Embed Size (px)
Citation preview

ESTEIRA
IDENTIFICADORA
Técnico responsável: Matheus Miguel
CREA 70 025

2
ETEC Martin Luther King
Curso Técnico em Mecatrônica
Mecanismos
Mecatrônicos
Prof.: Marcos Vaskevicius

3
Índice Esquema mecânico: ................................................................................................................... 5
Dimensionamento do motor ...................................................................................................... 6
Dimensionamento das ECDR’s 1,2: ........................................................................................ 9
Dimensionamento das ECDR’s 3,4: ...................................................................................... 12
Diagrama das forças atuantes nas ECDR’s 1,2: ................................................................. 16
Definição das forças nas ECDR’s 1,2: .................................................................................. 16
Diagrama das forças atuantes nas ECDR’s 3,4: ................................................................. 19
Definição das forças nas ECDR’s 3,4: .................................................................................. 20
Dimensionamento dos rolamentos para o eixo I do redutor: ............................................. 22
Dimensionamento dos rolamentos para o eixo III do redutor: ........................................... 24

4
Projeto Mecânico

5
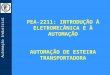
1) Esquema mecânico:
Onde:
M = Motor trifásico
P1 e P2 = Acoplamentos
A a J = Mancais
I, II, II e IV = Eixos (para suportarem as ECDR’s)
1 a 4 = ECDR’s
E = Esteira
R = Rolete motriz
Frol = Força tangencial no rolete
2) Valores adotados (pesquisa de campo):
D1 = 50 mm (Diâmetro ECDR 1)
D2 = 150 mm (Diâmetro ECDR 2)
D3 = 40 mm (Diâmetro ECDR 3)
D4 = 160 mm (Diâmetro ECDR 4)

6
Itot= 12
𝜇 = 0,5 (Cof. de atrito)
Rrol = 50 mm
nm = 900 RPM
nrol = 75 RPM
m1,2 = 2.50 mm
m3.4 = 2,50 mm
P = 170 g (por lata de atum) = 170 gf
N = 170 gf (por lata de atum)
N = 1,7 Kgf = 2 Kgf (para 10 latas)
Frequência = 60 Hz
3) Dimensionamento do motor a) Força aplicada no rolete:
Frol = μ . N
Onde:
μ = Coeficiente de atrito
N = Força normal sobre o rolete
Frol = 0,5 . 2 kgf
𝐅𝐫𝐨𝐥 = 𝟏 𝐊𝐠𝐟
b) Torque necessário para mover a carga:
Mtrol = Frol. Rrol
Onde:
Mtrol = Torque para mover a carga
Rrol = Raio do rolete
Mtrol = 1Kgf. 5 cm

7
Mtrol = 5Kgf . cm
c) Potência necessária para mover a carga:
Mtrol = 71.620 .N (CV)
n (RPM)
Onde:
N = Potência para mover a carga
n = Rotações do rolete
5 Kgf. cm = 71.620 .N (CV)
75 (RPM)
N (CV) = 75 RPM .5 Kgf. cm
71.620
𝐍 (𝐂𝐕) = 𝟎, 𝟎𝟎𝟓 𝐂𝐕
d) Rendimento global:
ŋg = (ŋECDR)n1. (ŋMancal)n2
Onde:
ŋg = Rendimento global
ŋECDR = Rendimento da ECDR (98%)
ŋMancal = Rendimento do Mancal (99%)
n1 = Número de pares de ECDR’s
n2 = Número de mancais
ŋg = (0,98)2 . (0,99)10
ŋg = (0,9604) . (0,9044)
ŋg = 0,869
ŋg = 87%
e) Potência mínima junto ao motor para mover a carga:

8

9
Nm =Nrol
ŋg
Onde:
Ng = Potência mínima para o motor
Nrol = Potência do rolete para mover a carga
Nm =0.005
0,869
Nm = 0,0057 CV
Nm = 0,25 CV (padronizado conf.catálogo WEG)
Classe de Proteção: IP 55
f) Número de pólos:
Np =7200
n
Np = Número de pólos
N = RPM do motor
Np =7200
900
Np = 8 pólos
4) Dimensionamento das ECDR’s 1,2:
Onde:
Hd1,2 = 1,25 . m = 1,25 . 2.50 mm = hd1,2 = 3,125 mm
Ha1,2 = m = ha1,2 = 2,50 mm
a) Número de dentes:
Z =D
m

10
Onde:
Z = Número de dentes
D = Diâmetro primitivo
m = Módulo
Z1 =50 mm
2,5 mm
Z1 = 20 dentes
Z2 = 60 dentes
Z2 = 60 dentes
b) Diâmetro externo:
De = D + (2 . ha)
Onde:
De = Diâmetro externo
D = Diâmetro interno
Ha = Adendum
De1 = 50 mm + ( 2 . 2,5 mm )
De1 = 50 mm + 5 mm
De1 = 55 mm
De2 = 150 mm + ( 2 . 2,5 mm)
De2 = 150 mm + 5 mm
De2 = 155 mm
c) Diâmetro interno
Di = D – ( 2 . hd )
Onde:
Di = Diâmetro interno

11
D = Diâmetro primitivo
hd = Dedendum
Di1 = 50 mm – (2 . 3,125 mm)
Di1 = 50 mm – 6,25 mm
Di1 = 43,75 mm
Di2 = 150 mm – (2 . 3,125 mm)
Di2 = 150 mm – 6,25 mm
Di2 = 143,75 mm
d) altura do dente:
H = hd + ha
Onde:
H = Altura do dente
hd = Dedendum
ha = Adendum
H1,2 = 3,125 mm + 2,50 mm
H1,2 = 5,625 mm
e) Largura do dente:
L = 6 .m
Onde:
L = Largura do dente
m = Módulo
L1,2 = 6 . 2,50 mm
L1,2 = 15,00 mm
f) Passo:
P = m .π

12
Onde:
P = Passo
m = Módulo
P1,2 = 2,5 mm . 3,14
P1,2 = 7,85 mm
g) Espessura do dente:
E = 0,49 . P
Onde:
E = Espessura do dente
P = Passo
E1,2 = 0,49 . 7,85 mm
E1,2 = 3,85 mm
h) Vão do dente:
V = 0,51 . P
Onde:
V = Vão do dente
P = Passo
V1,2 = 0,51 . 7,85 mm
V1,2 = 4,00 mm
5) Dimensionamento das ECDR’s 3,4:
Onde:
Ha3,4 = m = 2,50 mm
Hd3,4 = 1,25 .m = 1,25 . 2,50 mm = 3,125 mm

13
a) Número de dentes
Z =D
m
Onde:
Z = Número de dentes
D = Diâmetro primitivo
m = Módulo
Z3 = 40 mm
2,5 mm
Z3 = 16 dentes
Z4 =160 mm
2,5 mm
Z4 = 64 dentes
b) Diâmetro externo:
De = D + ( 2 . m)
Onde:
De = Diâmetro externo
D = Diâmetro primitivo
m = Módulo
De3 = 40 mm + (2 . 2,5 mm)
De3 = 40 mm + 5 mm
De3 = 45 mm
De4 = 160 mm + (2 . 2,5 mm)
De4 = 160 mm + 5 mm
De4 = 165 mm
c) Diâmetro interno
Di = D – (2 .hd)

14
Onde:
Di = Diâmetro interno
D = Diâmetro primitivo
hd = Dedendum
Di3 = 40 mm – (2 . 3,125 mm)
Di3 = 40 mm – 6,25 mm
Di3 = 33,75 mm
Di4 = 160 mm – (2 . 3,125 mm)
Di4 = 160 – 6,25 mm
Di4 = 153,75
d) Altura do dente:
H = hd + ha
Onde:
H = Altura do dente
hd = Dedendum
ha = Adendum
H3,4 = 3,125 mm + 2,50 mm
H3,4 = 5,625 mm
e) Largura do dente:
L = 6 .m
Onde:
L = Largura do dente
m = Módulo
L3,4 = 6 . 2,50 mm
L3,4 = 15,00 mm

15
f) Passo:
P = m .π
Onde:
P = Passo
m = Módulo
P3,4 = 2,5 mm . 3,14
P3,4 = 7,85 mm
g) Espessura do dente:
E = 0,49 . P
Onde:
E = Espessura do dente
P = Passo
E3,4 = 0,49 . 7,85 mm
E3,4 = 3,85 mm
h) Vão do dente:
V = 0,51 . P
Onde:
V = Vão do dente
P = Passo
V3,4 = 0,51 . 7,85 mm
V3,4 = 4,00 mm

16
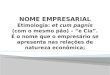
6.0) Diagrama das forças atuantes nas ECDR’s 1,2:
Onde:
F1 = Força resultante na engrenagem 1 (kgf ou N)
F2 = Força resultante na engrenagem 2 (kgf ou N)
Ft1 = Força tangencial na engrenagem 1 (kgf ou N)
Ft2 = Força tangencial na engrenagem 2 (kgf ou N)
Fr1 = Força radial na engrenagem 1 (kgf ou N)
Fr2 = Força radial na engrenagem 2 (kgf ou N)
α = Ângulo de pressão (α = Alfa)
a) No par 1 e 2 temos:
a) F1 = F2
b) Fr1 = Fr2
c) Ft1 = Ft2
d) α = 20° (Engrenagens Cilíndricas)
7.0) Definição das forças nas ECDR’s 1,2:

17
a) Cálculo de Mt1:
Mt1 = 71.620 .N1
n1≅ Mtm = 71.620 .
Nm
nm
Onde:
N1 = Potência na ECDR 1
n1 = RPM da ECDR 1
Nm = Potência do motor
nm =RPM do motor
Mt1 = Torque na ECDR 1
Mtm = Torque do motor
Mt1 = 71.620 .0,25
900
Mt1 = 71.620 . 0,0003
Mt1 = 19,89 Kgf.cm
b) Calcular r1:
r1 =D1
2
Onde:
D1 = Diâmetro da ECDR 1
r1 = Raio da ECDR 1
r1 =5 cm
2
r1 = 2,5 cm
c) Calcular Ft1:
Ft1 =Mt1
r1
Onde:
Ft1 = Força Tangencial na ECDR 1

18
r1 = Raio da ECDR 1
Mt1 = Torque na ECDR 1
Ft1 =19,89 Kgf . cm
2,5 cm
Ft1 = 7,96 Kgf
d) Calcular Fr1:
Fr1 = Ft1 .tan 20°
Onde:
Fr1 = Força radial na ECDR 1
Ft1 = Força tangencial na ECDR 1
Fr1 = 7,96 kgf . 0,364
Fr1 = 2,90 kgf
e) Calcular F1:
𝐹𝑟1 = √𝐹𝑡12+𝐹𝑟1
2
Onde:
F1 = Força resultante na ECDR 1
Ft1 = Força tangencial na ECDR 1
Fr1 = Força radial na ECDR 1
𝐹1 = √(7,96 𝑘𝑔𝑓)2 + (2,90 𝑘𝑔𝑓)2
𝐹1 = √63,36 𝑘𝑔𝑓2 + 8,41 𝑘𝑔𝑓2
𝐹1 = √71,77 𝑘𝑔𝑓2
F1 = 8,47 kgf
f) Cálculo das forças na ECDR 2:

19
Ft1 = Ft2 = 7,96kgf
Fr1 = Fr2 = 2,90kgf
F1 = F2 = 8,47kgf
8.0) Diagrama das forças atuantes nas ECDR’s 3,4:
Onde:
F3 = Força resultante na engrenagem 3 (kgf ou N)
F4 = Força resultante na engrenagem 4 (kgf ou N)
Ft3 = Força tangencial na engrenagem 3 (kgf ou N)
Ft4 = Força tangencial na engrenagem 4 (kgf ou N)
Fr3 = Força radial na engrenagem 3 (kgf ou N)
Fr4 = Força radial na engrenagem 4 (kgf ou N)
α = Ângulo de pressão (α = Alfa)
a) No par 3 e 4 temos:
a) F3 = F4
b) Fr3 = Fr4
c) Ft3 = Ft4

20
d) α = 20° (Engrenagens Cilíndricas)
9.0) Definição das forças nas ECDR’s 3,4:
a) Cálculo de Mt3:
Mt2 = Mt1 . i1,2
Onde:
Mt1 = Torque na ECDR 1
Mt2 = Torque na ECDR 2
I1,2 = Relação de transmissão das ECDR 1 e 2
Mt2 = 19,89 kgf . cm . 3
Mt2 = 59,67 kgf . cm
Mt2 = Mt3, pois a ECDR 2 está no mesmo eixo que a ECDR 3.
b) Calcular r3:
r3 =D3
2
Onde:
D3 = Diâmetro da ECDR 3
R3 = Raio da ECDR 3
r3 =D3
2
r3 = 2 cm
c) Calcular Ft3:
Ft3 =Mt3
r3
Onde:
Ft3 = Força tangencial na ECDR 3
r3 = Raio da ECDR 3

21
Mt3= Torque na ECDR 3
Ft3 =59,67 Kgf. cm
2 cm
Ft3 = 29,84 kgf
d) Calcular Fr3:
Fr3 = Ft3 . tan 20°
Onde:
Fr3 = Força radial na ECDR 3
Ft3 = Força tangencial na ECDR 3
Fr3 = 29,84 kgf . 0,364
Fr3 = 10,86 kgf
e) Calcular F3:
F3 = √Ft32 + Fr3
2
Onde:
F3 = Força resultante sobre a ECDR 3
Ft3 = Força tangencial sobre a ECDR 3
Fr3 = Força radical sobre a ECDR 3
F3 = √(29,84 kgf)2 + (10,86 kgf)2
F3 = √890,43 kgf 2 + 117,94 kgf 2
F3 = √1008,37 kgf
F3 = 31,76 kgf
f) Cálculo das forças na ECDR 4:
Ft3 = Ft4 = 29,84 kgf
Fr3 = Fr4 = 10,86 kgf

22
F3 = F4 = 31,76 kgf
10) Dimensionamento dos rolamentos para o eixo I do redutor:
a) Tipo de carga:
n < 20 RPM = Carga estática
n ≥ 20 RPM = Carga dinâmica
Onde:
n = Número de rotações do eixo I do redutor
900 RPM > 20 RPM
Logo iremos dimensionar esses rolamentos pelo método da carga dinâmica.
b) Carga dinâmica equivalente:
P = X . Fr + Y . Fa
Onde:
P = Carga dinâmica equivalente (kgf)
X = Fator radial (tabelado)
Fr = Força radial resultante, em cada mancal do eixo I (kgf)
Y = Fator axial ( tabelado)
Fa = Força axial resultante, em cada mancal do eixo I (kgf)
Quando:
Fa = 0 => P = Fr
P = Fr =F1
2
P =8,47
2

23
P = 4,24 kgf
c) Cálculo de Fn:
Verificando a tabela sobre esse fator, encontraremos que para:
n = 900 RPM
Fn = 0,333
d) Cálculo de FL:
Verificando a tabela, encontraremos que 3,0 ≥ FL ≤ 4,5 (rolos de correias
transportadoras)
Assim adotaremos:
FL = 4,0
e) Cálculo de capacidade de carga dinâmica (C) :
𝐶 =FL
Fn. P
Onde:
C = Capacidade de carga dinâmica (kgf)
Fn = Fator do número de rotações
FL = fator sobre a aplicação do rolamento
P = Carga dinâmica equivalente
C = 4,0
0,333 .4,24 kgf
C = 12 . 4,24 kgf
C = 50,88 kgf
f) Seleção do rolamento:
Verificando a tabela

24
C ≥ 50,88 kgf
C = 465 kgf
Rolamento nº 6200
Dimensões do Rolamento nº 6200:
d = 10 mm
D = 30 mm
B = 9 mm
r = 1 mm
Onde:
11 Dimensionamento dos rolamentos para o eixo III do redutor:
a) Tipo de Carga:
n < 20 RPM = Carga Estática
n ≥ 20 RPM = Carga Dinâmica
Onde:
n = Número de rotações do eixo III do redutor

25
75 RPM > 20 RPM
Logo iremos dimensionar esses rolamentos pelo método da carga dinâmica.
b) Carga dinâmica equivalente:
P = X . Fr + Y . Fa
Onde:
P = Carga dinâmica equivalente (kgf)
X = Fator radial (tabelado)
Fr = Força radial resultante, em cada mancal do eixo III (kgf)
Y = Fator axial
Fa = Força axial resultante, em cada mancal do eixo III (kgf)
Quando:
Fa = 0 => P = Fr
P = Fr = F3
2
P =31,76
2
P = 15,88 kgf
c) Cálculo de Fn:
Verificando a tabela sobre esse fator, encontraremos que para:
n = 75 RPM
Fn = 0,763
d) Cálculo de FL:
Verificando a tabela, encontraremos que 3,0 ≥ FL ≤ 4,5 (rolos de correias
transportadoras)

26
Assim adotaremos:
FL = 4,0
e) Cálculo de Capacidade de Carga Dinâmica:
C = FL
Fn. P
Onde:
C = Capacidade de carga dinâmica
Fn = Fator do número de rotações
FL = Fator sobre a aplicação do rolamento
P = carga dinâmica equivalente
C =4,0
0,763 .15,88 kgf
C = 5,24 . 15,88 kgf
C = 83,21 kgf
f) Seleção do Rolamento:
Verificando a Tabela
C ≥ 83,21 kgf
C = 465 kgf
Rolamento nº 6200
Dimensões do Rolamento nº 6200:
d = 10 mm
D = 30 mm
B = 9 mm

27
r = 1 mm
Onde:

28
Desenho de
Conjunto
Preliminar