
UNIVERSIDADE ESTADUAL DE CAMPINAS
Faculdade de Engenharia Elétrica e de Computação
Departamento de Sistemas e Energia
Marcelo Rodrigo Garcia Saquicela
Estudo da influência do controle de torque de motores de indução trifásicos
de grande porte, usando conversores eletrônicos de potência, em um
sistema de energia elétrica industrial
Study of the influence of torque control of large three-phase induction
motors, using electronics power converters, in an industrial electric system
Campinas – SP
2016

Marcelo Rodrigo Garcia Saquicela
Estudo da influência do controle de torque de motores de indução trifásicos
de grande porte, usando conversores eletrônicos de potência, em um
sistema de energia elétrica industrial
Dissertação de Mestrado apresentada à Faculdade
de Engenharia Elétrica e de Computação como
parte dos requisitos para a obtenção do título de
Mestre em Engenharia Elétrica na área de Energia
Elétrica.
Orientador: Prof. Dr. Ernesto Ruppert Filho
Coorientador: Prof. Dr. José Luís Azcue Puma
Este exemplar corresponde à versão final da
dissertação defendida pelo aluno, e orientada
pelo Prof. Dr. Ernesto Ruppert Filho
Campinas – SP
2016

Agência(s) de fomento e nº(s) de processo(s): Não se aplica.
Ficha catalográfica
Universidade Estadual de Campinas
Biblioteca da Área de Engenharia e Arquitetura
Luciana Pietrosanto Milla - CRB 8/8129
Saquicela, Marcelo Rodrigo Garcia, 1984-
Sa69e SaqEstudo da influência do controle de torque de motores de indução trifásicos
de grande porte, usando conversores eletrônicos de potência, em um sistema
de
energia elétrica industrial / Marcelo Rodrigo Garcia Saquicela. – Campinas,SP
: [s.n.], 2016.
Saq Orientador: Ernesto Ruppert Filho.
Saq Coorientador: José Luis Azcue Puma.
Saq Dissertação (mestrado) – Universidade Estadual de Campinas, Faculdade
de Engenharia Elétrica e de Computação.
Saq 1. Motores. 2. Torque. 3. Indução. 4. Controle. 5. Vetores. I. Ruppert Filho,
Ernesto,1948-. II. Azcue Puma, José Luis,1981-. III. Universidade Estadual de
Campinas. Faculdade de Engenharia Elétrica e de Computação. IV. Título.
Informações para Biblioteca Digital
Título em outro idioma: Study of the influence of torque control of large three-phase
induction motors using electronics power converters in an industrial electric system
Palavras-chave em inglês:
Engines
Torque
Induction
Control
Vectors
Área de concentração: Engenharia Elétrica
Titulação: Mestre em Engenharia Elétrica
Banca examinadora:
Ernesto Ruppert Filho [Orientador]
Rudolf Ribeiro Riehl
Gilmar Barreto
Data de defesa: 12-12-2016
Programa de Pós-Graduação: Engenharia Elétrica
COMISSÃO JULGADORA - DISSERTAÇÃO DE MESTRADO
Candidato: Marcelo Rodrigo Garcia Saquicela RA: 140184 Data da Defesa: 12 de dezembro de 2016 Título da Tese: "Estudo da influência do controle de torque de motores de indução trifásicos de grande porte, usando conversores eletrônicos de potência, em um sistema de energia elétrica industrial” Prof. Dr. Ernesto Ruppert Filho (Presidente, FEEC/UNICAMP) Prof. Dr. Rudolf Ribeiro Riehl (FEB/UNESP) Prof. Dr. Gilmar Barreto (FEEC/UNICAMP)
A ata de defesa, com as respectivas assinaturas dos membros da Comissão Julgadora, encontra-se no processo de vida acadêmica do aluno.

À memoria da minha tia Tania Elena, “te
veo donde las rosas crecen’’

Agradecimentos
Aos professores Dr. Ernesto Ruppert Filho e Dr. José Luis Azcue Puma, sou grato
pela oportunidade da realização deste trabalho.
Aos amigos e colegas do laboratório Filipe, Fernando, Juan Carlos, Ramon, Jorge,
Jeferson e Nelly pela amizade e momentos compartilhados.
À minha família pela compreensão e apoio, aos meus amigos Juan Carlos, Danny,
Felipe e Wendy.
À CAPES pelo apoio financeiro e à UNICAMP pela estrutura física e intelectual
disponíveis.
E a todos os amigos e colegas que eu fiz no Brasil.

Resumo
Neste trabalho apresenta-se o comportamento dinâmico de motores de indução
trifásicos de grande porte como cargas, dentro de uma rede de energia elétrica
industrial, alimentada por uma subestação e por geradores síncronos internos à
instalação constituindo um caso de geração distribuída, podendo trabalhar em conjunto
com o sistema elétrico para suprir a demanda do sistema.
Foram realizadas várias simulações no sistema para estudar o comportamento dos
motores de indução e sua influência na rede elétrica da indústria. Também foi
implementado o método de controle direto de torque (CDT), com modulação por
vetores espaciais nos motores de indução trifásicos, avaliando suas vantagens e
desvantagens no funcionamento sobre a rede elétrica industrial escolhida.

Abstract
This work presents the dynamic behavior of a three phase large induction motors as
loads in an industrial electric power system, supplied by a substation and also by
internal generators as a case of distributed generation, working together the power grid,
some tests were made on the system to study the behavior of induction motors and their
possible influence on the industrial electric network. It was also implemented the direct
torque control scheme (DTC) using space vector modulation technique on the three-
phase induction motors , showing the advantages and disadvantages of the motor
control using this technique control in the operation of the selected industrial power
grid.

Lista de Figuras
2.1 Esquema de controle direto de torque por modulação por vetores espaciais e orientação
do fluxo magnético do estator...............................................................................................7
2.2 Sistema de referência alinhado com o fluxo do estator........................................................8
2.3 Tensão alternada produzida por um chaveamento por semi período..................................11
2.4 Topologia do inversor a dois níveis.....................................................................................12
2.5 Vetores espaciais de comutação da tensão..........................................................................14
2.6 Vetores de tensão circunscritos...........................................................................................15
2.7 Diagrama da etapa de potência............................................................................................16
2.8 Diagrama da simulação do controle direto de torque do motor de indução trifásico.........18
2.9 Torque eletromagnético do motor de indução trifásico......................................................19
2.10 Fluxo do estator do motor de indução trifásico...................................................................20
2.11 Corrente no estator do motor de indução trifásico...............................................................20
2.12 Velocidade do rotor do motor de indução trifásico..............................................................21
3.1 Diagrama unifilar do sistema de energia elétrica industrial................................................27
3.2 Característica de estatismo de um gerador síncrono...........................................................29
3.3 Característica isócrona de um gerador................................................................................30
3.4 Representação do sistema de controle de velocidade.........................................................31
3.5 Representação da turbina hidráulica...................................................................................32
3.6 Sistema de excitação como controle da tensão terminal.....................................................33
3.7 Representação do sistema de controle do gerador síncrono implementado.......................34
3.8 Motor de indução trifásico com carga.................................................................................35
4.1 Corrente entregue ao sistema pela subestação.....................................................................37
4.2 Potência ativa entregue pela subestação..............................................................................38
4.3 Potência reativa entregue pela subestação...........................................................................38
4.4 Tensão no ponto de acoplamento comum...........................................................................39
4.5 Corrente no ponto de acoplamento comum.........................................................................40
4.6 Tensão no barramento alimentador dos motores de indução trifásicos..............................40
4.7 Corrente no barramento alimentador dos motores de indução trifásicos............................41
4.8 Torque eletromagnético do motor de indução trifásico número um...................................41
4.9 Velocidade do motor de indução trifásico...........................................................................42
4.10 Corrente do estator do motor de indução trifásico número um............................................42
4.11 Tensão no estator do motor de indução trifásico número um..............................................43
4.12 Corrente no barramento alimentador do sistema elétrico....................................................44
4.13 Potência ativa entregue pela subestação..............................................................................45
4.14 Potência reativa entregue pela subestação...........................................................................45
4.15 Tensão no ponto de acoplamento comum...........................................................................46
4.16 Corrente no ponto de acoplamento comum.........................................................................47
4.17 Tensão no barramento alimentador dos motores de indução trifásicos..............................47
4.18 Corrente no barramento de alimentação dos motores de indução trifásicos.......................48
4.19 Espectro em frequência da corrente no ponto de acoplamento comum..............................49
4.20 Espectro em frequência da tensão no ponto de acoplamento comum.................................49
4.21 Componente espectral da corrente no barramento que alimenta os motores de indução
trifásicos.......................................................................................................................................50
4.22 Espectro em frequência da tensão no barramento alimentador dos motores de indução
trifásicos..............................................................................................................................50
4.23 Espectro da corrente do barramento alimentador do sistema elétrico industrial................51
4.24 Torque eletromagnético de um dos motores de indução trifásicos ativado.......................52
4.25 Velocidade do rotor do motor de indução trifásico um......................................................52
4.26 Corrente do estator do motor número um...........................................................................53
4.27 Corrente entregue pela subestação......................................................................................55
4.28 Potência ativa entregue pela subestação..............................................................................56
4.29 Potência reativa entregue pela subestação...........................................................................56
4.30 Corrente no barramento de acoplamento comum................................................................57
4.31 Torque eletromagnético do motor de indução número um.................................................57
4.32 Velocidade do rotor do motor de indução número um......................................................58
4.33 Corrente entregue pela subestação......................................................................................59
4.34 Corrente do barramento alimentador do primeiro bloco de motores de indução...............60
4.35 Magnitude do espectro em frequência da corrente no barramento alimentador do
primeiro bloco de motores de indução trifásicos...............................................................60
4.36 Tensão no barramento alimentador do primeiro bloco de motores de indução
trifasicos..............................................................................................................................61
4.37 Espectro da tensão do barramento alimentador do primeiro bloco de motores de indução
trifasicos.............................................................................................................................61
4.38 Espectro em frequência da corrente no barramento comum...............................................62
4.39 Espectro em frequência da tensão no barramento comum..................................................62
4.40 Magnitude do espectro em frequência da corrente na barra de alimentação da
subestação...........................................................................................................................63
4.41 Torque eletromagnético do motor de indução número um.................................................63
4.42 Velocidade do rotor do motor de indução um.....................................................................64

Lista de Tabelas
2.1 Correspondência do estado das chaves do inversor de dois níveis ................................... 14
2.2 Valores nominais e parâmetros dos motores de indução trifásicos ................................... 17
3.1 Definição dos tipos de cargas elétricas............................................................................... 25
3.2 Potência nominal das cargas da unidade industrial ............................................................ 26
4.1 Potência entregue pelo sistema de distribuição ................................................................. 38
4.2 Potências do motor de indução trifásico em regime permanente ...................................... 43
4.3 Potência entregue ao sistema elétrico ................................................................................ 46
4.4 Potência consumida pelo motor número um de indução trifásico neste caso de estudo .. ..53
4.5 Gerador síncrono trifásico de polos salientes .................................................................... 54
4.6 Potência fornecida pelos geradores distribuídos ............................................................... 54
4.7 Valores de potência entregue pela subestação .................................................................. 55
4.8 Potência consumida pelo motor de indução trifásico número um ..................................... 58
4.9 Potência entregue pelo sistema testado com geração interna ............................................ 59
4.10 Potência consumida pelo motor de indução trifásico número um ...................................... 64

Sumário
1 Introdução 1
1.2 Motores de indução trifásicos.........................................................................................2
1.3 Sistemas de energia elétrica............................................................................................3
1.4 Conteúdo da dissertação.................................................................................................3
2 Controle do motor de indução trifásico 5
2.1 Introdução......................................................................................................................5
2.2 Controle direto de torque de motores de indução trifásicos..........................................6
2.3 Controle direto de torque com modulação por vetores espaciais e orientação do fluxo
do estator........................................................................................................................7
2.3.1 Técnica de controle...........................................................................................8
2.3.2 Cálculo do ângulo do fluxo magnético do estator.........................................10
2.3.3 Estimação do torque eletromagnético e do fluxo magnético do enrolamento
de estator.........................................................................................................10
2.4 Inversor de dois níveis.................................................................................................11
2.5 Vetor espacial..............................................................................................................12
2.5.1 Modulação por vetores espaciais....................................................................13
2.6 Cálculo da tensão.........................................................................................................15
2.7 Etapa de potência.........................................................................................................15
2.8 Simulação do controle direto de torque modulado por vetores espaciais...................16
3 Sistema de energia elétrica industrial 22
3.1 Introdução....................................................................................................................22
3.2 Descrição do sistema elétrico industrial estudado......................................................23
3.3 Modelagem dos componentes do sistema elétrico industrial......................................23
3.4 Controle dos geradores................................................................................................27
3.4.1 Sistema de controle de velocidade................................................................28
3.4.2 Característica de operação em estatismo.......................................................28
3.4.3 Característica de operação isócrona...............................................................29
3.4.4 Sistema de excitação......................................................................................32
3.5 Modelagem da carga do motor de indução trifásico....................................................34
4 Cenários e simulações 36
4.1 Introdução...................................................................................................................36
4.2 Cenário I: Motores de indução com partida direta (sem conversores).......................37
4.3 Cenário II: Motores de indução acionados através de conversores............................43
4.4 Cenário III: Sistema com entrada de geradores internos............................................53
4.5 Cenário IV: Sistema com entrada de geradores internos e acionamento de
conversores.................................................................................................................58
5 Conclusões, trabalhos futuros 65
Referências bibliográficas 67

13
Capítulo 1
1.1 Introdução
Uma das características básicas que um sistema de energia elétrica deve ter é a de
garantir o suprimento de energia elétrica às cargas de forma confiável e ininterrupta.
Esta característica está relacionada, nos dias de hoje, com o conceito de confiabilidade
dos sistemas elétricos que, além da continuidade do fornecimento de energia elétrica,
define condições mínimas para uma adequada operação, com os níveis de tensões, tanto
em amplitude como em frequência, devidamente especificados [5].
Nos estudos deve-se considerar o sistema de energia elétrica como um todo, levando
em consideração os elementos que afetam seu comportamento, principalmente incluindo
a modelagem dinâmica das cargas quando possível [1].
Sendo uma das principais cargas dentro do sistema de energia elétrica industrial os
motores de indução trifásicos, são muito utilizados devido à sua simplicidade, custo e
robustez.
Além disto, há outras características do comportamento de grandes motores de
indução trifásicos, dentro dos sistemas de energia elétrica industriais, onde é importante
analisar que são: a operação isolada dos motores, o religamento, as sobrecorrentes e
sobretensões, assim como o controle do torque e da velocidade e, sua influência no
comportamento dinâmico do sistema e na qualidade de energia na rede industrial
escolhida [6].
O objetivo deste trabalho é o de estudar o comportamento dinâmico de motores de
indução trifásicos de grande porte com e sem controle do torque eletromagnético e seus
efeitos na dinâmica de um sistema elétrico industrial alimentado pela rede elétrica, mas
também por geradores próprios funcionando como geração distribuída para o sistema de
energia elétrica.

14
1.2 Motores de indução trifásicos
Umas das principais cargas dentro do setor industrial são os motores de indução
trifásicos. Dentro deste setor, os motores de indução são responsáveis por
aproximadamente 70% do consumo de energia elétrica [8].
Os motores são utilizados numa ampla variedade de aplicações dentro da indústria,
sendo os motores de indução trifásicos os mais usados, seja por sua robustez, sua
simplicidade de construção, sua confiabilidade, seu custo mais baixo comparado com os
outros tipos de motores. Além disso, os motores de indução trifásicos podem ser usados
em ambientes perigosos por não apresentarem problemas associados com faiscamentos
ou dupla alimentação [8].
Os acionamentos com velocidade controlada dos motores de indução trifásicos, são
feitos por conversores estáticos de potência, requerendo técnicas de controle
sofisticadas em aplicações que necessitam de acionamentos de alto desempenho.
Dentro das principais dificuldades para o controle e acionamento deste tipo de
motores, encontra-se a necessidade de fornecer uma tensão de frequência variável e a
não-linearidade e complexidade do modelo matemático dinâmico utilizado para
representar o motor de indução trifásico [5].
Takahashi [2] e Depenbrock [3] propuseram um método para o controle do motor de
indução trifásico que substituiu a transformação de coordenadas e controladores PI,
utilizados no controle por orientação de campo por controladores do tipo histerese. Esta
estratégia de controle, denominada controle direto de torque (CDT), desde sua aparição,
tem sido alvo de constante desenvolvimento. A estratégia CDT possibilita rápidas
respostas de torque com reduzidas oscilações do fluxo de estator, mesmo durante
transitórios, apesar do torque apresentar oscilações na sua amplitude em regime
permanente.
Uma abordagem alternativa para reduzir as ondulações do torque é baseada na
modulação por vetores espaciais (Space Vector Modulation – SVM) [4].

15
1.3 Sistemas de energia elétrica
A maioria dos estudos realizados sobre sistemas industriais de energia elétrica não
leva em conta a dinâmica das cargas, como é no caso dos motores de indução trifásicos,
fazendo-se estudos baseados em métodos estáticos. Deixando fora o comportamento
dinâmico do sistema, já que fenômenos como o colapso de tensão são de natureza
essencialmente dinâmica, abordagens estáticas baseadas nas equações do fluxo de
potência tem sido amplamente consideradas como sendo a maneira prática de avaliar os
riscos da ocorrência de algum desequilíbrio no sistema elétrico.
Neste trabalho, que utiliza motores de indução trifásico de grande porte, chamados
de grande porte já que operam com potencias superiores aos 1000 kW. Apresenta-se
uma análise dinâmica de uma rede elétrica de uma empresa, simulações no domínio do
tempo são apresentadas e discutidas.
No contexto a modelagem dinâmica do motor bem como o uso de simulações
dinâmicas são importantes, pois o funcionamento da rede elétrica é um fenômeno
essencialmente dinâmico, causado pelo comportamento das cargas e de seus
dispositivos de controle [5].
A modelagem matemática dinâmica das cargas é um dos aspectos mais relevantes na
análise do sistema. Tendo em vista que os processos dinâmicos individuais dos
diferentes tipos de cargas conectadas a uma barra são impostos ao sistema de forma
coletiva, este só pode sentir os efeitos agregados. Isto devido ao comportamento
conjunto das cargas individuais. Este comportamento equivalente é denominado na
literatura como comportamento agregado da carga [6].
1.4 Conteúdo da dissertação
Este trabalho apresenta simulações dinâmicas de um sistema de energia elétrica
industrial com cargas de impedância constante e motores de indução trifásicos de
grande porte representados pelo seu modelo matemático dinâmico. Estuda-se o
comportamento do sistema em diversos cenários incluindo casos com geradores
distribuídos internos à instalação elétrica industrial.

16
No capítulo 2 apresenta-se a teoria referente ao controle direto de torque aplicado aos
motores de indução trifásicos, descrevendo-se cada bloco utilizado na implementação
do controle da maquina.
No capítulo 3 apresenta-se a descrição do sistema elétrico industrial escolhido e do
controle dos geradores síncronos de polos salientes.
No capítulo 4 são realizadas simulações dos casos de estudo propostos, tanto com o
funcionamento da rede elétrica sem e com o controle dos motores de indução trifásicos,
avaliando os resultados obtidos.
No capítulo 5 são apresentadas as conclusões do trabalho e sugestões para futuras
pesquisas.

17
Capítulo 2
Controle do motor de indução trifásico.
2.1 Introdução
Os acionamentos de motores de indução trifásicos com alto desempenho dinâmico
de torque eletromagnético têm sido usados há mais de trinta anos. Baseado nos
trabalhos pioneiros de Blaschke [10], Hasse [11] e Leonard [12], acionamentos com a
técnica de controle vetorial por orientação de fluxo do estator vêm sendo muito
utilizados no setor industrial. Os acionamentos utilizando o Controle Direto de Torque
(CDT) foram inicialmente estudados e implementados por Takahashi e Noguchi [13]
sendo uma alternativa às técnicas de controle vetorial até então existentes.
Em vez do uso da corrente elétrica, que é empregada no controle de fluxo orientado,
a estratégia do CDT é caracterizada pelo controle direto do vetor fluxo magnético de
estator e do torque eletromagnético. Diversas técnicas para o controle direto de torque
foram estudadas, desenvolvidas e implementadas desde o primeiro acionamento por
controle direto de torque (CDT) implementado por Takahashi. Muitos destes métodos e
técnicas demostraram o seu potencial na otimização das características de operação dos
acionamentos de motores de indução, alimentados por inversores do tipo fonte de
tensão.
Nesta seção analisa-se a estratégia para o controle que foi aplicado na simulação dos
motores de indução trifásicos, partindo da teoria original do controle direto de torque
com modulação por vetores espaciais (CDT/MVE). Com esta técnica de controle
consegue-se uma seleção apropriada dos vetores de chaveamento do inversor, que
controla o fluxo magnético do estator do motor de indução. Também se consegue uma
resposta rápida no controle do torque eletromagnético.

18
2.2 Controle direto de torque de motores de indução
trifásicos
O objetivo do controle direto de torque (CDT) é controlar diretamente o vetor do
fluxo concatenado do estator e o torque eletromagnético, mediante a seleção apropriada
dos vetores de chaveamento que serão aplicados no inversor que alimenta o motor de
indução trifásico. No presente trabalho utilizou-se um inversor de tensão trifásico de
dois níveis.
O fluxo concatenado do estator e o torque eletromagnético, são controlados através
de dois controladores PI, para se obter uma resposta rápida do torque eletromagnético e
do fluxo.
É utilizada a técnica de modulação por vetores espaciais com o objetivo de obter
uma frequência de chaveamento constante e baixo conteúdo harmônico. O CDT permite
que as respostas do torque eletromagnético e do fluxo do estator sejam rápidas.
No motor de indução trifásico, uma das formas de representação do torque
eletromagnético é através do produto vetorial entre os vetores espaciais do fluxo
magnético concatenado e da corrente do estator.
𝑇𝑒𝑚 = 3
2𝑃𝜓𝑠
× 𝑖𝑠→ (2.1)
Sendo que 𝜓𝑠 e 𝑖𝑠
→ são os vetores espaciais do fluxo concatenado e da corrente elétrica
do estator respectivamente, P é o número de pares de polos. Na equação 2.1, ambos
vetores espaciais estão representados no sistema de referência estacionário. Considera-
se que 𝜓𝑠 = |𝜓𝑠
|𝑒𝑗𝜌𝑠 e 𝑖𝑠→
= |𝑖𝑠→| 𝑒𝑗𝛼𝑠, sendo que 𝜌𝑠 e 𝛼𝑠 são os ângulos dos vetores
espaciais do fluxo concatenado e da corrente do estator em relação ao eixo real do
sistema de referência estacionário. A partir da equação anterior, tem-se que:
𝑇𝑒𝑚 = 3
2𝑃|𝜓
𝑠 | |𝑖𝑠
→
| sin(𝛼𝑠 − 𝜌𝑠) =3
2𝑃|𝜓
𝑠 | |𝑖𝑠
→
| sin ( 𝛼 ) (2.2)
Sendo que 𝛼 = 𝛼𝑠 − 𝜌𝑠 é o ângulo entre os vetores espaciais do fluxo concatenado e
da corrente do estator.
Se for aplicada uma tensão apropriada no enrolamento do estator de tal forma a
manter o fluxo do estator constante e, esta tensão conseguisse uma mudança rápida no

19
ângulo 𝜌𝑠, então o torque eletromagnético variaria rapidamente. Se o ângulo for
incrementado produzirá um torque eletromagnético positivo, enquanto que, se o ângulo
for diminuído produzirá uma redução do torque eletromagnético.
Em conclusão, para controlar o vetor espacial do fluxo do estator (módulo e ângulo),
é necessário gerar um vetor de tensão apropriado, através do inversor, que alimenta o
motor de indução trifásico.
PI
PI
d-q
α -β MVE
ângulo do fluxo
Estimador do fluxo e do torque
Cálculo da tensão
α -β
ABC
sinal de controle SW
Ucc
iaib
is
us
uds
uqs
*
*Tem
Tem
(ϴψs)
ψqs ψds ^
*+
-
ψs
ψs*
-+
ωs ӀψsӀ^
+
+
^
Figura 2.1: Metodologia do controle direto de torque por modulação por vetores
espaciais e orientação do fluxo magnético do estator.
2.3 Controle direto de torque com modulação por vetores
espaciais e orientação do fluxo do estator
O diagrama de blocos da figura 2.1 apresenta duas malhas de controle, uma para o
fluxo do estator e outra para o torque eletromagnético. A saída do controlador PI, cuja
entrada é o erro do torque eletromagnético, mais o termo de desacoplamento
𝜔𝑠|𝜓𝒔|^
, proporcionam o valor da tensão de referência 𝑢𝑞𝑠∗ necessária para minimizar o
erro do torque eletromagnético. Além disso, a saída do controlador PI, cuja entrada é o
erro do fluxo magnético do estator, proporciona o valor da tensão de referência 𝑢𝑑𝑠∗ ,
necessária para minimizar o erro do fluxo do estator. Com o ângulo do fluxo do estator
𝜃𝜓𝑠, o bloco de transformação de coordenadas d – q /α-β transforma as tensões 𝑢𝑞𝑠
∗ e
𝑢𝑑𝑠∗ , que estão no sistema de referência fixo no fluxo do estator, para o sistema de
referência estacionário. A tensão resultante da transformação será modulada através do
20
bloco de modulação por vetores espaciais (MVE) para finalmente ser sintetizado pelo
inversor.
2.3.1 Técnica de controle
O esquema de controle CDT-MVE, com orientação do fluxo do estator, mostrado na
figura 2.1, inclui dois controladores PI, dois blocos para transformação de coordenadas,
um bloco para modulação por vetores espaciais, um bloco para o cálculo da tensão do
estator a partir do estado das chaves e um bloco para estimação do torque
eletromagnético e do fluxo magnético. Em seguida discute-se cada um dos blocos.
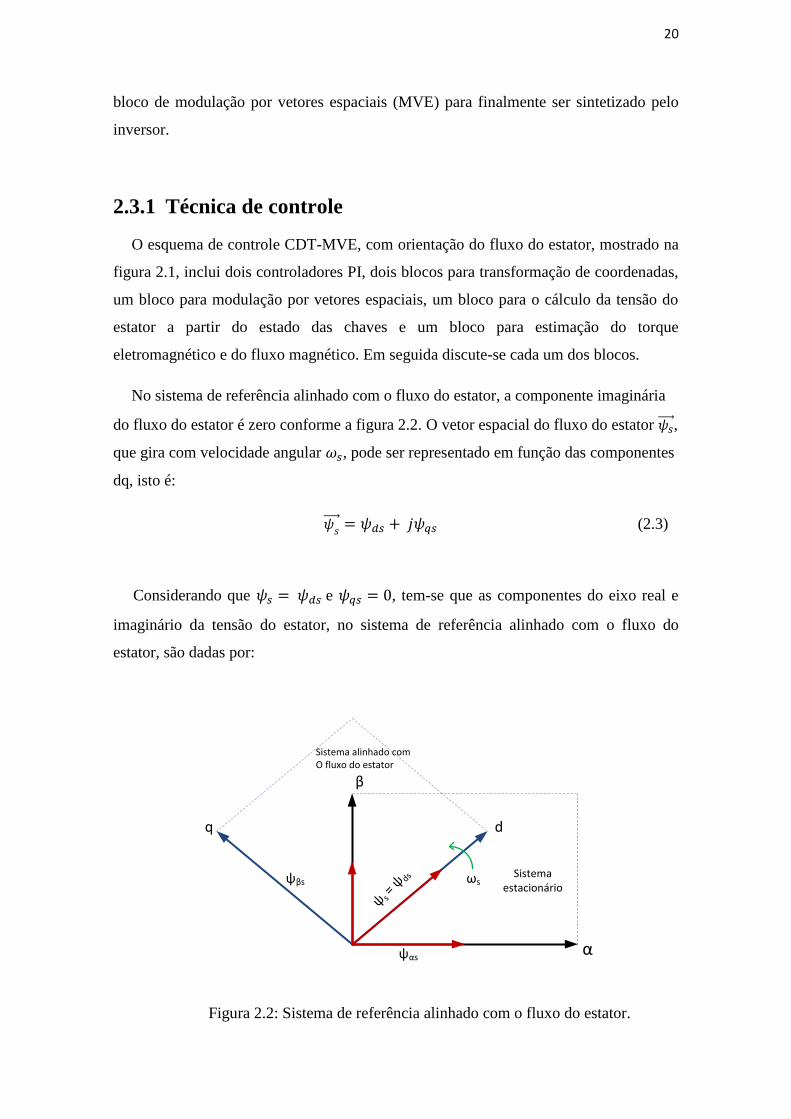
No sistema de referência alinhado com o fluxo do estator, a componente imaginária
do fluxo do estator é zero conforme a figura 2.2. O vetor espacial do fluxo do estator 𝜓𝑠 ,
que gira com velocidade angular 𝜔𝑠, pode ser representado em função das componentes
dq, isto é:
𝜓𝑠
= 𝜓𝑑𝑠 + 𝑗𝜓𝑞𝑠 (2.3)
Considerando que 𝜓𝑠 = 𝜓𝑑𝑠 e 𝜓𝑞𝑠 = 0, tem-se que as componentes do eixo real e
imaginário da tensão do estator, no sistema de referência alinhado com o fluxo do
estator, são dadas por:
β
α
q d
Sistemaestacionário
Sistema alinhado comO fluxo do estator
ωs
ψαs
ψβs
ψ s = ψ
ds
Figura 2.2: Sistema de referência alinhado com o fluxo do estator.

21
𝑢𝑑𝑠 = 𝑅𝑠 𝑖𝑑𝑠 + 𝑑𝜓𝑠
𝑑𝑡 (2.4)
𝑢𝑞𝑠 = 𝑅𝑠 𝑖𝑞𝑠 + 𝜔𝑠 𝜓𝑠 (2.5)
Sendo que 𝑅𝑠 é a resistência elétrica dos condutores das bobinas de uma fase do
enrolamento do estator, 𝑖𝑑𝑠 e 𝑖𝑞𝑠 são as correntes de eixos real e imaginário do estator,
respectivamente. O torque eletromagnético é calculado pela seguinte expressão no
sistema de referência alinhado com o fluxo do estator:
𝑇𝑒𝑚 = 3𝑃
2𝜓𝑠 𝑖𝑞𝑠 (2.6)
𝑖𝑞𝑠 = 2
3𝑃 𝑇𝑒𝑚
𝜓𝑠 (2.7)
Substituindo a equação (2.7) em (2.5), tem-se:
𝑢𝑞𝑠 = 2
3𝑃 𝑅𝑠
𝑇𝑒𝑚
𝜓𝑠+ 𝜔𝑠𝜓𝑠 (2.8)
Através do erro do fluxo do estator e do torque eletromagnético é possível produzir
os valores desacoplados de referência das componentes, real e imaginária, do vetor
espacial da tensão do estator por meio dos controladores PI com a finalidade de
minimizar os erros do fluxo do estator e do torque eletromagnético [13], [4].
A partir da equação (2.4) o fluxo do estator pode ser controlado através da
componente real 𝑢𝑑𝑠 do vetor espacial da tensão do estator. Para cada período de
amostragem 𝑇𝑠 a equação (2.4) pode ser aproximada por:
𝑢𝑑𝑠 = 𝑅𝑠 𝑖𝑑𝑠 +∆𝜓𝑠
𝑇𝑠 (2.9)
Para o caso, quando o motor de indução trifásico operar em altas velocidades, 𝑅𝑠𝑖𝑑𝑠
pode ser desprezado e a tensão pode chegar a ser proporcional com à variação do fluxo
do estator Δ𝜓𝑠 e com a frequência de chaveamento 1/𝑇𝑠. No entanto, a baixas
velocidades, 𝑅𝑠𝑖𝑑𝑠 não é desprezível. Para evitar o uso de uma transformação de
coordenadas para calcular a corrente no sistema de referência alinhado com o fluxo do
estator e calcular a queda na resistência elétrica do estator, será utilizado um controlador
PI para a malha de controle do fluxo do estator. Dessa forma:
𝑢𝑑𝑠∗ = (𝐾𝑃𝜓 +
𝐾𝐼𝜓
𝑆 )(𝜓𝑠
∗ − 𝜓𝑠^) (2.10)

22
Na equação (2.8) vê-se que a componente imaginária 𝑢𝑞𝑠 do vetor espacial da tensão
do estator, se o termo 𝜔𝑠𝜓𝑠 fosse desacoplado, controla o torque eletromagnético. Uma
forma simples de realizar o desacoplamento é somar o termo dependente da velocidade
𝜔𝑠𝜓𝑠 à saída do controlador do torque eletromagnético, isto é:
𝑢𝑞𝑠∗ = (𝐾𝑃𝑇𝑒𝑚
+𝐾𝐼𝑇𝑒𝑚
𝑠) (𝑇𝑒𝑚
∗ − 𝑇𝑒𝑚^ ) + 𝜔𝑠𝜓𝑠 (2.11)
Em [5] a velocidade do fluxo do estator 𝜔𝑠 é calculada no sistema de referência
estacionário a partir de duas estimativas sucessivas do fluxo do estator 𝜓𝑠(𝑘) e 𝜓𝑠(𝑘 +
1), ou seja:
𝜔𝑠 =(𝜓𝑑𝑠(𝑘)𝜓𝑞𝑠(𝑘+1)− 𝜓𝑞𝑠(𝑘)𝜓𝑑𝑠(𝑘+1))
(𝜓𝑠(𝑘+1)2 𝑇𝑠)
(2.12)
Sendo 𝑇𝑠 o período de amostragem. A precisão do calculo de 𝜔𝑠 não é importante
pelo fato de existir um controlador PI na malha de controle do torque eletromagnético
[8]. Este controlador corrige o torque eletromagnético se o último termo da equação
(2.8) fosse estimado de forma errada.
2.3.2 Cálculo do ângulo do fluxo magnético do estator
A partir das componentes real e imaginária do fluxo estimado do estator calcula-se o
ângulo do fluxo magnético do estator com o eixo real do sistema de referência
estacionário, isto é:
𝜃𝜓𝑠= arctan (
𝜓𝑞𝑠
𝜓𝑑𝑠) (2.13)
Sendo que 𝜃𝜓𝑠, 𝜓𝑞𝑠 e 𝜓𝑑𝑠 são o ângulo e as componentes real e imaginaria do fluxo
magnético do estator, representados no sistema de referência estacionário.
2.3.3 Estimação do torque eletromagnético e do fluxo
magnético do enrolamento de estator
A partir da equação (2.14) pode ser estimado o vetor espacial do fluxo magnético do
estator, isto é:

23
𝜓𝑠 = ∫( 𝑢𝑠 − 𝑅𝑠 . 𝑖𝑠 )𝑑𝑡 (2.14)
Conhecido o vetor espacial do fluxo magnético do estator, a corrente medida no
estator, e, utilizando a equação 2.14, obtêm-se torque eletromagnético através da
seguinte expressão:
𝑇𝑒𝑚 = 3
2𝑃𝜓𝑠 ∗ 𝑖𝑠 (2.15)
2.4 Inversor de dois níveis
Para o acionamento dos motores de indução trifásicos foram utilizados inversores de
dois níveis. O inversor de dois níveis (figura 2.3 e 2.4) converte uma tensão continua
em tensão alternada usando dois níveis de tensão e, consequentemente, dois estados de
polaridade são possíveis, como se fosse uma fonte de tensão continua que possui os
níveis +E e 0V e seus dois estados de polaridade são +E e –E, denominados,
respectivamente, de estado P e estado N. Na figura 2.3 tem-se a forma de onda da
tensão entre duas fases do inversor (Vab), onde T é o período da tensão alternada
produzida por um chaveamento por semi período.
Vab
(t)
P
N
T
+E
-E
Figura 2.3: Tensão alternada produzida por um chaveamento por semi período.

24
E
S1 a
S2 a
S1 b
S2 b
S1 c
S2 c
a b c
n
P
N
Figura 2.4: Topologia do inversor a dois níveis.
A configuração básica de um inversor tipo fonte de tensão é mostrada na figura 2.4
para uma conexão trifásica. Uma saída monofásica pode ser obtida utilizando-se apenas
dois ramos, ao invés de três. Uma vez que se tem uma tensão no lado CC, quando um
interruptor da semiponte superior e outro da semiponte inferior estiverem em condução,
esta tensão CC aparecerá em um par de condutores de saída alternada.
Considerando o circuito de um inversor trifásico como se mostra na figura 2.4, as
chaves não podem ser ligadas ao mesmo tempo, porque pode acontecer um curto
circuito na fonte, a ativação é obtida por estados. Em tal caso, uma tensão positiva é
aplicada à carga quando S1a ,S2c e S2b conduzirem (estado S2a , S1c e S1b desligados). A
tensão negativa é obtida complementarmente. O papel dos diodos é garantir um
caminho para a corrente em caso de a carga apresentar características indutivas, que é o
caso para motores de indução trifasicos [25].
2.5 Vetor espacial
Do esquema da figura 2.4, deduzem-se três tensões alternadas senoidais, 𝑣𝑎𝑛, 𝑣𝑏𝑛,
𝑣𝑐𝑛 de igual amplitude 𝑉𝑚𝑎𝑥 e defasadas de 120 graus entre si:
𝑣𝑎𝑛 = 𝑉𝑚𝑎𝑥 𝑠𝑒𝑛(𝜔𝑒 𝑡 + 0°) (2.16)

25
𝑣𝑏𝑛 = 𝑉𝑚𝑎𝑥 𝑠𝑒𝑛(𝜔𝑒𝑡 − 120°) (2.17)
𝑣𝑐𝑛 = 𝑉𝑚𝑎𝑥 𝑠𝑒𝑛(𝜔𝑒𝑡 + 120°) (2.18)
Define-se o vetor espacial de tensão como sendo a composição vetorial, [8]:
𝑉𝑒𝑠𝑝𝑎𝑐𝑖𝑎𝑙 = 𝑘(𝑉𝑎𝑛 + 𝑎𝑉𝑏𝑛 + 𝑎2𝑉𝑐𝑛) (2.19)
Sendo 𝑉𝑎𝑛, 𝑉𝑏𝑛 e 𝑉𝑐𝑛 as tensões instantâneas em cada uma das fases.
Onde: 𝑣𝑎𝑛 = 𝑉𝑚𝑎𝑥/√2∠0° , 𝑣𝑏𝑛 = 𝑉𝑚𝑎𝑥/√2∠ − 120°, 𝑣𝑐𝑛 = 𝑉𝑚𝑎𝑥/√2∠ + 120°,
𝑎 = 𝑒𝑗2𝜋
3 e 𝑘 uma constante que está relacionada com o fato da transformação ser ou
não invariante em potência [14].
O vetor espacial pode ser decomposto em apenas dois eixos ortogonalizados. Na
equação (2.20) é apresentada a transformação algébrica de Clark simplificada para
sistemas trifásicos equilibrados [7], transformando um sistema de três fases defasadas
de 120 graus entre si para duas fases de eixos ortogonais. Adota-se a nomenclatura de
plano (𝛼 − 𝛽).
𝑣𝛼 = 𝑣𝑎𝑛
𝑣𝛽 = √3
2(2𝑣𝑏𝑛 + 𝑣𝑎𝑛) (2.20)
2.5.1 Modulação por vetores espaciais
Na figura 2.5 ilustram-se os oito vetores de tensão no plano alfa-beta. Apresenta-se
a seguir a correlação dos vetores de tensão no plano (𝛼, 𝛽) com os estados das chaves
aplicados no inversor.
O estado P é resultado da combinação da chave superior ligada e a inferior desligada
no mesmo ramo.
O estado N é resultado da combinação da chave inferior ligada e a superior
desligada também no mesmo ramo.

26
β
α
V1
V2V3
V4
V5V6
V0
V7
Figura 2.5: Vetores espaciais de comutação da tensão
Tabela. 2.1: Correspondência do estado das chaves do inversor de dois níveis.
Considerando o inversor fonte de tensão, figura (2.4), têm-se seis vetores espaciais
de tensão ativos (𝑉1 , 𝑉2
, 𝑉3 , 𝑉4
, 𝑉5 , 𝑉6
) e dois vetores espaciais nulos (𝑉0 , 𝑉7
).
Para conseguir sintetizar uma forma de onda senoidal nas tensões de linha trifásicas,
a máxima amplitude dos vetores espaciais está limitada ao valor do barramento CC (link
CC) formando um círculo inscrito no hexágono mostrado na figura 2.6 cujo raio é UCC.
Vetor Chaves
V0 PPP
V1 PNN
V2 PPN
V3 NPN
V4 NPP
V5 NNP
V6 PNP
V7 NNN

27
α
β
U1
U2
U3
U4
U5U6
U0
U7
Uab
Uca
Ubc
U*
2
3ccU1U
Figura 2.6: Vetores de tensão circunscritos.
2.6 Cálculo da tensão
No método original do controle de torque clássico [16] o vetor espacial da tensão 𝑈𝑠
era calculado através da aplicação da transformada de coordenadas (ABC- 𝛼𝛽), nas
tensões trifásicas medidas, no entanto, utilizou-se o bloco que calcula o vetor espacial
de tensão 𝑈𝑠 a partir do valor do barramento CC e dos estados das chaves (Sa, Sb, Sc).
O vetor 𝑈𝑠 é determinado como em [9], isto é:
𝑈𝑠 =
2
3[(𝑆𝑎 −
𝑆𝑏+𝑆𝑐
2) + 𝑗
√3
2(𝑆𝑏 − 𝑆𝑐)]𝑈𝑐𝑐 (2.21)
Então para um determinado estado das chaves do inversor é possível determinar o
vetor de tensão do estator nesse instante.
2.7 Etapa de potência
A figura 2.7 mostra a etapa de potência que é utilizada no controle direto de torque
do motor de indução trifásico. O esquema apresentado na figura 2.6 proporciona os

28
pulsos de controle para as seis chaves do inversor trifásico de dois níveis. O inversor é
alimentado por um barramento CC que é utilizado para sintetizar as tensões necessárias
para minimizar os erros do torque eletromagnético e do fluxo do estator. As correntes 𝑖𝑎
e 𝑖𝑏, assim como a velocidade angular 𝜔𝑟 são medidas diretamente no motor de
indução.
CA MIT
LinkCC
Sinal de controle
Medidas
ia
ib
ωr
Figura 2.7: Diagrama da etapa de potência.
2.8 Simulação do controle direto de torque modulado por
vetores espaciais
Para o controle dos motores elétricos de grande porte adotou-se a estratégia de
acionamento de motores de indução baseada no controle direto de torque (CDT)
utilizando modulação por vetores espaciais [17]. Esta estratégia de controle utiliza a
orientação pelo fluxo do estator para o controle independente do torque eletromagnético
e do fluxo do estator. Segundo [18], pode-se utilizar um inversor de dois níveis para o
controle de um motor de indução de grande porte (até 4160V) que foi implementado
neste trabalho. Outras estratégias de controle, como a denominada de auto controle
direto apresentada em [3] podem também ser utilizadas.
Uma vez assimilados os conceitos fundamentais do controle direto de torque e do
inversor de dois níveis com modulação por vetores espaciais, foi implementado na
ferramenta computacional Matlab/SimPower Systems versão 2012b o controle de
torque do motor de indução. Os parâmetros do motor de indução trifásico utilizado são
especificados na tabela 2.2.
29
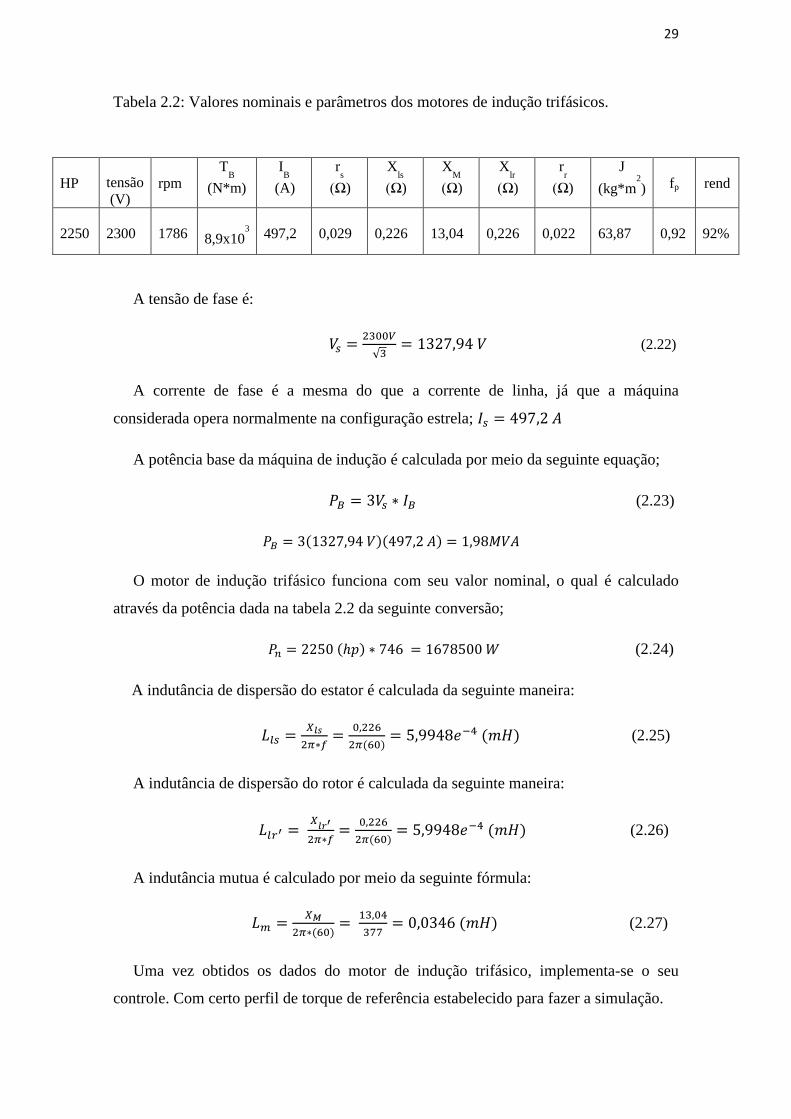
Tabela 2.2: Valores nominais e parâmetros dos motores de indução trifásicos.
A tensão de fase é:
𝑉𝑠 =2300𝑉
√3= 1327,94 𝑉 (2.22)
A corrente de fase é a mesma do que a corrente de linha, já que a máquina
considerada opera normalmente na configuração estrela; 𝐼𝑠 = 497,2 𝐴
A potência base da máquina de indução é calculada por meio da seguinte equação;
𝑃𝐵 = 3𝑉𝑠 ∗ 𝐼𝐵 (2.23)
𝑃𝐵 = 3(1327,94 𝑉)(497,2 𝐴) = 1,98𝑀𝑉𝐴
O motor de indução trifásico funciona com seu valor nominal, o qual é calculado
através da potência dada na tabela 2.2 da seguinte conversão;
𝑃𝑛 = 2250 (ℎ𝑝) ∗ 746 = 1678500 𝑊 (2.24)
A indutância de dispersão do estator é calculada da seguinte maneira:
𝐿𝑙𝑠 =𝑋𝑙𝑠
2𝜋∗𝑓=
0,226
2𝜋(60)= 5,9948𝑒−4 (𝑚𝐻) (2.25)
A indutância de dispersão do rotor é calculada da seguinte maneira:
𝐿𝑙𝑟′ = 𝑋
𝑙𝑟′
2𝜋∗𝑓=
0,226
2𝜋(60)= 5,9948𝑒−4 (𝑚𝐻) (2.26)
A indutância mutua é calculado por meio da seguinte fórmula:
𝐿𝑚 =𝑋𝑀
2𝜋∗(60)=
13,04
377= 0,0346 (𝑚𝐻) (2.27)
Uma vez obtidos os dados do motor de indução trifásico, implementa-se o seu
controle. Com certo perfil de torque de referência estabelecido para fazer a simulação.
HP tensão (V)
rpm
TB
(N*m)
IB
(A)
rs
(Ω)
Xls
(Ω)
XM
(Ω)
Xlr
(Ω)
rr
(Ω)
J
(kg*m2
)
fp
rend
2250
2300
1786
8,9x103
497,2
0,029
0,226
13,04
0,226
0,022
63,87
0,92
92%

30
A seguir é mostrado o sistema implementado em Matlab/SimPower Systems, onde se
pode ver as partes constitutivas do controle direto de torque com modulação por vetores
espaciais.
Etapa de potência
Sistema de Controle
Elementos de medição
Motor de indução trifásico
(a)
(b)
(c)
(d)
(e)
(f)
Figura 2.8: Diagrama da simulação do controle direto de torque do motor de indução
trifásico.

31
Na figura 2.8 pode-se observar o bloco pronto do motor de indução trifásico (d)
utilizado com todos seus parâmetros devidamente calculados, as partes que constituem
a etapa de potência, são um retificador trifásico (a) e um inversor trifásico de dois níveis
utilizando IGBT's (b). As outras partes que constituem o modelo são o bloco de controle
digital (e) e o bloco de medições (f).
No bloco de controle digital têm-se todas as etapas do controlador direto de torque
descrito anteriormente, um bloco principal para o controle de fluxo, um bloco para o
controle do torque, um bloco da modulação por vetores espaciais, e um bloco principal
para a estimação do torque eletromagnético e do fluxo.
As saídas dos controladores de fluxo e de torque são as componentes do eixo real e
imaginário da tensão do estator no sistema de referência orientado com o fluxo do
estator. Com uma transformação de coordenadas tem-se o vetor espacial da tensão do
estator no sistema de referência estacionário.
Simulando o motor de indução trifásico com o controle direto de torque, obtiveram-se
os seguintes resultados;
Figura 2.9: Torque eletromagnético do motor de indução trifásico.
Na figura 2.9 tem-se um torque eletromagnético de referência e um torque
eletromagnético gerado cujo comportamento é bastante aceitável, já que tem uma
resposta rápida e acompanha muito bem ao torque de referência que foi pré-estabelecido
para as simulações.
0 1 2 3 4 5 6 7 8 9 10-2
-1.5
-1
-0.5
0
0.5
1
1.5
2x 10
4
tempo (seg)
Te
m (
N*m
)
Tem
Tem__ref

32
Figura 2.10: Fluxo do estator do motor de indução trifásico
Como se pode ver na figura 2.10, o fluxo eletromagnético do estator tem uma
resposta rápida ao controle, comportando-se de uma maneira bastante aceitável.
Figura 2.11: Corrente no estator do motor de indução trifásico
A corrente no estator (figura 2.11) apresenta na partida do motor de indução trifásico
um valor de aproximadamente cinco vezes a corrente nominal, este comportamento se
encontra dentro do funcionamento normal de um motor de indução trifásico de grande
porte, para depois diminuir quando o motor alcançar o estado estável de operação
(tempo= 3 segundos).
0 1 2 3 4 5 6 7 8 9 100
1
2
3
4
5
6
tempo (seg)
flu
xo
(W
b)
0 1 2 3 4 5 6 7 8 9 10-5000
-4000
-3000
-2000
-1000
0
1000
2000
3000
4000
5000
tempo (seg)
co
rre
nte
(A
)

33
Figura 2.12: velocidade do rotor do motor de indução trifásico
A Velocidade do rotor do motor de indução (figura 2.12) apresenta um
comportamento que está interligado com o comportamento do torque eletromagnético,
esta velocidade igual do que o torque foi controlada para ser estabelecida em um valor
especifico de aproximadamente 170 rad/seg.
0 1 2 3 4 5 6 7 8 9 10-20
0
20
40
60
80
100
120
140
160
180
tempo (seg)
ve
locid
ad
e (
rad
/s)
V
Vref
34
Capítulo 3
Sistema de energia elétrica industrial
3.1 Introdução
Os estudos do comportamento dinâmico de um sistema de energia elétrica tratam de
averiguações, através de análise numérica, do comportamento dinâmico do sistema após
uma perturbação ou um teste específico do sistema. Com este estudo pode-se tirar
conclusões sobre a integridade e operação deste sistema [19].
Neste tipo de sistema, a carga, que é constituída principalmente por motores de
indução trifásicos de grande porte, tem um papel fundamental no comportamento do
sistema de energia elétrica.
Nos grandes sistemas operados por concessionárias a rede elétrica de distribuição
tem um importante papel e deve ser modelada com precisão. Já as cargas podem ser
modeladas simplificadamente. Nos sistemas industriais a rede elétrica pode ser
simplificada, mas não as cargas que causam as perturbações [21].
Para análise do comportamento de um sistema elétrico dinâmico, particularmente, o
sistema elétrico industrial, faz-se necessário estudos durante duas fases distintas: a fase
de projeto e a fase de operação.
Na fase de projeto as principais causas que influenciam no desenvolvimento do
sistema são: rapidez de atuação, custo e seletividade da proteção. Portanto, na fase de
projeto, o estudo dinâmico de operação tem papel importante no dimensionamento da
proteção.
Na fase de operação, o estudo dinâmico de operação faz-se necessário quando a
configuração do sistema é alterada bruscamente pela adição ou retirada de um elemento
no sistema, como é o caso da entrada ou saída de operação de grandes blocos de carga.
Os sistemas de energia elétrica industriais têm como principais características:

35
Níveis de tensão de distribuição menores do que 34,5kV.
Carga predominantemente composta por motores elétricos de indução e motores
elétricos síncronos (em menor escala).
Redes radiais com linhas de distribuição muito curtas.
Geração, geralmente interligada à rede da concessionária, produto de haver co-
geração.
3.2 Descrição do sistema elétrico industrial estudado
A seguir, descreve-se cada um dos componentes do sistema elétrico industrial sob
análise. Em primeiro lugar, cabe salientar que a ferramenta computacional utilizada para
as simulações dinâmicas foi o MatLab/SimPowerSystems versão R2012b. O
SimPowerSystems é um conjunto de bibliotecas que contem modelos matemáticos
dinâmicos de vários componentes de sistemas de energia elétrica para ser utilizado em
conjunto com o Matlab/Simulink. O conjunto de bibliotecas do SimPowerSystems é
bastante completo, fornecendo modelos de diversos componentes da rede, como por
exemplo, elementos RLC concentrados, cargas não-lineares, diversos modelos de
máquinas elétricas e controles associados.
A unidade industrial estudada é composta por: subestação, transformadores,
disjuntores, cargas do tipo impedâncias constantes, máquinas síncronas, linhas de
energia elétrica, motores de indução trifásicos e seus respectivos sistemas de controle.
3.3 Modelagem dos componentes do sistema elétrico
industrial
O sistema elétrico modelado, como já citado, é o apresentado na referência [20]. Ele
é composto por:
a. Subestação
A subestação é representada por uma fonte de tensão trifásica com conexão Y
aterrada e com impedância R-L em série.
36
Apresenta tensão eficaz de fase de 138kV, frequência de 60Hz, com um nível de
curto-circuito trifásico de 400MVA, funcionando como um barramento swing (gerador).
As cargas são ligadas e desligadas por disjuntores trifásicos que atuam como
comutadores, podendo serem comandados para se ativar ou desativar num determinado
instante.
b. Transformador
Os transformadores trifásicos de dois enrolamentos foram representados por modelos
T, nos quais as perdas no núcleo magnético foram consideradas. Contudo os efeitos de
saturação magnética foram desprezados.
c. Cargas dependentes da tensão
As cargas elétricas do sistema simulado são de dois tipos: impedâncias constantes e
motores de indução trifásicos.
As cargas estáticas foram representadas como dependentes da tensão através do uso
das seguintes equações ([15], [21]):
𝑃 = 𝑃0 . (𝑉
𝑉0)𝑛𝑃
(3.1)
𝑄 = 𝑄0 . (𝑉
𝑉0)𝑛𝑞
(3.2)
Sendo:
P – potência ativa consumida pela carga (pu).
P0 – potência ativa nominal da carga (pu).
Q – potência reativa consumida pela carga (pu).
Q0 – potência reativa nominal da carga (pu).
V – tensão nodal na carga (pu).
V0 – tensão nominal da carga (pu).

37
nP – expoente que indica o comportamento do componente de potência ativa da carga
em relação à variação da tensão nodal.
nq – expoente que indica o comportamento do componente de potência reativa da carga
em relação à variação da tensão nodal.
Considerando os modelos de cargas tipicamente empregados em análise de sistemas
de energia elétrica, os expoentes nP e nq assumem os valores apresentados na tabela 3.1.
Tabela. 3.1: Definição dos tipos de cargas elétricas [21].
Tipo de carga nP nq
Potencia constante 0 0
Corrente constante 1 1
Impedância constante 2 2
d. Linhas de distribuição
Os alimentadores internos da instalação industrial foram modelados como uma
impedância simples e constante, Z, composta por um resistor em série com um indutor
(R + jωL), visto que tais alimentadores são curtos.
e. Sistema industrial analisado
Trata-se de uma instalação que tem em funcionamento quatro motores de indução
trifásicos de grande porte, três conjuntos de turbinas a vapor com geradores síncronos
(GS1, GS2, GS3), cujas potências nominais são de 6,25MVA, cada um. O sistema
alimenta quatro motores de indução trifásicos do tipo gaiola de esquilo de 2250 hp cada
um e um conjunto de cargas que foram representadas por um modelo do tipo
impedância constante. O nível de curto-circuito trifásico do sistema, no ponto de
conexão com a concessionária local, é de 400MVA.
O sistema elétrico analisado que representa a unidade industrial é conectado a um
sistema de distribuição na tensão de 138kV. A operação dos geradores dentro da
instalação industrial é semelhante à operação de geradores distribuídos associados ao
sistema de energia elétrica. Os geradores são internos à instalação da unidade industrial,
porém podem gerar energia tanto para a unidade industrial como também para o sistema
externo a ela.
38
A energia produzida por estes geradores corresponde a uma parcela de toda a energia
necessária para alimentar as cargas da unidade. Portanto, a unidade solicita energia do
sistema de distribuição. Parte do sistema foi obtida através da referência [20].
De acordo com as classificações de geração distribuída, pode-se classificar este tipo
de geração distribuída como reserva descentralizada [20].
Os três geradores síncronos apresentam potência nominal de 6,25MVA, 4,16kV,
fator de potência 0,85 capacitivo cada um. Os dados nominais e os parâmetros do
gerador síncrono são mostrados na tabela 4.5.
As cargas são alimentadas em dois valores de tensão de linha que são 11,5kV e
2,3kV. Os geradores fornecem potência na tensão de 4,16kV. Dessa forma, foi
necessário utilizar transformadores para ajustar as tensões nos barramentos.
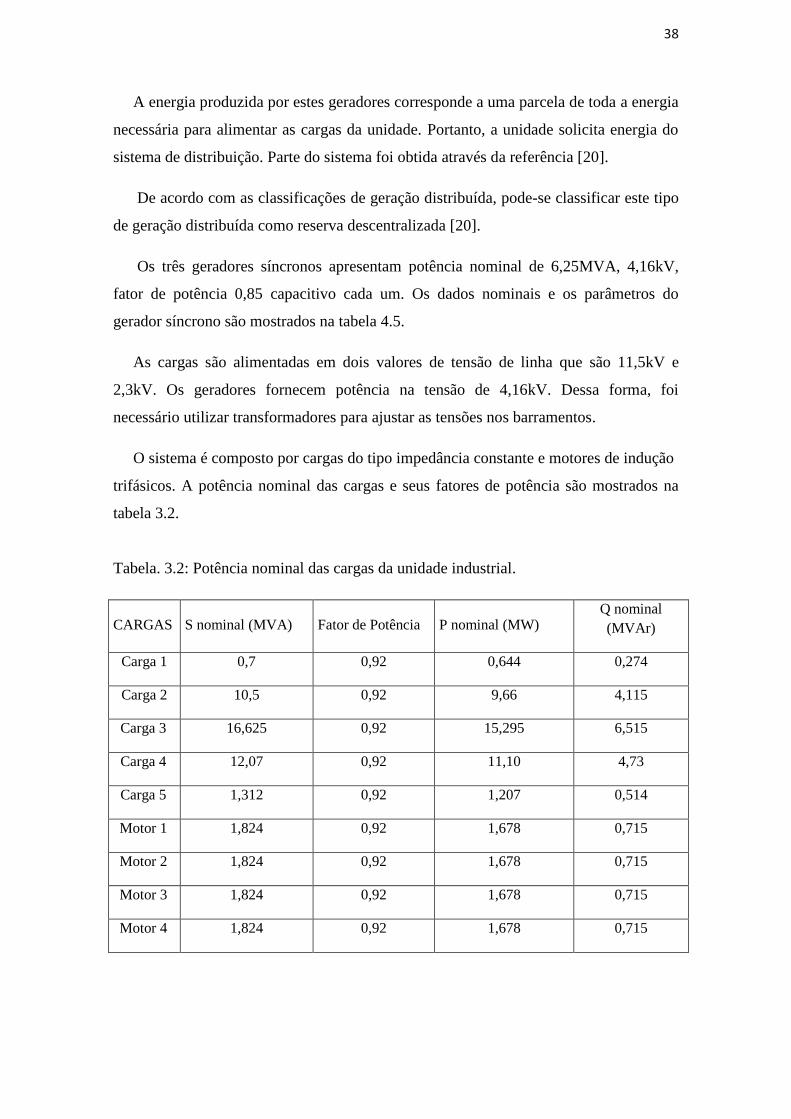
O sistema é composto por cargas do tipo impedância constante e motores de indução
trifásicos. A potência nominal das cargas e seus fatores de potência são mostrados na
tabela 3.2.
Tabela. 3.2: Potência nominal das cargas da unidade industrial.
CARGAS S nominal (MVA) Fator de Potência P nominal (MW) Q nominal
(MVAr)
Carga 1 0,7 0,92 0,644 0,274
Carga 2 10,5 0,92 9,66 4,115
Carga 3 16,625 0,92 15,295 6,515
Carga 4 12,07 0,92 11,10 4,73
Carga 5 1,312 0,92 1,207 0,514
Motor 1 1,824 0,92 1,678 0,715
Motor 2 1,824 0,92 1,678 0,715
Motor 3 1,824 0,92 1,678 0,715
Motor 4 1,824 0,92 1,678 0,715

39
O sistema elétrico de potência da instalação industrial com todos seus componentes é
representado na figura 3.1.
M.I.T. M.I.T. M.I.T. M.I.T.
Barramento infinito 138kV 400MVA
TR-4 40MVA 138-11.5kV
TR-1 7,5MVA138-11.5kV
TR-2 7,5MVA138-11.5kV
TR-3 40MVA138-11.5kV
Carga 01 0,7MVA Fp =0,92
Carga 0210,5MVAFp =0,92
Carga 0316,625MVAFp =0,92
Carga 0412,075MVAFp =0,92
Carga 051,312MVAFp =0,92
GS36250 KVA
4160 VFp= 0.85
GS26250 KVA
4160 VFp= 0.85
GS16250 KVA
4160 VFp =0.85
TR-97,5MVA
11.5-4.16kV
TR-77,5MVA
11.5-4.16kV
TR-87,5MVA
11.5-4.16kV
TR-520MVA
11.5-2.3kV
TR-620MVA
11.5-2.3kV
Motor 012250 hpFp =0.92
Motor 022250 hpFp =0.92
Motor 032250 hpFp =0.92
Motor 042250 hpFp =0.92
Barra 1
Barra 2 Barra 3
Barra 4
Barra 5 Barra 6Barra 7 Barra 8 Barra 9
Figura 3.1: Diagrama unifilar do sistema de energia elétrica industrial.
3.4 Controle dos geradores
Para controlar os valores de potência, tensão e frequência dos geradores síncronos
são utilizados controladores que atuam nos geradores para que estes operem de forma
estável dentro de condições exigidas.
O sistema de controle de velocidade é utilizado para controlar a potência ativa e a
frequência das tensões fornecidas pelos geradores. O sistema de excitação é utilizado
para controlar a tensão terminal do gerador e a potência reativa.

40
3.4.1 Sistema de controle de velocidade
O sistema de controle de velocidade é composto por uma máquina primária e uma
unidade de controle denominada regulador de velocidade.
O sistema de controle de velocidade é responsável por controlar a velocidade de
rotação do rotor do acionador do gerador síncrono, controlando assim a frequência das
grandezas elétricas produzidas. Para realizá-lo, o sistema controla a potência mecânica
entregue ao gerador de acordo com a variação da velocidade do rotor. Por esta razão,
diz-se que o sistema de controle de velocidade também controla a potência ativa [15].
Considerando um sistema elétrico, em regime permanente, o sistema de controle de
velocidade mantém constante a velocidade do gerador síncrono. Nos instantes em que
ocorre algum transitório, ele atua para que as variações de velocidade sejam mínimas.
Para fornecer energia mecânica ao gerador são utilizadas máquinas primárias. Os
principais tipos de máquinas primárias são as turbinas hidráulicas e a vapor, que são as
mais utilizadas em unidades de geração de energia elétrica de maior capacidade.
Geralmente são utilizadas turbinas hidráulicas nos geradores síncronos de pólos
salientes devido à baixa velocidade de rotação do gerador. Já as turbinas a vapor são
utilizadas para geradores síncronos de pólos lisos que apresentam uma maior velocidade
de rotação.
Neste trabalho, utiliza-se o sistema de controle de velocidade da turbina para
operação com um gerador síncrono de pólos salientes.
3.4.2 Característica de operação em estatismo
Quando se tem dois ou mais geradores conectados em paralelo, suas velocidades de
rotação devem ser iguais e deve haver uma boa distribuição de carga entre eles. Para
que tal distribuição ocorra são incorporados nas unidades de controle os reguladores de
velocidade, com uma característica denominada ganho de estatismo, que atua no
controle para alterar a velocidade nominal do gerador quando ocorrem variações na
carga [22]. Uma representação do uso de ganho de estatismo é mostrada na figura 3.2

41
fnom
Pg0 Pg1
f1
f
Pg
α
Figura 3.2: Característica de estatismo de um gerador síncrono
No eixo horizontal, tem-se a demanda de potência (pu), no eixo vertical tem-se a
velocidade angular (pu). A curva com certo grau de inclinação representa a
característica de estatismo.
No Brasil, o valor de estatismo é fixado em 5%, significando que para uma variação
de carga de 100% (gerador operando em vazio e aumentando até a plena carga), ocorre
uma queda máxima de 5% da velocidade nominal. [22]
Para que a distribuição de cargas conectadas em paralelo com os geradores seja
semelhante, é necessário que seus valores de estatismo sejam iguais.
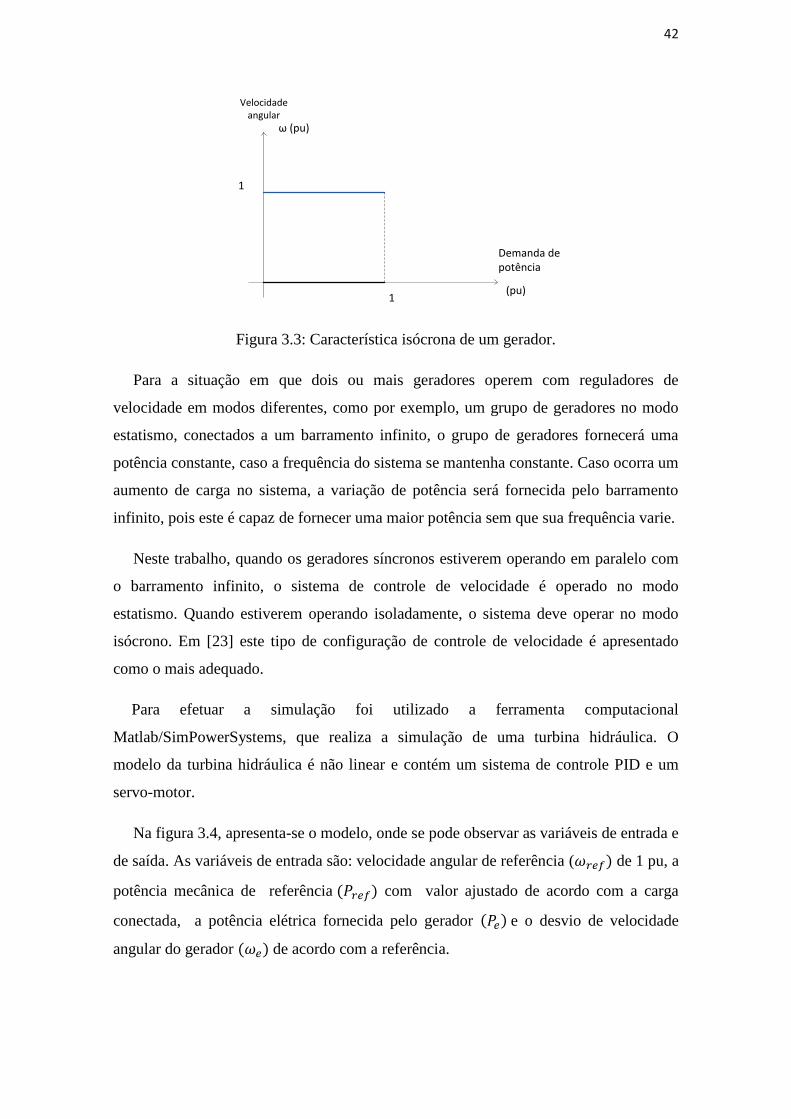
3.4.3 Características de operação isócrona
Quando o regulador de velocidade de um gerador não estiver configurado no modo
estatismo, diz-se que opera no modo isócrono. Para este tipo de controle, a velocidade
de operação é constante, independente da carga que está sendo alimentada, como pode
ser visto na Figura 3.3.
Nos estudos que envolvem geradores síncronos, os barramentos infinitos são
considerados como se estivessem operando no modo isócrono.
42
Velocidade angular
ω (pu)
1
1
Demanda de potência
(pu)
Figura 3.3: Característica isócrona de um gerador.
Para a situação em que dois ou mais geradores operem com reguladores de
velocidade em modos diferentes, como por exemplo, um grupo de geradores no modo
estatismo, conectados a um barramento infinito, o grupo de geradores fornecerá uma
potência constante, caso a frequência do sistema se mantenha constante. Caso ocorra um
aumento de carga no sistema, a variação de potência será fornecida pelo barramento
infinito, pois este é capaz de fornecer uma maior potência sem que sua frequência varie.
Neste trabalho, quando os geradores síncronos estiverem operando em paralelo com
o barramento infinito, o sistema de controle de velocidade é operado no modo
estatismo. Quando estiverem operando isoladamente, o sistema deve operar no modo
isócrono. Em [23] este tipo de configuração de controle de velocidade é apresentado
como o mais adequado.
Para efetuar a simulação foi utilizado a ferramenta computacional
Matlab/SimPowerSystems, que realiza a simulação de uma turbina hidráulica. O
modelo da turbina hidráulica é não linear e contém um sistema de controle PID e um
servo-motor.
Na figura 3.4, apresenta-se o modelo, onde se pode observar as variáveis de entrada e
de saída. As variáveis de entrada são: velocidade angular de referência (𝜔𝑟𝑒𝑓) de 1 pu, a
potência mecânica de referência (𝑃𝑟𝑒𝑓) com valor ajustado de acordo com a carga
conectada, a potência elétrica fornecida pelo gerador (𝑃𝑒) e o desvio de velocidade
angular do gerador (𝜔𝑒) de acordo com a referência.

43
Figura 3.4: Representação do sistema de controle de velocidade (bloco
SimPowerSystems).
Dentro dos parâmetros que devem ser ajustados no quadro de diálogo do bloco de
controle de velocidade, mostrado na figura 3.4, estão os do servomotor, os parâmetros
do PID e os da turbina hidráulica.
O servomotor é representado pelos ganhos Ka e Ta, que representam o sistema de
primeira ordem do servo mecanismo.
Os limites de abertura do distribuidor, (limites gmin e gmax ) , são impostos para a
abertura do distribuidor (gate) e são vgmin e vgmax (pu/s). Eles são impostos para
controlar a velocidade do gate.
A regulação do controle PID é feita com a variação nos parâmetros de droop
permanente (Rp), do ganho do controlador (Kp), do ganho integral (Ki) e do ganho
derivativo (Kd). O ganho de alta frequência no PID é limitado pelo filtro passa baixas
de primeira ordem, com constante de tempo Td(s).
Os valores que correspondem à turbina hidráulica são: o coeficiente de desvio da
velocidade, e a velocidade inicial da água Tw(s).
Deve-se também especificar a referência do droop (queda), que é outra variável
especificada para a entrada do laço de realimentação, com um valor de 1 a 0 para uma
variação da potência elétrica.
Outro valor que deve ser especificado é a potência mecânica inicial, Pm0 (pu) no
eixo do gerador. Este valor é automaticamente atualizado por meio da ferramenta de
fluxo de carga do bloco Powergui.
44
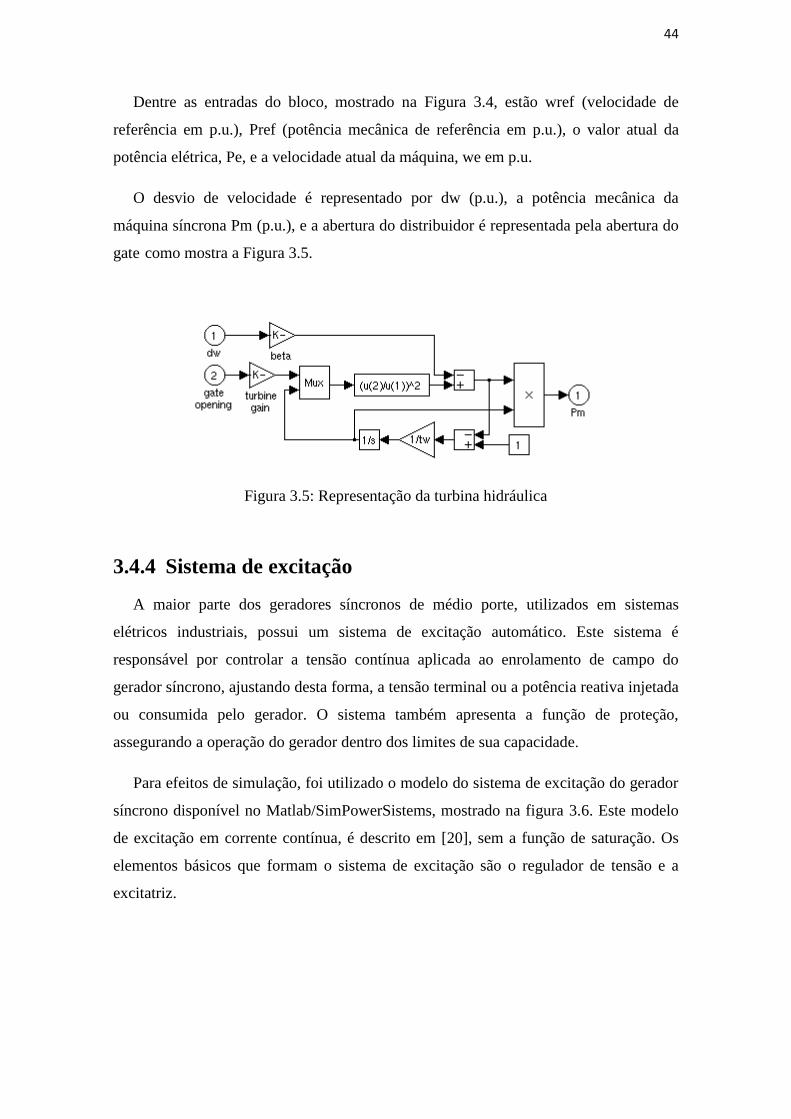
Dentre as entradas do bloco, mostrado na Figura 3.4, estão wref (velocidade de
referência em p.u.), Pref (potência mecânica de referência em p.u.), o valor atual da
potência elétrica, Pe, e a velocidade atual da máquina, we em p.u.
O desvio de velocidade é representado por dw (p.u.), a potência mecânica da
máquina síncrona Pm (p.u.), e a abertura do distribuidor é representada pela abertura do
gate como mostra a Figura 3.5.
Figura 3.5: Representação da turbina hidráulica
3.4.4 Sistema de excitação
A maior parte dos geradores síncronos de médio porte, utilizados em sistemas
elétricos industriais, possui um sistema de excitação automático. Este sistema é
responsável por controlar a tensão contínua aplicada ao enrolamento de campo do
gerador síncrono, ajustando desta forma, a tensão terminal ou a potência reativa injetada
ou consumida pelo gerador. O sistema também apresenta a função de proteção,
assegurando a operação do gerador dentro dos limites de sua capacidade.
Para efeitos de simulação, foi utilizado o modelo do sistema de excitação do gerador
síncrono disponível no Matlab/SimPowerSistems, mostrado na figura 3.6. Este modelo
de excitação em corrente contínua, é descrito em [20], sem a função de saturação. Os
elementos básicos que formam o sistema de excitação são o regulador de tensão e a
excitatriz.

45
Figura 3.6: Sistema de excitação como controle da tensão terminal.
A excitatriz é representada pela função de transferência que relaciona a tensão de
excitação 𝐸𝑓 e a saída do regulador 𝑉𝑓𝑑 :
1fd
f e e
V
E K sT
(3.3)
Os parâmetros que são ajustados no sistema de excitação do gerador síncrono são:
constante de tempo do filtro passa baixas, ganho do regulador e constante de tempo da
excitatriz, redução de ganho transitório, ganho do filtro de amortecimento, limites de
saída do regulador e ganho.
Os valores iniciais da tensão terminal (𝑉𝑡0 em pu) e da tensão de campo (𝑉𝑓0 em pu),
quando configurados corretamente, permitem iniciar a simulação em regime
estacionário.
A tensão inicial, normalmente deve ter o valor de 1 pu. Os valores de 𝑉𝑡0 e 𝑉𝑓0 são
atualizados automaticamente por meio do aplicativo de fluxo de carga do Matlab que
contém o bloco Powergui.
Quando um gerador síncrono opera em paralelo com um sistema elétrico interligado,
o sistema de excitação é programado para manter o fator de potência do gerador
constante ou a potência reativa fornecida ou recebida constante. A amplitude da tensão é
controlada pelos equipamentos das concessionárias de energia elétrica. Já para um
gerador alimentando cargas isoladas da rede elétrica, o sistema de excitação é
responsável por manter a tensão terminal dentro da faixa tolerável. A análise do modo
de controle do sistema de excitação de um gerador síncrono é mostrada em [23].

46
A figura 3.7 representa o gerador síncrono com o sistema de controle composto pelo
sistema de excitatriz e controle de velocidade.
Figura 3.7: Representação do sistema de controle do gerador síncrono
implementado.
3.5 Modelagem da carga do motor de indução trifásico
Para a simulação do sistema elétrico alimentando uma carga conectada ao motor de
indução trifásico utilizou-se uma expressão matemática da referência [24], na qual o
bloco da expressão modifica a variável de entrada (‘u’), em função do bloco dessa
expressão matemática estabelecida. No caso do diagrama da figura 3.8, o bloco
relaciona o torque mecânico (torque de carga) com a velocidade do eixo do motor.
Considerando-se que a carga é do tipo bomba hidráulica, então o torque mecânico (T) é
proporcional ao quadrado da velocidade angular do motor (𝜔)
𝑇 = 𝐾𝜔𝑚2 (3.4)
O torque mecânico do motor pode ser obtido da seguinte forma:
𝑇 =𝑃𝑚
𝜔𝑚 (3.5)
T – torque mecânico [N.m]

47
Pm – potência mecânica [W]
𝜔𝑚 – velocidade angular do rotor [rad/seg]
K – constante de proporcionalidade
Considerando que a velocidade do rotor é de 187,02 rad/seg, com base nas equações
3.4 e 3.5, obtém-se Tn= 8973,97 [N.m] com K=0,2566 sendo K chamada constante
mecânica do motor, igual a 0,2566.
Figura. 3.8: Motor de indução trifásico com carga.
48
Capítulo 4
Cenários e simulações
4.1 Introdução
Nesta seção mostram-se resultados que foram obtidos em diversos testes realizados
no sistema elétrico da figura 3.1, com e sem controle dos motores de indução trifásicos
de grande porte, para se verificar os comportamentos próprios de uma rede elétrica
industrial com a entrada de grandes blocos de cargas bem como, a operação da geração
interna do sistema industrial. Todos os valores de correntes elétricas são dados pelo
valor de fase do sistema elétrico. As tensões são dadas pelos valores de linha e as
potências são trifásicas. Em todas as simulações realizadas, os motores de indução
trifásicos alimentam carga do tipo bomba conectadas a eles.
No sistema completo, com todas as cargas funcionando, sem a entrada dos geradores
internos, a potência necessária para o funcionamento é fornecida pelo sistema elétrico
de distribuição elétrico que opera como um barramento swing.
O sistema elétrico de distribuição deve fornecer um valor mínimo para poder suprir a
demanda das cargas e, desta maneira, conseguir um adequado funcionamento do
sistema de energia elétrica.
Nesta seção são analisados os seguintes cenários ou casos:
Caso I: Motores de indução com partida direta.
Caso II: Motores de indução acionados através de conversores eletrônicos de potência.
Caso III: Sistema com entrada de geradores internos.
Caso IV: Sistema com entrada de geradores internos e acionamento de conversores
eletrônicos.

49
4.2 Cenário I: Motores de indução com partida direta (sem
conversores)
Teste: Partida com carga de quatro motores simultaneamente.
Neste cenário será estudado o comportamento do sistema elétrico industrial da figura
3.1 sem a utilização dos conversores eletrônicos para a alimentação dos motores de
indução trifásicos.
A simulação é feita com a partida dos quatro motores de indução com suas respetivas
cargas simultaneamente no tempo igual a t= 2 segundos, obtendo-se os seguintes
resultados para análise:
A corrente entregue pela subestação (figura 4.1) tem um valor inicial de 226A,
quando são ativados os quatro motores de indução trifásicos (t= 2 segundos). Ela
aumenta até chegar a um valor de 412A, para finalmente se estabelecer em um valor de
202,71A (valor eficaz) quando os motores alcançam o estado de operação em regime
permanente.
Figura 4.1: Corrente entregue ao sistema pela subestação.
A potência ativa entregue pela subestação tem o comportamento descrito na figura
4.2 onde há um pico de potência correspondente ao tempo de ativação dos quatro
motores de indução trifásicos. A partir do instante de tempo t= 13 segundos a potência
ativa entra em regime permanente de funcionamento.
0 2 4 6 8 10 12 14 16-600
-400
-200
0
200
400
600
800
tempo (seg)
co
rre
nte
(A
)
50
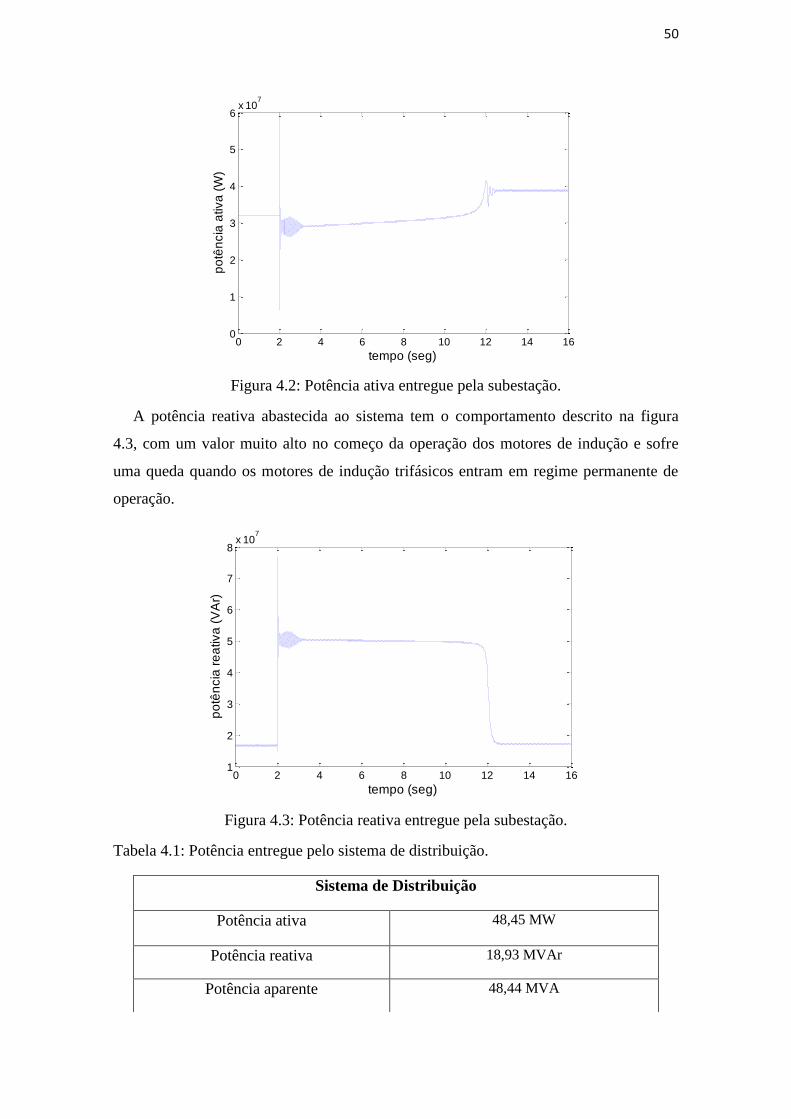
Figura 4.2: Potência ativa entregue pela subestação.
A potência reativa abastecida ao sistema tem o comportamento descrito na figura
4.3, com um valor muito alto no começo da operação dos motores de indução e sofre
uma queda quando os motores de indução trifásicos entram em regime permanente de
operação.
Figura 4.3: Potência reativa entregue pela subestação.
Tabela 4.1: Potência entregue pelo sistema de distribuição.
0 2 4 6 8 10 12 14 160
1
2
3
4
5
6x 10
7
tempo (seg)
po
tên
cia
ativa
(W
)
0 2 4 6 8 10 12 14 161
2
3
4
5
6
7
8x 10
7
tempo (seg)
po
tên
cia
re
ativa
(V
Ar)
Sistema de Distribuição
Potência ativa 48,45 MW
Potência reativa 18,93 MVAr
Potência aparente 48,44 MVA

51
Para saber como a entrada em operação dos quatro motores de indução trifásicos
afetam o sistema, analisa-se o comportamento das correntes e tensões no ponto de
acoplamento comum e nos barramentos alimentadores dos motores.
Na figura 4.4 é representada a tensão no ponto de acoplamento comum, observa-se
que há uma queda de 15,29kV para 11,5kV quando os quatro motores de indução
entram em funcionamento. No instante de tempo t= 12 segundos, aproximadamente, os
motores entram em regime permanente de operação com um valor final de tensão de
15,12kV.
Figura 4.4: Tensão no ponto de acoplamento comum.
A corrente no ponto de acoplamento comum dos motores de indução trifásicos tem
o comportamento descrito na figura 4.5. No instante de partida dos quatro motores
(tempo= 2 segundos) a corrente é de aproximadamente cinco vezes seu valor nominal.
Quando os motores atingem seu estado de regime permanente, em t= 12 segundos, a
corrente fica em um patamar de 454,8A.
0 2 4 6 8 10 12 14 16-2
-1.5
-1
-0.5
0
0.5
1
1.5
2x 10
4
tempo (seg)
ten
sã
o (
v)

52
Figura 4.5: Corrente no ponto de acoplamento comum.
No barramento alimentador dos motores de indução trifásicos obtiveram-se os
seguintes resultados. Na figura 4.6 pode-se ver que a tensão no barramento alimentador
do primeiro bloco de motores sofre uma queda de 800V aproximadamente quando os
motores de indução trifásicos são ativados, no entanto, após o transitório o valor da
tensão é aproximadamente o valor inicial.
Figura 4.6: Tensão no barramento alimentador dos motores de indução trifásicos.
A figura 4.7 mostra o comportamento da corrente no barramento que alimenta dois
motores de indução trifásicos. Como se pode ver tem-se um valor muito alto durante a
operação transitória das máquinas que dura aproximadamente 10 segundos, até chegar
ao estado estável na qual a corrente diminui seu valor.
0 2 4 6 8 10 12 14 16-6000
-5000
-4000
-3000
-2000
-1000
0
1000
2000
3000
4000
tempo (seg)
co
rre
nte
(A
)

53
Figura 4.7: Corrente no barramento alimentador dos motores de indução trifásicos.
Uma parte importante da análise são as grandezas dos motores de indução trifásicos,
já que as máquinas de indução são as principais cargas dentro do sistema sob analise. A
seguir mostram-se as principais grandezas dos motores de indução trifásicos simulados.
A figura 4.8 representa o torque eletromagnético de um dos motores. Como se pode
ver na figura, no instante de ativação da máquina há um transitório devido à ligação do
motor de grande porte, observa-se outro transitório menor para depois atingir o regime
permanente de operação em aproximadamente 12 segundos.
Figura 4.8: Torque eletromagnético do motor de indução trifásico número um.
A velocidade dos quatro motores de indução trifásicos são as mesmas. Mostra-se, na
figura 4.9, o comportamento da velocidade de um dos motores ativados, chegando a se
estabilizar em t= 12 segundos. Isto ocorre devido ao fato de se tratar de máquinas
elétricas de grande porte e de alta inércia de rotor [6].
0 2 4 6 8 10 12 14 16-12000
-10000
-8000
-6000
-4000
-2000
0
2000
4000
6000
8000
tempo (seg)
co
rre
nte
(A
)
0 2 4 6 8 10 12 14 16-1.5
-1
-0.5
0
0.5
1
1.5
2x 10
4
tempo (seg)
Te
m (
N*m
)
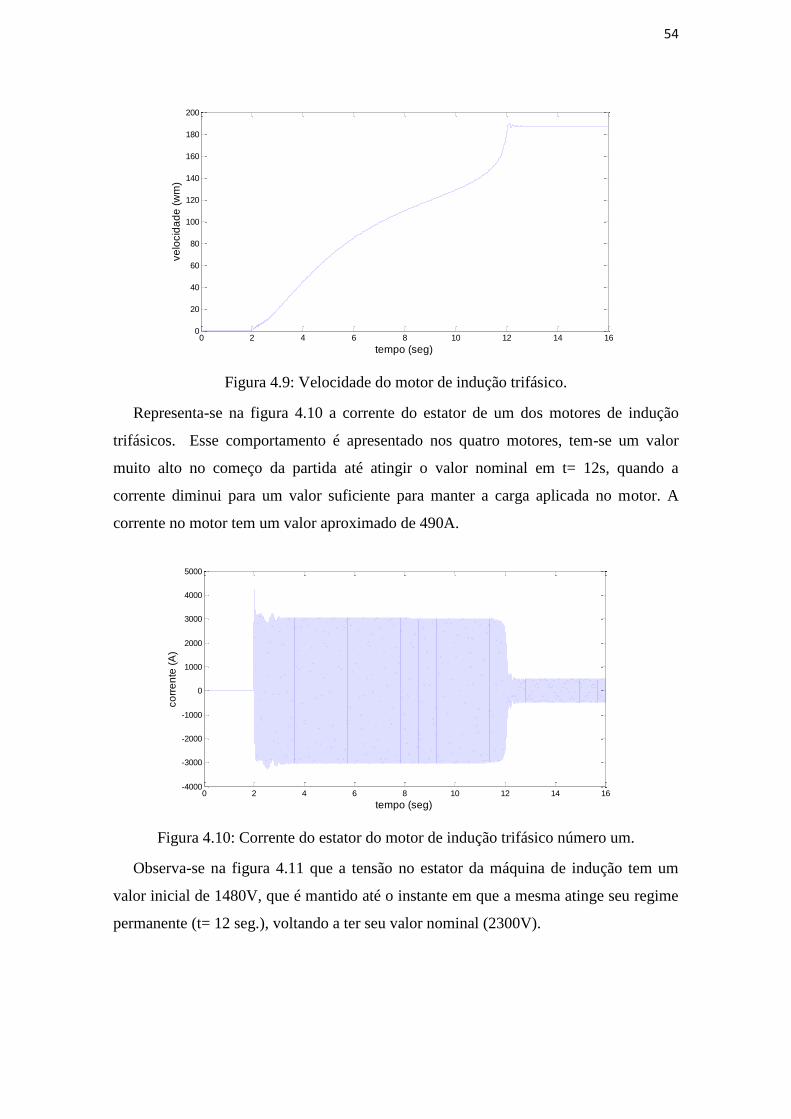
54
Figura 4.9: Velocidade do motor de indução trifásico.
Representa-se na figura 4.10 a corrente do estator de um dos motores de indução
trifásicos. Esse comportamento é apresentado nos quatro motores, tem-se um valor
muito alto no começo da partida até atingir o valor nominal em t= 12s, quando a
corrente diminui para um valor suficiente para manter a carga aplicada no motor. A
corrente no motor tem um valor aproximado de 490A.
Figura 4.10: Corrente do estator do motor de indução trifásico número um.
Observa-se na figura 4.11 que a tensão no estator da máquina de indução tem um
valor inicial de 1480V, que é mantido até o instante em que a mesma atinge seu regime
permanente (t= 12 seg.), voltando a ter seu valor nominal (2300V).
0 2 4 6 8 10 12 14 160
20
40
60
80
100
120
140
160
180
200
tempo (seg)
ve
locid
ad
e (
wm
)
0 2 4 6 8 10 12 14 16-4000
-3000
-2000
-1000
0
1000
2000
3000
4000
5000
tempo (seg)
co
rre
nte
(A
)

55
Figura 4.11: Tensão no estator do motor de indução trifásico número um.
De acordo com as pesquisas desenvolvidas por [1] e [5], sistemas formados por
cargas do tipo motores de indução, tendem a ter um alto consumo de energia reativa o
que pode acarretar em diversos problemas no funcionamento da rede. Na tabela 4.2
mostra-se o consumo de potência ativa e reativa de um dos motores de indução
trifásicos simulado. Cabe mencionar que todos os motores de indução ativados nos
testes têm as mesmas características mecânicas e elétricas.
Tabela 4.2: Potências do motor de indução trifásico em regime permanente.
4.3 Cenário II: Motores de indução acionados através de
conversores.
Nesta seção os motores de indução trifásicos são acionados por meio de conversores
estáticos de potência, constituídos por retificador trifásico não controlado e inversor
trifásico de dois níveis, modulado por meio de vetores espaciais. Pretende-se analisar as
possíveis diferenças entre o funcionamento com o sistema de controle para acionar os
0 2 4 6 8 10 12 14 16-2500
-2000
-1500
-1000
-500
0
500
1000
1500
2000
2500
tempo (seg)
ten
sã
o (
v)
MIT
Potência ativa 1,70MW
Potência reativa 0,90MVAr

56
motores de indução trifásicos e os casos simulados anteriormente sem estes
conversores.
Teste: Partida dos quatro motores simultaneamente com carga nominal.
A simulação é feita com a partida dos quatro motores de indução trifásicos
simultaneamente no tempo igual a t= 2 segundos. Os motores são controlados utilizando
a estratégia de controle direto de torque com modulação por vetores espaciais (CDT-
MVE). Obtendo-se os seguintes resultados para análise:
Como se pode ver na figura 4.12 a corrente na barra alimentadora do sistema tem um
comportamento diferente daquele do caso anterior, com um pico de corrente de
aproximadamente cinco vezes o valor nominal quando os motores de indução trifásicos
entram em operação.
Figura 4.12: Corrente no barramento alimentador do sistema elétrico.
Na figura 4.13 mostra-se a potência ativa entregue pela subestação. Comparando
com a forma de onda da potência ativa na simulação anterior, observa-se que o pico de
potência é maior quando os motores são acionados porém a duração do transitório é
menor.
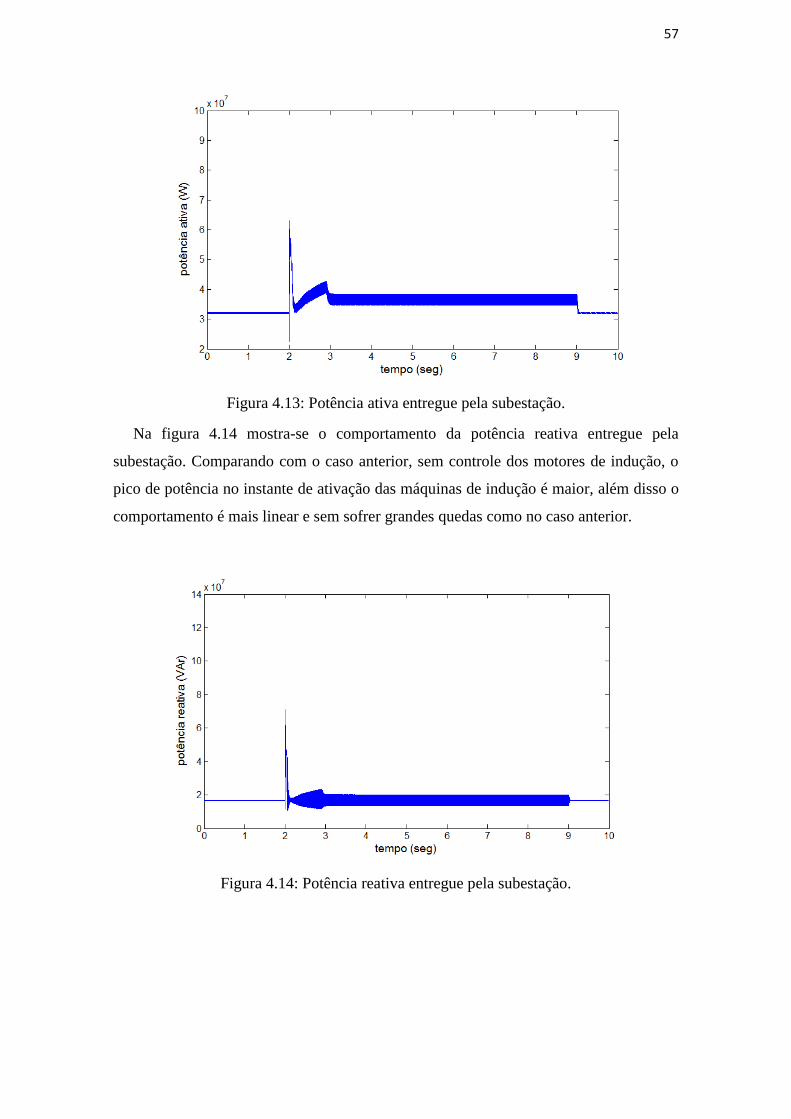
57
Figura 4.13: Potência ativa entregue pela subestação.
Na figura 4.14 mostra-se o comportamento da potência reativa entregue pela
subestação. Comparando com o caso anterior, sem controle dos motores de indução, o
pico de potência no instante de ativação das máquinas de indução é maior, além disso o
comportamento é mais linear e sem sofrer grandes quedas como no caso anterior.
Figura 4.14: Potência reativa entregue pela subestação.

58
Tabela 4.3: Potência entregue ao sistema elétrico.
A figura 4.15 representa a tensão no ponto de acoplamento comum dos motores de
indução trifásicos com a rede elétrica industrial. Pode-se ver que não existe uma
variação muito significativa no seu comportamento.
Figura 4.15: Tensão no ponto de acoplamento comum.
No ponto de acoplamento comum o comportamento da corrente é como se indica na
figura 4.16, como se pode ver existe distorção da sua forma de onda.
O comportamento da corrente no barramento seguinte que é o alimentador de um dos
blocos conformados pelos motores de indução trifásicos (figura 4.18) também
apresenta distorção harmônica.
0 2 4 6 8 10-2
-1.5
-1
-0.5
0
0.5
1
1.5
2x 10
4
tempo (seg)
ten
sã
o (
V)
Sistema de Distribuição
Potência ativa 40,21 MW
Potência reativa 20,21 MVAr
Potência aparente 45 MVA

59
Figura 4.16: Corrente no ponto de acoplamento comum.
A tensão no barramento que alimenta o primeiro bloco de motores de indução (figura
4.17) sofre uma pequena queda ao entrarem em operação as máquinas.
Figura 4.17: Tensão no barramento alimentador dos motores de indução trifásicos.
2 2.2 2.4 2.6 2.8 3 3.2
-4000
-2000
0
2000
4000
6000
tempo (seg)
co
rre
nte
(A
)
0 2 4 6 8 10-4000
-3000
-2000
-1000
0
1000
2000
3000
4000
tempo (seg)
ten
sã
o (
V)

60
A corrente no barramento alimentador dos motores de indução trifásicos (figura
4.18) apresenta sua forma de onda com interferência harmônica, como se pode ver a
seguir.
Figura 4.18: Corrente no barramento de alimentação dos motores de indução trifásicos.
Utiliza-se a transformada rápida de Fourier (FFT) para traçar o espectro do sinal. Na
figura 4.19 mostra-se os componentes harmônicos presentes no sinal de corrente do
barramento de acoplamento comum, nessa figura, observa-se a amplitude em frequência
da componente fundamental (60 Hz) e de outras componentes harmônicas.
2 2.2 2.4 2.6 2.8 3 3.2-1
-0.5
0
0.5
1
x 104
tempo (seg)
co
rre
nte
(A
)

61
Figura 4.19: Espectro em frequência da corrente no ponto de acoplamento comum.
Como se pode ver na figura 4.19 a corrente neste ponto tem componentes
harmônicas, sendo a maior a componente de quinta ordem.
A tensão no ponto de acoplamento comum também apresenta componentes
harmônicas como se pode ver na figura 4.20.
Figura 4.20: Espectro em frequência da tensão no ponto de acoplamento comum.
Continuando com a análise das componentes espectrais das correntes e das tensões
nos barramentos do sistema elétrico industrial, tem-se na figura 4.21 as frequências
harmônicas da corrente no barramento que alimenta os motores de indução trifásicos.
0 500 1000 15000
100
200
300
400
500
600
700
X: 60
Y: 639.5
Frequência (Hz)
Ma
gn
itu
de
Magnitude do espectro em frequência
X: 300
Y: 135
X: 420
Y: 35.51X: 660
Y: 24.62
0 500 1000 15000
5000
10000
15000
X: 60
Y: 1.485e+04
Frequência (Hz)
Ma
gn
itu
de
Magnitude do espectro em frequência
X: 300
Y: 815.8 X: 660
Y: 324.1
X: 420
Y: 303.8
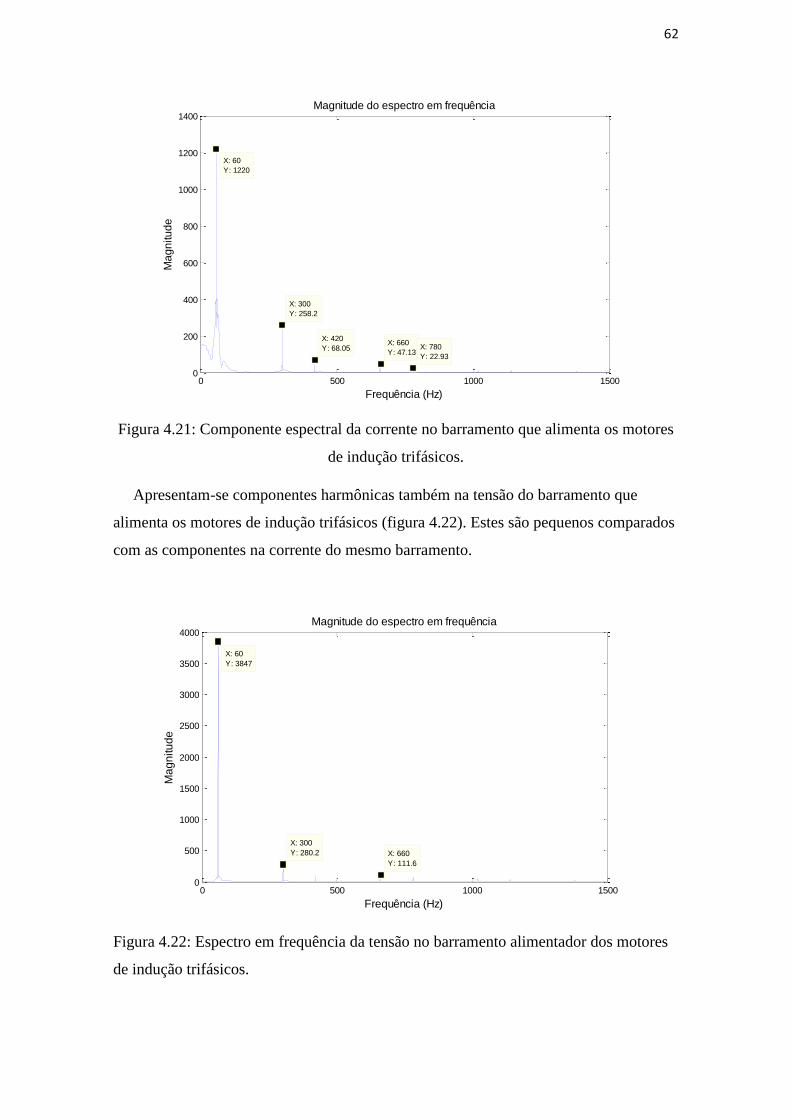
62
Figura 4.21: Componente espectral da corrente no barramento que alimenta os motores
de indução trifásicos.
Apresentam-se componentes harmônicas também na tensão do barramento que
alimenta os motores de indução trifásicos (figura 4.22). Estes são pequenos comparados
com as componentes na corrente do mesmo barramento.
Figura 4.22: Espectro em frequência da tensão no barramento alimentador dos motores
de indução trifásicos.
0 500 1000 15000
200
400
600
800
1000
1200
1400
X: 60
Y: 1220
Frequência (Hz)
Ma
gn
itu
de
Magnitude do espectro em frequência
X: 300
Y: 258.2
X: 420
Y: 68.05X: 660
Y: 47.13X: 780
Y: 22.93
0 500 1000 15000
500
1000
1500
2000
2500
3000
3500
4000
X: 60
Y: 3847
Frequência (Hz)
Ma
gn
itu
de
Magnitude do espectro em frequência
X: 300
Y: 280.2 X: 660
Y: 111.6
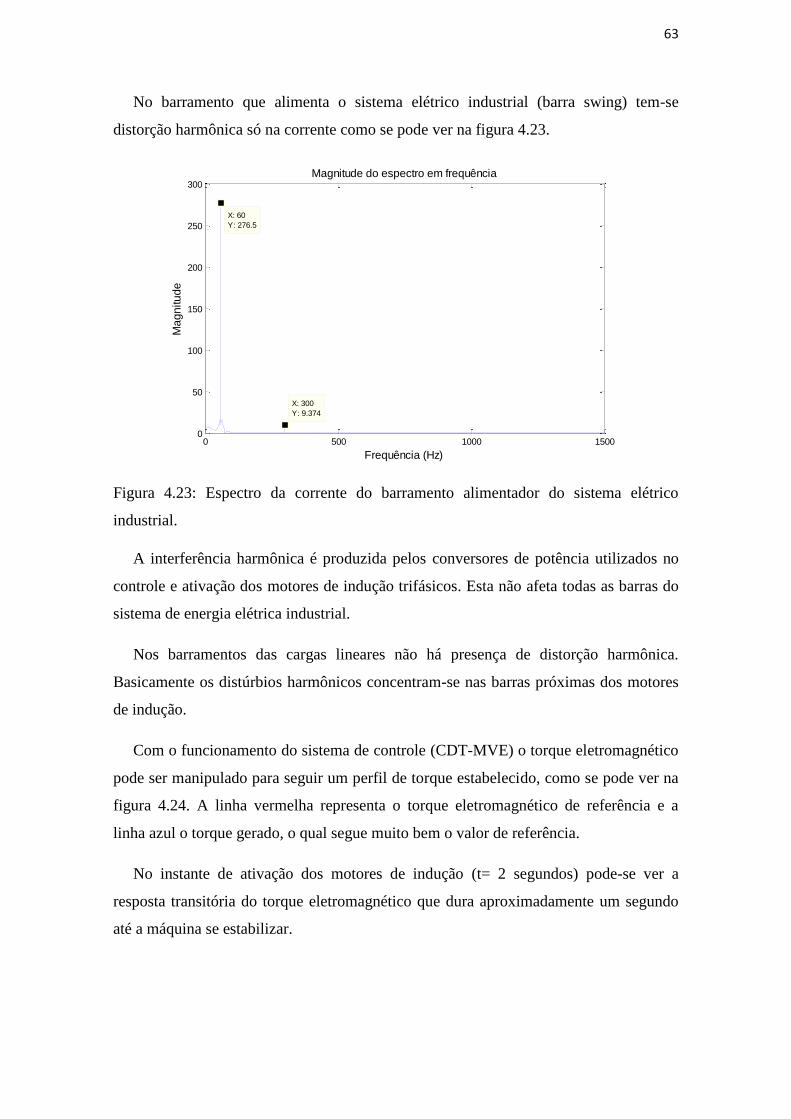
63
No barramento que alimenta o sistema elétrico industrial (barra swing) tem-se
distorção harmônica só na corrente como se pode ver na figura 4.23.
Figura 4.23: Espectro da corrente do barramento alimentador do sistema elétrico
industrial.
A interferência harmônica é produzida pelos conversores de potência utilizados no
controle e ativação dos motores de indução trifásicos. Esta não afeta todas as barras do
sistema de energia elétrica industrial.
Nos barramentos das cargas lineares não há presença de distorção harmônica.
Basicamente os distúrbios harmônicos concentram-se nas barras próximas dos motores
de indução.
Com o funcionamento do sistema de controle (CDT-MVE) o torque eletromagnético
pode ser manipulado para seguir um perfil de torque estabelecido, como se pode ver na
figura 4.24. A linha vermelha representa o torque eletromagnético de referência e a
linha azul o torque gerado, o qual segue muito bem o valor de referência.
No instante de ativação dos motores de indução (t= 2 segundos) pode-se ver a
resposta transitória do torque eletromagnético que dura aproximadamente um segundo
até a máquina se estabilizar.
0 500 1000 15000
50
100
150
200
250
300
X: 60
Y: 276.5
Frequência (Hz)
Ma
gn
itu
de
Magnitude do espectro em frequência
X: 300
Y: 9.374
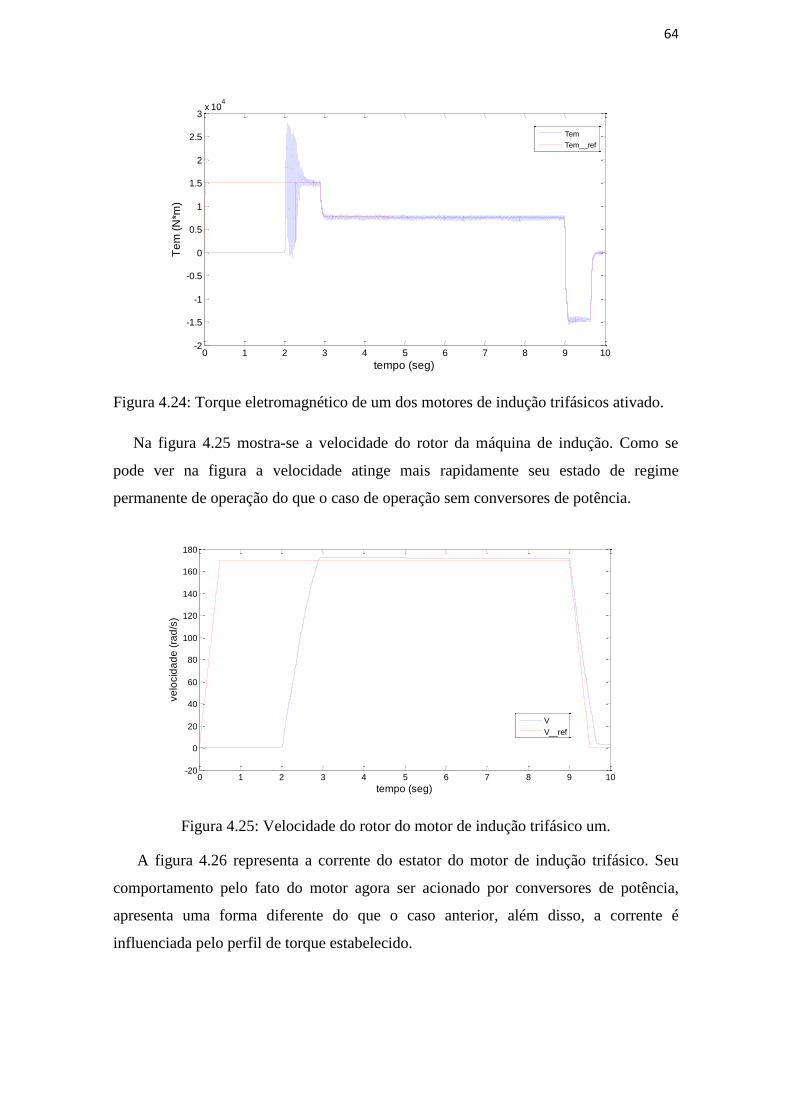
64
Figura 4.24: Torque eletromagnético de um dos motores de indução trifásicos ativado.
Na figura 4.25 mostra-se a velocidade do rotor da máquina de indução. Como se
pode ver na figura a velocidade atinge mais rapidamente seu estado de regime
permanente de operação do que o caso de operação sem conversores de potência.
Figura 4.25: Velocidade do rotor do motor de indução trifásico um.
A figura 4.26 representa a corrente do estator do motor de indução trifásico. Seu
comportamento pelo fato do motor agora ser acionado por conversores de potência,
apresenta uma forma diferente do que o caso anterior, além disso, a corrente é
influenciada pelo perfil de torque estabelecido.
0 1 2 3 4 5 6 7 8 9 10-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
3x 10
4
tempo (seg)
Te
m (
N*m
)
Tem
Tem__ref
0 1 2 3 4 5 6 7 8 9 10-20
0
20
40
60
80
100
120
140
160
180
tempo (seg)
ve
locid
ad
e (
rad
/s)
V
V__ref
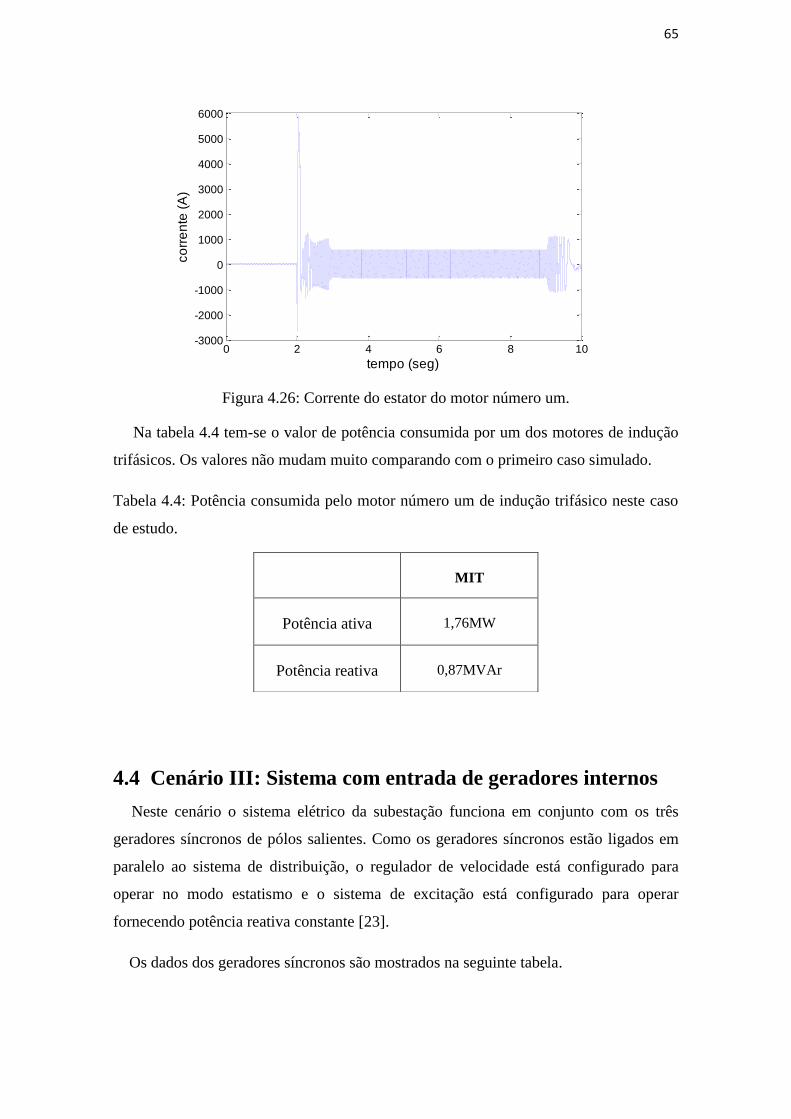
65
Figura 4.26: Corrente do estator do motor número um.
Na tabela 4.4 tem-se o valor de potência consumida por um dos motores de indução
trifásicos. Os valores não mudam muito comparando com o primeiro caso simulado.
Tabela 4.4: Potência consumida pelo motor número um de indução trifásico neste caso
de estudo.
4.4 Cenário III: Sistema com entrada de geradores internos
Neste cenário o sistema elétrico da subestação funciona em conjunto com os três
geradores síncronos de pólos salientes. Como os geradores síncronos estão ligados em
paralelo ao sistema de distribuição, o regulador de velocidade está configurado para
operar no modo estatismo e o sistema de excitação está configurado para operar
fornecendo potência reativa constante [23].
Os dados dos geradores síncronos são mostrados na seguinte tabela.
0 2 4 6 8 10-3000
-2000
-1000
0
1000
2000
3000
4000
5000
6000
tempo (seg)
co
rre
nte
(A
)
MIT
Potência ativa 1,76MW
Potência reativa 0,87MVAr

66
Tabela 4.5: Gerador síncrono trifásico de polos salientes.
Tabela 4.6: Potência fornecida pelos geradores distribuídos.
Geradores distribuídos
Potência ativa 15,42 MW
Potência reativa 9,81 MVAr
Potência aparente 18,27 MVA
Teste: Partida dos quatro motores de indução trifásicos simultaneamente com carga
nominal.
O instante em que ocorre a partida dos quatro motores de indução é t= 2 segundos.
Como se pode ver na figura 4.27, a corrente entregue pela subestação ao sistema
elétrico industrial é menor do que no caso anterior porque os geradores internos da
indústria estão ativados e suprindo uma parte da demanda.
Potência Nominal: 6250 kVA
Tensão de linha: 4160 V
Fator de potência: 0,85 (carga indutiva)
Número de pólos: 20
Velocidade nominal: 360 rpm
Momento de inércia do sistema combinado gerador turbina
J= 15355 kg.m2 , H= 7,11 s
Rs = 0,00636 pu Rkq = 0,05366 pu
XLS = 0,1235 pu Rfd = 0,00084 pu
Xmq = 0,5078 pu
Rkd = 0,03578 pu Xmd = 0,926 pu
Xlkq = 0,1678 pu Xlkd =0,1119 pu
Xlfd = 0,2691 pu

67
Figura 4.27: Corrente entregue pela subestação.
Os novos valores de potência ativa e reativa entregues pela subestação são os
descritos na tabela
Tabela 4.7: Valores de potência entregue pela subestação.
Observa-se nas figuras 4.28 e 4.29 as formas de onda da potência ativa e reativa
entregues pela subestação respectivamente. A forma de onda da potência ativa tem uma
diferença com relação aos casos simulados até agora. Isto é devido a que parte da
demanda de energia é suprida pelos geradores síncronos do sistema.
0 2 4 6 8 10 12 14-400
-300
-200
-100
0
100
200
300
400
500
tempo (seg)
co
rre
nte
(A
)
Sistema de Distribuição
Potência ativa 23,48 MW
Potência reativa 9,80 MVAr
Potência aparente 25,44 MVA

68
Figura 4.28: Potência ativa entregue pela subestação
Figura 4.29: Potência reativa entregue pela subestação.
Como se pode ver na figura 4.30, a corrente no barramento de acoplamento comum
dos motores de indução trifásicos, tem um comportamento diferente do que no caso sem
ativação da geração interna, mostra-se um valor maior de corrente entregue no estado
estável.
0 2 4 6 8 10 12 140
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5x 10
7
tempo (seg)
po
tên
cia
ativa
(W
)
0 2 4 6 8 10 12 140
1
2
3
4
5
6
7x 10
7
tempo (seg)
po
tên
cia
re
ativa
(V
Ar)

69
Figura 4.30: Corrente no barramento de acoplamento comum.
Cabe salientar que não se apresentam afundamentos de tensão neste caso de estudo.
As grandezas dos motores de indução trifásicos são mostradas a seguir. Na figura
4.31, tem-se o torque eletromagnético de um dos motores ativados. Comparando este
torque com o do caso em que não existe geração interna alimentando o sistema, o tempo
em que é atingido o ponto de operação de regime permanente é aproximadamente 6
segundos, pois o sistema conta agora com uma maior quantidade de reativos para suprir
as demandas das cargas.
Figura 4.31: Torque eletromagnético do motor de indução número um.
Pode-se verificar na figura 4.32, que representa a velocidade do rotor da maquina de
indução trifásica, esta atinge seu regime permanente de operação num tempo menor do
que no caso sem geração interna.
0 2 4 6 8 10 12 14-4000
-3000
-2000
-1000
0
1000
2000
3000
4000
tempo (seg)
co
rre
nte
(A
)
0 2 4 6 8 10 12 14-2
-1.5
-1
-0.5
0
0.5
1
1.5
2x 10
4
tempo (seg)
Te
m (
N*m
)

70
Figura 4.32: Velocidade do rotor do motor de indução número um.
As potências consumidas pelo motor neste teste são resumidas na tabela 4.14.
Tabela 4.8: Potência consumida pelo motor de indução trifásico número um.
4.5 Cenário IV: Sistema com entrada de geradores internos e
acionamento dos motores de indução através de conversores
de potência.
É realizada a simulação do sistema elétrico industrial, com a aplicação da estratégia
de controle (CDT-MVE) na ativação dos motores de indução e com a geração interna
além da alimentação da subestação.
Teste: Partida dos quatro motores de indução em simultâneo e em tensão nominal com
carga de valor nominal.
Neste teste os quatro motores de indução trifásicos são acionados no instante de
tempo de 2 segundos. Todos os motores estão sendo controlados com a estratégia de
0 2 4 6 8 10 12 140
50
100
150
200
tempo (seg)
ve
locid
ad
e (
rad
/s)
MIT
Potência ativa 1,72 MW
Potência reativa 0,64 MVAr
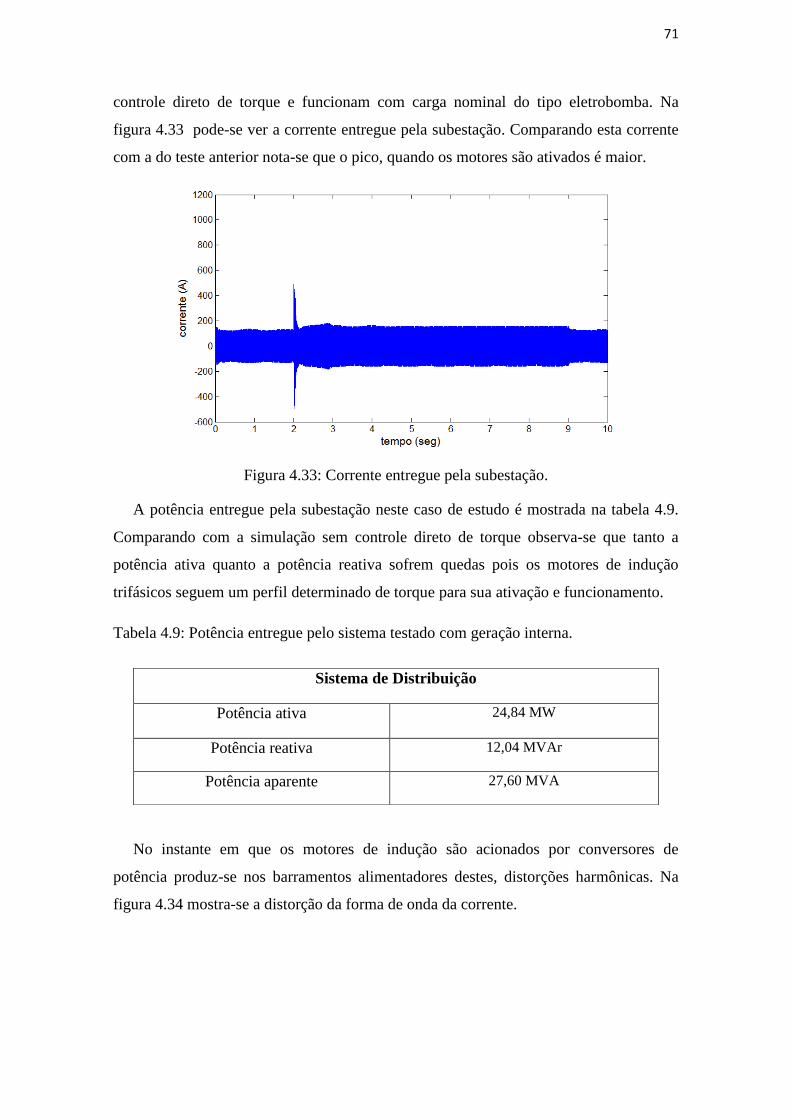
71
controle direto de torque e funcionam com carga nominal do tipo eletrobomba. Na
figura 4.33 pode-se ver a corrente entregue pela subestação. Comparando esta corrente
com a do teste anterior nota-se que o pico, quando os motores são ativados é maior.
Figura 4.33: Corrente entregue pela subestação.
A potência entregue pela subestação neste caso de estudo é mostrada na tabela 4.9.
Comparando com a simulação sem controle direto de torque observa-se que tanto a
potência ativa quanto a potência reativa sofrem quedas pois os motores de indução
trifásicos seguem um perfil determinado de torque para sua ativação e funcionamento.
Tabela 4.9: Potência entregue pelo sistema testado com geração interna.
No instante em que os motores de indução são acionados por conversores de
potência produz-se nos barramentos alimentadores destes, distorções harmônicas. Na
figura 4.34 mostra-se a distorção da forma de onda da corrente.
Sistema de Distribuição
Potência ativa 24,84 MW
Potência reativa 12,04 MVAr
Potência aparente 27,60 MVA

72
Figura 4.34: Corrente do barramento alimentador do primeiro bloco de motores de
indução.
A análise espectral da corrente do barramento alimentador do primeiro bloco de
motores de indução trifásicos (figura 4.35) indica que se têm componentes harmônicas,
sendo a mais significante a de quinta ordem.
Figura 4.35: Magnitude do espectro em frequência da corrente no barramento
alimentador do primeiro bloco de motores de indução trifásicos.
A tensão no barramento alimentador do primeiro bloco de motores de indução
trifásicos (figura 4.36), mostra que há uma queda muito pequena no seu valor quando os
1.5 1.6 1.7 1.8 1.9 2
-3000
-2000
-1000
0
1000
2000
3000
tempo (seg)
co
rre
nte
(A
)
0 500 1000 15000
200
400
600
800
1000
1200
X: 60
Y: 1150
Frequência (Hz)
Ma
gn
itu
de
Magnitude do espectro em frequência
X: 300
Y: 279.4
X: 420
Y: 89.15 X: 660
Y: 52.6 X: 1020
Y: 19.25

73
motores de indução entram em operação. Comparando com os casos anteriores esta
queda é menor pois o sistema é suprido pelos geradores síncronos, os quais injetam
reativos adicionais a rede elétrica industrial.
Figura 4.36: Tensão no barramento alimentador do primeiro bloco de motores de
indução trifásicos.
O espectro de frequência da tensão neste ponto é mostrada na figura 4.37, onde se
pode ver que há componentes harmônicas as quais serão analisadas no anexo c.
Figura 4.37: Espectro da tensão do barramento alimentador do primeiro bloco de
motores de indução trifásicos.
0 1 2 3 4 5 6 7 8 9 10-4000
-3000
-2000
-1000
0
1000
2000
3000
4000
tempo (seg)
ten
sã
o (
V)
0 500 1000 15000
500
1000
1500
2000
2500
3000
3500
4000
4500
X: 60
Y: 4125
Frequência (Hz)
Ma
gn
itu
de
Magnitude do espectro em frequência
X: 300
Y: 242.4 X: 660
Y: 100.1
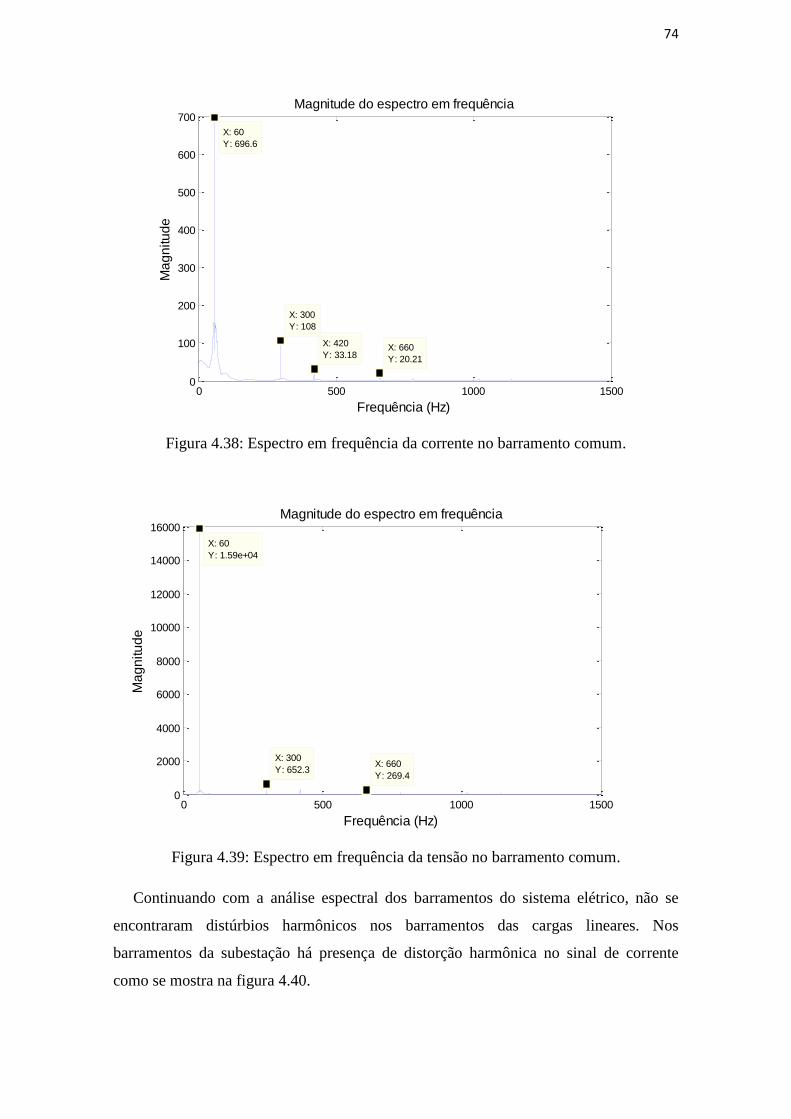
74
Figura 4.38: Espectro em frequência da corrente no barramento comum.
Figura 4.39: Espectro em frequência da tensão no barramento comum.
Continuando com a análise espectral dos barramentos do sistema elétrico, não se
encontraram distúrbios harmônicos nos barramentos das cargas lineares. Nos
barramentos da subestação há presença de distorção harmônica no sinal de corrente
como se mostra na figura 4.40.
0 500 1000 15000
100
200
300
400
500
600
700
X: 60
Y: 696.6
Frequência (Hz)
Ma
gn
itu
de
Magnitude do espectro em frequência
X: 300
Y: 108
X: 420
Y: 33.18X: 660
Y: 20.21
0 500 1000 15000
2000
4000
6000
8000
10000
12000
14000
16000
X: 60
Y: 1.59e+04
Frequência (Hz)
Ma
gn
itu
de
Magnitude do espectro em frequência
X: 300
Y: 652.3X: 660
Y: 269.4
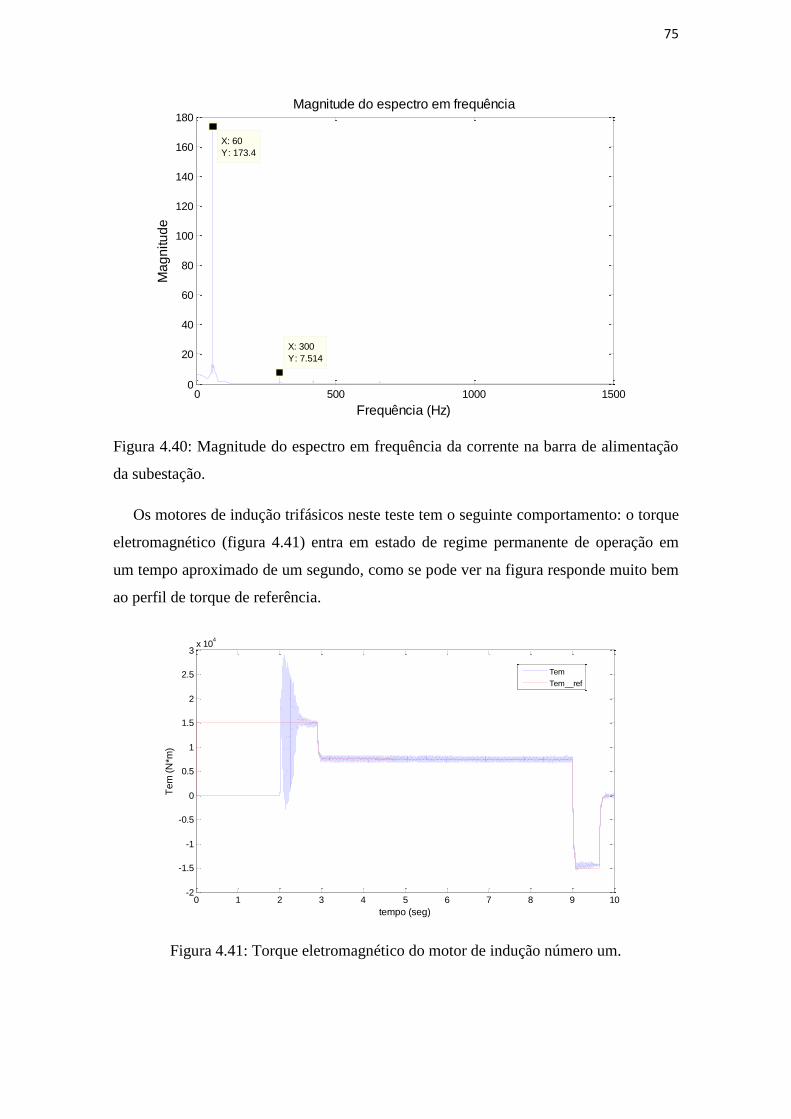
75
Figura 4.40: Magnitude do espectro em frequência da corrente na barra de alimentação
da subestação.
Os motores de indução trifásicos neste teste tem o seguinte comportamento: o torque
eletromagnético (figura 4.41) entra em estado de regime permanente de operação em
um tempo aproximado de um segundo, como se pode ver na figura responde muito bem
ao perfil de torque de referência.
Figura 4.41: Torque eletromagnético do motor de indução número um.
0 500 1000 15000
20
40
60
80
100
120
140
160
180
X: 60
Y: 173.4
Frequência (Hz)
Ma
gn
itu
de
Magnitude do espectro em frequência
X: 300
Y: 7.514
0 1 2 3 4 5 6 7 8 9 10-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
3x 10
4
tempo (seg)
Te
m (
N*m
)
Tem
Tem__ref

76
A velocidade do rotor de um dos motores de indução tem o comportamento descrito
na figura 4.42, sofrendo uma queda de velocidade para depois atingir sua velocidade
nominal.
Figura 4.42: Velocidade do rotor do motor de indução um.
As potências consumidas pelos motores de indução trifásicos neste novo teste são
resumidas na tabela 4.10 a seguir.
Tabela 4.10: Potência consumida pelo motor de indução trifásico número um.
0 1 2 3 4 5 6 7 8 9 10-20
0
20
40
60
80
100
120
140
160
180
tempo (seg)
ve
locid
ad
e (
rad
/s)
V
V__ref
MIT
Potência ativa 1,82 MW
Potência reativa 0,84 MVAr

77
Capítulo 5
Conclusões, trabalhos futuros
Este trabalho apresentou uma simulação do comportamento dinâmico de motores de
indução trifásicos de grande porte como cargas dentro de uma rede elétrica industrial.
Vários testes foram feitos, com e sem controle direto de torque dos motores de
indução e com e sem geração interna operando. O controle direto de torque por
modulação com vetores espaciais foi o utilizado já que demostrou adequado
funcionamento, resposta rápida e um aceitável nível de ondulações nos sinais.
No caso em que entra em funcionamento a geração interna, pode-se observar um
melhor funcionamento dos motores de indução trifásicos já que atingem mais
rápidamente o regime permanente de operação, comparado com o caso sem geração
distribuída, devido ao fato de existir um aumento da reserva de potência elétrica e, desta
forma, o sistema conta com uma maior quantidade de reativos para suprir as demandas
das cargas.
Quando o sistema foi simulado com o controle direto de torque, como método de
ativação das cargas conformadas pelos motores de indução trifásicos, a potência reativa
consumida pelos motores não apresenta uma diferença significativa comparado com o
caso sem controle dos motores, da mesma maneira a potência ativa. O sistema apresenta
um comportamento melhor quando opera o controle CDT sobre os motores de indução
e com a geração distribuída.
Quando os motores são acionados com inversores do tipo fonte de tensão, estes
geram frequências harmônicas na rede elétrica, as quais não afetam a todos os
barramentos do sistema elétrico industrial, porém com a análise da distorção harmônica
total tanto de corrente quanto de tensão nos barramentos, onde há frequências
harmônicas, os valores na sua maioria estão fora dos limites normais para uma adequada
operação (norma IEEE 519-1992). Isso mostra que a operação dos motores com
velocidade controlada com inversores introduz harmônicos na instalação elétrica
exigindo filtragem.

78
Com o controle direto de torque realizando a ativação dos motores de indução
trifásicos, estes atingem muito mais rapidamente o estado de regime permanente de
operação, já que tem diferença no transitório. Quando a partida é direta, o tempo para os
motores atingirem a velocidade e torque nominal é bem maior do que quando são
utilizados os conversores (estratégia CDT-MVE).
Mesmo com as vantagens que representam a operação dos geradores internos do
sistema industrial, estes geram um acréscimo nas frequências harmônicas de alguns
barramentos.
Para próximos trabalhos recomenda-se utilizar outros cenários de simulação do
sistema estudado como pode ser a perda de uma linha durante a operação e verificar sua
influência no comportamento do sistema elétrico industrial. Pode-se também analisar a
utilização de filtros para reduzir o conteúdo harmônico.
Estudos sobre a operação ótima do sistema podem ser realizados considerando os
custos da compra de energia elétrica, em comparação com a geração própria parcial ou
total.
79
Referências Bibliográficas
[1] Ricardo M. Henriques, Nelson Martins., ‘’ Impact of induction motor loads into
voltage stability margins of large systems’’, 14th
PSCC, Sevilla, 2002.
[2] Takahashi, I.; Ohmori, Y., "High-performance direct torque control of an induction
motor," Industry Applications, IEEE Transactions on , vol.25, no.2, pp.257,264,
Mar/Apr 1989.
[3] M. Depenbrock., ‘’Direct self control of inverted-fed induction mahcines ’’, IEEE
Trans. Power Electron. Vol 3, 1988.
[4] Van der Broeck, H.W.; Skudelny, H.-C; Stanke, G.V. Analysis and realization of a
pulsewidth modulator based on voltage space vector. IEEE transactions on Industry
Applications, 24(1):142-150, January 1988.
[5] Simone M. Sousa., ‘’ A Influencia das Características Torque x Velocidade da
Carga de Motores de Indução na Estabilidade de Tensão de Sistemas de Energia
Elétrica’’, Dissertação de mestrado, Campinas-SP, 2000.
[6] Dino Rogério C. Franklin., ‘’A influência das Características Torque x Velocidade
da Carga de Motores de Indução na Estabilidade de Tensão de Sistemas de Energia
Elétrica’’, Dissertação de doutorado, Campinas-SP, 1996.
[7] Krause, P. C., Wasynczuk, O. and Sudhoff, S. D. (1995), Analysis of Electric
Machinery, IEEE Press.
[8] Bim, E. Máquinas Elétricas e Acionamentos. 1ª. Edição. ed. [S.1.]: Campus, 2009.
[9] Chee-Mun Ong., Dynamic Simulation of Electric Machinery. 1st ed., New Jersey:
Prentice Hall Inc., 1998. 185 p.
[10] Manuel Vaz Guedes., O motor de indução trifásico, modelização . Universidade
do Porto, 1993.
[11] F. Blaschke, ‘’The Principle of Field Orientation as Applied to the New
Transvector Closed-loop Control System for Rotating-Field Machines”,Siemens Rev.,
39:217-220, 1972.
[12] Hasse, K.,‘’Control of cycloconverters for feeding of asynchronous
machines’’,Symposium, Control in Power Electronics and Electrical Drives, Dusseldorf
1977.
[13] Leonhard W., ‘’Field orientated control of variable speed alternator connected to
the constant frequency line’’, IEEE Conference Control in Power Systems, 1979.

80
[14] Takahashi, Isao; Noguchi, Toshihiko. A new Quick-Response and High-Efficiency
Control Strategy of an Induction Motor. IEEE Transactions on Industry Applications,
IA-22(5):820-827, September 1986.
[15] Kundur, P. Power System Stability and Control. 1st ed., New York: McGraw-Hill
Inc., 1994. 1176 p.
[16] Guiseppe S. Buja., ‘’ Direct Torque Control of PWM Inverter-Fed AC Motors—A
Survey’’, IEEE Transactions on Industrial Electronics, 2004.
[17] José L. Azcue Puma., ‘’Controle direto de torque do motor de indução trifásico
usando controlador fuzzy tipo PI autoajustável’’, Dissertação de mestrado, Campinas-
SP, 2010.
[18] Bin Wu., ‘’High power converters and AC drives’’ IEEE, published by John
Wiley & Sons, Inc., Hoboken, New Jersey. 2006.
[19] Richard H. McFadden., ‘’Stability considerations for industrial power system’’,
IEEE Transactions on industry applications, 1977.
[20] Vinicius de Freitas Gomes., ‘’Geração distribuída utilizando geradores síncronos
trifásicos’’, Dissertação de mestrado, Campinas-SP, 2011.
[21] IEEE Task Force. Load representation for dynamic performance analysis. IEEE
Transactions on Power Systems, v. 8, n. 2, p. 472-482, May 1993.
[22] IEEE Working Group on Prime Mover and Energy Supply Models for System
Dynamic Performance Studies, "Hydraulic Turbine and Turbine Control Models for
Dynamic Studies," IEEE Transactions on Power Systems, Vol. 7, No. 1, February,
1992, pp. 167-179.
[23] Fernanda C. Lima Trindade., ‘’Análise dos sistemas de proteção e controle de
instalações industriais com geradores síncronos durante operacao ilhada’’, Dissertação
de mestrado, Campinas-SP, 2009.
[24] Claudio Marzo Cavalcanti., “Modelagem computacional de métodos de partida de
um motor de indução trifásico no simulink/matlab”, II Congresso de pesquisa e
inovação da rede norte nordeste de educação tecnológica., João Pessoa, 2007.
[25] J.A. Pomilio., “Eletrônica de potência para geração, transmissão e distribuição de
energia elétrica’’, apostila de aula, Unicamp 2012.
[26] IEEE std. 519-1992, IEEE Recommended Practices and Requirements for
Harmonic Control in Electrical Power Systems, 1992.

81
Apêndice A
Transformação de coordenadas
Transformação de coordenadas d-q para 𝜶 − 𝜷
O vetor espacial da tensão do estator 𝑢𝑠 no sistema de referência alinhado com o
fluxo do estator escreve-se como:
𝑢𝑠 = |𝑢𝑠 |𝑒𝑗𝜃𝑢𝑠 = 𝑢𝑑𝑠 + 𝑗𝑢𝑞𝑠
Sendo que 𝜃𝑢𝑠, 𝜓𝑞𝑠 e 𝜓𝑑𝑠 são o ângulo e as componentes real e imaginaria do fluxo
magnético do estator representados no sistema de referência alinhado com o fluxo
magnético do estator.
O vetor espacial da tensão do estator 𝑢𝑠 pode ser expresso no sistema de referência
estacionário da seguinte forma:
𝑢𝑠′ = 𝑢𝑠 𝑒𝑗𝜃𝜓𝑠 = |𝑢𝑠 |𝑒𝑗(𝜃𝑢𝑠+ 𝜃𝜓𝑠) = 𝑢𝑑𝑠
′ + 𝑗𝑢𝑞𝑠′
Observa-se da equação anterior que é necessário somar os ângulos 𝜃𝑢𝑠 e 𝜃𝜓𝑠 que são
o ângulo do vetor espacial da tensão do estator em relação ao sistema alinhado com o
fluxo do estator e o ângulo do fluxo do estator em relação ao sistema estacionário
respectivamente.
Transformação ABC – 𝜶𝜷
Através da transformação de Clark [23] as correntes trifásicas A, B e C podem ser
representadas por suas componentes ortogonais equivalentes 𝛼 e 𝛽 como se mostra na
figura, isto é:
𝐼𝛼𝛽0 = [𝑇𝛼𝛽0]𝐼𝐴𝐵𝐶
Sendo [𝑇𝛼𝛽0] uma matriz de transformação. A componente ‘’0’’, denominada
componente de sequência zero, é adicionada à matriz para que a transformação seja bi-
direcional. A matriz é definida por:

82
[𝑇𝛼𝛽0] =2
3
[ 1 −
1
2−
1
2
0√3
2−
√3
21
2
1
2
1
2 ]
Para calcular as componentes trifásicas a partir das componentes ortogonais usa-se a
matriz inversa da matriz anterior, definida por:
[𝑇𝛼𝛽0]−1
=
[ 1 0 1
−1
2
√3
21
−1
2−
√3
21]
Sistema bifásico
A
C
B
α
β
iα
iβ is
Figura: Transformação de coordenadas.
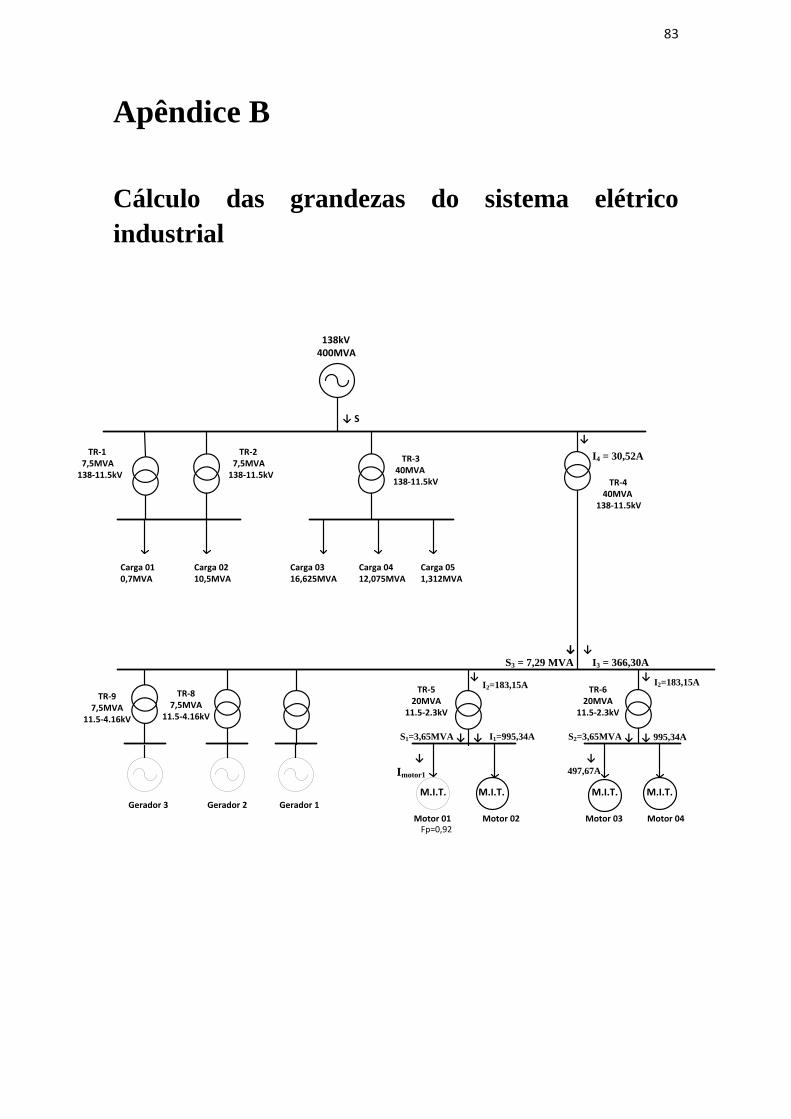
83
Apêndice B
Cálculo das grandezas do sistema elétrico
industrial
M.I.T. M.I.T. M.I.T. M.I.T.
138kV 400MVA
TR-4 40MVA 138-11.5kV
TR-1 7,5MVA138-11.5kV
TR-2 7,5MVA138-11.5kV
TR-3 40MVA138-11.5kV
Carga 01 0,7MVA
Carga 0210,5MVA
Carga 0316,625MVA
Carga 0412,075MVA
Carga 051,312MVA
Gerador 3 Gerador 2 Gerador 1
TR-97,5MVA
11.5-4.16kV
TR-87,5MVA
11.5-4.16kV
TR-520MVA
11.5-2.3kV
TR-620MVA
11.5-2.3kV
Motor 01 Motor 02 Motor 03 Motor 04
↓ S
I4 = 30,52A
↓
↓
I3 = 366,30A
↓
S3 = 7,29 MVA
I2=183,15A I2=183,15A
↓
↓ ↓
S1=3,65MVA ↓ ↓ ↓ S2=3,65MVAI1=995,34A ↓ 995,34A
Imotor1
↓ ↓
497,67A
Fp=0,92
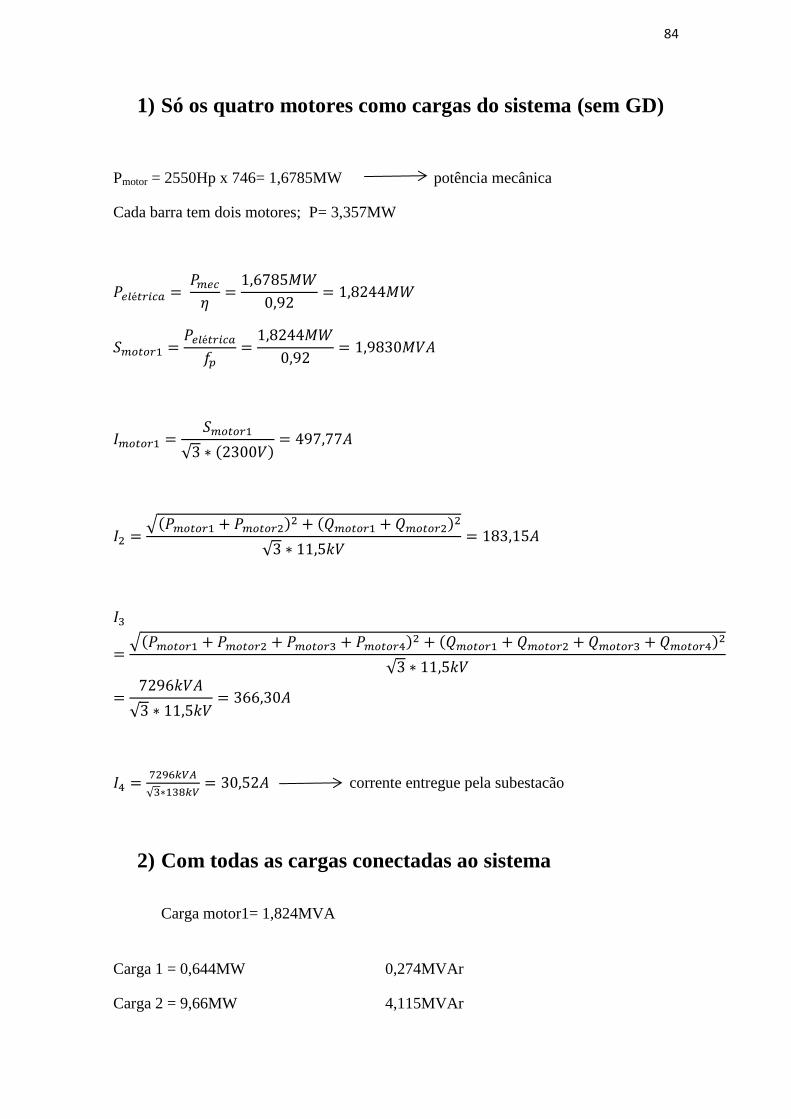
84
1) Só os quatro motores como cargas do sistema (sem GD)
Pmotor = 2550Hp x 746= 1,6785MW potência mecânica
Cada barra tem dois motores; P= 3,357MW
𝑃𝑒𝑙é𝑡𝑟𝑖𝑐𝑎 = 𝑃𝑚𝑒𝑐
𝜂=
1,6785𝑀𝑊
0,92= 1,8244𝑀𝑊
𝑆𝑚𝑜𝑡𝑜𝑟1 =𝑃𝑒𝑙é𝑡𝑟𝑖𝑐𝑎
𝑓𝑝=
1,8244𝑀𝑊
0,92= 1,9830𝑀𝑉𝐴
𝐼𝑚𝑜𝑡𝑜𝑟1 =𝑆𝑚𝑜𝑡𝑜𝑟1
√3 ∗ (2300𝑉)= 497,77𝐴
𝐼2 =√(𝑃𝑚𝑜𝑡𝑜𝑟1 + 𝑃𝑚𝑜𝑡𝑜𝑟2)2 + (𝑄𝑚𝑜𝑡𝑜𝑟1 + 𝑄𝑚𝑜𝑡𝑜𝑟2)2
√3 ∗ 11,5𝑘𝑉= 183,15𝐴
𝐼3
=√(𝑃𝑚𝑜𝑡𝑜𝑟1 + 𝑃𝑚𝑜𝑡𝑜𝑟2 + 𝑃𝑚𝑜𝑡𝑜𝑟3 + 𝑃𝑚𝑜𝑡𝑜𝑟4)2 + (𝑄𝑚𝑜𝑡𝑜𝑟1 + 𝑄𝑚𝑜𝑡𝑜𝑟2 + 𝑄𝑚𝑜𝑡𝑜𝑟3 + 𝑄𝑚𝑜𝑡𝑜𝑟4)2
√3 ∗ 11,5𝑘𝑉
=7296𝑘𝑉𝐴
√3 ∗ 11,5𝑘𝑉= 366,30𝐴
𝐼4 =7296𝑘𝑉𝐴
√3∗138𝑘𝑉= 30,52𝐴 corrente entregue pela subestacão
2) Com todas as cargas conectadas ao sistema
Carga motor1= 1,824MVA
Carga 1 = 0,644MW 0,274MVAr
Carga 2 = 9,66MW 4,115MVAr

85
Carga 3 = 15,29MW 6,51MVAr
Carga 4 = 11,10MW 4,73MVAr
Carga 5 = 1,20MW 0,514MVAr
Carga 6 = 1,678MW 0,715MVAr (motor1)
Carga 7 = 1,678MW 0,715MVAr (motor2)
Carga 8 = 1,678MW 0,715MVAr (motor3)
Carga 9 = 1,678MW 0,715MVAr (motor4)
Ptotal = 44,606MW Qtotal = 19,003MVAr
𝑆𝑡𝑜𝑡𝑎𝑙 = √𝑃𝑡𝑜𝑡𝑎𝑙2 + 𝑄𝑡𝑜𝑡𝑎𝑙
2 = √(44,606)2 + (19,003)2 = 48,48𝑀𝑉𝐴
𝐼𝑠𝑖𝑠𝑡𝑒𝑚𝑎 =48,48𝑀𝑉𝐴
√3∗138𝑘𝑉= 203,82𝐴 corrente entregue pela subestacão

86
Apêndice C
Cálculo da distorção harmônica total
Em cada figura correspondente ao espectro em frequência tem-se um conteúdo
harmônico com seus devidos coeficientes.
No caso de querer saber a distorção causada pela segunda harmônica faz-se a razão:
𝐻𝐷2 =𝑎2
𝑎1
onde, 𝑎2 é o coeficiente da segunda harmônica e 𝑎1 é o coeficiente da frequência
fundamental.
Como se deseja calcular a distorção harmônica total (THD) de cada sinal sob análise
faz-se a soma de todo o conteúdo harmônico do sinal de saída.
Logo, para o espectro:
𝑇𝐻𝐷 = √𝑎2
2 + 𝑎32 + 𝑎4
2 + ⋯+ 𝑎𝑁2
𝑎12 ∗ 100%
Onde, 𝑎2 , 𝑎3, 𝑎4, 𝑎𝑁 são os coeficientes do conteúdo harmônico e 𝑎1 é o coeficiente
da frequência fundamental.
O THD em tensão caracteriza a deformação da onda de tensão.
Valores de THDu medidos em uma instalação elétrica tem a seguinte descrição [26]:
Um valor de THDu inferior à 5% é considerado como normal. Algum
funcionamento errado não é temido.
Um valor de THDu compreendido entre 5 e 8% revela uma poluição harmônica
significativa. Qualquer funcionamento errado é possível.

87
Um valor de THDu superior a 8% revela uma poluição harmônica considerável.
Funcionamentos errados são prováveis. Uma analise aprofundada e a colocação de
dispositivos de atenuação são necessários.
O THD em corrente caracteriza a deformação da onda de corrente.
Valores de THDi medidos em uma instalação elétrica tem a seguinte descrição [26]:
Um valor de THDi inferior a 10% é considerado como normal. Não se apresentam
erros de funcionamento do sistema elétrico.
Um valor de THDi compreendido entre 10% e 50% revela uma poluição harmônica
significativa. Existe risco de aquecimento.
Um valor de THDi superior a 50% revela uma poluição harmônica considerável.
Erros de funcionamento são prováveis. Uma analise aprofundada e a colocação de
dispositivos de atenuação são necessários.
Calcula-se a distorção harmônica total para os casos onde existem componentes
espectrais;
𝑇𝐻𝐷𝑓𝑖𝑔 4.19 = √1352 + 35,512 + 24,622
639,52∗ 100% = 22,13%
𝑇𝐻𝐷𝑓𝑖𝑔 4.20 = √815,82 + 303,82 + 324,12
220522500∗ 100% = 6,24%
𝑇𝐻𝐷𝑓𝑖𝑔 4.21 = √258,22+68,052+47,132+22,932
12202 ∗ 100% = 22,29%
𝑇𝐻𝐷𝑓𝑖𝑔 4.22 = √280,22 + 111,62
38472∗ 100% = 7,83%
𝑇𝐻𝐷𝑓𝑖𝑔 4.23 = √9,3742
276,52∗ 100% = 3,37%
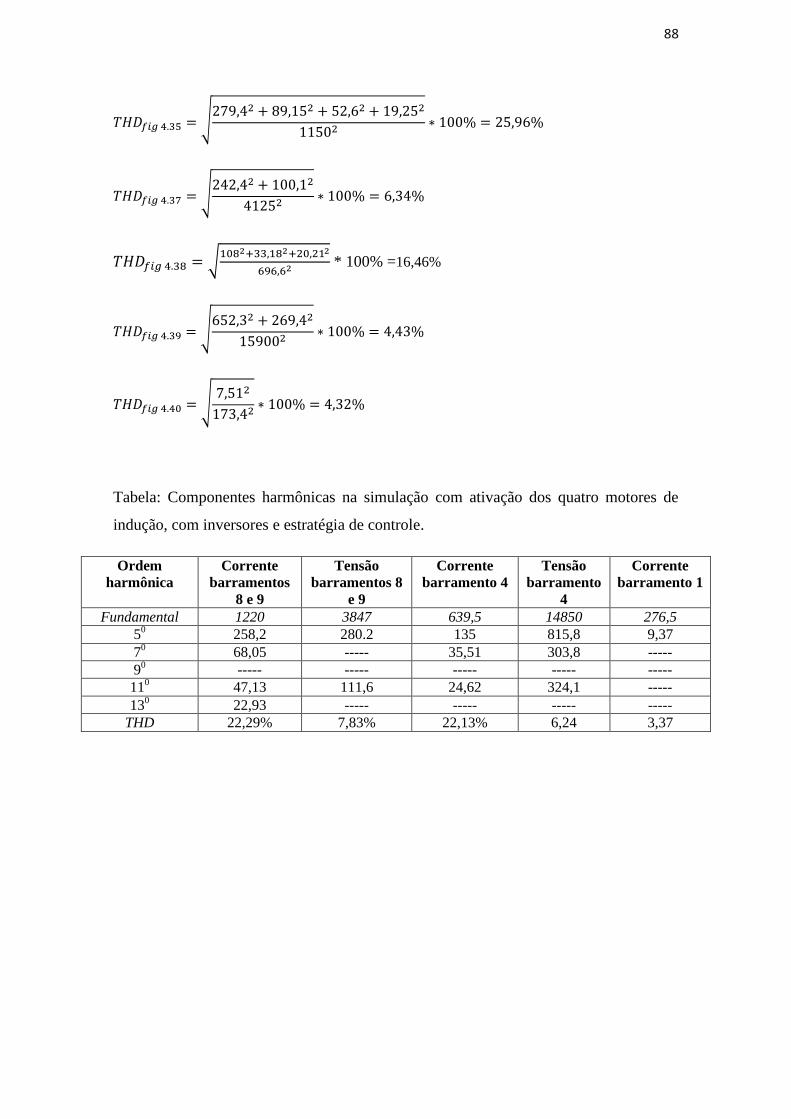
88
𝑇𝐻𝐷𝑓𝑖𝑔 4.35 = √279,42 + 89,152 + 52,62 + 19,252
11502∗ 100% = 25,96%
𝑇𝐻𝐷𝑓𝑖𝑔 4.37 = √242,42 + 100,12
41252∗ 100% = 6,34%
𝑇𝐻𝐷𝑓𝑖𝑔 4.38 = √1082+33,182+20,212
696,62 * 100% =16,46%
𝑇𝐻𝐷𝑓𝑖𝑔 4.39 = √652,32 + 269,42
159002∗ 100% = 4,43%
𝑇𝐻𝐷𝑓𝑖𝑔 4.40 = √7,512
173,42∗ 100% = 4,32%
Tabela: Componentes harmônicas na simulação com ativação dos quatro motores de
indução, com inversores e estratégia de controle.
Ordem
harmônica
Corrente
barramentos
8 e 9
Tensão
barramentos 8
e 9
Corrente
barramento 4
Tensão
barramento
4
Corrente
barramento 1
Fundamental 1220 3847 639,5 14850 276,5
50
258,2 280.2 135 815,8 9,37
70
68,05 ----- 35,51 303,8 -----
90
----- ----- ----- ----- -----
110
47,13 111,6 24,62 324,1 -----
130 22,93 ----- ----- ----- -----
THD 22,29% 7,83% 22,13% 6,24 3,37

89
Tabela: Componentes harmônicas na simulação com ativação dos quatro motores de
indução, com inversores e estratégia de controle e geração interna.
Ordem
harmônica
Corrente
barramentos 8
e 9
Tensão
barramentos
8 e 9
Corrente
barramento 4
Tensão
barramento
4
Corrente
barramento 1
Fundamental 1150 4125 696,6 15900 173,4
50
279,4 242,4 108 652,3 7,51
70
89,15 ----- 33,18 ----- -----
90
----- ----- ----- ----- -----
110
52,6 100,1 20,21 269,4 -----
130 ----- ----- ----- ----- -----
170
23,97 ----- ----- ----- -----
THD 25,96% 6,34% 16,46% 4,43% 4,32%
Recommended

















