Embed Size (px)
Citation preview

Universidade Federal do Rio de Janeiro
Escola Politécnica
Departamento de Eletrônica e de Computação
Processamento Digital de Imagens aplicado ao Auxílio à Programação do Sistema de Controle de Avarias (SCAV) da
Marinha do Brasil (MB)
Autor:
_________________________________________________ Fábio Pereira Azevedo Teixeira
Orientador:
_________________________________________________ Heraldo Luis Silveira de Almeida, D.Sc.
Examinador:
_________________________________________________ Flávio Luis de Mello, D.Sc.
Examinador:
_________________________________________________ Aloysio de Castro Pinto Pedroza, Dr.
DEL
Agosto de 2014

ii
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO
Escola Politécnica – Departamento de Eletrônica e de Computação
Centro de Tecnologia, bloco H, sala H-217, Cidade Universitária
Rio de Janeiro – RJ CEP 21949-900
Este exemplar é de propriedade da Universidade Federal do Rio de Janeiro, que
poderá incluí-lo em base de dados, armazenar em computador, microfilmar ou adotar
qualquer forma de arquivamento.
É permitida a menção, reprodução parcial ou integral e a transmissão entre
bibliotecas deste trabalho, sem modificação de seu texto, em qualquer meio que esteja
ou venha a ser fixado, para pesquisa acadêmica, comentários e citações, desde que sem
finalidade comercial e que seja feita a referência bibliográfica completa.
Os conceitos expressos neste trabalho são de responsabilidade do(s) autor(es) e
do(s) orientador(es).

iii
DEDICATÓRIA
Dedico este trabalho ao meu filho(a) ainda não nascido(a) e a todas as pessoas
que contribuíram para sua confecção e que me ajudaram a concluir o curso de
Engenharia Eletrônica e Computação, entre elas em especial, aos meus pais Mônica e
Paulo, e à minha namorada Analice.
iv
AGRADECIMENTO
Agradeço a todos aqueles que contribuíram de forma direta ou indireta para a
minha formação nesta Universidade e à confecção desse trabalho.
Ao professor Heraldo Luis Silveira de Almeida por sua confiança e orientação
segura no decorrer desse projeto.
Ao Instituto de Pesquisas da Marinha - Grupo de Sistemas Digitais pela
oportunidade de contribuir no aprimoramento do processo de desenvolvimento do
Sistema de Controle de Avarias dos Meios Navais da Marinha do Brasil.
Por fim, ao povo brasileiro que contribuiu de forma significativa à minha
formação e estada nesta Universidade. Este projeto é uma pequena forma de retribuir o
investimento e confiança em mim depositados.
v
RESUMO
Este Trabalho de Conclusão de Curso documenta o desenvolvimento de um
Software de Auxílio à Programação dos Sistemas de Controle de Avarias da Marinha do
Brasil. Introduz algumas técnicas inovadoras de processamento de imagens e é capaz de
automatizar tarefas repetitivas e laboriosas relativas ao traçado de objetos visuais em
tela, antes atribuídas a um programador. O software desenvolvido reduz o tempo
despendido pelo profissional alocado para a realização dessa atividade do projeto, em
mais de 90 por cento.
Palavras-Chave: desenvolvimento de software, redução de tempo de atividade
de projeto, automatização de tarefas, processamento de imagens, segmentação
de imagem, thresholding, cobertura de polígono retilíneo com número mínimo
de retângulos, traço de caminho sobre perímetro fechado, ajuste de polígono a
um perímetro fechado.

vi
ABSTRACT
This final paper documents the development of a Programming Aid Software for
the Brazilian Navy's Damage Control System. It presents some innovative image
processing techniques and is capable of automating repetitive and laborious tasks, that
are related to the layout of visual objects over the System's main interface. The
proposed software reduces the amount of time spent by the programmer in that activity,
by over 90 percent.
Key-Words: software development, project activity time reduction, task
automation, image processing, image segmentation, thresholding, covering of
rectilinear polygon with minimum amount of rectangles, path tracing over
closed perimeter, polygon fit over closed perimeter.

vii
SIGLAS
BCB – Borland C++ Builder
BD – Banco de Dados
HDTV – High-definition Television (Formato de Vídeo de Televisores, de Alta
Definição)
IDE – Integrated Development Environment (Ambiente de Desenvolvimento Integrado)
IHM – Interface Homem-Máquina
MB – Marinha do Brasil
PhAB – Photon Application Builder (IDE do QNX)
QNX – Sistema Operacional, "UNIX like", de tempo real da empresa QNX Software
Systems
RTOS – Real Time Operating System (Sistema Operacional de Tempo Real)
RGB – Modelo de representação de cores (Red, Green, Blue)
SCAV – Sistema de Controle de Avarias
SGBD – Sistema Gerenciador de Bancos de Dados
SO – Sistema Operacional
UFRJ – Universidade Federal do Rio de Janeiro

viii
Sumário
1 Introdução 1
1.1 - Tema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 - Delimitação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.3 - Justificativa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.4 - Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.5 - Metodologia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.6 - Descrição . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2 Panorama do Sistema 5
2.1 - Sistema de Controle de Avarias . . . . . . . . . . . . . . . . . . . . . . . 5
2.2 - Sistema Operacional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.3 - Desenvolvimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.4 - Requisitos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3 Engenharia Reversa 14
3.1 - Arquivo Fonte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.2 - Imagens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.3 - Polígonos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
3.4 - Retângulos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19

ix
4 Processamento de Imagem 20
4.1 - Segmentação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4.2 - Escala de Cinza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
4.3 - Thresholding . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
4.4 - Método de Otsu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.5 - Conclusões sobre Segmentação . . . . . . . . . . . . . . . . . . . . . . . . . 25
5 Processamento dos Compartimentos 26
5.1 - Considerações Iniciais . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
5.2 - Área Interna . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
5.3 - Retângulos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
5.4 - Perímetro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
5.5 - Caminho . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
5.6 - Polígonos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
6 Software 54
7 Conclusões 60
Bibliografia 61

x
Lista de Figuras
2.3.1 – Compartimento de um navio, no SCAV, no ambiente PhAB. 7
2.3.2 – Compartimento marcado com a avaria Incêndio. 7
2.3.3 – Polígono mapeado no compartimento em tempo de projeto, no PhAB. 8
2.3.4 – Polígonos mapeados, em conflito quanto à resposta a eventos do mouse. 9
2.3.5 – Proa de um navio mapeada em um polígono. 10
2.3.6 – Retângulos mapeados em um compartimentos simples. 11
2.3.7 – Retângulos mapeados em um dos compartimentos mais complexos. 11
3.1.1 – Trecho exemplo da natureza “mista” do arquivo fonte (*.wgtw). 14
3.2.1 – Imagens de teste utilizadas (cada cor preenche um pixel). 16
3.2.2 – Codificação de linha de uma imagem, com pixels de preenchimento. 17
3.3.1 – Parte do código fonte da descrição de um objeto polígono. 18
4.1.1 – Exemplo descaracterizado da planta baixa de um navio. 20
4.1.2 – Exemplo dos traços em gradiente de cor. 20
4.4.1 – Imagem exemplo do Método de Otsu, e seu histograma. 23
5.1.1 – Exemplos de regiões fechadas da imagem que não configuram compartimentos.
26
5.1.2 – Esboço de interface para o software. 27
5.2.1 – Exemplo de execução do algoritmo Scanline Flooding sobre um compartimento real.
28
5.3.1 – Retângulos sem otimização. 30
5.3.2 – Preenchimento por retângulos com otimização. 31
5.3.3 – Preenchimento por retângulos com erro permitido. 32
5.3.4 – O sentido de preenchimento que produz os melhores resultados pode variar de acordo com cada valor de erro permitido.
33
5.3.5 – Exemplo de erro permitido grande demais. 34
5.4.1 – Processo de Extração de Fronteira. 35
xi
5.4.2 – Perímetro da área interna ao compartimento, em vermelho. 36
5.4.3 – Remoção de rota sem saída. 37
5.4.4 – Matrizes de detecção de "cúspides". 38
5.4.5 – Resultado anterior da redução de rota sem saída, corrigido. 38
5.4.6 – Exemplo de compartimento com furo. 39
5.4.7 – Exemplo de compartimento com outro inscrito, muito próximo à antepara.
40
5.5.1 – Exemplo do objetivo do cálculo de caminho por sobre um perímetro externo
41
5.5.2 – Ordem de busca por pontos vizinhos. 42
5.5.3 – Exemplos de traçados válidos e inválidos. 43
5.5.4 – Trecho de perímetro, exemplo do algoritmo melhorado. 44
5.5.5 – Máquina de estados de tomada de decisão para escolha do caminho sobre o perímetro.
45
5.5.6 – Exemplo do conceito de uma concavidade degenerada. 46
5.5.7 – Primeiro passo de inserção de perímetro interno. 47
5.5.8 – Segundo passo de inserção de perímetro interno. 47
5.6.1 – Exemplo do traçado de linha pelo algoritmo ingênuo. 49
5.6.2 – Reta de exemplo do algoritmo de Bresenham no segundo octante. 50
5.6.3 – Pequena reta de exemplo, no segundo octante, e o passo a passo da execução do algoritmo.
51
5.6.4 – Exemplo de execução do algoritmo de ajuste de polígonos. 52
5.6.5 – O compartimento de exemplo com um furo, possui 58 pontos de perímetro.
53
6.1 – Janela de abertura de projeto, no SAP CAV. 54
6.2 – Trechos de exemplo de arquivos de saída do software. 55
6.3 – Janela de carga de imagens do sistema. 56
6.4 – Janela da vista geral e demais reparos do navio, carregadas. 57
6.5 – Compartimentos filtrados e um deles selecionado. 57

xii
6.6 – Arrastando ícone do compartimento para sua posição correta. 58
6.7 – Compartimento calculado. 58

xiii
Lista de Tabelas
4.4.1 – Resultados parciais do algoritmo de Otsu . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.4.2 – Comparação de resultados entre formas de cálculo . . . . . . . . . . . . . . . . . . 25

1
Capítulo 1
Introdução
1.1 – Tema
Os temas do trabalho são o estudo e a subseqüente aplicação de técnicas de
processamento digital de imagens, voltados ao auxílio à programação.
A hipótese inicial é de que seja possível desenvolver um software capaz de
executar todas as etapas necessárias à delimitação e programação em arquivo fonte dos
atributos de um compartimento fechado em uma planta baixa do SCAV, de forma quase
automática, necessitando apenas de um ponto de partida dentro do compartimento em
questão, fornecido pelo usuário.
1.2 – Delimitação
Apesar das técnicas de processamento alvo serem aplicáveis em quaisquer
imagens de plantas baixas similares (que possuam regiões fechadas e diferença de
luminância suficiente entre as regiões de fundo e de fronteira), o projeto está voltado
somente para imagens de plantas baixas dos SCAV da MB.
1.3 – Justificativa
Durante a fase de desenvolvimento do SCAV de um novo navio, todos os
compartimentos na planta baixa deste devem ter seus perímetros internos mapeados em
polígonos e suas áreas internas mapeadas em retângulos, na forma mais simples e
acurada possível, para que a interface visual de acompanhamento de avarias possa
funcionar como projetada. No entanto, a execução manual dessa tarefa demanda cerca
de 176 horas de trabalho de um programador especializado, para um navio de médio
porte.

2
Ao ser familiarizado com o problema, o aluno propôs aos seus superiores que
seria possível desenvolver um software capaz de agilizar a execução desta parte do
projeto de cada SCAV, utilizando processamento digital de imagens para analisar a
planta baixa do navio e realizar automaticamente o mapeamento e preenchimento dos
compartimentos, necessitando apenas de um ponto de origem dentro de cada um deles, a
serem fornecidos pelo programador do SCAV.
Atingindo-se todos os objetivos propostos, obter-se-á um software inteiramente
operacional, estimado ser capaz de realizar em menos de 8 horas de trabalho do mesmo
programador, a mesma tarefa. Uma redução de mais de 95% nas horas trabalhadas e de
aproximadamente um mês no cronograma do projeto.
1.4 – Objetivos
O objetivo final é desenvolver um aplicativo, de interface gráfica intuitiva e
amigável, que seja capaz de analisar um arquivo de código fonte do SCAV e, junto com
o banco de dados do mesmo sistema, fornecer visualmente ao usuário todos os
compartimentos cadastrados do navio. Uma vez listados, os compartimentos estarão
prontos para serem posicionados sobre a planta baixa. A partir deste posicionamento, o
software aplicará, de forma automática, técnicas de processamento de imagens sobre a
planta e escreverá sobre o arquivo fonte original todo código fonte necessário para
descrever os compartimentos.
1.5 – Metodologia
Para alcançar o objetivo supracitado, o software deverá ser capaz de
disponibilizar uma listagem dos compartimentos do navio em questão, para a
determinação da posição de cada um na planta baixa. Para tanto, será necessário
consultar o Banco de Dados (BD) do projeto SCAV do navio, e dele obter as descrições
e códigos de cada compartimento cadastrado. Este BD foi criado utilizando-se o
Sistema Gerenciador de Bancos de Dados (SGBD) "SQLite" [1] (embarcado na
aplicação). Será utilizada, por comodidade de integração, a própria biblioteca em
C/C++, disponível no site deste SGBD.

3
Em seguida, a imagem da planta baixa deverá, se possível, ser lida diretamente
do arquivo fonte do SCAV onde também está armazenada (evitando a necessidade de
mais um arquivo fonte de dados, nesse caso, um arquivo de imagem), e no qual os
códigos que descrevem os polígonos e retângulos que representam o perímetro e a área
interna dos compartimentos, respectivamente, serão escritos posteriormente. Faz-se
necessário, portanto, o estudo da formatação desse arquivo fonte, que é gerado
automaticamente por uma IDE no Sistema Operacional (SO) QNX [2], para determinar
as representações dos parâmetros de imagens, polígonos e retângulos.
Com a imagem da planta carregada em memória, seja a partir do arquivo fonte
do SCAV ou de um arquivo de imagem externo, é preciso classificar seu conteúdo em
duas entidades: fundo e fronteiras. A imagem original é colorida e deseja-se então uma
bicolor, em preto e branco por exemplo. Portanto, o primeiro passo é convertê-la para
uma escala de cinza, baseada na luminância de cada cor. Os pesos dados às
componentes RGB para esse cálculo variam de acordo com a modelagem da percepção
humana de cada uma das cores primárias. Arbitrar-se-á então o uso do mesmo modelo
de luminância do sistema HDTV.
Feito isso, as cores do fundo e das fronteiras ainda não são sólidas (ainda há um
gradiente de cinza). É necessário portanto processar novamente a imagem para
convertê-la em preto e branco.
O próximo passo será oferecer ao usuário, através de interface visual amigável,
uma maneira de posicionar um token representativo de cada compartimento, dentro do
mesmo, sobre a planta baixa carregada, para servir de ponto de partida para os
algoritmos seguintes.
Com um ponto de origem do compartimento e cores de fundo e de fronteira
sólidas, aplica-se o algoritmo que determinará a área interna do compartimento, que
depois será preenchida pelo menor número possível e/ou aceitável de retângulos por
outra sub-rotina.
O perímetro deste compartimento pode ser obtido a partir de sua área interna já
calculada. Ele será então processado de forma a obter-se o polígono mais simples que
circunscreva a área interna calculada.
Por fim, os polígonos e retângulos encontrados serão inseridos no arquivo de
código fonte mencionado anteriormente, finalizando o processo e deixando dito arquivo
pronto para ser compilado novamente no SO QNX, sem a "percepção" da IDE deste de
que os objetos não foram criados manualmente.

4
1.6 – Descrição
O Capítulo 2 tratará do histórico por trás do projeto, as dificuldades relacionadas
à programação do SCAV e os requisitos da solução desejada.
O Capítulo 3 seguirá elaborando a leitura do arquivo fonte do SCAV gerado
durante a programação na IDE do SO QNX, portanto, do esforço de engenharia reversa
para determinar o formato de armazenamento de imagens, de polígonos e de retângulos
no arquivo.
O Capítulo 4 apresentará os algoritmos utilizados no processamento de cores da
imagem. Nele estão contidos a conversão de uma imagem em cores para uma em escala
de cinza (valores de luminância, tendo como base as definições do sistema HDTV) e a
implementação de um filtro de limiar de luminância (Thresholding) utilizando o Método
de Otsu, para converter a imagem em preto e branco.
O Capítulo 5 discorrerá sobre as técnicas de processamento aplicadas na
determinação da área interna ao compartimento, no preenchimento eficiente desta por
retângulos, no cálculo do perímetro dela e na obtenção a partir deste do polígono mais
simples que circunscreve exatamente o compartimento. Para isso são aplicados,
respectivamente, o algoritmo de preenchimento Flood Fill em sua forma clássica, uma
sub-rotina própria para o preenchimento por retângulos, um Flood Fill modificado
juntamente com uma segunda sub-rotina própria para o determinar o perímetro do
compartimento, e por fim, para a obtenção do polígono uma terceira sub-rotina própria
que se utiliza do algoritmo de linhas de Bresenham.
No Capítulo 6 serão apresentados os resultados obtidos.
Por fim, o Capítulo 7 tecerá as conclusões.

5
Capítulo 2
Panorama do Sistema
2.1 – Sistema de Controle de Avarias
Objeto de interesse deste projeto, o SCAV é um sistema complexo, composto de
computadores, sensores, atuadores e software especializado.
O Sistema monitora remotamente diversos sensores, dos tipos fumaça,
temperatura, alagamento, fechamento de portas estanques, disparo de borrifo de água,
disparo de ampolas de CO2 e outros, distribuídos por diversas áreas e compartimentos.
Com a coleta dessas informações, o SCAV permite o acompanhamento visual de
quaisquer avarias vigentes, através de uma representação virtual da planta baixa do
navio, em qualquer um de seus diversos consoles.
Somam-se às suas capacidades a inserção de avarias não sensoriadas, tais como
avarias estruturais, a habilidade de calcular a melhor rota de evacuação de feridos em
incêndios levando em consideração a disponibilidade de acesso a compartimentos e
corredores. Além disso, está apto a sugerir a abertura e/ou fechamento de portas
estanques e o acionamento de determinados ventiladores e/ou extratores visando
otimizar a remoção de fumaça, e é capaz de propor manobras de esgotamento e/ou
alagamento de tanques ou porões baseado no cálculo de reserva de flutuabilidade do
navio, de forma a garantir sua estabilidade em caso de alagamentos por dano no casco.
O Sistema foi desenvolvido pelo Grupo de Sistema Digitais do Instituto de
Pesquisas da Marinha do Brasil.
2.2 – Sistema Operacional
O software do SCAV foi implementado sobre o sistema operacional QNX®
Neutrino®, um RTOS [3] (SO de tempo real) “UNIX like". Ser de "tempo real" implica
em ser capaz de garantir o processamento de threads de alta prioridade sem atraso,
mesmo com o SO sob alta carga de processamento.

6
O QNX possui um micro-kernel, e sua arquitetura propõe a execução de todos
os drivers, aplicações e até do sistema de arquivos, da segurança de um espaço de
usuário protegido em memória, fora do kernel. Então, no caso de falha de virtualmente
qualquer componente de software, este pode ser reinicializado automaticamente, sem
afetar outros, ou o próprio kernel.
Segundo o fabricante, nenhum outro RTOS comercial oferece esse grau de
proteção [4] e este tem sido usado desde a década de 1980 em aplicações de
desempenho crítico, de instrumentos médicos a centrais de atendimento do serviço de
emergência Norte-Americano 911, e até em sistemas de controle de tráfego aéreo.
O software do SCAV foi desenvolvido utilizando-se um dos ambientes de
desenvolvimento padrão do QNX, o Photon Application Builder (PhAB), uma IDE
gráfica orientada a objetos e direcionada a eventos, que utiliza as linguagens C e C++.
2.3 – Desenvolvimento
Tendo em vista que o desenvolvimento do SCAV já apresenta elevado grau de
maturidade, com um framework estável e testado em campo, cabe aos programadores
dos sistemas destinados às novas plataformas desenvolver interfaces personalizadas e
orientadas às particularidades de cada uma delas.
Como exposto anteriormente, compartimentos da planta supervisionada (fig.
2.3.1) podem ser selecionados e ter atribuídas uma ou mais avarias (fig. 2.3.2). Para
tanto, basta o operador posicionar o mouse sobre um dos compartimentos, acessar um
menu com um clique do mouse e escolher as avarias pertinentes.
A implementação dessa importante funcionalidade do sistema depende da
capacidade do software de, baseado na posição do mouse no momento do clique,
determinar qual compartimento foi selecionado, e por conseguinte, a área da imagem
que deve ser preenchida com a cor associada à avaria escolhida.
O que torna isso possível é o mapeamento, em tempo de projeto, da área
ocupada por cada compartimento relacionado na planta baixa. Esta é, porém, uma das
atividades mais dispendiosas durante o desenvolvimento de cada novo SCAV, que deve
ser executada para cada uma das múltiplas plataformas que o possuem.

7
Figura 2.3.1 – Compartimento de um navio, no SCAV, no ambiente PhAB.
Fonte: Próprio.
Figura 2.3.2 – Compartimento marcado com a avaria Incêndio.
Fonte: Próprio.

8
Do ponto de vista da programação, para se obter tal efeito com as ferramentas
disponíveis ao PhAB e ainda com a menor complexidade algorítmica e menores
overheads de processamento e memória possíveis, foi tomada a decisão de não alterar
as cores do compartimento selecionado dentro do objeto 'imagem' da planta baixa, e
sim, mapear seus compartimentos com objetos do tipo polígono, dispostos por sobre a
planta.
Em uma condição normal, esses polígonos são definidos como transparentes,
não sendo exibidos. Em condição de avaria, suas propriedades de cor são definidas de
acordo com a avaria selecionada, vermelho para incêndio, azul para alagamento, cinza
para fumaça, etc.
Como objetos, cada polígono possui um nome único que o identifica, e que deve
ser indexado pelo programador, o que posteriormente permitirá o preenchimento de
informações pertinentes ao compartimento, através de consultas a um banco de dados.
Cada polígono precisa ser construído à mão, ponto a ponto, de forma a melhor
preencher as centenas de compartimentos da planta (fig. 2.3.3). Quão melhor cada
polígono respeitar as fronteiras de seu compartimento, melhor será sua apresentação em
tela.
Figura 2.3.3 – Polígono mapeado no compartimento em tempo de projeto, no PhAB.
Fonte: Próprio.

9
Em um primeiro momento, seria necessário "apenas" desenhar tais polígonos
para permitir a implementação da interface desejada, no entanto, apesar de os objetos
desse tipo poderem responder a eventos de clique do mouse, sua região de resposta não
é a área interna ao polígono, e sim todo o interior do menor retângulo que o
circunscreve.
Segue então, que usar esses objetos como interface com o operador seria
impraticável em determinadas situações, como tentar selecionar um compartimento cujo
polígono esteja "atrás" de outro.
Na figura 2.3.4, por exemplo, tentar selecionar o polígono 2 seria impossível se
o polígono 1 estivesse "à sua frente" (ordem de exibição na janela). Repare na área de
resposta a eventos do mouse de "1", indicada pelo retângulo branco de traço fino que o
circunscreve.
Nesse caso, tomar o cuidado de posicionar 2 "à frente" de 1 resolveria o
problema, mas para casos de um compartimento côncavo e outro ao seu lado que
preencha essa concavidade, ou para o caso da proa do navio (fig. 2.3.5) que sendo quase
triangular responderia a cliques fora de seu interior, não há solução se usados objetos do
tipo polígono para a detecção desses eventos.
Figura 2.3.4 – Polígonos mapeados, em conflito quanto à resposta a eventos do mouse.
Fonte: Próprio.

10
Figura 2.3.5 – Proa de um navio mapeada em um polígono.
Fonte: Próprio.
A decisão de projeto que permitiu contornar este problema se resume a mapear
novamente os compartimentos, mas desta vez com objetos do tipo retângulo, que são
definidos como transparentes e que serão os responsáveis pela detecção de eventos de
mouse sobre suas regiões.
Assim como os polígonos, os retângulos devem ser criados de forma a melhor
preencher seus compartimentos; mas como as geometrias destes variam ao longo do
navio, muitas vezes acompanhando o contorno do casco, uma cobertura adequada
poderá demandar desde apenas um retângulo no melhor caso, até dezenas nos piores
casos (fig. 2.3.6 e 2.3.7).
Isto posto, como esses objetos serão sempre transparentes, não é necessário que
preencham perfeitamente o compartimento, isto é, para manter a um mínimo o total
necessário, é permitido ao programador traçá-los sobrepondo-se uns aos outros, às
paredes do compartimento, e "errar" pequenas áreas (de alguns pixels) nas bordas, que
de outra forma precisariam de vários pequenos retângulos para serem preenchidas.

11
Figura 2.3.6 – Retângulos mapeados em um compartimentos simples.
Fonte: Próprio.
Figura 2.3.7 – Retângulos mapeados em um dos compartimentos mais complexos.
Fonte: Próprio.

12
Um navio de médio porte possui pouco mais de 300 compartimentos, cada um
com seu polígono e seus retângulos, mas o programador do SCAV precisa mapear duas
vezes esse número, pois o sistema possui dois modos de exibição, uma visão geral dos
compartimentos e uma visão ampliada de cada um dos "reparos", sub-divisões do navio
de responsabilidade de um dos grupos de combate a avarias.
O subseqüente grande volume de trabalho, meticuloso e de alto teor empírico
que essas soluções demandam, onera de tal forma um programador do SCAV que
mesmo estando acostumado ao ambiente PhAB e à tarefa, ele despende várias semanas
para sua conclusão.
Apesar da automatização dessas tarefas ser um problema de difícil realização,
em princípio, este aluno propôs ser capaz de desenvolver um software que o fizesse,
visando possibilitar um melhor aproveitamento do tempo do programador antes
designado a esta tarefa.
2.4 – Requisitos Com o objetivo de eximir o programador da grande parte laboriosa do
desenvolvimento do SCAV e, consequentemente, proporcionar uma redução maciça no
tempo necessário à criação e manutenção de suas novas versões, o software
implementado deve possuir uma interface gráfica intuitiva e amigável, almejando uma
curva de aprendizagem o mais acentuada possível.
Ele deve ser capaz de analisar um arquivo de código fonte do SCAV em busca
de polígonos e retângulos já declarados e, se possível, da própria imagem da planta
baixa do navio, e juntamente com algum conteúdo do banco de dados do sistema,
fornecê-los ao programador, agora usuário, com uma listagem de todos os
compartimentos cadastrados do navio.
Se representados em tela através de marcadores individuais, os compartimentos
estarão prontos para serem posicionados sobre suas respectivas regiões da planta baixa.
Essa é a única ação do programador realmente indispensável, pois é o que associa o
significado físico de um determinado compartimento, sua posição no navio e suas
características listadas no banco de dados, a uma região fechada da planta baixa virtual.

13
A partir deste posicionamento o software deverá aplicar, de forma automática e
transparente, técnicas de processamento de imagens sobre a planta, de forma a mapear
as regiões e criar os objetos responsáveis pela interface visual.
Por fim, tendo identificado e processado todos os compartimentos, o software
deverá escrever sobre o arquivo fonte original ou uma cópia deste, todo código
necessário para descrever os objetos calculados, de forma a transparecer ao ambiente
PhAB, no QNX, que foi este que os descreveu.

14
Capítulo 3
Engenharia Reversa
3.1 – Arquivo Fonte
Dada a experiência anterior deste aluno com a IDE para Windows, Borland C++
Builder (BCB) e a forma como ela armazena a formatação de janelas e componentes
visuais em arquivos de texto simples (extensão ".dfm"), imaginou-se bastante provável
a existência de um arquivo similar, também gerado automaticamente, em projetos no
ambiente PhAB, no SO QNX.
Depois de copiar os arquivos gerados na criação de um projeto de teste para o
SO Windows e passar algum tempo escrutinando-os com uma ferramenta de edição de
texto voltada para programação (Notepad++), descobriu-se que, de fato, o PhAB
armazena a formatação de janelas e objetos visuais de forma similar ao BCB, em um
arquivo com o mesmo nome da janela no programa e extensão “.wgtw”. Este arquivo,
no entanto, é um arquivo "misto", que além de conter texto, possui também valores
binários armazenados diretamente em algumas propriedades de objetos (fig. 3.1.1), duas
das quais essenciais à realização deste projeto.
Figura 3.1.1 – Trecho exemplo da natureza “mista” do arquivo fonte (*.wgtw). Fonte: Próprio.

15
O passo seguinte foi descobrir como identificar o início e o fim da descrição de
cada objeto no arquivo. Por inspeção, concluiu-se que todos os objetos visuais que
foram gerados têm como propriedade inicial sua classe, como pode-se observar na fig.
3.1.1, o que poderia ser um identificador válido se todas fossem começadas por "Pt". De
fato, isso se provou verdade para todas as classes dos objetos visuais utilizados nas telas
do SCAV.
A próxima propriedade notável dos objetos é o "Nível de Aninhamento", que
cresce à medida em que estes são postos em contêineres. A janela principal tem nível 1,
todos os objetos pertencentes a ela têm nível 2, se um destes puder possuir outros como
por exemplo uma entidade grupo de objetos, então todos dentro dele terão nível 3 e
assim sucessivamente.
Segue o nome do objeto que, estranhamente, pode ser o mesmo em vários deles,
se igual à sua classe. Por isso, deve ser tomado o cuidado de sempre buscar o próximo
objeto depois de se ler o nome do atual, para evitar erros de acesso.
Outras propriedades de interesse são a posição do objeto dentro do seu contêiner
e suas dimensões, sinalizadas pelos identificadores "pos" e "dim" respectivamente, cuja
ordem de escrita no código fonte não é estrita. O parâmetro "pos" são as coordenadas do
canto superior esquerdo do objeto. Os valores desses campos são números inteiros
armazenados em formato texto.
Nos polígonos, sua propriedade "points" armazena sequencialmente as posições
de seus vértices. Nas imagens, a propriedade "pixmap" contém, além de outros dados, o
mapeamento de todos seus pixels em formato RGB. Ambas têm seus valores
armazenados em formato binário.
No mais, as outras propriedades dos objetos, apesar de importantes para a
correta exibição em tela e funcionamento do sistema, não são relevantes para o
processamento dos compartimentos (ex: cor dos objetos).

16
3.2 – Imagens
Todas as propriedades dessa classe podem ser lidas diretamente como texto,
salvo o "pixmap", que contém a listagem seqüencial de cada um dos pixels que formam
a figura, com os coeficientes das três cores primárias descritos em binário. Na tentativa
de decifrar a codificação utilizada, foram criadas e inseridas em projetos de teste no
PhAB algumas imagens de baixa complexidade (fig. 3.2.1). Elas foram projetadas com
cores distintas e padrões simples, de forma a produzir um mínimo de código fonte, no
qual fosse possível reconhecer a disposição das cores e as posições dos pixels nas
imagens, por inspeção visual do código.
Figura 3.2.1 – Imagens de teste utilizadas (cada cor preenche um pixel). Fonte: Próprio.
Os resultados obtidos foram, a princípio, desanimadores. Imaginou-se que a
análise do código gerado para um projeto contendo apenas a imagem de teste 1 seria
suficiente para se inferir a codificação utilizada pelo objeto. Entretanto, para uma
imagem de apenas 9 pixels foram escritos 133 bytes de dados em sua propriedade
"pixmap", muito mais do que os 27 necessários para mapear a imagem colorida, se
usado o formato de 3 bytes por pixel.
17
Foi preciso comparar os dados gerados para os objetos das quatro imagens da
fig. 3.2.1, até que fosse possível compreender o básico necessário da formatação desse
arquivo, que permitisse a leitura da imagem por software. As words são armazenadas no
formato big-endian e têm tamanho variável, possuindo dois ou três bytes. A word
composta pelos bytes 13 e 14, armazena a largura da imagem e aquela composta pelos
bytes 15 e 16, sua altura. Os dados de cor dos pixels só começam, de fato, a partir do
byte 56, com as cores sendo armazenadas na forma BGR (uma word de 3 bytes por cor,
em formato big-endian). O propósito dos outros bytes anteriores a esses permanece
desconhecido.
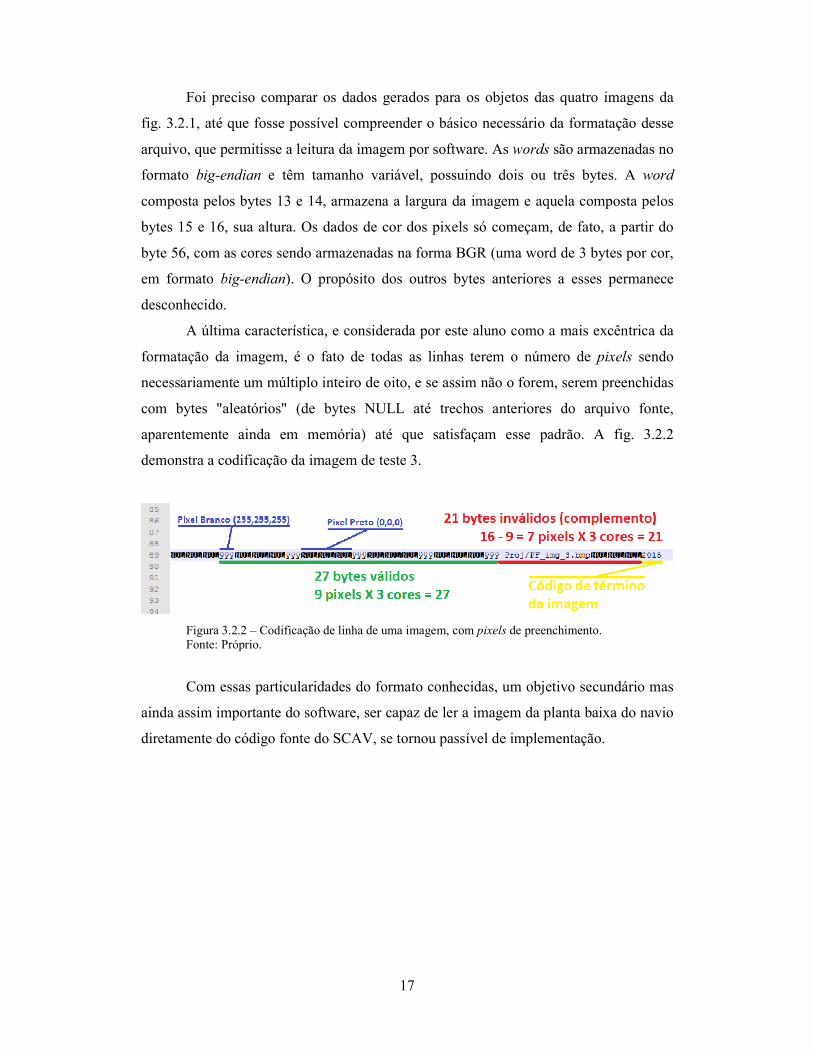
A última característica, e considerada por este aluno como a mais excêntrica da
formatação da imagem, é o fato de todas as linhas terem o número de pixels sendo
necessariamente um múltiplo inteiro de oito, e se assim não o forem, serem preenchidas
com bytes "aleatórios" (de bytes NULL até trechos anteriores do arquivo fonte,
aparentemente ainda em memória) até que satisfaçam esse padrão. A fig. 3.2.2
demonstra a codificação da imagem de teste 3.
Figura 3.2.2 – Codificação de linha de uma imagem, com pixels de preenchimento. Fonte: Próprio.
Com essas particularidades do formato conhecidas, um objetivo secundário mas
ainda assim importante do software, ser capaz de ler a imagem da planta baixa do navio
diretamente do código fonte do SCAV, se tornou passível de implementação.

18
3.3 – Polígonos
De forma similar às imagens, os polígonos possuem apenas uma propriedade,
points, cujo conteúdo é armazenado em formato binário (fig. 3.3.1). Ela é dividida em
duas linhas, a primeira armazena em texto o número inteiro positivo de vértices (pontos)
do polígono e a segunda contém words de 2 bytes armazenadas em formato big-endian
e em pares, com cada par representando as coordenadas de cada um dos pontos.
No entanto, onde é definida a origem do sistema de coordenadas desses pontos?
Uma primeira hipótese seria o canto superior esquerdo da janela principal, com todos os
objetos se orientando a partir desse ponto, mas ela se provou falha. O ponto de origem
correto é o ponto "pos" do contêiner do polígono, do objeto com o "nível de
aninhamento" imediatamente superior. Esse ponto é o mesmo que serve de referência
para as coordenadas posição "pos" do polígono.
Ainda nessa questão, os objetos desse tipo possuem um segundo parâmetro
"pos", sempre cadastrado depois de "points", que foi caracterizado por testes como
sendo um deslocamento aplicado aos pontos de todos os vértices. Pela análise dos
objetos desse tipo criados usando o PhAB, não foi possível concluir o que motiva o
preenchimento dos valores encontrados nesse campo. Assim, essa propriedade foi
aproveitada para o armazenamento do ponto de origem do compartimento, definido pelo
operador, que será visto com maiores detalhes mais a diante.
Figura 3.3.1 – Parte do código fonte da descrição de um objeto polígono. Fonte: Próprio.

19
Como dito anteriormente os polígonos, assim como todos os objetos declarados,
possuem nomes. Para propósito de associação aos retângulos que ocupam os mesmos
compartimentos, os nomes dos polígonos possuem uma numeração seqüencial singular,
e serão referência para a nomenclatura dos retângulos. Tais nomes são gerados no
momento em que os compartimentos são efetivamente posicionados em tela.
3.4 – Retângulos
Por último, mas não menos importante, os retângulos. Estes são simplórios em
suas propriedades, não tendo valores armazenados em formato binário, codificados ou
não. Suas propriedades notáveis são sua posição na tela e suas dimensões, que serão
calculadas automaticamente pelo algoritmo de otimização de preenchimento utilizado.
Como são necessários para prover resposta a eventos de clique do mouse para os
compartimentos, os retângulos devem possuir uma associação biunívoca com o
polígono que os representa em tela. Essa ligação se dá pela nomenclatura de todos os
retângulos com o mesmo número dado ao polígono de seu compartimento, acrescido de
uma letra, em ordem alfabética, gerando então um nome singular (ex. 01a). Na
eventualidade do algoritmo preencher um compartimento com mais de 26 retângulos, os
nomes dos retângulos consecutivos passam a possuir duas letras.

20
Capítulo 4
Processamento de Imagem
4.1 – Segmentação As plantas baixas dos navios são imagens coloridas, editadas por um
profissional durante sua criação e na qual não são projetadas para serem "comportadas",
de forma a permitir a execução direta do algoritmo de cálculo dos compartimentos que
se pretende usar.
Todas as imagens têm fundo preto e fronteiras de compartimentos (anteparas)
em cores claras e distintas, azul claro, cinza e amarelo, para navios com três grupos de
"reparos", por exemplo (fig. 4.1.1).
Figura 4.1.1 – Exemplo descaracterizado da planta baixa de um navio. Fonte: Próprio
Além disso, como conseqüência das ferramentas de edição utilizadas, essas
anteparas não são traçadas apenas com cores sólidas, mas possuem também gradientes
de sua cor ao fundo preto, quando em traços de curvas e de diagonais (fig. 4.1.2).
Figura 4.1.2 – Exemplo dos traços em gradiente de cor. Fonte: Próprio

21
A tomada de decisão do algoritmo de processamento de compartimentos sobre
que tons de cor deveriam ser considerados fundo e quais seriam anteparas, seria
dificultada por esses gradientes. Soma-se a isso o fato de que, para a visão humana, a
percepção de intensidade luminosa varia consoante à cor, portanto, um limiar de
luminância escolhido por um programador como adequado para uma cor, talvez não o
seja para outra.
4.2 – Escala de Cinza Como exposto, todas as anteparas devem ser apreciadas de uma mesma forma
pelo algoritmo que processa os compartimentos, independentemente de suas cores.
Assim, evidentemente, o primeiro passo deve ser converter a imagem em uma outra
com apenas tons de cinza. A abordagem originalmente vista como menos complexa
seria derivar da imagem original uma nova, composta pela luminância relativa (às vezes
referida apenas como luminância) de seus pixels.
Para isso foram testados dois padrões de caracterização de luminância, definidos
nas Recomendações 601 e 709 da International Telecommunication Union -
Radiocommunications sector (ITU-R). Em ambos, luminância relativa é definida como
a soma ponderada das componentes RBG, baseada nas características de percepção de
cor da visão humana, apesar de não o fazerem com os mesmos coeficientes.
O primeiro, e mais antigo deles, define a codificação de sinais analógicos de
vídeo em formato digital de baixa definição (para os padrões de hoje), tendo sido
aproveitado inclusive na definição do padrão de vídeo MPEG. Já o segundo, foi criado
especificamente para a padronizar o formato de alta definição HDTV.
Como o cálculo da luminância nas duas determinações se distingue apenas nos
coeficientes que ponderam cada componente de cor, não há como saber a princípio qual
deles teria o melhor desempenho. Em um primeiro momento, optou-se de forma
empírica pela utilização do padrão definido na Rec. 601, visto que os resultados obtidos
com este foram os que produziram menos artefatos e falhas nos contornos dos
compartimentos da imagem final, quando processada com o próximo algoritmo. Mais
adiante, no entanto, uma outra solução foi encontrada.

22
Então, com a imagem livre de ambigüidades introduzidas pelas informações de
cor, é preciso reduzi-la de tons de cinza a puramente monocromática, preta e branca,
para então atingir-se a almejada separação entre entidades fundo e fronteira (anteparas
dos compartimentos).
4.3 – Thresholding No campo de processamento de imagens, converter uma imagem em escala de
cinza para uma em preto-e-branco é uma necessidade usual, e comum a diversas
disciplinas. O objetivo é segmentar a imagem original em uma nova, binária, e sempre
com a menor perda de informação possível.
Dada a diversidade de aplicações, cada área que demanda esse tipo de
processamento acaba por apresentar uma ou mais particularidades, como análise de
imagens com sombras ou variações de iluminação, reflexos, ruído, etc. Para satisfazer
essas demandas específicas, várias abordagens ao problema foram desenvolvidas ao
longo dos anos, culminando hoje em uma miríade de algoritmos.
Demonstrando bem a ordem de grandeza dessa quantidade, Sezgin et. al. [7]
analisam e categorizam apenas 40 deles em seu estudo. Além disso, agruparam os
algoritmos em seis categorias distintas, a partir das características da imagem que são
exploradas durante o processamento.
Dentre as abordagens existentes, as mais básicas analisam o histograma de cores
da imagem e selecionam, de alguma forma, dentre os tons de cinza existentes, um único
limiar (threshold) que defina todos os outros tons mais escuros como sendo pixels
pretos e todos os mais claros como brancos, ou o contrário. Essa metodologia simples,
no entanto, falha em situações um pouco mais complexas, como em imagens que
possuam variações de iluminação.
Afortunadamente, as plantas baixas deste projeto são uniformes o suficiente para
não precisarem de um algoritmo mais robusto, que implemente threshold adaptativo por
exemplo. Ainda assim, mesmo na classe de algoritmos simples, não há um que seja
simultaneamente mais simples e de desempenho superior. Tendo seu uso amplamente
sugerido e pela grande quantidade de fontes detalhadas sobre sua implementação e
funcionamento, este aluno escolheu como algoritmo de thresholding, o Método de Otsu.

23
4.4 – Método de Otsu Batizado em homenagem a Nobuyuki Otsu [8][9], que publicou a técnica em
1979 em seu artigo "A Threshold Selection Method from Gray-Level Histograms"
(Método de Seleção de Limiar a partir de Histogramas em Escala de Cinza), parte das
seguintes premissas: a imagem, e por conseqüência seu histograma, são bimodais, ou
seja, compostos de duas entidades, aqui denominadas plano de fundo e plano de face; a
imagem possui iluminação uniforme, garantindo que quaisquer variações de luminância
representem diferenças entre as entidades; e por fim, para o algoritmo não há qualquer
noção de distribuição espacial de objetos na imagem.
Pressupondo o cumprimento dessas diretrizes, o primeiro passo do método é
gerar um histograma de todas as cores (tons de cinza) da imagem. Em seguida,
percorre-se sequencialmente todos os valores possíveis de threshold, calculando a cada
iteração os seguintes parâmetros: o coeficiente peso de cada classe, que é a razão entre a
quantidade de pixels pertencentes àquela classe e o total de pixels na imagem; o valor
médio dos pixels de cada classe; a variância entorno desse valor, novamente por classe;
e por fim a Within-Class Variance (Variância Intra-classe) definida como a soma das
variâncias, ponderadas por seus respectivos pesos.
O objetivo final é encontrar o valor de limiar que produza a menor variância
intra-classe, o que representa, para o método, a distribuição ótima entre os planos de
fundo e de face, dadas as restrições.
Tomando como exemplo uma imagem de tamanho 6x6 pixels e com 6 tons
diferentes de cinza, e seu histograma (fig. 4.4.1):
Figura 4.4.1 – Imagem exemplo do Método de Otsu, e seu histograma. Fonte: "Otsu Thresholding - The Lab Book Pages" [10].
24
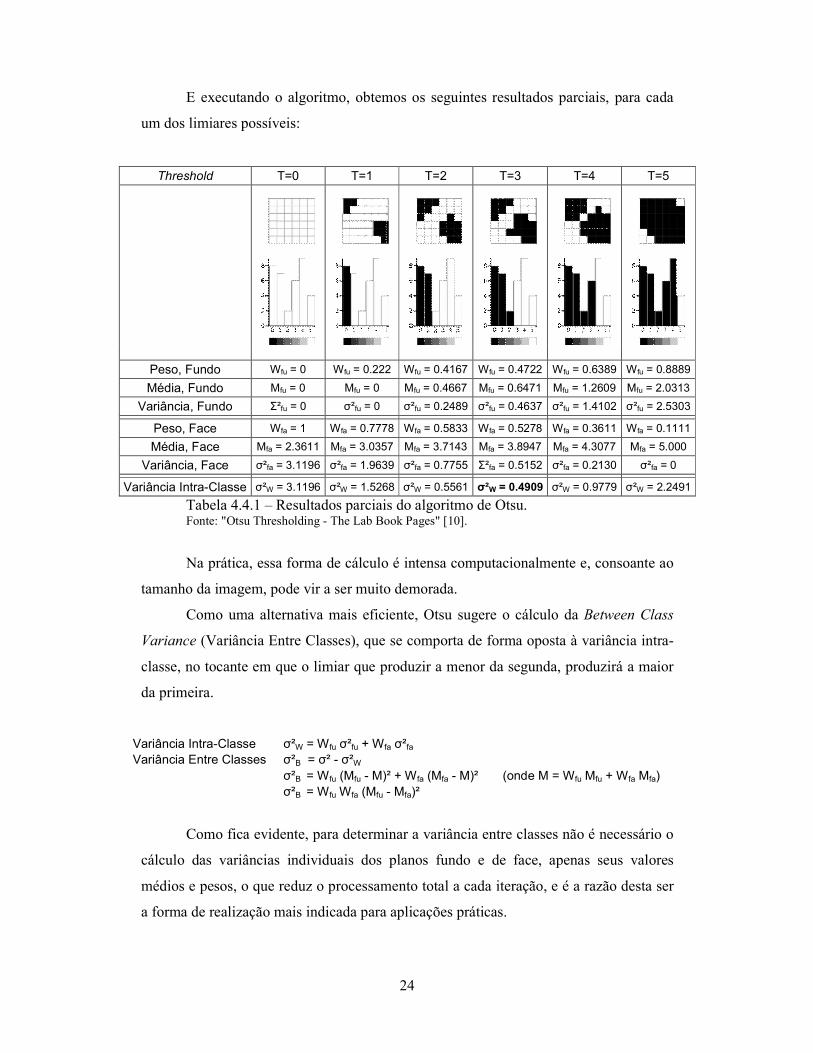
E executando o algoritmo, obtemos os seguintes resultados parciais, para cada
um dos limiares possíveis:
Threshold T=0 T=1 T=2 T=3 T=4 T=5
Peso, Fundo Wfu = 0 Wfu = 0.222 Wfu = 0.4167 Wfu = 0.4722 Wfu = 0.6389 Wfu = 0.8889
Média, Fundo Mfu = 0 Mfu = 0 Mfu = 0.4667 Mfu = 0.6471 Mfu = 1.2609 Mfu = 2.0313
Variância, Fundo Σ²fu = 0 σ²fu = 0 σ²fu = 0.2489 σ²fu = 0.4637 σ²fu = 1.4102 σ²fu = 2.5303
Peso, Face Wfa = 1 Wfa = 0.7778 Wfa = 0.5833 Wfa = 0.5278 Wfa = 0.3611 Wfa = 0.1111
Média, Face Mfa = 2.3611 Mfa = 3.0357 Mfa = 3.7143 Mfa = 3.8947 Mfa = 4.3077 Mfa = 5.000
Variância, Face σ²fa = 3.1196 σ²fa = 1.9639 σ²fa = 0.7755 Σ²fa = 0.5152 σ²fa = 0.2130 σ²fa = 0
Variância Intra-Classe σ²W = 3.1196 σ²W = 1.5268 σ²W = 0.5561 σ²W = 0.4909 σ²W = 0.9779 σ²W = 2.2491
Tabela 4.4.1 – Resultados parciais do algoritmo de Otsu. Fonte: "Otsu Thresholding - The Lab Book Pages" [10].
Na prática, essa forma de cálculo é intensa computacionalmente e, consoante ao
tamanho da imagem, pode vir a ser muito demorada.
Como uma alternativa mais eficiente, Otsu sugere o cálculo da Between Class
Variance (Variância Entre Classes), que se comporta de forma oposta à variância intra-
classe, no tocante em que o limiar que produzir a menor da segunda, produzirá a maior
da primeira.
Variância Intra-Classe σ²W = Wfu σ²fu + Wfa σ²fa
Variância Entre Classes σ²B = σ² - σ²W
σ²B = Wfu (Mfu - M)² + Wfa (Mfa - M)² (onde M = Wfu Mfu + Wfa Mfa)
σ²B = Wfu Wfa (Mfu - Mfa)²
Como fica evidente, para determinar a variância entre classes não é necessário o
cálculo das variâncias individuais dos planos fundo e de face, apenas seus valores
médios e pesos, o que reduz o processamento total a cada iteração, e é a razão desta ser
a forma de realização mais indicada para aplicações práticas.

25
Para a mesma imagem de exemplo acima, ao compararmos os resultados
parciais das duas formas, podemos ver a característica antagônica dos resultados:
Threshold T=0 T=1 T=2 T=3 T=4 T=5
Variância Intra-Classe σ²W = 3.1196 σ²W = 1.5268 Σ²W = 0.5561 σ²W = 0.4909 σ²W = 0.9779 σ²W = 2.2491
Variância Entre Classes σ²B = 0 σ²B = 1.5928 Σ²B = 2.5635 Σ²B = 2.6287 σ²B = 2.1417 σ²B = 0.8705
Tabela 4.4.2 – Comparação de resultados entre formas de cálculo. Fonte: "Otsu Thresholding - The Lab Book Pages" [10].
4.5 – Conclusões sobre Segmentação Apesar de a metodologia de segmentação delineada até aqui ter sido
integralmente implementada e ter alcançado seu objetivo com desempenho satisfatório,
descobriu-se empiricamente que a abordagem conservadora de levar em consideração a
variação de intensidade luminosa percebida consoante à cor, da fisiologia humana, não
é estritamente necessária para essa aplicação.
Dada a natureza da imagem de planta-baixa alvo, com grandes áreas de plano de
fundo em preto e estreitos anteparos em cores, é possível usar uma outra abordagem que
demonstrou produzir melhores resultados, virtualmente eliminando o problema de
"compartimentos abertos", que será detalhado mais adiante.
Ela consiste em executar o thresholding sobre cada coeficiente do modelo RGB
separadamente, produzindo três segmentações distintas, uma por camada de cor
primária, em preto e vermelho (R), preto e verde (G), e preto e azul (B). Entretanto,
como as camadas são visualizadas simultaneamente, acaba-se construindo um fac-
símile da imagem original, como se segmentada em oito entidades diferentes: preto,
branco, vermelho, verde, azul, amarelo, ciano e magenta.
Pode-se então derivar desta, a imagem bi-modal desejada, bastando para isso
interpretar como pixels do plano de fundo apenas os de cor preta, que foram
considerados como tal em cada uma das três etapas de segmentação. Aqueles que
possuírem qualquer outra cor farão parte do plano de face, sendo transformados em
pixels brancos.
26
Capítulo 5
Processamento dos Compartimentos
5.1 – Considerações Iniciais
Este capítulo trata do âmago do software proposto, os procedimentos necessários
para processar as áreas da planta baixa já segmentada, e gerar as estruturas que as
representarão como compartimentos para a sub-rotina de Interface Homem-Máquina
(IHM) do SCAV.
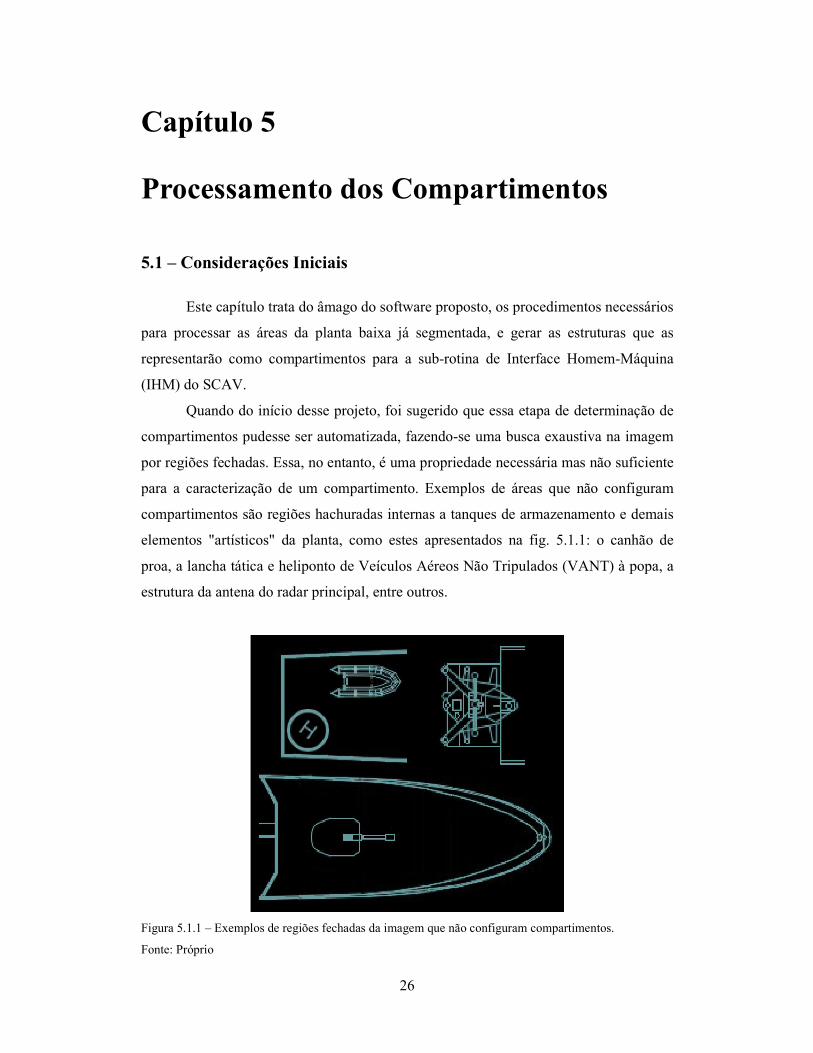
Quando do início desse projeto, foi sugerido que essa etapa de determinação de
compartimentos pudesse ser automatizada, fazendo-se uma busca exaustiva na imagem
por regiões fechadas. Essa, no entanto, é uma propriedade necessária mas não suficiente
para a caracterização de um compartimento. Exemplos de áreas que não configuram
compartimentos são regiões hachuradas internas a tanques de armazenamento e demais
elementos "artísticos" da planta, como estes apresentados na fig. 5.1.1: o canhão de
proa, a lancha tática e heliponto de Veículos Aéreos Não Tripulados (VANT) à popa, a
estrutura da antena do radar principal, entre outros.
Figura 5.1.1 – Exemplos de regiões fechadas da imagem que não configuram compartimentos.
Fonte: Próprio

27
Ademais, dado que não existe uma forma computacional de relacionar o nome
e/ou a descrição de um compartimento à área física ocupada por ele, essa etapa ainda
recairia sobre o programador do SCAV.
Decidiu-se então por realizar todos os passos de processamento depois de um
compartimento ter sido identificado como tal. Assim, deve ser oferecida ao usuário uma
lista, passível de filtragem, contendo os nomes e códigos de todos os compartimentos
existentes no navio. Além disso, ainda serão dispostos marcadores visuais individuais
de compartimentos por sobre a imagem da planta e, de modo bastante intuitivo, bastará
arrastar cada um deles para dentro de seu respectivo compartimento para dar início ao
processamento necessário. A fig. 5.1.2 oferece um esboço da interface proposta.
Figura 5.1.2 – Esboço de interface para o software.
Fonte: Próprio

28
5.2 – Área Interna
O primeiro passo de todo o processamento de compartimentos é, partindo do
ponto definido pelo usuário como interno a um deles, determinar toda a área ocupada
por este. Para isso foi usado o algoritmo de preenchimento mais comum das ferramentas
de edição de imagem, Flood Fill [11] (Preenchimento por Inundação), também
conhecido como Bucket Fill (Preenchimento por Balde).
A implementação clássica desse método consiste em, partindo de um pixel
original, alterar a cor deste e repetir recursivamente a chamada da função para cada um
de seus quatro "vizinhos", os dois verticais e os dois horizontais, se as cores deles forem
iguais à cor do original. No entanto, além de não ser a forma de implementação mais
eficiente, se for tentado um preenchimento de uma grande região sólida, dados os
tamanhos de imagens manipulados atualmente, a quantidade de chamadas da função na
pilha pode ser grande o suficiente para causar um stack overflow (transbordo/estouro de
pilha).
No software foi utilizada uma implementação em forma de pilha explícita desse
algoritmo, utilizando um objeto para sua manipulação, mitigando assim o problema de
estouro por excesso de chamadas recursivas. Além disso, o algoritmo foi escrito na
forma de Scanline Flooding (algo como "inundação por linhas") onde uma linha
horizontal é tratada por vez, evitando acessos repetidos a um mesmo pixel e assim
tornando o processo mais eficiente.
Figura 5.2.1 – Exemplo de execução do algoritmo Scanline Flooding sobre um compartimento real. Ponto
incial em verde, área mapeada em ciano. Em preto, as anteparas do compartimento. As coordenadas da
área interna estão salvas em memória para uso das próximas sub-rotinas.
Fonte: Próprio
29
Foi tomado o cuidado de armazenar as coordenadas de todos os pixels
processados em uma estrutura externa à função, de modo que essa lista que representa a
área interna ao compartimento possa ser passada às funções seguintes. De posse de toda
a região ocupada pelo compartimento, é possível começar a traçar uma estratégia para
seu preenchimento com retângulos.
5.3 – Retângulos
Recapitulando, o preenchimento do compartimento com objetos do tipo
retângulo se faz necessário devido à forma como o ambiente de desenvolvimento PhAB
responde a eventos de clique de mouse sobre um objeto do tipo polígono. Se estes
eventos ocorressem somente no interior do polígono traçado, esses objetos poderiam ser
usados para a interface com aquele periférico. No entanto, a área sensível aos eventos é
o menor retângulo que circunscreve o polígono, dando origem a problemas de
precedência no caso de polígonos com concavidades preenchidas por protuberâncias de
outros vizinhos, ou seja, dentro da planta baixa de um navio, praticamente qualquer
compartimento não retangular.
Para evitar as dificuldades de implementação e o overhead de processamento ao
calcular dinamicamente se o ponto do clique na tela pertence ao interior do polígono
cujo evento foi executado, a equipe de desenvolvimento do SCAV decidiu por
preencher o compartimento com retângulos invisíveis e associar a eles os eventos de
mouse, efetivamente trocando processamento por tempo de desenvolvimento e memória
em tempo de execução do programa.
Esse processo é referido como problema de cobertura de um polígono retilíneo
com o menor número de retângulos, com sobreposição permitida. A literatura [12]
define esse problema como NP-hard [13], o que normalmente implica em ser possível
encontrar soluções muito boas, mas encontrar a melhor possível seria muito
dispendioso. As abordagens encontradas para sua solução foram consideradas
excessivamente complexas, e este aluno optou por desenvolver uma própria.

30
Sem ter como determinar quão grande seria a quantidade possível de retângulos
em tela sem comprometer o desempenho do sistema, este aluno partiu da solução mais
simples possível, para cada pixel de área do compartimento, inserir um retângulo de
área 1x1 que o ocupasse. Quando a IDE "morreu" ao tentar carregar um arquivo de teste
com apenas um punhado de compartimentos preenchidos, a necessidade de otimização
passou de óbvia a obrigatória.
Com isso em mente, a próxima abordagem imaginada foi uma espécie de
integração discreta dos compartimentos, preenchendo-os com retângulos degenerados
em segmentos de reta. Como os compartimentos, em geral, possuem alturas e
comprimentos diferentes, quantidades distintas de retângulos verticais ou horizontais
serão necessárias para preenchê-los, dada a direção de integração.
Além disso, se um compartimento possui um ou mais "furos" como por exemplo
um tanque ou outro compartimento completamente inscrito naquele, os retângulos não
podem sobrepô-lo, precisando ser traçados das anteparas do compartimento até as do
furo, em ambos os lados. Portanto deve-se usar a orientação que os tiver gerado em
menor número. A fig. 5.3.1 demonstra os conceitos deste parágrafo e do anterior.
Figura 5.3.1 – Retângulos sem otimização. O gradiente de azul para amarelo denota a direção do
preenchimento. O compartimento da esquerda é de número 1 e o da direita 2.
Fonte: Próprio
Como próximo passo de otimização, se dois retângulos com dimensões iguais
estiverem lado a lado, vertical ou horizontalmente, pode-se substituí-los por apenas um
que ocupe ambas as suas áreas (fig. 5.3.2). Se implementada como uma verificação
exaustiva, o primeiro retângulo será repetidamente expandido e pode-se perceber que
essa pequena alteração produzirá uma solução ótima para compartimentos retangulares
paralelos ao eixo horizontal, preenchendo-os com um retângulo apenas.

31
Figura 5.3.2 – Preenchimento por retângulos com otimização.
Fonte: Próprio
É valido notar que o pior caso de aproximação dos retângulos seriam
compartimentos com arestas em ângulos de 45° com a horizontal, para os quais esse
método é capaz de reduzir a distribuição original. Portanto, quão mais acentuada a
inclinação das anteparas dos compartimentos em relação à horizontal, mais retângulos
serão necessários para seu preenchimento.
Uma concessão já usada pelos programadores do SCAV é a inspiração para o
próximo nível de otimização, permitir um erro de aproximação. Como os retângulos são
invisíveis, pode-se permitir que um retângulo aproxime o preenchimento da área de seu
vizinho, errando por um determinado número de pixels.
A existência desse erro pode levar a dois resultados: espaços não preenchidos
dentro do compartimento, se o vizinho for maior que o retângulo em questão, ou em
uma pequena sobreposição da antepara, se ele for menor. Nenhum dos dois não causará
problemas, dado que o erro em questão seja pequeno. No último, dificilmente um
operador vai clicar em uma antepara de alguns pixels de espessura propositadamente,
principalmente porque o sistema não prevê uma resposta a isso, e se o fizer acabará
apenas selecionando um dos compartimentos, e imaginar que o tivesse feito. E no
primeiro caso, como esses espaços vazios só existirão próximos às anteparas, a chance
de serem alvo do operador é igualmente pequena. A figura 5.3.3 demonstra
aproximações com erros sucessivamente maiores.

32
Figura 5.3.3 – Preenchimento por retângulos com erro permitido. As regiões vermelhas representam as
partes de retângulos se sobrepondo às anteparas.
Fonte: Próprio
33
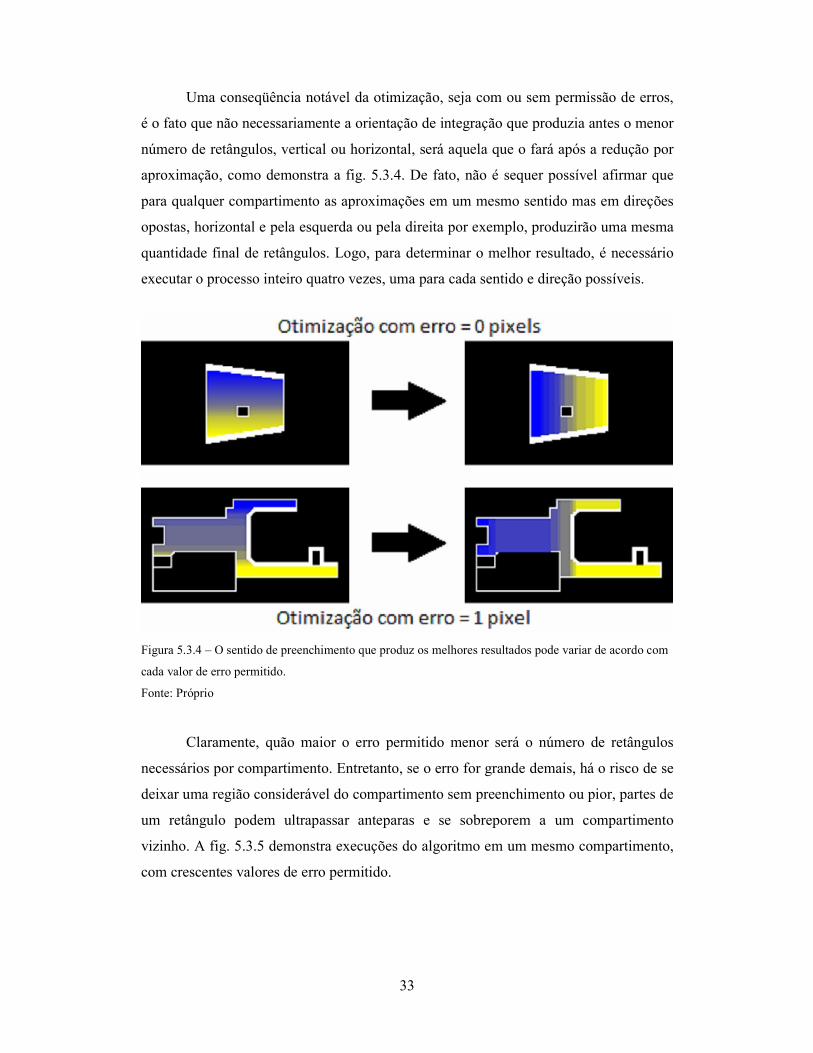
Uma conseqüência notável da otimização, seja com ou sem permissão de erros,
é o fato que não necessariamente a orientação de integração que produzia antes o menor
número de retângulos, vertical ou horizontal, será aquela que o fará após a redução por
aproximação, como demonstra a fig. 5.3.4. De fato, não é sequer possível afirmar que
para qualquer compartimento as aproximações em um mesmo sentido mas em direções
opostas, horizontal e pela esquerda ou pela direita por exemplo, produzirão uma mesma
quantidade final de retângulos. Logo, para determinar o melhor resultado, é necessário
executar o processo inteiro quatro vezes, uma para cada sentido e direção possíveis.
Figura 5.3.4 – O sentido de preenchimento que produz os melhores resultados pode variar de acordo com
cada valor de erro permitido.
Fonte: Próprio
Claramente, quão maior o erro permitido menor será o número de retângulos
necessários por compartimento. Entretanto, se o erro for grande demais, há o risco de se
deixar uma região considerável do compartimento sem preenchimento ou pior, partes de
um retângulo podem ultrapassar anteparas e se sobreporem a um compartimento
vizinho. A fig. 5.3.5 demonstra execuções do algoritmo em um mesmo compartimento,
com crescentes valores de erro permitido.

34
Figura 5.3.5 – Exemplo de erro permitido grande demais. As regiões vermelhas representam as partes de
retângulos se sobrepondo às anteparas, as verdes, se sobrepondo a outro compartimento.
Fonte: Próprio
Pode-se perceber que permitir um erro de aproximação de 3 pixels seria algo
imprudente, já que obviamente existem geometrias de compartimentos a bordo que
levariam a sobreposição de compartimentos vizinhos. Talvez um erro de 2 pixels não
causasse o mesmo problema, no entanto, não há garantias disso já que existem anteparas
com traços de 1 pixel de espessura. Portanto, apesar de implicar em um total maior de
retângulos, optou-se pelo valor conservador de erro de 1 pixel, que permite no pior caso
a sobreposição de anteparas mas não de partes de compartimentos vizinhos.
Essa metodologia simples se provou bastante eficiente para a maioria dos
compartimentos que, em geral, são regiões retangulares com protuberâncias
retangulares e ângulos retos, levando a uma redução expressiva no total de objetos
necessários. Com isso concluem-se os passos do preenchimento por retângulos.
Uma melhoria futura capaz de reduzir ainda mais o número de objetos seria
executar o algoritmo múltiplas vezes para cada compartimento, com níveis de erro
incrementais a partir de 1 pixel, até que o número de retângulos se reduza a um, ou até
que um deles ultrapasse uma antepara e se sobreponha a parte de um compartimento
vizinho. Note que para um determinado valor de erro, mesmo que uma aproximação em
dada direção e sentido ultrapasse uma antepara, não é possível afirmar que as outras três
o façam.
35
Dessa forma, cada compartimento teria erro de aproximação próprio, e seria
possível garantir que erros pequenos de 2 pixels não causariam problemas e que, em
determinadas situações, mesmo um erro grande de 5 ou 6 pixels também não o faria.
Dada a dinâmica do algoritmo, talvez fosse possível obter resultados melhores
se as integrações e otimizações nas direções vertical e horizontal fossem executadas em
uma mesma iteração. Mas como não há forma de determinar a precedência entre elas,
seriam precisas execuções repetidas, por tentativa e erro. Além disso, considerando o
desempenho já alcançado e a outra melhoria proposta, espera-se que qualquer ganho
obtido com essa idéia seria apenas marginal.
5.4 – Perímetro
Com a etapa de geração dos retângulos concluída, é preciso determinar o
perímetro da área interna ao compartimento, como o primeiro passo para a geração do
polígono de preenchimento.
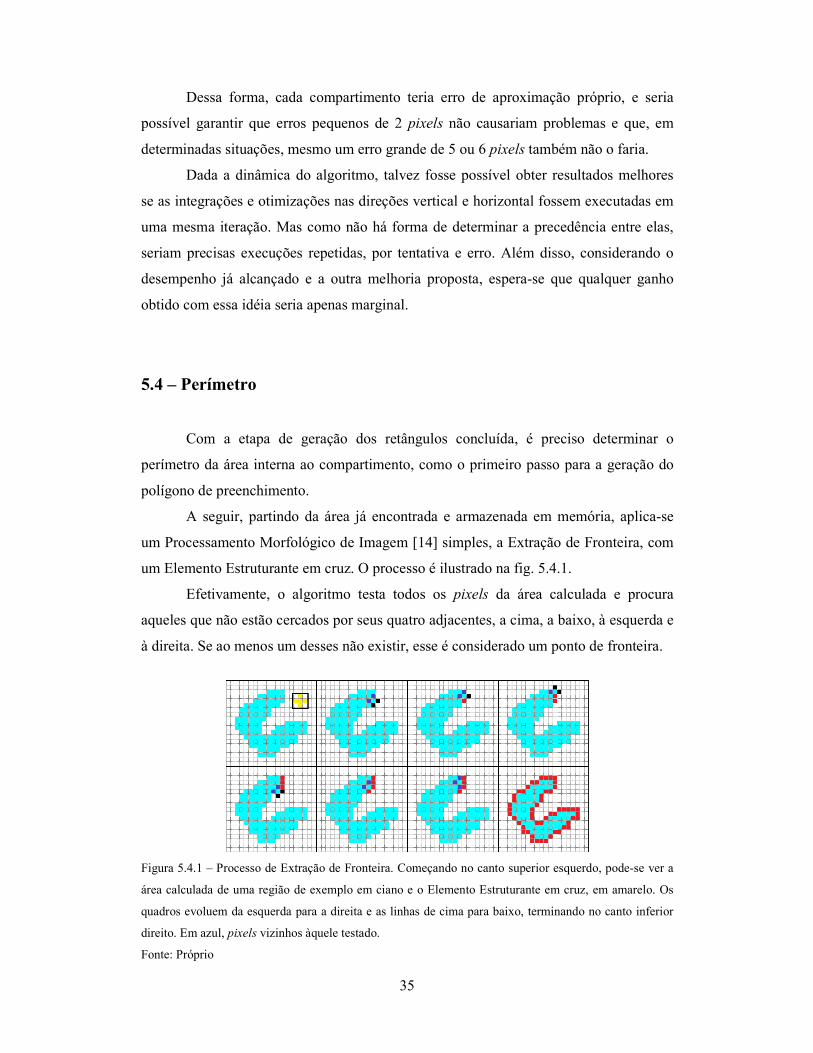
A seguir, partindo da área já encontrada e armazenada em memória, aplica-se
um Processamento Morfológico de Imagem [14] simples, a Extração de Fronteira, com
um Elemento Estruturante em cruz. O processo é ilustrado na fig. 5.4.1.
Efetivamente, o algoritmo testa todos os pixels da área calculada e procura
aqueles que não estão cercados por seus quatro adjacentes, a cima, a baixo, à esquerda e
à direita. Se ao menos um desses não existir, esse é considerado um ponto de fronteira.
Figura 5.4.1 – Processo de Extração de Fronteira. Começando no canto superior esquerdo, pode-se ver a
área calculada de uma região de exemplo em ciano e o Elemento Estruturante em cruz, em amarelo. Os
quadros evoluem da esquerda para a direita e as linhas de cima para baixo, terminando no canto inferior
direito. Em azul, pixels vizinhos àquele testado.
Fonte: Próprio

36
Como a área do compartimento é contígua, não granular, então qualquer ponto
que não estiver cercado por outros quatro pontos deve ser parte do perímetro, externo se
o compartimento não possuir furos, senão, do interno. A fig. 5.4.2 demonstra o
resultado do processo sobre um compartimento real de um navio.
Figura 5.4.2 – Perímetro da área interna ao compartimento, em vermelho. Área interna já calculada, em
ciano e fronteiras em preto.
Fonte: Próprio
Para a grande maioria dos compartimentos, isso seria o suficiente para traçar um
perímetro satisfatório, como ilustrado acima. Entretanto, em certos casos, algumas
anomalias não tratadas devidamente trariam ineficiências ao processo de cálculo de
polígonos, enquanto outras certamente o levariam à falha. Todas devem então ser
identificadas e corrigidas.
Essa rotina de correção foi implementada na forma de uma busca seqüencial
exaustiva, através da lista de pontos do perímetro, sempre retornando ao início assim
que um erro é corrigido. Claramente este não é o método mais eficiente de iterar pela
lista, mas garante que se uma nova discrepância for gerada ao corrigir uma antiga, ela
não será ignorada.
O primeiro passo é descobrir quantos e quais são os vizinhos do ponto atual no
laço de repetição, nas oito direções possíveis. De imediato já é possível determinar se o
ponto está "solto", ou seja, se não possui vizinho algum. Essa primeira anomalia parece
bastante improvável, senão impossível, de ser gerada durante o processamento
morfológico, mas é plausível como resultado de algum ajuste posterior. Esses pontos
devem ser eliminados.
37
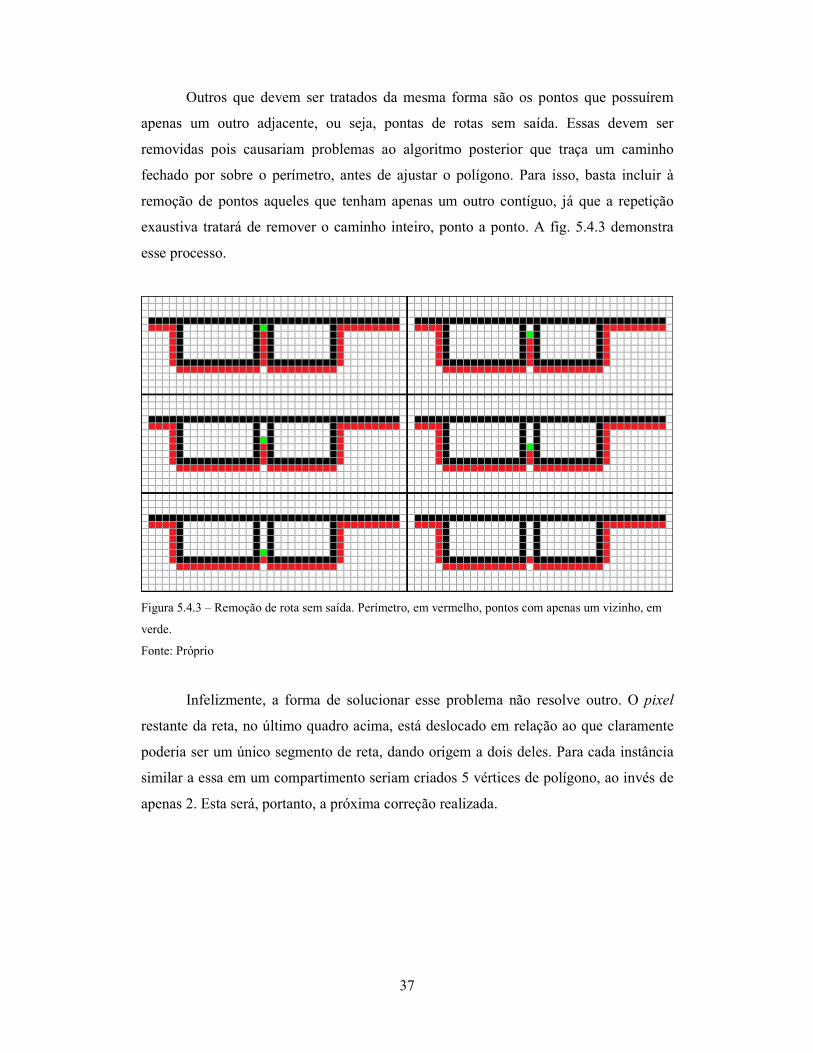
Outros que devem ser tratados da mesma forma são os pontos que possuírem
apenas um outro adjacente, ou seja, pontas de rotas sem saída. Essas devem ser
removidas pois causariam problemas ao algoritmo posterior que traça um caminho
fechado por sobre o perímetro, antes de ajustar o polígono. Para isso, basta incluir à
remoção de pontos aqueles que tenham apenas um outro contíguo, já que a repetição
exaustiva tratará de remover o caminho inteiro, ponto a ponto. A fig. 5.4.3 demonstra
esse processo.
Figura 5.4.3 – Remoção de rota sem saída. Perímetro, em vermelho, pontos com apenas um vizinho, em
verde.
Fonte: Próprio
Infelizmente, a forma de solucionar esse problema não resolve outro. O pixel
restante da reta, no último quadro acima, está deslocado em relação ao que claramente
poderia ser um único segmento de reta, dando origem a dois deles. Para cada instância
similar a essa em um compartimento seriam criados 5 vértices de polígono, ao invés de
apenas 2. Esta será, portanto, a próxima correção realizada.

38
Para retificar esses "cúspides", procura-se na lista de pontos aqueles que
satisfaçam determinadas matrizes de gabarito (fig. 5.4.4). Se for encontrado um pixel de
perímetro cujos dois pontos laterais sejam anteparas, com apenas ambas diagonais
superiores pertencentes ao perímetro mas não seu ponto adjacente superior, que deve
pertencer à área interna do compartimento. A natureza dos três pontos inferiores não
importa. Satisfeitas essas condições, foi de fato encontrado um cúspide e para corrigi-lo,
o ponto analisado deve ser deslocado para esse espaço adjacente superior antes
desocupado. Como essas estruturas podem ocorrer em qualquer uma das quatro
orientações, deve-se testar todas elas para cada pixel.
Figura 5.4.4 – Matrizes de detecção de "cúspides". À esquerda todas elas nas 4 orientações possíveis. Em
vermelho, pontos da lista do perímetro; pontos de anteparas, em preto; ponto da área interna do
compartimento, em ciano e o ponto atual na iteração da lista, em verde. À direita, correções efetuadas.
Fonte: Próprio
Se aplicado ao resultado anterior, essa correção produz a reta única desejada,
como demonstra a fig. 5.4.5.
Figura 5.4.5 – Resultado anterior da redução de rota sem saída, corrigido.
Fonte: Próprio

39
Antes de prosseguir com a última anomalia, é oportuno demonstrar como são
interpretados compartimentos que estejam contidos em outros.
Se na área do compartimento houver um "furo", ou seja, se existe um traço
fechado de antepara que delimita outro compartimento totalmente inscrito naquele e
sem contato com sua fronteira externa, então durante o processamento morfológico
também será computado o perímetro desse furo, como exemplifica a fig. 5.4.6. Esses
perímetros internos são tão importantes ao cálculo polígono quanto o perímetro externo,
pois determinam o não preenchimento dos furos quando o polígono for feito visível.
Um compartimento pode possuir inúmeros furos.
Figura 5.4.6 – Exemplo de compartimento com furo.
Fonte: Próprio
Segue então a última situação anômala identificada, empiricamente, e ocorre
mesmo com todas as correções anteriores sendo executadas. Se o compartimento
contiver outro inscrito, e se qualquer parte das anteparas desse estiver localizada a uma
distância de apenas um pixel da antepara externa, então os pontos de perímetro
encontrados nesse intervalo serão comuns a ambos, ao externo e ao interno.
Assim como no caso da remoção de rotas sem saída, pontos pertencentes ao
traçado de dois perímetros também são um problema para o algoritmo que encontra
caminhos fechados, pois implicariam em serem percorridos mais de uma vez. Seguindo
a mesma premissa do traçado manual dos polígonos, é preferível errar por não
preencher esses caminhos de um pixel de largura, do que errar sobrepondo o polígono a
outros compartimentos internos.

40
A solução, como nos outros casos, é retirar esses pontos da lista de polígonos, o
que efetivamente transforma o compartimento com furos em um compartimento com
concavidades, como pode ser visto na fig. 5.4.7. Para identificá-los, basta procurar por
pixels que possuam anteparas em ambos seus pontos adjacentes acima e abaixo, ou, em
ambos à esquerda e à direita.
Na prática, esse algoritmo vai encontrar o primeiro ponto do intervalo, removê-
lo, e assim que o fizer, o resto do caminho passa a ser reconhecido como uma rota sem
saída. Todos os pontos ao longo da rota serão retirados pela outra rotina, salvo o último
que terá mais de um vizinho. Este será removido, como o primeiro, por essa regra.
Figura 5.4.7 – Exemplo de compartimento com outro inscrito, muito próximo à antepara. Os quadros
evoluem da esquerda para direita: primeiro área interna do compartimento é calculada, área em ciano;
depois o perímetro extraído dessa área, em vermelho; os pixels comuns a dois caminhos de perímetros
que devem ser removidos, em verde; e a área do compartimento efetivamente apreciada, em ciano.
Fonte: Próprio
Com essas rotinas de ajuste implementadas, todos os compartimentos de teste e
de plantas reais que foram utilizados, tiveram uma aproximação do perímetro
satisfatoriamente calculada.

41
5.5 – Caminho
Feitos todos os ajustes necessários à lista de pontos do perímetro, ela é passada
adiante para a supracitada rotina de cálculo de caminho. Ela é indispensável, visto que
apesar de correta como um conjunto de pontos, a lista de perímetros ainda não se
encontra ordenada em uma forma relevante para o método de ajuste de polígonos. Os
pontos estão ordenados, basicamente, da mesma forma como foram lidos da matriz
imagem, em uma sucessão de linhas, aninhadas em uma sucessão de colunas. Cabe
então a esta sub-rotina ordená-los sequencialmente, seguindo um caminho fechado, de
forma que todos pontos consecutivos sejam vizinhos.
O primeiro caminho calculado deverá ser sempre o perímetro externo, e também
será o único se o compartimento não possuir furos. Para isso, basta partir de um ponto
sabidamente pertencente a esse caminho, como por exemplo um com ambos valores
mínimos ou máximos de coordenadas. Foi escolhida a primeira alternativa e dado que o
sistema de coordenadas da imagem tem sua origem no canto superior esquerdo,
crescente para a direita e para baixo, o algoritmo sempre partirá do ponto mais acima
dos pontos mais à esquerda existentes na lista.
A seguir, é preciso escolher o sentido de iteração por sobre o caminho. Este
poderia ser horário ou anti-horário. Sem qualquer restrição por parte da IDE que
impedisse qualquer uma das opções, foi arbitrado que o traçado do caminho seguiria no
sentido horário. A fig. 5.5.1 demonstra o objetivo do cálculo de caminho.
Figura 5.5.1 – Exemplo do objetivo do cálculo de caminho por sobre um perímetro externo. Nota-se que o
ponto de partida, em verde, não é o ponto mais acima na imagem, mas ainda é o mais acima daqueles
mais à esquerda.
Fonte: Próprio

42
É possível que existam segmentos diferentes de um mesmo perímetro ou de
perímetros diferentes, dispostos lado a lado e seguindo em direções opostas, sobre um
mapa de pontos. Para alcançar o objetivo de percorrer o caminho correto sobre tal mapa
foi necessário um árduo amadurecimento evolutivo do processo e, para a construção de
um algoritmo tido como ótimo para a tarefa, foram consideradas e testadas duas
premissas.
A primeira premissa do método é buscar o próximo pixel, em sucessão horária,
em todas as oito direções possíveis de progressão, a partir do pixel atual de iteração,
como ilustra a fig. 5.5.2. A busca tem início orientada para o ponto adjacente superior
direito do pixel inicial, visto que sabidamente não há pontos mais à esquerda ou
diretamente acima dele, dada a escolha de sua posição.
Figura 5.5.2 – Ordem de busca por pontos vizinhos.
Fonte: Próprio
Sempre que o ponto testado existir na lista do perímetro, ele é incluído na lista
ordenada, depois removido da lista não-ordenada e a variável de iteração assume suas as
coordenadas, efetivamente "andando" para o pixel vizinho. Se o ponto na direção
testada não existir, testa-se o da direção seguinte. Se todas as oito forem analisadas e
não for encontrado um ponto em nenhuma delas, um erro inesperado ocorreu, e para
evitar um loop infinito o algoritmo descarta esse ponto e tenta prosseguir do último
ponto já incluído na lista ordenada.

43
O algoritmo termina quando a variável de iteração alcança as coordenadas do
ponto inicial, o que indica que o caminho foi percorrido por completo, ou se todos os
pontos da lista ordenada forem removidos, o que seria o resultado de uma falha
inesperada e quaisquer pontos restantes na lista não-ordenada seriam descartados.
Essa primeira implementação seria capaz de ordenar os pontos da Fig. 5.5.1 da
forma desejada, entretanto todos os perímetros internos de compartimentos com furos
seriam descartados. Além disso, ela seria incapaz de ordenar corretamente
compartimentos com traçados que possuam segmentos adjacentes, gerando resultados
falhos no mínimo, e retornando uma lista vazia no pior caso. A fig. 5.5.3 ilustra essas
situações.
Figura 5.5.3 – Exemplos de traçados válidos e inválidos. À esquerda, o exemplo anterior, é traçado
corretamente pelo algoritmo. Ao centro, compartimento com exemplo de segmentos adjacentes que
causariam problemas ao algoritmo, em azul. À direita, perímetro interno descartado quando do término do
algoritmo, em azul.
Fonte: Próprio
Partindo desse algoritmo como base, analisando seus resultados sobre os
perímetros de compartimentos de vários formatos e, então, isolando as diversas
disposições de pontos que geravam erros, foi possível aprimorar o método à sua versão
final e garantir os resultados desejados, apenas incluindo uma segunda premissa.
Curiosamente, essa segunda premissa para conseguir percorrer um caminho
fechado com precisão, mantendo um determinado sentido, é sempre tentar seguir no
sentido contrário assim que um ponto vizinho for encontrado. Mais especificamente, no
caso da progressão em sentido horário, sempre que um ponto for encontrado em uma
determinada direção, o próximo ponto deverá ser procurado na direção perpendicular
àquela, no sentido anti-horário.

44
Então, se o algoritmo testar a direção para cima por exemplo, e encontrar um
ponto, o próximo deverá ser procurado à esquerda. Se o caminho seguir de fato para
cima, tal ponto não será encontrado à esquerda, nem à cima e esquerda, e dada a
primeira premissa, o algoritmo seguirá buscando até testar todas as direções possíveis.
A fig. 5.5.4 demonstra a busca de pontos e o traçado final de um trecho de perímetro no
qual o método falharia se utilizasse a primeira premissa apenas.
Visando garantir a conformidade da primeira premissa com a segunda, é
razoável alterar a direção inicial de busca para a esquerda.
Figura 5.5.4 – Trecho de perímetro, exemplo do algoritmo melhorado. Partindo do ponto em verde claro,
pretende-se chegar no ponto em ciano. As setas azuis são as primeiras direções testadas a partir de um
ponto, as verdes as segundas, laranjas são as terceiras e amarelas as quartas. As setas em preto são as
direções efetivamente seguidas, o trajeto correto.
Fonte: Próprio
O método pode ser descrito por completo pela máquina de estados da fig. 5.5.5.
Suas transições estão condicionadas à existência ou não de um ponto naquela direção.

45
Figura 5.5.5 – Máquina de estados de tomada de decisão para escolha do caminho sobre o perímetro.
Fonte: Próprio
Oferecendo uma analogia gráfica ao processo, seria como tentar seguir o
contorno interno de uma sala, com os olhos vendados. Como não é possível enxergar o
caminho adiante, para percorrê-lo no sentido horário e sempre junto às paredes, basta
seguir com a mão esquerda perpendicular à direção do movimento, tateando a parede.
Se em um determinado passo a parede "deixar de existir" será sabido que houve uma
curva à esquerda e que é necessário acompanhá-la nessa direção.
Agora, ao algoritmo resta apenas ser capaz de contemplar os perímetros internos
aos compartimentos mas, em primeiro lugar, é preciso saber como permitir um furo
dentro de um polígono. Na verdade, isso não é possível. A IDE PhAB não permite
retirar parte do interior de um polígono, ou desenhar outro por cima deste de forma a
marcar aquela região como vazia ou algo parecido. Para isso, será implementada a
mesma estratégia usada pelos programadores do SCAV quando realizando o processo
inserindo vértices individuais.
A abordagem consiste em ligar o perímetro externo ao interno por um único
caminho, cujos pontos serão percorridos duas vezes. Com isso cria-se, efetivamente,
uma concavidade degenerada (fig. 5.5.6), com seu interior fazendo parte do exterior do
compartimento mas com largura zero em sua "entrada". É importante salientar que os
caminhos internos devem ser mapeados no sentido contrário àquele do perímetro
externo, para garantir os resultados desejados.

46
Figura 5.5.6 – Exemplo do conceito de uma concavidade degenerada. Ponto de início da lista em verde,
área interna em ciano, pontos de perímetro em vermelho e pontos percorridos duas vezes em amarelo.
Fonte: Próprio
Portanto, o método de caminho deve ser alterado de forma a não mais terminar
quando encontrar o ponto inicial do perímetro externo, e sim continuar buscando
possíveis perímetros internos e os armazenando em listas independentes. Para que estes
sejam calculados no sentido correto, contrário ao externo, basta reverter as direções da
máquina de estados. A busca terminará quando não existirem mais pontos na lista não-
ordenada.
O próximo passo é inserir os pontos do(s) perímetro(s) interno(s) na lista do
externo. Essa sub-rotina começa procurando os dois pontos, um do perímetro interno e
um do externo, que sejam os mais próximos na direção vertical ou na horizontal (fig.
5.5.7). Desses dois, aquele que pertencer ao perímetro interno deve passar a ser o início
deste, portanto, sua lista precisa ser ajustada para prosseguir de acordo. Aquele do
perímetro externo determina onde todos os pontos devem ser inseridos nessa lista,
depois dele.
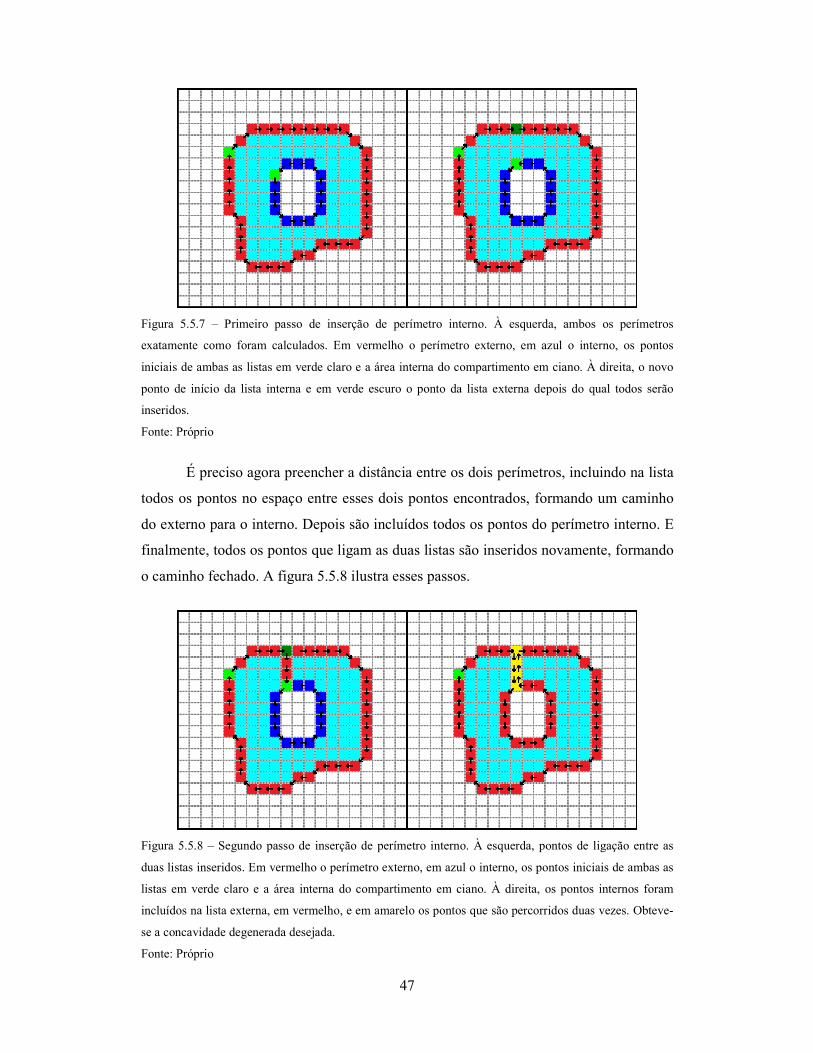
47
Figura 5.5.7 – Primeiro passo de inserção de perímetro interno. À esquerda, ambos os perímetros
exatamente como foram calculados. Em vermelho o perímetro externo, em azul o interno, os pontos
iniciais de ambas as listas em verde claro e a área interna do compartimento em ciano. À direita, o novo
ponto de início da lista interna e em verde escuro o ponto da lista externa depois do qual todos serão
inseridos.
Fonte: Próprio
É preciso agora preencher a distância entre os dois perímetros, incluindo na lista
todos os pontos no espaço entre esses dois pontos encontrados, formando um caminho
do externo para o interno. Depois são incluídos todos os pontos do perímetro interno. E
finalmente, todos os pontos que ligam as duas listas são inseridos novamente, formando
o caminho fechado. A figura 5.5.8 ilustra esses passos.
Figura 5.5.8 – Segundo passo de inserção de perímetro interno. À esquerda, pontos de ligação entre as
duas listas inseridos. Em vermelho o perímetro externo, em azul o interno, os pontos iniciais de ambas as
listas em verde claro e a área interna do compartimento em ciano. À direita, os pontos internos foram
incluídos na lista externa, em vermelho, e em amarelo os pontos que são percorridos duas vezes. Obteve-
se a concavidade degenerada desejada.
Fonte: Próprio

48
Ao término de sua inserção, o perímetro interno deixa de existir, já que todos
seus pontos passaram a fazer parte do externo. Se houver outra ou mais listas de pontos
que contornam um furo, basta executar o mesmo processo novamente até que por fim
restará uma única lista, com todos os pontos necessários para traçar corretamente o
polígono desse compartimento.
5.6 – Polígonos
Dada a lista de pontos ordenados produzida pelo algoritmo de caminhos, cabe a
esta sub-rotina construir um polígono que melhor os represente. Para isso, seus vértices
devem, obrigatoriamente, pertencer à lista de perímetro. Também é imperativo que as
arestas definidas se sobreponham a todos os pontos contidos entre os vértices, mas não
necessariamente somente a esses.
Apesar deste aluno ter encontrado uma publicação com um algoritmo que lidava
com um problema semelhante, esta foi considerada excessivamente complexa para este
problema, além de muito liberal na determinação do polígono. Este aluno então optou
por desenvolver sua própria abordagem.
Teoricamente, seria possível considerar cada ponto da lista de perímetro como
um vértice e assim construir um polígono extremamente grande porém ainda válido. No
entanto, com todos compartimentos possuindo ao menos algumas centenas de pontos de
perímetro e alguns se aproximando de um milhar deles, previu-se de ao menos uma
perda de performance para uma tela com polígonos gerados dessa forma, até uma falha
da IDE, como no caso dos retângulos. Assim como naquele, otimizações se fazem
necessárias.
Em primeiro lugar, para ser capaz de reduzir o número de vértices do polígono,
o método precisa ser capaz de determinar quais pontos representam um segmento que
ligue dois outros pontos quaisquer sobre um espaço bidimensional de coordenadas
discretas, no qual existem os pixels de uma imagem.

49
É perfeitamente plausível tratar esse espaço como contínuo, traçar uma reta com
suas extremidades nos centros dos pixels inicial e final, e então iterar ao longo do
segmento, determinando quais centros de coordenadas discretas mais se aproximam
dessa reta. Exemplificado na figura 5.6.1, esse é conhecido como o Algoritmo Ingênuo
de Desenho de Linha [15].
Figura 5.6.1 – Exemplo do traçado de linha pelo algoritmo ingênuo. As linhas em verde representam
distâncias menores da reta a um centro de "ponto", enquanto em vermelho, as distâncias maiores. Em
azul, os pontos que aproximam a reta no espaço discreto.
Fonte: Próprio
Entretanto, já existe há algum tempo um método muito mais eficiente.
O Algoritmo de Linhas de Bresenham [16][17][18], desenvolvido por Jack Elton
Bresenham em 1962 enquanto trabalhava na IBM, é capaz de resolver esse mesmo
problema, utilizando apenas estruturas de tomada de decisão, deslocamentos de bits e
aritmética simples com números inteiros, eliminando as custosas multiplicações e
divisões em ponto flutuante.
Desenvolvido em uma época em que os computadores tinham poder de
processamento extremamente limitado, o algoritmo fez parte do início da computação
gráfica. Apesar de menos favorecido atualmente frente às linhas mais suaves e
esteticamente agradáveis do algoritmo de Xiaolin Wu [19], fruto de seu uso de
antialiasing, pela sua simplicidade o algoritmo de Bresenham pode facilmente ser
encontrado em firmwares e hardwares de plotters e de placas gráficas modernas.

50
A idéia do método de Bresenham é de fácil compreensão. Por simplicidade o
algoritmo será demonstrado com uma reta situada no segundo octante de um sistema de
coordenadas cartesiano (fig. 5.6.2), mas com algumas poucas generalizações o
algoritmo torna-se capaz de traçar retas em qualquer octante. O sistema de coordenadas
é centrado no ponto (x0,y0) e é traçada uma reta deste até outro ponto (x1,y1), com
comprimento 'w' no eixo horizontal e altura 'h' no eixo vertical.
Figura 5.6.2 – Reta de exemplo do algoritmo de Bresenham no segundo octante.
Fonte: Próprio
Como em toda equação que define uma reta "y = a*x + b", o coeficiente angular
"a = h / w" determina de quanto 'y' é acrescido em função de um incremento em 'x'. O
que permitiu ao método de Bresenham sua eficiência, foi a concepção de que não é
preciso calcular, de fato, a divisão "h / w".
O algoritmo procede da seguinte forma: existe uma variável 'n' que armazena o
numerador da fração que define 'a', e é inicializada com metade do comprimento 'w',
pois assim como no algoritmo ingênuo, parte-se do centro do pixel. A cada iteração a
coordenada 'x' é incrementada de 1 unidade e 'n', de 'h' unidades. Sempre que a fração
"n / w" for maior ou igual a 1, ou seja, sempre que o numerador não for menor que 'w', é
subtraído dele o valor de 'w', efetivamente simplificando a fração, e 'y' é incrementado
de 1. O algoritmo termina quando atingir a coordenada 'x' do ponto final. Segue abaixo
o cálculo passo a passo de uma pequena reta de demonstração, na fig. 5.6.3.

51
Figura 5.6.3 – Pequena reta de exemplo, no segundo octante, e o passo a passo da execução do algoritmo.
Fonte: Próprio
De posse desse método eficiente de traço de retas, o algoritmo está apto a
prosseguir ao cálculo do polígono. Assim como ao problema de otimização dos
retângulos, este aluno tentou abordar este da forma mais direta e simples possível.
Como um polígono é definido por um conjunto de segmentos de retas unidos
dois a dois por suas extremidades em vértices e formando um caminho fechado, segue
que quão maiores suas arestas mais pontos cobrirão, sendo necessários menos vértices e
resultando em um polígono mais simples.
Mas o grande problema é conseguir encontrar as maiores arestas possíveis, de
forma eficiente, desconhecendo a geometria do polígono alvo. A primeira abordagem
implementada foi um método de busca exaustiva, favorecendo uma implementação
funcional a uma eficiente, inicialmente.

52
O método começa armazenando o ponto inicial da lista como primeiro vértice.
Partindo deste, o comprimento mínimo possível para uma reta (em pontos) seria 1, o
próprio ponto seguinte ao inicial. Obviamente, em um polígono plano, uma única aresta
não é capaz de conter todos os pontos do perímetro. Então o tamanho máximo possível
dessa reta seria metade do comprimento total do perímetro, considerando um polígono
degenerado em duas retas.
Tenta-se traçar uma aresta do ponto inicial até o ponto máximo. Aqueles que
compõem essa reta, obtidos pelo traçado com o algoritmo de Bresenham, são
comparados com todos os pontos contidos na lista entre o inicial e o máximo. Se ao
menos um ponto da lista não estiver contido na reta, esta não é uma aresta válida.
Nesse caso, sem enveredar para uma análise mais aprofundada da quantidade de
correlação entre pontos de reta e lista, sabe-se apenas que a maior aresta possível
partindo do vértice inicial tem tamanho menor que esse máximo calculado. Este é então
diminuído de uma unidade e o processo se repete até que o comprimento máximo seja
reduzido a um ponto, ou até ser localizada uma aresta válida.
Prosseguindo desta forma, assim que uma for encontrada, tem-se certeza de que
é a máxima possível dado seu ponto inicial. O algoritmo armazena como um novo
vértice esse segundo ponto que define a aresta, o toma como novo ponto de partida e
recomeça a busca por uma nova aresta. O processo todo se repete até percorrer a lista de
perímetro por completo (fig. 5.6.4).
Figura 5.6.4 – Exemplo de execução do algoritmo de ajuste de polígonos. Progredindo de cima para
baixo, da esquerda para a direita, em azul os pontos do perímetro. Em laranja, as retas sendo testadas; em
vermelho, pontos que não produzem arestas válidas; em verde, pontos que o fazem; em amarelo, arestas
válidas; e em preto, os vértices encontrados.
Fonte: Próprio

53
Esse processo pôde ser aprimorado quando da percepção de que se o
compartimento possuir concavidades ou furos, metade de seu perímetro é um valor
bastante super-estimado para o comprimento máximo de uma aresta, levando o
algoritmo a executar muitas iterações desnecessárias. Como é sabido, geometricamente,
que qualquer segmento reto do polígono deve, obrigatoriamente, estar contido no menor
retângulo que o circunscreve, um limite superior mais adequado para o comprimento
das arestas seria a diagonal desse retângulo.
Figura 5.6.5 – O compartimento de exemplo com um furo, possui 58 pontos de perímetro. À esquerda, em
vermelho, o ponto no comprimento máximo previamente calculado, 29 pontos. À direita, em vermelho, o
ponto no comprimento máximo com base no método aprimorado, 13 pontos. Em amarelo, os 16 pontos
"economizados", e em verde, o retângulo que circunscreve o perímetro.
Fonte: Próprio
Na esperança de tornar o processo mais eficiente, foi testada uma
implementação inspirada no método de busca binária, visando alcançar uma
complexidade de execução semelhante. Entretanto, quando posta à prova em perímetros
de compartimentos de teste, descobriu-se uma falha inerente a esse processo, que
impossibilitou seu uso. Como as coordenadas espaciais são discretas e os pontos das
retas de Bresenham são aproximações, essa abordagem com busca binária só
funcionaria corretamente em perímetros compostos apenas por arestas paralelas aos
eixos ortogonais ou às bissetrizes de seus quadrantes. Esse, obviamente, não é o caso
com compartimentos da planta de um navio.
Pelo mesmo motivo, não é possível fazer uma busca progressiva a partir do
ponto inicial, pois pode-se encontrar uma aresta válida que não seja a máxima.

54
Capítulo 6
Software
O último passo do projeto foi desenvolver uma interface gráfica amigável para o
programa, que permitisse ao programador do SCAV utilizar esses processos e sub-
rotinas de forma eficiente e transparente. O software foi estruturado de forma
minimalista, se atendo ao princípio de quão mais simples, melhor.
Quando da sua inicialização, a janela de abertura de projeto permite a escolha da
pasta de trabalho do projeto, e dentro dessa são sugeridos dois arquivos de entrada de
dados, se presentes (fig. 6.1).
O primeiro é o arquivo de código fonte da tela de avarias, gerado na IDE PhAB,
"base.wgtw", de onde serão lidas as imagens das plantas baixas a serem processadas;
que contém os retângulos e polígonos possivelmente já cadastrados; e onde serão
inseridos os objetos desses mesmos tipos, calculados para outros compartimentos.
O segundo é o arquivo do banco de dados do projeto, "scm.dat", no padrão do
SGBD SQLite, que contém os nomes e descrições de todos os compartimentos passíveis
de serem cadastrados.
Se não existirem arquivos com esses nomes, os primeiros encontrados que
possuírem as extensões corretas serão sugeridos. É possível escolher arquivos diferentes
dos indicados, se desejado, mas a existência dos dois é obrigatória.
Figura 6.1 – Janela de abertura de projeto, no SAP CAV.
Fonte: Próprio

55
Parte dos dados de saída do programa são inseridos no próprio arquivo de
código fonte "base.wgtw", especificamente as declarações dos polígonos e retângulos,
com todos seus atributos. Além de editar esse, são criados mais três arquivos com
código fonte na linguagem C ANSI (fig. 6.2).
O mais importante deles, denominado "carrega_id_comp.h", contém o
armazenamento em uma lista dos códigos de local dos compartimentos do navio. A
indexação da lista garante a crucial associação entre seus dados e os objetos de tipo
polígono, atributo que efetivamente transforma um objeto na tela em um compartimento
do navio.
Os outros dois arquivos contém o carregamento de listas com todos os nomes
dos polígonos e dos retângulos, permitindo o acesso de forma seqüencial, em tempo de
execução. Os arquivos são o "comp_cor.h" e o "comp_call.h", respectivamente. A lista
de polígonos está indexada na mesma ordem da lista no arquivo "carrega_id_comp.h".
Como cada compartimento possui um ou mais retângulos associados, a nomenclatura
desses começa com o nome do polígono do compartimento, acrescido de uma ou mais
letras e em ordem alfabética, para tornar cada nome único.
Figura 6.2 – Trechos de exemplo de arquivos de saída do software.
Fonte: Próprio

56
Para tornar mais eficientes o acompanhamento, combate e reparos de avarias a
bordo, praticamente todos os navios da MB são sub-divididos em duas ou mais regiões,
chamadas de Reparos, de responsabilidade de diferentes equipes.
O SCAV, além de exibir a planta completa com essas regiões delimitadas,
permite também a visualização individual e aumentada de cada uma delas. Ademais, o
sistema possui uma funcionalidade de visão noturna, na qual as cores de objetos e
imagens são alteradas de modo a reduzir o brilho total emitido pelas telas do sistema.
Assim, à noite, a iluminação gerada por um console no passadiço de um navio não
aumentaria o risco de detecção deste por outros navios.
Considerando isso, sabe-se então que a quantidade de imagens no código fonte
vindo do QNX será duas vezes o número de reparos existentes, mais duas, as imagens
da planta completa em ambos os modos de iluminação. O software busca no banco de
dados a quantidade de reparos desse navio, acrescenta um, e carrega todos os nomes de
imagens válidas encontradas, solicitando a escolha do operador de quais serão utilizadas
(fig. 6.3).
Figura 6.3 – Janela de carga de imagens do sistema.
Fonte: Próprio
Assim que as imagens desejadas são selecionadas e carregadas, são abertas as
principais janelas do programa, as interfaces de posicionamento dos compartimentos. À
direita são exibidos um campo de busca e uma lista com todos os compartimentos
pertinentes àquele reparo, ou todos, na janela da Vista Geral (fig. 6.4). A lista é filtrada
automaticamente quando preenchido o campo de busca. Pelo nível de sigilo das
informações do projeto, os nomes dos compartimentos nas áreas abaixo foram
mascarados.

57
Figura 6.4 – Janela da vista geral e demais reparos do navio, carregadas.
Fonte: Próprio
Cada ícone de mira desenhado sobre a imagem representa um compartimento no
banco de dados. Sempre que um compartimento for selecionado na lista, um marcador
indicará qual é o seu ícone sobre a tela (fig. 6.5).
Figura 6.5 – Compartimentos filtrados e um deles selecionado.
Fonte: Próprio

58
Sempre que o cursor do mouse for passado sobre um ícone, ou enquanto este for
arrastado, será exibida uma etiqueta com o nome de seu compartimento (fig. 6.6). Para
associar um compartimento a uma região fechada da imagem e gerar seu polígono e
seus retângulos, basta arrastar seu ícone para dentro dela (fig. 6.7).
Figura 6.6 – Arrastando ícone do compartimento para sua posição correta.
Fonte: Próprio
Figura 6.7 – Compartimento calculado.
Fonte: Próprio

59
Assim, resta ao usuário apenas posicionar as centenas de marcadores de
compartimentos em suas respectivas regiões por cima da planta da vista geral do navio e
dos diversos reparos, e não mais desenhar cada objeto de cada compartimento.

60
Capítulo 7
Conclusões
Sucesso. As formatações de arquivo, métodos e algoritmos, analisados e
implementados nos capítulos anteriores, alcançaram seus objetivos de projeto e juntos
formam o núcleo do Software de Auxílio ao Programador proposto.
Este por sua vez, apesar de minimalista e de não ter seguido rigorosamente
métricas de engenharia de software em seu desenvolvimento, foi muito bem aceito pela
equipe de programadores do SCAV. Em aplicações reais, um desses programadores
precisou de dois dias, em média, para realizar todo o mapeamento de uma nova janela
de controle de avarias, um dia além do proposto, mas ainda assim apenas uma fração do
tempo original de um mês.
Com base nessa redução no tempo de desenvolvimento, já foi cogitada pela
gerência dos projetos a possibilidade de implementação em vários novos navios, quando
antes não seria possível, dadas as limitações de tempo e pessoal.
Os desafios enfrentados durante a realização desse projeto proporcionaram a
este aluno um melhor entendimento de algumas técnicas de processamento de imagens,
bem como um apreço maior pela necessidade de iniciativa na implementação de
soluções não convencionais para problemas tidos como dificuldades intrínsecas de um
projeto.
Pretende-se dar continuidade ao desenvolvimento do software, visando torná-lo
mais robusto e acrescentando quaisquer funcionalidades que possam reduzir ainda mais
o tempo despendido em programação, por projeto.

61
Bibliografia
[1] “SQLite Home Page”, http://www.sqlite.org/, 2014, (Acesso em 16 Janeiro 2014). [2] “QNX Neutrino RTOS”, http://www.qnx.com/products/neutrino-rtos/neutrino-
rtos.html#overview, 2014, (Acesso em 16 Janeiro 2014). [3] “QNX Neutrino RTOS”, http://www.qnx.com/products/neutrino-rtos/neutrino-
rtos.html#technology-realtime, 2014, (Acesso em 16 Janeiro 2014). [4] “QNX Neutrino RTOS”, http://www.qnx.com/products/neutrino-rtos/neutrino-
rtos.html#benefits, 2014, (Acesso em 16 Janeiro 2014). [5] “BT.601 : Studio encoding parameters of digital television for standard 4:3 and wide
screen 16:9 aspect ratios”, http://www.itu.int/rec/R-REC-BT.601/en, 2014, (Acesso em 12 Fevereiro 2014).
[6] “BT.709 : Parameter values for the HDTV standards for production and
international programme exchange”, http://www.itu.int/rec/R-REC-BT.709/en, 2014, (Acesso em 12 Fevereiro 2014).
[7] SEZGIN, SANKUR, “Survey over image thresholding techniques and quantitative
performance evaluation”, Journal of Electronic Imaging 13(1), pp. 146-165, 2004. [8] NOBUYUKI OTSU, “A threshold selection method from gray-level histograms”,
IEEE Trans. Sys., Man., Cyber. 9(1), pp. 62–66, 1979. [9] “Otsu's method - Wikipedia, the free encyclopedia”,
http://en.wikipedia.org/wiki/Otsu's_method, 2014, (Acesso em 5 Março 2014). [10] “Otsu Thresholding - The Lab Book Pages”,
http://www.labbookpages.co.uk/software/imgProc/otsuThreshold.html, 2014, (Acesso em 5 Março 2014).
[11] “Flood Fill - Wikipedia, the free encyclopedia”,
http://en.wikipedia.org/wiki/Flood_fill, 2014, (Acesso em 8 Março 2014). [12] FRANZBLAU, D., KLEITMAN, D., “An Algorithm for Covering Polygons
with Rectangles”, Information and Control 63, pp. 164–189, 1984. [13] “NP-hard - Wikipedia, the free encyclopedia”, http://en.wikipedia.org/wiki/NP-
hard, 2014, (Acesso em 5 Junho 2014). [14] “ELEN 4304/5365 - Digital Image Processing”, http://ee.lamar.edu/gleb/dip/10-
2%20-%20Morphological%20Image%20Processing.pdf, 2014, (Acesso em 10 Junho 2014).

62
[15] “Line drawing algorithm - Wikipedia, the free encyclopedia”, http://en.wikipedia.org/wiki/Line_drawing_algorithm, 2014, (Acesso em 15 Junho 2014).
[16] BRESENHAM, J. E., “Algorithm for computer control of a digital plotter”, IBM
Systems Journal 4(1), pp. 25–30, 1965. [17] “Bresenham's line algorithm - Wikipedia, the free encyclopedia”,
http://en.wikipedia.org/wiki/Bresenham's_line_algorithm, 2014, (Acesso em 28 Junho 2014).
[18] “The Bresenham Line-Drawing Algorithm”,
http://www.cs.helsinki.fi/group/goa/mallinnus/lines/bresenh.html, 2014, (Acesso em 28 Junho 2014).
[19] “Xiaolin Wu's line algorithm - Wikipedia, the free encyclopedia”,
http://en.wikipedia.org/wiki/Xiaolin_Wu%27s_line_algorithm, 2014, (Acesso em 29 Junho 2014).