Embed Size (px)
Citation preview

ROBÓTICAProfa. Dra. GIOVANA TRIPOLONI TANGERINO
Tecnologia em Automação Industrial
SENSORES
SP – CAMPUS PIRACICABA
https://giovanatangerino.wordpress.com
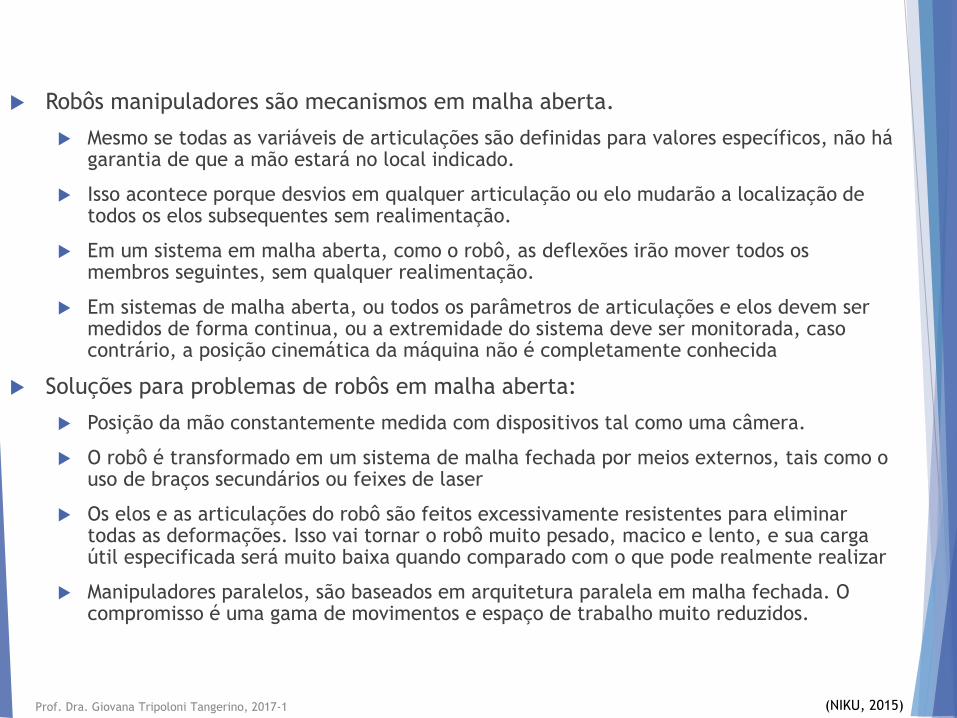
Robôs manipuladores são mecanismos em malha aberta.
Mesmo se todas as variáveis de articulações são definidas para valores específicos, não há garantia de que a mão estará no local indicado.
Isso acontece porque desvios em qualquer articulação ou elo mudarão a localização de todos os elos subsequentes sem realimentação.
Em um sistema em malha aberta, como o robô, as deflexões irão mover todos os membros seguintes, sem qualquer realimentação.
Em sistemas de malha aberta, ou todos os parâmetros de articulações e elos devem ser medidos de forma continua, ou a extremidade do sistema deve ser monitorada, caso contrário, a posição cinemática da máquina não é completamente conhecida
Soluções para problemas de robôs em malha aberta:
Posição da mão constantemente medida com dispositivos tal como uma câmera.
O robô é transformado em um sistema de malha fechada por meios externos, tais como o uso de braços secundários ou feixes de laser
Os elos e as articulações do robô são feitos excessivamente resistentes para eliminar todas as deformações. Isso vai tornar o robô muito pesado, macico e lento, e sua carga útil especificada será muito baixa quando comparado com o que pode realmente realizar
Manipuladores paralelos, são baseados em arquitetura paralela em malha fechada. O compromisso é uma gama de movimentos e espaço de trabalho muito reduzidos.
Prof. Dra. Giovana Tripoloni Tangerino, 2017-1 (NIKU, 2015)

INTRODUÇÃO
Sensores
Estrutura
mecânica
Atuadores
Processador Software
Comunicação Energia
Prof. Dra. Giovana Tripoloni Tangerino, 2017-1
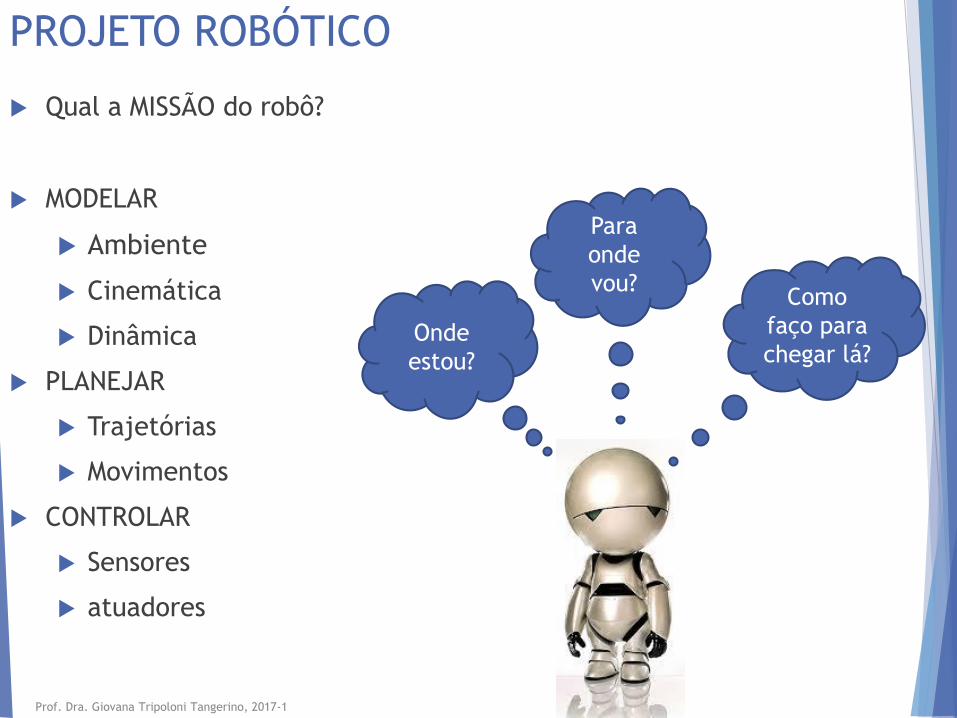
PROJETO ROBÓTICO
Qual a MISSÃO do robô?
MODELAR
Ambiente
Cinemática
Dinâmica
PLANEJAR
Trajetórias
Movimentos
CONTROLAR
Sensores
atuadores
Onde
estou?
Para
onde
vou?Como
faço para
chegar lá?
Prof. Dra. Giovana Tripoloni Tangerino, 2017-1
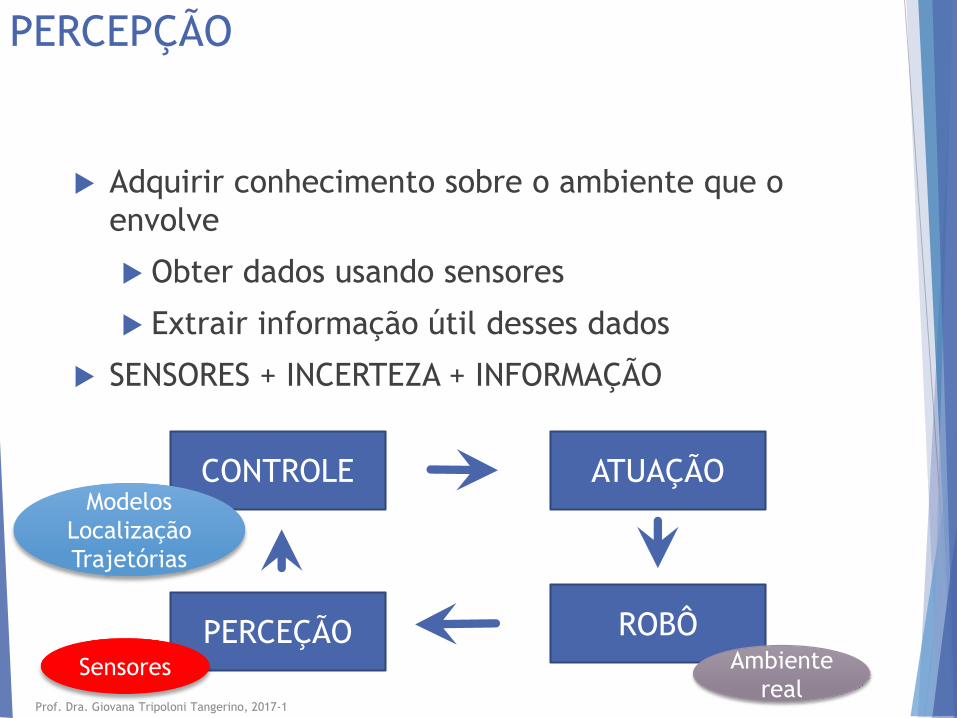
PERCEPÇÃO
Adquirir conhecimento sobre o ambiente que o
envolve
Obter dados usando sensores
Extrair informação útil desses dados
SENSORES + INCERTEZA + INFORMAÇÃO
CONTROLE ATUAÇÃO
ROBÔPERCEÇÃOSensores Ambiente
real
Modelos
Localização
Trajetórias
Prof. Dra. Giovana Tripoloni Tangerino, 2017-1
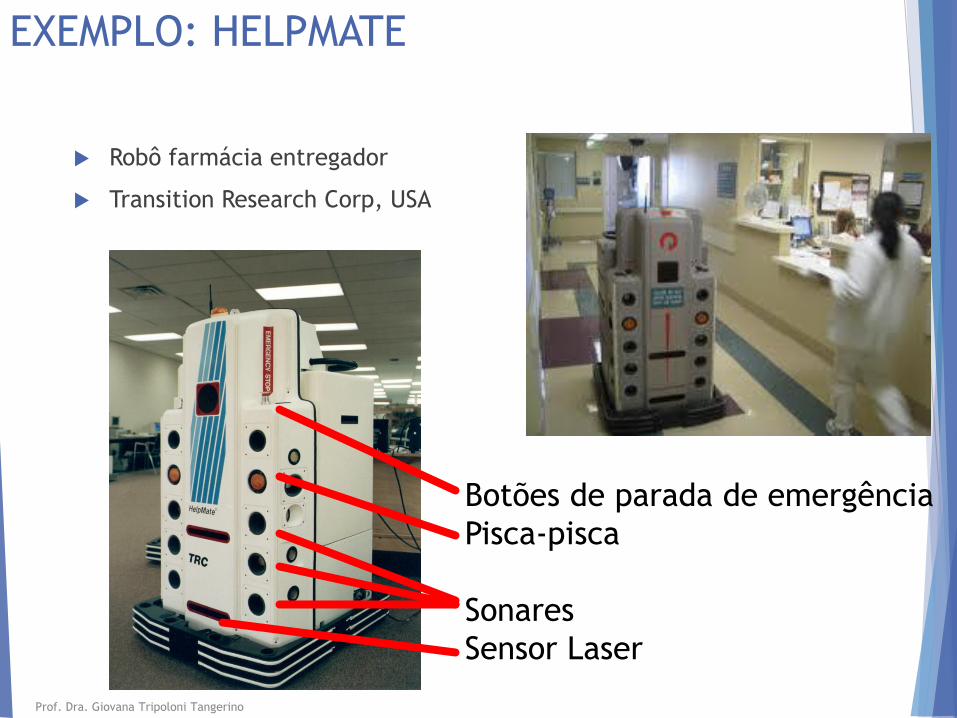
EXEMPLO: HELPMATE
Robô farmácia entregador
Transition Research Corp, USA
Botões de parada de emergência
Pisca-pisca
Sonares
Sensor Laser
Prof. Dra. Giovana Tripoloni Tangerino

EXEMPLO: Sensor de cor
Prof. Dra. Giovana Tripoloni Tangerino

Exemplo: Visão
Prof. Dra. Giovana Tripoloni Tangerino

Exemplo: ABB IRB 2400
Prof. Dra. Giovana Tripoloni Tangerino
CARACTERÍSTICAS A CONSIDERAR NA ESCOLHA DO SENSOR
Desempenho,
Economia,
Aplicabilidade do sensor.
Prof. Dra. Giovana Tripoloni Tangerino
Custo
Tamanho
Peso
Tipo de saída (digital ou analógica)
Interfaceamento (adaptadores)
Sensibilidade
Linearidade (mesma variação na entrada = mesma variação na saída)
Gama (range)
Tempo de resposta
Resposta de frequência
Confiabilidade (quantas vezes opera corretamente/quantas vezes ele é utilizado)
CARACTERÍSTICAS TÉCNICAS DOS SENSORES
Prof. Dra. Giovana Tripoloni Tangerino (NIKU, 2015)
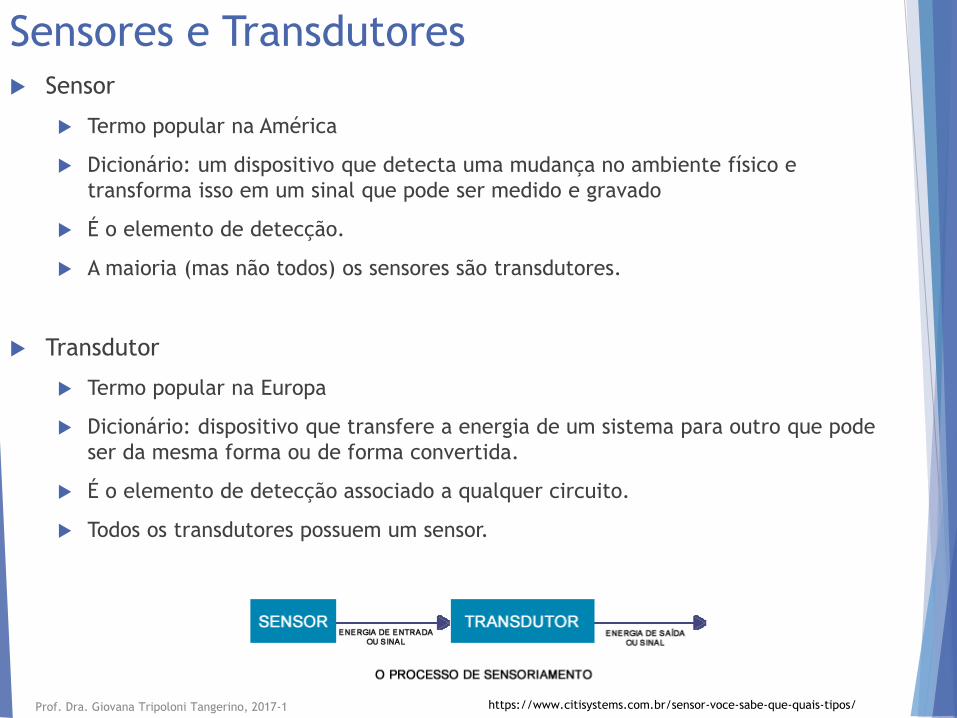
Sensores e Transdutores Sensor
Termo popular na América
Dicionário: um dispositivo que detecta uma mudança no ambiente físico e
transforma isso em um sinal que pode ser medido e gravado
É o elemento de detecção.
A maioria (mas não todos) os sensores são transdutores.
Transdutor
Termo popular na Europa
Dicionário: dispositivo que transfere a energia de um sistema para outro que pode
ser da mesma forma ou de forma convertida.
É o elemento de detecção associado a qualquer circuito.
Todos os transdutores possuem um sensor.
Prof. Dra. Giovana Tripoloni Tangerino, 2017-1 https://www.citisystems.com.br/sensor-voce-sabe-que-quais-tipos/
CARACTERÍSTICAS TÉCNICAS DOS SENSORES
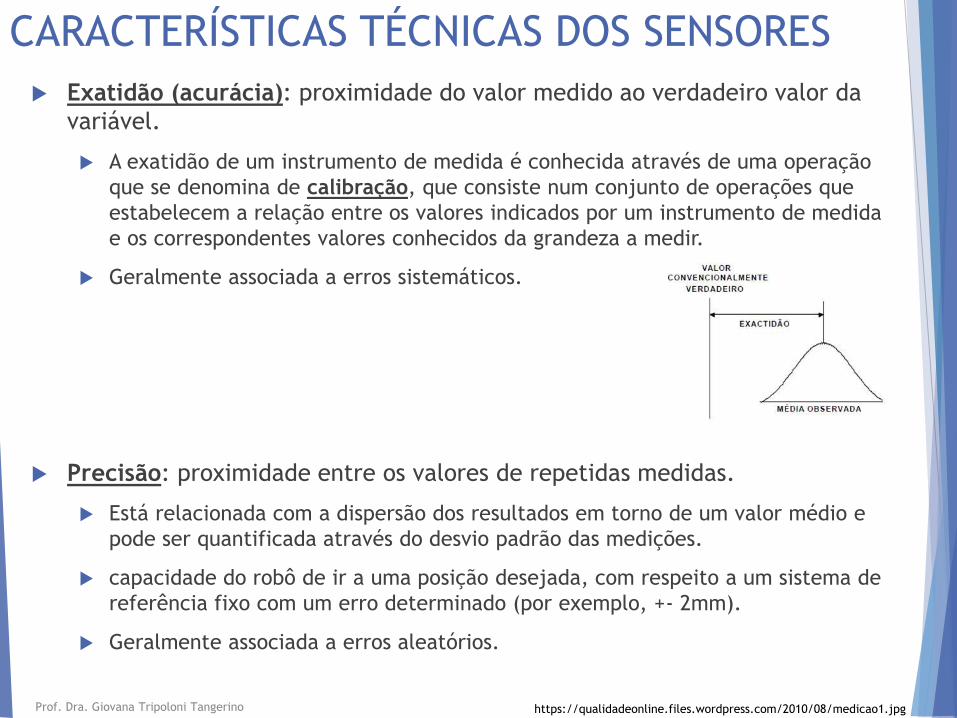
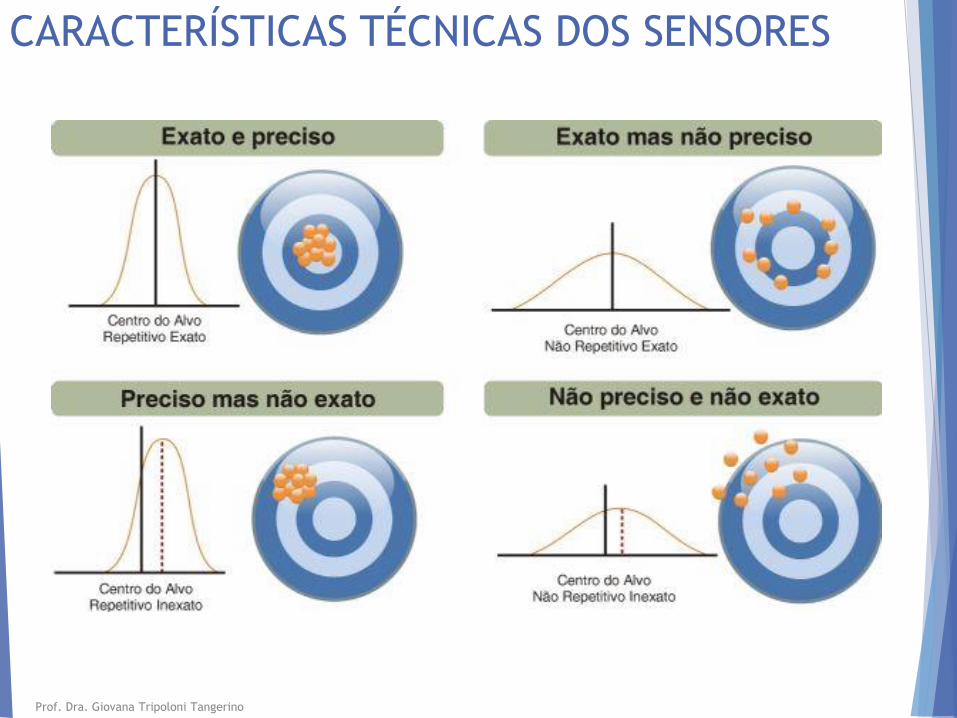
Exatidão (acurácia): proximidade do valor medido ao verdadeiro valor da
variável.
A exatidão de um instrumento de medida é conhecida através de uma operação
que se denomina de calibração, que consiste num conjunto de operações que
estabelecem a relação entre os valores indicados por um instrumento de medida
e os correspondentes valores conhecidos da grandeza a medir.
Geralmente associada a erros sistemáticos.
Precisão: proximidade entre os valores de repetidas medidas.
Está relacionada com a dispersão dos resultados em torno de um valor médio e
pode ser quantificada através do desvio padrão das medições.
capacidade do robô de ir a uma posição desejada, com respeito a um sistema de
referência fixo com um erro determinado (por exemplo, +- 2mm).
Geralmente associada a erros aleatórios.
Prof. Dra. Giovana Tripoloni Tangerino https://qualidadeonline.files.wordpress.com/2010/08/medicao1.jpg
CARACTERÍSTICAS TÉCNICAS DOS SENSORES
Prof. Dra. Giovana Tripoloni Tangerino
CARACTERÍSTICAS TÉCNICAS DOS SENSORES
Resolução: É uma medida do menor incremento mensurável.
É o tamanho do passo mínimo dentro do intervalo de medição do sensor
Se o instrumento for analógico, a sua resolução é dada pelo valor da menor
divisão da escala graduada, conforme o fundo de escala selecionado
Se o instrumento for digital, a sua resolução é dada pela unidade do dígito
menos significativo em relação ao ponto decimal, conforme o fundo de escala
selecionado.
Sensibilidade: é uma medida da menor quantidade mensurável por um
instrumento particular.
Prof. Dra. Giovana Tripoloni Tangerino
CARACTERÍSTICAS TÉCNICAS DOS SENSORES
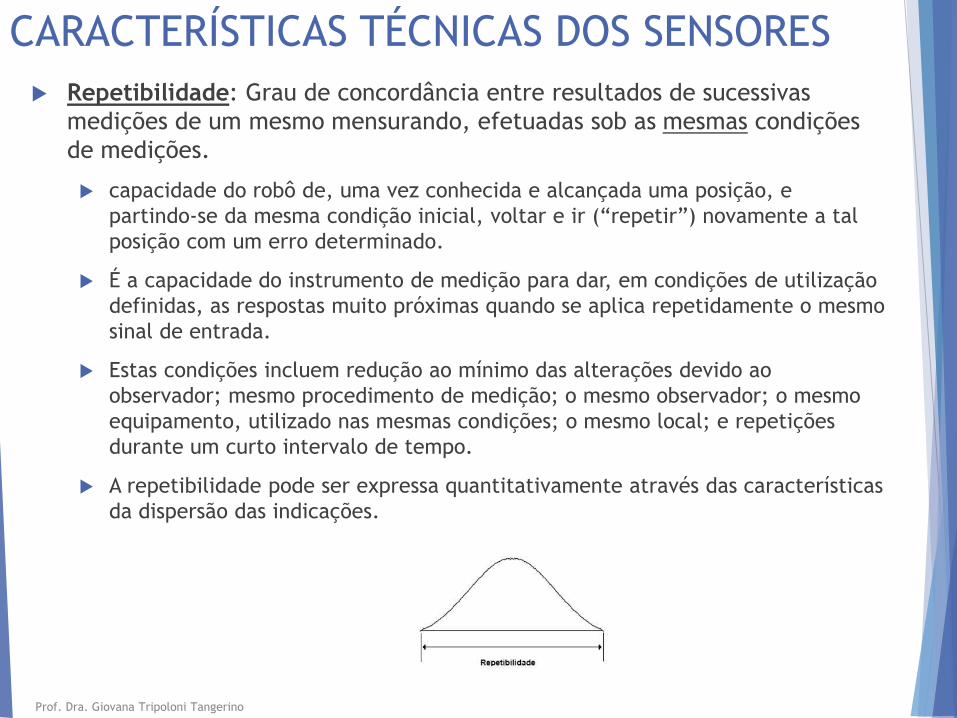
Repetibilidade: Grau de concordância entre resultados de sucessivas
medições de um mesmo mensurando, efetuadas sob as mesmas condições
de medições.
capacidade do robô de, uma vez conhecida e alcançada uma posição, e
partindo-se da mesma condição inicial, voltar e ir (“repetir”) novamente a tal
posição com um erro determinado.
É a capacidade do instrumento de medição para dar, em condições de utilização
definidas, as respostas muito próximas quando se aplica repetidamente o mesmo
sinal de entrada.
Estas condições incluem redução ao mínimo das alterações devido ao
observador; mesmo procedimento de medição; o mesmo observador; o mesmo
equipamento, utilizado nas mesmas condições; o mesmo local; e repetições
durante um curto intervalo de tempo.
A repetibilidade pode ser expressa quantitativamente através das características
da dispersão das indicações.
Prof. Dra. Giovana Tripoloni Tangerino
CARACTERÍSTICAS TÉCNICAS DOS SENSORES
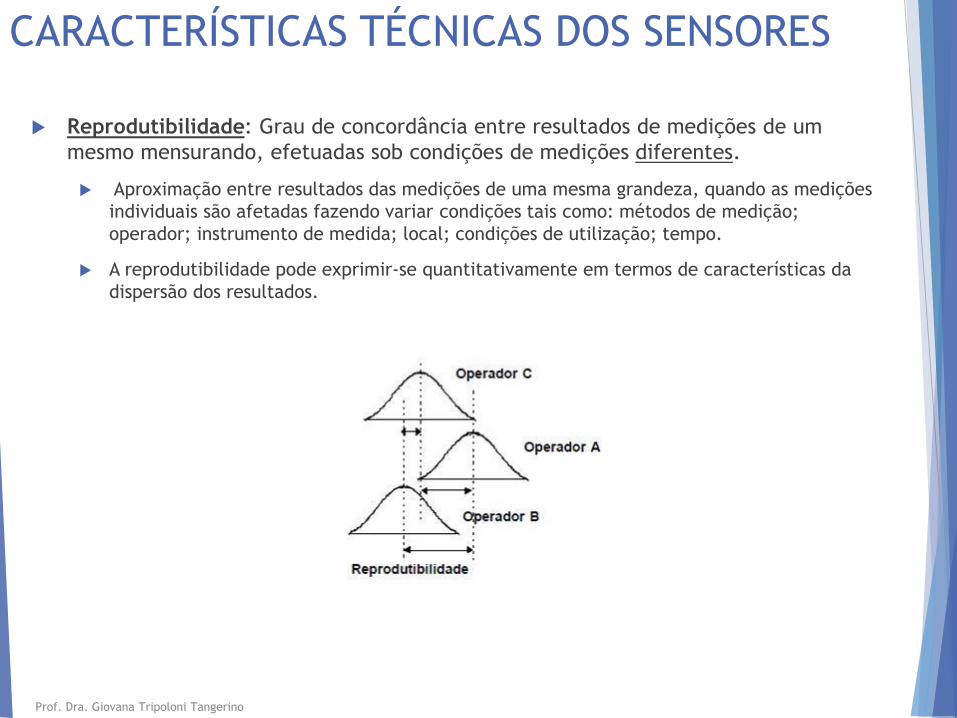
Reprodutibilidade: Grau de concordância entre resultados de medições de um
mesmo mensurando, efetuadas sob condições de medições diferentes.
Aproximação entre resultados das medições de uma mesma grandeza, quando as medições
individuais são afetadas fazendo variar condições tais como: métodos de medição;
operador; instrumento de medida; local; condições de utilização; tempo.
A reprodutibilidade pode exprimir-se quantitativamente em termos de características da
dispersão dos resultados.
Prof. Dra. Giovana Tripoloni Tangerino
CARACTERÍSTICAS TÉCNICAS DOS
SENSORES
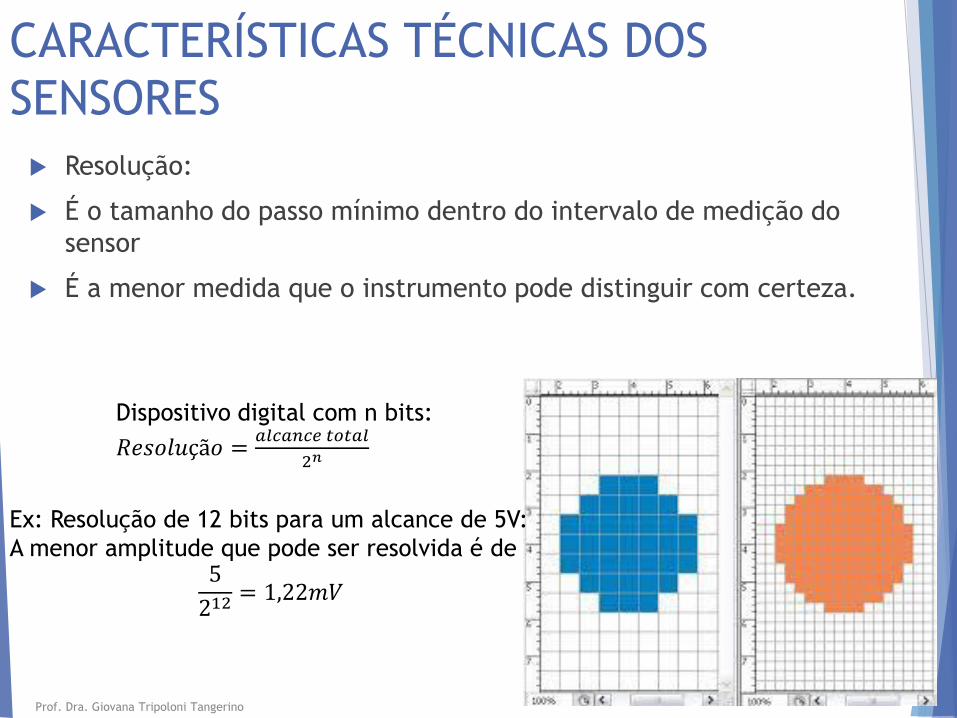
Resolução:
É o tamanho do passo mínimo dentro do intervalo de medição do
sensor
É a menor medida que o instrumento pode distinguir com certeza.
Ex: Resolução de 12 bits para um alcance de 5V:
A menor amplitude que pode ser resolvida é de 5
212= 1,22𝑚𝑉
Prof. Dra. Giovana Tripoloni Tangerino
Dispositivo digital com n bits:
𝑅𝑒𝑠𝑜𝑙𝑢çã𝑜 =𝑎𝑙𝑐𝑎𝑛𝑐𝑒 𝑡𝑜𝑡𝑎𝑙
2𝑛
CARACTERÍSTICAS TÉCNICAS DOS
SENSORES
Erros Sistemáticos:
Previsíveis (determinísticos)
Causados por fatores que podem ser modelados
Ex: calibração incorreta
Erros aleatórios:
Não podem ser previstos
Podem ser representados por probabilidade
Ex.: ruído na câmera, instabilidade no sensor, etc.
Prof. Dra. Giovana Tripoloni Tangerino
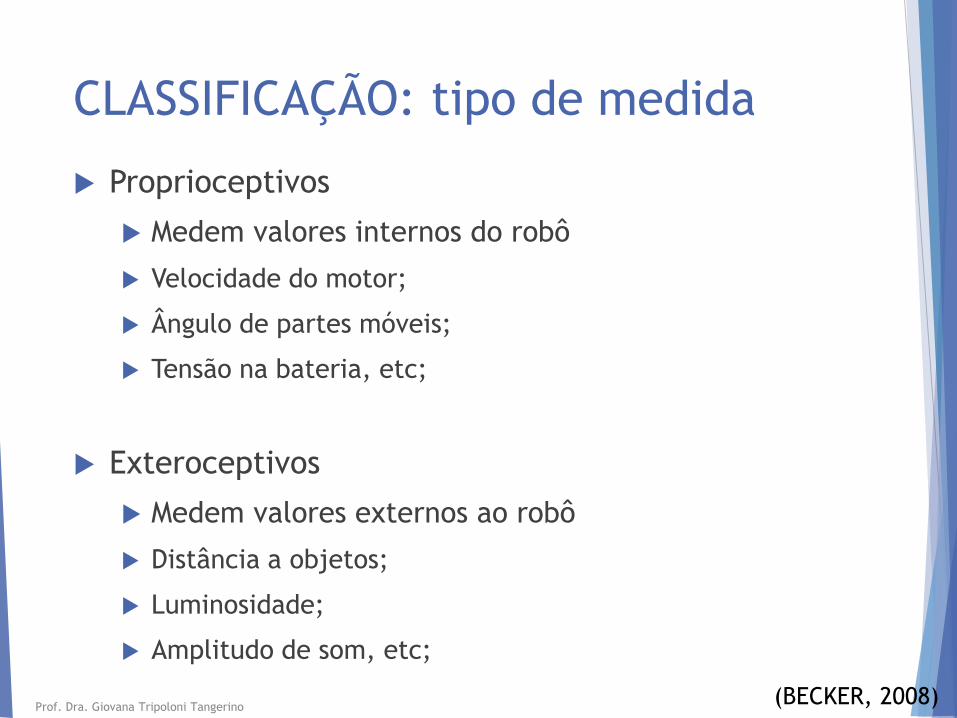
CLASSIFICAÇÃO: tipo de medida
Proprioceptivos
Medem valores internos do robô
Velocidade do motor;
Ângulo de partes móveis;
Tensão na bateria, etc;
Exteroceptivos
Medem valores externos ao robô
Distância a objetos;
Luminosidade;
Amplitudo de som, etc;
(BECKER, 2008)Prof. Dra. Giovana Tripoloni Tangerino
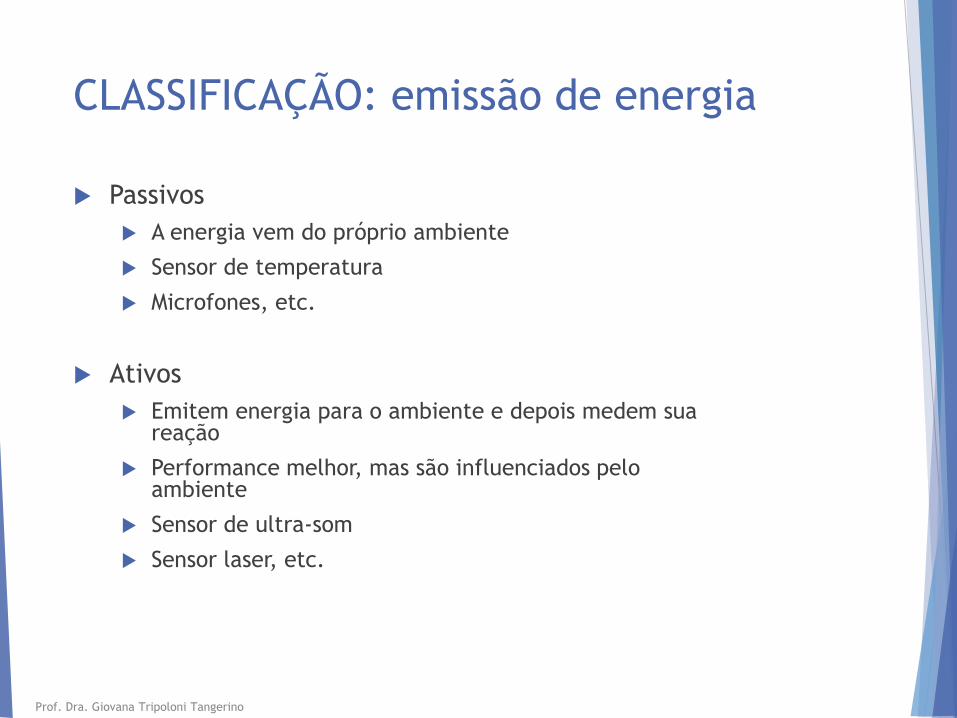
CLASSIFICAÇÃO: emissão de energia
Passivos
A energia vem do próprio ambiente
Sensor de temperatura
Microfones, etc.
Ativos
Emitem energia para o ambiente e depois medem sua reação
Performance melhor, mas são influenciados pelo ambiente
Sensor de ultra-som
Sensor laser, etc.
Prof. Dra. Giovana Tripoloni Tangerino
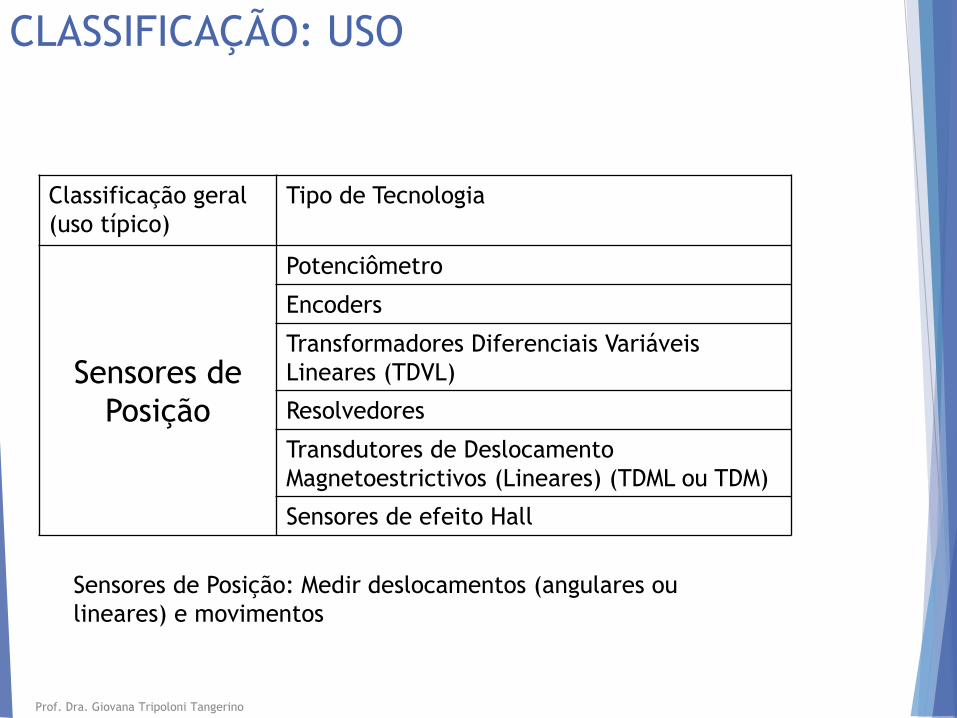
CLASSIFICAÇÃO: USO
Classificação geral
(uso típico)
Tipo de Tecnologia
Sensores de
Posição
Potenciômetro
Encoders
Transformadores Diferenciais Variáveis
Lineares (TDVL)
Resolvedores
Transdutores de Deslocamento
Magnetoestrictivos (Lineares) (TDML ou TDM)
Sensores de efeito Hall
Sensores de Posição: Medir deslocamentos (angulares ou
lineares) e movimentos
Prof. Dra. Giovana Tripoloni Tangerino
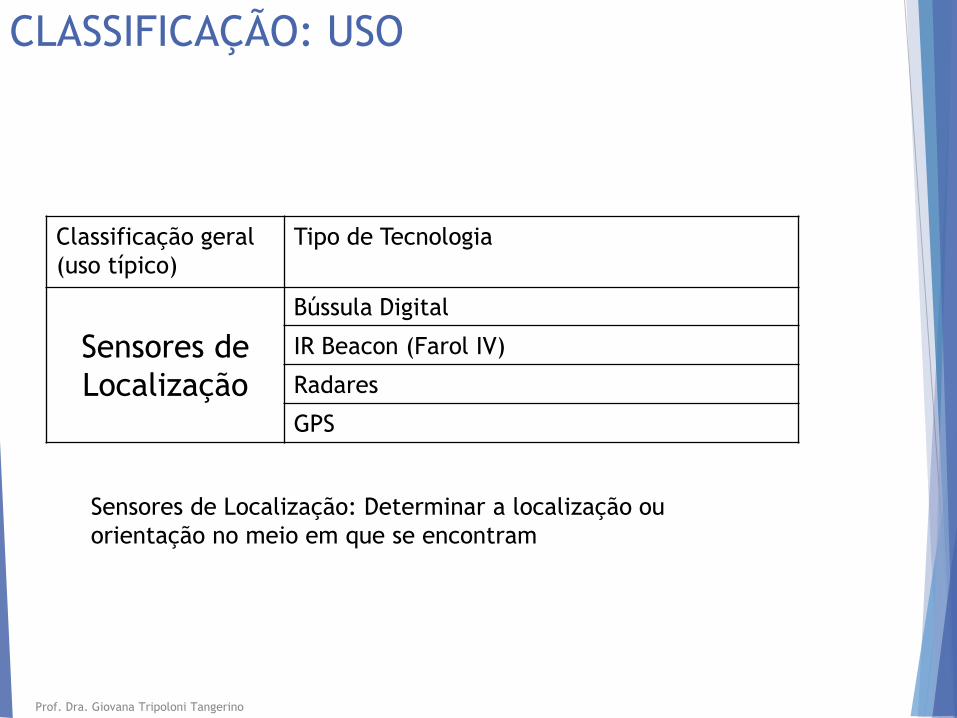
CLASSIFICAÇÃO: USO
Classificação geral
(uso típico)
Tipo de Tecnologia
Sensores de
Localização
Bússula Digital
IR Beacon (Farol IV)
Radares
GPS
Sensores de Localização: Determinar a localização ou
orientação no meio em que se encontram
Prof. Dra. Giovana Tripoloni Tangerino
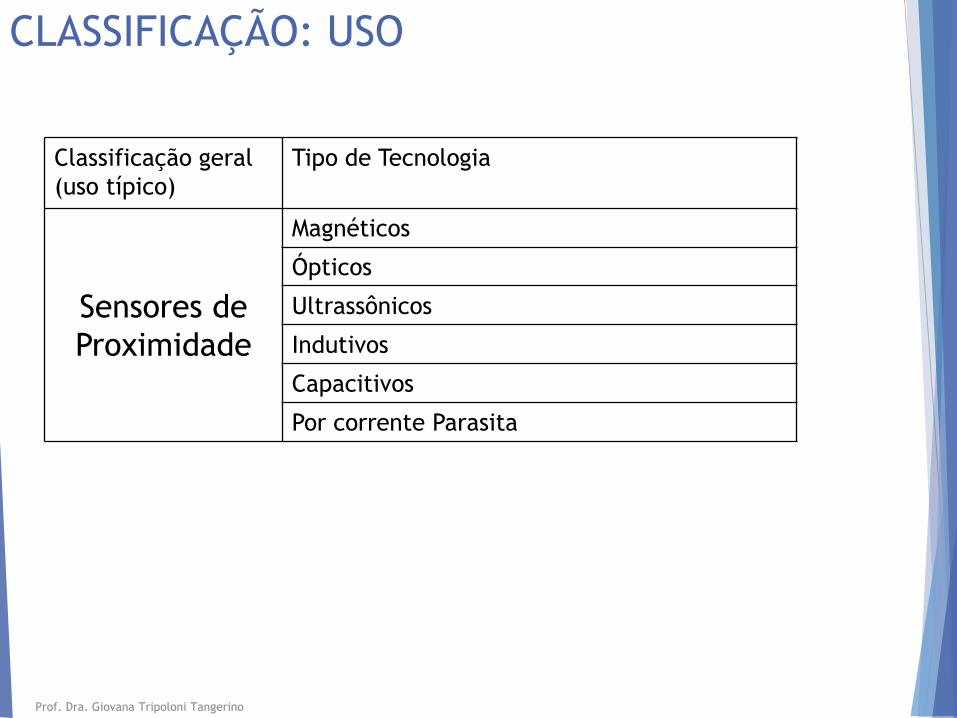
CLASSIFICAÇÃO: USO
Classificação geral
(uso típico)
Tipo de Tecnologia
Sensores de
Proximidade
Magnéticos
Ópticos
Ultrassônicos
Indutivos
Capacitivos
Por corrente Parasita
Prof. Dra. Giovana Tripoloni Tangerino
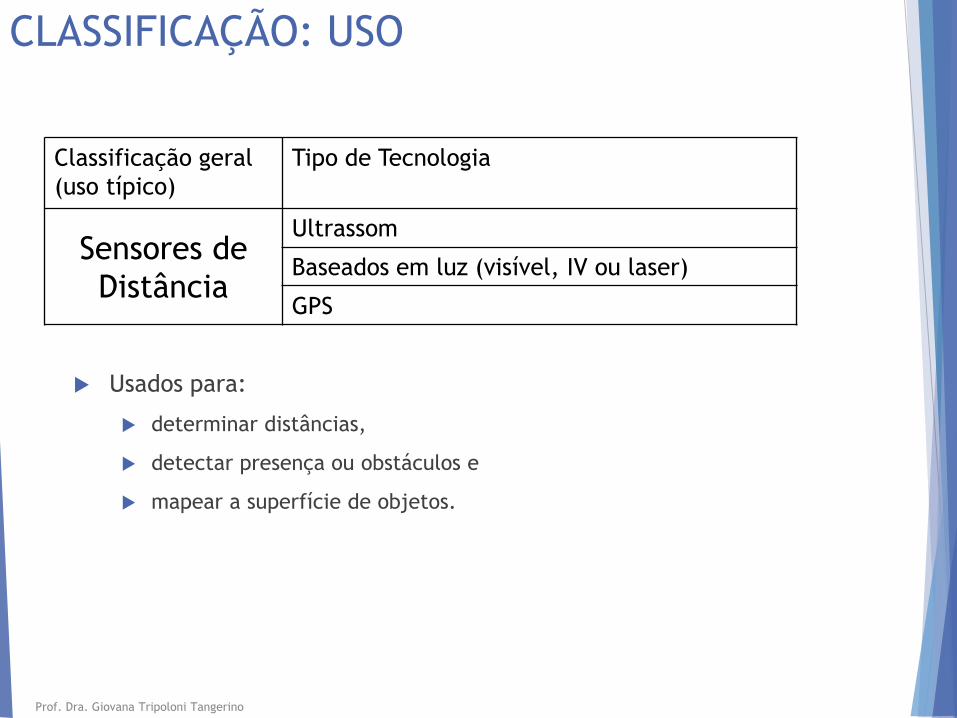
CLASSIFICAÇÃO: USO
Classificação geral
(uso típico)
Tipo de Tecnologia
Sensores de
Distância
Ultrassom
Baseados em luz (visível, IV ou laser)
GPS
Usados para:
determinar distâncias,
detectar presença ou obstáculos e
mapear a superfície de objetos.
Prof. Dra. Giovana Tripoloni Tangerino
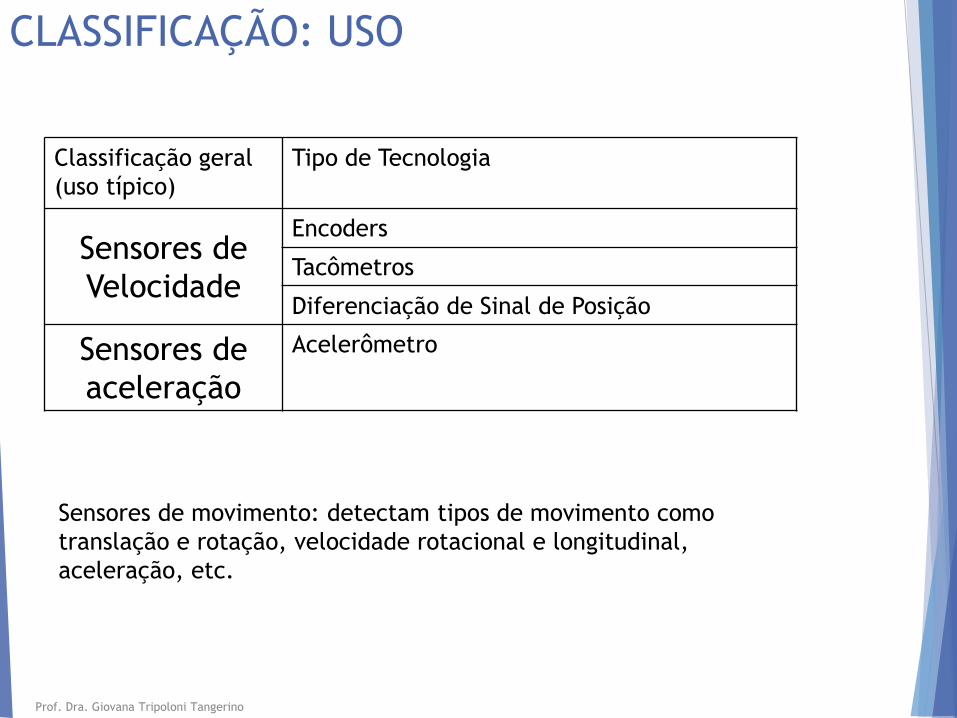
CLASSIFICAÇÃO: USO
Classificação geral
(uso típico)
Tipo de Tecnologia
Sensores de
Velocidade
Encoders
Tacômetros
Diferenciação de Sinal de Posição
Sensores de
aceleração
Acelerômetro
Sensores de movimento: detectam tipos de movimento como
translação e rotação, velocidade rotacional e longitudinal,
aceleração, etc.
Prof. Dra. Giovana Tripoloni Tangerino
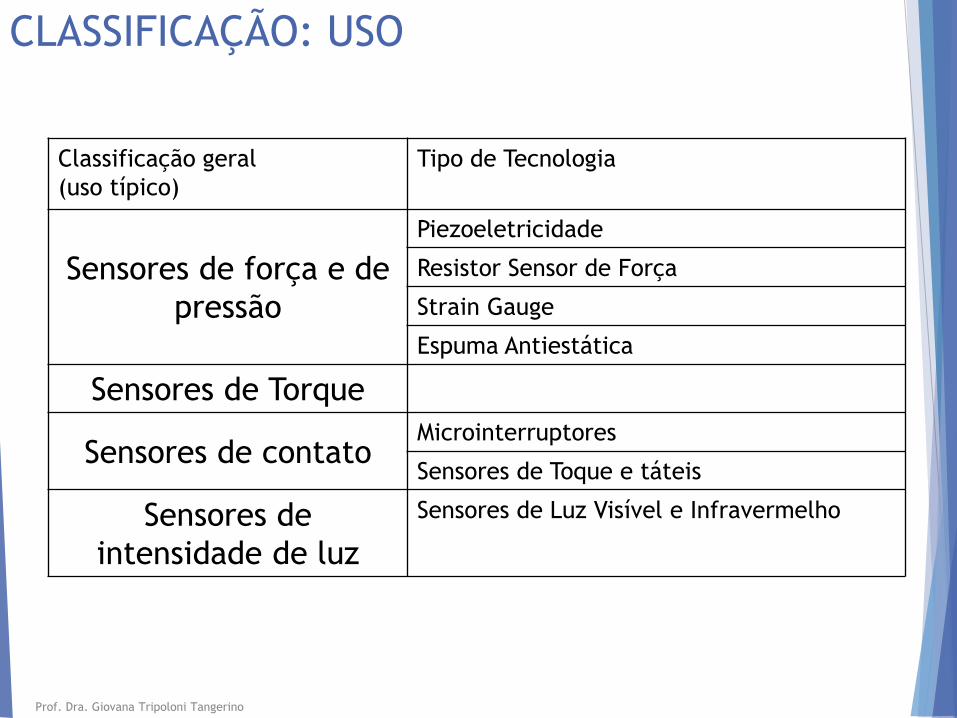
CLASSIFICAÇÃO: USO
Classificação geral
(uso típico)
Tipo de Tecnologia
Sensores de força e de
pressão
Piezoeletricidade
Resistor Sensor de Força
Strain Gauge
Espuma Antiestática
Sensores de Torque
Sensores de contatoMicrointerruptores
Sensores de Toque e táteis
Sensores de
intensidade de luz
Sensores de Luz Visível e Infravermelho
Prof. Dra. Giovana Tripoloni Tangerino
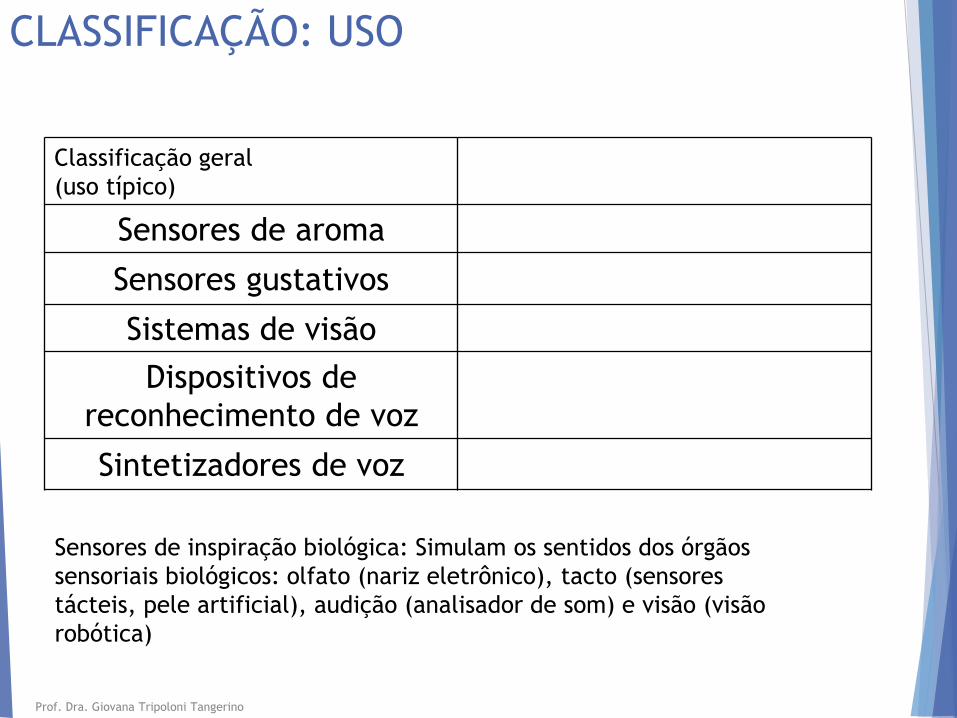
CLASSIFICAÇÃO: USO
Classificação geral
(uso típico)
Sensores de aroma
Sensores gustativos
Sistemas de visão
Dispositivos de
reconhecimento de voz
Sintetizadores de voz
Sensores de inspiração biológica: Simulam os sentidos dos órgãos
sensoriais biológicos: olfato (nariz eletrônico), tacto (sensores
tácteis, pele artificial), audição (analisador de som) e visão (visão
robótica)
Prof. Dra. Giovana Tripoloni Tangerino
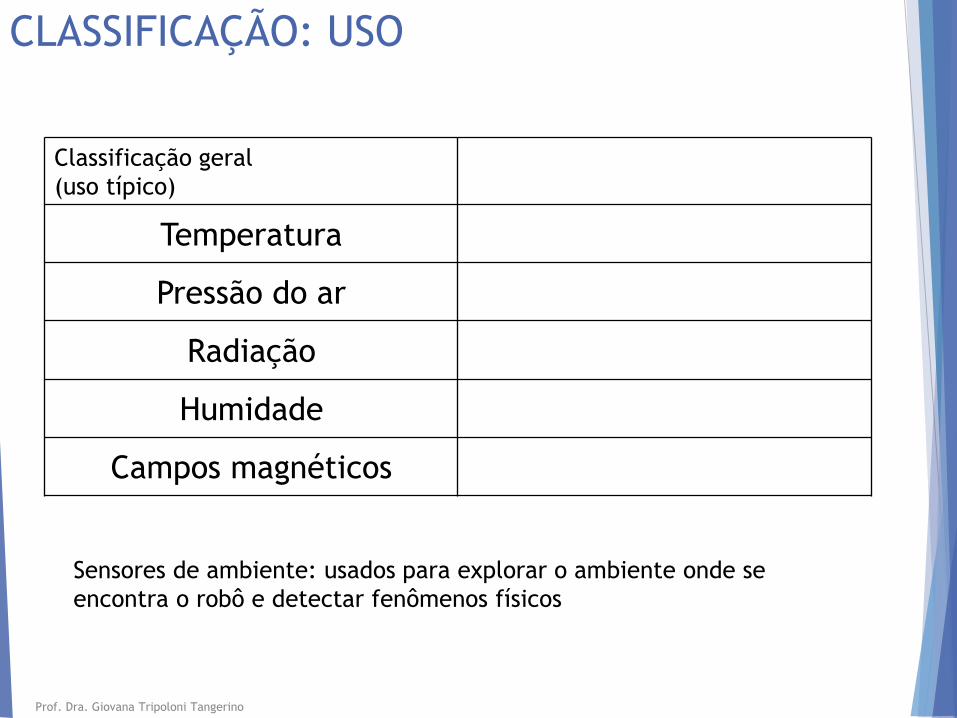
CLASSIFICAÇÃO: USO
Classificação geral
(uso típico)
Temperatura
Pressão do ar
Radiação
Humidade
Campos magnéticos
Sensores de ambiente: usados para explorar o ambiente onde se
encontra o robô e detectar fenômenos físicos
Prof. Dra. Giovana Tripoloni Tangerino
EXERCÍCIOS
Quais características devem ser consideradas na escolha do sensor?
Cite três características técnicas dos sensores.
Explique resolução.
Explique a diferença entre precisão e repetibilidade.
Qual a diferença entre sensores proprioceptivos e sensores exteroceptivos?
Prof. Dra. Giovana Tripoloni Tangerino
LINKS DE INTERESSE
Robótica móvel
Siegwart, R. (ETHZ - Suíça):
http://www.mobilerobots.org
Links de interessantes na área
Site pessoal do Matthew
http://superpositioned.com/category/electronics-and-engineering/cool-
robots/
Prof. Dra. Giovana Tripoloni Tangerino
BIBLIOGRAFIA
NIKU Saeed B . Introdução à Robótica - Análise, Controle, Aplicações. 2a
ed. LTC Editora. 2013.
ROSÁRIO, J.M. Princípios de Mecatrônica. São Paulo: Prentice Hall, 2005.
Prof. Dra. Giovana Tripoloni Tangerino