Embed Size (px)
Citation preview

Escola Secundária Afonso Lopes VieiraCurso Profissional de Técnico de Eletrónica e Telecomunicações
2009/2012
Vending Machine
Relatório da Prova de Aptidão Profissional
Daniel José Crespo Cavalcanti, N.º 18479, 3.º ET
Leiria, junho de 2012

Escola Secundária Afonso Lopes VieiraCurso Profissional de Técnico de Eletrónica e Telecomunicações
2009/2012
Vending Machine
Relatório da Prova de Aptidão Profissional
Daniel José Crespo Cavalcanti, N.º 18479, 3.º ET
Orientador – Paulo Manuel Martins dos Santos
Coorientadora – Judite de Jesus Rosa Judas da Cunha Vieira
Leiria, junho de 2012

Relatório da Prova de Aptidão Profissional – Daniel Cavalcanti
Agradecimentos
Agradeço ao Dr. Pedro Biscaia, diretor da escola, pela colaboração prestada ao longo do
curso. À Dr.ª Judite da Cunha Vieira, ex-presidente do conselho executivo, pela abertura deste
curso. Ao Dr. Paulo Santos, diretor do curso, por todo o apoio que nos deu ao longo destes
três anos. A todos os diretores de turma por tudo aquilo que passaram connosco, Agradeço
também à empresa Key Plastics Portugal S.A. que me acolheu durante o meu primeiro
período de estágio.
- i -

Relatório da Prova de Aptidão Profissional – Daniel Cavalcanti
Índice geral
Agradecimentos...........................................................................................................................i
Índice geral.................................................................................................................................ii
Outros índices............................................................................................................................iii
Índice de figuras....................................................................................................................iii
Índice de tabelas....................................................................................................................iii
Resumo......................................................................................................................................iv
Palavras-chave.......................................................................................................................iv
1.Introdução...............................................................................................................................1
1.1.Apresentação de ideias e linhas fundamentais................................................................1
1.2.Objetivos a alcançar........................................................................................................1
1.3.Estrutura do relatório.......................................................................................................1
2.Desenvolvimento....................................................................................................................3
2.1.Fundamentação do projeto..............................................................................................3
2.2.Métodos e técnicas utilizadas..........................................................................................9
2.3.Execução do projeto........................................................................................................9
3.Conclusão..............................................................................................................................22
Bibliografia...............................................................................................................................23
Anexos......................................................................................................................................24
Anexo 1 – Folhas de dados dos principais componentes.....................................................25
- ii -

Relatório da Prova de Aptidão Profissional – Daniel Cavalcanti
Outros índices
Índice de figuras
Figura 1: Motor de passo............................................................................................................3
Figura 2: Motor unipolar de passo inteiro...................................................................................4
Figura 3: Motor bipolar de passo inteiro.....................................................................................4
Figura 4: Motor unipolar de meio passo.....................................................................................4
Figura 5: Motor bipolar de meio passo.......................................................................................4
Figura 6: Motor unipolar.............................................................................................................5
Figura 7: Motor bipolar...............................................................................................................6
Figura 8: Esquema do circuito..................................................................................................10
Figura 9: Fotografia do projeto montado em placa de ensaio...................................................13
Figura 10: Fluxograma do projeto............................................................................................14
Índice de tabelas
Tabela 1: Passo completo - esquema 1 e esquema 2...................................................................7
Tabela 2: Meio passo...................................................................................................................7
Tabela 3 – Lista de material......................................................................................................11
- iii -

Relatório da Prova de Aptidão Profissional – Daniel Cavalcanti
Resumo
Este projeto consiste em desenvolver o sistema eletrónico para uma Vending Machine.
A Vending Machine consiste numa máquina de venda automática de produtos. Um cliente
seleciona o número correspondente ao produto desejado e insere as moedas num moedeiro. O
moedeiro envia as informações das moedas inseridas para o microcontrolador para este fazer a
contagem do dinheiro, mas o moedeiro não aceita moedas de 0,01€, 0,02€ e 2€. Quando o
dinheiro atingir a quantia correta o microcontrolador envia um sinal para a espiral que tem o
produto desejado, esta roda e o produto cai.
O sistema eletrónico baseia-se no microcontrolador PIC16F877 ao qual ligará um moedeiro
eletrónico e um teclado numérico que funcionarão como entradas do sistema. O sistema irá
atuar um motor passo-a-passo que estará acoplado a uma espiral dispensadora de produtos.
Palavras-chave
Microcontrolador; vending machine; moedeiro; motor de passo
- iv -

Relatório da Prova de Aptidão Profissional – Daniel Cavalcanti
1. Introdução
Realizei este projeto no âmbito da prova de aptidão profissional do curso profissional de
técnico de eletrónica e telecomunicações da escola secundária Afonso Lopes Vieira.
O meu projeto consiste numa máquina de venda automática de produtos, ou seja um cliente
insere o dinheiro na máquina, ela verifica a quantia do dinheiro introduzido e caso esteja certo
para o produto desejado, a máquina deixa cair o produto para que o cliente o recolha.
1.1. Apresentação de ideias e linhas fundamentais
Escolhi fazer este projeto porque gostava de perceber o funcionamento de uma máquina de
venda automática de produtos, e ao fazer este projeto consegui produzir um sistema parecido
ao que já existe, a nível de hardware e software, de uma Vending Machine. O sistema do meu
projeto inicializa e espera que um cliente selecione o número do produto que deseja adquirir,
após o cliente digitar o número, o sistema pede para inserir as moedas e começa a contá-las.
Quando chegar à quantia correta o microcontrolador faz o motor rodar para entregar o produto
ao cliente.
1.2. Objetivos a alcançar
Neste projeto tive como principais objetivos estudar o funcionamento dos motores de passo,
estudar o funcionamento dos mostradores LCD e a sua interface com um microcontrolador
PIC16F877. Estudar também os teclados numéricos e os moedeiros. Depois quanto ao
software os meus objetivos foram utilizar o Great Cow Graphical BASIC para escrever o
código e o MPLAB para programar o PIC com o programador PICSTART Plus da Microchip.
1.3. Estrutura do relatório
Este relatório inicia-se com a parte dos agradecimentos, onde eu refiro as pessoas que foram
- 1 -

Relatório da Prova de Aptidão Profissional – Daniel Cavalcanti
essenciais durante o percurso realizado durante estes três anos de curso e agradeço pelo apoio
prestado. A seguir vêm os índices e o resumo. Neste capítulo faço uma introdução, onde
explicito em que se baseia o meu trabalho e fundamento as ideias essenciais do trabalho.
Depois segue-se o capítulo do desenvolvimento, onde vou apresentar umas noções sobre
motores de passo, os métodos e técnicas utilizadas e a fases de execução do projeto. Depois
estará a conclusão onde mostro alguns problemas que tive ao longo do trabalho. Por fim,
apresentarei a bibliografia e os anexos. Nos anexos, estarão as folhas de dados dos principais
componentes utilizados.
- 2 -

Relatório da Prova de Aptidão Profissional – Daniel Cavalcanti
2. Desenvolvimento
Neste capítulo vou começar por apresentar algumas noções sobre motores de passo, depois
vou mostrar as diferentes fases do meu projeto e por fim vou mostrar o esquemático, a lista de
material e o código desenvolvido.
2.1. Fundamentação do projeto
Motor de Passo, o que é?
Os Motores de Passo são dispositivos eletromecânicos que convertem pulsos elétricos em
movimentos mecânicos que geram variações angulares discretas. O eixo de um motor de
passo é rodado em pequenos incrementos angulares, denominados “passos”, quando os pulsos
elétricos são aplicados numa determinada sequência aos terminais deste. A rotação de tais
motores é diretamente relacionada com os impulsos elétricos que são recebidos. A velocidade
a que o eixo do motor gira é dada pela frequência de pulsos recebidos e o valor do ângulo
rodado é diretamente relacionado com o número de pulsos aplicados.
Como funciona um Motor de Passo?
– Um exemplo de funcionamento: Motor de quatro passos
- 3 -
Figura 1: Motor de passo

Relatório da Prova de Aptidão Profissional – Daniel Cavalcanti
O funcionamento básico do motor de passo é dado pelo uso de solenoides alinhados dois a
dois que quando recebem energia atraem o rotor fazendo-o alinhar-se com o eixo determinado
pelos solenoides, causando assim uma pequena variação de ângulo a que se chama passo. A
velocidade e o sentido de movimento são determinados pela forma como cada solenoide é
ativado (a sua ordem e a sua velocidade entre cada ativação).
– Determinação do número de passos
O número de passos é dado pelo número de alinhamentos possíveis entre o rotor e as bobinas.
Ou seja, para aumentar o número de passos de um motor usa-se um maior número de bobinas,
ou um maior número de polos no rotor (para isso usa-se um rotor com a forma de roda
dentada).
– Passos completos e meios-passos
A energização de uma e somente uma bobina de cada vez produz um pequeno deslocamento
no rotor. Este deslocamento ocorre simplesmente pelo facto do rotor ser magneticamente ativo
e a energização das bobinas criar um campo magnético intenso que atua no sentido de se
alinhar com os dentes do rotor. Assim, polarizando de forma adequada as bobinas, podemos
movimentar o rotor entre as bobinas (meio passo) ou alinhadas com as mesmas (passo
completo). Abaixo seguem os movimentos executados.
- 4 -
Figura 2: Motor unipolar de passo inteiro Figura 3: Motor bipolar de passo inteiro
Figura 4: Motor unipolar de meio passo Figura 5: Motor bipolar de meio passo
Relatório da Prova de Aptidão Profissional – Daniel Cavalcanti
Que tipos existem?
Quanto à sua forma de operação:
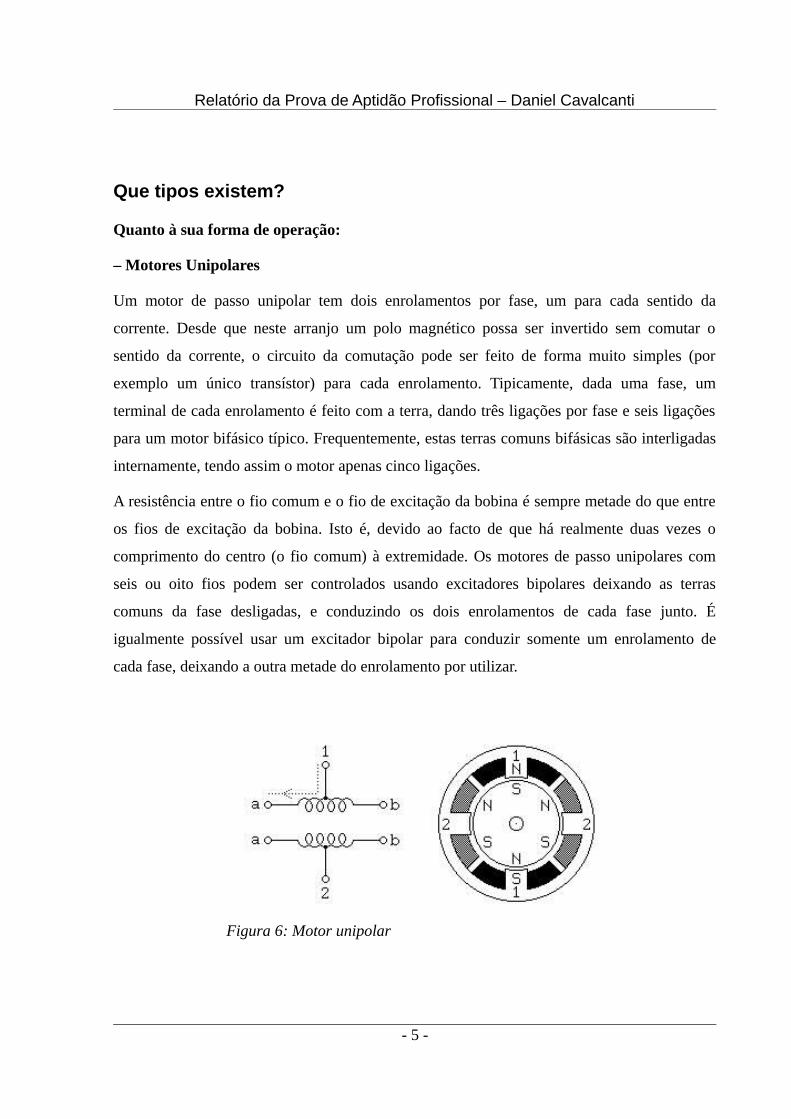
– Motores Unipolares
Um motor de passo unipolar tem dois enrolamentos por fase, um para cada sentido da
corrente. Desde que neste arranjo um polo magnético possa ser invertido sem comutar o
sentido da corrente, o circuito da comutação pode ser feito de forma muito simples (por
exemplo um único transístor) para cada enrolamento. Tipicamente, dada uma fase, um
terminal de cada enrolamento é feito com a terra, dando três ligações por fase e seis ligações
para um motor bifásico típico. Frequentemente, estas terras comuns bifásicas são interligadas
internamente, tendo assim o motor apenas cinco ligações.
A resistência entre o fio comum e o fio de excitação da bobina é sempre metade do que entre
os fios de excitação da bobina. Isto é, devido ao facto de que há realmente duas vezes o
comprimento do centro (o fio comum) à extremidade. Os motores de passo unipolares com
seis ou oito fios podem ser controlados usando excitadores bipolares deixando as terras
comuns da fase desligadas, e conduzindo os dois enrolamentos de cada fase junto. É
igualmente possível usar um excitador bipolar para conduzir somente um enrolamento de
cada fase, deixando a outra metade do enrolamento por utilizar.
- 5 -
Figura 6: Motor unipolar

Relatório da Prova de Aptidão Profissional – Daniel Cavalcanti
– Motores Bipolares
Os motores bipolares têm um único enrolamento por fase. A corrente num enrolamento
necessita de ser invertida a fim de inverter o polo magnético, assim o circuito de condução é
um pouco mais complicado, usando um arranjo de ponte em H. Há duas ligações por fase,
nenhuma está em comum. Como os enrolamentos são melhor utilizados, são mais potentes do
que num motor unipolar do mesmo tamanho.
Como identificar o tipo de ligação através do número de fios?
Motor Ligação4 Fios Bipolar
5 Fios Unipolar
6 Fios Unipolar/Bipolar (série)
7 Fios Unipolar/Bipolar (série/paralelo)
Como é feito o controlo do motor de passo?
A forma como o motor irá operar dependerá bastante do que se deseja controlar. Há casos em
- 6 -
Figura 7: Motor bipolar

Relatório da Prova de Aptidão Profissional – Daniel Cavalcanti
que o torque é mais importante, noutros a precisão ou ainda a velocidade. Essas são
características gerais dos motores de passo. Ao trabalhar com motores de passo, precisamos
de conhecer algumas características de funcionamento como a tensão de alimentação, a
corrente elétrica máxima suportada pelos enrolamentos e o grau de precisão. As características
mais importantes que devemos ter atenção para controlar um motor de passo são a tensão de
alimentação e a corrente elétrica que os enrolamentos suportam.
Nas tabelas 1 e 2 indicam-se as sequências para controlar um motor de passo.
Tabela 1: Passo completo - esquema 1 e esquema 2
Nº do passo B3 B2 B1 B0 Decimal Nº do passo B3 B2 B1 B0 Decimal1 1 0 0 0 8 1 1 1 0 0 122 0 1 0 0 4 2 0 1 1 0 63 0 0 1 0 2 3 0 0 1 1 34 0 0 0 1 1 4 1 0 0 1 9
Tabela 2: Meio passo
Nº do passo B3 B2 B1 B0 Decimal1 1 0 0 0 82 1 1 0 0 123 0 1 0 0 44 0 1 1 0 65 0 0 1 0 26 0 0 1 1 37 0 0 0 1 18 1 0 0 1 9
Quais são as vantagens e as desvantagens de um motor de passo?
Vantagens:
● Seguem uma lógica digital – O seu acionamento é feito através de pulsos elétricos que
ativam sequencialmente as suas bobinas, fazendo o rotor alinhar-se com as mesmas
provocando um deslocamento do mesmo.
- 7 -

Relatório da Prova de Aptidão Profissional – Daniel Cavalcanti
● Alta precisão no seu posicionamento – O posicionamento do motor de passo é preciso
porque o rotor movimenta-se sempre em ângulos bem determinados, chamados
“passos” cujo erro de posicionamento é pequeno, em geral nunca mais do que 5%.
● Precisão no torque aplicado – As variações no torque aplicado por um motor de passo
são pequenas, tendo em vista o seu funcionamento.
● Excelente resposta de aceleração e desaceleração – O movimento que um motor de
passo produz é resultado das ativações em sequência das suas bobinas. A resposta para
tais solicitações de aceleração e desaceleração é rápida pois o rotor alinha-se
rapidamente com as bobinas que se encontram energizadas.
Desvantagens:
● Baixo desempenho em altas velocidades – O aumento de rotações no motor de passo é
gerado pela variação no tempo entre o acionamento de uma bobina e a seguinte.
Entretanto é necessário uma rápida comutação de um solenoide energizado para outro
de forma a que tal velocidade seja mantida, o que muitas vezes é complexo e pouco
eficiente.
● Requer certo grau de complexidade para ser operado – Pelo facto de usar uma lógica
digital não basta apenas ligar o motor de passo a uma fonte de energia que o mesmo
começará a girar sem parar. A sua complexidade reside no facto de ser necessário um
aparato para controlá-lo ativando sequencialmente os seus solenoides. O custo
computacional e a complexidade do dispositivo de controlo crescem à medida que o
número de passos aumenta, uma vez que mais passos requerem um maior número de
terminais a serem ativados e controlados.
● Ocorrência de ressonância por controlo inadequado – Como todos os objetos que
existem, o motor de passo também tem uma frequência de ressonância. Caso as
rotações do mesmo se deem nesta frequência, este pode começar a oscilar, aquecer e
perder passos. Este problema pode ser contornado mudando-se o modo de operação do
motor, utilizando-se meio passos ou os passos completos com as bobinas energizadas
duas a duas.
- 8 -

Relatório da Prova de Aptidão Profissional – Daniel Cavalcanti
2.2. Métodos e técnicas utilizadas
Primeiro pensei no projeto que queria fazer, depois comecei por desenhar o esquema do
circuito do projeto, no EAGLE e depois montei-o numa placa de ensaio. A seguir comecei a
fazer um código simples em Great Cow Graphical BASIC para fazer os testes do circuito e
ver se estava tudo a funcionar corretamente. Para programar utilizei o programa MPLAB e o
programador PICSTART Plus. Não funcionou logo, mas após pensar, detetei o problema e
consegui resolvê-lo, ao testar o programa novamente, já funcionou. Como já estava tudo a
funcionar bem, comecei a desenvolver o código final para o projeto, quando acabei o código
final e ficou tudo a funcionar corretamente, passei para a elaboração deste relatório.
2.3. Execução do projeto
Neste subcapítulo irei começar por apresentar o esquema do circuito, de seguida uma lista do
material utilizado e uma fotografia do meu trabalho montado em placa de ensaio, depois
incluirei o fluxograma e, por fim, a listagem do código desenvolvido.
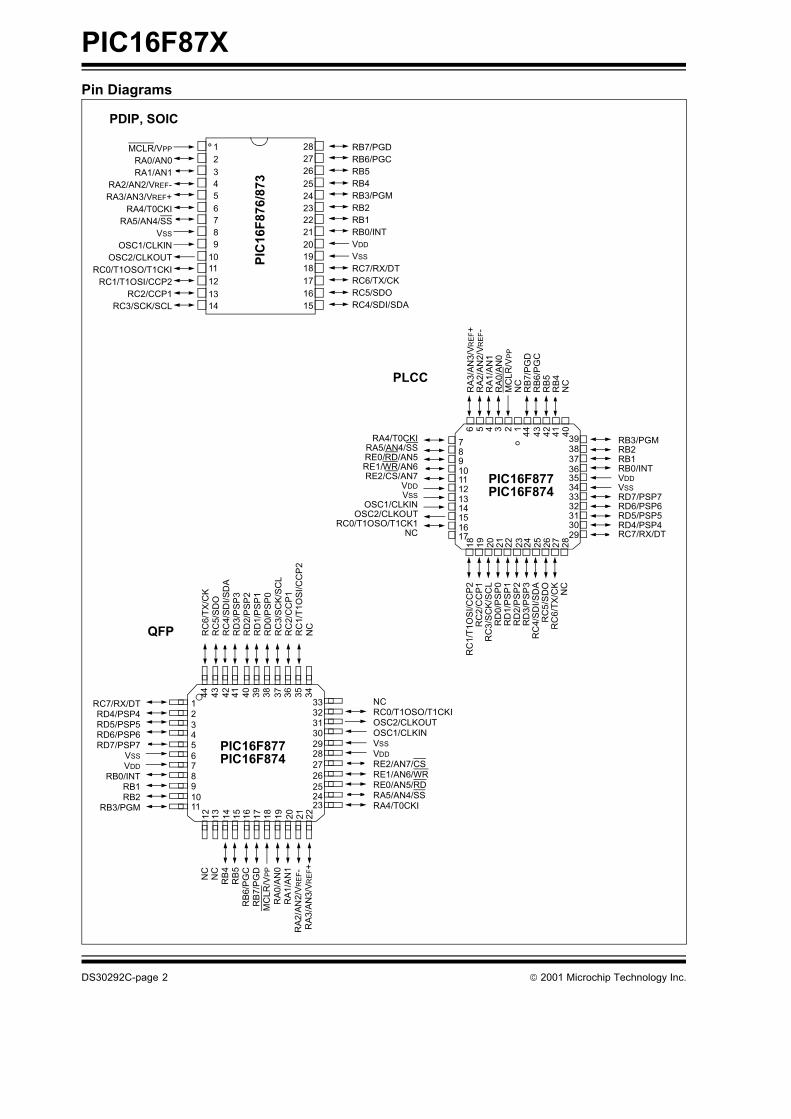
No meu projeto utilizei o PIC16F877 porque necessitava de muitos pinos para ligar o
mostrador LCD, o teclado numérico e a ponte em H para comando do motor de passo.
O mostrador LCD utilizado foi um de 2 linhas de 16 carateres cada, usei apenas quatro linhas
de dados, porque o mostrador permite tanto o modo de 8 bits como o de 4 bits, utilizei o modo
de 4 bits para poupar pinos do microcontrolador. Liguei também as três linhas de controlo (E,
RS e R/W) ao microcontrolador e liguei um potenciómetro para ajustar o contraste do visor.
No teclado numérico liguei quatro resistências, em pull-up, às quatros linhas para estas não
ficarem num estado indefinido.
Usei uma ponte em H para poder comandar o motor de passo, porque o microcontrolador não
consegue fornecer corrente suficiente para alimentar o motor, e por isso utilizei o circuito
integrado L298. Tive de utilizar díodos rápidos de Schottky (1N5822) para proteção da ponte,
funcionando em roda livre, para a corrente poder fluir através eles.
Segue-se o esquema do circuito:
- 9 -

Relatório da Prova de Aptidão Profissional – Daniel Cavalcanti
- 10 -
Figura 8: Esquema do circuito

Relatório da Prova de Aptidão Profissional – Daniel Cavalcanti
Na tabela 3 encontra-se a listagem do material utilizado para realizar o circuito de comando
da Vending Machine.
Tabela 3 – Lista de material
Item n.º Nome Quantidade Descrição/Valor
1 C4,
C5,
C7,
C9,
C11,
C12
6 Condensador cerâmico de 100nF
2 C1,
C2
2 Condensador cerâmico de 22pF
3 C3,
C8
2 Condensador eletrolítico de 100μF 16V
4 C10 1 Condensador eletrolítico de 100μF 25V
5 C6 1 Condensador eletrolítico de 2200μF 35V
6 D1,
D2,
D3,
D4,
D5,
D6,
D7,
D8
8 Díodo Schottky 1N5822
7 D9,
D10
2 Díodo retificador 1N4004
8 DIS1 1 Mostrador de cristal líquido alfanumérico de 2linhas x
16 carateres
9 F1 1 Fusível rápido de 250mA com suporte
10 IC1 1 Microcontrolador PIC16F877
11 IC2 1 Circuito integrado regulador de tensão 7805
12 IC3 1 Ponte em H L298
- 11 -

Relatório da Prova de Aptidão Profissional – Daniel Cavalcanti
13 IC4 1 Circuito integrado regulador de tensão 7812
14 KP1 1 Teclado mecânico de 12 teclas (0 .. 9, *, “) tipo telefone
15 LED1,
LED2
2 LED Ø5mm vermelho
16 M1 1 Motor de passo unipolar
17 R1,
R5,
R8,
R9,
R10,
R11
6 Resistência de 10kΩ 1/4W
18 R2 1 Resistência de 100Ω 1/2W
19 R6,
R7
2 Resistência de 330Ω 1/4W
20 R3,
R4
2 Resistência de 0,47Ω 2W
21 TR1 1 Transformador com primário de 230VAC e secundário
de 15-0-15V 100VA
22 Q1 1 Cristal de quartzo de 20MHz
23 X1,
X3
2 Ligador de 6 terminais
24 X2 1 Ligador de 2 terminais
25 X4 1 Ligador de 3 terminais
- 12 -

Relatório da Prova de Aptidão Profissional – Daniel Cavalcanti
Na figura 9 apresenta-se uma fotografia do meu projeto. Nesta fotografia podemos ver todo o
circuito montado e que funciona conforme o estipulado.
Na figura encontra-se o fluxograma do meu projeto. O fluxograma explica de uma forma
sucinta e clara todo o funcionamento do meu projeto. Primeiro o programa inicializa e fica na
posição a aguardar até um cliente selecionar no número do produto desejado. Quando um
cliente digitar um número no teclado numérico, o microcontrolador lê esse número e verifica
se existe algum produto atribuído a esse número. Se não existe, o programa volta à fase
inicial, se existe, avança e pede ao cliente para inserir as moedas. Depois o microcontrolador
conta as moedas que o cliente introduz até que estas atinjam o valor exato do produto. Quando
atingir o valor exato do produto, o microcontrolador faz o motor rodar para entregar o produto
ao cliente, depois disto feito o microcontrolador limpa os dados e o programa volta à sua fase
inicial.
- 13 -
Figura 9: Fotografia do projeto montado em placa de ensaio

Relatório da Prova de Aptidão Profissional – Daniel Cavalcanti
- 14 -
Figura 10: Fluxograma do projeto

Relatório da Prova de Aptidão Profissional – Daniel Cavalcanti
De seguir lista-se o código do programa desenvolvido no âmbito do meu projeto:
;***********************************************************************;************************ Programa Final ***********************;***********************************************************************; Nome do Ficheiro: final_D.gcb; Data: mMarco 2012; Versão: 1.0; Programado por: Daniel Cavalcanti; Curso: C P de Técnico de Eletrónica e Telecomunicações; Escola: Escola Secundária Afonso Lopes Vieira; Descrição: Programa final do projeto de Vending Machine. ;;Chip Settings#chip 16F877,20#config CP=OFF, DEBUG=OFF, CPD=OFF, LVP=OFF, BODEN=ON, PWRTE=ON, WDT=OFF, OSC=XT
;Defines (Constants)#define LCD_IO 4#define LCD_RW PORTE.2#define LCD_RS PORTE.1#define LCD_Enable PORTE.0#define LCD_DB4 PORTD.4#define LCD_DB5 PORTD.5#define LCD_DB6 PORTD.6#define LCD_DB7 PORTD.7#define KEYPAD_COL_1 PORTB.4#define KEYPAD_COL_2 PORTB.5#define KEYPAD_COL_3 PORTB.6#define KEYPAD_COL_4 PORTB.7#define KEYPAD_ROW_1 PORTB.0#define KEYPAD_ROW_2 PORTB.1#define KEYPAD_ROW_3 PORTB.2#define KEYPAD_ROW_4 PORTB.3#define PROD1_LED PORTD.0#define PROD2_LED PORTD.1
- 15 -

Relatório da Prova de Aptidão Profissional – Daniel Cavalcanti
;VariablesDim Contador As byteDim NR_Produto As byteDim Valor_Produto As byteDim Montante_Moedas As byteDim Espera As byteDim Espera_LED As byteDim Key_Code As byteDim Key_Value As byte
'Inicialização de variáveisValor_Produto=85NR_Produto=0Montante_Moedas=0Contador = 0Espera = 25
'Definição da direção dos pinosDir PORTA.0 InDir PORTC.0 OutDir PORTC.1 OutDir PORTC.2 OutDir PORTC.3 OutDir PORTC.4 OutDir PORTC.5 OutDir PROD1_LED OutDir PROD2_LED Out
'Instruções iniciais do programaClsLocate 0, 0Print "Vending Machine"Locate 1, 0Print "Daniel-3ET-CPTET"Set PORTC.4 OffSet PORTC.5 OffWait 3 s
- 16 -

Relatório da Prova de Aptidão Profissional – Daniel Cavalcanti
'Rotina principal do programaMain:Locate 0, 0Print "Selec. o Produto"Locate 1, 0Print " "Espera1:
'Lê o tecladoKey_Code = KeypadData
'Se não foi premida nenhuma tecla, volta a trás, volta a ler o tecladoIf Key_Code = 255 Then
Goto Espera1End If
'Aguarda algum tempo para se soltar a teclaWait 150 ms
'Se foi premida a tecla Cardinal (#), avança, conta moedas introduzidasIf Key_Code = 4 Then
If Nr_Produto > 99 ThenLocate 1, 0Print "PROD INEXISTENTE"Wait 5 sGoto Main
ElseGoto Continua1
End IfEnd If
'Caso contrário, verifica se foi premida outra tecla que não 0..9GetKeyValueIf Key_Value > 9 Then
Goto Espera1End If
'Escreve digito da tecla premida no mostradorLocate 1, 0
- 17 -

Relatório da Prova de Aptidão Profissional – Daniel Cavalcanti
Print Key_ValuePulseOut PORTD.0, 20 ms
'Determina o número do produtoIf NR_Produto = 0 Then
Nr_Produto = Key_ValueElse
Nr_Produto = Nr_Produto * 10 + Key_ValueEnd If
'Espera até a tecla ser soltaDo ForeverLoop while KeypadData <> 255Goto Espera1
'Continua após seleção válida do produtoContinua1:Locate 0,0Print "Introduza Moedas"
'Acumula o montante de moedas introduzidasDo Until Montante_Moedas = Valor_Produto
Espera2:If PORTA.0 = Off then
Goto Espera2End ifMontante_Moedas = Montante_Moedas + 1Espera3:If PORTA.0 = On then
Goto Espera3End ifLocate 1,0Print Montante_Moedas * 5Print " "
Loop
'Fornece produto ao cliente'Primeiro acende o LED correspondente ao produto selecionadoIf Nr_Produto = 1 then
- 18 -

Relatório da Prova de Aptidão Profissional – Daniel Cavalcanti
Set Prod1_LED OnEnd ifIf Nr_Produto=2 then
Set Prod2_LED OnEnd if
'De seguida aciona o mecanismo de entrega do produtoFor nr_passos = 1 To 12
Set PORTC.0 OffSet PORTC.1 OnSet PORTC.2 OnSet PORTC.3 OnWait Espera msSet PORTC.0 OnSet PORTC.1 OnSet PORTC.2 OnSet PORTC.3 OffWait Espera msSet PORTC.0 OnSet PORTC.1 OnSet PORTC.2 OffSet PORTC.3 OnWait Espera msSet PORTC.0 OnSet PORTC.1 OffSet PORTC.2 OnSet PORTC.3 OnWait Espera ms
Next
'Apaga LEDs dos produtosSet Prod1_LED OffSet Prod2_LED Off
'Mostra mensagens ao clienteLocate 0, 0Print "Recolha o Prod."Wait 2 sLocate 0, 0
- 19 -

Relatório da Prova de Aptidão Profissional – Daniel Cavalcanti
Print "Obrigado"
' Limpa dadosNR_Produto = 0Goto Main
'''Converte código do teclado no código ASCII do caráterSub GetKeyValue If Key_Code = 7 Then Key_Value = 0 Else If Key_Code = 13 Then Key_Value = 1 Else If Key_Code = 12 Then Key_Value = 2 Else If Key_Code = 11 Then Key_Value = 3 Else If Key_Code = 15 Then Key_Value = 4 Else If Key_Code = 9 Then Key_Value = 5 Else If Key_Code = 6 Then Key_Value = 6 Else If Key_Code = 0 Then Key_Value = 7 Else If Key_Code = 8 Then Key_Value = 8 Else If Key_Code = 5 Then Key_Value = 9 Else Key_Value = 255
- 20 -
Relatório da Prova de Aptidão Profissional – Daniel Cavalcanti
End If End If End If End If End If End If End If End If End If End IfEnd Sub
- 21 -

Relatório da Prova de Aptidão Profissional – Daniel Cavalcanti
3. Conclusão
Ao longo do meu percurso escolar percebi que para trabalhar com equipamento eletrónico,
resolver problemas, é preciso ser persistente, também aprendi bastante sobre trabalhar em
equipa e ser responsável pelo material que me é disponibilizado.
Durante a construção do meu projeto deparei-me com certos problemas. O primeiro problema
que tive, foi quando fui testar o primeiro código que fiz para ver se estava tudo a funcionar
corretamente, não funcionou. Pensei e procurei a origem do problema até que encontrei, o
cristal de quartzo não oscilava. Substituí o cristal, testei novamente o programa e já funcionou
tudo como devia. Depois tive mais uns problemas no código, por exemplo para programar o
motor de passo e o teclado numérico, após pensar e pesquisar, consegui programar tudo como
deve ser. Estes problemas nunca seriam resolvidos sem determinação e sem os estudar.
Para finalizar, não apresentei o meu projeto com placa de circuito impresso, nem maqueta,
porque não consegui encontrar as condições necessárias, nem tempo para conseguir fazer
ambos.
- 22 -

Relatório da Prova de Aptidão Profissional – Daniel Cavalcanti
Bibliografia
[1] Estudo do Motor de Passo e seu Controlo, acedido a 29 de fevereiro de 2012, em
http://www.telecom.uff.br/pet/petws/downloads/tutoriais/stepmotor/stepmotor2k81119
.pdf.
[2] Sistema de um moedeiro, acedido a 15 de dezembro de 2011, em http://www.cafebar-
software.com/moedeiro.html.
[3] Informações sobre microcontroladores da família PIC da Microchip, acedido a 20 de
outubro de 2011, em http://www.microchip.com/.
[4] Software Great Cow Graphical BASIC, acedido a 10 de novembro de 2011, em
http://gcbasic.sourceforge.net/.
- 23 -

Relatório da Prova de Aptidão Profissional – Daniel Cavalcanti
- 24 -
Anexos

Relatório da Prova de Aptidão Profissional – Daniel Cavalcanti
Anexo 1 – Folhas de dados dos principais componentes
C-5235 – Teclado matricial de 12 teclas (0..9, *, #)
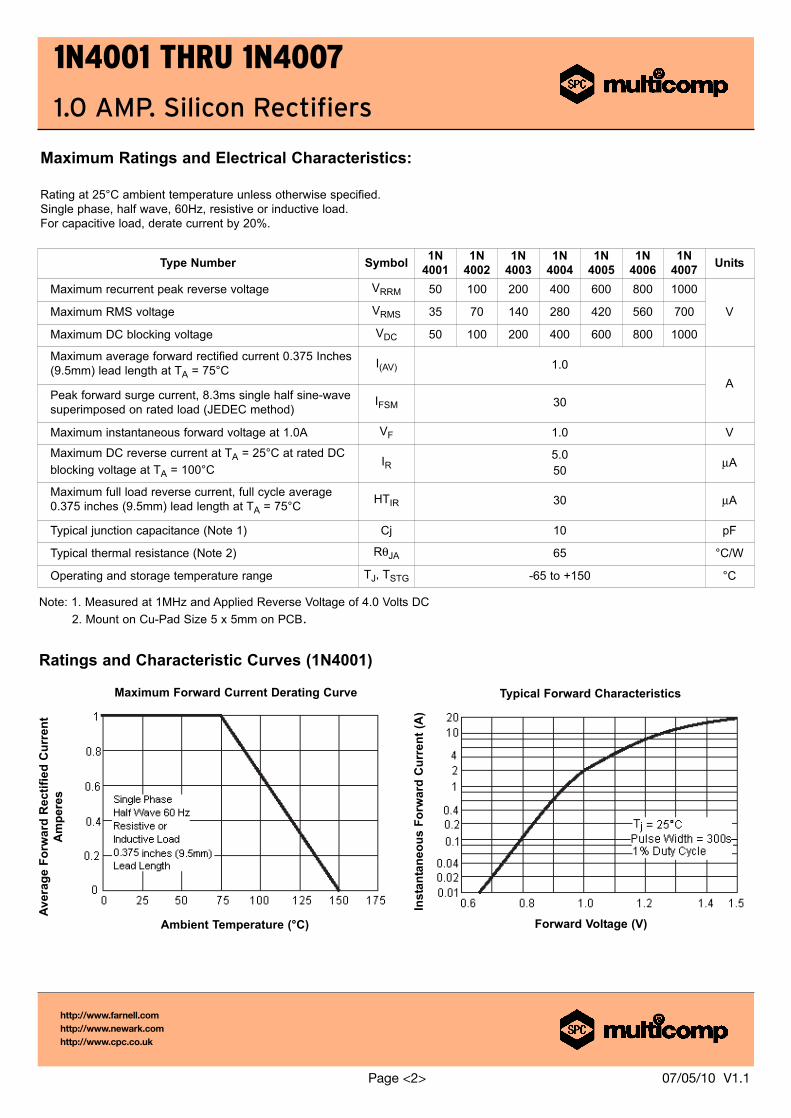
1N4004 – Díodo retificador, VRRM=400V, IF(AV)=1A, VF=1,1V
1N5822 – Díodo Schottky, VRRM=40V, IF(AV)=3A, VF=0,525V
PM4222-09 – Motor de passo unipolar, tensão nominal de 24V, ângulo do passo 7,5º,
resistência por fase 100Ω
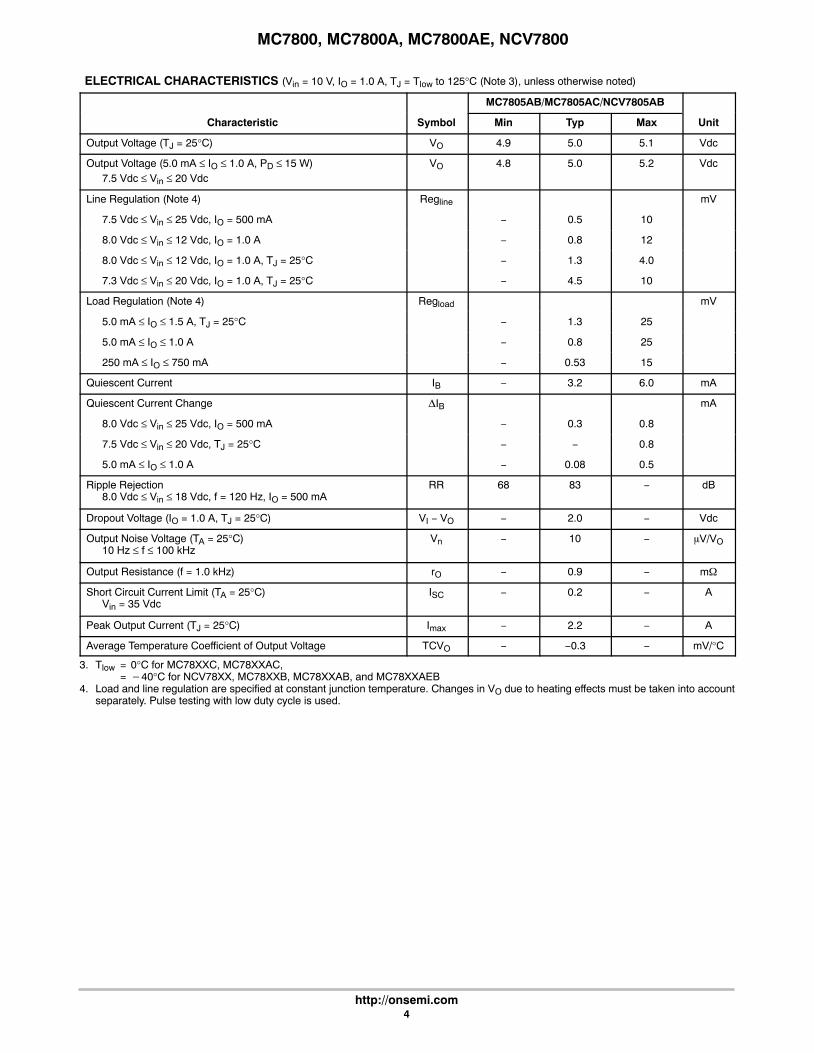
MC7805/12 – Regulador de tensão positiva, VI=35V, VO=5V/12V, IO=1A
L298 – Ponte em H dupla, VSS=7V, VS=46V, IO=2A
PIC16F877 – Microcontrolador de 8 bits (especificações, pinagem, diagrama de
blocos e descrição dos pinos)
Mostrador alfanumérico de cristal líquido (LCD) de 2 linhas x 16
carateres
- 25 -

�� Los nombres registrados y marcas que se citan son propiedad de sus respectivos titulares.
C-5235TECLADO MATRICIALFADISEL S.L.
Teclado mecánico tipo "telefónico" con conexión matricial.Dispone de 10 teclas numéricas (0 al 9) y dos teclas de símbolos ( * y # ).El conector está compuesto por una tira de 7 pines situada en el lateral, con paso 2,54 mm. y una longitud de 8mm.
Especialmente indicado para aplicaciones profesionales, tales como: control de accesos, cuadros de control yregulación de maquinaria y procesos, etc...
Fuerza actuación tecla 100 ±25gVida útil 1.000.000 ciclosRecorrido de la tecla 1.3 ±0.5mmTemperatura de trabajo -27 a 60ºC
Resistencia de contacto 200 m máximo�
CARACTERISTICAS TECNICAS.
Rev. Full0223 Total Pag: 1
1
Este componente está destinado para su uso por parte de profesionales, o usuarios con un nivel técnico o conocimientos suficientes, que les permita desarrollar por sí mismos los proyectos o aplicaciones deseados. Por este motivo no sefacilitará asistencia técnica sobre problemas de implementación del citado componente en las aplicaciones en las que sea empleado.Para cualquier problema relativo al funcionamiento del producto (excluidos los problemas de aplicación), póngase en contacto con nuestro .
Los productos de la familia "Componentes" de Cebek disponen de a partir de la fecha de compra. Quedan excluidos el trato o manipulación incorrectos.
Disponemos de más productos que pueden interesarle, visítenos en: ó solicite nuestro catálogo.
departamento técnico Fax 93 432 29 95.Correo electrónico: [email protected]. La documentación técnica de este producto responde a una transcripción de la proporcionada por el fabricante.
1 año de garantíawww.fadisel.com GRATUITAMENTE
CONSIDERACIONES.
DIMENSIONES Y CONEXIONADO.
NOTA: Cotas en milímetros.
Conexionado:
1 2 3 4 5 6 7
*0 #
Cotas:
1 2 3 4 5 6 7
1 2 3
4 5 6
7 8 9
0 #*
C 0 M P O N E N T S

1N4001 THRU 1N4007
1.0 AMP. Silicon Rectifiers
Page <1> 05/05/10 V1.1
http://www.farnell.comhttp://www.newark.comhttp://www.cpc.co.uk
Dimensions : Inches (Millimetres)
Features:
• Low forward voltage drop.• High current capability.• High reliability.• High surge current capability.
Mechanical Data:
Cases : Moulded plastic.Epoxy : Rate flame retardant.Lead : Axial leads, solderable per MIL-STD-202, method 208 guaranteed.Polarity : Colour band denotes cathode end.High temperature soldering guaranteed : 260°C/10 second/0.375 inches, (9.5mm) lead lengths at 5lbs., (2.3kg) tension.
Voltage Range50 to 1300 Volts
Current1.0 Ampere
DO-41
1N4001 THRU 1N4007
1.0 AMP. Silicon Rectifiers
Page <2> 07/05/10 V1.1
http://www.farnell.comhttp://www.newark.comhttp://www.cpc.co.uk
Maximum Ratings and Electrical Characteristics:
Rating at 25°C ambient temperature unless otherwise specified.Single phase, half wave, 60Hz, resistive or inductive load.For capacitive load, derate current by 20%.
Type Number Symbol 1N4001
1N4002
1N4003
1N4004
1N4005
1N4006
1N4007 Units
Maximum recurrent peak reverse voltage VRRM 50 100 200 400 600 800 1000
VMaximum RMS voltage VRMS 35 70 140 280 420 560 700
Maximum DC blocking voltage VDC 50 100 200 400 600 800 1000
Maximum average forward rectified current 0.375 Inches(9.5mm) lead length at TA = 75°C I(AV) 1.0
APeak forward surge current, 8.3ms single half sine-wavesuperimposed on rated load (JEDEC method)
IFSM 30
Maximum instantaneous forward voltage at 1.0A VF 1.0 V
Maximum DC reverse current at TA = 25°C at rated DCblocking voltage at TA = 100°C
IR5.050
µA
Maximum full load reverse current, full cycle average0.375 inches (9.5mm) lead length at TA = 75°C HTIR 30 µA
Typical junction capacitance (Note 1) Cj 10 pF
Typical thermal resistance (Note 2) RθJA 65 °C/W
Operating and storage temperature range TJ, TSTG -65 to +150 °C
Note: 1. Measured at 1MHz and Applied Reverse Voltage of 4.0 Volts DC2. Mount on Cu-Pad Size 5 x 5mm on PCB.
Ratings and Characteristic Curves (1N4001)
Ambient Temperature (°C)
Maximum Forward Current Derating Curve Typical Forward Characteristics
Forward Voltage (V)
Aver
age
Forw
ard
Rec
tifie
d C
urre
ntA
mpe
res
Inst
anta
neou
s Fo
rwar
d C
urre
nt (A
)

1N5820-1N
5822
1N5820-1N5822, Rev. C 2001 Fairchild Semiconductor Corporation
1N5820 - 1N5822
Schottky Rectifiers
Absolute Maximum Ratings* TA = 25°C unless otherwise noted
*These ratings are limiting values above which the serviceability of any semiconductor device may be impaired.
Electrical Characteristics TA = 25°C unless otherwise noted
Features• 3.0 ampere operation at TA = 95°C
with no thermal runaway.
• For use in low voltage, highfrequency inverters freewheeling, and polarityprotection applications.
Symbol
Parameter
Device
Units 1N5820 1N5821 1N5822
VF Forward Voltage @ 3.0 A @ 9.4 A
475 850
500 900
525 950
mV mV
IR Reverse Current @ rated VR TA = 25°C
TA = 100°C 0.5 20
mA mA
CT Total Capacitance VR = 4.0 V, f = 1.0 MHz
190 pF
Thermal Characteristics
Symbol
Parameter
Value
Units 1N5820 1N5821 1N5822
VRRM Maximum Repetitive Reverse Voltage 20 30 40 V IF(AV) Average Rectified Forward Current
3/8 " lead length @ TA = 95°C 3.0 A
IFSM Non-repetitive Peak Forward Surge Current 8.3 ms Single Half-Sine-Wave 80 A
Tstg Storage Temperature Range -65 to +125 °C TJ Operating Junction Temperature -65 to +125 °C
DO-201ADCOLOR BAND DENOTES CATHODE
Symbol
Parameter
Value
Units PD Power Dissipation 3.6 W RθJA Thermal Resistance, Junction to Ambient 28 °C/W

57
.5
49
.5±0
.05 棕
橙黑黄空红
2-∅2.75
-
-
-
-
黄 YEL
橙 ORG
黑 BLK
6
3
2
5
4
红 RED
-
59.1±20%H
136g
∅42
22
0.8
1.5
∅10 0
-0
.1
1
4321
审 核
PM4222-09
比 例
1.5 :1
标记
A B
版本
A/0
工 艺
批 准
签 字更改文件号处 数 日 期
设 计
标 记
第 页共 页
UL1007 26#
340pps MIN
7.5°±7%
2
<9.6g.cm
<210g.cm
>800g.cm
项目Item
NO. 规格
Specification
3
5
6
4
8
9
12
11
10
7
15
14
18
17
16
13
4
7.5°
48
100±7%
0.24A
100MΩ MIN
-30℃~80℃
-10℃~40℃
3000h MIN
分配方式Excitation
1 4-2
额定电压
Rated Voltage
相数No.of Phase
每步转角
Step Angle
每转步数
No.of Step Per Revolution 相电阻Resistance Per Phase
相电流Current Per Phase
保持转矩
Holding Torque
绝缘电阻Insulation Resistance
介电强度
Dielectric Strength
工作温度
Storang Temp Range
贮存温度
Operating Temp Range
定位力矩
Detent Torque
转动惯量Rotor Inertia
步距角精度
Stepping Accuracy
牵入起动频率Pull-in Rate
引出线规格Lead Wrie
2 24V
20
19
电感Inductance Per Phase
使用寿命Life
重量
Weight
CW
B
条件Condition
At 20℃
At 20℃ 200pps
At DC 500V
At AC 650±50VRMS for 2 Sec
STEPPin
No.
WIRE
COLOR
起动转距Pull-in Torque
270g.cm At 100pps
21
130±10
11.5±0.5
∅3-0
.002
-0
.008
∅10
BRN A
RED COM
YEL
BLK A
ORG
B
棕 BRN
H59Pb黄铜棒
模 数 mModule
齿 数 ZNumber of Teeth
精度等级Accuracy
压力角αPressure Angle
材料Material
17
0.5
20°
IT7-8
齿轮的规格PINION SPECIFICATION
φ8.5
φ9.5 0-0.05
分度圆dPitch Dia
齿顶圆daOutside Dia
8
+ + + +
-
-
-

© Semiconductor Components Industries, LLC, 2011
October, 2011 − Rev. 241 Publication Order Number:
MC7800/D
MC7800, MC7800A,MC7800AE, NCV7800
1.0 A Positive VoltageRegulators
These voltage regulators are monolithic integrated circuits designedas fixed−voltage regulators for a wide variety of applicationsincluding local, on−card regulation. These regulators employ internalcurrent limiting, thermal shutdown, and safe−area compensation. Withadequate heatsinking they can deliver output currents in excess of1.0 A. Although designed primarily as a fixed voltage regulator, thesedevices can be used with external components to obtain adjustablevoltages and currents.
Features• Output Current in Excess of 1.0 A
• No External Components Required
• Internal Thermal Overload Protection
• Internal Short Circuit Current Limiting
• Output Transistor Safe−Area Compensation
• Output Voltage Offered in 1.5%, 2% and 4% Tolerance
• Available in Surface Mount D2PAK−3, DPAK−3 and Standard3−Lead Transistor Packages
• NCV Prefix for Automotive and Other Applications Requiring Siteand Control Changes
• Pb−Free Packages are Available
MAXIMUM RATINGS (TA = 25°C, unless otherwise noted)
Rating Symbol
Value Unit
369C 221A 936
Input Voltage (5.0 − 18 V)(24 V)
VI 3540
Vdc
Power Dissipation PD Internally Limited W
Thermal Resistance,Junction−to−Ambient
R�JA 92 65 Figure 15
°C/W
Thermal Resistance,Junction−to−Case
R�JC 5.0 5.0 5.0 °C/W
Storage Junction TemperatureRange
Tstg −65 to +150 °C
Operating Junction Temperature TJ +150 °C
Stresses exceeding Maximum Ratings may damage the device. MaximumRatings are stress ratings only. Functional operation above the RecommendedOperating Conditions is not implied. Extended exposure to stresses above theRecommended Operating Conditions may affect device reliability.
*This device series contains ESD protection and exceeds the following tests:Human Body Model 2000 V per MIL_STD_883, Method 3015.Machine Model Method 200 V.
TO−220T SUFFIX
CASE 221AB
1
D2PAK−3D2T SUFFIXCASE 936
2
3
See detailed ordering and shipping information in the packagedimensions section on page 23 of this data sheet.
ORDERING INFORMATION
Heatsink surfaceconnected to Pin 2.
Pin 1. Input2. Ground3. Output
Heatsink surface (shown as terminal 4 incase outline drawing) is connected to Pin 2.
1
3
STANDARD APPLICATION
A common ground is required between theinput and the output voltages. The input voltagemust remain typically 2.0 V above the outputvoltage even during the low point on the inputripple voltage.
XX,
MC78XXInput
Cin*0.33 �F
CO**
Output
These two digits of the type number indicate nominal voltage.
Cin is required if regulator is located anappreciable distance from power supplyfilter.
CO is not needed for stability; however,it does improve transient response. Values of less than 0.1 �F could cause instability.
*
**
See general marking information in the device markingsection on page 31 of this data sheet.
DEVICE MARKING INFORMATION
DPAK−3DT SUFFIXCASE 369C
http://onsemi.com
1 23
4

MC7800, MC7800A, MC7800AE, NCV7800
http://onsemi.com2
R15680R18
100 k
D1Zener
R110.66 k
R21.56 k
R179.0 k
Q7QNPN
LATQ17
Q9QNPN 2
Q8QNPN
Q14QNPN
Q6QNPN
Q5QNPN 2
LAT 3 AQ18
R54.5 k
R61.0 k
Q13QNPN
Q2QNPN 4
SUBQ11 2
R1115 k
QNPN 6
Q1
R714 k
R31.8 k
R85.0 k
Diode
Q16
Q4QNPN
N+C130 PC2
3.0 P
R93.0 k
R16600
R2017500
Q15QNPN
Q10QNPN
R22100
Q12QNPN
R2450
1.0 P
R21600
R230.2
R1927.5 k
D2Zener
Q19QNPN
R141.0 k
Q20QNPN
R289.0 k
R279.0 k
R299.0 k
R256.0 k
R263.0 k
R123.0 k
R103340-(3316ACT)
R3018 k
Sense
Vout5.01
Vin
R1311660
Q3QNPN
MC7800
C3
Figure 1. Representative Schematic Diagram
This device contains 22 active transistors.
MC7800, MC7800A, MC7800AE, NCV7800
http://onsemi.com4
ELECTRICAL CHARACTERISTICS (Vin = 10 V, IO = 1.0 A, TJ = Tlow to 125°C (Note 3), unless otherwise noted)
MC7805AB/MC7805AC/NCV7805AB
Characteristic Symbol Min Typ Max Unit
Output Voltage (TJ = 25°C) VO 4.9 5.0 5.1 Vdc
Output Voltage (5.0 mA ≤ IO ≤ 1.0 A, PD ≤ 15 W)7.5 Vdc ≤ Vin ≤ 20 Vdc
VO 4.8 5.0 5.2 Vdc
Line Regulation (Note 4) Regline mV
7.5 Vdc ≤ Vin ≤ 25 Vdc, IO = 500 mA − 0.5 10
8.0 Vdc ≤ Vin ≤ 12 Vdc, IO = 1.0 A − 0.8 12
8.0 Vdc ≤ Vin ≤ 12 Vdc, IO = 1.0 A, TJ = 25°C − 1.3 4.0
7.3 Vdc ≤ Vin ≤ 20 Vdc, IO = 1.0 A, TJ = 25°C − 4.5 10
Load Regulation (Note 4) Regload mV
5.0 mA ≤ IO ≤ 1.5 A, TJ = 25°C − 1.3 25
5.0 mA ≤ IO ≤ 1.0 A − 0.8 25
250 mA ≤ IO ≤ 750 mA − 0.53 15
Quiescent Current IB − 3.2 6.0 mA
Quiescent Current Change �IB mA
8.0 Vdc ≤ Vin ≤ 25 Vdc, IO = 500 mA − 0.3 0.8
7.5 Vdc ≤ Vin ≤ 20 Vdc, TJ = 25°C − − 0.8
5.0 mA ≤ IO ≤ 1.0 A − 0.08 0.5
Ripple Rejection8.0 Vdc ≤ Vin ≤ 18 Vdc, f = 120 Hz, IO = 500 mA
RR 68 83 − dB
Dropout Voltage (IO = 1.0 A, TJ = 25°C) VI − VO − 2.0 − Vdc
Output Noise Voltage (TA = 25°C)10 Hz ≤ f ≤ 100 kHz
Vn − 10 − �V/VO
Output Resistance (f = 1.0 kHz) rO − 0.9 − m�
Short Circuit Current Limit (TA = 25°C)Vin = 35 Vdc
ISC − 0.2 − A
Peak Output Current (TJ = 25°C) Imax − 2.2 − A
Average Temperature Coefficient of Output Voltage TCVO − −0.3 − mV/°C
3. Tlow = 0°C for MC78XXC, MC78XXAC,= �40°C for NCV78XX, MC78XXB, MC78XXAB, and MC78XXAEB
4. Load and line regulation are specified at constant junction temperature. Changes in VO due to heating effects must be taken into accountseparately. Pulse testing with low duty cycle is used.

MC7800, MC7800A, MC7800AE, NCV7800
http://onsemi.com12
ELECTRICAL CHARACTERISTICS (Vin = 19 V, IO = 1.0 A, TJ = Tlow to 125°C (Note 19), unless otherwise noted)
MC7812AB/MC7812AC/NCV7812AB
Characteristic Symbol Min Typ Max Unit
Output Voltage (TJ = 25°C) VO 11.75 12 12.25 Vdc
Output Voltage (5.0 mA ≤ IO ≤ 1.0 A, PD ≤ 15 W) VO 11.5 12 12.5 Vdc
14.8 Vdc ≤ Vin ≤ 27 Vdc
Line Regulation (Note 20) Regline mV
14.8 Vdc ≤ Vin ≤ 30 Vdc, IO = 500 mA − 3.8 18
16 Vdc ≤ Vin ≤ 22 Vdc, IO = 1.0 A − 2.2 20
14.5 Vdc ≤ Vin ≤ 27 Vdc, TJ = 25°C − 6.0 120
Load Regulation (Note 20) Regload mV
5.0 mA ≤ IO ≤ 1.5 A, TJ = 25°C − − 25
5.0 mA ≤ IO ≤ 1.0 A − − 25
Quiescent Current IB − 3.4 6.0 mA
Quiescent Current Change �IB mA
15 Vdc ≤ Vin ≤ 30 Vdc, IO = 500 mA − − 0.8
14.8 Vdc ≤ Vin ≤ 27 Vdc, TJ = 25°C − − 0.8
5.0 mA ≤ IO ≤ 1.0 A, TJ = 25°C − − 0.5
Ripple Rejection RR 55 60 − dB
15 Vdc ≤ Vin ≤ 25 Vdc, f = 120 Hz, IO = 500 mA
Dropout Voltage (IO = 1.0 A, TJ = 25°C) VI − VO − 2.0 − Vdc
Output Noise Voltage (TA = 25°C) Vn − 10 − �V/VO
10 Hz ≤ f ≤ 100 kHz
Output Resistance (f = 1.0 kHz) rO − 1.1 − m�
Short Circuit Current Limit (TA = 25°C) ISC − 0.2 − A
Vin = 35 Vdc
Peak Output Current (TJ = 25°C) Imax − 2.2 − A
Average Temperature Coefficient of Output Voltage TCVO − −0.8 − mV/°C
19.Tlow = 0°C for MC78XXC, MC78XXAC,= �40°C for NCV78XX, MC78XXB, MC78XXAB, and MC78XXAEB
20.Load and line regulation are specified at constant junction temperature. Changes in VO due to heating effects must be taken into accountseparately. Pulse testing with low duty cycle is used.

L298
Jenuary 2000
DUAL FULL-BRIDGE DRIVER
Multiwatt15
ORDERING NUMBERS : L298N (Mult iwatt Vert. )L298HN (Mult iwatt Horiz.)L298P (PowerSO20)
BLOCK DIAGRAM
.OPERATING SUPPLY VOLTAGE UP TO 46 V. TOTAL DC CURRENT UP TO 4 A. LOW SATURATION VOLTAGE.OVERTEMPERATURE PROTECTION. LOGICAL ”0” INPUT VOLTAGE UP TO 1.5 V(HIGH NOISE IMMUNITY)
DESCRIPTION
The L298 is an integrated monolithic circuit in a 15-lead Multiwatt and PowerSO20 packages. It is ahigh voltage, high current dual full-bridge driver de-signedto acceptstandardTTL logic levels anddriveinductive loads such as relays, solenoids, DC andsteppingmotors. Two enableinputs are provided toenableor disable the deviceindependentlyof thein-put signals. The emitters of the lower transistors ofeach bridge are connected togetherand the corre-spondingexternal terminal can be used for the con-
nectionofanexternalsensingresistor.Anadditionalsupply input is provided so that the logic works at alower voltage.
PowerSO20
1/13

PIN CONNECTIONS (top view)
GND
Input 2 VSS
N.C.
Out 1
VS
Out 2
Input 1
Enable A
Sense A
GND 10
8
9
7
6
5
4
3
2
13
14
15
16
17
19
18
20
12
1
11 GND
D95IN239
Input 3
Enable B
Out 3
Input 4
Out 4
N.C.
Sense B
GND
ABSOLUTE MAXIMUM RATINGS
Symbol Parameter Value Unit
VS Power Supply 50 V
VSS Logic Supply Voltage 7 V
VI,Ven Input and Enable Voltage –0.3 to 7 V
IO Peak Output Current (each Channel)– Non Repetitive (t = 100µs)–Repetitive (80% on –20% off; ton = 10ms)–DC Operation
32.52
AAA
Vsens Sensing Voltage –1 to 2.3 V
Ptot Total Power Dissipation (Tcase = 75°C) 25 W
Top Junction Operating Temperature –25 to 130 °CTstg, Tj Storage and Junction Temperature –40 to 150 °C
THERMAL DATA
Symbol Parameter PowerSO20 Multiwatt15 Unit
Rth j-case Thermal Resistance Junction-case Max. – 3 °C/W
Rth j-amb Thermal Resistance Junction-ambient Max. 13 (*) 35 °C/W
(*) Mounted on aluminum substrate
1
2
3
4
5
6
7
9
10
11
8
ENABLE B
INPUT 3
LOGIC SUPPLY VOLTAGE VSS
GND
INPUT 2
ENABLE A
INPUT 1
SUPPLY VOLTAGE VS
OUTPUT 2
OUTPUT 1
CURRENT SENSING A
TAB CONNECTED TO PIN 8
13
14
15
12
CURRENT SENSING B
OUTPUT 4
OUTPUT 3
INPUT 4
D95IN240A
Multiwatt15
PowerSO20
L298
2/13
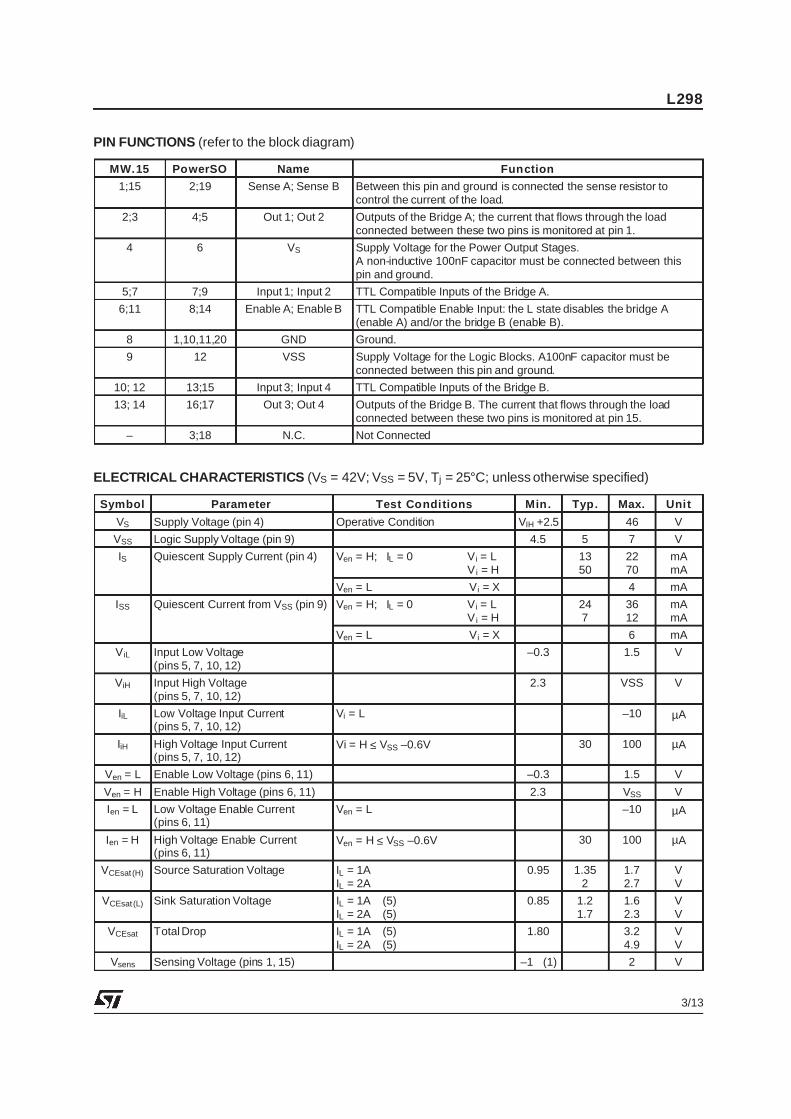
PIN FUNCTIONS (refer to the block diagram)
MW.15 PowerSO Name Function
1;15 2;19 Sense A; Sense B Between this pin and ground is connected the sense resistor tocontrol the current of the load.
2;3 4;5 Out 1; Out 2 Outputs of the Bridge A; the current that flows through the loadconnected between these two pins is monitored at pin 1.
4 6 VS Supply Voltage for the Power Output Stages.A non-inductive 100nF capacitor must be connected between thispin and ground.
5;7 7;9 Input 1; Input 2 TTL Compatible Inputs of the Bridge A.
6;11 8;14 Enable A; Enable B TTL Compatible Enable Input: the L state disables the bridge A(enable A) and/or the bridge B (enable B).
8 1,10,11,20 GND Ground.
9 12 VSS Supply Voltage for the Logic Blocks. A100nF capacitor must beconnected between this pin and ground.
10; 12 13;15 Input 3; Input 4 TTL Compatible Inputs of the Bridge B.
13; 14 16;17 Out 3; Out 4 Outputs of the Bridge B. The current that flows through the loadconnected between these two pins is monitored at pin 15.
– 3;18 N.C. Not Connected
ELECTRICAL CHARACTERISTICS (VS = 42V; VSS = 5V, Tj = 25°C; unless otherwise specified)
Symbol Parameter Test Conditions Min. Typ. Max. Unit
VS Supply Voltage (pin 4) Operative Condition VIH +2.5 46 V
VSS Logic Supply Voltage (pin 9) 4.5 5 7 V
IS Quiescent Supply Current (pin 4) Ven = H; IL = 0 Vi = LVi = H
1350
2270
mAmA
Ven = L Vi = X 4 mA
ISS Quiescent Current from VSS (pin 9) Ven = H; IL = 0 Vi = LVi = H
247
3612
mAmA
Ven = L Vi = X 6 mA
ViL Input Low Voltage(pins 5, 7, 10, 12)
–0.3 1.5 V
ViH Input High Voltage(pins 5, 7, 10, 12)
2.3 VSS V
IiL Low Voltage Input Current(pins 5, 7, 10, 12)
Vi = L –10 µA
IiH High Voltage Input Current(pins 5, 7, 10, 12)
Vi = H ≤ VSS –0.6V 30 100 µA
Ven = L Enable Low Voltage (pins 6, 11) –0.3 1.5 V
Ven = H Enable High Voltage (pins 6, 11) 2.3 VSS V
Ien = L Low Voltage Enable Current(pins 6, 11)
Ven = L –10 µA
Ien = H High Voltage Enable Current(pins 6, 11)
Ven = H ≤ VSS –0.6V 30 100 µA
VCEsat (H) Source Saturation Voltage IL = 1AIL = 2A
0.95 1.352
1.72.7
VV
VCEsat (L) Sink Saturation Voltage IL = 1A (5)IL = 2A (5)
0.85 1.21.7
1.62.3
VV
VCEsat Total Drop IL = 1A (5)IL = 2A (5)
1.80 3.24.9
VV
Vsens Sensing Voltage (pins 1, 15) –1 (1) 2 V
L298
3/13

���������������� ���������� ������������ ������� !"#$%&'(%)*�+(,-.%.*'+*/0')*$1/1*20%%/34'(56(6+/56,,%5*�65%* %1/-5%)3789:;<=>?@A?BCDE><FGHI<IJK7LDMN<OP<Q9D:M><RA?S<9DQT?UET9ADQ<TA<M>C?D7VMM<Q9D:M><ENEM><9DQT?UET9ADQ<>WE>=T<@A?<=?A:?CB<X?CDE;>Q<R;9E;<C?><TRA<ENEM>7L=>?CT9D:<Q=>>SYZI<[<\]<8_<EMAE<9D=UTZI<[<\]]<DQ<9DQT?UET9AD<ENEM>7K=<TA<ab<W<cd<RA?SQ<A@<efVH8<J?A:?CB<>BA?Ng<K=<TA<Oha<W<a<XNT>Q<A@<ZCTC<>BA?N<iFV jK=<TA<\Ph<W<a<XNT>Q<A@<kkJFL <ZCTC<>BA?N7J9DAUT<EAB=CT9XM><TA<T;><JGIchIlOmnldmnlhnll7GDT>??U=T<EC=CX9M9TN<iU=<TA<cd<QAU?E>Qj7k9:;T<M>o>M<S>>=<;C?SRC?><QTCE7Z9?>ETg<9DS9?>ET<CDS<?>MCT9o><CSS?>QQ9D:<BAS>Q7JAR>?[AD<F>Q>T<iJLFj7JAR>?[U=<p9B>?<iJqFpj<CDSLQE9MMCTA?<HTC?T[U=<p9B>?<iLHpj<7qCTE;SA:<p9B>?<iqZpj<R9T;<9TQ<ARD<AD[E;9=<FI<AQE9MMCTA?<@A?<?>M9CXM><A=>?CT9AD7J?A:?CBBCXM><EAS><=?AT>ET9AD7JAR>?<QCo9D:<HfkkJ<BAS>7H>M>ETCXM><AQE9MMCTA?<A=T9ADQ7fAR<=AR>?g<;9:;<Q=>>S<I LH<efVH8nkkJFL <T>E;DAMA:N7eUMMN<QTCT9E<S>Q9:D7GD[I9?EU9T<H>?9CM<J?A:?CBB9D:rsiGIHJjso9C<TRA<=9DQ7H9D:M><Pt<GD[I9?EU9T<H>?9CM<J?A:?CBB9D:<EC=CX9M9TN7GD[I9?EU9T<Z>XU::9D:<o9C<TRA<=9DQ7J?AE>QQA?<?>CSnR?9T><CEE>QQ<TA<=?A:?CB<B>BA?N7q9S><A=>?CT9D:<oAMTC:><?CD:>Y<<\u]t<TA<PuPt789:;<H9DnHAU?E><IU??>DTY<\PBV7IABB>?E9CMg<GDSUQT?9CM<CDS<kWT>DS>S<T>B=>?CTU?><?CD:>Q7fAR[=AR>?<EADQUB=T9ADY<[v<]uh<BV<TN=9ECM<w<Otg<d<8_[\]<xV<TN=9ECM<w<Otg<O\<8_[v<c<xV<TN=9ECM<QTCDSXN<EU??>DT �'+*$'1y51z*�%5'{0%51,* %1/-5%)37p9B>?]Y<a[X9T<T9B>?nEAUDT>?<R9T;<a[X9T<=?>QECM>?7p9B>?cY<ch[X9T<T9B>?nEAUDT>?<R9T;<=?>QECM>?gECD<X><9DE?>B>DT>S<SU?9D:<HfkkJ<o9C<>WT>?DCM<E?NQTCMnEMAE7p9B>?\Y<a[X9T<T9B>?nEAUDT>?<R9T;<a[X9T<=>?9AS?>:9QT>?g<=?>QECM>?<CDS<=AQTQECM>?<7pRA<IC=TU?>g<IAB=C?>g<Jq <BASUM>Q[IC=TU?><9Q<ch[X9Tg<BCWu<?>QAMUT9AD<9Q<c\uP<DQ[IAB=C?><9Q<ch[X9Tg<BCWu<?>QAMUT9AD<9Q<\]]<DQ[Jq <BCWu<?>QAMUT9AD<9Q<c][X9T7c][X9T<BUMT9[E;CDD>M<VDCMA:[TA[Z9:9TCM<EADo>?T>?7HNDE;?ADAUQ<H>?9CM<JA?T<iHHJj<R9T;<HJGr<iCQT>?<BAS>j<CDS<G\IrsiCQT>?nHMCo>j7KD9o>?QCM<HNDE;?ADAUQ<VQNDE;?ADAUQ<F>E>9o>?<p?CDQB9TT>?<iKHVFpnHIGj<R9T;<|[X9T<CSS?>QQ<S>T>ET9AD7JC?CMM>M<HMCo><JA?T<iJHJj<a[X9TQ<R9S>g<R9T;>WT>?DCM<FZg<qF<CDS<IH<EADT?AMQ<id]ndd[=9D<ADMNj7m?ARD[AUT<S>T>ET9AD<E9?EU9T?N<@A?m?ARD[AUT<F>Q>T<imLFj7JGIchealO7JGIcheald 7JGIchealh7JGIcheall FmlnJ}ZFmhnJ}IFmPFmdFmOnJ}Fm\FmcFm]nG~ptZZtHHFZlnJHJlFZhnJHJhFZPnJHJPFZdnJHJdFIlnF�nZpFIhnp�nIbFIPnHZLFIdnHZGnHZVFZOnJHJOFZ\nJHJ\IfFntJJFV]nV~]FVcnV~cFV\nV~\ntFke[FVOnV~OntFke�FVdnp]IbGFVPnV~dnHHFk]nFZnV~PFkcnqFnV~hFk\nIHnV~ltZZtHHLHIcnIfbG~LHI\nIfbLKpFI]npcLHLnpcIbGFIcnpcLHGnIIJ\FI\nIIJcFIOnHIbnHIfFZ]nJHJ]FZcnJHJc c\OdPhla|c]ccc\cOcdcPchclcac|\] d]O|OaOlOhOPOdOOO\OcO]\|\a\l\h\P\d\O\\\c����� !""�!"��$���������������������������������������������
����������� � ������� �� �������������������� ��!�"��#�$%&'$()*(+, ���������-��.���� �/01�23�� ���/ �0�1�3�2�� � � / 0 1 3 2 ���45678859�69:�59�69:�59 69: 675;<�59�69:�675;<=59/6���>"59069:/67?��6�4>":?� 6�4>?@�5��6��??6���>"5��6��?"6��8 5� 6��8�5��6�>6�4 5A368B5A168B�5A05A/5A�68B�5A 5A�5A�6":�775�365C6�5�16�C6�>5�06?5�/6"69 ����� ���/�0�1�3 �2 �� � � � / 0 1//23 1 0 / � � 3 2 ������ ���/�0�1�3�2��/�/�/ /�� ���������59/6���>"59069:/65;�6569:0?��6�4>":?� 6�4>?@�5��6��??6���>�:�5;�6D569:15; 6�69:377 5A�68B�5A 5A�5A�6":�775368835168815068805/688/5�365C6�59�69:�675;<= 59 69: 675;<� 59�69:� 59�69:� ��45 6788 :� 5A368B 5A168B� 5A0 5A/ :�:�5�16�C6�>5�06?5�/6"695�688�5 688 5�688�5�688�5��6�>6�45� 6��8�5��6��?"6��8 ���� �/01� �2 �� � � � �� �/ �0 �223 // /� / /� /� ���1 �3 ������ �� � / 0 1 3 2�1 �/�0� ����������3 59�69:�675;<=59 69: 675;<�59�69:�59�69:���456788:� 5A368B5A168B�5A05A/:�5�16�C6�> 5�06? 5�/6"69 5�688� 5 688 5�688� 5�688� 5��6�>6�4 5� 6��8� 5��6��?"6��8 :� :�5��6��??6���>"?� 6�4>?@�?��6�4>":775; 69:36�5;�69:16D55;�69:06559069:/659/6���>"5�365C6�5/688/506880516881536883775A�6":�5A�5A 5A�68B� �E��F���'��G&HI�� ��������J��������J

���������������� ���������� ������������ ������� !"#$%&'' %()*+%,���-./+01'2.345(67%'5%8%+%6/%'2(6*(9':;<==>?=@ ����� !"= ����� !"A ����� !"� ����� !""B� ��C����D� EF ��� ���������GH ���������GH ���������GH ���������GHIJ�J���K��L�� ���MN OBIP�QBI�KORI�P�B��N OBIP�QBI�KORI�P�B��N OBIP�QBI�KORI�P�B��N OBIP�QBI�KORI�P�B��NDST�G�O����U�� U���K�V�W�C�X�LMN VY VY ZY ZY��C��� U���KW�C MN ��� ��� �[Z �[ZJJOIB����C��� U�� ��Z ��Z �\[ �\[��C ��F�CM �� �V �� �V�]B�O�CM O�CM�TPQP� O�CM�TPQP�P�PJ O�CM�TPQP� O�CM�TPQP�P�PJ��U �M � � � ����CF� ]�U��� ]OR���LF� M � � � �� ������UUF����C��M ���OP��TI� ���OP��TI� ���OP��TI� ���OP��TI�O����� ���UUF����C��M _ O�O _ O�O���W�C�T�����C�����C����LF� \����FC����� �M Z����FC����� �M \����FC����� �M Z����FC����� �M��MC�F�C���� C �\���MC�F�C��M �\���MC�F�C��M �\���MC�F�C��M �\���MC�F�C��M

����������� � �������� �� ������������������ �!��"�# �$��%&'()�*+, ��������-)./0)���������)123�4)0�.%'.56789:�����;��;��" �� �<��=>? @�A:�����;=>? # ?<�>�<�� ���� :�����;���> <��@�7�B�!�<��CD���E�<F G8�6�!�G���?<��?����<�8HH� IG8��8HH�J�K �8HH���LM # H����<8HH�6G�����8�L�����LM87LN����:�O���>���;��P?��!!�<��<��<�>����;��:�O���� G�?�<N�<��H����;��# ?<�>�<�� ���H��Q�� <��!��;� �R� ���<�� P��S�7T#UP� S�7TPL� ��7G VW�V :PG�8:PG�=:PG��:PG�:PG�X G8AS���T#G8YS8UASG��S��PPS���T#G��S��P#S��: G� S��:�G��S�TS�7G�AS#S8G�YSPG��S�MS�TG�ISGMS�GX�S8UYSGGX�S8U�SNGGX S8UIS�@ @=��O ��><G�?�</Z[\�,9��������H���E�<?�����]��;�<����8�L�����?<��$ L8G���:�W " ���� �>? ���E�<�8S��;��� ��;��� ��;�� ����!�:��< G8�S8U�SVGX6G8 S8U SVGX6�G8�S8U�G8�S8U�:���!!�!�!�B��:��<@��<��XX:GP� G=�S#U�G=�G= G=�S:R�G=AG=YG=�S:R�G=IS:R0\_a\ �bZcbde)�2.fg 0d[d)5\eZbh 0d[d)((�'35:#���6@IA AT �� �="<�? � @�="<�?:#���6@II @T ��@�="<�? Y��="<�?# �����>�<�E>����7�O�V�!<���:�����;;� � G�S::�G�S::�G S:: G�S::�GAS::AGYS::YG�S::�GIS::I

����������� � �������� �� ������������������ �!��"�# �$%&'()*�+,- ��������.*&/0*���������*��/12%*0)3�4��%�1/�56*/789 0���56: �(���56: ;���56: �<1<�%=>9 '?@@9A%=>9 09BCA5>D5E6F��G�HI#J �� �K �� # �G��FL.M FN��!!�O�����"NO�!�� �POG�QO�� �!��!��R�N�P����� �PO$F� G�HIFS� �K �T �� F U FN��!!�O�����"NO�!��PO�PO$��� ��ON�O����"NO�!������N� �O���� ���"NO�!��N��!!�O���V�W�$�# �X��V�W�Y�F� ��� ��PO�PON��HIFS��Z�������N��GK�O���[��\P� �"��[�F��Y�� W�W� �O�N�O���� NO�P�O�� ��"�!����O�$��HXG]^ � �� #G � ��NO����!����_X�N�O�� �PO����������VV� ��a�!O����� �PO$����N��� ��N�� ���O�a��!�Z�Xbb��O��O���W�a���$�FX�c��N���d��W����O�� �!�#GF����O$Xc�GcJ� � �� #GF ��H Xc���� ��!N��d��� �!���� �PO�$Xc�GcJ� � K � #GF ��H Xc���� ��!N��d��� �!���� �PO�$Xc GcJ G]Xbe� K T � #GF ��H Xc ��� ��!N��d��� �!���� �PO ���� ���O�a��� �!�����[��� ���a�!O���$Xc�GcJ�G]Xbef T g #GF ��H Xc���� ��!N��d��� �!���� �PO�������N�O�a��� �!�����[��� ���a�!O���$XcKG���I# g h � #GF � XcK��� ��!N��d��O����!��R�� �PO�O��O�����V����O�V��G��P O��$�FPO�PO��N���� �W��� �O"��$XcTGGcJK h � K #GF ��H XcT��� ��!N��d��� �!���� �POK����O���N!�a��N�!��O�[���O���N" ���� �PN�N����!����O$FX�i��N���d��W����O�� �!�#GF����O$�FX�i��� �d��N�[O�Z����������VV�W�[���� O�� �!�Z��R��P!!�P��� ��!!�� �PON$�Xi�G#J� �� �g � #GF ��HG�L�M Xi���� ��!N��d��O����QO�� �!�� O���P�O��� $Xi� �K �h � #GF ��HXi �T �� �� #GF ��HXi�Gj� �g �� �� #GF ��H Xi���� ��!N��d��O���!�Z�a�!O����������VV� ��� �PO$XiK �h K� �K #GF ��H # O���P�O�� ���� ����� $XiT �� K �T #GF ��H # O���P�O�� ���� ����� $XigGj� �� K� �g #GF ��HG�L,M # O���P�O�� ���� ����� ����# �����P�O��dP������� $�����!�������VV� ���!��R$XihGj K� KK �h #GF ��HG�L,M # O���P�O�� ���� ����� ����# �����P�O��dP������� $�����!�������VV� ��W�O�$H��� Wk#�l�� �PO F�l��PO�PO #GF�l�� �POG�PO�PO �l���Z��U�l�J�O�PN�W ��H�l���H�� �PO ��l���V�OO���������� �PO/ED9�-���N�dP[[����N�����V�OO���������� �PO�Z�� ��� [��P��W��N�� ��QO�� �!�� O���P�O$,-���N�dP[[����N�����V�OO���������� �PO�Z�� �PN�W�� �����!������VV� ��V�W�$m-���N�dP[[����N�����V�OO���������� �PO�Z�� ��� [��P��W��N��� ���!��P���N��#GF�� W�����H�� �PO�Z�� �PN�W�� �O������!!�!�!�a����O�V�W��_[���� O��[��� ��O����V���������NN���dPN$.-���N�dP[[����N�����V�OO���������� �PO�Z�� ��� [��P��W�� �X���N��!!�O���V�W��� W�����F�� �PO��O���Z�N�$

���������������� ���������� ������������ ������� !"#$%&����'���(��)�� �*������+%���*�&��+��%�%+���,� �- �. �� �+% �� &���������'�( �* ���/ ���'�����*��0*�0*�������/ ������1����0*�&��+��%��+��$� �. �2 �- �+% �� &���������'�( �* ���/ ���'�����*�����0*������*0� �����0*+�/��� ��0*�0*+$3���0*�0*�&��+��$� �4 �� �. �+% �� &���������'�( �* ����*0� �����0*+�/��� ��0*�0*+$3���0*�0*�&��+��,+��5 �2 �� �4 �+% �� &���������'�( �* �'�����0'�' ��������1����0*+0*�0*�6��(*��$����)�����/) '�&�7+���+��8 �� �- 7� �+% �� &�7�������'�( �* ��$����*�����9�$��/) :���)�*���+%�9����/) :�&�-+��% �7 �. 7� �+% �� &�-�������'�( �* ��$����*��%0*�9�$��/) :�&�.+�;+�, �- �4 77 �+% �� &�.�������'�( �* �<�8&��8'�����0'�����'/�*���������0'����1�&�4+&;+�� �. �� � �+% �� &�4�������'�( �* �<�8&��8'�����0'�& � �= ���������0'���*��$%&����'���(��)�� �*������+%���*��������� ��'��= ���*�> ����* �6������*���/������ ''��(0'�&��+$�$� �� �� �2 �+% ��+��5?@A&��+$�$� �� �� �� �+% ��+��5?@A&��+$�$� �� �� 7� �+% ��+��5?@A&��+$�$� �� �7 7� �+% ��+��5?@A&�7+$�$7 �4 �� � �+% ��+��5?@A&�-+$�$- �2 �� � �+% ��+��5?@A&�.+$�$. �� �� 7 �+% ��+��5?@A&�4+$�$4 �� �� - �+% ��+��5?@A $%&�B��'���(��)�� �*������+%���*�&B�+&�+8C- 2 � �- �+% ��+��5?@A &B��������'�( �� �)���*���6��* ������� ��'��= ���*D������������0*-�&B�+3&+8C. � �� �. �+% ��+��5?@A &B��������'�( �>��* ���*���6��* ������� ��'��= ���*D������������0*.�&B�+��+8C4 �� �� �4 �+% ��+��5?@A &B��������'�( �' � �*���*���6��* ������� ��'��= ���*D������������0*4�E�� ��D�� ��D�7 .D�� $ F G�0�)�� 6 � �� �6���������)��+%����'�E�� ��D�� ��D�- 4D�2 $ F $'�*�= �'0�����6���������)��+%����'�C� F �D�4D�2D7� ��D��D��D�7 F � ' ����'��� ��*���* ���������� �* )��� ' ����'�'0�)�( �� 6*�0���� �* )�HIJKLM�NOP ����� !"QMIRSM����� !""M��RTUHMSLV�W��H�TRM?�TRH�RULSA�XYMRZ[\ S���XY] �K���XY] ��XY] �_T_�Ha\ Jbcc\dHa\ S\efdXagXhY5 � �)i��j����0* %�j�0*�0* �+%�j����0*+0*�0* $�j��> �F�j�C*�0' ) ��5�j���5����0* ���j���/�**������ �����0*Rhg\�P��'�(066 ���'�����/�**������ �����0*�> ����6��0� )��'���� k* �������* ��0�*�OP��'�(066 ���'�����/�**������ �����0*�> ��0' )����� �����$����//����/) �@P��'�(066 ���'�����/�**������ �����0*�> ����6��0� )��'�� � �����0��' ��+%���)�����5����0*�> ��0' )����* �$����� �����= �$�*�/) �96����* �6������*���/������ ''��(0':�QP��'�(066 ���'�����/�**������ �����0*�> ����6��0� )����&��'�����*��/) ���)�����%�����0*�* �>�' �
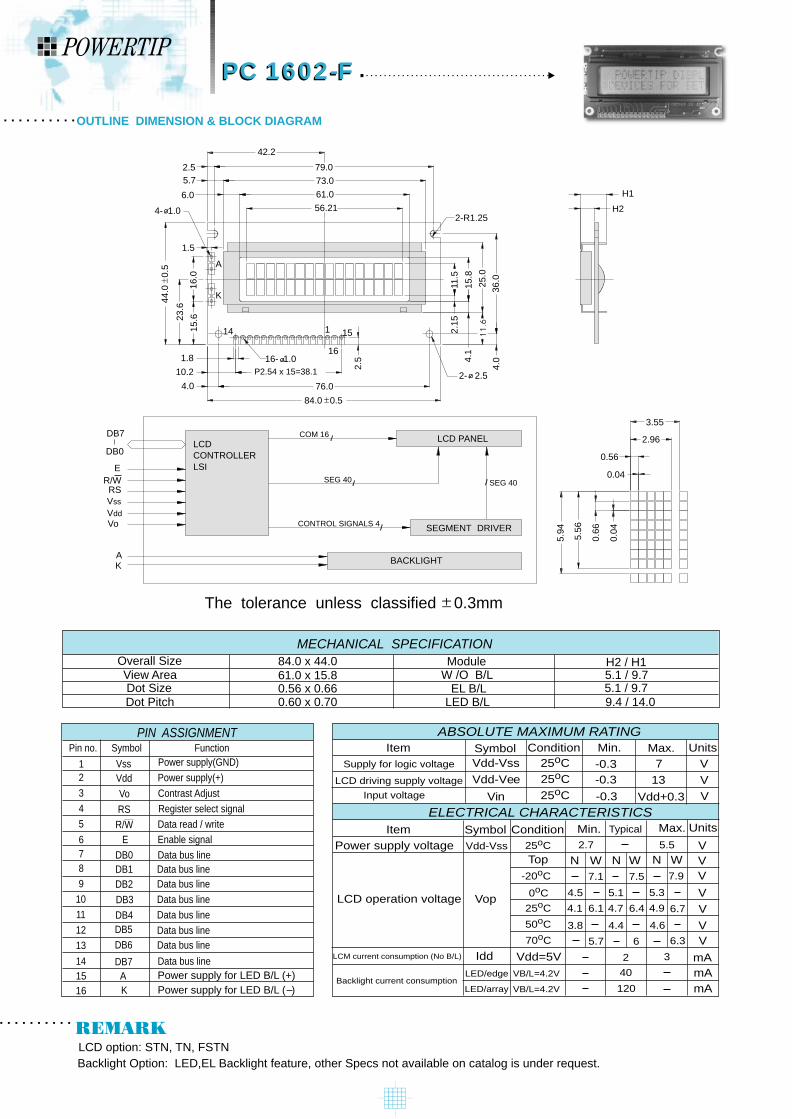
The tolerance unless classified 0.3mm
LCD option: STN, TN, FSTNBacklight Option: LED,EL Backlight feature, other Specs not available on catalog is under request.
OUTLINE DIMENSION & BLOCK DIAGRAM
MECHANICAL SPECIFICATIONOverall SizeView AreaDot SizeDot Pitch
84.0 x 44.061.0 x 15.80.56 x 0.660.60 x 0.70
ModuleW /O B/L
EL B/LLED B/L
H2 / H15.1 / 9.75.1 / 9.79.4 / 14.0
Vdd+0.3
VVV
137
ItemSupply for logic voltage
LCD driving supply voltageInput voltage
Vdd-VssVdd-Vee
Vin
25oC25oC25oC
-0.3-0.3-0.3
Symbol Condition Min. Max. UnitsABSOLUTE MAXIMUM RATING
Item
LCD operation voltage
LCM current consumption (No B/L)
Backlight current consumption
Symbol Min.Condition
Vop
IddLED/edge VB/L=4.2V
LED/array
Top-20oC
0oC25oC50oC70oC
VB/L=4.2V
N W7.1
4.54.1
Vdd=5V
3.85.7
6.1
ELECTRICAL CHARACTERISTICS Typical
N W
Max. Units
V
5.34.9
4.6
7.9
6.7
6.3
VVVVV
mAmAmA
3
N W7.5
5.14.7
4.46
6.4
PIN ASSIGNMENTPin no. Symbol Function
123456789
1011121314
VssVddVoRSR/W
EDB0DB1DB2DB3DB4DB5DB6DB7
Power supply(GND)Power supply(+)Contrast AdjustRegister select signalData read / writeEnable signalData bus lineData bus lineData bus lineData bus lineData bus lineData bus lineData bus lineData bus line
1516
A K
Power supply for LED B/L (+)Power supply for LED B/L ( )
2
12040
Power supply voltage Vdd-Vss 25oC 2.7 5.5 V
PC 1602-FPC 1602-F
3.55
2.96
0.56
0.04
0.04
0.66
5.94
DB7
DB0
ER/WRSVssVddVo
AK
LCDCONTROLLERLSI
LCD PANELCOM 16
BACKLIGHT
SEG 40
CONTROL SIGNALS 4
SEG 40
SEGMENT DRIVER
5.56
2-R1.25
25.0
H1H2
11.5
15.8
4.1
4.0
36.0
2.15
2- 2.5
16
1 15
76.084.0 0.5
16- 1.0P2.54 x 15=38.1
4.010.21.8
K
A
14
4- 1.0
1.5
6.05.72.5
42.279.073.061.056.21
44.0
0.
523
.615
.616
.0
2.5





























