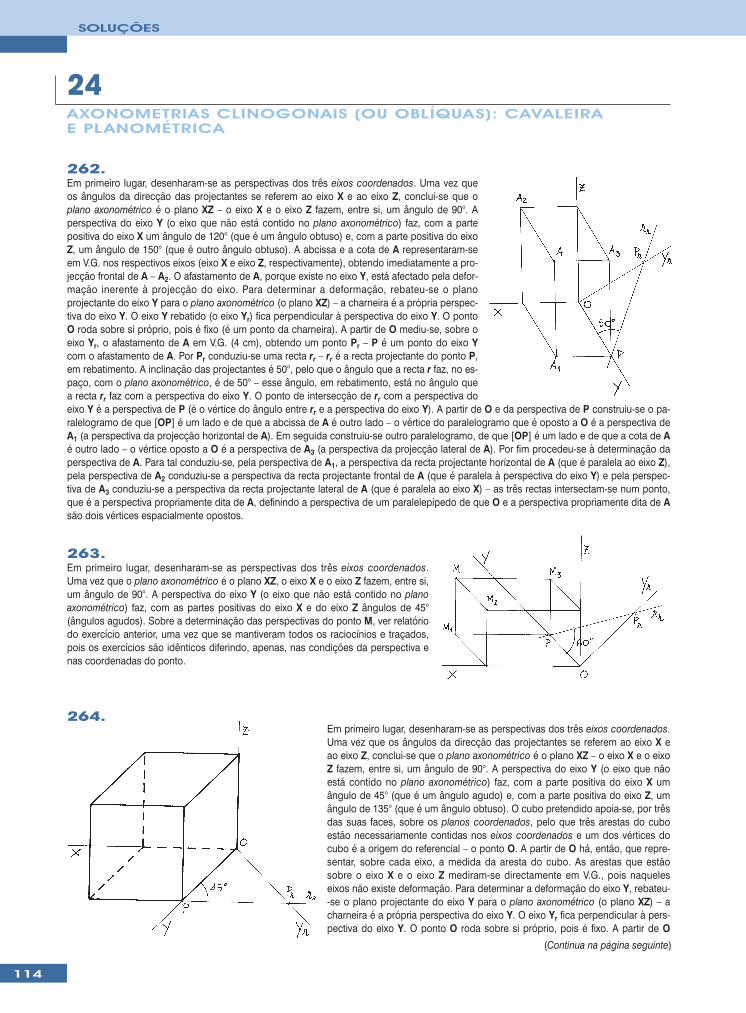
114
SOLUÇÕES
262.Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados. Uma vez queos ângulos da direcção das projectantes se referem ao eixo X e ao eixo Z, conclui-se que oplano axonométrico é o plano XZ – o eixo X e o eixo Z fazem, entre si, um ângulo de 90°. Aperspectiva do eixo Y (o eixo que não está contido no plano axonométrico) faz, com a partepositiva do eixo X um ângulo de 120° (que é um ângulo obtuso) e, com a parte positiva do eixoZ, um ângulo de 150° (que é outro ângulo obtuso). A abcissa e a cota de A representaram-seem V.G. nos respectivos eixos (eixo X e eixo Z, respectivamente), obtendo imediatamente a pro-jecção frontal de A – A2. O afastamento de A, porque existe no eixo Y, está afectado pela defor-mação inerente à projecção do eixo. Para determinar a deformação, rebateu-se o planoprojectante do eixo Y para o plano axonométrico (o plano XZ) – a charneira é a própria perspec-tiva do eixo Y. O eixo Y rebatido (o eixo Yr) fica perpendicular à perspectiva do eixo Y. O pontoO roda sobre si próprio, pois é fixo (é um ponto da charneira). A partir de O mediu-se, sobre oeixo Yr, o afastamento de A em V.G. (4 cm), obtendo um ponto Pr – P é um ponto do eixo Ycom o afastamento de A. Por Pr conduziu-se uma recta rr – rr é a recta projectante do ponto P,em rebatimento. A inclinação das projectantes é 50°, pelo que o ângulo que a recta r faz, no es-paço, com o plano axonométrico, é de 50° – esse ângulo, em rebatimento, está no ângulo quea recta rr faz com a perspectiva do eixo Y. O ponto de intersecção de rr com a perspectiva doeixo Y é a perspectiva de P (é o vértice do ângulo entre rr e a perspectiva do eixo Y). A partir de O e da perspectiva de P construiu-se o pa-ralelogramo de que [OP] é um lado e de que a abcissa de A é outro lado – o vértice do paralelogramo que é oposto a O é a perspectiva deA1 (a perspectiva da projecção horizontal de A). Em seguida construiu-se outro paralelogramo, de que [OP] é um lado e de que a cota de Aé outro lado – o vértice oposto a O é a perspectiva de A3 (a perspectiva da projecção lateral de A). Por fim procedeu-se à determinação daperspectiva de A. Para tal conduziu-se, pela perspectiva de A1, a perspectiva da recta projectante horizontal de A (que é paralela ao eixo Z),pela perspectiva de A2 conduziu-se a perspectiva da recta projectante frontal de A (que é paralela à perspectiva do eixo Y) e pela perspec-tiva de A3 conduziu-se a perspectiva da recta projectante lateral de A (que é paralela ao eixo X) – as três rectas intersectam-se num ponto,que é a perspectiva propriamente dita de A, definindo a perspectiva de um paralelepípedo de que O e a perspectiva propriamente dita de Asão dois vértices espacialmente opostos.
263.Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados.Uma vez que o plano axonométrico é o plano XZ, o eixo X e o eixo Z fazem, entre si,um ângulo de 90°. A perspectiva do eixo Y (o eixo que não está contido no planoaxonométrico) faz, com as partes positivas do eixo X e do eixo Z ângulos de 45°(ângulos agudos). Sobre a determinação das perspectivas do ponto M, ver relatóriodo exercício anterior, uma vez que se mantiveram todos os raciocínios e traçados,pois os exercícios são idênticos diferindo, apenas, nas condições da perspectiva enas coordenadas do ponto.
Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados.Uma vez que os ângulos da direcção das projectantes se referem ao eixo X eao eixo Z, conclui-se que o plano axonométrico é o plano XZ – o eixo X e o eixoZ fazem, entre si, um ângulo de 90°. A perspectiva do eixo Y (o eixo que nãoestá contido no plano axonométrico) faz, com a parte positiva do eixo X umângulo de 45° (que é um ângulo agudo) e, com a parte positiva do eixo Z, umângulo de 135° (que é um ângulo obtuso). O cubo pretendido apoia-se, por trêsdas suas faces, sobre os planos coordenados, pelo que três arestas do cuboestão necessariamente contidas nos eixos coordenados e um dos vértices docubo é a origem do referencial – o ponto O. A partir de O há, então, que repre-sentar, sobre cada eixo, a medida da aresta do cubo. As arestas que estãosobre o eixo X e o eixo Z mediram-se directamente em V.G., pois naqueleseixos não existe deformação. Para determinar a deformação do eixo Y, rebateu--se o plano projectante do eixo Y para o plano axonométrico (o plano XZ) – acharneira é a própria perspectiva do eixo Y. O eixo Yr fica perpendicular à pers-pectiva do eixo Y. O ponto O roda sobre si próprio, pois é fixo. A partir de O
24AXONOMETRIAS CLINOGONAIS (OU OBLÍQUAS): CAVALEIRA E PLANOMÉTRICA
264.
(Continua na página seguinte)
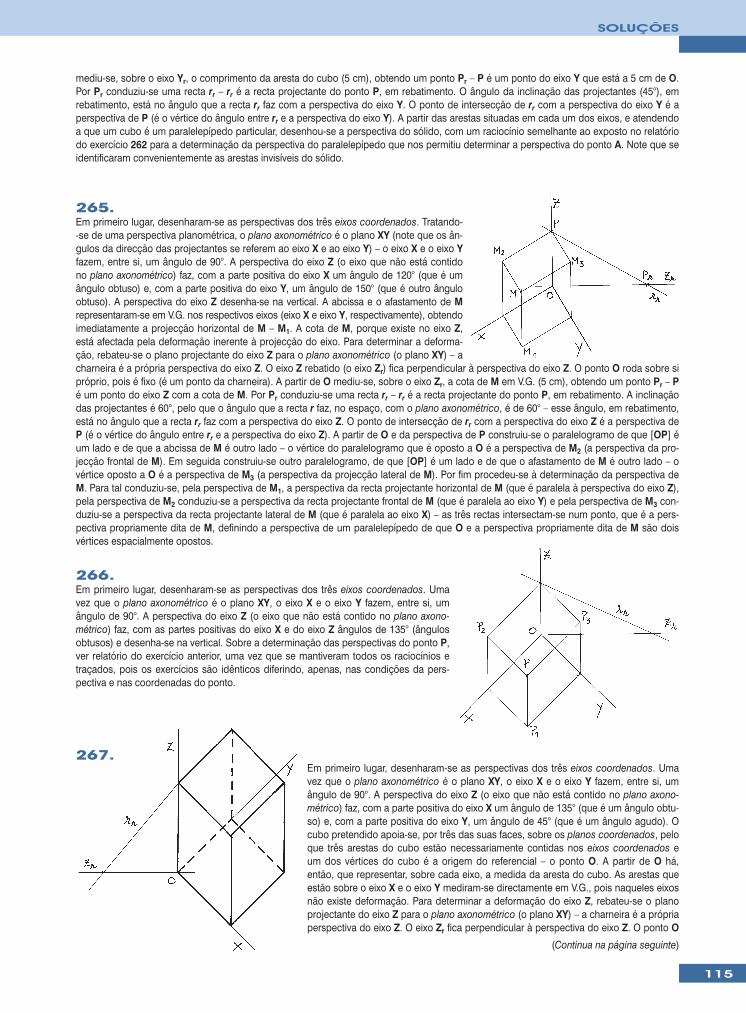
115
SOLUÇÕES
265.Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados. Tratando--se de uma perspectiva planométrica, o plano axonométrico é o plano XY (note que os ân-gulos da direcção das projectantes se referem ao eixo X e ao eixo Y) – o eixo X e o eixo Yfazem, entre si, um ângulo de 90°. A perspectiva do eixo Z (o eixo que não está contidono plano axonométrico) faz, com a parte positiva do eixo X um ângulo de 120° (que é umângulo obtuso) e, com a parte positiva do eixo Y, um ângulo de 150° (que é outro ânguloobtuso). A perspectiva do eixo Z desenha-se na vertical. A abcissa e o afastamento de Mrepresentaram-se em V.G. nos respectivos eixos (eixo X e eixo Y, respectivamente), obtendoimediatamente a projecção horizontal de M – M1. A cota de M, porque existe no eixo Z,está afectada pela deformação inerente à projecção do eixo. Para determinar a deforma-ção, rebateu-se o plano projectante do eixo Z para o plano axonométrico (o plano XY) – acharneira é a própria perspectiva do eixo Z. O eixo Z rebatido (o eixo Zr) fica perpendicular à perspectiva do eixo Z. O ponto O roda sobre sipróprio, pois é fixo (é um ponto da charneira). A partir de O mediu-se, sobre o eixo Zr, a cota de M em V.G. (5 cm), obtendo um ponto Pr – Pé um ponto do eixo Z com a cota de M. Por Pr conduziu-se uma recta rr – rr é a recta projectante do ponto P, em rebatimento. A inclinaçãodas projectantes é 60°, pelo que o ângulo que a recta r faz, no espaço, com o plano axonométrico, é de 60° – esse ângulo, em rebatimento,está no ângulo que a recta rr faz com a perspectiva do eixo Z. O ponto de intersecção de rr com a perspectiva do eixo Z é a perspectiva deP (é o vértice do ângulo entre rr e a perspectiva do eixo Z). A partir de O e da perspectiva de P construiu-se o paralelogramo de que [OP] éum lado e de que a abcissa de M é outro lado – o vértice do paralelogramo que é oposto a O é a perspectiva de M2 (a perspectiva da pro-jecção frontal de M). Em seguida construiu-se outro paralelogramo, de que [OP] é um lado e de que o afastamento de M é outro lado – ovértice oposto a O é a perspectiva de M3 (a perspectiva da projecção lateral de M). Por fim procedeu-se à determinação da perspectiva deM. Para tal conduziu-se, pela perspectiva de M1, a perspectiva da recta projectante horizontal de M (que é paralela à perspectiva do eixo Z),pela perspectiva de M2 conduziu-se a perspectiva da recta projectante frontal de M (que é paralela ao eixo Y) e pela perspectiva de M3 con-duziu-se a perspectiva da recta projectante lateral de M (que é paralela ao eixo X) – as três rectas intersectam-se num ponto, que é a pers-pectiva propriamente dita de M, definindo a perspectiva de um paralelepípedo de que O e a perspectiva propriamente dita de M são doisvértices espacialmente opostos.
266.Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados. Umavez que o plano axonométrico é o plano XY, o eixo X e o eixo Y fazem, entre si, umângulo de 90°. A perspectiva do eixo Z (o eixo que não está contido no plano axono-métrico) faz, com as partes positivas do eixo X e do eixo Z ângulos de 135° (ângulosobtusos) e desenha-se na vertical. Sobre a determinação das perspectivas do ponto P,ver relatório do exercício anterior, uma vez que se mantiveram todos os raciocínios etraçados, pois os exercícios são idênticos diferindo, apenas, nas condições da pers-pectiva e nas coordenadas do ponto.
Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados. Umavez que o plano axonométrico é o plano XY, o eixo X e o eixo Y fazem, entre si, umângulo de 90°. A perspectiva do eixo Z (o eixo que não está contido no plano axono-métrico) faz, com a parte positiva do eixo X um ângulo de 135° (que é um ângulo obtu-so) e, com a parte positiva do eixo Y, um ângulo de 45° (que é um ângulo agudo). Ocubo pretendido apoia-se, por três das suas faces, sobre os planos coordenados, peloque três arestas do cubo estão necessariamente contidas nos eixos coordenados eum dos vértices do cubo é a origem do referencial – o ponto O. A partir de O há,então, que representar, sobre cada eixo, a medida da aresta do cubo. As arestas queestão sobre o eixo X e o eixo Y mediram-se directamente em V.G., pois naqueles eixosnão existe deformação. Para determinar a deformação do eixo Z, rebateu-se o planoprojectante do eixo Z para o plano axonométrico (o plano XY) – a charneira é a própriaperspectiva do eixo Z. O eixo Zr fica perpendicular à perspectiva do eixo Z. O ponto O
mediu-se, sobre o eixo Yr, o comprimento da aresta do cubo (5 cm), obtendo um ponto Pr – P é um ponto do eixo Y que está a 5 cm de O.Por Pr conduziu-se uma recta rr – rr é a recta projectante do ponto P, em rebatimento. O ângulo da inclinação das projectantes (45°), emrebatimento, está no ângulo que a recta rr faz com a perspectiva do eixo Y. O ponto de intersecção de rr com a perspectiva do eixo Y é aperspectiva de P (é o vértice do ângulo entre rr e a perspectiva do eixo Y). A partir das arestas situadas em cada um dos eixos, e atendendoa que um cubo é um paralelepípedo particular, desenhou-se a perspectiva do sólido, com um raciocínio semelhante ao exposto no relatóriodo exercício 262 para a determinação da perspectiva do paralelepípedo que nos permitiu determinar a perspectiva do ponto A. Note que seidentificaram convenientemente as arestas invisíveis do sólido.
(Continua na página seguinte)
267.
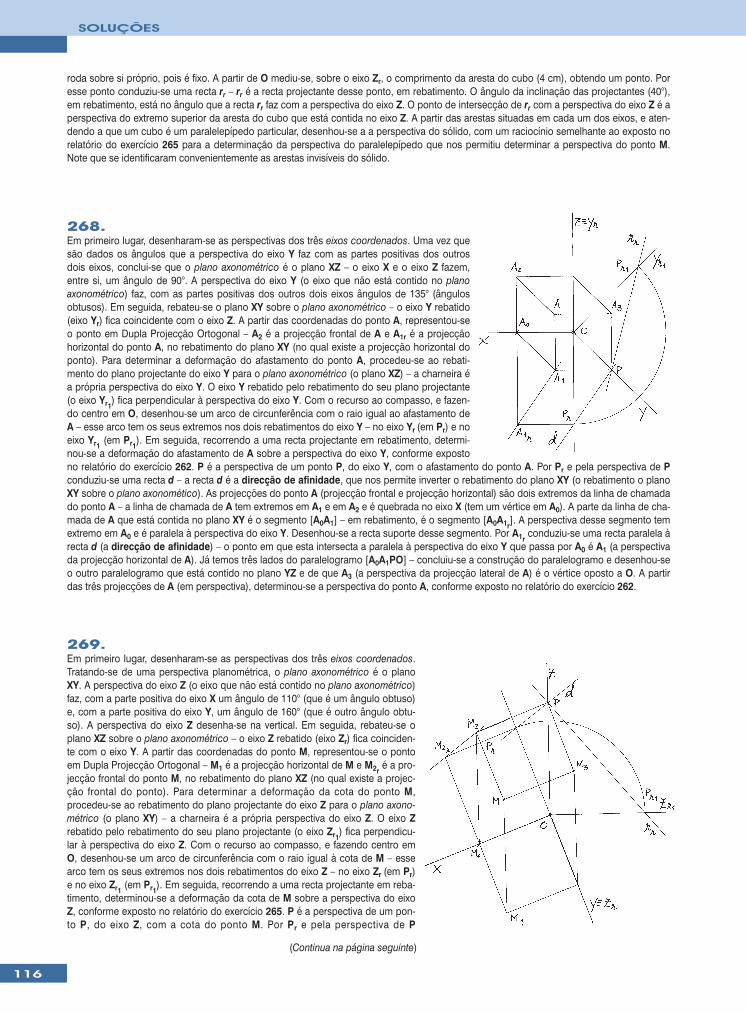
116
SOLUÇÕES
roda sobre si próprio, pois é fixo. A partir de O mediu-se, sobre o eixo Zr, o comprimento da aresta do cubo (4 cm), obtendo um ponto. Poresse ponto conduziu-se uma recta rr – rr é a recta projectante desse ponto, em rebatimento. O ângulo da inclinação das projectantes (40°),em rebatimento, está no ângulo que a recta rr faz com a perspectiva do eixo Z. O ponto de intersecção de rr com a perspectiva do eixo Z é aperspectiva do extremo superior da aresta do cubo que está contida no eixo Z. A partir das arestas situadas em cada um dos eixos, e aten-dendo a que um cubo é um paralelepípedo particular, desenhou-se a a perspectiva do sólido, com um raciocínio semelhante ao exposto norelatório do exercício 265 para a determinação da perspectiva do paralelepípedo que nos permitiu determinar a perspectiva do ponto M.Note que se identificaram convenientemente as arestas invisíveis do sólido.
268.Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados. Uma vez quesão dados os ângulos que a perspectiva do eixo Y faz com as partes positivas dos outrosdois eixos, conclui-se que o plano axonométrico é o plano XZ – o eixo X e o eixo Z fazem,entre si, um ângulo de 90°. A perspectiva do eixo Y (o eixo que não está contido no planoaxonométrico) faz, com as partes positivas dos outros dois eixos ângulos de 135° (ângulosobtusos). Em seguida, rebateu-se o plano XY sobre o plano axonométrico – o eixo Y rebatido(eixo Yr) fica coincidente com o eixo Z. A partir das coordenadas do ponto A, representou-seo ponto em Dupla Projecção Ortogonal – A2 é a projecção frontal de A e A1r é a projecçãohorizontal do ponto A, no rebatimento do plano XY (no qual existe a projecção horizontal doponto). Para determinar a deformação do afastamento do ponto A, procedeu-se ao rebati-mento do plano projectante do eixo Y para o plano axonométrico (o plano XZ) – a charneira éa própria perspectiva do eixo Y. O eixo Y rebatido pelo rebatimento do seu plano projectante(o eixo Yr1
) fica perpendicular à perspectiva do eixo Y. Com o recurso ao compasso, e fazen-do centro em O, desenhou-se um arco de circunferência com o raio igual ao afastamento deA – esse arco tem os seus extremos nos dois rebatimentos do eixo Y – no eixo Yr (em Pr) e noeixo Yr1
(em Pr1). Em seguida, recorrendo a uma recta projectante em rebatimento, determi-
nou-se a deformação do afastamento de A sobre a perspectiva do eixo Y, conforme expostono relatório do exercício 262. P é a perspectiva de um ponto P, do eixo Y, com o afastamento do ponto A. Por Pr e pela perspectiva de Pconduziu-se uma recta d – a recta d é a direcção de afinidade, que nos permite inverter o rebatimento do plano XY (o rebatimento o planoXY sobre o plano axonomético). As projecções do ponto A (projecção frontal e projecção horizontal) são dois extremos da linha de chamadado ponto A – a linha de chamada de A tem extremos em A1 e em A2 e é quebrada no eixo X (tem um vértice em A0). A parte da linha de cha-mada de A que está contida no plano XY é o segmento [A0A1] – em rebatimento, é o segmento [A0A1r
]. A perspectiva desse segmento temextremo em A0 e é paralela à perspectiva do eixo Y. Desenhou-se a recta suporte desse segmento. Por A1r
conduziu-se uma recta paralela àrecta d (a direcção de afinidade) – o ponto em que esta intersecta a paralela à perspectiva do eixo Y que passa por A0 é A1 (a perspectivada projecção horizontal de A). Já temos três lados do paralelogramo [A0A1PO] – concluiu-se a construção do paralelogramo e desenhou-seo outro paralelogramo que está contido no plano YZ e de que A3 (a perspectiva da projecção lateral de A) é o vértice oposto a O. A partirdas três projecções de A (em perspectiva), determinou-se a perspectiva do ponto A, conforme exposto no relatório do exercício 262.
269.Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados.Tratando-se de uma perspectiva planométrica, o plano axonométrico é o planoXY. A perspectiva do eixo Z (o eixo que não está contido no plano axonométrico)faz, com a parte positiva do eixo X um ângulo de 110° (que é um ângulo obtuso)e, com a parte positiva do eixo Y, um ângulo de 160° (que é outro ângulo obtu-so). A perspectiva do eixo Z desenha-se na vertical. Em seguida, rebateu-se oplano XZ sobre o plano axonométrico – o eixo Z rebatido (eixo Zr) fica coinciden-te com o eixo Y. A partir das coordenadas do ponto M, representou-se o pontoem Dupla Projecção Ortogonal – M1 é a projecção horizontal de M e M2r
é a pro-jecção frontal do ponto M, no rebatimento do plano XZ (no qual existe a projec-ção frontal do ponto). Para determinar a deformação da cota do ponto M,procedeu-se ao rebatimento do plano projectante do eixo Z para o plano axono-métrico (o plano XY) – a charneira é a própria perspectiva do eixo Z. O eixo Zrebatido pelo rebatimento do seu plano projectante (o eixo Zr1
) fica perpendicu-lar à perspectiva do eixo Z. Com o recurso ao compasso, e fazendo centro emO, desenhou-se um arco de circunferência com o raio igual à cota de M – essearco tem os seus extremos nos dois rebatimentos do eixo Z – no eixo Zr (em Pr)e no eixo Zr1
(em Pr1). Em seguida, recorrendo a uma recta projectante em reba-
timento, determinou-se a deformação da cota de M sobre a perspectiva do eixoZ, conforme exposto no relatório do exercício 265. P é a perspectiva de um pon-to P, do eixo Z, com a cota do ponto M. Por Pr e pela perspectiva de P
(Continua na página seguinte)
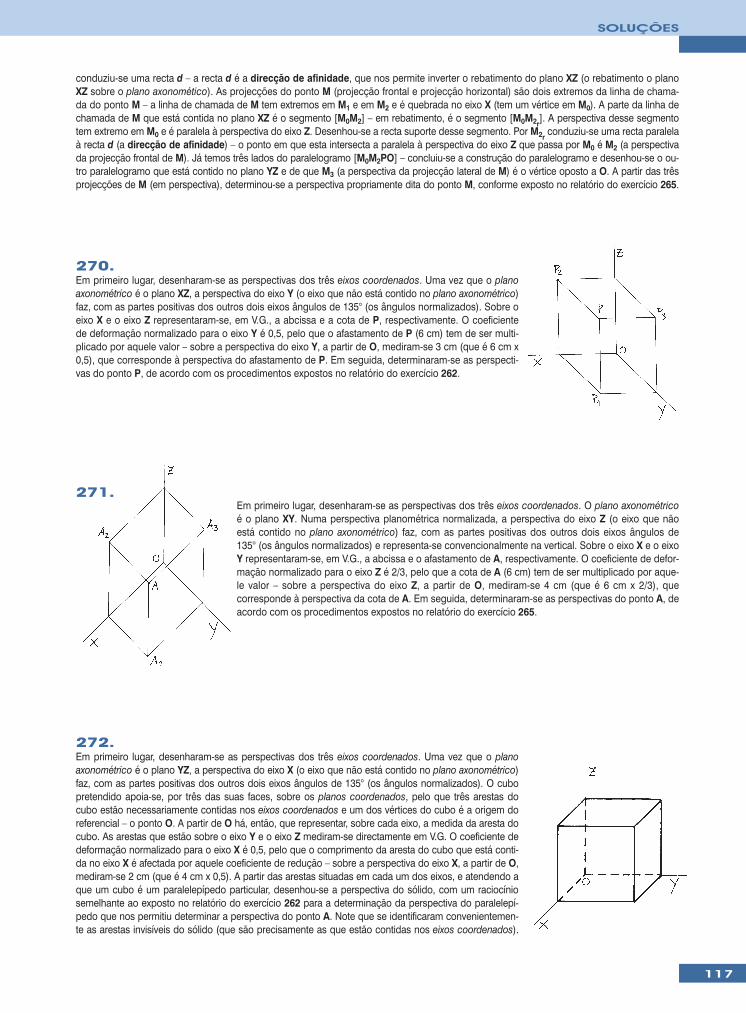
117
SOLUÇÕES
270.Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados. Uma vez que o planoaxonométrico é o plano XZ, a perspectiva do eixo Y (o eixo que não está contido no plano axonométrico)faz, com as partes positivas dos outros dois eixos ângulos de 135° (os ângulos normalizados). Sobre oeixo X e o eixo Z representaram-se, em V.G., a abcissa e a cota de P, respectivamente. O coeficientede deformação normalizado para o eixo Y é 0,5, pelo que o afastamento de P (6 cm) tem de ser multi-plicado por aquele valor – sobre a perspectiva do eixo Y, a partir de O, mediram-se 3 cm (que é 6 cm x0,5), que corresponde à perspectiva do afastamento de P. Em seguida, determinaram-se as perspecti-vas do ponto P, de acordo com os procedimentos expostos no relatório do exercício 262.
Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados. O plano axonométricoé o plano XY. Numa perspectiva planométrica normalizada, a perspectiva do eixo Z (o eixo que nãoestá contido no plano axonométrico) faz, com as partes positivas dos outros dois eixos ângulos de135° (os ângulos normalizados) e representa-se convencionalmente na vertical. Sobre o eixo X e o eixoY representaram-se, em V.G., a abcissa e o afastamento de A, respectivamente. O coeficiente de defor-mação normalizado para o eixo Z é 2/3, pelo que a cota de A (6 cm) tem de ser multiplicado por aque-le valor – sobre a perspectiva do eixo Z, a partir de O, mediram-se 4 cm (que é 6 cm x 2/3), quecorresponde à perspectiva da cota de A. Em seguida, determinaram-se as perspectivas do ponto A, deacordo com os procedimentos expostos no relatório do exercício 265.
272.Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados. Uma vez que o planoaxonométrico é o plano YZ, a perspectiva do eixo X (o eixo que não está contido no plano axonométrico)faz, com as partes positivas dos outros dois eixos ângulos de 135° (os ângulos normalizados). O cubopretendido apoia-se, por três das suas faces, sobre os planos coordenados, pelo que três arestas docubo estão necessariamente contidas nos eixos coordenados e um dos vértices do cubo é a origem doreferencial – o ponto O. A partir de O há, então, que representar, sobre cada eixo, a medida da aresta docubo. As arestas que estão sobre o eixo Y e o eixo Z mediram-se directamente em V.G. O coeficiente dedeformação normalizado para o eixo X é 0,5, pelo que o comprimento da aresta do cubo que está conti-da no eixo X é afectada por aquele coeficiente de redução – sobre a perspectiva do eixo X, a partir de O,mediram-se 2 cm (que é 4 cm x 0,5). A partir das arestas situadas em cada um dos eixos, e atendendo aque um cubo é um paralelepípedo particular, desenhou-se a perspectiva do sólido, com um raciocíniosemelhante ao exposto no relatório do exercício 262 para a determinação da perspectiva do paralelepí-pedo que nos permitiu determinar a perspectiva do ponto A. Note que se identificaram convenientemen-te as arestas invisíveis do sólido (que são precisamente as que estão contidas nos eixos coordenados).
conduziu-se uma recta d – a recta d é a direcção de afinidade, que nos permite inverter o rebatimento do plano XZ (o rebatimento o planoXZ sobre o plano axonomético). As projecções do ponto M (projecção frontal e projecção horizontal) são dois extremos da linha de chama-da do ponto M – a linha de chamada de M tem extremos em M1 e em M2 e é quebrada no eixo X (tem um vértice em M0). A parte da linha dechamada de M que está contida no plano XZ é o segmento [M0M2] – em rebatimento, é o segmento [M0M2r
]. A perspectiva desse segmentotem extremo em M0 e é paralela à perspectiva do eixo Z. Desenhou-se a recta suporte desse segmento. Por M2r
conduziu-se uma recta paralelaà recta d (a direcção de afinidade) – o ponto em que esta intersecta a paralela à perspectiva do eixo Z que passa por M0 é M2 (a perspectivada projecção frontal de M). Já temos três lados do paralelogramo [M0M2PO] – concluiu-se a construção do paralelogramo e desenhou-se o ou-tro paralelogramo que está contido no plano YZ e de que M3 (a perspectiva da projecção lateral de M) é o vértice oposto a O. A partir das trêsprojecções de M (em perspectiva), determinou-se a perspectiva propriamente dita do ponto M, conforme exposto no relatório do exercício 265.
271.

118
SOLUÇÕES
273.Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados. Oplano axonométrico é o plano XY. Numa perspectiva planométrica normalizada, aperspectiva do eixo Z (o eixo que não está contido no plano axonométrico) faz,com as partes positivas dos outros dois eixos ângulos de 135° (os ângulos normali-zados) e representa-se convencionalmente na vertical. O cubo pretendido apoia--se, por três das suas faces, sobre os planos coordenados, pelo que três arestasdo cubo estão necessariamente contidas nos eixos coordenados e um dos vérticesdo cubo é a origem do referencial – o ponto O. A partir de O há, então, que repre-sentar, sobre cada eixo, a medida da aresta do cubo. As arestas que estão sobre oeixo X e o eixo Y mediram-se directamente em V.G. O coeficiente de deformaçãonormalizado para o eixo Z é 2/3, pelo que o comprimento da aresta do cubo queestá contida naquele eixo (4 cm) tem de ser multiplicado por aquele valor – noteque, no presente caso, esse valor não é um valor exacto (4 cm x 2/3 = 2,6666…).Assim, para obter a medida dessa aresta já reduzida (em perspectiva), optou-sepor recorrer ao processo geométrico para a divisão de um segmento num qual-quer número de partes iguais, processo esse que foi objecto de estudo na discipli-na de Educação Visual dos 70, 80 e 90 anos de escolaridade. Pretende-serepresentar, sobre a perspectiva do eixo Z, a partir de O, 2/3 de 4 cm. Em primeirolugar desenhou-se um segmento de recta, com extremidade em O e uma direcção diferente da da perspectiva do eixo Z, com um compri-mento cujos 2/3 sejam de determinação directa. [OA] é o segmento pretendido – tem extremidade em O, não é paralelo à perspectiva doeixo Z e O�A� = 6 cm (repare que 6 cm x 2/3 = 4 cm, que é um valor exacto). [OA] é perpendicular à perspectiva do eixo Z, mas poderia seroblíquo. B é o ponto da perspectiva do eixo Z tal que O�B� = 4 cm (que é 2/3 x 6 cm). A recta que passa por A e por B é a recta que relaci-ona os comprimentos em V.G. com os seus transformados a 2/3, o que quer dizer que qualquer comprimento sobre a semi-recta •OA étransformado, através de rectas paralelas a AB, em 2/3 da sua dimensão sobre a perspectiva do eixo Z. M é um ponto da semi-recta •OA talque O�M� = 4 cm (a medida da aresta do cubo). Por M conduziu-se uma paralela a AB – o ponto N é o ponto em que aquela concorre com aperspectiva do eixo Z. O ponto N é um ponto tal que O�N� = 2/3 x O�M�. O�N� = 2/3 x 4 cm, pelo que [ON] é a perspectiva da aresta do cuboque está contida no eixo Z. A partir das arestas do cubo que estão contidas nos eixos, desenhou-se a perspectiva do sólido, atendendo àsrespectivas invisibilidades.
274.Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados.Uma vez que os ângulos das projectantes são relacionados ao eixo X e ao eixoZ, conclui-se que o plano axonométrico é o plano XZ – o eixo X e o eixo Z fa-zem, entre si, um ângulo de 90°. A perspectiva do eixo Y (o eixo que não estácontido no plano axonométrico) faz, com a parte positiva do eixo X um ângulode 150° (que é um ângulo obtuso) e, com a parte positiva do eixo Z, um ângulode 120° (que é outro ângulo obtuso). Em seguida, rebateu-se o plano XY sobreo plano axonométrico, conforme exposto no relatório do exercício 268, e repre-sentaram-se os três pontos em Dupla Projecção Ortogonal. Em seguida, deter-minou-se a direcção de afinidade d, conforme exposto no relatório do exercício268, e inverteu-se o rebatimento do plano XY, determinando, dessa forma, asperspectivas dos três pontos – R, S e T (aconselha-se a leitura do relatório doexercício 267). R é um ponto do plano XZ (tem afastamento nulo), pelo que setem R ≡ R2. S é um ponto do eixo Y, pelo que se tem S ≡ S1 ≡ S3. A partir dasperspectivas dos três pontos desenhou-se a perspectiva do triângulo. Note que,se bem não sendo estritamente necessária, se desenhou a perspectiva daprojecção horizontal do triângulo [RST] – esta constitui-se, apenas, como umareferência que permite uma melhor visualização da forma no espaço, bemcomo a verificação do Critério de Reversibilidade.
275.Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados. Tratando-se de uma perspectiva planométrica, o plano axo-nométrico é o plano XY. A perspectiva do eixo Z (o eixo que não está contido no plano axonométrico) faz, com a parte positiva do eixo X umângulo de 140° (que é um ângulo obtuso) e, com a parte positiva do eixo Y, um ângulo de 130° (que é outro ângulo obtuso). A perspectivado eixo Z desenha-se na vertical. Em seguida, rebateu-se o plano XZ sobre o plano axonométrico, conforme exposto no relatório do exercí-cio 269, e representaram-se os três pontos em Dupla Projecção Ortogonal. Em seguida, determinou-se a direcção de afinidade d, conformeexposto no relatório do exercício 269, e inverteu-se o rebatimento do plano XZ, determinando, dessa forma, as perspectivas dos três pontos
(Continua na página seguinte)
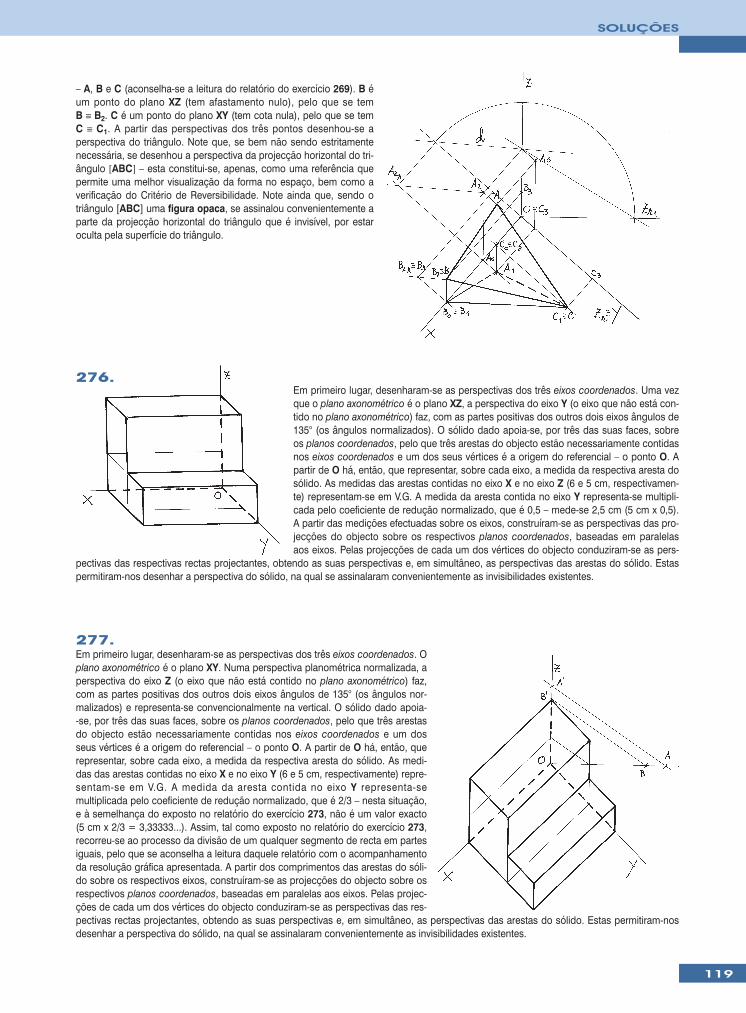
119
SOLUÇÕES
Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados. Uma vezque o plano axonométrico é o plano XZ, a perspectiva do eixo Y (o eixo que não está con-tido no plano axonométrico) faz, com as partes positivas dos outros dois eixos ângulos de135° (os ângulos normalizados). O sólido dado apoia-se, por três das suas faces, sobreos planos coordenados, pelo que três arestas do objecto estão necessariamente contidasnos eixos coordenados e um dos seus vértices é a origem do referencial – o ponto O. Apartir de O há, então, que representar, sobre cada eixo, a medida da respectiva aresta dosólido. As medidas das arestas contidas no eixo X e no eixo Z (6 e 5 cm, respectivamen-te) representam-se em V.G. A medida da aresta contida no eixo Y representa-se multipli-cada pelo coeficiente de redução normalizado, que é 0,5 – mede-se 2,5 cm (5 cm x 0,5).A partir das medições efectuadas sobre os eixos, construíram-se as perspectivas das pro-jecções do objecto sobre os respectivos planos coordenados, baseadas em paralelasaos eixos. Pelas projecções de cada um dos vértices do objecto conduziram-se as pers-
pectivas das respectivas rectas projectantes, obtendo as suas perspectivas e, em simultâneo, as perspectivas das arestas do sólido. Estaspermitiram-nos desenhar a perspectiva do sólido, na qual se assinalaram convenientemente as invisibilidades existentes.
277.Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados. Oplano axonométrico é o plano XY. Numa perspectiva planométrica normalizada, aperspectiva do eixo Z (o eixo que não está contido no plano axonométrico) faz,com as partes positivas dos outros dois eixos ângulos de 135° (os ângulos nor-malizados) e representa-se convencionalmente na vertical. O sólido dado apoia--se, por três das suas faces, sobre os planos coordenados, pelo que três arestasdo objecto estão necessariamente contidas nos eixos coordenados e um dosseus vértices é a origem do referencial – o ponto O. A partir de O há, então, querepresentar, sobre cada eixo, a medida da respectiva aresta do sólido. As medi-das das arestas contidas no eixo X e no eixo Y (6 e 5 cm, respectivamente) repre-sentam-se em V.G. A medida da aresta contida no eixo Y representa-semultiplicada pelo coeficiente de redução normalizado, que é 2/3 – nesta situação,e à semelhança do exposto no relatório do exercício 273, não é um valor exacto(5 cm x 2/3 = 3,33333...). Assim, tal como exposto no relatório do exercício 273,recorreu-se ao processo da divisão de um qualquer segmento de recta em partesiguais, pelo que se aconselha a leitura daquele relatório com o acompanhamentoda resolução gráfica apresentada. A partir dos comprimentos das arestas do sóli-do sobre os respectivos eixos, construíram-se as projecções do objecto sobre osrespectivos planos coordenados, baseadas em paralelas aos eixos. Pelas projec-ções de cada um dos vértices do objecto conduziram-se as perspectivas das res-pectivas rectas projectantes, obtendo as suas perspectivas e, em simultâneo, as perspectivas das arestas do sólido. Estas permitiram-nosdesenhar a perspectiva do sólido, na qual se assinalaram convenientemente as invisibilidades existentes.
– A, B e C (aconselha-se a leitura do relatório do exercício 269). B éum ponto do plano XZ (tem afastamento nulo), pelo que se temB ≡ B2. C é um ponto do plano XY (tem cota nula), pelo que se temC ≡ C1. A partir das perspectivas dos três pontos desenhou-se aperspectiva do triângulo. Note que, se bem não sendo estritamentenecessária, se desenhou a perspectiva da projecção horizontal do tri-ângulo [ABC] – esta constitui-se, apenas, como uma referência quepermite uma melhor visualização da forma no espaço, bem como averificação do Critério de Reversibilidade. Note ainda que, sendo otriângulo [ABC] uma figura opaca, se assinalou convenientemente aparte da projecção horizontal do triângulo que é invisível, por estaroculta pela superfície do triângulo.
276.
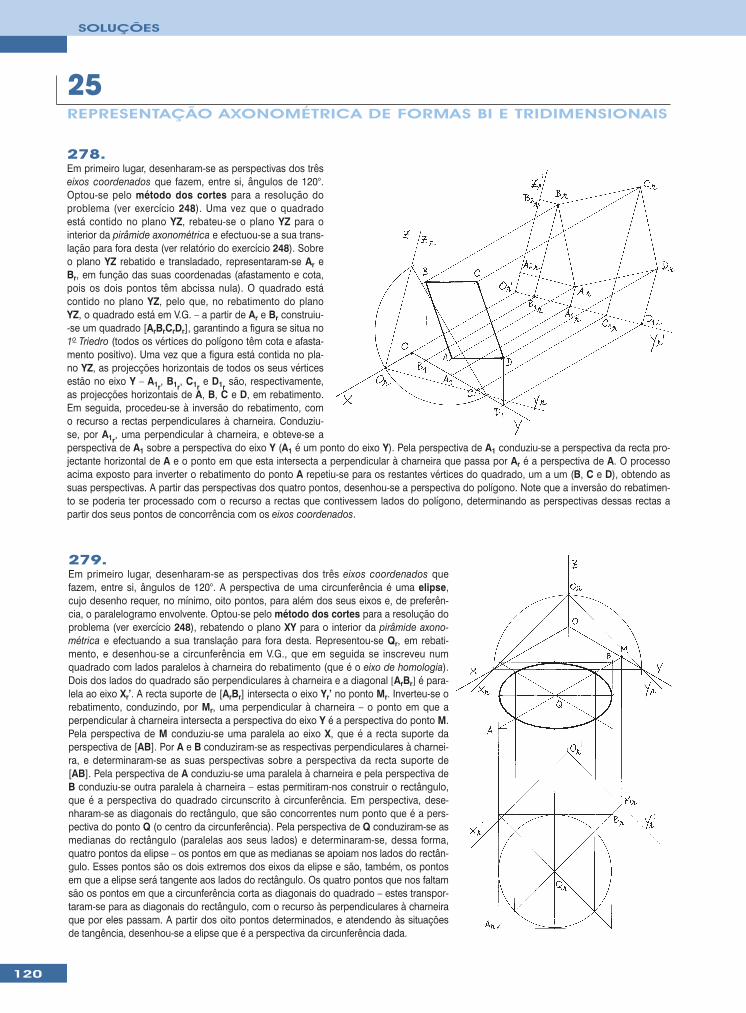
120
SOLUÇÕES
25REPRESENTAÇÃO AXONOMÉTRICA DE FORMAS BI E TRIDIMENSIONAIS
278.Em primeiro lugar, desenharam-se as perspectivas dos trêseixos coordenados que fazem, entre si, ângulos de 120°.Optou-se pelo método dos cortes para a resolução doproblema (ver exercício 248). Uma vez que o quadradoestá contido no plano YZ, rebateu-se o plano YZ para ointerior da pirâmide axonométrica e efectuou-se a sua trans-lação para fora desta (ver relatório do exercício 248). Sobreo plano YZ rebatido e transladado, representaram-se Ar eBr, em função das suas coordenadas (afastamento e cota,pois os dois pontos têm abcissa nula). O quadrado estácontido no plano YZ, pelo que, no rebatimento do planoYZ, o quadrado está em V.G. – a partir de Ar e Br construiu--se um quadrado [ArBrCrDr], garantindo a figura se situa no1o Triedro (todos os vértices do polígono têm cota e afasta-mento positivo). Uma vez que a figura está contida no pla-no YZ, as projecções horizontais de todos os seus vérticesestão no eixo Y – A1r
, B1r, C1r
e D1rsão, respectivamente,
as projecções horizontais de A, B, C e D, em rebatimento.Em seguida, procedeu-se à inversão do rebatimento, como recurso a rectas perpendiculares à charneira. Conduziu-se, por A1r
, uma perpendicular à charneira, e obteve-se aperspectiva de A1 sobre a perspectiva do eixo Y (A1 é um ponto do eixo Y). Pela perspectiva de A1 conduziu-se a perspectiva da recta pro-jectante horizontal de A e o ponto em que esta intersecta a perpendicular à charneira que passa por Ar é a perspectiva de A. O processoacima exposto para inverter o rebatimento do ponto A repetiu-se para os restantes vértices do quadrado, um a um (B, C e D), obtendo assuas perspectivas. A partir das perspectivas dos quatro pontos, desenhou-se a perspectiva do polígono. Note que a inversão do rebatimen-to se poderia ter processado com o recurso a rectas que contivessem lados do polígono, determinando as perspectivas dessas rectas apartir dos seus pontos de concorrência com os eixos coordenados.
279.Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados quefazem, entre si, ângulos de 120°. A perspectiva de uma circunferência é uma elipse,cujo desenho requer, no mínimo, oito pontos, para além dos seus eixos e, de preferên-cia, o paralelogramo envolvente. Optou-se pelo método dos cortes para a resolução doproblema (ver exercício 248), rebatendo o plano XY para o interior da pirâmide axono-métrica e efectuando a sua translação para fora desta. Representou-se Qr, em rebati-mento, e desenhou-se a circunferência em V.G., que em seguida se inscreveu numquadrado com lados paralelos à charneira do rebatimento (que é o eixo de homologia).Dois dos lados do quadrado são perpendiculares à charneira e a diagonal [ArBr] é para-lela ao eixo Xr’. A recta suporte de [ArBr] intersecta o eixo Yr’ no ponto Mr. Inverteu-se orebatimento, conduzindo, por Mr, uma perpendicular à charneira – o ponto em que aperpendicular à charneira intersecta a perspectiva do eixo Y é a perspectiva do ponto M.Pela perspectiva de M conduziu-se uma paralela ao eixo X, que é a recta suporte daperspectiva de [AB]. Por A e B conduziram-se as respectivas perpendiculares à charnei-ra, e determinaram-se as suas perspectivas sobre a perspectiva da recta suporte de[AB]. Pela perspectiva de A conduziu-se uma paralela à charneira e pela perspectiva deB conduziu-se outra paralela à charneira – estas permitiram-nos construir o rectângulo,que é a perspectiva do quadrado circunscrito à circunferência. Em perspectiva, dese-nharam-se as diagonais do rectângulo, que são concorrentes num ponto que é a pers-pectiva do ponto Q (o centro da circunferência). Pela perspectiva de Q conduziram-se asmedianas do rectângulo (paralelas aos seus lados) e determinaram-se, dessa forma,quatro pontos da elipse – os pontos em que as medianas se apoiam nos lados do rectân-gulo. Esses pontos são os dois extremos dos eixos da elipse e são, também, os pontosem que a elipse será tangente aos lados do rectângulo. Os quatro pontos que nos faltamsão os pontos em que a circunferência corta as diagonais do quadrado – estes transpor-taram-se para as diagonais do rectângulo, com o recurso às perpendiculares à charneiraque por eles passam. A partir dos oito pontos determinados, e atendendo às situaçõesde tangência, desenhou-se a elipse que é a perspectiva da circunferência dada.
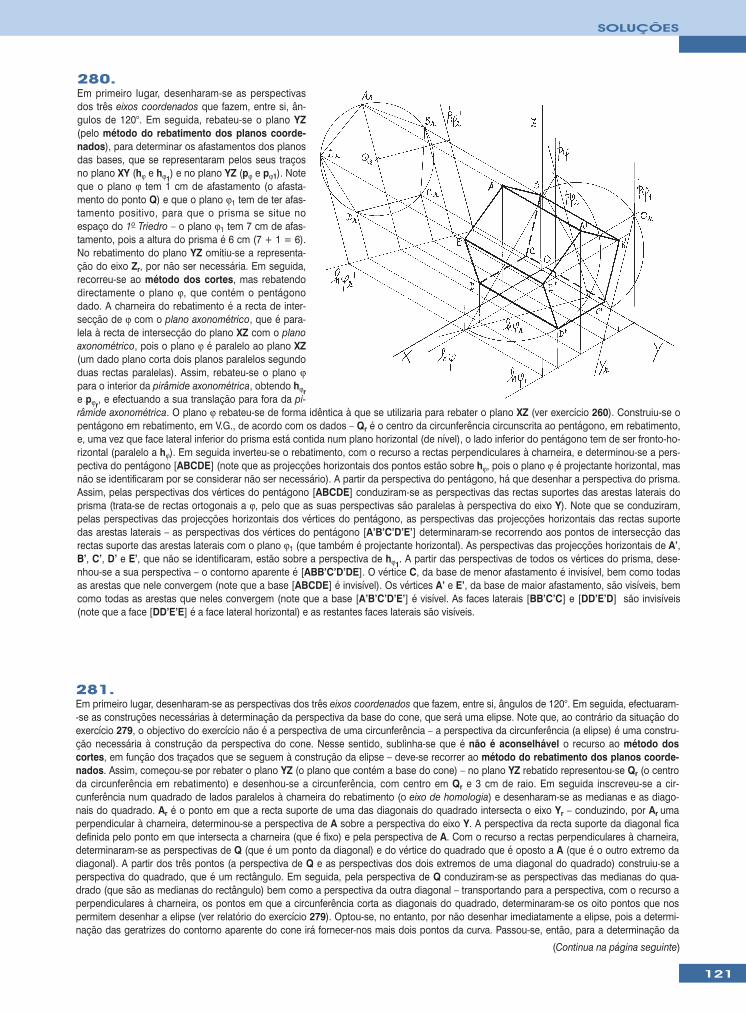
121
SOLUÇÕES
280.Em primeiro lugar, desenharam-se as perspectivasdos três eixos coordenados que fazem, entre si, ân-gulos de 120°. Em seguida, rebateu-se o plano YZ(pelo método do rebatimento dos planos coorde-nados), para determinar os afastamentos dos planosdas bases, que se representaram pelos seus traçosno plano XY (hϕ e hϕ1
) e no plano YZ (pϕ e pϕ1). Noteque o plano ϕ tem 1 cm de afastamento (o afasta-mento do ponto Q) e que o plano ϕ1 tem de ter afas-tamento positivo, para que o prisma se situe noespaço do 1o Triedro – o plano ϕ1 tem 7 cm de afas-tamento, pois a altura do prisma é 6 cm (7 + 1 = 6).No rebatimento do plano YZ omitiu-se a representa-ção do eixo Zr, por não ser necessária. Em seguida,recorreu-se ao método dos cortes, mas rebatendodirectamente o plano ϕ, que contém o pentágonodado. A charneira do rebatimento é a recta de inter-secção de ϕ com o plano axonométrico, que é para-lela à recta de intersecção do plano XZ com o planoaxonométrico, pois o plano ϕ é paralelo ao plano XZ(um dado plano corta dois planos paralelos segundoduas rectas paralelas). Assim, rebateu-se o plano ϕpara o interior da pirâmide axonométrica, obtendo hϕre pϕr
, e efectuando a sua translação para fora da pi-râmide axonométrica. O plano ϕ rebateu-se de forma idêntica à que se utilizaria para rebater o plano XZ (ver exercício 260). Construiu-se opentágono em rebatimento, em V.G., de acordo com os dados – Qr é o centro da circunferência circunscrita ao pentágono, em rebatimento,e, uma vez que face lateral inferior do prisma está contida num plano horizontal (de nível), o lado inferior do pentágono tem de ser fronto-ho-rizontal (paralelo a hϕ). Em seguida inverteu-se o rebatimento, com o recurso a rectas perpendiculares à charneira, e determinou-se a pers-pectiva do pentágono [ABCDE] (note que as projecções horizontais dos pontos estão sobre hϕ, pois o plano ϕ é projectante horizontal, masnão se identificaram por se considerar não ser necessário). A partir da perspectiva do pentágono, há que desenhar a perspectiva do prisma.Assim, pelas perspectivas dos vértices do pentágono [ABCDE] conduziram-se as perspectivas das rectas suportes das arestas laterais doprisma (trata-se de rectas ortogonais a ϕ, pelo que as suas perspectivas são paralelas à perspectiva do eixo Y). Note que se conduziram,pelas perspectivas das projecções horizontais dos vértices do pentágono, as perspectivas das projecções horizontais das rectas suportedas arestas laterais – as perspectivas dos vértices do pentágono [A’B’C’D’E’] determinaram-se recorrendo aos pontos de intersecção dasrectas suporte das arestas laterais com o plano ϕ1 (que também é projectante horizontal). As perspectivas das projecções horizontais de A’,B’, C’, D’ e E’, que não se identificaram, estão sobre a perspectiva de hϕ1
. A partir das perspectivas de todos os vértices do prisma, dese-nhou-se a sua perspectiva – o contorno aparente é [ABB’C’D’DE]. O vértice C, da base de menor afastamento é invisível, bem como todasas arestas que nele convergem (note que a base [ABCDE] é invisível). Os vértices A’ e E’, da base de maior afastamento, são visíveis, bemcomo todas as arestas que neles convergem (note que a base [A’B’C’D’E’] é visível. As faces laterais [BB’C’C] e [DD’E’D] são invisíveis(note que a face [DD’E’E] é a face lateral horizontal) e as restantes faces laterais são visíveis.
281.Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados que fazem, entre si, ângulos de 120°. Em seguida, efectuaram--se as construções necessárias à determinação da perspectiva da base do cone, que será uma elipse. Note que, ao contrário da situação doexercício 279, o objectivo do exercício não é a perspectiva de uma circunferência – a perspectiva da circunferência (a elipse) é uma constru-ção necessária à construção da perspectiva do cone. Nesse sentido, sublinha-se que é não é aconselhável o recurso ao método doscortes, em função dos traçados que se seguem à construção da elipse – deve-se recorrer ao método do rebatimento dos planos coorde-nados. Assim, começou-se por rebater o plano YZ (o plano que contém a base do cone) – no plano YZ rebatido representou-se Qr (o centroda circunferência em rebatimento) e desenhou-se a circunferência, com centro em Qr e 3 cm de raio. Em seguida inscreveu-se a cir-cunferência num quadrado de lados paralelos à charneira do rebatimento (o eixo de homologia) e desenharam-se as medianas e as diago-nais do quadrado. Ar é o ponto em que a recta suporte de uma das diagonais do quadrado intersecta o eixo Yr – conduzindo, por Ar umaperpendicular à charneira, determinou-se a perspectiva de A sobre a perspectiva do eixo Y. A perspectiva da recta suporte da diagonal ficadefinida pelo ponto em que intersecta a charneira (que é fixo) e pela perspectiva de A. Com o recurso a rectas perpendiculares à charneira,determinaram-se as perspectivas de Q (que é um ponto da diagonal) e do vértice do quadrado que é oposto a A (que é o outro extremo dadiagonal). A partir dos três pontos (a perspectiva de Q e as perspectivas dos dois extremos de uma diagonal do quadrado) construiu-se aperspectiva do quadrado, que é um rectângulo. Em seguida, pela perspectiva de Q conduziram-se as perspectivas das medianas do qua-drado (que são as medianas do rectângulo) bem como a perspectiva da outra diagonal – transportando para a perspectiva, com o recurso aperpendiculares à charneira, os pontos em que a circunferência corta as diagonais do quadrado, determinaram-se os oito pontos que nospermitem desenhar a elipse (ver relatório do exercício 279). Optou-se, no entanto, por não desenhar imediatamente a elipse, pois a determi-nação das geratrizes do contorno aparente do cone irá fornecer-nos mais dois pontos da curva. Passou-se, então, para a determinação da
(Continua na página seguinte)

122
SOLUÇÕES
perspectiva do sólido. Em primeiro lugar há que determi-nar a perspectiva de V, o vértice do cone. O cone tem 7cm de altura e a sua base tem abcissa nula, pelo que Vtem 7 cm de abcissa e situa-se na recta ortogonal ao pla-no YZ que passa por Q (que é a recta projectante lateralde V). Uma vez que os três eixos têm o mesmo coeficien-te de deformação, sobre o eixo Zr, a partir de Or, medi-ram-se 7 cm, obtendo um ponto Br, tal que O�r�B�r� =7 cm.Inverteu-se o rebatimento conduzindo, por Br, uma per-pendicular à charneira – a perspectiva de B situa-sesobre a perspectiva do eixo Z e O�B� é a altura do cone, járeduzida. Com o compasso, fazendo centro em O, trans-portou-se O�B� para a perspectiva do eixo X, o que nospermitiu determinar as perspectivas de V1 e, sequente-mente, de V. Para determinar as geratrizes do contornoaparente do sólido, há que recorrer aos planos tangen-tes ao cone que são paralelos a uma recta projectan-te. Para tal conduziu-se, por V, uma recta i, projectante(ortogonal ao plano axonométrico) – a perspectiva darecta i é um ponto, pelo que se assinalou devidamentecom parêntesis. Em seguida determinou-se o ponto deintersecção da recta i com o plano da base (o plano YZ)– o ponto I. A perspectiva do ponto I está coincidentecom a perspectiva da recta i e com a perspectiva de V,pois a recta i é simultaneamente a recta projectante de V e de I – I ≡ (i) ≡ V. Por Ι há que conduzir as rectas tangentes à base do cone – estaconstrução não se pode processar directamente em perspectiva, pois não existe qualquer processo rigoroso para determinar as rectas tan-gentes a uma elipse que, para além do mais, é desenhada à mão livre. Assim, há que efectuar este procedimento em rebatimento. Para tal,rebateu-se o ponto I pelo rebatimento já efectuado do plano YZ (o ponto I é um ponto do plano YZ). Pela perspectiva de I conduziu-se aperspectiva de uma recta paralela ao eixo Y – a recta h. A recta h é concorrente com a charneira do rebatimento no ponto C, que é um pontofixo – C ≡ Cr. Por Cr conduziu-se a recta hr (a recta h em rebatimento), paralela ao eixo Yr. O ponto em que hr é concorrente com a perpendi-cular à charneira que passa pela perspectiva de I é Ir. Por fim, por Ir conduziram-se as tangentes à circunferência em V.G., obtendo os pontosT e T’, os pontos de tangência. Note que não é estritamente necessária a representação das rectas tangentes, que aqui se omitiu. Paradeterminar as perspectivas de T e T’ conduziu-se, por Tr e T’r, uma recta mr, que é paralela à charneira do rebatimento. A recta mr intersectao eixo Yr no ponto Mr – a perspectiva de M determina-se imediatamente sobre a perspectiva do eixo Y, através da perpendicular à charneiraque passa por Mr. Pela perspectiva de M conduziu-se a perspectiva da recta m, paralela à charneira – as perspectivas de T e T’ estão sobre aperspectiva de m, nos pontos de concorrência desta com as perpendiculares à charneira que passam por aqueles pontos. As geratrizes docontorno aparente são [TV] e [T’V], cujas perspectivas se desenharam imediatamente. A partir dos dez pontos já determinados da elipse, de-senhou-se a curva, atendendo a que a elipse é concordante com a perspectiva da geratriz [TV] em T e é concordante com a perspectiva dageratriz [T’V] em T’. Assinalando convenientemente a parte invisível do contorno da base, obteve-se a perspectiva do cone.
282.Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados. Uma vez que o eixo Y é aquele cuja perspectiva faz ângulosiguais com as perspectivas dos outros dois eixos, o eixo Y é o que sofre uma redução isolada. A soma dos ângulos que a perspectiva doeixo Y faz com as perspectivas dos outros dois eixos é 220°, pelo que as perspectivas dos outros dois eixos fazem, entre si, um ângulo de140° (360° – 220° = 140°). Optou-se pelo método dos cortes para a resolução do problema (ver exercício 249). O pentágono está contidonum plano de perfil, pelo que se projecta em V.G. no plano YZ – poder-se-ia ter rebatido directamente o plano π, mas optou-se por rebater oplano YZ e construir a projecção lateral do pentágono em V.G., que é uma figura geometricamente igual ao pentágono [ABCDE]. Rebateu--se o plano YZ para o interior da pirâmide axonométrica e efectuou-se a sua translação para fora desta (ver relatório do exercício 249). Sobreo plano YZ rebatido e transladado, representou-se Q3r
, a projecção lateral de Q em rebatimento, em função da cota e do afastamento de Q(em V.G.). Com centro em Q3r
e 3 cm de raio, desenhou-se a circunferência circunscrita ao pentágono (que é tangente ao eixo Yr’) e cons-truiu-se o pentágono [A3r
B3rC3r
D3rE3r
] em função dos dados – o lado [A3rB3r
] é vertical, A3rtem cota superior a B3r
e A3re B3r
são os vérti-ces de menor afastamento do polígono. Note que o eixo Y e o eixo Z são os eixos que têm o mesmo coeficiente de redução – paradeterminar a abcissa do plano de perfil π que contém o pentágono é necessário rebater o eixo X. Optou-se por rebater o plano XY, tambémpelo método dos cortes. Rebateu-se o plano XY para o interior da pirâmide axonométrica e efectuou-se a sua translação para fora desta.Sobre o plano XY rebatido e transladado, representou-se Q1r
, a projecção horizontal de Q em rebatimento, em função da abcissa e do afas-tamento de Q (em V.G.). Por Q1r
conduziu-se hπr, o traço horizontal do plano π em rebatimento. Com o recurso a uma recta perpendicular à
charneira do rebatimento do plano XY, transportou-se a abcissa de Q (dada pelo ponto em que hπrintersecta o eixo Xr’) para a perspectiva
do eixo X, o que nos permitiu desenhar em seguida as perspectivas de fπ (traço frontal de π) e hπ (traço horizontal de π). Conduzindo, porQ1r
, uma perpendicular à charneira do rebatimento do plano XY, determinou-se a perspectiva de Q1 sobre a perspectiva de hπ (π é projec-tante horizontal). Por Q3r
conduziu-se uma perpendicular à charneira do rebatimento do plano YZ, o que nos permitiu determinar a perspec-tiva de Q no ponto de concorrência das duas perpendiculares às respectivas charneiras. Em seguida, inverteu-se o rebatimento do plano
(Continua na página seguinte)
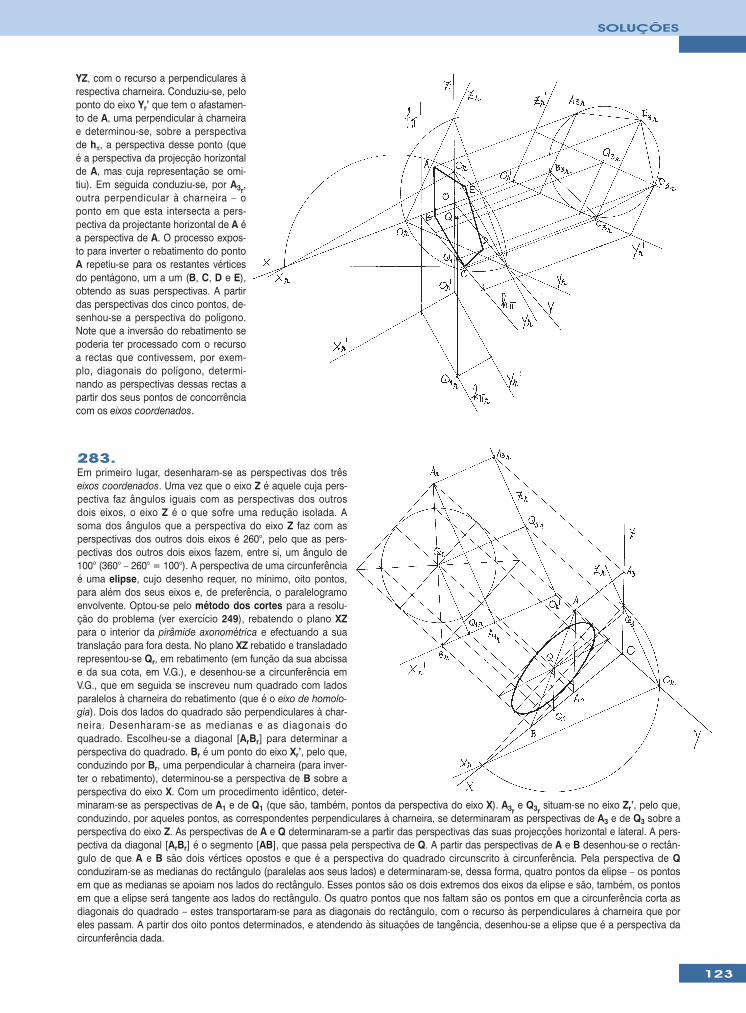
123
SOLUÇÕES
YZ, com o recurso a perpendiculares àrespectiva charneira. Conduziu-se, peloponto do eixo Yr’ que tem o afastamen-to de A, uma perpendicular à charneirae determinou-se, sobre a perspectivade hπ, a perspectiva desse ponto (queé a perspectiva da projecção horizontalde A, mas cuja representação se omi-tiu). Em seguida conduziu-se, por A3r
,outra perpendicular à charneira – oponto em que esta intersecta a pers-pectiva da projectante horizontal de A éa perspectiva de A. O processo expos-to para inverter o rebatimento do pontoA repetiu-se para os restantes vérticesdo pentágono, um a um (B, C, D e E),obtendo as suas perspectivas. A partirdas perspectivas dos cinco pontos, de-senhou-se a perspectiva do polígono.Note que a inversão do rebatimento sepoderia ter processado com o recursoa rectas que contivessem, por exem-plo, diagonais do polígono, determi-nando as perspectivas dessas rectas apartir dos seus pontos de concorrênciacom os eixos coordenados.
283.Em primeiro lugar, desenharam-se as perspectivas dos trêseixos coordenados. Uma vez que o eixo Z é aquele cuja pers-pectiva faz ângulos iguais com as perspectivas dos outrosdois eixos, o eixo Z é o que sofre uma redução isolada. Asoma dos ângulos que a perspectiva do eixo Z faz com asperspectivas dos outros dois eixos é 260°, pelo que as pers-pectivas dos outros dois eixos fazem, entre si, um ângulo de100° (360° – 260° = 100°). A perspectiva de uma circunferênciaé uma elipse, cujo desenho requer, no mínimo, oito pontos,para além dos seus eixos e, de preferência, o paralelogramoenvolvente. Optou-se pelo método dos cortes para a resolu-ção do problema (ver exercício 249), rebatendo o plano XZpara o interior da pirâmide axonométrica e efectuando a suatranslação para fora desta. No plano XZ rebatido e transladadorepresentou-se Qr, em rebatimento (em função da sua abcissae da sua cota, em V.G.), e desenhou-se a circunferência emV.G., que em seguida se inscreveu num quadrado com ladosparalelos à charneira do rebatimento (que é o eixo de homolo-gia). Dois dos lados do quadrado são perpendiculares à char-neira. Desenharam-se as medianas e as diagonais doquadrado. Escolheu-se a diagonal [ArBr] para determinar aperspectiva do quadrado. Br é um ponto do eixo Xr’, pelo que,conduzindo por Br, uma perpendicular à charneira (para inver-ter o rebatimento), determinou-se a perspectiva de B sobre aperspectiva do eixo X. Com um procedimento idêntico, deter-minaram-se as perspectivas de A1 e de Q1 (que são, também, pontos da perspectiva do eixo X). A3r
e Q3rsituam-se no eixo Zr’, pelo que,
conduzindo, por aqueles pontos, as correspondentes perpendiculares à charneira, se determinaram as perspectivas de A3 e de Q3 sobre aperspectiva do eixo Z. As perspectivas de A e Q determinaram-se a partir das perspectivas das suas projecções horizontal e lateral. A pers-pectiva da diagonal [ArBr] é o segmento [AB], que passa pela perspectiva de Q. A partir das perspectivas de A e B desenhou-se o rectân-gulo de que A e B são dois vértices opostos e que é a perspectiva do quadrado circunscrito à circunferência. Pela perspectiva de Qconduziram-se as medianas do rectângulo (paralelas aos seus lados) e determinaram-se, dessa forma, quatro pontos da elipse – os pontosem que as medianas se apoiam nos lados do rectângulo. Esses pontos são os dois extremos dos eixos da elipse e são, também, os pontosem que a elipse será tangente aos lados do rectângulo. Os quatro pontos que nos faltam são os pontos em que a circunferência corta asdiagonais do quadrado – estes transportaram-se para as diagonais do rectângulo, com o recurso às perpendiculares à charneira que poreles passam. A partir dos oito pontos determinados, e atendendo às situações de tangência, desenhou-se a elipse que é a perspectiva dacircunferência dada.
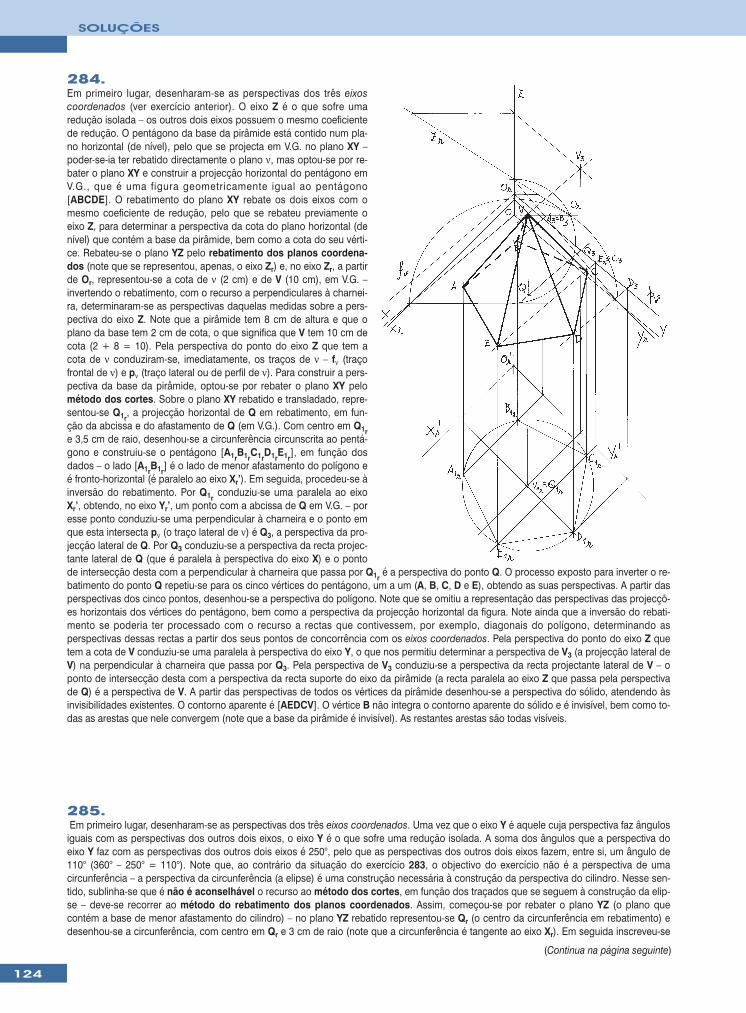
124
SOLUÇÕES
284.Em primeiro lugar, desenharam-se as perspectivas dos três eixoscoordenados (ver exercício anterior). O eixo Z é o que sofre umaredução isolada – os outros dois eixos possuem o mesmo coeficientede redução. O pentágono da base da pirâmide está contido num pla-no horizontal (de nível), pelo que se projecta em V.G. no plano XY –poder-se-ia ter rebatido directamente o plano ν, mas optou-se por re-bater o plano XY e construir a projecção horizontal do pentágono emV.G., que é uma figura geometricamente igual ao pentágono[ABCDE]. O rebatimento do plano XY rebate os dois eixos com omesmo coeficiente de redução, pelo que se rebateu previamente oeixo Z, para determinar a perspectiva da cota do plano horizontal (denível) que contém a base da pirâmide, bem como a cota do seu vérti-ce. Rebateu-se o plano YZ pelo rebatimento dos planos coordena-dos (note que se representou, apenas, o eixo Zr) e, no eixo Zr, a partirde Or, representou-se a cota de ν (2 cm) e de V (10 cm), em V.G. –invertendo o rebatimento, com o recurso a perpendiculares à charnei-ra, determinaram-se as perspectivas daquelas medidas sobre a pers-pectiva do eixo Z. Note que a pirâmide tem 8 cm de altura e que oplano da base tem 2 cm de cota, o que significa que V tem 10 cm decota (2 + 8 = 10). Pela perspectiva do ponto do eixo Z que tem acota de ν conduziram-se, imediatamente, os traços de ν – fν (traçofrontal de ν) e pν (traço lateral ou de perfil de ν). Para construir a pers-pectiva da base da pirâmide, optou-se por rebater o plano XY pelométodo dos cortes. Sobre o plano XY rebatido e transladado, repre-sentou-se Q1r
, a projecção horizontal de Q em rebatimento, em fun-ção da abcissa e do afastamento de Q (em V.G.). Com centro em Q1re 3,5 cm de raio, desenhou-se a circunferência circunscrita ao pentá-gono e construiu-se o pentágono [A1r
B1rC1r
D1rE1r
], em função dosdados – o lado [A1r
B1r] é o lado de menor afastamento do polígono e
é fronto-horizontal (é paralelo ao eixo Xr’). Em seguida, procedeu-se àinversão do rebatimento. Por Q1r
conduziu-se uma paralela ao eixoXr’, obtendo, no eixo Yr’, um ponto com a abcissa de Q em V.G. – poresse ponto conduziu-se uma perpendicular à charneira e o ponto emque esta intersecta pν (o traço lateral de ν) é Q3, a perspectiva da pro-jecção lateral de Q. Por Q3 conduziu-se a perspectiva da recta projec-tante lateral de Q (que é paralela à perspectiva do eixo X) e o pontode intersecção desta com a perpendicular à charneira que passa por Q1r
é a perspectiva do ponto Q. O processo exposto para inverter o re-batimento do ponto Q repetiu-se para os cinco vértices do pentágono, um a um (A, B, C, D e E), obtendo as suas perspectivas. A partir dasperspectivas dos cinco pontos, desenhou-se a perspectiva do polígono. Note que se omitiu a representação das perspectivas das projecçõ-es horizontais dos vértices do pentágono, bem como a perspectiva da projecção horizontal da figura. Note ainda que a inversão do rebati-mento se poderia ter processado com o recurso a rectas que contivessem, por exemplo, diagonais do polígono, determinando asperspectivas dessas rectas a partir dos seus pontos de concorrência com os eixos coordenados. Pela perspectiva do ponto do eixo Z quetem a cota de V conduziu-se uma paralela à perspectiva do eixo Y, o que nos permitiu determinar a perspectiva de V3 (a projecção lateral deV) na perpendicular à charneira que passa por Q3. Pela perspectiva de V3 conduziu-se a perspectiva da recta projectante lateral de V – oponto de intersecção desta com a perspectiva da recta suporte do eixo da pirâmide (a recta paralela ao eixo Z que passa pela perspectivade Q) é a perspectiva de V. A partir das perspectivas de todos os vértices da pirâmide desenhou-se a perspectiva do sólido, atendendo àsinvisibilidades existentes. O contorno aparente é [AEDCV]. O vértice B não integra o contorno aparente do sólido e é invisível, bem como to-das as arestas que nele convergem (note que a base da pirâmide é invisível). As restantes arestas são todas visíveis.
285.Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados. Uma vez que o eixo Y é aquele cuja perspectiva faz ângulos
iguais com as perspectivas dos outros dois eixos, o eixo Y é o que sofre uma redução isolada. A soma dos ângulos que a perspectiva doeixo Y faz com as perspectivas dos outros dois eixos é 250°, pelo que as perspectivas dos outros dois eixos fazem, entre si, um ângulo de110° (360° – 250° = 110°). Note que, ao contrário da situação do exercício 283, o objectivo do exercício não é a perspectiva de umacircunferência – a perspectiva da circunferência (a elipse) é uma construção necessária à construção da perspectiva do cilindro. Nesse sen-tido, sublinha-se que é não é aconselhável o recurso ao método dos cortes, em função dos traçados que se seguem à construção da elip-se – deve-se recorrer ao método do rebatimento dos planos coordenados. Assim, começou-se por rebater o plano YZ (o plano quecontém a base de menor afastamento do cilindro) – no plano YZ rebatido representou-se Qr (o centro da circunferência em rebatimento) edesenhou-se a circunferência, com centro em Qr e 3 cm de raio (note que a circunferência é tangente ao eixo Xr). Em seguida inscreveu-se
(Continua na página seguinte)

125
SOLUÇÕES
a circunferência num quadrado de lados paralelos à charneira do rebatimento (o eixo de homologia) e desenharam-se as medianas e as dia-gonais do quadrado. Em seguida inverteu-se o rebatimento, com o recurso aos pontos em que as diagonais do quadrado intersectam acharneira (que são fixos) e aos pontos em que cada uma das diagonais intersecta um dos eixos. Uma das diagonais intersecta o eixo Xr e aoutra intersecta o eixo Yr – estes pontos foram transportados para as perspectivas dos eixos através de perpendiculares à charneira. Depoisefectuada a construção do rectângulo envolvente da elipse e de determinadas as perspectivas dos oito pontos que nos permite o seu dese-nho (ver relatório do exercício 281), foi necessário determinar o afastamento da outra base do sólido. Os afastamentos medem-se no eixo Y,que é o eixo que sofre uma redução isolada, pelo que se rebateu o eixo Y pelo rebatimento dos planos coordenados – rebateu-se o planoYZ, tendo-se omitido a representação do eixo Zr, por não ser necessária. Sobre o eixo Yr, a partir de Or’, mediu-se o afastamento do plano ϕ(o plano frontal que contém a outra base do cilindro), que é 6 cm – note que a outra base do sólido tem afastamento nulo e a altura do cilin-dro é a distância entre os planos das duas bases, pelo que o afastamento do plano ϕ é igual à altura do sólido. Invertendo o rebatimento de-terminou-se, sobre a perspectiva do eixo Y, a perspectiva do ponto do eixo que tem 6 cm de afastamento – por esse pontos conduziram-seas perspectivas dos traços horizontal (hϕ) e lateral (pϕ) do plano ϕ. As geratrizes do cilindro (e o seu eixo) estão contidas em rectas ortogo-nais aos planos das bases, que são rectas projectante frontais – as suas perspectivas são paralelas à perspectiva do eixo Y. Assim, com orecurso a rectas paralelas à perspectiva do eixo Y transportaram-se, para o plano ϕ, todos os traçados referentes à construção da elipse eque nos permitirão, depois, desenhar a elipse que é a perspectiva da base do cilindro que está contida em ϕ. Q’ é o centro da base do cilin-dro que está contida em ϕ. Optou-se por não desenhar, ainda, nenhuma das elipses, determinando, antes de mais, as geratrizes do contor-no aparente. Estas determinam-se com o recurso aos planos tangentes ao cilindro que são paralelos a uma recta projectante. Para talconduziu-se, por um ponto M, qualquer, duas rectas – uma recta paralela às geratrizes do cilindro e uma recta projectante. Para evitar umtraçado excessivamente complexo e denso, optou-se por marcar o ponto M no próprio eixo do cilindro – a recta suporte do eixo do cilindroé, imediatamente, a recta paralela às geratrizes do sólido que passa por M. Em seguida, conduziu-se, por M, uma recta projectante (ortogo-nal ao plano axonométrico) – a recta r. A perspectiva da recta r é um ponto, pelo que se assinalou devidamente com parêntesis. A rectasuporte do eixo do cilindro e a recta r definem um plano θ – há que determinar a recta de intersecção desse plano (plano θ) com o plano dabase de referência do cilindro (considerou-se, como base de referência, a base que está contida no plano XZ). A recta r intersecta o planoXZ no ponto I. A perspectiva do ponto I está coincidente com a perspectiva da recta r e com a perspectiva de M, pois a recta r é simultane-amente a recta projectante de M e de I – I ≡ (r) ≡ M. A recta suporte do eixo do cilindro intersecta o plano XZ no ponto Q (o centro da baseque está contida no plano XZ). A recta de intersecção do plano θ com o plano XZ está definida por I e por Q – é a recta t. Em seguida háque conduzir as rectas tangentes à base de referência do cilindro que são paralelas à recta t – esta construção não se pode processardirectamente em perspectiva, pois não existe qualquer processo rigoroso para determinar as rectas tangentes a uma elipse (a perspectivada base) que, para além do mais, é desenhada à mão livre. Assim, há que efectuar este procedimento em rebatimento. Para tal, rebateu-seo ponto I pelo rebatimento já efectuado do plano XZ (o ponto I é um ponto do plano XZ). Pela perspectiva de I conduziu-se a perspectivade uma recta paralela ao eixo X – a recta h. A recta h é concorrente com a charneira do rebatimento no ponto H, que é um ponto fixo –H ≡ Hr. Por Hr conduziu-se a recta hr (a recta h em rebatimento), paralela ao eixo Xr. O ponto em que hr é concorrente com a perpendicularà charneira que passa pela perspectiva de I é Ir. O ponto Qr é o ponto Q no rebatimento do plano XZ – a recta tr está, assim, definida por Qr
e por Ir. Por fim conduziram-se, em V.G., as tangentes à circunferência que são paralelas a tr – as rectas t’r e t’’r. Esta construção permitiu--nos obter os pontos Ar e Br, os pontos de tangência. Note que não é estritamente necessária a representação das rectas tangentes. Ospontos Ar e Br são, nesta situação, os extremos do diâmetro da circunferência cuja perspectiva é o eixo maior da elipse, pelo que a inversãodo rebatimento está imediatamente efectuada. A e B são as perspectivas dos pontos de tangência e são os extremos do eixo maior da elip-se que é a perspectiva da base de menor afastamento do sólido. Os pontos correspondentes da outra base são também os extremos doeixo maior da elipse – A’ e B’. As perspecti-vas das rectas t’ e t’’ (cuja representação nãoé estritamente necessária) estão definidaspor A e A’ e por B e B’, respectivamente –t’ ≡ t’r e t’’≡ t’’r. As geratrizes do contornoaparente são [AA’] e [BB’]. Uma vez que estaconstrução não nos forneceu qualquer outroponto das elipses para além dos oito pontosde cada uma já determinados, conclui-se aconstrução da perspectiva do sólido, com odesenho das elipses, assinalando convenien-temente a parte invisível do contorno da basede menor afastamento do sólido. Tenha emconta que, no desenho de cada elipse, seteve em atenção as situações de tangência –a elipse da base que está contida no planoXZ é necessariamente tangente a perspectivado eixo X, enquanto que a elipse da base queestá contida no plano ϕ é necessariamentetangente a hϕ. Note que, caso se tratasse deuma situação geral de um cilindro oblíquo, semanteriam rigorosamente os procedimentosexpostos para a determinação das geratrizesdo contorno aparente, cujos traçados, nessecaso, nos fariam determinar mais dois pontosde cada elipse – o desenho de cada elipseprocessar-se-ia, no final, com dez pontos.
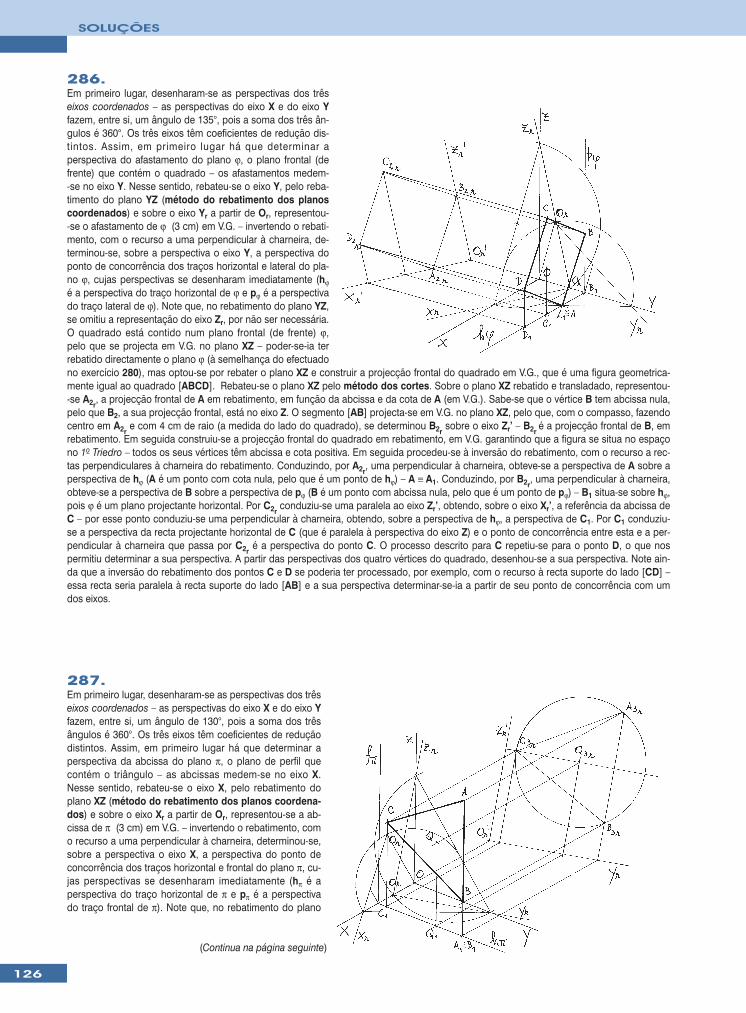
126
SOLUÇÕES
286.Em primeiro lugar, desenharam-se as perspectivas dos trêseixos coordenados – as perspectivas do eixo X e do eixo Yfazem, entre si, um ângulo de 135°, pois a soma dos três ân-gulos é 360°. Os três eixos têm coeficientes de redução dis-tintos. Assim, em primeiro lugar há que determinar aperspectiva do afastamento do plano ϕ, o plano frontal (defrente) que contém o quadrado – os afastamentos medem--se no eixo Y. Nesse sentido, rebateu-se o eixo Y, pelo reba-timento do plano YZ (método do rebatimento dos planoscoordenados) e sobre o eixo Yr a partir de Or, representou--se o afastamento de ϕ (3 cm) em V.G. – invertendo o rebati-mento, com o recurso a uma perpendicular à charneira, de-terminou-se, sobre a perspectiva o eixo Y, a perspectiva doponto de concorrência dos traços horizontal e lateral do pla-no ϕ, cujas perspectivas se desenharam imediatamente (hϕé a perspectiva do traço horizontal de ϕ e pϕ é a perspectivado traço lateral de ϕ). Note que, no rebatimento do plano YZ,se omitiu a representação do eixo Zr, por não ser necessária.O quadrado está contido num plano frontal (de frente) ϕ,pelo que se projecta em V.G. no plano XZ – poder-se-ia terrebatido directamente o plano ϕ (à semelhança do efectuadono exercício 280), mas optou-se por rebater o plano XZ e construir a projecção frontal do quadrado em V.G., que é uma figura geometrica-mente igual ao quadrado [ABCD]. Rebateu-se o plano XZ pelo método dos cortes. Sobre o plano XZ rebatido e transladado, representou--se A2r
, a projecção frontal de A em rebatimento, em função da abcissa e da cota de A (em V.G.). Sabe-se que o vértice B tem abcissa nula,pelo que B2, a sua projecção frontal, está no eixo Z. O segmento [AB] projecta-se em V.G. no plano XZ, pelo que, com o compasso, fazendocentro em A2r
e com 4 cm de raio (a medida do lado do quadrado), se determinou B2rsobre o eixo Zr’ – B2r
é a projecção frontal de B, emrebatimento. Em seguida construiu-se a projecção frontal do quadrado em rebatimento, em V.G. garantindo que a figura se situa no espaçono 1o Triedro – todos os seus vértices têm abcissa e cota positiva. Em seguida procedeu-se à inversão do rebatimento, com o recurso a rec-tas perpendiculares à charneira do rebatimento. Conduzindo, por A2r
, uma perpendicular à charneira, obteve-se a perspectiva de A sobre aperspectiva de hϕ (A é um ponto com cota nula, pelo que é um ponto de hϕ) – A ≡ A1. Conduzindo, por B2r
, uma perpendicular à charneira,obteve-se a perspectiva de B sobre a perspectiva de pϕ (B é um ponto com abcissa nula, pelo que é um ponto de pϕ) – B1 situa-se sobre hϕ,pois ϕ é um plano projectante horizontal. Por C2r
conduziu-se uma paralela ao eixo Zr’, obtendo, sobre o eixo Xr’, a referência da abcissa deC – por esse ponto conduziu-se uma perpendicular à charneira, obtendo, sobre a perspectiva de hϕ, a perspectiva de C1. Por C1 conduziu-se a perspectiva da recta projectante horizontal de C (que é paralela à perspectiva do eixo Z) e o ponto de concorrência entre esta e a per-pendicular à charneira que passa por C2r
é a perspectiva do ponto C. O processo descrito para C repetiu-se para o ponto D, o que nospermitiu determinar a sua perspectiva. A partir das perspectivas dos quatro vértices do quadrado, desenhou-se a sua perspectiva. Note ain-da que a inversão do rebatimento dos pontos C e D se poderia ter processado, por exemplo, com o recurso à recta suporte do lado [CD] –essa recta seria paralela à recta suporte do lado [AB] e a sua perspectiva determinar-se-ia a partir de seu ponto de concorrência com umdos eixos.
287.Em primeiro lugar, desenharam-se as perspectivas dos trêseixos coordenados – as perspectivas do eixo X e do eixo Yfazem, entre si, um ângulo de 130°, pois a soma dos trêsângulos é 360°. Os três eixos têm coeficientes de reduçãodistintos. Assim, em primeiro lugar há que determinar aperspectiva da abcissa do plano π, o plano de perfil quecontém o triângulo – as abcissas medem-se no eixo X.Nesse sentido, rebateu-se o eixo X, pelo rebatimento doplano XZ (método do rebatimento dos planos coordena-dos) e sobre o eixo Xr a partir de Or, representou-se a ab-cissa de π (3 cm) em V.G. – invertendo o rebatimento, como recurso a uma perpendicular à charneira, determinou-se,sobre a perspectiva o eixo X, a perspectiva do ponto deconcorrência dos traços horizontal e frontal do plano π, cu-jas perspectivas se desenharam imediatamente (hπ é aperspectiva do traço horizontal de π e pπ é a perspectivado traço frontal de π). Note que, no rebatimento do plano
(Continua na página seguinte)

127
SOLUÇÕES
288.Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados – as perspectivas do eixo X e do eixo Y fazem, entre si, umângulo de 120°, pois a soma dos três ângulos é 360°. Os três eixos têm coeficientes de redução distintos. Assim, em primeiro lugar há quedeterminar a perspectiva da cota do plano ν, o plano horizontal (de nível) que contém a base da pirâmide (o quadrado [ABCD]) – as cotasmedem-se no eixo Z. Nesse sentido, rebateu-se o eixo Z, pelo rebatimento do plano XZ (método do rebatimento dos planoscoordenados) e sobre o eixo Zr a partir de Or, representou-se a cota de ν (9 cm) em V.G. – invertendo o rebatimento, com o recurso a umaperpendicular à charneira, determinou-se, sobre a perspectiva o eixo Z, a perspectiva do ponto de concorrência dos traços frontal e lateraldo plano ν, cujas perspectivas se desenharam imediatamente (fν é a perspectiva do traço frontal de ν e pν é a perspectiva do traço lateral deν). Note que, no rebatimento do plano XZ, se omitiu a representação do eixo Xr, por não ser necessária. O quadrado está contido num planohorizontal (de nível), pelo que se projecta em V.G. no plano XY – poder--se-ia ter rebatido directamente o plano ν, mas optou-se por rebater oplano XY e construir a projecção horizontal do quadrado em V.G., que éuma figura geometricamente igual ao quadrado [ABCD]. Rebateu-se oplano XY pelo método dos cortes. Sobre o plano XY rebatido e transla-dado, representaram-se A1r
e B1r, as projecções horizontais de A e B em
rebatimento, em função dos respectivos afastamentos e abcissas (emV.G.). A partir de A1r
e B1rconstruiu-se o quadrado [A1r
B1rC1r
D1r] em
V.G., garantindo que o polígono se situa no espaço do 1o Triedro – todosos seus vértices têm abcissa e afastamento positivos. Uma vez que setrata de uma pirâmide regular, a projecção horizontal do vértice da pirâ-mide, em rebatimento, está no centro do quadrado. Em seguida proce-deu-se à inversão do rebatimento, com o recurso a rectasperpendiculares à charneira do rebatimento. Por C1r
conduziu-se uma pa-ralela ao eixo Yr’, obtendo, sobre o eixo Xr’, a referência da abcissa de C– por esse ponto conduziu-se uma perpendicular à charneira, obtendo,sobre a perspectiva de fν, a perspectiva de C2. Por C2 conduziu-se aperspectiva da recta projectante frontal de C (que é paralela à perspecti-va do eixo Y) e o ponto de concorrência entre esta e a perpendicular àcharneira que passa por C1r
é a perspectiva do ponto C. O processo des-crito para C repetiu-se para os pontos A, B, D e V, o que nos permitiu de-terminar as suas perspectivas. Note que V tem cota nula, pelo que é umponto do plano XY – V1 ≡ V. A partir das perspectivas dos cinco vérticesda pirâmide, desenhou-se a sua perspectiva. O contorno aparente é[ABVD]. O vértice C, que não integra o contorno aparente, é visível, bemcomo todas as arestas que nele convergem. A base da pirâmide é visível.As faces laterais [ABV] e [ADV] são invisíveis, pelo que a aresta lateral[AV] é a única aresta invisível do sólido. Note que as perspectivas dos la-dos do quadrado [ABCD] são paralelas entre si, duas a duas.
XZ, se omitiu a representação do eixo Zr, por não ser necessária. O triângulo está contido num plano de perfil, pelo que se projecta em V.G.no plano YZ – poder-se-ia ter rebatido directamente o plano π (à semelhança do efectuado no exercício 280), mas optou-se por rebater oplano YZ e construir a projecção lateral do triângulo em V.G., que é uma figura geometricamente igual ao triângulo [ABC]. Rebateu-se oplano YZ pelo método dos cortes. Sobre o plano YZ rebatido e transladado, representou-se Q3r
, a projecção lateral de Q em rebatimento,em função do afastamento e da cota de Q (em V.G.). Com centro em Q3r
e 3,5 cm de raio, desenhou-se a circunferência circunscrita aotriângulo e construiu-se a figura, de acordo com os dados – o lado [A3r
B3r] é vertical e o vértice C3r
é o vértice de menor afastamento dopolígono (é o vértice que está mais próximo do eixo Zr’. Em seguida procedeu-se à inversão do rebatimento, com o recurso a rectas perpen-diculares à charneira do rebatimento. Por C3r
conduziu-se uma paralela ao eixo Zr’, obtendo, sobre o eixo Yr’, a referência do afastamentode C – por esse ponto conduziu-se uma perpendicular à charneira, obtendo, sobre a perspectiva de hπ, a perspectiva de C1. Por C1 condu-ziu-se a perspectiva da recta projectante horizontal de C (que é paralela à perspectiva do eixo Z) e o ponto de concorrência entre esta e aperpendicular à charneira que passa por C3r
é a perspectiva do ponto C. O processo descrito para C repetiu-se para os pontos A e B, o quenos permitiu determinar as suas perspectivas. A partir das perspectivas dos três vértices do triângulo, desenhou-se a sua perspectiva. Noteque se determinou, ainda, a perspectiva de Q, se bem que esta não seja estritamente necessária para a obtenção do pretendido (a perspec-tiva do triângulo).
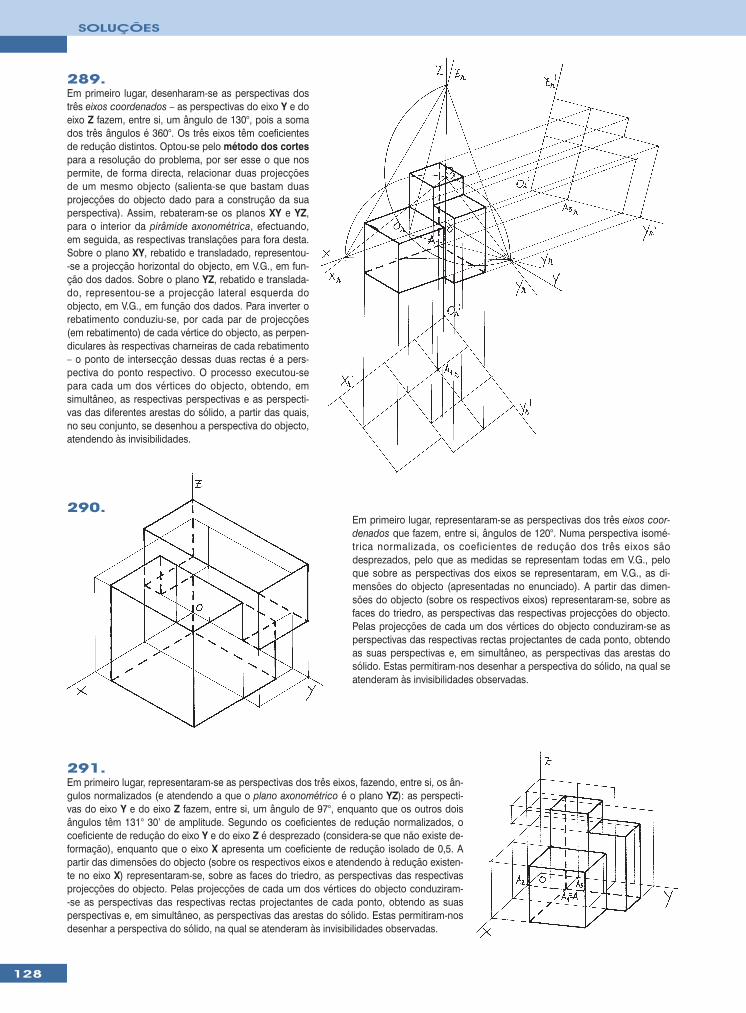
128
SOLUÇÕES
289.Em primeiro lugar, desenharam-se as perspectivas dostrês eixos coordenados – as perspectivas do eixo Y e doeixo Z fazem, entre si, um ângulo de 130°, pois a somados três ângulos é 360°. Os três eixos têm coeficientesde redução distintos. Optou-se pelo método dos cortespara a resolução do problema, por ser esse o que nospermite, de forma directa, relacionar duas projecçõesde um mesmo objecto (salienta-se que bastam duasprojecções do objecto dado para a construção da suaperspectiva). Assim, rebateram-se os planos XY e YZ,para o interior da pirâmide axonométrica, efectuando,em seguida, as respectivas translações para fora desta.Sobre o plano XY, rebatido e transladado, representou--se a projecção horizontal do objecto, em V.G., em fun-ção dos dados. Sobre o plano YZ, rebatido e translada-do, representou-se a projecção lateral esquerda doobjecto, em V.G., em função dos dados. Para inverter orebatimento conduziu-se, por cada par de projecções(em rebatimento) de cada vértice do objecto, as perpen-diculares às respectivas charneiras de cada rebatimento– o ponto de intersecção dessas duas rectas é a pers-pectiva do ponto respectivo. O processo executou-separa cada um dos vértices do objecto, obtendo, emsimultâneo, as respectivas perspectivas e as perspecti-vas das diferentes arestas do sólido, a partir das quais,no seu conjunto, se desenhou a perspectiva do objecto,atendendo às invisibilidades.
291.Em primeiro lugar, representaram-se as perspectivas dos três eixos, fazendo, entre si, os ân-gulos normalizados (e atendendo a que o plano axonométrico é o plano YZ): as perspecti-vas do eixo Y e do eixo Z fazem, entre si, um ângulo de 97°, enquanto que os outros doisângulos têm 131° 30’ de amplitude. Segundo os coeficientes de redução normalizados, ocoeficiente de redução do eixo Y e do eixo Z é desprezado (considera-se que não existe de-formação), enquanto que o eixo X apresenta um coeficiente de redução isolado de 0,5. Apartir das dimensões do objecto (sobre os respectivos eixos e atendendo à redução existen-te no eixo X) representaram-se, sobre as faces do triedro, as perspectivas das respectivasprojecções do objecto. Pelas projecções de cada um dos vértices do objecto conduziram--se as perspectivas das respectivas rectas projectantes de cada ponto, obtendo as suasperspectivas e, em simultâneo, as perspectivas das arestas do sólido. Estas permitiram-nosdesenhar a perspectiva do sólido, na qual se atenderam às invisibilidades observadas.
Em primeiro lugar, representaram-se as perspectivas dos três eixos coor-denados que fazem, entre si, ângulos de 120°. Numa perspectiva isomé-trica normalizada, os coeficientes de redução dos três eixos sãodesprezados, pelo que as medidas se representam todas em V.G., peloque sobre as perspectivas dos eixos se representaram, em V.G., as di-mensões do objecto (apresentadas no enunciado). A partir das dimen-sões do objecto (sobre os respectivos eixos) representaram-se, sobre asfaces do triedro, as perspectivas das respectivas projecções do objecto.Pelas projecções de cada um dos vértices do objecto conduziram-se asperspectivas das respectivas rectas projectantes de cada ponto, obtendoas suas perspectivas e, em simultâneo, as perspectivas das arestas dosólido. Estas permitiram-nos desenhar a perspectiva do sólido, na qual seatenderam às invisibilidades observadas.
290.
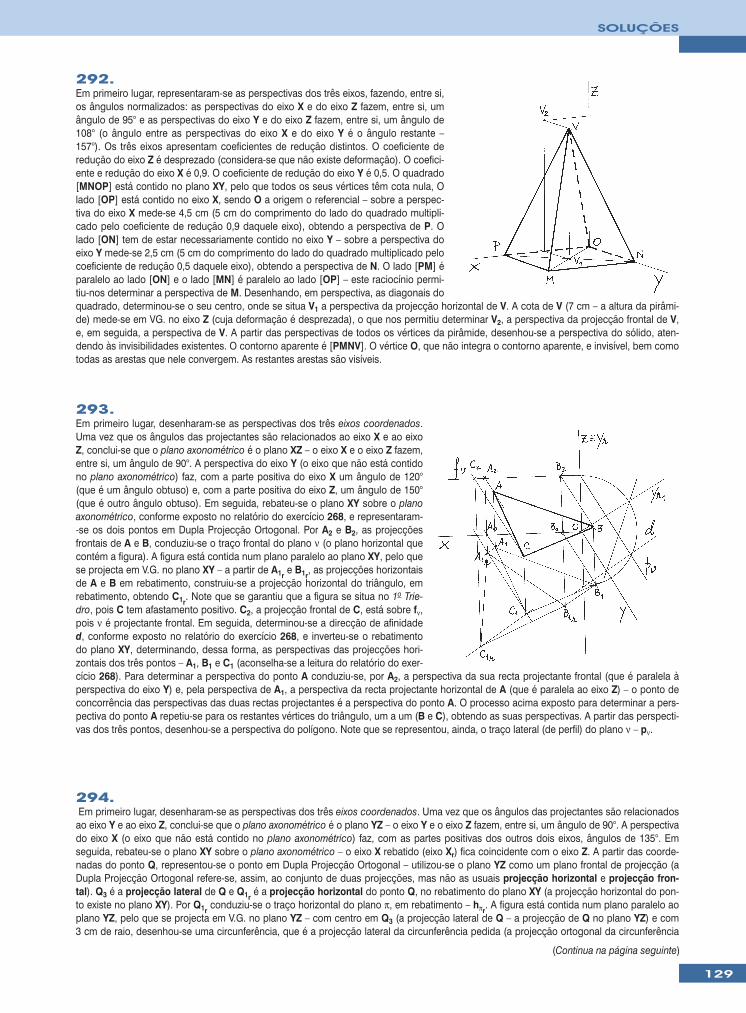
129
SOLUÇÕES
292.Em primeiro lugar, representaram-se as perspectivas dos três eixos, fazendo, entre si,os ângulos normalizados: as perspectivas do eixo X e do eixo Z fazem, entre si, umângulo de 95° e as perspectivas do eixo Y e do eixo Z fazem, entre si, um ângulo de108° (o ângulo entre as perspectivas do eixo X e do eixo Y é o ângulo restante –157°). Os três eixos apresentam coeficientes de redução distintos. O coeficiente deredução do eixo Z é desprezado (considera-se que não existe deformação). O coefici-ente e redução do eixo X é 0,9. O coeficiente de redução do eixo Y é 0,5. O quadrado[MNOP] está contido no plano XY, pelo que todos os seus vértices têm cota nula, Olado [OP] está contido no eixo X, sendo O a origem o referencial – sobre a perspec-tiva do eixo X mede-se 4,5 cm (5 cm do comprimento do lado do quadrado multipli-cado pelo coeficiente de redução 0,9 daquele eixo), obtendo a perspectiva de P. Olado [ON] tem de estar necessariamente contido no eixo Y – sobre a perspectiva doeixo Y mede-se 2,5 cm (5 cm do comprimento do lado do quadrado multiplicado pelocoeficiente de redução 0,5 daquele eixo), obtendo a perspectiva de N. O lado [PM] éparalelo ao lado [ON] e o lado [MN] é paralelo ao lado [OP] – este raciocínio permi-tiu-nos determinar a perspectiva de M. Desenhando, em perspectiva, as diagonais doquadrado, determinou-se o seu centro, onde se situa V1 a perspectiva da projecção horizontal de V. A cota de V (7 cm – a altura da pirâmi-de) mede-se em VG. no eixo Z (cuja deformação é desprezada), o que nos permitiu determinar V2, a perspectiva da projecção frontal de V,e, em seguida, a perspectiva de V. A partir das perspectivas de todos os vértices da pirâmide, desenhou-se a perspectiva do sólido, aten-dendo às invisibilidades existentes. O contorno aparente é [PMNV]. O vértice O, que não integra o contorno aparente, e invisível, bem comotodas as arestas que nele convergem. As restantes arestas são visíveis.
293.Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados.Uma vez que os ângulos das projectantes são relacionados ao eixo X e ao eixoZ, conclui-se que o plano axonométrico é o plano XZ – o eixo X e o eixo Z fazem,entre si, um ângulo de 90°. A perspectiva do eixo Y (o eixo que não está contidono plano axonométrico) faz, com a parte positiva do eixo X um ângulo de 120°(que é um ângulo obtuso) e, com a parte positiva do eixo Z, um ângulo de 150°(que é outro ângulo obtuso). Em seguida, rebateu-se o plano XY sobre o planoaxonométrico, conforme exposto no relatório do exercício 268, e representaram--se os dois pontos em Dupla Projecção Ortogonal. Por A2 e B2, as projecçõesfrontais de A e B, conduziu-se o traço frontal do plano ν (o plano horizontal quecontém a figura). A figura está contida num plano paralelo ao plano XY, pelo quese projecta em V.G. no plano XY – a partir de A1r
e B1r, as projecções horizontais
de A e B em rebatimento, construiu-se a projecção horizontal do triângulo, emrebatimento, obtendo C1r
. Note que se garantiu que a figura se situa no 1o Trie-dro, pois C tem afastamento positivo. C2, a projecção frontal de C, está sobre fν,pois ν é projectante frontal. Em seguida, determinou-se a direcção de afinidaded, conforme exposto no relatório do exercício 268, e inverteu-se o rebatimentodo plano XY, determinando, dessa forma, as perspectivas das projecções hori-zontais dos três pontos – A1, B1 e C1 (aconselha-se a leitura do relatório do exer-cício 268). Para determinar a perspectiva do ponto A conduziu-se, por A2, a perspectiva da sua recta projectante frontal (que é paralela àperspectiva do eixo Y) e, pela perspectiva de A1, a perspectiva da recta projectante horizontal de A (que é paralela ao eixo Z) – o ponto deconcorrência das perspectivas das duas rectas projectantes é a perspectiva do ponto A. O processo acima exposto para determinar a pers-pectiva do ponto A repetiu-se para os restantes vértices do triângulo, um a um (B e C), obtendo as suas perspectivas. A partir das perspecti-vas dos três pontos, desenhou-se a perspectiva do polígono. Note que se representou, ainda, o traço lateral (de perfil) do plano ν – pν.
294.Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados. Uma vez que os ângulos das projectantes são relacionados
ao eixo Y e ao eixo Z, conclui-se que o plano axonométrico é o plano YZ – o eixo Y e o eixo Z fazem, entre si, um ângulo de 90°. A perspectivado eixo X (o eixo que não está contido no plano axonométrico) faz, com as partes positivas dos outros dois eixos, ângulos de 135°. Emseguida, rebateu-se o plano XY sobre o plano axonométrico – o eixo X rebatido (eixo Xr) fica coincidente com o eixo Z. A partir das coorde-nadas do ponto Q, representou-se o ponto em Dupla Projecção Ortogonal – utilizou-se o plano YZ como um plano frontal de projecção (aDupla Projecção Ortogonal refere-se, assim, ao conjunto de duas projecções, mas não as usuais projecção horizontal e projecção fron-tal). Q3 é a projecção lateral de Q e Q1r
é a projecção horizontal do ponto Q, no rebatimento do plano XY (a projecção horizontal do pon-to existe no plano XY). Por Q1r
conduziu-se o traço horizontal do plano π, em rebatimento – hπr. A figura está contida num plano paralelo ao
plano YZ, pelo que se projecta em V.G. no plano YZ – com centro em Q3 (a projecção lateral de Q – a projecção de Q no plano YZ) e com3 cm de raio, desenhou-se uma circunferência, que é a projecção lateral da circunferência pedida (a projecção ortogonal da circunferência
(Continua na página seguinte)
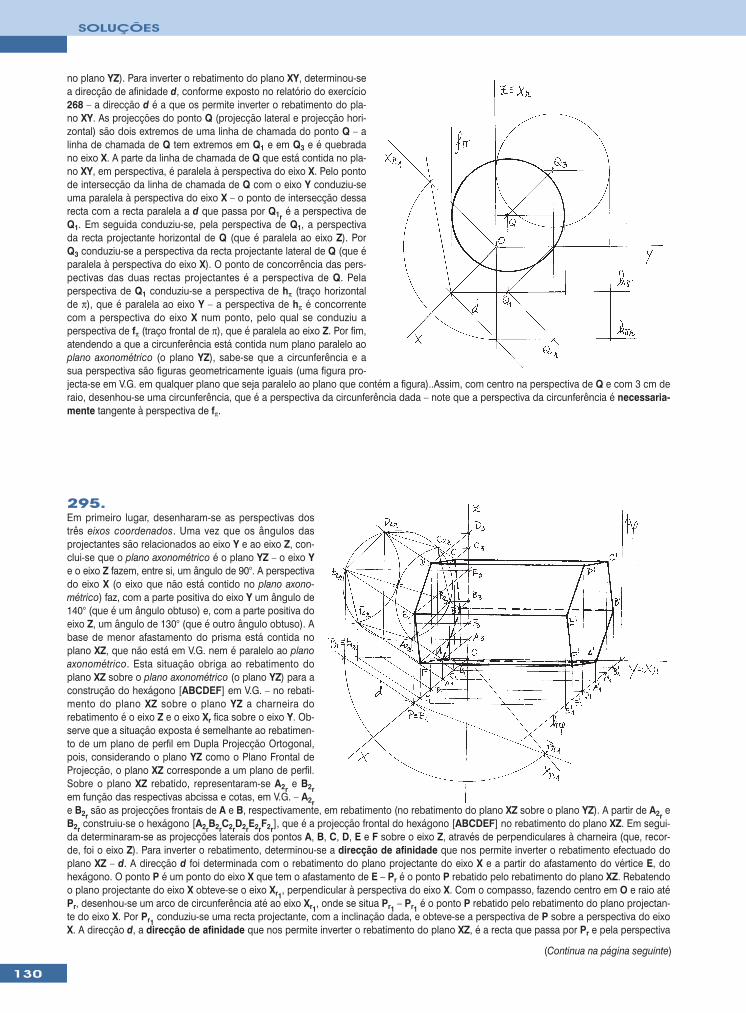
130
SOLUÇÕES
no plano YZ). Para inverter o rebatimento do plano XY, determinou-sea direcção de afinidade d, conforme exposto no relatório do exercício268 – a direcção d é a que os permite inverter o rebatimento do pla-no XY. As projecções do ponto Q (projecção lateral e projecção hori-zontal) são dois extremos de uma linha de chamada do ponto Q – alinha de chamada de Q tem extremos em Q1 e em Q3 e é quebradano eixo X. A parte da linha de chamada de Q que está contida no pla-no XY, em perspectiva, é paralela à perspectiva do eixo X. Pelo pontode intersecção da linha de chamada de Q com o eixo Y conduziu-seuma paralela à perspectiva do eixo X – o ponto de intersecção dessarecta com a recta paralela a d que passa por Q1r
é a perspectiva deQ1. Em seguida conduziu-se, pela perspectiva de Q1, a perspectivada recta projectante horizontal de Q (que é paralela ao eixo Z). PorQ3 conduziu-se a perspectiva da recta projectante lateral de Q (que éparalela à perspectiva do eixo X). O ponto de concorrência das pers-pectivas das duas rectas projectantes é a perspectiva de Q. Pelaperspectiva de Q1 conduziu-se a perspectiva de hπ (traço horizontalde π), que é paralela ao eixo Y – a perspectiva de hπ é concorrentecom a perspectiva do eixo X num ponto, pelo qual se conduziu aperspectiva de fπ (traço frontal de π), que é paralela ao eixo Z. Por fim,atendendo a que a circunferência está contida num plano paralelo aoplano axonométrico (o plano YZ), sabe-se que a circunferência e asua perspectiva são figuras geometricamente iguais (uma figura pro-jecta-se em V.G. em qualquer plano que seja paralelo ao plano que contém a figura)..Assim, com centro na perspectiva de Q e com 3 cm deraio, desenhou-se uma circunferência, que é a perspectiva da circunferência dada – note que a perspectiva da circunferência é necessaria-mente tangente à perspectiva de fπ.
295.Em primeiro lugar, desenharam-se as perspectivas dostrês eixos coordenados. Uma vez que os ângulos dasprojectantes são relacionados ao eixo Y e ao eixo Z, con-clui-se que o plano axonométrico é o plano YZ – o eixo Ye o eixo Z fazem, entre si, um ângulo de 90°. A perspectivado eixo X (o eixo que não está contido no plano axono-métrico) faz, com a parte positiva do eixo Y um ângulo de140° (que é um ângulo obtuso) e, com a parte positiva doeixo Z, um ângulo de 130° (que é outro ângulo obtuso). Abase de menor afastamento do prisma está contida noplano XZ, que não está em V.G. nem é paralelo ao planoaxonométrico. Esta situação obriga ao rebatimento doplano XZ sobre o plano axonométrico (o plano YZ) para aconstrução do hexágono [ABCDEF] em V.G. – no rebati-mento do plano XZ sobre o plano YZ a charneira dorebatimento é o eixo Z e o eixo Xr fica sobre o eixo Y. Ob-serve que a situação exposta é semelhante ao rebatimen-to de um plano de perfil em Dupla Projecção Ortogonal,pois, considerando o plano YZ como o Plano Frontal deProjecção, o plano XZ corresponde a um plano de perfil.Sobre o plano XZ rebatido, representaram-se A2r
e B2rem função das respectivas abcissa e cotas, em V.G. – A2re B2r
são as projecções frontais de A e B, respectivamente, em rebatimento (no rebatimento do plano XZ sobre o plano YZ). A partir de A2re
B2rconstruiu-se o hexágono [A2r
B2rC2r
D2rE2r
F2r], que é a projecção frontal do hexágono [ABCDEF] no rebatimento do plano XZ. Em segui-
da determinaram-se as projecções laterais dos pontos A, B, C, D, E e F sobre o eixo Z, através de perpendiculares à charneira (que, recor-de, foi o eixo Z). Para inverter o rebatimento, determinou-se a direcção de afinidade que nos permite inverter o rebatimento efectuado doplano XZ – d. A direcção d foi determinada com o rebatimento do plano projectante do eixo X e a partir do afastamento do vértice E, dohexágono. O ponto P é um ponto do eixo X que tem o afastamento de E – Pr é o ponto P rebatido pelo rebatimento do plano XZ. Rebatendoo plano projectante do eixo X obteve-se o eixo Xr1
, perpendicular à perspectiva do eixo X. Com o compasso, fazendo centro em O e raio atéPr, desenhou-se um arco de circunferência até ao eixo Xr1
, onde se situa Pr1– Pr1
é o ponto P rebatido pelo rebatimento do plano projectan-te do eixo X. Por Pr1
conduziu-se uma recta projectante, com a inclinação dada, e obteve-se a perspectiva de P sobre a perspectiva do eixoX. A direcção d, a direcção de afinidade que nos permite inverter o rebatimento do plano XZ, é a recta que passa por Pr e pela perspectiva
(Continua na página seguinte)
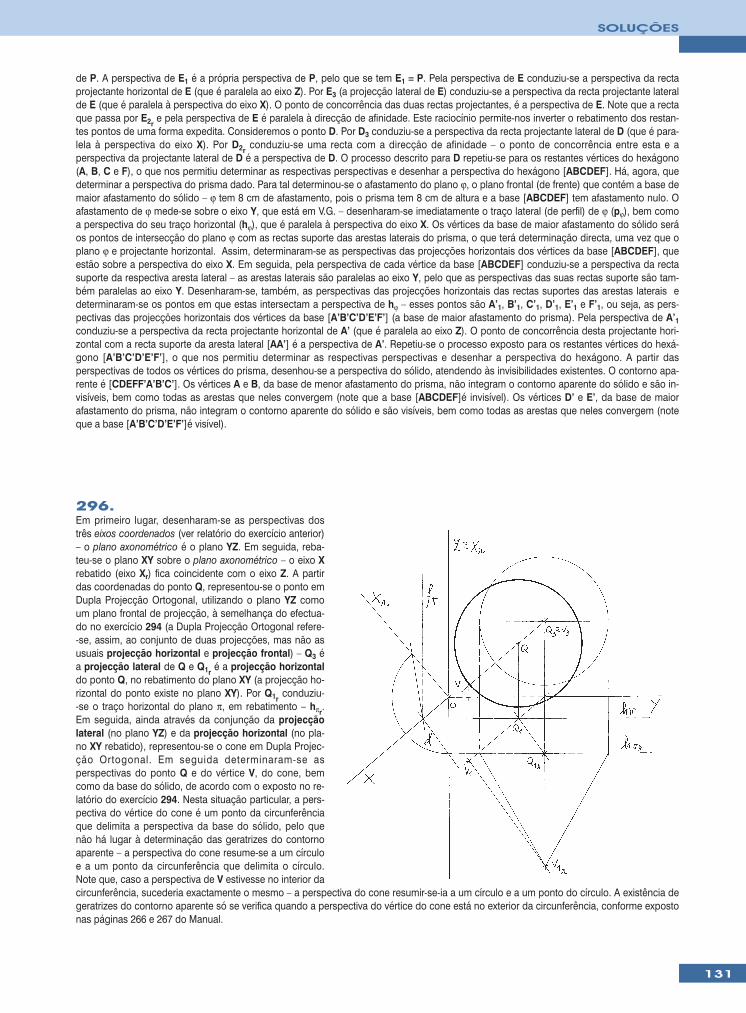
131
SOLUÇÕES
de P. A perspectiva de E1 é a própria perspectiva de P, pelo que se tem E1 ≡ P. Pela perspectiva de E conduziu-se a perspectiva da rectaprojectante horizontal de E (que é paralela ao eixo Z). Por E3 (a projecção lateral de E) conduziu-se a perspectiva da recta projectante lateralde E (que é paralela à perspectiva do eixo X). O ponto de concorrência das duas rectas projectantes, é a perspectiva de E. Note que a rectaque passa por E2r
e pela perspectiva de E é paralela à direcção de afinidade. Este raciocínio permite-nos inverter o rebatimento dos restan-tes pontos de uma forma expedita. Consideremos o ponto D. Por D3 conduziu-se a perspectiva da recta projectante lateral de D (que é para-lela à perspectiva do eixo X). Por D2r
conduziu-se uma recta com a direcção de afinidade – o ponto de concorrência entre esta e aperspectiva da projectante lateral de D é a perspectiva de D. O processo descrito para D repetiu-se para os restantes vértices do hexágono(A, B, C e F), o que nos permitiu determinar as respectivas perspectivas e desenhar a perspectiva do hexágono [ABCDEF]. Há, agora, quedeterminar a perspectiva do prisma dado. Para tal determinou-se o afastamento do plano ϕ, o plano frontal (de frente) que contém a base demaior afastamento do sólido – ϕ tem 8 cm de afastamento, pois o prisma tem 8 cm de altura e a base [ABCDEF] tem afastamento nulo. Oafastamento de ϕ mede-se sobre o eixo Y, que está em V.G. – desenharam-se imediatamente o traço lateral (de perfil) de ϕ (pϕ), bem comoa perspectiva do seu traço horizontal (hϕ), que é paralela à perspectiva do eixo X. Os vértices da base de maior afastamento do sólido seráos pontos de intersecção do plano ϕ com as rectas suporte das arestas laterais do prisma, o que terá determinação directa, uma vez que oplano ϕ e projectante horizontal. Assim, determinaram-se as perspectivas das projecções horizontais dos vértices da base [ABCDEF], queestão sobre a perspectiva do eixo X. Em seguida, pela perspectiva de cada vértice da base [ABCDEF] conduziu-se a perspectiva da rectasuporte da respectiva aresta lateral – as arestas laterais são paralelas ao eixo Y, pelo que as perspectivas das suas rectas suporte são tam-bém paralelas ao eixo Y. Desenharam-se, também, as perspectivas das projecções horizontais das rectas suportes das arestas laterais edeterminaram-se os pontos em que estas intersectam a perspectiva de hϕ – esses pontos são A’1, B’1, C’1, D’1, E’1 e F’1, ou seja, as pers-pectivas das projecções horizontais dos vértices da base [A’B’C’D’E’F’] (a base de maior afastamento do prisma). Pela perspectiva de A’1conduziu-se a perspectiva da recta projectante horizontal de A’ (que é paralela ao eixo Z). O ponto de concorrência desta projectante hori-zontal com a recta suporte da aresta lateral [AA’] é a perspectiva de A’. Repetiu-se o processo exposto para os restantes vértices do hexá-gono [A’B’C’D’E’F’], o que nos permitiu determinar as respectivas perspectivas e desenhar a perspectiva do hexágono. A partir dasperspectivas de todos os vértices do prisma, desenhou-se a perspectiva do sólido, atendendo às invisibilidades existentes. O contorno apa-rente é [CDEFF’A’B’C’]. Os vértices A e B, da base de menor afastamento do prisma, não integram o contorno aparente do sólido e são in-visíveis, bem como todas as arestas que neles convergem (note que a base [ABCDEF]é invisível). Os vértices D’ e E’, da base de maiorafastamento do prisma, não integram o contorno aparente do sólido e são visíveis, bem como todas as arestas que neles convergem (noteque a base [A’B’C’D’E’F’]é visível).
296.Em primeiro lugar, desenharam-se as perspectivas dostrês eixos coordenados (ver relatório do exercício anterior)– o plano axonométrico é o plano YZ. Em seguida, reba-teu-se o plano XY sobre o plano axonométrico – o eixo Xrebatido (eixo Xr) fica coincidente com o eixo Z. A partirdas coordenadas do ponto Q, representou-se o ponto emDupla Projecção Ortogonal, utilizando o plano YZ comoum plano frontal de projecção, à semelhança do efectua-do no exercício 294 (a Dupla Projecção Ortogonal refere--se, assim, ao conjunto de duas projecções, mas não asusuais projecção horizontal e projecção frontal) – Q3 éa projecção lateral de Q e Q1r
é a projecção horizontaldo ponto Q, no rebatimento do plano XY (a projecção ho-rizontal do ponto existe no plano XY). Por Q1r
conduziu--se o traço horizontal do plano π, em rebatimento – hπr
.Em seguida, ainda através da conjunção da projecçãolateral (no plano YZ) e da projecção horizontal (no pla-no XY rebatido), representou-se o cone em Dupla Projec-ção Ortogonal. Em seguida determinaram-se asperspectivas do ponto Q e do vértice V, do cone, bemcomo da base do sólido, de acordo com o exposto no re-latório do exercício 294. Nesta situação particular, a pers-pectiva do vértice do cone é um ponto da circunferênciaque delimita a perspectiva da base do sólido, pelo quenão há lugar à determinação das geratrizes do contornoaparente – a perspectiva do cone resume-se a um círculoe a um ponto da circunferência que delimita o círculo.Note que, caso a perspectiva de V estivesse no interior dacircunferência, sucederia exactamente o mesmo – a perspectiva do cone resumir-se-ia a um círculo e a um ponto do círculo. A existência degeratrizes do contorno aparente só se verifica quando a perspectiva do vértice do cone está no exterior da circunferência, conforme expostonas páginas 266 e 267 do Manual.
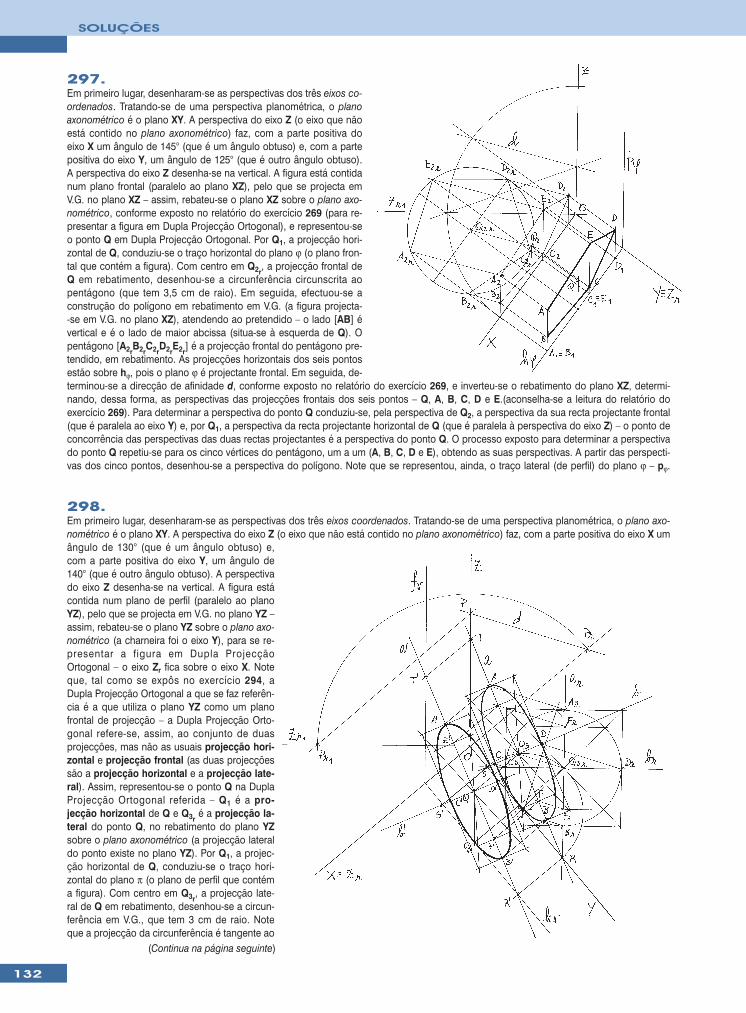
132
SOLUÇÕES
297.Em primeiro lugar, desenharam-se as perspectivas dos três eixos co-ordenados. Tratando-se de uma perspectiva planométrica, o planoaxonométrico é o plano XY. A perspectiva do eixo Z (o eixo que nãoestá contido no plano axonométrico) faz, com a parte positiva doeixo X um ângulo de 145° (que é um ângulo obtuso) e, com a partepositiva do eixo Y, um ângulo de 125° (que é outro ângulo obtuso).A perspectiva do eixo Z desenha-se na vertical. A figura está contidanum plano frontal (paralelo ao plano XZ), pelo que se projecta emV.G. no plano XZ – assim, rebateu-se o plano XZ sobre o plano axo-nométrico, conforme exposto no relatório do exercício 269 (para re-presentar a figura em Dupla Projecção Ortogonal), e representou-seo ponto Q em Dupla Projecção Ortogonal. Por Q1, a projecção hori-zontal de Q, conduziu-se o traço horizontal do plano ϕ (o plano fron-tal que contém a figura). Com centro em Q2r
, a projecção frontal deQ em rebatimento, desenhou-se a circunferência circunscrita aopentágono (que tem 3,5 cm de raio). Em seguida, efectuou-se aconstrução do polígono em rebatimento em V.G. (a figura projecta--se em V.G. no plano XZ), atendendo ao pretendido – o lado [AB] évertical e é o lado de maior abcissa (situa-se à esquerda de Q). Opentágono [A2r
B2rC2r
D2rE2r
] é a projecção frontal do pentágono pre-tendido, em rebatimento. As projecções horizontais dos seis pontosestão sobre hϕ, pois o plano ϕ é projectante frontal. Em seguida, de-terminou-se a direcção de afinidade d, conforme exposto no relatório do exercício 269, e inverteu-se o rebatimento do plano XZ, determi-nando, dessa forma, as perspectivas das projecções frontais dos seis pontos – Q, A, B, C, D e E.(aconselha-se a leitura do relatório doexercício 269). Para determinar a perspectiva do ponto Q conduziu-se, pela perspectiva de Q2, a perspectiva da sua recta projectante frontal(que é paralela ao eixo Y) e, por Q1, a perspectiva da recta projectante horizontal de Q (que é paralela à perspectiva do eixo Z) – o ponto deconcorrência das perspectivas das duas rectas projectantes é a perspectiva do ponto Q. O processo exposto para determinar a perspectivado ponto Q repetiu-se para os cinco vértices do pentágono, um a um (A, B, C, D e E), obtendo as suas perspectivas. A partir das perspecti-vas dos cinco pontos, desenhou-se a perspectiva do polígono. Note que se representou, ainda, o traço lateral (de perfil) do plano ϕ – pϕ.
298.Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados. Tratando-se de uma perspectiva planométrica, o plano axo-nométrico é o plano XY. A perspectiva do eixo Z (o eixo que não está contido no plano axonométrico) faz, com a parte positiva do eixo X umângulo de 130° (que é um ângulo obtuso) e,com a parte positiva do eixo Y, um ângulo de140° (que é outro ângulo obtuso). A perspectivado eixo Z desenha-se na vertical. A figura estácontida num plano de perfil (paralelo ao planoYZ), pelo que se projecta em V.G. no plano YZ –assim, rebateu-se o plano YZ sobre o plano axo-nométrico (a charneira foi o eixo Y), para se re-presentar a figura em Dupla ProjecçãoOrtogonal – o eixo Zr fica sobre o eixo X. Noteque, tal como se expôs no exercício 294, aDupla Projecção Ortogonal a que se faz referên-cia é a que utiliza o plano YZ como um planofrontal de projecção – a Dupla Projecção Orto-gonal refere-se, assim, ao conjunto de duasprojecções, mas não as usuais projecção hori-zontal e projecção frontal (as duas projecçõessão a projecção horizontal e a projecção late-ral). Assim, representou-se o ponto Q na DuplaProjecção Ortogonal referida – Q1 é a pro-jecção horizontal de Q e Q3r
é a projecção la-teral do ponto Q, no rebatimento do plano YZsobre o plano axonométrico (a projecção lateraldo ponto existe no plano YZ). Por Q1, a projec-ção horizontal de Q, conduziu-se o traço hori-zontal do plano π (o plano de perfil que contéma figura). Com centro em Q3r
, a projecção late-ral de Q em rebatimento, desenhou-se a circun-ferência em V.G., que tem 3 cm de raio. Noteque a projecção da circunferência é tangente ao
(Continua na página seguinte)
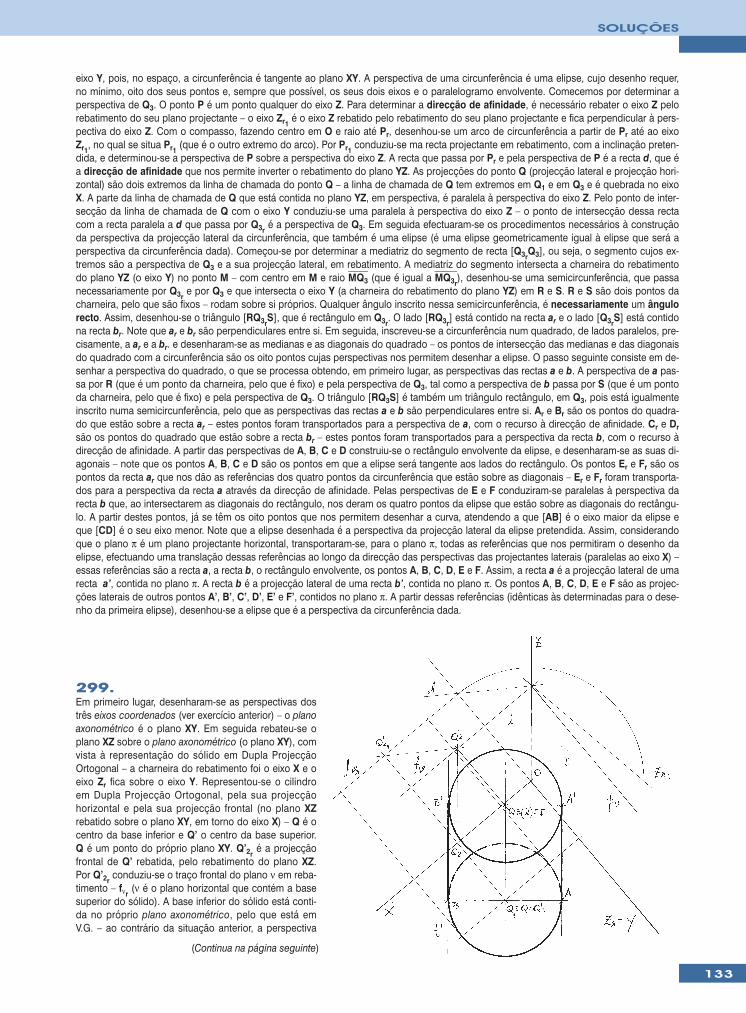
133
SOLUÇÕES
299.Em primeiro lugar, desenharam-se as perspectivas dostrês eixos coordenados (ver exercício anterior) – o planoaxonométrico é o plano XY. Em seguida rebateu-se oplano XZ sobre o plano axonométrico (o plano XY), comvista à representação do sólido em Dupla ProjecçãoOrtogonal – a charneira do rebatimento foi o eixo X e oeixo Zr fica sobre o eixo Y. Representou-se o cilindroem Dupla Projecção Ortogonal, pela sua projecçãohorizontal e pela sua projecção frontal (no plano XZrebatido sobre o plano XY, em torno do eixo X) – Q é ocentro da base inferior e Q’ o centro da base superior.Q é um ponto do próprio plano XY. Q’2r
é a projecçãofrontal de Q’ rebatida, pelo rebatimento do plano XZ.Por Q’2r
conduziu-se o traço frontal do plano ν em reba-timento – fνr
(ν é o plano horizontal que contém a basesuperior do sólido). A base inferior do sólido está conti-da no próprio plano axonométrico, pelo que está emV.G. – ao contrário da situação anterior, a perspectiva
eixo Y, pois, no espaço, a circunferência é tangente ao plano XY. A perspectiva de uma circunferência é uma elipse, cujo desenho requer,no mínimo, oito dos seus pontos e, sempre que possível, os seus dois eixos e o paralelogramo envolvente. Comecemos por determinar aperspectiva de Q3. O ponto P é um ponto qualquer do eixo Z. Para determinar a direcção de afinidade, é necessário rebater o eixo Z pelorebatimento do seu plano projectante – o eixo Zr1
é o eixo Z rebatido pelo rebatimento do seu plano projectante e fica perpendicular à pers-pectiva do eixo Z. Com o compasso, fazendo centro em O e raio até Pr, desenhou-se um arco de circunferência a partir de Pr até ao eixoZr1
, no qual se situa Pr1(que é o outro extremo do arco). Por Pr1
conduziu-se ma recta projectante em rebatimento, com a inclinação preten-dida, e determinou-se a perspectiva de P sobre a perspectiva do eixo Z. A recta que passa por Pr e pela perspectiva de P é a recta d, que éa direcção de afinidade que nos permite inverter o rebatimento do plano YZ. As projecções do ponto Q (projecção lateral e projecção hori-zontal) são dois extremos da linha de chamada do ponto Q – a linha de chamada de Q tem extremos em Q1 e em Q3 e é quebrada no eixoX. A parte da linha de chamada de Q que está contida no plano YZ, em perspectiva, é paralela à perspectiva do eixo Z. Pelo ponto de inter-secção da linha de chamada de Q com o eixo Y conduziu-se uma paralela à perspectiva do eixo Z – o ponto de intersecção dessa rectacom a recta paralela a d que passa por Q3r
é a perspectiva de Q3. Em seguida efectuaram-se os procedimentos necessários à construçãoda perspectiva da projecção lateral da circunferência, que também é uma elipse (é uma elipse geometricamente igual à elipse que será aperspectiva da circunferência dada). Começou-se por determinar a mediatriz do segmento de recta [Q3r
Q3], ou seja, o segmento cujos ex-tremos são a perspectiva de Q3 e a sua projecção lateral, em rebatimento. A mediatriz do segmento intersecta a charneira do rebatimentodo plano YZ (o eixo Y) no ponto M – com centro em M e raio M�Q�3� (que é igual a M�Q�3�r
�), desenhou-se uma semicircunferência, que passanecessariamente por Q3r
e por Q3 e que intersecta o eixo Y (a charneira do rebatimento do plano YZ) em R e S. R e S são dois pontos dacharneira, pelo que são fixos – rodam sobre si próprios. Qualquer ângulo inscrito nessa semicircunferência, é necessariamente um ângulorecto. Assim, desenhou-se o triângulo [RQ3r
S], que é rectângulo em Q3r. O lado [RQ3r
] está contido na recta ar e o lado [Q3rS] está contido
na recta br. Note que ar e br são perpendiculares entre si. Em seguida, inscreveu-se a circunferência num quadrado, de lados paralelos, pre-cisamente, a ar e a br. e desenharam-se as medianas e as diagonais do quadrado – os pontos de intersecção das medianas e das diagonaisdo quadrado com a circunferência são os oito pontos cujas perspectivas nos permitem desenhar a elipse. O passo seguinte consiste em de-senhar a perspectiva do quadrado, o que se processa obtendo, em primeiro lugar, as perspectivas das rectas a e b. A perspectiva de a pas-sa por R (que é um ponto da charneira, pelo que é fixo) e pela perspectiva de Q3, tal como a perspectiva de b passa por S (que é um pontoda charneira, pelo que é fixo) e pela perspectiva de Q3. O triângulo [RQ3S] é também um triângulo rectângulo, em Q3, pois está igualmenteinscrito numa semicircunferência, pelo que as perspectivas das rectas a e b são perpendiculares entre si. Ar e Br são os pontos do quadra-do que estão sobre a recta ar – estes pontos foram transportados para a perspectiva de a, com o recurso à direcção de afinidade. Cr e Dr
são os pontos do quadrado que estão sobre a recta br – estes pontos foram transportados para a perspectiva da recta b, com o recurso àdirecção de afinidade. A partir das perspectivas de A, B, C e D construiu-se o rectângulo envolvente da elipse, e desenharam-se as suas di-agonais – note que os pontos A, B, C e D são os pontos em que a elipse será tangente aos lados do rectângulo. Os pontos Er e Fr são ospontos da recta ar que nos dão as referências dos quatro pontos da circunferência que estão sobre as diagonais – Er e Fr foram transporta-dos para a perspectiva da recta a através da direcção de afinidade. Pelas perspectivas de E e F conduziram-se paralelas à perspectiva darecta b que, ao intersectarem as diagonais do rectângulo, nos deram os quatro pontos da elipse que estão sobre as diagonais do rectângu-lo. A partir destes pontos, já se têm os oito pontos que nos permitem desenhar a curva, atendendo a que [AB] é o eixo maior da elipse eque [CD] é o seu eixo menor. Note que a elipse desenhada é a perspectiva da projecção lateral da elipse pretendida. Assim, considerandoque o plano π é um plano projectante horizontal, transportaram-se, para o plano π, todas as referências que nos permitiram o desenho daelipse, efectuando uma translação dessas referências ao longo da direcção das perspectivas das projectantes laterais (paralelas ao eixo X) –essas referências são a recta a, a recta b, o rectângulo envolvente, os pontos A, B, C, D, E e F. Assim, a recta a é a projecção lateral de umarecta a’, contida no plano π. A recta b é a projecção lateral de uma recta b’, contida no plano π. Os pontos A, B, C, D, E e F são as projec-ções laterais de outros pontos A’, B’, C’, D’, E’ e F’, contidos no plano π. A partir dessas referências (idênticas às determinadas para o dese-nho da primeira elipse), desenhou-se a elipse que é a perspectiva da circunferência dada.
(Continua na página seguinte)
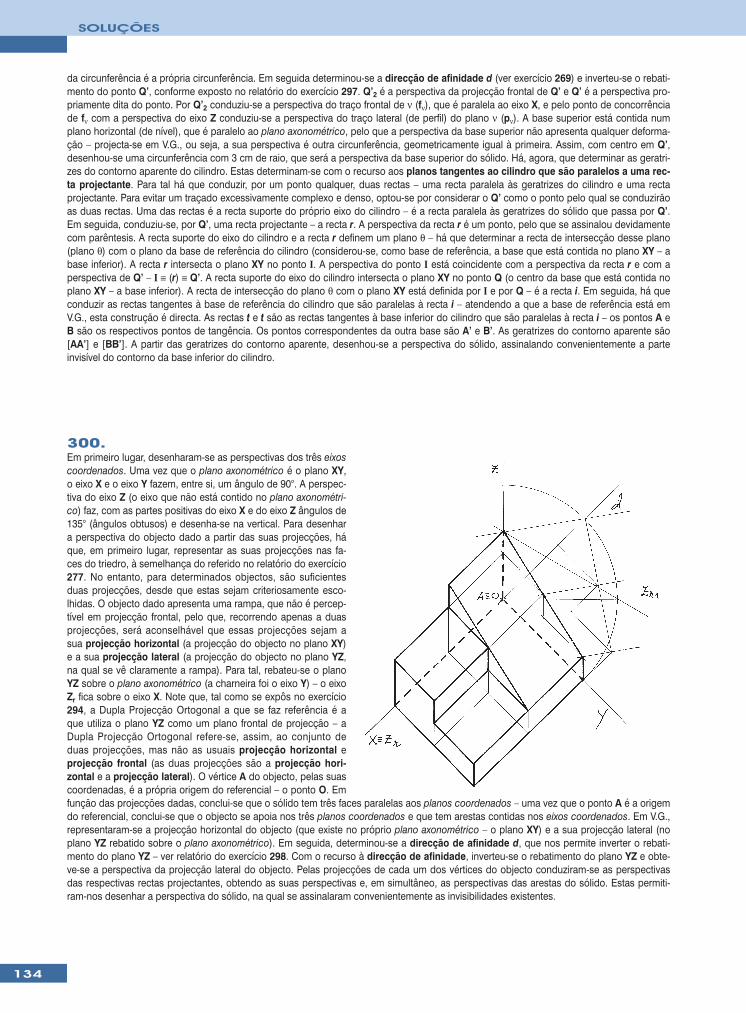
134
SOLUÇÕES
da circunferência é a própria circunferência. Em seguida determinou-se a direcção de afinidade d (ver exercício 269) e inverteu-se o rebati-mento do ponto Q’, conforme exposto no relatório do exercício 297. Q’2 é a perspectiva da projecção frontal de Q’ e Q’ é a perspectiva pro-priamente dita do ponto. Por Q’2 conduziu-se a perspectiva do traço frontal de ν (fν), que é paralela ao eixo X, e pelo ponto de concorrênciade fν com a perspectiva do eixo Z conduziu-se a perspectiva do traço lateral (de perfil) do plano ν (pν). A base superior está contida numplano horizontal (de nível), que é paralelo ao plano axonométrico, pelo que a perspectiva da base superior não apresenta qualquer deforma-ção – projecta-se em V.G., ou seja, a sua perspectiva é outra circunferência, geometricamente igual à primeira. Assim, com centro em Q’,desenhou-se uma circunferência com 3 cm de raio, que será a perspectiva da base superior do sólido. Há, agora, que determinar as geratri-zes do contorno aparente do cilindro. Estas determinam-se com o recurso aos planos tangentes ao cilindro que são paralelos a uma rec-ta projectante. Para tal há que conduzir, por um ponto qualquer, duas rectas – uma recta paralela às geratrizes do cilindro e uma rectaprojectante. Para evitar um traçado excessivamente complexo e denso, optou-se por considerar o Q’ como o ponto pelo qual se conduzirãoas duas rectas. Uma das rectas é a recta suporte do próprio eixo do cilindro – é a recta paralela às geratrizes do sólido que passa por Q’.Em seguida, conduziu-se, por Q’, uma recta projectante – a recta r. A perspectiva da recta r é um ponto, pelo que se assinalou devidamentecom parêntesis. A recta suporte do eixo do cilindro e a recta r definem um plano θ – há que determinar a recta de intersecção desse plano(plano θ) com o plano da base de referência do cilindro (considerou-se, como base de referência, a base que está contida no plano XY – abase inferior). A recta r intersecta o plano XY no ponto I. A perspectiva do ponto I está coincidente com a perspectiva da recta r e com aperspectiva de Q’ – I ≡ (r) ≡ Q’. A recta suporte do eixo do cilindro intersecta o plano XY no ponto Q (o centro da base que está contida noplano XY – a base inferior). A recta de intersecção do plano θ com o plano XY está definida por I e por Q – é a recta i. Em seguida, há queconduzir as rectas tangentes à base de referência do cilindro que são paralelas à recta i – atendendo a que a base de referência está emV.G., esta construção é directa. As rectas t e t são as rectas tangentes à base inferior do cilindro que são paralelas à recta i – os pontos A eB são os respectivos pontos de tangência. Os pontos correspondentes da outra base são A’ e B’. As geratrizes do contorno aparente são[AA’] e [BB’]. A partir das geratrizes do contorno aparente, desenhou-se a perspectiva do sólido, assinalando convenientemente a parteinvisível do contorno da base inferior do cilindro.
300.Em primeiro lugar, desenharam-se as perspectivas dos três eixoscoordenados. Uma vez que o plano axonométrico é o plano XY,o eixo X e o eixo Y fazem, entre si, um ângulo de 90°. A perspec-tiva do eixo Z (o eixo que não está contido no plano axonométri-co) faz, com as partes positivas do eixo X e do eixo Z ângulos de135° (ângulos obtusos) e desenha-se na vertical. Para desenhara perspectiva do objecto dado a partir das suas projecções, háque, em primeiro lugar, representar as suas projecções nas fa-ces do triedro, à semelhança do referido no relatório do exercício277. No entanto, para determinados objectos, são suficientesduas projecções, desde que estas sejam criteriosamente esco-lhidas. O objecto dado apresenta uma rampa, que não é percep-tível em projecção frontal, pelo que, recorrendo apenas a duasprojecções, será aconselhável que essas projecções sejam asua projecção horizontal (a projecção do objecto no plano XY)e a sua projecção lateral (a projecção do objecto no plano YZ,na qual se vê claramente a rampa). Para tal, rebateu-se o planoYZ sobre o plano axonométrico (a charneira foi o eixo Y) – o eixoZr fica sobre o eixo X. Note que, tal como se expôs no exercício294, a Dupla Projecção Ortogonal a que se faz referência é aque utiliza o plano YZ como um plano frontal de projecção – aDupla Projecção Ortogonal refere-se, assim, ao conjunto deduas projecções, mas não as usuais projecção horizontal eprojecção frontal (as duas projecções são a projecção hori-zontal e a projecção lateral). O vértice A do objecto, pelas suascoordenadas, é a própria origem do referencial – o ponto O. Emfunção das projecções dadas, conclui-se que o sólido tem três faces paralelas aos planos coordenados – uma vez que o ponto A é a origemdo referencial, conclui-se que o objecto se apoia nos três planos coordenados e que tem arestas contidas nos eixos coordenados. Em V.G.,representaram-se a projecção horizontal do objecto (que existe no próprio plano axonométrico – o plano XY) e a sua projecção lateral (noplano YZ rebatido sobre o plano axonométrico). Em seguida, determinou-se a direcção de afinidade d, que nos permite inverter o rebati-mento do plano YZ – ver relatório do exercício 298. Com o recurso à direcção de afinidade, inverteu-se o rebatimento do plano YZ e obte-ve-se a perspectiva da projecção lateral do objecto. Pelas projecções de cada um dos vértices do objecto conduziram-se as perspectivasdas respectivas rectas projectantes, obtendo as suas perspectivas e, em simultâneo, as perspectivas das arestas do sólido. Estas permiti-ram-nos desenhar a perspectiva do sólido, na qual se assinalaram convenientemente as invisibilidades existentes.
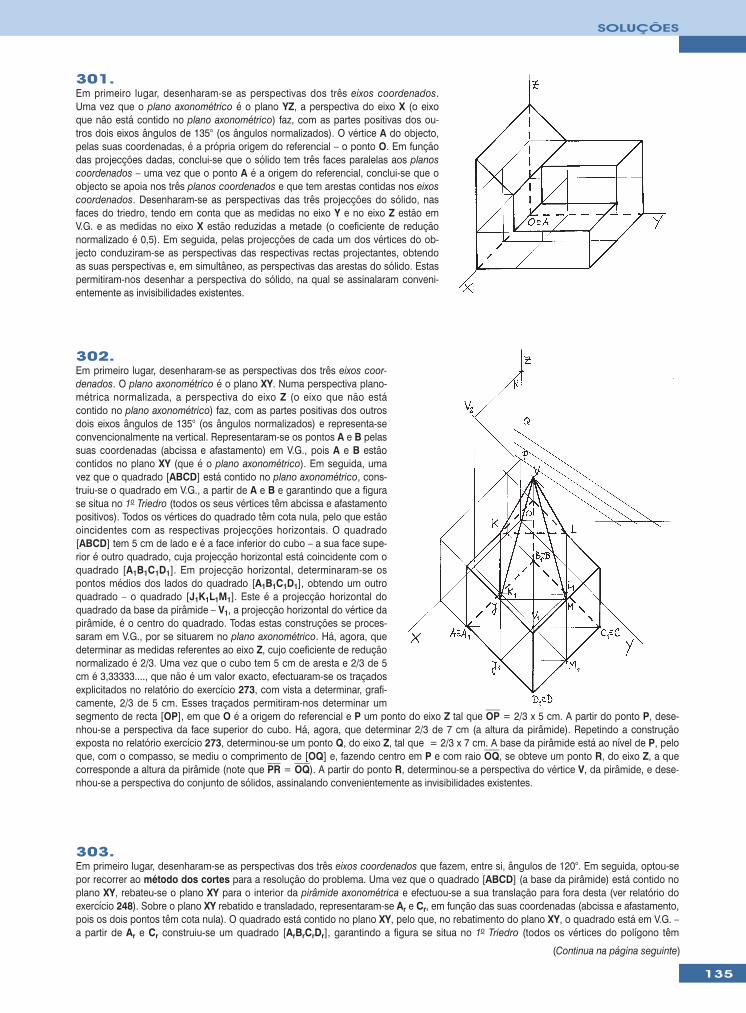
135
SOLUÇÕES
301.Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados.Uma vez que o plano axonométrico é o plano YZ, a perspectiva do eixo X (o eixoque não está contido no plano axonométrico) faz, com as partes positivas dos ou-tros dois eixos ângulos de 135° (os ângulos normalizados). O vértice A do objecto,pelas suas coordenadas, é a própria origem do referencial – o ponto O. Em funçãodas projecções dadas, conclui-se que o sólido tem três faces paralelas aos planoscoordenados – uma vez que o ponto A é a origem do referencial, conclui-se que oobjecto se apoia nos três planos coordenados e que tem arestas contidas nos eixoscoordenados. Desenharam-se as perspectivas das três projecções do sólido, nasfaces do triedro, tendo em conta que as medidas no eixo Y e no eixo Z estão emV.G. e as medidas no eixo X estão reduzidas a metade (o coeficiente de reduçãonormalizado é 0,5). Em seguida, pelas projecções de cada um dos vértices do ob-jecto conduziram-se as perspectivas das respectivas rectas projectantes, obtendoas suas perspectivas e, em simultâneo, as perspectivas das arestas do sólido. Estaspermitiram-nos desenhar a perspectiva do sólido, na qual se assinalaram conveni-entemente as invisibilidades existentes.
302.Em primeiro lugar, desenharam-se as perspectivas dos três eixos coor-denados. O plano axonométrico é o plano XY. Numa perspectiva plano-métrica normalizada, a perspectiva do eixo Z (o eixo que não estácontido no plano axonométrico) faz, com as partes positivas dos outrosdois eixos ângulos de 135° (os ângulos normalizados) e representa-seconvencionalmente na vertical. Representaram-se os pontos A e B pelassuas coordenadas (abcissa e afastamento) em V.G., pois A e B estãocontidos no plano XY (que é o plano axonométrico). Em seguida, umavez que o quadrado [ABCD] está contido no plano axonométrico, cons-truiu-se o quadrado em V.G., a partir de A e B e garantindo que a figurase situa no 1o Triedro (todos os seus vértices têm abcissa e afastamentopositivos). Todos os vértices do quadrado têm cota nula, pelo que estãooincidentes com as respectivas projecções horizontais. O quadrado[ABCD] tem 5 cm de lado e é a face inferior do cubo – a sua face supe-rior é outro quadrado, cuja projecção horizontal está coincidente com oquadrado [A1B1C1D1]. Em projecção horizontal, determinaram-se ospontos médios dos lados do quadrado [A1B1C1D1], obtendo um outroquadrado – o quadrado [J1K1L1M1]. Este é a projecção horizontal doquadrado da base da pirâmide – V1, a projecção horizontal do vértice dapirâmide, é o centro do quadrado. Todas estas construções se proces-saram em V.G., por se situarem no plano axonométrico. Há, agora, quedeterminar as medidas referentes ao eixo Z, cujo coeficiente de reduçãonormalizado é 2/3. Uma vez que o cubo tem 5 cm de aresta e 2/3 de 5cm é 3,33333...., que não é um valor exacto, efectuaram-se os traçadosexplicitados no relatório do exercício 273, com vista a determinar, grafi-camente, 2/3 de 5 cm. Esses traçados permitiram-nos determinar umsegmento de recta [OP], em que O é a origem do referencial e P um ponto do eixo Z tal que O�P� = 2/3 x 5 cm. A partir do ponto P, dese-nhou-se a perspectiva da face superior do cubo. Há, agora, que determinar 2/3 de 7 cm (a altura da pirâmide). Repetindo a construçãoexposta no relatório exercício 273, determinou-se um ponto Q, do eixo Z, tal que = 2/3 x 7 cm. A base da pirâmide está ao nível de P, peloque, com o compasso, se mediu o comprimento de [OQ] e, fazendo centro em P e com raio O�Q�, se obteve um ponto R, do eixo Z, a quecorresponde a altura da pirâmide (note que P�R� = O�Q�). A partir do ponto R, determinou-se a perspectiva do vértice V, da pirâmide, e dese-nhou-se a perspectiva do conjunto de sólidos, assinalando convenientemente as invisibilidades existentes.
303.Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados que fazem, entre si, ângulos de 120°. Em seguida, optou-sepor recorrer ao método dos cortes para a resolução do problema. Uma vez que o quadrado [ABCD] (a base da pirâmide) está contido noplano XY, rebateu-se o plano XY para o interior da pirâmide axonométrica e efectuou-se a sua translação para fora desta (ver relatório doexercício 248). Sobre o plano XY rebatido e transladado, representaram-se Ar e Cr, em função das suas coordenadas (abcissa e afastamento,pois os dois pontos têm cota nula). O quadrado está contido no plano XY, pelo que, no rebatimento do plano XY, o quadrado está em V.G. –a partir de Ar e Cr construiu-se um quadrado [ArBrCrDr], garantindo a figura se situa no 1o Triedro (todos os vértices do polígono têm
(Continua na página seguinte)
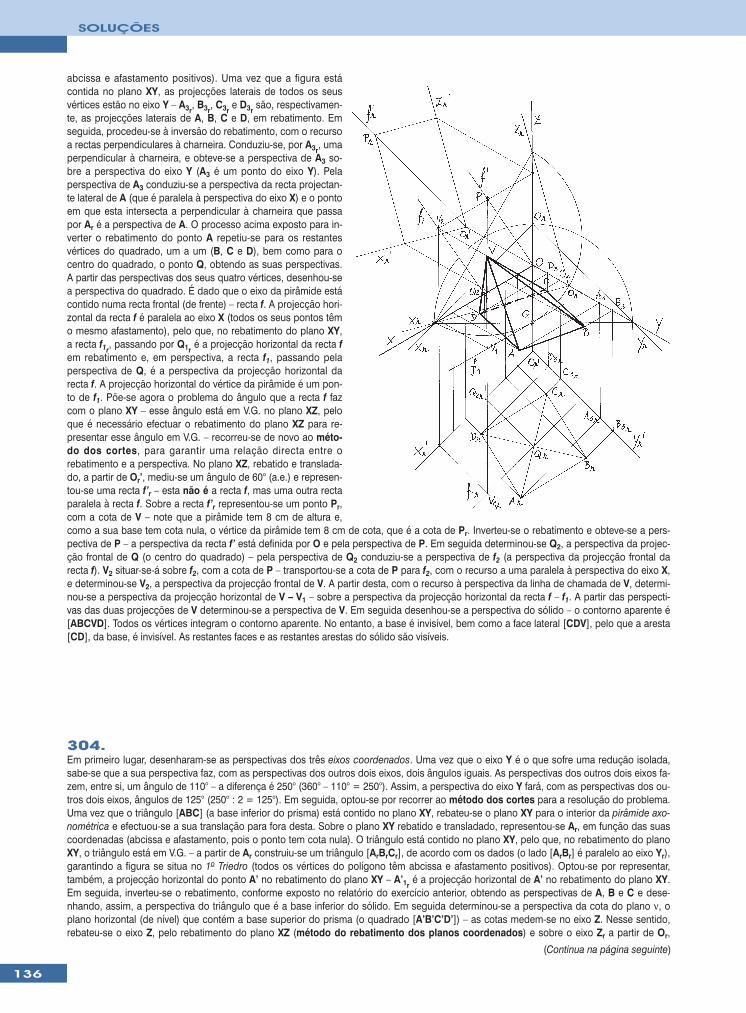
136
SOLUÇÕES
abcissa e afastamento positivos). Uma vez que a figura estácontida no plano XY, as projecções laterais de todos os seusvértices estão no eixo Y – A3r
, B3r, C3r
e D3rsão, respectivamen-
te, as projecções laterais de A, B, C e D, em rebatimento. Emseguida, procedeu-se à inversão do rebatimento, com o recursoa rectas perpendiculares à charneira. Conduziu-se, por A3r
, umaperpendicular à charneira, e obteve-se a perspectiva de A3 so-bre a perspectiva do eixo Y (A3 é um ponto do eixo Y). Pelaperspectiva de A3 conduziu-se a perspectiva da recta projectan-te lateral de A (que é paralela à perspectiva do eixo X) e o pontoem que esta intersecta a perpendicular à charneira que passapor Ar é a perspectiva de A. O processo acima exposto para in-verter o rebatimento do ponto A repetiu-se para os restantesvértices do quadrado, um a um (B, C e D), bem como para ocentro do quadrado, o ponto Q, obtendo as suas perspectivas.A partir das perspectivas dos seus quatro vértices, desenhou-sea perspectiva do quadrado. É dado que o eixo da pirâmide estácontido numa recta frontal (de frente) – recta f. A projecção hori-zontal da recta f é paralela ao eixo X (todos os seus pontos têmo mesmo afastamento), pelo que, no rebatimento do plano XY,a recta f1r
, passando por Q1ré a projecção horizontal da recta f
em rebatimento e, em perspectiva, a recta f1, passando pelaperspectiva de Q, é a perspectiva da projecção horizontal darecta f. A projecção horizontal do vértice da pirâmide é um pon-to de f1. Põe-se agora o problema do ângulo que a recta f fazcom o plano XY – esse ângulo está em V.G. no plano XZ, peloque é necessário efectuar o rebatimento do plano XZ para re-presentar esse ângulo em V.G. – recorreu-se de novo ao méto-do dos cortes, para garantir uma relação directa entre orebatimento e a perspectiva. No plano XZ, rebatido e translada-do, a partir de Or’, mediu-se um ângulo de 60° (a.e.) e represen-tou-se uma recta f’r – esta não é a recta f, mas uma outra rectaparalela à recta f. Sobre a recta f’r representou-se um ponto Pr,com a cota de V – note que a pirâmide tem 8 cm de altura e,como a sua base tem cota nula, o vértice da pirâmide tem 8 cm de cota, que é a cota de Pr. Inverteu-se o rebatimento e obteve-se a pers-pectiva de P – a perspectiva da recta f’ está definida por O e pela perspectiva de P. Em seguida determinou-se Q2, a perspectiva da projec-ção frontal de Q (o centro do quadrado) – pela perspectiva de Q2 conduziu-se a perspectiva de f2 (a perspectiva da projecção frontal darecta f). V2 situar-se-á sobre f2, com a cota de P – transportou-se a cota de P para f2, com o recurso a uma paralela à perspectiva do eixo X,e determinou-se V2, a perspectiva da projecção frontal de V. A partir desta, com o recurso à perspectiva da linha de chamada de V, determi-nou-se a perspectiva da projecção horizontal de V – V1 – sobre a perspectiva da projecção horizontal da recta f – f1. A partir das perspecti-vas das duas projecções de V determinou-se a perspectiva de V. Em seguida desenhou-se a perspectiva do sólido – o contorno aparente é[ABCVD]. Todos os vértices integram o contorno aparente. No entanto, a base é invisível, bem como a face lateral [CDV], pelo que a aresta[CD], da base, é invisível. As restantes faces e as restantes arestas do sólido são visíveis.
304.Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados. Uma vez que o eixo Y é o que sofre uma redução isolada,sabe-se que a sua perspectiva faz, com as perspectivas dos outros dois eixos, dois ângulos iguais. As perspectivas dos outros dois eixos fa-zem, entre si, um ângulo de 110° – a diferença é 250° (360° – 110° = 250°). Assim, a perspectiva do eixo Y fará, com as perspectivas dos ou-tros dois eixos, ângulos de 125° (250° : 2 = 125°). Em seguida, optou-se por recorrer ao método dos cortes para a resolução do problema.Uma vez que o triângulo [ABC] (a base inferior do prisma) está contido no plano XY, rebateu-se o plano XY para o interior da pirâmide axo-nométrica e efectuou-se a sua translação para fora desta. Sobre o plano XY rebatido e transladado, representou-se Ar, em função das suascoordenadas (abcissa e afastamento, pois o ponto tem cota nula). O triângulo está contido no plano XY, pelo que, no rebatimento do planoXY, o triângulo está em V.G. – a partir de Ar construiu-se um triângulo [ArBrCr], de acordo com os dados (o lado [ArBr] é paralelo ao eixo Yr),garantindo a figura se situa no 1o Triedro (todos os vértices do polígono têm abcissa e afastamento positivos). Optou-se por representar,também, a projecção horizontal do ponto A’ no rebatimento do plano XY – A’1r
é a projecção horizontal de A’ no rebatimento do plano XY.Em seguida, inverteu-se o rebatimento, conforme exposto no relatório do exercício anterior, obtendo as perspectivas de A, B e C e dese-nhando, assim, a perspectiva do triângulo que é a base inferior do sólido. Em seguida determinou-se a perspectiva da cota do plano ν, oplano horizontal (de nível) que contém a base superior do prisma (o quadrado [A’B’C’D’]) – as cotas medem-se no eixo Z. Nesse sentido,rebateu-se o eixo Z, pelo rebatimento do plano XZ (método do rebatimento dos planos coordenados) e sobre o eixo Zr a partir de Or,
(Continua na página seguinte)
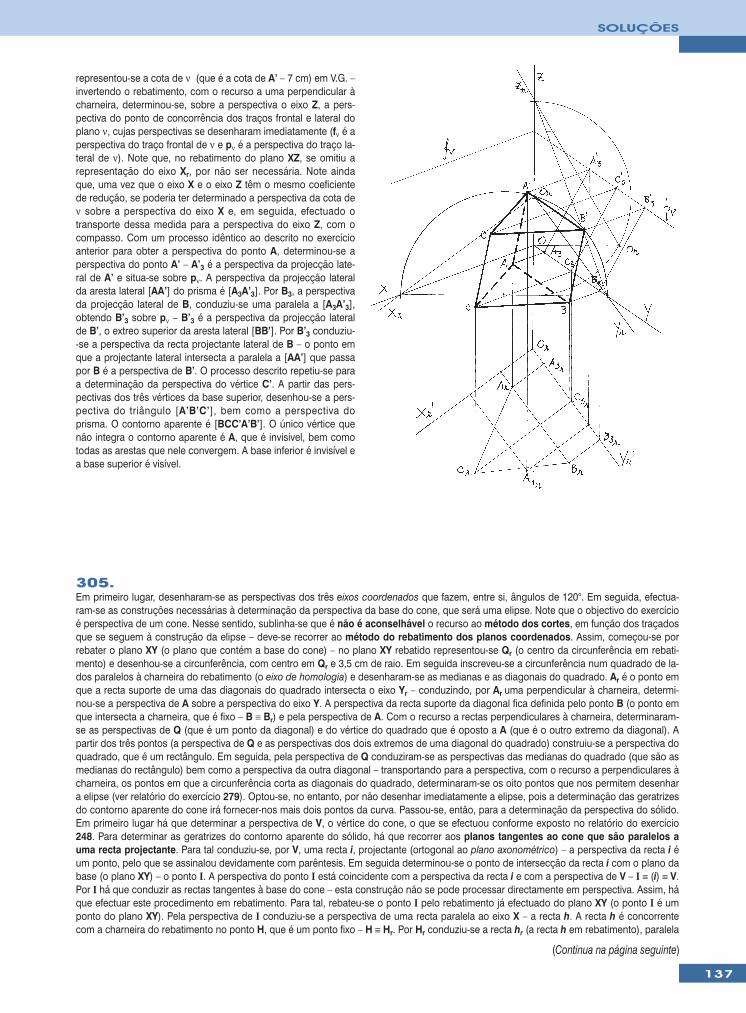
137
SOLUÇÕES
representou-se a cota de ν (que é a cota de A’ – 7 cm) em V.G. –invertendo o rebatimento, com o recurso a uma perpendicular àcharneira, determinou-se, sobre a perspectiva o eixo Z, a pers-pectiva do ponto de concorrência dos traços frontal e lateral doplano ν, cujas perspectivas se desenharam imediatamente (fν é aperspectiva do traço frontal de ν e pν é a perspectiva do traço la-teral de ν). Note que, no rebatimento do plano XZ, se omitiu arepresentação do eixo Xr, por não ser necessária. Note aindaque, uma vez que o eixo X e o eixo Z têm o mesmo coeficientede redução, se poderia ter determinado a perspectiva da cota deν sobre a perspectiva do eixo X e, em seguida, efectuado otransporte dessa medida para a perspectiva do eixo Z, com ocompasso. Com um processo idêntico ao descrito no exercícioanterior para obter a perspectiva do ponto A, determinou-se aperspectiva do ponto A’ – A’3 é a perspectiva da projecção late-ral de A’ e situa-se sobre pν. A perspectiva da projecção lateralda aresta lateral [AA’] do prisma é [A3A’3]. Por B3, a perspectivada projecção lateral de B, conduziu-se uma paralela a [A3A’3],obtendo B’3 sobre pν – B’3 é a perspectiva da projecção lateralde B’, o extreo superior da aresta lateral [BB’]. Por B’3 conduziu--se a perspectiva da recta projectante lateral de B – o ponto emque a projectante lateral intersecta a paralela a [AA’] que passapor B é a perspectiva de B’. O processo descrito repetiu-se paraa determinação da perspectiva do vértice C’. A partir das pers-pectivas dos três vértices da base superior, desenhou-se a pers-pectiva do triângulo [A’B’C’], bem como a perspectiva doprisma. O contorno aparente é [BCC’A’B’]. O único vértice quenão integra o contorno aparente é A, que é invisível, bem comotodas as arestas que nele convergem. A base inferior é invisível ea base superior é visível.
(Continua na página seguinte)
305.Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados que fazem, entre si, ângulos de 120°. Em seguida, efectua-ram-se as construções necessárias à determinação da perspectiva da base do cone, que será uma elipse. Note que o objectivo do exercícioé perspectiva de um cone. Nesse sentido, sublinha-se que é não é aconselhável o recurso ao método dos cortes, em função dos traçadosque se seguem à construção da elipse – deve-se recorrer ao método do rebatimento dos planos coordenados. Assim, começou-se porrebater o plano XY (o plano que contém a base do cone) – no plano XY rebatido representou-se Qr (o centro da circunferência em rebati-mento) e desenhou-se a circunferência, com centro em Qr e 3,5 cm de raio. Em seguida inscreveu-se a circunferência num quadrado de la-dos paralelos à charneira do rebatimento (o eixo de homologia) e desenharam-se as medianas e as diagonais do quadrado. Ar é o ponto emque a recta suporte de uma das diagonais do quadrado intersecta o eixo Yr – conduzindo, por Ar uma perpendicular à charneira, determi-nou-se a perspectiva de A sobre a perspectiva do eixo Y. A perspectiva da recta suporte da diagonal fica definida pelo ponto B (o ponto emque intersecta a charneira, que é fixo – B ≡ Br) e pela perspectiva de A. Com o recurso a rectas perpendiculares à charneira, determinaram-se as perspectivas de Q (que é um ponto da diagonal) e do vértice do quadrado que é oposto a A (que é o outro extremo da diagonal). Apartir dos três pontos (a perspectiva de Q e as perspectivas dos dois extremos de uma diagonal do quadrado) construiu-se a perspectiva doquadrado, que é um rectângulo. Em seguida, pela perspectiva de Q conduziram-se as perspectivas das medianas do quadrado (que são asmedianas do rectângulo) bem como a perspectiva da outra diagonal – transportando para a perspectiva, com o recurso a perpendiculares àcharneira, os pontos em que a circunferência corta as diagonais do quadrado, determinaram-se os oito pontos que nos permitem desenhara elipse (ver relatório do exercício 279). Optou-se, no entanto, por não desenhar imediatamente a elipse, pois a determinação das geratrizesdo contorno aparente do cone irá fornecer-nos mais dois pontos da curva. Passou-se, então, para a determinação da perspectiva do sólido.Em primeiro lugar há que determinar a perspectiva de V, o vértice do cone, o que se efectuou conforme exposto no relatório do exercício248. Para determinar as geratrizes do contorno aparente do sólido, há que recorrer aos planos tangentes ao cone que são paralelos auma recta projectante. Para tal conduziu-se, por V, uma recta i, projectante (ortogonal ao plano axonométrico) – a perspectiva da recta i éum ponto, pelo que se assinalou devidamente com parêntesis. Em seguida determinou-se o ponto de intersecção da recta i com o plano dabase (o plano XY) – o ponto I. A perspectiva do ponto I está coincidente com a perspectiva da recta i e com a perspectiva de V – I ≡ (i) ≡ V.Por I há que conduzir as rectas tangentes à base do cone – esta construção não se pode processar directamente em perspectiva. Assim, háque efectuar este procedimento em rebatimento. Para tal, rebateu-se o ponto I pelo rebatimento já efectuado do plano XY (o ponto I é umponto do plano XY). Pela perspectiva de I conduziu-se a perspectiva de uma recta paralela ao eixo X – a recta h. A recta h é concorrentecom a charneira do rebatimento no ponto H, que é um ponto fixo – H ≡ Hr. Por Hr conduziu-se a recta hr (a recta h em rebatimento), paralela
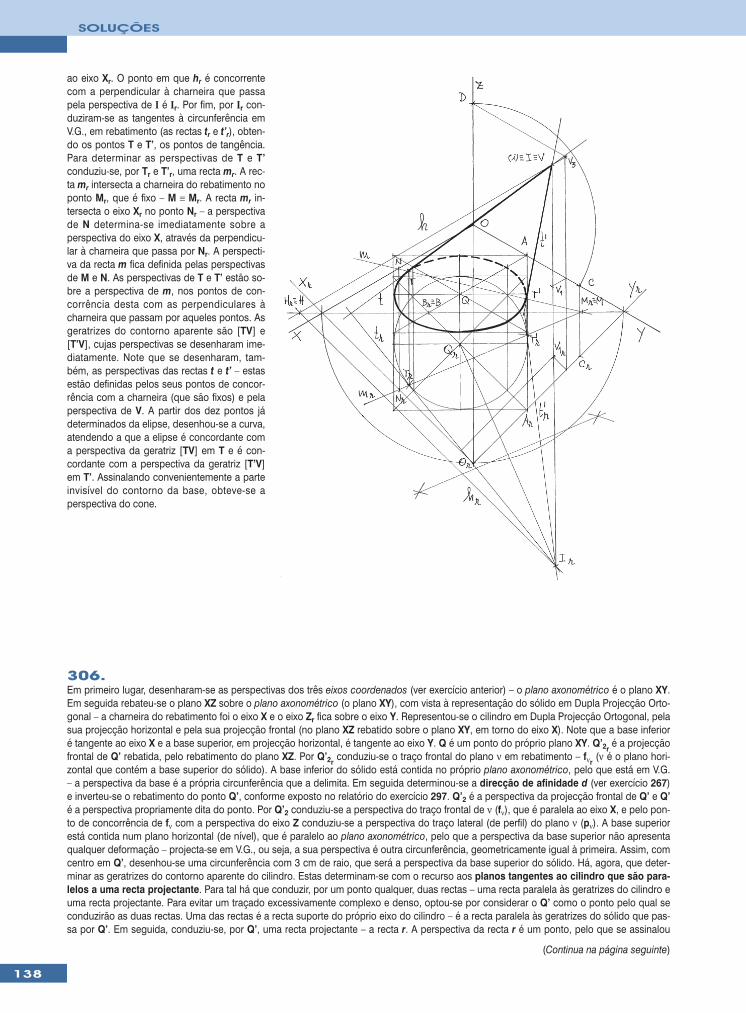
138
SOLUÇÕES
ao eixo Xr. O ponto em que hr é concorrentecom a perpendicular à charneira que passapela perspectiva de I é Ir. Por fim, por Ir con-duziram-se as tangentes à circunferência emV.G., em rebatimento (as rectas tr e t’r), obten-do os pontos T e T’, os pontos de tangência.Para determinar as perspectivas de T e T’conduziu-se, por Tr e T’r, uma recta mr. A rec-ta mr intersecta a charneira do rebatimento noponto Mr, que é fixo – M ≡ Mr. A recta mr in-tersecta o eixo Xr no ponto Nr – a perspectivade N determina-se imediatamente sobre aperspectiva do eixo X, através da perpendicu-lar à charneira que passa por Nr. A perspecti-va da recta m fica definida pelas perspectivasde M e N. As perspectivas de T e T’ estão so-bre a perspectiva de m, nos pontos de con-corrência desta com as perpendiculares àcharneira que passam por aqueles pontos. Asgeratrizes do contorno aparente são [TV] e[T’V], cujas perspectivas se desenharam ime-diatamente. Note que se desenharam, tam-bém, as perspectivas das rectas t e t’ – estasestão definidas pelos seus pontos de concor-rência com a charneira (que são fixos) e pelaperspectiva de V. A partir dos dez pontos jádeterminados da elipse, desenhou-se a curva,atendendo a que a elipse é concordante coma perspectiva da geratriz [TV] em T e é con-cordante com a perspectiva da geratriz [T’V]em T’. Assinalando convenientemente a parteinvisível do contorno da base, obteve-se aperspectiva do cone.
306.Em primeiro lugar, desenharam-se as perspectivas dos três eixos coordenados (ver exercício anterior) – o plano axonométrico é o plano XY.Em seguida rebateu-se o plano XZ sobre o plano axonométrico (o plano XY), com vista à representação do sólido em Dupla Projecção Orto-gonal – a charneira do rebatimento foi o eixo X e o eixo Zr fica sobre o eixo Y. Representou-se o cilindro em Dupla Projecção Ortogonal, pelasua projecção horizontal e pela sua projecção frontal (no plano XZ rebatido sobre o plano XY, em torno do eixo X). Note que a base inferioré tangente ao eixo X e a base superior, em projecção horizontal, é tangente ao eixo Y. Q é um ponto do próprio plano XY. Q’2r
é a projecçãofrontal de Q’ rebatida, pelo rebatimento do plano XZ. Por Q’2r
conduziu-se o traço frontal do plano ν em rebatimento – fνr(ν é o plano hori-
zontal que contém a base superior do sólido). A base inferior do sólido está contida no próprio plano axonométrico, pelo que está em V.G.– a perspectiva da base é a própria circunferência que a delimita. Em seguida determinou-se a direcção de afinidade d (ver exercício 267)e inverteu-se o rebatimento do ponto Q’, conforme exposto no relatório do exercício 297. Q’2 é a perspectiva da projecção frontal de Q’ e Q’é a perspectiva propriamente dita do ponto. Por Q’2 conduziu-se a perspectiva do traço frontal de ν (fν), que é paralela ao eixo X, e pelo pon-to de concorrência de fν com a perspectiva do eixo Z conduziu-se a perspectiva do traço lateral (de perfil) do plano ν (pν). A base superiorestá contida num plano horizontal (de nível), que é paralelo ao plano axonométrico, pelo que a perspectiva da base superior não apresentaqualquer deformação – projecta-se em V.G., ou seja, a sua perspectiva é outra circunferência, geometricamente igual à primeira. Assim, comcentro em Q’, desenhou-se uma circunferência com 3 cm de raio, que será a perspectiva da base superior do sólido. Há, agora, que deter-minar as geratrizes do contorno aparente do cilindro. Estas determinam-se com o recurso aos planos tangentes ao cilindro que são para-lelos a uma recta projectante. Para tal há que conduzir, por um ponto qualquer, duas rectas – uma recta paralela às geratrizes do cilindro euma recta projectante. Para evitar um traçado excessivamente complexo e denso, optou-se por considerar o Q’ como o ponto pelo qual seconduzirão as duas rectas. Uma das rectas é a recta suporte do próprio eixo do cilindro – é a recta paralela às geratrizes do sólido que pas-sa por Q’. Em seguida, conduziu-se, por Q’, uma recta projectante – a recta r. A perspectiva da recta r é um ponto, pelo que se assinalou
(Continua na página seguinte)
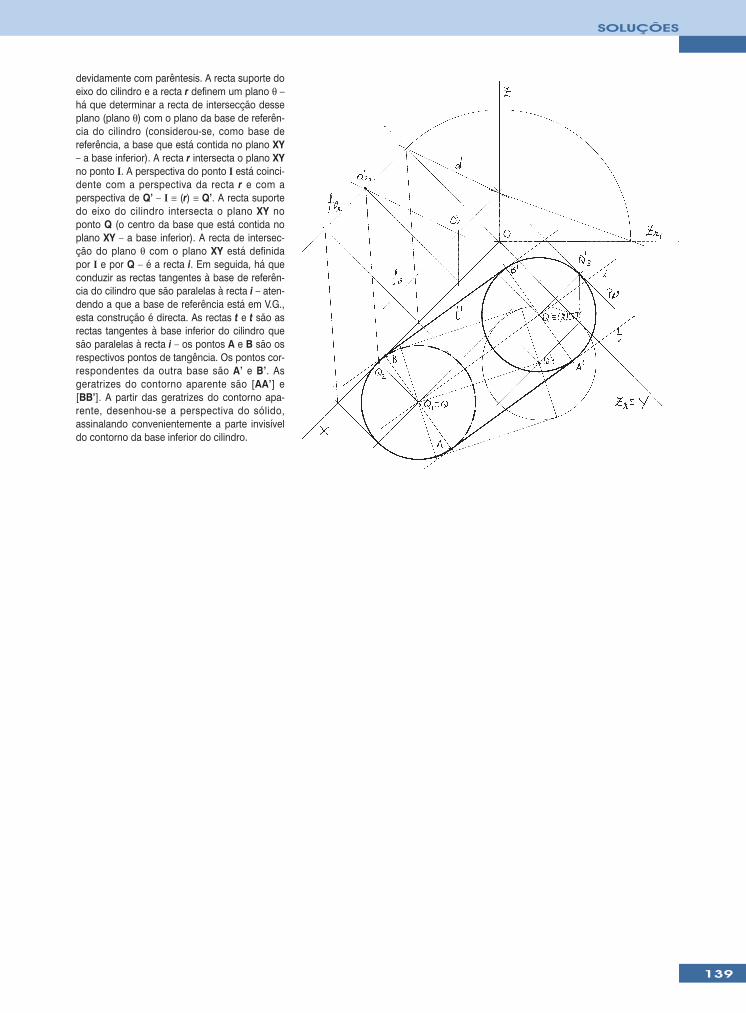
139
SOLUÇÕES
devidamente com parêntesis. A recta suporte doeixo do cilindro e a recta r definem um plano θ –há que determinar a recta de intersecção desseplano (plano θ) com o plano da base de referên-cia do cilindro (considerou-se, como base dereferência, a base que está contida no plano XY– a base inferior). A recta r intersecta o plano XYno ponto I. A perspectiva do ponto I está coinci-dente com a perspectiva da recta r e com aperspectiva de Q’ – I ≡ (r) ≡ Q’. A recta suportedo eixo do cilindro intersecta o plano XY noponto Q (o centro da base que está contida noplano XY – a base inferior). A recta de intersec-ção do plano θ com o plano XY está definidapor I e por Q – é a recta i. Em seguida, há queconduzir as rectas tangentes à base de referên-cia do cilindro que são paralelas à recta i – aten-dendo a que a base de referência está em V.G.,esta construção é directa. As rectas t e t são asrectas tangentes à base inferior do cilindro quesão paralelas à recta i – os pontos A e B são osrespectivos pontos de tangência. Os pontos cor-respondentes da outra base são A’ e B’. Asgeratrizes do contorno aparente são [AA’] e[BB’]. A partir das geratrizes do contorno apa-rente, desenhou-se a perspectiva do sólido,assinalando convenientemente a parte invisíveldo contorno da base inferior do cilindro.





























