Embed Size (px)
Citation preview

INSTITUTO FEDERAL DE EDUCAÇÃO,
CIÊNCIA E TECNOLOGIA DA PARAÍBA
COORDENAÇÃO DO CURSO SUPERIOR DE
BACHARELADO EM ENGENHARIA ELÉTRICA
José Diniz Neto
Máquina Síncrona à Imã Permanente: Caracterização Geral
Uma Abordagem Eólica
João Pessoa
2016

José Diniz Neto
Máquina Síncrona à Imã Permanente: Caracterização Geral
Uma Abordagem Eólica
Trabalho de Conclusão de Curso
submetido à Coordenação do Curso de
Bacharelado em Engenharia Elétrica do
Instituto Federal de Educação, Ciência e
Tecnologia da Paraíba, como parte dos
requisitos para a obtenção do grau de
Engenheiro Eletricista.
Orientador: Professor Doutor Álvaro de Medeiros
Maciel
João Pessoa
2016

José Diniz Neto
Máquina Síncrona à Imã Permanente: Caracterização Geral
Uma Abordagem Eólica
Trabalho de Conclusão de Curso
submetido à Coordenação do Curso de
Bacharelado em Engenharia Elétrica do
Instituto Federal de Educação, Ciência e
Tecnologia da Paraíba, como parte dos
requisitos para a obtenção do grau de
Engenheiro Eletricista.
BANCA EXAMINADORA
Álvaro de Medeiros Maciel, D. Sc. - IFPB
Orientador
José Artur Alves Dias, D. Sc. - IFPB
Ronimack Trajano de Souza, D. Sc. - IFPB
João Pessoa, 18 de Outubro de 2016

“Success is not final, failure is not fatal: it is the courage to continue that counts.”
Winston Churchill

Agradecimentos
Gostaria de agradecer profundamente à minha família pelo suporte fundamental que recebi em
todos os quesitos de educação desde minha infância até os presentes dias.
Quero agradecer encarecidamente ao meu orientador Professor Álvaro de Medeiros Maciel pelo
suporte incondicional durante todo o processo de pesquisa deste trabalho.
Agradecer a toda banca organizadora, composta pelos Professores Doutores José Artur Alves
Dias e Ronimack Trajano de Souza, e à coordenação de engenharia elétrica do IFPB,
representada pelo Professor Doutor Franklin Pamplona.
Também quero agradecer profundamente ao Professor José Artur Alves Dias pela sólida base
que me ajudou a construir minha carreira acadêmica e profissional durante nossas pesquisas.
Agradecer à parceria estabelecida entre o IFPB e WEG S.A. em seu projeto de Pesquisa de
Desenvolvimento (P&D) que já está proporcionando bons frutos.
Tenho um imenso prazer de ter desenvolvido pesquisa no IFPB com os professores Ilton Luiz
Barbacena, Walmeran Trindade, Gilvan Vieira, José Accioli e Marcos Meira.
Também quero agradecer a toda a equipe de docentes do IFPB pelo seus profissionalismo e
assistência ao corpo discente da Instituição.
Agradecer também ao ministério da Educação por toda a assistência providenciada durante meu
tempo como estudante da Rede Federal e programa no Intercâmbio Ciência Sem Fronteiras -
Austrália. Assim como o contribuinte Brasileiro, que sustenta não apenas a Rede Federal de
Educação do Brasil, mas também outros setores.
Ao ex-coordenador Alfrêdo Gomes Neto que tanto batalhou para que o curso de Engenharia
Elétrica do IFPB chegasse as condições que se apresenta nos dias atuais.
Quero agradecer aos amigos que fiz durante este período dentro e fora do espaço acadêmico.
Muito Obrigado.

Resumo
Este trabalho tem por objetivo realizar uma rápida revisão do patamar que o Brasil se encontra
com relação à energia eólica, e também realizar a caracterização geral da Máquina Síncrona à
Imã Permanente com uma sólida revisão teórica do seu modelo dinâmico (dq0). Entre os
principais resultados, pode-se destacar o desenvolvimento de um algoritmo que valida a análise
de tal máquina em regime dinâmico usando o scprit do Matlab®, assim como para futuras
estratégias de controle da mesma. Testes em vazio e curto-circuito também ajudaram à entender
melhor os aspectos físicos deste tipo de máquina sob diferentes pontos de operação.
Palavras-Chave: Máquina Síncrona à Imã Permanente. Modelo Dinâmico dq0. Acionamentos
Elétricos. Energia Eólica. Geração de Energia. Sistemas de Energias Renováveis

Abstract
This study aims to show a rapid review of the wind power potentials in Brazil, as well as
carrying out a solid revision of the permanent magnet synchronous machine (PMSM) dynamic
model. The development of an algorithm that validates through a Matlab® script, the analysis
of the PMSM under dynamic conditions, and the response of the machine through the emulation
of a vector control system are the most important results. Experimental outcomes investigated
the machine harmonic content composition under different operational conditions.
Keywords: Permanent Magnet Synchronous Machine. Dq0 Dynamic Model. Machine Drive.
Wind Power. Power Generation. Renewable Energy Systems.

Lista de Figuras
Figura 1 – Distribuição da Matriz Energética Brasileira ......................................................... 14
Figura 2 – Crescimento Anual do Potencial eólico Instalado ao Redor do Globo ................... 19
Figura 3 – Líderes Globais da Capacidade Instalada de Sistemas Eólicos ao Decorrer de 2015
(MW) ........................................................................................................................................ 20
Figura 4 – Líderes Globais de Capacidade Instalada Acumulada de Sistemas Eólicos (MW) 40
Figura 5 – Principais Estados Brasileiros com Relação à Capacidade Instalada de Energia Eólica
.................................................................................................................................................. 40
Figura 6 – Evolução da Capacidade Instalada de Sistemas Eólicos no Brasil ......................... 40
Figura 7 – Topologias Típicas de Sistemas Eólicos de Eixo Horizontal ................................. 25
Figura 8 – WEG W22 Magnet Drive System ....................................................................... 4026
Figura 9 – Comparação de um Sistema de 40CV Usando um Motor à Imã Permanente
(Denominado W22 Magnet Drive System) e um Motor de Indução Trifásico ........................ 27
Figura 10 – Diferentes Normas para Rendimento de Máquinas Elétricas ............................... 40
Figura 11 – Comparativo de Rendimento de Motores Elétricos para Velocidade Nominal de
1800 RPM ................................................................................................................................. 28
Figura 12 – Curva de Histerese ................................................................................................ 33
Figura 13 – Curva de Desmagnetização de Imãs Permanentes ................................................ 34
Figura 14 – Ilustração Esquemática para a Máquina Síncrona à Imã Permanente Trifásica ... 35
Figura 15 – Possíveis Métodos de Disposição dos Imãs Permanentes no Rotor da MSIP ...... 36
Figura 16 – Corte Transversal de uma Máquina Síncrona à Imã Permanente ......................... 36
Figura 17 – Malha de Elementos Finitos Usando Triângulos .................................................. 37
Figura 18 – Distribuição Geométrica de uma Máquina Síncrona à Imã Permanente Para Estudos
de Elementos Finistos ............................................................................................................... 38
Figura 19 – Análise de Distribuição do Fluxo Magnético em uma Máquina Síncrona à Imã
Permanente ............................................................................................................................... 39
Figura 20 – Onda de Tensão de Fase e Corrente de Linha nos Terminais do Protótipo de Uma
Máquina Síncrona à Imã Permanente ....................................................................................... 40
Figura 21 – Forma Gráfica da Transformada de Clarke ........................................................... 42
Figura 22 – Análise Grafica da Transformada de Park ............................................................ 44
Figura 23 – Análise de Fluxo por Fase em uma Máqiuna Síncrona Trifásica ......................... 46

Figura 24 – Representação do Modelo dq0 da Máquina Síncrona à Imã Permanente Trifásica
.................................................................................................................................................. 49
Figura 25 – Circuito Equivalente dq0 para a MSIP.................................................................. 50
Figura 26 – Diagrama Fasorial do Modelo dq0 da máquina Síncrona à Imã Permanente ....... 50
Figura 27 – Configuração do Teste em Vazio da Máquina Síncrona à Imã Permanente (Modo
Gerador) .................................................................................................................................... 53
Figura 28 – Ensaio em Curto-Circuito da Máquina Síncrona à Imã Permanente (Modo Gerador)
.................................................................................................................................................. 53
Figura 29 – Análise Grafica dos Parâmetros de Ensaio da Máquina Síncrona à Imã Permanente
de Rotor Cilíndrico ................................................................................................................... 55
Figura 30 – Diagrama de Blocos do Controle Vetorial da Máquina Síncrona à Imã com
Controlador de Corrente no Rotor ............................................................................................ 58
Figura 31 – Acionamento da Máquina Síncrona à Imã Permanente Via Simulink® ............... 59
Figura 32 – Cilhimento dos Dados da MSIP ............................................................................ 60
Figura 33 – Correntes Id e Iq - Simulink® ............................................................................... 40
Figura 34 – Tensões Vd e Vq - Simulink® .............................................................................. 61
Figura 35 – Conjugado Elétrico - Simulink® .......................................................................... 62
Figura 36 – Velocidade Rotórica - Simulink® ......................................................................... 62
Figura 37 – Posição Rotórica - Simulink® .............................................................................. 63
Figura 38 – Correntes Testatóricas (de Fase) - Simulink® ...................................................... 63
Figura 39 – Tensões Estatóricas (de Fase) - Simulink® .......................................................... 64
Figura 40 – Correntes Id e Iq Usando Script do Matlab® ........................................................ 65
Figura 41 – Tensões Vd e Vq Usando Script do Matlab® ....................................................... 65
Figura 42 – Conjugado Elétrico Usando Script do Matlab® ................................................... 66
Figura 43 – Velocidade Rotórica Usando Script do Matlab® .................................................. 66
Figura 44 – Posição Rotórica Usando Script do Matlab® ....................................................... 67
Figura 45 – Correntes Testatóricas (de Fase) Usando Script do Matlab® ............................... 67
Figura 46 – Tensões Estatóricas (de Fase) Usando Script do Matlab® ................................... 68
Figura 47 – Tensões Vd e Vq Emulando Controle Vetorial no Script do Matlab® ................. 69
Figura 48 – Correntes Id e Iq Figura 47 – Tensões Vd e Vq Emulando Controle Vetorial no
Script do Matlab® .................................................................................................................... 69
Figura 49 – Resposta do Conjugado Elétrico Emulando o Controle Vetorial no Script do
Matlab® .................................................................................................................................... 70

Figura 50 – Resposta da Velocidade Rotórica Emulando o Controle Vetorial no Scprit do
Matlab® .................................................................................................................................... 70
Figura 51 – Resposta das Correntes Estatóricas (de Fase) Emulando o Controle Velorial Usando
o Script do Matlab .................................................................................................................... 71
Figura 52 – Respostas das Tensões Estatóricas (de Fase) Emulando o Controle Vetorial usando
o Script do Matlab® ................................................................................................................. 71
Figura 53 – Sistema de Acoplamento Entre Motor de 2CV WEG W22 Plus e Gerador Síncrono
à Imã Permanente ..................................................................................................................... 73
Figura 54 – Tensão Terminal de Linha (de Pico) do Gerador Síncrono à Imã Permanente Para
uma Velocidade de 15 RPM Inserida no Inversor de Frequência WEG CFW 08 ................... 74
Figura 55 – Tensão Terminal de Linha (de Pico) do Gerador Síncrono à Imã Permanente Para
uma Velocidade de 350 RPM Inserida no Inversor de Frequência WEG CFW 08 ................. 74
Figura 56 – Tensão Terminal de Linha (de Pico) do Gerador Síncrono à Imã Permanente Para
uma Velocidade de 650 RPM Inserida no Inversor de Frequência WEG CFW 08 ................. 75
Figura 57 – Tensão Terminal de Linha (de Pico) do Gerador Síncrono à Imã Permanente Para
uma Velocidade de 950 RPM Inserida no Inversor de Frequência WEG CFW 08 ................. 75
Figura 58 – Curva Vpico(Nr) ................................................................................................... 76
Figura 59 – Análise do Conteúdo Harmônico da Tensão da Máquina Funcionando à 15RPM.
(Frequência Fundamental 43,3Hz) ........................................................................................... 77
Figura 60 - Análise do Conteúdo Harmônico da Tensão da Máquina Funcionando à 350RPM.
(Frequência Fundamental 43,3Hz) ........................................................................................... 77
Figura 61 - Análise do Conteúdo Harmônico da Tensão da Máquina Funcionando à 650RPM.
(Velocidade Nominal). (Frequência Fundamental 43,3Hz) ..................................................... 78
Figura 62 - Análise do Conteúdo Harmônico da Tensão da Máquina Funcionando à 950RPM.
(Frequência Fundamental 43,3Hz) ........................................................................................... 78

Lista de Tabelas
Tabela 1 – Forma Integral das Equações de Maxwell .............................................................. 29
Tabela 2 – Forma Diferencial das Equações de Maxwell ........................................................ 30
Tabela 3 – Coeficientes para Análise em Materiais Magnéticos.............................................. 31
Tabela 4 – Diferentes Valores dos Coeficientes da Matriz de Transformação ‘T’ .................. 40
Tabela 5 – Parâmetros da MSIP Utilizada na Simulação ......................................................... 56
Tabela 6 – Análise do Conteúdo Harmônico dos Dados Coletados no Ensaio em Vazio ....... 79
Tabela 7 – Dados do Teste em Curto-Circuito ......................................................................... 79

Lista de Símbolos
ᵠ𝑥 – Fluxo magnético, com sub índice indicando se o mesmo é de uma só bobina, ou se o
mesmo é mutuo entre uma ou mais componentes;
𝜆 – Fluxo magnético resultando de uma determinada fase;
𝜆𝑖𝑚ã – Fluxo magnético resultante dos imãs permanentes da MSIP;
𝜔 – Velocidade angular;
𝜔𝑟 – Velocidade rotórica da MSIP;
𝜃 – Posição do referêncial real da transformada de Park;
𝜃𝑒𝑠𝑡𝑖𝑚𝑎𝑑𝑜 – Posição do referêncial estimado da transformada de Park;
𝛥𝜃 – Variação angular entre a posição real e a estimação do algoritmo utilizado;

Lista de Siglas
EPE – Empresa de Pesquisa Energética
GWEC – Global Wind Energy Council
IFPB – Instituto Federal de Educação, Ciência e Tecnologia da Paraíba
LACA – Laboratório de Acionamentos, Controle e Automação
THD – Total Harmonic Distortion
MIT – Massachusetts Institute of Technology
MSIP – Máquina Síncrona à Imã Permanente
P&D – Pesquisa e Desenvolvimento

Sumário
AGRADECIMENTOS ............................................................................................................. 1
RESUMO ................................................................................................................................... 2
ABSTRACT .............................................................................................................................. 3
LISTA DE FIGURAS ............................................................................................................... 4
LISTA DE TABELAS .............................................................................................................. 7
LISTA DE SÍMBOLOS ........................................................................................................... 8
LISTA DE SIGLAS .................................................................................................................. 9
SUMÁRIO ............................................................................................................................... 10
1 INTRODUÇÃO ................................................................................................................... 13
2 PROJETO DE PESQUISA E DESENVOLVIMENTO (P&D) ENTRE O IFPB E A
WEG S.A. ................................................................. ERROR! BOOKMARK NOT DEFINED.
2.1 O IFPB E A WEG ........................................... ERROR! BOOKMARK NOT DEFINED.
2.2 O LABORATÓRIO DE ACIONAMENTOS, CONTROLE E AUTOMAÇÃO... ERROR!
BOOKMARK NOT DEFINED.
2.3 SOBRE A WEG S.A. ...................................... ERROR! BOOKMARK NOT DEFINED.
3 A ENERGIA EÓLICA NO CONTEXTO DO SÉCULO XXI ........................................ 17
4 SISTEMAS DE ENERGIA EÓLICA E SUA CONEXÃO COM A REDE ................... 22
5 INTRODUÇÃO À MÁQUINA SÍNCRONA À IMÃ PERMANENTE .......................... 25
5.1 PROPRIEDADES DOS MATERIAIS MAGNÉTICOS .............................................. 28
5.1.1 EQUAÇÕES DE MAXWELL ...................................................................................... 28
5.1.2 PROPRIEDADES DE PERFORMANCE DOS MATERIAIS MAGNÉTICOS .... 29
5.1.3 CURVA DE HISTERESE ............................................................................................ 31
5.1.4 CURVA DE DESMAGNETIZAÇÃO DOS MATERIAIS MAGNÉTICOS ................. 32
5.2 MÁQUINA SÍNCRONA À IMÃ PERMANENTE: VISÃO GERAL ......................... 34
5.3 ANÁLISE DINÂMICA DA MÁQUINA SÍNCRONA À IMÃ PERMANENTE ....... 39

5.3.1 TRANSFORMADA DE CLARKE .............................................................................. 39
5.3.2 TRANSFORMADA DQ0 .............................................................................................. 41
5.3.3 INTRODUÇÃO AO MODELO DINÂMICO (DQ0) DA MÁQUINA SÍNCRONA
À IMÃ PERMANENTE ......................................................................................................... 43
5.4 MÁQUINA SÍNCRONA À IMÃ PERMANENTE: CIRCUITO BIFÁSICO
EQUIVALENTE E SEU DIAGRAMA VETORIAL .......................................................... 49
5.5 ENSAIOS DA MÁQUINA SÍNCRONA À IMÃ PERMANENTE DE ACORDO
COM O IEEE STANDARD 1812 (2014) .............................................................................. 50
5.5.1 Ensaio em Vazio ............................................................................................................. 51
5.5.2 Ensaio em Curto Circuito ............................................................................................. 52
5.5.3 Determinação dos Parâmetros da Máquina Síncrona à Imã Permanente à Partir
dos Ensaios em Vazio e Curto-Circuito ................................................................................ 53
6 RESULTADOS DE SIMULAÇÃO .................................................................................... 55
6.1 TÉCNICA ADOTADA PARA A PARTIDA DA MSIP ............................................... 56
6.2 SIMULAÇÃO USANDO SIMULINK/MATLAB® ...................................................... 57
6.2.1 Resultados de Simulação (Simulink/Matlab®) ........................................................... 59
6.2.2 Resultados de Simulação Script Usando Matlab® ..................................................... 64
6.2.3 Resultados de Simulação Emulando Efetivação do Controle Vetorial com
Referencial Rotórico Usando Script Usando Matlab® ....................................................... 67
7 RESULTADOS EXPERIMENTAIS ................................................................................. 72
7.1 ENSAIO EM VAZIO ....................................................................................................... 72
7.2 ENSAIO EM CURTO-CIRCUITO ................................................................................ 78
8 CONCLUSÃO ...................................................................................................................... 79
REFERÊNCIAS BIBLIOGRÁFICAS ................................................................................. 80
APÊNDICE 1 – ESTABILIDADE DA MÁQUINA SÍNCRONA E SUA CONEXÃO
COM O SISTEMA ELÉTRICO ........................................................................................... 82
8.1 EQUAÇÃO DE POTÊNCIA E ÂNGULO DE CARGA DA MÁQUINA SÍNCRONA .. 83

8.2 EQUAÇÃO DE BALANÇO E CRITÉRIO DE IGUALDADE DE ÁREAS .................... 85
ANEXO I – CÓDIGO NO MATLAB PARA VALIDAÇÃO COM O SIMULINK ......... 88
ANEXO II – CÓDIGO NO MATLAB PARA VALIDAÇÃO COM O SIMULINK ....... 94

13
1 Introdução
A inserção de parques eólicos na matriz energética global vem crescendo significativamente
nas últimas décadas. Isto vem à acontecer por razões econômicas, ambientais, e também pelo
desenvolvimento de novas tecnologias que permitem o acesso ao uso da mesma em larga e
pequena escala. Em adição, acordos ambientais que almejam a minimização dos agravamentos
no efeito estufa estão sendo incentivadas ao redor do globo.
Não obstante, uma diversificação na matriz energética de um sistema elétrico pode proporcionar
uma maior segurança no que diz respeito à prováveis interrupções no fornecimento de energia
com relação à problemas de geração por falta de uma fonte primária. O Brasil se destaca
mundialmente por possuir uma matriz energética formada majoritariamente pela geração
hidroelétrica, eólica e biomassa. Mesmo assim, o país ainda conta com petróleo e seus derivados
tendo uma expressiva fatia no percentual total.
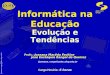
A Empresa de Pesquisa Energética (EPE) publicou no Balanço Energético Nacional 2015 a
diversificação da matriz energética nacional, que é exposta na Figura 1. O fato da energia
hidroelétrica ser majoritária na matriz energética nacional traz benefícios como por exemplo, a
redução da emissão de gases do efeito estufa no processo de conversão de energia, e
minimização nos custos de geração de energia. Entretanto, a conversão de energia usando
hidroelétricas vem sofrendo danos causados por estiagens prolongadas e também pelo constante
aumento na demanda por energia no sistema, e durantes estes períodos, termelétricas são
acionadas para evitar que blackouts ocorram. Com resultado final, a conta de luz para o
contribuinte se torna mais cara.
A energia eólica vem à crescer de maneira significativa no Brasil, com destaque para a Região
Nordeste, mais especificamente no Estado do Rio Grande do Norte, que vem aumentando sua
capacidade instalada de maneira expressiva no decorrer dos últimos anos.
Historicamente, a inserção parques eólicos no sistema elétrico é estudada por questões de
estabilidade e qualidade de energia do sistema elétrico. Uma vez que os mesmos possuem
circuitos de eletrônica de potência, e geradores que podem causar distúrbios na rede elétrica.
Sendo assim, estudos prévios sobre o estado do sistema elétrico são necessários para que
problemas antes, durante e depois do comissionamento do sistema eólico sejam mitigados.
Dentre os tipos de geradores utilizados em sistema de energia eólica, o gerador síncrono à imã
permanente vem sendo adotado por múltiplos fatores, dentre eles, a relação peso/potência que
permite a redução ou não utilização de outros componentes do sistema eólico, como por

14
exemplo a caixa de engrenagens. A possibilidade de gerar energia em diferentes velocidades
também é outra grande vantagem da máquina síncrona à imã permanente.
Figura 1 – Distribuição da matriz energética Brasileira
Fonte: Empresa de Pesquisa Energética (EPE), 2015
Para realizar o estudo da máquina síncrona à imã permanente é necessário realizar uma revisão
bibliográfica da literatura técnica com relação aos aspectos que afetam diretamente a operação
da mesma. Como é o caso de imãs permanentes e a relação de sua coercitividade levando em
consideração a temperatura. Os ensaios da máquina determinarão os seus principais parâmetros.
O estudo da inserção da máquina síncrona no sistema elétrico, analisando os principais critérios
de estabilidade para regime dinâmico e transiente expressa uma significativa relevância nos
estudos a serem considerados no sistema elétrico interligado.
A representação do modelo em regime dinâmico também é de suma importância para diferentes
estudos da máquina síncrona à imã permanente. Uma vez que tais dados sejam determinados, é
possível realizar novas estratégias de acionamento da mesma operando tanto quando motor,
quanto como gerador. Tais estratégias podem se propostas primeiramente por simulações
computacionais, e experimentos realizados em laboratório ou campo de aplicação da máquina.
Este trabalho visa realizar uma rápida revisão sobre o crescimento da energia eólica ao redor
do globo. Em seguida, objetiva-se apresentar os principais argumentos que tornam a máquina
Hidráulica
65%Gás Natural
13%
Biomassa
7%
Derivados do
Petróleo
7%
Carvão e Derivados
3%Nuclear
3%Eólica
2%
Hidráulica
Gás Natural
Biomassa
Derivados do
PetróleoCarvão e Derivados
Nuclear

15
síncrona à imã permanente mais competitiva no mercado de indústria moderna. Uma revisão
sólida sobre a caracterização da máquinas síncrona à imã permanente também será realizada.
Tal revisão dará suporte fundamental para a compreensão das simulações e resultados
experimentais que serão por último expostos neste trabalho.

16
2 Materiais e Métodos
Este trabalho foi conduzido primeiramente com uma sólida revisão bibliográfica sobre o
patamar eólico global, nacional e regional. Em adição, uma detalhada revisão técnica sobre a
Máquina Síncrona à Imã Permanente foi realizada. Tais revisões bibliográfica são essenciais
para qualquer trabalho com alto respaldo acadêmico e profissional.
Foram consultadas databases de publicações acadêmicas, tal como o IEEE Xplorer Digital
Library, onde o IFPB detêm licença para à aquisição dos documentos de tal sistema. Livros, e
Instituições consolidados no campo de Máquinas Elétricas e Eletrônica de Potência, assim
como sistemas de energia eólica também foram consultados. Não obstante, catálogos de
fabricantes respeitáveis também foram utilizados.
Os resultados do trabalho estão divididos em resultados de simulação, e resultados
experimentais, ambos realizados no Laboratório de Acionamentos, Controle e Automação do
IFPB.
O objetivos dos resultados de simulação convergem para a validação de um código
desenvolvido no Script do Matlab®, onde o desenvolvedor do software pode implementar um
desejado código. Este Script detalha por menores a caracterização geral da máquina síncrona à
imã permanente, incluindo, análise dinâmica do conjugado elétrico, velocidade rotórica, e
posição rotórica, assim como a análise das correntes trifásicas de entrada da máquina.
Os resultados do Script foram comparados com resultados de simulação via Simulink®, um
simulador de sistemas de alta confiabilidade. Os parâmetros da máquina utilizadas em ambas
simulações são idênticos.
O método numérico utilizado em ambas as simulações foi o método de Euler, pela sua
simplicidade, acurácia, e baixo esforço computacional, se comparado com outros métodos
numéricos. O passo de cálculo utilizado foi de 10−6, pelo fato de oferecer uma maior
confiabilidade na simulação, reduzindo assim erros e descontinuidades numéricas.
Os resultados experimentais objetivaram a análise do conteúdo harmônico de uma MSIP
operando em diferentes condições. A máquina foi acionada por um motor de indução trifásico,
alimentado por um inversor de Frequência. Softwares foram utilizados para a análise de tal
conteúdo harmônico.

17
3 A Energia Eólica no Contexto do Século XXI
O crescimento no consumo de energia nos últimos anos vem oferecendo espaço para inserção
de novas fontes alternativas de energia, especialmente as fontes de energias renováveis. O
incentivo na diversidade das matrizes energéticas também é um fator que contribui para a
confiabilidade do sistema elétrico de um país. A energia eólica vem despontando mundialmente
em projetos de larga escala onshore e offshore.
Tais vantagens estão ligadas ao custo-benefício de tal sistema de geração com relação à
impactos ambientais reduzidos, se comparados com outras fontes de energia, como por
exemplo, o carvão mineral e gás natural (Redlinger, 2002) & (Sawin, 2004).
Por serem uma matéria prima limitada, os combustíveis fosseis podem sofrer escassez durante
um período indeterminado de tempo, como ocorrido na crise energética global na década de
1970, causada simultaneamente pela alta demanda, e escassez de combustíveis fósseis para
diferentes fins (The Guardian, 2011). Isso favoreceu o crescimento da indústria verde, que
iniciou sua expansão fortemente a partir deste período, incentivando assim diferentes novos
meios de geração de energia a partir de energias renováveis (Solar, Eólica, Biomassa, e entre
outras).
Outro fator que incentivou o desenvolvimento da indústria verde são catastróficas mudanças
climáticas nas últimas décadas. Com o Paris Agreement 2015, diferentes países aceitaram
adotar novas medidas para reduzir os efeitos das mudanças climáticas, tais como novas fontes
de geração de energia limpa e redução na emissão de gases do efeito estufa, causada
majoritariamente por combustíveis fósseis (Change, 2016).
Dentre as novas fontes de geração de energia, renováveis e não renováveis, a energia eólica
lidera isoladamente os mais diversos índices de capacidade instalada anual. De acordo com
Anual Market Update 2015 fornecido pelo Global Wind Energy Council (GWEC), os
investimentos somados em energia limpa alcançaram o record de USD 329 bilhões em 2015,
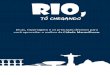
tendo um crescimento de 4% em relação à 2014. Ainda de acordo com o GWEC, em 2015
foram instalados 63.467 MW apenas com relação à energia eólica. A Figura 2 ilustra o
crescimento global anual da capacidade instalada de sistemas de geração de energia eólica.

18
Figura 2 – Crescimento Anual do Potencial eólico Instalado ao Redor do Globo
Fonte: Global Wind Energy Council, 2015
A China tem liderado o mercado tanto com relação a sua capacidade instalada total, quanto ao
seu crescimento em suas taxas de instalações anuais de sistemas eólicos. Seguindo tal
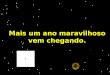
crescimento, temos os Estados Unidos, Alemanha e Brasil. A Figura 3 mostra os top 10 de
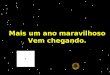
novas capacidades instaladas com relação a energia eólica em 2015. O Brasil também se
encontra no top 10 de capacidade instalada acumulada, assim como mostra a Figura 4.
2000 2001 2002 2003 2004 2005 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015
MW 3.76 6.50 7270 8133 8207 1153 1470 2031 2687 3844 3905 4062 4503 3579 5175 6346
0
10.000
20.000
30.000
40.000
50.000
60.000
70.000C
apac
idad
e In
stal
ada
(MW
)
Ano

19
Figura 3 – Líderes Globais de Capacidade Instalada de Sistemas Eólicos ao Decorrer de 2015 (MW)
Fonte: Global Wind Energy Council, 2015
Figura 4 – Líderes Globais de Capacidade Acumulada Instalada de Sistemas Eólicos (MW)
Fonte: Global Wind Energy Council, 2015
30753; 48%
8598; 14%
6013; 9%
2754; 4%
2623; 4%
1506; 2%
1266; 2%
1073; 2%
957; 2%
956; 2%
6950; 11%
PR China
Estados Unidos
Alemanha
Brasil
Índia
Canadá
Polônia
França
Reino Unido
Turquia
Resto to Mundo
145362; 34%
74471; 17%44947; 11%25088; 6%
23025; 5%
13603;
3%
11205; 3%
10358;
2%
8958;
2%
8715; 2%
64151; 15%
PR China
Estados Unidos
Germany
Índia
Espanha
Reino Unido
Canadá
França
Itália
Brasil
Resto do Mundo

20
Na América Latina, o Brasil é o atual líder de capacidade instalada. Em 2015 foram expandidos
2.754 MW de capacidade instalada, embora alguns comissionamentos realizados não
disponibilizaram uma conexão com o sistema elétrico até o presente momento. Mesmo assim,
é esperado que o Brasil continue sendo o líder continental neste mercado no mínimo até 2020
(GWEC,2015).
Salientando que o Brasil tem uma das melhores fontes de vento do mundo, tal capacidade de
geração pode superar por três vezes o atual consumo energético que o país necessita. O Governo
Brasileiro almeja uma capacidade de 24 GW de capacidade instalada com relação a energia
eólica em 2024 (GWEC, 2015). A Figura 5 mostra os principais estados brasileiros com relação
a sua capacidade instalada. Pode-se notar que os Estados do Rio Grande do Norte, e Bahia
lideram tal ranking.
Figura 5 – Principais Estados Brasileiros com Relação à Capacidade Instalada de Energia Eólica
Fonte: Global Wind Energy Council, 2015
O GWEC também forneceu o crescimento da capacidade instalada total brasileira no decorrer
dos últimos anos, como é mostrado na Figura 6.
1618,9
1304,3
69
377,3
705,1
2,5
28,1
2779,6
1557,7
238,5
34,5
0 500 1000 1500 2000 2500 3000
Bahia
Ceará
Paraíba
Pernambuco
Piauí
Paraná
Rio de Janeiro
Rio Grande do Norte
Rio Grande do Sul
Santa Catarina
Sergipe
Capacidade Instalada (MW)

21
Figura 6 – Evolução da Capacidade Instalada de Sistemas Eólicos no Brasil
Fonte: Global Wind Energy Council, 2015
Para 2016, é esperado que o Brasil instale mais 3GW em sua matriz energética, onde estipula-
se que 2GW serão providenciados pelo setor regulatório, e 1GW seja instalado pelo livre
mercado. Representando assim um investimento em torno de USD 4,51 Bilhões (R$18
Bilhões). Vale salientar que ainda não há nenhum ambicioso plano de instalações offshore no
mercado brasileiro, por razões que o continente ainda providencia um grande potencial ainda
não explorado, e também pela maior complexidade de instalação dos sistemas offshore.
2005 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015
MW 29 237 247 341 606 927 1431 2508 3466 5962 8715
0
1000
2000
3000
4000
5000
6000
7000
8000
9000
10000M
W

22
4 Sistemas de Energia Eólica E Sua Conexão com a Rede
Os sistemas eólicos mais comumente comissionados são majoritariamente sistemas que usam
turbinas de eixo vertical e são instaladas no continente (onshore). Entretanto, o crescimento de
sistemas offshore vem crescendo significantemente, uma vez que em tais localidades a
distribuição e uniformidade do vento são mais confiáveis, além do mais, o desenvolvimento das
engenharias vem possibilitando a utilização de tais sistemas nos últimos anos.
O mercado offshore também vem crescendo de maneira expressiva, em 2015 a capacidade
instalada total ao redor do globo alcançou o valor de 12GW. Tais sistemas foram instalados
principalmente nas águas costeiras de países europeus. Os líderes globais de capacidade
instalada offshore são Reino Unido, Alemanha, e Dinamarca.
Os grandes desafios para uma maior competitividade de sistemas offshore são os altos custos
requeridos e as complexidades técnicas em relação a instalação de tais sistemas. Vale salientar
que ainda não há nenhum ambicioso plano de instalações offshore no mercado Brasileiro, haja
vista que os potenciais onshore no territórios nacionais são de alta magnitude (GWEC, 2015).
Para à implementação dos sistemas de geração eólica, seja o desenvolvimento de um parque
eólico ou uma ordinária instalação residencial, é de suma importância saber qual a topologia do
sistema de geração que virá a ser usado, pois, dependendo de tal configuração, talvez sejam
necessárias melhorias na rede, e também deve-se ser analisada as possíveis influencias de tal
conexão ao sistema elétrico, como por exemplo, à perca de sincronismo de geradores síncronos
causados pelos distúrbios na rede, muitas vezes quando há inserção de parques eólicos e não
são propostas melhorias com relação à robustez da rede (Soderlund et al , 1996).
A seguir estão alguns requerimentos e consequências à serem estudados antes ou depois da
instalação da instalação de um sistema de energia eólico na rede:
Prévios estudos que analisem a qualidade do sistema elétrico em que o sistema eólico
estar a ser inserido, podendo assim ser necessário que upgrades no sistema sejam
realizados. Evitando assim problemas venham a ser agravados na rede em que o sistema
está a ser conectado, tais como qualidade de energia, eficiência energética, e proteção e
estabilidade do sistema.
Análise das variações dos valores nominais de tensão, se comparado com tais
magnitudes antes da instalação do sistema eólico;
Aumento iminente em transientes causados por chaveamentos provindos do sistema
eólico, assim como o surgimento de harmônicos;

23
Afundamento de tensão quando se é utilizado máquinas de indução como geradores no
parque eólico;
Aumento da complexidade do design do sistema de proteção;
Pequenas variações de frequência que podem acarretar na mudança no ângulo de
estabilidade de geradores síncronos conectados ao grid;
Análise de geração de ruídos sonoros.
A topologia adotada pela grande maioria dos sistemas eólicos instalados nos dias atuais pode
se basear na Figura 7. Pode-se notar que o uso de conversores estáticos e filtros que mitiguem
a injeção de harmônico no sistema elétrico são indispensáveis. Entretanto, o sistema de
engrenagem pode ser dispensado, dependendo do modelo do gerador à ser utilizado.
Neste caso do não uso de caixa de engrenagens, uma máquina que vem se tornando muito
popular no decorrer dos últimos avanços tecnológicos é a máquina à imã permanente, que
possui um peso reduzido, alta densidade de potência por quilograma e pode trabalhar em baixas
rotações, se comparada com outros tipos de máquinas elétrica utilizadas nos sistemas
convencionais.
A Figura 7 demonstra um sistema que usa máquinas à imã permanente tanto com caixa de
engrenagens, quanto sem o uso da mesma. Soderlund et al (1996) afirma que o não uso de caixa
de engrenagens traz significantes benefícios para os sistemas de geração eólica além de
simplificação na construção dos mesmos. Tais como, maior confiabilidade, redução das perdas
totais, minimização do peso total do sistema, e redução na taxa de manutenção do sistema.

24
Figura 7 – Topologias Típicas de Sistemas Eólicos de Eixo Horizontal

25
5 Introdução à Máquina Síncrona à Imã Permanente
A introdução da máquina síncrona à imã permanente vem se tornando cada vez mais notória no
decorrer das últimas décadas até os dias atuais. Sua alta eficiência, confiabilidade, robustez, e
constantes melhorias técnicas fazem com que este tipo de máquina aumente significantemente
sua competitividade no mercado da indústria moderna. Sua gradativa melhoria tem-se se dado
graças ao desenvolvimento de novos materiais, que possibilitam o melhorias técnicas no design
de tal máquina. Por exemplo, a utilização de materiais que possuem alta coercitividade,
densidade, e intensidade do campo magnético em sua excitação fazem com que a mesma tenha
um alto índice de densidade de potência com relação ao seu volume, se comparado com outras
máquinas elétricas convencionais.
Não obstante, assim como em outras máquinas elétricas, outros novos materiais e processos de
produção vem à aperfeiçoar a produção de componentes como enrolamentos, isolamentos,
carcaças, mancais, eixo. A Figura 8 mostra o corte transversal de um sistema de acionamento
que usa a máquina síncrona à imã permanente.
Figura 8 – WEG W22 Magnet Drive System
Fonte: WEG W22 Magnet Drive System Catálogo (Adaptado), 2016

26
As aplicações das máquinas à imã permanente (MSIP) também tem crescido de maneira
acelerada tanto para sistemas de geração standalone, quanto para sistemas interconectados à
rede (ongrid). Isso pode ser observado no setor de energias renováveis, especificamente com
energia eólica, tendo a vantagem da possível não utilização de caixa de engrenagem e a
possibilidade de redução de peso se comparado com outras máquinas na mesma faixa de
potência.
De acordo com a WEG S.A., O sistema WMagnet (usando máquina à imã permanente)
mostrado na Figura 1 é 313% menor em peso, e 300% menor em volume, se comparado com
um sistema de mesma potência se fosse utilizado um motor de indução trifásico. Em Adição, a
WEG S.A. também garante que os níveis de ruído e vibração do sistema WMangnet são
menores em comparação com o mesmo sistema que utilizaria uma máquina de indução trifásica.
Figura 9 – Comparação de um Sistema de 40CV Usando um Motor à Imã Permanente (Denominado W22
Magnet Drive System) e um Motor de Indução Trifásico
Fonte: WEG W22 Magnet Drive System Catálogo, 2016
Para o mesmo sistema ilustrado na Figura 9, também é possível afirmar que a eficiência das
máquinas de imã permanente é superior. A Figuras 10 mostra que a eficiência do Sistema
WMagnet é superior à reconhecidas normas de qualidade internacional, sendo assim, estando
na vanguarda em se tratando na qualidade do produto. Nesta mesma perspectiva, a máquina à
imã permanente também apresenta eficiência a outras classes de máquinas de indução trifásica,
como mostrado na Figura 11.
Ainda em se falando de eficiência, o fato da máquina à imã permanente possuir auto excitação
contribui para uma redução de 30% nas perdas totais da máquina (ABB, 2016).

27
Figura 10 – Diferentes Normas para Rendimento de Máquinas Elétricas
Eficiência para 460V - 3600 RPM
Efi
ciê
ncia
[%
]
Eficiência Padrão
NEMA PREMIUM
SistemaWMagnet
EPACT AltaEficiência
Fonte: WEG W22 Magnet Drive System Catalogue (Adaptado), 2016
Figura 11 – Comparativo de Rendimento de Motores Elétricos para Velocidade Nominal de 1800 RPM
Fonte: WEG W22 Magnet Drive System Catálogo, 2016
0
20
40
60
80
100
10
12
,5 15
20
25
30
40
50
60
75
10
0
12
5
15
0
17
5
20
0
25
0
27
0
30
0
35
0
40
0
45
0
Ren
dim
ento
(%
)
Potência (CV)
Motor de Indução IR3 Premium Motor de Indução IR4 Super Premium
W22 Magnet IR4 Super Premium W22 Magnet IR5 Ultra Premium

28
5.1 Propriedades dos Materiais Magnéticos
Importantes tópicos serão discutidos nesta seção. Primeiro, serão revisadas as equações que
regem os circuitos elétricos e magnéticos (Equações de Maxwell). Em seguida, será discutida
a performance dos materiais magnéticos, curva de magnetização para materiais magnéticos,
conhecida também como curva de histerese, e por fim, a curva de desmagnetização dos
materiais magnéticos, que está contida dentro da curva de histerese, sendo localizada no
segundo quadrante da curva, se analisar-se apenas um dos sentidos de orientação dos domínios
magnéticos do campo externo aplicado no material.
5.1.1 Equações de Maxwell
De acordo com o guia de estudos fornecido pelo Massachusetts Institute of Technology
MIT (2016), o estudo das equações de Maxwell é de suma importância para o entendimento
básico de circuitos elétricos e magnéticos. Maxwell foi responsável por expressar e quantizar
matematicamente as equações que regem os princípios básicos da eletricidade e o magnetismo.
Entretanto, ele não foi o responsável pelo descobrimento físico-prático da mesmas, excluindo-
se apenas parcialmente uma das equações que levam o seu nome. A forma integral de cada uma
das equações de Maxwell são mostradas na Tabela 1.
Tabela 1 - Forma Integral das equações de Maxuell (Massassuchets Institute of Technology Study Guide,
2016)
LEI
EQUAÇÃO INTERPRETAÇÃO FÍSICA
Lei de Gauss para
o Campo Elétrico
∯ . 𝑑 =𝑄
ℰ0
O fluxo elétrico através de uma
superfície fechada é proporcional
à carga elétrica dentro da
superfície
Lei de Faraday -
Lenz
∮ . 𝑑 = −𝒅𝝓𝑩
𝒅𝒕
A variação tempo-espacial de um
determinado fluxo magnético gera
um determinado campo elétrico,
que se opõe a tal variação.
Lei de Gauss para
o campo
magnético
∯ . 𝑑 = 0
O fluxo magnético total em um
superfície fechada é igual a zero

29
Lei de Àmpere-
Maxwell
∮ . 𝑑 = µ𝟎I + µ𝟎𝓔𝟎
𝒅𝝓𝑬
𝒅𝒕
A corrente elétrica e a variação do
campo elétrico é associada com
um campo magnético.
Tabela 2 - Forma diferencial das Equações de Maxwell (Massassuchets Institute of Technology Study
Guide, 2016)
LEI EQUAÇÃO
Lei de Gauss para o Campo
Elétrico
. =𝜌
ℰ0
Lei de Faraday - Lenz
x = −𝜕
𝜕𝑡
Lei de Gauss Para o Campo
Magnético
. = 0
Lei de Àmpere-Maxwell x = µ𝟎𝑱 + µ𝟎𝓔𝟎
𝜕
𝜕𝑡
5.1.2 Propriedades de Performance dos Materiais Magnéticos
De acordo com Alliance LLC (2016), existem quatro (4) relevantes propriedades de
performance de materiais magnéticos, e a análise de tais parâmetros são de importância
substancial para a seleção da liga do material que será utilizado para determinada aplicação.
Tais propriedades podem ser compreendidas a seguir:
Indução Redidual (Br) – Conceituada como o fluxo magnético permanente que
está intrinsicamente presente no imã;
Coercitividade (Hc e Hci) – A capacidade de resistência à desmagnetização que o
imã possui;
Produto de Energia (B.Hmax) – A energia total armazenada no campo magnético
Temperatura de estabilidade – Que pode ser reversível, irreversível, máxima
temperatura de operação e temperatura de Curie.
É importante salientar que a temperatura de operação de tais imãs influenciarão diretamente no
rendimento da máquina, pois ao alcançar determinadas temperaturas, a orientação dos domínios

30
magnéticos do material começam a perder a sua coercitividade de maneira temporária ou
permanente (First 4 Magnets, 2016). Em adição, First 4 Magnets (2016) também afirma que é
esperada uma perda de 0,11% do magnetismo do material para cada grau Celsius que é elevado.
Os imãs mais poderosos disponíveis do mercado são os de Neodímio e seus derivados. A Tabela
3 mostra a análise de alguns coeficientes de acordo com a composição do material do neodímio
e sua máxima temperatura de operação. Outro importante aspecto é a alta performance de tais
imãs em baixa temperatura. É possível que os parâmetros já citados sejam elevados para baixas
temperaturas.
Tabela 3 – Coeficientes para análise em materiais magnéticos (NdFeB - Info, 2016)
Sufixo do Tipo
da liga do
material
Magnético
Coeficiente de Temperatura
Reversível de Indução
Residual (Br), α, %/ºC (20-
100 ºC)
Coeficiente de
temperatura
reversível de
coercitividade
(Hci), β, %/ºC
(20-100 ºC)
Máxima
temperatura de
operação (ºC)
-
-0,12
-0,6
80
M
-0,12
-0,58
100
H
-0,11
-0,58
120
SH
-0,1
-0,55
150
UH
-0,09
-0,52
180
EH
-0,085
-0,5
200
VH/AH
-0,08
-0,45
230

31
5.1.3 Curva de Histerese
Os domínios magnéticos de um determinado material podem sofrer influências temporárias ou
permanentes se os mesmos sofrerem indução de um campo magnético exterior. A produção de
imãs segue este processo. A curva de magnetização determina a região de magnetização linear,
e a região em que o material sofre a sua saturação, ou seja, quase todos os domínios magnéticos
do material já estarão alinhados com os domínios magnéticos do campo exterior. Esta região
de saturação varia de acordo com o tipo de material a ser magnetizado, e também em que
temperatura este processo está à ocorrer.
Esta mesma analogia serve para a desmagnetização do material, que também pode sofrer
influência externa para a sua desmagnetização. A resistência que o material possui a tal
desorientação dos seus domínios magnéticos é conhecida como coercitividade, que já foi
discutida no item anterior. A Figura 12 mostra uma típica curva de Histerese, também conhecida
como curva H-B. Impactos mecânicos sofridos pelos imãs também deteriorarão as orientações
dos domínios magnéticos.
Como pode ser observado na Figura 12, um campo magnético H é aplicado em um material, a
medida em que se aumenta a magnitude de H, a densidade de campo magnético B no material
que sofre magnetização também aumenta de tal maneira a atingir a sua saturação (Ponto E).
Atingindo determinada saturação H é reduzido à zero, e alguns domínios magnéticos do
material magnetizados são perdidos, até o mesmo atingir o seu novo valor de magnetismo
residual (Ponto F). No entanto, se for aplicado um campo H na direção oposta, o fluxo
magnético residual poderá sofrer alterações. Esta análise serve para os Primeiros dois
quadrantes da Figura 8. Para o terceiro e quarto quadrante, a analogia é a mesma, entretanto a
direção inicial de H é 180º em comparação a análise realizada para os dois primeiros quadrantes
(Rudowicz et al, 2003).
A área interior da curva, juntamente com a sua largura determinará a coercitividade do
material, principalmente a sua largura. É esperado que materiais como imãs possuam uma curva
larga, pois será necessário um alto esforço para a desmagnetização do mesmo. Já no caso de
motores e transformadores, é desejável uma curva espeça, pois a orientação do fluxo magnético
do material mudará constantemente no núcleo do material, haja vista que a frequência de
alimentação do sistema determinará a velocidade de variação dos domínios magnéticos.

32
Figura 12 – Curva de Histerese
5.1.4 Curva de Desmagnetização dos Materiais Magnéticos
Esta região pode ser compreendida como a do segundo quadrante da Figura 12. Após da
magnetização do material, o mesmo será posto em operação. Dependendo das condições e do
meio que o mesmo estiver a operar, o seu magnetismo residual pode mudar de maneira
temporária ou permanente, como já foi discutido nas seções anteriores.
Na operação com gerador, esta região pode ser subdividia em três partes:
1. Operação em vazio
2. Operação a plena carga nominal
3. Operação em sobrecarga

33
A operação em sobrecarga pode ser considerado como o ponto de inflexão que servirá de limiar
que causará danos permanente à orientação dos domínios magnéticos do material dos imãs que
o gerador estiver a usar.
O excesso aumento na temperatura dos imãs também será um fator substancial a ser
considerado, pois a máquina pode chegar a tal região por sobre carga como discutido, ou apenas
por um aumento excessivo na temperatura de operação da máquina. A Figura 13 exemplifica
estas três curvas na região de desmagnetização do material do imã permanente (Xu et al,1995),
(Dehkordi et al, 2005), Sebastian et al (1989).
Figura 13 – Curva de Desmagnetização de Imãs Permanentes

34
5.2 Máquina Síncrona à Imã Permanente: Visão Geral
A máquina à imã permanente em sistemas de corrente alternada pode ser comparada com uma
máquina síncrona que possui excitação de magnitude fixa, entretanto, a mesma não precisa de
um circuito elétrico para a geração da mesma, uma vez que estão dispostos no rotor da máquina
imãs que possuem alta coercitividade e tem como função ser a excitação da máquina para
geração de energia. Tais imãs são distribuídos ao longo do rotor com objetivo de um alcance
ótimo das ondas de fluxo do rotor e do estator da máquina.
Os imãs podem ser instalados nas regiões periféricas do rotor ou eles podem ser inseridos dentro
do mesmo (Jhans et al, 1986). Os imãs produzirão um fluxo magnético constante no rotor da
máquina, e quando este rotor trabalhar em uma velocidade 𝜔𝑟, serão geradas tensões alternadas
nos terminais da mesma. Utilizando manipulações matemáticas posteriormente explicadas, será
possível realizar o acionamento da mesma e realizar o controle da mesma.
As Figuras 14 e 15 exemplificam o desenho esquemático de como uma máquina à imã
permanente trifásica, e possíveis modos de instalações dos imãs no rotor da máquina.
Figura 14 – Ilustração Esquemática para a Máquina Síncrona à Imã Permanente Trifásica

35
Figura 15 – Possíveis Métodos de Disposição dos Imãs Permanentes no Rotor da MSIP
Fonte: Pyrhönen, 2016
A Figura 16 mostra o corte transversal de uma máquina síncrona à imã permanente. Pyrhönen
(2016) afirma que nesta ilustração, como os imãs não estão à ocupar todo o espaço físico do
rotor, pode-se remover algumas partes do mesmo, reduzindo então a quantidade de material
usado no mesmo, observando-se apenas o limiar mínimo do mesmo.
Figura 16 – Corte Transversal de uma Máquina Síncrona à Imã Permanente
Fonte: Pyrhönen, 2016

36
Como a distribuição de tais imãs não é perfeita, tem-se um espaço físico entre os polos dos imãs
instalados no rotor da máquina, que somados com as limitações causadas pela saturação
magnética do material da máquina, causam o aparecimento de harmônicos espaciais e temporais
nas onda de fluxo magnético da máquina, que por sua vez induzirão a formação de distorções
nas ondas de tensão nos terminais da máquina.
Assim como as tradicionais máquinas de indução trifásica e síncrona com estator trifásico, o
design para o estator e núcleo da máquina à imã permanente pode ser assumido como o mesmo
destas duas máquinas, uma vez que a inovação desta máquina é o não requerimento de uma
excitação externa para a sua operação.
Uma das técnicas utilizadas para a análise da distribuição do fluxo magnético produzido pela
máquina é a técnica de Análise por Elementos Finitos. Esta técnica tem como princípio
particionar a estrutura geométrica da máquina em um expressivo número de segmentos. Estas
partições são reconstituídas formando assim equações nodais para que uma malha seja formada.
Com os resultados obtidos desta análise, é possível determinar os parâmetros técnicos mínimos
para o projeto da máquina. A literatura técnica fornece diversas técnicas para estes estudos,
entretanto, os mesmos são mais reservados para pós-graduação ou estudos em pesquisas de
corporações (Salon, 1995). A Figura 17 mostra um exemplo destas partições.
Figura 17 – Malha de Elementos Finitos Usando Triângulos
Fonte: Salon, 1995

37
A Figura 18 ilustra outro exemplo para análise de elementos finitos. Nela, Sjökvist et al (2014)
afirma que entre os imãs permanentes, são inseridos materiais de notável condutividade para
que a concepção de harmônicos seja mitigada. No exemplo desta figura, alumínio é utilizado
para a minimização de tal problema.
A Figura 19 mostra a simulação da distribuição fluxo magnéticos em uma máquina à imã
permanente que possui polos salientes. Um fator importante a ser notado é o aumento da
densidade de fluxo entre as extremidades dos polos da máquina, o entreferro e as ranhuras da
mesma, podendo isso em algumas situações gerar ripples de torque na máquina em baixas
rotações, sendo conhecidos também como “cogging torque”.
Figura 18 – Distribuição Geométrica de uma Máquina Síncrona à Imã Permanente para Estudos de
Elementos Finitos
Fonte: Sjökvist, 2013

38
Figura 19 – Análise da Distribuição do Fluxo Magnético em uma Máquina Síncrona à Imã Permanente
Fonte: Komurgoz et al, 2012
Chan et al (2010) realizou o acionamento de um gerador à imã permanente e registrou alguns
parâmetros de performance da máquina. A Figura 20 exibe os resultados da forma de onda de
tensão e corrente simulados e experimentais.
Figura 20 – Onda de Tensão de Fase e Corrente de Linha nos Terminais do Protótipo de uma Máquina
Síncrona à Imã Permanente.
Fonte: Chan et al, 2010

39
5.3 Análise Dinâmica da Máquina Síncrona à Imã Permanente
Máquinas elétricas requerem modelos matemáticos precisos para simulações, análise e
melhoramento de suas performances. Os comportamentos das máquinas elétricas pode ser
descritos normalmente por suas equações de tensão e corrente. O uso das mesmas em regime
permanente pode ser feito de maneira mais simplificada, através do uso de fasores e equações
diferenciais. Entretanto, em regime dinâmico, a análise de tais equações trifásicas no domínio
temporal são muito complexas devido à mudanças constantes em seus parâmetros causados
pela influência das partes girantes que compõem a máquina, e pelo número de variáveis que
regem o funcionamento da mesma.
Neste capitulo, primeiro será introduzido o uso de artifícios matemáticos para a simplificação
das equações para próximas análises, depois, serão introduzidas as expressões básicas do
funcionamento da máquina síncrona à imã permanente, seguido do modelo o dinâmico da
máquina síncrona à imã permanente, seu circuito equivalente bifásico, diagrama fasorial, e por
fim, serão discutidos dois ensaios básicos da máquina síncrona à imã permanente.
5.3.1 Transformada de Clarke
Esta é uma transformação linear entre dois espaços vetoriais, também conhecida como
transformada αβ, que providencia o desacoplamento de parâmetros trifásicos variantes no
tempo em variáveis estacionárias, bifásicas, ortogonais, e constantes no domínio estacionário.
Entretanto, se o sistema for desbalanceado, será notado o surgimento de uma componente
homopolar, normalmente expressa com índice zero (‘0’), esta componente homopolar pode ser
entendida da mesma forma que a componente de sequência zero no cálculo de componentes
simétricas e assimétricas. Podemos denominar esta transformada também como transformada
αβ0.
Pode-se assumir que é possível calcular a inversa da mesma, ou seja, também é possível calcular
os valores trifásicos variantes no tempo tendo em mãos os valores bifásicos ortogonais. Tal
transformada pode ser analisada pela equação (1). De maneira em que se houver mudança do
valor atribuído à constante ‘k’, o valor da constante homopolar ‘k0’ dentro da matriz de
transformação ‘T’ também mudará.

40
Por exemplo, em engenharia elétrica, o coeficiente ‘k’ pode possuir diferentes valores. Kundur
(1994) afirma que usando k = 2/3 a constante da componente homopolar será igual à 1/2, e os
valores de amplitude de tensão e corrente trifásicas serão os mesmos no espaço estacionário,
criando assim uma associação ambígua de amplitudes entre os dois espaços vetoriais,
contribuindo para cálculos mais realísticos. A Tabela 4 mostra algumas variações nos valores
de ‘k’ e ‘k0’ e suas vantagens. A análise gráfica da transformada de Clarke é mostrada na Figura
21.
[
𝑋𝛼
𝑋𝛽
𝑋0
]= [𝑇]. [𝑋𝑎
𝑋𝑏
𝑋𝑐
] , 𝑜𝑛𝑑𝑒 ∶ [𝑇] = 𝑘 [
11
2−
1
2
0√3
2−
√3
2
𝑘0 𝑘0 𝑘0
] (1)
[𝑋𝑎
𝑋𝑏
𝑋𝑐
]=[𝑇−1]. [
𝑋𝛼
𝑋𝛽
𝑋0
] (2)
Tabela 4 - Diferentes valores nos coeficientes da matriz de transformação ‘T’ (Kunur, ).
k
Matriz de Transformação
Conveniência
2
3
[ 1 −
1
2−
1
2
0√3
2−
√3
21
2
1
2
1
2 ]
As magnitudes das variáveis
a serem convertidas são
idênticas em ambos espaços
vetoriais (Amplitude
constante).
√2
3
[ 1 −
1
2−
1
2
0√3
2−
√3
21
√2
1
√2
1
√2 ]
Usando estes coeficientes
temos invariância de
potência em ambos os
espaços vetoriais (Potência
Invariante).

41
Figura 21 – Forma Gráfica da Transformada de Clarke
5.3.2 Transformada Dq0
Considerada como uma extensão da transformada αβ, utilizando seus valores estacionários
obtidos, entretanto, estes são posicionados a uma nova referência adotada. Esta transformada
também é conhecida como transformada de Park.
Com este à introdução desta nova referência, os coeficientes pode ser analisados como valores
variáveis ou contínuos. A aplicação desta transformada pode ser usada na implementação do
controle de velocidade e conjugado das máquinas elétricas, obtendo uma alta acurácia na
determinação de tais parâmetros. Assumindo-se que a máquina pode ser alimentada por tensões
trifásicas cossenoidais, as expressões das equações pode ser determinadas pelas seguintes
equações:

42
[
𝑋𝑑
𝑋𝑞
𝑋0
]= [𝑇]. [𝑋𝑎
𝑋𝑏
𝑋𝑐
] (3)
Onde:
[𝑇] = 𝑘 [
cos (Ɵ) cos (Ɵ −2𝜋
3) cos (Ɵ +
2𝜋
3)
−sen(Ɵ) −sen(Ɵ −2𝜋
3) −sen(Ɵ +
2𝜋
3)
𝑘0 𝑘0 𝑘0
] (4)
Sendo assim:
[𝑋𝑎
𝑋𝑏
𝑋𝑐
]=[𝑇−1]. [
𝑋𝑑
𝑋𝑞
𝑋0
] (5)
Os valores dos parâmetros usados na matriz de transformação realizam o mesmo efeito como é
explicado na Tabela 4. A Figura 22 mostra uma análise gráfica desta transformada.

43
Figura 22 – Análise Gráfica da Transformada de Park
5.3.3 Introdução ao Modelo Dinâmico (dq0) Da Máquina Síncrona à Imã Permanente
Em máquinas síncronas com polos não-salientes, por possuírem um entreferro uniforme, a
determinação das equações de indutância, fluxo, conjugado e potência da máquina são mais
simples a serem determinadas, e por muitas vezes não é necessário o uso da transformada dq0.
Entretanto, quando saliências são introduzidas no rotor da máquina, como o entreferro não será
mais constante, sendo assim, as expressões de fluxo, correntes, e tensões necessitarão de
técnicas que simplifiquem o processo de determinação dos mesmos regime dinâmico e regime
permanente. A transformada de Park é uma das técnicas utilizadas para esta situação. Por
exemplo, a mesma separa os eixos d-q de parâmetros de tensão, corrente, e fluxo estatórico.
Quando a máquina possui polos não-salientes (cilíndricos), os parâmetros do eixo d são iguais
ao do eixo q, retornando assim as equações tradicionais utilizadas pela literatura técnica. Tais

44
parâmetros poderão ser alinhados com um determinado referencial, dependendo dos objetivos
do estudo.
A equação da tensão induzida nos terminais de cada fase da máquina operando como gerador é
estará sob influência de diferentes fatores, como segue:
1. Lei de Faraday: Variação do fluxo magnético resultante dos imãs permanentes
instalados no rotor da máquina, produzida por um conjugado aplicado na ponta do eixo
da máquina, em casos de operação como gerador, ou em casos que técnicas de controle
são aplicadas através do uso de conversores estáticos para o acionamento da máquina
quando a mesma trabalha como motor;
2. Queda de tensão no estator: causada devida à resistência dos enrolamentos do estator;
3. Dispersão de fluxo magnético: Linhas de campo magnético que que se dispersam e
não induzem tensão nos terminais da máquina;
4. Rendimento dos imãs em função da temperatura: Os alinhamentos dos domínios
magnéticos da máquina podem perder orientação dependendo da temperatura de
operação da máquina;
5. Alinhamento do rotor da máquina: Um provável desalinhamento do rotor da máquina
com a sua posição original de projeto pode reduzir a tensão induzida nos terminais da
máquina, assim como também pode aumentar a distorção harmônica espaço-temporal
na máquina.
6. Demais Perdas: Histerese, correntes parasitas, perdas ôhmicas no ferro, assim como
perdas por atrito e ventilação
O fluxo resultante em cada fase da máquina pode ser melhor entendido analisando a Figura 22,
se assumirmos uma máquina ideal, sem perdas ôhmicas, e perdas por histerese e correntes
parasitas. Também é interessante levar-se em consideração que a mesma possui um rotor
cilíndrico, é possível simplificar a equação da tensão induzida nos terminais da máquina de
acordo com as equações (6) e (7) (Fitzgerald, 2006). Para as equações (6) e (7) a utilizou-se a
notação de gerador.
Cada fase terá um fluxo resultante 𝜆 em seus terminais, este fluxo possui uma componente
fixa, entendido como fluxo próprio, e uma componente variável, que dependerá da disposição
e do número de fases da máquina, juntamente com a posição do rotor da máquina pelo fato do
mesmo também possuir uma componente de campo magnético (Fitzgerald, 2006). A Figura 23
faz notação para a fase 1, mas o mesmo entendimento pode ser estendido para as outras fases
da máquina.

45
Figura 23 – Análise de Fluxo por Fase em Máquina Síncrona Trifásica
Fonte: Editado de Fitzgerald and Umans, 2006
Onde:
o 𝜆 é o fluxo magnético resultante em uma determinada fase, descrita com seu respectivo
subscrito.
o ᵠ é o fluxo próprio da fase, ou também o fluxo magnético mutuo entre fases, descritas
com seus respectivos subscritos;
o 𝐼 é a corrente que flui na fase descrita.
𝑣𝑎 = 𝑑𝜆𝑖𝑚ã
𝑑𝑡− 𝑅𝑎. 𝑖𝑎 − 𝐿𝑎.
𝑑𝑖𝑎
𝑑𝑡 V (6)
Onde:
o 𝜆𝑖𝑚ã é o fluxo resultante gerado pelos imãs instalados no rotor da máquina;
o 𝐿𝑎 é a indutância resultante da dispersão de fluxo magnético na fase “a”;
o 𝑅𝑎 é a resistência resultante do estator na fase “a”

46
o 𝑖𝑎 é a corrente o estator na fase “a”;
o 𝑣𝑎 é a tensão do terminal do estator “a”
A equação (7) mostra esta equação usando notação fasorial.
𝑽𝑎 = 𝑬𝑀 − 𝑅𝑎. 𝑰𝑎 − 𝑗𝑋𝑎. 𝑰𝑎 V (7)
Onde:
o 𝑬𝑀 é o fasor da tensão gerada pela variação do fluxo magnético dos imãs instalados no
rotor;
o 𝑿𝑎 é a reatância resultante da dispersão de fluxo magnético na fase “a”;
o 𝑅𝑎 é a resistencia resultante do estator na fase “a”;
o 𝑰𝑎 é o fasor da corrente no estator na fase “a”;
o 𝑽𝑎 é o fasor da tensão do terminal do estator “a”.
As expressões dq0 para tensões são propostas Xu et al (1995), e Da et al (2013), e podem ser
analisadas pelas equações (8) e (9). O reordenamento das equações seguindo o modelo matricial
pode ser compreendido pela equação (10). Tais equações estão utilizando o referencial rotórico.
𝑢𝑑 = 𝑅𝑠𝑖𝑑 + 𝐿𝑑𝑑𝑖𝑑
𝑑𝑡 − 𝜔𝑟𝐿𝑞𝑖𝑞 (8)
𝑢𝑞 = 𝑅𝑠𝑖𝑞 + 𝐿𝑞𝑑𝑖𝑞
𝑑𝑡+𝜔𝑟𝐿𝑑𝑖𝑞 + 𝐾𝑒𝜔𝑟 (9)
[𝑢𝑞
𝑢𝑑] = [
𝑅𝑠 + 𝐿𝑞𝑑
𝑑𝑡𝜔𝑟𝐿𝑑
−𝜔𝑟𝐿𝑞 𝑅𝑠 + 𝐿𝑑𝑑
𝑑𝑡
] [𝑖𝑞𝑖𝑑
] + 𝐾𝑒𝜔𝑟 [10] (10)
Onde:
o 𝑅𝑠 é a resistência do estator;
o 𝐿𝑑 e 𝐿𝑞 são as indutâncias do estator nas coordenadas d-q, respectivamente;
o 𝑢𝑑 e 𝑢𝑞 são as tensões nos terminais do estator nas coordenadas d-q, respectivamente;
o 𝑖𝑑 e 𝑖𝑞 são as correntes de fase nas coordenadas d-q, respectivamente;

47
o 𝜔𝑟 é a velocidade angular do rotor da máquina;
o 𝐾𝑒 é constante da força eletromotriz gerada pelos imãs. Normalmente esta constante irá
depender do projeto da máquina, como por exemplo, o número de pares de polos e o
fluxo magnético dos imãs da mesma.
Por muitas vezes a utilização de sensores no sistema de controle pode tornar o sistema
fisicamente inviável, e também comprometer o orçamento do projeto, reduzindo assim sua
competitividade no mercado. Com isto, técnicas de estimação são propostas pela literatura
técnica, dispensando então o uso de sensores. A acurácia do algoritmo de estimação irá
determinar a precisão da estimação dos parâmetros necessitados. Assumindo tal estimação, as
equações (11) e (12) contribuem para um melhor entendimento desta teoria (Da et al, 2013).
[𝑢𝑞
𝑒
𝑢𝑑𝑒] = 𝑇(𝛥𝜃) [
𝑢𝑞
𝑢𝑑] (11)
Onde o índice "𝑒" representa que as variáveis são estimadas e 𝛥𝜃 = 𝜃 − 𝜃𝑒𝑠𝑡𝑖𝑚𝑎𝑑𝑜 . O mesmo
entendimento deve ser considerado com relação ao cálculo das correntes d e q, com é mostrado
pela equação (10) (Da et al, 2013).
[𝑖𝑞𝑒
𝑖𝑑𝑒] = 𝑇(𝛥𝜃) [
𝑖𝑞𝑖𝑑
] (12)
As expressões para conjugado elétrico e a equação que representa a dinâmica mecânica da
máquina são expressas por (13) e (14).
𝐶𝐸 =3
2 𝑝 [𝜆𝑖𝑚ã. 𝑖𝑞 + (𝐿𝑑 − 𝐿𝑞 ). 𝑖𝑑 . 𝑖𝑞] (13)
𝐽𝑑𝜔𝑟
𝑑𝑡= 𝑝 (𝐶𝐸 − 𝐶𝑐𝑎𝑟𝑔𝑎 − 𝐹𝑎𝜔𝑟) (14)
Onde 𝐽 é o momento de inércia, 𝑝 representa o número de pares de polos, 𝜔𝑟 é a velocidade
rotórica, e 𝐹𝑎 representa a força de atrito aplicada ao eixo da máquina (Fitzgerald, 2006).
A Figura 24 contribui para um melhor entendimento de todas as equações anteriormente citadas.

48
Figura 24 – Representação do Modelo dq0 da Máquina Síncrona à Imã Permanente Trifásica

49
5.4 Máquina Síncrona à Imã Permanente: Circuito Bifásico Equivalente e seu Diagrama
Vetorial
Com a determinação das equações expressas no tópico 5.3, é possível determinar os circuito
equivalente bifásico (dq0), assim como o diagrama vetorial da máquina síncrona à imã
permanente. Tais modelos podem ser analisados nas Figuras 25 e 26.
Figura 25 – Circuito Equivalente dq0 para a MSIP
Figura 26 – Diagrama Fasorial do Modelo dq0 da Máquina Síncrona à Imã Permanente

50
Onde EM é a força eletromotriz gerada pela variação do fluxo resultante dos imãs, e Vt é a
tensão terminal da máquina.
O referencial da excitação da máquina dependerá do modelo utilizado na transformação, como
por exemplo entradas de tensão senoidais ou cossenoidais afetarão a posição dos vetores da
Figura 26.
5.5 Ensaios Da Máquina Síncrona à Imã Permanente de Acordo Com O IEEE Standard
1812 (2014)
A determinação dos principais parâmetros da MSIP podem ser calculados pelos ensaios em
vazio e curto circuito. Estes parâmetros podem servir como comprovação dos valores
fornecidos na placa de identificação da máquina. Em adição, à máquina pode estar a operar em
uma situação de carga ou temperatura adversa, e nestas condições é interessante saber como a
variação dos parâmetros da mesma está à ocorrer se comparados com os mesmos em condições
normais de testes e também comparar a variação dos seus parâmetros com os mesmos
fornecidos quando a mesma foi entregue pelo fornecedor.
Outro fator importante para a realização dos testes da máquina é a opção do uso dos parâmetros
da mesma para simulações computacionais, contribuindo significantemente para novas
estratégias de acionamento da máquina, e propostas de implementação de novos conversores
estáticos, que são projetados por profissionais de Eletrônica de Potência. Estas novas topologias
podem propor melhorias no acionamento e controle da MSIP, e também, para outros tipos de
máquinas elétricas.
De acordo com o IEEE Trial-Use Guide for Testing Permanent Magnet Machines Standard
1812 (2014), procedimentos mais específicos são necessários durante os testes da máquina
síncrona à imã permanente, como por exemplo, a temperatura de operação da máquina deve
estar em uma região em que os imãs foram projetados para trabalhar.
De acordo com este mesmo guia, se o teste for conduzido em temperatura ambiente e realizado
rapidamente, é admissível que a máquina operou conforme as temperaturas das condições
iniciais do teste.
Os dados da máquinas podem ser coletados com a máquina operando como motor ou como
gerador. A descrição dos procedimentos e configurações dos ensaios é discutida nos tópicos
subsequentes, assim como o cálculo de importantes parâmetros da máquina.

51
5.5.1 Ensaio em Vazio
O objetivo deste ensaio é medir a tensão terminal gerada pela MSIP à plena velocidade nominal.
Dados podem ser coletados em outras regiões de operação, para que ajudem a manter a
continuidade de gráficos a serem plotados. Com isso pode-se analisar o desempenho da
máquina em sua velocidade nominal de operação ao longo de sua vida de útil.
Como a excitação da MSIP já está diretamente acoplada no rotor da máquina, complica-se a
separação das perdas por atrito e ventilação, juntamente com as perdas no ferro da máquina.
Este teste também, juntamente com o teste em curto-circuito, contribui para o cálculo da
reatância síncrona saturada da máquina de rotor cilíndrico, ou da reatância do eixo direto (Xd)
da máquina síncrona à imã permanente de polos salientes. Em caso em que extrapolações da
linha do entreferro da máquina sejam realizadas, o mesmo contribui para a determinação da
reatância síncrona não saturada da máquina (IEEE Trial-Use Guide for testing Permanent
Magnet Machines Standard 1812, 2014). Dependendo dos equipamentos utilizados, este
parâmetro pode ser adquirido em regime permanente, transiente, e sub transiente.
Se a máquina operar como gerador, ela deve ser acionada por uma máquina primária, que
permita a variação de velocidade. Se a mesma operar como motor, o sistema de acionamento
deve ser compatível com máquina síncronas, haja vista que com as tecnologias atuais, tal
máquina ainda não conseguiu ser acionada sem o uso de inversores de frequência
convencionais. Isto se dá porque se houverem inserções de enrolamentos auxiliares para a
partida da máquina, estes enrolamentos contribuirão negativamente para o alinhamento das
linhas de campo magnético dos imãs dispostos no rotor da máquina.
Outro fator que é de suma importância a ser estressado é que para cada condição de velocidade
da máquina, dependendo do número de polos, a frequência fundamental da onda de tensão
variará, por razões da velocidade de operação da máquina estar intrinsicamente relacionada
com a força eletromotriz induzida nos terminais da mesma.
É recomendado a coleta dos dados de tensão em condições de baixa velocidade para análise do
comportamento do ripple de conjugado produzido pela máquina em tais condições. A
configuração deste tese pode ser analisada na Figura 27.

52
Figura 27 – Configuração do Teste em Vazio da Máquina Síncrona à Imã Permanente (Modo Gerador)
5.5.2 Ensaio em Curto Circuito
Assim como no teste em circuito aberto (vazio), as condições de temperatura ambiente dos imãs
podem influenciar diretamente os resultados deste teste. Assumindo que à máquina estar a
operar como gerador, o objetivo deste ensaio é curto circuitar os terminais da máquina e
aumentar a velocidade angular aplicada no eixo da máquina do zero até que os dispositivos de
medição meçam a corrente nominal da máquina. O teste deve ser realizado rapidamente para
valores de corrente maiores que os da corrente nominal da máquina. É interessante registrar a
velocidade rotórica para cada valor medido da corrente de curto circuito. Este ensaio também
pode determinar os cálculos das perdas estatóricas.
A configuração deste teste pode ser analisada na Figuras 28. O intuito da impedância adicionada
é de limitar a corrente falta nos terminais da máquina. Dependendo dos equipamentos
utilizados, pode-se calcular a corrente em regime permanente, transiente ou sub transiente da
máquina.
Figura 28 – Ensaio em Curto Circuito da Máquina Síncrona à Imã Permanente (Modo Gerador)

53
5.5.3 Determinação dos Parâmetros da Máquina Síncrona à Imã Permanente à Partir dos
Ensaios em Vazio e Curto-Circuito
Como já discutido nos tópicos 5.5.1 e 5.5.2, a possível determinar a reatância síncrona saturada
a partir dos testes descritos nestes tópicos. O cálculo da mesma pode ser utilizando valores da
tensão e corrente eficazes monofásicos, como mostrado em (15), ou utilizando os valores de
tensão de linha e corrente de linha, como expresso em (16) se a resistência estatórica for
desprezada.
𝑋𝑠 =𝑉𝑣
𝐼𝑐𝑐 𝑗Ω (15)
𝑋𝑠 =𝑉𝑣𝐿
√3𝐼𝑐𝑐𝐿 𝑗Ω (16)
A Figura 29 exemplifica de maneira geral os dados a serem colhidos nos ensaios em curto
circuito e vazio.
Observando a curva do ensaio em vazio, é possível observar que ao se aumentar a velocidade,
a tensão induzida nos terminais da máquina será diretamente proporcional a tal velocidade.
Dependendo do projeto e especificações do material da máquina, isto pode se manter linear até
um determinado ponto de operação, até que ao atingir uma determinada velocidade, a máquina
atingirá uma região de operação não linear. Isso se deve por razões de limitações dos materiais
magnéticos dos imãs, por limitações do entreferro da máquina, do núcleo da máquina, e do
estator da máquina. Em casos em que extrapolações são realizadas, é possível se projetar uma
linha que represente a tensão induzida nos terminais da máquina de maneira mais linear.
Quando se analisa o ensaio em curto circuito, esta saturação não é notada, pelo simples fato da
máquina atingir o valor de sua corrente nominal em uma baixa velocidade e a tensão induzida
também é minimizada pelo fato de seus terminais estarem curto circuitados, já que os terminais
estão curto circuitados.
Na região de operação linear da máquina, pode-se analisar que o valor da reatância síncrona
pode ser tido como constante, devido a razão entre a tensão e a corrente também se manter
constante. Entretanto, entra em sua região de operação não linear, o valor da tensão não será
tão diretamente proporcional como o valor da corrente em função da velocidade rotórica. Isso
pode. Com isso, é esperado que o valor da reatância síncrona decaia para regiões de operação
não lineares.

54
Figura 29 – Análise Gráfica dos Parâmetros de Ensaio da Máquina Síncrona à Imã Permanente de Rotor
Cilíndrico

55
6 Resultados de Simulação
Os resultados de simulações computacionais foram divididos em duas seções. A primeira trata
do uso do software Simulink/Matlab®, que viabiliza o acionamento da máquina de maneira
interativa, fornecendo ferramentas que permitem o acionamento usando diagrama de blocos
fornecidos pelo próprio software. A segunda seção usa exclusivamente o Script do Matlab®
para desenvolver a modelagem da máquina. O objetivo principal trata de validar os resultados
do script com os resultados de alta confiabilidade fornecidos pelo Simulink/Matlab®.
Desta maneira, usando tal Script será possível deixar uma gama maior de conhecimentos para
os futuros estudantes do laboratório, que irão dar continuidade aos estudos do presente trabalho.
Futuras estratégias de acionamento da máquina síncrona à imã permanente poderão ser
implementados, como o uso de novas topologias de conversores, assim como novas estratégias
de controle poderão ser estudadas e efetuadas antes da validação dos resultados práticos no
Laboratório de Acionamentos, Controle e Automação do IFPB.
Para ambas as simulações, os parâmetros da máquina utilizados foram selecionado de maneira
que não exista uma diferença significativa entre os parâmetros elétricos e mecânicos da
máquina. A placa do motor não fornece a resistência estatórica da máquina, assim como o do
fluxo dos imãs, tais valores adotados foram estabelecidos de acordo com a média de máquinas
de potência equivalente vistas em catálogos do mercado.
Tabela 5 – Parâmetros da Máquina Síncrona à Imã Permanente WMAGNET
Tensão
de Fase
(V)
Número
de Pares
de Polos
Fluxo
dos Imãs
(V.s)
Resistência de
Armadura/Fase
(Ω)
Indutância
Ld
(mH)
Indutância
Lq
(mH)
Inércia
(Kg.m²)
100 2 0.12 0.0485 8.5mH 8.5mH 0.0027
A transformada dq0 do Simulink® e do script desenvolvido tem como premissa que as tensões
de entrada são trifásicas e senoidais balanceadas, e que os fatores de escala adotados da
transformada dq0 mantém as amplitudes constantes entres os dois espaços vetoriais. Como as
tensões geradas serão balanceadas, cautelas com relação à componente homopolar poderão ser
minimizadas. Todavia, as equações das correntes dq0, conjugado elétrico, e velocidade da
máquina seguem o modelo fornecido pelo Simulink/Matlab®.
Como já é sabido, a MSIP conectada diretamente à rede possui um conjugado resultante igual
a zero (Fitzgerald, 2015). Desta forma, a primeira comparação entre as simulações foi

56
conectando a MSIP diretamente ao grid. Posteriormente, foi aplicada uma técnica de partida
direta tradicional para a mesma em ambas as simulações.
6.1 Técnica Adotada Para a Partida Da MSIP
Como este tipo de máquina não possui enrolamentos auxiliares assim como na máquina
síncrona tradicional, é essencial o estudo do outras técnicas de acionamento para a partida da
mesma. Como solução, o uso de conversores estáticos para realizarem a partida e controle desta
máquina vem sendo a técnica que é mais aplicada no mercado nos dias atuais.
Técnicas avançadas de acionamento são utilizadas, tais como o controle vetorial para
conjugado/velocidade. Este controle pode ser como uso de sensores, ou com à ausência dos
mesmos (sensorless), para a aplicação do controle vetorial sensorless, diversos algoritmos de
estimação são propostos pela literatura técnica.
Tal estratégia tem por opção impor uma corrente nula em um dos eixos (dependendo do
referencial adotado), e impor o conjugado em função da outra componente de corrente, assim
como exemplifica a Figura 30 (Jacobina, 2005).
Como o projeto dos controladores não faz parte deste trabalho, é possível emular tal situação,
impondo a tensão Vd = 0, e aumentar gradativamente amplitude de Vq. Desta forma, é
admissível assumir que tal situação emula o que o sistema de controle da Figura 30 propõe.
Na validação do código, duas situações são consideradas.
A máquina é conectada diretamente à rede, desta forma a mesma não terá sincronismo
e não haverá partida como consequência;
São impostas as tensões Vd = 0 e Vq variará progressivamente até atingir o valor da
tensão de fase do estator. Isso é admissível, pois os fatores de escalas utilizados
permitem que as amplitudes dos dois espaços vetoriais são invariantes.

57
Figura 30 – Diagrama de Blocos do Controle Vetorial da Máquina à Imã com Controlador de Corrente no
Rotor
Fonte: Modificado da Apostila de Acionamentos Elétricos do Professor Cursino Brandão Jacobina, 2005.
É de suma importância ressaltar que a adoção dos valores de projetos da máquina, tais como
fluxo dos imãs, inércia da mesma, indutâncias e resistência não podem ser selecionadas de
maneira aleatória, pois isso influenciará diretamente nos padrões de projetos da máquina, sendo
assim, o código poderá não convergir para uma situação habitual para modelagem de máquinas
elétricas.
6.2 Simulação Usando Simulink/Matlab®
Para o acionamento da máquina foram utilizadas fontes dependentes que irão emular o
acionamento da máquina via conversor estático VSI (Voltage Source Inverter). Pelo fato das
fontes serem ideais e gerarem exatamente a mesma forma de onda recebida como referência, a
mesmas não contribuirão em geração de THD (Total Harmonic Distortion). Esta simulação
pode ser entendida em três etapas:
Geração das Tensões de Referência: Estas tensões serão utilizadas como as tensões
de polo de referência que serão fornecidas como parâmetros de entrada para as fontes
dependentes.
Acionamento da Máquina: Com a geração das tensões de referência, as fontes terão
como função à alimentação da MSIP. As mesmas alimentarão de maneira que as tensões
médias nos terminais da mesma sejam iguais as tensões de referência fornecidas ao na

58
entrada delas. Isto ocorrerá se as perdas forem desprezadas. A máquina possui dados
de saída com relação à resposta as tensões de alimentação, tais como, as correntes
trifásicas, as correntes e tensões dq0, conjugado elétrico, velocidade rotórica e posição
rotórica.
Colhimento dos dados: Uma vez que a máquina seja acionada, o colhimento das
informações da mesma poderão ser verificados de forma dinâmica no próprio
Simulink®. Toda via, o simulador também fornece a possibilidade de armazenar estes
vetores e envia-los para o Workspace do Matlab®, fomentando assim outras
possibilidades de estudos, tais como a análise de distorção harmônica, fator de potência,
e entre outros.
As Figuras 31 e 32 detalham estas três seções da simulação.
Figura 31 – Acionamento da Máquina Síncrona à Imã Permanente Via Simulink®

59
Figura 32 – Colhimento dos Dados da MSIP
6.2.1 Resultados de Simulação (Simulink/Matlab®)
Neste acionamento, a máquina é conectada diretamente ao grid, como a mesma não possui
nenhum auxilio de partida, ela permanecerá com velocidade rotórica igual à zero. Como todos
os parâmetros estão sendo analisados do referencial rotórico, é esperado que os valores de
corrente e conjugado sejam alternados, demonstrando assim que a máquina não converge para
um ponto de operação. Fisicamente isto pode ser interpretado por trepidações contínuas da
máquina. Isto se deve pelo fato da máquina conseguir sincronizar os campos magnéticos do

60
rotor e do estator, como o rotor está parado e o referencial está adotado no mesmo, o rotor da
máquina perceberá as grandezas estatóricas girando ao seu redor.
Pelo fato da máquina estar com velocidade rotórica nula, no momento em que a componente
resultante do campo girante do estator passar pela componente resultante do campo magnético
do rotor, estas duas componentes tentarão se sincronizar, mas pelo fato da diferença de
velocidade ser muito alta, isto não será concretizado.
As Figuras 33 à 37 Mostram os resultados de simulação coletados do Simulink/Matlab®
Figura 33 – Correntes Id e Iq - Simulink®
Figura 34 – Tensões Vd e Vq - Simulink®
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-60
-40
-20
0
20
40
60Análise de Id e Iq - Simulink, Partida Direta
Tempo(s)
Corr
ente
(A
)
Id
Iq
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-100
-50
0
50
100
Análise de Vd e Vq - Simulink, Partida Direta
Tempo(s)
Tensão (
V)
Vd
Vq

61
Figura 35 – Conjugado Elétrico - Simulink®
Figura 36 – Velocidade Rotórica - Simulink®
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-20
-15
-10
-5
0
5
10
15
20Análise do Conjugado da MSIP - Simulink, Partida Direta
Tempo(s)
Conju
gado E
létr
ico (
N.m
)
Ce
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-600
-400
-200
0
200
400
600Velocidade Rotórica - Simulink, Partida Direta
Tempo(s)
RP
M
Nr

62
Figura 37 – Posição Rotórica - Simulink®
Figura 38 – Correntes Estatóricas (de Fase) -Simulink®
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.2
0.4
0.6
0.8
1
1.2
1.4Posição Rotórica - Simulink, Partida Direta
Tempo(s)
Ângulo
(ra
d)
Teta R
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-60
-40
-20
0
20
40
60Correntes Estatóricas - Simulink, Partida Direta
Tempo(s)
Corr
ente
(A)
Ia
Ib
Ic

63
Figura 39 – Tensões Estatóricas (de Fase)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-100
-50
0
50
100
Tensões Estatóricas
Tempo(s)
Tensão (
V)
Va
Vb
Vc

64
6.2.2 Resultados de Simulação Usando Script do Matlab®
Utilizando o código desenvolvido em laboratório, que está disponível no Anexo I deste
documento, é possível analisar-se e comparar-se os resultados desta simulação nas Figuras 40
à 46.
Figura 40 – Correntes Id e Iq Usando Script do Matlab®
Figura 41 – Tensões Vd e Vq Usando Script do Matlab®
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-60
-40
-20
0
20
40
60Análise de Id e Iq
Tempo(s)
Corr
ente
(A
)
Id
Iq
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-100
-50
0
50
100
Análise de Vd e Vq
Tempo(s)
Tensão (
V)
Vd
Vq

65
Figura 42 – Conjugado Elétrico usando Script do Matlab
Figura 43 – Velocidade Rotórica Usando Script do Matlab®
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-20
-15
-10
-5
0
5
10
15
20Análise do Conjugado da MSIP
Tempo(s)
Conju
gado E
létr
ico (
N.m
)
Ce
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-1000
-500
0
500
1000
1500Velocidade Rotórica
Tempo(s)
RP
M
Nr

66
Figura 44 – Posição Rotórica Usando Script do Matlab®
Figura 45 – Correntes Estatóricas (de Fase) Usando Script do Matlab®
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.5
1
1.5
2
2.5Posição Rotórica
Tempo(s)
Ângulo
(ra
d)
Teta R
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-60
-40
-20
0
20
40
60Correntes Estatóricas
Tempo(s)
Corr
ente
(A)
ia
ib
ic

67
Figura 46 – Tensões Estatóricas Rotórica Usando Script do Matlab®
6.2.3 Resultados de Simulação Emulando Efetivação do Controle Vetorial com Referencial
Rotórico Usando Script Usando Matlab®
Como explicado no início deste tópico, impõe-se uma tensão Vd de referência igual à zero, e
uma tensão Vq variando progressivamente de maneira linear até a mesma atingir o valor de sua
tensão nominal, e pelo fato da transformada dq0 utilizada possuir fatores de escada que fazem
com que sua amplitude seja constante, isso demonstra que a máquina estará operando com os
mesmos padrões do grid utilizado nesta simulação.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
-100
-50
0
50
100
Tensões Estatóricas
Tempo(s)
Tensão (
V)
Eg1
Eg2
Eg3

68
Figura 47 – Tensões Vd e Vq Emulando Controle Vetorial no Scprit do Matlab
Figura 48– Correntes Id e Iq Emulando Controle Vetorial no Script do Matlab®
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
50
100
150
200
250Análise de Vd e Vq
Tempo(s)
Tensão (
V)
Vd
Vq
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
5
10
15
20
25
30Análise de Id e Iq
Tempo(s)
Corr
ente
(A
)
Id
Iq

69
Figura 49 – Resposta do Conjugado Elétrico Emulando o Controle Vetorial no Script do Matlab®
Figura 50 – Resposta da Velocidade Rotórica Emulando o Controle Vetorial no Script do Matlab®
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.5
1
1.5
2
2.5
3
3.5
4
4.5Análise do Conjugado da MSIP
Tempo(s)
Conju
gado E
létr
ico (
N.m
)
Ce
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
200
400
600
800
1000
1200
1400
1600
1800Velocidade Rotórica
Tempo(s)
RP
M
Nr

70
Figura 51 – Respostas das Correntes Estatóricas (de Fase) Emulando o Controle Vetorial Usando o Script
do Matlab®
Figura 52 – Variação das Tensões Estatóricas (de Fase) Emulando o Controle Vetorial Usando o Script do
Matlab®
Com isto, é possível perceber que se a estratégia de controle for aplicada corretamente, o código
usado irá convergir para resultados plausíveis. É possível observar uma pequena diferença de
amplitude entre a simulação do Simulink® e o Script desenvolvido, assim como um pequeno
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-30
-20
-10
0
10
20
30Correntes Estatóricas
Tempo(s)
Corr
ente
(A)
is1
is2
is3
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-250
-200
-150
-100
-50
0
50
100
150
200
250Tensões Estatóricas
Tempo(s)
Tensão (
V)
Eg1
Eg2
Eg3

71
atraso, tal diferença pode ser entendida por prováveis configurações de valores iniciais ou até
mesmo melhorias internas dos blocos do Simulink® que por razões de direitos autorais não
devem ser divulgadas.

72
7 Resultados Experimentais
Para a realização dos testes de curto-circuito e vazio foi utilizado um motor de indução trifásico
gaiola de esquilo WEG W22 Plus de alto rendimento, 2CV, 220/380V, 1750RPM-60Hz (4
polos). Esta máquina foi utilizada como máquina primária e acionada por um inversor de
frequência WEG CFW 08.
A máquina à imã permanente utilizada Possui os seguintes parâmetros: Potência nominal de
1kW, Tensão de Linha de 85Vrms, 650RPM - 43,3Hz (8 polos).
O acoplamento entre estas duas máquinas pode ser observado na Figura 53
Figura 53 – Sistema de Acoplamento entre Motor de 2CV WEG W22 Plus e um
7.1 Ensaio em Vazio
Utilizando a máquina síncrona como gerador, e variando a velocidade da máquina primária à
partir do controle de velocidade do motor de indução trifásico utilizando o inversor de
frequência, foram coletados dados de tensão para diferentes pontos de operação. A coleta de
dados foi realizada a partir do uso de pontas de prova de alta precisão e também utilizado o
Osciloscópio Agilent Technologies Infinii Vision DSOX 4224 A, que além de fornecer as figuras
dispostas neste tópico, também fornece os pontos de dados das imagens coletadas, que foram
utilizados para análise de conteúdo harmônico. As Figuras a seguir mostram tais informações.

73
Figura 54 – Tensão Terminal de Linha (Pico) da Máquina Síncrona à Imã Permanente Para uma
Velocidade de 15RPM Inserida no Inversor de Frequência WEG CFW 08
Figura 55 – Tensão Terminal de Linha (Pico) da Máquina Síncrona à Imã Permanente Para uma
Velocidade de 350RPM Inserida no Inversor de Frequência WEG CFW 08

74
Figura 56 – Tensão Terminal de Linha (de Pico) do Gerador Síncrono à Imã Permanente Para uma
Velocidade de 650 RPM Inserida no Inversor de Frequência WEG CFW 08
Figura 57 – Tensão Terminal de Linha (de Pico) do Gerador Síncrono à Imã Permanente Para uma
Velocidade de 950 RPM Inserida no Inversor de Frequência WEG CFW 08

75
Figura 58 – Curva Vpico (Nr)
É importante salientar que devido a máquina de indução possuir um determinado
escorregamento que pode variar em função da carga, a velocidade rotórica, e pelo inversor que
aciona a mesma pode possuir um erro, a MSIP poderá ter uma velocidade inferior à velocidade
de referência parametrizada no inversor de frequência. Todavia, imprecisões no controle da
velocidade, e possíveis perdas de torque no acoplamento também contribuem para a redução na
velocidade no eixo da MSIP, assim como variações abruptas na ponta do eixo da máquina
primária também contribuem para a geração de harmônicos na saída. Tais dados podem ser
confirmados nas figuras anteriores.
Utilizando o software MATLAB® foi possível analisar o conteúdo harmônico dos pontos
coletados. O software utilizado para análise do conteúdo harmônico está disponibilizado no
Anexo II. A Tabela 5 disponibiliza o conteúdo harmônico em tais condições de operação.
Foi possível análisar que a máquina testada possui um conteúdo harmônico não aceitável para
condições de operação baixas rotações apresentando uma distorção harmônica totalmente
inaceitável para condições de trabalho em tal velocidade. A medida que a máquina se
aproximou da velocidade de projeto da mesma, tais condições de THD foram minimizadas.
Entretanto, ao ultrapassar a velocidade de projeto da máquina, o THD da mesma retornou à
aumentar. Não se pode generalizar tais condições para todos os tipos de máquina, pois tudos
estes fatores são parâmetro do projeto das mesmas.
0
50
100
150
200
250
0 100 200 300 400 500 600 700 800 900 1000
Vlin
ha(
Vp
)
Velocidade Rotórica de Entrada no Inversor (RPM)

76
É notório o aparecimento de componentes harmônicas de índices pares, indicando assim que a
máquina pode apresentar problemas de projeto, como por exemplo, o desbalanço interno entre
as fases da mesma.
Figura 59 – Análise do Conteúdo Harmônico da Tensão da Máquina Funcionando à 15 RPM.
(Frequência Fundamental = 43,3Hz)
Figura 60 – Análise do Conteúdo Harmônico da Tensão da Máquina Funcionando à 350 RPM.
(Frequência Fundamental de 43,3Hz)
0 5 10 15 20 25 30 35 40 450
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
Am
plit
ude (
V)
Harmônicos
Análise da do THD da Tensão para 15 RPM
0 5 10 15 20 25 30 35 40 450
5
10
15
20
25
30
35
40
Am
plit
ude (
V)
Harmônicos

77
Figura 61 – Análise do Conteúdo Harmônico da Tensão da Máquina Funcionando à 650RPM (velocidade
nominal). (Frequência Fundamental = 43,3Hz)
Figura 62 – Análise do Conteúdo Harmônico da Tensão da Máquina Funcionando à 950RPM.
(Frequência Fundamental = 43,3Hz)
0 5 10 15 20 25 30 35 40 450
20
40
60
80
100
120
140A
mplit
ude (
V)
Harmônicos
0 5 10 15 20 25 30 35 40 450
20
40
60
80
100
120
140
Am
plit
ude (
V)
Harmônicos

78
Tabela 6 – Análise do Conteúdo Harmônico dos Dados Coletados no Ensaio em Vazio
Velocidade
Inserida no
Inversor
(RPM)
Frequência do
Gerador (Hz)
Tensão de Pico
(Linha) (V) Vrms (V)
THD (%)
15 0,815 3,442 0,414 442
350 21,192 70,375 42,46 51,8
650 42,667 132,165 86,5 2
950 64,439 198,700 119,64 81,54
7.2 Ensaio em Curto-Circuito
Os terminais da máquina foram curto circuitados, e gradualmente, a velocidade da máquina
primária foi aumentada. Os valores coletados da corrente em curto-circuito e informações
suplementares são mostrados na Tabela 7. Por falta de conhecimento das ligações internas, a
máquina não foi levada ao ponto de atingir a sua corrente nominal através do ensaio de curto-
circuito.
Tabela 7 – Dados do teste em Curto-Circuito
Velocidade
Inserida no
Inversor (RPM)
Corrente de Linha de Pico
(A)
26,9 1
73 2,86
126 4,82
225,7 8,56
242,8 9,68

79
8 Conclusão
No acionamento da MSIP, não é possível acionar a mesma conectando-a diretamente à rede,
pelo fato dos modelos mais populares no mercado não possuírem enrolamentos auxiliares, que
se instalados com as tecnologias utilizadas nos dias atuais, deformariam expressivamente o
campo magnético gerado pelos imãs dispostos no rotor da máquina. Para acionamento e
controle da mesma, dispositivos de acionamentos são necessários, tais como os inversores de
frequência de última geração.
O desenvolvimento do modelo dinâmico (dq0) da MSIP é baseado na utilização da
transformada de Park, que possibilita uma análise dos parâmetros da MSIP em um modelo
bifásico (dq). Com isto, a complexidade analítica e numérica é reduzida, facilitando assim os
estudos avançados desta máquina elétrica.
Os ensaios da máquina síncrona à imã permanente são similares aos ensaios realizados na
máquina síncrona convencional. Contudo, o fator temperatura de operação deve ser levado em
consideração como fator crítico na coleta dos dados para a determinação dos parâmetros da
MSIP. Sendo assim, é de extrema importância seguir os procedimentos de normas de alta
confiabilidade disponibilizadas no mercado.
Foi desenvolvido um Script no Matlab® com objetivo de validar os seus resultados com os
obtidos pelo simulador de tal plataforma, o Simulink/Matlab®. Os resultados dos código
convergiram com os resultados de simulação, comprovando a acurácia e eficiência do código
desenvolvido neste trabalho.
No que se diz a validação, também foi analisada a reposta do código com relação ao seu
desempenho em para o desenvolvimentos de futuras estratégias de controle, e foi possível notar
que a máquina convergiu para um resultado plausível e aceitável.
Resultados experimentais mostraram que a MSIP possui um alto índice de distorção harmônica
para baixas rotações, entretanto, o THD da mesma é reduzido a medida que a sua velocidade se
aproxima a velocidade de projeto da máquina.
Como o algoritmo do modelo dinâmico da máquina já está validado, recomenda-se o uso do
mesmo para estudos e implementações de novas estratégias de acionamento da Máquina
síncrona à imã permanente no Laboratório de Acionamentos Controle e Automação do IFPB e
do Programa de P&D com WEG S. A.

80
Referências Bibliográficas
Alliance LLC: Magnet Guide and Tutorial. Disponível em:
<http://www.allianceorg.com/pdfs/Magnet_Tutorial_v85_1.pdf>. Acesso em: 26 set. 2016.
ABB: Permanent Magnet Generators. Disponível em: <http://new.abb.com/motors-
generators/generators/generators-for-wind-turbines/permanent-magnet-generators>. Acesso em: 13 set. 2016.
Change, U. The Paris Agreement - main page. Disponível em:
<http://unfccc.int/paris_agreement/items/9485.php>. Acesso em: 13 set. 2016.
Chan, T.; Wang, W.; Lai, L. Permanent-Magnet Synchronous Generator Supplying an Isolated Load. IEEE
Transactions on Magnetics, v. 46, n. 8, p. 3353-3356, 2010.
Da, Y.; Shi, X.; Krishnamurthy, M. A Novel Universal Sensor Concept for Survivable PMSM Drives. IEEE
Transactions on Power Electronics, v. 28, n. 12, p. 5630-5638, 2013.
Dehkordi, A. B. et al. Permanent magnet synchronous machine for real-time simulation. IEEE International
Conference on Power SystemsTransients (IPST’05) in Montreal, Canada on June 19-23, 2005.
Empresa de Pesquisa Energética. Balanço Energético Nacional 2015. Disponível em:
<https://ben.epe.gov.br/downloads/Relatorio_Final_BEN_2015.pdf> . Acesso em: 13 set. 2016.
Fitzgerald, A.; Kingsley Junior, C.; Umans, S. Maquinas eletricas. Porto Alegre: Bookman, 2006.
Ghosh, A. Lecture Notes from Curtin University – Western Australia, 2015.
Global Wind Energy Council. GLOBAL STATISTICS. Disponível em: <http://www.gwec.net/global-
figures/graphs/>. Acesso em: 13 set. 2016.
GLOBAL WIND REPORT 2015 | GWEC. Disponível em: <http://www.gwec.net/publications/global-wind-
report-2/global-wind-report-2015-annual-market-update/>. Acesso em: 13 set. 2016.
IEEE Trial-Use Guide for Testing Permanent Magnet Machine. Standard 1812 (2014).
Jacobina, C. B. Apostila de Máquina Síncrona de Rotor Bobinado, à Imã e à Relutância de Polos Salientes.
UFCG. Campina Grande, 2005.
Jacobina, C. B. Apostila de Acionamentos Elétricos da Pós Graduação em Engenharia Elétrica. UFCG.
Campina Grande, 2005.
Jahns, T.; Kliman, G.; Neumann, T. Interior Permanent-Magnet Synchronous Motors for Adjustable-Speed
Drives. IEEE Transactions on Industry Applications, v. IA-22, n. 4, p. 738-747, 1986.
Komurgoz, G.;Gundogdu,T. Comparison of Salient Pole and Permanent Magnet Synchronous Machines
Designed for Wind Turbines. IEEE Power Electronics and Machines in Wind Applications (PEMWA). 2012.
Kundur, P.; Balu, N.; Lauby, M. Power system stability and control. New York: McGraw-Hill, 1994.
Longya Xu, et al. A new design concept of permanent magnet machine for flux weakening operation. IEEE
Transactions on Industry Applications, v. 31, n. 2, p. 373-378, 1995.
Pyrhönen, Juha. Permanent Magnet Synchronous Machine (PMSM). Lappeenranta University of
Technology, Finland. Disponível em:
<http://ocw.nthu.edu.tw/ocw/upload/124/news/[%E9%9B%BB%E5%8B%95%E6%A9%9F%E6%A2%B0L14

81
%E8%A3%9C%E5%85%85%E6%95%99%E6%9D%90]LUT_PERMANENT%20MAGNET%20SYNCHRO
NOUS%20MACHINE.pdf>. Acesso em: 26 set. 2016.
Macalister, T. Background: What caused the 1970s oil price shock?. Disponível em:
<https://www.theguardian.com/environment/2011/mar/03/1970s-oil-price-shock>. Acesso em: 13 set. 2016.
NdFeB – Info. Temperature Ratings. Disponível em: <http://www.ndfeb-info.com/temperature_ratings.aspx>.
Acesso em: 26 set. 2016.
Redlinger, R.; Andersen, P.; Morthorst, P. Wind energy in the 21st century. New York: Palgrave, 2002.
Sawin, J.Prugh, T. Mainstreaming renewable energy in the 21st century. Washington, DC: Worldwatch
Institute, 2004.
Sebastian, T.Slemon, G. Transient modeling and performance of variable-speed permanent-magnet motors.
IEEE Transactions on Industry Applications, v. 25, n. 1, p. 101-106, 1989.
Sjökvist, S.Eriksson, S. Study of demagnetization risk for a 12 kW direct driven permanent magnet
synchronous generator for wind power. Energy Science & Engineering, v. 1, n. 3, p. 128-134, 2013.
Soderlund, L. et al. A permanent-magnet generator for wind power applications. IEEE Trans. Magn., v. 32,
n. 4, p. 2389-2392, 1996.
Salon, S. Finite Element Analysis of Electrical Machines. Springer US. 1995.
US Department of Energy. Wind Powering America. Disponível em:
<http://www.nrel.gov/docs/fy04osti/35873.pdf>. Acesso em: 13 set. 2016.
WEG: W22 MAGNET Drive System. Disponível em: <http://ecatalog.weg.net/files/wegnet/WEG-w22-magnet-
drive-system-50015189-catalogo-portugues-br.pdf>. Acesso em: 26 set. 2016.
WEG: W22 MAGNET Drive System. Disponível em: <http://ecatalog.weg.net/files/wegnet/WEG-w22-magnet-
drive-system-50015189-catalogo-portugues-br.pdf>. Acesso em: 26 set. 2016.
Massachusetts Institute of Technology (MIT): Study Guide, Maxwell’s Equations. Disponível em: <
http://web.mit.edu/8.02t/www/materials/StudyGuide/guide13.pdf>. Acesso em: 26 set. 2016.
Rudowicz, C.Sung, H. Textbook treatments of the hysteresis loop for ferromagnets—Survey of
misconceptions and misinterpretations. American Journal of Physics, v. 71, n. 10, p. 1080, 2003.

82
APÊNDICE 1 – Estabilidade da Máquina Síncrona e Sua Conexão Com o Sistema
Elétrico
A estabilidade de um sistema elétrico se refere à habilidade do mesmo permanecer em equilíbrio
aceitável sobre condições de regime permanente, e voltar sua operação em regime permanente
com condições satisfatórias quando a rede estiver sujeita à distúrbios. Neste caso, podemos
entender também entender que a estabilidade do sistema elétrico como a habilidade do gerador
trabalhar em condições operacionais sem que o mesmo perca o sincronismo com o barramento
do sistema elétrico (Kundur, 1994). A Figura 63 mostra uma analogia de pêndulos para uma
melhor assimilação sobre a estabilidade do sistema elétrico. O barramento, que pode ser
entendido como a base que sustenta os pesos, deve possuir uma tensão, frequência, e sequencia
de operação pré-determinada, os cabos podem ser entendidos como as linhas de transmissão
que interconectam os geradores, e os pesos podem ser entendidos como os geradores conectados
ao sistema.
Figura 63 – Analogia sobre a Estabilidade do Sistema Elétrico
Fonte: Ghosh, 2015
Para que o sistema permaneça em equilíbrio, são necessárias condições mínimas de operação
dos geradores, não as seguindo, o mesmos perderão o seu sincronismo e o sistema de proteção
o desconectarão da rede, evitando que estes distúrbios se proliferem pela rede e afetem a
operação de outros geradores (Kundur, 1994). De acordo com Kundur (1994) e Ghosh (2015),
as condições de estabilidade para os geradores permanecerem conectados ao sistema são:
1. O gerador deve operar na mesma tensão do barramento do sistema;

83
2. O gerador deve operar na frequência do barramento do sistema;
3. O gerador deve ser conectado com a mesma sequência de operação do sistema (Positiva
ou Negativa)
4. O gerador deve permanecer em sincronismo com a rede durante distúrbios de regime
transiente, dinâmico e permanente.
Os estudos de estabilidades podem ser separados em análises transientes, dinâmicas e
regime permanente. As análises em regime permanente são realizadas por pequenos e
graduais distúrbios no sistema, como por exemplo queda de tensão devido à longas
distâncias. As análises em regime dinâmicos são consideradas quando o sistema sofre
pequenos distúrbios, como no caso de rápidas flutuações de tensão. Já a análise transiente
é realizada quando o sistemas sobre distúrbios mais agressivos, como o caso de faltas
simétricas e assimétricas, e objetiva determinar se a máquina continuará em sincronismo
após o sistema de proteção limpar a falta e/ou reconectar o que o que foi desconectado à
rede. (Ghosh, 2015). Este tópico é focado apenas nos estudos de estabilidade sob regime
transiente.
8.1 EQUAÇÃO DE POTÊNCIA E ÂNGULO DE CARGA DA MÁQUINA SÍNCRONA
Para o estudo de estabilidade da máquina síncrona pode-se assumir que o sistema não tem
perdas por efeito Joule (perdas resistivas), e o gerador esta conectado ao barramento através de
uma linha de transmissão, como exposto na Figura 64. Pode-se entender a reatância mostrada
nessa figura como sendo a reatância total da linha de transmissão somada com a reatância do
gerador. Assume-se também que a tensão do barramento como a tensão de referência. Com
isso pode-se calcular a corrente que flui neste circuito como é mostrado pelas equações (15) e
(16).
Figura 64 – Diagrama de Conexão de um Gerador Síncrono
Fonte: Ghosh, 2015

84
S 1 R 2V V , V V 0 (15)
1 2S
1 2 1
V VI
jX
V cos V jV sin
jX
(16)
As potências ativa e reativa fornecidas pelo gerador são expressas por (17), e como assume-se
que o sistema é sem perdas, é possível afirmar que a potência do gerador injeta é igual a potência
que o barramento absorve, e com isso chegamos à equação (18), também conhecida como
equação de potência da máquina síncrona (Ghosh)
1 2 1S S S S 1
2
1 2 1 1 2
V cos V jV sinP jQ V I V cos jsin
jX
V V sin j V V V cos
X
(17)
1 2e S R max
V VP P P sin P sin
X
(18)
A curva de potência em função do ângulo de carga
Chega-se então à curva da potência da máquina em função do angulo , conhecido como ângulo
de carga, e da posição do rotor da máquina. Pode-se se observar esta curva na Figura 64.

85
Figura 64 – Curva de Potência da Máquina sincrona em função do ângulo de estabilidade
Fonte: Adaptado de Fitzgerald, 2015
A equação (18) leva em consideração que os polos da máquina não possuem saliência, caso a
máquina possua polos salientes, por questões de precisão, é recomendado usar a equação (19)
(FITZGERALD).
d q21 2e S R 2
d d q
X XV VP P P sin V . sin(2 )
X 2X X
(19)
8.2 EQUAÇÃO DE BALANÇO E CRITÉRIO DE IGUALDADE DE ÁREAS
A equação de balanço, expressa por (20), é a equação que definirá se o gerador permanecerá ou
não em sincronismo com a rede após a ocorrência de distúrbios no mesmo.
2
m e a2
s
2H dP P P pu
dt
(20)
Onde:
o 𝑃𝑚 é a potência mecânica aplicada no eixo do gerador (potência de entrada), em pu ou
Watts;

86
o 𝑃𝑒 é a potência elétrica nos terminais do gerador (potência de saída), em pu ou watts;
o 𝑃𝑎 é a diferença entre 𝑃𝑚e 𝑃𝑒;
o 𝐻 é a constante de inércia que representa a energia cinética na velocidade síncrona, sua
unidade é expressa em Mega Joules (MJ);
o 𝜔𝑠 é a velocidade síncrona de operação da máquina, em rad/s.
Quando o sistema estiver à operar em regime permanente, o gerador atingirá um ângulo de
operação 𝛿0, e como resultado, a potência elétrica será igual à potência mecânica. Entretanto,
se houver um distúrbio no sistema que como consequência requeira mais potência do gerador,
uma maior potência mecânica será aplicada no rotor do gerador, fazendo com que este acelere.
Agora podemos supor que o distúrbio foi extinto pelo sistema de proteção com o gerador
operando em um anglo 𝛿𝑐, neste instante a potência elétrica será maior com que a potência
mecânica, e isto fará com que o o rotor do gerador desacelere. Entretanto, devido à inercia do
rotor, o ângulo continuará à crescer. Em um determinado momento o ângulo irá parar de crescer
, atingindo um valor crítico com um ângulo 𝛿𝑚, e começará a diminuir. Caso contrário, o
gerador irá perder o sincronismo (Ghosh, 2014).
O critério de igualdade de áreas se baseia em separar a variação do ângulo de carga em duas
áreas A1 e A2. A1 é a área da curva que se inicia no ângulo de operação do gerador em regime
permanente antes do regime transiente ( 𝛿0 ), e por distúrbios transientes o rotor do gerador
acelera até o momento em que o sistema de proteção extingue o distúrbio na rede. A área A2 é
a área desde o momento de extinção do distúrbio, e o rotor continua a girar devido a sua inercia,
até o momento em que o rotor do gerador para e começa a desacelerar (𝛿𝑚). Kundur (1994)
mostra que se A2 for maior que A1 (A2>A1), o sistema é considero absolutamente estável. Ou
seja, o área de aceleração é menor que a de desaceleração. Se A1 for igual à A2, e o ângulo
gerador está a operar em um ângulo critico. Se A1>A2, o gerador perderá o sincronismo e será
desconectado da rede elétrica. A expressão matemática para o cálculo das áreas de aceleração
e desaceleração são dadas por (21) e (22). A figura 65 mostra a discriminação destas duas áreas
(Ghosh)
c
0
1 m eA P P d
(21)
m
c
2 e mA P P d
(22)

87
Figura 65 – Teorema da Igualdade de Áreas
Fonte: Ghosh, 2015
Para realizar a análise de estabilidade de diversos geradores conectado ao sistema, equações
mais complexas são introduzidas e tal análise é realizada a partir do uso de métodos numéricos
e ferramentas computacionais.

88
ANEXO I – Código Desenvolvido no Matlab® para Validação de Seus Resultados em
Comparação com os Resultados de Simulação do Simulink®
%Instituto Federal de Educação, Ciência e Tecnologia da Paraíba (IFPB) %Laboratório de Acionamentos, Controle e Automação (LACA) %Código Desenvolvido como parte do Trabalho de Conclusão de Curso com o %Título: Máquina Síncrona à Imã Permanente, Uma Abordagem Eólica %Orientador: Álvaro de Medeiros Maciel, D. Sc. %Estudante Desenvolvedor: José Diniz Neto
tic %%A função tic e toc irá servir para mostrar o tempo real de simulação clear all close all
%%Parametros temporais segundos_simulacao = 5; ciclos = segundos_simulacao*60; %Número de ciclos a serem analisados tmax = ciclos/60; %Tempo máximo de simulação t = 0; %Variável de contagem de tempo (começando em zero) h = 1e-6; %Passo de cálculo para toda a simulação tsave0 = 0;%(ciclos-1)/60; %Tempo inicial de salvamento das
variáveis tsave = tsave0; %Vetor onde será contado os tempos de salvamento
npt = round((tmax - tsave0)/h); %Número de pontos a serem salvos % npt = 300000; hsave = (tmax - tsave0)/npt; %Passo de cálculo para salvamento de
variáveis
if hsave < h hsave = h; npt = round((tmax-tsave)/h); end
%%Parametros da rede de alimentação VLL = 100*sqrt(3); %Tensão de Linha (RMS) Vf = VLL/sqrt(3); %Tensão de Fase (RMS)
fs = 60; % Frequência da Rede (Hz) ws =2*pi*fs; % Frequência Angular da Rede (Rad/s) eg1 = 0; % Valores Iniciais para as Tensões da Rede (V) eg2 = 0; eg3 = 0; %%Parametros da máquina %Parâmetros Elétricos
Rs = 0.0485; Ld = 8.5e-3; Lq = 8.5e-3; p = 2; %Pares de Polos; ns = ((120*fs)/(2*p))*((2*pi)/60); %Velocidade Síncrona (Rad/s) lf = 0.1094;%Vf/(ns); %Cálculo do Fluxo dos Imãs Permanentes

89
%Inicialização dos parâmetros que serão calcularos ce = 0.0; cr = 0.0;
delta_id = 0; %Inicialização dos parâmetros Id e Iq id = 0; delta_iq = 0; iq = 0;
dVq = 0; %Utilizado para a emulação da partida da máquina.
is1 = 0; %Correntes estatóricas da máquina is2 = 0; is3 = 0;
%Parâmetros Mecânicos Jm = 0.0027; %Inérica total : Rotor da Máquina + Carga. (Operando em Vazio) Fa = 0.0000; %Atrito imposto pelos rolamentos dos mancais; wr = 0.0000; %Velocidade Rotórica inicial; tetar = 0; %Posição Rotórica Inicial;
%%Inicialização dos vetores de armazenamento
%Pré-determinando as dimensões dos vetores de acordo com os parâmetros %inseridos nos parâmetros temporais.
T = zeros(1,npt-1);
EG1 = zeros(1,npt-1); EG2 = zeros(1,npt-1); EG3 = zeros(1,npt-1);
ID = zeros(1,npt-1); IQ = zeros(1,npt-1);
IS1 = zeros(1,npt-1); IS2 = zeros(1,npt-1); IS3 = zeros(1,npt-1);
VD = zeros(1,npt-1); VQ = zeros(1,npt-1);
CE = zeros(1,npt-1); WR = zeros(1,npt-1); TETAR = zeros(1,npt-1);
n = 1;
%%Início do loop de simulação dinâmica while t <= tmax
%%Tensões fornecidas pela rede
eg1 = Vf*sin(ws*t); eg2 = Vf*sin(ws*t - 2*pi/3);

90
eg3 = Vf*sin(ws*t + 2*pi/3);
%%Transformação das tensões da rede nas componentes vd, vq e v0
teta_odq = tetar; %Referêncial Rotórico
%Para todos os casos, mantem-se o calculo do referencial rotórico para ser %possível realizar a transformada inversa, e assim, poder calcular as %expressões das tensões e correntes trifásicas, quando necessário.
vd = (2/3)*(sin(teta_odq)*eg1 + sin(teta_odq - 2*pi/3)*eg2 + sin(teta_odq
+ 2*pi/3)*eg3); vq = (2/3)*(cos(teta_odq)*eg1 + cos(teta_odq - 2*pi/3)*eg2 + cos(teta_odq
+ 2*pi/3)*eg3); v0 = (1/3)*(eg1 + eg2 + eg3);
%Acionamento Simulando partida forçada, com Vd=0 e Vq=Vf, neste caso, %assume-se que a máquina já está trabalhando com os valores Vd e Vq em %regime permanente. Entretanto, como a mesma está com velocidade inicial %igual à zero, havera uma pequenas dinâmica na partida da mesma. %Pode-se assumir também que o sistema de controle ja passou pelo seu
periodo %dinâmico e está garantindo erro zero para Vd, e Vq.
% vd = 0; % vq = Vf;
%Partida Simulando o Controle de Vd e Vq, Neste caso, será imposto Vd = 0, %e Vq como sendo um valor que aumenta progressivamente até o valor da %tensão de Fase da Rede Adotada.
% % dVq = dVq + 0.001; % % % if dVq > Vf % dVq = Vf; % end % % % % % vd = 0; % vq = dVq;
%%Obtenção das correntes id e iq (Seguindo o Modelo Fornecido Pelo

91
%%Matlab/Simulink
%Derivada da componende d das correntes do estator delta_id = (1/Ld)*(vd - Rs*id + wr*Lq*iq);
%Derivada da componente q das correntes do estator delta_iq = (1/Lq)*(vq - Rs*iq - wr*Ld*id - lf*wr);
%Corrente d do estator id = id + delta_id*h;
%Corrente q do estator iq = iq + delta_iq*h;
%%Obtenção do conjugado eletromagnético ce = 1.5*p*(lf*iq + (Ld-Lq)*id*iq);
%%Obtenção da velocidade da máquina wr = wr + ((1/Jm)*(p*(ce-cr) - p*Fa*wr))*h;
%%Obtenção da posição do rotor à partir da sua velocidade angular tetar = tetar + wr*h;
%Limitação para fins de controle. Apenas para questão de melhoria %intepretacional
if (tetar >= 2*pi) tetar = 0; end
%Realizando a Transformada Inversa (dq0---->abc)
%%Obtenção das correntes do estator is1 = (sin(teta_odq)*id + cos(teta_odq)*iq); is2 = (sin(teta_odq - 2*pi/3)*id + cos(teta_odq - 2*pi/3)*iq); is3 = (sin(teta_odq + 2*pi/3)*id + cos(teta_odq + 2*pi/3)*iq);
%Obtenção das Tensões Estatóricas (Quando Necessário) Vs1 = (sin(teta_odq)*vd + cos(teta_odq)*vq); Vs2 = (sin(teta_odq - 2*pi/3)*vd + cos(teta_odq - 2*pi/3)*vq); Vs3 = (sin(teta_odq + 2*pi/3)*vd + cos(teta_odq + 2*pi/3)*vq);
%%Salvando os dados nos vetores com tamanhos pre-definidos if tsave <= t
T(n) = t;
% EG1(n) = eg1; % EG2(n) = eg2; % EG3(n) = eg3;
ID(n) = id; IQ(n) = iq;

92
IS1(n) = is1; IS2(n) = is2; IS3(n) = is3;
VS1(n) = Vs1; VS2(n) = Vs2; VS3(n) = Vs3;
VD(n) = vd; VQ(n) = vq;
CE(n) = ce; WR(n) = wr*60/(2*pi); TETAR(n) = tetar;
n = n + 1; tsave = tsave + hsave;
end
t = t + h; end
toc
%%Plotando as grandezas de interesse figure(1), plot(T,ID,T,IQ) title('Análise de Id e Iq') legend('Id','Iq') xlabel('Tempo(s)') ylabel('Corrente (A)') % y-axis label grid on zoom on
figure(2), plot(T,WR) title('Velocidade Rotórica') legend('Nr') xlabel('Tempo(s)') ylabel('RPM') grid on zoom on
figure(3), plot(T,CE) title('Análise do Conjugado da MSIP') legend('Ce') xlabel('Tempo(s)') ylabel('Conjugado Elétrico (N.m)') grid on zoom on
figure(4), plot(T,IS1,T,IS2,T,IS3) title('Correntes Estatóricas') legend('ia','ib','ic') xlabel('Tempo(s)') ylabel('Corrente(A)')

93
grid on zoom on
figure(5), plot(T,TETAR) title('Posição Rotórica') legend('Teta R') xlabel('Tempo(s)') ylabel('Ângulo (rad)') zoom on grid on
figure (6), plot(T,VS1,T,VS2,T,VS3) title('Tensões Estatóricas') legend('Eg1','Eg2','Eg3') xlabel('Tempo(s)') ylabel('Tensão (V)') grid on zoom on
figure(7), plot(T,VD,T,VQ) title('Análise de Vd e Vq') legend('Vd','Vq') xlabel('Tempo(s)') ylabel('Tensão (V)') % y-axis label grid on zoom on

94
ANEXO II – Código Utilizado para Análise de Conteúdo Harmônico de um Vetor no
Matlab® (Versão Geral)
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % % % Serie de Fourier % % % % 8 Agosto de 2006 % % Valor da amplitude das harmonicos (metodo se Simpson) % % Valor RMS e THD% % %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % o vetor wtempov é o vetor tempo multiplicado pela ws frequencia de % alimentação do sistema. % O vetor vetorv é o vetor de tensão, corrente, potencia associado ao vetor
tempo % Min e Max deve ter intervalo de 2pi exemplo : min=0 max=2pi; min=10pi
max=12pi
%zerando os vetores wtempov=0;vetorv=0;cf2=0;a=0;b=0;c=0; %%%%%%%%%%%%% DADOS A SEREM ATUALIZADOS %%%%%%%%%%%%%%%%%%%%%% nh=4;%Numero de hamonicos do estudo vetor_a_ser_estudado=ibcc; % vetor da variavel de estudo de tensao ou
corrente vetor_de_tempo=tempo; %vetor onde esta os dados de tempo tamanho_do_vetor=200001;%tamanho do vetor comeco_do_estudo=1;% onde começa o estudo %%%%%%%%%%%%% FIM DOS DADOS DE ATUALIZACAO %%%%%%%%%%%%%%%%%
%multiplicando os vetores de tempo pela frequencia do sistems Ws( e
acumulando em wtempov) w1h=2*43.3*pi; wtempov=vetor_de_tempo*w1h;%2*pi*1;%atualize o vetor e a frequencia
vetor*2*pi*F %acumulando de variavel tensão, corrente.. em vetorv12 vetorv=vetor_a_ser_estudado;%atualize o vetor %%%%%%%%%%%%%%%%%%%%% %valores iniciais ao=0; for k=1:nh a(k)=0; end; b1=0; for k=1:nh b(k)=0; end;
%definiçao do intervalo de estudo min=comeco_do_estudo*2*pi; max=min+2*pi; %indo atras dos k do intervalo de min a max menor1=100; menor2=100; for k=1:tamanho_do_vetor aa=vetorv(k); if menor1>abs(wtempov(k)-min)

95
kmin=k; menor1=abs(wtempov(k)-min); end if menor2>abs(wtempov(k)-max) kmax=k; menor2=abs(wtempov(k)-max); end end; %fim da procura dos kmax e kmin hp=wtempov(2)-wtempov(1); cont30=0; for k=kmin+1:kmax-1 cont30=cont30+1; if mod(cont30,2)==0 multip=2; else multip=4; end; ao=ao+multip*vetorv(k); cont=0; for z=1:nh cont=cont+1; a(z)=a(z)+multip*vetorv(k)*cos(cont*wtempov(k)); b(z)=b(z)+multip*vetorv(k)*sin(cont*wtempov(k)); end; end;
ao=((ao+vetorv(kmin)+vetorv(kmax))*hp/3)/(2*pi) for k=1:nh
a(k)=((a(k)+vetorv(kmin)*cos(wtempov(kmin))+vetorv(kmax)*cos(wtempov(kmax))
)*hp/3)/pi;
b(k)=((b(k)+vetorv(kmin)*sin(wtempov(kmin))+vetorv(kmax)*sin(wtempov(kmax))
)*hp/3)/pi; end; for k=1:nh c(k)=sqrt(a(k)*a(k)+b(k)*b(k)); end;
%Calculo do valor RMS da função até o 20º harmonico apw=2*ao*ao; apwwthd=2*ao*ao; orden=0; for k=1:nh orden=orden+1; apw=apw+c(k)*c(k); apwwthd=apwwthd+c(k)*c(k)/orden^2;%para o wthd end;
Valorrms=sqrt(apw)/sqrt(2)
%Calculo do THD até o 40º harmonico
istotal=sqrt(c(1)^2)/sqrt(2); idist=sqrt(apw-2*ao^2-c(1)^2)/sqrt(2); idistwthd=sqrt(apwwthd-2*ao^2-c(1)^2)/sqrt(2);

96
thdperc=100*idist/istotal wthd=idistwthd/istotal %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
figure(1); bar(c);%title('Espectro de amplitude dos harmonicos da ig'); ylabel('Amplitude (V)');xlabel('Harmônicos');grid;%pause; %figure(2); %bar(cf2);grid;title('Depois do filtro');