Embed Size (px)
Citation preview
UMA TÉCNICA PARA OTIMIZAÇÃO ESTRUTURAL
MEDIANTE A DERIVADA TOPOLÓGICA
Marcelo de França Cordeiro
DISSERTAÇÃO SUBMETIDA AO CORPO DOCENTE DA COORDENAÇÃO DOS
PROGRAMAS DE PÓS-GRADUAÇÃO DE ENGENHARIA DA UNIVERSIDADE
FEDERAL DO RIO DE JANEIRO COMO PARTE DOS REQUISITOS
NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE MESTRE EM CIÊNCIAS EM
ENGENHARIA MECÂNICA.
Aprovada por:
________________________________________________
Prof. Jose Herskovits Norman, D.Ing.
________________________________________________
Prof. Fernando Pereira Duda, D.Sc.
________________________________________________
Prof. Luiz Eloy Vaz, D.Sc.
RIO DE JANEIRO, RJ - BRASIL
MARÇO DE 2007
ii
CORDEIRO, MARCELO DE FRANÇA
Uma Técnica para Otimização Estrutural
Mediante a Derivada Topológica [Rio de
Janeiro] 2007
XII, 86 p. 29,7 cm (COPPE/UFRJ,
M.Sc., Engenharia Mecânica, 2007)
Dissertação - Universidade Federal do
Rio de Janeiro, COPPE
1. Análise de Sensibilidade Topológica
2. Método dos Elementos Finitos
I. COPPE/UFRJ II. Título (série)
iii
Resumo da Dissertação apresentada à COPPE/UFRJ como parte dos requisitos
necessários para a obtenção do grau de Mestre em Ciências (M.Sc.)
UMA TÉCNICA PARA OTIMIZAÇÃO ESTRUTURAL
MEDIANTE A DERIVADA TOPOLÓGICA
Marcelo de França Cordeiro
Março/2007
Orientador: Jose Herskovits Norman
Programa: Engenharia Mecânica
Esta dissertação aplica o conceito da análise de sensibilidade topológica e da
otimização estrutural evolutiva ao problema da otimização topológica de sólidos.
Estuda-se o caso de minimizar a energia interna de deformação com restrição nas
tensões. É considerado o comportamento do sólido como elástico e linear. O método
dos elementos finitos é utilizado para discretizar o domínio e obter uma solução
aproximada do problema. Os resultados numéricos obtidos são comparados com
resultados existentes na literatura. Por fim, é apresentada uma comparação entre a
presente formulação com formulações diferentes, provando a similaridade entre elas.
iv
Abstract of Dissertation presented to COPPE/UFRJ as a partial fulfillment of the
requirements for the degree of Master of Science (M. Sc.)
A STRUCTURAL OPTIMIZATION TECHNIQUE
USING THE TOPOLOGY SENSITIVITY ANALYSIS
Marcelo de França Cordeiro
March/2007
Advisor: Jose Herskovits Norman
Department: Mechanical Engineering
This dissertation applies the concepts of topological sensitivity analysis and
evotutionary structural optimization in the problem of topology optimization of solids.
The case studied is to minimize the internal deformation energy with stress constraint.
The comportment of the solid is linear and elastic. The method of finite element is used
to discretize the domain and to obtain an approximate solution of the problem. The
numerical results are compared with existing results in literature. Finally, is presented a
parallel between the present formulation with different ones proving their similarity.

v
Aos meus pais Fernando e Joana, meu irmão Alexandre e Tarsila.
vi
A ciência está em constante evolução. A necessidade do saber é um instinto que
está presente no inconsciente do Homem. Do fogo ao plasma, da célula ao quark. A
ciência empenha papel fundamental na quebra dos paradigmas da Sociedade.
vii
Sumário
1 Introdução 1
1.1 Conceitos Iniciais ..................................................................................1
1.2 Otimização Estrutural ............................................................................3
1.3 Derivada Topológica .............................................................................5
1.4 Histórico Evolutivo da Otimização Topológica ....................................6
1.5 Exemplos de Aplicações........................................................................8
2 Elasticidade Linear de Sólidos 9
2.1 Problema Variacional e de Valor de Contorno da Elasto-Estática
Linear ...............................................................................................................9
3 Derivada Topológica 12
3.1 Formulação da Derivada Topológica ..................................................12
3.2 Parametrização ....................................................................................15
3.3 Análise de Sensibilidade à Mudança de Forma...................................18
3.4 Método de Lagrange............................................................................19
3.5 Cálculo da Derivada Topológica .........................................................21
4 Otimização Topológica de Sólidos 30
4.1 Formulação do Problema de Minimizar a Energia de Deformação com
Restrições nas Tensões ................................................................................................30
4.2 Formulação da Distribuição de Material .............................................31
4.3 Discretização do Domínio ...................................................................32
4.4 Aplicação da Derivada Topológica no Problema de Otimização........33
5 Alivio de Tensões com a Otimização Estrutural
Evolucionária 37
viii
5.1 Formulação de Alívio de Tensões .......................................................38
6 Comparação dos Métodos de Otimização Topológica 42
6.1 Aproximação por Microestrutura ........................................................42
6.2 Aproximação por Macroestrutura........................................................43
6.3 Comparação entre Métodos .................................................................44
6.4 Tensão de Mises x Energia de Deformação Interna ............................45
7 Método dos Elementos finitos 47
7.1 Visão Geral ..........................................................................................47
7.2 Discretização das Equações.................................................................48
7.3 Treliça Tridimensional ........................................................................51
7.4 Triângulo Linear ..................................................................................53
7.5 Quadrado Bi-linear de Malha Regular.................................................55
8 Métodos de Resolução de Sistemas Lineares 58
8.1 Esparsidade..........................................................................................58
8.2 Matriz Simétrica ..................................................................................59
8.3 Matriz Definida Positiva......................................................................60
8.4 Matriz em Banda .................................................................................60
8.5 Decomposição de Cholesky ................................................................62
9 Exemplos 63
9.1 Viga Bi-apoiada com Carga Distribuída na Parte Superior.................64
9.2 Viga Engastada Superiormente com Carga Distribuída Cisalhante ....68
9.3 Viga Bi-apoiada com Carga Distribuída Inferiormente ......................72
10 Implementação Computacional 76
10.1 Programação Otimizada ..................................................................76
10.2 Estrutura do Programa.....................................................................77
ix
10.3 Pré-processamento...........................................................................78
10.4 Processamento .................................................................................78
10.5 Pós-processamento ..........................................................................79
11 Conclusão 80
12 Bibliografia 82
x
Lista de Símbolos
Ω1 Vetor de índices que indica quais pontos do domínio estão ativos. A Área da seção transversal da treliça. a(.,.) ou aτ Forma bi linear contínua e coerciva. b Conjunto de forças de corpo do domínio. Be Esfera de raio e. B Matriz de incidências. D Tensor constitutivo do material, ou tensor de elasticidade. D0 Tensor constitutivo do material na configuração inicial. Dad Conjunto de tensores de elasticidade admissíveis para o resultado
ótimo. D*
Tensor constitutivo do material penalizado. DT(x) ou DT Função vetorial que define a derivada topológica em relação a um
vetor x. E Campo de deformações. E Módulo de Elasticidade, Módulo de Young. e Raio de um furo B. En Energia de deformação interna. f(x) ou f Função objetivo ou função custo. fR(e) Função escalar regularizadora em função do raio e. g(x) ou g Vetor de Restrições de Desigualdade. h(x) ou h Vetor de Restrições de Igualdade. H1 Espaço de Hilbert de ordem 1. I Matriz identidade. ki Matriz de rigidez do elemento. K Matriz de rigidez global. L Comprimento da treliça. l(.) ou lτ Funcional linear contínuo. n Vetor normal a uma superfície pertencente ao domínio. Ni Função de forma de um nó i pertencente a um elemento. N Conjunto dos número naturais. N Dimensão do problema. p Expoente de Penalização na formulação SIMP. q Conjunto de Tensões aplicadas em um domínio. q Número de variáveis do problema. r Número de restrições de desigualdade do problema. Rn Conjunto dos números reais, de dimensão n.
+R Conjunto dos números reais positivos. s Número de restrições de igualdade do problema. t Espessura da malha de elementos finitos. T Campo de tensões. Te Campo de tensões no domínio perturbado. Tτ Campo de tensões parametrizado no domínio perturbado. TVM Tensão de Von Mises. u Conjunto de pontos de engaste do domínio. u Campo de deslocamentos.
xi
ue Campo de deslocamentos no domínio perturbado. uτ Campo de deslocamentos no domínio perturbado e parametrizado,
função implícita de τ. U Conjunto das funções e variações admissíveis do deslocamento u.
eU Conjunto das funções e variações admissíveis do deslocamento ue.
τU Conjunto das funções e variações admissíveis do deslocamento parametrizado uτ.
V Conjunto das funções e variações admissíveis do deslocamento η. eV Conjunto das funções e variações admissíveis do deslocamento ηe.
τV Conjunto das funções e variações admissíveis do deslocamento parametrizado ητ.
ΩV Volume relativo ao domínio Ω. VΓ Volume dos elementos que pertencem a fronteira Γ.
maxV Volume máximo admitido para a solução ótima. v(x) ou v Ação de mudança de forma, ou descrição material de velocidade
que caracteriza a mudança de forma de um corpo. vn Componente normal da Ação de mudança de forma v(x). V Matriz de coeficientes de Von Mises. x Vetor das variáveis de projeto. x Ponto interior ao domínio. x Vetor de solução ótima do projeto. xτ Nomenclatura resumida para ),( τχ x , função que define uma
perturbação parametrizada em um domínio.
x& Derivada parcial de x em relação ao parâmetro τ, xx&=
∂∂τ
.
Xi Vetor que armazena a coordenada nodal de um elemento i Z Matriz de coeficientes de Von Mises com o tensor constitutivo
agregado. α1,...,n Constantes de interpolação do elemento finito.
eB∂ Fronteira do furo Be.
supξ Parâmetro superior para a eliminação de elementos utilizando a Derivada Topológica.
infξ Parâmetro inferior para a eliminação de elementos utilizando a Derivada Topológica.
φ Função regular definida em um domínio não parametrizado.
τφ Função regular parametrizada.
τφΩ Função regular definida em τΩ .
τφΓ Função regular definidas em τΓ .
iφ Função de interpolação dos elementos finitos. μτ Deslocamento arbitrário pertencente ao conjunto τV . η Deslocamento arbitrário pertencente ao conjunto V . ητ Deslocamento arbitrário pertencente ao conjunto τV . ηe Deslocamento arbitrário do domínio perturbado pertencente ao
conjunto eV .
xii
ητ Deslocamento arbitrário do domínio perturbado e parametrizado pertencente ao conjunto τV .
Ω Domínio de projeto, ou de material. Ω0 Domínio inicial de projeto, ou de material. Ωe Domínio de projeto perturbado com um furo Be de raio e. Ωe+δe Domínio de projeto perturbado com a expansão de um furo Be de
raio e para um de raio e+δe. Ωτ Domínio de projeto perturbado e parametrizado. Ωelem Domínio de um elemento pertencente à malha de elementos finitos. τ Parâmetro que define a perturbação no domínio. Г Contorno ou fronteira do domínio. ГD Região da fronteira onde há engastes. Гe Fronteira perturbada com um furo Be de raio e. Гe+δe Fronteira perturbada com a expansão de um furo Be de raio e para
um de raio e+δe. ГN Região da fronteira onde são aplicadas tensões externas. Гτ Fronteira perturbada e parametrizada.
)( τψ Ω Função custo parametrizada em relação ao domínio parametrizado. )( τuΨ ou Ψ Função custo parametrizada em relação ao campo de
deslocamentos parametrizado. λτ Multiplicador de Lagrange.
),( τχ x Função que define uma perturbação parametrizada em um domínio. ),( ⋅⋅L Função Lagrangeano.
Σe Tensor de Eshelby na configuração perturbada do domínio. ρe Vetor de Densidades do domínio. ν Coeficiente de Poisson. σ1,...,i Tensão principal 1,...,i.
e
eρψ∂∂ Sensibilidade da função custo perturbada em relação à densidade
na formulação SIMP e ESO.
1
1 Introdução
1.1 Conceitos Iniciais
O projeto é uma etapa fundamental no desenvolvimento de um produto. Pode-se
dividir esta etapa em duas fases: concepção e dimensionamento. Na concepção, são
definidos os conceitos básicos e tecnologias empregadas para o desenvolvimento do
projeto, obtendo-se uma definição inicial do produto. Em uma segunda etapa, são
definidas as dimensões, forma e topologia através da utilização de técnicas analíticas ou
numéricas que propiciam a obtenção de produtos que atendam a todas as especificações
definidas na etapa da concepção.
A palavra “otimização” é definida como “fazer tão perfeito, efetivo ou
funcional quanto possível”. A otimização tem como meta dimensionar um produto da
melhor forma possível em relação a um objetivo, de modo que este produto atenda às
condições impostas pela sua concepção. Por exemplo: na indústria aeronáutica o peso é
um fator preponderante para se obter um bom projeto de uma peça, e é necessário
reduzir ao máximo este valor. No entanto, esta peça deve resistir a todos os esforços
nela aplicados. Além do peso, outra variável de suma importância para a indústria é o
custo final do produto. Desta forma, minimizando-se o peso, tem-se como conseqüência
o uso de menos matéria prima para se fabricar uma peça, resultando em redução do
custo. Em uma visão empresarial, cada grama de material economizado pode
2
representar um acréscimo considerável nos lucros para uma empresa, fazendo com que
esta se diferencie em relação às concorrentes. Portanto, projetar sem utilizar a
otimização pode acarretar superdimensionamentos desnecessários ao projeto.
Matematicamente, pode-se apresentar o problema de otimização da seguinte
forma:
problema do restrições0)(0)(
:que tal
objetivo funçãoou custo função)(minimize
⇒⎭⎬⎫
⎩⎨⎧
=≤
⇒
xx
xx
hg
f
(1.1)
Em que srq hgf RRRR ∈∈∈∈ e , , ,x , sendo q, r e s escalares que
definem o número de variáveis, restrições de desigualdade e de igualdade.
O problema mostrado em (1.1) consiste em achar, dentre todos os pontos x que
verificam as restrições, aquele que corresponde ao menor valor da função custo.
Definição: x é vetor das variáveis de projeto. f é a função objetivo ou também
chamada de função custo. g é o vetor de restrições de desigualdade e h é o vetor de
restrições de igualdade. Um vetor x satisfazendo todas as restrições impostas para o
problema é chamado de ponto viável do problema. O conjunto de todos os pontos
viáveis do problema é chamado de região viável. A solução ótima do problema é dada
para qR∈x , quando )()( xx ff ≤ , para todo x que pertencer à região viável.
Nas diversas áreas da engenharia, existem técnicas de dimensionamento que,
embora não forneçam um projeto ótimo, resultam em projetos de boa qualidade. Nesta
dissertação serão estudadas algumas técnicas com estas características, aplicadas ao
projeto de estruturas.
3
1.2 Otimização Estrutural
A otimização estrutural vem sendo estudada desde os anos 60 e apresenta
resultados satisfatórios na construção civil, indústria automobilística e indústria
aeroespacial. Estes projetos têm como objetivo básico a redução do custo financeiro e
da quantidade de material empregado, e, além disso, a garantia de que a estrutura
suporte todas as restrições mecânicas impostas, sejam elas estáticas ou dinâmicas.
A função custo mais comumente utilizada na engenharia é o peso total da
estrutura, com restrições locais de tensão. No entanto, nesta dissertação será utilizada
como função custo a energia de deformação interna com a restrição nas tensões. As
restrições mais usuais na engenharia são: tensão máxima de Mises, deslocamentos
máximos, volume máximo ou modos de vibração admitidos.
Existem três classes de otimização, e na concepção do projeto deve-se escolher
qual delas utilizar: otimização dimensional, otimização geométrica e otimização
topológica.
1.2.1 Otimização Dimensional
A otimização dimensional utiliza como variável de projeto um parâmetro de
um elemento estrutural. No caso da treliça, considerado um elemento unidimensional, a
variável de projeto é a área da seção transversal. Para um sólido bidimensional, a
variável de projeto é a sua espessura e necessita-se utilizar técnicas de discretização do
domínio para possibilitar a obtenção de uma solução numérica via método dos
elementos finitos
4
1.2.2 Otimização de Forma
A otimização de forma tem como objetivo definir a melhor fronteira de um
sólido com relação a uma função custo e restrições mecânicas de projeto. O domínio
deste problema necessita ser discretizado para existir um número finito de pontos ao
longo da fronteira e assim possibilitar uma solução numérica via método dos elementos
finitos.
1.2.3 Otimização Topológica
A otimização topológica tem o objetivo de definir da melhor forma possível a
distribuição de material em um domínio pré-determinado considerando-se uma função
custo e as restrições mecânicas. A variável de projeto, neste caso, é o próprio domínio,
no qual se pode eliminar material, ou seja, criar furos.
O domínio do problema da topologia necessita ser discretizado para se
trabalhar apenas com um número finito de pontos para se obter uma solução numérica
aproximada das equações diferenciais parciais do problema. Os elementos pertencentes
a este domínio são interpretados como bits, cujo valor pode ser 0 ou 1, ou seja,
pertencentes ou não ao domínio ótimo. A solução do problema discreto é definida como
a união de todos os elementos que tiverem o valor 1. Nesta dissertação, optou-se por
trabalhar com a formulação discreta das variáveis de projeto porque desta forma se
obtém uma solução final otimizada sem a necessidade da aplicação de filtros e de
penalidades, como, por exemplo, é feita no modelo SIMP (material sólido isotrópico
com penalização). Além disso, utilizando-se a formulação discreta não ocorre o
problema do “tabuleiro de xadrez”.
Como mencionado anteriormente, nesta dissertação será utilizada a energia
interna de deformação como função custo. A restrição mecânica empregada será a
tensão máxima de Mises admitida na estrutura. Apesar de não se trabalhar com o peso
5
como função custo, o resultado final sempre acarretará em uma redução de peso
considerável.
1.3 Derivada Topológica
A derivada topológica é uma função escalar que estuda a sensibilidade da
função custo com relação ao domínio, levando em conta determinadas restrições. A
função custo, relembrando o problema de otimização topológica desta dissertação, será
a energia interna de deformação e a restrição será a tensão máxima de Mises. Em outras
palavras: faz-se um furo infinitesimal no domínio, verifica-se a variação da energia
interna de deformação em relação àquele ponto, e se obtém o valor da derivada
topológica neste ponto.
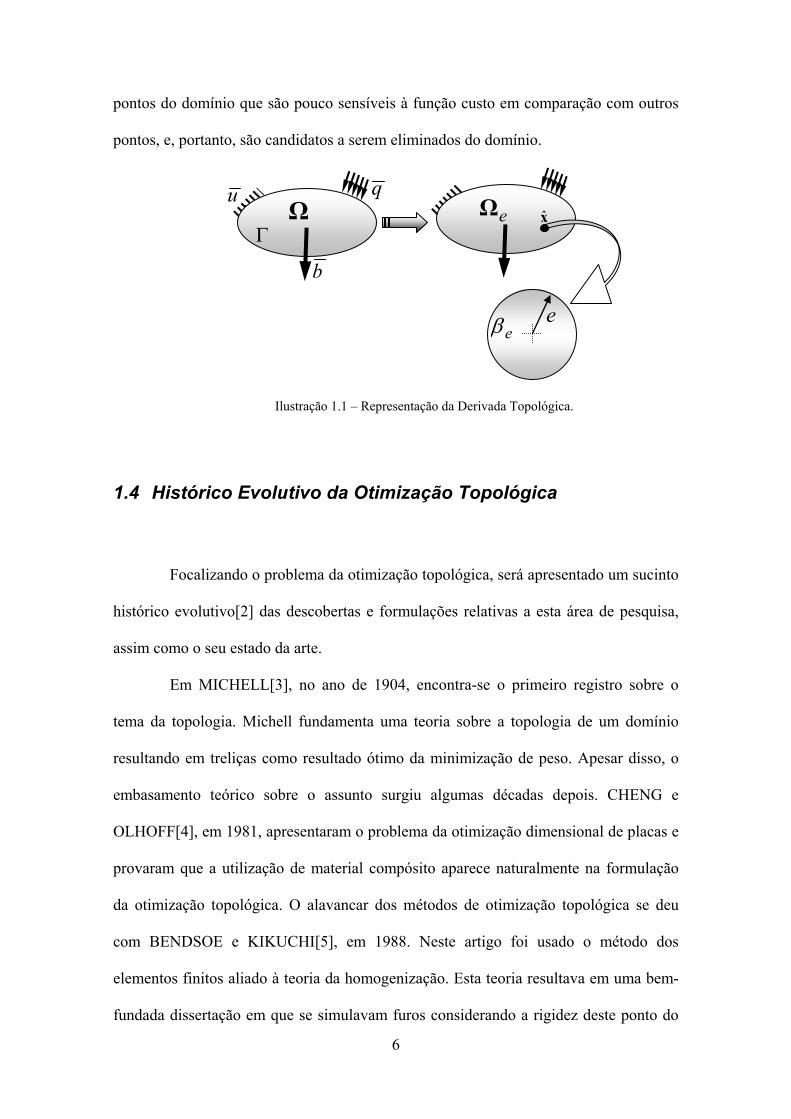
Considera-se um domínio inicial de material NR⊂Ω , com N sendo um
escalar que representa a dimensão do problema. Um novo domínio perturbado é criado
sendo ee B−Ω=Ω . Be é uma esfera de raio e. O contorno é dado por ee B∂∪Γ=Γ .
Conforme mostrado na Ilustração 1.1.
Em linguagem matemática, pode-se representar a derivada topológica da
seguinte forma:
( ) ( )( )ef
DR
ee
TΩ−Ω
=→
ψψ0
lim)ˆ(x (1.2)
)ˆ(xTD é um escalar em função do ponto x , ψ é a função custo parametrizada
e fR é uma função regularizadora.
Esta é a definição clássica da análise de sensibilidade de forma[1] que será
utilizada para o cálculo da derivada topológica. Desta maneira, podem-se obter os
6
pontos do domínio que são pouco sensíveis à função custo em comparação com outros
pontos, e, portanto, são candidatos a serem eliminados do domínio.
Ilustração 1.1 – Representação da Derivada Topológica.
1.4 Histórico Evolutivo da Otimização Topológica
Focalizando o problema da otimização topológica, será apresentado um sucinto
histórico evolutivo[2] das descobertas e formulações relativas a esta área de pesquisa,
assim como o seu estado da arte.
Em MICHELL[3], no ano de 1904, encontra-se o primeiro registro sobre o
tema da topologia. Michell fundamenta uma teoria sobre a topologia de um domínio
resultando em treliças como resultado ótimo da minimização de peso. Apesar disso, o
embasamento teórico sobre o assunto surgiu algumas décadas depois. CHENG e
OLHOFF[4], em 1981, apresentaram o problema da otimização dimensional de placas e
provaram que a utilização de material compósito aparece naturalmente na formulação
da otimização topológica. O alavancar dos métodos de otimização topológica se deu
com BENDSOE e KIKUCHI[5], em 1988. Neste artigo foi usado o método dos
elementos finitos aliado à teoria da homogenização. Esta teoria resultava em uma bem-
fundada dissertação em que se simulavam furos considerando a rigidez deste ponto do
eΩ xΩ
eβ
Γ
b
qu
e
7
domínio tendendo para zero. Um ano depois, BENDOSE[6], em 1989, formulou a
teoria do Material Sólido Isotrópico com Penalização (SIMP, em Inglês) que realizava a
penalização dos elementos de densidade intermediária para se aproximar da solução
discreta do problema. Estas publicações pioneiras causaram vasto desenvolvimento no
campo da otimização topológica.
Paralelamente ao estudo da otimização topológica, outra área de pesquisa
estava se desenvolvendo: a análise de sensibilidade à mudança de forma. O estudo da
sensibilidade em relação a perturbações na fronteira teve origem nos anos 70 com
MURAT e SIMON[7]. Este trabalho forneceu as bases matemáticas para a análise a
mudança de forma[8]. Em 1994, ESCHENAUER et al.[9] apresentaram uma
formulação que atendia tanto à mudança de forma quanto a topologia ótima usando as
técnicas da análise de sensibilidade à mudança de forma. No entanto, a formulação do
problema continha limitações com relação à função custo. Em 1998, o trabalho de CÉA
et al.[10] calculava a derivada topológica via análise de sensibilidade à mudança de
forma de maneira correta, em comparação com a formulação de NOVOTNY[11].
Entretanto, apenas era válida para a condição de contorno de Newman homogênea nos
furos. Finalmente, em 2003, NOVOTNY[11], em sua tese de doutorado, propõe uma
formulação completa para o problema, provando ser possível utilizar condições de
contorno de Newman, Robin e Dirichilet em diversas situações da engenharia,
estendendo enormemente a gama de problemas nos quais podem ser utilizados os
conceitos da derivada topológica. Atualmente, já existem alguns softwares comerciais
de otimização topológica difundidos pelo mundo. Tem-se como exemplo o NASTRAN
Topological Optimization, um dos mais usados programas comerciais de análise
estrutural, desenvolvido pela National Aeronautics and Space Administration (NASA).
8
1.5 Exemplos de Aplicações
No decorrer de todos estes anos de pesquisa, muitos exemplos práticos da
otimização topológica foram propostos. Como exemplo, cita-se:
1. Condução estacionária de calor em sólidos rígidos, considerando a
função objetivo como sendo a energia potencial total e condições de
contorno de Newman, Dirichilet ou Robin;
2. Flexão elástica linear de placas de Kirchhoff considerando a energia
potencial total como função objetivo;
3. Torsão de barras prismáticas sujeitas à fluência estacionária
considerando a energia de dissipação complementar como função
objetivo;
4. Elasticidade linear de sólidos, com o peso como função objetivo e
restrições locais de tensão;
5. Elasticidade linear de Sólidos, com a Energia de Deformação Interna
como função objetivo, que será abordada nesta dissertação.
9
2 Elasticidade Linear de Sólidos
Para descrever o fenômeno físico da elasticidade linear, e conseqüentemente
otimizar topologicamente o domínio de projeto, é necessário a definição de um modelo
físico de comportamento do sólido, considerando algumas simplificações. Adotar-se-á
neste trabalho um material isotrópico linear sob o estado plano de tensões. As equações
que modelam este fenômeno serão descritas a seguir.
2.1 Problema Variacional e de Valor de Contorno da Elasto-
Estática Linear
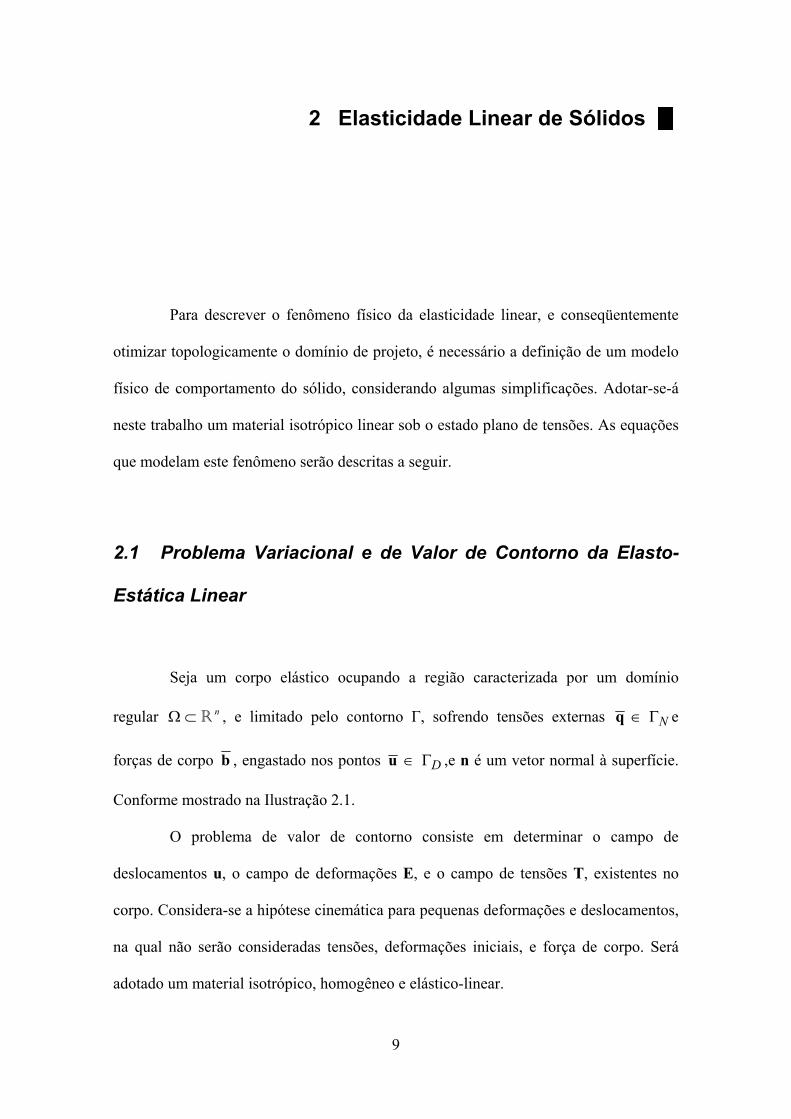
Seja um corpo elástico ocupando a região caracterizada por um domínio
regular nR⊂Ω , e limitado pelo contorno Γ, sofrendo tensões externas NΓ∈q e
forças de corpo b , engastado nos pontos DΓ∈u ,e n é um vetor normal à superfície.
Conforme mostrado na Ilustração 2.1.
O problema de valor de contorno consiste em determinar o campo de
deslocamentos u, o campo de deformações E, e o campo de tensões T, existentes no
corpo. Considera-se a hipótese cinemática para pequenas deformações e deslocamentos,
na qual não serão consideradas tensões, deformações iniciais, e força de corpo. Será
adotado um material isotrópico, homogêneo e elástico-linear.

10
Ilustração 2.1 – Exemplo genérico de um problema da mecânica dos sólidos.
As seguintes condições devem ser satisfeitas:
Equação diferencial de equilíbrio:
0=+ bTdiv (2.1)
Equação cinemática:
[ ] ( ) sT uuuE ∇=∇+∇=21 (2.2)
Equação constitutiva:
ET D= (2.3)
D é o tensor constitutivo do material, ou tensor de elasticidade. [E] é o tensor-
deformação. E é o tensor-deformação em forma de vetor, para o caso do estado plano de
tensões. T é o tensor de tensões em forma de vetor para o estado plano de tensões.
As seguintes condições de contorno serão consideradas:
Pontos engastados:
uu = sobre ΓD (2.4)
Pontos de aplicação de tensão na superfície:
qTn = sobre ΓN (2.5)
Resumidamente o problema resulta no seguinte sistema de equações (forma
diferencial ou forte):
Encontre u tal que:
ΓΩ
b
qu
n

11
⎪⎩
⎪⎨
⎧
Γ=Γ=Ω=+
em , em , em , 0
D
N
div
qTnuu
bT (2.6)
Reescrevendo o problema em sua forma fraca, usando o princípio dos trabalhos
virtuais, tem-se:
Encontre U∈u tal que:
V∈∀Γ+=Ω∇ ∫∫∫ ΓΩΩ
ηηqηbsηT ddΩ.d. . (2.7)
O conjunto das funções e das variações admissíveis é definido respectivamente
por [11]:
0))((
))((
Γ21
Γ21
=Ω∈=
=Ω∈=
vη
uuu
H
H
V
U (2.8)
H1 é o espaço de Hilbert de ordem 1.
A equação pode ser representada na forma abstrata a seguir:
Ω),( d.a ∫Ω ∇= sηTηu (2.9)
Γ+= ∫∫ ΓΩ
dd.l ηqηbη .Ω)( (2.10)
Esta equação relaciona os esforços externos com os internos aplicando um
deslocamento arbitrário (virtual) η e fazendo-se um balanço de energia em todo o
domínio Ω.
12
3 Derivada Topológica
3.1 Formulação da Derivada Topológica
Para se obter o valor da derivada topológica, necessita-se especificar o
problema variacional que descreve este fenômeno. As equações que regem seu
comportamento são as mesmas descritas no capítulo 2. Trabalhar-se-á com a forma
fraca destas equações porque isto viabiliza a utilização de espaços topologicamente
mais fracos, e que estabelecem facilmente condições de existência e unicidade da
solução u. O problema é definido da seguinte forma:
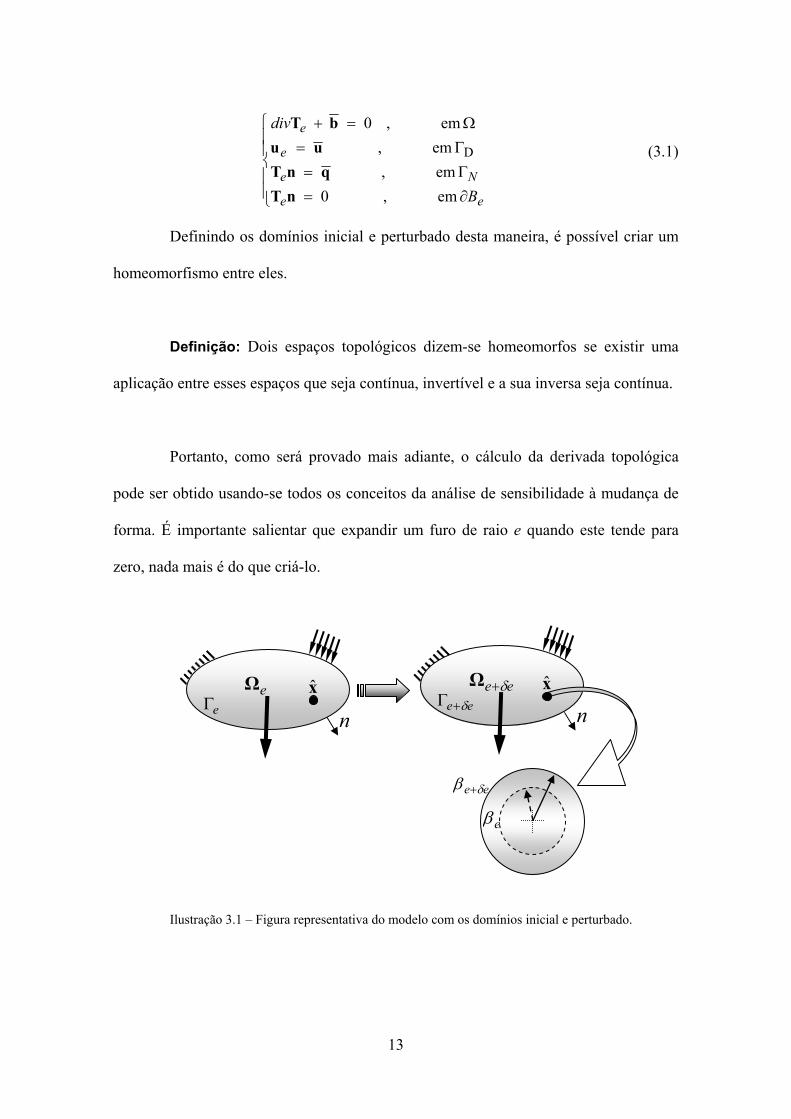
Definição: Considera-se um domínio inicial de material Ne R⊂Ω , com um
furo Be de raio e. Expande-se este furo para um raio e+δe. Um novo domínio perturbado
é criado sendo eeeee B δδ ++ −Ω=Ω . O contorno é dado por eeee B δδ ++ ∂∪Γ=Γ . Ilustração
3.1
A equação de Euler-Lagrange, associada ao problema variacional, agora com o
domínio perturbado Ne R⊂Ω , é dado como o seguinte problema de valor de contorno
vetorial de segunda ordem:
Encontre ue tal que:
13
⎪⎪⎩
⎪⎪⎨
⎧
∂=Γ=Γ=Ω=+
em , 0 em ,
em , em , 0
D
B
div
ee
Ne
e
e
nTqnT
uubT
(3.1)
Definindo os domínios inicial e perturbado desta maneira, é possível criar um
homeomorfismo entre eles.
Definição: Dois espaços topológicos dizem-se homeomorfos se existir uma
aplicação entre esses espaços que seja contínua, invertível e a sua inversa seja contínua.
Portanto, como será provado mais adiante, o cálculo da derivada topológica
pode ser obtido usando-se todos os conceitos da análise de sensibilidade à mudança de
forma. É importante salientar que expandir um furo de raio e quando este tende para
zero, nada mais é do que criá-lo.
Ilustração 3.1 – Figura representativa do modelo com os domínios inicial e perturbado.
ee δ+Γee δ+Ω x
eΓeΩ x
ee δβ +
eβ
n n
14
O Domínio inicial eΩ deve satisfazer as condições de contorno estipuladas
pelo problema de valor de contorno. Inclusive o contorno do furo eB∂ , que dependendo
do problema analisado pode conter uma restrição de Newman, Dirichilet ou Robin. No
caso específico da otimização topológica de sólidos, a condição de contorno eB∂ no furo
é a de Newman homogênea. O problema perturbado automaticamente satisfará as
condições do problema inicial, visto que a perturbação eeB δ+ é infinitesimal. O
problema se resume em:
Encontre ee U∈u , tal que:
eeeee la V∈∀= ηηηu )(),( (3.2)
Satisfazendo as condições de contorno eB∂ .
Estando o problema variacional bem definido, define-se a derivada topológica
da seguinte maneira:
( ) ( )( )
( ) ( )( ) ( )
( ) ( )( ) ( )efeef
efeefefD
RR
eee
ee
RR
eeeeeR
ee
T
−+Ω−Ω
=
=⎭⎬⎫
⎩⎨⎧
−+Ω−Ω
=Ω−Ω
=
+
→→
+
→→→
δψψ
δψψψψ
δ
δ
δδ
00
000
lim
limlimlim)ˆ(x
(3.3)
Para usar todo o ferramental da teoria da análise de sensibilidade à mudança de
forma, necessita-se criar um vínculo desta com a derivada topológica. Objetivando isto,
a equação (1.2) será parametrizada, e dessa forma o vínculo será criado.
15
3.2 Parametrização
Para se calcular analiticamente a expressão (3.3), necessita-se fazer a
parametrização do domínio de modo que as condições de homeomorfismo sejam
satisfeitas. Considera-se então uma perturbação dependente do parâmetro τ, denotada
por ),( τχ x com eΩ∈x e R∈τ . Então o domínio perturbado parametrizado Ωτ e o seu
contorno Γτ , são definidos por:
e
N
eeN
eR
eR
Γ=Γ==Γ∈∃∈=Γ
Ω=Ω==Ω∈∃∈=Ω
==
==
00
00
),,(,
),,(,
ττττττττ
τττττττ
τχ
τχ
xxxxxx
xxxxxx (3.4)
Faz-se uma linearização na perturbação ),( τχ x , usando a série de Taylor em
torno de 0τ , e se define:
)())(,(),(),( 000 ττττχτ
τχτχ O+−∂∂
+= xxx (3.5)
Fazendo 00 =τ , e simplificando a notação ),( τχ x por τx , )0,(xχ por x e
)()0,( xvx =∂∂ χτ
, tem-se que todo ponto com τ próximo de zero pode ser escrito por:
)(xvxx ττ += (3.6)
)(xv é uma ação de mudança de forma, ou descrição material de velocidade
que caracteriza a mudança de forma de um corpo.
Definição: A ação de mudança de forma )(xv , como foi provado em
ZOLÉSIO[12], somente tem valor significativo em sua componente normal às fronteiras
Г e B∂ do domínio Ω. Esta componente normal será denominada vn. Esta afirmação

16
baseia-se na idéia de que somente vn produz de maneira efetiva uma mudança de forma
no corpo.
Redefinindo a descrição material de velocidade, e levando em conta que a
perturbação no domínio é devida à expansão de um furo eB∂ , tem-se a definição deste
campo de velocidade:
⎩⎨⎧
∂∪Γ=ΓΓ=∂≤=
e
enn
BB
e que lembrando , sobre 0 sobre 0 com
vvnvv
(3.7)
n é um vetor normal à superfície. Analisando a definição acima, observa-se que
só ocorrerá mudança de forma no ponto onde foi expandido um furo. Nas outras áreas
do contorno a velocidade é nula.
Re-escrevendo (3.6):
en B∂∈∀+= xnvxx ττ (3.8)
Desta maneira, é possível associar o parâmetro τ com a perturbação eδ :
eee BBe δττδ +∂∈∂∈−= xxxx e, com (3.9)
Então:
nne vnv ττδ == (3.10)
Portanto, a relação entre o parâmetro e a perturbação está definida.
Com a equação (3.10), as formulações da análise de sensibilidade à mudança
de forma e a da derivada topológica passam a ser equivalentes, e todo o ferramental
usado para aquela formulação será usado também para a derivada topológica.
17
Este modelo parametrizado de domínio também deve respeitar as equações do
problema de valor de contorno definidas pela equação (3.2).
Encontre uτ τU∈ , tal que:
0,)(),( ≥∀∈∀= ττττττ Vηηηu la (3.11)
τU e τV são os conjuntos das funções e das variações admissíveis.
O conjunto das funções e das variações admissíveis é definido respectivamente
por:
0))((
))((
Γ21
Γ21
=Ω∈=
=Ω∈=
τττ
τττ
vη
uuu
H
H
V
U (3.12)
H1 é o espaço de Hilbert de ordem 1.
Agora, aplica-se esta parametrização na formulação da derivada topológica:
Sejam os domínios definidos anteriormente em (3.4), eΩ e ee δ+Ω , a equação
(1.2), pode ser re-escrita como:
( ) ( )( ) ( )
ee
efeefD
RR
eee
ee
Tδ
δδ
ψψ δ
δ−+
Ω−Ω= +
→→
00
lim)ˆ(x (3.13)
Simplificando a equação com:
( ) ( ) ( )e
efeefefe
R δδ
δ
−+=
→0lim' (3.14)
Chega em:
( )( ) ( )
eefD eee
eReT δ
ψψ δδ
Ω−Ω= +
→→ 00lim
'1lim)ˆ(x (3.15)
Usando a relação (3.10) na equação (3.15), obtém-se:
18
( )( ) ( )
( ) 00
000
)('1lim1
lim'1lim)ˆ(
=→
=
→→
Ω=
=Ω−Ω
=
ττ
δ
ττττδ
ψτ
τψψ
dd
ef
efD
Ren
nReT
v
vx
(3.16)
Considerando-se )(ef R uma função regularizadora escolhida de modo que
∞≤≤ )ˆ(0 xTD .
Finalmente a derivada topológica está definida no domínio parametrizado da
mesma maneira que na análise de sensibilidade à mudança de forma, assim como no
trabalho de SOKOLOWSKI e ZOCHOWSKI[1].
3.3 Análise de Sensibilidade à Mudança de Forma
Após a definição do modelo parametrizado, parte-se para os conceitos da
análise de sensibilidade à mudança de forma.
Determina-se a sensibilidade da função custo )( τψ Ω em relação à perturbação
caracterizada pelo campo de velocidade v governada pelo parâmetroτ :
τψψ
ψτ
τττ
τττ
)()(lim)( 0
00
=
→=
Ω−Ω=Ω
dd (3.17)
Esta derivada é descrita em LUEMBERGER[13].
De uma maneira generalizada, a função custo é definida como:

19
ττττττ
τ
τ
τ
τφφψ Γ+Ω=Ψ=Ω ∫∫ ΓΓ
ΩΩ dd )()()()( uuu (3.18)
τφΩ e
τφΓ são funções regulares definidas em τΩ e τΓ ,e τu é uma função
implícita deτ através da equação de estado(3.11).
Então a derivada (3.17) é definida por:
τψψ
ψτ
τττ
τ)()(
lim)( 000
uu −=Ω
→=dd (3.19)
Observa-se que euuu ===0
0τ
τ é a solução associada ao domínio eΩ do
problema variacional dado pela equação (3.2).
Formalmente, o cálculo da derivada topológica pode ser escrito da seguinte
forma:
Calcule:
0))((:que tal
)(0
=
Ψ
Ω
=
τ
ττ
τφ
τ
u
u
h
dd
(3.20)
3.4 Método de Lagrange
Para se determinar o valor da derivada topológica, deve-se escolher o melhor
método para resolver as equações (3.20)(ver HAUG et al.[14]). Os métodos existentes
para isto são: métodos direto, método adjunto e o método de Lagrange. A escolha do
método varia de problema para problema, e neste trabalho se escolherá o método do

20
lagrangeano devido a sua fácil generalização para variadas funções de restrição e custo.
Este método consiste em relaxar as restrições do problema através de multiplicadores,
chamados de multiplicadores de Lagrange. Assim o lagrangeano da equação na forma
perturbada, pode ser escrito como:
τττττττ λλλ V∈∀+Ψ= ),()(),( uuu hL (3.21)
Se a equação de estado (3.11) é satisfeita para todo τ , basta calcular a derivada
total do lagrangeano, respeitando as condições necessárias de primeira ordem de
Lagrange, em relação aτ para se obter a sensibilidade da função custo:
( ) ( ) ( )λλτ
λλτ
λτ ττ
τ
τττ
τττττ ∂
∂+
∂∂
∂∂
+∂∂
= ),(),(),(),( uu
uu
uu LLLLdd
(3.22)
Substituindo (3.21) em (3.22) e denominando xx&=
∂∂τ
, tem-se:
),(),(),(),( ττττττττ λλλτ
λτ
&& uuuu LLLL ++∂∂
=dd (3.23)
A equação adjunta é representada por:
0),( =∂∂
τττ
ηuu
L (3.24)
Dependendo do problema a ser resolvido, os procedimentos de cálculo serão
diferentes. Cada caso será estudado à parte.

21
3.5 Cálculo da Derivada Topológica
Considera-se o problema formulado em (3.11), de maneira que no domínio
perturbado a equação de equilíbrio bi linear e o funcional linear permanecem válidos:
+∈∀∈∀= Rττττττ ,)(),( Vηηηu la (3.25)
Com:
ττττ
τ
Ω∇= ∫Ω d.a sηTηu ),( (3.26)
ττττ
ττ
Γ+= ∫∫ ΓΩ
dd.l ηqηbη .Ω)( (3.27)
O cálculo da derivada topológica será realizado considerando como função
custo a energia potencial total definida por:
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛Γ+−Ω∇=Ψ ∫∫∫ ΓΩΩττττττ
τττ
dd.d. uqubsuTu .Ω21)( (3.28)
Ou ainda:
)(),(21)( ττττ uuuu la −=Ψ (3.29)
Relembrando a definição da derivada topológica (3.20) e o seu lagrangeano
(3.21), basta calcular a derivada total do lagrangeano com relação ao parâmetro τ , para
se obter a derivada topológica.
O problema fica da seguinte maneira:
Calcule:

22
+
=
∈∀∈∀=
⎟⎠⎞
⎜⎝⎛ −
Rτ
τ
ττττ
ττττ
,)(),(
:que tal
)(),(21
0
Vtla
ladd
ηηηu
uuu
(3.30)
O lagrangeano deste problema é:
ττ
ττττττττ
V∈∀
−+−=
μ
μμuuuuμu )(),()(),(21),( lalaL
(3.31)
Da equação (3.23), obtém-se a derivada do lagrangeano, que neste caso, é a
própria função custo:
⎟⎠⎞
⎜⎝⎛ −
∂∂
= )(),(21),( τττττ ττ
uuuμu ladd L (3.32)
Portanto a equação acima, mostra que a derivada parcial é igual à derivada total
com τu e τμ fixos. Então basta calcular a derivada parcial da função custo para se obter a
derivada topológica. Avaliando esta derivada para 0=τ , obtém-se a derivada
topológica.
( )000
)(),(21
=== ∂∂
−⎟⎠⎞
⎜⎝⎛
∂∂
=Ψτ
ττ
τττ τττ
uuu ladd (3.33)
Para se obter o valor analítico desta derivada, as seguintes formulações serão
usadas[11][15][16]:
Teorema do transporte de Reynolds:

23
Γ⎟⎟
⎠
⎞
⎜⎜
⎝
⎛+
∂∂
=Γ∂∂
Ω⎟⎟
⎠
⎞
⎜⎜
⎝
⎛+
∂∂
=Ω∂∂
∫∫∫∫Γ =Γ =
Ω =Ω =
dd
dd
v
v
div
div
00
00
φτφ
φτ
φτφ
φτ
τ
τ
τττ
τ
τ
τττ
τ
τ (3.34)
Teorema do transporte de Reynolds na configuração perturbada:
∫∫∫∫∫
ΩΓ
=Γ =
ΓΩ =Ω =
Γ⎟⎟
⎠
⎞
⎜⎜
⎝
⎛+∇+
∂∂
=Γ∂∂
Γ+Ω∂∂
=Ω∂∂
dd
dndd
vdivv
v
φφτφ
φτ
φτφ
φτ
τ
τ
τττ
τ
τ
τττ
τ
τ
.
.
00
00 (3.35)
Utilizando o teorema do transporte de Reynolds para calcular as derivadas,
obtém-se:
ττ
ττ
τ
τττ
τ
τ
τ
τ
Ω⎥⎦
⎤⎢⎣
⎡∇+∇
∂∂
=
=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛Ω∇
∂∂
∫
∫
Ω=
=Ω
d.
d.
see vuTsuT
suT
div.
21
0
0 (3.36)
A derivada do gradiente simétrico de um campo vetorial é dada por:
( )See. vuTsuT ∇∇−=∇∂∂
=.2
0ττττ
(3.37)
Substituindo (3.37) em (3.36), tem-se:
24
( )[ ]
( )[ ] τ
τ
τ
τττ
τ
ττ
τ
Ω∇∇−∇=
=Ω∇∇−∇=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛Ω∇
∂∂
∫
∫∫
Ω
Ω=
Ω
d
dd.
Te
see
See
see
vTuIuT
vuTvuTsuT
. 2.
.2div.21
e
0
(3.38)
A derivada do funcional linear )( τul fica da mesma maneira, analisado no
ponto 0=τ :
( ) ee dl
e
Ω∇=∂∂ ∫Ω=
vIub ..0τ
ττ (3.39)
Substituindo as equações (3.38) e (3.39) na equação (3.36), chega-se na
relação:
ee dl
e
Ω∇Σ=∂∂ ∫Ω=
v.0τ
ττ
(3.40)
Com ( ) eTee
Seee TuIubuT ∇−−∇=Σ .2.
21 sendo tensor momento de energia
de Eshelby. Interpreta-se o tensor de Eshelby[17] como sendo um conjunto de forças
necessárias para provocar uma mudança de forma no domínio Ωe caracteriza por v∇ .
Considerando a relação tensorial uTuTuTdiv ∇+= ..)div()( T e aplicando o
Teorema da Divergência[15], a equação (3.40) se torna:
eeee ddl
ee
ΩΣ+ΓΣ=∂∂ ∫∫ ΩΓ
=vvn .div.
0τ
ττ
(3.41)

25
Proposição: Sejam uτ e τλ , respectivamente, soluções da equação de estado e
adjunta, então:
0div =Σe (3.42)
Prova: Considerando o teorema do transporte de Reynolds na configuração
perturbada e a relação:
( ) vuuu
.00
∇+′=∂∂
==
τττ
ττ
(3.43)
Para ( ) ( ) fixoττττ
´..0=
∂∂
=.
As derivadas da forma bi linear ),( ττ uua e do funcional )( τul , avaliadas em
0=τ , podem ser representadas como:
( ) ( )∫∫ ΓΩ=Γ∇+Ω′∇=
∂∂
ee
eseee
see dda nvuTuT ...2
0τττ
(3.44)
( )
( )
( )[ ]∫∫∫∫∫
∫∫
ΓΓΩ
ΓΓ
ΓΩ=
Γ∇++Γ′+Ω′=
=Γ∇+Γ′+
+Γ+Ω′=∂∂
eNe
NN
ee
eeTeeNeeee
NeNe
eeee
ddd
dd
ddl
vnTunubuqub
vuquq
nvubub
....
..
...0τ
ττ
(3.45)
Substituindo as relações (3.44) e (3.45) na equação (3.33). Chega em
26
( )
( )
∫∫∫∫
∫∫
ΓΓ
ΓΓ
ΩΩ=
ΓΣ=ΓΣ+′−′=
=ΓΣ+Γ∇
−Ω′−Ω′∇=∂∂
ee
eN
ee
eeee
eeNe
eeees
ee
ddla
dd
dbdl
vnvnuuu
vnvuq
uuT
..)(),(
..
..0τ
ττ
(3.46)
Comparando as expressões (3.40) e (3.46), e lembrando que para este caso
particular ee V∈′u , pode-se concluir que o tensor de Eshelby possui divergência nula:
vv ∀=Σ⇒=ΩΣ∫Ω ,0div0.div eee d
e
(3.47)
E a proposição está provada .
A prova desta proposição pode ser considerada uma forma alternativa para o
cálculo das derivadas com relação ao domínio parametrizado. Esta forma se mostra
mais simples e direta uma vez que as derivações são realizadas na configuração
perturbada τΩ .
Substituindo a definição de campo de velocidade (3.7) na equação (3.46), tem-
se:
∫∂=∂Σ=
∂∂
eBeen Bdnnv .
0τ
ττ
L (3.48)
Substituindo o resultado dos cálculos (3.48) na definição de derivada
topológica (3.16), e considerando uma expansão no furo, ou seja, 1)sign( −=nv :

27
( ) ∫∂→∂Σ
′−=
eBee
ReT Bd
efD nnx .1lim)ˆ(
0δ (3.49)
Substituindo a relação cinemática(2.2), desconsiderando as forças de corpo,
0=b , e usando as condições de contorno do problema de elasticidade linear definidas
em (2.4) e (2.5), tem-se 0=nTe . Então a relação acima se torna:
( ) ∫∂→∂⎟
⎠⎞
⎜⎝⎛
′−=
eBeee
ReT Bd
efD ETx .
211lim)ˆ(
0δ (3.50)
Para facilitar os cálculos, considera-se um sistema de coordenadas curvilíneas:
( ) ( ) ( )ttTntTtnTnT tte
tne
nte
nnee ⊗+⊗+⊗+=T (3.51)
n e t são vetores normal e tangencial, ortogonais entre si (n . t=0), e a condição
de contorno do problema (2.6), é escrita em coordenadas curvilíneas:
( ) ( ) etne
nte
nnee BntTtnTnTn ∂=⊗+⊗+= sobre 0.T (3.52)
Então:
ttee T=T (3.53)
Substituindo na equação (3.50):
( ) ( )∫∂∈→∂⎟⎟
⎠
⎞⎜⎜⎝
⎛′
−=
eBe
tte
RT BdT
tefD
2
0 211lim)ˆ(Dδ
x (3.54)
Para se obter a expressão final da derivada topológica, necessita-se escolher
adequadamente a função ( )ef R′ , com a restrição de atender o teorema (3.16). Esta

28
escolha é feita fazendo uma análise assintótica[18] da solução eu ou realizando
experimentos numéricos.
Seja um sistema de coordenadas cujos eixos estão alinhados com as tensões
principais do tensor tensão T associado ao domínio original, e com sua origem
posicionada no centro x da esfera B . Adotando um sistema polar de coordenadas
),( θR , a componente tteT definida sobre eB∂ é dada por:
θτ
2cos)(2)(0
RDRST tte −=
= (3.55)
Com 0→R , quando 0→e e eR >> . R é o raio da expansão.
Com:
)()()()()()(
21
21
RRRDRRRS
σσσσ−=+=
(3.56)
Substituindo a equação (3.55) em (3.54), conclui-se que a função
regularizadora )(efR deve ter um valor igual a:
2)()(2)()( eBáreaefeBperímetroef eReR ππ −=−=⇒−=∂−=′ (3.57)
Considerando este último resultado, calcula-se o limite da equação (3.54), que
resulta em:
( ) ( )[ ]221
221 2
21)ˆ( σσσσρ
−++=E
DT x (3.58)
Sendo 1σ e 2σ as tensões principais do tensor tensão xT ˆ avaliado no ponto
Ω∈x .
29
Reescrevendo a relação com um pouco de algebrismo, resulta na expressão
final da derivada topológica para o estado plano de tensões:
ETETx tr.tr)1(2
13.1
2)ˆ( 2νν
ν −
−+
+=TD (3.59)
Para o estado plano de deformações[11], tem-se:
ETETx tr.tr)1(2
)14)(1(.)1(2)ˆ( 2νννν
−
−−+−=TD (3.60)
Para o caso geral tridimensional, tem-se[19]:
⎥⎦⎤
⎢⎣⎡
−−
−−−
= ETETx tr.tr2151.10
)57(4)1(3)ˆ(
νν
νν
TD (3.61)
Para o caso especial em que 31
=ν e 41
=ν , para as equações (3.59) e (3.60),
respectivamente, tem-se a derivada topológica:
ETx .23)ˆ( =TD (3.62)
Para o caso tridimensional, quando 51
=ν , tem-se:
ETx .)ˆ( =TD (3.63)
Portando, obteve-se o valor analítico da derivada topológica apenas
conhecendo o campo de tensões T e deformações E, para qualquer ponto x pertencente
ao domínio.
30
4 Otimização Topológica de Sólidos
Neste capítulo, formula-se o problema da otimização topológica considerando
a energia de deformação interna como função objetivo e restrição na tensão máxima de
Mises permitida no domínio, levando em conta o equilíbrio do sólido. A derivada
topológica é aplicada ao algoritmo de otimização com o objetivo de se obter o ponto
ótimo do problema de otimização topológica proposto.
4.1 Formulação do Problema de Minimizar a Energia de
Deformação com Restrições nas Tensões
O modelo utilizado para a formulação do problema é o mesmo proposto por
BENDSOE[20], porém considera-se a formulação direta sem a aplicação de um modelo
de penalização.
Definição: Considere um elemento mecânico como um corpo ocupando um
domínio Ω, que faz parte do domínio total Ω em R2 ou R3. O domínio de referência é
escolhido de modo que seja possível aplicar restrições de carregamentos e condições de
contorno. Referindo-se ao domínio Ω, define-se o problema de otimização topológica
como a tarefa de achar o tensor ótimo de elasticidade D, que é variável ao longo do
31
domínio. Relembrando o capítulo anterior: a forma de energia bi linear (2.9),
deformações linearizadas (2.2) e (2.3), carregamento na forma linear (2.10). O problema
da mínima flexibilidade (máxima rigidez global) toma a forma:
⎩⎨⎧
≤∈∀=
−
eVM
,
,Tla
la
σ21))(max(),(),(
que tal
)(),(21min
uηηηu
uuuu
U
D
(4.1)
TVM é a tensão de Mises, e σe é a tensão de escoamento do material. max é
uma função que fornece o valor máximo.
As equações deste modelo são todas escritas na sua forma “fraca”, ou seja,
forma variacional com U denotando o espaço cinematicamente admissível de
deslocamentos. Este problema converge para um resultado ótimo, mas é extremamente
dependente do modo como foi feita a discretização do domínio[20].
4.2 Formulação da Distribuição de Material
Para se obter a formulação do problema, ou seja, trabalhar com o domínio do
problema de modo que se possa acrescentar ou remover material, é necessário
formalizar como será a definição de distribuição de material representada pelo tensor D,
ao longo do domínio do problema Ω. Em outras palavras, precisa-se de um modelo de
distribuição de material. Em BENDSOE[20], encontra-se a formulação do
comportamento do material.
Definição: O valor do tensor de elasticidade D será nulo onde não existir
material, com relação ao domínio inicial Ω0.
32
Esta afirmação é representada por:
⎩⎨⎧
ΩΩ∈Ω∈
== ΩΩ \01
1,)(10
0 xx
xsese
DD (4.2)
D é o tensor de elasticidade para um dado material isotrópico, pertencente ao
domínio Ω. 1Ω é uma função que indica quais pontos do domínio inicial, Ω0, pertencem
ao domínio ótimo, Ω.
4.3 Discretização do Domínio
Para se obter uma solução para o problema da otimização topológica proposto
será necessário utilizar uma técnica de discretização do domínio, que no caso será o
método dos elementos finitos. Com o domínio discretizado, as formulações propostas
anteriormente sofrem alterações. Porém, as equações diferenciais de Euler para o
problema da elasticidade (2.6) devem permanecer válidas.
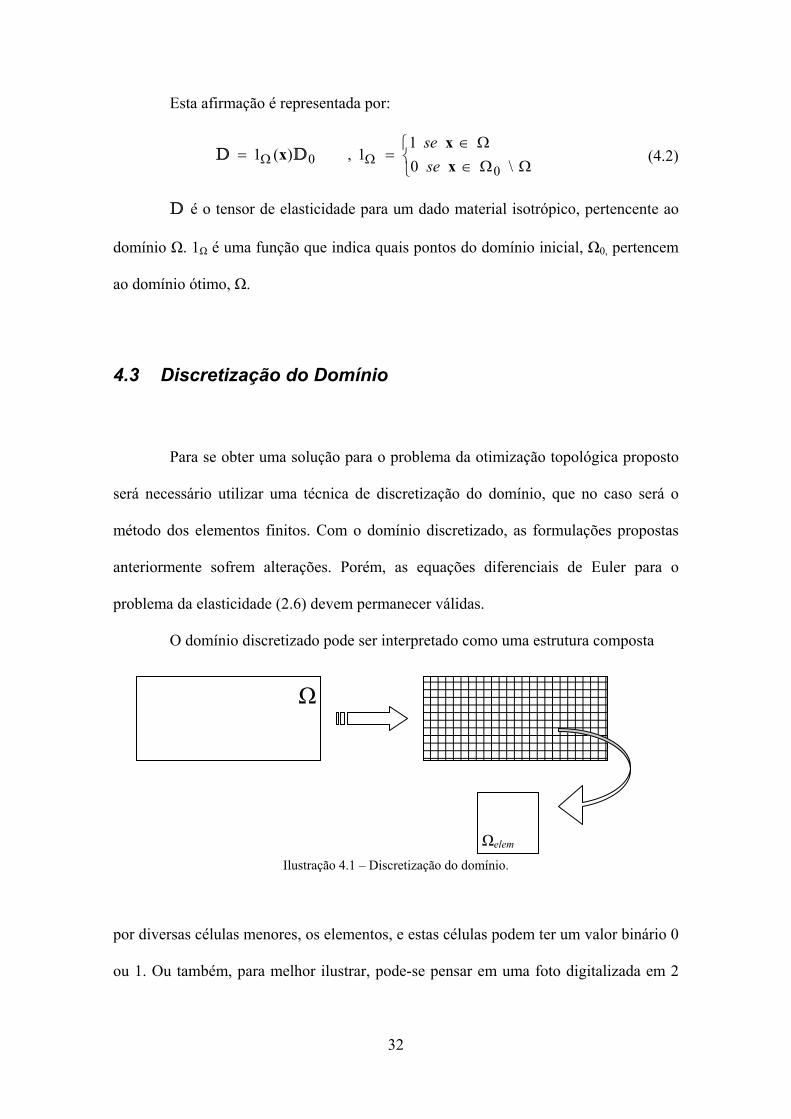
O domínio discretizado pode ser interpretado como uma estrutura composta
Ilustração 4.1 – Discretização do domínio.
por diversas células menores, os elementos, e estas células podem ter um valor binário 0
ou 1. Ou também, para melhor ilustrar, pode-se pensar em uma foto digitalizada em 2
Ω
Ωelem
33
bits, preto e branco, na qual os pixels representam cada elemento e estes podem apenas
ter a cor preta ou branca. Ver Ilustração 4.1.
O modelo de distribuição de material e a formulação da derivada topológica
são modificados de modo que:
qelemTDV R∈ΩΩΩ x),(,,1
0 (4.3)
q é o número de elementos do domínio Ω.
Para o elemento elemΩ , tem-se:
⎩⎨⎧
ΩΩ∈ΩΩ∈Ω
=Ω= ΩΩ \01
1,)(10
0elem
elemelem se
seDD (4.4)
D é o tensor de elasticidade individual para cada elemento da malha.
4.4 Aplicação da Derivada Topológica no Problema de
Otimização
A derivada topológica fornece os pontos do domínio menos sensíveis à função
custo, que no caso estudado é a energia interna de deformação. O valor da derivada
topológica será calculado no centro de cada elemento Ωelem pertencente ao domínio Ω.
Eliminando os elementos menos sensíveis, ou seja, que tenham a derivada topológica
menor que um parâmetro supξ , é garantido que no domínio perturbado se tem a melhor
distribuição de material para determinado volume fixo VV ∂− . É importante observar
que o parâmetro supξ deve ser escolhido de modo criterioso[11], de maneira que haja
um decréscimo infinitesimal no volume. Devido à discretização do domínio pelo
método dos elementos finitos este valor infinitesimal V∂ é aproximado para um VΔ .
Através de testes experimentais realizados em [11] se chegou a conclusão de
34
que VV %1=Δ é um valor admissível. Portanto, no algoritmo proposto a seguir, a
redução no volume admitida a cada iteração será sempre de 1%. O algoritmo descrito a
seguir cria furos através da eliminação dos nós da malha de elementos finitos porque
este procedimento reduz instabilidades numéricas[11].
4.4.1 Eliminação de elementos no domínio
A derivada topológica é calculada no baricentro de cada elemento pertencente
ao domínio. Porém, para facilitar a implementação do algoritmo de otimização e evitar
instabilidades numéricas, será calculada a derivada topológica em função dos nós e não
em função dos elementos. A nova definição da derivada topológica em função do nó é:
))(max()(jelemTnóT DD Ω=Ω (4.5)
Em que jelemΩ são os elementos que contém o referido nó e max é uma função
que retorna o valor máximo. Ωnó é o domínio que representa a união de todos os
elementos que contém este nó. Ver Ilustração 4.2.
Ilustração 4.2 – Definição de Ωelem e Ωnó.
O critério de atualização do vetor de índices e de eliminação dos nós é definido
por:
⎪⎩
⎪⎨⎧
≥Ω
≤Ω=ΩΩ
jnóTjnóT
nój
j
Dse
Dse
sup
sup
)(,1
)(,0)(1 ξ
ξ (4.6)
Ωelem
Ωelem Ωelem
Ωelem Ωnó
35
Este critério é calculado para todos os nós pertencentes ao domínio. Ver
Ilustração 4.3.
Ilustração 4.3 – Representação da eliminação de elementos.
4.4.2 Cálculo do parâmetro de eliminação ξ
O parâmetro de eliminação é calculado arranjando o vetor de derivadas
topológicas em função dos nós em ordem crescente e em seguida seleciona-se o
elemento que corresponde a 1% do tamanho total do vetor. Este elemento é definido
como ξsup. Ver Ilustração 4.4.
Ilustração 4.4 – Definição do parâmetro de corte ξsup.
nó que atende ao critério
Ω Ωe
furo no domínio
sort(DT(Ωnó) =
1% ξsup

36
4.4.3 Algoritmo para a Criação dos Furos
Este algoritmo é conhecido como método “hard kill” devido à sua
característica de se eliminar os elementos da malha.
Algoritmo:
Seja a seqüência jΩ dos domínios de projeto, em que j é a j-ésima iteração:
1. Fornecer:
a. Domínio inicial Ωj=0 discretizado pelo método dos elementos
finitos;
b. As condições de contorno ( carregamentos externos e pontos de
apoio);
c. O critério de parada nas tensões: eVMT σ2,1≤ ;
2. Calcular a derivada topológica jTD , considerando o vetor de índices
Ω1 ;
3. Calcular jsupξ de modo que jj VV %1=Δ ;
4. Atualizar o vetor de índices Ω1 (Criar os furos):
⎪⎩
⎪⎨⎧
≥Ω
≤Ω=ΩΩ
jnóTjnóT
nój
j
Dse
Dse
sup
sup
)(,1
)(,0)(1 ξ
ξ;
5. Definir o novo domínio Ωj=j+1;
6. Voltar para o passo 1 enquanto não atingir o critério de parada;
7. Determinar geometria final de projeto e realizar o pós-processamento.
37
5 Alivio de Tensões com a Otimização Estrutural
Evolucionária
No ano de 1993, XIE e STEVEN[21] desenvolveram uma metodologia para
resolver problemas de otimização estrutural chamada otimização estrutural
evolucionária. Esta metodologia é baseada na idéia de que uma estrutura ótima pode ser
gerada através da eliminação gradual do material pouco atuante no domínio de projeto.
Há muitos atrativos para esta formulação, como por exemplo, a facilidade de
implementação do algoritmo e a velocidade de cálculo das iterações. Porém, para
algumas funções custo, não existe prova analítica de que as iterações convergem para
um mínimo local do problema de minimização.
Muitos trabalhos estão sendo publicados nesta área de pesquisa. Por exemplo,
em TANSKANEN [22]. Neste artigo ele enfatiza o aspecto teórico da otimização
estrutural evolutiva. Já em RONG et. Al [23], é apresentada uma aplicação em sólidos
tridimensionais. Para problemas em larga escala, JANG e KWAK[24] desenvolveram
uma metodologia de refinamento de malha a cada iteração evolutiva do algoritmo.
38
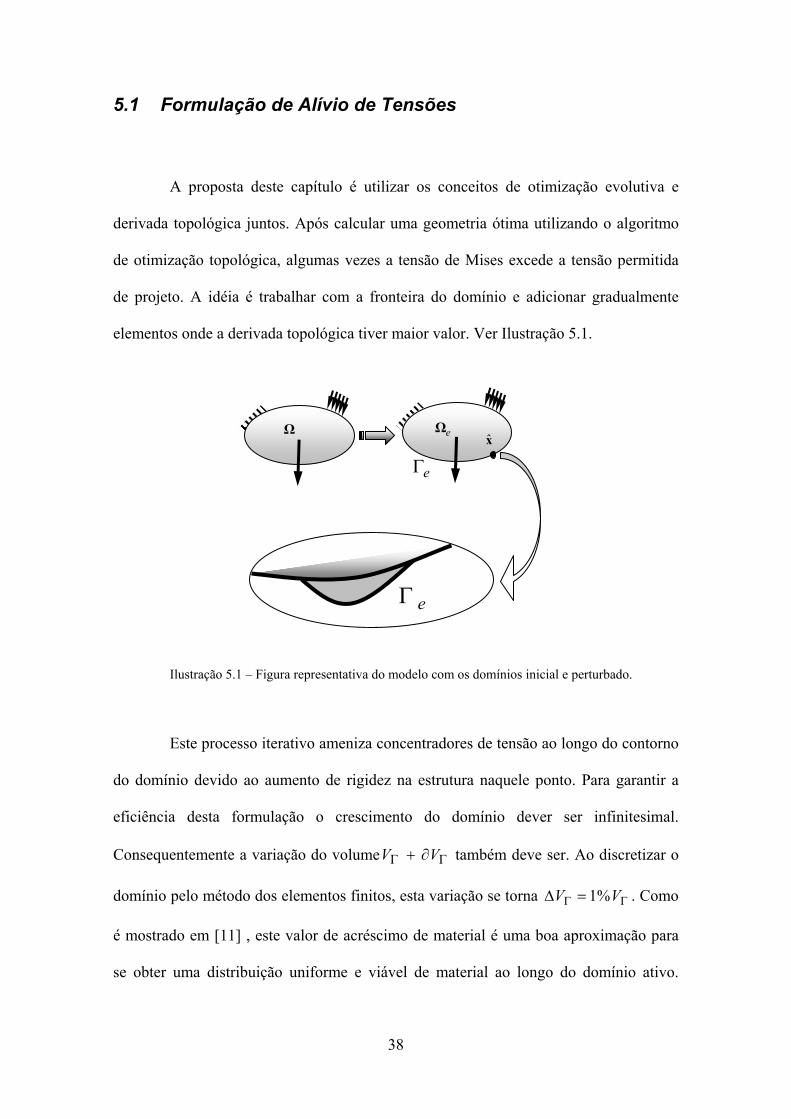
5.1 Formulação de Alívio de Tensões
A proposta deste capítulo é utilizar os conceitos de otimização evolutiva e
derivada topológica juntos. Após calcular uma geometria ótima utilizando o algoritmo
de otimização topológica, algumas vezes a tensão de Mises excede a tensão permitida
de projeto. A idéia é trabalhar com a fronteira do domínio e adicionar gradualmente
elementos onde a derivada topológica tiver maior valor. Ver Ilustração 5.1.
Ilustração 5.1 – Figura representativa do modelo com os domínios inicial e perturbado.
Este processo iterativo ameniza concentradores de tensão ao longo do contorno
do domínio devido ao aumento de rigidez na estrutura naquele ponto. Para garantir a
eficiência desta formulação o crescimento do domínio dever ser infinitesimal.
Consequentemente a variação do volume ΓΓ ∂+ VV também deve ser. Ao discretizar o
domínio pelo método dos elementos finitos, esta variação se torna ΓΓ =Δ VV %1 . Como
é mostrado em [11] , este valor de acréscimo de material é uma boa aproximação para
se obter uma distribuição uniforme e viável de material ao longo do domínio ativo.
eΩ xΩ
eΓ
eΓ
39
Similarmente ao algoritmo de otimização topológica, necessita-se calcular um valor
infξ no qual o material adicionado seja ΓΓ =Δ VV %1 .
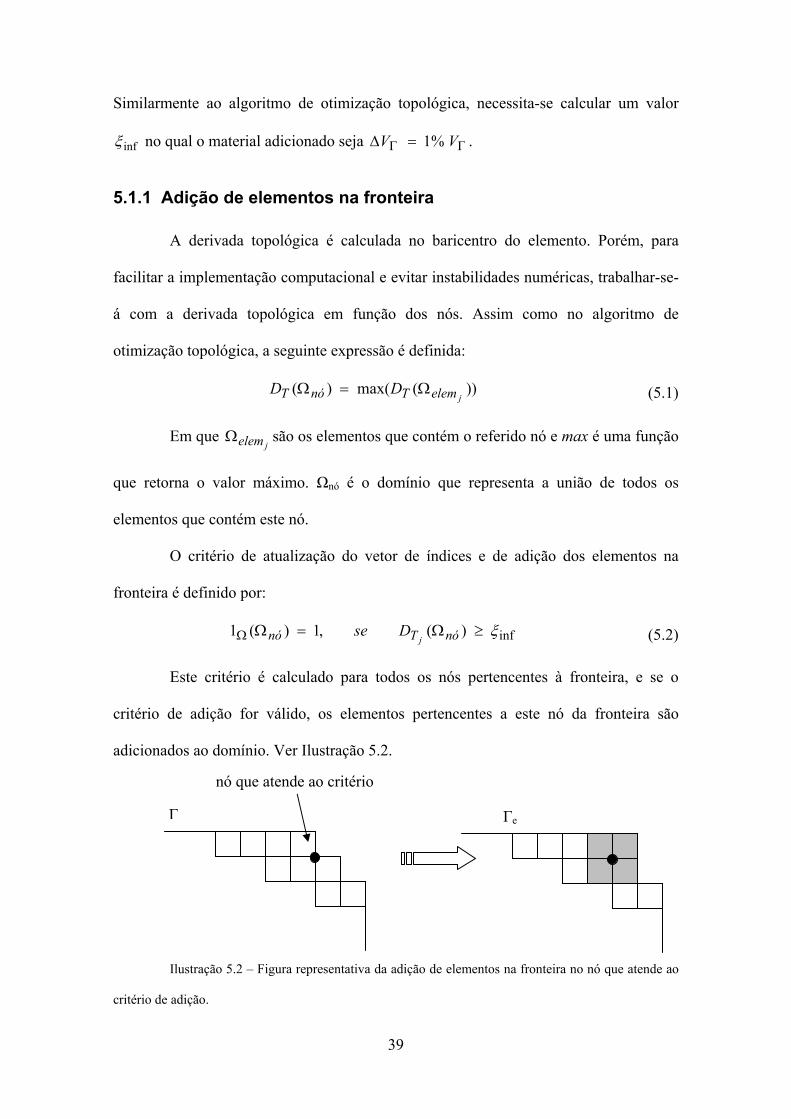
5.1.1 Adição de elementos na fronteira
A derivada topológica é calculada no baricentro do elemento. Porém, para
facilitar a implementação computacional e evitar instabilidades numéricas, trabalhar-se-
á com a derivada topológica em função dos nós. Assim como no algoritmo de
otimização topológica, a seguinte expressão é definida:
))(max()(jelemTnóT DD Ω=Ω (5.1)
Em que jelemΩ são os elementos que contém o referido nó e max é uma função
que retorna o valor máximo. Ωnó é o domínio que representa a união de todos os
elementos que contém este nó.
O critério de atualização do vetor de índices e de adição dos elementos na
fronteira é definido por:
inf)(,1)(1 ξ≥Ω=ΩΩ nóTnó jDse (5.2)
Este critério é calculado para todos os nós pertencentes à fronteira, e se o
critério de adição for válido, os elementos pertencentes a este nó da fronteira são
adicionados ao domínio. Ver Ilustração 5.2.
Ilustração 5.2 – Figura representativa da adição de elementos na fronteira no nó que atende ao
critério de adição.
Г Гe
nó que atende ao critério
40
5.1.2 Cálculo do parâmetro de adição
O parâmetro de adição, assim como na otimização topológica, é calculado
arranjando o vetor de derivadas topológicas em função dos nós em ordem crescente e
em seguida seleciona-se o elemento que corresponde a 1% do tamanho total do vetor.
Este elemento é definido como ξinf. Ver Ilustração 5.3.
Ilustração 5.3 – Figura representativa do modelo com os domínios inicial e perturbado.
Algoritmo:
Seja a seqüência jΩ dos domínios de projeto, em que j é a j-ésima iteração,
então:
1. Fornecer:
a. Domínio inicial Ω0 discretizado;
b. As condições de contorno ( carregamentos externos e pontos de
apoio);
c. O critério de parada nas tensões: eVMT σ< ;
2. Calcular a Derivada Topológica DTj utilizando a análise estrutural
através do método dos elementos finitos considerando o vetor de
índices Ω1 ;
sort(DT(Ωnó) =
1% ξinf

41
3. Calcular infξ de modo que ΓΓ =Δ VV %1
4. Atualizar o vetor de índices jΓ
1 (criar as incrustações):
jnóTnó jDse inf)(,1)(1 ξ≥Ω=ΩΩ ;
5. Definir o novo domínio Ωj=j+1;
6. Voltar para o passo 1 enquanto não atingir o critério de parada;
7. Determinar geometria final de projeto e realizar o pós-processamento.
42
6 Comparação dos Métodos de Otimização
Topológica
Devido à otimização topológica ter um grande desenvolvimento nas últimas
décadas, surgiram dois grupos de classificação para os métodos de solução para a
otimização topológica: aproximação por microestrutura ou aproximação por
macroestrutura[25].
6.1 Aproximação por Microestrutura
A aproximação por microestrutura usa a estratégia de variar a densidade dos
pontos do domínio admitindo existir um material compósito capaz de ter a sua rigidez
variando entre zero (sem material) até um (com material). O método da homogenização
e o método SIMP[26](Solid Isotropic Material with Penalization) são métodos eficazes
para solucionar o problema de minimizar a energia interna do problema com restrição
de volume. Já o método da relaxação por campo de fase provou ser uma ferramenta útil
para se resolver problemas nos quais existem muitas restrições de desigualdade , como
por exemplo, tensões locais[2]. Em BURGER e STAINKO[27] é demonstrado um
método eficaz para se resolver o problema de minimizar o volume com restrições locais
43
de tensão. Este método é baseado na técnica da relaxação-ε como proposto por
CHENGO e GOU[28], mas adaptada para muitas restrições.
6.2 Aproximação por Macroestrutura
Nesta aproximação, a topologia do domínio é modificada através da inserção
de furos em lugares onde a sensibilidade com relação à função custo tiver valor menor.
Podem-se classificar os métodos desta categoria em métodos baseados em sistemas
contínuos ou sistemas discretos. Um exemplo da aplicação de aproximação por
macroestrutura em sistemas discretos é encontrada em XIE e STEVEN[29], a chamada
ESO, Evolutionary Structural Optimization, ou Otimização Estrutural Evolutiva.
Para resolver o problema da Otimização Topológica, usar-se-á neste trabalho
uma aproximação por Macroestrutura baseada em Sistemas Contínuos, conhecida como
Derivada Topológica, ou Análise de Sensibilidade Topológica.
No trabalho de NOVOTNY[11], foi proposta uma nova relação entre a
Sensibilidade à Mudança de Forma, comumente usada na Otimização de Forma[1] e a
Derivada Topológica, resultando em um teorema que conduz a uma vasta classe de
problemas de Engenharia. O ferramental matemático utilizado para as deduções,
inicialmente foi desenvolvido para a mecânica do contínuo e se adaptou perfeitamente
para a Análise de Sensibilidade à mudança de forma. Esta nova formulação não
apresenta restrições com relação à função custo, função de restrições, condições de
contorno e ao fenômeno estudado. Restrições estas, que eram encontradas em trabalhos
anteriores, como por exemplo, em [30], que ainda utilizavam uma formulação mais
simples do problema.
44
6.3 Comparação entre Métodos
A característica comum a estes dois grupos de classificação, microestrutura e
macroestrutura é a utilização da sensibilidade da função objetivo para a obtenção do
resultado ótimo do problema. No caso particular de se usar a energia interna como
função objetivo, estas formulações geram sensibilidades semelhantes, diferindo apenas
de constantes. Esta sensibilidade é definida por e
eρψ∂∂ para a formulação SIMP e ESO e
definida como )ˆ(xTD na derivada topológica. Portanto todas as expressões acarretam
soluções semelhantes. Como mostrado em LABANOWSKI et al.[31]. Na formulação
SIMP, a sensibilidade e
eρψ∂∂ é calculada levando em conta a variação da densidade de
um ponto do domínio:
ess
e
e de
Ω∇∇=∂∂ ∫
Ω
uu .21 *D
ρψ
(6.1)
com DD 1* −= pepρ , correspondendo ao tensor de elasticidade do material com
densidade intermediária, p é o parâmetro de penalização e ρ é a densidade de um
elemento que pode variar entre 0 e 1.
Na formulação da otimização estrutural evolutiva (ESO)[32] a sensibilidade
e
eρψ∂∂ é calculada ao se retirar um elemento finito do espaço de aproximação do
domínio, e resulta em:
ess
e
e de
Ω∇∇=∂∂ ∫
Ω
uu .21
Dρψ
(6.2)
A expressão da derivada topológica, para ν = 1/3 , é representada por:

45
sseTD uux ∇∇=
∂∂
==
.23)ˆ(
0D
ττψ
(6.3)
Pode-se interpretar o resultado (6.3) da derivada topológica como sendo a
formulação local da equação ESO, equação (6.2), que por sua vez é igual a expressão da
formulação SIMP, equação (6.1), no ponto ótimo do problema. Ou seja, quando
DD =* .
6.4 Tensão de Mises x Energia de Deformação Interna
Com o objetivo de se utilizar a sensibilidade à mudança de topologia no
algoritmo de alívio de tensões, utilizou-se um trabalho de STEVEN et al.[33] [34], no
qual é comparado o critério falha de Von Mises avaliado em um ponto do domínio com
a energia interna de deformação avaliada neste mesmo ponto, para o caso do estado
plano de tensões.
Levando em conta as relações da teoria da elasticidade linear (2.1), (2.2) e
(2.3), o vetor de tensões, no estado plano de tensão, é representado por:
suT ∇= D (6.4)
Para o estado plano de tensões, a tensão de Mises é definida como:
TVTT TVM =2 (6.5)
Com:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−
−=
300015,005,01
V (6.6)
Substituindo (6.4) em (6.5), obtém-se:

46
( ) sTTsVM uVuT ∇∇= DD2 (6.7)
Chamando ZDD =VT , tem-se:
( ) sTsVM uuT ∇∇= Z2 (6.8)
Analisando a energia de deformação interna, tem-se:
( ) sTsTEn uuET ∇∇== D21.
21 (6.9)
T e E estão expressos em forma vetorial considerando o estado plano de
tensões.
Comparando as expressões (6.8) e (6.9), conclui-se que os valores calculados
diferem apenas dos valores das constantes Z e D . Para o estado plano de tensões, por
exemplo, que é o caso desta monografia, tem-se:
( ) ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−
=2/100
0101
1 2
νν
ν
νE
D (6.10)
Calculando o valor de Z :
( ) ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−+−−+−−+−+−
⎟⎠
⎞⎜⎝
⎛−
=2
22
222
2175,000015,025,005,025,01
1 ννννννννν
νE
Z (6.11)
Portanto, as duas formulações, da tensão de Von Mises e da energia de
deformação, são parecidas, diferindo apenas dos valores das constantes.
47
7 Método dos Elementos finitos
7.1 Visão Geral
O método dos elementos finitos é uma ferramenta essencial para a engenharia.
A sua simplicidade e robustez o torna muito atraente para solucionar diversos
problemas matemáticos que até então não tinham sequer uma solução aproximada.
Além disso, este método é generalizado, ou seja, sempre o mesmo procedimento é
adotado para diferentes problemas, facilitando assim a confecção de algoritmos e a
implementação em linguagens de programação.
Muitas das vezes, uma solução analítica para um problema se torna muito
trabalhosa ou até mesmo impossível de se obter devido a uma série de fatores:
geometrias complexas, estados de carga complexos, restrições complexas. O conceito
do método dos elementos finitos tenta contornar esta dificuldade assumindo o domínio
contínuo do problema ser um domínio discreto.
Essa discretização permite obter soluções aproximadas ou até mesmo iguais à
solução analítica do problema. Em [35], encontra-se uma excelente fonte de pesquisa
para o método dos elementos finitos.
48
7.2 Discretização das Equações
O domínio Ω, que ora era contínuo, agora passa a ser discreto e contendo um
número finito de elementos. Apesar disso, cada elemento é contínuo individualmente. O
comportamento individual destes elementos com relação ao fenômeno estudado é de
fácil entendimento e será mostrado agora.
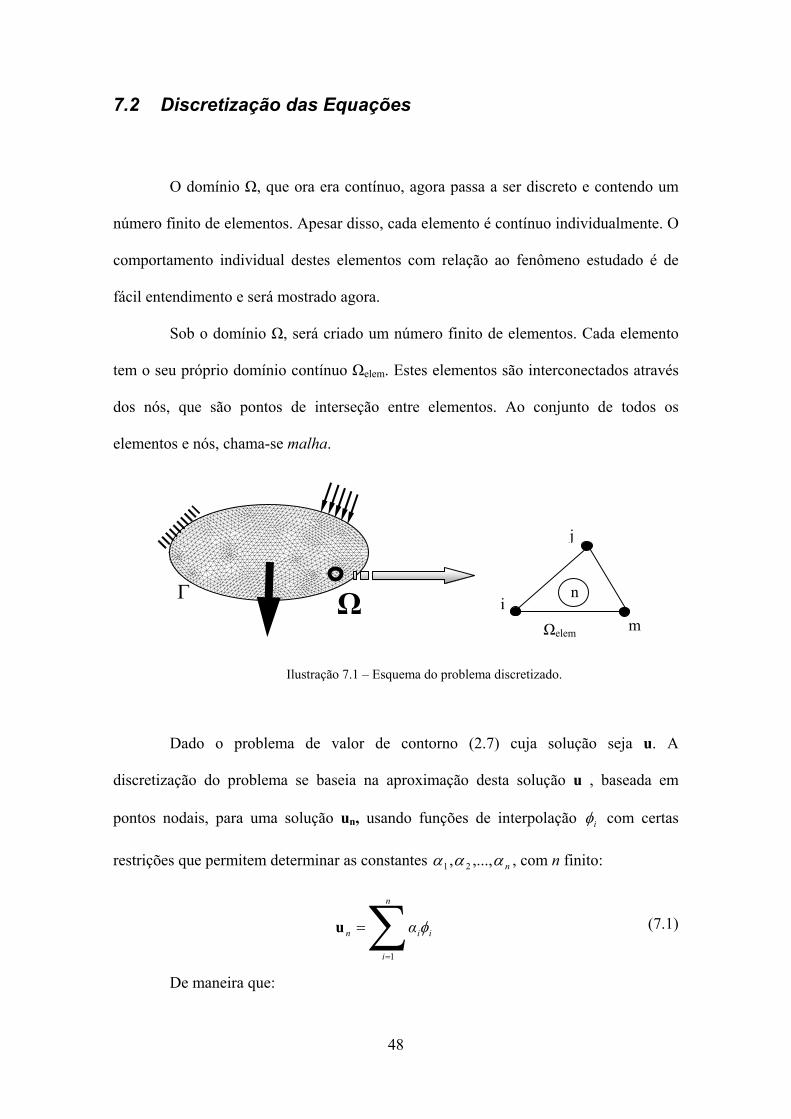
Sob o domínio Ω, será criado um número finito de elementos. Cada elemento
tem o seu próprio domínio contínuo Ωelem. Estes elementos são interconectados através
dos nós, que são pontos de interseção entre elementos. Ao conjunto de todos os
elementos e nós, chama-se malha.
Ilustração 7.1 – Esquema do problema discretizado.
Dado o problema de valor de contorno (2.7) cuja solução seja u. A
discretização do problema se baseia na aproximação desta solução u , baseada em
pontos nodais, para uma solução un, usando funções de interpolação iφ com certas
restrições que permitem determinar as constantes nααα ,...,, 21 , com n finito:
∑=
=
n
i
iin α
1
φu (7.1)
De maneira que:
Γ Ω im
j
n
Ωelem

49
uu →∞→
n
n (7.2)
Esta interpolação se dá nos deslocamentos dos nós para se obter um campo de
deslocamento diferenciável pertencente ao elemento. Para cada nó de um elemento,
resolve-se o seguinte sistema e determinam-se as constantes nααα ,...,, 21 :
⎩⎨⎧
==
0)(1)(
jii
iii
αα
XX
φφ
(7.3)
Sendo Xn um vetor que representa a coordenada nodal n do elemento.
Após o cálculo dos coeficientes, determina-se a função de forma do nó i, Ni:
iii φα=N (7.4)
A matriz de forma é obtida:
[ ]nNININ K1= (7.5)
I é a matriz identidade e n é o número de nós de um elemento.
Re-escrevendo a equação (7.1) , tem-se:
uNu =n (7.6)
A função de forma varia de elemento para elemento e geralmente é um
polinômio. Casos especiais desta função de forma serão descritos nos itens seguintes.
A equação (2.2) discretizada, torna-se:
uNE s∇= (7.7)
Simplificando a operação, define-se a matriz de derivada de forma B, que
relaciona diretamente as deformações com os deslocamentos nodais para cada elemento.

50
nós de número],,[
0
0
1
==
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
∂∂
∂∂
∂∂
∂∂
=∇=
N
xN
yN
yN
xN
N
ii
i
i
ii
BBB
NB
K
(7.8)
Nesta definição, apresenta-se o caso bidimensional para a matriz B.
E a relação fica:
uE B= (7.9)
Usando a equação (2.7), e discretizando-a para um número limitado de
elementos no domínio, obtém-se:
Fu
FuuU
Fuuu
∑ ∫
∑ ∫
∑ ∫
=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛Ω
=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛Ω
=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛Ω
Ω
Ω
= Ω
N
iiTi
N
Tii
Ti
T
T
N
i
iiT
i
i
i
i
d
d
d
1
1
1
)(
)(
)(
DBB
DBB
BDB
(7.10)
F é um vetor de forças externas, u é vetor de deslocamentos nodais.
Define-se a rigidez de um elemento por:
∫Ω Ω=
i
iiTii d)( DBBk (7.11)
Observa-se que sempre a matriz de rigidez será simétrica, pelo fato da matriz
constitutiva D ser simétrica e haver uma dupla multiplicação da matriz de derivada de
forma B, como será mostrado mais adiante.
A matriz de rigidez global é definida por:
51
∑=N
i
1
kK (7.12)
Tem-se a expressão final da formulação:
KuF = (7.13)
Definida a teoria geral dos elementos finitos, o próximo passo é definir a
matriz constitutiva D e de a derivada de forma B, que variam de acordo com o tipo de
elemento em questão. Neste trabalho optou-se por usar três tipos de elementos: treliça
tridimensional, triângulo linear, e quadrado bi-linear. Todos estes elementos são de fácil
formulação e não necessitam da integração numérica para calcular a matriz de derivada
de forma.
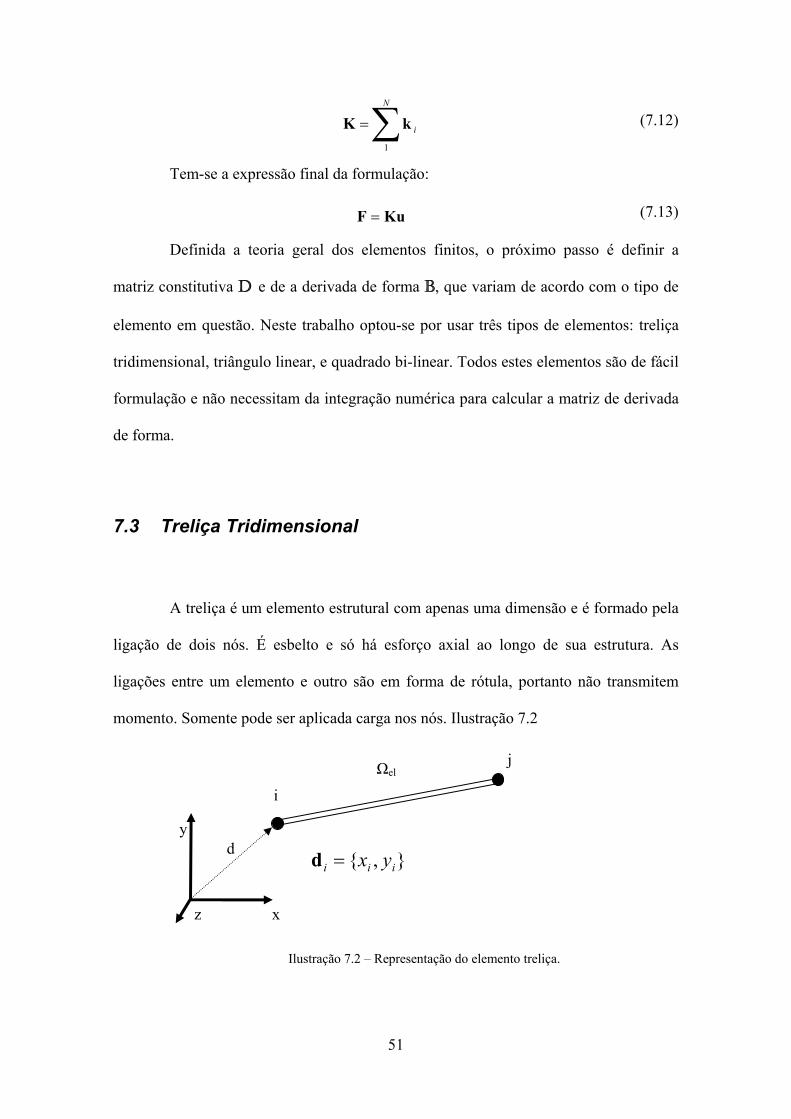
7.3 Treliça Tridimensional
A treliça é um elemento estrutural com apenas uma dimensão e é formado pela
ligação de dois nós. É esbelto e só há esforço axial ao longo de sua estrutura. As
ligações entre um elemento e outro são em forma de rótula, portanto não transmitem
momento. Somente pode ser aplicada carga nos nós. Ilustração 7.2
Ilustração 7.2 – Representação do elemento treliça.
j
x z
i
dy
Ωel
, iii yx=d

52
A matriz de rigidez local do elemento é definida como:
⎥⎦
⎤⎢⎣
⎡−
−=
1111
LEA
D (7.14)
E é o modulo de elasticidade, A é a área da seção transversal da treliça e L é o
comprimento da barra. Observa-se que neste caso a matriz D é apenas uma matriz de
segunda ordem. Devido à simplicidade deste elemento e por conter apenas tensões no
sentido axial. O vetor de tensões neste caso é:
[ ]xσ=T (7.15)
A função de interpolação generalizada para a treliça é:
xNi 21 αα += (7.16)
O sistema a ser resolvido para se determinar os coeficientes α da função de
interpolação Ni, fica:
⎩⎨⎧
=+==+=
01
21
21
jj
ii
xNxN
αααα
(7.17)
E assim sucessivamente para Nj.
Calculam-se todos os coeficientes e se determina a função de forma para o
elemento. Usando as relações (7.5) e (7.7) , chega-se na matriz B:
⎥⎦
⎤⎢⎣
⎡=
cbacba
L 0000001
B (7.18)
( ) ( ) ( )212
212
212
121212 ;; com
zzyyxxL
zzayybxxa
−+−+−=
−=−=−=
A matriz de rigidez, definida pela equação (7.11), neste caso, se torna um
produto matricial, lembrando que as matrizes D e B são constantes:
iTi DBB=ik (7.19)
Calculando este produto, resulta em uma matriz simétrica:

53
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−−−−−
−
=
2
2
2
22
22
22
3
ccbbcabaa
ccbcaccbbbacbb
caba-ac-abaa
LEAk s
i (7.20)
121212 ;;a com zzcyybxx −=−=−=
7.4 Triângulo Linear
O triângulo linear é o elemento bidimensional mais simples de todos devido a
sua facilidade de cálculo e sua versatilidade. É constituído por três nós e é realizada uma
interpolação linear para se obter o campo de deslocamentos pertencentes ao elemento. O
estado plano de tensões será adotado para este elemento. Ilustração 7.3:
Ilustração 7.3 – Representação do elemento triângulo linear.
A matriz constitutiva do material para o estado plano de tensões é definida
como:
j
x
, iii yx=d
y i m
n
di
Ωele

54
( ) ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−
=2/100
0101
1 2
νν
ν
νE
D (7.21)
E é o modulo de elasticidade, ν é o coeficiente de Poisson. Devido ao estado
plano de tensões, a matriz D nesse caso é de terceira ordem. Só existem três
componentes de tensão. São elas σx, σy, τxy, e formam o tensor de tensões de segunda
ordem:
⎥⎦
⎤⎢⎣
⎡=
yxy
xyx
σττσ
T (7.22)
A função de interpolação generalizada para o triângulo é:
yxNi 321 ααα ++= (7.23)
O sistema a ser resolvido para se determinar os coeficientes α da função de
interpolação Ni, fica:
⎪⎩
⎪⎨
⎧
=+=
=+==+=
00
1
21
21
21
mm
jj
ii
xNxNxN
αα
αααα
(7.24)
E assim sucessivamente para Nj e Nm.
Calculam-se todos os coeficientes e se determina a função de forma para o
elemento. Usando as relações (7.5) e (7.7) , chega-se na matriz B:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
Δ=
mmjji
mji
mji
bcbcbcccc
bbb000
000
21
B (7.25)
mm
jj
ii
jmi
mj
yxyxyx
ijm
yxc
yy
111
det) triângulodo (área 22
bcom
i
==Δ
−=
−=
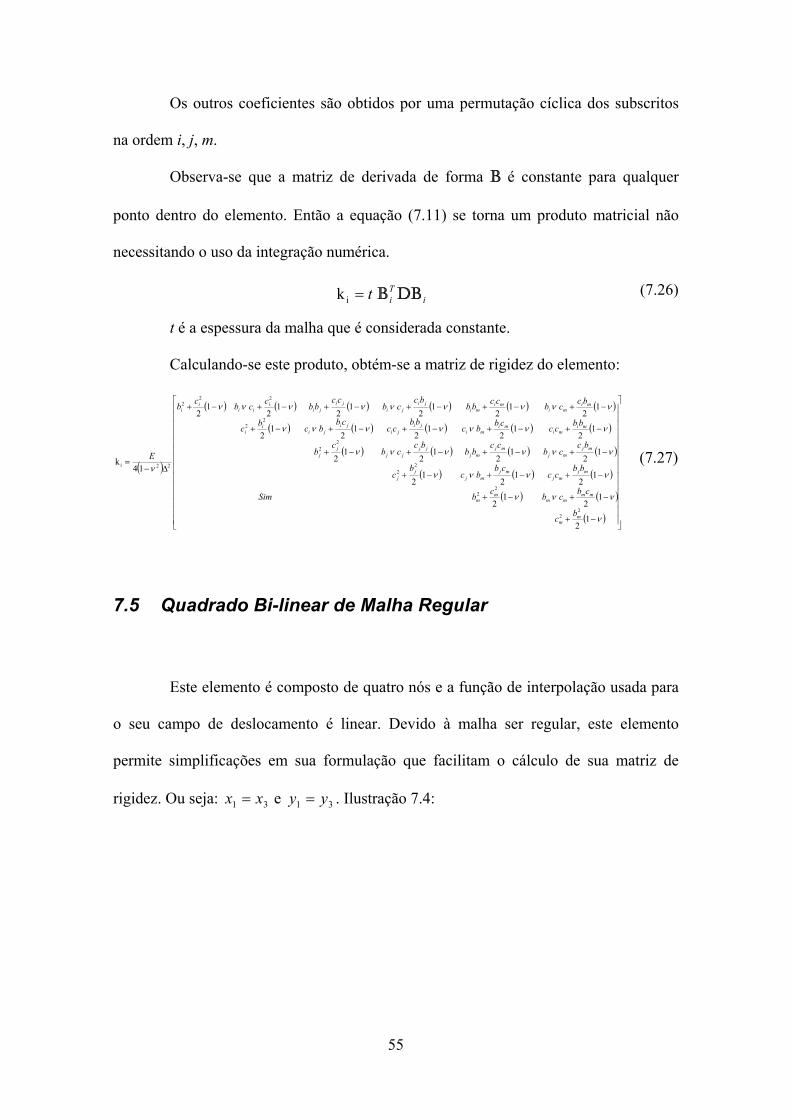
55
Os outros coeficientes são obtidos por uma permutação cíclica dos subscritos
na ordem i, j, m.
Observa-se que a matriz de derivada de forma B é constante para qualquer
ponto dentro do elemento. Então a equação (7.11) se torna um produto matricial não
necessitando o uso da integração numérica.
iTit DBB=ik (7.26)
t é a espessura da malha que é considerada constante.
Calculando-se este produto, obtém-se a matriz de rigidez do elemento:
( )
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
( ) ( ) ( )
( ) ( )
( ) ⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−+
−+−+
−+−+−+
−+−+−+−+
−+−+−+−+−+
−+−+−+−+−+−+
Δ−=
ν
ννν
νννν
νννννν
ννννννν
ννννννννν
ν
12
12
12
12
12
12
12
12
12
12
12
12
12
12
12
12
12
12
12
12
12
14k
22
22
22
22
22
222
22i
mm
mmmm
mm
mjmj
mjmj
jj
mjmj
mjmj
jjjj
jj
mimi
mimi
jiji
jiji
ii
mimi
mimi
jiji
jiji
iii
ii
bc
cbcbcbSim
bbcc
cbbc
bc
bccb
ccbb
bccb
cb
bbcccbbcbb
cccb
bcbc
bccbccbbbc
cbcc
bbccbcb
E
(7.27)
7.5 Quadrado Bi-linear de Malha Regular
Este elemento é composto de quatro nós e a função de interpolação usada para
o seu campo de deslocamento é linear. Devido à malha ser regular, este elemento
permite simplificações em sua formulação que facilitam o cálculo de sua matriz de
rigidez. Ou seja: 31 xx = e 31 yy = . Ilustração 7.4:

56
Ilustração 7.4 – Representação do elemento quadrado bi linear.
A matriz constitutiva do material é dada por:
( ) ⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−
=2/100
0101
1 2
νν
ν
νE
D (7.28)
E é o modulo de elasticidade, ν é o módulo de Poisson.
O tensor de tensões é:
⎥⎦
⎤⎢⎣
⎡=
yxy
xyx
σττσ
T (7.29)
Observa-se que a matriz constitutiva e o tensor de tensões são o mesmo do
elemento triângulo linear devido ao estado plano de tensões ser adotado nos dois casos.
A função de interpolação generalizada para o quadrado é:
yxNi 321 ααα ++= (7.30)
O sistema a ser resolvido para se determinar os coeficientes α da função de
interpolação Ni, fica:
⎪⎪
⎩
⎪⎪
⎨
⎧
=+=
=+=
=+==+=
00
01
21
21
21
21
mm
jk
jj
ii
xNxN
xNxN
αα
αα
αααα
(7.31)
E assim sucessivamente para Nj , Nk e Nm.
y
x
i m
j
n
di
, iii yx=d
k
Ωelem
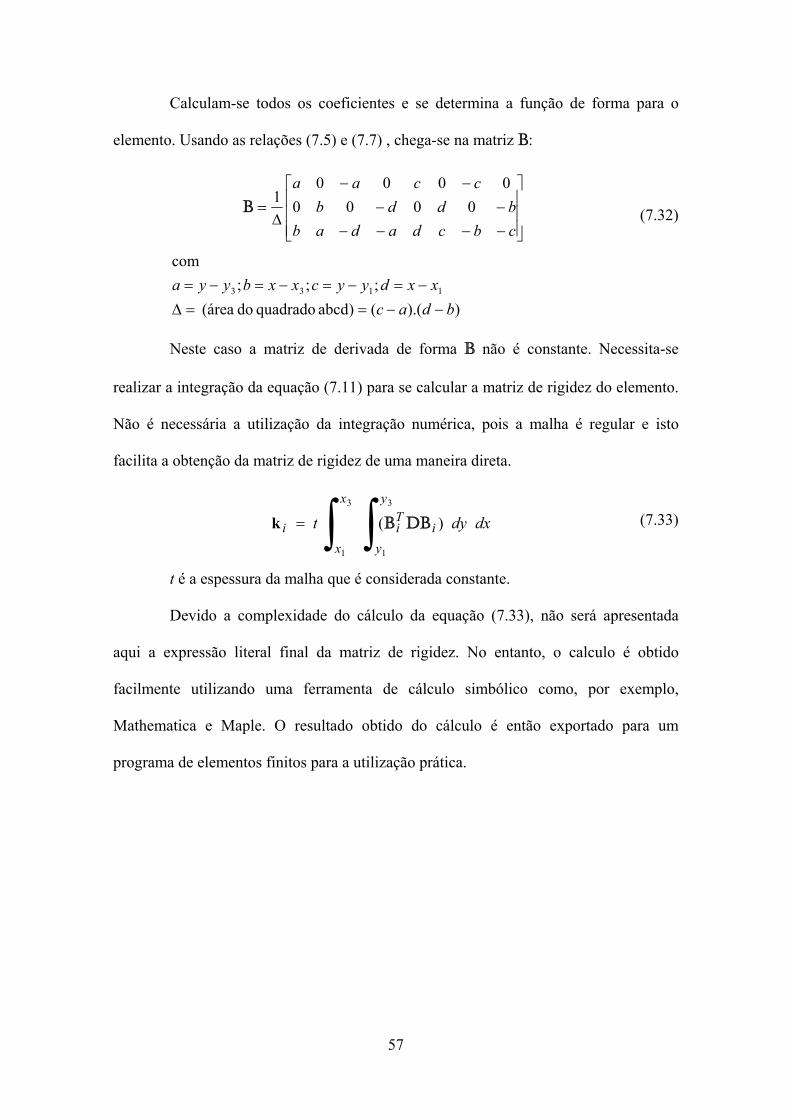
57
Calculam-se todos os coeficientes e se determina a função de forma para o
elemento. Usando as relações (7.5) e (7.7) , chega-se na matriz B:
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−−−−
−−
Δ=
cbcdadabbddb
ccaa0000
00001
B (7.32)
)).(()abcd quadrado do (área ;;;
com
1133
bdacxxdyycxxbyya−−==Δ
−=−=−=−=
Neste caso a matriz de derivada de forma B não é constante. Necessita-se
realizar a integração da equação (7.11) para se calcular a matriz de rigidez do elemento.
Não é necessária a utilização da integração numérica, pois a malha é regular e isto
facilita a obtenção da matriz de rigidez de uma maneira direta.
dxdytx
x
y
yi
Tii ∫ ∫=
3
1
3
1
)( DBBk (7.33)
t é a espessura da malha que é considerada constante.
Devido a complexidade do cálculo da equação (7.33), não será apresentada
aqui a expressão literal final da matriz de rigidez. No entanto, o calculo é obtido
facilmente utilizando uma ferramenta de cálculo simbólico como, por exemplo,
Mathematica e Maple. O resultado obtido do cálculo é então exportado para um
programa de elementos finitos para a utilização prática.
58
8 Métodos de Resolução de Sistemas Lineares
O método dos elementos finitos sempre resulta na solução de um sistema linear
com muitas equações. Relembrando a equação (7.13), necessita-se desenvolver técnicas
para se resolver de uma maneira satisfatória esse sistema para que o cálculo seja rápido
e eficiente. Para se determinar qual o melhor método para se utilizar, relacionam-se as
características desta matriz K:
1. Esparsa
2. Simétrica
3. Definida positiva
4. De banda
8.1 Esparsidade
Uma matriz é esparsa quando o número de elementos nulos é muito maior que
o número de elementos não nulos. Ilustração 8.1.

59
0 500 1000 1500
0
200
400
600
800
1000
1200
1400
1600
nz = 21650
Ilustração 8.1 – Exemplo de uma matriz esparsa de ordem 1722. Os elementos não nulos são os
pontos pretos neste diagrama totalizando nz = 21650.
A organização dos elementos desta matriz é otimizado da seguinte maneira: o
elemento jxin não nulo é armazenado na matriz esparsa junto com as coordenadas de
sua localização na matriz não esparsa. Deste modo, os elementos nulos não necessitam
serem armazenados de modo que esparsojxi Kn ∉= 0 . O vetor I e o vetor J armazenam
os índices de localização do elemento; na terceira coluna N, é armazenado o valor.
[ ]NJIK =esparso (8.1)
8.2 Matriz Simétrica
Uma matriz é simétrica quando ela é igual a sua transposta:
TAA = (8.2)
A matriz de rigidez para o caso da elasticidade linear, também é simétrica. A
equação (7.11) prova isso: observa-se que sempre a matriz de rigidez será simétrica,
pelo fato da matriz constitutiva D ser simétrica e haver uma dupla multiplicação da
matriz de derivada de forma B.

60
iTi
iiTii
TTi
TTii
Ti
Ti
Ti
T
iiTi
Ti
iii
i
ddd
d
kk
k
k
=
Ω=Ω=Ω=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛Ω=
∫∫∫∫
ΩΩΩ
Ω
)()()(
)(
DBBBDBDBB
DBB
(8.3)
8.3 Matriz Definida Positiva
Uma matriz é definida positiva quando:
0>vMvT (8.4)
Para qualquer nXnn RR ∈∈≠ Mv ,0
Re-escrevendo esta relação para a matriz de rigidez, tem-se:
0>= UKUTdefE (8.5)
Esta expressão é válida considerando que o resultado deste produto matricial é
a energia interna de deformação do sólido que sempre será positiva.
8.4 Matriz em Banda
Matriz em banda é aquela em que todos os elementos estão concentrados
próximo à diagonal principal da matriz.
Definição: A banda da matriz é a maior distância que um elemento não nulo
tem com a diagonal principal. Entende-se distância como a quantidade de diagonais

61
existentes com relação a diagonal principal. Uma matriz em banda sempre será esparsa,
mas nem sempre o oposto é verdadeiro. Ilustração 8.2
0 500 1000 1500
0
200
400
600
800
1000
1200
1400
1600
nz = 21650
Ilustração 8.2 – Representação gráfica dos elementos de uma matriz,destacando-se a banda
superior e inferior.
Uma vantagem de a matriz ser em banda, é reduzir a memória de
armazenamento para a matriz. Este método somente guarda os elementos que pertencem
à banda da matriz. Se a matriz for simétrica, ao mesmo tempo em que for de banda,
reduz-se mais ainda o tamanho da matriz armazenada, guardando somente uma das
metades simétricas da banda em questão.
O esquema de armazenamento para uma matriz em banda e simétrica é descrito
da seguinte forma:
),(),()1(
jjildbajianXldbnXn
−+⇒
⇒ +KK (8.6)
Com
simétrica. banda de largura a é ; , e ],1[];),1,1[max( ldbjijjjldbji N∈=+−=
62
8.5 Decomposição de Cholesky
Considerando todas as características da matriz de rigidez do problema -
simétrica, definida positiva e em banda - o melhor método para solucionar este sistema
de equações lineares é o método da decomposição de Cholesky, com o caso especial de
a matriz ser em banda. Esta decomposição resulta numa simplificação do tipo:
TLLK = (8.7)
L é uma matriz diagonal superior.
Esta simplificação facilita muitas operações que envolvem o cálculo da inversa
da matriz, ou quando a mesma matriz deve ser usada para diferentes vetores.
( ) ( )( ) FLLFKU
LLLLK111
1111
−−−
−−−−
==
==T
TT
(8.8)
Um algoritmo especial para a solução deste sistema é encontrado no LAPACK,
Linear Algebra Package[36]. Uma coletânea de algoritmos em FORTRAN 77 para
solucionar diversos tipos de problemas da álgebra linear. A grande vantagem desta
biblioteca virtual é a de que todas as funções que a integram suportam a plataforma de
multiprocessamento. Esta plataforma é possível através da linguagem OPEN MP[37],
que é uma série de diretivas de compilação e de variáveis que determinam o paralelismo
de processamento.
63
9 Exemplos
Todas as ferramentas necessárias para aplicar a derivada topológica e a
otimização evolucionária foram descritas nos capítulos anteriores. Com o objetivo de
validar toda a teoria proposta nesta dissertação, formularam-se alguns exemplos
existentes na literatura específica[38]. Os algoritmos citados nesta dissertação, de
otimização topológica e de alívio de tensões serão utilizados. Após executar o algoritmo
de otimização topológica, será executado o algoritmo de alívio de tensões partindo do
ponto ótimo obtido pelo algoritmo de topologia.
Em todos os exemplos será usado o mesmo material: aço carbono com módulo
de elasticidade GPaE 210= , tensão de escoamento MPae 250=σ , coeficiente de
Poisson 3,0=ν . O critério de parada para o algoritmo de otimização topológica é:
eVMT σ2,1≤ . O critério de parada para o algoritmo de alívio de tensões é:
eVMT σ< .
O elemento finito utilizado em todos os exemplos é o quadrado bi linear
isoparamétrico de malha regular.
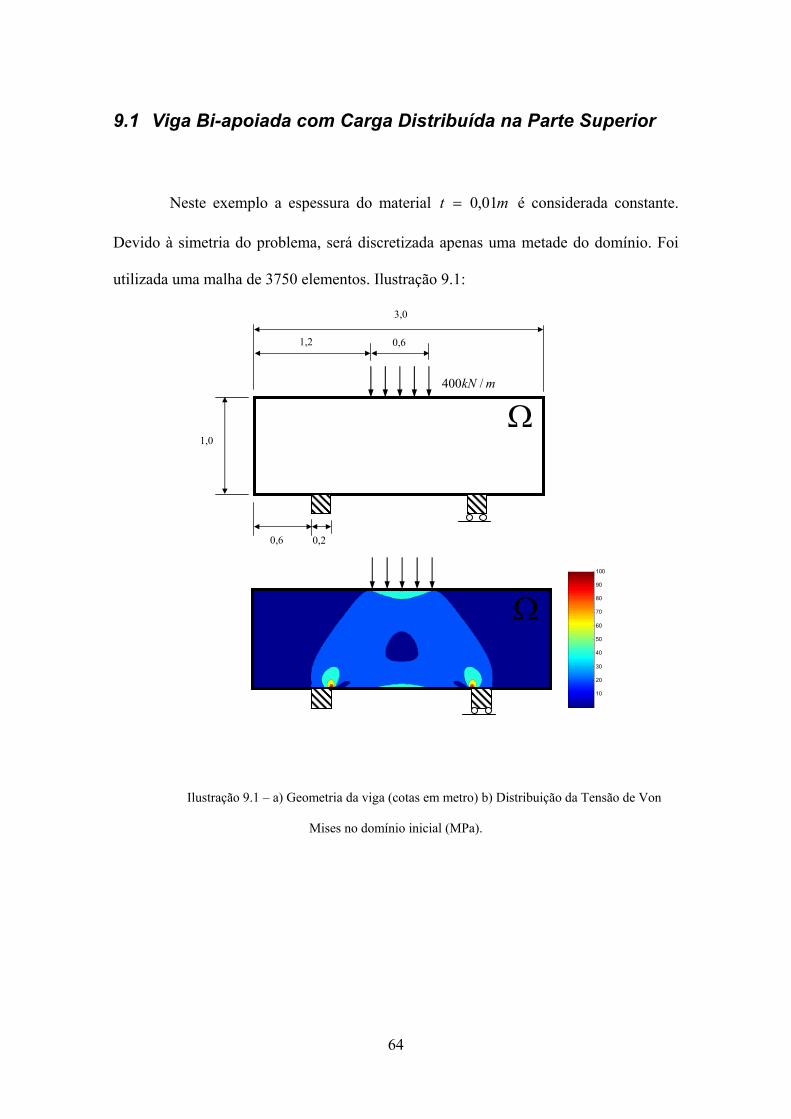
64
9.1 Viga Bi-apoiada com Carga Distribuída na Parte Superior
Neste exemplo a espessura do material mt 01,0= é considerada constante.
Devido à simetria do problema, será discretizada apenas uma metade do domínio. Foi
utilizada uma malha de 3750 elementos. Ilustração 9.1:
Ilustração 9.1 – a) Geometria da viga (cotas em metro) b) Distribuição da Tensão de Von
Mises no domínio inicial (MPa).
10
20
30
40
50
60
70
80
90
100
Ω
0,6 0,2
1,2 0,6
1,0
3,0
ΩmkN /400
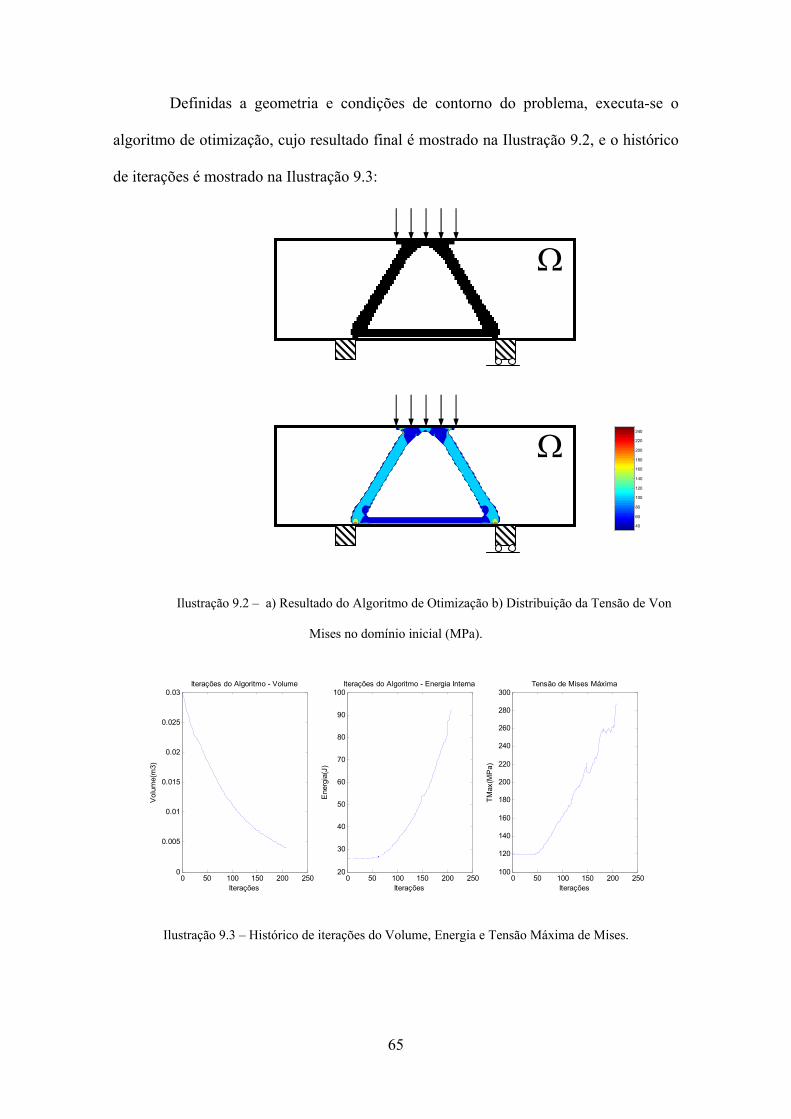
65
Definidas a geometria e condições de contorno do problema, executa-se o
algoritmo de otimização, cujo resultado final é mostrado na Ilustração 9.2, e o histórico
de iterações é mostrado na Ilustração 9.3:
Ilustração 9.2 – a) Resultado do Algoritmo de Otimização b) Distribuição da Tensão de Von
Mises no domínio inicial (MPa).
Ilustração 9.3 – Histórico de iterações do Volume, Energia e Tensão Máxima de Mises.
Ω
40
60
80
100
120
140
160
180
200
220
240
Ω
0 50 100 150 200 2500
0.005
0.01
0.015
0.02
0.025
0.03Iterações do Algoritmo - Volume
Vol
ume(
m3)
Iterações0 50 100 150 200 250
20
30
40
50
60
70
80
90
100Iterações do Algoritmo - Energia Interna
Ene
rgia
(J)
Iterações0 50 100 150 200 250
100
120
140
160
180
200
220
240
260
280
300Tensão de Mises Máxima
TMax
(MP
a)
Iterações
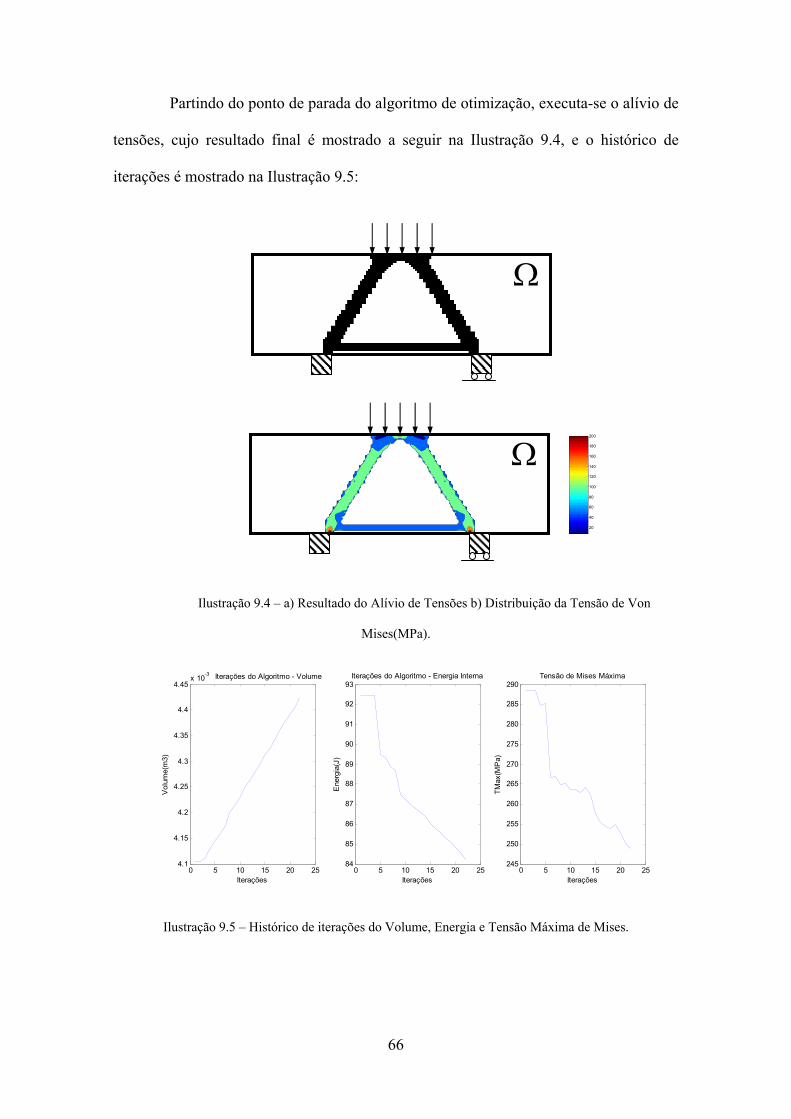
66
Partindo do ponto de parada do algoritmo de otimização, executa-se o alívio de
tensões, cujo resultado final é mostrado a seguir na Ilustração 9.4, e o histórico de
iterações é mostrado na Ilustração 9.5:
Ilustração 9.4 – a) Resultado do Alívio de Tensões b) Distribuição da Tensão de Von
Mises(MPa).
Ilustração 9.5 – Histórico de iterações do Volume, Energia e Tensão Máxima de Mises.
Ω
20
40
60
80
100
120
140
160
180
200
Ω
0 5 10 15 20 254.1
4.15
4.2
4.25
4.3
4.35
4.4
4.45x 10-3 Iterações do Algoritmo - Volume
Vol
ume(
m3)
Iterações0 5 10 15 20 25
84
85
86
87
88
89
90
91
92
93Iterações do Algoritmo - Energia Interna
Ene
rgia
(J)
Iterações0 5 10 15 20 25
245
250
255
260
265
270
275
280
285
290Tensão de Mises Máxima
TMax
(MP
a)
Iterações
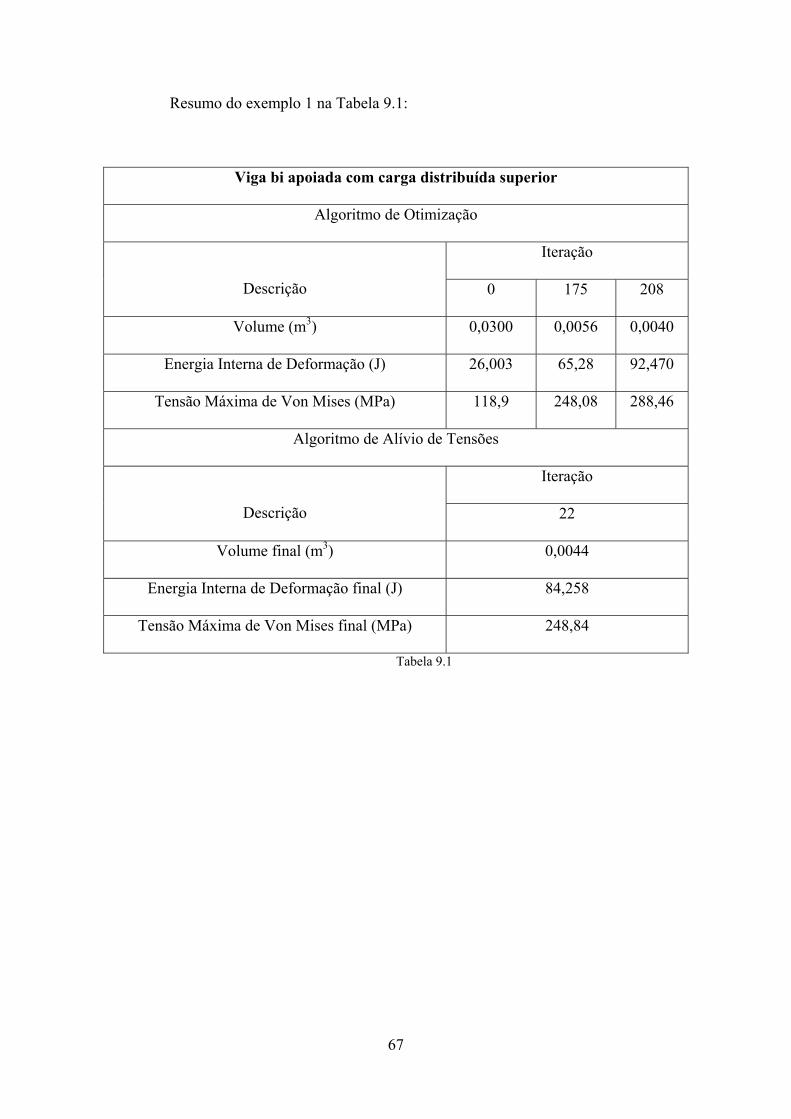
67
Resumo do exemplo 1 na Tabela 9.1:
Viga bi apoiada com carga distribuída superior
Algoritmo de Otimização
Iteração
Descrição 0 175 208
Volume (m3) 0,0300 0,0056 0,0040
Energia Interna de Deformação (J) 26,003 65,28 92,470
Tensão Máxima de Von Mises (MPa) 118,9 248,08 288,46
Algoritmo de Alívio de Tensões
Iteração
Descrição 22
Volume final (m3) 0,0044
Energia Interna de Deformação final (J) 84,258
Tensão Máxima de Von Mises final (MPa) 248,84
Tabela 9.1
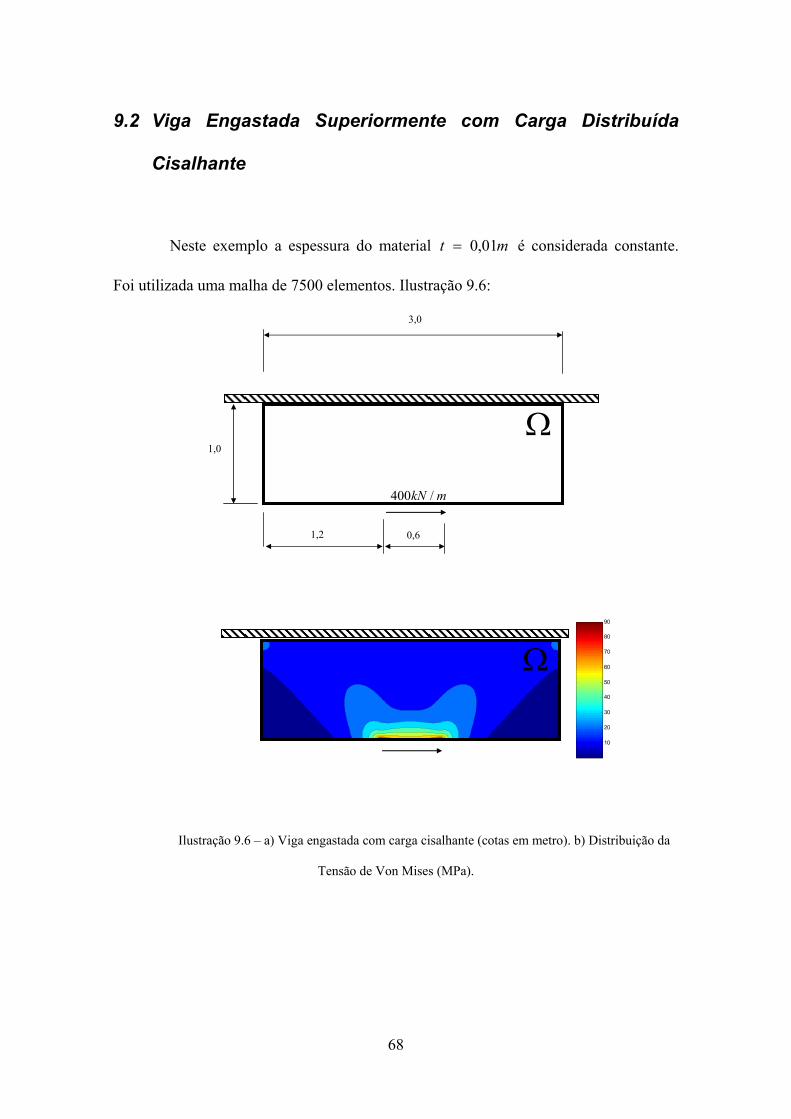
68
9.2 Viga Engastada Superiormente com Carga Distribuída
Cisalhante
Neste exemplo a espessura do material mt 01,0= é considerada constante.
Foi utilizada uma malha de 7500 elementos. Ilustração 9.6:
Ilustração 9.6 – a) Viga engastada com carga cisalhante (cotas em metro). b) Distribuição da
Tensão de Von Mises (MPa).
1,2 0,6
1,0
3,0
Ω
mkN /400
10
20
30
40
50
60
70
80
90
Ω
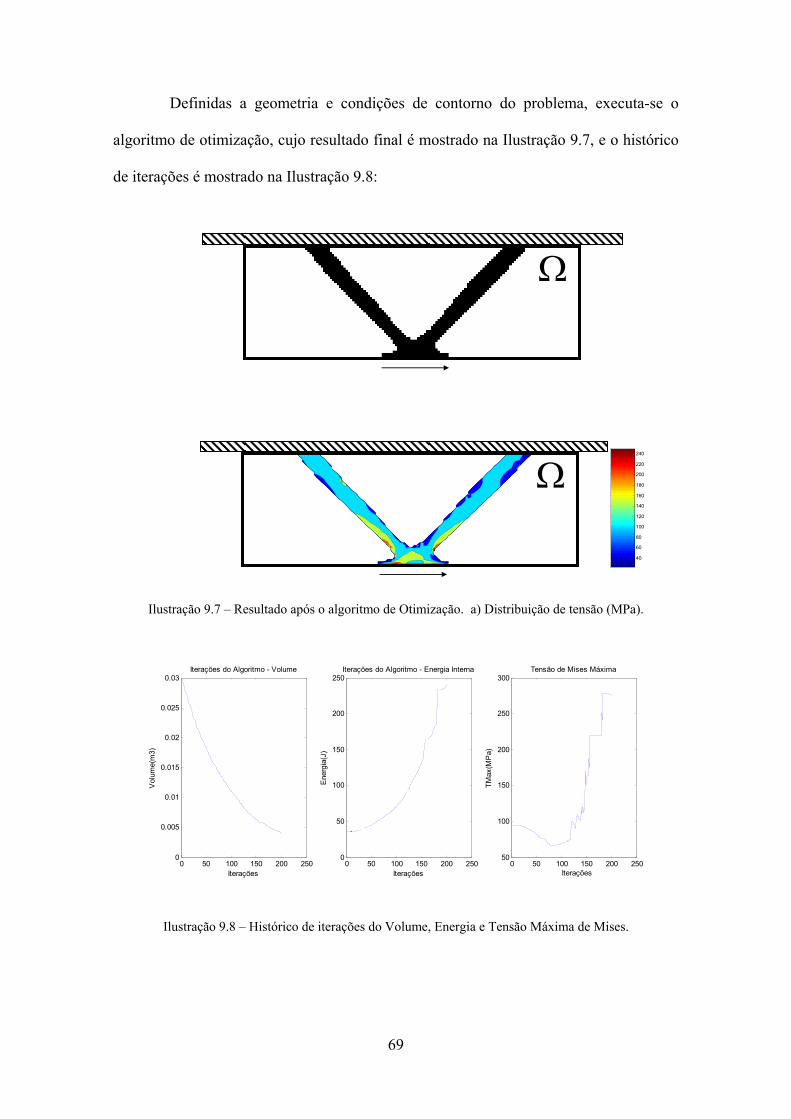
69
Definidas a geometria e condições de contorno do problema, executa-se o
algoritmo de otimização, cujo resultado final é mostrado na Ilustração 9.7, e o histórico
de iterações é mostrado na Ilustração 9.8:
Ilustração 9.7 – Resultado após o algoritmo de Otimização. a) Distribuição de tensão (MPa).
Ilustração 9.8 – Histórico de iterações do Volume, Energia e Tensão Máxima de Mises.
Ω
40
60
80
100
120
140
160
180
200
220
240
Ω
0 50 100 150 200 2500
0.005
0.01
0.015
0.02
0.025
0.03Iterações do Algoritmo - Volume
Vol
ume(
m3)
Iterações0 50 100 150 200 250
0
50
100
150
200
250Iterações do Algoritmo - Energia Interna
Ene
rgia
(J)
Iterações0 50 100 150 200 250
50
100
150
200
250
300Tensão de Mises Máxima
TMax
(MP
a)
Iterações
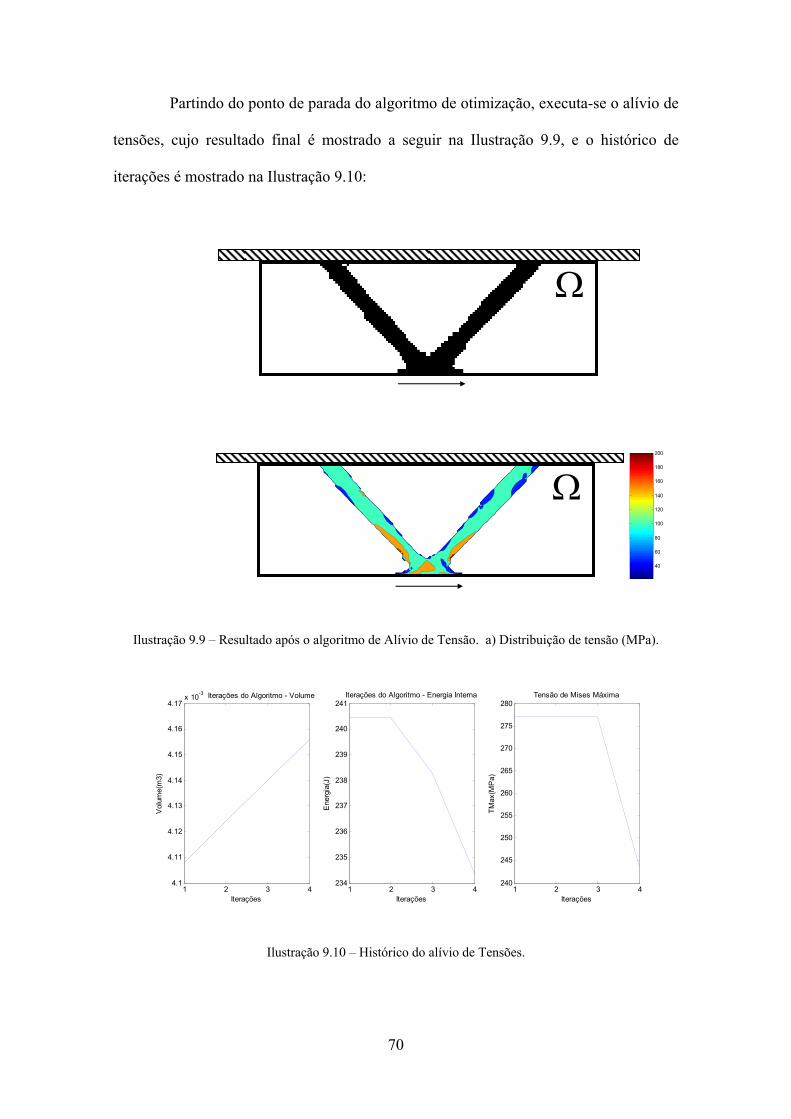
70
Partindo do ponto de parada do algoritmo de otimização, executa-se o alívio de
tensões, cujo resultado final é mostrado a seguir na Ilustração 9.9, e o histórico de
iterações é mostrado na Ilustração 9.10:
Ilustração 9.9 – Resultado após o algoritmo de Alívio de Tensão. a) Distribuição de tensão (MPa).
Ilustração 9.10 – Histórico do alívio de Tensões.
Ω
40
60
80
100
120
140
160
180
200
Ω
1 2 3 44.1
4.11
4.12
4.13
4.14
4.15
4.16
4.17x 10-3 Iterações do Algoritmo - Volume
Vol
ume(
m3)
Iterações1 2 3 4
234
235
236
237
238
239
240
241Iterações do Algoritmo - Energia Interna
Ene
rgia
(J)
Iterações1 2 3 4
240
245
250
255
260
265
270
275
280Tensão de Mises Máxima
TMax
(MP
a)
Iterações
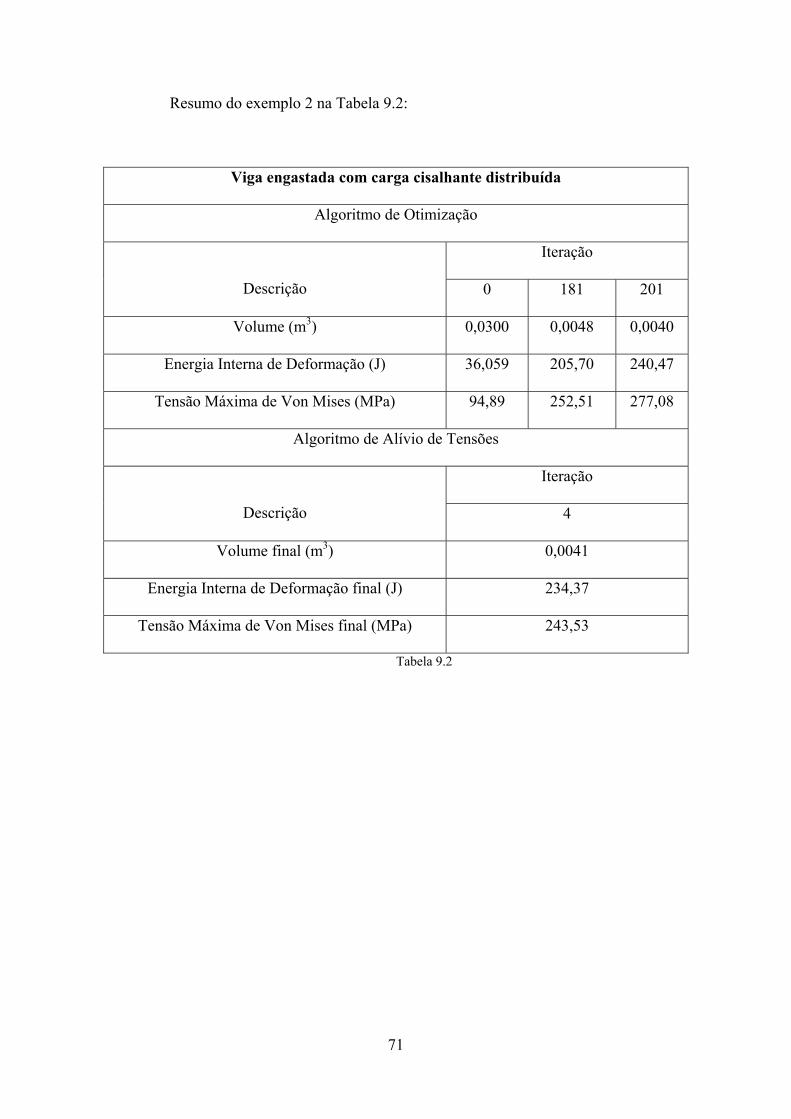
71
Resumo do exemplo 2 na Tabela 9.2:
Viga engastada com carga cisalhante distribuída
Algoritmo de Otimização
Iteração
Descrição 0 181 201
Volume (m3) 0,0300 0,0048 0,0040
Energia Interna de Deformação (J) 36,059 205,70 240,47
Tensão Máxima de Von Mises (MPa) 94,89 252,51 277,08
Algoritmo de Alívio de Tensões
Iteração
Descrição 4
Volume final (m3) 0,0041
Energia Interna de Deformação final (J) 234,37
Tensão Máxima de Von Mises final (MPa) 243,53
Tabela 9.2
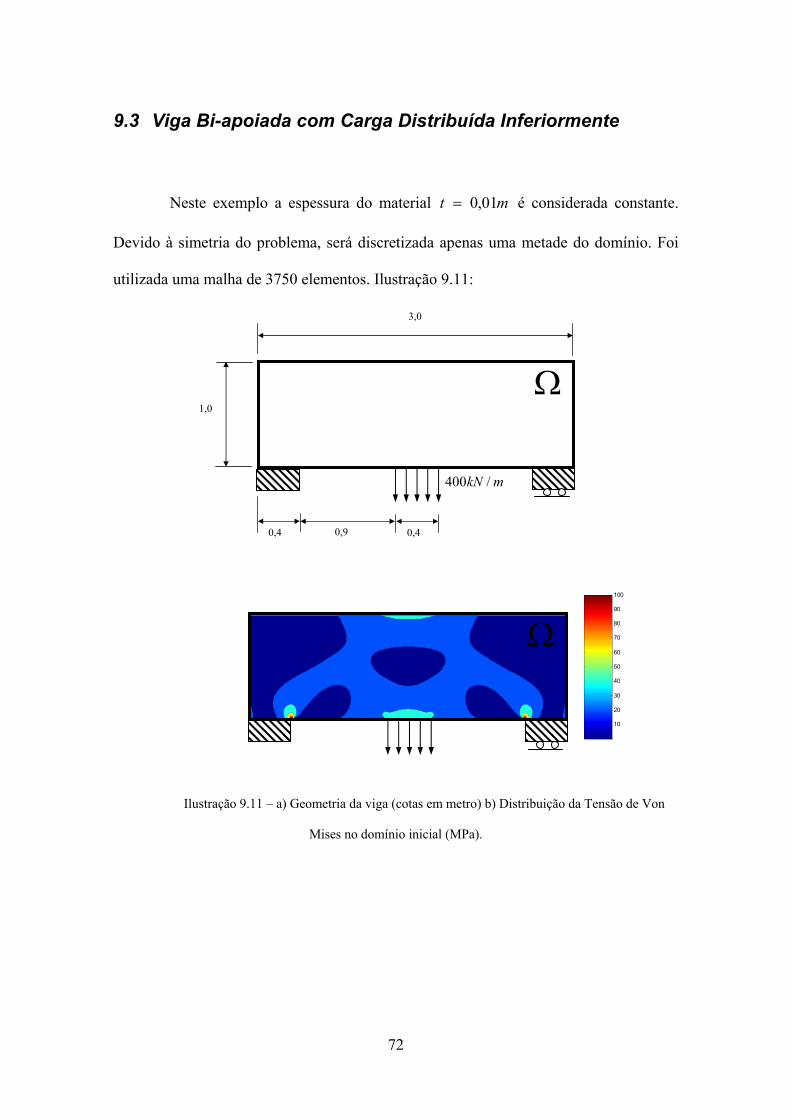
72
9.3 Viga Bi-apoiada com Carga Distribuída Inferiormente
Neste exemplo a espessura do material mt 01,0= é considerada constante.
Devido à simetria do problema, será discretizada apenas uma metade do domínio. Foi
utilizada uma malha de 3750 elementos. Ilustração 9.11:
Ilustração 9.11 – a) Geometria da viga (cotas em metro) b) Distribuição da Tensão de Von
Mises no domínio inicial (MPa).
0,4 0,9
1,0
3,0
Ω
mkN /400
0,4
10
20
30
40
50
60
70
80
90
100
Ω
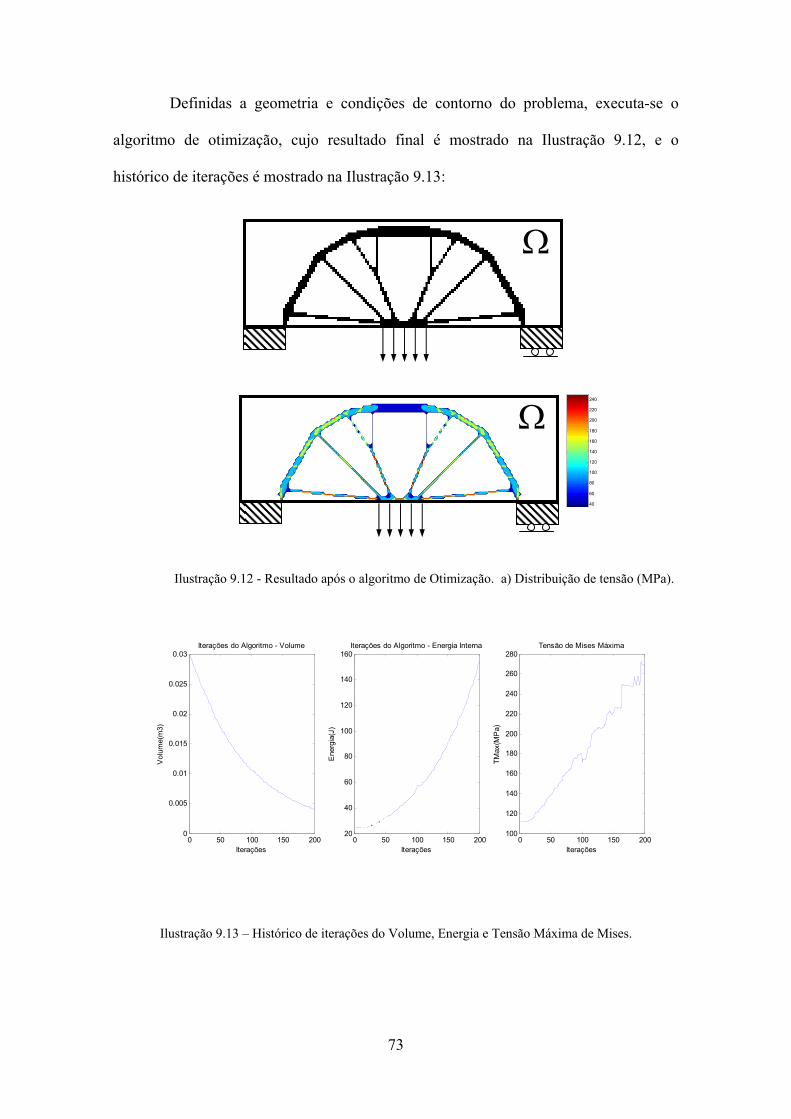
73
Definidas a geometria e condições de contorno do problema, executa-se o
algoritmo de otimização, cujo resultado final é mostrado na Ilustração 9.12, e o
histórico de iterações é mostrado na Ilustração 9.13:
Ilustração 9.12 - Resultado após o algoritmo de Otimização. a) Distribuição de tensão (MPa).
Ilustração 9.13 – Histórico de iterações do Volume, Energia e Tensão Máxima de Mises.
Ω
40
60
80
100
120
140
160
180
200
220
240
Ω
0 50 100 150 2000
0.005
0.01
0.015
0.02
0.025
0.03Iterações do Algoritmo - Volume
Vol
ume(
m3)
Iterações0 50 100 150 200
20
40
60
80
100
120
140
160Iterações do Algoritmo - Energia Interna
Ene
rgia
(J)
Iterações0 50 100 150 200
100
120
140
160
180
200
220
240
260
280Tensão de Mises Máxima
TMax
(MP
a)
Iterações
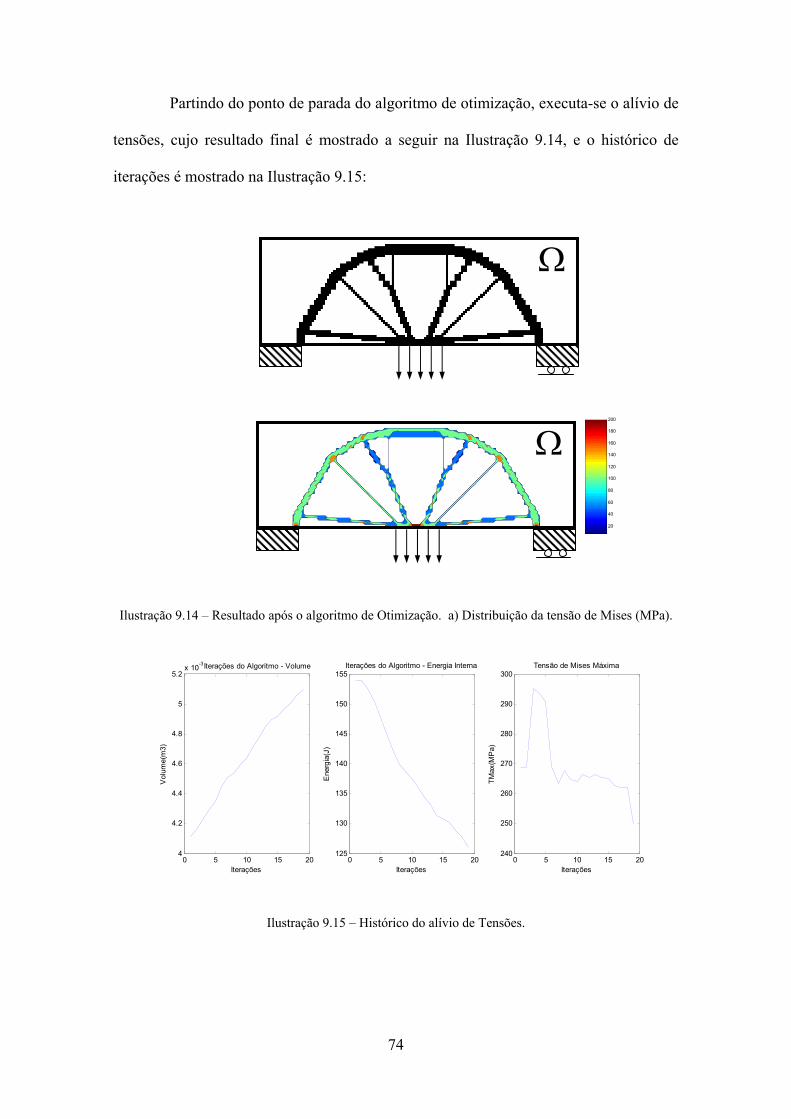
74
Partindo do ponto de parada do algoritmo de otimização, executa-se o alívio de
tensões, cujo resultado final é mostrado a seguir na Ilustração 9.14, e o histórico de
iterações é mostrado na Ilustração 9.15:
Ilustração 9.14 – Resultado após o algoritmo de Otimização. a) Distribuição da tensão de Mises (MPa).
Ilustração 9.15 – Histórico do alívio de Tensões.
Ω
20
40
60
80
100
120
140
160
180
200
Ω
0 5 10 15 204
4.2
4.4
4.6
4.8
5
5.2x 10-3Iterações do Algoritmo - Volume
Vol
ume(
m3)
Iterações0 5 10 15 20
125
130
135
140
145
150
155Iterações do Algoritmo - Energia Interna
Ene
rgia
(J)
Iterações0 5 10 15 20
240
250
260
270
280
290
300Tensão de Mises Máxima
TMax
(MP
a)
Iterações
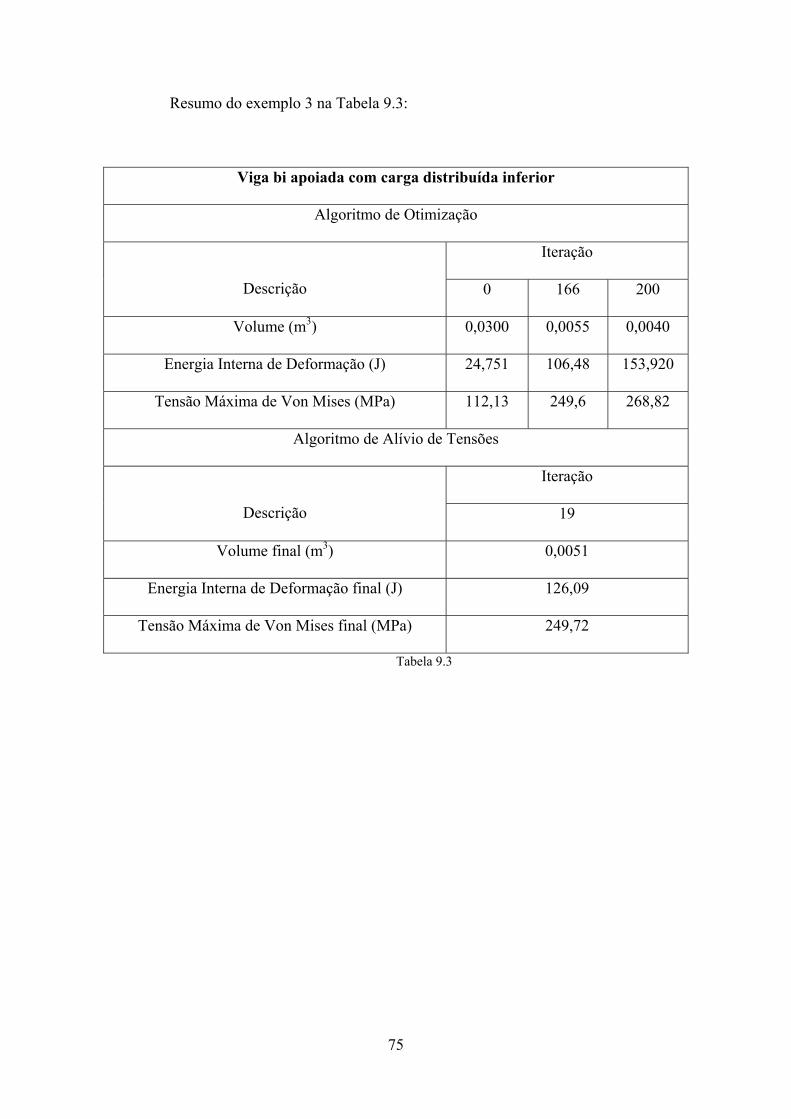
75
Resumo do exemplo 3 na Tabela 9.3:
Viga bi apoiada com carga distribuída inferior
Algoritmo de Otimização
Iteração
Descrição 0 166 200
Volume (m3) 0,0300 0,0055 0,0040
Energia Interna de Deformação (J) 24,751 106,48 153,920
Tensão Máxima de Von Mises (MPa) 112,13 249,6 268,82
Algoritmo de Alívio de Tensões
Iteração
Descrição 19
Volume final (m3) 0,0051
Energia Interna de Deformação final (J) 126,09
Tensão Máxima de Von Mises final (MPa) 249,72
Tabela 9.3
76
10 Implementação Computacional
Neste capitulo será mostrado como está organizada a estrutura das funções
computacionais que compõem este trabalho. A plataforma utilizada para a programação
foi o MatLab 6.5. A facilidade de programação com a linguagem MatLab facilitou
muito a implementação e a alteração do código fonte já existente de elementos finitos.
Este código necessitou apenas de algumas alterações para trabalhar em conjunto com a
formulação do algoritmo de otimização. Não houve nenhuma utilização de programas
comerciais de elementos finitos e nem de pós e pré-processamento. Com esta atitude,
conseguiu-se uma maior versatilidade nas funções programadas e também facilitou
alterações e modificações no programa de otimização.
10.1 Programação Otimizada
Procurou-se neste trabalho desenvolver um código fonte que seja eficiente em
velocidade e economia de memória. Para atingir esse objetivo alguns preceitos foram
considerados durante a fase de programação.
1. Trabalhar sempre com a formulação da matriz de rigidez esparsa para
economizar memória;
2. Evitar criar loops desnecessários, principalmente um loop dentro do
outro;
77
3. Trabalhar com os tipos de dados que são acelerados pelo MatLab:
logical, char, int8, int16, int32, uint8, uint16, uint32, double;
4. Evitar chamar funções durante um loop, pois diminuem a performance
do loop;
5. Evitar usar mais de uma operação por linha;
6. Evitar mudar o tipo de uma variável ou o tamanho de uma matriz ou
vetor;
7. Compilar funções gargalo em um arquivo tipo MEX, para melhorar a
velocidade do programa;
8. Trabalhar preferencialmente com funções e não com scripts;
9. Enquanto o programa estiver sendo executado, evitar carregar outros
aplicativos que comprometam a memória;
10. Pré-alocar valores iniciais de vetores e matrizes e definir seu tamanho
final;
11. Trabalhar preferencialmente com loops vetorizados. Isto significa
transformar o loop for e while em uma operação equivalente
vetorizada.
10.2 Estrutura do Programa
A estrutura do programa pode ser dividida em pré-processamento, programa
principal e pós-processamento. Cada etapa desta contém funções com finalidades
distintas, como mostrado na Ilustração 10.1.
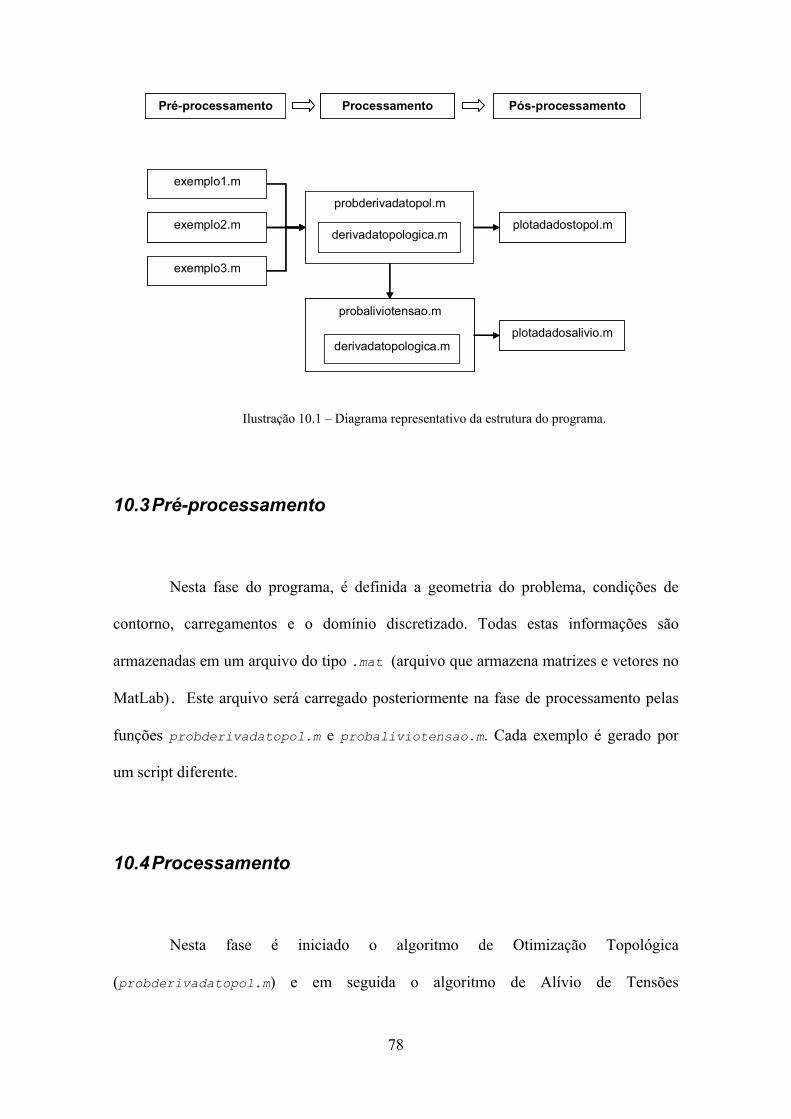
78
Ilustração 10.1 – Diagrama representativo da estrutura do programa.
10.3 Pré-processamento
Nesta fase do programa, é definida a geometria do problema, condições de
contorno, carregamentos e o domínio discretizado. Todas estas informações são
armazenadas em um arquivo do tipo .mat (arquivo que armazena matrizes e vetores no
MatLab). Este arquivo será carregado posteriormente na fase de processamento pelas
funções probderivadatopol.m e probaliviotensao.m. Cada exemplo é gerado por
um script diferente.
10.4 Processamento
Nesta fase é iniciado o algoritmo de Otimização Topológica
(probderivadatopol.m) e em seguida o algoritmo de Alívio de Tensões
Pré-processamento
probderivadatopol.m
Processamento Pós-processamento
exemplo1.m
exemplo2.m
exemplo3.m
derivadatopologica.m
probaliviotensao.m
derivadatopologica.m
plotadadostopol.m
plotadadosalivio.m
Pré-processamento
probderivadatopol.m
Processamento Pós-processamento
exemplo1.m
exemplo2.m
exemplo3.m
derivadatopologica.m
probaliviotensao.m
derivadatopologica.m
plotadadostopol.m
plotadadosalivio.m
79
(probaliviotensao.m). A informação contida em cada iteração dos algoritmos é
armazenada em uma matriz denominada histórico. Esta matriz será utilizada no pós-
processamento para recuperar informações de iterações intermediárias. A função
derivadatopologica.m é utilizada por ambos os programas desta fase de
processamento. Daí surgiu a necessidade de encapsular este procedimento em uma
função à parte. Dentro deste procedimento se encontra o código dos elementos finitos
adaptado para a aplicação da derivada topológica e alívio de tensões.
10.5 Pós-processamento
Nesta fase é interpretado o resultado gerado pelas funções do processamento.
Uma análise gráfica do domínio final, da distribuição de tensão de Mises e da
convergência do algoritmo são apresentadas na tela. Isto permite um estudo detalhado
da variação de todos os parâmetros envolvidos no problema de Otimização e no alívio
de tensões. Há ainda a possibilidade de se recuperar iterações intermediárias através da
matriz histórico .
80
11 Conclusão
A derivada topológica é um tema em pleno desenvolvimento e esta dissertação
ajudou a difundir os conceitos desta nova teoria. A inovação proposta nesta dissertação
foi formulação da análise de sensibilidade topológica utilizada em conjunto com a teoria
da otimização evolutiva. Provou-se que a presente formulação é mais eficiente que a
formulação tradicional da análise de sensibilidade topológica, ou seja, fornece pontos
ótimos melhores do ponto de vista da engenharia.
Aplicando os conceitos apresentados aqui, possibilitou-se uma discretização
refinada da malha de elementos finitos, 7500 elementos, com um tempo de
processamento igual a 20 minutos na obtenção do ponto ótimo, para um computador
caseiro. O método dos elementos finitos se adeqüou perfeitamente à metodologia da
derivada topológica e denotou importante papel na discretização do domínio, o que
permitiu trabalhar com geometrias e condições de contorno complexas, de maneira que
não seria possível uma solução analítica dos exemplos demonstrados.
Apresentou-se uma comparação entre formulações distintas da sensibilidade da
função custo em relação às variáveis de projeto para a solução do problema da
minimização de energia de deformação com restrição no volume. Todas as formulações
chegaram a um resultado semelhante, apesar de serem originárias de diferentes teorias.
Além do fenômeno da elasticidade linear, muitos outros fenômenos podem ser
modelados de acordo com o conceito aplicado nesta dissertação. Como, por exemplo,
81
no fenômeno da condução e convecção de calor, na torsão de barras prismáticas e em
placas de Kirchhoff.
Uma sugestão para trabalhos futuros é a utilização de novas formulações de
função custo e restrições aplicando os conceitos da derivada topológica, e como
sugestão de estudo, tem-se o problema de minimizar o peso com restrições locais de
tensão. Por fim, objetiva-se aplicar esta teoria em fenômenos ainda não explorados com
o conceito de derivada topológica.
82
12 Bibliografia
[1] SOKOŁOWSKI, J., ZOCHOWSKI, A., On topological derivative in shape
optimization, Relatório de pesquisa 3170, INRIA - Lorraine,França, Maio,
1997.
[2] STAINKO, R., Advanced Multilevel Techniques to Topology Optimization, Tese de
Doutorado, Johannes Kepler Universit¨at, Linz, February 2006
[3] MICHELL, A.G.M. “The limit of economy of material in frame structures”.
Philosophical Magazine, v.8(6), pp. 589–597, 1904.
[4] CHENG ,G.D., OLHOFF ,N . “An investigation concerning optimal design of solid
elastic plates”. International Journal of Solids and Structures, v.17, pp.
305–323, 1981.
[5] BENDSØE, M.P., KIKUCHI, N., “Generating optimal topologies in structural
design using a homogenization method”, Computer Methods in Applied
Mechanics and Engineering, v.71(2), pp.197–224, 1988.
[6] BENDSØE, M.P., “Optimal shape design as a material distribution problem”,
Structural Optimization, v.1, pp.193–202, 1989.
[7] MURAT, F., SIMON, J. ,Sur le côntrole par un domaine géométrique, Tese de
Doutorado, Université Pierre et Marie Curie, Paris , França, 1976.
83
[8] CÉA, E.J., “Problems of Shape Optimal Design”. In: Proceedings of Optimization of
Distributed Parameters Structures. Iowa, Estados Unidos da América,
1981.
[9] ESCHENAUER, H.A., KOBELEV, V.V., SCHUMACHER, S., “Buble Method for
Topology and Shape Optimization of Structures”, Structural Optimization,
v.8, pp.42-51, 1994.
[10] CÉA, J., GARREOU, S., GUILLAUME, Ph., MASMOUDI, M., The Shape and
Topological Optimizations Connection, Relatório de Pesquisa, UFR MIG,
Université Paul Sabatier, Toulouse, França, 1998, também publicado na
revista Computer Methods in Applied Mechanics and Engineering, v.188,
pp.713-726, 2000.
[11] NOVOTNY, A.A., Análise de Sensibilidade Topológica, Tese de D.Sc,
Laboratório Nacional de Computação Científica, Petrópolis, RJ , Brasil,
Fevereiro de 2003.
[12] ZOLÉZIO, J.P., “The Material Derivative (or Speed) Method for Shape
Optimization”, In: Optimization of Distributed Parameters Structures, Iowa,
EUA, 1981.
[13] LUEMBERGER, D.G., Optimization by Vector Space Methods, John Wiley &
Sons, 1969.
[14] HAUG, E.J., CHOI, K.K., KOMBOV, V., Design of Sensitivity Analysis of
Structural Systems. Academic Press, 1986.
[15] GONZALES, O., STUART, A.M., Introduction to Continuum Mechanics,
Relatório de Pesquisa, University of Warwick , Conventry, Inglaterra, 2005.
[16] GURTIN, M.E., “An Introduction to Continuum Mechanics”, Mathematics in
Science and Engineering, v.158, Academic Press, 1981.
84
[17] LI, S. WANG, G., SAUER, R.A., “The Eshelby Tensors in a Finite Spherical
Domain: II. Applications in Homogenization”, Accepted for Publication in
ASME Journal of Applied Mechanics, Department of Civil and
Environmental Engineering, University of California, Berkeley, CA94720,
U.S.A.
[18] GÖTZ, T., Asymptotic Analysis, Relatório de Pesquisa, Technomathematics Group
Department of Mathematics University of Kaiserslautern, Kaiserslautern,
Germany, e-mail:[email protected] , 22 de Julho, 2005.
[19] NOVOTNY, A.A., FEIJÓ, R.A., TAROCO, E. , PADRA, C., “Topological
Sensitivity Analysis for Three-dimensional Linear Elasticity Problem” ,6th
World Congress on Structural and Multidisciplinary Optimization, Rio de
Janeiro, Brazil, 30 de Maio à 03 Junho 2005.
[20] BENDSØE, M.P., SIGMUND, O, Topology Optimization: Theory, Methods and
applications. Springer, Berlin, 2003.
[21] XIE, Y.M., STEVEN, G.P., “A simple evolutionary procedure for structural
optimization”, Comput. Struct., 49 (1993) 885–896.
[22] TANSKANEN, P., “The evolutionary structural optimization method: theoretical
aspects”, Computer Methods in Applied Mechanical Engineering, v. 191,
pp.5485–5498, 2002.
[23] RONG, J, TANG, G., LANG, Q.Q., YANG, Y., “A Topology Optimization
Method for Three-dimensional Continuum Structures”, 6th World Congress
on Structural and Multidisciplinary Optimization, Rio de Janeiro, Brazil, 30
de Maio à 03 Junho 2005.
[24] JANG, I.G., KWAK, B.M., “Evolutionary topology optimization for large-scale
problems using design space adjustment and refinement”, 6th World
85
Congress on Structural and Multidisciplinary Optimization, Rio de Janeiro,
Brazil, 30 de Maio à 03 Junho 2005.
[25] ESCHENAUER, H.A., OLHOFF , N., “Topology of continuum structures: a
review”, Applied Mechanics Review, v.54, pp.331-390, 2001.
[26] MARTINEZ, J.M., On the Theoretical Convergence Properties of the SIMP
method, Instituto de Matemática da Universidade de Campinas, CP 6065,
13081-970 Campinas, SP, Brasil, 4 de Março, 2004.
[27] BURGER, R.S., STAINKO, R., Phase-Field Relaxation of Topology Optimization
with Local Stress Constraints, Relatório de Pesquisa, Institut fur
Industriemathematik, Johannes Kepler Universitat, Altenbergerstr, 14 de
Janeiro, 2005.
[28] CHENG, G.D., GOU, X, “ǫ-relaxed approach in topology optimization”,
Structural and Multidisciplinary Optimization, 13:258–267, 1997.
[29] XIE, Y.M., STEVEN, G.P., “A simple evolutionary procedure for structural
optimization”, Computers & Structures, v.49(5), pp.885-896, 1993.
[30] GARREAU, S., GUILLAUME, P., MASMOUDI, M., The Topological Gradient,
Relatório de Pesquisa, UFRJ MIG, Université Paul Sabatier, Toulouse,
França, 1998.
[31] LABANOWSKI, JR.A., FANCELLO, E.A., Simp, Eso e Tsa: Uma Análise
Comparativa Demétodos de Otimização Topológica para Elasticidade 2d,
Relatório de Pesquisa, Grupo de Análise e Projetos Mecânicos,
GRANTE/EMC/UFSC, Laboratório Nacional de Computação Científica.
[32] TANSKANEN, P. “The evolutionary structural optimization method:theoretical
aspects”, Computer Methods in Applied Mechanics and Engineering, v.
191(2002), pp. 5485-5498, 5 de Agosto, 2002.
86
[33] ZIENKIEWICZ, The Finite Element Method in Engineering Science, McGraw-
Hill, 2a. ed., Londres, Inglaterra, 1971.
[34] STEVEN, G., LI, Q., QUERIN, O. “Some Thoughts on the Physics And
Mechanics of the Evolutionary Structural Optimization Process”, 6th
ASMO-UK/ISSMO International Conference on Engineering Design
Optimization, Oxford University, United Kingdon, 3 - 4 July 2006.
[35] HUGHES, T.J.R., The Finite Element Method, Englewood Cliffs, New Jersey,
Prentice-Hall, 1987.
[36] ANDERSON, E., BAI, Z., BISCHOF, C., BLACKFORD, S., DEMMEL, J.,
DONGARRA, J., DU CROZ, J., GREENBAUM, A., HAMMARLING, S.,
MCKENNEY ,A., SORENSEN D., LAPACK User's Guide,
(http://www.netlib.org/lapack/lug/lapack_lug.html), Third Edition, SIAM,
Philadelphia, 1999.
[37] OpenMP Application Program Interface, site:http://www.openmp.org/drupal/,
Version 2.5, May 2005.
[38] MASSERA, J.M.A., Uma nova técnica para otimização de estruturas de grande
porte, Tese de M.Sc., COPPE/UFRJ, Rio de Janeiro, RJ, Brasil, 2005.





























