Capítulo 1
Geometria Analítica Plana
O principal objetivo deste capítulo é fornecer a base necessária para aboa compreensão dos números reais via construções geométrica e suas pro-priedades através de um tratamento conciso sem, contudo, descurar do rigormatemático.
1.1 Números Reais
Nesta seção vamos mostrar que os números reais podem ser identificadoscom os pontos de uma reta r.
Para isto, fixemos sobre a reta r um ponto O. Agora, escolhamos umoutro ponto P sobre r e uma unidade de comprimento u, de modo que u sejaigual ao comprimento do segmento OP .Com um compasso de abertura OP centrado em P marcamos o ponto
P2, a partir do qual, obtemos o ponto P3 e, assim, sucessivamente, obtemosa seqüência de pontos
P1, P2, P3, . . . ,
onde P1 = P . Note que, o n-ésimo ponto Pn dista n unidades de O. Demodo análogo, obtemos a seqüência de pontos
P−1, P−2, P−3, . . .
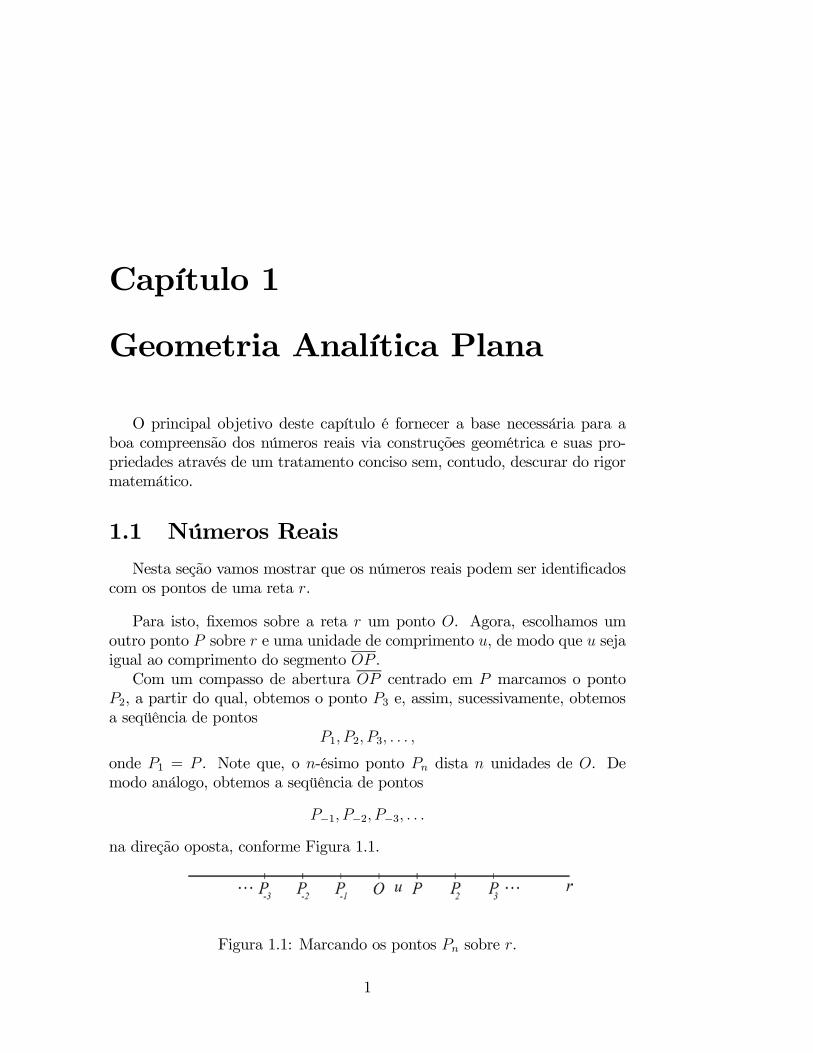
na direção oposta, conforme Figura 1.1.
Figura 1.1: Marcando os pontos Pn sobre r.
1

2 CAPÍTULO 1. GEOMETRIA ANALÍTICA PLANA
Assim, identificamos cada n ∈ Z com um ponto Pn ∈ r. Portanto, afigura acima se transforma na Figura 1.2.
Figura 1.2: Identificando cada n ∈ Z com um ponto Pn ∈ r.
Agora, dado
x =m
n∈ Q,
com n > 0. Como podemos associar x a um único ponto da reta r?Primeiro. Se m > n, então, pelo Algoritmo da Divisão, existem únicos
q, s ∈ Z tais que
m = qn+ s, onde s ∈ {0, 1, . . . , n− 1}.
Assim,
x =m
n= q +
s
n= q
s
n,
onde q sné chamada de fração mista.
Segundo. A partir de q tracemos uma reta que faz um certo ângulo coma reta r. Agora, com uma dada abertura do compasso, marcamos a partirde q, n pontos sobre esta reta. Unimos o último ponto P ao ponto q + 1 etracemos paralelas ao segmento P (q + 1). Estas paralelas divide o segmentoq(q + 1) em n partes iguais.Terceiro. Tomamos as s primeiras destas partes. O ponto final da última
parte é o ponto que corresponde ao número x.
Exemplo 1.1 Marque o ponto x = −76sobre a reta r.
Solução. Como −7 = (−2)6 + 5 temos que
−76= −2 + 5
6
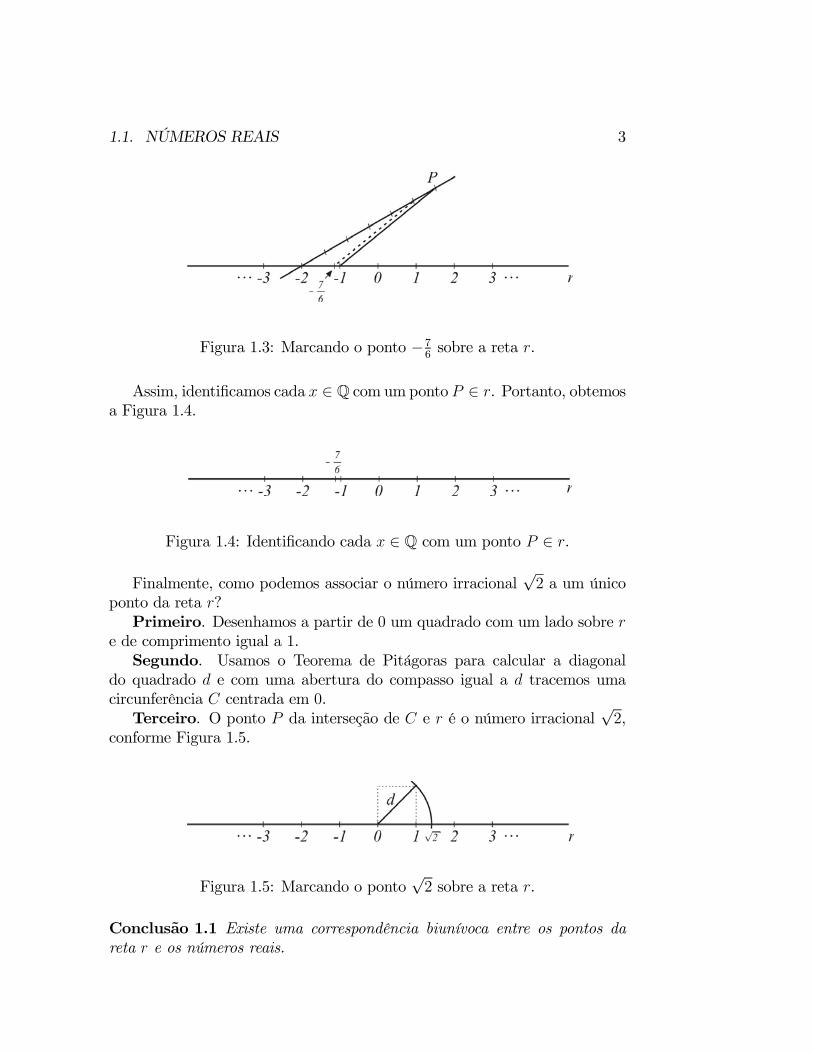
o resultado segue da Figura 1.3.
1.1. NÚMEROS REAIS 3
Figura 1.3: Marcando o ponto −76sobre a reta r.
Assim, identificamos cada x ∈ Q com um ponto P ∈ r. Portanto, obtemosa Figura 1.4.
Figura 1.4: Identificando cada x ∈ Q com um ponto P ∈ r.
Finalmente, como podemos associar o número irracional√2 a um único
ponto da reta r?Primeiro. Desenhamos a partir de 0 um quadrado com um lado sobre r
e de comprimento igual a 1.Segundo. Usamos o Teorema de Pitágoras para calcular a diagonal
do quadrado d e com uma abertura do compasso igual a d tracemos umacircunferência C centrada em 0.Terceiro. O ponto P da interseção de C e r é o número irracional
√2,
conforme Figura 1.5.
Figura 1.5: Marcando o ponto√2 sobre a reta r.
Conclusão 1.1 Existe uma correspondência biunívoca entre os pontos dareta r e os números reais.

4 CAPÍTULO 1. GEOMETRIA ANALÍTICA PLANA
Uma reta r na qual foi estabelecida uma correspondência biunívoca entreseus pontos e os números reais R será chamada de reta numérica ou eixo. Oponto O será chamado de origem e o número x associado a um ponto P de rserá chamado de coordenada de P ou abscissa de P . A reta r fica orientada,pois nela podemos destiguir dois sentidos de percurso: sentido positivo ousemi-eixo positivo, que é o das coordenadas crescentes, e sentido negativo ousemi-eixo negativo, que é o das coordenadas decrescentes.
Figura 1.6: Identificando cada x ∈ R com um ponto P ∈ r.
Note que sex =
a
b, y =
c
d∈ Q,
então seu ponto médio
m =x+ y
2=
da+ bc
2bd∈ Q.
Suponhamos que x < y. Então
m = x+y − x
2.
Figura 1.7: Ponto Médio m.
Observação 1.1 Em torno de qualquer x ∈ R, existe uma infinidade denúmeros racionais. De fato, seja bxc o maior inteiro menor do que ou iguala x ou, equivalentemente,
bxc = max{n ∈ Z : n ≤ x},
por exemplo b√2c = 1. Então
bxc ≤ x < bxc+ 1.
1.2. SISTEMA DE COORDENADAS CARTESIANAS 5
Assim, para cada x ∈ R, existem m,n ∈ Z tais que
m < x < n.
Portanto, podemos aplicar indefinidamente, de modo conveniente, o processode obter o ponto médio.
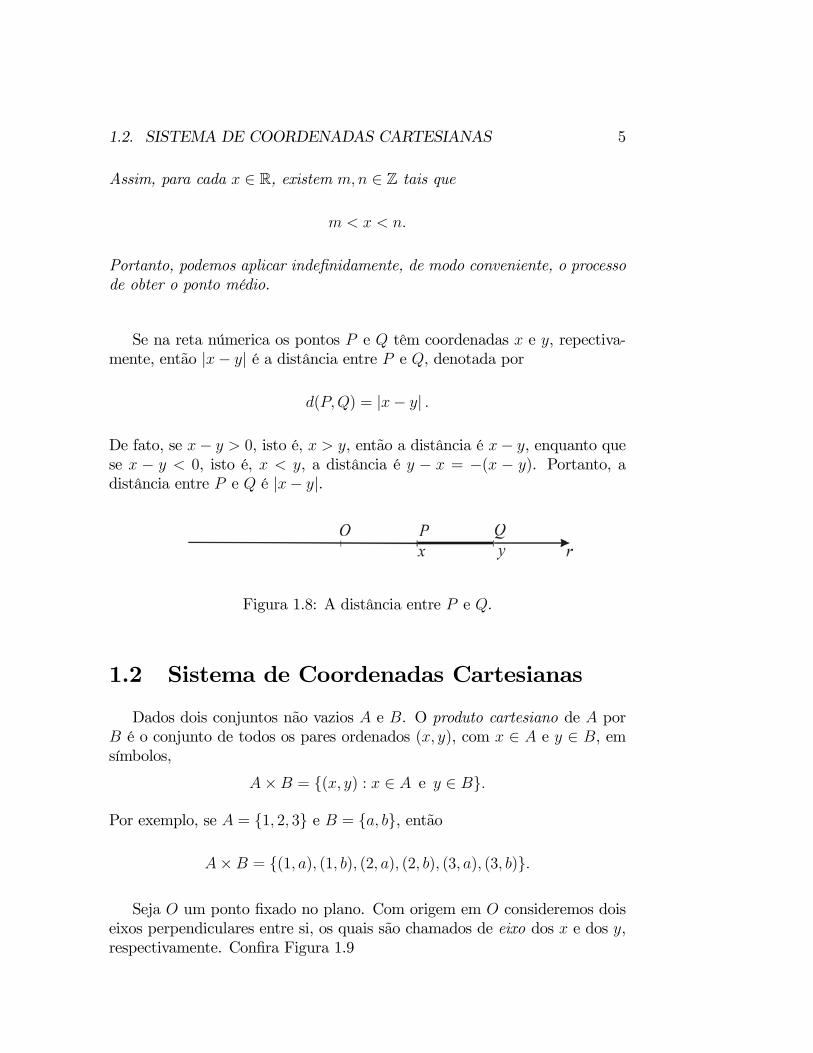
Se na reta númerica os pontos P e Q têm coordenadas x e y, repectiva-mente, então |x− y| é a distância entre P e Q, denotada por
d(P,Q) = |x− y| .
De fato, se x− y > 0, isto é, x > y, então a distância é x− y, enquanto quese x − y < 0, isto é, x < y, a distância é y − x = −(x − y). Portanto, adistância entre P e Q é |x− y|.
Figura 1.8: A distância entre P e Q.
1.2 Sistema de Coordenadas Cartesianas
Dados dois conjuntos não vazios A e B. O produto cartesiano de A porB é o conjunto de todos os pares ordenados (x, y), com x ∈ A e y ∈ B, emsímbolos,
A×B = {(x, y) : x ∈ A e y ∈ B}.
Por exemplo, se A = {1, 2, 3} e B = {a, b}, então
A×B = {(1, a), (1, b), (2, a), (2, b), (3, a), (3, b)}.
Seja O um ponto fixado no plano. Com origem em O consideremos doiseixos perpendiculares entre si, os quais são chamados de eixo dos x e dos y,respectivamente. Confira Figura 1.9
6 CAPÍTULO 1. GEOMETRIA ANALÍTICA PLANA
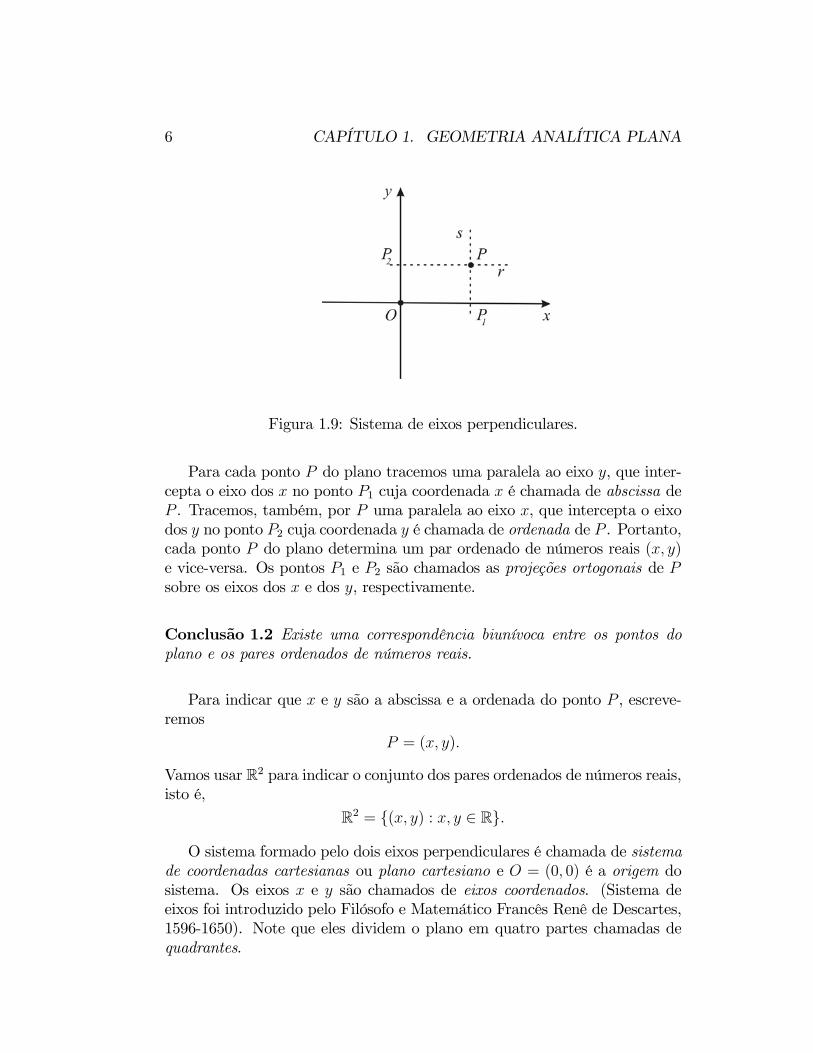
Figura 1.9: Sistema de eixos perpendiculares.
Para cada ponto P do plano tracemos uma paralela ao eixo y, que inter-cepta o eixo dos x no ponto P1 cuja coordenada x é chamada de abscissa deP . Tracemos, também, por P uma paralela ao eixo x, que intercepta o eixodos y no ponto P2 cuja coordenada y é chamada de ordenada de P . Portanto,cada ponto P do plano determina um par ordenado de números reais (x, y)e vice-versa. Os pontos P1 e P2 são chamados as projeções ortogonais de Psobre os eixos dos x e dos y, respectivamente.
Conclusão 1.2 Existe uma correspondência biunívoca entre os pontos doplano e os pares ordenados de números reais.
Para indicar que x e y são a abscissa e a ordenada do ponto P , escreve-remos
P = (x, y).
Vamos usar R2 para indicar o conjunto dos pares ordenados de números reais,isto é,
R2 = {(x, y) : x, y ∈ R}.O sistema formado pelo dois eixos perpendiculares é chamada de sistema
de coordenadas cartesianas ou plano cartesiano e O = (0, 0) é a origem dosistema. Os eixos x e y são chamados de eixos coordenados. (Sistema deeixos foi introduzido pelo Filósofo e Matemático Francês Renê de Descartes,1596-1650). Note que eles dividem o plano em quatro partes chamadas dequadrantes.
1.2. SISTEMA DE COORDENADAS CARTESIANAS 7
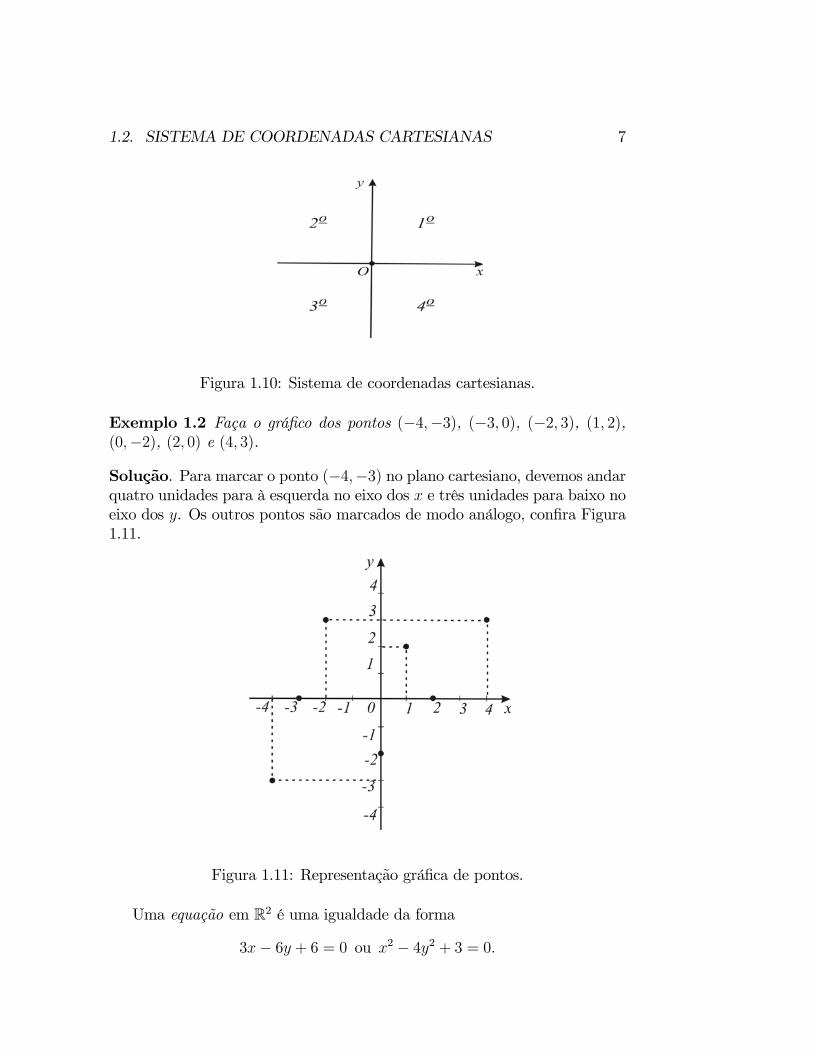
Figura 1.10: Sistema de coordenadas cartesianas.
Exemplo 1.2 Faça o gráfico dos pontos (−4,−3), (−3, 0), (−2, 3), (1, 2),(0,−2), (2, 0) e (4, 3).Solução. Para marcar o ponto (−4,−3) no plano cartesiano, devemos andarquatro unidades para à esquerda no eixo dos x e três unidades para baixo noeixo dos y. Os outros pontos são marcados de modo análogo, confira Figura1.11.
Figura 1.11: Representação gráfica de pontos.
Uma equação em R2 é uma igualdade da forma
3x− 6y + 6 = 0 ou x2 − 4y2 + 3 = 0.

8 CAPÍTULO 1. GEOMETRIA ANALÍTICA PLANA
O gráfico ou (a curva) de uma equação em R2 é o conjunto de todos os pontos(x, y) que satisfazem esta equação.
Exemplo 1.3 Esboçar o gráfico da equação
y2 − x− 2 = 0.
Solução. Como
y2 − x− 2 = 0⇔ y2 = x+ 2 e y2 ≥ 0
devemos escolher os x ∈ R tais que x ≥ −2. Assim, vamos construir a tabela
x −2 −1 −1 0 0 1 1 2 2
y 0 1 −1 √2 −√2 √
3 −√3 2 −2
para depois esboçar o gráfico, confira Figura 1.12.
Figura 1.12: O gráfico da equação y2 − x− 2 = 0.
EXERCÍCIOS
1. Faça o gráfico dos pontos (3, 0), (0,−2), (2, 2), (−2,−3), (1,−1), (−3, 4)e (−3
2, 2).
2. Todo ponto pertencente ao eixo das abscissas possui uma mesma orde-nada. Qual é o valor dessa ordenada?
1.2. SISTEMA DE COORDENADAS CARTESIANAS 9
3. Todo ponto pertencente ao eixo das ordenadas possui uma mesma a-bscissa. Qual é o valor dessa abscissa?
4. Dê os sinais da abscissa e da ordenada de um ponto, conforme elepertença ao 1o, 2o, 3o e 4o quadrante.
5. Determinar x e y de modo que:
(a) (2x− 1, y + 2) = (3x+ 2, 2y − 6);(b) (x+ 2, y − 3) = (2x+ 1, 3y − 1);(c) (2x, x− 8) = (1− 3y, y);(d) (x2 + x, 2y) = (6, y2);
(e) (y2, |x|) = (3, 2).6. Determinar x de modo que:
(a) (3x− 1,−2x+ 1) pertença ao 1o quadrante;(b) (x+
√3,−2x− 4) pertença ao 4o quadrante.
7. Dados os pares ordenados (2, 1), (0, 1), (−2, 3), (1, 0), (−1,−2), deter-minar quais deles pertencem ao conjunto
A = {(x, y) : y = x− 1}.
8. Se A = [−2, 5[ e B =]1, 6], determinar A × B e B × A. Representargraficamente.
9. Esboçar o gráfico das equações abaixo:
(a) y = 2x+ 5;
(b) y = −4x+ 3;(c) y2 = x− 3;(d) y = 5;
(e) x = y2 + 1;
(f) y = |x− 5|;(g) y = |x|− 5;(h) y = x3;
(i) x2 + y2 = 4.
10. Escreva uma equação cujo gráfico é o eixo dos x. Escreva uma equaçãocujo gráfico é o eixo dos y.

10 CAPÍTULO 1. GEOMETRIA ANALÍTICA PLANA
1.3 Distância entre Dois Pontos
Sejam P1 = (x1, y1) e P2 = (x2, y2) dois pontos do plano. Então há trêscasos a ser considerado:
1o Caso. Se o segmento P1P2 é paralelo ao eixo dos y, isto é, x1 = x2,então a distância entre P1e P2 é
d(P1, P2) = |y2 − y1| .2o Caso. Se o segmento P1P2 é paralelo ao eixo dos x, isto é, y1 = y2,
então a distância entre P1e P2 é
d(P1, P2) = |x2 − x1| .3o Caso. Se o segmento P1P2 não é paralelo nem ao eixo dos x e nem
ao eixo dos y, isto é, x1 6= x2 e y1 6= y2, então traçando por P1 uma paralelaao eixo dos x e por P2 uma paralela ao eixo dos y, obtemos um triânguloretângulo P1QP2, comQ = (x2, y1), cujos catetes P1Q e QP2 têm, pelos casosanteriores, distâncias
d(P1, Q) = |x2 − x1| e d(P2, Q) = |y2 − y1| ,respectivamente. Obtemos, pelo Teorema de Pitágoras, que
d(P1, P2)2 = |x2 − x1|2 + |y2 − y1|2
ou, equivalentemente,
d(P1, P2) =p(x2 − x1)2 + (y2 − y1)2,
confira Figura 1.13.
Figura 1.13: Distância entre os pontos P1 e P2.

1.3. DISTÂNCIA ENTRE DOIS PONTOS 11
Exemplo 1.4 Mostrar que o ponto P = (1, 2) é eqüidistante dos pontosP1 = (0, 0), P2 = (2, 0) e P3 = (0, 4).
Solução. Basta mostrar que
d(P, P1) = d(P,P2) = d(P,P3).
Logo,d(P,P1) =
p(0− 1)2 + (0− 2)2 = √5
d(P,P1) =p(2− 1)2 + (0− 2)2 = √5
d(P,P1) =p(0− 1)2 + (4− 2)2 = √5
.
Portanto, o ponto P = (1, 2) é eqüidistante dos pontos P1 = (0, 0), P2 = (2, 0)e P3 = (0, 4).
EXERCÍCIOS
1. Calcular a distância entre:
(a) P1 = (2,−3) e P2 = (−3, 2);(b) P1 = (1, 2) e P2 = (−3, 4);(c) P1 = (2, 3) e P2 = (−2, 6).
2. Dados os pontos A = (2, 7), B = (6, 4) e C = (−2, 4). Mostrar que otriângulo ABC é isósceles.
3. Dados os pontos A = (1, 4), B = (5, 1) e C = (5, 4).
(a) Calcular o perímetro do triângulo ABC.
(b) Mostrar que o triângulo ABC é retângulo e calcular sua área.
4. Determinar x de modo que a distância entre A = (x, 2) e B = (1,−1)seja 5 unidades.
5. Determinar um ponto P do eixo das abscissas, sabendo que P é eqüidis-tante dos pontos A = (3, 8) e B = (9, 2).
6. Determinar x de modo que o ponto P = (3, x) seja eqüidistante dospontos P1 = (0, 4) e P2 = (6, 0).
7. Calcular o raio da circunferência que tem centro em C = (4, 9) e quepassa pelo ponto P = (−2, 1).
8. Calcular o comprimento da mediana relativa ao lado BC do triângulode vértices A = (2, 17), B = (−6, 1) e C = (−4,−15).

12 CAPÍTULO 1. GEOMETRIA ANALÍTICA PLANA
1.4 A Reta
O gráfico da equação
Ax+By + C = 0, (1.1)
onde A, B e C são constantes e pelo menos um dos dois, A ou B, é não nulo,é uma reta. A equação (1.1) é chamada de equação geral do 1o grau em xe y ou equação cartesiana da reta. (A geometria analítica foi ciriada peloMatemático Francês Pierre de Fermat, 1601-1665).Uma maneira de esboçar o gráfico de uma reta é determinar as suas
interseções com os eixos coordenados: Se A 6= 0, então, fazendo y = 0,obtemos o ponto
P1 = (−CA, 0)
de interseção da reta com o eixo dos x, o qual é chamado de intercepto x. SeB 6= 0, então, fazendo x = 0, obtemos o ponto
P2 = (0,−CB)
de interseção da reta com o eixo dos y, o qual é chamado de intercepto y.
Exemplo 1.5 Esboçar o gráfico da reta
3x+ 2y − 6 = 0.
Solução. Para esboçar o gráfico de uma reta basta determinar os interceptosx e y, respectivamente. Fazendo y = 0, obtemos
3x− 6 = 0⇒ 3x = 6⇒ x =6
3= 2.
Logo, P1 = (2, 0) é o ponto de interseção da reta com o eixo dos x. Fazendoy = 0, obtemos
2y − 6 = 0⇒ 2y = 6⇒ y =6
2= 3.
Logo, P2 = (0, 3) é o ponto de interseção da reta com o eixo dos y. Portanto,o gráfico da reta é dado pela Figura 1.14.

1.4. A RETA 13
Figura 1.14: Gráfico da reta 3x+ 2y − 6 = 0.
A inclinação, declive ou coeficiente angular de uma reta é a tangente doângulo que ela faz com o eixo dos x, conforme Figura 1.15.
Figura 1.15: Inclinação da reta Ax+By + C = 0.
Logo,
m = tan θ =
¯A
B
¯=
½ABse 0 < θ < π
2,
−ABse π
2< θ < π.
Portanto, se B 6= 0, a equação (1.1) pode ser escrita sob a forma
y = mx+ b, onde b = −CB. (1.2)

14 CAPÍTULO 1. GEOMETRIA ANALÍTICA PLANA
A equação (1.2) é chamada de forma inclinação intercepto (ou equação re-duzida) da reta e b é chamado de coeficiente linear da reta.
Observação 1.2 Se B = 0, então a equação (1.1) é a reta
x = −CA
paralela ao eixo dos y. Neste caso, a inclinação m não está definida.
Exemplo 1.6 Determinar a equação da reta que passa pelo ponto P = (2, 1)e tem inclinação m = −1.Solução. A equação da reta que tem inclinação m = −1 é
y = −x+ b.
Como P = (2, 1) é um ponto desta reta temos que
1 = −2 + b⇒ b = 3.
Portanto, y = −x+ 3 é a equação da reta que passa pelo ponto P = (2, 1) etem inclinação m = −1.Vamos agora determinar a equação da reta que passa por dois pontos
P1 = (x1, y1) e P2 = (x2, y2). Há três casos a ser considerado.
1o Caso. Se x1 = x2, então a reta é paralela ao eixo dos y e, portanto,sua equação é
x = x1.
Neste caso, a inclinação m não está definida.
2o Caso. Se x1 6= x2 e y1 = y2, então a reta é paralela ao eixo dos x e,portanto, sua equação é
y = y1.
Neste caso, m = 0.
3o Caso. Se x1 6= x2 e y1 6= y2, então a reta tem inclinação
m =y2 − y1x2 − x1
µou m =
y1 − y2x1 − x2
¶e, portanto, sua equação é
y =
µy2 − y1x2 − x1
¶x+ b.

1.4. A RETA 15
Como P1 = (x1, y1) (ou P2 = (x2, y2)) é um ponto desta reta temos que
y1 =
µy2 − y1x2 − x1
¶x1 + b.
Logo, por subtração, obtemos
y − y1 =
µy2 − y1x2 − x1
¶(x− x1) (1.3)
que é a equação da reta que passa por P1 = (x1, y1) e P2 = (x2, y2). ConfiraFigura 1.16
Figura 1.16: Reta determinada por dois pontos.
Exemplo 1.7 Determinar a equação da reta que passa pelos pontos P1 =(3, 1) e P1 = (−1, 2).
Solução. A reta tem inclinação
m =2− 1−1− 3 =
1
−4 = −1
4.
Logo, a equação da reta é
y − 1 = −14(x− 3),
ou ainda,
y = −14x+
7
4.
16 CAPÍTULO 1. GEOMETRIA ANALÍTICA PLANA
1.5 Posições Relativas de Duas Retas
Consideremos duas retas, r e s, dadas por suas equações cartesianas
Ax+By + C = 0 e A0x+B0y + C 0 = 0.
Se r não é paralela ao eixo dos y, então r e s são paralelas se, e somente se,elas têm a mesma inclinação, isto é,
−AB= −A
0
B0 ⇔ AB0 −A0B = 0.
Se r é paralela ao eixo dos y, então r e s são paralelas se, e somente se,B = B0 = 0, de modo que,
AB0 −A0B = 0.
Portanto, r e s são paralelas se, e somente se,
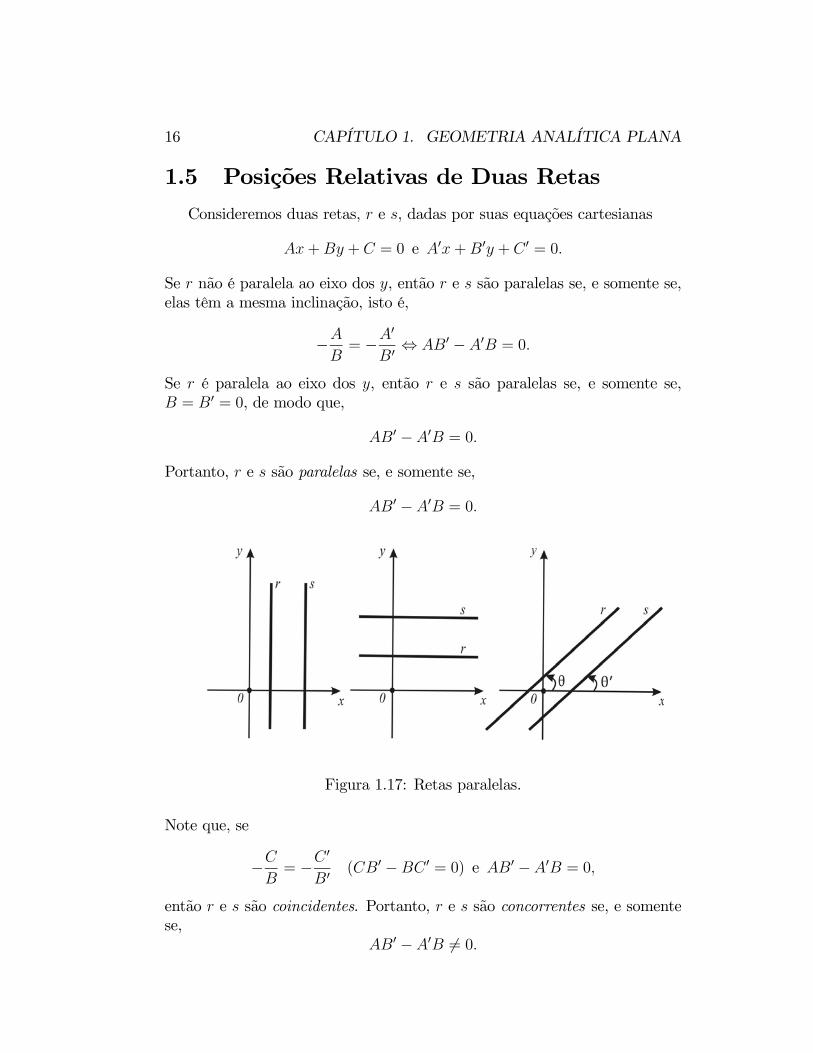
AB0 −A0B = 0.
Figura 1.17: Retas paralelas.
Note que, se
−CB= −C
0
B0 (CB0 −BC 0 = 0) e AB0 −A0B = 0,
então r e s são coincidentes. Portanto, r e s são concorrentes se, e somentese,
AB0 −A0B 6= 0.
1.6. PERPENDICULARISMO 17
Exemplo 1.8 Determinar se as retas são paralelas ou concorrentes:
1. x− 2y + 5 = 0 e 3x− 6y + 2 = 0;2. x− y + 1 = 0 e 2x− y + 2 = 0.
Solução. 1. Pelas equações temos que A = 1, B = −2 e A0 = 3, B0 = −6.Logo,
AB0 −A0B = 1 · (−6)− 3 · (−2) = −6 + 6 = 0.Portanto, as retas são paralelas.2. Pelas equações temos que A = 1, B = −1 e A0 = 2, B0 = −1. Logo,
AB0 −A0B = 1 · (−1)− 2 · (−1) = −1 + 2 = 1 6= 0.
Portanto, as retas são concorrentes.
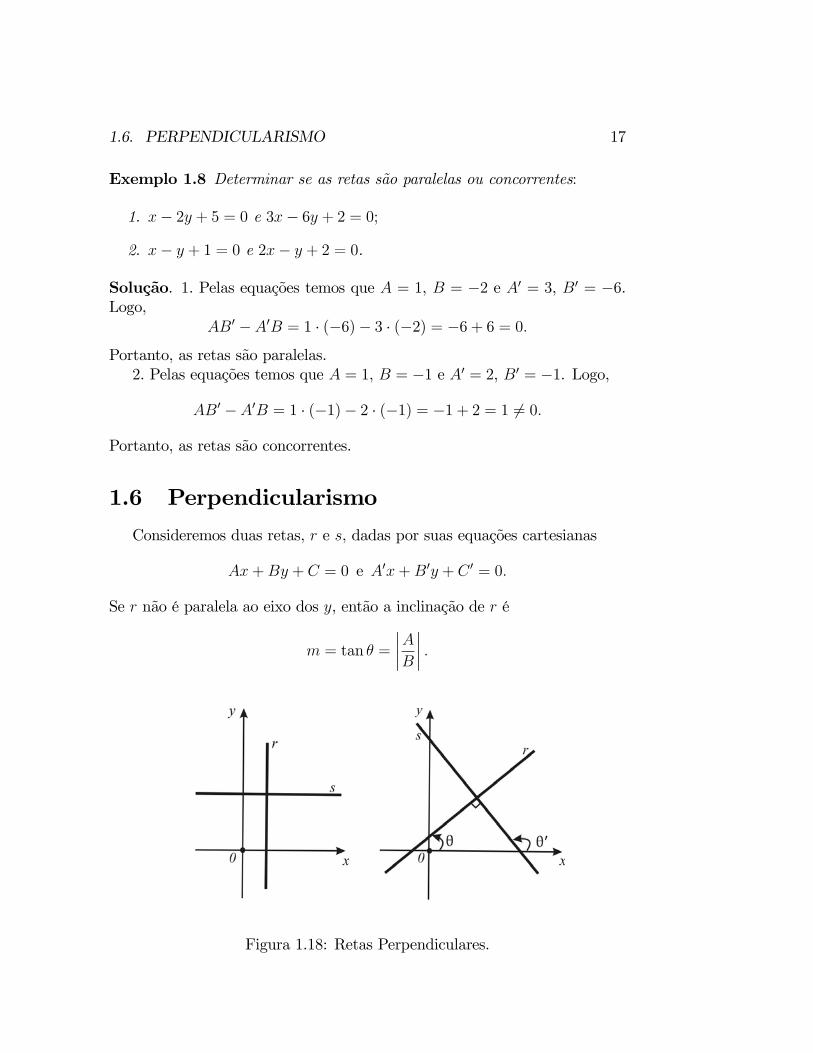
1.6 Perpendicularismo
Consideremos duas retas, r e s, dadas por suas equações cartesianas
Ax+By + C = 0 e A0x+B0y + C 0 = 0.
Se r não é paralela ao eixo dos y, então a inclinação de r é
m = tan θ =
¯A
B
¯.
Figura 1.18: Retas Perpendiculares.

18 CAPÍTULO 1. GEOMETRIA ANALÍTICA PLANA
Assim, pela Figura 1.18, r e s são perpendiculares se, e somente se,
θ0 = θ +π
2.
Comom0 = tan θ0 = tan(θ +
π
2) = − 1
tan θ
temos que m ·m0 = −1 ou, equivalentemente,
AA0 +BB0 = 0.
Se r é paralela ao eixo dos y, então r e s são perpendiculares se, e somentese, B = A0 = 0, de modo que,
AA0 +BB0 = 0.
Portanto, r e s são perpendiculares se, e somente se,
AA0 +BB0 = 0.
Exemplo 1.9 Determinar se as retas são perpendiculares:
1. 3x− y − 1 = 0 e x+ 3y = 02. x− y = 0 e x+ 2y − 1 = 0.
Solução. 1. Pelas equações temos que A = 3, B = −1 e A0 = 1, B0 = 3.Logo,
AA0 +BB0 = 3 · 1 + (−1) · 3 = 3− 3 = 0.Portanto, as retas são perpendiculares.2. Pelas equações temos que A = 1, B = −1 e A0 = 1, B0 = 2. Logo,
AA0 +BB0 = 1 · 1 + (−1) · 3 = 1− 3 = −2 6= 0
Portanto, as retas não são perpendiculares mas são concorrentes, pois
AB0 −A0B = 3 · 2− 1 · (−1) = 6 + 1 = 7 6= 0.
Observação 1.3 Para estudar a posição relativa de duas retas r e s, bastadiscutir o sistema ½
Ax+By = −CA0x+B0y = −C 0.

1.6. PERPENDICULARISMO 19
Para finalizar esta seção, vamos expressar a equação da reta que passaem dois pontos, em forma de determinante.A equação da reta que passa pelos pontos P1 = (x1, y1) e P2 = (x2, y2) é,
conforme equação (1.3), dada por
y − y1 =
µy2 − y1x2 − x1
¶(x− x1)
ou, equivalentemente,
(x2 − x1)(y − y1) = (y2 − y1)(x− x1),
ou ainda,(x2 − x1)y − (y2 − y1)x+ (x1y2 − x2y1) = 0.
É fácil verificar que isto é o desenvolvimento, relativo a primeira linha, dodeterminante da matriz
A =
x y 1x1 y1 1x2 y2 1
.Portanto, a equação da reta que passa pelos pontos P1 = (x1, y1) e P2 =(x2, y2) pode ser escrita sob a forma de determinante
det (A) = 0.
Exemplo 1.10 Determinar a equação da reta que passa pelos pontos P1 =(−1, 3) e P2 = (2, 1).Solução. Já vimos que a equação da reta que passa pelos pontos P1 = (−1, 3)e P2 = (2, 1) é dada por
det
x y 1−1 3 12 1 1
= 0⇔ (3− 1)x− (−1− 2)y + (−1− 6) = 0,
isto é, 2x+ 3y − 7 = 0. O determinante de uma matriz de ordem três pode,também, ser obtido pela Regra de Sarrus.
Figura 1.19: Regra de Sarrus.

20 CAPÍTULO 1. GEOMETRIA ANALÍTICA PLANA
Observação 1.4 1. Sejam r e s duas retas, cujas equações cartesianassão:
Ax+By + C = 0 e A0x+B0y + C 0 = 0.
Uma condição necessária e suficiente para que r e s sejam paralelas(concorrentes) é que
det
0 0 1A B 1A0 B0 1
= 0
det 0 0 1
A B 1A0 B0 1
6= 0 .
2. Uma condição necessária e suficiente para que três pontos P1 = (x1, y1),P2 = (x2, y2) e P3 = (x3, y3) estejam alinhados é que
det
x1 y1 1x2 y2 1x3 y3 1
= 0.
Exemplo 1.11 Determinar se os pontos P1 = (2, 3), P2 = (3, 5) e P3 =(0,−1) estão alinhados.Solução. Os pontos estão alinhados se, e somente se,
det
2 3 13 5 10 −1 1
= (10 + 0− 3)− (0− 2 + 9) = 7− 7 = 0.
Portanto, os pontos P1 = (2, 3), P2 = (3, 5) e P3 = (0,−1) estão alinhados.Exemplo 1.12 Determinar a equação da reta que intercepta os eixos coor-denados, fora da origem, nos pontos A = (p, 0) e B = (0, q).
Solução. Já vimos que a equação da reta que passa pelos pontos A = (p, 0)e B = (0, q) é dada por
det
x y 1p 0 10 q 1
= 0⇔ pq − qx− py = 0.
Portanto, dividindo esta equação por pq, obtemos
x
p+
y
q= 1,
a qual é a equação segmetária da reta.

1.6. PERPENDICULARISMO 21
EXERCÍCIOS
1. Determinar a inclinação da reta que passa pelos pontos dados:
(a) P1 = (2,−3) e P2 = (−4, 3);(b) P1 = (5, 2) e P2 = (−2,−3);(c) P1 = (
13, 12) e P2 = (−56 ,−23);
(d) P1 = (34,−3
2) e P2 = (−52 , 14).
2. Determinar k de modo que a reta de equação 3x − 5y + k = 0 passepelo ponto P = (1,−1).
3. Obtenha a equação reduzida de cada uma das retas. Em cada caso,determinar a inclinação e o coeficiente linear.
(a) 5x− y + 3 = 0;
(b) 2x+ 3y − 7 = 0;(c) x− 2y + 4 = 0;(d) 6x+ 3y − 1 = 0.
4. Determinar, se existir, o ponto de interseção das retas
(a) 2x+ y + 2 = 0 e 3x− y − 17 = 0;(b) 6x+ 4y − 1 = 0 e 3x+ 2y + 5 = 0.
5. Determinar a equação da reta que tem inclinação 4 e passa pelo pontoP = (2,−3).
6. Determinar a equação da reta que passa pelos pontos P1 = (3, 1) eP2 = (−5, 4).
7. Determinar a equação da reta que passa pelo ponto P = (1, 4) e éparalela à reta cuja equação é 2x− 5y + 7 = 0.
8. Determinar a equação da reta que passa pelo ponto P = (−2, 3) e éperpendicular à reta cuja equação é 2x− y − 2 = 0.
9. Determinar a equação da reta que intercepta o eixo dos y no ponto −4e é perpendicular à reta cuja equação é 3x− 4y − 2 = 0.
10. Determinar a equação da reta que passa pelo ponto P = (−3,−4) e éparalela ao eixo dos y.

22 CAPÍTULO 1. GEOMETRIA ANALÍTICA PLANA
11. Determinar a equação da reta que passa pelo ponto P = (1,−7) e éparalela ao eixo dos x.
12. Determinar se as retas 3x+ 5y + 7 = 0 e 5x− 3y − 2 = 0 são perpen-diculares.
13. Determinar se as retas 3x+5y+7 = 0 e 6x+10y−5 = 0 são paralelas.14. Considere as retas k2x− y + 3 = 0 e (3k + 4)x− y − 5 = 0.
(a) Determinar k para que elas sejam paralelas;
(b) Determinar k para que elas sejam concorrentes;
(c) Existe algum valor de k para que elas sejam coincidentes.
15. Determinar se os pontos dados são alinhados:
(a) P1 = (2, 3), P2 = (−4,−7) e P3 = (5, 8);(b) P1 = (2,−1), P2 = (1, 1) e P3 = (3, 4);(c) P1 = (4, 6), P2 = (1, 2) e P3 = (−5,−4);(d) P1 = (−3, 6), P2 = (3, 2) e P3 = (9,−2).
16. Mostrar que a distância de um ponto P0 = (x0, y0) a uma reta r, cujaequação cartesiana é Ax+By + C = 0, é dada por
d(P0, r) =|Ax0 +By0 + C|√
A2 +B2.
17. Calcular a distância entre o ponto P e a reta r nos seguintes casos:
(a) P = (0, 0) e 12x+ 5y + 26 = 0;
(b) P = (3,−2) e 3x− 4y + 3 = 0;(c) P = (5,−2) e x+ 2y − 1 = 0;(d) P = (−3, 7) e y = 11− x;
(e) P = (1, 1) e x4+ y
3= 1.
18. Calcular a distância do ponto P = (1, 2) à reta definida por A = (5, 7)e B = (−1,−1).
19. Calcular a distância entre as retas r e s nos seguintes casos:

1.6. PERPENDICULARISMO 23
(a) 7x+ 24y − 1 = 0 e 7x+ 24y + 49 = 0;(b) 2x+ y − 11 = 0 e 4x+ 2y − 17 = 0;(c) Ax+By + C = 0 e Ax+By + C = 0.
20. Calcular a altura AH do triângulo ABC, dados A = (1, 1), B =(−1,−3) e C = (2,−7).
21. Calcular a altura do trapézio ABCD, dados A = (0, 0), B = (8, 1),C = (16, 4) e D = (0, 2).
22. Determinar as equações das retas paralelas a reta r, cuja equação é12x− 5y + 1 = 0, e distantes 3 unidades de r.
23. Sejam A = (x1, y1), B = (x2, y2) e C = (x3, y3) três vértices de umtriângulo. Mostrar que área do triângulo ABC é dada por
S =1
2· |D| onde D = det(A) e A =
x1 y1 1x2 y2 1x3 y3 1
.24. Calcular a área do triângulo ABC nos seguintes casos:
(a) A = (9, 2), B = (1, 10) e C = (−3,−8);(b) A = (0, 0), B = (3, 0) e C = (0, 5);
(c) A = (−2, 6), B = (8,−4) e C = (11, 11);(d) A = (x, x+ 3), B = (x− 1, x) e C = (x+ 1, x+ 1).
25. Calcular a área do quadrilátero ABCD, dados A = (1, 2), B = (5, 0),C = (7, 10) e D = (1, 6).
26. Calcular a área do pentágono ABCDE, dados A = (0, 0), B = (2, 0),C = (4, 2), D = (1, 6) e E = (0, 4).
27. Dados A = (5, 1), B = (7, 3) e C = (−1, x), determinar x, de modoque, o triângulo ABC tenha área igual a 4 unidades.
28. Dados A = (−3, 0) e B = (0,−3), determinar C, de modo que, otriângulo ABC tenha área igual a 9 unidades, sabendo-se que pertenceà reta y = 2x.
29. Considere os pontos A = (2, 0) e B = (0, 1). Determinar o pontoP = (x, y) pertencente ao terceiro quadrante, de modo que, as retasAB e BP sejam perpendiculares e o triângulo ABP tenha área igual a10 unidades.
24 CAPÍTULO 1. GEOMETRIA ANALÍTICA PLANA
Capítulo 2
Vetores
O principal objetivo, deste capítulo, é o estudo de “vetores” de um pontode vista geométrico e analítico, será tomada uma abordagem formal e/ouinformal do assunto. O estudo axiomático é visto no curso de Introdução àÁlgebra Linear.
2.1 Segmentos Orientados
Sejam A e B dois pontos, com A 6= B. A única reta que passa por A e Bé chamada de reta suporte.Um segmento de reta determinado por A e B, denotado por AB, é o
conjunto de pontos formado por A e B e os pontos da reta suporte queestejam entre A e B. Neste caso, A e B chamam-se os pontos extremos.
Um segmento orientado é um segmento AB mais a escolha de um de seusextremos. O extremo escolhido é chamado origem ou ponto inicial do seg-mento orientado e o outro é chamado de extremidade ou ponto final. Se A éo extremo escolhido, denotaremos por
−→AB. Formalmente, um segmento ori-
entado−→AB pode ser definido como um par (AB,A), formado pelo segmento
AB e um ponto inicial A.
Observação 2.1 1. Um segmento orientado pode ser visualizado comouma flexa cuja cauda representa o ponto inicial e a cabeça representao ponto final.
25
26 CAPÍTULO 2. VETORES
2. Os pontos são, também, considerados como segmentos orientados nulos.Assim, o ponto A pode ser identificado com o segmento orientado
−→AA
3. Dois segmentos orientados−→AB e
−−→CD são chamados colineares se eles
têm a mesma reta suporte.
O comprimento (ou a norma) do segmento orientado−→AB, denotado por°°°−→AB°°°, é o comprimento do segmento AB, isto é, a distância entre os pontos
A e B.
Observação 2.2 Se°°°−→AB°°° = 0, então teremos A = B.
Sejam−→AB e
−−→CD segmentos orientados não nulos. Dizemos que eles têm
a mesma direção se estão situados sobre retas suportes paralelas ou coinci-dentes.
Note que,−→AB e
−−→CD têm a mesma direção, enquanto
−→AB e
−→EF não têm.
Sejam−→AB e
−−→CD segmentos orientados não nulos. Dizemos que eles têm o
mesmo sentido se têm a mesma direção, são não colineares e−→AC ∩−−→BD = ∅.
Se−→AC ∩−−→BD 6= ∅, dizemos que eles têm sentido opostos.
Observação 2.3 1. Se−→AB e
−−→CD são colineares, então comparamos
−→AB
com−−−→C 0D
0, onde
−−−→C 0D
0é uma translação paralela de
−−→CD para outra reta
suporte. Neste caso,−→AB e
−−→CD têm o mesmo sentido se, e somente se,−→
AB e−−→C 0D0 também tiverem.

2.1. SEGMENTOS ORIENTADOS 27
Note que,−→AB e
−−→CD têm os mesmos sentidos, enquanto
−→EF e
−−→GH têm
sentidos opostos.
2. Não se compara sentidos de segmentos orientados que possuem direçõesdiferentes. No caso do segmento orientado nulo, a direção e o sentidosão indefinidos.
Sejam−→AB e
−−→CD segmentos orientados não nulos. Dizemos que
−→AB e
−−→CD
são equipolentes (ou equivalentes), denotado por−→AB ∼ −−→CD, se eles têm o
mesmo comprimento, a mesma direção e o mesmo sentido, isto é, se um podeser obtido do outro por uma translação paralela.
Proposição 2.1 1.−→AB ∼ −→AB; (reflexividade)
2. Se−→AB ∼ −−→CD, então −−→CD ∼ −→AB; (simétria)
3. Se−→AB ∼ −−→CD e
−−→CD ∼ −→EF , então −→AB ∼ −→EF ; (transitividade)
4.−→AB ∼ −−→CD e
−→AB não colinear a
−−→CD se, e somente se,
−→AB e
−−→CD
determinam um paralelogramo.
5. Dados um segmento orientado−→AB e um ponto P , existe um único ponto
Q tal que−→AB ∼ −→PQ. ¥

28 CAPÍTULO 2. VETORES
2.2 Vetores
Um vetor (ou vetor livre) determinado por um segmento orientado−→AB é
a classe de todos os segmentos orientados que são equivalentes a−→AB.
Observação 2.4 1. Note a diferença entre um segmento orientado e umvetor. Um segmento orientado é um segmento de reta direcionado, oqual é firmemente fixado e tem um ponto inicial e final bem definidos,enquanto um vetor é uma classe inteira de segmentos, onde cada umdeles é chamado representante do vetor e denotado por −→a .
2. Quando visualizamos um vetor −→a , usualmente fazemos desenhandouma única flexa, mas com o entendimento que, esta flexa represen-tando −→a é deteminada, a menos de translações paralelas, e podendoser livremente movida paralela a ela própria.
Se −→a é representado por um segmento orientado−→AB, denotaremos por
−→a = −→AB.Sejam −→a e
−→b vetores determinados por
−→AB e
−−→CD, respectivamente.
Dizemos que −→a e−→b são iguais, denotado por −→a =
−→b , se, e somente se,−→
AB ∼ −−→CD.
Exemplo 2.1 Na figura acima temos que−→AB =
−−→CD =
−→EF . Isto significa
que os pontos A e B têm a mesma posição mútua como os pontos C e D ouE e F .
É conveniente, às vezes, expressar a posição mútua de dois pontos A e B,considerando as posições de A e B relativas a um ponto de referência fixado0, chamado de origem. Mais precisamente: suponhamos que um ponto dereferência fixado 0 no “espaço” seja escolhido. Então:
1. Para cada vetor −→a existe um único segmento orientado representando−→a , o qual origina-se de 0. Reciprocamente, cada segmento orientado

2.3. ADIÇÃO DE VETORES 29
originando-se em 0 representa um único vetor −→a , a saber, a classe detodas as suas translações paralelas.
Conclusão: Existe uma correspondência biunívoca entre vetores e seg-mentos orientados originando-se em 0.
2. Para cada ponto A no “espaço” existe um único segmento orientado,a saber,
−→0A. Reciprocamente, cada segmento orientado originando-se
em 0 determina um único ponto no “espaço”, a saber, sua cabeça.
Conclusão: Existe uma correspondência biunívoca entre segmentosorientados originando-se em 0 e pontos no “espaço.”
O segmento orientado−→OA é chamado o vetor posição do ponto A relativo
à origem O. Usualmente denotaremos pontos por letras maiúsculas e oscorrespondentes vetores posições por letras minúsculas. Assim escrevemos
−→a = −→OA,−→b = −−→OB,−→p = −→OP e−→0 =
−→AA o vetor nulo.
2.3 Adição de Vetores
Sejam A, B e C três pontos tais que −→a =−→AB e
−→b =
−−→BC. A soma de
−→a e−→b , denotada por −→a +−→b , é definida por
−→a +−→b = −→AC.

30 CAPÍTULO 2. VETORES
Vamos mostrar que a soma de dois vetores está bem definida, isto é, nãodepende da escolha do ponto A. De fato, suponhamos que
−→AB =
−−→A0B0 e
−−→BC =
−−→B0C 0.
Então −→AC =
−→AB +
−−→BC =
−−→A0B0 +
−−→B0C 0 =
−−→A0C 0.
Observação 2.5 (Regra do Paralelogramo) Note que −→a +−→b = −→b +−→aé a diagonal do paralelogramo gerado por −→a e
−→b .
O vetor inverso (ou o oposto) de um vetor −→a , denotado por −−→a , é ovetor obtido de −→a mudando apenas o sentido. Assim, se −→a =
−→AB, então
−−→a = −→BA.
Proposição 2.2 Sejam −→a , −→b e −→c vetores quaisquer. Então:
1. −→a + (−→b +−→c ) = (−→a +−→b ) +−→c ;

2.3. ADIÇÃO DE VETORES 31
2. −→a +−→b = −→b +−→a ;3. −→a +−→0 = −→a (o vetor nulo é o elemento neutro da adição);
4. −→a + (−−→a ) = −→0 (o vetor inverso é o elemento inverso da adição).Prova. Vamos provar apenas o item 1. Observando as figuras, obtemos oresultado. ¥
Sejam −→a e−→b vetores quaisquer. A diferença entre −→a e
−→b é definida
como −→b −−→a = −→b + (−−→a ).
Assim, se −→a = −→OA e −→b = −−→OB, então −→b −−→a = −→AB, pois −→OA+−→AB =−−→OB
implica que−→AB =
−→AB +
−→0
=−→AB +
³−→OA+ (−−→OA)
´=
³−→AB +
−→OA´+ (−−→OA)
=−−→OB + (−−→OA)
=−→b −−→a .
Observação 2.6 As propriedades associativa e comutativa da adição de ve-tores implicam que uma soma de um certo número de vetores é independen-tente da maneira pela qual estes vetores são combinados ou associados. Por

32 CAPÍTULO 2. VETORES
exemplo, se −→a , −→b , −→c e −→d são vetores quaisquer, então
(−→a +−→b ) + (−→c +−→d ) = [−→b + (−→a +−→c )] +−→d )e esta pode ser escrita sem confusão como
−→a +−→b +−→c +−→d .
Exemplo 2.2 Sejam −→a , −→b e −→c vetores quaisquer tais que −→a + −→b = −→c .Mostrar que −→a = −→c −−→b .
Solução.
−→a = −→a +−→0= −→a + [−→b + (−−→b )]= [−→a +−→b ] + (−−→b )= −→c −−→b .
Exemplo 2.3 Sejam A, B, C, D e E os vértices de um polígono (fechado).Mostrar que −→
AB +−−→BC +
−−→CD +
−−→DE +
−→EA =
−→0 .
Solução. Vamos primeiro construir o polígono.
Pela figura, obtemos que
−→AB +
−−→BC +
−−→CD +
−−→DE =
−→AE

2.4. MULTIPLICAÇÃO POR ESCALAR 33
Como−→AE +
−→EA =
−→AA =
−→0 temos que
−→AB +
−−→BC +
−−→CD +
−−→DE +
−→EA =
³−→AB +
−−→BC +
−−→CD +
−−→DE
´+−→EA
=−→AE +
−→EA
=−→0 .
Exemplo 2.4 Sejam A, B, C e D os vértices de um tetraedro. Se −→a = −→AB,−→c =
−→AC e
−→d =
−−→AD. Escreva os vetores
−−→BC,
−−→BD e
−−→CD em termos dos
vetores −→a , −→c e −→d .Solução. Vamos primeiro construir o tetraedro.
Pela figura, obtemos que−→AC =
−→AB +
−−→BC ⇒ −−→BC = −→c −−→a−−→
AD =−→AB +
−−→BD⇒−−→BD =
−→d −−→a−−→
AD =−→AC +
−−→CD⇒ −−→CD =
−→d −−→c .
2.4 Multiplicação por escalar
A segunda operação que queremos introduzir é a multiplicação de umvetor por um número real (um elemento de R). Neste contexto, os númerosreais são chamados de escalares.Sejam −→a um vetor qualquer e x um escalar (x ∈ R). O produto de x por−→a , denotado por x−→a , é o vetor obtido de −→a mudando o comprimento de −→a
pelo fator x, onde um valor negativo de x implica uma mudança de sentido.Neste caso, kx−→a k = |x| k−→a k. frequentemente, denotaremos por −→a
xo vetor
1x−→a , onde x ∈ R∗.

34 CAPÍTULO 2. VETORES
Proposição 2.3 Sejam −→a , −→b vetores quaisquer e x, y escalares quaisquer.Então:
1. x(y−→a ) = (xy)−→a ;2. (x+ y)−→a = x−→a + y−→a ;
3. x(−→a +−→b ) = x−→a + x−→b ;
4. 1−→a = −→a ;5. Se x = 0 ou −→a = −→0 , então x−→a = −→0 ;6. Se x−→a = −→0 , então x = 0 ou −→a = −→0 .
Prova. Vamos provar apenas o item 3. Se x = 0, nada há para ser provado.Se x 6= 0, então observando as figuras e usando semelhança de triângulos,obtemos o resultado. ¥
Sejam A e B pontos distintos e X ∈ AB. A razão de divisão (AXB) éum escalar λ tal que −−→
AX = λ−−→XB
Observação 2.7 1. Se −→a =−→OA,
−→b =
−−→OB e −→x =
−−→OX com relação a
uma origem qualquer O, então
−→x −−→a = λ(−→b −−→x )⇒ −→x =
−→a + λ−→b
1 + λ, se λ 6= −1.
Neste caso, °°°−−→AX°°°°°°−−→XB°°° = λ.

2.4. MULTIPLICAÇÃO POR ESCALAR 35
2. Se (AXB) = λ, dizemos que X divide o segmento AB na razão λ. Emparticular, se λ = 1, dizemos que X é o ponto médio do segmento AB.Em termos de vetores posições significa que
−→x =−→a +−→b2
.
3. Seja r é a reta suporte de A e B. Sejam X ∈ r e λ = (AXB). SeX ∈ AB, então 0 < λ <∞. Se X /∈ AB, então ou X está à esquerdade A, neste caso, −1 < λ < 0 ou X está à direita de B, neste caso,λ < −1. Além disso, se X = A, então λ = 0 e se X = B, entãoλ =∞.
Exemplo 2.5 Mostrar que as diagonais de um paralelogramo interceptam-seao meio.
1a Solução. Sejam A, B, C, D os vértices do paralelogramo e M , N ospontos médios das diagonais AC e BD, como mostra a figura.
Expressando todos em termos de vetores posições em relação a uma origemqualquer O, obtemos que
−→m =−→a +−→c2
e −→n =−→b +−→d
2.
Como−→b −−→a = −(−→d −−→c ) temos que
−→n −−→m =
−→b +−→d
2−−→a +−→c2
=(−→b −−→a ) + (−→d −−→c )
2
=−→0 .

36 CAPÍTULO 2. VETORES
Assim, −−→MN =
−−→MO +
−−→ON =
−−→ON −−−→OM = −→n −−→m =
−→0 .
Portanto, M = N .2a Solução. Sejam −→a = −→AB e
−→b =
−−→AD. Então
−−→AN =
−→AB +
−−→BN
= −→a +−→b −−→a2
=−→a +−→b2
=−−→AM.
Logo, −−→MN =
−−→MA+
−−→AN =
−−→MA+
−−→AM =
−−→MM =
−→0 .
Portanto, M = N .
Exemplo 2.6 Mostrar que em um quadrilátero qualquer, os pontos médiosdos lados formam um paralelogramo.
1a Solução. Sejam A, B, C, D os vértices do quadrilátero e P , Q, R, S ospontos médios, como mostra a figura.
Expressando todos em termos de vetores posições em relação a uma origemqualquer O, obtemos que
−→p =1
2(−→a +−→b ), −→q = 1
2(−→b +−→c ),
−→r =1
2(−→c +−→d ) e −→s = 1
2(−→d +−→a ).
Logo,
−→q −−→p =1
2(−→c −−→a ) = −→r −−→s ⇒ −→PQ = −→SR e
−→s −−→p =1
2(−→d −−→b ) = −→r −−→q ⇒ −→PS = −→QR

2.4. MULTIPLICAÇÃO POR ESCALAR 37
Portanto, o quadrilátero PQRS é um paralelogramo.2a Solução. Pela figura, obtemos que
−→AP =
−−→PB =
1
2
−→AB,
−−→BQ =
−→QC =
1
2
−−→BC,
−→CR =
−−→RD =
1
2
−−→CD e
−→DS =
−→SA =
1
2
−−→DA.
Como−→AB +
−−→BC +
−−→CD +
−−→DA =
−→0 ,−→PQ =
−−→PB +
−−→BQ e
−→RS =
−−→RD +
−→DS
temos que−→PQ+
−→RS =
−−→PB +
−−→BQ+
−−→RD +
−→DS
=1
2
³−→AB +
−−→BC +
−−→CD +
−−→DA
´=
1
2
−→0 =
−→0 .
Logo,−→SR =
−→0 +−→SR
=³−→PQ+
−→RS´+−→SR
=−→PQ+
³−→RS +
−→SR´
=−→PQ+
−→0 =
−→PQ.
De modo análogo, mostra-se que−→PS =
−→QR. Portanto, o quadrilátero PQRS
é um paralelogramo.
EXERCÍCIOS
1. Sejam P , A e B três pontos. Seja C um ponto no segmento AB talque °°°−→AC°°°°°°−−→CB°°° = m
n.
Escreva o vetor−→PC em termos dos vetores
−→PA e
−−→PB.
2. Sejam ABCD um paralelogramo e M , N os pontos médios dos ladosAB e AD, respectivamente. Mostrar que
−−→CN +
−−→CM =
3
2
−→CA.

38 CAPÍTULO 2. VETORES
3. SejaABCD um paralelogramo. Junte o vérticeA com os pontos médiosdos lados BC e CD, respectivamente. Mostrar que as duas retas assimobtidas divide a diagonal BD em três partes iguais.
4. Sejam AC e DB dois segmentos que interceptam-se em M . Se M é oponto médio destes segmentos Mostrar queABCD é um paralelogramo.
5. Sejam ABC um triângulo equilátero e M , N os pontos médios doslados AB e BC, respectivamente. Mostrar que MBN é também umtriângulo equilátero.
6. Seja ABC um triângulo qualquer. Sejam M um ponto no lado AB eN um ponto no lado AC tais que
−−→AN =
1
3
−→AC e
−−→AM =
2
3
−→AB.
Escreva o vetor−−→NM em termos dos vetores
−→BA e
−−→BC.
7. Seja ABC um triângulo qualquer. Sejam K, M e N os pontos médiosdos lados AB, BC e AC, respectivamente, e P um ponto qualquer nointerior deste triângulo. Mostrar que
−−→PK +
−−→PM +
−−→PN =
−→PA+
−−→PB +
−→PC.
8. Mostrar que o segmento que une os pontos médios de dois lados deum triângulo qualquer é paralelo ao terceiro lado e tem a metade docomprimento deste.
9. Use o resultado do exercício anterior para mostrar que em um quadriláteroqualquer, os pontos médios dos lados formam um paralelogramo.
10. Seja ABCD um trapézio qualquer com lados paralelos AB e DC. Se-jam M e N os pontos médios dos lados AD e BC, respectivamente.Mostrar que
−−→MN =
1
2(−→AB +
−−→DC).
11. Mostrar que o segmento que une os pontos médios dos lados não par-alelos de um trapézio qualquer é paralelo aos outros dois lados.
12. Sejam Pi, i = 1, . . . , 6, os vértices de um polígono regular centrado naorigem O. Mostrar que
−−→P1P2 +
−−→P1P3 +
−−→P1P4 +
−−→P1P5 +
−−→P1P6 = 6
−−→P1O.
2.4. MULTIPLICAÇÃO POR ESCALAR 39
13. Sejam Pi, i = 1, . . . , 6, os vértices de um polígono regular centrado naorigem O e −→p i =
−−→OPi. Mostrar que
−→p 1 +−→p 2 +−→p 3 +−→p 4 +−→p 5 +−→p 6 = −→0 .Generalize para um polígono regular qualquer.
14. Sejam ABCD um tetraedro e M o ponto médio do lado CD. Escrevao vetor
−−→BM em termos dos vetores
−→AB,
−→AC e
−−→AD.
15. Seja M o ponto médio do lado BF do cubo da figura abaixo. Escrevao vetor
−−→HM em termos dos vetores
−→AB,
−−→AD e
−→AE.
16. Seja ABC um triângulo qualquer. Mostrar que:
(a) Se AD, BE e CF são suas medianas, então−−→AD +
−−→BE +
−→CF =
−→0 .
(b) Existe um triângulo com lados paralelos às medianas de ABC ecom os comprimentos destas?
17. Seja ABCDEF um hexágono regular. Sejam −→a =−→AB e
−→b =
−−→BC.
Escreva os vetores−−→CD,
−−→DE,
−→EF ,
−→FA,
−→AC,
−−→AD e
−→AE em termos de −→a
e−→b .
18. Sejam A, B e C pontos distintos. Mostrar que A, B e C são colinearesse, somente se, existem x, y, z ∈ R∗ tais que
x+ y + z = 0 e x−→OA+ y
−−→OB + z
−→OC =
−→0 .

40 CAPÍTULO 2. VETORES
2.5 Dependência e independência linear
Sejam −→a e−→b dois vetores. Então os vetores −→a + x
−→b , onde x ∈ R, são
obtidos medindo externamente os múltiplos de−→b da cabeça de −→a .
Sejam P um ponto e −→a um vetor não nulo. Seja r a reta que passa emP na direção do vetor −→a . Então:
r = {−→p + t−→a : t ∈ R}= −→p +R−→a ,
onde −→p = −→OP ..
Assim, X ∈ r se, e somente se, existe t ∈ R tal que −→x − −→p = t−→a se, esomente se, existe t ∈ R tal que
−→x = −→p + t−→a ,onde −→x =
−−→OX. Isto significa que: um ponto arbitrário de r pode ser al-
cançado de O primeiro indo de O para r via −→p e então anda ao longo de rvia um certo múltiplo de −→a .Exemplo 2.7 Sejam A e B pontos distintos. A reta r passando por A e Bé dada por
r = {x−→a + y−→b : x, y ∈ R e x+ y = 1},
onde −→a = −→OA e−→b =
−−→OB.

2.5. DEPENDÊNCIA E INDEPENDÊNCIA LINEAR 41
Solução. Vamos primeiro construir a reta que passa por A e B.
Assim, X ∈ r se, e somente se, existe t ∈ R tal que−→x = −→a + t(
−→b −−→a )
= (1− t)−→a + t−→b .
Fazendo x = 1− t e y = t, obtemos que
−→x = x−→a + y−→b onde x+ y = 1
Sejam −→a e −→b vetores quaisquer. Dizemos que um vetor −→c é combinaçãolinear de −→a e
−→b se existirem x, y ∈ R tais que
−→c = x−→a + y−→b .
Dizemos que −→a e−→b são linearmente dependentes (LD) ou colineares se
existirem x, y ∈ R, não ambos nulos, tais que
x−→a + y−→b =
−→0 .
Caso contrário, dizemos que −→a e−→b são linearmente independentes (LI) ou
não colineares, isto é, a única solução da equação vetorial
x−→a + y−→b =
−→0
é a trivial x = y = 0.
Observação 2.8 Note que −→a e−→b são LD se, e somente se, um deles é
múltiplo escalar do outro, isto é, eles têm a mesma direção. Note, também,que todo vetor −→a , com −→a 6= −→0 , é sempre LI.
Exemplo 2.8 Seja −→a e −→b dois vetores LI. Então os vetores −→a −−→b e −→a +−→bsão LI.

42 CAPÍTULO 2. VETORES
Solução. Seja x, y ∈ R. Devemos mostrar que a única solução da equaçãovetorial
x(−→a −−→b ) + y(−→a +−→b ) = −→0é a trivial x = y = 0. Como
x(−→a −−→b ) + y(−→a +−→b ) = (x+ y)−→a + (y − x)−→b
temos que
x(−→a −−→b ) + y(−→a +−→b ) = −→0 ⇔ (x+ y)−→a + (y − x)−→b =
−→0 .
Assim, por hipótese, ½x+ y = 0y − x = 0.
Resolvendo o sistema, obtemos que x = y = 0. Portanto, os vetores −→a −−→be −→a +−→b são LI.Sejam P um ponto, −→a e
−→b vetores linearmente independentes. Seja π
um plano que passa por P e é paralelo ou coincidente ao plano gerado por−→a e
−→b . Então
π = {−→p + s−→a + t−→b : s, t ∈ R}
= −→p +R−→a +R−→b ,onde −→p = −→OP .
Assim, X ∈ π se, e somente se, existem s, t ∈ R tais que −→x −−→p = s−→a + t−→b
se, e somente se, existem s, t ∈ R tais que−→x = −→p + s−→a + t
−→b ,
onde −→x =−−→OX. Isto significa que: um ponto arbitrário de π pode ser al-
cançado de O primeiro indo de O para π via −→p e então anda dentro de πuma certa distância na direção de −→a e uma certa distância na direção de −→b .

2.5. DEPENDÊNCIA E INDEPENDÊNCIA LINEAR 43
Exemplo 2.9 Sejam A, B e C pontos não colineares. O plano π passandopor A,B e C é dado por
π = {x−→a + y−→b + z−→c : x, y, z ∈ R e x+ y + z = 1},
onde −→a = −→OA, −→b = −−→OB e −→c = −→OC .
Solução. Vamos primeiro construir o plano que passa por A, B e C..
Assim, X ∈ π se, e somente se, existem s, t ∈ R tais que−→x = −→a + s(
−→b −−→a ) + t(−→c −−→a )
= (1− s− t)−→a + s−→b + t−→c .
Fazendo x = 1− s− t, y = s e z = t, obtemos que
−→x = x−→a + y−→b + z−→c onde x+ y + z = 1.
Sejam −→a , −→b e −→c vetores quaisquer. Dizemos que um vetor−→d é combi-
nação linear de −→a , −→b e −→c se existirem x, y, z ∈ R tais que−→c = x−→a + y
−→b + z−→c .
Dizemos que −→a , −→b e −→c são LD ou coplanares se existirem x, y, z ∈ R, nãotodos nulos, tais que
x−→a + y−→b + z−→c = −→0 .
Caso contrário, dizemos que −→a , −→b e −→c são LI ou não coplanares, isto é, aúnica solução da equação vetorial
x−→a + y−→b + z−→c = −→0
é a trivial x = y = z = 0.

44 CAPÍTULO 2. VETORES
Observação 2.9 Note que −→a , −→b e −→c são LD se, e somente se, um dêles écombinação linear dos outros dois, isto é, eles são coplanares. Note, também,que se pelo menos um dos vetores −→a , −→b e −→c for o vetor nulo
−→0 , então os
vetores −→a , −→b e −→c são sempre LD.
Exemplo 2.10 Sejam −→a , −→b e −→c três vetores LI. Então os vetores −→a , −→a +−→b e −→a +−→b +−→c são LI.
Solução. Sejam x, y, z ∈ R. Devemos mostrar que a única solução daequação vetorial
x−→a + y(−→a +−→b ) + z(−→a +−→b +−→c ) = −→0
é a trivial x = y = z = 0. Como
x−→a + y(−→a +−→b ) + z(−→a +−→b +−→c ) = (x+ y + z)−→a + (y + z)−→b + z−→c
temos que
x−→a +y(−→a +−→b )+z(−→a +−→b +−→c ) = −→0 ⇔ (x+y+z)−→a +(y+z)−→b +z−→c = −→0 .
Assim, por hipótese, x+ y + z = 0y + z = 0
z = 0
Resolvendo o sistema, obtemos que x = y = z = 0. Portanto, os vetores −→a ,−→a +−→b e −→a +−→b +−→c são LI.
Seja V o conjunto de todos os vetores. Um conjunto
B = {−→e 1,−→e 2,−→e 3}
é uma base de V se todo vetor −→u de V pode ser escrito de modo único comouma combinação linear dos vetores −→e 1, −→e 2 e −→e 3, isto é,
−→u = x1−→e 1 + x2
−→e 2 + x3−→e 3,
onde x1, x2, x3 ∈ R . Isto significa que: para obter−→u temos que fazer x1 vezeso comprimento de −→e 1 na direção de −→e 1, então x2 vezes o comprimento de−→e 2 na direção de −→e 2 e finalmente x3 vezes o comprimento de −→e 3 na direçãode −→e 3.

2.5. DEPENDÊNCIA E INDEPENDÊNCIA LINEAR 45
Observação 2.10 Para verificar que um conjunto
B = {−→e 1,−→e 2,−→e 3}é uma base de V, basta mostrar que os vetores −→e 1, −→e 2 e −→e 3 são LI. Isto sig-nifica, intuitivamente, que −→e 1 e −→e 2 estão localizados em direções diferentese −→e 2 sai do plano gerado por −→e 1 e −→e 2.O conjunto
B = {−→e 1,−→e 2,−→e 3}de vetores linearmente independentes deV é chamado uma base ordenada deV ou um sistema de coordenadas paraV. O escalar xi é a i-ésima coordenadade −→u em relação à base B. Note que, se
−→v = y1−→e 1 + y2
−→e 2 + y3−→e 3,
então
−→u +−→v = (x1 + y1)−→e 1 + (x2 + y2)
−→e 2 + (x3 + y3)−→e 3
e
x−→u = (xx1)−→e 1 + (xx2)−→e 2 + (xx3)−→e 3.Assim, a i-ésima coordenada de −→u +−→v e x−→u em relação à base B é (xi+yi)e (xxi), respectivamente.Seja R3 o conjunto de todos os ternos ordenados (x, y, z), onde x, y, z ∈ R,
isto é,R3 = {(x, y, z) : x, y, z ∈ R}.
Definimos a adição e a multiplicação por escalar em R3 como:
(x1, x2, x3) + (y1, y2, y3) = (x1 + y1, x2 + y2, x3 + y3)
e
x(x1, x2, x3) = (xx1, xx2, xx3).
É fácil verificar que R3 com estas operações satisfaz todas as propriedadesdo conjunto de vetores V.Conclusão. Cada base ordenada de V determina uma correspondência
biunívoca
−→u ↔ (x1, x2, x3)
entre o conjunto dos vetores V e o conjunto dos ternos ordenados R3.

46 CAPÍTULO 2. VETORES
Observação 2.11 É conveniente, às vezes, usar a matriz das coordenadasde −→u em relação à base B :
[−→u ]B = x1
x2x3
,ao invés do terno (x1, x2, x3) das coordenadas.
Exemplo 2.11 Mostrar que as medianas de um triângulo se interceptam emum ponto, o qual é um ponto de trisseção de cada mediana.
Solução. Sejam −→u e −→v os vetores gerando o triângulo, conforme figura.
Então as medianas são:−→u +−→v2
,−→u − 2−→v
2e−→v − 2−→u
2.
Assim, as medianas se interceptam em um ponto P se, e somente se, existemescalares x, y e z tais que
x
µ−→u +−→v2
¶= −→v + y
µ−→u − 2−→v2
¶e x
µ−→u +−→v2
¶= −→u + z
µ−→v − 2−→u2
¶.
Estas equações podem ser re-escrita como((x− y)−→u + (x+ 2y − 2)−→v = −→0(x+ 2z − 2)−→u + (x− z)−→v = −→0 .
Como −→u e −→v são LI temos quex− y = 0x+ 2y = 2x+ 2z = 2x− z = 0
.

2.5. DEPENDÊNCIA E INDEPENDÊNCIA LINEAR 47
Portanto, as medianas se interceptam em um ponto P se, e somente se, osistema acima tem solução. É fácil verificar que o sistema tem uma únicasolução
x = y = z =2
3.
Teorema 2.1 (Ceva) Dado um triângulo ABC, escolhemos um ponto Rno segmento BC, um ponto S no segmento AC e um ponto T no segmentoAB. Sejam λ1 = (ATB), λ2 = (BRC) e λ3 = (CSA). Então as seguintescondições são equivalentes:
1. Os segmentos AR, BS e CT são concorrentes;
2. λ1λ2λ3 = 1 e 1 + λ2 + λ2λ3 6= 0;
3. λ1λ2λ3 = 1 e cada um dos três números 1 + λ1+ λ1λ2, 1 + λ2 + λ2λ3 e1 + λ3 + λ1λ3 é diferente de zero.
Prova. Primeiro vamos desenhar a figura.
Expressando todos em termos de vetores posições em relação a uma origemqualquer O, obtemos que
−→t =
−→a + λ1−→b
1 + λ1, −→r =
−→b + λ2
−→c1 + λ2
, e −→s =−→c + λ3
−→a1 + λ3
.
Em particular, tomando O = C, obtemos que
−→t =
−→a + λ1−→b
1 + λ1, −→r =
−→b
1 + λ2, e −→s = λ3
−→a1 + λ3
.

48 CAPÍTULO 2. VETORES
Logo,
−→AR = −→a + x
à −→b
1 + λ2−−→a
!−→BS =
−→b + y
µλ3−→a
1 + λ3−−→b
¶−→CT = z
Ã−→a + λ1−→b
1 + λ1
!.
Assim, os segmentos AR, BS e CT se interceptam em um ponto P se, esomente se,
−→a + x
à −→b
1 + λ2−−→a
!=−→b + y
µλ3−→a
1 + λ3−−→b
¶= z
Ã−→a + λ1−→b
1 + λ1
!,
ou ainda,
(1− x)−→a + x
1 + λ2
−→b =
λ3y
1 + λ3
−→a + (1− y)−→b =
z
1 + λ1
−→a + λ1z
1 + λ1
−→b
e, portanto,·(1− x)− λ3y
1 + λ3
¸−→a +
·x
1 + λ2+ (y − 1)
¸−→b =
−→0·
(1− x)− z
1 + λ1
¸−→a +
·x
1 + λ2− λ1z
1 + λ1
¸−→b =
−→0 .
Como −→a e−→b são LI temos que
x+ λ31+λ3
y = 11
1+λ2x+ y = 1
x+ 11+λ1
z = 11
1+λ2x− λ1
1+λ1z = 0.
Assim, os segmentos AR, BS e CT se interceptam em um ponto P se, esomente se, o sistema acima tem solução. Agora vamos mostrar as equi-valências.(1. ⇔ 2.) Suponhamos que AR, BS e CT sejam concorrentes. Então o
sistema tem solução x, y e z. Resolvendo para x a primeira e a segundaequação, fica
x = 1− λ31 + λ3
y = (1 + λ2)(1− y)⇒ (1 + λ2 + λ2λ3)y = λ2(1 + λ3).

2.6. MUDANÇA DE BASES 49
Assim, se 1 + λ2 + λ2λ3 = 0, então λ2(1 + λ3) = 0 e λ2 = 0. Logo, 1 +λ2 + λ2λ3 = 1 6= 0, o que é impossível. Portanto, 1 + λ2 + λ2λ3 6= 0 e,consequentemente,
y =λ2(1 + λ3)
1 + λ2 + λ2λ3e x =
1 + λ21 + λ2 + λ2λ3
.
Por outro lado,
z = (1 + λ1)(1− x) =(1 + λ1)λ2λ31 + λ2 + λ2λ3
=1 + λ1
(1 + λ2 + λ2λ3)λ1
se, e somente se, λ1λ2λ3 = 1, pois λ1 6= 0. Reciprocamente, suponhamos queλ1λ2λ3 = 1 e 1 + λ2 + λ2λ3 6= 0. Então o sistema tem solução
x =1 + λ2
1 + λ2 + λ2λ3, y =
λ2(1 + λ3)
1 + λ2 + λ2λ3e
z =(1 + λ1)λ2λ31 + λ2 + λ2λ3
=1 + λ1
(1 + λ2 + λ2λ3)λ1.
(2.⇔ 3.) Suponhamos, por absurdo, que 1 + λ3 + λ3λ1 = 0. Então
0 = λ2(1 + λ3 + λ3λ1)
= λ2 + λ2λ3 + λ2λ3λ1
= λ2 + λ2λ3 + 1,
o que é uma contradição. A recíproca é imediata. ¥
2.6 Mudança de bases
SejamB = {−→e 1,−→e 2,−→e 3} e B0 = {−→u 1,
−→u 2,−→u 3}
duas bases ordenadas de V. Então, para cada vetor −→v ∈ V existem únicosx1, x2, x3, y1, y2, y3 ∈ R tais que
−→v = x1−→e 1 + x2
−→e 2 + x3−→e 3 (2.1)
−→v = y1−→u 1 + y2
−→u 2 + y3−→u 3.
Como −→u i ∈ V temos que existem únicos aij ∈ R, i, j = 1, 2, 3, tais que
−→u 1 = a11−→e 1 + a21
−→e 2 + a31−→e 3 (2.2)
−→u 2 = a12−→e 1 + a22
−→e 2 + a32−→e 3
−→u 3 = a13−→e 1 + a23
−→e 2 + a33−→e 3.

50 CAPÍTULO 2. VETORES
Substituindo −→u i na segunda equação de (2.1), obtemos que
−→v = y1−→u 1 + y2
−→u 2 + y3−→u 3
= y1
Ã3X
i=1
ai1−→e i
!+ y2
Ã3X
i=1
ai2−→e i
!+ y3
Ã3X
i=1
ai3−→e i
!
=
Ã3X
j=1
a1jyj
!−→e 1 +
Ã3X
j=1
a2jyj
!−→e 2 +
Ã3X
j=1
a3jyj
!−→e 3.
Pela primeira equação de (2.1) e unicidade das coordenadas, obtemos que
x1 = a11y1 + a12y2 + a13y3
x2 = a21y1 + a22y2 + a23y3
x3 = a31y1 + a32y2 + a33y3.
Em forma de matriz x1x2x3
= a11 a12 a13
a21 a22 a23a31 a32 a33
y1y2y3
.Denotanto
[I]B0B =
a11 a12 a13a21 a22 a23a31 a32 a33
,obtemos que
[−→u ]B = [I]B0B [−→u ]B0 .
A matrizM = [I]B0B é a matriz de mudança da base B0 para a base B. Com-
parando M com (2.2), notamos esta matriz é obtida colocando as coorde-nadas em relação à base B de −→u i na i-ésima coluna.
Observação 2.12 A matriz M é invertível, pois
[−→u ]B = [I]B0B [−→u ]B0 e [−→u ]B0 = [I]BB0 [−→u ]B
implica que
[−→u ]B = [I]B0B [I]
BB0 [−→u ]B ⇒
³[I]B
0B [I]
BB0 − I
´[−→u ] = O,
para todo −→u ∈ V. Em particular, para −→e i ∈ V, i = 1, 2, 3,³[I]B
0B [I]
BB0 − I
´[−→e i] = O⇒ [I]B
0B [I]
BB0 = I.
Neste caso, [I]BB0 =M−1.

2.6. MUDANÇA DE BASES 51
Sejam B e B0 duas bases ordenadas de V. Dizemos que B e B0 determi-nam a mesma orientação se det (M) > 0. Caso contrário, elas determinamorientação oposta, ondeM é a matriz de mudança de base.
Exemplo 2.12 Sejam
B =n−→a ,−→b ,−→c o e B0 = {−→u 1,
−→u 2,−→u 3} ,
onde
−→u 1 = −→a−→u 2 = −→a +−→b−→u 3 = −→a +−→b +−→c
duas bases ordenadas de V. Então B e B0 determinam a mesma orientação.
Solução. Como
−→u 1 = 1 ·−→a + 0 ·−→b + 0 ·−→c−→u 2 = 1 ·−→a + 1 ·−→b + 0 ·−→c−→u 3 = 1 ·−→a + 1 ·−→b + 1 ·−→c
temos que a matriz de mudança de base é
M =
1 1 10 1 10 0 1
.Logo, det(M) = 1 > 0.
EXERCÍCIOS
1. Mostrar que −→a +−→b , −→a +−→c e −→c −−→a são LD quaisquer que sejam osvetores −→a , −→b e −→c .
2. Seja B = {−→a ,−→b ,−→c } uma base de R3. Mostrar que B0 = {−→a +−→b ,−→a −2−→c ,−→a + 3−→b − −→c } também é uma base de R3. Elas têm a mesmaorientação?
3. Seja B = {−→a ,−→b ,−→c } uma base de R3. Mostrar que {−→a +2−→b −−→c , 3−→a −−→b +−→c ,−−→a + 5−→b − 3−→c } é um conjunto LD.

52 CAPÍTULO 2. VETORES
4. Sejam −→a e−→b vetores LI tais que
−→AB = −→a + 2−→b , −−→BC = −4−→a −−→b e−−→
CD = −5−→a − 3−→b . Mostrar que ABCD é um trapézio.
5. A seção ouro ou divisão harmônica de um segmento AB é a escolhade um ponto X entre A e B tal que°°°−−→AX°°°°°°−−→XB
°°° =°°°−−→XB
°°°°°°−→AB°°° .Determinar a razão de divisão (AXB) se X é escollhido desta maneira.
6. Sejam P1, P2, P3 postos colineares e λ = (P1P2P3). Mostrar que oconjunto de todas as razões de divisões (PiPjPk), onde i, j, k ∈ {1, 2, 3},é igual a ½
λ,1
λ,−(1 + λ),− 1
1 + λ,− λ
1 + λ,−1 + λ
λ
¾.
7. Sejam A, B, C e D pontos. Mostrar que:
(a) Os segmentos AB e CD são paralelos se, e somente se, existet ∈ R∗ tal que
−→c −−→d = t(−→a −−→b ),onde −→a = −→OA, −→b = −−→OB, −→c = −→OC e
−→d =
−−→OD.
(b) Os segmentos AB e CD interceptam-se se, e somente se,
x(−→a −−→b ) + y(−→c −−→d ) = −→0
implica que x = y = 0, onde −→a =−→OA,
−→b =
−−→OB, −→c =
−→OC e−→
d =−−→OD.
8. Considere duas semi-retas originando-se de um ponto comum O. Es-colha dois pontos A e R da primeira diferente de O e dois pontos B eS da segunda diferente de O, de modo que existam x, r, y, s ∈ R taisque
x+ r = y + s = 0 e x−→OA+ r
−→OR = y
−−→OB + s
−→OS =
−→0 .
Mostrar que os segmentos AB e RS são paralelos se, e somente se,x = s (y = r).

2.7. PRODUTO ESCALAR 53
9. Sejam A, B, C, R, S e T pontos dados como no Teorema de Ceva taisque os segmentos AR, BS e CT interceptm-se em um ponto comumP . Mostrar que
(PRA) + (PBS) + (PCT ) = −1.10. Seja ABC um triângulo qualquer. Mostrar que suas medianas intercep-
tam-se em um ponto comum. (Sugestão: Use o Teorema de Ceva.)
11. Seja ABC um triângulo qualquer. Mostrar que os três bissetores in-ternos interceptam-se em um ponto comum. (Sugestão: Use a Lei dosSenos e o Teorema de Ceva.)
12. Seja ABC um triângulo qualquer. Mostrar que as três alturas intercep-tam-se em um ponto comum.
13. (Teorema de Menelao) Dado um triângulo ABC, escolhemos umponto R no segmento BC, um ponto S no segmento AC e um pontoT no segmento AB. Mostrar que R, S e T são colineares se, e somentese,
(ATB)(BRC)(CSA) = −1.
2.7 Produto escalar
Sejam −→a e−→b vetores não nulos de V. O ângulo entre −→a e
−→b é a figura
geométrica formada pelos segmentos−→OA e
−−→OB, onde O é um ponto qualquer
do espaço e A, B são escolhidos de modo que −→a = −→OA e−→b =
−−→OB. Vamos
denotar o ângulo entre −→a e−→b por
θ = ∠(−→a ,−→b ),
Sejam−→a , −→b vetores não nulos deV e θ o ângulo entre −→a e −→b . O produtoescalar (interno) de −→a e
−→b é definido como
h−→a ,−→b i = k−→a k°°°−→b °°° cos θ.

54 CAPÍTULO 2. VETORES
Note que, na definição de produto escalar de dois vetores −→a e −→b não especi-ficamos se o ângulo θ é medido de −→a para
−→b ou de
−→b para −→a e nem se
é medido no sentido horário ou anti-horário. Portanto, cada escolha para θdar o mesmo resultado para h−→a ,−→b i, pois
cos θ = cos(−θ) = cos(2π − θ) = cos(θ − 2π).
Assim,
h−→a ,−→b i = h−→b ,−→a i.
Além disso, se −→a = −→0 ou −→b = −→0 , definimos
h−→a ,−→b i = 0.
Proposição 2.4 Sejam −→a e−→b vetores quaisquer de V. Então:
1. k−→a k =ph−→a ,−→a i;
2. O menor dos dois ângulos entre −→a e−→b é
θ = arccos
h−→a ,−→b ik−→a k
°°°−→b °°° ;
3. −→a e −→b são ortogonais (perpendiculares) se, e somente se, h−→a ,−→b i = 0.
Prova. Vamos provar apenas o item 3. Note que,
h−→a ,−→b i = 0⇔ k−→a k = 0,°°°−→b °°° = 0 ou cos θ = 0.
¥
Seja −→a um vetor não nulo de V.Todo vetor−→b de V pode ser escrito de
modo único sob a forma −→b =
−→b0 +
−→b00 ,
onde−→b0 é um vetor com a mesma direção que −→a e
−→b00 é ortogonal a −→a .

2.7. PRODUTO ESCALAR 55
A componente−→b0 é chamada a projeção de
−→b sobre−→a e denotada por Pr−→a
−→b .
Em outras palavras, Pr−→a−→b é por definição o único vetor −→v ∈ V tal que−→
b −−→v seja ortogonal a −→a . Esta definição de projeção é motivada da física,por exemplo, se aplicamos uma força constante
−→F ao longo de uma trajetória,
então, em cada momento, somente aquela parte de−→F que age na direção de
−→v da trajetória contribui para o trabalho feito por −→F . Neste caso, o trabalhoW é dado por
W =°°°−→F °°° k−→v k cos θ = h−→F ,−→v i.
Proposição 2.5 Sejam −→a , −→b e −→c vetores de V com −→a 6= −→0 e x ∈ R.Então:
1. Pr−→a−→b =
°°°−→b °°° cos θ −→ak−→a k = h
−→a ,−→b i −→ak−→a k2 ;
2. Pr−→a (−→b +−→c ) = Pr−→a
−→b +Pr−→a
−→c ;3. Pr−→a (x
−→b ) = xPr−→a
−→b ;
4. h−→a ,−→b i = h−→a ,Pr−→a−→b i.
Prova. 1. Pela figura.
o comprimento da Pr−→a−→b é °°°−→b °°° cos θ

56 CAPÍTULO 2. VETORES
e −→ak−→a k
é um vetor de comprimento unitário na direção de −→a . Logo,
Pr −→a−→b =
°°°−→b °°° cos θ −→ak−→a k = h−→a ,−→b i −→ak−→a k2 .2. Vamos primeiro ver geometricamente,
Sejaπ = {−→v ∈ V : h−→v ,−→a i = 0}
o plano perpendicular a −→a . Como−→b − Pr −→a
−→b ∈ π e −→c − Pr −→a−→c ∈ π
temos que
(−→b +−→c )− (Pr −→a
−→b +Pr −→a
−→c ) = (−→b − Pr −→a−→b ) + (−→c − Pr −→a−→c ) ∈ π
Por outro lado, o único vetor −→v ∈ V tal que
(−→b +−→c )−−→v ∈ π
é, por definição, a projeção−→b +−→c sobre −→a , a saber: Pr−→a (
−→b +−→c ). Segue
quePr −→a (
−→b +−→c ) = Pr −→a
−→b +Pr −→a
−→c ).3. É similar a 2. Para provar 4. Seja θ o ângulo entre −→a e
−→b . Como o
ângulo entre −→a e Pr−→a−→b é igual a 0◦, obtemos que
h−→a ,Pr −→a−→b i = k−→a k
°°°Pr −→a−→b °°° cos 0◦= k−→a k
°°°Pr −→a−→b °°°= k−→a k
°°°−→b °°° cos θ= h−→a ,−→b i.

2.7. PRODUTO ESCALAR 57
¥
Proposição 2.6 Sejam −→a , −→b e −→c vetores quaisquer de V e x ∈ R. Então:
1. h−→a ,−→b i = h−→b ,−→a i;
2. h−→a ,−→b +−→c i = h−→a ,−→b i+ h−→a ,−→c i;
3. h−→a , x−→b i = xh−→a ,−→b i;4. h−→a ,−→a i ≥ 0 e h−→a ,−→a i = 0 se, e somente se, −→a = −→0 .
5.¯h−→a ,−→b i
¯≤ k−→a k
°°°−→b °°° (Desigualdade de Cauchy-Schwarz).6.°°°−→a +−→b °°° ≤ k−→a k+ °°°−→b °°° (Desigualdade Triangular).
Prova. Vamos provar apenas os itens 2. e 5. Se −→a =−→0 , nada há para ser
provado. Se −→a 6= −→0 , então
h−→a ,−→b +−→c i−→ak−→a k2 = Pr −→a (
−→b +−→c )
= Pr −→a−→b +Pr −→a
−→c )= h−→a ,−→b i
−→ak−→a k2 + h
−→a ,−→c i−→ak−→a k2
=³h−→a ,−→b i+ h−→a ,−→c i
´ −→ak−→a k2 .
Assim, comparando os coeficientes, obtemos que
h−→a ,−→b +−→c i = h−→a ,−→b i+ h−→a ,−→c i.
Agora, vamos provar 5., se −→a = −→0 , nada há para ser provado. Se −→a 6= −→0 ,então a função f : R → R definida por f(t) =
°°°−→b − t−→a°°°2 ≥ 0, satisfaz
f(t) ≥ 0, para todo t ∈ R. Como°°°−→b − t−→a°°°2 = h−→b − t−→a ,−→b − t−→a i
= h−→b ,−→b − t−→a i− th−→a ,−→b − t−→a i= h−→b ,−→b i− th−→a ,−→b i− th−→b ,−→a i+ t2h−→a ,−→a i=
°°°−→b °°°2 − 2th−→a ,−→b i+ t2 k−→a k2

58 CAPÍTULO 2. VETORES
temos que
k−→a k2 t2 − 2h−→a ,−→b it+°°°−→b °°°2 ≥ 0,∀t ∈ R.
Logo, a função quadrática f(t) não pode ter duas raízes reais distintas. As-sim, o discriminante de f(t) deve ser menor do que ou igual zero e, assim,³
−2h−→a ,−→b i´2− 4 k−→a k2
°°°−→b °°°2 ≤ 0⇔ ³h−→a ,−→b i
´2≤³k−→a k
°°°−→b °°°´2 .Portanto, extraindo a raiz quadrade desta desigualdade, obtemos que¯
h−→a ,−→b i¯≤ k−→a k
°°°−→b °°° .¥
Exemplo 2.13 Mostrar que um paralelogramo é um losango, se e somentese, suas diagonais são ortogonais.
Solução. Sejam −→a e−→b vetores gerando o paralelogramo, conforme figura.
Então −→a +−→b e −→a −−→b são as diagonais. Como
h−→a +−→b ,−→a −−→b i = h−→a ,−→a −−→b i+ h−→b ,−→a −−→b i= h−→a ,−→a i− h−→a ,−→b i+ h−→b ,−→a i− h−→b ,−→b i= k−→a k2 −
°°°−→b °°°2temos que
k−→a k =°°°−→b °°°⇔ h−→a +−→b ,−→a −−→b i = 0.
Exemplo 2.14 Mostrar que todo ângulo inscrito em um semicírculo é umângulo reto.

2.8. BASES ORTOGONAIS 59
Solução. Sejam −→a e−→b vetores mostrados na figura.
Como k−→a k =°°°−→b °°° temos, pelo Exemplo 2.13, que
h−→a +−→b ,−→a −−→b i = 0,isto é,
∠(−→a +−→b ,−→a −−→b ) = π
2.
2.8 Bases ortogonais
Seja −→u ∈ V um vetor qualquer. Dizemos que −→u é vetor unitário se
k−→u k = 1.Se −→v ∈ V é um vetor qualquer não nulo, então
−→u =−→vk−→v k
é um vetor unitário de mesma direção que −→v . Neste caso, dizemos que −→u éa normalização de −→v .Seja
B = {−→e 1,−→e 2,−→e 3}uma base de V. Dizemos que B é uma base ortogonal de V se
h−→e 1,−→e 2i = h−→e 1,−→e 3i = h−→e 2,−→e 3i = 0,isto é, os vetores −→e 1, −→e 2 e −→e 3 são dois a dois ortogonais. Dizemos que Bé uma base ortonormal ou sistema de coordenadas cartesianas de V se B éuma base ortogonal e
h−→e 1,−→e 2i = δij =
½1 se i = j0 se i 6= j,

60 CAPÍTULO 2. VETORES
onde δij é o símbolo de Kronecker, isto é, os vetores −→e 1, −→e 2 e −→e 3 são doisa dois ortogonais e unitários.
Proposição 2.7 Seja B = {−→e 1,−→e 2,−→e 3} uma base ortonormal deV. Então−→v = h−→v ,−→e 1i−→e 1 + h−→v ,−→e 2i−→e 2 + h−→v ,−→e 3i−→e 3,∀−→v ∈ V.
Prova. Dado −→v ∈ V existem únicos x1, x2, x3 ∈ R tais que−→v = x1
−→e 1 + x2−→e 2 + x3
−→e 3=
3Xi=1
xi−→e i.
Logo,
h−→v ,−→e ji = hx1−→e 1 + x2−→e 2 + x3
−→e 3,−→e ji= x1h−→e 1,−→e ji+ x2h−→e 2,−→e ji+ x3h−→e 3,−→e ji= xj, j = 1, 2, 3.
Portanto, −→v = h−→v ,−→e 1i−→e 1 + h−→v ,−→e 2i−→e 2 + h−→v ,−→e 3i−→e 3.¥
Observação 2.13 O escalar xj = h−→v ,−→e ji é chamado o coeficiente deFourier de −→v em relação a −→e j.
Proposição 2.8 Seja B = {−→e 1,−→e 2,−→e 3} uma base ortonormal de V. Se−→u = x1
−→e 1 + x2−→e 2 + x3
−→e 3 e −→v = y1−→e 1 + y2
−→e 2 + y3−→e 3,
então:

2.8. BASES ORTOGONAIS 61
1. h−→u ,−→v i = x1y1 + x2y2 + x3y3;
2. k−→u k =px21 + x22 + x23 e k−→v k =py21 + y22 + y23;
3. O menor dos dois ângulos entre −→u e −→v é
θ = arccos
Ãx1y1 + x2y2 + x3y3p
x21 + x22 + x23py21 + y22 + y23
!;
4. (x1y1 + x2y2 + x3y3)2 ≤ (x21 + x22 + x23)(y
21 + y22 + y23).
Prova. Vamos provar apenas o item 1.
h−→u ,−→v i = hx1−→e 1 + x2−→e 2 + x3
−→e 3,3X
i=1
yj−→e ji
= x1h−→e 1,3X
i=1
yj−→e ji+ x2h−→e 2,
3Xi=1
yj−→e ji+ x3h−→e 3,
3Xi=1
yj−→e ji
= x1y1 + x2y2 + x3y3.
¥Seja
B = {−→a ,−→b ,−→c }uma base qualquer de V. Escolhendo −→u 1 =
−→a , já vimos que o vetor
−→u 2 =−→b − h
−→b ,−→u 1ik−→u 1k2
−→u 1
é ortogonal ao vetor−→u 1 e claramente−→u 1 e
−→u 2 são linearmente independentese estão no plano gerado por −→a e
−→b . Assim, os vetores coplanares a −→u 1 e−→u 2 são da forma
x−→u 1 + y−→u 2,
para alguns x, y ∈ R. Logo,
h−→c − (x−→u 1 + y−→u 2),−→u 1i = 0⇔ x =
h−→c ,−→u 1ik−→u 1k2
.
Analogamente,
h−→c − (x−→u 1 + y−→u 2),−→u 2i = 0⇔ y =
h−→c ,−→u 2ik−→u 2k2
.

62 CAPÍTULO 2. VETORES
Assim, o vetor
−→u 3 =−→c − h
−→c ,−→u 1ik−→u 1k2
−→u 1 − h−→c ,−→u 2ik−→u 2k2
−→u 2
é simultaneamente ortogonal a −→u 1 e−→u 2. Portanto,
B = {−→u 1,−→u 2,−→u 3}
é uma base ortogonal de V. Este processo de ortogonalização é conhecidocomo o Processo de Ortogonalização de Gram-Schmidt.Conclusão. A partir de uma base qualquer de V podemos obter uma
base ortogonal de V.
Sejam A, B e C pontos no espaço tais que
B = {−→OA,−−→OB,−→OC}
seja uma base ortonormal de V. Vamos definir os vetores−→i ,−→j e−→k como:
−→i =−→OA,−→j =
−−→OB e
−→k =
−→OC.
Portanto, os vetores−→i ,−→j e−→k satisfazem às seguintes relações:
h−→i ,−→j i = h−→i ,−→k i = h−→j ,−→k i = 0 e h−→i ,−→i i = h−→j ,−→j i = h−→k ,−→k i = 1.
Neste caso, dizemos queB = {−→i ,−→j ,−→k }
é a base canônica de V.Sejam P um ponto qualquer no espaço e −→v = −→OP . Então existem únicos
x, y, z ∈ R tais que−→v = x
−→i + y
−→j + z
−→k .

2.8. BASES ORTOGONAIS 63
É fácil verificar que
x = h−→v ,−→i i = k−→v k cos θ1, onde θ1 = ∠(−→v ,−→i );y = h−→v ,−→j i = k−→v k cos θ2, onde θ2 = ∠(−→v ,−→j );z = h−→v ,−→k i = k−→v k cos θ3, onde θ3 = ∠(−→v ,−→k ).
Os ângulos θ1, θ2, θ3 são chamados de ângulos diretores do vetor−→v e os
cossenos cos θ1, cos θ2 e cos θ3 são chamados de cossenos diretores do vetor−→v .
Assim, qualquer vetor pode ser escrito de modo único em termos de suascoordenadas cartesianas. Portanto, as coordenadas (x, y, z) de um ponto Pem R3 podem ser identificadas com o vetor
−→v = x−→i + y
−→j + z
−→k .
Neste caso, denotamos o vetor −→v por
−→v = −→OP = x−→i + y
−→j + z
−→k = (x, y, z).
Uma base {−→u 1,−→u 2,−→u 3} de R3 é positiva se ela tem a mesma orientação
da base canônica {−→i ,−→j ,−→k }. Caso contrário, dizemos que ela é uma basenegativa.
Exemplo 2.15 Sejam −→a = (2, 3, 0),−→b = (1, 0, 1), −→c = (0, 1, 2) e −→v =
(1, 1, 1).
1. Mostrar que B = {−→a ,−→b ,−→c } é uma base de R3.

64 CAPÍTULO 2. VETORES
2. Escreva o vetor −→v como combinação linear de −→a , −→b e −→c .3. B é uma base positiva de R3?
Solução. Para mostrar 1., basta provar que os vetores −→a , −→b e −→c são LI.Sejam x, y, z ∈ R3 tais que
x−→a + y−→b + z−→c = −→0 .
Então
x(2, 3, 0) + y(1, 0, 1) + z(0, 1, 2) = (0, 0, 0)
m(2x+ y, 3x+ z, y + 2z) = (0, 0, 0)
ou, equivalentemente, 2x+ y = 03x+ z = 0y + 2z = 0
. (2.3)
Assim, o problema de determinar se os vetores −→a , −→b e −→c são LI é equi-valente a resolver o sistema homogêneo de equações lineares (2.3). Para isto,consideremos a matriz dos coeficientes do sistema
A =
2 1 03 0 10 1 2
.Reduzindo a matriz A à forma em escada, nosso sistema é equivanlente a: x = 0
y = 0z = 0
.
Portanto, os vetores −→a , −→b e −→c são LI.2. Sejam x, y, z ∈ R3 tais que
−→v = x−→a + y−→b + z−→c .
Então
(1, 1, 1) = x(2, 3, 0) + y(1, 0, 1) + z(0, 1, 2)
m(1, 1, 1) = (2x+ y, 3x+ z, y + 2z)

2.8. BASES ORTOGONAIS 65
ou, equivalentemente, 2x+ y = 13x+ z = 1y + 2z = 1
. (2.4)
Assim, o problema de determinar se o vetor−→v os vetores −→a , −→b e −→c é equi-valente a resolver o sistema não homogêneo de equações lineares (2.4). Paraisto, consideremos a matriz ampliada do sistema
A =
2 1 0... 1
3 0 1... 1
0 1 2... 1
.Reduzindo a matriz A à forma em escada, nosso sistema é equivanlente a: x = 1
4
y = 12
z = 14
.
Portanto,−→v = 1
4−→a + 1
2
−→b +
1
4−→c .
3. Por definição dos vetores −→a , −→b e −→c , obtemos a matriz mudança debase
M =
2 1 03 0 10 1 2
.Como det(M) = −8 temos que a base B é negativa.
EXERCÍCIOS
1. Dados −→a = −→i −−→j +−→k e−→b = 2
−→i − 5−→k .
Determine o vetor −→c tal que−→a + 2−→c = 1
2−→c −−→b .
2. Sejam−→a = 1
4
−→i −−→j + 1
2
−→k e
−→b = x
−→i + y2
−→j − y
−→k .
Determinar x e y de modo que−→b tenha sentido contrário a −→a e seja
quatro vezes maior do que −→a .

66 CAPÍTULO 2. VETORES
3. Sejam
−→a = a1−→i +a2
−→j +a3
−→k ,−→b = b1
−→i +b2
−→j +b3
−→k ,−→c = c1
−→i +c2
−→j +c3
−→k
e
D = det
a1 a2 a3b1 b2 b3c1 c2 c3
.
(a) Mostrar que −→a , −→b e −→c são LD se, e somente se, D = 0.
(b) Mostrar que −→a , −→b e −→c são LI se, e somente se, D 6= 0.
4. Sejam
−→a = 2−→i −−→j ,−→b = −→j + 2−→k e −→c = −→i + 2−→j −−→k .
(a) O conjunto B = {−→a ,−→b ,−→c } é uma base de R3?(b) Escreva o vetor −→u = 4−→i + 2−→j − 4−→k como combinação linear de−→a , −→b e −→c .
5. Sejam A(1, 2, 4), B(2, 3, 2) e C(2, 1,−1).
(a) Os pontos A, B e C são vértices de um triângulo?
(b) Determinar D de modo que ABCD seja um paralelogramo.
(c) Determinar o ponto de interseções das diagonais deste paralelo-gramo.
6. Dê exemplo de dois vetores unitários que tenham a mesma direção que−→v = 4−→i + 2−→j − 4−→k .
7. Sejam A(3, 1, 0), B(1, 0, 1) e C(−1, y, 2). Determine y de modo que A,B e C sejam colineares.
8. Sejam −→a = −→i − 2−→j +−→k e −→b = 2−→i +−→j . Dê exemplo de dois vetorescujas normas sejam o triplo da norma −→a +−→b .
9. Sejam
−→a = −→i +−→j −−→k ,−→b = −→j +−→k e −→c = 2−→i −−→j +−→k .
(a) Mostrar que B = {−→a ,−→b ,−→c } é uma base de R3.

2.8. BASES ORTOGONAIS 67
(b) Determinar as coordenadas de −→u = 4−→i − 2−→k nesta base.
10. Determinar se as bases são positivas ou negativas.
(a) {−→i ,−→j ,−→k };(b) {3−→i ,−−→j −−→k ,−2−→i − 5−→k };(c) {−→j ,−→i ,−→k };(d) {−→i +−→j +−→k ,−→j +−→k ,−→k }.
11. Verificar se os pontos A(2, 2, 1), B(3, 1, 2), C(2, 3, 0) e D(2, 3, 2) sãocoplanares.
12. Sejam −→a e−→b vetores quaisquer. Mostrar que°°°−→a ±−→b °°°2 = k−→a k2 ± 2h−→a ,−→b i+ °°°−→b °°°2 .
13. Seja ABC um triângulo qualquer. Mostrar a Lei dos Cossenos
a2 = b2 + c2 − 2bc cos θ,onde
a =°°°−−→BC°°° , b = °°°−→AC°°° , c = °°°−→AB°°° e θ = ∠(−→AB,−→AC).
14. Calcular as seguintes somas e diferenças:
(a) (−→i + 2
−→j − 3−→k ) + (2−→i −−→j + 5−→k )
(b) (−−→i + 5−→j − 6−→k ) + (2−→i +−→j −−→k ) + (−→i − 2−→j + 6−→k )(c) (2
−→i +−→j − 3−→k )− (6−→i + 2−→j +−→k )
(d) (−→i + 2
−→j − 4−→k )− (2−→i + 5−→j + 6−→k ) + (3−→i − 5−→j + 7−→k ).
15. Sejam −→a = −→i +2−→j − 3−→k e−→b = 2
−→i +−→j − 2−→k . Determinar vetores
unitários paralelos aos vetores
(a) −→a +−→b(b) −→a −−→b(c) 2−→a − 3−→b .

68 CAPÍTULO 2. VETORES
16. Calcular a norma de cada um dos seguintes vetores:
(a) −→a = −→i − 2−→j + 4−→k(b)−→b = cos θ
−→i + sen θ
−→j
(c) −→c = 2−→i −−→j + 3−→k .
17. Mostrar que os pontos A(1, 2, 2), B(3, 3, 4), C(4, 5, 3) e D(2, 4, 1) sãoos vértices de um paralelogramo.
18. Dados os pontos A(2, 1, 5) e B(3, 6, 2), escreva o vetor−→AB como com-
binação linear dos vetores−→i ,−→j ,−→k . Qual é a norma de
−→AB.
19. Calcular os seguintes produtos internos:
(a) h−→i + 2−→j − 3−→k , 2−→i −−→j + 5−→k i(b) h−−→i + 5−→j − 6−→k , 2−→i +−→j −−→k i(c) h2−→i +−→j − 3−→k , 6−→i + 2−→j +−→k i.
20. Determinar o vetor unitário da bissetriz do ângulo entre os vetores
−→a = 2−→i + 3−→j +−→k e−→b = 3
−→i + 2
−→j − 3−→k .
21. Determinar o valor de x para o qual os vetores x−→i + 3
−→j + 4
−→k e
3−→i + 2
−→j − 3−→k sejam perpendiculares.
22. Determinar que não existe um número real x tal que os vetores x−→i +
2−→j + 4
−→k e x
−→i − 2−→j + 3−→k sejam perpendiculares.
23. Determinar o ângulo entre os seguintes pares de vetores:
(a) 2−→i +−→j ,−→j −−→k
(b)−→i +−→j +−→k ,−2−→j − 2−→k
(c) 3−→i + 3
−→j , 2−→i +−→j − 2−→k .
24. Determinar os ângulos do triângulo cujos vértices são os pontos
A(3, 2, 1), B(3, 2, 2) e C(3, 3, 2).
25. Verificar se os seguintes vetores são LI:

2.8. BASES ORTOGONAIS 69
(a) 2−→i +−→j −−→k , 2−→i + 3−→j − 2−→k e
−→i + 2
−→j +−→k
(b) 3−→i + 2
−→j +−→k , 2−→i +−→j + 3
−→k e 4
−→i + 3
−→j + 6
−→k .
26. Verificar se os seguintes pontos são coplanares:
(a) A(2, 2, 1), B(3, 1, 2), C(2, 3, 0) e D(2, 3, 2)
(b) A(2, 0, 2), B(3, 2, 0), C(0, 2, 1) e D(1, 2, 0).
27. Sejam O, A e B pontos quaisquer e P o ponto médio do segmento AB.Mostrar que
h−→OA,−−→OBi =°°°−→OP°°°2 − °°°−→PA°°°2 .
28. Sejam −→v um vetor não nulo qualquer e α, β e γ os ângulos que −→vforma com os vetores
−→i ,−→j e−→k , respectivamente. Mostrar que
cos2 α+ cos2 β + cos2 γ = 1.
29. Mostrar que, se −→a e−→b são vetores quaisquer, então
(a) h−→a ,−→b i = 14
µ°°°−→a +−→b °°°2 − °°°−→a −−→b °°°2¶ .
(b)°°°−→a +−→b °°°2 + °°°−→a −−→b °°°2 = 2µk−→a k2 + °°°−→b °°°2¶ .
(c)¯k−→a k−
°°°−→b °°°¯ ≤ k−→a k+ °°°−→b °°° .30. Sejam a, b, c ∈ R∗+. Mostrar que
(a+ b+ c)
µ1
a+1
b+1
c
¶≥ 9.
(Sugestão: Faça
−→u = (√a,√b,√c) e −→v = ( 1√
a,1√b,1√c)
e use a Desigualdade de Cauchy-Schwarz.)
31. Mostrar que se −→a , −→b e −→c são vetores não nulos, então pelo menosum dos três ângulos ∠(−→c ,−→b ), ∠(−→b ,−→c ) e ∠(−→a ,−→c ) é menor do queπ3. (Sugestão: Assuma que k−→a k =
°°°−→b °°° = k−→c k = 1 e calcule°°°−→a +−→b +−→c °°°2.)

70 CAPÍTULO 2. VETORES
2.9 Produto vetorial
Nesta seção vamos introduzir uma quarta operação entre elementos deV.Sejam −→a e −→b vetores não nulos de V e θ o ângulo entre −→a e
−→b . O produto
vetorial (externo) de −→a e −→b é o único vetor −→a ×−→b que satisfaz às seguintescondições:
1. h−→a ,−→a ×−→b i = h−→b ,−→a ×−→b i = 0;
2.°°°−→a ×−→b °°° = k−→a k°°°−→b °°° |sen θ|;
3. Se −→a e−→b são LD, então −→a ×−→b = −→0 . Se −→a e
−→b são LI, então
{−→a ,−→b ,−→a ×−→b }
é uma base positiva de V.
Proposição 2.9 Sejam −→a , −→b e −→c vetores quaisquer de V e x ∈ R. Então:
1. −→a ×−→b = −(−→b ×−→a );
2.¯h−→a ×−→b ,−→c i
¯é igual ao volume do paralelepípedo gerado pelos vetores
−→a , −→b e −→c ;
3. −→a × (−→b +−→c ) = −→a ×−→b +−→a ×−→c ;
4. −→a × (x−→b ) = x(−→a ×−→b );

2.9. PRODUTO VETORIAL 71
5.−→i ×−→j = −→k , −→j ×−→k = −→i e −→k ×−→i = −→j ;
6. Se −→a = a1−→i + a2
−→j + a3
−→k e
−→b = b1
−→i + b2
−→j + b3
−→k ,
então
−→a ×−→b = (a2b3 − a3b2)−→i + (−a1b3 + a3b1)
−→j + (a1b2 − a2b1)
−→k
= det
−→i −→j−→k
a1 a2 a3b1 b2 b3
.
Prova. Para mostrar 1., basta observar que, se
{−→a ,−→b ,−→v }
é uma base positiva de V, então
{−→b ,−→a ,−−→v }
é uma base positiva de V.2. Se −→a , −→b e −→c são vetores LD, então o volume reduz-se a 0 e, assim,
h−→a × −→b ,−→c i = 0. Suponhamos que −→a , −→b e −→c são vetores LI. Sejam θ =
∠(−→a ,−→b ) e φ = ∠(−→a ×−→b ,−→c ), conforme figura.
O volume do paralelepípedo é o produto da área da base, a qual é igual a°°°−→a ×−→b °°° = k−→a k°°°−→b °°° |sen θ| ,

72 CAPÍTULO 2. VETORES
pela altura h. Como
h =°°°Pr−→a ×−→b −→c °°° = k−→c k |cosφ|
temos que °°°−→a ×−→b °°°h =°°°−→a ×−→b °°° k−→c k |cosφ|
=¯°°°−→a ×−→b °°° k−→c k cosφ¯
=¯°°°−→a ×−→b °°° k−→c k cosφ¯
=¯h−→a ×−→b ,−→c i
¯.
3. Primeiro, note que, na fórmula do volume do item 2. não importa aordem dos vetores −→a , −→b e −→c , pois se
{−→a ,−→b ,−→c }
é uma base positiva de V, então
{−→b ,−→c ,−→a } e {−→c ,−→a ,−→b }
são bases positivas de V, conforme figura.
Logo,
h−→a ×−→b ,−→c i = h−→b ×−→c ,−→a i = h−→c ×−→a ,−→b i.Agora, sejam −→v um vetor qualquer de V e
−→u = −→a × (−→b +−→c )− (−→a ×−→b )− (−→a ×−→c ).

2.9. PRODUTO VETORIAL 73
Então
h−→v ,−→u i = h−→v ,−→a × (−→b +−→c )i− h−→v ,−→a ×−→b i− h−→v ,−→a ×−→c i= h−→v ,−→a × (−→b +−→c )i+ h−→b ,−→a ×−→v i+ h−→c ,−→a ×−→v i= h−→v ,−→a × (−→b +−→c )i+ h−→b +−→c ,−→a ×−→v i= h−→v ,−→a × (−→b +−→c )i− h−→v ,−→a × (−→b +−→c )i= 0.
Assim, °°°−→a × (−→b +−→c )− (−→a ×−→b )− (−→a ×−→c )°°°2 = 0.Portanto,
−→a × (−→b +−→c ) = (−→a ×−→b ) + (−→a ×−→c ).4. É similar a 3. O item 5. segue da unicidade. Para provar 6, sejam
e1 =−→i , e2 =
−→j e e3 =
−→k . Então, pelos itens anterior, obtemos que
−→a ×−→b =3X
i=1
3Xj=1
aibj(ei × ej)
= (a2b3 − a3b2)−→i + (−a1b3 + a3b1)
−→j + (a1b2 − a2b1)
−→k
=−→i det
µ·a2 a3b2 b3
¸¶−−→j det
µ·a1 a3b1 b3
¸¶+−→k det
µ·a1 a2b1 b2
¸¶
= det
−→i −→j−→k
a1 a2 a3b1 b2 b3
.
¥
Observação 2.14 O determinante do item 6 da Proposição acima foi cal-culado no sentido formal, isto é, expansão pela primeira linha. Note que elenão é um determinante real, pois a primeira linha são vetores e não númerosreais.
Exemplo 2.16 Sejam
−→a = 2−→i −−→j + 3−→k e−→b = −−→i + 3−→j − 2−→k .
Determinar −→a ×−→b .

74 CAPÍTULO 2. VETORES
Solução.
−→a ×−→b = det
−→i −→j−→k
2 −1 3−1 3 −2
= −7−→i +−→j + 5−→k .
2.10 Produto Misto
Seja B = {−→a ,−→b ,−→c } é uma base ordenada de V. O produto misto de−→a ,−→b e −→c é definido como
[−→a ,−→b ,−→c ] = h−→a ×−→b ,−→c i.
Seja φ = ∠(−→a × −→b ,−→c ). Se φ < π2, isto é, φ é um ângulo agudo, então
k−→c k cosφ é a altura do paralelepípedo. Se φ > π2, isto é, φ é um ângulo
obtuso, então − k−→c k cosφ é a altura do paralelepípedo, conforme figura.Assim,
[−→a ,−→b ,−→c ] < 0 ou [−→a ,−→b ,−→c ] > 0se B é positiva ou não. Como as bases
{−→a ,−→b ,−→c } e {−→b ,−→c ,−→a }são ambas positivas ou ambas negativas temos que
[−→a ,−→b ,−→c ] = [−→b ,−→c ,−→a ] = h−→b ×−→c ,−→a i.

2.10. PRODUTO MISTO 75
Portanto, o produto misto depende somente da ordem cíclica dos vetores enão da posição do produto escalar e do produto vetorial.
Proposição 2.10 Sejam−→a = a1
−→i + a2
−→j + a3
−→k ,−→b = b1
−→i + b2
−→j + b3
−→k e −→c = c1
−→i + c2
−→j + c3
−→k
vetores quaisquer de V. Então
[−→a ,−→b ,−→c ] = det a1 a2 a3
b1 b2 b3c1 c2 c3
.
Prova. Como−→a ×−→b = (a2b3 − a3b2)
−→i + (−a1b3 + a3b1)
−→j + (a1b2 − a2b1)
−→k
temos que
h−→a ×−→b ,−→c i = (a2b3 − a3b2)c1 + (−a1b3 + a3b1)c2 + (a1b2 − a2b1)c3
= (b2c3 − b3c2)a1 + (−b1c3 + b3c1)a2 + (b1c2 − b2c1)a3
= a1 det
µ·b2 b3c2 c3
¸¶− a2 det
µ·b1 b3c1 c3
¸¶+a3 det
µ·b1 b2c1 c2
¸¶
= det
a1 a2 a3b1 b2 b3c1 c2 c3
.
¥Exemplo 2.17 Determinar o volume do tetraedro de vértices A, B, C e D.
Solução. Sejam −→a =−→AB,
−→b =
−→AC e −→c =
−−→AD os vetores mostrados na
figura.
Então o volume do paralelepípedo gerado por −→a , −→b e −→c é igual a duas vezes

76 CAPÍTULO 2. VETORES
o volume do prisma ABCDEF , isto é,
Vp =1
2
¯[−→a ,−→b ,−→c ]
¯.
Note que o prisma é dividido em três tetraedros, a saber, ABCD, BCDE eCDEF com o mesmo volume, por exemplo, ABCD e BCDE têm faces con-gruentes ABD, BDE e o mesmo vértice C. Portanto, o volume do tetraedroé igual
Vt =1
3Vp =
1
6
¯[−→a ,−→b ,−→c ]
¯,
ou seja, o volume do tetraedro é igual um sexto do volume do paralelepípedogerado por −→a , −→b e −→c .
Exemplo 2.18 Calcular a altura do tetraedro de vértices
A (−2, 2,−1) , B (0, 1, 2) , C(1, 1, 3) e D (0, 0, 1)
relativa à face de vértices B, C e D.
Solução. Pela figura acima temos que
h =°°°Pr−−→BC×−−→BD−→BA°°° =
¯h−−→BC ×−−→BD,
−→BAi
¯°°°−−→BC ×−−→BD°°° =
¯[−−→BC,−−→BD,
−→BA]
¯°°°−−→BC ×−−→BD°°° .
Como−→BA = (−2, 1,−3), −−→BC = (1, 0, 1) e −−→BD = (0,−1,−1) temos que
−−→BC ×−−→BD = (1, 1,−1) e [−−→BC,−−→BD,
−→BA] = −2.
Portanto,
h =2√3=2√3
3.
EXERCÍCIOS
1. Calcular o produto misto [−→a ,−→b ,−→c ] para os seguintes ternos de vetores:
(a) −→a = 2−→i −−→j +−→k , −→b = −→i −−→j +−→k e c =−→i + 2
−→j −−→k .
(b) −→a = −→i , −→b = −→i + 1000−→j e c = 100−→i − 200−→j .(c) −→a = 2−→i , −→b = 3−→j e c = 4−→k .(d) −→a = 2−→i −−→j +−→k , −→b = 3−→i −−→j +−→k e c =
−→i + 2
−→j − 3−→k .

2.10. PRODUTO MISTO 77
2. Calcular o volume do paralelepípedo que tem um dos vértices no pontoA (2, 1, 6) e os três vértices adjacentes nos pontos B (4, 1, 3) , C (1, 3, 2)e D (1, 2, 1) .
3. Calcular os seguintes produtos vetoriais:
(a)³−→i −−→j +−→k
´×³2−→i +−→j −−→k
´.
(b)³−−→i + 2−→j + 3−→k
´×³2−→i −−→j + 3−→k
´.
(c)³2−→i − 3−→j −−→k
´×³−−→i +−→j −−→k
´.
4. Calcular a área do paralelogramo em que três vértices consecutivos sãoA (1, 0, 1) , B (2, 1, 3) e C (3, 2, 5) .
5. Mostrar que {−→a ,−→b ,−→c } é uma base ortonormal, onde
−→a = 1√6(−→i + 2
−→j +−→k ),−→b =
1√2(−−→i +−→k ),−→a = 1√
3(−→i −−→j +−→k ).
Essa base é positiva ou negativa?
6. Calcular a área do triângulo com vérticesA (1, 2, 1) , B (3, 0, 4) eC (5, 1, 3) .
7. Determinar um vetor unitário perpendicular aos vetores
−→a = −→i − 2−→j + 3−→k e−→b = 3
−→i −−→j + 2−→k .
8. Calcular os produtos h−→a ,−→b i, h−→b ,−→c i, −→a × −→b , −→a × −→c , [−→a ,−→b ,−→c ],(−→a ×−→b )× (−→a ×−→c ) e h−→a ×−→b ,−→a ×−→c i quando −→a = 2−→i +−→j − 2−→k ,−→b = 2
−→i −−→j + 3−→k e −→c = −→i + 2−→j −−→k .
9. Calcular k−→c k, h−→a ,−→b i,°°°−→b ×−→c °°°, [−→a ,−→b ,−→c ], e o ângulo entre −→a e
−→b , sendo
−→a = 2−→i −−→j + 3−→k ,−→b = −−→i + 3−→j − 2−→k ,−→c = −−→i + 2−→j − 2−→k .
10. Use o produto misto para mostrar que se duas linhas quaisquer em umdeterminante de terceira ordem são iguais, então o valor desse deter-minante é zero.

78 CAPÍTULO 2. VETORES
11. Utilize o produto misto para mostrar que:
det
xa1 xa2 xa3b1 b2 b3c1 c2 c3
= xdet
a1 a2 a3b1 b2 b3c1 c2 c3
e
det
a1 + a01 a2 + a02 a3 + a03b1 b2 b3c1 c2 c3
= det
a1 a2 a3b1 b2 b3c1 c2 c3
+det
a01 a02 a03b1 b2 b3c1 c2 c3
.
12. Mostrar que {−→a ,−→b ,−→c }, com −→a = x−→i − 2x−→j + 2x−→k , −→b = 2x−→i +
2x−→j + x
−→k e −→c = −2x−→i + x
−→j +2x
−→k , é uma base ortogonal positiva
se x 6= 0. Para que valor de x essa base é ortonormal?13. O produto vetorial é associativo? Justifique sua resposta.
14. Seja −→a = −→i + 2−→j −−→k e−→b = −−→i + 3−→k . Calcular:
h−→a ,−→b i,−→a ×−→b ,−→a°°°−→b °°° e
°°°−→a ×−→b °°° .15. Mostrar que −→a e
−→b são linearmente independente se, e somente se,
−→a ×−→b 6= −→0 .
16. Escreva o vetor −→v = 6−→i +−→j −−→k como combinação linear dos vetoresda base {−→a ,−→b ,−→c } do Exercício 6.
17. Mostrar que os vetores −→a , −→b e −→c são linearmente independentes se, esomente se,
det
h−→a ,−→a i h−→a ,−→b i h−→a ,−→c ih−→b ,−→a i h−→b ,−→b i h−→b ,−→c ih−→c ,−→a i h−→c ,−→b i h−→c ,−→c i
6= 0.

2.10. PRODUTO MISTO 79
18. Sejam −→a e−→b vetores quaisquer. Mostrar que°°°−→a ×−→b °°°2 + ³h−→a ,−→b i´2 = k−→a k2 °°°−→b °°°2 .
19. Sejam −→a e −→c vetores e x um escalar. Determinar todos os vetores−→b
tais que−→a ×−→b = −→c e h−→a ,−→b i = x.
20. Sejam −→a , −→b e −→c vetores, com −→a 6= −→0 e x um escalar. Provar ou darum contra exemplo que
h−→a ,−→b i = h−→a ,−→c i e −→a ×−→b = −→a ×−→c ⇒−→b = −→c .
21. Sejam −→a ,−→b ,−→c e −→d vetores quaisquer. Mostrar que:
(a) −→a × (−→b ×−→c ) = h−→a ,−→c i−→b − h−→a ,−→b i−→c ; (Expansão de Grass-mann) (Sugestão: Mostre que
h−→v ,−→a × (−→b ×−→c )i = h−→v ,³h−→a ,−→c i−→b − h−→a ,−→b i−→c
´i,
onde −→v = −→i , −→j e −→k , continue.)(b) (−→a ×−→b )×−→c = h−→c ,−→a i−→b − h−→c ,−→b i−→a ;(c) −→a ×(−→b ×−→c )+−→b × (−→c ×−→a )+−→c × (−→a ×−→b ) = −→0 ; (Identidade
de Jacobi)
(d) h−→a ×−→b ,−→c ×−→d i = h−→a ,−→c ih−→b ,−→d i−h−→a ,−→d ih−→b ,−→c i; (Identidadede Lagrange) (Sugestão: Note que
h−→a ×−→b ,−→c ×−→d i = h−→b × (−→c ×−→d ),−→a i
e use a.)
(e) (−→a ×−→b )× (−→c ×−→d ) = [−→a ,−→c ,−→d ]−→b − [−→b ,−→c ,−→d ]−→a .
80 CAPÍTULO 2. VETORES

Capítulo 3
Retas e Planos
Neste capítulo veremos como utilizar a teoria dos vetores para caracterizarretas e planos, a saber, suas equações, posições relativas, ângulos e distâncias.
3.1 A reta
Sejam P0 um ponto e −→a um vetor não nulo. Já vimos que a reta r quepassa em P0 na direção do vetor
−→a é dada por
r = {−→p 0 + t−→a : t ∈ R}= −→p 0 +R−→a ,
onde −→p 0 = −−→OP0.Seja X um ponto em R3. Então X ∈ r se, e somente se, existe t ∈ R tal
que −→x −−→p 0 = t−→a se, e somente se, existe t ∈ R tal que−→x = −→p 0 + t−→a , (3.1)
onde −→x =−−→OX. A equação (3.1) é chamada equação vetorial da reta r, t o
parêmetro do ponto P0 e −→a o.vetor diretor da reta r.
Observação 3.1 Se −→a é um vetor na direção de uma reta r e x ∈ R∗, entãox−→a também é um vetor na direção da reta r.
Se P0(x0, y0, z0),−→a = a1
−→i +a2
−→j +a3
−→k e X(x, y, z), então, pela equação
(3.1), obtemos que
r :
x = x0 + ta1y = y0 + ta2z = z0 + ta3, t ∈ R.
(3.2)
As equações (??) são chamadas equações paramétricas da reta r.
81

82 CAPÍTULO 3. RETAS E PLANOS
Observação 3.2 1. Se a1a2a3 6= 0, então pelas equações (??), obtemosque
t =x− x0a1
, t =y − y0a2
e t =z − z0a3
.
Logo,
r :x− x0a1
=y − y0a2
=z − z0a3
. (3.3)
As equações (3.3) são chamadas equações semétricas da reta r. Alémdisso, as coordenadas a1, a2 e a3 do vetor
−→a são chamadas parâmetrosdiretores da reta r e os cossenos diretores do vetor −→a são chamadascossenos diretores da reta r. Note, também, que
x− x0a1
=y − y0a2
ex− x0a1
=z − z0a3
implica que
y =a2a1(x− x0) + y0 e z =
a3a1(x− x0) + z0. (3.4)
As equações (3.4) são chamadas equações reduzidas da reta r.
2. Se a1a2 6= 0 e a3 = 0, então, pelas equações (??), obtemos que
t =x− x0a1
, t =y − y0a2
e z = z0.
Logo,
r :x− x0a1
=y − y0a2
e z = z0. (3.5)
As equações (3.5) são chamadas equações pseudo-semétricas da reta r.Neste caso, a equação
r : ax+ by + c = 0,
onde a = −a2, b = a1 e c = −(ax0 + by0), é chamada de equaçãocartesiana ou normal da reta r no plano z = z0 (paralelo ao plano x0y)com vetor normal
−→n = a−→i + b
−→j = (a, b, 0).
Exemplo 3.1 Determinar as equações paramétricas e simétricas da reta quepassa em P0(1,−2, 3) na direção do vetor
−→a = 4−→i +−→j − 3−→k .

3.1. A RETA 83
Solução. Seja r a reta que passa em P0 e está na direção do vetor
−→a = 4−→i +−→j − 3−→k .Então as equações paramétricas de r são:
r :
x = 1 + 4ty = −2 + tz = 3− 3t, t ∈ R.
Consequentemente, as equações simétricas de r são:
r :x− 14
=y + 2
1=
z − 3−3 .
EXERCÍCIOS
1. Determinar as equações simétricas e paramétricas da reta que passa emP0(1, 2, 2) na direção do vetor
−→a = 3−→i −−→j +−→k .2. Determinar as equações simétricas e paramétricas da reta que passa em
P0(1, 0, 1) na direção do vetor−→a = −→i − 2−→j +−→k . Verificar se o ponto
A(1,−2, 1) pertence a esta reta.3. Determinar as equações simétricas e paramétricas da reta que passaem P0(1, 2, 3) na direção do vetor
−→a = 4−→i − 2−→j − 5−→k . Verificar se
os ponto A(5, 0,−3) e B(−1, 3, 2) pertencem a esta reta. Obtenha umoutro ponto C desta reta distinto dos anteriores.
4. Determinar as equações simétricas e paramétricas da reta que passapelos pontos A(1, 2, 3) e B(5, 0, 6). Verificar se os ponto C(9,−2, 9) eD(9, 2,−3) pertencem a esta reta.
5. Determinar as equações simétricas e paramétricas da reta cuja equaçãovetorial é −→x = −→p 0 + t−→a , t ∈ R,onde −→p 0 = (1, 2, 3), −→a = (1,−1, 1) e −→x = −−→OX.
6. Determinar as equações paramétricas da reta cujas equações simétricassão
r : x− 1 = 5y + 4
2= −6z + 9.

84 CAPÍTULO 3. RETAS E PLANOS
7. Determinar as equações simétricas da reta cujas equações paramétricassão
r :
x = 2− ty = 4z = 3t, t ∈ R.
8. Determinar as equações simétricas e paramétricas da reta que passapelo ponto A(1,−1, 2) e pelo ponto médio do segmento BC, ondeB(−1, 0, 1) e C(5, 2, 1).
9. Seja −→a um vetor não nulo em R3. Mostrar que o conjunto
{−→x ∈ R3 : −→a ×−→x = −→b }representa uma reta se os vetores −→a e
−→b são perpendiculares. Caso
contrário, é um conjunto vazio.
10. Seja r um reta em R3. Mostrar que existem vetores −→a e −→b em R3 taisque
r = {−→x ∈ R3 : −→a ×−→x = −→b }.
3.2 O plano
Sejam P0 um ponto e −→a , −→b vetores linearmente independentes. Já vimosque o plano π que passa em P0 e é paralelo ou coincidente ao plano geradopor −→a e
−→b é dado por
π = {−→p + s−→a + t−→b : s, t ∈ R}
= −→p +R−→a +R−→b ,onde −→p = −−→OP0.Seja X um ponto de R3. Então X ∈ π se, e somente se, existem s, t ∈ R
tais que−→x = −→p + s−→a + t
−→b , (3.6)
onde −→x = −−→OX. A equação (3.6) é chamada equação vetorial do plano π e s,t os parêmetros do ponto P0.Se P0(x0, y0, z0), −→a = a1
−→i + a2
−→j + a3
−→k ,−→b = b1
−→i + b2
−→j + b3
−→k e
X(x, y, z), então, pela equação (3.6),
π :
x = x0 + sa1 + tb1y = y0 + sa2 + tb2z = z0 + sa3 + tb3, s, t ∈ R.
(3.7)

3.2. O PLANO 85
As equações (3.7) são chamadas equações paramétricas do plano π.
Observação 3.3 X ∈ π se, e somente se,−−→P0X,
−→a e−→b são linearmente
dependentes se, e somente se, [−−→P0X,−→a ,−→b ] = 0 se, e somente se,
det
x− x0 y − y0 z − z0a1 a2 a3b1 b2 b3
= 0
se, e somente se,π : ax+ by + cz + d = 0, (3.8)
onde
a = a2b3 − a3b2, b = a3b1 − a1b3, c = a1b2 − a2b1 e
d = −(ax0 + by0 + cz0).
A equação (3.8) é chamada equação cartesiana do plano π.
Exemplo 3.2 Determinar as equações cartesiana e paramétricas do planoque passa por P0(1,−2, 3) e é paralelo ou coincidente ao plano gerado pelosvetores −→a = 4−→i +−→j − 3−→k e
−→b = −3−→j + 7−→k .
Solução. Seja π o plano que passa em P0 e está na direção do plano geradopor −→a e −→b . Então X ∈ π se, somente se, [
−−→P0X,−→a ,−→b ] = 0 se, e somente se,
det
x− 1 y + 2 z − 34 1 −30 −3 7
= 0⇔ (x−1)(−2)−(y+2)28+(z−3)(−12) = 0.
Logo, a equação cartesiana do plano π é
−2x− 28y − 12z − 18 = 0 ou x+ 14y + 6z + 9 = 0.
As equações paramétricas do plano π são:
π :
x = 1 + 4sy = −2 + s− 3tz = 3− 3s+ 7t, s, t ∈ R.
Sejam P0, A e B três pontos não colineares. Seja π o plano determinadopor P0, A e B, conforme figura

86 CAPÍTULO 3. RETAS E PLANOS
Assim, X ∈ π se, e somente se, existem s, t ∈ R tais que−→x = −→p 0 + s(−→a −−→p 0) + t(
−→b −−→p 0),
onde −→p 0 = −−→OP0, −→a =−→OA,
−→b =
−−→OB e −→x =
−−→OX. Se P0(x0, y0, z0),
A(a1, a2, a3), B(b1, b2, b3) e X(x, y, z), então
π :
x = x0 + s(a1 − x0) + t(b1 − x0)y = y0 + s(a2 − y0) + t(b2 − y0)z = z0 + s(a3 − z0) + t(b3 − z0), s, t ∈ R.
Observação 3.4 X ∈ π se, e somente se,−−→P0X,
−−→P0A e
−−→P0B são linearmente
dependentes se, e somente se, [−−→P0X,
−−→P0A,
−−→P0B] = 0 se, e somente se,
det
x− x0 y − y0 z − z0a1 − x0 a2 − y0 a3 − z0b1 − x0 b2 − y0 b3 − z0
= 0
se, e somente se,π : ax+ by + cz + d = 0,
onde
a = (a2 − y0)(b3 − z0)− (a3 − z0)(b2 − y0),
b = (a3 − z0)(b1 − x0)− (a1 − x0)(b3 − z0),
c = (a1 − x0)(b2 − y0)− (a2 − y0)(b1 − x0) e
d = −(ax0 + by0 + cz0).
Exemplo 3.3 Determinar as equações cartesiana e paramétricas do planoque passa pelos pontos A(3, 1, 2), B(4,−1,−1) e C(2, 0, 2).Solução. Fixando um dos pontos, digamos P0 = A, obtemos que
−−→P0B =
−→i − 2−→j − 3−→k e
−−→P0B = −−→i −−→j .
Logo,
π :
x = 3 + s− ty = 1− 2s− tz = 2− 3s, s, t ∈ R.
são as equações paramétricas do plano π. Agora X ∈ π se, somente se,
det
x− 3 y − 1 z − 21 −2 −3−1 −1 0
= 0⇔ (x−3)(−3)−(y−1)(−3)+(z−2)(−3) = 0.

3.2. O PLANO 87
Portanto, a equação cartesiana do plano π é
π : x− y + z − 4 = 0.
Seja −→n um vetor qualquer não nulo. Dizemos que −→n está na direçãoperpendicular a um plano π se ele está na direção de qualquer reta que sejaperpendicular ao plano π, conforme figura
Seja X um ponto de R3. Então X ∈ π se, e somente se,
h−−→P0X,−→n i = 0,∀P0 ∈ π. (3.9)
A equação (3.9) é chamada de equação normal do plano π e −→n de vetornormal ao plano π.
Observação 3.5 Se −→n é um vetor normal a um plano π e x ∈ R∗, entãox−→n também é um vetor normal ao plano π.
Se P0(x0, y0, z0), X(x, y, z) e−→n = a
−→i + b
−→j + c
−→k , então a equação do
plano que passa em P0 tendo como vetor normal −→n é
ax+ by + cz + d = 0,
onded = −(ax0 + by0 + cz0).
Reciprocamente, a equação
ax+ by + cz + d = 0,
onde a, b e c não são todos nulos, representa um plano que tem como vetornormal −→n . De fato, se a 6= 0, então
a(x+d
a) + b(y − 0) + c(z − 0) = 0⇔ h−−→P0X,−→n i = 0,
onde P0(−da, 0, 0) e X(x, y, z).

88 CAPÍTULO 3. RETAS E PLANOS
Observação 3.6 (Forma normal de Hesse) Seja π o plano que passa emP0(x0, y0, z0) tendo como vetor normal
−→n = (a, b, c). Então
π = {P ∈ R3 : h−→OP,−→n i = d},
onde d = h−−→OP0,−→n i = ax0 + by0 + cz0 e O é a origem de R3.
Exemplo 3.4 Determinar a equação do plano que passa em P0(1,−2, 3)tendo como vetor normal
−→n = 4−→i + 2−→j − 3−→k .
Solução. Pela equação (3.9), obtemos que
4(x− 1) + 2(y + 2)− 3(z − 3) = 0⇔ 4x+ 2y − 3z + 9 = 0.
Exemplo 3.5 Determinar a equação do plano que intercepta os eixos coor-denados, fora da origem, nos pontos A(p, 0, 0), B(0, q, 0) e C(0, 0, r).
Solução. Fixando um dos pontos, digamos P0 = A, obtemos que
−−→P0B = −p−→i + q
−→j e
−−→P0B = −p−→i + r
−→k .
Logo,
−→n = det −→i −→
j−→k
−p q 0−p 0 r
= qr−→i + pr
−→j + pq
−→k
é o vetor normal ao plano. Assim,
qrx+ pry + pqz + d = 0.
Como P0 = A pertence ao plano temos que
pqr + d = 0⇒ d = −pqr.Portanto,
qrx+ pry + pqz − pqr = 0,
ou ainda, dividindo esta equação por pqr, obtemos que
x
p+
y
q+
z
r= 1,
a qual é a equação segmetária do plano.

3.2. O PLANO 89
Exemplo 3.6 Sejam A(x1, y1, z1), B(x2, y2, z2) e C(x3, y3, z3) três pontosnão colineares. Mostrar que a equação do plano que passa pelos pontos A, Be C é dada por
det
x y z 1x1 y1 z1 1x2 y2 z2 1x3 y3 z3 1
= 0.
Solução. Já vimos que a equação do plano π que passa pelos pontos A, B eC é dada por
π : ax+ by + cz + d = 0,
onde
a = (y2 − y1)(z3 − z1)− (z2 − z1)(y3 − y1),
b = (z2 − z1)(x3 − x1)− (x2 − x1)(z3 − z1),
c = (x2 − x1)(y3 − y1)− (y2 − y1)(x3 − x1) e
d = −(ax1 + by1 + cz1).
É fácil verificar que
ax = xdet
y1 z1 1y2 z2 1y3 z3 1
, by = −y det x1 z1 1
x2 z2 1x3 z3 1
,
cz = z det
x1 y1 1x2 y2 1x3 y3 1
e d = −det x1 y1 z1
x2 y2 z2x3 y3 z3
.
Como o desenvolvimento, relativo a primeira linha, do determinante da ma-triz
A =
x y z 1x1 y1 z1 1x2 y2 z2 1x3 y3 z3 1
é igual a
det(A) = ax+ by + cz + d
temos que a equação do plano que passa pelos pontos A, B e C é dada por
det
x y z 1x1 y1 z1 1x2 y2 z2 1x3 y3 z3 1
= 0.

90 CAPÍTULO 3. RETAS E PLANOS
Observação 3.7 Uma condição necessária e suficiente para que quatro pon-tos A(x1, y1, z1), B(x2, y2, z2), C(x3, y3, z3) e D(x4, y4, z4) sejam coplanares éque
det
x1 y1 z1 1x2 y2 z2 1x3 y3 z3 1x4 y4 z4 1
= 0.
Concluiremos esta seção determinando as equações paramétricas da retadeterminada pela interseção de dois planos.Sejam π1 e π2 dois planos com direções perpendiculares diferentes, cujas
equações cartesianas são:
π1 : a1x+ b1y + c1z + d1 = 0 e π2 : a2x+ b2y + c2z + d2 = 0. (3.10)
As equações (3.10) são chamadas de equações cartesianas da reta. Sejam
−→n 1 = a1−→i + b1
−→j + c1
−→k e −→n 2 = a2
−→i + b2
−→j + c2
−→k
os vetores normais aos planos π1 e π2, respectivamente. Então o vetor
−→a = −→n 1 ×−→n 2 6= −→0
é paralelo ou coincidente com a reta determinada pela interseção dos planosπ1 e π2. Assim, basta encontrar um ponto P0 tal que P0 ∈ π1 ∩ π2, isto é,resolver o sistema ½
a1x+ b1y + c1z = −d1a2x+ b2y + c2z = −d2 .
Exemplo 3.7 Determinar as equações paramétricas da reta determinada pe-los planos
π1 : x+ y + z = 0 e π2 : 2x+ 3y − z − 4 = 0.

3.2. O PLANO 91
Solução. Primeiro devemos encontrar os vetores normais aos planos. Nestecaso,
−→n 1 =−→i +−→j +−→k e −→n 2 = 2
−→i + 3
−→j −−→k .
Segundo devemos calcular o vetor diretor da reta, isto é,
−→a = −→n 1 ×−→n 2 = det
−→i −→j−→k
1 1 12 3 −1
= −4−→i + 3−→j +−→k .
Terceiro resolver o sistema ½x+ y + z = 0
2x+ 3y − z = 4.
Consideremos a matriz ampliada do sistema
A0 =
"1 1 1
... 0
2 3 −1 ... 4
#→ · · ·→ R =
"1 0 4
... −40 1 −3 ... 4
#.
Logo, nosso sistema é equivalente ao sistema½x+ 4z = −4y − 3z = 4 .
Escolhendo, z = c ∈ R, obtemos queS = {(−4− 4c, 4 + 3c, c) : c ∈ R}
é o conjunto solução do sistema. Em particular, P0(−4, 4, 0) é uma soluçãodo sistema. Portanto,
r :
x = −4− 4ty = 4 + 3tz = t, t ∈ R.
são as equações paramétricas da reta r.
EXERCÍCIOS
1. Determinar as equações simétricas e paramétricas do plano que passapelos pontos A(3, 2, 1), B(4,−1,−1) e C(2, 0, 0).
2. Determinar as equações simétricas e paramétricas do plano que passapelos pontosA(1, 0, 0), B(0, 2, 0) eC(0, 0, 3). Obtenha um vetor normalde comprimento 2
3a este plano.

92 CAPÍTULO 3. RETAS E PLANOS
3. Determinar as equações simétricas e paramétricas do plano que passaem A(2, 1,−1) e é ortogonal ao vetor −→a = (1,−2, 1). Verificar se ospontos B(0,−1, 0) e C(1,−2, 1) pertencem ao plano.
4. Determinar as equações simétricas e paramétricas do plano que passaem P0(1, 2, 2) na direção dos vetores
−→a = (2, 1,−1) e −→b = (1,−1,−2).Obtenha um outro ponto deste plano.
5. Determinar as equações normal e cartesiana do plano que passa pelospontos A(1, 2, 3), B(5, 0, 6) e é paralelo ao vetor −→a = (3,−1,−4).
6. Determinar as equações simétricas e paramétricas do plano cuja equaçãovetorial é −→x = −→p 0 + s−→a + t
−→b , s, t ∈ R,
onde −→p 0 = (1, 2, 3), −→a = (1,−1, 1), −→b = (1, 1,−2) e −→x = −−→OX.7. Determinar as equações paramétricas do plano cuja equação cartesianaé
3x− y + z − 4 = 0.Obtenha um vetor normal unitário a este plano.
8. Determinar a equação cartesiana do plano cujas equações paramétricassão
π :
x = 3− 3s− ty = 1 + s− 2tz = −s− t, s, t ∈ R.
Obtenha um vetor normal de comprimento 15 a este plano.
9. Seja π o plano cuja equação cartesiana é
π : 2x− y − 3z + 5 = 0.Determinar o valor de k de modo que o ponto P (k, k + 2, 2) pertençaao plano π. A origem pertence ao plano π? Determinar a equação deum plano paralelo ao plano π contendo a origem.
10. Determinar as equações simétricas e paramétricas do plano que contémo eixo 0z e um vetor na direção da bissetriz do ângulo entre os vetores−→i e−→j . Faça um esboço deste plano.
11. Determinar as equações simétricas e paramétricas do plano que passapelos pontos A(7, 2,−3), B(5, 6,−4) e é paralelo ao eixo 0x. O pontomédio do segmento AB pertence a este plano?

3.3. POSIÇÕES RELATIVAS 93
12. O ponto A(2,−1,−1) é o pé da perpendicular baixada da origem a umplano. Determinar a equação deste plano.
13. Sejam π1 e π2 dois planos com direções perpendiculares diferentes, cujasequações cartesianas são:
π1 : a1x+ b1y + c1z + d1 = 0 e π2 : a2x+ b2y + c2z + d2 = 0.
Mostrar que
α(a1x+ b1y + c1z + d1) + β(a2x+ b2y + c2z + d2) = 0,
onde α, β ∈ R, não ambos nulos, é a equação cartesiano de um planoque contém a reta de interseção dos planos π1 e π2. Seja r reta deinterseção dos planos π1 e π2. Determinar os números α e β de modoque o plano que contém a reta r passe pelo ponto P0(x0, y0, z0).
3.3 Posições relativas
Nesta seção vamos estudar a posição relativa e o ângulo entre retas, retase planos e entre planos.Sejam r1 e r2 duas retas, cujas equações paramétricas são:
r1 :
x = x1 + a1sy = y1 + a2sz = z1 + a3s, s ∈ R
e r2 :
x = x2 + b1ty = y2 + b2tz = z2 + b3t, t ∈ R.
Sejam−→a = (a1, a2, a3) e −→b = (b1, b2, b3),
os vetores diretores das retas r1 e r2, respectivamente, e o sistema b1s− a1t = x2 − x1b2s− a2t = y2 − y1b3s− a3t = z2 − z1
. (3.11)
Então:(a) As retas r1 e r2 são paralelas se, e somente se, elas têm a mesma
direção se, e somente se, existe k ∈ R tal que−→a = k
−→b ,
ou ainda,a1b1=
a2b2=
a3b3.
94 CAPÍTULO 3. RETAS E PLANOS
Nestas igualdades fazemos a convenção de que o numerador é igual a zero,quando o denominador o for.O caso em que as retas são coincidentes é considerado como um caso
especial de paralelismo. Neste caso, o sistema (3.11) tem infinitas soluções,isto é, ele é compatível indeterminado.
(b) As retas r1 e r2 são concorrentes se, e somente se, elas têm direçõesdiferentes e um ponto em comum se, e somente se,
−→a 6= k−→b ,
para todo k ∈ R, ou ainda,a1b16= a2
b26= a3
b3
e o sistema (3.11) tem uma única solução, isto é, ele é compatível e determi-nado.
(c) As retas r1 e r2 são perpendiculares se, e somente se, h−→a ,−→b i = 0, istoé,
a1b1 + a2b2 + a3b3 = 0.
Neste caso, as retas r1 e r2 podem ser ou não concorrentes.(d) As retas r1 e r2 são reversas se, e somente se, elas não são coplanares
e têm interseção vazia se, e somente se,
a1b16= a2
b26= a3
b3

3.3. POSIÇÕES RELATIVAS 95
e o sistema (3.11) não tem solução, isto é, ele é incompatível.
Observação 3.8 Para determinar a posição relativa de duas retas basta dis-cutir o sistema (3.11).
Exemplo 3.8 Determinar a posição relativa das retas
r1 :x− 12
=y + 2
−3 =z − 54
e r2 :
x = 7 + 3ty = 2 + 2tz = 1− 2t, t ∈ R.
Solução. Como2
36= −3
26= 4
−2temos que as retas são concorrentes ou reversas. Para decidirmos se elas sãoconcorrentes ou reversas, devemos resolver o sistema 2s− 3t = 6
−3s− 2t = 44s+ 2t = −4
.
Consideremos a matriz ampliada do sistema
A0 =
2 −3 ... 6
−3 −2 ... 4
4 2... −4
→ · · ·→ R =
1 0... 0
0 1... −2
0 0... 0
.Logo, o nosso sistema é equivalente ao sistema
s = 0 e t = −2.Portanto, as retas são concorrentes e P (1,−2, 5) é o ponto de interseção.Note que elas não são perpendiculares, pois
2 · 3 + (−3) · 2 + 4 · (−2) = −8 6= 0.

96 CAPÍTULO 3. RETAS E PLANOS
Exemplo 3.9 Determinar a posição relativa das retas
r1 :x− 26
=y + 1
4=
z − 3−4 e r2 :
x− 19
=y − 26
=z + 3
−6Solução. Como
6
9=4
6=−4−6
temos que as retas são paralelas ou coincidentes. Sendo P (2,−1, 3) um pontopertencente a primeira reta mas não pertencente a segunda reta temos queelas são paralelas ou, equivalentemente, o sistema abaixo é incompatível 6s− 9t = −1
4s− 6t = 3−4s+ 6t = −6
.
Exemplo 3.10 Determinar a posição relativa das retas
r1 :
x = −2 + 2sy = −3sz = 1 + 4s, s ∈ R
e r2 :
x = 3 + ty = 1 + 4tz = 2t, t ∈ R.
Solução. Como2
16= −3
46= 4
2
temos que as retas são concorrentes ou reversas. Para decidirmos se elas sãoconcorrentes ou reversas, devemos resolver o sistema 2s− t = 5
−3s− 4t = 14s− 2t = −1
.
Consideremos a matriz ampliada do sistema
A0 =
2 −1 ... 5
−3 −4 ... 1
4 −2 ... −1
→ · · ·→ R =
1 0... 0
0 1... 0
0 0... 1
.Como
posto(A0) = 3 > 2 = posto(A)
temos que o sistema é incompatível. Portanto, as retas são reversas.

3.3. POSIÇÕES RELATIVAS 97
Concluiremos esta seção definindo o ângulo entre as retas r1 e r2. Oângulo θ entre as retas r1 e r2 satisfaz a condição¯
h−→a ,−→b i¯= k−→a k
°°°−→b °°° cos θ,pois o ângulo entre −→a e −→b é θ ou π−θ e, assim, h−→a ,−→b i ≥ 0 ou h−→a ,−→b i ≤ 0.Portanto, o ângulo entre as retas r1 e r2 é definido como
∠(r1, r2) = arccos
¯h−→a ,−→b i
¯k−→a k
°°°−→b °°° .
Observação 3.9 Se r1 e r2 são retas paralelas, então ∠(r1, r2) = 0◦.
Exemplo 3.11 Determinar o ângulo entre as retas
r1 :
x = −2y = −3sz = 1− 3s, s ∈ R
e r2 :
x = 2ty = 1− tz = 2 + 3t, t ∈ R.
Solução. Como
−→a = −3−→j − 3−→k e−→b = 2
−→i −−→j + 3−→k
temos queh−→a ,−→b i = −6, k−→a k = 3√2 e
°°°−→b °°° = √14.Logo, o ângulo entre as retas é igual a
∠(r1, r2) = arccos
¯h−→a ,−→b i
¯k−→a k
°°°−→b °°°
= arccos
µ |−6|3√2√14
¶= arccos
µ1√7
¶.
Sejam π1 e π2 dois planos, cujas equações cartesianas são:
π1 : a1x+ b1y + c1z + d1 = 0 e π2 : a2x+ b2y + c2z + d2 = 0.
Sejam−→n 1 = a1
−→i + b1
−→j + c1
−→k e −→n 2 = a2
−→i + b2
−→j + c2
−→k

98 CAPÍTULO 3. RETAS E PLANOS
os vetores normais aos planos π1 e π2, respectivamente, e o sistema½a1x+ b1y + c1z = −d1a2x+ b2y + c2z = −d2 . (3.12)
Então:(a) Os planos π1 e π2 são paralelas se, e somente se, os vetores −→n 1 e −→n 2
têm a mesma direção se, e somente se, existe k ∈ R tal que−→n 1 = k−→n 2,
ou ainda,a1a2=
b1b2=
c1c2.
O caso em que os planos são coincidentes é considerado como um casoespecial de paralelismo. Neste caso, o sistema (3.12) tem duas variáveis livres,isto é, ele é compatível e indeterminado.
(b) Os planos π1 e π2 são concorrentes se, e somente se, os vetores −→n 1 e−→n 2 têm direções diferentes e um reta em comum se, e somente se,−→n 1 6= k−→n 2,
para todo k ∈ R, ou ainda,a1a26= b1
b26= c1
c2
e o sistema (3.12) tem uma variável livre, isto é, ele é compatível e indeter-minado.
(c) Os planos π1 e π2 são perpendiculares se, e somente se, h−→n 1,−→n 2i = 0,

3.3. POSIÇÕES RELATIVAS 99
isto é,a1a2 + b1b2 + c1c2 = 0.
Observação 3.10 Para determinar a posição relativa de dois planos bastadiscutir o sistema (3.12).
Exemplo 3.12 Determinar a posição relativa dos planos
π1 : 2x+ y − z − 1 = 0 e π2 : 3x− 5y + z − 4 = 0.
Solução. Sejam
−→n 1 = 2−→i +−→j −−→k e −→n 2 = 3
−→i − 5−→j +−→k
os vetores normais aos planos. Como
2
36= 1
−5 6=−11
temos que os planos são concorrentes. Note que eles são perpendiculares,pois
h−→n 1,−→n 2i = 6− 5− 1 = 0.
Agora, para determinar a reta de interseção, devemos resolver o sistema½2x+ y − z = 13x− 5y + z = 4
.
Consideremos a matriz ampliada do sistema
A0 =
"2 1 −1 ... 1
3 −5 1... 4
#→ · · ·→ R =
"1 0 − 4
13
... 913
0 1 − 513
... − 513
#.
Logo, nosso sistema é equivalente ao sistema½x− 4
13z = 9
13
y − 513z = − 5
13
.
Escolhendo, z = t ∈ R, obtemos que
r :
x = 913+ 4
13t
y = − 513− 5
13t
z = t,
são as equações paramétricas da reta.

100 CAPÍTULO 3. RETAS E PLANOS
Exemplo 3.13 Determinar a posição relativa dos planos
π1 : x+ 2y + 3z − 1 = 0 e π2 : 2x+ 4y + 6z − 3 = 0.
Solução. Sejam
−→n 1 =−→i + 2
−→j + 3
−→k e −→n 2 = 2
−→i + 4
−→j + 6
−→k
os vetores normais aos planos. Como
1
2=2
4=3
6
temos que os planos são paralelos ou coincidentes. Para decidirmos se elessão paralelos ou coincidentes, devemos resolver o sistema½
x+ 2y + 3z = 12x+ 4y + 6z = 3
.
Consideremos a matriz ampliada do sistema
A0 =
"1 2 3
... 1
2 4 6... 3
#→ · · ·→ R =
"1 2 3
... 0
0 0 0... 1
#.
Comoposto(A0) = 2 > 1 = posto(A)
temos que o sistema é incompatível. Portanto, os planos são paralelos.
Concluiremos esta seção definindo o ângulo entre os planos π1 e π2. Oângulo entre os planos π1 e π2 é definido como
∠(π1, π2) = arccosµ |h−→n 1,
−→n 2i|k−→n 1k k−→n 2k
¶.
Observação 3.11 Se π1 e π2 são planos paralelos, então ∠(π1, π2) = 0◦.
Exemplo 3.14 Determinar o ângulo entre os planos
π1 : 2x+ y − 3z + 1 = 0 e π2 : 3x− y − 2z − 3 = 0.
Solução. Sejam
−→n 1 = 2−→i +−→j − 3−→k e −→n 2 = 3
−→i −−→j − 2−→k

3.3. POSIÇÕES RELATIVAS 101
os vetores normais aos planos. Então
∠(π1, π2) = arccosµ |11|√
14√14
¶= arccos
µ11
14
¶.
Sejam r e π uma reta e um plano, cujas equações paramétricas e cartesianasão:
r :
x = x1 + a1ty = y1 + b1tz = z1 + c1t, t ∈ R
e π : a2x+ b2y + c2z + d2 = 0.
Sejam−→a = a1
−→i + b1
−→j + c1
−→k e −→n = a2
−→i + b2
−→j + c2
−→k
os vetores diretor e normal à reta r e ao plano π, respectivamente, e a equação
(a1a2 + b1b2 + c1c2)t+ (a2x1 + b2y1 + c2z1) + d2 = 0, t ∈ R, (3.13)
ou, equivalentemente,
h−→a ,−→n it+ h−→b ,−→n i+ d2 = 0
h−→a +−→b , (1 + t)−→n i+ d2 = 0, t ∈ R,
onde−→b = x1
−→i + y1
−→j + z1
−→k . Então:
(a) A reta r e o plano π são paralelos se, e somente se, os vetores −→a e −→nsão perpendiculares se, e somente se, h−→a ,−→n i = 0, isto é,
a1a2 + b1b2 + c1c2 = 0.
O caso em que a reta está contida no plano é considerado como um casoespecial de paralelismo. Neste caso, a equação (3.13) tem infinitas soluções.
(b) A reta r e o plano π são concorrentes se, e somente se, os vetores −→ae −→n não são perpendiculares se, e somente se, h−→a ,−→n i 6= 0, isto é,
a1a2 + b1b2 + c1c2 6= 0.

102 CAPÍTULO 3. RETAS E PLANOS
Neste caso, a equação (3.13) tem uma única solução.
(c) A reta r e o plano π são perpendiculares se, e somente se, os vetores−→a e −→n têm a mesma direção se, e somente se, existe k ∈ R tal que−→a = k−→n ,
ou ainda,a1a2=
b1b2=
c1c2.
Exemplo 3.15 Determinar a posição relativa entre a reta e o plano
r :x− 13
=y − 52
=z + 1
−3 e π : 2x+ 3y + 4z + 5 = 0.
Solução. Sejam
−→a = 3−→i + 2−→j − 3−→k e −→n = 2−→i + 3−→j + 4−→k
os vetores diretor e normal da reta e do plano, respectivamente. Como
h−→a ,−→n i = 6 + 6− 12 = 0
temos que a reta é paralela ao plano ou está contida no plano. Para de-cidirmos se a reta é paralela ao plano ou está contida no plano, devemosresolver a equação
h−→a ,−→n it+ h−→b ,−→n i+ 5 = 0, t ∈ R,
onde−→b =
−→i + 5
−→j −−→k . Como
h−→a ,−→n i = 0 e h−→b ,−→n i = 2 + 15− 4 = 13 6= −5
temos que a equação não tem solução. Portanto, a reta e o plano são parale-los.

3.3. POSIÇÕES RELATIVAS 103
Exemplo 3.16 Determinar a posição relativa entre a reta e o plano
r : x− 1 = y + 1
−2 =z
6e π : 2x+ 3y + z − 3 = 0.
Solução. Sejam
−→a = −→i − 2−→j + 6−→k e −→n = 2−→i + 3−→j +−→k
os vetores diretor e normal da reta e do plano, respectivamente. Como
h−→a ,−→n i = 2− 6 + 6 = 2 6= 0
temos que a reta e o plano são concorrentes. Para determinarmos o pontode interseção, devemos resolver a equação
h−→a ,−→n it+ h−→b ,−→n i− 3 = 0, t ∈ R,
onde−→b =
−→i −−→j . Como
h−→a ,−→n i = 2 e h−→b ,−→n i = 2− 3 = −1
temos que2t− 1− 3 = 0⇒ t = 2.
Portanto, escrevendo a equação da reta na forma paramétrica e fazendo t = 2,obtemos que P0(3,−5, 12) é o ponto de interseção entre a reta e o plano.
Concluiremos esta seção definindo o ângulo entre a reta r e o plano π. Oângulo entre a reta r e o plano π é definido como
∠(r, π) = π
2− arccos
µ |h−→a ,−→n i|k−→a k k−→n k
¶.
Observação 3.12 Se a reta r e o plano π são paralelos, então ∠(r, π) = 0◦.
Exemplo 3.17 Determinar o ângulo entre a reta e o plano
r : x− 1 = y + 1
−2 =z
6e π : 2x+ 3y + z − 3 = 0.
Solução. Sejam
−→a = −→i − 2−→j + 6−→k e −→n = 2−→i + 3−→j +−→k

104 CAPÍTULO 3. RETAS E PLANOS
os vetores diretor e normal da reta e do plano, respectivamente. Então
∠(r, π) =π
2− arccos
µ |2|√41√14
¶=
π
2− arccos
Ã√574
287
!.
Sejam π1, π2 e π3 três planos, cujas equações cartesianas são:
a1x+ b1y + c1z + d1 = 0, a2x+ b2y + c2z + d2 = 0 e
a3x+ b3y + c3z + d3 = 0.
Então para determinar a posição relativa dos planos, devemos discutir osistema a1x+ b1y + c1z = −d1
a2x+ b2y + c2z = −d2a3x+ b3y + c3z = −d3
.
Exemplo 3.18 Determinar a posição relativa dos planos
π1 : 2x+ y − 2z − 10 = 0, π2 : 3x+ 2y + 2z − 1 = 0 eπ3 : 5x+ 4y + 3z − 4 = 0.
Solução. Devemos resolver o sistema 2x+ y − 2z = 103x+ 2y + 2z = 15x+ 4y + 3z = 4
.
Consideremos a matriz ampliada do sistema
A0 =
2 1 −2 ... 10
3 2 2... 1
5 4 2... 4
→ · · ·→ R =
1 0 0... 1
0 1 0... 2
0 0 1... −3
.Logo, o nosso sistema é equivalente ao sistema x = 10
y = 2z = −3
.
Portanto, os planos interceptam-se em um ponto P0(10, 2,−3).

3.3. POSIÇÕES RELATIVAS 105
Exemplo 3.19 Determinar a posição relativa dos planos
π1 : x+ 2y − 3z − 6 = 0, π2 : 2x− y + 4z − 2 = 0 eπ3 : 4x+ 3y − 2z − 14 = 0.
Solução. Devemos resolver o sistema x+ 2y − 3z = 62x− y + 4z = 24x+ 3y − 2z = 14
.
Consideremos a matriz ampliada do sistema
A0 =
1 2 −3 ... 6
2 −1 4... 2
4 3 −2 ... 14
→ · · ·→ R =
1 0 1... 2
0 1 −2 ... 2
0 0 0... 0
.Logo, o nosso sistema é equivalente ao sistema½
x+ z = 2y − 2z = 2 .
Escolhendo, z = t ∈ R, obtemos que
r :
x = 2− ty = 2 + 2tz = t,
são as equações paramétricas da reta interseção. Portanto, os planos interceptam-se em uma reta.
Exemplo 3.20 Determinar a posição relativa dos planos
π1 : x+ y − z − 1 = 0, π2 : 2x+ 3y − 3z − 3 = 0 eπ3 : x− 3y + 3z − 2 = 0.
Solução. Devemos resolver o sistema x+ y − z = 12x+ 3y − 3z = 3x− 3y + 3z = 2
.

106 CAPÍTULO 3. RETAS E PLANOS
Consideremos a matriz ampliada do sistema
A0 =
1 1 −1 ... 1
2 3 −3 ... 3
1 −3 3... 2
→ · · ·→ R =
1 0 0... 0
0 1 −1 ... 0
0 0 0... 1
.Como
posto(A0) = 3 > 2 = posto(A)
temos que o sistema é incompatível. Portanto, os planos não interceptam-se.Para decidirmos a configuração dos planos no espaço, devemos determinaras direções dos vetores normais
−→n 1 = (1, 1,−1),−→n 2 = (2, 3,−3) e −→n 3 = (1,−3, 3).Como
−→n 1 ×−→n 2 = (0, 1, 1),−→n 1 ×−→n 3 = (0,−4,−4) e −→n 2 ×−→n 3 = (0,−9,−9)
temos que os planos interceptam-se dois a dois.
EXERCÍCIOS
1. Sejam r1 e r2 duas retas com vetores diretores −→a 1 e −→a 2, respectiva-mente, e P1 ∈ r1 e P2 ∈ r2. Mostrar que r1 e r2 são concorrentes se, esomente se, [−→a 1,−→a 2,−−→P1P2] = 0.
2. Sejam r1 e r2 duas retas com vetores diretores −→a 1 e −→a 2, respectiva-mente, e P1 ∈ r1 e P2 ∈ r2. Mostrar que r1 e r2 são reversas se, esomente se, [−→a 1,−→a 2,−−→P1P2] 6= 0.
3. Determinar a posição relativa das retas abaixo. Calcular, se existir, oponto de interseção e o ângulo entre elas.
(a) x = 1, y = s, z = 1 e x = t, y = 0, z = 1, s, t ∈ R.(b) x = 1 + 3s, y = 2 + 5s, z = 2 + 7s e x = 7 + 6t, y = 12 + 10t,
z = 6 + 4t, s, t ∈ R.(c) x− 3 = z−2
7, y = 4 e x−6
2= z−4
14, y = 8.
(d) x+ 1 = y−12, z = 5 e x = 1 + 4t, y = 5 + 2t, z = 2 + 3t, t ∈ R.
(e) x = 1, y = 3−s, z = 5+2s e x = −4+5t, y = 3+2t, z = −2+2t,s, t ∈ R.

3.3. POSIÇÕES RELATIVAS 107
4. Determinar a posição relativa das retas e os planos abaixo. Calcular,se existir, o ponto de interseção e o ângulo entre eles.
(a) x = −8 + 15t, y = 5− 9t, z = 0, t ∈ R, e 3x+ 5y − 1 = 0.(b) x − 3 = y−2
2= z−2
4e x = 5 − 2s, y = 1 − s + 4t, z = 2 + s − 2t,
s, t ∈ R.(c) x = 2−s, y = 1+2s, z = 1+s e x = 1−u−4v, y = −2+2u−8v,
z = 1 + u− v, s, u, v ∈ R.(d)−→OP = (1, 2, 3) + t(2,−1, 1), t ∈ R, e x− 2y − 4z + 5 = 0.
5. Determinar a posição relativa dos planos abaixo. Calcular, se existir,a reta de interseção e o ângulo entre eles.
(a) 2x+ y − z − 1 = 0 e 3x− 5y + z − 4 = 0.(b) x+ y − 4z = 1 e 2x+ 4y = 2− 6z.(c) 2x− 2y + 6z = 6 e x = −3s− t, y = −t, z = s, s, t ∈ R.(d) 3x+ 6y = 27− 3z e 2x+ 4y + 2z = 14.
6. Determinar a posição relativa dos planos abaixo. Calcular, se existir,suas interseções.
(a) x+ y + z = 0, x+ 2y + z − 1 = 0 e x+ y + 3z − 2 = 0.(b) x+ y − 4z = 0, x− y = 0 e x+ 2y − 6z = 0.(c) x+ 2y − z = 0, 2x+ 4y − 2z = 1 e 3x− y + z = 2.
(d) x+ 2y + z = 0, 2x+ 4y − z + 1 = 0 e x+ 2y = 0.
7. Determinar as interseções da reta
r :x− 32
=y + 1
5= 2− z
com os planos coordenados. Esta reta intercepta algum eixo coorde-nado?
8. Determinar a interseção do plano
π : 3x+ 2y − z = 5
com os planos e eixos coordenados.

108 CAPÍTULO 3. RETAS E PLANOS
9. Determinar a equação do plano que passa pelo ponto A(−5, 2, 3) e éparalelo ao plano, cuja equação cartesiana é:
π : 3x− 2y + 5z = 6.
10. Determinar a equação do plano que passa pelos pontos A(−1, 0,−3) eB(1, 1, 3) e é perpendicular ao plano, cuja equação cartesiana é:
π : x− y + 2z = 3.
11. Determinar a equação do plano que contém as retas abaixo:
(a) x−23= y−1
2= z e x−2
5= y − 1 = z
3.
(b) x = 2 + 3t, y = 1 + 2t, z = 1, t ∈ R, e x−33= y−1
2= z + 1.
12. Determinar a equação cartesiana do plano que passa pelo ponto P0(2,−3, 5)e é paralelo ao plano do triângulo de vértices A(2, 0, 1), B(3, 1, 2) eC(2, 1, 1).
13. Sejam r e π uma reta e um plano, cujas equações simétricas e cartesianasão:
r :x+ 1
3=
y − 2k
=z + 3
2e π : x− 3y + 6z + 7 = 0.
Determinar os valores de k de modo que:
(a) A reta r e o plano π sejam paralelos.
(b) A reta r esteja contida no plano π.
(c) A reta r intercepte o plano π em um ponto.
14. Sejam r e π uma reta e um plano, cujas equações simétricas e cartesianasão:
r :x− 2k
=y + 1
4=
z − 5−3 e π : 3x− 2y +mz + 1 = 0.
Determinar os valores de k e m de modo que a reta r e o plano π sejamperpendiculares. Obtenha sua interseção.
15. Seja r1 uma reta, cujas as equações paramétricas são:
r1 :
x = 2 + 3ty = tz = −t, t ∈ R.
Determinar as equações de uma reta r2 de modo que:

3.3. POSIÇÕES RELATIVAS 109
(a) As retas r1 e r2 sejam reversas.
(b) As retas r1 e r2 sejam concorrentes.
16. Determinar as equações simétricas e paramétricas da reta que passapelo pontoA(1,−1, 2) e é paralela à reta que contém os pontosB(3, 0, 1)e C(−1, 2, 1).
17. Determinar as equações simétricas e paramétricas da reta que passapela origem e é ortogonal às retas cujas equações paramétricas são
r1 :
x = 2 + sy = 3 + 5sz = 5 + 6s, s ∈ R.
e r2 :
x = 1 + 3ty = tz = −7 + 2t, t ∈ R.
18. Sejam −→u e −→v vetores em R3 tais que −→u seja paralelo e −→v seja perpen-dicular à reta cujas equações simétricas são
r :x− 22
=y − 1−3 = z + 1.
Escreva o vetor −→w = (1, 2, 1) como combinação linear dos vetores −→u e−→v .
19. Mostrar que as retas que passam pela origem e são paralelas aos vetores−→u = (1,−1, 2), −→v = (2,−3, 0) e −→w = (1, 0, 3) são coplanares.
20. Determinar a equação do plano que passa pelo ponto A(2, 3, 0) e éperpendicular à reta
r :x− 12
=z
4e y = 2.
21. Determinar as equações simétricas e paramétricas da reta que passapelo ponto A(2,−1, 3) e é perpendicular ao plano
π : 3x+ y − 2z − 9 = 0.
22. Determinar as equações simétricas e paramétricas da reta que passapelo ponto A(1, 2,−1), é perpendicular ao vetor−→a = (0, 1, 1) e paralelaao plano
π : x+ y − 5 = 0.

110 CAPÍTULO 3. RETAS E PLANOS
23. Determinar uma base ortonormal negativa {−→a ,−→b ,−→c } tal que −→a sejanormal ao plano
π : 2x− 5y + 4z − 3 = 0e os vetores
−→b e −→c sejam paralelos a este plano.
24. Determinar as equações simétricas e paramétricas do plano que passapela origem e é paralelo ao plano
π : 5x+ 2y − 3z + 6 = 0.O ponto A(1, 0, 1) pertence a este plano?
25. Determinar as equações simétricas e paramétricas do plano que passapelo ponto A(1,−2, 4) e é paralelo ao plano x0z. A origem pertence aeste plano?
26. Determinar k e m de modo que os planos
π1 : 2x+ ky + 3z − 5 = 0 e π2 : mx− 6y − 6z = 0sejam paralelos.
27. Determinar k de modo que os planos
π1 : kx− 2y + z = 0 e π2 : kx+ y + z − 1 = 0sejam perpendiculares.
28. Determinar a equação do plano que passa pelos pontos A(1,−2, 4),B(3, 1, 1) e é perpendicular ao plano
π : x− y + z − 5 = 0.
29. Determinar a equação do plano que passa pelo ponto A(1, 2, 3) e éperpendicular aos planos
π1 : 2x− y + 3z = 0 e π2 : x+ 2y + z − 1 = 0
30. Determinar a equação do plano que passa pelo ponto A(2, 2,−1) e éparalelo aos eixos 0y e 0z.
31. Determinar k e m de modo que os planos
π1 : 3x− 5y + kz − 3 = 0 e π2 : x+my + 2z − 5 = 0sejam ortogonais.

3.4. DISTÂNCIAS 111
3.4 Distâncias
Nesta seção calcularemos as distâncias entre ponto e reta, ponto e plano,retas reversas.Sejam A e B dois pontos quaisquer. Então a distância entre A e B,
denotada por d(A,B), é a norma do vetor−→AB.
Se A(x1, y1, z1) e B(x2, y2, z2), então
d(A,B) =°°°−→AB°°° =p(x2 − x1)2 + (y2 − y1)2 + (z2 − z1)2.
Note que a distância é o menor percurso entre os pontos.
Exemplo 3.21 Obtenha a representação analítica dos pontos de R3 equidis-tantes dos pontos A(1,−2, 1) e B(−3, 5, 4).Solução. Seja P (x, y, z) ∈ R3 tal que
d(P,A) = d(P,B).
Entãop(1− x)2 + (−2− y)2 + (1− z)2 =
p(−3− x)2 + (5− y)2 + (4− z)2.
Elevando ao quadrado ambos os membros desta igualdade, obtemos que
(1− x)2 + (−2− y)2 + (1− z)2 = (−3− x)2 + (5− y)2 + (4− z)2.
Desenvolvendo e simplificando, obtemos que
−8x+ 14y + 6z − 44 = 0,ou ainda,
4x− 7y − 3z + 22 = 0,que é a representação analítica dos pontos de R3 equidistantes dos pontosA(1,−2, 1) e B(−3, 5, 4). Geometricamente, é o hiperplano que passa peloponto médio do segmento AB e lhe é perpendicular.
Sejam P0(x0, y0, z0) um ponto e π um plano, cuja equação cartesiana é:
ax+ by + cz + d = 0.
Então a distância entre P0 e π, denotada por d(P0, π), é dada pela fórmula
d(P0, π) =|ax0 + by0 + cz0 + d|√
a2 + b2 + c2.

112 CAPÍTULO 3. RETAS E PLANOS
De fato, sejam
Q(x, y, z) ∈ π e −→n = a−→i + b
−→j + c
−→k
o vetor normal ao plano π. Então, pela figura,
obtemos qued(P0, π) =
°°°Pr−→n−−→P0Q°°° .Como
Pr−→n−−→P0Q =
h−→n ,−−→P0Qik−→n k2
−→n e−−→P0Q = (x− x0)
−→i + (y − y0)
−→j + (z − z0)
−→k
temos que
d(P0, π) =
¯h−→n ,−−→P0Qi
¯k−→n k
=|(x− x0)a+ (y − y0)b+ (z − z0)c|√
a2 + b2 + c2
=|ax0 + by0 + cz0 + d|√
a2 + b2 + c2,
pois −d = ax+ by + cz.
Observação 3.13 1. Uma maneira alternativa de determinar a distânciado ponto P0 ao plano π é a seguinte: primeiro determina a equação dareta r que passa pelo ponto P0 na direção do vetor normal −→n ; segundodetermina o ponto Q de interseção da reta r e o plano π. Finalmente,
d(P0, π) = d(P0, Q)
2. Se P0 ∈ π, então d(P0, π) = 0, pois
P0 ∈ π ⇔ ax0 + by0 + cz0 + d = 0.

3.4. DISTÂNCIAS 113
3. Sejam π1 e π2 dois planos, então
d(π1, π2) = d(P1, π2) = d(π1, P2),
onde P1 ∈ π1 e P2 ∈ π2. Neste caso, devemos primeiro estudar aposição relativa dos planos π1 e π2.
Exemplo 3.22 Determinar a distância P0(1, 1,−1) ao plano, cuja equaçãocartesiana é
π : 2x− y + z − 2 = 0.Solução. Neste caso,
d(P0, π) =|2 + (−1)1 + 1(−1)− 2|p
22 + (−1)2 + 12
=2√6=
√6
3.
Sejam P0(x0, y0, z0) um ponto e r uma reta, cujas equações paramétricassão:
r :
x = x0 + a1ty = y0 + b1tz = z0 + c1t, t ∈ R.
Seja−→a = a1
−→i + b1
−→j + c1
−→k
o vetor diretor r. Então a distância entre P0 e r, denotada por d(P0, r), édada pela fórmula
d(P0, r) =
°°°−→a ×−−→QP0°°°k−→a k ,∀Q ∈ r.
De fato, pela figura,
obtemos qued(P0, r) =
°°°−−→QP0°°° |sen θ| ,∀Q ∈ r.

114 CAPÍTULO 3. RETAS E PLANOS
Como °°°−→a ×−−→QP0°°° = k−→a k°°°−−→QP0°°° |sen θ|temos que
d(P0, r) =
°°°−→a ×−−→QP0°°°k−→a k ,∀Q ∈ r.
Observação 3.14 1. Uma maneira alternativa de determinar a distânciado ponto P0 à reta r é a seguinte: primeiro determina a equação doplano π que passa pelo ponto P0 tendo como vetor normal
−→n o vetordiretor da reta r; segundo determina o ponto Q de interseção da reta re o plano π. Finalmente,
d(P0, r) = d(P0, Q)
2. Se P0 ∈ r, então d(P0, r) = 0, pois
P0 ∈ r ⇔ −→a ×−−→QP0 = −→0 , ∀Q ∈ r.
3. Sejam r1 e r2 duas retas não reversas, então
d(r1, r2) = d(P1, r2) = d(r1, P2),
onde P1 ∈ r1 e P2 ∈ r2. Neste caso, devemos primeiro estudar a posiçãorelativa das retas r1 e r2.
4. Sejam π e r um plano e uma reta, então
d(r, π) = d(P, π) = d(Q, r),
onde P ∈ r e q ∈ π. Neste caso, devemos primeiro estudar a posiçãorelativa do plano π e da reta r.
Exemplo 3.23 Determinar a distância P0(3, 2,−5) e a reta que passa pelospontos plano A(1, 0, 1) e B(0, 1,−1).Solução. Primeiro vamos determinar as equações paramétricas da reta quepassa A e B. Fixado um dos pontos, digamos A(1, 0, 1), obtemos que
−→a = −−→i +−→j − 2−→ké o vetor diretor da reta. Logo,
r :
x = 1− ty = tz = 1− 2t, t ∈ R.

3.4. DISTÂNCIAS 115
Escolhendo Q = B, obtemos que−−→QP0 = 3
−→i +−→j − 4−→k e −→a ×−−→QP0 = −2−→i − 10−→j − 4−→k .
Portanto,
d(P0, r) =2√30√6= 2√5.
Sejam r1 e r2 duas retas reversas, cujas equações paramétricas são:
r1 :
x = x1 + a1sy = y1 + a2sz = z1 + a3s, s ∈ R
e r2 :
x = x2 + b1ty = y2 + b2tz = z2 + b3t, t ∈ R.
Sejam−→a = (a1, a2, a3) e −→b = (b1, b2, b3),
os vetores diretores das retas r1 e r2, respectivamente. Então existem doisúnicos planos parelelos (distintos) π1 e π2 tais que r1 ⊂ π1 e r2 ⊂ π2. Como−→a × −→b é o vetor normal π1 e π2, respectivamente, temos que a distânciaentre r1 e r2, denotada por d(r1, r2), é dada por
d(r1, r2) = d(P, π2) =
¯h−→a ×−→b ,−→PQi
¯°°°−→a ×−→b °°° ,
onde P ∈ r1 e Q ∈ r2.
Observação 3.15 Uma maneira alternativa de determinar a distância entreàs retas reversas r1 e r2 é a seguinte: primeiro determina um ponto P ∈ r1e um ponto Q ∈ r2; segundo determina a altura h do paralelepípedo geradopelos vetores −→a , −→b e −→PQ, onde −→a e
−→b são os vetores diretores das retas r1
e r2, respectivamente. Finalmente,
d(r1, r2) = h.
Exemplo 3.24 Determinar a distância entre as retas r1 e r2, cujas equaçõesparamétricas são:
r1 :
x = 1− 2sy = 2 + sz = 3− 4s, s ∈ R
e r2 :
x = −1 + ty = 1− tz = 4 + 2t, t ∈ R.
Além disso, determinar a equação da reta que intercepta ortogonalmente estasretas.

116 CAPÍTULO 3. RETAS E PLANOS
Solução. Como−216= 1
−1 6=−42
temos que as retas são concorrentes ou reversas. Para decidirmos se elas sãoconcorrentes ou reversas, devemos resolver o sistema −2s− t = −2
s− t = −1−4s− 2t = 1
.
Consideremos a matriz ampliada do sistema
A0 =
−2 −1... −2
1 −1 ... −1−4 −2 ... 1
→ · · ·→ R =
1 0... 0
0 1... 0
0 0... 1
.Como
posto(A0) = 3 > 2 = posto(A)
temos que o sistema é incompatível. Portanto, as retas são reversas. Escol-hendo P (1, 2, 3) ∈ r1 e Q(−1, 1, 4) ∈ r2, obtemos que
−→PQ = −2−→i +−→j +−→k .
Sendo−→a = −2−→i +−→j − 4−→k e
−→b =
−→i −−→j + 2−→k ,
obtemos que−→a ×−→b = −2−→i +−→k .
Logo,
d(r1, r2) =
¯h−→a ×−→b ,−→PQi
¯°°°−→a ×−→b °°°
=|4 + 1|√4 + 1
=√5.
Finalmente, o vetor diretor da reta que intercepta ortogonalmente estas retasé dado por
−→c = −→a ×−→b = −2−→i +−→k .

3.4. DISTÂNCIAS 117
Assim, basta determinar um ponto desta reta. Para isto, seja π o planodeterminado por Q(−1, 1, 4) ∈ r2 e os vetores
−→b e −→c . A equação cartesiana
deste plano é dada por
[−→QR,−→b ,−→c ] = 0, ∀R ∈ π,
isto é,π : x+ 5y + 2z − 12 = 0.
Então o ponto procurado é o ponto de interseção da reta r1 e o plano π.Assim,
(1− 2s) + 5(2 + s) + 2(3− 4s)− 12 = 0⇒ s = 1.
Portanto, P0 = (−1, 3,−1) é o ponto de interseção e
r :
x = −1− 2uy = 3z = −1 + u, u ∈ R
são as equações paramétricas da reta.
Exemplo 3.25 Determinar um ponto simétrico ao ponto P (1, 2,−1) em re-lação à reta r, cujas equações paramétricas são:
r :
x = 1− 2ty = 2 + tz = 3− 4t, t ∈ R.
Solução. Um ponto Q(x, y, z) ∈ R3 é simétrico ao ponto P (1, 2,−1) emrelação à reta r se, e somente se,
d(P, r) = d(Q, r)
e ele pertence a reta r1 que passa em P e intercepta r ortogonalmente ou,equivalentemente, resolver a equação vetorial
−→OA =
1
2(−→OP +
−→OQ),
onde A ∈ r ∩ r1. Assim,
A ∈ r ∩ r1 ⇔ h−→a ,−→PAi = 0⇔ t =16
21,
pois−→PA = −2t−→i + t
−→j + (4− 4t)−→k . Logo,
A(−1121
,58
21,− 121)

118 CAPÍTULO 3. RETAS E PLANOS
e(−1121
,58
21,− 121) = (
x+ 1
2,y + 2
2,z − 12).
Portanto,
Q(−4321
,74
21,19
21)
é o ponto simétrico ao ponto P (1, 2,−1) em relação à reta r.
EXERCÍCIOS
1. Determinar a distância do ponto P (1, 2, 2) ao plano determinado pelospontos A(−1, 0, 0), B(1, 0, 1) e C(−2, 3, 0).
2. Determinar a distância do ponto P (1, 2, 2) à reta que passa pelo pontoA(1, 2, 5) e é paralela à reta que contém os pontosB(3, 0, 1) eC(−1, 2, 1).
3. Determinar a distância entre as retas abaixo.
(a) x = 1, y = s, z = 1 e x = t, y = 0, z = 1, s, t ∈ R.(b) x = 1 + 3s, y = 2 + 5s, z = 2 + 7s e x = 7 + 6t, y = 12 + 10t,
z = 6 + 4t, s, t ∈ R.(c) x− 3 = z−2
7, y = 4 e x−6
2= z−4
14, y = 8.
(d) x+ 1 = y−12, z = 5 e x = 1 + 4t, y = 5 + 2t, z = 2 + 3t, t ∈ R.
(e) x = 1, y = 3−s, z = 5+2s e x = −4+5t, y = 3+2t, z = −2+2t,s, t ∈ R.
4. Determinar a distância entre as retas e os planos abaixo.
(a) x = −8 + 15t, y = 5− 9t, z = 0, t ∈ R, e 3x+ 5y − 1 = 0.(b) x − 3 = y−2
2= z−2
4e x = 5 − 2s, y = 1 − s + 4t, z = 2 + s − 2t,
s, t ∈ R.(c) x = 2−s, y = 1+2s, z = 1+s e x = 1−u−4v, y = −2+2u−8v,
z = 1 + u− v, s, u, v ∈ R.(d)−→OP = (1, 2, 3) + t(2,−1, 1), t ∈ R, e x− 2y − 4z + 5 = 0.
5. Determinar a distância entre os planos abaixo. Calcular, se existir, areta de interseção e o ângulo entre eles.
(a) 2x+ y − z − 1 = 0 e 3x− 5y + z − 4 = 0.

3.4. DISTÂNCIAS 119
(b) x+ y − 4z = 1 e 2x+ 4y = 2− 6z.(c) 2x− 2y + 6z = 6 e x = −3s− t, y = −t, z = s, s, t ∈ R.(d) 3x+ 6y = 27− 3z e 2x+ 4y + 2z = 14.
6. Determinar a equação da reta r que intercepta ortogonalmente as retasdadas abaixo:
(a) x = 2+ s, y = 3+5s, z = 5+6s e x = 1+3t, y = t, z = −7+ 2t,s, t ∈ R.
(b) x−1−1 =
y2, z = 0 e x−2
1= y−3
2= z−4
3.
7. Determinar um ponto simétrico ao ponto P (1, 2,−1) em relação:
(a) à origem.
(b) ao ponto Q(3, 1, 1).
(c) à reta x = 1 + t, y = t e z = 1, t ∈ R.(d) ao plano 2x+ y − z + 1 = 0.
8. Determinar a distância entre interseção dos planos
π1 : x+ y − z + 2 = 0, π2 : 2x− y + z − 5 = 0 eπ3 : x+ y − 2z + 4 = 0
e a reta
r :
x = 1 + 2ty = −tz = 2− 3t, t ∈ R.
9. Mostrar que os planos
π1 : x+ 2y − z − 1 = 0 e π2 : 2x− y + z = 0
se interceptam segundo uma reta r. Determinar a equação de uma retaque passa pelo ponto P (1, 0, 1) e intercepta a reta r ortogonalmente.
10. Determinar as equações da reta que pertence ao plano
π : x− y + z − 7 = 0,contém P (3,−3, 1) e é ortogonal a reta
r :
x = 1 + ty = 1 + 2tz = 1 + 3t, t ∈ R.

120 CAPÍTULO 3. RETAS E PLANOS
11. Mostrar que os planos
π1 : x+ 2y − z − 1 = 0 e π2 : 2x− y + z = 0
se interceptam segundo uma reta r. Determinar a equação do planoque passa pelo ponto P (1, 0,−1) e contém a reta r.
12. Determinar as equações da reta que passa pelo ponto P (1,−2, 1) eintercepta as retas reversas
r1 :
x = −1 + sy = −3 + 2sz = s, s ∈ R
e r2 :
x = −2 + ty = 1 + tz = t, t ∈ R.
Capítulo 4
Cônicas e Quádricas
O principal objetivo, deste capítulo, é estudar as curvas e superfícies quepodem ser expressas pelas equações do 2o grau:
Ax2 +By2 + Cx+Dy +E = 0, onde A 6= 0 ou B 6= 0
e
Ax2 +By2 +Cz2 +Dx+Ey + Fz +G = 0, onde A 6= 0, B 6= 0 ou C 6= 0.
121
122 CAPÍTULO 4. CÔNICAS E QUÁDRICAS
Referências Bibliográficas
[1] Cabral, H., Geometria analítica, UFPE, 1979.
[2] Campos, M. S. e Duarte Filho, J. C., Cálculo vetorial e geometriaanalítica, Nota de Aulas, UFPB, 1990.
123
Recommended