
1
MODELAGEM VIA REGRESSÃO DINÂMICA DO ÍNDICE DE
RADIAÇÃO ULTRAVIOLETA DA CIDADE DE SALVADOR-
BAHIA.
Alexandre Boleira Lopo; Maria Helena Constantino Spyrides; Paulo Sérgio Lucio.
Programa de Pós-Graduação em Ciências Climáticas - PPGCC-DFTE-UFRN
Caixa Postal 1641, Campus Universitário Lagoa Nova, CEP 59072-970, Natal/RN E-mail: [email protected], [email protected], [email protected]
RESUMO: Esta pesquisa aborda o ajuste de Modelos de Regressão Dinâmica ao Índice de
Radiação Ultravioleta máximo (IUVmáx) com o objetivo de realizar predição e previsão desta
variável a partir de seu comportamento temporal e por meio de variáveis explicativas: Coluna
Total de Ozônio, Fluxo de Radiação Solar Descendente, Cobertura Total de Nuvens, Umidade
Relativa e Temperatura média do ar. Os dados diários utilizados para análise referem-se à
cidade de Salvador-BA e ao período de 2009 à 2010. Os resultados das simulações futuras
(previsões) para o ano de 2011, através do modelo ajustado, apresentaram uma forte correlação
(R2 = 0,98) com os valores observados do IUVmáx para aquele ano.
1-INTRODUÇÃO
A Radiação Ultravioleta (RUV) é uma pequena parte do espectro solar, na ordem de 8% a
9% da radiação solar total incidente no topo da atmosfera terrestre para comprimentos de onda
λ<400mnm e 1,4% para comprimentos de onda λ< 300nm. Entretanto, a RUV é de grande
importância na estruturação da atmosfera terrestre e também tem grande ação na biosfera [4].
O Índice de Radiação Ultravioleta (IUV) é um valor inteiro e adimensional e descreve o
nível ou intensidade de RUV solar na superfície do planeta em relação ao seu efeito
fotobiológico, sendo classificado como baixo (≤ 2), moderado ou médio (3 ≤ 𝐼𝑈𝑉 ≤ 5), alto
(6 ≤ 𝐼𝑈𝑉 ≤ 7), muito alto (8 ≤ 𝐼𝑈𝑉 ≤ 10) e extremo (≥ 11). As precauções a serem tomadas
pelo indivíduo, de acordo com esta classificação, se referem ao uso de chapéus, roupas, óculos
de sol, guarda-chuvas ou até mesmo a permanência dentro de casa [7].
O IUV é um importante veículo para sensibilizar o público para os riscos de exposição
excessiva às RUV e para alertar as pessoas sobre a necessidade de adotar medidas de proteção,
incentivando-as a reduzir sua exposição ao sol, com a finalidade de evitar queimaduras ou
doenças como o câncer de pele [7].
Para a modelagem do IUVmáx escolheu-se o Modelo de Regressão Dinâmica por ser capaz
de explicar o fenômeno observado a partir de suas variáveis explicativas ou preditoras e dos
valores passados (característica autoregressiva) da variável resposta, ou seja, combinam a
dinâmica de séries temporais e o efeito de variáveis explicativas [5] proporcionando a
realizações de simulações/previsões.
O objetivo desse artigo é ajustar Modelos de Regressão Dinâmica à série temporal da
variabilidade do IUVmáx da cidade de Salvador-BA em função das variáveis explicativas e
dos valores passados, com a finalidade de realizar predições e previsão (simulação).
2-MATERIAIS E MÉTODOS
O método consistiu de três etapas: (1) Imputação dos dados diários de IUV via técnica
Preditive Mean Matching (PMM); (2) Ajuste do Modelo Dinâmico Linear polinomial e
sazonal; e (3) previsões ou simulações futuras via modelo ajustado.
2.1 DADOS
Os dados diários e máximos de IUV em Salvador (5°48’S e 35°12’W) para o período de
2009 à 2011 sendo obtidos no SISAM-CPTEC. Os dados diários de 2011 foram usados para
avaliar o modelo ajustado com dados de 2009 à 2010..
2.2 IMPUTAÇÃO DE DADOS
Em função da presença de dados faltantes aplicou-se técnica de imputação múltipla via
método da média preditiva ou Preditive Mean Matching [1, 2] presente no aplicativo mice
302
ISSN 2317-3297
2
(Multivariate Imputation by Chained Equatoins) do software R (disponível em http://www.r-
project.org/).
O PMM parte do princípio que as imputações múltiplas são feitas a partir de uma regressão
linear (Y = α + βX); Y~N(Xβ; Iσ2), em que a variável-resposta Y será a variável a ser imputada.
No PMM os parâmetros são estimados a partir de uma distribuição a posteriori própria [6]. São
calculados os valores preditos para a variável-resposta observada (yob) e variável-resposta
faltante (yf). Para cada yf predito, procura-se a unidade observada com valor predito mais
próximo, e utiliza-se o valor observado como valor a ser imputado. A variabilidade entre
imputações é gerada por meio dos passos que servem para estimar β e σ e que são repetidos m
vezes [2].
2.1-DADOS E ETAPA 1-IMPUTAÇÃO DE DADOS À SÉRIE TEMPORAL DE IUVmáx
Os dados diários de IUVmáx em Salavdor para o período de 2009 a 2010 apresentavam 109
dados ausentes (14,9%). Em função da presença de dados faltantes, aplicou-se técnica de
imputação múltipla via método da média preditiva ou Preditive Mean Matching [2] presente no
aplicativo mice (Multivariate Imputation by Chained Equations) do software R (disponível em
http://www.r-project.org/).
Para o ajuste dos modelos às variáveis explicativas, obteve-se um conjunto de dados mensais
da National Centers for Environmental Prediction/ National Oceanic and Atmospheric
Administration (NCEP/NOAA), disponível em www.esrl.noaa.gov, extraindo-se as variáveis:
Coluna Total de Ozônio (UD), Cobertura Total de Nuvens (%), Umidade Relativa (%), Fluxo de
Radiação Solar Descendente (W/m2) e Temperatura média do ar (ºC) para o período de 2009 à
2010.
2.2-MODELO DE REGRESSÃO DINÂMICA
Os Modelos de Regressão Dinâmica combinam a dinâmica de séries temporais e o efeito de
variáveis explicativas, assim trata-se de um modelo matemático de regressão envolvendo séries
de tempo, que inclui não somente valores atuais da variável em estudo como seus valores
históricos ou passados [5]. Além disso, é possível incluir as variáveis explicativas ou preditoras
da variável resposta ao modelo com ou sem defasagens (em inglês lag) e criar intervalos de
confiança.
Considerando os valores defasados da variável ( 1tY ) e de suas preditoras (Xn, t) ou preditoras
defasadas (Xn,t-k) utiliza-se a seguinte equação para representar um Modelo de Regressão
Dinâmica:
0 1 1 1 1, 1, 1, 1 1, 1 1, 1, 2, 2, 2, 1 2, 1... ...t t t k t t t t t k t k t t t t tY Y Y X X X X X ,
sendo os índices t-i as variáveis e parâmetros com i defasagens. À equação acrescenta-se um
termo estocástico (εt) que representa as variáveis não incluídas no modelo (resíduos), assim
como algumas flutuações normalmente distribuídas e insignificantes para o modelo [5].
A estimação dos parâmetros da equação foi feita utilizando-se o Método dos Mínimos
Quadrados Ordinários [8], supondo que o termo estocástico (εt) tenha as propriedades
adequadas como média zero (E(εt) = 0), homoscedasticidade (Var(εt) = σ²) e erros não
correlacionados (E(εi,εj) = 0, se i > j).
O aplicativo dynlm (Dynamic Linear Models and Time Series Regression) do software R e
de autoria de Zeileis (2011) foi usado para realizar os cálculos e ajustar do modelo.
3-RESULTADOS
3.1-ETAPA 2-AJUSTE DOS MODELOS DE REGRESSÃO DINÂMICA
Ajustaram-se dois modelos diferenciados: Modelo 1 formado apenas pelas variáveis
explicativas escolhidas, sem defasagens; e o modelo 2 incluindo-se o vetor autoregressivo às
variáveis explicativas e defasagens (t-1, t-2, ...) para otimização do ajuste. Os primeiros testes
indicaram a falta de significância da variável Umidade Relativa em ambos os modelos e da
Cobertura Total de Nuvens e Temperatura média do ar no modelo 2, sendo assim essas foram
retiradas das equações apresentadas na tabela 3.1.
303
ISSN 2317-3297

3
A tabela 3.1 apresenta-se a abreviação da variável em língua inglesa como obtido na
NCEP/NOAA e sua defasagem (lag) através do índice subscrito, em que X1 representa o Fluxo
de Radiação Solar Descendente (dswrf)t; X2 a Cobertura Total de Nuvens (tcdc)t; X3 a Coluna
Total de Ozônio (tco3)t; e X4 a Temperatura média do ar (air) t.
Tabela 3.1 Estimação dos coeficientes, erro padrão e p-valor dos modelos.
Variável Resposta
(IUVmáx)
X1
(dswrf) t
X2
(tcdc) t
X3
(tco3)t,
X4
(air) t
interceptot
IUV t-1
Modelo 1 0,008 0,021 0,076 0,692 -30,42 -
p-valor 0,001 0,001 0,001 0,001 0,001 -
Erro Padrão 0,001 0,003 0,004 0,025 1,374 -
Modelo 2 0,001 - 0,003 - -0,697 0,967
p-valor 0,01 - 0,01 - 0,05 0,001
Erro Padrão 0,000 - 0,001 - 0,319 0,008
Fonte: Elaborada pelos autores. Obs: Traço indica ausência
A Figura 3.1 apresenta a variabilidade mensal das observações de IUVmáx e os valores
preditos pelos modelos.
Figura 3.1 – Observações de IUV máximo e os valores preditos pelos dois modelos.
3.2 - ETAPA 3 - COMPARAÇÃO DOS MODELOS E ANÁLISE DOS RESÍDUOS.
Na análise de correlação entre os valores modelados (preditos) e observados, o modelo 1
obteve o coeficiente de determinação R2 = 0,73 e o modelo 2, R
2 = 0,97.
Na análise de resíduos do modelo 2, aquele com o melhor resultado de R2, estes se
mostraram-se hetereocedásticos na análise gráfica e no teste de Breusch-Pagan. A hipótese nula
de homocedásticidade seria aceita se o p-valor do teste fosse maior ou igual a 5 %, no caso foi
de 2,2x10-16
. Os resíduos não se apresentaram normalizados conforme o teste Shapiro-Wilk e a
interpretação gráfica do QQ-Plot.
Figura 3.2 – Análise de resíduos do modelo 2 em relação a variância e normalidade.
Nesse caso em que não houve homocedásticidade existe a possibilidade de modelar a
variância dos resíduos e incluir no modelo, através do modelo ARCH (autoregressive
conditional heteroscedaticity).
Na existência de heterocedásticidade dos resíduos não se pode garantir que a estimação do
modelo é BLUE (Best Linear Unbiased Estimator), entretanto optou-se em realizar previsões
(simulações) com o modelo 2, devido ao resultado encontrado para o R2.
IUV obs e Modelos
Time
IUVm
áx
2002 2004 2006 2008 2010
810
1214
Observações
Modelo 1
Modelo 2
304
ISSN 2317-3297
4
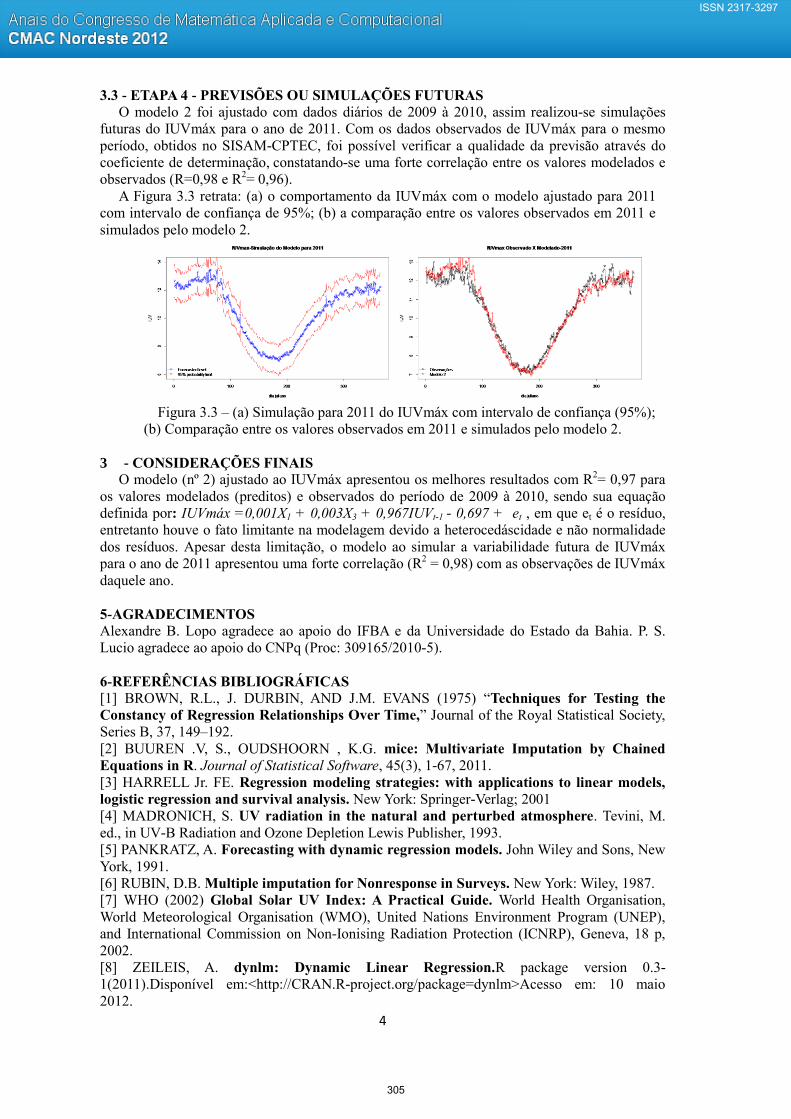
3.3 - ETAPA 4 - PREVISÕES OU SIMULAÇÕES FUTURAS
O modelo 2 foi ajustado com dados diários de 2009 à 2010, assim realizou-se simulações
futuras do IUVmáx para o ano de 2011. Com os dados observados de IUVmáx para o mesmo
período, obtidos no SISAM-CPTEC, foi possível verificar a qualidade da previsão através do
coeficiente de determinação, constatando-se uma forte correlação entre os valores modelados e
observados (R=0,98 e R2= 0,96).
A Figura 3.3 retrata: (a) o comportamento da IUVmáx com o modelo ajustado para 2011
com intervalo de confiança de 95%; (b) a comparação entre os valores observados em 2011 e
simulados pelo modelo 2.
Figura 3.3 – (a) Simulação para 2011 do IUVmáx com intervalo de confiança (95%);
(b) Comparação entre os valores observados em 2011 e simulados pelo modelo 2.
3 - CONSIDERAÇÕES FINAIS
O modelo (nº 2) ajustado ao IUVmáx apresentou os melhores resultados com R2= 0,97 para
os valores modelados (preditos) e observados do período de 2009 à 2010, sendo sua equação
definida por: IUVmáx =0,001X1 + 0,003X3 + 0,967IUVt-1 - 0,697 + et , em que et é o resíduo,
entretanto houve o fato limitante na modelagem devido a heterocedáscidade e não normalidade
dos resíduos. Apesar desta limitação, o modelo ao simular a variabilidade futura de IUVmáx
para o ano de 2011 apresentou uma forte correlação (R2 = 0,98) com as observações de IUVmáx
daquele ano.
5-AGRADECIMENTOS
Alexandre B. Lopo agradece ao apoio do IFBA e da Universidade do Estado da Bahia. P. S.
Lucio agradece ao apoio do CNPq (Proc: 309165/2010-5).
6-REFERÊNCIAS BIBLIOGRÁFICAS
[1] BROWN, R.L., J. DURBIN, AND J.M. EVANS (1975) “Techniques for Testing the
Constancy of Regression Relationships Over Time,” Journal of the Royal Statistical Society,
Series B, 37, 149–192.
[2] BUUREN .V, S., OUDSHOORN , K.G. mice: Multivariate Imputation by Chained
Equations in R. Journal of Statistical Software, 45(3), 1-67, 2011.
[3] HARRELL Jr. FE. Regression modeling strategies: with applications to linear models,
logistic regression and survival analysis. New York: Springer-Verlag; 2001
[4] MADRONICH, S. UV radiation in the natural and perturbed atmosphere. Tevini, M.
ed., in UV-B Radiation and Ozone Depletion Lewis Publisher, 1993.
[5] PANKRATZ, A. Forecasting with dynamic regression models. John Wiley and Sons, New
York, 1991.
[6] RUBIN, D.B. Multiple imputation for Nonresponse in Surveys. New York: Wiley, 1987.
[7] WHO (2002) Global Solar UV Index: A Practical Guide. World Health Organisation,
World Meteorological Organisation (WMO), United Nations Environment Program (UNEP),
and International Commission on Non-Ionising Radiation Protection (ICNRP), Geneva, 18 p,
2002.
[8] ZEILEIS, A. dynlm: Dynamic Linear Regression.R package version 0.3-
1(2011).Disponível em:<http://CRAN.R-project.org/package=dynlm>Acesso em: 10 maio
2012.
305
ISSN 2317-3297
Recommended

















