Embed Size (px)
Citation preview
Universidade Federal do Rio Grande do Norte
Centro de Tecnologia
Programa de Pos-Graduacao em Engenharia Eletrica
Uma Proposta de um Controlador Adaptativo por
Posicionamento de Polos e Estrutura Variavel
Francisco das Chagas da Silva Junior
Orientador: Prof. Dr. Aldayr Dantas de Araujo
Natal/RN - Brasil
Julho de 2005

Universidade Federal do Rio Grande do Norte
Centro de Tecnologia
Programa de Pos-Graduacao em Engenharia Eletrica
Uma Proposta de um Controlador Adaptativo por
Posicionamento de Polos e Estrutura Variavel
Francisco das Chagas da Silva Junior
Dissertacao submetida ao Programa de Pos-
Graduacao em Engenharia Eletrica da Uni-
versidade Federal do Rio Grande do Norte
como parte dos requisitos para a obtencao
do grau de Mestre em Ciencias.
Orientador: Prof. Dr. Aldayr Dantas de Araujo
Natal/RN - Brasil
Julho de 2005

Ao meu pai - Francisco Chagas
A minha mae - Ieda Maria
Ao meu irmao - Rodrigo Marcio
Ao meu pai - Francisco Chagas
A minha mae - Ieda Maria
Ao meu irmao - Rodrigo Marcio
Ao meu pai - Francisco Chagas
A minha mae - Ieda Maria
Ao meu irmao - Rodrigo Marcio
Ao meu pai - Francisco Chagas
A minha mae - Ieda Maria
Ao meu irmao - Rodrigo Marcio
Ao meu pai - Francisco Chagas
A minha mae - Ieda Maria
Ao meu irmao - Rodrigo Marcio
Ao meu pai - Francisco Chagas
A minha mae - Ieda Maria
Ao meu irmao - Rodrigo Marcio
i

Agradecimentos
A Deus pelo dom da vida e pela conquista de mais esta vitoria.
Ao Professor Aldayr Dantas de Araujo, pelo incentivo e pela sua brilhante orientacao
academica.
A todos os meus familiares, que puderam me dar forca e tranquilidade para chegar
ate aqui.
Aos amigos Josenalde, Plınio, Maximiliano, Liviane, Marcos, Andre, Iuri e Rosciano
que me ajudaram sempre que precisei nas tarefas do laboratorio, necessarias para a cons-
trucao deste trabalho.
A todos os professores do DCA e do DEE que me transmitiram seus conhecimentos e
experiencias profissionais durante este perıodo.
A todos os funcionarios da UFRN, que direta ou indiretamente, colaboraram para a
realizacao deste trabalho.
Finalmente, a todos que, de alguma forma, contribuıram com este trabalho, mas que
aqui nao foram citados.
ii

Conteudo
Lista de Figuras vi
Lista de Tabelas vii
Resumo viii
Abstract ix
Glossario de Termos x
1 Introducao 1
1.1 Controle Adaptativo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.1 Definicao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.2 Controle Adaptativo Direto e Indireto . . . . . . . . . . . . . . . . 2
1.1.3 Escalonamento de Ganhos . . . . . . . . . . . . . . . . . . . . . . . 5
1.1.4 Controle Adaptativo por Modelo de Referencia . . . . . . . . . . . . 6
1.1.5 Controle Adaptativo por Posicionamento de Polos . . . . . . . . . . 7
1.2 Sistemas com Estrutura Variavel . . . . . . . . . . . . . . . . . . . . . . . 9
1.3 Controle Adaptativo por Posicionamento de Polos e Estrutura Variavel . . 9
1.4 Estrutura do Trabalho . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2 Controle Adaptativo por Posicionamento de Polos 11
2.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2 PPC: Parametros da Planta Conhecidos . . . . . . . . . . . . . . . . . . . 12
2.2.1 Descricao do Problema . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.2.2 Metodo Polinomial . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
iii

3 Sistemas com Estrutura Variavel 17
3.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.2 Descricao Geral . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.3 Controle Equivalente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.4 Solucao de Filippov . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
4 Controle Adaptativo por Posicionamento de Polos e Estrutura Variavel 23
4.1 Introducao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.2 Descricao do Metodo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.3 Prova de Estabilidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.4 Calculo dos Parametros do Controlador . . . . . . . . . . . . . . . . . . . . 26
5 Aplicacao do Controlador 29
5.1 Planta de Primeira Ordem Instavel . . . . . . . . . . . . . . . . . . . . . . 29
5.1.1 Simulacoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
5.2 Motor de Inducao Trifasico . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
5.2.1 Modelagem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
5.2.2 Parametros do Motor de Inducao . . . . . . . . . . . . . . . . . . . 35
5.2.3 Simulacoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
5.2.4 Sistema de Acionamento . . . . . . . . . . . . . . . . . . . . . . . . 39
5.2.5 Implementacao Pratica . . . . . . . . . . . . . . . . . . . . . . . . . 40
6 Conclusoes e Perspectivas 42
A Modelos Entrada/Saıda 43
A.1 Funcoes de Transferencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
A.2 Polinomios Coprimos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
B Conceitos Sobre Estabilidade 46
B.1 Definicao de Estabilidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
B.2 Metodo Direto de Lyapunov . . . . . . . . . . . . . . . . . . . . . . . . . . 47
B.2.1 Funcoes Definidas Positivas e Negativas . . . . . . . . . . . . . . . . 47
B.2.2 Translacao da Origem do Sistema de Coordenadas . . . . . . . . . . 48
B.2.3 Teoremas Sobre Estabilidade (Segundo Lyapunov) . . . . . . . . . . 48
iv

B.3 Princıpio do Modelo Interno . . . . . . . . . . . . . . . . . . . . . . . . . . 49
Referencias Bibliograficas 50
v

Lista de Figuras
1.1 Esquema de um controlador adaptativo. . . . . . . . . . . . . . . . . . . . 2
1.2 Diagrama de blocos para controle adaptativo indireto. . . . . . . . . . . . . 3
1.3 Diagrama de blocos para controle adaptativo direto. . . . . . . . . . . . . . 4
1.4 Escalonamento de ganhos. . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
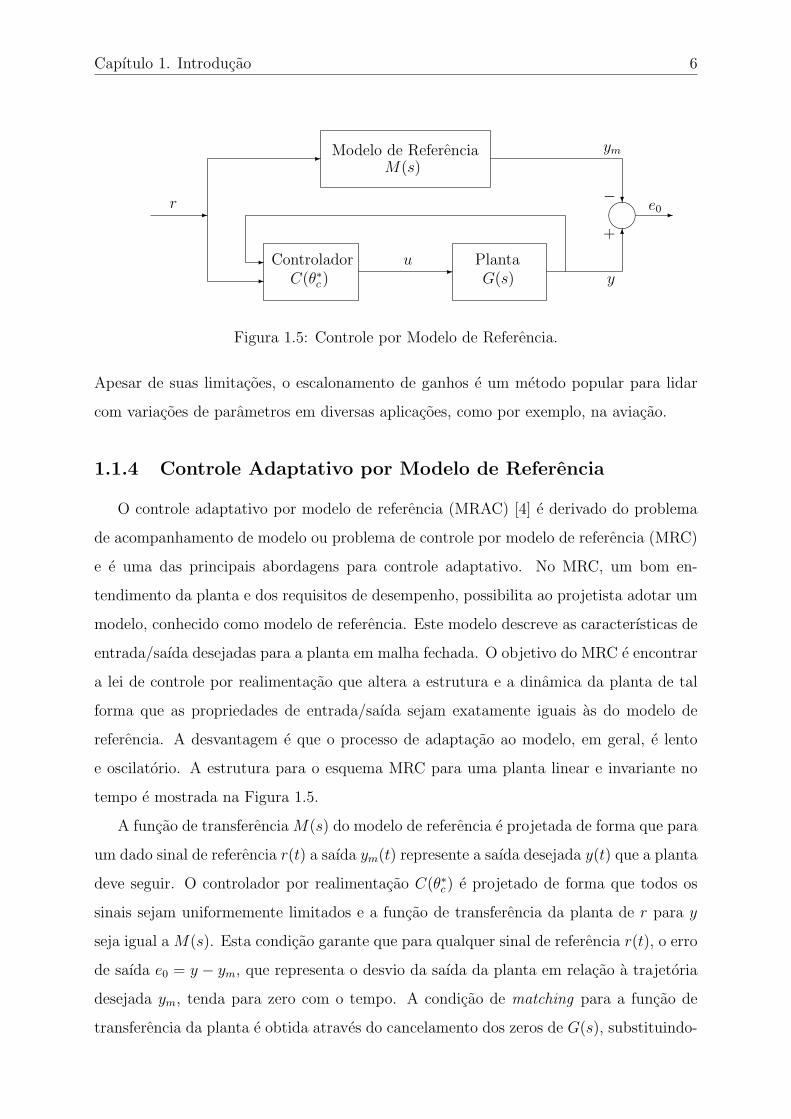
1.5 Controle por Modelo de Referencia. . . . . . . . . . . . . . . . . . . . . . . 6
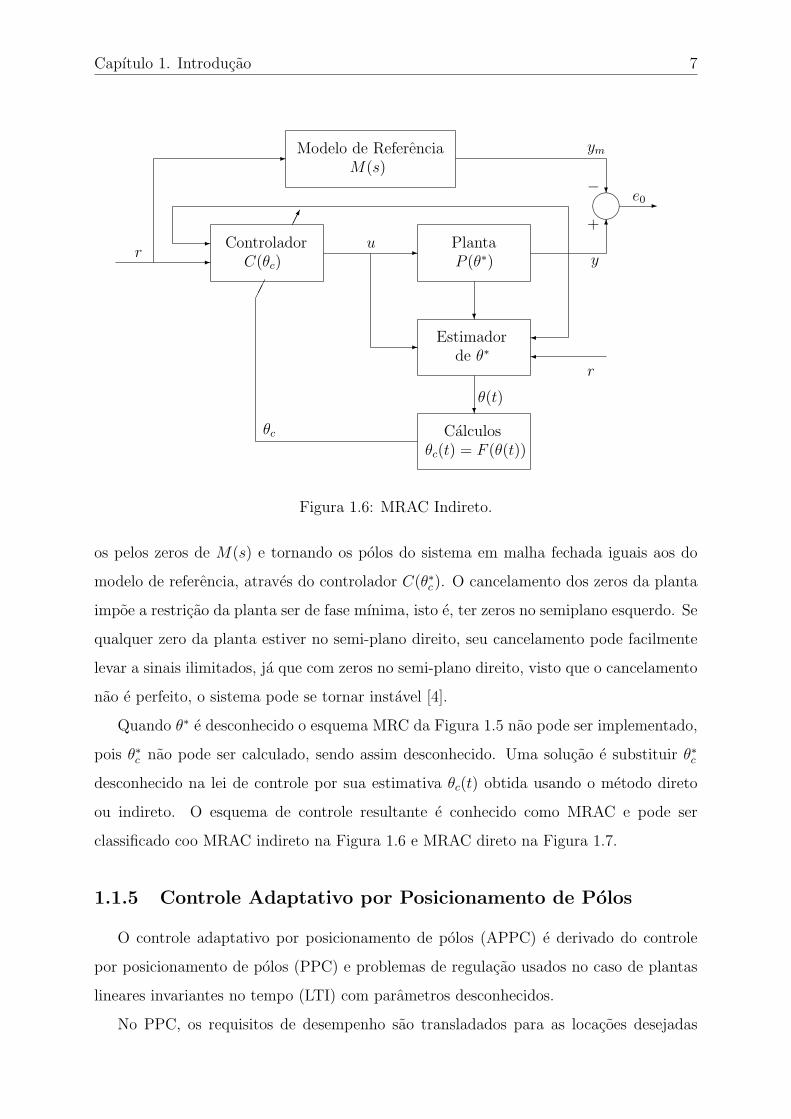
1.6 MRAC Indireto. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.7 MRAC Direto. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.1 Diagrama de blocos do PPC. . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.2 Uma realizacao alternativa do PPC. . . . . . . . . . . . . . . . . . . . . . . 16
3.1 Superfıcie de deslizamento em um sistema de estrutura variavel. . . . . . . 18
3.2 Filtro passa-baixa para obtencao de ueq. . . . . . . . . . . . . . . . . . . . 20
3.3 Campo vetorial no modo deslizante (solucao de Filippov) . . . . . . . . . . 21
4.1 Diagrama de blocos do VS-APPC para planta de primeira ordem. . . . . . 28
5.1 APPC Indireto utilizando o metodo do gradiente. . . . . . . . . . . . . . . 30
5.2 VS-APPC Indireto para sistema de primeira ordem. . . . . . . . . . . . . . 31
5.3 Comportamento dos parametros da planta utilizando leis chaveadas. . . . . 31
5.4 Diagrama vetorial do motor de inducao (ωs e a velocidade sıncrona.) . . . . 34
5.5 VS-APPC para o controle de velocidade de um motor de inducao trifasico. 37
5.6 Alteracao dos parametros da planta. . . . . . . . . . . . . . . . . . . . . . 38
5.7 Perturbacoes no sistema e alteracoes no sinal de referencia do sistema. . . . 38
5.8 Sistema de acionamento. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
5.9 Implementacao pratica do VS-APPC. . . . . . . . . . . . . . . . . . . . . . 41
vi

Lista de Tabelas
5.1 Parametros eletricos do motor . . . . . . . . . . . . . . . . . . . . . . . . . 35
5.2 Caracterıstica tensao x velocidade do tacogerador . . . . . . . . . . . . . . 39
vii

Resumo
Existem dois metodos principais para a construcao de controladores adaptativos. Um
deles e o controle adaptativo por modelo de referencia (MRAC) e o outro e o controle
adaptativo por posicionamento de polos (APPC). No MRAC, um modelo de referencia
e escolhido para gerar a trajetoria desejada que o sinal de saıda da planta deve seguir,
e ele pode requerer o cancelamento de zeros da planta. Devido a sua flexibilidade em
escolher a metodologia de projeto do controlador (realimentacao de estado, projeto de
compensador, linear quadratico, etc.) e a lei adaptativa (mınimos quadrados, metodo do
gradiente, etc.), o APPC e o tipo mais geral de controle adaptativo. Tradicionalmente,
vem sendo desenvolvido em uma abordagem indireta e, como uma vantagem, pode ser
aplicado a plantas de fase nao-mınima, ja que nao envolve cancelamentos de zeros e polos.
A integracao aos sistemas com estrutura variavel permite agregar rapidez no transitorio
e robustez as variacoes parametricas e perturbacoes.
O objetivo deste trabalho e desenvolver um controlador adaptativo por posiciona-
mento de polos e estrutura variavel (VS-APPC). Portanto, sao propostas leis chaveadas
em substituicao as leis adaptativas integrais tradicionais. Adicionalmente, sao apresen-
tadas simulacoes para uma planta de primeira ordem instavel, assim como simulacoes e
resultados praticos da aplicacao da tecnica proposta a um motor de inducao trifasico.
viii

Abstract
There are two main approaches for using in adaptive controllers. One is the so-
called model reference adaptive control (MRAC), and the other is the so-called adaptive
pole placement control (APPC). In MRAC, a reference model is chosen to generate the
desired trajectory that the plant output has to follow, and it can require cancellation of
the plant zeros. Due to its flexibility in choosing the controller design methodology (state
feedback, compensator design, linear quadratic, etc.) and the adaptive law (least squares,
gradient, etc.), the APPC is the most general type of adaptive control. Traditionally,
it has been developed in an indirect approach and, as an advantage, it may be applied
to non-minimum phase plants, because do not involve plant zero-pole cancellations. The
integration to variable structure systems allows to aggregate fast transient and robustness
to parametric uncertainties and disturbances, as well.
In this work, a variable structure adaptive pole placement control (VS-APPC) is pro-
posed. Therefore, new switching laws are proposed, instead of using the traditional inte-
gral adaptive laws. Additionally, simulation results for an unstable first order system and
simulation and practical results for a three-phase induction motor are shown.
ix

Glossario de Termos
APPC - Adaptive Pole Placement Control (Controle Adaptativo por Posicionamento
de Polos)
LTI - Linear Time Invariant (Linear e Invariante no Tempo)
MRAC - Model Reference Adaptive Control (Controle Adaptativo por Modelo de
Referencia)
MRC - Model Reference Control (Controle por Modelo de Referencia)
PPC - Pole Placement Control (Controle Adaptativo por Posicionamento de Polos)
SISO - Single Input Single Output (Monovariavel)
VSC - Variable Structure Control (Controle por Estrutura Variavel)
VS-APPC - Variable Structure Adaptive Pole Placement Control (Controle Adapta-
tivo por Posicionamento de Polos e Estrutura Variavel)
VS-MRAC - Variable Structure Model Reference Adaptive Control (Controle Adap-
tativo por Modelo de Referencia e Estrutura Variavel)
x

Capıtulo 1
Introducao
1.1 Controle Adaptativo
A maioria das tecnicas para projeto de sistemas de controle sao baseadas em um bom
entendimento da planta em estudo e seu meio. Entretanto, em muitos casos, a planta
a ser controlada e muito complexa e os processos fısicos basicos nela presentes nao sao
completamente entendidos, possuindo muitas vezes parametros incertos constantes ou
variando lentamente. Por exemplo, robos manipuladores podem carregar objetos grandes
com parametros inerciais desconhecidos. Sistemas de potencia podem ser submetidos a
grandes variacoes nas condicoes de carga. Portanto, as tecnicas de projeto de controle
precisam ser adicionadas de uma tecnica de estimacao de parametros, visando obter pro-
gressivamente um melhor entendimento da planta a ser controlada. E assim intuitivo
agregar estimacao de parametros e controle. Frequentemente, os dois passos sao feitos
separadamente. Se a estimacao de parametros e recursiva, isto e, o modelo da planta e
periodicamente atualizado com base em estimativas anteriores e novos dados, estimacao
e controle podem ser executados concorrentemente [1]. O controle de modelos de plan-
tas desconhecidas ou parcialmente conhecidas e objeto de estudo da area de sistemas de
controle adaptativo.
1.1.1 Definicao
A ideia basica em controle adaptativo e estimar os parametros desconhecidos da planta
(ou equivalentemente, os correspondentes parametros do controlador) em tempo real
1

Capıtulo 1. Introducao 2
---
-
-
?
controladorreferencia
processosaıda
ajuste deparametros
parametros docontrolador
sinal decontrole
Figura 1.1: Esquema de um controlador adaptativo.
baseado nos sinais medidos do sistema, e usar os parametros estimados no calculo da
lei de controle [2], tendo como objetivo alterar o comportamento do sistema de modo a
ajusta-lo a circunstancias novas ou modificadas. Um sistema de controle adaptativo pode
ser considerado como um sistema de controle com estimacao de parametros em tempo
real.
Controle adaptativo consiste, portanto, em aplicar alguma tecnica de estimacao para
obter os parametros do modelo do processo e de seu meio a partir de medicoes de entradas e
saıdas e usar este modelo para projetar um controlador [3]. Os parametros do controlador
sao ajustados durante a operacao da planta conforme a quantidade de dados disponıveis.
As tecnicas de projeto para sistemas adaptativos sao estudadas e analisadas em teoria
para plantas desconhecidas, mas fixas (isto e, invariantes no tempo). Na pratica, elas sao
aplicadas para plantas desconhecidas e lentamente variantes no tempo.
A estrutura do controlador consiste de uma malha de realimentacao e de um contro-
lador com ganhos ajustaveis, conforme mostra a Figura 1.1. A forma como sao alterados
os ganhos do controlador em resposta a mudancas na planta e perturbacoes distingue um
esquema de controle do outro.
1.1.2 Controle Adaptativo Direto e Indireto
Um controlador adaptativo e formado atraves da combinacao de um estimador de
parametros em tempo real, que prove a estimativa dos parametros desconhecidos a cada
instante, com uma lei de controle. A forma como o estimador de parametros, tambem
conhecido como lei adaptativa, e combinado com a lei de controle, leva a dois diferentes

Capıtulo 1. Introducao 3
?
?
-
--
--
θc
u
θ(t)
Controlador PlantaC(θc)
Estimadorde θ∗
r
r
Calculosθc(t) = F (θ(t))
yP (θ∗)
Figura 1.2: Diagrama de blocos para controle adaptativo indireto.
metodos. No primeiro metodo, conhecido como controle adaptativo direto, o modelo
da planta e parametrizado em funcao dos parametros do controlador, os quais sao es-
timados diretamente, sem calculos intermediarios envolvendo estimativas de parametros
da planta. No segundo metodo, conhecido como controle adaptativo indireto, os
parametros da planta sao estimados a cada instante e utilizados para o calculo dos
parametros do controlador.
No controle adaptativo indireto, o modelo da planta P (θ∗) e parametrizado em relacao
a um vetor de parametros desconhecidos θ∗. Um estimador em tempo real gera uma
estimativa θ(t) de θ∗ a cada instante t, processando a entrada u e a saıda y. A estimativa
dos parametros θ(t) especifica um modelo estimado caracterizado por P (θ(t)), que e usado
para calcular os parametros do controlador ou vetor de ganhos θc(t) a cada instante t. Este
modelo, para o projeto do controlador, e tratado como o verdadeiro modelo da planta no
instante t. Este princıpio e conhecido como princıpio de equivalencia a certeza. As
formas da lei de controle C(θc) e da equacao algebrica θc = F (θ) sao escolhidas como as
mesmas que seriam usadas para atender os requisitos de desempenho para o modelo P (θ∗)
se θ∗ fosse conhecido. E claro, neste metodo, que C(θc(t)) e projetada a cada instante t
de modo a satisfazer os requisitos de desempenho do modelo estimado P (θ(t)), que pode
ser diferente do modelo da planta desconhecida P (θ∗). Assim, o principal problema no
controle adaptativo indireto e escolher a classe de leis de controle C(θc) e a classe de
estimadores de parametros que geram θ(t), bem como a equacao algebrica θc = F (θ(t)),

Capıtulo 1. Introducao 4
-
Estimacaoem tempo real
de θ∗c
--
Controlador
C(θc)u Planta
P (θ∗) → Pc(θ∗c )
-y
r
θc r
Figura 1.3: Diagrama de blocos para controle adaptativo direto.
de forma que C(θc(t)) atenda os requisitos de desempenho para o modelo P (θ∗) com
θ∗ desconhecido. A Figura 1.2 mostra o diagrama de blocos para o controle adaptativo
indireto.
No controle adaptativo direto, o modelo da planta P (θ∗) e parametrizado em funcao
de um vetor de parametros desconhecido θ∗c do controlador, com o qual C(θ∗c ) atende
os requisitos de desempenho, para obter o modelo Pc(θ∗c ) com exatamente as mesmas
caracterısticas entrada/saıda de P (θ∗).
O estimador de parametros em tempo real e projetado baseado em Pc(θ∗c ) ao inves de
P (θ∗) para prover estimativas diretas θc(t) de θ∗c em cada instante t atraves do proces-
samento da entrada u e da saıda y da planta. A estimativa θc(t) e entao usada para
atualizar o vetor de parametros do controlador θc sem calculos intermediarios. A escolha
da classe de leis de controle C(θc) e os estimadores de parametros que geram θc(t), de
forma que C(θc(t)) atenda os requisitos de desempenho para o modelo P (θ∗) sao os prin-
cipais problemas no controle adaptativo direto. As propriedades do modelo P (θ∗) sao
fundamentais na obtencao do modelo parametrizado Pc(θ∗c ) que e conveniente para a es-
timacao em tempo real. Como consequencia, o controle adaptativo direto e restrito a
certas classes de modelos de planta. Uma classe de modelos possıvel consiste em todas as
plantas monovariaveis, lineares e invariantes no tempo (LTI) que sao de fase mınima, isto
e, seus zeros estao localizados no semi-plano esquerdo. A Figura 1.3 mostra o diagrama
de blocos para o controle adaptativo direto.

Capıtulo 1. Introducao 5
-
-r-u -y
Escalonador
de ganhos
ControladorC(θ) Planta
Medicoes
Auxiliares
θi
Figura 1.4: Escalonamento de ganhos.
1.1.3 Escalonamento de Ganhos
Em alguns sistemas existem variaveis auxiliares que descrevem bem as caracterısticas
da dinamica do processo. Se estas variaveis podem ser medidas, elas podem ser usadas
para mudar os parametros do controlador. Cada conjunto destas variaveis consiste num
ponto de operacao do processo.
Vamos considerar um processo onde para cada ponto de operacao i, i = 1, 2, ..., N ,
consistindo das variaveis citadas anteriormente, os parametros sao conhecidos. Para um
dado ponto de operacao i, um controlador por realimentacao com ganhos constantes,
dito θi, pode ser projetado para encontrar os requisitos de desempenho para o modelo
linear correspondente. Isto leva a um controlador, dito C(θ), com um conjunto de ganhos
θ1, θ2, ..., θn cobrindo os N pontos de operacao. Uma vez que um ponto de operacao i e
detectado, os ganhos do controlador podem ser mudados para o valor apropriado de θi,
obtido de um conjunto pre-calculado de ganhos. Esta abordagem e chamada escalona-
mento de ganhos e e ilustrada na Figura 1.4.
A vantagem do escalonamento de ganhos e que os ganhos do controlador podem ser
mudados tao rapidamente quanto as medidas auxiliares respondem para as mudancas
de parametros. Mudancas rapidas e frequentes dos ganhos do controlador, entretanto,
podem conduzir a instabilidade. Por isso, existe um limite de acordo com a frequencia e
rapidez com que os ganhos do controlador podem ser mudados.
Existem controversias se o escalonamento de ganhos deve ser considerado como um
sistema adaptativo ou nao, ja que os ganhos do controlador sao mudados em malha aberta.
Capıtulo 1. Introducao 6
-
-
--
6?
-e0
Modelo de ReferenciaM(s)
r
uControlador PlantaC(θ∗c ) G(s)
-
−
+
y
ym
Figura 1.5: Controle por Modelo de Referencia.
Apesar de suas limitacoes, o escalonamento de ganhos e um metodo popular para lidar
com variacoes de parametros em diversas aplicacoes, como por exemplo, na aviacao.
1.1.4 Controle Adaptativo por Modelo de Referencia
O controle adaptativo por modelo de referencia (MRAC) [4] e derivado do problema
de acompanhamento de modelo ou problema de controle por modelo de referencia (MRC)
e e uma das principais abordagens para controle adaptativo. No MRC, um bom en-
tendimento da planta e dos requisitos de desempenho, possibilita ao projetista adotar um
modelo, conhecido como modelo de referencia. Este modelo descreve as caracterısticas de
entrada/saıda desejadas para a planta em malha fechada. O objetivo do MRC e encontrar
a lei de controle por realimentacao que altera a estrutura e a dinamica da planta de tal
forma que as propriedades de entrada/saıda sejam exatamente iguais as do modelo de
referencia. A desvantagem e que o processo de adaptacao ao modelo, em geral, e lento
e oscilatorio. A estrutura para o esquema MRC para uma planta linear e invariante no
tempo e mostrada na Figura 1.5.
A funcao de transferencia M(s) do modelo de referencia e projetada de forma que para
um dado sinal de referencia r(t) a saıda ym(t) represente a saıda desejada y(t) que a planta
deve seguir. O controlador por realimentacao C(θ∗c ) e projetado de forma que todos os
sinais sejam uniformemente limitados e a funcao de transferencia da planta de r para y
seja igual a M(s). Esta condicao garante que para qualquer sinal de referencia r(t), o erro
de saıda e0 = y − ym, que representa o desvio da saıda da planta em relacao a trajetoria
desejada ym, tenda para zero com o tempo. A condicao de matching para a funcao de
transferencia da planta e obtida atraves do cancelamento dos zeros de G(s), substituindo-
Capıtulo 1. Introducao 7
?
?
-
--
-
-
e06
?-
θc
u
θ(t)
Controlador PlantaC(θc)
Estimadorde θ∗
r
r
Calculosθc(t) = F (θ(t))
P (θ∗)
Modelo de ReferenciaM(s)
−
+
y
ym
Figura 1.6: MRAC Indireto.
os pelos zeros de M(s) e tornando os polos do sistema em malha fechada iguais aos do
modelo de referencia, atraves do controlador C(θ∗c ). O cancelamento dos zeros da planta
impoe a restricao da planta ser de fase mınima, isto e, ter zeros no semiplano esquerdo. Se
qualquer zero da planta estiver no semi-plano direito, seu cancelamento pode facilmente
levar a sinais ilimitados, ja que com zeros no semi-plano direito, visto que o cancelamento
nao e perfeito, o sistema pode se tornar instavel [4].
Quando θ∗ e desconhecido o esquema MRC da Figura 1.5 nao pode ser implementado,
pois θ∗c nao pode ser calculado, sendo assim desconhecido. Uma solucao e substituir θ∗c
desconhecido na lei de controle por sua estimativa θc(t) obtida usando o metodo direto
ou indireto. O esquema de controle resultante e conhecido como MRAC e pode ser
classificado coo MRAC indireto na Figura 1.6 e MRAC direto na Figura 1.7.
1.1.5 Controle Adaptativo por Posicionamento de Polos
O controle adaptativo por posicionamento de polos (APPC) e derivado do controle
por posicionamento de polos (PPC) e problemas de regulacao usados no caso de plantas
lineares invariantes no tempo (LTI) com parametros desconhecidos.
No PPC, os requisitos de desempenho sao transladados para as locacoes desejadas

Capıtulo 1. Introducao 8
- Estimacaoem tempo real
de θ∗c
--
-
?
6
-
- Controlador
C(θc)u Planta
P (θ∗) → Pc(θ∗c )
Modelo de ReferenciaM(s)
ry
ym
r
−
+
e0
θc
Figura 1.7: MRAC Direto.
dos polos de malha fechada. Uma lei de controle por realimentacao e entao desenvolvida
alocando os polos de malha fechada nas posicoes desejadas.
A estrutura do controlador C(θ∗c ) e o vetor de parametros θ∗c sao escolhidos de forma
que os polos da funcao de transferencia da planta em malha fechada de r para y sejam
iguais aos desejados. O vetor θ∗c e geralmente calculado em funcao de θ∗, onde θ∗ e um
vetor com os coeficientes da funcao de transferencia G(s).
Se θ∗ e conhecido, entao θ∗c e calculado e usado na lei de controle. Quando θ∗ e
desconhecido, θ∗c e tambem desconhecido e o PPC nao pode ser implementado. Nesse
caso, assim como no caso do MRC, nos podemos usar o princıpio de equivalencia a certeza
para substituir o vetor desconhecido θ∗c por sua estimativa θc(t), ou seja, em linhas gerais,
os parametros do controlador sao calculados das estimativas dos parametros da planta
como se elas fossem os verdadeiros parametros. O esquema resultante e referido como
APPC. Se θc(t) e atualizado diretamente usando um estimador de parametros em tempo
real, o esquema e referido como um APPC direto. Se θc(t) e calculado em funcao de
θ(t), que e uma estimativa para θ∗ gerada por um estimador em tempo real, o esquema
e referido como APPC indireto. As estruturas do APPC indireto e direto sao as mesmas
que as mostradas nas Figuras 1.2 e 1.3, respectivamente, para o caso geral.

Capıtulo 1. Introducao 9
1.2 Sistemas com Estrutura Variavel
A teoria de sistemas com estrutura variavel tem sido bastante utilizada no tratamento
de problemas de sistemas de controle, principalmente na forma conhecida como controle
por modos deslizantes [5-11]. Neste metodo, as funcoes de chaveamento das variaveis de
controle devem ser projetadas de modo a restringir a dinamica do sistema a uma superfıcie
chamada superfıcie deslizante.
Os sistemas com estrutura variavel tem como principais caracterısticas a rapidez do
transitorio e robustez a variacoes parametricas e perturbacoes, dentro de uma faixa de
tolerancia estipulada no projeto. Em contrapartida, possuem alguns aspectos a considerar,
como alto valor do sinal de controle inicial e chaveamento do sinal de controle em alta
frequencia, fenomeno chamado chattering.
Esta teoria teve origem no estudo dos controladores a rele e baseia-se no chaveamento
das variaveis de controle dentro de um conjunto de funcoes das variaveis de estado da
planta de acordo com uma dada regra, o que impoe para este metodo o conhecimento de
todas as variaveis de estado do sistema.
1.3 Controle Adaptativo por Posicionamento de Polos
e Estrutura Variavel
Conforme foi visto nas Secoes 1.1.4 e 1.1.5, as duas principais abordagens do controle
adaptativo (MRAC e APPC) utilizam algoritmos de adaptacao que, em geral, baseiam-se
em uma lei do tipo integral [12]. O sistema resultante apresenta problemas bem conhecidos
de estabilidade sob condicoes nao ideais como, por exemplo, na presenca de disturbios
externos [13,24], e um comportamento transitorio inaceitavel [14-15].
No caso do APPC, dentro do qual se insere este trabalho, diversos trabalhos tem sido
publicados tratando de possıveis solucoes para o problema de robustez no que diz respeito
a perturbacoes limitadas [16-17]; dinamica nao-modelada [18-20]; e variacoes parametricas
[17].
Com o objetivo de agregar as caracterısticas do APPC e do VSC, ou seja, aplicabilidade
a plantas de fase nao mınima, transitorio rapido e robustez, este trabalho propoe um

Capıtulo 1. Introducao 10
controlador, chamado VS-APPC (Controle Adaptativo por Posicionamento de Polos e
Estrutura Variavel) [21-23], que substitui as leis integrais do APPC por leis chaveadas.
1.4 Estrutura do Trabalho
Este trabalho esta organizado da seguinte forma: o capıtulo 2 apresenta o desenvolvi-
mento matematico do APPC utilizando a abordagem polinomial; o capıtulo 3 apresenta
uma breve descricao do controle por estrutura variavel (VSC), com um exemplo de projeto
para uma planta de segunda ordem; o capıtulo 4 apresenta a descricao e o desenvolvimento
matematico, assim como a prova de estabilidade, do VS-APPC para plantas de primeira
ordem; o capıtulo 5 apresenta os resultados de simulacoes para duas plantas de primeira
ordem e os resultados praticos da implementacao do VS-APPC aplicado a um motor de
inducao; e o capıtulo 6 apresenta as conclusoes e perspectivas para futuras pesquisas.
Capıtulo 2
Controle Adaptativo por
Posicionamento de Polos
2.1 Introducao
A suposicao de que a planta e de fase mınima, ou seja, tem zeros no semiplano esquerdo,
e bastante restritiva em muitas aplicacoes. Por exemplo, a aproximacao de atrasos de
tempo em processos quımicos e outros processos industriais leva a modelos de planta com
zeros no semiplano direito.
Uma classe de esquemas de controle muito popular no caso de parametros conhecidos
e aquela que muda o posicionamento dos polos da planta e nao envolve cancelamentos
de zeros e polos. Estes esquemas (PPC) sao aplicaveis a plantas LTI de fase mınima e
nao mınima. A combinacao de uma lei de controle por posicionamento de polos com um
estimador de parametros ou uma lei adaptativa leva a um APPC e pode ser usado para
controlar uma grande variedade de plantas LTI com parametros desconhecidos.
O APPC pode ser dividido em duas classes: APPC indireto, onde a lei de controle
gera as estimativas dos coeficientes da planta em tempo real, que sao usadas entao para
calcular os parametros da lei de controle atraves da solucao de alguma equacao algebrica;
e o APPC direto, onde os parametros da lei de controle sao gerados diretamente por uma
lei adaptativa sem calculos intermediarios que envolvem estimativas dos parametros da
planta.
O APPC direto e restrito a plantas monovariaveis (SISO) e a uma classe especial
11
Capıtulo 2. Controle Adaptativo por Posicionamento de Polos 12
de plantas onde os parametros desejados do controle por alocacao de polos podem ser
expressos na forma de um modelo parametrico linear ou bilinear [25].
O APPC indireto, por outro lado, e facil de projetar e e aplicavel a uma grande
variedade de plantas LTI que nao precisam ser de fase mınima ou estavel. Devido a
sua flexibilidade em escolher a metodologia do projeto do controlador (realimentacao
de estado, projeto de compensador, linear quadratico, etc.) e lei adaptativa (mınimos
quadrados, metodo do gradiente, etc.), o APPC indireto e o tipo mais geral de controle
adaptativo. O controle APPC tambem e conhecido como self-tuning (auto-ajustavel).
Esta tecnica de controle tambem pode ser aplicada a alguns sistemas nao lineares sem
qualquer diferenca conceitual [2].
Neste trabalho, e abordado o APPC indireto. O metodo escolhido para projetar a lei
de controle e o metodo polinomial, que sera discutido na Secao 2.2.2.
2.2 PPC: Parametros da Planta Conhecidos
Um esquema de controle adaptativo indireto consiste de tres partes: a lei adaptativa
que prove estimativas em tempo real para os parametros da planta; o mapeamento entre
os parametros da planta e do controlador que e usado para calcular os parametros do
controlador a partir das estimativas em tempo real dos parametros da planta; e a lei de
controle.
Diversas leis de controle podem ser desenvolvidas para alcancar o objetivo do PPC,
como, por exemplo, o metodo por variaveis de estado, que usa um observador de estados e
realimentacao por variaveis de estado, e o controle linear quadratico, que usa uma tecnica
de otimizacao para projetar o sinal de controle que garante limitacao e regulacao do sinal
de saıda da planta ou erro de rastreamento nulo por minimizar uma certa funcao de custo
que reflete o desempenho do sistema em malha fechada [25]. Neste trabalho e abordado
o metodo polinomial.
O proposito desta secao e fazer o desenvolvimento do metodo polinomial para alcancar
o objetivo do PPC, quando os parametros sao conhecidos com exatidao. A forma desta
lei de controle assim como o mapeamento entre os parametros do controlador e da planta
sao usados para formar o APPC indireto para plantas com parametros desconhecidos.
Capıtulo 2. Controle Adaptativo por Posicionamento de Polos 13
2.2.1 Descricao do Problema
Consideremos uma planta SISO e LTI
y = G(s)u,G(s) =Z(s)
R(s)(2.1)
onde G(s) e estritamente propria (seu grau relativo, ou excesso de polos, e pelo menos 1)
e R(s) e um polinomio monico (o coeficiente da potencia mais alta em s e 1). O objetivo
de controle e escolher um sinal de entrada u de forma que os polos de malha fechada sejam
os polos do polinomio monico Hurwitz (todas as raızes com parte real negativa) A∗(s).
O polinomio A∗(s) e referido como o polinomio caracterıstico de malha fechada desejado,
e e escolhido baseado nos requisitos de desempenho de malha fechada. Para alcancar o
objetivo de controle, serao feitas as seguintes suposicoes sobre a planta:
S1. R(s) e um polinomio cujo grau n e conhecido.
S2. Z(s) e R(s) sao coprimos e grau(Z) < n.
As suposicoes S1 e S2 permitem que Z e R sejam nao-Hurwitz em contraste ao caso
do MRC onde Z deve ser Hurwitz. Em geral, pela atribuicao dos polos de malha fechada
aos polos de A∗(s), nos podemos garantir a estabilidade e convergencia da saıda da planta
y para zero sem a utilizacao de uma entrada externa. Nos podemos estender o objetivo
do PPC ao incluir o rastreamento, onde y e requerido seguir uma certa classe de sinais
de referencia r, usando o princıpio do modelo interno como segue: o sinal de referencia
uniformemente limitado e assumido satisfazer:
Qm(s)r = 0 (2.2)
onde Qm(s) e o modelo interno de r, ou seja, e um polinomio monico conhecido de grau
q com raızes nao repetidas no eixo jω, exceto na origem, e que satisfaz
S3. Qm(s) e Z(s) sao coprimos.
Por exemplo, se y e requerido seguir o sinal de referencia r = 2+sen(2t), entaoQm(s) =
s(s2 +4) e, portanto, de acordo com (S3), Z(s) nao deveria ter s ou s2 +4 como um fator.
2.2.2 Metodo Polinomial
Vamos considerar a lei de controle
Qm(s)L(s)u = −P (s)y +M(s)r (2.3)

Capıtulo 2. Controle Adaptativo por Posicionamento de Polos 14
onde P (s), L(s) e M(s) sao polinomios (com L(s) monico) de grau q + n − 1, n − 1 e
q + n − 1, respectivamente, a serem calculados e Qm(s) satisfaz (2.2) e a suposicao S3.
Aplicando (2.3) a planta (2.1), nos obtemos a planta em malha fechada
y =Z(s)M(s)
QmL(s)R(s) + P (s)Z(s)r (2.4)
cuja equacao caracterıstica
QmL(s)R(s) + P (s)Z(s) = 0 (2.5)
tem ordem 2n+ q − 1. O objetivo agora e escolher P e L, tal que
QmL(s)R(s) + P (s)Z(s) = A∗(s) (2.6)
seja satisfeita por um polinomio Hurwitz monico A∗(s) de grau 2n + q − 1. Devido as
suposicoes S2 e S3 garantirem que Qm, R, Z sao coprimos, existe solucao para que L e P
satisfacam (2.6) e esta solucao e unica. A solucao para os coeficientes de L(s), P (s) da
equacao (2.6) pode ser obtida pela resolucao da equacao algebrica
Slβl = α∗l (2.7)
onde Sl e a matriz de Sylvester de QmR e Z de dimensao 2(n+ q)× 2(n+ q)
βl = [lTq , pT ]T , α∗l = [0, ..., 0︸ ︷︷ ︸
q
, 1, α∗T ]T
lq = [0, ..., 0︸ ︷︷ ︸q
, 1, lT ]T ∈ <n+q
l = [ln−2, ln−3, ..., l1, l0]T ∈ <n−1
p = [pn+q−1, pn+q−2, ..., p1, p0]T ∈ <n+q
α∗ = [α∗2n+q−2, α∗2n+q−3, ..., α
∗1, α
∗0]
T ∈ <2n+q−1
li, pi e α∗i sao os coeficientes de
L(s) = sn−1 + ln−2sn−2 + ...+ l1s+ l0 = sn−1 + lTαn−2(s)
P (s) = pn+q−1sn+q−1 + pn+q−2s
n+q−2 + · · ·+ p1s+ p0 = pTαn+q−1(s)
A∗(s) = s2n+q−1 + α∗2n+q−2s2n+q−2 + · · ·+ α∗1s+ α∗0 = s2n+q−1 + α∗Tα2n+q−2(s)

Capıtulo 2. Controle Adaptativo por Posicionamento de Polos 15
-- - -
6
P (s)Qm(s)L(s)
G(s)r u y+
−e
Figura 2.1: Diagrama de blocos do PPC.
onde αi(s) , [si, si−1, . . . , 1]T .
O fato de Qm, R e Z serem coprimos garante que Sl e nao-singular e, portanto, os
coeficientes de L(s) e P (s) podem ser computados da equacao
βl = S−1l α∗l (2.8)
Usando (2.6), a planta em malha fechada e descrita por
y =ZM
A∗r (2.9)
Similarmente, da equacao da planta em (2.1), da lei de controle em (2.3) e (2.6), obtemos
u =RM
A∗r (2.10)
Devido r ser um sinal uniformemente limitado e ZMA∗ e RM
A∗ serem proprias com polos
estaveis, y e u sao uniformemente limitados para algum polinomio M(s) de grau n+q−1.
Por isso, o objetivo do posicionamento de polos e alcancado pela lei de controle (2.3) sem
ter que adicionar restricoes em M(s) e Qm(s). Quando r = 0, (2.9) e (2.10) implicam que
y e u convergem para zero com taxa de convergencia exponencial. Quando r 6= 0 o erro
de rastreamento e = r − y e dado por
e =A∗ − ZM
A∗r =
LR
A∗Qmr −
Z
A∗(M − P )r (2.11)
Para erro de rastreamento nulo, (2.11) sugere a escolha de M(s) = P (s) para anular o
segundo termo em (2.11). O primeiro termo em (2.11) e anulado usando Qmr = 0. Por
isso, o posicionamento de polos e o objetivo de rastreamento sao conseguidos pela lei de
controle
QmLu = P (r − y) (2.12)
que e implementada como mostrado na Figura 2.1 usando n + q − 1 integradores para a
realizacao do controlador C(s) =P (s)
Qm(s)L(s). Devido L(s) nao ser necessariamente Hurwitz,

Capıtulo 2. Controle Adaptativo por Posicionamento de Polos 16
-- -
6
-
6
P (s)Λ(s)
Λ(s)−Qm(s)L(s)Λ(s)
G(s)r u y+
−
-+
+
Figura 2.2: Uma realizacao alternativa do PPC.
a realizacao de (2.12) com n + q − 1 integradores pode ter uma funcao de transferencia,
nomeada C(s), com polos no semi-plano direito. Uma realizacao alternativa de (2.12) e
obtida reescrevendo (2.12) como
u =Λ− LQm
Λu− P
Λ(y − r) (2.13)
onde Λ e algum polinomio Hurwitz de grau n + q − 1. A lei de controle (2.13) e imple-
mentada como mostrada na Figura 2.2 usando 2(n+ q − 1) integradores para realizar as
funcoes de transferencia estaveis proprias Λ−LQm
Λe P
Λ.

Capıtulo 3
Sistemas com Estrutura Variavel
3.1 Introducao
Conforme foi dito no Capıtulo 1, o VSC tem sua fundamentacao no controle por reles,
sendo as funcoes de chaveamento das variaveis de controle projetadas de modo a restrin-
gir a dinamica do sistema a uma superfıcie chamada superfıcie deslizante, e tem como
principais caracterısticas a rapidez do transitorio e robustez a variacoes parametricas e
perturbacoes (dentro de uma faixa de tolerancia estipulada no projeto). Esta estrategia de
controle tem sido usada com sucesso em manipuladores roboticos, veıculos submarinos,
motores eletricos de alta performance e sistemas de potencia [2]. O VSC com modos
deslizantes e largamente utilizado em pesquisa na area de controle por ser insensıvel a
variacoes parametricas e perturbacoes externas [8].
O projeto do controle por modos deslizantes geralmente envolve dois passos principais:
primeiro, e feita a selecao de uma superfıcie deslizante que induza a uma dinamica de
ordem reduzida estavel designada pelo projetista, e, posteriormente, a sıntese de uma lei
de controle para forcar as trajetorias do sistema em malha fechada irem e permanecerem
na superfıcie deslizante.
A maioria das tecnicas de projeto para controle por modos deslizantes supoe que
todos os estados do sistema sao acessıveis para a lei de controle. Na pratica, nem todos os
estados estao fisicamente disponıveis para realimentacao. Neste caso, um controlador por
modos deslizantes com realimentacao de estados nao pode ser implementado, a menos que
um observador seja usado para estimar os estados nao-mensuraveis [26], ou os metodos
17

Capıtulo 3. Sistemas com Estrutura Variavel 18
-
6
QQQs
x1
x2
s(x) > 0s(x) < 0
s(x) < 0s(x) > 0
?-
f+(x)
f−(x)
s(x) = cx1 + x2 = 0
rx(0)
Figura 3.1: Superfıcie de deslizamento em um sistema de estrutura variavel.
de projeto devem ser modificados de tal forma que somente um subconjunto dos estados
seja requerido para implementar a lei de controle.
Este capıtulo tem por objetivo apresentar o desenvolvimento matematico do VSC,
para um sistema de segunda ordem, que e fundamental para o desenvolvimento de um
controlador adaptativo com leis chaveadas.
3.2 Descricao Geral
Consideremos o seguinte sistema de segunda ordem
x1 = x2
x2 = a1x1 + a2x2 + u(3.1)
com a1 e a2 conhecidos com incertezas.
Define-se uma superfıcie de chaveamento s como
s =x ∈ R2 | s(x) = cx1 + x2 = 0, c > 0
(3.2)
na qual deseja-se que permanecam as variaveis de estado x1 e x2 (dinamica do sistema),
ou seja, sobre a qual o sistema deve deslizar. Deve ser satisfeita a condicao ss < 0 para
se ter o comportamento ilustrado na Figura 3.1.

Capıtulo 3. Sistemas com Estrutura Variavel 19
Utiliza-se um sinal de controle da forma
u(x) =
u+(x), se s(x) > 0
u−(x), se s(x) < 0(3.3)
Sendo f(x) uma funcao definida como
f(x) =
x2
a1x1 + a2x2 + u
(3.4)
o sistema passa a ser
x =
f+(x), se s(x) > 0
f−(x), se s(x) < 0(3.5)
Se a condicao ss < 0 e satisfeita em uma vizinhanca de s(x) = 0, os campos vetoriais
f+(x) e f−(x) apontam para s nesta vizinhanca. Portanto, se uma trajetoria alcanca s,
e forcada a deslizar (escorregar ou apresentar um modo deslizante - sliding mode) sobre
esta superfıcie, ou seja, e definido um modo deslizante em s.
Consideremos o sinal de controle
u = θ1x1 + θ2x2 (3.6)
com
θ1 = −θ1sgn(sx1), θ1 > |a1|
θ2 = −θ2sgn(sx2), θ2 > |c+ a2|(3.7)
onde
sgn(x) =
1, se x > 0
−1, se x < 0(3.8)
Os valores dos parametros θ determinam a rapidez com que a trajetoria atinge a
superfıcie de deslizamento. Pela condicao de deslizamento temos
ss = s (cx1 + x2) = s(cx2 + a1x1 + a2x2 + u) (3.9)
Substituindo (3.6) em (3.9), encontramos
ss = s [a1x1 + (a2 + c)x2 + θ1x1 + θ2x2] (3.10)
Usando (3.7) em (3.10), obtemos
ss = s[a1x1 + (a2 + c)x2 − θ1sgn (sx1)x1 − θ2sgn (sx2)x2
]ss = a1sx1 − θ1|sx1|+ (a2 + c) sx2 − θ2|sx2|
(3.11)

Capıtulo 3. Sistemas com Estrutura Variavel 20
- -u uav1
τs+1
Figura 3.2: Filtro passa-baixa para obtencao de ueq.
Entao, a condicao de deslizamento ss < 0 e obtida com θ1 > |a1| e θ2 > |c+a2|. Portanto,
s torna-se uma superfıcie deslizante (Figura 3.1).
Se a1 e a2 sao variantes no tempo e/ou conhecidos com incertezas, a condicao de
deslizamento pode ser satisfeita desde que os parametros do vetor θ sejam devidamente
dimensionados, ou seja,
θ1 > supt>0|a1(t)|
θ2 > supt>0|c+ a2(t)|(3.12)
Este sistema de controle apresenta dificuldades de implementacao devido a necessi-
dade de medicao de todas as variaveis de estado da planta e ao surgimento de sinais
de alta frequencia (chattering), devido a excessiva atividade de controle decorrente de
imperfeicoes nos mecanismos de chaveamento reais.
3.3 Controle Equivalente
O Controle Equivalente [6] e definido como o controle contınuo que, quando a trajetoria
esta sobre a superfıcie deslizante, deveria ser aplicado para manter a trajetoria sobre esta
superfıcie.
No deslizamento, temos para o caso ideal s ≡ 0. Entao
cx1 + x2 = 0
cx2 + a1x1 + a2x2 + u = 0
ueq = −a1x1 − (a2 + c)x2
Na pratica, a obtencao de ueq e feita atraves da filtragem de u (uav) por um filtro
passa-baixa com frequencia de corte suficientemente elevada.
Se a frequencia de corte do filtro ( 1τ) e suficientemente elevada, entao uav ≈ ueq.
Capıtulo 3. Sistemas com Estrutura Variavel 21
-
6
@@
@@
@@
@@
@@
@@
@@
@@
@@@
x1
x2
f−
f+ f ∗
s(x) = 0
?
-@
@@@R
Figura 3.3: Campo vetorial no modo deslizante (solucao de Filippov)
3.4 Solucao de Filippov
As equacoes diferenciais que surgem em sistemas com estrutura variavel apresentam
lado direito descontınuo (devido a descontinuidade introduzida pelo controle) e, assim, nao
e possıvel garantir a existencia e unicidade de uma solucao para o sistema. Filippov [28]
propos uma definicao que e particularmente adequada para o tipo de equacoes diferenciais
que surgem em sistemas com estrutura variavel. Basicamente, as solucoes no sentido de
Filippov sao absolutamente contınuas como funcoes do tempo e, tambem, contınuas em
relacao as condicoes iniciais. Isto torna possıvel a extensao do metodo direto de Lyapunov
na analise de estabilidade de sistemas com estrutura variavel.
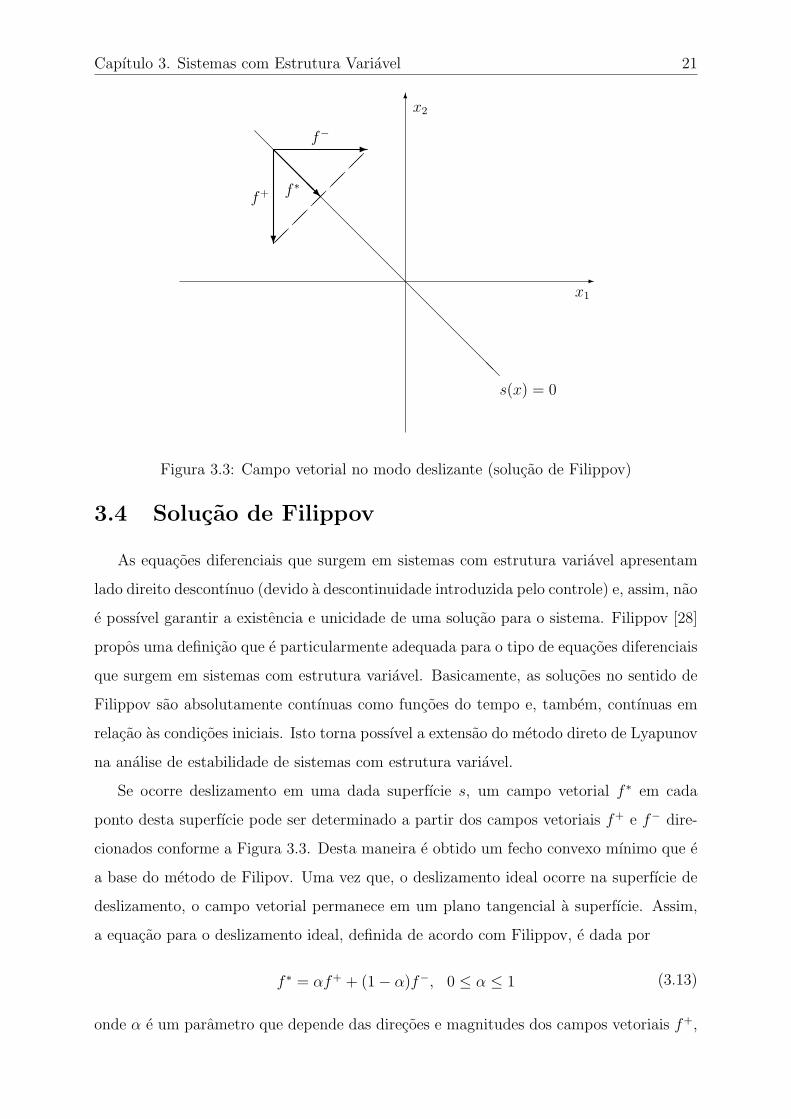
Se ocorre deslizamento em uma dada superfıcie s, um campo vetorial f ∗ em cada
ponto desta superfıcie pode ser determinado a partir dos campos vetoriais f+ e f− dire-
cionados conforme a Figura 3.3. Desta maneira e obtido um fecho convexo mınimo que e
a base do metodo de Filipov. Uma vez que, o deslizamento ideal ocorre na superfıcie de
deslizamento, o campo vetorial permanece em um plano tangencial a superfıcie. Assim,
a equacao para o deslizamento ideal, definida de acordo com Filippov, e dada por
f ∗ = αf+ + (1− α)f−, 0 ≤ α ≤ 1 (3.13)
onde α e um parametro que depende das direcoes e magnitudes dos campos vetoriais f+,

Capıtulo 3. Sistemas com Estrutura Variavel 22
f− e do gradiente da funcao s(x).
A definicao acima permite garantir a existencia e unicidade da solucao em equacoes
diferenciais com lado direito descontınuo e e muito util em problemas de engenharia.
Suponha que f(x, t) seja funcao de um rele nao ideal, por exemplo, com um pequeno atraso
de chaveamento. A solucao de Filippov corresponde ao limite da solucao de x = f(x, t)
com o atraso do rele tendendo a zero [6].
Capıtulo 4
Controle Adaptativo por
Posicionamento de Polos e Estrutura
Variavel
4.1 Introducao
Em trabalhos anteriores, foi desenvolvida uma tecnica de controle que absorveu as
qualidades do VSC, utilizando, ao inves de medicoes de todas as variaveis de estado do
sistema, apenas medicoes de entrada e saıda da planta, a qual foi denominada Controle
Adaptativo por Modelo de Referencia e Estrutura Variavel (VS-MRAC) [11,29-30], tendo
em vista que as leis de adaptacao integrais do MRAC [31] foram substituıdas por leis
chaveadas. Este algoritmo se baseava na abordagem direta do MRAC, sendo assim limi-
tada a plantas de fase mınima. Com o intuito de simplificar o projeto do controlador,
foi proposto um novo controlador, chamado VS-MRAC indireto [32-34], o qual utilizava
informacoes dos proprios parametros nominais da planta para o calculo da amplitude dos
reles, uma vez que tais parametros representam grandezas fısicas, tais como resistencias,
capacitancias, momentos de inercia, etc.
Neste trabalho, e proposto um controlador que agrega as caracterısticas do APPC e
do VSC, isto e, aplicabilidade a plantas de fase nao-mınima, transitorio rapido e robustez,
que e denominado VS-APPC [21-23], onde, assim como no VS-MRAC, as leis adaptativas
integrais foram substituıdas por leis chaveadas.
23

Capıtulo 4. Controle Adaptativo por Posicionamento de Polos e Estrutura Variavel 24
Neste capıtulo, o objetivo e descrever matematicamente o VS-APPC, onde o chavea-
mento e realizado nas leis de adaptacao dos parametros da planta. As incertezas nos
parametros da planta podem ser conhecidas mais facilmente, pois representam incertezas
de parametros fısicos. Neste trabalho, sera abordado o caso de uma planta de primeira
ordem.
4.2 Descricao do Metodo
Consideremos a seguinte planta
y =b
s+ au⇒ y = −ay + bu (4.1)
onde a e b sao constantes e conhecidas com incertezas. Temos como objetivo estimar a e
b e gerar um sinal de controle u para que y tenda assintoticamente ao sinal de referencia
r e para que os polos de malha fechada da planta (4.1) sejam alocados nas raızes de
A∗(s) = s2 + α∗1s+ α∗0 = 0.
Seja am > 0. Entao, podemos escrever (4.1) como
y = −amy + (am − a)y + bu (4.2)
Um modelo para a planta pode ser escrito como
˙y = −amy + (am − a)y + bu (4.3)
onde a e b sao estimativas para a e b, respectivamente [25].
Definimos o erro de estimacao e0 como
e0 = y − y (4.4)
e, portanto,
e0 = −ame0 + ay − bu (4.5)
com
a = a− a
b = b− b(4.6)
Como a e b sao constantes, por hipotese, temos:
˙a = ˙a
˙b =˙b
(4.7)

Capıtulo 4. Controle Adaptativo por Posicionamento de Polos e Estrutura Variavel 25
Nos algoritmos convencionais (com leis integrais de estimacao) utilizamos
˙a = −γ1e0y, γ1 > 0
˙b = γ2e0u, γ2 > 0
(4.8)
onde γ1 e γ2 sao os ganhos adaptativos.
Seja a seguinte candidata a funcao de Lyapunov
V (e0, a, b) =1
2
(e20 +
a2
γ1
+b2
γ2
)> 0 (4.9)
entao,
V (e0, a, b) = e0e0 +a ˙a
γ1
+b ˙b
γ2
(4.10)
Substituindo (4.8) em (4.10) ficamos com
V (e0, a, b) = −ame20 ≤ 0 (4.11)
que garante [e0, a, b]T = [0, 0, 0]T como um ponto de equilıbrio estavel.
As leis de adaptacao sao do tipo puramente integral (necessidade de ”memoria”por
parte do mecanismo de adaptacao) e podem levar o sistema a apresentar um comporta-
mento instavel na presenca de disturbios externos ou dinamica nao modelada da planta
[24].
No VS-APPC utiliza-se a mesma estrutura de controle do APPC, porem com um sinal
de controle chaveado da mesma forma que o controlador VSC. Portanto, a proposta deste
trabalho e substituir as leis integrais de estimacao (leis adaptativas) pelas seguintes leis
chaveadas para o calculo de a e b:
a = −asgn(e0y), a > |a|
b = bsgn(e0u), b > |b|(4.12)
As amplitudes dos reles (a e b) devem dominar os valores maximos dos parametros
da planta, para que se possa garantir a estabilidade assintotica, conforme mostra a secao
seguinte.
4.3 Prova de Estabilidade
Seja a seguinte candidata a funcao de Lyapunov
V (e0) =1
2e20 > 0 (4.13)

Capıtulo 4. Controle Adaptativo por Posicionamento de Polos e Estrutura Variavel 26
entao,
V (e0) = e0e0
= −ame20 + ae0y − be0u
= −ame20 + (a− a)e0y − (b− b)e0u
= −ame20 + [−asgn(e0y)− a]e0y − [bsgn(e0u)− b]e0u
= −ame20 − (a|e0y|+ ae0y)− (b|e0u| − be0u)
(4.14)
Desde que a > |a| e b > |b|, ficamos com
V (e0) ≤ −ame20 < 0 (4.15)
o que garante e0 = 0 um ponto de equilıbrio globalmente assintoticamente estavel. Como
limt→∞
|e0| = 0, nos temos
|e0| ≥ c > 0,∀t ≥ tf > 0 (4.16)
Entao, e0 atinge a superfıcie deslizante e0 = 0 em um tempo finito tf . Este procedimento
e similar a [29].
Com esta tecnica de controle, nao podemos garantir a convergencia das estimativas
para os valores corretos dos parametros da planta, ja que nao se trata de adaptacao
parametrica e sim de uma lei de controle chaveada. As simulacoes que sao mostradas
no capıtulo seguinte mostram uma notavel insensibilidade a variacoes parametricas e
perturbacoes.
4.4 Calculo dos Parametros do Controlador
Conforme mostrado na Secao 2.2.2, a lei de controle
Qm(s)L(s)u = P (s)(r − y) (4.17)
pode ser usada para conseguir o objetivo de controle. Neste trabalho, o controlador sera
projetado para uma referencia constante. Como o polinomio Qm(s) e calculado de acordo
com a referencia a ser seguida, para cada tipo de sinal de referencia, temos expressoes
diferentes para os parametros do controlador. Entretanto, estes parametros sao calculados
da mesma forma, utilizando a equacao Diofantina ou a matriz de Sylvester.

Capıtulo 4. Controle Adaptativo por Posicionamento de Polos e Estrutura Variavel 27
Para uma planta de primeira ordem, temos: L(s) = 1 e P (s) = p1s+p0 e os coeficientes
p1 e p0 satisfazem a equacao Diofantina
s(s+ a) + (p1s+ p0)b = s2 + α∗1s+ α∗0 (4.18)
A equacao (4.18) pode ser escrita na forma da equacao algebrica (2.7), ou seja, a
matriz de Sylvester de s(s+ a) e b e dada por1 0 0 0
a 1 0 0
0 a b 0
0 0 0 b
0
1
p1
p0
=
0
1
α∗1
α∗0
(4.19)
cuja solucao e
p1 =α∗1 − a
be p0 =
α∗0b
(4.20)
Como supomos que os parametros da planta sao conhecidos com incertezas, o princıpio
da equivalencia a certeza sugere o uso da mesma lei de controle, mas com o polinomio
P (s) = p1s+ p0 calculado usando as estimativas dos parametros, e, portanto, temos
p1 =α∗1 − a
be p0 =
α∗0
b(4.21)
onde p1 e p0 sao as estimativas dos parametros do controlador que precisam ser geradas
em tempo real. No APPC indireto convencional sao utilizadas leis adaptativas que sao
guiadas pelo erro e0. Para isso, podem ser utilizados o metodo do gradiente, o metodo
dos mınimos quadrados, etc. A estimacao dos parametros pelo metodo do gradiente e
dada por (4.8). Para o VS-APPC serao substituıdas as leis adaptativas por leis chaveadas
conforme (4.12).
Uma vez que os parametros do controlador podem ser funcoes de mais de um parametro
da planta simultaneamente, o sinal pode ficar indefinido, pois existem dois ou mais sinais
chaveados em frequencias elevadas. Alem disso, o parametro b aparece no denominador
das expressoes, o que pode causar divisoes por zero. Com isso, faz-se necessaria a in-
troducao de um valor nominal do parametro b, para manter o valor com sinal definido.
Reescrevendo as leis chaveadas com a modificacao na expressao de b, temos
a = −asgn(e0y), a > |a|
b = bsgn(e0u) + bnom, b > |b− bnom|(4.22)
Capıtulo 4. Controle Adaptativo por Posicionamento de Polos e Estrutura Variavel 28
- -
-
bs+a
u
? ?
? ?
?
a = −asgn(e0y)
b = bsgn(e0u) + bnom
p1 = p0 =α∗0b
α∗1−ab,
(p1s+p0)s
u e
y
a b
p1 p0
−
+
r
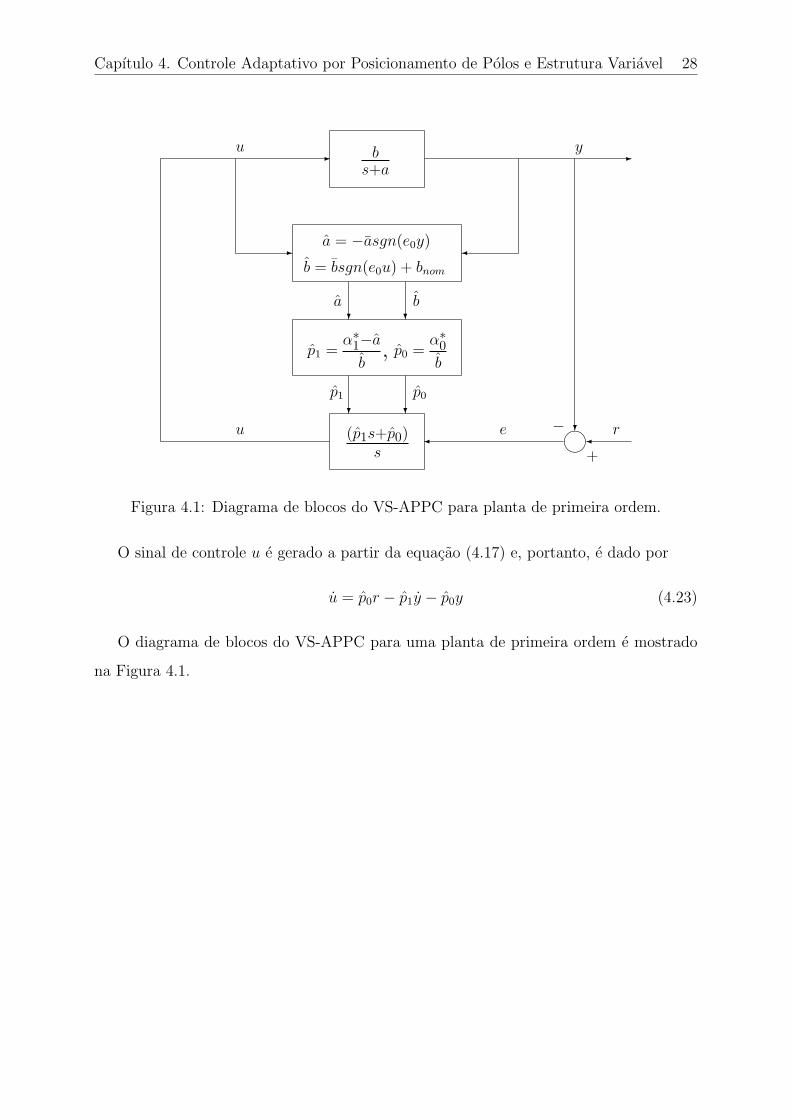
Figura 4.1: Diagrama de blocos do VS-APPC para planta de primeira ordem.
O sinal de controle u e gerado a partir da equacao (4.17) e, portanto, e dado por
u = p0r − p1y − p0y (4.23)
O diagrama de blocos do VS-APPC para uma planta de primeira ordem e mostrado
na Figura 4.1.

Capıtulo 5
Aplicacao do Controlador
5.1 Planta de Primeira Ordem Instavel
Nesta secao, a estrategia de controle proposta no capıtulo anterior sera projetada para
uma planta do tipo
G(s) =1
s− 1=
b
s+ a(5.1)
cujo polinomio caracterıstico escolhido e
A∗(s) = (s+ 1)2 = s2 + 2s+ 1 (5.2)
Utilizamos (4.22) para encontrar a e b e, com estes valores, calculamos os parametros do
controlador, que de acordo com (4.21) e (5.2) sao
p1 =2− a
be p0 =
1
b(5.3)
O sinal de controle e calculado pela equacao (4.23).
5.1.1 Simulacoes
Todas as simulacoes deste trabalho foram feitas com a utilizacao do programa MAT-
LAB 6 [35], utilizando como metodo de integracao o metodo de Euller.
Para a planta descrita em (5.1), foi utilizado um intervalo de integracao de h = 0, 01s.
A referencia utilizada para a planta (5.1) foi r = 1.
Inicialmente foi feita uma simulacao utilizando nas leis adaptativas o metodo do gra-
diente. Foram manipulados os ganhos adaptativos e, para efeito de comparacao com a
29

Capıtulo 5. Aplicacao do Controlador 30
Figura 5.1: APPC Indireto utilizando o metodo do gradiente.
tecnica proposta neste trabalho, escolhemos um resultado obtido quando γ1 = 1 e γ2 = 1,
que tem uma magnitude do sinal de controle de 0,353. A saıda da planta converge em 6,52s
considerando uma tolerancia de 2%. A Figura 5.1 mostra o resultado desta simulacao.
Na simulacao seguinte (Figura 5.2), as leis adaptativas convencionais foram subs-
tituıdas pelas leis chaveadas propostas em (4.22). Como temos tres constantes para
serem projetadas, diversos testes foram feitos combinando valores para as mesmas, com o
objetivo de conseguir o melhor resultado possıvel em relacao ao tempo de convergencia.
Apos os testes feitos, utlizamos as constantes bnom = 1, 5, b = 0, 7 e a = 1, 1. Observou-se
que a saıda da planta converge em 2,66s considerando tambem uma tolerancia de 2%.
Para uma mesma magnitude do sinal de controle (0,353) do caso anterior, o VS-APPC
apresentou uma convergencia do sinal de saıda da planta bem mais rapida do que o
metodo do gradiente. A Figura 5.3 mostra a evolucao do comportamento dos parametros
da planta. Podemos observar que o sinal de controle e bem mais suave que no caso do
VS-MRAC, devido ao polinomio Qm, que multiplica o sinal de controle u atuando como
um filtro, de acordo com (2.3).

Capıtulo 5. Aplicacao do Controlador 31
Figura 5.2: VS-APPC Indireto para sistema de primeira ordem.
Figura 5.3: Comportamento dos parametros da planta utilizando leis chaveadas.

Capıtulo 5. Aplicacao do Controlador 32
5.2 Motor de Inducao Trifasico
Nos dias atuais, os motores de inducao tem cada vez mais tomado o lugar dos motores
CC em aplicacoes de alto desempenho [36]. Em relacao ao motor CC, o motor de inducao
apresenta como vantagens robustez, baixo custo, menor frequencia de manutencao, e no
caso de motores com rotor em gaiola de esquilo, sua principal vantagem e a ausencia
de contatos deslizantes. No entanto, na maquina CC o controle de velocidade se da de
uma forma bastante simples, ja que o torque e o fluxo podem ser impostos a maquina
de uma forma desacoplada. Isto fazia com que os motores CC fossem os preferidos em
acionamentos de alto desempenho.
Com o surgimento, na decada de 70, da teoria de controle vetorial [37], que e baseada
na orientacao dada pelo campo do rotor, e que se teve ferramentas teoricas para controlar
a velocidade do motor de inducao de forma desacoplada, semelhante ao motor CC [36,38-
39], quando o motor e alimentado por fontes de corrente ideais.
Com o avanco da eletronica de potencia e do aparecimento de microprocessadores mais
rapidos e de menor custo, foi possıvel a implementacao do controle vetorial orientado pelo
campo, tornando o motor de inducao mais competitivo em relacao ao motor CC.
Nesta estrategia, um elemento importante de incerteza e o valor da constante de tempo
rotorica que varia com as condicoes de operacao, mudando o comportamento do sistema, o
que impoe o uso de alguma estrategia de controle adaptativo e/ou robusto, que compense
possıveis variacoes de parametros.
5.2.1 Modelagem
A modelagem do motor de inducao ja foi bastante discutida em diversos trabalhos
[40]. Dessa forma, parte-se do modelo matematico em notacao vetorial [36].
Nesta secao e usada uma tecnica vetorial para modelar o motor de inducao. Define-se
um sistema de eixos complexos ortogonais, d e q, onde o fluxo do rotor e a referencia para
o eixo d.
As equacoes que descrevem a dinamica do motor de inducao sao:
US = RsiS(t) + Lsd
dt(iS(t)) + Lm
d
dt(iR(t)ejε) (5.4)
0 = RriR(t) + Lrd
dt(iR(t)) + Lm
d
dt(iS(t)e−jε) (5.5)

Capıtulo 5. Aplicacao do Controlador 33
Te(t) =2
3PLmIm
iS(t)
[iR(t)ejε
]∗(5.6)
Jdω(t)
dt= Te(t)−Bω(t)− Tl(t) (5.7)
dε(t)
dt= ω(t) (5.8)
onde
US - Vetor tensao do estator;
iS e iR - Vetores corrente do estator e corrente do rotor, respectivamente;
Rs e Rr - Resistencias por fase do estator e do rotor, respectivamente;
Ls e Lr - Indutancias proprias por fase do estator e do rotor, respectivamente;
Lm - Indutancia de magnetizacao por fase;
Te - Torque eletromagnetico no eixo do motor;
Tl - Torque de carga;
J - Momento de inercia do rotor;
B - Coeficiente de atrito viscoso da maquina;
P - Numero de pares de polos;
ω(t) - Velocidade angular do eixo do motor;
ε - Posicao angular do eixo do motor (angulo entre os eixos da fase 1 do estator e a
fase 1 do rotor);
Im - Componente imaginario de um numero complexo ”x”;
[x]∗ - Operador complexo conjugado de um vetor ”x”.
Na pratica, o que se busca com a modelagem vetorial e a observacao das correntes
do estator de um referencial fixo a um fluxo de referencia. Assim, definindo um novo
sistema de coordenadas (Figura 5.4) com o eixo de referencia direto, d ou eixo real (Re),
coincidindo com o vetor fluxo do rotor (ψR), a componente do vetor fluxo do rotor no
eixo em quadratura, q ou eixo imaginario (Im), e anulada, ou seja, ψRq = 0.
Baseado na Figura 5.4 e partindo-se da Equacao (5.5), obtemos
0 =Rr
Lr
(ψRd − LmiSe−jρ) +
d
dt(ψRd) + j
(dρ
dt− ω
)ψRd (5.9)
onde
ψRd - Componente do vetor fluxo do rotor no eixo direto;
ρ - Posicao angular do vetor fluxo do rotor em relacao ao estator;

Capıtulo 5. Aplicacao do Controlador 34
Figura 5.4: Diagrama vetorial do motor de inducao (ωs e a velocidade sıncrona.)
Observando o diagrama vetorial (Figura 5.4) e com (5.9), as componentes do vetor
corrente do estator no eixo direto e em quadratura sao calculadas como
iSd =1
Lm
ψRd +Lr
RrLm
dψRd
dt(5.10)
iSq =Lr
RrLm
(dρ
dt− ω(t)
)ψRd (5.11)
Pela analise do diagrama,
iS(t) = (iSd + jiSq(t))ejρ (5.12)
ψR(t) = ψRd(t)ej(ρ−ε) (5.13)
e, o torque da maquina (5.6) fica
Te(t) =2
3PLm
Lr
ψRd(t)iSq(t) (5.14)
A equacao (5.14) descreve o torque do motor de inducao de forma similar ao torque
de uma maquina de corrente contınua, onde a componente do vetor de fluxo do rotor no
eixo direto e equivalente ao fluxo de campo em uma maquina CC e a componente do
vetor corrente do estator no eixo em quadratura e equivalente a corrente de armadura
em uma maquina CC. Pela equacao (5.14), mantendo-se a componente de fluxo no eixo
direto constante, o torque pode ser controlado apenas pela componente da corrente em

Capıtulo 5. Aplicacao do Controlador 35
quadratura, atraves de uma relacao linear, ate o limite da velocidade nominal do motor.
Para obter-se o torque maximo, o fluxo de referencia sera mantido constante e em seu
valor maximo.
5.2.2 Parametros do Motor de Inducao
Foi utilizado um motor de inducao trifasico classe ”B”de 0,25 HP, com 4 polos, veloci-
dade nominal de 1725 rpm (180,64 rad/s), tensoes nominais 380 V/220 V para ligacao Y
e ∆, respectivamente, com frequencia nominal de 60 Hz. As correntes nominais sao de
1,26 A em 220 V (ligacao ∆) e 0,726 A em 380 V (ligacao Y). O rotor e do tipo gaiola de
esquilo. O conjugado nominal e de 1,02 N.m.
A obtencao dos parametros do motor foi atraves de ensaios de curto-circuito e de
circuito aberto [38] e confrontados com os dados fornecidos pelo fabricante. Os resultados
obtidos sao apresentados na Tabela 5.1.
Rs 29,5012 Ω
Rr 17,8384 Ω
Lm 1,0417 H
Ls 0,0534 + 1,0417 = 1,0951 H
Lr 0,0637 + 1,0417 = 1,1054 H
Tabela 5.1: Parametros eletricos do motor
Tambem foi fornecido pelo fabricante o momento de inercia do motor, cujo valor e
J = 5× 10−4Kg.m
A obtencao da equacao de primeira ordem que representa a planta foi baseada no fato
de que, utilizando-se o controle vetorial indireto pelo campo do rotor, com alimentacao
dada pelo valor de referencia da componente da corrente do estator em quadratura (irSq)
e mantendo-se constante o valor de referencia do fluxo do rotor no eixo direto (ψrRd), a
relacao entre o torque eletrico e a corrente de referencia e aproximadamente
Te(t) = KirSq (5.15)
onde K e uma constante obtida a partir de (5.14).

Capıtulo 5. Aplicacao do Controlador 36
A entrada da planta (motor) e a componente iSq do vetor corrente de estator e a
saıda e a velocidade do rotor ω. Supondo o motor em vazio e sem conjugado de carga,
a funcao de transferencia da planta e, entao, determinada a partir das equacoes (5.7) e
(5.15) resultando emω(s)
iSq(s)=
KJ
s+ BJ
= G(s) =b
s+ a(5.16)
Para os valores dos parametros obtidos [38], o seguinte modelo nominal e obtido
G(s) =3798
s+ 11, 3(5.17)
5.2.3 Simulacoes
Para a planta descrita em (5.17), foi um escolhido um polinomio caracterıstico que
nao exigisse um sinal de controle de alta magnitude. Portanto, o polinomio escolhido foi
A∗(s) = (s+ 12)2 = s2 + 24s+ 144 (5.18)
Como a funcao de transferencia do motor de inducao tambem e de primeira ordem, temos
os mesmos polinomios L(s) e P (s) do caso anterior e tambem o mesmo polinomio Qm(s),
ja que aqui o sinal de referencia tambem e constante.
Os parametros do controlador sao
p1 =24− a
be p0 =
144
b(5.19)
As leis chaveadas utilizadas para o motor de inducao sao as mesmas de (4.22) e o sinal
de controle e calculado a partir de (4.23).
Para o motor de inducao, foi utilizado um passo de integracao de h = 1ms, ou seja,
menor que no caso anterior (h = 10ms). O sinal de referencia foi de r = 900 rpm.
Assim como para a planta anterior, foram feitos diversos testes ate que se chegasse em
tres constantes que apresentassem um resultado satisfatorio. As constantes utilizadas que
mostraram os melhores resultados foram bnom = 3600, b = 3550 e a = 22 (Figura 5.5).
O sinal de saıda da planta e o sinal de referencia sao dados em rpm e o sinal de controle
u = iSq e dado em mA. Foi verificado que a saıda da planta converge em 0,247s.
Na simulacao seguinte, foram mantidas as constantes utilizadas na simulacao anterior,
entretanto, foram feitas alteracoes nos parametros da planta, com o objetivo de verificar
Capıtulo 5. Aplicacao do Controlador 37
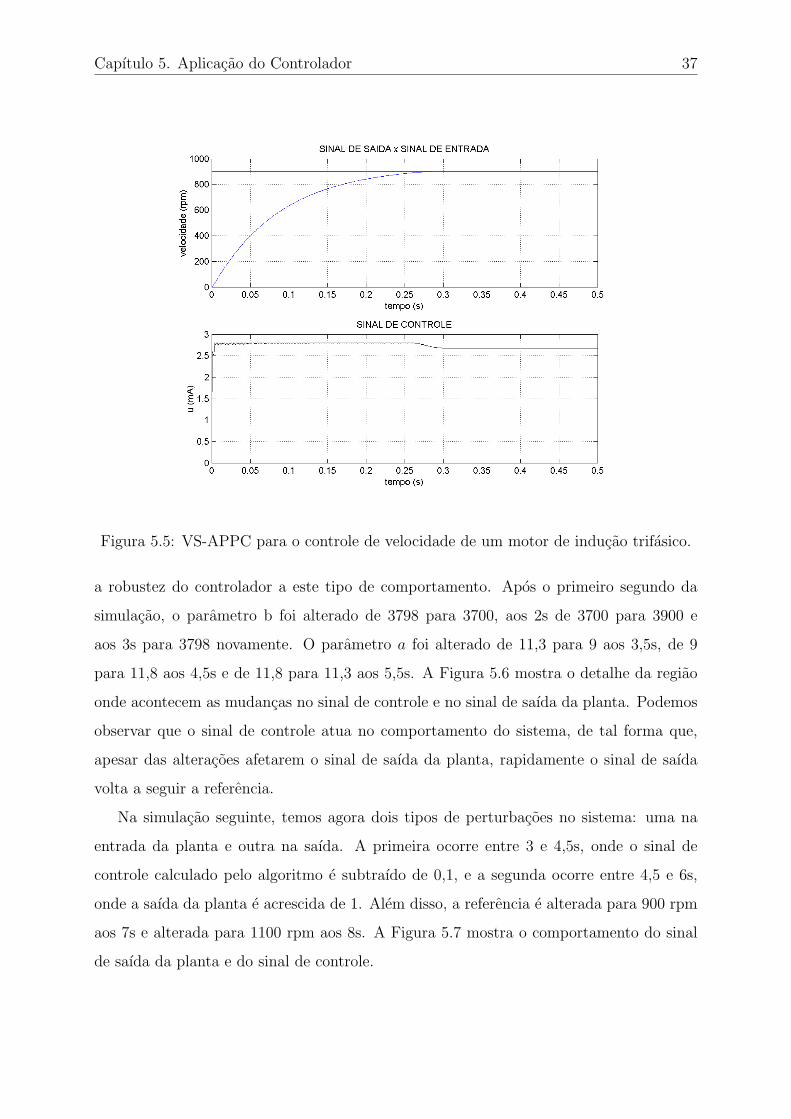
Figura 5.5: VS-APPC para o controle de velocidade de um motor de inducao trifasico.
a robustez do controlador a este tipo de comportamento. Apos o primeiro segundo da
simulacao, o parametro b foi alterado de 3798 para 3700, aos 2s de 3700 para 3900 e
aos 3s para 3798 novamente. O parametro a foi alterado de 11,3 para 9 aos 3,5s, de 9
para 11,8 aos 4,5s e de 11,8 para 11,3 aos 5,5s. A Figura 5.6 mostra o detalhe da regiao
onde acontecem as mudancas no sinal de controle e no sinal de saıda da planta. Podemos
observar que o sinal de controle atua no comportamento do sistema, de tal forma que,
apesar das alteracoes afetarem o sinal de saıda da planta, rapidamente o sinal de saıda
volta a seguir a referencia.
Na simulacao seguinte, temos agora dois tipos de perturbacoes no sistema: uma na
entrada da planta e outra na saıda. A primeira ocorre entre 3 e 4,5s, onde o sinal de
controle calculado pelo algoritmo e subtraıdo de 0,1, e a segunda ocorre entre 4,5 e 6s,
onde a saıda da planta e acrescida de 1. Alem disso, a referencia e alterada para 900 rpm
aos 7s e alterada para 1100 rpm aos 8s. A Figura 5.7 mostra o comportamento do sinal
de saıda da planta e do sinal de controle.

Capıtulo 5. Aplicacao do Controlador 38
Figura 5.6: Alteracao dos parametros da planta.
Figura 5.7: Perturbacoes no sistema e alteracoes no sinal de referencia do sistema.
Capıtulo 5. Aplicacao do Controlador 39
5.2.4 Sistema de Acionamento
O sistema de acionamento, que foi utilizado na implementacao do controlador VS-
APPC, e mostrado na Figura 5.8 [41]. Ele e composto por um motor de inducao de 0.25
HP, alimentado por um inversor trifasico VSI/PWM com controle de corrente por janela
de histerese. No controle de corrente sao usados sensores de efeito Hall para a medicao das
correntes de duas fases do motor. Um microcomputador recebe a velocidade do motor,
atraves do sinal de um tacogerador.
A saıda do tacogerador e uma tensao alternada cuja frequencia e valor eficaz sao
proporcionais a velocidade do motor. Essa tensao alternada e atenuada, retificada e
filtrada (eliminando os ruıdos de medicao) gerando uma tensao contınua proporcional a
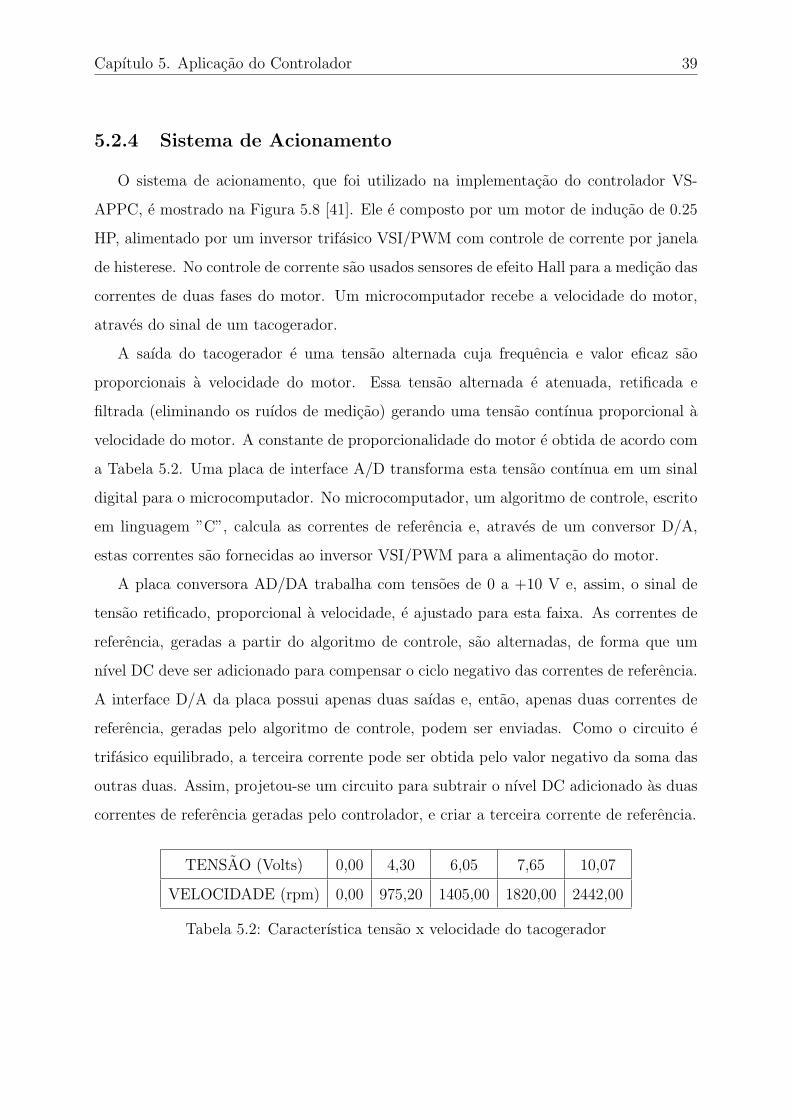
velocidade do motor. A constante de proporcionalidade do motor e obtida de acordo com
a Tabela 5.2. Uma placa de interface A/D transforma esta tensao contınua em um sinal
digital para o microcomputador. No microcomputador, um algoritmo de controle, escrito
em linguagem ”C”, calcula as correntes de referencia e, atraves de um conversor D/A,
estas correntes sao fornecidas ao inversor VSI/PWM para a alimentacao do motor.
A placa conversora AD/DA trabalha com tensoes de 0 a +10 V e, assim, o sinal de
tensao retificado, proporcional a velocidade, e ajustado para esta faixa. As correntes de
referencia, geradas a partir do algoritmo de controle, sao alternadas, de forma que um
nıvel DC deve ser adicionado para compensar o ciclo negativo das correntes de referencia.
A interface D/A da placa possui apenas duas saıdas e, entao, apenas duas correntes de
referencia, geradas pelo algoritmo de controle, podem ser enviadas. Como o circuito e
trifasico equilibrado, a terceira corrente pode ser obtida pelo valor negativo da soma das
outras duas. Assim, projetou-se um circuito para subtrair o nıvel DC adicionado as duas
correntes de referencia geradas pelo controlador, e criar a terceira corrente de referencia.
TENSAO (Volts) 0,00 4,30 6,05 7,65 10,07
VELOCIDADE (rpm) 0,00 975,20 1405,00 1820,00 2442,00
Tabela 5.2: Caracterıstica tensao x velocidade do tacogerador

Capıtulo 5. Aplicacao do Controlador 40
6
-
-
-
@@
@
@@RAA
rrr
@@
Pentium IV
2.8 GHz
v ∝ ω
Tacometro
Motor de
Inversor
Inducao
irS1
irS2
irS3
iS1 iS2 iS3
Figura 5.8: Sistema de acionamento.
5.2.5 Implementacao Pratica
Nesta implementacao, foi medido o perıodo de amostragem referente ao tempo de
processamento do algoritmo de controle e de conversoes A/D-D/A, cujo resultado foi
h = 150µs.
No ensaio pratico, o motor parte com velocidade inicial nula e a referencia e inicial-
mente assumida como 900 rpm. Aos 4s o valor da referencia e diminuıdo para 700 rpm
e aos 8s e aumentado para 900 rpm. Na Figura 5.9, temos o resultado deste ensaio.
Podemos observar que a planta segue a referencia especificada, com desempenho tran-
sitorio bastante rapido. A velocidade do motor e a referencia estao em rpm e o sinal de
controle u = iSq em mA.

Capıtulo 5. Aplicacao do Controlador 41
Figura 5.9: Implementacao pratica do VS-APPC.

Capıtulo 6
Conclusoes e Perspectivas
Neste trabalho foi proposto um controlador adaptativo por posicionamento de polos e
estrutura variavel, denominado VS-APPC [21-23], que procurou agregar as caracterısticas
do APPC e do VSC, isto e, aplicabilidade a plantas de fase nao-mınima, transitorio rapido
e robustez, atraves da substituicao das leis adaptativas convencionais por leis chaveadas.
Foram feitas duas aplicacoes: uma para o controle de uma planta instavel, atraves
de simulacoes, e outra para o controle de velocidade de um motor de inducao trifasico,
onde foram feitas inicialmente simulacoes, e posteriormente a implementacao pratica. A
tecnica proposta apresentou transitorio bastante rapido em ambas as aplicacoes.
O controlador VS-APPC indireto apresenta um projeto simples, com o calculo das
amplitudes dos reles estando diretamente relacionado com os parametros fısicos da planta.
A sequencia deste trabalho se dara com a posterior generalizacao para plantas de
ordem qualquer. A generalizacao segue os mesmos passos do APPC apresentado em [25]
e neste trabalho.
42

Apendice A
Modelos Entrada/Saıda
A.1 Funcoes de Transferencia
As funcoes de transferencia sao muito importantes na caracterizacao das propriedades
entrada/saıda de sistemas LTI e sao usadas largamente na teoria de controle classica.
Vamos considerar um sistema descrito pela equacao diferencial de ordem n
y(n)(t) + an−1y(n−1)(t) + · · ·+ a0y(t) = bmu
(m)(t) + bm−1u(m−1)(t) + · · ·+ b0u(t) (A.1)
Para obtermos a funcao de transferencia do sistema (A.1), nos aplicamos a transfor-
mada de Laplace em ambos os lados da equacao e assumimos condicoes iniciais nulas.
Portanto, com s sendo a variavel complexa, temos a seguinte funcao de transferencia para
(A.1)
G(s) ,Y (s)
U(s)=bms
m + bm−1sm−1 + · · ·+ b0
sn + an−1sn−1 + · · ·+ a0
(A.2)
Nos dizemos que G(s) e propria se G(∞) e finita, ou seja, n ≥ m; e estritamente
propria se G(∞) = 0, ou seja, n > m.
A equacao caracterıstica do sistema (A.1) e definida como a equacao sn + an−1sn−1 +
· · ·+ a0 = 0.
A.2 Polinomios Coprimos
As propriedades de entrada/saıda dos sistemas apresentados neste trabalho sao repre-
sentadas por funcoes de transferencia expressas como a razao de dois polinomios em s
com coeficientes reais, ou seja,
43

Apendice A. Modelos Entrada/Saıda 44
G(s) =Z(s)
R(s)(A.3)
onde Z(s) = bmsm + bm−1s
m−1 + · · ·+ b0, R(s) = sn + an−1sn−1 + · · ·+ a0 e n ≥ m.
As propriedades do sistema associado com G(s) dependem muito das propriedades de
Z(s) e R(s). Nesta secao, temos uma revisao de algumas propriedades de polinomios que
sao usados no decorrer deste trabalho.
Definicao A.2.1 Considere o polinomio X(s) = αnsn + αn−1s
n−1 + · · · + α0. Dizemos
que X(s) e monico se αn = 1 e X(s) e Hurwitz se todas as raızes de X(s) = 0 estao
em Re[s] < 0. Nos dizemos que o grau de X(s) e n se o coeficiente αn de sn satisfaz
αn 6= 0.
Definicao A.2.2 Um sistema com uma funcao de transferencia dada por (A.3) e referida
como de fase mınima se Z(s) e Hurwitz e e referida como estavel se R(s) e Hurwitz.
Definicao A.2.3 Dois polinomios a(s) e b(s) sao ditos ser coprimos (ou relativa-
mente coprimos) se eles nao tem fatores comuns diferentes de uma constante.
Uma outra definicao para polinomios coprimos e dada pelo seguinte lema.
Lema A.2.1 (Identidade de Bezout) Dois polinomios a(s) e b(s) sao coprimos se, e
somente se, existem dois polinomios c(s) e d(s) tais que
c(s)a(s) + d(s)b(s) = 1 (A.4)
Uma prova para este lema pode ser encontrada em [25].
Teorema A.2.1 Se a(s) e b(s) sao coprimos e de grau na e nb, respectivamente, onde
na > nb, entao, para algum polinomio arbitrario a∗ de grau na∗ ≥ na, a equacao polinomial
a(s)l(s) + b(s)p(s) = a∗(s) (A.5)
tem uma unica solucao l(s) e p(s) cujos graus nl e np, respectivamente, satisfazem as
restricoes np < na e nl ≤ max(na∗ − na, nb − 1).

Apendice A. Modelos Entrada/Saıda 45
Teorema A.2.2 (Teorema de Sylvester) Dois polinomios a(s) = ansn + an−1s
n−1 +
· · · + a0, b(s) = bnsn + bn−1s
n−1 + · · · + b0 sao coprimos se e somente se sua matriz de
Sylvester Se e nao singular, onde Se e definida como a seguinte matriz 2n× 2n:
Se ,
an 0 0 · · · 0 0 bn 0 0 · · · 0 0
an−1 an 0 0 0 bn−1 bn 0 0 0
· an−1 an. . .
... · bn−1 bn. . .
...
· · · · . . .... · · · · . . .
...
· · · · · 0 · · · · · 0
a1 · · · · an b1 · · · · bn
a0 a1 · · · an−1 b0 b1 · · · bn−1
0 a0 · · · · 0 b0 · · · ·
0 0 · · · · 0 0 · · · ·...
. . . · · · ... 0. . . · · ·
.... . . a0 a1
.... . . b0 b1
0 0 · · · 0 0 a0 0 0 · · · 0 0 b0
Apendice B
Conceitos Sobre Estabilidade
B.1 Definicao de Estabilidade
Vamos considerar os sistemas descritos por equacoes diferenciais nao-lineares da forma
x = f(t, x), x(t0) = x0 (B.1)
onde f e uma funcao vetorial nao-linear n × 1, x e um vetor de estado n × 1 e cada
componente se chama variavel de estado. Um valor particular do vetor de estado e
tambem chamado de ponto, porque ele corresponde a um ponto no espaco de estado.
O numero de variaveis de estado n e chamado ordem do sistema. Uma solucao de x(t) de
(B.1) corresponde a uma curva no espaco de estado com t variando de zero a infinito.
Definicao B.1.1 Um estado x∗ e dito ser um ponto de equilıbrio do sistema descrito
por (B.1) se f(t, x∗) = 0, ou seja, se x(0) = x∗ implica x(t) = x∗, para todo t ≥ 0.
Definicao B.1.2 O ponto de equilıbrio x∗ e dito ser estavel se para um t0 arbitrario e
ε > 0 existe um δ(ε, t0) tal que |x0−x∗| < δ implica |x(t; t0, x0)−x∗| < ε para todo t ≥ t0.
Em caso contrario, ele e instavel.
Definicao B.1.3 O ponto de equilıbrio x∗ e dito ser assintoticamente estavel se ele
e estavel e se existe um δ(t0) tal que |x0 − x∗| < δ implica limt→∞ |x(t; t0, x0)− x∗| = 0.
Definicao B.1.4 O conjunto de todos x0 ∈ Rn tal que x(t; t0, x0) → x∗ quando t → ∞
para algum t0 ≥ 0 e chamado regiao de atracao do ponto de equilıbrio x∗.
46
Apendice B. Conceitos Sobre Estabilidade 47
Definicao B.1.5 Uma solucao x(t; t0, x0) de (B.1) e limitada se existe um β > 0 tal
que |x(t; t0, x0)| < β para todo t ≥ t0, onde β pode depender de cada solucao.
Definicao B.1.6 As solucoes de (B.1) sao uniformemente limitadas se para algum
α > 0 e t0 ∈ R+, existe um β = β(α) independente de t0 tal que se |x0| < α, entao
|x(t; t0, x0)| < β para todo t ≥ t0.
Definicao B.1.7 O ponto de equilıbrio x∗ de (B.1) e globalmente assintoticamente
estavel se ele e estavel e cada solucao de (B.1) tende a x∗ conforme t → ∞ (isto e, a
regiao de atracao de x∗ e todo o R+).
B.2 Metodo Direto de Lyapunov
Este metodo utiliza funcoes de energia para a verificacao de estabilidade do sistema.
Por exemplo, se a energia total de um sistema mecanico (ou eletrico) e continuamente dis-
sipada, quer seja linear ou nao-linear, tende a convergir para um ponto de equilıbrio. Por-
tanto, pode-se tirar conclusoes sobre a estabilidade de um sistema observando a variacao
de uma simples funcao escalar, a funcao de energia.
B.2.1 Funcoes Definidas Positivas e Negativas
Definicao B.2.1 Uma funcao V (x) e definida positiva (V (x) > 0) em uma vizinhanca
de x = 0, se V (x) > 0, ∀x tal que ‖x‖ < ε, ε > 0, x 6= 0 e V (0) = 0.
Definicao B.2.2 Uma funcao V (x) e semidefinida positiva (V (x) ≥ 0) em uma vizi-
nhanca de x = 0, se V (x) ≥ 0, ∀x tal que ‖x‖ < ε, ε > 0 e V (0) = 0.
Definicao B.2.3 Uma funcao V (x) e definida negativa (V (x) < 0) em uma vizinhan-
ca de x = 0, se V (x) < 0, ∀x tal que ‖x‖ < ε, ε > 0, x 6= 0 e V (0) = 0.
Definicao B.2.4 Uma funcao V (x) e semidefinida negativa (V (x) ≤ 0) em uma vi-
zinhanca de x = 0, se V (x) ≤ 0, ∀x tal que ‖x‖ < ε, ε > 0 e V (0) = 0.

Apendice B. Conceitos Sobre Estabilidade 48
B.2.2 Translacao da Origem do Sistema de Coordenadas
Seja x∗ um ponto de equilıbrio de (B.1), ou seja, f(x∗) = 0. Para analisar o compor-
tamento do sistema em uma vizinhanca de x∗, fazemos a seguinte translacao do ponto de
equilıbrio para a origem
x = x− x∗
˙x = x− x∗ = x
˙x = f(x+ x∗)
Ponto de equilıbrio: x = 0 (para x = 0 ⇒ ˙x = f(x∗) = 0).
B.2.3 Teoremas Sobre Estabilidade (Segundo Lyapunov)
Teorema B.2.1 Se para o sistema (B.1), existe uma funcao V (x) continuamente dife-
renciavel tal que
(i) V (x) > 0
(ii) V (x) ≤ 0
entao x∗ = 0 e estavel.
Teorema B.2.2 Se para o sistema (B.1), existe uma funcao V (x) continuamente dife-
renciavel tal que
(i) V (x) > 0
(ii) V (x) < 0
entao x∗ = 0 e assintoticamente estavel.
Teorema B.2.3 Se para o sistema (B.1), existe uma funcao V (x) continuamente dife-
renciavel tal que
(i) V (x) > 0
(ii) V (x) ≤ 0
(iii) V (x) →∞ quando ‖x‖ → ∞
entao x∗ = 0 e globalmente assintoticamente estavel.
Apendice B. Conceitos Sobre Estabilidade 49
Teorema B.2.4 (Teorema de La Salle) Se para o sistema (B.1), existe uma funcao
V (x) continuamente diferenciavel tal que
(i) V (x) > 0
(ii) V (x) ≤ 0
(iii) nao existe x 6= 0 tal que V (x) = 0, para todo t ≥ 0
entao x∗ = 0 e assintoticamente estavel.
B.3 Princıpio do Modelo Interno
Em muitos problemas de controle, a entrada de referencia y∗ pode ser modelada por
Qr(s)y∗ = 0 (B.2)
onde Qr e um polinomio conhecido, e s , ddt
e o operador diferencial. Por exemplo, quando
y∗ = constante, Qr(s) = s. Quando y∗ = t, Qr(s) = s2 e quando y∗ = Asen(ω0t) para
algumas constantes A e ω0, entao Qr(s) = s2 + ω20, etc. Similarmente, uma perturbacao
determinıstica d pode ser modelada como
Qd(s)d = 0 (B.3)
para algum Qd conhecido, em casos onde existe informacao suficiente sobre d. Por exem-
plo, se d e um sinal senoidal com amplitude e fase desconhecida, mas com frequencia ωd
entao ele pode ser modelado por (B.3) com Qd(s) = s2 + ω2d.
A ideia por tras do princıpio do modelo interno e que por incluir o fator 1Qr(s)Qd(s)
no
controlador C(s), nos podemos anular o efeito de y∗ e d no erro de rastreamento e = y∗−y,
ou seja, o modelo interno e um operador aplicado a referencia com o objetivo da planta
acompanha-la.
Bibliografia
[1] Sastry, S. e Bodson, M., “Adaptive Control: Stability, Convergence and Robustnes”,
Prentice Hall, Englewood Cliffs, New Jersey, 1989.
[2] Slotine, J. J. e Li, W., “Applied Nonlinear Control”, Prentice Hall, Englewood Cliffs,
New Jersey, 1991.
[3] Astrom, K. J. e Wittenmark, B., “Adaptive Control”, Addison-Wesley Publishing
Company, Reading, Massachusetts, 1989.
[4] Narendra, K. S. e Annaswamy, A. M., “Stable Adaptive Systems”, Prentice Hall,
Englewood Cliffs, New Jersey, 1989.
[5] Utkin, V. I., “Variable Structure Systems with Sliding Modes”, IEEE Transactions
on Automatic Control, Vol. AC-22, No 2, Pag. 212-222, 1977.
[6] Utkin, V. I., “Sliding Modes and Their Application in Variable Structure Systems”,
Mir Publishers, Moscou, 1978.
[7] Utkin, V. I., “Variable Structure Systems: Present and Future”, Automation and
Remote Control, Vol. 44, No 9, Pt. 1, Pag. 1105-1120, 1983.
[8] Utkin, V. I., “Discontinuous Control Systems: State of Art in Theory and Applica-
tions”, Procedings of the 10th IFAC World Congress, Munich, Vol. 1, Pag. 75-94,
1987.
[9] Utkin, V. I., “Sliding Modes in Control and Optimization”, Springer-Verlag, 1992.
[10] Utkin, V. I., “Sliding Mode Control Design: Principles and Applications to Electric
Drives”, IEEE Transactions on Industrial Electronics, Vol. 1, No 40, Pag. 23-36,
1993.
50
Referencias Bibliograficas 51
[11] Araujo, A. D., “Contribuicao a Teoria de Controle Adaptativo por Modelo de Re-
ferencia e Estrutura Variavel: Uma Abordagem Entrada/Saıda”, Tese de Doutorado,
Universidade Federal do Rio de Janeiro, 1993.
[12] Narendra, K. S., Lin, Y. H. e Valavani, L. S., “Stable Adaptive Controller Design -
Part II - Proof of Stability”, IEEE Transactions on Automatic Control, Vol. AC-25,
No 3, Pag. 440-448, 1980.
[13] Ioannou, P. A. e Kokotovic, P. V., “Instability Analysis and Improvement of Robust-
ness of Adaptive Control”, Automatica, Vol. 20, No 5, Pag. 583-594, 1984.
[14] Hsu, L. e Costa, R. R., “Adaptive Control with Discontinuous σ-Factor and Satura-
tion for Improved Robustness”, International Journal of Control, Vol. 45, No 3, Pag.
843-859, 1987.
[15] Rohrs, C. E., Younce, R. e Harvey, S., “Unacceptable Transients in Adaptive Con-
trollers”, SIAM Conference on Control in the 90’s: Achievements, Opportunities and
Challenges, San Francisco, 1989.
[16] Suarez, D. A. e Lozano R., “Adaptive Control of Nonminimum Phase Systems Subject
to Unknown Bounded Disturbances”, IEEE Transactions on Automatic Control, Vol.
AC-41, No 12, Pag. 1830-1836, 1996.
[17] Das, M. e Cristi, R., “Robustness of an Adaptive Pole Placement Algorithm in the
Presence of Bounded Disturbances and Slow Time Variation of Parameters”, IEEE
Transactions on Automatic Control, Vol. AC-35, No 6, Pag. 752-756, 1990.
[18] Praly, L., “Robustness of Indirect Adaptive Control Based on Pole-Placement De-
sign”, PAC Workshop on Adaptive Control, San Francisco,1983.
[19] Naik, S. M., Kumar, P. R. e Ydstie, B. E., “Robust Continuous-Time Adaptive
Control by Parameter Projection”, IEEE Transactions on Automatic Control, Vol.
AC-37, No 2, Pag. 182-197, 1992.
[20] Filatov, N. M. e Unbehauen, H., “Adaptive Controller with Dual Properties for Sys-
tems with Unmodelled Nonlinearity”, Proceedings of the American Control Confer-
ence, Pag. 1213-1217, 1997.

Referencias Bibliograficas 52
[21] Silva, Jr., F. C., Araujo, A. D. e Oliveira, J. B., “A Proposal for a Variable Structure
Adaptive Pole Placement Control”, 8th International Workshop on Variable Structure
Systems, Barcelona-Espanha, Setembro/2004.
[22] Silva, Jr., F. C., Araujo, A. D. e Oliveira, J. B., “Uma Proposta de um Controlador
Adaptativo por Posicionamento de Polos e Estrutura Variavel”, Anais do XV CBA,
Gramado-RS, 2004.
[23] Silva, Jr., F. C. e Araujo, A. D., “A Variable Structure Adaptive Pole Placement
Control Applied to the Speed Control of a Three-Phase Induction Motor”, Anais do
VIII COBEP, Recife-PE, Pag. 438-442, 2005.
[24] Rohrs, C. E., Valavani, L. S., Athans, M. e Stein, G., “Robustness of Continuous-
Time Adaptive Control Algorithms in the Presence of Unmodeled Dynamics”, IEEE
Transactions on Automatic Control, Vol. AC-30, No 9, Pag. 881-889, 1985.
[25] Ioannou, P. A. e Sun, J., “Robust Adaptive Control”, Prentice Hall, 1996.
[26] Ha, Q. P., Trinh, H., Nguyen, H. T. e Tuan, H. D., “Dynamic Output Feedback
Sliding-Mode Control Using Pole Placement and Linear Functional Observers”, IEEE
Transactions on Industrial Electronics, Vol. 50, No 5, Pag. 1030-1036, 2003.
[27] Hsu, L., “Smooth Sliding Control of Uncertain Systems Based on a Prediction Error”,
I. J. Robust and Nonlinear Control, Vol. 7, Pag. 353-372, 1997.
[28] Filippov, A. F., “Differential Equations with Discontinuous Right-Hand Side”, Amer-
ican Math. Soc. Translations, Vol. 42, Ser. 2, Pag. 199-231, 1964.
[29] Hsu, L. e Costa, R. R., “Variable Structure Model Reference Adaptive Control Using
Only Input and Output Measurements - Part I”, International Journal of Control,
Vol. 49 No 2, Pag. 399-416, 1989.
[30] Hsu, L. e Costa, R. R., “Adaptive Control with Sliding Modes: Theory and Applica-
tions”, Anais do XI CBA, Mini-curso, Pag. 39-60, 1996.
[31] Narendra, K. S. e Valavani, L. S., “Stable Adaptive Controller Design-Part I-Direct
Control”, IEEE Trans. Automatic Control, Vol.AC-23, No 4, Pag. 570-583, 1978.

Referencias Bibliograficas 53
[32] Oliveira, J. B. e Araujo, A. D., “Controle Adaptativo Indireto por Modelo de Re-
ferencia e Estrutura Variavel: VS-MRAC Indireto”, Anais do XIV CBA, Natal-RN,
Pag. 2557-2562, 2002.
[33] Oliveira, J. B., “Controle Adaptativo Indireto por Modelo de Referencia e Estrutura
Variavel”, Dissertacao de Mestrado, Universidade Federal do Rio Grande do Norte,
Natal-RN, 2003.
[34] Oliveira, J. B. e Araujo, A. D., “An Indirect Variable Structure Model Reference
Adaptive Control Applied to the Speed Control of a Three-Phase Induction Motor”,
Anais do American Control Conferece 2004-ACC 2004, 2004.
[35] Hanselman, D. e Littlefield, B., “Matlab 6 - Curso Completo”, Prentice Hall, 2002.
[36] Leonhard, W., “Control of Electrical Drives”, Springer-Verlag, Segunda Edicao, 1996.
[37] Blashcke, F., “The Principle of Field Orientation as Applied to the New Transvektor
Closed Loop Control System for Rotating Field Machines”, Siemens Review, Pag.
217-220, 1972.
[38] Cunha, C. D., “Controlador Dual Adaptativo Robusto para um Motor de Inducao
Trifasico”, Dissertacao de Mestrado, Universidade Federal do Rio Grande do Norte,
Natal-RN, 2001.
[39] Larrea, J. A. S., “Estudo Comparativo de Metodos de Controle Vetorial para Motores
de Inducao”, Dissertacao de Mestrado, Universidade Federal do Rio de Janeiro, Rio
de Janeiro-RJ, 1993.
[40] Bose, B. K., “High Performance Control of Induction Motor Driver”, New Tech-
nologies, Department of Electrical Engineering, University of Tennessee, Knoxville,
U.S.A, 2000.
[41] Fortunato, A. F. A., Salazar, A. O. e Araujo, A. D., “Controle de Velocidade U-
sando Modos Deslizantes para um Motor de Inducao Trifasico”, Revista Controle e
Automacao, Vol.12, No 2, Pag. 148-155, 2001.





























