FACULDADE DE ENGENHARIA DA UNIVERSIDADE DO PORTO
An Instrumentation Amplifier forMyoelectric Signals
Henrique Rodrigues de Castro Mendes Martins
PREPARAÇÃO DA DISSERTAÇÃO
PREPARAÇÃO DA DISSERTAÇÃO
Advisor: PhD:Vitor Grade Tavares
February 19, 2013

c© Henrique Rodrigues de Castro Mendes Martins, 2013

An Instrumentation Amplifier for Myoelectric Signals
Henrique Rodrigues de Castro Mendes Martins
PREPARAÇÃO DA DISSERTAÇÃO
February 19, 2013


Resumo
Nas décadas passadas, o setor da eletrónica evoluiu exponencialmente. No nosso dia a dia aeletrónica está presente em tudo, nos nossos carros, e até em algumas das nossas roupas. A verdadeé que os desenvolvimentos nesse setor aumentaram a qualidade de vida do Homem. No caso dealgumas doenças, apenas com o auxílio de sistemas eletrónicos é possível realizar diagnósticose tratamentos apropriados. Problemas do foro muscular e de movimento são uma vasta área naqual a eletrónica teve grande influência na ajuda a lidar e a tratar essas doenças. A eletrónicamoderna permite uma melhor visão do que se passa ao nivel do músculo. Com instrumentaçãode grande precisão é possivel obter o sinal gerado pelas fibras das membranas musculares, o sinalmiográfico. Os sinais miográficos são signais muito específicos; eles são formados por variaçõesfisiológicas nas fibras das membranas musculares. A medição e o processamento destes sinais é degrande importância, dado que eles permitem olhar diretamente para o músculo. Isto é uma análiseimportante que precisa de ser feita para :
• Ajudar na tomada de decisão antes/após da cirurgia;
• Permitir a medição do desempenho muscular;
• Ajudar no processo de reabilitação;
Estes são apenas alguns exemplos daquilo que é possível atingir investindo na investigaçãoe desenvolvimento de sistemas aplicados a esta área em específico. Com isso em mente, a ne-cessidade de um sistema que meça e processe tais sinais surge. O objetivo desta tese é então dedesenvolver uma parte desse sistema, um amplificador de instrumentação de baixo ruído e de baixapotência para ser integrado em chip, usando a tecnologia CMOS de 0.35 µm. Este amplificadordeve seguir um conjunto de regras, dado que este tipo de sinais requerem caraterísticas muito es-pecíficas no amplificador e no processamento de sinal, nomeadamente um CMRR(Common-moderejection ratio) elevado, baixo ruído e baixo consumo de potência, dado que o chip a ser produzidoserá usado em aplicações de elevada autonomia. É então esperado atingir no fim desta tese um am-plificador genérico para sinais de baixa tensão e frequência:caraterísticas estas que estão presentena maior parte dos sinais biológicos.
i

ii

Abstract
In the past decades, the electronics sector has evolved exponentially. In our everyday there iselectronics everywhere, in our cars, in our houses and even in some of our clothes. Truth is, thedevelopments in that sector have increased the quality of life of the average Man. In the caseof some diseases, only with the aid of electronic systems proper diagnosis and treatments canbe made. Muscular and movement related problems are a wide area in which electronics have agreat influence in dealing with such diseases. Modern electronics allows us to take a better lookat what is going on at the muscle level. With great precision instrumentation we can obtain thesignal generated by muscle fiber membranes, the Myographic signal. Myographic signals are avery specific type of signals; they are formed by physiological variations in the state of musclefibre membranes [1]. The measuring and processing of these signals is of great importance, sincethey allow looking directly into the muscle [1]. This is an important analysis that needs to be doneto:
• Help in decision making both before/after surgery;
• Allow measurement of muscular performance;
• Aid in the rehabilitation process;
These are just a few examples of what we can achieve investing in the research and develop-ment of electronic systems applied to this specific area. With that in mind, the need for a systemthat can measure and process such signals arises. The goal of this thesis is to develop a part of thatsystem, an instrumentation amplifier to be integrated on chip, using CMOS 0.35 µm technology.This amplifier must follow a set of rules, since these signals demand very specific characteristicson an amplifier and in the signal processing, such as a good CMRR (Common-mode RejectionRatio), low noise and low power consumption, as this chip is to be used on high autonomy appli-cations. Thus, it is hoped to achieve in the end of this thesis a generic amplifier for low voltageand low frequency signals: characteristics that are present in most of the biological signals.
iii

iv

Contents
1 Introduction 11.1 Document structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
2 Theoretical Background 32.1 Myoelectric signals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1.1 What are they? . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32.1.2 Obtaining and measuring . . . . . . . . . . . . . . . . . . . . . . . . . . 32.1.3 Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.2 Noise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.2.1 Thermal Noise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.2.2 Flicker Noise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52.2.3 Noise in Differential Pairs . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.3 Amplifiers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.3.1 Basic transistor configurations . . . . . . . . . . . . . . . . . . . . . . . 62.3.2 Single Stage Amplifiers . . . . . . . . . . . . . . . . . . . . . . . . . . 92.3.3 Differential amplifiers . . . . . . . . . . . . . . . . . . . . . . . . . . . 102.3.4 Differential pair with load resistors . . . . . . . . . . . . . . . . . . . . 112.3.5 Common-mode Response . . . . . . . . . . . . . . . . . . . . . . . . . 122.3.6 CMOS Differential Pair . . . . . . . . . . . . . . . . . . . . . . . . . . 132.3.7 Stability and Frequency Compensation . . . . . . . . . . . . . . . . . . 172.3.8 Common-mode Feedback . . . . . . . . . . . . . . . . . . . . . . . . . 182.3.9 Class Type of Amplifiers . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3 Bybliographic Review 253.1 A CMOS Fully Balanced Differential Difference Amplifier and Its Applications [2] 253.2 A New Architecture for Rail-to-Rail Input Constant-gm CMOS Operational Transcon-
ductance Amplifiers [3] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273.3 A 1 Volt CMOS Pseudo Differential Amplifier [4] . . . . . . . . . . . . . . . . 293.4 Low-Voltage Rail-to-Rail CMOS Differential Difference Amplifier [5] . . . . . 313.5 A CMOS Chopper-Stabilized Differential Difference Amplifier for Biomedical
Integrated Circuits [6] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 323.6 System design of a low noise, low offset instrumentation amplifier with chopper
stabilization [7] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4 Problem Presentation 354.1 Preliminary topology for an instrumentation amplifier . . . . . . . . . . . . . . . 35
5 Methodology and Work Plan 37
v

vi CONTENTS

List of Figures
2.1 Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.2 Differential pair modelled with noise sources . . . . . . . . . . . . . . . . . . . 52.3 Common-source topology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62.4 Common-source with source resistor topology . . . . . . . . . . . . . . . . . . . 72.5 Common-source with capacitor topology . . . . . . . . . . . . . . . . . . . . . . 72.6 Source-Follower topology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.7 Common-gate topology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82.8 Nmos amplifier with an enhancement load . . . . . . . . . . . . . . . . . . . . . 92.9 Nmos amplifier with a Depletion load . . . . . . . . . . . . . . . . . . . . . . . 102.10 Nmos amplifier with a Pmos load . . . . . . . . . . . . . . . . . . . . . . . . . . 102.11 Basic Differential pair . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.12 Basic Differential pair with common mode input . . . . . . . . . . . . . . . . . 122.13 Basic Differential pair with CMOS active load . . . . . . . . . . . . . . . . . . . 132.14 Differential pair with cascoding . . . . . . . . . . . . . . . . . . . . . . . . . . 142.15 Differential pair with current source load . . . . . . . . . . . . . . . . . . . . . . 142.16 Differential pair equivalent half circuit . . . . . . . . . . . . . . . . . . . . . . . 152.17 Differential pair with current source load . . . . . . . . . . . . . . . . . . . . . . 162.18 Differential pair with mirror pole representation . . . . . . . . . . . . . . . . . . 172.19 Two-stage operational amplifier . . . . . . . . . . . . . . . . . . . . . . . . . . 182.20 Differential pair with inputs shorted to outputs . . . . . . . . . . . . . . . . . . . 192.21 Common-mode feedback with resistive sensing . . . . . . . . . . . . . . . . . . 202.22 Common-mode feedback with source followers . . . . . . . . . . . . . . . . . . 212.23 Common-mode feedback with MOSFETs operating in deep triode region . . . . 212.24 Sensing and controlling the output CM level . . . . . . . . . . . . . . . . . . . . 22
3.1 Differential Difference Amplifier. Image obtained from [2] . . . . . . . . . . . . 253.2 Differential Difference Amplifier - Implementation. Image obtained from [2] . . 263.3 Fully Balanced Differential Difference Amplifier - Implementation. Image ob-
tained from [2] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 273.4 A simple rail to rail input stage. Image obtained from [3] . . . . . . . . . . . . . 283.5 New constant gm rail-to-rail input stage. Image obtained from [3] . . . . . . . . 283.6 Conventional method for biasing the current summation circuit. Image obtained
from [3] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 293.7 Diagram block of the pseudo-differential amplifier. Image obtained from: [4] . . 303.8 Diagram block of the pseudo-differential amplifier. Image obtained from: [4] . . 303.9 Maximum current selecting circuit. Image obtained from: [5] . . . . . . . . . . 313.10 rail-to-rail V-I converter. Image obtained from: [5] . . . . . . . . . . . . . . . . 323.11 Circuit Diagram of the CHSDDA. Image obtained from: [6] . . . . . . . . . . . 33
vii

viii LIST OF FIGURES
3.12 Rail-to-rail input pre amplifier. Image obtained from: [7] . . . . . . . . . . . . . 34
4.1 Initial amplifier proposal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
5.1 Gant chart of the work plan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38

List of Tables
2.1 A comparison table between basic transistor configurations . . . . . . . . . . . . 9
ix

x LIST OF TABLES

Abbreviations and symbols
BPF Band-Pass FilterCHSDDA Chopper Stabilized Differential Difference AmplifierCM Common-modeCMFB Common-mode FeedbackCMOS Complementary Metal-Oxide-SemiconductorCMRR Common-mode Rejection RatioDDA Differential Difference AmplifierEEG ElectroencephalogramEMG ElectromyographicFDDA Fully Differential Difference AmplifierFBDDA Fully Balanced Differential Difference AmplifierLPF Low-Pass FilterMOSFET Metal Oxide Semiconductor Field Effect TransistorNMOS nFET Metal Oxide SiliconOTA Operational Transconductance AmplifierPD Pseudo DifferentialPDA Pseudo Differential AmplifierPMOS pFET Metal Oxide SiliconRF Radio Frequency
xi


Chapter 1
Introduction
The system responsible for the measuring and processing of myoelectric signals consists of elec-
trodes, an instrumentation amplifier, a filter, a sample and hold circuit and an analog to digital
converter (ADC). Electrodes are an important part of the system, as they allow us to measure the
Myographic signals, when strategically positioned on the patient’s skin. Since the characteristics
of these signals are far from optimal for one to properly process them, the use of the instrumen-
tation amplifier is justified. It will bring the signal to a band of voltage that will permit us to
handle these signals with no additional efforts. However, precautions must be taken in the devel-
opment and building of the instrumentation amplifier, to assure there are no external components
interfering with the signal, such as noise. The goal of this thesis is to develop a new instrumenta-
tion amplifier topology, based on the CMOS 0,35 µm technology, simulate its operation and then
implement it in an integrated circuit.
1.1 Document structure
The document is organized in the following chapters:
• Chapter 2 - Provides the necessary theoretical background regarding Myographic signals,
noise and differential amplifiers. Differential amplifiers will be thoroughly explained.
• Chapter 3 – Some amplifier topologies are presented, as well as a discussion about the
comparison of them.
• Chapter 4 – A preliminary solution is presented.
• Chapter 5 - A methodology for the project is made.
1

2 Introduction

Chapter 2
Theoretical Background
The purpose of this chapter is to enlighten the reader, providing the necessary theoretical back-
ground for him to read the document with clear understanding of what is the topic of discussion.
2.1 Myoelectric signals
2.1.1 What are they?
A myoelectric signal, also called a motor action potential, is an electrical impulse that produces
contraction of muscle fibers in the body. The term is most often used in reference to skeletal
muscles that control voluntary movements. Myoelectric signals have frequencies ranging from a
few hertz to about 300 Hz, and voltages ranging from microvolts to milivolts.
2.1.2 Obtaining and measuring
Myoelectric signals are detected by placing three electrodes on the skin. Two electrodes are posi-
tioned so there is a voltage between them when a myoelectric signal occurs. The third electrode
is placed in a neutral area, and its output is used to cancel the noise that can otherwise inter-
fere with the signals from the other two electrodes. The output voltage is processed using the
differential amplifier. The output of the amplifier has much higher voltage than the myoelectric
signals themselves. This higher voltage, which produces significant current, can be used to control
electromechanical or electronic devices.
2.1.3 Applications
Myoelectric signals are of interest to the developers of prosthetic devices, such as artificial limbs.
The signals can also be used to facilitate the operation of a computer using small voluntary muscle
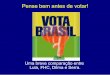
movements, such as blinking the eyelids. Figure 2.1 contains a summary of applications for
electromyography (EMG).
3

4 Theoretical Background
Figure 2.1: Applications
2.2 Noise
Noise limits the minimum signal level that a circuit can process with acceptable quality. Analog
designers must take into consideration noise when designing circuits, because it trades with power
dissipation, speed and linearity. In this type of systems, the kinds of noise we have to take into
account are thermal noise, and flicker noise, also known as 1/f noise. Noise is a random process,
i.e. we cannot predict any values of noise. To incorporate noise in analog circuits a statistical
model is done, observing its behaviour for a long time. This allows us to determine some important
characteristics of noise, such as average power. The average power is: Pav = limT→+∞1T
∫ T/2−T/2 v2 dt
In circuits we can easily obtain the power expressed by W, when that same voltage is applied
to a load R, the power is defined as Pav/R. The concept of average power becomes more versatile
if defined with regard to the frequency content of noise. The power spectral density spectrum (
Sx(f) ) shows how much power the signal carries at each frequency, and it is defined as the average
power carried by x(t) in a one-hertz bandwidth around the frequency f .
2.2.1 Thermal Noise
Resistor thermal noise – The random motion of electrons in a conductor introduces fluctuations in
the voltage measured across the conductor even if the average current is zero. Thus, the spectrum
of thermal noise is proportional to the absolute temperature: Sv( f ) = 4kT R, f ≥ 0 Where k is the
Boltzmann constant. MOS thermal noise – MOS transistors also exhibit thermal noise. The most
significant source is the noise generated in the channel. For a long-channel MOS device operating
in saturation, the channel noise can be modelled by a current source connected between the drain
and source terminals with a spectral density:

2.2 Noise 5
2.2.2 Flicker Noise
The interface between the gate oxide and the silicon substrate in a MOSFET entails an interesting
phenomenon. Since the silicon crystal reaches an end at this interface, many “dangling” bonds
appear, giving rise to extra energy states. As charge carriers move at the interface, some are ran-
domly trapped and later released by such energy states, introducing flicker noise in the drain. In
addition to trapping, several other mechanisms are believed to generate flicker noise [1]. The
average power of this type of noise cannot be predicted easily, unlike the thermal kind. Depending
on the oxide-silicon interface characteristics, flicker noise may assume considerably different val-
ues and as such varies from one CMOS technology to another. It is modelled as a voltage source
in series with the gate and given by the following equation:
V 2n =
KCoxWL
.1f
(2.1)
Where K is a process dependent constant on the order of 10−23. The trap-and-release phe-
nomenon associated with the dangling bonds occurs at low frequencies, since the noise spectral
density is inversely proportional to frequency. This is the reason why this type of noise is also
known as 1/f noise. Since the signals to be measured have low frequencies, this noise must be
taken into account, upon the developing of the amplifier.
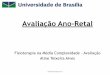
2.2.3 Noise in Differential Pairs
Figure 2.2 shows a differential pair with the overall noise modelled.
Figure 2.2: Differential pair modelled with noise sources

6 Theoretical Background
We can obtain the input-referred noise voltage by taking into account the output noise of M3
and M4. The drain noise current of M3 is divided between ro3 and the resistance seen looking
into the drain of M1. This resistance RX = ro4 + 2ro1. Denoting the resulting noise currents
flowing through ro3 and RX by InA and InB, respectively , we have: InA = gm3Vn3(ro4+2ro1)(2ro4+2ro1)
and
InB = gm3Vn3ro3
(2ro4+2ro1). The former produces a noise voltage gm3Vn3ro3
(ro4+2ro1)(2ro4+2ro1)
at node X with
respect to ground, whereas the latter flows through M1, M2 and ro4, generating gm3Vn3(ro3ro4)
(2ro4+2ro1)
at node Y, with respect to ground. Thus, the total differential output noise due to M3 is equal to
gm3Vn3(ro3ro1)(ro3+ro1)
. We can conclude then, that the noise current of M3 is simply multiplied by the
parallel combination of ro1 and ro3 to produce the differential output voltage.
2.3 Amplifiers
The purpose of this chapter is to enlighten the reader in the analog electronics design fields, namely
amplifiers. The reader can find more information about amplifiers here: [8], [9].
2.3.1 Basic transistor configurations
2.3.1.1 Common-source configuration
This configuration is normally used in the gain stage, since it can achieve a high gain value.
Figure 2.3: Common-source topology
Transistor kept in saturation through R1 and R2.
Open loop gain Av =Vo/Vi =−gmVgsRi(ro//Rd)(Ri+Rsi)
Input resistor Ri = R1/R2
Output resistor Ro = Rd//ro
With source resistor

2.3 Amplifiers 7
Figure 2.4: Common-source with source resistor topology
Used to stabilize the quiescent point against variations of the parameters of the transistor.
However, the gain is reduced.
Open loop gain Av =− gmRd(1+gmRs)
With a bypass capacitor on the source
Figure 2.5: Common-source with capacitor topology
To minimize the loss of gain (because of Rs).
The stability of the quiescent point can be enhanced by replacing Rs with a current source.
Input pole: ωin =1
([Cgd(1+gmRD)+Cgs](RS))
Output pole: ωout =1
([RD||((Cgd+Cgs)
Cgd. 1
gm)](Ceq+Cdb)))
with Ceq = (CgdCgs)/(Cgd +Cgs)
2.3.1.2 Source-follower configuration
This configuration is normally used in the output stage of an amplifier, because of its low output
resistor.

8 Theoretical Background
Figure 2.6: Source-Follower topology
Open loop gain Av =Vo/Vi =(Rs//ro)Ri
((1/gm+Rs//ro).(Ri+Rsi))
Input resistor Ri = R1/R2
Output resistor Ro = 1/gm//Rs//ro
Significant pole: ωp =gm
([(gmRD)+Cgs](RS))
2.3.1.3 Common-gate configuration
This configuration is much less used, standing alone, than source follower, or common source.
It is usually used in CMOS RF receivers or in cascode configurations. The transistor is kept in
saturation by the current source.
Figure 2.7: Common-gate topology
Open loop gain Av =Vo/Vi = gm(Rd//RL)
Input resistor Ri = 1/gm
Output resistor Ro = Rd
To better understand the differences between these configurations, a comparison table is presented:

2.3 Amplifiers 9
Table 2.1: A comparison table between basic transistor configurations
Topology Av Ai Ri Ro
Common-Source Av > 1 - Rth Moderate to highSource-Follower Av ∼= 1 - Rth LowCommon-Gate Av > 1 Ai ∼= 1 Low Moderate to high
2.3.2 Single Stage Amplifiers
These are the basic MOS load topologies:
• NMOS with enhancement load
• NMOS with depletion load
• NMOS amplifier with PMOS load
The last one is one of the most used active load configurations, for example it is used in the
differential pair.
NMOS with enhancement load
Figure 2.8: Nmos amplifier with an enhancement load
Open loop gain Av =−gmD/gmL
NMOS with depletion load

10 Theoretical Background
Figure 2.9: Nmos amplifier with a Depletion load
Av =−gmD(roD//roL)
NMOS amplifier with PMOS load
Figure 2.10: Nmos amplifier with a Pmos load
Av =−gmn(ron//rop)
2.3.3 Differential amplifiers
This section deals with one of the most used input stages, the differential pair. Because of its
useful characteristics, it is the dominant choice in today’s high performance analog and mixed
signal circuits. So, what makes us choose differential over single ended operation?
• Environmental noise immunity
• Increase in the maximum achievable voltage swings
• Simpler biasing

2.3 Amplifiers 11
• Higher linearity
Although differential operation brings a lot of benefits, it has a small drawback: the occupied
area. This section enlightens the reader on the basic differential pair, a detailed analysis on its
mode of operation, and possible negative feedback topologies, as well as common mode feedback
topologies.
2.3.4 Differential pair with load resistors
Figure 2.11: Basic Differential pair
To allow normal operation, it is imperative to ensure that both M1 and M2 stay in saturation. Their
mode of operation can move to the triode area if there is a disturbance in the common mode level,
affecting their currents. Thus it is important that the bias currents of the devices have minimal
dependence on the input CM level. To do that a current source is used.
If the input voltage swing increases (Vin1−Vin2), the circuit becomes more non-linear, due to
one of the transistors absorbing all of ISS (in the worst case scenario), and the other one absorbs
none, thus one of them goes into cut-off and the other remains in saturation. Therefore its max-
imum and minimum voltage output varies from VDD and VDD−RDISS. For Vin1 = Vin2 the circuit
is in equilibrium. The range of the minimum and maximum common mode voltage can also be
obtained: M1 and M2 enter the triode region if Vin,CM > Vout1 +Vth = VDD−RDISS/2+Vth, and
if Vin,CM > Vgs1 +Vgs3−Vth we guarantee that both M1 and M2 remain in saturation. Thus we
set limits for Vin,CM : Vgs1 +Vgs3−Vth ≤ Vin,CM ≤ min(VDD−RDISS/2+Vth,VDD) . Now that the
common mode voltage is defined, we can define the maximum values for the output voltage: it
can go as high as VDD, and as low as approximately Vin,CM−Vth.

12 Theoretical Background
2.3.5 Common-mode Response
Figure 2.12: Basic Differential pair with common mode input
One of the most important attributes of differential amplifiers is their ability to suppress the effect
of common mode perturbations. In reality, neither the circuit is fully symmetric, nor does the
current source exhibits infinite output impedance. By definition AV,CM = VoutVin,CM
= − (RD/2)(1/(2gm)+RSS)
.
If the resistor of the current source was of infinite value, AV,CM would be zero. The finite output
impedance of the tail current source results in some common-mode gain in a symmetric differential
pair, as seen from the equation. This conclusion was made assuming the circuit was perfectly
symmetrical, but what if it wasn’t? Assuming there is a mismatch in a resistor, RD1 = RD1 +∆,
what happens to Vout1 and Vout2 as Vin,CM increases? Assuming M1 and M2 are symmetrical we
obtain: ∆Vout1 =−∆Vin,CMgm
(1+2gmRSS)(RD1+∆) and ∆Vout2 =−∆Vin,CMgm
(1+2gmRSS)(RD2), thus, a common mode change
at the input introduces a differential component at the output. This is a problem because if the input
of the differential pair includes both a differential signal and common mode noise, the circuit
corrupts the amplified differential signal by the input CM change. In conclusion, the common
mode response of differential pairs depends on the output impedance of the tail current source and
the asymmetries in the circuit.

2.3 Amplifiers 13
2.3.6 CMOS Differential Pair
Figure 2.13: Basic Differential pair with CMOS active load
In this case the load is done through an active load (diode connected or current-source load).
The small signal gain is: AV = gmN(ron||rop). The diode connected loads consume voltage head-
room, thus creating a trade-off between the output voltage swings, the voltage gain, and the input
common mode range. There are a lot of techniques that can be used to improve some of the char-
acteristics of this topology. For example, using current-source loads( 2.15) can help reduce the gm
of the diode connected load devices, by aiding in supplying the bias current, thus reducing their
currents rather than their aspect ratios, which will help increase the differential gain. However,
the small signal gain of the differential pair with current-source loads is relatively low; One way
to solve this problem is to increase the NMOS and PMOS output impedance through means of
cascoding ( 2.14). This method increases differential gain, but its drawback is an increase in the
consumption of more voltage headroom.

14 Theoretical Background
Figure 2.14: Differential pair with cascoding
Figure 2.15: Differential pair with current source load
2.3.6.1 Frequency Response
This section deals with the analysis of the frequency response of the differential pair, both for
differential signals and common mode signals.

2.3 Amplifiers 15
Figure 2.16: Differential pair equivalent half circuit
As we can see in figure Figure 2.16, its frequency response is similar to that of a common
source stage, exhibiting miller multiplication of Cgd . In this case both +Vin2/2and−Vin2/2 are
multiplied by the same transfer function, that brings us to the conclusion that the number of poles
in Vout/Vin is equal to that of each path (rather than the sum of the number of the poles in the two
paths). For common-mode signals, the high frequency gain is determined by the capacitance at
node P, which consists of Cgd3,Cdb3,Csb1 and Csb2. If M1-M3 are wide transistors this capacitance
will be of considerable value. Assuming there is a mismatch between M1 and M2,we can obtain
the common mode high frequency gain simply by replacing in the formula the drain resistor and
the output resistor of M3 with its own value in parallel with the capacitance seen through that node.
AV,CM =−(∆gm(RD||( 1
(CLs) )))
((gm1+gm2)[ro3||( 1(CPs)+1)
). This suggest that, if the output pole is much farther from the
origin than is the pole at node P, the common mode rejection of the circuit degrades considerably
at high frequencies. For differential pairs with high impedance loads made with active loads, an
analysis can be made for differential and common mode signals separately.

16 Theoretical Background
Figure 2.17: Differential pair with current source load
In this case, G is an ac ground, because Cgd3 and Cgd4 conduct equal and opposite currents to
that node. As we have a very high load seen from the output (ro3||(ro1), the dominant pole is given
by ((ro3||ro1)CL)(−1). The common mode behaviour of this circuit is similar to the one analysed
before. Let us consider now a differential pair with an active current mirror.

2.3 Amplifiers 17
Figure 2.18: Differential pair with mirror pole representation
In contrast to the fully differential configuration, this topology does not have the same transfer
function on both sides. The path consisting of M3 and M4 includes a pole at node E, which
is known as the mirror pole. This pole is greater in magnitude than the output pole, and it is
given by Cgs3,Cgs4,Cdb3,Cdb1 ,and the miller effect of Cgd1 and Cgd4. Even if only Cgs3 and Cgs4
are considered, the severe trade-off between gm(1/gm3) is the impedance seen through that node)
and Cgs of PMOS devices results in a pole that greatly impacts the performance of the circuit.
Through some abbreviations, the poles of this circuit are as follows: ωp1 = 1/(CL(roN ||roP)) and
ωp2 = gmP/CE where CE is the total capacitance at node E. There can also be obtained a zero in
the left half plane, and its value is 2ωp2. In summary, fully differential circuits do not possess a
mirror pole, another advantage against single ended circuits.
2.3.7 Stability and Frequency Compensation
Stability and frequency compensation is a topic that has to be taken into account by analog cir-
cuit designers. If we want to achieve higher output voltage swings, then a two stage operational
amplifier is required, and the study of such amplifier’s stability is of great importance.

18 Theoretical Background
Figure 2.19: Two-stage operational amplifier
Observing figure 2.19, we can identify 3 poles, one at A1(A2), another at B1(B2) and another
at X(Y ). As stated in the previous section the pole at X lies in the high frequencies. Since the small
signal resistance seen at A1 is high, even the capacitances of M3,M5 and M9 can create a pole
close to the origin.In the output, the resistance can be small, however, CL can be high, making the
circuit exhibit two dominant poles. A bode plot of this circuit can be found in [9]. Since the poles
at A1 and B1 are relatively close to the origin, the phase approaches −180o well below the third
pole. This implies that the phase margin may be close to zero even before the third pole contributes
with its phase shift. So, how do we compensate this circuit? The goal is to move a dominant pole
towards the origin so as to place the gain crossover well below the phase crossover. However,
the unity gain bandwidth after compensation cannot exceed the frequency of the second pole of
the open-loop system. Thus, the magnitude of ωp,A1 must be reduced, however, the available
bandwidth will be limited to approximately ωp,A1, which is a low value. Furthermore, the small
magnitude of the required dominant pole translates to a very large compensation capacitor, which
is not desired. In [9], a better approach is taken, also known as miller compensation, that creates
a large capacitance at node A1, and moves the output pole away from the origin.
2.3.8 Common-mode Feedback
As we have seen in the previous sections, fully differential amplifiers have many advantages in
comparison with their single ended counterparts, such as greater output swings, avoiding mirror
poles, thus achieving a higher closed loop speed. However, high gain differential circuits require
common-mode feedback. For a better understanding of the need of this type of feedback, an
example is required. In a differential amplifier, sometimes negative feedback is required, and for
that, we short the inputs and the outputs of the circuit. The input and output common mode levels
are well defined in this case: VDD−RDISS/2. Now suppose the load resistors are replaced by

2.3 Amplifiers 19
PMOS current sources , so as to increase the differential voltage gain. Figure 2.20 represents this
example.
Figure 2.20: Differential pair with inputs shorted to outputs
What is the common mode level at the output node? Since each of the input transistors carry
half of the tail current, the CM level depends on how close the PMOS current values are to that
value. Suppose there is a mismatch in the PMOS and NMOS current mirrors defining an error
between their drain currents and ISS/2. If we assume the drain currents of both M3 and M4 in
the saturation region are slightly greater than ISS/2, both M3 and M4 must enter the triode region
so that their drain currents match ISS/2. Conversely, if their drain currents are inferior to ISS/2
then both Vout1 and Vout2 must drop so that M5 enters the triode region, thereby producing only
2ID3,4. The above difficulties arise because in high gain amplifiers, we want to use a p-type current
source to balance an n-type current source. The difference between the currents, IP and IN flows
through the intrinsic output impedance of the amplifier, creating an output voltage change equal
to (IP− In)(RP||Rn). Since the current error depends on mismatches and the load associated with
it is high, the voltage error can become very large, thus driving the n-type or p-type current source
into the triode region. It is emphasized that differential feedback cannot define the CM level. As
expected, in high gain amplifiers, the output CM level is quite sensitive to device properties and
mismatches and it cannot be stabilized by means of differential feedback. Thus, a common mode
feedback network must be added to sense the CM level of the two outputs and accordingly adjust
one of the bias currents in the amplifier. CMFB consists of three operations:
• Sensing the output CM level

20 Theoretical Background
• Comparison with a reference
• Returning the error to the amplifier’s bias network
Recalling that Vout,CM = (Vout1 +Vout2)/2, a resistive divider can be employed as shown in figure
2.21.
Figure 2.21: Common-mode feedback with resistive sensing
This generates a voltage Vout,CM = (R1Vout1+R2Vout2)(R1+R2)
, that is equal to (Vout1 +Vout2)/2 if the re-
sistors are equal. The difficulty here is that both resistors must be much greater than the output
impedance of the amplifier so as to avoid lowering the open loop gain. Such large resistors occupy
a very large area and suffer from substantial parasitic capacitance to the substrate. To eliminate
the resistive loading, we can interpose source followers between each output and its corresponding
resistor as seen in figure 2.22.

2.3 Amplifiers 21
Figure 2.22: Common-mode feedback with source followers
This technique produces a CM level that is in fact lower that the output CM level by the gate-
source voltage of transistors M7/M8. It is also important to state that R1 and R2 or I1 and I2 must
be large enough to ensure that M7 or M8 can handle a large differential swing on the output.
However, this sensing method has an important drawback: it limits the differential output swings
(even if the resistors and the currents are large enough) by approximately the threshold voltage.
Another type of CM sensing can be seen in figure 2.23:
Figure 2.23: Common-mode feedback with MOSFETs operating in deep triode region
In this type of sensing, we use two transistors in deep triode region, introducing a total
impedance that is equal to the parallel of M7 and M8 output resistors, which vary with the width,

22 Theoretical Background
the length of the transistors and Vout1 +Vout2. If both the outputs rise together, then the total load
imposed by the transistors will drop, whereas if they change differentially, the load of one transis-
tor will increase and the other will decrease. As the resistor-based sensing method, this method
also limits the output voltage swing. Now that we have a method of sensing the CM level, it is
imperative to compare it with a reference and return the difference to the bias network. To do
this, an op amp can be employed, connected to the NMOS current sources, as we can see in figure
2.24:
Figure 2.24: Sensing and controlling the output CM level
The mode of operation is as follows: if both the output voltages increase, so does VE , thus
increasing the drain currents of M9 and M10 and lowering the output CM level. It can also be
interpreted as a form of forcing the CM level of both the outputs to the value of the reference, if
the open loop gain is high. This type of feedback can be applied to the PMOS current sources
as well. In some cases, the feedback can be used to control only one tail current source, to allow
optimization of the settling behaviour. As we’ve seen, both M9 and M10 were fed by the error
coming from the op amp. This technique consists of using only one of them to receive the error,
whilst the other is biased at a constant current.
2.3.9 Class Type of Amplifiers
This section provides the reader with an insight about the possible classes of the amplifiers. In our
case, it is only pertinent to study the A class , the B class and the AB class. For more information
on amplifier class types the reader can find it here : [10].
2.3.9.1 Class A
This is the most linear of the classes, meaning the output signal is a truer representation of the
input. Here are the characteristics of the class:
• The output transistor conducts for the entire cycle of the input signal. In other words, they
reproduce the entire waveform in its entirety.

2.3 Amplifiers 23
• These amplifiers work at higher temperatures, as the transistors in the amplifier are on and
running at full power all the time.
• There are no conditions to turn the transistors on/off. That doesn’t mean that the amplifier
is never off or can never be turned off; it means the transistors doing the work inside the
amplifier have a constant flow of electricity through them, also known as bias.
• Class A is the most inefficient of all power amplifier designs, averaging only around 20%.
Because of these factors, Class A amplifiers are very inefficient: for every watt of output
power, they usually waste at least 4-5 watts as heat. Because of this, they run hotter than the other
class types, increasing somewhat the thermal noise of the devices. All this is due to the amplifier
constantly operating at full power. The upside is that these amplifiers are the most enjoyed of
all amplifiers. Since the transistor reproduces the entire waveform without ever cutting off, the
waveform is more linear; that is, it contains much lower levels of distortion.
2.3.9.2 Class B
In this amp, the positive and negative halves of the signal are dealt with by different parts of the
circuit. The output devices continually switch on and off. Class B operation has the following
characteristics:
• The input signal has to be a lot larger in order to drive the transistor appropriately.
• This is almost the opposite of Class A operation.
• There has to be at least two output devices with this type of amplifier. The output stage
employs two output devices so that each side amplifies each half of the waveform. Either
both output devices are never allowed to be on at the same time, or the bias for each device
is set so that the current flowing in one output device is zero when not presented with an
input signal.
• Each output device is on for exactly one half of a complete signal cycle.
These amps run cooler than Class A amps, but the sound quality is not as pure, as there is a
lot of "crossover" distortion, as one output device turns off and the other turns on over each signal
cycle.
This type of amplifier design, or topology, gives us the term "push-pull," as this describes the
tandem of output devices that deliver the audio signal to your speakers: one device pushes the
signal, the other pulls the signal. They can be less expensive, because one can use two cheap
output devices instead of one high-quality one in the design.
As mentioned before, the input signal has to be lot a larger, meaning that from the amplifier
input, it needs to be "stepped up" in a gain stage, so that the signal will allow the output transistors
to operate more efficiently within their designed specifications. This means more circuitry in the

24 Theoretical Background
path of your signal, degrading sound even before it gets to the output stage. The efficiency of such
topology wanders around the 60 per cent, and its linearity is inferior to that of class A, as there is
a trade-off between efficiency and linearity.
2.3.9.3 Class AB
This is the compromise between both classes, A and B. Class AB operation has some of the best
advantages of both Class A and Class B built-in. Its main benefits are sound quality(linearity)
comparable to that of Class A and efficiency similar to that of Class B. Most modern amp designs
employ this topology.
Its main characteristics are:
• In fact, many Class AB amps operate in Class A at lower output levels, again giving the best
of both worlds
• The output bias is set so that current flows in a specific output device for more than a half
the signal cycle but less than the entire cycle.
• There is enough current flowing through each device to keep it operating so they respond
instantly to input voltage demands.
• In the push-pull output stage, there is some overlap as each output device assists the other
during the short transition, or crossover period from the positive to the negative half of the
signal.
There are many implementations of the Class AB design. A benefit is that the inherent non-
linearity of Class B designs is almost totally eliminated, while avoiding the heat-generating and
wasteful inefficiencies of the Class A design. And as stated before, at some output levels, Class
AB amps operate in Class A. It is this combination of good efficiency (around 50) with excellent
linearity that makes class AB the most popular audio amplifier design.

Chapter 3
Bybliographic Review
This chapter has the intent to provide the reader with the technological trends on instrumenta-
tion amplifiers until 2013. An explanatory and critical approach is taken when addressing every
relevant article.
3.1 A CMOS Fully Balanced Differential Difference Amplifier andIts Applications [2]
In this article, the authors wish to achieve a wide input range FBDDA(Fully balanced differential
difference amplifier) with low power consumption. It begins with an explanation about the DDA,
and the equations by which it operates:
Figure 3.1: Differential Difference Amplifier. Image obtained from [2]
Vo = Ao[(Vpp−Vpn)− (Vnp−Vnn)] Vpp−Vpn = Vnp−Vnn as Ao− > ∞ With these equations,
the conclusion is made that the open loop gain must be made as high as possible, so as to have
the differences between the input voltages close to zero. The amplifier presented next, has two
stages: a differential input – single ended output transconductance stage(differential pair with
active loads), and a second gain stage(common-source amplifier with active load). Next it is
described the input noise formulas, for both flicker and thermal noise:
V 2thermal =
323 kT ( 1
gmn)+ 16
3 kT ( gmngmp
2( 1gmp
))
25

26 Bybliographic Review
From which it is concluded that increasing the width of the input transistors diminish the 1/f
noise, as well as increasing their gmn. The proposed topology by the authors is presented in figure
3.2.
Figure 3.2: Differential Difference Amplifier - Implementation. Image obtained from [2]
The small-signal no-load gain of the DDA can approximately be expressed by: Ao = gmn(rds1||rds3||rds5)(gm9+
gm10)(rds9||rds10) Clearly the gain is proportional to gmn. Because of the virtual short property in
op-amps where the differential pair operates at Vd = 0, it is possible to select the width (W) of
the differential pair transistors as large as desired to increase its transconductance gm = for-
mula. Hence, noise is minimized and linearity is improved. [2]. Then, it is presented that there
is a trade-off between achieving high input differential range, low noise and low distortion in the
DDA designs. After introducing the DDA, a FBDDA architecture is proposed, along with its
CMFB(common-mode feedback) network. The CM output voltage is employed with 2 capacitors
and resistors. Two similar AB rail to rail output stages are employed to achieve low power con-
sumption with good output current driving capability. The FBDDA along with its CMFB network
is presented in figure 3.3:

3.2 A New Architecture for Rail-to-Rail Input Constant-gm CMOS OperationalTransconductance Amplifiers [3] 27
Figure 3.3: Fully Balanced Differential Difference Amplifier - Implementation. Image obtainedfrom [2]
The reader can find more information about DDAs here: [11], [12], [13], [14] and [15].
3.2 A New Architecture for Rail-to-Rail Input Constant-gm CMOSOperational Transconductance Amplifiers [3]
In this article, the authors present a new architecture for constant-gm rail-to-rail (R-R) input stages
that has less than 5 per cent deviation in gm over the entire range of the input common-mode
voltage. The topology presented here is of a folded cascode type, based on a floating current
source. Referring about the trade-off between speed, gain and power that exists at high voltage
supplies, the authors introduce the signal swing at the low voltage supplies, as another metric to
take into account. It is pertinent to refer that this swing is relative to the input swing, because the
output swing can be close to the power supply, using a class A or class AB output stage or even a
folded cascode architecture. To build a rail-to-rail input common mode range, two complementary
differential input stages are used, that deal with the extreme input voltages by using only one input
pair, with a total effective transconductance reduced by half. Therefore, the deviations in gmT as a
function of the input common mode voltage, VCM, can be as much as 100 per cent [3]. However,
in normal operation its input transconductance is the sum of the NMOS and the PMOS input stage
transconductance.

28 Bybliographic Review
Figure 3.4: A simple rail to rail input stage. Image obtained from [3]
Then it is presented the author’s topology, with the final goal of achieving a constant input gm
independently of the input’s voltage.
Figure 3.5: New constant gm rail-to-rail input stage. Image obtained from [3]

3.3 A 1 Volt CMOS Pseudo Differential Amplifier [4] 29
The principle of this new technique is to activate another pair similar to the active pair when
one pair has lost required gate bias for proper operation. As a result, at extreme supply voltage
ranges that one of input pairs turns off, two similar pairs of other polarity generate signal current
in parallel, and so the input transconductance doubles [3]. The circuit for the summation of the
currents can be seen in figure 3.6.
Figure 3.6: Conventional method for biasing the current summation circuit. Image obtained from[3]
The explanation of the functioning of the global circuit can be found here: [3].
The performance achieved by employing these architectures is enhanced, as well as obtaining
a low power, high swing, high speed and a high gain single-stage OTA(Operational transconduc-
tance amplifier).
3.3 A 1 Volt CMOS Pseudo Differential Amplifier [4]
This article presents a 1 V pseudo differential amplifier with a simple rail-to-rail CMFB circuit,
that consists in the traditional common-mode detector and the transimpedance and transconduc-
tance amplifiers. At first some advantages of using a pseudo-differential topology are presented,
such as allowing wider input and output ranges, and making the architecture much more attractive
to low power supplies. However, PD structure requires an extra common-mode feedback (CMFB)
circuit which serves two purposes: 1) to fix the common-mode voltage at high impedance nodes

30 Bybliographic Review
and 2) to suppress the common-mode signal components [4]. The proposed topology is presented
in figure 3.7, in the block diagram form.
Figure 3.7: Diagram block of the pseudo-differential amplifier. Image obtained from: [4]
When the outputs from GM(IN) are differential signals, the currents through resistors R are of
the same value but of opposite phase. These currents will flow to each resistor and they will be
imposed on OutlA and OutIB. Because these currents are of the same amplitude but opposite in
phase, there will be no input current to the transimpedance amplifier and no voltage variation at
node C. The current that flows through resistor R is also mirrored and positively fed back to the
output of the input transconductor GM(IN). As a result, the output impedance of the PDA(Pseudo
differential amplifier) at node Vo1 and Vo2 are given by Zout . When the outputs from the PDA are
common mode signals, the common mode current will flow through nodes A and B with the same
magnitude and phase. As a result, the summation of these two currents is passed to the common
mode amplifier (A) which consists of a transimpedance amplifier and an output transconductor
GMO. The output current of GMO is fed back to the output node of input transconductor GM(IN) to
eliminate the common mode signal.
Figure 3.8: Diagram block of the pseudo-differential amplifier. Image obtained from: [4]
With this topology a low voltage and wide swing is achieved, with a CM gain of -36db. The
explanation for the dimensioning of the circuit can be found here: [4]. The reader can find more
information about PDAs here: [16]

3.4 Low-Voltage Rail-to-Rail CMOS Differential Difference Amplifier [5] 31
3.4 Low-Voltage Rail-to-Rail CMOS Differential Difference Ampli-fier [5]
This article introduces a low-voltage rail-to-rail wide range CMOS Differential Difference Ampli-
fier (DDA). The input stage of this DDA comprises two rail-to-rail VI converters with large signal
handling capability. Constant transconductance is achieved through the use of two maximum-
current selecting circuits and an output subtraction stage. A maximum-current selecting circuit is
presented in figure 3.9:
Figure 3.9: Maximum current selecting circuit. Image obtained from: [5]
Where Iout will always take the maximum value of I1 or I2. The authors start by analysing the
DDA, analysis that was made in previous articles presented here. Then the rail-to-rail VI converter
is presented in figure 3.10:

32 Bybliographic Review
Figure 3.10: rail-to-rail V-I converter. Image obtained from: [5]
Through the transfer function of the circuit it is concluded that : I1− I2 = gmN(V1−V2), thus
achieving a V -I converter. Then, using these blocks previously referred, the authors build a rail-
to-rail DDA with a wider input voltage range, due to the use of the linear V-I converters. The
reader can find more information about low voltage amplifiers here: [17], [18] and [19].
3.5 A CMOS Chopper-Stabilized Differential Difference Amplifierfor Biomedical Integrated Circuits [6]
This articles presents a topology that is also convenient for biomedical applications, the chopper
topology. Its principle of operation is to modulate the input signal, to avoid the flicker noise (which
grows with the decrease of the signal’s frequency), and then demodulate it at the output. However,
in this article, the amplifier proposed is a mixed technique between chopper topology with DDA.
Image 3.11 contains the proposed CHSDDA (Chopper stabilized Differential Difference Am-
plifier):

3.6 System design of a low noise, low offset instrumentation amplifier with chopper stabilization[7] 33
Figure 3.11: Circuit Diagram of the CHSDDA. Image obtained from: [6]
In the end this topology presents very good characteristics, namely a high CMRR(Common-
mode rejection ratio) high gain and low noise. The reader can find more information about chopper
amplifiers here: [20] and [21].
3.6 System design of a low noise, low offset instrumentation amplifierwith chopper stabilization [7]
This document presents an instrumentation amplifier chopper stabilized with some good charac-
teristics. Some of them come from the fact that the amplifier used is fully differential. As referred
before, the chopper technique allows the diminishing of the flicker and thermal noise. In this par-
ticular case, a modulator and a demodulator are used, a BPF(band-pass filter) and a LPF(low-pass
filter), as well as a rail-to-rail input pre amplifier,which can be seen in the figure 3.12:

34 Bybliographic Review
Figure 3.12: Rail-to-rail input pre amplifier. Image obtained from: [7]
The modulator and the demodulator are implemented using CMOS switches, and as the name
may suggest, they modulate and demodulate the input signal as to increase or decrease the signal’s
frequency. The function of the band-pass filter is to reduce the residual offset which comes from
the charge injection of the input modulator, and the top priority is that the center frequency of the
band-pass filter should be very close to the oscillator frequency in order to achieve low residual
offset. And low-pass filter is just used to select the base-band signal and reject the harmonics. [7]
As for the instrumentation amplifier, the goal is to amplify the signal and try to diminish its input
noise level.
However, the results achieved by the author in terms of noise are a bit higher than expected, as
a 345nV/√
Hz is obtained at the frequency of 100Hz. It is proposed in the end as future work the
diminishing of the noise level, and higher gain stages for lower amplitude signals. The reader can
find more information about instrumentation amplifiers here: [22], [23], [24].

Chapter 4
Problem Presentation
As the reader may have noticed during the reading of this document, it is not easy to achieve a lot
of satisfactory characteristics in an amplifier topology. Most of the times it’s a trade-off between
power, bandwidth, CMRR, and a lot of other things, and the choice mostly comes depending of
the situation in which we are going to employ our amplifier. However, in this case there are some
restrictions, and we must have that in mind when choosing which path to take. For example, in
biomedical applications, a good CMRR must be above the 120db mark. Noise is critical, as we
want to maintain the signals in the most pure form.
With that in mind, the challenge of this work is to develop a versatile high gain instrumentation
amplifier, with a CMFB network that will be able to suppress most of these problems. Also, its
gain has to be sufficiently high, and his power supply as low as possible. It will be designed for
chip integration, so mostly the technology used will be the CMOS 0.35µm technology.
4.1 Preliminary topology for an instrumentation amplifier
It is presented in image 4.1 the preliminary topology for the instrumentation amplifier:
35

36 Problem Presentation
Figure 4.1: Initial amplifier proposal
As stated before, its input will come from the electrodes, and it consists of a small frequency
and small voltage signal. Ideally its output would be the same input signal with a larger voltage
but that is always not the case. This initial proposal consists of a differential amplifier, but the
goal is to achieve a fully differential amplifier, which can easily be achieved by including another
gain stage at the left of the amplifier and add another output. It has two stages, the input stage
and the gain/output stage. In the input we have two differential pairs, that are complementary
to each other. This is because when extreme input voltages are achieved, one input pair will be
disabled accordingly, thus making the PMOS pair deal with the most negative voltages, and the
NMOS deal with the most positive. Besides this, as previously explained the FDDA architecture
allows for great voltage swings. The resistors and the capacitors are employed for compensation
reasons. The active loads are employed with diode connected PMOS and NMOS, according to the
transistors to whom they load, as well as the bias network.
This topology lacks a CMFB network, and that is the next step to be taken in the evolution of
the project. As one can read in the sub chapter related to CMFB, its topology can be employed by
resistors and MOSFETs, but the goal is to develop perhaps a new topology with MOSFETS.

Chapter 5
Methodology and Work Plan
In the preparation for the Master thesis, a thorough study has been made on amplifiers and its
design. In the second semester the following tasks will be carried out to complete the Master
Thesis:
• Get familiar with the design and simulation tools, namely cadence
• Develop and simulate various CMFB networks, and see which fits best for the proposed
topology
• Study and development of the instrumentation amplifier
• Structural design and post-layout simulation of the amplifier
• Writing the final report for the master thesis
The work plan for the next semester can be found in figure 5.1 , which contains a gant chart:
37

38 Methodology and Work Plan
Figure 5.1: Gant chart of the work plan

Bibliography
[1] Peter Konrad. The ABC of EMG. Noraxon INC. USA, international edition, 2005. ISBN
90-75452-15-2.
[2] H. Alzaher and M. Ismail. A cmos fully balanced differential difference amplifier and its
applications. IEEE Transactions on Circuits and Systems II: Analog and Digital Signal
Processing, 48(6):614–620, 2001.
[3] M. M. Ahmadi, R. Lotfi, and M. Sharif-Bakhtiar. A new architecture for rail-to-rail input
constant-gm cmos operational transconductance amplifiers. In Proceedings of the Interna-
tional Symposium on Low Power Electronics and Design, pages 353–358, 2003.
[4] A. Suadet and V. Kasemsuwan. A 1 volt cmos pseudo differential amplifier. In IEEE Region
10 Annual International Conference, Proceedings/TENCON, 2007.
[5] C. Hung, M. Ismail, K. Halonen, and V. Porra. Low-voltage rail-to-rail cmos differential dif-
ference amplifier. In Proceedings - IEEE International Symposium on Circuits and Systems,
volume 1, pages 145–148, 1997.
[6] P. K. Chan, K. A. Ng, and X. L. Zhang. A cmos chopper-stabilized differential difference
amplifier for biomedical integrated circuits. In Midwest Symposium on Circuits and Systems,
volume 3, pages III33–III36, 2004.
[7] L. Zhang, L. Zhaohui, and L. He. System design of a low noise, low offset instrumenta-
tion amplifier with chopper stabilization. In ASIC, 2007. ASICON ’07. 7th International
Conference, pages 627 – 630, 2007.
[8] A. Sedra and K. Smith. Microelectronic Circuits. Oxford University Press, international
edition, 1997. ISBN 978-0195142518.
[9] Behzad Razavi. Design of Analog CMOS Integrated Circuits. McGraw-Hill, international
edition, 2001. ISBN 0-07-118839-8.
[10] Jagat. Amplifier classes, 2006. URL http://www.hifivision.com/amplifiers/
174-types-amplifiers-class-class-b-class-ab-class-d.html.
39

40 BIBLIOGRAPHY
[11] Shu-Chuan Huang, Mohammed Ismail, and Seyed R. Zarabadi. A wide range differential
difference amplifier: A basic block for analog signal processing in mos technology. IEEE
Transactions on Circuits and Systems II: Analog and Digital Signal Processing, 40(5):289–
301, 1993.
[12] G. Xu and S. H. K. Embabi. A systematic approach in constructing fully differential ampli-
fiers. IEEE Transactions on Circuits and Systems II: Analog and Digital Signal Processing,
47(12):1547–1550, 2000.
[13] Antonio J. Gano and Jose E. Franca. Fully differential variable gain instrumentation amplifier
based on a dda topology. Conference Record - IEEE Instrumentation and Measurement
Technology Conference, 1:60–64, 1999.
[14] Antonio J. Gano and Jose E. Franca. New multiple input fully differential variable gain cmos
instrumentation amplifier. In Proceedings - IEEE International Symposium on Circuits and
Systems, volume 4, pages IV–449–IV–452, 2000.
[15] E. Sackinger and W. Guggenbuehl. Versatile building block: The cmos differential difference
amplifier. IEEE Journal of Solid-State Circuits, SC-22(2):287–294, 1987.
[16] T. Degen and H. Jäckel. A pseudodifferential amplifier for bioelectric events with dc-offset
compensation using two-wired amplifying electrodes. IEEE Transactions on Biomedical
Engineering, 53(2):300–310, 2006.
[17] J. F. Duque-Carrillo, J. L. Ausín, G. Torelli, J. M. Valverde, and M. A. Domínguez. 1-v
rail-to-rail operational amplifiers in standard cmos technology. IEEE Journal of Solid-State
Circuits, 35(1):33–44, 2000.
[18] A. Harb, H. Yamu, and M. Sawan. Cmos low-voltage operational amplifiers with constant
gm rail-to-rail input stage. In Electronics, Circuits and Systems, 1999. Proceedings of ICECS
’99. The 6th IEEE International Conference, volume 1, pages 517 – 520, 1999.
[19] R. Hogervorst, R. J. Wiegerink, P. A. L. Jong, J. Fonderie, R. F. Wassenaar, and J. H. Hui-
jsing. Cmos low-voltage operational amplifiers with constant gm rail-to-rail input stage. In
Circuits and Systems, 1992. ISCAS ’92. Proceedings., 1992 IEEE International Symposium,
volume 6, pages 2876 – 2879, 1992.
[20] Q. Fu, Y. Xiao, K. Tan, X. Liu, and Q. Shan. Analysis and design of instrumentation am-
plifier based on chopper technology. In 2010 Academic Symposium on Optoelectronics and
Microelectronics Technology and 10th Chinese-Russian Symposium on Laser Physics and
Laser Technology, RCSLPLT/ASOT 2010, pages 318–321, 2010.
[21] X. Yang, Q. Cheng, L. . Lin, W. . Huang, and C. . Ling. Design of low power low noise
amplifier for portable electrocardiogram recording system applications. In ASID 2011 - Pro-
ceedings: 2011 IEEE International Conference on Anti-Counterfeiting, Security and Identi-
fication, pages 89–92, 2011.

BIBLIOGRAPHY 41
[22] M. Goswami and S. Khanna. Dc suppressed high gain active cmos instrumentation ampli-
fier for biomedical application. In 2011 International Conference on Emerging Trends in
Electrical and Computer Technology, ICETECT 2011, pages 747–751, 2011.
[23] R. Martins, S. Selberherr, and F. A. Vaz. A cmos ic for portable eeg acquisition systems.
IEEE Transactions on Instrumentation and Measurement, 47(5):1191–1196, 1998.
[24] Y. Sun, N. Ye, and F. Pan. A novel design of eeg signal amplifier. In Proceedings of the 2012
24th Chinese Control and Decision Conference, CCDC 2012, pages 3369–3372, 2012.
Recommended