Embed Size (px)
Citation preview

UNIVERSIDADE FEDERAL DO SUL E SUDESTE DO PARÁ
INSTITUTO DE GEOCIÊNCIAS E ENGENHARIAS
Faculdade de Computação e Engenharia Elétrica
Bacharelado em Sistemas de Informação
PRODUÇÃO DE ELEMENTOS AUDIO VISUAIS PARA JOGOS
DIGITAIS E ANIMAÇÃO DE PERSONAGEM VIRTUAL UTILIZANDO
SENSOR KINECT V1: Aplicação da tecnologia Motion Capture em um
modelo 3D
Tiago de Souza Araújo
MARABÁ
2017

II
Tiago de Souza Araújo
PRODUÇÃO DE ELEMENTOS AUDIO VISUAIS PARA JOGOS
DIGITAIS E ANIMAÇÃO DE PERSONAGEM VIRTUAL UTILIZANDO
SENSOR KINECT V1: Aplicação da tecnologia Motion Capture em um
modelo 3D
Trabalho de Conclusão de Curso, apresentado à
Universidade Federal do Sul e Sudeste do Pará,
como parte dos requisitos necessários para
obtenção do Título de Bacharel em Sistemas de
Informação.
Orientador:
Prof. Dr. Manoel Ribeiro Filho
MARABÁ
2017

III
Dados Internacionais de Catalogação-na-Publicação (CIP) Biblioteca Josineide da Silva Tavares da UNIFESSPA. Marabá, PA
Araújo, Tiago de Souza
Produção de elementos áudio visuais para jogos digitais e animação de personagem virtual utilizando sensor Kinect v1: aplicação da tecnologia Motion Capture em um modelo 3D / Tiago de Souza Araújo ; orientador, Manoel Ribeiro Filho. — 2017. Trabalho de Conclusão de Curso (Graduação) - Universidade Federal do Sul e Sudeste do Pará, Campus Universitário de Marabá, Instituto de Geociências e Engenharias, Faculdade de Computação e Engenharia Elétrica, Curso de Bacharelado em Sistemas de Informação, Marabá, 2017. 1. Software - Desenvolvimento. 2. Jogos eletrônicos - Programas de computador. 3. Ensino auxiliado por computador. 4. Jogos no ensino de história. 5. Recursos audiovisuais. 6. Marabá (PA) - História. I. Ribeiro Filho, Manoel, orient. II. Universidade Federal do Sul e Sudeste do Pará. III. Título.
CDD: 22. ed.: 005.1
Elaborado por Alessandra Helena da Mata Nunes
Bibliotecária-Documentalista CRB2/586

IV

V
Dedico este trabalho a todos que
contribuíram direta ou indiretamente em
minha formação acadêmica.

VI
AGRADECIMENTOS
A Deus, o autor e consumador da minha fé.
A Universidade Federal do Sul e Sudeste do Pará – Unifesspa.
A minha família que com amor sempre me apoiou.
A minha esposa Simone por me impulsionar e motivar a fazer sempre melhor.
Ao orientador Prof. Dr. Manoel Ribeiro Filho que teve papel fundamental na elaboração deste
trabalho.
Aos meus amigos pelo companheirismo e disponibilidade para me auxiliar em vários
momentos.

VII
"à digitalização da mídia e a
democratização da tecnologia".
Chong 2011

VIII
Sumário
CAPÍTULO I - INTRODUÇÃO ............................................................................................. 1
1.1. OBJETIVO GERAL ........................................................................................................ 1
1.2. OBJETIVOS ESPECÍFICOS .......................................................................................... 1
1.3. JUSTIFICATIVA ............................................................................................................ 1
1.4. ESTRUTURA DO TRABALHO .................................................................................... 2
CAPÍTULO II – REFERENCIAL TEÓRICO ...................................................................... 4
2.1. CONTEXTO HISTÓRICO ............................................................................................. 4
2.1.1. Técnicas fotográficas ................................................................................................. 4
2.1.2. Rotoscopia ................................................................................................................... 5
2.1.3. Captura de movimentos através do computador .................................................... 7
2.2. TRABALHOS RELACIONADOS ............................................................................... 13
2.3. CONSIDERAÇÕES ...................................................................................................... 16
CAPÍTULO III – FERRAMENTAS E MÉTODOS ........................................................... 17
3.1. FERRAMENTAS .......................................................................................................... 17
3.1.1. Game Marabá: ......................................................................................................... 17
3.1.2. Guerrilha do Araguaia: ........................................................................................... 18
3.2. MÉTODOS .................................................................................................................... 18
3.2.1. Game Marabá: ......................................................................................................... 18
3.2.2. Jogo da Guerrilha do Araguaia: ............................................................................. 18
CAPÍTULO IV – RESULTADOS ........................................................................................ 20
4.1. PRODUÇÃO AUDIO VISUAL DO JOGO MARABÁ ............................................... 20
4.2. CAPTURANDO OS MOVIMENTOS PARA O JOGO GUERRILHA DO
ARAGUAIA ............................................................................................................................. 23
4.2.1. Captura e renderização ........................................................................................... 23
CAPÍTULO V – CONSIDERAÇÕES FINAIS .................................................................... 28
5.1. TRABALHO FUTUROS .............................................................................................. 28
REFERÊNCIAS BIBLIOGRÁFICAS ................................................................................. 29
APÊNDICE A – TELAS DE bônus de informação DA 1ª FASE DO JOGO marabá ..... 31
APÊNDICE B – TELAS DE bônus de informação DA 2ª FASE DO JOGO marabá ..... 33
APÊNDICE C – TELAS DE bônus de informação DA 3ª FASE DO JOGO marabá ..... 34

IX
LISTA DE FIGURAS
Figura 1 – Resultado da captura do galope de um cavalo utilizando o zoopraxiscópio ........... 04
Figura 2 – Modelo de zoopraxiscópio ...................................................................................... 05
Figura 3 – Desenho do processo de rotoscopia.......................................................................... 06
Figura 4 – Tira em quadrinhos do palhação Koko .................................................................... 06
Figura 5 – Fotograma de As Viagens de Gulliver .................................................................... 07
Figura 6 – Personagens do comercial Party Hardy ................................................................... 10
Figura 7 – Equipe do comercial Party Hardy no set de gravação ............................................. 10
Figura 8 – Pôster de lançamento do filme Sinbad: Beyond the Veil of Mists .......................... 11
Figura 9 – Sessão de captura de movimento e a cena correspondente no filme O Senhor dos
Anéis......................................................................................................................................... 12
Figura 10 – Sessão de captura de movimento para o filme King Kong ................................... 12
Figura 11 – Sistema de ossos baseado em hierarquia ............................................................... 14
Figura 12 – Bônus de informação do Jogo Marabá .................................................................. 21
Figura 13 – Processo de pós-produção dos áudios gravados .................................................... 21
Figura 14 – Tela de inventário da 1ª fase do jogo Marabá ....................................................... 22
Figura 15 – Tela de inventário da 2ª fase do jogo Marabá ....................................................... 22
Figura 16 – Tela de inventário da 3ª fase do jogo Marabá ....................................................... 22
Figura 17 – Elementos que compõem a tela principal do jogo Marabá ................................... 23
Figura 18 – Equipamentos utilizados na MOCAP..................................................................... 25
Figura 19 – Alinhamentos dos personagens.............................................................................. 25
Figura 20 – Teste de captura óptica de movimento .................................................................. 26
Figura 21 – Sessão de MOCAP ................................................................................................. 26
Figura 22 – Diálogo entre os personagens Osvaldão e o menino............................................ 27

X
LISTA DE SIGLAS
3D – 3 Dimensões (x,y,z)
BTS – Bioengineering Technology Systems (Sistemas de Tecnologia de Bioengenharia)
FACEEL – Faculdade de Computação e Engenharia Elétrica
LAGE – Laboratório de Games Educativos
LED - Light Emitting Diode (Diodo Emissor de Luz)
MIT – Massachusetts Institute of Technology (Instituto de Tecnologia de Massachusetts)
MOCAP – Motion Capture (Captura Óptica de Movimento)
RGB – Red, Green e Blue (Vermelho, Verde e Azul)
UHF – Ultra High Frequency (Frequência Ultra-Alta)
Unifesspa – Universidade Federal do Sul e Sudeste do Pará

XI
RESUMO
Este trabalho aborda algumas características do processo de criação de elementos áudio visuais
de jogos digitais, tendo como objeto de estudo o jogo Marabá que tem como principal objetivo
ensinar de forma lúdica sobre a história da fundação da cidade de Marabá aos alunos da rede
pública municipal de ensino da referida cidade, sendo estes relevantes processos na criação de
jogos digitais, os quais tem por objetivo contribuir no processo de imersão do jogador dentro
do ambiente virtual, bem como fomentar o interesse e a interação do jogador com o jogo. Será
abordado também os conceitos e características do processo de captura óptica de movimento
humano (MOCAP), utilizando o sensor Kinect v1 do console Xbox 360 da empresa Microsoft®,
o qual será utilizado no processo de captura de movimento para animação de personagem
virtual, possibilitando a interação mais natural entre o usuário e a aplicação. Serão apresentadas
as ferramentas necessárias para efetuação do processo de captura óptica de movimento e quais
a vantagens e desvantagens dos sistemas de captura óptica. Será apresentado como exemplo de
aplicação da MOCAP, a animação dos personagens “Osvaldão” e do “menino”, do jogo que
tem por enredo a Guerrilha do Araguaia

XII
ABSTRACT
This work will address some of the characteristics of the process of creation of visual audio
elements of digital games, having as object of study the theme Marabá that has as main objective
to teach in a playful way about a history of the foundation of the city of Marabá for students of
municipal network Teaching Of the area of life, these processes being relevant for the creation
of digital games, which aim to contribute to the player development process within the virtual
environment, as well as foster interest and interaction of the player with the game. By also
addressing the concepts and characteristics of the human motion optical capture (MOCAP)
process, using the Kinect v1 sensor from the Microsoft® company's Xbox 360 console, which
will be used no motion capture process for virtual person animation, Enabling an inter-stranger;
They will be presented as tools for the realization of the process of optical capture of movement
and as advantages and disadvantages of the systems of optical capture. You have an example
of application of MOCAP, an animation of the characters "Osvaldão" and the "menino", the
game that has as a plot the Guerrilha do Araguaia

1
CAPÍTULO I - INTRODUÇÃO
A produção de jogos digitais se apresenta como ferramenta de grande relevância no
suporte ao processo de ensino aprendizagem, oferecendo possibilidade ao aluno de absorver
conhecimento de maneira lúdica e interativa. “Os jogos proporcionam diversão que acarreta
prazer e satisfação, elementos essenciais no processo de aprendizagem” (FILHO et al., 2016,
p1).
1.1. OBJETIVO GERAL
Este trabalho tem como objetivo geral demonstrar as etapas para desenvolvimento de
elementos áudio visuais para jogos digitais e utilizar a técnica de captura óptica de movimentos
MOCAP no processo de animação de personagens virtuais utilizando o dispositivo sensor
Kinect v1 do console Xbox 360 da empresa Microsoft®.
1.2. OBJETIVOS ESPECÍFICOS
Visando atingir o objetivo principal, alguns objetivos específicos são requeridos, que
são:
Desenvolver as artes do jogo GAME Marabá (tela inicial, cutscenes e os bônus de
informação)
Produzir as narrações que compõem o jogo Marabá (cutscenes e bônus de informação)
Desenvolver o personagem 3D com estrutura hierárquica de ossos;
Realizar captura de movimentos do ator a partir do dispositivo Kinect v1;
Realizar o mapeamento dos movimentos capturados para o personagem 3D.
Como estudo de caso, utilizar a captura óptica de movimentos no personagem Osvaldão
e o menino, sendo estes, personagens do jogo da Guerrilha do Araguaia.
1.3. JUSTIFICATIVA
A captura de movimento é uma importante ferramenta no processo de animação de
personagens virtuais em filmes e jogos digitais graças ao alto grau de realismo e suavidade que
podem ser alcançados.
A equipe de desenvolvimento de jogos da Faculdade de Computação e Engenharia
Elétrica – FACEEL da Universidade Federal do Sul e Sudeste do Pará, tem trabalhado no

2
desenvolvimento de jogos que visam auxiliar o ensino aprendizagem de alunos em escolas da
rede pública da cidade de Marabá, estado do Pará, criando cenários e personagens
bidimensionais e tridimensionais para composição dos jogos educacionais.
No Jogo Marabá, o qual tem como enredo a história da fundação da cidade de Marabá,
foi utilizada a técnica de quadro-chave (keyframe), na animação de alguns personagens, onde
se define os pontos de início e fim de transição no posicionamento do modelo 3D, sendo que
tal técnica além de consumir muito tempo não apresenta um resultado muito realístico, pois fica
na responsabilidade do usuário a manipulação do personagem, posicionando-o e registrando os
quadros-chaves.
Durante o processo de animação dos modelos 3D foi observado a necessidade de
aplicação de técnica que aperfeiçoasse os movimentos, simulando com maior precisão os
movimentos de um ser humano, como: caminhar, correr, atacar e morrer. Surgiu então a
oportunidade de melhoria no processo de animação dos personagens utilizando a técnica de
captura de movimentos MOCAP.
Ao ser feito pesquisa sobre os sistemas de captura óptica de movimento, foi possível
observar o elevado valor para aplicação da técnica no processo de animação de personagens
3D, “onde os sistemas de captura óptica de movimento utilizados em grandes produções de
cinema e jogos chegam a custar algo em torno de 15 a 100 dólares por segundo capturado,
dependendo da complexidade da cena e da quantidade de profissionais envolvidos” (Chandler,
2012).
Diante deste quadro, observou-se a possibilidade de efetivação da captura óptica de
movimento utilizando o sensor Kinect v1 que representa uma tecnologia de baixo custo para os
estudantes e profissionais que desenvolvem animações tridimensionais para jogos ou outras
produções digitais.
Neste intuito que este trabalho pretende contribuir com a discussão sobre a utilização
do sensor Kinect v1 como recurso tecnológico para efetivação da captura óptica de movimentos
de atores reais.
1.4. ESTRUTURA DO TRABALHO
Este trabalho está estruturado da seguinte forma:
No capítulo 1 que é a introdução, serão apresentados o objetivo geral e os objetivos
específicos desta pesquisa e a justificativa a respeito da relevância do trabalho.

3
No capítulo 2 será apresentado o referencial teórico deste trabalho, sendo este
subdividido no contexto histórico da captura de movimentos e trabalhos relacionados ao
assunto.
No capítulo 3 serão apresentadas as ferramentas e métodos utilizados no
desenvolvimento do trabalho.
No capítulo 4 serão apresentados os resultados obtidos no desenvolvimento dos
elementos áudio visuais e captura de movimentos para jogos digitais.
No capítulo 5 as considerações finais e trabalho futuros.

4
CAPÍTULO II – REFERENCIAL TEÓRICO
Uma importante etapa no processo de criação de jogos digitais é a animação dos
personagens virtuais, visando uma interação mais imersiva por parte dos jogadores no ambiente
virtual.
Diante da necessidade de expressões e comportamento mais realístico dos personagens,
surgiram várias técnicas de animação. O presente trabalho apresentará algumas das técnicas
mais relevantes, enfatizando a técnica de captura óptica de movimentos (MOCAP).
2.1.CONTEXTO HISTÓRICO
2.1.1. Técnicas fotográficas
Para Gomide (2013) dentro de um conceito mais amplo de captura de movimento, é
possível inserir estudos iniciais do movimento de serem humanos e animais através da
fotografia. No final do século XIX, o fotógrafo Eadweard Muybridge desenvolveu técnica
fotográfica para estudar a locomoção humana. Sendo este considerado como um dos
precursores do cinema.
Em 1878, Eadweard Muybridge1 realizou uma das primeiras capturas de movimento ao
registrar fotografias de um cavalo galopando usando um conjunto de câmeras acionadas pelas
patas do animal (figura 1). Dessa maneira, ele conseguiu provar que, em determinado momento
do galope, as quatro patas do animal estariam no ar. Muybridge contribuiu também para os
primeiros passos do cinema ao inventar o zoopraxiscópio, um dispositivo capaz de exibir uma
série de imagens em sequência, dando impressão de movimento.
1 Eadweard J. Muybridge foi um fotógrafo inglês conhecido por seus experimentos com o uso de múltiplas câmeras
para captar o movimento
Figura 1 – Resultado da captura do galope de um cavalo utilizando o zoopraxiscópio.
Fonte: https://goo.gl/j73Fwo

5
No zoopraxiscópio as fotografias eram fixadas em uma roda com intervalos entre elas,
por onde se podia ver o lado oposto. Girando-se a roda obtinha-se o resultado do movimento
animado, a figura 2 mostra um modelo de zoopraxiscópio.
2.1.2. Rotoscopia
Segundo Gomide (2013) a rotoscopia pode ser considerada um ancestral direto da
captura de movimento. Ela é a única técnica que consiste em capturar os movimentos gravados
quadro a quadro para utilização em personagens digitais. As imagens do filme são projetadas
sobre uma placa de vidro e redesenhadas pelo animador, quadro a quadro, de trás para a frente.
Esse equipamento é chamado de rotoscópio.
De acordo com Gomide (2013) a rotoscopia, no sentido estrito da palavra, foi inventada
pelo cartunista Max Fleischer2, o qual obteve a patente em 1917. Ele tinha o desejo de
automatizar a produção de filmes de animação. Fleischer iniciou em 1915 a primeira animação
usando um rotoscópio. A figura 3 apresenta o funcionamento do processo de animação.
2 Pioneiro no desenvolvimento de desenhos animados. Foi o responsável pela transformação de personagens de
história em quadrinhos em desenhos animados como Betty Boop, Popeye e o Super-Homem.
Figura 2 – Modelo de zoopraxiscópio.
Fonte: https://goo.gl/bDWBcq

6
A rotoscopia ficou naquela época sendo útil e viável apenas para certas tomadas onde
fossem necessários movimentos de animação mais realísticos (GOMIDE, 2013, p.36).
Fleischer utilizou a rotoscopia para animar as séries Out of the Inkwell, começando em
1915 com o palhaço em Koko, the Clown, usando cenas filmadas como base para fazer as
animações, conforme figura 4.
Fleischer filmou seu irmão movimentando-se com uma roupa de palhaço e produziu
desenhos sobre os quadros individualmente, combinando-os em uma animação concluída em
1916.
Gomide (2013) diz afirma que para animar um minuto de Koko gastou-se quase um ano
de trabalho, o que demonstrou que a técnica não servia para reduzir custos ou tempo de
produção. Posteriormente, na década de 1930, fez as danças de Cab Calloway nos filmes de
Betty Boop, personagem criada por ele. Os estúdios Disney utilizaram a rotoscopia em Branca
de Neve e os Sete Anões, em 1937, em diversas animações de Branca de Neve e do príncipe,
mas de uma forma alternativa. A rotoscopia foi utilizada não para reduzir custos ou tempo de
Fonte: https://goo.gl/LHNSMZ
Figura 4 – Tira em quadrinhos do palhação Koko.
Figura 3 – Desenho do processo de rotoscopia.
Fonte: https://goo.gl/cUygEU

7
realização, mas para dar mais realismo ao movimento dos personagens, que é onde a técnica
foi amplamente empregada em diversos desenhos animados.
Para fazer frente aos Estúdios Disney e seu filme Branca de Neve, os Estúdios
Fleischer fizeram, então, o longa-metragem de desenho animado As Viagens de
Gulliver (1939), onde a animação do personagem Gulliver é toda feita com rotoscopia.
Desde então, muitos estúdios empregaram a rotoscopia, mas poucos admitem tê-la
usado devido à eterna polêmica entre os que defendem o seu uso e os que a consideram
uma técnica que desvaloriza o trabalho de animação. (GOMIDE, 2013, p.20)
A figura 5 retrata cena do filma As viagens de Gulliver, onde o personagem puxa vários
barcos.
Em 1941 Fleischer usou a técnica para fazer a série de Superman em desenho, dando
muito realismo às cenas de ação, o que foi muito marcante para a época.
2.1.3. Captura de movimentos através do computador
Dois dos participantes da equipe dos Estúdios Disney, Frank Thomas e Ollie Johnston,
escreveram o clássico The Illusion of Life: Disney Animation. Nesse livro estão descritos os
doze princípios de animação de personagens utilizados pela equipe de Disney, e que segundo
(Thomas, 1984) “podemos considerar como princípios básicos para a animação de personagens
em geral. Tendo em vista esses princípios podemos analisar as possibilidades da captura de
movimento para as diferentes demandas de uso da técnica”.
1. Comprimir e esticar: pode ser criado para criar uma sensação de peso;
2. Antecipação: é o movimento na direção oposta antes que a ação principal comece;
Fonte: https://goo.gl/MVLdTO
Figura 5 – Fotograma de As Viagens de Gulliver

8
3. Encenação: refere-se a apresentar uma ideia ou ação claramente: como os personagens
interagem entre si, como se movem, como a cena é vista;
4. Animação direta e posição-chave: são dois métodos de animação. No primeiro caso, a
ação é construída em uma sequência de eventos quadro a quadro, começando no início
até que a animação esteja completa. Na posição-chave as poses mais importantes da
ação são construídas primeiramente. A seguir, os quadros entre elas vão sendo
preenchidos até que a animação esteja completa;
5. Continuidade e sobreposição da ação: refere-se ao movimento secundário, como passar
do ponto de parada e depois retornar, por exemplo; é o oposto da antecipação;
6. Aceleração e desaceleração: mudanças na velocidade dos objetos animados;
7. Movimento em arco: a maior parte dos movimentos não são lineares; refere-se aos
objetos se movendo no espaço em arcos ao invés de retas;
8. Ação secundária: movimento de outras partes ou objetos que reagem à ação primária
dos membros e face, como cabelos e roupas;
9. Temporização: refere-se ao ritmo em que a ação ocorre;
10. Exageração: implica em aproximar ou ultrapassar os limites da realidade física para
aumentar ou dramatizar a performance do personagem;
11. Personalidade: dois personagens idênticos podem aparecer totalmente diferentes com
personalidades diferentes em cada um deles;
12. Apelo: a plateia deve achar os personagens interessantes e com apelo, tanto em
animação quanto em cenas captadas ao vivo.
Os princípios de sobreposição de ação, animação direta, aceleração e desaceleração,
arcos e movimento secundário são naturais para uma performance ao vivo. Assim, têm-se os
princípios naturalmente no processo de captura de movimento. A temporização, o apelo, a
personalidade e a encenação requerem trabalho, qualquer que seja a técnica utilizada.
De acordo com Gomide (2013) algumas das tecnologias usadas para a captura de
movimento existem desde a década de oitenta, utilizadas em aplicações com propósitos médicos
e militares.
Ela foi inicialmente utilizada no final dos anos setenta e início dos oitenta em projetos
de pesquisa, em instituições como o Massachusetts Institute of Technology (MIT), o New York
Institute of Technology e a Simon Fraser University, e só entrou em produções comerciais em
meados dos anos oitenta. Entre 1980 e 1983 desenvolveu-se um exoesqueleto com
potenciômetros acoplados às junções, na Universidade Simon Fraser. Este exoesqueleto era
vestido por uma pessoa, e os sinais dos potenciômetros eram usados para dar vida as figuras
9
animadas por computador em estudos clínicos de movimentos anormais e coreográficos. A
saída de sinal analógico era convertida em sinal digital e alimentava o sistema de computador.
Em 1982 e 1983, o MIT desenvolveu o Projeto Marionete Gráfica. Ele utilizava os
mesmos princípios dos sistemas ópticos atuais. As dificuldades maiores da época eram de
velocidade e capacidade de processamento dos computadores, e tempo de resposta das câmeras
e dos marcadores de posição. O ator que teria seus movimentos gravados, vestia uma roupa
com diodos emissores de luz (LED – light emitting diode) colocados nas principais articulações
e partes mais importantes do corpo. Duas câmeras com fotodetectores especiais capturavam as
posições bidimensionais de cada LED. O sistema era usado para movimentar um esboço de
personagem em uma figura de palitos para verificar a qualidade dos dados, e a sequência de
pontos era armazenada para posterior processamento em um personagem mais detalhado. As
dificuldades com relação à velocidade de processamento, ao número de pontos que podiam ser
capturados de cada vez, à perda dos pontos devido à oclusão dos LEDs, dentre outros
problemas, impediram que o sistema se popularizasse na época. Atualmente os equipamentos
de captura mais usados utilizam os mesmos princípios desse projeto de pesquisa.
No começo dos anos 90 a captura óptica de movimento começava a se mostrar como
elemento relevante nos projetos de computação gráfica. Muitas empresas procuravam
desenvolver aplicações em tempo real, como Medialab, Mr. Film, SimGraphics, Brad deGraf,
Windlight Studios, e outros, como Tsi, Biovision e Acclaim, desenvolviam aplicações que
funcionavam não tempo real, com ênfase no mercado de videogames.
É importante ressaltar que a indústria de videogames foi a grande responsável pela
sobrevivência durante anos das empresas que trabalhavam com mocap para animação.
Como os movimentos não precisavam ser muito precisos e os personagens eram à
época mais rudimentares, ela foi uma ferramenta amplamente utilizada nesse
mercado. (GOMIDE, 2013, p.44)
Em 1991 ocorreu o advento da empresa Homer and Associates que entrou no mundo da
captura de movimentos, fazendo uma cena para o filme O Passageiro do Futuro (Law nmover
Man), dirigido por Brett Leonard, um clipe de música premiado para Peter Gabriel e um
comercial para a loteria da Pensilvânia, chamada Party Hardy, lançando os três produtos em
1992. “Nesse comercial, uma turma de cartões de loteria animados estão em uma festa. Era uma
tarefa difícil porque os cartões deveriam ter personalidades diferentes entre si, com movimentos
humanoides e expressões faciais. ” (MENACHE, 2000, p.12), conforme a figura 6. O diretor
do comercial, Michael Kory, fez as performances de todos os tickets.

10
Para produzir estes trabalhos, a empresa Homer and Associates usou um sistema óptico
desenvolvido por uma empresa italiana de aplicações médicas e industriais, a Bioengineering
Technology Systems (BTS). Para adaptar o sistema para animação de personagens, a empresa
SuperFluo desenvolveu os softwares com essa finalidade. A figura 7 apresenta uma sessão de
captura.
Para Gomide (2009) A captura óptica de movimentos conhecida como MOCAP é um
conjunto de artifícios usados para mapear e reproduzir deslocamentos em objetos ou seres
vivos. Ela é atualmente realizada usando recursos digitais e é um campo do conhecimento
relativamente recente.
“... A mocap foi primeiramente utilizada e desenvolvida para aplicações médicas, mas
as produções cinematográficas e de jogos eletrônicos se apropriaram dela e expandiram suas
aplicações...” (GOMIDE, 2009, p.3).
Fonte: MENACHE, 2000, p.12.
Fonte: MENACHE, 2000, p.13.
Figura 6 – Personagens do comercial Party Hardy
Figura 7 – Equipe do comercial Party Hardy no set de gravação.

11
A captura óptica de movimento envolve um conhecimento multidisciplinar, utilizando
técnicas de computação e de engenharia associadas à criação e realização de animações, sejam
bidimensionais como tridimensionais, sobre imagens animadas virtualmente ou aplicando
animações sobre cenas gravadas. Para Gomide (2009) esta técnica ainda possui diversas
polêmicas de taxonomia, referentes às possíveis denominações de divisões de trabalho e de
responsabilidades na produção da animação com captura de movimentos. Alguns dos nomes
adotados são captura de movimento, captura de performance, animação de performance,
marionete digital e animação em tempo real. Para fins deste trabalho, utilizaremos como
convenção o termo captura óptica de movimento.
Em 2000 lançou-se o primeiro longa-metragem com a animação toda feita com captura
óptica de movimento, Simbad nos Limites da Aventura (Sinbad: Beyond the Veil of Mists),
dirigido por Evan Ricks, conforme apresenta a figura 8. Essa produção indo-americana, com
logística complexa, demonstrava definitivamente a viabilidade da técnica na produção de
desenhos animados feitos com computação.
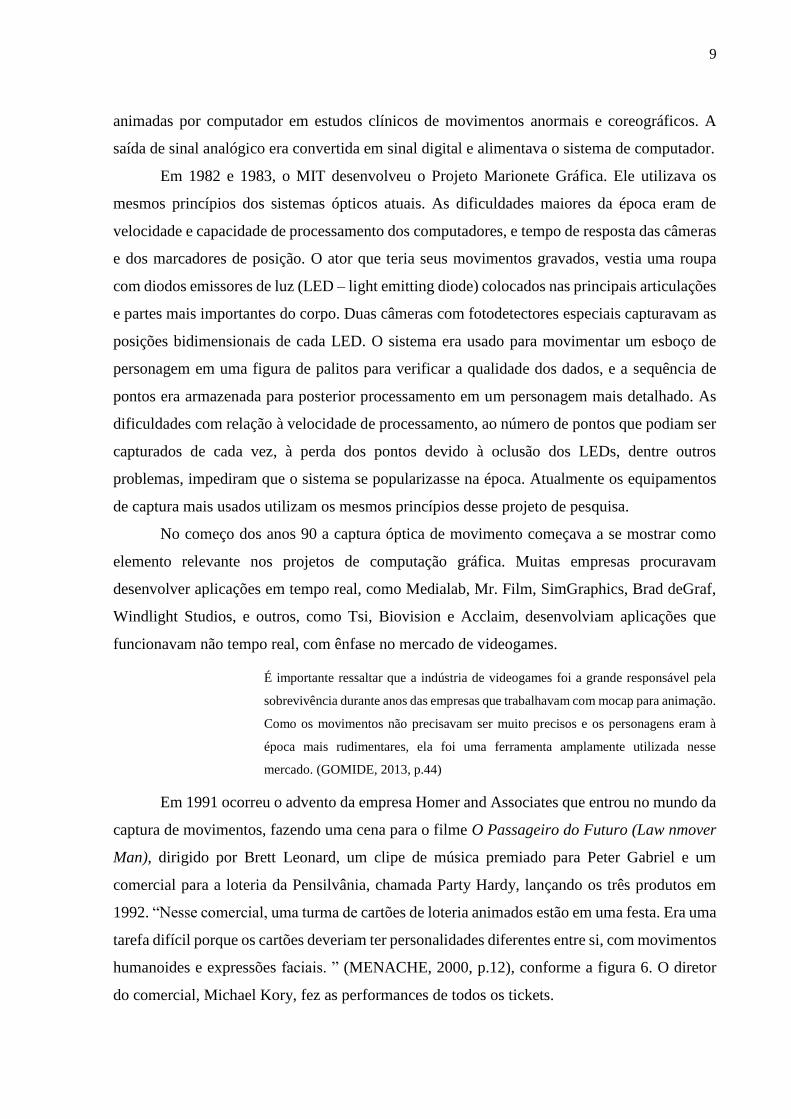
Na trilogia O Senhor dos Anéis (The Lord of the Rings), dirigida por Peter Jackson,
também utilizou a MOCAP na animação do personagem Gollum. O ator Andy Serkis na figura
9, atuou para dar vida ao personagem. O personagem contracenava com atores reais, sendo um
dos mais marcantes dos filmes. A atuação foi tão bem-sucedida que foi sugerido à época do
filme As Duas Torres (2002), o segundo da trilogia, que se criasse uma nova premiação do
Oscar para o melhor performático de captura de movimento. De acordo com o site oficial do
Fonte: https://goo.gl/D8xJ2s
Figura 8 – Pôster de lançamento do filme Sinbad: Beyond the Veil of Mists.
12
Oscar 2003, o filme O retorno do Rei ganhou o Oscar de Efeitos Visuais de 2003 (OSCAR,
2017).
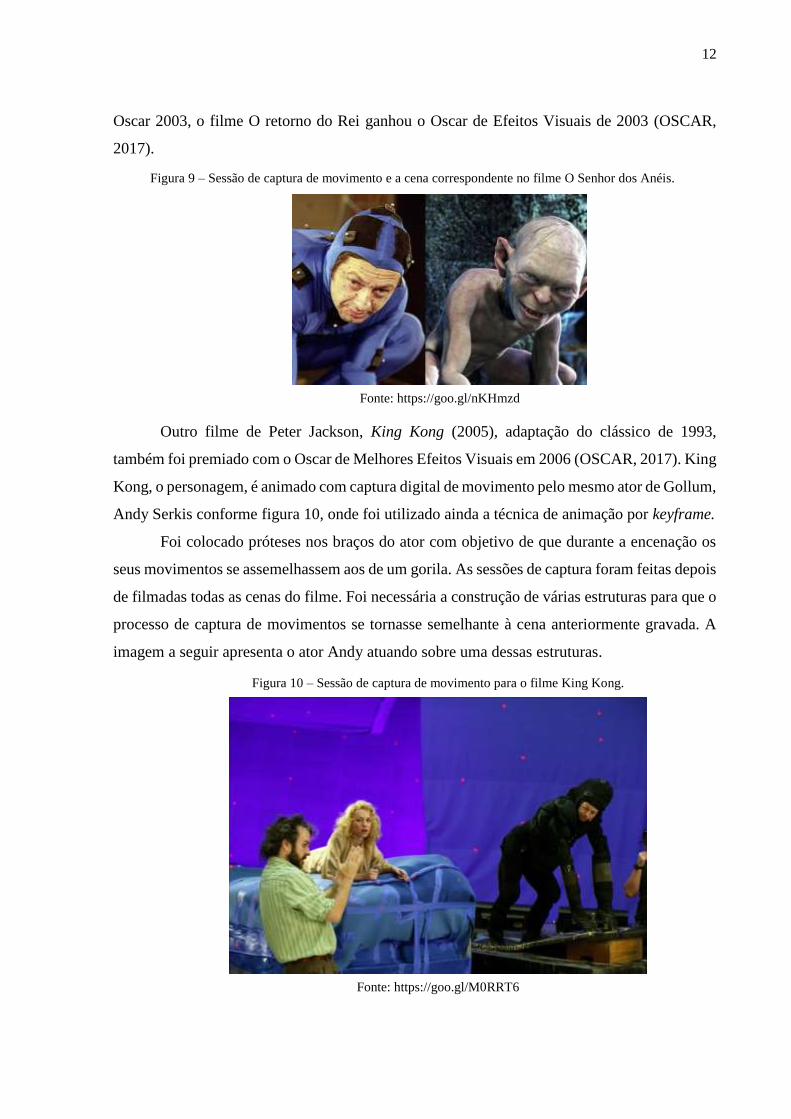
Outro filme de Peter Jackson, King Kong (2005), adaptação do clássico de 1993,
também foi premiado com o Oscar de Melhores Efeitos Visuais em 2006 (OSCAR, 2017). King
Kong, o personagem, é animado com captura digital de movimento pelo mesmo ator de Gollum,
Andy Serkis conforme figura 10, onde foi utilizado ainda a técnica de animação por keyframe.
Foi colocado próteses nos braços do ator com objetivo de que durante a encenação os
seus movimentos se assemelhassem aos de um gorila. As sessões de captura foram feitas depois
de filmadas todas as cenas do filme. Foi necessária a construção de várias estruturas para que o
processo de captura de movimentos se tornasse semelhante à cena anteriormente gravada. A
imagem a seguir apresenta o ator Andy atuando sobre uma dessas estruturas.
Figura 10 – Sessão de captura de movimento para o filme King Kong.
Fonte: https://goo.gl/nKHmzd
Figura 9 – Sessão de captura de movimento e a cena correspondente no filme O Senhor dos Anéis.
Fonte: https://goo.gl/M0RRT6

13
O sistema utilizado no processo de captura utilizada 32 câmeras para capturar os
movimentos do ator. Os marcadores eram pequenas bolas refletoras fixadas na roupa. Havia 60
marcadores para o curso e 20 para as expressões faciais. Os prolongamentos no braço também
eram monitorados e davam realismo ao movimento do gorila3.
“Os resultados da animação de King Kong com a captura de movimentos humanos
representaram uma grande evolução em relação ao que era feito até então, quando
existia um tabu de que personagens não humanos não poderiam ser animados por
MOCAP. ” (GOMIDE, 2013, p.65).
Para Flan (2009), todos os inventos e criações analógicas impulsionaram o
desenvolvimento da captura de movimento em modo bidimensional. Entretanto, somente o
surgimento dos computadores e a evolução do cinema possibilitaram a solidificação da técnica
e, mais tarde, a gravação de movimentos tridimensionais na era digital.
2.2.TRABALHOS RELACIONADOS
Para Dias (2010), animação computacional constitui um elemento vital de variadas
aplicações tais como os jogos, os filmes e os simuladores de ambientes virtuais. Permitindo ao
utilizador obter sensações através da simulação de diversos ambientes melhorando a qualidade
da experiência. Num jogo é muito importante animar adequadamente os movimentos corporais
humanos dos seus personagens, de modo a tornar o jogo mais atrativo, e de forma a
proporcionar uma experiência realista.
No decorrer do tempo foram desenvolvidas várias técnicas, tendo como premissa a
produção de animações mais realistas, como por exemplo, a animação por quadro chave
(keyframing), animação utilizando conceitos de física newtoniana e animação através de captura
de movimento, também chamada de MOCAP.
De acordo com Damasceno, Eduardo; Lamounier, Edgard Afonso; Cardoso, Alexandre
(2012), A MOCAP é um conjunto de artifícios usado para mapear deslocamentos em objetos
ou seres vivos e representa-los em um ambiente computacional.
As tecnologias utilizadas por um sistema de Captura de Movimentos (MOCAP), de
acordo com (FURNISS, 1999 apud KUHN, 2005), “podem ser divididas em quatro categorias:
acústica, eletromagnética, mecânica e óptica”, que é a de interesse do presente trabalho.
3 Extras do dvd duplo King Kong, de 2006, da Universal Studio

14
De acordo com (Gomide, 2013, p.68) “Os dispositivos para se fazer a captura de
movimento poder ser classificados em ativos ou passivos, síncronos ou assíncronos, com
marcadores ou sem marcadores, e/ou de acordo com os princípios físicos empregados”. O
presente trabalho utilizará o sensor Kinect v1 do console Xbox 360 da empresa Microsoft®
como ferramenta que possibilitará a efetivação da captura dos movimentos humanos.
O Kinect é uma tecnologia de realidade virtual que é uma combinação de hardware e
software contida dentro do sensor do Kinect. O sensor possui um hardware que
oferece diversos recursos para auxiliar no processo de reconhecimento de gestos e
voz, os principais são: emissor de luz infravermelho, sensor RGB, sensor
infravermelho, eixo motorizado e um conjunto de microfones dispostos ao longo do
sensor. (FERNANDES, et. al.,2014)
Geralmente personagens são modelados a partir de estruturas articuladas que consiste
em um conjunto de objetos rígidos interconectados por articulações que são representadas por
estruturas hierárquicas (árvores). Estas articulações formam o vínculo geométrico entre os
objetos, permitindo o movimento relativo entre eles.
A figura 11 apresenta um modelo genérico de personagem virtual, que possui 16
articulações e 20 segmentos rígidos. A raiz do modelo é o quadril e todo movimento realizado
nele tem efeito sobre toda a estrutura hierárquica.
No sistema ativo os marcadores são fontes de luz, em geral LEDs colocados nas junções
do corpo. O sistema passivo usa refletores como marcadores, em ambos os casos os detectores
são câmeras de vídeo. O sensor Kinect v1 é classificado como sistema ativo, porque utiliza
emissão de luz infravermelha e sensor infravermelho para mapeamento dos movimentos
Fonte: WOLF, Paulo Henrique e VIEIRA,
Milton Luiz, (2015).
Figura 11 – Sistema de ossos baseado em hierarquia.

15
tridimensionais, tendo como partida as coordenadas bidimensionais do personagem e
permitindo que a animação seja realizada em tempo real.
A seguir serão apresentadas algumas vantagens e desvantagens dos sistemas de captura
óptica de movimento de acordo com Menache (2000, p.20).
Vantagens:
Os dados ópticos são muito precisos na maior parte dos casos;
Um número maior de marcadores pode ser usado, como o sistema utilizado no filme O
Expresso Polar, que teve 600 marcadores;
É fácil mudar a configuração dos marcadores;
É possível obter aproximações com esqueletos internos utilizando grupo de marcadores;
Os atores não são limitados por cabos;
Permite uma área de capturar maior que em todos os outros sistemas;
Possuem uma maior frequência de captura, permitindo assim uma taxa de amostragem
maior.
Desvantagens:
Requer uma pós-produção, isto é, um posterior processamento dos dados;
O sistema é mais caro, variando entre 80.000 e 250.000 dólares;
Não pode capturar movimentos quando os marcadores ficam oclusos por períodos
longos de tempo;
A captura de movimento tem que ser feita em um ambiente controlado, sem muitos
pontos de reflexão para evitar interferência nos resultados.
É importante enfatizar que o presente trabalho utilizará o sensor Kinect v1 como
ferramenta para captura óptica de movimentos, que representa uma tecnologia de baixo custo
para os estudantes e profissionais que desenvolvem animações tridimensionais para jogos ou
outras produções digitais.
Dias (2010) apresenta como foco no seu estudo a criação de uma proposta de sistema
de animação de personagens virtuais, cujos movimentos e expressões faciais são capazes de
transmitir emoções e estados de espírito. Os movimentos primários, ou seja, os movimentos
que definem o comportamento dos personagens são provenientes da captura de movimentos
humanos (MOCAP), objetivando contar uma história através da utilização de personagens
virtuais emocionalmente expressivos.

16
O trabalho do referido autor possibilita a utilização de comunicação não verbal,
demonstrando sentimentos e emoções através das expressões faciais, o que agrega
complexidade no processo de animação de personagens virtuais. Tendo como objetivo o
desenvolvimento de um protótipo de um sistema para a simulação de movimentos humanos
realistas em tempo real, através da combinação de Motion Capture com sistemas dinâmicos.
Através da construção de animações de personagens humanos de forma simples.
O presente trabalho, assim como o de Dias (2010), apresenta proposta de animação de
personagem virtual utilizando captura óptica de movimentos, porém, este trabalho enfoca a
animação de personagem para jogos digitais, o que acarreta aplicação de metodologias distintas
no processo de desenvolvimento.
RIBEIRO, Pedro. SILVA, Tiago e JOSÉ, Rui, (2010) apresentam proposta de utilização
de personagens virtuais como tecnologia de suporte a visitas em espaços como museus ou
exposições, objetivando um maior proveito possível da experiência pelo usuário, onde o
visitante pode ser inserido no contexto através da utilização de sensores. Ficando com o usuário
a oportunidade de andar no ambiente simulado, utilizando-se do avatar (personagem do jogo).
OLIVEIRA (2011) apresenta a adaptação de um ambiente virtual tridimensional já
existente para a interação com o dispositivo Microsoft Kinect, tornando possível controlar o
ambiente sem a intervenção de periféricos tradicionais como dispositivos de entrada,
permitindo aos usuários o controle do ambiente através de gestos corporais, sendo este trabalho
similar ao de RIBEIRO, Pedro. SILVA, Tiago e JOSÉ, Rui.
2.3.CONSIDERAÇÕES
Os trabalhos descritos neste capítulo apresentam como a técnica de animação de
personagem por captura de movimento tem evoluído, sendo acrescida de outras tecnologias que
facilitam o mapeamento dos movimentos humanos e em tempo real.
O presente trabalho tem por diferencial o ambiente em que a pesquisa está inserida. No
contexto de jogos o usuário precisa de um ambiente dinâmico e evolutivo, seja no nível de
dificuldade que o jogador terá para evoluir no jogo ou de complexidade das ações dos
personagens. Dessa forma a MOCAP torna-se uma solução relevante para os possíveis
percalços que por ventura venham a ocorrer no processo de interação dos jogadores com o jogo.

17
CAPÍTULO III – FERRAMENTAS E MÉTODOS
No desenvolvimento do presente trabalho foram utilizadas as seguintes ferramentas e
métodos, as quais estão subdivididas pelos jogos em que foram utilizadas:
3.1. FERRAMENTAS
3.1.1. Game Marabá:
Audacity 2.0.5: “... Software de áudio livre, de código aberto e multiplataforma para
gravação e edição em várias faixas” (AUDACITY, 2017). Ferramenta utilizada no processo de
gravação dos áudios das cutscenes e dos bônus de informação do Game Marabá.
Blender 2.78: “... Ferramenta que permite a criação de vastos conteúdos 3D. Oferece
funcionalidades completas para modelagem, renderização, animação, pós-produção, criação e
visualização de conteúdo 3D interativo” (BLENDER, 2017). Esta ferramenta foi utilizada na
finalização dos personagens do Game Marabá e também utilizado no jogo da Guerrilha do
Araguaia, no mapeamento dos movimentos capturados pelo sensor Kinect v1 e aplicação dos
movimentos nos personagens virtuais Osvaldão e no menino, no momento onde ocorre um
diálogo entre os personagens.
Inkscape 0.91: “... Editor de gráficos vetoriais de código-fonte aberto semelhante ao
Adobe Illustrator, Corel Draw, Freehand ou Xara X” (INKSCAPE, 2017). Esta ferramenta foi
utilizada para produção de todo material de designer artístico do jogo Marabá: Tela inicial, tela
de inventário e bônus de informação.
Mesa de som Yamaha mg 16xu: Console analógico utilizado para gravação das
narrações, as quais após processo de masterização, utilizado o software Audacity 2.0.5, foram
inseridas nas cutscenes e nos bônus de informação do jogo Marabá e na gravação do diálogo
entre os personagens Osvaldão e o menino, sendo estes personagens do jogo da guerrilha do
Araguaia.
Microfone TSI-UD-2000-UHF: “Microfone duplo em UHF, banda alta (620 a 806
Mhz), dotado do sistema Ghostless, com saídas independentes balanceadas e desbalanceadas e
microfone alimentados com pilhas AA” (TSI, 2017). Esta ferramenta foi utilizada para captura
dos áudios que fizeram parte dos jogos: Game Marabá e Guerrilha do Araguaia.

18
3.1.2. Guerrilha do Araguaia:
Considerando a semelhança no processo de desenvolvimento dos jogos já citados, a foi
possível utilizar a maioria das ferramentas apresentadas para produção do material áudio visual
dos dois jogos, sendo as seguintes ferramentas: Audacity 2.0.5, Blender 2.78, MakeHuman
1.0.2, Mesa de som Yamaha mg 16xu, Microfone TSI-UD-2000-UHF.
Cada ferramenta foi utilizada em ambos os jogos com o mesmo objetivo, exceto as
seguintes ferramentas:
NI mate 2.12: “... Software que oferece captura de movimento em tempo real...” (NI
MATE, 2017). Esta ferramenta foi utilizada como um tipo de middleware no processo de
captura óptica de movimentos utilizando o sensor Kinect v1, visto que esta ferramenta possui
interoperabilidade com o blender possibilitando o mapeamento dos movimentos do ator e
manipulação dos mesmos no software blender, assim como a efetiva gravação dos frames.
Kinect 1414: Sensor de movimentos desenvolvido pela Microsoft, que possui sensor de
profundidade infravermelho, que permite o escaneamento de ambiente de forma tridimensional.
Esta ferramenta foi utilizada para capturar os movimentos dos dois atores em tempo real.
3.2. MÉTODOS
3.2.1. Game Marabá:
Levantamento bibliográfico: Foi feito levantamento bibliográfico sobre
desenvolvimento de jogos digitais e da história de fundação da cidade de Marabá, tendo como
premissa a análise de texturas e formas que remetessem ao contexto histórico de fundação da
cidade.
Produção áudio visual: Na produção visual, foi utilizado como método principal a
confecção de material que obtivesse alguma ligação ao contexto histórico e se apresentassem
ao jogador de forma agradável, e na produção dos áudios que compõem o game, foi levado em
consideração a nitidez da fala, visando estabelecer contato com o jogador de forma objetiva.
3.2.2. Jogo da Guerrilha do Araguaia:
Levantamento bibliográfico: Foi feito levantamento bibliográfico sobre
desenvolvimento de jogos digitais, e do processo de animação de personagens virtuais
utilizando a captura óptica de movimentos assim como as condições necessárias para efetivação
da captura. Verificou-se então as condições de ambiência necessárias, que favorecessem o
processo de captura óptica de movimentos.

19
Modelagem: Os personagens foram modelados no Makehuman, onde ganharam
aparência humana, esqueleto, corpo e vestimentas.
Motion Capture (MOCAP): Após a verificação das condições necessárias para
efetivação do processo de captura óptica de movimentos, realizou-se de fato a captura seguindo
as orientações observadas na literatura, como questões de iluminação.
Pós-produção: Método relevante no processo de MOCAP, pois possibilita a correção
de quadros gravados que possuem alguma perca dos movimentos realizados, seja por oclusão
que é a perda da referência corporal do ator (braços, pernas e tronco), ou por problemas de
ambiência (iluminação inadequada, sensor em mal estado).

20
CAPÍTULO IV – RESULTADOS
Este capítulo está dividido em duas partes, onde a primeira parte apresentará os
resultados do processo de produção áudio visual do Jogo Marabá e a segunda parte apresentará
os resultados do processo de animação dos personagens virtuais utilizando a técnica de captura
óptica de movimento do jogo Guerrilha do Araguaia.
4.1. PRODUÇÃO AUDIO VISUAL DO JOGO MARABÁ
O jogo GAME Marabá, desenvolvido pelo Laboratório de Games Educativos – LAGE,
da Universidade Federal do Sul e Sudeste do Pará – Unifesspa, têm como objetivo principal o
aprendizado lúdico da história da fundação da cidade, através das aventuras de Velho Chico,
espírito de Francisco Coelho da Silva (fundador de Marabá), que viaja no tempo do ano de 1906
(ano de sua morte) até o ano de 2015. E ao chegar ao Pontal, localizado no bairro Francisco
Coelho, a margem do encontro dos rios Itacaiúnas e Tocantins, local de fundação da cidade
percebe as mudanças ocorridas com o passar do tempo, e que não existem mais árvores de
caucho na região. Neste cenário ele terá como missão principal, plantar árvores de caucho. Com
a finalização da missão, Velho Chico subira o moro, chegando ao espaço de encontro das ruas
27 de março e Quintino Bocaiuvas, onde agora terá como missão principal, a construção do
estabelecimento comercial, uma casa de aviamentos de cujo nome se originou o nome da
cidade, a “Casa Marabá” (MATTOS, 2013).
No presente trabalho foram desenvolvidos todos os bônus de informação, seguindo
como premissa o contexto histórico, para isso foi necessário realizar levantamento sobre tipos
de materiais utilizados na época para confecção dos bônus de informação, os quais funcionam
como mecanismo de imersão do jogador no contexto histórico que circunda a fundação da
cidade de Marabá. A figura 12 apresente o 3º bônus de informação da 2ª fase do jogo Marabá
que apresenta ao jogador informações históricas sobre a fundação da cidade de Marabá.

21
No decorrer do jogo, quando o jogador atinge o objetivo de vencer seus inimigos, é
disponibilizado a ele um bônus de informação e cada bônus possui uma produção sonora,
facilitando ao jogador a compreensão do contexto histórico apresentado a ele.
Para a produção sonora, foi necessária a utilização de mesa de som e microfone para
efetivação da captura e gravação das vozes e ainda do software Audacity 2.0.5 para pós-
produção dos áudios gravados. A figura 13 mostra a interface o software Audacity 2.0.5 e os
áudios da segunda fase do Game Marabá no processo de pós-produção.
Figura 12 – Bônus de informação do Jogo Marabá
Fonte: Autoria própria
Figura 13 – Processo de pós-produção dos áudios gravados.
Fonte: Print screen do programa Audacity 2.0.5.

22
No processo de produção visual do jogo Marabá, foi desenvolvido também as telas que
norteiam o jogador na sua missão, pois para cada fase do jogo a missão muda, o que pode trazer
alguma confusão para o jogador. As figuras 14, 15 e 16 apresentam o resultado final da tela de
inventário, com o auxílio das telas, é possível ter sempre que necessário o resumo geral da fase
do jogo em que o jogador se encontra, facilitando assim a compressão do objetivo que ele
precisa alcançar.
Dessa forma, foi necessário produzir arte que pudesse consistir em uma tela pequena
que facilitasse ao jogador acessa-la sem precisar sair do jogo. Ficou então, estabelecido que
através de atalho no teclado o jogador pudesse acessar a tela de inventário sem
comprometimento a sua experiência no jogo.
Fonte: Autoria Própria
Figura 16 – Tela de inventário da 3ª fase
do jogo Marabá.
Fonte: Autoria Própria
Figura 14 – Tela de inventário da 1ª fase
do jogo Marabá.
Figura 15 – Tela de inventário da 2ª fase
do jogo Marabá.
Fonte: Autoria Própria

23
Para a tela principal do jogo foi necessário desenvolver elementos que simbolizassem a
somatória das etapas que estavam sendo vencidas pelo jogador, seja a obtenção de sementes à
medida que vencia os inimigos, seja o contador das árvores que o jogador já plantou. Elementos
de suma importância, pois fica transparente para o jogador a sua evolução, tornando assim o
jogo mais atrativo e interativo. A figura 17 apresenta o resultado final da arte.
Foi produzido também arte destinada a inserção da identificação do jogado como
personagem principal do enredo, o “Velho Chico”.
4.2. CAPTURANDO OS MOVIMENTOS PARA O JOGO GUERRILHA DO ARAGUAIA
Como a captura óptica de movimento pode ser utilizada em animação de personagens
virtuais, deve-se então focar a atenção nele, de que forma o personagem é criado e em como ela
lhe dá vida. A construção e conceituação do personagem, enfim, sua personalidade, é
fundamental para definir como a captura será realizada. De acordo com Gomide (2013)
entende-se por personalidade a aparência física do personagem, os seus movimentos básicos
como caminhar, correr, saltar, etc., suas ações e reações aos acontecimentos e a outros
personagens.
4.2.1. Captura e renderização
Para realização da captura óptica dos movimentos e renderização, foi utilizado no
presente trabalho os seguintes equipamentos:
Sensor Kinect v1: Foi utilizado 1 sensor Kinect v1 série 1414, como ferramenta
capaz de identificar as articulações e movimentos básicos dos atores humanos. Este
sensor possui 4 recursos essenciais para a efetivação da captura óptica de movimentos,
que são:
o 1º - Câmera RGB (Red, Green, Blue) que permite o reconhecimento facial
perfeito da pessoa que está em frente do sensor.
Figura 17 – Elementos que compõem a tela principal do jogo Marabá.
Fonte: Autoria Própria

24
o 2º - Sensor de profundidade (Infra-vermelho), que permite que o sensor realize
o escaneamento do ambiente a sua volta em três dimensões.
o 3º - Próprio processador e software.
o 4º - Detecta 48 pontos de articulação do nosso corpo.
Middelware Delicode NI Mate: Foi utilizado o software Delicode NI Mate v2.12
free como ferramenta capaz de realizar o mapeamento dos movimentos dos
personagens, a partir da captura feita pelo Kinect. Fornecendo interoperabilidade entre
o sensor e o software de modelagem e animação 3d utilizado no presente trabalho, que
foi o Blender v2.78.
O Delicode NI Mate v2.12 free oferece aos usuários a possibilidade de manipulação
de 15 articulações básicas dos personagens virtuais, criando uma estrutura hierárquica
com sistema de ossos.
Blender 2.78: Para a efetivação da captura óptica de movimentos foi utilizado o
software de modelagem Blender v2.78, onde os personagens virtuais foram inseridos
no ambiente previamente modelado. Foi utilizado o recurso de gravação automática de
quadros (Automatic keyframe), possibilitando a gravação da captura de forma
automática.
Notebook: Foi necessário a utilização de computador com configuração apropriada
para processamento gráfico, a gravação em tempo real requer alto poder de
processamento da CPU e GPU.
Diante de tal necessidade, foi utilizado no presente trabalho um notebook com a
seguinte configuração:
o Placa de vídeo NVIDIA GeForce 710M 2GB dedicada;
o 8GB de memória RAM;
o Processador core I5 1.70GHz.
A figura 18 apresenta os equipamentos utilizados no presente trabalho.

25
A captura óptica de movimentos foi aplicada na animação dos personagens Osvaldão e
do menino, sendo estes personagens pertencentes ao jogo da guerrilha do Araguaia. Os
personagens foram modelados no software Makehuman e exportados para o Blender para que
ambos fossem inseridos no ambiente 3D que representa parte da margem do Rio Araguaia. A
figura 19 apresenta parte do processo de ajustes dos personagens no software Blender.
Foi realizada a captura de dois atores de forma simultânea, simulando um diálogo que
acontece no jogo da guerrilha do Araguaia, entre os personagens Osvaldão e o menino. A cena
apresenta um jovem observando o rio e alguns jovens que estavam brincando. Nesse contexto
surge o personagem Osvaldão que inicia um diálogo com o jovem.
Foi então feito vários testes para fins de ajustes das posições dos atores, a fim evitar
oclusões e ajustes dos ossos dos personagens, evitando que haja rotação fora dos ângulos
normais do corpo humano. A figura 20 apresenta uma sessão de teste e ajuste do sensor com os
personagens.
Figura 19 – Alinhamentos dos personagens
Fonte: Print screen do Blender 2.78
Figura 18 – Equipamentos utilizados na MOCAP
Fonte: Autoria Própria

26
Para efetivação da captura foi necessário a participação de três pessoas, onde a primeira
representará o personagem Osvaldão, a segunda representará o menino que está observando o
rio e a terceira pessoa estará realizando a captura de movimentos. Foram utilizados dois
computadores notebooks, ficando um para a captura e outro para execução do áudio que contém
diálogo entre os personagens, para que os atores pudessem realizar os movimentos de maneira
sincronizada com o vídeo, otimizando assim o processo de pós-produção. A figura 21 apresenta
parte da sessão de captura.
No processo de renderização foi verificado a necessidade de processamento gráfico de
larga escala, onde cada quadro renderizado obteve um custo computacional de cerca de
1min55seg, gerando um custo total de 50horas para finalização da renderização da animação.
Para minimização deste custo, é possível a realização de Render farm que é um cluster
de computadores que tem como função paralelizar o trabalho de renderização das imagens,
Figura 20 – Teste de captura óptica de movimento
Fonte: Autoria própria
Figura 21 – Sessão de MOCAP
Fonte: Autoria própria

27
onde cada computador poderá renderizar quadros diferentes e independentes. Ressalto que por
questões de recursos de hardware, este trabalho não utilizou Render farm, o que onerou de
forma considerável o processo de renderização.
Como resultado final da gravação da captura óptica de movimentos, foi gerado um total
de 1935 quadros. Tendo a animação final, após a renderização, a duração de 01min21seg.
Aproximadamente 24 quadros por segundo de gravação. A figura 22 mostrar parte da gravação
em que os personagens estão dialogando às margens do rio Araguaia.
Figura 22 – Diálogo entre os personagens Osvaldão e o menino
Fonte: Autoria própria

28
CAPÍTULO V – CONSIDERAÇÕES FINAIS
O processo de desenvolvimento de jogos digitais possui aspectos essenciais para uma
experiência realística por parte do jogador. Independentemente do tipo de jogo é necessário que
a sua produção áudio visual esteja ajustada ao enredo para que a cada passo dentro do jogo, o
usuário tenha a sensação de estar de fato dentro do jogo.
Outra importante parte da produção nos jogos digitais e o processo de animação dos
personagens, desde questões relacionadas ao custo até prazos para o desenvolvimento, nesse
contexto a captura óptica de movimentos surge como possibilidade muito interessante, pois
possibilita ao animador captura movimentos humanos com qualidade e realismo, entretanto,
dependendo do sistema, este pode acarretar custos elevados no orçamento.
O planejamento é fundamental quando se vai utilizar a captura óptica de movimentos
em uma produção de jogos digitais, para decidir-se sobre a sua utilização e para obtenção dos
melhores resultados dentro do tempo e orçamento disponíveis.
O presente trabalho apresenta a possibilidade de utilização do sensor Kinect v1, como
ferramenta capaz de capturar movimentos humanos através de suas câmeras e sensores. Sendo
este de baixo custo e produtor de resultados satisfatórios. Abrindo assim, perspectivas sobre a
utilização do referido sensor no processo de captura de movimentos e até estudos sobre outras
possibilidades para utilização do mesmo nas mais diversas áreas do conhecimento. Esperamos
contribuir com isso, para ampliação de estudos sobre técnicas de desenvolvimento áudio visuais
de jogos digitais e MOCAP.
5.1. TRABALHO FUTUROS
Como possíveis trabalhos futuros, pode-se apontar:
Jogos digitais utilizando captura óptica de movimentos e inteligência computacional.
Aplicação da MOCAP utilizando o sensor Kinect v2®, o qual possui maior fidelidade
no mapeamento dos movimentos e oportuniza a captura de expressões faciais;
Aplicação da MOCAP utilizando o Kinect v1 ou v2 no desenvolvimento de fisiogames,
jogo voltados para análise funcional de movimentos humanos. Seja para
acompanhamento fisioterapêutico como prevenção de doenças que afetam diretamente
a parte motora do ser humano;

29
Prototipação de middleware capaz de mapear de forma mais eficiente os dados
capturados pelo sensor Kinect e exporta-los para o Blender para fins de animação,
conforme o que fora desenvolvido no presente trabalho.
Aplicação da MOCAP utilizando o Kinect v1 ou v2 no desenvolvimento de softwares
capazes de falar o significado de cada movimento da Língua Brasileira de Sinais
(Libras), facilitando a interação entre pessoas com deficiência auditiva e vocal.
REFERÊNCIAS BIBLIOGRÁFICAS
AUDACITY, 2017. Audacity 2.0.5. Disponível em: < http://www.audacityteam.org> Acesso
em 13 de abr. de 2016.
BLENDER, 2017. Blender 2.78. Disponível em: <https://www.blender.org>. Acesso em 06 de
jan. de 2017.
CHANDLER, Heather Maxwell. Manual de Produção de Jogos Digitais. 2. ed. Porto Alegre:
Bookman, 2012.
DAMASCENO, Eduardo; LAMOUNIER, Edgard Afonso; CARDOSO, Alexandre. Artigo
publicado por Journal of Health Informatics, 2012. Uma avaliação heurística sobre um Sistema
de Captura de Movimentos em Realidade Aumentada. Disponível em <http://www.jhi-
sbis.saude.ws/ojs-jhi/index.php/jhi-sbis/article/view/148/122 >. Acesso em 15 de abr. de 2016.
DIAS, Rui Luís Correia, 2010. Sistema de animação de personagens virtuais para comunicação
não verbal. Disponível em < http://biblioteca.versila.com/15031839 >. Acesso em 15 de abr. de
2016.
FERNANDES, Flávia Gonçalves et al. Artigo publicado no XII CEEL, 2014. REALIDADE
VIRTUAL E AUMENTADA APLICADA EM REABILITAÇÃO FISIOTERAPÊUTICA
UTILIZANDO O SENSOR KINECT E DISPOSITIVOS MÓVEIS. Disponível em < http://www.ceel.eletrica.ufu.br/artigos2014/ceel2014_artigo005_r01.pdf>. Acesso em 08 de
jan. de 2017.
FIILHO, Rangel Teixeira et al. Artigo publicado no SBGames, trilha cultura, 2016. GAME
MARABÁ: Projeto, Implementação, e Avaliação de um Jogo Educativo para Auxilio no Ensino
de Estudos Amazônicos. Disponível em <
https://lage.unifesspa.edu.br/images/publicacoes_lage/Rangel.pdf>. Acesso em 07 de jan. de
2017.
FLAN, David Lunardi. Dissertação apresentada na UFMG, 2009. OPENMOCAP: UMA
APLICAÇÃO DE CÓDIGO LIVRE PARA A CAPTURA ÓPTICA DE MOVIMENTO.
Disponível em < http://hdl.handle.net/1843/SLSS-7WMJG9>. Acesso em 03 de mar. de 2016.
GOMIDE, J.V.B. Artigo publicado no SBGames, 2009. Captura de Movimento e Animação de
Personagens em Jogos. Disponível em <
http://ddijogos.xpg.uol.com.br/captura_de_movimento.pdf>. Acesso em 07 de mar. de 2017

30
GOMIDE, J.V.B. Dissertação apresentada na UFMG, 2013. CAPTURA DIGITAL DE
MOVIMENTO NO CINEMA DE ANIMAÇÃO. Disponível em
<http://www.bibliotecadigital.ufmg.br/dspace/bitstream/handle/1843/JSSS-
94EPAW/mestrado_jvbg.pdf?sequence=1>. Acesso em 07 de jan. de 2017.
INKSCAPE, 2017. Inkscape 0.91. Disponível em: < https://inkscape.org/pt-br/>. Acesso em 13
de abr. de 2016.
KUHN, Giovane Roslindo. Monografia apresentada na FURB, 2005. Animação de um
Personagem Virtual Utilizando Captura Óptica de Movimento com Marcadores Especiais.
Disponível em: < http://www.inf.furb.br/~rodacki/tcc/293215>.
MAKEHUMAN, 2017. MakeHuman 1.0.2. Disponível em: <http://www.makehuman.org>.
Acesso em 01 de jan. de 2017.
MATTOS, Maria Virginia Bastos de. 2013. História de Marabá. 2. ed. Revisada e
aumentada, Fundação Casa da Cultura de Marabá.
MENACHE, Alberto. 2000. Understanding Motion Capture for Computer Animation and
Video Games. Morgan Kaufmann Publishers Inc., San Francisco, CA, USA.
MUYBRIDGE, Eadweard. 1984. The Male and Female Figure in Motion: Classic
Photographic Sequences. Dover Publications, 1984.
OLIVEIRA, Fernando Cruzatti de. Artigo publicado na Computer on the Beach 2011. Um
ambiente Interativo em 3D para o projeto TAMAR – ICMBio – Praia do Forte – Utilização do
Microsoft Kinect. Disponível em:
<http://siaiap32.univali.br/seer/index.php/acotb/article/view/6392>. Acesso em 07 de mar. de
2016.
OSCAR, 2017. Base de Dados de Prêmios da Academia contém o registro oficial de vencedores
e indicados ao Oscar. Disponível em <http://awardsdatabase.oscars.org>. Acesso em 08 de jan.
de 2017
RIBEIRO, Pedro. SILVA, Tiago e JOSÉ, Rui. Artigo publicado na Universidade do Minho-
Portugal, 2010. Aplicação de personagens virtuais como guias de visita. Disponível em: <
https://repositorium.sdum.uminho.pt/bitstream/1822/19206/3/UbiVisit_paper_v1.5.pdf>.
Acesso em 15 de abr. de 2016.
THOMAS, Frank (Johnston, Ollie).1984. Disney animation: the illusion of life. Popular ed.
New York: Abbeville Press, 1984
TSI, 2017. Microfone TSI-UD-2000-UHF. Disponível em: < http://www.tsi.ind.br/produto/tsi-
ud-2000-uhf/67>. Acesso em 09 de abr. e 2017.
WOLF, Paulo Henrique e VIEIRA, Milton Luiz. Revista publicada pela Universidade Federal
de Londrina – UEL, 2015. DESIGN DE ANIMAÇÃO: CONCEPÇÃO DE PERSONAGEM
E CAPTURA DE MOVIMENTO. Disponível em:
<http://www.uel.br/revistas/uel/index.php/projetica/article/viewFile/19906/17113>. Acesso
em 15 de abr. de 2016.

31
APÊNDICE A – TELAS DE BÔNUS DE INFORMAÇÃO DA 1ª FASE DO JOGO
MARABÁ

32

33
APÊNDICE B – TELAS DE BÔNUS DE INFORMAÇÃO DA 2ª FASE DO JOGO
MARABÁ

34
APÊNDICE C – TELAS DE BÔNUS DE INFORMAÇÃO DA 3ª FASE DO JOGO
MARABÁ

35





























