Embed Size (px)
Citation preview

1/Cap.1Fevereiro .2008
CONTROLO:motivação e perspectiva histórica
©M
. Isa
bel R
ibei
ro, A
ntón
io P
asco
al
Instituto Superior Técnico- Controlo – 2007/2008
CONTROLO2º semestre – 2007/2008
Mestrado Integrado em Engenharia Electrotécnica e de Computadores (LEEC)
Departamento de Engenharia Electrotécnica e de Computadores (DEEC)
Transparências de apoio às aulas teóricas
Capítulo 1 – Introdução ao Controlo: Exemplos Motivadores
Maria Isabel RibeiroAntónio Pascoal
Revisão: Setembro de 2007
Todos os direitos reservadosEstas notas não podem ser usadas para fins distintos daqueles para que foram
elaboradas (leccionação no Instituto Superior Técnico) sem autorização dos autores

2/Cap.1Fevereiro .2008
CONTROLO:motivação e perspectiva histórica
©M
. Isa
bel R
ibei
ro, A
ntón
io P
asco
al
Instituto Superior Técnico- Controlo – 2007/2008
MOTIVAÇÃO
• Um conjunto de sub-sistemas (dispositivos electrónicos, sistemas de computação, actuadores, etc.) e um processo (instalação) que interactuam de modo a levar a saída desse processo a exibir um comportamento desejado.
O que é um SISTEMA DE CONTROLO?
Sistema de controlo
Entrada: estímulo Saída: resposta
Resposta desejada Resposta efectiva
• Os sistemas de controlo automático– Fazem parte integrante da sociedade
moderna (fruto da intervenção do homem),
– Estão presentes, desde sempre, na natureza,
– São importantes em inúmeras aplicações, em áreas muito diversas.

3/Cap.1Fevereiro .2008
CONTROLO:motivação e perspectiva histórica
©M
. Isa
bel R
ibei
ro, A
ntón
io P
asco
al
Instituto Superior Técnico- Controlo – 2007/2008
MOTIVAÇÃO
O que é um SISTEMA DE CONTROLO?
Sistema de controlo
Entrada: estímulo Saída: resposta
Resposta desejada Resposta efectiva
• Controlo de posição de um elevador• Resposta desejada – indicação do piso para onde se
pretende ir• Resposta efectiva – variação da altura do elevador com o
tempo
Piso 0
• Requisitos• Pretende-se que não haja disnivelamento final• Quando o elevador pára, não deve ficar a oscilar em torno
da posição em que vai parar• O comportamento deve ser independente da carga (para
certos limites de carga)• A movimentação do elevador deve fazer-se “sem
solavancos”

4/Cap.1Fevereiro .2008
CONTROLO:motivação e perspectiva histórica
©M
. Isa
bel R
ibei
ro, A
ntón
io P
asco
al
Instituto Superior Técnico- Controlo – 2007/2008
MOTIVAÇÃO
O que é um SISTEMA DE CONTROLO?
Sistema de controlo
Entrada: estímulo Saída: resposta
Resposta desejada Resposta efectiva
• Controlo de temperatura de uma sala• Resposta desejada – temperatura constante (p.e. igual a
22ºC)• Resposta efectiva – temperatura da sala
• Porque varia a temperatura da sala ?• variação da temperatura ambiente• Abertura de portas e/ou janelas• Número de pessoas na sala• Sistema de aquecimento/arrefecimento central
FornalhaVálvula de gás
Termostato SalaTemperatura desejada
Temperatura da sala
Perdas decalor
∑
Retroacção (feedback)
• Que aconteceria se a retroacção fosse interrompida?

5/Cap.1Fevereiro .2008
CONTROLO:motivação e perspectiva histórica
©M
. Isa
bel R
ibei
ro, A
ntón
io P
asco
al
Instituto Superior Técnico- Controlo – 2007/2008
Um moderno sistema de controlo• avalia as condições de operação do sistema• compara-as com o comportamento desejado• calcula acções correctivas com base num modelo do sistema• actua no sistema para implementar essas acções correctivas
Sistema
Sensoriamento / PercepçãoComputaçãoActuação
Sistema SensoresActuadores
Computador A/DD/A
Relógio
Saída
Entrada de referência
RuídoPerturbações externasRuído
Controlador
Processo
Sistema de controlo implementado em computador
Processo: Sistema físico, actuacção, sensores
Controlador: microprocessador (onde é executado um algoritmo) + A/D + D/A
• Modificar o comportamento do sistema (processo)• Fazer com que a saída do sistema (processo) siga uma entrada de referência• E simultaneamente, o sistema controlado:
• Deve ser estável• Ter boa rejeição de perturbações• Responder rapidamente a alterações nos set-points
Objectivos do controlo

6/Cap.1Fevereiro .2008
CONTROLO:motivação e perspectiva histórica
©M
. Isa
bel R
ibei
ro, A
ntón
io P
asco
al
Instituto Superior Técnico- Controlo – 2007/2008
EXEMPLOS
• Variáveis que são controladas– Pressão sanguínea– Concentração de açúcar no sangue– Dióxido de carbono– Diâmetro das pupilas– ....
Mecanismos biológicos de controlono Corpo Humano
• Problema: seguimento de objectos– Os olhos ou (olhos+cabeça) ou
(olhos+cabeça+tronco) são capazes de seguir um objecto móvel por forma a mantê-lo dentro do campo de visão
Fóveacentral
Nervoóptico
Retina
Lente
Eixoóptico
Luzincidente
Pupila
IrisCórnea
Zona de maior acuidade visual
eixo óptico
Retina Musculos oculares
Sistema de visão
θocular θobjectoΔθ
Δθ =θocular - θobjecto

7/Cap.1Fevereiro .2008
CONTROLO:motivação e perspectiva histórica
©M
. Isa
bel R
ibei
ro, A
ntón
io P
asco
al
Instituto Superior Técnico- Controlo – 2007/2008
EXEMPLOS
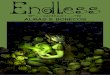
• Criação de implantes que permitam a administração automática de medicamentos em doentes
– insulina em diabéticos
Sistema de controlo em biomedicina
Figuras retiradas deModern Control Systems, R.Dorf, R.Bishop
controlo em cadeia aberta
valores para um não diabético
controlo em cadeia fechada
• modelo matemático da relação causa-efeito na administração de um fármaco
• características do paciente

8/Cap.1Fevereiro .2008
CONTROLO:motivação e perspectiva histórica
©M
. Isa
bel R
ibei
ro, A
ntón
io P
asco
al
Instituto Superior Técnico- Controlo – 2007/2008
EXEMPLOS
• Variáveis que são controladas– temperatura
• Aplicações– Sistemas de aquecimento central em edifícios– Processos industriais (químicos)
Sistemas térmicos
Sistema de controlo de temperatura
Entrada: temperatura desejada, Τref
Saída: temperatura real, Τ
água fria água quente
OBJECTIVO: manter constante a temperatura da água no tanque
sistema de controlo de temperatura
Duas estratégias de controlo:
• colocar as torneiras em posições pré-determinadas – CADEIA ABERTA
• ir actuando nas torneiras em função da avaliação da temperatura da água no tanque – CADEIA FECHADA

9/Cap.1Fevereiro .2008
CONTROLO:motivação e perspectiva histórica
©M
. Isa
bel R
ibei
ro, A
ntón
io P
asco
al
Instituto Superior Técnico- Controlo – 2007/2008
EXEMPLOSSistema de controlo de temperatura
• As torneiras da água fria e da água quente são colocadas em posições pré-determinadas
• p.e., resultante da experiência de um operador
• Nem a saída (temperatura da água no tanque) nem outras variáveis do sistema (p.e., temperatura da água nos canos, temperatura ambiente) são usadas.
Que sucede se houver PERTURBAÇÕES às condições normais de funcionamento?
Que sucede se:
• temperatura da água nas canalizações diferente da habitual?
• A temperatura ambiente for mais baixa do que usualmente ?
• O depósito de água quente ficar sem água ?
PERTURBAÇÕES o sinal de saída não tem o valor desejado
CADEIA ABERTA
O êxito deste tipo de controlo EM CADEIA ABERTA depende de:• Calibração do elemento de controlo
• Periodicidade da ocorrência das acções de controlo (experiência do operador)
• Ausência de perturbações

10/Cap.1Fevereiro .2008
CONTROLO:motivação e perspectiva histórica
©M
. Isa
bel R
ibei
ro, A
ntón
io P
asco
al
Instituto Superior Técnico- Controlo – 2007/2008
EXEMPLOSSistema de controlo de temperatura
• Existe retroacção• quer a saída, quer outras variáveis do sistema afectam a actuação do sistema
• Tipo de retroacção• Manual
• Automática
CADEIA FECHADA
água fria
água quenteengrenagensmotorAmpl.
engrenagensmotorAmpl.
controlador
Controlo automático em cadeia fechada
termopares
ΤrefΤ
• Sensores – termopares – tensões eléctricas proporcionais às temperaturas lidas
• Controlador – compara a temperatura de referência, Tref, com uma função das temperaturas lidas. A saída é uma tensão eléctrica que vai actuar o sistema ampl+motor+engrenagens
• Amplificador e Motor – actuação na posição angular das torneiras
• Engrenagens – o motor é inerentemente um dispositivo de alta velocidade e as torneiras devem ser actuadas lentamente.

11/Cap.1Fevereiro .2008
CONTROLO:motivação e perspectiva histórica
©M
. Isa
bel R
ibei
ro, A
ntón
io P
asco
al
Instituto Superior Técnico- Controlo – 2007/2008
EXEMPLOSSistema de controlo de temperatura
CADEIA FECHADA• a introdução da realimentação reduz os efeitos de perturbações
externas ou de variação de parâmetros (incerteza no modelo do sistema físico)
mas ....
• pode conduzir a situações de instabilidade
água fria
água quente
engrenagensmotorAmpl.
controladorΤref
Τ
T muito baixo
Exemplo: posição fixa na torneira de água fria
Aumentar caudal de água quente
Há atraso na propagação da água quente nas canalizações
T baixa ainda mais Aumentar ainda mais caudal de água quente
Quando finalmente a água quente atinge a torneira, vem muito quente
T > Τref Diminuir o caudal de água quente.......
T < Τref
Ganho elevado + atraso instabilidade

12/Cap.1Fevereiro .2008
CONTROLO:motivação e perspectiva histórica
©M
. Isa
bel R
ibei
ro, A
ntón
io P
asco
al
Instituto Superior Técnico- Controlo – 2007/2008
EXEMPLOS
• Variáveis que são controladas– Posição (linear, angular)– Velocidade (linear, angular)– Força– Binário
• Aplicações– Sistemas de transporte
• Elevadores• Automóveis• Robots móveis (terrestres, submarinos)• Aviões
– International Space Station (ISS)– Linhas de montagem em fábricas– Sistemas de comunicações
• Antenas– Dispositivos eléctricos e electrónicos
• Leitores de CD• Máquinas fotográficas• Discos de PCs
Sistemas mecânicos

13/Cap.1Fevereiro .2008
CONTROLO:motivação e perspectiva histórica
©M
. Isa
bel R
ibei
ro, A
ntón
io P
asco
al
Instituto Superior Técnico- Controlo – 2007/2008
EXEMPLOSControlo de um manipulador com duas articulações
Perturbações (binários aplicados)
Sistema a controlar
Sistema mecânico+
motores
u1 (volt)
u2 (volt)
Variações imprevisíveis
θ1 (rad)
θ2 (rad)
u1. u2. – sinais eléctricos
θ1, θ2 – posições das articulações
Sistema a controlar
u1
u2
Variações imprevisíveis
θ1 (rad)
θ2 (rad)
sensores
Controlador
θ1 ref
θ2ref
S1
S2
Sinais a seguir
ruídon
ESTRATÉGIA DE CONTROLO
SISTEMA DE CONTROLO
Controlo de posição do efector terminal

14/Cap.1Fevereiro .2008
CONTROLO:motivação e perspectiva histórica
©M
. Isa
bel R
ibei
ro, A
ntón
io P
asco
al
Instituto Superior Técnico- Controlo – 2007/2008
EXEMPLOS
ANDROS robot terrestre para o desmantelamento de bombasEmpresa: REMOTEC
Robot de pintura
Robot de soldadura na indústria automóvel

15/Cap.1Fevereiro .2008
CONTROLO:motivação e perspectiva histórica
©M
. Isa
bel R
ibei
ro, A
ntón
io P
asco
al
Instituto Superior Técnico- Controlo – 2007/2008
EXEMPLOS
ManipuladorSoporcel – Figueira da Foz
Mãos robóticas

16/Cap.1Fevereiro .2008
CONTROLO:motivação e perspectiva histórica
©M
. Isa
bel R
ibei
ro, A
ntón
io P
asco
al
Instituto Superior Técnico- Controlo – 2006/2007
EXEMPLOS
• Condução de um automóvel por um operador humano
Sistemas mecânicos de posição
condutorSistema de controlo de direcção
automóvel
Sensores visuais e tácteis
+
_
Erro
Direcção de movimento desejada
Direcção de movimento actual
• E se não houvesse retroacção ?
condutorSistema de controlo de direcção
automóvel
Direcção de movimento desejada
Direcção de movimento actual
• Que aconteceria se:• Houvesse um obstáculo inesperado ?• Uma das rodas passasse por cima de um obstáculo ?• Um dos pneus ficasse com menos ar ?• O piso tivesse óleo ?
perturbações
Ruidos nos sensores
perturbações

17/Cap.1Fevereiro .2008
CONTROLO:motivação e perspectiva histórica
©M
. Isa
bel R
ibei
ro, A
ntón
io P
asco
al
Instituto Superior Técnico- Controlo – 2007/2008
EXEMPLOS
• Condução de um Veículo Guiado Automaticamente (AGV) que deve seguir AUTOMATICAMENTE uma trajectória definida no chão
• Aplicações– Transporte automático de materiais ou de produtos
acabados em unidades industriais
Sistemas mecânicos de posição
Trajectória efectiva
Trajectória desejada
Sensores de posição
Controlador Motor de direcção AGV
Implementado no computador de bordo do AGV
Sinal de erro
Tem características que variam no tempo:• peso da carga• envelhecimento do material• carga das baterias
+ _
Retroacção
Incertezas no modelo matemático do AGV
PerturbaçõesPiso irregular
ruído dos sensores

18/Cap.1Fevereiro .2008
CONTROLO:motivação e perspectiva histórica
©M
. Isa
bel R
ibei
ro, A
ntón
io P
asco
al
Instituto Superior Técnico- Controlo – 2007/2008
EXEMPLOSSistemas mecânicos de posição
Laser Guided VehicleSoporcel – Fábrica de Papel
NASA Mars rover
• Trajectória desejada• Trajectória real• O controlo é implementado para que a
trajectória real se aproxime da trajectória desejada, independentemente das perturbações e incertezas

20/Cap.1Fevereiro .2008
CONTROLO:motivação e perspectiva histórica
©M
. Isa
bel R
ibei
ro, A
ntón
io P
asco
al
Instituto Superior Técnico- Controlo – 2007/2008
EXEMPLOSRemotely Operated Vehicle (ROV)
Controlo de posição – referido a O – canal acústicoControlo de atitute – referido a O’ – giroscópios e câmaras
ROVMotores
de propulsão
giroscópio
Canal acústico
Controlador
d (correntes)
n1
n2
Incertezas no modelo
trajectória
posição
orientação

21/Cap.1Fevereiro .2008
CONTROLO:motivação e perspectiva histórica
©M
. Isa
bel R
ibei
ro, A
ntón
io P
asco
al
Instituto Superior Técnico- Controlo – 2007/2008
EXEMPLOSVeículo submarino autónomo
• Movimento no plano horizontal
orientação desejada
orientação real
Objectivo do controlo: levar o erro de orientação do veículo para zero

22/Cap.1Fevereiro .2008
CONTROLO:motivação e perspectiva histórica
©M
. Isa
bel R
ibei
ro, A
ntón
io P
asco
al
Instituto Superior Técnico- Controlo – 2007/2008
EXEMPLOS
• Movimento no plano horizontalSistema de controlo de orientação
Veículo submarino autónomo
COMPUTADOR+
ALGORITMODE CONTROLO
Veículo+
SENSOR DEORIENTAÇÃO
Valordesejado
Lemevertical
• O modelo do veículo não traduz exactamente o comportamento do veículo. Há incertezas.
• O veículo está sujeito a perturbações (p.e., correntes)
• Os sinais dos sensores são ruidosos

23/Cap.1Fevereiro .2008
CONTROLO:motivação e perspectiva histórica
©M
. Isa
bel R
ibei
ro, A
ntón
io P
asco
al
Instituto Superior Técnico- Controlo – 2007/2008
EXEMPLOS
Veículos marinhos
Catamaran Autónomo
Vai-vém Submarino
DELFIM - ISR, Lisboa

24/Cap.1Fevereiro .2008
CONTROLO:motivação e perspectiva histórica
©M
. Isa
bel R
ibei
ro, A
ntón
io P
asco
al
Instituto Superior Técnico- Controlo – 2007/2008
EXEMPLOS
Veículos Aéreos
Helicóptero Autónomo
X-Treme - ISR, Lisboa

25/Cap.1Fevereiro .2008
CONTROLO:motivação e perspectiva histórica
©M
. Isa
bel R
ibei
ro, A
ntón
io P
asco
al
Instituto Superior Técnico- Controlo – 2006/2007
EXEMPLOS
Sistema de controlo de temperaturaForno de vidro
Fábrica da Barbosa & Almeida

26/Cap.1Fevereiro .2008
CONTROLO:motivação e perspectiva histórica
©M
. Isa
bel R
ibei
ro, A
ntón
io P
asco
al
Instituto Superior Técnico- Controlo – 2007/2008
EXEMPLOS
Sistema de controlo de temperaturaForno de vidro
Fábrica da Barbosa & Almeida
sensor
FORNOQueimador
controlador
Variações na composição do fuel, temperatura do ar, etc
envelhecimento
ºC
ºC no chão
controlador implementado em computador

27/Cap.1Fevereiro .2008
CONTROLO:motivação e perspectiva histórica
©M
. Isa
bel R
ibei
ro, A
ntón
io P
asco
al
Instituto Superior Técnico- Controlo – 2007/2008
EXEMPLOSSistemas de controlo industriaisMáquina de papelFábrica de Papel – Soporcel, Figueira da Foz
Matéria prima à entrada: pasta de papelSaída: produção (ao ritmo de 72Km/h) de uma folha de papel, em rolo, com uma largura de 8.6m e uma espessura de 0.1mm
Comprimento: 161m
Pasta de papel
Bobines de papel
Algumas das variáveis que é preciso controlar
TemperaturaVelocidadeEspessuraHumidade.....
Detalhes do processo de fabrico na máquina de papel

28/Cap.1Fevereiro .2008
CONTROLO:motivação e perspectiva histórica
©M
. Isa
bel R
ibei
ro, A
ntón
io P
asco
al
Instituto Superior Técnico- Controlo – 2007/2008
EXEMPLOS
• Controlo do azimute de uma antena
Sistemas Mecânicos de Posição
• Eliminação do efeito das perturbações (p.e., vento)• Amplificação de potência – resultado da existência do
amplificador de potência
ruído
perturbações

29/Cap.1Fevereiro .2008
CONTROLO:motivação e perspectiva histórica
©M
. Isa
bel R
ibei
ro, A
ntón
io P
asco
al
Instituto Superior Técnico- Controlo – 2007/2008
EXEMPLOS
• Controlo do azimute de uma antena– Quando a saída é igual à entrada, o erro é nulo e o
motor não roda.– Quanto maior o erro, maior a tensão à entrada do
motor, e maior a velocidade de rotação do motor.• Consequências de aumentar o ganho do
amplificador– Varia o valor da saída em regime estacionário ?
• Não. Varia apenas a resposta transitória.• O erro em regime estacionário mantém-se nulo.

31/Cap.1Fevereiro .2008
CONTROLO:motivação e perspectiva histórica
©M
. Isa
bel R
ibei
ro, A
ntón
io P
asco
al
Instituto Superior Técnico- Controlo – 2007/2008
EXEMPLOS
ISS – International Space Station
Uma fase da assemblagem
Após a conclusão da assemblagem

32/Cap.1Fevereiro .2008
CONTROLO:motivação e perspectiva histórica
©M
. Isa
bel R
ibei
ro, A
ntón
io P
asco
al
Instituto Superior Técnico- Controlo – 2007/2008
OUTROS EXEMPLOS

33/Cap.1Fevereiro .2008
CONTROLO:motivação e perspectiva histórica
©M
. Isa
bel R
ibei
ro, A
ntón
io P
asco
al
Instituto Superior Técnico- Controlo – 2007/2008
SISTEMAS DE CONTROLO em CADEIA FECHADA
Transdutor de entrada Controlador Processo
++
++
Entrada de Referência Variável
Controlada
Perturbação Perturbação
Transdutor de saída ou
sensor
+_
ErroActuador
+
+
Nomenclatura Sinal de comando
Ruído nos sensores
Cadeia de retroacção

34/Cap.1Fevereiro .2008
CONTROLO:motivação e perspectiva histórica
©M
. Isa
bel R
ibei
ro, A
ntón
io P
asco
al
Instituto Superior Técnico- Controlo – 2007/2008
FASES NO PROJECTO DE CONTROLOSistema Físico
Modelo
Representação Matemática
Análise
Síntese/Projecto
modelação
• Modelação• encontrar as leis que regem o comportamento do sistema, a partir de
consideração de ordem físicapodem ser consideradas hipóteses simplificativas
• ao mesmo sistema físico podem corresponder modelos distintos
• Do Modelo para a Representação Matemática• Utilização das leis físicas na tradução matemática das hipóteses
simplificativas da modelação• Estimação dos parâmetros do modelo (p.e., por experimentação)• Ao mesmo modelo podem corresponder diversas representações
matemáticas
• Análise• Caracterização do comportamento do sistema
• resposta no termpo, resposta em frequência, estabilidade, ....• Síntese
• projecto de controladores para que a resposta do sistema satisfaça determinadas especificações