Embed Size (px)
Citation preview
Fundamentos da Conversão Eletromecãnica de En~rgia Capítulo 3
3-17. lJma máquina é construíd:. com um enrolamento de dois pólos. monofásico, e é equipada com um enrolamento comutador cc. como indicado na Ftg P3 17. O eixo da escova está d.!Slocado 20' do eixo d<l bobtn~ Se uma tensão monofásica é aplicada ao enrolamento do estator. será desenvolvido um Iorque conúnuo, umdtre ional'? Explique. Supo:ilia um fluxo de di·persão de armadura desprezíveL
Figura P3-7
3-18. Mostre que a equação básica para o torque eletromagnético oa forma
é dimensiooalmente correta.
/
4
Motores de Indução Trifásicos
Uma caractcristica qae distingue os motores de indução é que eles ~o JLáquinas com ercwaçxw ií'!ica. Embora tais máquinas sejam equipadas tanto rom um enrolamento de ampo como com am enrolamer:to de artnadura, em condições 110rmais de utilizaçio a fonle de energia.é cooectada a um úaico enrolamento, o eruolamen_!g d_~ campo. As correntes circ~ _no eJIIl?lameotQJkanna4~r. i~. o que cria uma disÜibuição ampere-coádutor que interage com a distribuição de campo par.t produzir um torque líquido unidireaonal. A freqiência da corrente induzida no condutor é ditada pela elocidade do rotor na qual está colo;cada; coomdo, a relação entn: a velocidade do rollll' e a freqüência da cor...én""te de armadura é rru que d3 uma disbibuição ampere-coodutor resultante que é estacionária ca rdação à distribuição do campo. Como realtado, a máquina de ÍIKIIPÇàO com excitação única é capaz de produzir torque a fliiD}.quer velocidtuJe llbab:o da velocidtMJe síncrona 1• Por casa razão, a máqaioa de indução é classific:ada COJDO uma m6.qJiilr.a assíncrona. E.. contraste, m4qlliruzl SÚICronas são dispositiviJS elettomecânjros de catvcrsão de mergia nos quais o torque líquido pode su produzido em apcaas uma2 velocidade do rolar. A caraaaíslica que distingue a máquina síncrona é ffJe ela é um disposilivo com uciiDçiio dJtpiD. ex~ quaado esti seodo usada aao um motor de reluliocia.
Os aspectos mais importmtes de CODSirUção dos motores de ioduçio trifisicos estão desaitos na Seção 3-3. Sendo o motor de ioduçio ...a ..mquioa com excitação única, é ua::essáaio que tanto a corrente de magnetivçãn como a compooc:ate de potência da c:orreotc cin:ulem na mesma rede. Além di -so. devido à preseaça de u. eutaereuo., circuito magnc'rico da m6quioa de indução. um vaiOI' apreciável de corrente de magnelizaçiQ ~ .,.. ' io para estabelecer o Ouxo por pólo solicitado pela leasão aplicada Normalmente. o walor da c:onmte de magnetinçio para os motoleS ele iDduçio trifásioos fica
~---~··· .............. wiDcidltl.. ____ ...._.......,~.-podeaillil-.--....-wlocidlok-ate·
--·~-·-.... , .. -·.-;ADÍIIIIÍilOIII. •
138 1\ totores de tnduç.io 1 rif.ís1cos Capítulo 4
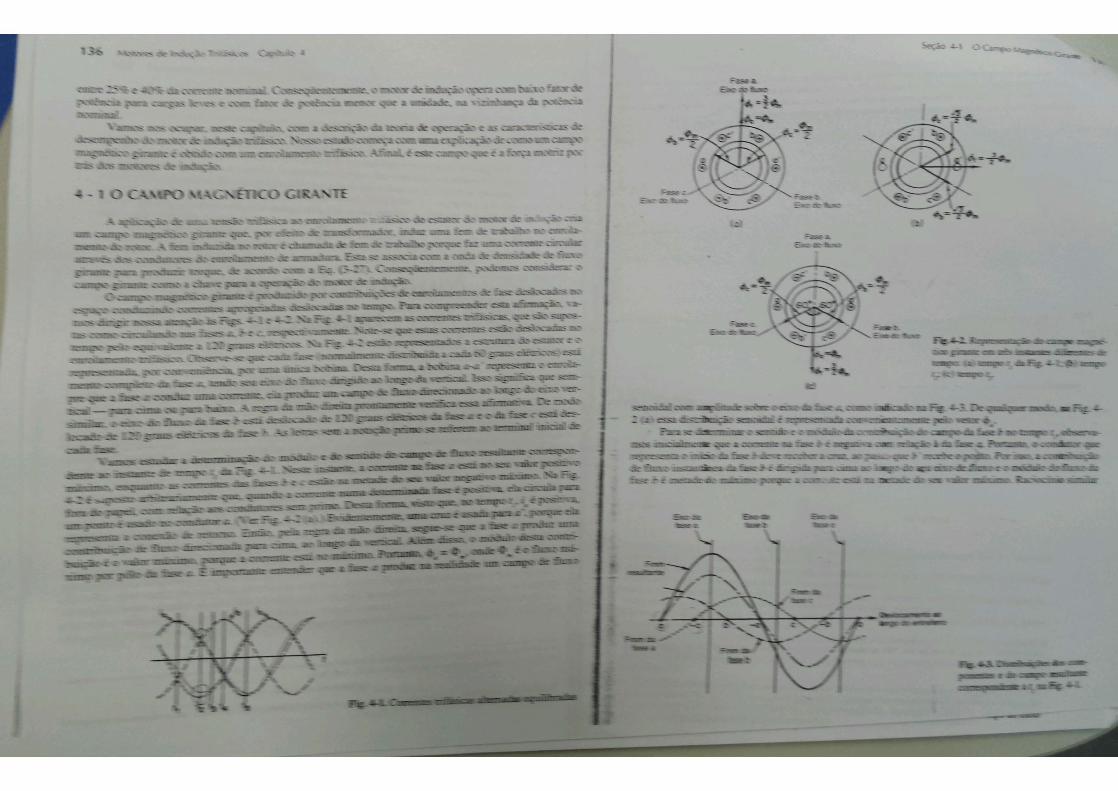
. lé% âó ~Multndo indicgdo na Fig. 4.2(a) para a fase c. O exame da representação no espaço correspon-dente ao tempo r,. como ilustrado na Fig. 4 -2(a), cvtdcncia que o fluxo por pólo resultante está direcionado para cima e tem um módulo 3/2 vezes o fluxo máximo por pólo de qualquer fase . A Fig. 4-3 representa o mesmo resu ltado que a Fig. 4-2(a), ma~ em termos das ondas de fluxo senoidais, ao invés de vetores de fluxo. Ooserve-se que o vetor de flu xo res11ltante na Fig. 4-2 mostra o sentido em que o fluxo cruza o entreferro. Uma vez cruzado o entreferro, ó fluxo fica confinncloãõl'ei'i'o7·no-mo"dõ\Ru:u.---
A seguir, vamos estudar como a situação da Fig. 4-2(a) se alter<t, quando o tempo passa de 90 graus elétricos, de r 1 a t 1, na Fig. 4-1. Aqui, a corrente da fase a é zero, não dan.do nenhuma contribuição do fluxo. A corrente na fase b é positiva e igual a V 3/2 vezes seu valor máximo. A fase c tem o mesmo módulo da cotTente mas é negativa. Juntas, ::.s fases h e c se combinam para produzir um lluxo resultante tendo o me:> mo módulo que no instante r r Ver Fig,. 4-2(b). É importante observar, r:unbém, que a passagem de 90 graus elétricos no tempo resulta numa rotação do campo do flu xo magnético de 90 graus elétricos.
Um espaço adicional de tempo equivalente a outros 90 graus elétricos leva à situação representada na Fig. 4-2(c). Observe-se que, novamente, o eixo do campo do flu xo gira de outros 90 graus el€tncos.
Com base na discussão precedente, deve ser evidente que a aplicação de correntes trifásicas em enrolamentos ttifásicos equilibrados dá origem a urn campo magnético girante que possui dua~ ~acte: rísticas: ( 1) é de amplitude constante e (2) e de velocidade constante. A primeira carac_terfsttca Já fot demonstrada. A segunda segue do fato de que o fluxo resultante gira de 21T radtanos elétncos no esp~ço a cada 2n radianos elétricos de variação no tempo para as correntes de fase. Portanto, para uma máquma de dois pólos, onde os graus elétricos e mecânicos são idênticos, cada ciclo de variação da corrente produz. uma rotação completa do campo do fluxo. Portanto, esta é uma relação fixa, que é dependente dn freqüência das correntes e do número de pólos para o qwil o enrolamento tri:ás~co é projetado. No caso
nde rolamento é pro"etado ara uatro ólos, re:.Juer do1s ctclos de vanaçao da c~:-rent_e para pro-duzir uma rofaÇao o campo do fluxo. Por conseguinte, segue-se que para uma máquma de P pólos a relação é
p p n f =- = X rps =--
2 2 60 (4- l)
~e f está em ciclos por segundo e rps representa rotações por segundo. Observe-se que a Eq. (4-1) é idêntica à Eq. (3-33). " . .
Urna inspeção da distribuição ampere-conéutor do enrolamento do ~stator no~ diversos m~tantes de tempo mostra que as fases individuais contribuem de modo a produz1r um efetto de solen61de no estator. Desta forrna, na Fig. 4-2(a), os sentidos das correntes são de forma que. todas entram para dentro da página no lado direit? e saem no esqu~rdo. A re~ra da mão d~eita_indic~ ~ue o campo do fluxo é então dirigido para cima, ao longo da vert1cal. Na F1g. 4-2(b) a s1tuaçao é Similar, ~xceto que _agora a distribuição de cruz.es e pontos é de tal forma que o c:unpo do fluxo rf".sultan~ é o~tentado honz.ontalmente em direção à direita. Portanto, pode-se conclmr que o campo magnético gtrante é uma conse-qüência da fmm girante associada com o enrolamento do estator. . . ..
No precedente, foi apontado que a circulação de correntes tnfástcas eq:nhbradas através de um enrolamento trifásico equilibrado produz. um campo girante de amplilllde e velocidade constante. Se nenhuma destas condições for perfeitamente satisfeita. é aind.i!?.ossí\'~S~ obt~U!m-~aQI_ESL.rnagnético
.~nte ~~_E.ão terá amp_litude constant~ nem veloci_<!_~e linear_ constante. Em geral, para uma máquina de q--fãses, um campo grrante de amplitude constante e velocidade coustante resulta quando as duas condições a seguir forem satisfeitas: (1) há um deslocamento no espaço entre os enrolamentos de fase equilibrados de 2-rr/q graus elétricos. e (2) as correntes que circulam aaravés dos enrolamentos de fase ~ão c~u\\ib~adas e deslocadas no tempo d~ 27rfq graus elétricos. Para a máquina trifásica, q = 3 e, então, o agora familiar número 120" é obtido. A única exceção à regra é a Dáquina de duas fases. Devid<' à
siluaçiio de duas fases ser um caso especial do si.cu:ma de quatro fa•e~. o valor do q igual a 4 deve ~er usado.
Uma última observação deve ~er feita. A velocidade de rotação do campo, como descrito pcl:i Eq. ( t!- 1 ), é sempre dada em relação aos enrolamentos de fase que conduUIII u correntes vari,ve is no tempo. ConseqUentei1ICIIte, se ocorre uma situação onde o cnrolamenU> t.2mbé m g tra. entáo a velocidade de rotação do campo em relação ao espaço inercial é d1ferente em relaç:io ao enrolamento.
Análise Matemál.ca
A distribuição da fmm do enrolamento do est.ator (campo) do 111<>10r de ind uçfio t.n fásico é normalmente de forlll31o trapezoidll, m:~.s contém uma compooente fundamental rr.uito acentuada. ~ realidade, é essa componente que está representada na Fíg. 4-3. Embora algumas harmônicas exis t:un, vamos continuar a li!IÚtar nossa alcnção aqui ao importante termo fundamental .
A frnm do eSUlor resultante em qualquer instante de tempo é composta das contnbutçõ.:s de c:Jd.l fase. É imp<>rtante lembrar-se de que cada enrolamento de fase produz uma co ntribuição que varú com o tempo ao longo de um eixo oo espaço fixo. Um observador olh:utdo apenas uma fa,e md rvidwl vé, então, um campo aiJen,;:do. Se o eixo da fase a na Fig. 4-3 for consrdendo como o ponto de n:fcrincia zero para o ãngulo de deslocamr.nto a no entreferro, o campo altemadl:l criado por es ta fase pode ser expresso matematicamente por
'!f = '!f cos {.r)t cos a . .. (4-2;
onde~ .. repre$entao valor máximo da fmm por pólo e é especificado pela Eq. (3-24), quando q torfeito igual a um (uma f~). É importante fazer uma pausa para assegurar que o significado da Eq. (4-2) fo i compreendido. Essa equação estabelece que um observador colocado no espaço, drgnmos, em a. = Cl' (isto é, no eixo da fase a), enxerga, no tempo t =o; o valonnáximo da fmm da fase a. À medida tjllc o tempo passa, o valor Jesta flllln ~altera. Desta f01ma, em~~= 60", o observad:>r s ituado e m n =0'1 vê agora '?F )2 como a contribuição da fase. Em wt = 120", a cootribu.ição se torna - '!1. 12. o que s igaiiica que o pólo trocou de polaridade.. Em wt = 18CI', a contribuição da fmm ~ - 7F ,.· Con~eqoentemaue, o observador colocado em a= fYl vê à contribuição da firun da fase a al~ar entre um , aJor pos1tiYo 'J e um valor negativo !lf.,, à meilida que o tempo passa. Se o popto de observação se altera, a Eq. (4-2) esrnbelece que o observador coatinua a enxergar um campo aff'ernado mas agora ele '.'aria entre má.x.imos diferentes. Desaa fomta, se o observador for colocado em a = JOO. ent.ãc, com o passar do teiDpO, a fmm da fase a pode ser observada como variando entre :!: (V 3!2) ~ _Um observador colocado aest.a P.O$ição rmnca podm ver o valor de pico da fmm fundamellla..l da fase;;_ Evidentemente, um obse!T.ldor snuado em a= ~C!'_ enxerga um valor z.ero para a fmm da fase a, para IOdos os instantes de tempo.
A_expres~a~ para a fmm da fase b pode ser escrita i.DCroduzind<He duas modificações na Eq. (4-2), relattv~ A vanbel tempo, r.. e à variável no espaço, a.. Lembrando que uma tensão trifásica equilibrada é aplicada ao ~nrolamenao do estator trifásico equilibrado, segue-se que a corrente variáwel no tem~o de enrol_arneato da f~e bestá deslocada de 120 graus elétricos do da fase a, como represc.tado na Fig. 4- L Alem ~so, o euo do enrolamento da fase b esti também deslocado por 120 graus elétticos no espaço. Consequentemente, 2 expressão para a fmm instantânea da fase b se torna
!f • ='!f .. cos (úJl-120") cos (a -120")
onde ~ .. tem o mesmo significado que teve para a fase a. Procedendo de modo similar, atmm da fase c pode ser esaita como
~. = ~., cos (Wf- 240•) oos (a- 2401
{4-3)
(44)
140 Motores de Indução Trifásicos Capítulo 4
Como foi demonslrado na análise física, a fmm resultante do enrolamento trifásico tot~l é obtida somando-se as contribuições instantâneas das frnm's alternadas de cada fase. Expresso algcbncamente, temos
?f =?f +?f +?f =?f [cos OJt cosa.+ cos (wt -120") cos (a.- 120') r o b ~ m
+ cos (OJt- 240") cos (a.- 240.)J (4-5)
Introduzindo a identidade trigonomélrica,
resulta
co~ x cos y =i cos (x- y) +! cos (x + y)
'!:F '!:F =____m_[cos(cvt -a.)+cos(cvt+a.)+cos(cvt -·a)
r 2 + cos (cvt +a.- 240") + cos (cvt- a.)+ cos (cvt +a. -120"))
(4-6)
(4-7)
Lembrando que essa última expressão descreve um campo no espaço, dev: ficar claro q~e- ? se~undo, quarto e sexto termos, sendo iguais em amplitude e deslocados de 1200, dao um valor hqutdo rgual a zero. Portanto, a Eq. (4-7) simplifica para
1..--'!:F-, -=-~-'!:F-.. -c-os_(_w_t ___ a._)--,] (4-8)
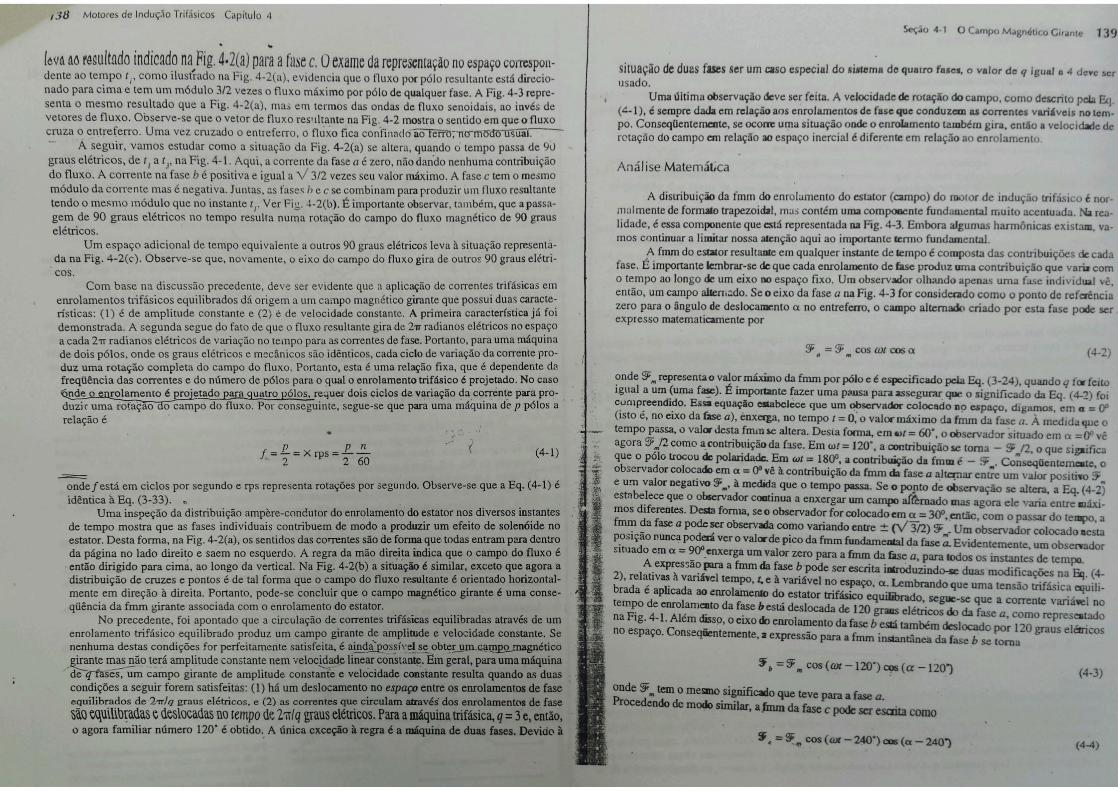
Essa é a equação para um campo girante de amplitude constante. Note-se a correspond!ncia com os resultados representados na Fig. 4-2. Lá foi mostrado que a cooperação dos três campos altema~os dá u campo resultante tendo uma amplitude igt•al a 3/2 da amplitude de qualquer fase. Isso~ conststente c:m 0 fator 3/2 '!:F que aparece na Eq. (4-8). ~ara completar a correspondência, devemos agora mostr·H que cos (wt - a) é a expressão matemática para uma onrla trafcgantc. . • . .
A este re~peito, vamos considerar um observador fuo no espaço na posJção a. = 30 ; mvesugar o que acontece à medida que o tempo passa. Por aplicação direta da Eq. (4-8), para a= 30 , obtemos:
I. Em wt1 = 00,
2. Em wt2 = 30",
3. Em wt3 = 120",
!!F,=! '!:F .. cos (120" - 30.) =o
Representadas na Fig. 4-4 e5tão as várias posições que a cossenóide de amplitude ~nstante deve to.:nar para dar valores consistentes cQm os que acabamos ~e calcu~. No~~se que, à medida que o tempo pa'lsa em 30•, a posjção da onda em wt deve Lrafegar 30 no sentidQ po111tivo de a. Apenas desta forma pode o observador fixo na posição do dspaço a = 30" ver o valor de pico da onda resultante, como pedido pela Eq. (4-8). Para um período adicional de tempo correspondente a 90•, o observador vi um valor zero para a onda resultante. Isso acontece quando a onda indicada na posiçlo 2 se move, na direçio positiva de a,
I;
t
Seção 4-2 Escorrega.mento do Motor de Indução 141
a. ângulo no espaço
Fig. 4-4. Demoostração gráfica de que a Eq. ( 4-8) é a expressão de uma onda trafegao te.
por 90", pant a posição 3. Por conseguinte, a Eq. (4-8) representa efetivamente a equação de uma onda Lrafegante, envolvendo uma função trigonométrica. O mesmo raciocínio empregndo anteri01 meme pode ser empregado para ilustrar que uma onda lrafegante de forma trigonométrica, Lrafegando na direção negativa de a., leva a fonna cos (wt + a.), onde, como antes, t é a variável no tempo e a é a variável no espaço.
4-2 ESCORREGAMENTO DO MOTOR DE INDUÇÃO
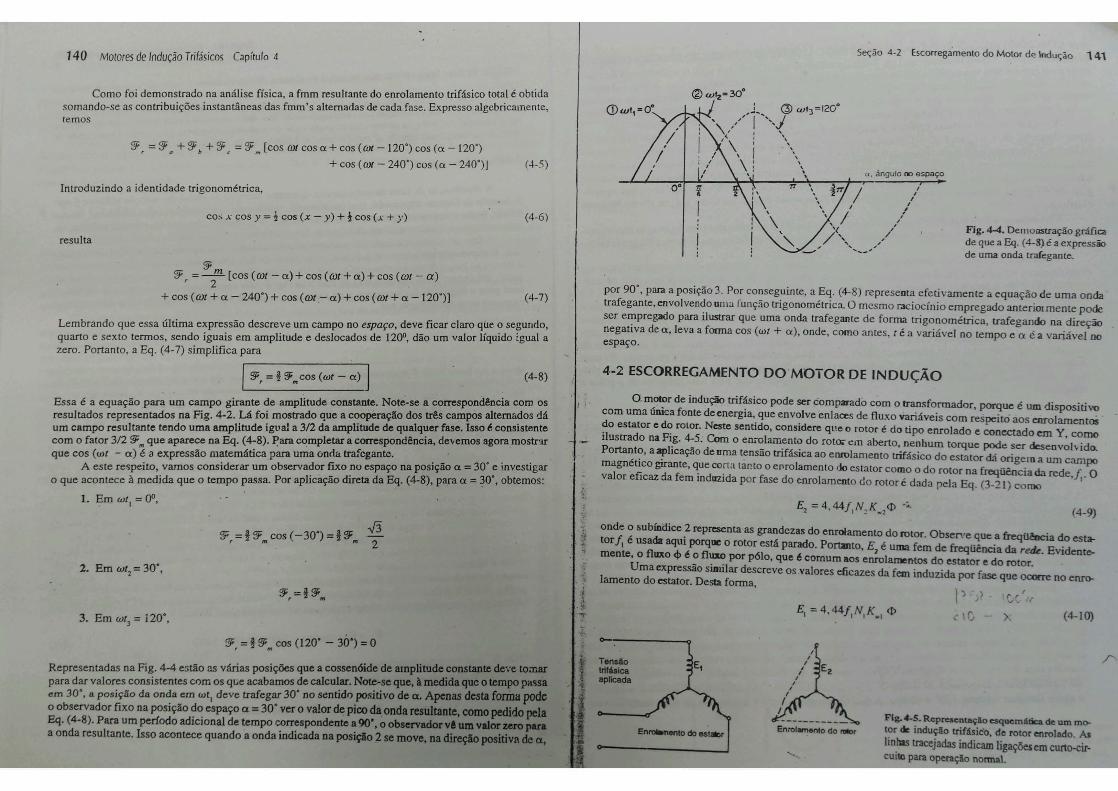
O motor de indução trifásico pode ser comparado com o transformador, porque é um dispositiV() co:n uma única fonte de energia, que envolve enlaa:s de fluxo variáveis com resoeito aos enrolamento$ do estator e do rotor. Neste sentido, considere qPe o 1 otor é do tipo enrolado e ~onectado em Y, como ilusrrado na Fig. 4-5. Com o enrola...uento do rotoo <!•TI aberto, nenbum torque pode ser desenvolvido_ Portanto, a aplicação de nma tensão trifásica ao enrolamento trifásico do estator dá origem a um campo magnético gi.rante, ~ue ro~"ta tanto o enrolamento do estator como o do rotor na freqüência da rede, f,. O valor eficaz da fero mduztda por fase do enrolamento do roto r é dada pela Eq. (3-21) corno
(4-9)
onde o ~ubíndice 2 representa as grandezas do enrolamento do rotor. Obserye que a freqü~ia do estator / 1 é usada aqui porqoe o rotor está parado_ Po!Uilto, E
2 é uma fem de freqüência da retk. Evident~
mente, o fluxo c!> é o flWU> por pólo, que é comum aos enrolamentos do estator e do rotor. Uma expressão siorilar descreve os valores eficazes da f em induzida por fase que ocorre no enre>
larnento do estator. Desta forma,
-·------o Tena.io trtlúk:a aplicada
, > S': ',,. E, =. 4, 44/, NIK•l <I> > (4-10)
Enro/.,ento do ,_, Flg.4-5. Repreaentaçloesquemálica.de um mc:>tor clt induçll.o trifásico, de rotor enrolado. ~ linbas tracejadas indicam ligações em curto-circuiiO para operação nonnal.
142 Motores de Indução Trifásicos Capítu lo 4
o~~- (4-0} e (4-10). podemos fonnuhr a relação
(4-11 )
Observe-se a semelhança desta expressão com a relação de transformação de um transformador A diferença está na inclusão dos fatores de enrolamento_ do motor, necessários pelo uso de enrolamentos distribu{dos nos motores, em contraste com os enrolamentos concentrados empregados nos transformadores. Em suma, então, o motor de indução parado tem car::tcterlsticas de um transformadl'\r em que o enrolamento do estator é o do primário e o enrolamento do rotor é o do secundário.
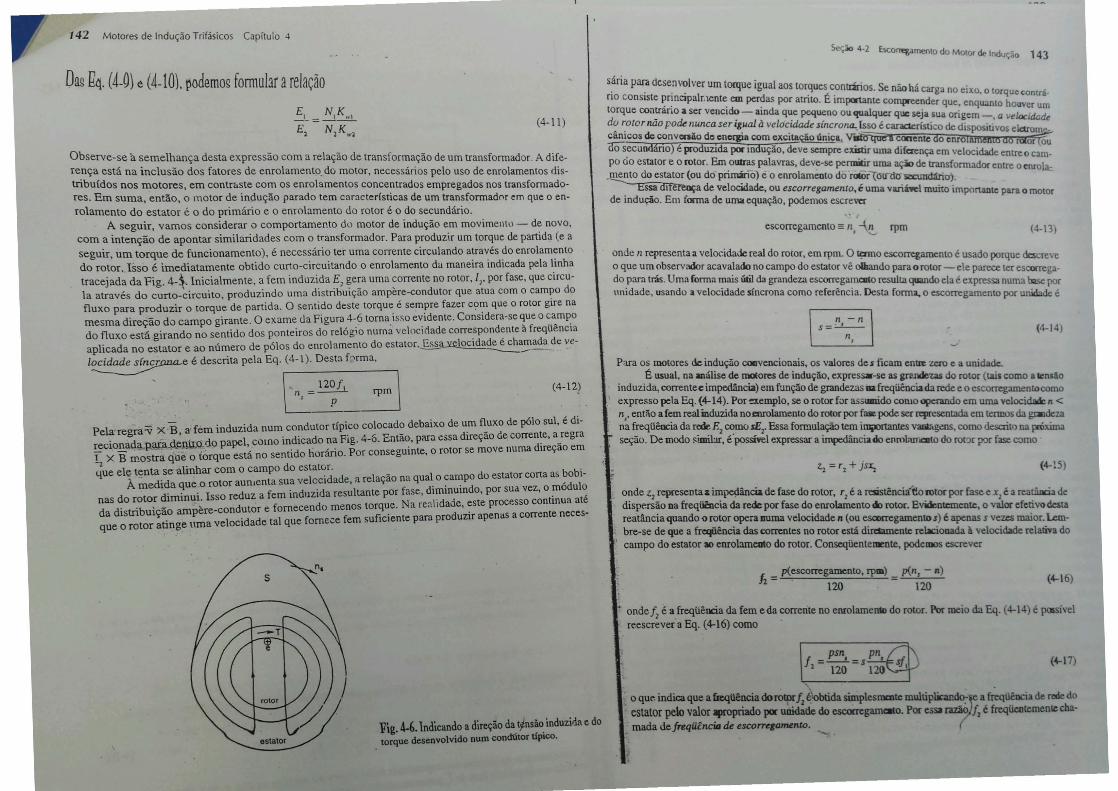
A seguir, vamos considerar o comportamento do motor de indução ~m movimemu - d~ novo, com a intenção de apontar similaridades com o transformador. Para produztr um torque de parttda (e a seguir, um torque de funcionamento), é necessário ter uma corrente circulando a~a~és ~o enrolam~nto do rotor. Isso é imediatamente obtido curto-circuitando o enrolamento da manetra mdtcada pela l_mha tracejada da Fig. 4-i Inicialmente, a f em induzida ~2 ~e~a uma ~orrente no roto r. 1,. por fase, que ctrcula através do curto-circuito, produzindo uma dtstnbmçao ampere-condutor que atua com o cam~o do fluxo para produzir 0 torque de partida. O sentido deste torque é sem~re fazer c~~ que o rotor gtre na mesma di ão do campo girante. O exame da Figura 4-6 toma_isso e~tdente. Constdera-se que o c~m~o do fluxo ~ girando no sentido dos ponteiros do relógio numa vclnctctade corre.spond~nte à freqüencta aplicada no estator e ao número de pólos do enrolamento do estator.~ lleloctdade e cha~ada devel~ é descrita pela Eq. (4- l). Desta f" rma,
\ n, =7 q>m \ (4-12)
P la. .cn11 :y )( ·B a- fem induzida num condutor típico colocado debaixo de ~m fluxo de pólo sul, é di-
e re ... - ' l . di ado na fio 4-6 "!:<'ntão para ~ssa direção de corrente, a regra · d - ~... ...,... do pape como tn c .,. · ..... • · !._CClOna-~pw;a. ~-- ' 'd h. rári Por conseguinte, o rotor se move numa dtreç!i.o em T x B mostra que o torque está no sentt o o o. • 1 ta 1inbar com 0 campo do estator. b b' que e ~ tc;n se a 1 . d de a relação na qual 0 campo do estator corta as o t-
À medida que o rotor aun,enta su~ ve ~ct a ~ltante r fase diminuindo, por sua vez, o módulo
:S :~~':f:m:~~~~o~~~: :~:~::::~~:nos torq~. Na ;enl i~e, ~~~~c:::::!n~:C:~ que o rotor atinge uma velocidade tal que fornece fem suficiente para P um
S"',-ào 4-2 Escortqamento do 1-v\ot{)( dt> lndu~ao 143
sária para desenvolver um tORjUe igual aos torques contários. Se não há carga no eixo 0
torque . . . . . É , c:ontra n o consiSte pnncapalr. lente em perdas por atrito. importante compreender que, enqllólllto houve
• . "do . r~ torque co.,trano a ser venct - amda que pequeno ou qualquer que seja sua origem-. a velocUüuk do ror o r não pode nunca ser i&ual à velocidade síncroruJ.. Isso é caraaeristico de disposiuvos e~ cânicos de convcnio de Cll~ com CltCitaç_io 6nica, V"lllã'ijoe i Cãií'ênte ÓO enroiiJN!iifb do nJ10r ou ãoSecuiidário) é produzida por mdução, deve sempre existir wna difaença em veloci<bde entre o campo cio cstator e o rotor. Em Ollbas palavras, deve-se perliiÍiir uma açio de transformador entre o enrola· .mento do estator (ou do prinWio) e o enrolameuto do roiÕr\Otnlo" llllCUJIIttria). ~difereaça de velocidade, ou escorregCliMnto,é uma variáel muito imponaute para o motor de induclo. Em fonna de uma equação, podemos escreva
escorregamento = n -\n rpm ' ..__
onde n representa a veloddaJe real do rotor, em rpm. O ~o esconqamento é usado porque dc::s~.:reve o que um observador acavalado no campo do estator vê aliando para o rocor- ele parece ter escorregado para trás. Uma forma mais úlil da grandeza escorregamt:a10 resulta qtando ela é expressa numa base por unidade, usando a velocidade síncrona como referência. Desta forma, o escorregamento por unidade é
E] r
I
(4-14)
Pua os motores de indução a.veocionais, os valores de s ficam e111a zero e a unidade. É usual, na lllálise de 11111t0res de induçilo, express.-sc u pande"ZU do rotor (tais como allenllo
induzida, correntee impcdlncia) em função de grandezas • freqüeociada rede e o esconegamencocomo expresso pela Eq. {4-14). Por ~mplo, se o rotor for as~ COIUO GpCraDdo em uma YClocidllk 11 < n , então afem realillduzida nomrolameutodo rocorpor faa pode ser rcpn:sentada em !amos da gl8leza ~ freqüêaciada rcdeEJ comosEJ. Elisa fonnulaçiotem ~~como desailn na púima seção. De modo ~imilar. é'possnel expressar a ~cido enroburato do rot'X por faslc COOlO
(4-!5)
onde~ represeutaa~defase do rotor, r2 é a rc:tist!ocii"t!oiQtorpor fasee.x2é a reatâaàa de dispersão aa freqüãacia da rede por fase do enrolamento 4ID rotor. B'YidaMmcnte, o vaiar efetiwdclla reatAncia quando o rotor operalllliDI velocidade 11 (ou escarepmr:DIDI) é apeuas s vezes maior. Lc:mbre-se de Cf1e a fRqMDcia das ClCXla1tcl DO rotor está din:llmcntlc Rlaçjcwad• • velocidldc rdalift do
' campo do estator 10 emotamc:.lo do rotor. ConseqllenteJiale, pode-. escrever
h_ p(~to, rpa) = p(n,-a) 120 120
(4-16)
onde f2 é a freqiiaaáa da fem e da correaue DO eamlameall do rotor. l'W meio da Eq. (4-14) é paasivel
reescrever a Bq. (4-16) como ·
(4-17)
1 ~~ \lc:rc.-es de/ dução Tr:fásíco; ú pí:Uio 4
-+-3 O CIRCUITO EQ UIVAlENTE
É desejável ter um circuito equi vaJente do motor de indução trifásico, de forma a conduzir a análise da operação e facilitar o cálculo do desempenho. Das observações feitas n2. seção preceôente, não deve constituir surpresa que o circuito equivalente assuma uma forma idêntica à do circuito equivaJence exato do transformador. A dedução será feita de forma similar, com as moóificaçõcs necessárias introduzidas para considerar o fato de q ue o enrolamento do secundário (v rotor) neste momento gira e, desta forma, desenvolve potência mecânica.
O Ramo de Magnetização do Circuito Equ ivalente
(o)
(c)
Seção 4-3 O Círcu-.;o Equi.alen·e 145
(b)
BT2 jx2
'Í Eí =oE2 =E1
j.CI-s) b
(e)
1.(1-s) s
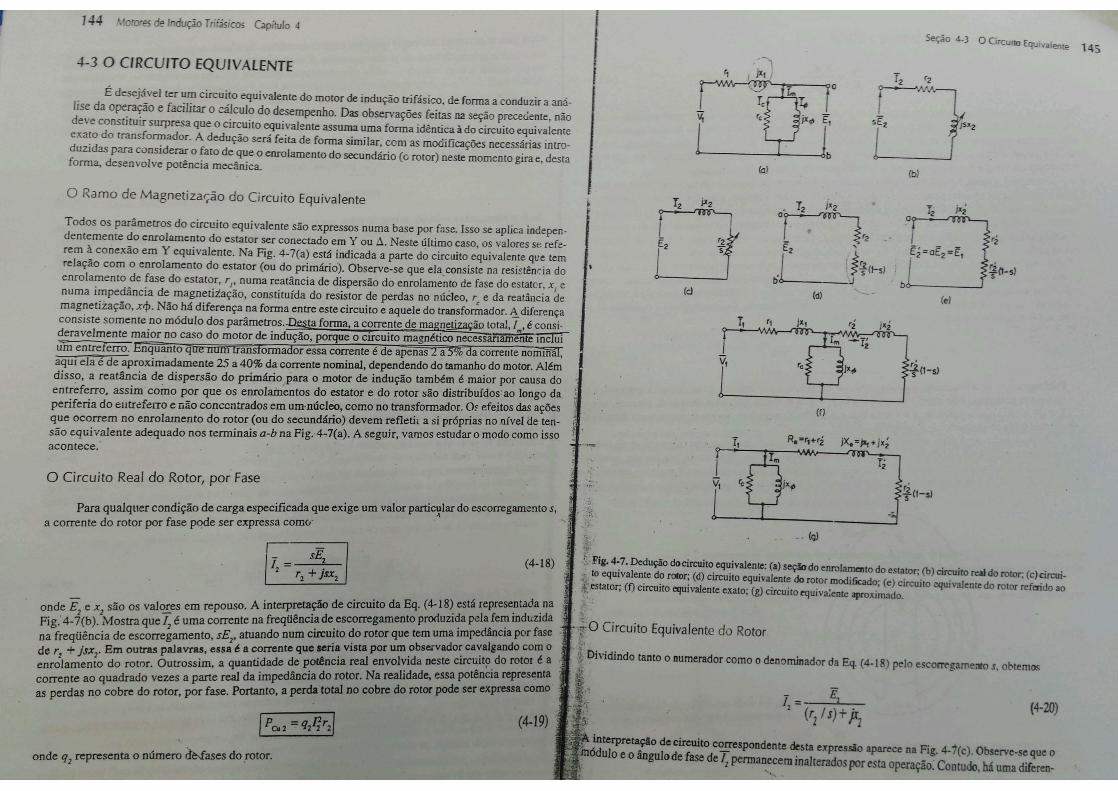
Todos os parâmetros do circuito equivaJente são expressos numa base por fase. Isso se aplica independentemente do enrolamento do estator ser conectado em Y ou 6.. Neste último caso, os valores se: referem à conexão em Y equivalente. Na Fig. 4-7(a) está indicada a parte do circuito cquivaJente que tem re lação com o enrolamento do estator (ou do primário). Observe-se que ela_ consiste na resi$têm·ia do enrolamento de fase do estator , r1, numa reatância de dispersão do enrolamento de fase do estatcr, x
1 e
numa impedância de magnetiiação, constituída do resistor de perdas no núcleo, r, e da reat.ância de magnetização, x,P. Não há diferença na forma entre este circuito e aquele do transformador. 1_ diferença consiste somente no módulo dos parâmetros.-D.e.§._ta forma, a corrente de magn~ç_ão total, lm, é consi· dera velmente maior no caso do motor de indução, porque o circuito magnético necessãnamen7ê iilcJüi IÍh1 entreferro. Enquanto que num lianstorrnador essa corrente é de apenas 2 a 5% da correu te nomiffiíl, aqu1 ela é de aproximadamente 25 a 40% da corrente nominal, dependendo do tamanho do motor. Além disso, a reatância de dispersão do primário para o motor de indução também é maior por causa do entreferro, assim coi;no por que os enrolamentos do estator e do rotor são distribuídos· ao longo da. periferia do eutreferro e não concentrados em um-núcleo, como no transfonnad0r. o~ P-feitos das ações que ocorrem no enrolamento do rotor (ou do secundário) devem refletit a si próprias no nfvel de ten- r são equivalente adequado nos terminais a-b na Fig. 4-7(a). A seguir, vamos estudar o modo como isso f · acontece.
(f)
O Circuito Real do Rotor, por Fase
Para qualquer condição de carga especificada que exige um valor partic~lar do escorregamento s, a corrente do rotor por fase pqde ser expressa comú·
(4-18)
onde E ex são os valores em repouso. A interpretação de circuito da Eq. (4-18~ está represe_ntada_na Fi · 4 _7 (b)
1 Mostra que T é uma corrente na freqüência de escorregamento produzt~a pela f e~ md~<ztda
a gfre üên~ia de escorre~amento, sE1
, atuando num cin:u~to ~o rotor que tem uma Irnpedâncta por fase 0 q Em outras alavru, essa~ a corrente que sena vtsta por um _obse.-vado~ ca~algando com o
de rz + }sx1. Ó . a uantidade de potência real envolvtda neste ctreuttp do rotor é a enrola:e;~o ~:d~~~:-ve:e~~s;:~ r~ da impedância do rotor. Na realidade, essa potência representa ~~;:;~as noqcobre do rotor, por fase. Portanto, a perda total no cobre do rotor pode ser expressa como
/Po.2=qiir2/ (4-19)
onde q1
representa o número dMases do rotor.
. (q)
i c1-sl s
' Fig. 4~7. Dedução do circuito_ eq~ivalen~: (a) seçJodo enrolart1e11to do estator; (b) circuito rc:M do rotor. (c)circui. to equ1valen_te d? roror: (d) cu-culto equ1valente do rotor modificado; (e) circuito ~ui valente do rotor rcfaido ao -:~. estator; (f) Circuito oqmvalente exato; (g) circuito rquiva:eot.: aproximado.
· 7· O Circuito Equivalente do Rotor
:: Dividindo tanto o numerador como o denominador da Eq. (4- 18) pelo escorrrognmenro s, o!.-temos
(4-20)
.in interpretaçto de circuito c~rrespondente de~ ta e:rpressio aparece na Fig. 4-?(c). Observe-se que o · ódulo e
0 ângulo de fase de 11 perm~ecem inalterados por esta operação. Contudo, há uma diferen-
146 Motores de Indução Trifás icos Capítulo 4
Çâ JilfliflCâfiYâ úfllJV QJ Lq~, ( 1-l B_L Ç ( 4·20). No últim~ c~so, ~ é considerada com~ prod~zi~a por uma tensão na freqüência da rede, E , atuando em um c1rcutto do rotor que tem uma rmpedancta por fase de r ;s + jx
1• Portanto,~ na Eq.\4-20) é uma corrente nafre~üêncin da rede, ao pa.sso que 12 ~a
Eq. (4-18) é uma corrente na freqüência de escorregamento. É Importante que esta dtferença ~eJ& entendida. . . .
A manipulação da Eq. ( 4-18) por s nos possibilitou passar de um cucutto real do rotor caract~nza-. · d' - · ' I [ver F'tgura 4-7(b)] para um caractenzadc do por resistênc.ta constante e reatâncta de tspersao vanave , . • .
por resistência variável e·reatãncia de dispersão co~stante f ve.r Fi~. 4-7(c)]. Alem dtsso, a potencta real associada com o circuito equivalente do rotor da Ftg. 4-7(c) e, evtdentemente.
Portanto, a potência total para q2 fases é
. r P= 1- ....1..
2 s (4-21)
(4-22)
• t:: .. (4-19) indica que a potência associada com o circuito equr-Uma comparação desta expressao com a LAt· • p mplo numa miquina grande, U~ol valor t!pico
d F 4 7(c) é consideravelmente maJOr. orexe • 50 , valen:e a 1g. - . da real no cobre do rotor por um fator de . de sé 0,02. PortantG, P, é mal o~ que a pe~ • . 7 Ares sta está no fato de que, pela Eq. ( 4-20), - Qua! o significado desta dJscrepâncJa na pot~~cJt. po to de referência mudou do rotor (onde I é uma corrente na freqüência Jn rede. Isso Sl~ ca que o po~tator (onde as variáveis na freqüêpcia ~variáveis na freqüência de escorregamento_:x:~:C:Fig.4-7(c),oobservadormudaseupónto da· rede existem). De acordo com a representaça é . gnificativa, porque agora, olhando para o rotor, de referência do rotor para o estator. Essa mudança SI tamb6m a pot!ncia mecânica desenvolvida. o observador vê não ~penas as perdas no cob7:ar:..n:sbservador situado no estator, a velocidade do A última grandeza é incluída porque, ~em re observador situado no rotor. Na realidade, a Eq. (4-22) rotor não é mais zero. como ~~~~ relativ~ a umtê . aransferida atrav6s do cntreferro do estator para o dá a potência total de entrada h};:.rotor. E a ~:::videnciar este fato: rotor. Podemos reescrever a Eq. (4-22) de
Pg =q2I~; =qzl~r2 +-:(1-•l]
• Essa expressão ~ útil na análise. porque cuito equivalente por um raisfor'. A FiJ. 4-7(d)
do roror. f"malmente, fica evideafe. ClOI;1I bale do rotor ~ equivalente apeaas ao que diz ""f'"iD fase.
Seção 4-4 ulculo do o...mpen~~o 147
O Circuito Equivalente do Rotor Referido ao Estator
A tensão que aparece nos terminais a-b aa Fi&. 4-7(a) 6 uma lfllldeu na froqlllnc:ía da roc11, 100-
do N, Kw1 espiras detivas. A tensão que aparece nos termioais a' - b' na Figura 4-7(d) tam~m é uma
grandeza na freqil&lcia da rede, mas tem N2 K.J espiras ei:rivas Em geral, E1 -;. E1, de forma quecr · ·b' na figut:J4-7(d) n» podem ser ligados a a-b aa Fig. 4-7(a) para se obter um circuito IBlifilar cquinlente. Par.~ s~:: obter isso, é necessário substituir o cnrolamemo real do rotor por um enrolamento cquiftleu.. te tendo N, Kw, espiras efetivas, como foi feito com o transformador. Em oulias pala VIaS, todas as graadezas do rotor devem ser referidas ao estatórdo modo representado na Fig. 4-7(e). A notação primo é usada para represealar grandezas do rotor referidas ao est2for. A dedução dos f .. torcs de redução a serem usados para referir as grandezas do roto r ao estator apm:ce no Apênd1ce D. Tanto as máqui1111 com rotor eurolado como as com rotor de gaiola são estudadas uaquele A~ndice.
O Circuito Equivalente Completo
A tensão que aparece nos terminais a-b aa Fig. 4-7(c) é a mesma que aparece entre os tenainais a-b na Fig. 4-?(a). Portanto, estes terminais podem ser lipdos para dar um circuito cquivalentecoJDpleto, oomo aparece na Pig. 4-7((). Note-se que a forma~ idêutica à do transformador de dois CII'Olamentos..
O Circvito Equivalente Aproximado
Considerável simplificação nos cálculos com pequena perda na precisão pode ser obtida passando or.amo de mapetização p1D os tcrmiuais da~ ~o ilustmlo ua Fig. 4-7(g). Essa molificação ~ lllsealia essc:a;ialmente • hipótese de que V1 • E1 = E1'. Todos os álcu.los de deaempeuliD &crio cf~ usando o circuito cqaivalente aproximado.
4-4 CÁLCULO DO DESEMPENHO
Qaando o moeor de induçio trifásico estáaperando em Yazio, o elcom:gamcnto r.c:. um valor.Wto ptÓXÍIDD de uro. Pw iao o JaÍitor de carga ~ic;a R. IIm D1D valor muiro Jl'll*, o que. pcw IUI vez, cao;a a circulaçio de uma pequena com11tc no roroc O rorque ~co COITeSpOIIIbte, como clcscrito pela f.q. (3-27), súilpleaoearc a.u~ aquele valor que ~ oeceuáio ~ superw as perdas rota'ionaisquec:oosistem principalmenteC!II perdas panlrifoe venrilaçin. Se uma carga mcdaica ~ a seglir aplicada ao eD:o do motor, a n:açio ilicial6 que ac:ap DO eixo reduz a veJac:idade do .olOr
ligeil:'a.-nte e, eles!! forma, aumeuta o~· O escotl"pi!JCIIIO •IIDCDIIdo faz com que, subseqimtemeute,I, aumente 816 o valorque.qwmdo colocadoua Eq. (3-27). de tonpe suficiente para fornecer um equilíbrio de potência à arp. Delta forma, oapbbrio 6 csrabtJecido e a operação Glllliuua, paa um valor particular de s. Na milidaik. para c:ada valor da carp mcdaica -=eaúria, W um valor dlico do escoaegamento. lsso pode ser 6WziOO a ,..m do circuito eqaivalenlr. que IDOSba que uma vez que s seja especificado, CDiio a pot&xia de ealnldl,. a cona11e do ..-r, o desellvolrido. a pot6aga de saída C O fP.OIÜIIJC"AAff ficam fodol detamjn ....
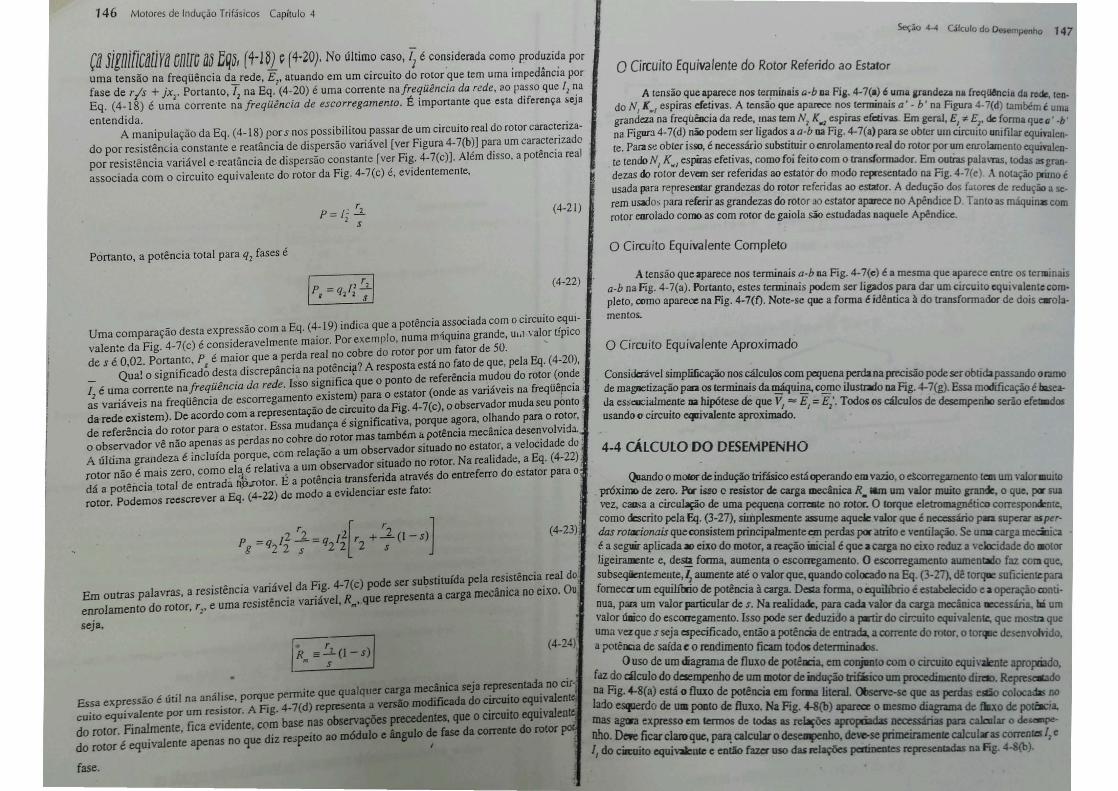
Ouso de um tlagmna de fluxo de i"""-da, em~ com o c:in:uiiD eqai faz do dk:alodo daempeubode 11111-*lrdeildlçlolli&lico-por; 'o Rep1Nc r "o • Pig. 4-l(a) eld o fiao de po6acia Clll C.... lillnl. q11e • pada ..-o c:oDc:adll lado elp:ldo de-paliO de fluxo. Na Pig. 4-l(b) ..... o--.-de de pw:l-
- .... expreaoan tamol de IOdal • ...,. •• i - h &tAXIIá .... cabllr O d11 i I
lbo. lleldic•~quc, ~calcallrodl'& a n'n, ._.... · r Cllcallr•~I,c 11 doc:iailo .,W'*-c ea11o facr.o clall8ia!i&l 11 a , aqa mt t aa 4-l(b).
148 Motores de Indução Tnfásicos Capítulo 4
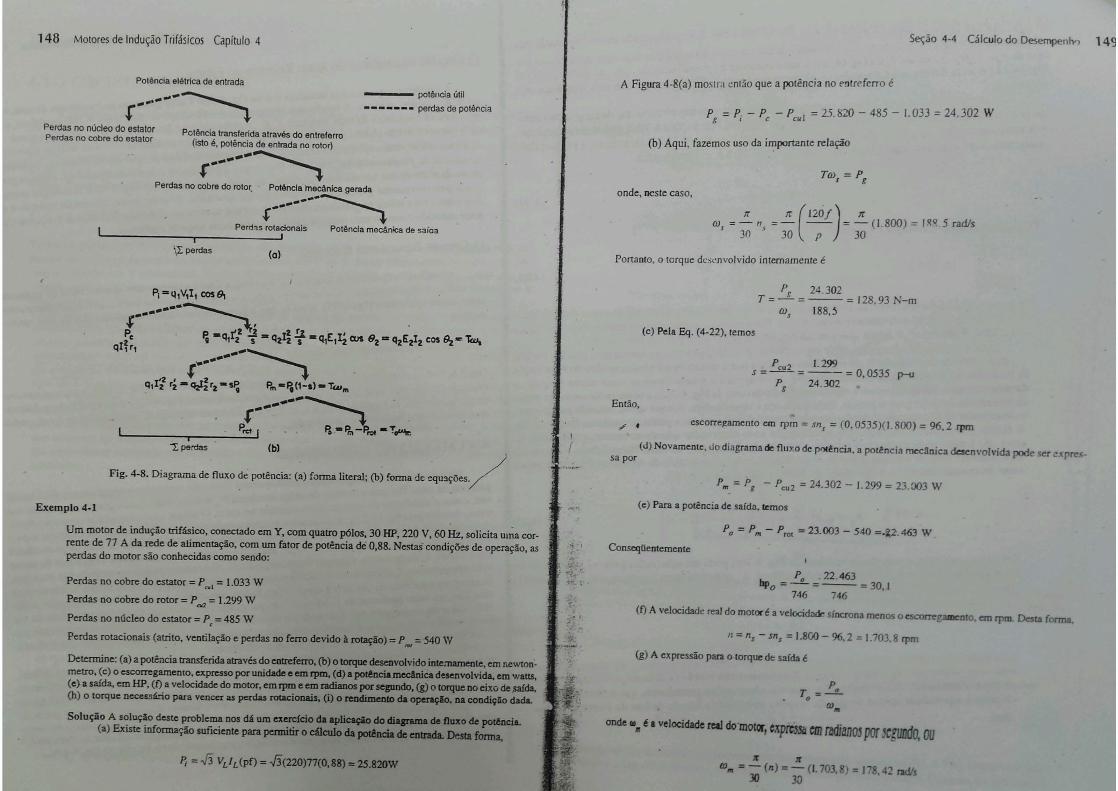
Potência elétrica de entrada
Perdas no nücleo do estator Perdas no cobre do estalar Potência transferida através do entreferro
(isto é, potência de entrada no rotor)
r-----~
---- potê11cia úlll
·---·-· perdas de potência
Perdas no cobre do roto~ Potência mecânica gerada
f-------~ Perd~s rotacionais Potência mecânõca de saíoa
I
\I perdas (o)
Exemplo 4·1
Um motor de indução trifásico, conectado em Y, com quatro pólos, 30 HP, 220 V, 60Hz, solicita uma corrente de 77 A da rede de alimentação, com um fator de potência de 0,88. Ne$taS condiçõ-..s de operação, as perdas do motor são conhecidas como sendo:
Perdas no cobre do estator = P ~• = 1.033 W
Perdas no cobre do rotor = P oa = 1.2~9 W
Perdas no núcleo do estator = P, = 485 W
Perdas rotacionais (atrito, ventilação e perdas no ferro devido à rotação)= P,.., = 540 \V
Determine: (a) a potêucia transferida através do eotteferro, (b) o torque desenvolvido intemamente, em newtonmetro, (c) o escorregamemo, expresso por unidade e em rpm, (d) a pot!nciameclnica desenvolvida, em watts, (e) a saída, em HP, (O a velocidade do motor, emrpmeem radianos por segundo, (g) o torquenoeixode saída, (h) o torque neces9á.'":io para vencer as perdas rocacionais, {i) o reodimento da operaçlo, na condiçil.o dada.
Solução A solução deste problema nos dá um exercício da aplicaçio do diqrama de fluxo de pot!ncia. (a) Existe informação suficiente para permitir o ~culo da pot!ncia de entrada.Dt-.sta fonna,
Seção 4-4 Cilculo do De5empen1YJ 14
A Figura 4-8(a) mos11a c:nlão que a potência no t>!ltrt>ferro é
p = p - P - P I = 25.!)20 - 485 - I. 033 = 24.302 W g I C CU
(b) Aqui, fazemos uso da importante relação
onde, neste caso,
" (J) =- n s 30 j
I! (120/) I! = - -- =- ( I 800) = l!l'l 5 radls 30 p 30
Portanto, o torque d~,;,·nvolvido internamente é
PC 24 302 T = - = -- = 128. 93 1'\-m
(J)s 188,~
(c) Pela Eq. (4-22), temos
pcu2 I. 299 s = -- = --- = O, 0535 p-tJ
pg 24.302
Então,
escorrej!amento em rpm = snr = (0. 0535)(1 SOO) = 91í, 2 rpm
(J) Novamente, do diagrama de fluyo de pfllênci.a, a potencia medlmca ~nvolvida pode ser ~~rr~. sa por
P,. = P8 - Pcu2 = 24.302-1.299 = 23.:J03 W
(e) Para a potênc!a de safda, temos
Po = P,. - Prol= 23.003- 540 =.~2.463 W
ConseqGentemente
P0 22.463 bpo =-=- -=30,1
746 746
(f) A velocidade real do motor~ a velocidactt, sfncrona menos o escorregamento, em rpm Desta f011l'Ul,
11 = n,- sns = 1.800- 96,2 = 1.703, 8 rpm
(g) A expressão para o torque dt: safda ~
onde~ .. ~ I velocidade real do motor, e~~:pmlil em 17ldianOj por 5cgundo, ou
1C 1C
(J),. =- (n) =- (1.703,&) =I 8,4::! radls 30 3J
Motores d ~ lnd·JÇà L' Trifás icos Capítulo 4
Portanfo. P
0 22.463
Tu =-=---= 125,9 N-m wm 178,42
, (h) A diferença ~ntre o torque.desenvolvido internamente de 128,93 N.m e o torque de saída de 125,9 N.m e o tcwque necessano para supm as perdas rotacionais associadas à velocidade de operação de 1.703,8 rpm. Desta forma, · · ·
T, .. , = T- T0
= 128,93-125,9 = 3,03 N-m
É instrutivo.observar que este mesmo torque pode ser calculado da expressão que relaciona tmque, velocida-de e potêncta. Conseqüentemente, podemos também escrever .
prot 540 T,
01 = -- = --- = 3,03 N-m
wm 178,42
(i) o rendimento é
P0
22 463 7] =-=--- = 0,87
P1 25.820
Desta forma, o motor opera com uma eticiência de 87%.
Exemplo 4-2
Um motor de indução trifásico, conectado em Y, com quatro pólos, 50 HP, 480 V, 60Hz, tem os seguintes
parâriletros por fase
,, =o, to n
, ,_ =0,120
x1 =0,35í2
x~=0,40í2
Sabe-se que as perdas no núcleo do estator chegam :t 1200 W e ?.s perdas rotacionais são de 950 W. Além disso, em vazio, o motor solicita uma corrente da rede de 19,64 A, com fator de potência 0,089 atrasado.
Quando o motor opera com um escorregamento de 2,5% calcule: (a) a corrente da rede de entrada e o fator de pot!ncia, (b) o torque eletromagnético desenvolvido, em newton-meu-os, (c) a safda, em HP, (d) o
renqimento.
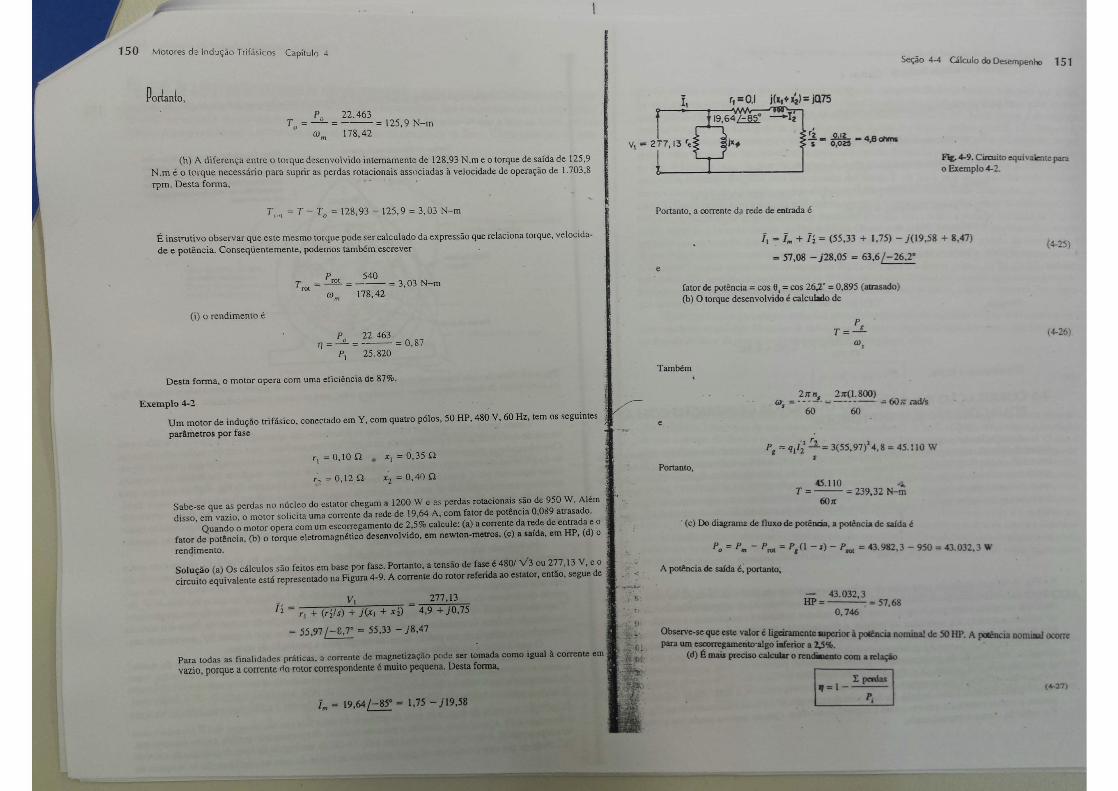
Solução (a) Os cálculos são feitos em base por fas~. Portanto, a tensão de fase é 480/ V3 ou 277,13 V, e o circuito equivalente está representado na Figura 4-9. A corrente do rotor referida ao estator, entlio, segue de
v, 277,13 r, + (rils) + j(:x, + xí) 4,9 + j0,75
= 55,97f-E,7• = 55,33 - j8,47
Para todas as finahdades práticas, a corrente Je magnetização pode ser tomada como igual à corrente em vazio, porque a corrente no rotor correspondente é muito pequena. IJesta forma,
i ... = 19,64/--85"- 1,75 - j19,58
' ., fJ
rz ..2.!L $- o,o~ - 4,8 ohml
Seção 4-4 üílculo do Desempenho 151
Fie- ~9. Cirruito equivalt:nte p:lr:t
o Exemplo -4-2.
Portanto, a corrente d~ rede de entrada é
e
i, =i,.+ ií = (55,33 + 1,75) - j(I9,58 + 8,47)
= 57,08 - j28,05 = 63,6/-26,2°
fator de potência= cos a,= cos 26,.2' = 0,895 (atrasado) (b) O torque desenvolvido é calculado de
Também
27rrss 27r{L800) GJ, =- ---· ~ -------= 6Ur. rodls
60 60 e
Portanto,
45.110 ... r=--= 239,32 I'Hn
601f
· (c) Do dillgrama de fluxo de potêoàa, a potência de saída é
po = P'" - P <011 = P1 (1 - s)- Pro< = 43.982,3 - 950 = 43.032, 3 1Ao'
A potência de saída é, portanto.
- 43.032,3 HP= --- = 57,68
0,746
Observe-se que este valor é ligàramente 81 · or à - • · , para wn ~amento·algo m.ferior a 2,.5::" poteDCI.I nomma.: de 50 HP. A ~i.! oomi.tul ocorre
(d) É mais preciso calcular ore~ com a rei~
1·=·-~1
152
~d.asx co.'r.e 1o~rar = q 12 r1 = .:Y63. '5/IJ.! = 1.213,5 ·;:
~....S.::Al cc::-->! ~on·or = q./"-:r2 = sPt = (;,IJ25{45.!JfJ) = U2:í,-'; rr p ~ = ~--G..<f _.f..at:..~ i;-'= Ç,S1j '"..;'
... -~ =.!. 4-;. t, ~ ;.'
-~--~-:-
-( ,'h_= ),7.6
~-5 CORR.E~ÇÃO, DA OPERAÇÃO DO .~OTOR DE I~DLÇÃO COY. A5 EQL . .!.ÇQES 8.\SICAS DO TORQLE
..... a..--~?-:. ,...":t ·:..-.-: - ~- ~a "~·~-:;....z r._ ~J!C",t;za:-uemo) é_.=-~ ~~.::i··.e: ~-:---.;; ... ~ -:."j ---:. ... -:.~ ~
4
-.:_ __ ~J =-...!:i:i:::. .. O!:,~ g~ ~:r:; a ;y-./...e&!':Cobtiéc. em :_er:::.,_ -:a.~~~ =.-úí~ -:e ::-~ ;f! =-~ a-;ir.. Ç -ZL)_ ~ -':. -:r.r.::~~ -:.:. ;.:r:'l.?.L:..-:-L:r.!IJ .:.e~ éo ~.:...:.. r: ~~r.- ::I./.u :.:--~ ~:.- _;::. ~, .. ~~,;:-S:r•o ;::;._.;.-:.. ~..!eZ/j -:..-,~ ;--~ ~ ~~, a Eç .. .t-.1 ~) hz!~ -:.z a r;,'r.
•~ ~-:;r-: x f-- "·:. ~~ -~ ,...f'ier.:t! ;.~:a~ oh~ -"" ·-:K~ca:t'd.de ~-;:r.:a ;'-f.... _!. .. ~ ~ : - • 0 ~~~-;'J 'l, fa•A de ~Ú f!a :fAT~ &J t"NJ'{ ~?Ta:_;~~~ U::~ .. (. •
~%&·~s ··-~; rl
~-0" .. ~ ~ ~,~- "?7"..; ?'~RJ"Y... ~ ~~.a.-.e-? X, r.< l'l ·-~<c..,-,----
Motores de Indução Trifá sicos Capítulo 4
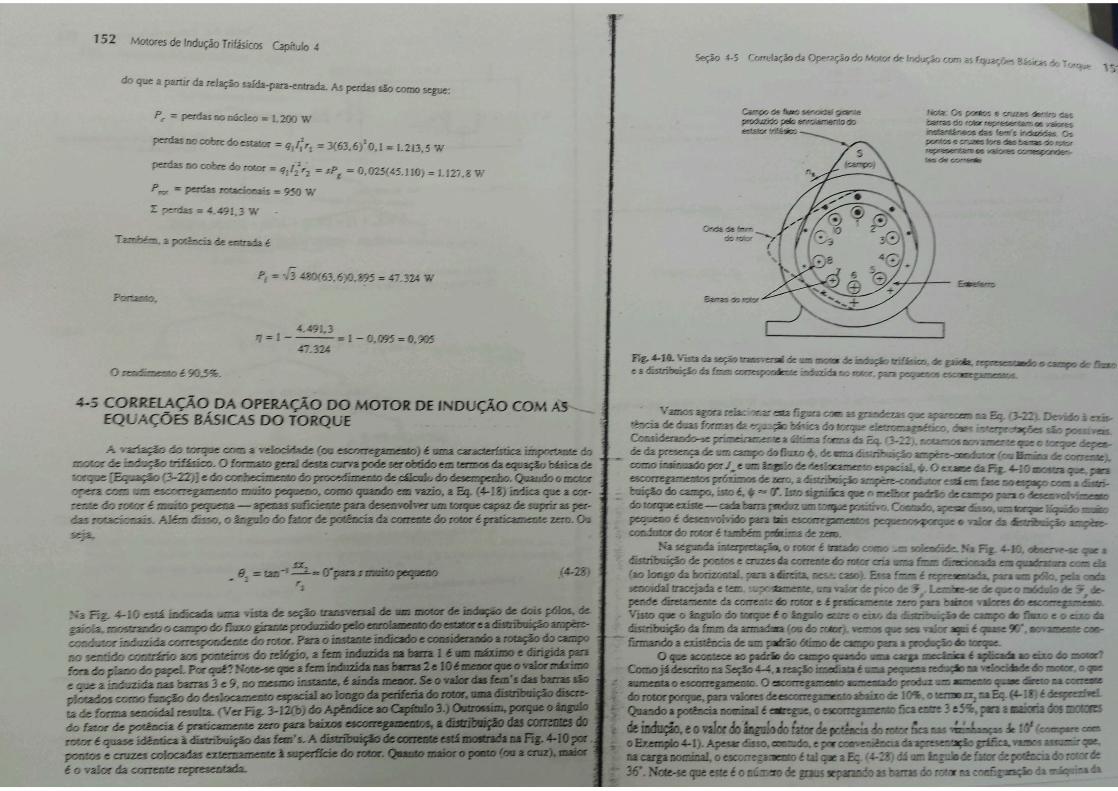
fiiQ. 4-1 O. Se a digtribuição do campo for supos~ como tendo a mesma posição instantânea como repre-sentado na Fig. 4,1 O, então a distribuição da fem deve ser a mesma. Isto é mostrado com a notação ponto-cruz apropriada d~ntro das barras do roto r da Fig. 4-11 (a). Observe-se que a fern na barra I é um máximo porque está sob a influência do valor máximo da densidade de fluxo. Como resultado da rota-
Eixo da onda de fmm do roto r (armadura). O eixo do n-polo do rotor se situa neste po'lto.
-1/f=f)~
---~\---,.,.,,;~o·~··~""""' 1
do rotor (invertida)
(o)
6-54 .IY•92·36·
EIXO do campo
(b)
J \ I
+ (!)-- Distribuição •- datem
Distnbuição de corrente no rotor
·.._./
- Rotação do rotor
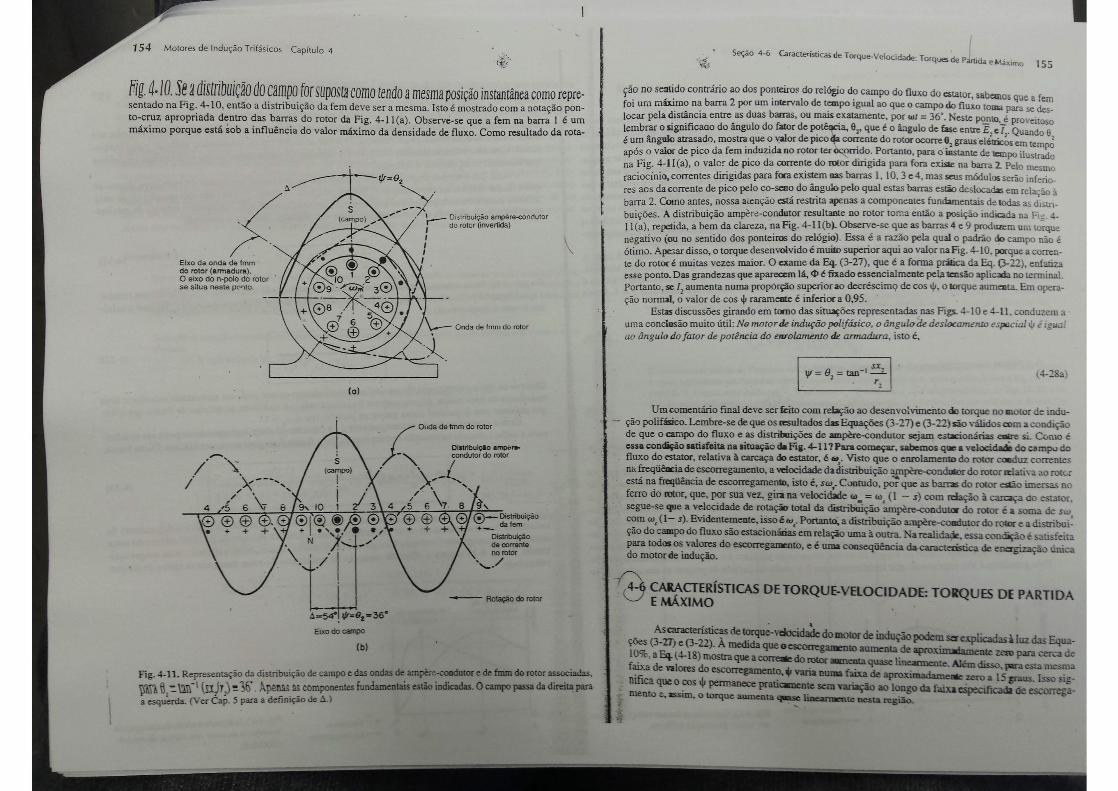
Fig. ~-11. Representação da distribuição de campo e das ondas de arnperc-coodutor e de fmm do rotor associadas,
\'i!U fi,":. Ul\-1 \Sl)T) ~ 16' . ,\~nas.~ componentes fundamentais estão indicadas. 0 campo passa da direita para a esquerda. (Ver Cap. 5 para a defimçao de~.)
Seç.ão 4-6 Caracte<ísticas de Torque-Velocidade: Torq d p ·d . ues e arto a e Maxomo 155
r.ão no sealido contrário ao dos ponteiros do relógio do campo do fluxo do cstator sab r . . . , anos que n fcm foi um Iil.áxi.m~ n~ barra 2 por um tntervalo de t~po tgual ao que o campo do fluxo toma para sedes-locar pela dtstancta entre as duas banas, ou mau; exatamente, por wi = 36·. Neste ponto, é prove't . lembrar o significaao do ângulo do ÍlltOr de potê'Fa, el, que é o â;tg\llO de fase enrre E e T. Quan~~~o é um ângulo atras.ado, mos~ que~ ~alor de pico~ co~ente do rotor ocorre 0
1 graus ell~s em tem~
após o valor de ptco da f em mduztda no roto r tec ~mdo. Portanto, para o instante de ll::mpo ilustrado na Fig. 4-ll(a), o valer de pico da corrente do rotor dirigida para fora exisae na barra 2 Pelo mesmo raciocínio, correntes dirigidas para foca existem nas barras I, lO, 3 e 4, mas seus módulos serão inferiores aos da corrente de pico pelo co-seno do ângulo pelo qtt.al estas barras estão deslocadz; em relação à barra 2. Corno antes, nossa a<enção está restrita apenas a componentes fundamentais de todas as di~tnbuições. A distribuição amper~-condutor resultante no rotor toma então a posição indicada na F:; 4-ll(a), repetida, a hem da clareza, na Fíg. 4-ll(b)_ Observe-se que as barras 4 e 9 produ:zem um torque negativo {ou no sentido dos ponteiros do relógio) . Essa é a razão pela qual o padrão do campo não é ótimv. Ape:;ar disso, o torque desenvolvido é muilo superior aqui ao valor na Fíg. 4-l O, porque a corrente do rotocé muitas vezes maior. O exame da Eq. (3-27), que é a forma práli.ca da Eq. (3-22), enf:uiza esse ponto. Das grandezas que aparecem lá, <I> é fuado essencialmente pela u:nsão aplicada no terminal. Portanto, se !
2 aumenta numa propúrção superior ao decréscim<;> de cos >V. o torque aume~~ta. Em opera
ção normal, o valor de cos ljJ rarameote é inferioca 0,95. Estas discussões girando em t001o das situações representadas nas FtgS.. 4-IO e +ll, conduzem a
urna conclusão muito útil : No mmorde indução polifásico, o ângulo de deslocarrtGnJ.O especial ué igud ao ângulo do faiOr de potência do enTolamento de armadura, isto é,
(+2 a)
Um comentário final deve ser feito com relação ao desenvolvúnento do torque no motor de indução polifásico. Lembre-se de que os m>ultados das Equações (3-27) e (3-22) são válidos rom a condição de que o campo do fluxo e as distrihllições de m~pC:re..Condutor sejam C<>"'tXionárias ea1re si. Cc.mo é essa con~o aati<~feita naaituação da Fi&. 4-117 Para começar, sabemos q11e a veloci~ do camp<J do fluxo do estator, relativa à carcaça do estator, é •,· Visto que o enrolamento do rotor COilduz correntes n;,. freqüêaciade escorregarnento, a velocidade da distribuição ~<O!ldulor do rotor rc-1 ti v :l-O rotc~ está na ~&leia de escorregamento., isto é, sw •. C00rudo, po~ que as b:mas do rotor estio imersas no ferro do rotor, que. por sua vez, gÍI2 na velocidaie w. = w, (I - s) com rd:lção i ~raça á . e-·t:ltor. segue-se que a velocidade de rotação total da distril:iu.ição arnpêre<Ondutc. do rotor é a orna de sw c~m w, (1- s). Evidentemente, isso é w,. Portanto, a distribuição a.npere-coadutor do rotor e a distribui~ çao do campo do fluxo são estacionárias em relação uma à outra. Na realidade. essa condiçiio e s:msfei~ para todos os Yalores do escorregamento, e é uma conseqüência da-caractcóstica de enc:rgiuçãv ~nic:1 do motor de indução.
0 , êJ CAIACTERISTICAS DETORQUE-VELOCIDADE: TORQUES DE PARTIDA E MÁXIMO
As características cletorqu~-vdocidadedomotocde · du - pode · ções (3-Z7)e(3-22). À medida ueo m 540 ~screxplicadasàluzd:lS b.:ju-10%. a Eq.t+18) q escorrega~mo aumenu _de aprox,madamente um para cer.::a faixa de -valores d=que a ~do~~ quase ~te. Além disso, par.1 m m
nifi rregamen O..+ vana numa fuxa de aproximadamea uro a 1 <> ....,.us IN·' 1· ,_ C3. que O COS lj, · · • - cr- · ~v 5
. permanece prabCIIDCilte sem '\'lii1aÇlo ao longo da faix&c:specificadl de esc rr~ -mento e • .ssun. o torque aumenta ~ lillcarmente nesta região. ~
156 Motores de Indução Trifásicos Capítulo 4
Quando o escorregamento aumenta mais ainda, a corrente do rotor continua a crescer, mas muito mais lent~~ente que a pri~cípio. A razão está na crescente importância do termos .x
2 da impedâucia do ,
rotor. Adtctonalmente, o angulo de espaço~ agora principia a crescer com urna taxa de crescimento
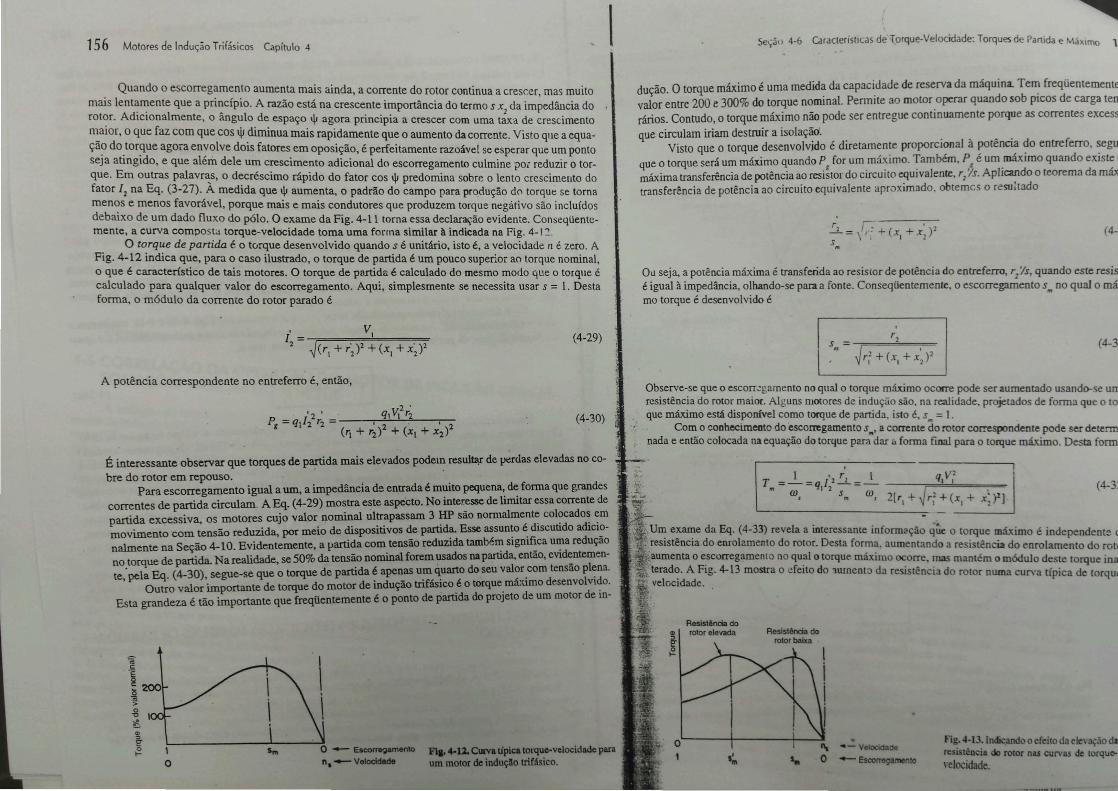
n~a10r, o que faz com que cos ljJ diminua mais rapidamente que o aumento da corrente. Visto que a equaça? do_tor~ue agora envolve dois fatores em oposição, é perfeitamente razoável se esperar que um ponto Seja atmgtdo, e que além dele um crescimento adicional do escorregamento culmine por reduzir o torque. Em outras palavr':s, o decréscimo rápido do fator cos ljl predomina sobre o lento crescimento do fator 12 na Eq. (3-27). A medida que ljl aumenta, o padrão do campo para produção dn torqut: se torna menos e menos favorável, porque mais e mais condutores que produzem torque nt:gátivo são incluídos debaixo de um dado fluxo do pólo. O exame da Fig. 4-11 torna essa declaração evidente. ConseqUentcmente, a curva composta torque-ve1ocidade toma uma forma similar à indicada na Fig. 4-1 ~-
0 torque de parrida é o tCJrque desenvolvido quando sé unitário, isto é, a velocidade n é zero. A Fig. 4-12 indica que, para o caso ilustrado, o torque de partida é um pouco superior ao torque nominal, o que é característico de tais motores. O torque de partid& é calculado do mesmo modo y_ue o torque é calculado para qualquer valor do escorregamento. Aqui, simplesmente se necessita usar s = l. Desta forma, o módulo da corrente do rotor parado é
(4-29)
A potência correspondente no e.ntreferro é, então,
(4-30)
É interessante observar que torques de partida mais elevados podem resulb,r de p~:rdas elevadas no co-
bre do rotor em repouso. · Para escorregamento igual a um, a impedância de entrada é muito pequena, de fórrna que grandes
correntes de partida circulam A Eq. ( 4-29) mostra este aspecto. No inte':sse de limitar essa corrente de partida excessiva, os motores cujo valor nominal ultrapassam 3 ~ sao nomtalment~ col~ado~ :m movimento com tensão reduzida, por meio de dispositivos de parti~ Esse assun~o é_ dtscuttdo adict~nalmente na Seção 4-10. Evidentemente, a vartida com tensão redUZida tambéll_l stgn~ca u~a reduçao no torque de partida. Na realidade, se 50% da tensão nominal forem usados na partl.da. entao, evtd:ntemente: pela Eq. (4-30), segue-se que 0 torque de partida é apenas um <l:uarto do seu valor_com tensao pl~na.
Outro valor importante de torque do motor de indução trifás1co _é o torque_má;umo d~senvolv1~0. Esta grandeza é tão importante que freqüentemente é o ponto de partida do projeto de um motor de tn-
1 o
O - ~ Fiao 4-U. Curva típic:a torque·vclocidadc para "•-Veloddede um motor de induçlo trlfAsico.
Seçã•, 4-6 Car actemltLas de Torque-Velocidade: Torques de ?art1da e Máxuno
dução. O torque máximo é uma medida da capacidade de reserva da máquina. Te~ freqüentemente valor entre 200 e 300% do torque nominal. Permite ao motor operar quando sob ptcos de carga terr rários. Contudo, o torque máximo não pode ser entregue continuamente porque as correntes excess
que circulam iriam destruir a isolação'. . . • . Visto que o torque desenvolvido é diretamente proporci?nal a ~tencta ?o entreferro, ~egw
que 0 torque será um máximo quando P for um máximo. Tambem, Px e um _rná.xtmo quando eXJste 1
máxima transferência de potência ao resi~tot do circuito equivalente, r2 '/s. Aplicando o teorema da máx transferência de potência ao circuito equivalente apr.:>ximado. obtemcs o rc:su:t:~do
r-------!i.. = , ': -"- (r --"- x ' ) 2
s'" ' . ' ~ (4-
OLI seja, a potência máxima é transferida ao resistor de potência do entreferro, r2'/s, quando esce resis
é igual à impedância, olhando-se para a fonte. ConseqUentemenl.e, o escorregarnento s,. no qual o má; mo torque é desenvolvido é
Observe-se que o escorr~gamento no qual o torque máJtimo ocorre pode ser aumentado usando-se u resistência do rotor maior. Alguns moc:ores de indução são, na realidade, projetados de form:1 que o t que máximo está disponível como torque de partida, isto é, s = I .
Com o conhectmeotc do escorregamento s ,., a corrente do roto r correspondente pode ser de te nada e então colocada na equação do torque para dar "forma fioal para o toique máximo. Desta fo
r =_!_=qi1i=_l_ q,v;~· .. w l 2 s w '
s '" • 2[r1 +:r~~(x1 + x;fl (4-3
. u~ e~an:e da Eq. (4-33) revela a interessante inforrn~ção q~ o torque máximo é independente ·..:: reststencta do enrolamento do rotor. Desta forma, aumentando a resistência do enrolamento do rot :i aumenta o e_scorregarnento no qu_al o torqu~ máximo ocorre, mas mantém o módulo deste torque 10
"'>, terado. A F1g. 4-13 mostra o detto do 1wncnto da resistência do rotor numa curva típica de torqu ~ ve\ccidade.
Resistência do rotor elevada Resistência do
. •-Velocidade
- Eseotregamento
t'ig. 4-13. Indicando o efeito d:t ~!c' ação n:sistêucia do rotor nu curvas de torque>l·elocidade.
.:
P1h 'r;! (I~ •''lllfi>h ~ nrorvi • . L b w H• li 111 "' ~ ....... k • .:. • ( " .. u r.e~! pomo. em re-se úe que os resultados que aparecem
n3.S Eqs. 4-29\ (4-30} e (+-33) são ,·:aJidac!os no circuito equivaleme aproximado, que é usado sempre <;ue a queda de tensão :ltra\és da tmpedância d~ dispersão do primário é pequena em comparação com
fem induzida no estat r por f se. Esta hipótese e perfeitam.:nte válida para condições norr:uis de operação, abrangendo a faixa de em vazio até carga nominal. Contudo, quando o interesse se centra no terque máximo ou no torque de partida na tensão nomir . .J. então a queda de tensão na dispersão do primário ccmeça a ter uma intluência percepl!vel. Por conseguinte, se resultados mais precisos são necessários, podemos apoiar a análise no circuík equtvalente mais exato da Fig. 4-7(f) (ver Exemplo 4-4). Normalmente, fica-se sujeito a erros da o rdem de 3% quando estes cálculos são baseados no circuno equivalente mai~ s1mples. porem aprox1mado. L1e,·ido ao rato de, em situações práticas, a exter.são de tais erros ser freqüentemenrc mfenor aos efcíws de saturação e pelicul:u. que não são considerados em nenhum dos model0s. nossa política aqui é ficar com o circuno equi,·~lente aproximado.
Exemplo 4-3
Ver 0 motor de indução do Exemplo 4-2. Considerando que a operação se inicia na tensão norrúnaJ ~len~ com todos os efeitos de saturação desprez.ados, calcule (a) o escorregamento no qual o torque mâxll:':~ desenvolvido, (b} a corrente no tor-que m 1mo e CJ o v or · áx. ( · a1 do torque máximo Compare estes resu wuos com aqueks encontrados no Exemplo 4-2.
' b ·d 1 d circuito equivalente apro-Solução A solução é obtida aqui empregando-se os resultados o tt os pt: o us0 o ximado.
(a) A aplicação da E j. (1-32) dá
0•12
=0,159 ~(0,1) 2 + o. 75)
2
(b) A corrente do rotor referida ao escato:: é
277,13 277,13 ~~ = '' + 277,1~ 2) = 0,1 + (0,12/0,159} +j0,7S 1~137/41.3"
• (ríls} + J~• + x = 243,74/-41,3• A
uando o motor entrega um pouco mais do que 57 3 maior que a corre'lte q . . E orrente é cerca de 3.8 vezes dições p ·óximaç das norrunaJs. sca c E lo 4-" para con • . HP, como calculado no . xcrr:p di:e~mente da E.q. (4-33). Desta lnrma,
(c) O torque máx•mo 'em
= (611.5> c<o 1>' +<o. 7=>/ o,1+vtu.
= 611.15(1,181) = 721.77 N-m
. róltimas das uorcinais oo valor calcu1atlo para condi~ p - 7~· m:uor que o . damenle trc:s ve...... . que é aprox1ma
Exemplo 4-2.
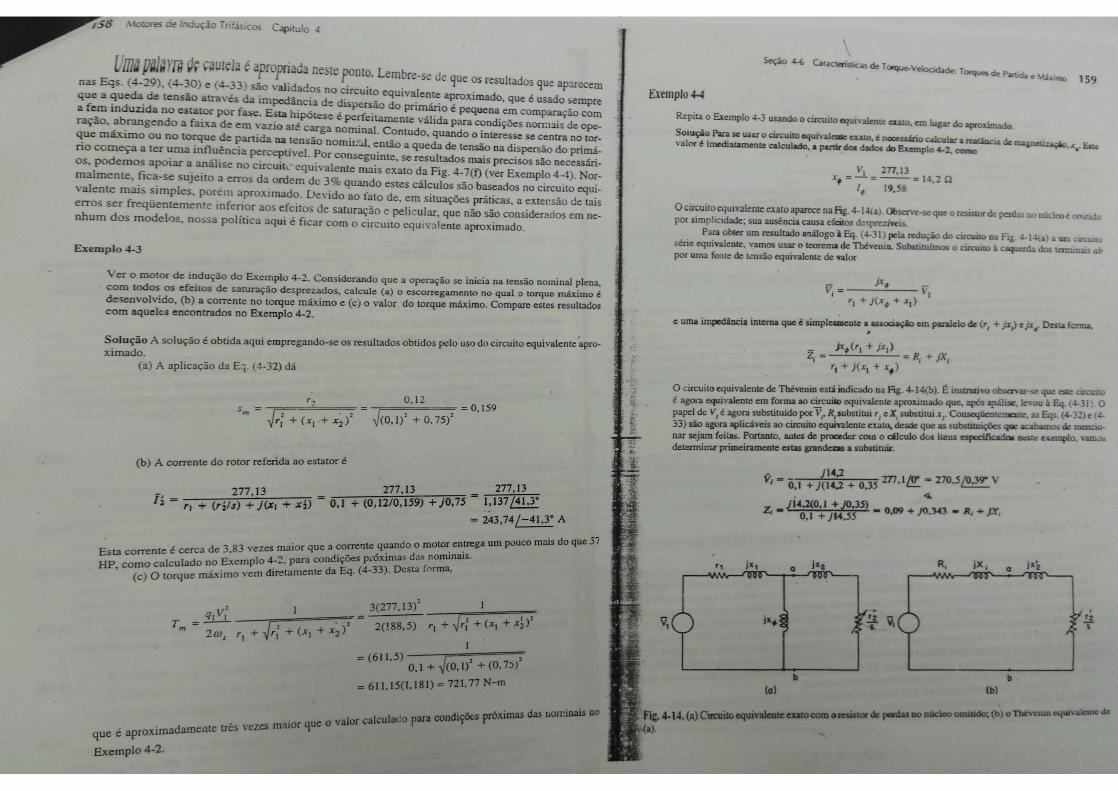
Exemplo 4-4
Rep&l.l o Exemplo .;...3 usando o circuito equmllenté CUlO, em I~ :t.r do aproximado
So1uç.to Pan. se unr o circuito cqurva!CIIIe eu:o, é ncaessário c.olcu!ar a re.uloca de mainctiu.,;ic, .... FA:e '~lor ~ uncdiatamente calculado, a partir doe dadoc do Exemplo 4-2. co1110
~·, 2n.u .xf =-=--= 14,2!1
1, 19,5
O circuiloequlvaleme exato aparece na Fig. 4-1-l,a). Obsen·e-sc qu~ o r• ·>tO< de perdas no .!..,~ omnlo por simpl1ctdade; sua ausência causa efc:ilos de<pn:u?eis _ . . • • _ ,
Para obter um resullldo ara.ílogo i Eq. (+31 pela reduçao do CU::Wto !!!i F:o ~-I 3) • CUt.<J
s.:ne equivalente. vamos usar o teorema de lbéventiL Subutwimos o CUOJIIO enb dos tttm: -b por uma fonte de t.:nsão equivalente de valor
j~. ----'--- V, r 1 + j(xf + x 1)
e uma imped!Dcia interna que é simplem~ente a associaçio em paralelo de r,.,. JX) e)x. Des:a iorrr.a. •
j:<f (r1 + jx1) .• Z; = =R,+ ]X,
r1 + J(x1 + .xf)
· · · • · lá iod'cado a Fíg 4-14(b). É instru0\'0 ~-se q~ csu • r.~ ' 0 CU"cuno eqwvaJente de 1bévemn es 1 _ 0 · . •
1 ~ (
4•3 I' 0
é agora equivalente em forma ao circuilo oqutvalente apro:umado que, ::P..: a; =.:vou E.j 4-J ) ;(~papel de v, é agora substit:uido por v r R!substitw r, eX~~~utuu,. c~~~Cmatqae ~bamos de ~~IC>-
'cá · · ·to equiwlente exata,~ que as ~u ... ~.....-33) são agora ~ti vets ao CU"CWde roceda álculo d.
5 i~t:us ~ Dc>.tc e:.c:Jnplo, varr.;,; nar sejam fd~. Portanto, aula p cow_ o u
detemúrr..cprimeiramente estu gnndezas a substinnr.
_ = _ )14.2 m.l/!!_- 270,5/ 0.:J<r v VI 0,1 + j(14,2 + 0,35 -11.
jÍ4.2(0,1 + jO,JS) - 0,09 + JO,J-43 • R1
• j.Y, z,- O, I + jl-4,55
b (ai (b)
I
~ s
b
. . de DO nóclco omilidcr. (b) o lbtvcrun cqiD' alente .Jc 4-14. (a) Cimlilc.eqwnleale euaocom o~a~SU~r ~
160 to ores de Indução Trifásicos Capítulo 4
Observe a mudança relativamente pequena que ocorre no valor de R, em ~lação a r1 e X ~:n relação a.x,. Em
outras palavras, o efeito da reatância de magnetização em derivação não é muito grande. (a) O escorregamento no qual o torque máx.imo agora ocorre é
0,12 -r====~===== o. :61 ~(0,09)2 + (0, 343 + 0,45)2
Isso representa uma mudança de um pouco mais de I% do valor obtido com o circuito equivalente apro.<im:-.dr (b) O valor da corrente na condição de torqu~ máximo é
I' = v, = 270,5 - /.41 ~o• 1 Ri+ ri+ j(X, + .xi) 0,09 + 0,7453 + j(0,343 + 0,4) -
21•9&_ A
Aqui, novamente, a diferença é de cerca de 1%. Evidentemente, existem motores ocde a diferença p'Jde ser da ordem de 3 ou 4%. Em tais casos, o uso do circuito equivalente mais euto pode parecer se justificar. Mas é imponante observar aqui que esses \'alores são sutis, pois existem efeitos mais importantes ocorrendo na condição de torque máximo que não consideramos. Com correntes tão gr:mdes como tcês vezes a wrrente nominal circulando na coodição de torque nWtimo, Dm'1 quantidade consider.ivel de saruraçlio ocorre nos dentes do estator e do rotor. Um dec:réscimo subseqüente nos valores das reaiAncias de dispersão do ~wor e do rotor da ordem de 50% ou mais pode facilmente ocorrer. O qdto &esw mudança I muitCt mais s~rio qUL O ql!ito tUCOTTDIII! do &ISO do circuito l!quivaJentl! aproJCimDdo OU do UIJIO.
(c~ Continuando com a premissa original no enunciado do problema como r.olocado no Exemplo 4-2, obtemos para o torque mblmo
9t~ -----------~~~-~·~5~)'------==~ T = = "' 2GJ
1(Rt + ~JÇ +(XI + .X~)2 ). 2(188,5)(0,09 + ~(0,09)2 + (0,343 + 0,4)
2}
= (S82,26)(1,193) = 694,71 N-m
Aqui, a diferença é próxima de 4%.
~7 PARÂMETROS DO CJRCUITO EQUIVALENTE DE TESTES~ VAZIO
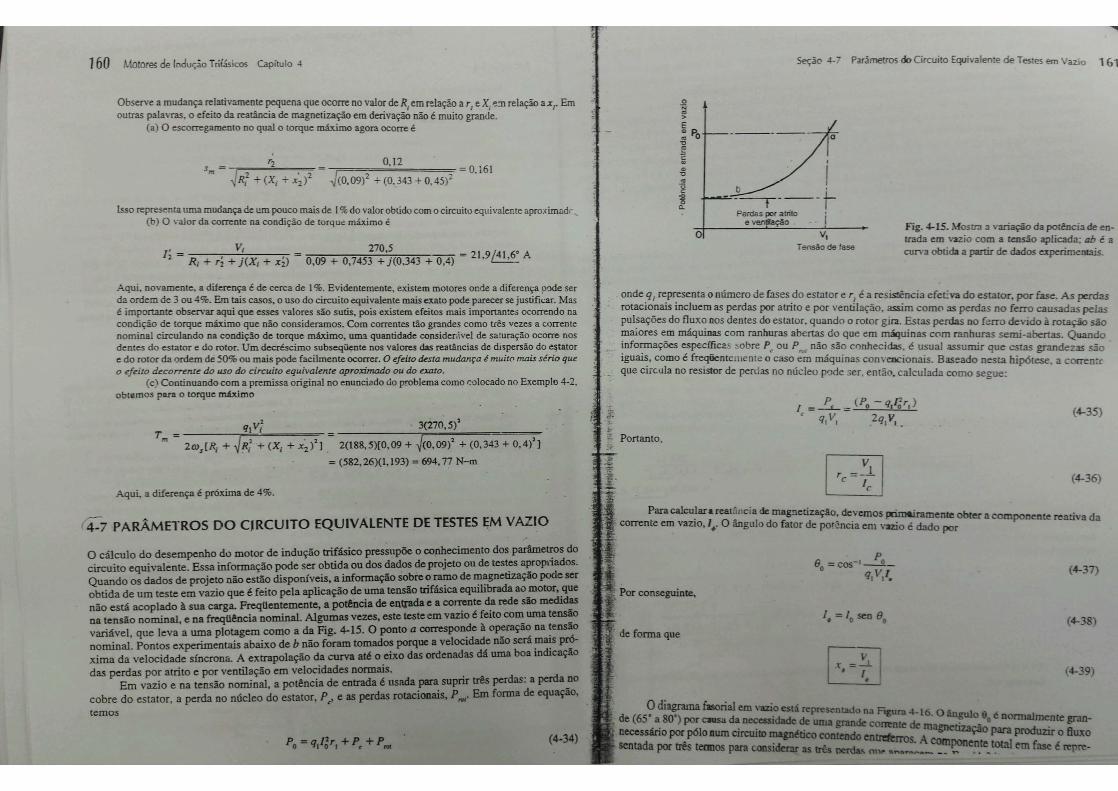
o álculo do desempenho do motor de indnçio critisico ~o cophecimento dos padmeUo8 do circuito equivalente. Essa informação pode sec obtida ou dos dados de p:ojeCo ou de testes apropiados. Quando os dados de projeto Dio estio disponíveis. a iDfomlllçlo lobieoramo de magncriaçln pode• obtida de um teste em vazio que~ feito pela apHcaçlo de uma 1cD11o uBsicaequilibndaao ~ qae nio está acoplado l sua carp. Preqtlelltallalte. a polt8cia de eQCpdae a CCIIftllte da nele do lllllldWII DA tenslo nominal, e DA freqGeDcia nomiDa1. Alpmll wzes. eiiD te~~Dcm valo~ feilo com ama...., variável que leva a uma plotagem COIQO a da Fig. 4-lS. O poaiD G Cilil'ei(JOIIIIl O(ICDÇio aa-..., no~Di~ull Pontos experimeotais abaixo de b nlo fonm tomados JICII'IU8 a ftloc:idD alo aed mllil pr6-xima da velocidade síncroDa. A extrapolaçlo da carva 1116 o eixo du'GI'deliadal eM uma boa Wir..;., das perdas por atrito e por venn1açln em veloc:idldes.......;.,
Em vazio e na tenslo nominal. a pc:docia de em.da6 ,.. penill: • peàla • cobre do estator, a perda ao n6cleo do estatm P~ e dafllllllllliiO. temos
Seçãc 4-7 Parâmetros do Circuito Equival~te de Teses em 'azio 161
v, Tensão de fase
F"tg. 4-15. Mostr.1 a variação da pocâlcia de enrrada em nzio com a rmsio aplicada; llh ~ a curva obtida a ~*rir de dados experimealais.
onde _q 1 n:~nta o número de fases _do estator e r 1 é a resistência efetiva do eswor, por fase. As perdas rotacJO_DalS mcluem as perdas por atnto e por ventilação. assim como as perdas no ferro causadas pelas pul~açoes do flux~ nos dentes do estator, quando o rotor gira. Estas perdas oo ferro devido à rotaçio são ~ores e_m máqWDaS com ranburas abenas do que em máquinas rom ranhuras semi-abertas. Quando ~nfo~çoes ~cas ~obre P, ou P"" não são c~Jnhecidas. é usual assumir que estas grandezas são 1~, como é freqüentemente o caso em máquinas convCIICionais. Baseado nesta hipótese. a cou-en:c
_ que Circ.ula no res1Sior de peruas no núcleo p'Jde :;er. então. calculada como segue:
(P0 - q1Pqr
1)
_2q1V1
~ ~
(4-35)
(4-36)
Paracak:ularareaUinc:ia de rrwanc«i'açlo devemos_._. __ _......_ correnteemVIZI· 1 Q&nnu) doc.......a_ ' . r-:---......,.,.-aoompeaentereaâvada
o, •. - o lUIIUI uc potência em wao ~ dado por
(4-37)
11 •I,- 9, (4-38)
(4-39)
t.1010res de Indução TrifásiCOS Capít•JIO 4
v,
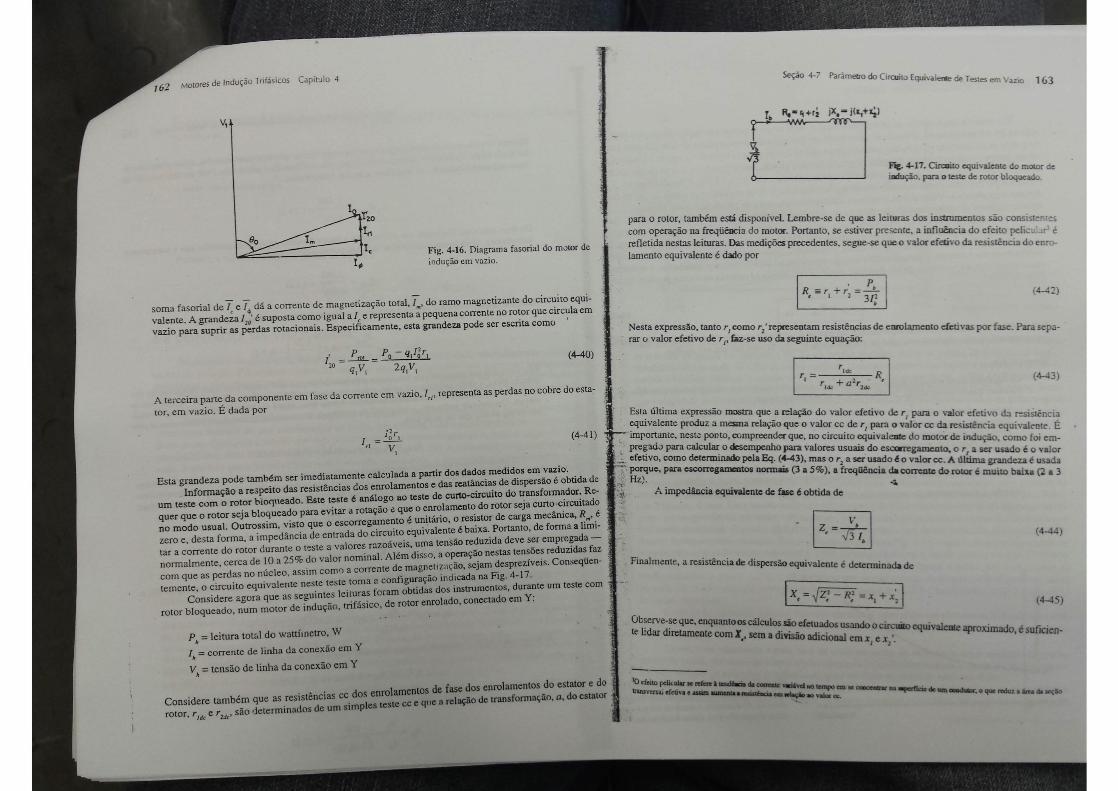
Fig. 4-16. Diagrama fasorial do mvtor de indução em vazio.
soma fasorial de !c e I._ dá a corrente de magnetização total, f.., do ramo magnetizante do circuito equivalente. A grandeza 1
10' é suposta como igual a !c e representa a pequena corrente no rotor que circula em
vazio para suprir as perdas rotacionais . Especificamente, esta grandeza pode ser escrita como '
/ = P,, 20 qy,
P0 - q/;r1
2q1V
1
(4-40)
A te<ceira parte da componente em fase da corrente em vazio, !,"representa as perdas no cobre do esta
ter, em vazio. É dada por
1 = í~ r1
" v, (4-41)
Esta grandeza pode também ser imediatamente calc'.llada a partir dos dados medidos em vazio. Informação a re.>peito das resistências dos enrolamentos e das reatáncias de dispersão é obtida de
um teste com o rotor bloCJneado. Este teste é análogo ao teste de curto-circuito do transfo1mador. Requer que o rotor seja bloqueado para evitar a rotação e que o enrolamento do rotor seja curto -circuitado no modo usual. Outrossim, visto que o escorregamento é unitário, o resistor de carga mecânica, R,.. é zero e, desta forma, a impedância de entrada do circuito equivalente é baixa. Portanto, de forma a limitar a corrente do rotor durante o t'!Ste a valores razoáveis, uma tensão reduzida deve ser empregadanormalmente, cerca de 1 O a 25% do valor nominal. Além dis~o. a operação nestas tensões reduzidas faz com que as perdas no núcleo. assim com0 a corrente de magnetização, sejam desprezíveis. Conseqüentemente, o drcuito equivalente neste teste toma a configuração indicada na Fig. 4-17.
Considere agora que as seguintes leituras foram obtidas dos instrumentos, durante um teste com
rotor bloqueado, num motor de indução, rrifásicc, de rotor enrolado, conectado em Y:
P. =leitura tot&.l do wattítnetro, W
I• = corre'lte de linha da conexão em Y
v. = tensão de linha da conexão em Y
Considere também que as resistências cc dos enrolamentos de fase dos enrolamentos do estator e do roto r r e r são determinados de um simples teste cc e que a relação de transformaç.ão, a, do cstator
' Ide 2Jc'
Seção 4-7 Parãrne!Io do CiraJi;;:> Equi, .. t.,.,.., de T estes em\ azoo 1 63
F'JC- 4:11. Ciranto equi\'alent.e do rr.<Xor de induçao, para o teSte de rotor b!oque:ldo.
para o rotor, também está disponível Lembre-se de que as leituras d . - . com operação ua freqüência do motor. Portanto se estiv r o:' ~mos ~ const> e.., ·es refletida nestas leituras Das med· - eced ' e presente, a influcoc1a do efello peli;: ~ .1rl é
· 1çoes pr entes. segue-se que o valo feri · -'- · • · lamento equivalente é dado por r e 'o= res1stencta do en~o-
Nesta expressA?, tanto ri como rz , repr-esentam resistências de l eiJ .. raro valor efenvo de ri' faz-se uso da seguinte equação: enro arnento eQ\as por fa:.e. Para sepa-
(<W3)
. Esr~ última expressão = que a ~!ação do valor efetivo de r . . ~wvalente produz a mesma relação que 0
al d 1 para o valor efeuvo cb r-..sistinci:J unportame, nest;! ponto, ccmpreenda-que nvo o_r cc_ e ri ~ara o valor cc da re~ist.ên-i.a equi~ leme . É
• • CITCUI!O eqwvaleme do de · preg!iO.J para calcular o desempenho para \'al . mot'X 1.11du.y.ão, como foi em-
' ~ · ores usuaJS do escorre ::::-~ e envo, como determinado pela Eq. (4-43), mas 0
r a ser gamento. o r, a ser usado é 0 valor . porque, para cscorregamc:utos normais (3 a 5%) f -·~do~ o V:Jlor cc. A 11l.tima grandeza~ usad
.-:. Hz). . • a requencla da corrente do rotor é muito baixa (2 a 3
A lrnpedância equiwlente de Wc é obtida de -~
(4-.:W)
Finalmentt'", a resistência de dispersão eq . al utv ente é determinada de
I x, = ~ z; - R? = x + x :--} ..._ ___ -.:._....:·~....:2:.! I <4-ls>
Observe-se que, enquanto os cálculos são te ltdar diretamente com X . . efetuados usando o circuito equival . •' sem 1 diVISão adicional em x e x • eole aprox.unado, ê suficJen-
' z.
164 ,\.fo ores de lnd!.!ção Trifásicos Capítulo 4
E m vista da importânc ia de se trabalhar com o valor cc de r2
no circuito equivalente para baixos valores de escorregameoto, como esse valor pode ser determinado para motores de indução com rotor de gaiola, se os dados de projeto não estão dis poníveis? O uso do valor efetivo de r
2
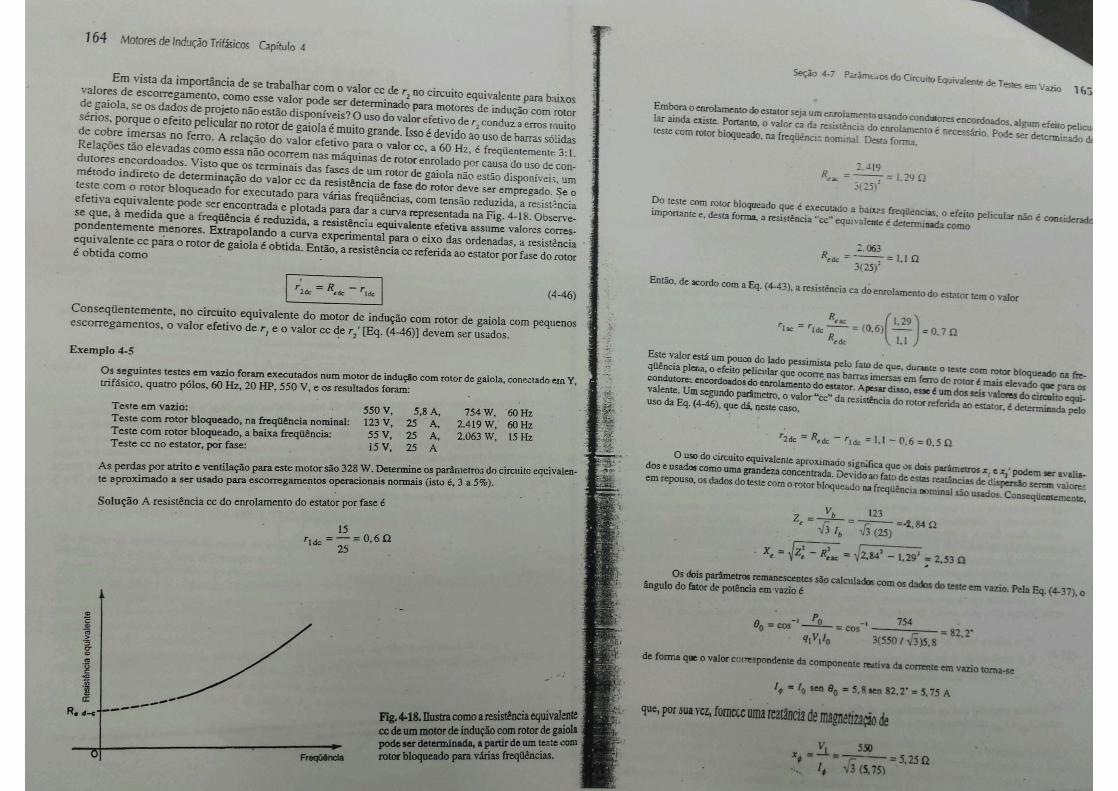
conduz a erros rouito sérios. porque o efeito pelicular no rotor de gaiola é muito grande . Isso é devido ao uso de harras só !.idas de cobre imersas no ferro. A relação do valor efetivo para o valor cc, a 60 Hz, é freqüentementt 3: I. Relações tão elevadas como essa não ocorrem nas máquinas de rotor enrolado por causa do uso de condutores encordoados. Visto que os terminais das fases de um rotor de gaiola não es tão d isponíve i;, um método ind ireto de determinação d o valo r cc da resistência de fase do roto r deve ser empregado. Se o teste com o rotor bloqueado for executado para várias freqüências, com tensão reduzida, a res ist-!ncia efetiva equivalente pode ser e ncontrada e p lotada para dar a curva representada na Fig. 4-18. Observese q u e , à m edida qu e a freqüência é reduzida, a resistência equivalente efetiva assume valorcs _corre~pond e n temente meno res. Extrapolando a c urva experimental para o e ixo das ordenadas, a reststêncta equivale nte c c pára o rotor de gaiola é obtida. Então, a resistência cc referida ao estator por fase do rotor é obtida como ·
[ r~dc = R,dc - r,dc I (4-46)
C onseqüente mente , no circuito equivalente do motor de indução com rotor de gaiola com pequenos escorregamentos, o valor efetivo de r1 e o valor cc ~e r
2' [Eq. (4-46)] devem ser usados.
Exemplo 4-5
O s seguintes testes em vazio foram executados num motor de indução com rotor de gaiola, conP...::Iado ero Y, trifásico, qua tro pólos, 60Hz, 20 HP, 550 V, e os resultados foram:
Te~re em vazio: . Tes te com rotor bloqueado, na freqU!ncia nQm.mal: Teste com rotor bloqueado, a baixa freqilênc~a: Teste cc no estator, por fase: .
550 v, 123 v, 55 V, 15 V,
5,8A, 25 A, 25 A, 25 A
754 w, "60Hz 2.419 w. 60Hz 2.063 w. 15 Hz
- 328 W Determine os parâruetTo3 do circuito ~civalen-. tilação para este motor sao · As perdas por atnto e ven tos operacionais normais (isto é, 3 a 5%). te aproximado a ser usado para escorregamen .
Solução A resistência cc do enrolamento do estator por fase é
-------
15 r = -= 0,60 Ide 2~
Flg. 4-18. Dustra como a resist!ncia equival~te cc de um motor de indução com rotor de gaiola
.. __ , __ .. _ 1
pan1r de um teste 00111 podeeer ........ ........_ ,u_ · rotor bloqueado para váriu frequcuc!as.
Seção 4-7 P;;râmtuOS do GrCUI"(J Eo~ alent.e de Testes em Vazio
Embora o enrolamento do estator seja um er.rolam~No usando condlAores encordoodos, algum efeito lar ainda existe. Portanoo, o valor ca rla resístên<:ia do enrolamento é nttessário. Pod~ ser detcrn:;i~ado teste com rotor bloqueado. na freqüenc1:: nommal ~a fomu.
2 . .1 19 R, .. = --. = 1.2'1 !1
j( ~jl"
Do teste com rotor bloqueado que é executado a ba=s freqücnC!ÃS, o efeito películ:!r não é COilSrcter.IOa imJ")name e. desta forma. a resistência "'cc~ equ:valente é detennía.ada como
: . 063 R .. k: = ---. = 1.1 n
3 25)"
Então, de acordo com a Eq. (4-43), a resistência ca do enrolamento do estnor tem o valor
r , IIC = rldc -- = 10,6) -- = O, 7 n R.,c (1 ,29)
R,dc l. l
Este valor está um poucn do lado pessimista pelo faoo de que, durante o teste com ro10r bloqueado na freq!iência pler.a, o efeito pelicular que ocorre. nas barr<LS imersas em ferro do rotor ~ ouis elevado qae rara os condutorec cncordoados do enrotament.J do esta to r. Apeur disso, esx t um dos seis valores do circuito equivalente. Um segundo padmetro, o valor"cc~ da resiS'.ência do rotoc referid:~ ao es-..:~ror, ~determinada pelo uso da Eq. (4-46), que dá, neste caso,
r2 dc = R, de - r Ide = 1, 1 - O. 6 = 0, 5 n
O uso do ..:ircuito equivalente aproJUmaao sigrWica que >ls dois parâmetros x1
e x1
' podem xr avaliados e usados como uma grandeza concentrada. i)evido ao fato de es~ reatãncias de disperslo serem '-aiore~ em repouso, os dados do teste com o rotor blnque:.do na freqüência oorninal são uudos. Consequeotemente,
vb 123 z, = -~-- = -,=--- =~. 84 n
·J3 Jb •!3 (25)
~-.- ' 2 X, =yL., - R.,c =-.,2,84 -1,29 :;= 2.530
Os dois pa.rimetros remanescentes são calcnlados com os dados do teste ern vazio. Pela Eq. (4-37), o ângulo do &tor dt' potência em vazio ~
de forma que o valor correspondente da componente n::.tiva da corrente em vazio toma.se
1, • 10 sen 80 • 5, !\ 11en 82,2" =S. 7.5 A
que, por SUl \"CZ, (Olli(U UJDa J"Catancia de !Dag!letiza~ de
v 550 x1 • .:.1. = r = 5.250 · ·~ r. ,.3 <s. 7S\
t-lotores de Indução Triíásrcns Capítu lo -t
Ç[nalmeme. o resi~to r de perdas no núcleo é de!emtinado, calculando-se p · · · no núcleo de nme1rameme o valor aas perdas
e, então. ob~erv:llldo-se que
Ponantc , o valor do resistor de perdas no núcleo é
q\ ·: 3(550)' (550)' rc =-- = - ---=---=
PC (\'3)' PC s1.2 n
355. -l
4-8 CONTROLE DA VELOCIDADE
a ~aiori_:' ru;.s aplicações industriais , a cara-;terística de velocidade essencialmente constante: do m~tor de mduçao e deseJavel. Cont~d?: existem alg1rmas aplicações (por exemplo, transportadoras. gul.lldast.es c elevadores) ~nde a. poss1bihdade de controlar a velocidade é um fator extraordinário. Por conse_gumte, nesta_ s:ç!!o, mvesugaremos !lté onde o motor de induçl!o se presta a ajustes de velocidade,
sob diversas condiçoes de carga. O ~otor de indução com rotor de gaiola é esrodado primeiramente por ser mais simples, devido à
~.:onstruçao fechada do seu enrolamento do rotor, que elimina toda a possibilidade de concrole a partir deste ~?_nto. Qualquer cont;"oie que seja possível deve ser exercido através do estator. Aqui existem três possib.IIldad~s. duas das quais são evidentes a partir da Eq. (4-12). r\ primeira é alterara freqüência da rede . A medida que a freqüênci a da rede é elevada 'JU reduzida, a velocidade síncrona também aumenta ou diminui, o que proporcion'! um controle satisfatório. Contudo, o sério defeito deste procedimento é que uma fonte de freqüência variável não está normahnente disponível. Além nisso, se tai fonte <.>'(istir · no local, é nece~sário um grupo mol~r-gerador, com os controles apropriados e potência nominal com paúvel com a do motor de indução que ele deve controlar. Outrossim, se uma densidade máxima do fluxo no ferro não deve ser excedida à :rtedida que a freqüência se reduz, uma redução correspondente
na tensão aplicada deve ser eferuada. Um segundo m étodo de controle é mudar o número de pólos. Lembre-se de que o número de pólos
é determinado pelo ananjo físico do enrolamento. É possível agrupar o enrolamento em seções emparelhadas apropriadas para cada fase. Quando as duas seções, por exemplo, estão conectadas de fonna n assegurar orientações simétricas da circu!ação de corrente, resultã uma máquina de quatro pólos. Contudo, se a corrente da segunda seção for colocada circulando na direção oposta por meio de mna chave, o resultado é uma máquina de dois pólos. Conseqüentemente, a velocidade síncrona pode ser alterada por um fator 2. Tal máquina é chamada de mo cor de diversas velocidades. O motor pode operar em uma de duas velocidades, mas, infelizmente, uma vez que uma determinada velocidade seja escolhida, não há mais nenhum controle adicional disponível. O controle de velocidade, neste caso. ocorre de modo discreto. Para uma freqüência da rede de 60 Hz, tal máquina permite a operação para velocidades próximas de 3600 ou 1800 rpm. Se o controle da velocidade for desejado entre 1800 e 3600 rpm, não pode
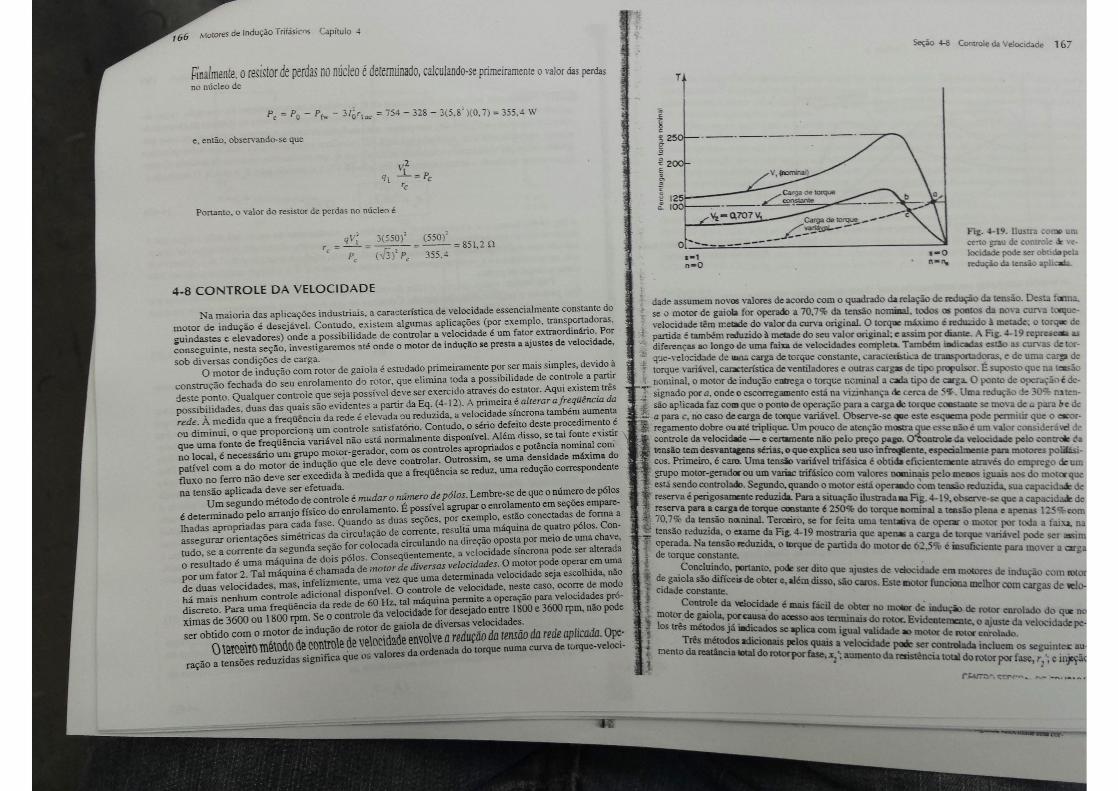
ser obtido com o motor de indução de rotor de gaiola de diversas velocidades. G ~m\ro mB\OOQ oe cQntro\e oe velocidade envolve a reduçãD da tensãD dil rede aplicada. Ope-
ração a tensões reduzidas significa que o~ valores da ordenada do torque numa curva de tc.rque-veloci-
T
-Clrgadet~ _____ c.
/vana ---0 , ___________ ..r----
s- · ""'•-=" s-o
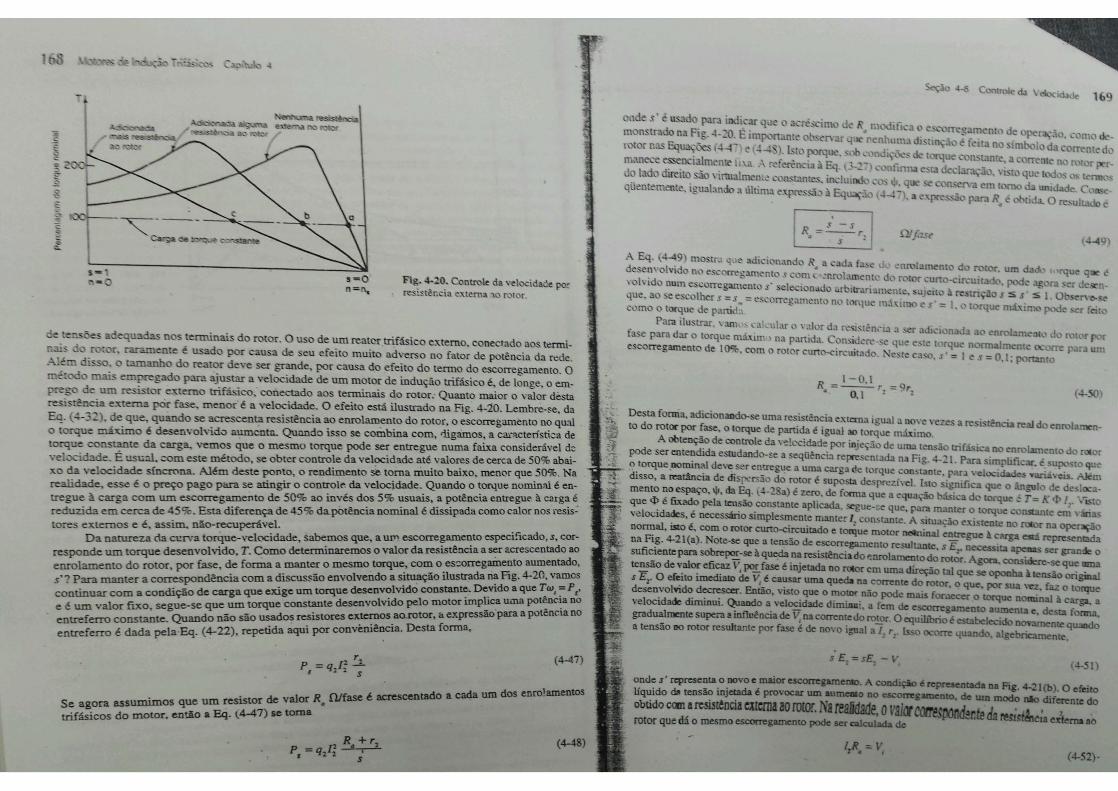
n=n. Fig. -'·10. C ntrole da vel 'ldsêe po~ res!.ster..:io. e '\.tema '\:'\ r.:'\t0r
..:e ::e::_Qe5 a.:!eq'.!:J.d.:J.S n s terminais d rot r . Ou de um reatcr trifásico externo. cone<:tndo ao t.:nni.:~ r. r:lr"...roente é us.ad por c:~.usa de seu e fe it muito adverso no fator de pott!n ia da rt:de
.-\:.::'::: diss . c- um:mho do re.:n r deve ser grande., por causa do efeito do termo do escorregamento. O r..é:
4 ._ :üs empreg:td p:1r.1 s.just:u- a velocidade de um motor de indução trifásico é. de lon'"'e , o em
pr-eg~.: de ut-:-1 re i·t r e~terno tri.fusico. conectado aos termin:Us do rotor. Quanto maior o Yalor desta r- 1s::ên =!:1 e"Ctema por fase. menor é a velocidade. O efeito está ilustrado na Fig. 4-20. Lembre-se, da Eq. ~-3::: . de que. q u9.Ildo e acrescenta resistência ao enrolamento do rotor. o escorregamento n? qu:U o torque oá"Cimo é desenvolvido aumenta. Qunndo isso se combina com, -ligamos: a c.a:.."'l.c~eóst\~a de torque constante da carga. vemos que o mesmo torque pode ser entregue numa f8.l.'ta considerável d_c vei :::id:!.de. É USI.Ã.::l. =m este método. se obter controle da velocidade até valores de cerca de 50% abSJ"CO da veloci dade síncrona. AMm deste ponto, o rendimento se torna muito baixo. menCir que _50%. Na realidade. ess~ é o preço pago~ se atingir o controlt> da velocidade .. Quando o ~arque no!DlDnl é entre ~me à carg:a com um escorregameroto de 50% ao invés dos 5% usuais, _a ~têncta entregue à carg~ é_ d~ "da ~ d -< se: Es·~ diferença de 45% dapotência nominal é diss1pada como calor nos l"eSIS-re UZI em ce rca e-. c. .....
tores externos e é , assim. não-recuperável. L+icado s cor-Da natureza da. cl:.rva torque-\·elocidade, sabemos que, a w:n escorre~ame~to espec • d
d 1 · d T Como determinaremos o valor da resiStência a ser acrescenta o ao responde um torque esenvo Vl o, · mesmo t ue com
0 es~orregainento aumentado,
enro lamento d o rotor, por f.ase, de forma a _mante!" 0 orq .'tua -0 il~trada naFig. 4-20, vamos
s, '? Par.l manter a correspondência com a ~lscus~ao envo=~o~.::do ~nstante. Devido a que Tw, = P ,. continuar com a condição de carga que eXlge um torqude nl "do pelo motor implica u.na potência no
um torque constante esenvo Vl ê . e~ um valor fixo , segue-se que . o.rotor h expressão' para a pot nna no Quand - - usados res1stores externos a •
entreferro consdtante.l Eq (4-o ~~o) s:eopetida aqui por conveniência. Desta forma, entreferro é da a pe a · •
rl p =q Jl-
1 l l s (4-47)
OJf ~acrescentado a cada um dos enrolamentoS Se agora assumimos que um resistor de valor R. ase trifásicos do motor, entl.o a Eq. l4-47) se toma
1-0.l R. = --- • = l)r
0.1 : :
lti9
ru r r um
(.;._
Desta fortn:~. aclicion:m<:lo- e uma resistênci:l e:\.tern:t ígu:~l a nove \'eZ. ·a re:>ist"n :i re:!.l d~ en to do rotoc por fase. o torque de p:utida é igual XJ torque m.iximo
A obtenção de controle da Y'!!~.: ·!d:tde por inje~:io de um.:~ tensli trif ,jc n en l:unento J riJI r pode er ente?clid:1 esrud:m<:lo-se 3 seqüênci::t repre ·cntJda n:t Fig . ..;. 2 t. Para imrlifi~ . ~ ;;upo -
1 qu.
o rorque oomm:U Jeve ser em:reg"!e a uma c:u-ga <!e torque con:tante, p.:u-.1 'e oci "' ".ui ,eio. Akm disso, a reatância de dis~rs:i do roto r é supoSb despn:zÍ\ e!. Isto : ignifica que o àngul' de d -!oc _ mento no espaço. $. da Eq. \ 'l-2 a) é zero. de fo,ma que 3 equ::t :3o b ·ica d0 torq~;: T=, • cf> !
1
• \~LS:(I que <ll é fi.'tado pela tensão constante 3plic:!d3, seguc-re que, r.ua manter o t..:rq e C<:ll.SUnte em ,.:iri velocidades. é necessário simplesmente n•anter 1, .:on,tante. A . itu ç:io e:tisrente no rot r n ope j
normal, isto é. com o rotor curto-<:ircuitado e t<>niue motor ~ entregue c . .rga est rerre. ent1da na Fig. 4-2l(a). Note-se que a tens:io de escorrep ;nento re ultante, sE.. n ·essit:ll pems ser g:ran::le
0 sufi:_ientepara sobre~-se à queda _n~ resistência do ~nrolamcnto do rotÕr. Agora. considere-se que ama. tc~o de valor eficaz\ , po_L fase é IDJetada oo rotor em uma direção t:U que se oponha 1 t nsão n ginal s E1• O mito imediatD de V, é causar uma queda na c:>rrenre do rotor, o que, por SIU \TZ, f:.z o torque desenvolvido decrescer-. Então, visto que o mo!of não pode m · for.1e er o torquc nocnin:!.l 11 c:u-ga.,
3 velocidade diminui. ~o a vel~dade di miAu:. a f em de escorregamento aumenu e. desu ~ ~3• gradualmente supem a inflcência de\', na correnteuo ro~r. O equilabrio é ube ido nov3mente qu:mdo a tt:nsão 110 rotor resuJunte por fase é de no -.·o i~3l a 1
1 rr L! , ·orre quand , lgelmc~ente,
s' E = sE - \ " • 1 (~-51)
onde s ' representa o novo e maior escortegamet*>. A condiçio é representada na Fí&. 4-2l{b). o efeito líquido ~ tensllo injetada é pro,·ocar um aumeao no esc~amento, de wn modo n1o diferente do
obtido C<ll1 a rcmrtnda Cltalla ao roor. Na~ o vai« ~r.te da ~rllnt;. eilema ao rotor que dá o mesmo escorregamento pode ser calculada de
I R :. V l o I
(4-52)·
\ I
lz n-·L- v , __ . '"" e ...... t<lade nominal
\a)
J • ~"-l2r2- v1
~z s•-o n'~n.
\dl
h s' >s n'>~
• • .. , \b) (c)
..\~ •
E,.·~z
s'E2 lz s' nega1lvo n':..n..
\e)
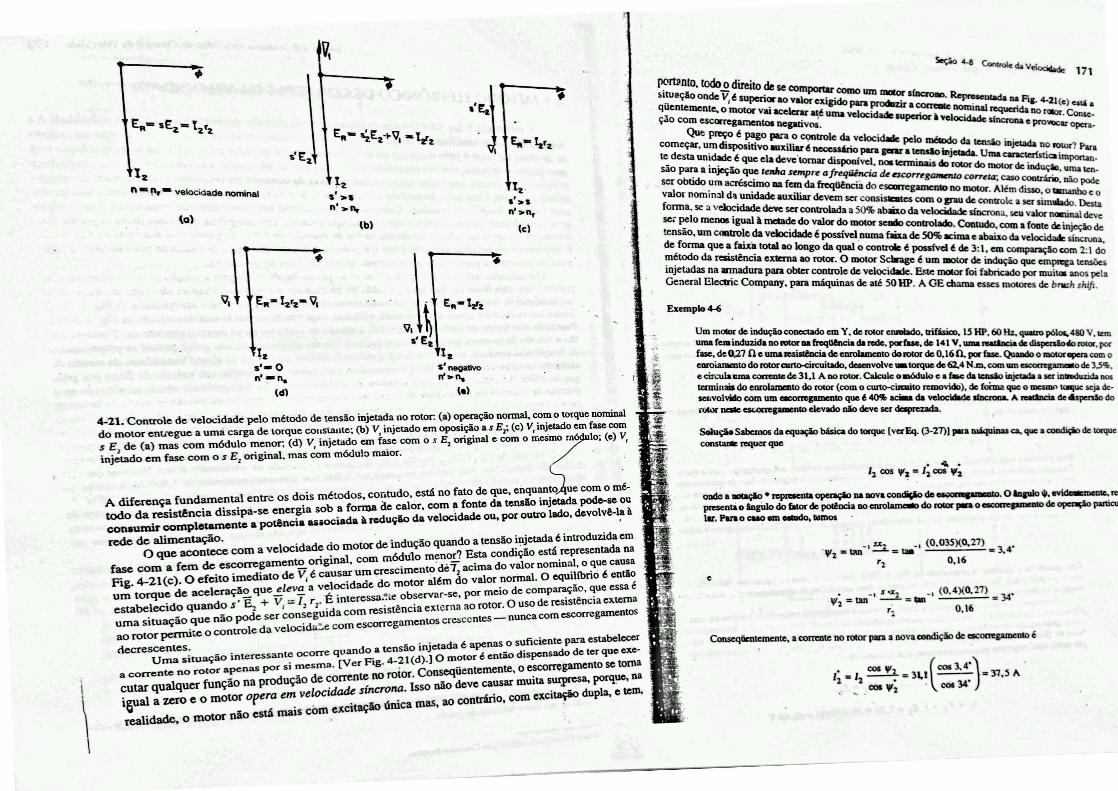
4-21. Controle de velocidade pelo m~todo de t.ensão injetada no rotor: (a · do motor enu-egue a uma carga de lorque co sta t (b) V . . d · ) operação normal, com o torque nominal n u e; mJeta o em oposi - E · ( ) v · · · sE, de (a) mas com módulo menor. (d) V injetado f E ~as ,. c ,mJetadocmfasecom injetado em fase com os E, original. mas ~om mó<lu:' m::r~m o s , ongmal e com o mes71o; (e) v,
A difC<Cnça fundamental entre o• doi• m<tod"'· contu~o. "'" no '"" de que. eúquan~ue""" 0 m<
todo da ~ist!ncia dissipa-se ener~a sob a forma de calor, com a fonte da tenalo injetada pode-se ou conaumu- ~mplotamemte a potênc1a auociada ~ roduvio da velocidade ou, por outro lado, devolve-la à
rede de alimentação- . · O que acontece com a velocidade do motor de indução quando a tensão injetada é introduzida em
fase com a fem de escorregamento original. com módulo menor'? Esta condição está representada na Fíg. 4-21(c). O efeito imediato de\!; é causar um crescimento -dê~ acima do valor nominal, o que causa um torque de aceleração que eleva a velocidade de motor além do valor normal. O equilíbrio é entlo estabelecido quando s · E
2
+ v; == ~ ,.. 2
• É interessa.~ te observar-se, por meio de comparação, que essa é uma situação que não pode ser conseguida com resistência ex. te rna ao rotor. O uso de resistência externa ao rotor permite o contrOle da velocida~e com escorregamentos cr~ccntes- nunca com escorrcgamentos
decrescentes. Uma situação interessante ocorre quando a tensão injetada é apenas o suficiente pa:a estabelecer a corrente no rotor apenas por si mesma. [Ver Fig. 4-21(d) .] O motor é então dispensado de ter que exe-cutar qualquer função na produção de corrente no rotor. Conseqüentemente. o esco~gamento se toma i~al a zero e o motor opera em velocidade slncrona. Isso não deve ca~ar muita ~wp~a, porque, na realidade.
0
motor não está mais ci>m excitaçio única mas. ao contrário, com excttaça<> dupla, e tem,
~ 4-8 Conb nnrunto ,_ ... _ d" . ole do v~ J ··.~ • \UUU o ltelto de -- 171 ~•tuaçlo onde V~ s . se comporte como um qüentemente, o ~m:~ ao valor exi,gido par. ~ lfllcro.o. ~ ção com escorreg vaa acelerar ~~ uma velcx~ a c:orre.c IIOI1lina1 reqU:!"· 4-lJ (c) eaii a
Qu(; amento. negativos. wpcnoc ~velocidade sincrona 110
rcJIOr. Coasc.
com p~ ~ pago para o CQntrole da . c pro~ opera. te eçar, um dispositivo lllXiliar ~ . velocidade pelo mélodo da - . . -desta unidade é que eladeve·t~para pnr a tensloilljebda.. ~ mjel.ada no IIXOr1 Pva
sao para a in jcção í vcl, noa lenJliDais ma c::anc:terútica im ser obtido ~ telllta sempre afreqiiincia de elo rocor do IDCKOr de ind . ponan.
a)
~m acrésClDlo aa fem da -.ü&lci- acorregt1MDIID corr~ta: ~- u.ma len-v or nomon:ll d:s unidade a . . ..-t a do esaliTCglmeiiiD 00 • caso~- nlo pode fonna. se a velocidade de-.le uxiliar devem ser consiSICIItc$ com o vau~- Al~m diSSO, o tamanho e o se; pelo menos iguall ~controlada a 50% abaixo da veloc:idade s::;:ok a ser~- Desta tensão, um CODtrole da eloc. ~valor do IDO(or seiMio controlado. CoolUdo . seu valor roo.linal deve de forma que a faixa,;.. a; 1on é poss{vel.nwna flliu de 50% .cima e abaixC::: f~ de in)eçlo de m~todo da n:sistência go da qual o controle é possfvel ~ de 3·1 eloc•dalle síncruna. injetadas na annad ex11ema ao rotOI". O motor Sck-age ~ um JDOCor ~ .' em ~o com 2: I do General Elemic c: para obcer con~le de velocidade. E.'lte maior foi f= que ern~a tensões
pany • para máqumas de até 50 HP. A GE chama por mun .. anos pela =motores de brvsh shift .
Exemplo4-6
Um moa de induçlo conectado uma feaai.nduzida no IIUtor oa em y. de rotor ennàdo, trifúim, 15 HP. 60 Hz. fase, deG,27 ne uma~~ da rede. parfue, ck 141 v.-.-a..a.=: ,ltm
earoianlalto do rotorauto-circuitado ~to do rocor ck 0.16 n. por fase. QoMdo o ~~~~~~a:·!'« e cin:~cma correDICdc 31,1 A
00 ~-~ :-..::: ck62,
4 N.m. comam eoc:onqamso de ~.:
tcnrun- do eurolamalto do-- ( . . . . e a fac da lalalo illjaada a ser , _ __._,_._ '
ol . ·~ com o cuno-<:u.auto RmOvido) ...... . ..._._.... nos
senv vide com um eKOaepmeniD que~ 40'1> acilu da • ""' fClllm que o mumn ~m~~uc seja cl<.-roc.x DCIIe ~to elendo oio deve ser~ veltocVàlk llDcroaa. A reMIDda de~ do
Soluçie Sabemos da equaçio búica do . constara requer que torque [verEq. (3-27)) ~-a~ ca, que a ooadiçio de mrque
. ., _ •• ft -• .ul -• (0.03SX0.27) z - ~ - = ta. '"'3,4' rl 0,16
e
• _ - • s •xl - • (0,4X0. 7) 'l'z - tan - . - = 1111 = 34'
r l 0.16
Cooseqlim~mcnte. a c:orreote no rotor piR a nova c:oodiçio de cscorrepmen&o é
• ~ lCOI 3,4') · 12
= 12
• = 31.1 --- - n.s A . , . COI "1 ' COI 34'
172 Motores de :ndução Trifásicos Capitulo 4
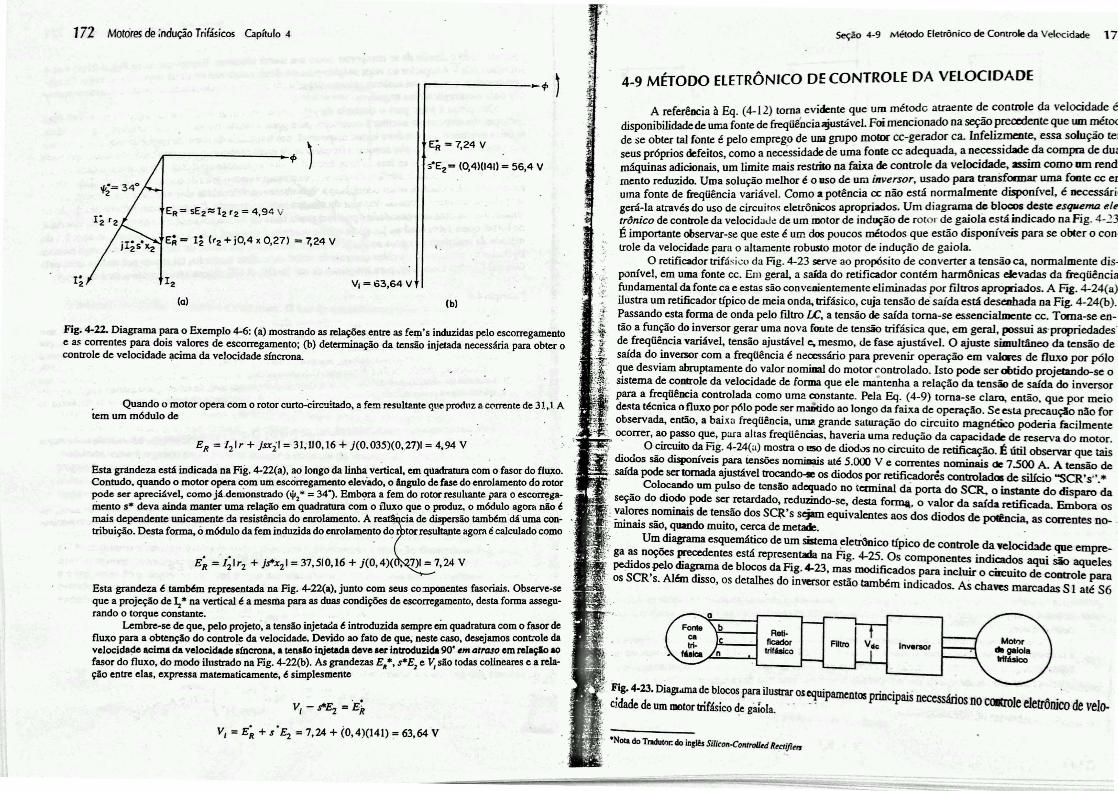
r 2
r------~ r
ER = 12 Cr2 + j0,4 x 0,27) = 7,24 V
(a)
V;=I53,64V
EÃ = 7,24 V
s•E2 = (0,41(141) = 56,4 V
I .
(b)
Fig. 4-22. Diagrama para o Exemplo 4-6: (a) mostrando as .relações entre as fei!J'S induzidas ~lo escorregamento e as correntes para dois valo.rcs de escorregamento; (b) detenninação da tensão injetada necessária para obter o controle de velocidade l1ocima da velocidade síncrona.
. Quando o motor opera· com o rotor curto-Circuitado, a fem resultl!nte qu~ pro<IIIZ a, c~rrente de 31,.1. A tem um módulo de
ER = 12 1 r+ js.xil = 31,110,16 + j(0.035)(0,27)1 = 4,94 V
Esta grándeza está indicada na Fig. 4-22(a), ao longo da linha vertical, em quadratura com o fasordo fluxo. Contudo, quando o motor opera com um escorreg!IIDento elevado, o Angulo de fase do enrolamento do rotor pode ser apreciável, como já.deruonsttado (ljl
2'" = 34'). Emlx?ra a fem do rotor resultante para o escorrega
menta s• deva ainda manter uma relação em quadratura com o iluxo que o produz. o módulo agore nio 6 mais dependente unicamente da resistência do enrolamento. A · cia de dispersão tambtm dá' uma contribuição. Desta forma, o módulo da fem induzida do enrolamento do tor res~te agora é calculado como
E~= 1;1r2 + js*x2 1 = 37,510,16 + j(0,4)( , 7)1 = 7,24 V
Esta grandeza 6 tambtm n :presentada na Fig. 4-22(a), junto com seus co:nponentes fase>riais. Observe-se que a projeção de I, • na vertical é a mesma para as duas condições de escorregamento, desta forma assegurando o torque constante.
Lembre-se de que, pelo projeto~ a tensão injetaGa é introduzida sempre ein quadratura com o f!ISOr de fluxo para a obtenção do controle da velocidade. Devido ao fato de que; oeste caso, de~tejamos cootõ'ole da vcloc:ida~e aclmá da velociiW:Ie ifncrona. a tenalo i.Qjetada deve aer introduzida 90' ., atrtl.fo em relaçlo AQ
fasor do fluxo, do modo ilustrado na Fig. 4-22(b). As grandezas E~*· s*E2
e V, são todas colineares e a reJa· ção entre elas, expressa matematicamente, 6 simplesmente ·
vt - s*-Ez = Ek VI= E~+ s 'E2 = 7,24 + (0,4)(141) = 63,64 V
SeçZo 4-9 Método Eletrônico de Controle da Vekx:idade 173
4-9 MÉTODO ELETRÔNICO DE CONTROLE DA VELOCIDADE
A referêocia à Eq. (4-12) toma evidente que um mét~c atraente d~ controle da velocidad,e é ; disponibilidade de llffill fonte de freqüê'nciaajustável. Foi menciOnado na seçao precedente que um ~od< de se obter tal fonte é pelo emprego de unJ grupo motor cc-gerador ca. Infe~te, essa soluçao ten seus próprios defeitos, como a necessidade de uma fonte cc adequada, a necessidade da compra de duru máquinas adicionais, um limite mais restrito na faixa de controle da velocidade, assim como am rendimento redU7ido. Uma solução melhor é o uso de um inversor, usado para lJ?lDSformar uma foote CC em uma fonte de freqüência variável. Como a potência cc não está normalmente disponíveL é oecessário gerá-la através do uso de circuiro.~ eletrônicos apropriados. Um d iagrama de blocos deste esquenu2 ef~trônico de conlrole da velocid:~Jc! de um motor de indução de rotor de gaiola está indicado na Fig. 4-23. É importante observar-se que este é um dos poucos métodos que estão disponíveis para se obcer o controle da velocidade para o altamente robusto motor de indução de gaiola.
O retificador trifás i..:o da Fig. 4-23 serve ao propósito de converter a tensão ca, normalmente di s..... p<>nível, em uma fonte cc. Em geral, a saída do retificador contém harmônicas elevadas da freqüência ~~. fundamental da fonte ca e estas são conveoientemente eliminadas por fila-os apropriados. A Fq:. 4-24(a)
ilustra um retificador típico de meia onda, trifásico, cuja tensão de saída está desenhada na Fig. 4-24(b). Passando esta forma de onda pelo fLitro LC, a tensão de saída toma-se essencialmente cc. Toma-se então a função do inversor gerar uma nova fo11te de tensão trifásica que, em geral, possui as· propriedades· de freqüência variável, tensão ajustável e. mesmo, de fase ajustável. O ajuste simultâneo da tensão de saída do inversor com a freqüência é oea:ssário para prevenir operação em valores de fluxo por pólo q_ue desviam abruptamente d~ valor nomiml do motor ~ootrolado. Isto pode ser obtido projecando-se 0 s1stema de coottole da veloc1dade de forma que ele mantenha a relação da tensão de saída do inversor para a fre~üêocia controlada como uma ~nstante. Pela Eq. (4-9) toma-se claro, então, que por meio de~ta técntca o !luxo ~r pólo pode ~r mantido ao longo da faixa de operação. Se est.a precauçlo não for observada, ent:io, a bruxa freqUênc1a, Ullll! grande saturação do circuito magnético poderia facilmente ~orrer, a~ p~o q~, para altas freqüências, haveria uma redução da capacidade de reserva do motor. . • O :rrc~ ~ J:-~g. 4-24(:~) ~ostra o_~ de d.iod..JS no circuito de retificação. É útil observar que tais
d.iO<los sao dispomvelS ~ara tensoes no~s até 5.000 V e correntes nominais de 7.500 A. A tensão de · .saída pode ser tomada lljustável trocando-se os diodos por retifi~rês controlad01 de silício '"SCR '.s". •
_ Col~audo um pulso de tensão adequado no terminal da porta do SCR, 0 instante do disparo da seçao do di~_pode ser retardado, reduzindo-se, desta fo~. 0 valor da saída retificada. Embora os ~~o~s DODU.DalS de tensão dos SCWs sejam equivalentes aos dos diodos de .v..a · mmlUs são, quando muito, cerca de metade. r-D~ as correntes no- .
Um_diagrama esquemático de um sistema ~letÍOOico típico de controle da Yelocidade qoe e ga ~ noçoes ~entes está representada na Fig. 4-25. Os componentes indicados · · - mpre~dos pelo diagrama de blocos da Fig. 4-23, mas modificados para incluir o cin:uit i sao ~ueles os SCR's. Além disso, os detalhes do in-vm;or estão também indicados As. h o e contro e para
Retillcador trifMico lnv.raor
. c aftS marcadas SI até S6
. Flg. 4-23. Diagr.un.a de blocos para ilustrar os equipament~ . . . . · ci.dade de um motor trifásico de gaiola. · · · pnnctpaJS necessários 00 a.tt'Oie elelrôlÜCO de velo-
· •Nota do Tnodut~~r. do inclb Silkon-ColllrOikd Rtctifim
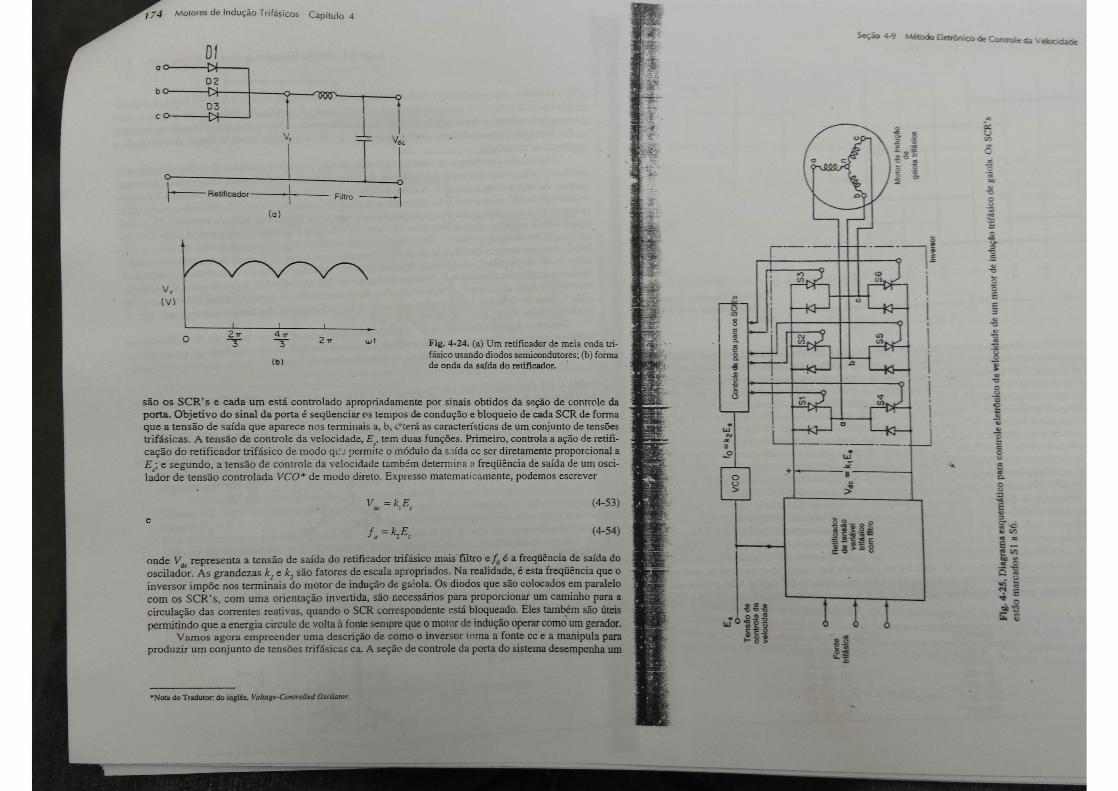
Morares de Indução Tnfásicos Capítulo 4
DI ao----f~--
02
03
v, vd~
0,.____--L\ -----....JL_\ t----Retificador---+-- -- Fôl tro --~
v, (V)
o
( o l
27T wt Fig. 4-24. (a) Um retificador de meia onda trifásico usando diodos sem.ioondutores; (b) forma de onda da saída do retificador.
são os SCR's e cada um está controlado apropriRdamente por sinais obtidos da seção de controle da porta. Objetivo do sinal da porta é seqüenciar os tempos de condução e bloqueio de cada SCR de forma que a tensão de saída que aparece nos terminais a, b, <- terá as características de um conjunto de tensões trifásicas. A tensão de controle da velocidade, E,, tem duas funções. Primeiro, controla a ação de retificação do retificador trifásico de modo qL.! permite o módulo da s :~ ída cc ser diretamente proporcional a. E,; e segundo, a tensão de controle da velocidade também determina ll freqüência de saída de um oscilador de tensão controlada VCO * de modo direto. Expresso matemaucamente, podemos escrever
(4-53)
e (4-54)
onde V .x representa a tensão de saída do retificador trifásico mais· filtro e j 0 é a freqüência de saída do oscilador. As grandezas k
1 e k
2 são fatores de escala apropriados. Na realid~de, é esta freqüêncil que o
inversor impõe nos terminais do motor de indução de ga~ola. Os diodos que são colocados em paralelo com os SCR's, com uma orientação inve11ida, são r.ecessários para proporcionar um camiaho para a circulação das correntes reativas, quando o SCR corre.spoodente está bloqueado. Eles tamb_ém são úteis pemútindo que a energia circule de volta à fonte sempre que o motor de indução operar como um gerador.
Vamos agora empreender uma descrição de como o inversor toma a fonte cc e a manipula para produzir um conjunto de tensões tnfásic&s ca. A seçã0 de controle da porta do sistema desempenha um
•Nau do T.-.dutor: do inglêl, Voi.UJg•·Ú>ntroll•d OsciiDtor.
IJJ
+1----~------l ...
>
=
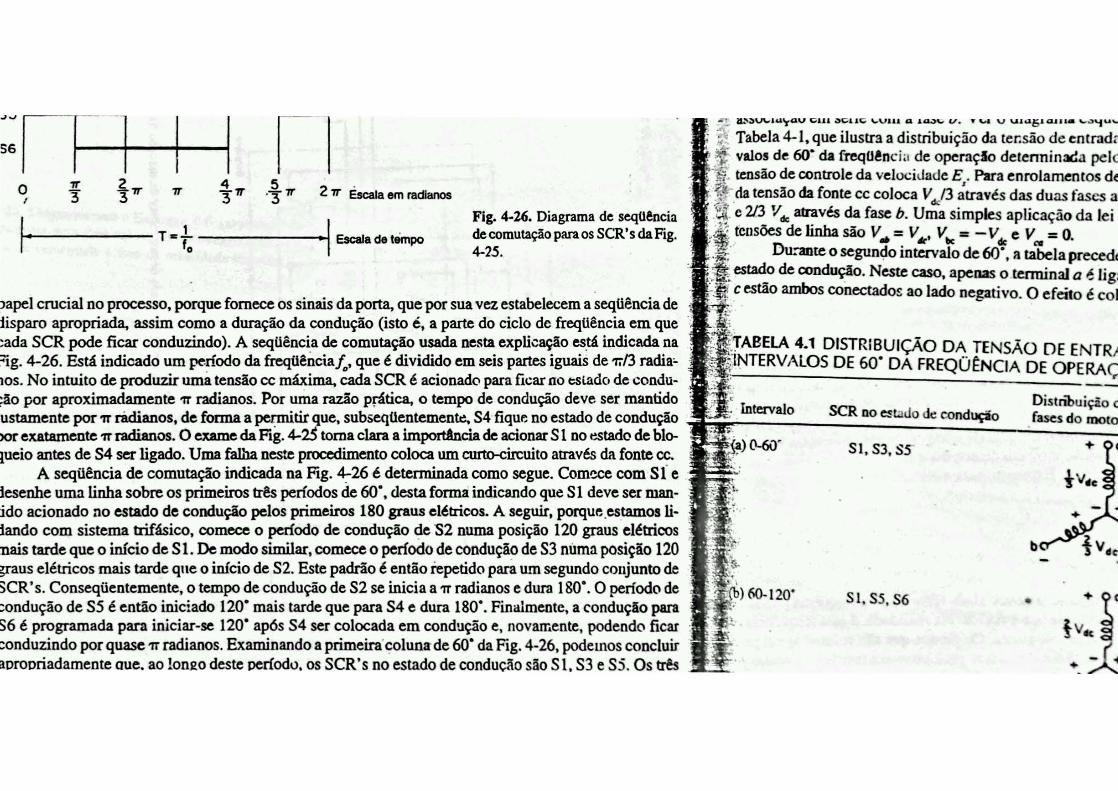
::1 ll I I I o .,
3 2 ., ÉscaJa em radianos ., I
....,.,. _______ T • t ------1 .... Escala de t8mpo Fig. 4-26. Diagrama de seqU!ncia de comutação para os SCR' s da Fig. 4-25.
Japel crucial no processo, porque fornece os sinais da porta, que por sua vez estabelecem a seqüência de iisparo apropriada, assim como a duração da condução (isto é, a parte do ciclo de freqüência em que ~ada SCR pode ficar conduzindo). A seqüência de comutação usada ne!;ta explicação es.tá indicada na ~g. 4-26. Está indicado um período da freqüênciaf, que é dividido em seis partes iguais de Ti/3 radia~
, D
1os. No intuito de produzir uma tensão cc máxima. cada SCR é acionado para ficar ao c:si.ado de condu-
- - IL" ::t"'-a"yov """' .,,..1,,.. \.VIII a 1Glt'l;; v. • .._. v uu•5 acuaa• o.. .>'fu ....
-: .. Tabela 4- l, que ilustra a distribuição da ter. são de entradél valos de 60. da fyeqU~nci<1 de operaçlo derennin3(!a peJo tensão de controle da velociJade E . Para enrolamentos de , da tensão da fonte cc coloca V 13 através das duas fases a;
dt
c U3 V* através da fase b. Uma simples aplicação da le i , tensões de linha são V = V , V = -V e V = O .. .. k • ~ •
Ou. ""3D te o segun~o intervalo de 6<r, a tabela preced~ estado de condução. Neste caso, apenas o tenninaJ a ~ ligl c estão ambos conectado~ ao lado negativo. O efeito é col
ELA 4.1 DISTRIBUIÇÃO DA TENSÃO OE EN TRJ VALOS DE 60. DA FREQÜtNCIA DE OPERAC
r'
~ão por aproximadamente 1f radianos. Por uma razão prática. o tempo de condução deve ser mantido Distribuição d ustamente por 1r rildianos, de forma a pe~tir que, subseqüentemen~ S4 fique no estado de condução llt~~~~--SCR __ 0_0_~_b_· J_o_d_e_co_nd.:..uçi:..:.:.· o:__.:,:fasc=:s:.:d:o~mot=~o )()t' exatamente 1r radianos. O exame da Fig. 4-25 toma clara a importAncia de acionar S 1 no t>..Stado de blo-IUeio antes de S4 ser ligado. Uma falha neste procedimento coloca um curto-circuito através da fonte cc.
A seqüência de comutação indicada na Fig. 4-26 é detenninada como segue. Comece com Si e iesenhe uma linha sobre os primeiros três períodos de 60 •• desta forma indicando que S 1 deve ser manjdo acionado no estado de condução pelos primeiros 180 graus elétricos. A seguir, porque.estamos liiando com sistema trifásico, comece o período de condução de S2 numa posição 120 graus elétricos mais tarde que o início de S 1. De modo similar, comece o período de condução de S3 núma posição 120 graus elétricos mais tarde qne o início de S2. Este padrão é então repetido para um segundo conjunto de SCR' s. Conseqüentemente, o tempo de condução de S2 se inicia a 1r radianos e dura 180 •. O período de :ondução de S5 é então iniciado 120· mais tarde que para S4 e dura 180·. Finalmente, a conduç!o para S6 é programada para iniciar-se 120• após S4 ser colocada em condução e, novamente, podendo ficar conduzindo por quase 1r radianos. Examinando a primeira' columrde 60• da Fig. 4-26, podemos concluir aorooriadamente aue. ao 1om~ o deste oeríodo. os SCR's no estado de condução sãoS l, S3 e S5. Os tres ----·
SI, S3, SS
b
Sl , S5, S6 •
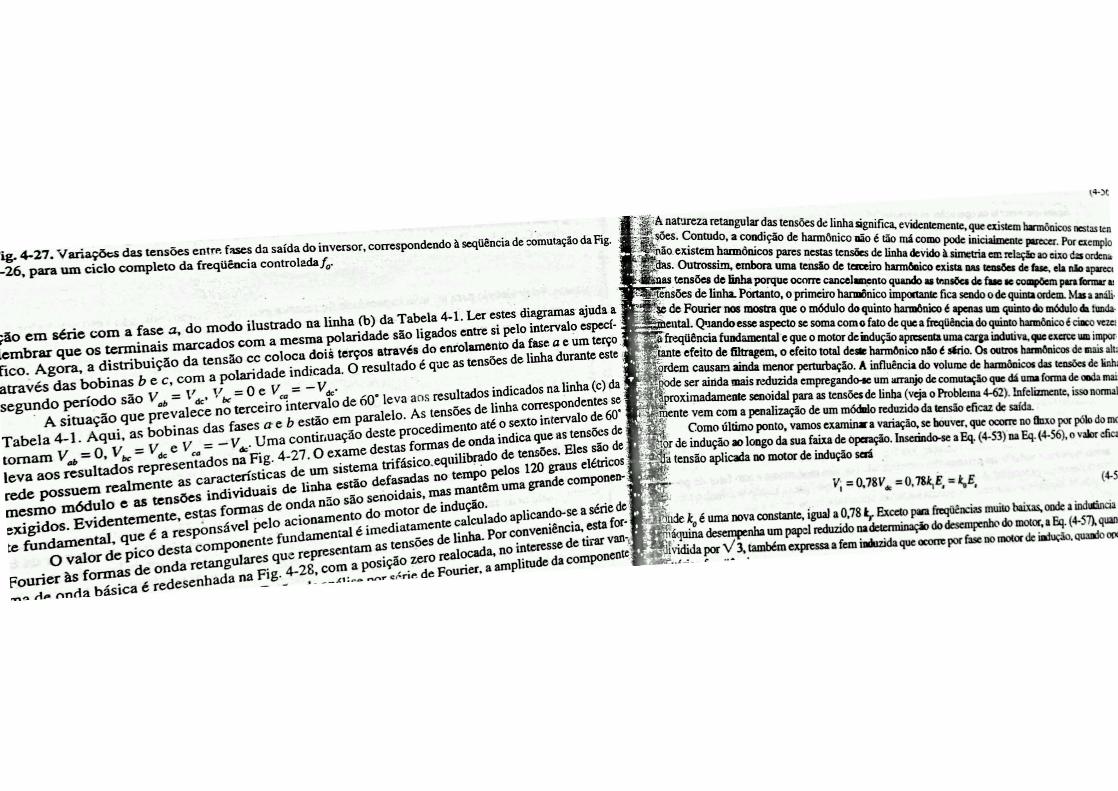
nat'Jreza \~-:x retangular das ~nsões detinha si . .
Contudo, a coodição de harmônico _gnétfi~ evidenlemente, que ws&em hlnnõn' ,:~·u•'-""'.,u:;m bannõni llaO 100 má como pode · . . lOOS nestas ten Outrossim. eum:: pares nestas ~nsões de linha devido à ~cialmente parecer. Por aemplo
:WR:..w.t.~ac d . uma ~nslo de tcu:eiro harm&lico . ~ re~ ao eixo da arde . e linha porque ocorre I exllta ou leDI6ea de .___ n:.· de linha. p . . . .cance ~to quando u IM~&~ de ._ ela alo aparte(
de . . ortanto, o pnmetro harul6nico . fala IC ~pera bmar ll
Fig. 4-l7 ·Variações das tensões entrP. fases da saíd d · · 4-26, para um ciclo complelO da freqüOacia contto':.:.'i;''"or • conespondeodo hcqüênci• de ,..uloçlo da 1'\g.
ção em série com a fase a, do modo ilustrado na linha (b) da Tabela 4-1 . Ler estes diagramas ajuda a lembrar que os terminais marcados com a mesma polaridade são ligados entre si pelo intervalo específico. Agora. a distribuição da tensl!O cc coloca doiS terços atravé• do eniolomeniD da fase a e iun tc<ÇO .
anavés das bobinaS b e c. com a polaridade indicada- O resultado 6 que as tensões de linha durante este
segundo período são V = \' l/ = O e V = -V . _ ab ele' bc _ C'! de r • • • • A situação que prevalece no tercetro mtervalo de oO leva aos <eS"!tados mdicados na bnha (c) da
Tabela 4-1 . Aqui. a.s bobinas das fases "e b estio em paralelo. As "'nsoes de bnha c<x~espondenres ·~ V
- o v - V e V - - V Uma contir.uação deste procedunento até o ,.,., mte.valo de 60 tomam ab - • bc - c1c ca - c~c· d d · d' te õcs de leva aos resultados representados oa Fig. 4-27. O exame destaS formas . ~ ':ct' •;;.•ca ..:;'~.':'são de
Founer nos mostra que 0
módulo do . ~fica seudo o de qui.nlaordem. Ma 1 , . ~~c~u~ll. QtJando esse qumto barmôruco é apenas um · do . lllili· aspecto se soma como falo de que a freqüência do _C(UIDIO módulo da !UIIda·
-.-~ .. ~ ... fuodamenta1 e que o motor deiod - qw:nto bamõoico ~ c:iao vtlCl
efeito de filtragem, o efeito total dea =:f:enta ~ c:~r~a i.Dduliva, c,1C txcrcc 11111 impor· causaJ!l ainda menor perturbação A . A • nlo é drio. Os oatrol bamtJaicos de mais alu
ser ainda mais red 'da . influenCla do volume de bal:m&rieo~ elas leiiSÕCS de"·'-· UZl empregando-te um arranjo de ......,. proXIIIllld<amc~Die sc:ooidal para as tensões de linha . comutaçlo que di uma fonna de a.da mail
vem com a penalização de um módllo red ~dao Problema 4-62). Infelizmente. isso normal· C '1 · uzt lalsio eficaz de saída.
.orno u tuno ponto, vamos ex~ a variaçã se bou de indução ao loogo da sua faixa de 0
o.. ver, que ocorre no tmo por pólo do mo-tensão aplicada
00 motor de indução ~. InseriDdo-se a Eq. (4-53) na Eq. (4-56). o valor efiw
V; = 0. 78V *=O, 1S~E, = t._E, (4-5 . rede possuem reatmente as caract.crlsticas de um slSU:nlll tnfãs•co.eqmlib . . o te 20 · .
· d' · d · . d linha estão defasadas no terop<> pelos 1 graus m~';"o módulo e .. tensões m lVl -;., :nda oão sio senoidais. mas mantbn uma grande c<>mpooen-
eXlgtdos. Evtdenternente. es~ fo:aselo acionamento do motor de indução. . te fundantental. que é a responsá p f d tal é imediatamente calculado aplicando-se a sén< do O valor de pico desta cOmpooento un ameo • nsõeS de linha- Por cooveniênCill. esta for· l, 6 uma nova CXKlSWl". igu>l• O. 78 t,.llxcdo I*"~ .....,loius. """" ind· .... n~;, ...
da
uJareS que representam as .e · d tirar ~ru. I ~-"d _.., ...... "" Fourier às ronnas de on retang . g com a osição zero realocada. oo mtcr<S"' e """'7 wn 1"1" ·~ o .. ~ do"""""""' do ""'""·' &j. (4-57). q'""' - • A• nnrla básica é redesenhada na f! g. _4-2. : -- ' " __ P ~_.,,.;. de Fouriet. a aJnpliwde da colmponc:nte -~~ ~-~-~-~.~- ~ .. A 3, .também expressa a fero m.luzida que (JICOm por fue no [1l()(Or de illduçio. QU3II'Io oocra
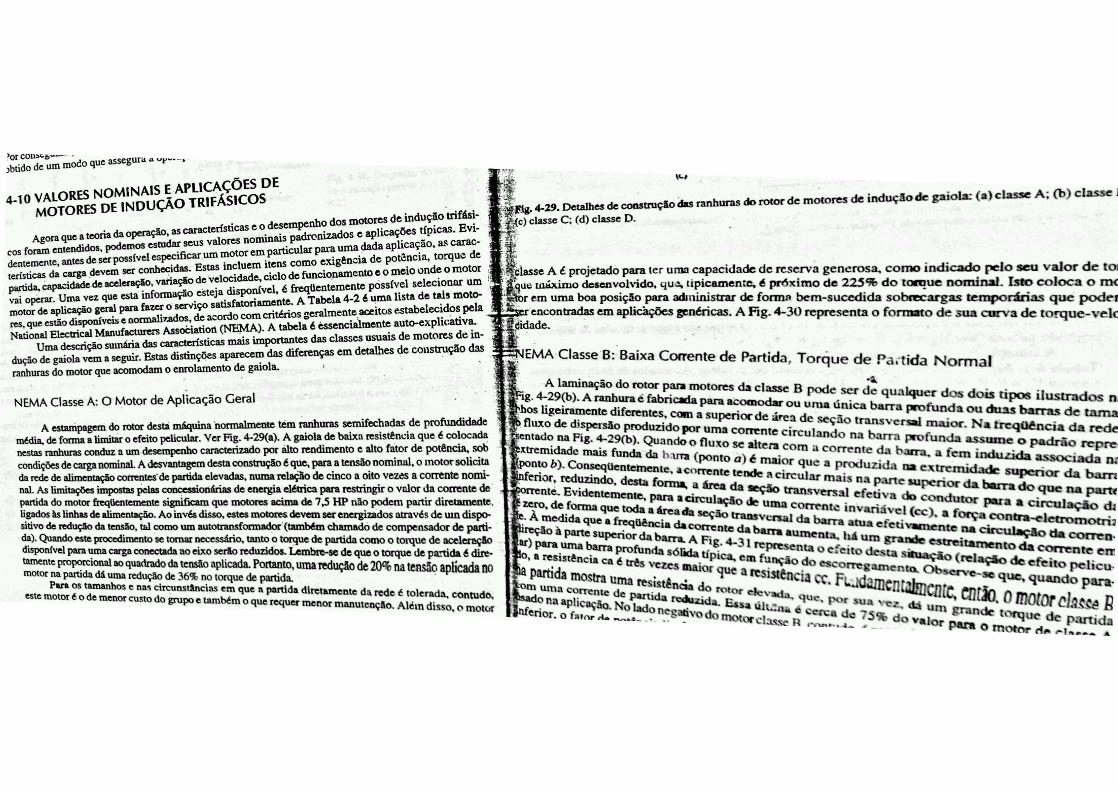
'Of COII>"f>-·· - ;,cO que assegura a vy-· - • )btidode um m
NAIS E APLICAÇÕES DE 4-1 o VALORESSNDOE~~DUÇA-O TRIFÁSICOS . .
MOTORE · · 'fás' . o desem nho dos motores de mduç~o tn ~- .:
ra ue a teoria da operação, as caracterlsncas e . . :Cruzados e aplicações típlcas. Evl-
, .. , ·~"" 4-19. Detalhes de ~auçlo d.s ranhuras do rotor de motores de induç!o de gaiola: (a) c lasse A ; (b
:iF> classe C ; (d) classe D . .
c lasse B
cos fo~ en':endidos, podemos estud~ seus valores n~:m~~ular para uma dada aplica~ão, as carac- . dentemente, antes de ser poss{velnhespe_cdasific~= ~=~em i~ens como eJtig!ncia de potê~cla,dtm:quc: !~ . . . aJ d teristicas da carga ~evem ser co ec! · d . locidade ciclo de funcio.namento e o me10 on ~o mo ;, ~' Í:lasse A l projetado para ter urna capacidade de reserva ge ne rosa. como indicado peJo seu v or e tor' pa,rtida.eapaddade.deaceleraçlo, vanaçlo e v~ di nÍvel é freqüentemente põss(vel selec1onnr um : .. " · uemÚJÚruo desenvolvido, q uo, tipicamente. 6 próximo de 225~ do laft!Ue nom.inal. Isto coloca o mo v~i ope· rar. Uma vez que esta: informação. esteJa. fspo . e'nte A Tabela 4-2 6 uma lista de tais moto- : r em uma boa posição para administrar de fonn11 bem-sucedida sobftcarg as r~~ q ue podt"n
f · ervlÇO sans atonam · · · d la · ---r-motor de apli~o gef8;1_para a~ 0 5
e acordo com critérios geralmente, aceitos estabelec~ ~~ pe ...,..~~:· ... ·encontradas em apücàções &en~ricas. A Fi-g. 4-30 representa o fo rt1118to de sua curva de rorque - velo res, que estão disponíveiS e normali7.ad~ •. d .
11 (NEMA.) A tabela é essencialmente auto-exph<:ativa.. '. ~idade. . .
National Electric~ Manuf~urers ~:C:::cas m~s ~portantes das classes usuais de motores de in- . :
dução~::~:~~; =:::.:tas distinçqes aparecei? das diferenças em detalhes ~e construção~ ·. . ,: EMA Classe ·s:. Baixa Corrente de Partida, Torque de p , ida ranhuras do motor que acomodam o enrolamento d~ gmola. ·
NEMA Classe A: O Motor de ApÚcação Geral
A estanipagem do rotor desta máquina ·normalmente tem ~uras sc:mifec~adas .de profundidade roMia, de forma a limitar o efeito pelicular. Ver Fig. 4-29(a). A gmola de baixa res1st!nc1a que é co~ocada nestas ranhuras conduz a um.cksempenho caracterizado por lilto rendimento e alto fator de pot!llClll, sob condições de carga nominal. A desvantagem desta ronstruçlo t que, para a tensão nomimll, o motof solicita da rede de alimentaçlo cotrentes' de partida elevadas. numa relaÇlo de cinco a oito veus a corrente nominal. As limitações impostas Pelas coocessionárias de energia elétrica para restri,ngir o valor da corrente de partida do motor freqüentemente significam que motores acima de 7 .S HP ulio podem partir diretamente. ligados b linhas de alimentação. Ao inv& disso. estes motores devem ser energiDdos ntravts de wn dispositivo de miuçlo da tenslo, tal. eomo um autotransformador'(tambtm chamado de compensador de parti~). Quando este procedimento se tomar necessário. tanto? torque de partida como o torque de acelereçlo .. disponível para urna earga conectada ao eixo serlo reduzidos. Lembre-se de que o torque de panida t ~ tamente pro~ional ao quadrado da tensão aplicada. Ponanto, uma reduçlo de 20% na teasão aplicada no motor na paruda dá urna reduçlo de 36% no torque de partida ·
Para os tamanhos e na, clrcunstlncias e.m que a partida diretamente d rede ~ tole da. d este motor to de menor custo do grupo e também 0 que no~ouer . ". contu o,
·-. menor manutençlo. Alem dtsso, C' motor
ormal
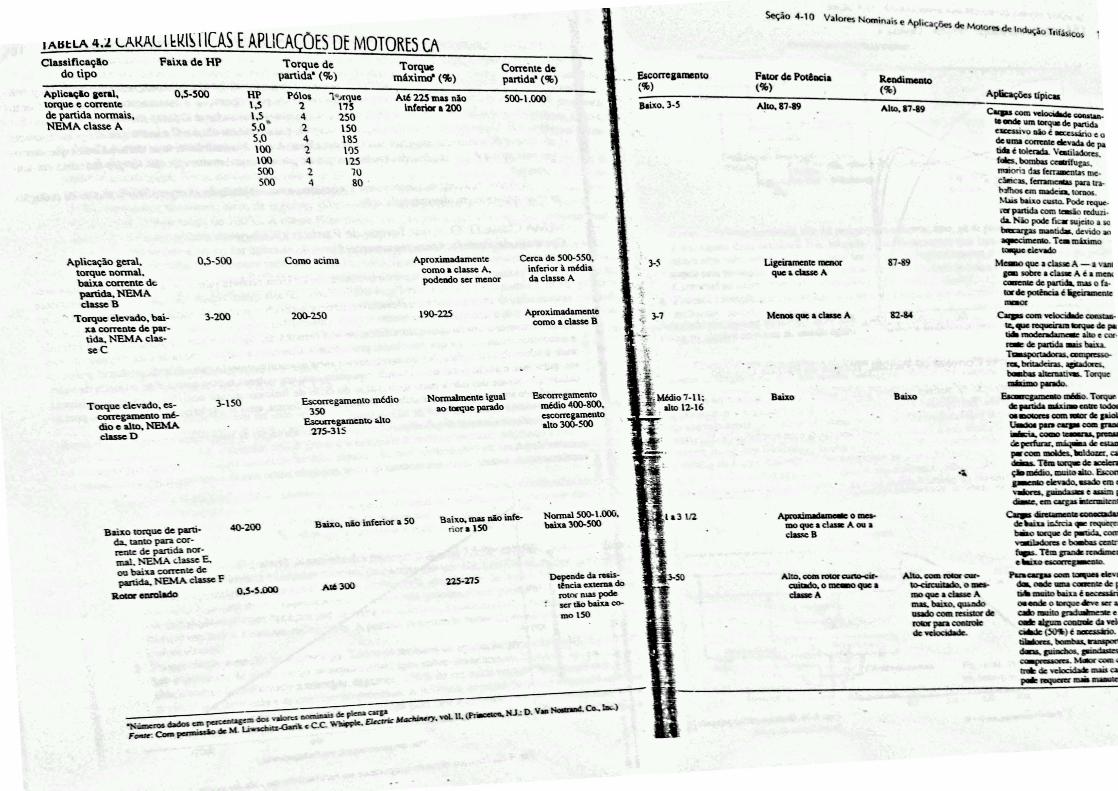
I AHtLA 4.:L LAKAL I ~I{ISTICAS E APLICAÇOES DE MOTORES CA --~~~~~-------------Clauificaç&o Fai~a de HP
do tipo
Aplicaç&o pral, o.s-soo torque e corrente. de partida nonnais, NEMA classe A
Aplicação gera\, torque normal. baixa corrente. de puóda.NEMA classe B
Torque elevado, baixa con-eotc. de partida.. NEMA dasse C
0,5-500
l-2.00
T arque elevado. es- l-\50 conegameoto m6-dio e alto, NEMA classe D
HP l.S 1.~ 5.o· s.o 100 100 500 500
s.i1o wrque de puti- 40-200 da.. tanm pan coe-~ de putida normal. NE.MA 1as.se E. ou baixa CQITellle de partida. NatA c\assre F
1ldar ...aladO
1'orque de partida• (%)
1'orque mbimd(%)
Pólos
Corrente de partida• (%) . _ Eac;omaameoto
{~) 1•, rque At! 2.25 mas nlo 500-1 .000
2. 175 4 250 2 \50 4 \85 2 \')5 4 125 2 70 4 80
Como acima
100-2.50
Escoaegamcnto médio 350
Esc:uaegamenu. r.lto '275-315
Inferior a lOO
Aproximadarnen:e como a classe A. podeodo ser menor
190-2.15
Normalmente igual ao IOIGUC panda
Cerca de 500-550, inferior à média da classe A
Aproltimadamcnle como a classe B
Bsc:orn-gamcnto médio 400-800. csconegameuto alto 300-500
Baixo, n1o inferior a 50 Baixo. mas oio inferior a ISO
Normal 500-\.()()(i, Mixa 300-SOO
Dopcnclc da reaist!Dcia C1ta1l& do rocnr ruas pode ser !Ao Mixa como tSO
Baixo. 3-S
lal l/2
Seç~o 4-1 O v •---~ ..... .., Nominais e ,o,plla ões de Motous de I~ Ttif~tCOS
Fa&of de PCM!ac:ia {'li.)
Apwi~omo que a cu- A ou a clasJe B
C.... com~cou-.. la ... WIIIOrq .. de plr1ida
87-89
12-14
Alio. __ .,...
IO-Cilaoilado. o -111D que a c:t.ae A
- t.W>. qtWido aado- raiaDr de roa~ CC*I'Ok de -docMht'k
"-'0 lllo t ~c o de- com:a&e . vada de pa '* t tolerada. Vali\adores. f*s.~~ps..
das f=-ent:a• me:. dmca. (~ pon tr&tooi!IOI em l1llldcQ. 1011006, . l>is baür.o aasU>.. Pode rcquc. norpanidacom n:d\lz:i. da. pode fi SU.)CliO a t.Earps .-ida. dt\-ido ... .... . • . Tc.múhno -..c elevado ~que aclwcA - a a- sotn a d.uKA ameac ~ deputilk mas o falar* polbci& t ~ -c...-~~ ..... ~aq. elo pll
-~ C COf· RIR de~ ..ÕS t.iJ:a. T~~ rcs.briladciDs. ~ ~ allt:nwi-. Torqur .....,s-do-
F 1 !116M. T orqoae clo fMtida .w--IDÓDI aa-- -clopda u.daa s-a-.. .... .,.... ÍIIIEÍa. .,_-,_
elo pc:dllrw.llliqlia de -,..,..-.Idos.~. cü-...... na aqa de acc~araçt;a ..tdio.muiiD ~· ,_.., ckvado. .ado .... do v-.a.. ~e Mlim poo .-....-.... ~
C..,. ·dim --de Wu íJõo!r<:Q ... ~~de ,.ooa_ como ~c bo-.s CCII!rl~ Thapandct .......... c -•<&
.......... ........... okva. da....tc-~de.-· li*a.ilot.ixaé~ oe..tc o 1111qoc.,... ...- aplic:am -m,pw+ ' ~ CDIIIIIIk da ..ell>-~(~)é~-liWDta. .......,.u-dlm&, pildllx. piadallles. ~ .............. ~co.
a* de dDc:ilbtk .... c ..... .................
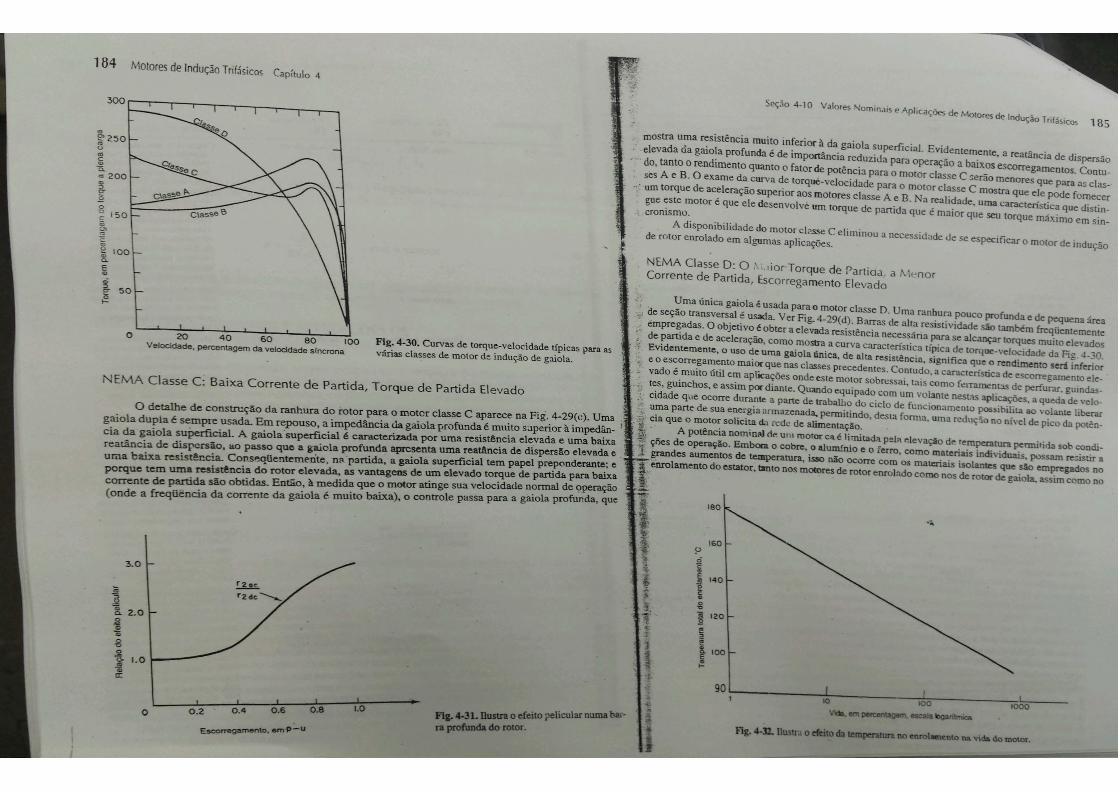
184 Motores de Indução Trtfásicos Capítulo 4
o "
o 20 40 60 80 100 Velocidade, pet C6i ilageii 1 da velocldacle slncrona Flg. 4-30. Curvas de torque-velocidade típicas para as
várias classes de molor de indução de gaiola.
EMA Classe C: Baixa Corrente de Partida, Torque de Partida Elevado
detalhe de constn:çAo da ranhura do rotor para o motor classe C apar~ na Fig .. 4-2~(1:). Uma 1 O impedAncia da gaiola profunda~ mmto sapenor à i.mpedlàn-
gaiola dupla~~ .usada.~ ~;!:i~ ~ caracterizada por uma resist!ncia elevada e uma baixa cia da gaiola supediciaL A g&J.ola su . la uma reatlfteia de c:lispen&o elevada e ~cia de ~. 110 paaao que a &~ola '):!'!;;!• =superficial tem papel prepondeamte; e uma baixa resbtf!:nd• Conseqoentemente, ntt de um elevado torque de parti&. para baixa porque tem uma r••l••• ~do roem elev~ vanca:.. atinge sua velocidade normal de 9pençio
corrente de~ alo obtidas.~.' ~ ~ mui:ue ~), o controle passa para a gaiola profunda, que (onde a freqtlt!ncia da corrente g&J.O
3-0
t 2-0
t .g
I o
Se-ção 4-1 O Valores "Jomonais f' Aplicaç<>e de Motores de Indução Trifásicos 185
mostra uma resistência muito mferior à da gaiola superficial. Evidentemente, a rcalância de dispersão elevada da gaiola profunda é de importância reduzida para operação a baixos escorregamentos. Conru
.- do, tanto o rendimento quanto o fator de potênci:l para o motor classe C :;erão menores que para as classes A e B. O exame da curva de torqut-velocidade para o motor classe C mostra que ele pode fornecer
··· um torque de aceleração superior aos motores classe A e B. Na realidade, uma característica que distingue este motor é que ele desenvolve um torque de panida que é maior que seu torque máximo em incronismo.
A disponibilidade do motor cl<'SSe C eliminou a necessidade ue se e pecificar o motor de indução de rntor enrolado em algumas aplicações.
NEMA Classe D: O . dor·Torque de Partiaa. a o\h·nor Corrente de Partida, Escorregamento Elevado
Uma única gaiola é usada para o motor classe D. Uma ranhura pouco profunda e de pequena área ;, de seção transversal é usada. Ver Fig. 4-29(d). Barras de alta resistividade são também freqüentemente · empregadas. O objetivo é obter a elevada resistência necessána para se alcançar torques muito e)e,·ados
•. · de partida e de aceleração, como mosara a curva característica típica de torque-veJocidade da Fig 4-30. -~ Evidentemente, o uso de uma gaiola llnica, de alta resist!ncia, significa que o rendimento sen inferior e o escorregamento maic:.- que nas classes precedentes. Contudo, a característica de escorregamemo ele
: vado é muito útil em aplicações onde este motor sobressai, tais como f.:rramenus de perfurar. gumdas.. ;. tes, guinchos, e auim pc:.- diante. Quando equipado com um volante nesL'\S aplicações, a queda de \'elo·
' cidade que ocorre durante a pane de ttabalho do ciclo de ft.:ncionarnento po5s1bilita ao •olantc liberar ·: uma parte de sua energia armazenada, permitindo, desta forma. uma reduç'io no ní\·el de pico da potên; cia que o motor solicita da rede de alimentaçio.
·1 · A por!ncia nom;MI ru. um ruotw ca é liTnitadl! pelR ~levaçto de temperatura pet'Dlitida sob condi-! ~ de openç~o. Embcm o cobre, o alum!nio e o ferro, como JDateriais individuais., possam rcistir a
· · grandes aumemos de ~ U., n1o ocorre com os mataiais isolanees que slo empregados no emolameato do estmor, lmto nos m<*lres de rotor enrollldo como nos de rotor de gaiola., assim como no
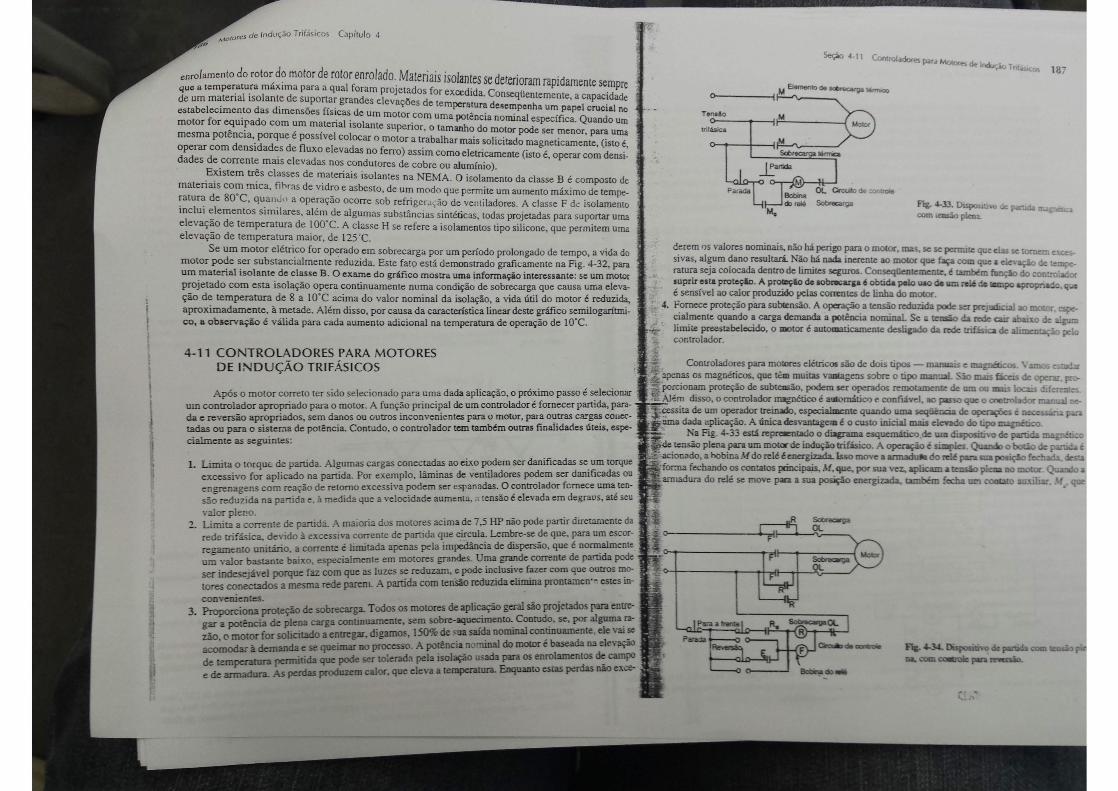
Capítulo 4
enrolamento do roto~ do motor de roto r enrolado .. Materiais isolan~es se deTerioram rapidamente sempre que a temperatu.ra muxtma para a qual foram proJetados for exce.dtda. Conseqüentemente, a capacidade de um m~tenaltsolam_e de s~port_a~ grandes elevações de temperatura deRempenha um papel crucial no estabelec1men_to das dtmensoes fts t_cas de um motor com uma potência nominal específica. Quando um motor for eqUipado com um matenal tsolante superior, o tamanho do motor pode ser menor, para uma mesma potência, porque é possível colocar o motor a trabalhar mais solicitado magneticamente, (isto é, operar com densidades de fluxo elevadas no fen·o) assim como eletricamente (isto é, operar com densidades de corrente mais elevadas nos condutores de cobre ou alumínio).
Existem três classes de materiais isolan:es na NEMA. O isolamento da classe B é composto de materiais com mica, fihras de vidro e asbesto, de um modo que permite um aumento máximo de temperatura de 80"C, quanJ•' a operação ocorre sob refriger.Jo;ão de ventiladores. A classe F d.: isolamento inclui elementos similares, além de algumas substâncias sintéticas, todas projetadas para suportar uma elevação de temperatura de I OO"C. A ci&Sse H se refere a isolamentos tipo silicone, que permitem umz elevação de temperatura maior, de l25 'C.
Se um motor elétrico for operado em sobrecarga. por um período prolongado de tempo, a vida do motor pode ser substancialmente reduzida. Este fato está demonstrado graficamente na Fig. 4-32, para um material isolante de classe B. O exame do gráfico mostra uma informação interessante: se um motor projetado com esta isolação opera continuamente numa condição de sobrecarg~ que causa ~rr.a el~vação de temperatura de 8 a lO"C acima do valor nominal da isolação, a vida útil d? motor~ redU::'~ aproximadamente, à metade. Além disso, por causa da caracteristica linear deste ~co s:milogantrruco, a observa-rão é válida para cada aumento adicional na temperatura de operaçao de lO C.
4 -11 CO NT ROLADORES PARA MOTO RES DE IN D U ÇÃO TRIFÁSICOS
Após 0 motor correto ter sido selecionado pa:ca _um_a dada aplicação, o pró~imo passo é s~lecion~ um controlador apropriado para o motor. A função pnnctpal de um controlador e fornecer pamda, para da e reversão apropriados, sem danos ou outros inconvenientes para o motor, prua ou.tras cl!!g~ couec· tadas ou para 0 sistema de potência. Contudo, o controlador tem também outras finalidades 6tets, especialmente as seguintes:
Limita 0 torque. de panida. Algumas cargas conectadas ao eixo J>?rlem ser danificadas se. um torque 1. excessivo for a licado na partida. Por exemplo, lâminas de ventiladores podem ser damficadas ou
eng:renagpns cor:n reação de retomo excessiva podem ser esranadas. O controlador fcmece uma_tens:i;; redu';.ida na partida e. a medida que a velocidade aumenta, .• tensão é elevada em degrat>s, ate seu
.. a!o~ pleno - · d da L, · : , · ~ente de p:mid:i. :\ ma.oria du motores acima de 7,5 HP nao pode parur tretameme
2. trru!2 a co ·d · ula Lembre se de oue para um escor-rede aifásica. devido à excessiva corrente de paro a que CirC : · . - _ • • , alm te
regamento unitário, a corrente~ limitada apenas pela im~â~~adegrandis~~~~~ ;en;~da ~ al b ba·xo espec~almente em motores gra .
um .,. or astante 1
• 1 duzam e pode inclusive fazer com que outros moser inde ejável porque faz com que as uzes s~ Jae com re~são reduzida elimina proma;nen·· estes intores conectados a mesma rede parem. A parn
conveni~ntes. teção de sobrecarga. Todos os motores de aplicação gerJ.l são projetados para entre-3. Proporct~na_pro uamente, sem sobre-aquecimento. Contudo, se, por algumara-
gar a poteDCla de p~e~ carga conun . " 150% de . ua saída nominal contin~nte. ele vaJ se z.ão, o motor for solicu.ado a entregar, dJgamo.' • . · a1 do OlOlOr é baseada na el~vayão
odai . de anda e se queimar no proces o. A potencta n mm acom -a m , . pode toierad:~ pela isolação u ·ada para os enrolamentos de campo de temperarura penmuda que ser) . leva a tempellUura. Enquanw estas pa.:ias não excce de ann.adura. As perdas produzem ca or, que e
l8i
derem 0s valores nominais, não há perigo para o motor, mas, se se penru:.e sivas, algum dano resultará.. ão há nada inerente ao IDO(()r qo.e faça com ~::a e.e> de e:Dpe·
ratura seja colocaJa dentro de ümites seguros. Conseq eruementc:, ~ wn.bc!m fu.'lÇio co~ ,;: • suprir esta proteçlo. A prolllÇio de aobRicar&a é obúcl& pe.lo u.o dc :n ~ ter:po p:cr,.c:. .: é sensível ao calor produzido velas com;ntes de ünha do motor.
• 4. Fornece proteção para subcensão. A operação a tensão reduzid~ J)O(k er preJ · w cialmente quando a carga demanda a potência oomina.L Se:: teDSã.o da~ cnr x ::.e _ limite preestabelecido, o motor é automaticamente deslig<iC!o rede t.-if de imo:n.t:a~;1Ulpe<:o cvntrolador.
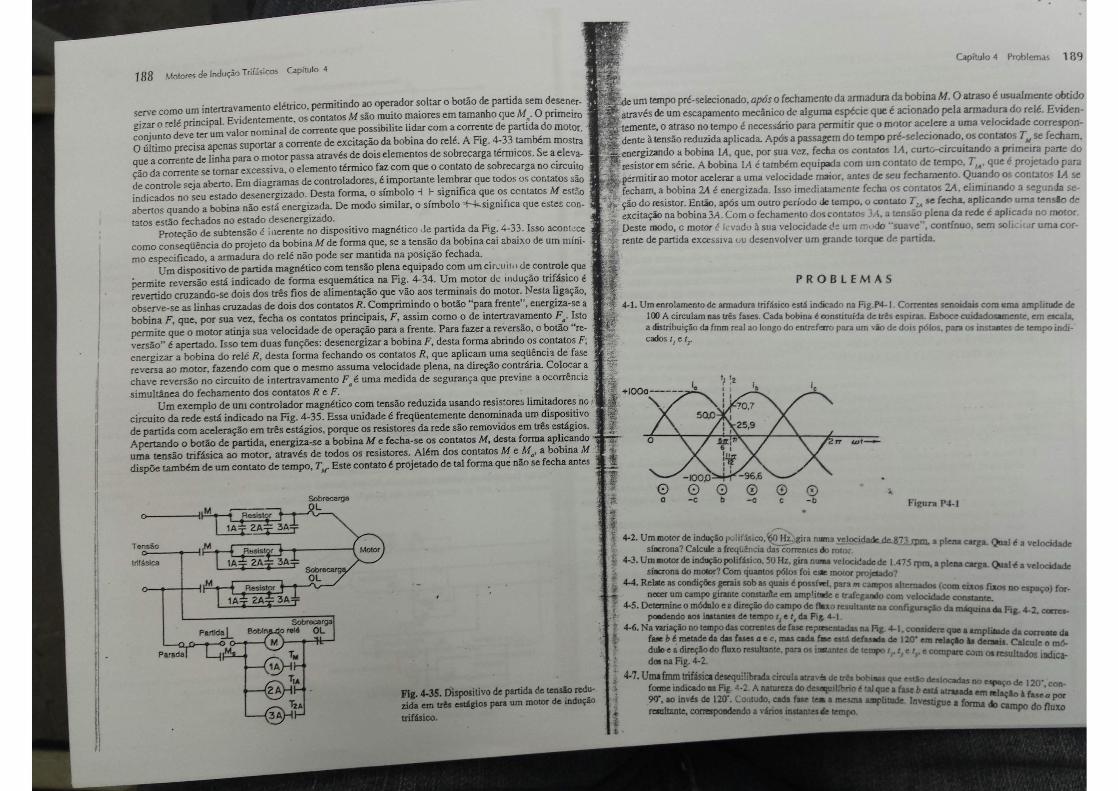
Clpí"Jio .l Problem .. s 189 188 l.lotores de indução Tri(~s:cos Capítulo 4
· tertravamento elétrico permitindo ao operador soltar o botão de partida sem desener- "U;!'.':-f~~1c um tempo pré-selecionado, ap6s o fechamen da aJlTiadura da bobina M. O atrasO é usualmente obúdo serve como um m • _ . . . . ..
. r
1• pn·ncipal. Evidentemente, os contatos M sao mUito matares em tamanho queM •. O pnme1ro através de um escapamento mecânico de alguma espécie que é acionado pela armadura do relé. Evíden-
gizar 0 ·e e ·b·l· lidar d 'da d conjunto deve ter um valor nominal de corrente qu~ po~s1 1 tte . com a corrente e partt • o motor. o atraso no tempo é necessário para permitir que o motor acelere a uma velocidade corre~pon-0 último precisa apenas suportar a corrente de excttaça? da bobma do relé. A FiE. 4:33 _ta.mbém mostra reduzida aplicada. Após a passagem do tempo pré-selecionado, os contatos TM se fecham, que a corrente de linha para o motor passa através de dolS elementos de sobrecarga LemlJCOS. $(!a eleva- a bobina lA , que, por sua vez, fecha os contat~ IA, curtv-circuíta.ndo a primeira parte do ção da corrente se tornar excessiva, o elemento térmico faz com que o contato de sohrecarga no circuito resistorem série. A bobina lA é também e0,uipada com um conta !O de tempo. 7111 , que é projetadn para de controle seja aberto. Em diagramas de controladores, é importante lembrar que todos os contatos são permitir ao motor acelerar a uma velocidade maior, antes de seu fechamento . Quando o contJ.to IA se indicados no seu esta.do descnergizado. Desta. forma, o símbolo -1 1- significa que os ccntatos M est.'\o . fecham. a bobina 2A é energizada Isso imcdialaJTl··nre fecha os con•;Jtos 2A. eiimmando:; egurda se-abertos quando a bobina não está energizada.. De modo similar, o símbolo ~significa que este$ coo- .i;. ção do resistor. Então, após um outro ~ríodo Je tempo, o cont<lto T1, se fecha., aplicand., uma ·~n-!o de tatos estão fechados no estado desenergizado. ,: excitação na bobina 3A. Com o fechamento dos contatr ·A. a tensão plena da rede é aplicada no rTIQ or.
Proteção de subtensão é inerente no dispositivo magnético ,[c partida da Fig. 4-33. Isso acon l...:ce , Deste modo, c motor é I• vadu à sua velocidade c!~ um rn•YI.lo .. suave··. contínuo, sem solicitar uma cor-como conseqüência do projeto da bobina M de forma que, se a tensão da bobina cai abaixo de um míni- ·} rente de partida excrssiva <,u desenvolver um grande torque d~ partida.
mo especificado, a armadura do relé não pode ser mantida na posição fechada. Um dispositivo de partida magnético com tensão plena equipado com um cir.:uii" de controle que
j>errn.ite reversão está incticado de forma esquemática na Fig. 4-34. Um motor de 1ndução trifásico é revertido cruzando-se dois dos três fios de alimentação que vão aos terrn.inais do motor. Nesta ligação, observe-se as linhas cruzauas de dois dos contatos R. Comprimindo o botão "para frente", eaergiza-se a bobina F, que, por sua vez, fecha os contatos principais, F, assim como o de intertfavamento F •. Isto permite que o motor atinja sua velocidade de operação para a frente. Para fazer a reversão, o botão "reversão" é apertado. Isso tem duas funções : desenergizar a bobina F, desta forma abrindo os contatos F; energizar a bobina :io relé R, desta forma fechando os contatos R, que aplicam uma seqüênci1 de fase reversa ao motor, fazendo com que o mesmo assuma velocidade plena, na direção contrária. Colocar a chave reversão no circuito de i ntertravamento F. é urna medida de segurança que previne a o<.:orrém.:ia
simultânea do fechamento dos contatos R e F. Um exemplo de um controlador magnético com tensão reduzida usando resistores limitadores oo
circuito da rede está indicado na Pig. 4-35. Essa u:Udade é freqüentemente denominada um dispositivo de partida com aceleração em três estágios, porque os resistores da rede são removidos em três estágios. Apertando o botão de partida, energiz.a-.se a bobina Me fecha-se os contatos M, desta fomJ.a aplicando uma tensão trifásica ao motor, através de todos os resistores. Além dos contatos M e M •• a bobina M dispõe também de um contato de tempo, T M" Este contato é projetado de tal for.na que não se fecha antes
F'lg. 4-35. Di!positivo de partida de tcoslo redu· zida em tres esúgios para um motor de induçiO
trifásico.
PROBLEMAS
4-1. Um enrol:unento de armadura trifá5ico está indicado na Fíg.P4- I. Corr~ni.eS senoidAis com uma Ainphrud .. de l!X! A_ctr~ulam 11.3.3 três f:ues. Cada bobin11 ~ constiruf1a de três espiras. &boce cuídJd men · • em eJCaU., a distnbu•ção da fmm real ao longo do entrcferro para um 'â<) d.: doi pólos, p:lill os in t..:.D e de tempo mdtcados 11 e 1
2•
0 0 0 o -c b -o -b Figura P.S-1
,-. 4-2. Um motor de indução polif1sico, ~·gira n\8'!1a velocidade~ 1c:u
sfocrona? Calcule a freqt;~t.::ia das correntes do r;;Õ:. • a P ar Qn~ ~ n velocidade
4-3. Um motor de indução polifá!ico, 50Hz, gira numa vcloci<!adedc 1 475 • do ?Co · rpm,ap carga.Qualtavel · --'-SIIICTOna mOCDf m quant~ pólos foi e,ac rno«>r ;>roJebdo ....,
4-4. Rebtt as condições ~s sob 11.5 quais~ posshd, param c alternados (com eix f a nccer um campo gtl21lte const.an\e em arnp'i e tr<~f'" 0 com velocidade no espaço) for-
4-5. Delmnine o módnlo e a direção do campo de Bu.o r ult.ante na configuraçJo ch ~~ poadendo aos í111tantes de tempo r, e r, da Fi&- 4·1. ~ ... na da Fig, 4-2. c:.orre.s-
4-6. Na variação no tempo das correntes de fase reí'lftCOladu na fig. 4-1, c ide.re ue • am r fue b ~metade da das fues a e c, mas cada fa.c está de(uada de 120' em re q u/e~ ch CQITCDte d& dulo e a direção do fluxo resultante, para~ siiiUnte de temro: ,l e : e co laçlo
1 • Calcule
0 mó-
doe na Fig. 4-2. 1 1 '' mpare c:nn resultAdos LDdrca-
• 4-7. Umafmm trifásicadettqu:Iibratb circula atra'la de ues bobl que ettlodestocad&s ~ foonein<hcadoaaFí~; ·1-::!.AnAtUrezado 11. no~tll.lqueafasebesú no o<k 120",con·
90", ao in v& de 120". Comudo. cada fase tea 1 mesma llllplllude. Investi ,.r;ut em ~laçlo l (a e a por raalW!tc, coueapooda1do a vúios inlun:es4e tempo. gu
1 orma do campo do fluxo