Embed Size (px)
Citation preview

5/8/2018 Trabalho Simulação de Ações de Controle-Willian - slidepdf.com
http://slidepdf.com/reader/full/trabalho-simulacao-de-acoes-de-controle-willian 1/20
1
UNIVERSDADE DO EXTREMO SUL CATARINENSE
CURSO DE ENGENHARIA QUÍMICA
WILLIAN BONELI DE ALMEIDA
SIMULAÇÕES DE AÇÕES DE CONTROLE PROPORCIONAL, PROPORCIONAL
INTEGRAL, PROPORCIONAL DERIVATIVO E PROPORCIONAL INTEGRAL
DERIVATIVO.
CRICIÚMA, 2011

5/8/2018 Trabalho Simulação de Ações de Controle-Willian - slidepdf.com
http://slidepdf.com/reader/full/trabalho-simulacao-de-acoes-de-controle-willian 2/20
2
WILLIAN BONELI DE ALMEIDA
IMULAÇÕES DE AÇÕES DE CONTROLE PROPORCIONAL, PROPORCIONAL
INTEGRAL, PROPORCIONAL DERIVATIVO E PROPORCIONAL INTEGRAL
DERIVATIVO.
Trabalho apresentado à disciplina de
Controle de Sistemas do Curso de
EngenhariaQuímica.
Professor: Evanio Ramos Nicoleit
CRICIÚMA, 2011

5/8/2018 Trabalho Simulação de Ações de Controle-Willian - slidepdf.com
http://slidepdf.com/reader/full/trabalho-simulacao-de-acoes-de-controle-willian 3/20
3
SUMÁRIO
1. SISTEMA ORIGINAL........................................................................................... 4
1.2. Simulação do sistema original no matlab ................................................. 5
2. CONTROLE PROPORCIONAL (P) ................................ ................................ ..... 6
2.1 Simulação do sistema com controle proporcional no matlab ................. 8
3 CONTROLE PROPORCIONAL INTEGRAL (PI)................................................. 8
3.1 Simulação do sistema com controle proporcional integral no matlab . 10
4 CONTROLE PROPORCIONAL DERIVATIVO (PD).......................................... 12
4.1 Simulação do sistema com controle proporcional derivativo no matlab
14
5 CONTROLE PROPORCIONAL INTEGRAL DERIVATIVO (PID) ..................... 15
5.1 Simulação do sistema com controle proporcional integral derivativo no
matlab ................................................................................................................... 17
6 CONCLUSÃO .................................................................................................... 19
REFERENCIAS ........................................................................................................ 20

5/8/2018 Trabalho Simulação de Ações de Controle-Willian - slidepdf.com
http://slidepdf.com/reader/full/trabalho-simulacao-de-acoes-de-controle-willian 4/20
4
1. SISTEMA ORIGINAL
A figura abaixo representa um sistema qualquer sem nenhuma ação de
controle.
+
-
R(s) G(s)
E(s)
C(s)
Figure 1-Sistema original

5/8/2018 Trabalho Simulação de Ações de Controle-Willian - slidepdf.com
http://slidepdf.com/reader/full/trabalho-simulacao-de-acoes-de-controle-willian 5/20
5
1.2. Simulação do sistema original no matlab
clearall; closeall;
clc;
t = 0:0.01:10;
for n = 1:8; num = [1]; den = [1 15 38 25];
[y(:,n),x, t] = step(num,den,t); end plot(t,y)
gridon;

5/8/2018 Trabalho Simulação de Ações de Controle-Willian - slidepdf.com
http://slidepdf.com/reader/full/trabalho-simulacao-de-acoes-de-controle-willian 6/20

5/8/2018 Trabalho Simulação de Ações de Controle-Willian - slidepdf.com
http://slidepdf.com/reader/full/trabalho-simulacao-de-acoes-de-controle-willian 7/20
7

5/8/2018 Trabalho Simulação de Ações de Controle-Willian - slidepdf.com
http://slidepdf.com/reader/full/trabalho-simulacao-de-acoes-de-controle-willian 8/20
8
2.1 Simulação do sistema com controle proporcional no matlab
clearall; closeall;
clc;
Kp=[1 2 5 10 20 50 100 200 300];
t = 0:0.01:10;
for n = 1:9; num = Kp(n); den = [1 15 38 24+Kp(n)];
[y(:,n),x, t] = step(num,den,t); end plot(t,y)
gridon;
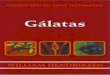
Gráfico 2 - Ganho do sistema com controle proporcional
Analisando o gr fico 2 nota-se para valores da constante deproporcionalidadeKp até 50 o sistema tem um ganho menor que 80%, para valores
acima de 100 até 300 o sistema tem um over-shut maior que 120% do ganho que se
deseja alcançar, o sistema oscila muito dentro dessa faixa de Kp.
3 CONTROLE PROPORCIONAL INTEGRAL (PI)

5/8/2018 Trabalho Simulação de Ações de Controle-Willian - slidepdf.com
http://slidepdf.com/reader/full/trabalho-simulacao-de-acoes-de-controle-willian 9/20
9
sistema abaixo representa o sistema original sendo controlado por um
controlador proporcional integral.
� �� �
� �� �
� �� �
+
-
R(s) G(s)E(s)
C(s)
Figura 3 - Controle Proporcional Integral

5/8/2018 Trabalho Simulação de Ações de Controle-Willian - slidepdf.com
http://slidepdf.com/reader/full/trabalho-simulacao-de-acoes-de-controle-willian 10/20
10
� �� �� �� �
� �� � � �� �
Kp=Kp
Ti=0,5
3.1 Simulação do sistema com controle proporcional integral no matlab
clearall; closeall;
clc;
Kp=[1 2 5 10 20 50 100 200 300]; Ti=0.5;
t = 0:0.01:50;
for n = 1:9; num = [Kp(n)*(Ti+1)]; den = [Ti 15*Ti 38*Ti 24*Ti+Ti*Kp(n) Kp(n)];
[y(:,n),x, t] = step(num,den,t); end plot(t,y)
gridon;

5/8/2018 Trabalho Simulação de Ações de Controle-Willian - slidepdf.com
http://slidepdf.com/reader/full/trabalho-simulacao-de-acoes-de-controle-willian 11/20
11
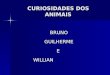
Gráfico 3 - Ganho do sistema com controle proporcional integral, com valoresde Kp = 1, 2, 5, 10, 20, 50 e 100.
gr fico 3 mostra uma resposta crescente de ganhos maiores que 200%,
conforme a constanteKp aumenta. A partir do Kp=5 o sistema começa a ter over-
shut acima do ganho que se deseja alcançar que é de 100%. Para valores de kp
maiores que 20 até 100 o sistema começa a sofrer muita oscilação.
Gráfico 4 - Ganho do sistema com controle proporcional integral, com valoresde Kp = 200.

5/8/2018 Trabalho Simulação de Ações de Controle-Willian - slidepdf.com
http://slidepdf.com/reader/full/trabalho-simulacao-de-acoes-de-controle-willian 12/20

5/8/2018 Trabalho Simulação de Ações de Controle-Willian - slidepdf.com
http://slidepdf.com/reader/full/trabalho-simulacao-de-acoes-de-controle-willian 13/20
13

5/8/2018 Trabalho Simulação de Ações de Controle-Willian - slidepdf.com
http://slidepdf.com/reader/full/trabalho-simulacao-de-acoes-de-controle-willian 14/20
14
Kp=Kp
Td=0,1
4.1 Simulação do sistema com controle proporcional derivativono matlab
clearall; closeall;
clc;
Kp=[1 2 5 10 20 50 100 200 300]; Td=0.1;
t = 0:0.01:30;
for n = 1:9; num = [Td*Kp(n) Kp(n)]; den = [1 15 38+Td*Kp(n) 24+Kp(n)];
[y(:,n),x, t] = step(num,den,t); end plot(t,y)
gridon;

5/8/2018 Trabalho Simulação de Ações de Controle-Willian - slidepdf.com
http://slidepdf.com/reader/full/trabalho-simulacao-de-acoes-de-controle-willian 15/20

5/8/2018 Trabalho Simulação de Ações de Controle-Willian - slidepdf.com
http://slidepdf.com/reader/full/trabalho-simulacao-de-acoes-de-controle-willian 16/20
16
Kp=Kp

5/8/2018 Trabalho Simulação de Ações de Controle-Willian - slidepdf.com
http://slidepdf.com/reader/full/trabalho-simulacao-de-acoes-de-controle-willian 17/20
17
Ti=0,5
Td=0,1
5.1 Simulação do sistema com controle proporcional integral derivativo nomatlab
clearall; closeall;
clc;
Kp=[1 2 5 10 20 50 100 200 300]; Ti=0.5; Td=0.1;
t = 0:0.01:30;
for n = 1:9; num = [Td*Ti*Kp(n) Ti*Kp(n) Kp(n)]; den = [1 15 38*Ti+Kp(n)*Ti*Td 24*Ti+Ti*Kp(n) Kp(n)];
[y(:,n),x, t] = step(num,den,t); end plot(t,y)
gridon;
Gráfico 7 - Ganho do sistema com controle proporcional integral derivativo,com valores de Kp = 1, 2, 5 10, 20, 50, 100, 200 e 300.

5/8/2018 Trabalho Simulação de Ações de Controle-Willian - slidepdf.com
http://slidepdf.com/reader/full/trabalho-simulacao-de-acoes-de-controle-willian 18/20
18
Para uma melhorvisualização do ganho do sistema o gr fico 8 mostra o
ganho até o Kp=20. A partir de Kp=50 até Kp=300 o sistema oscila muito e fica difícil
a visualização dos ganhos menores.
Gráfico 8 - Ganho do sistema com controle proporcional integral derivativo,com valores de Kp = 1, 2, 5 10 e 20.
s gr fico 7 e 8 mostram que o sistema tem uma boa estabilidade para
valores de Kp entre 1 e 10. Acima desses valores o sistema apresenta grande
oscilação e ganhos maiores que .

5/8/2018 Trabalho Simulação de Ações de Controle-Willian - slidepdf.com
http://slidepdf.com/reader/full/trabalho-simulacao-de-acoes-de-controle-willian 19/20
19
6 CONCLUSÃO
A combinação das ações proporcional, integral e derivativa para gerar umsó sinal de controle, d origem ao que chamamos de controlador proporcional-
integral derivativo (PID), este ultimo teve uma melhor resposta em relação às outros
controladores separados.
A oscilação do sistema depende muito do valor de Kp usado para
controlar cada sistema simulado.
sistema sem nenhum controle teve uma ganho muito pequeno.

5/8/2018 Trabalho Simulação de Ações de Controle-Willian - slidepdf.com
http://slidepdf.com/reader/full/trabalho-simulacao-de-acoes-de-controle-willian 20/20
20
REFERENCIAS
Engenharia de Controle Moderno ± Quarta Edição ± Editora Pearson Prentice Hall ± Autor: Katsuhiko GATA










![TCC-Willian [29-11-06]](https://img.document.onl/doc/110x75/5572023d4979599169a33198/tcc-willian-29-11-06.jpg)