Embed Size (px)
Citation preview
1
Resumo - O artigo em questão aborda o tema de
modelagem de carga, fundamental para estudos de regimes permanente (fluxo de potência) e dinâmico (estabilidade transitória) do sistema elétrico de potência, responsáveis, dentre outras coisas, por determinar os limites de transferência de energia das linhas de transmissão.
A partir de dados de medições de Tensão e Corrente, aquisitadas por Registradores Digitais de Perturbação, alocados no sistema de subtransmissão (69kV), foi utilizada a técnica de inteligência computacional conhecida como Algoritmo Genético (AG), a fim de identificar qual o modelo de carga, dentre os investigados, que melhor representasse o comportamento estático e dinâmico daquela região (capital do Piauí, Teresina).
Como a carga é variante no tempo, uma vez identificado o modelo, o mesmo foi validado em diferentes dias da semana e diferentes horários, para diferentes tipos de curto-circuito, constatando-se a acurácia e abrangência do modelo.
A heurística que permeia a solução do problema consiste na estimação de parâmetros que minimizam o erro entre o modelo matemático de carga, e a curva de carga obtida através da medição.
Palavras Chave – Modelagem de carga, algoritmos genéticos, estabilidade dinâmica, medição.
I. INTRODUÇÃO
O principal objetivo de um sistema elétrico de potência é transportar energia de unidades geradoras remotas aos clientes, atendendo a certos requisitos de qualidade e segurança. Modelos matemáticos são inerentes à compreensão do comportamento do sistema elétrico de potência, fornecendo subsídios para controle, planejamento e operação. Os operadores do sistema querem determinar com exatidão o limite máximo de intercâmbios de energia entre áreas. Um dos critérios impeditivos é o dinâmico: o sistema pode perder a estabilidade se uma linha estiver muito sobrecarregada e houver um evento qualquer (curto-circuito remoto, chaveamento de bancos de capacitores, entrada/saída de linhas...). O resultado das simulações está correlacionado com a representação das cargas e seu comportamento dinâmico, um modelo preciso do sistema pode aumentar a margem de manobra, sem comprometer as restrições de segurança. Cargas representam a agregação centenas de milhares de equipamentos elétricos, “vistos” a partir de barramentos de subestações de sistemas de distribuição. Têm um comportamento estocástico, aproximadamente sazonal e não-linear. Estas características dificultam a tarefa de se obter representações precisas. Em [1] e [2] há uma lista de
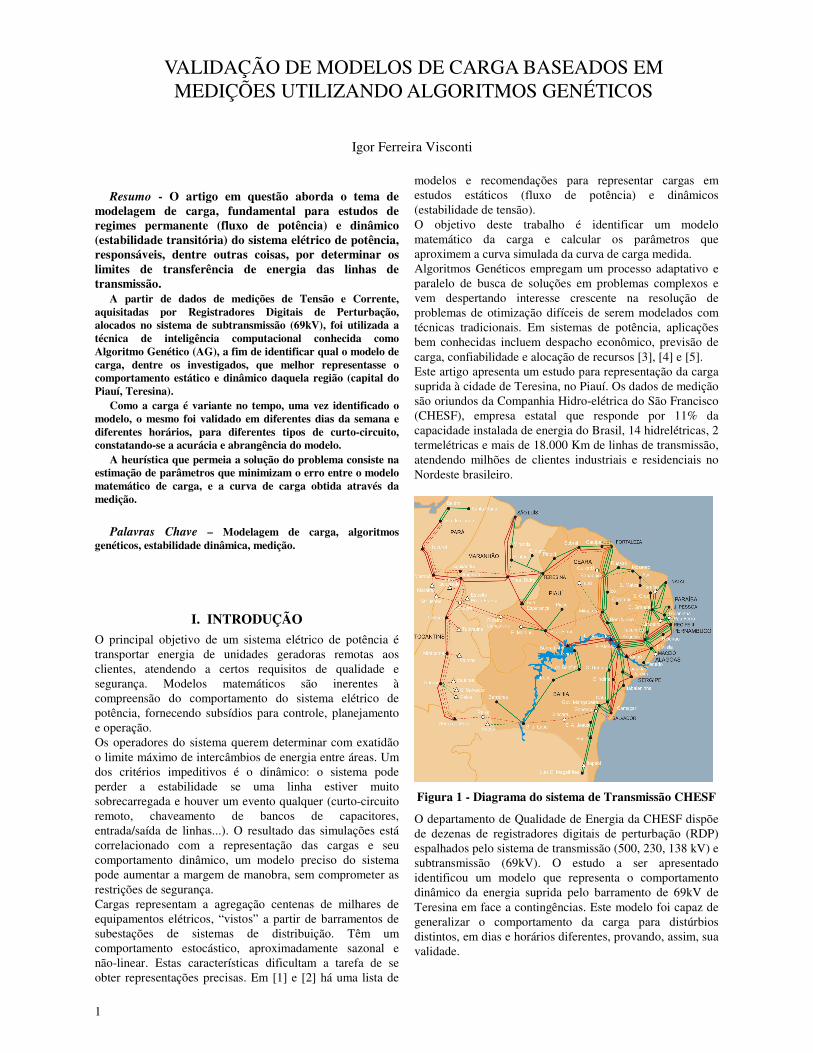
modelos e recomendações para representar cargas em estudos estáticos (fluxo de potência) e dinâmicos (estabilidade de tensão). O objetivo deste trabalho é identificar um modelo matemático da carga e calcular os parâmetros que aproximem a curva simulada da curva de carga medida. Algoritmos Genéticos empregam um processo adaptativo e paralelo de busca de soluções em problemas complexos e vem despertando interesse crescente na resolução de problemas de otimização difíceis de serem modelados com técnicas tradicionais. Em sistemas de potência, aplicações bem conhecidas incluem despacho econômico, previsão de carga, confiabilidade e alocação de recursos [3], [4] e [5]. Este artigo apresenta um estudo para representação da carga suprida à cidade de Teresina, no Piauí. Os dados de medição são oriundos da Companhia Hidro-elétrica do São Francisco (CHESF), empresa estatal que responde por 11% da capacidade instalada de energia do Brasil, 14 hidrelétricas, 2 termelétricas e mais de 18.000 Km de linhas de transmissão, atendendo milhões de clientes industriais e residenciais no Nordeste brasileiro.
Figura 1 - Diagrama do sistema de Transmissão CHESF
O departamento de Qualidade de Energia da CHESF dispõe de dezenas de registradores digitais de perturbação (RDP) espalhados pelo sistema de transmissão (500, 230, 138 kV) e subtransmissão (69kV). O estudo a ser apresentado identificou um modelo que representa o comportamento dinâmico da energia suprida pelo barramento de 69kV de Teresina em face a contingências. Este modelo foi capaz de generalizar o comportamento da carga para distúrbios distintos, em dias e horários diferentes, provando, assim, sua validade.
Igor Ferreira Visconti
VALIDAÇÃO DE MODELOS DE CARGA BASEADOS EM MEDIÇÕES UTILIZANDO ALGORITMOS GENÉTICOS
2
II. METODOLOGIA
A abordagem de modelagem de cargas baseada em medição pode ser sintetizada nos seguintes tópicos [6]:
• Aquisição de dados medidos de Tensão e Corrente (V e I) no 69kV de Teresina
• Processamento das formas de ondas de Tensão e Corrente em Potências Ativa e Reativa (P e Q)
• Identificação do modelo mais representativo das curvas de Potência e obtenção de seus parâmetros
• Validação do modelo para outras medições no mesmo ponto (Teresina – 69kV) referentes a diferentes dias, horários e distúrbios
III. AQUISIÇÃO E PROCESSAMENTO DE DADOS
Os RDP da rede de coleta de dados da CHESF são programados para registrar formas de ondas de tensão e corrente quando ocorrem Variações de Tensão de Curta Duração (VTCD, [7] e [8]), definidas como uma redução súbita no valor eficaz de pelo menos uma das tensões entre fase e neutro, abaixo de noventa por cento do seu valor nominal (Va(k) OU Vb(k) OU Vc(k) ≤ 0,9 p.u.) , durando até o restabelecimento de todas as fases acima deste patamar (Va(k+∆t) E Vb(k+∆t) E Vc(k+∆t) > 0,9 p.u., sendo ∆t=duração da VTCD). A Figura 2 ilustra uma VTCD.
Figura 2 - Variação de Tensão de Curta Duração (VTCD)
A partir de dados de VTCD registradas no banco de dados do sistema de monitoração da CHESF, foi estabelecido o seguinte procedimento:
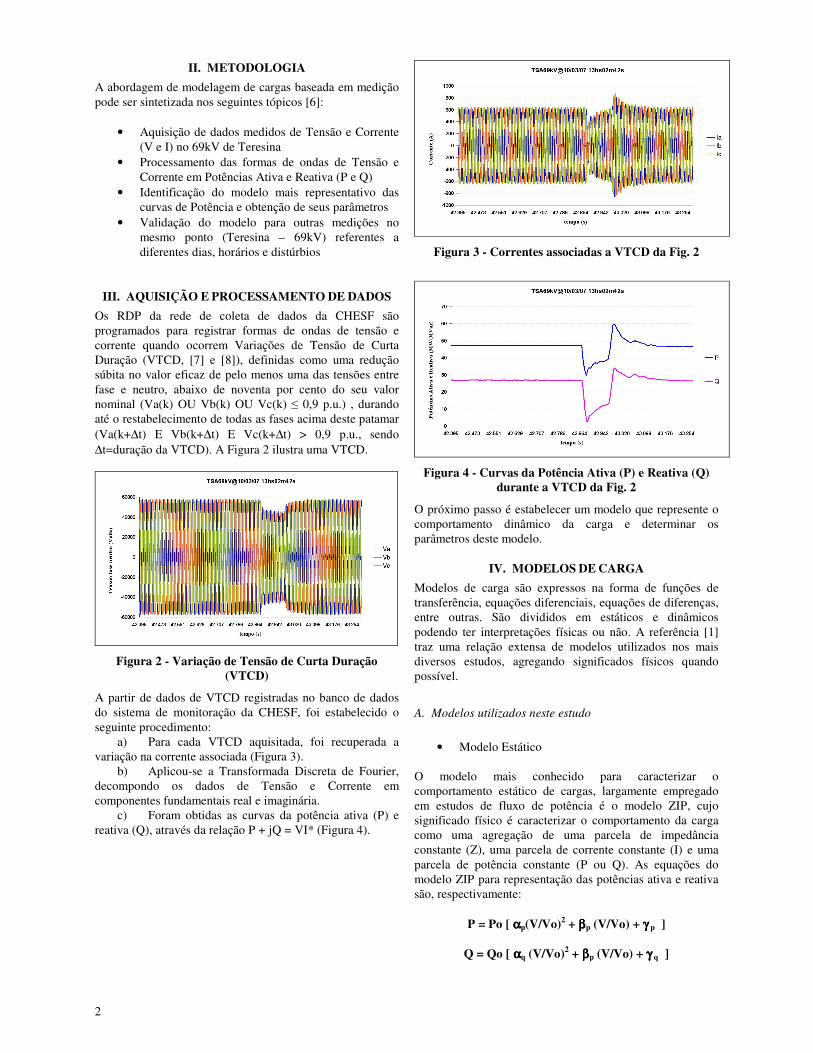
a) Para cada VTCD aquisitada, foi recuperada a variação na corrente associada (Figura 3).
b) Aplicou-se a Transformada Discreta de Fourier, decompondo os dados de Tensão e Corrente em componentes fundamentais real e imaginária.
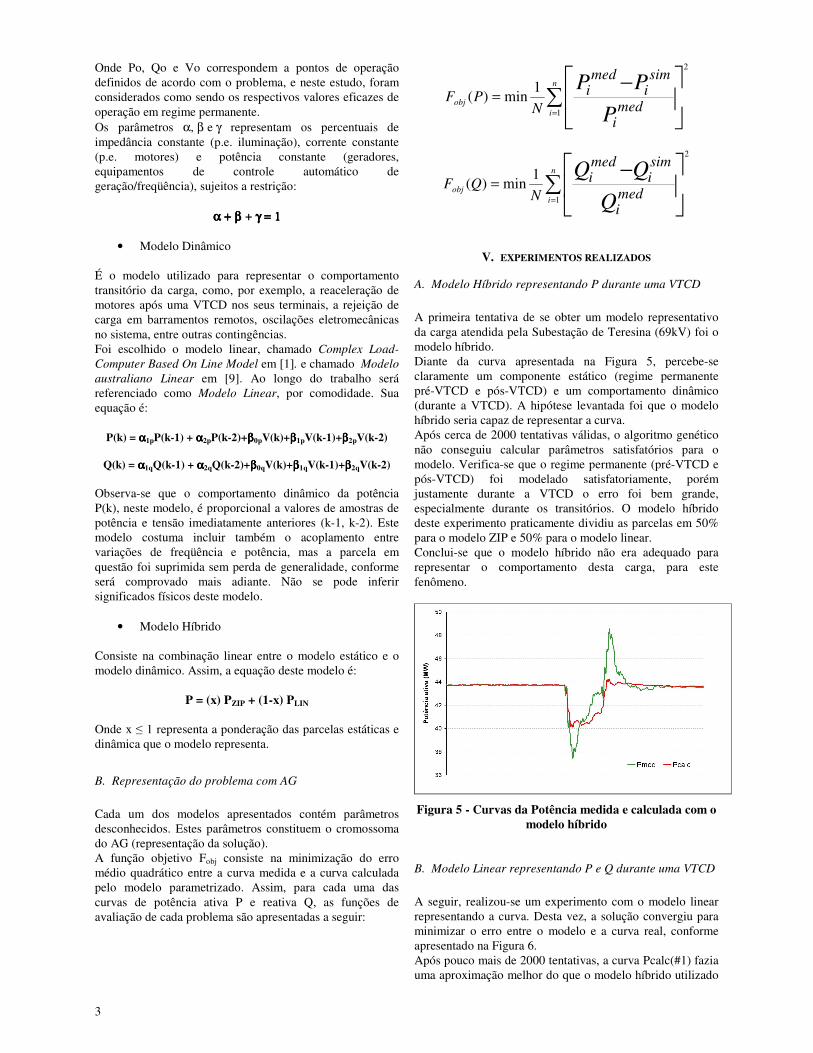
c) Foram obtidas as curvas da potência ativa (P) e reativa (Q), através da relação P + jQ = VI* (Figura 4).
Figura 3 - Correntes associadas a VTCD da Fig. 2
Figura 4 - Curvas da Potência Ativa (P) e Reativa (Q) durante a VTCD da Fig. 2
O próximo passo é estabelecer um modelo que represente o comportamento dinâmico da carga e determinar os parâmetros deste modelo.
IV. MODELOS DE CARGA
Modelos de carga são expressos na forma de funções de transferência, equações diferenciais, equações de diferenças, entre outras. São divididos em estáticos e dinâmicos podendo ter interpretações físicas ou não. A referência [1] traz uma relação extensa de modelos utilizados nos mais diversos estudos, agregando significados físicos quando possível.
A. Modelos utilizados neste estudo
• Modelo Estático
O modelo mais conhecido para caracterizar o comportamento estático de cargas, largamente empregado em estudos de fluxo de potência é o modelo ZIP, cujo significado físico é caracterizar o comportamento da carga como uma agregação de uma parcela de impedância constante (Z), uma parcela de corrente constante (I) e uma parcela de potência constante (P ou Q). As equações do modelo ZIP para representação das potências ativa e reativa são, respectivamente:
P = Po [ ααααp(V/Vo)2 + ββββp (V/Vo) + γγγγ p ]
Q = Qo [ ααααq (V/Vo)2 + ββββp (V/Vo) + γγγγ q ]
3
Onde Po, Qo e Vo correspondem a pontos de operação definidos de acordo com o problema, e neste estudo, foram considerados como sendo os respectivos valores eficazes de operação em regime permanente. Os parâmetros α, β e γ representam os percentuais de impedância constante (p.e. iluminação), corrente constante (p.e. motores) e potência constante (geradores, equipamentos de controle automático de geração/freqüência), sujeitos a restrição:
α + β α + β α + β α + β + γ = 1 γ = 1 γ = 1 γ = 1
• Modelo Dinâmico
É o modelo utilizado para representar o comportamento transitório da carga, como, por exemplo, a reaceleração de motores após uma VTCD nos seus terminais, a rejeição de carga em barramentos remotos, oscilações eletromecânicas no sistema, entre outras contingências. Foi escolhido o modelo linear, chamado Complex Load-
Computer Based On Line Model em [1]. e chamado Modelo
australiano Linear em [9]. Ao longo do trabalho será referenciado como Modelo Linear, por comodidade. Sua equação é:
P(k) = αααα1pP(k-1) + αααα2pP(k-2)+ββββ0pV(k)+ββββ1pV(k-1)+ββββ2pV(k-2)
Q(k) = αααα1qQ(k-1) + αααα2qQ(k-2)+ββββ0qV(k)+ββββ1qV(k-1)+ββββ2qV(k-2)
Observa-se que o comportamento dinâmico da potência P(k), neste modelo, é proporcional a valores de amostras de potência e tensão imediatamente anteriores (k-1, k-2). Este modelo costuma incluir também o acoplamento entre variações de freqüência e potência, mas a parcela em questão foi suprimida sem perda de generalidade, conforme será comprovado mais adiante. Não se pode inferir significados físicos deste modelo.
• Modelo Híbrido
Consiste na combinação linear entre o modelo estático e o modelo dinâmico. Assim, a equação deste modelo é:
P = (x) PZIP + (1-x) PLIN
Onde x ≤ 1 representa a ponderação das parcelas estáticas e dinâmica que o modelo representa.
B. Representação do problema com AG
Cada um dos modelos apresentados contém parâmetros desconhecidos. Estes parâmetros constituem o cromossoma do AG (representação da solução). A função objetivo Fobj consiste na minimização do erro médio quadrático entre a curva medida e a curva calculada pelo modelo parametrizado. Assim, para cada uma das curvas de potência ativa P e reativa Q, as funções de avaliação de cada problema são apresentadas a seguir:
∑
−=
=n
i
obj medi
simi
medi
NPF
P
PP
1
2
1min)(
∑
−=
=n
i
obj medi
simi
medi
NQF
Q
1
2
1min)(
V. EXPERIMENTOS REALIZADOS
A. Modelo Híbrido representando P durante uma VTCD
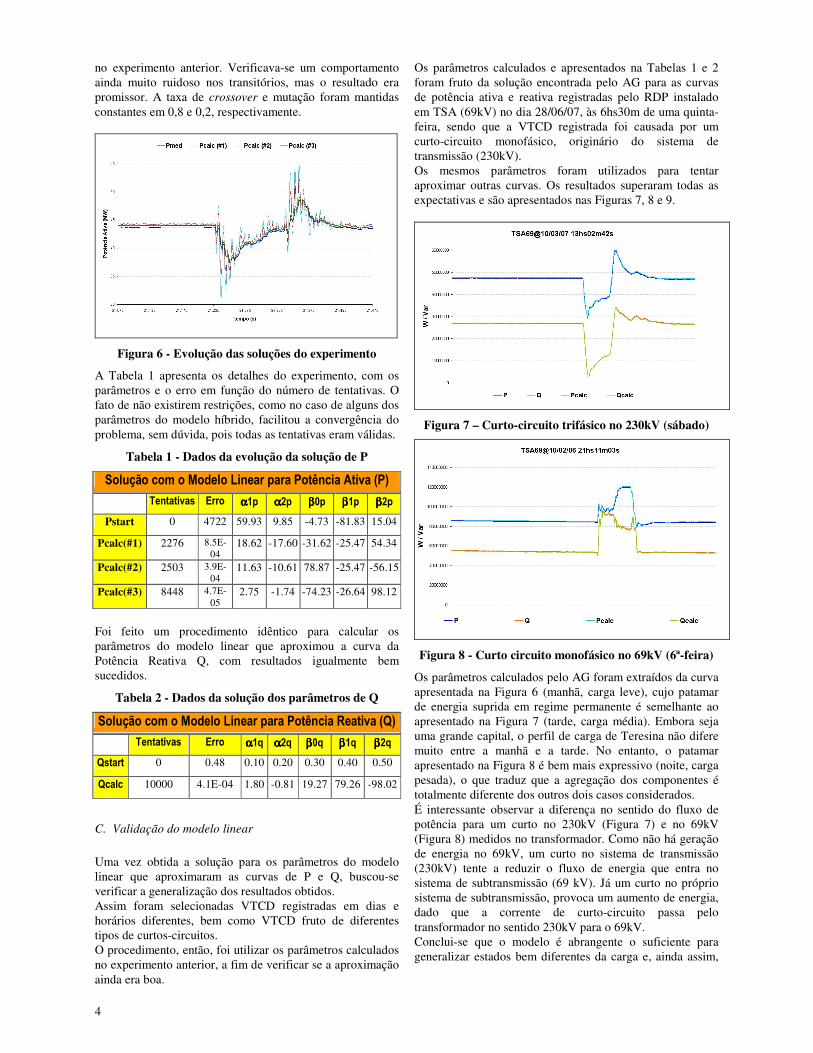
A primeira tentativa de se obter um modelo representativo da carga atendida pela Subestação de Teresina (69kV) foi o modelo híbrido. Diante da curva apresentada na Figura 5, percebe-se claramente um componente estático (regime permanente pré-VTCD e pós-VTCD) e um comportamento dinâmico (durante a VTCD). A hipótese levantada foi que o modelo híbrido seria capaz de representar a curva. Após cerca de 2000 tentativas válidas, o algoritmo genético não conseguiu calcular parâmetros satisfatórios para o modelo. Verifica-se que o regime permanente (pré-VTCD e pós-VTCD) foi modelado satisfatoriamente, porém justamente durante a VTCD o erro foi bem grande, especialmente durante os transitórios. O modelo híbrido deste experimento praticamente dividiu as parcelas em 50% para o modelo ZIP e 50% para o modelo linear. Conclui-se que o modelo híbrido não era adequado para representar o comportamento desta carga, para este fenômeno.
Figura 5 - Curvas da Potência medida e calculada com o modelo híbrido
B. Modelo Linear representando P e Q durante uma VTCD
A seguir, realizou-se um experimento com o modelo linear representando a curva. Desta vez, a solução convergiu para minimizar o erro entre o modelo e a curva real, conforme apresentado na Figura 6. Após pouco mais de 2000 tentativas, a curva Pcalc(#1) fazia uma aproximação melhor do que o modelo híbrido utilizado
4
no experimento anterior. Verificava-se um comportamento ainda muito ruidoso nos transitórios, mas o resultado era promissor. A taxa de crossover e mutação foram mantidas constantes em 0,8 e 0,2, respectivamente.
Figura 6 - Evolução das soluções do experimento
A Tabela 1 apresenta os detalhes do experimento, com os parâmetros e o erro em função do número de tentativas. O fato de não existirem restrições, como no caso de alguns dos parâmetros do modelo híbrido, facilitou a convergência do problema, sem dúvida, pois todas as tentativas eram válidas.
Tabela 1 - Dados da evolução da solução de P
Solução com o Modelo Linear para Potência Ativa (P)
Tentativas Erro αααα1p αααα2p ββββ0p ββββ1p ββββ2p
Pstart 0 4722 59.93 9.85 -4.73 -81.83 15.04
Pcalc(#1) 2276 8.5E-04
18.62 -17.60 -31.62 -25.47 54.34
Pcalc(#2) 2503 3.9E-04
11.63 -10.61 78.87 -25.47 -56.15
Pcalc(#3) 8448 4.7E-05
2.75 -1.74 -74.23 -26.64 98.12
Foi feito um procedimento idêntico para calcular os parâmetros do modelo linear que aproximou a curva da Potência Reativa Q, com resultados igualmente bem sucedidos.
Tabela 2 - Dados da solução dos parâmetros de Q
Solução com o Modelo Linear para Potência Reativa (Q)
Tentativas Erro αααα1q αααα2q ββββ0q ββββ1q ββββ2q
Qstart 0 0.48 0.10 0.20 0.30 0.40 0.50
Qcalc 10000 4.1E-04 1.80 -0.81 19.27 79.26 -98.02
C. Validação do modelo linear
Uma vez obtida a solução para os parâmetros do modelo linear que aproximaram as curvas de P e Q, buscou-se verificar a generalização dos resultados obtidos. Assim foram selecionadas VTCD registradas em dias e horários diferentes, bem como VTCD fruto de diferentes tipos de curtos-circuitos. O procedimento, então, foi utilizar os parâmetros calculados no experimento anterior, a fim de verificar se a aproximação ainda era boa.
Os parâmetros calculados e apresentados na Tabelas 1 e 2 foram fruto da solução encontrada pelo AG para as curvas de potência ativa e reativa registradas pelo RDP instalado em TSA (69kV) no dia 28/06/07, às 6hs30m de uma quinta-feira, sendo que a VTCD registrada foi causada por um curto-circuito monofásico, originário do sistema de transmissão (230kV). Os mesmos parâmetros foram utilizados para tentar aproximar outras curvas. Os resultados superaram todas as expectativas e são apresentados nas Figuras 7, 8 e 9.
Figura 7 – Curto-circuito trifásico no 230kV (sábado)
Figura 8 - Curto circuito monofásico no 69kV (6ª-feira)
Os parâmetros calculados pelo AG foram extraídos da curva apresentada na Figura 6 (manhã, carga leve), cujo patamar de energia suprida em regime permanente é semelhante ao apresentado na Figura 7 (tarde, carga média). Embora seja uma grande capital, o perfil de carga de Teresina não difere muito entre a manhã e a tarde. No entanto, o patamar apresentado na Figura 8 é bem mais expressivo (noite, carga pesada), o que traduz que a agregação dos componentes é totalmente diferente dos outros dois casos considerados. É interessante observar a diferença no sentido do fluxo de potência para um curto no 230kV (Figura 7) e no 69kV (Figura 8) medidos no transformador. Como não há geração de energia no 69kV, um curto no sistema de transmissão (230kV) tente a reduzir o fluxo de energia que entra no sistema de subtransmissão (69 kV). Já um curto no próprio sistema de subtransmissão, provoca um aumento de energia, dado que a corrente de curto-circuito passa pelo transformador no sentido 230kV para o 69kV. Conclui-se que o modelo é abrangente o suficiente para generalizar estados bem diferentes da carga e, ainda assim,
5
traduzir o comportamento dinâmico frente a diferentes tipos de contingências.
500 kV
230 kV
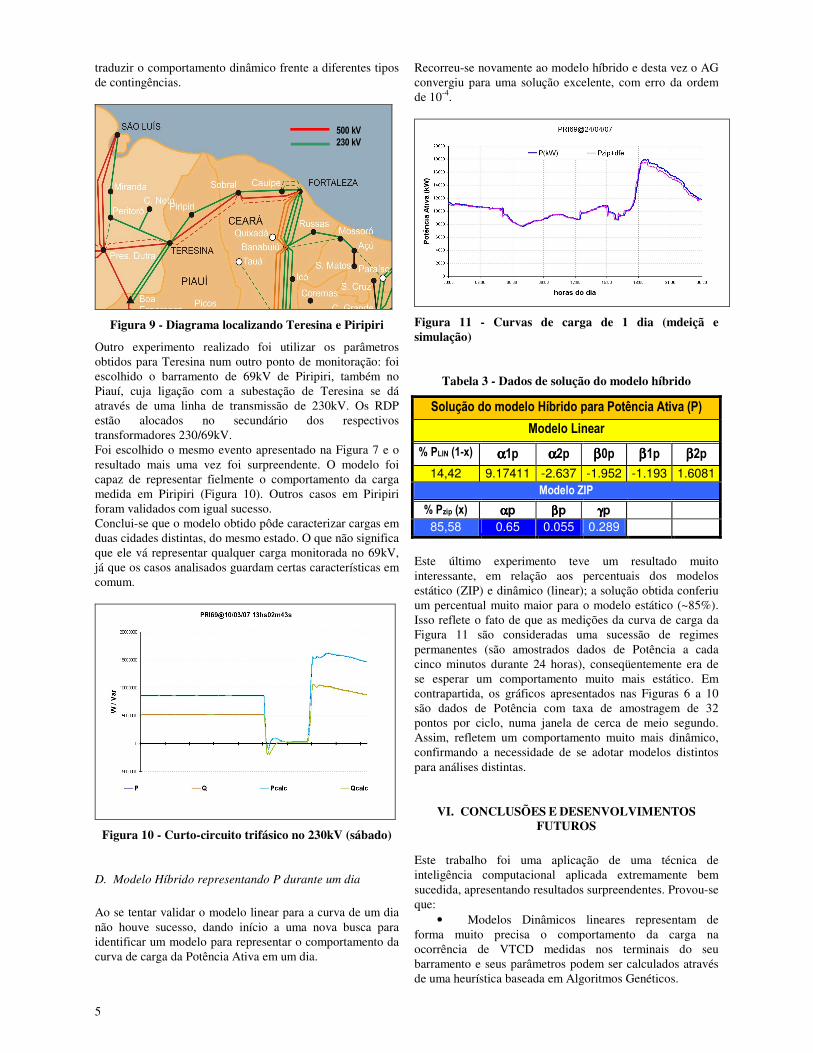
Figura 9 - Diagrama localizando Teresina e Piripiri
Outro experimento realizado foi utilizar os parâmetros obtidos para Teresina num outro ponto de monitoração: foi escolhido o barramento de 69kV de Piripiri, também no Piauí, cuja ligação com a subestação de Teresina se dá através de uma linha de transmissão de 230kV. Os RDP estão alocados no secundário dos respectivos transformadores 230/69kV. Foi escolhido o mesmo evento apresentado na Figura 7 e o resultado mais uma vez foi surpreendente. O modelo foi capaz de representar fielmente o comportamento da carga medida em Piripiri (Figura 10). Outros casos em Piripiri foram validados com igual sucesso. Conclui-se que o modelo obtido pôde caracterizar cargas em duas cidades distintas, do mesmo estado. O que não significa que ele vá representar qualquer carga monitorada no 69kV, já que os casos analisados guardam certas características em comum.
Figura 10 - Curto-circuito trifásico no 230kV (sábado)
D. Modelo Híbrido representando P durante um dia
Ao se tentar validar o modelo linear para a curva de um dia não houve sucesso, dando início a uma nova busca para identificar um modelo para representar o comportamento da curva de carga da Potência Ativa em um dia.
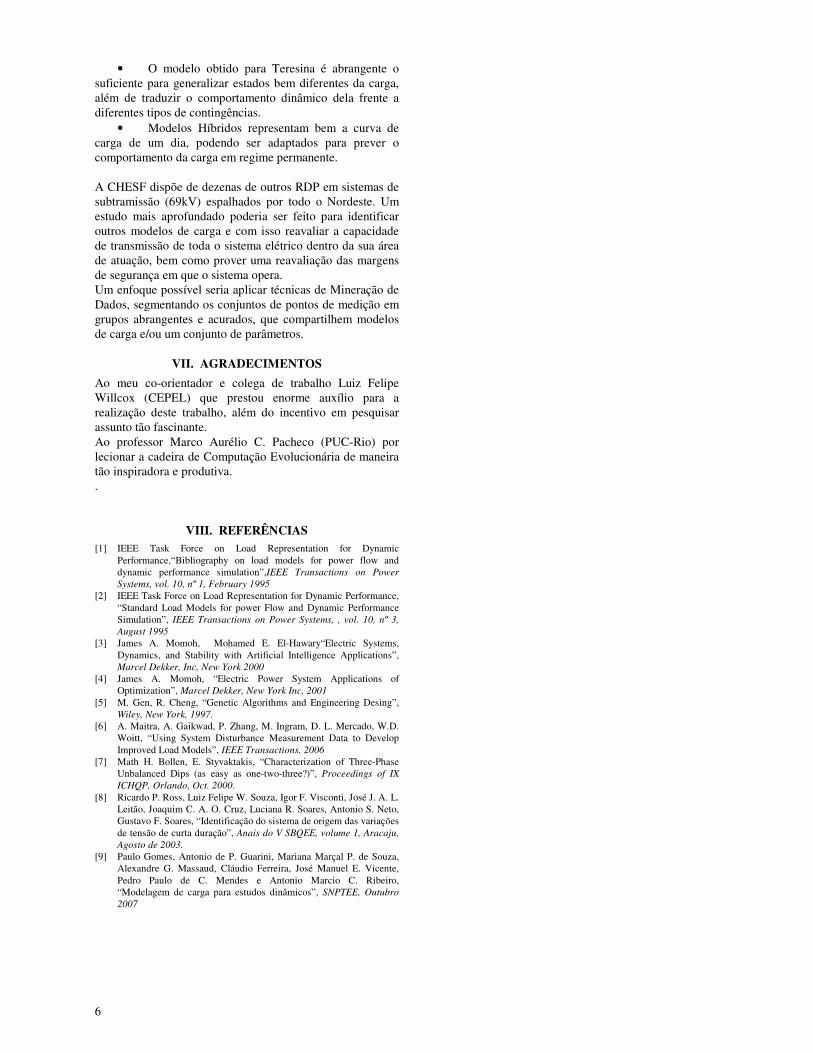
Recorreu-se novamente ao modelo híbrido e desta vez o AG convergiu para uma solução excelente, com erro da ordem de 10-4.
Figura 11 - Curvas de carga de 1 dia (mdeiçã e simulação)
Tabela 3 - Dados de solução do modelo híbrido
Solução do modelo Híbrido para Potência Ativa (P)
Modelo Linear
% PLIN (1-x) αααα1p αααα2p ββββ0p ββββ1p ββββ2p
14,42 9.17411 -2.637 -1.952 -1.193 1.6081
Modelo ZIP
% Pzip (x) ααααp ββββp γγγγp
85,58 0.65 0.055 0.289
Este último experimento teve um resultado muito interessante, em relação aos percentuais dos modelos estático (ZIP) e dinâmico (linear); a solução obtida conferiu um percentual muito maior para o modelo estático (~85%). Isso reflete o fato de que as medições da curva de carga da Figura 11 são consideradas uma sucessão de regimes permanentes (são amostrados dados de Potência a cada cinco minutos durante 24 horas), conseqüentemente era de se esperar um comportamento muito mais estático. Em contrapartida, os gráficos apresentados nas Figuras 6 a 10 são dados de Potência com taxa de amostragem de 32 pontos por ciclo, numa janela de cerca de meio segundo. Assim, refletem um comportamento muito mais dinâmico, confirmando a necessidade de se adotar modelos distintos para análises distintas.
VI. CONCLUSÕES E DESENVOLVIMENTOS
FUTUROS
Este trabalho foi uma aplicação de uma técnica de inteligência computacional aplicada extremamente bem sucedida, apresentando resultados surpreendentes. Provou-se que:
• Modelos Dinâmicos lineares representam de forma muito precisa o comportamento da carga na ocorrência de VTCD medidas nos terminais do seu barramento e seus parâmetros podem ser calculados através de uma heurística baseada em Algoritmos Genéticos.
6
• O modelo obtido para Teresina é abrangente o suficiente para generalizar estados bem diferentes da carga, além de traduzir o comportamento dinâmico dela frente a diferentes tipos de contingências.
• Modelos Híbridos representam bem a curva de carga de um dia, podendo ser adaptados para prever o comportamento da carga em regime permanente. A CHESF dispõe de dezenas de outros RDP em sistemas de subtramissão (69kV) espalhados por todo o Nordeste. Um estudo mais aprofundado poderia ser feito para identificar outros modelos de carga e com isso reavaliar a capacidade de transmissão de toda o sistema elétrico dentro da sua área de atuação, bem como prover uma reavaliação das margens de segurança em que o sistema opera. Um enfoque possível seria aplicar técnicas de Mineração de Dados, segmentando os conjuntos de pontos de medição em grupos abrangentes e acurados, que compartilhem modelos de carga e/ou um conjunto de parâmetros.
VII. AGRADECIMENTOS
Ao meu co-orientador e colega de trabalho Luiz Felipe Willcox (CEPEL) que prestou enorme auxílio para a realização deste trabalho, além do incentivo em pesquisar assunto tão fascinante. Ao professor Marco Aurélio C. Pacheco (PUC-Rio) por lecionar a cadeira de Computação Evolucionária de maneira tão inspiradora e produtiva. .
VIII. REFERÊNCIAS [1] IEEE Task Force on Load Representation for Dynamic
Performance,“Bibliography on load models for power flow and dynamic performance simulation”,IEEE Transactions on Power
Systems, vol. 10, nº 1, February 1995 [2] IEEE Task Force on Load Representation for Dynamic Performance,
“Standard Load Models for power Flow and Dynamic Performance Simulation”, IEEE Transactions on Power Systems, , vol. 10, nº 3,
August 1995 [3] James A. Momoh, Mohamed E. El-Hawary“Electric Systems,
Dynamics, and Stability with Artificial Intelligence Applications”, Marcel Dekker, Inc, New York 2000
[4] James A. Momoh, “Electric Power System Applications of Optimization”, Marcel Dekker, New York Inc, 2001
[5] M. Gen, R. Cheng, “Genetic Algorithms and Engineering Desing”, Wiley, New York, 1997.
[6] A. Maitra, A. Gaikwad, P. Zhang, M. Ingram, D. L. Mercado, W.D. Woitt, “Using System Disturbance Measurement Data to Develop Improved Load Models”, IEEE Transactions, 2006
[7] Math H. Bollen, E. Styvaktakis, “Characterization of Three-Phase Unbalanced Dips (as easy as one-two-three?)”, Proceedings of IX
ICHQP, Orlando, Oct. 2000. [8] Ricardo P. Ross, Luiz Felipe W. Souza, Igor F. Visconti, José J. A. L.
Leitão, Joaquim C. A. O. Cruz, Luciana R. Soares, Antonio S. Neto, Gustavo F. Soares, “Identificação do sistema de origem das variações de tensão de curta duração”, Anais do V SBQEE, volume 1, Aracaju,
Agosto de 2003. [9] Paulo Gomes, Antonio de P. Guarini, Mariana Marçal P. de Souza,
Alexandre G. Massaud, Cláudio Ferreira, José Manuel E. Vicente, Pedro Paulo de C. Mendes e Antonio Marcio C. Ribeiro, “Modelagem de carga para estudos dinâmicos”, SNPTEE, Outubro
2007





























