Embed Size (px)
Citation preview
Universidade do Estado do Rio de Janeiro
Centro de Tecnologia e Ciências
Faculdade de Engenharia
Marcos Antonio da Silva
Aplicação de um modelo de inteligência computacional híbrido
(neuro-fuzzy) na previsão do potencial de ruptura de taludes
Rio de Janeiro
2016
Marcos Antonio da Silva
Aplicação de um modelo de inteligência computacional híbrido (neuro-
fuzzy) na previsão do potencial de ruptura de taludes
Tese apresentada, como requisito parcial para obtenção do título de Doutor, ao Programa de Pós-Graduação em Engenharia Civil, da Universidade do Estado do Rio de Janeiro. Área de concentração: Geotecnia.
Orientadores: Profa. Dra. Ana Cristina Castro Fontenla Sieira
Prof. Dr. Luiz Biondi Neto
Rio de Janeiro
2016
CATALOGAÇÃO NA FONTE
UERJ / REDE SIRIUS / BIBLIOTECA CTC/B
Autorizo, apenas para fins acadêmicos e científicos, a reprodução total ou parcial
desta tese, desde que citada a fonte.
S586 Silva, Marcos Antonio da. Aplicação de um modelo de inteligência computacional híbrido
(neuro-fuzzy) na previsão do potencial de ruptura de taludes / Marcos Antonio da Silva – 2016.
210f.
Orientadores: Ana Cristina Castro Fontenla Sieira e Luiz Biondi Neto.
Tese (Doutorado) – Universidade do Estado do Rio de Janeiro, Faculdade de Engenharia.
1. Engenharia Civil. 2. Taludes - Estabilidade - Teses. 3. Solos
residuais - Teses. 4. Lógica difusa - Teses. 5. Geotecnia - Teses. 6. ANFIS (Adaptive-Network-Based Fuzzy Inference System) – Teses. I. Sieira, Ana Cristina Castro Fontenla. II. Biondi Neto, Luiz. III. Universidade do Estado do Rio de Janeiro. IV. Título.
CDU 624.131:510.6

Marcos Antonio da Silva
Aplicação de um modelo de inteligência computacional híbrido (neuro-fuzzy)
na previsão do potencial de ruptura de taludes
Tese apresentada, como requisito parcial para obtenção do título de Doutor, ao Programa de Pós-Graduação em Engenharia Civil, da Universidade do Estado do Rio de Janeiro. Área de concentração: Geotecnia.
Aprovado em: 14 de dezembro de 2016.
Banca Examinadora:
Rio de Janeiro
2016

DEDICATÓRIA
Dedico este trabalho a minha Família, Ana Paula, Mylena e Manuella, e a meus
Pais, Antonio e Lúcia, que me incentivaram em todos os momentos da minha
caminhada.
AGRADECIMENTOS
Agradeço primeiramente à Deus por ter me dado força para concluir mais essa
etapa em minha vida.
Também agradeço aos meus orientadores, Dra. Ana Cristina Castro Fontenla
Sieira e Dr. Luiz Biondi Neto pela amizade, incentivo e brilhantismo de seus conselhos
durante o desenvolvimento deste trabalho. Para mim, é uma honra tê-los como
orientadores e amigos desde o Mestrado, pois são 10 anos de convivência. Muito
Obrigado por Tudo!
Sinto-me grato a Universidade do Estado do Rio de Janeiro e ao Departamento
de Estrutura e Fundações por terem me aceitado no programa de Doutorado do
PGECIV, e a CAPES (Coordenação de Aperfeiçoamento de Pessoal de Nível
Superior) pelo apoio.
Também manifesto minha gratidão a todos os professores do PGECIV pela
transmissão de suas experiências e conhecimento que para mim foram valiosíssimos.
O meu muito obrigado a Michele Guedes pelo fornecimento dos dados para a
modelagem com o Banco de Dados efetuada nesse trabalho e a Defesa Civil do
Município do Rio de Janeiro e seus Engenheiros, por preencherem os formulários que
foram utilizados para aumentar o quantitativo de dados utilizados na Modelagem com
o Banco de Dados.
Agradecimento especial ao Engenheiro Dr. Rogério Feijó pelo companheirismo,
pela experiência transmitida e pelo pedido de criação dos protocolos emergenciais,
que valorizaram este trabalho.
A Banca do Exame de Qualificação, a Banca Examinadora da Defesa da
Proposta de Tese e a Banca Examinadora da defesa de Tese, meus sinceros
agradecimentos pela contribuição.
A todos aqueles que, embora não nomeados, me presentearam com suas
inestimáveis palavras de incentivo em momentos distintos.
Por fim, o meu agradecimento especial àqueles que sempre me apoiaram em
todos os momentos, me incentivando a seguir em frente, e que acima de tudo
compartilham de minha alegria nesse momento: minha esposa Ana Paula, minhas
filhas Mylena e Manuella, meus pais Antonio e Lúcia, e meu irmão Marcio.

Nunca permita que alguém corte suas asas,
estreite seus horizontes e tire as estrelas do teu céu.
Nunca deixe seus medos serem maiores que a tua vontade de voar.
O valor da vida está nos sonhos que lutamos para conquistar.
Charles Edward
RESUMO
SILVA, Marcos Antonio da. Aplicação de um modelo de inteligência computacional híbrido (neuro-fuzzy) na previsão do potencial de ruptura de taludes. 2016. 210f. Tese (Doutorado em Engenharia Civil) – Faculdade de Engenharia, Universidade do Estado do Rio de Janeiro, Rio de Janeiro, 2016.
A estabilidade de taludes naturais é um tema de grande interesse ao engenheiro geotécnico, face às significativas perdas econômicas, e até mesmo humanas, resultantes da ruptura de taludes. Estima-se que a deflagração de escorregamentos já provocou milhares de mortes, e dezenas de bilhões de dólares em prejuízos anuais em todo o mundo. Os fenômenos de instabilização de encostas são condicionados por muitos fatores, como o clima, a litologia e as estruturas das rochas, a morfologia, a ação antrópica e outros. A análise dos condicionantes geológicos e geotécnicos de escorregamentos proporciona a apreciação de cada um dos fatores envolvidos nos processos de instabilização de encostas, permitindo a obtenção de resultados de interesse, no que diz respeito ao modo de atuação destes fatores. O presente trabalho tem como objetivo a utilização de um sistema híbrido que utiliza a Rede Neural e a Lógica Nebulosa (Neuro-Fuzzy) para criação de um modelo que, de forma qualitativa, forneça uma previsão do potencial de ruptura de taludes. Para o cumprimento deste objetivo, foram estudados os fatores envolvidos nos processos de instabilização de encostas, e a forma como estes fatores se interrelacionam. Análises paramétricas foram executadas com o objetivo fornecer dados para o modelo Neuro-Fuzzy. Após a elaboração do modelo, apresenta-se um caso histórico bem documentado para a validação do mesmo. Dentre as principais conclusões, destaca-se a potencialidade da Modelagem Híbrida Neuro-Fuzzy na previsão do potencial de ruptura de taludes, aparecendo como uma ferramenta capaz de auxiliar na detecção de taludes com potencial de ruptura.
Palavras-chave: Escorregamento de Talude; Condicionantes Geológicos-
Geotécnicos; Estabilidade de Talude; Solos Residuais; Movimentos de Massa; Rede
Neural; Lógica Nebulosa; Inferência Fuzzy; Neuro-Fuzzy; ANFIS.

ABSTRACT
SILVA, Marcos Antonio da. Application of a hybrid (neuro-fuzzy) computational intelligence model to predict slope rupture potential. 2016. 210f. Doctorate Thesis (Post-Graduate Program in Civil Engineering) - University of the State of Rio de Janeiro, Rio de Janeiro, 2016.
The stability of slopes is a topic of great interest to the geotechnical engineer, given the significant economic losses, and even human, resulting from the slopes collapse. It’s estimated that the landslides outbreak has already caused thousands of deaths and tens of billions of dollars in annual losses worldwide. The phenomena of instability of slopes are conditioned by many factors, such as climate, the lithology and structures of rock, the morphology, the anthropic and others. The analysis of geological and geotechnical conditions of landslides provides an appraisal of each of the factors involved in the processes of instability of slopes, allowing the achievement of results of interest with regard to the mode of action of factors. The current work aims at the use a Hybrid system that uses the Neural Network and Fuzzic Logic (Neuro-Fuzzy) to create a model that, in qualitative form, provides a prediction of the potential of slope rupture. To fulfill this objective, we studied the factors involved in the processes of instability of slopes, and how these factors are interrelated. Parametric analyzes were carried out to provide data for the Neuro-Fuzzy model. It is presented in this work, one history case well documented for the validation of the Neuro-Fuzzy Model and Among the main findings includes the capability of Hybrid Neuro-Fuzzy Modeling in predicting the potential of slope rupture, appearing as a tool capable of assisting in the detection of slopes with potential for rupture.
Keywords: Slope Landslides; Geological - Geotechnical Conditions of Stability; Slope
Stability; Residual Soil; Movements of Mass; Neural Network; Fuzzy Logic; Fuzzy
Inference; Neuro-Fuzzy; ANFIS.

LISTA DE FIGURAS
Figura 1 – Escorregamento na Comunidade Cerro Corá, Rio de Janeiro/RJ - 2010. (Foto do
Autor) ................................................................................................................. 21
Figura 2 – Comunidade Jonatas Botelho - Cubango, Niterói/RJ - 2010. (Foto do Autor) ..... 22
Figura 3 – Escorregamento em Nova Friburgo/RJ - 2011. (Marques, 2011) ........................ 23
Figura 4 – Diagrama Resumo da Organização da Tese. ...................................................... 26
Figura 5 – Horizontes de Solo Residual (Fonte IPT) ............................................................ 30
Figura 6 – Tipos de escorregamento (Infanti Jr. e Fornasari Filho, 1998) ............................ 37
Figura 7 – Ilustração dos dois tipos de mecanismos de instabilização associados aos
escorregamentos translacionais (Benessiuti, 2011 apud Wolle, 1988) .............. 38
Figura 8 – Localização dos Pluviômetros na Cidade do Rio de Janeiro: Alerta Rio .............. 42
Figura 9 – Protocolo de Alerta de Cheias do INEA (fonte: http://alertadecheias.inea.rj.gov.br/)
........................................................................................................................... 44
Figura 10 – Exemplos de Descontinuidades no Maciço (Salamuni, 2006) ........................... 47
Figura 11 – Diferentes formas das vertentes (Adaptada de Chorley et al., 1984) ................. 51
Figura 12 – Geometria do Escorregamento (Adaptado de Gerscovich, 2009) ...................... 54
Figura 13 – Caracterização da Lógica Contemporânea – Adaptado de (Barreto, 2001) ....... 60
Figura 14 – Exemplo em Lógica Booleana ........................................................................... 62
Figura 15 – Exemplo em Lógica Nebulosa ........................................................................... 64
Figura 16 – Sistema de Inferência Fuzzy (Adaptado de Tanscheit, 1995) ............................ 67
Figura 17 – Comparação entre os modelos biológico (Mendes, 2013) e artificial (autor). .... 71
Figura 18 – Exemplo Ilustrativo do conceito de generalização. Goldschmidt (2010) ............ 73
Figura 19 – Exemplo Ilustrativo do conceito de abstração. Goldschmidt (2010) ................... 73
Figura 20 – Exemplo Ilustrativo do conceito de generalização. (Adaptado de Marínez-Carvajal,
2006) .................................................................................................................. 74
Figura 21 – Arquitetura Neuro-Fuzzy (adaptado de Neto, 2010) .......................................... 81
Figura 22 – Característica Fuzzy de um SNF (adaptado de Neto, 2010) ............................. 82
Figura 23 – Característica de aprendizagem de um SNF (adaptado de Neto, 2010) ........... 82
Figura 24 – Modelo Fuzzy TS de Primeira Ordem, adaptado de Chen et al (2011) ............. 83
Figura 25 – Arquitetura ANFIS Equivalente, adaptado de Chen et al (2011) ........................ 84
Figura 26 – Diagrama em bloco do modelo preliminar baseado no ANFIS (Adaptado de Chen
et al) ................................................................................................................... 96
Figura 27 – Formulário criado para aumento de registros no Banco de Dados da Tese .... 100
Figura 28 – Neuro-Fuzzy Toolbox e Dados do Treinamento .............................................. 101

Figura 29 – Estrutura do Modelo ANFIS com 03 Variáveis de Entrada e 01 de Saída ....... 101
Figura 30 – Escolha da Função de Pertinência Triangular e Gráfico do Treinamento ........ 102
Figura 31 – Escolha da Função de Pertinência Trapezoidal e Gráfico do Treinamento ..... 102
Figura 32 – Escolha da Função de Pertinência Sino e Gráfico do Treinamento ................. 103
Figura 33 – Escolha da Função de Pertinência Gauss e Gráfico do Treinamento .............. 103
Figura 34 – Escolha da Função de Pertinência Gauss2 e Gráfico do Treinamento ............ 103
Figura 35 – Escolha da Função de Pertinência Pi e Gráfico do Treinamento ..................... 104
Figura 36 – Escolha da Função de Pertinência dSigmóide e Gráfico do Treinamento ....... 104
Figura 37 – Escolha da Função de Pertinência pSigmóide e Gráfico do Treinamento ....... 104
Figura 38 – Gráfico do Novo Treinamento - 300 Épocas .................................................... 105
Figura 39 – Gráfico Comparativo entre os Dados de Teste e os Dados de Saída do ANFIS
......................................................................................................................... 105
Figura 40 – Geometria: Altura= 5,0m - Inclinação= 10º - Linha piezométrica= 1,7 m ......... 108
Figura 41 – Curva de Conversão de FS em PPRT (%), adaptado de Costa (2005) ........... 109
Figura 42 – Neuro-Fuzzy Toolbox e Dados do Treinamento .............................................. 110
Figura 43 – Estrutura do Modelo ANFIS com 05 Variáveis de Entrada e 01 de Saída ....... 111
Figura 44 – Escolha da Função de Pertinência Triangular e Gráfico do Treinamento ........ 111
Figura 45 – Escolha da Função de Pertinência Trapezoidal e Gráfico do Treinamento ..... 112
Figura 46 – Escolha da Função de Pertinência Sino e Gráfico do Treinamento ................. 112
Figura 47 – Escolha da Função de Pertinência Gauss e Gráfico do Treinamento .............. 112
Figura 48 – Escolha da Função de Pertinência Gauss2 e Gráfico do Treinamento ............ 113
Figura 49 – Escolha da Função de Pertinência Pi e Gráfico do Treinamento ..................... 113
Figura 50 – Escolha da Função de Pertinência dSigmóide e Gráfico do Treinamento ....... 113
Figura 51 – Escolha da Função de Pertinência pSigmóide e Gráfico do Treinamento ....... 114
Figura 52 – Parâmetros do Método de Agrupamento e Gráfico do Treinamento ................ 114
Figura 53 – Gráfico do Novo Treinamento – 500 épocas ................................................... 115
Figura 54 – Gráfico Comparativo entre os Dados de Teste e os Dados de Saída do ANFIS
......................................................................................................................... 115
Figura 55 – Neuro-Fuzzy Toolbox e Dados do Treinamento .............................................. 119
Figura 56 – Estrutura do Modelo ANFIS com 04 Variáveis de Entrada e 01 de Saída ....... 119
Figura 57 – Escolha da Função de Pertinência Triangular e Gráfico do Treinamento ........ 120
Figura 58 – Escolha da Função de Pertinência Trapezoidal e Gráfico do Treinamento ..... 120
Figura 59 – Escolha da Função de Pertinência Sino e Gráfico do Treinamento ................. 120
Figura 60 – Escolha da Função de Pertinência Gauss e Gráfico do Treinamento .............. 121
Figura 61 – Escolha da Função de Pertinência Gauss2 e Gráfico do Treinamento ............ 121
Figura 62 – Escolha da Função de Pertinência Pi e Gráfico do Treinamento ..................... 121
Figura 63 – Escolha da Função de Pertinência dSigmóide e Gráfico do Treinamento ....... 122
Figura 64 – Escolha da Função de Pertinência pSigmóide e Gráfico do Treinamento ....... 122
Figura 65 – Parâmetros do Método de Agrupamento e Gráfico do Treinamento ................ 122
Figura 66 – Gráfico do Novo Treinamento – 500 épocas ................................................... 123
Figura 67 – Gráfico Comparativo entre os Dados de Teste e os Dados de Saída do ANFIS
......................................................................................................................... 123
Figura 68 – Neuro-Fuzzy Toolbox para a criação do Modelo de Conversão ANFIS ........... 130
Figura 69 – Estrutura da Modelagem ANFIS com Saída em PPRT (%) ............................. 131
Figura 70 – Resultado da Rotina de Programação no MATLAB ......................................... 131
Figura 71 – Localização da área. (Mota, 2014) .................................................................. 137
Figura 72 – Fotos do Talude. (Mota, 2014) ........................................................................ 137
Figura 73 – Movimentação do talude do talude com levantamento da pista.(Mota, 2014) . 138
Figura 74 – Locação das sondagens mistas. (Mota, 2014) ................................................ 139
Figura 75 - Perfil Geotécnico definido pelas Sondagens Mistas – Seção “AA” . (Mota, 2014)
......................................................................................................................... 140
Figura 76 - Perfil Geotécnico definido pelas Sondagens Mistas – Seção “BB” . (Mota, 2014)
......................................................................................................................... 140
Figura 77 - Perfil Geotécnico definido pelas Sondagens Mistas – Seção “CC” . (Mota, 2014)
......................................................................................................................... 140
Figura 78 - Perfil Geotécnico definido pelas Sondagens Mistas – Seção “DD” . (Mota, 2014)
......................................................................................................................... 141
Figura 79 - Perfil Geotécnico definido pelas Sondagens Mistas – Seção “EE” . (Mota, 2014)
......................................................................................................................... 141
Figura 80 - Perfil Geotécnico definido pelas Sondagens Mistas – Seção “FF” . (Mota, 2014)
......................................................................................................................... 141
Figura 81 - Distribuição granulométrica do solo. (Adaptado de Mota, 2014) ..................... 143
Figura 82 – Tensão Cisalhante (kPa) x Deslocamento Horizontal (mm). Amostra 1 sob
condição natural. (Mota, 2014) ......................................................................... 144
Figura 83 - Tensão Cisalhante (kPa) x Deslocamento Horizontal (mm). Amostra 1 sob
condição submersa. (Adaptado de Mota, 2014) ............................................... 144
Figura 84 – Tensão Cisalhante (kPa) x Deslocamento Horizontal (mm). Amostra 2 sob
condição natural. (Mota, 2014) ......................................................................... 145
Figura 85 – Tensão Cisalhante (kPa) x Deslocamento Horizontal (mm). Amostra 2 sob
condição submersa. (Adaptado de Mota, 2014) ............................................... 145
Figura 86 – Envoltória de resistência do solo: Amostra 1 sob condição natural. (Mota, 2014)
......................................................................................................................... 146
Figura 87 – Envoltória de resistência do solo: Amostra 1 sob condição submersa. (Adaptado
de Mota, 2014) ................................................................................................. 146
Figura 88 – Envoltória de resistência do solo: Amostra 2 sob condição natural. (Mota, 2014)
......................................................................................................................... 146
Figura 89 – Envoltória de resistência do solo: Amostra 2 sob condição Submersa. (Adaptado
de Mota, 2014) ................................................................................................. 147
Figura 90 – Geometria adotada nas análises numéricas. (Mota, 2014) .............................. 148
Figura 91 – Nível do lençol freático inicial definido com base nas sondagens. (Mota, 2014)
......................................................................................................................... 150
Figura 92 – Análise de estabilidade: Condição inicial (FS = 1,30) ...................................... 150
Figura 93 – Análise de estabilidade na posição normal do lençol freático. (Mota 2014) ..... 152
Figura 94 – Análise da estabilidade com o lençol freático na condição crítica. (Mota 2014)
......................................................................................................................... 152
Figura 95 – Análise ANFIS para a situação inicial, antes da elevação do NA .................... 154
Figura 96 – Análise ANFIS para a situação final, após a elevação do NA .......................... 155
Figura 97 – Variação da PPRT com a Altura do Nível D’água para o Caso Histórico......... 156

LISTA DE TABELAS
Tabela 1 - Características das Principais Rochas Ocorrentes no Rio de Janeiro (Adaptado de
Tozatto, 2000) ............................................................................................................. 32
Tabela 2 - Parâmetros de Resistência de Solos Residuais do Rio de Janeiro (Silva, 2008) 34
Tabela 3 - Classificação da intensidade de chuva. (Fonte: Sistema Alerta Rio) ................... 42
Tabela 4 - Protocolo de Acionamento das Sirenes da Defesa Civil.
(Adaptado do Plano Verão 2015/2016 da Prefeitura da Cidade do Rio de Janeiro) .... 45
Tabela 5 - Principais tipos de descontinuidades (Adaptado de Freire, 1965) ....................... 48
Tabela 6 - Diversos Métodos de Análise Determinística para Estabilidade de Taludes ........ 55
Tabela 7 - Funções de Pertinência (Neto, 2005) .................................................................. 65
Tabela 8 - Modelos de RNAs................................................................................................ 77
Tabela 9 - Valores de Saída do Banco de Dados, Modelo ANFIS e o Erro calculado ........ 106
Tabela 10 - Faixa de Valores das Variáveis Altura, Inclinação, Coesão, Ângulo de Atrito e
Nível D’água. ............................................................................................................. 109
Tabela 11 - Valores de Saída da Análise Paramétrica, do Modelo ANFIS e o Erro
calculado ................................................................................................................... 116
Tabela 12 - Valores de Saída da Análise Paramétrica, do Modelo ANFIS e o Erro
calculado ................................................................................................................... 124
Tabela 13 - Valores de Saída da Análise Paramétrica, do Modelo ANFIS e o Erro calculado –
Modelagem 03 (c=5 kPa) .......................................................................................... 126
Tabela 14 - Valores de Saída da Análise Paramétrica, do Modelo ANFIS e o Erro calculado –
Modelagem 04 (c= 10 kPa) ....................................................................................... 126
Tabela 15 - Valores de Saída da Análise Paramétrica, do Modelo ANFIS e o Erro calculado –
Modelagem 05 (c= 20 kPa) ....................................................................................... 127
Tabela 16 - Dados do Gráfico de Conversão de FS para PPRT ........................................ 129
Tabela 17 - Protocolos Emergenciais baseados nas PPRTs .............................................. 132
Tabela 18 - Caracterização Geotécnica. (Adaptado de Mota, 2014) ................................. 142
Tabela 19 - Resultados dos Ensaios de Cisalhamento Direto. (Mota, 2014) ...................... 147
Tabela 20 - Parâmetros Geotécnicos Adotados nas Análises Numéricas. (Mota 2014) ..... 149
Tabela 21 - Valores típicos de parâmetros geotécnicos com base no valor de NSPT (Dados
selecionados de Marangon, 2009 e Aguilera, 2009). (Mota 2014) ............................ 149
Tabela 22 - Valores Iniciais das Variáveis adotados no modelo ANFIS ............................. 153
Tabela 23 - Valores Finais das Variáveis ........................................................................... 154
Tabela 24 - Valores Adotados para Variável Altura do Nível D’água .................................. 155

LISTA DE ABREVIATURAS E SIGLAS
ANFIS Sistema Adaptativo de Inferência Neuro-Fuzzy
CIS Ensaio de Cisalhamento Direto
CPTEC Centro de Previsão do Tempo e Estudos Climáticos
FS Fator de Segurança
INA Indicador de Nível D’água
INPE Instituto Nacional de Pesquisas Espaciais
IPCC Painel Intergovernamental de Mudanças Climáticas
LN Lógica Nebulosa
PGECIV Programa de Pós Graduação em Engenharia Civil
PPRT Previsão do Potencial de Ruptura de Taludes
PUC Pontifícia Universidade Católica
Pz Piezômetro
RNA Rede Neural Artificial
SIF Sistema de Inferência Fuzzy
SNF Sistema Neuro Fuzzy
SPT “Standard Penetration Test”
T(CU) Ensaio Triaxial Consolidado Não Drenado
UERJ Universidade do Estado do Rio de Janeiro
UFJF Universidade Federal de Juiz de fora
UVA Universidade Veiga de Almeida

LISTA DE SÍMBOLOS
c' Intercepto de coesão efetiva do solo
Ângulo de atrito do solo
Peso específico do solo
hw Nível d’água ou Nível freático
NSPT
Número de Golpes do ensaio SPT
I Inclinação do talude
h Altura do Talude
u Poropressão
μ(x) Função de pertinência
μ Pertinência
P(1) Pluviosidade registrada em milímetros no período de 1 hora
P(24) Pluviosidade registrada em milímetros no período de 24 horas
’ Tensão vertical efetiva
𝜏𝑚𝑜𝑏 Tensão cisalhante mobilizada
f Resistência ao Cisalhamento
FS Fator de Segurança
SUMÁRIO
INTRODUÇÃO ............................................................................................................ 18
1 – FUNDAMENTAÇÃO TEÓRICA - GEOTÉCNICA ................................................ 27
1.1 - Condicionantes Geológicos e Geotécnicos na Estabilidade de Taludes ........... 27
1.1.1 – Introdução ..................................................................................... 27
1.1.2 – Os Solos das Encostas Naturais .................................................. 28
1.1.3 – Os Solos do Estado do Rio de Janeiro ......................................... 31
1.1.4 – Movimentos de Massa .................................................................. 35
1.1.5 – Condicionantes de Movimentos de Massa ................................... 39
1.2 – Métodos de Análise de Estabilidade de Taludes ............................................... 53
1.2.1 – Introdução ..................................................................................... 53
1.2.2 – Análise Determinística de Estabilidade de Taludes ...................... 53
1.2.3 – Análise Não Determinística de Estabilidade de Taludes .............. 56
1.3 – Considerações Finais ......................................................................................... 56
2 – FUNDAMENTAÇÃO TEÓRICA DA INTELIGÊNCIA COMPUTACIONAL ......... 58
2.1 – Introdução .......................................................................................................... 58
2.2 – Lógica Nebulosa: Fuzzy ..................................................................................... 59
2.2.1 - Introdução ...................................................................................... 59
2.2.2 - Conceito de Lógica Nebulosa (LN) ................................................ 61
2.2.3 - Vantagens e Desvantagens da LN ................................................ 68
2.3 – Redes Neurais Artificiais .................................................................................... 69
2.3.1 - Introdução ...................................................................................... 69
2.3.2 - Conceito de Rede Neural Artificial (RNA) ...................................... 70
2.3.3 - Características de uma RNA ......................................................... 72
2.3.4 – Arquitetura de uma RNA ............................................................... 74
2.3.5 - Treinamento das RNAs .................................................................. 75
2.3.6 - Modelos de RNAs .......................................................................... 77
2.3.8 - Vantagens e Desvantagens das RNAs ......................................... 77
2.4 – Neuro-Fuzzy ....................................................................................................... 79
2.4.1 - Introdução ...................................................................................... 79
2.4.2 - Conceito de Sistema Neuro-Fuzzy (SNF) ..................................... 79
2.4.3 - Vantagens e Desvantagens dos SNFs .......................................... 86
2.5 – Utilização de Modelos de Inteligência Computacional na Geotecnia ................ 87
2.5.1 - Aplicações da LN ........................................................................... 87
2.5.2 - Aplicações da RNA ........................................................................ 91
2.5.3 - Aplicações do SNF ........................................................................ 92
3 – METODOLOGIA ................................................................................................... 95
3.1 – Introdução .......................................................................................................... 95
3.2 – Modelagem ANFIS ............................................................................................. 95
3.3 – Resultados Esperados ....................................................................................... 97
4 – MODELAGEM ANFIS ........................................................................................... 99
4.1 – Modelagem Utilizando Um Banco de Dados ..................................................... 99
4.1.1 – Introdução ..................................................................................... 99
4.1.2 – Modelagem .................................................................................. 100
4.1.3 – Resultados Obtidos na Modelagem com o Banco de Dados ..... 102
4.1.4 – Conclusões sobre a Modelagem com o Banco de Dados Existente
........................................................................................................................... 107
4.2 – Modelagem Utilizando Análise Paramétrica .................................................... 107
4.2.1 – Introdução ................................................................................... 107
4.2.2 – Modelagem 01 (Todos os Dados da Análise Paramétrica) ........ 110
4.2.3 – Modelagem 02 (Utilizando dados de Coesão nula) .................... 118
4.2.4 – Modelagens 03, 04 e 05 .............................................................. 125
4.2.5 – Conclusões sobre a Modelagem com a Análise Paramétrica .... 127
4.3 – Modelagem ANFIS para Conversão de FS para PPRT .................................. 128
4.4 – Sugestão de Protocolos Emergenciais baseados na Previsão do Potencial de
Ruptura de Taludes obtida pela Modelagem ANFIS ............................................ 132
4.5 – Conclusões sobre a Modelagem ANFIS .......................................................... 134
5 – VALIDAÇÃO DA MODELAGEM ANFIS ............................................................ 136
5.1 – Descrição do Caso Histórico ............................................................................ 136
5.1.1 – Investigação Geotécnica ............................................................. 139
5.1.2 – Análise Numérica ........................................................................ 147
5.1.3 – Retroanálise da Movimentação .................................................. 151
5.2 – Análise da Estabilidade do Caso Histórico utilizando a Modelagem ANFIS ... 153
5.3 – Conclusões sobre a Validação da Modelagem ANFIS .................................... 157
6 - CONCLUSÕES E SUGESTÕES PARA PESQUISAS FUTURAS ..................... 158
6.1 - Conclusões ....................................................................................................... 158
6.2 - Sugestões ......................................................................................................... 159

REFERÊNCIAS ......................................................................................................... 161
ANEXO 1 - ROTINAS DE PROGRAMAÇÃO ANFIS NO MATLAB ......................... 170
ANEXO 2 - BANCO DE DADOS ............................................................................... 173
ANEXO 3 - ANÁLISE PARAMÉTRICA ..................................................................... 175

18
INTRODUÇÃO
Os escorregamentos, também conhecidos como deslizamentos, são processos
de movimentos de massa envolvendo materiais que recobrem as superfícies das
vertentes ou encostas, tais como solos, rochas e vegetação. (Varnes, 1958; Guidicini
e Nieble, 1983; e Tominaga et al. 2009)
O escorregamento de solo tem um papel fundamental como agente modificador
do relevo, pois afeta diretamente o meio físico do local de ocorrência. A dinâmica
superficial provocada pelos escorregamentos de solo, apesar de muito estudada no
meio geotécnico, é na maioria das vezes uma tarefa complexa, pois existem inúmeras
incógnitas envolvidas, que incluem: formas do relevo; características da rede de
drenagem da bacia hidrográfica; intensidade, quantidade, distribuição e frequência
das chuvas; características do solo e o teor de umidade; presença ou ausência da
cobertura vegetal; e ação antrópica, dentre outras.
No Brasil, o acelerado crescimento populacional verificado nas últimas décadas
levou a ocupação e urbanização de áreas, muitas vezes impróprias à ocupação, e
quando os escorregamentos de solo ocorrem nessas áreas, provocam prejuízos
diversos que vão desde danos materiais até a inestimável perda de vidas humanas, e
quando isto ocorre passamos a chamá-lo de desastre.
A Defesa Civil Nacional define o desastre como sendo “resultado de eventos
adversos, naturais ou provocados pelo homem, sobre um ecossistema (vulnerável),
causando danos humanos, materiais e/ou ambientais e consequentes prejuízos
econômicos e sociais” (Castro, 1998).
Além do aumento global dos desastres naturais, a população está se tornando
mais vulnerável a esses fenômenos, principalmente em países em desenvolvimento,
onde uma parcela considerável das pessoas possui um baixo poder aquisitivo, vivem
em moradias frágeis e em áreas densamente povoadas (Tominaga, 2007).
No Estado do Rio de Janeiro, os desastres devido a escorregamento de solo
são recorrentes e ocorrem, principalmente, associados a eventos pluviométricos
intensos e prolongados. Nos últimos anos diversas cidades do Estado sofreram com
escorregamentos provocados por chuvas intensas, dentre elas podemos citar Angra

19
dos Reis (2010), Niterói (2010), Nova Friburgo (2011), Petrópolis (2011), Rio de
Janeiro (2010 e 2012), e Teresópolis (2011).
O Anuário Brasileiro de Desastres Naturais calcula que aproximadamente
4 milhões de pessoas foram afetadas por enxurradas, deslizamentos, alagamentos e
inundações no período de 1991 a 2012 no Estado do Rio de Janeiro (CEPED, 2013).
Em resposta a esses impactos na região, em 1996 foi criado o sistema de alerta de
chuvas do munícipio chamado de Alerta Rio (D'Órsi, et al., 2015). O Alerta RIO tem
como objetivo auxiliar no monitoramento de chuvas na cidade, principalmente nas
áreas de riscos de deslizamento designadas pela Fundação Instituto de Geotécnica
do Município do Rio de Janeiro – GEO-RIO.
O conhecimento de todos os processos que provocam os escorregamentos de
solo nas encostas é de extrema importância para que novas situações de riscos
geotécnicos possam ser minimizadas ou mesmo evitadas. O estudo e a compreensão
desses processos servem de subsídio para: o aprimoramento e adequação de
métodos de análise e projetos de estabilização; o planejamento e concepção de novas
obras a serem implantadas; e tomadas de decisão emergenciais, tais como a emissão
de alertas e remoção da população que se encontra nas áreas de risco.
Segundo Engelbrecht et al. (2011), principalmente em países como o Brasil,
onde o crescimento das cidades também ocorre em áreas de risco, as ações de
prevenção, como o estabelecimento de áreas de suscetibilidade e um efetivo sistema
de alerta, se tornam ainda mais importantes, pois podem minimizar os danos dos
desastres naturais, tanto em termos financeiros, quanto em perdas de vidas humanas
(Rodrigues, 2013).
Diante desta situação, avaliou-se a oportunidade de elaborar uma ferramenta,
que utilizará diversos parâmetros geotécnicos (diferentemente do sistema Alerta RIO
que avalia apenas o índice pluviométrico), para definir o potencial de ruptura de
taludes de forma a auxiliar na tomada de decisão para possíveis intervenções em
áreas onde exista a possibilidade de escorregamento de solo, minimizando os
desastres.

20
Motivação
Os fenômenos de instabilização de encostas são condicionados por muitos
fatores, como o clima, a litologia e as estruturas de arcabouço rochoso, a morfologia,
a ação do homem e outros. A análise dos condicionantes geológicos e geotécnicos
envolvidos em escorregamentos proporciona a apreciação de cada um dos fatores
envolvidos nos processos de instabilização, permitindo uma melhor compreensão em
relação ao modo de atuação destes fatores.
A erosão dos solos, na sua forma mais ampla, embora seja um dos fenômenos
naturais mais estudados, ainda é pouco compreendida, principalmente no que se
refere à sua previsão, tanto no espaço quanto no tempo. Tal dificuldade resulta, dentre
outras razões, das complexas interações entre os diversos fatores condicionantes, os
vários mecanismos de ruptura dos solos, as características de transporte, além das
intervenções antrópicas, cada vez mais frequentes. Sabe-se, além disso, que as
diferentes feições erosivas observadas na natureza encontram-se associadas a
processos bem específicos, fato este que dificulta ainda mais o desenvolvimento de
estudos voltados para a previsão (Fernandes et al, 2001).
Dentro deste cenário destacam-se os escorregamentos nas encostas, os quais
trazem enormes prejuízos econômicos, bloqueiam vias expressas e, com frequência,
levam à perda de muitas vidas, em especial na cidade do Rio de Janeiro (Amaral,
1997).
Desastres naturais, quando atingem áreas povoadas, sempre provocam
grande comoção, todavia abrem a oportunidade para reflexão com relação ao que
poderia ter sido feito pelos fatores envolvidos, como forma de evitar ou ao menos
mitigar as consequências danosas do evento. O intenso evento pluviométrico que
assolou a Costa Verde (e.g. Angra dos Reis, Ilha Grande e adjacências) na virada do
ano de 2009 para 2010 culminou na morte de 53 pessoas, 250 famílias ficaram
desabrigadas e 64 escorregamentos de encosta ocorreram, interditando a Rodovia
BR-101(Trecho Rio-Santos) (Site do portal G1: http://acervo.oglobo.globo.com/
riodehistorias/naviradadoanotemporalcausa53mortesemangradosreis9244851).
21
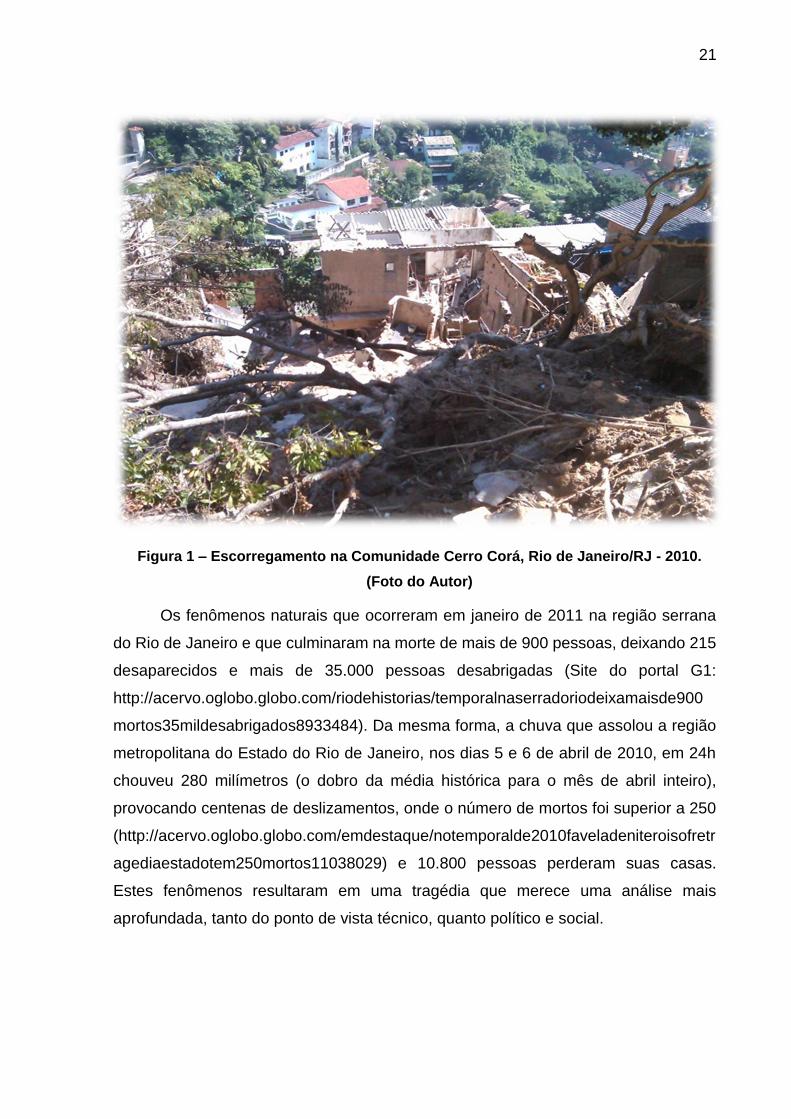
Figura 1 – Escorregamento na Comunidade Cerro Corá, Rio de Janeiro/RJ - 2010.
(Foto do Autor)
Os fenômenos naturais que ocorreram em janeiro de 2011 na região serrana
do Rio de Janeiro e que culminaram na morte de mais de 900 pessoas, deixando 215
desaparecidos e mais de 35.000 pessoas desabrigadas (Site do portal G1:
http://acervo.oglobo.globo.com/riodehistorias/temporalnaserradoriodeixamaisde900
mortos35mildesabrigados8933484). Da mesma forma, a chuva que assolou a região
metropolitana do Estado do Rio de Janeiro, nos dias 5 e 6 de abril de 2010, em 24h
chouveu 280 milímetros (o dobro da média histórica para o mês de abril inteiro),
provocando centenas de deslizamentos, onde o número de mortos foi superior a 250
(http://acervo.oglobo.globo.com/emdestaque/notemporalde2010faveladeniteroisofretr
agediaestadotem250mortos11038029) e 10.800 pessoas perderam suas casas.
Estes fenômenos resultaram em uma tragédia que merece uma análise mais
aprofundada, tanto do ponto de vista técnico, quanto político e social.
22
Figura 2 – Comunidade Jonatas Botelho - Cubango, Niterói/RJ - 2010.
(Foto do Autor)
Aliás, reflexão interessante é definir se um evento como tal realmente é uma
tragédia ou um drama. Com efeito, remontando à mitologia grega, as tragédias se
caracterizam como acontecimentos inevitáveis e independentes da vontade de seus
personagens, sendo ilustrativo o exemplo de Édipo e Jocasta. Porém, o que se tem
verificado no noticiário, a bem da verdade, são quadros de “dramas” urbanos, ou seja,
fenômenos que não obstante sejam identificados como de grande sofrimento humano,
não se traduzem em tragédias, na verdadeira acepção do vocábulo, porquanto suas
consequências danosas poderiam, sim, ser evitadas ou mesmo amenizadas de
diversas formas. (Lieber et al, 2002).

23
Figura 3 – Escorregamento em Nova Friburgo/RJ - 2011. (Marques, 2011)
Muito tem se falado das carências e deficiências de ações na gestão das
questões públicas neste caso. Muito já se estudou a partir de acidentes como estes
que ocorreram nos últimos anos neste mesmo Estado e ultimamente a mídia está
repleta de casos de insucessos de gestão pública. Mas, por que ainda se sofre tanto
com este tipo de situação? Quantas mais tragédias como essa, que se viu no Rio de
Janeiro, serão necessárias para promover uma transformação na forma das
pessoas/governos reagirem frente a situações de risco? (de Castilho et al 2012) Quais
as técnicas e modelos confiáveis para efetuar o monitoramento das encostas no

24
Município do Rio de Janeiro? Quais os sistemas de alerta de risco implantados no
Município do Rio de Janeiro? Como melhorar os Modelos de Previsão de Ruptura de
Taludes em uso no Município do Rio de Janeiro?
Objetivo
O objetivo do presente estudo é a utilização de um modelo híbrido usando
Redes Neurais Artificiais (RNA) e Lógica Nebulosa (LN) para fornecer, de forma
qualitativa, uma Previsão de uma Potencial Ruptura de Taludes no Município do Rio
de Janeiro, que tem relevo susceptível à ocorrência de escorregamentos de massas
de solo.
Com base nos condicionantes geológicos e geotécnicos envolvidos na
estabilidade de taludes, foi idealizado um modelo inteligente híbrido capaz de prever
uma potencial ruptura de taludes das encostas do Rio de Janeiro.
Para a validação do modelo foi utilizado um Caso Histórico bem documentado
que, de forma qualitativa, permitiu verificar e aferir se a previsão de áreas
potencialmente instáveis em solo residual através da modelagem híbrida foram
compatíveis com os dados apresentados no caso Histórico.
Com o intuito de padronizar a tomada de decisões, a partir da utilização dos
dados do modelo híbrido neuro-fuzzy criado no presente trabalho, foram estabelecidos
critérios de priorização de atividades emergenciais, subdividindo as previsões de
ruptura de taludes em níveis e determinando as intervenções a serem adotadas em
cada nível.
Cabe ressaltar que os resultados fornecidos pela modelagem neuro-fuzzy não
substituem os resultados obtidos pelos métodos clássicos de análise de estabilidade
(e.g. análise por equilíbrio limite ou análise por tensão x deformação), que de forma
determinística avaliam a possibilidade de ocorrência de escorregamento de massa de
solo presente em talude natural ou construído. O dado de saída do modelo neuro-
fuzzy é um índice percentual, qualitativo, referente a uma potencial ruptura de taludes,
que quando comparado com a tabela de protocolos emergenciais embasa e facilita a
tomada de decisões por parte do técnico que está analisando a área estudada.

25
Guedes (2011) cita que a saída do programa Neuro-fuzzy fornece uma
proposta de uniformização da conclusão de uma inspeção visual, com a indicação da
suscetibilidade de escorregamento de um determinado talude.
De fato a saída do modelo Neuro-fuzzy, aliada à tabela de protocolos
emergenciais, criada nesta Tese, pode ajudar a uniformizar o embasamento e a
conclusão de um Laudo Técnico derivado de uma inspeção visual, indicando a
previsão do potencial de ruptura de taludes e a adoção de medidas mitigadoras, ou
intervenções, a serem adotadas para o talude analisado.
Estrutura da Tese
Neste Capítulo Introdutório foi realizado um breve relato dos problemas de
escorregamentos de taludes ocorridos no Estado do Rio de Janeiro, que motivaram a
realização da presente pesquisa, além da descrição dos objetivos da Tese.
Apresenta-se, a seguir, a estrutura da organização desta Tese e a Figura 4
apresenta um diagrama resumo da mesma.
O Capítulo 1 apresenta a fundamentação teórica geotécnica, onde são
mostrados os condicionantes geológicos e geotécnicos na estabilidade de taludes,
além dos principais métodos de análise de estabilidade de taludes.
O Capítulo 2 mostra a fundamentação teórica da inteligência computacional,
sendo apresentados os métodos computacionais utilizados para predição e
aprendizado (e.g. rede neural artificial, lógica nebulosa e neuro-fuzzy), bem como um
breve histórico de estudos que utilizaram a inteligência computacional na Geotecnia.
O Capítulo 3 descreve a metodologia da análise neuro-fuzzy, sendo mostrados
os métodos para aquisição de dados (e.g. banco de dados de escorregamentos e
análises paramétricas para determinação dos fatores de segurança na estabilidade
de taludes) e os devidos tratamentos desses dados, procedimentos para a escolha
das variáveis que compõem o modelo neuro-fuzzy e a ferramenta computacional
utilizada para a implementação do modelo neuro-fuzzy.
O Capítulo 4 apresenta e discute os resultados das análises da modelagem
neuro-fuzzy, os ajustes nos parâmetros do modelo para minimizar os erros e mostra
a criação dos protocolos emergenciais associados aos resultados da modelagem.

26
No Capítulo 5 é apresentado um caso histórico bem documentado de onde são
obtidos os valores de entrada para as variáveis do modelo neuro-fuzzy, que inseridos
e executada a modelagem será gerado o dado de saída (previsão do potencial de
ruptura do talude), para validação do método proposto.
Finalmente, no Capítulo 6, são descritas as conclusões obtidas com o
desenvolvimento do presente trabalho, além de apresentar algumas proposições para
trabalhos futuros.
Figura 4 – Diagrama Resumo da Organização da Tese.
Pré-Textual
Capa
Folha de Rosto
Dedicatória
Agradecimentos
Resumo e Abstract
Listas (Figuras, Tabelas, etc.)
Desenvolvimento
Introdução
Revisão bibliográfica
Metodologia de Análise
Modelagem, resultados obtidos, análise dos resultados e protocolos emergenciais
Validação do modelo
Conclusões
proposições para trabalhos futuros
Pós-Textual
Referências
Anexos

27
1 – FUNDAMENTAÇÃO TEÓRICA - GEOTÉCNICA
1.1 - Condicionantes Geológicos e Geotécnicos na Estabilidade de
Taludes
1.1.1 – Introdução
Movimentos de massa são episódios de extrema importância, resultantes da
atuação de processos geomorfológicos nas mais diversas escalas temporais. Dentro
deste cenário, destacam-se os escorregamentos, ou deslizamentos nas encostas, os
quais trazem enormes prejuízos econômicos, bloqueiam vias expressas e, com
frequência, levam à perda de muitas vidas, em especial na cidade do Rio de Janeiro
(Amaral, 1997).
Nos grandes centros urbanos, os escorregamentos assumem frequentemente
proporções catastróficas, uma vez que os inúmeros cortes, aterros, depósitos de lixo,
desmatamentos, modificações na drenagem, entre outras agressões, geram novas
relações com os fatores condicionantes naturais associados à geomorfologia e à
geologia (Fernandes e Amaral, 1996; Augusto Filho e Virgili, 1998).
Consequentemente, torna-se muito difícil a efetiva previsão destes fenômenos em
uma determinada paisagem.
A questão da previsão da ocorrência dos escorregamentos vem assumindo
importância crescente na literatura geotécnica, com diferentes concepções do
problema e formas de investigação. Grande parte das metodologias propostas visa a
definição de áreas mais susceptíveis à ocorrência do processo (Barros et al., 1992;
Guzzetti et al., 1999). Outros estudos, por sua vez, buscam caracterizar o risco
envolvido, englobando tanto a possibilidade de ocorrência do processo quanto os
danos decorrentes (Cerri, 1993; Augusto Filho e Wolle, 1996; Cruden, 1997).
A utilização de modelos matemáticos de previsão de áreas susceptíveis a
escorregamentos depende, diretamente, de uma melhor compreensão dos diferentes
mecanismos e fatores condicionantes envolvidos (Montgomery et al., 2001).

28
O presente item apresenta os principais aspectos envolvidos na instabilidade
de taludes, enfocando os tipos de solos encontrados nas encostas naturais, os tipos
de movimentos de massa e os condicionantes geológicos e geotécnicos envolvidos
na estabilidade de taludes. Estes condicionantes serão fundamentais no
estabelecimento de fatores que inseridos em um modelo híbrido Neuro-Fuzzy
permitirão avaliar o potencial de ruptura de talude.
1.1.2 – Os Solos das Encostas Naturais
Os solos são formados a partir da decomposição das rochas, que se
apresentam fraturadas ou fragmentadas, em função da própria origem, em virtude de
movimentos tectônicos, ou pela ação do meio ambiente.
Em função do processo de formação, os solos podem ser classificados como
residuais ou transportados. Na formação dos solos residuais, os sedimentos oriundos
da decomposição da rocha permanecem no local de origem, enquanto na formação
dos solos transportados, estes sedimentos são transportados pela ação da gravidade,
do vento, das águas, etc.
Vieira (1975), Vieira et al.(1983) e Zimback (2003) citaram que existem
05 fatores de formação de solos e estes são:
(a) Material de Origem;
(b) Clima;
(c) Organismos;
(d) Relevo; e
(e) Tempo.
O material de origem pode ser constituído de rochas (magmáticas,
metamórficas e sedimentares), sedimentos e material de decomposição de rochas
transportado. Vários minerais constituintes do material de origem permanecem
inalterados, enquanto outros sofrem decomposição, por ação química. O material de
origem assume uma grande importância, visto que as propriedades e características
do solo dependem, primariamente, da composição do material de origem. (Vieira,
1975;Vieira et al.,1983; e Tozatto, 2000)

29
O clima assume grande importância na formação dos solos, uma vez que o
solo, produto do intemperismo do material de origem, apresenta propriedades e
características diferenciadas em função do clima. Solos formados em clima tropical
são solos bastante intemperizados. Quanto mais quente e úmido o clima, maior a
lixiviação de minerais.
Os organismos influem na formação do solo, considerando-se que são
fornecedores de matéria orgânica, bem como contribuem com determinados
compostos orgânicos que podem promover diferenciação entre alguns solos.
O relevo influencia o solo resultante condicionando a penetração de água no
solo, e interferindo na intensidade de intemperismo. Em áreas planas, ocorre
penetração de grande quantidade de água, com pequena formação de enxurrada,
ocasionado uma lixiviação interna significativa, com a formação de solos profundos, e
altamente intemperizados. Em áreas com declividade acentuada, a penetração de
água é menor, com formação de mais enxurrada, ocasionando uma lixiviação menos
intensa, e formando solos mais rasos, e menos intemperizados.
O tempo é um fator formador de solo, uma vez que essa formação é resultado
de reações químicas, bem como da ação das forças físicas de atração de partículas,
que demandam tempo para se manifestarem.
Moncada (2008) cita que Vargas (1953) apresentou a primeira classificação
genética dos solos tropicais brasileiros, distinguindo três horizontes: solo residual
maduro, argiloso e poroso; solo residual jovem, silto-arenoso, com a presença de
estruturas reliquiares; e rocha alterada. A autora ainda cita que dentre outros autores
que contribuíram com propostas de classificação de solos podem ser citados os
trabalhos de Vaz, 1969; Deere e Patton, 1971; De Mello, 1972; Vargas, 1974 e outros
descritos em Vaz, 1996.
Em 1977, Vargas propôs uma classificação para solos residuais, subdividindo-
os em três horizontes, com graus de intemperização decrescentes. O horizonte mais
superficial corresponde ao solo residual maduro, que se caracteriza pela perda total
da estrutura original da rocha matriz. Abaixo deste horizonte, encontra-se o solo
residual jovem, que apresenta aparência de rocha, porém desintegra-se com a
pressão dos dedos ou com o uso de ferramentas pontiagudas. Finalmente, ocorre a
rocha alterada, que se trata de um material de transição entre o solo e a rocha. Na
formação da rocha alterada, a ação do intemperismo progride ao longo de zonas de
30
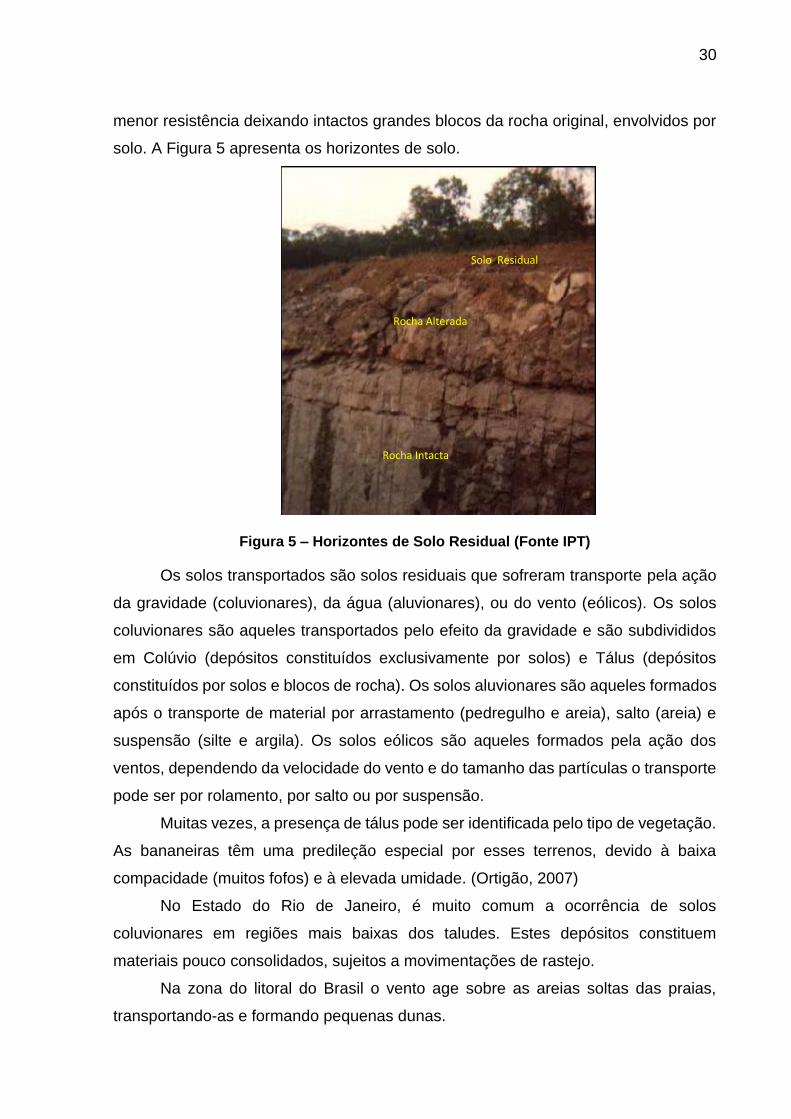
menor resistência deixando intactos grandes blocos da rocha original, envolvidos por
solo. A Figura 5 apresenta os horizontes de solo.
Figura 5 – Horizontes de Solo Residual (Fonte IPT)
Os solos transportados são solos residuais que sofreram transporte pela ação
da gravidade (coluvionares), da água (aluvionares), ou do vento (eólicos). Os solos
coluvionares são aqueles transportados pelo efeito da gravidade e são subdivididos
em Colúvio (depósitos constituídos exclusivamente por solos) e Tálus (depósitos
constituídos por solos e blocos de rocha). Os solos aluvionares são aqueles formados
após o transporte de material por arrastamento (pedregulho e areia), salto (areia) e
suspensão (silte e argila). Os solos eólicos são aqueles formados pela ação dos
ventos, dependendo da velocidade do vento e do tamanho das partículas o transporte
pode ser por rolamento, por salto ou por suspensão.
Muitas vezes, a presença de tálus pode ser identificada pelo tipo de vegetação.
As bananeiras têm uma predileção especial por esses terrenos, devido à baixa
compacidade (muitos fofos) e à elevada umidade. (Ortigão, 2007)
No Estado do Rio de Janeiro, é muito comum a ocorrência de solos
coluvionares em regiões mais baixas dos taludes. Estes depósitos constituem
materiais pouco consolidados, sujeitos a movimentações de rastejo.
Na zona do litoral do Brasil o vento age sobre as areias soltas das praias,
transportando-as e formando pequenas dunas.
Solo Residual
Rocha Alterada
Rocha Intacta
31
1.1.3 – Os Solos do Estado do Rio de Janeiro
Vários são os fatores que influenciam na velocidade do processo de
intemperismo (desagregação e decomposição da rocha). Dentre eles, citam-se: a
mineralogia das rochas, o clima, a topografia, os organismos, etc.
A seguir, serão apresentados os fatores relevantes para a formação dos solos
no Estado do Rio de Janeiro.
Mineralogia das Rochas
A natureza da rocha mãe predominante no Estado do Rio de Janeiro é a
metamórfica, ocupando cerca de 50% do território. Observa-se também, a ocorrência
de rochas sedimentares e magmáticas, porém em menores proporções (Fonseca et
al, 1998).
Dentre os tipos de rochas metamórficas, as mais frequentes no Estado são os
gnaisses, rochas usualmente formadas por quartzo e feldspato, de granulometria
média a grossa, e os migmatitos, que são rochas de composição e estruturas
heterogêneas, de granulometria média a grossa, geralmente foliadas (Frasca e
Sartori, 1998).
As rochas sedimentares ocorrem principalmente no delta de rios de grande
porte (e.g. Rio Paraíba do Sul). Os principais tipos de rochas sedimentares
encontradas no Estado do Rio de Janeiro são as rochas calcárias e os arenitos
(Fonseca et al, 1998).
As rochas magmáticas ou ígneas ocorrem praticamente em todo o Estado,
sendo as mais frequentes: granitos e sienitos (Fonseca et al, 1998). Os granitos são
rochas ígneas intrusivas predominantemente constituída de quartzo, feldspato e
micas. Os Sienitos são rochas ígneas intrusivas compostas predominantemente por
feldspatos alcalinos e menores quantidades de plagioclásio, piroxênios, anfibólio e
biotita. Ainda na classificação de rochas magmáticas existe o diabásio que são rochas
constituídas predominantemente por feldspatos alcalinos e formam os enxames de
diques intrusivos ao longo dos maciços da Serra do Mar. (Tomba, 2012)
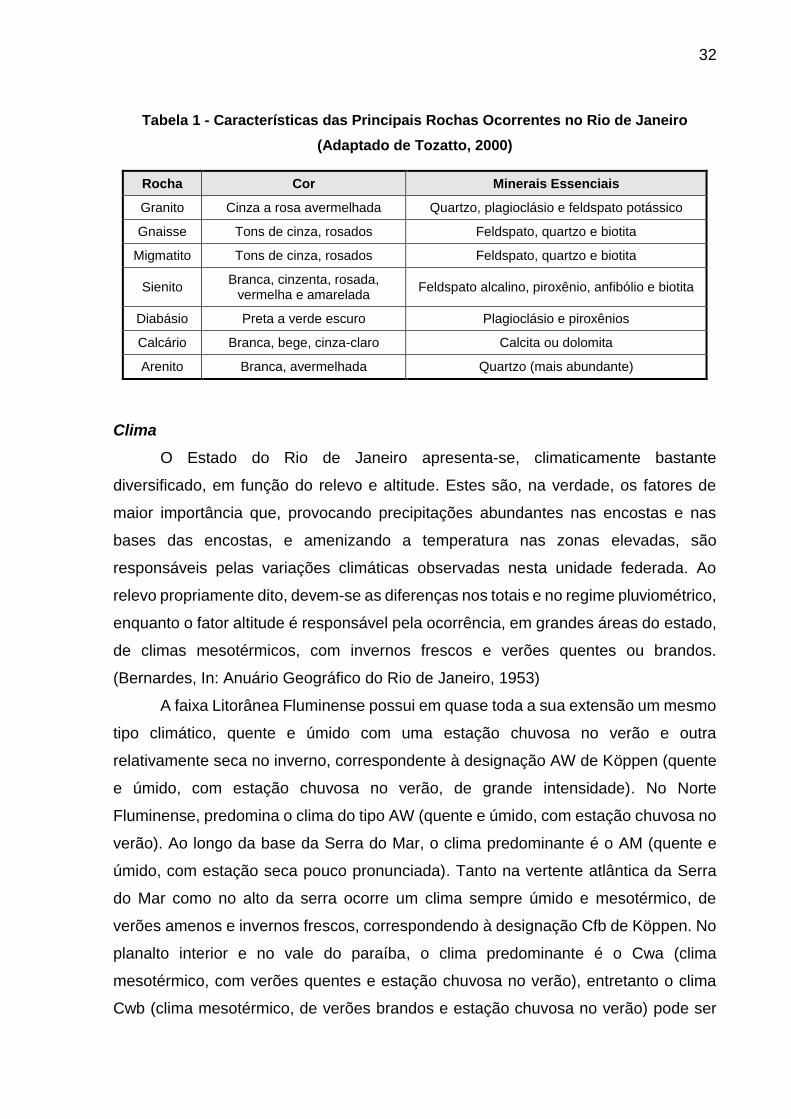
A Tabela 1 apresenta a composição mineralógica, bem como a cor predominante
das principais rochas encontradas no Estado.
32
Tabela 1 - Características das Principais Rochas Ocorrentes no Rio de Janeiro
(Adaptado de Tozatto, 2000)
Rocha Cor Minerais Essenciais
Granito Cinza a rosa avermelhada Quartzo, plagioclásio e feldspato potássico
Gnaisse Tons de cinza, rosados Feldspato, quartzo e biotita
Migmatito Tons de cinza, rosados Feldspato, quartzo e biotita
Sienito Branca, cinzenta, rosada,
vermelha e amarelada Feldspato alcalino, piroxênio, anfibólio e biotita
Diabásio Preta a verde escuro Plagioclásio e piroxênios
Calcário Branca, bege, cinza-claro Calcita ou dolomita
Arenito Branca, avermelhada Quartzo (mais abundante)
Clima
O Estado do Rio de Janeiro apresenta-se, climaticamente bastante
diversificado, em função do relevo e altitude. Estes são, na verdade, os fatores de
maior importância que, provocando precipitações abundantes nas encostas e nas
bases das encostas, e amenizando a temperatura nas zonas elevadas, são
responsáveis pelas variações climáticas observadas nesta unidade federada. Ao
relevo propriamente dito, devem-se as diferenças nos totais e no regime pluviométrico,
enquanto o fator altitude é responsável pela ocorrência, em grandes áreas do estado,
de climas mesotérmicos, com invernos frescos e verões quentes ou brandos.
(Bernardes, In: Anuário Geográfico do Rio de Janeiro, 1953)
A faixa Litorânea Fluminense possui em quase toda a sua extensão um mesmo
tipo climático, quente e úmido com uma estação chuvosa no verão e outra
relativamente seca no inverno, correspondente à designação AW de Köppen (quente
e úmido, com estação chuvosa no verão, de grande intensidade). No Norte
Fluminense, predomina o clima do tipo AW (quente e úmido, com estação chuvosa no
verão). Ao longo da base da Serra do Mar, o clima predominante é o AM (quente e
úmido, com estação seca pouco pronunciada). Tanto na vertente atlântica da Serra
do Mar como no alto da serra ocorre um clima sempre úmido e mesotérmico, de
verões amenos e invernos frescos, correspondendo à designação Cfb de Köppen. No
planalto interior e no vale do paraíba, o clima predominante é o Cwa (clima
mesotérmico, com verões quentes e estação chuvosa no verão), entretanto o clima
Cwb (clima mesotérmico, de verões brandos e estação chuvosa no verão) pode ser

33
notado na transição entre a região serrana e o planalto interior. Por último, nas
encostas da Mantiqueira e no maciço de Itatiaia, predomina o clima Cfb. (Bernardes,
In: Anuário Geográfico do Rio de Janeiro, 1953)
As mudanças climáticas, em níveis globais, têm sido objeto de estudo da
comunidade científica há cerca de vinte anos. A criação do Painel Intergovernamental
de mudanças climáticas, IPCC (1988) sob a tutela da ONU foi um marco quanto ao
reconhecimento mundial do problema. (Araujo, 2010)
A Cidade do Rio de Janeiro vem experimentando mudanças climáticas ao longo
dos últimos anos (Tozatto, 2000). Uma das principais alterações é o aumento da
temperatura média global (Moreira e Neto, 1998), acompanhado de elevação do nível
do mar e aumento das precipitações totais anuais. Araujo (2010) citou em seu trabalho
que, segundo o meteorologista Carlos Nobre, do Centro de Previsão do Tempo e
Estudos Climáticos (CPTEC) do Instituto Nacional de Pesquisas Espaciais (INPE), já
há uma tendência perceptível de aumento de precipitação, incluindo chuvas fortes,
que vêm acontecendo com muito mais frequência hoje do que 30 ou 50 anos atrás
Topografia
Fonseca et al (1998) dividem o território Fluminense em três blocos ou formas
de relevo: o Bloco Cabo Frio, caracterizado por uma estrutura planar; o Bloco Serra
dos Órgãos e o Segmento das Zonas de Cisalhamento, caracterizados por colinas,
escarpas e reversos.
Parâmetros
Diversos autores apresentam resultados de ensaios de laboratório em solos
residuais ocorrentes no Rio de Janeiro. Sandroni (1985) recomenda que a seleção de
parâmetros de resistência para projeto em solos residuais considere aspectos como:
existência ocasional de estrutura reliquiar com resistência inferior à massa global,
anisotropia, curvatura da envoltória de resistência, condição parcialmente saturada do
solo, % de mica, compacidade, influência do tipo de ensaio e efeitos de amostragem.
A Tabela 2 reúne resultados de ensaios triaxiais e de cisalhamento direto publicados
na literatura, executados em solos oriundos de diferentes tipos de rocha. Observa-se
uma grande variabilidade nos valores dos parâmetros de resistência, com ângulos de
atrito entre 20º e 44º, e interceptos coesivos entre 9 e 80 kPa.

34
Cabe ressaltar que os parâmetros de resistência listados na Tabela 2 foram
utilizados no estudo para a elaboração do modelo híbrido Neuro-Fuzzy.
Tabela 2 - Parâmetros de Resistência de Solos Residuais do Rio de Janeiro (Silva, 2008)
Rocha Mãe c’ (kpa) (o) Grau de Saturação Ensaio Referência
Quartzito Férrico
20 37 Parcial.
Saturado
CIS Sandroni, 1985
50 44 Parcial.
Saturado
Quartzito Micáceo
40 22 Parcial.
Saturado
45 27 Parcial.
Saturado
Gnaisse Migmatito
40 20 Parcial.
Saturado
CIS Campos, 1974 52 23 Parcial.
Saturado
30 21 Submerso
49 22 Submerso
Gnaisse rico em
feldspato
30 43 Natural
CIS Seraphin, 1974 20 44 Submerso
Gnaisse rico em
mica
40 29,5 Natural
18 29,5 Submerso
Gnaisse rico em
feldspato
80 34 Natural
CIS Sandroni e Maccarini,
1981
32 36 Submerso
70 30 Natural
34 32 Submerso
60 30 Natural
33 30 Submerso CIS Sandroni, 1985
Granito 9 30 Saturado CIS Lacerda e Silveira,
1992
Gnaisse
20 26 54%
T (CU) Barata et al, 1978
10 33 49,5%
20 29 49,7%
35 32 79,1%
20 29 54,5%
30 25 47,6%
35 26 67,3%
30 27 45,6%
25 23 47,8%
40 25 69%
Legenda: c’ = intercepto coesivo; = ângulo de atrito; CIS: cisalhamento direto; T (CU): triaxial consolidado não drenado

35
1.1.4 – Movimentos de Massa
A formação e a dinâmica do relevo relacionam-se tanto à interação de variáveis
endógenas, como o tipo e estrutura das rochas, quanto exógenas, como as variáveis
climáticas, atuação de fauna e flora, etc. Como parte dessa dinâmica, ocorrem os
processos de vertente, entre os quais, os movimentos de massa, que envolvem o
desprendimento e transporte de solo e/ou material rochoso vertente abaixo. A
mobilização de material deve-se à sua condição de instabilidade, devido à atuação da
gravidade, podendo ser acelerada pela ação de outros agentes, como a água. O
deslocamento de material ocorre em diferentes escalas e velocidades, variando de
rastejos a movimentos muito rápidos (Fernandes e Amaral, 1996; Varnes, 1958;
Varnes 1978).
Existem na literatura diversas propostas de classificação dos movimentos de
massa (Varnes, 1958; Varnes, 1978; Hansen, 1984b; Hutchinson, 1988; Sassa, 1989).
No entanto, a classificação proposta por Varnes (1978) ainda é a mais utilizada.
No Brasil, porém, destaca-se a classificação proposta por Guidicini e Nieble
(1984), a qual divide os movimentos de massa em escoamentos (englobando rastejos
e corridas), escorregamentos (translacionais e rotacionais), e subsidências. Sabe-se,
no entanto, que a aplicação direta desses sistemas de classificação aos movimentos
observados na natureza não é uma tarefa simples. Além das dificuldades derivadas
das atividades antrópicas e das rápidas transformações que ocorrem nas cicatrizes
dos deslizamentos, há problemas associados à própria complexidade dos fenômenos.
Muitos movimentos são deflagrados como escorregamentos translacionais e se
transformam gradativamente em corridas de massa devido ao excesso de água
(Kochel, 1987). Independente do tipo de movimento de massa, o quanto mais rápido
o engenheiro geotécnico puder chegar ao local do acidente, melhor será sua avaliação
sobre como se deu a deflagração movimento.
Os escoamentos são deformações ou movimentos contínuos, com ou sem
superfície definida de movimentação. Os escoamentos podem ser divididos em dois
tipos, as corridas e os rastejos. As corridas são movimentos fluido-viscosos
ocasionados pela perda de atrito interno, devido à presença de excesso de água na
massa de solo. São movimentos rápidos, com velocidade superior a 10 km/h,
caracterizados pelas dinâmicas da mecânica dos sólidos e dos fluidos, pelo volume
36
de material envolvido e pelo extenso raio de alcance que possuem, chegando até
alguns quilômetros, apresentando alto potencial destrutivo.
Os rastejos são movimentos descendentes, lentos e contínuos da massa de
solo de um talude, estes correspondem a uma deformação de caráter plástico e não
apresentam o desenvolvimento de superfície de ruptura definida.
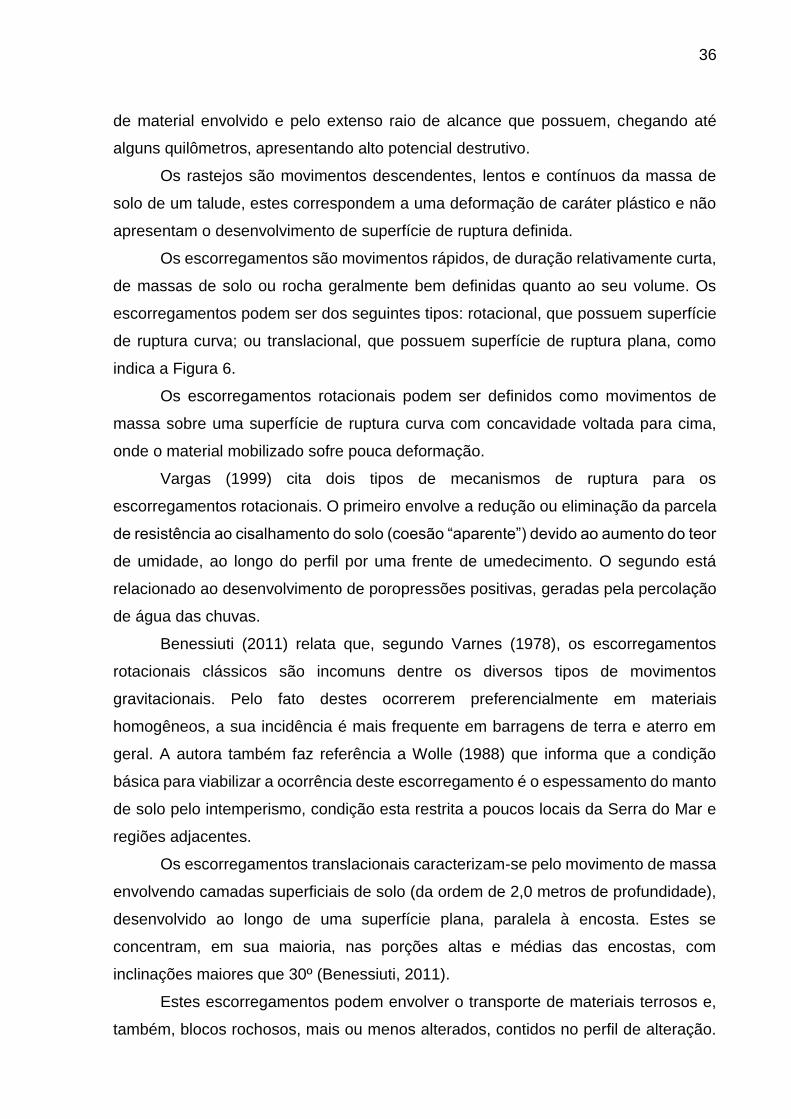
Os escorregamentos são movimentos rápidos, de duração relativamente curta,
de massas de solo ou rocha geralmente bem definidas quanto ao seu volume. Os
escorregamentos podem ser dos seguintes tipos: rotacional, que possuem superfície
de ruptura curva; ou translacional, que possuem superfície de ruptura plana, como
indica a Figura 6.
Os escorregamentos rotacionais podem ser definidos como movimentos de
massa sobre uma superfície de ruptura curva com concavidade voltada para cima,
onde o material mobilizado sofre pouca deformação.
Vargas (1999) cita dois tipos de mecanismos de ruptura para os
escorregamentos rotacionais. O primeiro envolve a redução ou eliminação da parcela
de resistência ao cisalhamento do solo (coesão “aparente”) devido ao aumento do teor
de umidade, ao longo do perfil por uma frente de umedecimento. O segundo está
relacionado ao desenvolvimento de poropressões positivas, geradas pela percolação
de água das chuvas.
Benessiuti (2011) relata que, segundo Varnes (1978), os escorregamentos
rotacionais clássicos são incomuns dentre os diversos tipos de movimentos
gravitacionais. Pelo fato destes ocorrerem preferencialmente em materiais
homogêneos, a sua incidência é mais frequente em barragens de terra e aterro em
geral. A autora também faz referência a Wolle (1988) que informa que a condição
básica para viabilizar a ocorrência deste escorregamento é o espessamento do manto
de solo pelo intemperismo, condição esta restrita a poucos locais da Serra do Mar e
regiões adjacentes.
Os escorregamentos translacionais caracterizam-se pelo movimento de massa
envolvendo camadas superficiais de solo (da ordem de 2,0 metros de profundidade),
desenvolvido ao longo de uma superfície plana, paralela à encosta. Estes se
concentram, em sua maioria, nas porções altas e médias das encostas, com
inclinações maiores que 30º (Benessiuti, 2011).
Estes escorregamentos podem envolver o transporte de materiais terrosos e,
também, blocos rochosos, mais ou menos alterados, contidos no perfil de alteração.

37
Guidicini e Nieble (1983) define que as superfícies de ruptura se localizam dentro de
horizontes de solo, ou ao longo dos planos de contato solo-rocha, planos estes que
costumam apresentar os mais baixos índices de resistência.
(a) Escorregamento translacional
Superfície de ruptura plana
(b) Escorregamento rotacional
Superfície de ruptura circular
(c) Escorregamento em cunha
Figura 6 – Tipos de escorregamento (Infanti Jr. e Fornasari Filho, 1998)
Benessiuti (2011) também cita que segundo Wolle (1988), há dois tipos
prováveis de mecanismos que podem explicar a deflagração destes movimentos,
ambos associados aos efeitos causados pela infiltração das águas de chuva (Figura
7). O primeiro tipo de mecanismo, denominado “clássico”, envolve a elevação do nível
de água pré-existente, devido a uma rede de fluxo gerada pela água infiltrada. Neste
caso, há um acréscimo nas poropressões no interior do maciço gerando uma
diminuição nas tensões confinantes efetivas. A condição básica para a ocorrência
deste mecanismo é a existência de uma camada impermeável subjacente aos
horizontes superficiais, onde possa constatar a diminuição da condutividade hidráulica
com o aumento da profundidade, ao longo do perfil. O segundo tipo de mecanismo

38
ocorre quando há a formação de uma frente de umedecimento, sem nível de água
pré-existente, causando eliminação ou redução da sucção devido à infiltração das
águas de chuva. Neste caso, há um aumento da condutividade hidráulica ao longo da
profundidade e a direção de fluxo é praticamente na vertical.
Figura 7 – Ilustração dos dois tipos de mecanismos de instabilização associados aos
escorregamentos translacionais (Benessiuti, 2011 apud Wolle, 1988)
No entanto, Mendes (2008) cita que para deflagrar este movimento, deve-se
existir uma combinação entre as intensidades pluviométricas acumulada e do evento.
As primeiras chuvas (acumulada) geram um aumento no teor de umidade dos
horizontes superficiais, e as chuvas seguintes (evento) promovem uma maior
elevação deste teor, proporcionando o avanço da frente de saturação para os
horizontes mais profundos.
As subsidências ocorrem devido ao recalque súbito (colapso) da superfície do
solo devido a uma variação no estado de tensão na superfície. A subsidência por
definição é o resultado do deslocamento da superfície gerado por adensamento ou
afundamento de camadas, como resultado da remoção de uma fase sólida, líquida ou
gasosa. Em geral envolve grandes áreas e as causas mais comuns são: ação erosiva
das águas subterrâneas, atividades de mineração, efeito de vibração em sedimentos
não consolidados, exploração de petróleo e bombeamento de águas subterrâneas.
As quedas de blocos são classificadas por Guidicini e Nieble (1984) como
movimentos rápidos, que ocorrem em penhascos verticais, ou taludes muito íngremes,
onde blocos e/ou lascas de rocha, deslocados do maciço por intemperismo, caem por

39
ação da gravidade, sem a presença de uma superfície de movimentação, na forma de
queda livre”.
Amaral (1997) salienta que, na cidade do Rio de Janeiro, os escorregamentos
rasos de solo, geralmente sob a forma de movimentos translacionais, são os mais
importantes, respondendo por cerca de 38% de todos os processos ocorridos entre
1962 e 1992. Diversos estudos indicam que tal comportamento não se limita a cidade
do Rio de Janeiro, sendo característico de todo o escarpamento da Serra do Mar
(Wolle e Carvalho, 1989). Dessa forma, devido à sua importância e representatividade
espacial, tornam-se urgentes procedimentos metodológicos voltados para a previsão
da ocorrência desses movimentos translacionais, embora tenham sido realizados pela
Prefeitura da Cidade do Rio de Janeiro monitoramentos e obras de contenção ao
longo dos anos.
1.1.5 – Condicionantes de Movimentos de Massa
Os fenômenos de acidentes geotécnicos envolvem uma variedade de
processos e fatores que dispõem possibilidades ilimitadas de classificação. O termo
escorregamento é utilizado no sentido de abranger todo e qualquer movimento
coletivo de materiais terrosos e/ou rochosos, independentemente da diversidade de
processos, causas, velocidades, formas e demais características (Guidicini e Nieble,
1993).
Os condicionantes geoambientais à ocorrência de escorregamentos são
aqueles que compõem o sistema físico, o meio ambiente, e que influenciam no
desenvolvimento dos movimentos de massa. Pode-se incluir entre esses
condicionantes os que formam os agentes preparatórios ou predisponentes dos
eventos, compreendendo os aspectos lito-estruturais, geomorfológicos e climáticos.
Distinguem-se ainda, as consequências da interação desses condicionantes,
constituindo elementos como os perfis de intemperismo, vegetação e hidrogeologia
das encostas, diretamente ligados à deflagração de escorregamentos, sob
determinadas condições. A ação antrópica, em geral, constitui um importante
condicionante de instabilização de encostas.

40
A seguir, serão discutidos os principais fatores condicionantes de movimentos
de massa em encostas naturais. Estes fatores serão considerados durante a
elaboração do modelo inteligente Fuzzy, caracterizando o grau de influência de cada
um. Ressalta-se que os condicionantes geológicos e geotécnicos de escorregamentos
serão apresentados e discutidos de forma individualizada, entretanto, a deflagração
dos escorregamentos ocorre de forma dinâmica com os condicionantes interligados.
Clima / Precipitação
O papel do clima relaciona-se, principalmente, à precipitação e suas
conseqüências sobre os processos morfogenéticos. Nos domínios morfoclimáticos
tropicais, a elevada umidade provoca o encharcamento do solo, favorecendo os
movimentos de massa. A intensidade da chuva relaciona-se à energia cinética, que
está relacionada à erosividade (habilidade potencial em promover a erosão de um
determinado tipo de solo ou terreno geológico).
As medidas de pluviosidade (totais diários, médias mensais, etc.) fornecem
uma aproximação da intensidade da chuva (Guerra, 1994). Com uma precipitação
pluvial prolongada, a infiltração é contínua. Como consequência, ocorre a saturação
do solo, reduzindo a coesão, e a resistência desse material ao cisalhamento. As
variações micro climáticas, como diferenças de precipitação ao longo de uma vertente,
podem determinar pontos preferenciais de ocorrência de deslizamentos.
Augusto Filho e Virgili (1998) comentam que as chuvas atuam como o principal
agente não antrópico na deflagração de escorregamentos no Brasil. Os grandes
acidentes relacionados a processos de escorregamentos sempre ocorrem durante o
período chuvoso.
A água é, portanto, o mais importante agente natural na predisposição à
ocorrência de escorregamentos, podendo atuar das seguintes formas:
(a) Elevação do nível piezométrico no maciço, aumentando a poropressão
e reduzindo a resistência ao cisalhamento;
(b) Infiltração d’água promovendo um aumento do peso específico dos
materiais geológicos, que embora pequeno, reflete uma mudança nas
tensões de solicitação externa;
(c) Aumento da pressão hidrostática em descontinuidades. A ocorrência e o
comportamento da água subterrânea são condicionados pelas rochas e

41
estruturas geológicas presentes no local em questão. No caso de
maciços de rochas fraturadas com baixa porosidade, a subida do N.A.
acontece de forma rápida.
(d) Erosão subterrânea retrogressiva (“piping”). Este processo, resultante da
força de percolação, inicia-se a partir de uma surgência de água e
através da erosão e carreamento das partículas forma cavidades que
podem apresentar muitos metros de comprimento.
(e) Diminuição do efeito da coesão aparente;
(f) Enfraquecimento dos materiais, pela ação do intemperismo químico;
(g) Runoff, e a consequente erosão hídrica superficial, alteram o perfil
geométrico da encosta, principalmente em aterros e cortes. O mesmo
ocorre com os solapamentos nas margens de rios e com os rompimentos
de sistemas de drenagem. Isto modifica o FS dos taludes;
(h) Erosão superficial, agindo diretamente sobre o talude, a água superficial
contribui para a erosão laminar, que será tanto maior quanto menos
protegido estiver o solo, podendo inclusive criar cicatrizes erosivas
(ravinas ou voçorocas) que mais tarde resultarão, eventualmente, em
escorregamentos.
A detecção, instrumentação e controle da água subterrânea é, portanto, de
grande valia nos estudos e nas aplicações práticas relativas à ocorrência de
movimento de massa. Carregã e Balzan (1997) ressaltam que as rupturas de taludes
são acidentes comumente ocasionados por condições excepcionais de água
subterrânea.
Diante do exposto, fica clara a importância do acompanhamento das
precipitações na identificação de áreas de risco. Gusmão Filho (1997) ressalta que a
ocorrência de escorregamentos nas mais variadas cidades brasileiras está sempre
associada a episódios de chuva. O autor destaca o conhecimento de diversas
correlações entre os episódios de precipitação e os escorregamentos em diferentes
regiões do Brasil. Cada local apresenta características próprias de chuva, relevo,
materiais naturais, vegetação e uso do solo, impondo um modelo regional de interação
distinto. Segundo Gusmão Filho (1997), uma vez conhecida a correlação local, é
possível estabelecer níveis de alerta e emergência para a mobilização da Defesa Civil.
Com este objetivo, a Fundação GEO-RIO implementou o Sistema Alerta Rio,
na cidade do Rio de Janeiro. Este sistema foi criado em setembro de 1996, com 32

42
estações pluviométricas distribuídas pela cidade do Rio de Janeiro, hoje o sistema
conta com 33 estações como mostra a Figura 8 (http://alertario.rio.rj.gov.br/
?page_id=314), com o objetivo de emitir BOLETINS DE ALERTA à população sempre
que houver previsão de chuvas intensas que possam gerar inundações de vias
públicas e/ou acidentes geotécnicos em encostas (deslizamentos).
Figura 8 – Localização dos Pluviômetros na Cidade do Rio de Janeiro: Alerta Rio
Estas estações enviam dados em tempo real, a cada 15 minutos, para a central
do Alerta Rio. Deste total de 33, duas estações (São Cristóvão e Guaratiba) são
estações meteorológicas completas e enviam, além dos dados de chuvas,
informações de vento, temperatura do ar, umidade e pressão atmosférica. A estação
Alto da Boa Vista também envia dados de temperatura e umidade, além dos dados
pluviométricos (http://alertario.rio.rj.gov.br/?page_id=2).
A Tabela 3 apresenta os termos designados pela GEO-RIO para a classificação
da intensidade de chuva.
Tabela 3 - Classificação da intensidade de chuva. (Fonte: Sistema Alerta Rio)
CLASSIFICAÇÃO PRECIPITAÇÃO
Fraca < 5,0 mm/h.
Moderada > 5,0 e < 25 mm/h.
Forte > 25,1 e < 50 mm/h.
Muito Forte > 50,0 mm/h.
Pancadas de Chuva Intensa ocorrida em curto período de
tempo e espacialmente restrita
43
O Sistema Alerta Rio informa as seguintes probabilidades de ocorrência de
escorregamentos (deslizamentos) quando a rede de pluviômetros detecta valores de
chuva que ultrapassam limites pré-estabelecidos pelos geólogos da GEO-RIO:
1) Probabilidade Baixa - Possibilidade de ocorrências de escorregamentos
circunstanciais (movimentos de massa não deflagrados diretamente pela
ação das chuvas, tendo como agente de maior importância uma
circunstância localizada relacionada a efeitos naturais ou antrópicos, como
por exemplo, rompimento de tubulações, dilatações térmicas, vibrações,
etc).
2) Probabilidade Média - Possibilidade de ocorrências de escorregamentos
ocasionais (movimentos de massa deflagrados pelas chuvas,
predominantemente em taludes artificiais (corte e/ou aterro), com
distribuição pouco expressiva).
3) Probabilidade Alta - Ocorrência de escorregamentos esparsos
(movimentos de massa deflagrados pelas chuvas em taludes naturais e
artificiais, com moderada a grande distribuição).
4) Probabilidade Muito Alta - Ocorrência de escorregamentos generalizados
(movimentos de massa deflagrados pelas chuvas em taludes naturais e
artificiais, com distribuição muito grande, especialmente nas vias que
cortam os maciços montanhosos).
Com um foco voltado para cheias de rios, o Instituto Estadual do Ambiente –
INEA, órgão da Secretaria de Estado do Ambiente – SEA, possui um sistema de alerta
de cheias que tem como objetivo informar às autoridades e à população quanto a
possibilidade de chuvas intensas e de inundações graduais (cheias) que possam
causar perdas materiais e humanas. O sistema de alerta possui uma rede de estações
telemétricas e de radares meteorológicos (65 estações pluviométricas: 19
pluviométricas e 46 hidrológicas) que enviam em tempo real, dados da medição da
quantidade de chuvas e do nível d’água dos rios. Na sala de situação do INEA,
meteorologistas e técnicos em meteorologia fazem o acompanhamento das condições
de tempo e dos rios 24 horas por dia, todos os dias. Quando há previsão de chuvas
fortes ou transbordamento dos rios para a região monitorada, o INEA envia alertas via
mensagens SMS e E-mails para agentes da defesa civil e a população cadastrada no
site:http://www.inea.rj.gov.br/Portal/MegaDropDown/Monitoramento/Centrodemonitd

44
edesastresamb/Alertadecheias/index.htm&lang=. A Figura 9 exemplifica o protocolo
de alerta de cheias adotado pelo INEA.
Figura 9 – Protocolo de Alerta de Cheias do INEA
(fonte: http://alertadecheias.inea.rj.gov.br/)
A Defesa Civil do Município do Rio de Janeiro possui um sistema de alerta,
integrado ao Sistema Alerta-Rio da GEO-RIO e a 02 Radares meteorológicos do
INEA, que é monitorado no Centro de Operações do Rio de Janeiro – CORIO, onde é
possível efetuar o acionamento de 165 sirenes espalhadas em 103 comunidades do
município do Rio de Janeiro. Esses acionamentos baseiam-se nos índices
pluviométricos e a Tabela 4 indica o Protocolo de Acionamento dessas sirenes.
Elbachá et al (1992) salientam que a correlação entre escorregamentos e
precipitação, utilizando-se totais diários não é satisfatória, deve-se considerar a
variação da intensidade de precipitação ao longo do dia.
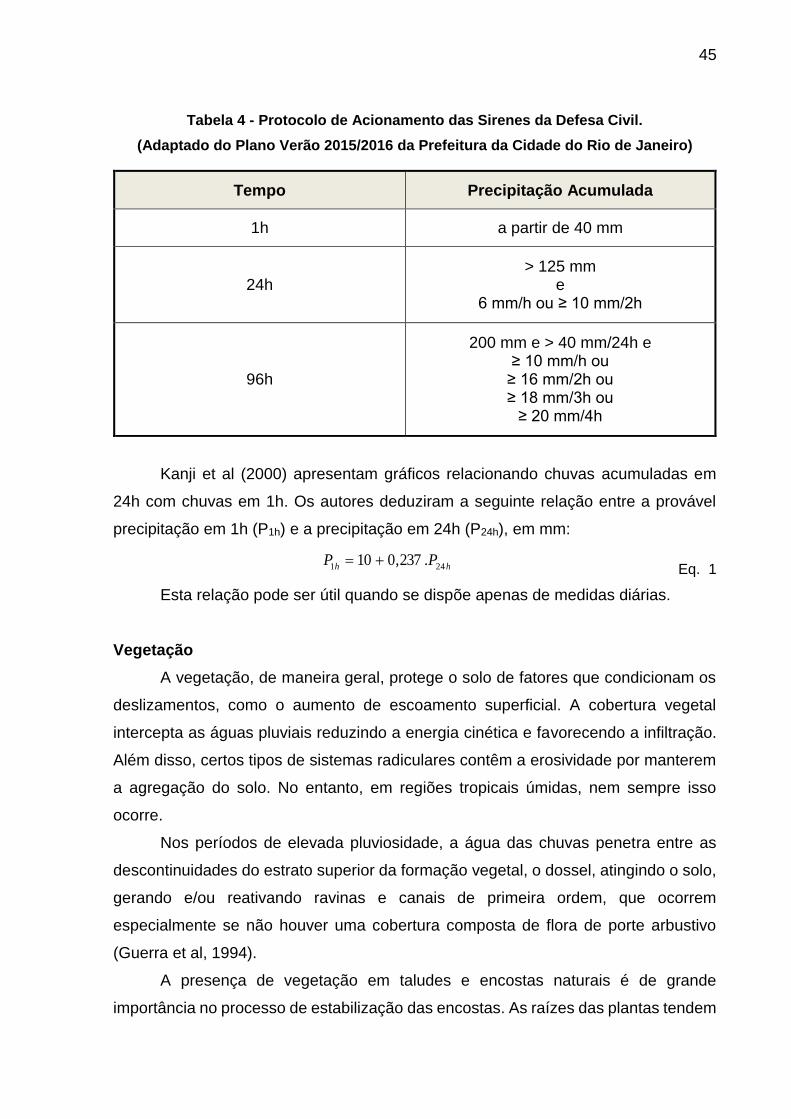
45
Tabela 4 - Protocolo de Acionamento das Sirenes da Defesa Civil.
(Adaptado do Plano Verão 2015/2016 da Prefeitura da Cidade do Rio de Janeiro)
Tempo Precipitação Acumulada
1h a partir de 40 mm
24h > 125 mm
e 6 mm/h ou ≥ 10 mm/2h
96h
200 mm e > 40 mm/24h e ≥ 10 mm/h ou
≥ 16 mm/2h ou ≥ 18 mm/3h ou
≥ 20 mm/4h
Kanji et al (2000) apresentam gráficos relacionando chuvas acumuladas em
24h com chuvas em 1h. Os autores deduziram a seguinte relação entre a provável
precipitação em 1h (P1h) e a precipitação em 24h (P24h), em mm:
hhPP
241.237,010
Eq. 1
Esta relação pode ser útil quando se dispõe apenas de medidas diárias.
Vegetação
A vegetação, de maneira geral, protege o solo de fatores que condicionam os
deslizamentos, como o aumento de escoamento superficial. A cobertura vegetal
intercepta as águas pluviais reduzindo a energia cinética e favorecendo a infiltração.
Além disso, certos tipos de sistemas radiculares contêm a erosividade por manterem
a agregação do solo. No entanto, em regiões tropicais úmidas, nem sempre isso
ocorre.
Nos períodos de elevada pluviosidade, a água das chuvas penetra entre as
descontinuidades do estrato superior da formação vegetal, o dossel, atingindo o solo,
gerando e/ou reativando ravinas e canais de primeira ordem, que ocorrem
especialmente se não houver uma cobertura composta de flora de porte arbustivo
(Guerra et al, 1994).
A presença de vegetação em taludes e encostas naturais é de grande
importância no processo de estabilização das encostas. As raízes das plantas tendem
46
a melhorar a qualidade do solo, aumentando sua resistência através do reforço
mecânico das raízes e reduzindo o teor de umidade do solo, função desenvolvida
pelas plantas através dos processos de transpiração e absorção.
Kanji (1997), no entanto, salienta que esta contribuição fica restrita à espessura
alcançada pelo comprimento das raízes. Suarez (1997) ressalta que um efeito positivo
importante é a ancoragem das massas de solo pelas raízes.
Guidicini e Nieble (1983) destacam a importância do papel desempenhado pela
cobertura vegetal na estabilidade dos taludes. As florestas reduzem a intensidade da
ação dos agentes do clima no maciço natural, evitando bruscas variações na umidade
e temperatura do solo da encosta, com claras vantagens do ponto de vista de
estabilidade. A cobertura vegetal também promove a deposição de matéria orgânica
sobre a superfície do talude, a qual absorve parte da água precipitada e promove a
proteção da erosão superficial.
A avaliação da importância da cobertura vegetal na estabilidade de encostas é
bastante difícil. No entanto, fica clara a ação da vegetação nos seguintes aspectos:
1. Aumento da resistência pela trama de raízes;
2. Prevenção de erosão superficial. Tal efeito ocorre pela diminuição da
velocidade de escoamento superficial da água das chuvas e pela redução da
desagregação devida ao impacto de gotas de chuva no solo;
3. Diminuição do nível d’água pelo efeito da transpiração e interceptação. O
rebaixamento do lençol freático diminui as poropressões no interior do maciço,
fato benéfico à estabilidade;
Quanto ao revestimento superficial do terreno, é necessário analisar todas as
variáveis que alteram o balanço hídrico do solo: a evapotranspiração realizada por
espécies vegetais, a interceptação da precipitação pela vegetação, o reforço da
camada superficial por meio do sistema radicular da vegetação e a execução de
revestimentos aplicados sobre a superfície (Franch, 2008).
De acordo com Suarez (1997), a influência da vegetação na estabilidade de
taludes tem sido muito debatida nos últimos anos, deixando dúvidas na quantificação
dos efeitos de estabilização da vegetação. No entanto, a experiência tem
demonstrado o efeito positivo da vegetação. O autor comenta que o desmatamento
tem sido identificado como um importante agente na instabilização de encostas
urbanas.
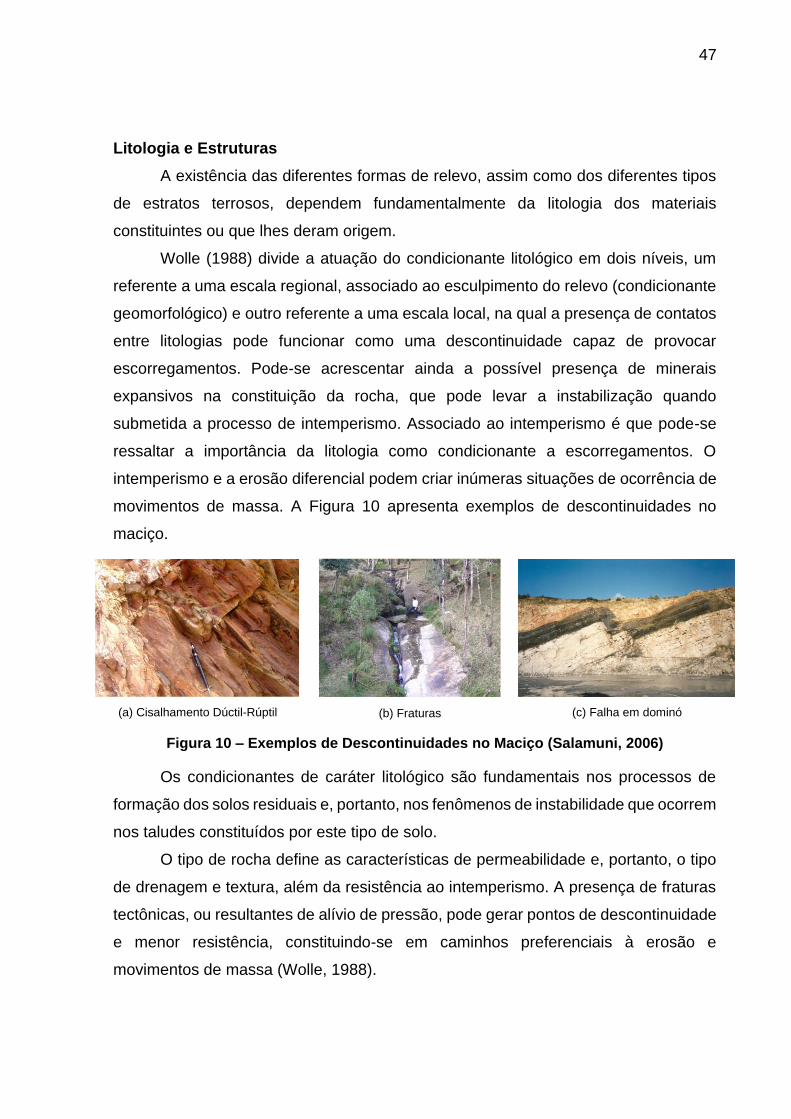
47
Litologia e Estruturas
A existência das diferentes formas de relevo, assim como dos diferentes tipos
de estratos terrosos, dependem fundamentalmente da litologia dos materiais
constituintes ou que lhes deram origem.
Wolle (1988) divide a atuação do condicionante litológico em dois níveis, um
referente a uma escala regional, associado ao esculpimento do relevo (condicionante
geomorfológico) e outro referente a uma escala local, na qual a presença de contatos
entre litologias pode funcionar como uma descontinuidade capaz de provocar
escorregamentos. Pode-se acrescentar ainda a possível presença de minerais
expansivos na constituição da rocha, que pode levar a instabilização quando
submetida a processo de intemperismo. Associado ao intemperismo é que pode-se
ressaltar a importância da litologia como condicionante a escorregamentos. O
intemperismo e a erosão diferencial podem criar inúmeras situações de ocorrência de
movimentos de massa. A Figura 10 apresenta exemplos de descontinuidades no
maciço.
(a) Cisalhamento Dúctil-Rúptil
(b) Fraturas
(c) Falha em dominó
Figura 10 – Exemplos de Descontinuidades no Maciço (Salamuni, 2006)
Os condicionantes de caráter litológico são fundamentais nos processos de
formação dos solos residuais e, portanto, nos fenômenos de instabilidade que ocorrem
nos taludes constituídos por este tipo de solo.
O tipo de rocha define as características de permeabilidade e, portanto, o tipo
de drenagem e textura, além da resistência ao intemperismo. A presença de fraturas
tectônicas, ou resultantes de alívio de pressão, pode gerar pontos de descontinuidade
e menor resistência, constituindo-se em caminhos preferenciais à erosão e
movimentos de massa (Wolle, 1988).

48
O granito, por exemplo, apresenta forte resistência ao intemperismo e
porosidade e permeabilidade baixas. No entanto, em regiões tropicais úmidas, este
tipo de rocha é fortemente intemperizado (Chorley et al., 1984).
As estruturas presentes nas rochas e remanescentes nos solos residuais
constituem um fator extremamente importante no desencadeamento de
escorregamentos. No caso de rochas, como granitos, gnaisses e migmatitos, as
características geomecânicas do maciço são ditadas muito mais pelas estruturas que
pela litologia. A estrutura assume, por vezes, a importância de um condicionante
principal em certos escorregamentos, quando há presença de zonas de falha na rocha
e ocorrência de juntas de alívio de tensões.
Desse modo, em função do ângulo da descontinuidade em relação à face do
talude, e de características como ângulo de atrito, preenchimentos presentes no plano
e presença de água percolando na fratura, pode haver uma maior ou menor
susceptibilidade a movimentos de massa. Este fato pode ser ainda agravado com a
ação do homem, por meio de cortes, etc. A Tabela 5 apresenta os principais tipos de
descontinuidades (Freire, 1965).
Tabela 5 - Principais tipos de descontinuidades (Adaptado de Freire, 1965)
1. FRATURAS OU JUNTAS
1.1 De contração por resfriamento (solidificação)
1.2 De contração por dessecamento
1.3 De origem externa (alternância térmica por insolação e resfriamento, alívio de tensões, alteração química)
1.4 De origem interna ou tectônica, diaclases (por compressão, trações, flexões) e falhas geológicas.
2. PLANOS DE XISTOSIDADE
3. PLANOS DE SEDIMENTAÇÃO
4. CONTATOS
5. SUPERFÍCIES LIMITES OU ZONAS DE TRANSIÇÃO
5.1 Entre rocha sã e manto intemperizado
5.2 Entre formações de solo diferente
Dentre as descontinuidades geológicas, as de maior extensão e por este motivo
de influência sobre maiores regiões, são as falhas geológicas, que podem condicionar
a evolução do relevo de extensas regiões, definir a localização de morros, cadeias de

49
montanhas e vales. Grandes zonas de falha podem dar origem a formas de relevo
abruptos que se tornam palco de fenômenos de instabilização de encostas.
A xistosidade das rochas, decorrente da orientação paralela dos minerais,
permite a formação de descontinuidades litológicas que mergulham para fora do
talude. Esses planos de fraqueza tornam-se mais instáveis com a presença do
intemperismo diferencial. Rochas gnáissicas apresentam xistosidade marcante.
Ponce (1984) reporta que no domínio das rochas homogêneas, os
condicionantes estruturais, representados pelas juntas de alívio, são os de maior
importância, em função de sua continuidade nos maciços, dos volumes de rocha
envolvidos e da tendência à formação de horizontes de iso-intemperismo. Quanto às
rochas heterogêneas, a xistosidade é o principal condicionante estrutural da
estabilidade.
As juntas de alívio dão condições para o desenvolvimento de um perfil de
alteração abrupta entre o solo residual e a rocha sã. Os horizontes de iso-
intemperismo, limitados por juntas de alívio, especialmente no contato entre a rocha
alterada e a rocha parcialmente sã causam problemas de instabilidade.
Geomorfologia
Entende-se por geomorfologia o estudo das formas de relevo associado à
gênese e à evolução destas formas. A geomorfologia estuda os processos
responsáveis pelas ações de criar, destruir, deslocar, ampliar, reduzir, preservar e
alterar as formas de relevo.
A declividade natural ou resultante da intervenção humana nas encostas é
também fundamental no desencadeamento de movimentos de massa, o que é
largamente comprovado pelas leis da mecânica dos solos e das rochas.
Os condicionantes geomorfológicos incluem as formas de vertentes e as
variáveis morfométricas, como a dissecação, declividade, aspecto, amplitude de
relevo, etc. Conforme observado por Netto (1994), a drenagem exerce papel
fundamental sobre o modelamento do relevo (formas de vertentes e vales), sendo uma
variável especialmente importante em regiões tropicais úmidas.
A declividade fornece a medida de inclinação (em graus ou percentual) do
relevo em relação ao plano do horizonte. A velocidade de deslocamento de material
e, portanto, a capacidade de transporte de massas sólidas e líquidas, é diretamente
proporcional à declividade. Esta variável tem grande importância nos processos

50
geomorfológicos, condicionando cursos de água e deslocamento de solos
coluvionares (Thomas, 1979).
As declividades acima de 30º apresentam risco de deslizamentos mais
frequente. Acima de 60º, a camada de solo residual é menos espessa o que,
teoricamente, diminuiria o risco de escorregamentos. No entanto, fenômenos desse
tipo já foram verificados em áreas cujo manto de solo residual era pouco espesso,
principalmente em épocas de pluviosidade elevada, tornando exposta a rocha de base
(Fernandes e Amaral, 1996).
A amplitude de relevo refere-se à variação de altura, em metros, dada pela
diferença entre as cotas máxima e mínima. Quando esta variação tem como cota
mínima o nível de base geral, tem-se a altitude. A amplitude está relacionada ao
encaixamento dos vales. Quanto mais elevado o valor da amplitude, maior a energia
cinética aplicada às vertentes e, consequentemente, maior é a capacidade de
deslocamento de material, principalmente se associada a elevadas declividades
(Thomas, 1979).
Com relação à forma das vertentes, existem três tipos básicos: as formas
côncavas, convexas e retilíneas. Estas formas encontram-se combinadas na
natureza, gerando os demais tipos (côncavo-convexas, retilíneo-convexas, etc.).
Segundo Moreira e Neto (1998), uma vertente com perfil côncavo apresenta
curvatura negativa, com ângulos decrescentes para baixo. Vertentes convexas
caracterizam-se por uma curvatura positiva, com ângulos que aumentam
continuamente para baixo. Já as vertentes retilíneas apresentam ângulos de
declividade aproximadamente constantes.
Segundo Pinto (2002), taludes convexos são menos estáveis que os taludes
côncavos, por apresentarem maior peso de material disponível para escorregamento,
e consequente aumento das tensões cisalhantes.
A Figura 11 ilustra os diferentes tipos de forma das vertentes, que são
caracterizadas da seguinte forma: LL (retilínea), LX (convexo-retilínea), LV (côncavo-
retilíneo), XL (retilíneo-convexo), XX (convexo), XV (côncavo-convexo), VL (retilíneo-
côncavo), VX (convexo-côncavo), VV (côncavo).

51
Figura 11 – Diferentes formas das vertentes (Adaptada de Chorley et al., 1984)
O tipo de material depositado sobre as vertentes também é importante. A
presença tanto de mantos espessos de solo residual quanto de tálus contribuem para
a ocorrência de escorregamentos (Fernandes e Amaral, 1996). Os depósitos de tálus
são resultantes de movimentos de massa pretéritos e servem de fonte para novos
movimentos de massa, principalmente em períodos de elevada pluviosidade (Guidicini
e Nieble, 1993).
Ação Antrópica
O homem constitui o mais importante agente modificador da dinâmica das
encostas. O avanço de diversas formas de uso e ocupação, para áreas naturalmente
susceptíveis aos movimentos de massa, acelera e amplia os processos de
instabilização.
Com relação à ação antrópica, as principais modificações indutoras dos
movimentos gravitacionais de massa são (Gerscovich, 2009 Apud Augusto-Filho,
1995):
1 Remoção da cobertura vegetal;
2 Lançamento e concentração de águas pluviais e/ou servidas;
3 Vazamentos na rede de abastecimento, esgoto e presença de fossas;
4 Execução de cortes com geometria incorreta (altura/inclinação);
5 Execução deficiente de aterros (geometria, compactação e fundação); e
6 Lançamento de lixo nas encostas/taludes.
52
Tais modos de atuação podem ser favoráveis ou desfavoráveis à manutenção
da estabilidade, dependendo das peculiaridades da encosta. Em geral, a intervenção
humana contribui para uma aceleração dos processos de denudação/desmatamento.
Na região litorânea sul do Rio de Janeiro, existem desmatamentos antigos, para
a constituição de pastos ou culturas. Outras áreas foram desmatadas para permitir a
passagem da rodovia BR-101 e, a partir do início da operação da via, ocorreram
desmatamentos subsequentes, com o aumento da população da área. Nesta região,
foram observados diversos casos de instabilidade de encostas. A maioria dos casos
ocorreu em faces de taludes de corte, onde estão expostos horizontes diversos dos
perfis de intemperismo.
A ação antrópica destrutiva sobre a vegetação tem gerado e/ou acelerado
processos geomorfológicos de degradação. Estes processos têm ocorrido de forma
intensa no sudeste brasileiro, devido tanto às atividades agrícolas quanto à
urbanização, sendo que a instabilização de encostas tem sido agravada pela remoção
das matas (Wolle, 1988). Sem esta interferência, os processos de decomposição
seriam mais rápidos que os de transporte, devido a fatores como a alta taxa de
infiltração induzida pela umidade, a temperatura do solo, a ação bioquímica, e o
intenso intemperismo químico (Chorley et al,1984).
Os cortes de estradas, e outras obras em áreas de declividade desfavorável
e/ou que possuam características geológicas e geomorfológicas sujeitas a
deslizamentos, aceleram estes processos (Guerra, 1994; Fernandes e Amaral, 1996).
Além disso, o tráfego de veículos pesados provoca vibrações que detonam processos
de instabilização de encostas (Guidicini e Nieble, 1993). O papel das atividades
antrópicas como indutoras de deslizamentos é muito significativo, sendo muito
frequentes os deslizamentos em encostas ocupadas durante períodos de chuvas
intensas. O volume de material removido e transportado por água pluvial está
relacionado à densidade de cobertura vegetal e à declividade, de forma que com o
desmatamento, esses processos se tornam mais intensos, principalmente em pontos
de alta declividade.
53
1.2 – Métodos de Análise de Estabilidade de Taludes
1.2.1 – Introdução
A avaliação da estabilidade de um dado talude, em função dos condicionantes
geológicos/geotécnicos e da ação dos agentes externos/internos de instabilização,
pode ser realizada por análises determinísticas ou análises não determinísticas.
As análises determinísticas de estabilidade de taludes, usadas comumente na
Geotecnia são baseadas, principalmente, em métodos de equilíbrio limite (por
exemplo: Bishop, 1955; Morgenstern-Price, 1965; Spencer, 1967; e Janbu, 1973).
Estes métodos permitem a obtenção de um fator de segurança (FS), com base em
um conjunto de dados de entrada. Além dos métodos de equilíbrio limite, existe o
método dos elementos finitos (MEF), que visa incorporar as relações tensão-
deformação dos diversos solos que compõem o talude e assim evitar a adoção das
hipóteses simplificadoras que caracterizam os métodos de equilíbrio limite.
As análises não determinísticas de estabilidade de taludes podem ser do tipo:
análises probabilísticas e análises através da inteligência computacional. Tanto as
análises probabilísticas quanto as análises através da inteligência computacional
levam em conta as incertezas não incorporadas nas análises determinísticas
(incertezas devido a pequenas quantidades de amostras ou observações feitas para
se definir o valor médio dos parâmetros de resistência e os erros nos procedimentos
de ensaios). Com estas também se pode, através da análise dos resultados, verificar
os parâmetros que influenciam mais significativamente no problema.
Nos itens a seguir serão demonstradas resumidamente as técnicas de análise
de estabilidade de taludes.
1.2.2 – Análise Determinística de Estabilidade de Taludes
Os métodos determinísticos para análise de estabilidade de taludes, são
comumente utilizados na geotecnia, pois fornecem uma análise quantitativa sob a
forma de um coeficiente ou fator de segurança (FS).
O Fator de Segurança pode ser definido como a razão entre as forças de
resistência à ruptura e as forças atuantes tangencialmente à superfície de ruptura. O
FS é uma incógnita que representa o quão distante da ruptura encontra-se a massa

54
de solo, pois se o fator de segurança for igual a unidade, tem-se um estado de
equilíbrio limite onde o talude encontra-se na iminência do colapso. Fatores de
segurança maiores que a unidade indicam um talude estável. Na prática, para a
maioria dos casos, o FS deve ser igual ou maior que 1,5 para garantir a segurança do
talude em estudo.
Em outras palavras, a instabilidade do talude será deflagrada quando as
tensões cisalhantes mobilizadas (mob) se igualarem à resistência ao cisalhamento (f),
FS=1,0 (Eq. 2; Figura 12). Então, a instabilidade pode ser atingida com o aumento das
tensões cisalhantes mobilizadas ou pela redução da resistência e o Fator de
Segurança também pode ser definido como o fator pelo qual os parâmetros de
resistência podem ser reduzidos de tal forma a tornar o talude em estado de equilíbrio
limite ao longo de uma superfície (Eq. 3). (Gerscovich, 2009)
FS=𝜏𝑓
𝜏𝑚𝑜𝑏=1,0 Eq. 2
𝜏𝑚𝑜𝑏 =𝑐′
𝐹𝑆+ 𝜎′
𝑡𝑎𝑛 𝜙′
𝐹𝑆 Eq. 3
Figura 12 – Geometria do Escorregamento (Adaptado de Gerscovich, 2009)
Fabrício (2006) citou em sua pesquisa que os métodos determinísticos de
estabilidade de taludes estão divididos, basicamente, em dois grupos: os que se
baseiam em análise de deslocamentos e os que se baseiam em estado de equilíbrio
limite. No primeiro Grupo, destaca-se o método de elementos finitos no qual
poderosas técnicas numéricas são em pregadas com o auxílio de um computador,
levando em consideração as relações tensão/deformação dos diversos materiais. O
segundo grupo pode ser dividido em três subgrupos: métodos que consideram a
massa rompida como um corpo único, formulando hipóteses sobre as tensões ao
Superfície de Ruptura
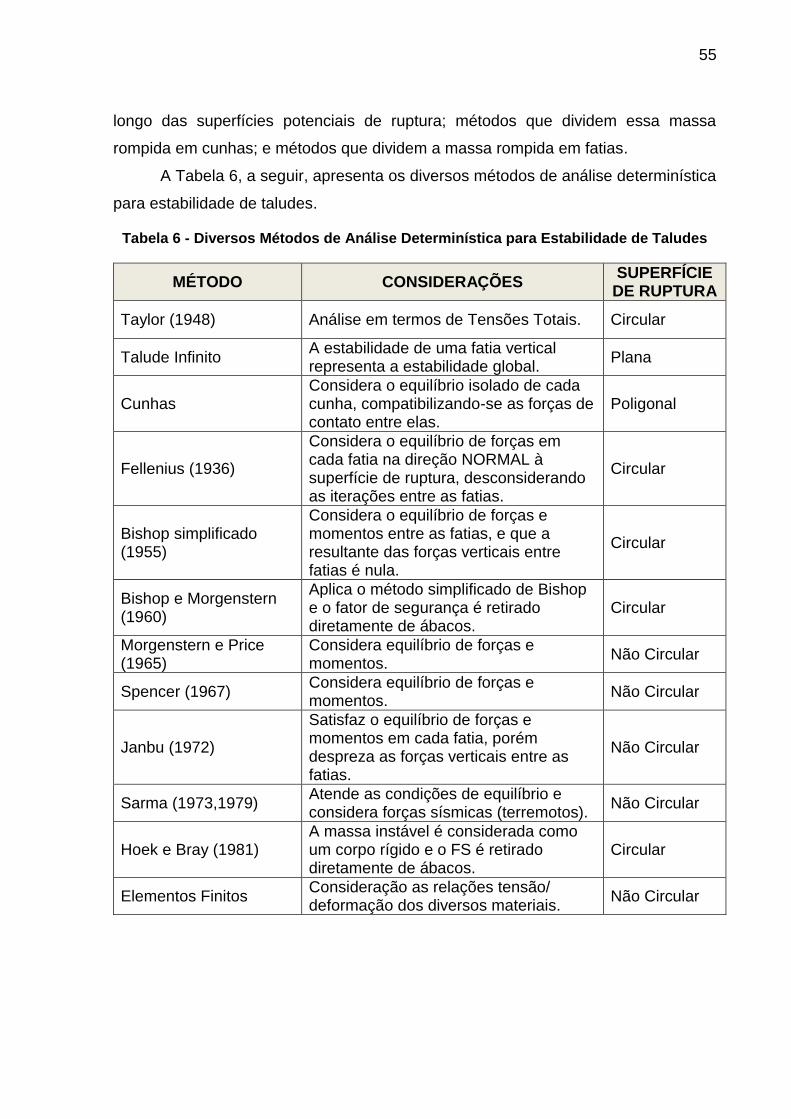
55
longo das superfícies potenciais de ruptura; métodos que dividem essa massa
rompida em cunhas; e métodos que dividem a massa rompida em fatias.
A Tabela 6, a seguir, apresenta os diversos métodos de análise determinística
para estabilidade de taludes.
Tabela 6 - Diversos Métodos de Análise Determinística para Estabilidade de Taludes
MÉTODO CONSIDERAÇÕES SUPERFÍCIE
DE RUPTURA
Taylor (1948) Análise em termos de Tensões Totais. Circular
Talude Infinito A estabilidade de uma fatia vertical representa a estabilidade global.
Plana
Cunhas Considera o equilíbrio isolado de cada cunha, compatibilizando-se as forças de contato entre elas.
Poligonal
Fellenius (1936)
Considera o equilíbrio de forças em cada fatia na direção NORMAL à superfície de ruptura, desconsiderando as iterações entre as fatias.
Circular
Bishop simplificado (1955)
Considera o equilíbrio de forças e momentos entre as fatias, e que a resultante das forças verticais entre fatias é nula.
Circular
Bishop e Morgenstern (1960)
Aplica o método simplificado de Bishop e o fator de segurança é retirado diretamente de ábacos.
Circular
Morgenstern e Price (1965)
Considera equilíbrio de forças e momentos.
Não Circular
Spencer (1967) Considera equilíbrio de forças e momentos.
Não Circular
Janbu (1972)
Satisfaz o equilíbrio de forças e momentos em cada fatia, porém despreza as forças verticais entre as fatias.
Não Circular
Sarma (1973,1979) Atende as condições de equilíbrio e considera forças sísmicas (terremotos).
Não Circular
Hoek e Bray (1981) A massa instável é considerada como um corpo rígido e o FS é retirado diretamente de ábacos.
Circular
Elementos Finitos Consideração as relações tensão/ deformação dos diversos materiais.
Não Circular

56
1.2.3 – Análise Não Determinística de Estabilidade de Taludes
Os métodos não determinísticos para análise de estabilidade de taludes, em
geral fornecem resultados qualitativos e baseiam-se: na obtenção de um índice de
confiabilidade que permite quantificar a probabilidade de ruptura; ou na obtenção
direta de um valor percentual do potencial de ruptura de talude. A vantagem destes
métodos em relação às análises determinísticas é que através destes consegue-se
quantificar e utilizar na análise as incertezas inerentes ao talude analisado.
Segue abaixo a relação dos métodos não determinísticos que podem ser
aplicados a análises de problemas de estabilidade em Geotecnia:
Método Analítico;
Método Aproximado;
Simulação de Monte Carlo;
Simulação de Monte Carlo com Variabilidade Espacial dos Solos;
Lógica Nebulosa; e
Neuro Fuzzy.
Os Métodos Lógica Nebulosa e Neuro Fuzzy serão detalhados no Capítulo 2
desta Tese.
1.3 – Considerações Finais
Como descrito nos itens anteriores, muitos são os fatores que condicionam os
movimentos de massa e muitos são os tipos de movimento que podem ocorrer em
uma encosta, ou em um talude natural ou construído. Dentre os principais
condicionantes, citam-se clima e precipitação, geomorfologia da encosta, litologia e
estruturas das rochas, vegetação e ação antrópica.
Apesar da apresentação dos diferentes tipos de movimentos de massa
(escorregamentos, escoamentos, subsidências, etc), ressalta-se que o foco do
presente trabalho consiste na análise de escorregamentos de massas de solo.
Somente um estudo minucioso dos condicionantes possibilita o conhecimento
necessário para o desenvolvimento de novas abordagens e modelos capazes de
prever uma Potencial Ruptura de Talude.
57
Em geral, os métodos de análise de estabilidade necessitam do conhecimento
dos parâmetros de resistência dos materiais envolvidos. A possibilidade de previsão
de deslizamentos de massa de solo no campo, com dados retirados de laudos de
vistorias anteriores ou através de dados de análises paramétricas, aparece como uma
alternativa atraente para um parecer preliminar do comportamento da encosta.

58
2 – FUNDAMENTAÇÃO TEÓRICA DA INTELIGÊNCIA COMPUTACIONAL
2.1 – Introdução
A sobrevivência da espécie humana deve-se principalmente pelas capacidades
mentais que o ser humano vem desenvolvendo ao longo de sua existência. Em função
disso, o entendimento sobre “como o Homem pensa” tem sido objeto de estudo
durante milhares de anos, ou seja, como uma pequena porção de matéria pode
perceber, compreender, prever e manipular um mundo muito maior e mais complexo
que ela própria (Russell e Norvig, 2004).
Segundo Fernandes (2003), a Inteligência Artificial é um tipo de inteligência
produzida pelo homem para dotar as máquinas de algum tipo de habilidade que simule
a inteligência humana.
A Inteligência Computacional vai além da perspectiva de compreensão do
pensamento humano, pois também procura construir entidades artificiais inteligentes
Goldschmidt (2010).
Para os Técnicos do Laboratório de Inteligência Computacional Aplicada da
PUC-RIO, a Inteligência Computacional pode ser definida como a busca, através de
técnicas computacionais inspiradas na Natureza, para o desenvolvimento de sistemas
inteligentes que imitem aspectos do comportamento humano, tais como: aprendizado,
percepção, raciocínio, evolução e adaptação (http://www.academico.ica.ele.puc-
rio.br/compint/index.rails?name=Intelig%C3%AAncia%20 Computacional).
Goldschmidt (2010) definiu a Inteligência Computacional como sendo a ciência
multidisciplinar que busca desenvolver e aplicar técnicas computacionais que simulem
o comportamento humano em atividades específicas.
Neste sentido, a técnica de inteligência computacional conhecida como Lógica
Fuzzy (LF) ou Lógica Nebulosa serve para tratamento de incertezas, pois possui
habilidade em inferir conclusões e gerar respostas baseadas em variáveis linguísticas
que podem ser, por exemplo: muito, pouco, frio, calor, alto, baixo, entre outros, ou
seja, informações vagas, ambíguas e qualitativamente incompletas e imprecisas.

59
Outra técnica de inteligência computacional, a Rede Neural Artificial (RNA), é
formada por algoritmos que apresentam um modelo inspirado na estrutura neural do
cérebro humano, capazes de adquirir conhecimento através de treinamento.
Já o modelo híbrido Neuro-fuzzy refere-se à combinação de um conjunto de
teorias fuzzy e redes neurais artificiais. Neste método, são incorporadas as vantagens
de ambas as abordagens anteriores.
Apesar da instabilidade de taludes ser um fenômeno natural muito estudado
por pesquisadores de todo o mundo, há grande dificuldade em determinar as
complexas interações entre os diversos fatores condicionantes e as suscetibilidades
de escorregamento. Para tratar dessas complexas interações, os métodos de
Inteligência Computacional supracitados podem, quando bem modelados, produzir
resultados precisos e acurados, pois estes são capazes de: realizar o tratamento de
qualquer tipo de informação (numérica, linguística, lógica, etc.); gerenciamento do
impreciso, parcial, vago ou informação imperfeita; resolução de conflitos por
colaboração e agregação; capacidade de auto aprendizado, de auto-organização e de
auto direcionamento; imitação humana do processo de tomada de decisão; rápida
computação usando operações de números fuzzy; habilidade de aprender:
representação transparente do conhecimento e habilidade de lidar com incertezas
com as vantagens das redes neurais; e se existem dados "experts", estes podem ser
usados, pois após o treinamento, as novas regras podem ser analisadas e em alguns
casos disponibilizam informações úteis sobre o problema em questão.
Também, pode-se levar em conta que estas técnicas de inteligência
computacional são de fácil utilização, fornecem resultados rápidos e possuem baixo
custo de implantação.
2.2 – Lógica Nebulosa: Fuzzy
2.2.1 - Introdução
A palavra ‘lógica’ está presente em nossa vida desde muito cedo, mas a sua
compreensão, assim como ocorre com muitas outras palavras e suas respectivas
definições, sofre variações à medida que vamos crescendo e observando o mundo
com outros olhos. (Camargos, 2002)
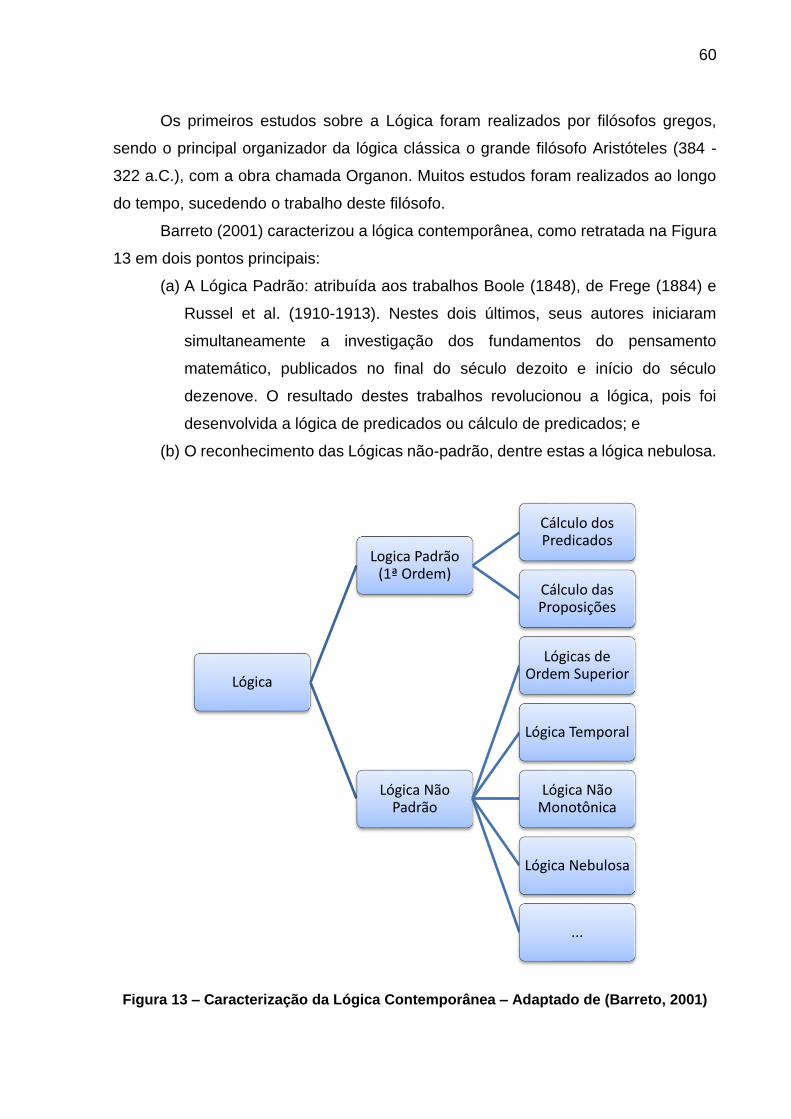
60
Os primeiros estudos sobre a Lógica foram realizados por filósofos gregos,
sendo o principal organizador da lógica clássica o grande filósofo Aristóteles (384 -
322 a.C.), com a obra chamada Organon. Muitos estudos foram realizados ao longo
do tempo, sucedendo o trabalho deste filósofo.
Barreto (2001) caracterizou a lógica contemporânea, como retratada na Figura
13 em dois pontos principais:
(a) A Lógica Padrão: atribuída aos trabalhos Boole (1848), de Frege (1884) e
Russel et al. (1910-1913). Nestes dois últimos, seus autores iniciaram
simultaneamente a investigação dos fundamentos do pensamento
matemático, publicados no final do século dezoito e início do século
dezenove. O resultado destes trabalhos revolucionou a lógica, pois foi
desenvolvida a lógica de predicados ou cálculo de predicados; e
(b) O reconhecimento das Lógicas não-padrão, dentre estas a lógica nebulosa.
Figura 13 – Caracterização da Lógica Contemporânea – Adaptado de (Barreto, 2001)
Lógica
Logica Padrão (1ª Ordem)
Cálculo dos Predicados
Cálculo das Proposições
Lógica Não Padrão
Lógicas de Ordem Superior
Lógica Temporal
Lógica Não Monotônica
Lógica Nebulosa
...

61
2.2.2 - Conceito de Lógica Nebulosa (LN)
A Teoria dos Conjuntos Nebulosos, desenvolvida por Lofti A. Zadeh (Zadeh,
1965) durante a década de 1960, executa o tratamento de informações incertas,
imprecisas e vagas comumente encontradas nos problemas cotidianos e fornece a
base matemática que permite o manuseio destas incertezas por intermédio da
linguística e cognição humanas.
A teoria dos conjuntos nebulosos, quando utilizada em um contexto lógico,
como o de sistemas baseados em conhecimento, é conhecida como lógica nebulosa,
lógica difusa ou lógica "fuzzy" (Sandri et al,1999).
Segundo Kosko (1992), o principal objetivo da lógica nebulosa é generalizar a
idéia representada pela teoria dos conjuntos ordinários, ou convencionais,
aproximando-se da imprecisão e do aspecto vago do raciocínio humano.
Oliveira Jr. (1999) cita que o aspecto mais notável dessa metodologia é a
possibilidade de se capturar, em um modelo matemático, conceitos intuitivos como
graus de satisfação, conforto, adequação, etc. sem a necessidade de “violentá-los”
por meio de enquadramento obrigatório em modelos por vezes incompatíveis com o
grau de difusão apresentado no contexto em questão.
Pinto (2002), afirma que a Lógica Difusa é uma poderosa ferramenta que obtém
soluções viáveis para problemas de difícil tratamento por técnicas convencionais, pois
tem a capacidade de efetuar a análise de sistemas de extrema complexidade, cuja
modelagem por ferramentas convencionais se mostra extremamente difícil, ou até
impossível.
Portanto, a Lógica Nebulosa é uma lógica multivalorada capaz de absorver
informações vagas, normalmente descritas em uma linguagem natural e convertê-las
para um formato numérico, de fácil manipulação computacional, procurando modelar
o modo impreciso do raciocínio humano e auxiliar na habilidade humana de tomar
decisões.
A Teoria dos Conjuntos Nebulosos tem toda a sua base formal na Teoria
Clássica dos Conjuntos. Um fato imprescindível para o entendimento de onde se
insere a lógica nebulosa no contexto das lógicas não-padrão (Figura 13) está em
conhecer o trabalho de George Boole (Boole, 1848), que associou à lógica dois

62
estados de verdade e que passou a ser conhecida como Lógica de Boole ou Lógica
Padrão. (Camargos, 2002)
Um conjunto é uma coleção de objetos que possuem determinada
característica em comum. Na Lógica de Boole, um objeto possui apenas duas
maneiras de se relacionar com um conjunto, ou seja, um dado objeto pertence ou não
pertence a um determinado conjunto. Isso porque a Lógica de Boole usa apenas os
valores 0 e 1 para representar o grau de pertinência “” da variável, isto é “=0” não
pertence ao conjunto e “=1” pertence ao conjunto.
Tomando como exemplo a representação da escala da velocidade de um
automóvel através da Lógica Booleana, Figura 14, pode ser observado que houve
uma mudança abrupta na pertinência () dos conjuntos quando é atingida a velocidade
V. O grau de pertinência do conjunto Veloz passa de 0 para 1, enquanto o do conjunto
Lento passa de 1 para 0. Esta mudança abrupta de grau de pertinência ocorre porque
é impossível representar variáveis que apresentam graus de pertinência diversificados
dentro do domínio 0 e 1.
Supondo que V seja igual a 100km/h e a velocidade do automóvel seja inferior
a V, este não pertence ao conjunto Veloz, mesmo que esteja a uma velocidade de 99
km/h, pois a Lógica Booleana nos dá uma visão de conjunto “Crisp”, onde a variável
pertence ou não pertence ao conjunto. Todavia, a velocidade de 99km/h está muito
próxima do conjunto Veloz, tendo apenas 1 unidade separando-a deste conjunto.
Figura 14 – Exemplo em Lógica Booleana
1
0 Velocidade (km/h)
V
Lento Veloz

63
Na Figura 14, os valores do domínio “Velocidade” são dados pelos conjuntos
Lento e Veloz, caracterizados pelas equações 4 e 5:
Lento: {automóvel Lento / Velocidade < V} Eq. 4
Veloz: {automóvel Veloz / Velocidade ≥ V} Eq. 5
Na Teoria de Zadeh (1965), um conjunto nebuloso é uma coleção de objetos
com características comuns. No entanto, estes objetos possuem diversas maneiras
de se relacionarem ao conjunto, além de pertencente ou não pertencente, pois estão
associados ao mesmo através de um grau de pertinência (μ) que varia de 0 a 1. Com
isso, há uma suavização na transição entre as condições de pertinência e não
pertinência, de modo que a mesma não ocorra de modo abrupto, mas sim
progressivamente.
Pinto (2002) citou que um conjunto fuzzy é uma coleção de pares de números
que consistem em membros, e graus de “suporte” para estes membros. Em uma forma
discreta, o conjunto fuzzy “aproximadamente 7” deve ser expresso da seguinte forma:
{0.1/5, 0.7/6, 1.0/7, 0.7/8, 0.1/9}. Na notação de conjunto fuzzy, os números após a
barra (/) são membros do conjunto e os valores antes da barra são os graus de
pertinência daqueles números. O uso de conjuntos fuzzy para representar termos
linguísticos nos habilita a representar de forma mais adequada e consistente algo que
é fuzzy (Juang et al., 1992).
Tomando como base o exemplo supracitado e utilizando a Lógica Nebulosa
para a configuração dos conjuntos Lento e Veloz, tornou-se possível uma suavização
na transição entre estes, pois o grau de pertinência pode variar de 0 a 1,
diferentemente da Lógica de Boole.
Na Figura 15, observa-se que, dependendo da velocidade, o automóvel pode
pertencer ao conjunto Lento, ao conjunto Veloz ou até mesmo aos dois conjuntos,
com diferentes graus de pertinência. Por exemplo: um automóvel com velocidade V,
pertence ao conjunto Lento com grau de pertinência baixo (μ~0,15) e ao conjunto
Veloz com grau de pertinência alto (μ~0,65).

64
Figura 15 – Exemplo em Lógica Nebulosa
Neste caso, as funções de pertinência ou MFs (memberships functions) dos
conjuntos Fuzzy mapeiam cada elemento de X com um grau de pertinência (ou valor
de pertinência) entre 0 e 1, conforme as equações 6 e 7:
cX
cXaac
Xc
aX
Lento
0
)(
)(
1
Eq. 6
dX
dXbbd
bX
bX
Veloz
1
)(
)(
0
Eq. 7
Segundo Neto (2005), os conjuntos fuzzy possuem características específicas,
como:
(a) Altura. É o maior grau de pertinência da função de pertinência;
(b) Normalização. O conjunto Fuzzy está na Forma Normal Mínima se pelo
menos um elemento possui “(u)=1”. O conjunto Fuzzy está na Forma
Normal Máxima se pelo menos um elemento possui “(u)=1” e um elemento
“(u)=0”;
1
0 X= Velocidade (km/h)
Veloz
V a b d c
Lento
0,15
0,65

65
(c) Domínio. É o universo total de valores possíveis dos elementos do
conjunto. Dependendo do contexto, o domínio pode ser aberto ou fechado
e cresce monotonicamente da esquerda para direita;
(d) Universo do Discurso. É o espaço Fuzzy completo de variação de uma
variável do modelo.
Os tipos mais comuns de funções de pertinência, além de indicar em que área
as mesmas são comumente utilizadas estão demonstradas na Tabela 7.
Tabela 7 - Funções de Pertinência (Neto, 2005)
Função Utilização
Linear (Crescente e Decrescente)
Aproximação de conceitos não bem compreendidos.
ab
ax)b,a,x(f
Sigmoide (Crescente e Decrescente), Curva S ou Curva Z
Modelagem Dinâmica. Problema das Filas. Qualificadores de freqüência: usualmente, maioria, quase todos.
)cx(a1
1)c,a,x(f
Sendo: a=10 (maior valor de x com pertinência igual a 1)
c= 4 (x onde há mudança de curvatura)
Sino
Qualificadores de quantidade: poucos alguns. Número Fuzzy: aproximadamente, entorno de.
b
a
cxcxf
2
1
1),,(
Sendo: a = 2 (x onde se inicia a curva)
b = 4 (x onde há mudança de curvatura, antes do
centro) c = 6 (x no centro da curva)
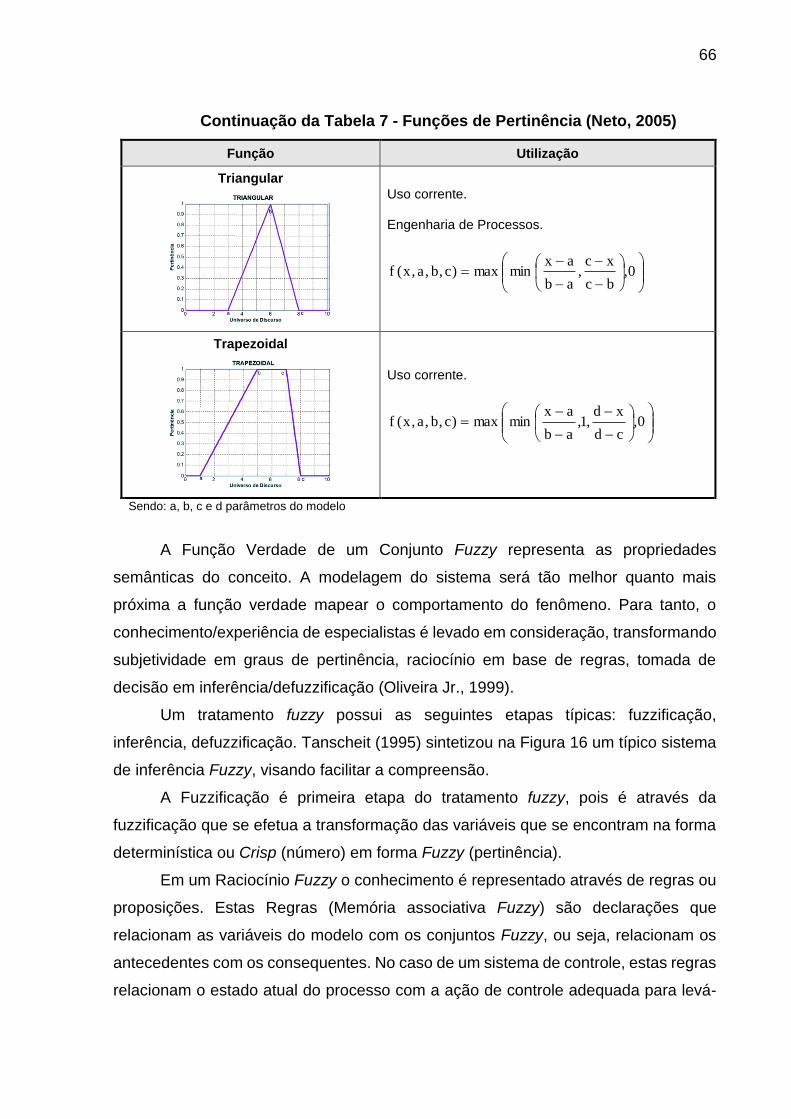
66
Continuação da Tabela 7 - Funções de Pertinência (Neto, 2005)
Função Utilização
Triangular
Uso corrente. Engenharia de Processos.
0,
bc
xc,
ab
axminmax)c,b,a,x(f
Trapezoidal
Uso corrente.
0,
cd
xd,1,
ab
axminmax)c,b,a,x(f
Sendo: a, b, c e d parâmetros do modelo
A Função Verdade de um Conjunto Fuzzy representa as propriedades
semânticas do conceito. A modelagem do sistema será tão melhor quanto mais
próxima a função verdade mapear o comportamento do fenômeno. Para tanto, o
conhecimento/experiência de especialistas é levado em consideração, transformando
subjetividade em graus de pertinência, raciocínio em base de regras, tomada de
decisão em inferência/defuzzificação (Oliveira Jr., 1999).
Um tratamento fuzzy possui as seguintes etapas típicas: fuzzificação,
inferência, defuzzificação. Tanscheit (1995) sintetizou na Figura 16 um típico sistema
de inferência Fuzzy, visando facilitar a compreensão.
A Fuzzificação é primeira etapa do tratamento fuzzy, pois é através da
fuzzificação que se efetua a transformação das variáveis que se encontram na forma
determinística ou Crisp (número) em forma Fuzzy (pertinência).
Em um Raciocínio Fuzzy o conhecimento é representado através de regras ou
proposições. Estas Regras (Memória associativa Fuzzy) são declarações que
relacionam as variáveis do modelo com os conjuntos Fuzzy, ou seja, relacionam os
antecedentes com os consequentes. No caso de um sistema de controle, estas regras
relacionam o estado atual do processo com a ação de controle adequada para levá-

67
lo ao estado desejado. No caso de um sistema de decisão, previsão ou diagnóstico,
estas regras conduzem à conclusão.
Figura 16 – Sistema de Inferência Fuzzy (Adaptado de Tanscheit, 1995)
As regras podem ser condicionais ou incondicionais e sua ordem de execução
depende do modelo adotado. No caso de modelos com somente regras condicionais
ou incondicionais, a ordem é irrelevante. Se o modelo contém ambos os tipos de
regras, a ordem é importante. As regras incondicionais devem ser executadas antes
e são geralmente usadas como “DEFAULT” isto é, se nenhuma regra condicional é
executada, então o valor da solução é determinado pela regra incondicional.
Ressalta-se que, se nenhuma regra condicional possui um antecedente com
força maior que a interseção máxima das regras incondicionais, as regras condicionais
não contribuirão para a solução do modelo.
As seguintes propriedades são desejáveis para as regras:
(a) Qualquer combinação das variáveis de entrada deve ativar pelo menos
uma regra;
(b) Duas ou mais regras com as mesmas entradas devem ter saídas
mutuamente exclusivas. Caso contrário, as regras são inconsistentes;
Fornecidas por especialistas ou extraídas
de dados numéricos
REGRAS
INFERÊNCIA
Para ativar as regras
Para fornecer a
saída precisa
FUZZIFICAÇÃO DEFUZZIFICAÇÃO
Mapeia conjuntos fuzzy Determina como as regras são
ativadas e combinadas
Entradas
Precisas
Conjuntos fuzzy
de entrada
Conjuntos fuzzy
de saída
Saída
Precisa

68
(c) Não deverão existir regras vizinhas com saídas cujas funções de
pertinência não apresentem interseção.
A segunda etapa é a Inferência Fuzzy é o procedimento de avaliação das regras
que relacionam as variáveis e que levam a conclusão final do sistema. O raciocínio é
efetuado através da inferência, que permite tirar conclusões (deduzir, concluir)
partindo de fatos conhecidos (Min-Max) e as variáveis linguísticas, de entrada e saída,
representam o conhecimento em inferência Fuzzy. A inferência possui duas fases
distintas, a avaliação da implicação de cada regra e a composição das conclusões de
todas as regras em um valor consolidado. Existem muitos procedimentos inferenciais
na lógica fuzzy, porém os mais utilizados são o Mamdani e o Takagi-Sugeno-Kang
(Mendel, 2001).
A Defuzzificação é última etapa do tratamento fuzzy. Nesta etapa, ocorre a
transformação das variáveis que se encontram na forma fuzzificada para forma
determinística (Crisp), determinando o valor real da(s) saída(s). Os principais métodos
para efetuar a defuzzificação são o Centro-de-Área (Centróide), o Centro-do-Máximo,
a Média-do-Máximo e a Média-Ponderada (Shaw e Simões, 1999).
2.2.3 - Vantagens e Desvantagens da LN
Tendo em vista que a Lógica Nebulosa ou Fuzzy vem sendo estudada e
aperfeiçoada desde a sua criação, a seguir serão apresentadas algumas
características, vantagens e eventuais desvantagens da utilização desta Ferramenta.
Dentre as características pode-se salientar que a Lógica Nebulosa:
(a) Está baseada em palavras e não em números, ou seja, os valores
verdades são expressos linguisticamente (quente, muito frio, verdade,
longe, perto, rápido, vagaroso, médio);
(b) Possui vários modificadores de predicado (muito, mais ou menos, pouco,
bastante, médio);
(c) Possui um amplo conjunto de quantificadores (poucos, vários, em torno
de, usualmente);
(d) Faz uso das probabilidades linguísticas (como, por exemplo, provável e
improvável) que são interpretados como números nebulosos; e
69
(e) Manuseia todos os valores entre 0 e 1, tomando estes, como um limite
apenas (Camargos, 2002).
A lógica nebulosa apresenta uma série de vantagens, dentre as quais podemos
citar: a possibilidade de captura do pensamento humano a partir da utilização de
variáveis linguísticas; a necessidade de poucas regras, valores e decisões; a
simplicidade de solução de problemas e de aquisição da base do conhecimento; a
possibilidade de avaliar variáveis advindas de simples observações, tendo em vista
que a Lógica Nebulosa pode absorver o conhecimento de especialistas.
Adicionalmente, sistemas baseados em lógica Nebulosa são mais fáceis de
entender, manter e testar, são robustos e operam com falta de regras ou com regras
defeituosas. A utilização da Lógica Nebulosa proporciona um rápido protótipo dos
sistemas.
As desvantagens existentes na utilização da Lógica Nebulosa são poucas e
dentre elas podemos destacar que a especificação das funções de pertinência é
trabalhosa, por isso há a necessidade de muita simulação/teste para o ajuste fino
destas funções. Outra desvantagem é a grande dificuldade do estabelecimento de
regras consistentes, pois, para tal há a necessidade da captura do conhecimento de
um especialista e/ou de dados históricos.
2.3 – Redes Neurais Artificiais
2.3.1 - Introdução
As primeiras informações sobre a neurocomputação surgiram em 1943, em
artigos do neurofisiologista Warren McCulloch, do MIT, e do matemático Walter Pitts
da Universidade de Illinois. Em um primeiro trabalho sobre “neurônios formais”, eles
apresentaram um modelo matemático de simulação do processo biológico que ocorre
em células nervosas vivas. O modelo procurava simular artificialmente o
comportamento de um neurônio natural. Neste modelo, o neurônio artificial possuía
apenas uma saída, produzida em função da soma dos valores de suas diversas
entradas. Em termos físicos, o trabalho consistia num modelo de resistores variáveis

70
e amplificadores representando conexões sinápticas (sinapse é o nome dado à
conexão existente entre neurônios) de um neurônio biológico (Goldschmidt, 2010).
Os sistemas inspirados na biologia são diferentes dos sistemas convencionais,
pois os sistemas convencionais baseiam seu processamento explicitamente em
modelos algorítmicos, onde todas as tarefas possíveis devem ser previamente
programadas e o resultado do sistema depende exclusivamente da programação.
Sistemas de controle baseados em redes neurais não se baseiam em modelos
algorítmicos, se baseiam em cálculos matemáticos para efetuar suas operações,
porém podem coordenar diversos graus de liberdade durante a execução das tarefas
manipulativas e em ambientes desestruturados, sendo então capazes de lidar com
tarefas complicadas sem que tenham que desenvolver um algoritmo específico para
cada problema nem um modelo do ambiente em que operam.
O trabalho sobre redes neurais artificiais (RNAs) tem sido motivado desde o
começo pelo reconhecimento de que o cérebro humano processa informações de uma
forma diferente do computador digital convencional (Haykin, 2001). O cérebro é o
órgão no qual se alojam as habilidades cognoscitivas dos seres humanos. Foi o
cientista espanhol Ramón y Cajal (prêmio Nobel em 1911) quem no final do século
XIX apresentou a noção do neurônio como elemento estrutural constitutivo do cérebro
(Coronel-Ávila & Parra-Grajales, 2003). O cérebro é um elemento de processamento
de informação extremamente complexo, cujo modo de funcionamento é
predominantemente paralelo e cujo comportamento não pode ser descrito por meio
de modelos simples. Talvez a característica mais importante do cérebro é a sua
capacidade de adaptação a estímulos externos por meio de dois procedimentos:
criação de novas conexões sinápticas entre neurônios ou modificação das conexões
já existentes. Tais procedimentos são simulados de uma forma muito simplificada nas
redes neurais artificiais.
2.3.2 - Conceito de Rede Neural Artificial (RNA)
Como o cérebro, as Redes Neurais Artificiais (RNAs) são processadores
maciçamente paralelos com capacidade de armazenar conhecimento experimental
para fazê-lo disponível para uso posterior, mediante um processo de aprendizagem.
Em termos intuitivos, as RNAs são modelos matemáticos inspirados nos princípios de

71
funcionamento dos neurônios biológicos e na estrutura do cérebro. Estes modelos têm
capacidade de adquirir, armazenar e utilizar conhecimento
As RNAs consistem em um método de solucionar problemas de inteligência
artificial, construindo um sistema que tenha circuitos que simulem o cérebro humano,
inclusive seu comportamento, ou seja, aprendendo, errando e fazendo descobertas.
São técnicas computacionais que apresentam um modelo inspirado na estrutura
neural de organismos inteligentes e que adquirem conhecimento através da
experiência. Uma grande rede neural artificial pode ter centenas ou milhares de
unidades de processamento, enquanto que o cérebro de um mamífero pode ter muitos
bilhões de neurônios.
A Figura 17 apresenta uma ilustração da analogia entre o modelo biológico e o
modelo artificial adotado pelas RNAs.
Neurônio Biológico Neurônio Artificial
Figura 17 – Comparação entre os modelos biológico (Mendes, 2013) e artificial (autor).
Segundo Hecht-Nielsen (1990), uma RNA pode ser formalmente definida como:
“uma estrutura que processa informação de forma paralela e distribuída e que consiste
de unidades computacionais (as quais podem possuir memória local e podem
executar operações locais) interconectadas por canais unidirecionais chamados de
conexões. Cada unidade possui uma única conexão de saída, que pode ser dividida
em quantas conexões laterais se fizer necessário, sendo que cada uma destas
conexões transporta o mesmo sinal (sinal de saída da unidade). Esse sinal de saída
pode ser contínuo ou discreto. O processamento executado por cada unidade pode
ser definido arbitrariamente, com a restrição de que ele deve ser completamente local,
isto é, deve depender somente dos valores atuais dos sinais de entrada que chegam
W1
W2
W3
Pesos
Propagação
Ativação
Entr
adas
Saíd
a
72
até a unidade via as conexões e dos valores armazenados na memória local da
unidade computacional”.
Na sua forma mais geral, uma RNA é uma “máquina de inferência” projetada
para modelar a maneira como o cérebro realiza uma tarefa particular ou função de
interesse; a rede é normalmente implementada utilizando-se componentes eletrônicos
ou é simulada por programação em um computador digital. Para alcançarem bom
desempenho, as RNA’s empregam uma interligação maciça de células
computacionais chamadas neurônios, nodos, nós ou unidades de processamento.
(Haykin, 2001)
2.3.3 - Características de uma RNA
Goldschmidt (2010) salienta que devido à sua similaridade com a estrutura do
cérebro, as RNAs apresentam algumas características similares as do comportamento
humano, tais como:
a) Busca paralela e endereçamento pelo conteúdo - O cérebro não possui
endereço de memória. Analogamente, nas RNAs o conhecimento fica
distribuído pela estrutura das redes, de forma que a procura pela informação
ocorre de forma paralela e não sequencial.
b) Aprendizado por Experiência - As RNAs tentam aprender padrões
diretamente a partir dos dados. Para isso, utilizam um processo de repetidas
apresentações dos dados à rede que busca abstrair modelos de conhecimento
de forma automática. Este processo é denominado aprendizado, e é
implementado por um algoritmo de aprendizado.
c) Generalização - As RNAs são capazes de generalizar seu conhecimento a
partir de exemplos anteriores. A capacidade de generalização permite que
RNAs lidem com ruídos e distorções nos dados, respondendo corretamente a
novos padrões. A Figura 18 apresenta um exemplo do conceito de
generalização.

73
Figura 18 – Exemplo Ilustrativo do conceito de generalização. Goldschmidt (2010)
d) Associação - As RNAS são capazes de estabelecer relações entre padrões
de natureza distinta. Por exemplo, identificar pessoas a partir de características
da voz destas pessoas.
e) Abstração - Abstração é a capacidade das RNAs em identificar a essência de
um conjunto de dados de entrada. Isto significa que as RNAs são capazes de
perceber quais as características relevantes em um conjunto de entradas.
Assim sendo, a partir de padrões ruidosos as RNAS podem extrair as
informações dos padrões sem ruído. A Figura 19 ilustra o conceito de
abstração.
Figura 19 – Exemplo Ilustrativo do conceito de abstração. Goldschmidt (2010)
f) Robustez e Degradação Gradual - Como a informação fica distribuída em
uma RNA, a perda de um conjunto de neurônios artificiais não causa
necessariamente o mau funcionamento desta rede. Na realidade, o
desempenho de uma RNA tende a diminuir gradativamente na medida em que
aumenta a quantidade de neurônios artificiais inoperantes.
g) Não Programáveis - As RNAs são construídas e não requerem programação.
Dado um problema, a rede deve ser modelada segundo as entradas e saídas
envolvidas e um algoritmo de aprendizado, programado previamente é aplicado
A
A

74
sobre o modelo e sobre dados históricos, buscando mapear corretamente as
entradas da rede nas saídas correspondentes.
h) Soluções Aproximadas - Muitas vezes, as RNAs não produzem a melhor
solução para um problema, gerando, no entanto, soluções aproximadas e
aceitáveis. Alguns modelos neurais trabalham com o conceito de minimização
de erro, nem sempre reduzido ao patamar nulo. Cabe ressaltar que, de forma
análoga ao comportamento humano, mesmo treinadas, as RNAs são
suscetíveis a geração de soluções incorretas.
2.3.4 – Arquitetura de uma RNA
A Figura 20 apresenta um esquema de uma rede neural simples e pode-se
observar que existe uma camada de entrada composta por três neurônios, os quais
estão completamente interligados por meio de conexões com uma segunda camada
de neurônios, que podem estar escondidos ou não, que se interligam a última camada
que representa as saídas da rede. O processo de fluxo de informação através da rede
(de esquerda para direita no caso do esquema em questão) se dá de tal forma que
cada uma das conexões toma pesos diferentes na medida que diversos vetores de
treinamento são apresentados. (Martínez-Carvajal, 2006)
Figura 20 – Exemplo Ilustrativo do conceito de generalização.
(Adaptado de Marínez-Carvajal, 2006)
W1
W2
W3
Camada de
Neurônios de
Entrada
Camada de
Neurônios
Intermediária
Camada de
Neurônios de
Saída

75
De fato, a rede neural artificial, como mostrada na Figura 20, é um sistema de
neurônios ligados por conexões sinápticas e divididos em:
Camada de neurônios de entrada, que recebem estímulos do meio
externo e onde os padrões são apresentados à rede;
Camada de neurônios intermediários ou hidden (ocultos) onde é feita a
maior parte do processamento, através das conexões ponderadas;
podem ser consideradas como extratoras de características; e
Camada de neurônios de saída, que se comunicam com o exterior, pois
onde o resultado final é concluído e apresentado.
2.3.5 - Treinamento das RNAs
A propriedade mais importante das redes neurais é a habilidade de aprender
de seu ambiente e com isso melhorar seu desempenho. Isso é feito através de um
processo iterativo de ajustes aplicado a seus pesos, o treinamento. O aprendizado
ocorre quando a rede neural atinge uma solução generalizada para uma classe de
problemas.
A maioria dos modelos de redes neurais possui alguma regra de treinamento,
onde os pesos de suas conexões são ajustados de acordo com os padrões
apresentados. Em outras palavras, elas aprendem através de exemplos. Arquiteturas
neurais são tipicamente organizadas em camadas, com unidades que podem estar
conectadas às unidades da camada posterior. A rede neural passa por um processo
de treinamento a partir dos casos reais conhecidos, adquirindo, a partir daí, a
sistemática necessária para executar adequadamente o processo desejado dos dados
fornecidos. Sendo assim, a rede neural é capaz de extrair regras básicas a partir de
dados reais, diferindo da computação programada, onde é necessário um conjunto de
regras rígidas pré-fixadas e algoritmos.
O procedimento para realizar o processo de aprendizagem é chamado de
algoritmo de aprendizagem, cuja função é modificar os pesos das conexões entre os
neurônios (pesos sinápticos) da rede de uma forma ordenada para alcançar um
objetivo de projeto desejado (Haykin, 2001).
76
O algoritmo mais empregado no aprendizado em Redes Neurais é conhecido
como Algoritmo com Retropropagação do Erro, ou Backpropagation. Destaca-se que,
este algoritmo tem fundamentos matemáticos baseados na Regra da Cadeia.
Basicamente, o processo de aprendizado possui os seguintes passos:
A rede neural é estimulada pelo ambiente ao receber um padrão de
entrada retirado de um conjunto histórico de padrões ou dados.
A rede neural sofre modificações em seus parâmetros livres (pesos
sinápticos)
A rede neural responde de uma nova maneira ao ambiente
Estes passos se repetem até que algum critério de parada seja alcançado. São
exemplos de critérios de parada:
Número de iterações máximo alcançado – é o número máximo de vezes
que um padrão ou conjunto de padrões é apresentado a rede neural.
Erro produzido pela rede atinge um patamar abaixo de limiar definido –
Neste caso, a medida do erro produzido pela RNA a cada estímulo de
entrada é considerada como referência para interrupção do treinamento.
Tal interrupção deve ocorrer sempre que o erro produzido pela rede
atingir um valor considerado suficientemente pequeno.
A participação do usuário, responsável pela utilização da RNA na solução de
um problema, é necessária para escolher os parâmetros a serem utilizados em ambos
os critérios de parada mencionados. Assim, tanto o número de iterações máximo
quanto a margem de erro suficientemente pequena são definidos pelo usuário.
O tipo de treinamento (aprendizado) é determinado pelo modo com que se
promove a adaptação dos parâmetros e isso pode ser feito de dois modos:
Aprendizado Supervisionado e Aprendizado Não Supervisionado. Todo aprendizado
adquirido pela rede neural fica então gravado no conjunto final de pesos que as suas
conexões adquiriram.
Após a execução do treinamento, segue-se para a fase de Teste da RNA, onde
será executada a validação da fase de treinamento.

77
2.3.6 - Modelos de RNAs
Os principais modelos de RNAs e suas descrições estão apresentados na
Tabela 8.
Tabela 8 - Modelos de RNAs
Modelo Descrição
Perceptron de Camada Única
É o mais antigo modelo de rede neural e tem como objetivo classificar corretamente o conjunto de estímulos aplicados externamente a rede em uma de duas classes.
Adaline
O surgimento foi quase simultâneo ao Perceptron de Camada Única. Como diferenças principais em relação ao seu contemporâneo, no modelo Adaline, as redes neurais possuem função de ativação linear e a função de erro a ser minimizada é quadrática e a minimização é feita pelo método do gradiente descendente.
Madaline
Este modelo foi um dos primeiros a envolver elementos adaptativos organizados em camadas treináveis. Trata-se de um modelo composto por múltiplos Adalines. Uma rede Madaline pode possuir vários Adalines sendo um deles com parâmetros fixos implementando critérios de decisão como E, OU e MAIORIA.
Perceptron de Múltiplas Camadas
Foi uma evolução do Madaline. Conforme o próprio nome sugere, redes deste modelo consistem de múltiplas camadas de unidades computacionais, geralmente completamente interconectadas e com processamento feedforward. Isso quer dizer que cada neurônio em uma camada tem conexões com todos os neurônios da camada seguinte. Em muitas aplicações as unidades dessas redes utilizam a função sigmóide como função de ativação.
2.3.8 - Vantagens e Desvantagens das RNAs
Sobre as vantagens da utilização das RNAs pode-se destacar a Aquisição
automática de conhecimentos empíricos à partir de uma base de exemplos de
aprendizado referente a um problema.
Com as RNAs pode-se efetuar a Manipulação de dados quantitativos,
aproximados e mesmo incorretos com uma degradação gradual das respostas, pois
as redes podem preencher lacunas sem sofrer degradação. É algo parecido com a
interpolação ou extrapolação da estatística, porém operacionalmente muito diferente.
Os dados reais sempre contêm ruídos e as RNAs conseguem separá-los da
informação relevante e estas estão sendo utilizadas até como filtro de dados.

78
Uma vez construída uma RNA eficiente em dada aplicação, ela pode ser
utilizada em aplicações em tempo real, sem a necessidade de ter sua arquitetura
alterada a cada atualização, basta apenas treinar novamente a rede com base nos
novos dados históricos.
Os dados de entrada necessitam de tratamento prévio, pois estes devem ser
normalizados e cuidadosamente selecionados para que a RNA seja corretamente
ensinada a agir: dados de má qualidade produzem resultados falhos.
Existe a dificuldade da RNA explicitar os conhecimentos adquiridos pela rede
através de uma linguagem compreensível para um ser humano.
Pode ocorre a dificuldade de convergência (bloqueios) e instabilidade,
inerentes aos algoritmos de otimização empregados na RNA, ou mesmo, ocorrer a
lentidão do processo de aprendizado / adaptação.
Para uma RNA poder aprender corretamente, necessita de uma grande
quantidade de dados históricos, pois a carência de dados relevantes em quantidade
suficiente torna a rede inaplicável.
Algumas modelagens de RNA também não têm a capacidade de trabalhar com
problemas ligados à probabilidade.
Tendo em vista o supracitado e entrando no âmbito desta Tese, pode-se afirmar
que a RNA por si só não tem a capacidade de trabalhar com incertezas inerentes aos
condicionantes geológicos/geotécnicos relacionados à Estabilidade em Geotecnia,
pois tem a necessidade de trabalhar com conhecimentos completos e exatos sobre
um determinado problema, além da dificuldade para tratar informações imprecisas ou
aproximadas.

79
2.4 – Neuro-Fuzzy
2.4.1 - Introdução
Os sistemas híbridos são a sinergia obtida pela combinação de duas ou mais
técnicas de modelagem. O foco desses sistemas está em obter um sistema mais
poderoso e com menos deficiências. Dependendo da forma básica da construção,
uma técnica pode ser aplicada para melhorar as deficiências do outro em um maior
ou menor grau.
Os Sistemas Híbridos podem ser dos seguintes tipos:
Sequenciais – quando a saída de um subsistema que utiliza a técnica 1
atua como entrada em um sistema que utiliza a técnica 2;
Auxiliar – é constituído de dois subsistemas, um principal utilizando a
técnica 1, que chama o sistema auxiliar que utiliza a técnica 2 para
realizar determinada tarefa, devolvendo o resultado desta tarefa ao
subsistema principal, que o utiliza para gerar a resposta solicitada; e
Incorporado – Apresenta o maior grau de hibridização, pois não é
possível a separação entre os dois subsistemas. Como o grau de
hibridização é elevado, pode-se dizer que o primeiro subsistema contém
o segundo, e vice-versa.
Nessa Tese o sistema híbrido utilizado é o incorporado Neuro-Fuzzy, pois essa
técnica tem chamado a atenção de pesquisadores de todas as áreas da engenharia,
seja para área de controle, predição de áreas sujeitas a escorregamentos de talude,
dentre outras.
2.4.2 - Conceito de Sistema Neuro-Fuzzy (SNF)
O sistema Neuro-Fuzzy (SNF) combina os paradigmas da RNA e da LF, que
possuem características de adaptação e aprendizagem, formando um sistema Híbrido
Incorporado (hibridização forte).
80
De acordo com Gil (2010) os SNFs procuram usar o máximo das propriedades
das RNAs (aprendizado) e da LF (interpretação linguística), minimizando suas
limitações e deficiências.
Individualmente as técnicas RNA e LF apresentam vantagens evidenciadas em
diversas aplicações. Entretanto, também apresentam certas desvantagens que são
minimizadas, ou até mesmo eliminadas, quando as técnicas são aplicadas em
sistemas híbridos. Assim, podem ser produzidos sistemas com maior poder de
interpretação, de aprendizado, de estimativa de parâmetros e de generalização. Os
SNF usam o máximo da capacidade de aprendizagem das RNAs e de interpretação
linguística da LF.
Basicamente um SNF é a construção de um sistema de inferência fuzzy (FIS),
numa estrutura paralela distribuída de tal forma que os algoritmos de aprendizado das
redes neurais possam ser aproveitados nesses sistemas híbridos para ajustar os
parâmetros do FIS. (Mejia Sanchez, 2009)
Neto (2010) apresenta as seguintes características do SNF:
1. Permitem a integração de conhecimento:
a. Implícito (conjunto de dados)
b. Explícito (preliminar, proveniente de especialista)
2. Extração de conhecimento sob o formato de regras fuzzy.
A Figura 21, adaptada de Neto (2010) por Guedes (2011), representa a
arquitetura Neuro-Fuzzy.
Guedes (2011) também apresentou em seu trabalho as características Fuzzy e
de aprendizagem de um Sistema Neuro-Fuzzy, adaptadas de Neto (2010) e
apresentadas na Figura 22 e na Figura 23, respectivamente.
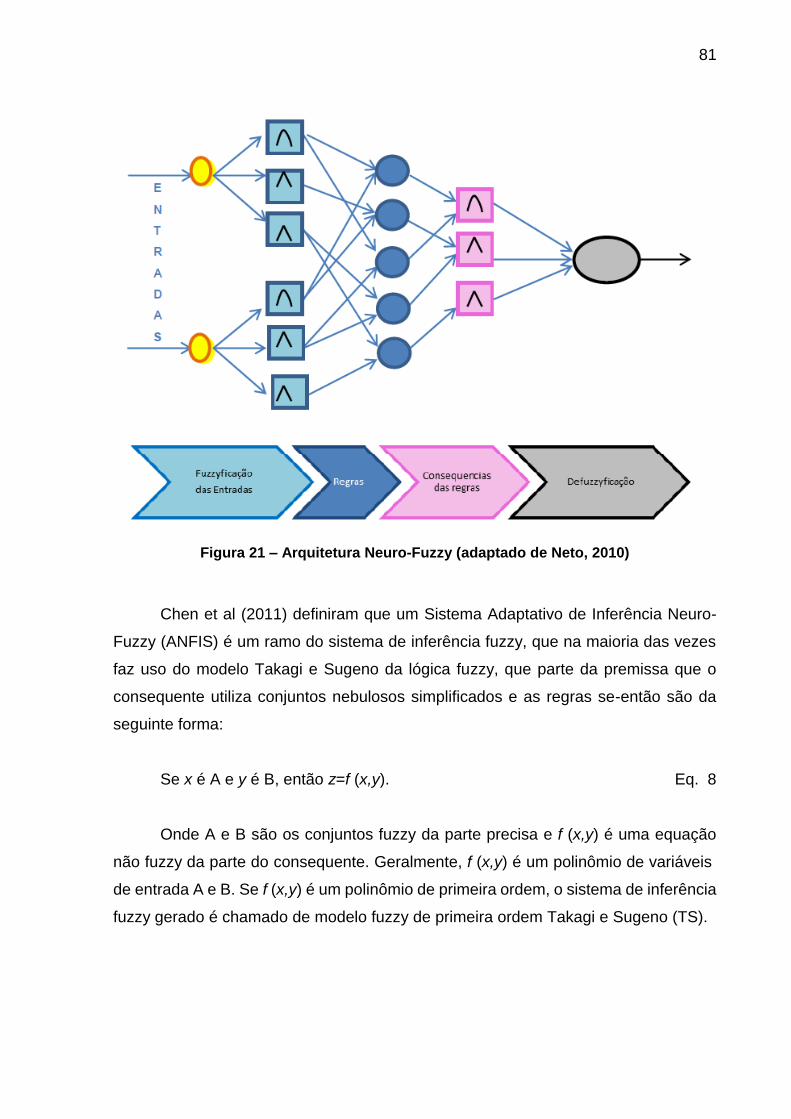
81
Figura 21 – Arquitetura Neuro-Fuzzy (adaptado de Neto, 2010)
Chen et al (2011) definiram que um Sistema Adaptativo de Inferência Neuro-
Fuzzy (ANFIS) é um ramo do sistema de inferência fuzzy, que na maioria das vezes
faz uso do modelo Takagi e Sugeno da lógica fuzzy, que parte da premissa que o
consequente utiliza conjuntos nebulosos simplificados e as regras se-então são da
seguinte forma:
Se x é A e y é B, então z=f (x,y). Eq. 8
Onde A e B são os conjuntos fuzzy da parte precisa e f (x,y) é uma equação
não fuzzy da parte do consequente. Geralmente, f (x,y) é um polinômio de variáveis
de entrada A e B. Se f (x,y) é um polinômio de primeira ordem, o sistema de inferência
fuzzy gerado é chamado de modelo fuzzy de primeira ordem Takagi e Sugeno (TS).

82
Figura 22 – Característica Fuzzy de um SNF (adaptado de Neto, 2010)
Figura 23 – Característica de aprendizagem de um SNF (adaptado de Neto, 2010)
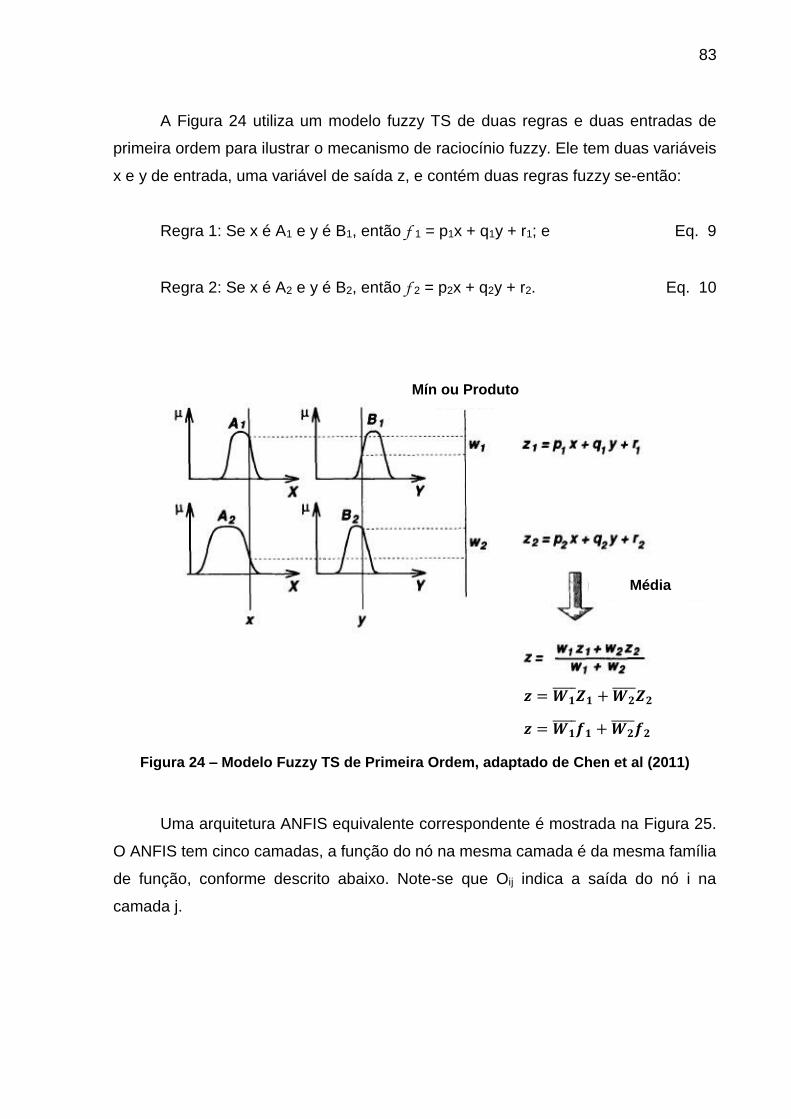
83
A Figura 24 utiliza um modelo fuzzy TS de duas regras e duas entradas de
primeira ordem para ilustrar o mecanismo de raciocínio fuzzy. Ele tem duas variáveis
x e y de entrada, uma variável de saída z, e contém duas regras fuzzy se-então:
Regra 1: Se x é A1 e y é B1, então f 1 = p1x + q1y + r1; e Eq. 9
Regra 2: Se x é A2 e y é B2, então f 2 = p2x + q2y + r2. Eq. 10
Figura 24 – Modelo Fuzzy TS de Primeira Ordem, adaptado de Chen et al (2011)
Uma arquitetura ANFIS equivalente correspondente é mostrada na Figura 25.
O ANFIS tem cinco camadas, a função do nó na mesma camada é da mesma família
de função, conforme descrito abaixo. Note-se que Oij indica a saída do nó i na
camada j.
Mín ou Produto
Média
Ponderada
𝒛 = 𝑾𝟏 𝒁𝟏 + 𝑾𝟐
𝒁𝟐
𝒛 = 𝑾𝟏 𝒇𝟏 + 𝑾𝟐
𝒇𝟐

84
Camada 1 Camada 2 Camada 3 Camada 4 Camada 5
Figura 25 – Arquitetura ANFIS Equivalente, adaptado de Chen et al (2011)
Camada 1: Cada nó i nesta camada é um nó adaptativo (quadrado) com uma
função de nó
𝑂1𝑖 = 𝑢𝐴𝑖(𝑥), 𝑖 = 1,2 Eq. 11
onde x é a entrada para o nó i, e A é o rótulo linguístico (pequeno, grande, etc)
associado a esta função do nó. Em outras palavras, O1i é a função de pertinência Ai
que especifica o grau em que o dado x satisfaz o quantificador Ai. De fato, todas as
funções diferenciáveis contínuas e segmentadas são qualificados para funções de nó
nesta camada, tal como a função em forma de sino com máxima geralmente utilizada
igual a 1 e mínimo igual a 0, como se segue:
𝑢𝐴(𝑥) =1
1+|𝑥−𝑐𝑖
𝑎𝑖|2𝑏𝑖
Eq. 12
onde {ai, bi, ci} é o conjunto de parâmetros. À medida que os valores destes
parâmetros mudam, as funções em forma de sino variam de acordo, apresentando,
assim, várias formas de funções de pertinência do rótulo linguístico Ai. Parâmetros
nesta camada são referidos como os "parâmetros premissa” ou “parâmetros dos
antecedentes”.
Camada 2: Cada nó nesta camada calcula a “força de disparo” de cada regra
via multiplicação:
𝑂2𝑖 = 𝑢𝐴𝑖(𝑥) × 𝑢𝐵𝑖(𝑦), 𝑖 = 1,2 Eq. 13
Os neurônios desta camada executam a operação de T-norma (norma
triangular, representada pelo produtório (multiplicação) ou operação mínimo dos
conjuntos fuzzy), efetuando o produtório dos sinais de entrada e enviando-os para
saída da camada.
85
Camada 3: Esta camada realiza a normalização dos graus de pertinência. O
nó i nesta camada calcula a relação entre a “força de disparo” da regra i para a soma
de todas as “forças de disparo” de regras:
𝑂3𝑖 = �� =𝑤𝑖
𝑤1+𝑤2, 𝑖 = 1,2 Eq. 14
Em outras palavras, cada nó nesta camada executa a função normalização, a
qual é utilizada como um pré-processamento para defuzzificação.
Para maior comodidade, as saídas nessa camada serão chamadas de “força
de disparo normalizado”, pois nesta camada normalizam-se as funções de pertinência.
Camada 4: Nesta camada, a saída de cada neurônio é calculada pelo produto
da saída normalizada da camada anterior e o grau de ativação do consequente. Cada
nó i nesta camada é um nó adaptativo (quadrado) com uma função de nó:
𝑂4𝑖 = ��𝑖𝑓𝑖 = ��𝑖(𝑝𝑖𝑥 + 𝑞𝑖𝑦 + 𝑟𝑖) Eq. 15
onde ��𝑖 é a saída da camada 3, e (pi, qi, ri) é o conjunto de parâmetros,
denominados “parâmetros dos consequentes”.
Camada 5: o único nó nesta camada é fixo e calcula a saída final como a soma
de todas as entradas para este nó, isto é, a saída desta camada fornece a saída
precisa do sistema ANFIS, dado por:
𝑂5𝑖 = ∑ ��𝑖𝑓𝑖 =∑ 𝑤𝑖𝑓𝑖
∑ 𝑤𝑖 Eq. 16
Para representar as diferentes capacidades adaptativas, usa-se tanto círculo e
nós quadrados em uma rede adaptativa, Figura 25. Um nó adaptativo (com formato
quadrado) tem parâmetros enquanto um nó adaptativo com formato de círculo (nó
fixo) não tem nenhum. O conjunto de parâmetros de uma rede adaptativa é a união
dos conjuntos de parâmetros de cada nó adaptativo. A fim de alcançar um
mapeamento de entrada-saída desejado, estes parâmetros são atualizados de acordo
com dados de treinamento e de um procedimento de aprendizagem. Pode-se aplicar
o método do gradiente descendente para identificar os parâmetros em uma rede
adaptativa, porém o método é geralmente lento e propenso a mínimos locais. Assim
foi proposta uma regra de aprendizagem híbrida que combina o método de gradiente
descendente nos parâmetros antecedentes e os mínimos quadrados (LSE) para
estimar ou identificar parâmetros consequentes (Jang, 1993).

86
Assim, uma rede adaptativa é construída, que é funcionalmente equivalente ao
modelo Fuzzy TS. Mas a arquitetura adaptativa não é exclusiva, pode-se mesclar as
camadas 3 e 4 e obter uma arquitetura equivalente com 4 camadas. Da mesma forma,
a normalização do peso pode ser efetuada na última camada da rede. Mais
extremamente, podemos ainda reduzir toda a rede para um nó de adaptação com o
mesmo conjunto de parâmetros (Jang et al, 1997).
Existem, basicamente, dois métodos para gerar a estrutura de treinamento
ANFIS e estes são: método de particionamento do espaço de entrada e método de
agrupamento. Onde as regras de aprendizagem, estão focadas nos seguintes erros:
regra de aprendizagem back-propagation; e regra de aprendizagem híbrida (Jang et
al, 1997), que é uma combinação do back-propagation com a estimativa dos mínimos
quadrados.
2.4.3 - Vantagens e Desvantagens dos SNFs
Dentre as vantagens dos SNFs, Mejia Sanches (2009) cita que:
Os SNF combinam as vantagens das LNs e RNAs, mostrando um
enorme potencial para aplicações que combinem conhecimento
qualitativo com robustez.
A lógica fuzzy provê uma interface de alto nível, de rápida computação
e amigável para a programação, permitindo que o especialista se
concentre nos objetivos funcionais ao invés dos detalhes matemáticos.
Por conseguinte, as RNAs são convenientes para a extração do
conhecimento através do treinamento e aprendizado.
Não é necessário que o projetista tenha o conhecimento prévio do
processo, levando a uma fácil adaptabilidade aos diferentes processos.
Os modelos Neuro-Fuzzy, podem lidar de uma maneira melhor que as
RNAs ao problema de ruído nos dados.
Capacidade de auto-aprendizado, auto-organização e auto-
direcionamento, imitando a capacidade humana do processo de tomada
de decisão.
87
Mejia Sanches (2009) também descreveu as seguintes limitações dos SNFs:
Os SNFs trabalham com um número reduzido de entradas, devido ao
problema de explosão combinatória das regras. Portanto, um sistema
com muitas entradas demandam um maior esforço computacional.
Limitação na construção de sua própria estrutura, devido à estrutura
rígida, e quando há a capacidade de alterar a sua estrutura, são
limitados pelo elevado número de regras.
2.5 – Utilização de Modelos de Inteligência Computacional na Geotecnia
A utilização de modelos de Inteligência Computacional na engenharia tem
obtido bons resultados e ao longo dos últimos anos foram desenvolvidos trabalhos
para criação de: sistemas de controle de processos, sistemas de classificação de
dados, sistemas de otimização, sistemas de avaliação de áreas de risco, sistemas
para reconhecimento de padrões e sistemas de análise e processamento de sinais,
dentre outros.
A seguir serão demonstrados alguns casos de aplicação da Inteligência
computacional nos modelos de LN, RNA e SNF na geotecnia.
2.5.1 - Aplicações da LN
Na Engenharia, Geotecnia, os primeiros trabalhos datam da década de 90, e
estão relacionados à classificação dos solos (Juang et al, 1996), análise do potencial
de erosão (Mitra et al, 1998; Alves et al, 2002; Alves, 2004), avaliação de áreas
susceptíveis a escorregamentos (Pinto, 2002; Oliveira et al, 2005; Lee e Juang, 1992),
avaliação da estabilidade de barragens (Fontenelle e Vieira, 2002); avaliação de
modelos de susceptibilidade a movimentos de massa em uma faixa de dutos (Rabaco,
2005), dentre outros. No âmbito da Geotecnia Ambiental, tem-se aplicado a lógica
Fuzzy a diversas finalidades, dentre elas a escolha de áreas para aterros sanitários
(Macbean et al, 1995; Champratheep e Ganer, 1996; Lima, 1995; Ramos e Mendes,
88
2001; Calijuri et al, 2002), e o diagnóstico dos impactos de áreas de resíduos
(Menezes, 1995).
Alves (2004) avaliou o potencial de erosão dos solos através de uma análise
por Lógica Fuzzy. A erosão acelerada de solos é um problema mundial de grandes
impactos ambientais e econômicos e tem origem tanto em causas naturais quanto em
ações antrópicas. Planos de conservação de solos em áreas de alta erosão
necessitam de mapas de risco da ocorrência do fenômeno, que são criados a partir
de modelos de erosão. Os principais modelos existentes levam em consideração os
fatores envolvidos no processo de erosão, incluindo características climáticas,
propriedades dos solos, topografia e práticas de uso dos solos. No entanto, a maioria
desses modelos possui limitações, tais como: (1) necessitam de um grande volume
de dados, alguns deles de difícil obtenção; (2) são geralmente desenvolvidos para
regiões diferentes daquelas nas quais são aplicados; (3) são criados, na maioria das
vezes, para escalas nas quais diferentes interações e processos podem ser
importantes. Os conceitos de Lógica Fuzzy foram utilizados propondo-se uma
metodologia para estimar a distribuição espacial das classes de potencial de erosão.
Dois modelos distintos foram propostos. O primeiro modelo é composto por duas
variáveis: mapas de declividade e cobertura. O segundo modelo é representado por 3
variáveis: mapas de fator topográfico, fator de erodibilidade dos solos e cobertura.
Estes modelos foram aplicados na microbacia do Rio Pimentel, localizada no
município de São Fidélis (Rio de Janeiro), classificando as áreas em três classes
distintas quanto ao potencial à erosão: Moderado, Moderado Alto e Alto. Os resultados
apresentados por Alves (2004) mostraram que o modelo Fuzzy de duas variáveis
obteve sucesso em estimar áreas de alto potencial a erosão com um número reduzido
de variáveis, tornando tal opção muito interessante para aplicação em regiões onde
os recursos para projetos ambientais são limitados e o nível de degradação ambiental
é elevado.
Fontenelle e Vieira (2002) apresentaram uma análise de risco aplicada à
estabilidade do talude de jusante de uma barragem de terra no Estado do Ceará, para
a condição de reservatório cheio. Para tanto, os autores utilizaram a simulação de
Monte Carlo para distribuições triangular, normal e metodologia de Larson, e a Teoria
dos Conjuntos Difusos, considerando-se a aleatoriedade dos parâmetros de
resistência (coesão e ângulo de atrito) do solo compactado. Foi concluído que, em
função da variabilidade do fator de segurança em estabilidade de taludes a análise de

89
risco é uma metodologia aconselhável e adequada. Também foi verificado que é
altamente válido estender as análises considerando a variabilidade dos outros
materiais e posicionamento da linha freática (poropressões).
A utilização de lógica nebulosa na avaliação de modelos de susceptibilidade a
movimentos gravitacionais de massa em uma faixa de dutos foi estudada Rabaco
(2005). A avaliação foi realizada em um Sistema de Informações Geográficas (SIG),
incluindo modelos matemáticos baseados em equações de hidrologia associadas a
equações de estabilidade do talude infinito. Os resultados fornecidos por este modelo
foram comparados aos resultados de modelos empíricos dirigidos pelo conhecimento
do usuário e de lógica nebulosa. A área estudada, nas escalas 1:1.000, 1:10.000 e
1:50.000, foi um trecho de faixa de dutos da Petrobrás, na Serra do Mar perto de
Coroa Grande. O trabalho teve como objetivo principal apresentar resultados
comparativos entre modelos com controle topográfico para a previsão de
susceptibilidade a movimentos de massa, utilizando parâmetros do Modelo Digital de
Terreno (declividade, curvatura, área de contribuição da encosta e direção de fluxo).
O autor concluiu que os modelos nebulosos não tiveram desempenho superior aos
modelos empíricos. A justificativa seria o fato de uma parcela de subjetividade e de
conhecimento do usuário já estar embutida nos modelos empíricos originais. Os
resultados deste trabalho de pesquisa indicaram que a modelagem nebulosa é uma
variação da modelagem empírica onde os limites de atuação das variáveis, possuem
uma faixa flexível de valores favorecendo o mapeamento mais homogêneo.
Pinto (2002) apresenta a avaliação da susceptibilidade a escorregamentos em
solo fazendo uso da abordagem Fuzzy. O objetivo do trabalho consistiu em gerar um
modelo inteligente para avaliar a susceptibilidade a escorregamentos em solo, em
áreas de taludes naturais pertencentes ao perímetro urbano do Município de
Itaperuna/RJ. Sendo assim, através de avaliação essencialmente qualitativa e
considerando fatores que são sabidamente importantes na deflagração de
movimentos de massa em ambiente tropical úmido, gerar cartas de susceptibilidade
através da obtenção de um índice denominado Índice de Potencial de Ruptura de
Taludes (IPRT). A área estudada foi subdividida em células, que são polígonos que
dividem a área a ser cartografada em unidades menores. Com isso, foi possível
estabelecer setores mais ou menos susceptíveis a escorregamentos em solo com o
uso de qualificadores correspondentes a faixas de valores de IPRT (muito alta
susceptibilidade, alta susceptibilidade, média susceptibilidade, baixa susceptibilidade,

90
muito baixa susceptibilidade). O autor destaca dentre as principais vantagens
apresentadas por esta abordagem: menor custo envolvido na avaliação,
comparativamente aos métodos tradicionais de análise de estabilidade (esta
vantagem torna-se mais notável à medida que a área a ser cartografada aumenta);
possibilidade de capturar, para o modelo concebido, a experiência e conhecimento de
especialistas, assim como seu importante e apropriado julgamento de engenharia,
transportando para o campo matemático características subjetivas não consideradas
em outros métodos de análise de estabilidade atualmente utilizados; especialmente
para regiões com perfil de ocorrência de escorregamentos de menor porte, torna-se
vantajosa a característica de tratamento localizado da encosta, podendo-se atacar
setores mais instáveis porventura identificados, mitigando a encosta como um todo.
Os resultados obtidos mostraram-se coerentes com a realidade verificada no campo
e entende-se que os setores apontados como de média susceptibilidade a
escorregamentos devem ser objeto de atenção e cuidados a fim de evitar a ocorrência
de escorregamentos.
Lee e Juang (1992) propuseram um esquema qualitativo para avaliação do
potencial de ruptura de taludes. Este esquema baseia-se em uma avaliação formada
por fatores que são sabidamente considerados pelos especialistas como atuantes na
estabilidade de taludes. A seleção dos fatores e dos pesos relativos atribuídos a cada
um deles foi baseada em resultados de pesquisa de opinião de especialistas na área
de estabilidade, dados estatísticos disponíveis, e busca de estudos em áreas e
regiões com condições climáticas, ambientais e geológicas similares àquelas da área
avaliada. Juang et al (1992) salientam que deve-se ter cautela quando se adotam
fatores e pesos estabelecidos para uma determinada área, na avaliação do potencial
de ruptura de taludes de outras áreas.
Calijuri et al (2002) apresentam uma metodologia para identificação de áreas
para implantação de aterros sanitários no município de Cacheira de Itapemirim, com
o uso de análise de estratégia de decisão. A metodologia fez uso de lógica fuzzy e
análise multicritério e compreendeu o levantamento e a análise de condicionantes
operacionais, legais, ambientais e socioeconômicos, seguidos de aquisição,
armazenamento, descrição e análise desses dados geo-referenciados. Para cada um
dos condicionantes foram atribuídos pesos, quantificando a importância relativa de
cada um deles no processo de decisão. Os resultados apresentados por Calijuri et al
(2002) mostraram que o método de análise estratégica de decisão, viabilizado pela

91
potencialidade do SIG, permite a integração de informações espaciais para a tomada
de decisão no processo de avaliação e seleção de áreas para a implantação de aterros
sanitários.
Ressalta-se que estudos mostram que a utilização de operações booleanas
(método baseado na lógica binária – base matemática dos SIGs convencionais)
conduz a uma falha de 35% na seleção de áreas potenciais para implantação de
aterros sanitários, quando comparadas às análises utilizando lógica fuzzy
(Champratheep e Ganer, 1996).
2.5.2 - Aplicações da RNA
As aplicações de RNA na engenharia geotécnica vão desde estimativa de
deslocamentos de maciços, constituição e classificação de solos, até estudo de
fundações, por exemplo.
Martinez-Carvajal, H.E. (2006) efetuou a Modelagem Constitutiva de Areias
Usando Redes Neurais Artificiais e Elementos finitos. O estudo consistiu na utilização
de redes neurais artificiais (RNA) treinadas com informação experimental para
capturar diretamente o comportamento constitutivo do solo e eventualmente atuar
como um operador constitutivo dentro de um código de elementos finitos (programa
ALLFINE) para solucionar problemas de contorno. A base de dados para o
treinamento da RNA foi conformada por uma série de ensaios de laboratório que
incluem uma ampla gama de trajetórias de tensão tanto do tipo convencional como de
compressão isotrópica e trajetórias no plano octaédrico. A informação dos ensaios foi
majoritariamente obtida de publicações de trabalhos anteriores, incluindo 13 tipos
diferentes de areia. O pesquisador conclui que o comportamento do sistema híbrido
(SH) RNA-Elementos Finitos nas simulações realizadas se mostrou satisfatório, o que
é um alento para seguir pesquisando nesta área da geotecnia que se mostra bastante
promissora.
Guedes (2011) cita que a aplicação de RNA em Geotecnia pode ser encontrada
nas seguintes publicações:
i. Chissolucombe (2009) utiliza RNA para estimar os deslocamentos
induzidos pela escavação de um túnel. A técnica, aplicada em uma situação
real ocorrida durante a escavação do Metrô-DF, apresentou resultado
92
extremamente eficiente quando tem-se um conjunto de dados para
treinamento que abrangem todo o universo do problema. O autor destaca
que de acordo com sua revisão bibliográfica, as RNAs têm sido utilizadas
na resolução de vários problemas geotécnicos, desde obras subterrâneas,
fundações, pavimentação, estruturas de contenção, prospecção
geotécnica e modelagem constitutiva. Em todas as situações, a quantidade
e qualidade dos dados disponíveis foram de extrema importância para o
desempenho da rede neural.
ii. Biondi et al (2006) treinaram uma RNA com situações reais, com
classificação validada pelo método de determinação do comportamento do
solo através do Teste da Penetração do Cone (CPT) a fim de classificar os
solos a partir de resultados desse tipo de ensaio.
iii. Ruffier, et al (1998) apresentam uma aplicação de RNA ao estudo de
fundações sujeitas a esforços de tração, assentes em terrenos inclinados.
2.5.3 - Aplicações do SNF
Como o conceito de Neuro-fuzzy determina um sistema que carrega as
vantagens das redes neurais, combinadas às vantagens da lógica nebulosa,
eliminando as desvantagens de ambas as técnicas, este foi o método de aplicação da
inteligência computacional proposto para o presente tema de investigação.
Com base no tema e modelo propostos, seguem abaixo alguns trabalhos
publicados sobre estes:
Chen et al (2011) criaram um modelo para avaliação da estabilidade em taludes
de rochas metamórficas baseado em um Sistema Adaptativo de Inferência Neuro-
Fuzzy (ANFIS), devido a sua capacidade de análises não lineares dinâmicas. O
sistema de inferência foi utilizado para prever a estabilidade do talude, com as
seguintes variáveis de entrada: densidade aparente (Y), a altura (H), ângulo de
inclinação (β) e os parâmetros de resistência c e . A condição de estabilidade foi
utilizada como saída do modelo. Os Autores investigaram 53 casos de
escorregamento, onde 53 pares de dados de entrada e saída foram extraídos, dos
quais 41 pares (conjunto de dados de treinamento) foram utilizados para treinar o
ANFIS enquanto os restantes 12 pares (conjunto de dados de verificação) foram
utilizados para validar o modelo. Eles observaram que os resultados da verificação do

93
modelo ANFIS coincidiram com o estado da estabilidade real dos taludes de rocha
metamórficas, e que comparado ao resultado da modelagem de Redes Neurais
Artificias Back Propagation, estudado por outros autores, o ANFIS foi superior. Por
último, o modelo ANFIS foi utilizado para prever a estabilidade do Talude Wangjiazhai,
onde foi verificada, novamente, a capacidade de previsão de estabilidade de taludes
rochosos metamórficos.
Sezer et al (2011) apresentaram um modelo Neuro-Fuzzy utilizando dados de
sensoriamento remoto e GIS para análise de susceptibilidade de deslizamento de
terra em uma área da Klang Valley na Malásia. Os locais de deslizamento de terra na
área de estudo foram identificados através da interpretação de fotografias aéreas e
imagens de satélite, apoiado por extensivas pesquisas de campo. Sete fatores
condicionantes deslizamento de terra, tais como altitude, ângulo de inclinação, o plano
de curvatura, comprimento de drenagem, tipo de solo, distância entre falhas e NDVI
foram extraídos do banco de dados espacial. Esses fatores foram analisados usando
um modelo neuro-fuzzy (sistema adaptativo de inferência neuro-fuzzy, ANFIS) para a
construção dos mapas de susceptibilidade deslizamento de terra. Durante os
trabalhos de desenvolvimento do modelo, foram feitos 5 modelos de susceptibilidade
de deslizamento de terra onde foram obtidos resultados utilizando o ANFIS. Os locais
das extensivas pesquisas de campo foram utilizados para validar os resultados do
mapa de suscetibilidade de deslizamento de terra e o resultado das verificações
mostrou precisão de 98 % para o modelo 5, utilizando todos os parâmetros produzidos
no presente estudo como os fatores condicionantes de deslizamento de terra. Os
resultados da validação mostrou concordância suficiente entre o mapa de
suscetibilidade obtidos e os dados existentes sobre as áreas de deslizamentos.
Qualitativamente, o modelo produziu resultados razoáveis que podem ser utilizados
para fins de planejamento preliminar do uso do solo.
Guedes (2011) utilizou um modelo neuro-fuzzy na avaliação da suscetibilidade
de escorregamento de taludes. Com base no banco de dados obtido pela autora,
foram elaborados modelos para fornecer a Previsão de Escorregamento (PE) a partir
de método básico de caracterização que permitem uma avaliação preliminar com os
seguintes fatores: altura, inclinação, pluviosidade, drenagem, vegetação e ocupação.
Foram realizados diversos treinamentos para ajustes dos parâmetros (nMF, Erros
objetivos e Número máximo de Épocas) do Sistema Neuro-Fuzzy e refinamento do
banco de dados, entretanto os resultados esperados não foram satisfatórios. A autora
94
concluiu que: quanto maior o número de funções de pertinência (MFs), melhor o
resultado apresentado para o mesmo conjunto de dados; os resultados da validação
utilizando dados com ruído, com razoável aproximação da suscetibilidade desejada,
apresentou valores fora do intervalo de valores atribuídos à Previsão de
Escorregamento (PE) utilizado no treinamento, o que evidencia a necessidade de
aprimoramento do banco de dados para obter valores de PE com maior grau de
certeza.

95
3 – METODOLOGIA
3.1 – Introdução
Tendo em vista que os trabalhos de Chen et al (2011) e Sezer et al (2011)
obtiveram resultados consistentes, com excelente grau de precisão e confiança,
utilizando em ambos os casos um modelo baseado em um Sistema Adaptativo de
Inferência Neuro-Fuzzy (ANFIS), o modelo adotado na presente pesquisa utilizará o
mesmo método utilizado pelos autores supracitados, que será desenvolvido utilizando
o software MATLAB®, da empresa The Mathworks, Inc., para sua implementação.
Inicialmente para a utilização deste modelo optou-se por adotar um banco de
dados com registros de vistorias da GEO-RIO e Defesa Civil, que são órgãos
pertencentes à Prefeitura da Cidade do Rio de Janeiro. Entretanto, o resultado não
correspondeu às expectativas, coforme exposto no item 4.1 da presente Tese. Uma
nova abordagem, então, foi realizada adotando-se dados de análises paramétricas,
resultando em uma previsão do potencial de ruptura de talude próxima da realidade.
Nos itens a seguir, serão apresentados: a Modelagem ANFIS e os Resultados
esperados com as duas abordagens supracitadas.
3.2 – Modelagem ANFIS
Como dito anteriormente, a modelagem será baseada no método de Sistema
Adaptativo de Inferência Neuro-Fuzzy (ANFIS) e a Figura 26 representa o diagrama
em bloco do modelo preliminar, baseado no método ANFIS, onde a arquitetura do
modelo foi dividida em 05 níveis até a obtenção da variável de saída.
Conforme explicitado no Item 2.4.2 da presente Tese, tem-se:
No Nível 1 do modelo, cada nó i é um nó adaptativo onde x é a entrada para o
nó i, e A é o rótulo linguístico (pequeno, grande, etc) associado a esta função do nó.
Parâmetros nesta camada são referidos como os "parâmetros premissa” ou
“parâmetros dos antecedentes”.

96
Figura 26 – Diagrama em bloco do modelo preliminar baseado no ANFIS (Adaptado de
Chen et al)
No Nível 2, cada nó calcula a “força de disparo” de cada regra via multiplicação
e os neurônios desta camada executam a operação de T-norma, efetuando o
produtório dos sinais de entrada e enviando-os para saída da camada.
No Nível 3, cada nó executa a função normalização, a qual é utilizada como
um pré-processamento para defuzzificação. As saídas desse nível serão chamadas
de “força de disparo normalizado”, pois neste nível normalizam-se as funções de
pertinência.
No Nível 4, a saída de cada neurônio é calculada pelo produto da saída
normalizada da camada anterior e o grau de ativação do consequente. Os parâmetros
neste nível são chamados de parâmetros do consequente.
No Nível 5, o único nó nesta camada é fixo e calcula a saída final como a soma
de todas as entradas para este nó, isto é, o último bloco do diagrama apresenta a
variável de saída Y calculada no Nível 5, que no modelo proposto será a Previsão de
uma Potencial Ruptura de Talude (PPRT).
97
3.3 – Resultados Esperados
A análise de estabilidade de taludes feita por técnicas convencionais preveem
que a instabilidade do talude será deflagrada quando as tensões cisalhantes
mobilizadas se igualarem à resistência ao cisalhamento (vide item 1.2 da presente
Tese).
Quando utiliza-se métodos convencionais, geralmente, as tensões (’) e os
parâmetros de resistência (c’ e ') são fundamentais para a determinação do FS de
um talude.
Entretanto nos métodos que utilizam as técnicas inteligentes, tais como fuzzy e
neuro-fuzzy, pode-se obter uma Previsão do Potencial de Ruptura de Taludes ou
Susceptibilidade de Escorregamento de Taludes, sem que as tensões e os parâmetros
de resistência sejam conhecidos, ou seja, utilizando-se apenas os principais fatores
condicionantes de movimentos de massa apontados na literatura, que são:
geomorfologia, clima/precipitação, geometria, vegetação e ação antrópica.
Como as técnicas de inteligência computacional possuem a capacidade de
realizar o tratamento das informações conforme relatado anteriormente, o que se
espera como resultado da presente pesquisa é a obtenção da variável de saída,
através do modelo ANFIS, que fornecerá resultados qualitativos a respeito da
estabilidade do talude estudado que será o valor da Previsão do Potencial de Ruptura
de Taludes (PPRT). Ressaltando que estes resultados não podem ser comparados
diretamente ao FS determinado pelas técnicas convencionais, porém podem dar uma
estimativa do quão o talude está seguro.
A grande vantagem da utilização da técnica da inteligência computacional em
problemas de estabilidade é que o valor esperado da variável de saída (Previsão do
Potencial de Ruptura de Taludes - PPRT) no modelo (método ANFIS) indicará a PPRT
em uma escala de 0 a 100 (ou 0 a 1), onde 100 é o indicativo que o talude rompeu ou
romperá por escorregamento, assim como o FS=1,0. Entretanto, valores menores que
100 sempre indicarão o percentual do potencial de ruptura associado ao
escorregamento do talude em questão.
Outro fator importante sobre a utilização do método sugerido é que no caso das
coordenadas geográficas dos locais vistoriados serem conhecidas, as PPRTs geradas
após a execução do modelo podem ser inseridas em Sistemas de Informações

98
Geográficas (GIS), podendo-se criar mapas de risco de escorregamento de talude,
com pontos/áreas de diversas cores para diferentes graus de potenciais de ruptura,
facilitando a visão global de uma localidade, bairro ou até mesmo de todo o Município.
Tendo em vista os fatos supracitados, a aplicabilidade do modelo na Previsão
do Potencial de Ruptura de Taludes pode ser considerada de fácil utilização,
mostrando-se uma ferramenta útil para Previsão de Ruptura de Taludes e como
método alternativo para o monitoramento das encostas do Município do Rio de
Janeiro, podendo ser realizada a delimitação de áreas de risco e de locais que
necessitam de intervenções/obras geotécnicas.

99
4 – MODELAGEM ANFIS
4.1 – Modelagem Utilizando Um Banco de Dados
4.1.1 – Introdução
Dando continuidade ao trabalho de Silva (2008), tentou-se adotar variáveis
semelhantes às utilizadas na época, que são: altura, inclinação, pluviosidade,
drenagem, vegetação e ocupação da encosta, que são variáveis que podem ser
obtidas em qualquer inspeção visual, sem a necessidade de instalação de qualquer
equipamento e ensaio de laboratório.
Para treinamento e validação do modelo foram utilizados dados de um banco
de dados que possui 160 registros e é uma mescla entre o banco de dados compilado
na época da pesquisa de mestrado (Silva, 2008), com 67 registros, e o banco de dados
utilizado por Guedes (2011), onde nele também foram incluídos registros de vistorias
realizadas pela Defesa Civil do Município do Rio de Janeiro, através de formulário
criado para este propósito, que foi preenchido por técnicos deste órgão (Figura 27).
Levando em conta que Sezer et al (2011) utilizaram em seu trabalho um banco
de dados de 60 escorregamentos na área de Klang Valley na Malásia e Chen et al
(2011) utilizaram 53 casos na China, a quantidade de registros disponíveis (160) para
o presente trabalho era superior, o que poderia resultar em uma previsão mais
acurada. Entretanto, os resultados obtidos, assim como na modelagem proposta por
Guedes (2011), não foram os esperados.

100
Figura 27 – Formulário criado para aumento de registros no Banco de Dados da Tese
4.1.2 – Modelagem
Para a modelagem do ANFIS foi utilizada a Toolbox Neuro-Fuzzy Designer do
Software Matlab da empresa The Mathworks Inc. (vide Figura 28), juntamente com o
seguinte conjunto de dados: 69 registros para treinamento do modelo e 13 registros
para checagem do modelo (que não pertenciam ao conjunto de treinamento).
A Figura 28 apresenta a Neuro-Fuzzy Toolbox e o gráfico dos dados para
treinamento do Modelo ANFIS. A Figura 29 apresenta a estrutura do Modelo ANFIS
onde na primeira camada (input) estão representadas as seguintes Variáveis do
Modelo: Altura, Inclinação e Pluviosidade. As camadas 02, 03 e 04 (inputmf, rule e
outputmf) representam os adjetivos com as funções de pertinência de cada variável
de entrada, as regras criadas e as funções de pertinência da variável de saída,
respectivamente. A última camada apresenta o resultado final, que é a Previsão do
Potencial de Ruptura de Taludes (PPRT), que nos dados de treinamento varia de 0 a
100.
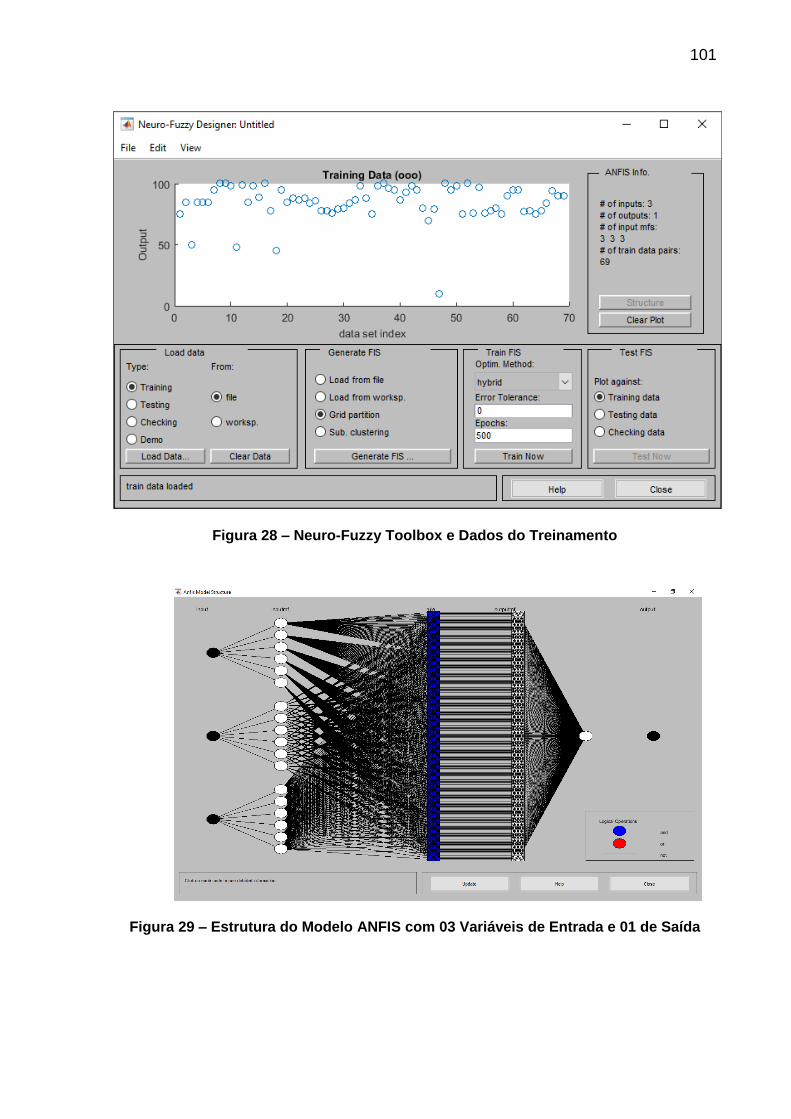
101
Figura 28 – Neuro-Fuzzy Toolbox e Dados do Treinamento
Figura 29 – Estrutura do Modelo ANFIS com 03 Variáveis de Entrada e 01 de Saída

102
4.1.3 – Resultados Obtidos na Modelagem com o Banco de Dados
Foram realizadas diversas análises para a obtenção de um modelo que gerasse
o menor erro possível. Para tal, na geração da inferência fuzzy e das regras foram
testados todos os tipos de função de pertinência para os adjetivos dos dados de
entrada (triangular, trapezoidal, sino, etc.) e a quantidade de adjetivos foi fixada em
06 (seis). Também foi definido que a função de pertinência do dado de saída seria
constante. Feita a escolha do tipo de Inferência Fuzzy, para o treinamento da rede
adotou-se o método de aprendizagem híbrido com treinamento fixado em 100 épocas
e foram obtidos os seguintes erros:
Funções de Pertinência do Tipo Triangular: erro = 6,75
Figura 30 – Escolha da Função de Pertinência Triangular e Gráfico do Treinamento
Funções de Pertinência do Tipo Trapezoidal: erro = 8,11
Figura 31 – Escolha da Função de Pertinência Trapezoidal e Gráfico do Treinamento

103
Funções de Pertinência do Tipo sino: erro = 7,66
Figura 32 – Escolha da Função de Pertinência Sino e Gráfico do Treinamento
Funções de Pertinência do Tipo Gauss: erro = 7,23
Figura 33 – Escolha da Função de Pertinência Gauss e Gráfico do Treinamento
Funções de Pertinência do Tipo Gauss 2: erro = 8,14
Figura 34 – Escolha da Função de Pertinência Gauss2 e Gráfico do Treinamento

104
Funções de Pertinência do Tipo Pi: erro = 8,40
Figura 35 – Escolha da Função de Pertinência Pi e Gráfico do Treinamento
Funções de Pertinência do Tipo dSigmóide: erro = 7,77
Figura 36 – Escolha da Função de Pertinência dSigmóide e Gráfico do Treinamento
Funções de Pertinência do Tipo pSigmóide: erro = 7,77
Figura 37 – Escolha da Função de Pertinência pSigmóide e Gráfico do Treinamento
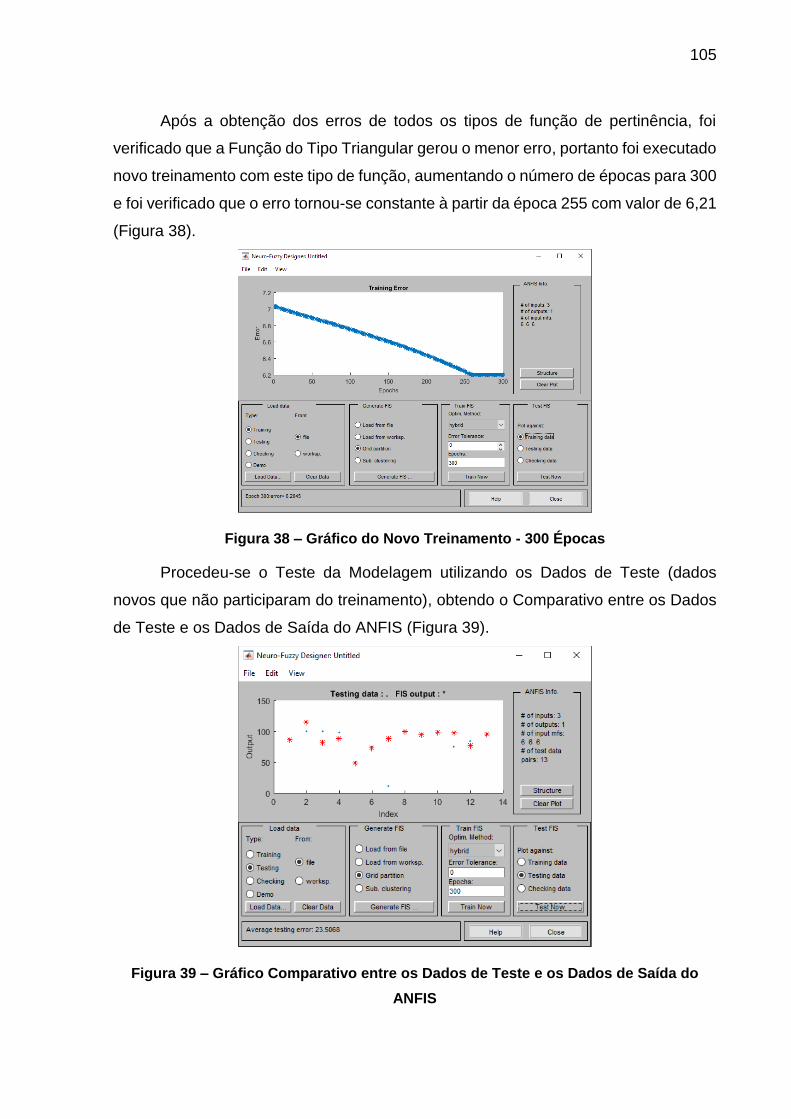
105
Após a obtenção dos erros de todos os tipos de função de pertinência, foi
verificado que a Função do Tipo Triangular gerou o menor erro, portanto foi executado
novo treinamento com este tipo de função, aumentando o número de épocas para 300
e foi verificado que o erro tornou-se constante à partir da época 255 com valor de 6,21
(Figura 38).
Figura 38 – Gráfico do Novo Treinamento - 300 Épocas
Procedeu-se o Teste da Modelagem utilizando os Dados de Teste (dados
novos que não participaram do treinamento), obtendo o Comparativo entre os Dados
de Teste e os Dados de Saída do ANFIS (Figura 39).
Figura 39 – Gráfico Comparativo entre os Dados de Teste e os Dados de Saída do
ANFIS

106
A Tabela 9 demonstra os valores da Susceptibilidade de Escorregamento
contido no Banco de Dados, o valor da PPRT gerada pelo Modelo ANFIS e o Erro
calculado, para cada Dado de Teste.
Tabela 9 - Valores de Saída do Banco de Dados, Modelo ANFIS e o Erro calculado
Conjunto de
Dados
Risco de Escorregamento –
Banco de Dados (%)
Saída ANFIS -PPRT (%)
Erro (%)
1 86 85,8 00,23 2 100 114 14,00
3 100 82,3 17,70 4 98 88,5 09,69 5 50 48 04,00
6 75 72,9 02,80 7 11 88,6 705,45 8 100 100 00,00 9 95 94,3 00,74
10 98 98 00,00 11 75 97 29,33 12 84 76,9 08,45 13 93 95,4 02,58
Erro Médio (%) 61,15
Analisando o gráfico da Figura 39 e a Tabela 9 pode-se notar que o Modelo
obteve valores da PPRT com grande divergência em relação a do percentual de risco
de escorregamento contido no Banco de Dados, gerando um erro médio de 61,15%.
O principal motivo para a elevação do erro médio foi que no Banco de Dados não
existe uma quantidade expressiva de registros com Risco de Escorregamento menor
que 70% e se analisarmos com cautela o Gráfico da Figura 39 e a Tabela 9, percebe-
se que no sétimo conjunto de dados de teste, o modelo ANFIS deveria fornecer um
valor de PPRT próximo de 11% entretanto o valor de PPRT gerado foi próximo de
88,6%, com erro aproximado de 705,5%, elevando consideravelmente o erro médio.
Se o sétimo conjunto de dados for desconsiderado, o erro médio reduz para 7,46%.
Também foi verificado que o segundo conjunto de dados gerou uma PPRT de
114%, entretanto como nesta etapa da pesquisa não foi realizada qualquer imposição
de limites, superior e inferior, na variável de saída, o Modelo gerou previsões acima
de 100% e caso esta tivesse sido implementada, o erro médio seria de 60,07%
considerando todos os dados de teste ou 6,29% desconsiderando o sétimo conjunto
de dados.

107
4.1.4 – Conclusões sobre a Modelagem com o Banco de Dados Existente
A partir da análise dos resultados supracitados, foi concluído que ocorreram os
seguintes problemas com os registros do Banco de Dados utilizado:
Registros com dados diferentes mapeando a mesma saída, gerando
interferências na geração das Regras Fuzzy;
Registros com dados próximos mapeando saídas diferentes, gerando conflito
na geração das Regras Fuzzy; e
Quantidade pequena de Registros com os dados de Saída abaixo de 70%
dificultando o aprendizado e aumentando o erro para PPRTs abaixo deste
valor.
Tendo em vista o exposto, tudo indica que o Modelo ANFIS funciona, neste
caso, apenas para conjuntos de dados que gerem Previsão do Potencial de Ruptura
de Taludes acima de 70%, entretanto não é possível a utilização de um Banco de
Dados incompleto para a obtenção da Previsão do Potencial de Ruptura de Taludes,
porque a fase de treinamento do modelo requer que os dados de entrada contenham
todas as faixas de valores da variável de saída, fazendo com que o Modelo ANFIS
consiga gerar as Previsões do Potencial de Ruptura de Taludes (PPRT) com o menor
erro possível.
4.2 – Modelagem Utilizando Análise Paramétrica
4.2.1 – Introdução
Com o intuito de eliminar os problemas relatados no item 4.1.4 do presente
trabalho, foi realizada análise paramétrica para a geração de dados contendo todas
as faixas de fatores de segurança, que consideram desde de um talude totalmente
seguro a um talude rompido.
O efeito das variáveis geométricas (altura e inclinação), dos parâmetros do solo
(peso específico, coesão e ângulo de atrito) e da pluviosidade (que impacta
diretamente no nível d’água do terreno natural) foram inicialmente avaliados com o
programa de equilíbrio limite Slope-W pertencente ao pacote de aplicativos da GEO-

108
STUDIO, conhecido no meio técnico como Geo-Slope. Com esta ferramenta, foram
analisadas diversas geometrias distintas, de forma a adquirir dados referentes à
influência destes parâmetros na estabilidade de taludes, ou seja, para a obtenção dos
Fatores de Segurança nas mais variadas faixas (da Ruptura a Segurança Total). A
Figura 40 exemplifica uma Geometria com 05 metros de altura, 10º de inclinação e
Nível d’água coincidente com 1/3 da altura do talude.
Figura 40 – Geometria: Altura= 5,0m - Inclinação= 10º - Linha piezométrica= 1,7 m
Cabe ressaltar que o programa de equilíbrio limite fornece um valor de fator de
segurança para o talude analisado, sendo, portanto, um método determinístico.
Entretanto nesta Modelagem ANFIS, apesar de fornecer valores que podem ser
comparados com o Fator de Segurança (FS), estes serão convertidos em valores
expressos em percentual para a obtenção de uma Previsão do Potencial de Ruptura
de Taludes (PPRT), através da curva da Figura 41, implementada em um novo modelo
ANFIS no final do processamento, para a obtenção automática deste valor, evitando
conversões manuais.
A curva de conversão de FS para PPRT (Figura 41) foi adaptada de Costa
(2005), que através de Iterações de Monte Carlo, método probabilístico, obteve o
gráfico da função de distribuição acumulada do Fator de Segurança (FS) em relação
a probabilidade de segurança do talude (%). Como este trabalho trata de um
parâmetro inverso à probabilidade de segurança, ou seja, a ruptura do talude, efetuou-
se a inversão do eixo da probabilidade (eixo vertical) para adequá-lo à realidade.
Nesta etapa do trabalho, não se pretendeu comparar os dois métodos, e sim,
adquirir dados em todas as faixas de valores dos fatores de segurança para que o
modelo pudesse estabelecer corretamente as funções de pertinência para os adjetivos
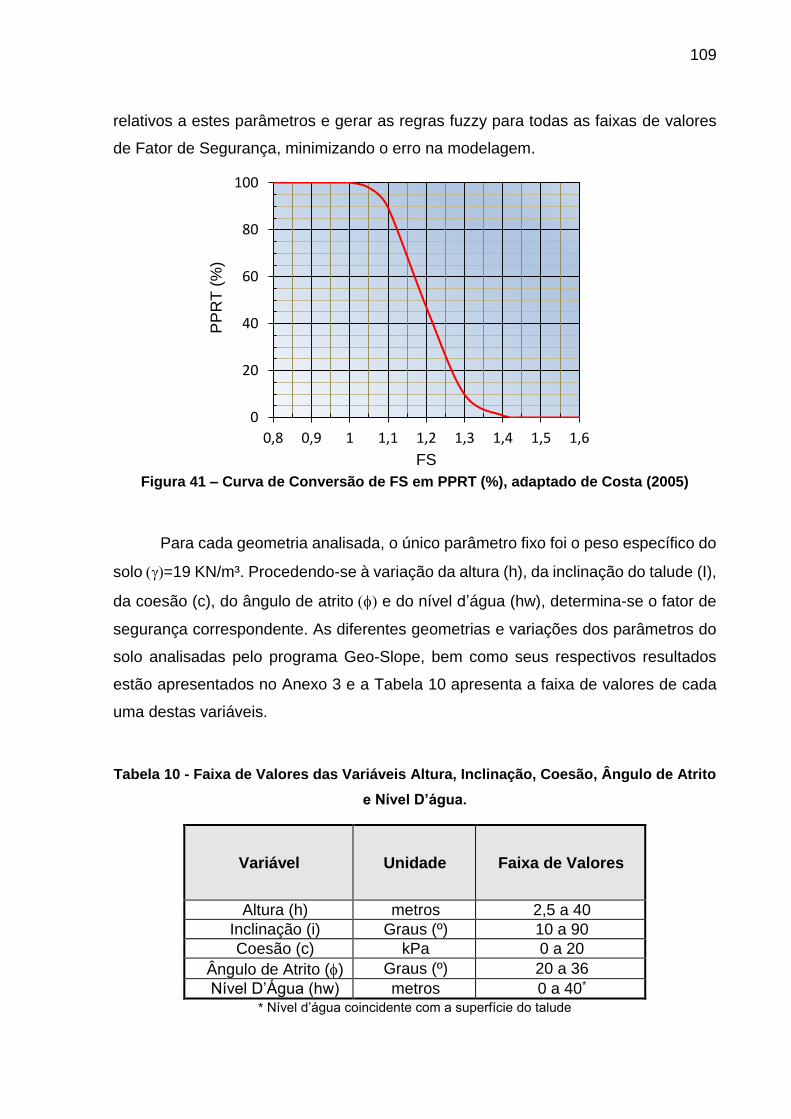
109
relativos a estes parâmetros e gerar as regras fuzzy para todas as faixas de valores
de Fator de Segurança, minimizando o erro na modelagem.
Figura 41 – Curva de Conversão de FS em PPRT (%), adaptado de Costa (2005)
Para cada geometria analisada, o único parâmetro fixo foi o peso específico do
solo =19 KN/m³. Procedendo-se à variação da altura (h), da inclinação do talude (I),
da coesão (c), do ângulo de atrito e do nível d’água (hw), determina-se o fator de
segurança correspondente. As diferentes geometrias e variações dos parâmetros do
solo analisadas pelo programa Geo-Slope, bem como seus respectivos resultados
estão apresentados no Anexo 3 e a Tabela 10 apresenta a faixa de valores de cada
uma destas variáveis.
. . .
Tabela 10 - Faixa de Valores das Variáveis Altura, Inclinação, Coesão, Ângulo de Atrito
e Nível D’água.
Variável Unidade Faixa de Valores
Altura (h) metros 2,5 a 40
Inclinação (i) Graus (º) 10 a 90
Coesão (c) kPa 0 a 20
Ângulo de Atrito () Graus (º) 20 a 36
Nível D’Água (hw) metros 0 a 40* * Nível d’água coincidente com a superfície do talude
0
20
40
60
80
100
0,8 0,9 1 1,1 1,2 1,3 1,4 1,5 1,6
PP
RT
(%
)
FS

110
4.2.2 – Modelagem 01 (Todos os Dados da Análise Paramétrica)
Assim como no Item 4.1.2, para a modelagem do ANFIS foi utilizada a Toolbox
Neuro-Fuzzy Designer, juntamente com o seguinte conjunto de dados: 1106 registros
para treinamento do modelo e 64 registros para checagem do modelo (que não
pertenciam ao conjunto de treinamento).
A Figura 42 apresenta a Neuro-Fuzzy Toolbox e o gráfico dos dados para
treinamento do Modelo ANFIS, e a Figura 43 apresenta a estrutura do Modelo ANFIS
onde na primeira camada (input) estão representadas as seguintes Variáveis do
Modelo: Coesão, Ângulo de Atrito, Altura, Inclinação e Nível D’água. As camadas 02,
03 e 04 (inputmf, rule e outputmf) representam os adjetivos com as funções de
pertinência de cada variável de entrada, as regras criadas e as funções de pertinência
da variável de saída, respectivamente. a última camada apresenta um valor
comparável ao Fator de Segurança, que será posteriormente convertido em um valor
percentual gerando a Previsão do Potencial de Ruptura de Talude (PPRT).
Figura 42 – Neuro-Fuzzy Toolbox e Dados do Treinamento

111
Figura 43 – Estrutura do Modelo ANFIS com 05 Variáveis de Entrada e 01 de Saída
4.2.2.1 – Resultados Obtidos na Modelagem 01
Foram realizadas diversas análises para a obtenção de um modelo que gerasse
o menor erro possível. Para tal, na geração da inferência fuzzy e das regras foram
testados todos os tipos de função de pertinência para os adjetivos dos dados de
entrada (triangular, trapezoidal, sino, etc.) e a quantidade de adjetivos foi fixada em
03. Também foi definido que a função de pertinência do dado de saída seria constante.
Feita a escolha do tipo de Inferência Fuzzy, para o treinamento da rede adotou-se o
método de aprendizagem híbrido com treinamento fixado em 10 épocas e foram
obtidos os seguintes erros:
Funções de Pertinência do Tipo Triangular: erro = 0,30
Figura 44 – Escolha da Função de Pertinência Triangular e Gráfico do Treinamento
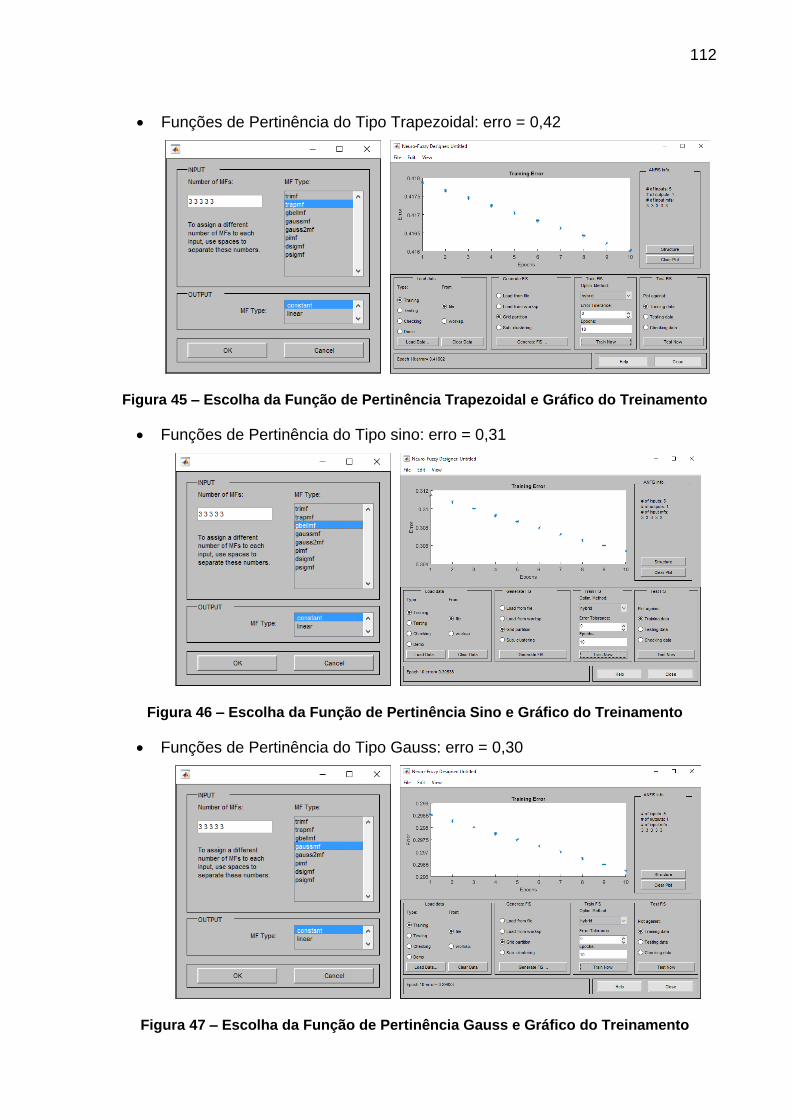
112
Funções de Pertinência do Tipo Trapezoidal: erro = 0,42
Figura 45 – Escolha da Função de Pertinência Trapezoidal e Gráfico do Treinamento
Funções de Pertinência do Tipo sino: erro = 0,31
Figura 46 – Escolha da Função de Pertinência Sino e Gráfico do Treinamento
Funções de Pertinência do Tipo Gauss: erro = 0,30
Figura 47 – Escolha da Função de Pertinência Gauss e Gráfico do Treinamento

113
Funções de Pertinência do Tipo Gauss 2: erro = 0,40
Figura 48 – Escolha da Função de Pertinência Gauss2 e Gráfico do Treinamento
Funções de Pertinência do Tipo Pi: erro = 0,43
Figura 49 – Escolha da Função de Pertinência Pi e Gráfico do Treinamento
Funções de Pertinência do Tipo dSigmóide: erro = 0,30
Figura 50 – Escolha da Função de Pertinência dSigmóide e Gráfico do Treinamento

114
Funções de Pertinência do Tipo pSigmóide: erro = 0,39
Figura 51 – Escolha da Função de Pertinência pSigmóide e Gráfico do Treinamento
Utilizando o Método de Agrupamento Sub Clustering: erro = 0,27
Figura 52 – Parâmetros do Método de Agrupamento e Gráfico do Treinamento
Após a obtenção dos erros de todos os tipos de função de pertinência do
Método de Particionamento do Espaço de Entrada e do Método de Agrupamento, foi
verificado que o Método de Agrupamento gerou o menor erro, portanto foi executado
novo treinamento com este tipo de função, aumentando o número de épocas para 500
e foi obtido erro com valor de 0,20 (vide Figura 53).

115
Figura 53 – Gráfico do Novo Treinamento – 500 épocas
Procedeu-se o Teste da Modelagem utilizando os dados de teste (dados novos
que não participaram do treinamento) e o seguinte gráfico foi obtido:
Figura 54 – Gráfico Comparativo entre os Dados de Teste e os Dados de Saída do
ANFIS

116
A Tabela 11 demonstra os valores dos Fatores de Segurança (Determinístico)
obtidos pela análise paramétrica, os valores dos Fatores de Segurança (Qualitativos)
gerados pelo Modelo ANFIS e o Erro calculado, para cada Dado de Teste.
Tabela 11 - Valores de Saída da Análise Paramétrica, do Modelo ANFIS e o Erro
calculado
Conjunto de Dados
Co
es
ão
(kP
a)
Alt
ura
(m
)
Inclin
ação
(º)
Ân
gu
lo d
e
Atr
ito
Po
siç
ão
do
Nív
el
D’á
gu
a
(m)
Fator de Segurança –
Análise Paramétrica
Saída ANFIS – Fator de
Segurança Erro (%)
1 0 2,5 10 36 0 3,699 2,906 21,44
2 5 5 50 20 0 0,622 0,803 29,16
3 10 5 70 20 0 0,856 1,063 24,17
4 10 5 70 33 0 1,160 1,211 4,38
5 20 5 50 33 0 2,175 2,384 9,59
6 20 5 90 36 0 1,258 1,291 2,61
7 0 10 30 36 0 1,262 1,074 14,92
8 0 20 30 25 0 0,809 0,824 1,91
9 0 20 50 29 0 0,472 0,606 28,36
10 10 20 50 36 0 1,052 0,939 10,75
11 5 40 10 29 0 3,004 2,539 15,48
12 10 40 30 36 0 1,566 2,084 33,08
13 10 40 50 36 0 0,890 0,566 36,35
14 20 40 30 20 0 1,033 1,021 1,19
15 20 40 30 33 0 1,603 2,136 33,24
16 20 40 50 33 0 0,966 0,879 9,05
17 10 10 50 25 0,3 0,849 0,762 10,23
18 0 2,5 50 20 0,8 0,340 0,364 7,20
19 5 2,5 30 36 0,8 2,325 2,314 0,48
20 5 2,5 50 36 0,8 1,442 1,356 5,95
21 10 2,5 10 25 0,8 3,935 3,923 0,31
22 10 2,5 30 20 0,8 2,199 2,014 8,42
23 10 2,5 50 20 0,8 1,679 1,461 12,97
24 10 2,5 70 33 0,8 1,619 1,554 4,00
25 20 2,5 90 20 0,8 1,672 1,562 6,55
26 0 2,5 30 20 0,8 0,454 0,650 43,20
27 0 2,5 30 25 1,6 0,464 0,660 42,25
28 0 2,5 30 36 1,6 0,715 0,883 23,45
29 0 2,5 50 25 1,6 0,313 0,385 22,85
30 0 2,5 50 33 1,6 0,384 0,464 20,79
31 5 2,5 10 25 1,6 2,375 2,856 20,24
32 5 2,5 70 33 1,6 0,774 0,781 0,92
33 10 2,5 90 29 1,6 0,896 0,821 8,36
34 10 5 30 33 1,7 1,998 2,079 4,04
35 10 5 50 29 1,7 1,264 1,296 2,51
36 0 10 30 20 10 0,308 0,185 40,02
37 20 10 50 29 10 1,073 1,176 9,59
38 20 10 70 36 10 0,705 0,684 3,04
39 5 20 30 33 14 0,875 0,999 14,22
40 10 20 10 20 14 1,528 2,044 33,76
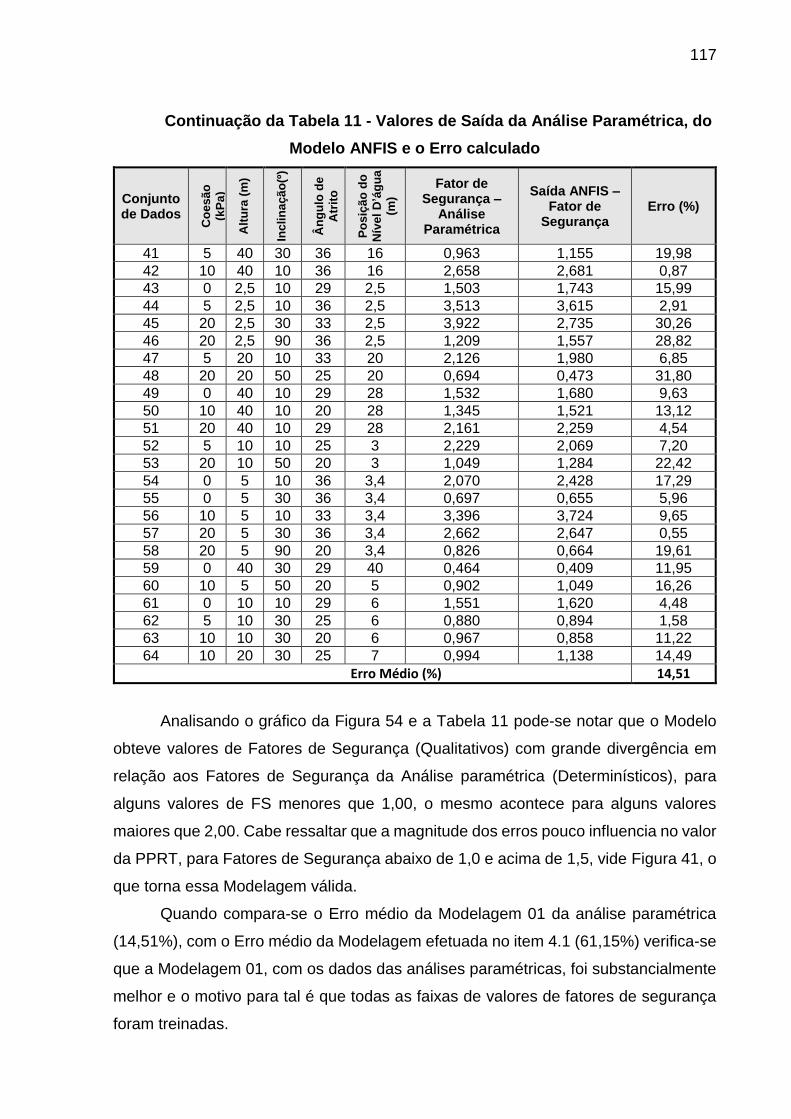
117
Continuação da Tabela 11 - Valores de Saída da Análise Paramétrica, do
Modelo ANFIS e o Erro calculado
Conjunto de Dados
Co
es
ão
(kP
a)
Alt
ura
(m
)
Inclin
ação
(º)
Ân
gu
lo d
e
Atr
ito
Po
siç
ão
do
Nív
el
D’á
gu
a
(m)
Fator de Segurança –
Análise Paramétrica
Saída ANFIS – Fator de
Segurança Erro (%)
41 5 40 30 36 16 0,963 1,155 19,98
42 10 40 10 36 16 2,658 2,681 0,87
43 0 2,5 10 29 2,5 1,503 1,743 15,99
44 5 2,5 10 36 2,5 3,513 3,615 2,91
45 20 2,5 30 33 2,5 3,922 2,735 30,26
46 20 2,5 90 36 2,5 1,209 1,557 28,82
47 5 20 10 33 20 2,126 1,980 6,85
48 20 20 50 25 20 0,694 0,473 31,80
49 0 40 10 29 28 1,532 1,680 9,63
50 10 40 10 20 28 1,345 1,521 13,12
51 20 40 10 29 28 2,161 2,259 4,54
52 5 10 10 25 3 2,229 2,069 7,20
53 20 10 50 20 3 1,049 1,284 22,42
54 0 5 10 36 3,4 2,070 2,428 17,29
55 0 5 30 36 3,4 0,697 0,655 5,96
56 10 5 10 33 3,4 3,396 3,724 9,65
57 20 5 30 36 3,4 2,662 2,647 0,55
58 20 5 90 20 3,4 0,826 0,664 19,61
59 0 40 30 29 40 0,464 0,409 11,95
60 10 5 50 20 5 0,902 1,049 16,26
61 0 10 10 29 6 1,551 1,620 4,48
62 5 10 30 25 6 0,880 0,894 1,58
63 10 10 30 20 6 0,967 0,858 11,22
64 10 20 30 25 7 0,994 1,138 14,49
Erro Médio (%) 14,51
Analisando o gráfico da Figura 54 e a Tabela 11 pode-se notar que o Modelo
obteve valores de Fatores de Segurança (Qualitativos) com grande divergência em
relação aos Fatores de Segurança da Análise paramétrica (Determinísticos), para
alguns valores de FS menores que 1,00, o mesmo acontece para alguns valores
maiores que 2,00. Cabe ressaltar que a magnitude dos erros pouco influencia no valor
da PPRT, para Fatores de Segurança abaixo de 1,0 e acima de 1,5, vide Figura 41, o
que torna essa Modelagem válida.
Quando compara-se o Erro médio da Modelagem 01 da análise paramétrica
(14,51%), com o Erro médio da Modelagem efetuada no item 4.1 (61,15%) verifica-se
que a Modelagem 01, com os dados das análises paramétricas, foi substancialmente
melhor e o motivo para tal é que todas as faixas de valores de fatores de segurança
foram treinadas.
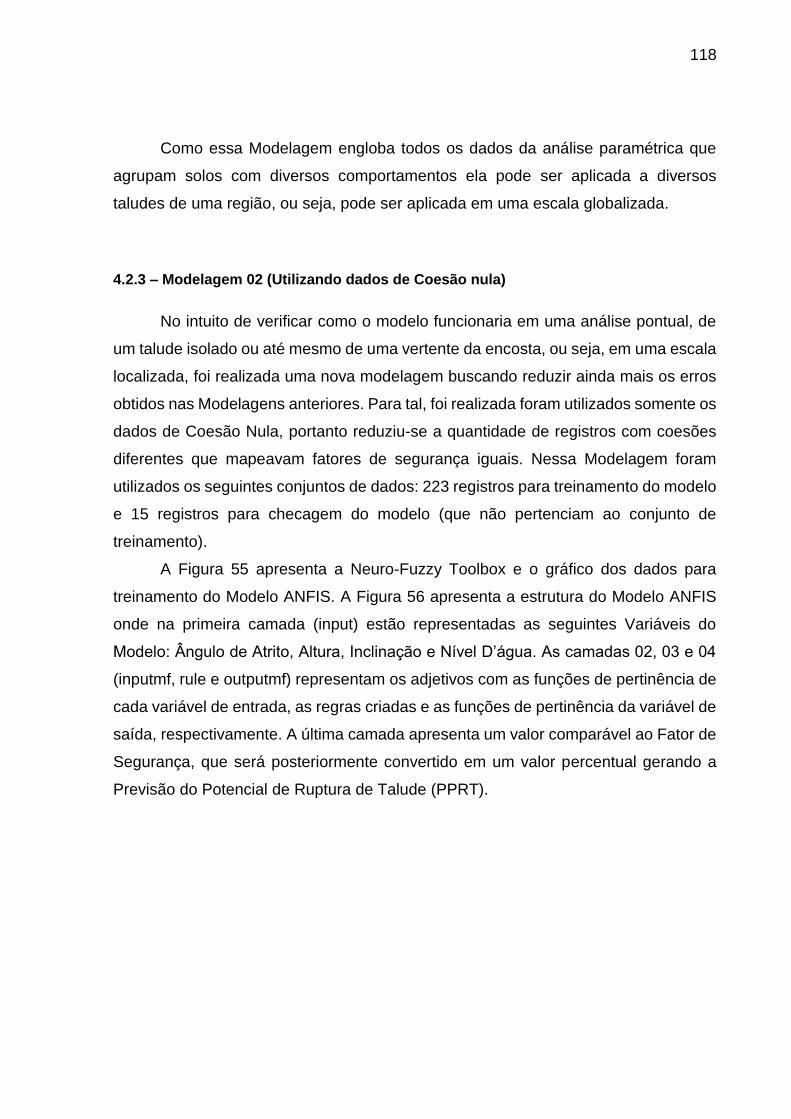
118
Como essa Modelagem engloba todos os dados da análise paramétrica que
agrupam solos com diversos comportamentos ela pode ser aplicada a diversos
taludes de uma região, ou seja, pode ser aplicada em uma escala globalizada.
4.2.3 – Modelagem 02 (Utilizando dados de Coesão nula)
No intuito de verificar como o modelo funcionaria em uma análise pontual, de
um talude isolado ou até mesmo de uma vertente da encosta, ou seja, em uma escala
localizada, foi realizada uma nova modelagem buscando reduzir ainda mais os erros
obtidos nas Modelagens anteriores. Para tal, foi realizada foram utilizados somente os
dados de Coesão Nula, portanto reduziu-se a quantidade de registros com coesões
diferentes que mapeavam fatores de segurança iguais. Nessa Modelagem foram
utilizados os seguintes conjuntos de dados: 223 registros para treinamento do modelo
e 15 registros para checagem do modelo (que não pertenciam ao conjunto de
treinamento).
A Figura 55 apresenta a Neuro-Fuzzy Toolbox e o gráfico dos dados para
treinamento do Modelo ANFIS. A Figura 56 apresenta a estrutura do Modelo ANFIS
onde na primeira camada (input) estão representadas as seguintes Variáveis do
Modelo: Ângulo de Atrito, Altura, Inclinação e Nível D’água. As camadas 02, 03 e 04
(inputmf, rule e outputmf) representam os adjetivos com as funções de pertinência de
cada variável de entrada, as regras criadas e as funções de pertinência da variável de
saída, respectivamente. A última camada apresenta um valor comparável ao Fator de
Segurança, que será posteriormente convertido em um valor percentual gerando a
Previsão do Potencial de Ruptura de Talude (PPRT).

119
Figura 55 – Neuro-Fuzzy Toolbox e Dados do Treinamento
Figura 56 – Estrutura do Modelo ANFIS com 04 Variáveis de Entrada e 01 de Saída
4.2.3.1 – Resultados Obtidos na Modelagem 02
Assim como na Modelagem 01, do item 4.2.2, na geração da inferência fuzzy e
das regras foram testados todos os tipos de função de pertinência para os adjetivos
dos dados de entrada (triangular, trapezoidal, sino, etc.) e a quantidade de adjetivos
foi fixada em 04. Também foi definido que a função de pertinência do dado de saída
seria constante. Feita a escolha do tipo de Inferência Fuzzy, para o treinamento da
rede adotou-se o método de aprendizagem híbrido com treinamento fixado em 10
épocas e foram obtidos os seguintes erros:

120
Funções de Pertinência do Tipo Triangular: erro = 0,16
Figura 57 – Escolha da Função de Pertinência Triangular e Gráfico do Treinamento
Funções de Pertinência do Tipo Trapezoidal: erro = 0,25
Figura 58 – Escolha da Função de Pertinência Trapezoidal e Gráfico do Treinamento
Funções de Pertinência do Tipo sino: erro = 0,20
Figura 59 – Escolha da Função de Pertinência Sino e Gráfico do Treinamento

121
Funções de Pertinência do Tipo Gauss: erro = 0,18
Figura 60 – Escolha da Função de Pertinência Gauss e Gráfico do Treinamento
Funções de Pertinência do Tipo Gauss 2: erro = 0,24
Figura 61 – Escolha da Função de Pertinência Gauss2 e Gráfico do Treinamento
Funções de Pertinência do Tipo Pi: erro = 0,25
Figura 62 – Escolha da Função de Pertinência Pi e Gráfico do Treinamento
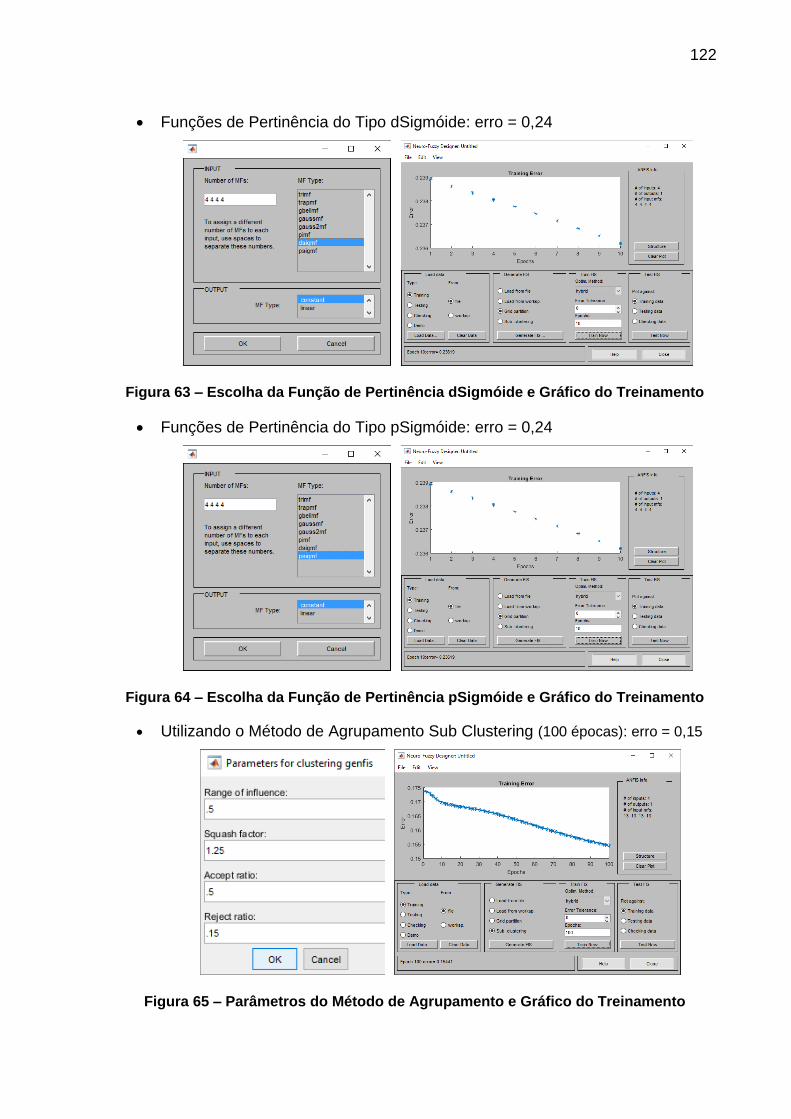
122
Funções de Pertinência do Tipo dSigmóide: erro = 0,24
Figura 63 – Escolha da Função de Pertinência dSigmóide e Gráfico do Treinamento
Funções de Pertinência do Tipo pSigmóide: erro = 0,24
Figura 64 – Escolha da Função de Pertinência pSigmóide e Gráfico do Treinamento
Utilizando o Método de Agrupamento Sub Clustering (100 épocas): erro = 0,15
Figura 65 – Parâmetros do Método de Agrupamento e Gráfico do Treinamento

123
Após a obtenção dos erros de todos os tipos de função de pertinência do
Método de Particionamento do Espaço de Entrada e do Método de Agrupamento, foi
verificado que o Método de Agrupamento gerou o menor erro, portanto foi executado
novo treinamento com este Método, aumentando o número de épocas para 500 e foi
obtido erro com valor de 0,089 (vide Figura 66).
Figura 66 – Gráfico do Novo Treinamento – 500 épocas
Procedeu-se o Teste da Modelagem utilizando os dados de teste (dados novos
que não participaram do treinamento) e o seguinte gráfico foi obtido:
Figura 67 – Gráfico Comparativo entre os Dados de Teste e os Dados de Saída do
ANFIS

124
A Tabela 12 demonstra os valores dos Fatores de Segurança (Determinístico)
obtidos pela análise paramétrica, os valores dos Fatores de Segurança (Qualitativos)
gerados pelo Modelo ANFIS e o Erro calculado, para cada Dado de Teste.
Tabela 12 - Valores de Saída da Análise Paramétrica,
do Modelo ANFIS e o Erro calculado
Conjunto de Dados
Fator de Segurança – Análise Paramétrica
Saída ANFIS – Fator de
Segurança Erro (%)
1 1,503 1,530 1,80
2 3,699 3,200 13,49
3 0,464 0,541 16,59
4 0,715 0,787 10,07
5 0,340 0,301 11,47
6 0,313 0,313 0,00
7 2,070 2,050 0,97
8 0,697 0,648 7,03
9 1,551 1,610 3,80
10 1,262 1,380 9,35
11 0,809 0,768 5,07
12 0,472 0,441 6,57
13 1,532 1,550 1,17
14 0,464 0,458 1,29
15 0,454 0,491 8,15
Erro Médio (%) 6,46
Analisando o gráfico da Figura 67 e a Tabela 12 pode-se notar que o Modelo
obteve valores de Fatores de Segurança (Qualitativos) com divergência em relação
aos Fatores de Segurança (Determinísticos) da Análise paramétrica, para alguns
valores de FS menores que 1,00, o mesmo acontece para o único valor de FS maior
que 3,00. Assim como visto na Modelagem 01, as divergências nas faixas de valores
citados não influenciam significativamente no valor do PPRT (%), vide Figura 41.
Quando compara-se o Erro médio da Modelagem 02 (6,46%) com o Erro médio
da Modelagem 01 (14,97%) verifica-se que a Modelagem 02, com os dados das
análises paramétricas de solos sem coesão, foi substancialmente melhor e o motivo
para tal é que na Modelagem 01 realizada com solos com coesões diferentes, ou seja,
com comportamentos diferentes (granular e plástico), mapeavam Fatores de
Segurança iguais, fazendo com que o erro gerado no treinamento aumentasse, ao
passo que quando o Modelo foi treinado com apenas um tipo de comportamento de
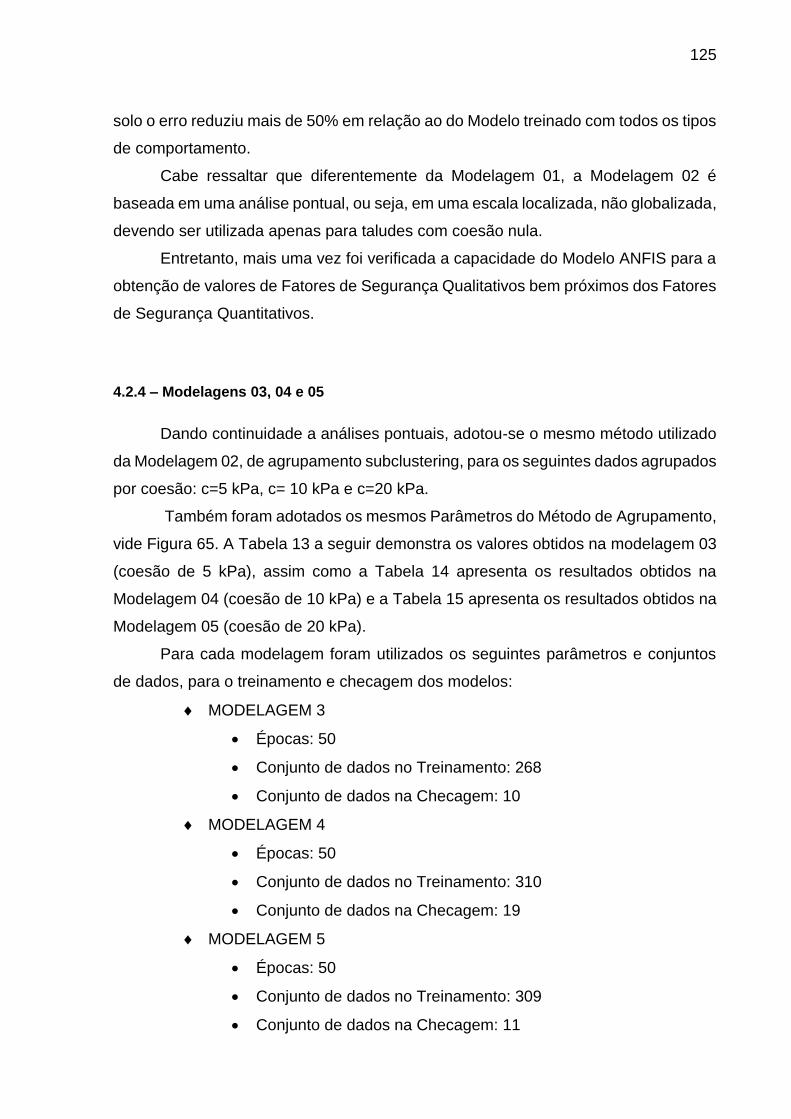
125
solo o erro reduziu mais de 50% em relação ao do Modelo treinado com todos os tipos
de comportamento.
Cabe ressaltar que diferentemente da Modelagem 01, a Modelagem 02 é
baseada em uma análise pontual, ou seja, em uma escala localizada, não globalizada,
devendo ser utilizada apenas para taludes com coesão nula.
Entretanto, mais uma vez foi verificada a capacidade do Modelo ANFIS para a
obtenção de valores de Fatores de Segurança Qualitativos bem próximos dos Fatores
de Segurança Quantitativos.
4.2.4 – Modelagens 03, 04 e 05
Dando continuidade a análises pontuais, adotou-se o mesmo método utilizado
da Modelagem 02, de agrupamento subclustering, para os seguintes dados agrupados
por coesão: c=5 kPa, c= 10 kPa e c=20 kPa.
Também foram adotados os mesmos Parâmetros do Método de Agrupamento,
vide Figura 65. A Tabela 13 a seguir demonstra os valores obtidos na modelagem 03
(coesão de 5 kPa), assim como a Tabela 14 apresenta os resultados obtidos na
Modelagem 04 (coesão de 10 kPa) e a Tabela 15 apresenta os resultados obtidos na
Modelagem 05 (coesão de 20 kPa).
Para cada modelagem foram utilizados os seguintes parâmetros e conjuntos
de dados, para o treinamento e checagem dos modelos:
MODELAGEM 3
Épocas: 50
Conjunto de dados no Treinamento: 268
Conjunto de dados na Checagem: 10
MODELAGEM 4
Épocas: 50
Conjunto de dados no Treinamento: 310
Conjunto de dados na Checagem: 19
MODELAGEM 5
Épocas: 50
Conjunto de dados no Treinamento: 309
Conjunto de dados na Checagem: 11

126
Tabela 13 - Valores de Saída da Análise Paramétrica, do Modelo ANFIS e o Erro
calculado – Modelagem 03 (c=5 kPa)
Conjunto de Dados
Fator de Segurança – Análise Paramétrica
Saída ANFIS – Fator de
Segurança Erro (%)
1 3.513 3,490 0,65
2 2.325 2,400 3,23
3 1.442 1,370 4,99
4 0.774 0,799 3,23
5 0.622 0,853 37,14
6 2.229 2,180 2,20
7 0.880 0,915 3,98
8 2.126 1,930 9,22
9 0.875 0,854 2,40
10 0.963 0,969 0,62
Erro Médio (%) 6,77
Tabela 14 - Valores de Saída da Análise Paramétrica, do Modelo ANFIS e o Erro
calculado – Modelagem 04 (c= 10 kPa)
Conjunto de Dados
Fator de Segurança – Análise Paramétrica
Saída ANFIS – Fator de
Segurança Erro (%)
1 3,935 3,880 1,40
2 2,199 2,220 0,95
3 1,679 1,690 0,66
4 1,619 1,490 7,97
5 0,896 0,817 8,82
6 3,396 3,490 2,77
7 1,998 2,010 0,60
8 0,902 0,782 13,30
9 1,264 1,350 6,80
10 0,856 0,997 16,47
11 1,16 1,370 18,10
12 0,967 0,941 2,69
13 0,849 0,827 2,59
14 1,528 1,530 0,13
15 0,994 0,909 8,55
16 1,345 1,410 4,83
17 2,658 3,120 17,38
18 1,566 1,510 3,58
19 0,89 0,872 2,02
Erro Médio (%) 6,30
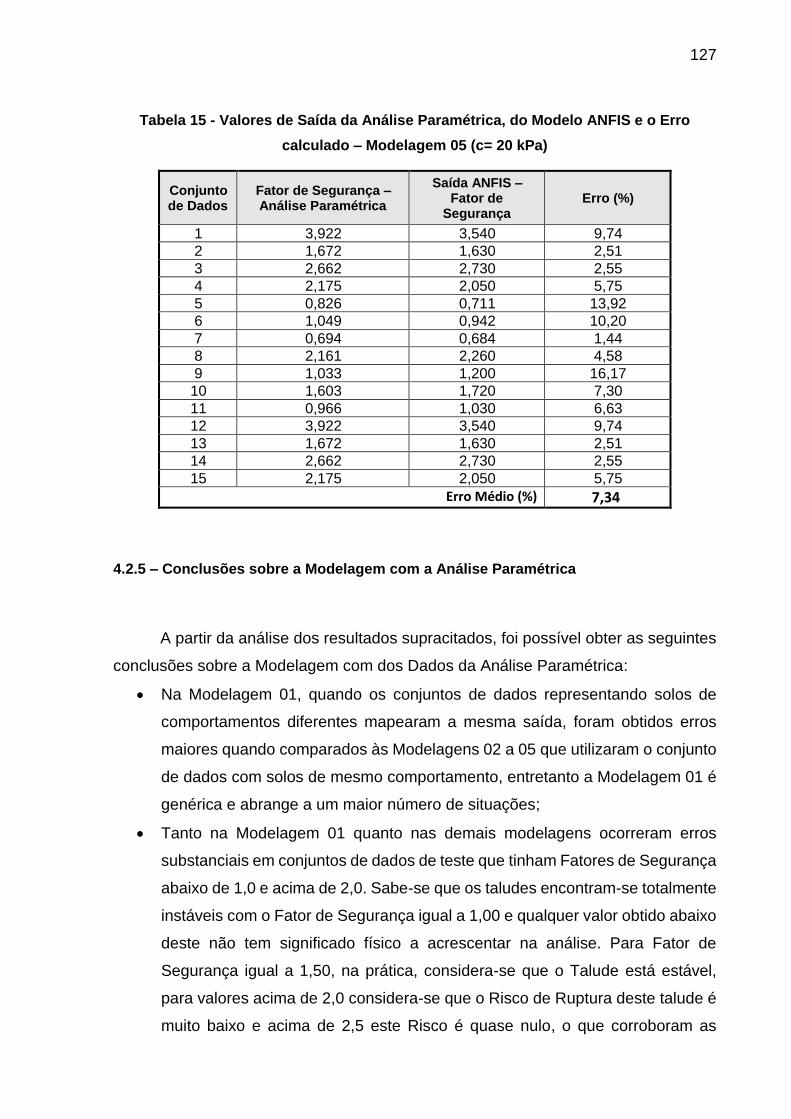
127
Tabela 15 - Valores de Saída da Análise Paramétrica, do Modelo ANFIS e o Erro
calculado – Modelagem 05 (c= 20 kPa)
Conjunto de Dados
Fator de Segurança – Análise Paramétrica
Saída ANFIS – Fator de
Segurança Erro (%)
1 3,922 3,540 9,74
2 1,672 1,630 2,51
3 2,662 2,730 2,55
4 2,175 2,050 5,75
5 0,826 0,711 13,92
6 1,049 0,942 10,20
7 0,694 0,684 1,44
8 2,161 2,260 4,58
9 1,033 1,200 16,17
10 1,603 1,720 7,30
11 0,966 1,030 6,63
12 3,922 3,540 9,74
13 1,672 1,630 2,51
14 2,662 2,730 2,55
15 2,175 2,050 5,75
Erro Médio (%) 7,34
4.2.5 – Conclusões sobre a Modelagem com a Análise Paramétrica
A partir da análise dos resultados supracitados, foi possível obter as seguintes
conclusões sobre a Modelagem com dos Dados da Análise Paramétrica:
Na Modelagem 01, quando os conjuntos de dados representando solos de
comportamentos diferentes mapearam a mesma saída, foram obtidos erros
maiores quando comparados às Modelagens 02 a 05 que utilizaram o conjunto
de dados com solos de mesmo comportamento, entretanto a Modelagem 01 é
genérica e abrange a um maior número de situações;
Tanto na Modelagem 01 quanto nas demais modelagens ocorreram erros
substanciais em conjuntos de dados de teste que tinham Fatores de Segurança
abaixo de 1,0 e acima de 2,0. Sabe-se que os taludes encontram-se totalmente
instáveis com o Fator de Segurança igual a 1,00 e qualquer valor obtido abaixo
deste não tem significado físico a acrescentar na análise. Para Fator de
Segurança igual a 1,50, na prática, considera-se que o Talude está estável,
para valores acima de 2,0 considera-se que o Risco de Ruptura deste talude é
muito baixo e acima de 2,5 este Risco é quase nulo, o que corroboram as
128
afirmativas anteriores a respeito da não influência dessas faixas de valores no
valor do PPRT, convertido através da Figura 41;
Em ambas modelagens a quantidade de registros com os dados de saída em
todas as faixas de Fatores de Segurança foi suficiente para reduzir
drasticamente o erro de 61,15% na Modelagem com o Banco de Dados para
14,51% na Modelagem 01, 6,46 % na Modelagem 02, 6,77% na Modelagem
03, 6,30% na Modelagem 04 e 7,34% na modelagem 05;
A Modelagem 01 deve ser utilizada para análise em escala global e as demais
modelagens apenas para taludes onde a coesão coincida com os valores 0, 5,
10 e 20 kPa; e
Em todas as modelagens utilizando os dados da análise paramétrica foi
verificada a capacidade do sistema NEUROFUZZY em obter valores de
Fatores de Segurança Qualitativos (não determinísticos) bem próximos dos
Fatores de Segurança Quantitativos (determinísticos).
4.3 – Modelagem ANFIS para Conversão de FS para PPRT
Como a Modelagem 01 utilizou todos os dados da Análise Paramétrica,
representando solos com diversos comportamentos, este Modelo foi adotado para
proceder à validação e os valores gerados por essa modelagem serão utilizados no
Modelo de Conversão ANFIS, descrito neste item.
No item 4.2, informou-se que o Fator de Segurança obtido a partir da
Modelagem ANFIS seria convertido para Previsão do Potencial de Ruptura de Taludes
(PPRT), expresso em percentual, através da Curva de conversão apresentada na
Figura 41. Para tal, foi criado um novo um Modelo ANFIS, denominado Modelo de
Conversão, utilizando os dados da Tabela 16 para treinamento do mesmo, que foram
obtidos através da curva da Figura 41.

129
Tabela 16 - Dados do Gráfico de Conversão de FS para PPRT
Fator de Segurança - FS Previsão do Potencial de
Ruptura de Talude – PPRT (%)
0,00 100,0
0,80 100,0
0,90 100,0
0,95 100,0
0,99 100,0
1,00 100,0
1,05 98,0
1,10 90,0
1,15 68,5
1,20 47,0
1,25 27,5
1,30 10,0
1,35 4,0
1,40 0,7
1,41 0,5
1,42 0,1
1,45 0,005
1,48 0,001
1,50 0
1,60 0
2,00 0
Para a criação do Modelo de conversão foram adotados os seguintes
parâmetros:
Geração da Inferência Fuzzy:
Método do Particionamento do Espaço de Saída;
Função de Pertinência do Tipo GAUSSMF;
Número de Funções de Pertinência para a variável de entrada (FS) igual
a 5 (cinco); e
Variável de Saída (PPRT) com função de pertinência do tipo Constante.
Treinamento da Rede Neural:
Método de Otimização Híbrido;
Tolerância do Erro=0; e
Épocas=50.
A Figura 68 apresenta os passos para a criação do Modelo de Conversão, onde
são mostradas (1) a Neuro-Fuzzy Toolbox, (2) a tela de configuração das funções de
pertinência, (3) o gráfico do erro obtido no treinamento e (4) o gráfico do teste do
modelo utilizando os mesmos dados de entrada.

130
Figura 68 – Neuro-Fuzzy Toolbox para a criação do Modelo de Conversão ANFIS
A partir da criação do modelo ANFIS para conversão de FS para PPRT, foi
elaborada uma Rotina de Programação no MATLAB, mostrada no Anexo 1, para a
automatização desse processo, ou seja, para a utilização do Modelo ANFIS sem a
necessidade de acessar a Neuro-Fuzzy Toolbox do MATLAB. Essa rotina torna a
utilização do modelo amigável, onde são pedidos, um a um, os parâmetros de entrada
(Coesão, Altura do Talude, Inclinação do Talude, Ângulo de Atrito e Posição do Nível
D’água) e após a entrada dos dados pelo usuário, a rotina retorna o valor do Fator de
Segurança gerado pela Modelagem 01 e o Valor da Previsão do Potencial de Ruptura
do Talude, convertido pelo Modelo de Conversão.
A Figura 69 apresenta a Estrutura da Modelagem ANFIS para a obtenção da
Previsão do Potencial de Ruptura do Talude, onde a Saída da Modelagem 01 é a
Entrada do Modelo de Conversão, ou seja, foram realizadas Duas Modelagens ANFIS
ligadas em Série.
(1) (2)
(3) (4)

131
Figura 69 – Estrutura da Modelagem ANFIS com Saída em PPRT (%)
A Figura 70 mostra o resultado da execução da Rotina supracitada, onde foi
utilizado o conjunto de dados 02 do teste da Modelagem 01 (Tabela 11), que foram
digitados os seguintes dados de entrada: Coesão= 5 kPa; Altura= 5 m;
Inclinação = 50°; ângulo de Atrito= 20°; e Nível D’água=0 m.
Figura 70 – Resultado da Rotina de Programação no MATLAB

132
4.4 – Sugestão de Protocolos Emergenciais baseados na Previsão do
Potencial de Ruptura de Taludes obtida pela Modelagem ANFIS
Uma sugestão para o monitoramento de taludes é a utilização dos dados da
Previsão do Potencial de Ruptura de Taludes (PPRT), obtidos pela Modelagem
ANFIS, combinados com Protocolos Emergenciais baseados nos valores dos PPRTs.
Os protocolos emergenciais atuais, gerenciados pelo INEA ou pela Prefeitura
da Cidade do Rio de Janeiro (Sistema Alerta Rio – Geo-Rio e Defesa Civil) utilizam-
se de escalas padronizadas e dependentes, basicamente, de apenas uma variável,
que é a precipitação (Item 1.1.5).
O valor da PPRT baseia-se em uma combinação de diversos condicionantes
geológico-geotécnicos, tais como: Geometria do Talude (altura e inclinação);
Parâmetros de Resistência do solo (coesão e ângulo de atrito); e poropressão (nível
do lençol freático), e não apenas de uma única variável, como nos modelos em uso
atualmente, o que torna a saída do Modelo ANFIS (PPRT) um parâmetro mais robusto,
quando comparado a uma análise de uma única variável condicionante de ruptura de
taludes. Cabe ressaltar que para a obtenção do nível do nível freático, piezômetros ou
indicadores de nível d’água deverão estar instalados no Talude.
Face o exposto, a Tabela 17 mostra uma sugestão para protocolos
emergenciais baseados nos valores das PPRTs obtidas pela Modelagem ANFIS.
Tabela 17 - Protocolos Emergenciais baseados nas PPRTs
PPRT (%) Potencial de
Ruptura Estado Protocolo Emergencial
< 25 Inexistente Normalidade
Encostas Habitadas: Criação de locais que podem servir como Pontos de Apoio e/ou Abrigo de Moradores. Cadastro de Moradores. Treinamento contínuo dos Moradores, ocupantes das encostas, para deslocamentos aos pontos de apoio em caso de alertas sonoros. Verificação e manutenção contínua dos equipamentos instalados (piezômetros ou Medidores de Nível D’água). Encostas não Habitadas: Verificação e manutenção contínua dos equipamentos instalados (piezômetros ou Medidores de Nível D’água).

133
Continuação da Tabela 17 - Protocolos Emergenciais baseados nas PPRTs
PPRT (%) Potencial de
Ruptura Estado Protocolo Emergencial
> 25 e < 60 Baixo Atenção
Encostas Habitadas: Comunicar a mudança de Estado aos Líderes comunitários, Subprefeitos e Administradores regionais. Verificação dos pontos de apoio e/ou abrigo de moradores. Encostas não Habitadas: Verificação e manutenção contínua dos equipamentos instalados (piezômetros ou Medidores de Nível D’água).
> 60 e < 85 Alto Alerta
Encostas Habitadas: Comunicar a mudança de Estado aos Líderes comunitários, Subprefeitos e Administradores regionais. Acionar a Defesa Civil e/ou órgãos municipais/ estaduais. Emissão de Alertas Sonoros contínuos. Envio de Equipes ao local para:
- Coordenação da Abertura dos Pontos de Apoio e/ou abrigo de Moradores;
- Encaminhamento de todos os moradores das encostas para os Pontos de Apoio e/ou abrigo de Moradores, de forma ordenada; e
- Efetuar as interdições e isolamentos pontuais.
Mitigação dos Problemas que possam ocorrer. Encostas não Habitadas: Acionar a Defesa Civil, órgãos municipais/ estaduais/federais ou Concessionárias (em caso de rodovias). Interdições e isolamentos pontuais. Mitigação dos Problemas que possam ocorrer.

134
Continuação da Tabela 17 - Protocolos Emergenciais baseados nas PPRTs
PPRT (%) Potencial de
Ruptura Estado Protocolo Emergencial
> 85 Iminente Crítico
Encostas Habitadas: Comunicar a mudança de Estado aos Líderes comunitários, Subprefeitos e Administradores regionais. Acionar a Defesa Civil e/ou órgãos municipais/ estaduais. Emissão de Alertas Sonoros contínuos. Envio de Equipes ao local para:
- Coordenação da Abertura dos Pontos de Apoio e/ou abrigo de Moradores;
- Encaminhamento de todos os moradores das encostas para os Pontos de Apoio e/ou abrigo de Moradores, de forma ordenada; e
- Efetuar interdições e isolamentos das áreas críticas.
Mitigação dos Problemas ocorridos. Encostas não Habitadas: Acionar a Defesa Civil, órgãos municipais/ estaduais/federais ou Concessionárias (em caso de rodovias). Interdições e Isolamentos das áreas críticas. Mitigação dos Problemas ocorridos.
4.5 – Conclusões sobre a Modelagem ANFIS
Neste capítulo foram apresentadas diversas modelagens ANFIS, onde
inicialmente foram utilizados registros de um banco de dados com 69 registros obtidos
da mesclagem das dissertações de Silva (2008) e Guedes (2011), incluindo alguns
dados de Boletins de Ocorrência da Defesa Civil do Município do Rio de Janeiro.
Como os resultados obtidos da modelagem ANFIS com o banco de dados
supracitado geraram dados de saída com erro maior que 700% e erro médio da ordem
de 61,15%, procurou-se uma alternativa para minimizar esse erro, adotando-se dados
da análise paramétrica composta por 1170 registros (1106 para treinamento e 64 para
teste) obtidos pela execução do software GEOSLOPE através de simulações com a
variação: da geometria do talude (altura e inclinação); dos parâmetros de resistência
do solo (coesão e ângulo de atrito); e poropressão (nível d’água), onde em uma
primeira modelagem o erro obtido foi de 14,51%.
135
No intuito de minimizar ainda mais o erro da Modelagem ANFIS, foram
realizadas mais 04 modelagens utilizando os dados da análise paramétrica,
separando os dados por coesão, obtendo-se erros da ordem de 7%. Entretanto, no
presente trabalho, essas modelagens serviram apenas para demonstrar que os erros
podem ser minimizados ainda mais se utilizarmos apenas os dados de solos com o
mesmo tipo de comportamento (plástico ou granular) e não serão utilizadas para a
validação do Modelo ANFIS, pois só seriam válidas se a coesão do solo do talude a
ser estudado fosse idêntica à coesão de uma dessas modelagens (casos pontuais).
Como a modelagem ANFIS utilizando os dados da análise paramétrica resulta
em uma variável de saída equivalente ao Fator de Segurança - FS, efetuou-se a
conversão desta variável em Previsão do Potencial de Ruptura de Taludes – PPRT,
expresso em termos percentuais, através de uma última Modelagem ANFIS, ligada
em série à primeira, que efetua a devida conversão através do treinamento de dados
obtidos da Curva da Figura 41.
Foi criada a Rotina de Programação no software MATLAB, mostrada na íntegra
no Anexo 1, para facilitar a inserção dos valores das variáveis de entrada e obtenção
da Previsão do Potencial de Ruptura do Talude de forma mais amistosa, sem a
utilização da NEURO-FUZZY Toolbox do MATLAB.
Face ao exposto, a aplicabilidade do Modelo ANFIS será avaliada a partir da
validação do modelo proposto com um estudo de um caso, mostrado no Capítulo 5
desta Tese.

136
5 – VALIDAÇÃO DA MODELAGEM ANFIS
Neste Capítulo, será apresentado o estudo de um caso histórico de
escorregamento que iniciou no ano de 2006, no Município de Rio Bonito/RJ. Mota
(2014) estudou o escorregamento ocorrido e apresentou a retroanálise realizada
através de estabilidade por equilíbrio limite para as condições anterior e posterior à
ruptura.
Inicialmente, será realizada uma breve descrição do caso, apresentando a área
e as características do escorregamento, descritas por Mota (2014). Posteriormente,
serão apresentados os dados de investigações e instrumentação de campo, os
eventos pluviométricos, e os resultados das análises de estabilidade. Finalmente,
serão definidos os fatores que condicionaram o escorregamento, determinando-se a
Previsão do Potencial de Ruptura do Talude (PPRT) a partir do modelo proposto na
presente Tese.
A comparação entre os resultados das análises de estabilidade por equilíbrio
limite (Mota, 2014) e a variável de saída do modelo ANFIS (PPRT) tem como objetivo
a validação do modelo ANFIS na previsão do Potencial de Ruptura de Taludes.
5.1 – Descrição do Caso Histórico
Mota (2014) efetuou sua pesquisa em uma região do município de Rio
Bonito/RJ, em um talude localizado no km 15+700 da Rodovia RJ-124, Via Lagos, na
pista sentido Rio de Janeiro, que segundo a autora apresentava um histórico
complexo de instabilidade. A Figura 71 mostra a localização da área estudada por
Mota (2014), e a Figura 72 apresenta duas fotos do local.

137
Figura 71 – Localização da área. (Mota, 2014)
Figura 72 – Fotos do Talude. (Mota, 2014)
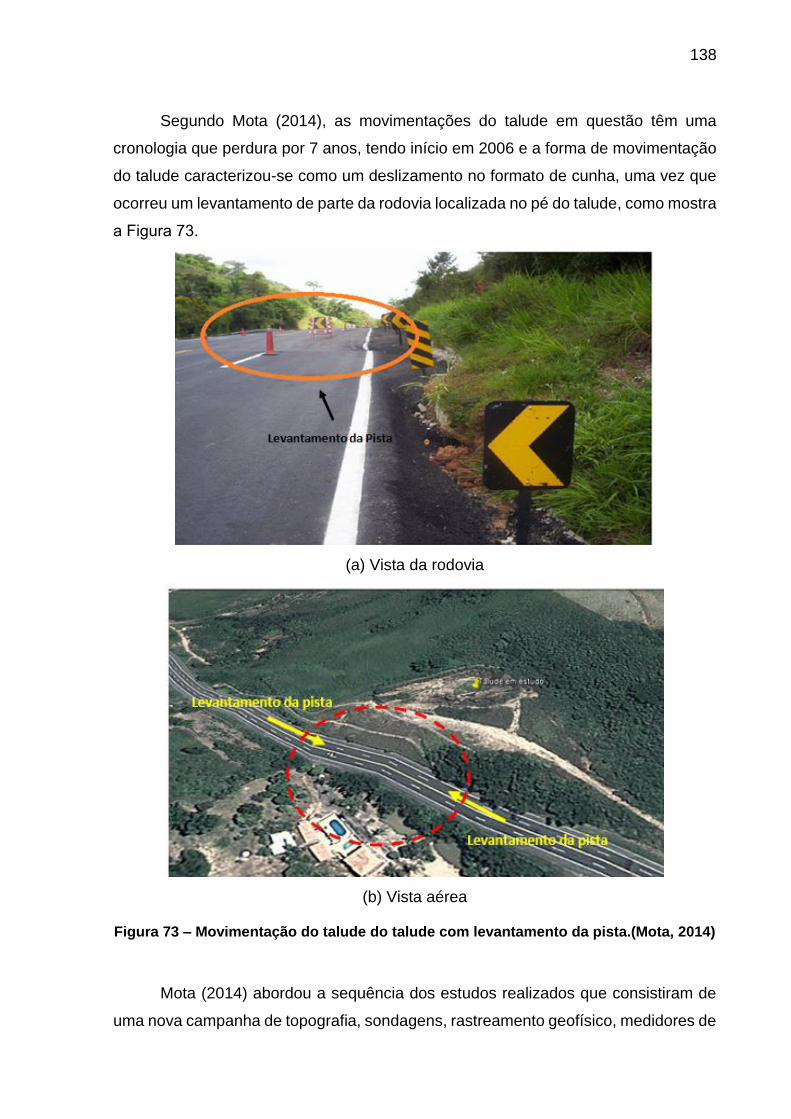
138
Segundo Mota (2014), as movimentações do talude em questão têm uma
cronologia que perdura por 7 anos, tendo início em 2006 e a forma de movimentação
do talude caracterizou-se como um deslizamento no formato de cunha, uma vez que
ocorreu um levantamento de parte da rodovia localizada no pé do talude, como mostra
a Figura 73.
(a) Vista da rodovia
(b) Vista aérea
Figura 73 – Movimentação do talude do talude com levantamento da pista.(Mota, 2014)
Mota (2014) abordou a sequência dos estudos realizados que consistiram de
uma nova campanha de topografia, sondagens, rastreamento geofísico, medidores de

139
nível d'água, inclinometria, e ensaios de laboratório executados em amostras retiradas
do local. O objetivo da investigação geotécnica era detectar alguma feição geológica
que pudesse ser considerada como condicionante do processo de instabilização e
com as informações obtidas na investigação geotécnica foi realizada uma retroanálise
da movimentação do talude, buscando-se as causas de instabilização.
5.1.1 – Investigação Geotécnica
Os itens subsequentes descrevem os principais ensaios de campo executados
e/ou analisados por Mota (2014), bem como os principais resultados obtidos.
Sondagens Mistas (SPT e Rotativa)
Para a caracterização geológico-geotécnica da encosta e determinação dos
pontos de instalação da instrumentação de campo, foram executados 8 furos de
sondagens mistas. A Figura 74 apresenta a planta de locação das sondagens, com o
posicionamento das diferentes seções estabelecidas para traçado de perfis. Da Figura
75 a Figura 80 são apresentados os perfis geotécnicos obtidos. Mota (2014) cita que
é interessante observar a presença de um solo de alteração de rocha na profundidade
de 15 m a 16 m.
Figura 74 – Locação das sondagens mistas. (Mota, 2014)

140
Figura 75 - Perfil Geotécnico definido pelas Sondagens Mistas – Seção “AA” . (Mota, 2014)
Figura 76 - Perfil Geotécnico definido pelas Sondagens Mistas – Seção “BB” . (Mota, 2014)
Figura 77 - Perfil Geotécnico definido pelas Sondagens Mistas – Seção “CC” . (Mota, 2014)

141
Figura 78 - Perfil Geotécnico definido pelas Sondagens Mistas – Seção “DD” . (Mota, 2014)
Figura 79 - Perfil Geotécnico definido pelas Sondagens Mistas – Seção “EE” . (Mota, 2014)
Figura 80 - Perfil Geotécnico definido pelas Sondagens Mistas – Seção “FF” . (Mota, 2014)

142
Ensaios de Laboratório
Mota (2014) informou que os ensaios de laboratório consistiram em ensaios de
granulometria, para caracterização do material, e ensaios de cisalhamento direto, para
determinação dos parâmetros de resistência do solo de alteração identificado a cerca
de 15 m de profundidade, com resultados mostrados a seguir.
Granulometria
Granulometria ou Análise Granulométrica dos solos é o processo que visa
definir, para determinadas faixas pré-estabelecidas de tamanho de grãos, a
percentagem em peso que cada fração possui em relação à massa total da amostra
em análise. O ensaio de granulometria foi executado de acordo com os procedimentos
estabelecidos na norma ABNT NBR 6502/1995. (Mota, 2014)
A Tabela 18 apresenta o resultado da análise granulométrica, que indicou que
o solo é constituído de 63% de areia e 27% de pedregulho, sendo classificado como
um solo arenoso com pouco percentual de finos (10%). A Figura 81 mostra a curva
granulométrica do solo, que é classificado como bem graduado.
Tabela 18 - Caracterização Geotécnica. (Adaptado de Mota, 2014)
Análise Granulométrica
Pedregulho
Areia
Silte Argila Grossa Média Fina
27% 30% 23% 10% 4% 6%

143
Figura 81 - Distribuição granulométrica do solo. (Adaptado de Mota, 2014)
Ensaio de Cisalhamento Direto (CIS)
O ensaio de cisalhamento direto foi desenvolvido basicamente para a
determinação da resistência ao cisalhamento dos solos. Este ensaio é executado em
uma caixa de seção quadrada e consiste na imposição de um plano de ruptura, para
obtenção dos valores do ângulo de atrito interno e do intercepto coesivo do solo,
através da interpretação de uma envoltória linear. (Mota, 2014)
As amostras ensaiadas foram retiradas do local, com um amostrador do tipo
Denison, e as perfurações foram executadas por meio de sondagem rotativa mista.
De cada amostra, foram montados 8 (oito) corpos de prova, sendo que 4 (quatro)
foram ensaiados sob a condições submersas, e 4 (quatro) sob condições de umidade
ótima (natural).
Nos ensaios sob condições naturais, a velocidade de ensaio foi de 0,03
mm/min, enquanto os ensaios sob condição natural foram realizados com velocidade
igual a 0,09 mm/min. Os ensaios foram executados sob níveis de tensão normal iguais
a 25 kPa, 50 kPa, 150 kPa e 300 kPa, para as duas situações.
Para a moldagem dos corpos de prova a partir das amostras indeformadas, foi
utilizado o método da “talhagem”, até o preenchimento total da caixa com o solo.
2''1 1/2''1''3/4''3/8''41016304050100200
0
10
20
30
40
50
60
70
80
90
100 0
10
20
30
40
50
60
70
80
90
100
0,0001 0,001 0,01 0,1 1 10 100
Per
cen
tag
em p
ass
an
do
(%
)
Diâmetros das partículas (mm)
Curva Granulométrica P
erce
nta
gem
ret
ida
(%
)
Peneiras Nº : (Série ABNT)
PedregulhoArgila SilteAreia
MédiaFina GrossaMArgila Silte
Areia
Fina Média Grossa
Pedregulho PM

144
Da Figura 82 até a Figura 85 são apresentadas as curvas tensão cisalhante
versus deslocamento horizontal obtidas nos ensaios. Observa-se que para níveis mais
altos de tensão vertical, há um ganho de resistência pós-pico, que é o comportamento
típico de uma areia densa. Estes ensaios foram executados em amostras de solo de
alteração situadas a 15,0 m de profundidade. Este fato corrobora várias observações
de campo feitas pelos autores e que podem condicionar movimentações profundas
nesses materiais.
Figura 82 – Tensão Cisalhante (kPa) x Deslocamento Horizontal (mm). Amostra 1 sob
condição natural. (Mota, 2014)
Figura 83 - Tensão Cisalhante (kPa) x Deslocamento Horizontal (mm). Amostra 1 sob
condição submersa. (Adaptado de Mota, 2014)
Condição Submersa

145
Figura 84 – Tensão Cisalhante (kPa) x Deslocamento Horizontal (mm). Amostra 2 sob
condição natural. (Mota, 2014)
Figura 85 – Tensão Cisalhante (kPa) x Deslocamento Horizontal (mm). Amostra 2 sob
condição submersa. (Adaptado de Mota, 2014)
Da Figura 86 a Figura 89 são apresentadas as envoltórias de resistência
obtidas nos diferentes ensaios. A Tabela 19 reúne os parâmetros de resistência
obtidos nos ensaios para a amostra 1 e amostra 2. Observa-se que, para a amostra 1
os resultados de ângulo de atrito obtidos para a condição natural como para a
condição submersa foram de aproximadamente 46 graus. Já para a amostra 2 os
valores de ângulo de atrito são da ordem de 52 graus na condição natural e submersa.
Estes valores de parâmetros de resistência são representativos de solos
arenosos densos. Segundo Casagrande (1940), as areias densas tendem a dilatarem
durante o ensaio de cisalhamento direto, e exibem um alto ângulo de atrito.
0,00
50,00
100,00
150,00
200,00
250,00
300,00
350,00
400,00
450,00
0,00 5,00 10,00 15,00 20,00 25,00
Ten
são
Cis
alh
ante
(K
Pa)
Deslocamento Horizontal (mm)
Condição Natural
25 KPa
50 KPa
150 KPa
300KPa
Condição Submersa

146
Figura 86 – Envoltória de resistência do solo: Amostra 1 sob condição natural.
(Mota, 2014)
Figura 87 – Envoltória de resistência do solo: Amostra 1 sob condição submersa.
(Adaptado de Mota, 2014)
Figura 88 – Envoltória de resistência do solo: Amostra 2 sob condição natural.
(Mota, 2014)
Condição Submersa
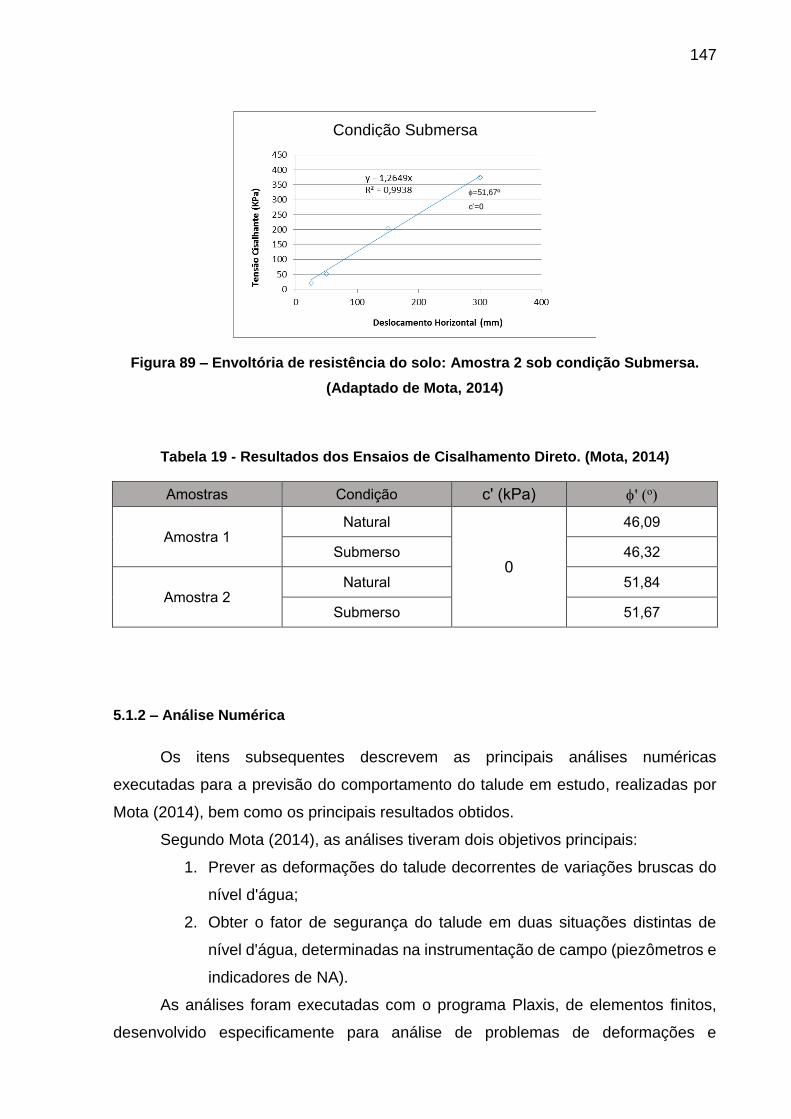
147
Figura 89 – Envoltória de resistência do solo: Amostra 2 sob condição Submersa.
(Adaptado de Mota, 2014)
Tabela 19 - Resultados dos Ensaios de Cisalhamento Direto. (Mota, 2014)
Amostras Condição c' (kPa) ' (o)
Amostra 1 Natural
0
46,09
Submerso 46,32
Amostra 2 Natural 51,84
Submerso 51,67
5.1.2 – Análise Numérica
Os itens subsequentes descrevem as principais análises numéricas
executadas para a previsão do comportamento do talude em estudo, realizadas por
Mota (2014), bem como os principais resultados obtidos.
Segundo Mota (2014), as análises tiveram dois objetivos principais:
1. Prever as deformações do talude decorrentes de variações bruscas do
nível d'água;
2. Obter o fator de segurança do talude em duas situações distintas de
nível d'água, determinadas na instrumentação de campo (piezômetros e
indicadores de NA).
As análises foram executadas com o programa Plaxis, de elementos finitos,
desenvolvido especificamente para análise de problemas de deformações e
Condição Submersa
=51,67º
c’=0

148
estabilidade de obras geotécnicas e a metodologia e os resultados obtidos serão
descritos a seguir.
Inicialmente, foi estabelecida uma geometria típica com base nas sondagens
executadas e apresentadas neste capítulo (Figura 76). Nesta geometria, observa-se
a presença da camada de solo de alteração a uma profundidade de 15,0 m. A Figura
90 apresenta a geometria adotada nas análises numéricas. A malha de elementos
finitos, gerada automaticamente pelo programa, foi composta por 3800 elementos
triangulares e 31043 nós.
Figura 90 – Geometria adotada nas análises numéricas. (Mota, 2014)
Um aspecto importante na modelagem numérica é a adoção de parâmetros
geotécnicos representativos dos materiais envolvidos. Segundo Mota (2014), foram
executados ensaios de caracterização e resistência ao cisalhamento em amostras
retiradas a uma profundidade de 15,0 m, que corresponde ao solo de alteração de
rocha (arenoso).
A Tabela 20 reúne os parâmetros geotécnicos adotados por Mota (2014) nas
análises numéricas. Ressalta-se que o programa Plaxis também necessita do módulo
de deformabilidade (E) do solo para as análises do comportamento tensão-
deformação. Este parâmetro foi definido com base nos valores de NSPT obtidos nas
sondagens (Schnaid, 2000), e em formulações empíricas da literatura.

149
Para solos arenosos, Clayton (1986) sugere a expressão:
4360
,N
E
Eq. 17
Onde:
600
66060
,
,.NN SPT
Eq. 18
Para solos argilosos, Strond e Butler (1975) sugerem a expressão:
MPaN
E2
60
Eq. 19
Tabela 20 - Parâmetros Geotécnicos Adotados nas Análises Numéricas. (Mota 2014)
Solo Metodologia NSPT (kN/m3) c' (kPa) ' (º) E (MPa)
Areia siltosa Correlação com NSPT
16 19 0 32 59,8 Silte argiloso 19 17 30 17 41,8
Solo de alteração
Ensaios de laboratório
- 15 15 46 120,0
Rocha Literatura
(Aguilera, 2009) - 22 200 35 1000,0
Na ausência de ensaios para os demais materiais, os parâmetros de
caracterização (peso específico) e resistência (c' e ') foram definidos com base em
faixas de valores disponíveis na literatura em função do valor de NSPT. (Tabela 21).
Tabela 21 - Valores típicos de parâmetros geotécnicos com base no valor de NSPT
(Dados selecionados de Marangon, 2009 e Aguilera, 2009). (Mota 2014)
NSPT (kN/m³) ' (º) c' (kPa)
Areia e Silte Arenoso
≤ 4 11 - 16 25 - 30 0
5 a 8 14 - 18 27 - 32 0
9 a 18 18 - 21 30 -35 0 19 a 40 18 - 22 35 - 40 0
> 40 22 - 24 38 - 43 0 Gnaisse - 20-22 30 - 40 150 - 400
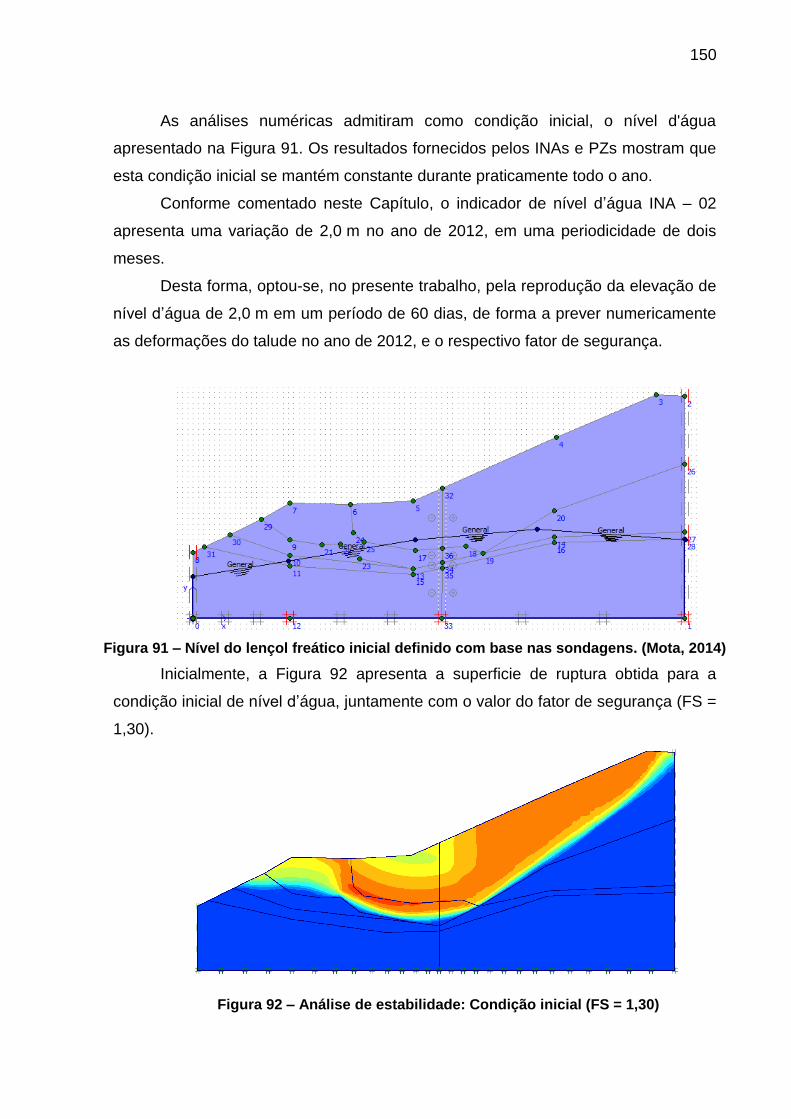
150
As análises numéricas admitiram como condição inicial, o nível d'água
apresentado na Figura 91. Os resultados fornecidos pelos INAs e PZs mostram que
esta condição inicial se mantém constante durante praticamente todo o ano.
Conforme comentado neste Capítulo, o indicador de nível d’água INA – 02
apresenta uma variação de 2,0 m no ano de 2012, em uma periodicidade de dois
meses.
Desta forma, optou-se, no presente trabalho, pela reprodução da elevação de
nível d’água de 2,0 m em um período de 60 dias, de forma a prever numericamente
as deformações do talude no ano de 2012, e o respectivo fator de segurança.
Figura 91 – Nível do lençol freático inicial definido com base nas sondagens. (Mota, 2014)
Inicialmente, a Figura 92 apresenta a superficie de ruptura obtida para a
condição inicial de nível d’água, juntamente com o valor do fator de segurança (FS =
1,30).
Figura 92 – Análise de estabilidade: Condição inicial (FS = 1,30)

151
5.1.3 – Retroanálise da Movimentação
A NBR 11.682/91 determina o uso da retroanálise para o estudo de
estabilização em locais onde já ocorreram a instabilidade. Sendo assim, Mota (2014),
efetuou uma retroanálise da movimentação com o objetivo de determinar os fatores
que conduziram à redução das tensões resistentes do talude e/ou o aumento das
tensões cisalhantes e, consequentemente sua ruptura. A seguir serão apresentados
Para as análises realizadas no trabalho de Mota (2014) tomou-se como base a
seção crítica “BB” da Figura 76, a superfície de ruptura definida e os parâmetros
geotécnicos médios do solo que constituem o talude foram mostrados na Tabela 20.
A retroanálise foi realizada com o uso do software Slide v. 6.0 e para atingir-se
o proposto, foi considerado como hipótese de instabilização a elevação do nível
d’água para que o talude apresentasse fator de segurança (FS) da ordem de 1,0.
Mota (2014) apresentou o resultado obtido a partir do método de avaliação do
fator de segurança proposto por Bishop (1955).
Foi considerada uma superfície de escorregamento planar, condicionada na
base pela posição do solo de alteração. Por se tratar de resistência residual da
superfície de ruptura, foi desconsiderada a possibilidade de existência de coesão. As
observações de campo mostraram ainda que a superfície de ruptura deve passar sob
a pista da rodovia, aflorando à jusante desta.
A Figura 93 ilustra a análise de estabilidade (Método de Bishop Simplificado)
para a posição normal do lençol freático, onde se obteve o FS=1,36. A superfície de
ruptura obtida na condição crítica do nível freático foi similar à representada na Figura
93 e a análise de estabilidade para esta condição crítica é apresentada na Figura 94.
Como já era esperado a Figura 94 demonstra a redução do fator de segurança
provocado pelo aumento das poropressões, ocasionado pela elevação do nível do
lençol freático. Logo, observa-se na Figura 94, que a superfície de ruptura apresenta
FS=1,05 quando o nível do lençol freático se encontra 4,0 m acima da posição normal.

152
Figura 93 – Análise de estabilidade na posição normal do lençol freático. (Mota 2014)
Figura 94 – Análise da estabilidade com o lençol freático na condição crítica. (Mota 2014)

153
Portanto, Mota (2014) concluiu que o fator responsável pelas movimentações
do talude é a elevação do nível do lençol freático provocado pelas chuvas no maior
período de incidência, nos primeiros meses do ano.
5.2 – Análise da Estabilidade do Caso Histórico utilizando a Modelagem
ANFIS
Para validação do Modelo ANFIS foram utilizados dados referentes ao estudo
de Mota (2014), apresentados no item 5.1, que foram inseridos na Rotina programada
no MATLAB, descrita no item 4.3.
A Tabela 22 indica os valores iniciais adotados no modelo proposto, ou seja, os
dados antes da elevação do nível do nível freático provocada pelas chuvas nos
primeiros meses do ano. Após a execução da Rotina ANFIS, estes valores foram
digitados nos campos correspondentes a cada variável e a Figura 95 mostra que o
Fator de Segurança obtido com a modelagem ANFIS, FS=1,3482, se aproximou do
fator de segurança obtido pela retroanálise feita por Mota (2014), FS=1,361, com erro
de 0,94%.
A Figura 95 também demonstra que a Previsão do Potencial de Ruptura do
Talude – PPRT é igual a 4,09%, ou seja, o Talude para essa situação encontra-se
estável.
Tabela 22 - Valores Iniciais das Variáveis adotados no modelo ANFIS
Variáveis Valores Adotados
Coesão (kPa) 0 Altura (m) 20
Inclinação (°) 24 Ângulo de Atrito (°) 32
Altura do Lençol Freático (m) 1,5

154
Figura 95 – Análise ANFIS para a situação inicial, antes da elevação do NA
A Tabela 23 indica os valores finais adotados no modelo proposto, ou seja, os
dados após a elevação do nível freático, 4,0 metros acima do nível freático inicial.
Após a execução da Rotina ANFIS, estes valores foram digitados nos campos
correspondentes a cada variável e a Figura 96 mostra que o Fator de Segurança
obtido com a modelagem ANFIS, FS=1,016, também ficou muito próximo do fator de
segurança obtido pela retroanálise feita por Mota (2014), FS=1,05, com erro de 3,24%.
A Figura 96 também demonstra que a Previsão do Potencial de Ruptura do
Talude – PPRT é igual a 98,57%, ou seja, o Talude para essa nova situação encontra-
se instável.
Tabela 23 - Valores Finais das Variáveis
Variáveis Valores Adotados
Coesão (kPa) 0
Altura (m) 20 Inclinação (°) 24
Ângulo de Atrito (°) 32 Altura do Lençol Freático (m) 5,5

155
Figura 96 – Análise ANFIS para a situação final, após a elevação do NA
Observa-se que a variável altura do nível d’água influenciou, para este caso,
todo o processo de estabilização da encosta. Para a verificação da sensibilidade
dessa variável, foi efetuada análise utilizando a Modelagem ANFIS onde se manteve
constante todas as variáveis do Talude e considerou-se a elevação do nível d’água,
com os resultados apresentados na Tabela 24.
Tabela 24 - Valores Adotados para Variável Altura do Nível D’água
Variável Valor Adotado
(m) Fator de Segurança
PPRT (%)
Altura do Nível d’água
0,0 1,5485 0,00
0,5 1,4770 0,00
1,0 1,4103 0,85
1,5 1,3482 4,09
2,0 1,2907 12,76
2,5 1,2379 29,97
3,0 1,1898 52,84
3,5 1,1462 72,85
4,0 1,1071 85,74
4,5 1,0725 92,83
5,0 1,0422 96,58
5,5 1,0160 98,57
6,0 0,9938 99,66
6,5 0,9753 100,00

156
A Figura 97 apresenta o gráfico da variação do PPRT com a Altura do Nível
D’água. Da análise deste gráfico foi verificado que para o nível d’água inexistente (0
m), a previsão do Potencial de Ruptura do Talude (PPRT) foi de 0% (potencial de
ruptura inexistente). Quando elevou-se o nível d’água a 2,5 metros, o valor de PPRT
aumentou para 29,97% (potencial de ruptura baixo), quando o nível d’água atingiu a
cota de 3,5 metros, o valor de PPRT aumentou para 72,85% (potencial de ruptura alto)
e para níveis d’água superiores a 4,0 metros o PPRT é maior que 85,74%, o que deixa
o talude com um potencial de ruptura crítico, ou seja, a ruptura é iminente.
As faixas que delimitam os Estados para os Protocolos Emergenciais baseados
na PPRT, indicados na Tabela 17, foram representadas na Figura 97 através de
cores, onde a faixa Azul representa o estado de Normalidade (PPRT< 25%), o
Amarelo significa que o estado é de Atenção (25% < PPRT < 59,99%), o Vermelho
encontra-se no estado de Alerta (60% < PPRT < 84,99%) e o Preto indica o estado
Crítico (PPRT > 85%).
Figura 97 – Variação da PPRT com a Altura do Nível D’água para o Caso Histórico
0
10
20
30
40
50
60
70
80
90
100
0 1 2 3 4 5 6 7
PP
RT
(%)
Nível D'Água
Normalidade Atenção Alerta Crítico
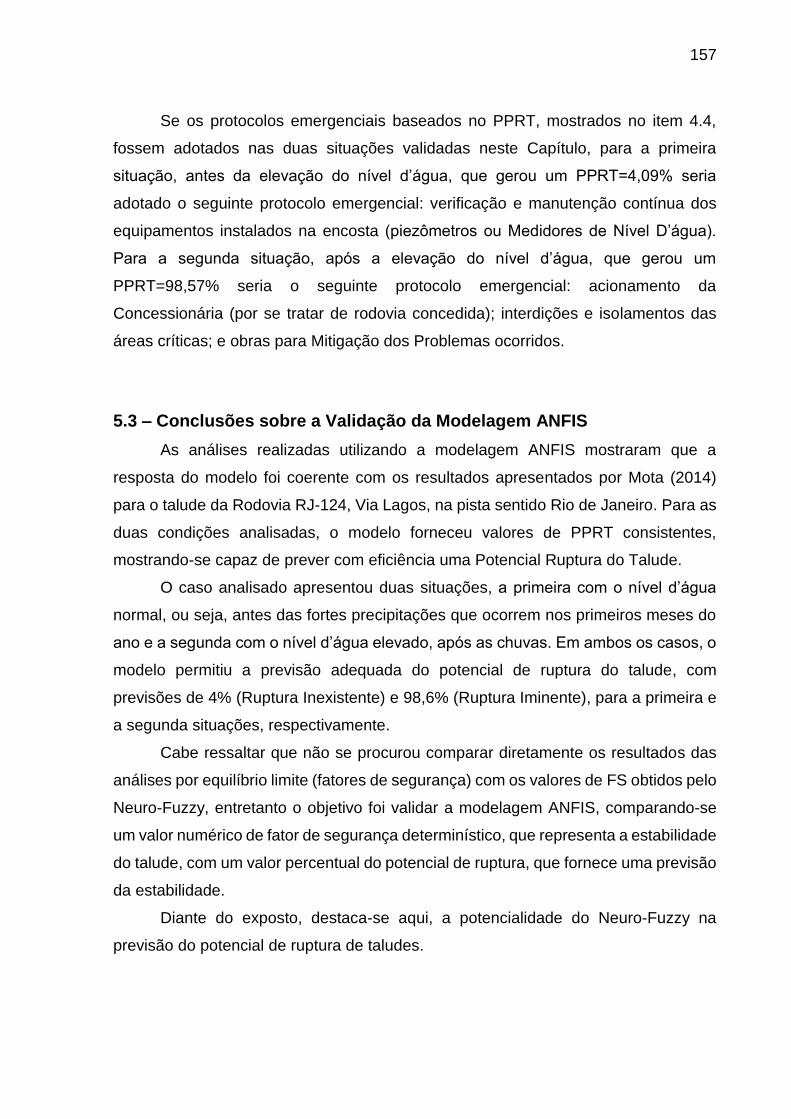
157
Se os protocolos emergenciais baseados no PPRT, mostrados no item 4.4,
fossem adotados nas duas situações validadas neste Capítulo, para a primeira
situação, antes da elevação do nível d’água, que gerou um PPRT=4,09% seria
adotado o seguinte protocolo emergencial: verificação e manutenção contínua dos
equipamentos instalados na encosta (piezômetros ou Medidores de Nível D’água).
Para a segunda situação, após a elevação do nível d’água, que gerou um
PPRT=98,57% seria o seguinte protocolo emergencial: acionamento da
Concessionária (por se tratar de rodovia concedida); interdições e isolamentos das
áreas críticas; e obras para Mitigação dos Problemas ocorridos.
5.3 – Conclusões sobre a Validação da Modelagem ANFIS
As análises realizadas utilizando a modelagem ANFIS mostraram que a
resposta do modelo foi coerente com os resultados apresentados por Mota (2014)
para o talude da Rodovia RJ-124, Via Lagos, na pista sentido Rio de Janeiro. Para as
duas condições analisadas, o modelo forneceu valores de PPRT consistentes,
mostrando-se capaz de prever com eficiência uma Potencial Ruptura do Talude.
O caso analisado apresentou duas situações, a primeira com o nível d’água
normal, ou seja, antes das fortes precipitações que ocorrem nos primeiros meses do
ano e a segunda com o nível d’água elevado, após as chuvas. Em ambos os casos, o
modelo permitiu a previsão adequada do potencial de ruptura do talude, com
previsões de 4% (Ruptura Inexistente) e 98,6% (Ruptura Iminente), para a primeira e
a segunda situações, respectivamente.
Cabe ressaltar que não se procurou comparar diretamente os resultados das
análises por equilíbrio limite (fatores de segurança) com os valores de FS obtidos pelo
Neuro-Fuzzy, entretanto o objetivo foi validar a modelagem ANFIS, comparando-se
um valor numérico de fator de segurança determinístico, que representa a estabilidade
do talude, com um valor percentual do potencial de ruptura, que fornece uma previsão
da estabilidade.
Diante do exposto, destaca-se aqui, a potencialidade do Neuro-Fuzzy na
previsão do potencial de ruptura de taludes.

158
6 - CONCLUSÕES E SUGESTÕES PARA PESQUISAS FUTURAS
6.1 - Conclusões
A presente tese apresentou a aplicação do Neuro-Fuzzy na previsão do
potencial de ruptura de taludes. Os dados para o treinamento das variáveis de
influência no modelo, foram obtidos através da realização de análises paramétricas.
Na idealização do modelo ANFIS, foram adotadas as seguintes variáveis como
condicionantes geológico-geotécnicos envolvidos na ruptura de taludes: altura e
inclinação da encosta; coesão e ângulo de atrito do solo; e nível do lençol freático.
Como resposta do modelo, obteve-se a Previsão do Potencial de Ruptura de Taludes
(PPRT), em percentuais.
Adicionalmente, um caso histórico de escorregamento bem documentado foi
apresentado, com o objetivo de comparar os resultados fornecidos pela Modelagem
Neuro-Fuzzy (análise qualitativa) com os resultados de análises por equilíbrio limite
(análises quantitativas).
O estudo do caso histórico mostrou que a análise realizada utilizando o modelo
Neuro-Fuzzy refletiram de forma eficiente os resultados apresentados por Mota (2014)
em análises por equilíbrio limite. Para a condição antes da ruptura, o modelo Neuro-
Fuzzy forneceu uma previsão de ruptura inexistente (PPRT=4,1%), enquanto as
análises de estabilidade realizadas por Mota (2014) indicaram FS=1,36, ou seja,
talude estável. Para a condição após a ruptura, Mota (2014) obteve um valor de fator
de segurança igual a 1,05, que indica que o talude encontra-se instável, já o modelo
Neuro-Fuzzy, para esta mesma condição, forneceu coerentemente uma previsão de
ruptura iminente (PPRT=98,6%). Como a Modelagem ANFIS também fornece o valor
do Fator de Segurança (qualitativo), foram calculados os erros para cada uma das
situações descritas, comparando os valores dos Fatores de Segurança, qualitativo e
quantitativo, e verificou-se que os erros foram de 0,94% para a condição antes da
ruptura e de 3,24% para a condição após a ruptura, ou seja, apresentou erros muito
baixos evidenciando a capacidade de generalização da Modelagem ANFIS.
É interessante ressaltar que análises por equilíbrio limite fornecem um valor
numérico para o fator de segurança, ou seja, é um método essencialmente
determinístico (quantitativo). No presente trabalho, o fator de Segurança foi obtido por

159
um método não determinístico (qualitativo). A ideia de confrontar os dois métodos teve
como objetivo mostrar que a resposta do modelo Neuro-Fuzzy, dentro de uma faixa
de valores de previsão do potencial de ruptura de talude, encontra-se em
concordância com o método determinístico usualmente adotado na avaliação da
estabilidade de taludes.
Cabe comentar que para a aplicação do modelo além da geometria do talude,
são necessários parâmetros de resistência do solo e dados do nível d’água. Os
parâmetros de resistência podem ser obtidos através de ensaios de laboratório
(ensaios triaxiais e cisalhamento direto, por exemplo) e o nível d’água, através de
piezômetros ou indicadores de nível d’água, instalados nos locais a serem estudados.
Face ao exposto, conclui-se que a aplicabilidade do Modelo Neuro-Fuzzy na
Previsão do Potencial de Ruptura de Taludes é eficiente e de fácil utilização.
O modelo também mostra-se uma ferramenta válida para ser utilizada no
monitoramento das encostas do Município do Rio de Janeiro, desde que sejam
realizados ensaios para a obtenção de parâmetros de resistência nas áreas de
interesse e que nestes locais sejam instalados piezômetros ou indicadores de nível
d’água, com envio de dados através de telemetria (transmissão sem fio utilizada para
envio dos dados dos pluviômetros instalados no município do Rio de Janeiro), onde
os dados recebidos poderão ser inseridos automaticamente no Modelo Neuro-Fuzzy
e as saídas (PPRTs) comparadas com a Tabela 17 para que se possa seguir os
diversos protocolos de acionamento emergenciais propostos.
6.2 - Sugestões
O presente trabalho apresentou um modelo de previsão do potencial de ruptura
de taludes com enfoque em escorregamentos, onde foram contemplados os principais
condicionantes envolvidos no desencadeamento deste tipo de mecanismo de ruptura.
Todavia, este modelo pode ser refinado, com a introdução de outros condicionantes,
e outros modelos podem ser desenvolvidos, utilizando os conceitos aqui
apresentados. Como sugestão para pesquisas futuras pode-se citar:
- Criação de modelos neuro-fuzzy para previsão de outros tipos de movimentos
de massa, como escoamentos, subsidências, queda de blocos, etc., bastando
averiguar os fatores envolvidos em cada tipo de movimento;

160
- Consideração da presença de colúvios sobrejacentes à camada de solo
residual, situação bastante comum quando ocorre a repetição de um episódio de
deslizamento;
- Consideração de análise paramétrica considerando diversos valores de peso
específico do solo e diversas camadas de solo, buscando-se um refinamento do
modelo; e
- Utilização de Comitês Neuro-Fuzzy para tentativa de minimização de erros.

161
REFERÊNCIAS
Amaral, C.P. 1997. Escorregamentos no Rio de Janeiro. Inventário,
Condicionantes Geológicas e Redução do Risco. s.l. : Tese de Doutorado –
Departamento de Engenharia Civil da Pontifícia Universidade Católica do Rio de
Janeiro – PUC/RJ, 1997.
Araujo, W. D. 2010. A Defesa Civil no Estado do Rio de Janeiro frente à
intensificação de desastres relacionados aos eventos hidrológicos extremos:
elementos para um plano de atuação adaptativa. s.l. : Dissertação (Mestrado) –
Universidade do Estado do Rio de Janeiro, Faculdade de Engenharia, 2010.
Augusto Filho, O. e Virgili, J.C. 1998. Estabilidade de Taludes. s.l. : In:
Oliveira, A.M.S. e De Brito, S.N.A., Geologia de Engenharia. 1a ed. São Paulo:
Associação Brasileira de Geologia de Engenharia. 582 páginas, 1998.
Augusto Filho, O. e Wolle, C. M. 1996. Cartas de Risco de Escorregamentos:
Uma Proposta Metodológica e sua Aplicação no Município de Ilha Bela, SP. s.l. : Solos
e Rochas, 19: 45-62, 1996.
Barbosa, K.J. 2011. Avaliação Geotécnica de Lavra Subterrânea do Corpo do
Serrotinho da Mina Cuiabá Através de Modelagem Numérica Tridimensional. s.l. :
Dissertação de Mestrado - Universidade Federal de Ouro Preto, Escola de Minas,
NUGEO, 2011.
Barreto, J.M. 2001. Inteligência Artificial No Limiar do Século XXI. s.l. :
Florianópolis: ρρρ Edições, 2001.
Barros, W. T., Amaral, C. P. e D'Orsi, R. N. 1992. Landslide Susceptibility Map
of Rio de Janeiro. s.l. : In Bell (ed.) Landslides. Balkema, Roterdam: 869-871, 1992.
Benessiuti, M.F. 2011. Estudos dos mecanismos de instabilidade em solos
residuais de biotita-gnaisse da bacia do ribeirão Guaratinguetá. s.l. : Dissertação
(Mestrado) – Universidade Estadual Paulista. Faculdade de Engenharia, Bauru, 2011.
Bernardes, L. M. C. 1953. Anuário Geográfico do Estado do Rio de Janeiro -
Nº 6. s.l. : Instituto Brasileiro de Geografia e Estatística. Rio de Janeiro. p.145-159,
1953.
Boole, G. 1848. The Calculus of Logic. s.l. : Cambridge and Dublin
Mathematical Journal, Vol. III, p. 183-98, 1848.

162
Camargos, F.L. 2002. Lógica Nebulosa: uma abordagem filosófica e aplicada.
s.l. : Disponível em <http://www.inf.ufsc.br/~barreto/trabaluno/IAfernandoLC.pdf>.
Acesso em: Maio de 2016, 2002.
Carregã, D.L. e Balzan, G. 1997. Aspectos do Comportamento de Encostas
Argilosas no Creep. s.l. : II PSL / II COBRAE, Rio de Janeiro, Vol. 1, p. 233-241, 1997.
Castro, A. L. C. 1998. Glossário de defesa civil: estudo de riscos e medicina
de desastres. s.l. : Brasília, 1998.
CEPED. 2013. Atlas Brasileiro de Desastres Naturais: 1991 a 2012. s.l. : Centro
Universitário de Estudos e Pesquisas sobre Desastres. Florianópolis: CEPED/UFSC.
Disponível em: http://www.ceped.ufsc.br/atlas-brasileiro-de-desastres-naturais-1991-
a-2012/. Acesso: 11/11/2016, 2013.
Cerri, L. E. S. 1993. Riscos Geológicos Associados a Escorregamentos: Uma
Proposta para a Prevenção de Acidentes. s.l. : Tese de Doutorado, UNESP, Rio Claro,
SP, 1993.
Chen, C. Xiao, Z., Zhang, G. 2011. Stability Assessment Model for
Epimetamorphic Rock Slopes based on Adaptive Neuro-Fuzzy Inference System. s.l. :
EJGE, Vol. 16, 2011.
Chorley, R.J., Schumm, S.A. e Sugden, D.E. 1984. Geomorphology. s.l. :
Cambridge: Methuen, 1984.
Costa, E.A. 2005. Avaliação de ameaças e risco geotécnico aplicados à
Estabilidade de Taludes. s.l. : Dissertação (mestrado) - Universidade Federal do rio
Grande do Sul. Escola de engenharia. Programa de Pós-Graduação em Engenharia
Civil. Porto Alegre, BR-RS, 2005.
Cruden, D. M. 1997. Estimating The Risks from Landslides Using Historical
Data. s.l. : In Cruden, D.M. e Fel, R. (eds.) Landslide Risk Assessment. Balkema,
Rotterdam: 177-184, 1997.
De Castilho, L.A., Oliveira, P.M.C, Fabriani, C.B. 2012. Análise de Uma
Tragédia Ambiental e a Participação da População no Equacionamento dos
Problemas de Moradia: Um Estudo de Caso da Tragédia na Região Serrana do Rio
De Janeiro. s.l. : VI Encontro Nacional da ANPPAS. Belém/PA, Brasil, 2012.
D'Órsi, R. N., et al. 2015. Cidade do rio de janeiro em relação a eventos
pluviométricos intensos no período 1966-2013. s.l. : 15º Congresso Brasileiro de
Geologia de Engenharia e Ambiental. Bento Gonçalves/RS. Agosto, 2015.

163
Elbachá, A.T., Campos, L.E.P. e Bahia, R.F.C. Tentativa de Correlação Entre
Precipitação e deslizamentos na Cidade de Salvador. s.l. : In: Conferência Brasileira
sobre Estabilidade de Encostas, 1º COBRAE, Rio de Janeiro. Anais, II: 647 – 673.
Fabrício, J.V.F. 2006. Análises probabilísticas da estabilidade de taludes e
contenções. Rio de Janeiro : Dissertação de Mestrado – PUC, Departamento de
Engenharia, 2006.
Fernandes, A.M.R. 2003. Definições de Inteligência Artificial. Inteligência
Artificial. s.l. : Florianópolis – SC: Visual Books Editora, 2003.
Fernandes, N.F. e Amaral, C.P. 1996. Movimentos de Massa: Uma
Abordagem Geológico-Geomorfológica. s.l. : In: Guerra, A.J.T.; Cunha, S. ed.
Geomorfologia e meio ambiente. Rio de Janeiro: Bertrand Brasil, 1996.
Flores, E. e Figueroa, A. 2008. Análises Probabilísticas da Estabilidade de
Taludes Considerando a Variabilidade Espacial do Solo. s.l. : Dissertação (Mestrado
em Engenharia Civil) – Pontifícia Universidade Católica do Rio de Janeiro, Rio de
Janeiro/RJ, 2008.
Fonseca, M.J.G., Peçanha, R.M., Junho, M.C.B., Francisco, B.H.R. e
Dreher, A. 1998.. Mapa Geológico do Estado do Rio de Janeiro, escala 1:400.000 e
texto correspondente. s.l. : Programa cartas de Síntese – DNPM/MME, Rio de Janeiro,
141 p., 1998.
Franch, F.A.J.P. 2008. Influência do tipo de revestimento superficial no fluxo
não saturado e sua influência na estabilidade de taludes. s.l. : Dissertação de
Mestrado, USP, São Paulo, 2008.
Frascá, M.H.B.O e Sartori, P.L.P. 1998. Minerais e Rochas. s.l. : In: Oliveira,
A.M.S, Brito, S.N.A. (org.). Geologia de Engenharia. São Paulo: Associação Brasileira
de Engenharia, p.15-38, 1998.
Frege, F.L.G. 1884. Die Grundlagen der Arithmetik. s.l. : Eine logisch-
mathematische Untersuchung über den Begriff der Zahl, Breslau, 1884.
Freire, E.S.M. 1965. Movimentos Coletivos de Solos e Rochas e sua Moderna
Sistemática. s.l. : Construção. Rio de Janeiro, 8(95), 10-18, 1965.
Gerscovich, D.M.S. 2009. Estabilidade de Taludes. s.l. : Faculdade de
Engenharia - Departamento de Estruturas e Fundações - Universidade do Estado do
Rio de Janeiro (Apostila), 2009.
Gil, M.C.C. 2010. Aplicação de Redes Neuro-Fuzzy para a Solução de
Problemas Inversos em Transferência Radiativa. 2010.

164
Goldschmidt, R.R. 2010. Inteligência Computacional. s.l. : Rio de Janeiro: IST-
Rio, 2010.
Guedes, M.N. 2011. Uso de Neuro-fuzzy na Avaliação da Suscetibilidade de
Escorregamento de Taludes. s.l. : Dissertação (Mestrado) – Universidade do Estado
do Rio de Janeiro, Faculdade de Engenharia, 2011.
Guerra, A.J.T. e Cunha, S. 1994. Geomorfologia: Uma Atualização de
Conceitos e Bases. s.l. : Rio de Janeiro: Bertrand Brasil, 1994.
Guidicini, G. e Nieble, C. M. 1984. Estabilidade de taludes naturais e de
escavação. s.l. : Edgard Blücher, São Paulo, 1984.
Guidicini, G. e Nieble, C.M. 1993. Estabilidade de Taludes Naturais de
Escavação. s.l. : 2 ed. São Paulo: Edgard Blücher, 196 p., 1993.
Guidicini, G. e Nieble, C.M. 1983. Estabilidade de taludes naturais e de
escavação. s.l. : Ed. Edgard Blucher Ltda, São Paulo. p.194, 1983.
Gusmão Filho, J.A. 1997. Encostas Urbanas: Aspectos Ambientais, Sociais e
Políticos. s.l. : II PSL / II COBRAE, Rio de Janeiro, Vol. 3, p. 315-331, 1997.
Guzzetti, F., Carrara, A., Cardinali e M.Reichenbach, P. 1999. Landslide
Hazard Evaluation: A Review of Current Techniques and Their Application in a Multi-
Scale Study. s.l. : Central Italy. Geomorphology, 1999.
Hansen, M. J. 1984b. Strategies for classification of landslides. s.l. : In
Brunsden, D. e Prior, D.B. (eds.) Slope Instability. John Wiley, Chichester: 1-25, 1984b.
Haykin, S. 2001. Redes Neurais: A comprehensive foundation. s.l. : Prentice-
Hall, 2nd edition, 2001.
HECHT-NIELSEN, R. 1988. Applications of Counterpropagation Networks .
s.l. : Neural Networks, v. 1, pp. 131-139, 1988.
Hutchinson, J. N. 1988. General report: morphological and geotechnical
parameters of landslides in relation to geology and hydrogeology. s.l. : 5th International
Symposium on Landslides. A. A. Balkema, Lausanne: 3-35, 1988.
Infanti Jr., N. e Fornasari Filho, N. 1998. Processos da Dinâmica Superficial.
s.l. : In:Oliveira, A. M.S. e Brito, S.N.A. (eds) Geologia de Engenharia. São
Paulo:ABGE, P. 131-152, 1998.
Jang, J.S.R., Sun, C.T. e Mizutani, E. 1997. Neuro-fuzzy and Soft Computing:
A Computational Approach to Learning and Machine Intelligence. London : Prentice-
Hall International, 1997.
165
Juang, C.H., Huang, X.H., Holtz, R.D. e Chen, J.W. 1996. Determining
Relative Density of Sands From CPT Using Fuzzy Sets. s.l. : Journal of Geothecnical
Engineering, ASCE, Vol. 122, No. 1, p.1-6, 1996.
Juang, C.H., Lee, D.H. e Sheu, C. 1992. Mapping Slope Failure Potential Using
Fuzzy Sets. s.l. : Journal of Geothecnical Engineering. ASCE, Vol. 118, No. 3, p. 475-
494, 1992.
Kanji, M.A. 1997. Estabilização e Remediação de Taludes – Relato Geral. s.l. :
II PSL / II COBRAE, Rio de Janeiro, Vol. 3, p. 251-259, 1997.
Kanji, M.A., Gramani, M.F., Massad, F., Cruz, P.T. e de Araújo Filho, H.A.
2000. Main Factors Intervening in the Risk Assessment on Debris Flows. s.l. :
International Workshop on the Debris Flow Disaster of December 1999 in Venezuela,
Caracas, 2000.
Kochel, R.C. 1987. Holocene Debris Flows in Central Virginia. s.l. : In Costa,
J.E. e Wieczorek, G.F. (eds.) Debris Flows/ Avalanches: Process, Recognition, and
Mitigation. Geological Society of America, Boulder: 139-155, 1987.
Kosko, B. 1992. Neural Networks and Fuzzy Systems, A Dynamical Systems
Approach to Machine lntelligence. s.l. : Prentice Hall, Englewood Cliffs, NJ, 1992.
Lacasse, S. and Nandim, F. 1996. Uncertainties in Characterizing Soil
Properties. s.l. : Uncertainty in the Geologic Environment, GSP nº 58, ASCE, 1996.
Lieber, F.R. e Romano-Lieber, N.S. 2002. O Conceito de Risco: Janus
reinventado. Saúde e Ambiente Sustentável: Estreitando nós. s.l. : Org. Minayo e
Miranda. Editora Fiocruz, Rio de Janeiro/RJ, 2002.
Marangon, M. 2009. Tópicos em Geotecnia e Obras de Terra. s.l. : Unidade 04
das Notas de Aula, Universidade Federal de Juiz de Fora, MG, 2009.
Marques, J.A.P. 2011. Estudo de Metodologia de Avaliação de Risco a
Escorregamento de Terra em Área Urbana: O Caso do Município de Juiz de Fora -
MG. s.l. : Dissertação (Mestrado em Ambiente Construído)–Universidade Federal de
Juiz de Fora, Juiz de Fora/MG, 2011.
Martínez-Carvajal, H. E. 2006. Modelagem Constitutiva de Areias Usando
Redes Neurais Artificiais. s.l. : Tese de Doutorado, Publicação G.TD-035/06,
Departamento de Engenharia Civil e Ambiental, Universidade de Brasília, Brasília, DF,
247 p, 2006.
Mejia Sanchez, E. C. 2009. Controle por aprendizado acelerado e neuro-fuzzy
de sistemas servo-hidráulicos de alta frequência. s.l. : Dissertação (Mestrado em

166
Engenharia Mecânica) - Pontifícia Universidade Católica do Rio de Janeiro, Rio de
Janeiro, 2009.
Mendel, J.M. 2001. Uncertain rule-based fuzzy logic systems: introduction and
new directions. s.l. : Londres: Prentice Hall P. T. R, 2001.
Mendes, M. 2013. Tecido Nervoso. s.l. : site:
http://maxaug.blogspot.com.br/2013_11_01_archive.html, visitado em 31/05/2016,
2013.
Moncada, M.P.H. 2008. Avaliação de propriedades hidráulicas de solos
tropicais não saturados. s.l. : Tese (Doutorado em Engenharia Civil) - Pontifícia
Universidade Católica do Rio de Janeiro, Rio de Janeiro, 2008.
Montgomery, D.R., Fernandes, N.F., Guimarães, R.F., Gomes, R.A.T,
Vieira, B.C. e Greenberg, H. 2001. Condicionantes Geomorfológicos dos
Deslizamentos nas Encostas: Avaliação de Metodologias e Aplicação de Modelo de
Previsão de Áreas Susceptíveis. s.l. : Revista Brasileira de Geomorfologia, Volume 2,
N°1 51-71, 2001.
Moreira, C.V.R. e Neto, A.G.P. 1998. Clima e Relevo. s.l. : In: Oliveira, A.M.S.
e De Brito, S.N.A., Geologia de Engenharia. 1a ed. São Paulo: Associação Brasileira
de Geologia de Engenharia. 582 páginas, 1998.
Mota, A.P. 2014. Retroanálise de escorregamento ocorrido em um talude na
Via Lagos. s.l. : Dissertação (Mestrado) – Universidade do Estado do Rio de Janeiro,
Faculdade de Engenharia., 2014.
Nelson F. Fernandes, Renato F. Guimarães, Roberto A. T. Gomes, Bianca
C. Vieira, David R. Montgomery e Harvey Greenberg. 2001. Condicionantes
Geomorfológicos dos Deslizamentos nas Encostas: Avaliação de Metodologias e
Aplicação de Modelo de Previsão de Áreas Susceptíveis. s.l. : Revista Brasileira de
Geomorfologia, Volume 2, Nº 1, 51-71, 2001.
Neto, L.B. 2005. Sistemas Fuzzy. s.l. : Apostila do Curso de Inteligência
Computacional, UERJ, Rio de Janeiro, 2005.
—. 2010. Sistemas Híbridos. Rio de Janeiro : Pós-Graduação em Engenharia
Civil, Disciplina Inteligência Computacional - Notas de Aula, 2010.
Netto, A.L.C. 1994. Hidrologia de Encosta na Interface com a Geomorfologia.
s.l. : In: Guerra, A.J.T.; Cunha, S. ed. Geomorfologia: uma atualização de conceitos e
bases, Rio de Janeiro: Bertrand Brasil, 1994.

167
Oliveira Jr., H.A. 1999. Lógica Difusa: Aspectos práticos e aplicações. s.l. : Rio
de Janeiro: Interciência.189 páginas, 1999.
Ortigão, J. A. R. 2007. Introdução à mecânica dos solos dos estados críticos.
s.l. : Terratek. Disponível em: www.terratek.com.br. 3a. Edição, 2007.
Pinto, W.D. 2002. Avaliação da Susceptibilidade a Escorregamentos em Solo:
Uma Abordagem Fuzzy. s.l. : Dissertação de Mestrado - Universidade Estadual Norte
Fluminense, UENF, Rio de Janeiro, 2002.
Ponce, V.M. 1989. Engineering Hydrology: Principles and Pratices. New
Jersey : Prentice-Hall, 640 p., 1989.
Rodrigues, C.S. 2013. Mapeamento de suscetibilidade a escorregamentos de
Nova Friburgo-RJ por meio de inferência fuzzy e elaboração de cenários de alerta com
uso do TerraMA2. s.l. : Instituto Nacional de Pesquisas Espaciais, São José dos
Campos: INPE, 2013.
Russel, B. e Whitehead, A.N. 1962. Principia Mathematica. 1910 - 1913. s.l. :
3 vols, Cambridge: At the University Press, 1962.
Russel, S.J. e Norvig, P. 2004. Inteligência Artificial. s.l. : 2ª. ed. Rio de
Janeiro: Campus, 2004.
Salamuni, E. 2006. Geologia Estrutural - CG017. s.l. : Apostila do Curso de
Graduação em Geologia, UFPR. Disponível em:
<http://www.geologia.ufpr.br/graduacao2/estrutural/indicegeoestrutural.htm> (acesso
em: Ago. 2014), 2006.
Sandri, S. e Correa, C. 1999. Lógica Nebulosa. s.l. : Anais da V Escola de
Redes Neurais. São José dos Campos, pp 073-090, 1999.
Sandroni, S.S. 1985. Sampling and Testing of Residual Soils in Brasil. s.l. : In
: BRAND, E.W., PHILLIPSON, H.B. (eds), Sampling and Testing of Residual Soils - A
Review of International Practice. Hong Kong. Scorpion Press, 1985.
Sassa, K. 1989. Geotechnical classification of landslides. s.l. : Landslide News,
3: 21-24, 1989.
Sezer, E.A., Pradhan, B. e Gokceoglu, C. 2011. Manifestation of an Adaptive
Neuro-fuzzy Model on Landslide Susceptibility Mapping: Klang valley, Malaysia. s.l. :
Expert Systems with Applications 38, 2011.
Shaw, I.S. e Simões, M.G. 1999. Controle e Modelagem Fuzzy. 1999. 1ª. ed.
São Paulo: Edgard Blücher Ltda.

168
Suarez, J.D. 1997. La Vegetación en la Estabilización de Deslizamientos. s.l. :
II PSL / II COBRAE, Rio de Janeiro, Vol. 2, p. 739-746, 1997.
Tanscheit, R. 2007. Sistemas Fuzzy. s.l. : Disponível em:
<http://www.dainf.cefetpr.br/~myriam/PastaWeb/Fuzzy/ApostilaFuzzy.pdf>. Acesso
em: Maio, 2007.
Thomas, M.F. 1979. Tropical Geomorphology: A Study of Weathering and
Landform Development in Warm Climates. London : MacMillan, 1979.
Tomba, C.L.B. 2012. Análise estrutural dos enxames de diques máficos
eocretáceos do sul-sudeste brasileiro. s.l. : Dissertação de Mestrado-IGC/USP, 2012.
Tominaga, L.K. 2007. Avaliação de metodologias de análise de risco a
escorregamentos: aplicação de um ensaio em Ubatuba, SP. s.l. : Tese (Doutorado em
Geografia) – Universidade de São Paulo (USP), São Paulo, 2007.
Tominaga, L.K., Santoro, J. e Amaral, R. 2009. Desastres Naturais: conhecer
para prevenir. s.l. : 1ª Edição, Instituto Geológico, São Paulo, 2009.
Tozzato, J.H.F. 2000. Estruturas de Contenção de Baixa Altura em Solo
Residual. s.l. : Dissertação de Mestrado - Universidade Federal do Rio de Janeiro,
2000.
Vargas, M. 1977. Introdução à Mecânica dos Solos. s.l. : Capítulo V., 1977.
—. 1999. Revisão histórico-conceitual dos escorregamentos da Serra do Mar.
s.l. : Solos e Rochas, São Paulo. v. 22, p. 53-83, 1999.
Varnes, D. J. 1958. Landslides types and processes. In Eckel, E.B. s.l. : (ed.)
Landslides and Engineering Practice. National Academy of Science. Washington: 20-
47, 1958.
—. 1978. Slope Movements Types and Processes. s.l. : In Schuster, R.L. e
Krizek, R.J. (eds.) Landslides Analysis and Control. National Academy of
Science,Washington: 11-33, 1978.
VIEIRA, L. S. e VIEIRA, M. N. F. 1983. Manual de morfologia e classificação
de solos. s.l. : São Paulo, Ed. Agron. Ceres, 1983.
Vieira, L.S. 1975. Manual da Ciência do Solo. s.l. : São Paulo. Editora
Agronômica Ceres Ltda. 464P, 1975.
Wolle, C. M. e Carvalho, C. S. 1989. Deslizamentos em Encostas na Serra do
Mar - Brasil. s.l. : Solos e Rochas, v.12, p. 27-36, 1989.
Wolle, C.M. 1988. Análise de Escorregamentos Translacionais Numa Região
da Serra do Mar no Contexto de uma Classificação de Mecanismos de Instabilização

169
de Encostas. s.l. : São Paulo, 800 p. Tese - Doutorado em Engenharia - Universidade
de São Paulo, Escola Politécnica, 1988.
Zadeh, L.A. 1965. Fuzzy Sets. On formation and Control. s.l. : V.8, p.338-353,
1965.
—. 1975. The Concept of a Linguistic Variable and its Application to Aproximate
Reasoning. s.l. : Information Science, Vol. 8, p. 199-249, 1975.
Zimback, C.R.L. 2003. Formação dos Solos. s.l. : Botucatu: UNESP/GEPAG.
27. (Apostila), 2003.

170
ANEXO 1 - ROTINAS DE PROGRAMAÇÃO ANFIS NO MATLAB
A Rotina de programação abaixo deverá ser executada no MATLAB para a obtenção
do PPRT.
%carrega os dados da análise paramétrica
load('parametrica.mat')
%separa os dados de entrada dos dados de saída e cria variável de dados
datin=[Coesao Altura Inclinacao Atrito NA];%Dados de Entrada
datout=[FS];%Dados de saída
data = [datin,datout];
% Carrega os dados da Checagem e cria variáveis
load('validacao.mat')
chkdatin=[C A I AT NIVAG];
chkdatout=[FATSEG];
%CARREGA FUZZYSET com o Método SUBCLUSTERING já treinado no neuro-fuzzy toolbox
load ('FISFINAL.mat')
fismat=FISFINAL;
% executa o Treinamento ANFIS nos dados de Entrada
fuzout=evalfis(datin,fismat);
%Mostra o Erro Médio Quadrático
trnRMSE=norm(fuzout-datout)/sqrt(length(fuzout))
%Plota os dados do treinamento comparando com a saída do ANFIS
figure (1);
plot(datout)
hold on
plot(fuzout,'o')
hold off
% Plota os dados da Checagem e compara com o ANFIS
figure (2)
chkfuzout=evalfis(chkdatin,fismat);
chkRMSE=norm(chkfuzout-chkdatout)/sqrt(length(chkfuzout))
plot(chkdatout)
hold on
plot(chkfuzout,'o')
hold off
% Solicita ao usuário os dados para o cálculo do FS
clc;%limpa a tela de comando
frase=['MODELAGEM ANFIS PARA O CÁLCULO DO PPRT'];
disp(frase);
frase0=[' '];
disp(frase0);
disp(frase0);

171
frase1=['ENTRADA DE DADOS NO MODELO ANFIS'];
disp(frase1);
Coes = input('Digite a Coesão do Solo (kPa): ');
Altur = input('Digite a Altura do Talude (m): ');
Inclin = input('Digite a Inclinação do Talude (°): ');
Atrit = input('Digite o Ângulo de Atrito do Solo (°): ');
Nivagua = input('Digite a altura do Nível d´água, a partir da base do talude (m):
');
%Calcula o Fator de Segurança e exibe o valor
dadosFS=[Coes Altur Inclin Atrit Nivagua];
VALORFS=evalfis(dadosFS,fismat);
disp(frase0);
frase2=['SAÍDA DO MODELO ANFIS'];
disp(frase2);
frase3=['O Fator de Segurança do Talude é: FS=',num2str(VALORFS)];
disp(frase3);
%INICIA ROTINA DE CÁLCULO DO PPRT
load('FS_PPRT.mat');%carrega dados da curva de conversão
%Carrega a Inferência Fuzzy de conversão já treinada pela Neuro-fuzzy toolbox
load('in_fis.mat');
load('out_fis.mat');
% Calcula o PPRT, Elimina a possibilidade de Previsões negativas e maiores que 100%
e exibe o resultado
PPRT=evalfis(VALORFS(:,:),out_fis);
if PPRT<0
PPRT=0;
elseif PPRT>100
PPRT=100;
else PPRT=PPRT;
end;
frase4=['A Previsão do Potencial de Ruptura do Talude é: PPRT=',num2str(PPRT),'%'];
disp(frase4);
Após a utilização da rotina acima, o usuário poderá entrar novos dados para obtenção do PPRT
através da rotina abaixo (arquivo ModeloPPRT.m), não sendo necessária nova execução de toda
modelagem. Essa rotina só funciona se a rotina anterior tiver sido executada.
% Solicita ao usuário os dados para o cálculo do FS
clc;%limpa a tela de comando
frase=['MODELAGEM ANFIS PARA O CÁLCULO DO PPRT'];
disp(frase);
frase0=[' '];
disp(frase0);
disp(frase0);
frase1=['ENTRADA DE DADOS NO MODELO ANFIS'];
disp(frase1);
Coes = input('Digite a Coesão do Solo (kPa): ');
Altur = input('Digite a Altura do Talude (m): ');
Inclin = input('Digite a Inclinação do Talude (°): ');
Atrit = input('Digite o Ângulo de Atrito do Solo (°): ');
Nivagua = input('Digite a altura do Nível d´água, a partir da base do talude (m):
');
%Calcula o Fator de Segurança e exibe o valor

172
dadosFS=[Coes Altur Inclin Atrit Nivagua];
VALORFS=evalfis(dadosFS,fismat);
disp(frase0);
frase2=['SAÍDA DO MODELO ANFIS'];
disp(frase2);
frase3=['O Fator de Segurança do Talude é: FS=',num2str(VALORFS)];
disp(frase3);
%INICIA ROTINA DE CÁLCULO DO PPRT
load('FS_PPRT.mat');%carrega dados da curva de conversão
%Carrega a Inferência Fuzzy de conversão já treinada pela Neuro-fuzzy toolbox
load('in_fis.mat');
load('out_fis.mat');
% Calcula o PPRT, Elimina a possibilidade de Previsões negativas e maiores que 100%
e exibe o resultado
PPRT=evalfis(VALORFS(:,:),out_fis);
if PPRT<0
PPRT=0;
elseif PPRT>100
PPRT=100;
else PPRT=PPRT;
end;
frase4=['A Previsão do Potencial de Ruptura do Talude é: PPRT=',num2str(PPRT),'%'];
disp(frase4);

173
ANEXO 2 - BANCO DE DADOS
As Tabelas a seguir mostram os dados utilizados na Modelagem ANFIS através do Banco de Dados (treinamento e teste do Modelo).
Dados do Banco de Dados Usados para o Treinamento do Modelo Conjunto de
Dados Altura
(m) Inclinação
(º) Pluviosidade
(mm) Previsão do Potencial de Ruptura do Talude
(%)
1 3 90 20.00 75
2 30 40 23.4 85
3 3 45 5 50
4 3 90 20.8 85
5 6 45 19.4 85
6 7 70 34.4 85
7 4 85 34 95
8 6 80 163.4 100
9 6 90 53.9 100
10 6.5 90 17.4 98
11 4 40 163.4 48
12 5 90 89.3 99
13 6 30 16.4 85
14 8 40 51.5 98
15 5 60 42.9 89
16 5 50 163.4 100
17 3 70 0.9 78
18 5 70 3.3 45
19 1.5 35 68.7 95
20 3 60 23.2 85
21 4 70 23.2 88
22 6 70 23.2 87
23 4 70 23.2 88
24 2 40 6.6 84
24 8 70 6.1 86
25 6 35 4.3 78
26 5 90 0 78
27 4 25 0 76
28 4 60 0.6 79
29 7 90 0 80
30 3 45 41.2 84
31 2.5 75 42.8 87
32 10 90 47 98
33 6 45 31.8 88
34 2.5 25 1.6 75
35 20 70 0 98
36 3 25 163.4 100
37 10 45 54.2 96
38 10 35 52.3 95
39 5 30 28.6 87
40 12 35 1.6 93
41 6 80 94.3 98
42 15 75 3.4 95
43 3 45 0.6 80
44 3 10 0 70
45 15 45 0 79
46 3 20 0 10
47 10 70 105.2 100
48 8 50 42 95
49 40 80 64.6 98
50 7 20 1.4 75

174
Conjunto de Dados
Altura (m)
Inclinação (º)
Pluviosidade (mm)
Previsão do Potencial de Ruptura do Talude
(%)
51 40 80 45 100
52 5 60 0 76
53 6 50 31.6 97
54 7 70 1 76
55 5 40 1.6 78
56 5 90 1.8 80
57 4 90 0 75
58 4 90 10.6 90
59 4 70 38.1 95
60 6 85 11.8 95
61 7 85 0 77
62 10 60 0 78
63 3 45 0 75
64 3.8 85 0 78
65 5 50 13.6 84
66 4 45 54.6 94
67 4 50 31.2 90
68 30 80 0 90
Dados usados para o Teste do Modelo (que não fizeram parte do treinamento)
Conjunto de Dados
Altura (m)
Inclinação (º)
Pluviosidade (mm)
Previsão do Potencial de Ruptura
do talude (%)
1 33 45 25 86
2 7 70 160 100
3 5 90 50 100
4 4 90 18 98
5 4 40 163.4 50
6 2.5 25 1.6 75
7 4 20 0 11
8 10 70 105.2 100
9 8 50 42 95
10 40 80 64.6 98
11 6 20 1.4 75
12 6 45 13.6 84
13 5 45 54.6 93
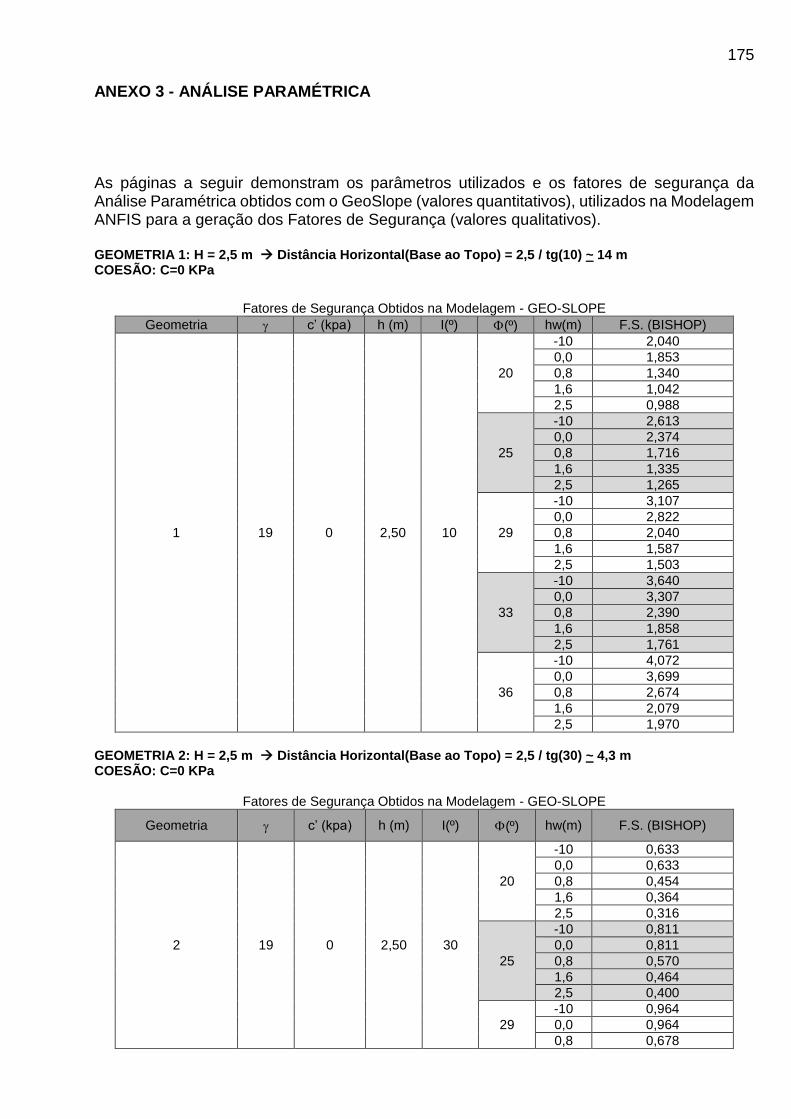
175
ANEXO 3 - ANÁLISE PARAMÉTRICA
As páginas a seguir demonstram os parâmetros utilizados e os fatores de segurança da Análise Paramétrica obtidos com o GeoSlope (valores quantitativos), utilizados na Modelagem ANFIS para a geração dos Fatores de Segurança (valores qualitativos).
GEOMETRIA 1: H = 2,5 m Distância Horizontal(Base ao Topo) = 2,5 / tg(10) ~ 14 m COESÃO: C=0 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’ (kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
1 19 0 2,50 10
20
-10 2,040
0,0 1,853
0,8 1,340
1,6 1,042
2,5 0,988
25
-10 2,613
0,0 2,374
0,8 1,716
1,6 1,335
2,5 1,265
29
-10 3,107
0,0 2,822
0,8 2,040
1,6 1,587
2,5 1,503
33
-10 3,640
0,0 3,307
0,8 2,390
1,6 1,858
2,5 1,761
36
-10 4,072
0,0 3,699
0,8 2,674
1,6 2,079
2,5 1,970
GEOMETRIA 2: H = 2,5 m Distância Horizontal(Base ao Topo) = 2,5 / tg(30) ~ 4,3 m COESÃO: C=0 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’ (kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
2 19 0 2,50 30
20
-10 0,633
0,0 0,633
0,8 0,454
1,6 0,364
2,5 0,316
25
-10 0,811
0,0 0,811
0,8 0,570
1,6 0,464
2,5 0,400
29
-10 0,964
0,0 0,964
0,8 0,678
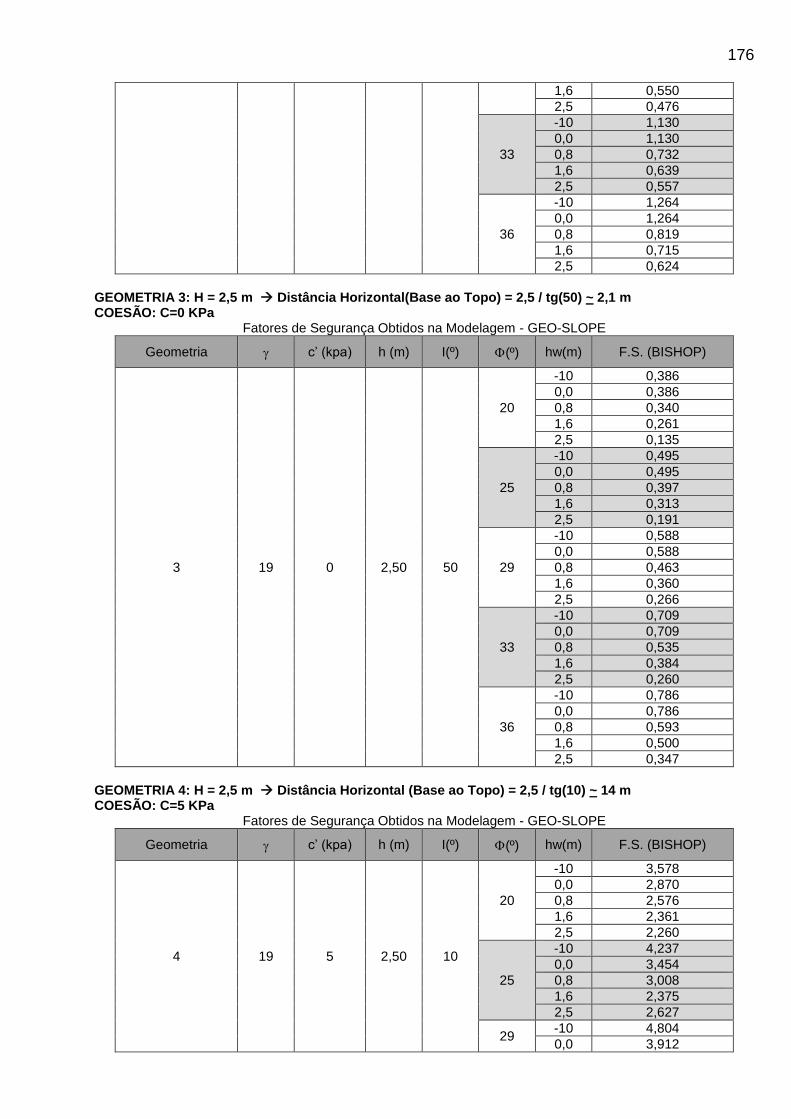
176
1,6 0,550
2,5 0,476
33
-10 1,130
0,0 1,130
0,8 0,732
1,6 0,639
2,5 0,557
36
-10 1,264
0,0 1,264
0,8 0,819
1,6 0,715
2,5 0,624
GEOMETRIA 3: H = 2,5 m Distância Horizontal(Base ao Topo) = 2,5 / tg(50) ~ 2,1 m COESÃO: C=0 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’ (kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
3 19 0 2,50 50
20
-10 0,386
0,0 0,386
0,8 0,340
1,6 0,261
2,5 0,135
25
-10 0,495
0,0 0,495
0,8 0,397
1,6 0,313
2,5 0,191
29
-10 0,588
0,0 0,588
0,8 0,463
1,6 0,360
2,5 0,266
33
-10 0,709
0,0 0,709
0,8 0,535
1,6 0,384
2,5 0,260
36
-10 0,786
0,0 0,786
0,8 0,593
1,6 0,500
2,5 0,347
GEOMETRIA 4: H = 2,5 m Distância Horizontal (Base ao Topo) = 2,5 / tg(10) ~ 14 m COESÃO: C=5 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’ (kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
4 19 5 2,50 10
20
-10 3,578
0,0 2,870
0,8 2,576
1,6 2,361
2,5 2,260
25
-10 4,237
0,0 3,454
0,8 3,008
1,6 2,375
2,5 2,627
29 -10 4,804
0,0 3,912
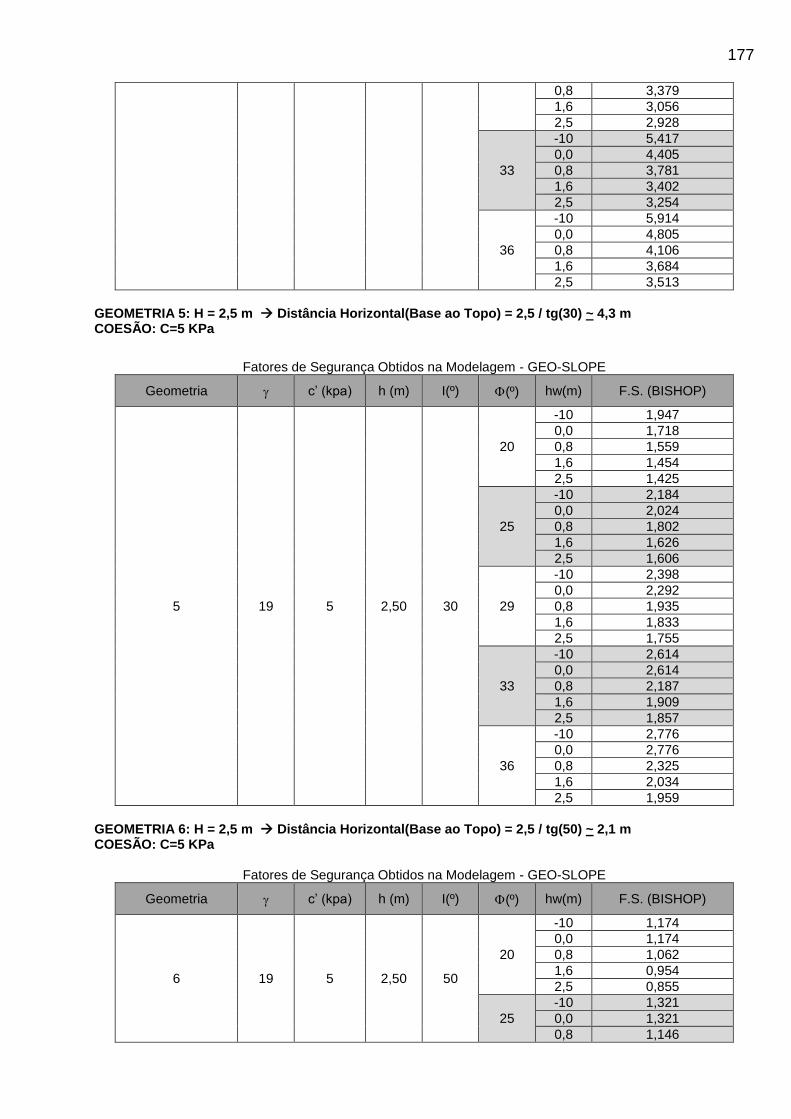
177
0,8 3,379
1,6 3,056
2,5 2,928
33
-10 5,417
0,0 4,405
0,8 3,781
1,6 3,402
2,5 3,254
36
-10 5,914
0,0 4,805
0,8 4,106
1,6 3,684
2,5 3,513
GEOMETRIA 5: H = 2,5 m Distância Horizontal(Base ao Topo) = 2,5 / tg(30) ~ 4,3 m COESÃO: C=5 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’ (kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
5 19 5 2,50 30
20
-10 1,947
0,0 1,718
0,8 1,559
1,6 1,454
2,5 1,425
25
-10 2,184
0,0 2,024
0,8 1,802
1,6 1,626
2,5 1,606
29
-10 2,398
0,0 2,292
0,8 1,935
1,6 1,833
2,5 1,755
33
-10 2,614
0,0 2,614
0,8 2,187
1,6 1,909
2,5 1,857
36
-10 2,776
0,0 2,776
0,8 2,325
1,6 2,034
2,5 1,959
GEOMETRIA 6: H = 2,5 m Distância Horizontal(Base ao Topo) = 2,5 / tg(50) ~ 2,1 m COESÃO: C=5 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’ (kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
6 19 5 2,50 50
20
-10 1,174
0,0 1,174
0,8 1,062
1,6 0,954
2,5 0,855
25
-10 1,321
0,0 1,321
0,8 1,146

178
1,6 1,024
2,5 0,921
29
-10 1,446
0,0 1,446
0,8 1,233
1,6 1,101
2,5 1,008
33
-10 1,571
0,0 1,571
0,8 1,374
1,6 1,163
2,5 1,061
36
-10 1,674
0,0 1,674
0,8 1,442
1,6 1,216
2,5 1,091
GEOMETRIA 7: H = 2,5 m Distância Horizontal (Base ao Topo) = 2,5 / tg(70) ~ 0,90 m COESÃO: C=5 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’ (kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
7 19 5 2,50 70
20
-10 0,861
0,0 0,861
0,8 0,787
1,6 0,652
2,5 0,572
25
-10 0,938
0,0 0,938
0,8 0,827
1,6 0,705
2,5 0,582
29
-10 1,008
0,0 1,008
0,8 0,882
1,6 0,720
2,5 0,594
33
-10 1,088
0,0 1,088
0,8 0,965
1,6 0,774
2,5 0,606
36
-10 1,148
0,0 1,148
0,8 1,013
1,6 0,806
2,5 0,615
GEOMETRIA 8: H = 2,5 m Distância Horizontal (Base ao Topo) = 0,00 m COESÃO: C=10 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’ (kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
8 19 5 2,50 90
20 -10 0,630
25 -10 0,703
29 -10 0,763
33 -10 0,830
36 -10 0,872

179
GEOMETRIA 9: H = 2,5 m Distância Horizontal (Base ao Topo) = 2,5 / tg(10) ~ 14 m COESÃO: C=10 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’ (kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
9 19 10 2,50 10
20
-10 4,583
0,0 3,657
0,8 3,419
1,6 3,238
2,5 3,084
25
-10 5,330
0,0 4,247
0,8 3,935
1,6 3,683
2,5 3,488
29
-10 5,946
0,0 4,750
0,8 4,371
1,6 4,067
2,5 3,835
33
-10 6,612
0,0 5,292
0,8 4,802
1,6 4,436
2,5 4,211
36
-10 7,147
0,0 5,732
0,8 5,145
1,6 4,718
2,5 4,515
GEOMETRIA 10: H = 2,5 m Distância Horizontal(Base ao Topo) = 2,5 / tg(30) ~ 4,3 m COESÃO: C=10 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’ (kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
10 19 10 2,50 30
20
-10 2,710
0,0 2,356
0,8 2,199
1,6 2,066
2,5 2,036
25
-10 3,063
0,0 2,653
0,8 2,437
1,6 2,320
2,5 2,281
29
-10 3,393
0,0 2,911
0,8 2,666
1,6 2,531
2,5 2,472
33
-10 3,634
0,0 3,197
0,8 2,906
1,6 2,749
2,5 2,679
36
-10 3,891
0,0 3,431
0,8 3,113
1,6 2,901
2,5 2,845

180
GEOMETRIA 11: H = 2,5 m Distância Horizontal(Base ao Topo) = 2,5 / tg(50) ~ 2,1 m COESÃO: C=10 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’ (kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
11 19 10 2,50 50
20
-10 1,802
0,0 1,801
0,8 1,679
1,6 1,619
2,5 1,563
25
-10 1,952
0,0 1,950
0,8 1,823
1,6 1,776
2,5 1,654
29
-10 2,091
0,0 2,091
0,8 1,952
1,6 1,739
2,5 1,723
33
-10 2,242
0,0 2,242
0,8 2,077
1,6 1,835
2,5 1,790
36
-10 2,345
0,0 2,345
0,8 2,117
1,6 1,907
2,5 1,713
GEOMETRIA 12: H = 2,5 m Distância Horizontal (Base ao Topo) = 2,5 / tg(70) ~ 0,90 m COESÃO: C=10 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’ (kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
12 19 10 2,50 70
20
-10 1,499
0,0 1,499
0,8 1,452
1,6 1,333
2,5 1,200
25
-10 1,593
0,0 1,593
0,8 1,532
1,6 1,380
2,5 1,095
29
-10 1,642
0,0 1,642
0,8 1,603
1,6 1,424
2,5 1,081
33
-10 1,742
0,0 1,742
0,8 1,619
1,6 1,310
2,5 1,147
36
-10 1,792
0,0 1,792
0,8 1,575
1,6 1,304
2,5 1,156

181
GEOMETRIA 13: H = 2,5 m Distância Horizontal (Base ao Topo) = 0,00 m COESÃO: C=10 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’ (kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
13 19 10 2,50 90
20
-10 1,018
0,0 1,018
0,8 0,963
1,6 0,847
2,5 0,606
25
-10 1,095
0,0 1,095
0,8 1,026
1,6 0,868
2,5 0,582
29
-10 1,148
0,0 1,148
0,8 1,063
1,6 0,896
2,5 0,558
33
-10 1,211
0,0 1,211
0,8 1,125
1,6 0,922
2,5 0,544
36
-10 1,263
0,0 1,263
0,8 1,174
1,6 0,958
2,5 0,459
GEOMETRIA 14: H = 2,5 m Distância Horizontal (Base ao Topo) = 2,5 / tg(10) ~ 14 m COESÃO: C=20 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’ (kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
14 19 20 2,50 10
20 2,5 4,591
25 2,5 5,075
29 2,5 5,467
33 2,5 5,857
36 2,5 6,162
GEOMETRIA 15: H = 2,5 m Distância Horizontal(Base ao Topo) = 2,5 / tg(30) ~ 4,3 m COESÃO: C=20 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’ (kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
15 19 20 2,50 30
20 2,5 3,190
25 2,5 3,461
29 2,5 3,678
33 2,5 3,922
36 2,5 4,069

182
GEOMETRIA 16: H = 2,5 m Distância Horizontal(Base ao Topo) = 2,5 / tg(50) ~ 2,1 m COESÃO: C=20 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’ (kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
16 19 20 2,50 50
20 2,5 2,620
25 2,5 2,950
29 2,5 3,014
33 2,5 3,082
36 2,5 3,163
GEOMETRIA 17: H = 2,5 m Distância Horizontal (Base ao Topo) = 2,5 / tg(70) ~ 0,90 m COESÃO: C=20 KPa
Geometria – Altura= 2,5m - Inclinação= 70º - Linha piezométrica= 2,5 m Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’ (kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
17 19 20 2,50 70
20 0,0 2,697
2,5 2,383
25 0,0 2,775
2,5 2,379
29 0,0 2,847
2,5 2,382
33 0,0 2,929
2,5 2,390
36 0,0 2,997
2,5 2,400
GEOMETRIA 18: H = 2,5 m Distância Horizontal (Base ao Topo) = 0,00 m COESÃO: C=20 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’ (kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
18 19 20 2,50 90
20
-10 1,746
0,0 1,746
0,8 1,672
1,6 1,551
2,5 1,333
25
-10 1,812
0,0 1,812
0,8 1,755
1,6 1,594
2,5 1,320
29
-10 1,921
0,0 1,921
0,8 1,825
1,6 1,628
2,5 1,303
33
-10 1,981
0,0 1,981
0,8 1,873
1,6 1,655
2,5 1,255
36
-10 2,035
0,0 2,035
0,8 1,925
1,6 1,689
2,5 1,209

183
GEOMETRIA 19: H = 5,0 m Distância Horizontal(Base ao Topo) = 5,0 / tg(10) ~ 28,4 m COESÃO: C=0 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
19 19 5 5,00 10
20
-10 2,069
0,0 1,852
1,7 1,210
3,4 1,038
5,0 1,001
25
-10 2,650
0,0 2,373
1,7 1,532
3,4 1,329
5,0 1,283
29
-10 3,150
0,0 2,280
1,7 1,843
3,4 1,579
5,0 1,524
33
-10 3,691
0,0 3,304
1,7 2,163
3,4 1,850
5,0 1,786
36
-10 4,129
0,0 3,697
1,7 2,421
3,4 2,070
5,0 1,998
GEOMETRIA 20: H = 5,0 m Distância Horizontal(Base ao Topo) = 5,0 / tg(30) ~ 8,7 m COESÃO: C=0 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
20 19 0 5,00 30
20
-10 0,638
0,0 0,638
1,7 0,424
3,4 0,352
5,0 0,314
25
-10 0,817
0,0 0,817
1,7 0,518
3,4 0,448
5,0 0,399
29
-10 0,971
0,0 0,971
1,7 0,615
3,4 0,532
5,0 0,474
33
-10 1,138
0,0 1,138
1,7 0,721
3,4 0,623
5,0 0,555
36 -10 1,273
0,0 1,273
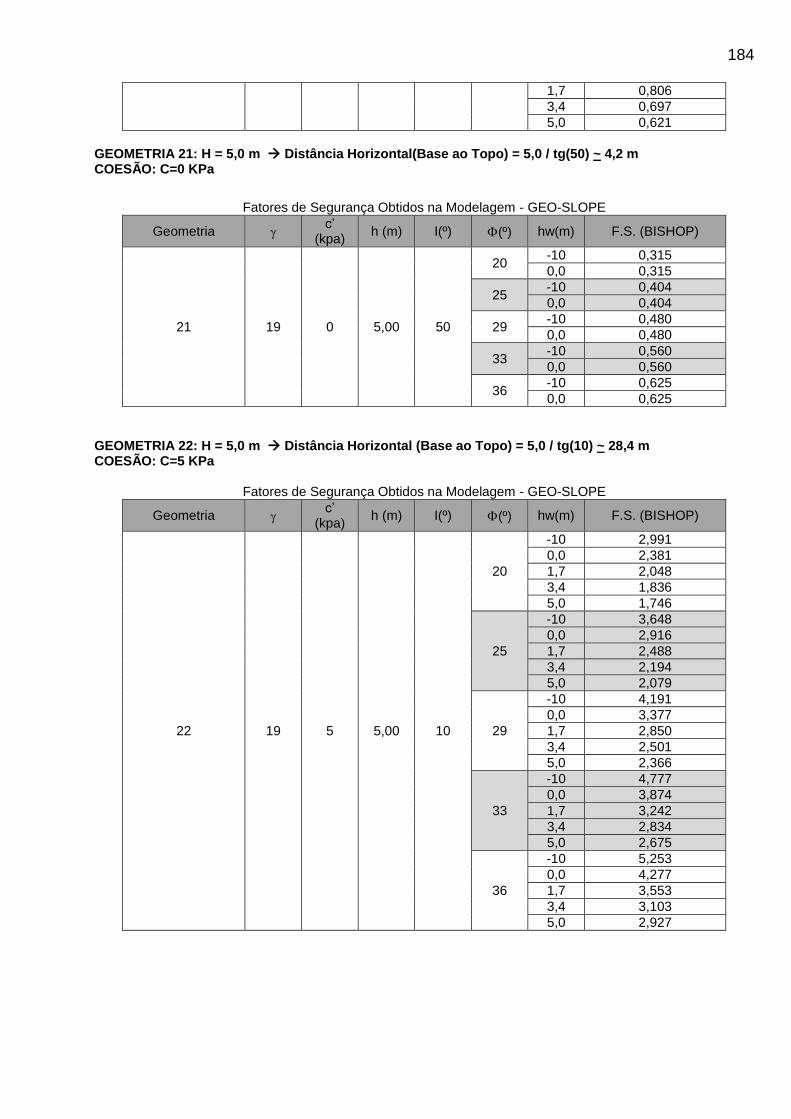
184
1,7 0,806
3,4 0,697
5,0 0,621
GEOMETRIA 21: H = 5,0 m Distância Horizontal(Base ao Topo) = 5,0 / tg(50) ~ 4,2 m COESÃO: C=0 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
21 19 0 5,00 50
20 -10 0,315
0,0 0,315
25 -10 0,404
0,0 0,404
29 -10 0,480
0,0 0,480
33 -10 0,560
0,0 0,560
36 -10 0,625
0,0 0,625
GEOMETRIA 22: H = 5,0 m Distância Horizontal (Base ao Topo) = 5,0 / tg(10) ~ 28,4 m COESÃO: C=5 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
22 19 5 5,00 10
20
-10 2,991
0,0 2,381
1,7 2,048
3,4 1,836
5,0 1,746
25
-10 3,648
0,0 2,916
1,7 2,488
3,4 2,194
5,0 2,079
29
-10 4,191
0,0 3,377
1,7 2,850
3,4 2,501
5,0 2,366
33
-10 4,777
0,0 3,874
1,7 3,242
3,4 2,834
5,0 2,675
36
-10 5,253
0,0 4,277
1,7 3,553
3,4 3,103
5,0 2,927

185
GEOMETRIA 23: H = 5,0 m Distância Horizontal (Base ao Topo) = 5,0 / tg(30) ~ 8,7 m COESÃO: C=5 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
23 19 5 5,00 30
20
-10 1,312
0,0 1,259
1,7 1,071
3,4 0,953
5,0 0,890
25
-10 1,549
0,0 1,493
1,7 1,249
3,4 1,104
5,0 1,024
29
-10 1,752
0,0 1,692
1,7 1,402
3,4 1,228
5,0 1,134
33
-10 1,972
0,0 1,902
1,7 1,562
3,4 1,361
5,0 1,248
36
-10 2,143
0,0 2,069
1,7 1,692
3,4 1,463
5,0 1,341
GEOMETRIA 24: H = 5,0 m Distância Horizontal (Base ao Topo) = 5,0 / tg(50) ~ 4,2 m COESÃO: C=5 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
24 19 5 5,00 50
20
-10 0,848
0,0 0,843
1,7 0,734
3,4 0,644
5,0 0,617
25
-10 0,995
0,0 0,987
1,7 0,847
3,4 0,739
5,0 0,693
29
-10 1,114
0,0 1,105
1,7 0,953
3,4 0,821
5,0 0,772
33
-10 1,215
0,0 1,210
1,7 1,079
3,4 0,905
5,0 0,839
36 -10 1,438
0,0 1,436

186
1,7 1,135
3,4 0,894
5,0 0,898
GEOMETRIA 25: H = 5,0 m Distância Horizontal (Base ao Topo) = 5,0 / tg(70) ~ 1,8 m COESÃO: C=5 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
25 19 5 5,00 50
20 -10 0,624
0,0 0,622
25 -10 0,730
0,0 0,730
29 -10 0,827
0,0 0,826
33 -10 0,930
0,0 0,926
36 -10 0,998
0,0 0,998
GEOMETRIA 26: H = 5,0 m Distância Horizontal (Base ao Topo) = 5,0 / tg(10) ~ 28,4 m COESÃO: C=10 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
26 19 10 5,00 10
20
-10 3,553
0,0 2,840
1,7 2,523
3,4 2,320
5,0 2,234
25
-10 4,236
0,0 3,392
1,7 2,965
3,4 2,706
5,0 2,604
29
-10 4,823
0,0 3,853
1,7 3,345
3,4 3,038
5,0 2,917
33
-10 5,458
0,0 4,351
1,7 3,756
3,4 3,396
5,0 3,236
36
-10 5,973
0,0 4,754
1,7 4,089
3,4 3,667
5,0 3,487
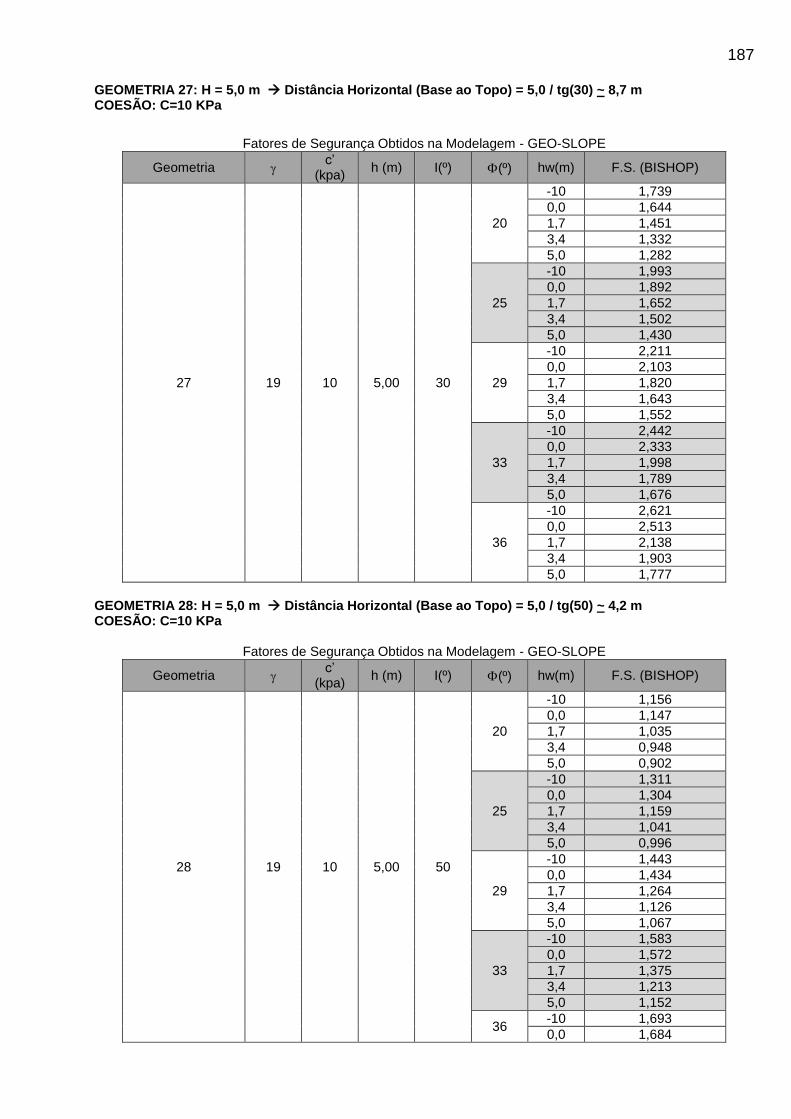
187
GEOMETRIA 27: H = 5,0 m Distância Horizontal (Base ao Topo) = 5,0 / tg(30) ~ 8,7 m COESÃO: C=10 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
27 19 10 5,00 30
20
-10 1,739
0,0 1,644
1,7 1,451
3,4 1,332
5,0 1,282
25
-10 1,993
0,0 1,892
1,7 1,652
3,4 1,502
5,0 1,430
29
-10 2,211
0,0 2,103
1,7 1,820
3,4 1,643
5,0 1,552
33
-10 2,442
0,0 2,333
1,7 1,998
3,4 1,789
5,0 1,676
36
-10 2,621
0,0 2,513
1,7 2,138
3,4 1,903
5,0 1,777
GEOMETRIA 28: H = 5,0 m Distância Horizontal (Base ao Topo) = 5,0 / tg(50) ~ 4,2 m COESÃO: C=10 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
28 19 10 5,00 50
20
-10 1,156
0,0 1,147
1,7 1,035
3,4 0,948
5,0 0,902
25
-10 1,311
0,0 1,304
1,7 1,159
3,4 1,041
5,0 0,996
29
-10 1,443
0,0 1,434
1,7 1,264
3,4 1,126
5,0 1,067
33
-10 1,583
0,0 1,572
1,7 1,375
3,4 1,213
5,0 1,152
36 -10 1,693
0,0 1,684
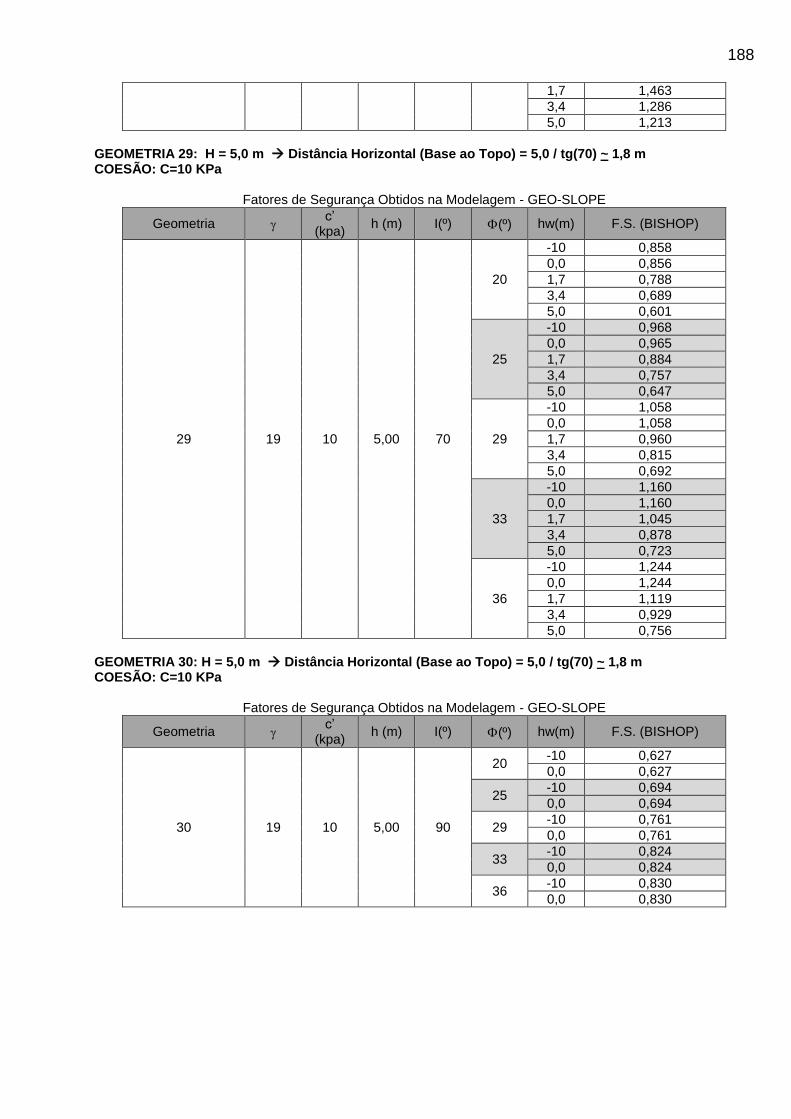
188
1,7 1,463
3,4 1,286
5,0 1,213
GEOMETRIA 29: H = 5,0 m Distância Horizontal (Base ao Topo) = 5,0 / tg(70) ~ 1,8 m COESÃO: C=10 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
29 19 10 5,00 70
20
-10 0,858
0,0 0,856
1,7 0,788
3,4 0,689
5,0 0,601
25
-10 0,968
0,0 0,965
1,7 0,884
3,4 0,757
5,0 0,647
29
-10 1,058
0,0 1,058
1,7 0,960
3,4 0,815
5,0 0,692
33
-10 1,160
0,0 1,160
1,7 1,045
3,4 0,878
5,0 0,723
36
-10 1,244
0,0 1,244
1,7 1,119
3,4 0,929
5,0 0,756
GEOMETRIA 30: H = 5,0 m Distância Horizontal (Base ao Topo) = 5,0 / tg(70) ~ 1,8 m COESÃO: C=10 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
30 19 10 5,00 90
20 -10 0,627
0,0 0,627
25 -10 0,694
0,0 0,694
29 -10 0,761
0,0 0,761
33 -10 0,824
0,0 0,824
36 -10 0,830
0,0 0,830
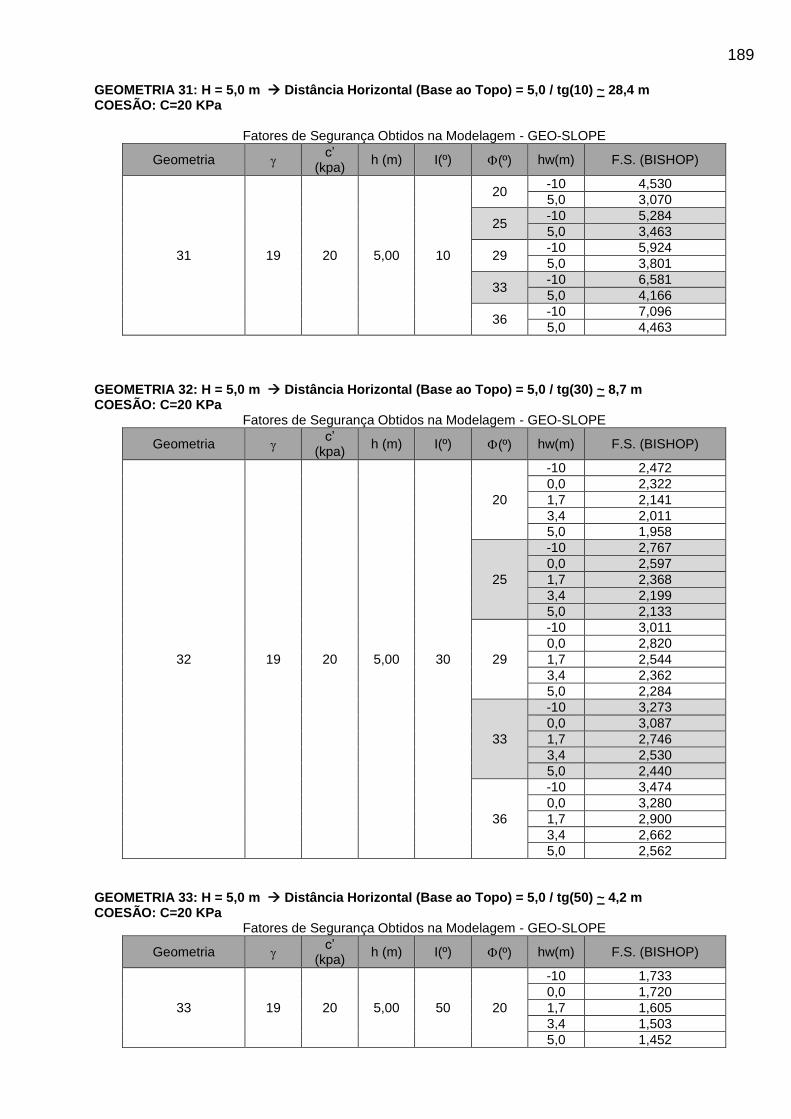
189
GEOMETRIA 31: H = 5,0 m Distância Horizontal (Base ao Topo) = 5,0 / tg(10) ~ 28,4 m COESÃO: C=20 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
31 19 20 5,00 10
20 -10 4,530
5,0 3,070
25 -10 5,284
5,0 3,463
29 -10 5,924
5,0 3,801
33 -10 6,581
5,0 4,166
36 -10 7,096
5,0 4,463
GEOMETRIA 32: H = 5,0 m Distância Horizontal (Base ao Topo) = 5,0 / tg(30) ~ 8,7 m COESÃO: C=20 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
32 19 20 5,00 30
20
-10 2,472
0,0 2,322
1,7 2,141
3,4 2,011
5,0 1,958
25
-10 2,767
0,0 2,597
1,7 2,368
3,4 2,199
5,0 2,133
29
-10 3,011
0,0 2,820
1,7 2,544
3,4 2,362
5,0 2,284
33
-10 3,273
0,0 3,087
1,7 2,746
3,4 2,530
5,0 2,440
36
-10 3,474
0,0 3,280
1,7 2,900
3,4 2,662
5,0 2,562
GEOMETRIA 33: H = 5,0 m Distância Horizontal (Base ao Topo) = 5,0 / tg(50) ~ 4,2 m COESÃO: C=20 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
33 19 20 5,00 50 20
-10 1,733
0,0 1,720
1,7 1,605
3,4 1,503
5,0 1,452

190
25
-10 1,902
0,0 1,886
1,7 1,739
3,4 1,614
5,0 1,552
29
-10 2,057
0,0 2,049
1,7 1,880
3,4 1,706
5,0 1,639
33
-10 2,192
0,0 2,175
1,7 2,004
3,4 1,819
5,0 1,734
36
-10 2,310
0,0 2,292
1,7 2,069
3,4 1,893
5,0 1,803
GEOMETRIA 34: H = 5,0 m Distância Horizontal (Base ao Topo) = 5,0 / tg(70) ~ 1,8 m COESÃO: C=20 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
34 19 20 5,00 70
20
-10 1,310
0,0 1,310
1,7 1,237
3,4 1,145
5,0 1,048
25
-10 1,425
0,0 1,425
1,7 1,335
3,4 1,208
5,0 1,080
29
-10 1,522
0,0 1,522
1,7 1,417
3,4 1,267
5,0 1,119
33
-10 1,629
0,0 1,629
1,7 1,504
3,4 1,326
5,0 1,165
36
-10 1,712
0,0 1,712
1,7 1,573
3,4 1,377
5,0 1,199

191
GEOMETRIA 35: H = 5,0 m Distância Horizontal (Base ao Topo) = 5,0 / tg(70) ~ 1,8 m COESÃO: C=20 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
35 19 20 5,00 90
20
-10 1,001
0,0 1,001
1,7 0,941
3,4 0,826
5,0 0,601
25
-10 1,076
0,0 1,076
1,7 1,004
3,4 0,807
5,0 0,550
29
-10 1,140
0,0 1,140
1,7 1,052
3,4 0,816
5,0 0,522
33
-10 1,202
0,0 1,202
1,7 1,100
3,4 0,822
5,0 0,471
36
-10 1,258
0,0 1,258
1,7 1,143
3,4 0,840
5,0 0,418
GEOMETRIA 36: H = 10,0 m Distância Horizontal(Base ao Topo) = 10 / tg(10) ~ 56,7 m COESÃO: C=0 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
36 19 0 10,00 10
20
-10 2,065
0,0 1,850
3,0 1,267
6,0 1,019
10,0 0,999
25
-10 2,645
0,0 2,370
3,0 1,557
6,0 1,305
10,0 1,280
29
-10 3,144
0,0 2,817
3,0 1,858
6,0 1,551
10,0 1,521
33
-10 3,684
0,0 3,301
3,0 2,179
6,0 1,817
10,0 1,782
36
-10 4,121
0,0 3,693
3,0 2,395
6,0 2,030
10,0 1,994
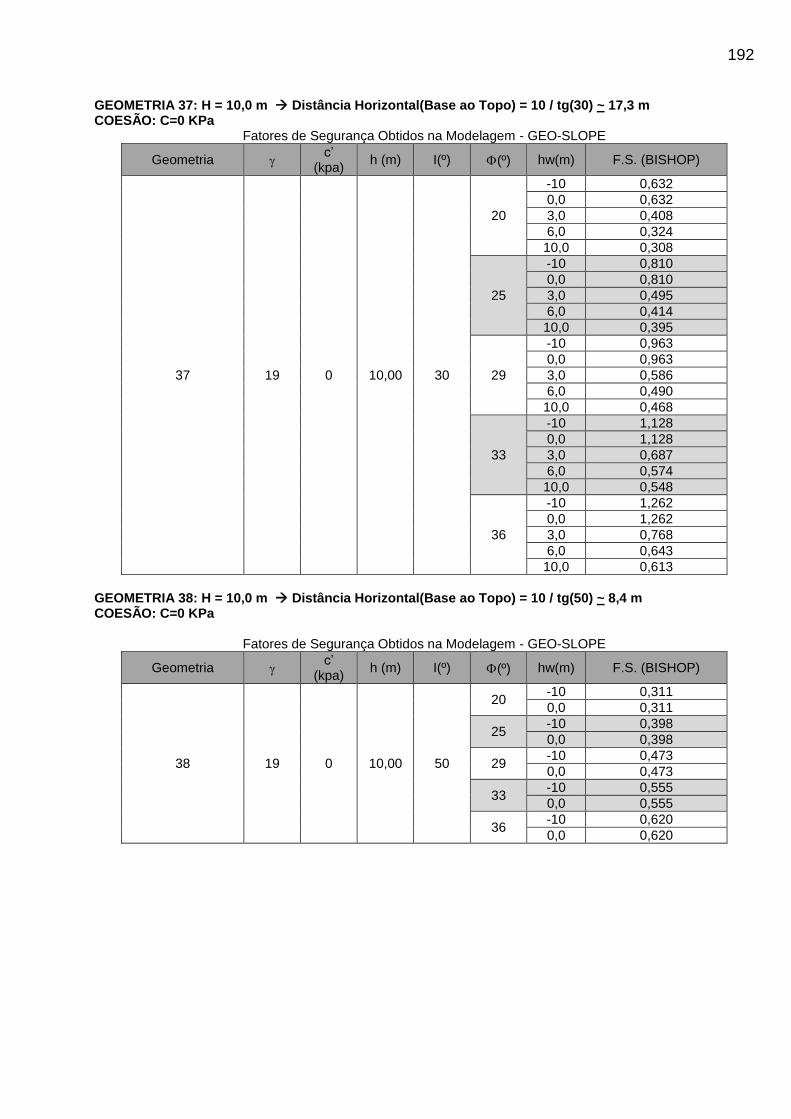
192
GEOMETRIA 37: H = 10,0 m Distância Horizontal(Base ao Topo) = 10 / tg(30) ~ 17,3 m COESÃO: C=0 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
37 19 0 10,00 30
20
-10 0,632
0,0 0,632
3,0 0,408
6,0 0,324
10,0 0,308
25
-10 0,810
0,0 0,810
3,0 0,495
6,0 0,414
10,0 0,395
29
-10 0,963
0,0 0,963
3,0 0,586
6,0 0,490
10,0 0,468
33
-10 1,128
0,0 1,128
3,0 0,687
6,0 0,574
10,0 0,548
36
-10 1,262
0,0 1,262
3,0 0,768
6,0 0,643
10,0 0,613
GEOMETRIA 38: H = 10,0 m Distância Horizontal(Base ao Topo) = 10 / tg(50) ~ 8,4 m COESÃO: C=0 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
38 19 0 10,00 50
20 -10 0,311
0,0 0,311
25 -10 0,398
0,0 0,398
29 -10 0,473
0,0 0,473
33 -10 0,555
0,0 0,555
36 -10 0,620
0,0 0,620

193
GEOMETRIA 39: H = 10,0 m Distância Horizontal (Base ao Topo) = 10 / tg(10) ~ 56,7 m COESÃO: C=5 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
39 19 5 10,00 10
20
-10 2,609
0,0 2,133
3,0 1,814
6,0 1,579
10,0 1,451
25
-10 3,239
0,0 2,664
3,0 2,229
6,0 1,922
10,0 1,764
29
-10 3,781
0,0 3,114
3,0 2,551
6,0 2,212
10,0 2,027
33
-10 4,367
0,0 3,600
3,0 2,893
6,0 2,523
10,0 2,312
36
-10 4,841
0,0 3,994
3,0 3,170
6,0 2,768
10,0 2,543
GEOMETRIA 40: H = 10,0 m Distância Horizontal (Base ao Topo) = 10 / tg(30) ~ 17,3 m
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
40 19 5 10,00 30
20
-10 1,043
0,0 1,031
3,0 0,860
6,0 0,744
10,0 0,673
25
-10 1,243
0,0 1,243
3,0 1,023
6,0 0,880
10,0 0,784
29
-10 1,414
0,0 1,414
3,0 1,164
6,0 0,995
10,0 0,877
33
-10 1,600
0,0 1,600
3,0 1,315
6,0 1,113
10,0 0,970
36
-10 1,750
0,0 1,750
3,0 1,428
6,0 1,208
10,0 1,046

194
GEOMETRIA 41: H = 10,0 m Distância Horizontal (Base ao Topo) = 10 / tg(50) ~ 8,4 m COESÃO: C=5 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
41 19 5 10,00 50
20 -10 0,646
0,0 0,644
25 -10 0,774
0,0 0,774
29 -10 0,876
0,0 0,876
33 -10 0,977
0,0 0,977
36 -10 1,060
0,0 1,059
GEOMETRIA 42: H = 10,0 m Distância Horizontal (Base ao Topo) = 10 / tg(10) ~ 56,7 m COESÃO: C=10 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
42 19 10 10,00 10
20
-10 2,963
0,0 2,368
3,0 2,077
6,0 1,875
10,0 1,734
25
-10 3,608
0,0 2,902
3,0 2,528
6,0 2,244
10,0 2,063
29
-10 4,149
0,0 3,361
3,0 2,903
6,0 2,559
10,0 2,345
33
-10 4,735
0,0 3,856
3,0 3,304
6,0 2,888
10,0 2,650
36
-10 5,210
0,0 4,258
3,0 3,622
6,0 3,153
10,0 2,898
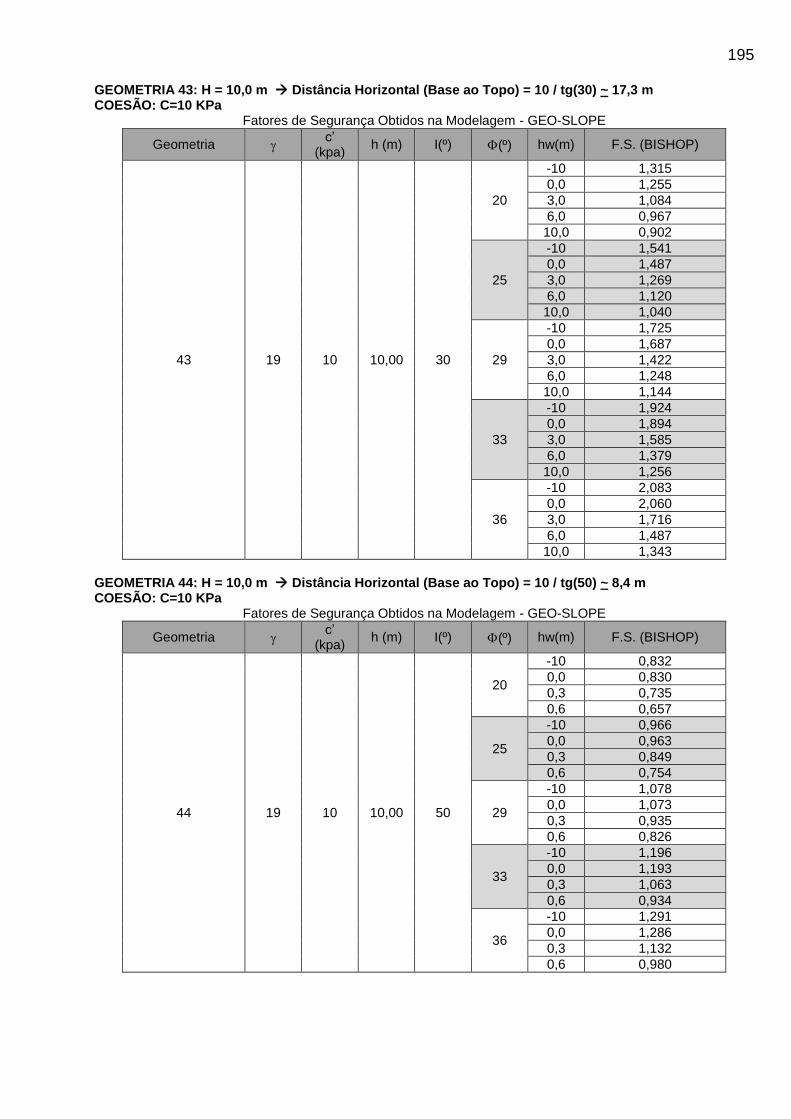
195
GEOMETRIA 43: H = 10,0 m Distância Horizontal (Base ao Topo) = 10 / tg(30) ~ 17,3 m COESÃO: C=10 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
43 19 10 10,00 30
20
-10 1,315
0,0 1,255
3,0 1,084
6,0 0,967
10,0 0,902
25
-10 1,541
0,0 1,487
3,0 1,269
6,0 1,120
10,0 1,040
29
-10 1,725
0,0 1,687
3,0 1,422
6,0 1,248
10,0 1,144
33
-10 1,924
0,0 1,894
3,0 1,585
6,0 1,379
10,0 1,256
36
-10 2,083
0,0 2,060
3,0 1,716
6,0 1,487
10,0 1,343
GEOMETRIA 44: H = 10,0 m Distância Horizontal (Base ao Topo) = 10 / tg(50) ~ 8,4 m COESÃO: C=10 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
44 19 10 10,00 50
20
-10 0,832
0,0 0,830
0,3 0,735
0,6 0,657
25
-10 0,966
0,0 0,963
0,3 0,849
0,6 0,754
29
-10 1,078
0,0 1,073
0,3 0,935
0,6 0,826
33
-10 1,196
0,0 1,193
0,3 1,063
0,6 0,934
36
-10 1,291
0,0 1,286
0,3 1,132
0,6 0,980

196
GEOMETRIA 45: H = 10,0 m Distância Horizontal (Base ao Topo) = 10 / tg(10) ~ 56,7 m COESÃO: C=20 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
45 19 20 10,00 10
20
-10 3,530
0,0 2,819
3,0 2,552
6,0 2,352
10,0 2,214
25
-10 4,204
0,0 3,368
3,0 3,003
6,0 2,749
10,0 2,593
29
-10 4,783
0,0 3,831
3,0 3,391
6,0 3,089
10,0 2,892
33
-10 5,408
0,0 4,327
3,0 3,809
6,0 3,457
10,0 3,211
36
-10 5,916
0,0 4,729
3,0 4,149
6,0 3,745
10,0 3,464
GEOMETRIA 46:H = 10,0 m Distância Horizontal (Base ao Topo) = 10 / tg(30) ~ 17,3 m COESÃO: C=20 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
46 19 20 10,00 30
20
-10 1,740
0,0 1,630
3,0 1,465
6,0 1,353
10,0 1,281
25
-10 2,001
0,0 1,884
3,0 1,672
6,0 1,532
10,0 1,431
29
-10 2,230
0,0 2,100
3,0 1,842
6,0 1,668
10,0 1,557
33
-10 2,455
0,0 2,333
3,0 2,023
6,0 1,815
10,0 1,692
36
-10 2,627
0,0 2,507
3,0 2,165
6,0 1,933
10,0 1,802

197
GEOMETRIA 47: H = 10,0 m Distância Horizontal (Base ao Topo) = 10 / tg(50) ~ 8,4 m COESÃO: C=20 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
47 19 20 10,00 50
20
-10 1,158
0,0 1,147
3,0 1,049
6,0 0,969
10,0 0,908
25
-10 1,304
0,0 1,297
3,0 1,171
6,0 1,065
10,0 1,004
29
-10 1,429
0,0 1,421
3,0 1,274
6,0 1,149
10,0 1,073
33
-10 1,559
0,0 1,553
3,0 1,383
6,0 1,241
10,0 1,154
36
-10 1,663
0,0 1,656
3,0 1,468
6,0 1,311
10,0 1,219
GEOMETRIA 48: H = 10,0 m Distância Horizontal (Base ao Topo) = 10 / tg(70) ~ 3,6 m COESÃO: C=20 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
48 19 20 10,00 70
20
-10 0,838
0,0 0,838
3,0 0,778
6,0 0,690
10,0 0,588
25
-10 0,931
0,0 0,931
3,0 0,855
6,0 0,749
10,0 0,624
29
-10 1,008
0,0 1,008
3,0 0,917
6,0 0,800
10,0 0,652
33
-10 1,088
0,0 1,088
3,0 0,984
6,0 0,834
10,0 0,678
36
-10 1,153
0,0 1,153
3,0 1,034
6,0 0,872
10,0 0,705

198
GEOMETRIA 49: H = 10,0 m Distância Horizontal (Base ao Topo) = 10 / tg(90) ~ 0,0 m COESÃO: C=20 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
49 19 20,00 10,00 90
20 -10 0,626
25 -10 0,694
29 -10 0,719
33 -10 0,773
36 -10 0,815
GEOMETRIA 50: H = 20,0 m Distância Horizontal(Base ao Topo) = 20 / tg(10) ~ 113,4 m COESÃO: C=0 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
50 19 0 20,00 10
20
-10 2,066
0,0 1,849
7 1,082
14 1,006
20,0 1,000
25
-10 2,647
0,0 2,369
7 1,392
14 1,289
20,0 1,281
29
-10 3,145
0,0 2,817
7 1,652
14 1,531
20,0 1,522
33
-10 3,685
0,0 3,300
7 1,937
14 1,794
20,0 1,783
36
-10 4,123
0,0 3,692
7 2,168
14 2,007
20,0 1,995
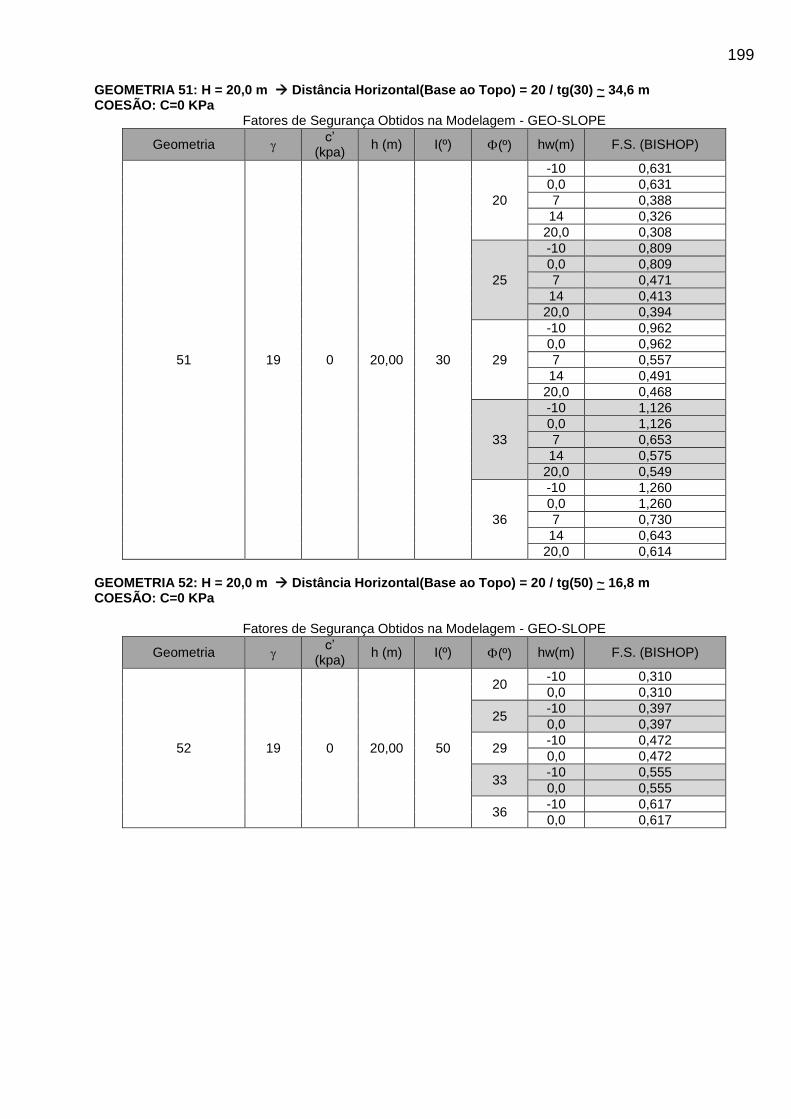
199
GEOMETRIA 51: H = 20,0 m Distância Horizontal(Base ao Topo) = 20 / tg(30) ~ 34,6 m COESÃO: C=0 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
51 19 0 20,00 30
20
-10 0,631
0,0 0,631
7 0,388
14 0,326
20,0 0,308
25
-10 0,809
0,0 0,809
7 0,471
14 0,413
20,0 0,394
29
-10 0,962
0,0 0,962
7 0,557
14 0,491
20,0 0,468
33
-10 1,126
0,0 1,126
7 0,653
14 0,575
20,0 0,549
36
-10 1,260
0,0 1,260
7 0,730
14 0,643
20,0 0,614
GEOMETRIA 52: H = 20,0 m Distância Horizontal(Base ao Topo) = 20 / tg(50) ~ 16,8 m COESÃO: C=0 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
52 19 0 20,00 50
20 -10 0,310
0,0 0,310
25 -10 0,397
0,0 0,397
29 -10 0,472
0,0 0,472
33 -10 0,555
0,0 0,555
36 -10 0,617
0,0 0,617

200
GEOMETRIA 53: H = 20,0 m Distância Horizontal(Base ao Topo) = 20 / tg(10) ~ 113,4 m COESÃO: C=5 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
53 19 5 20,00 10
20
-10,0 2,422
0,0 2,013
7,0 1,538
14,0 1,348
20,0 1,275
25
-10 3,034
0,0 2,534
7,0 1,895
14,0 1,657
20,0 1,580
29
-10,0 3,548
0,0 2,982
7,0 2,202
14 1,921
20,0 1,842
33
-10,0 4,105
0,0 3,467
7,0 2,530
14,0 2,207
20,0 2,126
36
-10,0 4,556
0,0 3,859
7,0 2,787
14,0 2,439
20,0 2,355
GEOMETRIA 54: H = 20,0 m Distância Horizontal(Base ao Topo) = 20 / tg(30) ~ 34,6 m COESÃO: C=5 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
54 19 5 20,00 30
20
-10 0,882
0,0 0,882
7 0,693
14 0,571
20,0 0,520
25
-10 1,087
0,0 1,087
7 0,833
14 0,683
20,0 0,627
29
-10 1,255
0,0 1,255
7 0,944
14 0,776
20,0 0,716
33
-10 1,433
0,0 1,433
7 1,061
14 0,875
20,0 0,810
36 -10 1,578
0,0 1,578
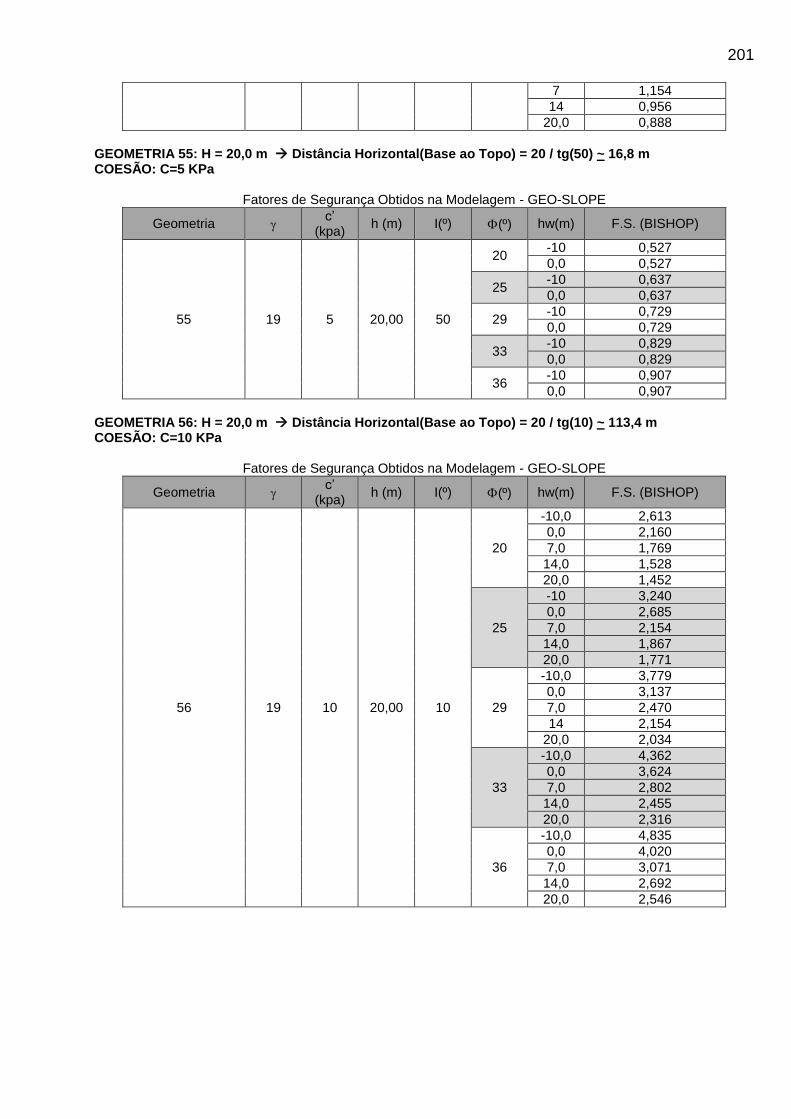
201
7 1,154
14 0,956
20,0 0,888
GEOMETRIA 55: H = 20,0 m Distância Horizontal(Base ao Topo) = 20 / tg(50) ~ 16,8 m COESÃO: C=5 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
55 19 5 20,00 50
20 -10 0,527
0,0 0,527
25 -10 0,637
0,0 0,637
29 -10 0,729
0,0 0,729
33 -10 0,829
0,0 0,829
36 -10 0,907
0,0 0,907
GEOMETRIA 56: H = 20,0 m Distância Horizontal(Base ao Topo) = 20 / tg(10) ~ 113,4 m COESÃO: C=10 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
56 19 10 20,00 10
20
-10,0 2,613
0,0 2,160
7,0 1,769
14,0 1,528
20,0 1,452
25
-10 3,240
0,0 2,685
7,0 2,154
14,0 1,867
20,0 1,771
29
-10,0 3,779
0,0 3,137
7,0 2,470
14 2,154
20,0 2,034
33
-10,0 4,362
0,0 3,624
7,0 2,802
14,0 2,455
20,0 2,316
36
-10,0 4,835
0,0 4,020
7,0 3,071
14,0 2,692
20,0 2,546

202
GEOMETRIA 57: H = 20,0 m Distância Horizontal(Base ao Topo) = 20 / tg(30) ~ 34,6 m COESÃO: C=10 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
57 19 10 20,00 30
20
-10 1,028
0,0 1,028
7 0,834
14 0,712
20,0 0,653
25
-10 1,236
0,0 1,236
7 0,994
14 0,838
20,0 0,767
29
-10 1,415
0,0 1,415
7 1,127
14 0,942
20,0 0,859
33
-10 1,607
0,0 1,607
7 1,270
14 1,052
20,0 0,957
36
-10 1,762
0,0 1,762
7 1,385
14 1,136
20,0 1,037
GEOMETRIA 58: H = 20,0 m Distância Horizontal(Base ao Topo) = 20 / tg(50) ~ 16,8 m COESÃO: C=10 Kpa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
58 19 10 20,00 50
20 -10 0,643
0,0 0,643
25 -10 0,762
0,0 0,762
29 -10 0,860
0,0 0,860
33 -10 0,966
0,0 0,966
36 -10 1,052
0,0 1,052
GEOMETRIA 59: H = 20,0 m Distância Horizontal (Base ao Topo) = 20 / tg(10) ~ 113,4 m COESÃO: C=20 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
59 19 20 20,00 10
20
-10,0 2,965
0,0 2,453
7,0 2,067
14,0 1,821
20,0 1,733
25 -10 3,621
0,0 2,978

203
7,0 2,484
14,0 2,169
20,0 2,069
29
-10,0 4,161
0,0 3,430
7,0 2,842
14 2,468
20,0 2,350
33
-10,0 4,744
0,0 3,918
7,0 3,229
14,0 2,792
20,0 2,654
36
-10,0 5,217
0,0 4,313
7,0 3,553
14,0 3,051
20,0 2,900
GEOMETRIA 60: H = 20,0 m Distância Horizontal (Base ao Topo) = 20 / tg(30) ~ 34,6 m COESÃO: C=20 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
60 19 20 20,00 30
20
-10 1,283
0,0 1,260
7 1,062
14 0,935
20,0 0,876
25
-10 1,503
0,0 1,501
7 1,240
14 1,072
20,0 1,003
29
-10 1,692
0,0 1,690
7 1,388
14 1,190
20,0 1,109
33
-10 1,896
0,0 1,894
7 1,546
14 1,318
20,0 1,219
36
-10 2,053
0,0 2,053
7 1,666
14 1,421
20,0 1,305
GEOMETRIA 61: H = 20,0 m Distância Horizontal (Base ao Topo) = 20 / tg(50) ~ 16,8 m COESÃO: C=20 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
61 19 20 20,00 50 20
-10 0,834
0,0 0,831
7 0,721
14 0,638
20,0 0,612

204
25
-10 0,966
0,0 0,964
7 0,824
14 0,722
20,0 0,694
29
-10 1,075
0,0 1,073
7 0,909
14 0,792
20,0 0,757
33
-10 1,191
0,0 1,189
7 1,004
14 0,866
20,0 0,827
36
-10 1,285
0,0 1,285
7 1,068
14 0,922
20,0 0,881
GEOMETRIA 62: H = 20,0 m Distância Horizontal (Base ao Topo) = 20 / tg(70) ~ 7,3 m COESÃO: C=20 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
62 19 20 20,00 70
20 -10 0,584
0,0 0,584
25 -10 0,660
0,0 0,660
29 -10 0,726
0,0 0,726
33 -10 0,794
0,0 0,794
36 -10 0,845
0,0 0,845

205
GEOMETRIA 63: H = 40,0 m Distância Horizontal(Base ao Topo) = 40 / tg(10) ~ 226,9 m COESÃO: C=0 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
63 19 0 40,00 10
20
-10 2,065
0,0 1,878
16 1,065
28 1,006
40 0,999
25
-10 2,647
0,0 2,406
16 1,344
28 1,289
40 1,280
29
-10 3,146
0,0 2,860
16 1,610
28 1,532
40 1,522
33
-10 3,690
0,0 3,350
16 1,886
28 1,794
40 1,784
36
-10 4,125
0,0 3,748
16 2,109
28 2,008
40 1,995
GEOMETRIA 64: H = 40,0 m Distância Horizontal(Base ao Topo) = 40 / tg(30) ~ 69,3 m COESÃO: C=0 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
64 19 0 40,00 30
20
-10 0,632
0,0 0,632
16 0,350
28 0,318
40 0,307
25
-10 0,809
0,0 0,809
16 0,442
28 0,407
40 0,395
29
-10 0,962
0,0 0,962
16 0,526
28 0,484
40 0,464
33
-10 1,126
0,0 1,126
16 0,616
28 0,567
40 0,547
36
-10 1,260
0,0 1,260
16 0,689
28 0,634
40 0,612

206
GEOMETRIA 65: H = 40,0 m Distância Horizontal(Base ao Topo) = 40 / tg(50) ~ 33,6 m COESÃO: C=0 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
65 19 0 40,00 50
20 -10 0,309
0,0 0,309
25 -10 0,396
0,0 0,396
29 -10 0,470
0,0 0,470
33 -10 0,554
0,0 0,554
36 -10 0,617
0,0 0,617
GEOMETRIA 66: H = 40,0 m Distância Horizontal (Base ao Topo) = 40 / tg(10) ~ 226,9 m COESÃO: C= 5 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
66 19 5 40,00 10
20
-10 2,283
0,0 2,022
16 1,331
28 1,218
40 1,178
25
-10 2,879
0,0 2,550
16 1,653
28 1,522
40 1,480
29
-10 3,391
0,0 3,004
16 1,931
28 1,784
40 1,728
33
-10 3,944
0,0 3,494
16 2,230
28 2,065
40 1,996
36
-10 4,393
0,0 3,892
16 2,473
28 2,284
40 2,214
GEOMETRIA 67: H = 40,0 m Distância Horizontal(Base ao Topo) = 40 / tg(30) ~ 69,3 m COESÃO: C= 5 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
67 19 5 40,00 30 20
-10 0,785
0,0 0,785
16 0,558
28 0,481
40 0,443

207
25
-10 0,976
0,0 0,976
16 0,673
28 0,585
40 0,542
29
-10 1,140
0,0 1,140
16 0,770
28 0,668
40 0,621
33
-10 1,317
0,0 1,317
16 0,876
28 0,761
40 0,709
36
-10 1,460
0,0 1,460
16 0,963
28 0,836
40 0,781
GEOMETRIA 68: H = 40,0 m Distância Horizontal(Base ao Topo) = 40 / tg(50) ~ 33,6 m COESÃO: C= 5 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
68 19 5 40,00 50
20 -10 0,448
0,0 0,448
25 -10 0,549
0,0 0,549
29 -10 0,634
0,0 0,634
33 -10 0,724
0,0 0,724
36 -10 0,791
0,0 0,791
GEOMETRIA 69: H = 40,0 m Distância Horizontal (Base ao Topo) = 40 / tg(10) ~ 226,9 m COESÃO: C= 10 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
69 19 10 40,00 10
20
-10 2,419
0,0 2,129
16 1,488
28 1,345
40 1,277
25
-10 3,042
0,0 2,670
16 1,829
28 1,653
40 1,582
29
-10 3,555
0,0 3,135
16 2,115
28 1,918
40 1,843
33 -10 4,108
0,0 3,638

208
16 2,415
28 2,202
40 2,124
36
-10 4,557
0,0 4,036
16 2,658
28 2,432
40 2,353
GEOMETRIA 70: H = 40,0 m Distância Horizontal(Base ao Topo) = 40 / tg(30) ~ 69,3 m COESÃO: C= 10 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
70 19 10 40,00 30
20
-10 0,878
0,0 0,878
16 0,673
28 0,574
40 0,526
25
-10 1,074
0,0 1,074
16 0,808
28 0,686
40 0,630
29
-10 1,243
0,0 1,243
16 0,913
28 0,781
40 0,716
33
-10 1,422
0,0 1,422
16 1,024
28 0,881
40 0,806
36
-10 1,566
0,0 1,566
16 1,111
28 0,960
40 0,881
GEOMETRIA 71: H = 40,0 m Distância Horizontal(Base ao Topo) = 40 / tg(50) ~ 33,6 m COESÃO: C= 10 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
71 19 10 40,00 50
20 -10 0,527
0,0 0,527
25 -10 0,636
0,0 0,636
29 -10 0,726
0,0 0,726
33 -10 0,820
0,0 0,820
36 -10 0,890
0,0 0,890

209
GEOMETRIA 72: H = 40,0 m Distância Horizontal (Base ao Topo) = 40 / tg(10) ~ 226,9 m COESÃO: C= 20 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
72 19 20 40,00 10
20
-10 2,617
0,0 2,323
16 1,743
28 1,553
40 1,456
25
-10 3,245
0,0 2,874
16 2,098
28 1,885
40 1,765
29
-10 3,781
0,0 3,340
16 2,399
28 2,161
40 2,031
33
-10 4,360
0,0 3,842
16 2,715
28 2,452
40 2,317
36
-10 4,830
0,0 4,250
16 2,972
28 2,686
40 2,550
GEOMETRIA 73: H = 40,0 m Distância Horizontal(Base ao Topo) = 40 / tg(30) ~ 69,3 m COESÃO: C= 20 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
73 19 20 40,00 30
20
-10 1,033
0,0 1,033
16 0,813
28 0,708
40 0,656
25
-10 1,242
0,0 1,242
16 0,967
28 0,835
40 0,770
29
-10 1,419
0,0 1,419
16 1,095
28 0,941
40 0,865
33
-10 1,603
0,0 1,603
16 1,233
28 1,053
40 0,966
36
-10 1,753
0,0 1,753
16 1,343
28 1,143
40 1,049

210
GEOMETRIA 74: H = 40,0 m Distância Horizontal(Base ao Topo) = 40 / tg(50) ~ 33,6 m COESÃO: C= 20 KPa
Fatores de Segurança Obtidos na Modelagem - GEO-SLOPE
Geometria c’
(kpa) h (m) I(º) (º) hw(m) F.S. (BISHOP)
74 19 20 40,00 50
20 -10 0,642
0,0 0,642
25 -10 0,765
0,0 0,765
29 -10 0,861
0,0 0,861
33 -10 0,966
0,0 0,966
36 -10 1,052
0,0 1,052