3. VIBRAÇÕES LIVRES DE SISTEMAS COM UM GRAU DE LIBERDADE
3. 3. VIBRAÇÕES LIVRES VIBRAÇÕES LIVRES DE DE SISTEMASSISTEMAS COM COM UM UM GRAUGRAU DE DE LIBERDADELIBERDADE
Conforme já apresentado, a equação fundamental é:
( ) ( ) ( ) ( ).00, uutftu &econhecendoCalcularOBJECTIVO:
)(tfukucum =++ &&&
em que m, c, k e f(t) podem ser quantidades generalizadas.
Trata-se duma equação diferencial linear de 2ª ordem, de coeficientesconstantes.
A resposta total é a soma de duas parcelas:
)(tup - movimento forçado – relacionado directamente com a carga f(t)
)(tuc - movimento natural – relacionado apenas com as características do sistema
Em termos matemáticos:
Solução GERAL = Solução Particular up(t) + Solução Complementar uc(t)

3.1 VIBRAÇÕES LIVRES SEM AMORTECIMENTO
0=+ ukum &&
Existem procedimentos gerais para a solução deste tipo de equações.Porém, neste caso simples podemos resolvê-la directamente.
Uma solução do tipo
Substituindo na equação diferencial e atendendo a que
Como a equação deve ser satisfeita para qualquer instante t, obtém-se
twAu cos= ou
satisfaz a equação diferencial.
A e B são constantes que dependem do início do movimento e
w é uma característica física da estrutura
twAwu cos2−=&&
0cos)( 2 =+− wtkmwA
→=mk
w2
mkw =
Frequência Natural(circular ou angular)do Sistema
twBu sen=A equação também satisfaz a equação diferencial.
A solução geral vem então
twBtwAu sencos +=
twBu sen=

Determinação das constantes iniciais:
00 )0(;)0(0 uuuut && ==⇒= quandoSe
00 0sen0cos uABAu =→+=
wuBBwAwu 0
0 0cos0sen&
& =→+−=
wtBwwtAwu cossen +−=&
e sendo
resulta
A solução geral vem então
(Eq. 3.1)wtsenwu
wtutu 00 cos)(
&+=
Note-se que esta função é PERIÓDICA!
π=−+→+= 2)()()( wtTtwTtutu
wT
π= 2 Período dafunção(segundos)
π==
21 wT
fFrequência Natural
em Ciclos / Segundo
ou Hertz (Hz)

Exemplo: Seja o seguinte pórtico com uma viga de rigidez “infinita”.
Pretende-se calcular w, f e T.
0.276s
0.1 0.2 0.3 0.4 t(seg)
u(mm)
010 00 ==→= ummut &&&e instante noSe
ttu 8.22cos001.0)( =
GPaEmA
213.03.0 2
=×=Dados:
sTHzf
sradw
lEIk
kgm
276.063.314.328.22
/8.2210000
2106.2
106.24
123.0
10211212
100000.598
20000
6
63
49
3
=⇒=×
=
=××=
×=×××
==
=×=
Resolução:12EI
5.0
4.0
20 kN/m
L312EI
3L
A equação (3.1) pode ser transformada de modo conveniente.
Definindo 202
0
+=
wu
uC&
+= wtsen
Cwu
wtCu
Ctu 00 cos)(&
vem

Observando a figura
pode-se escrever ( )wtwtCtu sencoscossen)( α+α=
( )α+= wtCtu sen)(wu
u
0
0tg&
=αcom
Alternativamente, designando α=α= sencos 00
Cwu
Cu &
e
( )wtwtCtu sensencoscos)( α+α=
( )α−= wtCtu cos)(
Representação Vectorial ou em Diagrama de Argand
wtsenwu
wtutu 00 cos)(
&+=
Projecção no eixo R dosvectores e wu0&0u
ou
( )α−= wtCtu cos)(
Projecção no eixo R dovector C, que partiu comatraso de fase de α
α=
α=
cos
sen
0
0
CwuCu
&
( )20
20 wuuC &+=
0u
wu0&
α
ou
vem
u
t
T=2π/ω
T=2π/ω
u0
u0
I
R
0uC
α
wt
u0 /w
/w0u sen wt
cos wtu0
C cos (wt-α )

3.2 VIBRAÇÕES LIVRES COM AMORTECIMENTO
0=++ ukucum &&&
A função tseCu = satisfaz a equação diferencial.
Substituindo
02 =++ ststst eCkesCcesCm
02 =++ kscsm
mk
mc
mc
ss −
±−=
2
2
1
22
tsts eCeCu 2121 +=
A solução virá
apresentando diferentes formas conforme as raízes s1 e s2.
3.2.1 Sistema Criticamente Amortecido
Caso em que o radicando é nulo
→=−
0
2
2
mk
mccr mkccr 2=
ou, atendendo a que ⇒=mkw wmccr 2=
amortecimentocrítico
e então
mc
ss cr
221 −==

Como as soluções são iguais, a solução geral do tipo Cest fornece só umaconstante, e portanto só uma solução independente.
( )tmccreCu 211
−=
Outra solução independente pode ser procurada com o seguinte aspecto
( )tmccretCu 222
−=
sm
ccr =−2
Designando
stst estCeCu 222 +=&
ststst estCesCesCu 22222 ++=&&
02 2222
22 =++++ ststststst etCkestCceCcestCmesCm
tmccretCCu )2/(21 )( −+=
e substituindo
0)()2( 2
0
22
0
=++++==
stst etCkscsmeCcsm 434 21434 21
obtém-se uma expressão verdadeira que confirma a validade destasegunda solução independente.
Assim, a solução geral será:
u(t)
t
0u
u0
Não entra em movimentooscilatório !!

3.2.2 Sistema com Amortecimento Superior ao Crítico
3.2.3 Sistema com Amortecimento Inferior ao Crítico
As duas soluções s1 e s2 são reais e a solução geral é
tsts eCeCu 2121 +=
O gráfico é idêntico ao do caso criticamente amortecido só que tende parazero menos rapidamente.
crcc >
Coeficiente de amortecimento:wm
ccc
cr 2==ξ
Foi visto que
mk
mc
mc
ss −
±−=
2
2
1
22
e então
12222
2
1 −ξ±ξ−=−ξ±ξ−=
wwwwwss
434 21
aw
wiwss 2
2
1 11 ξ−±ξ−=⇒<ξsendo
A solução geral é então
tiwwttiwwt aa eCeCu −ξ−+ξ− += 21

Introduzindo as condições iniciais, tem-se
Fazendo intervir as equações de Eulerxixeix sencos +=
xixe ix sencos −=−
pode-se transformar a expressão anterior
( )( ) ( )( )
( ) ( )
−++=
−++=+=
ξ−
ξ−
−ξ−
tw
B
iCiCtw
A
CCe
twitwCtwitwCe
eCeCetu
aawt
aaaawt
tiwtiwwt aa
sencos
sencossencos
)(
2121
21
21
434 21434 21
para obter
( )twBtwAetu aawt sencos)( += ξ−
ξ++= ξ− tw
wwuu
twuetu aa
awt sencos)( 00
0
&
0uA =
( ) ( )twBwtwAwetwBtwAewtu aaaawt
aawt cossensencos)( +−++ξ−= ξ−ξ−&
aa w
wuuBBwuwu
ξ+=⇒+ξ−= 0000
&&
e finalmente
onde wa é a frequência angular do movimento com amortecimento.

Tal como para o caso sem amortecimento,pode-se definir α tal que
2
0020
ξ++=
awwuu
uC&
e obter
com
awuwuu
0
00tgξ+=α &
Nos casos correntes o amortecimento varia entre 2% e 20%.
Se ξ = 0.2:
( )α−= ξ− tweCtu awt cos)(
Que graficamente adquire o aspecto
wwwww aa ≅⇒=ξ−= 98.01 2
O diagrama de Argand é idêntico ao apresentado para os sistemas comamortecimento. Neste caso a grandeza do vector vai diminuindo com otempo .( )wtCe ξ−
Cα
0uaw
wuu ξ+ 00&
u(t)
C e − ξ wt
t
u0
Ta
aa w
Tπ= 2

3.3 DETERMINAÇÃO DO COEFICIENTE DE AMORTECIMENTO
Experimentalmente podemos determinar o coeficiente de amortecimentoinduzindo uma vibração no sistema e registando a diminuição da suaamplitude com o tempo.
Considerem-se dois picos sucessivos
( )α−= ξ−11 cos1 tweCu a
wt
aaa w
tttwtw π=−⇒π+α−=α− 22 1212u2 é tal que
( )α−= ξ−22 cos2 tweCu a
wt
aww
euu
πξ=⇒
2
2
1
Tomando o logaritmo natural obtém-se2
2
1
1
22ln
ξ−ξπ=ξπ==δ
aww
uu
Para pequenos amortecimentos vem ξπ≅=δ 2ln2
1
uu
o que permite determinar o coeficiente de amortecimento conhecidosu1 e u2 afastados de Ta.
Para aumentar a precisão na sua determinação podemos usar nperíodos, obtendo-se
ξπ≅=δ nuu 2ln
2
1
Outro processo consiste em observar o número de ciclos que sãonecessários para reduzir 50% a amplitude do movimento é consultar aseguinte relação gráfica
6
5
4
3
2
1
00 0.05 0.10 0.15 0.20
nº d
e ci
clos
par
a re
duzi
ra
ampl
itude
de
50%
ξ, coef. de amortec.
ln 2 = 2nπξ
4. RESPOSTA DE UM SISTEMA COM UM GRAU DELIBERDADE A UMA CARGA HARMÓNICA
4. RESPOSTA DE UM SISTEMA COM UM GRAU DE4. RESPOSTA DE UM SISTEMA COM UM GRAU DELIBERDADE A UMA CARGA HARMÓNICALIBERDADE A UMA CARGA HARMÓNICA
A solicitação (forças ou deslocamentos) podem ser representadas por senoou cosseno.
4.1 SISTEMA NÃO AMORTECIDO
Seja a solicitação ( ) twptp sen0=
0p
w
- amplitude
- frequência da solicitação
A equação de equilíbrio dinâmico é
twpukum sen0=+&&
e a solução complementar já se viu que é
Dado que no 1º membro só aparecem derivadas pares, a soluçãoparticular poderá ser do tipo
( ) wtBwtAtuc sencos +=
( ) twUtup sen=
sendo( ) twwUtu p cos=&
( ) twwUtup sen2−=&&
Substituindo vem
twptwkUtwwUm sensensen 02 =+−
2
20
20
1
1
wwk
pwmk
pU
−=
−=
donde

wwr =Designando por e razão de frequências
o deslocamento estático00 U
kp =
vem20
11r
UU−
=
A solução geral é então
( ) twr
UwtBwtAtu sen1
1sencos 20 −
++=
Admitindo que para t = 0 ( ) ( ) 0000 == uu &e
obtém-se
( )
2020
20
110
cos1
cossen
0
rr
UBr
wUwB
twr
wUwtwBwtwAtu
A
−−=⇒
−+=
−++−=
=
&
donde
( ) ( )wtrtwr
Utu sensen
1 20 −
−=
Trata-se da sobreposição de duas funções harmónicas com frequênciasdiferentes, pelo que o movimento resultante NÃO É HARMÓNICO !!
Temos assim
211r−
twsen
wtsenr
Factor de AMPLIFICAÇÃO DINÂMICA
Resposta em estado ESTACIONÁRIO
Resposta TRANSITÓRIA

Exemplo: Considere-se o mesmo pórtico já estudado, sujeito agora a uma
força harmónica horizontal. Pretende-se calcular a resposta dinâmica.
01520
sen)(2106.2
8.2221
00
0
0
6
====
=××=
==
uurad/swkNp
twptpN/mk
rad/swGPaE
&
Dados e resultados anteriores:
5.0
4.0
m=2000 kg/m
0.3x0.3
p(t)
mU 0038.02106.2
2000060 =××
= 6580.wwr ==
( ) ( )tttu 8.22sen658.015sen658.01
0038.02 −
−=
76411
12 .
rD =
−=
Acção
Resposta
u
t(s)0.1 0.2 0.3 0.4 0.5 0.6
6
4
2
(mm)
estacionária
resposta totaltransitória
p(t)
t(s)
20 kN
10 kN
0.1 0.2 0.3 0.4 0.5 0.6
p = 20000 sen 15t
t8.22sen658.0764.18.3 ×××−
t15sen764.18.3 ××

Factores de Amplificação Dinâmica
3
4
2
1
00 0.5 1.0 1.5 2.0 2.5 3.0
r = w/w
total, Destacionária, D
D,D t
t
- da resposta estacionária21
1r
D−
=
- da resposta total( )
0
maxU
tuDt = Factor de AMPLIFICAÇÃO
DINÂMICA TOTAL
Quando r = 1 ( ) ∞→tu
Verifica-se portanto que quando ocorre a RESSONÂNCIA é impossíveldeterminar u pela expressão anterior. Então a solução será do tipo
( ) wwtwtCtup == comcos
( )( ) twwtCtwwCtwwCtu
twwtCtwCtu
p
p
cossensen
sencos2−−−=
−=&&
&
{ wmp
CwtptwtCktwwtmCtwwmCwm 2
sencoscossen2 00
2
2
−=⇒=+−−
twcostwm
pu p 2
0−=
( ) twtwm
pwtBwtAtu cos2
sencos 0−+=
Substituindo vem
donde
e a nova solução total resulta em

Sendo para t = 0 ( ) ( ) 0000 == uu &e
obtém-se
donde a expressão final
( )
200
00
220
sen2
cos2
cos
0
wmp
Bwm
pwB
wttmw
wpwt
mwp
wtwBtu
A
=⇒−=
+−=
=
&
( ) ( ) ( )wttwtsenk
pwtwtwtmwptu cos
2sencos
20
20 −=+−=
ww =:Obs
cuja evolução no tempo, tem o seguinte aspecto
u(t)
t
Amplitude crescente
4.2 SISTEMA COM AMORTECIMENTO
A equação é agora
twpukucum sen0=++ &&&
sendo a solução complementar
( ) ( )twBtwAetu aatw
c sencos += ξ−
A solução particular assume a forma seguinte
( ) twCtwCtup cossen 21 +=
Onde são introduzidas estas duas parcelas porque em geral a resposta dosistema amortecido não está em fase com a carga harmónica.

Re-arranjando a equação, vem
2
0
2
sen
ww
twmp
umk
umc
u
ξ↓↓
=++ &&&
Mas como
( ) twwCtwwCtup sencos 21 −=&
( ) twwCtwwCtup cossen 22
21 −−=&&
obtém-se, após substituição e separação dos múltiplos de sen e cos
( )( ) twmp
twwCwwCwC sensen2 0212
21 =+ξ−−
( )( ) 0cos2 221
22 =+ξ+− twwCwwCwC
Dividindo por w2 resulta
kp
CrCrC 012
21 2 =+ξ−−
( ) 021 122 =ξ+− CrCr
donde
( ) ( )222
20
121
1
rr
rkp
Cξ+−
−=
( ) ( )220
2 212
rrr
kp
Cξ+−
ξ−=
A solução geral vem então
( ) ( )
( ) ( ) ( )[ ]444444444 3444444444 21
4444 84444 76
iaEstacionár Parcela
aTransitóri Parcela
twrtwrrrk
ptwBtwAetu aa
wt
cos2sen121
1sencos
2222
0 ξ−−ξ+−
+
++= ξ−

Tal como anteriormente, pode-sedefinir α tal que
( ) ( )222 21 rrC ξ+−=e
com
( )α−= twUtu sen)(
Cα
21 r−
rξ2
212
rr
tg−ξ=α
Cr 21cos −=α
Crξ=α 2sen
Considerando apenas a parte estacionária, virá
( ) ( )44444 344444 21
α−α−α=
tw
twtwCk
ptu
sen
cossensencos10
donde
em queCk
pU
10=
wt α
I
RR2
1R
0pkC =U
( )22
01 1 r
CkpR −=
rCkpR ξ= 22
02
( ) ( )D
rrCUU
kpU
oo
=ξ+−
===222 21
11A razão representa
o COEFICIENTE DE AMPLIFICAÇÃO DINÂMICA da parcela estacionária.

I
R
-P0
P0
U
α
kU
cwU
mw U2
R
I
Fe
U
Fc
Fi
U
P0
U
αwt
Equilíbrio de forças da resposta em REGIME ESTACIONÁRIO
DpDkp
kUkFe 00 ===
DprDpwmwc
Dkp
wcUcFc 0020 2 ξ==== &
DprDkp
wmUmFi 0202 === &&
Velocidade
Este sistema de forças está em equilíbrio em REGIME ESTACIONÁRIO.
A dedução da equação do movimento podia então ser feita, também, apartir desta consideração de equilíbrio.
O amortecimento introduz um atraso na resposta estacionária, traduzido
pelo ângulo de fase α :
( )α−= twUtup sen)(
( )α−−= twwUtup cos)(&
( )α−−= twwUtup sen)( 2&&
Pelo equilíbrio de forças pode-se então
determinar a fase α e a amplitude U.

Do triângulo rectângulo da figura obtém-se
( ) ( ) 20
222 pUwcUwmKU =+−
222 12
tgrr
wmkwc
UwmUkUwc
−ξ=
−=
−=α
( ) ( ) 2
2
2
2
22
20
222
202
1
1
+
−
=+−
=⇒
wmwc
wwk
p
wcwmk
pU
{ ( ) ( )444 3444 21D
rr
U
kp
U222
0
21
1
0
ξ+−↓
=∴
Relação entre o FACTOR de AMPLIFICAÇÃO DINÂMICA e a RAZÃO deFREQUÊNCIAS:
4
3
2
1
00 1 2 3
r
D
ξ=1.0
ξ=0.7ξ=0.5
ξ=0.2
ξ=0

Conclusões mais importantes (para a resposta estacionária):
• O movimento é HARMÓNICO e têm a mesma frequência da excitação
• A amplitude é função de: amplitude e frequência da excitação;frequência e amortecimento do sistema;
O coeficiente de amplificação dinâmica tanto pode serconsideravelmente superior à unidade como inferior.
• A RESPOSTA e a EXCITAÇÃO NÃO ESTÃO EM FASE, ou seja nãoatingem os valores máximos simultaneamente. A resposta atinge omáximo segundos depois de a excitação o ter atingido.
• Em ressonância (r = 1), a amplitude é limitada pelas forças deamortecimento sendo
Em RESSONÂNCIA a resposta está atrasada de 90º.
wα
ξ== 2
11rD
4.3 RESPOSTA EM RESSONÂNCIA
O pico da resposta em regime estacionário ocorre para valores de r próximosda unidade, sendo que o valor máximo exacto se obtém derivando a
expressão de D em ordem a r.
No entanto, para pequenos valores de ξ, os diversos valores de r no pico daresposta praticamente coincidem em torno da unidade.
Assim, no caso de ressonância ( r=1 ) a expressão da resposta escreve-se:
( ) ( )ξ
−+= ξ−
2cos
sencos 0 twkp
twBtwAetu aatw
e, admitindo que para t = 0 , ( ) ( ) 0000 == uu &e
obtém-se
2
00
12
1;
21
ξ−=
ξ=
kp
Bkp
A
( )
−
ξ−ξ+
ξ= ξ− twtwtwe
kp
tu aatw cossen
1cos
21
2
0
( )wp ;0
( )ξ;w
2tg1 π=α⇒+ ∞=α⇒=r
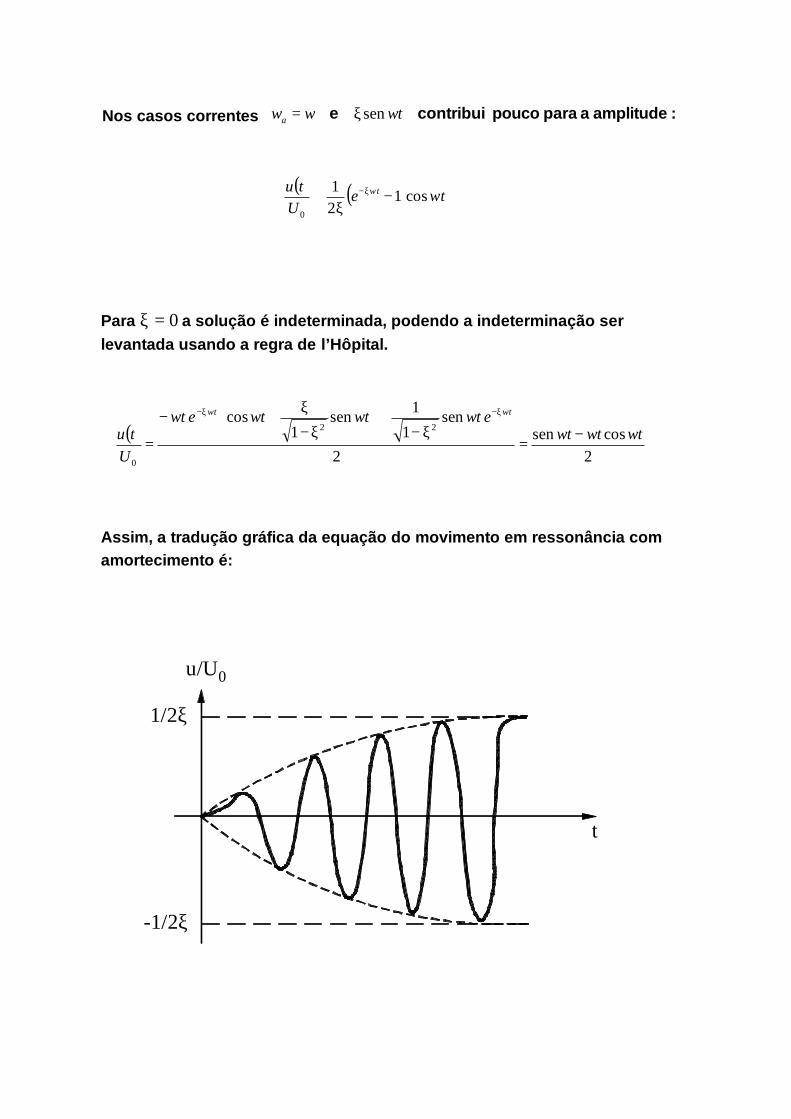
Para ξ = 0 a solução é indeterminada, podendo a indeterminação serlevantada usando a regra de l’Hôpital.
Nos casos correntes :amplitude a para pouco contribuie twwwa senξ=
( ) ( ) tweU
tu tw cos121
0
−ξ
≅ ξ−
Assim, a tradução gráfica da equação do movimento em ressonância comamortecimento é:
( )2
cossen2
sen1
1sen1
cos22
0
twtwtwetwtwtwewt
Utu
twtw
−=ξ−
+
ξ−ξ+−
=
ξ−ξ−
u/U
t
1/2ξ
0
-1/2ξ

Resolvendo a equação aproximada ( ) 1cos1 =−ξ− twe tw em ordem a wt,
obtém-se o número de ciclos necessário para que a resposta amortecidaem ressonância atinja o seu pico, traduzido pelo seguinte aspecto gráfico:
1/2ξ
1/4ξ
ξ=0.2 ξ=0.1ξ=0 .05
ξ=0 .02
2 4 6 8 10 12nº de ciclos
0 4π 8π 12π 16π 20π 24π 28π
u/U0
4.4 CÁLCULO DO AMORTECIMENTO EM SISTEMAS DE 1 G.L.
i) Decréscimo da amplitude nas vibrações livres
πδ≅ξn
n
2 nm
mn u
u
+=δ lnem que
ii) Amplificação em ressonância
Considere-se a estrutura solicitada por
Calcula-se a máxima amplitude para umconjunto de frequências crescentes.
( ) twptp sen0=2U0
0
U0
1 2 r
3U0
U
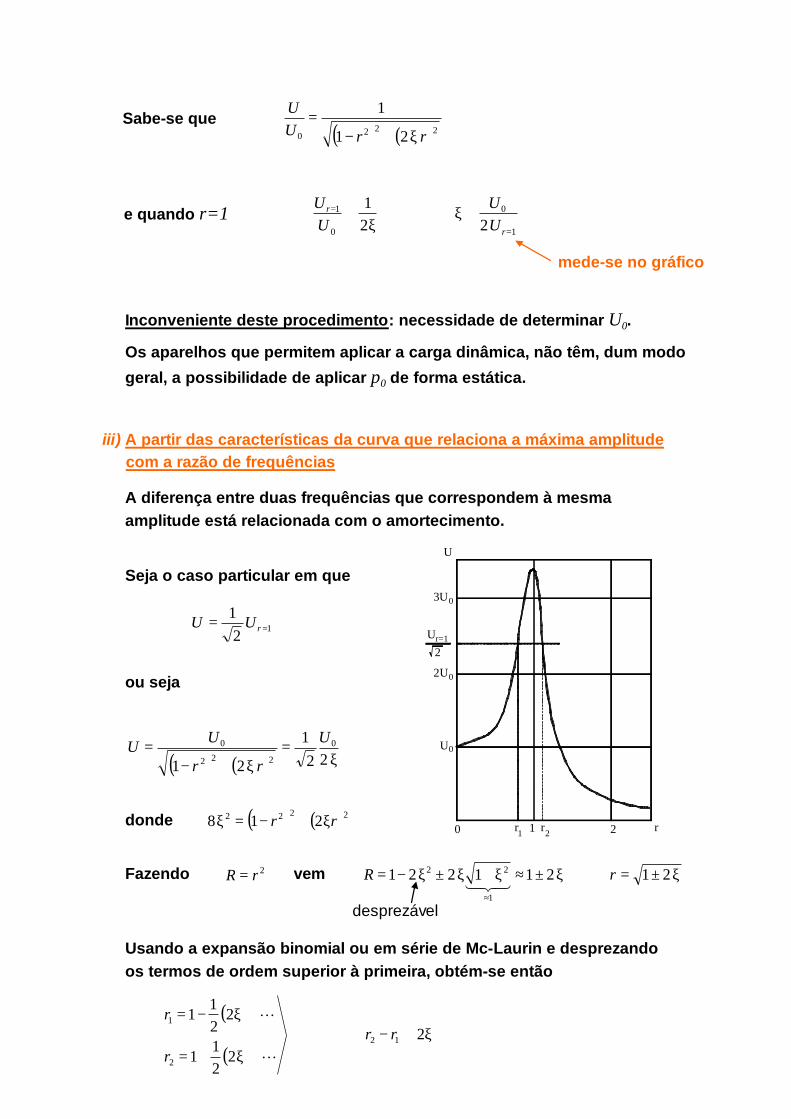
Sabe-se que
e quando r=1
( ) ( )2220 21
1
rrUU
ξ+−=
Inconveniente deste procedimento: necessidade de determinar U0.
Os aparelhos que permitem aplicar a carga dinâmica, não têm, dum modo
geral, a possibilidade de aplicar p0 de forma estática.
1
0
0
1
221
=
= ≅ξ⇒ξ
≅r
r
UU
UU
mede-se no gráfico
iii) A partir das características da curva que relaciona a máxima amplitudecom a razão de frequências
A diferença entre duas frequências que correspondem à mesmaamplitude está relacionada com o amortecimento.
121
== rUU
Seja o caso particular em que3U 0
0 r1 1 2r 2
r=1U2
U
2U0
U0
r
( ) ( ) ξ=
ξ+−=
221
210
222
0 U
rr
UU
( ) ( )2222 218 rr ξ+−=ξ
ou seja
donde
Fazendo 2rR = vem ξ±=⇒ξ±≈ξ+ξ±ξ−=≈
212112211
22 rR 321
desprezável
Usando a expansão binomial ou em série de Mc-Laurin e desprezandoos termos de ordem superior à primeira, obtém-se então
( )
( )ξ≅−⇒
+ξ+=
+ξ−=2
221
1
221
112
2
1
rrr
r
L
L
Recommended