Embed Size (px)
Citation preview

UFRJ Universidade Federal do Rio de Janeiro
EE Escola de Engenharia
DEL Departamento de Eletronica
EEL-555 Sistemas Lineares II
Prof. Ramon
1

EEL-555 Sistemas Lineares II 2
Organizacao do curso
Sala de aula : H-211
Horario : 2a. feira 13:00 – 15:00
: 4a. feira 15:00 – 17:00
Atendimento : 6a. feira 10:00 – 12:00
Professor : Ramon R. Costa
Laboratorio : H-345
Telefone : 2562-8604
e-mail : [email protected]
Homepage : http://www.coep.ufrj.br/∼ramon: http://www.coep.ufrj.br/∼teleduc
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 3
Pre-requisitos
⋆ Sistemas Lineares I
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 4
Objetivos do curso
⋆ Estudo de ferramentas e metodos para analise de sistemas lineares
invariantes no tempo.
⋆ Enfase em sistemas discretos.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 5
Descricao do curso
Parte I - Sistemas contınuos
1. Revisao: Sistemas lineares
2. Representacao no espaco de estado
3. Realizacao de funcoes de transferencia
4. Modelagem de sistemas dinamicos lineares
5. Linearizacao
6. Solucao da equacao de estado
7. Revisao: Algebra linear
8. Analise
9. Solucao numerica de EDOs
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 6
Descricao do curso
Parte II - Sistemas discretos
9. Sinais e sistemas discretos no tempo
10. Amostragem de sinais contınuos
11. Transformada Z
12. Analise de sistemas lineares discretos
13. Transformada discreta de Fourier (DFT)
14. Fast Fourier Transform (FFT)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 7
Duracao do curso
Inıcio : 15/ago
Termino : 10/dez
⋆ 75 horas-aula
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 8
Plano de aulas simplificado
Parte I - Sistemas contınuos
1. Revisao: Sistemas Lineares . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 aulas
2. Representacao no espaco de estado . . . . . . . . . . . . . . . . . . . 5 aulas
3. Realizacao de funcoes de transferencia . . . . . . . . . . . . . . . . 5 aulas
4. Revisao: Algebra Linear . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 aulas
5. Solucao da equacao de estado . . . . . . . . . . . . . . . . . . . . . . . . 5 aulas
6. Analise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 aulas
7. Simulacao de sistemas dinamicos . . . . . . . . . . . . . . . . . . . . . 5 aulas
TOTAL : 35 aulas
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 9
Plano de aulas simplificado
Parte II - Sistemas discretos
1. Sinais e sistemas discretos no tempo . . . . . . . . . . . . . . . . . . 5 aulas
2. Equacoes a diferencas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 aulas
3. Transformada Z . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 aulas
4. Analise de sistemas lineares discretos . . . . . . . . . . . . . . . . 10 aulas
5. Transformada de Fourier . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 aulas
6. Transformada discreta de Fourier (DFT) . . . . . . . . . . . . . . 5 aulas
7. Fast Fourier Transform (FFT) . . . . . . . . . . . . . . . . . . . . . . . . 5 aulas
TOTAL : 40 aulas
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 10
Em resumo ...
Pouco tempo pra brincadeira !
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 11
Exercıcios & trabalhos
Durante o curso os alunos receberao:
• 9 ou mais listas de exercıcios
• 2 trabalhos/projetos
⋆ Poderao requerer a utilizacao do pacote MATLAB e seus toolboxes.
⋆ Nao serao considerados para avaliacao.
Os aluno serao poupados da tarefa de copia-los.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 12
Avaliacao
⋆ Serao aplicadas 4 provas .
⋆ Todas as provas sao sem consulta .
⋆ Para aprovacao no curso o aluno devera ter media final ≥ 5 .
⋆ Sera dada uma unica 2a. chamada no final do curso com toda a materia .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 13
Datas das provas
Prova Peso Data
1a. 1 05/set/2005
2a. 1 03/out/2005
3a. 1 07/nov/2005
4a. 1 05/dez/2005
2a. cham. 1 07/dez/2005
Perıodo letivo : 15/agosto a 10/dezembro
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 14
Livros textos
[ 1] C. T. Chen ,
Linear Systems Theory and Design ,
3rd Edition, Oxford , 1999.
[ 2] K. Ogata ,
Modern Control Engineering ,
3rd Edition, Prentice Hall , 1997.
[ 3] B. C. Kuo ,
Automatic Control Systems ,
7th Edition, Prentice Hall , 1995.
[ 4] A. Oppenheim & R. Schafer ,
Discrete Time Signal Processing ,
Prentice Hall , 1989.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 15
Bibliografia complementar
[ 1] Paulo S. R. Diniz & Eduardo A. B. da Silva & Sergio L. Netto ,
Digital signals processing: system analysis and design ,
Cambridge University Press , 2002.
[ 2] J. Proakis & D. Manolakis ,
Digital Signal Processing ,
Prentice Hall , 1996.
[ 3] Oppenheim & Willsky ,
Signals and Systems ,
2nd Edition, Prentice Hall , 1997.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 16
Bibliografia complementar
[ 4] Karl J. Astrom & Bjorn Wittenmark ,
Computer Controlled Systems ,
3nd Edition, Prentice–Hall , 1997.
[ 5] Gene Franklin & J. David Powell & Michael L. Workman ,
Digital Control of Dynamic Systems ,
Addison–Wesley , 1990.
[ 6] Charles L. Phillips & H. Troy Nagle ,
Digital Control Systems Analysis & Design ,
3rd Edition, Prentice–Hall , 1995.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 17
Bibliografia complementar
[ 7] B. C. Kuo ,
Digital Control Systems ,
Saunders , 1992.
[ 8] C. T. Chen ,
Analog & Digital Control System Design ,
Saunders , 1993.
[ 9] K. Ogata ,
Discrete Control Systems ,
2nd Edition, Prentice–Hall , 1995.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

UFRJ Universidade Federal do Rio de Janeiro
EE Escola de Engenharia
DEL Departamento de Eletronica
EEL-555 Sistemas Lineares II
Capıtulo # 1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 19
1 Revisao: Sistemas Lineares
Conteudo
1. Introducao
2. Equacoes diferenciais ordinarias (EDOs)
3. Resposta ao impulso
4. Transformada de Laplace
5. Funcao de Transferencia
6. Diagrama de blocos
7. Exercıcios
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 20
1.1 Introducao
Nossa visao de sistema : algo com terminais de entrada e saıda.
Sistema
yu
Entrada Saıda
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 21
Classificacao de sistemas :
Lineares Nao lineares
Contınuos Discretos
Invariantes Variantes no tempo
SISO MIMO
Determinısticos Estocasticos
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 22
Neste curso :
⋆ Sistemas lineares invariantes no tempo (SLIT) .
⋆ Sistemas discretos lineares invariantes no tempo (SDLIT) .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 23
Exemplo 1 Sistema discreto (ou melhor, digital)
A/Dy(k)
Micro
r(k)
u(k)D/A
u(t)Processo
y(t) y(k)
Figura 1: Sistema discreto.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 24
Motivacao
⋆ Controlar um sistema significa impor certas propriedades aos seus sinais
de saıda como, por exemplo, overshoot.
⋆ A entrada e o sinal que pode ser livremente manipulado.
⋆ E necessario um modelo do sistema para se poder calcular o sinal de con-
trole necessario para se impor as propriedade desejadas a saıda.
⋆ Estrategias adequadas de controle permitem obter bom desempenho
mesmo com um modelo impreciso do sistema.
⋆ ...
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 25
Representacao
Um sistema e definido matematicamente como uma transformacao ou operador :
y(t) = T
x(t)
y(t)x(t)
T
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 26
Exemplo 2 Integrador
y(t) =
∫ t
0
x(ζ)dζ
y(t)x(t) ∫
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 27
Conside 2 sinais de entrada distintos :
y1(t) = T
x1(t)
y2(t) = T
x2(t)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 28
Propriedade (Aditividade)
T
x1(t) + x2(t)
= T
x1(t)
+ T
x2(t)
= y1(t) + y2(t)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 29
Propriedade (Homogeneidade)
T
a xi(t)
= aT
xi(t)
= a yi(t)
Combinando-se estas 2 propriedade, tem-se o ...
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 30
Princıpio da superposicao
T
a x1(t) + b x2(t)
= a y1(t) + b y2(t)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 31
Propriedade (Linearidade)
A classe de sistemas que satisfaz o princıpio da superposicao e dito linear .
⋆ Nos sistemas dinamicos , a resposta a condicao inicial tambem deve
satisfaz o princıpio da superposicao.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 32
Exemplo 3 Duplo integrador.
y(t)u(t) ∫ ∫v(t)
v(0) y(0)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 33
E facil verificar que se para u1(t), v1(0) e y1(0) :
y1(t) =
∫ t
0
(∫ t
0
u1(τ)dτ + v1(0)
)
dζ + y1(0)
e para u2(t), v2(0) e y2(0) :
y2(t) =
∫ t
0
(∫ t
0
u2(τ)dτ + v2(0)
)
dζ + y2(0)
entao
y1(t) + y2(t) =
∫ t
0
(∫ t
0
[u1(τ) + u2(τ)
]dτ +
[v1(0) + v2(0)
])
dζ +[y1(0) + y2(0)
]
⋆ O sistema e linear.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 34
Exemplo 4 Sistema nao-linear.
Oscilador de Van der Pol :
y − y − θy3 + y = 0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 35
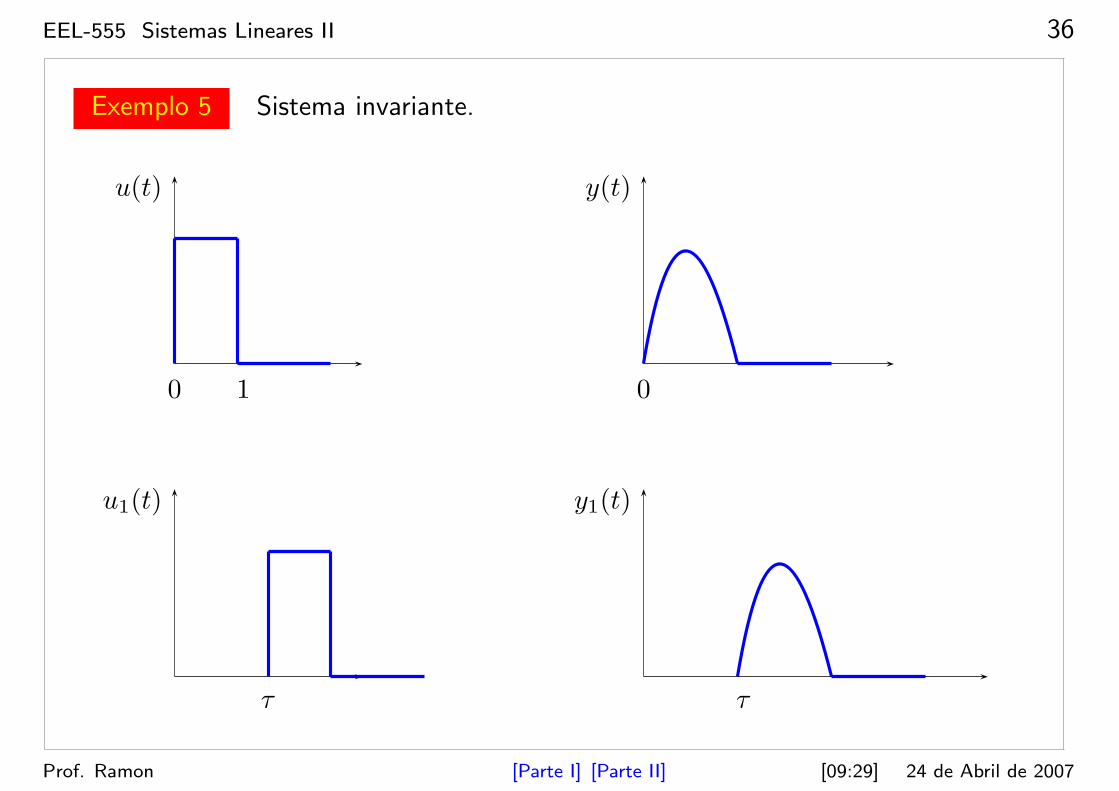
Propriedade (Invariancia no tempo)
Um sistema e dito invariante no tempo se, ∀τ ,
a entrada x1(t) = x(t− τ)
produz a saıda y1(t) = y(t− τ) .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 36
Exemplo 5 Sistema invariante.
0 1 0
u1(t)
τ τ
y1(t)
u(t) y(t)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 37
Propriedade (Causalidade)
Um sistema e dito causal se a sua saıda atual depende somente das entradas
atuais e passadas, i.e., nao depende das entradas futuras.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 38
Exemplo 6 Sistema nao causal.
Sistemayu
0 1 0 1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 39
Exemplo 7 Sistema diferenciador.
y(t)x(t) d
dt
⋆ A diferenciacao (on line) nao e uma operacao causal.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 40
Exemplo 8 Sistema nao causal discreto.
y[k] = 0.2 y[k − 1] + 0.5 y[k − 2] + u[k]− u[k + 1]
⋆ Exemplo de uma equacao a diferencas (equacao recursiva).
⋆ A saıda atual depende do valor futuro do sinal de entrada u[k + 1].
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 41
Interpretacao de um SLIT
u(t) y(t)+ ·∫
d
dt
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 42
Interpretacao de um SDLIT
u(k) y(k)+ ·
>> <<
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 43
1.2 Equacoes diferenciais ordinarias (EDO)
Forma geral :
andny
dtn+ an−1
dn−1y
dtn−1+ · · ·+ a1
dy
dt+ a0y = bm
dmu
dtm+ · · ·+ b1
du
dt+ b0u
⋆ EDO linear de ordem n.
⋆ Causalidade ⇔ n ≥ m .
⋆ Modelo temporal .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 44
Operador diferencial
Definicao p =d
dt
Notacao simplificada :(
anpn + an−1pn−1 + · · ·+ a1p + a0
)
y(t) =(
bmpm + bm−1pm−1 + · · ·+ b1p + b0
)
u(t)
ou melhor,
A(p) y(t) = B(p) u(t)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 45
Exemplo 9 Sistema mecanico massa-mola-atrito.
mk
y
b
u
A posicao da massa m e descrita pela EDO de 2a. ordem
m y + b y + k y = u
onde : m = massa
b = coeficiente de atrito
k = constante de mola
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 46
Usando o operador diferencial :(
mp2 + b p + k)
y = u
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 47
1.3 Resposta ao impulso
⋆ Modelo temporal : g(t) = resposta ao impulso.
SLITu(t)
c.i. = 0
y(t)
Figura 2: Resposta com condicoes iniciais nulas.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 48
A resposta a uma entrada u(t) e dada pela integral de convolucao :
y(t) =
∫ t
0
g(t− τ)u(τ)dτ
=
∫ t
0
u(t− τ)g(τ)dτ
⋆ g(t) = resposta do sistema com condicoes iniciais nulas a um impulso
aplicado em t = 0.
⋆ A convolucao e comutativa : y(t) = g(t) ∗ u(t) = u(t) ∗ g(t)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 49
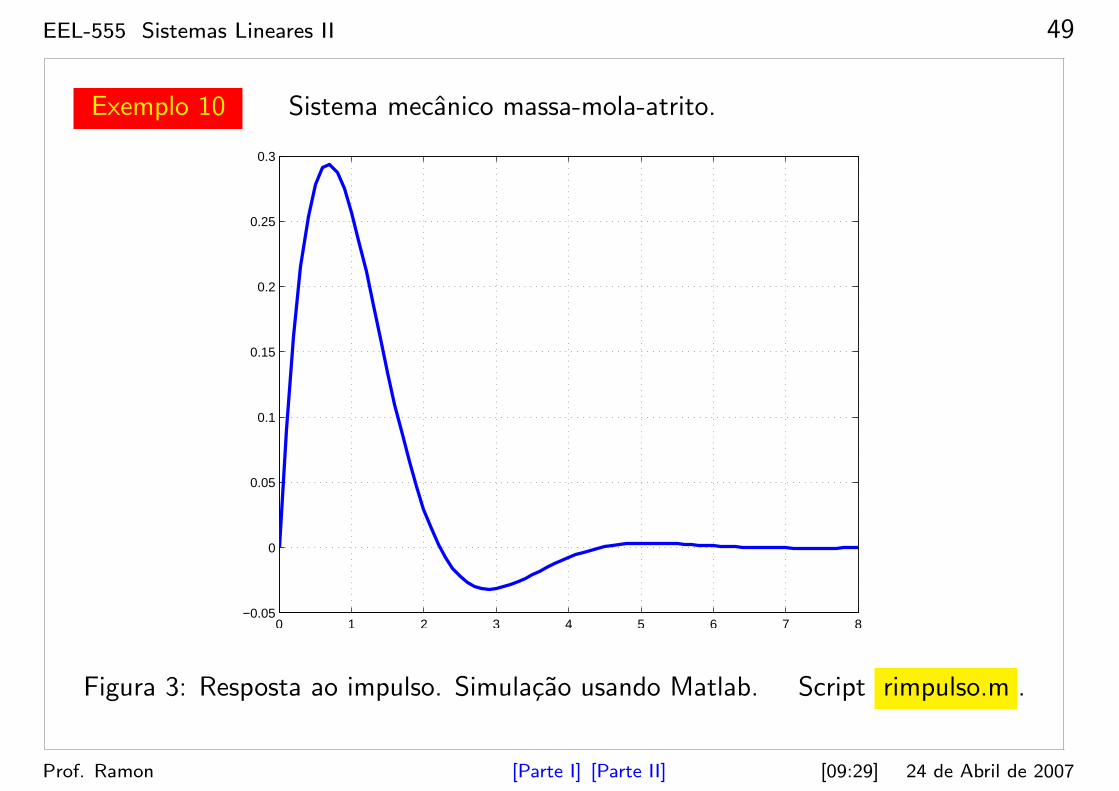
Exemplo 10 Sistema mecanico massa-mola-atrito.
0 1 2 3 4 5 6 7 8−0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
Figura 3: Resposta ao impulso. Simulacao usando Matlab. Script rimpulso.m .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 50
Convolucao aproximada
y = T
n=N∑
n=0
g(t− nT ) u(nT )
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 51
Script para calcular a convolucao aproximada ( convolucao.m ) :
num = [1];
den = [1 2 3];
G = tf(num,den); % Func~ao de transferencia
T = 0.1;
t = [0:T:8]’;
g = impulse(G,t); % Resposta ao impulso de G
r = ones(size(t)); % Degrau
y = T*conv(g,r); % Convoluc~ao aproximada
y = y(1:size(t));
plot(t,y,’b-’,’Linew’,2)
grid on
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 52
0 1 2 3 4 5 6 7 80
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
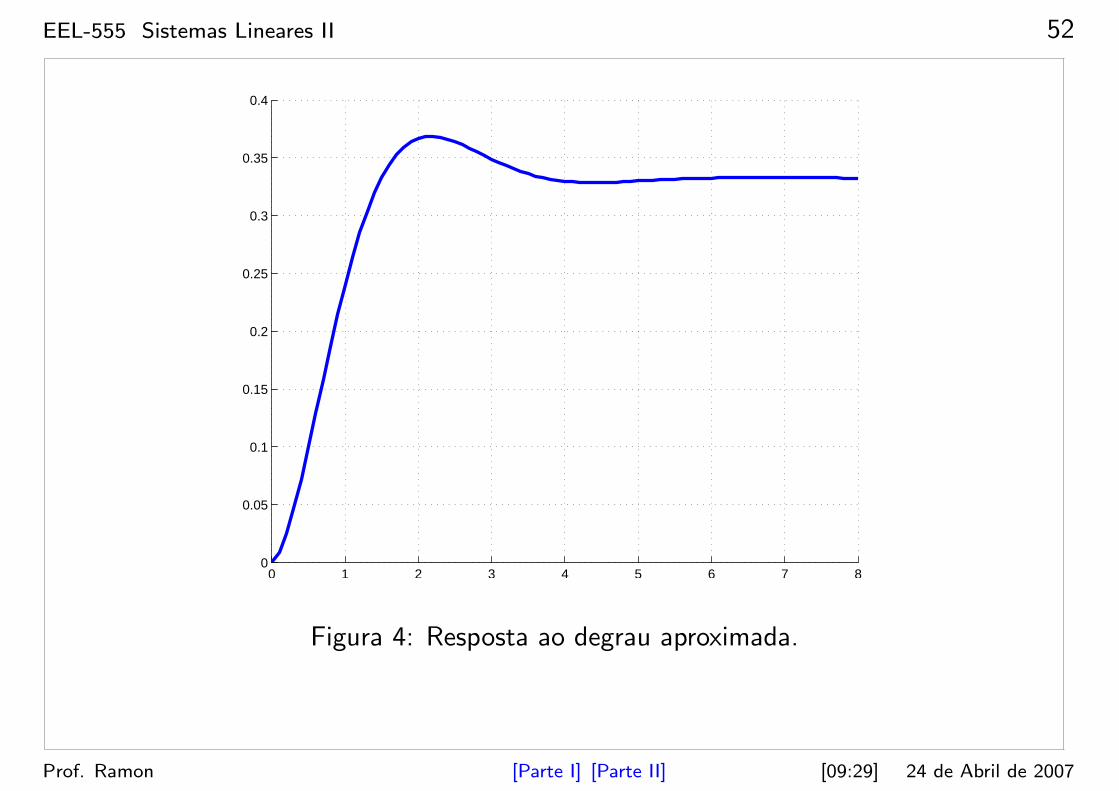
Figura 4: Resposta ao degrau aproximada.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 53
1.4 Transformada de Laplace
⋆ Util na solucao analıtica de equacoes diferenciais ordinarias (EDOs).
⋆ Reduz uma EDO (no domınio temporal) a uma equacao algebrica
(no domınio complexo).
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 54
Definicao (Transformada de Laplace)
F (s) = L[
f(t)]
=
∫ ∞
0
f(t) e−st dt
⋆ s = variavel complexa .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 55
Exemplo 11 Funcao exponencial.
f(t) =
0 se t < 0
k e−at se t ≥ 0
Transformada de Laplace : F (s) = L[
k e−at]
=
∫ ∞
0
k e−at e−st dt
= k
∫ ∞
0
e−(s+a)t dt
=k
s + a
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 56
Propriedades
(1) L[
αf(t)]
= αL[
f(t)]
(2) L[
f1(t) + f2(t)]
= L[
f1(t)]
+ L[
f2(t)]
⋆ A Transformada de Laplace e linear .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 57
Teorema (Diferenciacao)
L[
d
dtf(t)
]
= sF (s)− f(0)
⋆ F (s) = L[
f(t)]
.
⋆ f(0) e a condicao inicial de f(t).
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 58
Teorema (Integracao)
L[∫
f(t) dt
]
=F (s)
s+
f−1(0)
s
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 59
Teorema (Valor final)
limt→∞
f(t) = lims→0
sF (s)
⋆ So se aplica se limt→∞
f(t) existir .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 60
Teorema (Convolucao)
L[
f1(t) ∗ f2(t)]
= F1(s)F2(s)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 61
Transformada inversa
Metodologia :
1. Determinar a expansao em fracoes parciais
2. Consultar tabelas de transformadas
Metodologia alternativa :
1. Usar o MATLAB
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 62
Expansao em fracoes parciais
F (s) =B(s)
A(s)=
r1
s + p1+
r2
s + p2+ · · ·+ rn
s + pn
⋆ ri = resıduos .
⋆ pi = polos .
⋆ O caso geral envolve polos multiplos .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 63
Tabela
(Vide Ogata. pag. 22 e 23)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 64
Exemplo 12 Transformada de Laplace usando MATLAB.
Encontrar a transformada de :
f(t) =
0 se t < 0
k e−at se t ≥ 0
Solucao : >> syms t s a k
>> f = k*exp(-a*t);
>> F = laplace(f)
F =
k/(s+a)
>> _
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 65
Exemplo 13 Anti-transformada de Laplace usando MATLAB.
Encontrar a anti-transformada de :
F (s) =k
(s + a)2
Solucao : >> syms t s a k
>> F = k/(s+a)^2;
>> f = ilaplace(F)
f =
k*t*exp(-a*t)
>> _
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 66
1.5 Funcao de transferencia
Considere uma EDO :
dny
dtn+ · · ·+ a1
dy
dt+ a0y = bm
dmu
dtm+ · · ·+ b1
du
dt+ b0u
Hipotese : Todas as condicoes iniciais sao nulas.
Aplicando-se a Transformacao de Laplace em ambos os lados,[
sn + · · ·+ a1s + a0
]
Y (s) =[
bmsm + · · ·+ b1s + b0
]
U(s)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 67
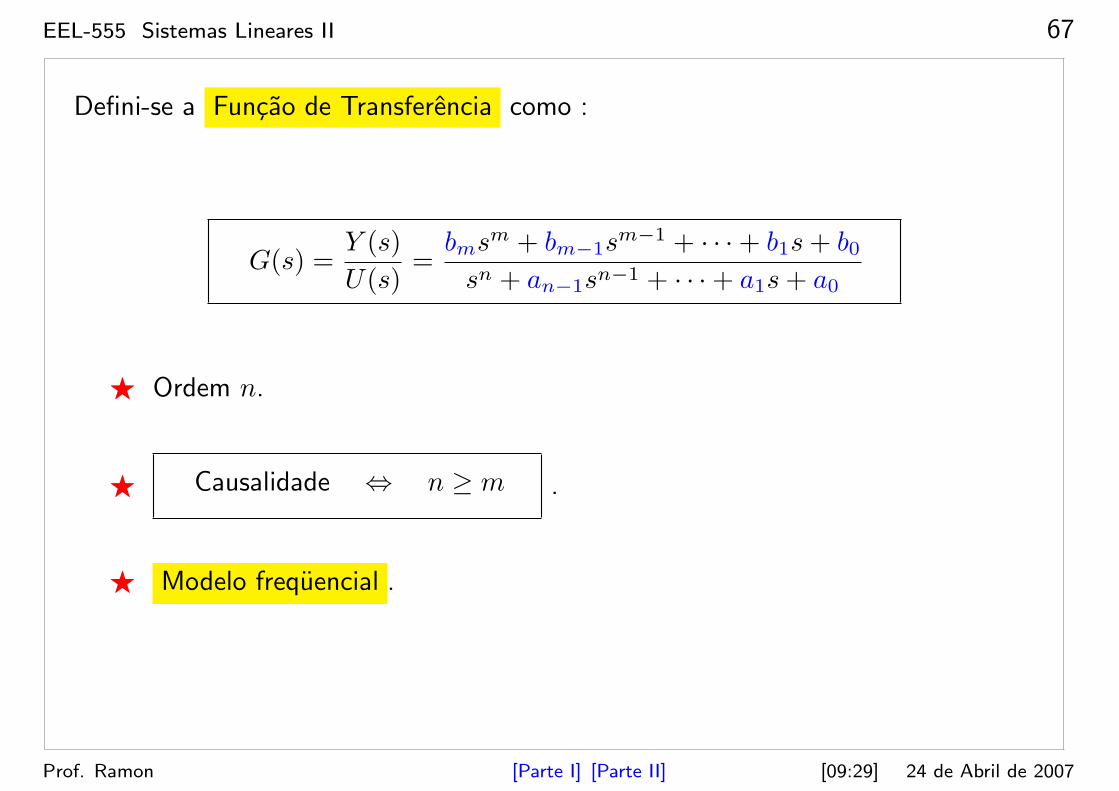
Defini-se a Funcao de Transferencia como :
G(s) =Y (s)
U(s)=
bmsm + bm−1sm−1 + · · ·+ b1s + b0
sn + an−1sn−1 + · · ·+ a1s + a0
⋆ Ordem n.
⋆ Causalidade ⇔ n ≥ m .
⋆ Modelo frequencial .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 68
Notacao simplificada :
Y (s)
U(s)=
B(s)
A(s)
Y (s)U(s) B(s)
A(s)
Figura 5: Funcao de transferencia.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 69
Notacao mista
y(t)u(t) B(s)
A(s)
⋆ Pode ser encontrada na literatura.
⋆ A variavel s deve ser interpretada como o operador diferenciald
dt.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 70
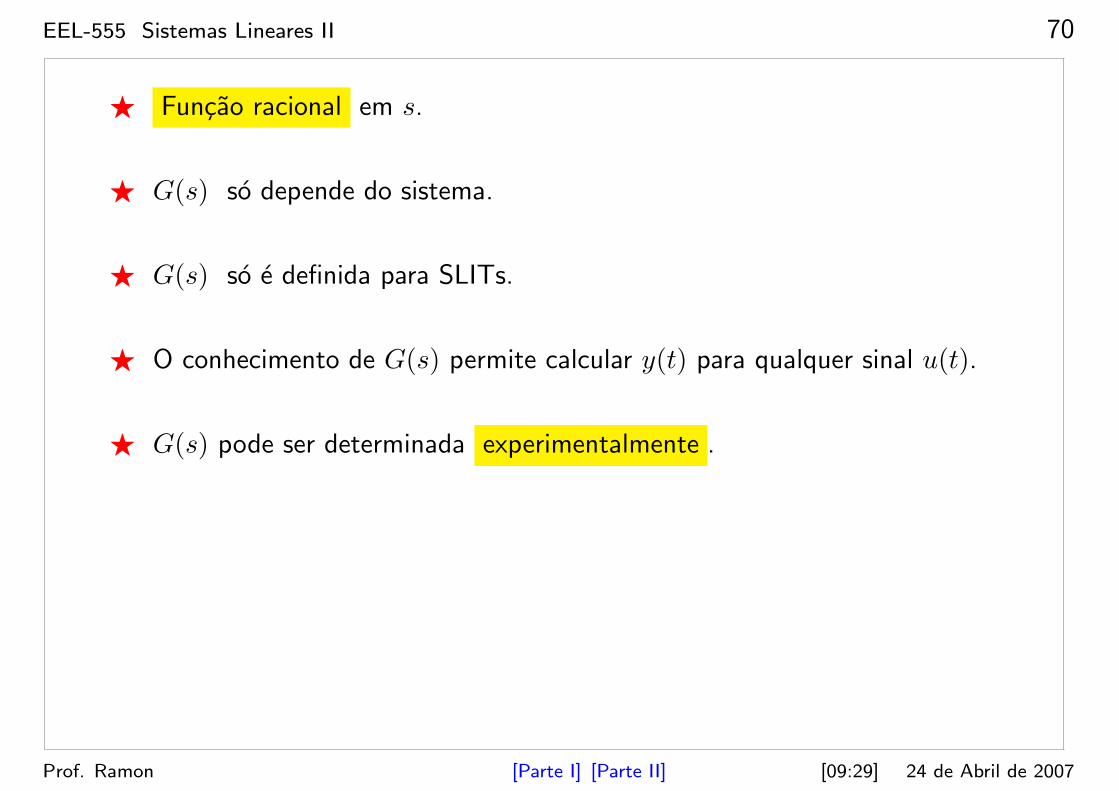
⋆ Funcao racional em s.
⋆ G(s) so depende do sistema.
⋆ G(s) so e definida para SLITs.
⋆ O conhecimento de G(s) permite calcular y(t) para qualquer sinal u(t).
⋆ G(s) pode ser determinada experimentalmente .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 71
Exemplo 14 Sistema massa-mola-atrito.
y + 2y + 3y = u
Aplicando Laplace :
s2Y + 2sY + 3Y = U
Portanto,
G(s) =Y (s)
U(s)=
1
s2 + 2s + 3
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 72
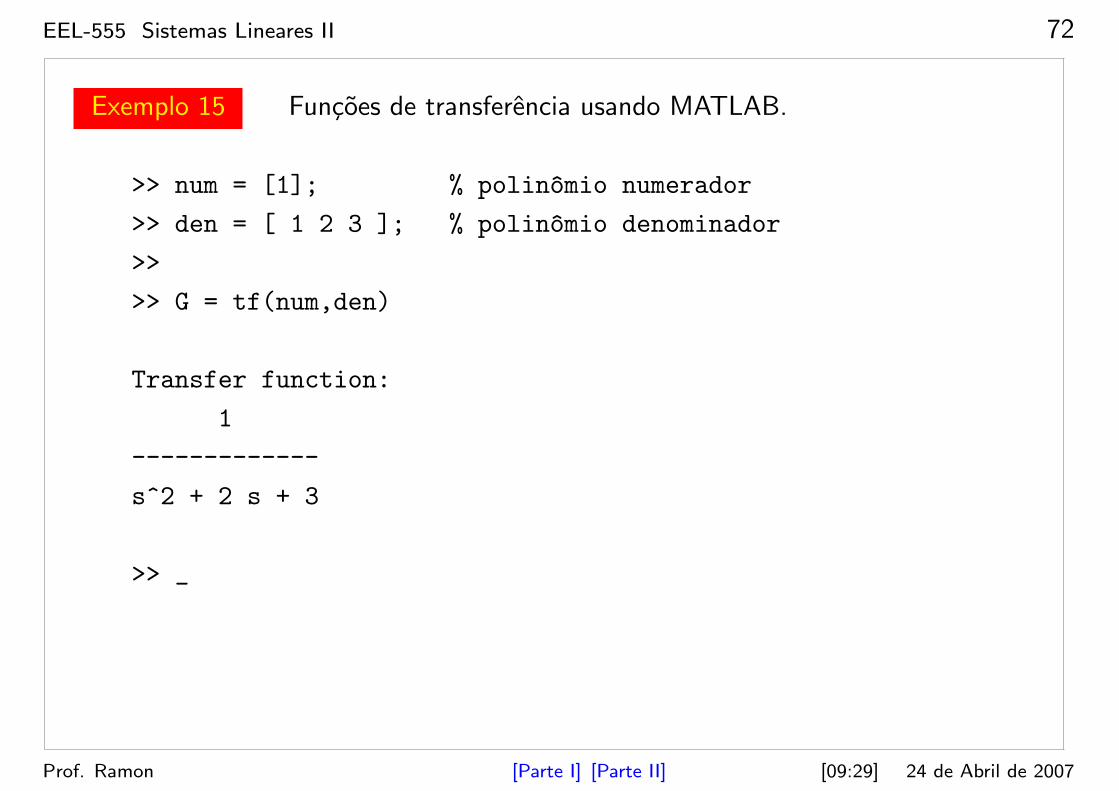
Exemplo 15 Funcoes de transferencia usando MATLAB.
>> num = [1]; % polinomio numerador
>> den = [ 1 2 3 ]; % polinomio denominador
>>
>> G = tf(num,den)
Transfer function:
1
-------------
s^2 + 2 s + 3
>> _
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 73
1.6 Diagramas de blocos
Servem para :
⋆ Visualizacao de sistemas complexos .
⋆ Visualizacao de conexoes e fluxos de sinais .
Elementos : Setas/sinais
Somadores
Ganhos/FTs
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 74
Somador
+
−
u
y
e = u− y
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 75
Ganho/FT
y(s)u(s)
G(s)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 76
Exemplo 16 Sistema em malha fechada.
+
−
u eG(s)
H(s)
y
Figura 6: Diagrama de blocos de sistema em malha fechada.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 77
Determinacao da FT em malha fechada :
Do diagrama tiramos :
y = G e
e = u−H y
Eliminando o erro e :
y = G(
u−H y)
= G u−GH y
Portanto :
(
1 + GH)
y = G u ⇒ y(s)
u(s)=
G
1 + GH
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 78
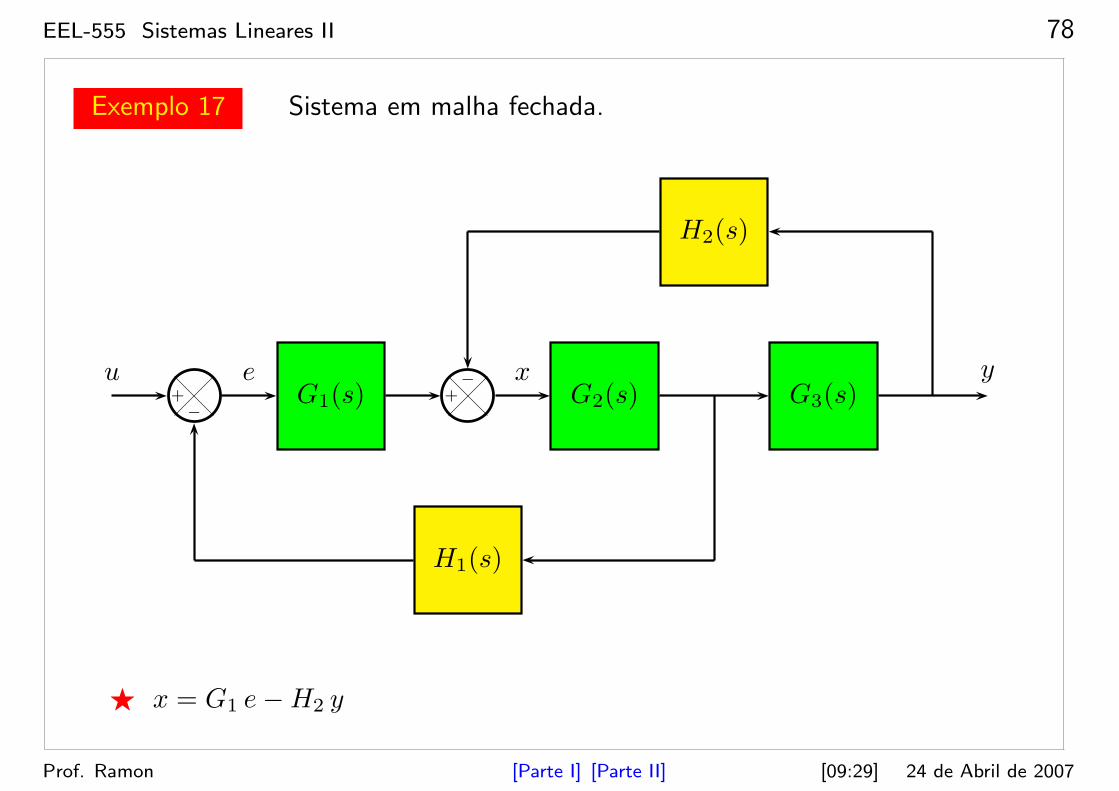
Exemplo 17 Sistema em malha fechada.
+−
u e
H1(s)
yG1(s) +
−
G2(s) G3(s)
H2(s)
x
⋆ x = G1 e−H2 y
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 79
Determinacao da FT em malha fechada :
+−
u e
H1(s)
yG1(s)+
−
G2(s) G3(s)
H2(s)
G1(s)
x
⋆ x = G1
(
e− H2
G1y
)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 80
Determinacao da FT em malha fechada :
u yG1(s)G2(s)
1 + G1(s)G2(s)H1(s)+
−
G3(s)
H2(s)
G1(s)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 81
Determinacao da FT em malha fechada :
y(s)
u(s)=
G1(s) G2(s) G3(s)
1 + G1(s) G2(s) H1(s) + G2(s) G3(s) H2(s)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 82
Exemplo 18 Usando MATLAB/Simulink.
1
y
1
s+4
H2(s)
1
s+5
H1(s)
1
s+3
G3(s)
1
s+2
G2(s)
1
s+1
G1(s)
1
r
Figura 7: Diagrama de blocos em Simulink. Model dblocos.mdl .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 83
Script para obter a FT em malha fechada ( diag blocos.m ) :
%----------------------------------------
%
% Exemplo: Diagramas de blocos
%
%----------------------------------------
open_system(’dblocos’);
[A,B,C,D] = linmod(’dblocos’); % retorna o modelo de estado
g = ss(A,B,C,D);
h = tf(g)
close_system(’dblocos’);
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 84
Resultado :
>> diag_blocos
Transfer function:
s^2 + 9 s + 20
---------------------------------------------
s^5 + 15 s^4 + 85 s^3 + 227 s^2 + 287 s + 137
>>
>> _
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 85
Verificacao : Script ( verifica.m )
g1 = tf(1,[1 1]);
g2 = tf(1,[1 2]);
g3 = tf(1,[1 3]);
h1 = tf(1,[1 5]);
h2 = tf(1,[1 4]);
H = (g1*g2*g3)/(1 + g1*g2*h1 + g2*g3*h2);
G = minreal(H) % soluc~ao apos todos os cancelamentos
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 86
Resultado :
>> verifica
Transfer function:
s^2 + 9 s + 20
---------------------------------------------
s^5 + 15 s^4 + 85 s^3 + 227 s^2 + 287 s + 137
>> _
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

UFRJ Universidade Federal do Rio de Janeiro
EE Escola de Engenharia
DEL Departamento de Eletronica
EEL-555 Sistemas Lineares II
Capıtulo # 2
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 88
2 Representacao no espaco de estado
Conteudo
1. Introducao
2. Exemplo preliminar
3. Exemplo preliminar 2
4. Diagrama de blocos
5. Exemplos com Matlab/Simulink
6. Exercıcios
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 89
2.1 Introducao
Hipotese: O aluno esta familiarizado com as representacoes matematicas
⋆ Resposta ao impulso (ja visto em SL-I)
⋆ Equacao diferencial ordinaria (EDO)
⋆ Funcao de transferencia
Novidade: Vamos introduzir a representacao de SLIT’s por
⋆ Variaveis de estado
Metodologia: Obtencao da representacao de estado a partir da EDO.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 90
2.2 Exemplo preliminar
Exemplo 1 Sistema mecanico tipo massa-mola-atrito.
mk
y
b
u
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 91
Modelo : EDO de 2a. ordem
y + 2y + 3y = u
y(s)u(s)EDO
Sistema mecanico : y = aceleracao
y = velocidade e
y = posicao da massa
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 92
Manipulacao :
1 EDO de 2a. ordem ⇒
EDO de 1a. ordem
EDO de 1a. ordem
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 93
Introduzimos novas variaveis :
x1 = y
x2 = y
Neste caso : x1 = posicao
x2 = velocidade da massa
Derivando-se x1 e x2 :
x1 = y = x2
x2 = y
= −3y − 2y + u
= −3x1 − 2x2 + u
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 94
Portanto, a EDO de 2a. ordem pode ser reescrita como
x1 = x2
x2 = −3x1 − 2x2 + u
y = x1
⋆ As equacoes acima formam uma representacao de estado .
⋆ As variaveis x1 e x2 sao os estados .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 95
O sistema de equacoes
x1 = x2
x2 = −3x1 − 2x2 + u
y = x1
pode ser escrito na forma matricial
x =
0 1
−3 −2
x +
0
1
u
y =[
1 0]
x +[
0]
u
onde
x =
x1
x2
.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 96
Introduzindo as matrizes
A =
0 1
−3 −2
B =
0
1
C =[
1 0]
D =[
0]
tem-se a forma matricial para a representacao de estado
x = Ax + Bu
y = Cx + Du
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 97
Importante :
⋆ A representacao de estado de um SLIT nao e unica .
⋆ A escolha das variaveis de estado x1 e x2 foi arbitraria .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 98
Exemplo 2 Mesmo sistema massa-mola-atrito.
Escolhemos : x1 = −y
x2 = y + y
Derivando-se x1 e x2 :
˙x1 = −y
= y − x2
= −x1 − x2
˙x2 = y + y
= y + (−3y − 2y + u) = −2y − (y + y) + u
= 2x1 − x2 + u
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 99
A representacao do sistema passa para
˙x =
−1 −1
2 −1
x +
0
1
u
y =[
−1 0]
x
onde
x =
x1
x2
.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 100
Interpretacao. O estado x e obtido a partir de uma transformacao linear sobre x :
x1 = −y = −x1
x2 = y + y = x1 + x2
Usando notacao matricial, tem-se
x = Tx =
−1 0
1 1
x .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 101
Condicoes iniciais
A solucao da EDO
y + 2y + 3y = u
requer o conhecimento das condicoes iniciais y(t0) e y(t0).
Para a solucao das equacoes de estado (em x) e necessario o conhecimento de
x1(t0) = y(t0)
x2(t0) = y(t0)
Para a representacao equivalente (em x), a condicao inicial e
x1(t0) = −y(t0)
x2(t0) = y(t0) + y(t0)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 102
Definicao
Definicao. (Estado)
O estado em t = t0 de um sistema de ordem n e o conjunto de n
valores x1(t0), · · · , xn(t0), que juntamente com o sinal de entrada
para t ≥ t0, e suficiente para determinar todo o comportamento do
sistema para t ≥ t0.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 103
2.3 Exemplo preliminar 2
Exemplo 3 Vamos considerar agora um SLIT descrito por
y + 2y + 3y = u + u
⋆ u nao deve aparecer na representacao de estado
Escolhemos as seguintes variaveis :
x1 = y
x2 = y − u (!!)
⋆ Essas variaveis podem nao ter significado fısico.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 104
Derivando-se x1 e x2, obtemos
x1 = y = x2 + u
x2 = y − u
= −3y − 2y + u
= −3x1 − 2(x2 + u) + u
⋆ x2 foi escolhida de modo que x2 = y − u ⇒ elimina u.
Resultado :
x =
0 1
−3 −2
x +
1
−1
u
y =[
1 0]
x
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 105
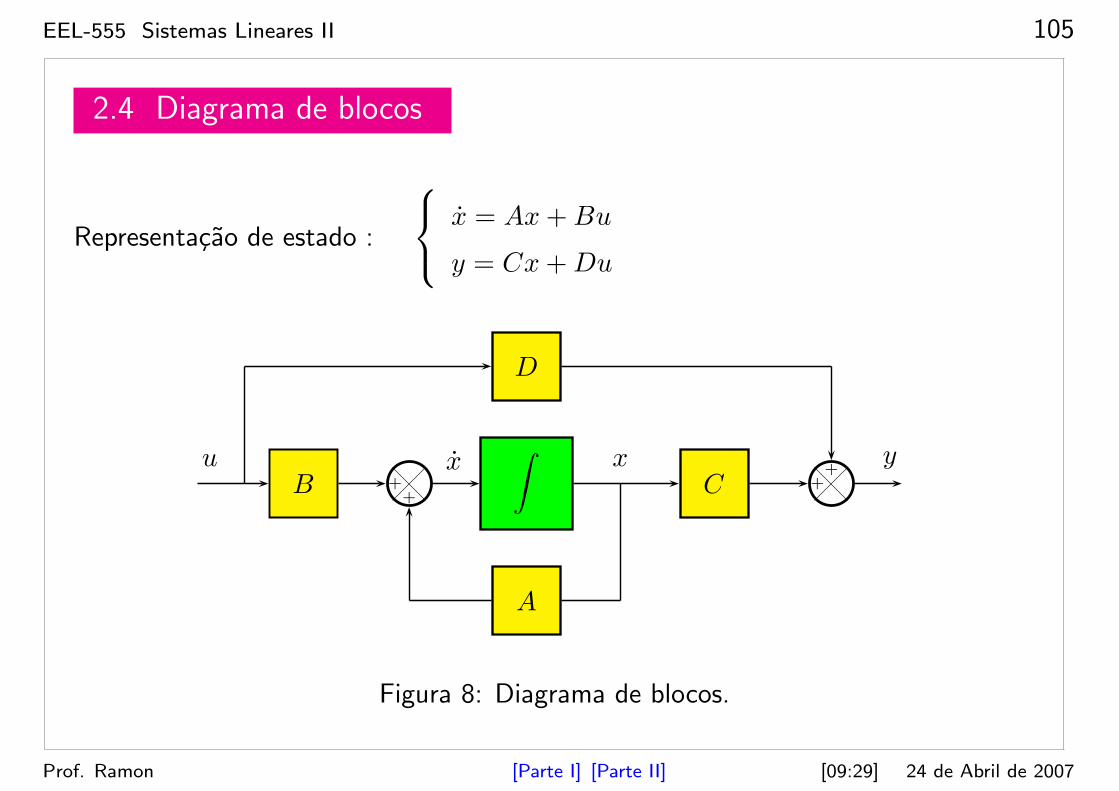
2.4 Diagrama de blocos
Representacao de estado :
x = Ax + Bu
y = Cx + Du
++
∫
++
A
B C
D
x yxu
Figura 8: Diagrama de blocos.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
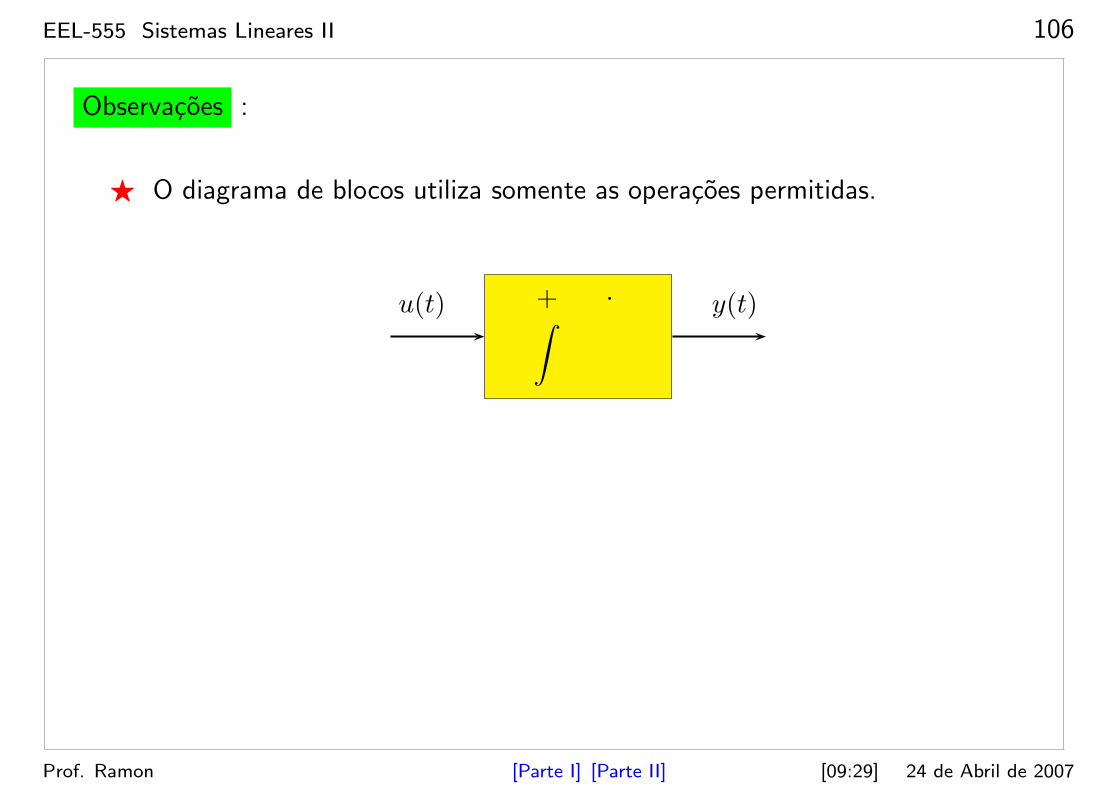
EEL-555 Sistemas Lineares II 106
Observacoes :
⋆ O diagrama de blocos utiliza somente as operacoes permitidas.
u(t) y(t)+ ·∫
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 107
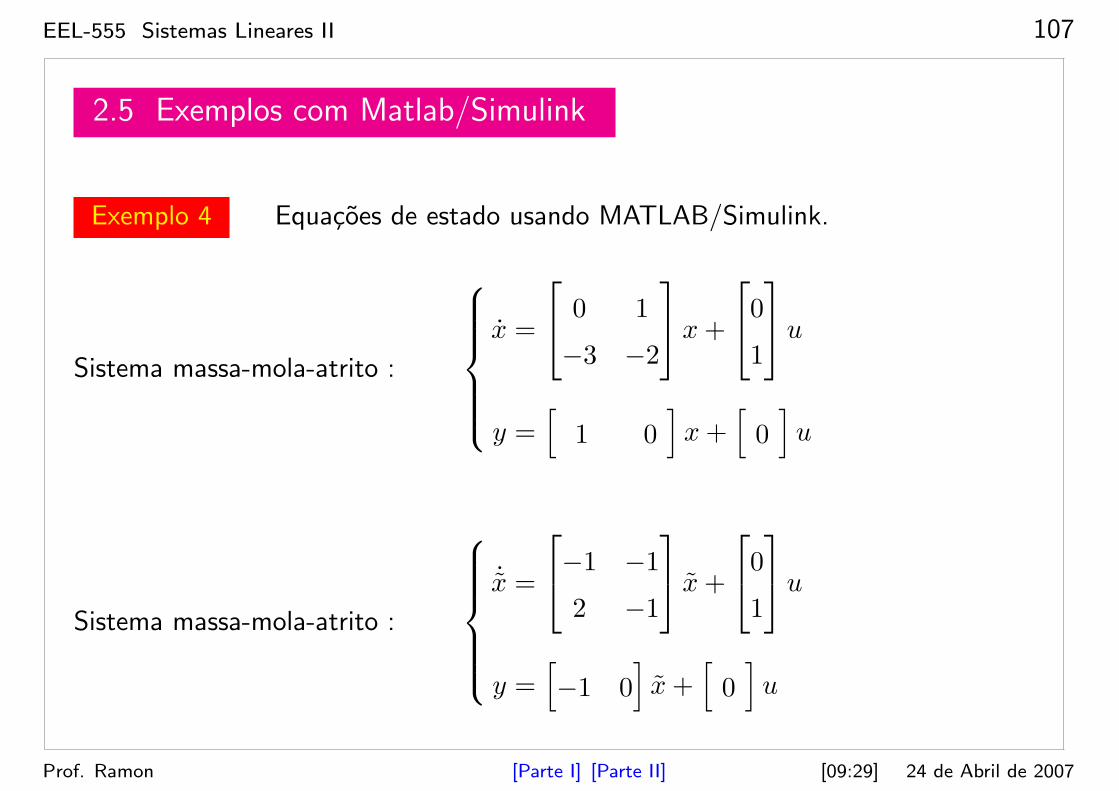
2.5 Exemplos com Matlab/Simulink
Exemplo 4 Equacoes de estado usando MATLAB/Simulink.
Sistema massa-mola-atrito :
x =
0 1
−3 −2
x +
0
1
u
y =[
1 0]
x +[
0]
u
Sistema massa-mola-atrito :
˙x =
−1 −1
2 −1
x +
0
1
u
y =[
−1 0]
x +[
0]
u
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
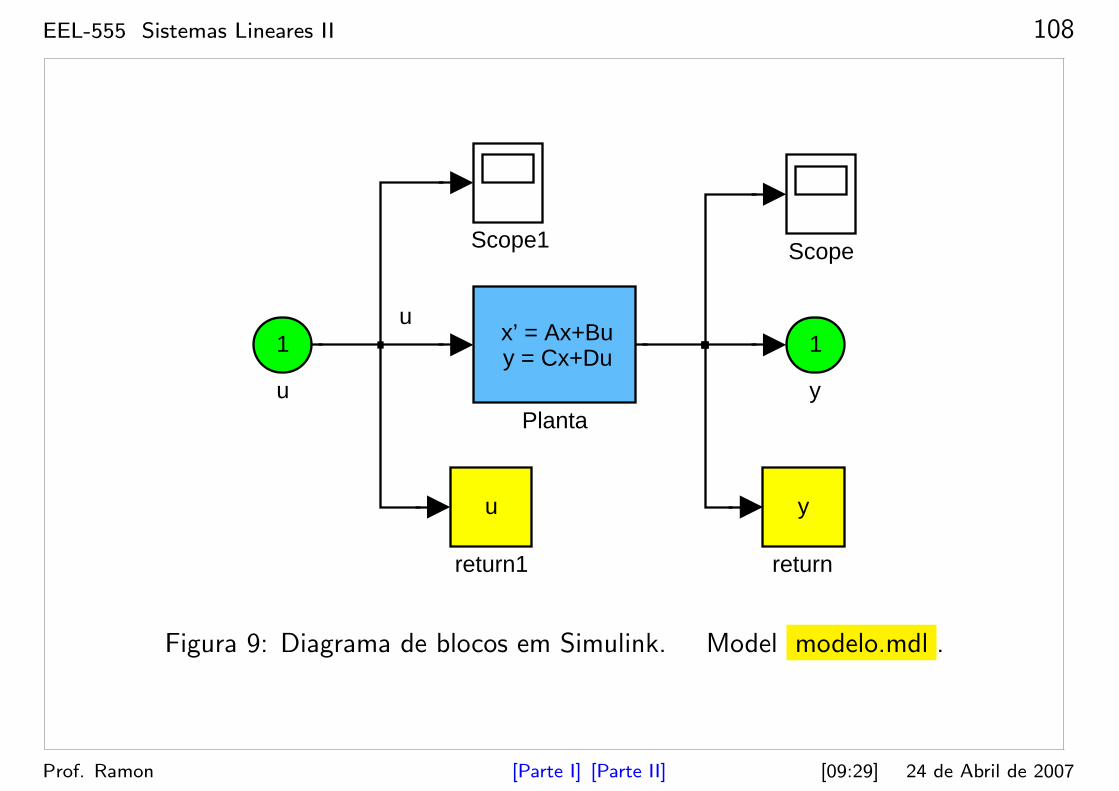
EEL-555 Sistemas Lineares II 108
yu1
y
u
return1
y
return
Scope1 Scope
x’ = Ax+Bu y = Cx+Du
Planta
1
u
Figura 9: Diagrama de blocos em Simulink. Model modelo.mdl .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 109
Script simu1.m
% Resposta do sistema massa-mola-atrito a uma condic~ao inicial
A = [0 1; -3 -2]; % matrizes
B = [0; 1];
C = [ 1 0];
D = 0;
x0 = [1 0]; % condic~ao inicial
tfinal = 8;
sim(’modelo’,tfinal)
plot(y,’Linew’,2.5); grid on; shg
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 110
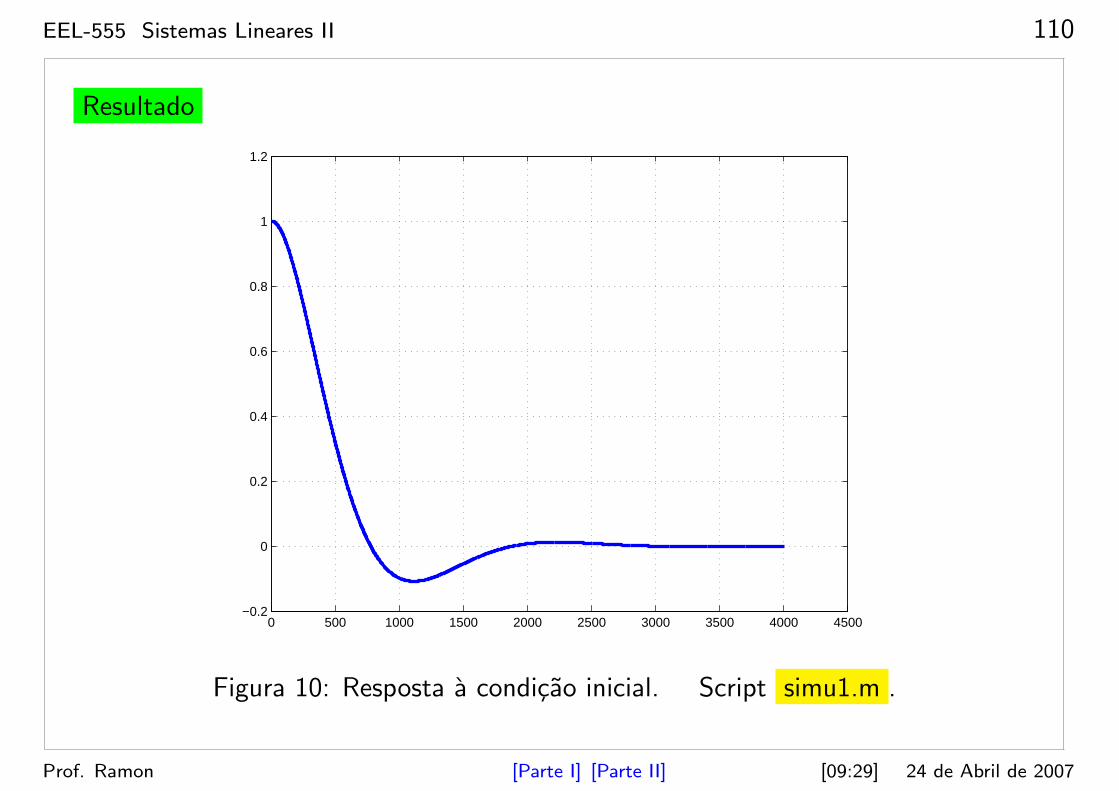
Resultado
0 500 1000 1500 2000 2500 3000 3500 4000 4500−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Figura 10: Resposta a condicao inicial. Script simu1.m .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 111
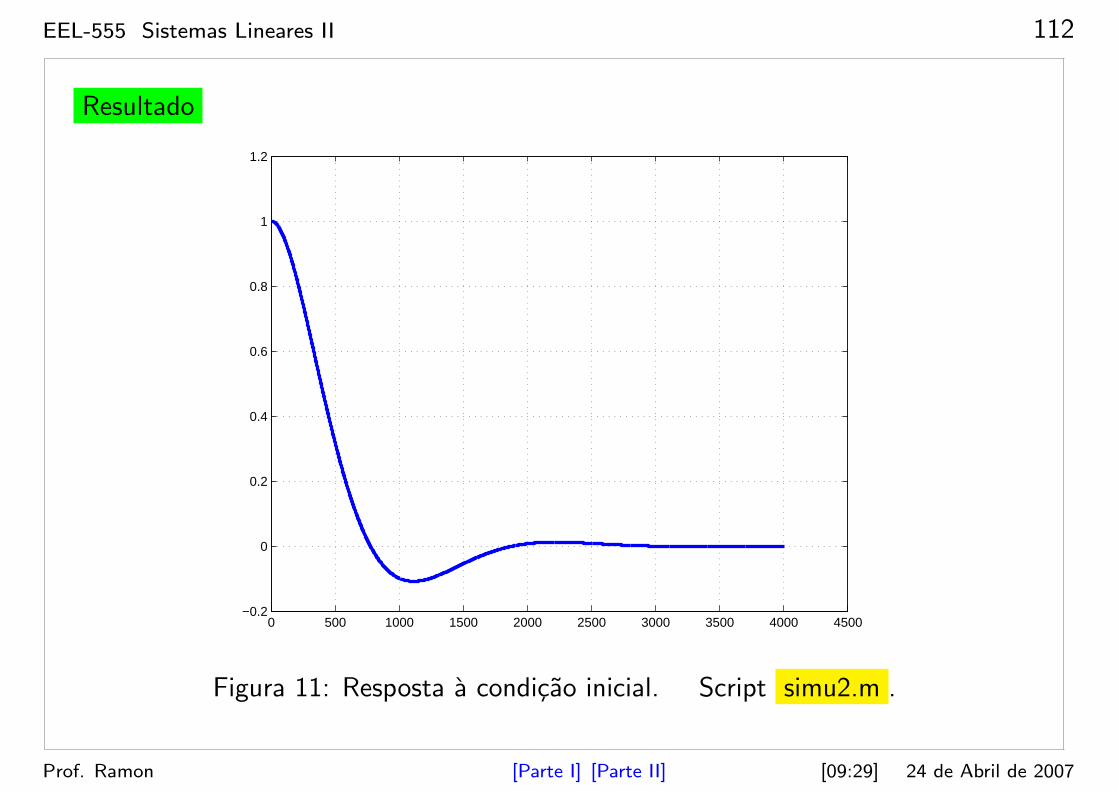
Script simu2.m
% Resposta do sistema massa-mola-atrito a uma condic~ao inicial
A = [-1 -1; 2 -1]; % matrizes do sistema transformado
B = [0; 1];
C = [-1 0];
D = 0;
x0 = [-1 1]; % condic~ao inicial
tfinal = 8;
sim(’modelo’,tfinal)
plot(y,’Linew’,2.5); grid on; shg
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 112
Resultado
0 500 1000 1500 2000 2500 3000 3500 4000 4500−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Figura 11: Resposta a condicao inicial. Script simu2.m .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 113
Exemplo 5 Equacoes de estado usando MATLAB/Simulink.
Sistema massa-mola-atrito :
x =
0 1
−3 −2
x +
0
1
u
y =[
1 0]
x +[
0]
u
⋆ Simulacao alternativa do mesmo sistema utilizando bloco integrador.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 114
u dx x y1
y
x
To Workspace2
y
To Workspace1
t
To Workspace 3
u
To Workspace
1s
Integrator
B* u
Gain3
C* u
Gain2
D* u
Gain1
A* u
GainClock
1
u
Figura 12: Diagrama de blocos em Simulink. Model modelo1.mdl .
⋆ Note a utilizacao do bloco Clock para obter a variavel tempo.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 115
Vantagens :
⋆ Maior controle sobre a integracao numerica.
⋆ Acesso ao estado.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 116
Script simu3.m
% Resposta do sistema massa-mola-atrito a uma condic~ao inicial
A = [0 1; -3 -2]; % matrizes
B = [0; 1];
C = [ 1 0];
D = [0];
x0 = [1 0]; % condic~ao inicial
open_system(’modelo1’);
set_param(’modelo1’,’MaxStep’,’0.01’)
tfinal = 10;
sim(’modelo1’,tfinal)
plot(t,x,’Linew’,2); grid on; shg
close_system(’modelo1’);
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 117
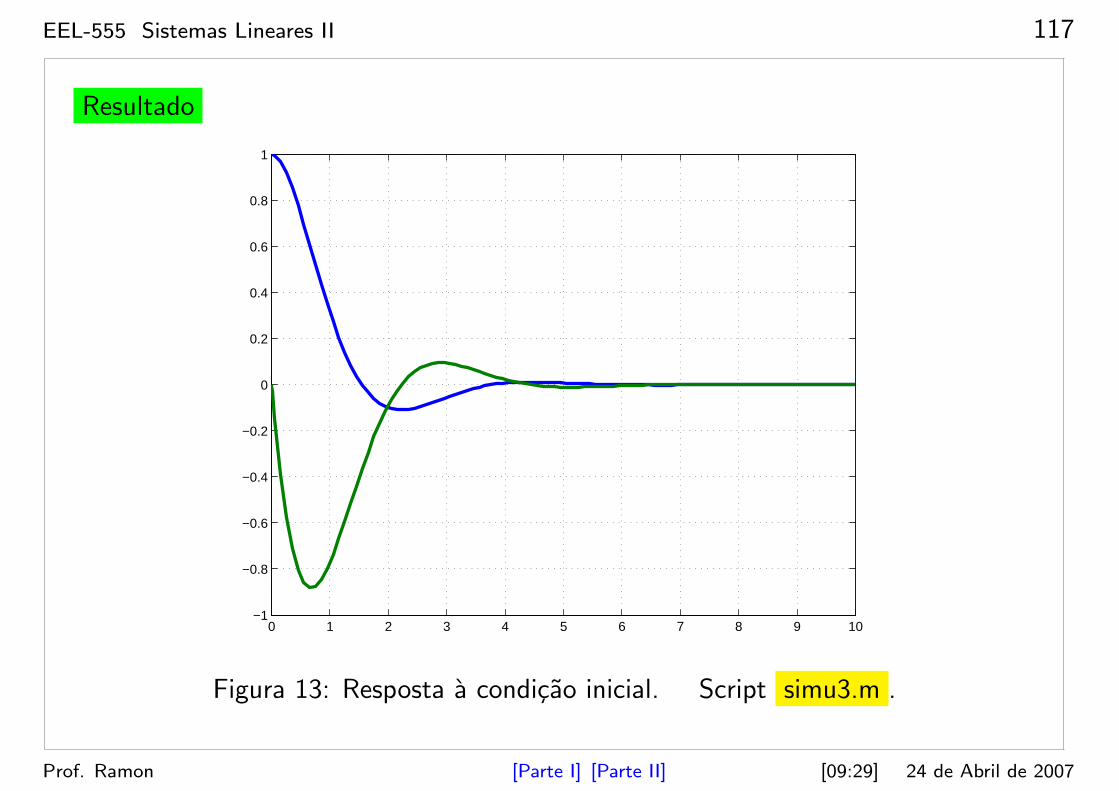
Resultado
0 1 2 3 4 5 6 7 8 9 10−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Figura 13: Resposta a condicao inicial. Script simu3.m .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 118
Importante :
⋆ Para SLITs de ordem elevada o procedimento descrito pode resultar bastante
trabalhoso.
⋆ Metodo sistematico : utilizacao de formas canonicas .
Proximo passo :
⋆ Vamos determinar a Funcao de Transferencia de um SLIT dado por uma
representacao de estado.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 119
Resumo da metodologia
EDO
L[ · ]FT
Estado
FormasCanonicas
L[ · ]de x
Escolha
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

UFRJ Universidade Federal do Rio de Janeiro
EE Escola de Engenharia
DEL Departamento de Eletronica
EEL-555 Sistemas Lineares II
Capıtulo # 3
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 121
3 Realizacao de funcoes de transferencia
Conteudo
1. Funcao de transferencia (FT)
2. Formas canonicas
• Forma canonica controlavel
• Forma canonica observavel
3. Transformacao de coordenadas
4. Exemplos
5. Exercıcios
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 122
3.1 Funcao de transferencia (FT)
Considere novamente a representacao de estado
x = Ax + Bu
y = Cx + Du
Estamos interessados em determinar a FT
g(s) =Y (s)
U(s)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 123
Aplicando Transformada de Laplace :
sX(s) = AX(s) + BU(s)
Y (s) = CX(s) + DU(s)
Portanto,
sX(s)−AX(s) = BU(s)
(sI −A)X(s) = BU(s) ⇒ X(s) = (sI −A)−1BU(s)
Y (s) = CX(s) + DU(s) ⇒ Y (s) = C(sI −A)−1BU(s) + DU(s)
A FT procurada e : g(s) =Y (s)
U(s)= C(sI −A)−1B + D
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 124
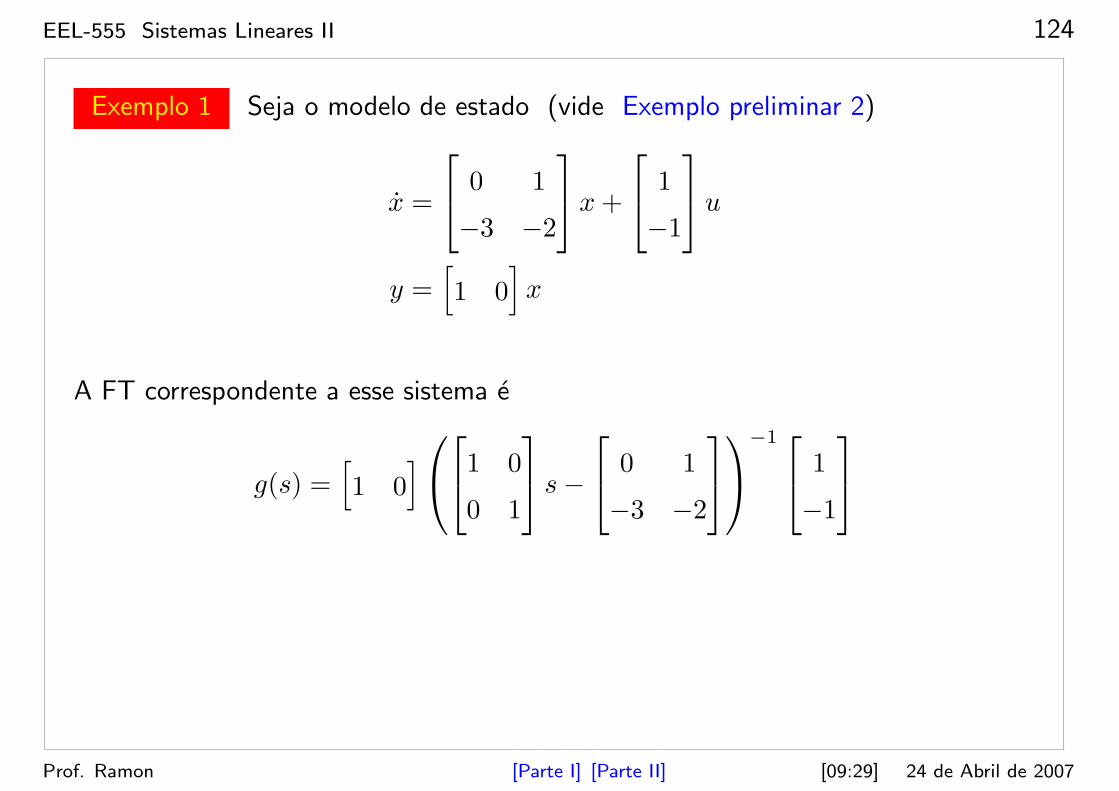
Exemplo 1 Seja o modelo de estado (vide Exemplo preliminar 2)
x =
0 1
−3 −2
x +
1
−1
u
y =[
1 0]
x
A FT correspondente a esse sistema e
g(s) =[
1 0]
1 0
0 1
s−
0 1
−3 −2
−1
1
−1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 125
Lembrete. Inversa de uma matriz 2× 2
a b
c d
−1
=1
∆
d −b
−c a
∆ = det
a b
c d
= ad− bc
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 126
Calculos :
g(s) =[
1 0]
1 0
0 1
s−
0 1
−3 −2
−1
1
−1
=[
1 0]
s −1
3 s + 2
−1
1
−1
=1
s2 + 2s + 3
[
1 0]
s + 2 1
−3 s
1
−1
=1
s2 + 2s + 3
[
s + 2 1]
1
−1
=s + 1
s2 + 2s + 3
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 127
Exemplo 2 Usando Matlab.
Considere o mesmo sistema do exemplo anterior :
x =
0 1
−3 −2
x +
1
−1
u
y =[
1 0]
x
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 128
Script calcula ft.m
% Determinac~ao de func~ao de transferencia
A = [0 1; -3 -2]; % matrizes
B = [0; 1];
C = [1 0];
D = 0;
s1 = ss(A,B,C,D) % cria o sistema s1 (representac~ao de estado)
g = tf(s1) % determina a Func~ao de Transferencia de s1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 129
Resultado
>> calcula_ft
Transfer function:
s + 1
-------------
s^2 + 2 s + 3
>>
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 130
Exemplo 3 Usando Matlab/symbolic.
Ainda utilizando o mesmo sistema :
x =
0 1
−3 −2
x +
1
−1
u
y =[
1 0]
x
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 131
Script calcula ft sym.m
A = [0 1; -3 -2]; % matrizes
B = [1; -1];
C = [1 0];
D = 0;
syms s; % cria variaveis simbolicas
I = eye(2); % cria matriz identidade
g = C*inv(s*I - A)*B + D; % calcula a Func~ao de Transferencia
g = simple(g); % determina a forma mais simples
g
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 132
Resultado
>> calcula_ft_sym
s + 1
------------
2
s + 2 s + 3
>>
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 133
3.2 Formas canonicas
⋆ Uteis para a obtencao de uma representacao de estado de um SLIT.
Neste contexto, duas formas canonicas sao de particular interesse:
1. Forma canonica controlavel (FC Co)
2. Forma canonica observavel (FC Ob)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 134
Forma canonica controlavel
x =
0 1 0 · · · 0
0 0 1 · · · 0
0 0 0 · · · 0...
......
...
0 0 0 · · · 1
−a0 −a1 −a2 · · · −an−1
x +
0
0
0...
0
1
u
y =[
b0 b1 b2 · · · bn−1
]
x
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
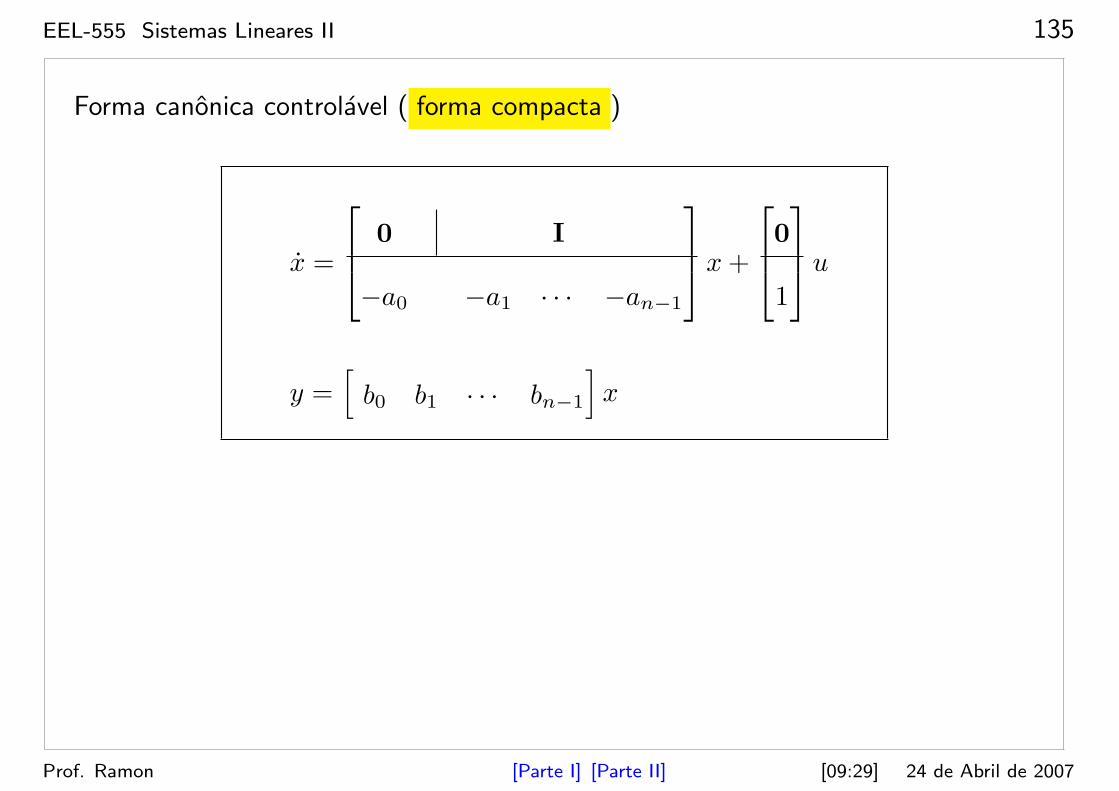
EEL-555 Sistemas Lineares II 135
Forma canonica controlavel ( forma compacta )
x =
0 I
−a0 −a1 · · · −an−1
x +
0
1
u
y =[
b0 b1 · · · bn−1
]
x
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 136
Forma canonica observavel
x =
−an−1 1 0 · · · 0
−an−2 0 1 · · · 0...
......
...
−a1 0 0 · · · 1
−a0 0 0 · · · 0
x +
bn−1
bn−2
...
b1
b0
u
y =[
1 0 0 · · · 0]
x
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 137
Forma canonica observavel ( forma compacta )
x =
−an−1... I
−a1
——
−a0 0
x +
bn−1
...
b1
b0
u
y =[
1 0]
x
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 138
Exemplo 4 Seja o seguinte SLIT de 2a. ordem na FC Co
x =
0 1
−a0 −a1
x +
0
1
u
y =[
b0 b1
]
x
A FT correspondente e dada por
g(s) =[
b0 b1
]
1 0
0 1
s−
0 1
−a0 −a1
−1
0
1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 139
Calculos :
g(s) =[
b0 b1
]
1 0
0 1
s−
0 1
−a0 −a1
−1
0
1
=[
b0 b1
]
s −1
a0 s + a1
−1
0
1
=1
s2 + a1s + a0
[
b0 b1
]
s + a1 1
−a0 s
0
1
=1
s2 + a1s + a0
[
b0 b1
]
1
s
=b1s + b0
s2 + a1s + a0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 140
Propriedade :
⋆ Os coeficientes bi e ai sao os mesmos que aparecem no numerador e deno-
minador da FT.
⋆ Para se obter uma representacao de estado a partir de uma FT, basta o
conhecimento desses coeficientes.
⋆ A FC Ob tambem tem essa propriedade.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 141
Exemplo 5 Seja o seguinte SLIT de 2a. ordem na FC Ob
x =
−a1 1
−a0 0
x +
b1
b0
u
y =[
1 0]
x
A FT correspondente e dada por
g(s) =[
1 0]
1 0
0 1
s−
−a1 1
−a0 0
−1
b1
b0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 142
Calculos :
g(s) =[
1 0]
1 0
0 1
s−
−a1 1
−a0 0
−1
b1
b0
=[
1 0]
s + a1 −1
a0 s
−1
b1
b0
=1
s2 + a1s + a0
[
1 0]
s 1
−a0 s + a1
b1
b0
=1
s2 + a1s + a0
[
s 1]
b1
b0
=b1s + b0
s2 + a1s + a0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 143
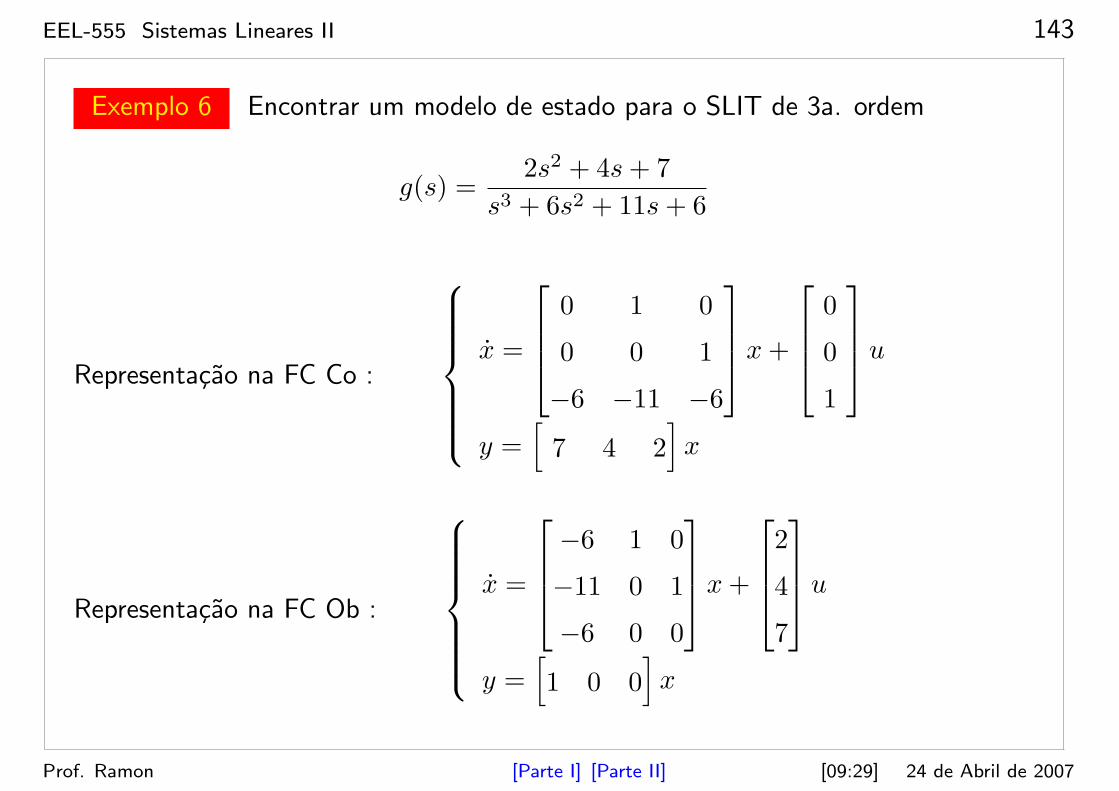
Exemplo 6 Encontrar um modelo de estado para o SLIT de 3a. ordem
g(s) =2s2 + 4s + 7
s3 + 6s2 + 11s + 6
Representacao na FC Co :
x =
0 1 0
0 0 1
−6 −11 −6
x +
0
0
1
u
y =[
7 4 2]
x
Representacao na FC Ob :
x =
−6 1 0
−11 0 1
−6 0 0
x +
2
4
7
u
y =[
1 0 0]
x
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 144
3.3 Transformacao de coordenadas
Modelo de estado :
x = Ax + Bu
y = Cx + Du
Podemos definir estados zi a partir de uma combinacao linear dos estados xi.
Isso pode ser representado por uma transformacao linear
z = Tx
onde T e uma matriz nao singular .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 145
Representacao de estado transformado
Multiplicando a 1a. equacao por T :
T x = TAx + TBu
Porem,
z = T x
x = T−1z
Eliminando a variavel x, tem-se
z = TAT−1z + TBu
y = CT−1z + Du
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 146
Apos definir as matrizes
A = TAT−1 B = TB
C = CT−1 D = D
obtemos a seguinte representacao do sistema com estado z
z = Az + Bu
y = Cz + Du
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 147
Exemplo 7
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

UFRJ Universidade Federal do Rio de Janeiro
EE Escola de Engenharia
DEL Departamento de Eletronica
EEL-555 Sistemas Lineares II
Capıtulo # 4
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 149
4 Modelagem de sistemas dinamicos lineares
Conteudo 1. Analogia forca–corrente
2. Modelos de sistemas mecanicos de translacao
3. Modelos de sistemas mecanicos de rotacao
4. Modelos de sistemas eletricos
5. Modelos de sistemas fluidos
6. Modelos de sistemas termicos
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 150
Analogia forca–corrente
⋆ Metodo sistematico para obtencao das equacoes de estado.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 151
Potencia
Sistema Potencia
Mecanico de translacao P = F v
Mecanico de rotacao P = T ω
Eletrico P = i v
Fluido P = q p
Termico −
P = variavel sequenciada × variavel referenciada
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 152
P = variavel sequenciada × variavel referenciada
⋆ Caracterıstica da variavel sequenciada :
o sensor deve ser instalado em serie.
⋆ Caracterıstica da variavel referenciada :
em todos os sistemas, e medida em relacao a alguma referencia.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 153
Elementos
Sistema Resistencia Indutancia Capacitancia
Mec. de translacao Atrito Mola Massa
Mec. de rotacao Atrito Mola torsional Inercia
Fluido Restricao Inertancia fluida Capacitancia fluida
Termico Isolamento — Capacitancia termica
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 154
Modelos de sistemas mecanicos de translacao
Variavel sequenciada : Forca[
F]
Variavel referenciada : Velocidade[
v]
Variaveis integradas : Γ =
∫ t
0
F dτ + Γ(0)Quantidade de
movimento
x =
∫ t
0
v dτ + x(0) Deslocamento linear
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 155
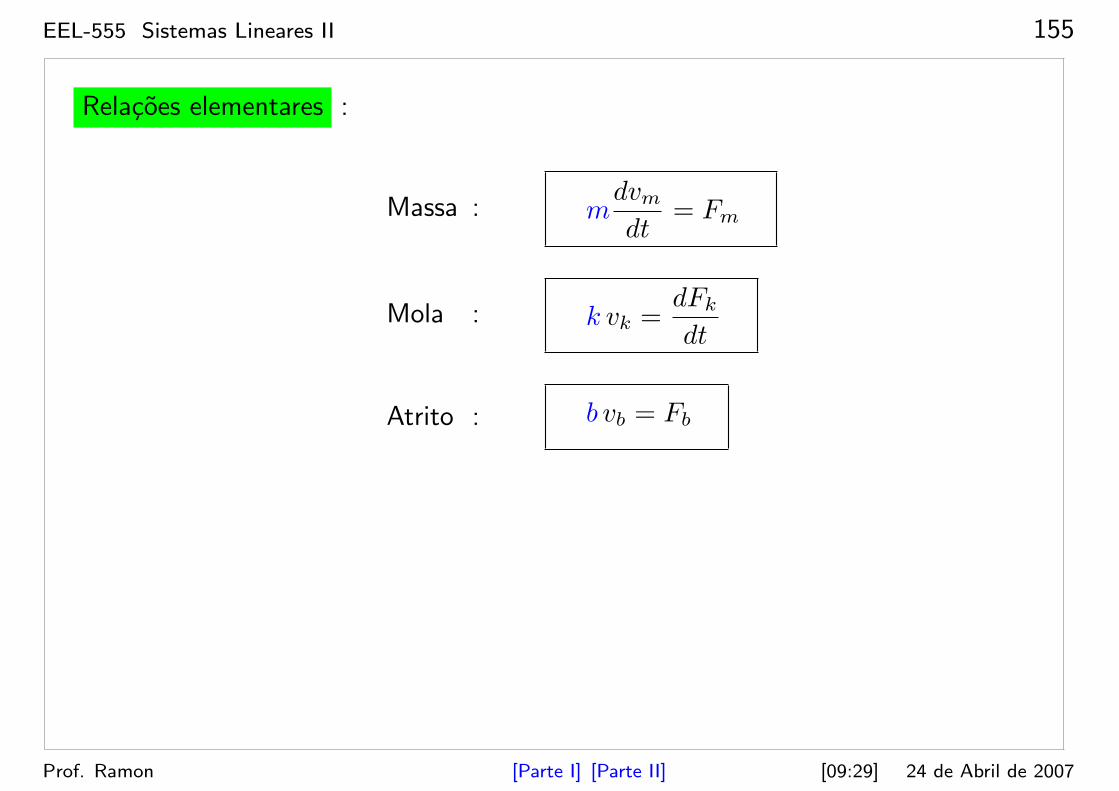
Relacoes elementares :
Massa : mdvm
dt= Fm
Mola : k vk =dFk
dt
Atrito : b vb = Fb
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 156
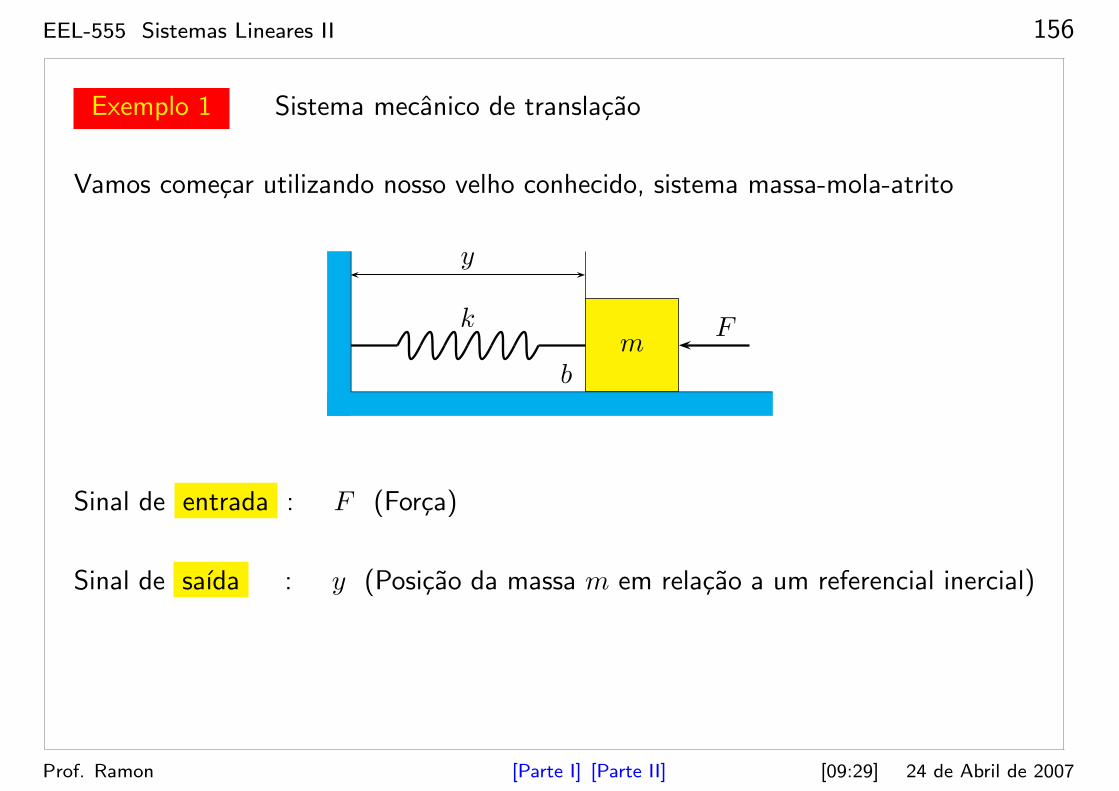
Exemplo 1 Sistema mecanico de translacao
Vamos comecar utilizando nosso velho conhecido, sistema massa-mola-atrito
mk
y
b
F
Sinal de entrada : F (Forca)
Sinal de saıda : y (Posicao da massa m em relacao a um referencial inercial)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 157
Representacao alternativa
mF
v
k
b
Ordem do sistema = Numero de elementos armazenadores de energia
independentes.
Neste exemplo : n = 2
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 158
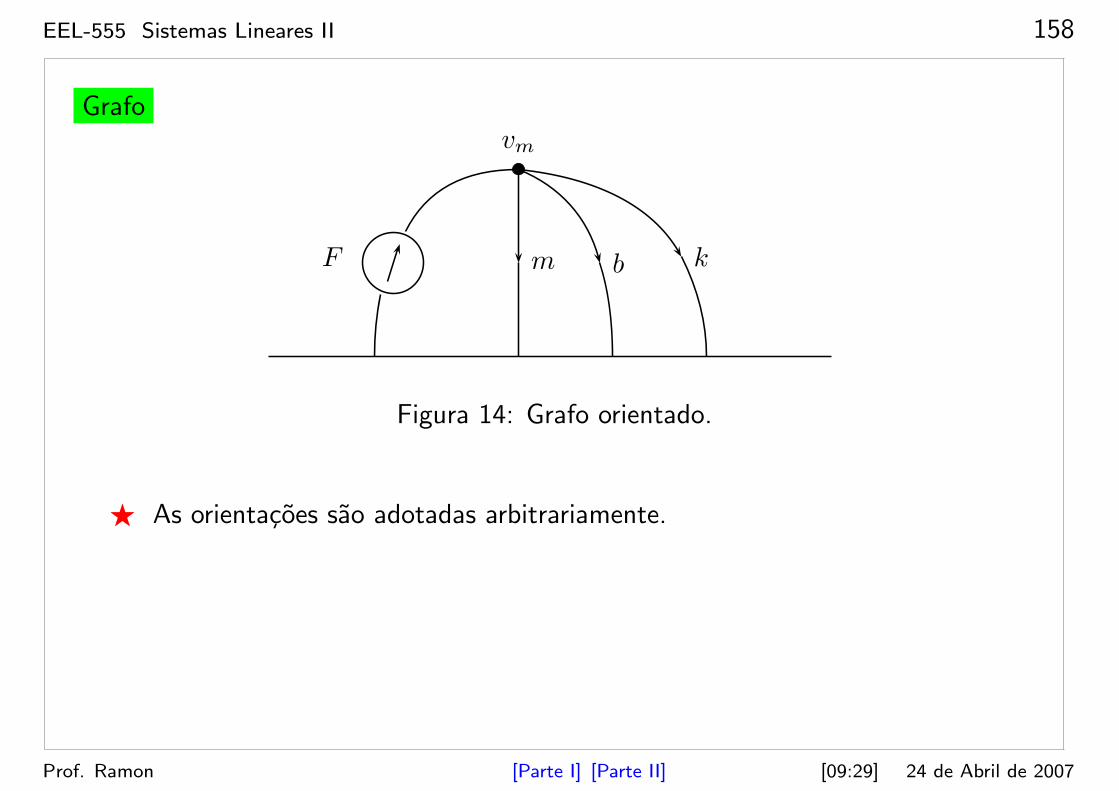
Grafo
m b kF
vm
Figura 14: Grafo orientado.
⋆ As orientacoes sao adotadas arbitrariamente.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 159
Equacoes do grafo
Equacoes dos Nos : Fm + Fb + Fk = F
Equacoes das Malhas : vm = vb = vk
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 160
Obtencao da EDO
Substituindo as relacoes elementares na equacao dos nos :
mdvm
dt+ bvb + k
∫ t
0
vk dτ = F
Utilizando as equacoes das malhas :
mdvm
dt+ b vm + k
∫ t
0
vm dτ = F
Utilizando a definicao de deslocamento y (variavel integrada), temos :
m y + b y + k y = F
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 161
Obtencao da equacao de estado
Passo 1 : Escolher as variaveis de estado
x1 = vm (Velocidade da massa)
x2 = Fk (Forca na mola)
Passo 2 : Escrever as equacoes dos elementos armazenadores de energia
em funcao dos estados.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 162
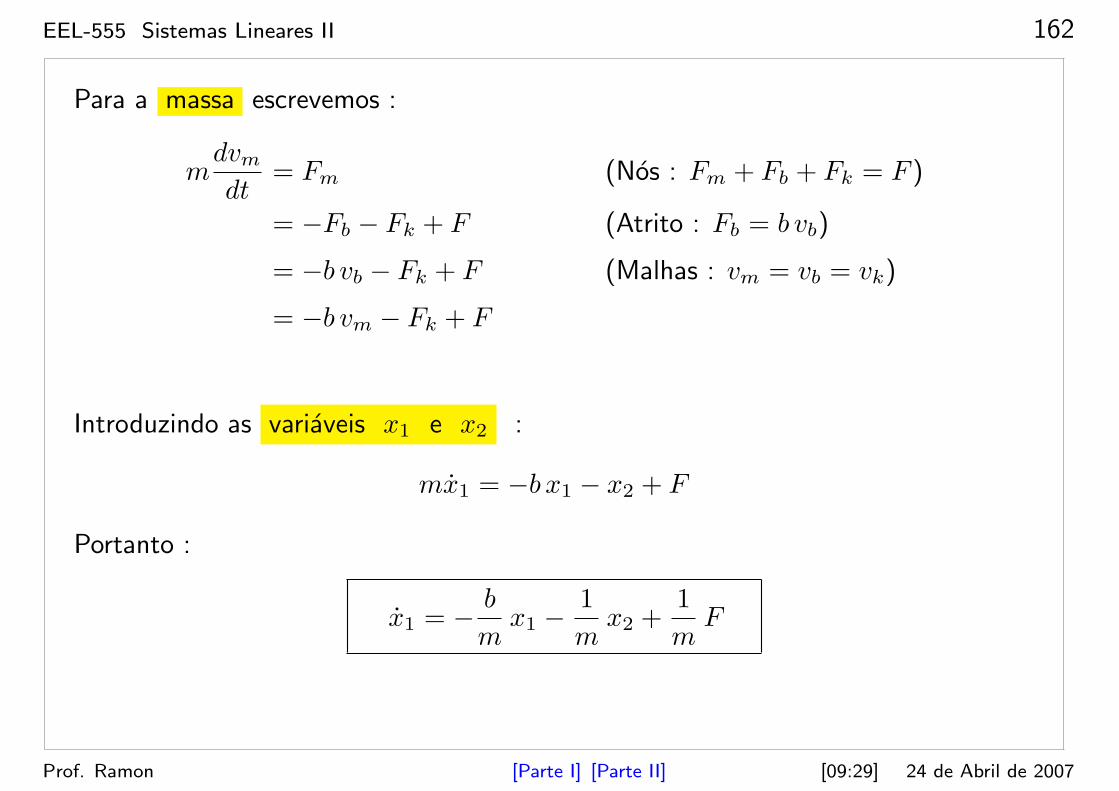
Para a massa escrevemos :
mdvm
dt= Fm (Nos : Fm + Fb + Fk = F )
= −Fb − Fk + F (Atrito : Fb = b vb)
= −b vb − Fk + F (Malhas : vm = vb = vk)
= −b vm − Fk + F
Introduzindo as variaveis x1 e x2 :
mx1 = −b x1 − x2 + F
Portanto :
x1 = − b
mx1 −
1
mx2 +
1
mF
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 163
Para a mola escrevemos :
dFk
dt= k vk (Malhas : vm = vb = vk)
= k vm
Introduzindo as variaveis x1 e x2 :
x2 = k x1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 164
Equacao de saıda
Sinal de saıda : y (Posicao da massa m em relacao a um referencial inercial)
Utilizando a equacao para a mola :
Fk = k
∫ t
0
vkdτ
= k
∫ t
0
vmdτ
= k(y(t)− y(0)
)= k y ⇒ y =
1
kFk
Portanto,y =
1
kx2
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 165
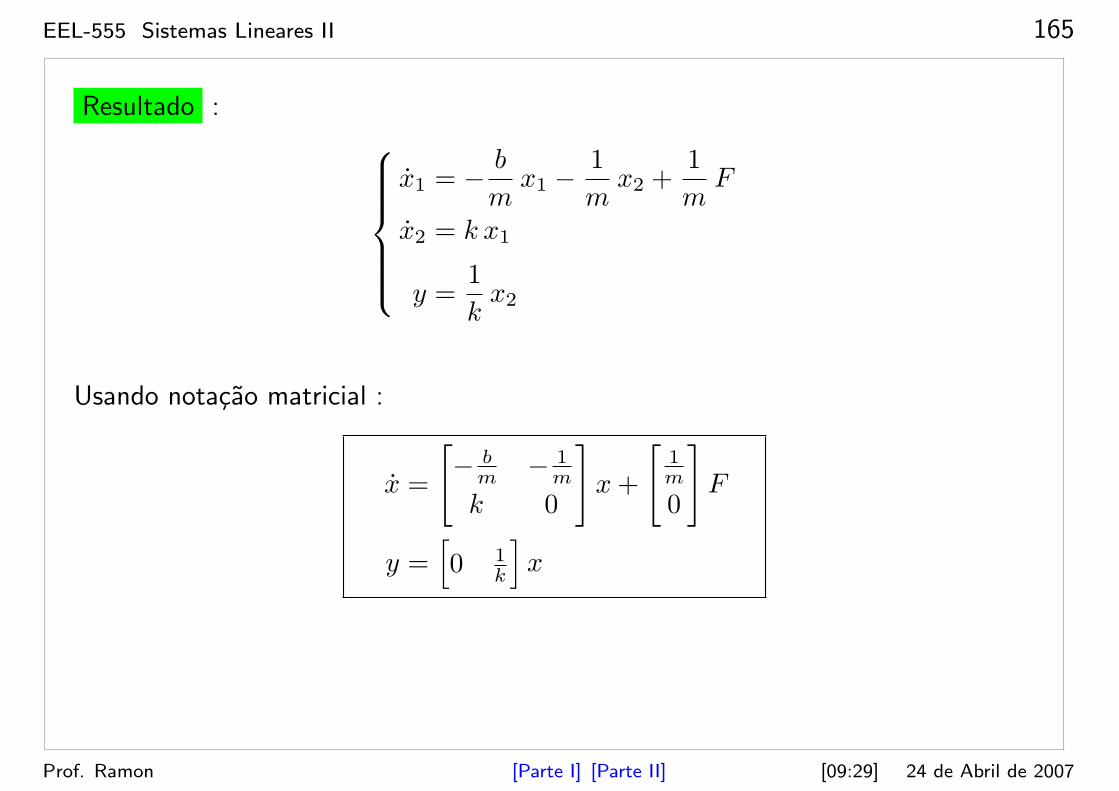
Resultado :
x1 = − b
mx1 −
1
mx2 +
1
mF
x2 = k x1
y =1
kx2
Usando notacao matricial :
x =
[
− bm − 1
m
k 0
]
x +
[1m
0
]
F
y =[
0 1k
]
x
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 166
Exemplo 2 Sistema mecanico de translacao
m1
F
v1
m2
v2
k2
b2
k1
b1
Sinal de entrada : F (Forca)
Sinal de saıda : y1 (Posicao da massa m1)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 167
Ordem do sistema = Numero de elementos armazenadores de energia
independentes.
Neste exemplo : n = 4
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 168
Grafo
m2
k2
F
vm2
m1 k1
vm1
b1
b2
Figura 15: Grafo orientado.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 169
m2
k2
F
vm2
m1 k1
vm1
b1
b2
Equacoes dos Nos : Fm2 + Fb2 + Fk2 = F
Fk2 + Fb2 = Fm1 + Fb1 + Fk1
Equacoes das Malhas : vk2 = vb2
vk2 + vm1 − vm2 = 0
vm1 = vb1 = vk1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 170
Obtencao da equacao de estado
Passo 1 : Escolher as variaveis de estado
x1 = vm1 (Velocidade da massa 1)
x2 = vm2 (Velocidade da massa 2)
x3 = Fk1 (Forca na mola 1)
x4 = Fk2 (Forca na mola 2)
Passo 2 : Escrever as equacoes dos elementos armazenadores de energia
em funcao dos estados.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 171
Para a massa 1 escrevemos :
m1dvm1
dt= Fm1 (equacoes dos Nos)
= Fk2 + Fb2 − Fb1 − Fk1 (equacoes dos atrito)
= Fk2 + b2 vb2 − b1 vb1 − Fk1 (equacoes das Malhas)
= Fk2 + b2
(− vm1 + vm2
)− b1 vm1 − Fk1
Introduzindo as variaveis xi :
m1x1 = x4 + b2
(− x1 + x2
)− b1 x1 − x3
Portanto :
x1 = −b1 + b2
m1x1 +
b2
m1x2 −
1
m1x3 +
1
m1x4
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 172
Para a massa 2 escrevemos :
m2dvm2
dt= Fm2 (equacoes dos Nos)
= −Fb2 − Fk2 + F (equacoes dos atrito)
= −b2 vb2 − Fk2 + F (equacoes das Malhas)
= −b2
(− vm1 + vm2
)− Fk2 + F
Introduzindo as variaveis xi :
m2x2 = b2 x1 − b2 x2 − x4 + F
Portanto :
x2 =b2
m2x1 −
b2
m2x2 −
1
m2x4 +
1
m2F
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 173
Para a mola 1 escrevemos :
dFk1
dt= k1 vk1 (equacoes das Malhas)
= k1 vm1
Introduzindo as variaveis xi :
x3 = k1 x1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 174
Para a mola 2 escrevemos :
dFk2
dt= k2 vk2 (equacoes das Malhas)
= k2
(− vm1 + vm2
)
Introduzindo as variaveis xi :
x4 = −k2 x1 + k2 x2
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 175
Equacao de saıda
Sinal de saıda : y = y1 (Posicao da massa m1)
Utilizando a equacao para a mola 1 :
Fk1 = k1
∫ t
0
vk1dτ
= k1
∫ t
0
vm1dτ
= k1
(y1(t)− y1(0)
)= k1 y1 ⇒ y1 =
1
k1Fk1
Portanto,
y = y1 =1
k1x3
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 176
Resultado :
x1 = −b1 + b2
m1x1 +
b2
m1x2 −
1
m1x3 +
1
m1x4
x2 =b2
m2x1 −
b2
m2x2 −
1
m2x4 +
1
m2F
x3 = k1 x1
x4 = −k2 x1 + k2 x2
y =1
k1x3
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 177
Usando notacao matricial :
x =
− b1+b2m1
b2m1
− 1m1
1m1
b2m2
− b2m2
0 − 1m2
k1 0 0 0
−k2 k2 0 0
x +
0
1m2
0
0
F
y =[
0 0 1k1
0]
x
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 178
Modelos de sistemas mecanicos de rotacao
Variavel sequenciada : Torque[
T]
Variavel referenciada : Velocidade angular[
ω]
Variaveis integradas : h =
∫ t
0
T dτ + h(0)Quantidade de
movimento angular
θ =
∫ t
0
ω dτ + θ(0) Deslocamento angular
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 179
Relacoes elementares :
Inercia : JdωJ
dt= TJ
Mola torsional : k ωk =dTk
dt
Atrito : b ωb = Tb
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 180
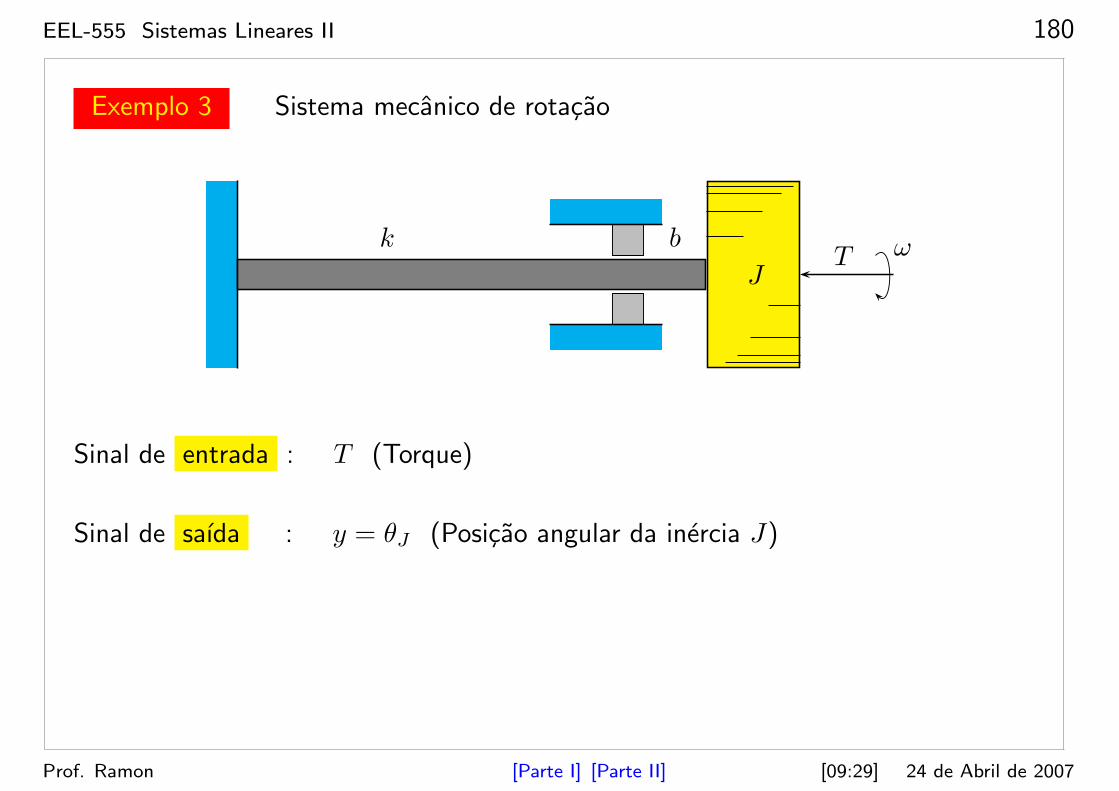
Exemplo 3 Sistema mecanico de rotacao
JT ωbk
Sinal de entrada : T (Torque)
Sinal de saıda : y = θJ (Posicao angular da inercia J)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 181
Ordem do sistema = Numero de elementos armazenadores de energia
independentes.
Neste exemplo : n = 2
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 182
Grafo
J b kT
ωJ
Figura 16: Grafo orientado.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 183
Equacoes do grafo
Equacoes dos Nos : TJ + Tb + Tk = T
Equacoes das Malhas : ωJ = ωb = ωk
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 184
Obtencao da equacao de estado
Passo 1 : Escolher as variaveis de estado
x1 = ωJ (Velocidade angular da inercia)
x2 = Tk (Torque na mola)
Passo 2 : Escrever as equacoes dos elementos armazenadores de energia
em funcao dos estados.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 185
Para a inercia escrevemos :
JdωJ
dt= TJ (Nos : TJ + Tb + Tk = T )
= −Tb − Tk + T (Atrito : Tb = b ωb)
= −b ωb − Tk + T (Malhas : ωJ = ωb = ωk)
= −b ωJ − Tk + T
Introduzindo as variaveis x1 e x2 :
Jx1 = −b x1 − x2 + T
Portanto :
x1 = − b
Jx1 −
1
Jx2 +
1
JT
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 186
Para a mola torsional escrevemos :
dTk
dt= k ωk (Malhas : ωJ = ωb = ωk)
= k ωJ
Introduzindo as variaveis x1 e x2 :
x2 = k x1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 187
Equacao de saıda
Sinal de saıda : y = θJ (Posicao angular da inercia J)
Utilizando a equacao para a mola :
Fk = k
∫ t
0
ωkdτ
= k
∫ t
0
ωJdτ
= k(θJ(t)− θJ(0)
)= k θJ ⇒ θJ =
1
kFk
Portanto,y =
1
kx2
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 188
Resultado :
x1 = − b
Jx1 −
1
Jx2 +
1
JT
x2 = k x1
y =1
kx2
Usando notacao matricial :
x =
[
− bJ − 1
J
k 0
]
x +
[1J
0
]
T
y =[
0 1k
]
x
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 189
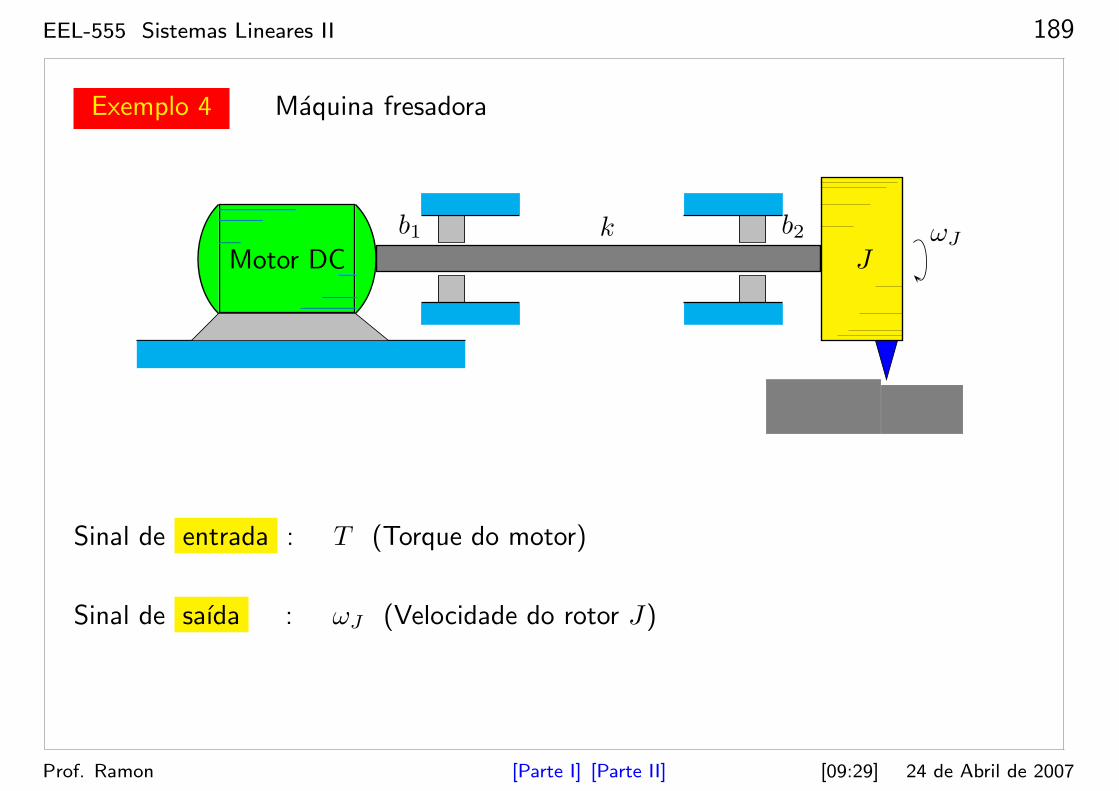
Exemplo 4 Maquina fresadora
JωJ
b2kb1
Motor DC
Sinal de entrada : T (Torque do motor)
Sinal de saıda : ωJ (Velocidade do rotor J)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 190
Ordem do sistema = Numero de elementos armazenadores de energia
independentes.
Neste exemplo : n = 2
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 191
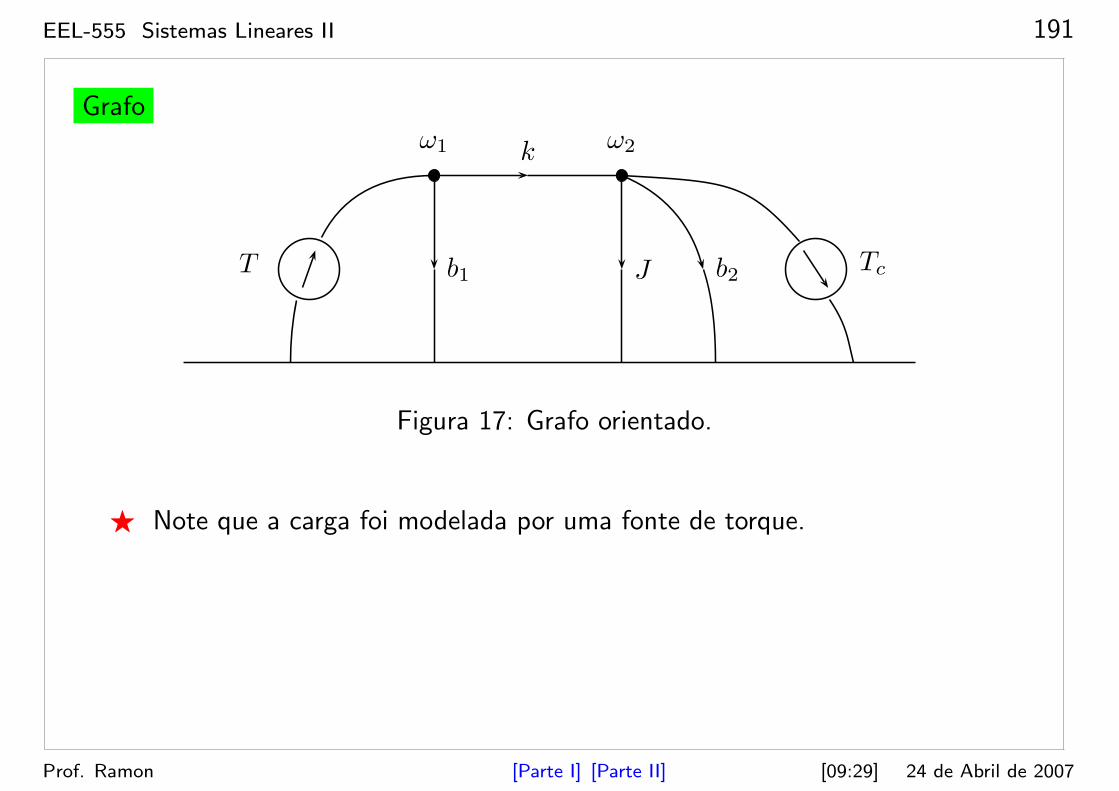
Grafo
b1
k
T
ω1
J
ω2
b2Tc
Figura 17: Grafo orientado.
⋆ Note que a carga foi modelada por uma fonte de torque.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 192
Obtencao das equacoes de estado
Fica como exercıcio ...
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 193
Modelos de sistemas eletricos
Variavel sequenciada : Corrente[
i]
Variavel referenciada : Tensao[
v]
Variaveis integradas : q =
∫ t
0
i dτ + q(0) Carga eletrica
λ =
∫ t
0
v dτ + λ(0)Fluxo magnetico
concatenado
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 194
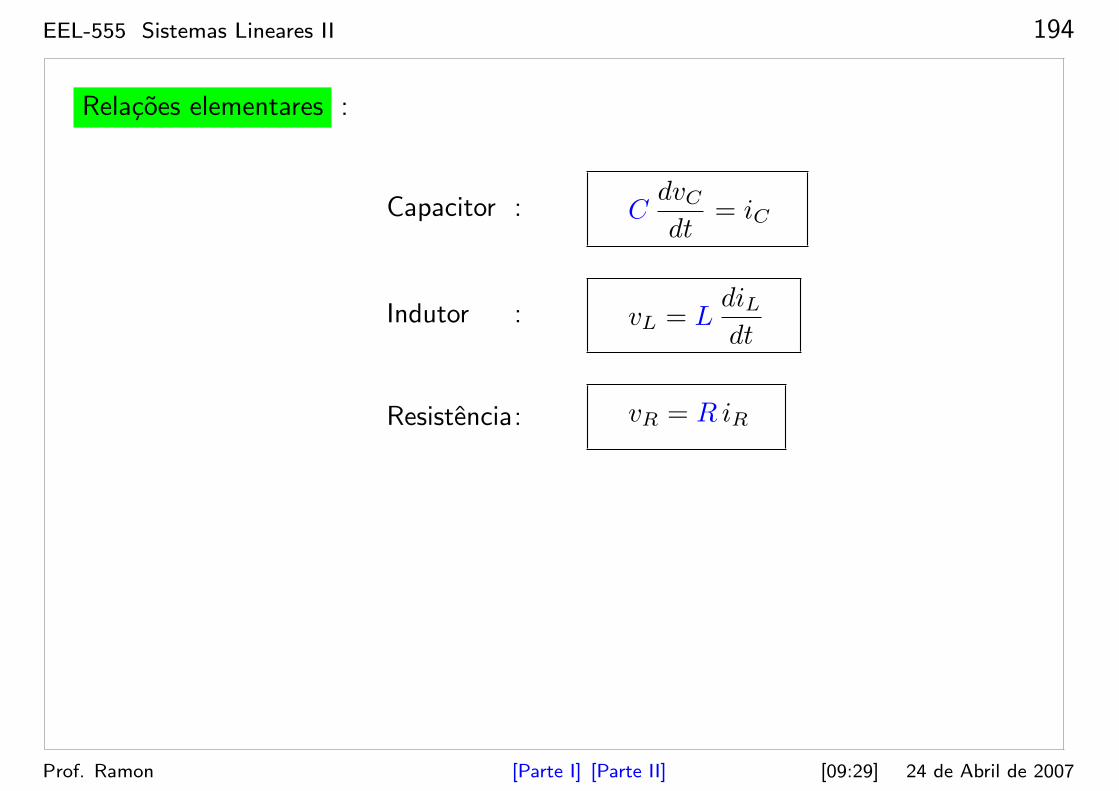
Relacoes elementares :
Capacitor : CdvC
dt= iC
Indutor : vL = LdiLdt
Resistencia: vR = R iR
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 195
Exemplo 5
C1 = 1F
+ −
R1 = 1Ω
x1
C2 = 1F
+ −
R2 = 1Ω
x2
u 2Ω y
+
−
R1 = 1Ω (em paralelo com C1)
R2 = 1Ω (em paralelo com C2)
iR1, vR1 = corrente e tensao em R1
iR2, vR2 = corrente e tensao em R2
Lei dos nos :
iR1+ iC1
= u
iR2+ iC2
= 0Lei das malhas :
vR1+ x1 = 0
vR2+ x2 = 0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 196
Nos :
iC1= u− iR1
iC2= −iR2
Malhas :
vR1= −x1
vR2= −x2
Tensao em R1 :
vR1= R1iR1
⇒ vR1= iR1
Tensao em C1 :
x1 =1
C1iC1
=1
C1
(u− iR1
)=
1
C1
(u− vR1
) ⇒ x1 =1
C1
(u + x1
)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 197
Nos :
iC1= u− iR1
iC2= −iR2
Malhas :
vR1= −x1
vR2= −x2
Tensao em R2 :
vR2= R2iR2
⇒ vR2= iR2
Tensao em C2 :
x2 =1
C2iC2
=1
C2
(− iR2
)=
1
C2
(− vR2
) ⇒ x2 =1
C2x2
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 198
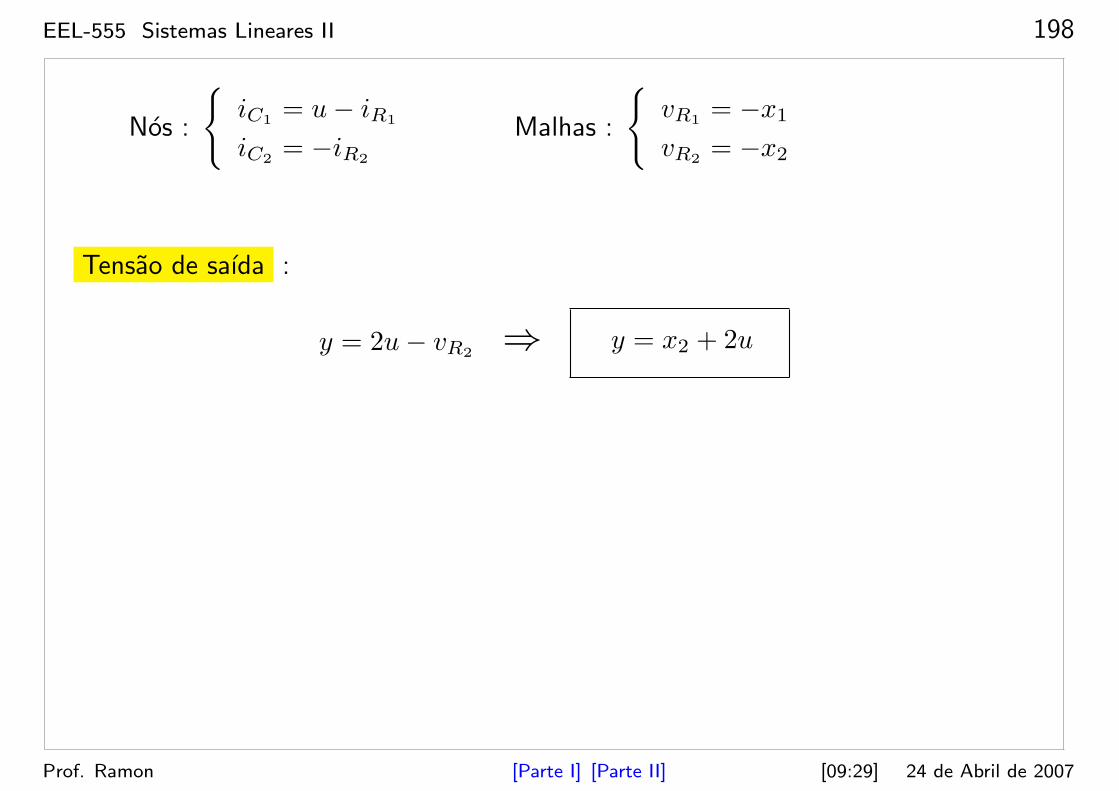
Nos :
iC1= u− iR1
iC2= −iR2
Malhas :
vR1= −x1
vR2= −x2
Tensao de saıda :
y = 2u− vR2⇒ y = x2 + 2u
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 199
Equacao de estado para o circuito :
x =
[
1/C1 0
0 1/C2
]
x +
[
1/C1
0
]
u
y =[
0 1]
x +[
2]
u
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 200
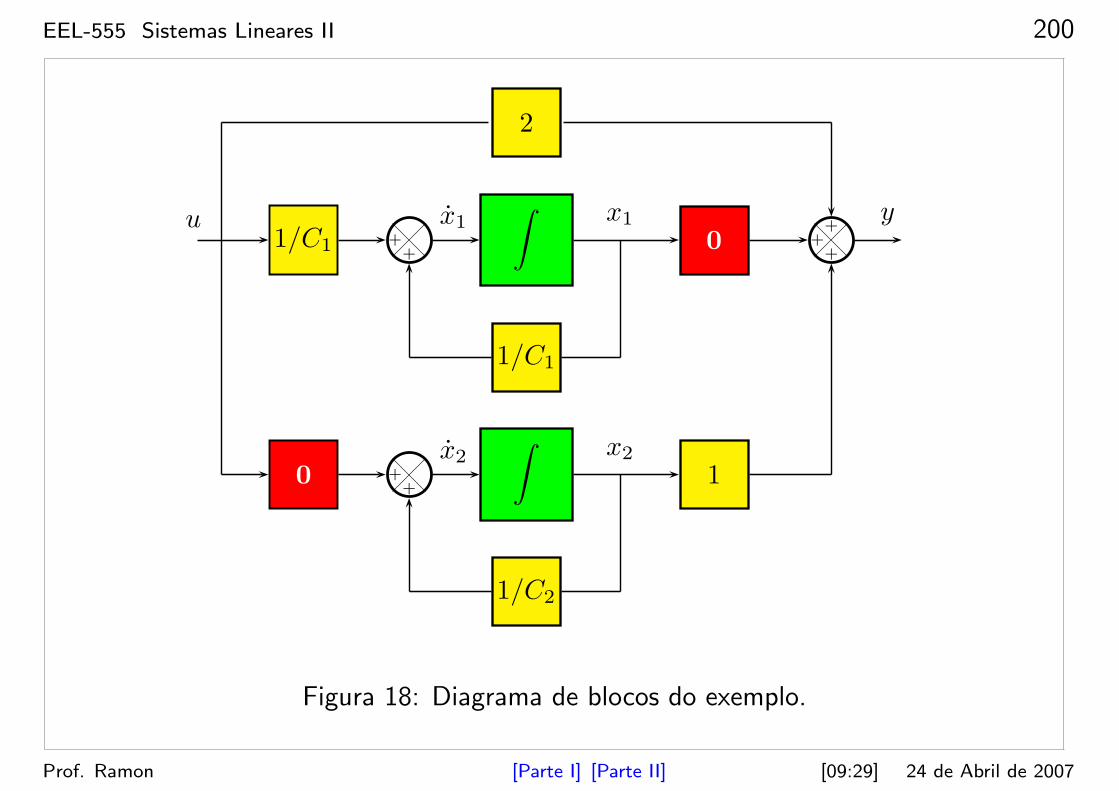
∫
1/C2
0 1x2x2
++
∫
++
+
1/C1
1/C1
x1 yx1u
2
++
0
Figura 18: Diagrama de blocos do exemplo.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 201
Diagrama geral
Co Ob
Co Ob
Co Ob
Co Ob
Figura 19: Decomposicao canonica de Kalman.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 202
Exemplo 6
C = 1F
+ −x
u
1Ω
y
+
−1Ω
1Ω
1Ω+
−
⋆ A corrente da fonte i nao circula pelo capacitor.
A fonte enxerga somente 2 resistores de 2Ω em paralelo.
Portanto : u =2 · 22 + 2
i ⇒ i = u
Componente de corrente devido a tensao u : i1 =1
2u
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 203
C = 1F
+ −x
u
1Ω
y
+
−1Ω
1Ω
1Ω+
−
⋆ A corrente do capacitor iC nao circula pela fonte.
O capacitor enxerga somente 2 resistores de 2Ω em paralelo.
Portanto : x =2 · 22 + 2
iC ⇒ iC = x
Componente de corrente devido a tensao x : i2 =1
2x
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 204
Corrente total : i = i1 + i2 ⇒ i =1
2
(u + x
)
Tensao de saıda : y = Ri ⇒ y =1
2
(u + x
)
Tensao no capacitor :
x =1
CiC ⇒ x =
1
Cx
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
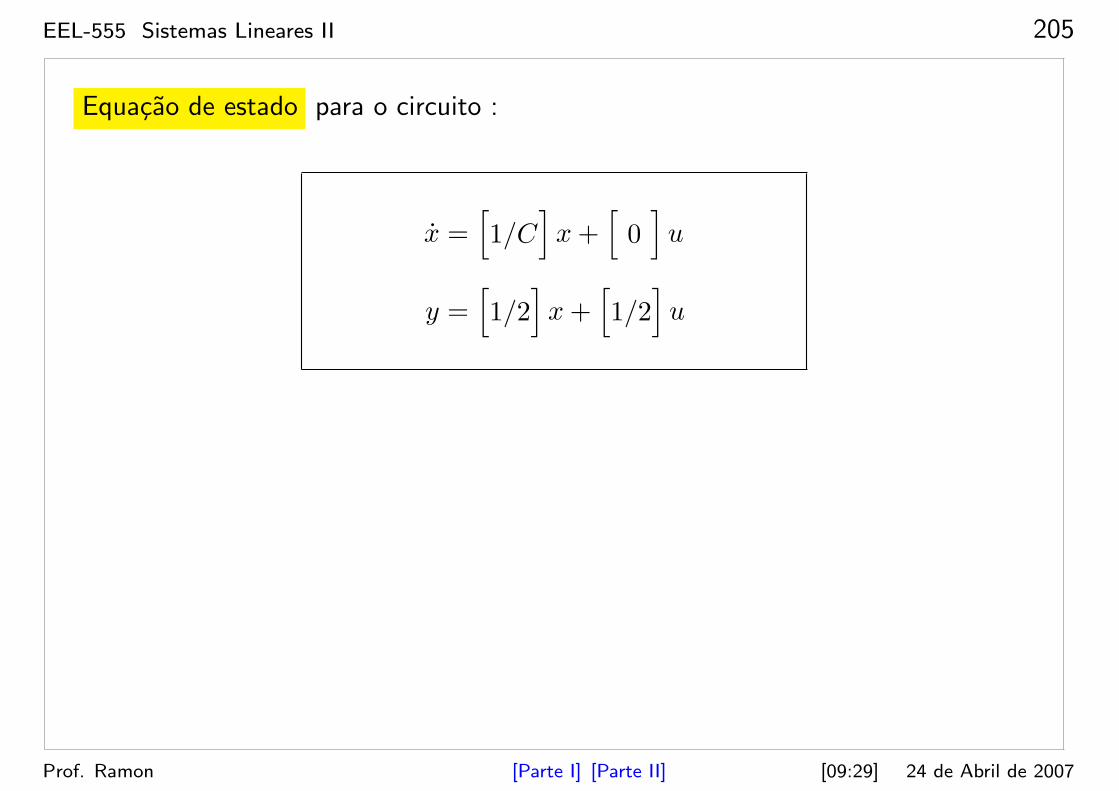
EEL-555 Sistemas Lineares II 205
Equacao de estado para o circuito :
x =[
1/C]
x +[
0]
u
y =[
1/2]
x +[
1/2]
u
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 206
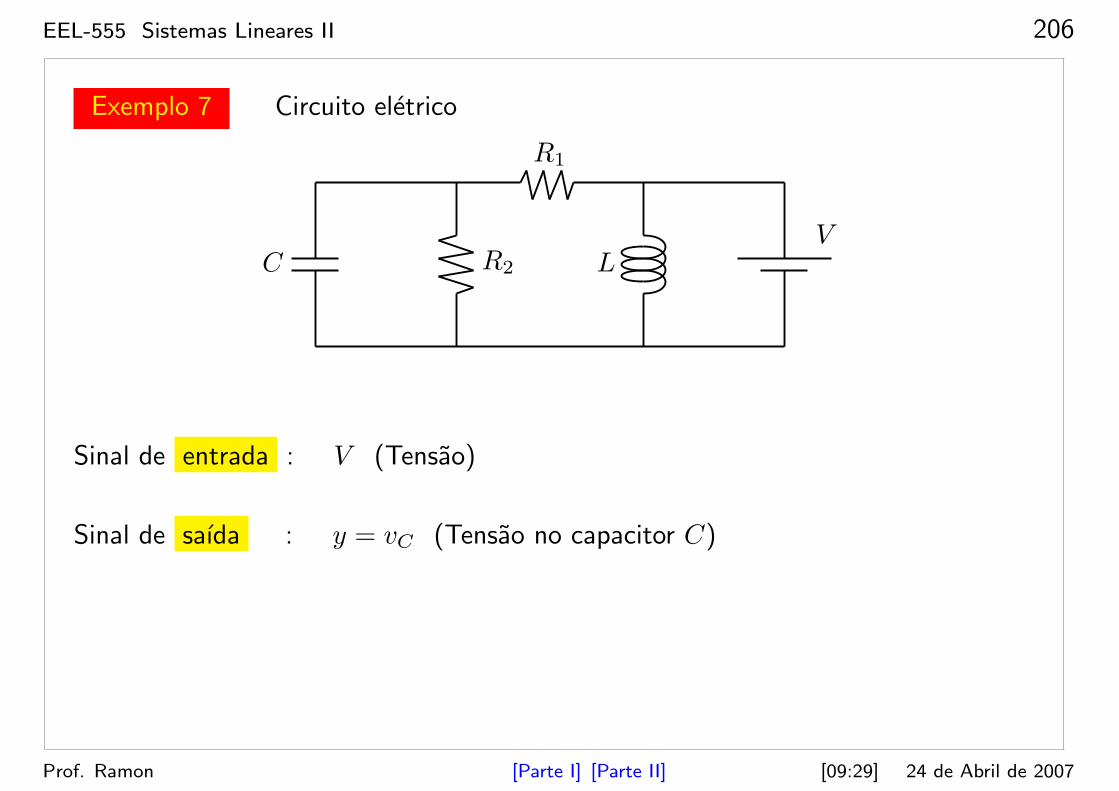
Exemplo 7 Circuito eletrico
C R2
R1
LV
Sinal de entrada : V (Tensao)
Sinal de saıda : y = vC (Tensao no capacitor C)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 207
Ordem do sistema = Numero de elementos armazenadores de energia
independentes.
Neste exemplo : n = 2
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 208
Grafo
R1
R2
C
v1
L
v2
+
−V
Figura 20: Grafo orientado.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
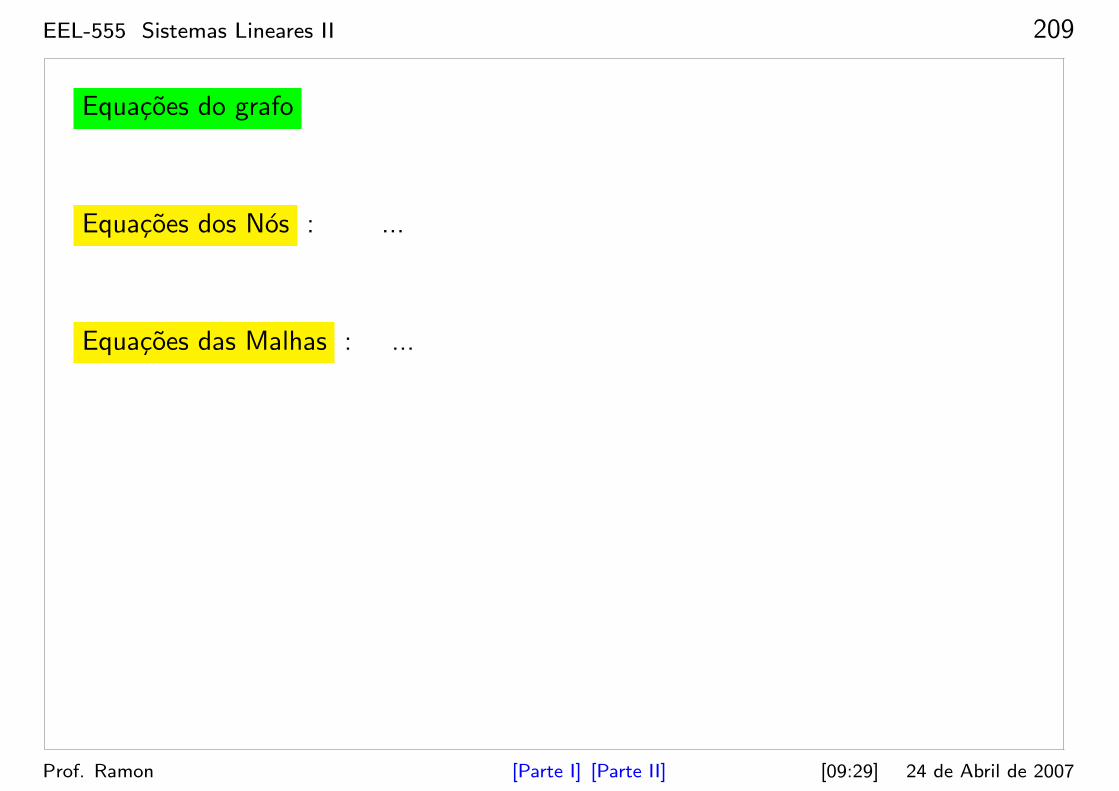
EEL-555 Sistemas Lineares II 209
Equacoes do grafo
Equacoes dos Nos : ...
Equacoes das Malhas : ...
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
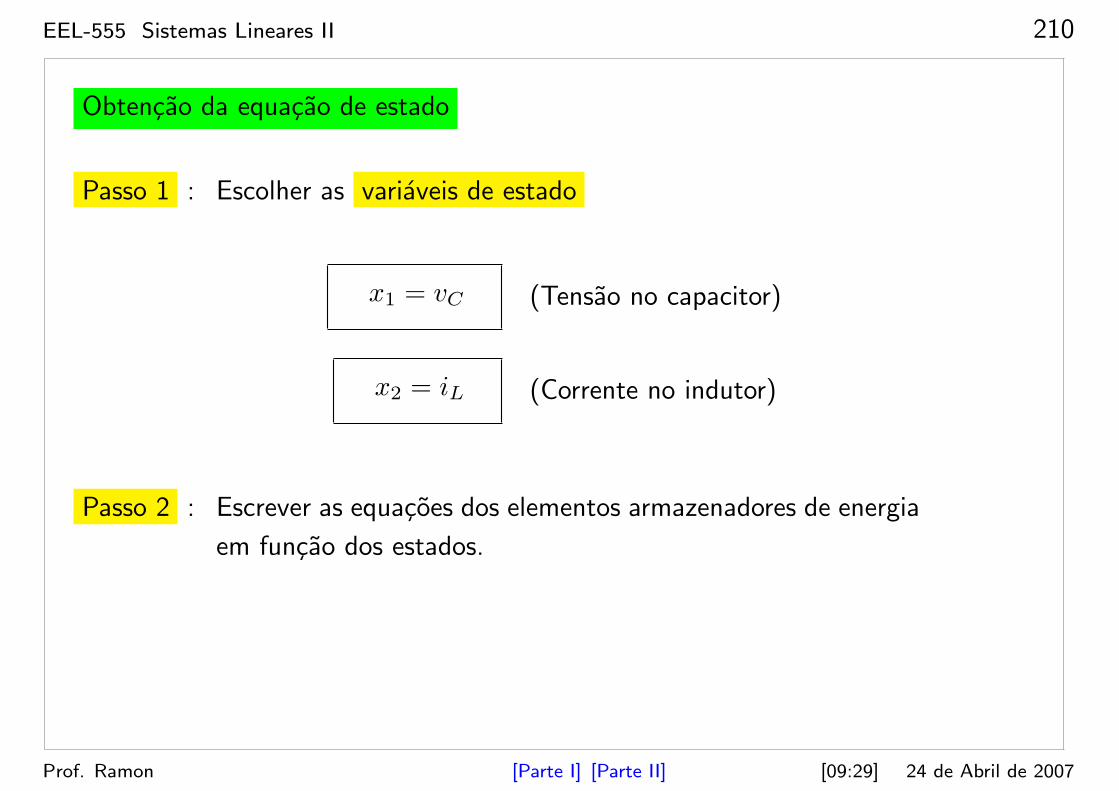
EEL-555 Sistemas Lineares II 210
Obtencao da equacao de estado
Passo 1 : Escolher as variaveis de estado
x1 = vC (Tensao no capacitor)
x2 = iL (Corrente no indutor)
Passo 2 : Escrever as equacoes dos elementos armazenadores de energia
em funcao dos estados.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 211
Para o capacitor escrevemos :
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 212
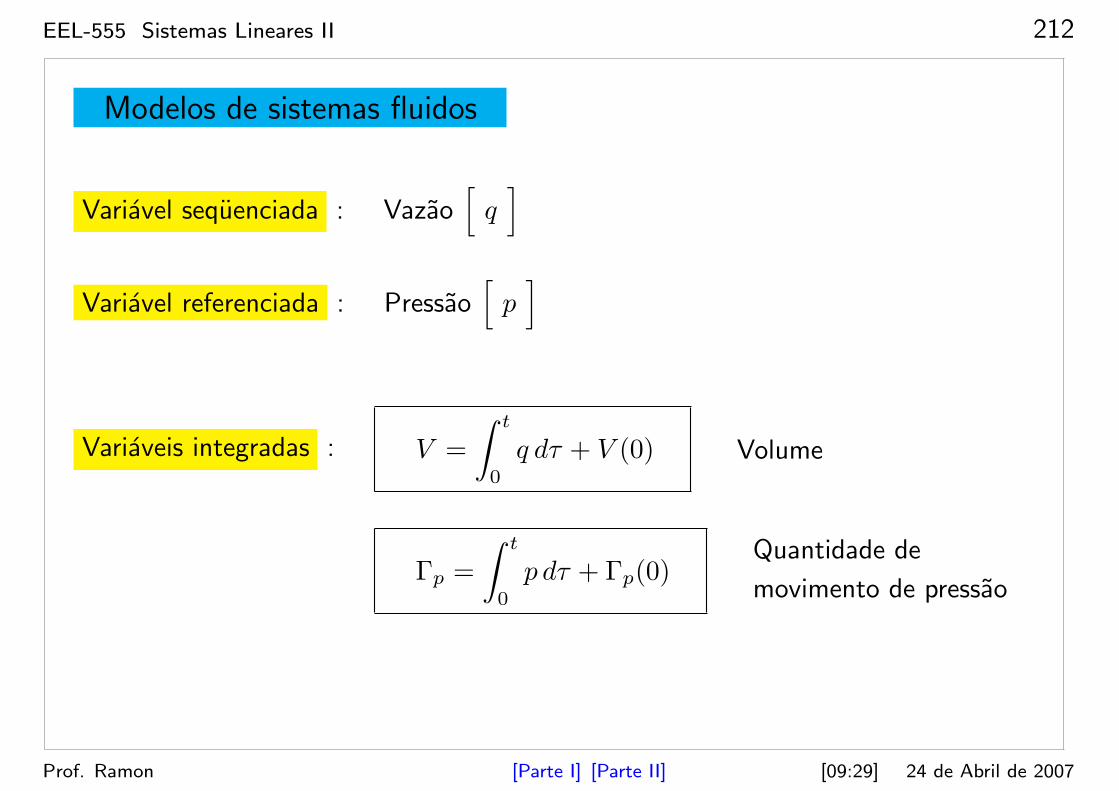
Modelos de sistemas fluidos
Variavel sequenciada : Vazao[
q]
Variavel referenciada : Pressao[
p]
Variaveis integradas : V =
∫ t
0
q dτ + V (0) Volume
Γp =
∫ t
0
p dτ + Γp(0)Quantidade de
movimento de pressao
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 213
Relacoes elementares :
Capacitancia fluida : CFdpC
dt= qC
Inertancia fluida : pI = IFdqI
dt
Resistencia fluida : pR = RF qR
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
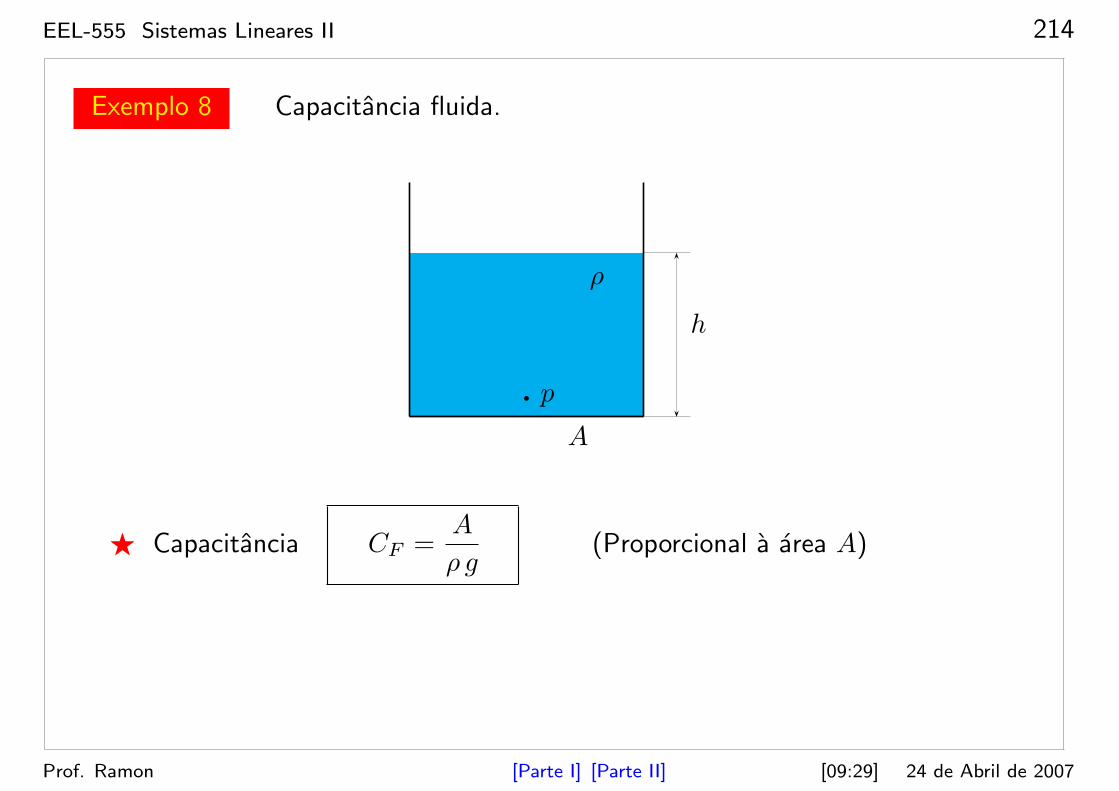
EEL-555 Sistemas Lineares II 214
Exemplo 8 Capacitancia fluida.
A
h
ρ
p
⋆ Capacitancia CF =A
ρ g(Proporcional a area A)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 215
Definicao : V = CF p
Pressao no fundo do tanque : p = ρ g h ⇒ h =p
ρ g
onde : ρ = densidade do fluido
g = aceleracao da gravidade
Portanto :
V = Ah = Ap
ρg⇒ CF =
A
ρ g
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 216
Exemplo 9 Inertancia fluida.
L
Aρ
p1 p2
⋆ Inertancia IF =ρ L
A(Proporcional ao comprimento L)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
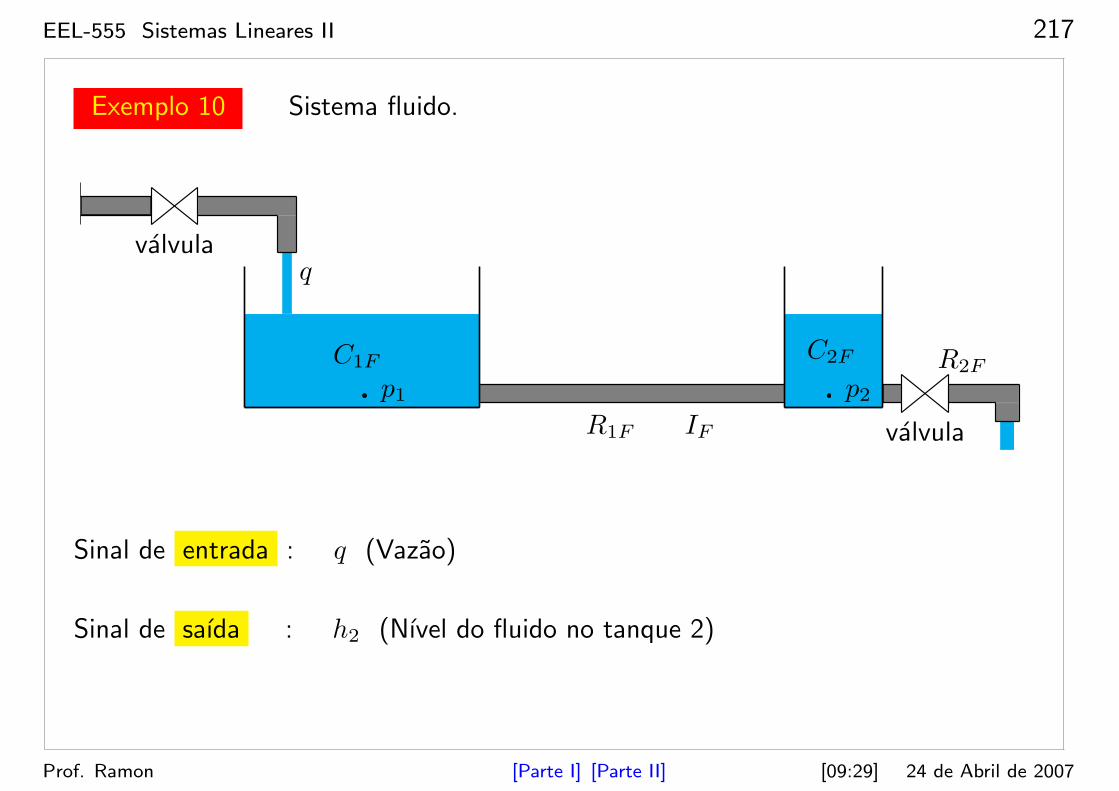
EEL-555 Sistemas Lineares II 217
Exemplo 10 Sistema fluido.
q
p1 p2
valvula
valvula
R1F IF
R2FC2FC1F
Sinal de entrada : q (Vazao)
Sinal de saıda : h2 (Nıvel do fluido no tanque 2)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 218
Ordem do sistema = Numero de elementos armazenadores de energia
independentes.
Neste exemplo : n = 3
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 219
Grafo
C1
IF
q
p1
C2
p2
R2F
R1F
Figura 21: Grafo orientado.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 220
C1
IF
q
p1
C2
p2
R2F
R1F
Equacoes dos Nos : q = qC1 + qI
qR1 = qC2 + qR2
Equacoes das Malhas : pI + pR1 + pC2 − pC1 = 0
pC2 = pR2
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
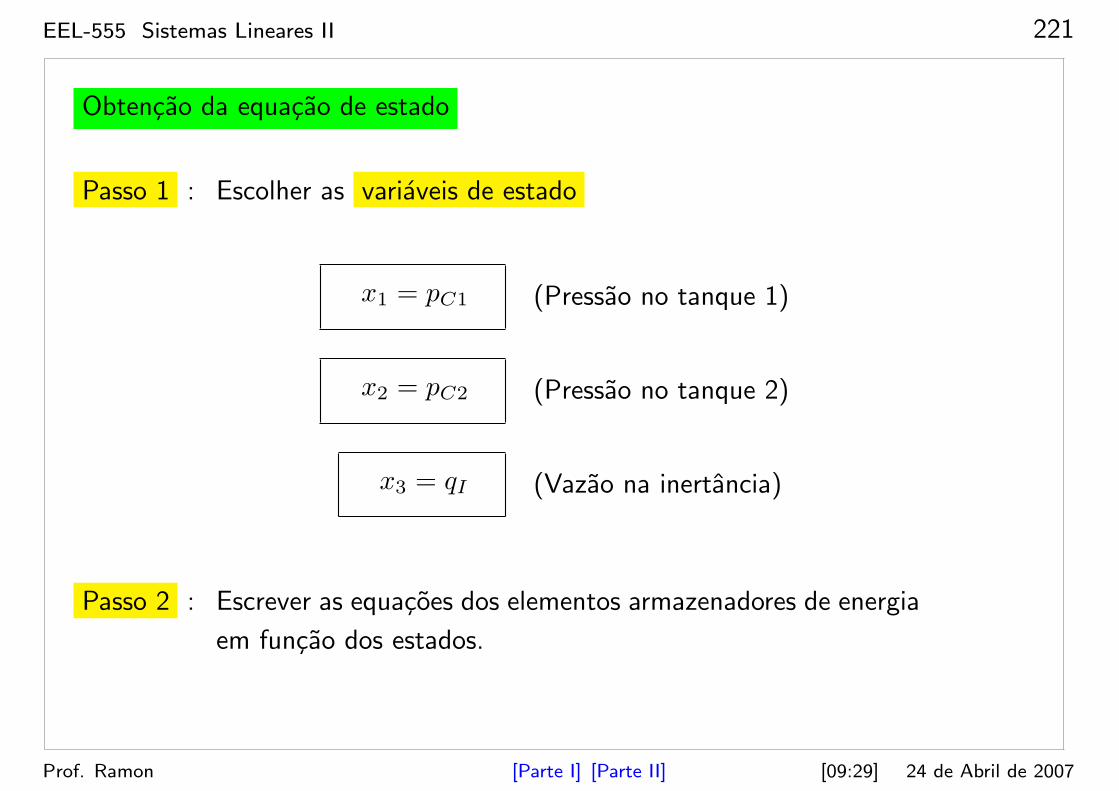
EEL-555 Sistemas Lineares II 221
Obtencao da equacao de estado
Passo 1 : Escolher as variaveis de estado
x1 = pC1 (Pressao no tanque 1)
x2 = pC2 (Pressao no tanque 2)
x3 = qI (Vazao na inertancia)
Passo 2 : Escrever as equacoes dos elementos armazenadores de energia
em funcao dos estados.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 222
Obtencao da equacao de estado
Para o tanque 1 escrevemos :
C1dpC1
dt= qC1 (equacoes dos Nos)
= q − qI
Introduzindo as variaveis xi :
C1x1 = −x3 + q
Portanto :
x1 = − 1
C1x3 +
1
C1q
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 223
Para o tanque 2 escrevemos :
C2dpC2
dt= qC2 (equacoes dos Nos)
= qR1 − qR2 (equacoes dos atrito)
=1
R1pR1 −
1
R2pR2 (equacoes das Malhas)
=1
R1(pC1 − pC2 − pI)−
1
R2pC2 (equacao da inertancia)
=1
R1
(
pC1 − pC2 − IFdqI
dt
)
− 1
R2pC2
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 224
Introduzindo as variaveis xi :
C2x2 =1
R1
(
x1 − x2 − x3dqI
dt
)
− 1
R2x2
Portanto :
x2 =b2
m2x1 −
b2
m2x2 −
1
m2x4 +
1
m2F
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 225
Para a mola 1 escrevemos :
dFk1
dt= k1 vk1 (equacoes das Malhas)
= k1 vm1
Introduzindo as variaveis xi :
x3 = k1 x1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 226
Para a mola 2 escrevemos :
dFk2
dt= k2 vk2 (equacoes das Malhas)
= k2
(− vm1 + vm2
)
Introduzindo as variaveis xi :
x4 = −k2 x1 + k2 x2
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 227
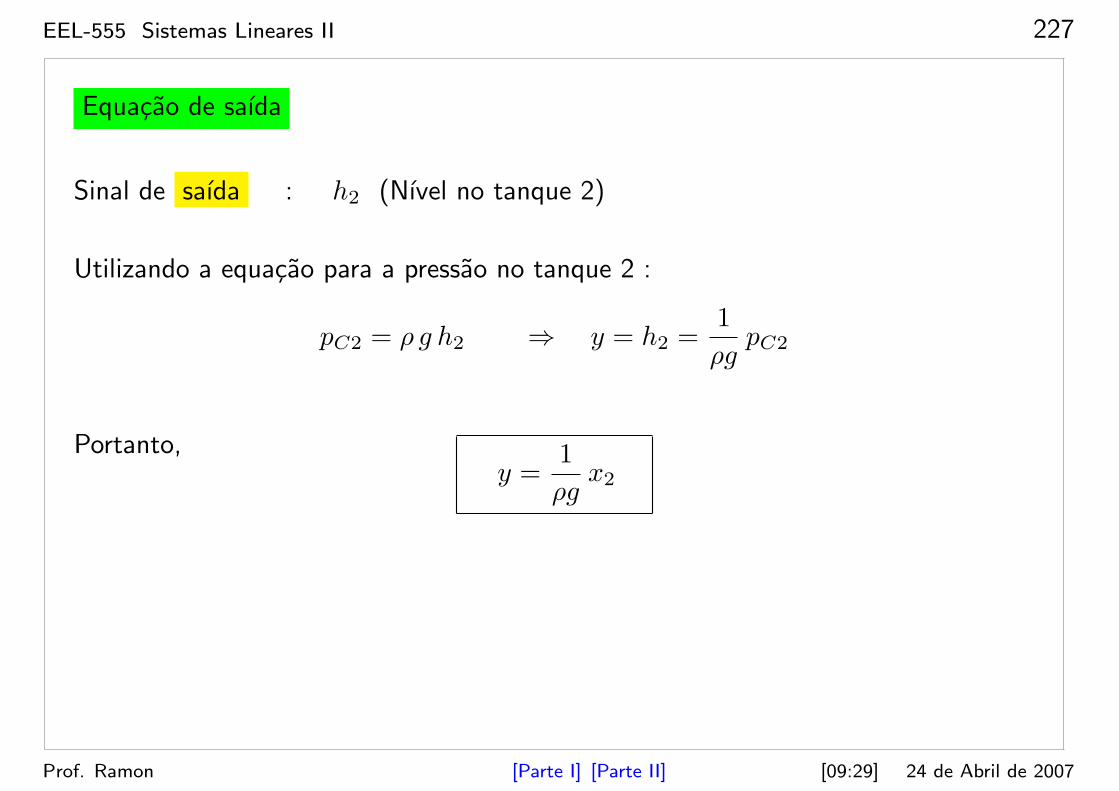
Equacao de saıda
Sinal de saıda : h2 (Nıvel no tanque 2)
Utilizando a equacao para a pressao no tanque 2 :
pC2 = ρ g h2 ⇒ y = h2 =1
ρgpC2
Portanto,y =
1
ρgx2
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 228
Resultado :
x1 = −b1 + b2
m1x1 +
b2
m1x2 −
1
m1x3 +
1
m1x4
x2 =b2
m2x1 −
b2
m2x2 −
1
m2x4 +
1
m2F
x3 = k1 x1
x4 = −k2 x1 + k2 x2
y =1
k1x3
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 229
Usando notacao matricial :
x =
− b1+b2m1
b2m1
− 1m1
1m1
b2m2
− b2m2
0 − 1m2
k1 0 0 0
−k2 k2 0 0
x +
0
1m2
0
0
F
y =[
0 0 1k1
0]
x
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 230
Modelos de sistemas termicos
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 231
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 232
Elementos de 2 acessos
Tipos :
• Transformadores
• Inversores
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 233
Quadro de emprego de elementos de multiplos acessos
Mecanicotranslacao
(Alavanca)
Mecanicorotacao
(Redutor)(Bombas)
(Turbinas)Fluido
( )
Eletrico
(Transformadores)
(Solenoides)
(Motores)
(Geradores)
(Motores) (Embolos)
(Eletrohidrodinamica)
(Magnetohidrodinamica)
(Cremalheiras)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 234
Transformadorv1 v2
T
[
v1
i1
]
=
[
T 0
0 −1/T
][
v2
i2
]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 235
Inversoresv1 i2
G
[
v1
i1
]
=
[
0 G
−1/G 0
][
v2
i2
]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 236
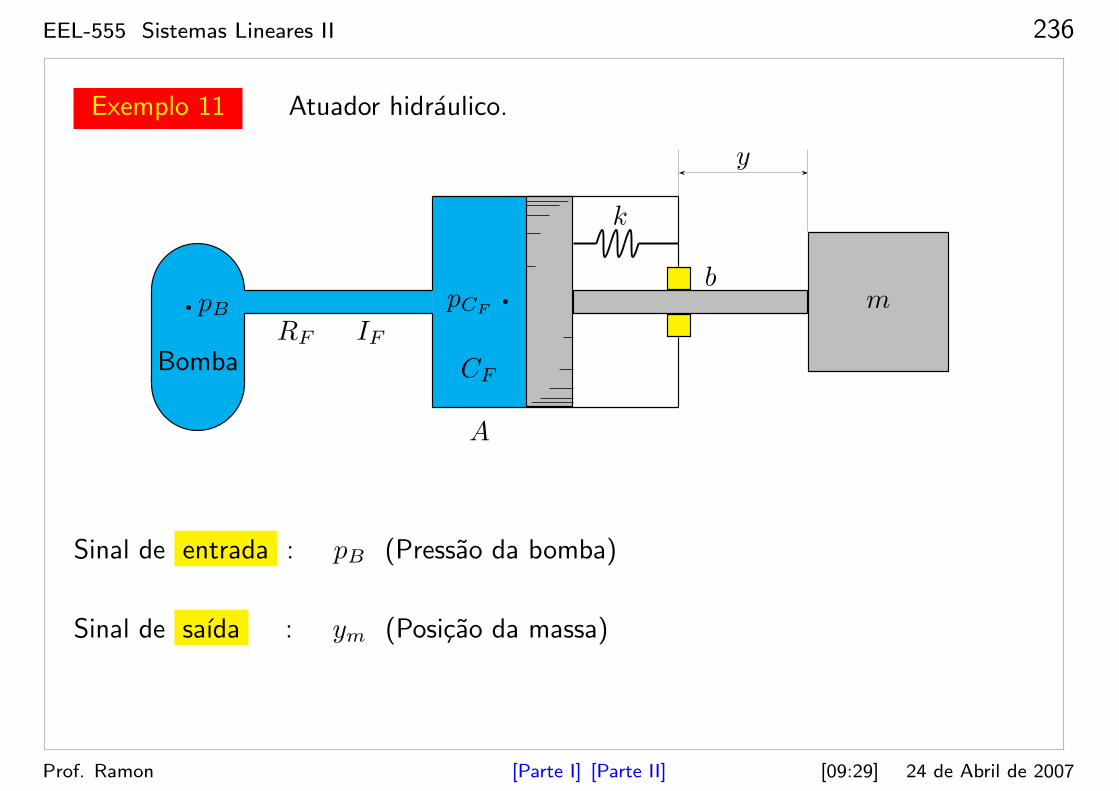
Exemplo 11 Atuador hidraulico.
BombaRF IF
CF
A
pCF
b
k
m
y
pB
Sinal de entrada : pB (Pressao da bomba)
Sinal de saıda : ym (Posicao da massa)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 237
Ordem do sistema = Numero de elementos armazenadores de energia
independentes.
Neste exemplo : n = 4
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 238
Grafo
IF
pB
pB
CF
pCRF
+
−
f2
G m b k
vmq1
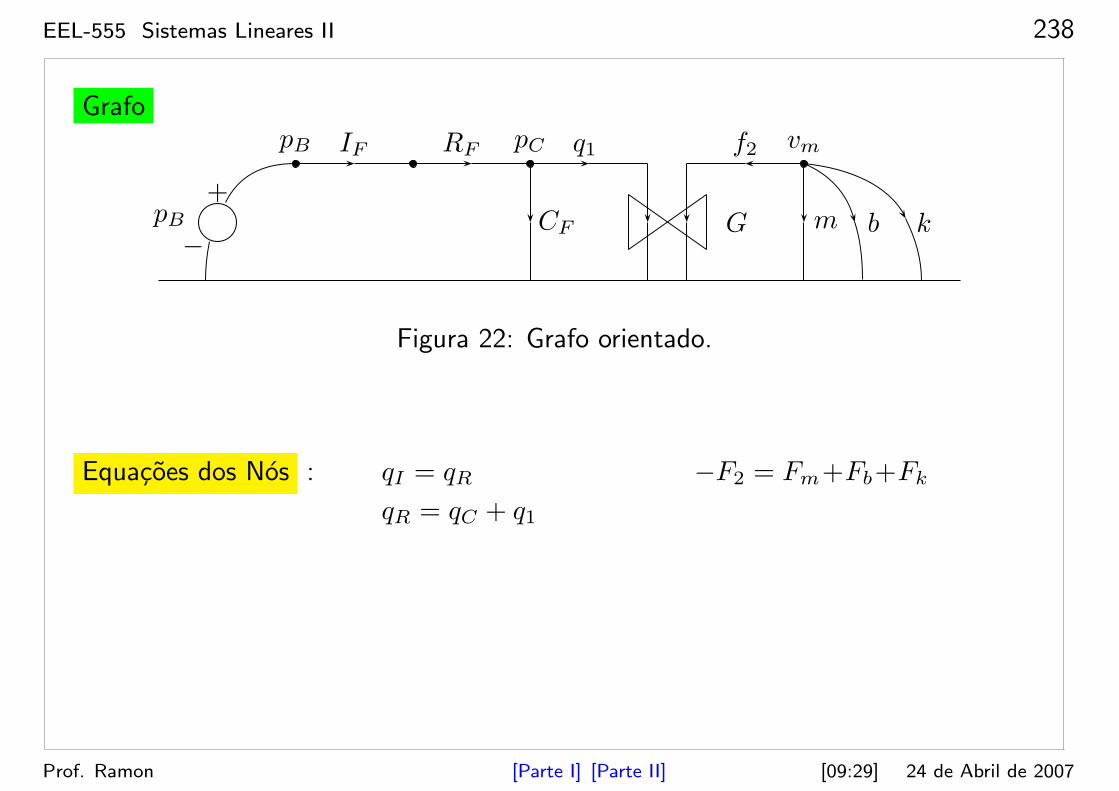
Figura 22: Grafo orientado.
Equacoes dos Nos : qI = qR
qR = qC + q1
−F2 = Fm+Fb+Fk
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 239
Grafo
IF
pB
pB
CF
pCRF
+
−
f2
G m b k
vmq1
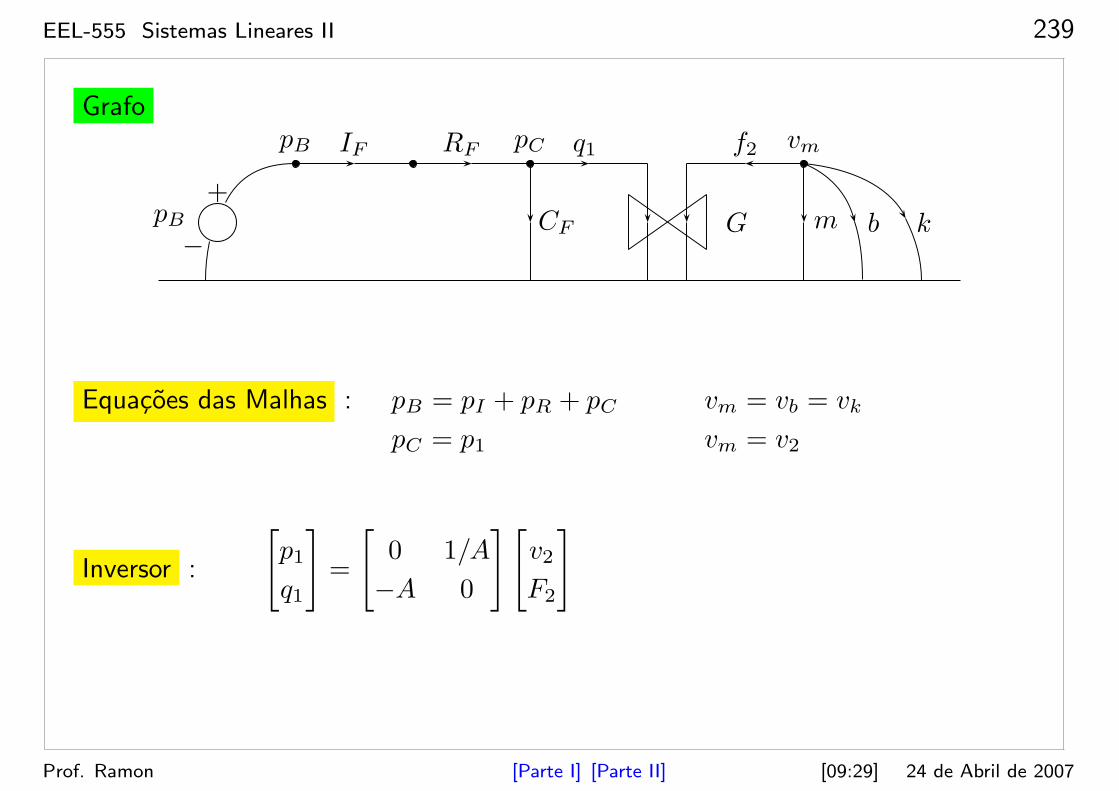
Equacoes das Malhas : pB = pI + pR + pC
pC = p1
vm = vb = vk
vm = v2
Inversor :
[
p1
q1
]
=
[
0 1/A
−A 0
][
v2
F2
]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 240
Obtencao da equacao de estado
Passo 1 : Escolher as variaveis de estado
x1 = pC (Pressao no embolo)
x2 = qI (Vazao na inertancia)
x3 = vm (Velocidade da massa)
x4 = Fk (Forca na mola)
Passo 2 : Escrever as equacoes dos elementos armazenadores de energia
em funcao dos estados.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 241
Obtencao da equacao de estado
Fica como exercıcio...
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

UFRJ Universidade Federal do Rio de Janeiro
EE Escola de Engenharia
DEL Departamento de Eletronica
EEL-555 Sistemas Lineares II
Capıtulo # 5
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 243
5 Linearizacao
Conteudo
1. Introducao
2. Exemplos
3. Exercıcios
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 244
5.1 Introducao
Problema. A grande maioria dos sistemas/processos sao nao lineares .
⋆ Os sistemas NL sao de difıcil analise.
⋆ Existem muitas ferramentas (eficientes) para a analise de sistemas lineares.
Uma solucao : Linearizacao .
⋆ E o processo de se encontrar uma aproximacao linear para o comporta-
mento do sistema NL.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 245
Resultado chave :
Lyapunov mostrou (∼ 1890) que
se um modelo linear e valido e estavel nas vizinhancas de um ponto de equilıbrio,
entao ∃ uma regiao contendo esse equilıbrio em que o sistema NL e estavel.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
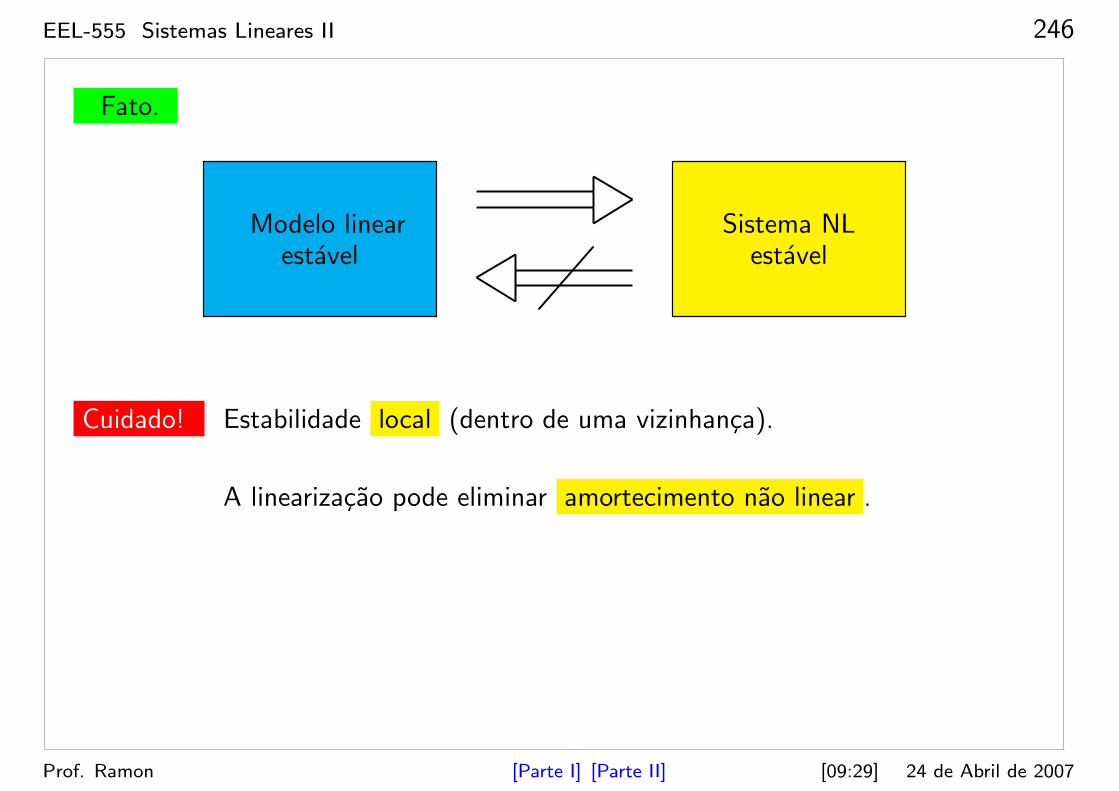
EEL-555 Sistemas Lineares II 246
Fato.
Modelo linearestavel
Sistema NLestavel
Cuidado! Estabilidade local (dentro de uma vizinhanca).
A linearizacao pode eliminar amortecimento nao linear .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 247
Uma representacao geral para sistemas NL :
x = f(x, u)
Uma classe de sistema NLs de particular interesse e caracterizada pelo seguinte
modelo :
x = f(x) + g(x)u
⋆ Essa classe e dita affine em u .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 248
Definicao. Um sistema e dito autonomo se f(·) nao depende explicitamente
de t, i.e., se a dinamica do sistema e dada por
x = f(x)
Em outras palavras, u ≡ 0 .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 249
Definicao. Um estado x e dito equilıbrio (ou ponto de equilıbrio)
do sistema sse
f(x) = 0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 250
Exemplo 1 Pendulo.
m
l
θ
EDO : Jθ + mlg sin θ = 0
Estado :
x1 = θ
x2 = θ
Eq. de estado :
x1 = x2
x2 = − 1
Jmlg sin(x1)
Equilıbrio :
x2 = 0
sin(x1) = 0 ⇒ x1 = ±nπ
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 251
Metodo para linearizacao : Expansao em serie de Taylor em torno de x.
x = f(x) = f(x) +∂f
∂x
∣∣∣x=x
(x− x) +1
2!
∂2f
∂x2
∣∣∣x=x
(x− x)2 + · · ·
Truncando a expressao,
x = f(x) ∼= ∂f
∂x
∣∣∣x=x
(x− x)
Nota. Lembre-se que f(x) = 0 !
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 252
Definindo-se
v = x− x ⇒ v = x
A =∂f
∂x
∣∣∣x=x
podemos escrever a equacao linearizada como
v = Av
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 253
Resultado mais geral
Dado o sistema NL : x = f(x, u)
Modelo linearizado : v = Av + Bw
onde
v = x− xA =
∂f
∂x
∣∣∣x=x,u=u
w = u− uB =
∂f
∂u
∣∣∣x=x,u=u
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 254
Exemplo 2 Pendulo.
m
l
θ
EDO : Jθ + mlg sin θ = 0
Eq. de estado :
x1 = x2
x2 = − 1J mlg sin(x1)
Linearizacao em torno do ponto de equilıbrio x = 0 :
A =
[∂f1
x1
∂f1
x2∂f2
x1
∂f2
x2
]
x=0
=
[
0 1
−mlgJ 0
]
Portanto,
v =
[
0 1
−mlgJ 0
]
v
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 255
Exemplo 3 Pendulo com atrito.
EDO : Jθ + mlg sin θ + bθ = 0
Eq. de estado :
x1 = x2
x2 = −mlgJ sin(x1)− b
J x2 = −c1 sin(x1)− c2x2
Linearizacao em torno do ponto de equilıbrio x = 0 :
v =
[∂f1
x1
∂f1
x2∂f2
x1
∂f2
x2
]
x=0
v =
[
0 1
−c1 −c2
]
v
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
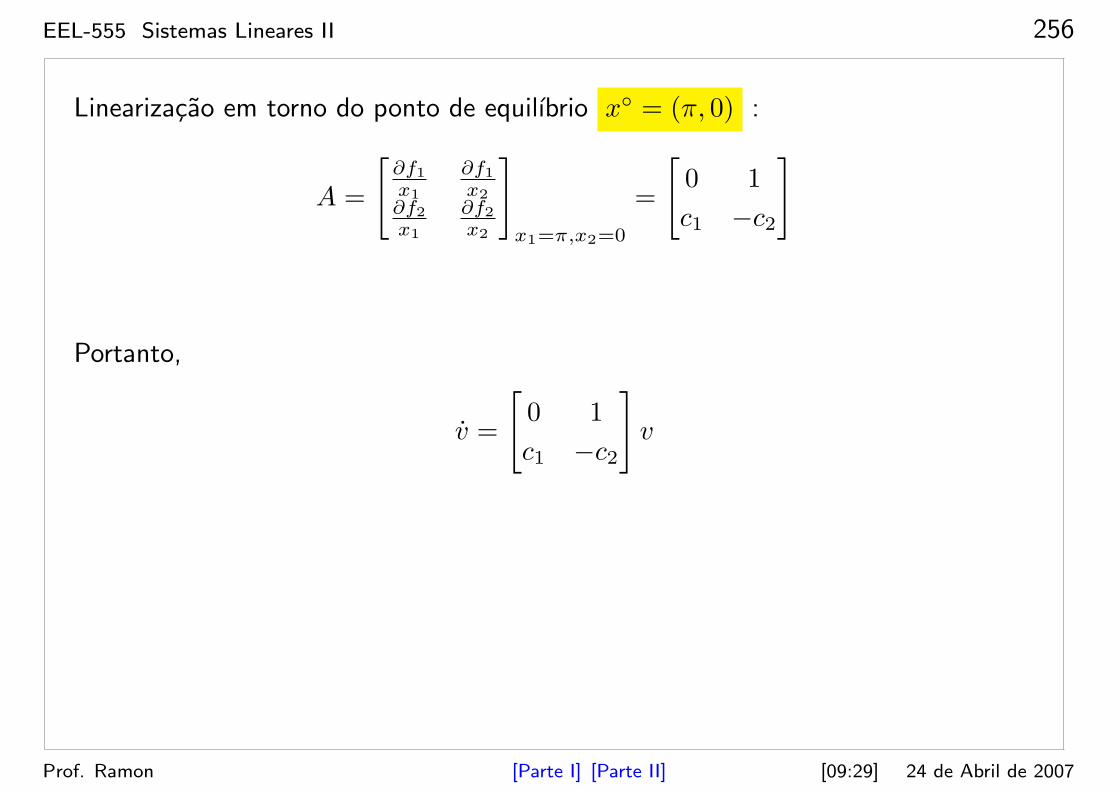
EEL-555 Sistemas Lineares II 256
Linearizacao em torno do ponto de equilıbrio x = (π, 0) :
A =
[∂f1
x1
∂f1
x2∂f2
x1
∂f2
x2
]
x1=π,x2=0
=
[
0 1
c1 −c2
]
Portanto,
v =
[
0 1
c1 −c2
]
v
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 257
Exercıcio. Linearizar o sistema massa-mola nao linear abaixo
mx + k1x + k2x3 = 0
Ref.: (Slotine & Li 1991)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

UFRJ Universidade Federal do Rio de Janeiro
EE Escola de Engenharia
DEL Departamento de Eletronica
EEL-555 Sistemas Lineares II
Capıtulo # 6
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 259
6 Solucao da equacao de estado
Conteudo
1. Caso escalar
• Solucao homogenea
• Solucao geral
2. Caso com coeficientes matriciais
• Solucao homogenea
• Solucao geral
3. Exemplos
4. Exercıcios
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 260
6.1 Caso escalar
Vamos iniciar recordando o metodo de solucao de uma EDO escalar.
Problema : Resolver a equacao
x(t) = ax(t) + bu(t)
onde a e b ∈ R.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 261
Solucao homogenea
Para u(t) ≡ 0 , tem-se
x(t) =dx
dt= ax(t)
⋆ A variavel dependente x(t) e a variavel independente t podem ser
separadas :
dx
x= a dt
⋆ A forma encontrada acima e dita integravel .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 262
Podemos integrar ambos os lados da equacao para obter
∫ x(t)
x(t0)
dξ
ξ=
∫ t
t0
a dτ
Apos integracao :
lnx(t)− lnx(t0) = a(t− t0)
ou melhor
lnx(t)
x(t0)= a(t− t0)
Usando a relacao eln x = x, explicitamos a solucao homogenea
x(t) = ea(t−t0)x(t0)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 263
Solucao nao homogenea
Para u(t) 6≡ 0,
x(t) = ax(t) + bu(t)
⋆ Para aplicar o mesmo metodo de solucao anterior, e necessario reduzir a
equacao a uma forma integravel.
⋆ Na equacao acima as variaveis x(t) e t nao sao facilmente separadas.
⋆ Procedimento mais elaborado ...
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
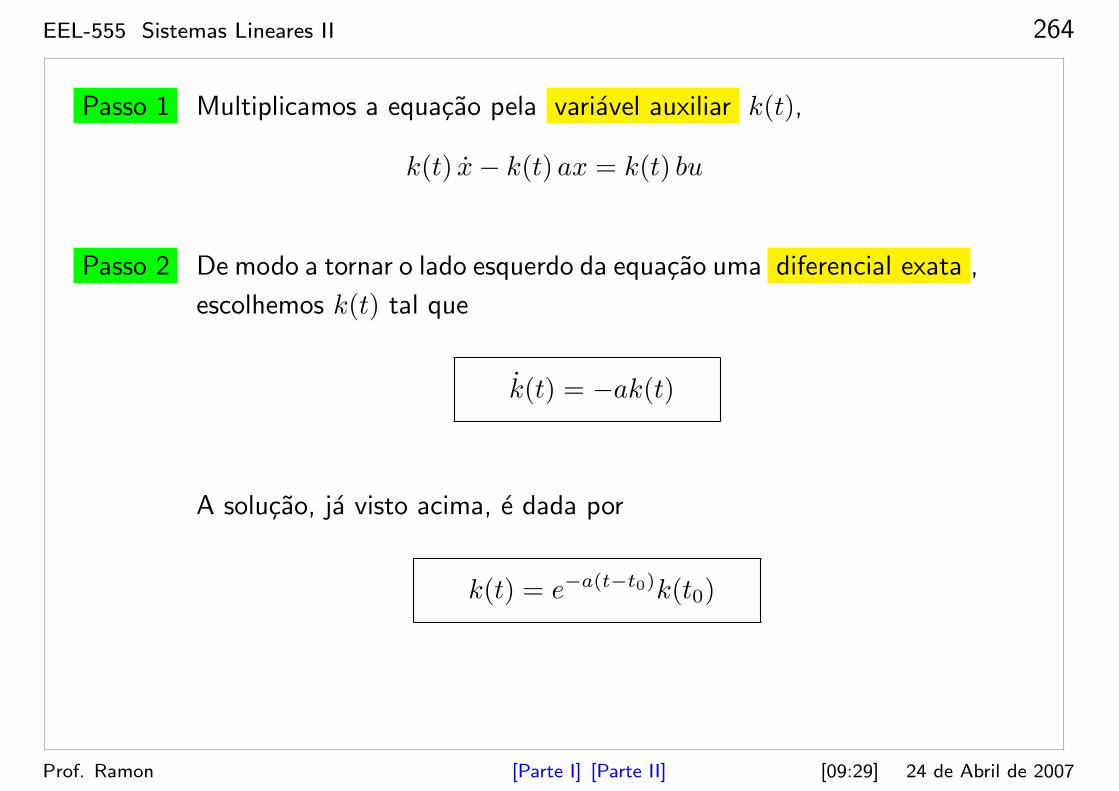
EEL-555 Sistemas Lineares II 264
Passo 1 Multiplicamos a equacao pela variavel auxiliar k(t),
k(t) x− k(t) ax = k(t) bu
Passo 2 De modo a tornar o lado esquerdo da equacao uma diferencial exata ,
escolhemos k(t) tal que
k(t) = −ak(t)
A solucao, ja visto acima, e dada por
k(t) = e−a(t−t0)k(t0)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 265
Desse modo obtemos
kx + kx = k bu
a qual pode ser reescrita na forma
d
dt[kx] = k bu
Separando as variaveis,
d[kx] = k bu dt
⋆ Esta e a forma integravel procurada.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 266
Integrando ambos os lados,
∫ k(t)x(t)
k(t0)x(t0)
dξ =
∫ t
t0
k(τ) bu(τ) dτ
Resultado:
k(t)x(t)− k(t0)x(t0) =
∫ t
t0
k(τ) bu(τ) dτ
Explicitando x(t), tem-se
x(t) =k(t0)
k(t)x(t0) +
∫ t
t0
k(τ)
k(t)bu(τ) dτ
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 267
Como
k(t) = e−a(t−t0)k(t0)
tem-se que
k(t0)
k(t)=
k(t0)
e−a(t−t0)k(t0)= ea(t−t0)
k(τ)
k(t)=
e−a(τ−t0)k(t0)
e−a(t−t0)k(t0)= e−a(τ−t0−t+t0) = ea(t−τ)
Substituindo as expressoes acima, obtem-se a solucao geral
x(t) = ea(t−t0)x(t0) +
∫ t
t0
ea(t−τ) bu(τ) dτ
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 268
6.2 Caso com coeficientes matriciais
Para simplificar a apresentacao desse caso, vamos considerar inicialmente o
seguinte exemplo com apenas 2 EDO’s
x1 = 4x1 − 5x2 , x1(0) = 8
x2 = 2x1 − 3x2 , x2(0) = 5
Fazendo
x =
[
x1
x2
]
, A =
[
4 −5
2 −3
]
e x0 =
[
8
5
]
o sistema de equacoes acima pode ser reescrito na forma matricial
x = Ax , x(0) = x0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 269
Solucao homogenea
⋆ A solucao do caso escalar x = ax e uma funcao exponencial x(t) = eatx0.
Hipotese: A equacao x = Ax tem solucao com a mesma forma exponencial
x1(t) = eλty
x2(t) = eλtz
ou melhor
x(t) = eλtv onde v =
[
y
z
]
Proximo passo : Encontrar valores de λ, y e z tais que a equacao x = Ax seja
satisfeita.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
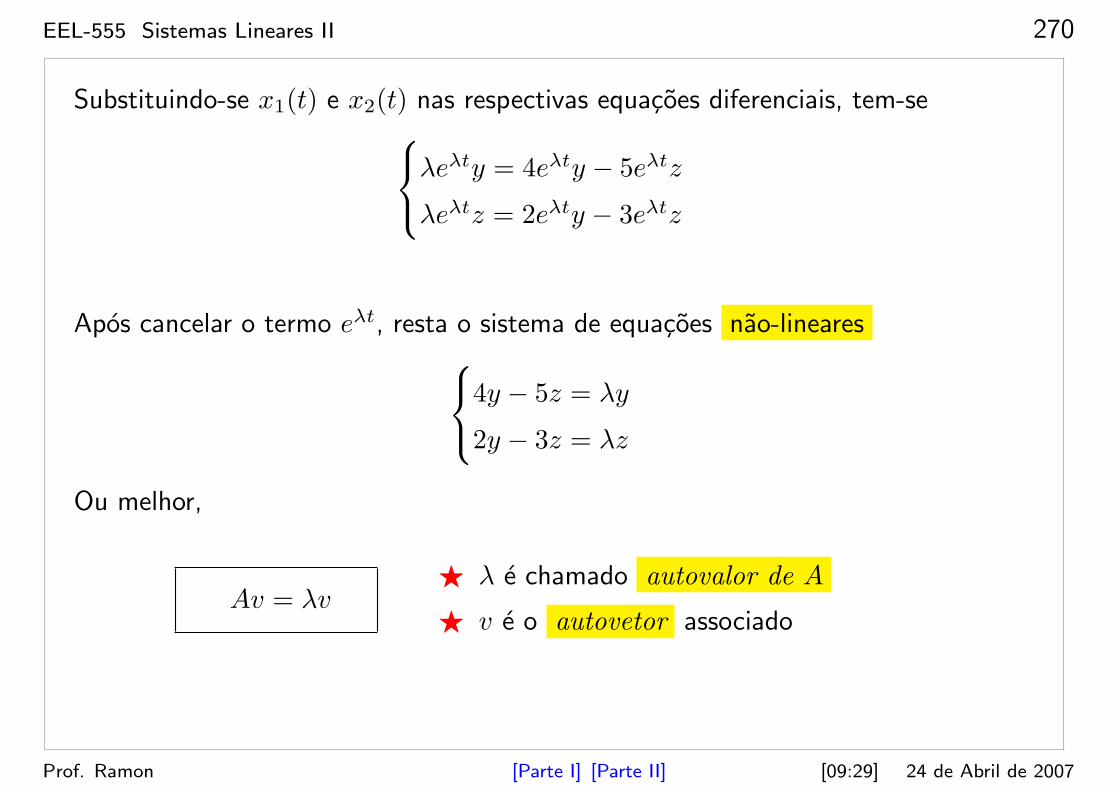
EEL-555 Sistemas Lineares II 270
Substituindo-se x1(t) e x2(t) nas respectivas equacoes diferenciais, tem-se
λeλty = 4eλty − 5eλtz
λeλtz = 2eλty − 3eλtz
Apos cancelar o termo eλt, resta o sistema de equacoes nao-lineares
4y − 5z = λy
2y − 3z = λz
Ou melhor,
Av = λv⋆ λ e chamado autovalor de A
⋆ v e o autovetor associado
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 271
Podemos reescrever a equacao anterior como
(A− λI)v = 0
Importante :
⋆ v pertence ao subespaco nulo de (A− λI) (i.e., v ∈ N (A− λI) ).
⋆ Estamos interessados somente em solucoes nao triviais v 6= 0.
⋆ λ e tal que (A− λI) tem um espaco nulo.
⋆ A solucao λ procurada e tal que (A− λI) seja singular .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 272
Fato. λ e autovalor de A ⇔ det(A− λI) = 0 .
⋆ p(λ) = det(A− λI) e denominado polinomio caracterıstico de A.
⋆ A equacao p(λ) = 0 e denominada equacao caracterıstica de A.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 273
⋆ Os autovalores sao uma das caracterısticas mais importantes dos sistemas
dinamicos.
Propriedades:
1.
n∑
i=1
λi =
n∑
i=1
aii = traco(A),
2.n∏
i=1
λi = det(A).
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 274
Fato. A cada autovalor λi distinto corresponde um autovetor vi tal que
Avi = λivi
No caso da matriz A do exemplo em questao ( 2× 2 ) :
Av1 = λ1v1
Av2 = λ2v2
Estas equacoes podem ser reescritas na forma matricial
A[
v1 v2
]
=[
v1 v2
][
λ1 0
0 λ2
]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 275
Definindo-se a matriz de autovetores
V =[
v1 v2
]
e a matriz diagonal dos autovalores
Λ =
[
λ1 0
0 λ2
]
obtemos
AV = V Λ ⇒ A = V ΛV −1 Λ = V −1AV
⋆ A transformacao linear que diagonaliza a matriz A e dada pela matriz V .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 276
Retornando ao exemplo
A =
[
4 −5
2 −3
]
A− λI =
[
4− λ −5
2 −3− λ
]
p(λ) = det(A− λI) = λ2 − λ− 2
p(λ) = 0 ⇒
λ1 = −1
λ2 = 2
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 277
⋆ Os autovalores sao distintos , portanto podemos determinar
2 autovetores l.i. (linearmente independentes).
Para λ1 = −1 :
(A− λ1I)v1 =
[
5 −5
2 −2
]
v1 =
[
0
0
]
⇒ v1 =
[
1
1
]
Para λ2 = 2 :
(A− λ2I)v2 =
[
2 −5
2 −5
]
v2 =
[
0
0
]
⇒ v2 =
[
5
2
]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 278
Importante:
⋆ Os autovetores nao sao unicos .
⋆ Qualquer valor v ∈ N (A−λI) e um autovetor de A associado ao autovalor
λ.
⋆ E usual escolher autovetores normalizados , por exemplo, com um dos ele-
mentos igual a 1.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 279
v1
v2
1 5
1
2
2 3 4
Figura 23: Interpretacao geometrica de autovetor.
⋆ Um autovetor define uma reta passando pela origem ( subespaco ).
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
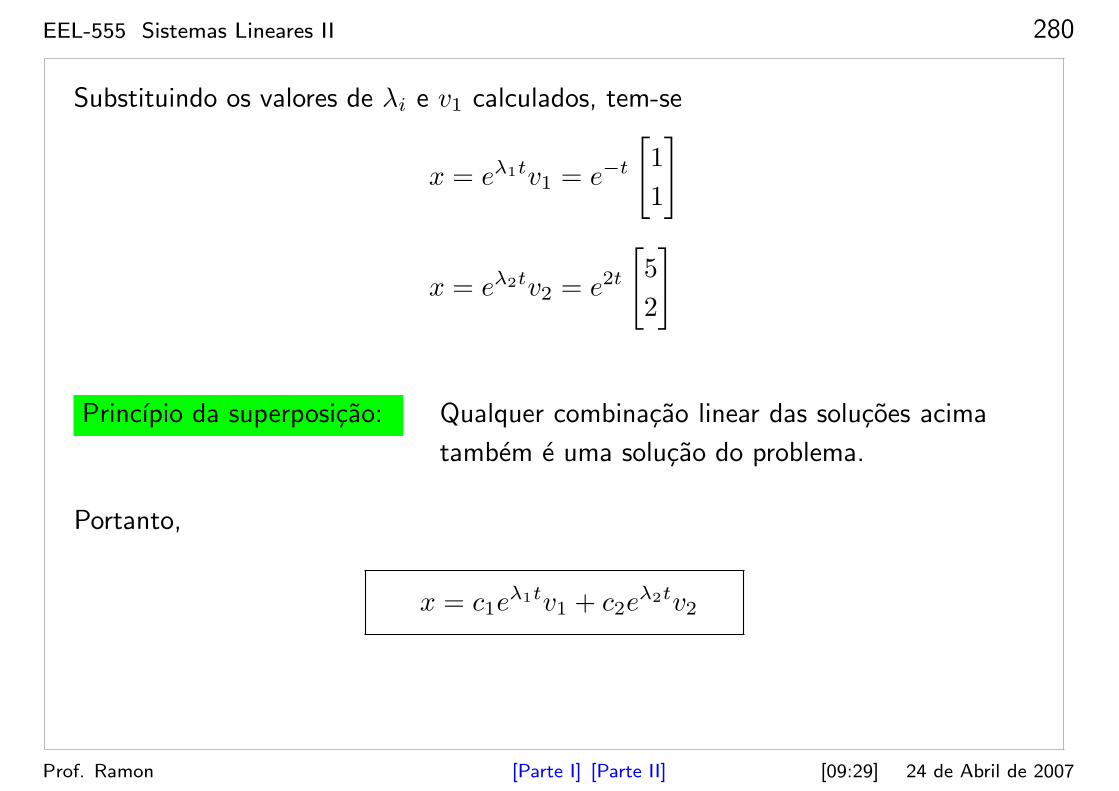
EEL-555 Sistemas Lineares II 280
Substituindo os valores de λi e v1 calculados, tem-se
x = eλ1tv1 = e−t
[
1
1
]
x = eλ2tv2 = e2t
[
5
2
]
Princıpio da superposicao: Qualquer combinacao linear das solucoes acima
tambem e uma solucao do problema.
Portanto,
x = c1eλ1tv1 + c2e
λ2tv2
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 281
As constantes c1 e c2 sao determinadas a partir das condicoes iniciais .
Fazendo t = 0 nas equacoes,
x(0) = c1v1 + c2v2 = x0 ⇒[
1 5
1 2
][
c1
c2
]
=
[
8
5
]
Solucao do sistema de equacoes lineares acima :[
c1
c2
]
=
[
3
1
]
⋆ Note que x(0) = V
[
c1
c2
]
= x0 ⇒ c = V −1x0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 282
Portanto, a solucao homogenea da equacao diferencial dada e
x = 3e−t
[
1
1
]
+ e2t
[
5
2
]
ou ainda
x1(t) = 3e−t + 5e2t
x2(t) = 3e−t + 2e2t
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 283
Proximo passo : Utilizar notacao matricial .
⋆ Notacao mais compacta para a solucao.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 284
Observamos que a solucao homogenea
x = c1eλ1tv1 + c2e
λ2tv2
pode ser escrita como
x =[
v1 v2
][
eλ1t 0
0 eλ2t
][
c1
c2
]
Relacao fundamental : eΛt :=
[
eλ1t 0
0 eλ2t
]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 285
Portanto, a solucao homogenea pode ser expressa como
x = V eΛtc
onde V =[
v1 v2
]
e c =[
c1 c2
]T
.
⋆ c e tal que x(0) = V c = x0 ⇒ c = V −1x0
Resultado: a solucao homogenea de x = Ax e
x(t) = V eΛtV −1x0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 286
Vamos agora introduzir formalmente a definicao de exponencial matricial .
Definicao. (Exponencial matricial)
eAt = I + At +(At)2
2!+
(At)3
3!+ · · ·
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 287
Propriedades :
1. eAt tem inversa ∀t
2. eAseAt = eA(s+t)
3. eAte−At = I
4.d
dteAt = AeAt
5. eAteBt = e(A+B)t, so se AB = BA
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 288
Usando a definicao e as propriedades acima, tambem podemos verificar que:
1. Relacao fundamental
eΛt =
1 + λ1t +
(λ1t)2
2!+ · · · 0
0 1 + λ2t +(λ2t)2
2!+ · · ·
=
[
eλ1t 0
0 eλ2t
]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 289
2. Solucao homogenea
x(t) = eAtx0
e solucao da equacao x = Ax.
Prova. Pela propriedade (4),
x = AeAtx0 = Ax
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
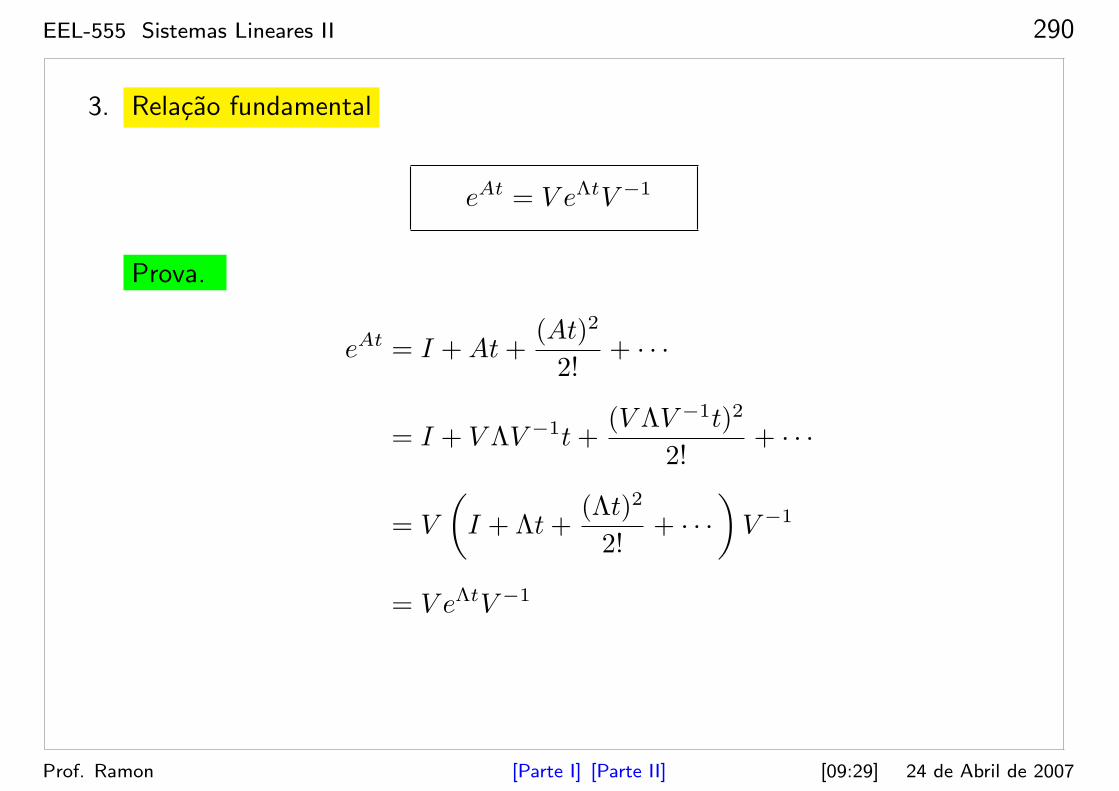
EEL-555 Sistemas Lineares II 290
3. Relacao fundamental
eAt = V eΛtV −1
Prova.
eAt = I + At +(At)2
2!+ · · ·
= I + V ΛV −1t +(V ΛV −1t)2
2!+ · · ·
= V
(
I + Λt +(Λt)2
2!+ · · ·
)
V −1
= V eΛtV −1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 291
4. Solucao homogenea
A solucao do problema
x = Ax , x(0) = x0
e dada por
x(t) = V eΛtV −1x0 = eAtx0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 292
Solucao nao homogenea
A solucao geral do problema : x = Ax + Bu , x(t0) = x0
e dada pela formula : x(t) = eA(t−t0)x0 +
∫ t
t0
eA(t−τ)Bu(τ)dτ
⋆ O metodo para se chegar a essa solucao e semelhante ao que foi empregado
no caso escalar.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
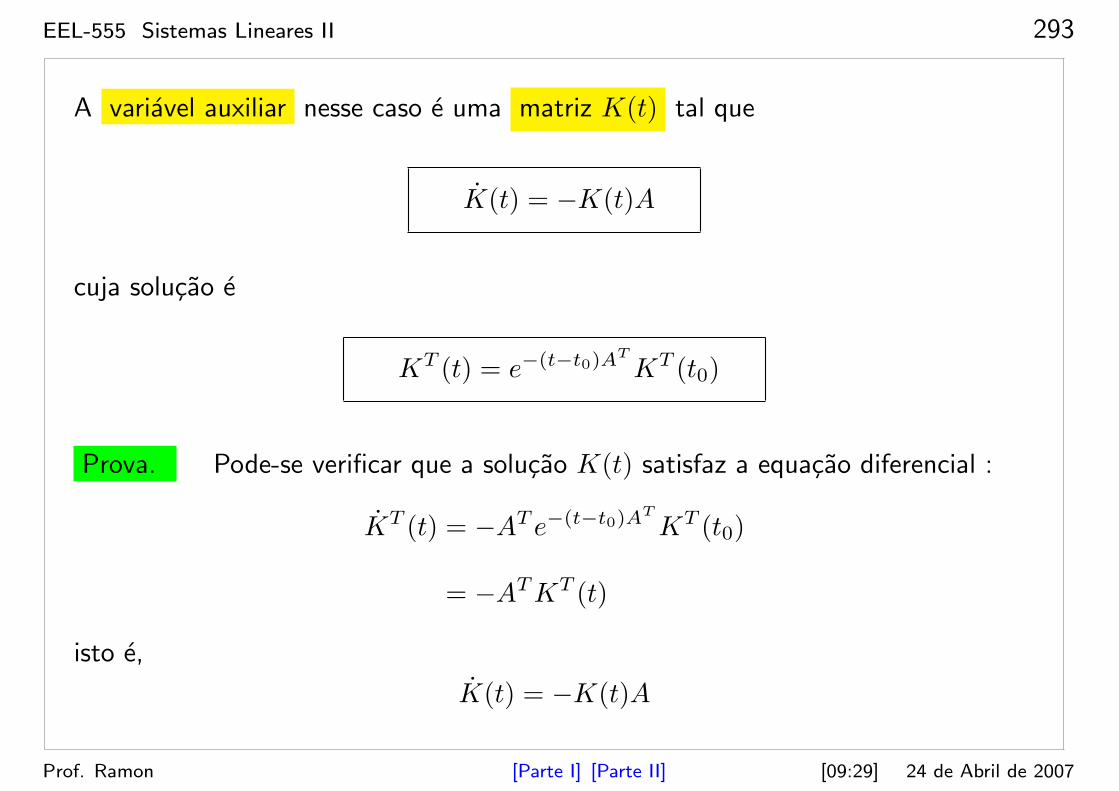
EEL-555 Sistemas Lineares II 293
A variavel auxiliar nesse caso e uma matriz K(t) tal que
K(t) = −K(t)A
cuja solucao e
KT (t) = e−(t−t0)AT
KT (t0)
Prova. Pode-se verificar que a solucao K(t) satisfaz a equacao diferencial :
KT (t) = −AT e−(t−t0)AT
KT (t0)
= −AT KT (t)
isto e,
K(t) = −K(t)A
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 294
Importante:
EDO : x = Ax + Bu
⋆ A escolha de K(t) anterior permite reduzir a EDO a uma forma integravel .
⋆ E usual na literatura, expressar a solucao da EDO em termos da
matriz de transicao de estado
Φ(t) = eAt
isto e : x(t) = Φ(t− t0)x0 +
∫ t
t0
Φ(t− τ)Bu(τ)dτ
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 295
Esta na hora de fazer uma pequena revisao de ...
Algebra Linear : Bloco de Jordan
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 296
6.3 Exemplos
Vamos considerar 4 casos :
• Autovalores reais distintos
• Autovalores reais repetidos
• Autovalores imaginarios
• Autovalores complexos
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 297
Exemplo 1 Calcular eAt para a matriz
A =
[
1 2
0 −1
]
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 298
Exemplo 2 Calcular eAt para a matriz
A =
[
1 1
0 1
]
Basta aplicar a definicao
eAt = I + At +(At)2
2!+ · · ·
=
[
1 0
0 1
]
+
[
t t
0 t
]
+1
2
[
t2 2t2
0 t2
]
+ · · ·
=
[
1 + t + 12 t2 + · · · t + t2 + · · ·0 1 + t + 1
2 t2 + · · ·
]
=
[
et tet
0 et
]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
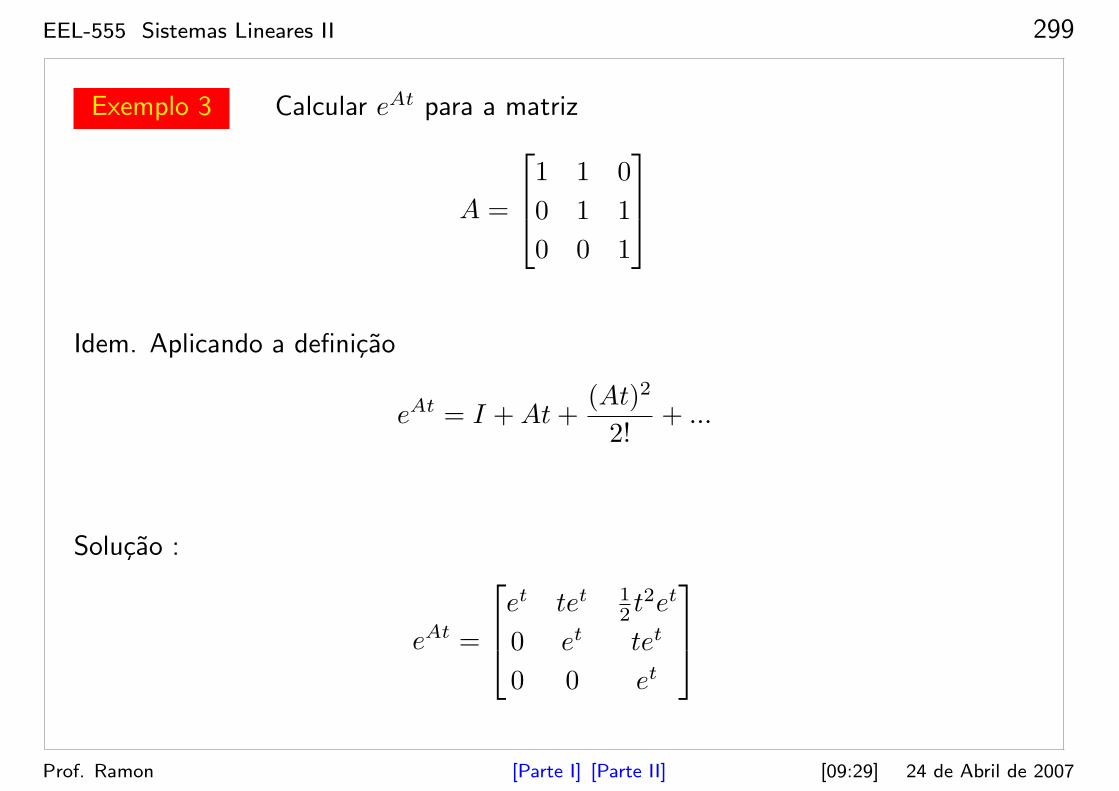
EEL-555 Sistemas Lineares II 299
Exemplo 3 Calcular eAt para a matriz
A =
1 1 0
0 1 1
0 0 1
Idem. Aplicando a definicao
eAt = I + At +(At)2
2!+ ...
Solucao :
eAt =
et tet 12 t2et
0 et tet
0 0 et
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 300
Exemplo 4 Calcular eAt para a matriz
A =
[
0 1
−1 0
]
(Oscilador harmonico)
Determinacao dos autovalores :
det(A− λI
)= det
[
−λ 1
−1 −λ
]
= λ2 + 1
Portanto : λ = ±i
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
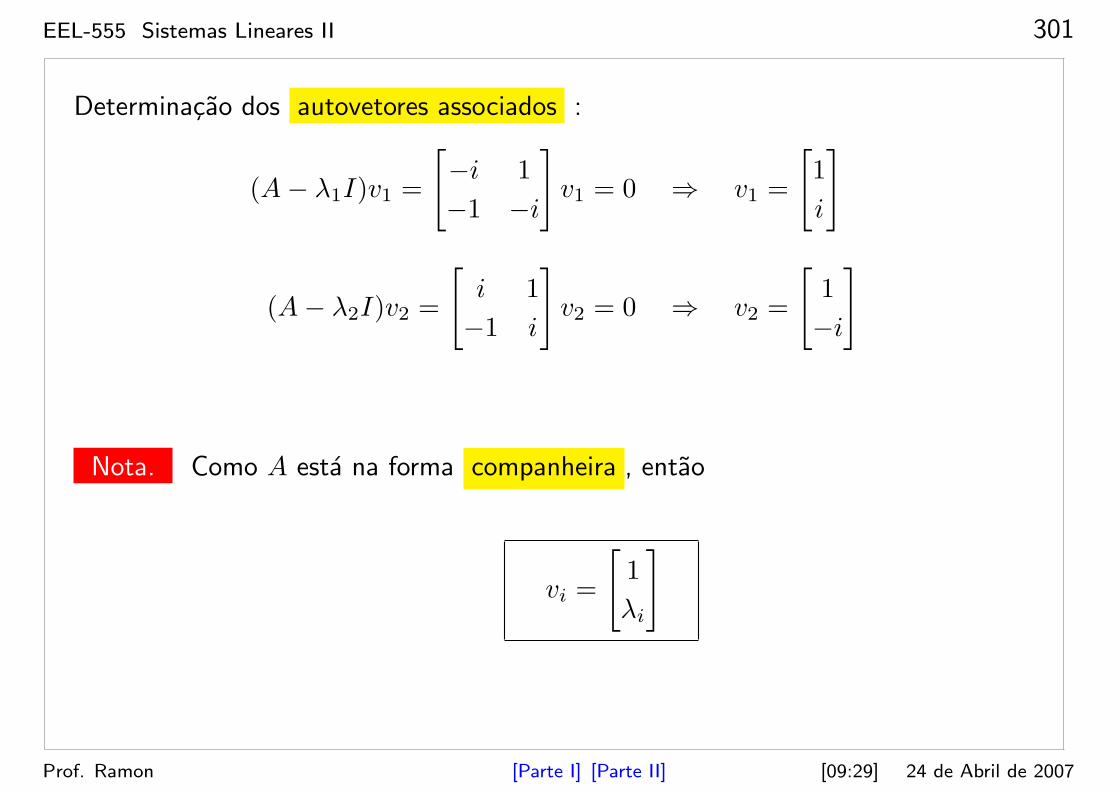
EEL-555 Sistemas Lineares II 301
Determinacao dos autovetores associados :
(A− λ1I)v1 =
[
−i 1
−1 −i
]
v1 = 0 ⇒ v1 =
[
1
i
]
(A− λ2I)v2 =
[
i 1
−1 i
]
v2 = 0 ⇒ v2 =
[
1
−i
]
Nota. Como A esta na forma companheira , entao
vi =
[
1
λi
]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 302
Portanto,
V =[
v1 v2
]
=
[
1 1
i −i
]
eΛt =
[
eit 0
0 e−it
]
=
[
cos t + i sin t 0
0 cos t− i sin t
]
Resultado :
eAt = V eΛtV −1
=
[
1 1
i −i
][
cos t + i sin t 0
0 cos t− i sin t
]
1
2
[
1 −i
1 i
]
=
[
cos t sin t
− sin t cos t
]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 303
⋆ Note que :
A =
[
0 1
−1 0
]
eAt =
[
cos t sin t
− sin t cos t
]
= I cos t + A sin t (!!)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 304
Verificacao
Λ =
[
i 0
0 −i
]
eΛt =
[
eit 0
0 e−it
]
=
[
cos t + i sin t 0
0 cos t− i sin t
]
= I cos t + Λ sin t
eAt = V eΛtV −1
= V(
I cos t + Λ sin t)V −1
= I cos t + A sin t
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 305
Conclusao
eAt = I cos t + A sin t
⋆ Esta e a forma cartesiana com coeficientes matriciais !!
⋆ Nao e necessario calcular V !!
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 306
Exercıcio. Calcular eAt para a matriz
A =
0 1 0 0
−1 0 0 0
0 0 0 −1
0 0 1 0
.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
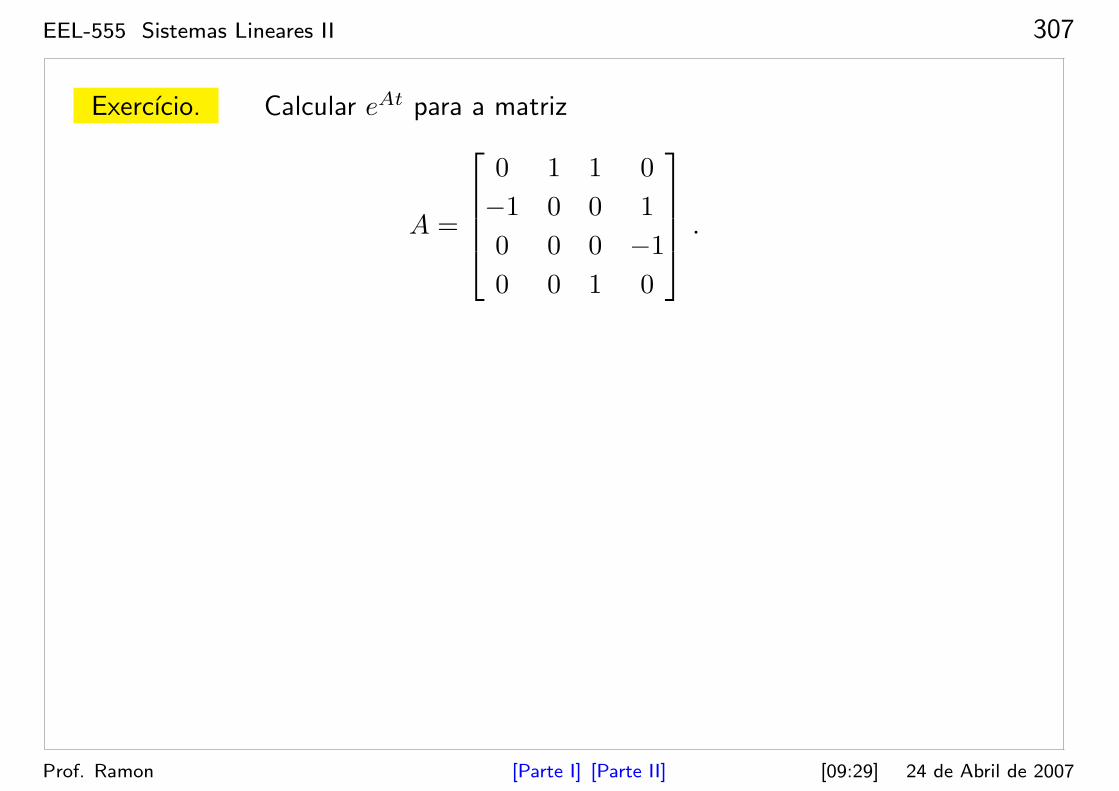
EEL-555 Sistemas Lineares II 307
Exercıcio. Calcular eAt para a matriz
A =
0 1 1 0
−1 0 0 1
0 0 0 −1
0 0 1 0
.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 308
Exercıcio. Calcular eAt para a matriz
A =
0 1 0 1
−1 0 0 0
0 0 0 −1
0 0 1 0
.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 309
Exercıcio. Calcular eAt para a matriz
A =
[
0 ω
−ω 0
]
.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 310
Exemplo 5 Calcular eAt para a matriz
A =
[
1 1
−1 1
]
(Oscilador nao amortecido)
Autovalores : λ = 1± i
Portanto :
Λ =
[
1 + i 0
0 1− i
]
eΛt =
[
e(1+i)t 0
0 e(1−i)t
]
= et
(
I cos t +
[
i 0
0 −i
]
sin t
)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 311
Porem :
[
i 0
0 −i
]
= Λ− I
Portanto :
eAt = V eΛtV −1
= V et(I cos t + Λ sin t− I sin t
)
V −1
= et(I cos t + A sin t− I sin t
)
= et
[
cos t sin t
− sin t cos t
]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 312
Exercıcio. Calcular eAt para a matriz
A =
[
−4 1
−2 1
]
.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 313
Exercıcio. Calcular eAt para a matriz
A =
[
α β
−β α
]
.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 314
Notas e referencias
⋆ A solucao do caso escalar foi tirada de ( William L. Brogan 1991), pag.
309.
⋆ O exemplo de 2a. ordem pode ser encontrado em (Strang 1988), pag. 243.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
UFRJ Universidade Federal do Rio de Janeiro
EE Escola de Engenharia
DEL Departamento de Eletronica
EEL-555 Sistemas Lineares II
Capıtulo # 7
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 316
7 Revisao: Algebra Linear
Conteudo
1. Espacos vetoriais
2. Independencia linear
3. Base e Span
4. Dimensao
5. Representacao
6. Norma de vetores
7. Ortonormalizacao
8. Sistema de equacoes lineares
9. Transformacoes de similaridade
10. Forma companheira
11. Bloco de Jordan
12. Funcoes de matrizes
13. Teorema de Cayley-Hamilton
14. Equacao de Lyapunov
15. Formas quadraticas
16. Inversao de matrizes
17. Algoritmo de Leverrier
18. Exemplos
19. Exercıcios
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 317
7.1 Espacos vetoriais
Espacos vetoriais de interesse : Rn e Cn
Exemplo 1 Representacao por n-uplas.
R2 :
[
x1
x2
]
R3 :
x1
x2
x3
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 318
Definicao. (valida para Rn e Cn)
Espaco vetorial (EV) e um conjunto de vetores com regras para
adicao de vetores e multiplicacao por escalar.
⋆ Operacoes possıveis :
• adicao de 2 vetores
• multiplicacao por escalar
Combinacao linear
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 319
Exemplo 2
• Espaco R∞.
• Espaco R2×2.
• Espaco de funcoes f(x), 0 ≤ x ≤ 1.
Nota. E necessario adotar uma convencao para representar R2×2 e f(x) na
forma de n-uplas .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 320
Definicao. (Subespaco)
Subespaco de um EV e um subconjunto nao vazio que satisfaz 2
exigencias :
(1) e fechado para a adicao
(2) e fechado para produto por escalar.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 321
Exemplo 3
• Plano em R3 passando pela origem.
• Linha em R3 passando pela origem.
• Origem : 0.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 322
7.2 Independencia linear
Definicao. (Independencia linear)
O conjunto de vetores v1, v2, · · · , vn e l.i sse
c1v1 + c2v2 + · · ·+ cnvn = 0 ⇒ ci = 0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
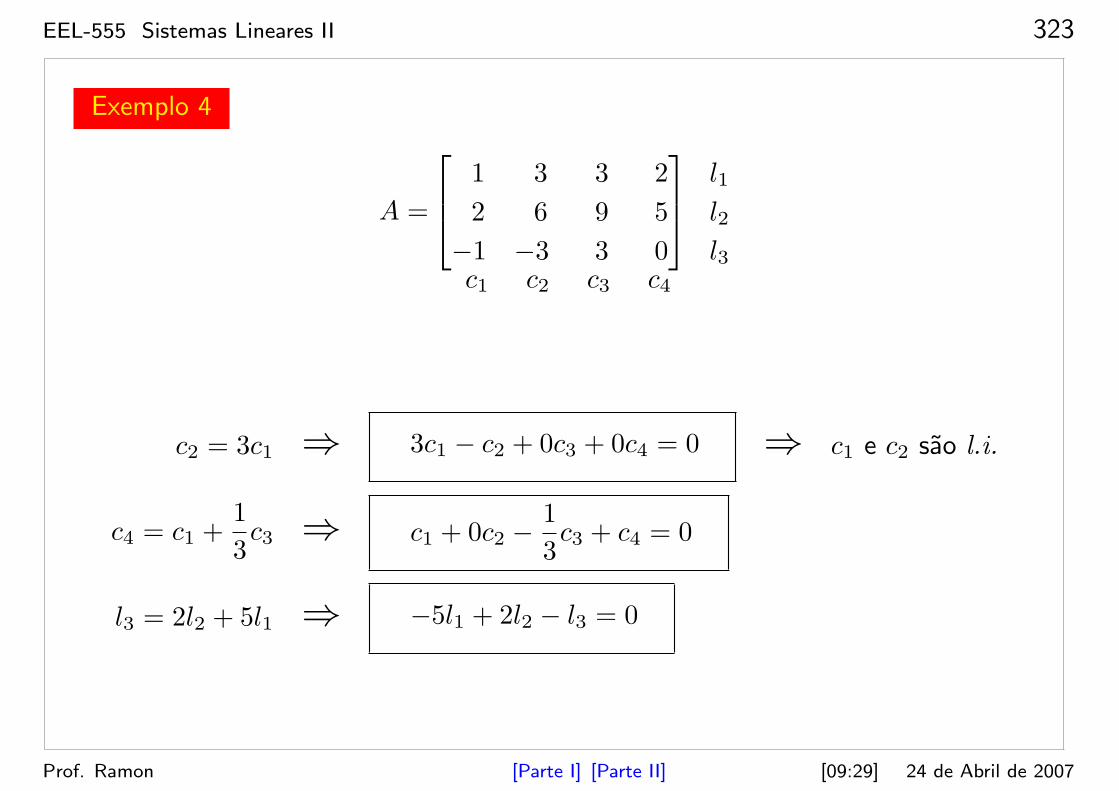
EEL-555 Sistemas Lineares II 323
Exemplo 4
A =
1 3 3 2
2 6 9 5
−1 −3 3 0
l1
l2
l3c1 c2 c3 c4
c2 = 3c1 ⇒ 3c1 − c2 + 0c3 + 0c4 = 0 ⇒ c1 e c2 sao l.i.
c4 = c1 +1
3c3 ⇒ c1 + 0c2 −
1
3c3 + c4 = 0
l3 = 2l2 + 5l1 ⇒ −5l1 + 2l2 − l3 = 0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 324
Portanto, a matriz A possui
• 2 colunas l.i.
• 2 linhas l.i.
rank(A) = 2
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 325
Teorema. (Fundamental da algebra linear)
Numero de colunas l.i. = Numero de linhas l.i.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 326
7.3 Base e Span
Definicao. (Span)
Se um EV consiste de todas as combinacoes lineares dos vetores
v1, v2, · · · , vn, entao estes vetores geram (span) o EV.
Definicao. (Base)
Uma base para um EV e um conjunto de vetores com 2 propriedades:
(1) o conjunto e l.i.
(2) o conjunto gera o EV.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 327
Exemplo 5
A =
1 3 3 2
0 0 3 1
0 0 0 0
Seja R(A) o EV gerado pelas colunas de A .
Base para R(A) :
1
0
0
,
3
3
0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 328
7.4 Dimensao
Definicao. (Dimensao)
Dimensao de um EV e o maximo numero de vetores l.i.
pertencente ao espaco.
Fato. Quaisquer 2 bases para um EV contem o mesmo numero de vetores.
Este numero e a dimensao do EV .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 329
Exemplo 6
X1 =plano em R3 passando pela origem
Dim(X1) = 2.
X2 =linha em R3 passando pela origem
Dim(X2) = 1.
X3 =
origem
=0
Dim(X3) = 0.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 330
7.5 Representacao
A todo EV Rn associa-se uma base canonica ortonormal :
i1 =
1
0...
0
, i2 =
0
1...
0
, · · · , in =
0
0...
1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 331
A representacao de um vetor x ∈ Rn na base canonica ortonormal e dada por :
x =
x1
x2
...
xn
= x1i1 + x2i2 + · · ·+ xnin =
1 0 · · · 0
0 1 · · · 0...
......
0 0 · · · 1
︸ ︷︷ ︸
base
x1
x2
...
xn
= I
x1
x2
...
xn
⋆ E uma representacao natural .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 332
Sejaq1, q2, · · · , qn
uma base para Rn.
Fato. ∀x ∈ Rn, ∃! conjuntoαi
tal que
x = α1q1 + α2q2 + · · ·+ αnqn
Podemos escrever :
x = α1q1 + α2q2 + · · ·+ αnqn =[
q1 q2 · · · qn
]
︸ ︷︷ ︸
Q
α1
α2
...
αn
︸ ︷︷ ︸
x
:= Qx
O vetor x e denominado representacao de x na baseq1, q2, · · · , qn
.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 333
Exemplo 7 Vetor x =
[
1
3
]
∈ R2.
Base canonica ortonormal para R2 : i1, i2 =
[
1
0
]
,
[
0
1
]
Seja a base : q1, q2 =
[
3
1
]
,
[
2
2
]
A representacao de x na base i1, i2 e :
x =
[
1
3
]
= −1
[
3
1
]
+ 2
[
2
2
]
=[
q1 q2
][
−1
2
]
⇒ x =
[
−1
2
]
.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 334
i1
i2 q1
q2
x
2 3
2
3
Figura 24: Representacao de x na base q1, q2.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 335
7.6 Norma de vetores
Definicao. (Norma)
Norma de x ∈ Rn e uma funcao, denotada por ||x||, com as
seguintes propriedades :
(1) ||x|| ≥ 0, ∀x ∈ Rn
(2) ||x|| = 0 ⇔ x = 0
(3) ||αx|| = |α| ||x||, ∀α ∈ R, ∀x ∈ Rn
(4) ||x1 + x2|| ≤ ||x1||+ ||x2||, ∀x1, x2 ∈ Rn
⋆ Norma e a generalizacao do conceito de distancia.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 336
Definicao. (Norma p)
Norma p : ||x||p :=
(n∑
i=1
|xi|)1/p
As normas mais usuais sao :
||x||1 :=
n∑
i=1
|xi| = |x1|+ |x2|+ · · ·+ |xn|
||x||2 :=√
xT x =(x2
1 + x22 + · · ·+ x2
n
)1/2
||x||∞ := maxi|xi|
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 337
7.7 Ortonormalizacao
Definicao. (Vetor normalizado)
Um vetor x ∈ Rn e dito normalizado se
xT x = 1 .
Definicao. (Vetores ortogonais)
2 vetores x1, x2 ∈ Rn sao ortogonais se
xT1 x2 = xT
2 x1 = 0 .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 338
Definicao. (Vetores ortonormais)
1 conjunto de vetores xi ∈ Rn e dito ortonormal se
xTi xj =
0 se i 6= j
1 se i = j
i.e., todos os vetores tem norma 1 e sao ortogonais entre si .
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 339
7.8 Sistema de equacoes lineares
Seja o sistema de equacoes lineares : Ax = b
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 340
7.9 Transformacao de similaridade
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 341
7.10 Forma companheira
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 342
7.11 Bloco de Jordan
Fato. Toda matriz quadrada n× n possui exatamente n autovalores.
Fato. A cada autovalor distinto λi corresponde um autovetor associado vi.
Problema. Autovalores repetidos.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 343
Problema. Autovalores repetidos.
⋆ E possıvel que uma matriz tenha um conjunto incompleto de autovetores .
⋆ Nao e possıvel determinar uma matriz de autovetores V tal que
A = V ΛV −1
Quer dizer, a matriz A pode nao ser diagonalizavel .
⋆ Para contornar essa situacao, introduz-se os blocos de Jordan
(generalizacao da forma diagonal).
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 344
Um bloco de Jordan de ordem n , correspondente a um autovalor repetido com
multiplicidade n , tem a seguinte forma geral
J =
λ 1 0 0 · · · 0 0
0 λ 1 0 · · · 0 0
0 0 λ 1 · · · 0 0...
......
......
...
0 0 0 0 · · · λ 1
0 0 0 0 · · · 0 λ
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 345
Exemplo 8 Uma matriz 4 × 4 com os 4 autovalores repetidos pode ser
similar a uma das seguintes formas de Jordan
J1 =
λ 1 0 0
0 λ 1 0
0 0 λ 1
0 0 0 λ
J2 =
λ 1 0 0
0 λ 0 0
0 0 λ 1
0 0 0 λ
J3 =
λ 0 0 0
0 λ 1 0
0 0 λ 1
0 0 0 λ
J4 =
λ 1 0 0
0 λ 1 0
0 0 λ 0
0 0 0 λ
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 346
⋆ A matriz J1 e formada por 1 bloco de Jordan de 4a. ordem .
Nesse caso, existe um unico autovetor associado ao autovalor λ.
⋆ A matriz J2 e formada por 2 blocos de Jordan de 2a. ordem .
Nesse caso, existem 2 autovetores associados ao autovalor λ.
⋆ As matrizes J3 e J4 sao formadas por 1 bloco de Jordan de 1a. ordem e
1 bloco de Jordan de 3a. ordem .
Novamente, nesse caso, existem 2 autovetores associados ao autovalor λ.
A seguir vamos revisar, atraves de exemplos, o metodo de determinacao da forma
de Jordan de uma matriz.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 347
Exemplo 9 Seja a matriz
A =
[
1 2
0 1
]
Autovalores repetidos : λ1 = λ2 = 1.
Os autovetores associados sao obtidos resolvendo-se
(A− λI)v =
[
0 2
0 0
]
v = 0
Solucao unica : v1 =
[
1
0
]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 348
Para se determinar um vetor v2 tal que
M =[
v1 v2
]
e
J = M−1AM
recorremos a utilizacao dos denominados autovetores generalizados .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 349
Definicao. (Autovetores generalizados)
Os autovetores generalizados gi associados ao autovalor λ
sao obtidos utilizando-se o seguinte procedimento
Av = λv (A− λI)v = 0
Ag1 = λg1 + v (A− λI)g1 = v
Ag2 = λg2 + g1 (A− λI)g2 = g1
......
Nota. Utilizando notacao matricial, podemos escrever
A[
v g1 g2
]
︸ ︷︷ ︸
M
= AM =[
λv λg1 + v λg2 + g1
]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 350
ou melhor,
AM =[
λv λg1 + v λg2 + g1
]
=[
λv λg1 λg2
]
+[
0 v g1
]
=[
v g1 g2
]
︸ ︷︷ ︸
M
Λ +[
0 v g1
]
= MΛ +[
0 v g1
]
Porem,
[
0 v g1
]
=[
v g1 g2
]
︸ ︷︷ ︸
M
0 1 0
0 0 1
0 0 0
︸ ︷︷ ︸
J0
= MJ0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 351
Portanto,
AM = MΛ + MJ0
= M(Λ + J0)
= MJ
J = Λ + J0 A = MJM−1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 352
Voltando ao exemplo...
Precisamos determinar um autovetor generalizado v2 a partir da equacao
(A− λI)v2 = v1
isto e,[
0 2
0 0
]
v2 =
[
1
0
]
⇒ v2 =
[
1
1/2
]
Nota. Sera que poderia ser
v2 =
[
0
1/2
]
?
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 353
Podemos agora verificar que a matriz M encontrada,
M =
[
1 1
0 1/2
]
tem a propriedade requerida :
J = M−1AM
= 2
[
1/2 −1
0 1
][
1 2
0 1
][
1 1
0 1/2
]
=
[
1 1
0 1
]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 354
Exemplo 10 Considere agora a matriz
A =
1 1 0
0 1 0
0 0 1
⋆ Essa matriz ja se encontra na forma de Jordan.
⋆ O autovalor λ = 1 tem multiplicidade 3 .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 355
Os autovetores associados sao obtidos resolvendo-se
(A− λI)v =
0 1 0
0 0 0
0 0 0
v = 0
⋆ 2 solucoes :
v1 =
1
0
0
e v2 =
0
0
1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 356
Precisamos determinar apenas um autovetor generalizado v3,
(A− λI)v3 = v1
isto e,
0 1 0
0 0 0
0 0 0
v3 =
1
0
0
⇒ v3 =
0
1
0
⋆ Note que nao existe um autovetor generalizado associado a v2.
A equacao
(A− λI)v3 =
0 1 0
0 0 0
0 0 0
v3 =
0
0
1
= v2
nao tem solucao!
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 357
Verificacao :
M =[
v1 v3 v2
]
=
1 0 0
0 1 0
0 0 1
Como era esperado!
Importante :
⋆ Observe a ordem dos autovetores na matriz M .
⋆ O autovetor generalizado v3 aparece logo apos o autovetor v1, que e o
autovetor ao qual esta associado e a partir do qual foi gerado.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
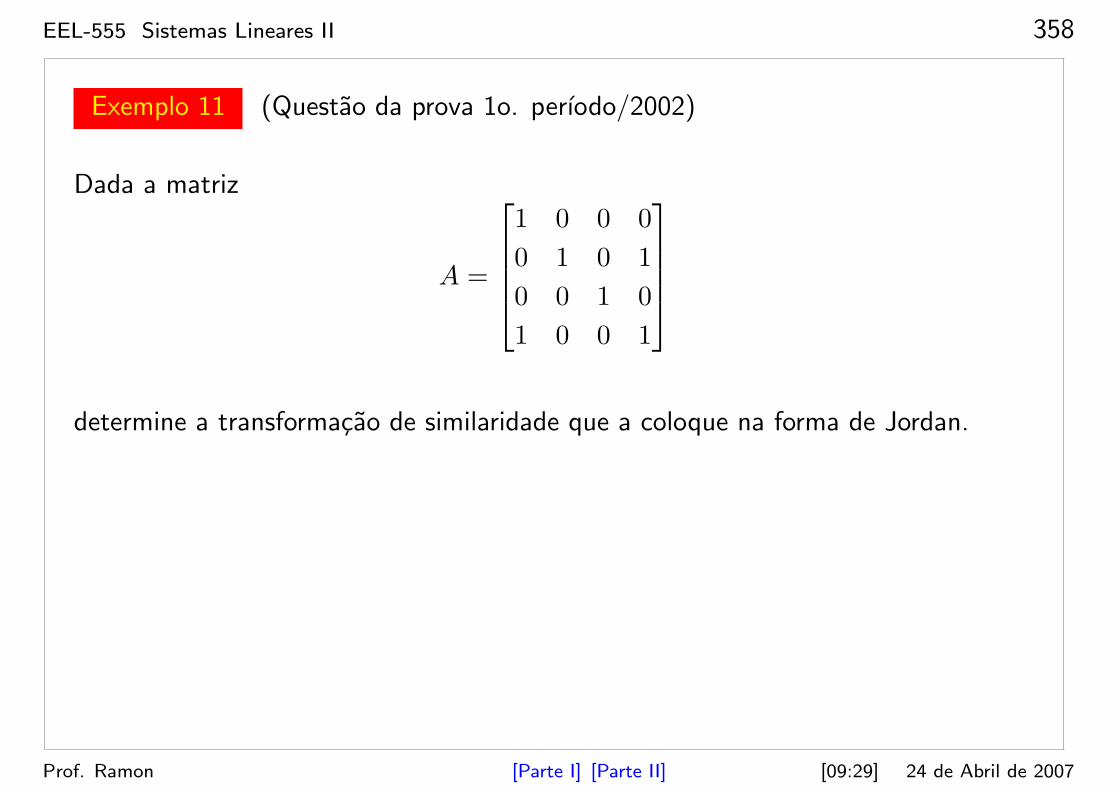
EEL-555 Sistemas Lineares II 358
Exemplo 11 (Questao da prova 1o. perıodo/2002)
Dada a matriz
A =
1 0 0 0
0 1 0 1
0 0 1 0
1 0 0 1
determine a transformacao de similaridade que a coloque na forma de Jordan.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
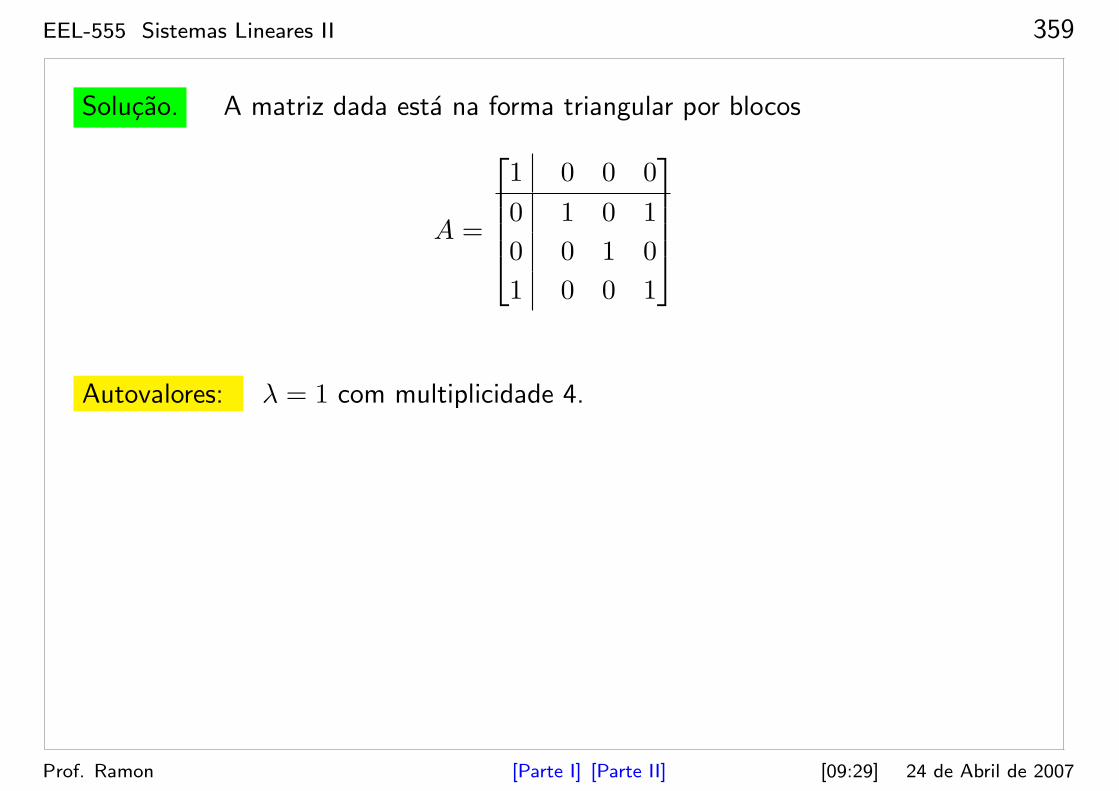
EEL-555 Sistemas Lineares II 359
Solucao. A matriz dada esta na forma triangular por blocos
A =
1 0 0 0
0 1 0 1
0 0 1 0
1 0 0 1
Autovalores: λ = 1 com multiplicidade 4.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
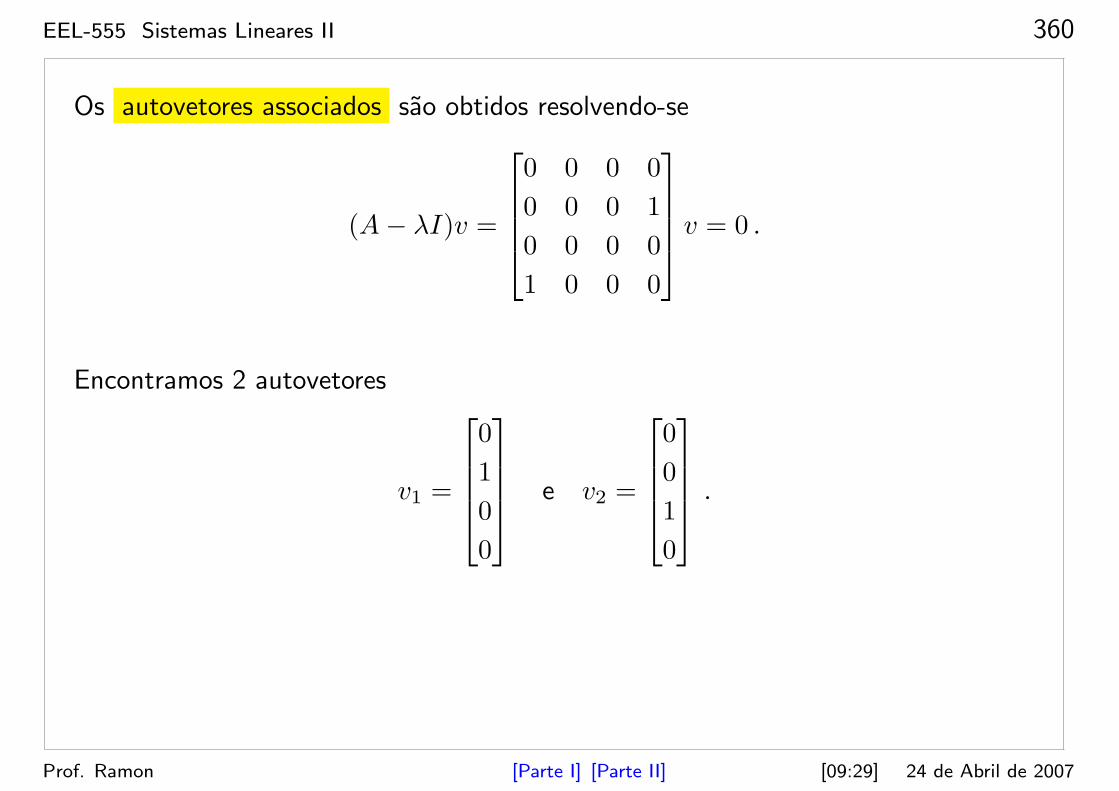
EEL-555 Sistemas Lineares II 360
Os autovetores associados sao obtidos resolvendo-se
(A− λI)v =
0 0 0 0
0 0 0 1
0 0 0 0
1 0 0 0
v = 0 .
Encontramos 2 autovetores
v1 =
0
1
0
0
e v2 =
0
0
1
0
.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 361
Precisamos de 2 autovetores generalizados v3 e v4.
Vamos tentar obte-los a partir de v1 :
(A− λI)v3 = v1 ⇒
0 0 0 0
0 0 0 1
0 0 0 0
1 0 0 0
v3 =
0
1
0
0
⇒ v3 =
0
0
0
1
(A− λI)v4 = v3 ⇒
0 0 0 0
0 0 0 1
0 0 0 0
1 0 0 0
v4 =
0
0
0
1
⇒ v4 =
1
0
0
0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 362
⋆ Nao existe autovetor generalizado associado a v2.
A equacao (A− λI)v3 = v2 nao tem solucao!
(A− λI)v3 = v2 ⇒
0 0 0 0
0 0 0 1
0 0 0 0
1 0 0 0
v3 =
0
0
1
0
⇒ v3 =?
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 363
Portanto, a matriz pedida e:
M =[
v1 v3 v4 v2
]
=
0 0 1 0
1 0 0 0
0 0 0 1
0 1 0 0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
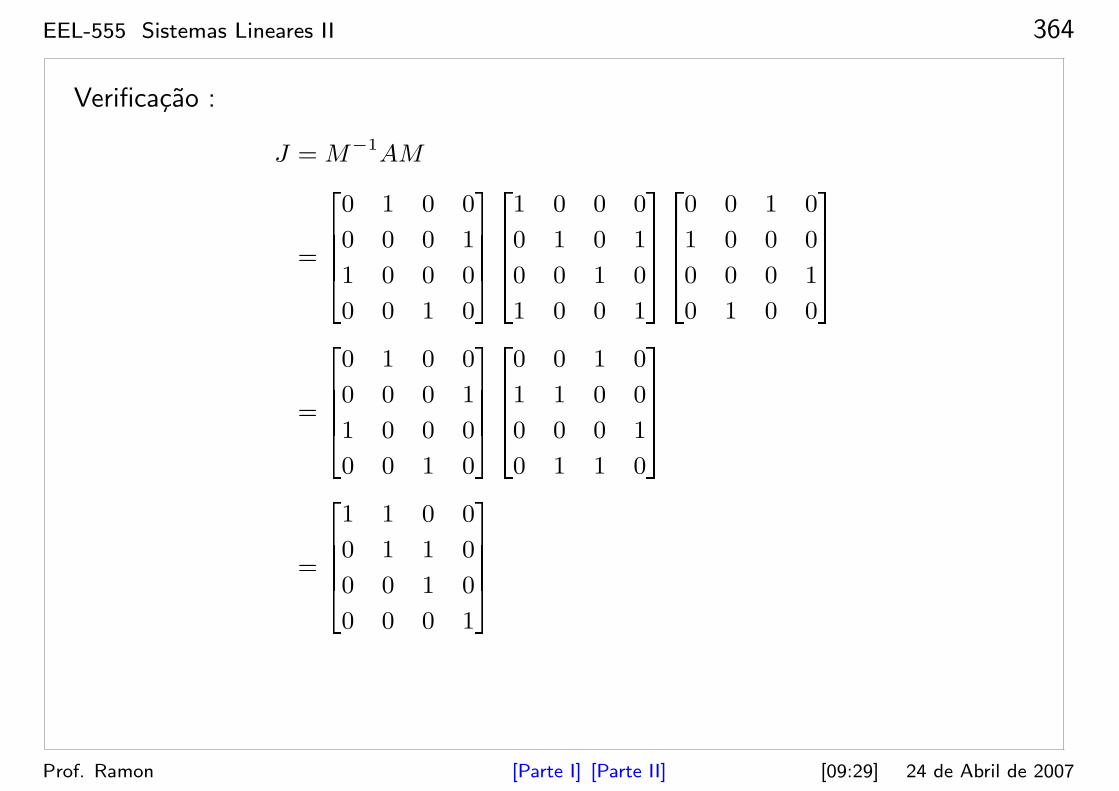
EEL-555 Sistemas Lineares II 364
Verificacao :
J = M−1
AM
=
266640 1 0 0
0 0 0 1
1 0 0 0
0 0 1 0
37775266641 0 0 0
0 1 0 1
0 0 1 0
1 0 0 1
37775266640 0 1 0
1 0 0 0
0 0 0 1
0 1 0 0
37775=
266640 1 0 0
0 0 0 1
1 0 0 0
0 0 1 037775266640 0 1 0
1 1 0 0
0 0 0 1
0 1 1 0
37775=
266641 1 0 0
0 1 1 0
0 0 1 0
0 0 0 1
37775Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 365
Exemplo 12 (Questao da prova 1o. perıodo/20023)
Dada a matriz
A =
1 0 0 0
0 1 0 1
1 0 1 0
1 0 0 1
determine a transformacao de similaridade que a coloque na forma de Jordan.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 366
Solucao. A matriz dada esta na forma triangular por blocos
A =
1 0 0 0
0 1 0 1
1 0 1 0
1 0 0 1
Autovalores: λ = 1 com multiplicidade 4 (basta uma simples inspecao !)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 367
Os autovetores associados sao obtidos resolvendo-se
(A− λI)v =
0 0 0 0
0 0 0 1
1 0 0 0
1 0 0 0
v = 0 .
Encontramos 2 autovetores
v1 =
0
1
0
0
e v2 =
0
0
1
0
.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 368
Precisamos de 2 autovetores generalizados v3 e v4.
Vamos tentar obte-los a partir de v1 :
(A− λI)v3 = v1 ⇒
0 0 0 0
0 0 0 1
1 0 0 0
1 0 0 0
v3 =
0
1
0
0
⇒ v3 =
0
0
0
1
(A− λI)v4 = v3 ⇒
0 0 0 0
0 0 0 1
1 0 0 0
1 0 0 0
v4 =
0
0
0
1
⇒ v4 =
?
∗∗0
⋆ v4 nao pode ser derivado de v3 !
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
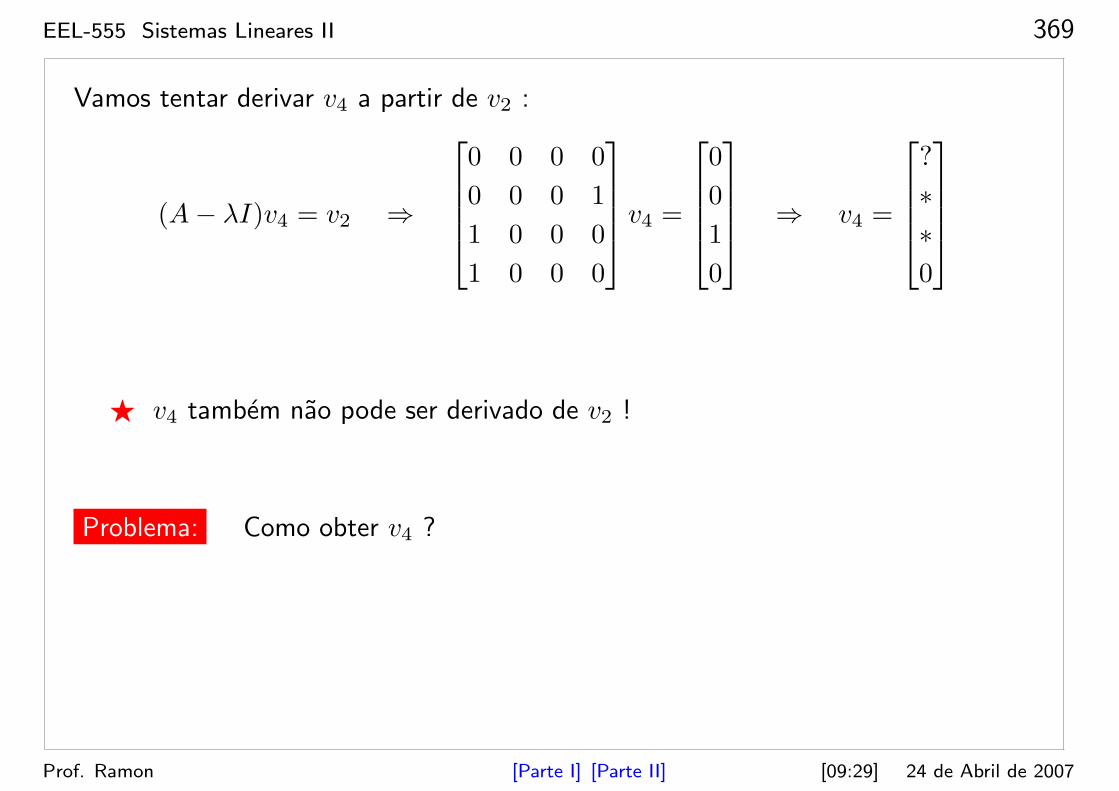
EEL-555 Sistemas Lineares II 369
Vamos tentar derivar v4 a partir de v2 :
(A− λI)v4 = v2 ⇒
0 0 0 0
0 0 0 1
1 0 0 0
1 0 0 0
v4 =
0
0
1
0
⇒ v4 =
?
∗∗0
⋆ v4 tambem nao pode ser derivado de v2 !
Problema: Como obter v4 ?
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 370
Solucao: So resta escolher outro autovetor generalizado v3.
(A− λI)v3 = v1 ⇒
0 0 0 0
0 0 0 1
1 0 0 0
1 0 0 0
v3 =
0
1
0
0
⇒ v3 =
0
0
1
1
(A− λI)v4 = v3 ⇒
0 0 0 0
0 0 0 1
1 0 0 0
1 0 0 0
v4 =
0
0
1
1
⇒ v4 =
1
0
0
0
⋆ Ok. Desta vez foi !
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 371
Portanto, a matriz pedida e:
M =[
v1 v3 v4 v2
]
=
0 0 1 0
1 0 0 0
0 1 0 1
0 1 0 0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
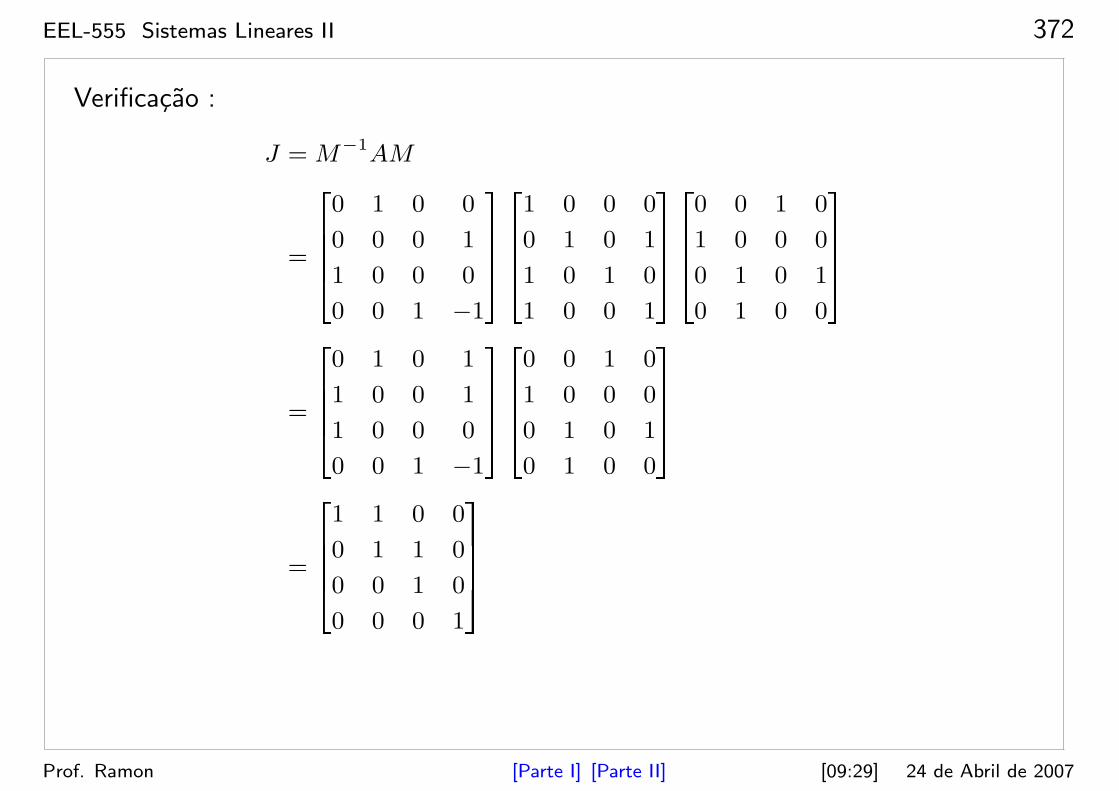
EEL-555 Sistemas Lineares II 372
Verificacao :
J = M−1
AM
=
266640 1 0 0
0 0 0 1
1 0 0 0
0 0 1 −1
37775266641 0 0 0
0 1 0 1
1 0 1 0
1 0 0 1
37775266640 0 1 0
1 0 0 0
0 1 0 1
0 1 0 0
37775=
266640 1 0 1
1 0 0 1
1 0 0 0
0 0 1 −137775266640 0 1 0
1 0 0 0
0 1 0 1
0 1 0 0
37775=
266641 1 0 0
0 1 1 0
0 0 1 0
0 0 0 1
37775Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 373
7.12 Funcoes de matrizes
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 374
7.13 Teorema de Cayley-Hamilton
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
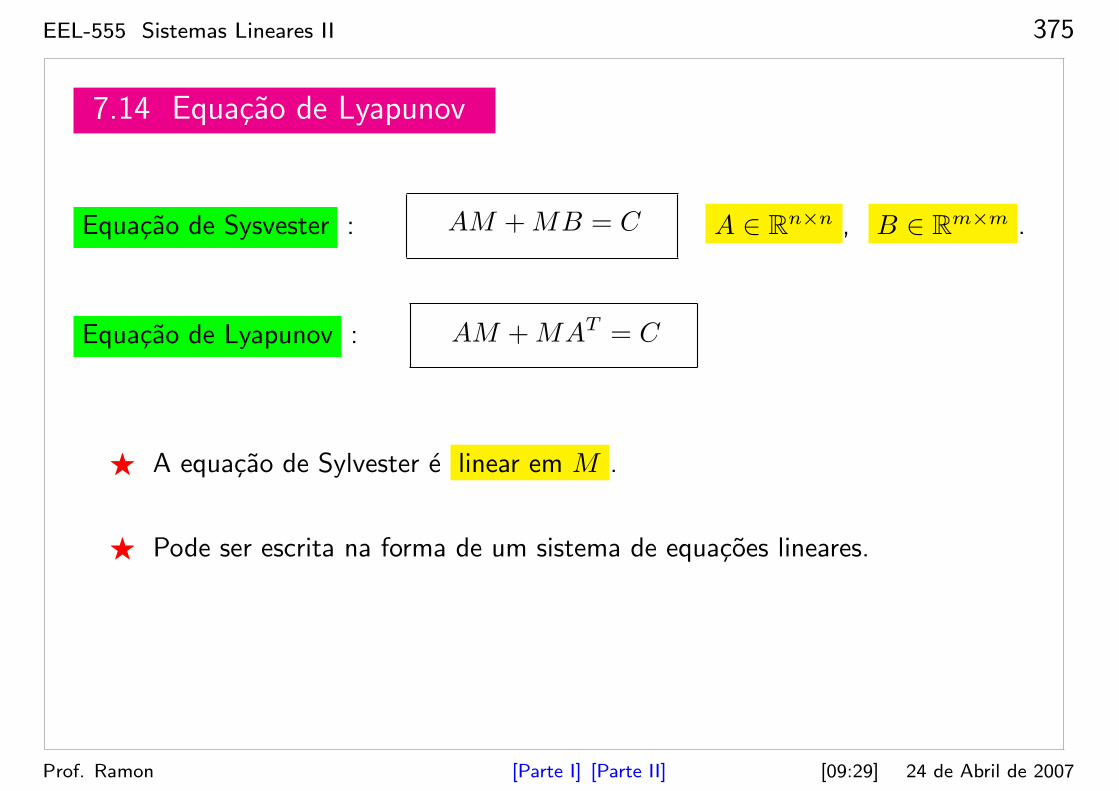
EEL-555 Sistemas Lineares II 375
7.14 Equacao de Lyapunov
Equacao de Sysvester : AM + MB = C A ∈ Rn×n , B ∈ Rm×m .
Equacao de Lyapunov : AM + MAT = C
⋆ A equacao de Sylvester e linear em M .
⋆ Pode ser escrita na forma de um sistema de equacoes lineares.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 376
Exemplo 13
a11 a12 a13
a21 a22 a23
a31 a32 a33
m11 m12
m21 m22
m31 m32
+
m11 m12
m21 m22
m31 m32
[
b11 b12
b21 b22
]
=
c11 c12
c21 c22
c31 c32
A equacao acima pode ser escrita como :
A[
m1 m2
]
+[
m1 m2
][
b11 b12
b21 b22
]
=[
c1 c2
]
ou melhor :
Am1 + b11m1 + b21m2 = c1
b12m1 + b22m2 + Am2 = c2
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 377
Rearranjando os termos :
(A + b11I
)m1 +
(b21I
)m2 = c1
(b12I
)m1 +
(A + b22I
)m2 = c2
Resultado : [
A + b11I b21I
b12I A + b22I
]
︸ ︷︷ ︸
A
[
m1
m2
]
=
[
c1
c2
]
A[
m1
m2
]
=
[
c1
c2
]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
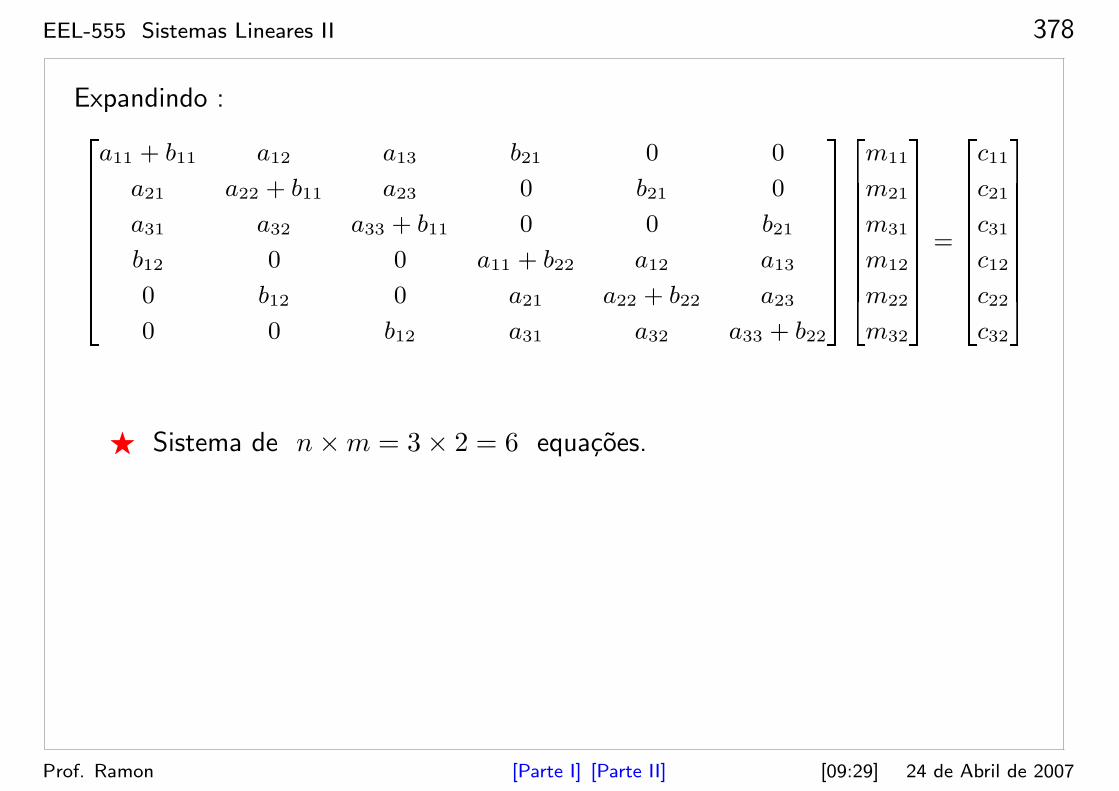
EEL-555 Sistemas Lineares II 378
Expandindo :2666666664a11 + b11 a12 a13 b21 0 0
a21 a22 + b11 a23 0 b21 0
a31 a32 a33 + b11 0 0 b21
b12 0 0 a11 + b22 a12 a13
0 b12 0 a21 a22 + b22 a23
0 0 b12 a31 a32 a33 + b22
37777777752666666664m11
m21
m31
m12
m22
m32
3777777775 =
2666666664c11
c21
c31
c12
c22
c32
3777777775
⋆ Sistema de n×m = 3× 2 = 6 equacoes.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 379
Fato. Os autovalores de A sao todas as possıveis somas dos autovalores de A
e de B.
Prova.
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 380
7.15 Formas quadraticas e positividade
Definicao. (Matriz simetrica)
Uma matriz real M e dita simetrica se
M = MT
Definicao. (Forma quadratica)
Uma forma quadratica e uma funcao escalar
xT Mx , x ∈ Rn .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 381
Fato. Se M e simetrica, entao
x∗Mx ∈ R , ∀x ∈ Cn .
⋆ x∗ denota transposta conjugada .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 382
Prova.
(x∗Mx
)∗= x∗M∗x = xM∗x∗ = xMx∗
Portanto,
(x∗Mx
)∗= xMx∗ ⇒ x∗Mx ∈ R
⋆ x∗Mx e real para qualquer x complexo .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 383
Fato. Se M e simetrica, entao
λi(M) ∈ R
⋆ Em outras palavras, os autovalores de uma matriz real simetrica sao reais .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 384
Prova. v = autovetor
λ = autovalor
v∗Mv︸ ︷︷ ︸
∈R
= v∗λv = λ (v∗v)︸ ︷︷ ︸
∈R
Portanto,
λ ∈ R
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 385
Exemplo 14
M =
[
a b
b c
]
Equacao caracterıstica : P (λ) = λ2 − (a + c)λ + ac− b2 = 0
Condicao para raızes complexas :
∆ = (a + c)2 − 4(ac− b2)
= (a− c)2 + 4b2 < 0
Portanto, as raızes somente podem ser reais.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 386
Fato. Toda matriz real simetrica M pode ser diagonalizada por uma trans-
formacao de similaridade mesmo que tenha autovalores repetidos.
M ∈ Rn×n
M = MT
⇒ ∃Q∣∣ QMQ−1 = Λ
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 387
Prova. Suponha que x seja um autovetor generalizado de M,
(M − λI
)v = 0 (autovetor)
(M − λI
)x = v (autovetor generalizado)
Note que,
(M − λI
)x = v
(M − λI
)2x =
(M − λI
)v = 0
Portanto, (
M − λI)2
x = 0(M − λI
)x 6= 0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 388
Seja
[(M − λI
)x]T [(
M − λI)x]
= xT(MT − λI
)(M − λI
)x
= xT(M − λI
)2x
Usando(M − λI
)2x = 0 : xT
(M − λI
)2x = 0
Usando(M − λI
)x 6= 0 : xT
(M − λI
)2x 6= 0
⋆ Contradicao !
⋆ ∄x autovetor generalizado.
⋆ ∃Q∣∣ QMQ−1 = Λ.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 389
Definicao. (Matriz ortogonal)
Uma matriz A e ortogonal se
AT A = I ⇔ A−1 = AT
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 390
Exemplo 15 A ∈ R3×3
A =
−1/2√
2/2 1/2
−√
2/2 0 −√
2/2
1/2√
2/2 1/2
AT =
−1/2 −√
2/2 1/2√2/2 0
√2/2
1/2 −√
2/2 1/2
A−1 =
−1/2 −√
2/2 1/2√2/2 0
√2/2
1/2 −√
2/2 1/2
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 391
Teorema. Para toda matriz simetrica M , ∃Q ortogonal tal que
QMQ−1 = Λ
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
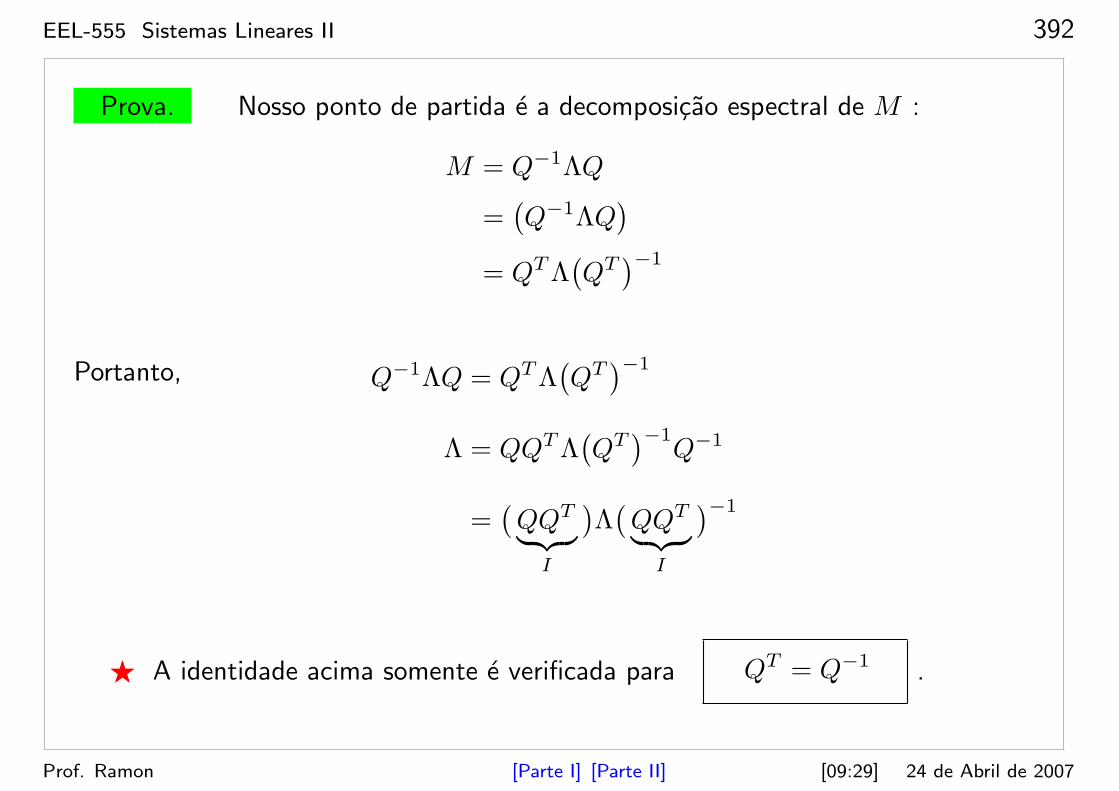
EEL-555 Sistemas Lineares II 392
Prova. Nosso ponto de partida e a decomposicao espectral de M :
M = Q−1ΛQ
=(Q−1ΛQ
)
= QT Λ(QT)−1
Portanto, Q−1ΛQ = QT Λ(QT)−1
Λ = QQT Λ(QT)−1
Q−1
=(QQT
︸ ︷︷ ︸
I
)Λ(QQT
︸ ︷︷ ︸
I
)−1
⋆ A identidade acima somente e verificada para QT = Q−1 .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 393
Definicao. (Definida positiva)
Uma matriz simetrica M e dita definida positiva se
xT Mx > 0 , ∀x 6= 0 .
⋆ xT Mx = 0 ⇒ x = 0.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 394
Definicao. (Semi-definida positiva)
Uma matriz simetrica M e dita semi-definida positiva se
xT Mx ≥ 0 , ∀x 6= 0 .
⋆ ∃x 6= 0∣∣ xT Mx = 0.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 395
Teorema. Uma matriz simetrica M e DP (SDP) sse uma das seguintes
condicoes e verificada :
1. λi
(M)
> 0 (≥ 0)
2. ∆i
(M)
> 0 (≥ 0)
3. ∃N ∈ Rn×n nao singular (∃N ∈ Rm×n) tal que M = NT N .
⋆ ∆i
(M)
sao os menores principais de M .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 396
Prova.
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 397
Exemplo 16 A ∈ R2×2
A =
[
1 2
2 a
]
∆1 = 1
∆2 = a− 4
Condicao para positividade : a > 4
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 398
Teorema. Uma matriz H ∈ Rm×n, m ≥ n, tem rank n sse
det(HT H
)6= 0
Prova.
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 399
Exemplo 17 H ∈ R3×2 e rank(H) = 2.
H =
1 1
0 1
2 2
⇒ HT H =
[
1 0 2
1 1 2
]
1 1
0 1
2 2
=
[
5 5
5 6
]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 400
Teorema. Uma matriz H ∈ Rm×n, m ≤ n, tem rank m sse
det(HHT
)6= 0
Prova.
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 401
Exemplo 18 H ∈ R2×3 e rank(H) = 2.
H =
[
1 1 1
1 1 2
]
⇒ HHT =
[
1 1 1
1 1 2
]
1 1
1 1
1 2
=
[
3 4
4 6
]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 402
7.16 Inversao de matrizes
Metodo de inversao de Shipley
⋆ Uma operacao chamada pivotagem e executada em cada elemento da
diagonal principal em qualquer ordem.
⋆ No instante da pivotagem, o elemento usado nao pode ser nulo .
⋆ Elementos nulos na diagonal devem ser “saltados” . So podem ser usa-
dos como pivos quando forem transformados em elementos nao nulos pelo
processo.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 403
Algoritmo. As operacoes de pivotagem devem ser executadas uma unica vez
para cada elemento da diagonal.
(1) Todos os elementos que nao estejam na mesma linha ou coluna do pivo akk
sao modificados por:
a′ij = aij − aik
akj
akk
A =
aij aik
akj akk
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
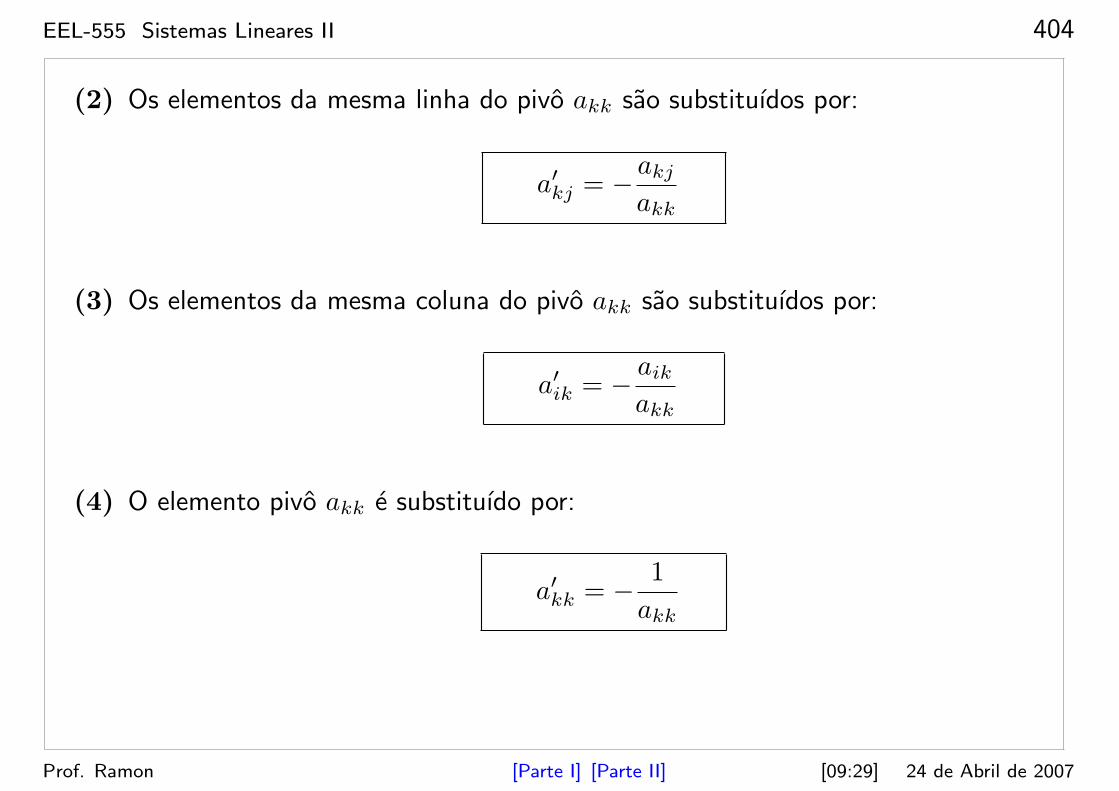
EEL-555 Sistemas Lineares II 404
(2) Os elementos da mesma linha do pivo akk sao substituıdos por:
a′kj = −akj
akk
(3) Os elementos da mesma coluna do pivo akk sao substituıdos por:
a′ik = − aik
akk
(4) O elemento pivo akk e substituıdo por:
a′kk = − 1
akk
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 405
⋆ O processo e repetido para todos os elementos da diagonal tomados em
qualquer ordem.
⋆ Terminado o processo, a matriz original e substituıda pela negativa da
inversa :
[a′
ij
]= −A−1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
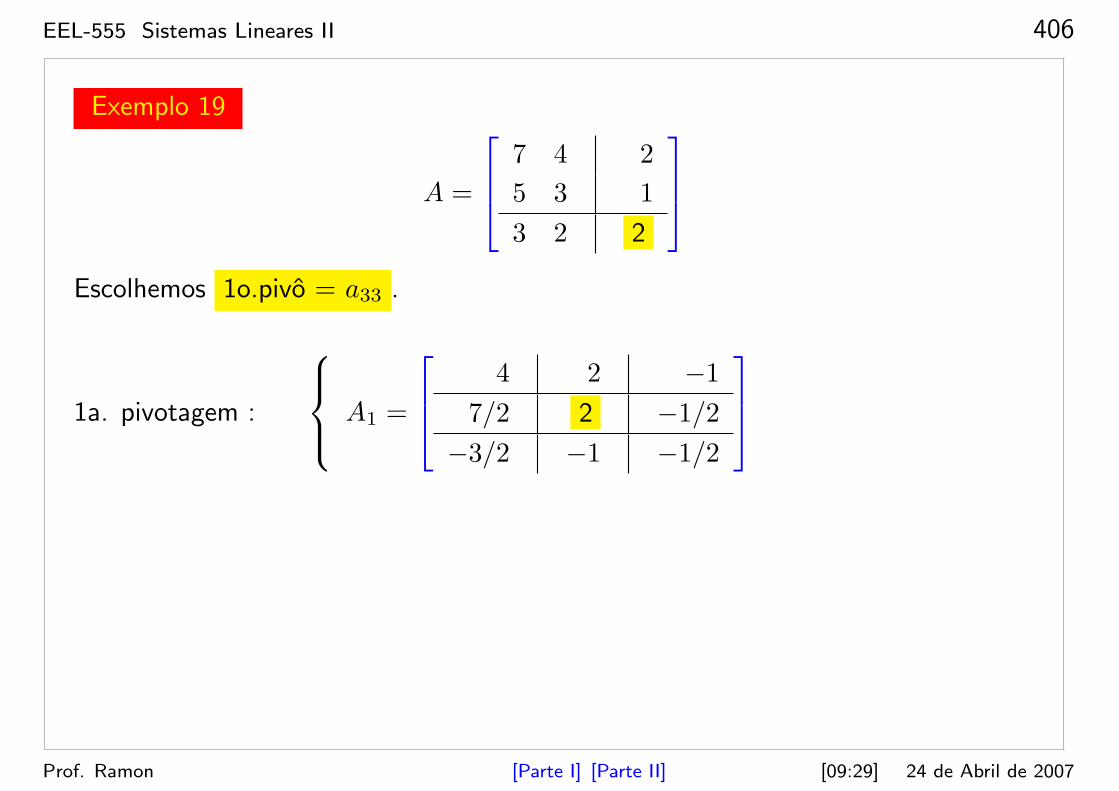
EEL-555 Sistemas Lineares II 406
Exemplo 19
A =
7 4 2
5 3 1
3 2 2
Escolhemos 1o.pivo = a33 .
1a. pivotagem :
A1 =
4 2 −1
7/2 2 −1/2
−3/2 −1 −1/2
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 407
Escolhemos 2o.pivo = a22 .
2a. pivotagem :
A2 =
1/2 −1 −1/2
−7/4 −1/2 1/4
1/4 1/2 −3/4
Finalmente, 3o.pivo = a11 .
3a. pivotagem :
A3 =
−2 2 1
7/2 −4 −3/2
−1/2 1 −1/2
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
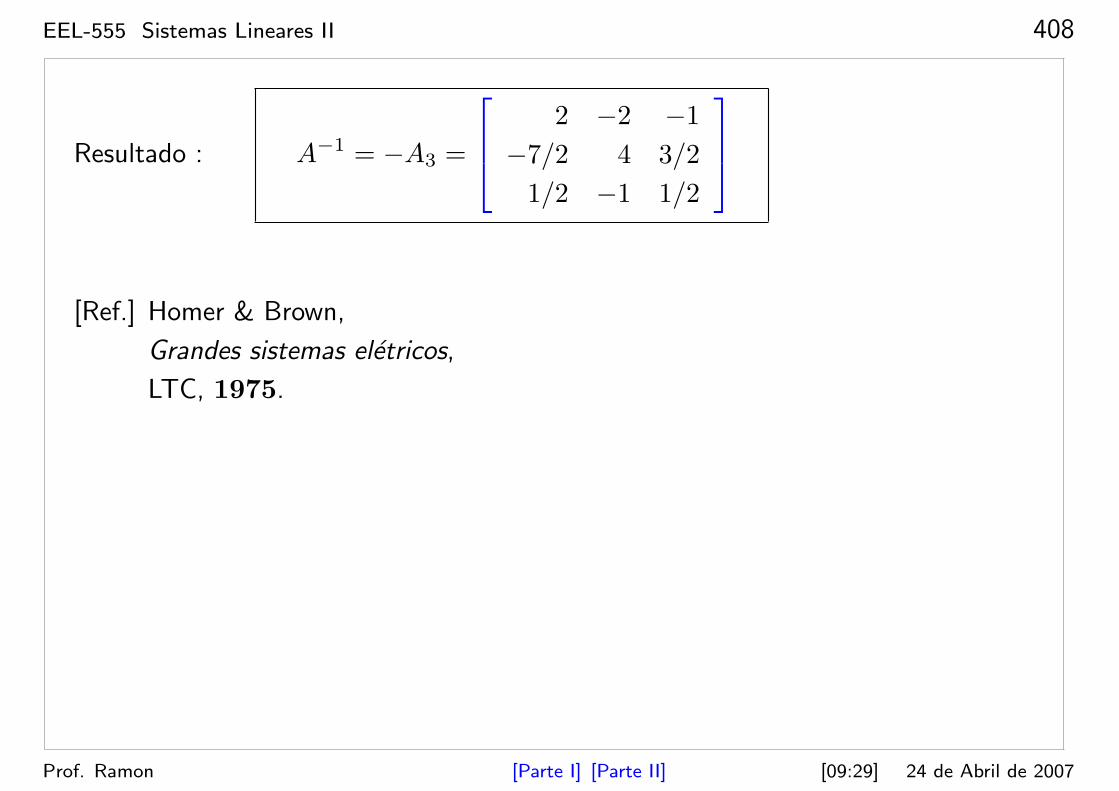
EEL-555 Sistemas Lineares II 408
Resultado : A−1 = −A3 =
2 −2 −1
−7/2 4 3/2
1/2 −1 1/2
[Ref.] Homer & Brown,
Grandes sistemas eletricos,
LTC, 1975.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 409
7.17 Algoritmo de Leverrier
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 410
Exercıcio.
1. Encontre a forma de Jordan das seguintes matrizes
(a) A =
1 0 1
0 1 0
0 0 1
(b) A =
1 0 1 0
0 1 0 1
0 0 1 0
0 0 0 1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 411
Exercıcio.
1. Verifique que para o bloco de Jordan
J =
λ 1 0
0 λ 1
0 0 λ
tem-se que
eJt =
eλt teλt 12 t2eλt
0 eλt teλt
0 0 eλt
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

UFRJ Universidade Federal do Rio de Janeiro
EE Escola de Engenharia
DEL Departamento de Eletronica
EEL-555 Sistemas Lineares II
Capıtulo # 8
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 413
8 Analise
Conteudo
1. Estabilidade
2. Controlabilidade
3. Observabilidade
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 414
8.1 Estabilidade
• Introducao
• Estabilidade entrada/saıda
– Definicoes: [Sinal limitado ] [Estabilidade BIBO ]
– Teoremas: [Estabilidade BIBO ] [Resposta em regime ] [FT BIBO ]
• Estabilidade interna
– Definicoes: [Ponto de equilıbrio ] [Estabilidade Lyapunov ]
– Teoremas: [Estabilidade marginal ] [Estabilidade assintotica ]
• Metodo de Lyapunov
– Teoremas: [E ] [EA ] [EAG ]
– Exemplos: [ 1 ] [ 2 ]
– Teorema. Unicidade da solucao
– Exemplos: [ 3 ] [ 4 ] [ 5 ]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 415
Introducao
⋆ Estabilidade e uma propriedade fundamental para qualquer sistema.
Propriedade. A resposta de um SLIT pode ser decomposta como
Resposta de um SLIT
y(t)=
Resposta com
x(0) = 0+
Resposta com
u(t) ≡ 0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 416
⋆ Podemos estudar a estabilidade de cada resposta separadamente:
Estabilidade BIBO → para resposta com x(0) = 0
Estabilidade marginal
Estabilidade assintotica
→ para resposta com u(t) ≡ 0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 417
Estabilidade entrada/saıda
Modelo do SLIT : g(t) = resposta ao impulso.
SLIT
u(t)
x(0) = 0
y(t)
Figura 25: Resposta com estado nulo.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 418
A resposta e dada pela convolucao :
y(t) =
∫ t
0
g(t− τ)u(τ)dτ
=
∫ t
0
u(t− τ)g(τ)dτ
⋆ g(t) = resposta ao impulso aplicado em t = 0 com x(0) = 0.
⋆ A convolucao e comutativa .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 419
Definicao. (Sinal limitado)
Um sinal z(t) e dito limitado ou bounded se existe uma
constante zm tal que
|z(t)| ≤ zm <∞ , ∀t ≥ 0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 420
Definicao. (Estabilidade BIBO)
Um sistema e dito BIBO estavel se, para toda entrada limitada, a
saıda e limitada.
Nota. Lembrar que as c.i.’s sao nulas !
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 421
Teorema. (BIBO estabilidade)
BIBO estabilidade ⇔ g(t) absolutamente integravel .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
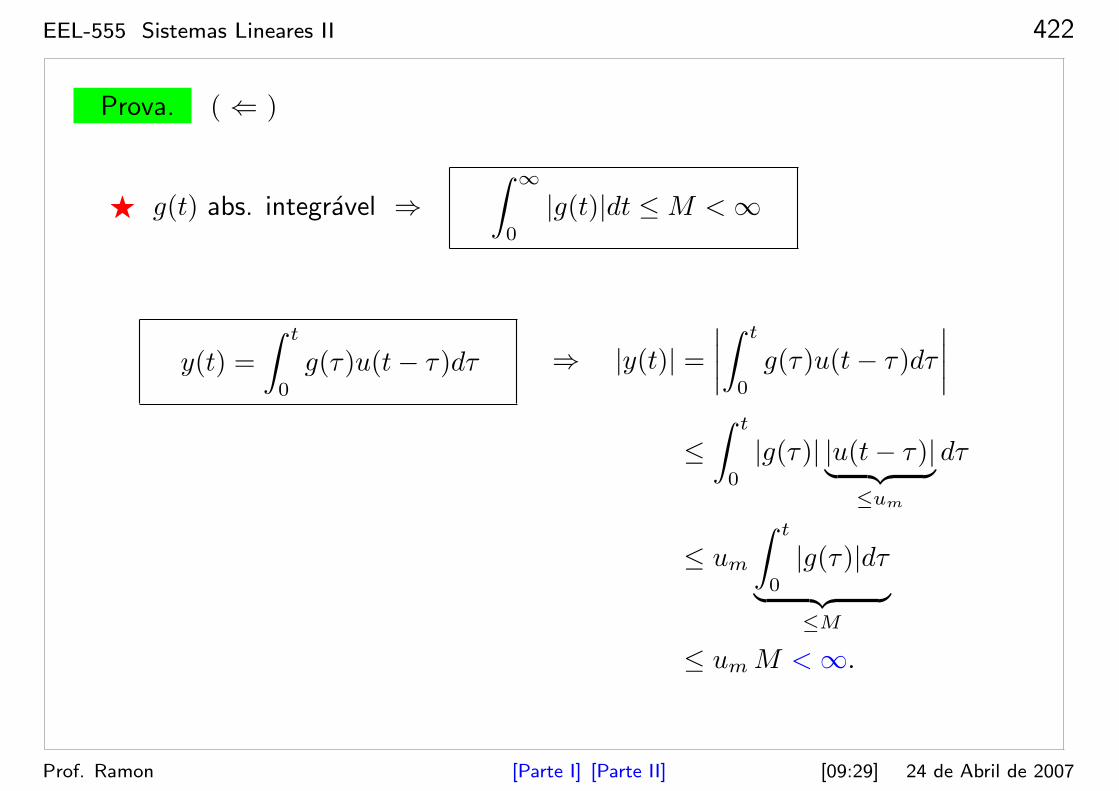
EEL-555 Sistemas Lineares II 422
Prova. ( ⇐ )
⋆ g(t) abs. integravel ⇒∫ ∞
0
|g(t)|dt ≤M <∞
y(t) =
∫ t
0
g(τ)u(t− τ)dτ ⇒ |y(t)| =∣∣∣∣
∫ t
0
g(τ)u(t− τ)dτ
∣∣∣∣
≤∫ t
0
|g(τ)| |u(t− τ)|︸ ︷︷ ︸
≤um
dτ
≤ um
∫ t
0
|g(τ)|dτ
︸ ︷︷ ︸
≤M
≤ um M <∞.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 423
Exercıcio. Provar ( ⇒ ).
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
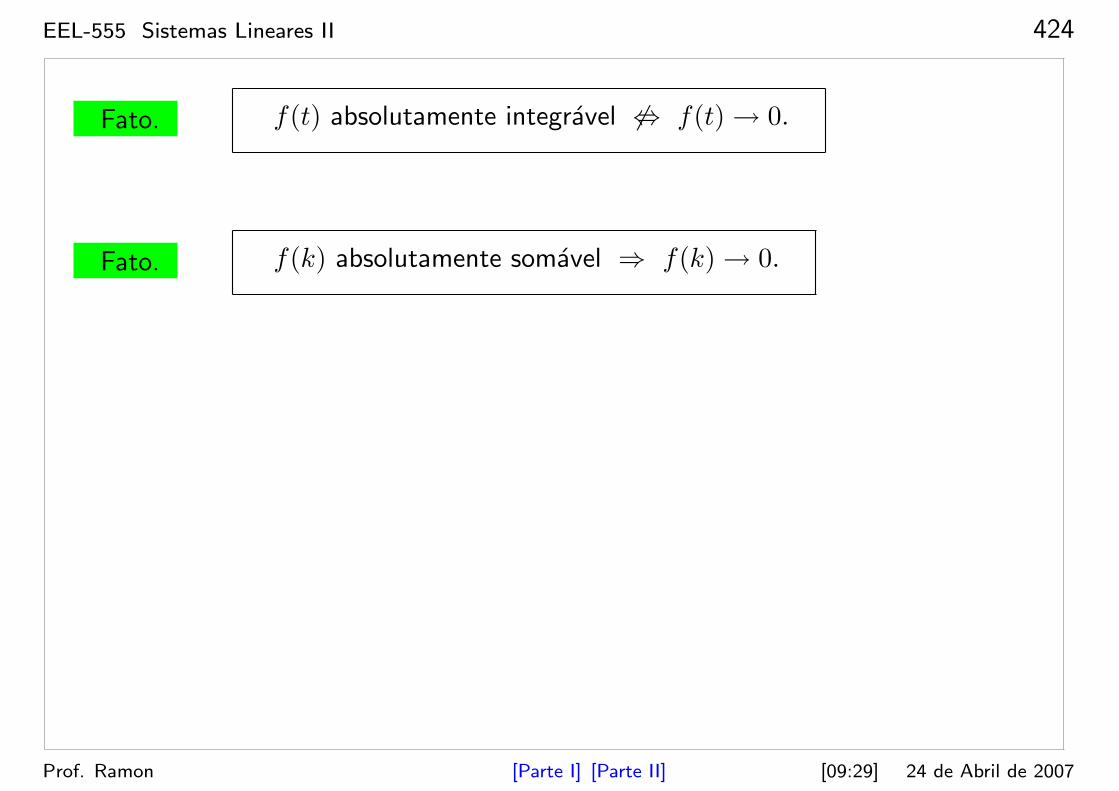
EEL-555 Sistemas Lineares II 424
Fato. f(t) absolutamente integravel 6⇔ f(t)→ 0.
Fato. f(k) absolutamente somavel ⇒ f(k)→ 0.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 425
Exemplo 1
1 3
1
2
f
t
Figura 26: Funcao soluco.
Neste exemplo,
∫ ∞
0
|f(t)|dt ≤M <∞ , porem, f(t) 6→ 0 .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 426
Exemplo 2 f → 0 6⇒ f converge
f(t) = sin(log(t)
)
f(t) =cos(log(t)
)
t(→ 0 para t→∞)
Ref.: (Slotine & Li 1991), pag. 124. MATLAB : Script exemplo4.m .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 427
Exemplo 3 f → 0 6⇐ f converge
f(t) = e−t sin(e2t)
(→ 0 para t→∞)
f(t) = −e−t sin(e2t)
+ 2et cos(e2t)
(→∞ para t→∞)
Ref.: (Slotine & Li 1991), pag. 124. MATLAB : Script exemplo4.m .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 428
:)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 429
Teorema. (Resposta em regime)
Se um sistema com resposta ao impulso g(t) e BIBO estavel,
entao :
(1) u(t) ≡ a ⇒ limt→∞
y(t) = G(0)a
(2) u(t) = sin (ω0t) ⇒ limt→∞
y(t) = |G(jω0)| sin(
ω0t + fase[G(jω0)
])
⋆ G(s) = L[g(t)
].
⋆ G(0) = ganho DC.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 430
Exercıcio. Provar.
Nota. Este e um resultado basico!
ejωt e uma autofuncao do sistema.
Ref. : Oppenheim & Schafer , 1989, pag. 39.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 431
Teorema. (Funcao de transferencia BIBO)
Um SLIT com funcao de transferencia G(s) e BIBO estavel
sse todos os polos de G(S) tem parte real negativa .
BIBO estavel ⇔ Repolos < 0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 432
Exercıcio. Provar.
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 433
Estabilidade interna
Seja o sistema com entrada u(t) ≡ 0 :
x = f(x) , f(0) = 0 .
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 434
Definicao. (Ponto de equilıbrio)
x e um ponto de equilıbrio de x = f(x) sse
f(x) = 0.
Nota. Tambem denominado ponto singular ou ponto crıtico .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 435
Definicao. (Estabilidade Lyapunov)
O ponto de equilıbrio x de x = f(x) e estavel no
sentido de Lyapunov se
∀ε > 0 ,
∃δ > 0 ,
tal que
∥∥x(0)− x
∥∥ < δ ⇒
∥∥x(t)− x
∥∥ < ε , ∀t > 0.
Nota. Raciocınio δ/ǫ.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 436
Exemplo 4 Oscilador harmonico
x =
[
a b
c −a
]
x
Equacao caracterıstica : s2 + ω2 = 0 , ω2 = −(a2 + bc)
Autovalores : λ1 =√
−(a2 + bc) ,
λ2 = −√
−(a2 + bc)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 437
⋆ Este sistema tem um unico equilıbrio x = 0.
⋆ Usando a definicao, verifica-se que x e estavel .
⋆ Neste caso, diz-se que o sistema e estavel .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 438
δ
ǫ
Figura 27: Plano de fase para a = 1 e bc = −4.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 439
−1.5 −1 −0.5 0 0.5 1 1.5−1.5
−1
−0.5
0
0.5
1
1.5
Figura 28: Resultado de simulacao usando MATLAB. (Script: fig1.m )
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 440
Teorema. (Estabilidade marginal)
O sistema x = Ax e marginalmente estavel sse ∃λi(A) tal que
(1) Re(λi(A)
)= 0
(2) o bloco de Jordan associado e de 1a. ordem.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 441
Exemplo 5
x =
0 0 0
0 0 0
0 0 −1
x
⋆ A matriz A possui 3 autovalores : λ =0, 0, −1
.
⋆ Todos os autovalores sao simples ⇒ blocos de Jordan de 1a. ordem.
⋆ O sistema e marginalmente estavel .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
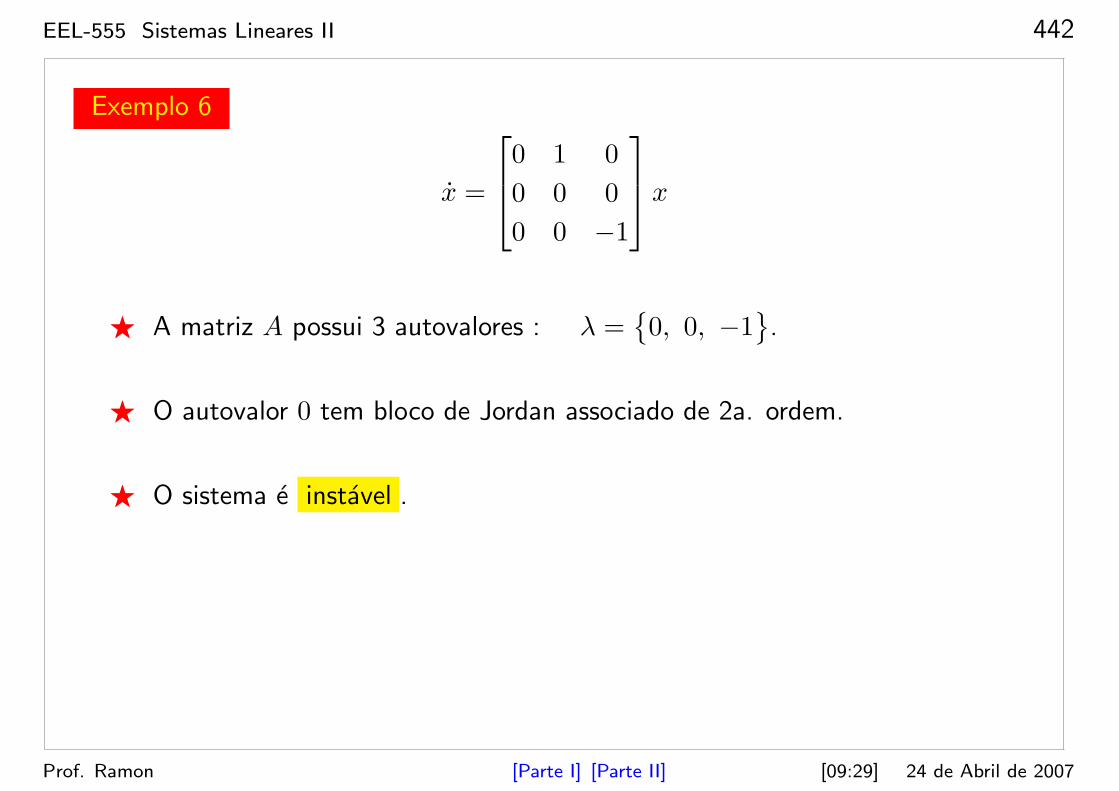
EEL-555 Sistemas Lineares II 442
Exemplo 6
x =
0 1 0
0 0 0
0 0 −1
x
⋆ A matriz A possui 3 autovalores : λ =0, 0, −1
.
⋆ O autovalor 0 tem bloco de Jordan associado de 2a. ordem.
⋆ O sistema e instavel .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 443
Teorema. (Estabilidade assintotica)
O sistema x = Ax e assintoticamente estavel sse Re(λi(A)
)< 0.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 444
Prova. Para toda matriz A, ∃M tal que
˙x = Jx , J = M−1AM
A solucao e : x(t) = eJtx(0)
A matriz J e composta por blocos de Jordan de ordem i da forma
Ji =
λ 1 0
0 λ 1
0 0 λ
, (i = 3)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
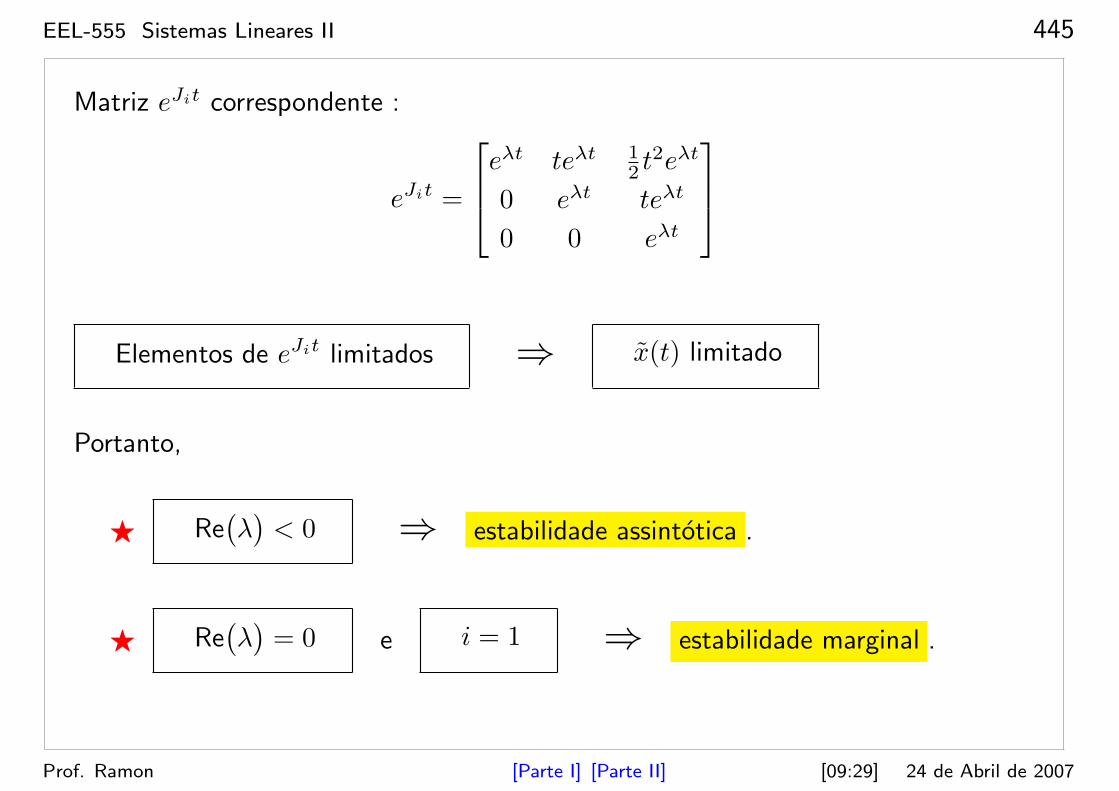
EEL-555 Sistemas Lineares II 445
Matriz eJit correspondente :
eJit =
eλt teλt 12 t2eλt
0 eλt teλt
0 0 eλt
Elementos de eJit limitados ⇒ x(t) limitado
Portanto,
⋆ Re(λ)
< 0 ⇒ estabilidade assintotica .
⋆ Re(λ)
= 0 e i = 1 ⇒ estabilidade marginal .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 446
Fato. Estabilidade assintotica ⇒ estabilidade BIBO.
Fato. Estabilidade assintotica : estabilidade BIBO.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 447
Metodo de Lyapunov
⋆ E um metodo geral para analise de estabilidade.
⋆ Aplica-se a sistemas contınuos e discretos.
⋆ Aplica-se a sistemas lineares e nao-lineares.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 448
Teorema. (Estabilidade)
O ponto de equilıbrio x e estavel (E) se existir uma funcao V (x) tal que
(1) V (x) e contınua em x
(2) V (0) = 0
(3) V (x) > 0
(4) V (x) ≤ 0
⋆ A funcao V (x) e denominada Funcao de Lyapunov .
⋆ A funcao V (·) satisfaz quase todas as propriedades de uma norma.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 449
Interpretacao.
⋆ V (x) pode ser vista como a distancia de x(t) do equilıbrio.
⋆ V (x) ≤ 0 assegura que essa distancia nao esta aumentando.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 450
Teorema. (Estabilidade assintotica)
Se
(4) V (x) < 0
entao a solucao e assintoticamente estavel (AE) .
Nota. V (x) < 0 assegura que a distancia esta diminuindo.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 451
Problema. (Falta de homogeneidade)
x
V
Figura 29: Funcao de Lyapunov V (x) ≤ Vmax.
⋆ Neste caso pode-se ter x→∞ e V (x) ≤ Vmax .
⋆ V (x) nao acusa que x→∞!
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 452
Problema.
x
V
Figura 30: Funcao de Lyapunov com inversao.
⋆ Neste exemplo x aumenta e V (x) decresce .
⋆ Nao basta ter V (x)→∞ para x→∞ !
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 453
Teorema. (Estabilidade assintotica global)
Se
(5) V (x) > φ(||x||) > 0, φ(||x||)→∞ para x→∞,
entao a solucao e AE ∀x(0), i.e., globalmente AE (GAE) .
Nota. A estabilidade e um conceito local .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 454
Importante :
⋆ A dificuldade do metodo de Lyapunov e achar V (x).
⋆ No caso de sistemas lineares esta busca e relativamente mais simples.
Basta escolher uma forma quadratica em x.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 455
Exemplo 7 Considere o sistema de primeira ordem
x = ax
Escolhemos a funcao de Lyapunov : V (x) =x2
2
Derivando : V =∂V
∂x
dx
dt= xx = ax2
Portanto : condicao para E : a ≤ 0
condicao para EA : a < 0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 456
Exemplo 8 Considere agora um sistema de ordem n
x = Ax
Escolhemos a funcao de Lyapunov : V (x) = xT Px , P = PT > 0
Derivando : V = xT Px + xT Px
= xT PAx + (Ax)T Px
= xT(PA + AT P
)
︸ ︷︷ ︸
−Q
x = −xT Q x
Portanto : condicao para E : Q = QT ≥ 0
condicao para EA : Q = QT > 0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 457
Teorema. (Unicidade da solucao da equacao de Lyapunov)
Para o sistema x = Ax ,
Re(λi(A)
)< 0 ⇔
∀Q = QT > 0 ,
∃! P = PT > 0
tal que PA + AT P = −Q .
⋆ PA + AT P = −Q e denominada equacao de Lyapunov .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 458
Prova. ( ⇒ )
Equacao de Lyapunov : PA + AT P = −Q
Podemos escrever : eAT t[PA + AT P
]eAt = −eAT t
[Q]eAt
ou melhor :d
dt
[
eAT t P eAt]
= −eAT t Q eAt
Lembrete : d
dt
[eAt]
= AeAt
d
dt
[
eAT t]
=d
dt
[eAt]T
=[AeAt
]T= eAT tAT
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 459
Integrando ambos os lados :[
eAT t P eAt] ∣∣∣
∞
0= −
∫ ∞
0
eAT t Q eAtdt
Se Re(λi(A)
)< 0 entao eAt = 0 para t =∞ .
Portanto : 0− P = −∫ ∞
0
eAT t Q eAtdt
ou melhor : P =
∫ ∞
0
eAT t Q eAtdt
⋆ Dadas A e Q, a formula acima fornece a matriz P correspondente.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 460
Vamos mostrar a unicidade por contradicao.
Suponha que existam 2 solucoes P1 e P2 :
P1A + AT P1 = −Q
P2A + AT P2 = −Q
⇒ (P1 − P2)A + AT (P1 − P2) = 0
Entao : eAT t[
(P1 − P2)A + AT (P1 − P2)]
eAt = 0
ou melhor :d
dt
[
eAT t (P1 − P2) eAt]
= 0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 461
Integrando :[
eAT t (P1 − P2) eAt] ∣∣∣
∞
0= 0
Como eAt = 0 para t =∞ , tem-se : 0− (P1 − P2) = 0
⋆ Quer dizer, P1 = P2 . A solucao e unica.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 462
E facil ver que Q = QT ⇒ P = PT
De fato :
Q = QT ⇒ [eAT t Q eAt
]=[eAT t Q eAt
]T
e portanto
P =
∫ ∞
0
[eAT t Q eAt
]dt =
∫ ∞
0
[eAT t Q eAt
]Tdt = PT
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 463
Q = QT > 0 ⇒ Q = NT N , N nao-singular.
Portanto :
P =
∫ ∞
0
[eAT t Q eAt
]dt
xT Px =
∫ ∞
0
xT[eAT t NT N eAt
]x dt
=
∫ ∞
0
[NeAtx
]T [NeAtx
]dt
=
∫ ∞
0
∥∥NeAtx
∥∥
2
2dt
⋆ x 6= 0 ⇒ ∥∥NeAtx
∥∥ > 0 ⇒ xT Px > 0 ⇒ P = PT > 0 .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 464
( ⇐ ) Seja λ um autovalor de A e v o autovetor associado :
Av = λv ⇒ v∗T AT = λ∗v∗T
Equacao de Lyapunov : PA + AT P = −Q
Podemos escrever : v∗T[PA + AT P
]v = −v∗T
[Q]v
ou melhor : −v∗T Q v =(v∗T AT
)
︸ ︷︷ ︸
λ∗v∗T
Pv + v∗T P(Av)
︸ ︷︷ ︸
λv
=(λ∗v∗T
)Pv + v∗T P
(λv)
=(λ∗ + λ
)v∗T Pv
= 2Re(λ)v∗T Pv
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 465
Se : P = PT > 0 e Q = QT > 0
entao : − v∗T Q v︸ ︷︷ ︸
>0
= 2Re(λ)v∗T Pv︸ ︷︷ ︸
>0
Portanto : Re(λ)
< 0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 466
Exemplo 9 Para o sistema linear descrito por
x =
[
0 1
−3 −2
]
x ,
escolhemos a funcao de Lyapunov V (x) = xT Px , onde
P =
[
α 1
1 1
]
, α > 1 .
Encontre um valor de α que permita concluir a estabilidade assintotica do
sistema dado.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 467
Solucao.
Equacao de Lyapunov : PA + AT P = −Q
Substituindo valores,
PA + AT P =
[
α 1
1 1
][
0 1
−3 −2
]
+
[
0 −3
1 −2
][
α 1
1 1
]
=
[
−6 α− 5
α− 5 −2
]
= −Q .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 468
Portanto :
Q =
[
6 5− α
5− α 2
]
.
Um valor de α que garante Q > 0 e : α = 5
Pelo lema de Sylvester , a condicao para a positividade de Q e
∆1 = q11 = 6 > 0
∆2 = det(Q) = −α2 + 10α− 13 > 0
Solucao : 5− 2√
3 < α < 5 + 2√
3 .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 469
Exemplo 10 Analise a estabilidade do sistema
x =
[
0 1
−1 −1
]
x .
1. Utilize a expressao integral para a solucao P .
2. Ache e resolva o sistema de equacoes lineares correspondente a equacao de
Lyapunov. (Vide : [Revisao de algebra linear: Equacao de Lyapunov.]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 470
Solucao.
(1) Escolhendo Q = I , tem-se :
P =
∫ ∞
0
eAT t Q eAtdt
=
∫ ∞
0
eAT t eAtdt =
[
3/2 1/2
1/2 1
]
⋆ P = PT > 0 ⇒ o sistema e GAE .
Solucao via MATLAB : Script exemplo2.m .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 471
(2) Equacao de Lyapunov :
AT P + PA = −Q
Sistema de equacoes lineares equivalente :
[
AT + a11I a21I
a12I AT + a22I
]
︸ ︷︷ ︸
A
[
p1
p2
]
= −[
q1
q2
]
A[
p1
p2
]
= −[
q1
q2
]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
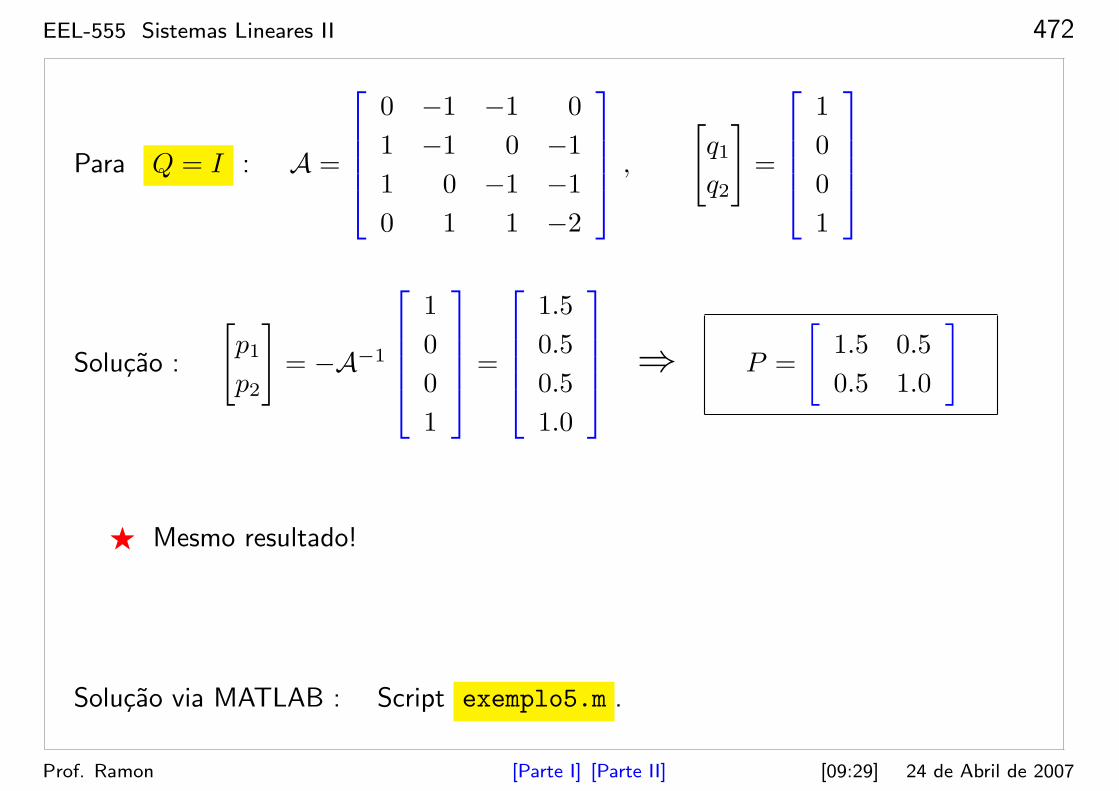
EEL-555 Sistemas Lineares II 472
Para Q = I : A =
0 −1 −1 0
1 −1 0 −1
1 0 −1 −1
0 1 1 −2
,
[
q1
q2
]
=
1
0
0
1
Solucao :
[
p1
p2
]
= −A−1
1
0
0
1
=
1.5
0.5
0.5
1.0
⇒ P =
[
1.5 0.5
0.5 1.0
]
⋆ Mesmo resultado!
Solucao via MATLAB : Script exemplo5.m .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 473
Exemplo 11 Analise a estabilidade do sistema
x =
[
0 1
−1 0
]
x .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 474
Solucao.
Escolhendo Q = I , tem-se :
P =
∫ ∞
0
eAT t Q eAtdt
=
∫ ∞
0
eAT t eAtdt
=
∫ ∞
0
[
cos2(t) + sin2(t) 0
0 cos2(t) + sin2(t)
]
dt =
[
∞ 0
0 ∞
]
⋆ Este sistema e um oscilador harmonico. Nao e AE .
Solucao via MATLAB : Script exemplo3.m .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 475
Escolhendo P = I , tem-se :
V = xT(PA + AT P
)x
= xT(A + AT
)x
= xT
([
0 1
−1 0
]
+
[
0 −1
1 0
])
x = 0
⋆ Como V > 0 e V = 0 , concluı-se que o sistema e estavel .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 476
8.2 Controlabilidade (Co)
• Introducao
• Definicao de Co– Exemplos: [ 1 ] [ 2 ] [ 3 ]
• Criterios de controlabilidade
– Definicoes: [Matriz C ] [Matriz Wc ] [Matriz Gramiana ]
– Teorema
– Exemplos: [ 4 ] [ 5 ] [ 6 ] [ 7 ] [ 8 ]
• Forma canonica Co– Propriedade
– Teorema
– Transformacao para FC Co– Exemplos: [ 9 ]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 477
Introducao
SLIT :
x = Ax + Bu
y = Cx
⋆ Controlabilidade - Propriedade que diz quando o estado x(t) pode ser
“controlado” livremente atraves da entrada u(t).
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 478
Definicao de Co
Definicao. Um SLIT e dito controlavel se
∀x0 = x(0) , ∀x1 ,
∃u(t) tal que
x(tf ) = x1 , tf finito.
⋆ Tambem se diz que o par(A, B
)e Co .
⋆ O sinal u(t) nao e unico.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
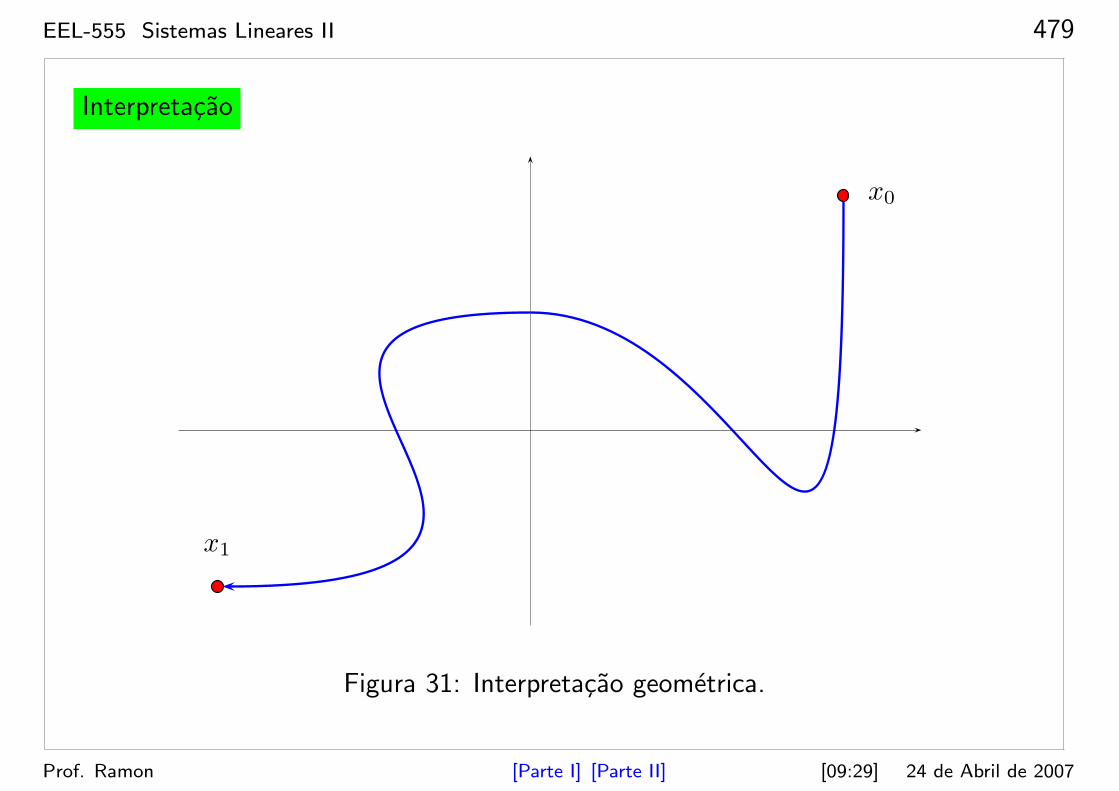
EEL-555 Sistemas Lineares II 479
Interpretacao
x0
x1
Figura 31: Interpretacao geometrica.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 480
Definicao alternativa :
Definicao. Um SLIT e dito controlavel se
∀x0 = x(0) ,
∃u(t) tal que
x(tf ) = 0 , tf finito.
⋆ Nesta definicao, o estado final x1 foi transladado para a origem.
⋆ Basta uma transformacao de coordenadas.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 481
Nova interpretacao
x0
x1
Figura 32: Interpretacao geometrica.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 482
Perolas
• E a propriedade que um sistema pode possuir de mudar sua resposta a
determinado “sinal” de entrada, proporcionalmente a variacao no valor de
algum de seus estados que devem possuir conexao fısica com alguma entrada
do sistema.
• Quando as condicoes iniciais pode ser alterado a depender do valor da entrada.
• Um sistema e dito controlavel se a entrada esta ligada a sua funcao.
• Um sistema e controlavel se em seus estados caracterısticos houverem
componentes da entrada (u).
• Controlabilidade e quando a saıda so depende da entrada u(t).
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 483
Exemplo 12
C1 = 1F
+ −
R1 = 1Ω
x1
C2 = 1F
+ −
R2 = 1Ω
x2
u 2Ω y
+
−
u = corrente de entrada
y = tensao de saıda
x1 = tensao no capacitor C1
x2 = tensao no capacitor C2
⋆ Circuito aberto.
⋆ Tensao x2 nao pode ser controlada pela corrente u ⇒ SLIT Co .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
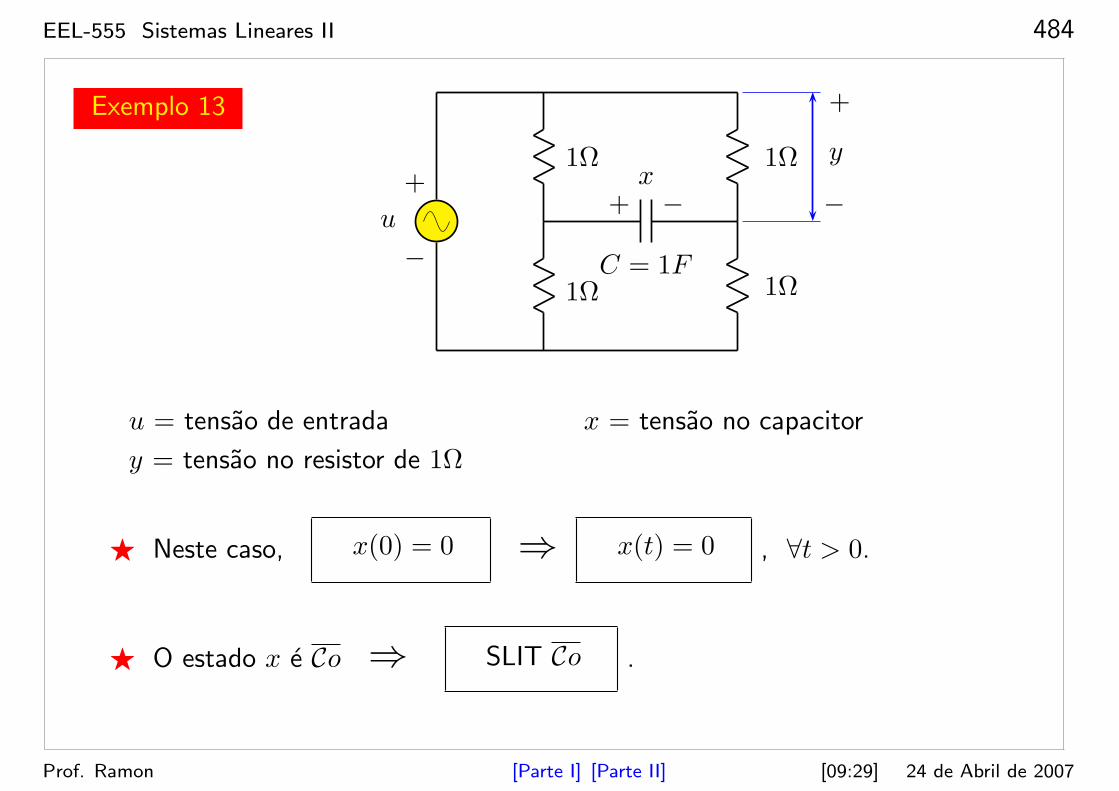
EEL-555 Sistemas Lineares II 484
Exemplo 13
C = 1F
+ −x
u
1Ω
y
+
−1Ω
1Ω
1Ω+
−
u = tensao de entrada
y = tensao no resistor de 1Ω
x = tensao no capacitor
⋆ Neste caso, x(0) = 0 ⇒ x(t) = 0 , ∀t > 0.
⋆ O estado x e Co ⇒ SLIT Co .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 485
Exemplo 14
1F+
−u
1Ω
x2
+
−
1Ω
+
−
1F+
−x1
+
−
u = tensao de entrada
y = tensao no resistor de 1Ω
x1 = tensao no capacitor 1F
x2 = tensao no capacitor 1F
⋆ Neste caso, x1(0) = x2(0) = 0 ⇒ x1(t) = x2(t) , ∀t > 0.
⋆ SLIT Co .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 486
Criterios para Co
⋆ A aplicacao da definicao nao e muito pratica.
⋆ Vamos introduzir criterios algebricos .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
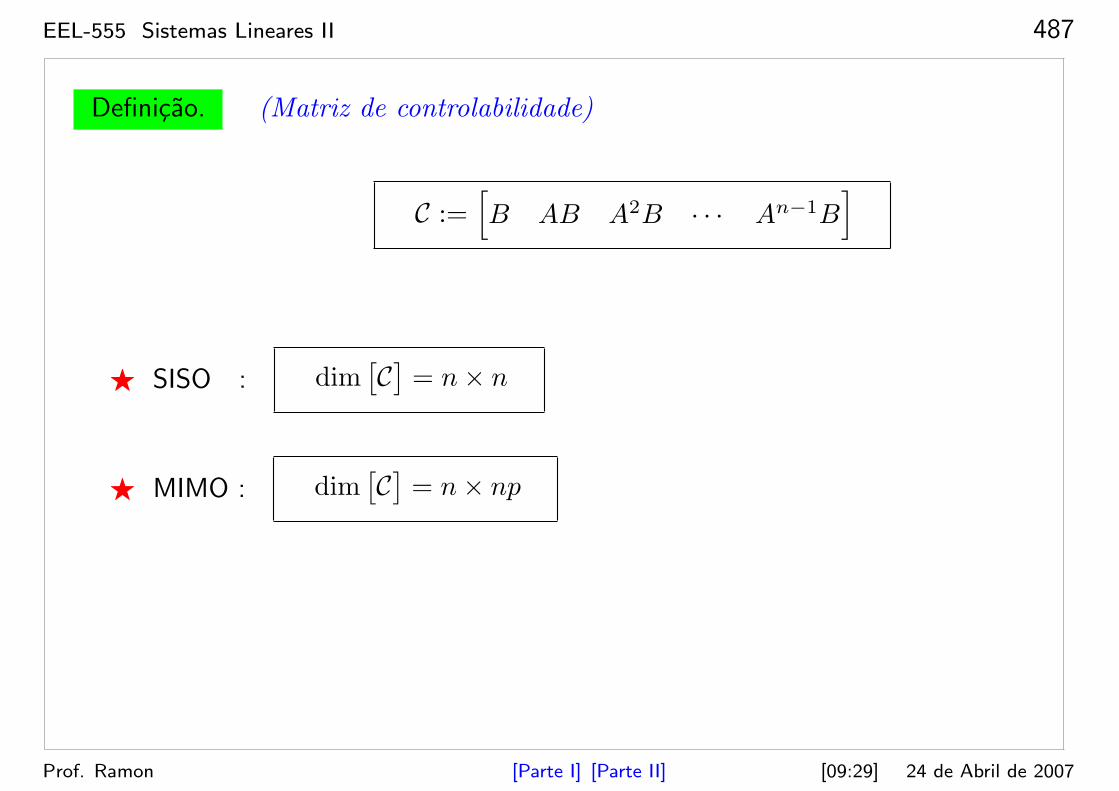
EEL-555 Sistemas Lineares II 487
Definicao. (Matriz de controlabilidade)
C :=[
B AB A2B · · · An−1B]
⋆ SISO : dim[C]
= n× n
⋆ MIMO : dim[C]
= n× np
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 488
Definicao. (Matriz Wc(t))
Wc(t) =
∫ t
0
eAτBBT eAT τdτ
=
∫ t
0
eA(t−τ)BBT eAT (t−τ)dτ
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 489
Definicao. (Matriz Gramiana)
Wc := Wc(∞) =
∫ ∞
0
eAτBBT eAT τdτ
⋆ dim[Wc
]= n× n
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 490
Teorema. As seguintes sentencas sao equivalentes :
(1) O par(A, B
)e Co .
(2) rank(C) = n .
(3) A matriz Wc(t) e nao singular ∀t > 0.
(4) rank([
A− λI B])
= n para todo autovalor λ de A.
(5) Re(λ(A)
)< 0 ⇒
∃! Wc = WTc > 0 (matriz gramiana)
tal que AWc + WcAT = −BBT .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 491
Prova. ( C. T. Chen 1999), p. 145
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 492
Fato. Se o par(A, B
)e Co , entao
u(t) = −BT eAT (t1−t)W−1c (t1)
[eAt1x0 − x1
]
transfere o estado x0 = x(0) para x1 = x(t1).
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 493
Exemplo 15
x =
0 1 0 0
0 0 −1 0
0 0 0 1
0 0 5 0
x +
0
1
0
−2
u
y =[
1 0 0 0]
x
Para este sistema : C =[
B AB A2B A3B]
=
0 1 0 2
1 0 2 0
0 −2 0 −10
−2 0 −10 0
⋆ rank(C)
= 4 ⇒ Co .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 494
Exemplo 16
C1 = 1F
+ −
R1 = 1Ω
x1
C2 = 1F
+ −
R2 = 1Ω
x2
u 2Ω y
+
−
R1 = 1Ω (em paralelo com C1)
R2 = 1Ω (em paralelo com C2)
iR1, vR1 = corrente e tensao em R1
iR2, vR2 = corrente e tensao em R2
Lei dos nos :
iR1+ iC1
= u
iR2+ iC2
= 0Lei das malhas :
vR1+ x1 = 0
vR2+ x2 = 0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
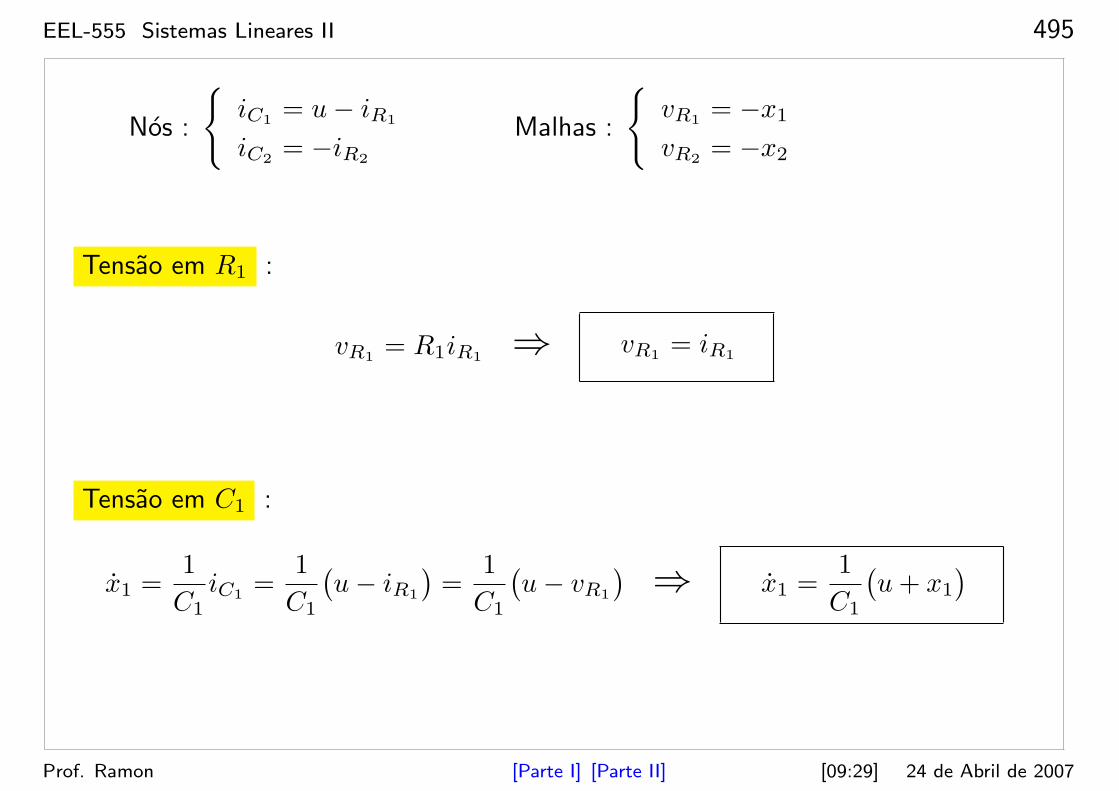
EEL-555 Sistemas Lineares II 495
Nos :
iC1= u− iR1
iC2= −iR2
Malhas :
vR1= −x1
vR2= −x2
Tensao em R1 :
vR1= R1iR1
⇒ vR1= iR1
Tensao em C1 :
x1 =1
C1iC1
=1
C1
(u− iR1
)=
1
C1
(u− vR1
) ⇒ x1 =1
C1
(u + x1
)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 496
Nos :
iC1= u− iR1
iC2= −iR2
Malhas :
vR1= −x1
vR2= −x2
Tensao em R2 :
vR2= R2iR2
⇒ vR2= iR2
Tensao em C2 :
x2 =1
C2iC2
=1
C2
(− iR2
)=
1
C2
(− vR2
) ⇒ x2 =1
C2x2
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 497
Nos :
iC1= u− iR1
iC2= −iR2
Malhas :
vR1= −x1
vR2= −x2
Tensao de saıda :
y = 2u− vR2⇒ y = x2 + 2u
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 498
Equacao de estado para o circuito :
x =
[
1/C1 0
0 1/C2
]
x +
[
1/C1
0
]
u
y =[
0 1]
x +[
2]
u
Para este sistema : C =[
B AB]
=
[
1/C1
(1/C1
)2
0 0
]
⋆ rank(C)
= 1 ⇒ Co .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
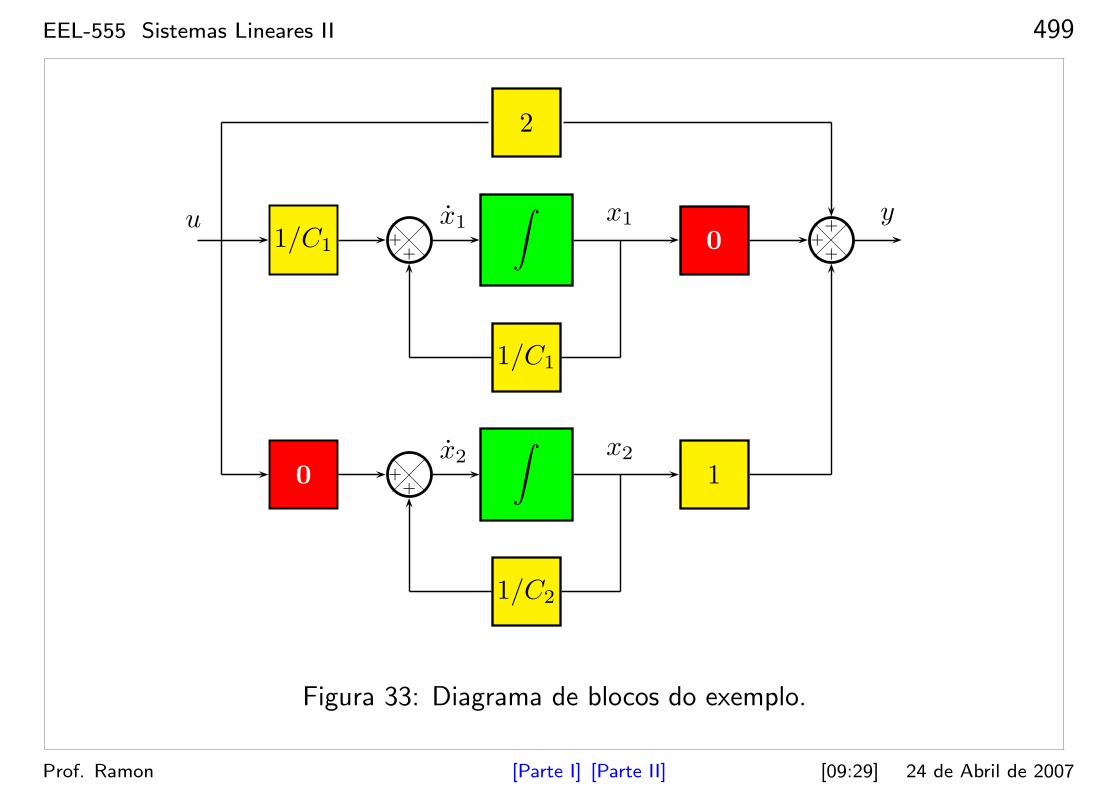
EEL-555 Sistemas Lineares II 499
∫
1/C2
0 1x2x2
++
∫
++
+
1/C1
1/C1
x1 yx1u
2
++
0
Figura 33: Diagrama de blocos do exemplo.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
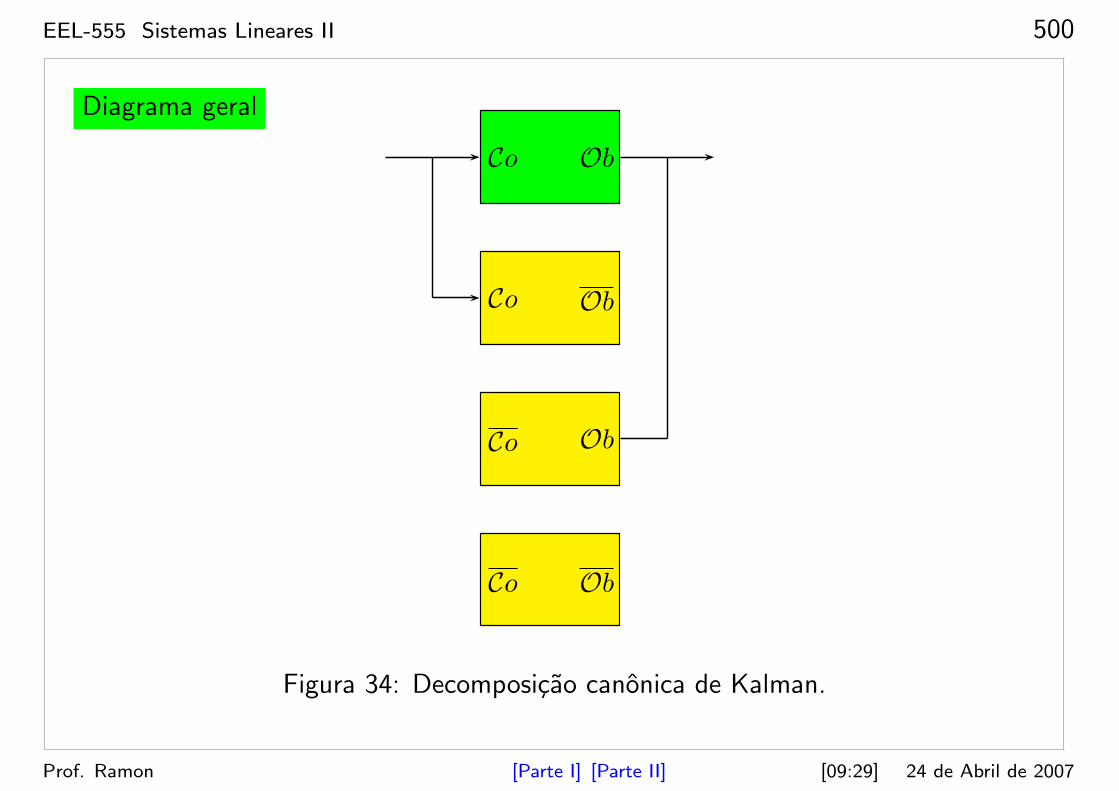
EEL-555 Sistemas Lineares II 500
Diagrama geral
Co Ob
Co Ob
Co Ob
Co Ob
Figura 34: Decomposicao canonica de Kalman.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
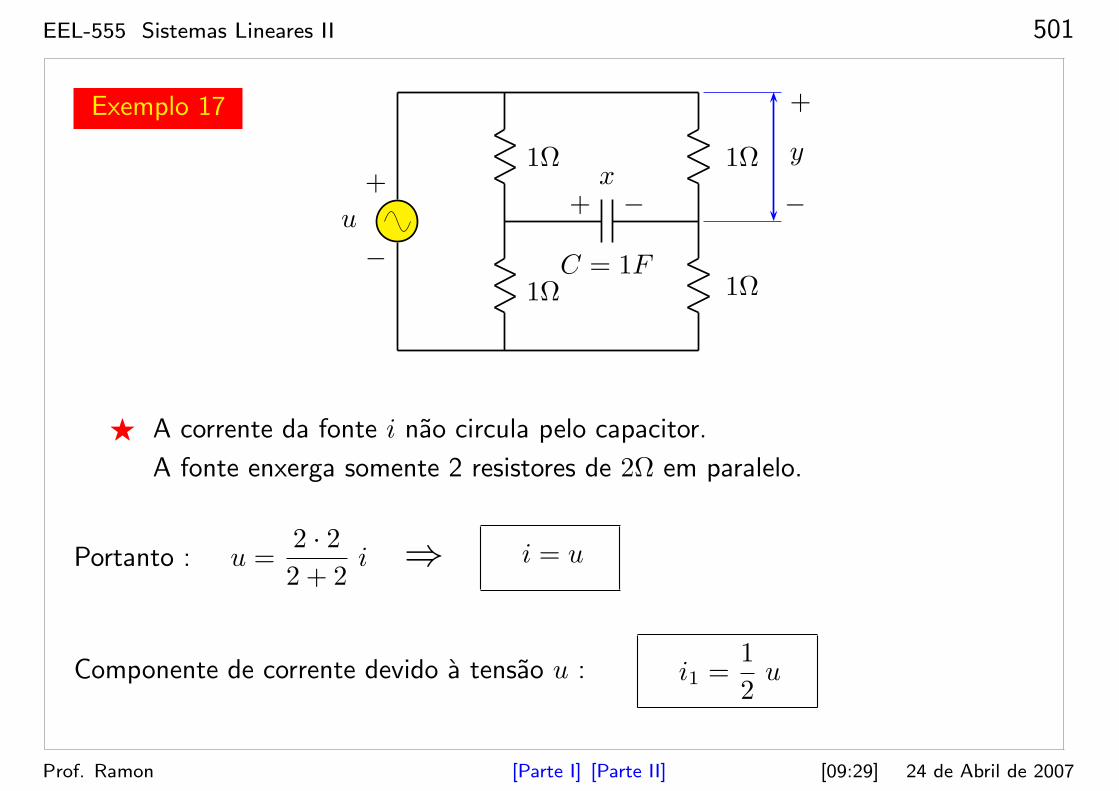
EEL-555 Sistemas Lineares II 501
Exemplo 17
C = 1F
+ −x
u
1Ω
y
+
−1Ω
1Ω
1Ω+
−
⋆ A corrente da fonte i nao circula pelo capacitor.
A fonte enxerga somente 2 resistores de 2Ω em paralelo.
Portanto : u =2 · 22 + 2
i ⇒ i = u
Componente de corrente devido a tensao u : i1 =1
2u
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 502
C = 1F
+ −x
u
1Ω
y
+
−1Ω
1Ω
1Ω+
−
⋆ A corrente do capacitor iC nao circula pela fonte.
O capacitor enxerga somente 2 resistores de 2Ω em paralelo.
Portanto : x =2 · 22 + 2
iC ⇒ iC = x
Componente de corrente devido a tensao x : i2 =1
2x
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
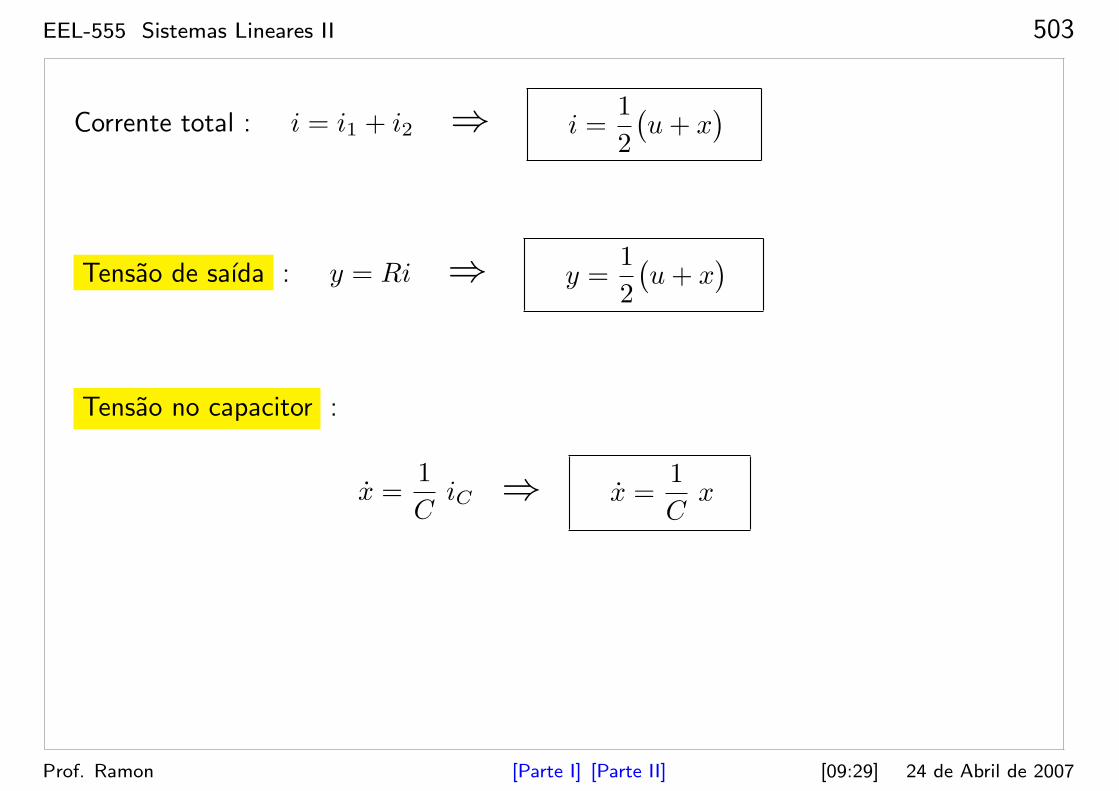
EEL-555 Sistemas Lineares II 503
Corrente total : i = i1 + i2 ⇒ i =1
2
(u + x
)
Tensao de saıda : y = Ri ⇒ y =1
2
(u + x
)
Tensao no capacitor :
x =1
CiC ⇒ x =
1
Cx
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 504
Equacao de estado para o circuito :
x =[
1/C]
x +[
0]
u
y =[
1/2]
x +[
1/2]
u
Para este sistema : C =[
B]
= 0
⋆ rank(C)
= 0 ⇒ Co .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
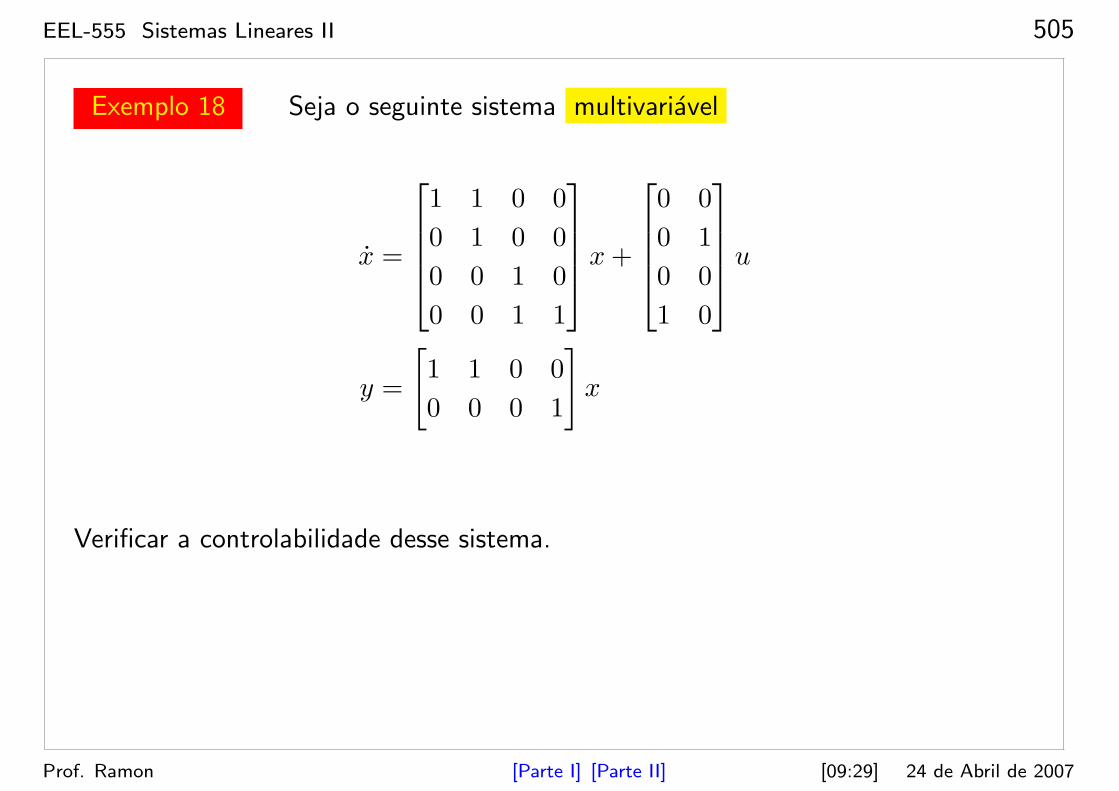
EEL-555 Sistemas Lineares II 505
Exemplo 18 Seja o seguinte sistema multivariavel
x =
1 1 0 0
0 1 0 0
0 0 1 0
0 0 1 1
x +
0 0
0 1
0 0
1 0
u
y =
[
1 1 0 0
0 0 0 1
]
x
Verificar a controlabilidade desse sistema.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 506
Neste caso, n = 4, portanto
C =[
B AB A2B A3B]
=
0 0 0 1 0 2 0 3
0 1 0 1 0 1 0 1
0 0 0 0 0 0 0 0
1 0 1 0 1 0 1 0
Como a matriz C possui uma linha de zeros ⇒ rank(C) < 4
Conclusao: o sistema e incontrolavel.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 507
Solucao alternativa
Os autovalores da matriz A podem ser obtidos por inspecao:
λi = 1 .
Entao, podemos verificar a Co aplicando o criterio
(A, B
)Co ⇔ rank
([
A− λi I B])
= n , ∀λi(A).
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 508
Para o sistema dado,
[
A− λI B]
=
0 1 0 0 0 0
0 0 0 0 0 1
0 0 0 0 0 0
0 0 1 0 1 0
.
Devido a linha de zeros ⇒ rank([
A− λI B])
< 4
Conclusao: o sistema e incontrolavel.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
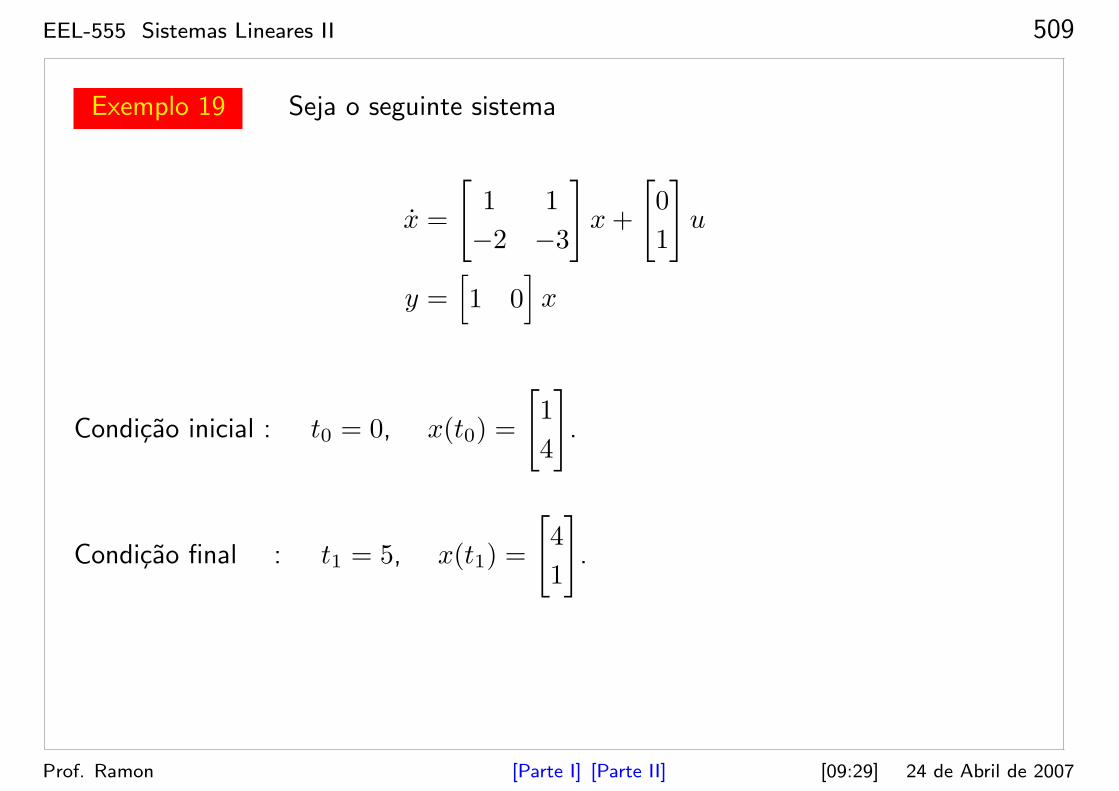
EEL-555 Sistemas Lineares II 509
Exemplo 19 Seja o seguinte sistema
x =
[
1 1
−2 −3
]
x +
[
0
1
]
u
y =[
1 0]
x
Condicao inicial : t0 = 0, x(t0) =
[
1
4
]
.
Condicao final : t1 = 5, x(t1) =
[
4
1
]
.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 510
Calculo do sinal de controle usando Matlab :
u(t) = −BT eAT (t1−t)W−1c (t1)
[eAt1x0 − x1
]
= 41.29 e(−5+t) − 35.06 e(−10+2t)
(Script: exemplo6.m )
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
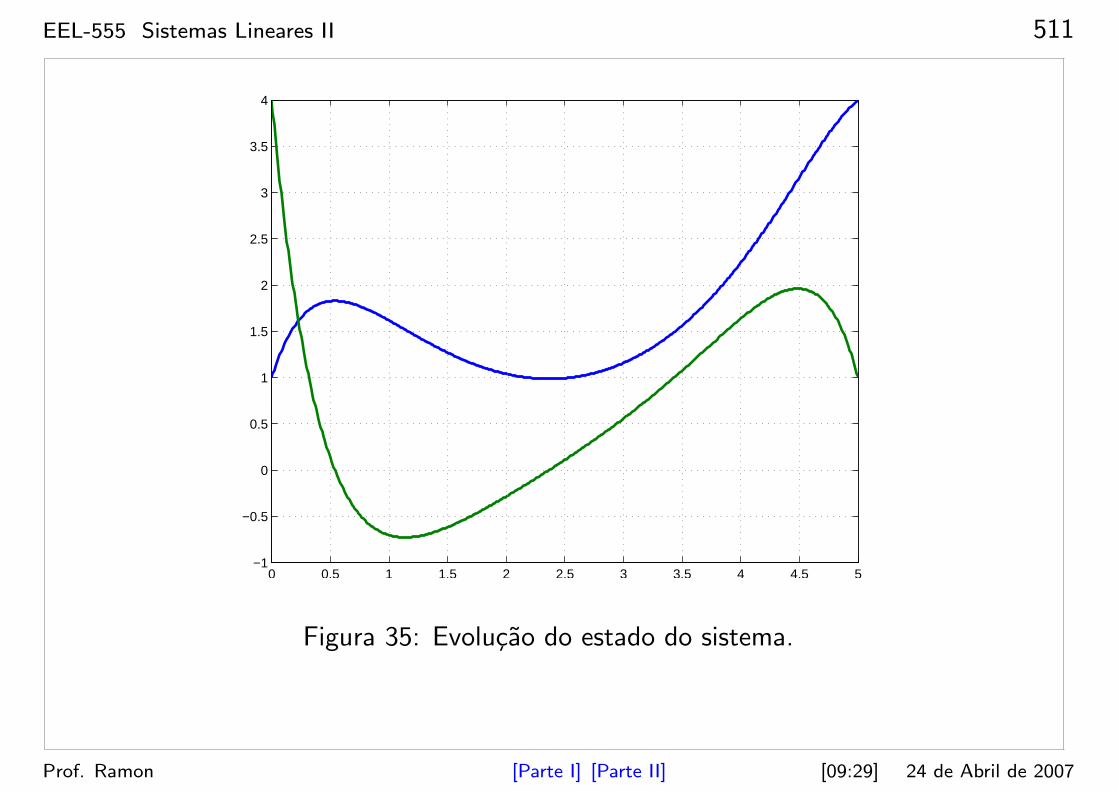
EEL-555 Sistemas Lineares II 511
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5−1
−0.5
0
0.5
1
1.5
2
2.5
3
3.5
4
Figura 35: Evolucao do estado do sistema.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
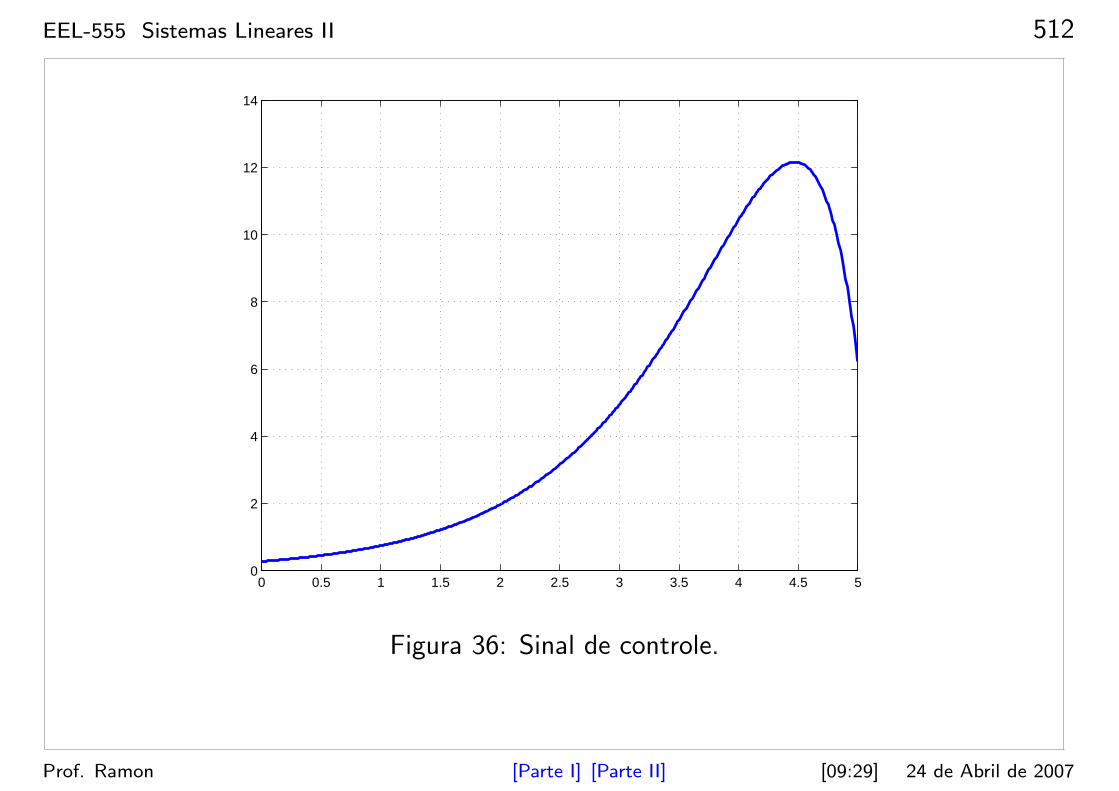
EEL-555 Sistemas Lineares II 512
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
2
4
6
8
10
12
14
Figura 36: Sinal de controle.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
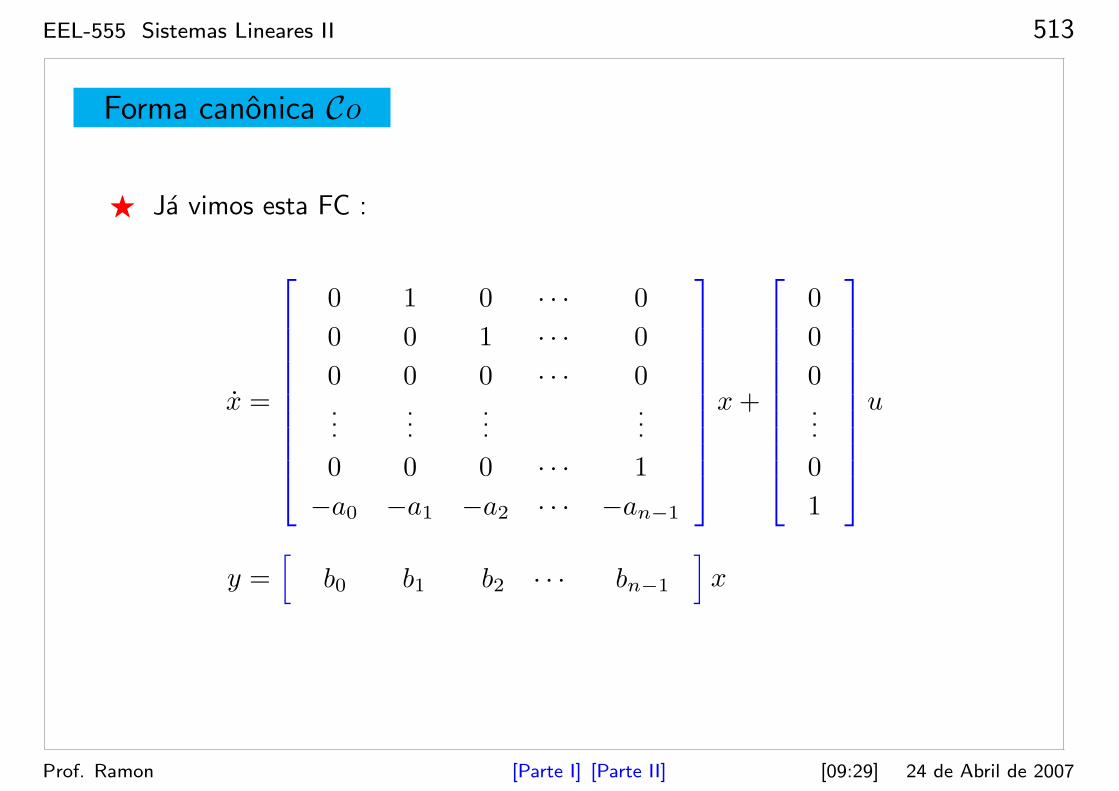
EEL-555 Sistemas Lineares II 513
Forma canonica Co
⋆ Ja vimos esta FC :
x =
0 1 0 · · · 0
0 0 1 · · · 0
0 0 0 · · · 0...
......
...
0 0 0 · · · 1
−a0 −a1 −a2 · · · −an−1
x +
0
0
0...
0
1
u
y =[
b0 b1 b2 · · · bn−1
]
x
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 514
Propriedade. Toda equacao de estado na FC Co e Co.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
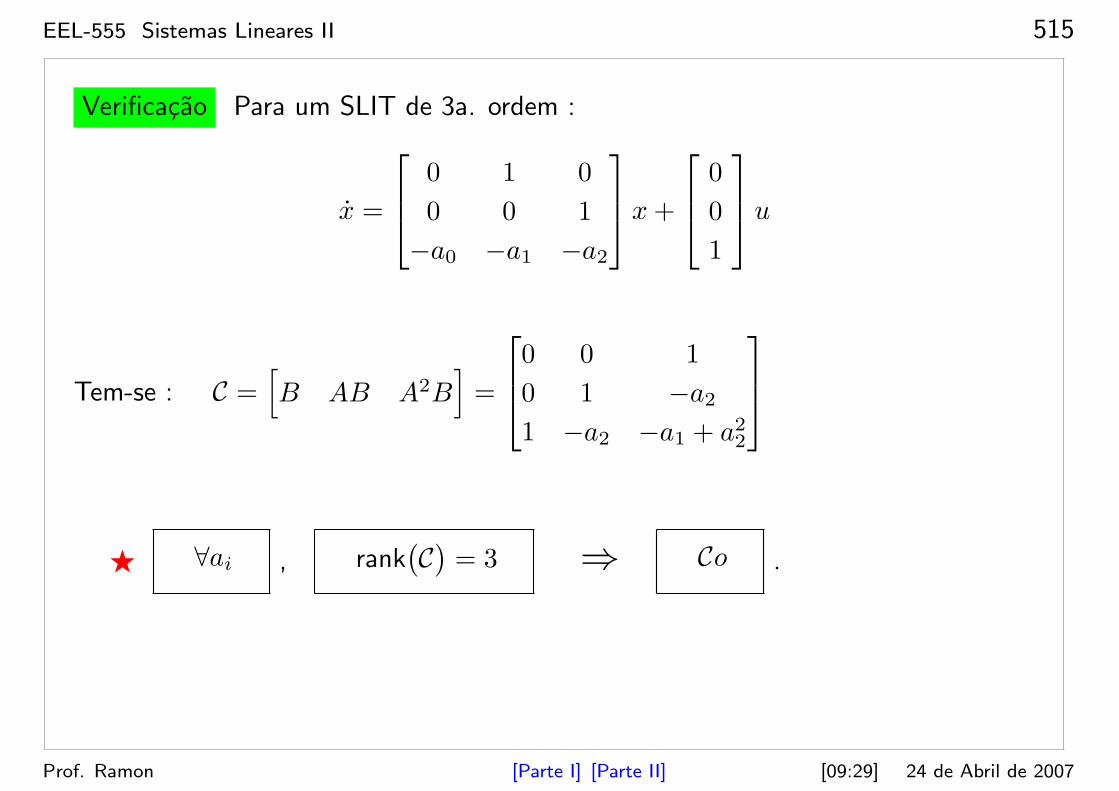
EEL-555 Sistemas Lineares II 515
Verificacao Para um SLIT de 3a. ordem :
x =
0 1 0
0 0 1
−a0 −a1 −a2
x +
0
0
1
u
Tem-se : C =[
B AB A2B]
=
0 0 1
0 1 −a2
1 −a2 −a1 + a22
⋆ ∀ai , rank(C)
= 3 ⇒ Co .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 516
Transformacao de coordenadas
x = Ax + Bu
y = Cx
z = Az + Bu
y = Cz
z = Tx
Matrizes do SLIT transformado :
A = TAT−1
B = TB
C = CT−1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 517
Teorema. A transformacao de coordenadas nao destroi a Co.
(A, B
)Co ⇔
(A, B
)Co
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 518
Exercıcio. Provar.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 519
Transformacao para FC Co
A matriz de controlabilidade do sistema transformado e :
C =[
B AB · · · An−1B]
=
[
TB TA T−1 T︸ ︷︷ ︸
I
B · · · TAn−1 T−1 T︸ ︷︷ ︸
I
B]
= T[
B AB · · · An−1B]
= TC
Portanto : T = CC−1 .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 520
Exemplo 20
A =
1 1 1
0 1 1
0 0 1
, B =
1
0
1
C =[
1 0 0]
Tem-se : C =[
B AB A2B]
=
1 2 4
0 1 2
1 1 1
⋆ rank(C)
= 3 ⇒ Co .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 521
Pol. caracterıstico de A : p(λ) = det(sI −A
)
= (s− 1)3
= s3 − 3s2 + 3s− 1
Portanto : A =
0 1 0
0 0 1
1 −3 3
, B =
0
0
1
Tem-se : C =[
B AB A2B]
=
0 0 1
0 1 3
1 3 6
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 522
Portanto :
T = CC−1 =
0 0 1
0 1 3
1 3 6
1 2 4
0 1 2
1 1 1
−1
=
0 0 1
0 1 3
1 3 6
1 −2 0
−2 3 2
1 −1 −1
=
1 −1 −1
1 1 −1
1 1 0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
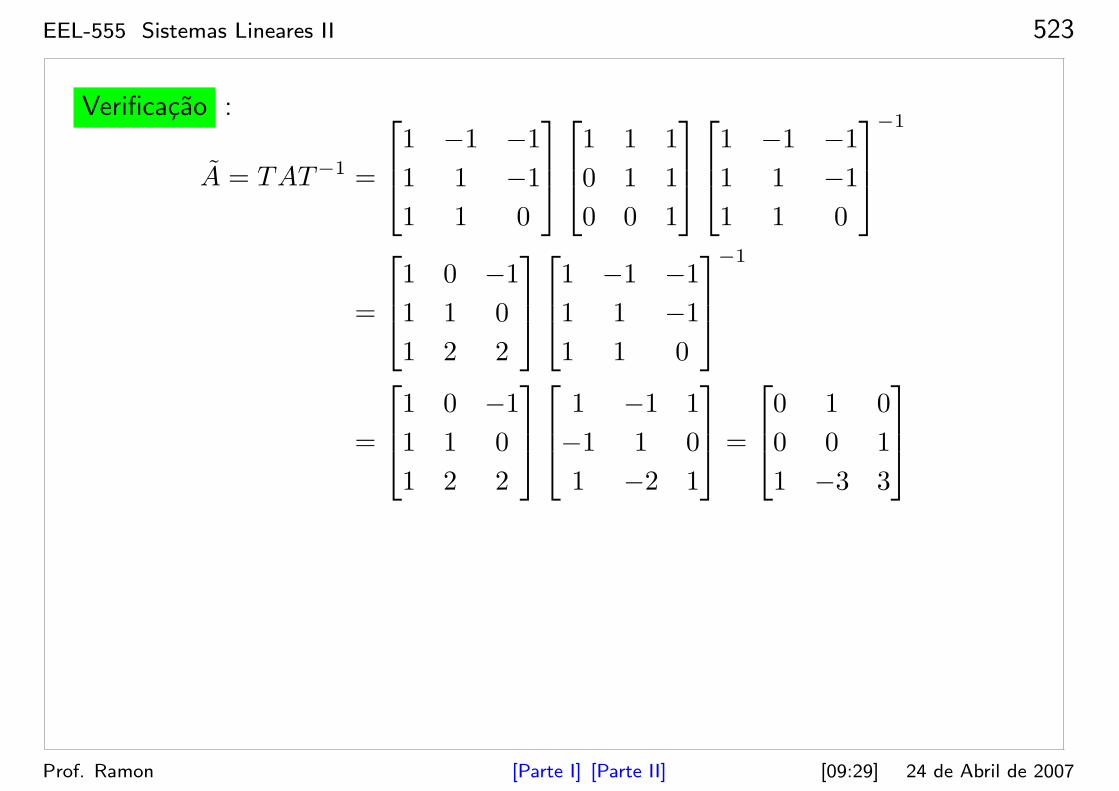
EEL-555 Sistemas Lineares II 523
Verificacao :
A = TAT−1 =
1 −1 −1
1 1 −1
1 1 0
1 1 1
0 1 1
0 0 1
1 −1 −1
1 1 −1
1 1 0
−1
=
1 0 −1
1 1 0
1 2 2
1 −1 −1
1 1 −1
1 1 0
−1
=
1 0 −1
1 1 0
1 2 2
1 −1 1
−1 1 0
1 −2 1
=
0 1 0
0 0 1
1 −3 3
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 524
Verificacao :
B = TB =
1 −1 −1
1 1 −1
1 1 0
1
0
1
=
0
0
1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 525
8.3 Observabilidade (Ob)
• Introducao
• Definicao de Ob
– Exemplos: [ 1 ] [ 2 ] [ 3 ]
• Criterios de observabilidade
– Definicoes: [Matriz O ] [Matriz Wo ] [Matriz Gramiana ]
– Teoremas: [Observabilidade ] [Dualidade ]
– Exemplos: [ 4 ] [ 5 ] [ 6 ]
• Forma canonica Ob
– Propriedade
– Teorema
– Transformacao para FC Ob
• Forma canonica de Kalman
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 526
Introducao
SLIT :
x = Ax + Bu
y = Cx
⋆ Observabilidade - Propriedade que diz quando o estado inicial x(0) pode
ser “reconstruıdo” a partir da saıda y(t).
⋆ E uma propriedade dual da controlabilidade.
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 527
Definicao. (Observabilidade)
Um SLIT e dito observavel se
∃t1 > 0 finito tal que
o conhecimento de u(t) e y(t) no intervalo [0, t1] e suficiente para se
determinar unicamente a condicao inicial
x0 = x(0) .
⋆ Tambem se diz que o par(A, C
)e Ob .
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 528
Definicao alternativa :
Definicao. Um SLIT e observavel sse o estado inicial
∀x0 = x(0) ,
pode ser unicamente determinado a partir de y(t) no intervalo [0, t1]
t1 > 0 finito com
u(t) ≡ 0 .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 529
Perolas
• E a propriedade que um sistema pode possuir de, em determinada saıda sua,
serem sentidos diretamente os efeitos causados por determinado estado
interno, sem a necessidade de ser possıvel a alteracao do “valor” deste estado
por acao externa ao sistema.
• Um sistema e dito observavel quando a saıda do sistema e condicao suficiente
para se prever a entrada do mesmo.
• Aplicado um sinal nulo na entrada e possıvel saber o sinal na saıda em estado
zero.
• Na observabilidade mudamos o controle na entrada para o controle na saıda.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 530
Exemplo 21
C1 = 1F
+ −
R1 = 1Ω
x1
C2 = 1F
+ −
R2 = 1Ω
x2
u 2Ω y
+
−
u = corrente de entrada
y = tensao de saıda
x1 = tensao no capacitor C1
x2 = tensao no capacitor C2
⋆ Tensao x1 nao aparece na saıda ⇒ SLIT Ob .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
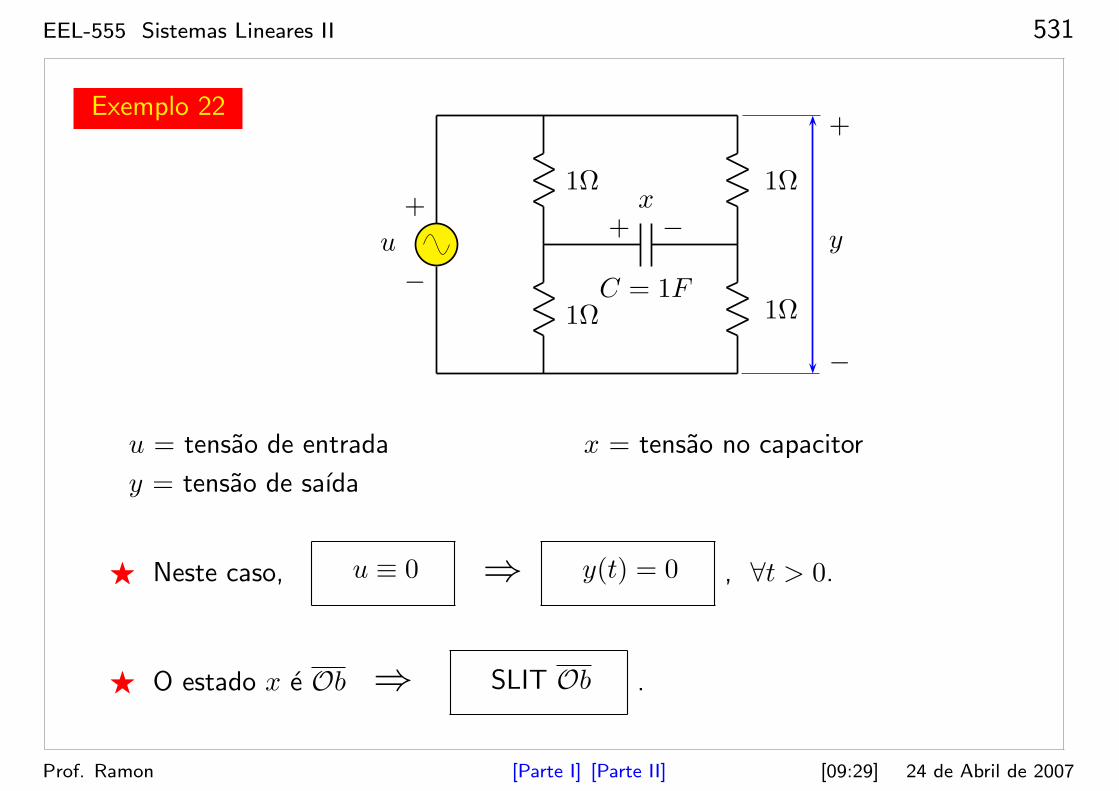
EEL-555 Sistemas Lineares II 531
Exemplo 22
C = 1F
+ −x
u
1Ω
y
+
−
1Ω
1Ω
1Ω+
−
u = tensao de entrada
y = tensao de saıda
x = tensao no capacitor
⋆ Neste caso, u ≡ 0 ⇒ y(t) = 0 , ∀t > 0.
⋆ O estado x e Ob ⇒ SLIT Ob .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 532
Exemplo 23
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 533
Criterios para Ob
⋆ A aplicacao da definicao nao e muito pratica.
⋆ Vamos introduzir criterios algebricos .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
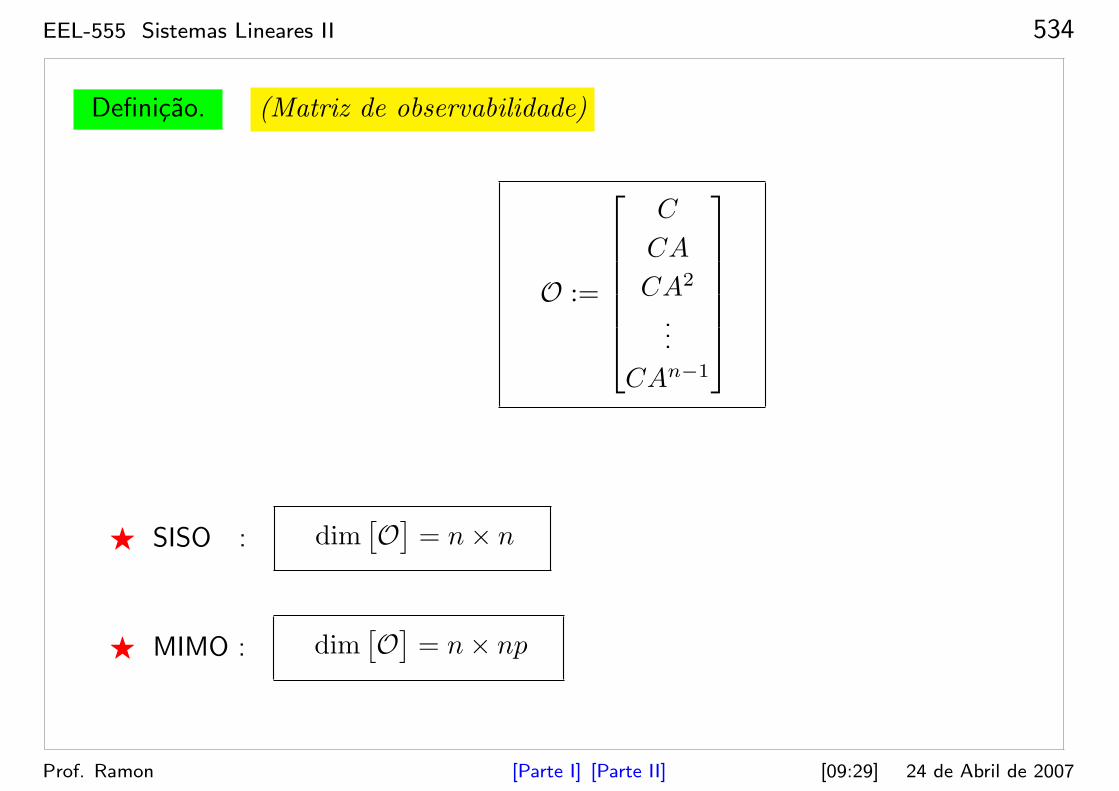
EEL-555 Sistemas Lineares II 534
Definicao. (Matriz de observabilidade)
O :=
C
CA
CA2
...
CAn−1
⋆ SISO : dim[O]
= n× n
⋆ MIMO : dim[O]
= n× np
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
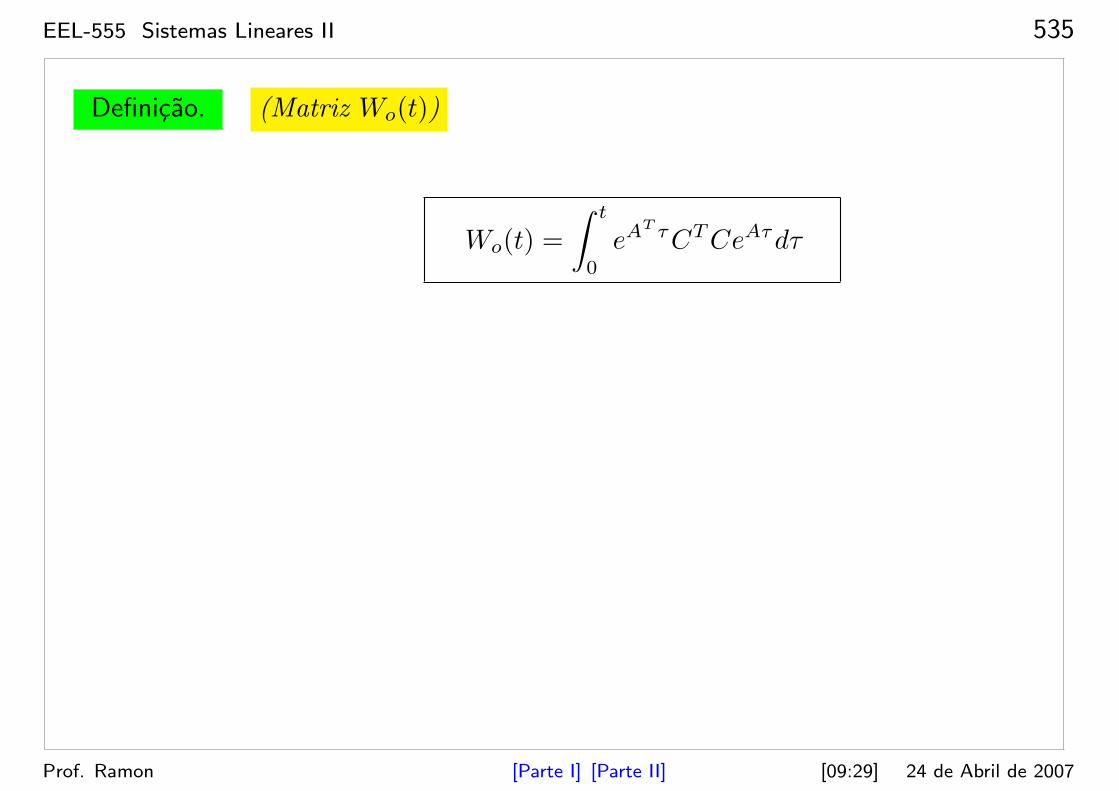
EEL-555 Sistemas Lineares II 535
Definicao. (Matriz Wo(t))
Wo(t) =
∫ t
0
eAT τCT CeAτdτ
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
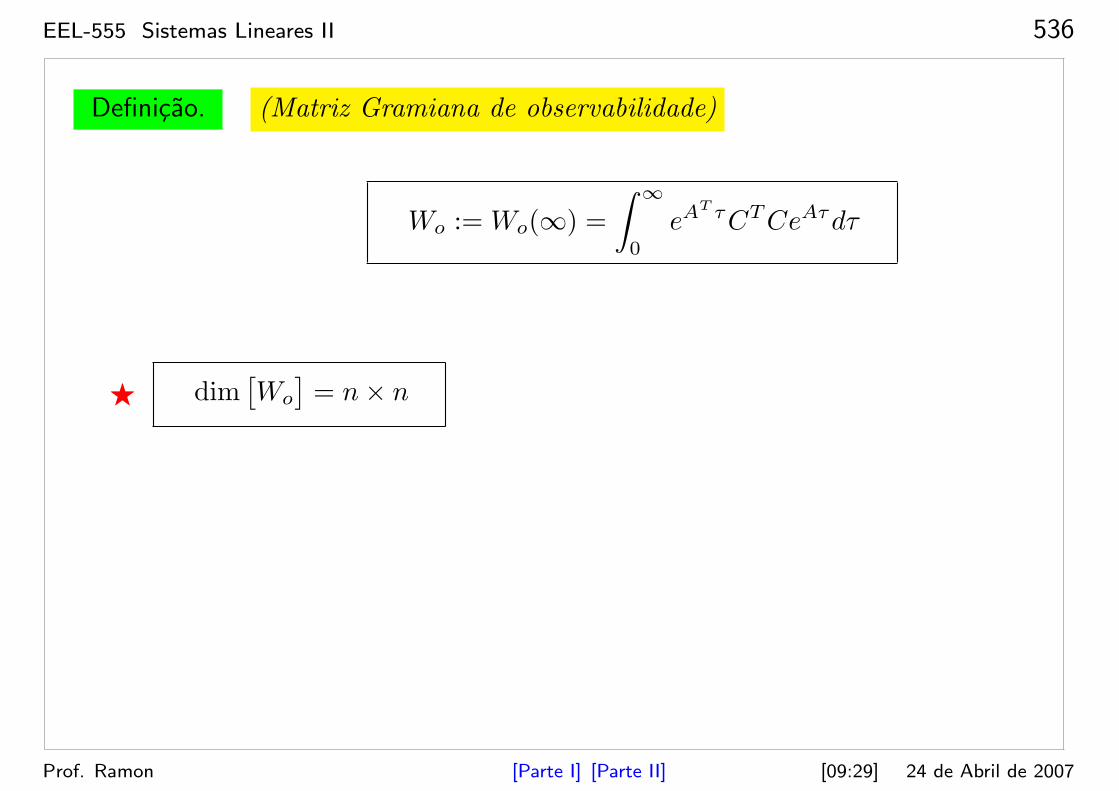
EEL-555 Sistemas Lineares II 536
Definicao. (Matriz Gramiana de observabilidade)
Wo := Wo(∞) =
∫ ∞
0
eAT τCT CeAτdτ
⋆ dim[Wo
]= n× n
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 537
Teorema. As seguintes sentencas sao equivalentes :
(1) O par(A, C
)e Ob .
(2) rank(O) = n .
(3) A matriz Wo(t) e nao singular ∀t > 0.
(4) rank
([
A− λI
C
])
= n para todo autovalor λ de A.
(5) Re(λ(A)
)< 0 ⇒
∃! Wo = WTo > 0 (matriz gramiana)
tal que AT Wo + WoA = −CT C .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 538
Prova.
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
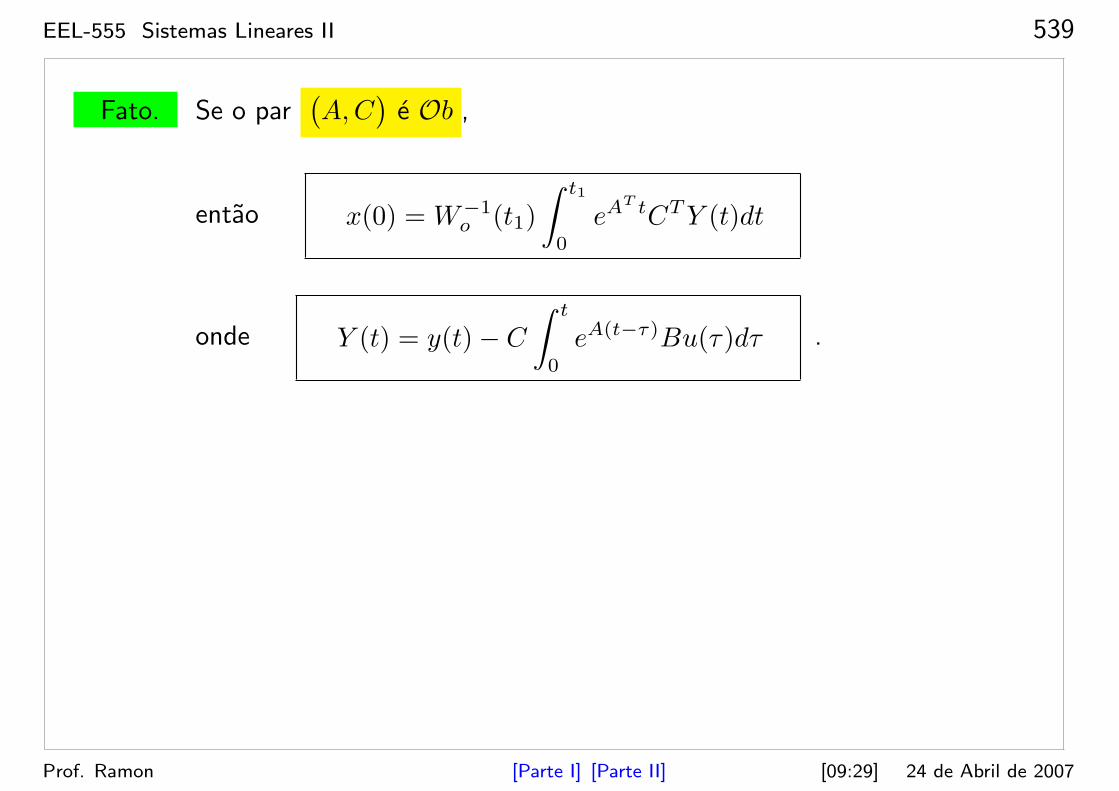
EEL-555 Sistemas Lineares II 539
Fato. Se o par(A, C
)e Ob ,
entao x(0) = W−1o (t1)
∫ t1
0
eAT tCT Y (t)dt
onde Y (t) = y(t)− C
∫ t
0
eA(t−τ)Bu(τ)dτ .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 540
Teorema. (Dualidade)
(A, B
)e Co ⇔
(AT , BT
)e Ob
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 541
Prova.
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
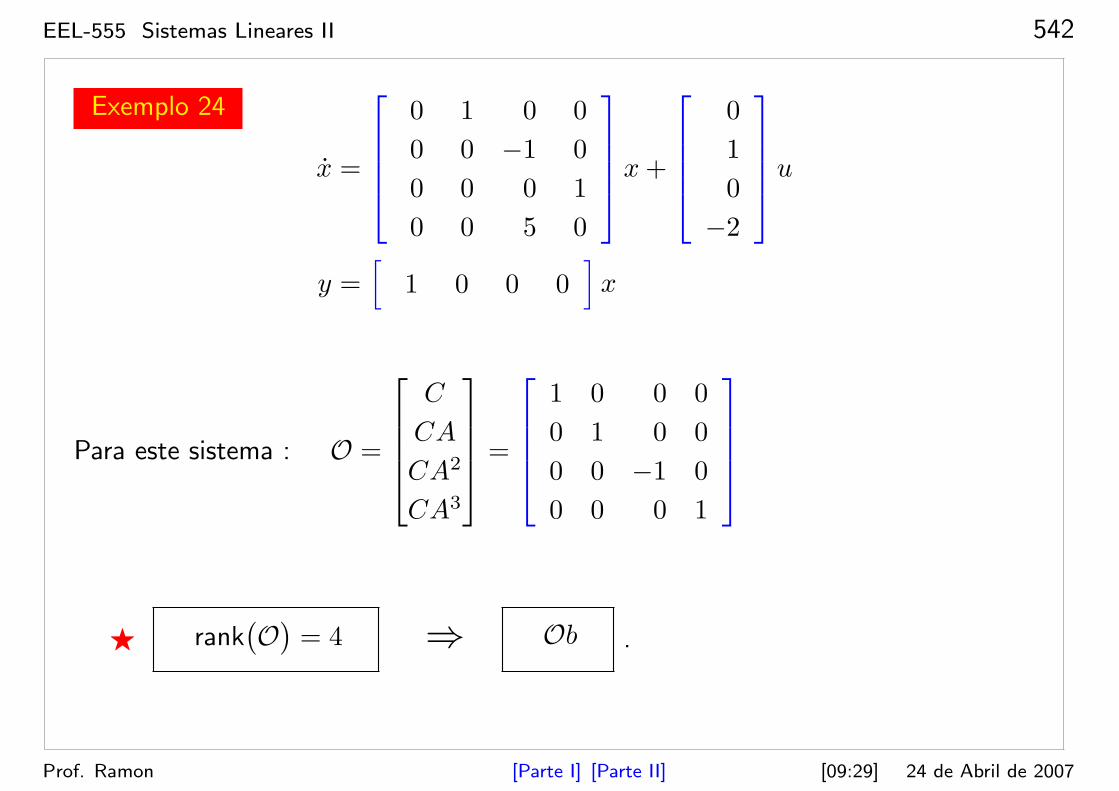
EEL-555 Sistemas Lineares II 542
Exemplo 24
x =
0 1 0 0
0 0 −1 0
0 0 0 1
0 0 5 0
x +
0
1
0
−2
u
y =[
1 0 0 0]
x
Para este sistema : O =
C
CA
CA2
CA3
=
1 0 0 0
0 1 0 0
0 0 −1 0
0 0 0 1
⋆ rank(O)
= 4 ⇒ Ob .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
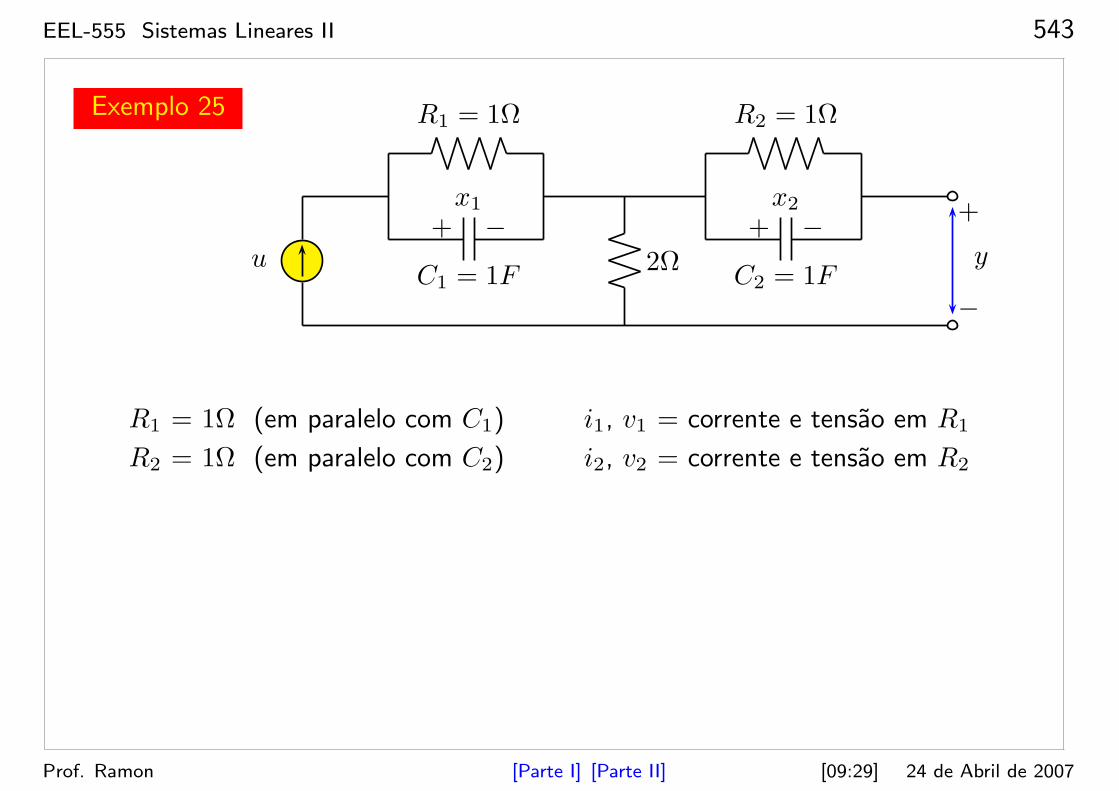
EEL-555 Sistemas Lineares II 543
Exemplo 25
C1 = 1F
+ −
R1 = 1Ω
x1
C2 = 1F
+ −
R2 = 1Ω
x2
u 2Ω y
+
−
R1 = 1Ω (em paralelo com C1)
R2 = 1Ω (em paralelo com C2)
i1, v1 = corrente e tensao em R1
i2, v2 = corrente e tensao em R2
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 544
Equacao de estado para o circuito :
x =
[
1/C1 0
0 1/C2
]
x +
[
1/C1
0
]
u
y =[
0 1]
x +[
2]
u
Para este sistema : O =
[
C
CA
]
=
[
0 1
0 1/C2
]
⋆ rank(O)
= 1 ⇒ Ob .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 545
∫
1/C2
0 1x2x2
++
∫
++
+
1/C1
1/C1
x1 yx1u
2
++
0
Figura 37: Diagrama de blocos do exemplo.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
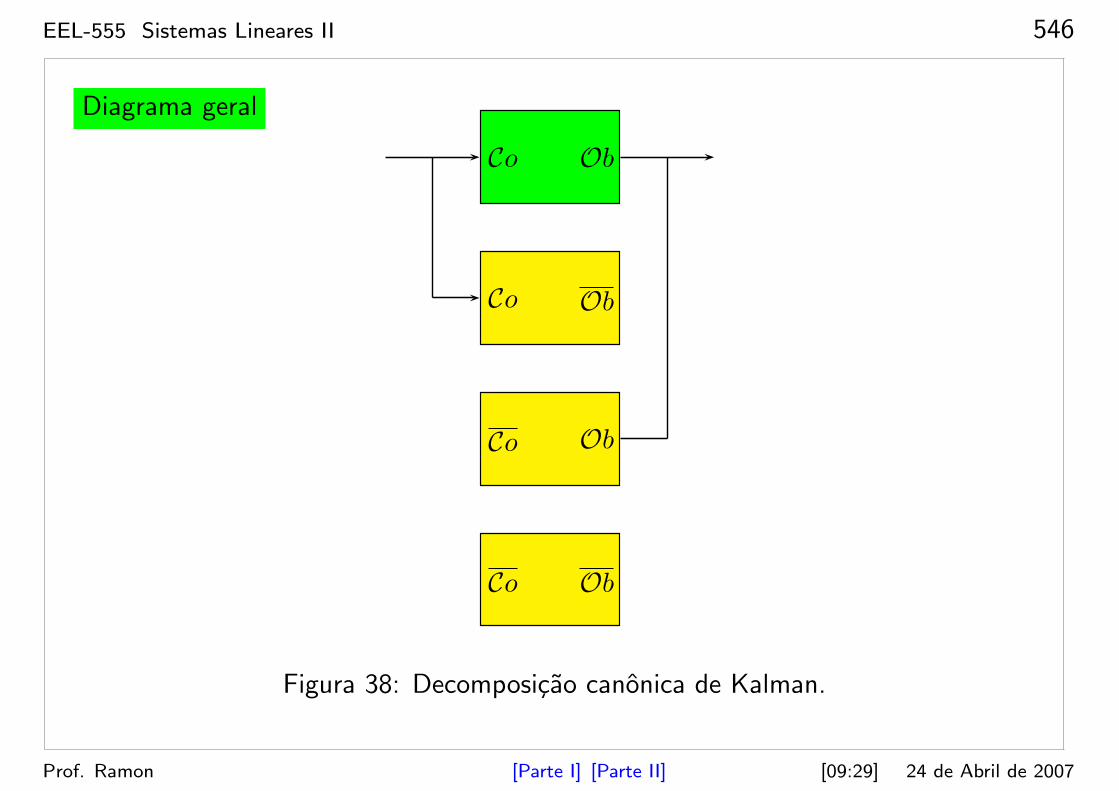
EEL-555 Sistemas Lineares II 546
Diagrama geral
Co Ob
Co Ob
Co Ob
Co Ob
Figura 38: Decomposicao canonica de Kalman.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 547
Exemplo 26 Seja o seguinte sistema multivariavel
x =
1 1 0 0
0 1 0 0
0 0 1 0
0 0 1 1
x +
0 0
0 1
0 0
1 0
u
y =
[
1 1 0 0
0 0 0 1
]
x
Verifique a observabilidade desse sistema.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 548
Neste caso, n = 4, portanto
O =
C
CA
CA2
CA3
=
1 1 0 0
0 0 0 1
1 2 0 0
0 0 1 1
1 3 0 0
0 0 2 1
1 4 0 0
0 0 3 1
.
As 4 primeiras linhas de O sao lin. independentes ⇒ rank(O) = 4
Conclusao : O sistema e observavel.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 549
Solucao alternativa
Os autovalores da matriz A podem ser obtidos por inspecao:
λi = 1 .
Entao, podemos verificar a Ob aplicando o criterio
(A, C
)Ob ⇔ rank
([
A− λi I
C
])
= n , ∀λi(A).
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
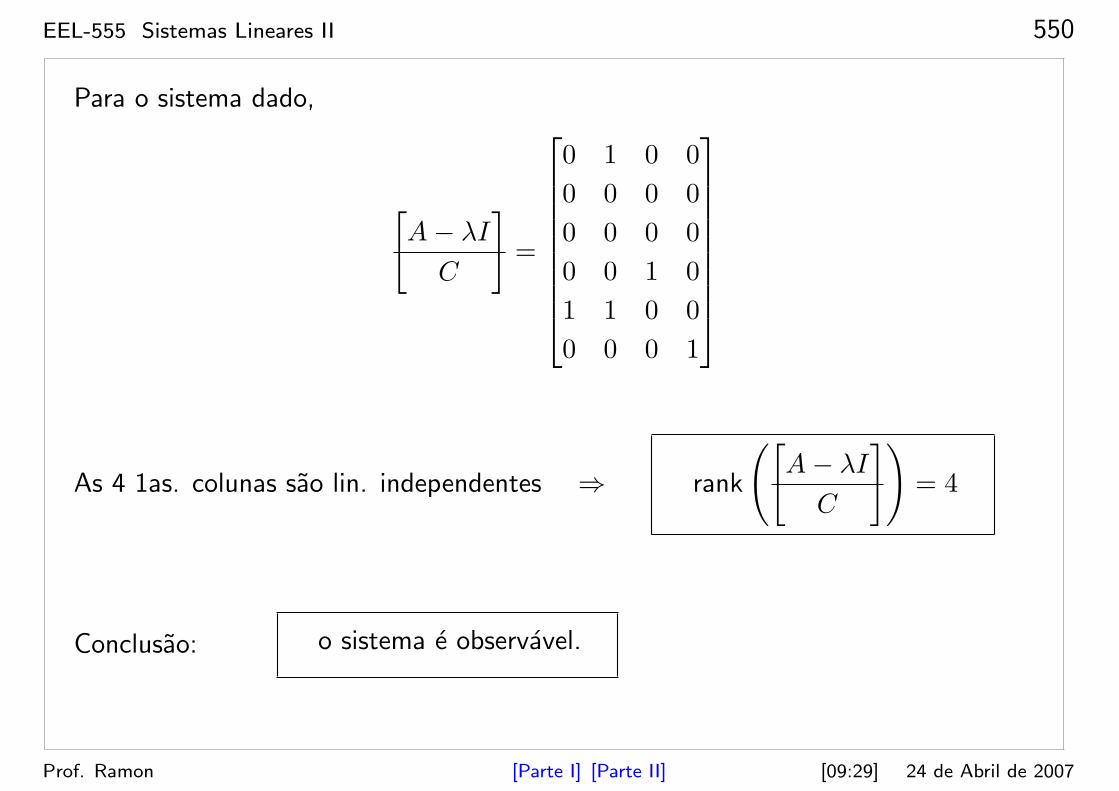
EEL-555 Sistemas Lineares II 550
Para o sistema dado,
[
A− λI
C
]
=
0 1 0 0
0 0 0 0
0 0 0 0
0 0 1 0
1 1 0 0
0 0 0 1
As 4 1as. colunas sao lin. independentes ⇒ rank
([
A− λI
C
])
= 4
Conclusao: o sistema e observavel.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 551
Forma canonica Ob
⋆ Ja vimos esta FC :
x =
−an−1 1 0 · · · 0
−an−2 0 1 · · · 0...
......
...
−a1 0 0 · · · 1
−a0 0 0 · · · 0
x +
bn−1
bn−2
...
b1
b0
u
y =[
1 0 0 · · · 0]
x
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 552
Propriedade. Toda equacao de estado na FC Ob e Ob.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 553
Verificacao Para um SLIT de 3a. ordem :
x =
−a2 1 0
−a1 0 1
−a0 0 0
x +
b2
b1
b0
u
y =[
1 0 0]
x
Tem-se : O =
C
CA
CA2
=
1 0 0
−a2 1 0
a22 − a1 −a2 1
⋆ ∀ai , rank(O)
= 3 ⇒ Ob .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 554
Transformacao de coordenadas
x = Ax + Bu
y = Cx
z = Az + Bu
y = Cz
z = Tx
Matrizes do SLIT transformado :
A = TAT−1
B = TB
C = CT−1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 555
Teorema. A transformacao de coordenadas nao destroi a Ob.
(A, C
)Ob ⇔
(A, C
)Ob
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 556
Exercıcio. Provar.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 557
Transformacao para FC Ob
A matriz de observabilidade do sistema transformado e :
O =
C
AC...
An−1C
=
CT−1
CT−1TAT−1
...
CT−1TAn−1T−1
=
C
CA...
CAn−1
T−1 = OT−1
Portanto : T = O−1O .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 558
Exemplo 27
A =
1 1 1
0 1 1
0 0 1
, B =
1
0
1
C =[
1 0 0]
Tem-se : O =
C
CA
CA2
=
1 0 0
1 1 1
1 2 3
⋆ rank(O)
= 3 ⇒ Ob .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 559
Pol. caracterıstico de A : p(λ) = det(sI −A
)
= (s− 1)3
= s3 − 3s2 + 3s− 1
Portanto : A =
3 1 0
−3 0 1
1 0 0
, C =
[
1 0 0]
Tem-se : O =
C
CA
CA2
=
1 0 0
3 1 0
6 3 1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 560
Portanto :
T = O−1O =
1 0 0
3 1 0
6 3 1
−1
1 0 0
1 1 1
1 2 3
=
1 0 0
−3 1 0
3 −3 1
1 0 0
1 1 1
1 2 3
=
1 0 0
−2 1 1
1 −1 0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
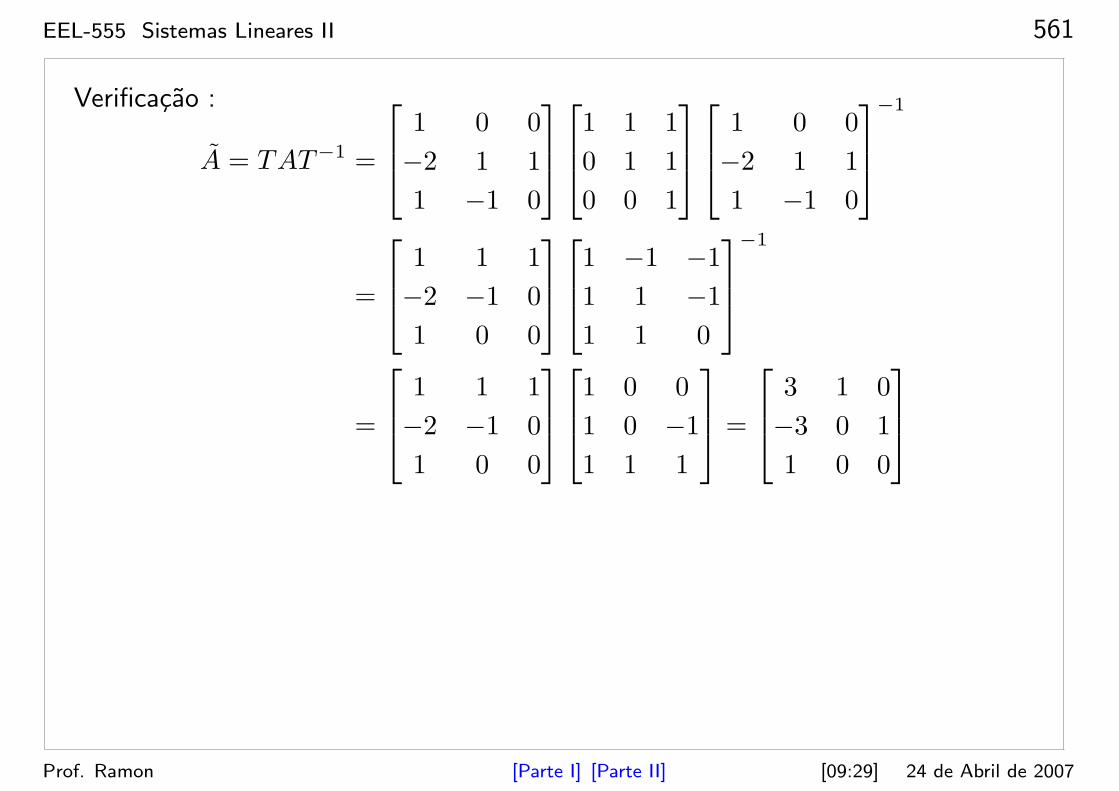
EEL-555 Sistemas Lineares II 561
Verificacao :
A = TAT−1 =
1 0 0
−2 1 1
1 −1 0
1 1 1
0 1 1
0 0 1
1 0 0
−2 1 1
1 −1 0
−1
=
1 1 1
−2 −1 0
1 0 0
1 −1 −1
1 1 −1
1 1 0
−1
=
1 1 1
−2 −1 0
1 0 0
1 0 0
1 0 −1
1 1 1
=
3 1 0
−3 0 1
1 0 0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 562
Verificacao :
C = CT−1 =[
1 0 0]
1 0 0
1 0 −1
1 1 1
=
[
1 0 0]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
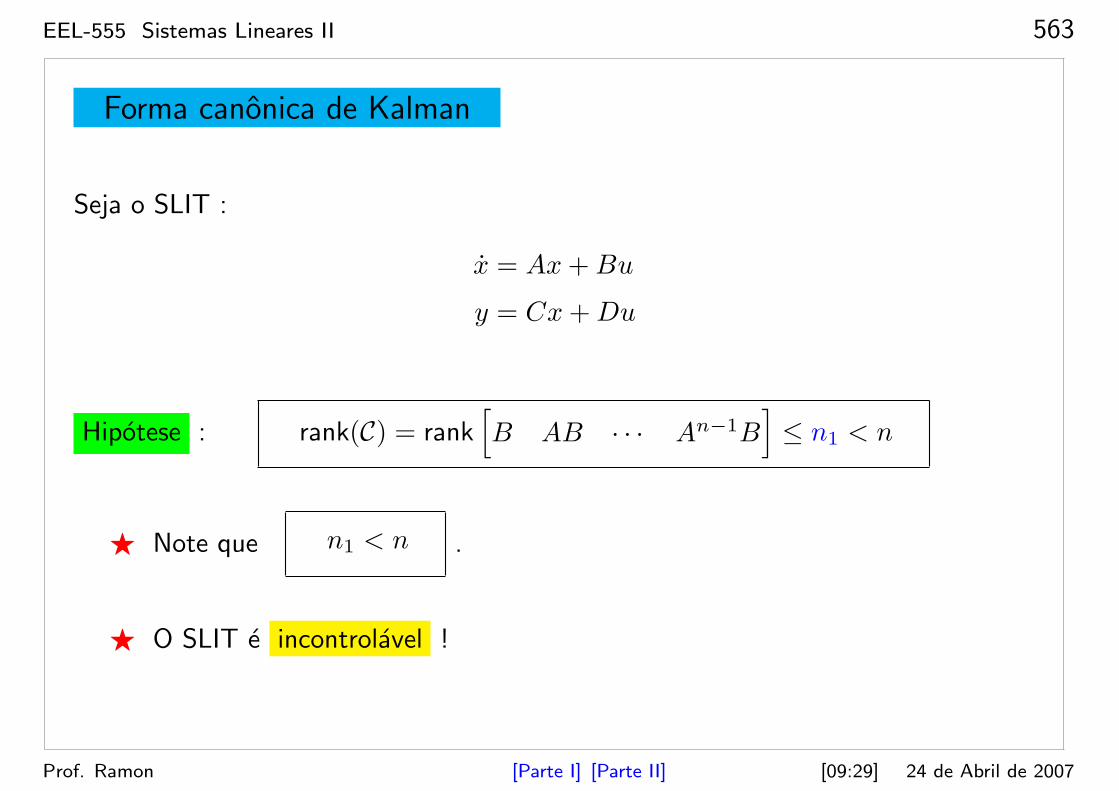
EEL-555 Sistemas Lineares II 563
Forma canonica de Kalman
Seja o SLIT :
x = Ax + Bu
y = Cx + Du
Hipotese : rank(C) = rank[
B AB · · · An−1B]
≤ n1 < n
⋆ Note que n1 < n .
⋆ O SLIT e incontrolavel !
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 564
A partir de C montamos a matriz
P−1 =[
q1 q2 · · · qn1
∣∣∣ qn1+1 · · · qn
]
onde
• q1, q2, · · · , qn1sao quaisquer n1 colunas l.i. de C .
• qn1+1, · · · , qn sao colunas arbitrarias escolhidas tal que P−1 seja nao singular.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 565
Fato. Utilizando a transformacao de coordenadas
x = Px
o SLIT e transformado para a forma[
˙xC
˙xC
]
=
[
AC A12
0 AC
][
xC
xC
]
+
[
BC
0
]
u
y =[
CC CC
][
xC
xC
]
+ Du
onde
xC e o estado do subsistema controlavel
xC e o estado do subsistema incontrolavel
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 566
⋆ Note que
g(s) = C(sI −A)−1B + D
= C(sI − A)−1B + D
⋆ O modelo do subsistema controlavel e dado por :
˙xC = AC xC + BCu
y = CC xC + Du
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 567
Prova.
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 568
Exemplo 28
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 569
Idem para um SLIT inobservavel.
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

UFRJ Universidade Federal do Rio de Janeiro
EE Escola de Engenharia
DEL Departamento de Eletronica
EEL-555 Sistemas Lineares II
Capıtulo # 9
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 571
9 Solucao numerica de EDOs
Conteudo 1. Introducao
2. Metodos de Taylor
3. Metodos de Runge-Kutta
4. Metodos multipasso
5. Exercıcios
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 572
9.1 Introducao
Problema Resolver numericamente a EDO
y = f(t, y)
com condicao inicial y(0).
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 573
9.2 Metodos de Taylor
• Serie de Taylor
– Teorema. Expansao em serie de Taylor
• Metodo de Euler
– Interpretacao geometrica
– Erro de aproximacao
– Exemplos: [ 1 ] [ 2 ]
• Metodo de Euler-Cauchy
– Interpretacao geometrica
– Erro de aproximacao
– Exemplos: [ 3 ]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 574
Serie de Taylor
⋆ Esta classe de metodos e derivada a partir do truncamento da
expansao em serie de Taylor da funcao f(·).
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 575
Teorema. (Expansao em serie de Taylor)
Seja f(x) uma funcao continuamente diferenciavel em x no intervalo
(x− r, x + r), entao :
f(x + h) =
∞∑
n=0
hn
n!
dn
dxnf(x)
f(x + h) = f(x) + hd
dxf(x) +
h2
2!
d2
dx2f(x) + · · ·
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 576
Metodo de Euler
⋆ E o metodo mais simples de solucao.
Ideia. f(·) e constante durante o intervalo de integracao h.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 577
Expansao em serie de Taylor :
y(t + h) = y(t) + hy(t) +O(h2)
O metodo de Euler emprega somente os 2 primeiros termos da expansao.
Notacao : y(t + h)︸ ︷︷ ︸
yi+1
= y(t)︸︷︷︸
yi
+ h y(t)︸︷︷︸
f(ti,yi)
Aproximacao de Euler : yi+1 = yi + hf(ti, yi)Formula de
recorrencia
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
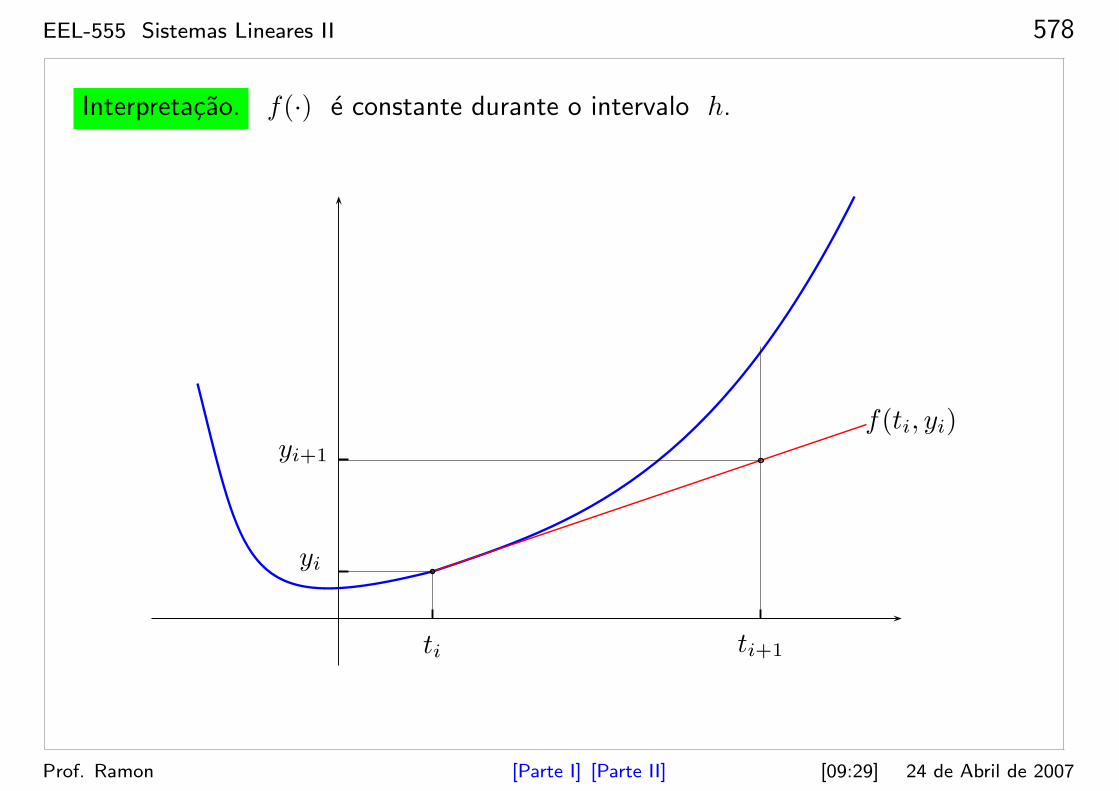
EEL-555 Sistemas Lineares II 578
Interpretacao. f(·) e constante durante o intervalo h.
ti ti+1
yi
yi+1
f(ti, yi)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 579
Erro de aproximacao. O(h2)
Verificacao.
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 580
Exemplo 1 Resolver numericamente a equacao
y = y + t
Condicao inicial : y(0) = 2
Intervalo de integracao : h = 0.5
Intervalo de solucao : [0, 1]
Metodo : Euler .
Solucao analıtica : y = 3et − t− 1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 581
Solucao
Aproximacao de Euler : yi+1 = yi + hf(ti, yi)
Iteracoes :
i = 0 , t1 = 0.5 : y1 = y0 + hf(t0, y0)
= 2 + 0.5(2 + 0)
= 3
i = 1 , t2 = 1.0 : y2 = y1 + hf(t1, y1)
= 3 + 0.5(3 + 0.5)
= 4.75
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 582
0.5
2
3
4.75
1.0
y
t
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 583
Solucao usando Matlab :
Euler Exata
i t y y
- 0 2 2
0 0.5 3 3.4462
1 1.0 4.75 6.1548
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 584
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 12
2.5
3
3.5
4
4.5
5
5.5
6
6.5
(h = 0.5)
Legenda :
Exata
Euler
Figura 39: Solucao usando Matlab. Script exemplo1a.m .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 585
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 12
2.5
3
3.5
4
4.5
5
5.5
6
6.5
(h = 0.1)
Legenda :
Exata
Euler
Figura 40: Solucao usando Matlab. Script exemplo1b.m .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 586
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 12
2.5
3
3.5
4
4.5
5
5.5
6
6.5
(h = 0.01)
Legenda :
Exata
Euler
Figura 41: Solucao usando Matlab. Script exemplo1c.m .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 587
Exemplo 2 Resolver numericamente a equacao de Van der Pol
x = y
y = −x + y − cy3
Contante : c = 1
Condicao inicial : x(0) = 1
y(0) = 1
Intervalo de integracao : h = 0.5
Intervalo de solucao : [0, 1]
Metodo : Euler .
⋆ Esse sistema nao possui solucao analıtica.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 588
Solucao Usando notacao vetorial :
z =
[
x
y
]
=
[
f1(t, x, y)
f2(t, x, y)
]
= f(t, z)
Aproximacao de Euler : zi+1 = zi + hf(ti, zi)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 589
Iteracoes :
t0 = 0 : z0 =
[
x0
y0
]
=
[
1
1
]
i = 0 , t1 = 0.5 : z1 = z0 + hf(t0, z0)
=
[
x0
y0
]
+ 0.5
[
y0
−x0 + y0 − y30
]
=
[
1
1
]
+ 0.5
[
1
−1 + 1− 1
]
=
[
1.5
0.5
]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 590
Iteracoes :
i = 1 , t2 = 1.0 : z2 = z1 + hf(t1, z1)
=
[
x1
y1
]
+ 0.5
[
y1
−x1 + y1 − y31
]
=
[
1.5
0.5
]
+ 0.5
[
0.5
−1.5 + 0.5− 0.53
]
=
[
1.75
−0.0625
]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 591
Resumo :
Euler “Exata”
i t x y x y
- 0 1 1 1 1
0 0.5 1.5 0.5 1.3836 0.5321
1 1.0 1.75 -0.0625 1.5046 -0.1006
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
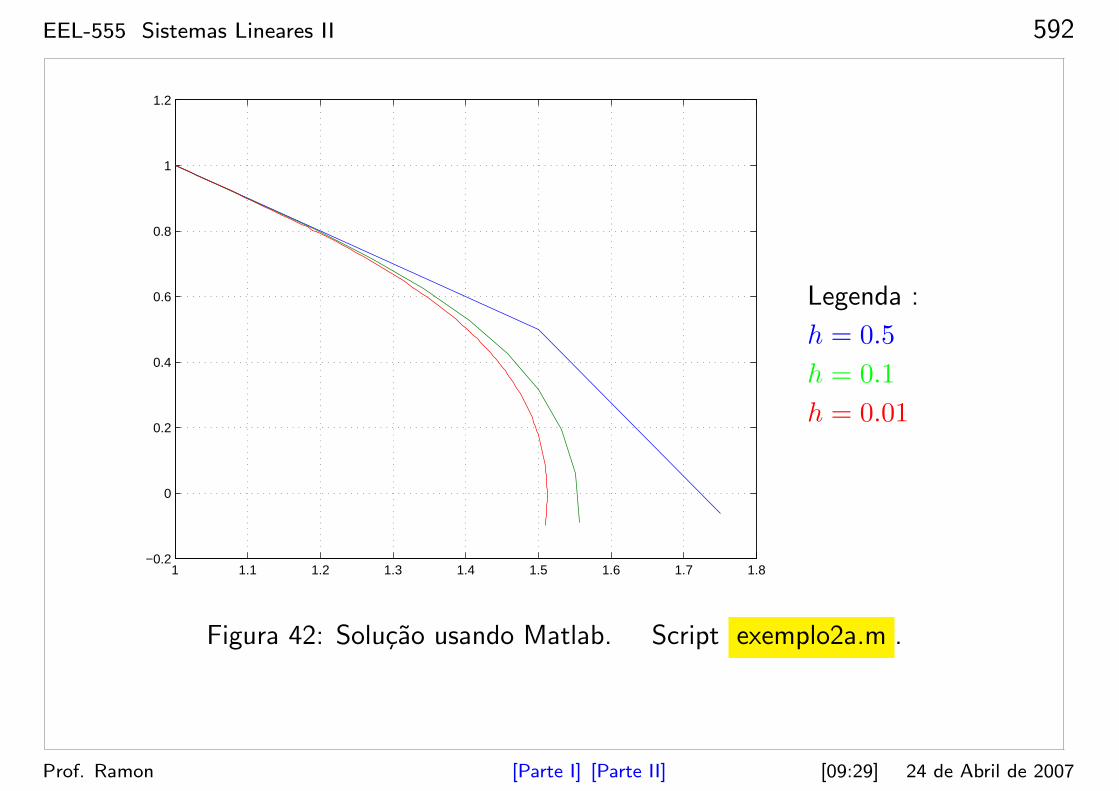
EEL-555 Sistemas Lineares II 592
1 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8−0.2
0
0.2
0.4
0.6
0.8
1
1.2
Legenda :
h = 0.5
h = 0.1
h = 0.01
Figura 42: Solucao usando Matlab. Script exemplo2a.m .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 593
Solucao no intervalo [0, 10] .
−2 −1.5 −1 −0.5 0 0.5 1 1.5 2−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
Legenda :
h = 0.5
h = 0.1
h = 0.01
Figura 43: Solucao usando Matlab. Script exemplo2b.m .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 594
Metodo de Euler-Cauchy
yi+1 = yi + hf(ti, yi) ( Atualizacao usando Euler )
yi+1 = yi + h2
[
f(ti, yi) + f(ti+1, yi+1)]
⋆ yi+1 e uma primeira estimativa de yi+1 usando Euler.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 595
Interpretacao
yi+1 = yi +h
2
[
f(ti, yi)︸ ︷︷ ︸
yi
+ f(ti+1, yi+1)︸ ︷︷ ︸
˙yi+1
]
Portanto :
yi+1 = yi + h
[
yi + ˙yi+1
2
]
⋆
[
yi + ˙yi+1
2
]
: Estimativa da velocidade media .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 596
Interpretacao geometrica.
ti ti+1
yi
yi+1
f(ti, yi)
f(ti+1, yi+1)f(ti,yi)+f(ti+1,yi+1)
2
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 597
Erro de aproximacao. O(h3)
Verificacao.
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 598
Exemplo 3 Resolver numericamente a equacao
y = y + t
Condicao inicial : y(0) = 2
Intervalo de integracao : h = 0.5
Intervalo de solucao : [0, 1]
Metodo : Euler-Cauchy .
Solucao analıtica : y = 3et − t− 1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 599
Solucao
Euler-Cauchy :yi+1 = yi + hf(ti, yi)
yi+1 = yi + h2
[
f(ti, yi) + f(ti+1, yi+1)]
Iteracoes :
i = 0 , t1 = 0.5 : y1 = y0 + hf(t0, y0)
= 2 + 0.5(2 + 0)
= 3
y1 = y0 +h
2
[
f(t0, y0) + f(t1, y1)]
= 2 + 0.25[(2 + 0) + (3 + 0.5)
]
= 3.375
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 600
Iteracoes :
i = 1 , t2 = 1.0 : y2 = y1 + hf(t1, y1)
= 3.375 + 0.5(3.375 + 0.5)
= 5.3125
y2 = y1 +h
2
[
f(t1, y1) + f(t2, y2)]
= 3.375 + 0.25[(3.375 + 0.5) + (5.3125 + 1.0)
]
= 5.9219
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 601
Resumo :
Euler Cauchy Exata
i t y y y
- 0 2 2 2
0 0.5 3 3.375 3.4462
1 1.0 4.75 5.9219 6.1548
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
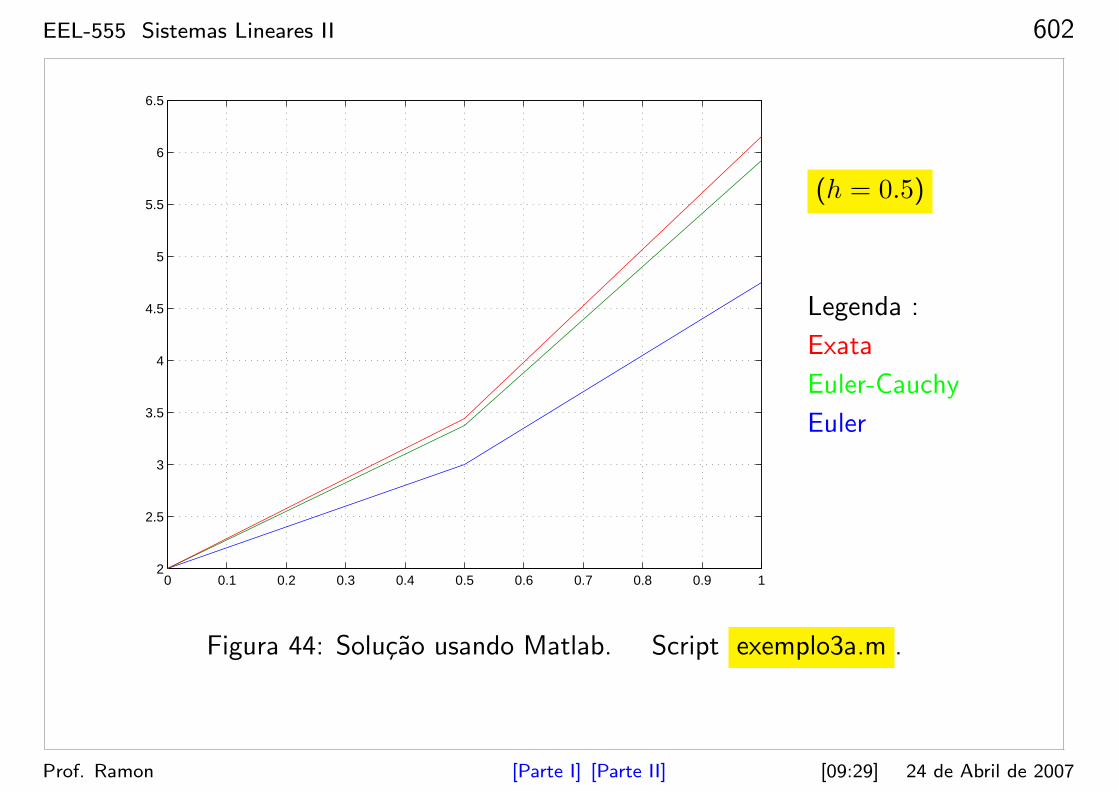
EEL-555 Sistemas Lineares II 602
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 12
2.5
3
3.5
4
4.5
5
5.5
6
6.5
(h = 0.5)
Legenda :
Exata
Euler-Cauchy
Euler
Figura 44: Solucao usando Matlab. Script exemplo3a.m .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 603
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 12
2.5
3
3.5
4
4.5
5
5.5
6
6.5
(h = 0.1)
Legenda :
Exata
Euler-Cauchy
Euler
Figura 45: Solucao usando Matlab. Script exemplo3b.m .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
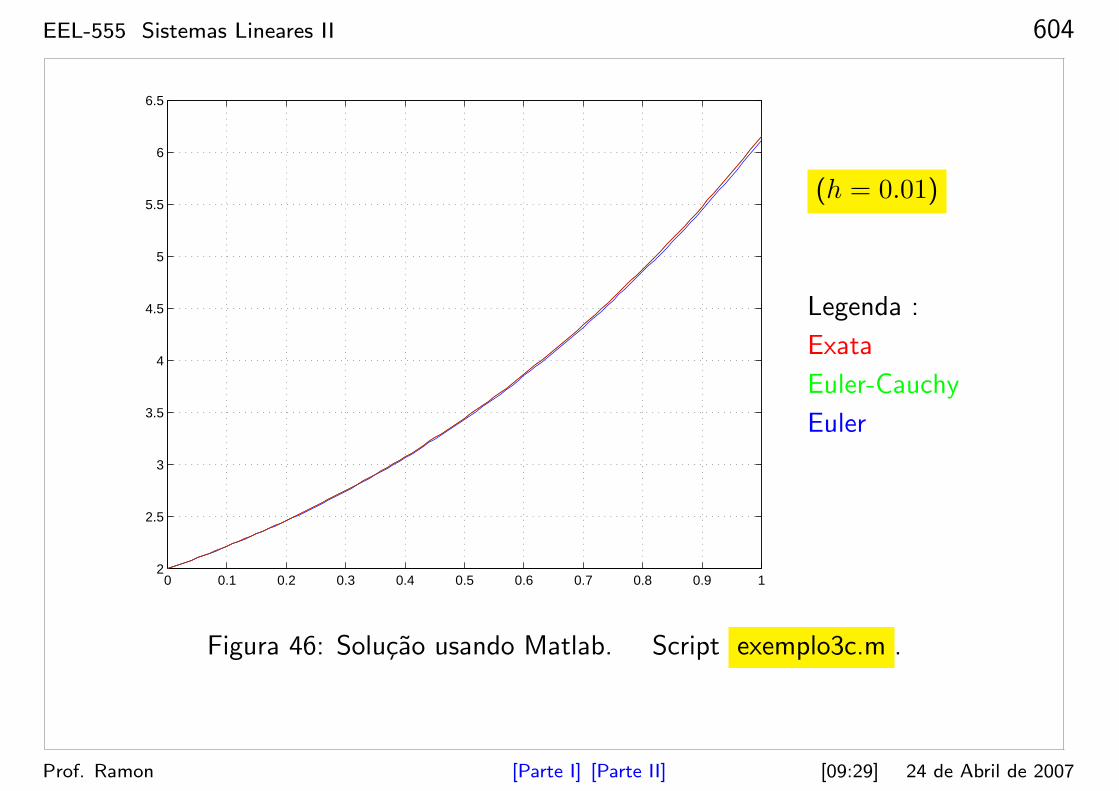
EEL-555 Sistemas Lineares II 604
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 12
2.5
3
3.5
4
4.5
5
5.5
6
6.5
(h = 0.01)
Legenda :
Exata
Euler-Cauchy
Euler
Figura 46: Solucao usando Matlab. Script exemplo3c.m .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 605
9.3 Metodos de Runge-Kutta
• Introducao
• Metodo Mid-point
– Interpretacao geometrica
– Exemplos: [ 1 ]
• Metodo de Runge-Kutta de 2a. ordem
• Metodo de Runge-Kutta classico
– Exemplos: [ 2 ] [ 3 ]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 606
Introducao
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 607
Metodo Mid-point
k1 = hf(ti, yi) (A)
k2 = hf(ti + 1
2h, yi + 12k1
)(B)
yi+1 = yi + k2
Nota. (A) : Incremento de y calculado por Euler.
(B) : Incremento de y calculado com f no ponto intermediario.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
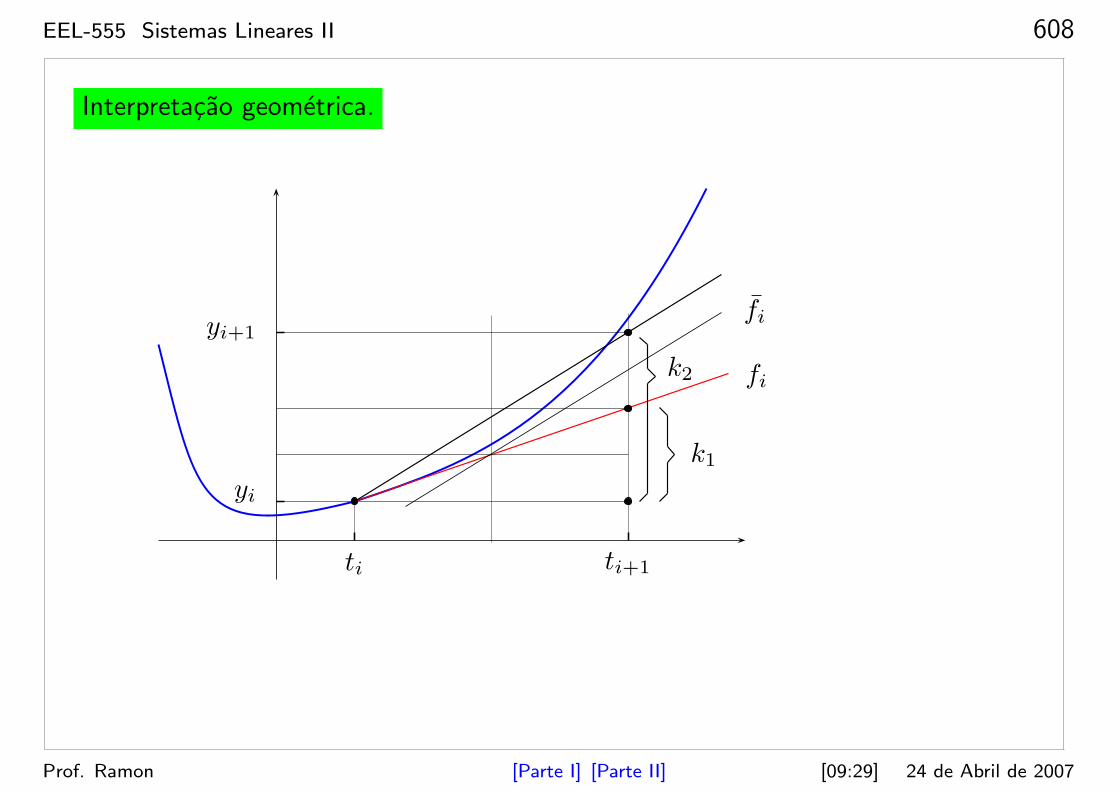
EEL-555 Sistemas Lineares II 608
Interpretacao geometrica.
ti ti+1
yi
yi+1
fi
k1
k2
fi
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 609
Exemplo 4 Resolver numericamente a equacao
y = y + t
Condicao inicial : y(0) = 2
Intervalo de integracao : h = 0.5
Intervalo de solucao : [0, 1]
Metodo : Metodo Mid-point .
Solucao analıtica : y = 3et − t− 1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 610
Solucao
Mid-point :
k1 = hf(ti, yi)
k2 = hf(ti + 1
2h, yi + 12k1
)
yi+1 = yi + k2
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
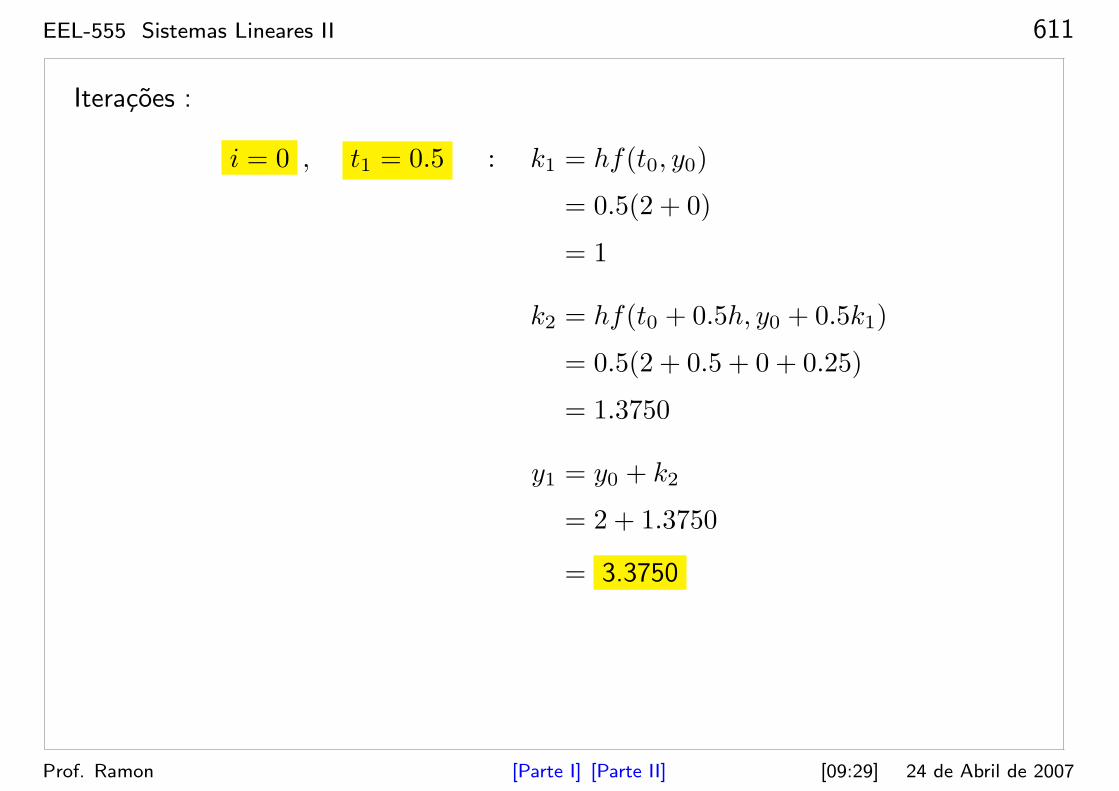
EEL-555 Sistemas Lineares II 611
Iteracoes :
i = 0 , t1 = 0.5 : k1 = hf(t0, y0)
= 0.5(2 + 0)
= 1
k2 = hf(t0 + 0.5h, y0 + 0.5k1)
= 0.5(2 + 0.5 + 0 + 0.25)
= 1.3750
y1 = y0 + k2
= 2 + 1.3750
= 3.3750
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
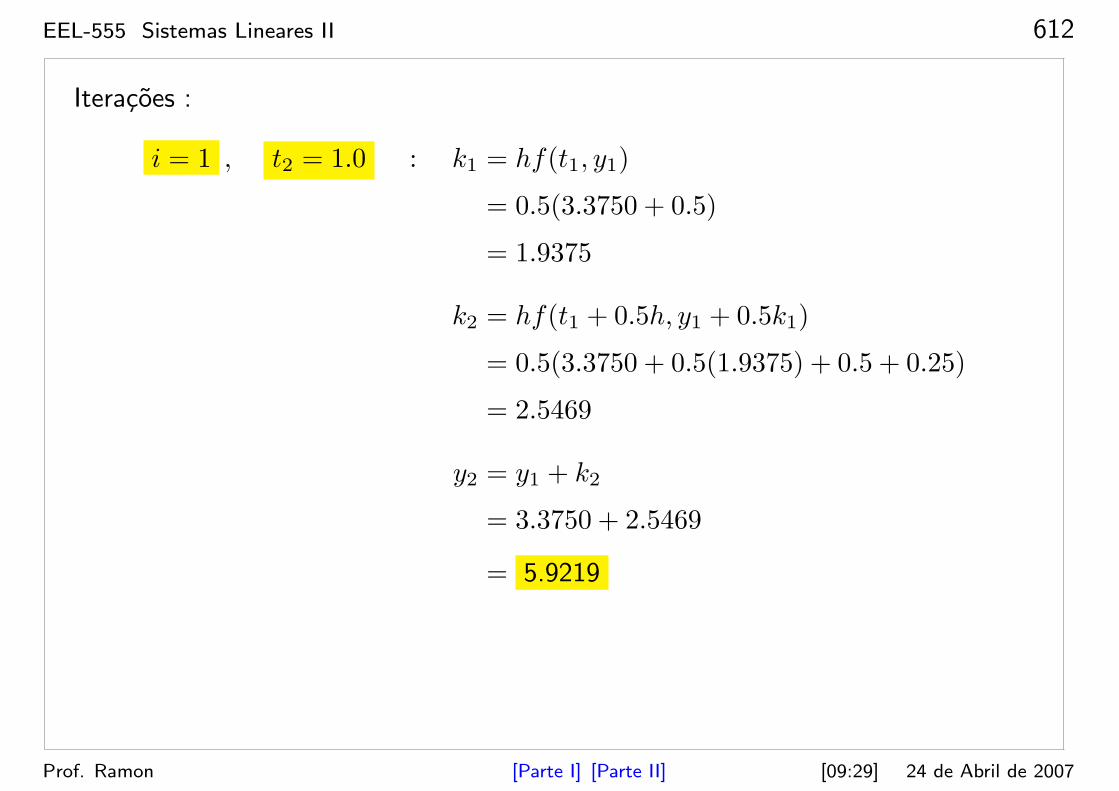
EEL-555 Sistemas Lineares II 612
Iteracoes :
i = 1 , t2 = 1.0 : k1 = hf(t1, y1)
= 0.5(3.3750 + 0.5)
= 1.9375
k2 = hf(t1 + 0.5h, y1 + 0.5k1)
= 0.5(3.3750 + 0.5(1.9375) + 0.5 + 0.25)
= 2.5469
y2 = y1 + k2
= 3.3750 + 2.5469
= 5.9219
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 613
Resumo :
Euler Cauchy Mid-point Exata
i t y y y y
- 0 2 2 2 2
0 0.5 3 3.375 3.3750 3.4462
1 1.0 4.75 5.9219 5.9219 6.1548
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 614
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 12
2.5
3
3.5
4
4.5
5
5.5
6
6.5
(h = 0.5)
Legenda :
Exata
Mid-point
Euler
Figura 47: Solucao usando Matlab. Script exemplo4a.m .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
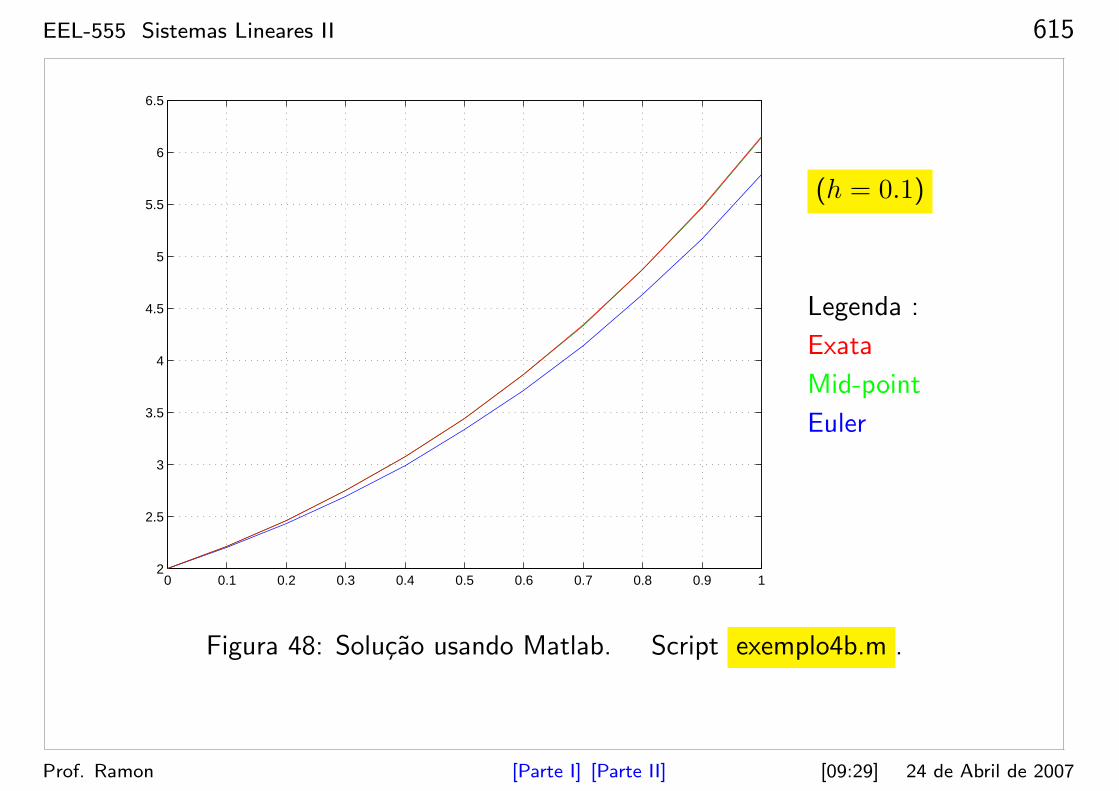
EEL-555 Sistemas Lineares II 615
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 12
2.5
3
3.5
4
4.5
5
5.5
6
6.5
(h = 0.1)
Legenda :
Exata
Mid-point
Euler
Figura 48: Solucao usando Matlab. Script exemplo4b.m .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 616
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 12
2.5
3
3.5
4
4.5
5
5.5
6
6.5
(h = 0.01)
Legenda :
Exata
Mid-point
Euler
Figura 49: Solucao usando Matlab. Script exemplo4c.m .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 617
Metodo Runge-Kutta de 2a. ordem
Generalizacao do metodo Mid-point :
k1 = hf(ti, yi)
k2 = hf (ti + c2h, yi + a21k1)
yi+1 = yi + ω1k1 + ω2k2
Para derivar o metodo de Runge-Kutta de 2a. ordem, fazemos :
y(t + h) = y(t) + h[
ω1f(t, y)
+ ω2 f(t + c2h, y + a21k1
)
︸ ︷︷ ︸
Taylor
]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 618
Expansao em serie de Taylor :
f(t + c2h, y + a21k1
)= f
(t, y)
+ c2h∂f
∂t
(t, y)
+ a21k1∂f
∂y
(t, y)
+ · · ·
Portanto :
y(t + h) = y(t) + hω1f + hω2f + ω2c2h2 ∂f
∂t+ ω2a21 k1
︸︷︷︸
hf
h∂f
∂y+ · · ·
= y(t) +(ω1 + ω2
)hf + h2
(
ω2c2∂f
∂t+ ω2a21
∂f
∂yf
)
+ · · ·
Comparando com a expansao em serie de Taylor de y(t + h) :
y(t + h) = y(t) + hf +h2
2
(∂f
∂t+
∂f
∂yf
)
+ · · ·
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
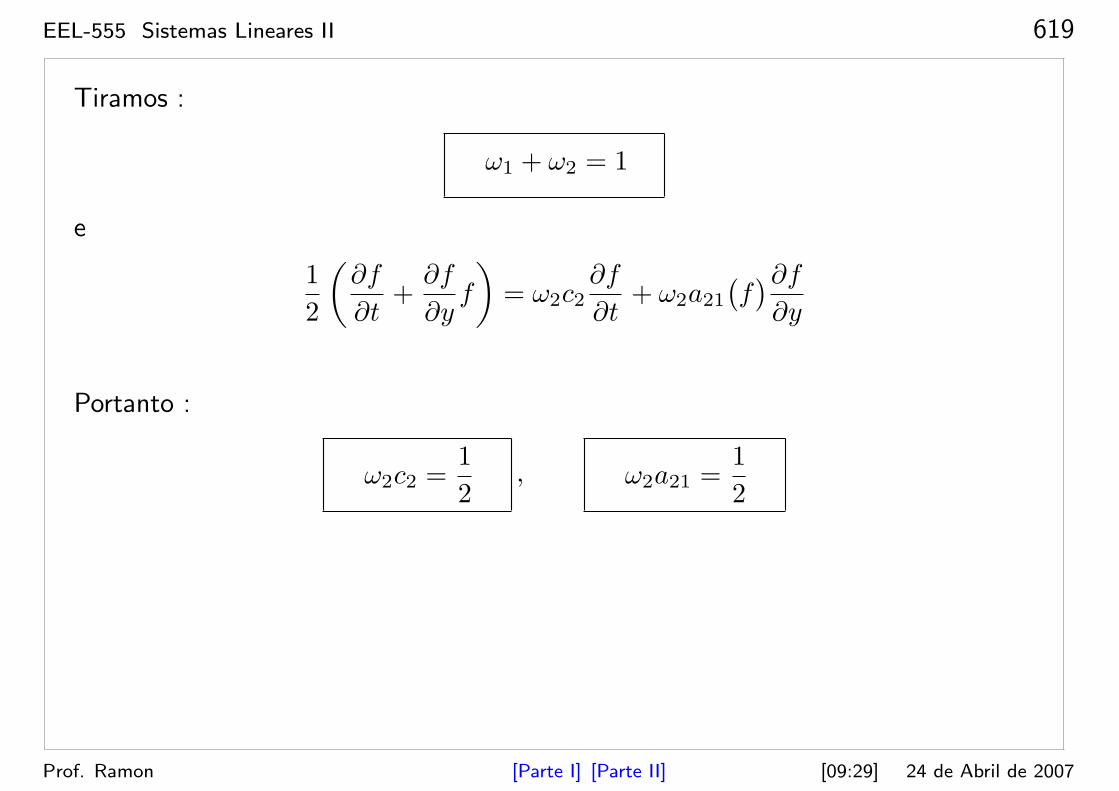
EEL-555 Sistemas Lineares II 619
Tiramos :
ω1 + ω2 = 1
e
1
2
(∂f
∂t+
∂f
∂yf
)
= ω2c2∂f
∂t+ ω2a21
(f)∂f
∂y
Portanto :
ω2c2 =1
2, ω2a21 =
1
2
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 620
Metodo Mid-point
ω1 = 0 , ω2 = 1 , c2 =1
2, a21 =
1
2
Metodo de Euler modificado
ω1 =1
2, ω2 =
1
2, c2 = 1 , a21 = 1
Metodo Heun
ω1 =1
4, ω2 =
3
4, c2 =
2
3, a21 =
2
3
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 621
Metodo Runge-Kutta classico (4a. ordem)
k1 = hf(ti, yi
)(A)
k2 = hf(ti + 1
2h, yi + 12k1
)(B)
k3 = hf(ti + 1
2h, yi + 12k2
)(C)
k4 = hf(ti + h, yi + k3
)
yi+1 = yi + 16
(k1 + 2k2 + 2k3 + k4
)
Nota. (A) : Aproximacao por Euler.
(B) : Aproximacao usando inclinacao no mid-point.
(C) : Aproximacao refinada.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
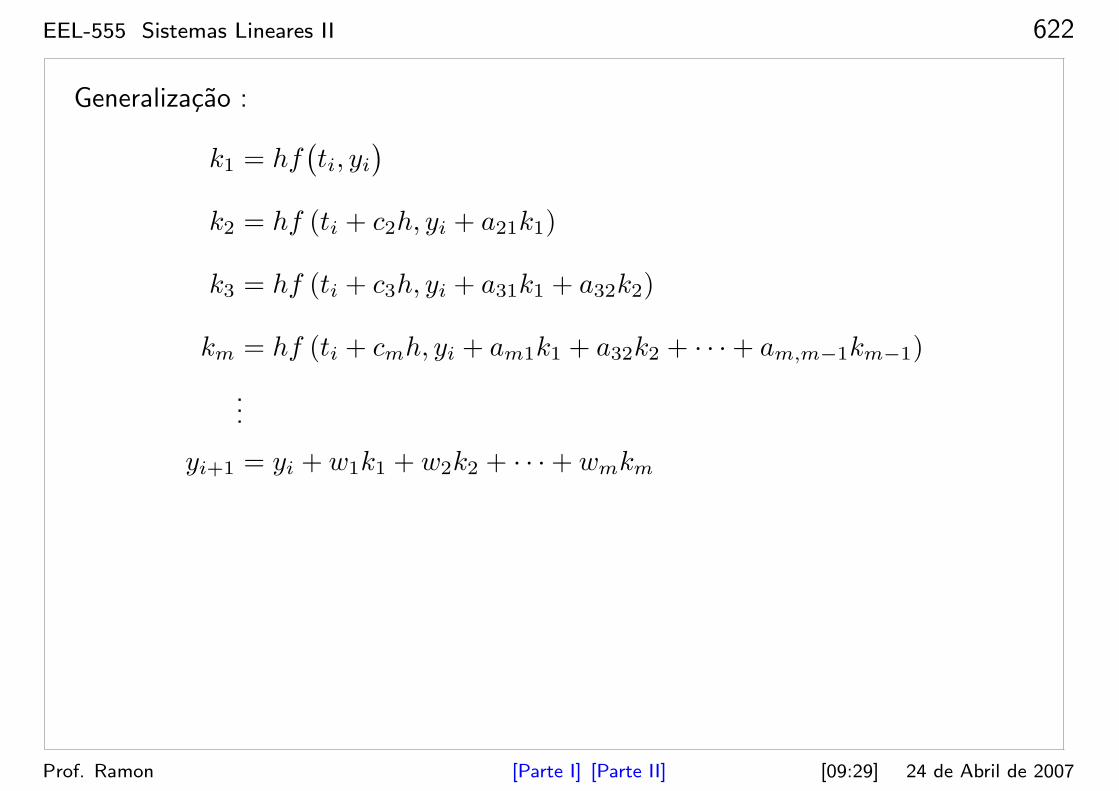
EEL-555 Sistemas Lineares II 622
Generalizacao :
k1 = hf(ti, yi
)
k2 = hf (ti + c2h, yi + a21k1)
k3 = hf (ti + c3h, yi + a31k1 + a32k2)
km = hf (ti + cmh, yi + am1k1 + a32k2 + · · ·+ am,m−1km−1)
...
yi+1 = yi + w1k1 + w2k2 + · · ·+ wmkm
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 623
Exemplo 5 Resolver numericamente a equacao
y = y + t
Condicao inicial : y(0) = 2
Intervalo de integracao : h = 0.5
Intervalo de solucao : [0, 1]
Metodo : Runge-Kutta classico .
Solucao analıtica : y = 3et − t− 1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 624
Solucao
Runge-Kutta :
k1 = hf(ti, yi
)
k2 = hf
(
ti +1
2h, yi +
1
2k1
)
k3 = hf
(
ti +1
2h, yi +
1
2k2
)
k4 = hf(ti + h, yi + k3
)
yi+1 = yi +1
6
(k1 + 2k2 + 2k3 + k4
)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
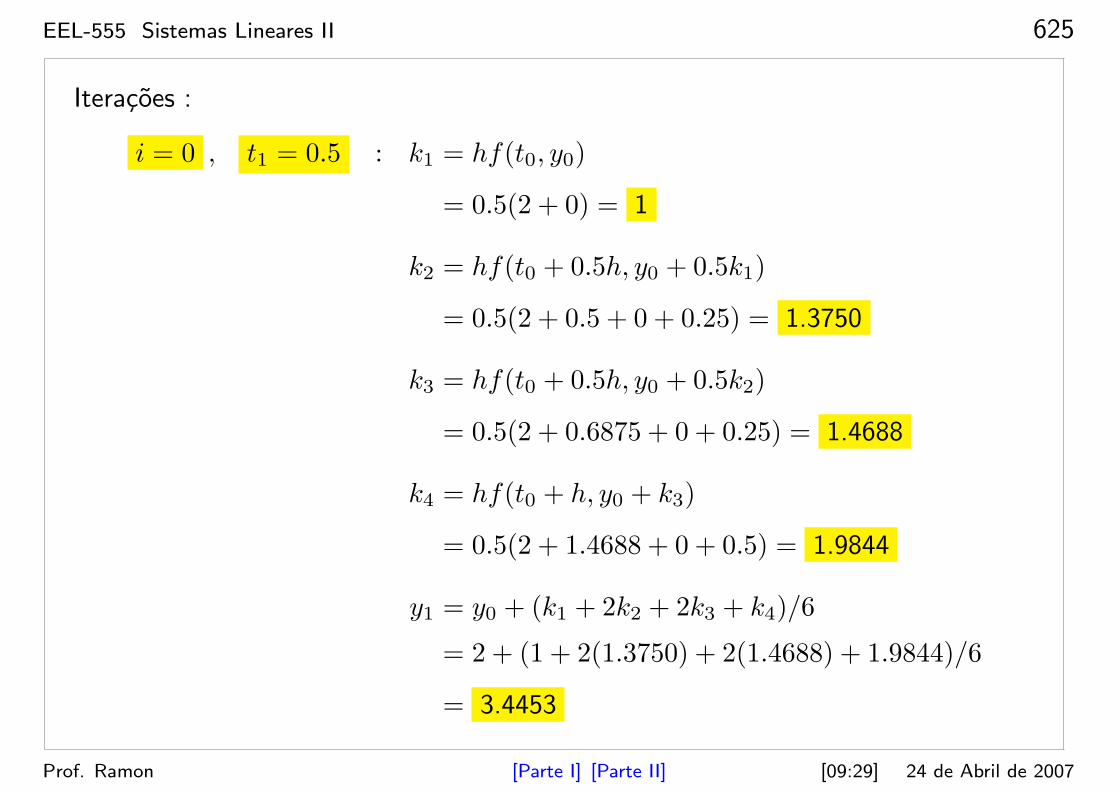
EEL-555 Sistemas Lineares II 625
Iteracoes :
i = 0 , t1 = 0.5 : k1 = hf(t0, y0)
= 0.5(2 + 0) = 1
k2 = hf(t0 + 0.5h, y0 + 0.5k1)
= 0.5(2 + 0.5 + 0 + 0.25) = 1.3750
k3 = hf(t0 + 0.5h, y0 + 0.5k2)
= 0.5(2 + 0.6875 + 0 + 0.25) = 1.4688
k4 = hf(t0 + h, y0 + k3)
= 0.5(2 + 1.4688 + 0 + 0.5) = 1.9844
y1 = y0 + (k1 + 2k2 + 2k3 + k4)/6
= 2 + (1 + 2(1.3750) + 2(1.4688) + 1.9844)/6
= 3.4453
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 626
Iteracoes :
i = 1 , t1 = 1.0 : k1 = hf(t1, y1)
= 0.5(3.4453 + 0.5) = 1.9727
k2 = hf(t1 + 0.5h, y1 + 0.5k1)
= 0.5(3.4453 + 0.5(1.9727) + 0.5 + 0.25) = 2.5908
k3 = hf(t1 + 0.5h, y1 + 0.5k2)
= 0.5(3.4453 + 0.5(2.5908) + 0.5 + 0.25) = 2.7454
k4 = hf(t1 + h, y1 + k3)
= 0.5(3.4453 + 2.7454 + 0.5 + 0.5) = 3.5953
y2 = y1 + (k1 + 2k2 + 2k3 + k4)/6
= 3.4453 + (1.9727 + 2(2.5908) + 2(2.7454) + 3.5953)/6
= 6.1520
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 627
Resumo :
Euler Cauchy Mid-point Runge-Kutta Exata
i t y y y y y
- 0 2 2 2 2 2
0 0.5 3 3.375 3.3750 3.4453 3.4462
1 1.0 4.75 5.9219 5.9219 6.1520 6.1548
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 628
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 12
2.5
3
3.5
4
4.5
5
5.5
6
6.5
(h = 0.5)
Legenda :
Exata
Runge-Kutta
Mid-point
Euler
Figura 50: Solucao usando Matlab. Script exemplo5a.m .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 629
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 12
2.5
3
3.5
4
4.5
5
5.5
6
6.5
(h = 0.1)
Legenda :
Exata
Runge-Kutta
Mid-point
Euler
Figura 51: Solucao usando Matlab. Script exemplo5b.m .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
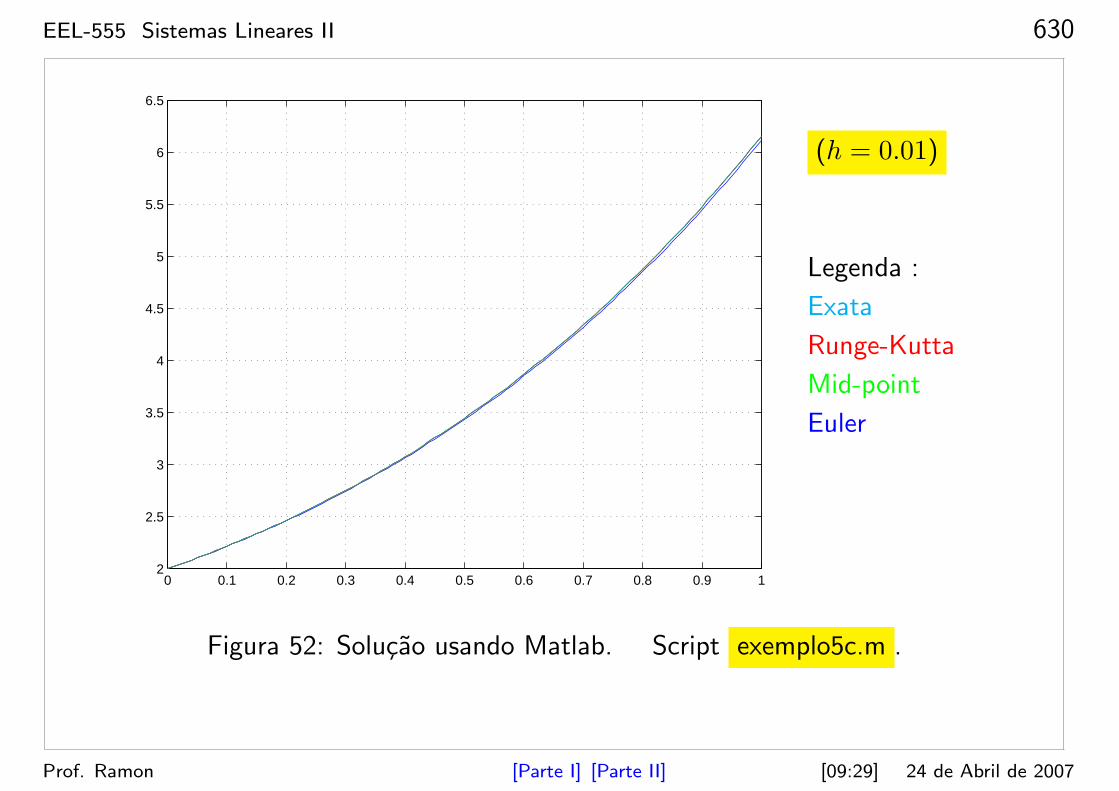
EEL-555 Sistemas Lineares II 630
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 12
2.5
3
3.5
4
4.5
5
5.5
6
6.5
(h = 0.01)
Legenda :
Exata
Runge-Kutta
Mid-point
Euler
Figura 52: Solucao usando Matlab. Script exemplo5c.m .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 631
Exemplo 6 Resolver numericamente a equacao de Van der Pol
x = y
y = −x + y − cy3
Contante : c = 1
Condicao inicial : x(0) = 1
y(0) = 1
Intervalo de integracao : h = 0.5
Intervalo de solucao : [0, 10]
Metodo : Runge-Kutta classico (4a. ordem)
⋆ Esse sistema nao possui solucao analıtica.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 632
Solucao Usando notacao vetorial :
z =
[
x
y
]
=
[
f1(t, x, y)
f2(t, x, y)
]
= f(t, z)
Runge-Kutta :
k1 = hf(ti, zi
)
k2 = hf
(
ti +1
2h, zi +
1
2k1
)
k3 = hf
(
ti +1
2h, zi +
1
2k2
)
k4 = hf(ti + h, zi + k3
)
zi+1 = zi +1
6
(k1 + 2k2 + 2k3 + k4
)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 633
Resumo :RK classico “Exata”
t x y x y
0 1.0000 1.0000 1.0000 1.0000
1 1.5046 -0.0981 1.5040 -0.1007
2 0.6645 -1.1878 0.6647 -1.2345
3 -0.4559 -0.9662 -0.4674 -0.9690
4 -1.1737 -0.3985 -1.1818 -0.3893
5 -0.9843 0.8774 -0.9779 0.8953
6 0.1121 1.0695 0.1262 1.0767
7 0.9936 0.6382 1.0055 0.6303
8 1.1987 -0.3901 1.1958 -0.4155
9 0.2588 -1.1304 0.2446 -1.1505
10 -0.7486 -0.8188 -0.7647 -0.8136
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
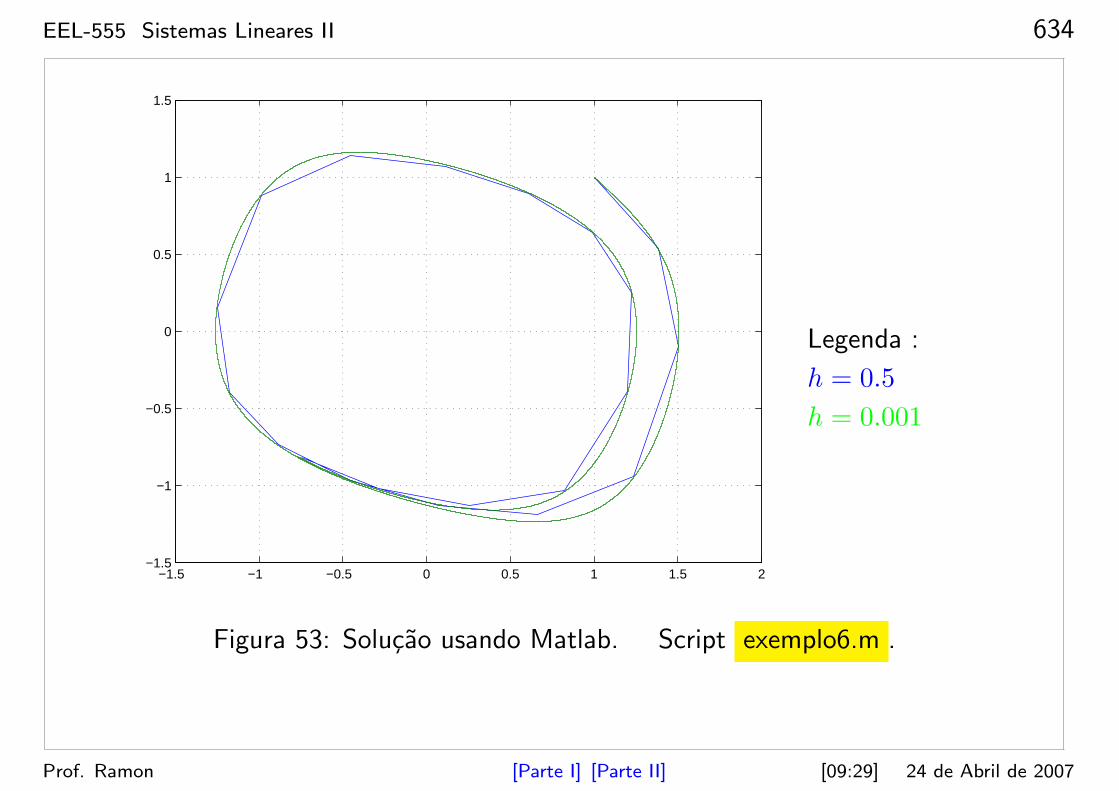
EEL-555 Sistemas Lineares II 634
−1.5 −1 −0.5 0 0.5 1 1.5 2−1.5
−1
−0.5
0
0.5
1
1.5
Legenda :
h = 0.5
h = 0.001
Figura 53: Solucao usando Matlab. Script exemplo6.m .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 635
9.4 Metodos multipassos
• Introducao
• Metodo de Adams-Bashforth
– Exemplos: [ 1 ] [ 2 ]
• Metodo de Adams-Moulton
– Exemplos: [ 3 ] [ 4 ]
• Metodo Preditor-corretor de 3a. ordem
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 636
Introducao
⋆ Os metodos estudados ate agora sao do tipo um passo .
Forma geral de um metodo de 2 passos :
yi+1 = a1yi + a2yi−1 + h[
b0f(ti+1, yi+1
)+ b1f
(ti, yi
)+ b2f
(ti−1, yi−1
)]
ou, usando notacao simplificada
yi+1 = a1yi + a2yi−1 + h[
b0fi+1 + b1fi + b2fi−1
]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 637
Se b0 6= 0 → Metodo implıcito
yi+1 = a1yi + a2yi−1 + h[
b0fi+1 + b1fi + b2fi−1
]
⋆ Precisa de um procedimento iterativo para achar a solucao.
⋆ Possui propriedades interessantes que o tornam muito importante (e que
compensam a aparente desvantagem).
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 638
Se b0 = 0 → Metodo explıcito
yi+1 = a1yi + a2yi−1 + h[
b1fi + b2fi−1
]
⋆ Possui uma desvantagem: instabilidade numerica.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 639
⋆ Metodos multipassos requerem:
• Condicoes iniciais (usual).
• Inicializacao (p. ex. usando R-K.)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
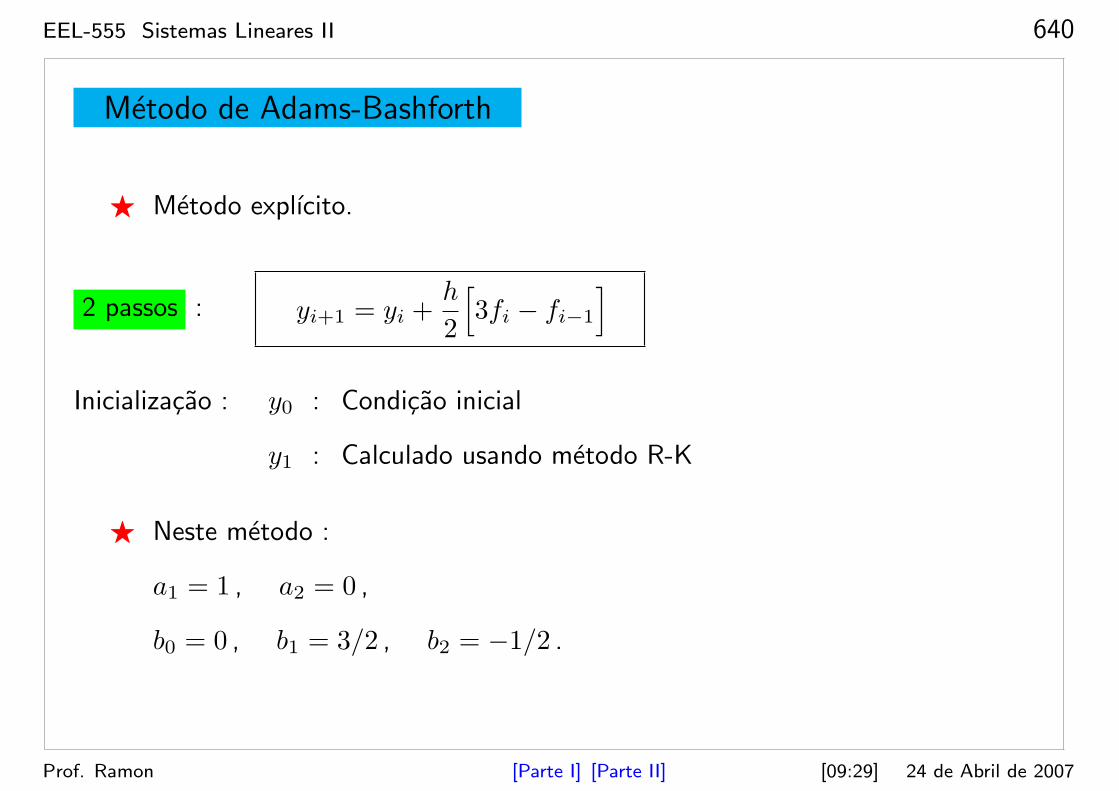
EEL-555 Sistemas Lineares II 640
Metodo de Adams-Bashforth
⋆ Metodo explıcito.
2 passos : yi+1 = yi +h
2
[
3fi − fi−1
]
Inicializacao : y0 : Condicao inicial
y1 : Calculado usando metodo R-K
⋆ Neste metodo :
a1 = 1 , a2 = 0 ,
b0 = 0 , b1 = 3/2 , b2 = −1/2 .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 641
3 passos : yi+1 = yi +h
12
[
23fi − 16fi−1 + 5fi−2
]
4 passos : yi+1 = yi +h
24
[
55fi − 59fi−1 + 37fi−2 − 9fi−3
]
5 passos :
yi+1 = yi +h
720
[
1901fi − 2774fi−1 + 2616fi−2 − 1274fi−3 + 251fi−4
]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 642
⋆ Vantagem: metodo explıcito.
⋆ Desvantagem: tem problemas de instabilidade numerica → h pequeno.
⋆ Principal utilidade: trabalhar em conjunto com um metodo implıcito.
⋆ Os coeficientes negativos no caso de 5a. ordem sao um indicacao de que o
metodo pode apresentar dificuldades numericas.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 643
Exemplo 7
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 644
Exemplo 8
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 645
Metodo de Adams-Moulton
⋆ Metodo implıcito.
2 passos : yi+1 = yi +h
12
[
5fi+1 + 8fi − fi−1
]
3 passos : yi+1 = yi +h
24
[
9fi+1 + 19fi − 5fi−1 + fi−2
]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 646
⋆ Vantagem: nao tem problema de instabilidade numerica.
⋆ Desvantagem: metodo implıcito.
⋆ Os coeficientes sao menores.
⋆ Os erros de arredondamento sao menores.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 647
Exemplo 9
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 648
Exemplo 10
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 649
Metodo Preditor-corretor de 3a. ordem
⋆ Metodo explıcito : causal porem instavel.
⋆ Metodo implıcito : nao causal porem estavel.
Ideia : Fazer uma combinacao dos 2 metodos!
• O metodo explıcito e usado para estimar yi+1 (denotado por y∗i+1).
• y∗i+1 e usado no metodo implıcito para refinar (melhorar) o valor de yi+1.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 650
Algoritmo Metodo Preditor-corretor de 3a.-ordem.
Inicializacao : y0 : Condicao inicial dada.
y1 : Calculado usando metodo tipo 1 passo.
y2 : Calculado usando metodo tipo 2 passos.
Para i = 2, 3, · · · : y∗i+1 = yi +
h
12
[
23fi − 16fi−1 + 5fi−2
]
f∗i+1 = f(ti+1, y
∗i+1)
yi+1 = yi +h
24
[
9f∗i+1 + 19fi − 5fi−1 + fi−2
]
⋆ O erro neste algoritmo e O(h4).
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 651
Exercıcio. Resolva numericamente a equacao de Van der Pol utilizando um
metodo multipasso.
x = y
y = −x + y − cy3
Contante : c = 1
Condicao inicial : x(0) = 1
y(0) = 1
Intervalo de integracao : h = 0.5
Intervalo de solucao : [0, 10]
Metodo : Multipasso (3a. ordem)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 652
Exercıcio. Resolva numericamente a equacao
x = −sign(x)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

UFRJ Universidade Federal do Rio de Janeiro
EE Escola de Engenharia
DEL Departamento de Eletronica
EEL-555 Sistemas Lineares II
Capıtulo # 10
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 654
10 Sinais e sistemas discretos no tempo
Conteudo 1. Overview
2. Introducao
3. Sequencias
4. Sistemas discretos
5. Sistemas lineares invariantes no tempo
6. Propriedades de SDLITs
7. Equacoes a diferencas
8. Representacao no domınio da frequencia
9. Transformada de Fourier
10. Propriedades da transformada de Fourier
11. Teoremas da transformada de Fourier
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
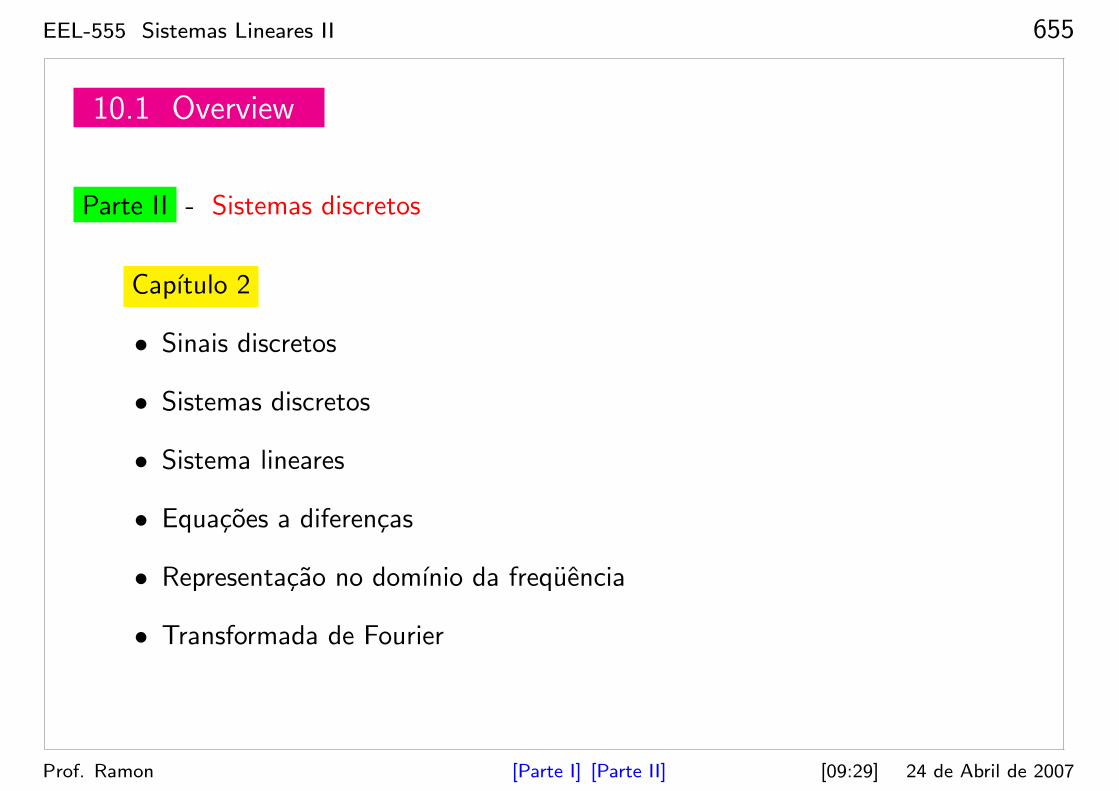
EEL-555 Sistemas Lineares II 655
10.1 Overview
Parte II - Sistemas discretos
Capıtulo 2
• Sinais discretos
• Sistemas discretos
• Sistema lineares
• Equacoes a diferencas
• Representacao no domınio da frequencia
• Transformada de Fourier
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 656
Capıtulo 3
• Amostragem de sinais contınuos
• Reconstrucao
• Filtro anti-aliasing
• Quantizacao
Capıtulo 4
• Transformada z
• Transformada z inversa
• Propriedades
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 657
Capıtulo 5
• Analise de SDLIT
Capıtulo 8
• Transformada discreta de Fourier
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 658
10.2 Introducao
Motivacao :
⋆ Facilidade de implementacao
⋆ Custo reduzido para aplicacoes simples
⋆ Existencia de elementos muito eficientes
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 659
Exemplo 1 (Diniz, Silva & Neto 2002, pag. 5)
Suponha que se deseja fazer a seguinte operacao com um sinal contınuo :
y(t) =cosh
[
ln(|x(t)|
)+ x3(t) + cos3
(√
|x(t)|)]
5x5(t) + ex(t) + tan(x(t)
)
Sinal de entrada . . . . . x(t)
Sinal de saıda . . . . . . . y(t)
⋆ Virtualmente, nao ha limites para a complexidade!
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 660
Exemplo 2 Elementos eficientes
Processador : DSP TigerSharc da Analog Devices
Site : http://www.analog.com/processors/processors/tigersharc/
Caracterısticas : 500 MHz
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 661
Notacao :
Sinal analogico : xa(t)
Sequencia : x[n] = xa(nT ) , (−∞ < n <∞)
Intervalo de amostragem : T
Frequencia de amostragem : fs =1
T
Frequencia angular de amostragem : ωs = 2πfs =2π
T
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
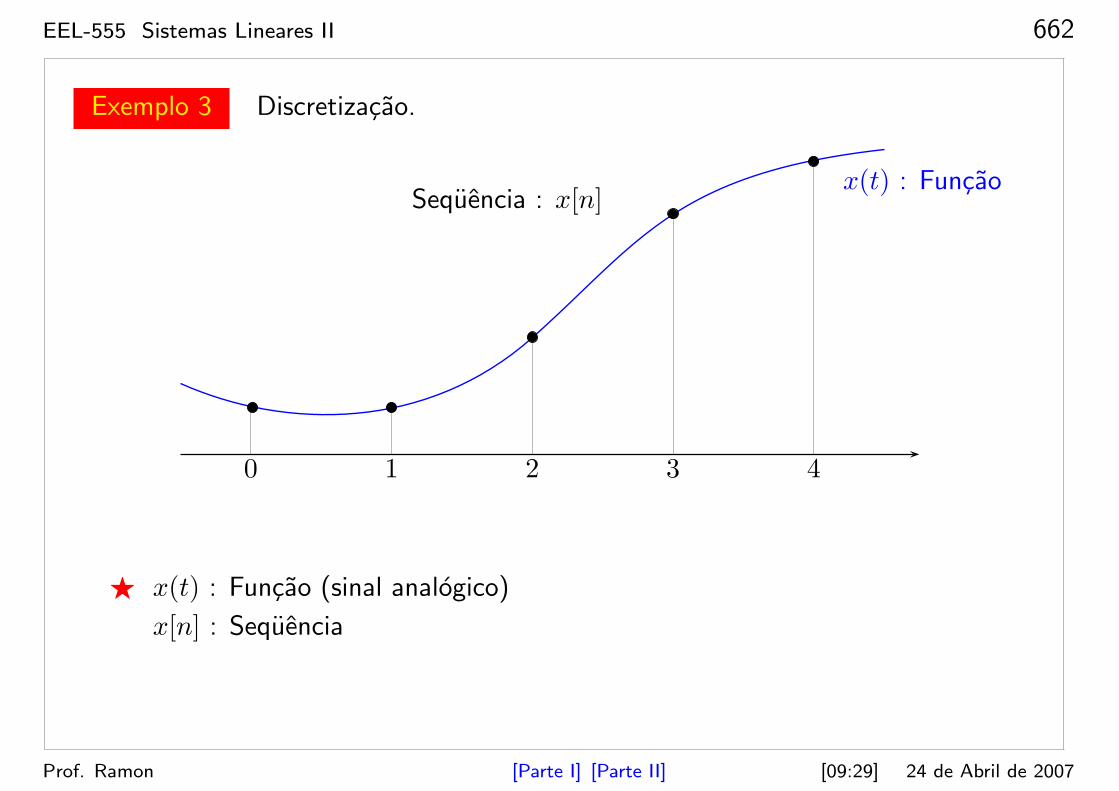
EEL-555 Sistemas Lineares II 662
Exemplo 3 Discretizacao.
0 1 2 3 4
x(t) : FuncaoSequencia : x[n]
⋆ x(t) : Funcao (sinal analogico)
x[n] : Sequencia
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
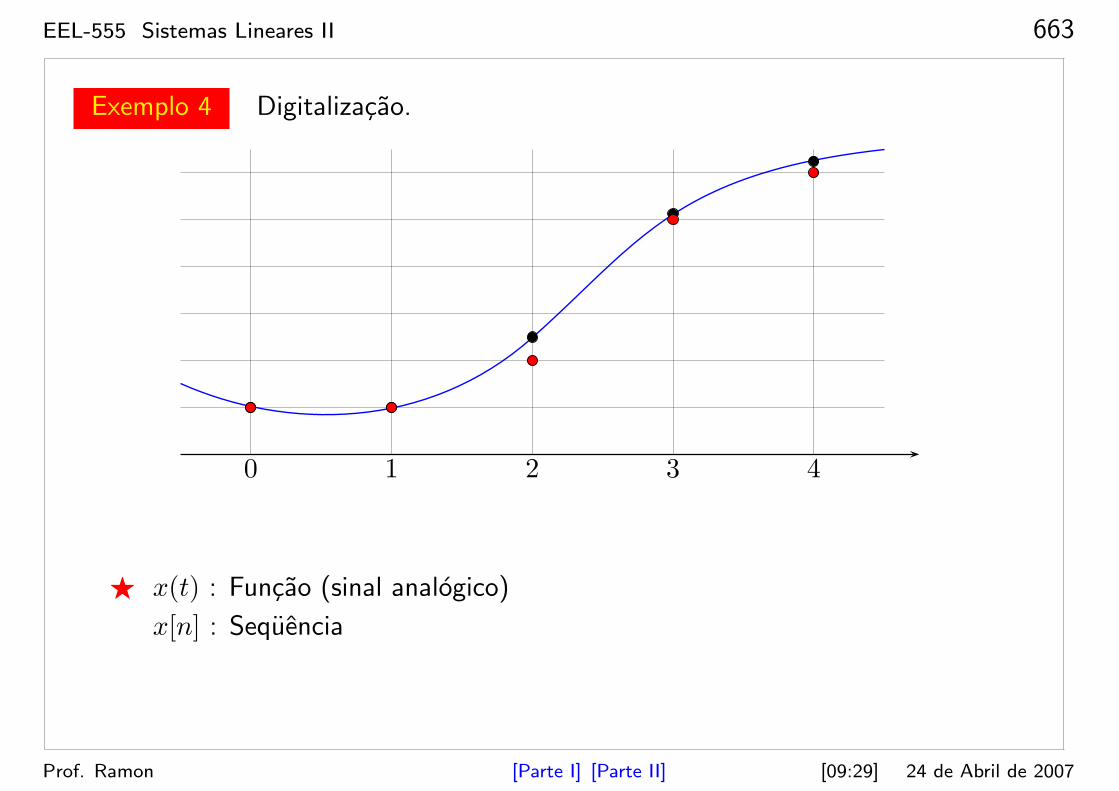
EEL-555 Sistemas Lineares II 663
Exemplo 4 Digitalizacao.
0 1 2 3 4
⋆ x(t) : Funcao (sinal analogico)
x[n] : Sequencia
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 664
Importante :
⋆ A digitalizacao e uma operacao nao linear .
⋆ A discretizacao e uma digitalizacao com precisao infinita.
⋆ Neste curso consideraremos apenas sinais discretos de 1 dimensao .
⋆ O efeito da digitalizacao e avaliado via simulacao.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 665
Importante :
⋆ Sob certas condicoes, as representacoes contınua e discreta de um mesmo
sinal sao equivalentes .
⋆ Nem toda sequencia e obtida por discretizacao.
⋆ Existem diferencas fundamentais entre sistemas contınuos e discretos.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 666
10.3 Sequencias
⋆ Sinais discretos sao representados matematicamente como sequencias .
⋆ Cuidado : nao e correto assumir x[n] = 0 para n nao inteiro.
⋆ Vamos iniciar vendo algumas sequencias basicas importantes.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
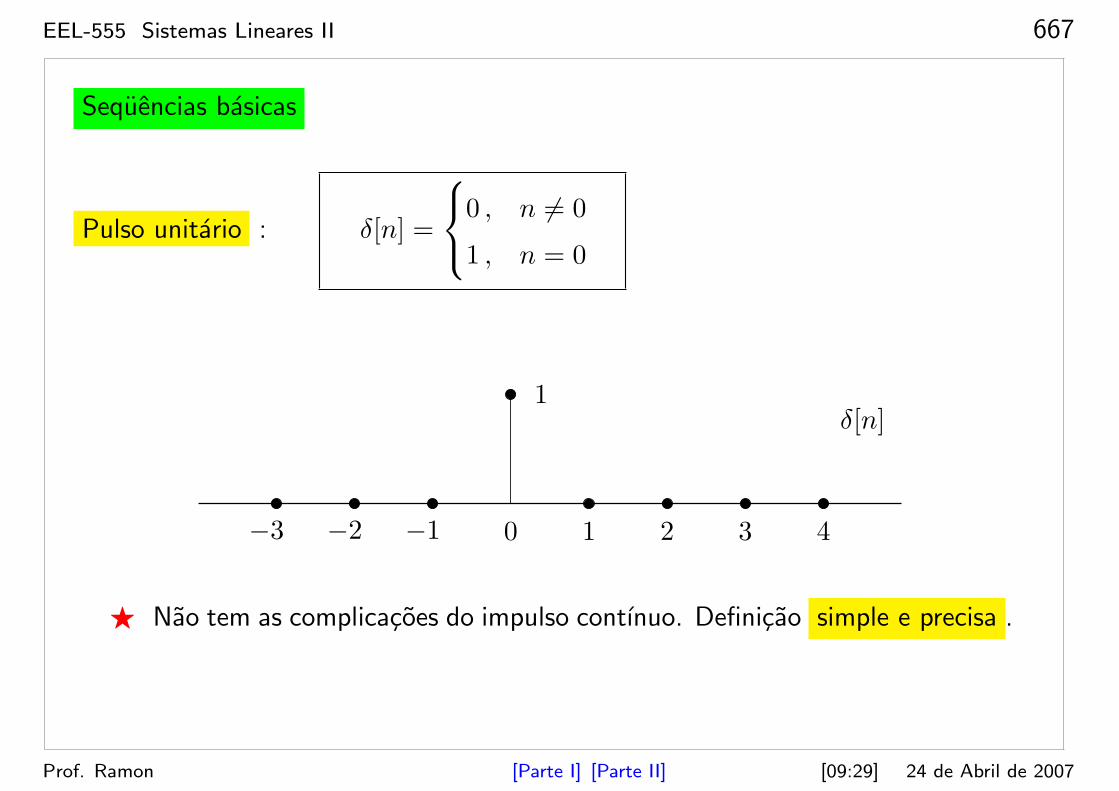
EEL-555 Sistemas Lineares II 667
Sequencias basicas
Pulso unitario : δ[n] =
0 , n 6= 0
1 , n = 0
−3 −2 −1 0 1 2 3 4
δ[n]1
⋆ Nao tem as complicacoes do impulso contınuo. Definicao simple e precisa .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 668
Fato. Toda sequencia x[n] pode ser expressa como a soma de pulsos
deslocados e escalados.
x[n] =∞∑
k=−∞
x[k] δ[n− k]
x[k] : escalar
δ[n− k] : sequencia
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 669
Exemplo 5
p[n]
−3 −2 −1 0 1
2
3 4
a−1
a1
a2
p[n] = a−1δ[n + 1] + a1δ[n− 1] + a2δ[n− 2]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 670
Sequencias basicas
Degrau unitario : u[n] =
1 , n ≥ 0
0 , n < 0
−3 −2 −1 0 1 2 3 4
u[n]1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 671
Fato. Relacao entre degrau e pulso unitarios :
u[n] =n∑
k=−∞
δ[k] (Acumulador)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 672
Sequencias basicas
Senoide : x[n] = A cos(ω0n + φ
)
, ∀n
A = amplitude
ω0 = frequencia (em radianos/s)
φ = fase
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 673
Sequencias basicas
Exponencial : x[n] = Aαn
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 674
Sequencias basicas
Exponencial complexa : (|α| = 1)
x[n] = |A|ej(ω0n+φ
)
= |A| cos(ω0n + φ) + j|A| sin(ω0n + φ)
A = amplitude
ω0 = frequencia (em radianos/s)
φ = fase
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 675
Fato. Exponenciais complexas com frequencias (ω0 + 2πn) se confundem.
x[n] = Aej(ω0+2π
)n
= Aejω0n ej2πn︸ ︷︷ ︸
1
= Aejω0n
⋆ Somente precisamos considerar ω0 ∈ (−π, π] ou ω0 ∈ [0, 2π) .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 676
Exemplo 6 (Aliasing)
x0[n] = Aejω0n
x1[n] = Aej(ω0+2π)n
x2[n] = Aej(ω0+4π)n
A = 1
ω0 = 1.5
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 677
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
−1
−0.5
0
0.5
1
n
Figura 54: Parte real das sequencias x0[n], x1[n], x2[n].
Script exemplo06.m .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 678
Fato. A periodicidade de sinais discretos e diferente da de contınuos.
Sequencia periodica : x[n] = x[n + N ] , ∀n
Portanto, para uma senoide ser periodica :
A cos(ω0n + φ
)= A cos
(ω0n + ω0N + φ
)
⇒ ω0N = (2π)k Condicao para periodicidade
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 679
Exemplo 7 Sequencia periodica
x[n] = A cos
(3π
4n + φ
)
.
E periodica para N = 8 :
A cos
(3π
4n +
3π
4N + φ
)
= A cos
(3π
4n +
3π
48 + φ
)
= A cos
(3π
4n + 6π + φ
)
⋆3π
48 = 6π = multiplo inteiro de 2π .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 680
0 1 2 3 4 5 6 7 8 9 10
−1
−0.5
0
0.5
1
n
x[n]
xa(t)
Figura 55: Sequencia periodica : x[n] = A cos(
3π4 n + φ
).
Script exemplo07.m .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 681
Exemplo 8 Sequencia nao periodica
x[n] = A cos
(9
4n + φ
)
.
A cos
(9
4n + φ
)
6= A cos
(9
4n +
9
4N + φ
)
⋆9
4N 6= (2π)k , ∀N , ∀k inteiros.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
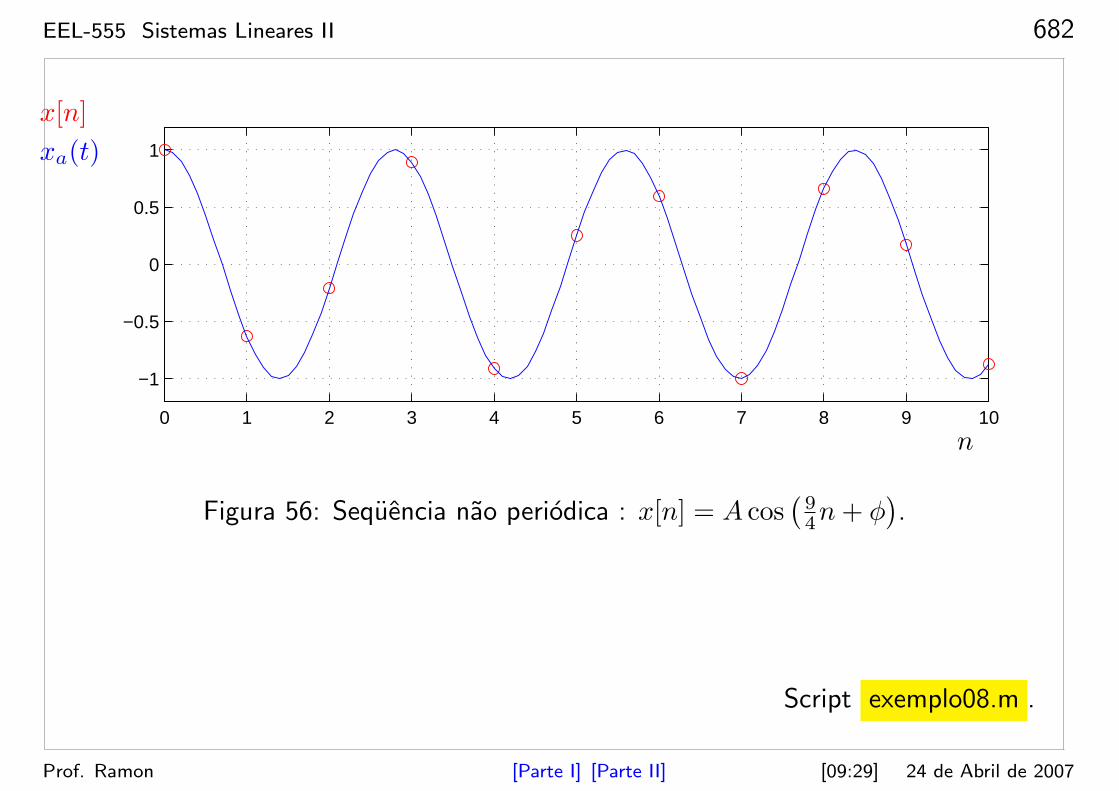
EEL-555 Sistemas Lineares II 682
0 1 2 3 4 5 6 7 8 9 10
−1
−0.5
0
0.5
1
n
x[n]
xa(t)
Figura 56: Sequencia nao periodica : x[n] = A cos(
94n + φ
).
Script exemplo08.m .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 683
Fato. Altas frequencias x baixas frequencias.
Altas frequencias : ω0 proximo de (2π)k.
Baixas frequencias : ω0 proximo de (π + 2πk).
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 684
10.4 Sistemas discretos
Um sistema discreto e definido matematicamente como uma transformacao ou
operador :
y[n] = T
x[n]
y[n]x[n]
T
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 685
Exemplo 9 Media movel
Algoritmo da media movel :
y[n] =1
M1 + M2 + 1
M2∑
k=−M1
x[n− k]
Para M1 = 3 e M2 = 2 :
y[n] =1
3 + 2 + 1
2∑
k=−3
x[n− k]
=1
6
(
x[n + 3] + x[n + 2] + x[n + 1] + x[n] + x[n− 1] + x[n− 2])
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 686
Conside 2 sinais de entrada distintos :
y1[n] = T
x1[n]
y2[n] = T
x2[n]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 687
Propriedade (Aditividade)
T
x1[n] + x2[n]
= T
x1[n]
+ T
x2[n]
= y1[n] + y2[n]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 688
Propriedade (Homogeneidade)
T
axi[n]
= aT
xi[n]
= ayi[n]
Combinando-se estas 2 propriedade, tem-se o ...
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 689
Princıpio da superposicao
T
a x1[n] + b x2[n]
= a y1[n] + b y2[n]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 690
Propriedade (Linearidade)
A classe de sistemas discretos que satisfaz o princıpio da superposicao e dito linear .
Notacao SDL : sistema discreto linear.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 691
Exemplo 10
Sistemas lineares :
y[n] = x[n− nd]
y[n] =1
M1 + M2 + 1
M2∑
k=−M1
x[n− k]
Sistemas nao-lineares :
y[n] = x2[n]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 692
Propriedade (Invariancia no tempo)
Um sistema e invariante no tempo se, ∀n0,
a entrada x1 = x[n− n0]
produz a saıda y1 = y[n− n0] .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 693
Exemplo 11 Compressor
y[n] = x[Mn] , −∞ < n <∞
M=2 ⇒ y[0] = x[0]
y[1] = x[2]
y[2] = x[4]
...
Este sistema e variante para M 6= 1.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 694
Verificacao
Sequencia de entrada atrasada :
x1[n] = x[n− n0]
Compressao de x1[n] :
y1[n] = x1[Mn]
= x[Mn− n0]
Porem, a sequencia de saıda atrasada e
y[n− n0] = x[M(n− n0)]
6= y1[n]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
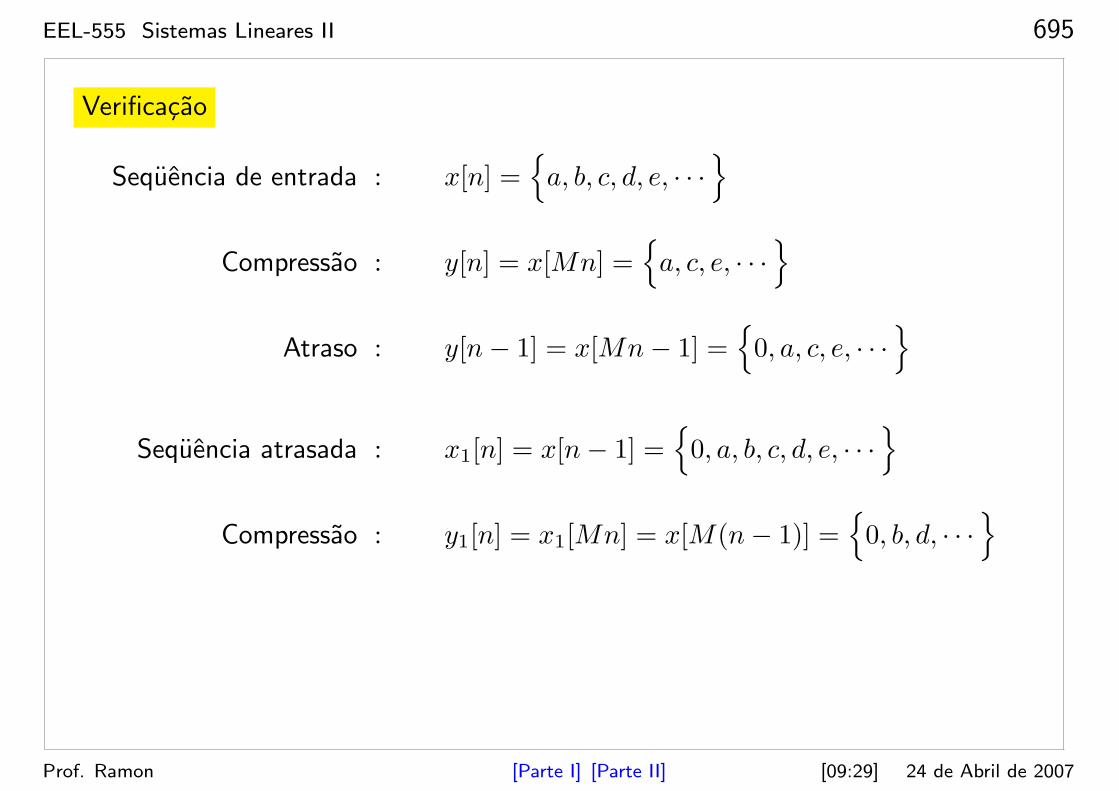
EEL-555 Sistemas Lineares II 695
Verificacao
Sequencia de entrada : x[n] =
a, b, c, d, e, · · ·
Compressao : y[n] = x[Mn] =
a, c, e, · · ·
Atraso : y[n− 1] = x[Mn− 1] =
0, a, c, e, · · ·
Sequencia atrasada : x1[n] = x[n− 1] =
0, a, b, c, d, e, · · ·
Compressao : y1[n] = x1[Mn] = x[M(n− 1)] =
0, b, d, · · ·
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 696
Propriedade (Causalidade)
Um sistema e causal se a sequencia de saıda no instante n0 so depende da
sequencia de entrada ate n0.
⋆ O sistema e nao antecipativo .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
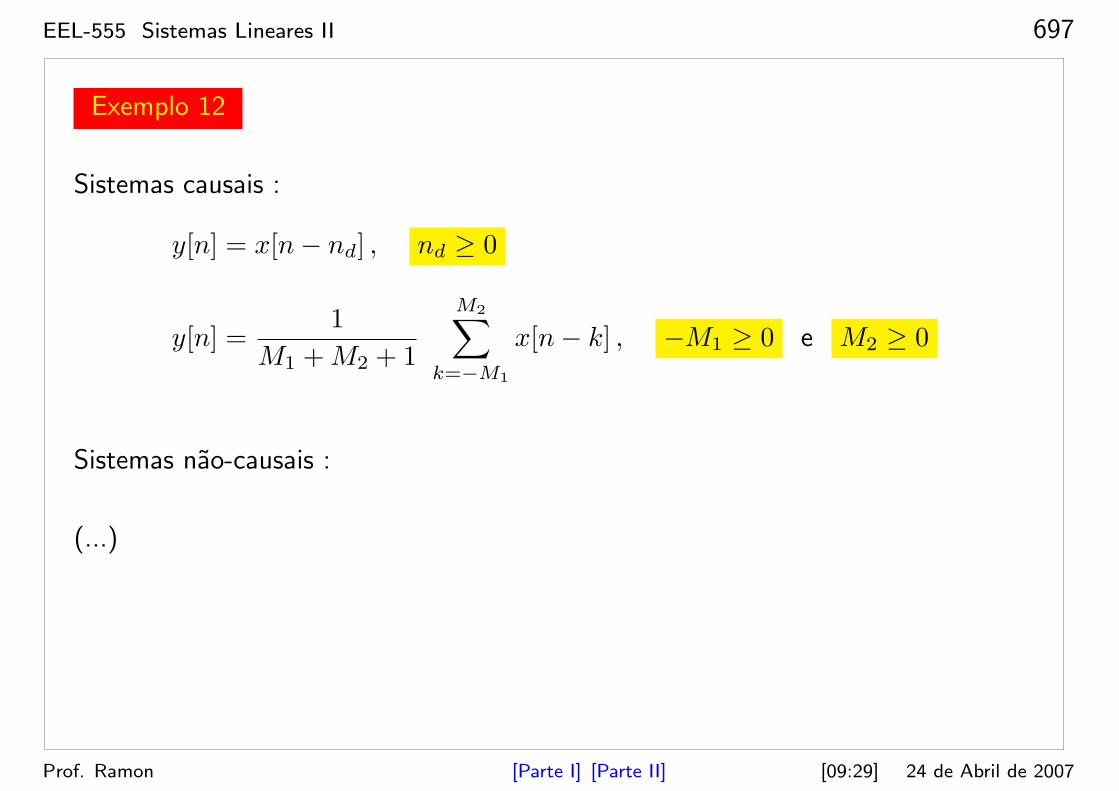
EEL-555 Sistemas Lineares II 697
Exemplo 12
Sistemas causais :
y[n] = x[n− nd] , nd ≥ 0
y[n] =1
M1 + M2 + 1
M2∑
k=−M1
x[n− k] , −M1 ≥ 0 e M2 ≥ 0
Sistemas nao-causais :
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 698
10.5 Sistemas lineares invariantes no tempo (SLIT)
Um SLIT pode ser completamente caracterizado pela sua resposta ao pulso .
Seja hk[n] a resposta do SL a δ[n− k] (pulso no instante k), i.e.,
hk[n] = T δ[n− k]
Entao :
y[n] = Tx[n] = T
∞∑
k=−∞
x[k] δ[n− k]
︸ ︷︷ ︸
x[n]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 699
Pelo princıpio da superposicao :
y[n] =
∞∑
k=−∞
x[k] T
δ[n− k]
︸ ︷︷ ︸
hk[n]
=
∞∑
k=−∞
x[k] hk[n]
Se o sistema for invariante,
T
δ[n− k]
= hk[n]
Entao a resposta do SLIT e :
y[n] =
∞∑
k=−∞
x[k] h[n− k] Somatorio de convolucao
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 700
⋆ Para se determinar a resposta de um SDLIT a qualquer entrada,
basta o conhecimento de sua resposta ao pulso unitario.
Notacao : y[n] = x[n] ∗ h[n]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
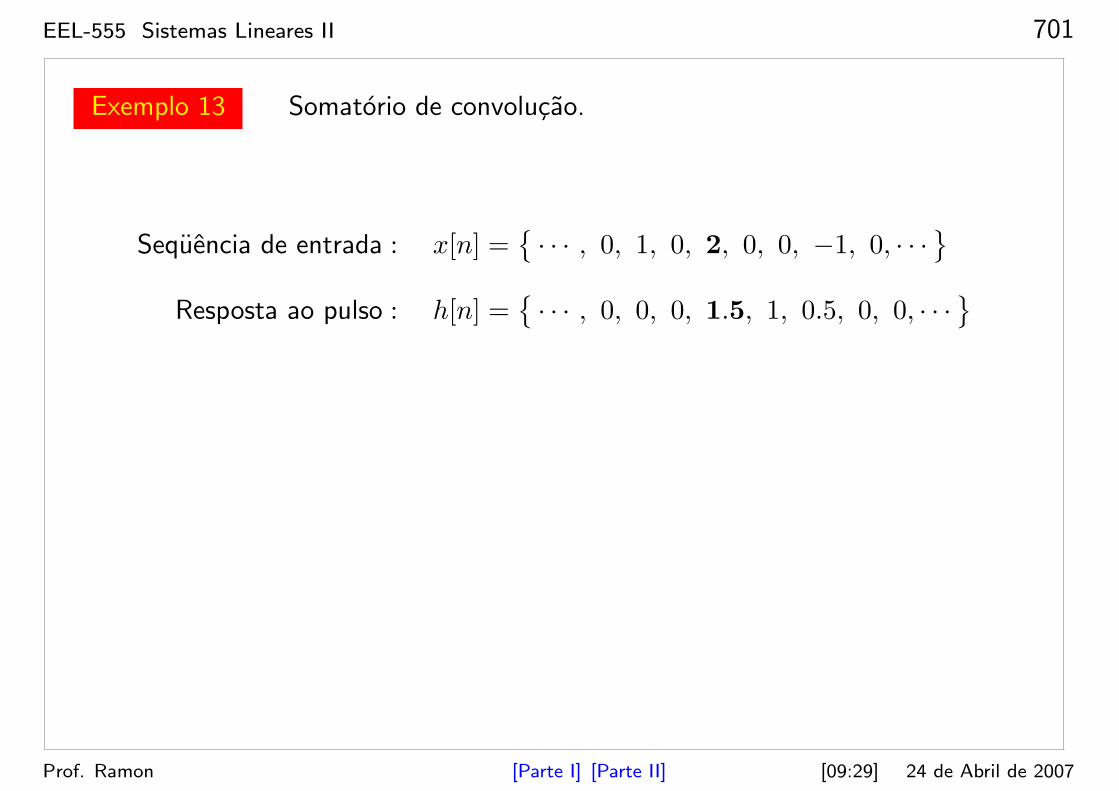
EEL-555 Sistemas Lineares II 701
Exemplo 13 Somatorio de convolucao.
Sequencia de entrada : x[n] =· · · , 0, 1, 0, 2, 0, 0, −1, 0, · · ·
Resposta ao pulso : h[n] =· · · , 0, 0, 0, 1.5, 1, 0.5, 0, 0, · · ·
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
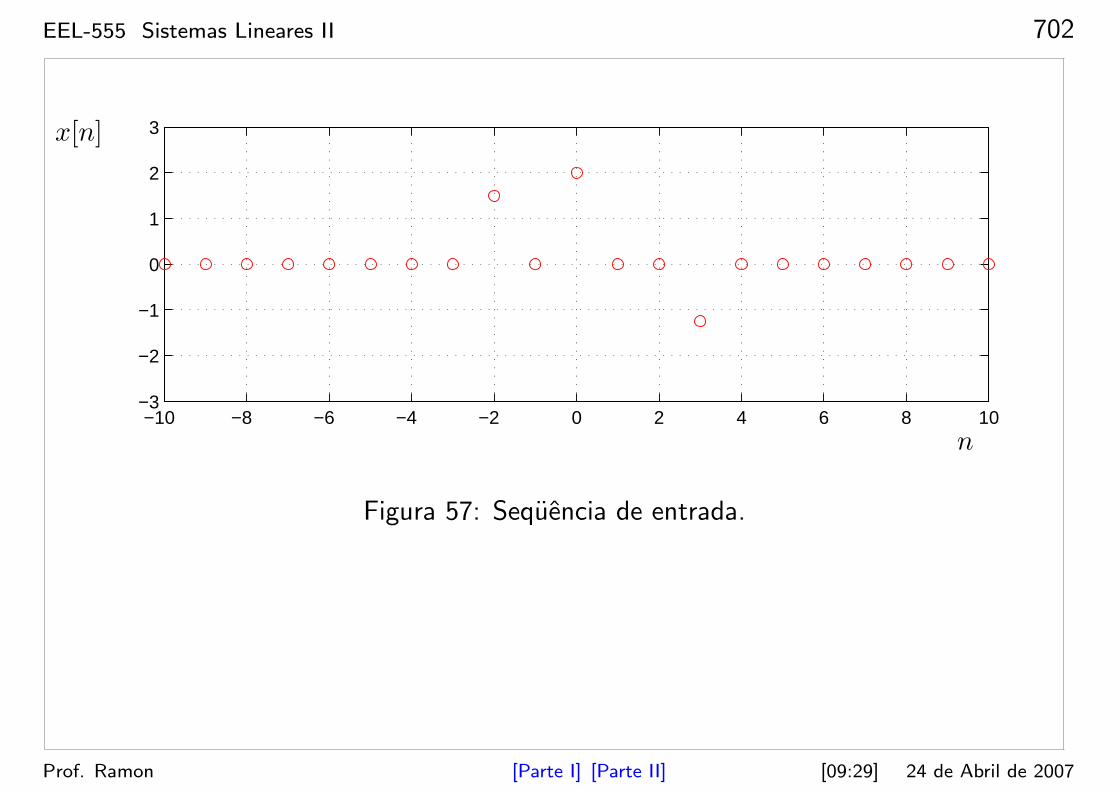
EEL-555 Sistemas Lineares II 702
−10 −8 −6 −4 −2 0 2 4 6 8 10−3
−2
−1
0
1
2
3
n
x[n]
Figura 57: Sequencia de entrada.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 703
−10 −8 −6 −4 −2 0 2 4 6 8 10−3
−2
−1
0
1
2
3
n
h[n]
Figura 58: Resposta ao pulso.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 704
Calculo da sequencia de saıda:
y[n] =∞∑
k=−∞
x[k] h[n− k]
= x[−2]h[n + 2] + x[0]h[n] + x[3]h[n− 3]
x[n] =· · · , 0, 1, 0, 2, 0, 0, −1, 0, · · ·
h[n] =· · · , 0, 0, 0, 1.5, 1, 0.5, 0, 0, · · ·
x[−2]h[n + 2] =· · · , 0, 1.5, 1, 0.5, 0, 0, 0, 0, · · ·
x[0]h[n] =· · · , 0, 0, 0, 3, 2, 1, 0, 0, · · ·
x[3]h[n− 3] =· · · , 0, 0, 0, 0, 0, 0, −1.5, −1, −0.5, 0, · · ·
y[n] =· · · , 0, 1.5, 1, 3.5, 2, 1, −1.5, −1, −0.5, 0, · · ·
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 705
−10 −8 −6 −4 −2 0 2 4 6 8 10−4
−2
0
2
4
n
y[n]
Figura 59: Sequencia de saıda.
Script exemplo13.m .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
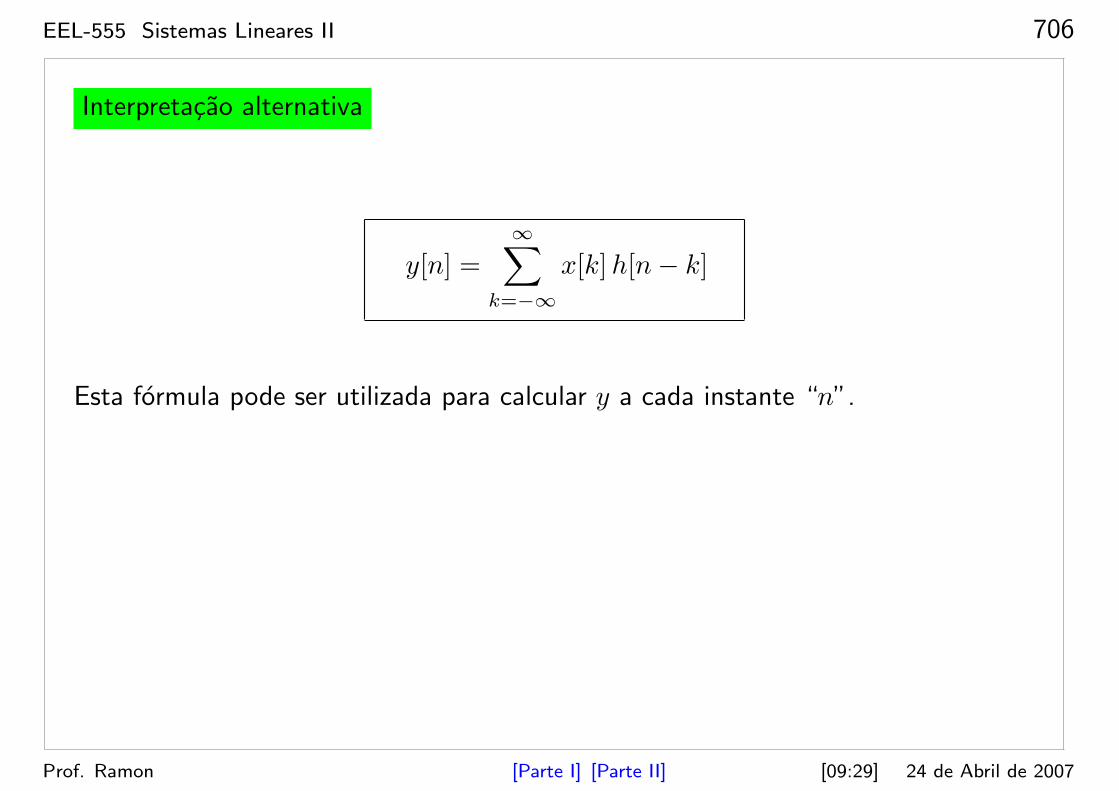
EEL-555 Sistemas Lineares II 706
Interpretacao alternativa
y[n] =
∞∑
k=−∞
x[k] h[n− k]
Esta formula pode ser utilizada para calcular y a cada instante “n”.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 707
Exemplo 14 Para o mesmo sistema do exemplo anterior :
n = −2 : y[−2] =
∞∑
k=−∞
x[k] h[−2− k]
y[−2] = x[−2] h[0] + x[−1] h[−1] + x[0]h[−2] + x[1]h[−3] + x[2]h[−4] + x[3]h[−5]
= x[−2] h[0]
n = −1 : y[−1] =
∞∑
k=−∞
x[k] h[−1− k] = x[−2] h[1] + x[−1] h[0]
n = 0 : y[0] =
∞∑
k=−∞
x[k] h[0− k] = x[−2] h[2] + x[−1] h[1] + x[0]h[2]
n = 1 : y[1] =∞∑
k=−∞
x[k] h[1− k] = x[−2] h[3] + x[−1] h[2] + x[0]h[1] + x[1]h[0]
...
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
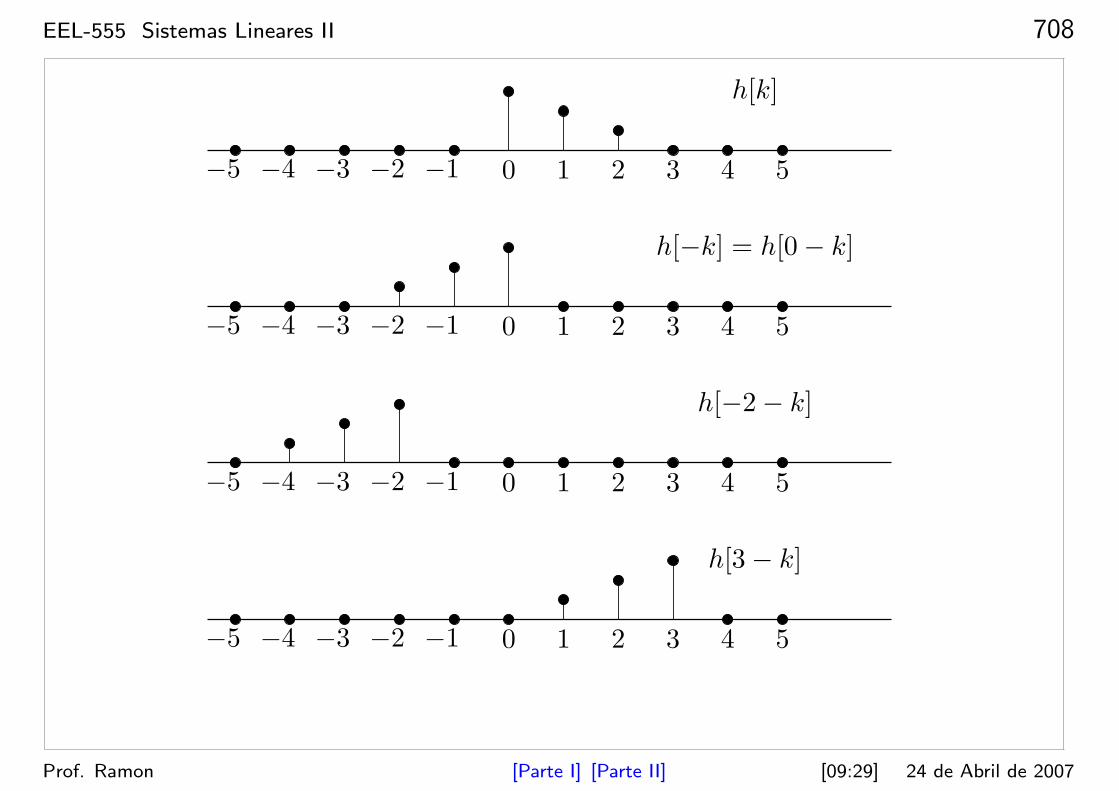
EEL-555 Sistemas Lineares II 708
−3 −2 −1 0 1 2 3 4
h[k]
5
−3 −2 −1 0 1 2 3 4
h[−k] = h[0− k]
5
−3 −2 −1 0 1 2 3 4
h[−2− k]
5
−5 −4
−5 −4
−5 −4
−3 −2 −1 0 1 2 3 4
h[3− k]
5−5 −4
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 709
Exemplo 15 2.8 pag. 25.
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 710
10.6 Propriedades de SDLITs
A convolucao e comutativa
x[n] ∗ h[n] = h[n] ∗ x[n]
Quer dizer,
y[n] =
∞∑
k=−∞
x[k] h[n− k] =
∞∑
k=−∞
h[k] x[n− k]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 711
Prova. Basta uma substituicao de variaveis :
m = n− k ⇒ k = n−m
⇒ y[n] =∞∑
k=−∞
x[k]h[n− k]
=
−∞∑
m=∞
x[n−m]h[m]
k = n−m = −∞ ⇒ −m = −∞− n ⇒ m = n +∞ ⇒ m =∞
ou melhor,
y[n] =
∞∑
m=−∞
h[m] x[n−m] = h[n] ∗ x[n]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 712
h2[n] h1[n]x[n] y[n]
y[n]x[n]h1[n] ∗ h2[n]
h1[n] h2[n]x[n] y[n]
Figura 60: A convolucao e comutativa.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 713
A convolucao e distributiva
x[n] ∗(
h1[n] + h2[n])
= x[n] ∗ h1[n] + x[n] ∗ h2[n]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 714
h2[n]
y[n] y[n]x[n]h1[n] + h2[n]
h1[n]
x[n]≡
Figura 61: A convolucao e distributiva.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 715
Estabilidade
BIBO : Entrada limitada ⇒ Saıda limitada
|y[n]| =∣∣∣∣∣
∞∑
k=−∞
h[k] x[n− k]
∣∣∣∣∣≤
∞∑
k=−∞
|h[k]| |x[n− k]|
Se x[n] e limitado,
|x[n]| ≤ Bx
entao
|y[n]| ≤ Bx
∞∑
k=−∞
|h[k]|
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 716
Portanto, y[n] e limitado se
S =
∞∑
k=−∞
|h[k]| <∞ Condicao suficiente
E possıvel mostrar que e condicao necessaria .
⋆ BIBO estabilidade ⇔ h[n] e absolutamente somavel
.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 717
Causalidade
Para SDLITs a causalidade implica que
h[n] = 0 , n < 0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 718
Exemplo 16
Backward difference : y[n] = x[n]− x[n− 1]
Resposta ao pulso : h[n] = δ[n]− δ[n− 1] ⇒ Causal
Forward difference : y[n] = x[n + 1]− x[n]
Resposta ao pulso : h[n] = δ[n + 1]− δ[n] ⇒ Nao causal
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
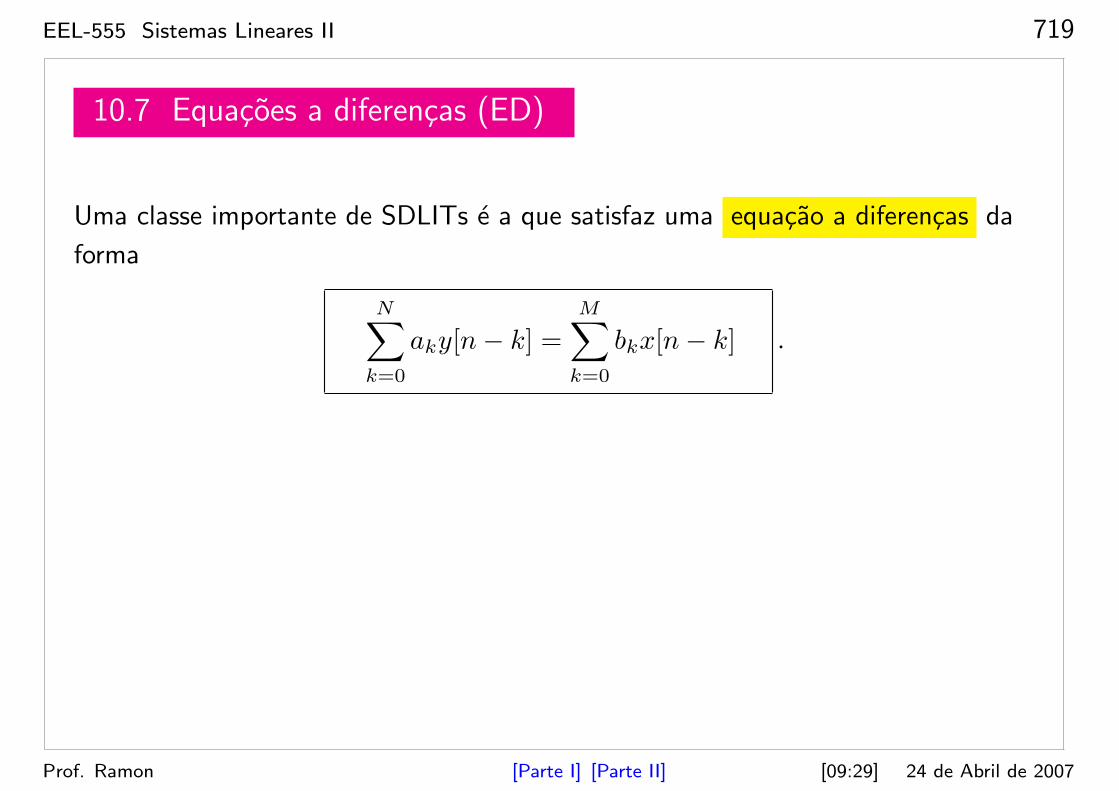
EEL-555 Sistemas Lineares II 719
10.7 Equacoes a diferencas (ED)
Uma classe importante de SDLITs e a que satisfaz uma equacao a diferencas da
forma
N∑
k=0
aky[n− k] =
M∑
k=0
bkx[n− k] .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
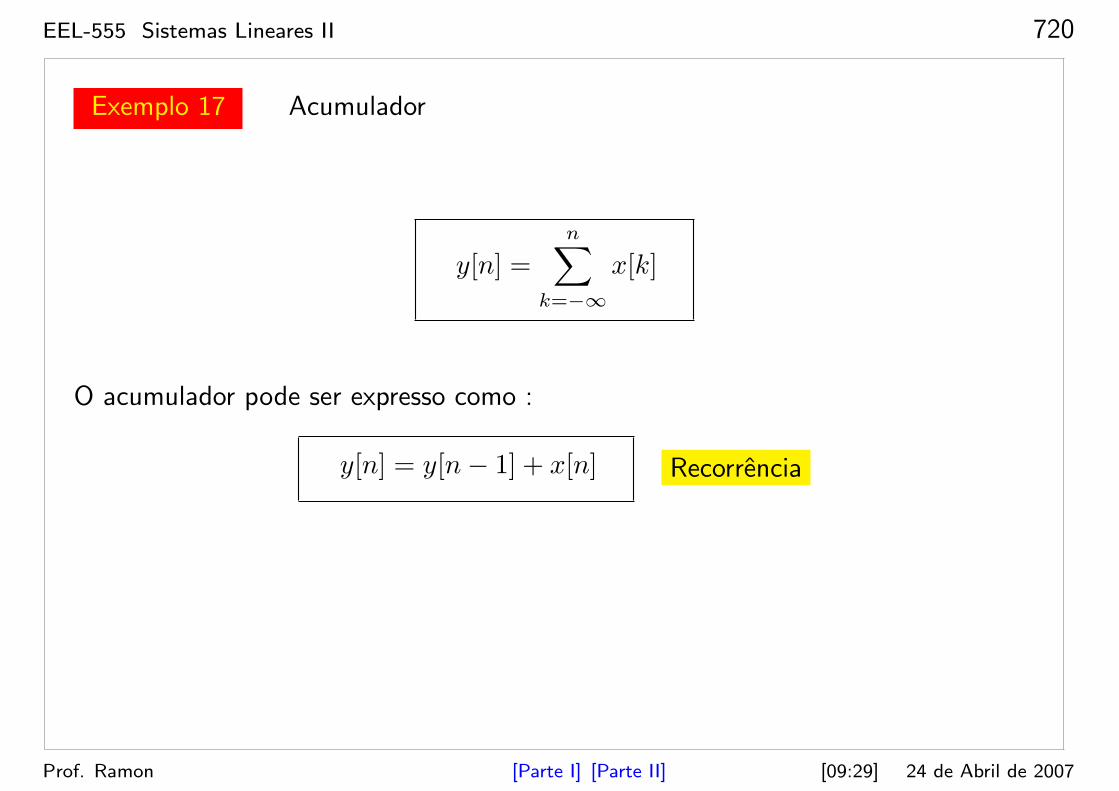
EEL-555 Sistemas Lineares II 720
Exemplo 17 Acumulador
y[n] =
n∑
k=−∞
x[k]
O acumulador pode ser expresso como :
y[n] = y[n− 1] + x[n] Recorrencia
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 721
Diagrama de blocos
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 722
Exemplo 18 Media movel
Para M1 = 0 : y[n] =1
M2 + 1
M2∑
k=0
x[n− k]
⋆ E uma ED com N = 0.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 723
Outra forma para o algoritmo :
y[n]− y[n− 1] =1
M2 + 1
(M2∑
k=0
x[n− k]−M2+1∑
k=1
x[n− k]
)
=1
M2 + 1
(
x[n] + x[n− 1] + · · ·+ x[n−M2]−
− x[n− 1]− · · · − x[n−M2]− x[n−M2 − 1])
=1
M2 + 1
(
x[n]− x[n−M2 − 1])
⋆ De fato, pode-se escrever o sistema de infinitas maneiras.
⋆ Existem infinitos modelos de estado para a ED !
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 724
Fato. A linearidade, invariancia e causalidade dependem das condicoes iniciais.
Se as condicoes iniciais forem nulas
entao o sistema e linear, invariante e causal .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 725
10.8 Representacao no domınio da frequencia
⋆ Ja vimos a representacao de um sinal em termos de impulsos.
⋆ Sinais podem ser representados de diversas formas.
⋆ Nesta secao : representacao usando exponenciais complexas .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 726
Fato. A resposta de um SLIT a uma senoide e uma senoide de
mesma frequencia com amplitude e fase determinadas pelo sistema .
Um SLIT nao altera a frequencia.
⋆ Sequencias exponenciais complexas sao autofuncoes de SLITs.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 727
Prova.
Sequencia de entrada : x[n] = ejωn
Resposta de um SDLIT (com resposta ao pulso h[n]) :
y[n] =
∞∑
k=−∞
h[k] ejω(n−k)
= ejωn
(∞∑
k=−∞
h[k] e−jωk
)
︸ ︷︷ ︸
H(ejω)
⋆ ejωn e uma autofuncoes do sistema associada ao autovalor H(ejω).
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 728
Definindo
H(ejω)
=
∞∑
k=−∞
h[k] e−jωk
⇒ y[n] = H(ejω)
ejωn
⋆ H(ejω)
e denominada resposta em frequencia .
⋆ H(ejω)
e uma funcao complexa contınua em ω.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 729
Exemplo 19 Atraso ideal
y[n] = x[n− nd]
Sequencia de entrada : x[n] = ejωn
Resposta :
y[n] = ejω(n−nd)
= e−jωnd
︸ ︷︷ ︸
H(ejω
)
ejωn ⇒ H(ejω)
= e−jωnd
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 730
Solucao alternativa :
H(ejω)
=
∞∑
n=−∞
h[n]e−jωn
=
∞∑
n=−∞
δ[n− nd]e−jωn
= e−jωnd
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 731
Importante
Uma classe bastante ampla de sinais de interesse pode ser expressa como
x[n] =∞∑
i=−∞
ai ejωin Expansao em serie de Fourier
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 732
Entao, se x[n] e a sequencia de entrada de um SDLIT, a saıda e :
y[n] =
∞∑
k=−∞
h[k]x[n− k]
=∞∑
k=−∞
h[k]
(∞∑
i=−∞
ai ejωi(n−k)
)
=
∞∑
i=−∞
ai
(∞∑
k=−∞
h[k] e−jωik
)
︸ ︷︷ ︸
H(ejωi
)
ejωin
⇒ y[n] =
∞∑
i=−∞
aiH(ejωi
)ejωin
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 733
Fato. A resposta em frequencia H(ejω)
e uma funcao periodica
com perıodo 2π.
Prova. H(
ej(ω+2π))
=
∞∑
n=−∞
h[n] e−j(ω+2π)n
=
∞∑
n=−∞
h[n] e−jωn e−j2πn︸ ︷︷ ︸
1
=∞∑
n=−∞
h[n] e−jωn
= H(ejω)
⋆ Por conveniencia, e usual especificar H(ejω)
somente para ω ∈(− π, π
].
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 734
Exemplo 20 Media movel
Algoritmo da media movel :
y[n] =1
M1 + M2 + 1
M2∑
k=−M1
x[n− k]
Resposta ao pulso unitario :
h[n] =
1M1+M2+1 , se −M1 ≤ n ≤M2 ,
0 , caso contrario.
Resposta em frequencia :
H(ejω)
=1
M1 + M2 + 1
M2∑
n=−M1
e−jωn
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 735
Formula : Soma de uma PG
N2∑
k=N1
αk =αN1 − αN2+1
1− α, N2 ≥ N1 .
⋆ Formula util para encontra formas fechadas .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 736
Formula : Euler
ejω = cos(ω)
+ j sin(ω)
Portanto :
2 cos(ω)
= ejω + e−jω
2j sin(ω)
= ejω − e−jω
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 737
Aplicando a formula da soma de PGs :
H(ejω)
=1
M1 + M2 + 1
ejωM1 − e−jω(M2+1)
1− e−jω
=1
M1 + M2 + 1
(e−jω(M2−M1+1)/2
e−jω/2
)ejω(M1+M2+1)/2 − e−jω(M1+M2+1)/2
ejω/2 − e−jω/2
=1
M1 + M2 + 1
(
e−jω(M2−M1)/2) sin
(
ω(M1 + M2 + 1)/2)
sin(ω/2
)
Aplicando Euler :
H(ejω)
=1
M1 + M2 + 1
(
e−jω(M2−M1)/2) sin
(
ω(M1 + M2 + 1)/2)
sin(ω/2
)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 738
−3 −2 −1 0 1 2 3−0.2
0
0.2
0.4
0.6
0.8
1
−3 −2 −1 0 1 2 3−3
−2
−1
0
1
2
3
n
n
Figura 62: Resposta em frequencia : modulo e fase para M1 = 0, M2 = 4.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
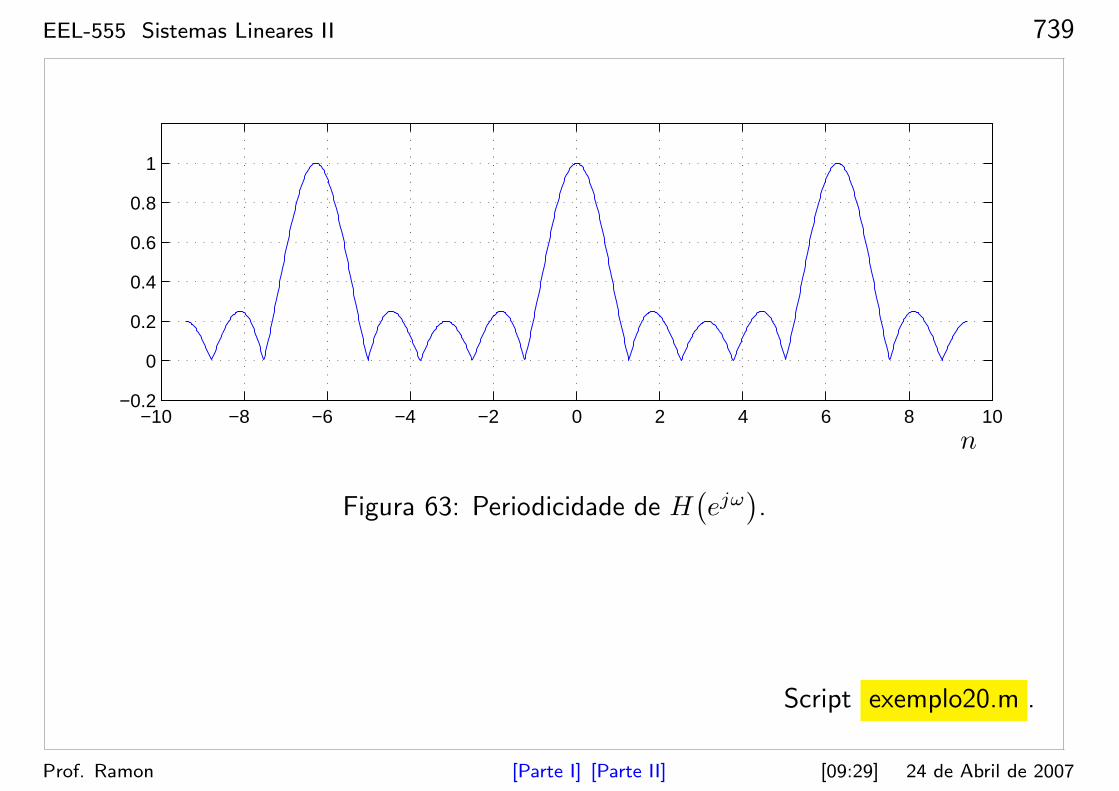
EEL-555 Sistemas Lineares II 739
−10 −8 −6 −4 −2 0 2 4 6 8 10−0.2
0
0.2
0.4
0.6
0.8
1
n
Figura 63: Periodicidade de H(ejω).
Script exemplo20.m .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 740
10.9 Transformada de Fourier
Equacao de sıntese : x[n] =1
2π
∫ π
−π
X(ejω)ejωndω
Equacao de analise : X(ejω)
=∞∑
n=−∞
x[n] e−jωn
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 741
⋆ X(ejω)
e periodica com perıodo 2π.
⋆ X(ejω)
e uma funcao complexa contınua da variavel ω :
X(ejω)
= XR
(ejω)
+ jXI
(ejω)
X(ejω)
=∣∣∣X(ejω)∣∣∣ e
j<) X(ejω)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 742
Nota. A resposta em frequencia de um SLIT e simplesmente a transformada
de Fourier da resposta ao impulso
H(ejω) =∞∑
k=−∞
h[k] e−jωk
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 743
Verificacao Vamos mostrar que a eq. de sıntese e a inversa da eq. de analise.
Equacao de analise : X(ejω)
=
∞∑
m=−∞
x[m] e−jωm
Equacao de sıntese : x[n] =1
2π
∫ π
−π
(∞∑
m=−∞
x[m] e−jωm
)
ejωndω
Podemos trocar a ordem da integracao e do somatorio :
x[n] =
∞∑
m=−∞
x[m]
(1
2π
∫ π
−π
ejω(n−m)dω
)
︸ ︷︷ ︸
I
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 744
I =1
2π
∫ π
−π
ejω(n−m)dω
=1
2π
(
−j1
n−mejω(n−m)
)∣∣∣∣
π
−π
=1
2π
(
−j1
n−m
)(
ejπ(n−m) − e−jπ(n−m))
=−j
2π(n−m)
[
2j sin(π(n−m)
)]
=sin(π(n−m)
)
π(n−m)
=
1 se m = n
0 se m 6= n= δ[n−m]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 745
Portanto :
x[n] =
∞∑
m=−∞
x[m] I
=
∞∑
m=−∞
x[m] δ[n−m]
= x[n]
⋆ Se x[n] e absolutamente somavel ⇒ ∃X(ejω)
.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 746
Importante
⋆ Sequencias FIR sao estaveis e absolutamente somaveis.
⋆ Quando a sequencias e IIR , deve-se verificar sua convergencia.
Notacao : FIR : Finite Impulse Response
IIR : Infinite Impulse Response
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 747
Exemplo 21 Sequencia exponencial
x[n] = an u[n]
Transformada de Fourier :
X(ejω)
=
∞∑
n=−∞
x[n] e−jωn
=
∞∑
n=0
an e−jωn =
∞∑
n=0
(
a e−jω)n
⋆ X(ejω)
e convergente para∣∣a e−jω
∣∣ < 1 ⇒ |a| < 1 .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 748
Forma fechada :
X(ejω)
=
(a e−jω
)0 −(a e−jω
)∞
1−(a e−jω
)
=1− 0
1− a e−jω
⋆ |a| < 1 ⇒ (a e−jω
)∞= 0
Portanto :
X(ejω)
=1
1− a e−jω
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 749
Importante
⋆ Se x[n] nao for absolutamente somavel , entao ∄X(ejω).
⋆ 2 sequencias podem ter a mesma transformada X(ejω)
!
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 750
Nota. Algumas sequencias nao sao absolutamente somaveis, porem sao
quadraticamente somaveis :
∞∑
n=−∞
∣∣x[n]
∣∣2
<∞
⋆ Sequencias quadraticamente somaveis podem ser representadas por uma
transformada de Fourier.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 751
Exemplo 22 Filtro passa-baixa ideal
H(ejω)
=
1 se |ω| < ωc
0 se ωc < |ω| ≤ π
Resposta ao pulso :
h[n] =1
2π
∫ ωc
−ωc
H(ejω)ejωndω
=1
2π
∫ ωc
−ωc
ejωndω
=sin(ωcn
)
πn(nao causal!)
⋆ Nao causal... A resposta ao pulso e uma funcao de n ∈ (−∞,∞)...
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 752
⋆ h[n] nao e uma PG!
⋆ h[n] nao e absolutamente somavel.
⋆ Porem, h[n] e quadraticamente somavel.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 753
0 50 100 150 200 2501
1.5
2
2.5
3
3.5
4
n
Figura 64: Verificacao : h[n] nao e absolutamente somavel.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
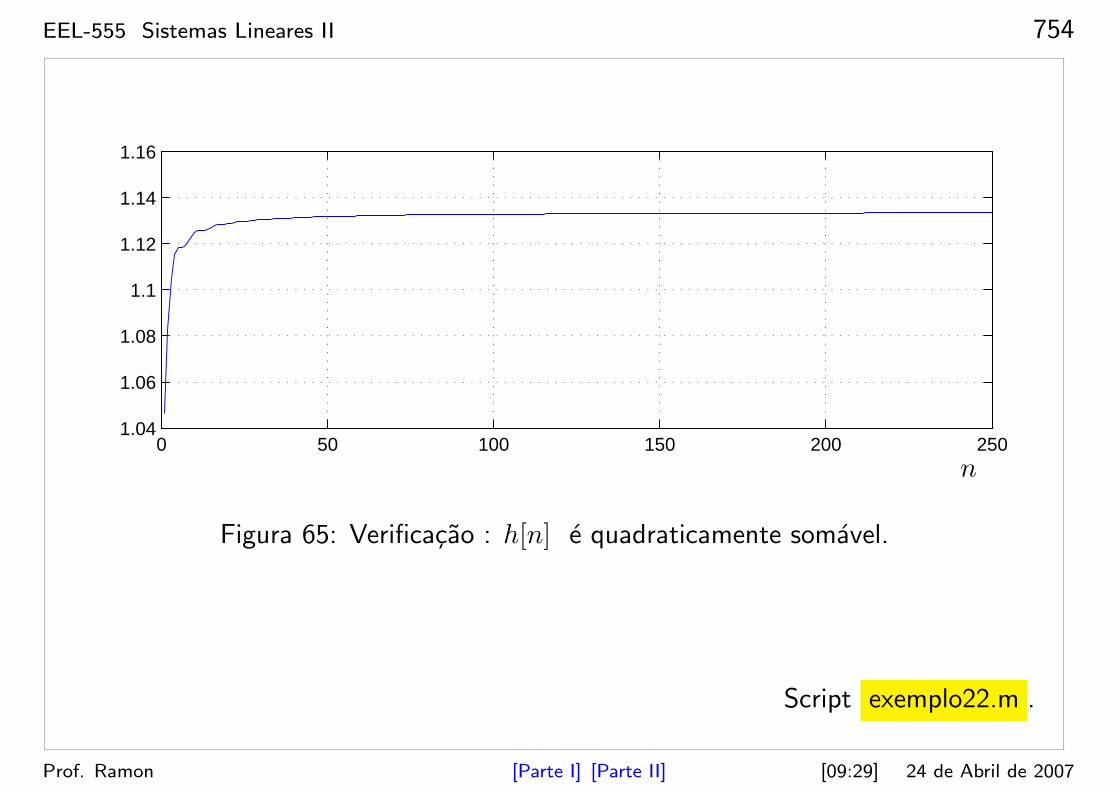
EEL-555 Sistemas Lineares II 754
0 50 100 150 200 2501.04
1.06
1.08
1.1
1.12
1.14
1.16
n
Figura 65: Verificacao : h[n] e quadraticamente somavel.
Script exemplo22.m .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 755
Seja a sequencia
x[n] = 1 , ∀n
Esta sequencia nao e absolutamente somavel nem quadraticamente somavel.
Por definicao :
X(ejω)
=
∞∑
r=−∞
2π δ(ω + 2πr
)
⋆ δ(ω + 2πr
)e a funcao impulso contınua com amplitude infinito e area 1.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 756
Exemplo 23 Seja a sequencia x[n] tal que
X(ejω)
=
∞∑
r=−∞
2π δ(ω − ω0 + 2πr
)
(Trem de impulsos)
Anti-transformada :
x[n] =1
2π
∫ π
−π
X(ejω)ejωndω
=1
2π
∫ π
−π
(
2π δ(ω − ω0 + 2πr
))
ejωndω (1 perıodo !)
= ejω0n
A definicao e consistente : ω0 = 0 ⇒ x[n] = 1 , ∀n.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 757
10.10 Propriedades da transformada de Fourier
Definicao. (Sequencia conjugada-simetrica)
Uma sequencia xe[n] e dita conjugada-simetrica se
xe[n] = x∗e[−n]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 758
Exemplo 24 Sequencia complexa
xe[n] = · · · a− jb , z , a + jb , · · ·
x∗e[n] = · · · a + jb , z , a− jb , · · ·
x∗e[−n] = · · · a− jb , z , a + jb , · · ·
⇒ xe[n] = x∗e[−n]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 759
Exemplo 25 Sequencia real
xe[n] = · · · 1 , 1 , z , 1 , 1 , · · ·
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 760
Definicao. (Sequencia conjugada-antisimetrica)
Uma sequencia xo[n] e dita conjugada-antisimetrica se
xo[n] = −x∗o[−n]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 761
Exemplo 26 Sequencia complexa
xo[n] = · · · − a + jb , 0 , a + jb , · · ·
xo[−n] = · · · a + jb , 0 , −a + jb , · · ·
x∗o[−n] = · · · a− jb , 0 , −a− jb , · · ·
−x∗o[−n] = · · · − a + jb , 0 , a + jb , · · ·
⇒ xo[n] = −x∗o[−n]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 762
Exemplo 27 Sequencia real
xo[n] = · · · − 1 , −1 , 0 , 1 , 1 , · · ·
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 763
Fato. Toda sequencia pode ser expressa como :
x[n] = xe[n] + xo[n]
onde :
Parte conjugada-simetrica : xe[n] =1
2(x[n] + x∗[−n])
Parte conjugada-antisimetrica : xo[n] =1
2(x[n]− x∗[−n])
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 764
Exemplo 28 Degrau unitario
u[n] = · · · 0 , 0 , 1 , 1 , 1 , · · ·
ue[n] = · · · 0.5 , 0.5 , 1 , 0.5 , 0.5 , · · ·
uo[n] = · · · − 0.5 , −0.5 , 0 , 0.5 , 0.5 , · · ·
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 765
Definicao. (Sequencia simetrica)
Uma sequencia real xe[n] e dita simetrica se
xe[n] = xe[−n]
⋆ Tambem e denominada de sequencia par (“even”).
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 766
Definicao. (Sequencia antisimetrica)
Uma sequencia real xo[n] e dita antisimetrica se
xo[n] = −xo[−n]
⋆ Tambem e denominada de sequencia impar (“odd”).
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 767
Fato. Toda transformada de Fourier X(ejω) pode ser decomposta como :
X(ejω) = Xe(ejω) + Xo(e
jω)
onde :
Parte conjugada-simetrica : Xe(ejω) =
1
2
(
X(ejω)+X∗(e−jω))
Parte conjugada-antisimetrica : Xo(ejω) =
1
2
(
X(ejω)−X∗(e−jω))
Propriedades : Xe(ejω) = X∗
e (−ejω)
Xo(ejω) = −X∗
o (−ejω)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 768
⋆ As propriedades de simetria da Transformada de Fourier estao resumidas
na Tabela 2.1,
(Oppenheim & Schafer 1989), pag. 53.
Notacao :
X(ejω)
= Fx[n]
x[n] = F−1X(ejω)
x[n]F−→ X
(ejω)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 769
Sequencia Trans. Fourier
1 x∗[n] X∗(e−jω
)
2 x∗[−n] X∗(ejω)
3 Rex[n]
Xe
(ejω)
4 Imx[n]
Xo
(ejω)
5 xe[n] XR
(ejω)
6 xo[n] j XI
(ejω)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 770
Sequencia real Trans. Fourier
7 x[n] X(ejω)
= X∗(e−jω
)
8 x[n] XR
(ejω)
= XR
(e−jω
)
9 x[n] XI
(ejω)
= −XI
(e−jω
)
10 x[n]∣∣∣X(ejω)∣∣∣ =
∣∣∣X(e−jω
)∣∣∣
11 x[n] <) X(ejω)
= <) X(e−jω
)
12 xe[n] XR
(ejω)
13 xo[n] j XI
(ejω)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 771
Exercıcio. 2.29, (Oppenheim & Schafer 1989), pag. 75.
Provar as propriedades 1 e 2 da Tabela 2.1.
(a) Propriedades 1 : Fx∗[n]
= X∗
(e−jω
)
Seja :
x[n] = a[n] + j b[n] ⇒ x∗[n] = a[n]− j b[n]
Notacao: f(x)∣∣∣x→y
significa f(x) com x substituıdo por y.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 772
Entao :
Fx[n]
= X
(ejω)
=
∞∑
n=−∞
(
a[n] + j b[n])
e−jωn
X∗(ejω)
= X(ejω)∣∣∣j→−j
=
∞∑
n=−∞
(
a[n]− j b[n])
ejωn
Fx∗[n]
=
∞∑
n=−∞
x∗[n] e−jωn =
∞∑
n=−∞
(
a[n]− j b[n])
e−jωn
Portanto : Fx∗[n]
= X∗
(ejω)∣∣∣ω→−ω
= X∗(e−jω
)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 773
(b) Propriedades 2 : Fx∗[−n]
= X∗
(ejω)
Fx∗[n]
=
∞∑
n=−∞
x∗[n] e−jωn
=
∞∑
n=−∞
(
a[n]− j b[n])
e−jωn = X∗(e−jω
)
Fx∗[−n]
=
∞∑
n=−∞
(
a[−n]− j b[−n])
e−jωn
=
−∞∑
n=∞
(
a[n]− j b[n])
ejωn = X∗(e−jω
)∣∣∣ω→−ω
= X∗(ejω)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 774
Exercıcio.
Provar as demais propriedades.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 775
Exercıcio.
Verificar as propriedades 7 a 11 para a sequencia
x[n] = an u[n] .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 776
10.11 Teoremas da transformada de Fourier
Notacao :
X(ejω)
= Fx[n]
x[n] = F−1X(ejω)
x[n]F−→ X
(ejω)
Os teoremas estao resumidos na Tabela 2.2.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 777
Sequencia Trans. Fourier
1 a x[n] + b y[n] a X(ejω)
+ b Y(ejω)
2 x[n− nd], (nd ∈ N) e−jωnd X(ejω)
3 ejω0nx[n] X(ej(ω−ω0)
)
4 x[−n] X(e−jω
)
5 n x[n] jdX(ejω)
dω
6 x[n] ∗ y[n] X(ejω)Y(ejω)
7 x[n] y[n]1
2π
∫ π
−π
X(ejθ)Y(ej(ω−θ)
)dθ
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
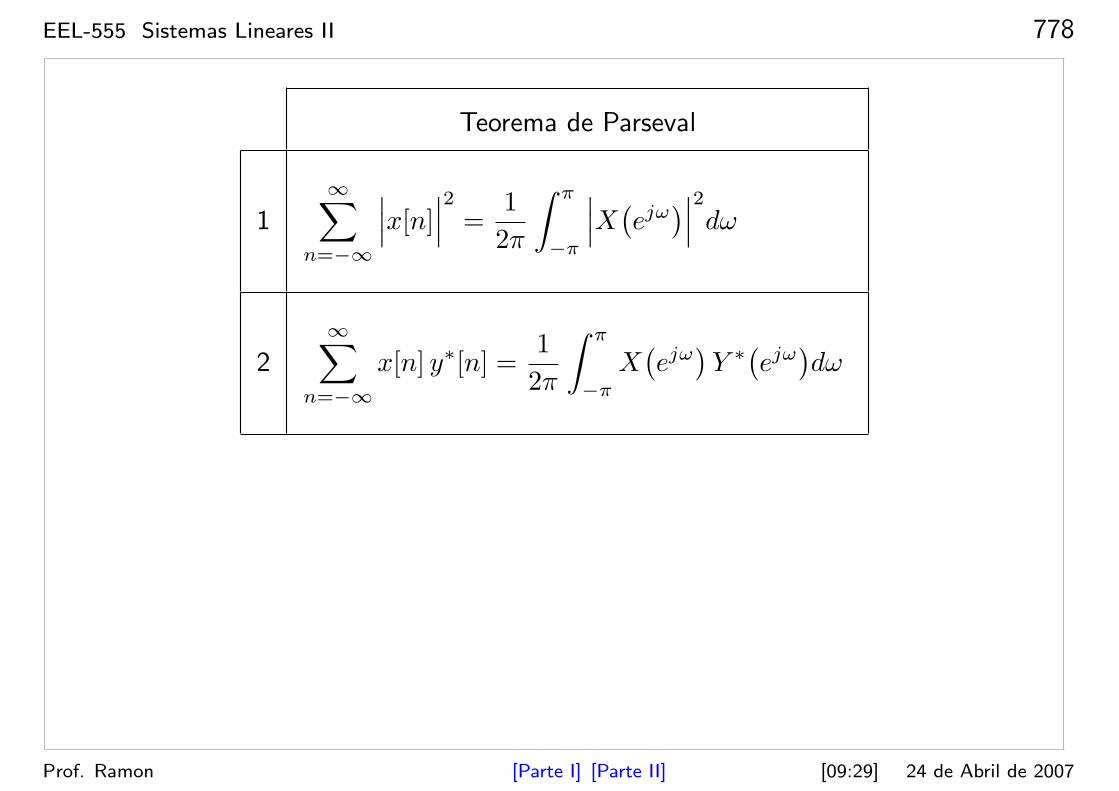
EEL-555 Sistemas Lineares II 778
Teorema de Parseval
1
∞∑
n=−∞
∣∣∣x[n]
∣∣∣
2
=1
2π
∫ π
−π
∣∣∣X(ejω)∣∣∣
2
dω
2
∞∑
n=−∞
x[n] y∗[n] =1
2π
∫ π
−π
X(ejω)Y ∗(ejω)dω
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 779
Exercıcio. 2.35, (Oppenheim & Schafer 1989), pag. 76.
Seja a sequencia x[n] abaixo
x[n]
−3
−2 −1 0 1 2 3 4−4−5
−1
1
2
1 1
2
1
−1
5 6
7
Simetria
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
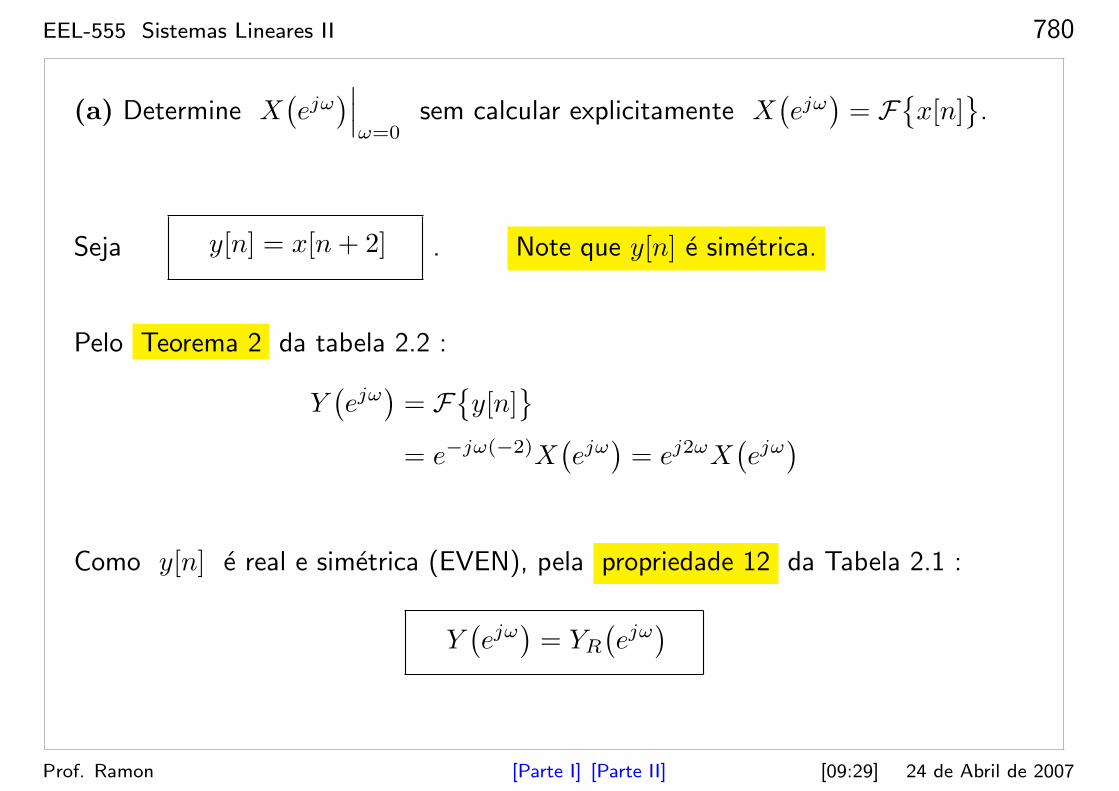
EEL-555 Sistemas Lineares II 780
(a) Determine X(ejω)∣∣∣ω=0
sem calcular explicitamente X(ejω)
= Fx[n]
.
Seja y[n] = x[n + 2] . Note que y[n] e simetrica.
Pelo Teorema 2 da tabela 2.2 :
Y(ejω)
= Fy[n]
= e−jω(−2)X(ejω)
= ej2ωX(ejω)
Como y[n] e real e simetrica (EVEN), pela propriedade 12 da Tabela 2.1 :
Y(ejω)
= YR
(ejω)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
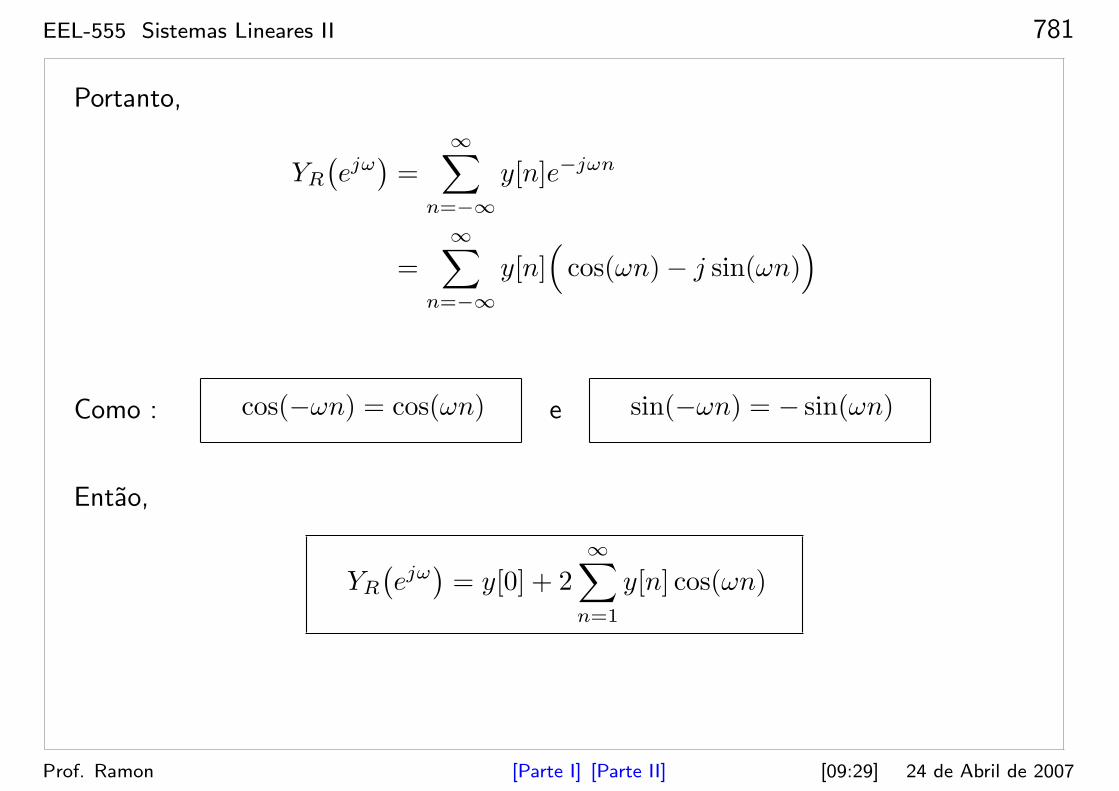
EEL-555 Sistemas Lineares II 781
Portanto,
YR
(ejω)
=
∞∑
n=−∞
y[n]e−jωn
=
∞∑
n=−∞
y[n](
cos(ωn)− j sin(ωn))
Como : cos(−ωn) = cos(ωn) e sin(−ωn) = − sin(ωn)
Entao,
YR
(ejω)
= y[0] + 2
∞∑
n=1
y[n] cos(ωn)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 782
Resultado Para sequencias reais e simetricas (EVEN) :
x[n]F−→ X
(ejω)
= x[0] + 2∞∑
n=1
x[n] cos(ωn)
Voltando ao exercıcios :
Y(ejω)
= YR
(ejω)
= y[0] + 2
5∑
n=1
y[n] cos(ωn)
= 2(
cos(ω) + 2 cos(2ω) + cos(3ω)− cos(5ω))
Entao : X(ejω)∣∣∣ω=0
= e−j2ω Y(ejω)∣∣∣ω=0
= 2(
1 + 2 + 1− 1)
⇒ X(ejω)∣∣∣ω=0
= 6
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 783
(b) Determine <) X(ejω)
sem calcular explicitamente X(ejω).
X(ejω)
= e−j2ω YR
(ejω)
︸ ︷︷ ︸
Real!
= YR
(ejω)∣∣−2ω
Portanto : <) X(ejω)
= −2ω
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

UFRJ Universidade Federal do Rio de Janeiro
EE Escola de Engenharia
DEL Departamento de Eletronica
EEL-555 Sistemas Lineares II
Capıtulo # 11
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 785
11 Amostragem de sinais contınuos
Conteudo 1. Introducao
2. Representacao no domınio da frequencia
3. Reconstrucao de sinais
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 786
11.1 Introducao
⋆ Sinais discretos aparecem em muitas situacoes praticas.
⋆ Situacao mais comum : amostragem de sinais contınuos .
⋆ O processamento de sinais contınuos pode ser implementado fazendo-se
• amostragem
• processamento discreto das sequencias e
• reconstrucao do sinal contınuo processado.
⋆ Sob certas condicoes, um sinal contınuo pode ser adequadamente represen-
tado por suas amostras.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 787
Historico
Nyquist (1928) : Observou que era possıvel reconstruir uma senoide a
partir de suas amostrar se a frequencia de amostragem
fosse maior do que 2 vezes a frequencia do sinal.
Shannon (1949) : Formalizou o resultado (apresentado nesse capıtulo).
Kotelnikov (1933) : Introduziu o resultado na literatura Sovietica.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 788
11.2 Amostragem
⋆ Metodo mais usual : amostragem periodica .
Sequencia amostrada : x[n] = xc(nT )
T . . . . . . . . . . . . . . . . . . . . . . . . . . . . intervalo de amostragem
fs =1
T. . . . . . . . . . . . . . . . . . . . . frequencia de amostragem
ωs = 2πfs =2π
T. . . . frequencia angular de amostragem
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 789
C/Dxc(t) x[n] = xc(nT )
T
Figura 66: Conversor Contınuo/Discreto ideal .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 790
Modelagem matematica
⋆ E conveniente separar o processo de amostragem em 2 etapas :
• Modulador por trem de impulsos
• Conversor de trem de impulsos para sequencias
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 791
Conversor de trem
xs(t) x[n] = xc(nT )
×xc(t)
Conversor C/D
s(t)
de impulsos para
sequencia discreta
Figura 67: Representacao : Modulador + conversor.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
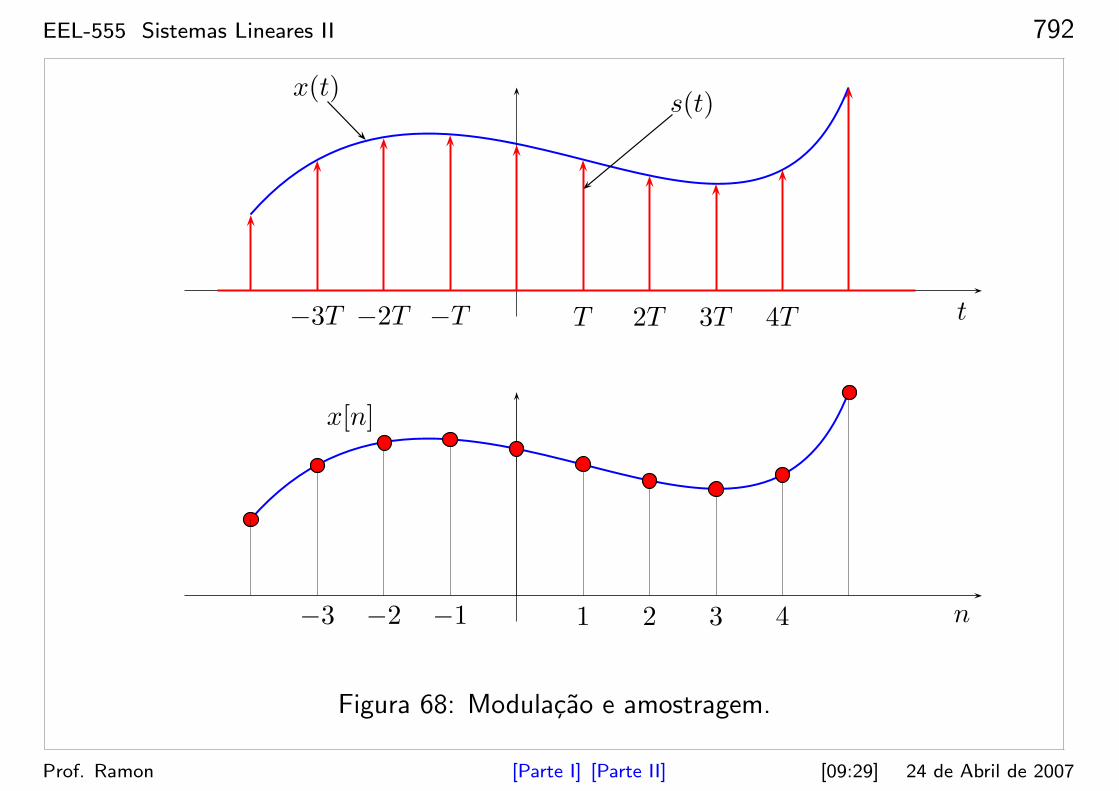
EEL-555 Sistemas Lineares II 792
n
x[n]
t
x(t)s(t)
−3T −2T −T T 2T 3T 4T
−3 −2 −1 1 2 3 4
Figura 68: Modulacao e amostragem.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 793
⋆ A saıda do modulador xs(t) e um trem de impulsos (sinal contınuo).
⋆ A saıda do conversor x[n] e uma sequencia (sinal discreto).
⋆ Essa representacao matematica da operacao de amostragem permite obter
de maneira mais simples alguns resultados.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 794
Reconstrucao
⋆ Em geral, nao e possıvel reconstruir o sinal contınuo a partir de suas
amostras.
Problema : Muitos sinais contınuos produzem as mesmas sequencias de
amostragem.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 795
Exemplo 1
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
−1
−0.5
0
0.5
1
n
Figura 69: Aliasing.
Script exemplo01.m .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 796
Solucao Para se eliminar essa ambiguidade e necessario restringir a classe de
sinais no amostrador.
⋆ O sinal contınuo a ser amostrado deve ter banda limitada .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
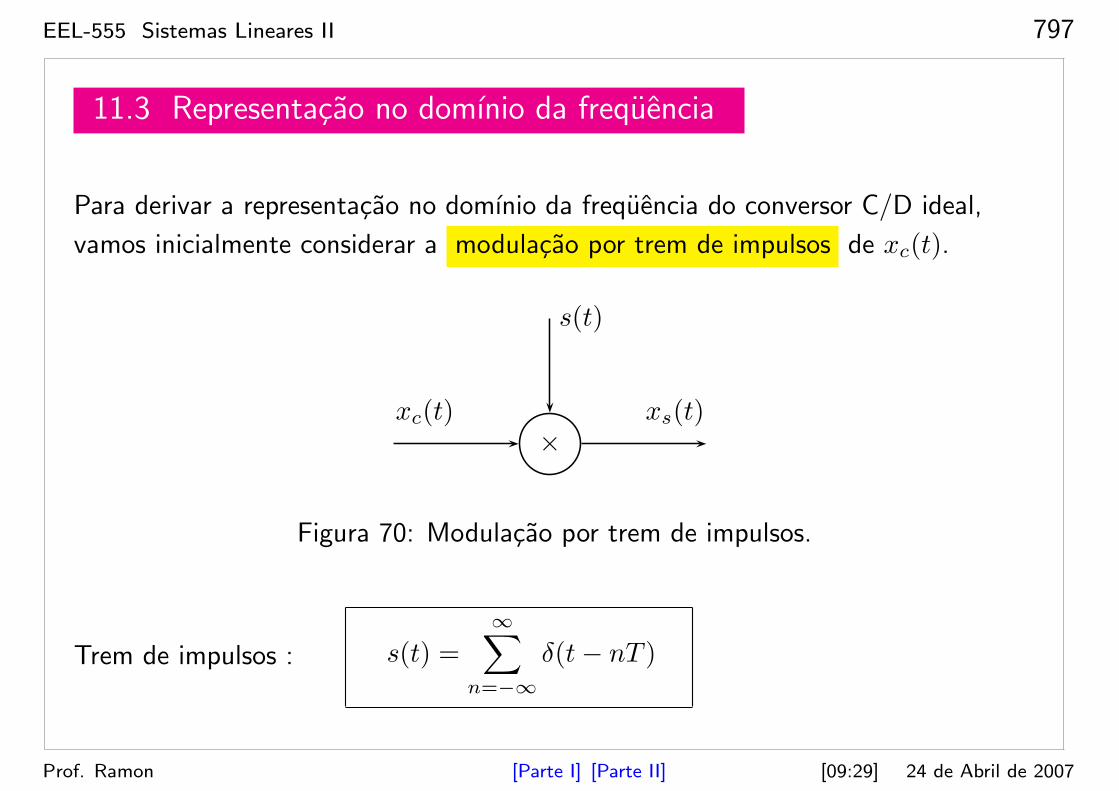
EEL-555 Sistemas Lineares II 797
11.3 Representacao no domınio da frequencia
Para derivar a representacao no domınio da frequencia do conversor C/D ideal,
vamos inicialmente considerar a modulacao por trem de impulsos de xc(t).
×xc(t)
s(t)
xs(t)
Figura 70: Modulacao por trem de impulsos.
Trem de impulsos : s(t) =
∞∑
n=−∞
δ(t− nT )
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 798
Sinal modulado :
xs(t) = xc(t) s(t)
= xc(t)
∞∑
n=−∞
δ(t− nT )
Usando propriedade da funcao impulso (Delta de Dirac) :
xs(t) = xc(t)
∞∑
n=−∞
δ(t− nT )
=
∞∑
n=−∞
xc(nT ) δ(t− nT )
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 799
⋆ s(t) e um sinal periodico com frequencia ωs =2π
T.
Transformada de Fourier de s(t) :
S(jω)
=2π
T
∞∑
k=−∞
δ(ω − kωs)
Portanto,
Xs
(jω)
=1
2πXc
(jω)∗ S(jω)
ou melhor,
Xs
(jω)
=1
T
∞∑
k=−∞
Xc
(jω − kjωs
)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
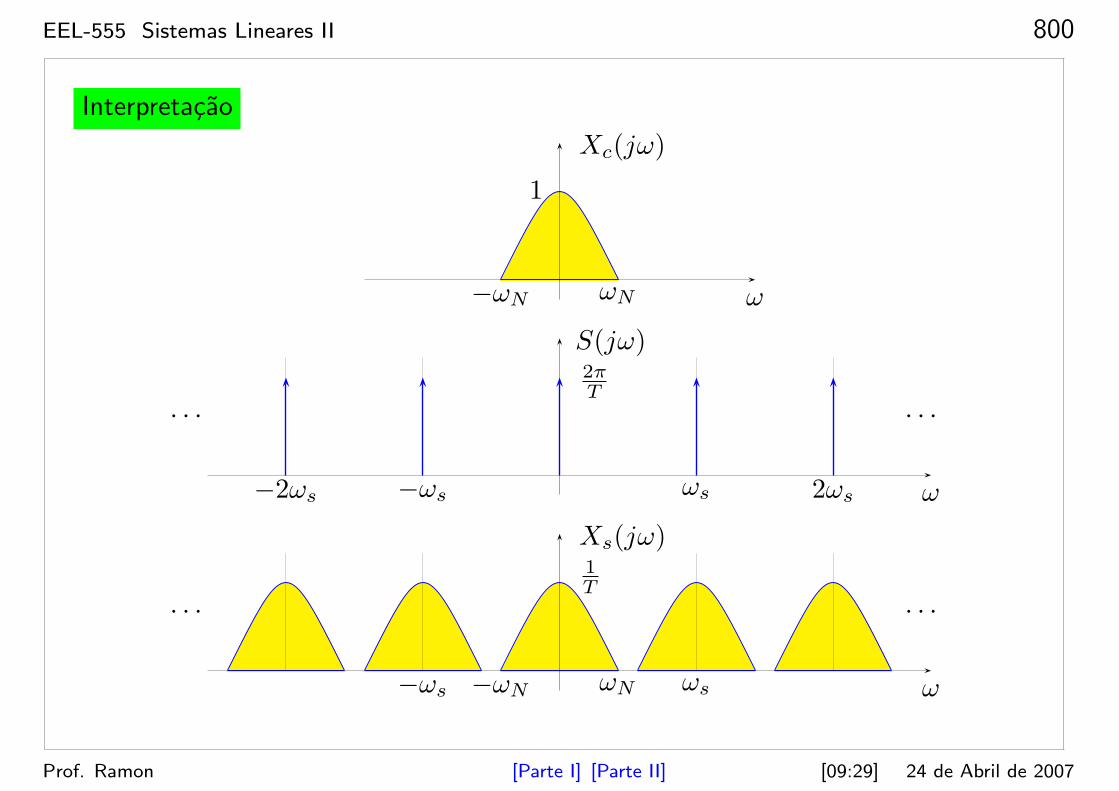
EEL-555 Sistemas Lineares II 800
Interpretacao
−ωN ωN ω
· · · · · ·
ωs−ωs
ωs ω
· · · · · ·
−ωs
−ωN ωωN
1
2ωs−2ωs
Xc(jω)
S(jω)2πT
Xs(jω)1T
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
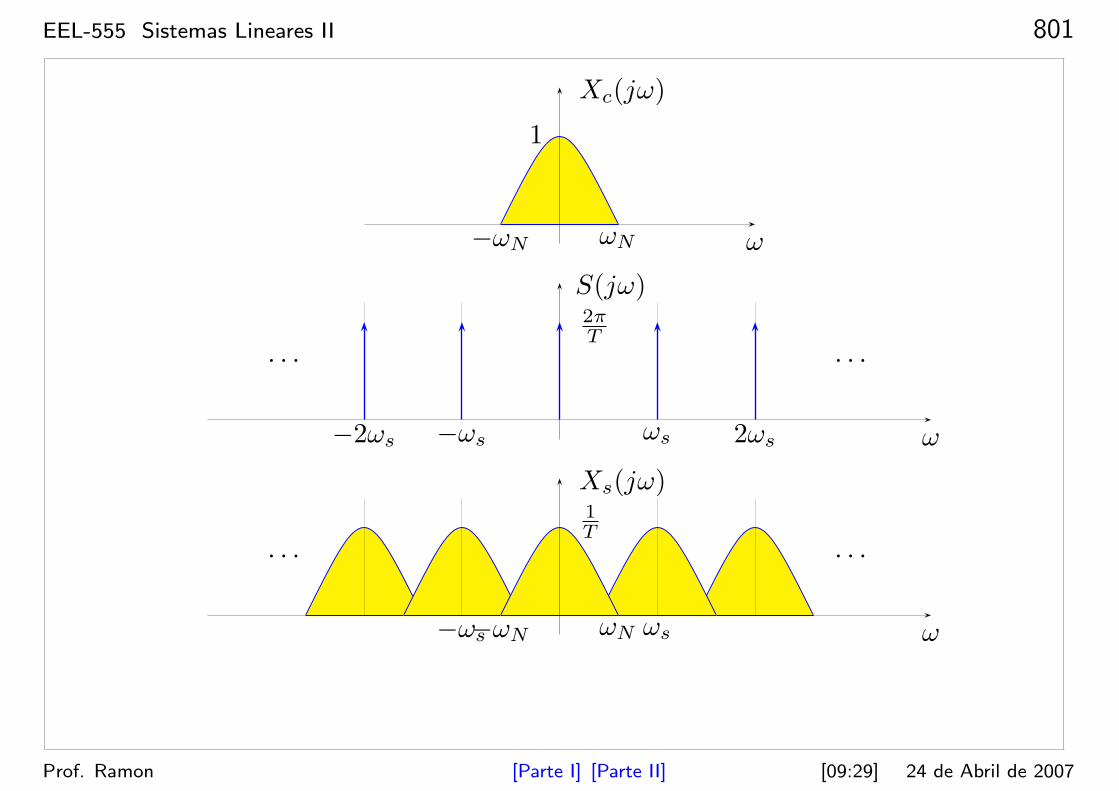
EEL-555 Sistemas Lineares II 801
−ωN ωN ω
· · · · · ·
ωs−ωs
ωs ω
· · · · · ·
−ωs
−ωN ωωN
1
2ωs−2ωs
Xc(jω)
S(jω)2πT
Xs(jω)1T
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 802
11.4 Reconstrucao de sinais
Problema: Quando um sinal analogico e dado de maneira unica pelas suas
amostragens?
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
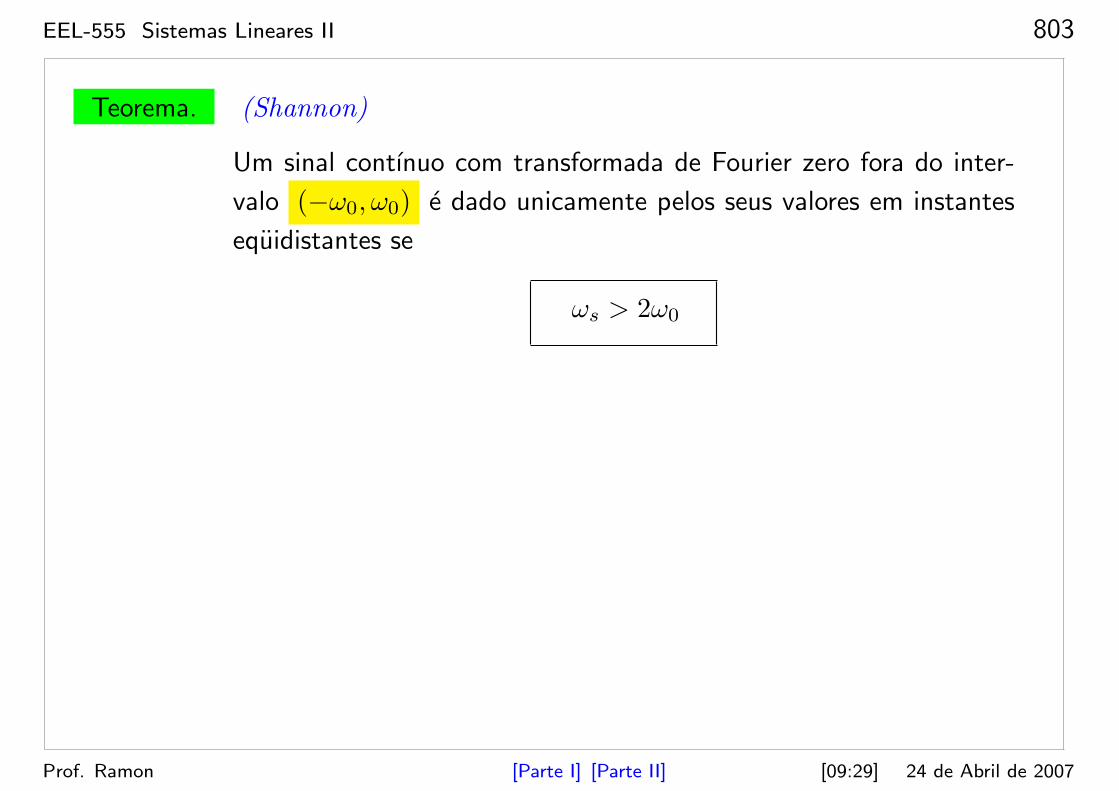
EEL-555 Sistemas Lineares II 803
Teorema. (Shannon)
Um sinal contınuo com transformada de Fourier zero fora do inter-
valo (−ω0, ω0) e dado unicamente pelos seus valores em instantes
equidistantes se
ωs > 2ω0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 804
Formula de reconstrucao
f(t) =
∞∑
k=−∞
f [k] sinc(ωs
2(t− kT )
)
sinc(x) =sin(x)
x
⋆ ωs = 2πfs , fs =1
T
⋆ ωN =ωs
2= Frequencia de Nyquist .
⋆ Formula nao causal .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 805
Prova
Fica como exercıcio...
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 806
Metodos de reconstrucao
• ZOH
• FOH preditivo
• Formula de Shannon
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 807
ZOH
E o metodo de reconstrucao mais simples.
f(t) = f(k)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 808
Figura 71: Reconstrucao FOH.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 809
FOH
Formula de reconstrucao FOH :
f(t) = f(k) +t− kh
h
(
f(k)− f(k − 1))
Desvantagem: O sinal reconstituıdo e descontınuo.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 810
Figura 72: Reconstrucao FOH.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 811
FOH preditivo
Formula de reconstrucao :
f(t) = f(k) +t− kh
h
(
f(k + 1)− f(k))
Para t = kh → f(t) = f(k)
Para t = kh + h → f(t) = f(k + 1)
Problema : Nao causal.
Solucao : usar predicao de f(k + 1)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 812
Figura 73: Reconstrucao FOH preditivo.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 813
Exemplo 2 Reconstrucao usando ZOH e formula de Shannon.
Sinal contınuo :
x(t) = 0.5 + 2 sin(0.7t + 1) + sin(1.25t + 2) + 1 sin(3.1t + 3)
Maior frequencia : 3.1 rad/s
Frequencia de amostragem : 2π rad/s
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
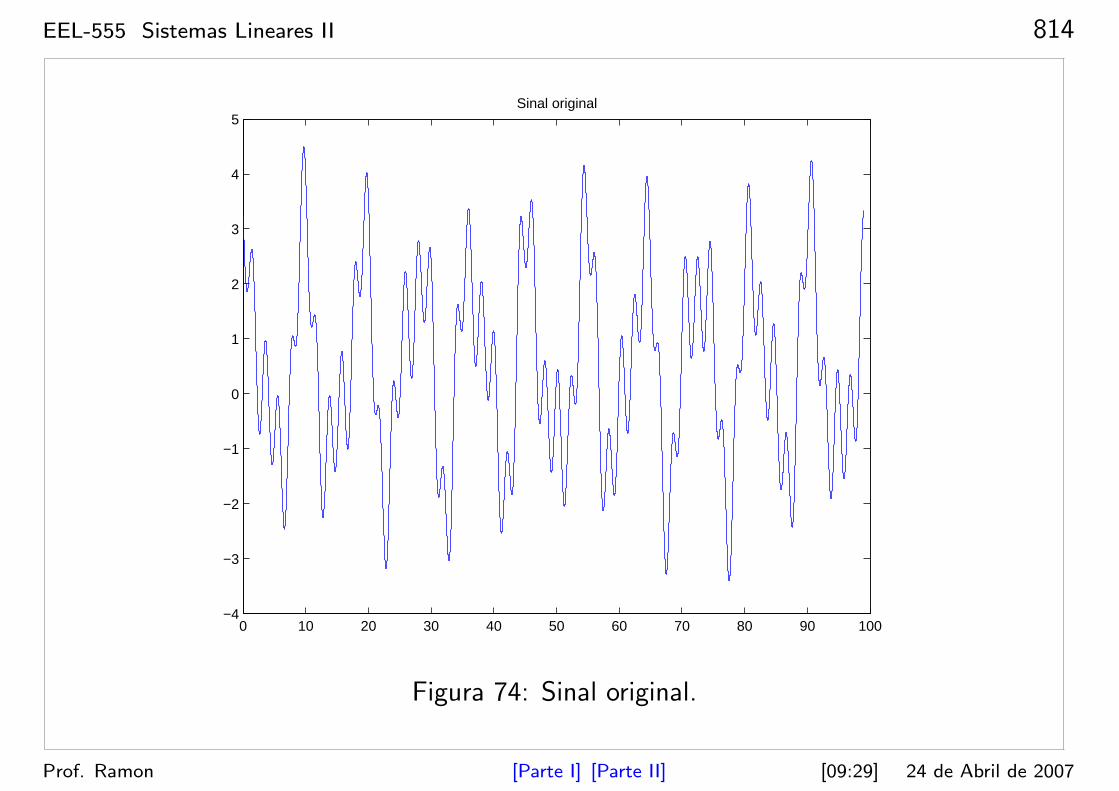
EEL-555 Sistemas Lineares II 814
0 10 20 30 40 50 60 70 80 90 100−4
−3
−2
−1
0
1
2
3
4
5Sinal original
Figura 74: Sinal original.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 815
0 10 20 30 40 50 60 70 80 90 100−3
−2
−1
0
1
2
3
4Sinal amostrado
Figura 75: Sinal amostrado.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
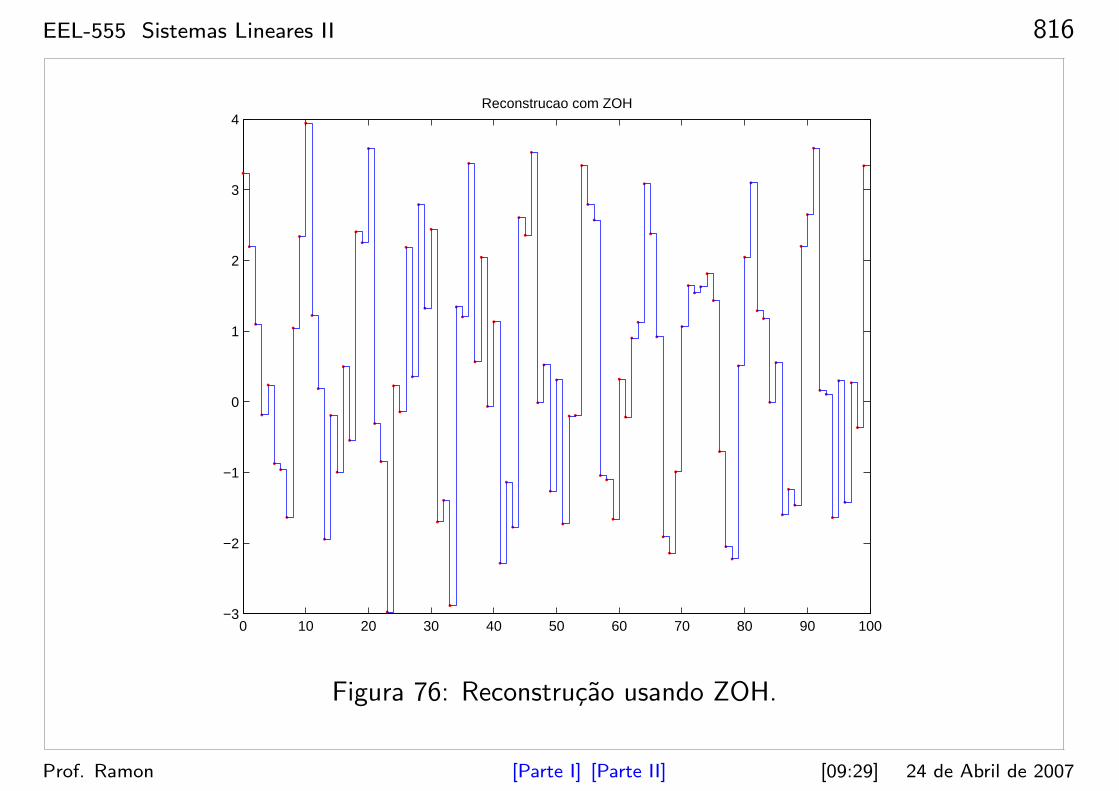
EEL-555 Sistemas Lineares II 816
0 10 20 30 40 50 60 70 80 90 100−3
−2
−1
0
1
2
3
4Reconstrucao com ZOH
Figura 76: Reconstrucao usando ZOH.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 817
0 10 20 30 40 50 60 70 80 90 100−4
−3
−2
−1
0
1
2
3
4
5Comparacao das reconstrucoes
Figura 77: Reconstrucao usando formula de Shannon.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 818
40 42 44 46 48 50 52 54 56 58 60−5
−4
−3
−2
−1
0
1
2
3
4
5Comparacao das reconstrucoes
Figura 78: Detalhe da reconstrucao usando formula de Shannon.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 819
Aliasing
E um fenomeno relacionado a amostragem de sinais periodicos.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 820
Filtro anti-aliasing
Para evitar o problema de aliasing, e necessario garantir que o sinal analogico (que
sera amostrado) tenha banda limitada.
Para tanto, introduz-se um Filtro Passa-Baixas antes do amostrador.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 821
sinalanalogico
SensorCircuitocondicio-
nador
Filtroanalogico S&H
MUX
CAD
Relogioprogram.
Sinal decontrole
Sinaldigital
Figura 79: Sistema de aquisicao de dados.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 822
Figura 80: Tabela 7.1.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 823
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
UFRJ Universidade Federal do Rio de Janeiro
EE Escola de Engenharia
DEL Departamento de Eletronica
EEL-555 Sistemas Lineares II
Capıtulo # 12
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 825
12 Transformada Z
Conteudo
1. Introducao
2. Origem da Transformada z
3. Definicao
4. Generalizacao da Transformada de Fourier
5. Exemplos
6. Tabela de Transformadas z mais comuns
7. Transformada z inversa
8. Propriedades da Transformada z
9. Exemplos
10. Exercıcios
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 826
12.1 Introducao
A transformada e uma ferramenta importante para a analise de sistemas lineares.
⋆ Contınuos (SLIT’s) : Transformada de Laplace .
⋆ Discretos (SDLIT’s) : Transformada z .
Nesta apresentacao :
⋆ Origem a partir da Transformada de Laplace.
⋆ Generalizacao da Transformada de Fourier .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 827
Vantagens em relacao a Transformada de Fourier :
• A Transformada de Fourier nao converge para todas as sequencias.
• Notacao mais conveniente.
• Utilizacao para solucao de equacoes a diferencas .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 828
Origem da transformada z
Problema : Como usar a Transformada de Laplace com sequencias ?
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 829
Ideia : Substituir a sequencia por um trem de impulsos .
n
x[n]
t
x∗(t)
Figura 81: Modulacao por impulsos.
⋆ A informacao contida nas 2 representacoes e a mesma.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 830
A funcao x∗(t) pode ser expressa como
x∗(t) = x(0)δ(t) + x(1)δ(t− T ) + x(2)δ(t− 2T ) + · · ·
=
∞∑
k=0
x[k]δ(t− kT )
Aplicando a Transformada de Laplace :
X∗(s) = Lx∗(t)
= x(0) + x(1)e−sT + x(2)e−s2T + · · ·
=
∞∑
k=0
x[k]e−skT
⋆ Qual e o problema ?
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 831
Problema : X∗(s) nao e uma funcao racional em s.
Solucao : Introduzir uma nova variavel complexa
z = esT
Como resultado obtem-se a seguinte transformada :
X∗(z) =∞∑
k=0
x[k]z−k
⋆ X∗(z) e uma funcao contınua racional na variavel complexa z.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 832
Definicao da Transformada z
Definicao. (Transformada z bilateral)
A Transformada z de uma sequencia duplamente-infinita
x[n] e definida como :
X(z) = Zx[n]
=
∞∑
n=−∞
x[n] z−n
⋆ As sequencias tratadas no livro A. Oppenheim & R. Schafer , 1989,
sao duplamente-infinitas .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 833
Definicao. (Transformada z unilateral)
A Transformada z de uma sequencia semi-infinita
a direita x[n] e definida como :
X(z) = Zx[n]
=
∞∑
n=0
x[n] z−n
⋆ As sequencias tratadas no livro Astrom & Wittenmark , 1997,
sao do tipo semi-infinitas a direita.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 834
Nota. Se a sequencia e tal que
x[n] = 0 , n < 0
entao as 2 transformadas sao equivalentes .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 835
Comparacao
Transformada de Fourier de x[n] : X(ejω)
=
∞∑
n=−∞
x[n] e−jωn
Transformada de Laplace de x∗(t) : X∗(s) =∞∑
n=−∞
x∗(nT ) e−snT
Transformada z de x[n] : F (z) =
∞∑
n=−∞
x[n] z−n
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 836
Notacao :
X(z) = Zx[n]
x[n] = Z−1X(z)
x[n]Z−→ X(z)
X(z)Z−1
−−−→ x[n]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 837
Interpretacao :
Sequenciastemporais
Funcoes
contınuas na
variavel complexa z
x[n] X(z)
Z
Z−1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 838
Generalizacao da Transformada de Fourier
A variavel complexa z pode ser escrita como : z = r ejω
Portanto :X(
r ejω)
=
∞∑
n=−∞
x[n](
r ejω)−n
=∞∑
n=−∞
(
x[n] r−n)
e−jωn
⋆ A Transformada z de x[n] pode ser interpretada como a Transformada de
Fourier de x[n] r−n.
⋆ r−n e uma exponencial !
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 839
Nota. A Transformada de Fourier e uma particularizacao da Transformada z,
X(ejω)
= X(z)∣∣∣z=ejω
i.e., e uma particularizacao para r = 1 .
z = ejω
ω
1
Im
Re
Figura 82: Cırculo unitario no plano z.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 840
Convergencia
⋆ A Transformada de Fourier converge ⇔ x[n] e absolutamente somavel .
⋆ A Transformada de Fourier nao converge para uma classe significativa de
sinais.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 841
Definicao. Regiao de convergencia
ROC =
z∣∣ Zx[n]
converge.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 842
⋆ Para que a Transformada z seja convergente , devemos ter
∞∑
n=−∞
∣∣x[n] r−n
∣∣ <∞
⋆ Basta que exista uma exponencial r−n tal que x[n] r−n seja absolutamente
somavel.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 843
Exemplo 1
A sequencia x[n] = degrau unitario nao e absolutamente somavel.
⋆ x[n]r−n e abs. somavel para r > 1.
⋆ Quer dizer, existe uma Transformada z do degrau unitario com
ROC : |z| > 1.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 844
Fato. A ROC e um anel no plano z centrado na origem.
Im
Re
⋆ Se o circulo unitario pertence ao anel, entao a Transformada de Fourier
tambem existe.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 845
Nota. No caso de sequencias nao absolutamente somaveis e nao quadratica-
mente somaveis, a Transformada de Fourier e definida usando impulsos .
Para estes casos,
X(ejω)6= X(z)
∣∣∣z=ejω
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 846
⋆ A Transformada z e mais util quando expressa em forma fechada .
Formula util : A soma de uma PG e dada por :
N2∑
n=N1
αn =αN1 − αN2+1
1− α, N2 > N1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 847
Prova.
N2∑
n=N1
αn = αN1 + αN1+1 + · · ·+ αN2
α
N2∑
n=N1
αn = αN1+1 + · · ·+ αN2 + αN2+1
Subtraindo :
(1− α)
N2∑
n=N1
αn = αN1 − αN2+1
Portanto :
N2∑
n=N1
αn =αN1 − αN2+1
1− α
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 848
Exemplo 2 Pulso unitario
Pulso unitario : x[n] =
1 se n = 0
0 se n 6= 0
Usando a definicao :
X(z) = x[0] + x[1]z−1 + x[2]z−2 + · · · = 1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 849
Exemplo 3 Degrau unitario
Degrau unitario : x[n] =
0 se n < 0
1 se n ≥ 0
Usando a definicao : X(z) = 1 + z−1 + z−2 + · · ·
Condicao para convergencia : |z| > 1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 850
Forma fechada :
X(z) =
(z−1
)0 −(z−1
)∞
1− z−1=
1
1− z−1=
z
z − 1
⋆ Dentro da regiao de convergencia,(z−1
)∞= 0 .
Solucao : X(z) =z
z − 1ROC: |z| > 1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 851
Exemplo 4 Sequencia exponencial semi-infinita a direita.
Exponencial : x[n] = an u[n]
Usando a definicao : X(z) = Zx[n]
=
∞∑
n=−∞
an u[n] z−n =
∞∑
n=0
(az−1)n
Condicao para convergencia : |az−1| < 1 ⇒ |z| > |a|
⋆(an)r−n =
(a
r
)n
abs. somavel ⇒ |r| > |a| ⇒ |z| > |a| .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 852
Forma fechada :
X(z) =(az−1)0 − (az−1)∞
1− az−1=
1
1− az−1=
z
z − a
⋆ Dentro da regiao de convergencia,(az−1
)∞= 0 .
Solucao : X(z) =z
z − aROC: |z| > |a|
⋆ Para |a| > 1 a Transformada de Fourier nao converge.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
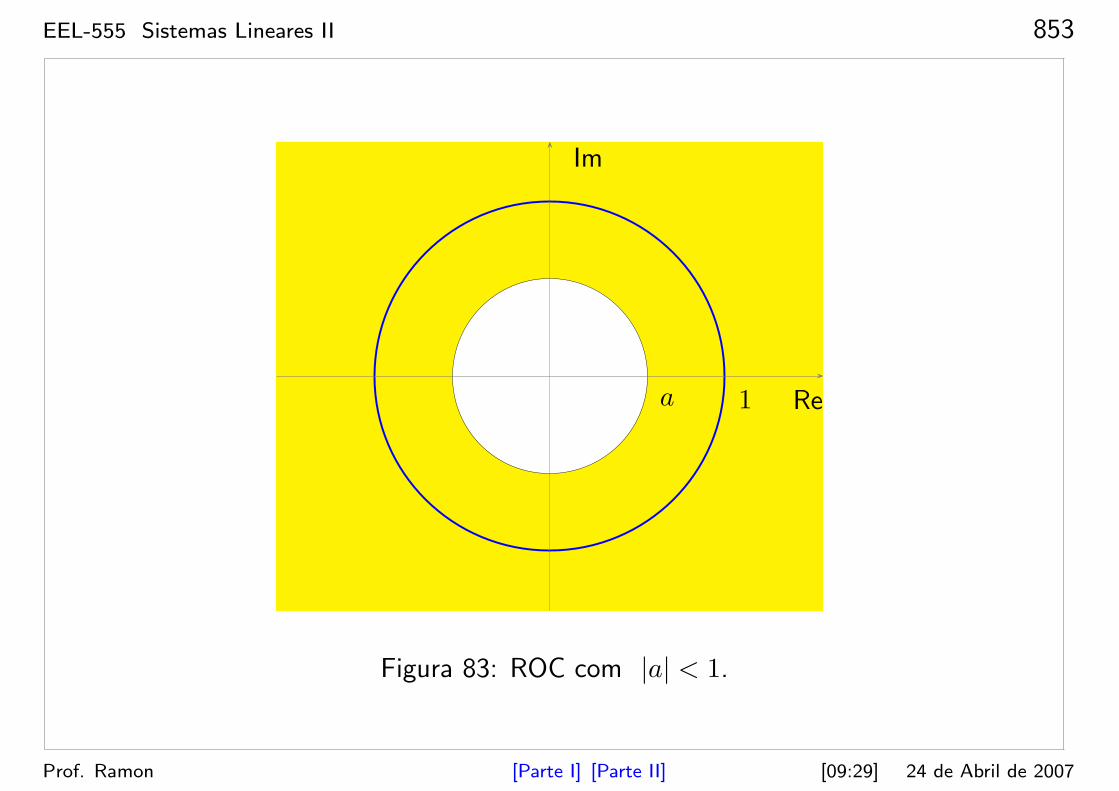
EEL-555 Sistemas Lineares II 853
Im
Rea 1
Figura 83: ROC com |a| < 1.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 854
Exemplo 5 Sequencia exponencial semi-infinita a esquerda.
Exponencial : x[n] = −an u[−n− 1], x[n] =
−an se n ≤ −1
0 se n ≥ 0
Usando a definicao :
X(z) =
∞∑
n=−∞
−anz−n =
−1∑
n=−∞
−anz−n
= −∞∑
n=1
a−nzn = −∞∑
n=1
(a−1z
)n
Condicao para convergencia :∣∣a−1z
∣∣ < 1 ⇒ |z| < |a|
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 855
Forma fechada :
X(z) = − (a−1z)1 − (a−1z)∞
1− (a−1z)=−(a−1z)
1− a−1z=
z
z − a
⋆ Dentro da regiao de convergencia,(a−1z
)∞= 0 .
Solucao : X(z) =z
z − aROC: |z| < |a|
⋆ Para |a| < 1 a Transformada de Fourier nao converge.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 856
Im
Rea1
Figura 84: ROC com |a| > 1.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 857
Exemplo 6 Sequencia exponencial duplamente-infinita.
Exponencial : x[n] =
(
−1
3
)n
u[n]−(
1
2
)n
u[−n− 1]
⋆ Note que x[n] cresce exponencialmente para n→ −∞.
Usando os resultados anteriores:
Z(
−1
3
)n
u[n]
=1
1 + 13z−1
ROC: |z| > 1
3
Z(
1
2
)n
u[−n− 1]
=1
1− 12z−1
ROC: |z| < 1
2
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 858
Utilizando a linearidade da Transformada z, tem-se:
X(z) =1
1 + 13z−1
+1
1− 12z−1
=2z(z − 1
12
)
(z + 1
3
) (z − 1
2
) ROC:1
3< |z| < 1
2
⋆ A Transformada de Fourier nao converge.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 859
Im
Re112
− 13
12
Figura 85: ROC.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
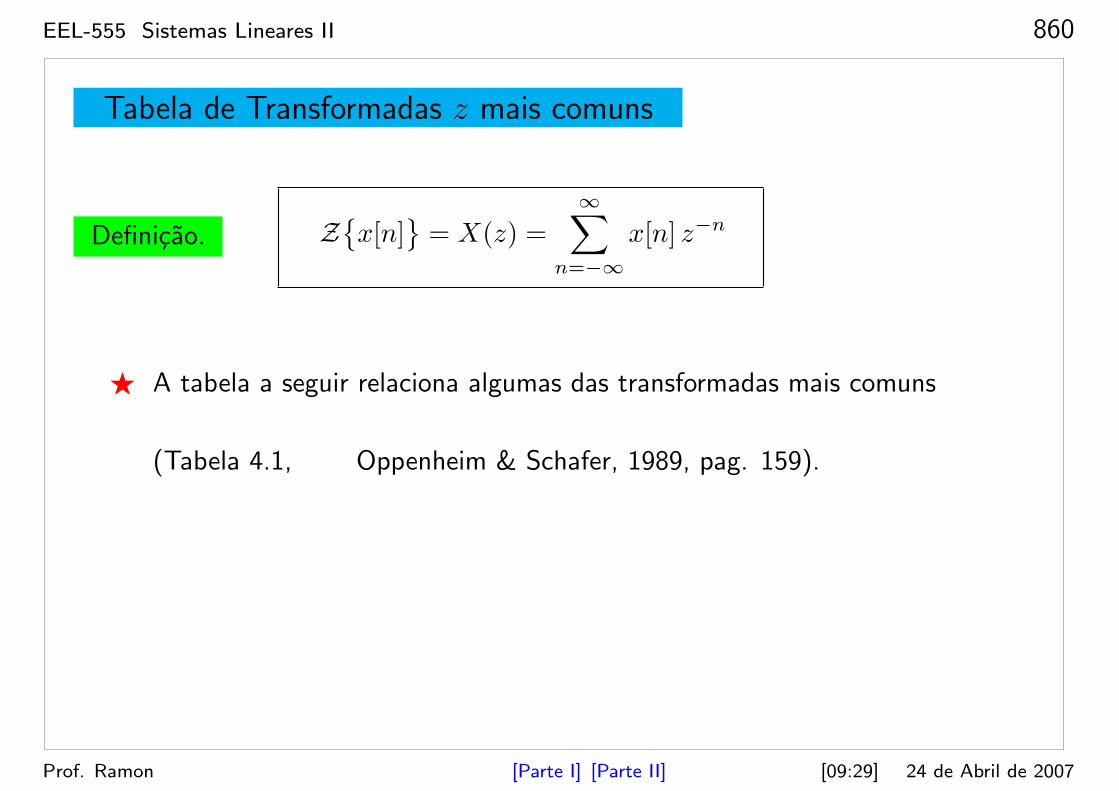
EEL-555 Sistemas Lineares II 860
Tabela de Transformadas z mais comuns
Definicao. Zx[n]
= X(z) =
∞∑
n=−∞
x[n] z−n
⋆ A tabela a seguir relaciona algumas das transformadas mais comuns
(Tabela 4.1, Oppenheim & Schafer, 1989, pag. 159).
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
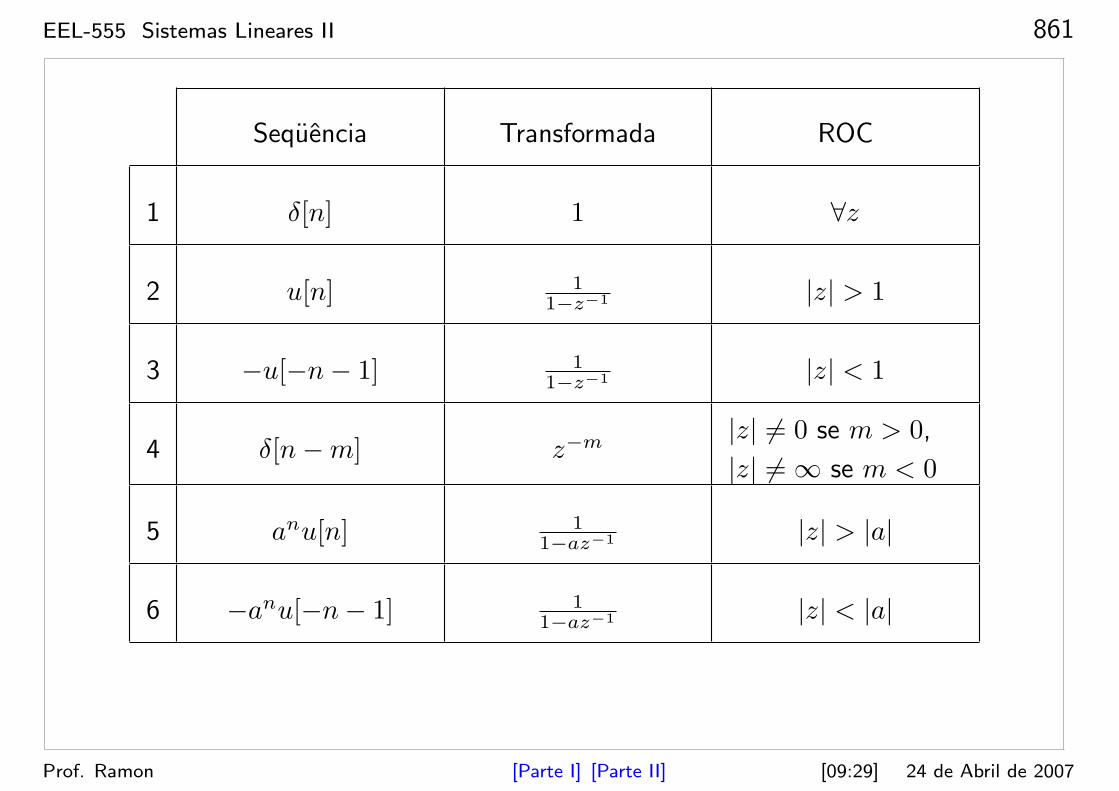
EEL-555 Sistemas Lineares II 861
Sequencia Transformada ROC
1 δ[n] 1 ∀z
2 u[n] 11−z−1 |z| > 1
3 −u[−n− 1] 11−z−1 |z| < 1
4 δ[n−m] z−m |z| 6= 0 se m > 0,
|z| 6=∞ se m < 0
5 anu[n] 11−az−1 |z| > |a|
6 −anu[−n− 1] 11−az−1 |z| < |a|
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
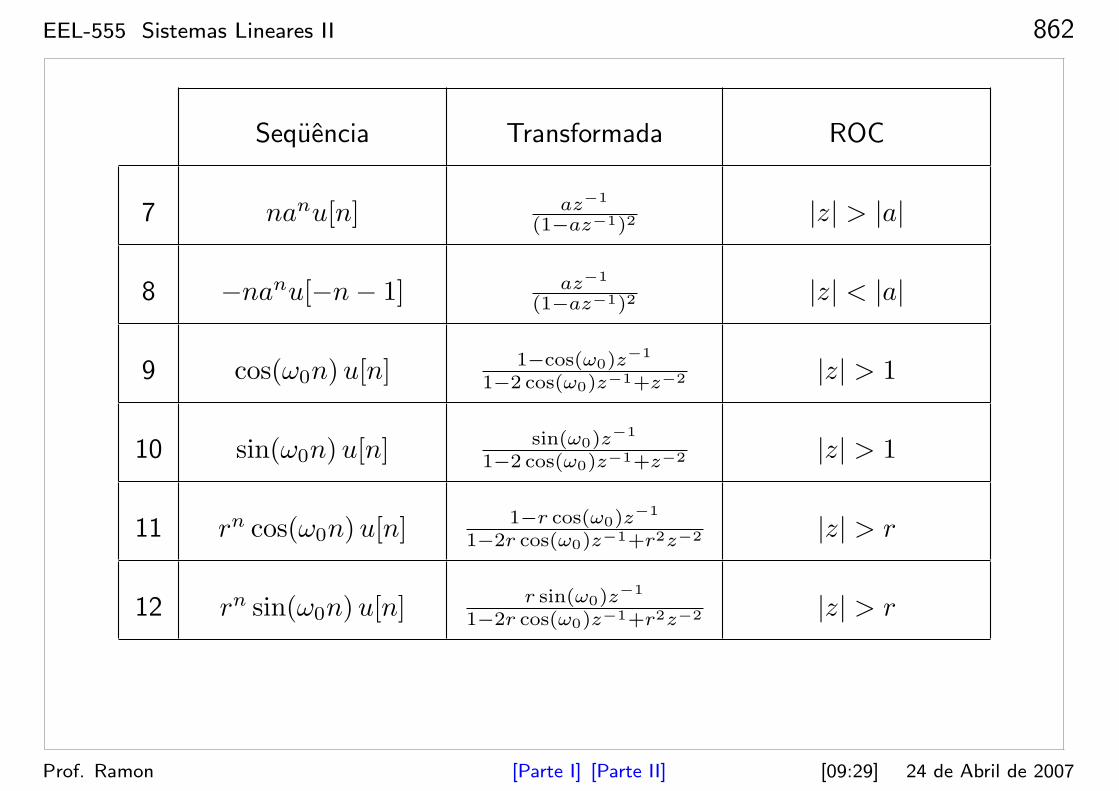
EEL-555 Sistemas Lineares II 862
Sequencia Transformada ROC
7 nanu[n] az−1
(1−az−1)2 |z| > |a|
8 −nanu[−n− 1] az−1
(1−az−1)2 |z| < |a|
9 cos(ω0n) u[n] 1−cos(ω0)z−1
1−2 cos(ω0)z−1+z−2 |z| > 1
10 sin(ω0n) u[n] sin(ω0)z−1
1−2 cos(ω0)z−1+z−2 |z| > 1
11 rn cos(ω0n) u[n] 1−r cos(ω0)z−1
1−2r cos(ω0)z−1+r2z−2 |z| > r
12 rn sin(ω0n) u[n] r sin(ω0)z−1
1−2r cos(ω0)z−1+r2z−2 |z| > r
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 863
Propriedades da regiao de convergencia
⋆ A tabela a seguir relaciona as propriedades da ROC
(Veja Oppenheim & Schafer, 1989, pag. 160).
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
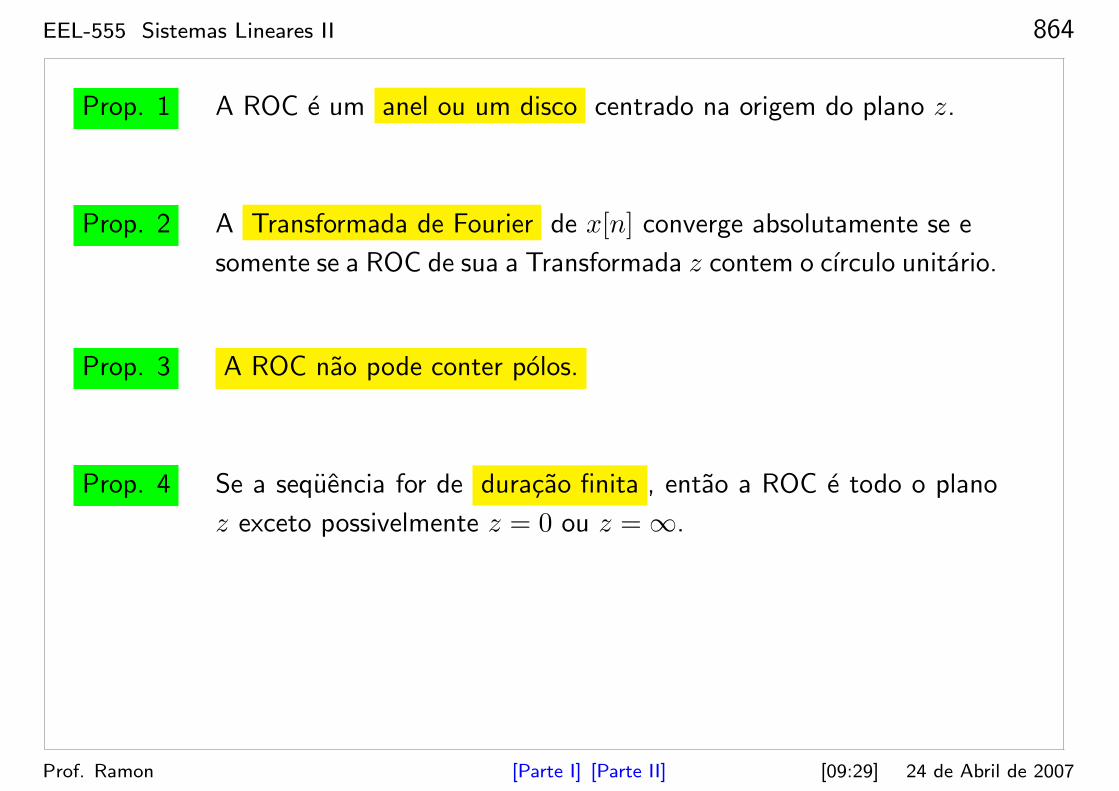
EEL-555 Sistemas Lineares II 864
Prop. 1 A ROC e um anel ou um disco centrado na origem do plano z.
Prop. 2 A Transformada de Fourier de x[n] converge absolutamente se e
somente se a ROC de sua a Transformada z contem o cırculo unitario.
Prop. 3 A ROC nao pode conter polos.
Prop. 4 Se a sequencia for de duracao finita , entao a ROC e todo o plano
z exceto possivelmente z = 0 ou z =∞.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 865
Prop. 5 Se a sequencia for semi-infinita a direita , a ROC estende-se para
fora do cırculo que passa pelo polo de X(z) de maior magnitude,
possivelmente incluindo z =∞.
Prop. 6 Se a sequencia for semi-infinita a esquerda , a ROC estende-se para
dentro do cırculo que passa pelo polo de X(z) de menor magnitude,
possivelmente incluindo z = 0.
Prop. 7 Se a sequencia for duplamente infinita , a ROC e um anel no plano
z limitado internamente e externamente por um polo e sem conter
polos em seu interior.
Prop. 8 A ROC deve ser uma regiao conexa.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
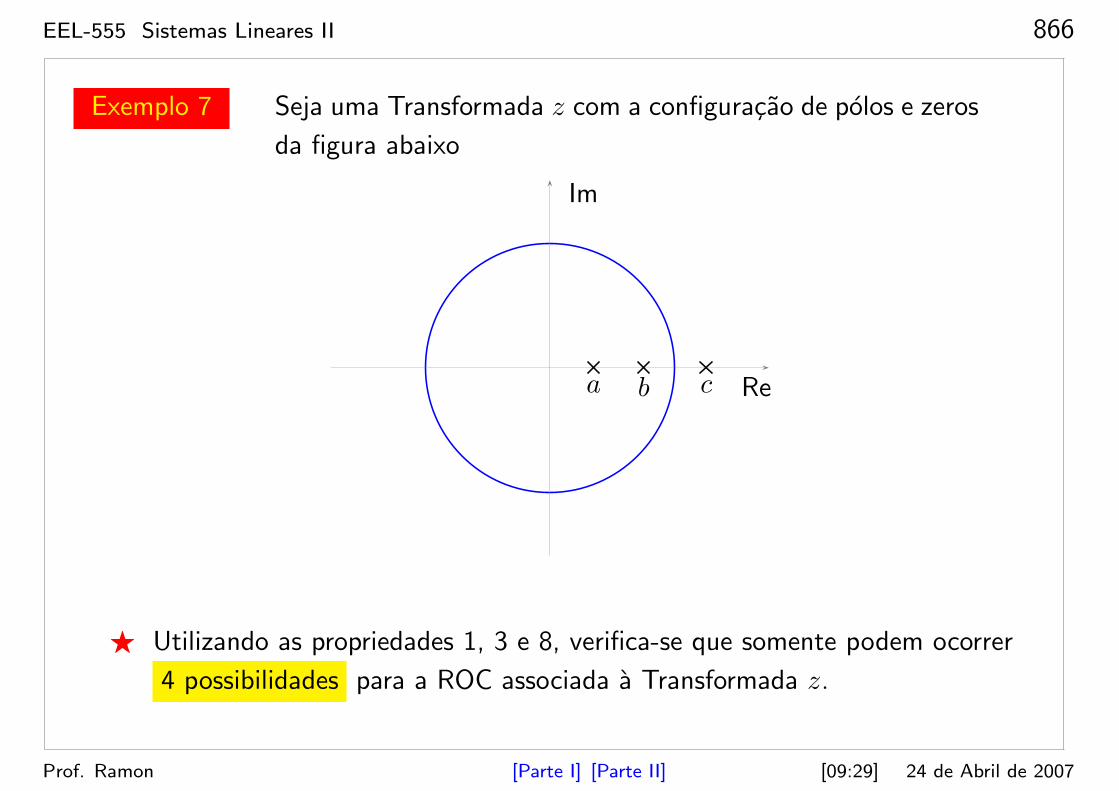
EEL-555 Sistemas Lineares II 866
Exemplo 7 Seja uma Transformada z com a configuracao de polos e zeros
da figura abaixo
Im
Rea b c
⋆ Utilizando as propriedades 1, 3 e 8, verifica-se que somente podem ocorrer
4 possibilidades para a ROC associada a Transformada z.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
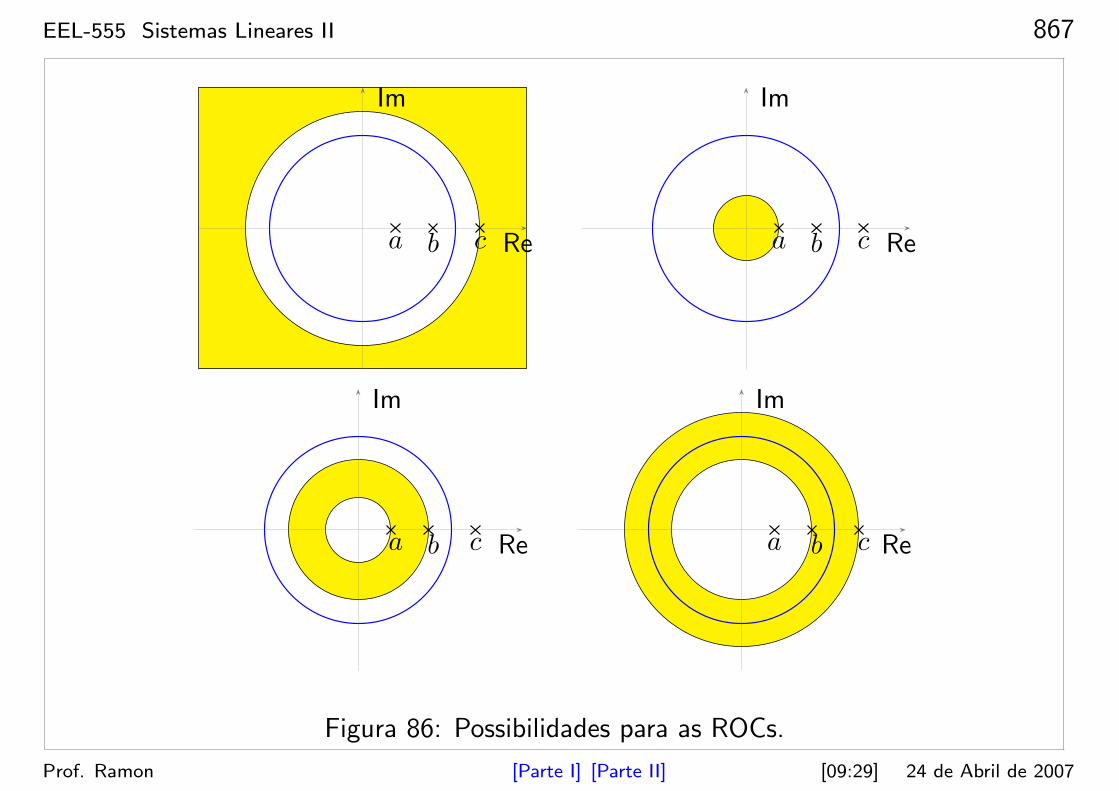
EEL-555 Sistemas Lineares II 867
Im
Rea b c
Im
Rea b c
Im
Rea b c
Im
Rea b c
Figura 86: Possibilidades para as ROCs.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
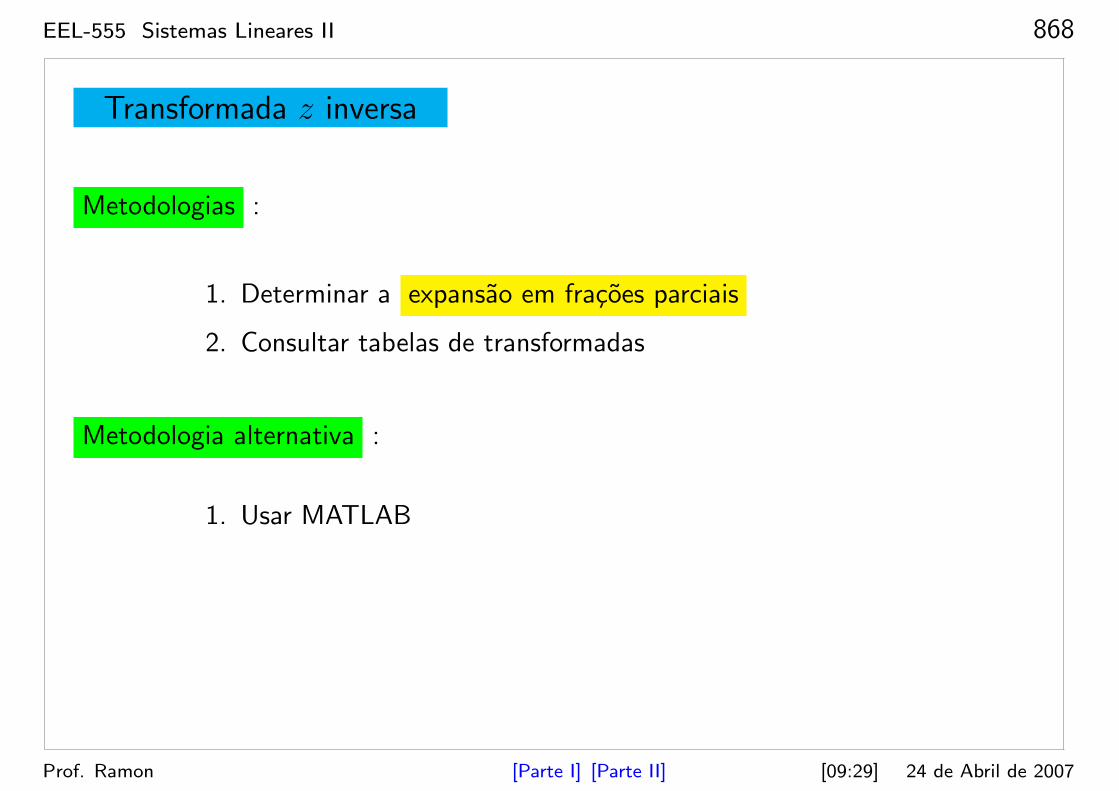
EEL-555 Sistemas Lineares II 868
Transformada z inversa
Metodologias :
1. Determinar a expansao em fracoes parciais
2. Consultar tabelas de transformadas
Metodologia alternativa :
1. Usar MATLAB
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 869
Expansao em fracoes parciais
F (s) =B(s)
A(s)=
r1
s + p1+
r2
s + p2+ · · ·+ rn
s + pn
⋆ ri = resıduos .
⋆ pi = polos .
⋆ O caso geral envolve polos multiplos .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 870
Exemplo 8 ...
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 871
Exemplo 9 Transformada z usando MATLAB.
Encontrar a Transformada Z de :
f [n] = k an u[n]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 872
Solucao : >> syms n z a k
>> f = k*a^n;
>> F = ztrans(f)
F =
k*z/a/(z/a-1)
>> F = simple(F);
>> pretty(F)
k z
- ------
-z + a
>> _
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 873
Exemplo 10 Anti-transformada z usando MATLAB.
Encontrar a anti-transformada de :
F (z) =k
(z + a)2
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 874
Solucao : >> syms t z a k
>> F = k/(z+a)^2;
>> f = iztrans(F);
f =
k*(-a)^n+k*(-a)^n*n
>> pretty(f)
n n
k (-a) + k (-a) n
>> _
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 875
Propriedades da Transformada z
Notacao:
Sequencia Transformada ROC
x[n] X(z) Rx
x1[n] X1(z) Rx1
x2[n] X2(z) Rx2
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 876
Propriedade 1
(1) Z[
αx[n]]
= αZ[
x[n]]
(2) Z[
x1[n] + x2[n]]
= Z[
x1[n]]
+ Z[
x2[n]]
⋆ A Transformada z e linear .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 877
Teorema (Convolucao)
Z[
x1[n] ∗ x2[n]]
= X1(z)X2(z)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 878
Sequencia Transformada ROC
x[n] X(z) Rx
x1[n] X1(z) Rx1
x2[n] X2(z) Rx2
1 ax1[n] + bx2[n] aX1(z) + bX2(z) Contem Rx1
⋂Rx2
2 x[n− n0] z−n0X(z) Rx ,±0 ,±∞
3 zn0 x[n] X(z/z0) |z0|Rx
4 nx[n] −z dX(z)dz Rx ,±0 ,±∞
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 879
Sequencia Transformada ROC
5 x∗[n] X∗(z∗) Contem Rx
6 Re x[n] 12
[
X(z) + X∗(z∗)]
Contem Rx
7 Im x[n] 12
[
X(z)−X∗(z∗)]
Contem Rx
8 x1[n] ∗ x2[n] X1(z)X2(z) Contem Rx1
⋂Rx2
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 880
Exemplo 11 Sabendo-se que a Transformada Z da sequencia
x[n] = sin(ω0n
)u[n]
e dada por
X(z) =sin(ω0
)z−1
1− 2 cos(ω0
)z−1 + z−2
, ROC: |z| > 1 ,
determine a Transformada Z de:
(a) x1[n] = αn x[n] ,
(b) x2[n] = x[−n] ,
(c) x3[n] = n x[n] .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 881
Solucao
(a) Neste caso usamos a seguinte propriedade da Transforma z:
Z
x[n]
= X(z), ROC : r1 < |z| < r2 ,
entao,
Z
αn x[n]
= X(α−1z
),
ROC : |α|r1 < |z| < |α|r2 .
Portanto,
X1(z) =α sin
(ω0
)z−1
1− 2α cos(ω0
)z−1 + α2z−2
ROC: |z| > |α|
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 882
(b) Neste caso usamos a seguinte propriedade da Transforma z:
Z
x[−n]
= X(z−1
),
ROC : 1/r2 < |z| < 1/r1 .
Portanto,
X2(z) =sin(ω0
)z
1− 2 cos(ω0
)z + z2
ROC: 0 < |z| < 1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 883
(c) Neste caso usamos a seguinte propriedade da Transforma z:
Z
nx[n]
= −zdX(z)
dz,
ROC : r1 < |z| < r2 .
Portanto,
X3(z) =z sin
(ω0
)(z2 − 1)
(1− cos
(ω0
)z + z2
)2
ROC: |z| > 1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 884
Exemplo 12 Determine a Transformada Z da sequencia
x[n] = an u[n] + bn u[−n− 1] .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 885
Solucao Aplicando a definicao:
X(z) =
∞∑
n=−∞
x[n] z−n
=
∞∑
n=0
an z−n +
−1∑
n=−∞
bn z−n
=
∞∑
n=0
(az−1
)n+
∞∑
m=1
(b−1z
)m.
A serie e convergente se∣∣az−1
∣∣ < 1 e
∣∣b−1z
∣∣ < 1 ,
isto e,
|z| > |a| e |z| < |b|
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 886
Podemos ter 2 casos:
Caso |b| < |a| :
Neste caso nao ha uma intersecao das regioes e portanto nao existe X(z).
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
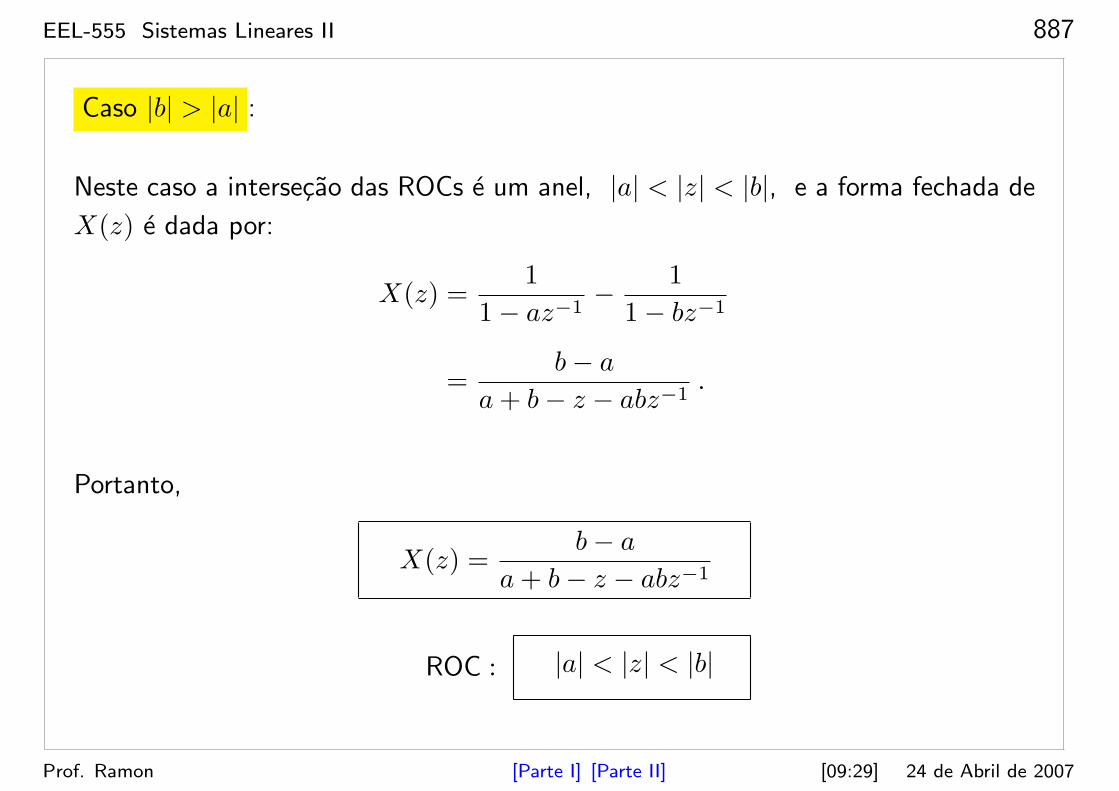
EEL-555 Sistemas Lineares II 887
Caso |b| > |a| :
Neste caso a intersecao das ROCs e um anel, |a| < |z| < |b|, e a forma fechada de
X(z) e dada por:
X(z) =1
1− az−1− 1
1− bz−1
=b− a
a + b− z − abz−1.
Portanto,
X(z) =b− a
a + b− z − abz−1
ROC : |a| < |z| < |b|
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 888
Exemplo 13 Determine a Transformada Z da sequencia finita
x[n] =
1 se −N − 1 ≤ n ≤ N ,
0 caso contrario.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 889
Solucao Usando a definicao:
X(z) =
N∑
n=−N−1
x[n] z−n
= zN+1 + zN + · · ·+ 1 + z−1 + · · ·+ z−N .
A serie e convergente em todo o plano z, exceto em z = 0.
Usando a formula para a soma de PGs,
N2∑
n=N1
αn =αN1 − αN2+1
1− α,
encontramos a forma fechada:
X(z) =zN+1 − z−N+1
1− z−1.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
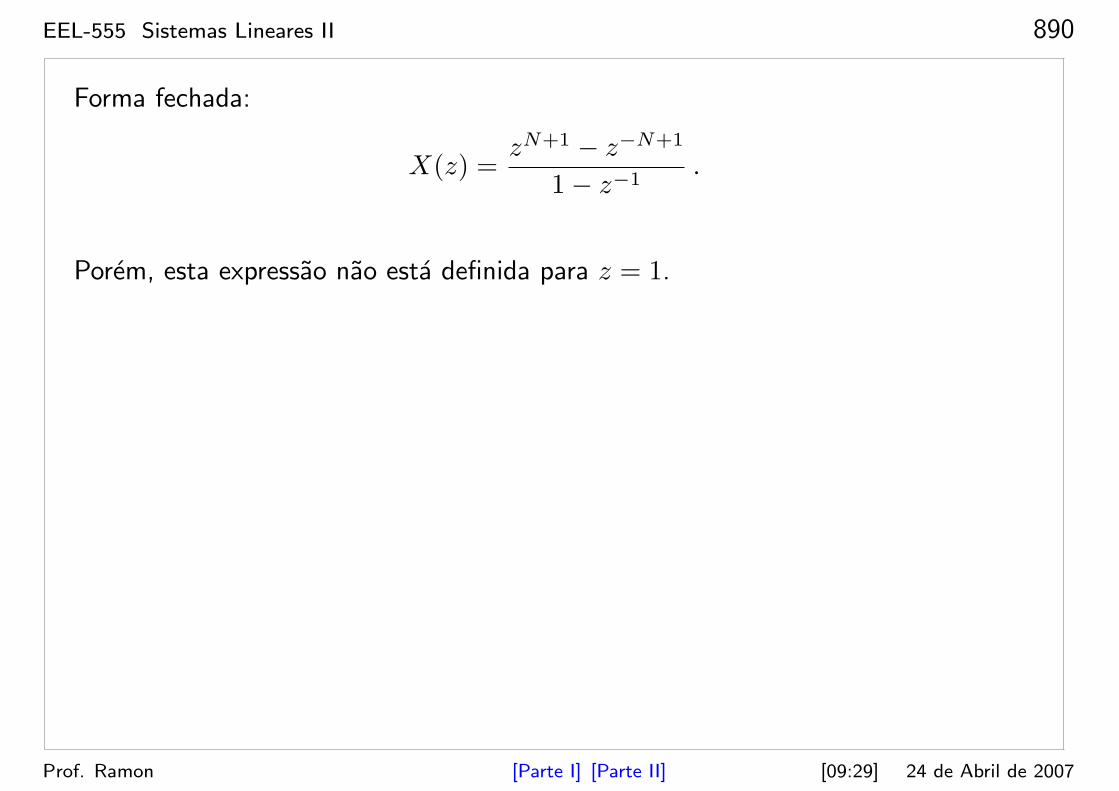
EEL-555 Sistemas Lineares II 890
Forma fechada:
X(z) =zN+1 − z−N+1
1− z−1.
Porem, esta expressao nao esta definida para z = 1.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 891
Para z = 1, usamos a serie de potencia para obter
X(z)∣∣∣z=1
=
N∑
n=−N−1
x[n] z−n
=N∑
n=−N−1
x[n] (1)−n
= 2N + 2 .
Portanto,
X(z) =
2N + 2 se z = 1 ,
zN+1−z−N+1
1−z−1 se z 6= 1 ,
ROC : z 6= 0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
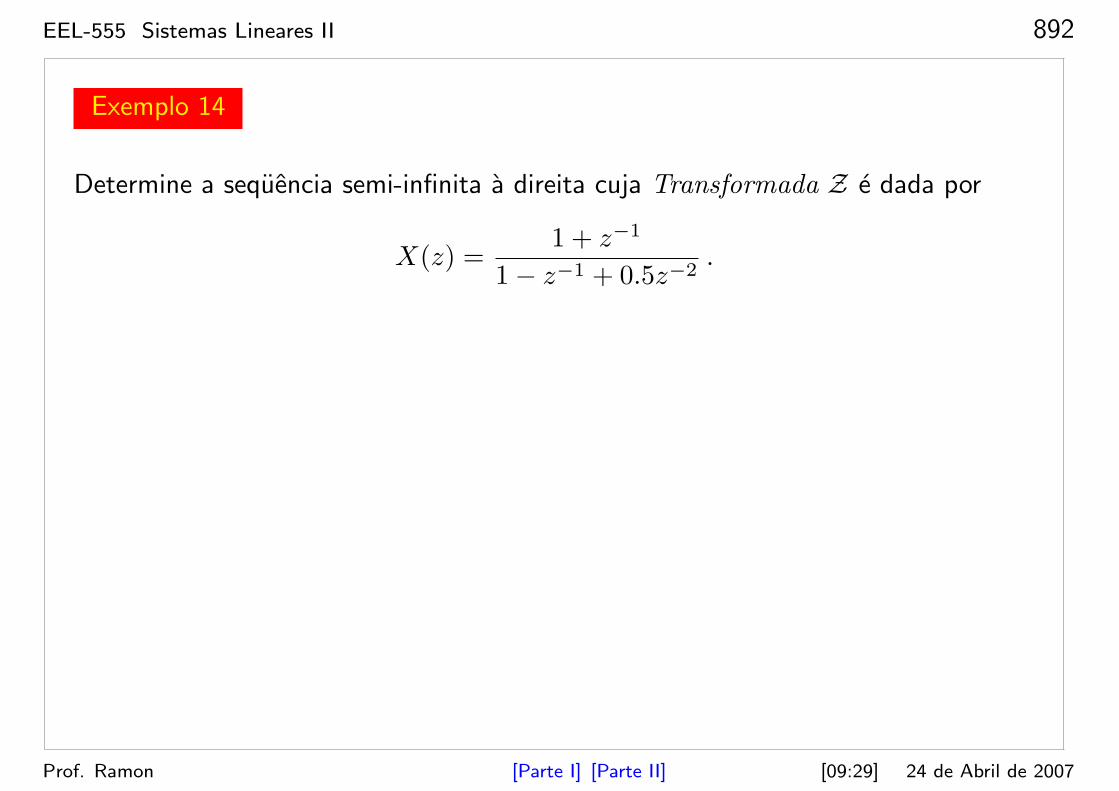
EEL-555 Sistemas Lineares II 892
Exemplo 14
Determine a sequencia semi-infinita a direita cuja Transformada Z e dada por
X(z) =1 + z−1
1− z−1 + 0.5z−2.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 893
Solucao A expansao em fracoes parciais e dada por:
X(z) =A1
1− p1z−1+
A2
1− p2z−1,
onde
A1 =1
2− j
3
2,
A2 =1
2+ j
3
2,
e
p1 =1
2+ j
1
2,
p2 =1
2− j
1
2.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 894
Usando a forma polar, temos:
A1 = |A1|ejα1 =
√10
2e−j1.25 ,
A2 = A∗1 =
√10
2ej1.25 ,
e
p1 = |p1|ejβ1 =1√2
ejπ/4 ,
p2 = p∗1 =1√2
e−jπ/4 .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 895
Como os polos sao complexos conjugados, usamos a formula
Z−1
(A1
1− p1z−1+
A∗1
1− p∗1z−1
)
= 2 |A1| |p1|n cos(β1n + α1
)u[n] .
Portanto,
x[n] =√
10
(1√2
)n
cos(nπ
4− 1.25
)
u[n]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
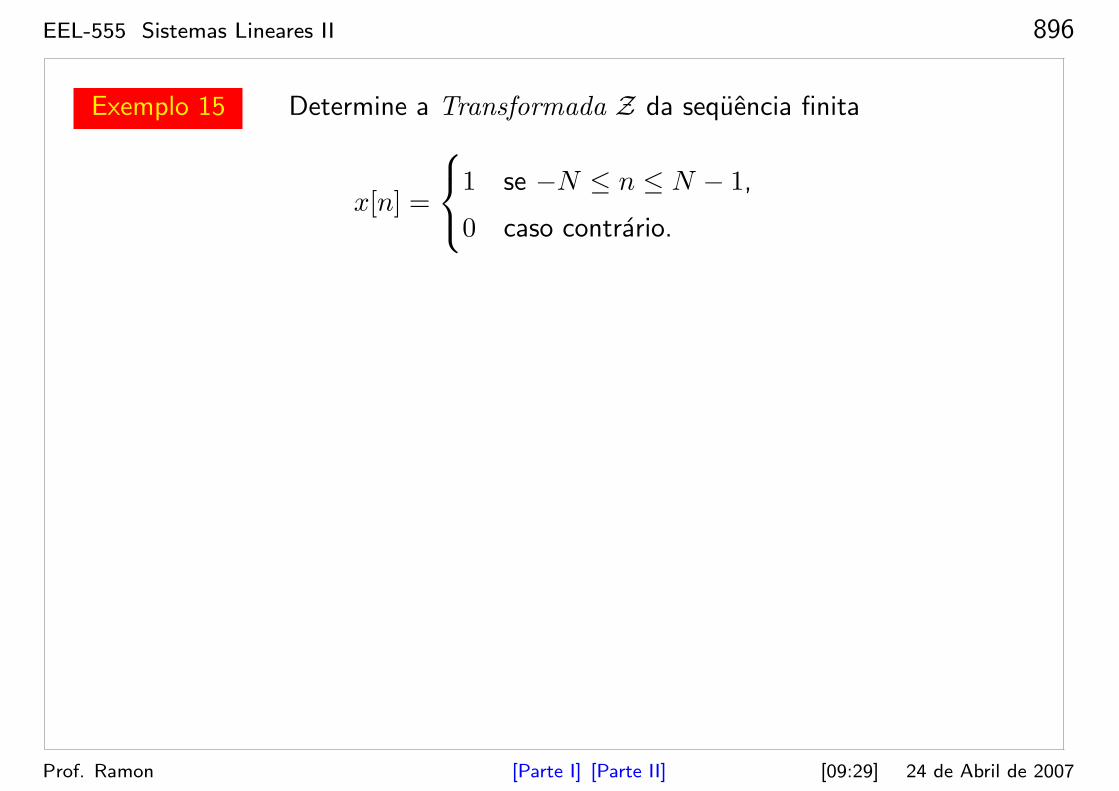
EEL-555 Sistemas Lineares II 896
Exemplo 15 Determine a Transformada Z da sequencia finita
x[n] =
1 se −N ≤ n ≤ N − 1,
0 caso contrario.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 897
Exemplo 16
Utilizando Transformada Z, calcule a convolucao das sequencias finitas x1[n] e
x2[n]:
x1[n] = 1, 0, 1 , 0, 1 ,
x2[n] = 1,−1, 0 ,−1, 1 .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 898
Exemplo 17 Determine a Transformada Z inversa de
X(z) =1
1− 1.5z−1 + 0.5z−2.
para os casos:
(a) ROC : |z| > 1 .
(b) ROC : |z| < 0.5 .
(c) ROC : 0.5 < |z| < 1 .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 899
Exercıcio.
1. (...)
(a) (...)
(b) (...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

UFRJ Universidade Federal do Rio de Janeiro
EE Escola de Engenharia
DEL Departamento de Eletronica
EEL-555 Sistemas Lineares II
Capıtulo # 13
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 901
13 Analise de sistemas lineares discretos
Conteudo
(a) ...
(b) ...
(c) ...
(d) Exemplos
(e) Exercıcios
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 902
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

UFRJ Universidade Federal do Rio de Janeiro
EE Escola de Engenharia
DEL Departamento de Eletronica
EEL-555 Sistemas Lineares II
Capıtulo # 14
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 904
14 Transformada discreta de Fourier (DFT)
Conteudo
(a) Revisao
(b) Serie discreta de Fourier
(c) Propriedades da DSF
(d) ...
(e) Exemplos
(f) Exercıcios
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 905
Referencias para este capıtulo
(a) Oppenheim & Schafer,
Discrete-time signal processing,
Prentice Hall, 1989.
(b) Paulo S. R. Diniz, Eduardo A. B. da Silva e Sergio L. Netto,
Digital signals processing: system analysis and design,
Cambridge University Press, 2002.
(c) J. Proakis e D. Manolakis,
Digital Signal Processing,
Prentice Hall, 1996.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
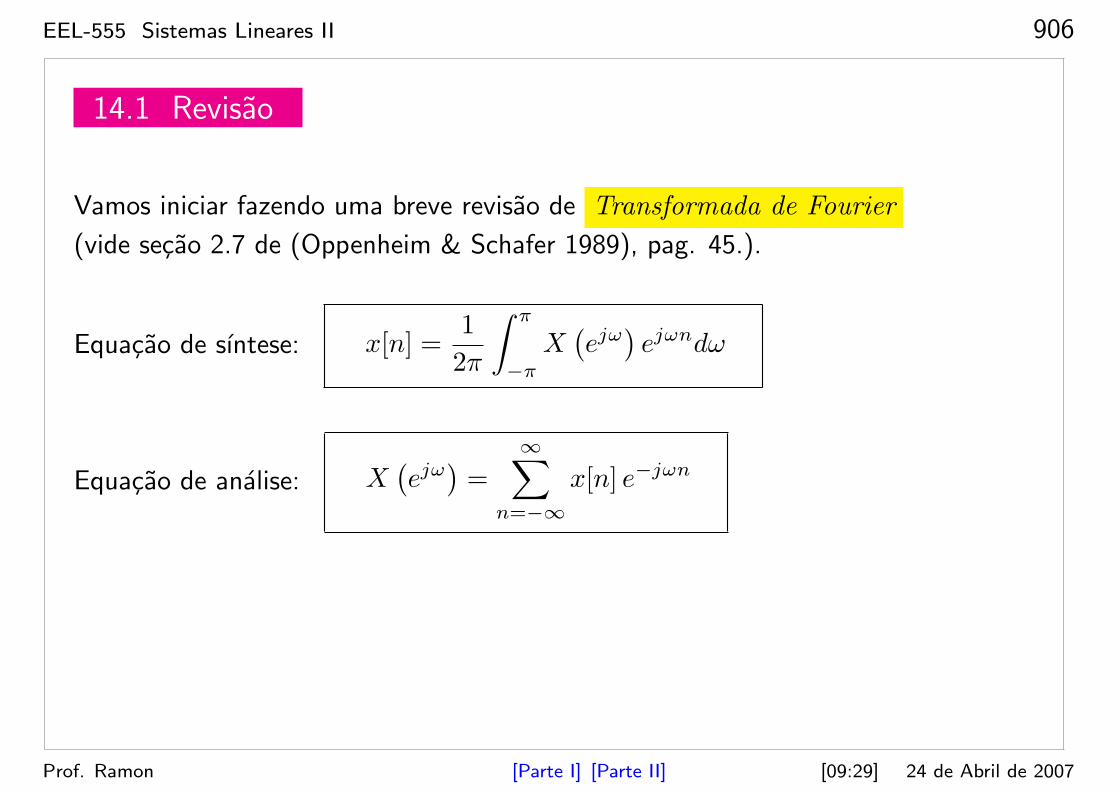
EEL-555 Sistemas Lineares II 906
14.1 Revisao
Vamos iniciar fazendo uma breve revisao de Transformada de Fourier
(vide secao 2.7 de (Oppenheim & Schafer 1989), pag. 45.).
Equacao de sıntese: x[n] =1
2π
∫ π
−π
X(ejω)ejωndω
Equacao de analise: X(ejω)
=
∞∑
n=−∞
x[n] e−jωn
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
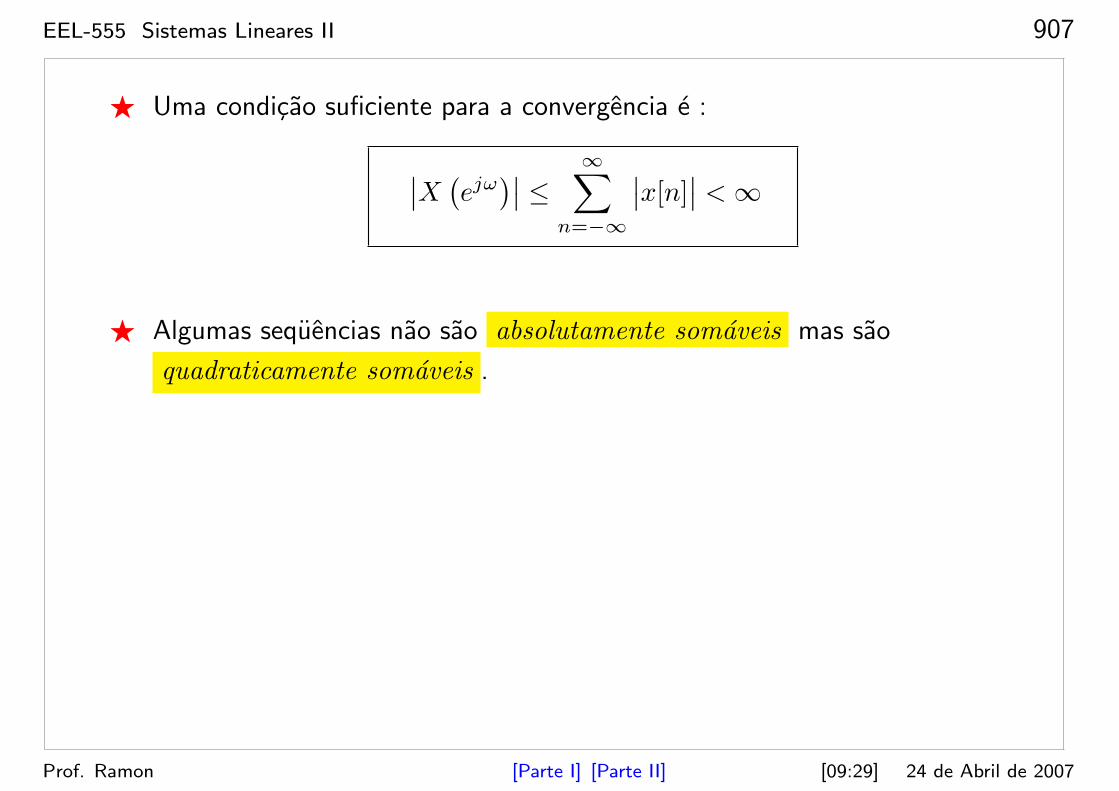
EEL-555 Sistemas Lineares II 907
⋆ Uma condicao suficiente para a convergencia e :
∣∣X(ejω)∣∣ ≤
∞∑
n=−∞
∣∣x[n]
∣∣ <∞
⋆ Algumas sequencias nao sao absolutamente somaveis mas sao
quadraticamente somaveis .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 908
Exemplo 1 Sequencia absolutamente somavel.
Sequencia exponencial: x[n] = an u[n]
Transformada de Fourier:
X(ejω)
=
∞∑
n=−∞
x[n] e−jωn =
∞∑
n=0
(
a e−jω)n
⋆ X(ejω)
e convergente para∣∣a e−jω
∣∣ < 1 ⇒ |a| < 1 .
Forma fechada: X(ejω)
=1
1− a e−jω
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 909
Exemplo 2 Sequencia quadraticamente somavel.
Filtro passa-baixa ideal: H(ejω)
=
1 se |ω| < ωc
0 se ωc < |ω| ≤ π
Resposta ao pulso: h[n] =sin(ωcn
)
πn
⋆ h[n] nao e causal.
⋆ h[n] nao e uma PG!
⋆ h[n] nao e absolutamente somavel.
⋆ Porem, h[n] e quadraticamente somavel.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 910
Generalizacao
Usando a teoria de funcoes generalizadas , defini-se a Transformada de Fourier
de sequencias periodicas (nao absolutamente somaveis nem quadraticamente
somaveis) do tipo
x[n] =∑
k
ak ejωkn−∞ ≤ n ≤ ∞
como
X(ejω)
=
∞∑
r=−∞
2π ak δ (ω − ωk + 2πr)
onde δ(·) e a funcao impulso (com amplitude ∞).
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 911
Exemplo 3 Sequencia exponencial complexa
x[n] = ejω0n , ∀n
Transformada de Fourier:
X(ejω)
=
∞∑
r=−∞
2πδ (ω − ω0 + 2πr) .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 912
14.2 Serie discreta de Fourier (DFS)
Seja uma sequencia periodica x[n] com perıodo N .
Propriedade de x[n] : x[n] = x[n + N ]
Nota. A notacao x indica sequencia periodica.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
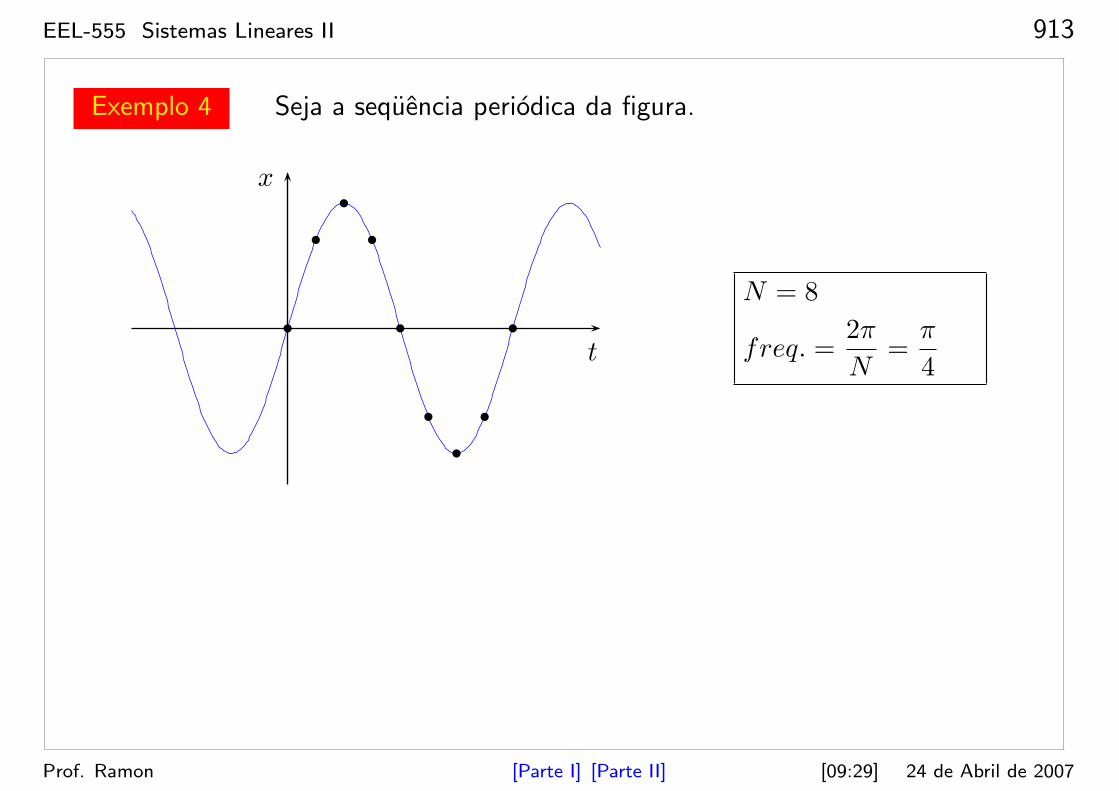
EEL-555 Sistemas Lineares II 913
Exemplo 4 Seja a sequencia periodica da figura.
t
x
b
b
b
b
b
b
b
b
b
N = 8
freq. =2π
N=
π
4
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 914
A expansao em serie de Fourier de x[n] e dada por
x[n] =1
N
∑
k
X[k] ejωf kn
onde :
⋆ ωf =2π
Ne a frequencia fundamental .
⋆ A constante1
Ne introduzida por conveniencia.
⋆ X[k] sao os coeficientes da expansao.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 915
Importante : Note que
ek[n] = ejωf kn = ejωf (k+rN)n = ek+rN [n]
⋆ ek[n] e ek+rN [n] sao a mesma sequencia!
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 916
Exemplo 5 N = 4
e0[n] = ej( 2π4 ) 0 n = e0 = e4[n]
e1[n] = ej( 2π4 ) 1 n = ej(π
2 )n = e5[n]
e2[n] = ej( 2π4 ) 2 n = ej(π)n
e3[n] = ej( 2π4 ) 3 n = ej( 3π
2 )n
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
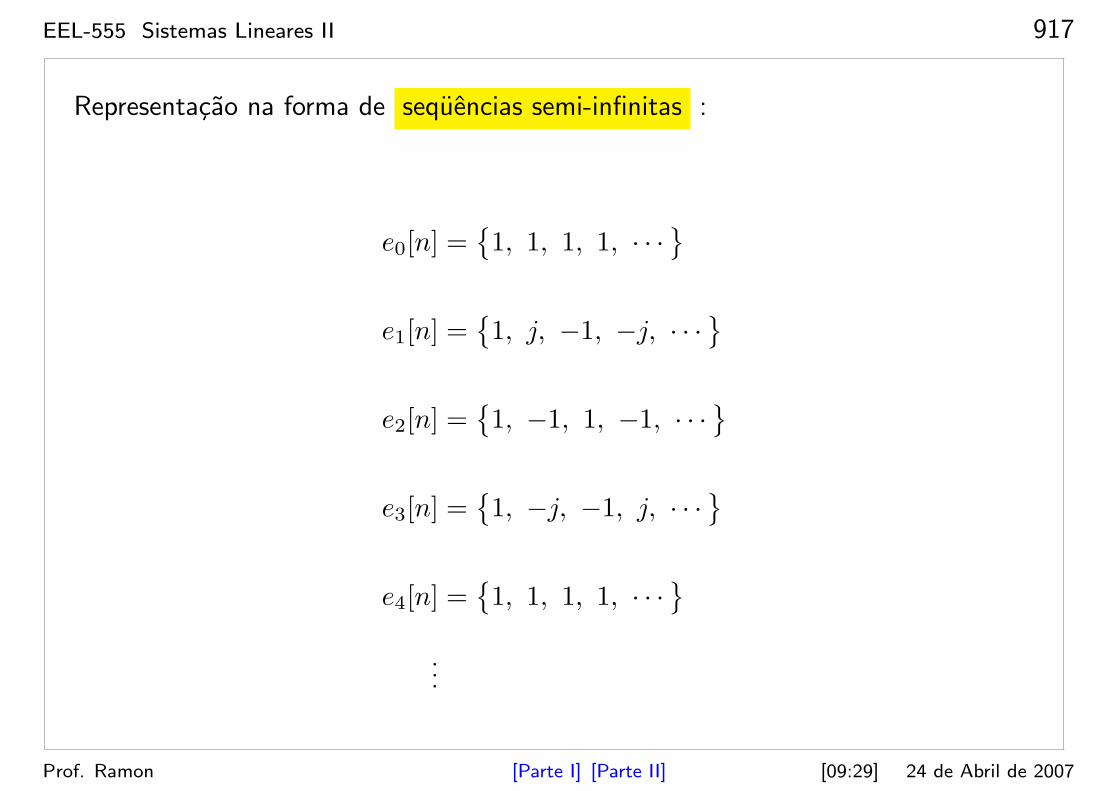
EEL-555 Sistemas Lineares II 917
Representacao na forma de sequencias semi-infinitas :
e0[n] =1, 1, 1, 1, · · ·
e1[n] =1, j, −1, −j, · · ·
e2[n] =1, −1, 1, −1, · · ·
e3[n] =1, −j, −1, j, · · ·
e4[n] =1, 1, 1, 1, · · ·
...
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
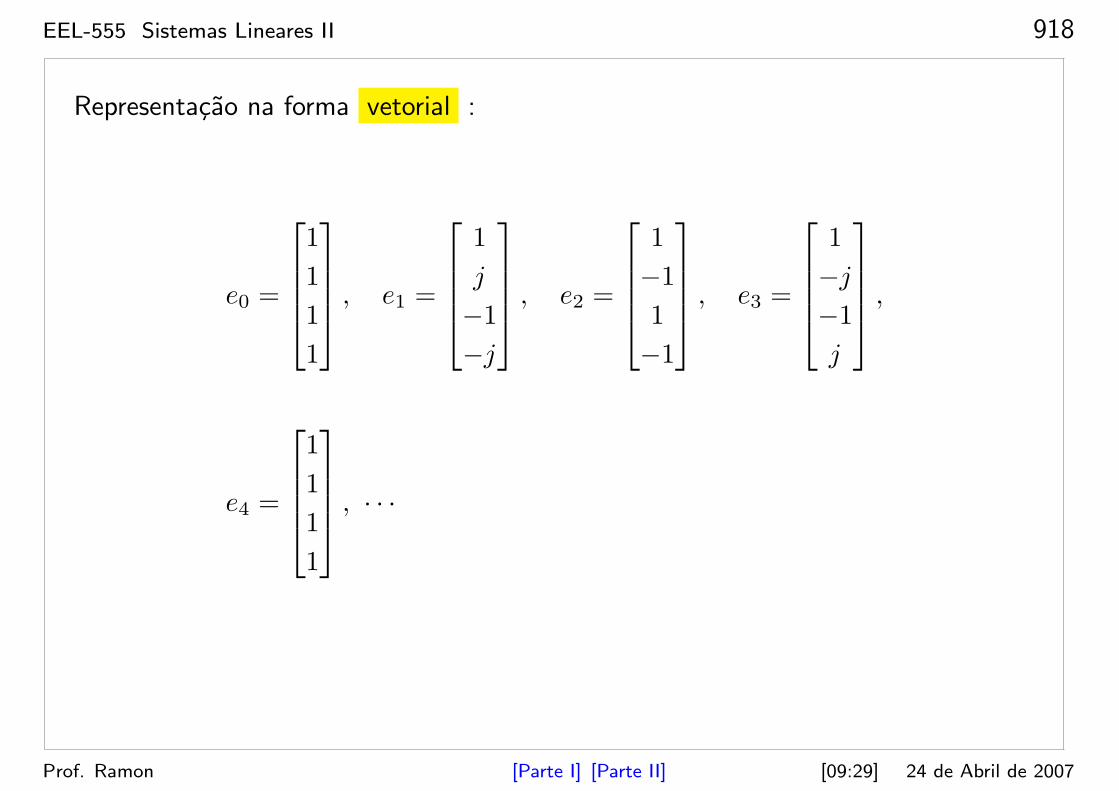
EEL-555 Sistemas Lineares II 918
Representacao na forma vetorial :
e0 =
1
1
1
1
, e1 =
1
j
−1
−j
, e2 =
1
−1
1
−1
, e3 =
1
−j
−1
j
,
e4 =
1
1
1
1
, · · ·
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
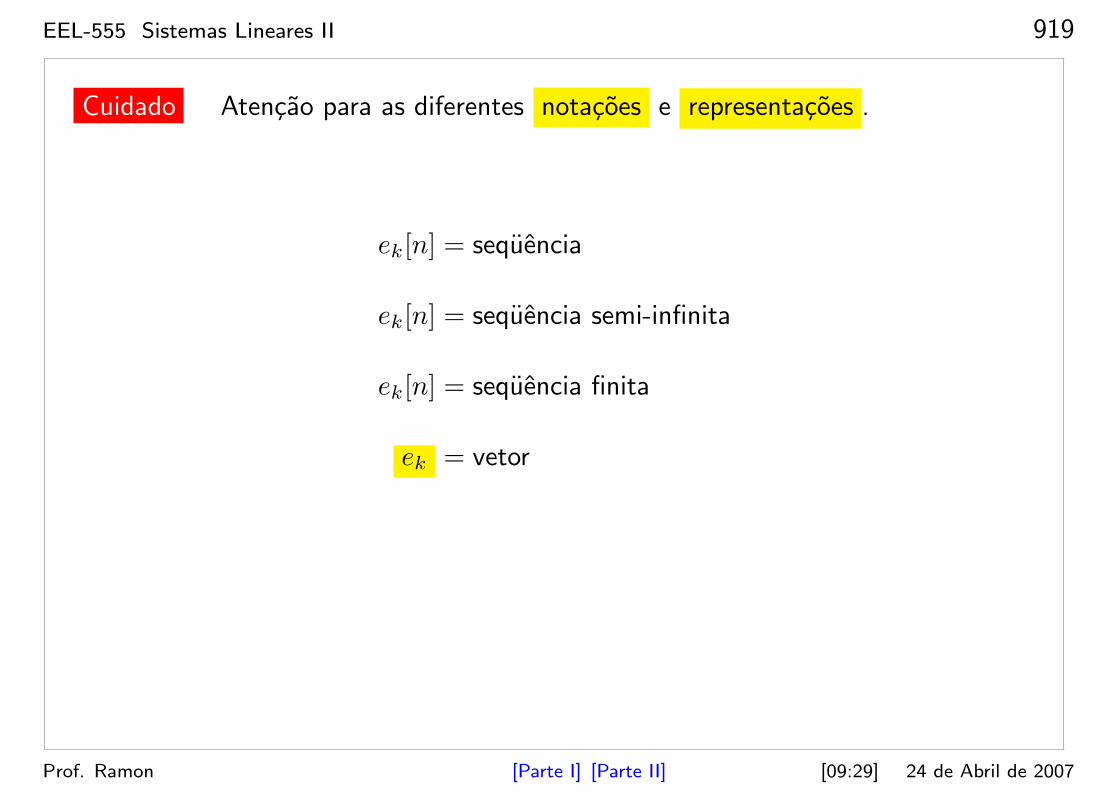
EEL-555 Sistemas Lineares II 919
Cuidado Atencao para as diferentes notacoes e representacoes .
ek[n] = sequencia
ek[n] = sequencia semi-infinita
ek[n] = sequencia finita
ek = vetor
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 920
Conclusao : Somente sao necessarias N exponenciais complexas
(harmonicas) para a representacao em serie de Fourier da
sequencia periodica x[n]:
x[n] =1
N
N−1∑
k=0
X[k] ejωf kn
⋆ Esta e a equacao de sıntese .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 921
Determinacao dos coeficientes
Para obter os coeficientes X[k] da serie, exploramos a ortogonalidade das
exponenciais complexas.
⋆ Verificacao atraves de um exemplo simples.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 922
Exemplo 6 Verificacao da ortogonalidade para o caso N = 4.
e0[n] =1, 1, 1, 1, · · ·
e1[n] =1, j, −1, −j, · · ·
e2[n] =1, −1, 1, −1, · · ·
e3[n] =1, −j, −1, j, · · ·
...
Fato. Duas sequencias ei[n] e ej [n] sao ortogonais quando
⟨ei[n], ej [n]
⟩=
N−1∑
k=0
ei[k] e∗j [k] =
N se i = j
0 se i 6= j
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 923
Nota. Lembrar que estamos trabalhando com numeros complexos, portanto,
para x, y ∈ CN ,
⟨x, y⟩
= x∗T y = xHy = yHx
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 924
Exemplo 7 Norma Euclidiana em C2.
x =
[
1
j
]
xT x =[
1 j][
1
j
]
= 1− 1 = 0 (!?)
xHx =[
1 −j][
1
j
]
= 1 + 1 = 2 (Ok!)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 925
Portanto :
⟨e0, e0
⟩=[
1 1 1 1]∗ [
1 1 1 1]T
= 1 + 1 + 1 + 1 = 4
⟨e0, e1
⟩=[
1 1 1 1]∗ [
1 j −1 −j]T
= 1 + j − 1− j = 0
⟨e0, e2
⟩=[
1 1 1 1]∗ [
1 −1 1 −1]T
= 1− 1 + 1− 1 = 0
⟨e0, e3
⟩=[
1 1 1 1]∗ [
1 −j −1 j]T
= 1− j − 1 + j = 0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
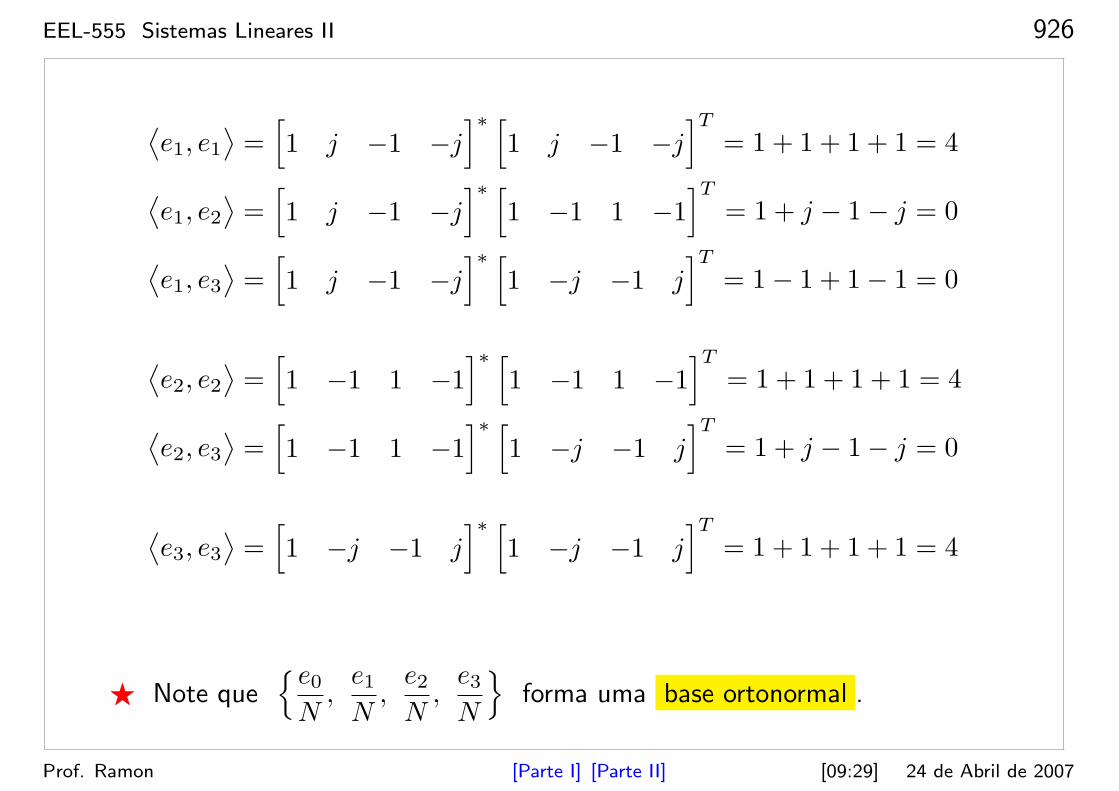
EEL-555 Sistemas Lineares II 926
⟨e1, e1
⟩=[
1 j −1 −j]∗ [
1 j −1 −j]T
= 1 + 1 + 1 + 1 = 4
⟨e1, e2
⟩=[
1 j −1 −j]∗ [
1 −1 1 −1]T
= 1 + j − 1− j = 0
⟨e1, e3
⟩=[
1 j −1 −j]∗ [
1 −j −1 j]T
= 1− 1 + 1− 1 = 0
⟨e2, e2
⟩=[
1 −1 1 −1]∗ [
1 −1 1 −1]T
= 1 + 1 + 1 + 1 = 4
⟨e2, e3
⟩=[
1 −1 1 −1]∗ [
1 −j −1 j]T
= 1 + j − 1− j = 0
⟨e3, e3
⟩=[
1 −j −1 j]∗ [
1 −j −1 j]T
= 1 + 1 + 1 + 1 = 4
⋆ Note quee0
N,
e1
N,
e2
N,
e3
N
forma uma base ortonormal .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
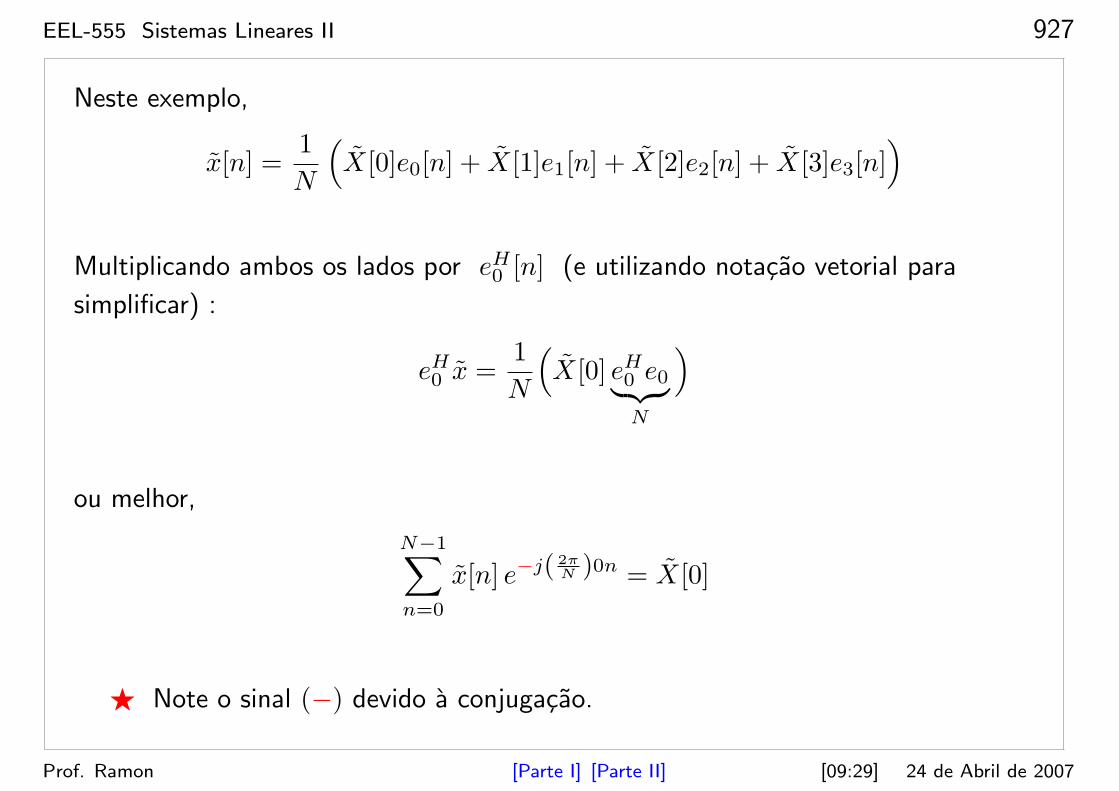
EEL-555 Sistemas Lineares II 927
Neste exemplo,
x[n] =1
N
(
X[0]e0[n] + X[1]e1[n] + X[2]e2[n] + X[3]e3[n])
Multiplicando ambos os lados por eH0 [n] (e utilizando notacao vetorial para
simplificar) :
eH0 x =
1
N
(
X[0] eH0 e0︸ ︷︷ ︸
N
)
ou melhor,
N−1∑
n=0
x[n] e−j( 2πN )0n = X[0]
⋆ Note o sinal (−) devido a conjugacao.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
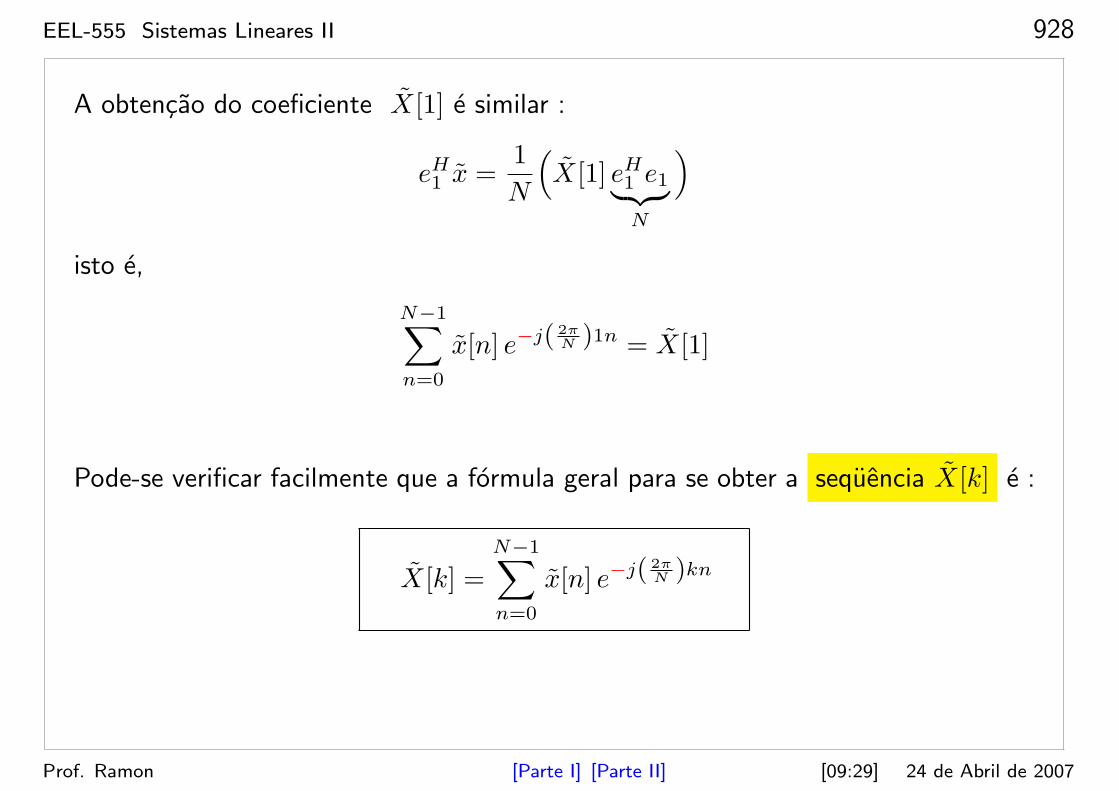
EEL-555 Sistemas Lineares II 928
A obtencao do coeficiente X[1] e similar :
eH1 x =
1
N
(
X[1] eH1 e1︸ ︷︷ ︸
N
)
isto e,
N−1∑
n=0
x[n] e−j( 2πN )1n = X[1]
Pode-se verificar facilmente que a formula geral para se obter a sequencia X[k] e :
X[k] =
N−1∑
n=0
x[n] e−j( 2πN )kn
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 929
Interpretacao
Os coeficientes X[k] podem ser interpretados como
• Sequencia de comprimento finito (k = 0, · · · , N − 1), ou
• Sequencia periodica definida para todo (k ∈ Z).
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
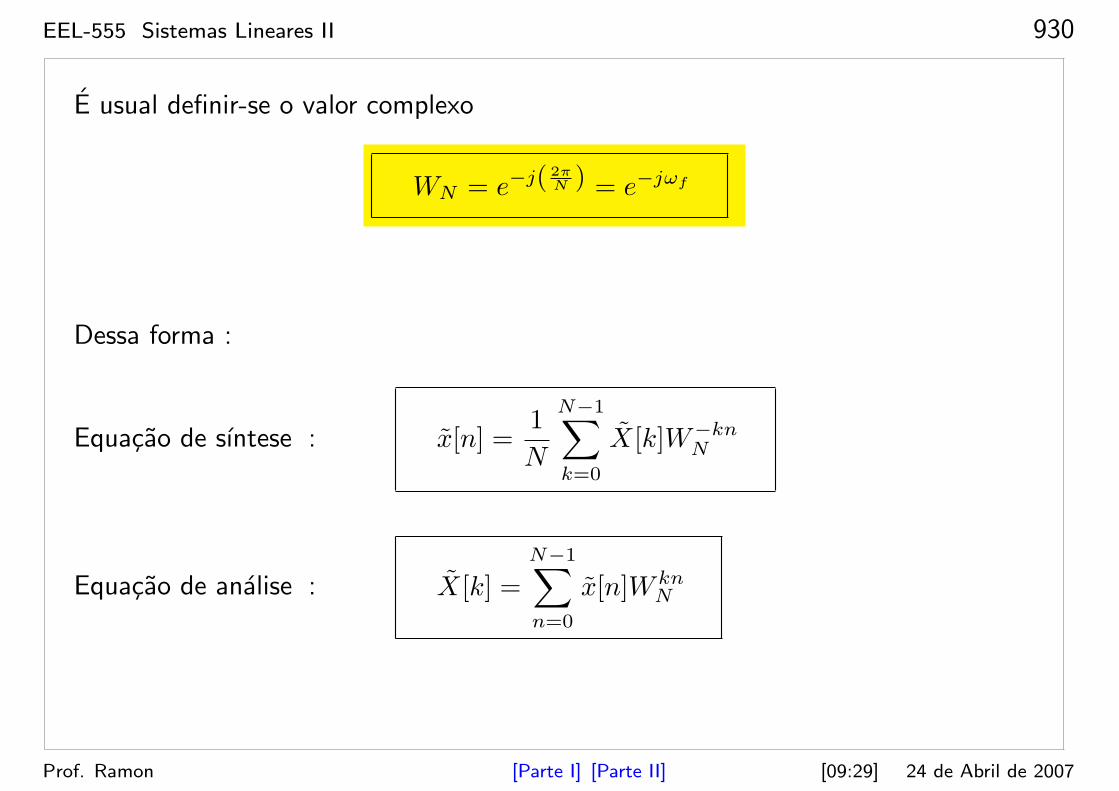
EEL-555 Sistemas Lineares II 930
E usual definir-se o valor complexo
WN = e−j( 2πN ) = e−jωf
Dessa forma :
Equacao de sıntese : x[n] =1
N
N−1∑
k=0
X[k]W−knN
Equacao de analise : X[k] =
N−1∑
n=0
x[n]W knN
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 931
Notacao
Vamos indicar a relacao entre as sequencias periodicas x[n] e X[k] pela seguinte
notacao :
x[n]←DFS−−−−→ X[k]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 932
Exemplo 8 Seja a sequencia periodica
x[n] =
∞∑
r=−∞
δ[n + rN
]
0
1
x[n]
N
· · ·
2N
· · ·1 1
· · ·
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
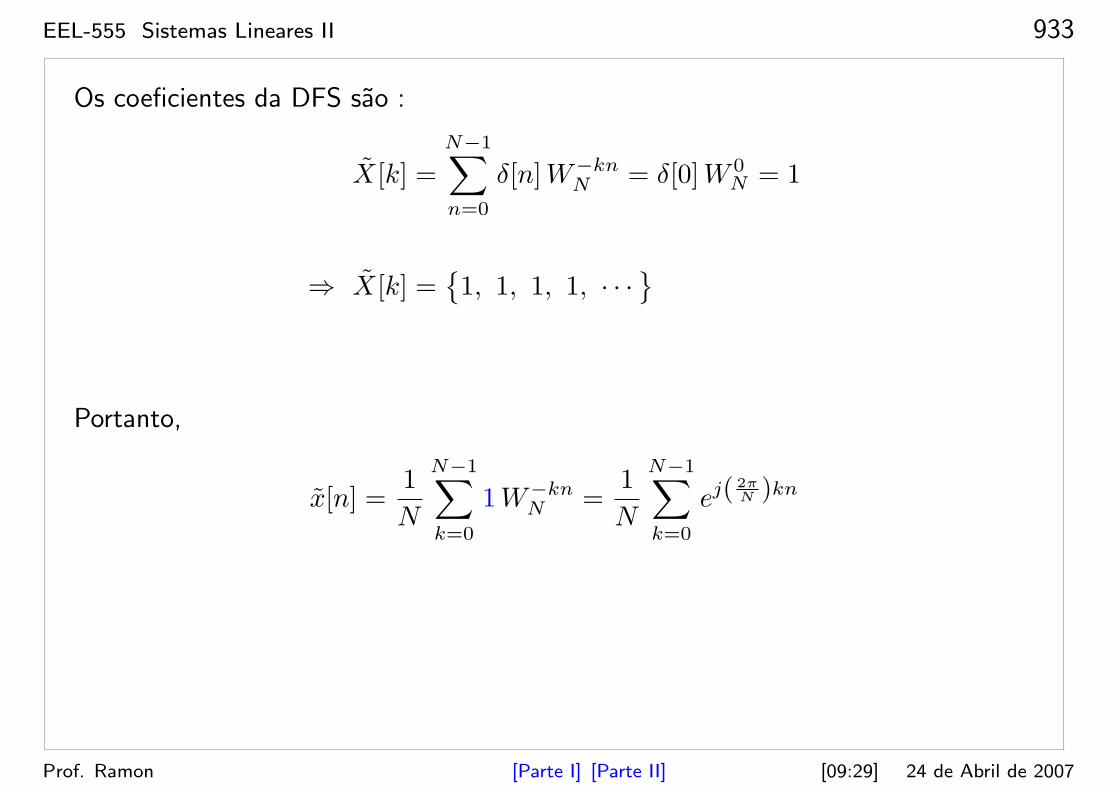
EEL-555 Sistemas Lineares II 933
Os coeficientes da DFS sao :
X[k] =
N−1∑
n=0
δ[n] W−knN = δ[0]W 0
N = 1
⇒ X[k] =1, 1, 1, 1, · · ·
Portanto,
x[n] =1
N
N−1∑
k=0
1 W−knN =
1
N
N−1∑
k=0
ej( 2πN )kn
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 934
No caso N = 4 (e usando notacao vetorial) :
x =
1
0
0
0
=1
4
(
X[0]e0 + X[1]e1 + X[2]e2 + X[3]e3
)
=1
4
1
1
1
1
1
+ 1
1
j
−1
−j
+ 1
1
−1
1
−1
+ 1
1
−j
−1
j
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
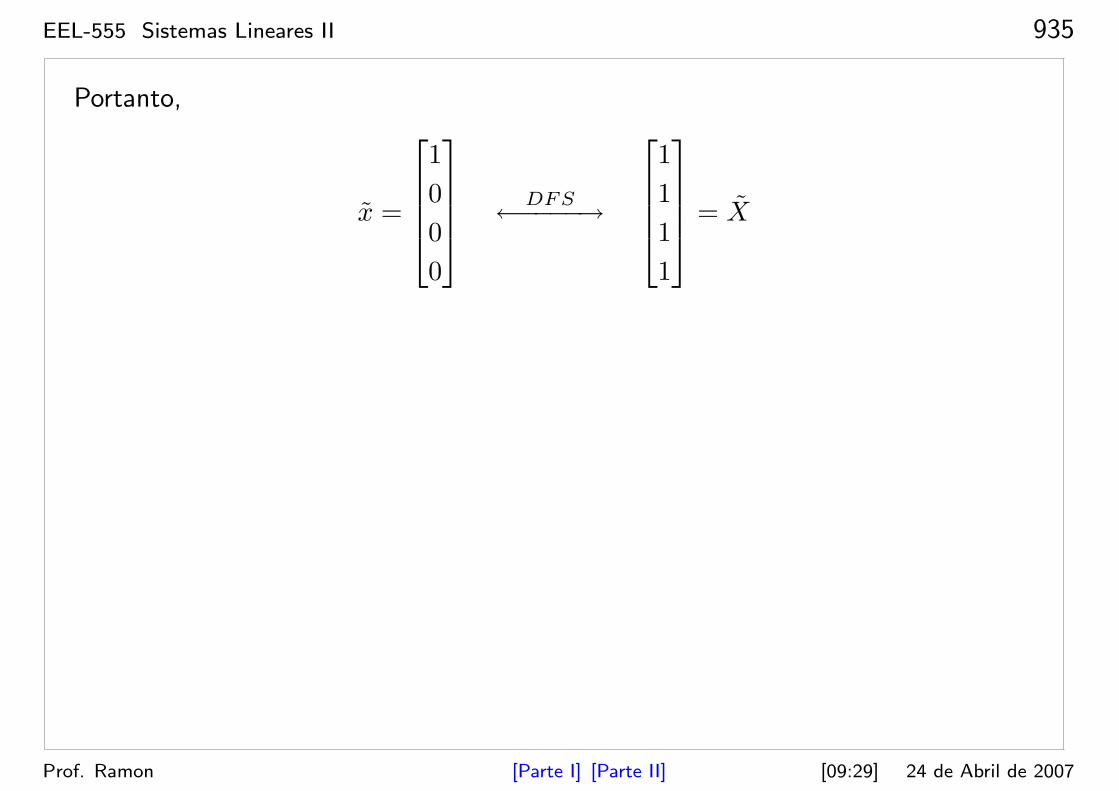
EEL-555 Sistemas Lineares II 935
Portanto,
x =
1
0
0
0
←DFS−−−−→
1
1
1
1
= X
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 936
Exemplo 9 Seja x1[n] = x[n− 1].
x[n] e o trem de impulsos do exemplo anterior.
Por simplicidade, vamos tomar novamente N = 4 .
0
1
x1[n]
5
· · ·1
1 2 3 4
· · ·
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
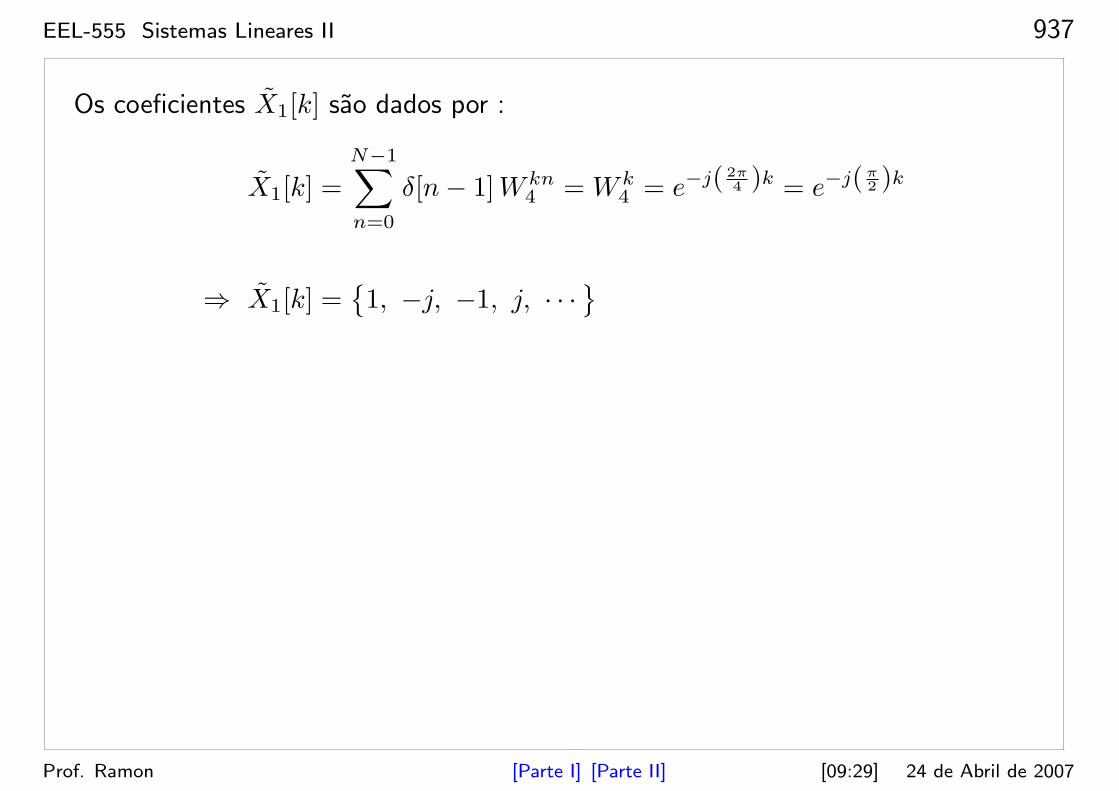
EEL-555 Sistemas Lineares II 937
Os coeficientes X1[k] sao dados por :
X1[k] =
N−1∑
n=0
δ[n− 1] W kn4 = W k
4 = e−j( 2π4 )k = e−j(π
2 )k
⇒ X1[k] =1, −j, −1, j, · · ·
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 938
Portanto,
x[n] =1
4(1 e0[n] + (−j) e1[n] + (−1) e2[n] + j e3[n])
Verificacao (usando notacao vetorial) :
x =1
4
1
1
1
1
1
+ (−j)
1
j
−1
−j
+ (−1)
1
−1
1
−1
+ j
1
−j
−1
j
=1
4
1
1
1
1
+
−j
1
j
−1
+
−1
1
−1
1
+
j
1
−j
−1
=
0
1
0
0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 939
Observe o rodızio nos vetores :
−j e1 = −jj
−1
−j
1
1
j
−1
−j
=
⋆ Esse rodızio pode ser observado em todos os vetores.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 940
Resultado,
x1 =
0
1
0
0
←DFS−−−−→
1
−j
−1
j
= X1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 941
Exemplo 10 Seja a sequencia da figura abaixo.
1
x[n]· · ·
1 2 3 4
· · ·
0 10
1
14
O perıodo e N = 10 .
Os coeficientes da expansao sao dados por :
X[k] =4∑
n=0
W kn10 =
4∑
n=0
e−j( 2π10 )kn
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 942
A expressao para os coeficientes pode ser reescrita como :
X[k] =1−W 5k
10
1−W k10
= e−j( 4π10 )k sin
(π2 k)
sin(
π10k)
Portanto :
−2 −1 0 1 2 3 4 5 6 7 8−1
0
1
2
3
4
5
6
ω
∣∣X(ejω)∣∣
Figura 87: Modulo de X[k].
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 943
Importante : A sequencia periodica X[k] pode ser interpretada como as amostras,
igualmente espacadas, da Transformada de Fourier de um perıodo
de x[n].
Para comprovar essa relacao, vamos considerar uma sequencia periodica x[n].
Por exemplo,
x[n]· · ·· · ·
0 N 2N
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 944
Vamos denotar por x[n] a sequencia (aperiodica) correspondente a um perıodo de
x[n] :
x[n]· · ·· · ·
0 N
Ou melhor,
x[n] =
x[n] se 0 ≤ n ≤ N − 1
0 caso contrario
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 945
Como x[n] = x[n] no intervalo (0 ≤ n ≤ N − 1), temos que a Transformada de
Fourier de x[n] e dada por :
X(ejω)
=
N−1∑
n=0
x[n] e−jωn =
N−1∑
n=0
x[n] e−jωn
Comparando-se esta expressao com a equacao de analise
X[k] =
N−1∑
n=0
x[n] e−j( 2πN )kn
concluımos que X[k] = X(ejω)∣∣∣ω= 2π
Nk
⋆ Isto corresponde a amostrar a Transformada de Fourier em N frequencias
entre ω = 0 e ω = 2π com espacamento de2π
N.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 946
14.3 Propriedades da DFS
Linearidade
Se x1[n] ←DFS−−−−→ X1[k]
x2[n] ←DFS−−−−→ X2[k]
Entao : α1x1[n] + α2x2[n] ←DFS−−−−→ α1X1[k] + α2X2[k]
Nota. x1[n] e x2[n] tem o mesmo perıodo N .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 947
Exemplo 11 Seja a sequencia periodica
0
x2[n]
5
· · ·
1 2 3 4
· · ·1 1
Note que :
x2[n] = x[n] + x[n− 1]
= x[n] + x1[n]
onde x[n] e a sequencia do exemplo 7 e
x1[n] = x[n− 1] foi analisada no exemplo 8.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 948
Neste exemplo,
X2[k] =
3∑
n=0
x2[n]W kn4 =
1∑
n=0
W kn4 = 1 + W k
4
Portanto,
X2[k] = X[k] + X1[k] = 1 + W k4 = 1 + e−j(π
2 )k
Usando notacao vetorial, temos que
x2 =1
4(2 e0 + (1− j) e1 + (0) e2 + (1 + j) e3)
=1
4
2
1
1
1
1
+ (1− j)
1
j
−1
−j
+ (0)
1
−1
1
−1
+ (1 + j)
1
−j
−1
j
=
1
1
0
0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 949
Resultado,
x2 =
1
1
0
0
←DFS−−−−→
2
1− j
0
1 + j
= X2
Relembrando,
X =
1
1
1
1
, X1 =
1
−j
−1
j
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 950
Shift
Se x[n] ←DFS−−−−→ X[k]
Entao : x[n−m] ←DFS−−−−→ W kmN X[k]
Da mesma forma, devido a dualidade entre x[n] e X[k], tem-se que
W−lnN x[n] ←DFS−−−−→ X[k − l]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 951
Exemplo 12 Seja a sequencia periodica
0
x3[n]
5
· · ·
1 2 3 4
· · ·1 1
Note que x3[n] = x[n] + x[n− 3]
ou ainda, x3[n] = x2[n− 3]
onde x[n] e a sequencia do exemplo 8 e
x2[n] foi analisada no exemplo 11.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 952
Neste exemplo,
X3[k] =
3∑
n=0
x3[n]W kn4 = 1 + W 3k
4
Considerando x3[n] = x[n] + x[n− 3] ⇒ m = 3
entao,
X3[k] = X[k] + Wmk4 X[k] = 1 + W 3k
4 = 1 + e−j( 2π4 )3k
⇒ X3[k] =1, 1, 1, 1, · · ·
+1, j, −1, −j, · · ·
=2, (1 + j), 0, (1− j), · · ·
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 953
Considerando x3[n] = x2[n− 3] ⇒ m = 3
temos,
X3[k] = Wmk4 X2[k] = W 3k
4
(
1 + W k4
)
= W 3k4 + W 4k
4
Porem, W 4k4 = W 0k
4 = 1
entao
X3[k] = W 3k4 + W 0k
4 = W 3k4 + 1
⋆ Mesmo resultado!
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 954
Usando notacao vetorial, temos que
x3 =1
4(2 e0 + (1 + j) e1 + (0) e2 + (1− j) e3)
=1
4
2
1
1
1
1
+ (1 + j)
1
j
−1
−j
+ (0)
1
−1
1
−1
+ (1− j)
1
−j
−1
j
=
1
0
0
1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 955
Resultado,
x3 =
1
0
0
1
←DFS−−−−→
2
1 + j
0
1− j
= X3
Relembrando,
X =
1
1
1
1
, X2 =
2
1− j
0
1 + j
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 956
Dualidade
⋆ Sequencia aperiodica ←F−−→ funcao periodica
⋆ Sequencia periodica ←F−−→ funcao periodica
⋆ As unicas diferencas entre as equacoes de sıntese e analise sao :
• O fator 1N na equacao de sıntese.
• O expoente negativo na equacao de sıntese.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 957
Portanto, podemos reescrever a equacao de sıntese
x[n] =1
N
N−1∑
k=0
X[k] W−knN
como (trocando n por −n)
Nx[−n] =N−1∑
k=0
X[k] W knN
Fazendo-se a troca de n por k :
Nx[−k] =N−1∑
n=0
X[n] WnkN
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 958
A equacao anterior
Nx[−k] =N−1∑
n=0
X[n] WnkN
e semelhante a equacao de analise
X[k] =N−1∑
n=0
X[n] W knN
Conclusao : X[n] ←DFS−−−−→ Nx[−k]
isto e, os coeficientes da DFS da sequencia periodica X[n]
sao dados por Nx[−k].
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 959
Propriedades da simetria
⋆ Similares as da Transformada de Fourier.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 960
Convolucao periodica
Se x1[n] ←DFS−−−−→ X1[k]
x2[n] ←DFS−−−−→ X2[k]
Entao :N−1∑
m=0
x1[m] x2[n−m] ←DFS−−−−→ X1[k] X2[k]
⋆ O produto das funcoes no domınio da frequencia corresponde a convolucao
das funcoes no domınio do tempo.
⋆ Como as sequencias envolvidas tem perıodo N , a convolucao e feita somente
em um perıodo, daı o nome de convolucao periodica .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 961
Resumo das propriedades
⋆ As propriedades da DFS estao resumidas na Tabela 8.1,
(Oppenheim & Schafer 1989), pag. 525.
Notacao : x[n]DFS−−−−→ X[k]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 962
Sequencia DFS
1 x[n] X[k], perıodo N
2 xi[n] Xi[k], perıodo N
3 ax1[n] + bx2[n] aX1[k] + bX2[k]
4 X[n] N x[−k]
5 x[n−m] W kmN X[k]
6 W−lnN x[n] X[k − l]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 963
Sequencia DFS
7
N−1∑
m=0
x1[m] x2[n−m] X1[k] X2[k]
8 x1[n] x2[n]1
N
N−1∑
m=0
X1[l] X2[k − l]
9 x∗[n] X∗[−k]
10 x∗[−n] X∗[k]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 964
Sequencia DFS
11 Re
x[n]
Xe[k]
12 Im
x[n]
Xo[k]
13 xe[n] Re
X[k]
14 xo[n] Im
X[k]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 965
14.4 Transformada discreta de Fourier (DFT)
Vamos considerar uma sequencia finita x[n] com comprimento N .
Propriedade : x[n] = 0, se n /∈ [0, N − 1]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 966
Exemplo 13 Sequencia finita
0
x[n]· · ·
1 2
· · ·
⋆ Esta e uma sequencia de comprimento N ≥ 3 .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 967
⋆ Sempre e possıvel associar uma sequencia periodica x[n] a sequencia
aperiodica x[n] :
x[n] =
∞∑
r=−∞
x[n + rN ]
Notacao alternativa :
x[n] = x[(n modulo N)
]
ou ainda
x[n] = x[((n))N
]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 968
⋆ Tambem podemos recuperar a sequencia finita original x[n] :
x[n] =
x[n] se n ∈ [0, N − 1]
0 caso contrario
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 969
Lembrando que
x[n]︸︷︷︸
Perıodo N
←DFS−−−−→ X[k]︸︷︷︸
Perıodo N
Definicao. Transformada discreta de Fourier (DFT)
x[n] ←DFS−−−−→ X[k] =
X[k] se k ∈ [0, N − 1]
0 caso contrario
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 970
Notacao :
X[k] = X[(k modulo N)
]= X
[((k))N
]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 971
Portanto, as equacoes de sıntese e analise da DFT sao :
Equacao de sıntese: x[n] =1
N
N−1∑
k=0
X[k] W−knN
Equacao de analise: X[k] =
N−1∑
n=0
x[n] W knN
Notacao :
x[n] ←DFT−−−−→ X[k]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 972
Exemplo 14
Calcule a convolucao circular das sequencias finitas dadas abaixo:
x1[n] =
1, 2, 1, 2, 1, 2
,
x2[n] =−1, 1,−1, 1,−1, 1
,
utilizando:
(a) Calculo direto.
(b) Transformada Discreta de Fourier (DFT).
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 973
(a) Calculo direto da convolucao circular:
x1[n] =
1, 2, 1, 2, 1, 2
x2[n] =−1, 1,−1, 1,−1, 1
x2[0]x1[n] =−1,−2,−1,−2,−1,−2
x2[1]x1[n− 1] =
2, 1, 2, 1, 2, 1
x2[2]x1[n− 2] =−1,−2,−1,−2,−1,−2
x2[3]x1[n− 3] =
2, 1, 2, 1, 2, 1
x2[4]x1[n− 4] =−1,−2,−1,−2,−1,−2
x2[5]x1[n− 5] =
2, 1, 2, 1, 2, 1
Resposta: x1[n] ⊛ x2[n] =
3,−3, 3,−3, 3,−3
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 974
(b) Para calcular a convolucao circular via DFT aplicamos a propriedade:
x1[n] ←DFT−−−−→ X1[k]
x2[n] ←DFT−−−−→ X2[k]
x1[n] ⊛ x2[n] ←DFT−−−−→ X1[k] X2[k]
Por ser mais simples, utilizamos notacao matricial.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 975
Para N = 6 , temos
W 06
W 16W 2
6
W 36
W 46 W 5
6
Figura. Cırculo unitario (N = 6).
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 976
Assim, obtemos a DFT de x1[n] como:
X1 = F6 x1 =
1 1 1 1 1 1
1 W 16 W 2
6 W 36 W 4
6 W 56
1 W 26 W 4
6 W 06 W 2
6 W 46
1 W 36 W 0
6 W 36 W 0
6 W 36
1 W 46 W 2
6 W 06 W 4
6 W 26
1 W 56 W 4
6 W 36 W 2
6 W 16
x1
=
1 1 1 1 1 1
1 W 16 W 2
6 −1 W 46 W 5
6
1 W 26 W 4
6 1 W 26 W 4
6
1 −1 1 −1 1 −1
1 W 46 W 2
6 1 W 46 W 2
6
1 W 56 W 4
6 −1 W 26 W 1
6
1
2
1
2
1
2
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 977
Porem, devido a simetria:
W 46 = −W 1
6
W 26 = −W 5
6
Portanto,
X1 =
1 1 1 1 1 1
1 W 16 −W 5
6 −1 −W 16 W 5
6
1 −W 56 −W 1
6 1 −W 56 −W 1
6
1 −1 1 −1 1 −1
1 −W 16 −W 5
6 1 −W 16 −W 5
6
1 W 56 −W 1
6 −1 −W 56 W 1
6
1
2
1
2
1
2
=
9
−1 + W 16 + W 5
6
3(1−W 1
6 −W 56
)
−3
3(1−W 1
6 −W 56
)
−1 + W 16 + W 5
6
⋆ Somente W 16 e W 5
6 .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 978
Como
W 16 = e−j 60
W 56 = ej 60
e facil verificar que
−1 + W 16 + W 5
6 = 0
Portanto,
X1 =
9
−1 + W 16 + W 5
6
3(1−W 1
6 −W 56
)
−3
3(1−W 1
6 −W 56
)
−1 + W 16 + W 5
6
=
9
0
0
−3
0
0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 979
A DFT da sequencia x2[n] e obtida de forma semelhante:
X2 = F6 x2 =
1 1 1 1 1 1
1 W 16 −W 5
6 −1 −W 16 W 5
6
1 −W 56 −W 1
6 1 −W 56 −W 1
6
1 −1 1 −1 1 −1
1 −W 16 −W 5
6 1 −W 16 −W 5
6
1 W 56 −W 1
6 −1 −W 56 W 1
6
−1
1
−1
1
−1
1
=
0
2(1−W 1
6 −W 56
)
0
−6
0
2(1−W 1
6 −W 56
)
=
0
0
0
−6
0
0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 980
Portanto,
X3 = X1 X2 =
9
0
0
−3
0
0
0
0
0
−6
0
0
=
0
0
0
18
0
0
⋆ Observe que o produto e elemento a elemento !!
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
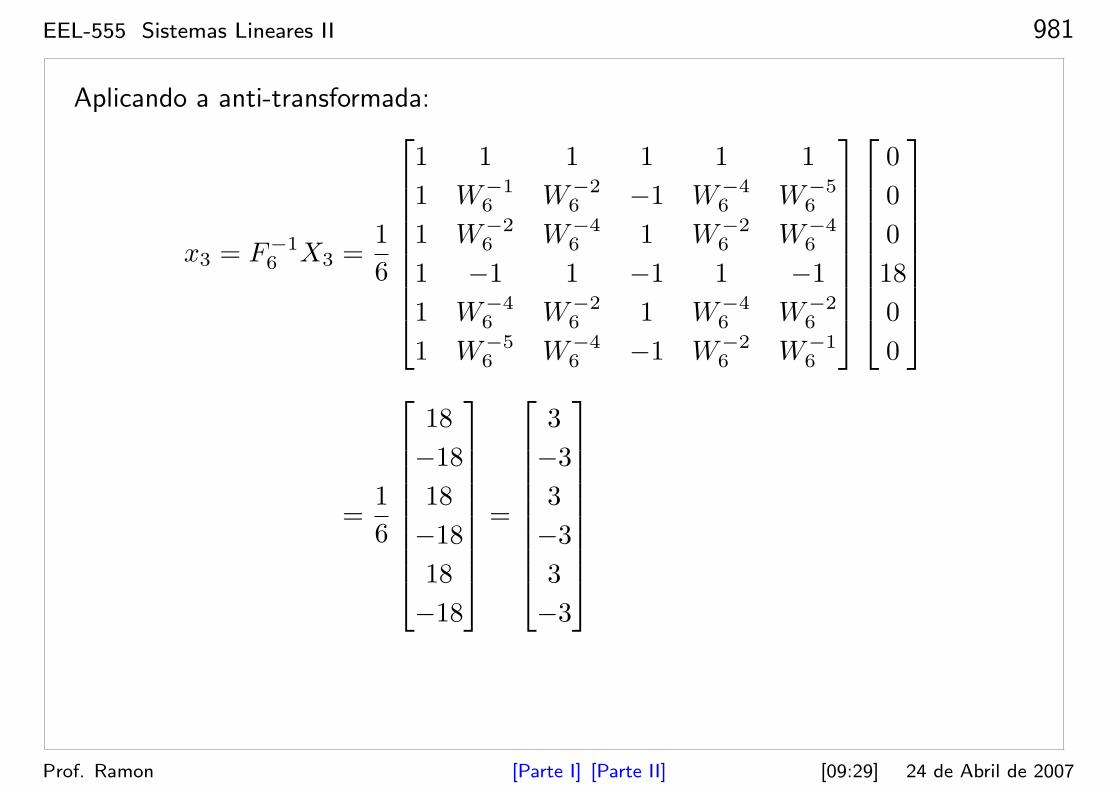
EEL-555 Sistemas Lineares II 981
Aplicando a anti-transformada:
x3 = F−16 X3 =
1
6
1 1 1 1 1 1
1 W−16 W−2
6 −1 W−46 W−5
6
1 W−26 W−4
6 1 W−26 W−4
6
1 −1 1 −1 1 −1
1 W−46 W−2
6 1 W−46 W−2
6
1 W−56 W−4
6 −1 W−26 W−1
6
0
0
0
18
0
0
=1
6
18
−18
18
−18
18
−18
=
3
−3
3
−3
3
−3
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

UFRJ Universidade Federal do Rio de Janeiro
EE Escola de Engenharia
DEL Departamento de Eletronica
EEL-555 Sistemas Lineares II
Capıtulo # 15
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 983
15 Fast Fourier Transform (FFT)
Conteudo
(a) ...
(b) ...
(c) ...
(d) Exemplos
(e) Exercıcios
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 984
Referencias para este capıtulo:
(a) Gilbert Strang,
Linear algebra and its applications,
Harcourt Brace Jovanovich, Publishers, 1988.
(b) J. Proakis e D. Manolakis,
Digital Signal Processing,
Prentice Hall, 1996.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 985
15.1 Forma matricial da DFT
Teorema da Algebra Linear :
Toda transformacao linear tem uma representacao matricial.
⋆ A DFT e uma transformacao linear, entao existe uma representacao
matricial .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
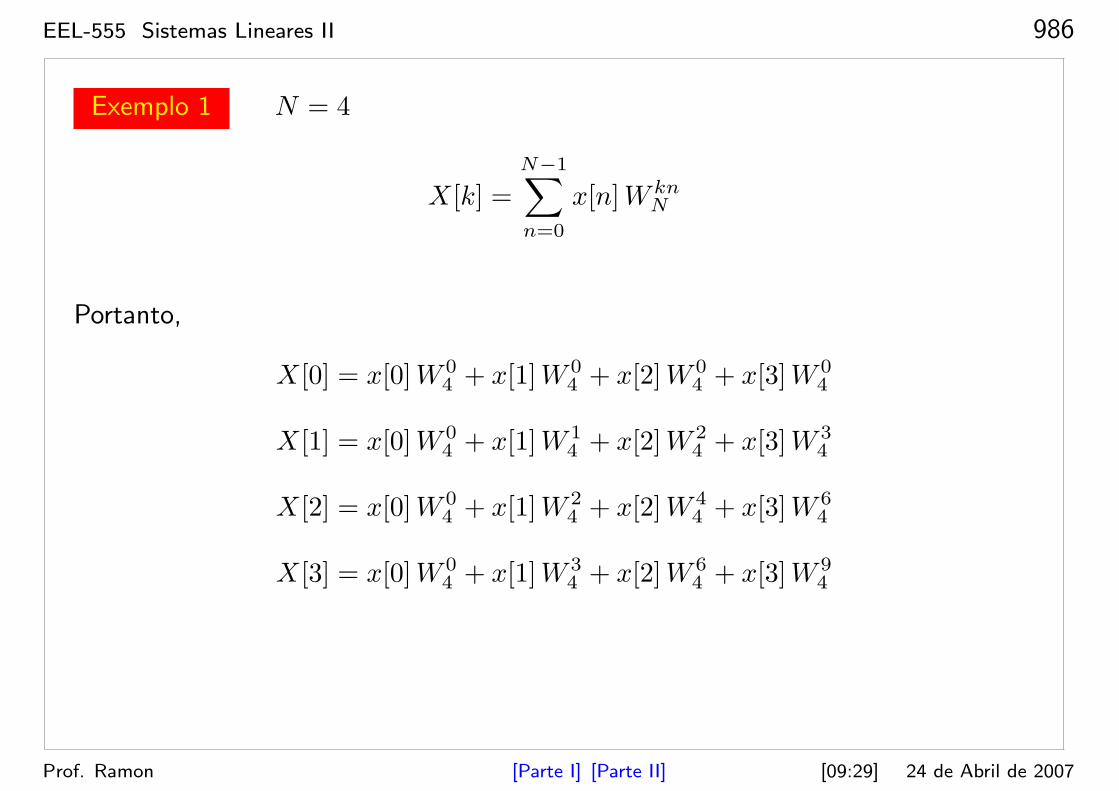
EEL-555 Sistemas Lineares II 986
Exemplo 1 N = 4
X[k] =
N−1∑
n=0
x[n] W knN
Portanto,
X[0] = x[0]W 04 + x[1]W 0
4 + x[2]W 04 + x[3]W 0
4
X[1] = x[0]W 04 + x[1]W 1
4 + x[2]W 24 + x[3]W 3
4
X[2] = x[0]W 04 + x[1]W 2
4 + x[2]W 44 + x[3]W 6
4
X[3] = x[0]W 04 + x[1]W 3
4 + x[2]W 64 + x[3]W 9
4
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
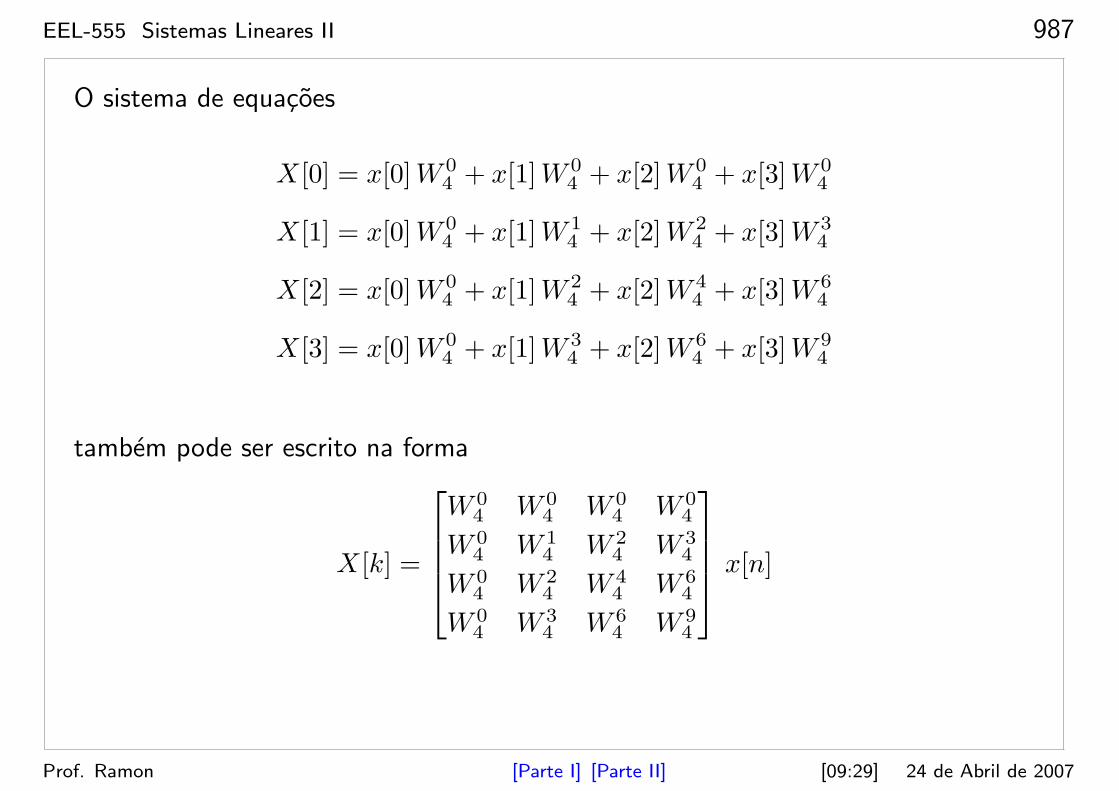
EEL-555 Sistemas Lineares II 987
O sistema de equacoes
X[0] = x[0]W 04 + x[1]W 0
4 + x[2]W 04 + x[3]W 0
4
X[1] = x[0]W 04 + x[1]W 1
4 + x[2]W 24 + x[3]W 3
4
X[2] = x[0]W 04 + x[1]W 2
4 + x[2]W 44 + x[3]W 6
4
X[3] = x[0]W 04 + x[1]W 3
4 + x[2]W 64 + x[3]W 9
4
tambem pode ser escrito na forma
X[k] =
W 04 W 0
4 W 04 W 0
4
W 04 W 1
4 W 24 W 3
4
W 04 W 2
4 W 44 W 6
4
W 04 W 3
4 W 64 W 9
4
x[n]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 988
Ou melhor,
X[k] = F x[n] , F =
W 04 W 0
4 W 04 W 0
4
W 04 W 1
4 W 24 W 3
4
W 04 W 2
4 W 44 W 6
4
W 04 W 3
4 W 64 W 9
4
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
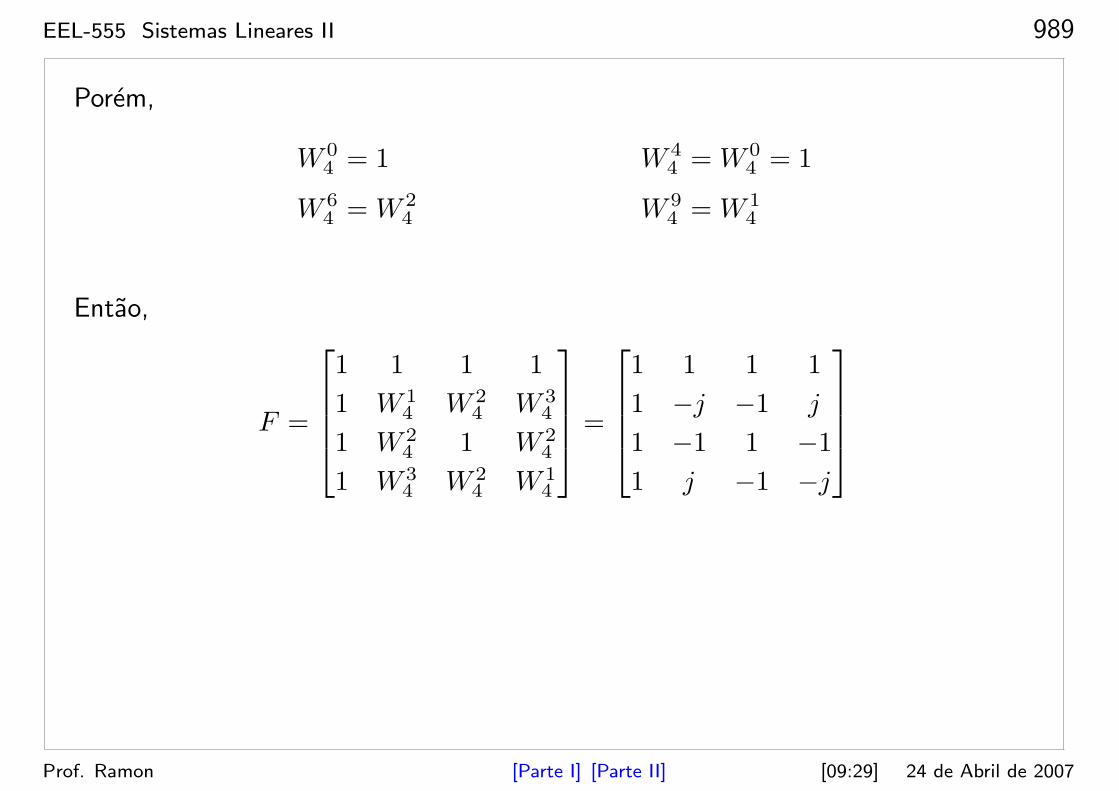
EEL-555 Sistemas Lineares II 989
Porem,
W 04 = 1 W 4
4 = W 04 = 1
W 64 = W 2
4 W 94 = W 1
4
Entao,
F =
1 1 1 1
1 W 14 W 2
4 W 34
1 W 24 1 W 2
4
1 W 34 W 2
4 W 14
=
1 1 1 1
1 −j −1 j
1 −1 1 −1
1 j −1 −j
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
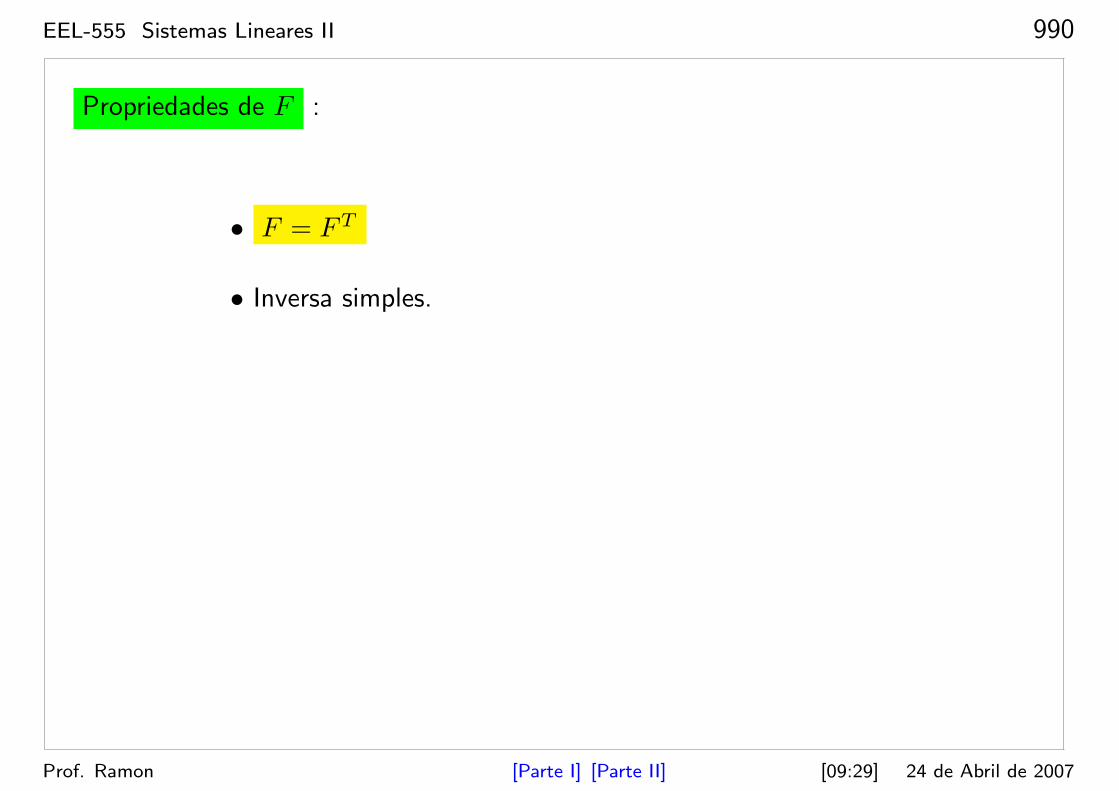
EEL-555 Sistemas Lineares II 990
Propriedades de F :
• F = FT
• Inversa simples.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
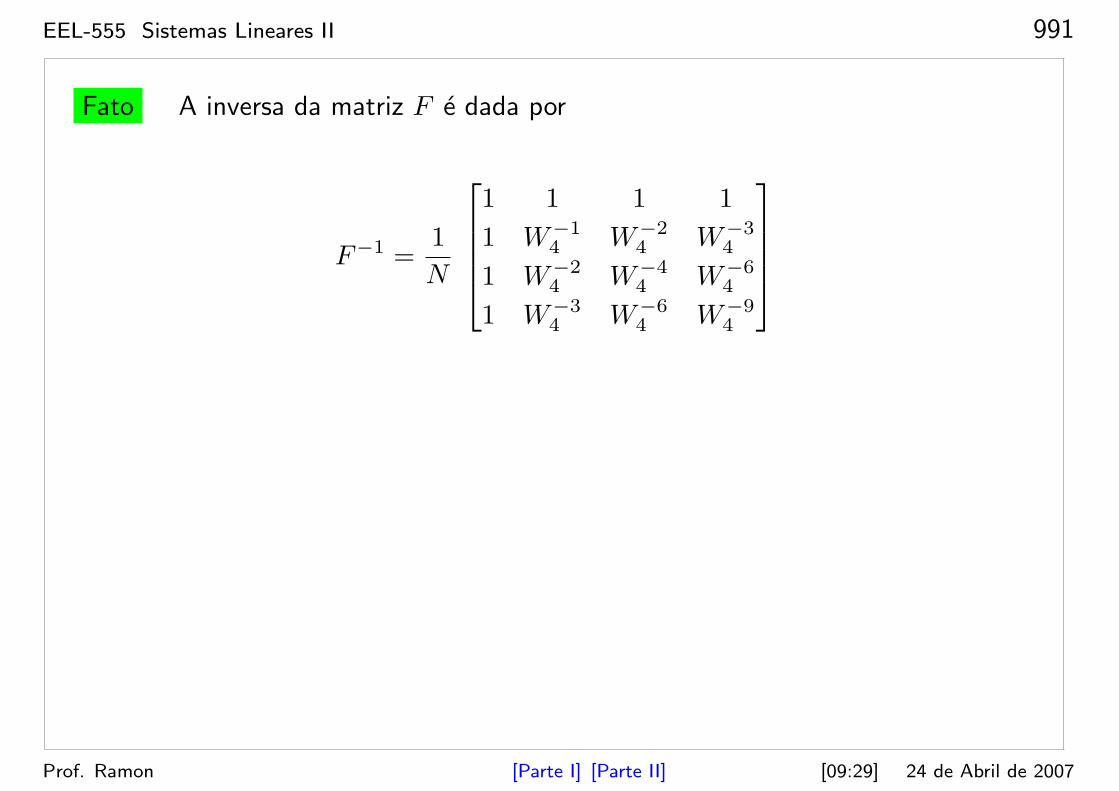
EEL-555 Sistemas Lineares II 991
Fato A inversa da matriz F e dada por
F−1 =1
N
1 1 1 1
1 W−14 W−2
4 W−34
1 W−24 W−4
4 W−64
1 W−34 W−6
4 W−94
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 992
Verificacao :
F−1 =1
4
1 1 1 1
1 j −1 −j
1 −1 1 −1
1 −j −1 j
F−1 F =1
4
1 1 1 1
1 j −1 −j
1 −1 1 −1
1 −j −1 j
1 1 1 1
1 −j −1 j
1 −1 1 −1
1 j −1 −j
= I
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 993
Notacao E usual denotar
F4 =
1 1 1 1
1 −j −1 j
1 −1 1 −1
1 j −1 −j
Assim,
F2 =
[
1 1
1 −1
]
F3 =
1 1 1
1 e2π/3 e4π/3
1 e4π/3 e8π/3
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
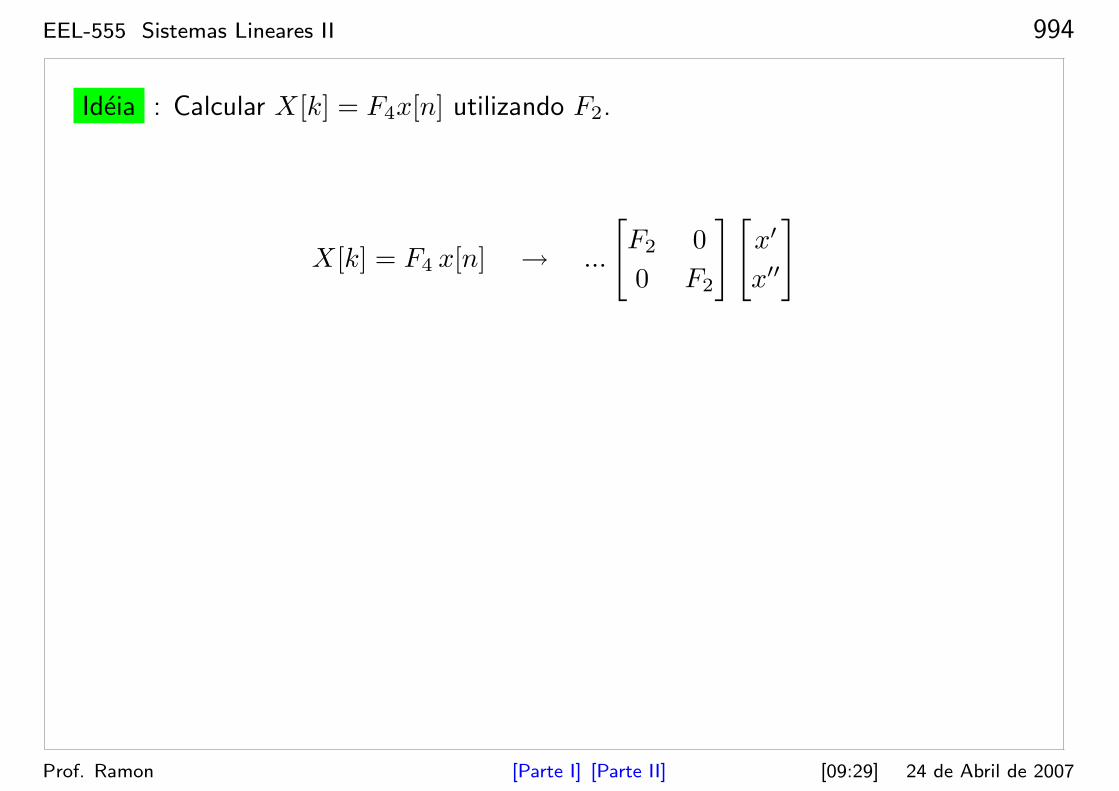
EEL-555 Sistemas Lineares II 994
Ideia : Calcular X[k] = F4x[n] utilizando F2.
X[k] = F4 x[n] → ...
[
F2 0
0 F2
][
x′
x′′
]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 995
Resultado Cooley & Tukey, 1965
x[n] →[
x′[n]
x′′[n]
]
→
X ′[k] = FN/2 x′[n]
X ′′[k] = FN/2 x′′[n]
X[k] = X ′[k] + W kN X ′′[k]
(k = 0, · · · , N/2− 1
)
X[k + N/2− 1] = X ′[k]−W kN X ′′[k]
(k = 0, · · · , N/2− 1
)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 996
Exemplo 2 N = 4
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 997
Exemplo 3 N = 8
Calcular a FFT da sequencia
x[n] =−2, 1, −1, 1, −2, 1, −1, 1
,
utilizando:
(a) A representacao matricial da equacao de analise.
(b) O algoritmo FFT.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
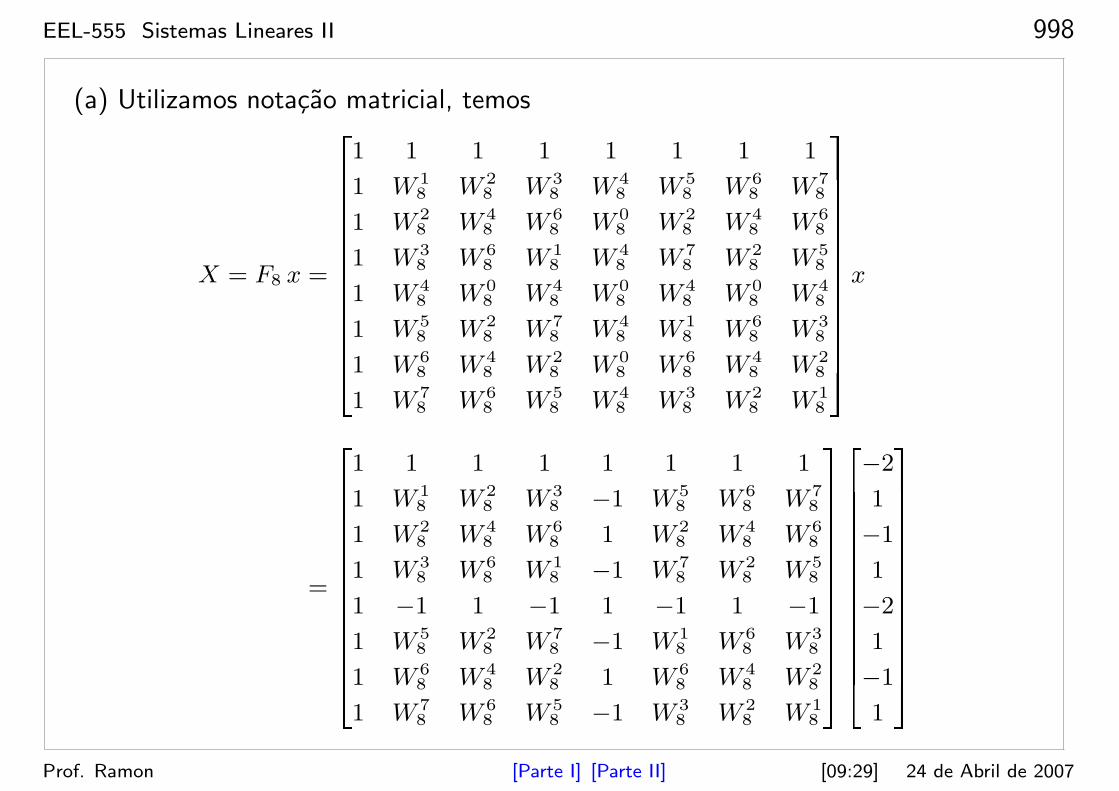
EEL-555 Sistemas Lineares II 998
(a) Utilizamos notacao matricial, temos
X = F8 x =
2666666666666641 1 1 1 1 1 1 1
1 W 18 W 2
8 W 38 W 4
8 W 58 W 6
8 W 78
1 W 28 W 4
8 W 68 W 0
8 W 28 W 4
8 W 68
1 W 38 W 6
8 W 18 W 4
8 W 78 W 2
8 W 58
1 W 48 W 0
8 W 48 W 0
8 W 48 W 0
8 W 48
1 W 58 W 2
8 W 78 W 4
8 W 18 W 6
8 W 38
1 W 68 W 4
8 W 28 W 0
8 W 68 W 4
8 W 28
1 W 78 W 6
8 W 58 W 4
8 W 38 W 2
8 W 18
377777777777775x
=
2666666666666641 1 1 1 1 1 1 1
1 W 18 W 2
8 W 38 −1 W 5
8 W 68 W 7
8
1 W 28 W 4
8 W 68 1 W 2
8 W 48 W 6
8
1 W 38 W 6
8 W 18 −1 W 7
8 W 28 W 5
8
1 −1 1 −1 1 −1 1 −1
1 W 58 W 2
8 W 78 −1 W 1
8 W 68 W 3
8
1 W 68 W 4
8 W 28 1 W 6
8 W 48 W 2
8
1 W 78 W 6
8 W 58 −1 W 3
8 W 28 W 1
8
377777777777775266666666666664
−2
1
−1
1
−2
1
−1
1
377777777777775Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 999
Utilizando as identidades
W 08 + W 4
8 = 0
W 18 + W 5
8 = 0
W 28 + W 6
8 = 0
W 38 + W 7
8 = 0
o resultado da multiplicacao e:
X =
−2
0
−2
0
−10
0
−2
0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 1000
Resposta (em notacao vetorial):
X =
−2
0
−2
0
−10
0
−2
0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
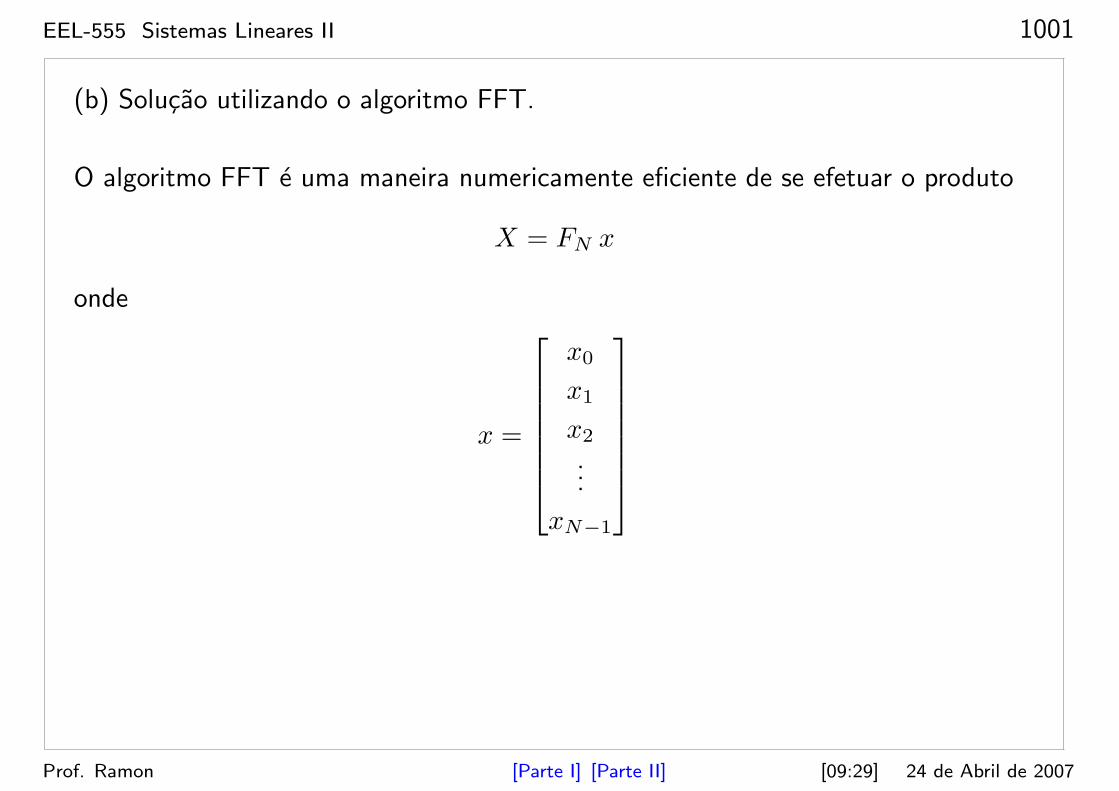
EEL-555 Sistemas Lineares II 1001
(b) Solucao utilizando o algoritmo FFT.
O algoritmo FFT e uma maneira numericamente eficiente de se efetuar o produto
X = FN x
onde
x =
x0
x1
x2
...
xN−1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 1002
Algoritmo FFT:
Passo 1: Dividir o vetor x da seguinte forma:
x(1) =
x0
x2
...
xN−2
x(2) =
x1
x3
...
xN−1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
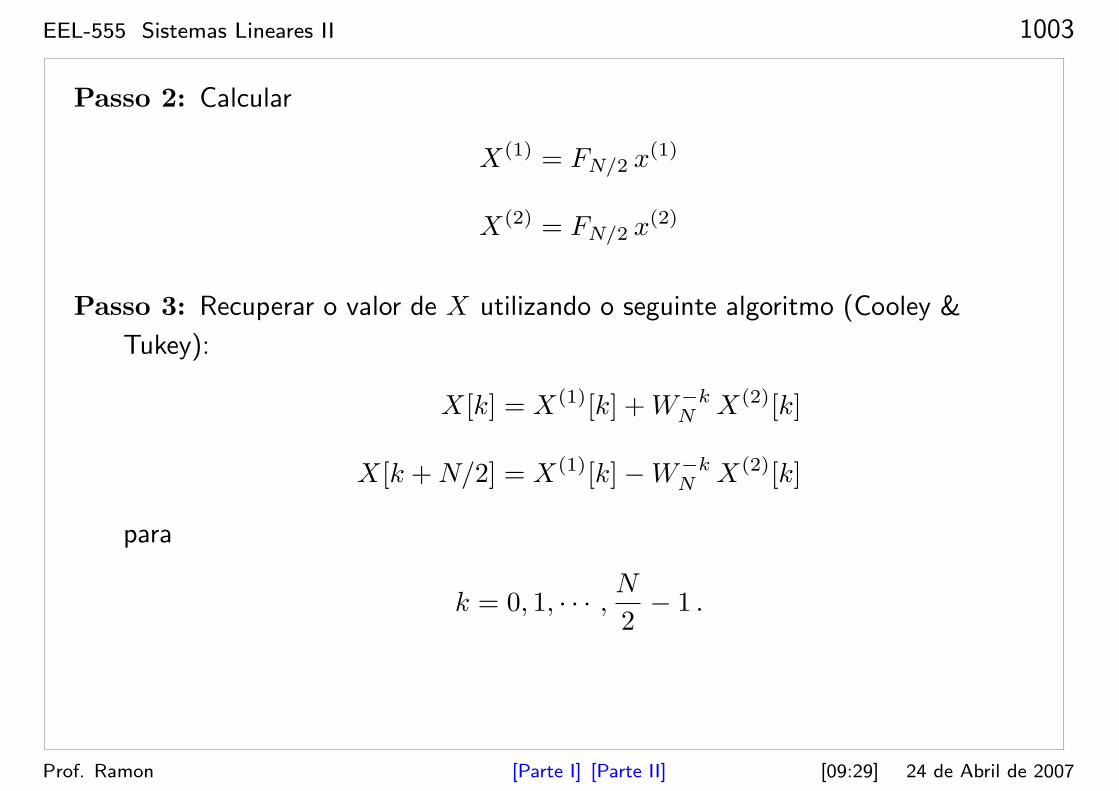
EEL-555 Sistemas Lineares II 1003
Passo 2: Calcular
X(1) = FN/2 x(1)
X(2) = FN/2 x(2)
Passo 3: Recuperar o valor de X utilizando o seguinte algoritmo (Cooley &
Tukey):
X[k] = X(1)[k] + W−kN X(2)[k]
X[k + N/2] = X(1)[k]−W−kN X(2)[k]
para
k = 0, 1, · · · , N
2− 1 .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 1004
Para a sequencia da questao, N = 8. Assim, aplicamos o algoritmo FFT
sucessivamente da seguinte forma.
Representacao vetorial da sequencia x[n]:
x =
−2
1
−1
1
−2
1
−1
1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 1005
Passo 1: Dividimos o vetor x ∈ R8 em 2 vetores pertencentes a R4
x(1) =
−2
−1
−2
−1
x(2) =
1
1
1
1
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 1006
Em seguida, dividimos cada um dos vetores resultantes em vetores pertencentes a
R2
x(1,1) =
[
−2
−2
]
x(1,2) =
[
−1
−1
]
x(2,1) =
[
1
1
]
x(2,2) =
[
1
1
]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
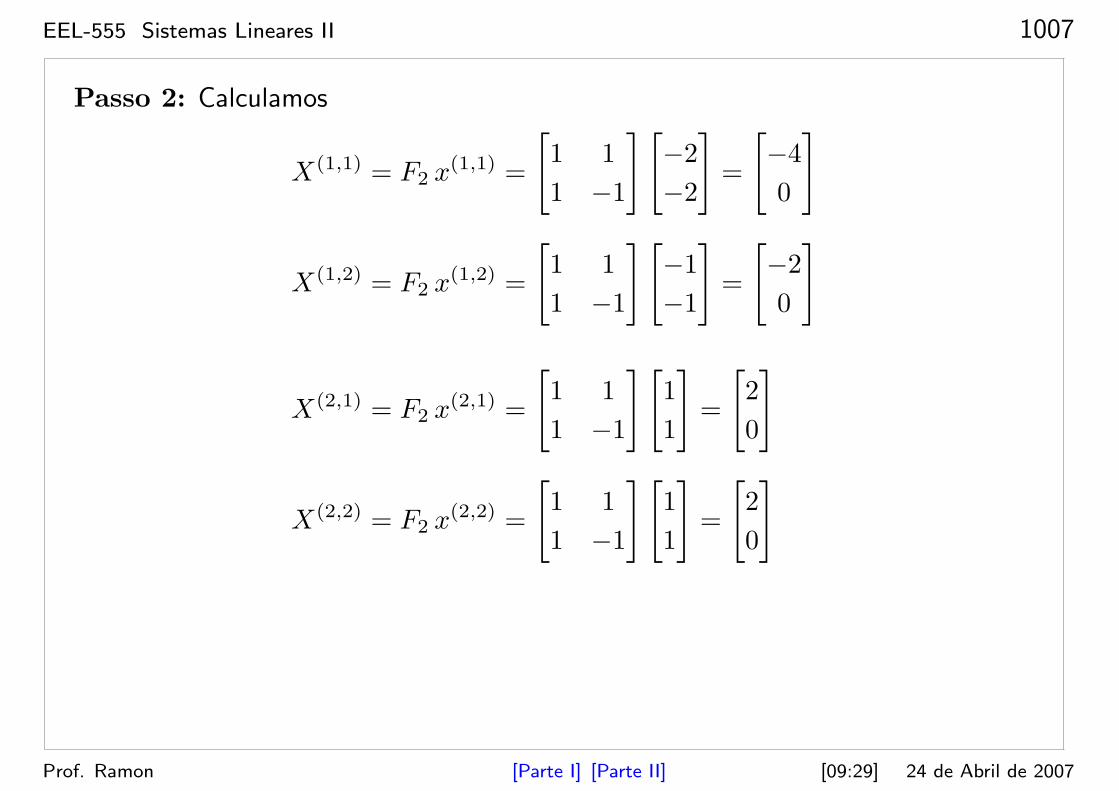
EEL-555 Sistemas Lineares II 1007
Passo 2: Calculamos
X(1,1) = F2 x(1,1) =
[
1 1
1 −1
][
−2
−2
]
=
[
−4
0
]
X(1,2) = F2 x(1,2) =
[
1 1
1 −1
][
−1
−1
]
=
[
−2
0
]
X(2,1) = F2 x(2,1) =
[
1 1
1 −1
][
1
1
]
=
[
2
0
]
X(2,2) = F2 x(2,2) =
[
1 1
1 −1
][
1
1
]
=
[
2
0
]
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 1008
Passo 3: Recuperamos inicialmente os vetores X(1) e X(2) utilizando o algoritmo
de Cooley & Tukey para (k = 0, 1)
X(1)[k] = X(1,1)[k] + W−k4 X(1,2)[k] ,
X(1)[k + 2] = X(1,1)[k]−W−k4 X(1,2)[k] ,
X(2)[k] = X(2,1)[k] + W−k4 X(2,2)[k] ,
X(2)[k + 2] = X(2,1)[k]−W−k4 X(2,2)[k] .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
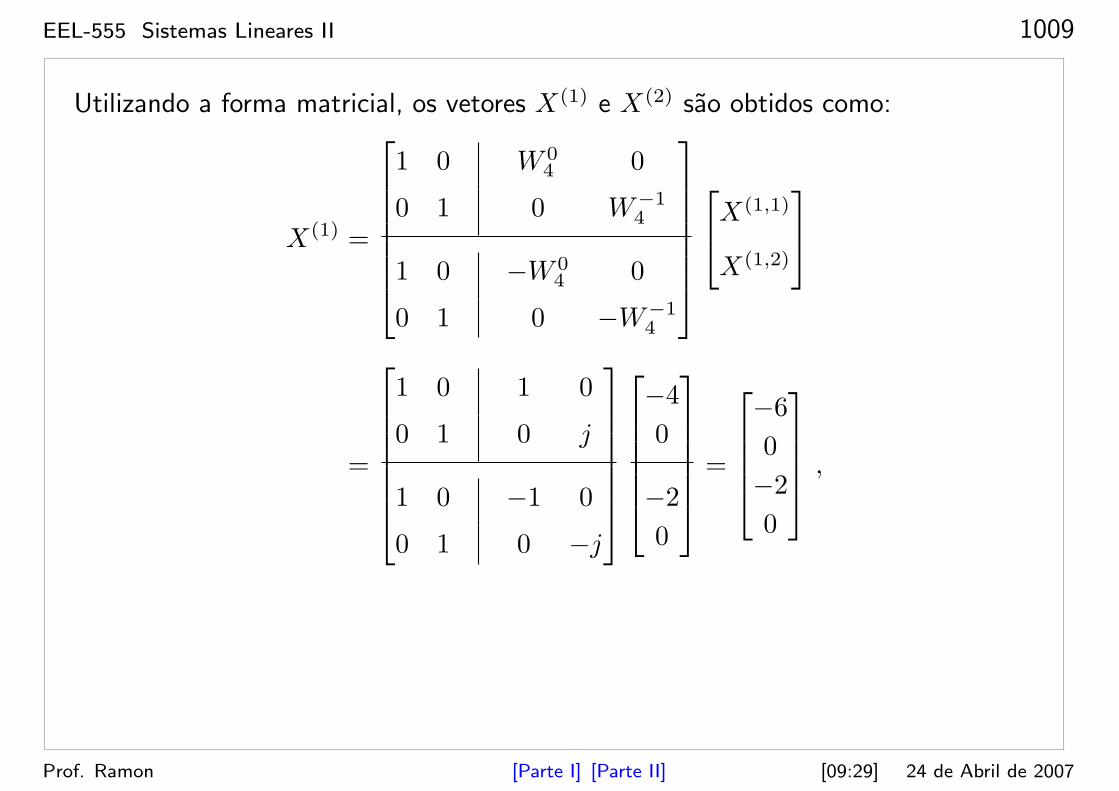
EEL-555 Sistemas Lineares II 1009
Utilizando a forma matricial, os vetores X(1) e X(2) sao obtidos como:
X(1) =
1 0 W 04 0
0 1 0 W−14
1 0 −W 04 0
0 1 0 −W−14
X(1,1)
X(1,2)
=
1 0 1 0
0 1 0 j
1 0 −1 0
0 1 0 −j
−4
0
−2
0
=
−6
0
−2
0
,
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
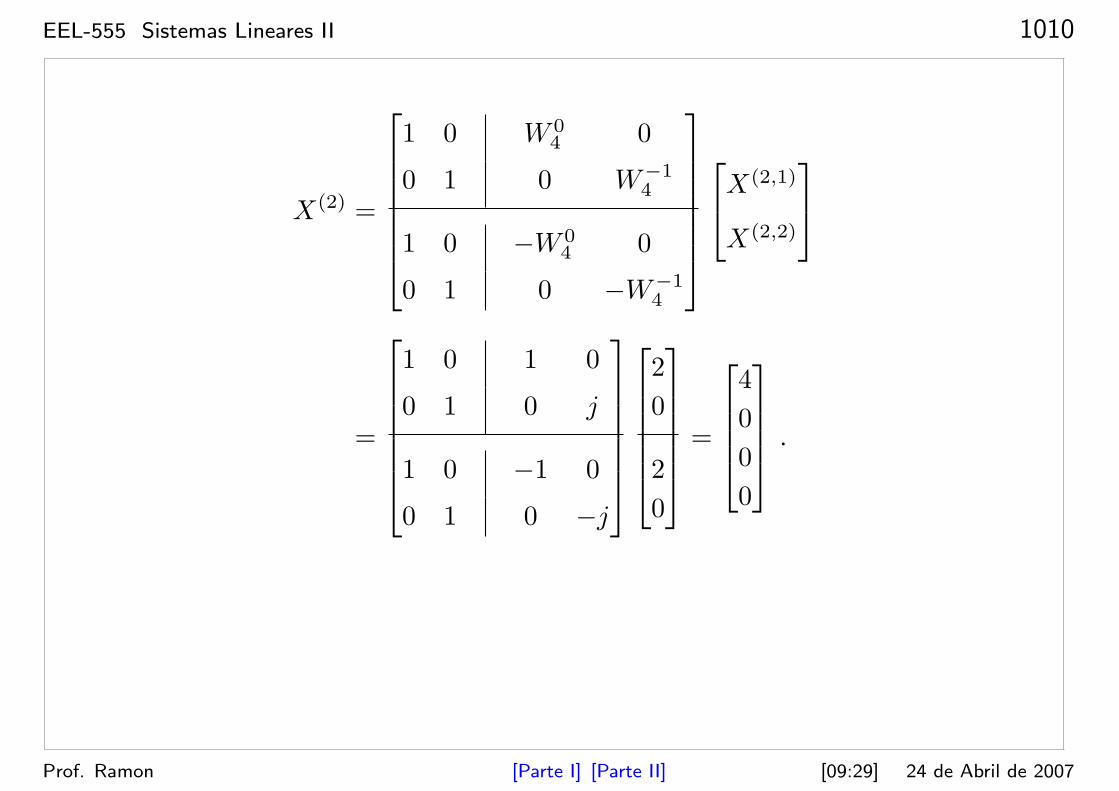
EEL-555 Sistemas Lineares II 1010
X(2) =
1 0 W 04 0
0 1 0 W−14
1 0 −W 04 0
0 1 0 −W−14
X(2,1)
X(2,2)
=
1 0 1 0
0 1 0 j
1 0 −1 0
0 1 0 −j
2
0
2
0
=
4
0
0
0
.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 1011
Em seguida, aplicamos novamente o algoritmo de Cooley & Tukey para recuperar o
vetor X
X[k] = X(1)[k] + W−k8 X(2)[k] ,
X[k + 4] = X(1)[k]−W−k8 X(2)[k] ,
onde (k = 0, 1, 2, 3).
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
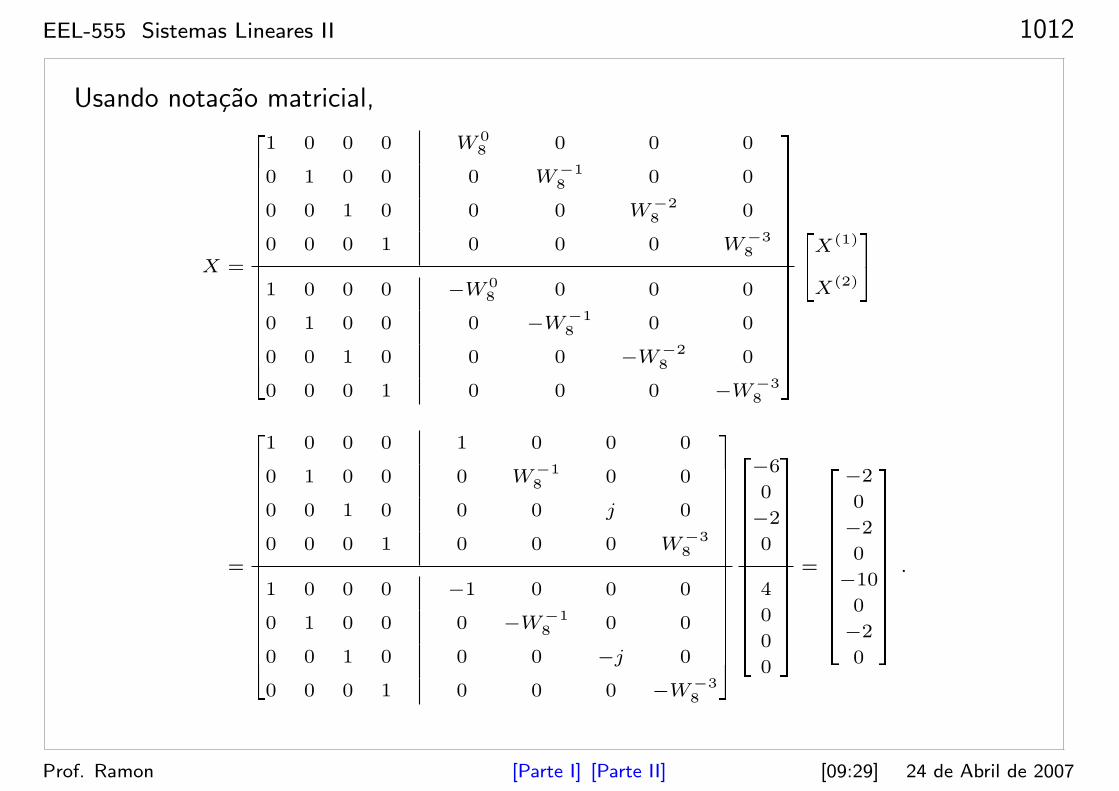
EEL-555 Sistemas Lineares II 1012
Usando notacao matricial,
X =2666666666666666664
1 0 0 0 W 08 0 0 0
0 1 0 0 0 W−18 0 0
0 0 1 0 0 0 W−28 0
0 0 0 1 0 0 0 W−38
1 0 0 0 −W 08 0 0 0
0 1 0 0 0 −W−18 0 0
0 0 1 0 0 0 −W−28 0
0 0 0 1 0 0 0 −W−38
377777777777777777524X(1)
X(2)
35=
26666666666666666641 0 0 0 1 0 0 0
0 1 0 0 0 W−18 0 0
0 0 1 0 0 0 j 0
0 0 0 1 0 0 0 W−38
1 0 0 0 −1 0 0 0
0 1 0 0 0 −W−18 0 0
0 0 1 0 0 0 −j 0
0 0 0 1 0 0 0 −W−38
3777777777777777775266666666666664
−6
0
−2
0
4
0
0
0
377777777777775 =
2666666666664 −2
0
−2
0
−10
0
−2
0
3777777777775 .
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 1013
Resposta (em notacao vetorial):
X =
−2
0
−2
0
−10
0
−2
0
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

EEL-555 Sistemas Lineares II 1014
15.2 Diagrama Butterfly
(...)
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007
EEL-555 Sistemas Lineares II 1015
Referencias
Oppenheim, A. V. & Schafer, R. W. (1989), Discrete–Time Signal Processing,
Prentice–Hall, Englewood Cliffs, NJ.
C. T. Chen (1999), Linear Systems Theory and Design , 3rd edn, Oxford.
William L. Brogan (1991), Modern Control Theory , 3rd edn, Prentice Hall.
Slotine, J. J. E. & Li, W. (1991), Applied Nonlinear Control, Prentice–Hall
International, Inc.
Strang, G. (1988), Linear Algebra and Its Applications, Harcourt Brace Jovanovich,
Publishers.
Prof. Ramon [Parte I] [Parte II] [09:29] 24 de Abril de 2007

















![1. Fundamentos [Modo de Compatibilidade] - inf.ufsc.brfrank/INE5418/1.Fundamentos-Slides.pdf · Fundamentos de Computação Distribuída ... redes de computadores Sistemas computacionais](https://img.document.onl/doc/110x75/5a79f06d7f8b9a3d058be681/1-fundamentos-modo-de-compatibilidade-infufscbr-frankine54181fundamentos-.jpg)