Embed Size (px)
Citation preview

Universidade de Aveiro
2004 Departamento de Física
Sinibaldo de Jesus Varela Canhanga
Modelação Hidrodinâmica da Baía de Maputo

Universidade de Aveiro 2004
Departamento de Física
Sinibaldo de Jesus Varela Canhanga
Modelação Hidrodinâmica da Baía de Maputo Dissertação apresentada à Universidade de Aveiro para cumprimento dos requisitos necessários à obtenção do grau de Mestre em Ciências das Zonas Costeiras, realizada sob a orientação científica do Doutor João Miguel Dias, Professor Auxiliar do Departamento de Física da Universidade de Aveiro

o júri
presidente Prof. Dr. Alfredo Moreira Caseiro Rocha professor associado da Universidade de Aveiro
Prof. Dr. Joaquim Guilherme Henriques Dias
professor auxiliar da Universidade de Lisboa
Prof. Dr. José Fortes de Nascimento Lopes
professor auxiliar da Universidade de Aveiro
Prof. Dr. João Miguel Sequeira Silva Dias
professor auxiliar da Universidade de Aveiro

ÍNDICE
Agradecimentos. …………………………………………………………………….........I
Resumo. ……………………………………………………………………………..........II
Abstract …..…….. …………………………………………………………………..…...III
CAPÍTULO I – Introdução........................................................................................ 1
1.1 Introdução e motivação.................................................................................. 1
1.2 Objectivos ...................................................................................................... 4
1.3 Estrutura do trabalho ..................................................................................... 4
CAPÍTULO II – Caracterização Hidrológica da Baía de Maputo ............................. 7
2.1 Introdução ...................................................................................................... 7
2.2 Descrição geral da área em estudo ............................................................... 9
2.3 Distribuição de temperatura da água e salinidade ....................................... 11
2.4 Rios.............................................................................................................. 16
2.5 Climatologia ................................................................................................. 17
2.6 Marés ........................................................................................................... 19
2.6.1 Formulação do algoritmo T_TIDE ......................................................... 19
2.6.2 Fase e amplitude da maré no Porto de Maputo .................................... 23
2.7 Correntes de maré ....................................................................................... 25
CAPÍTULO III – Equações Hidrodinâmicas Fundamentais; Modelação matemática
de Processos Físicos ............................................................................................ 26
3.1 Introdução .................................................................................................... 26
3.2 Equações hidrodinâmicas para ondas gravíticas de longo período ............. 26
3.2.1 Aproximação hidrostática. ..................................................................... 30
3.3 Formulação em termos da velocidade média vertical .................................. 32
3.4.1 Aproximação de Boussinesq ................................................................. 38
3.4 Integração vertical das equações hidrodinâmicas fundamentais ................. 39
3.4.2 Aproximação de águas pouco profundas .............................................. 43
CAPÍTULO IV – Discretização das Equações do Movimento e da Continuidade.. 45
4.1 O método das diferenças finitas .................................................................. 45
4.2 Consistência, estabilidade e convergência .................................................. 48
4.3 Aproximação das equações do movimento e da continuidade pelo método
das diferenças finitas ......................................................................................... 51

4.3.1 Discretização da equação do movimento .............................................. 54
4.3.2 Discretização da equação da continuidade ........................................... 55
CAPÍTULO V – O Modelo Numérico e as Condições de Fronteira ....................... 58
5.1 O modelo numérico de propagação de ondas gravíticas de longo período . 58
5.2 Condições de fronteira ................................................................................. 66
5.2.1 Fronteiras móveis .................................................................................. 66
5.2.2 Fronteiras fixas e condições iniciais ...................................................... 68
CAPÍTULO VI – Dados e Calibração ..................................................................... 69
6.1 Dados .......................................................................................................... 69
6.2 Calibração .................................................................................................... 71
6.2.1 Elevação da superfície livre .................................................................. 72
6.2.2 Velocidades de corrente de maré ......................................................... 74
CAPÍTULO VII – Hidrodinâmica da Baía de Maputo ............................................. 78
7.1 Introdução .................................................................................................... 78
7.2 Resultados e análise dos resultados ........................................................... 79
7.2.1 Amplitudes, fases e elipses de maré ..................................................... 79
7.2.2. Evolução da maré em situações extremas ........................................... 85
7.2.3 Diferença de fase entre a onda de maré e as correntes de maré ......... 92
CAPÍTULO VIII – Circulação Residual Euleriana .................................................. 96
8.1 Introdução .................................................................................................... 96
8.2 Formulação da teoria da circulação residual euleriana ................................ 98
8.3 Resultados e análise dos resultados ........................................................... 99
8.3.1 Correntes residuais induzidas pela interacção não linear da maré com a
topografia. ...................................................................................................... 99
8.3.2 Correntes residuais induzidas pelos rios e pelo vento ........................ 106
CAPÍTULO IX – Transporte Lagrangeano de Partículas ..................................... 113
9.1 Introdução .................................................................................................. 113
9.2 O módulo Lagrangeano de trajectória das partículas ................................ 114
9.2.1 Equações do módulo do transporte Lagrangeano .............................. 114
9.3 Resultados e análise dos resultados ......................................................... 117
9.3.1 Padrão da trajectória das partículas .................................................... 117
9.3.2 Trajectória das partículas .................................................................... 121

9.3.3 Pontos de emissão contínua ............................................................... 123
9.3.4 Tempo de residência ........................................................................... 125
CAPÍTULO X – Conclusão .................................................................................. 127
Referências ......................................................................................................... 130

agradecimentos
Um estudo pormenorizado da hidrodinâmica da Baía de Maputo, foi possível não apenas pelo meu empenhamento pessoal, mas especialmente pela constante disponibilidade do professor Doutor João Dias, que ao longo de todo o período da minha dissertação acompanhou a evolução deste trabalho. A disponibilidade mostrada pelo Instituto de Investigação Pesqueira (Moçambique) e HIDROPROJECTO (Portugal), na cedência da batimetria numérica e dos dados para a calibração do modelo, sem os quais seria impensável a realização deste trabalho, constituíram também gestos inesquecíveis. Foi também importante a atribuição da bolsa de estudo pelo IPAD (Instituto de Apoio e Desenvolvimento), através da embaixada de Moçambique em Portugal, para a minha estadia durante dois anos e meio em Portugal. Gostaria de não esquecer os bons momentos que tive ao longo do mestrado, com a respectiva turma (estudantes e professores), especialmente com aqueles com quem foi possível trocar experiência, tanto no âmbito académico como no âmbito social. Um outro aspecto importante que gostaria de recordar é a aprendizagem que tive durante dois anos e meio relativamente à importância dos nossos amigos distantes, pois: “a distância pode causar saudade, mas nunca o esquecimento”; neste aspecto queria lembrar a apreciação que tive da minha família e de modo especial da minha mãe. Queria também recordar todos os amigos que fiz em Portugal, pela experiência construtiva que deles colhi, especialmente no laboratório de atmosfera da Universidade de Aveiro, e a Paula Alexandra pela revisão e correcção ortográfica desta tese. Finalmente, queria realçar a boa intenção e interesse mostrado no ínicio deste trabalho pelo INAHINA, e de modo particular pelo malogrado David Chemane, pelo director Albano Gove e pela Cândida Sete. A todos as pessoas aqui mencionadas, bem como às que tiveram um papel crucial de decisão nas instituições acima referidas, queria deixar expressa a minha sincera gratidão, principalmente pelo apoio e encorajamento. Bem hajam
I

II
resumo
O objectivo deste trabalho foi efectuar um estudo das características hidrodinâmicas (com auxílio de um modelo numérico) da Baía de Maputo, e posteriormente avaliar as implicações do padrão hidrodinâmico nos diferentes processos que possam ocorrer na Baía. Na parte inicial deste trabalho é efectuada uma descrição sucinta da hidrologia da Baía de Maputo, através da análise de valores de perfis de salinidade e temperatura, de séries temporais de velocidade e da elevação da superfície livre de água. Os valores médios da intensidade do vento e dos caudais dos rios que desaguam na Baía foram também estudados. Análises dos perfis de salinidade e temperatura mostraram que a Baía de Maputo pode considerar-se verticalmente homogénea; porém, nos periodos de ocorrência de cheias ou nas épocas de Verão, com intensificação da precipitação, podem ser observadas estratificações horizontais de salinidade e temperatura na Baía. Foi identificada a maré como o principal forçador da hidrodinâmica da Baía, e determinados os valores característicos para os outros forçadores (vento e caudais fluviais). Atendendo as características da Baía (verticalmente homogénia) e ao tipo de fenómeno que se pretende estudar (propagação de ondas longas), optou-se por utilizar um modelo numérico bidimensional (SYMS/S2D). Este modelo foi posteriormente calibrado, comparando as séries temporais observadas da elevação da superfície livre da água e das componentes da velocidade, com as respectivas séries temporais obtidas por simulações numéricas. Os resultados da calibração mostraram um bom ajuste entre os valores observados e simulados. Após a calibração do modelo numérico, foi efectuado um estudo da hidrodinâmica da Baía de Maputo, permitindo a determinação do tipo da maré, da amplitude e fase dos principais constituintes e da influência dos forçadores não periódicos na hidrodinâmica da Baía, através da determinação da circulação residual. Os resultados do modelo hidrodinâmico mostram que a maré na Baía de Maputo é essencialmente semi-diurna, e que os principais constituintes, M2 e S2, representam quase 90% da maré astronómica total. Em toda a Baía a onda da maré apresentou características mistas entre uma onda estacionária e progressiva. A análise dos resultados da circulação residual, mostrou que os ventos, o caudal dos rios, e a topografia constituem os forçadores hidrodinâmicos não periódicos importantes em processos com escalas temporais relativamente longas. Foi também acoplado ao modelo hidrodinâmico um módulo de transporte Lagrangeano, para avaliação de fenómenos de dispersão de partículas passivas na Baía. Os resultados do módulo Lagrangeano, indicam que para uma escala temporal superior à do ciclo da maré, os processos de mistura e dispersão são mais significativos no centro da Baía e na zona do estuário do Espirito Santo, respectivamente, sendo praticamente insignificantes nas restantes zonas. O tempo de residência na zona do estuário do Espirito Santo variou entre um dia (na embocadura do Estuário) e uma semana (na foz dos rios Matola, Umbeluzi e Tembe).

III
abstract
The aim of this work was to understand by using a numerical model, the main characteristics of the Maputo Bay hydrodynamics; and furthermore to assess the hydrodynamics implications on different processes that can occur in the Bay. The study was initiated with a description of the hydrological characteristics of Maputo Bay, through the analysis of vertical profiles of salinity and temperature, time series of the components of tide currents and water elevation. The wind intensity and the river runoff patterns were also studied. Analysis of temperature and salinity profiles have revealed that the Maputo Bay can be considered vertically homogeneous; however, when floods occur or when there are an high intensity of precipitation on summer season, a horizontal stratification of salinity and temperature in the Bay was observed. The tides were identified as the main forcing on the Bay hydrodynamics. The general patterns of other forcing (winds and river discharges) were also identified. Through the characteristics of the Bay (vertically homogeneous), and the process that is intended to be understood (long wave propagation), a bi-dimensional numerical model (SYMS/S2D) was chosen as the best to perform this study. Afterwards, the model was calibrated by comparison of observed and simulated time series of tide elevation, the horizontal and the vertical components of tidal currents. Results of calibration have shown that the model reproduces with accuracy the wave propagation in the Bay. The hydrodynamic study of Maputo Bay was done after the calibration of the numerical model; which allows the determination of the form number (type of the tide); the amplitude and phase of the main constituents, as well as, the influence of non-periodic forces on the Bay hydrodynamics, through the determination of residual currents. The results of the hydrodynamic model have shown that in the Maputo Bay, the tide is essentially semi-diurnal, and that the main semi-diurnal constituents, M2 and S2, represented almost 90% of the total astronomical tide. In most part of the Bay, the tidal wave has exhibited a characteristic that lies between a standing and a progressive wave. Was also noticed by the results of the Eulerian residual circulation, that the influences of rivers, winds and bathymetry on non-periodic forces were very important on long-term processes. A Lagrangian module was also coupled to the hydrodynamic model, to assess the evolution of dispersion processes of passive particles in the Bay. The results of the Lagrangian module have shown that for time scales superior than a tidal cycle, the mixing and dispersion processes are more important in the central part of the Bay and in the Estuário do Espirito Santo zone, respectively; in other zones these values are actually insignificants. The range of flushing time in the Estuário do Espirito Santo zone lied between one day (on the mouth of the estuary) and one week (on the mouth of Matola, Umbeluzi and Tembe rivers).

1
CAPÍTULO I – INTRODUÇÃO
1.1 Introdução e motivação
As zonas costeiras são regiões sensíveis a mudanças morfológicas e muito
vulneráveis a processos costeiros naturais ou antropogénicos. A pressão exercida
sobre os recursos costeiros, como resultado da actividade humana, tem vindo a
acelerar a degradação da qualidade destas áreas. É também do conhecimento
geral que os recursos marinhos estão entre as riquezas mais valiosas do mundo e
ainda não totalmente compreendidos.
Estas zonas são importantes no transporte de substâncias entre a terra e o
oceano, actuando como um sistema de interface entre estes dois meios. São
também economicamente importantes para os países adjacentes. Assim, o estudo
destas zonas torna-se importante não só para a comunidade científica, mas de
um modo particular para as populações que nelas habitam.
A Baía de Maputo (figura 1.1) faz parte de um dos mais importantes sistemas
costeiros da zona sul de Moçambique.
Moçambique (figura 1.2), está situado na costa leste da África Austral, entre as
latitudes 10º 27’ e 26º 52’ Sul e longitudes 30º 12’ e 40º 51’ Este. A linha de costa
moçambicana tem aproximadamente 2700 km, e é a terceira maior costa de
África. A costa é caracterizada por uma grande variedade de ecossistemas,
incluindo praias, dunas, sistemas estuarinos, baías, etc.
A densidade populacional de Moçambique é de cerca de 20.1 habitantes por
km2 (INE, 2000), sendo maior nas zonas costeiras, como por exemplo na cidade
de Maputo (1525 habitantes por km2).
A zona sul de Moçambique é também conhecida pela sua grande
biodiversidade, existindo quatro géneros endémicos e pelo menos 168 espécies
diferentes. A Ilha de Inhaca, por exemplo, (localizada na Baía de Maputo), apesar
de ter uma área relativamente pequena, abriga cerca de 33% de todas as
espécies de pássaros existentes em toda a África Austral e nela ainda se
reproduzem duas espécies de tartarugas marinhas. De um modo geral, estas
espécies estão protegidas, contudo, as condições físicas e geoquímicas da Ilha
não são estáticas, estando sujeita a erosão, sedimentação e à existência de

2
poluição, pondo em risco de vida estas espécies e as comunidades de recife de
coral lá existentes.
Práticas pesqueiras têm também sido comuns na zona sul de Moçambique; por
exemplo, a captura do camarão é comum e variável de ano para ano. Pensa-se
que o conhecimento das diversas condições ambientais apropriadas ao
desenvolvimento destas espécies seria importante para compreensão da origem
desta variabilidade. Um estudo das variações da salinidade, da temperatura, da
circulação, da maré e do sistema de ventos é, portanto, fundamental para o
conhecimento da dinâmica funcional deste ecossistema costeiro, permitindo uma
correcta gestão dos recursos lá existentes.
Figura1.1: Imagem da Baía de Maputo, obtida do catálogo da NASA, 1989
Estuário do Espirito Santo
Área de estudo
Figura 1.2: Mapa geográfico de Moçambique, extraído do world fact book, 1988

3
Os transportes marítimos também são reconhecidos a sul de Moçambique
como uma económica via de comunicação. Já em tempos contribuíram como
importantes fontes de receita externa. O porto de Maputo (localizado na Baía de
Maputo), é um dos três maiores portos de Moçambique; localizado no interior da
Baía, caracteriza-se à entrada por fundos com bancos de areia dinâmicos. Para
além de fins nacionais, este porto tem sido também importante para uso dos
países “interiores” como a África do Sul e a Suazilândia. Portanto, existe uma
necessidade de um desenvolvimento eficiente de mecanismos que garantam um
conhecimento eficaz da dinâmica do fundo da Baía, de modo a garantir a
segurança da navegação aos navios que utilizam os seus canais.
São também evidentes indícios de poluição proveniente dos portos de
navegação. Destacando-se como os principais poluidores: o petróleo, que pode
escapar dos petroleiros, os produtos usados na lavagem dos tanques, bem como
o lixo despejado no mar pelos navios.
Existem também ameaças de poluição na Baía de Maputo, com origem em
instalações indústriais situadas na zona costeira (1). Este facto esteve evidente na
segunda reunião da MOZAL (a maior indústria de fundição de alumínio na zona
austral da África), onde foi levantada a hipótese de a poluição das águas na foz
do rio Matola ser devida a descargas de resíduos provenientes da indústria da
MOZAL.
Pensa-se também que a agricultura tem consequências nefastas para o
ambiente marinho, devido às descargas nos rios e no mar de produtos agro-
químicos. Pratica-se agricultura intensiva em Moçambique e nos países vizinhos,
nas bacias dos diversos rios que desaguam no estuário do Espírito Santo (no
interior da Baía, figura1.2).
Da abordagem até agora feita, verifica-se que embora se compreenda que o
uso das zonas costeiras seja inevitável para o desenvolvimento dos sectores cima
(1)..... “Até aqui, a explicação dada mostra não terem sido ainda detectadas situações de contaminação das águas
daquele rio acima dos níveis recomendáveis. Entretanto, um interveniente questionou o facto dos mariscos, peixes, e
outros que anteriormente abundavam, terem desaparecido. A este questionamento não houve uma explicação
plausível........, ”. (in MEDIAFAX, 29-11-2002, João Chamusse)

4
referidos (sectores de transportes marítimos, agricultura, pescas e industrial), uma
eficiente exploração e gestão destas zonas exige uma percepção prévia e uma
capacidade de previsão dos processos físicos (hidrodinâmicos) dominantes
nestas áreas.
É em torno desta abordagem que se insere a motivação e se definirão os
objectivos deste trabalho.
1.2 Objectivos
Foram seleccionados com base na motivação os seguintes objectivos para este
trabalho:
- Estudar a aplicabilidade de um modelo numérico bidimensional “SYMS/S2D”,
(Leendertse, 1987) na Baía de Maputo.
- Utilizar um modelo numérico bidimensional para simular a hidrodinâmica da
Baía do Maputo, possibilitando o estudo e a caracterização da maré, assim como,
das correntes de maré.
- Compreender os processos de transporte de longo termo na Baía de Maputo,
através da análise de correntes residuais
- Acoplar ao modelo hidrodinâmico um módulo de transporte Lagrangeano e
avaliar possíveis fenómenos localizados de poluição.
1.3 Estrutura do trabalho
Este trabalho é dividido em 10 capítulos. Nestes capítulos são analisados os
dados experimentais, assim como é efectuado o desenvolvimento, a aplicação do
modelo numérico bidimensional (SYMS/S2D) e a apresentação dos respectivos
resultados.
No primeiro capítulo é feita uma introdução do trabalho, sendo dado destaque à
motivação para a sua realização, aos seus objectivos e à sua estrutura. A
apresentação geral da área de estudo é também feita neste capítulo.
No segundo capítulo efectua-se a caracterização hidrológica da Baía de
Maputo. Foram utilizados para esta caracterização os valores observados (em
diversas estações de amostragem) de perfis de salinidade, de temperatura da

5
água, e séries temporais de elevação da superfície livre da água. Caracteriza-se
também a distribuição da profundidade ao longo da Baía. Analisa-se ainda, neste
capítulo, a influência dos diversos forçadores hidrodinâmicos na Baía de Maputo.
Nos capítulos III, IV e V é feita a descrição do modelo numérico “SYMS/S2D”,
utilizado neste trabalho. No capítulo III aborda-se de uma maneira generalizada a
teoria de modelação matemática dos processos físicos em águas pouco
profundas. São estabelecidas no final deste capítulo as equações hidrodinâmicas,
simplificadas e verticalmente integradas. No capítulo IV, analisam-se os métodos
de discretização das equações que constituem o modelo matemático, bem como
os conceitos de estabilidade, consistência e convergência das equações
discretizadas e consequentemente do modelo numérico. No capítulo V, abordam-
se questões relativas ao modelo numérico, especialmente, as condições de
fronteira adoptadas neste trabalho.
No capítulo VI realiza-se a implementação e calibração do modelo numérico.
Os resultados da calibração revelaram que o modelo reproduz com precisão a
hidrodinâmica da Baía de Maputo.
No capítulo VII, inicia-se o estudo da hidrodinâmica da Baía de Maputo; o
principal objectivo é analisar o comportamento da Baía sob a influência dos
principais forçadores periódicos hidrodinâmicos; neste âmbito foi determinada a
distribuição da amplitude e da fase dos principais constituintes da maré, assim
como as elipses da corrente de maré em toda a Baía de Maputo. Foram também
apresentados e analisados os resultados de simulações em condições extremas
da amplitude de maré (máxima amplitude da maré viva e mínima amplitude da
maré morta).
No capítulo VIII, apresentam-se os resultados da circulação residual Euleriana
na Baía de Maputo, sob a influência de vários forçadores não periódicos,
nomeadamente, o vento, os caudais dos rios, e a interacção da maré com a
batimetria. Neste capítulo é também mostrado que embora o constituinte da maré
S2 represente aproximadamente 50% do principal constituinte M2, será suficiente
utilizar o constituinte M2 para a determinação do padrão e da intensidade típica
das correntes residuais induzidas pela maré.

6
No capítulo IX, efectua-se o acoplamento de um módulo Lagrangeano de
transporte de partículas passivas ao modelo hidrodinâmico. Este permitiu a
análise dos processos de mistura e dispersão das partículas na Baía, bem como a
determinação do tempo de residência na zona do Estuário de Espírito Santo.
O capítulo X é o capítulo das conclusões; são aqui apresentadas as conclusões
dos diversos capítulos, bem como as recomendações para estudos futuros.

7
CAPÍTULO II – CARACTERIZAÇÃO HIDROLÓGICA DA BAÍA DE MAPUTO
2.1 Introdução
Antes de se iniciar o estudo de modelação numérica da Baía de Maputo, uma
descrição geral das características morfológicas, hidrológicas, bem como
oceanográficas, é de importância primordial, pois esta descrição será importante
na definição da metodologia, nas assunções, nas simplificações e na identificação
dos processos primários e secundários que ocorrem nesta área.
Uma descrição geral das características acima referidas exige uma série de
dados observados. Poucas observações de interesse científico foram efectuadas
na Baía de Maputo. Na primeira etapa deste capítulo, mencionam-se as
campanhas que resultaram na amostragem dos dados utilizados nesta tese.
Nos anos de 2000 e 2001 o IIP (Instituto de Investigação Pesqueira) realizou
várias campanhas hidrológicas em 29 estações (figura 2.1) na Baía de Maputo.
Nestas campanhas foram medidas em cada uma das estações perfis verticais da
salinidade e da temperatura da água. Neste trabalho são utilizados os dados
relativos a três secções transversais distintas (figura 2.1). Na tabela 2.1
apresentam-se as coordenadas geográficas e os nomes das estações de
amostragem destas secções transversais. Com o intuito de promover a realização
de mais estudos nesta Baía, estes dados foram disponibilizados à comunidade
científica e fornecidos para a realização deste trabalho.
Alturas de maré referentes ao Porto de Maputo (figura 2.2) medidas em 1974,
1984, 1986, 1993, 1994 e 1998 foram cedidas pelo INAHINA (Instituto de
Hidrografia e Navegação de Moçambique). O comprimento da série temporal das
alturas de maré do ano de 1993 corresponde a 15 dias com alturas registadas de
6 em 6 minutos; ao passo que, as restantes séries temporais têm um
comprimento igual a um ano e variações horárias da superfície livre do mar.
Informação referente aos caudais médios mensais dos rios Maputo, Umbeluzi e
Incomati foi obtida das campanhas realizadas pela Direcção Nacional de Águas
(DNA).
Os dados meteorológicos foram cedidos pelo INAM (Instituto Nacional de
Meteorologia).

8
Tabela 2.1: Coordenadas geográficas das estações nas secções de amostragens
Algumas descrições das características físicas (temperatura da água,
distribuição de salinidade, precipitação, regime dos ventos, etc.) relativas à Baía
de Maputo podem ser encontradas em artigos escritos por: Hoguane (1994),
Hoguane e Dove (2000), Hoguane et al (2000) e Hoguane et al (2002). Em muitos
destes trabalhos abordaram-se problemas em áreas localizadas, ou ainda,
assuntos específicos. Seguidamente faz-se neste capítulo uma descrição das
principais características morfológicas, bem como dos principais forçadores
hidrológicos da Baía de Maputo, recorrendo à análise dos dados observados e as
publicações anteriormente descritas.
Estação Latitude (Sul) Longitude (Este)
A1 25º57.7’ 32º 34.2’
A2 25º59.4’ 32º 52.4’
A3 25º 59.4’ 32º 48.4’
A4=B3 25º 59.4’ 32º 41.0’
A5 25º 59.4’ 32º 44.0’
A6 25º 59.4’ 32º 48.6’
A7 25º 59.4’ 32º 52.9’
B1 25º 55.5’ 32º 40.5’
B2 25º 57.0’ 32º 41.0’
B4 26º 02.0’ 32º 41.0’
B5 26º 05.0’ 32º 41.2’
B6 26º 05.0’ 32º 40.3’
B7 26º 07.0’ 32º 41.0’
D1 25º 54.6’ 32º 50.2’
D2 25º 56.0’ 32º 51.8’
D3 25º 5720’ 32º 53.1’
D4 ……… ……….

9
Pro
fundid
ades (
m)
Figura 2.1: Localização das estações de amostragem no domínio de calculo; o sinal “٭ “ representa as estações da secção A; o sinal ” ٭ “ representa as estações da secção D; e o sinal “٭ “ representa as estações da secção B.
2.2 Descrição geral da área em estudo
A Baía de Maputo, com uma área de cerca de 1875 km2 (75 km de
comprimento e 25 km de largura), localiza-se na zona Sul de Moçambique, entre
os paralelos 25º 55’ e 26º10’ Sul e os meridianos 32º 40’ e 32º 55’ Este. É
adjacente à cidade de Maputo pelo lado Oeste, e faz fronteira com o oceano
Índico do lado Norte, fazendo fronteira Este com a Ilha de Inhaca e com a
península de Machangulo. Uma análise da distribuição das profundidades na Baía
é feita, após a digitalização da seguinte informação cartográfica da Baía:
- Carta de aproximação da Baía de Maputo n.º 16301 à escala de 1:65000,
publicada pelo Instituto de Hidrografia e Navegação de Moçambique em 2000
- Carta de acesso ao Porto de Maputo n.º 16659 à escala de 1:75000,
publicada pelo Ministério da Defesa da URSS em 1985
- Carta hidrográfica da foz do Limpopo à Ponta do Ouro n.º 440 à escala de
1:25000, publicada por Instituto Hidrográfico de Portugal em 1961.
- Batimetria da carta náutica n.º 495 (Porto de Maputo), à escala de 1:20000,
publicada pelo Instituto Hidrográfico de Portugal em 1972.

10
Desta análise conclui-se que a Baía é pouco profunda (figura 2.2); na sua maior
parte tem profundidades inferiores a 10 metros, com excepção da zona adjacente
ao Oceano, com profundidades superiores a 15 metros.
Figura 2.2: Distribuição da profundidade na Baía de Maputo; profundidade em metros com
referência ao zero hidrográfico
Existem bancos de areia que cobrem uma área de 138 km2. O fundo é arenoso
do lado oriental e lodoso do lado ocidental (Hoguane, 1994). A profundidade
460000 480000 500000
7060000
7080000
7100000
7120000
7140000
7160000
7180000
h < - 2
-2 < h < 0
0 < h < 2
2 < h < 5
5 < h < 10
10 < h < 20
20 < h < 35
100 < h < 200
200 < h < 300
h > 300
Profundidade (m)
Porto de Maputo
Ilha dosPortugueses
Ilha de Inhaca
Baixo Ribeiro
Estu
ári
o d
o E
spír
ito S
anto
Estu
ário
do E
spirito S
anto

11
aumenta para Este e para Norte no interior da Baía, ao passo que no exterior a
profundidade aumenta para Sul e para Este da Baía.
2.3 Distribuição de temperatura da água e salinidade
A fronteira do oceano Índico adjacente à Baía de Maputo (lado Este), é
caracterizada pela corrente quente de Moçambique, que fluí para o Sul. As águas
da Baía são frias durante o Inverno e quentes durante o Verão, quando
comparadas com a água do oceano. A temperatura média diária da água na Baía
varia de 17º C a 27º C (Hoguane, 1996), do Inverno ao Verão.
Nesta secção foi efectuada e posteriormente analisada a distribuição dos
campos de salinidade e temperatura da água (figura 2.3). As medições foram
efectuadas pelo Instituto de Investigação Pesqueira (IIP), nos dias 23 de Janeiro e
1 de Abril de 2000. As estações correspondentes às três secções transversais
(secção A, secção B e secção D) estão ilustradas na figura 2.1. A estação A1 não
foi considerada na elaboração da secção A, pois a sua localização está
relativamente fora desta secção. Os campos podem ser observados na figura 2.3.
De acordo com os registos dos campos da salinidade e da temperatura da
água efectuados em Janeiro (secção B e D), e Abril de 2000 (secção A), a Baía
pode ser dividida em duas partes (Hoguane, 1994): o lado Oeste com
variabilidade considerável da salinidade e mais influenciado pelas descargas
fluviais, e o lado Este com pouca variabilidade de salinidade durante todo o ano.
Resultados similares são visíveis na figura 2.3. A heterogeneidade apresentada
nas secções (nas extremidades das secções A e B, e ao centro da secção D)
relaciona-se com o facto de estas zonas serem adjacentes à fronteira terrestre da
Baía (o que corresponde à proximidade de zonas de afluência dos rios), ou
coincidirem com zonas de canais profundos (secção D). As secções da
temperatura mostram a existência de uma massa de água fria (provavelmente
proveniente do oceano), que flúi para o interior da Baía na direcção NE – SW.

12
0 2 4 6 8 10 12 14 16 18 20 22 24
Distanica (km)
-19
-17
-15
-13
-11
-9
-7
-5
-3
-1
pro
fun
did
ad
e (
m)
Salinidade (ppm) da secção A
0.0
6.0
12.0
18.0
24.0
30.0
A2 A3 A4 A5 A6 A7
01/04/2001
0 2 4 6 8 10 12 14 16 18 20 22 24
Distancia (km)
-15
-10
-5
0
pro
fundid
ade (
m)
-19
-17
-15
-13
-11
-9
-7
-5
-3
-1
19.5
21.0
22.5
24.0
25.5
Temperatura (ºc) da secção A
A2 A3 A4 A5 A6 A7
01/04/2000
0 2 4 6 8 10 12
Distância (km)
-14
-12
-10
-8
-6
-4
-2
0
pro
fun
did
ad
e (
m)
16
19
22
25
28
31
34
Salinidade (ppm) da secção B
B1 B2 B3 B4 B5 B6 B7
23/01/2000
0 2 4 6 8 10 12
Distância (km)
-14
-12
-10
-8
-6
-4
-2
0
pro
fund
idade (
m )
Temperatura (ºC) da secção B
16.0
19.0
22.0
25.0
B1 B2 B3 B4 B5 B6 B7
23/01/2000
0 2 4 6 8 10-22
-20
-18
-16
-14
-12
-10
-8
-6
-4
-2
0
Pro
fun
did
ad
e (
m)
0 2 4 6 8 10
Distância (Km)
Salinidade (ppm) da secção D
28.5
30
31.5
33
34.5
D4 D3 D2 D1
23/01/2000
0 2 4 6 8 10
Distancia (Km)
-22
-20
-18
-16
-14
-12
-10
-8
-6
-4
-2
0
pro
fundid
ade (
m)
Temperatura (ºC) da secção D
25
.7
25
.8
26
.0
26
.1
26
.3
26
.4
26
.6
26
.7
D4 D3 D2 D1
23/01/2000
Figura 2.3: Distribuição dos campos de salinidade e temperatura em três secções transversais
(Figura 2.1); o sinal “●” ou “●”, representa a localização dos pontos de amostragem.

13
Nas figuras 2.4.a e 2.4.b apresentam-se os perfis de salinidade e temperatura
da água nas estações A3, B4 (estações localizadas no interior da Baía), D2 e A7
(estações localizadas em zonas supostamente fora da influência dos caudais
fluviais). Os perfis foram medidos na época de Verão (Janeiro de 2000), no
Inverno (Abril de 2001) e em situações típicas de cheias (Abril de 2000). A
profundidade nos gráficos é expressa em metros, a salinidade em “ppm” (partes
por mil) e a temperatura em ºC.
Figura 2.4.a: Perfis de salinidade e temperatura da água nas estações A3, B4
5
4
3
2
1
0
30.0 30.1 30.2 30.3 30.4 30.5
6/04/2001
Salinidade (ppm)
Pro
fun
did
ad
e (
m)
A3
5
4
3
2
1
0
18.0 18.5 19.0 19.5 20.0 20.5
1/04/2000
Temperatura (ºC)
Pro
fun
did
ad
e (
m)
A3
5
4
3
2
1
0
18 20 22 24 26 28 30
1/04/2000
Salinidadde (ppm)
Pro
fun
did
ad
e (
m)
A3
5
4
3
2
1
0
25.0 25.2 25.4 25.6 25.8 26.0 26.2 26.4 26.6 26.8 27.0
6/04/2001
Temperatura (ºC)
Pro
fun
did
ad
e (m
)
A3
8
7
6
5
4
3
2
1
0
25.2 25.6 26.0 26.4 26.8
09/04/2001
Temperatura (ºC)
Pro
fun
did
ad
e (
m)
B4
8
7
6
5
4
3
2
1
0
23 24 25 26 27 28 29 30 31
23/01/2000
Salinidade (ppm)
Pro
fun
did
ad
e (
m)
B4
8
7
6
5
4
3
2
1
0
31.2 31.6 32.0
09/04/2001
Salinidade (ppm)
Pro
fun
did
ad
e (
m)
B4
8
7
6
5
4
3
2
1
0
25.6 26.0 26.4 26.8
23/01/2000
Temperatura (ºC)
Pro
fun
did
ad
e (
m)
B4

14
Figura 2.4.b: Perfis de salinidade e temperatura da água nas estações D2 e A7
Nas estações A3 e B4, os perfis da salinidade na época de Inverno de 2001,
mostram uma variação entre 30.35 e 31.30 ppm; nas estações D2 e A7, valores
18
16
14
12
10
8
6
4
2
0
25.2 25.6 26.0 26.4 26.8
09/04/2001
Temperatura (ºC)
Pro
fun
did
ad
e (
m)
D2
18
16
14
12
10
8
6
4
2
0
34.0 34.4 34.8
09/04/2001
Salinidade (ppm)
Pro
fun
did
ad
e (
m)
D2
18
16
14
12
10
8
6
4
2
0
32.6 32.8 33.0 33.2 33.4
23/01/2000
Salinidade (ppm)
Pro
fun
did
ad
e (
m)
D2
18
16
14
12
10
8
6
4
2
0
25.2 25.6 26.0 26.4 26.8
23/01/2000
Temperatura (ºC)
Pro
fun
did
ad
e (
m)
D2
10
8
6
4
2
0
34,0 34,2 34,4 34,6 34,8 35,0
A7
09/04/2001
Salinidade (ppm)
Pro
fun
did
ad
e (
m)
10
8
6
4
2
0
25.0 25.5 26.0 26.5 27.0
09/04/2001
Temperatura (ºC)
Pro
fun
did
ad
e (
m)
A7
10
8
6
4
2
0
24 26 28 30 32 34
01/04/2000
Salinidade (ppm)
Pro
fun
did
ad
e (
m)
A7
10
8
6
4
2
0
25.2 25.4 25.6 25.8 26.0 26.2 26.4
01/04/2000
Temperatura (ºC)
Pro
fun
did
ad
e (
m)
A7

15
típicos de salinidade foram de 34.5 ppm, aproximadamente. As temperaturas
típicas das estações A3 e B4 foram de 25.8º C, e para as estações D2 e A7, os
valores da temperatura aproximaram-se a 26.2º C. Estes resultados indicam uma
boa mistura vertical em todas as estações na época de Inverno. Porém, a análise
dos perfis de salinidade nas estações A3 e B4, bem como nas estações D2 e A7,
indica a existência de um gradiente horizontal de salinidade entre as águas do
interior (influenciada pela descarga dos rios) e as do exterior da Baía (as menos
influenciadas pelas descargas dos rios).
Análises dos perfis correspondentes à amostragem das estações B4 e D2, no
ano 2000, indicam uma variação vertical da salinidade de 24 a 30 ppm na estação
B4, e 32.6 a 33.4 ppm na estação D2. Relativamente às temperaturas, os perfis
das duas estações mostram uma diminuição da temperatura com a profundidade
de 26.2 para 25.6 na estação B4, e de 26.2 para 25.8 na estação D2. Destes
resultados conclui-se que durante o Verão prevalecem os gradientes horizontais
descritos para a situação de Inverno, porém, a característica quente e chuvosa do
Verão no hemisfério sul influencia a estratificação da temperatura e salinidade na
Baía de Maputo, o que se reflecte pelo aumento da salinidade e diminuição da
temperatura com a profundidade.
Os perfis de salinidade nas estações A3 e A7, correspondentes ao Inverno de
2000, apresentam maior estratificação relativamente aos do Inverno de 2001; os
gradientes horizontais também foram maiores quando comparados com
gradientes entre as mesmas estações, na mesma época do ano 2001. Embora
esta observação pareça contraditória, justifica-se pela influência dos diversos
forçamentos da Baía. De facto, o ano 2000 foi caracterizado pelo prolongamento
da época chuvosa até ao inicio do Inverno e pela ocorrência de cheias na região
sul de Moçambique, o que teve como consequência o aumento da estratificação e
dos gradientes horizontais de salinidade ao longo da Baía.
Destas análises conclui-se que a estrutura vertical da Baía se pode considerar,
de um modo geral, como verticalmente homogénea. Porém, em épocas chuvosas,
bem como em situações particulares de ocorrência de cheias ou prolongamento
da estação chuvosa, a Baía de Maputo pode ser caracterizada por uma ligeira

16
17-10-1995 17-10-1996 17-10-1997 17-10-1998 17-10-1999
0
100
200
300
400
1995-2000
Ca
uld
al (m
3/s
)
Tempo (anos)
R. Maputo
estratificação vertical e pela intensificação dos gradientes horizontais de
salinidade e temperatura.
2.4 Rios
Na Baía confluem cinco rios principais: Incomati, a Norte, Umbelúzi, Tembe e
Matola a Oeste, e o rio Maputo a Sul (figura 2.1) Os rios Umbelúzi, Tembe e
Matola desaguam no estuário do Espírito Santo antes de chegar à Baía.
Existem ainda pequenos rios, canais, pântanos e mangais. O volume total de
água doce de todas as fontes acima referidas que desaguam na Baía estima-se
em cerca de 6 km3/ano (Hoguane e Dove, 2000), sendo que a maior parte deste
caudal entra na Baía durante o Verão. O rio Maputo apresenta maior variabilidade
do caudal, conforme se pode verificar pela figura 2.5, em que são representadas
as séries temporais dos caudais médios mensais dos rios Incomati, Umbeluzi e
Maputo, correspondentes aos períodos de 1983-2000, 1985-2000 e 1995-2000,
respectivamente. É ainda possível verificar pela análise desta figura que o caudal
do rio Incomati, nos últimos cinco anos, foi o que apresentou variações extremas.
Figura 2.5: Séries temporais dos caudais dos rios Incomati, Umbeluzi e Maputo
Os valores médios mensais dos caudais (em m3/s) dos principais rios que
desaguam na Baía de Maputo são apresentados na tabela 2.2.
O rio Incomati e o rio Maputo apresentam maior caudal médio mensal,
comparativamente aos restantes rios. Para todos os rios, o caudal médio máximo
foi observado no mês de Fevereiro, ao passo que, com excepção dos rios Tembe
e Incomati (onde os caudais mínimos foram observados no mês de Agosto) o
14-12-1985 14-12-1989 14-12-1993 14-12-1997
0
20
40
60
80
100
120
140
1985-2000
Ca
ud
al (
m3/s
)
Tempo (anos)
R. Umbeluzi
15-09-1983 15-09-1987 15-09-1991 15-09-1995 15-09-1999
-200
0
200
400
600
800
1000
1200
1400
1600
1800
1983-2000
Ca
ud
al (m
3/s
)
Tempo (anos)
R. Incomati

17
caudal mínimo foi observado no mês de Setembro. O caudal máximo (que
correspondeu a 260.19 m3/s) registou-se no rio Incomati, e o mínimo
(correspondente a 0.58 m3/s) foi registado no rio Matola.
Tabela 2.2: Caudal médio mensal (m3/s) na foz dos rios
Rios
Mês Maputo Incomati Umbeluzi Tembe Matola
Janeiro 188.96 197.13 30.0 6.16 3.26
Fevereiro 242.95 260.19 37.0 8.13 4.19
Março 134.97 137.40 21.0 4.29 2.33
Abril 80.98 86.42 11.5 2.70 1.40
Maio 60.74 64.16 9.0 2.00 1.05
Junho 43.87 47.16 6.7 1.47 0.76
Julho 40.49 44.32 6.0 1.39 0.70
Agosto 37.12 40.96 5.5 1.28 0.64
Setembro 33.74 61.73 5.0 1.93 0.58
Outubro 47.24 65.71 7.7 2.05 0.81
Novembro 67.49 86.42 11.0 2.70 1.16
Dezembro 134.97 137.40 22.3 4.29 2.33
2.5 Climatologia
Situada na região tropical, com transição de clima tropical para temperado
quente, a Baía de Maputo caracteriza-se por apresentar duas estações: uma seca
e outra húmida. A estação seca estende-se de Abril a Setembro e a estação
húmida estende-se de Outubro a Março. A média da precipitação total anual é de
1100 mm (Hoguane e Dove, 2000).
A humidade relativa varia entre 59% e 67% durante o dia e 79% e 82% durante
a noite (Hoguane e Dove, 2000).

18
A temperatura diurna do ar atinge 31º C no Verão e 24º C no Inverno. A
temperatura máxima registada nos últimos 30 anos foi de 44º C (Janeiro de 1980)
e a mínima registada foi de 8.6º C (Junho de 1984).
Na tabela 2.3 apresenta-se a intensidade média mensal dos ventos registados
entre os anos de 1931 e 1960, (Teles et al, 2001). Os ventos predominantes na
Baía (tabela 2.3) são de Sudeste (SE) e de Este (E), durante o Verão (Novembro
a Março), sendo no Inverno predominantes os ventos de Nordeste (NE) (Maio a
Agosto).
Tabela 2.3: Intensidade média do vento por sector de rumo no Maputo (1931-1960); valores expressos em km/h
Sector dos Ventos
Mês N NE E SE S SW W NW
Janeiro 13.7 16.7 15.8 15.8 18.6 15.6 9.4 10.0
Fevereiro 13.5 16.8 15.8 16.2 16.8 14.2 8.0 10.8
Março 13.5 16.2 13.8 15.0 16.7 12.7 7.9 12.4
Abril 14.6 14.2 12.0 13.9 16.3 13.1 8.7 12.2
Maio 15.1 12.6 10.0 11.5 15.9 14.3 9.9 13.6
Junho 15.2 12.0 8.7 10.8 15.7 14.7 11.0 13.6
Julho 16.3 13.4 10.3 12.4 16.6 14.4 10.6 14.4
Agosto 17.6 16.2 14.1 15.7 18.2 13.8 8.5 14.8
Setembro 17.7 17.9 15.8 17.3 19.0 15.0 9.2 15.8
Outubro 17.6 17.8 16.5 17.1 19.6 14.9 8.7 14.0
Novembro 15.8 18.3 16.0 16.4 19.1 15.8 9.5 14.1
Dezembro 14.9 17.3 15.9 15.4 18.6 16.2 6.5 10.0
Tanto no Verão como no Inverno, os ventos sopram com uma intensidade
aproximadamente igual a 16 km/h (4.4 m/s) mudando de orientação em direcção a
Nordeste na passagem do Verão a Inverno.
Os ventos de Inverno e de Verão são relativamente fracos e fortes, quando se
comparam com os ventos observados em terra e no mar aberto respectivamente.

19
Para além dos ventos prevalecentes, os ventos de Este causam fortes
ondulações, com implicações na morfologia da Baía (Hoguane e Dove, 2000).
2.6 Marés
Existem vários programas para efectuar a análise harmónica da maré, com
períodos de observação das séries temporais correspondentes a 1 ano ou
inferiores. Neste trabalho utilizou-se o programa “T_TIDE”2 (desenvolvido em
Matlab por Pawlowicz et al, 2002), para a execução da última parte deste capítulo,
que consistiu na análise harmónica das séries temporais das alturas da maré no
Porto de Maputo.
Posteriormente, efectuou-se a reprodução da maré (“T_TIDE”2) para o Porto de
Maputo, para o intervalo compreendido entre 1990 e 2000. Neste intervalo foram
determinados os períodos correspondentes às situações de extrema influência da
maré na Baía; ou seja, encontraram-se os períodos correspondentes a máxima
maré viva e mínima maré morta, assim como as respectivas amplitudes da maré.
2.6.1 Formulação do algoritmo T_TIDE
O algoritmo utilizado pelo T_TIDE (Pawlowicz et al, 2002) para a estimativa das
amplitudes e das fases baseia-se no uso da álgebra complexa (inclusão do eixo
imaginário na análise harmónica), o que permite a unificação do tratamento
escalar (importante para a análise harmónica das alturas da maré) e do
tratamento vectorial (importante para a análise harmónica da corrente de maré).
Assim, nesta secção descreve-se toda a teoria relativa à análise harmónica de
correntes de maré, uma vez que quando a parte complexa é nula, a teoria é
aplicada para análise harmónica das alturas da maré.
A descrição da formulação do algoritmo inicia-se considerando a corrente Z(t)
decomposta em componentes Norte-Sul e Este-Oeste (as direcções Norte e Este,
por convenção, são positivas).
2 Uma “função” escrita em MATLAB, usada actualmente para a realização da análise harmónica de séries temporais das
alturas ou das componentes da velocidade da maré, bem como para a respectiva previsão.
20
Assumiu-se ainda que cada componente da corrente é composta por um
conjunto de constituintes não periódicos e constituintes da maré (periódicos),
sendo que cada constituinte da maré ocorre com uma frequência j (em
ciclos/hora), sendo Mj .... 1, , onde M é o número máximo de constituintes
incluídos na análise harmónica. Considera-se ainda que eixo yy é imaginário, e
faz um ângulo de 90º (no sentindo horário) com o eixo real xx .
Então, a forma complexa de Z(t) pode ser expressa como:
M
j
M
j
jjjjjj tYtYitX
tXtZ
1 1
0
0
)(2cos)()(2cos
)()(
(2.1)
Consideremos agora que jCX e jSX são as variáveis correspondentes aos
termos associados ao co-seno e seno, respectivamente, da fase da componente
real. Sejam ainda jCY e jSY as variáveis correspondentes aos termos associados
ao co-seno e seno, respectivamente, da fase da componente imaginária, isto é:
jjj XCX 2cos , jjj senXSX 2 , jjj YCY 2cos , jjj senYSY 2 (2.2)
A função Z(t) pode então ser expressa como:
M
j
jjjj
M
j
jjjj
tsenSYtCYtYi
tsenSXtCXtXtZ
1
0
1
0
22cos)(
)22cos()()(
(2.3)
Recordando as relações trigonométricas:
2
cosixix ee
x
e
2
ixix eesenx
,

21
e substituindo na equação anterior obtém-se:
)2exp()()(
)2exp()()()()(
1
1
0
tSXCYiSYCXi
tSXCYiSYCXtXtZ
jjj
M
j
jj
M
j
jjjjj
(2.4)
Excluindo os índices j e considerando:
2
122
22
SXCYSYCX
a
2
122
22
SXCYSYCX
a
SYCX
SXCYarctan e
SYCX
SXCYarctan
Então, a distribuição da corrente para cada constituinte é tal que pode ser
descrita como se segue:
)2exp()2exp()()()( tiiatiiatZtZtZ (2.5)
tisenaaitiaaitZ
2)2
()(2)2
(cos)()2
(exp)( (2.6)
A análise das duas últimas equações (2.5 e 2.6), começando pela primeira,
revela que a função consiste em dois vectores )()( tZtZ e e que cada um
deles roda a uma velocidade angular de ciclos/hora.

22
O primeiro vector ( )(tZ ) tem um comprimento correspondente ao a e roda no
sentido anti-horário, estando a radianos (no sentido anti-horário) do eixo real,
ou seja, da direcção Este-Oeste no tempo 0t . Enquanto que o segundo vector
( )(tZ ) tem o comprimento a , roda no sentido horário e está a radianos no
sentido horário do eixo xx (eixo real) no instante 0t .
O efeito rotacional resultante irá mover o vector )(tZ no sentido anti-horário se
aa , no sentido horário se aa e linearmente se aa .
Da segunda expressão, verifica-se que durante o período de tempo
correspondente a horas
1, a trajectória do vector composto ( )(tZ ) desenha uma
elipse (ou um segmento de recta no caso degenerado em que aa ), cujos
respectivos eixos maiores e menores têm comprimentos iguais a aa e aa
respectivamente. O ângulo de inclinação relativamente ao eixo real (eixo dos xx )
é: 2
radianos.
E a fase para cada constituinte será igual a: 2
)(0
tVg , ou seja,
2
)(0
tVg
Onde )( 0tV é o argumento astronómico do constituinte.
Na análise harmónica quando a latitude é referenciada o argumento
astronómico é corrigido (correcções nodais).
O algoritmo baseia-se no ajustamento da amplitude e fase dos constituintes
pelo método dos mínimos quadrados. Para tal, considera-se uma série temporal
)( itZ regularmente espaçada (normalmente com espaçamentos de hora em hora,
isto é Ni 3, 2, ,1 horas). Sendo j , onde Mj ..... ,1 as frequências (em
ciclos/hora) do j-ésimo constituinte escolhido para a inclusão na análise pelo
critério de Rayleigh, o objectivo é encontrar os eixos maiores e menores

23
(amplitudes) e fase para cada constituinte incluído que melhor se ajusta à série de
observação )( itZ .
No tratamento vectorial, a série temporal observada é representada como um
vector complexo ivu onde u e v representam, respectivamente, as
componentes das velocidades nas direcções Este-Oeste e Norte-Sul (Pawlowicz
et al, 2002). Este tratamento apenas é valido para ondas de maré lineares ou
quase lineares. Em alguns casos (por exemplo ao longo da secção transversal ou
mesmo ao longo dos canais) é melhor tratar as duas componentes
separadamente (tratamento escalar).
Quando a componente v é zero (tratamento escalar), a elipse degenera-se em
uma recta. O ângulo de inclinação da “elipse” relativamente ao eixo real, bem
como o eixo menor torna-se nulo, isto é:
2
=0
0 aa
A grandeza aa passa a ser a amplitude do constituinte. O ajustamento
pelo método dos mínimos quadrados neste caso é feito para a amplitude e fase
de cada constituinte da maré.
2.6.2 Fase e amplitude da maré no Porto de Maputo
Para a caracterização da maré, utilizaram-se dados do marégrafo do Porto de
Maputo. O intervalo de espaçamento das alturas da maré nas séries temporais foi
de uma hora. Através da função T_TIDE, e das séries temporais das alturas da
maré no Porto de Maputo, determinou-se a amplitude e fase dos principais
constituintes da maré.
Na tabela 2.4 apresentam-se as amplitudes (metros) e as fases (em graus)
obtidas através de análise harmónica das séries temporais da altura da maré
observada nos anos de: 1974, 1984, 1986, 1994 e 1998.

24
Da tabela 2.4 verifica-se que no Porto de Maputo a maré é essencialmente
semi-diurna, sendo as amplitudes dos constituintes semi-diurnos superiores uma
ou duas ordens de grandeza em relação às amplitudes dos constituintes diurnos.
Tabela 2.4: Constantes harmónicas da maré no Porto de Maputo; onde ampl representa a amplitude do constituinte e são expressas em metros (m).
Constitu
inte
s
Ano
1974 1984 1986 1994 1998
ampl Fase ampl fase Ampl fase ampl fase ampl Fase
M2 0.94 121.17 0.94 122.72 0.94 122.89 0.94 125.87 0.94 122.22
S2 0.55 163.90 0.55 163.97 0.54 166.97 0.54 166.99 0.54 165.73
N2 0.14 107.28 0.15 103.64 0.15 108.87 0.15 115.70 0.15 113.86
K2 0.14 161.01 0.15 158.15 0.15 154.34 0.16 168.53 0.15 162.20
O1 0.028 359.12 0.02 353.71 0.02 355.90 0.02 353.38 0.02 2.27
K1 0.035 200.99 0.04 200.17 0.03 204.17 0.06 192.43 0.03 194.18
As fases dos principais constituintes semi-diurnos M2 e S2, foram
aproximadamente iguais a 122º e 164º respectivamente, o que representa um
atraso de aproximadamente 4 horas para o constituinte M2 e um atraso de 6 horas
para o constituinte S2 relativamente ao meridiano de Greenwich.
Na figura 2.6 representa-se uma série temporal da elevação de superfície livre
da água na estação do Porto de Maputo.
Figura 2.6: Elevação da superfície livre da água no Porto de Maputo; elevações em metros e referenciadas ao nível médio
-2 0 2 4 6 8 10 12 14 16
1,0
1,5
2,0
2,5
3,0
3,5
4,0
4,5
Ele
vaçã
o (m
)
Tempo (dias)
Porto de Maputo
28/04/93 a 13 /05/93
25
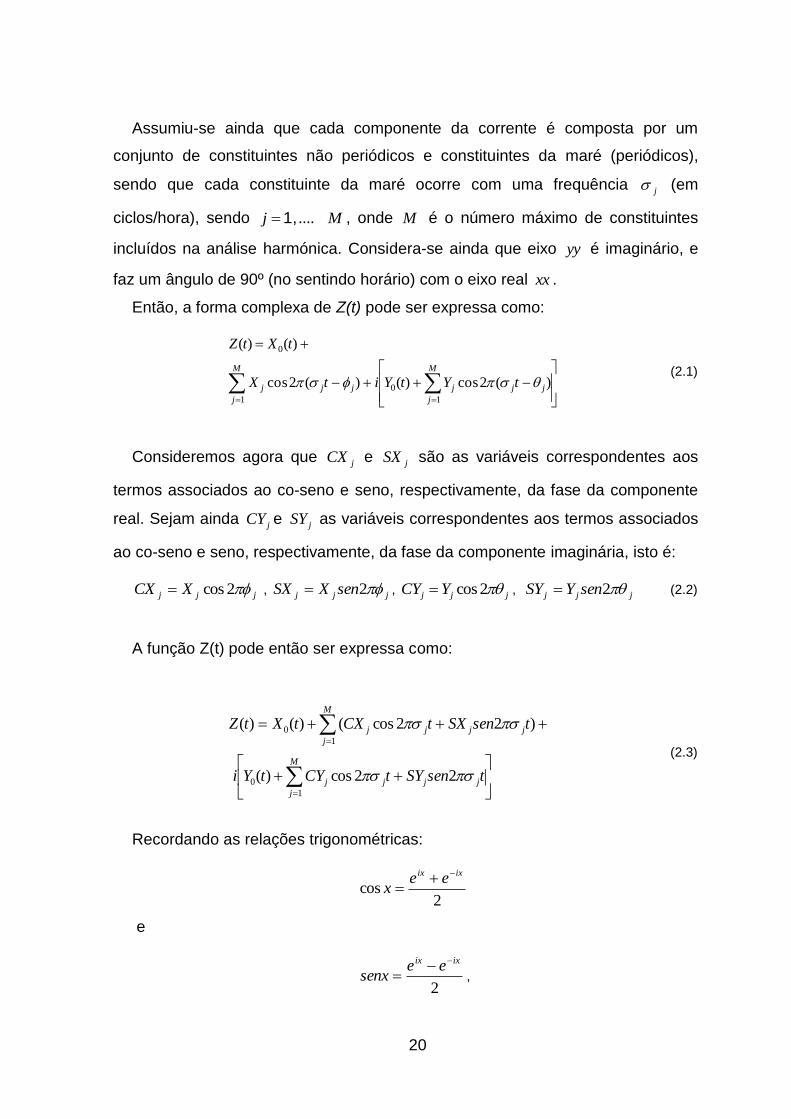
O comprimento da série corresponde a um período de duas semanas com início
no dia 28/4/93. As elevações estão em metros e em relação ao nível médio.
Pela figura 2.6 é possível observar que a maré média viva é de
aproximadamente 3.8 metros, e a maré média morta é de cerca de 2.6 metros.
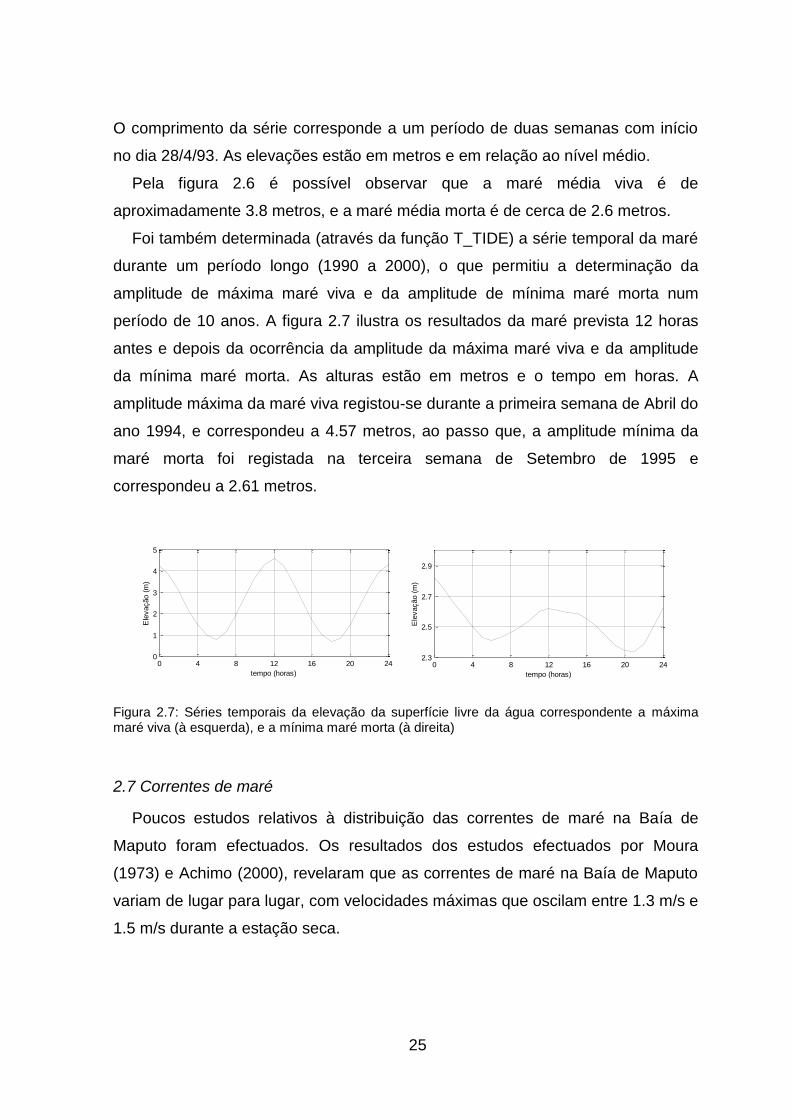
Foi também determinada (através da função T_TIDE) a série temporal da maré
durante um período longo (1990 a 2000), o que permitiu a determinação da
amplitude de máxima maré viva e da amplitude de mínima maré morta num
período de 10 anos. A figura 2.7 ilustra os resultados da maré prevista 12 horas
antes e depois da ocorrência da amplitude da máxima maré viva e da amplitude
da mínima maré morta. As alturas estão em metros e o tempo em horas. A
amplitude máxima da maré viva registou-se durante a primeira semana de Abril do
ano 1994, e correspondeu a 4.57 metros, ao passo que, a amplitude mínima da
maré morta foi registada na terceira semana de Setembro de 1995 e
correspondeu a 2.61 metros.
0 4 8 12 16 20 242.3
2.5
2.7
2.9
tempo (horas)
Ele
vação (
m)
0 4 8 12 16 20 240
1
2
3
4
5
tempo (horas)
Ele
vação (
m)
Figura 2.7: Séries temporais da elevação da superfície livre da água correspondente a máxima maré viva (à esquerda), e a mínima maré morta (à direita)
2.7 Correntes de maré
Poucos estudos relativos à distribuição das correntes de maré na Baía de
Maputo foram efectuados. Os resultados dos estudos efectuados por Moura
(1973) e Achimo (2000), revelaram que as correntes de maré na Baía de Maputo
variam de lugar para lugar, com velocidades máximas que oscilam entre 1.3 m/s e
1.5 m/s durante a estação seca.

26
CAPÍTULO III – EQUAÇÕES HIDRODINÂMICAS FUNDAMENTAIS;
MODELAÇÃO MATEMÁTICA DE PROCESSOS FÍSICOS
3.1 Introdução
A compreensão e desenvolvimento da modelação matemática de processos
físicos em águas pouco profundas têm vindo a ser durante as ultimas décadas
assunto de interesse, pois muitos fenómenos de transporte são dependentes da
descrição dos processos hidrodinâmicos. Devido à complexidade dos processos
envolvidos, certamente que este desenvolvimento irá continuar ainda por longos
anos. Porém, alguns modelos podem já considerar-se no estado “maduro”, como
é o caso dos modelos bidimensionais verticalmente integrados (2DH). Portanto,
os modelos 2DH podem ser utilizados como uma importante ferramenta para o
estudo da hidrodinâmica dos ambientes costeiros (Neves, 1985; Cheng et al,
1993; Dias, 2001).
A crescente utilização das zonas costeiras pelas actividades humanas tem
motivado e aumentado o esforço no desenvolvimento de tecnologias e métodos
para a simulação e o prognóstico dos fenómenos complexos que tem lugar nestes
sistemas.
Neste capítulo começa-se por descrever as equações fundamentais da
propagação das ondas longas (base do modelo bidimensional). Realiza-se ainda
a integração vertical das equações obtidas para o regime médio. Serão utilizadas
algumas expressões empíricas para a parametrização de alguns termos destas
equações
3.2 Equações hidrodinâmicas para ondas gravíticas de longo período
Algumas hipóteses serão assumidas para a simplificação das equações que
seguidamente se descrevem, nomeadamente:
- O fluído é incompreensível (neste caso assume-se que a densidade da água
do mar é constante).
- O fluído é Newtoniano e anisotrópico.
- As acelerações e velocidades verticais são desprezáveis.

27
- O equilíbrio é localmente hidrostático (em primeira aproximação o balanço
faz-se entre a força de gravidade e o gradiente vertical de pressão).
O estudo da hidrodinâmica dos oceanos baseia-se no estudo do movimento de
uma fina camada de fluído estratificado que se encontra sobre a superfície da
terra em rotação, recorrendo-se inicialmente a uma descrição matemática deste
movimento.
As principais leis físicas que governam este movimento são: lei de conservação
de massa, lei de conservação do momento linear, equação de estado e leis
termodinâmicas.
Na apresentação destas equações, é utilizada a descrição Euleriana, em que, a
velocidade da partícula ( u ), a pressão ( p ), a densidade ( ), a temperatura (T ) e
a salinidade ( S ), são todas tratadas como função do vector de posição, r
( r
é
medido para o exterior do centro da terra) e do tempo, t . Todas as posições são
referidas relativamente a um sistema de coordenadas ortogonal directo, que roda
uniformemente com a velocidade angular da terra. Sendo:
rad/s1029.7 5
(3.1)
A velocidade u neste movimento de rotação relaciona-se com a velocidade
inércial pela relação:
ruuinercial
(3.2)
Sendo R o raio médio da terra (do centro da terra até a superfície livre do
oceano) e z a distância média (medida verticalmente para cima) a partir da
superfície não perturbada do oceano, então:
zRrr
(3.3)
A conservação da massa expressa-se pela seguinte relação:
0).(
u
t
(3.4)

28
ou:
0. udt
d
(3.5)
Onde: )(.)()(
u
tdt
d representa a derivada total segundo o movimento.
A conservação do momento linear toma a seguinte forma:
2
2
2
2
2
21)cos(2
z
u
y
u
x
u
x
pvsenw
dt
du
(3.6.1)
2
2
2
2
2
21)(2
z
v
y
v
x
v
y
pusen
dt
dv
(3.6.2)
gz
w
y
w
x
w
z
pu
dt
dw
2
2
2
2
2
21)cos(2
(3.6.3)
Onde ),,( wvuu
, é o coeficiente de viscosidade cinemática e é a latitude.
A densidade da água do mar é dada pela equação do estado e tem a seguinte
forma:
),,( STp (3.7)
A hipótese da incomprensíbilidade do fluido, traduz-se na seguinte equação:
t
10 (3.8)
Então, a equação de conservação da massa toma a forma:

29
0
z
w
y
v
x
u (3.9.1)
Ou:
0)( udiv
(3.9.2)
Analisando as equações de conservação do momento linear, e atendendo ao
domínio em que se pretende aplicá-las, verifica-se que algumas simplificações
podem ser feitas.
Nas latitudes médias o termo )cos(2 w pode não ser considerado, pois a
componente da velocidade vertical é muito pequena quando comparada com as
componentes da velocidade horizontal.
Este termo na equação de conservação de momento linear também pode ser
desprezado na equação segundo o eixo zz , pois comparando com o termo da
pressão e das forças volúmicas (gravidade) é bastante pequeno.
A aplicação das simplificações acima descritas às equações de conservação do
momento linear conduz a um novo conjunto de equações, conhecidas por
equações de Navier-Stokes, expressas da seguinte forma:
2
2
2
2
2
21
z
u
y
u
x
u
x
pfv
dt
du
(3.10.1)
2
2
2
2
2
21
z
v
y
v
x
v
y
pfu
dt
dv
(3.10.2)
gz
w
y
w
x
w
z
p
dt
dw
2
2
2
2
2
21
(3.10.3)

30
Onde )(sin2 f é o parâmetro de Coriolis.
Estas equações descrevem a propagação da onda da maré, sendo as
principais forças aplicadas a uma partícula da água as forças de gravidade e de
gradiente de pressão. Considera-se também o efeito da rotação da terra sobre a
partícula em movimento e a dissipação de energia representada pelo termo de
atrito.
O termo de atrito, que se deve à presença da viscosidade da água, representa
os efeitos da tensão do vento à superfície e do atrito no fundo, bem como os
efeitos das fricções laterais.
A onda da maré é considerada uma onda longa (o comprimento de onda é
muito maior que a profundidade dos estuários ou das baías). A teoria clássica que
se aplica a estas ondas despreza a aceleração vertical das partículas do fluído,
pois quando comparada com a aceleração do campo gravitacional a aceleração
vertical torna-se muito pequena.
3.2.1 Aproximação hidrostática.
Na definição da circulação costeira e estruturação da sua teoria, considera-se
que a extensão da superfície livre é tão grande que o movimento vertical de uma
partícula de água associada à maré pode ser desprezado face aos movimentos
horizontais (Koutitas, 1988); então, em alguns casos de estudos de circulação
costeira, os termos que contenham w na equação de Navier-Stokes podem ser
desprezados. A importância relativa de cada um dos termos da equação (3.10.3)
é estimada pela análise de escala.
A ordem de grandeza dos principais parâmetros descritos anteriormente é a
seguinte para o domínio deste trabalho:
- As dimensões horizontais nas direcções xx e yy variam entre 104 e 105
metros respectivamente, correspondendo à escala horizontal típica da Baía.
- As velocidades horizontais apresentam um intervalo de variação desde 10-1
m/s a 1m/s;
- As profundidades típicas no domínio são da ordem de grandeza de 10 m no
interior e na zona central da Baía e 1000m na zona exterior.

31
- A frequência do constituinte mais importante da maré (M2) é da ordem de
grandeza de 10-5 s-1, consequentemente, a escala temporal típica do fenómeno
em estudo é da ordem de 105 s.
Então, os valores típicos para efectuar a análise de escala de um fenómeno
como a propagação da onda de maré na Baía de Maputo são os seguintes:
s m/s, m/s,
m m, m,
51
45
10101
101010
TUV
HLxLy
A escala da velocidade vertical é estimada pela equação de continuidade, isto
é:
yx L
V
L
U
H
W , o que implica que a escala da velocidade vertical seja:
m/s 4
5410
10
10
10
1 yx L
HV
L
HUW .
Os valores do coeficiente de viscosidade variam normalmente de 1 a 103 m2/s
(coeficientes de viscosidade horizontal) e de 10-4 a 10-1 m2/s (coeficientes de
viscosidade vertical) (Weiyan, 1992). Consideram-se os valores máximos para se
obter o efeito máximo do termo de atrito (Pond e Pickard, 1983).
Então, a equação do movimento na direcção vertical tem a seguinte ordem de
grandeza:
2
1
2
3
2
32
1010101
10H
W
L
W
L
W
z
pO
H
W
L
VW
L
UW
T
W
yxyx
Ou seja:
665999 1010101
10101010
z
pO
Desta análise de escala, conclui-se que o termo que contém o gradiente de
pressão é balanceado com o termo que contém a aceleração de gravidade, pois
os restantes termos têm ordens de grandeza consideravelmente inferiores. Neste
caso, a equação do movimento na vertical é reduzida a:

32
gz
p
10 , que assume que a distribuição da pressão obedece à lei
hidrostática (Proudman, 1953; Dias, 2001).
Assim, as equações de Navier-Stokes terão a seguinte forma:
2
2
2
2
2
21
z
u
y
u
x
u
x
pfv
y
uv
x
uu
t
u
(3.11.1)
2
2
2
2
2
21
z
v
y
v
x
v
y
pfu
y
vv
x
vu
t
v
(3.11.2)
gz
p
10 (3.11.3)
3.3 Formulação em termos da velocidade média vertical
O factor gerador da circulação é uma perturbação periódica ou não-periódica
da elevação da superfície livre, com origem no oceano aberto que se desenvolve
durante um período de várias horas (no caso comum da influência da lua na
geração do constituinte M2 da maré, o período é de 12.42 horas). As ondas longas
com origem no oceano propagam-se através da fronteira aberta do sistema e são
reflectidas pelas fronteiras da costa. Estas ondas estão sujeitas a várias
deformações devido à refracção, difracção e perdas friccionais de energia, sendo
parte da sua energia radiada pela fronteira aberta e assim devolvida ao oceano.
As equações desenvolvidas até agora são válidas para campos instantâneos
do movimento e distribuição das propriedades da água da Baía (densidade e
pressão). Entretanto, em casos reais em que há ocorrência de turbulência, estas
equações podem não ser tão úteis. É então necessário encontrar métodos de
separação da parte do movimento que por natureza é aleatória.
O método escolhido consiste na decomposição das grandezas numa
componente média e numa perturbação (decomposição à Reynolds).
A assunção feita é que o operador da média temporal, t , é grande
comparativamente à escala temporal característica na qual se pretendem resolver

33
os campos dos movimentos. A vantagem deste método está no facto de se poder
filtrar o modo aleatório do movimento em todas as escalas temporais.
As equações daí resultantes expressam a estimativa do campo de movimento
mais provável, em vez de determinarem os valores instantâneos das grandezas
em cada momento.
As variáveis ,,, wvu e p serão separadas num valor médio e num valor
aleatório: uuu
Onde por definição 0u .
Este procedimento realiza-se nas equações da continuidade e do movimento.
Seguidamente, determina-se a equação da continuidade referente aos valores
médios.
A equação de continuidade terá assim a seguinte forma:
0)()()(
z
ww
y
vv
x
uu (3.12)
Como:
0u , 0v , 0w (3.12.1)
A equação de continuidade para o regime médio tem a seguinte forma:
0
z
w
y
v
x
u (3.13)
Considerando agora as equações do movimento (equações 3.11.1 a 3.11.3) e
prestando atenção ao segundo termo da direita da equação (3.11.1), obtém-se,
depois de substituir as variáveis pela soma dos seus valores médios e aleatório:
x
p
x
p
x
p
x
p
x
pp
)()( (3.14.1)
onde:

34
)(
1)(
De uma forma geral, a média de qualquer termo que tenha apenas flutuação de
uma variável será nula. Assim, o segundo e o terceiro termo da equação (3.14.1)
são nulos. O último termo desta equação pode não ser nulo se existir uma relação
entre as perturbações de e de p . Entretanto, quando se compara esta
grandeza com o valor médio do primeiro termo, nota-se que a ordem de grandeza
deste termo (o último termo) é inferior ou igual à ordem de grandeza do primeiro.
Esta comparação permite-nos desprezar o último termo. Então:
x
p
x
pp
)()( (3.14.2)
Do termo de Coriolis obtém-se:
)(2)(2 vvsenvvsen (3.14.3)
Pela equação (3.12.1), uma vez que o termo sen2 é constante (e que a média
da soma de duas variáveis é igual à soma da média das mesmas), obtém-se:
vfvvsen )(2 (3.14.4)
Prestando agora atenção ao termo de atrito, às assunções (3.12.1) e
atendendo a que o coeficiente da viscosidade molecular é constante obtém-se:
2
2
2
2
2
2
2
2
2
2
2
2 )()()(
z
u
y
u
x
u
z
uu
y
uu
x
uu (3.15)
Todos os termos do lado direito da equação (3.11.1) têm a mesma forma tanto
para o regime instantâneo como para o regime médio.

35
Esta conclusão também é válida para os termos correspondentes às equações
segundo os eixos yy e zz .
Prestando agora atenção aos termos do lado esquerdo da equação (3.11.1),
tendo em conta as mesmas assunções e considerações efectuadas
anteriormente, obtém-se:
z
uw
y
uv
x
uu
z
uw
y
uv
x
uu
z
uuww
y
uuvv
x
uuuu
)()(
)()(
)()(
(3.16)
Nesta equação, para além de os valores médios substituírem os valores
instantâneos, há uma quantidade nova (o último termo da equação (3.16)), que
envolve flutuações da velocidade. Estes novos termos representam o efeito da
turbulência e do transporte médio das flutuações do momento linear pelas
flutuações da velocidade turbulenta. Pelo facto de estes termos provirem dos
termos não lineares, conclui-se que a existência da turbulência e os efeitos de
atrito estão relacionados com a natureza não linear das equações do movimento.
Agora procuremos parametrizar o termo responsável pelos efeitos de
turbulência.
Recordando que os campos instantâneos e médios são não divergentes, e que
uuu , pode-se facilmente concluir que também os campos das perturbações
são não divergentes. Como:
z
uw
y
uv
x
uu
z
w
y
v
x
uuwu
zvu
yuu
x
).().().( (3.16.1)
Pela equação da continuidade o primeiro termo do lado direito é nulo, ou seja, o
último termo da equação (3.16) pode ser substituído pelo lado esquerdo da
equação (3.16.1).
Tendo em conta as equações (3.14.2) a (3.16.1), a equação do movimento
(3.11.1) toma a seguinte forma:
36
wuz
vuy
uuxz
u
y
u
x
u
x
pvf
y
uv
x
uu
t
u
2
2
2
2
2
21
(3.17)
Recordando que o termox
u
representa a tensão na direcção xx devida aos
efeitos moleculares e turbulentos, e que a unidade de grandeza no sistema
internacional é idêntica à unidade de uu , que é igual a [2.
1
sm], pode-se
concluir que os últimos três termos identificam a tensão devida à turbulência.
Provavelmente os seus efeitos são qualitativamente semelhantes. O efeito
turbulento deve-se ao movimento aleatório das parcelas do fluído que trocam
momento com o fluído circundante. Uma vez que tanto a distância percorrida
como a massa envolvida são maiores quando comparadas com as mesmas
provocadas pelo efeito molecular, conclui-se que os efeitos turbulentos são
bastante mais eficientes que os efeitos moleculares, pelo que os efeitos
moleculares podem ser desprezados.
As tensões turbulentas são conhecidas por tensões de Reynolds e relacionam-
se com as velocidades médias tal como as tensões moleculares, ou seja:
x
uAuu x
,
y
uAvu y
,
z
uAwu z
Onde as constantes de proporcionalidade, iA , são designadas por coeficientes
de viscosidade turbulenta cinemática. Estes coeficientes, ao contrário do
coeficiente de viscosidade molecular que é uma propriedade do fluído (varia
com as variáveis do estado do sistema), dependem do tipo da escala do
movimento, da estratificação do fluído, bem como das respectivas interacções, ou
seja, são propriedade do fluxo.
Desprezando as variações espaciais dos coeficientes de viscosidade
turbulenta, o termo do atrito na direcção xx terá a seguinte forma:
2
2
2
2
2
2
z
uA
y
uA
x
uA zyx
(3.17.1)

37
Define-se como circulação costeira, uma circulação que se caracteriza
normalmente pelo desenvolvimento de velocidades não constantes e campos de
elevação da superfície num domínio geofísico costeiro cuja profundidade é da
ordem dos 10 ou mais metros. As dimensões horizontais são da ordem de 10 ou
mais quilómetros e a geometria da linha de costa não é simples (Koutitas, 1988).
Atendendo a esta definição, verifica-se que se podem desprezar os efeitos da
viscosidade horizontal na equação (3.17.1), quando comparados com os efeitos
verticais sempre que não sejam importantes por motivos computacionais.
Deste modo, a forma final das equações que descrevem o movimento da
propagação de uma onda longa em regiões costeiras e em regime médio terá a
forma:
2
21
z
uA
x
pvf
y
uv
x
uu
t
uz
(3.18.1)
2
21
z
vA
y
puf
y
vv
x
vu
t
vz
(3.18.2)
gz
p
10 (3.18.3)
A distribuição dos campos das velocidades no interior de uma Baía, é descrita
pelas equações do movimento e da continuidade em regime médio. O modelo
usado neste trabalho, resolve as equações (3.18.1) a (3.18.3) anteriormente
descritas, com as respectivas assunções e simplificações.
O estabelecimento do regime médio das equações do movimento e da
continuidade é importante, uma vez que separa o movimento aleatório do
movimento “médio”. Embora este procedimento simplifique e aproxime as
equações hidrodinâmicas à realidade, muitas vezes a complexidade da geometria
das zonas costeiras, as condições de fronteira, bem como a natureza não
estacionária do escoamento, dificultam a obtenção de soluções hidrodinâmicas
correspondentes ao regime médio.

38
Uma alternativa à questão exposta, é o procedimento de simplificações e
aproximações, em que as hipóteses introduzidas devem ser compatíveis com as
condições naturais verificadas no domínio em que as equações se pretendem
resolver.
3.4 Aproximação de Boussinesq
Na aproximação de Boussinesq descreve-se a influência da variação de
densidade nas equações do movimento.
Integrando segundo o eixo zz a equação hidrostática, tem-se:
),,()( tyxfgzzp (3.19)
Na fronteira, ),,( tyxz e opp . Substituindo as condições de fronteira na
equação acima, obtém-se:
0),,( pgtyxf (3.20)
Considerando a densidade do fluído expressa pela soma da densidade média
0 e de uma pequena variação da densidade ' , ou seja, ),,,('0 tzyx , a
equação hidrostática integrada verticalmente tem a forma:
dzy
gdzx
gzgpzpzz
'')()( 00 (3.21)
Em que 0p representa a pressão atmosférica.
As derivadas da pressão no plano horizontal serão funções da elevação da
superfície livre e da pressão atmosférica:
z
dzx
gx
gx
p
x
p'0
0 (3.22.1)

39
z
dzy
gy
gy
p
y
p'0
0 (3.22.2)
Estas últimas equações ((3.22.1) e (3.22.2)) facilitam a integração das
equações (3.18.1), (3.18.2) e (3.18.3) (equações hidrodinâmicas em regime
médio).
3.5 Integração vertical das equações hidrodinâmicas fundamentais
A integração vertical das equações (3.18.1) a (3.18.3) conduz-nos a uma
situação em que se descreve um fluxo bidimensional; para tal, considere-se um
sistema de coordenadas cartesiano no plano horizontal da superfície da água não
perturbada.
A distância entre o plano de referência e o fundo é designada por h e a
distância entre este plano e a superfície é designada por (figura 3.1). Por
questão de simplificação, embora todas as grandezas representem valores
médios, serão omitidas as barras indicadoras de grandezas médias.
0Z
),( yxhZ
Figura 3.1 Referencial geográfico OXYZ
Antes de efectuar a integração vertical das equações hidrodinâmicas, efectuou-
se a aproximação de Boussinesq, que permite a representação dos termos que
contém o gradiente de pressão de uma forma simplificada.
O
),,( tyx
),,( tyxh
Z
Y
X
),,( tyxZ

40
Assim, substituindo as equações (3.22) nas equações do movimento (3.18), e
integrando desde o fundo até a superfície livre da água obtêm-se:
0'
1
2
2
0
0
0
h h
z
h
hhhhh
dzz
uAfvdzdz
x
g
dzx
pdz
xgdz
y
uvdz
x
uudz
t
u
(3.23)
0'
1
2
2
0
0
0
h h
z
h
hhhhh
dzz
vAfudzdz
y
g
dzy
pdz
ygdz
y
vvdz
x
vudz
t
v
(3.24)
Onde:
),( yx , ),( yxhh
Ao dividir ambas as equações por )( h e substituindo o termo:
hz
z
z
z
h
zz
uA
hz
uA
hdz
z
uA
h
11
)(
12
2
por '
xA (3.24.a)
e
hz
z
z
z
h
zz
vA
hz
vA
hdz
z
vA
h
11
)(
12
2
por '
yA (3.24.b)
Introduzindo nas equações (3.18.1) e (3.18.2) as componentes verticalmente
integradas das velocidades médias, expressas pelas equações seguintes
(Hansen, 1956):
h
dzuh
U .1
(3.25)

41
h
dzvh
V .1
(3.26)
Tendo em conta as condições de fronteira e recorrendo a regra de Leibnitz (Dias,
2001), obtêm-se finalmente as seguintes equações:
'
0
0 '1x
h
Adzx
g
x
p
xgfV
y
UV
x
UU
t
U
(3.27)
'
0
0 '1y
h
Adzy
g
y
p
ygfU
y
VV
x
VU
t
V
(3.28)
Os primeiros termos do lado direito da equação (3.24.a) e (3.24.b),
representam o atrito à superfície, enquanto os segundos termos representam o
atrito no fundo. A parametrização destes termos é inicializada assumindo que a
tensão no fundo ( b
) é proporcional ao quadrado da velocidade, e portanto afecta
consideravelmente as ondas longas. O factor que representa a resistência
oferecida pelo atrito do fundo apenas pode ser obtido por observação. Este factor
relaciona a tensão no fundo e o quadrado da velocidade e depende da rugosidade
do fundo, do material que constitui o fundo, e da profundidade. Segundo Dronkers
(1964), esta relação para o fluxo numa direcção pode ser expressa por:
VVgCb
. 2 (3.29)
Onde:
- é a densidade do fluído;
V - é a velocidade;
C - é o coeficiente de Chézy.
As parametrizações para a tensão à superfície são também obtidas através de
várias observações e englobam termos que representam o efeito da pressão
barométrica. Este termo é menos importante quando comparado com o descrito
anteriormente. A função resultante depende da velocidade, da direcção do vento e
da rugosidade da superfície da água.

42
As componentes da tensão do vento, também estabelecidas por Dronkers
(1964), têm a forma:
senWCDa
s
x
2 (3.30)
cos2WCDa
s
y (3.31)
Em que:
a - é a densidade do ar;
W - é a intensidade do vento;
DC - é o coeficiente de tensão de vento.
- é o ângulo entre a direcção do vento e a direcção yy
A integração vertical da equação da continuidade, após aplicação da regra de
Leibnitz (Dias, 2001) e utilização das condições de fronteira, resulta em:
0),(),(
hh
dzyxvy
dzyxuxt
(3.32)
Introduzindo os termos das componentes da velocidade verticalmente
integradas (U e V ) na equação anterior, obtém-se:
0)()(
y
Vh
x
Uh
t
(3.33)
O termo h representa a altura total da coluna de água e pode ser
representado por H . Obtém-se assim as equações da continuidade e do
movimento integradas para um fluxo bidimensional:
01)(
'1
2
21
22
0
0
s
x
h
HHC
VUUg
dzx
g
x
p
xgfV
y
UV
x
UU
t
U
(3.34)

43
01)(
'1
2
21
22
0
0
s
y
h
HHC
VUVg
dzy
g
y
p
ygfU
y
VV
x
VU
t
V
(3.35)
0
y
HV
x
HU
t
(3.36)
3.6 Aproximação de águas pouco profundas
Pela ordem de grandeza, os termos que contêm o coeficiente de difusão
horizontal (termos de atrito horizontal) podem ser desprezados quando
comparados com outros termos da equação de movimento, porém, para garantir a
estabilidade computacional (Hansen, 1962), é importante a inclusão destes
termos nas equações de movimento. Na integração vertical destes termos é
efectuada a aproximação de águas pouco profundas. Segundo Hansen (1949) e
Dias (2001), nesta aproximação assume-se que as velocidades horizontais são
quasi-constantes ao longo da direcção vertical. Considera-se também que o
movimento é barotrópico, o que significa que a estratificação da densidade é
desprezável.
Assim, os termos lineares e não lineares do atrito horizontal podem ser
aproximados pela seguinte equação:
UAhdzuA h
h
h
22 )(
(3.37)
e
VAhdzvA h
h
h
22 )(
(3.38)
Considerando a aproximação de águas pouco profundas, incluindo os termos
do atrito horizontal e considerando que as variações espaciais da pressão

44
atmosférica podem ser desprezadas, as equações hidrodinâmicas em águas
pouco profundas expressam-se pelas relações:
01)( 2
2
21
22
UA
HHC
VUUg
xgfV
y
UV
x
UU
t
Uh
s
x
(3.39)
01)( 2
2
21
22
VA
HHC
VUVg
ygfU
y
VV
x
VU
t
Vh
s
y
(3.40)
0
y
HV
x
HU
t
(3.41)

45
CAPÍTULO IV – DISCRETIZAÇÃO DAS EQUAÇÕES DO MOVIMENTO E DA
CONTINUIDADE
4.1 O método das diferenças finitas
Neste capítulo descreve-se o método das diferenças finitas, que permite a
discretização no domínio computacional das equações já referidas.
O método das diferenças finitas consiste na determinação das funções, bem
como das suas derivadas, sob a forma de quantidades definidas num sistema
discreto. Pelo uso deste método, um espaço contínuo onde as grandezas são
definidas é transformado num espaço discreto definido por uma malha regular,
constituída por células de dimensões x e y (pontos nodais).
A forma básica das diferenças finitas para derivadas parciais pode ser definida
a partir do desenvolvimento em série de Taylor de uma determinada função n
jif ,
num ponto genérico ),( ji . Os índices referem-se aos valores de yx e , n refere-
se a um certo instante, x e y correspondem aos afastamentos dos pontos
nodais nas direcções i e j, respectivamente.
Expandindo a função n
jif , em série de Taylor até ao termo da 2ª ordem, obtém-
se:
TOSxxx
fxx
x
fff jiji
ji
jiji
ji
jiji
2
,,1
,
2
2
,,1
,
,,1 )(2
1)( (4.1)
TOSxx
fx
x
fff
jiji
jiji
2
,
2
2
,
,,12
1 (4.2)
Utiliza-se a abreviatura TOS para designar termos de ordem superior.
Isolando o termo x
f
tem-se:
TOSxx
f
x
ff
x
f jiji
ji
2
2,,1
, 2
1 (4.3)
46
)(,,1
,
xOx
ff
x
f jiji
ji
(4.4)
Onde )( xO refere-se aos restantes termos que possuem factores de x com
expoentes iguais ou superiores à unidade. Representando a diferença x
f
por
x
f
,
obtém-se a seguinte expressão para diferenças avançadas:
x
ff
x
f jiji
ji
,,1
,
(4.5)
Esta aproximação tem uma precisão da primeira ordem, ou seja, o erro de
truncatura é da ordem de x .
A função anterior poderia ser expandida com incrementos negativos, obtendo-
se assim, a seguinte equação, com precisão igual à da equação anterior:
x
ff
x
f jiji
ji
,1,
,
(4.6)
Subtraindo a expansão da série de Taylor com incrementos positivos pela série
com incrementos negativos, obtém-se a aproximação por diferenças finitas
centradas, ou seja:
ji
ji
ji fxOx
f
x
fx
x
ff ,1
4
3
3
2
2
,
, )(6
1
2
1
(4. 7.a)
ji
jijiji
ji fxOx
f
x
fx
x
ff ,1
4
,
3
3
,
2
2
,
, )(6
1
2
1
(4.7.b)
então ao fazer (3.7.a)-(3.7.b) tem-se:

47
x
ff
x
f jiji
ji
2
,1,1
,
(4.8)
Um desenvolvimento detalhado desta expressão mostra que os termos
desprezados são de ordem igual ou superior a três. Ou seja, tem uma precisão de
segunda ordem. Por analogia obtêm-se as expressões equivalentes para y e t .
Os termos de segunda ordem
2
2
x
f também podem ser aproximados por
diferenças centradas, somando as equações (4.7.a ) e (4.7.b), resultando:
)(2
2
2
,,1,1
,
2
2
xOx
fff
x
f jijiji
ji
(4.9)
A expressão para diferenças centradas
x
f2
2
será então:
2
,,1,1
,
2
2 2
x
fff
x
f jijiji
ji
(4.10)
Que tem uma precisão de segunda ordem.
Utilizando as equações (4.5), (4.6), (4.8) e (4.10), podem-se aproximar as
equações do modelo bidimensional (equações diferencias de Navier-Stokes) sob
a forma de equações com diferenças finitas.
Embora o método de discretização possa estar correcto, nem sempre a solução
da equação de diferenças finitas se ajusta à solução analítica da aproximação que
deste resulta. É também necessário que os esquemas de aproximação sejam
coerentes relativamente ao princípio de conservação de energia, massa, vortidade
e entropia.

48
4.2 Consistência, estabilidade e convergência
O método de diferenças finitas consiste na aproximação de cada derivada
parcial por uma razão de diferenças finitas
x
f
x
f. Para que esta aproximação
seja valida, é necessário que a razão x
f
seja o mais próximo possível do valor
da derivada neste ponto, à medida que os incrementos tendem para zero. Esta
condição verifica-se quando são usadas as aproximações com diferenças
atrasadas, centradas ou adiantadas. Por consequência, a equação de diferenças
finitas deve ter as mesmas propriedades da equação diferencial correspondente
para que constitua uma boa aproximação.
Nesta secção são analisadas três propriedades fundamentais: a convergência,
a consistência e a estabilidade.
Os fundamentos de convergência e estabilidade de esquemas numéricos estão
bem desenvolvidos somente para sistemas lineares. Os resultados da teoria linear
são usados como base para problemas que envolvem sistemas não lineares,
porém, a conclusão final depende de experiências numéricas.
Esquemas convergentes de diferenças finitas, definem-se como esquemas em
que os valores da solução das equações de diferenças finitas se aproximam da
solução da equação diferencial contínua, à medida que as dimensões das células
se aproximam de zero (Roache, 1985; Dias, 2001). Este conceito de limite que
aqui se referencia abrange toda a solução da equação diferencial, não meramente
os termos individuais (termos diferenciais) da equação.
Todas as equações diferenciais podem ser escritas representando as derivadas
parciais que as constituem por expansões em séries de Taylor. A diferença entre
as equações diferenciais e as equações obtidas pelo método das diferenças
finitas, é denominada por erro de truncatura. Sempre que o erro de truncatura se
aproxima de zero quando os incrementos x , y e t se aproximam de zero,
diz-se que as equações são consistentes. Este erro estabelece a precisão do
esquema numérico, em que a ordem do esquema numérico é geralmente definido
como uma função de ordem da potência mais baixa de x , y e t presente no
erro de truncatura. Em certos casos uma equação diferencial pode ser consistente

49
com a sua “congénere” (obtida pelo método de diferenças finitas), ser instável e
consequentemente não convergir.
Diz-se que uma equação é estável se os erros associados ao esquema
numérico não crescem com o tempo, ou seja, se num intervalo de tempo
consideravelmente longo a solução numérica obtida permanece uniforme;
portanto o conceito de estabilidade associa-se ao crescimento ou decaimento dos
erros de arredondamento.
Se a solução numérica converge para a solução analítica, os erros associados
a esta aproximação tendem para zero à medida que os incrementos x , y e t
se aproximam de zero. Em princípio, estes erros têm duas contribuições:
A primeira, devido à aproximação feita na discretização das equações
diferenciais, erro de discretização. E a segunda, resultante da solução numérica
das equações pelo método das diferenças finitas, introduzindo em cada operação
algébrica um erro de arredondamento.
Designemos agora:
n
jiF , - A solução da equação de diferenças finitas (contém erros de truncatura)
n
jif , - A solução exacta da equação, ou seja, a solução analítica da equação
n
jiN , - A solução numérica (contém erros de arredondamento).
O erro da solução numérica será então:
)()( ,,,,,
n
ji
n
ji
n
ji
n
ji
n
ji FNfFe
)( ,,,
n
ji
n
ji
n
ji fNe
Embora sendo desprezáveis os erros de arredondamento (pois são muito
insignificantes quando comparados com os erros de discretização), é ainda difícil
obter-se uma explicação conclusiva relativamente à convergência. Devido a
limitações computacionais, o estudo da convergência ainda tem sido difícil de se
realizar, uma vez que a diminuição dos incrementos x e y corresponde ao
aumento do tempo de cálculo e de memória disponível nos computadores. O

50
problema da convergência deve ser abordado de outra forma, ou seja, através da
análise da evolução temporal da solução numérica, uma vez que as instabilidades
têm a sua origem no aumento dos erros de discretização e de arredondamento ao
longo do tempo computacional.
A diminuição dos incrementos x , y e t , permanecendo constantes as
razões t
x
e t
y
, aumenta o número de operações a realizar. Se o sistema é
instável, a diferença entre a solução numérica e a solução exacta da equação
diferencial aumentará. Porém, quando a solução numérica permanece constante
ao longo do tempo, ou seja, quando a solução numérica é estável, os erros
permanecem constantes com o tempo e aproximam-se de zero à medida que os
incrementos x , y e t se aproximam de zero. Esta observação final
estabelece a equivalência entre os conceitos de convergência e estabilidade e
baseia-se no teorema de Lax: para um esquema consistente de diferenças finitas,
a estabilidade é a condição necessária e suficiente para a convergência (Roache,
1985).
O conceito de estabilidade em esquemas de diferenças finitas tem importância
na teoria de modelação numérica, uma vez que partindo da análise da solução
analítica pode-se determinar a consequência na solução numérica (condições de
convergência) por adopção de células no domínio com determinadas
características.
Para o modelo SYMS/S2D, um estudo exaustivo do esquema de equações de
diferenças finitas usado para a aproximação das equações hidrodinâmicas já foi
feito (Leendertse, 1967). O estudo das propriedades do esquema de discretização
e da solução numérica do modelo hidrodinâmico utilizado neste trabalho, foi
efectuado usando o método de Fourier e a versão linearizada das equações de
diferenças finitas (Leendertse, 1967). Este esquema numérico obedece aos
requisitos que foram referenciados ao longo desta secção. Deste estudo a
principal conclusão foi que o esquema do algoritmo aplicado às equações de
águas pouco profundas é incondicionalmente estável tanto no espaço como no
tempo (Leendertse, 1967, Cheng et al, 1982a). Desde então este modelo foi com
sucesso usado por vários autores.

51
4.3 Aproximação das equações do movimento e da continuidade pelo método das
diferenças finitas
Vários esquemas numéricos para a solução de modelos de circulação de ondas
longas em domínios costeiros continuam a ser objecto de estudo por parte dos
investigadores. O modelo adoptado neste trabalho consiste nas equações (3.39) a
(3.41) na forma apresentada ou ligeiramente modificada. O esquema é baseado
em diferenças finitas. Este esquema é escolhido com base na sua simplicidade e
eficiência.
O domínio é discretizado por uma malha ortogonal e horizontal, com células de
lado x e y . As fronteiras laterais aproximam-se pelos lados xx e yy das
células que constituem a malha. A fronteira aberta do oceano corresponde à parte
da malha em que um dos lados da célula é aberto, o que garante a ligação com o
oceano. As funções desconhecidas U , V e são calculadas em locais
característicos de modo alternado.
As coordenadas dos pontos a calcular (figura 4.1), são caracterizadas pelos
índices i, j , e n . O primeiro refere-se à abcissa (direcção xx ), o segundo à
ordenada (direcção yy ) e o terceiro ao tempo (múltiplos do passo temporal).
Os valores de V e U referem-se aos lados yy e xx da célula, respectivamente,
e refere-se aos nós da célula, e a profundidade é referida em relação ao centro
da célula figura (4.2).
Ou seja, o nível de água é descrito por valores inteiros de i, j , a componente
U é descrita em valores semi-inteiros de ie inteiros de j , a velocidade V é
calculada em valores semi-inteiros de j e inteiros de ie a profundidade
determinada pela batimetria numérica é referenciada em valores semi-inteiros de
ie j .
Os termos que contêm as derivadas temporais e a força de Coríolis são
considerados alternadamente de forma avançada ou atrasada; este procedimento
é possível, uma vez que o passo temporal é decomposto em duas partes, pelo

52
que no intervalo de tempo correspondente ao incremento temporal efectuam-se
duas operações sucessivas.
Figura 4.1: Esquema da discretização de domínios para a solução de modelos de circulação de ondas longas
Figura 4.2: Localização das variáveis do modelo; as variáveis de entrada (profundidade) são definidas em índices semi-inteiros; as variáveis vectoriais (componentes da velocidade) definem-se num índice inteiro e noutro semi-inteiro; as variáveis escalares (elevação da superfície livre) definem-se em índices inteiros
Δy
Δx
(i, j+1)
(i-1, j)
(i, j-1)
(i+1, j)
(i,j)
X
Y
Nível de água Velocidade U Velocidade V Profundidade

53
Na aproximação de equações diferenciais pelo sistema de equações de
diferenças finitas, utilizam-se as seguintes notações:
),,(, tnyjxiFf n
ji
Onde ),(),( yjxiyx , representa as coordenadas dos pontos na malha
espacial.
Os índices ,j i tomam os valores 0 , 2
1 , 1 , ...,
2
3 e o índice n toma os
valores 0 ,2
1,1, ...,
2
3
Será ainda comum o uso da notação seguinte para representar a média no
espaço:
a) grandezas centradas na malha,
n
ji
n
ji
n
ji
n
jiFFFFF
2
1,
2
1
2
1,
2
1
2
1,
2
1
2
1,
2
14
1
b) grandezas com índices semi-inteiros de ,j
n
ji
n
ji
n
ji
n
jivvvvv
2
1,
2
1,
2
1,1
2
1,14
1
c) grandezas com índices semi-inteiros de ,i
n
ji
n
ji
n
ji
n
jiuuuuu
,2
11,
2
1,
2
11,
2
14
1

54
Em cada passo temporal o sistema de equações é resolvido em duas etapas:
na primeira, desde o instante n até ao instante 2/1n , obtêm-se os valores de
2
1n
e 2
1n
u , partindo dos campos de 2
1n
e 2
1n
u , e nv por uma operação implícita.
Na segunda, do instante 2/1n ao instante 1n , obtêm-se os valores de 1n
e 1nv , partindo dos campos de n e 2
1n
u , e nv , também por uma operação
implícita.
4.3.1 Discretização da equação do movimento
Então, a discretização da equação de movimento na primeira etapa, recorrendo
à equação (2.34) e todos os conceitos já adquiridos até agora relativos à
descrição da malha, permite a obtenção da seguinte equação:
02
2
21
)(2
1(
2
1)(
4
1
)(.2
1
2
.2
1
2
1
2
2
1
,2
12
1
,2
12
1
,2
3
,,1
2
1,
2
1
2
1,
2
1
,,1
2
1,
2
1
2
1,
2
1,,1
2
2
2
1
,2
12
1
,2
12
1
,2
1
2
1
,2
1
,12
1
,2
1
,1
2
1
1,2
12
1
,2
12
1
,2
12
1
1,2
1
2
1
,2
12
1
,2
12
1
,2
12
1
,2
32
1
,2
1
2
1
,2
12
1
,2
1
x
uuu
A
hhhhCC
vuuu
g
x
g
vfuuuuy
v
uuuux
ut
uu
n
ji
n
ji
n
ji
h
n
ji
n
jijiji
s
x
n
ji
n
jijiji
n
ji
n
ji
n
ji
n
ji
n
ji
n
ji
n
ji
n
ji
n
ji
n
ji
n
ji
n
ji
n
ji
n
ji
n
ji
n
ji
n
ji
n
ji
n
ji
n
ji
Ao multiplicar a equação por t e agrupando as incógnitas vem a equação
seguinte que pela sua extensão é de difícil análise.

55
tx
uuu
A
hh
t
hhCC
vutug
x
tgvtfuu
y
tu
x
tg
hhCC
vutg
uux
tu
x
tg
n
ji
n
ji
n
ji
h
n
ji
n
jijiji
s
x
n
ji
n
jijiji
n
ji
n
ji
n
ji
n
ji
n
ji
n
ji
n
ji
n
ji
n
ji
n
ji
n
ji
n
jijiji
n
ji
n
ji
n
jin
ji
n
ji
n
ji
n
ji
2
2
1
,2
12
1
,2
12
1
,2
3
,,1
2
1,
2
1
2
1,
2
1
,,1
2
1,
2
1
2
1,
2
1
2
,,1
2
1
2
2
2
1
,2
12
1
,2
1
2
1
,2
1
,12
1
1,2
12
1
1,2
12
1
,2
12
1
,1
,,1
2
1,
2
1
2
1,
2
1
2
,,1
2/1
2
2
2
1
,2
1
2
1
,2
12
1
,2
32
1
,2
1
2
1
,
2
22
)(
)(4
222
)(
)(4
21
2
Por uma questão de simplicidade, denominam-se os termos associados a
por k , os associados a u por ji
p,
2
1
e o termo independente por ji
A,
2
1
.
Neste caso obtém-se a seguinte equação geral:
ji
n
ji
n
jiji
n
ji Akupk,
2
12
1
,12
1
,2
1,
2
12
1
,
(4.11)
4.3.2 Discretização da equação da continuidade
Recorrendo à equação (3.39), e considerando as malhas apresentadas nas
figuras 4.1 e 4.2, obtém-se:

56
02
1
2
1
2
1,,
2
1,
2
1
2
1,
2
1
2
1,
,1,
2
1,
2
1
2
1,
2
1
2
1,
,1,
2
1,
2
1
2
1,
2
12
1
,2
1,,1
2
1,
2
1
2
1,
2
12
1
,2
1
,2
1
,
n
ji
n
jijiji
n
ji
n
ji
n
jijiji
n
ji
n
ji
n
jijiji
n
ji
n
ji
n
jijiji
n
ji
n
ji
n
ji
hhvhhvy
hhuhhux
t
Multiplicando a equação por 2/t e colocando em evidência as incógnitas,
obtém-se:
Considerando que o termo associado a 2
1
,2
1
n
jiu pode ser representado por
jiq
,2
1
,
o termo associado a 2
1
,2
1
n
jiu por
jiq
,2
1
e o termo independente por jB , obtém-se a
equação final de continuidade discretizada:
j
n
jiji
n
ji
n
jijiBuquq
2
1
,2
1,
2
12
1
,2
1
,2
1,
2
1 (4.12)
As equações (4.11) e (4.12), representam as equações discretizadas do
movimento segundo o eixo xx e da continuidade.
De modo análogo pode-se efectuar a discretização para v e no instante
1n .
n
ji
n
jijiji
n
ji
n
ji
n
jijiji
n
ji
n
ji
n
ji
n
jijiji
n
ji
n
ji
n
ji
n
jijiji
n
ji
hhvhhvy
t
x
thhu
x
thhu
1,,
2
1,
2
1
2
1,
2
1
2
1,
,1,
2
1,
2
1
2
1,
2
1
2
1,
,,,1
2
1,
2
1
2
1,
2
12
1
,2
1
2
1
,,1,
2
1,
2
1
2
1,
2
12
1
,2
1
4
2
4

57
Usando os mesmos procedimentos descritos anteriormente, e ainda por uma
questão de simplicidade considerando todos os termos associados a
correspondentes ao valor 'k , os termos associados a v correspondentes ao valor
2
1, ji
r e o termo independente correspondente ao valor 2
1, ji
C , obtém-se neste
caso:
2
1,
1
1,
'1
2
1,
2
1,
1
,
'
ji
n
ji
n
jiji
n
ji Ckvrk (4.13)
A equação de continuidade para o instante 1n , é também obtida pelo mesmo
método usado para a obtenção desta no instante 2/1n . Ao designar o termo
associado a 1
2
1,
n
jiv por
2
1, ji
s , o termo associado a 1
2
1,
n
jiv por
2
1, ji
s e ainda sendo o
termo independente kD , teremos a equação de continuidade discretizada para o
instante 1n :
k
n
jiji
n
ji
n
jijiDusvs
1
2
1,
2
1,
1
,
1
2
1,
2
1,
(4.14)
As equações (4.13) e (4.14) representam as equações do movimento na
direcção yy e da continuidade discretizadas no instante 1n .
Assim, o conjunto das equações (4.11), (4.12), (4.13) e (4.14) constitui a
aproximação por diferenças finitas das equações de movimento e da continuidade
em duas etapas consecutivas em cada incremento temporal (1ª etapa de n a
2/1n ; 2ª etapa de 2/1n a 1n ). A metodologia de discretização dos vários
termos apresentados recorre a um elevado número de valores médios. O principal
objectivo é eliminar eventuais picos, ou seja, as instabilidades, obedecendo aos
requisitos para a convergência do esquema numérico.

58
CAPÍTULO V – O MODELO NUMÉRICO E AS CONDIÇÕES DE FRONTEIRA
5.1 O modelo numérico de propagação de ondas gravíticas de longo período
O modelo hidrodinâmico utilizado (Leendertse & Gritton, 1971; Leendertse,
1987) tem como objectivo principal a simulação de campos da velocidade e da
altura da coluna de água em todo o domínio computacional. Seguidamente
efectua-se pelo uso do modelo um estudo das influências da hidrodinâmica em
eventuais episódios de poluição, por meio da análise da dispersão de partículas
passivas (a parte Lagrangeana do modelo). Tendo em conta os objectivos deste
trabalho, primeiro faz-se um estudo hidrodinâmico da Baía e seguidamente
analisa-se o transporte Lagrangeano das partículas.
A solução numérica das equações (4.11) a (4.14), permite determinar o campo
das velocidades e o nível da superfície livre do escoamento nos M N pontos do
domínio computacional em função do tempo. Para tal, um conhecimento prévio da
geometria da Baía e as especificações das condições de fronteira da Baía no
modelo são requeridos.
Neste capítulo, procura-se descrever o modelo numérico de propagação de
ondas longas (Leendertse e Gritton, 1971; Leendertse, 1987); assim, partindo das
equações (4.11) a (4.14), procura-se determinar os valores das componentes da
velocidade e do nível, em qualquer ponto do domínio computacional em função do
tempo, pelo método implícito em direcções alternadas (Alternating direction
implicit) “ADI”.
Por este método, através das equações (4.11) e (4.12), determinam-se os
valores das incógnitas u e no instante tn )2/1( ao longo de uma linha j , ou
seja, ao longo do eixo xx para qualquer j , sendo conhecidas as incógnitas v e
no instante tn , u e no instante tn )2/1( e ainda sendo conhecidas as
profundidades e as condições iniciais de fronteira.
Utilizando as equações (4.13) e (4.14), determinam-se os valores das
incógnitas v e no instante tn )1( , segundo a direcção do eixo dos yy , ou
seja, ao longo da linha i . Sendo assim necessário conhecer para além das
variáveis referidas anteriormente, os valores das incógnitas u e nos instantes
tn )2/1( e de v e no instante tn . O método utilizado para a determinação

59
dos campos do nível tem assim dois passos temporais, calculando-se
alternadamente os campos da velocidade segundo o eixo dos xx e dos yy .
Começa-se por resolver as equações (4.11) e (4.12), ou seja:
ji
n
ji
n
jiji
n
ji Akupk,
2
12
1
,12
1
,2
1,
2
12
1
,
j
n
jiji
n
ji
n
jijiBuquq
2
1
,2
1,
2
12
1
,2
1
,2
1,
2
1
Sendo as incógnitas deste conjunto 2
1
,
n
ji , 2
1
,1
n
ji , 2
1
,2
1
n
jiu , 2
1
,2
1
n
jiu .
Nas fronteiras abertas e fechadas da Baía são estabelecidas condições de
modo a serem conhecidos os valores da velocidade ou do nível. Neste trabalho,
na fronteira aberta especificam-se os valores de e na fronteira fechada os
valores de u (pois vamos resolver a equação ao longo do eixo xx , o índice j , no
instante 2/1n permanece constante).
Então, os valores conhecidos na fronteira serão 2
1
,1
n
j , que representam o valor
da altura de água na fronteira aberta, e o valor de 2
1
,2
1
n
jNu .
Então para a linha j , a forma matricial das equações (4.11), (4.12) será a
seguinte:
(5.1)
N
NNN
NN
B
A
B
A
uquq
kupk
uquq
kupk
.
.
.
.
.
.
...............00
..............
..............
................
.
................
0.......00
0.......00
0......00
2
5
2
2
3
2
1
2
1
2
1
2
1
3
2
5
2
52
2
5
2
52
2
3
2
3
2
2
3
2
31
.. ..
.. ..
..
... ... ... ... ... ..
..

60
Considerando a representação matricial na forma FA
. = B
, em que o vector
F
contém todos os valores desconhecidos de u e no instante )2/1( n , o
vector B
representa toda a informação conhecida para os instantes n e )2/1( n
e a matriz A é uma matriz tridiagonal que contém os coeficientes das incógnitas
u e , obtém-se:
NN
N
N
NN
B
A
B
A
u
u
u
u
kpk
uquq
kpk
.
.
.
.
.
.
.
.
.
1.......00
..............
..............
................
.
................
0....00
0......00
0.......00
2
5
2
2
3
2
1
2
1
2
5
2
2
3
1
2
1
2
1
2
5
2
5
2
5
2
3
2
3
2
3
... ....
.. ..
.. ..
..
... ... ... ... ... ..
..
-
. .... 1
....
(5.2)
O sistema obtido resolve-se pelo método do duplo varrimento. Os valores
desconhecidos que integram o vector F
, no instante ( 2/1n ), determinam-se por
um número ilimitado de operações utilizando o método de eliminação das
incógnitas.
Começando com a primeira equação da matriz, determina-se a velocidade
2
1
,2
3
n
ju , que vem expressa em função de: 2
1
,2
n
j .
Ou seja:
S
p
kA
R
p
ku
n
jjn
j
n
j
11
2
3
2
1
,1,
2
3
2
1
,2
2
3
2
1
,2
3
(5.3)
Escrevendo a segunda equação da matriz e utilizando a equação (5.3), obtém-
se:

61
22
1
,2
5
2
52
1
,2
2
3
2
1
,1,
2
3
2
1
,2
2
32
3 Buqp
kA
p
kq
n
j
n
j
n
jjn
j
Ou então:
Q
p
q
k
kAp
q
B
u
P
p
q
k
q
n
jj
n
j
n
j
22
2
3
2
3
2
1
,1,
2
3
2
3
2
3
2
2
1
,2
5
2
3
2
3
2
5
2
1
,2
11
(5.4)
E agora, escrevendo a terceira equação da matriz em função da equação (5.4)
obtém-se:
S
p
q
k
kq
p
p
q
k
kAp
q
B
kA
R
p
q
k
q
kp
ku
n
jj
j
n
j
n
j
22
2
3
2
3
2
5
2
5
2
3
2
3
2
1
,1,
2
3
2
3
2
3
2
,2
5
2
1
,3
2
3
2
3
2
5
2
5
2
1
,2
5
1
1
1
(5.5)
Analisando as equações já apresentadas (5.3), (5.4) e (5.5), conclui-se que se
podem estabelecer expressões genéricas para o nível da água e para a
velocidade u como se segue:

62
ji
n
jiji
n
ji
ji
n
jiji
n
ji
SRu
QuP
,12
1
,,12
1
,2
1
,2
1
,2
1,2
1
,
(5.6)
Onde:
jiji
ji
jiqR
q
P
,2
1,1
,2
1
,1
(5.7)
jiji
jiji
ji
jiqR
SqB
Q
,2
1,1
,1,
2
1,
,1
(5.8)
jiji
jikPp
kR
,,
2
1
,
(5.9)
jiji
jiji
jikPp
kQA
S,
,2
1
,,
2
1
,
(5.10)
Os factores recursivos , , PSR e Q das equações (5.7) a (5.10) facilitam o
cálculo das variáveis u e do esquema numérico apresentado. Estes factores
calculam-se sucessivamente desde a fronteira aberta, começando portanto por
determinar os valores de 1R e 1S que se apresentam na equação (5.3), e que só
necessitam do valor de 2
1
,
n
ji , que é conhecido. Seguidamente, calculam-se os

63
factores recursivos , , NNN PSR e NQ , através da realização dos cálculos em
passos avançados e intercalados entre as variáveis , SR e QP, .
A primeira equação do conjunto de equações (5.6), resolve-se utilizando o valor
de u na fronteira. Prosseguindo até 2j , determinam-se valores de
1
2,
1
, , n
i
n
Ni , ..... (o índice j varia de N a 2, ou seja, efectuam-se os cálculos com
passo atrasado)
A segunda equação deste mesmo conjunto, resolve-se também por passos
atrasados e intercalando as incógnitas u e , obtendo-se os valores de
2
1
2,2
12
1
,2
1
n
i
n
Niuu até .
De modo semelhante ao cálculo das incógnitas u e no instante tn )2
1( ,
podem-se também determinar as incógnitas v e no instante tn )1( . Para tal,
consideram-se as equações (4.13) e (4.14).
2
1,
1
1,
'1
2
1,
2
1,
1
,
'
ji
n
ji
n
jiji
n
ji Ckvrk
k
n
jiji
n
ji
n
jijiDusvs
1
2
1,
2
1,
1
,
1
2
1,
2
1,
Neste caso as incógnitas são: 1
,
n
ji , 1
1,
n
ji , 1
2
1,
n
jiv , 1
2
1,
n
jiv .
Nas fronteiras abertas e fechadas são estabelecidas condições de modo a
serem conhecidos os valores da velocidade ou da elevação da superfície livre.
Neste trabalho, na fronteira aberta especificaram-se os valores de e na fronteira
fechada os valores de v .
Então, os valores conhecidos na fronteira serão 1
,1
n
j (que representa o valor da
altura da água na fronteira aberta) e o valor de 1
2
1,
n
Niv (que representa a velocidade
na fronteira fechada).

64
Para a coluna i , os procedimentos da determinação da forma matricial das
equações (4.13) e (4.14) são os mesmos descritos para o caso das equações
(4.11) e (4.12). Por analogia com a descrição anterior, também por duplo
varrimento resolvem-se as equações (4.13) e (4.14).
Sendo:
2
3
'
1r
kN (5.11)
2
3
1
1,
'
2
3,
1r
kC
O
n
ii
(5.12)
2
3
2
3
'
2
5
2
1r
s
k
s
L
(5.13)
2
3
2
3
'
1
1,
'
2
3,
2
3
2
3
2
2
1
)(
r
s
k
kCr
s
D
M
n
ii
(5.14)
2
3
2
3
'
2
5
'
2
5
'
2
1r
s
k
s
kr
kN
(5.15)

65
2
3
2
3
'
2
5
'
2
5
2
3
2
3
'
1
,
'
2
3,
2
3
2
3
2
'
2
5,
2
1
1
r
s
k
sk
r
r
s
k
kCr
s
D
kC
O
n
jii
i
(5.16)
Obtém-se as equações genéricas para a altura da água e para a velocidade v ,
como se segue:
ji
n
jiji
n
ji
ji
n
jiji
n
ji
ONv
MvL
,
1
1,,
1
2
1,
,
1
2
1,
,
1
,
(5.17)
Onde:
1,
2
1,
2
1,
,1
jiji
ji
jiNs
s
L (5.18)
1,
2
1,
1,
2
1,
,
,1
ji
ji
jiji
ji
jiNs
OqD
M (5.19)
2
1,
,
'
'
,
jiji
jirLk
kN (5.20)
2
1,
,
'
,
'
2
1,
,
jiji
jiji
jirLk
MkC
O (5.21)

66
Este último conjunto de seis equações permite determinar o valor da velocidade
v e da altura de água no instante tn )1( . Então, começa-se por determinar os
valores de 1O e 1N , uma vez que para o respectivo cálculo só é necessário o
valor de 1
,
n
ji , que é conhecido na fronteira aberta. Seguidamente, usando as
equações (5.18) e (5.15), calculam-se os restantes factores recursivos, variando o
k de 2 a N , ou seja, NM e NL são os últimos factores determinados (valores
correspondentes a fronteira fechada).
Finalmente, calcula-se v e . Usando as equações (5.17), determinam-se os
valores da velocidade na fronteira fechada e os valores de até 1
2
3,
1
2
1,
n
i
n
Nivv . De
modo análogo ao anterior efectua-se a primeira etapa com um passo avançado e
alternado entre as variáveis L, MON e , , posteriormente, uma nova etapa com
um passo atrasado alternando as incógnitas v e .
Este modelo resolve as equações (5.6) a (5.10) e as equações (5.17) a (5.21),
obtendo-se os campos da velocidade e da elevação da superfície livre.
Nas fronteiras fechadas assumem-se como nulos os valores das componentes
da velocidade.
5.2 Condições de fronteira
5.2.1 Fronteiras móveis
O coeficiente de Chézy ( C ), para além de ser utilizado na parametrização do
atrito do fundo, é utilizado neste modelo para definir os pontos “terra” e os pontos
“água”. Nos pontos terra, o valor do coeficiente de Chézy ( C ) é nulo e nos pontos
água é diferente de zero.
A dinâmica da maré conduz a que ao longo da sua evolução temporal alguns
pontos que foram “terra” sejam preenchidos por água (figura 5.1) ou vice-versa
(fronteira móvel), havendo então a necessidade de definir as fronteiras móveis.
De modo a tornar possível a determinação de novas fronteiras terra-água,
definiu-se neste modelo uma variável, relacionada com o volume de água numa
dada célula. Se num ponto particular do domínio do cálculo o valor do nível

67
diminuir de maneira a que o volume seja negativo, então esta célula será retirada
do cálculo.
Figura 5.1: Perfil vertical das áreas onde se impõe as condições das fronteiras móveis
O coeficiente de Chézy e os valores das velocidades que conduzem a este
ponto da grelha tomam o valor zero e todos os processos que envolvem fluxos
são eliminados. Recalculam-se os valores das fórmulas recursivas da velocidade
e do nível da água da coluna anterior, considerando o novo ponto terra. Este
procedimento obriga o modelo a andar meio passo para trás. Existe uma variável
que define a frequência de alisamento temporal, impondo ao modelo o recuo meio
passo, reiniciando posteriormente os cálculos com os valores médios do passo
temporal atrás. O método acima descrito, pode ser instável devido ao fenómeno
de Gibbs3.
Uma verificação mais eficiente é realizada da seguinte forma: se num dado
ponto da malha computacional qualquer dos transportes tomar um valor inferior a
uma constante pré-definida, este ponto é retirado dos cálculos.
3 Fenómeno de Gibbs consiste na formação da ondulação devido à súbita variação do fluxo causada pela retirada ou
acréscimo da água numa determinada célula do domínio computacional
O nível de água é mantido no seu valor presente, até que se inicie a enchente.
O mecanismo pelo qual o ponto terra passa a ser considerado ponto água, devido
à subida do nível da água, é realizado através do seguinte procedimento: se um
ou mais dos quatro pontos que circundam o ponto seco se encontra debaixo da
água, realiza-se a média dos quatro pontos. Se este valor for superior à constante
pré-definida anteriormente (quando o ponto se tornou seco), então o ponto da
Nível de referência
h

68
malha que anteriormente estava seco tem possibilidades de voltar a estar
molhado e ser integrado nos cálculos. A seguir fazem-se os cálculos dos
transportes através das secções que separam o ponto seco; se um destes
transportes for negativo, o ponto permanece seco. Se todos forem positivos, então
considera-se existirem condições para o ponto voltar a ser integrado no domínio
computacional.
5.2.2 Fronteiras fixas e condições iniciais
Na aplicação deste modelo considerou-se a fronteira Este e algumas células da
fronteira Oeste (correspondentes à foz dos diferentes rios que fazem parte do
domínio), abertas. As restantes fronteiras foram consideradas fechadas,
especificando-se valores da velocidade nestes pontos iguais a zero.
Na fronteira aberta do lado Este especificam-se valores do nível da maré de 6
em 6 minutos. As correntes nesta fronteira terão somente a componente Este-
Oeste. Nas fronteiras abertas correspondentes à foz dos rios especificam-se
valores do caudal dos respectivos rios.
O modelo numérico necessita de condições iniciais, a partir das quais a solução
numérica é construída de acordo com os valores das condições de fronteira. A
inicialização dos valores das componentes da velocidade é feita pela atribuição de
valores nulos a estas variáveis.
Relativamente à inicialização das elevações da superfície livre (altura da maré),
antes do início dos cálculos faz-se um teste para a determinação dos pontos terra
e dos pontos água. Na batimetria numérica da Baía do Maputo, os pontos terra
são representados por – 88.0, e aos restantes pontos atribuíram-se as respectivas
profundidades, em metros.
Nos pontos “água” (com profundidade diferente de – 88.0), atribui-se um valor
para a elevação da superfície livre da água diferente de zero, definido por uma
variável do modelo.
Para o estabelecimento do parâmetro de Coriolis, a latitude considerada é a
latitude média do domínio, correspondente para a Baia de Maputo a 25.9º Sul.
O coeficiente de Chézy foi definido a partir dos valores da altura de água e dos
valores do coeficiente de Manning. Os valores do coeficiente de Manning não são

69
constantes em toda a malha computacional, tendo o valor de 0.021 nas células
cujas abcissas são inferiores à coordenada numérica 160, e 0.033 nas restantes
células. O coeficiente de viscosidade utilizado é de 20 m2/s.
Foram também definidas a aceleração de gravidade, densidade do ar e
densidade da água do mar.
O passo temporal é de 60 segundos, sendo, o tempo de inicialização do
modelo (período de aquecimento) de 3 dias.
CAPÍTULO VI – DADOS E CALIBRAÇÃO
6.1 Dados
Para dar continuidade a este trabalho são requeridos vários dados, pois as
equações que constituem o modelo são resolvidas num domínio de cálculo onde
as especificações das condições de fronteira do fundo e condições de fronteiras
laterais são fundamentais. Posteriormente, o modelo é calibrado comparando
resultados obtidos através de simulações com dados observados na Baía.

70
O domínio do cálculo especificando as fronteiras do fundo e laterais, ou seja, a
batimetria numérica utilizada neste trabalho foi cedida pela empresa
HIDROPROJECTO4. É representada por uma malha regular de 250×250 metros.
Por razões computacionais, efectuou-se uma rotação de 20 graus da malha para
Este em relação ao Norte geográfico. O domínio (figura 6.1), tem uma extensão
de 95 km e 87.5 km nas direcções Norte-Sul e Este-Oeste, respectivamente.
Os limites da Baía foram prolongados para a zona Este, para o Sul e para o
Norte, de modo a centrar a zona da Baía e o estuário do Espirito Santo e afastar a
fronteira aberta que se localiza na zona oceânica (Teles et al, 2001).
Foi utilizada a seguinte informação cartográfica da região para a digitalização
das profundidades da Baía:
- A Batimetria da carta náutica 644 (Baía de Maputo) do Hydrographic Office
(UK), à escala 1:75000, publicada em 1994.
- Batimetria da carta náutica n.º 2930 (Josser point to Boa Paz) do
Hydrographic Office (UK), à escala de 1:300000, publicada em 1985.
- Batimetria da carta náutica n.º 495 (Porto de Maputo), à escala de 1:20000,
publicada pelo Instituto Hidrográfico de Portugal em 1972.
Na construção da batimetria utilizou-se o SoftWare AUTOCAD/DTM (Barata et
al, 2001).
4 Uma empresa Portuguesa que tem trabalhado na área de modelação hidrodinâmica

71
Figura 6.1: Batimetria numérica da Baía do Maputo. As profundidades são referidas relativamente ao zero hidrográfico e estão em metros
6.2 Calibração
Por definição, um modelo matemático constitui uma reconstrução aproximada
dos fenómenos reais. As aproximações e simplificações assumidas nas equações
gerais, bem como na sua discretização, geram diferenças entre os resultados
reais e computacionais. Por isso, embora o modelo satisfaça todas as condições
de estabilidade, consistência, etc., anteriormente referidas pode não reproduzir
integralmente os fenómenos tal como ocorrem na realidade.
Para que se possa garantir que o modelo reproduz a realidade com máxima
precisão possível, fazem-se simulações antes da aplicação do modelo, com o
objectivo de comparar os valores observados com os valores computacionais. Se
houver discrepâncias significativas entre este dois conjuntos de valores, novas
simulações são feitas, alterando-se individualmente e de uma forma progressiva
os parâmetros da tensão do vento, as condições de fronteira aberta, o atrito do
fundo, e, se possível, a batimetria numérica. Assim, a calibração é a parte da
modelação em que se investiga e se melhora a precisão dos resultados
computacionais por comparação com os resultados observados.
A verificação da reprodução correcta dos valores observados pelo modelo
depende também do grau de precisão da amostragem, pois pouco se pode
esperar da calibração com dados observados se estes não forem precisos.
Neste trabalho para a calibração, foram utilizados séries temporais da elevação
da superfície livre observadas nas estações do Porto de Maputo (PM) e Ilha dos
Portugueses (IP), bem como séries temporais das componentes da velocidade
observadas nas estações da Ilha dos Portugueses e do Baixo Ribeiro (BR) (figura
2.2). Estas séries foram obtidas em campanhas oceanográficas realizadas pelo

72
IIP (Instituto de Investigação Pesqueira) em Abril de 1993. O intervalo de
amostragem e o comprimento da série temporal das elevações da superfície livre
no Porto de Maputo é de 6 minutos e 15 dias respectivamente. Para as restantes
séries o intervalo de amostragem é de 10 minutos e o comprimento das séries
correspondeu a um mês. As coordenadas numéricas das estações de calibração
acima referidas são apresentadas na tabela 6.1.
Tabela 6.1: Coordenadas numéricas das estações utilizadas para a calibração do modelo numérico
6.2.1 Elevação da superfície livre
O processo de calibração iniciou-se comparando valores de elevação da
superfície livre. Com este objectivo, foram feitas várias simulações no período
correspondente ao mês de Abril de 1993. O modelo foi forçado na fronteira aberta
com a maré gerada pelos 35 constituintes mais significativos determinados na
secção 2.6 através da análise harmónica da série temporal de alturas de água do
Porto de Maputo. Os resultados destas simulações foram posteriormente
comparados com resultados observados. Com o objectivo de ajustar as saídas do
modelo aos valores observados, em cada nova simulação variou-se a amplitude e
fase dos constituintes da maré determinados anteriormente e impostos na
fronteira aberta, o que permitiu a diminuição das diferenças por comparação
qualitativa entre os valores observados e calculados.
Comparando os resultados das amplitudes e fases dos principais constituintes
da maré no Porto de Maputo e da maré registada na Ilha dos Portugueses, a maré
foi extrapolada para a fronteira aberta impondo-se um factor de redução de 0.8 na
amplitude, relativamente às alturas registadas no marégrafo do Porto de Maputo.
No que se refere às fases, em função de cada constituinte, foram impostos
atrasos (ou adiantamentos) correspondentes aos apresentados na tabela 6.2.
Estação Coordnum_i Coordnum_j
PM 143 144
IP 260 182
BR 231 197

73
Tabela 6.2: Atrasos impostos aos constituintes da maré do Porto de Maputo para extrapolação da maré para a fronteira aberta
Constituinte M2 S2 N2 K1 M8 OO1 Ms4 S4 O1 M4
Correcção () 13.0 -15.7 23.0 -63.1 -41.0 -45.3 151.0 -28.3 17.0 140.0
Os resultados da comparação entre as séries temporais simuladas e
observadas dos níveis de água nas estações de calibração (tabela 6.1), após a
aplicação do factor de correcção de 0.8 nas amplitudes da estação PM e a
correcção das fases de acordo com a tabela 6.2, são ilustrados na figura 6. 2.1
Ao analisar a figura verifica-se a existência de um bom ajuste entre os valores
observados e simulados. Os valores observados e simulados correspondentes às
séries temporais das elevações da superfície livre da água foram então sujeitos a
um tratamento estatístico, o que permitiu o cálculo do desvio quadrático médio
dos valores simulados em relação aos valores observados. Para as duas
estações de calibração o desvio foi igual a 0.013 metros.
Figura 6.2.1: Comparação das séries temporais da elevação da superfície livre observadas e simuladas
Tabela 6.3: Amplitude e fase dos principais constituintes harmónicos das séries temporais observadas e simuladas, bem como suas diferenças; aplmod e aplobs representam a amplitude determinada a partir dos valores simulados e observados, respectivamente; faobs e famod representam a fase determinada a partir dos valores observados e simulados, respectivamente; D_apl e D_fa representam a diferença entre as amplitudes e as fases, respectivamente
0 5 10 15 20 25
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0
2.5
3.0
i=143 j=144
altu
ras
(m)
tempo (horas)
níveis do modelo
níveis observados
Porto do Maputo - 2/5/93
0 5 10 15 20 25
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0
2.5
3.0
i=260 j=182
altu
ras
(m)
tempo (horas)
níveis do modelo
níveis observados
Ilha dos Portugueses - 18/4/93

74
Posteriormente a este tratamento estatístico preliminar, efectuou-se a análise
harmónica (Foreman, 1977; Foreman e Henry, 1989) para as alturas de água (na
estação IP e PM). Na tabela 6.3 são apresentados os resultados da análise
harmónica efectuada a séries observadas e calculadas, bem como as suas
diferenças para os cinco constituintes mais significativos.
Da tabela 6.3 é possível verificar que a diferença entre as amplitudes obtidos
para os valores observados e simulados relativamente aos principais constituintes
M2 e S2, não é superior a 10 cm; relativamente às fases, as diferenças não
excedem 3.37º (a diferença máxima foi observada na estação IP para o
constituinte M2) o que corresponde aproximadamente a um atraso de 7 minutos
para os constituintes M2 e S2.
6.2.2 Velocidades de corrente de maré
Após o ajuste obtido ao comparar os valores simulados e observados da
elevação da superfície livre, procedeu-se à comparação dos valores simulados e
Constantes M2 S2 N2 K1 MSF Estação
Aplmod (m) 0.84 0.57 0.11 0.05 --
IP
Aplobs (m) 0.81 0.46 0.13 0.03 --
D_apl (m) 0.03 0.10 -0.02 0.02 --
Famo (º) 87.27 116.76 63.06 148.92 --
Faobs (º) 90.64 119.51 66.96 134.81 --
D_fa (º) -3.37 -2.75 -3.90 14.11 --
Aplmod (m) 0.90 0.53 -- 0.05 0.04
PM
Aplobs (m) 0.98 0.49 -- 0.04 0.05
D_apl (m) -0.08 0.04 -- 0.01 -0.01
Famo (º) 123.57 155.11 -- 115.73 280.81
Faobs (º) 126.85 158.42 -- 159.54 281.09
D_fa (º) -3.28 -3.31 -- -43.81 -0.28

75
observados da velocidade de corrente de maré (figura 6.2.2). Este procedimento,
apesar de integrado no processo de calibração, pode ser interpretado como uma
espécie de validação do modelo.
Figura 6.2.2: Comparação das séries temporais das correntes e das componentes da velocidade observadas e simuladas
Desta figuras conclui-se que existe um bom ajuste entre os valores observados e
simulados. O desvio quadrático médio da simulação em relação aos dados
observados das componentes U e V da velocidade nas estações da Ilha dos
Portugueses e do Baixo Ribeiro foram iguais a 7.5 cm/s, 8.3 cm/s, 10.8 cm/s e
10.8 cm/s, respectivamente. O desvio quadrático médio dos valores simulados em
relação aos dados observados da corrente de maré nas estações da IP e BR
foram iguais a 7.9 cm/s e 10.83 cm/s, respectivamente. Efectuou-se ainda a
0 5 10 15 20 25
-60
-50
-40
-30
-20
-10
0
10
20
30
40
50
60
70
80
90
100
i= 231 j=197
velo
cida
de (
cm/s
)
tempo (horas)
componente u do modelo
componente u observada
Baixo ribeiro - 18/4/93
0 5 10 15 20 25
-50
-40
-30
-20
-10
0
10
20
30
40
50
60
70
80
90
100
i= 260 j=182
velo
cida
de (
cm/s
)
tempo (horas)
componente u do modelo
componente u observada
Ilha dos Portugueses - 18/4/93
0 5 10 15 20 25
-80
-60
-40
-20
0
20
40
60
80
100
i=260 j=182
velo
cida
de (
cm/s
)
tempo (horas)
componente v do modelo
componente v observada
Ilha dos Portugueses - 18/4/93
0 5 10 15 20 25
-80
-60
-40
-20
0
20
40
60
80
100
i= 231 j= 197
velo
cida
de (
cm/s
)
tempo (horas)
componente v do modelo
componente v observada
Baixo Ribeiro - 18/4/93
0 5 10 15 20 25
0
10
20
30
40
50
60
70
80
90
100
110
120
i=231 j=197
Inte
nsi
da
de
da
co
rre
nte
(cm
/s)
tempo (horas)
correntes do modelo
correntes observadas
Baixo Ribeiro - 18/4/93
0 5 10 15 20 25
0
10
20
30
40
50
60
70
80
90
100
110
120
i=260 j=182
Inte
nsid
ade
da c
orre
nte
(cm
/s)
tempo (horas)
correntes do modelo
correntes observadas
Ilha dos Portugueses 18/4/93

76
análise harmónica para as correntes de maré nas estações de BR e IP, tanto dos
dados observados como dos obtidos nas simulações (análise harmónica dos
valores observados e calculados). Os valores calculados e observados, bem
como as suas diferenças para os cinco constituintes mais significativos, nas
estações de calibração são apresentados na tabela 6.4, onde:
Emamod e Emaobs, Ememod e Emeobs representam valores simulados e
observados dos eixos maiores e dos eixos menores, respectivamente; faobs e
famod, representam os valores da fase observada e simulada; Dfa, DEma, DEme, Dinc
representam as diferenças das fases, diferenças das amplitudes dos eixos
maiores, diferenças das amplitudes dos eixos menores e diferenças da inclinação
dos valores simulados e observados, respectivamente.
A diferença mais significativa entre os valores observados e simulados na
estação BR (9.69 cm/s), corresponde à diferença entre os eixos maiores relativa
ao constituinte S2. Porém, excluindo este valor, para os principais constituintes M2
e S2 as diferenças obtidas foram sempre inferiores a 3 cm/s, tanto para o eixo
maior como para o eixo menor, enquanto que os desvios das fases não foram
superiores a 3.72º, correspondente aproximadamente a um atraso de 8 minutos
para o constituinte M2 ou 7 minutos para o constituinte S2.
Uma comparação qualitativa entre os resultados da análise harmónica da
corrente efectuada às séries temporais simuladas e observadas foi também
realizada pela representação das elipses de maré, traçadas através dos
respectivos parâmetros da elipse. As figuras 6.3a e 6.3b, mostram que os
resultados destas comparações não apresentam discrepâncias qualitativas.
Tabela 6.4: Eixos maiores e menores das elipses de maré, fases e inclinações, bem como suas diferenças obtidas por análise harmónica das séries temporais observadas e simuladas da corrente de maré
Constantes M2 S2 N2 K1 MSF Estação
Emamod (cm/s) 56.88 38.98 7.03 1.56 2.11
Emaobs (cm/s) 57.30 29.29 10.32 2.45 4.19
Ememod (cm/s) 2.41 1.55 0.34 0.05 -0.02
Emeobs (cm/s) 1.00 0.26 0.35 -0.16 0.34
DEma (cm/s) -0.42 9.69 -3.29 -0.89 2.08

77
Dos resultados apresentados anteriormente, apesar das diferenças referidas
para o constituinte S2, verifica-se que o modelo reproduz com precisão a evolução
temporal e espacial da elevação da superfície livre induzida pela maré, assim
como das correntes de maré. Assim, conclui-se que a calibração foi efectuada

78
com sucesso e que o modelo reproduz com precisão a propagação da onda de
maré na Baía de Maputo.
Figuras 6.3a: Elipses de corrente de maré relativas aos dados observados e calculados pelo modelo. Correspondem aos constituintes da maré M2 e S2: Baixo Ribeiro
Figuras 6.3b: Elipses de corrente de maré relativas aos dados observados e calculados pelo modelo. Correspondem aos constituintes da maré M2 e S2: Ilha dos Portugueses
CAPÍTULO VII – HIDRODINÂMICA DA BAÍA DE MAPUTO
7.1 Introdução
A circulação na Baía de Maputo caracteriza-se principalmente por ser forçada
pela maré astronómica.
A informação que se tem em relação ao comportamento da maré na Baía de
Maputo é referente a apenas duas estações (a estação do Porto de Maputo e do
-60 -40 -20 0 20 40 60 -60
-40
-20
0
20
40
60 M2
local: I P mare observada: ------ mare calculada: ____
-60 -40 -20 0 20 40 60 -60
-40
-20
0
20
40
60 S2
local: I P mare observada: --- mare calculada: ___
-60 -50 -40 -30 -20 -10 0 10 20 30 40 50 60 -60 -50 -40 -30 -20 -10
0 10 20 30 40 50 60 M2
local: B R maré observada: ---- maré calculada:____
-60 -50 -40 -30 -20 -10 0 10 20 30 40 50 60 -60 -50 -40 -30 -20 -10
0 10 20 30 40 50 60
S2
local: B R maré observada: ------
maré calculada: ____

79
Baixo Ribeiro). Nenhum registo de período longo (com excepção ao do Porto de
Maputo) foi feito na Baía.
Uma vez calibrado o modelo, neste trabalho fez-se um estudo pormenorizado
do comportamento da maré na Baía determinando-se (para cada célula da malha
do domínio computacional), as amplitudes e fases das alturas da maré, os eixos
maiores e menores das elipses de maré, bem como as fases correspondentes às
correntes.
Fez-se seguidamente a simulação da evolução hidrodinâmica da Baía em
situações de máxima amplitude na maré viva e mínima amplitude na maré morta,
permitindo uma análise das situações extremas que eventualmente possam
ocorrer na Baía.
7.2 Resultados e análise dos resultados
7.2.1 Amplitudes, fases e elipses de maré
Os resultados da análise harmónica das séries temporais simuladas da
elevação da superfície livre durante a calibração (secção 6.2), mostraram que a
amplitude do constituinte K1 representa aproximadamente 5% da amplitude do
maior constituinte M2; a contribuição conjunta da amplitude dos constituintes M2 e
S2 em relação à maré astronómica total, foi de aproximadamente 90%.
Relativamente às séries temporais observadas da elevação da superfície livre nas
estações PM e BR, a amplitude do constituinte K1 representa aproximadamente
3% da amplitude do constituinte M2 e a soma das amplitudes dos constituintes M2
e S2 representa aproximadamente 90% da maré astronómica total. Assim, os
constituintes com amplitudes inferiores às da amplitude do constituinte K1 não
foram considerados nesta secção, pois pela sua reduzida contribuição podem ser
desprezados.
Recorrendo ao modelo, fez-se uma simulação correspondente a um período de
dois meses começando no dia 29 de Dezembro de 2002 à 1 hora. O intervalo das
saídas do modelo foi de 1 hora, obtendo-se assim séries temporais das
componentes da velocidade e das alturas da maré, para cada célula do domínio
num período de dois meses.

80
Posteriormente, efectuou-se a análise harmónica das séries obtidas através da
simulação, utilizando a função T_TIDE (secção 2.6.1), obtendo-se assim para os
constituintes principais a distribuição de fases e amplitudes na Baía.
A maré astronómica é reconhecida como um dos principais mecanismos
forçadores da hidrodinâmica da Baía de Maputo; por isso, para todo o domínio
computacional, determinaram-se os valores das amplitudes e fases dos principais
constituintes diurnos e semi-diurnos, (M2, S2, N2 e K1) que são representados nas
figuras 7.1 e 7.2.
A análise da Figura 7.1 revela que a amplitude do constituinte M2 é
aproximadamente o dobro da amplitude do constituinte S2, indicando a
importância deste constituinte na dinâmica da Baía. Verifica-se também que as
amplitudes dos constituintes M2, S2, N2 e K1 aumentam conforme a onda de maré
se propaga para o interior da Baía, diminuindo de amplitude ao longo dos canais.
Estes resultados podem ser interpretados como uma consequência da interacção
da onda da maré com o fundo da Baía e da lei da conservação de energia. De
facto, em águas pouco profundas a onda da maré propaga-se com uma
velocidade dada pela seguinte equação:
ghv (7.1)
Onde:
v - velocidade de propagação da onda em aguas pouco profundas (m/s);
g - aceleração de gravidade (m/s2);
h - profundidade (m).

81
Figura 7.1 Amplitude dos constituintes M2,S2,N2,K1

82
Figura 7.2: Fase dos constituintes M2, S2, N2 e K1
A equação (7.2) revela que a onda da maré ao propagar-se em direcção à
costa diminui a sua velocidade em consequência da diminuição da profundidade;
porém, a energia cinética da onda (que provém do seu movimento) pode ser

83
transformada em energia potencial relacionada com a amplitude da onda
(amplitude do constituinte) ou dissipada devido ao atrito com o fundo.
A figura 7.1 mostra que os efeitos do atrito no centro da Baía (zonas mais
profundas) são menores relativamente aos mesmos efeitos nos canais (zonas
menos profundas), o que se reflecte na transformação da energia cinética
(diminuição da velocidade de propagação da onda) em energia potencial
(traduzida pelo aumento da amplitude dos constituintes) no centro da Baía. Nas
áreas dos canais, correspondentes a zonas em que os efeitos do atrito são
relativamente maiores, a onda dissipa a sua energia potencial (anteriormente
adquirida através da transformação da energia cinética em potencial) sob a forma
de atrito, o que implica uma diminuição da amplitude da onda de maré.
Relativamente às fases dos principais constituintes diurnos e semi-diurnos, os
resultados obtidos (figura 7.2), revelam que há um aumento da fase (atraso na
propagação da onda de maré) em direcção à costa; os atrasos da onda da maré
intensificam-se quando a maré se propaga ao longo dos canais devido ao efeito
significativo do atrito no fundo. O atraso determinado na propagação dos
constituintes semi-diurnos desde a fronteira com o oceano até à extremidade mais
distante dos canais é da ordem dos 90, correspondente a aproximadamente 3
horas.
A determinação da natureza da maré (figura 7.3) para toda a Baía foi
Figura 7.3: Distribuição do factor de Forma na Baía de Maputo

84
M2
obtida pelo cálculo da razão (factor de Forma), entre as amplitudes dos
constituintes diurnos e semi-diurnos ( 1122 ,,, OKSM ), ou seja:
22
11
SM
OKF
(7.2)
Da figura 7.3 verifica-se que para todo o domínio a maré é essencialmente
semi-diurna (factor de forma entre 0 e 0.25), (Pugh, 1987). A análise desta figura
revela ainda que a influência dos constituintes M2 e S2 aumenta relativamente à
influência dos constituintes diurnos K1 e O1 conforme a onda de maré se propaga
na Baía, voltando a ser menor nas extremidades dos principais canais
A determinação, por análise harmónica, das elipses de maré para os
constituintes M2 e S2, em todo o domínio computacional, permite a observação e
análise da distribuição das correntes de maré (figuras 7.4.1 e 7.4.2).
Figuras 7.4.1: Elipses de maré do constituinte M2

85
Figuras 7.4.2: Elipses de maré do constituinte S2
Na Baía, a corrente de maré atinge valores máximos (na ordem de 1m/s e de
0.5 m/s para os constituintes M2 e S2, respectivamente), no centro e nos canais;
valores menores da corrente foram encontrados próximo da fronteira com o
oceano e próximo da costa. A orientação e rotação das elipses revela a
importância da batimetria no estabelecimento dos fluxos de maré na Baía de
Maputo, com o escoamento principal a orientar-se de acordo com as zonas de
maior profundidade.
7.2.2. Evolução da maré em situações extremas
Utilizando a função T_TIDE, foi possível “reconstruir” as séries temporais
correspondentes a situações de amplitudes extremas (amplitude máxima na maré
viva e amplitude mínima na maré morta) da elevação da onda da maré no Porto
de Maputo (e consequentemente na fronteira aberta), entre os períodos de 1990 e
2000 (secção 2.6.2 - figura 2.7).

86
Nesta secção apresenta-se a caracterização hidrodinâmica da Baía de Maputo
nas duas situações de amplitudes extremas, através das simulações realizadas
forçando o modelo com as séries referidas. A evolução das correntes de maré e
da elevação da superfície livre 1 hora, 3, 7, 10 e 12 horas lunares após o inicio da
baixa-mar na fronteira aberta com o oceano, são ilustradas nas figuras 7.5 e 7.6
nas situações de máxima amplitude na maré viva e mínima amplitude na maré
morta, respectivamente. As séries temporais (gráfico do canto superior esquerdo
das figuras) representam a elevação da superfície livre imposta na fronteira
aberta, e o último sinal “” corresponde ao instante em que é representado o
campo horizontal.
Em todos os instantes da evolução da maré foi possível notar que a corrente de
maré é mais intensa tanto na vazante como na enchente no centro da Baia
(figuras 7.5.1 a 7.5.5) comparativamente às outras áreas.
Figura 7.5.1: Padrão de corrente de maré 1 hora após a baixa-mar (maré viva)

87
Figura 7.5.2: Padrão de corrente de maré 3 horas após a baixa-mar (maré viva)
Figura 7.5.3: Padrão de corrente de maré 7 horas após a baixa-mar (maré viva)

88
Figura 7.5.4: Padrão de corrente de maré 10 horas após a baixa-mar (maré viva)
Figura 7.5.5: Padrão de corrente de maré 12 horas após a baixa-mar (maré viva)

89
Figura 7.6:1 Padrão de corrente de maré 1 hora após a baixa-mar (maré morta)
Figura 7.6.2: Padrão de corrente de maré 3 horas após a baixa-mar (maré morta)

90
Ele
vação (
m)
Figura 7.6.3: Padrão de corrente de maré 7 horas após a baixa-mar (maré morta)
Figura 7.6.4: Padrão de corrente de maré 10 horas após a baixa-mar (maré morta)

91
Figura 7.6.5: Padrão de corrente de maré 12 horas após a baixa-mar (maré morta)
Na maré viva, em toda a Baía as intensidades da corrente máxima foram
observadas 3 horas e aproximadamente 9 horas (a figura não é apresentada
neste trabalho) após o início da enchente na fronteira aberta. Nestes instantes os
valores das intensidades variam entre 0.0 m/s e 0.64 m/s e 0.0 m/s e 0.70 m/s,
respectivamente. Os valores da elevação da superfície livre atingiram o máximo,
correspondente a 4.5 m, 7 horas após o início da enchente na fronteira aberta.
Relativamente aos ciclos da maré morta, a corrente atinge valores máximos em
toda a Baía 3 horas e 7 horas após o início da enchente na fronteira aberta. Os
valores oscilam entre 0.0 m/s e 0.34 m/s e 0.0 m/s e 0.24 m/s, respectivamente.
Os valores das elevações da superfície livre atingiram o valor máximo de 2.60 m,
7 horas após o início da enchente na fronteira aberta.
Os resultados do ciclo correspondente ao período da maré morta mostram que
há uma redução em toda a Baía de aproximadamente 50% (de 5 metros a 2.24
metros) da amplitude da onda de maré comparativamente ao ciclo da maré viva.

92
No ciclo de maré viva, é evidente uma diferença de amplitude de
aproximadamente um metro entre a onda de maré na fronteira aberta e na
entrada do estuário do Espírito Santo; ao passo que para o mesmo espaço é
pouco evidente esta variabilidade no ciclo de maré morta. O facto de a
variabilidade espacial no ciclo de maré viva ser maior relativamente à do ciclo de
maré morta, poderá estar relacionada com as diferenças das correntes de maré
nos dois ciclos. Durante a maré morta, em toda a Baía os valores das
intensidades da corrente de maré variaram entre 0.0 m/s e 0.30 m/s
aproximadamente; ao passo que no ciclo da maré viva as intensidades da
corrente variaram entre 0.0 m/s a 1.15 m/s aproximadamente.
A análise das séries temporais das alturas da maré na fronteira aberta mostra
que 12 horas após o início da enchente, no ciclo da maré viva (figura 7.5.5), inicia-
se a nova enchente na fronteira aberta. Pela análise da série temporal na maré
morta (figura 7.6.5), verifica-se que no mesmo instante ainda permanecem
correntes de vazante. Uma vez que nos dois ciclos (maré viva e maré morta) o
período da enchente foi de aproximadamente 6 horas (figuras 7.5.1, 7.5.3 e
figuras 7.6.1 e 7.6.3) conclui-se que durante a maré morta a onda de maré se
propaga mais lentamente na vazante do que durante a enchente.
7.2.3 Diferença de fase entre a onda de maré e as correntes de maré
A equação (7.2) pressupõe que a distorção da onda da maré é muito pequena,
o que implica que a diferença de fase entre a elevação da superfície livre e a
intensidade da corrente é de 90º. Consequentemente, não existem fluxos quando
a elevação da superfície livre atinge valores extremos (máximos e mínimos), bem
como o fluxo médio num ciclo completo da maré seria igual a zero (Lewis, 1997).
Em águas pouco profundas, quando devido ao atrito com o fundo a onda é
distorcida, a velocidade de propagação da onda toma a forma (Lewis, 1997):
)3( hgv (7.3)
onde é a elevação da superfície livre.

93
Neste caso, a elevação da superfície livre, e a corrente de maré, podem perder
a sua forma simétrica, resultando na alteração dos instantes de ocorrência das
amplitudes máximas da corrente e da elevação da superfície livre. Esta mudança
de fase de ocorrências de máximos, indica que a distorção da forma da onda das
elevações de superfície livre e da corrente tem como consequência um aumento
ou diminuição (relativamente ao caso de uma onda estacionária) da diferença de
fase entre estas duas ondas. Assim, durante o ciclo de maré, uma mudança de
fase entre as ondas de maré e da corrente de maré pode ocorrer de tal modo que
a corrente máxima de enchente ocorre quando a elevação da superfície livre é
maior que o nível médio da maré e o máximo da corrente de vazante ocorre
quando a elevação da superfície livre é menor do que o nível médio.
Consequentemente, a corrente em média seria fraca na enchente e forte na
vazante (Lewis, 1997). Deste modo, pela distorção da onda de maré, uma
mudança de fase induziria um fluxo médio na direcção do fluxo da vazante (ou em
direcção ao fluxo de enchente nos casos em que o máximo da enchente ocorre a
um nível inferior ao nível médio da maré e o máximo da vazante ocorre a um nível
superior ao nível médio da maré). Em casos mais complicados de uma onda
progressiva, o fluxo médio das correntes de maré depende da relação entre a fase
da corrente de maré e da onda da maré (Pugh, 1987). Estas correntes (correntes
residuais) que surgem devido às variações das diferenças de fase têm sido
comuns em zonas costeiras e têm sido assunto de análises detalhadas (Longuet-
Higgins, 1969).
Outro aspecto importante da análise das diferenças de fase entre a onda de
maré e da corrente de maré está no facto de o fluxo médio de energia (fluxo numa
secção transversal), da onda de maré ser proporcional ao co-seno da diferença de
fase entre a onda de maré e da corrente da maré. Assim, o fluxo médio de energia
é máximo quando a onda for progressiva (diferença entre as fases é nula), e
torna-se mínimo quando a onda for estacionária (diferença entre as fases é de
90º). Apesar de não ter sido objectivo deste trabalho um estudo pormenorizado
destes conceitos, uma abordagem sucinta mostra as implicações, bem como a
importância, de uma análise das diferenças de fase entre a onda de maré e a
corrente de maré. Assim, com base nos resultados do modelo, foram

94
determinadas as fases das correntes de maré dos constituintes M2 e S2, assim
como foram determinadas as diferenças de fase entre a onda de maré
(determinadas na secção 2.7.1) e a corrente de maré; estes resultados são
ilustrados nas figuras 7.7a e 7.7b.
Em poucas áreas da Baía a diferença entre as fases foi de aproximadamente
0º, tanto para o constituinte M2 como para o constituinte S2. A diferença de fases
para ambos os constituintes no interior da Baía variou entre -135º e -45º. Foram
também identificadas diferenças de fase com valores compreendidos entre 45º e
90º à entrada do rio Incomati e em algumas áreas do Estuário do Espirito Santo.
Os valores típicos da diferença de fase em toda a Baía para os constituintes M2 e
S2 corresponderam a 117º e 120º, respectivamente. O que demonstra que para os
dois constituintes as correntes atingem valores máximos aproximadamente quatro
horas após a ocorrências dos valores máximos da altura da maré.
Os resultados indicam também que em quase toda a Baía o fluxo de energia
não atinge o valor máximo para ambos os constituintes. Pois, mostram diferenças
entre as fases que indicam a quase inexistência de coincidências entre os
instantes de ocorrência de valores máximos da corrente de maré e os valores
nulos das elevações da superfície livre da maré. De facto as diferenças de fase
são maiores que 90º na maior parte da Baía para os dois constituintes da maré.
Figuras 7.7a: Fase da corrente da maré do constituinte M2 (a); diferença de fase do constituinte M2 (b)
b
a

95
Figuras 7.7b: Fase da corrente da maré do constituinte S2 (c) e diferença de fases do constituinte S2 (d)
Assim na maior parte do domínio, a onda de maré apresenta características
entre uma onda estacionária e uma onda progressiva, podendo ser classificada
como uma onda mista. No que concerne à corrente média, estes resultados
poderão revelar ocorrência de correntes mais fracas na vazante relativamente às
correntes de enchente ou vice-versa, isto é, ocorrência de correntes residuais ao
longo dos ciclos de maré.
c
d

96
CAPÍTULO VIII – CIRCULAÇÃO RESIDUAL EULERIANA
8.1 Introdução
A análise das correntes de maré na Baía de Maputo revelou que no centro da
Baía a corrente alcança velocidades máximas próximas de 70 cm/s
(aproximadamente na ordem de 1m/s). Intensidades da corrente menores foram
observadas junto à entrada da Baía e próximo das fronteiras fechadas.
A diferença de fase determinada na secção 7.2.3 mostrou a possível existência
de um fluxo médio diferente de zero ao longo do ciclo de maré em muitas partes
da Baía; ou seja, que correntes resultantes do forçamento do modelo com a maré
podem não ser periódicas durante o ciclo de maré.
Evidentemente, a característica fundamental do movimento do fluido em Baías
é o fluxo oscilatório, forçado pelas marés das bacias oceânicas adjacentes. Um
estudo prévio deste fluxo oscilatório foi efectuado no capítulo anterior. Contudo, a
circulação da maré em baías é definida pelas correntes devido à acção da “maré
oscilatória” (maré astronómica), dos ventos, dos rios, bem como pela corrente
produzida devido à interacção entre estes forçamentos. Por isso, embora o
conhecimento e a compreensão da dinâmica das marés seja importante, não é
ainda suficiente para determinar as propriedades do transporte associado ao
fluido (tais como o transporte da matéria suspensa, de poluentes, etc.), (Robinson,
1983). Mesmo que a distribuição média destas propriedades ao longo do ciclo de
maré seja fortemente influenciada pelo fluxo oscilatório que actua para dispersar
as suas concentrações (pelo processo da difusão de maré), o transporte médio
em cada ciclo de maré é controlado pelo fluxo residual. O conceito de fluxo
residual, é então associado à parte não oscilatória do fluxo total da água em cada
ciclo da maré.
De uma maneira geral, a ordem de grandeza das velocidades relacionadas
com o fluxo residual ou com o transporte residual, pode ter valores
correspondentes a uma ou mesmo duas ordens de grandeza inferiores aos
valores típicos da corrente de maré. Uma consequência evidente desta
discrepância de ordens de grandezas, é a dificuldade existente na determinação
experimental das correntes residuais. Por exemplo, o sinal da corrente residual
obtido com o auxilio de um correntómetro (atendendo à sua ordem de grandeza),

97
por vezes é inferior ao sinal do ruído associado à medição da corrente de maré, o
que gera um falso registo de correntes residuais, como os já abordados por Gould
(1973) e Booth et al (1978). Assim, mesmo os mais detalhados registos de
circulação residual baseada em técnicas de medição por instrumentos
oceanográficos são questionáveis do ponto de vista da sua precisão. O uso dos
modelos numéricos tem sido, consequentemente, frequente na compreensão da
dinâmica das correntes residuais.
A compreensão do conceito de circulação residual, como um mecanismo de
verificação da razoabilidade da interpretação dada à observação das correntes é
de importância relevante. Contudo, é necessário ter-se alguma cautela na
interpretação dos campos residuais obtidos pelo uso dos modelos numéricos, pois
os erros associados ao esquema das diferenças finitas podem estar “mascarados”
nos campos residuais.
Na descrição do movimento residual do fluido, podem ser considerados dois
tipos de abordagens: a abordagem Euleriana, em que se descreve o movimento
do fluido num referencial fixo e a abordagem Lagrangeana, em que a descrição é
feita de modo que o referencial corresponde ao centro de massa da partícula do
fluido. De acordo com a abordagem Euleriana (a considerada neste capítulo),
considera-se a velocidade e outras propriedades da partícula do fluido, como
sendo funções do tempo e das coordenadas espaciais referenciadas em relação a
um ponto fixo. Esta abordagem é mais adequada em estudos de processos com
escalas temporais superiores às escalas das excursões de maré, que são
fundamentais em sistemas costeiros, uma vez que o transporte de substâncias
com taxas lentas de decaimento ou com reprodução lenta são processos de longo
termo (Dias, 2001). A compreensão da distribuição e movimento destas
substâncias em sistemas costeiros (depende também da correcta descrição da
hidrodinâmica do sistema), é de importância relevante em outros estudos, tais
como na compreensão das implicações de operações de dragagem, na
identificação de zonas com extinção da luz e seus efeitos na produtividade
primária (quando a partícula é suspensa e não biodegradável), na determinação
dos depósitos dos contaminantes, etc.

98
8.2 Formulação da teoria da circulação residual euleriana
Recordando a assunção feita relativamente à homogeneidade vertical da Baía
de Maputo, a velocidade média Euleriana 5 é definida como:
),(
),(
),,(1
),,(,),,(),,(
yx
yxh
ee dztyxuh
tyxVtyxUtyxU
(8.1)
Onde U e V são as componentes verticalmente integradas da velocidade nas
direcções dos eixos xx e yy , respectivamente, ),( yxh é a profundidade em
relação ao nível de referência (zero hidrográfico) e ),,( tyx é a elevação da
superfície livre relativamente ao nível de referência (nível médio).
Separando a parte periódica correspondente às velocidades devido à maré
(índice m), a componente residual (índice r) é formalmente expressa por:
mmrr VUVUVU , , , (8.2)
Definindo o operador média do ciclo da maré por:
dtT
T
0
1 (8.3)
Onde T é o período de cada constituinte utilizado para forçar o modelo (por
exemplo para M2, T=12h 25 min.
A velocidade residual é definida como se segue:
dtdztyxuhT
tyxVtyxU
T yx
yxh
err
0
),(
),(
),,(11
),,(,),,(
(8.4)
Onde eu é a velocidade Euleriana que é determinada pelo modelo
bidimensional previamente calibrado.
5 Definem-se grandezas Eulerianas as grandezas com propriedades de um ponto fixo no espaço.

99
Para determinar a velocidade residual euleriana para todas as células do
domínio computacional, são efectuadas simulações numéricas em que se
determinam os campos da velocidade euleriana em todos os instantes que
correspondem a múltiplos do passo temporal do modelo. O período da simulação
corresponde ao período do constituinte da maré utilizado como forçamento do
modelo. O número dos campos da velocidade euleriana determinados nesta
simulação, corresponde ao produto do período do constituinte da maré pelo passo
temporal de integração do modelo numérico. A velocidade residual euleriana (em
cada ponto do domínio) é determinada somando as velocidades (neste ponto)
obtidas em todos os campos e dividindo pelo período do constituinte da maré.
Este procedimento permite a eliminação da componente periódica da maré, e
consequentemente a determinação da parte não periódica da maré (componente
residual da maré).
8.3 Resultados e análise dos resultados
8.3.1 Correntes residuais induzidas pela interacção não linear da maré com a topografia.
A maré na Baía de Maputo, é principalmente caracterizada pelos constituintes
M2 e S2 da maré. O constituinte S2 representa quase 50% da maré gerada pelo
constituinte M2. Esta relação percentual entre os principais constituintes, indica a
importância da inclusão da constituinte S2 nos cálculos da corrente residual. Neste
caso, o período T , foi definido como:
22
111
MS TTT (8.5)
Para forçamentos do modelo com os constituintes M2 e S2 em simultâneo, o
período T foi igual a: T min 22 h 354 (ou seja aproximadamente 14.77 dias).
Três casos foram estudados; no primeiro efectuou-se a simulação forçando o
modelo com a maré correspondente aos dois principais constituintes (M2+S2);
seguidamente fizeram-se duas simulações, onde para cada uma forçou-se o
modelo com a maré correspondente a apenas um dos principais constituintes.

100
1.4 cm/s
Pro
fundid
ade (
m)
As figuras 8.1, 8.2a e 8.2b mostram os resultados da distribuição da corrente
residual, nos casos em que o forçamento do modelo foi efectuado com os dois
principais constituintes em simultâneo, e nos casos em que o forçamento do
modelo foi efectuado com cada um dos principais constituintes separadamente.
A partir da análise das figuras 8.1, 8.2a e 8.2b, verifica-se que a corrente
residual é maior no centro da Baía (com ordem de grandeza de 1 cm/s), e
relativamente menor próximo da fronteira aberta e no interior da Baía próximo da
fronteira fechada (na parte Sul da Baía).
As correntes residuais produzidas pelos constituintes M2+S2, M2 e S2 (figuras
8.1, 8.2a e 8.2b), são de igual ordem de grandeza. Os resultados das figuras 8.2a
e 8.2b mostram que comparativamente ao constituinte S2, o constituinte M2 é o
que produz a maior corrente residual e um padrão de distribuição espacial
semelhante ao produzido pela acção simultânea dos constituintes M2+S2 (figura
8.1).
Figura 8.1: Correntes residuais, obtidas forçando o modelo com os constituintes M2 e S2 da maré

101
Figura 8.2.a: Correntes residuais, obtidas forçando o modelo com o constituinte M2 da maré
Norte
Figura 8.2b: Correntes residuais obtidas forçando o modelo com o constituinte S2 da maré
Pro
fundid
ade (
m)

102
Estes resultados mostram ser suficiente o forçamento do modelo somente com
o constituinte M2 no estudo das distribuições do padrão e da intensidade típica da
corrente residual. Um estudo similar efectuado no Golfo da Califórnia (Marinone,
1997), mostrou que embora as correntes residuais produzidas pela acção do
constituinte M2 tivessem intensidades relativamente inferiores às correntes
residuais produzidas pela acção simultânea dos constituintes M2 e S2 ou pela
acção simultânea de todos os constituintes, o forçamento do modelo com este
constituinte (M2), seria suficiente para descrever os padrões da circulação residual
influenciada pela maré.
Os fluxos residuais representados nas figuras 8.1, 8.2a e 8.2b, podem ser
gerados pela interacção não linear da maré com o fundo, pois com o mesmo
coeficiente de atrito do fundo teremos maiores efeitos dissipativos em locais
pouco profundos relativamente aos locais mais profundos. A característica mais
importante e talvez a mais significativa dos fluxos nas figuras 8.2a e 8.2b, é o
conjunto de vórtices que se formam no centro da Baía.
A distribuição da vorticidade devido à interacção da maré com o fundo é
avaliada teoricamente. Por analogia com a equação do movimento verticalmente
integrada, num sistema de referência rotacional, em fluidos com densidade
constante, a equação da vorticidade verticalmente integrada é obtida, pela
seguinte expressão, (Zimmerman, 1978):
VH
HvtH
fV
t D
b
D
D
2
)()(.).(
(8.6)
Onde:
é a vorticidade relativa
é a densidade do fluido
t é o incremento temporal
f é o parâmetro de Coriolis
),,( tyx é a elevação da superfície livre da água
é o coeficiente de viscosidade
),,( tyxV é a velocidade média horizontal verticalmente integrada

103
),( yxH D é a profundidade
b é tensão de atrito no fundo
Neste modelo a tensão do fundo é expressa pela equação (3.29).
Admitindo que a profundidade ),( yxH D pode ser expressa como a soma de
uma profundidade característica (constante) e uma flutuação da profundidade, ou
seja, por:
),(),( yxhHyxH D (8.7)
sendo ainda
),( yxH D , Hh e ),( yxh (8.7a)
Recordando que o rotacional de um campo escalar é sempre nulo e na base
das assunções já feitas ((8.7) e (8.7a)), a equação da vorticidade devido à
interacção com o fundo pode ser reescrita da seguinte maneira:
VHC
Vgv
HC
hVghV
tH
fV
t
2
222
..).(
(8.8)
Os termos que contém a irregularidade do fundo ( h ) no lado direito da
equação (8.8) são os termos responsáveis pela produção da vorticidade devido às
interacções não lineares com o fundo. Estes termos também podem ser
designados por termos da perturbação do campo da vorticidade e são nulos
quando h =0; neste caso, a vorticidade será expressa por H
f , que é
equivalente à vorticidade da onda de Kelvin. Ou seja, uma vez que a onda possui
uma vorticidade planetária devida ao seu movimento superficial, a vorticidade
relativa da onda de Kelvin, , é a vorticidade obtida pelo aumento da elevação da
superfície livre (elevação da coluna de água) da onda à medida que ela se vai
propagando.
Assim, qualquer outra vorticidade será consequência do efeito das
irregularidades do fundo. Portanto, define-se a perturbação da vorticidade (ou
vorticidade residual) , por , que por sua vez se relaciona com a

104
perturbação da velocidade pela expressão KUVu ; onde KU é a velocidade da
onda de Kelvin e é dada por c
gU K
, sendo ainda válida a aproximação
KUu .
Neste caso, a equação da perturbação da vorticidade (vorticidade residual), em
primeira aproximação é dada por:
2
222
).(
HC
UgU
HC
hUg
H
hfUhU
tHuU
t
K
K
KKK
(8.9)
Os termos do lado direito da equação (8.9) contêm as fontes e a dissipação da
vorticidade; o segundo, o terceiro, e o quarto termos do lado esquerdo da mesma
equação, contêm as interacções da perturbação do campo da vorticidade com a
onda da maré não perturbada.
Para se ter uma ideia da ordem de grandeza dos diferentes termos da última
equação, na tabela 8.1 mostram-se os resultados da análise de escala dos
respectivos termos. Sendo a ordem de grandeza dos principais parâmetros
descritos anteriormente a seguinte: no domínio deste trabalho as dimensões
horizontais variaram entre 104 m e 105 m, correspondendo à escala horizontal
típica da Baía; as velocidades horizontais apresentaram um intervalo de variação
desde 10-1 m/s a 1m/s; as profundidades típicas no domínio foram da ordem de
grandeza de 10 m no interior e no centro da Baía, e 100 m mais para o lado Este
da Baía (no exterior da Baía); a perturbação da profundidade ),( yxh variou entre
as ordens de grandezas de 10-1 m a 101 m; sendo ainda, a frequência do
constituinte M2, que tem a ordem de grandeza de 105s e o parâmetro de Coriolis
da ordem de grandeza de 10-4 1/s; o coeficiente 2C
g variou entre 1 e 10-3; o
coeficiente de viscosidade utilizado foi de ordem de grandeza de 102m2/s. Ou
seja:
m/s 10 -
s m m, , s , s 10
m, m, m/s, m,
3
2 1 - 1 - 5 -
2 2 2
2 4
1 2 1 5 4
10 , 10 1
/ 10 1 10
10 10 10 10 1 10 10 10
c C
g
A f
h H U L

105
Tabela 8.1: Termos da equação de vorticidade e as respectivas ordens de grandeza
Após a aplicação do operador média do ciclo de maré aos termos da equação
(8.9) num período correspondente ao ciclo do constituinte M2 da maré, e
desprezando os termos de ordem de grandeza inferior a 10-6 (uma vez que a
análise de escala mostrou que estes termos são menos importantes relativamente
aos restantes), a equação toma a forma:
2
2).(
HC
Ug
tHuU
K
K (8.10)
Onde a barra superior indica a aplicação do operador média aos termos na
equação (8.10).
Desta equação, conclui-se que o balanço da vorticidade residual no interior da
Baía de Maputo depende da advecção da perturbação da vorticidade pela
velocidade não perturbada da maré (1º termo do lado esquerdo), da advecção da
vorticidade não perturbada (vorticidade da onda de Kelvin) pela perturbação da
velocidade (2º termo do lado esquerdo) e da variação da vorticidade de Kelvin
Termos Aproximação Ordem de grandeza
KU 1LU K 10-5
-10-6
u 12 )( HcALf 10-6
-10-10
tH
1HA 10
-6-10
-7
).(1 hUH K 1)( HLhU K 10
-7-10
-9
).(1 hUfH K
fHLhU K
1)( 10
-11-10
-13
KK UhUHCg .)( 122
KK UHLChgU 122 )( 10
-8-10
-10
KUHCg 12 )( 12 )( HCgU K 10
-2-10
-4
2 2L 10-6
-10-8

106
(terceiro termo do lado esquerdo). A vorticidade residual é dissipada tanto pelo
atrito no fundo (1º termo do lado direito) como pela viscosidade devida à
turbulência interna (último termo da última equação). Na zona exterior da Baía, o
termo correspondente à variação da vorticidade de Kelvin (pela sua ordem de
grandeza) pode ser desprezado. Portanto, este balanço depende da advecção da
perturbação da vorticidade pela velocidade não perturbada da maré, da advecção
da vorticidade não perturbada pela perturbação da velocidade (a vorticidade
residual devido às interacções não lineares), e é dissipada pelo atrito no fundo,
bem como pela viscosidade devida à turbulência interna. Esta descrição está de
acordo com os resultados obtidos pelo modelo numérico utilizado neste trabalho,
pois o 1º e o 2º termos do lado esquerdo da última equação relacionam-se
linearmente com a intensidade da corrente de maré (campos das velocidades) e
com as irregularidades do fundo. A sobreposição das correntes residuais à
batimetria numérica efectuada nas figuras 8.1 e 8.2, mostra que a localização dos
vórtices da corrente residual se aproxima, ou por vezes chega mesmo a coincidir,
com os locais da Baía correspondentes à maiores irregularidades do fundo. Na
zona correspondente à entrada do estuário do Espirito do Santo, a ausência de
vorticidade provavelmente deve-se à ausência de irregularidades do fundo, fracas
variações da intensidade da corrente de maré, bem como ao excesso dos
fenómenos de dissipação da vorticidade pelo efeito de atrito que aparenta ser
mais importante nesta área.
De uma maneira geral, embora os resultados indiquem diferentes padrões da
dinâmica dos fluxos residuais no interior e no centro da Baía, os sentidos dos
vectores da corrente residual indicam uma transferência de substâncias do interior
para o exterior da Baía.
8.3.2 Correntes residuais induzidas pelos rios e pelo vento
Seguidamente, impuseram-se simultaneamente ao modelo os forçamentos não
periódicos (caudais médios mensais dos rios e ventos predominantes) e
forçamentos periódicos (maré).
Relativamente às correntes residuais induzidas pelos rios, foram efectuadas
oito simulações, sendo quatro (na época de Verão) durante o mês de Fevereiro,

107
que corresponde ao mês de maior caudal médio mensal, e as restantes (na época
de Inverno) durante o mês de Setembro, que corresponde ao mês de menor
caudal médio mensal, de acordo com a análise efectuada na secção 2.4 do
capítulo II. Para cada uma destas quatro simulações (nas duas épocas do ano), o
modelo foi forçado impondo-se individualmente na fronteira aberta “Rio-Baía”, o
caudal médio dos rios Incomati, Maputo e, dos três rios (Umbeluzi, Matola e
Tembe) que desaguam no estuário do Espirito Santo, e os caudais de todos os
rios em simultâneo, respectivamente. Na fronteira aberta “Oceano – Baía”, foi
imposta a série temporal da maré gerada apenas pelo constituinte M2. O período
de simulação correspondeu ao período de oscilação do constituinte M2.
Efectuou-se posteriormente uma simulação, impondo na fronteira aberta
apenas a série temporal da maré gerada pelo constituinte M2 (forçamento
periódico na fronteira aberta).
A corrente residual induzida pelos rios foi determinada subtraindo os campos
das correntes de maré obtidos nas simulações em que foram impostos
simultaneamente forçamentos periódicos e não periódicos, pelos campos das
correntes de maré obtidos nas simulações em que foram impostos somente os
forçamentos periódicos.
A distribuição destas correntes residuais durante a época de Verão é
apresentada nas figuras 8.3. Os rios Maputo e Incomati (figuras 8.3a e 8.3b),
geram fortes correntes residuais comparativamente aos rios que desaguam no
estuário de Espírito Santo. Com excepção do rio Maputo, as correntes residuais
geradas por cada rio (figuras 8.3a, 8.3b, 8.3c), são apenas significativas junto à
foz dos respectivos rios. A acção simultânea de todos os rios dá origem a
correntes residuais em toda a Baía que se orientam (de acordo com a orientação
dos caudais dos rios), para o exterior da Baía.
Os resultados das simulações em que se impuseram os caudais dos rios
correspondentes à época de Inverno (meses de menor caudal), não foram
apresentados neste trabalho. Estes resultados revelaram padrões de distribuição
da corrente residual semelhante, mas de menor intensidade comparativamente
aos padrões obtidos quando se impôs ao modelo os caudais de Verão.

108
Pro
fundid
ade (
m)
Figura 8.3.a: Correntes residuais induzidas pelo caudal do rio Maputo
Figura 8.3.b: Correntes residuais induzidas pelo caudal do rio Incomati

109
Figura 8.3.c: Correntes residuais induzidas pelo caudal dos três rios (Tembe, Matola e Umbeluzi)
1.2 cm/s

110
Figura 8.3.d: Correntes residuais induzidas simultaneamente pelos caudais dos cinco rios
Relativamente à influência dos ventos na circulação residual, foram realizadas
duas simulações correspondentes a períodos de ventos típicos de Verão (figura
8.4a) e ventos de Inverno (figura 8.4b). O procedimento de determinação da
corrente residual induzida pelo vento, é idêntico ao descrito para o caso de
determinação da corrente residual induzida pelos rios. Ou seja, foram subtraídos
os resultados das simulações obtidas forçando o modelo com a maré gerada pelo
constituinte M2 e o vento (forçamento periódico e não periódico em simultâneo)
pelos resultados obtidos forçando o modelo apenas com a maré gerada pelo
constituinte M2 (apenas forçamento periódico).
Foram impostos ventos com intensidade de 4.4 m/s e direcções de Sudoeste
(Inverno) e Oeste (Verão) de acordo com a tabela 2.3.
Devido à influência do vento há uma transferência de momento do ar para as
águas da Baía, embora de reduzida intensidade, mas significativa relativamente
ao momento inerente às correntes residuais.
Os ventos típicos de Verão (figura 8.4a) induzem a formação de correntes
residuais orientadas para Este nas zonas Sul e Norte da Baía. Durante o Inverno,
com ventos predominantes de sudeste (figura 8.4b), há um transporte de massa
de água para Nordeste.
Relativamente às zonas mais profundas da Baía, os resultados são pouco
conclusivos, pois embora tivesse sido imposto o mesmo valor da intensidade de
vento nas simulações das duas estações, verificou-se maior intensidade da
corrente residual no Inverno (com ventos de Sudoeste) comparativamente à
intensidade determinada durante o Verão. Estes resultados mostram um
relacionamento não linear da influência do vento nas correntes residuais. As
figuras mostram ainda que independentemente da época do ano, há poucas
evidências da alteração da direcção das correntes residuais devido ao fundo, o
que revela a complexidade da determinação da influência dos ventos em zonas
muito profundas. Os efeitos directos da influência da tensão do vento nas massas
de água são mais evidentes em profundidades reduzidas, devido à menor

111
quantidade de massa de água existentes comparativamente a zonas mais
profundas.
Figura 8.4a: Correntes residuais induzidas por ventos de Oeste (Ventos de Verão)

112
Figura 8.4b: Correntes residuais induzidas por ventos de Sudoeste (Ventos de Inverno)
Estes resultados mostram que os modelos bidimensionais respondem
razoavelmente à influência dos ventos nas correntes residuais apenas em águas
pouco profundas; assim, a aplicação de modelos tridimensionais poderia ser
relevante na percepção da influência dos ventos em áreas mais profundas da
Baía.

113
CAPÍTULO IX – TRANSPORTE LAGRANGEANO DE PARTÍCULAS
9.1 Introdução
A abordagem Lagrangeana, ao contrário da abordagem Euleriana, considera a
partícula de fluido e as suas propriedades como função do tempo e da nova
posição da partícula. Analiticamente, os dois sistemas de coordenadas são
capazes de produzir soluções exactas; ou seja, estes sistemas analiticamente
consideram-se equivalentes, exceptuando o facto de na abordagem Lagrangeana
existir a informação da evolução da partícula (Hui, 2002). No capítulo VIII
efectuou-se o estudo da circulação residual utilizando-se a formulação Euleriana.
Este estudo permitiu a determinação da influência dos factores forçadores não
periódicos na hidrodinâmica da Baía de Maputo, numa escala temporal superior à
escala do ciclo da maré.
Neste capítulo faz-se uma descrição sucinta da teoria subjacente ao transporte
residual Lagrangeano. Acoplou-se ao modelo hidrodinâmico anteriormente
descrito três subrotinas relativas ao transporte Lagrangeano, duas das quais
desenvolvidas por Dias et al (2000) e a terceira correspondente a uma ligeira
modificação destas subrotinas. Estes procedimentos permitiram a análise da
advecção de massas de água, representadas como partículas passivas, bem
como o cálculo do tempo de residência destas partículas na Baía, num intervalo
de tempo computacional relativamente inferior ao tempo necessário para resolver
estas questões usando a formulação Euleriana. Estas subrotinas seguem a
trajectória efectuada por partículas passivas, ao contrário do módulo Euleriano,
em que os cálculos da concentração de qualquer propriedade são feitos em todos
os pontos do domínio computacional (Hofmann et al, 1991; Dias, 2001).
Algumas partículas foram emitidas na foz dos principais rios, no Porto de
Maputo e em locais considerados de maior risco de ocorrência de poluição. As
suas trajectórias foram posteriormente estudadas; determinaram-se também as
áreas de maior risco no caso de eventual ocorrência de episódios de poluição,
bem como o tempo de residência das partículas emitidas na zona do estuário do
Espírito Santo.

114
9.2 O módulo Lagrangeano de trajectória das partículas
9.2.1 Equações do módulo do transporte Lagrangeano
Muitas vezes é difícil interpretar os campos de velocidade Euleriana em termos
de processos de transporte inerentemente Lagrangeano. Contudo, é possível
recuperar a informação Lagrangeana, a partir do conhecimento dos campos de
correntes de Euler. O objectivo torna-se então, partindo de campos de velocidade
Euleriana, obtidos de um modelo bidimensional, determinar a trajectória da
partícula Lagrangeana integrando a seguinte equação:
),( tXudt
Xd n
ii
n
i
(9.1)
Onde ),( tXu n
ii
representa o campo de velocidade Euleriana da partícula i; n
iX
representa o vector da trajectória Lagrangeana da partícula i.
Portanto, a trajectória bidimensional da partícula é calculada usando a
aproximação Lagrangeana, resolvendo a seguinte equação para cada incremento
temporal:
dtyxuyxXyxX
tnt
tnt
i
n
i
n
i ),(),(),(
)1(
000000
10
0
(9.2)
),( 00
1 yxX n
é a posição no instante n+1 da partícula libertada no ponto ),( 00 yx
e no instante 0t ( ),( 00
0 yxX
).
As trajectórias calculadas podem ser sensíveis aos detalhes dos algoritmos
usados para a realização da integração; neste trabalho o passo integral é
calculado recorrendo a um esquema de Runge-Kutta de quarta ordem (Dias,
2000):
ttyxXuK n
iii ),,( 001
(9.3a)
tt
tK
yxXuK in
iii
2,
2),( 1
002
(9.3b)

115
tt
tK
yxXuK in
iii
2,
2),( 2
003
(9.3c)
tttKyxXuK iniii ,),( 3004
(9.3d)
6236
),(),( 43210000
1 iiiinn KKKKyxXyxX
(9.4)
Onde ),( 00
1 yxX n
representa a nova localização da partícula, que por
advecção se moveu da sua posição prévia ),( 00 yxX n
com a velocidade
),( iii vuu
num intervalo de tempo t . Os coeficientes de Runge-Kutta são
representados por jiK .
O incremento temporal utilizado na integração da trajectória da partícula foi o
mesmo utilizado na integração do modelo hidrodinâmico, ou seja, 60 segundos.
O módulo acima é estritamente dependente do campo da velocidade simulado
pelo modelo hidrodinâmico. Uma vez que a velocidade euleriana verticalmente
integrada é conhecida, a trajectória residual Lagrangeana pode ser determinada
pela equação (9.4).
Sendo N o numero de integrações feitas, a velocidade média residual
Lagrangeana é definida por:
tN
yxXyxXtyxXu
n
lr
.
),(),()),,(( 00
0
00
1
00
(9.5)
Quando a geometria do fundo é praticamente uniforme de modo a não
influenciar a fase da maré e, consequentemente a trajectória da partícula, ou seja,
quando a escala da evolução da maré é inferior às irregularidades do fundo
(Cheng et al, 1982a), esta velocidade pode ser igual à velocidade residual
Euleriana.
As partículas podem-se mover tanto por difusão, dissolução, deposição, bem
como por outros processos adicionais próprios da dinâmica costeira. A assunção
implícita feita neste estudo é que a distribuição das partículas é imposta por
advecção passiva das partículas dentro do fluxo do campo gerado pelo modelo
bidimensional.

116
Os cálculos do modelo hidrodinâmico são efectuados numa malha discreta ao
longo de um plano horizontal, no entanto, as partículas são livres de se mover
para qualquer ponto do espaço horizontal. Assim, as velocidades determinadas
pelo modelo hidrodinâmico devem ser interpoladas para as posições instantâneas
das partículas, para posterior aplicação nas equações dos coeficientes de Runge-
Kutta e na equação da trajectória da partícula.
A interpolação (figura 9.1), é feita considerando a velocidade da partícula em
cada ponto proporcional à velocidade calculada nas quatro células da malha
computacional mais próximas da localização da partícula. É aplicado um peso que
é inversamente proporcional à distância entre a posição da partícula e os pontos
onde foram determinadas as velocidades (Dias et al, 2000)
Figura 9.1: Interpolação da velocidade para cada posição da partícula: interpolação da componente U (à esquerda) interpolação da componente V (à direita)
Assim:
4
1
4
1
))(
j
ji
j
jiji
ji
P
UP
u (9.6)
4
1
4
1
) )(
j
ji
j
jiji
ji
P
VP
v (9.7)
Sendo ainda:
d 1i
d 2i
d 3i
d 4i
y0
x0
d 1id 2i
d 3i
d 4iy0
x0

117
ji
jid
P1
e 22 )()( jijiji yyxxd (9.8)
Uma vez conhecidas as duas componentes da velocidade no ponto de
localização da partícula, a partícula é advectada no próximo instante pelo método
de Runge-Kutta (equação 9.4)
Assume-se que as partículas que se movem para fora da fronteira aberta nunca
mais voltam, ou seja, perdem a sua identidade. As que atingem a fronteira
fechada são localizadas novamente na sua posição anterior, para garantir a
conservação do número de partículas dentro do domínio computacional.
A precisão deste módulo foi testada efectuando a comparação da trajectória
das partículas advectadas num campo de velocidades com características
similares ao campo de velocidades da Ria de Aveiro, com a solução analítica da
trajectória (Dias et al, 2000). A conclusão neste estudo foi que as duas trajectórias
foram quase coincidentes, demonstrando a boa precisão do módulo Lagrangeano
na advecção das partículas passivas.
9.3 Resultados e análise dos resultados
9.3.1 Padrão da trajectória das partículas
Neste capítulo obtém-se ideias e informações mais completas sobre a
circulação na Baía de Maputo e sobre o transporte de substâncias com baixas
taxas de decaimento. Este estudo foi possível pelo acoplamento do módulo
Lagrangeano ao modelo hidrodinâmico; este módulo tem como principal função a
advecção de partículas passivas. Estudos da importância relativa dos três
principais processos da dispersão (advecção, difusão devida à turbulência e
dispersão devida aos efeitos de arrastamento), revelam que em águas bem
misturadas a advecção é o processo mais importante (Gomes-Gesteira et al,
1999). As partículas (“partículas Lagrangeanas”), são utilizadas neste capítulo
como simples traçadores passivos, ou seja, como se fossem partículas com uma
taxa de decaimento quase nula, de modo que o volume da partícula não
aumentasse ao ponto de serem importantes os efeitos de viscosidade, bem como
o volume não diminuísse ao ponto de serem importantes as interacções com o
meio.

118
Antes de se descrever o padrão da trajectória das partículas emitidas em
células seleccionadas, é importante descrever o padrão geral das trajectórias e
das velocidades residuais Lagrangeanas das partículas emitidas em todas as
células; este estudo permite avaliar o comportamento típico das trajectórias em
toda a Baía. Deste modo, a Baía foi dividida em cinco partes tendo em conta as
possíveis proveniências das partículas. Nas fronteiras abertas, impuseram-se os
caudais dos rios correspondentes ao mês de Fevereiro e séries temporais da
maré. Em cada célula do domínio computacional emitiu-se uma partícula ao início
da vazante na fronteira aberta, e após um período inicial de aquecimento de 3
dias. Através do módulo Lagrangeano, acompanhou-se a evolução da trajectória
das partículas durante um período de aproximadamente três semanas.
Posteriormente, determinaram-se as velocidades residuais Lagrangeanas que são
ilustradas na figura 9.1.
Figura 9.1: Distribuição do campo das intensidades da velocidade residual Lagrangeana
Os valores típicos da velocidade residual Lagrangeana variam entre 0 cm/s a
3.5 cm/s na Baía. Os valores máximos foram obtidos no centro da Baía e na foz
dos rios Maputo e Incomati, ao passo que os valores mínimos correspondem aos
valores na foz dos rios Matola, Umbeluzi e Tembe (os rios que desaguam no
estuário do Espirito Santo) e às restantes zonas no interior da Baía. Os valores
das velocidades residuais foram duas ordens de grandeza inferiores aos valores
da velocidade da onda da maré na Baía de Maputo, indicando a boa

119
representatividade do comportamento dinâmico da Baía de Maputo pelo módulo
Lagrangeano.
A evolução temporal da posição das partículas emitidas na Baía está ilustrada
nas figuras 9.2, onde as figuras 9.2.a, b, c e d, mostram a posição das partículas
3, 6, 9 e 12 horas após o início da vazante na fronteira aberta e as figuras 9.2e e f
referem-se à posição das partículas 18 e 20 dias após o início das simulações.
Após o primeiro ciclo de maré quase todas as partículas ainda continuam dentro
da Baía (figuras 9.2.a,b,c,d), indicando que durante a vazante as partículas são
advectadas para o exterior da Baía com uma velocidade relativamente baixa.
Consequentemente terão um deslocamento menor que o comprimento da Baía,
impossibilitando a advecção da partícula para o exterior da Baía durante a
vazante. Com a nova enchente, a maioria destas partículas é trazida de volta para
a Baía, efectuando-se assim um movimento aproximado de “vai e vem” da
partícula nos ciclos subsequentes de maré. Consequentemente, só muito poucas
partículas saem da Baía no primeiro ciclo da maré. Vinte dias após o inicio das
simulações, os resultados (figuras 9.2.e e 9.2.f), mostram que, com excepção da
zona central da Baía, das zonas próximas à foz dos rios Maputo e Incomati, bem
como no Estuário do Espírito Santo, as partículas ainda permanecem próximo das
zonas onde foram libertadas. Este comportamento mostra que nestas áreas (onde
as partículas permaneceram até ao 20º dia de simulação), existem condições
propícias para a ocorrência de sedimentação; no centro da Baía, na proximidade
da foz dos rios Maputo e Incomati, bem como no estuário do Espírito Santo, os
resultados mostram que provavelmente existem boas condições de erosão e de
renovação das massas de água.
A evolução temporal da posição das partículas mostrou também que com a
evolução da maré, as partículas foram livres de ocupar as “faixas” (figura 9.2.a)
adjacentes das partículas com coloração diferente. Porém, os resultados mostram
uma maior tendência para a ocorrência de mistura entre as partículas
correspondentes a todas as faixas localizadas na zona central da Baía (faixas:
vermelhas, verde, amarela, azul clara, e azul escura), relativamente à mistura
entre as partículas de outras zonas da Baía.

120
Figuras 9.2: Sequência da evolução temporal da posição das partículas libertadas 3 (a), 6 (b) 9 (c)
e 12 (d), horas após o início da vazante na fronteira aberta, e 18 (e) e 20 (f) dias após o inicio das
simulações.
a a
a
b
e
f
c
d

121
Esta característica da evolução temporal do posicionamento das partículas está
de acordo com a descrição do padrão da distribuição dos vórtices da corrente
residual induzida pelos principais constituintes da maré, M2 e S2 (capítulo VIII,
secção 8.3.1). Devido à influência dos vórtices residuais localizados na zona
central da Baía (responsáveis pelo transporte em escalas temporais longas,
relativamente à escala da maré), as partículas emitidas nesta zona da Baía são
sensíveis aos processos de mistura e dispersão, comparativamente às partículas
emitidas em outras zonas da Baía. As partículas emitidas ao Sul da Ilha de
Inhaca, escaparam pelo “canal” localizado ao Sul da Ilha; este resultado revela a
existência de boas condições de renovação da água nesta área.
9.3.2 Trajectória das partículas
Para a determinação da trajectória das partículas foram seleccionadas cinco
áreas correspondentes às áreas de maior risco de ocorrência de poluição. Em
cada área foram emitidas partículas em dois pontos diferentes, permitindo analisar
a dependência da trajectória da partícula com o ponto de emissão.
Na figura 9.3, são ilustradas as trajectórias das partículas libertadas em dez
pontos distintos na Baía de Maputo. O tempo de simulação foi de 20 dias. As
coordenadas dos pontos de emissão estão apresentadas na tabela 9.1. Com
excepção da primeira área (na zona do estuário do Espírito Santo), as partículas
foram separadas por 10 células tanto na direcção xx como na direcção yy do
domínio computacional. O espaçamento da primeira área correspondeu a 24
células na direcção xx e 38 células na direcção yy.
Na zona do Porto de Maputo, dependendo do ponto de emissão, as partículas
seguem trajectórias diferentes: a emitida mesmo no Porto de Maputo (PM -
trajectória de cor violeta na figura 9.3 b), saiu do Estuário do Espírito Santo, ao
passo que a que foi libertada a Sudoeste do Porto de Maputo (SW-PM - trajectória
de cor violeta na figura 9.3 a) durante o período de simulação permaneceu
sempre dentro do Estuário do Espírito Santo.
As partículas emitidas ao Norte da Ilha de Inhaca também tiveram trajectórias
influenciadas pela posição inicial de emissão. Na situação apresentada na figura
9.3.a (área do N-II), a partícula no início deslocou-se para Sudoeste e

122
posteriormente teve um deslocamento para Nordeste, permanecendo durante
todo o período no centro da Baía, enquanto que na mesma área a partícula na
situação 9.3.b (NE-II), teve no início um movimento para Noroeste e
posteriormente seguiu uma trajectória que a conduziu para o exterior da Baía.
Tabela 9.1: Coordenadas dos pontos de emissão das partículas Lagrangeanas; onde PM
representa o ponto de emissão localizado na estação do Porto de Maputo; SW-PM, o ponto de
emissão localizado a Sudoeste do Porto de Maputo; RM, o ponto localizado na foz do rio Maputo;
NE-RM, ponto localizado a Nordeste do rio Maputo; S-II, o ponto localizado a Sul da Ilha de
Inhaca; SE-II, o ponto localizado a Sudeste da Ilha de Inhaca; RI, o ponto localizado na foz do rio
Incomati; NE-RI, o ponto localizado a Nordeste do rio Incomati, NE-II, o ponto localizado a
Nordeste da Ilha de Inhaca e N-II, o ponto localizado ao Norte da Ilha de Inhaca
Y 144 120 76 86 120 130 190 200 180 170
X 143 105 210 220 280 290 210 220 280 270
área PM SW-PM RM NE-RM S-II SE-II RI NE-RI NE-II N-II
Figuras 9.3: Evolução temporal das partículas libertadas em cinco áreas diferentes da Baía; ” *” indica o ponto de emissão; o tempo de simulação corresponde a 20 dias.
Embora com menores diferenças, foram também evidentes as discrepâncias
das trajectórias das partículas libertadas nas zonas a Sudoeste da Ilha de Inhaca
(S-II e SE-II), e na foz do rio Maputo (RM e NE-RM). Na zona do rio Incomati, as
partículas tiveram trajectórias similares nos casos representados nas figuras 9.3a
a
b
123
e 9.3b. Estes resultados mostram a natureza não linear das correntes residuais
Lagrangeanas, como as já descritas por Zimmerman (1986) e por Dias (2001).
9.3.3 Pontos de emissão contínua
Para simular os fenómenos de emissão contínua de poluentes em áreas
localizadas na Baía de Maputo, foram consideradas as áreas de maior risco de
ocorrência de poluição referidas na secção 9.3.2. Nomeadamente, nas zonas
sujeitas a poluição devido a práticas indevidas da actividade turística (a e e), nas
zonas sob influência de agricultura intensiva com recurso a produtos agro-
químicos (b e c), nas proximidades da zona da indústria de fundição de alumínio e
no porto comercial (d). Foram seleccionadas cinco células pertencentes às cinco
áreas já referidas. Em cada uma destas células, emitiram-se partículas em cada
passo temporal. As emissões iniciaram-se ao princípio da vazante na fronteira
aberta e tiveram uma duração de 12 horas. Seguidamente, acompanharam-se
(num período de 20 dias) as trajectórias das partículas emitidas nestes pontos, o
que permitiu a determinação de possíveis áreas contaminadas após as emissões.
Os resultados destas simulações estão ilustrados na figura 9.4.
A área da Baía afectada pelas partículas emitidas depende da localização do
ponto de emissão. Quando as partículas são emitidas ao Norte da Ilha de Inhaca
(a), a área afectada é a maior, o que poderá dever-se ao facto de nesta área as
velocidades residuais Lagrangeanas serem mais intensas relativamente às
restantes áreas da Baía. As partículas emitidas nas zonas próximas da foz dos
rios Maputo e Incomati ((b) e (c), respectivamente), no início deslocam-se para
Nordeste (no interior da Baía); posteriormente espalharam-se dentro da Baía,
uma vez que não existem correntes residuais Lagrangeanas que as deslocassem
para fora. As partículas emitidas na zona do Porto de Maputo (d), tiveram o
mesmo comportamento. As partículas emitidas ao Sul da Ilha de Inhaca atingiram
o exterior da Baía, o que mostra tratar-se da zona com melhores condições de
renovação das águas relativamente aos pontos anteriormente descritos.

124
e
Figuras 9.4: Zonas afectadas (após três semanas de simulação) por emissão continua (durante 12
horas) de partículas em pontos localizados; o sinal “*”, indica a posição do ponto de emissão das
partículas
d
c
a
b

125
Os resultados das emissões dos traçadores nos cinco pontos diferentes,
mostram de modo claro o efeito das correntes residuais. No caso da água contida
na zona central da Baía, o elevado espalhamento das partículas indica uma
dispersão rápida, o que demonstra tratar-se de numa zona sujeita a elevados
riscos em eventuais episódios de poluição. A maior parte das partículas emitidas
ao Sul da Ilha de Inhaca foi expelida para o exterior da Baía, revelando para esta
área a importância do canal localizado ao Sul da Ilha de Inhaca nos mecanismo
de renovação de água nesta região da Baía. Os resultados mostraram também
que em todos os casos os episódios locais de poluição não afectam somente as
áreas de emissão das partículas.
9.3.4 Tempo de residência
Entende-se por tempo de residência, o tempo necessário para que se possa
substituir a água doce existente numa secção do estuário ou Baía a uma taxa
igual à descarga dos rios (Dyer, 1997).
Os resultados da secção 9.3.1 indicam que, com excepção de algumas zonas
do Estuário do Espirito Santo, até ao vigésimo dia um elevado número de
partículas ainda permanece próximo dos locais em que foram emitidas. Assim,
estabeleceu-se a coordenada numérica com o índice 190 na direcção xx como a
fronteira do Estuário do Espirito Santo para a determinação do tempo de
residência. Emitiram-se partículas (em todas as células do Estuário do Espirito
Santo), em 12 fases diferentes do ciclo de maré. Os intervalos de emissão
corresponderam a uma hora lunar. Na fronteira aberta foram impostos os
forçamentos da maré e de todos os rios que desaguam na Baía. Posteriormente,
acompanhou-se a trajectória das partículas até que se libertassem do estuário do
Espirito Santo. Uma vez que o tempo de libertação das partículas depende do
instante de emissão, o tempo de residência foi determinado pelo cálculo da média
(dos 12 conjuntos dos resultados) do tempo necessário para que as partículas
advectadas pelo modelo abandonassem a zona do Estuário do Espirito Santo.
Este procedimento permitiu a eliminação da influência dos instantes de emissão
na determinação do tempo de residência. Na figura 9.5, representa-se o tempo de
residência (em dias) das partículas nesta área num período de 15 dias. Assumiu-

126
se que as partículas que permaneceram na zona do estuário até ao décimo quinto
dia têm um tempo de residência superior a 15 horas.
Através da análise da figura 9.5 verifica-se a que maior parte das partículas são
libertadas do Estuário a partir do oitavo dia. O tempo de residência aumenta da
embocadura do Estuário (fronteira Este do Estuário do Espirito Santo) em
direcção a foz dos rios que desaguam no Estuário (rios Tembe, Umbeluzi e
Matola), indicando condições excelentes de renovação das águas no Estuário.
Figura 9.5: Distribuição do tempo de residência (em dias) das partículas libertadas na zona do estuário do Espirito Santo

127
CAPÍTULO X – CONCLUSÃO
Este trabalho teve como objectivo principal a modelização hidrodinâmica da
Baía de Maputo, pretendendo-se caracterizar os padrões hidrodinâmicos da Baía
com o auxílio de um modelo numérico bidimensional. Estes resultados permitiram
uma posterior avaliação das implicações do padrão hidrodinâmico nos diversos
processos que ocorrem dentro da Baía. A importância de um estudo desta
natureza reside no facto de se poder avaliar os principais riscos a que está sujeita
a Baía de Maputo, nomeadamente pelos diferentes usos que são feitos das suas
águas.
Para tal, iniciou-se o trabalho com uma descrição das características
hidrológicas e morfológicas da Baía de Maputo. Destas descrições concluiu-se
que na sua maior parte a Baía é pouco profunda, com profundidades que oscilam
entre 1 e 35 metros. Os padrões de salinidade e temperatura revelaram que
verticalmente a Baía poderá ser considerada homogénea e que horizontalmente,
em épocas chuvosas como também em anos com prolongada estação chuvosa,
ou ainda em anos de ocorrência de cheias, são evidentes gradientes horizontais
de salinidade e temperatura que dividem a Baía em duas áreas: uma mais
estuarina, e outra com características mais oceânicas. Foram também
identificados os principais forçadores da hidrodinâmica da Baía de Maputo.
Atendendo às características da Baía de Maputo, optou-se por utilizar um
modelo numérico hidrodinâmico bidimensional SYMS/S2D neste trabalho.
Analisaram-se posteriormente as equações fundamentais da propagação das
ondas longas (base do modelo numérico bidimensional), tendo sido dada especial
atenção à descrição das principais aproximações, às integrações efectuadas para
a simplificação das equações, ao método de discretização das equações e às
condições de consistência, estabilidade e convergência da solução numérica das
equações do modelo de propagação das ondas longas. Destas análises, a
principal conclusão foi que o esquema do algoritmo “ADI” (o que foi utilizado no
modelo SYMS/S2D), aplicado às equações de águas pouco profundas é
incondicionalmente estável tanto no espaço como no tempo.
A implementação e calibração do modelo numérico mostraram que o modelo é
estável com os passos temporal e espacial de 60 segundos e 250 metros,

128
respectivamente. Este resultado está de acordo com as conclusões de Leendertse
(1967) e Cheng et al, (1982) que afirmam que a escolha do incremento temporal
pode ser independente do critério “CFL” (Courant Friederichs Levy) para garantir a
estabilidade do modelo numérico, quando é aplicado o algoritmo “ADI” nas
equações hidrodinâmicas de águas pouco profundas.
Efectuou-se também um estudo da hidrodinâmica da Baía de Maputo. Deste
estudo conclui-se que 90% da maré astronómica na Baía pode ser representada
pelos constituintes semi-diurnos M2 e S2. Conclui-se também que a amplitude dos
principais constituintes aumenta à medida que a onda de maré se desloca em
direcção à costa, ao passo que relativamente à fase nota-se um atraso da onda
de maré quando se desloca em direcção à costa.
Foram determinados os padrões dos campos da velocidade residual na Baía de
Maputo, através da implementação do modelo numérico acoplado ao módulo do
transporte Euleriano. Nesta secção mostrou-se que embora o constituinte S2
represente 50% do constituinte M2, o uso unicamente do constituinte M2 será
suficiente para determinar a ordem de grandeza e o padrão da influência da
interacção da maré e do fundo na corrente residual da Baía de Maputo.
A topografia, os ventos e os rios, foram identificados como os factores não
periódicos mais influentes na hidrodinâmica da Baía de Maputo. Verificou-se que
a topografia influencia a formação de vórtices residuais no centro da Baía, os
caudais influenciam a formação de correntes residuais com direcção da vazante
(para o exterior da Baía), e dependendo da época do ano, os ventos influenciam a
formação de correntes residuais de Nordeste (durante o Inverno) e a formação de
vórtices anti-horários de correntes residuais (durante o Verão).
Resultados do modelo Lagrangeano indicaram que para uma escala temporal
superior à do ciclo de maré, os processos de mistura e dispersão são mais
significativos no centro da Baía e na zona do Estuário do Espirito Santo,
respectivamente, sendo praticamente insignificantes nas restantes zonas. O
tempo de residência para a zona do Estuário do Espirito Santo variou entre um dia
e uma semana, indicando uma boa renovação das águas nesta zona.
Uma limitação deste trabalho consiste em que a calibração do modelo
hidrodinâmico foi efectuada comparando as séries temporais da elevação de

129
superfície livre e das componentes da velocidade da corrente de maré (dados
observados com um comprimento máximo de um mês), em apenas três estações
da Baía de Maputo. Dada a extensão da Baía, para futuros estudos seria
conveniente que fossem efectuadas mais amostragens em que sejam definidas
estações que possam abranger toda a área da Baía. Este procedimento poderia
ser importante no melhoramento do processo de calibração e na validação do
modelo numérico. Medições recentes dos caudais dos rios, e dos ventos também
seriam importantes para uma melhor compreensão do comportamento
hidrodinâmico da Baía de Maputo.
Na caracterização hidrológica da Baía de Maputo, foram identificados
gradientes horizontais de salinidade, o que poderá ser uma evidência da
existência de duas massas de água com características diferentes. Assim, o
acoplamento de um módulo de transporte ao modelo hidrodinâmico, seria também
de importância relevante em estudos futuros, pois possibilitaria uma explicação
mais consistente da influência dos gradientes de densidade na circulação
residual, e consequentemente, nos processos de transporte de longo termo.
Estudos experimentais dos perfis da velocidade poderiam também ser incluídos
nas recomendações dos trabalhos futuros, pois permitiriam o desenvolvimento e
implementação de modelos numéricos tridimensionais na Baía de Maputo, para
estudos dos processos que ocorrem à escala tridimensional.
Embora a selecção do incremento temporal não seja dependente do critério
CFL, a precisão dos resultados da modelação numérica depende tanto da
discretização temporal como da espacial. Numa primeira abordagem da
modelação hidrodinâmica da Baía de Maputo, consideraram-se apropriados os
incrementos temporais e espaciais utilizados neste trabalho. Porém, novos
estudos da Baía com passos espaciais relativamente menores podiam ser
importantes, pois permitiriam uma descrição pormenorizada da batimetria
numérica e, consequentemente, uma análise mais detalhada dos processos
hidrodinâmicos que ocorrem nos canais da Baía.

130
REFERÊNCIAS
Achimo, M. (2000) - Sediment types and dynamics of Maputo Bay and Maputo
Estuary, Mozambique, Filosofie Licentiant avhandiling; Stockholm, 57 pp.
Booth, D. A; Howarth, M. J; Durance, J. A; Simpson, J. H. (1978) – A
comparision of residual currents estimated with current meters and a
parachute drogue in a shallow sea, Dtsch. Hydrogr. Z. vol 31, p 237 – 248.
Barata, A; Teles, M; Silva, R. P. (2001) - Sistemas de modelos matemáticos
para a gestão integrada da Baía de Maputo, in Iº Congresso sobre
Planeamento e Gestão das Zonas Costeiras dos Países de Expressão
Portuguesa, 12 pp.
Cheng, R. T; Casulli, V. (1982a) - On Lagrangian Residual Currents with
Applications in South San Fransico Bay, California, Water Resource
Research, p 1652-1662.
Cheng, R. T; Walters, R. (1982) - A Modeling of Estuarine Hydrodynamics and
Field Data Requirements, in Norrie, G. D. H; Oden J.T; Zienkiewicz, O. C;
Finite Elements in Fluids; John Wiley & Sons Ltd, p 89-108.
Cheng, R. T; Casulli, V; Gartner, J. W. (1993) - Tidal, residual, intertidal mudflat
(TRIM) model and its applications to San Francisco Bay, California”.
Estuarine Coastal and Shelf Science, 36, p 235-280.
Dias, J. M. (2001) - Contribution to the study of the Ria de Aveiro
hydrodynamics, PhD Thesis, Universidade de Aveiro, 288 pp.
Dias, J. M; Lopes, J. F; Dekeyser, I. (2000) – Lagrangian transport of particles
in Ria de Aveiro Lagoon, Portugal, Physic and Chemistry on the Earth, vol.
26, nº9, p 721-727.
Dronkers, J. J. (1964) - Tidal computation in rivers and coastal waters, North-
Holland Publishing Company, Amesterdam.
Dyer, K. R. (1997) – Estuaries: A Physical Introduction, 2nd edition, John Wiley &
Sons, New York.
Foreman, M. G. G. (1977) - Manual for tidal heights analysis and predictions,
pac. Mar. Sci. Rep, Institute of Oceanographic Sciences, Victoria, Canada.
Foreman, M. G. G; Henry, R. F. (1989) - The harmonic analysis of tidal model
time series, Computation Mechanics Publications, p 109-120.

131
Gomes-Gesteira, M; Montero, P; Prego, R; Neves, R; Taboada, J. J; Pérez-
Villar, V; Leitão ,P; Ruiz-Villarreal, M. (1999) - A two dimensional particle
tracking model for pollution dispersion in a Coruña and Vigo Rias (NW
Spain), Oceanologica Acta 22, p 167-174.
Gould, W. J. (1973) - Effects of non-linearity of current meters compasses,
Deep Sea Res, 20, p 423-427.
Hansen, W. (1949) – Die halbtägign gezeitn im Nordatlantisepen, Ozean. Dtsch.
Hydr. Zeit, vol 2, p 44 -61.
Hansen, W. (1956) -Theorie zür errechnung des wassertandes und der
strömungen in randmeeren nesbst anwendungen, Tellus, 8 pp.
Hansen, W. (1962) - Hydrodynamical methods applied to oceanography
problems, in Symposium on Mathematical-Hydrodynamical Methods of
Physical Oceanography, Institut für Meereskunde der Universität Hamburg.
Hoguane, A. M. (1994) -Tidal currents and Oil Spill Dispersion in Maputo Bay,
16 pp.
Hoguane, A. M. (1996) - Hydrodynamics, temperature and salinity in mangrove
swamps in Mozambique, PhD Thesis; University of Wales, Bangor, UK.
Hoguane, A. M; Dove, V. F. (2000) - Condições oceanograficas da Baía de
Maputo, Relatório de estudos ambientais, Instituto de Investigação
Pesqueira, Maputo, Moçambique.
Hoguane, A. M; Meulen, F. V. D; Leestemaker, J. H. (2000) – Contribution to
coastal zone management in Mozambique, Proceedings, Maputo, 97 pp.
Hoguane, A. M; Mota, H; Pereira, M. A. M. (2002) – Proceeding of the II
National Conference on Coastal Zone Research, Maputo,125 pp.
Hofman, E. E; Hedstrom, K. S; Moisan, R. J; Haidvogel, D. B; Makas, D. L.
(1991) - Use of Simulated Drifter Tracks to Investigate General Transport
Patterns and Residence Times in the Coastal Transition Zone, 96, p 41-96.
Hui, W. H. (2002) - A Unified coordinates approach to computing
multidimensional flow, Journal of Computational Fluid Dynamics, vol10, nº 4.
INE (2000) – Resultados do censo populacional e habitacional de Moçambique
em 1987, (Revised data). Website: www.ine.gov.mz.

132
Koutitas, C. G. (1988) - Mathematical model in coastal engineering, Pentech
Press-London, 155 pp.
Leendertse, J. J. (1967) - Aspects of a computational model for a long period
water wave propagation, California, Santa Monica, Rand Corporation.
Leendertse, J. J. (1987) - Aspects of the SYMS/S2D. A system for two-
dimensional flow computation, NY, USA, Rand Corporation.
Leendertse, J. J; Gritton, E. C. (1971) - A water quality simulation model for well
mixed estuaries and coastal seas, vol. II, Computation on Procedures, R-
708-NYC, The Rand Corporation, Santa Monica, California, 53 pp.
Lewis, R. (1997) - Dispersion in Estuaries and Coastal Waters, Bookcraft (Bath)
ltd, Great Britain, 312 pp .
Longuet-Higgins, M. S. (1969) - On the transport of mass by time-varying ocean
currents, Deep Sea, vol 16, p 431-447.
Marinone; S. G. (1997) -Tidal residual currents in the Gulf of California: Is the
M2 tidal constituents sufficient to include them?, Journal of Geophysical
Research, 102, p 8611-8623.
Moura, A. C. (1973) – A dinâmica estuarina e sua influência nos processos
sedimentologicos, série B; Lourenço Marques.
Neves, R. J. J. (1985) - Étude experimentale et modélization des circulations
transitoire et résiduelle dans l’Estuaire du Sado, PhD Thesis, Univ.Liège, 271
pp.
Pawlowicz, R; Beardsley, B; Lentz, S. (2002) – Classical Tidal Harmonic
Analysis including Errors estimates in MATLAB using T_TIDE, Journal of
Computers and Geosciences, p 929-937.
Pond, S; Pickard, G. L. (1983) - Introdutory Dynamical Oceanography, second
edition, Pergamon Press, Oxford, 329 pp.
Proudman, J. (1953) - Dynamical oceanography, Mathuen, John Wiley & sons,
London, 409 pp.
Pugh, D. T. (1987) - Tides, Surges and Mean Sea Level: A Handbook for
Engineers and Scientists, John Wiley & Sons, Chichester, 472 pp.
Roache, P. J. (1985) - Computational fluid dynamic, Hermosa Publisher, 446
pp.

133
Robinson, I. S. (1983) - Tidally induced residual flows, In B. Johns (Ed.),
Physical Oceanography of Coastal and Shelf Seas, Amsterdam-Oxford-New
York-Tokyo: Elsevier, p 321-356.
Teles, M; Barata, A; Rosa, T. (2001) - Sistemas de modelos matemáticos para
a gestão integrada da Baía de Maputo, Relatório Apresentado ao Instituto de
Investigação Pesqueira; vol I/II,43 pp.
Weiyan, T. (1992) - Shallow water hydrodynamics, Elsiever Oceanographic
Series; nº 55; Elsiever; Amsterdam, 434 pp.
Zimmerman, J. T. F (1978) - Topographic generation of residual circulation by
(tidal) oscillatory currents, Geophysics, Astrophysics Fluid Dynamics, p 35-
47.
Zimmerman, J. T. F. (1986) -The tidal whirlpool: a review of horizontal
dispersion by tidal and residual currents, Netherlands Journal of Sea
Research, vol. 20, p 133-154.