Embed Size (px)
Citation preview

1
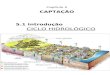
A órbita é
definida como
tendo uma
direção cross-
track e uma
along-track.
Direção Along-TrackDireção ao longo da trajetória do satélite
Direção Cross-TrackDireção transversal à trajetória do satélite
Direção do Movimento do Satélite
Sensores e Varreduras

Existem dois principais métodos ou maneiras de
sistemas de varredura para adquirir uma imagem:
• Cross-Track Scanning (Varredura transversal à
trajetória) – Whiskbroom Scanners
• Along-Track Scanning (Varredura ao longo da
trajaetória) - Pushbroom Scanners
Sensores e Varreduras

Cross-Track Scanners – Whiskbroom
Scanners:
Sistema de varredura que varre a Terra numa série
de linhas. As linhas são orientadas
perpendicularmente à direção de movimento
(trajetória) da plataforma. Cada linha é varrida de
um lado do sensor ao outro, utilizando um espelho
rotor.
Sensores e Varreduras

Único detector – Cross-Track
Sensores e Varreduras
Varredura transversal à trajetória do satélite
Direção Movimento do Satélite

Único detector – Cross-Track
Sensores e Varreduras
A – espelho rotor;
B – detectores sensíveis para cada λ;
C – IFOV (Instantaneous Field of View) – ângulocônico de visibilidade de um sensor;
D – GIFOV (Ground IFOV) – Célula de resoluçãodo terreno determinada por C e pela altura;
E – FOV (Field of View)– varredura/oscilação doespelho medido em graus que determina alargura da facha de terreno imageada;
F – GFOV (Ground FOV)– Cobertura do satélite,largura da imagem, que é determinada por E epela altura;
O período de tempo que o IFOV observa umacélula de resolução do terreno a medida que oespelho roda é chamado de tempo depermanecia e é em geral bastante curto.

Único detector – Cross-Track
Sensores e Varreduras

Sensores e Varreduras - FOV
Satélite
Considerando 16 órbitas por dia,qual deve ser a largura (GFOV)para cobrir toda a Terra em um dia?

Sensores e Varreduras - FOV
H = 800 km
Satélite
Largura = exercício anterior km
Qual deve ser então ovalor do FOVconsiderando um satélitenesta altura, para queele cubra toda a Terraem um dia?FOV= ?

Sensores e Varreduras - FOV
H = 800 km
Satellite
Largura = ?
FOV/2 = 6.1°
Quanto temo levaria para cobrir a Terra com este sistema?
16 órbitas/dia *2* ? km = ? km/dia imageado (largura)
Circunferência da Terra = 2*pi*Rt (km)
2*pi*Rt/? km/dia= ? dias

Cross-Track Scanners – Whiskbroom Scanners:
Único Detector
Tempo de Permanência: Tempo que um sistema de
varredura tem para coletar a energia
eletromagnética de um elemento da imagem (pixel):
(Tempo para varrer uma linha/Número de pixels numa linha)
Depende de:
• Velocidade do satélite;
• Largura da linha;
• Tempo por linha;
• Número de pixels numa linha.
Sensores e Varreduras

Cross-Track Scanners – Whiskbroom Scanners:
Único Detector
Tempo de Permanência: Tempo que um sistema de
varredura tem para coletar a energia
eletromagnética de um elemento da imagem (pixel):
Tempo para observar uma linha inteira =
___________________________________ =
Número de pixels numa linha =
(comprimento do pixel / velocidade orbital)
= _________________________________________
(largura da imagem/largura do pixel)
Sensores e Varreduras

Componentes dos Sensores Imageadores
Sistema óptico: Constituído de espelhos e lentes, possui afunção de focar uma área na superfície terrestre e coletar a REMrefletida ou emitida por ela.
Sistema de dispersão e de detecção: Grades de dispersão eprismas são utilizados como filtros para dividir a REM em váriosintervalos de comprimento de onda ou bandas espectrais, quesão direcionados para incidirem sobre um conjunto dedetectores, que geram sinais elétricos proporcionais àsintensidades das radiações neles incidentes.
Sistema eletrônico: Constitui-se de componentes eletrônicosque ampliam os sinais elétricos de saída dos detectores e ostransformam em valores digitais que são gravados;

Espelho rotativo para varredura doterreno;
A radiação que chega ao espelho érefletida em direção à um sistema delentes que a foca no sistema dedispersão e depois aos detectores;
A REM é separada em intervalosespectrais pela grade de difração ouprisma antes que ela atinja osdetectores, definindo-se assim, asbandas espectrais do sensor;
Para medir a intensidade de cadaintervalo espectral, ou banda, umarranjo de detectores é colocado atrásda grade de difração ou do prisma;

A energia da radiaçãoeletromagnética incidente nosdetectores provoca-lhes umaexcitação, proporcional àintensidade da energia incidente,gerando um sinal elétrico de saídaque é registrado pelo sistemaeletrônico do sensor;
Este sistema eletrônico é umconversor analógico/digital quetransforma os sinais elétricos desaída dos detectores emcorrespondentes valores digitais

Detectores lineares – Cross-Track
Sensores e Varreduras
Varredura transversal à trajetória do satélite
Direção Movimento do Satélite

Detectores lineares – Along-Track - Pushbroom Scanners
Sensores e Varreduras
Varredura ao longo da trajetória do satélite
Direção Movimento do Satélite
Não há movimento mecânico

Sensores e VarredurasDetectores lineares – Along-Track - Pushbroom Scanners

Sensores e Varreduras
Em vez de um espelho rotativo elesutilizam um vetor linear de detectores(A) localizado no plano focal daimagem (B) formada pelos sistemasde lentes (C), os quais sãoempurrados ao longo da trajetória dosatélite.
Cada detector individual mede aenergia de uma única célula doterreno com resolução (D) e, assim, oIFOV dos detectores e a alturadeterminam a resolução espacial dosistema. Neste caso temos umdetector para cada pixel numa linha;
Detectores lineares – Along-Track - Pushbroom Scanners

Tempo de Permanência: Tempo que um sistema de
varredura tem para coletar a energia
eletromagnética de um elemento da imagem (pixel):
Tempo para observar uma linha inteira =
= (comprimento do pixel / velocidade orbital)
Sensores e VarredurasDetectores lineares – Along-Track - Pushbroom Scanners

Vantagens e desvantagens
Sensores e Varreduras
Nesse sistema de varredura linha a linha, tem-se a vantagem demaior tempo de permanência para a medida da radiância quedeixa cada pixel, isto permite que mais energia seja detectada emelhora a resolução radiométrica. O maior tempo depermanência também facilita GIFOVs menores e larguras debanda mais estreitas para cada detector. Assim, uma melhorresolução espacial e espectral podem ser conseguidas semimpactar a resolução radiométrica.
É uma tecnologia mais avançada do que os sensores mecânicos,exatamente porque dispensa o movimento de varreduraoscilatório de um espelho, que é um problema. Portanto são maisduráveis e confiáveis;

Vantagens e desvantagens
Sensores e Varreduras
Uma das desvantagens desses sistemas é queum calibração entre os milhares de detectores,para conseguir uma sensibilidade uniforme emtodo os detectores, é necessário e complicado

Sensores e Varreduras

Sensores de área – 2D
Sensores e Varreduras
Matriz de detectoresem ambas asdimensões lineares.Cada observaçãoresulta numa imagemcomo uma fotografiaaérea
Direção Movimento do Satélite

Cobertura Orbital
Sensor com um FOV pequeno oualtura muito baixa resultando numswath estreito (200 km).
Sensor com um FOV grande oualtura muito alta resultando numswath extenso (2000km).

25
Cobertura OrbitalÓrbita do Landsat Multispectral Scanning SystemÓrbita do Landsat Multispectral Scanning System

26
Cobertura Orbital
Caminho das órbitas do Landsat durante
um único dia de cobertura
Caminho das órbitas do Landsat durante
um único dia de cobertura

27
Cobertura Orbital
Caminho das órbitas do NOAA17
em 17 de outubro de 2003
Caminho das órbitas do NOAA17
em 17 de outubro de 2003

28
Nimbus-7 TOMS altitude orbital: 955 km
EarthProbe TOMS altitude orbital: 500 km
Se a órbita é muito
baixa e/ou o FOV é
muito pequeno, uma
cobertura global não
pode ser obtida com
somente 16 órbitas
num único dia.
Cobertura Orbital

29
Coberturas diárias incompletas resultam em mapas compostos de bandas
da dados com falhas entre os swaths nas regiões equatoriais. Para
satélites com uma inclinação alta existe uma sobreposição significante
nos pólos mesmo quando a cobertura equatorial é incompleta.
29 de Setembro de 1997
Pólo Sul Pólo Norte
Visão Global
Cobertura Orbital

30
“Mapas sem falhas,” é o
que a maioria dos
modeladores requerem
como entrada para as suas
simulações
computacionais. Pode ser
obtido fazendo-se a média
sobre 2-3 dias (ou mais).
29 Setembro 1997
28-29 Setembro 1997
28-30 Setembro 1997
Um Dia Dois Dias Três Dias
29-30 Setembro 1997
Fazendo-se a média por
diferentes dias completa as
falhas orbitais e resulta
numa cobertura global, isto
também resulta numa
resolução temporal mais
baixa.
pequenas gaps sem gaps
Cobertura Orbital