
MOTOR DE INDUÇÃO TRIFÁSICO
• OS ASPECTOS QUE NOS VÃO INTERESSAR SÃO:
o Constituição e aspectos construtivos
o Princípio de funcionamento
o Esquemas equivalentes
o Ensaios económicos para determinação de parâmetros
o Características de funcionamento
o Formas de arranque
o Inversão do sentido de rotação
1

MOTOR DE INDUÇÃO TRIFÁSICO
• CAMPO DE APLICAÇÃO
A maioria dos motores utilizados actualmente na industria, (mais de 80%), são motores de indução.
• CONSTITUIÇÃO
o Alimentação única trifásica
o Estator: Circuito indutor trifásico, simétrico, bobinado e com p pares de pólos Alimentado com tensões trifásicas, equilibradas e sinusoidais
o Rotor Circuito induzido Bobinado ou em gaiola de esquilo p pares de pólos
o Outros aspectos Circuito magnético integralmente laminado Entreferro constante
2

MOTOR DE INDUÇÃO TRIFÁSICO
ESTATOR
3
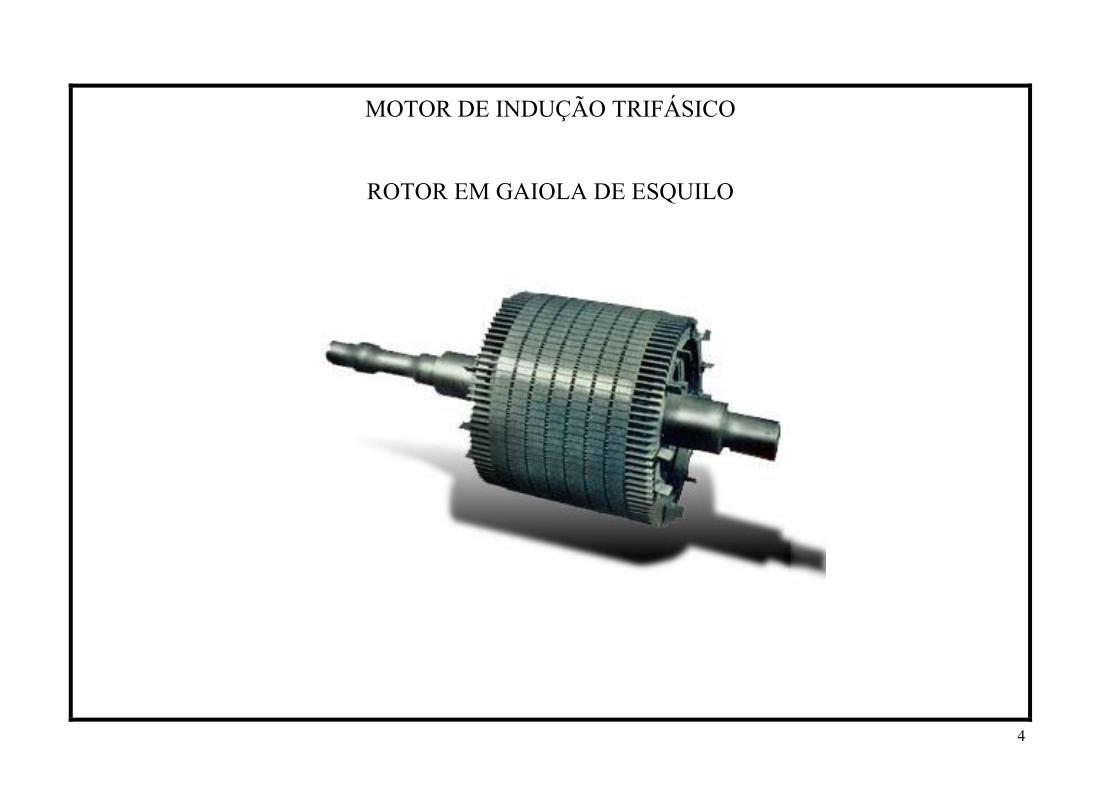
MOTOR DE INDUÇÃO TRIFÁSICO
ROTOR EM GAIOLA DE ESQUILO
4

MOTOR DE INDUÇÃO TRIFÁSICO
ROTOR BOBINADO
Repare-se nos três anéis colectores que permitem um acesso ao circuito rotórico desde o exterior. Veremos em que é que isto nos pode ser útil mais adiante!
5

MOTOR DE INDUÇÃO TRIFÁSICO
6

MOTOR DE INDUÇÃO TRIFÁSICO
7

MOTOR DE INDUÇÃO TRIFÁSICO
8

MOTOR DE INDUÇÃO TRIFÁSICO
• PRINCÍPIO DE FUNCIONAMENTO Quando o estator é alimentado com um sistema equilibrado de correntes trifásicas, surge no entreferro um campo magnético girante, cuja amplitude e velocidade são constantes. Este campo magnético vai induzir correntes no circuito rotórico, correntes estas que segundo a lei de Lenz serão responsáveis pela produção de binário.
Para melhor compreensão do princípio de funcionamento, vamos imaginar várias situações, caracterizando-as por forma a que a sua conjugação apresente o perfil geral do funcionamento do motor de indução trifásico…
(Nota: o índice 1 referir-se-á ao estator e o 2 ao rotor).
Situação 1 – Considera-se apenas o estator: o Estator: tem o seu enrolamento trifásico distribuído alimentado com um sistema
equilibrado de tensões, U com uma frequência que é a da rede e a que chamaremos f1. o No entreferro surge um campo girante com uma velocidade denominada de sincronismo e
dada por: pf60ns⋅
=
o No estator surge uma FCEM a que chamaremos E1 e para a qual se pode escrever: E1≈U1.
9

MOTOR DE INDUÇÃO TRIFÁSICO
Situação 2 – Estator + Rotor só que este último em circuito aberto: o Agora, introduziu-se um rotor dentro do motor, mas em que o circuito rotórico se encontra
em aberto, o que faz com que o rotor permaneça imóvel… o Como consequência da existência do campo girante estatórico, os condutores rotóricos,
(rotor imóvel!), verão um campo variável e induzir-se-á em cada barra/condutor uma FEM, E2, que terá uma dada frequência, f2, que no caso desta situação (rotor em circuito aberto, logo imóvel) será igual à da rede.
o Seja Kd1 o factor de distribuição do enrolamento estatórico e Kd2 o factor de distribuição do enrolamento rotórico, poderemos escrever em resumo:
ESTATOR → E1 (≈U1) ; f1
n = 0 Rotor em circuito aberto ROTOR → E2 ; f1 = f2
I2 = 0
s22
s111
NKdNKd
EE
2 ⋅⋅
= com Kd1≈Kd2 fica s2
s11
NN
EE
2
=
10

MOTOR DE INDUÇÃO TRIFÁSICO
Situação 3 – Estator + Rotor agora com o seu circuito fechado:
Vamos subdividir a situação 3 em duas partes distintas, parte I e parte II… Parte I: O rotor tem o seu circuito fechado. Por intermédio de uma máquina exterior, coloca-se o rotor a rodar com uma velocidade igual à de sincronismo, isto é, n = ns o que significa ter o rotor a rodar à velocidade do campo girante. Sendo o campo magnético constante, não se verifica qualquer indução e consequentemente não há FEM induzida no circuito rotórico e logo também não há corrente.
ESTATOR → E1 (≈U1) ; f1
n = ns
ROTOR → Não há variação de fluxo => FEM nula => Não há correntes no rotor
Parte II: O rotor tem o seu circuito fechado e não existe nenhuma máquina exterior ao motor. Assim, o rotor roda com uma velocidade n tal que 0<n<ns. Se o rotor se encontrar a rodar no mesmo sentido do campo magnético girante estatórico mas com menor velocidade, significa que cada condutor rotórico como que deslizará, escorregará em relação ao campo girante, atrasando-se!
11

MOTOR DE INDUÇÃO TRIFÁSICO
Este atraso – deslizamento ou escorregamento relativo do motor – não é mais do que o desvio relativo da velocidade do rotor em relação à velocidade de sincronismo associada à frequência de alimentação. A frequência da FEM induzida no rotor tem que ver com a razão de variação do campo magnético visto por cada condutor, o que implica que o deslizamento tem, naturalmente, que existir!
ESTATOR → E1 (≈U1) ; f1
0<n<ns ROTOR → E'2 = s·E2 ; f2 = s·f1 (E'2<E2)
I2 ≠ 0
A expressão para o deslizamento é dada por : s
s
nnns −
=
As correntes induzidas na bobinagem trifásica do rotor também produzem um campo girante
cuja velocidade é, em relação ao rotor, dada por: snsp
fs60p
f60n 12s2 ⋅=
⋅⋅=
⋅=
Uma vez que o rotor gira ele próprio à velocidade n, o campo girante gerado pela bobinagem do rotor gira no entreferro à velocidade: n+n2 = (1-s) ns + s·ns = ns.
12

MOTOR DE INDUÇÃO TRIFÁSICO
Isto permite-nos concluir que ambos os campos girantes, o devido ao estator e o devido ao rotor, giram no entreferro, em sincronismo, à velocidade ns. Os campos são estacionários entre si e a interacção entre eles pode ser considerada na produção de binário.
Como os campos magnéticos têm tendência para se alinhar entre si, o campo magnético do estator pode ser visto como que arrastando o campo magnético do rotor.
U1f
F1FR
δ
T F2
ns
ns
ns
TM = KFRF2senδ => motor com binário de arranque
Se F2 ≈ cte e F2 ~ I2 => TM= K'I2senδ p estator = p rotor
FR= F1 + F2
13

MOTOR DE INDUÇÃO TRIFÁSICO
• EM TERMOS ENERGÉTICOS TEREMOS:
Pabs = √3·Uc·Il·cosφ
Pu = Tu·Ω => Potência útil desenvolvida
Perdas totais = pT=Pabs-Pu
Perdas Joule: Perdas Não Joule ( pnJ):
pJ1 = 3R1I12 pmec
pJ2 = 3R2I22 pFe
Potência mecânica desenvolvida: Pmec = Pu + pmec
Potência transferida do estator para o rotor: P2 ou Pag
P2 = Pabs-pJ1-pFe
Tws = P2
14

MOTOR DE INDUÇÃO TRIFÁSICO
• DIAGRAMA ENERGÉTICO
f2 = s·f1 => f2 <<<<<< f1 => pFe2 <<<<<< pFe1
Admitindo que as massas de ferro do estator e do rotor são análogas, conclui-se que as pFe2 são muito inferiores às pFe1 o que implica poder considerar todas as perdas no ferro do motor como estando concentradas em pFe1, no circuito estatórico.
Estator Rotor
Univ. Eléct. Univ. Mec.
Pabs P2 ou Pag Pmec Pu
pJ1
pJ2
pFe
pmec Tu
Tp Tel
15

MOTOR DE INDUÇÃO TRIFÁSICO
• VAMOS VER COMO SE CHEGA AO ESQUEMA EQUIVALENTE POR FASE...
o Analogia entre o transformador e o motor de indução trifásico: toda a energia transferida para o rotor faz-se por via electromagnética. No transformador há passagem de potência do primário para o secundário por via electromagnética. No caso do motor de indução trifásico, a máquina é concebida com uma dada disposição geométrica que proporciona o desenvolvimento de binário (o que não acontece no transformador).
o Como chegar ao esquema equivalente por fase:
22 =
2 2
sEIr + jsx
Fig b
r2/s jx2
E2
Fig a
sE2
r2 jsx2
Pmec/3
I2E1U1f
n
16

MOTOR DE INDUÇÃO TRIFÁSICO
O circuito rotórico é alimentado a uma dada tensão simples, U1f, e no enrolamento estatórico desenvolve-se uma fcem, E1. Através do entreferro e por fenómenos de indução são induzidas fem's no enrolamento rotórico e circularão correntes. O circuito equivalente rotórico por fase apresenta uma resistência equivalente (r2) e uma reactância de fugas equivalente (sx2) que é variável com o deslizamento pois depende da frequência das correntes induzidas no rotor (f2=s·f1) que é igualmente variável com o deslizamento ou seja, com a velocidade rotórica.
Será um erro pensar que a simplificação da figura a para a figura b é apenas a divisão por s...
Na figura a resistência r2 representa as pJ2 : pJ2 = 3r2I22.
Em b surge-nos r2/s em lugar de r2. Quando estudamos a situação em termos de potência :
2 2 222 2 2 2 2
s 2r 1- s 1- s3 I 3 r + r I pJ2 + 3 r Is s
⎛ ⎞= =⎜ ⎟⎝ ⎠
Assim, é fácil constatar que a passagem de a para b, embora não introduza alterações em termos de corrente, introduz alterações em termos energéticos, isto é, em termos de potência.
22 2 2
1- s Pmec 1- s 3 r Pmec = 3 r I s 3 s
→
17

MOTOR DE INDUÇÃO TRIFÁSICO
Na figura a vemos ainda o realçar da saída mecânica do motor correspondendo-lhe uma dada velocidade → Pmec/3. Ao passarmos de a) para b) estamos a incluir Pmec/3 na resistência dada por 3·R2·[(1-s)/s].
Assim, isto significa que considerando o equivalente rotórico de b, a saída mecânica do motor
passa a ter um equivalente eléctrico englobado em r2/s. Ao englobar Pmec em r2/s, esta passa
a ser representada por um elemento eléctrico. A passagem de a) para b) leva a que os
elementos que em a dependiam de s, logo da velocidade, passam agora a ser independentes do
deslizamento (logo da velocidade de rotação), o que não sucedia em a).
18
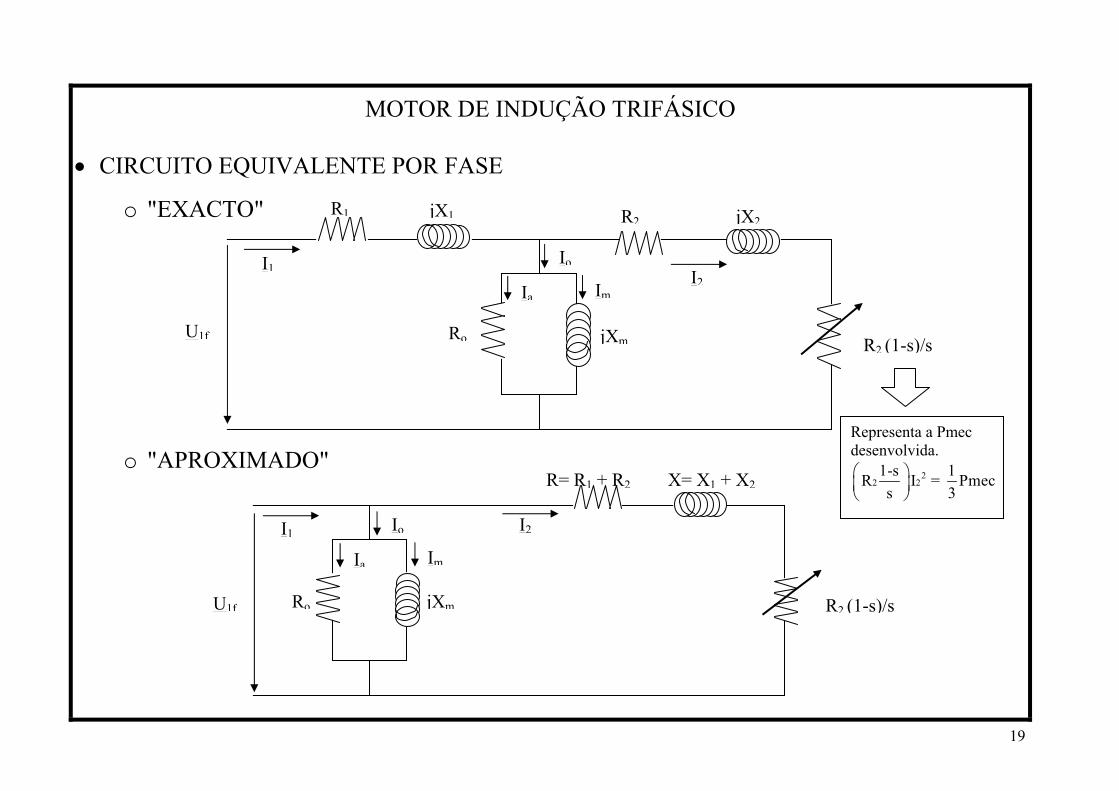
MOTOR DE INDUÇÃO TRIFÁSICO
• CIRCUITO EQUIVALENTE POR FASE
o "EXACTO"
o "APROXIMADO"
U1f
I1 I2
R2 (1-s)/s
R= R1 + R2 X= X1 + X2
Io
ImIa
Ro jXm
U1f
I1 I2
R1 jX1 R2 jX2
Ro jXm R2 (1-s)/s
Io
ImIa
Representa a Pmec desenvolvida.
22 2 1-s 1R I = Pmecs 3
⎛ ⎞⎜ ⎟⎝ ⎠
19

MOTOR DE INDUÇÃO TRIFÁSICO
• PASSAGEM DO CIRCUITO EQ. POR FASE EXACTO PARA O APROXIMADO:
o Supõe que o fluxo é constante permitindo que o ramo de Z0 passe para a nova localização,
logo à entrada do circuito. Isto é o mesmo que assumir que o campo magnético é
independente das condições de funcionamento, (condições de carga), do motor.
o Os erros decorrentes desta simplificação, são muito maiores no motor de indução trifásico
que no transformador, uma vez que neste último as correntes em vazio são bastante baixas
(1% a 2%) enquanto que no motor de indução trifásico são bem maiores (20% a 30% de
In).
20

MOTOR DE INDUÇÃO TRIFÁSICO
• RECORRENDO AO ESQUEMA EQUIVALENTE PODEREMOS ESCREVER:
Pabs = √3·Uc·Il·cosφ = 3·R1·I12+3·R0·Ia
2+3·R2·I22+3·R2·[(1-s)/s] I2
2.
I1 = U1f/Zeq
P2 = pJ2/s
Pmec = (1-s) P2
22
2 Is
Rf2
p3Tel ⋅⋅π
⋅= onde p é o nº de pares de pólos...
O rendimento rotórico é dado por: s12P
Pmecr −==η
O rendimento do motor: Puη =
Pabs
21

MOTOR DE INDUÇÃO TRIFÁSICO
• EM VAZIO TEMOS:
s ≈ 0 Aspecto do circuito:
Pu = 0 → Pmec ≈ pmec →
n ≈ ns
s ≈ 0 => R2[(1-s)/s] →+ ∞
I2 ≈ 0 => pJ2 ≈ 0 s ≈ 0 => f2 ≈ 0 => pFe2 ≈ 0
U1f
I1 ≡ Io
R1 jX1
Ro
I
P1 = √3·U·Io·cosφo = 3·R1·Io2 + 3·R0·Ia
2 + pmec
IjXm
mIa
22

MOTOR DE INDUÇÃO TRIFÁSICO
• NO ARRANQUE FICA:
n = 0 => s = 1 => R2[(1-s)/s] = 0
Para o circuito teremos:
n = 0 => pmec = 0
s = 1 => f2 = f1
P1 = √3·U·Iarr·cosφarr = 3·R1·I1a
2 + 3·R2·I2a2 + pFe1 + pFe2
U1f
Iarr
R1 jX1 R2 jX2
Ro jXm
23

MOTOR DE INDUÇÃO TRIFÁSICO
• ENSAIOS ECONÓMICOS A PARTIR DOS QUAIS SE DETERMINAM OS PARÂMETROS DO ESQUEMA EQUIVALENTE POR FASE (Esquema simplificado ou aproximado!)
• A PARTIR DO ENSAIO EM VAZIO DETERMINA-SE:
R0 Xm pmec
• A PARTIR DO ENSAIO COM ROTOR TRAVADO E EM CC DETERMINA-SE:
R1 R2 X1+X2
• A PARTIR DO ENSAIO COM ROTOR TRAVADO E EM CA (Circuito Aberto - Só para rotor bobinado), DETERMINA-SE:
22
1
NKNKa 1
=
24
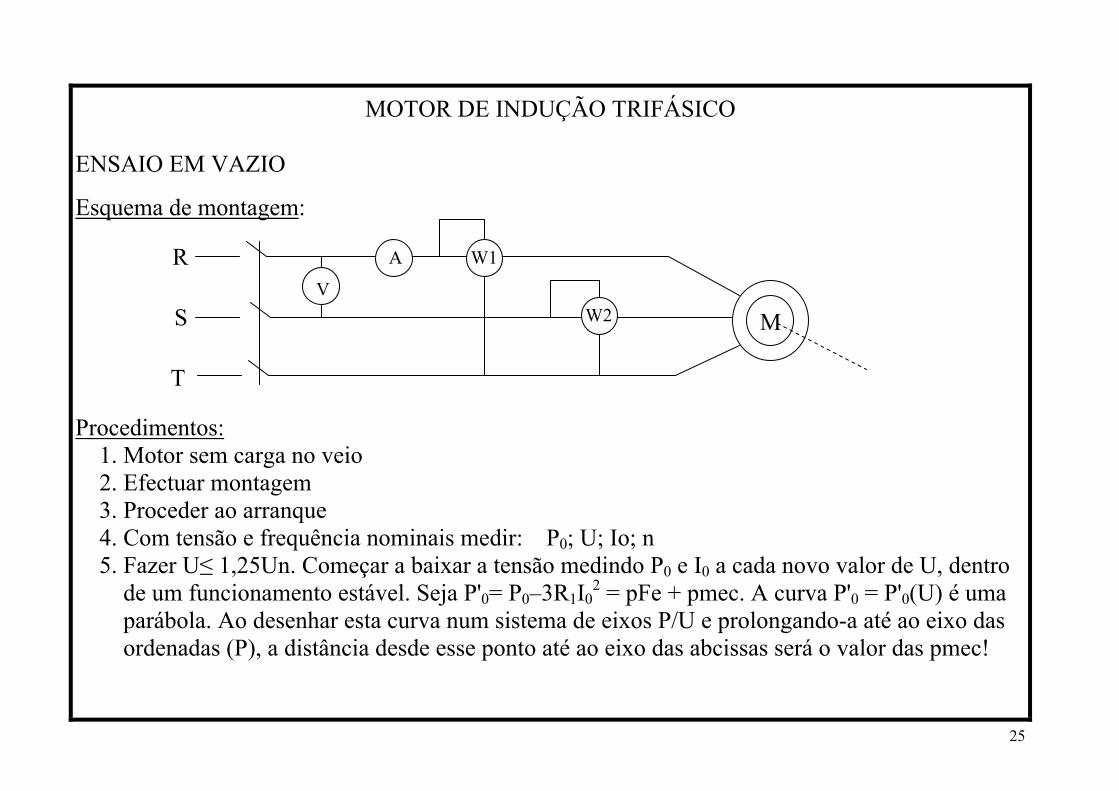
MOTOR DE INDUÇÃO TRIFÁSICO
ENSAIO EM VAZIO
Esquema de montagem: Procedimentos:
1. Motor sem carga no veio 2. Efectuar montagem 3. Proceder ao arranque 4. Com tensão e frequência nominais medir: P0; U; Io; n 5. Fazer U≤ 1,25Un. Começar a baixar a tensão medindo P0 e I0 a cada novo valor de U, dentro
de um funcionamento estável. Seja P'0= P0–3R1I02 = pFe + pmec. A curva P'0 = P'0(U) é uma
parábola. Ao desenhar esta curva num sistema de eixos P/U e prolongando-a até ao eixo das ordenadas (P), a distância desde esse ponto até ao eixo das abcissas será o valor das pmec!
M W2
W1 A
V
R
S
T
25

MOTOR DE INDUÇÃO TRIFÁSICO
Tratamento de dados para obtenção dos parâmetros R0 e Xm:
Modalidade 1: Se não for possível ter o valor das perdas mecânicas e consequentemente não pudermos separar pmec de pFe os cálculos recomendados são os seguintes:
00
n 0
Pcos = 3U I
ϕ senφ0 Ia=I0cosφ0 e Im=I0senφ0
Ia3
UnR0 = Im
3Un
Xm = Estamos a admitir que: • pJ10 ≈0 • s = 0 • não se separam pFe e pmec
26

MOTOR DE INDUÇÃO TRIFÁSICO
Modalidade 2:
Efectuou-se o ensaio descrito no ponto 5 dos procedimentos e a partir dele podemos separar as perdas...
P'0 = P0–3R1I02 = pFe + pmec donde P0 = P'0 + 3R1I0
2 = pFe + pmec + 3R1I02
pFe + pmec = P0–3R1I02 pmec ≈ ctes pFe ~ U2
pFe = P0–3R1I02 – pmec
2
2
0
UnUn3R = = pFe pFe
3
⎛ ⎞⎜ ⎟⎝ ⎠
0 0 U=Un
Un Un3 3Xm = =
Im I senϕ
Estamos a admitir que s = 0. pFe + pmec = A+BU2.
pFe + pmec
pmec
U U2
ou
pFe + pmec
pmec
recta
parábola
27
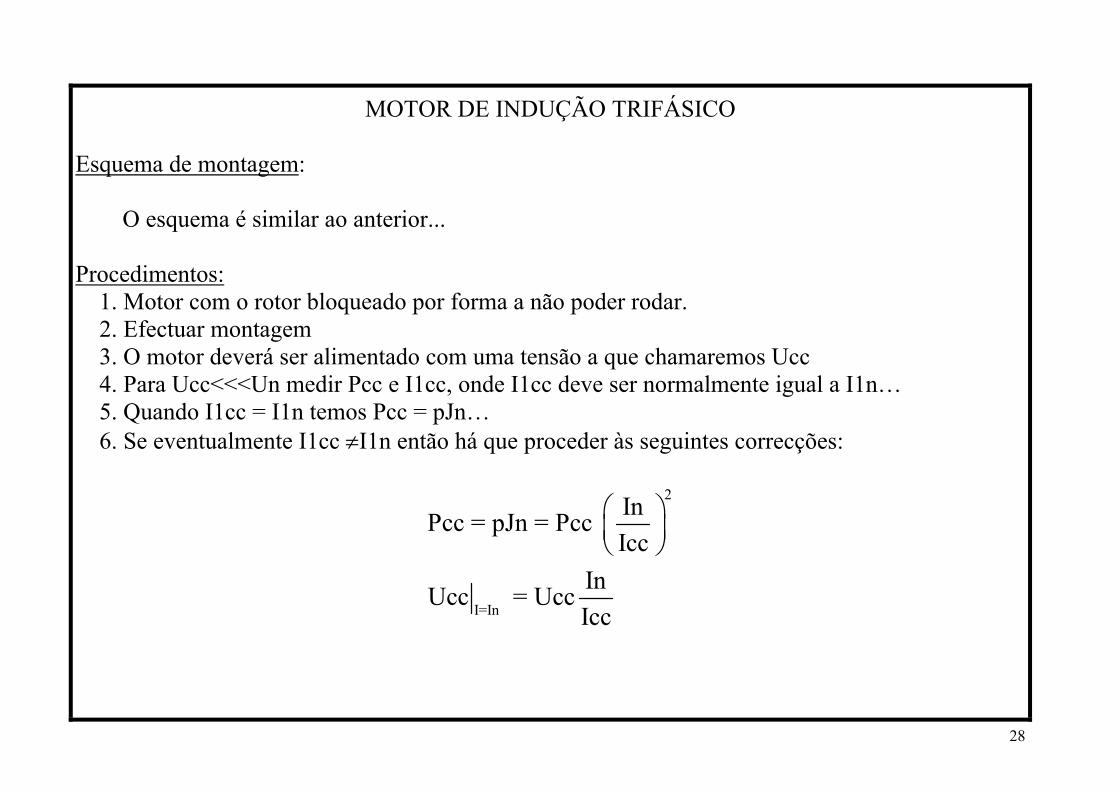
MOTOR DE INDUÇÃO TRIFÁSICO
Esquema de montagem: O esquema é similar ao anterior... Procedimentos:
1. Motor com o rotor bloqueado por forma a não poder rodar. 2. Efectuar montagem 3. O motor deverá ser alimentado com uma tensão a que chamaremos Ucc 4. Para Ucc<<<Un medir Pcc e I1cc, onde I1cc deve ser normalmente igual a I1n… 5. Quando I1cc = I1n temos Pcc = pJn… 6. Se eventualmente I1cc ≠I1n então há que proceder às seguintes correcções:
2
I=In
InPcc = pJn = Pcc Icc
InUcc = UccIcc
⎛ ⎞⎜ ⎟⎝ ⎠
28

MOTOR DE INDUÇÃO TRIFÁSICO
Tratamento de dados:
Esquema a ter em conta:
( ) ( )1I
3Ucc
2X1X2R1R 22 =+++
21I3Pcc
2R1R =+
( )2
2
2R1R1I
3Ucc
2X1X +−⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛=+
1R1I3
Pcc2R −=
R2|n=0 > R2|n=nn : o valor de R2 obtido no ensaio com o rotor bloqueado é maior que o valor de R2 correspondente ao regime nominal, isto é, R2rtblq >R2n.
Uccf
I1cc R1 R2 j(X1 + X2)
29

MOTOR DE INDUÇÃO TRIFÁSICO
No ensaio de rotor bloqueado e em curto-circuito desprezaremos I0cc uma vez que U1cc <<<U1n. Nestas condições, e sabendo que as perdas no ferro são proporcionais ao quadrado da tensão de alimentação,
pFe ~U12
se a tensão de alimentação baixar para metade as perdas no ferro diminuem para ¼ !!!
• ESTIMATIVA PARA A CORRENTE DE ARRANQUE DIRECTO
1IUccUn
Iad ⋅=
• ESTIMATIVA PARA O BINÁRIO DE ARRANQUE
Tad (ws) = P2ad = 3R2I2ad2.
30

MOTOR DE INDUÇÃO TRIFÁSICO
• CARACTERÍSTICA ELECTROMECÂNICA DE CORRENTE ABSORVIDA: I1=f(s) ou I1=f(n)
( )
1f2
22 2
1 1 2
UI = RR + + X +Xs
⎛ ⎞⎜ ⎟⎝ ⎠
U1=constante f1= constante
R2
2R
3R2
I2
R2 => I2a s= Cte
I2a
2
s
IR2 => s I2= Cte
s = 0 s = 1 (n = n ) (n = 0)s
s 2s 3s
31

MOTOR DE INDUÇÃO TRIFÁSICO • CONTINUAÇÃO DE I1=f(s)…
I1 = I0 + I2 I0 ≈ Cte
s => I1
s = 1
I1
Ia
Io
s
32

MOTOR DE INDUÇÃO TRIFÁSICO • CARACTERÍSTICA DE POTÊNCIA ÚTIL DESENVOLVIDA : Pu = f (s)
( )
21f2
2 2 2 22 2
1 1 2
1-s 1-s UPmec = 3×R × ×I 3×R × ×s s RR + + X +X
s
≅⎛ ⎞⎜ ⎟⎝ ⎠
Extremos: ( ) ( )2
22 1 2 1 2
dPmec R= 0 s = ds R ± R +R + X +X
⇒2
Sinal "+" => PMÁX e sinal "–" Pmín Pu=Pmec – pmec
MOTOR ( 0 < s < 1)
FREIO ( s > 1)
GERADOR ( s < 0)
s
Pu, Pmec
PMÁX
Pmin
Pmec
Pu
33

MOTOR DE INDUÇÃO TRIFÁSICO • CARACTERÍSTICA MECÂNICA T=f(n) ou T=f(s).
( )2
1fMAX
2 2
UTel 32 2 R1 +X +R1
pfπ
= ⋅ ⋅
o TMAX não depende de R2
o sTMAX é proporcional a R2 ( )22MAX
2X1X1R
2RT|s++
=
Frenagem: rotor roda em sentido contrário ao do campo girante; movimento com sentido contrário ao do binário desenvolvido
T
TMAX
Tmin
MOTOR
GERADOR
1FREIO
s
34

MOTOR DE INDUÇÃO TRIFÁSICO • Característica Mecânica T = f(n) ou T = f(s). (CONT)
( )
21f
2 2
UTela 3 R22 R1+R2 +X
pfπ
= ⋅ ⋅ ⋅ ( )1f
2 2
UI2a = R1+R2 +X
Tel Tel
n ss = 0 n = ns
s = 1 n = 0
Tel = f(n)
Ta
s | Tmáx
TMÁX
Teln
snnn
35

MOTOR DE INDUÇÃO TRIFÁSICO
• Influência de R2 sobre a característica anterior…
22MAX X1R2R1T|s +=⇒=
s | TMAX R2 =>
TMAX = Cte
[R2 < R'2 < R''2] Tel
s s = 1
Ta
TMÁX
Ta’
Ta’’
[R2 < R'2 < R''2]
36

MOTOR DE INDUÇÃO TRIFÁSICO
• VANTAGENS E DESVANTAGENS ASSOCIADAS AO MAIOR OU MENOR VALOR DE R2 NO COMPORTAMENTO DE UM MI3~…
R2 elevado
R2 baixo
Tarr maior
Iarr menor
Rendimento menor
Tarr menor
Iarr maior
Rendimento maior
vantagens
desvantagem
desvantagens
vantagem
37
MOTOR DE INDUÇÃO TRIFÁSICO
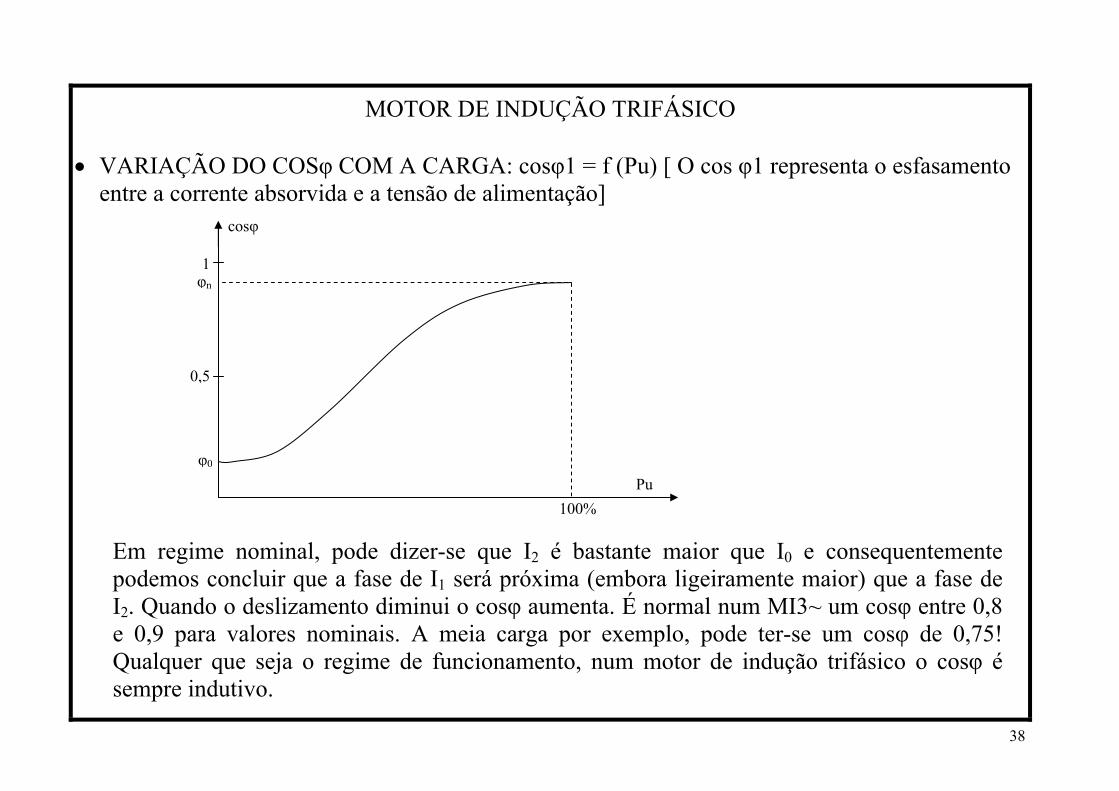
• VARIAÇÃO DO COSφ COM A CARGA: cosφ1 = f (Pu) [ O cos φ1 representa o esfasamento entre a corrente absorvida e a tensão de alimentação]
Em regime nominal, pode dizer-se que I2 é bastante maior que I0 e consequentemente podemos concluir que a fase de I1 será próxima (embora ligeiramente maior) que a fase de I2. Quando o deslizamento diminui o cosφ aumenta. É normal num MI3~ um cosφ entre 0,8 e 0,9 para valores nominais. A meia carga por exemplo, pode ter-se um cosφ de 0,75! Qualquer que seja o regime de funcionamento, num motor de indução trifásico o cosφ é sempre indutivo.
φn
φ0
1
0,5
Pu 100%
cosφ
38

MOTOR DE INDUÇÃO TRIFÁSICO
• ESTUDO DO ARRANQUE
0s
s12R1s0n =
−→=→=
( )1f
2 12 2
UI a I aR1+R2 +X
= ≅
4·In ≤ Iad ≤ 6·In Valores típicos
2 22
n n2
Ta I a Ias ×sTn I n In
⎛ ⎞ ⎛ ⎞≅ ⋅ ≅⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
R2|s = 1 ≈ R2|s = sn e Ia ≈ I2a e ainda In ≈ I2n
39

MOTOR DE INDUÇÃO TRIFÁSICO
• MÉTODOS DE ARRANQUE
o Arranque directo: para motores de pequena e média potência
o Arranque com auto-transformador: método caro; para grandes motores
o Arranque com impedância estatórica (tensão reduzida): para pequenos motores; é pior que o método com auto-transformador uma vez que Irede é reduzida na proporção de U e Ta é reduzido na proporção do quadrado da redução de U.
o Arranque estrela-triângulo: para motores de pequena e média potência; Tay/Ta∆ = 1/3 ; Iy/I∆ = 1/3.
o Reóstato rotórico: só para motores de rotor bobinado.
Pretende-se sempre limitar o valor da corrente de arranque mas assegurando um binário de arranque suficiente.
40

MOTOR DE INDUÇÃO TRIFÁSICO
Usa-se o motor de indução trifásico de rotor bobinado quando se pretende grandes binários de arranque ou quando há interesse em controlar a velocidade do motor pelo rotor.
Hoje em dia a electrónica de potência permite outros tipos de arranque:
Arranque em "rampa" ("soft starters"): sistemas electrónicos só para arranque.
Arranque por intermédio de um sistema que efectua o controlo de velocidade do motor. Princípio: Variação de U1 e f1 mas onde o quociente U1/f1 permanece constante…
Como inverter o sentido de rotação de um motor de indução trifásico?
Trocando duas (e apenas duas) das três fases!
41

MOTOR DE INDUÇÃO TRIFÁSICO
• Controlo de velocidade
Formas de variar a velocidade num motor de indução trifásico
Variação do número de pólos:
o Se for possível alterar as ligações estatóricas e se forem ainda assegurados conjuntos independentes de bobinagem no estator poderemos ter diferentes velocidades de funcionamento pois teremos diferentes velocidades de síncronismo disponíveis. (2 conjuntos => 4 ns diferentes...)
o Esta é uma opção de custo elevado que permite apenas escalões limitados de velocidade.
Controlo pela tensão de alimentação:
o Num MI3~ o binário é proporcional ao quadrado da tensão de alimentação.
o Variação da tensão de alimentação por autotransformador ou com equipamento electrónico apropriado => variação da velocidade.
42

MOTOR DE INDUÇÃO TRIFÁSICO
Controlo por tensão/frequência constante: [ V/f = constante]
o Recurso a variadores de velocidade...
Controlo por resistência rotórica
o Apenas para motores com rotor bobinado. Embora simples como solução
envolve sempre um motor que é à partida mais caro em termos de fabrico.
Esta solução também não é vantajosa uma vez que apresenta rendimentos
baixos para velocidades baixas/ deslizamentos elevados.
43
Recommended





![Apontamentos Fundações - Acetatos Appleton [IST]](https://img.document.onl/doc/110x75/55cf979a550346d03392823a/apontamentos-fundacoes-acetatos-appleton-ist.jpg)











